Некоммерческое акционерное общество
АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электропривода и автоматизации промышленных установок
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
Конспект лекций
для бакалавров всех форм обучения специальности 050718 – Электроэнергетика
Алматы 2007
СОСТАВИТЕЛИ: Ю.А. Цыба. Системы управления электроприводами. Конспект лекций для студентов всех форм обучения специальности 050718 – Электроэнергетика. – Алматы: АИЭС, 2007. – 51с.
Конспект лекций по курсу «Системы управления электроприводами» разработан в соответствии с рабочей учебной программой и рассчитан на 26 часов для бакалавров специальности 050700 – Электроэнергетика.
Рассмотрены вопросы принципов построения, устройства и работы цифроаналоговых и цифровых систем автоматического управления электроприводами, выполняющих функции стабилизации скорости и момента, точного позиционирования, слежения и работы с программным и адаптивным управлениями.
Конспект лекций предназначен для бакалавров дневной и заочной форм обучения специальностей электроэнергетического направления, а также может быть использован инженерно-техническими работниками, занимающимися вопросами автоматики.
Ил. 36, библиогр. – 17 назв.
Рецензент: д-р техн. наук, проф. П.И. Сагитов.
Печатается по плану издания некоммерческого акционерного общества «Алматинский институт энергетики и связи» на 2007г.
Ó НАО «Алматинский институт энергетики и связи», 2007г.
Содержание
|
Введение…………………………………………………………………………….. |
4 |
|
Лекция №1. Принципы построения цифроаналоговых и цифровых систем автоматического управления электроприводами |
5 |
|
Лекция №2.Цифроаналоговые и цифровые системы стабилизации скорости… |
9 |
|
Лекция №3. Аналоговые и цифроаналоговые системы управления положением позиционного электропривода |
3 |
|
Лекция №4. Цифровые системы управления положением с управлением от ЭВМ |
16 |
|
Лекция №5. Системы управления следящего электропривода и основные принципы их построения… |
18 |
|
Лекция №6. Аналоговые и цифровые системы управления следящего электропривода… |
21 |
|
Лекция №7. Системы программного управления электроприводами, принципы их построения и классификация… |
25 |
|
Лекция №8. Цикловые системы программного управления электроприводами. |
29 |
|
Лекция №9. Системы числового программного управления электроприводами. |
33 |
|
Лекция №10. Системы числового программного управления с ЭВМ… |
37 |
|
Лекция №11. Адаптивные системы управления электроприводами и принципы их построения…… |
41 |
|
Лекция №12. Беспоисковые адаптивные системы управления электроприводами… |
43 |
|
Лекция №13. Поисковые адаптивные системы управления электроприводами.. |
47 |
|
Список литературы…………………………………………………………………. |
50 |
Введение
Средства автоматики поднимают любой технологический процесс на новую, более высокую ступень совершенства и позволяют существенно повысить эффективность ведения технологических процессов. При этом автоматизированный электропривод является основным и главным средством автоматизации рабочих машин и производственных процессов [1,2,3,4].
Автоматизированный электропривод в современных условиях представляет собой систему автоматического управления, которая может составлять часть более сложной автоматической системы управления процессом. Такие сложные системы должны собирать информацию о ходе производственного процесса, обрабатывать её согласно заданным «алгоритмам» и выдавать управляющие воздействия электрическим машинам или другим элементам, обеспечивающие целесообразный ход производственного процесса. Алгоритмом здесь назван перечень логических и математических правил, которым должны подчиняться переменные в данном процессе. В простейших случаях алгоритм сводиться к задачам автоматического пуска или остановки электродвигателей. В более сложных системах управления электроприводами, может оказаться необходимым подсчет к.п.д. объекта управления и автоматическое управление, обеспечивающее максимум к.п.д., при различных возмущениях.
Широкое развитие цифровых управляющих машин привело к тому, что системы управления электроприводами в настоящее время строятся не аппаратными средствами, а с использованием таких машин, в которых требуемые алгоритмы управления электропривода закладываются программно. Это упрощает задачи проектирования и изготовления таких систем, а также создаёт возможность управлять электроприводами больших промышленных установок, связанных единым технологическим процессом от единого информационно управляющего комплекса, что особенно важно при создании гибких управляющих производств. Использование цифровых управляющих машин в системах электропривода открывает новые возможности их работы, обусловленные созданием систем диагностики и контроля работы электропривода на дисплее. В данном конспекте лекций рассмотрены не только цифровые системы управления, но и аналоговые, на базе которых создаются цифровые. Это целесообразно по методическим соображениям, так как позволяет показать последовательность развития сложных современных систем управления электропривода и методики их синтеза и анализа.
Лекция №1. Принципы построения цифроаналоговых и цифровых систем автоматического управления электроприводами
Содержание лекции:
- основные понятия о цифровых и цифроаналоговых системах автоматического управления электроприводами (САУЭП) и принципы их построения;
- преобразование аналоговых сигналов в дискретные сигналы и наоборот;
- основные функциональные элементы САУЭП.
Цели лекции:
- освоить методы преобразования аналоговых сигналов в дискретные сигналы и наоборот;
- изучить назначение основных функциональных элементов САУЭП;
- освоить основные принципы построения структурных схем САУЭП.
Аналоговые системы управления электроприводами, осуществляющие, например, стабилизацию скорости с точностью 1- 0,5 % не могут обеспечить точность порядка 0,1 – 0,01 %, требующуюся в некоторых производственных механизмах. Это происходит из-за неспособности аналоговых задатчиков и датчиков скорости точно измерять значения стабилизируемой координаты и неспособности аналоговых устройств сравнения (усилителей) точно сравнивать малые сигналы задания и обратной связи при наличии в них дрейфа нуля. От этих недостатков свободны цифровые устройства, позволяющие создавать цифровые системы управления, обеспечивающие регулирование координат с точностью до 0,01 % и выше.
Обычно в системах управления электроприводами обеспечивается контроль координат электропривода, например скорости, и контроль состояния объекта управления (исполнительного органа рабочей машины ИОРМ), например его положения, осуществляемое с помощью датчиков ДСЭП и ДСОУ (рисунок 1.1). Применение в таких системах цифровых задающих устройств (ЗУ) с цифроаналоговыми преобразователями цифрового сигнала в аналоговый (ЦАП) повышает точность задающих воздействий и позволяет осуществить их точную индикацию (рисунок 1.1, а). Использование цифровых устройств задания ЗУ, обратной связи ДСОУ и сравнения УС с ЦАП (рисунок 1.1, б) повышает точность регулирования в целом. При этом в цифровых системах появилась возможность использования точных цифровых регуляторов ЦР с аналоговой системой управления электропривода (рисунок 1.1, в) с аналоговым регулятором АР или с полностью цифровой (рисунок 1.1, г).
Разделение устройств на цифровые и аналоговые связано с формой представления информации, обрабатываемой этими устройствами, и соответствующей аппаратурой для реализации этих устройств. Аналоговая форма представления переменных характеризуется пропорциональностью их различным физическим величинам – напряжению, току, скорости, частоте, углу поворота вала и т. п. Цифровая (числовая) форма представления – обозначение величины цифровым кодом числа с использованием только двух чисел 1 и 0. При записи числа унитарным кодом обеспечивается требуемое количество импульсов, означающих число и следующих чисел последовательно.
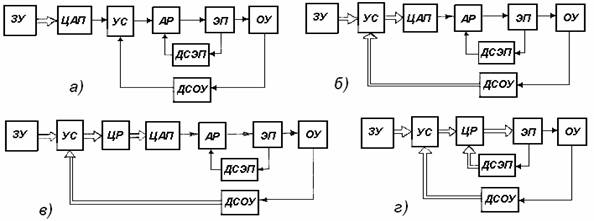
Рисунок 1.1 - Цифроаналоговые системы управления электроприводом: а – с цифровым заданием; б – с цифровым заданием и контролем положения; в – с цифровым управлением положения; г – с цифровым управлением положения и скорости
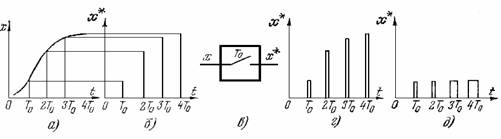
При цифровом представлении сигнала фиксируется уровень аналогового сигнала на определенном дискретном промежутке времени или уровне сигнала. Тогда непрерывная функция аналогового сигнала аппроксимируется ступенчатой функцией, представляющей собой последовательность значений непрерывной функции в дискретном ряде точек. Эта операция называется квантованием сигнала [6]. Если дискретность осуществляется по времени через равные промежутки времени Т0, то такое квантование называется квантованием по времени (рисунок 1.2, а), а если по уровню выходного сигнала, через равные значения q (рисунок 1.3, а), то – квантованием по уровню. Интервалы Т0 и q называют шагом квантования.
Рисунок
1.2 - Дискретизация величин по времени: а – непрерывная функция; б
–решетчатая функция; в – условное обозначение импульсного элемента; г
– амплитудно-импульсная модуляция; д – широтно-импульсная
модуляция
При квантовании по времени непрерывный сигнал (рисунок 1.2, а) заменяется решетчатой функцией (рисунок 1.2, б)
 (1.1)
(1.1)
где Т0 – период дискретности.
Эта операция осуществляется импульсным элементом дискретизатором, условное обозначение которого показано на рисунке 1.2,в. Обычно дискретизатором является модулятор, который модулирует последовательность импульсов с периодом дискретности Т0 непрерывным входным сигналом по амплитуде импульсов (рисунок 1.2, г, амплитудно-импульсная модуляция – АИМ), по длительности, т. е. по ширине импульсов (рисунок 1.2, д, широтно-импульсная модуляция – ШИМ). Применяются также модуляции по частоте следования импульсов – частотно-импульсная модуляция (ЧИМ) и по фазе импульсов фазоимпульсная модуляция (ФИМ).
В результате дискретизации с частотой квантования ![]() о=2
о=2![]() /То=2
/То=2![]() fо дискретная
функция
fо дискретная
функция
 (1.2)
(1.2)записанная при х(0)=0, содержит полезный сигнал при частоте
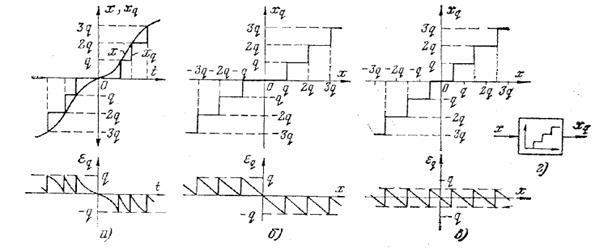
Рисунок 1.3 - Квантование величин по уровню: а – замена непрерывной функции дискретной при квантовании по уровню; б, в – статические характеристики квантователей и соответствующие им погрешности квантования; г – условное обозначение квантователя
В цифровых устройствах большее использование находит квантование по уровню, при котором непрерывная функция заменяется дискретной, определяемой по времени на интервалах кванта (рисунок 1.3, а). В этом случае непрерывный сигнал представляется в виде его цифрового значения
 (1.6)
(1.6)
где k – крутизна характеристики квантователя (рисунок 1.3) которая равна k = 1; ent - целая часть; n = 0, ±1, ±2,… - номер интервала шкалы квантователя.
Квантование по уровню осуществляется с погрешностью, равной разности между выходным хq и входным х сигналами ![]() (1.4)
(1.4)
показанной на рисунке 1.3, а.
Модуль погрешности зависит от вида характеристики
квантователя и равен ![]() q и
q и ![]() q/2 соответственно для характеристик, приведенных на
рисунках 1.3, б и 1.3, в. Условное изображение
квантователя как аналого-цифрового преобразователя (АЦП) показано на
рисунке 1.3, г.
q/2 соответственно для характеристик, приведенных на
рисунках 1.3, б и 1.3, в. Условное изображение
квантователя как аналого-цифрового преобразователя (АЦП) показано на
рисунке 1.3, г.
Преобразование дискретизированных сигналов в
аналоговые при квантовании по времени называется демодуляцией, а восстановление
огибающей решетчатой функции – интерполяцией. Такие преобразования осуществляют
устройства, называемые демодуляторами или интерполяторами. Они являются
фильтрами нижних частот. Их условное изображение приведено на рисунке 1.4, а.
Дискретизация осуществляется с частотой дискретизации ![]() 0 согласно
теореме Котельникова [6,7], непрерывная функция х(t) полностью определяется своими ординатами, заданными
во временной области для последовательных моментов времени, следующих через Тс
, если функция х(t) не содержит частот выше 0,5 Тс .
Отсюда следует, что частота дискретизация должна быть
0 согласно
теореме Котельникова [6,7], непрерывная функция х(t) полностью определяется своими ординатами, заданными
во временной области для последовательных моментов времени, следующих через Тс
, если функция х(t) не содержит частот выше 0,5 Тс .
Отсюда следует, что частота дискретизация должна быть
![]() (1.5)
(1.5)
где –![]() =2
=2![]() / Тс =2
/ Тс =2![]() f0 наибольшая частота спектра функции х(t).
f0 наибольшая частота спектра функции х(t).

Рисунок 1.4 - Интерполяция величин: а – условное обозначение фильтра нижних частот – интерполятора; б – условное обозначение цифроаналогового преобразователя; в – восстановление огибающей решетчатой функции и ее погрешность; г – квантованная по уровню решетчатая функция и погрешность восстановления ее интерполятором
В системах управления электроприводами наибольшее распространение
получили простейшие интерполяторы нулевого порядка, которые фиксируют значение
дискретного сигнала в момент дискретизации на весь период дискретности и
преобразуют решетчатую функцию в кусочно-постоянную (рисунок 1.4, в).
Это преобразование происходит с погрешностью интерполяции ![]() = = х= – х, которая может быть уменьшена
= = х= – х, которая может быть уменьшена
при использовании сложных интерполяторов более высоких порядков.
Преобразование цифровой информации в аналоговую при квантовании сигналов по уровню выполняется цифроаналоговым преобразователем (ЦАП), условное обозначение которого показано на рисунке 1.4, б. ЦАП осуществляет линейное цифроаналоговое преобразование цифрового сигнала хq в цифроаналоговую величину xц,а. Фактически величина xц,а не является аналоговой, а в статическом режиме имеет вид исходной кусочно-постоянной квантованной функции хq, показанной на рисунке 1.3, а.
В цифроаналоговых устройствах и системах управления электроприводами дискретные величины могут представляться как в аналоговой форме х*(t) (рисунок 1.2, б), так и в цифровой х*q(t), в виде решетчатой функции, квантованной по уровню с погрешностью e =хq - х, (рисунок 1.4, г). В первом случае устройства называют импульсными, а во втором – импульсно-кодовыми.
Лекция №2. Цифроаналоговые и цифровые системы стабилизации скорости
Содержание лекции:
- цифроаналоговая система стабилизации скорости электропривода, её компоненты, устройство и принцип действия;
- цифровая система стабилизации скорости электропривода, её компоненты, устройство и принцип действия.
Цели лекции:
- освоить основные принципы построения цифроаналоговых и цифровых систем стабилизации скорости;
- изучить назначение и принцип действия рассматриваемых систем и основных функциональных элементов.
Цифроаналоговые системы стабилизации скорости и момента двигателя, как и аналоговые системы, выполняются по структуре с подчиненным регулированием координат. Они содержат аналоговую и цифровую часть и поэтому называются цифроаналоговыми. Аналоговыми элементами таких систем являются преобразователи и двигатели. Вследствие способности датчиков тока точно измерять ток двигателя, контуры тока в системе также выполняются аналоговыми. Цифровая часть системы электропривода относится к контуру регулирования скорости и включает в себя цифровые устройства задания скорости и информационно - измерительные устройства скорости в виде датчика и регулятора скорости.
В системах с меньшей точностью регулирования скорости контур скорости делают комбинированным – цифроаналоговым. Пропорциональная часть регулятора скорости является аналоговой, а интегрирующая – цифровой. Задание скорости в таких системах является цифровым. Функциональная схема системы приведена на рисунке 2.1. Задание скорости электропривода вводится в форме числа NЗС с помощью устройства ввода задания SZ. Темп нарастания задающего напряжения, а соответственно и скорости обеспечивается цифровым задатчиком интенсивности SJZ. Далее цифровой сигнал задания N’ЗС цифроаналоговым преобразователем (ЦАП) UZV преобразуется в аналоговый сигнал задания скорости UЗС , подается на аналоговый регулятор скорости АR. Одновременно число N’ЗС в управляемом делителе частоты А1 определяет частоту следования импульсов задания скорости fЗ, которые получаются из импульсов эталонной частоты fЭ , задаваемых высокостабильным кварцевым генератором Gf.
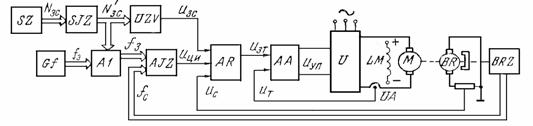
Рисунок 2.1 - Функциональная схема цифроаналоговой системы стабилизации скорости электропривода
Импульсы задания с частотой fЗ поступают в цифровой интегратор (ЦИ) АJZ, являющийся интегрирующей частью регулятора скорости и на который также подаются импульсы обратной связи по скорости, следующие с импульсного датчика скорости ВRZ с частотой fС, пропорциональной текущей скорости двигателя. ЦИ состоит из трех основных узлов: узла разделения импульсов задания и обратной связи по времени (УРИ), реверсивного счетчика РС и ЦАП (рисунок 2.2, а). УРИ распределяет во времени импульсы с частотами fЗ и fС, чтобы они поступали на РС последовательно, т. е. fЗ во время пауз fС и наоборот fП - во время пауз fС. Реверсивный счетчик имеет два входа: сложение и вычитание, на которые соответственно поступают последовательно импульсы fЗ и fС. РС считает количество импульсов fЗ и fС. При этом, если fС = fЗ т. е. скорость двигателя равна заданной, счетчик на выходе числа не меняет; если fС < fЗ (скорость двигателя ниже заданной), то счетчик сосчитает число + f = fЗ - fС, что повысит на выходе ЦАП цифрового интегратора напряжение UЦИ, являющееся интегральной составляющей рассогласования регулятора скорости, и соответственно напряжение UЗТ и скорость двигателя (рисунок 2.1). Если fС >fЗ, т. е. скорость двигателя выше заданной, то счетчик сосчитает число – f = fС – fЗ, что снизит на выходе UЦИ значение, а затем UЗТ и скорость двигателя. Таким образом, счетчик обеспечивает интегрирование рассогласования между импульсом задания и обратной связи, следующими с частотами fЗ и fС которое в ЦАП ЦИ превращается в аналоговый сигнал интегральной составляющей рассогласования UЦИ, величина которого пропорциональна числу, записанному в счетчике. Далее сигнал UЦИ складываясь арифметически с UЗС в АR, обеспечивает повышение или снижение скорости двигателя.
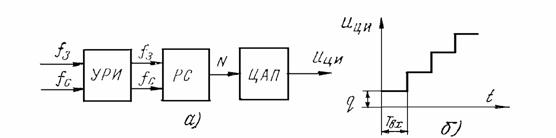
Рисунок 2.2 - Цифровой интегратор: а – функциональная схема;
б –характеристика
Работа ЦИ иллюстрируется на рисунке 2.2, б, где приведена его переходная функция UЦИ (t) при постоянной частоте входного сигнала fвх. Как видно, сигнал на выходе ЦИ увеличивается дискретно на дискрету q=UЦИмах /N, где N цифровая емкость счетчика ЦИ, при поступлении каждого входного импульса с периодом их следования Твх=1/fвх. При больших значениях и высокой частоте входных импульсов переходная функция ЦИ практически превращается в прямую линию.
Выходное напряжение ЦИ и его полярность определяются интегралом разности входных частот (задания и обратной связи)
 (2.1)
(2.1)
или
![]() (2.2)
(2.2)
где ![]() - разность фаз последовательностей импульсов
входных частот.
- разность фаз последовательностей импульсов
входных частот.
Переходная функция ЦИ в дискретной форме описывается уравнением
Если ![]() разложить в степенной ряд и
ограничить двумя первыми членами разложения, то
разложить в степенной ряд и
ограничить двумя первыми членами разложения, то
![]() (2.4)
(2.4)
![]() (2.5)
(2.5)
где ТЦИ =Твх/q – постоянная времени интегратора.
Более точная система регулирования скорости получается при наличии цифрового контура скорости. Функциональная схема системы приведена на рисунке 2.3. В такой системе электропривода задание скорости может
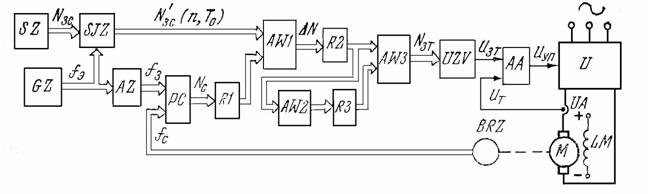
Рисунок 2.3 - Функциональная схема цифровой системы стабилизации скорости электропривода
осуществляться скачком или в виде временной функции с использованием цифрового задатчика интенсивности SJZ, обеспечивающего требуемый темп нарастания сигнала задания скорости N’ЗС(nT0) и соответственно скорости двигателя. Сигнал обратной связи по скорости обеспечивается импульсным датчиком скорости ВRZ. Импульсы датчика скорости подсчитываются счетчиком РС за фиксированный дискретный интервал времени Т0, определяемый частотой дискретизации f0 цифровой системы (Т0=1/f0). Частота дискретизации задается от выcокостабильного кварцевого генератора эталонной частоты Gf через делитель частоты АZ (f0=fЭ/kд). Текущая скорость электродвигателя в момент времени t=пТ0 пропорциональна числу подсчитанных импульсов
где m - число импульсов датчика скорости за интервал времени [(п-1)Т0 – пТ0]; z – число импульсов датчика за один оборот его вала.
На выходе счетчика РС по истечении интервала времени получается число Nc[пТ0] как цифровой сигнал обратной связи по скорости. Это число запоминается в регистре R1 до начала следующего периода [пТ0 - (n +1)Т0] и затем сравнивается в сумматоре АW1 с числом задания скорости NЗС . На выходе АW1 получается разница в виде числового сигнала управлениякоторое запоминается в регистре R2 и далее подается в ЦАП UZV, если в системе используется пропорциональный регулятор скорости, работающий по алгоритму
![]() (2.7)
(2.7)
где k1 - масштабный коэффициент.
Если в системе используется ПИ-регулятор скорости, работающий по алгоритмуто в цифровой части применяются дополнительно сумматор AW2 и регистр R3. Интегральная составляющая получается посредством последовательного алгебраического суммирования текущих значений отклонения скорости
Цифровой регулятор скорости и другие цифровые устройства реализуются на базе стандартных блоков, выпускаемых промышленностью [6]. Реализация этих устройств упрощается, если управление электроприводом производится от ЭВМ, в которую заложена соответствующая программа.
В последнее время разрабатываются системы регулирования скорости с управлением тиристорным преобразователем непосредственно от ЭВМ без системы импульсно-фазового управления (СИФУ), которое назвали прямым управлением. В таких системах аналоговой частью системы является только силовая часть выпрямитель – двигатель, а контуры тока и скорости – цифровые. «Прямое» управление обеспечивает ЭВМ, которая также выполняет функции СИФУ, т. е. формирует и в требуемые моменты времени подает импульсы управления на тиристоры выпрямителя. Работа цифровых регуляторов скорости и тока обеспечивается в ЭВМ программными способами.
Лекция №3. Аналоговые и цифроаналоговые системы управления положением позиционного электропривода
Содержание лекции:
- функциональная и принципиальная схемы аналоговой системы управления положением, устройство и принцип действия;
- принципы построения цифроаналоговых систем управления положением, функциональная схема, устройство и принцип действия.
Цели лекции:
- освоить основные принципы построения аналоговых и цифровых систем управления положением позиционного электропривода;
- изучить назначение и принцип действия рассматриваемых систем и основных их функциональных элементов.
При автоматизации механизмов, основным рабочим движением которых является угловое или линейное перемещение исполнительного органа и его остановка в требуемых положениях, широкое распространение получил позиционный электропривод с системами управления положением. Автоматическое управление положением бывает двух видов:
a) дискретное позиционирование электропривода в заданных точках пути по дискретным сигналам путевых датчиков;
b) непрерывное автоматическое управление положением по отклонению для осуществления дозированных перемещений или по заданной программе.
Независимо от способа управления электропривод обеспечивает дискретное или непрерывное задание позиции или значения перемещения; контроль перемещения в позиции, определяемый требуемой точностью останова исполнительного органа и производительностью рабочей машины, зависящей от скорости перемещения в заданную позицию; точный останов в заданной позиции.
При дискретном позиционировании задается определенное конечное положение движения исполнительного органа. Контроль этого положения осуществляют дискретные датчики положения – контактные и бесконтактные конечные или путевые выключатели с погрешностью срабатывания 1– 0,01 мм. В этом случае обычно используются разомкнутые системы управления электроприводом, обеспечивающие остановку электродвигателя в заданной позиции с наложением механического тормоза. Такой вид управления применяется при невысокой точности позиционирования с редко переналаживаемым циклом перемещений.
При непрерывном управлении положением контроль положения исполнительного органа производится непрерывно в течение всего перемещения до остановки в заданном положении. С этой целью используют непрерывные аналоговые или цифровые датчики перемещения, характеризуемые высокой точностью (до 0,001 мм). В этом случае применяют замкнутые системы электропривода. Такой вид управления целесообразен в системах позиционирования высокой точности с часто переналаживаемым циклом перемещений. Точные системы позиционирования строятся по принципам подчиненного регулирования с двигателями постоянного тока, причем к внутренним контурам тока и скорости добавляется аналоговый или цифровой контур положения.

Рисунок 3.1 - Функциональная схема аналоговой системы управлением положением
Функциональная схема аналоговой системы управления положением приведена на рисунке 3.1. В ней используется тиристорный электропривод постоянного тока с трехконтурной системой управления, построенной
по принципу подчиненного регулирования скорости и тока с контурами тока, скорости и положения. Сигнал задания положения UЗП подается на регулятор положения АQ, на который также с датчика положения BQ подается сигнал обратной связи по положению Uп. Внутренние контуры скорости и тока выполнены как в системах стабилизации скорости [4,5]. В таких системах управления позиционного электропривода в качестве датчиков перемещения обычно используются датчики углового перемещения в виде сельсинов или поворотных трансформаторов, валы которых соединяются как с валом двигателя, так и с валом ИОРМ непосредственно или через редукторы (рисунок 3.2). Для преобразования сигнала управления переменного тока определенной фазы, идущего с сельсина или поворотного трансформатора, в сигнал управления постоянного тока определенной полярности в схеме используются фазочувствительные выпрямители (ФЧВ) UВ. Задание положения обеспечивается задатчиком (сельсином-датчиком ВС), который поворачивается на требуемый заданный угол qЗ, определяющий требуемое перемещение ИОРМ. Текущее положение ИОРМ контролируется датчиком положения, который называется сельсином-приемником ВЕ. Задачей рассматриваемой системы управления является точная остановка двигателя и соответственно ИОРМ в заданном положении. Это произойдет, когда двигатель или ИОРМ отработает заданный угол qЗ и угол сельсина приемника ВЕ станет равным углу задания (qП =qЗ), а рассогласование будет
равно нулю (qЗ -qП =![]() =0).
=0).
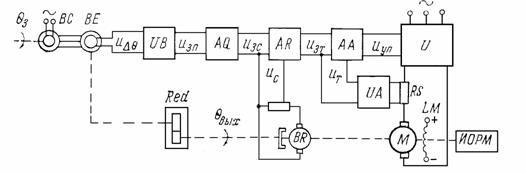
Рисунок 3.2 - Упрощенная принципиальная схема аналоговой системы управления положением
При высоких требованиях
к позиционированию применяются цифроаналоговые системы управления положением. Так
как система позиционирования не предъявляет высоких требований к точности
регулирования скорости и тока электропривода, то система выполняется с
аналоговыми контурами тока и скорости и цифровым контуром положения.
Функциональная схема такой системы приведена на рисунке 3.3. Схема содержит
аналоговую часть системы в силовой части с преобразователем и двигателем и в
системе управления с контурами тока и скорости с аналоговыми регуляторами АА
и АR и
датчиками тока и скорости UА, ВR. Регулятор положения выполнен как цифроаналоговый с аналоговой
частью АQ. В цифровую часть контура положения входят арифметическое
устройство (АУ)
АW, цифроаналоговый преобразователь (ЦАП) UZV.
Арифметическое устройство получает на
вход цифровой сигнал задания положения NӨЗ с цифрового устройства ввода задания SZ и цифровой
сигнал NӨП,
соответствующий реальному положению. Этот
сигнал подается от датчика положения BQ и преобразуется в цифровой
сигнал преобразователем кода UZ. Числа NӨЗ и NӨП поступают в АУ в двоично-параллельном коде. АУ
сравнивает NӨЗ
и NӨП и
вырабатывает на входе числовой сигнал управления, равный разности ![]() N = N
N = N![]() = NӨЗ - NӨП. Это число с
помощью цифроаналогового преобразователя UZV преобразуется в аналоговый
сигнал задания положения UЗП,
поступающий на аналоговую часть РП.
Остальная часть системы работает как аналоговая.
= NӨЗ - NӨП. Это число с
помощью цифроаналогового преобразователя UZV преобразуется в аналоговый
сигнал задания положения UЗП,
поступающий на аналоговую часть РП.
Остальная часть системы работает как аналоговая.

Рисунок 3.3 - Функциональная схема цифроаналоговой системы управления положением
Лекция №4. Цифровые системы управления положением с управлением от ЭВМ
Содержание лекции:
- функциональная схема цифровой системы управления положением с микро-ЭВМ, основные компоненты и принцип действия;
- регулятор положения, алгоритм работы контура положения.
Цели лекции:
- освоить основные принципы построения цифровой системы управления положением с микро-ЭВМ;
- изучить назначение и принцип действия рассматриваемой системы и основных её функциональных элементов.
В настоящее время разрабатываются системы позиционного электропривода с ЭВМ, осуществляющие цифровое управление положением. Функциональная схема такой системы приведена на рисунке 4.1. Формирование графиков скорости и тока электропривода обеспечивается аналоговыми контурами скорости и тока. Контур положения, отрабатывающий заданное линейное перемещение S, выполняется программным способом, осуществляемым с микро-ЭВМ. Микро-ЭВМ содержит микропроцессор МП, оперативное ОЗУ и постоянное П3У запоминающие устройства, интерфейсы входов и выходов Инт и шины данных ШД, адреса ША и управления ШУ. Связь микро-ЭВМ с аналоговой частью электропривода осуществляется через ЦАП.
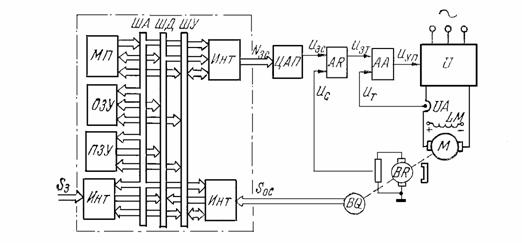
Рисунок 4.1 - Функциональная схема цифровой системы управления положением с микро-ЭВМ
Программным способом с помощью микро-ЭВМ можно реализовать
регулятор положения РП любого типа П, ПИ параболический. Наиболее сложным
является РП с линейно параболической характеристикой (рисунок 4.2). Эта
характеристика кодируется в числовом коде и записывается в ОЗУ в виде
таблицы соответствия цифрового задания скорости NЗС и приращения перемещения ![]() S=Sз-Sос. В примере, поясняющем
принцип действия системы, кодирование NЗС и
S=Sз-Sос. В примере, поясняющем
принцип действия системы, кодирование NЗС и ![]() S выполнено с
помощью четырех разрядов двоичного кода. При этом получается большая
погрешность записи NЗС* по
сравнению с требуемой NЗС. Реально в микро-ЭВМ используются восемь разрядов
двоичного кода и кодируется 28 = 256 точек, обеспечивающих
достаточную точность воспроизведения зависимости NЗС=f(
S выполнено с
помощью четырех разрядов двоичного кода. При этом получается большая
погрешность записи NЗС* по
сравнению с требуемой NЗС. Реально в микро-ЭВМ используются восемь разрядов
двоичного кода и кодируется 28 = 256 точек, обеспечивающих
достаточную точность воспроизведения зависимости NЗС=f(![]() S). Работа контура положения строится по алгоритму,
показанному на рисунке 4.3. Задание на движение Sз
записывается в ПЗУ, и
микро-ЭВМ сравнивает значения SЗ и
SОС и вырабатывает
рассогласование
S). Работа контура положения строится по алгоритму,
показанному на рисунке 4.3. Задание на движение Sз
записывается в ПЗУ, и
микро-ЭВМ сравнивает значения SЗ и
SОС и вырабатывает
рассогласование![]() SРПрп,
согласно которому определяет NЗС по характеристике РП,
записанной в ОЗУ. В начале движения, когда Sос мало,
SРПрп,
согласно которому определяет NЗС по характеристике РП,
записанной в ОЗУ. В начале движения, когда Sос мало, ![]() S имеет
большое значение и микро-ЭВМ выдает NЗС мах,
чему соответствует UЗC мах, и электропривод обеспечивает максимальную скорость.
Когда
S имеет
большое значение и микро-ЭВМ выдает NЗС мах,
чему соответствует UЗC мах, и электропривод обеспечивает максимальную скорость.
Когда ![]() S
станет меньше значения 1111, микро-ЭВМ начнет уменьшать NЗС и UЗC и скорость перемещения будет снижаться. В конце
перемещения, когда Sос = Sз и
S
станет меньше значения 1111, микро-ЭВМ начнет уменьшать NЗС и UЗC и скорость перемещения будет снижаться. В конце
перемещения, когда Sос = Sз и ![]() S=0, то NЗС = 0 и UЗC =0
и двигатель остановится, отработав
заданное перемещение. Если возникает перерегулирование, то
S=0, то NЗС = 0 и UЗC =0
и двигатель остановится, отработав
заданное перемещение. Если возникает перерегулирование, то ![]() S
получит отрицательное значение, что обеспечит - NЗС и -UЗC, двигатель реверсируется и приближает ИОРМ к
заданному положению.
S
получит отрицательное значение, что обеспечит - NЗС и -UЗC, двигатель реверсируется и приближает ИОРМ к
заданному положению.
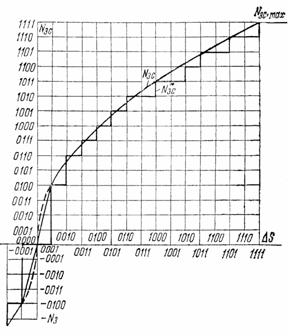
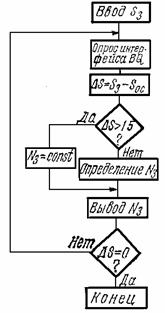
Рисунок 4.2 - Характеристика регулятора Рисунок 4.3 - Алгоритм работы положения контура положения
Лекция №5. Системы управления следящего электропривода и основные принципы их построения
Содержание лекции:
- назначение и основные принципы построения систем управления следящего электропривода, классификация СУ СЭП;
- структурная схема СУ СЭП, основные её компоненты и принцип действия.
Цели лекции:
- освоить основные принципы построения СУ СЭП и научиться их классифицировать;
- изучить принцип действия СУ СЭП и основных её функциональных элементов на примере рассматриваемой структурной схемы.
Система управления следящего электропривода (СУ СЭП) – это замкнутая динамическая система, которая получает на вход переменную, произвольно меняющуюся во времени, и обеспечивает ее отработку на выходе таким образом, чтобы погрешность слежения не превышала допустимых (заданных) значений. Следящие электроприводы производственных механизмов подразделяются по назначению на электроприводы со слежением по угловому или линейному перемещениям ИОРМ, по исполнению на электрические с двигателями постоянного и переменного тока, по системе управления на системы с суммирующим усилителем и с подчиненным регулированием координат, по принципу действия на аналоговые, дискретные (релейные и импульсные) и цифровые системы [8,9,10].
Обобщенная структурная схема СУ СЭП приведена на рисунке 5.1. Система включает в себя измерительное устройство АW, преобразующее устройство UВ, промежуточный суммирующий усилитель А, электропривод ЭП с преобразователем U и электрическим двигателем М, воздействующим обычно через редуктор Rеd на исполнительный орган производственного механизма – объект управления ОУ, с выходной координатой обычно в виде угла qвых, обратные связи: внешнюю или главную (ОСГ) и внутренние (ОСВ).
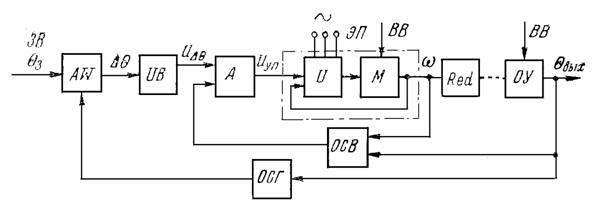
Рисунок 5.1 - Структурная схема СУ СЭП
На вход СУ СЭП подается задающее воздействие ЗВ в виде угла ![]() изменяющееся во
времени и обеспечивающее требуемый закон управления объектом. Кроме задающего
воздействия на объект управления и электропривод всегда действуют различные
внешние возмущающие воздействия ВВ, вызывающие отклонения регулируемой
величины от заданного закона управления. К внешним воздействиям относятся
изменения нагрузки на валу электрического двигателя, к внутренним – различные
случайные помехи и изменения, действующие в устройствах СУ СЭП.
изменяющееся во
времени и обеспечивающее требуемый закон управления объектом. Кроме задающего
воздействия на объект управления и электропривод всегда действуют различные
внешние возмущающие воздействия ВВ, вызывающие отклонения регулируемой
величины от заданного закона управления. К внешним воздействиям относятся
изменения нагрузки на валу электрического двигателя, к внутренним – различные
случайные помехи и изменения, действующие в устройствах СУ СЭП.
По своему действию СУ СЭП является астатической, обеспечивающей полную отработку управляющего воздействия с небольшой погрешностью, определяемой возмущающими воздействиями и параметрами системы. Точность работы СУ СЭП при управлении оценивают по точности воспроизведения задающего сигнала, который при исследованиях изменяют с постоянной скоростью, с постоянным ускорением или по гармоническому закону.
В качестве измерительных устройств в СУ СЭП используются потенциометры, сельсины и синусно-косинусные вращающиеся трансформаторы (СКВТ), имеющие погрешность отработки рассогласования у потенциометров 0,2– 0,6%, у сельсинов 0,25 – 1o и поворотных трансформаторов – единицы угловых минут.
Преобразующее устройство (ПУ) UВ служит для получения напряжения рассогласования U![]() , пропорционального погрешности
, пропорционального погрешности ![]() .
Это осуществляют сами измерительные устройства, выходным сигналом которых и
является напряжение рассогласования. Однако при использовании сельсинов и СКВТ
в ПУ входит еще
фазочувствительный выпрямитель (ФЧВ), преобразующий
сигнал переменного тока определенной фазы в сигнал постоянного тока
соответствующей ей полярности.
.
Это осуществляют сами измерительные устройства, выходным сигналом которых и
является напряжение рассогласования. Однако при использовании сельсинов и СКВТ
в ПУ входит еще
фазочувствительный выпрямитель (ФЧВ), преобразующий
сигнал переменного тока определенной фазы в сигнал постоянного тока
соответствующей ей полярности.
В качестве промежуточных усилителей в СУ СЭП используются операционные усилители постоянного тока, позволяющие суммировать сигналы задания корректирующих обратных связей. При больших дрейфах нуля усилителя постоянного тока в СУ СЭП применяются усилители переменного тока, работающие по схеме модулятор – усилитель – демодулятор, обеспечивающие преобразование сигнала постоянного тока в сигнал переменного тока (модулятор) – усиление сигнала переменного тока (усилитель) и преобразование усиленного сигнала переменного тока в сигнал постоянного тока (демодулятор).
Исполнительным устройством в СУ СЭП являются тиристорные и транзисторные электроприводы постоянного и переменного тока. В электроприводах постоянного тока широкое применение находят высокомоментные двигатели серий ДПМ и ПБВ [17], обеспечивающие высокое быстродействие за счет малых индуктивностей обмоток и моментов инерции якоря, а также за счет обеспечения высоких пусковых моментов, превышающих номинальные значения до восьмикратных.
Питание следящих электроприводов осуществляется от индивидуальных источников постоянного тока и от промышленных сетей переменного тока с частотой 50 Гц. Маломощные электроприводы питаются от источников с частотой 400 Гц. Измерительные и преобразующие устройства, а также промежуточные усилители, питаются преимущественно от источников переменного тока с частотой 400 Гц. Это уменьшает габариты и снижает инерционности этих устройств.
Простейшей нескорректированной СУ СЭП является система с главной обратной связью по выходной координате, получившая название системы с пропорциональным регулированием. За выходную координату при синтезе и анализе СУ СЭП принимается координата, измеряемая приемником измерительного устройства. Если приемник установлен непосредственно на ИОРМ, то в качестве выходной координаты принимается перемещение или угол поворота вала этого исполнительного органа. В большинстве же следящих элёктроприводов приемник измерительного устройства устанавливается на валу двигателя, а в высокомоментных двигателях он встроен в двигатель. В этом случае за выходную координату можно принимать угол поворота двигателя, соответствующий углу поворота или перемещению ИОРМ.
Лекция №6. Аналоговые и цифровые системы управления следящего электропривода
Содержание лекции:
- основные принципы построения аналоговых и цифровых систем управления следящего электропривода;
- функциональные и структурные схемы аналоговых и цифровых СУ СЭП, основные их компоненты и принцип действия.
Цели лекции:
- изучить устройство и принцип действия аналоговых и цифровых СУ СЭП;
- изучить способы повышения точности работы СУ СЭП.
Функциональная схема простейшей нескорректированной аналоговой системы управления следящего электропривода (СУ СЭП) с главной обратной связью по выходному углу с двигателем постоянного тока и получившая название, как было отмечено выше, системы с пропорциональным регулированием приведена на рисунке 6.1. В схеме условно принято сельсинное измерительное устройство (ВС и ВЕ), в преобразующем устройстве использован ФЧВ UВ, в качестве усилителя напряжения безынерционный усилитель постоянного тока А и усилителя мощности безынерционный управляемый тиристорный электропривод U- М.
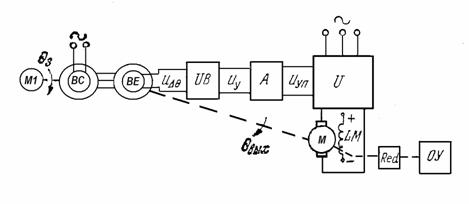
Рисунок 6.1 - Функциональная схема
аналоговой СУ СЭП с суммирующим усилителем
При имеющемся на входе (задающей оси) СУ СЭП угле
задания![]() , изменяющегося по произвольному закону, вал двигателя и
вал ИОРМ (исполнительная ось) следуют за ним с определенной погрешностью
, изменяющегося по произвольному закону, вал двигателя и
вал ИОРМ (исполнительная ось) следуют за ним с определенной погрешностью ![]() , которая является
сигналом рассогласования, управляющим системой следящего электропривода,
отрабатывающего сигнал задания.
, которая является
сигналом рассогласования, управляющим системой следящего электропривода,
отрабатывающего сигнал задания.
Для повышения точности работы СУ СЭП в них
используются двухотсчетные измерительные элементы с грубым (ГО) и точным (ТО) отсчетами
(рисунок 6.2). Сельсин-датчик и сельсин-приемник грубого отсчета ВС1 и ВЕI
соединяются с задающим и выходным осями системы непосредственно, а сельсины
точного отсчета ВС2 и ВЕ2 через редукторы Rеd1
и Rеd2.
Тогда погрешности сельсинов ТО снижаются
в число раз, равное передаточному отношению редуктора. В такой системе сельсины
грубого отсчета работают при отработке начальных больших углов рассогласования,
а сельсины точного отсчета – при малых
углах в режиме слежения. Выбор действия сельсинов ГО и ТО производит
специальный селектор S, обеспечивающий
использование сигнала сельсинов ГО при больших значениях рассогласования ![]() , а сигнала сельсинов
ТО – при его малых значениях. Используются различные схемы селекторов, наиболее
распространенная из них приведена на рисунке 6.2 [9]. В этой схеме при больших
сигналах рассогласования сигнал сельсина-приемника ГО оказывается больше
половины опорного напряжения U0, открывает диоды V1 и V2 и проходит на выход схемы (грубый отсчет). При этом
сигнал ВЕ2 не оказывает воздействие, так как R2>>R1.
При малых сигналах рассогласования
диоды закрыты и на выход схемы проходит только сигнал сельсина приемника ТО
(точный отсчет).
, а сигнала сельсинов
ТО – при его малых значениях. Используются различные схемы селекторов, наиболее
распространенная из них приведена на рисунке 6.2 [9]. В этой схеме при больших
сигналах рассогласования сигнал сельсина-приемника ГО оказывается больше
половины опорного напряжения U0, открывает диоды V1 и V2 и проходит на выход схемы (грубый отсчет). При этом
сигнал ВЕ2 не оказывает воздействие, так как R2>>R1.
При малых сигналах рассогласования
диоды закрыты и на выход схемы проходит только сигнал сельсина приемника ТО
(точный отсчет).
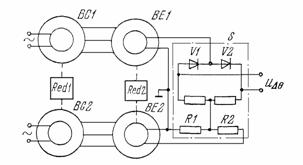
Рисунок 6.2 - Электрическая схема двухотсчетного измерительного устройства СУ СЭП
После изучения работы отдельных узлов следящих систем рассмотрим общую компоновку следящей системы непрерывного действия, функциональная схема которой показана на рисунке 6.3. На схеме обозначено: АW1 – измеритель рассогласования, содержащий задатчики ВС и приемники ВЕ грубого (ВС1, ВЕ1) и точного (ВС2, ВЕ2) отсчетов угловых (или линейных) перемещений; S – селектор грубого и точного отсчетов; АW2 – АW5 – сумматоры; UВ1, UВ 2 – фазочувствительные выпрямители (ФЧВ); АD1 – АDЗ и ВR1, ВR2 – последовательные и параллельные корректирующие устройства; UR – модулятор; А – усилитель; U – силовой тиристорный преобразователь напряжения; М – двигатель постоянного тока независимого возбуждения.

Рисунок 6.3 - Функциональная схема развернутой аналоговой CУ CЭП
В качестве измерителей рассогласования могут быть применены потенциометры, сельсины или поворотные синусно-косинусные трансформаторы в зависимости от требуемой точности управления. ФЧВ применяется, если в АW1 используются сельсины или поворотные трансформаторы.
В СУ СЭП сигнал
задания ![]() поступает
от задатчика ВС, а сигнал обратной связи
поступает
от задатчика ВС, а сигнал обратной связи ![]() – от датчика ВЕ; измеритель рассогласования углового перемещения АW1
обеспечивает сигнал рассогласования U
– от датчика ВЕ; измеритель рассогласования углового перемещения АW1
обеспечивает сигнал рассогласования U![]() пропорциональный рассогласованию углов. Селектор
включает схему грубого отсчета (при больших рассогласованиях) или точного
отсчета (при малых рассогласованиях).
пропорциональный рассогласованию углов. Селектор
включает схему грубого отсчета (при больших рассогласованиях) или точного
отсчета (при малых рассогласованиях).
На выходе селектора производится сложение сигнала рассогласования
U![]() c корректирующими сигналами по первой производной от
задающего воздействия U1
c корректирующими сигналами по первой производной от
задающего воздействия U1![]() , снимаемого с задающего тахогенератора ВR2,
и по первой производной от выходного
угла U1
, снимаемого с задающего тахогенератора ВR2,
и по первой производной от выходного
угла U1![]() снимаемого
с выходного тахогенератора ВR2,
если используются тахогенераторы ВR1
и ВR2 переменного тока (см. штрихпунктирные линии).
Суммарный сигнал переменного тока преобразуется в ФЧВ (UВ1)
в сигнал постоянного тока. После ФЧВ
может быть включено последовательное корректирующее устройство АD1
в виде дифференциатора,
обеспечивающего дополнительно к сигналу рассогласования его первую производную
U1
снимаемого
с выходного тахогенератора ВR2,
если используются тахогенераторы ВR1
и ВR2 переменного тока (см. штрихпунктирные линии).
Суммарный сигнал переменного тока преобразуется в ФЧВ (UВ1)
в сигнал постоянного тока. После ФЧВ
может быть включено последовательное корректирующее устройство АD1
в виде дифференциатора,
обеспечивающего дополнительно к сигналу рассогласования его первую производную
U1![]() . Дифференциатор
может быть также совмещен с ФЧВ. Далее к сигналу рассогласования и его производной
может добавляться сигнал параллельного корректирующего устройств АD2
по второй производной от выходного
угла U11
. Дифференциатор
может быть также совмещен с ФЧВ. Далее к сигналу рассогласования и его производной
может добавляться сигнал параллельного корректирующего устройств АD2
по второй производной от выходного
угла U11![]() взятая как производная сигнала по скорости, или АDЗ
– как сигнал по току двигателя с датчика тока UА
(отрицательная обратная связь по
ускорению). Сюда же могут подаваться сигналы U1
взятая как производная сигнала по скорости, или АDЗ
– как сигнал по току двигателя с датчика тока UА
(отрицательная обратная связь по
ускорению). Сюда же могут подаваться сигналы U1![]() и U1
и U1![]() (если ВR1 и ВR2 тахогенераторы постоянного тока). Суммарный сигнал
после корректирования усиливается усилителем постоянного тока. Ввиду дрейфа
нуля усилителя постоянного тока прямого усиления в следящих электроприводах наибольшее
распространение получили усилители, работающие по принципу модулятор – усилитель переменного тока – демодулятор UR –
А – UB2. Обычно демодулятором является второй ФЧВ UВ2,
преобразующий сигнал переменного тока
в постоянный. Далее сигнал подается на транзисторный или тиристорный электропривод
постоянного тока, который имеет в своём составе усилитель, СИФУ, систему
токоограничения, преобразователь U и двигатель постоянного тока М, отрабатывающий
заданное перемещение.
(если ВR1 и ВR2 тахогенераторы постоянного тока). Суммарный сигнал
после корректирования усиливается усилителем постоянного тока. Ввиду дрейфа
нуля усилителя постоянного тока прямого усиления в следящих электроприводах наибольшее
распространение получили усилители, работающие по принципу модулятор – усилитель переменного тока – демодулятор UR –
А – UB2. Обычно демодулятором является второй ФЧВ UВ2,
преобразующий сигнал переменного тока
в постоянный. Далее сигнал подается на транзисторный или тиристорный электропривод
постоянного тока, который имеет в своём составе усилитель, СИФУ, систему
токоограничения, преобразователь U и двигатель постоянного тока М, отрабатывающий
заданное перемещение.
В цифровых CУ СЭП используются цифровые устройства или ЭВМ. Такие системы обеспечивают задание, контроль отработки перемещения и выработку сигнала управления в цифровом коде с последующим преобразованием его в непрерывные сигналы управления электроприводом.
СУ СЭП бывают как цифроаналоговые, так и цифровые. Такие системы выполняются как системы регулирования положения, рассмотренные ранее (рисунки 3.3 и 4.1), в которых цифровые сигналы задания NӨЗ изменяются по требуемому алгоритму управления, а их скачкообразное изменение, используемое в системах управления положением, является частным случаем работы СУ СЭП.
В общем виде цифровая СУ СЭП может быть представлена структурной схемой, приведенной на рисунке 6.4.
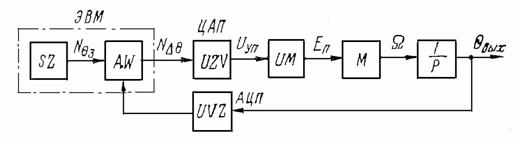
Рисунок 6.4 - Структурная схема цифровой СУ СЭП
Управление положением осуществляется от ЭВМ. Она
задает алгоритм управления и контролирует его отработку. Задание осуществляется
в цифровом коде NӨЗ.
Сигнал обратной связи по положению обеспечивается также в цифровом коде NӨвых, получаемый
с помощью АЦП UVZ. АЦП осуществляет квантование непрерывной величины по
уровню и времени и обеспечивает кодирование, т. е. преобразование аналоговых
сигналов в цифровые. Сравнивающее устройство ЭВМ производит сравнивание
цифровых сигналов задания и обратной связи и вырабатывает цифровой сигнал
управления ![]() .
Далее этот цифровой сигнал декодируется в ЦАП и превращается в аналоговый
сигнал задания скорости UУП, управляющий
электроприводом; если ЭВМ обеспечивает регулирование скорости и тока в цифровом
виде, то осуществляется прямое управление электроприводом.
.
Далее этот цифровой сигнал декодируется в ЦАП и превращается в аналоговый
сигнал задания скорости UУП, управляющий
электроприводом; если ЭВМ обеспечивает регулирование скорости и тока в цифровом
виде, то осуществляется прямое управление электроприводом.
Возможности используемой цифровой техники определяют основные достоинства цифровых СУ СЭП: высокие точность и помехозащищенность, реализацию сложных алгоритмов управления с помощью ЭВМ и организацию цифровой индикации работы электропривода.
Цифроаналоговые СУ СЭП позволяют получить высокую статическую точность регулирования (погрешность 0,01 — 0,001%), присущую цифровым устройствам, и хорошие динамические, т. е. высокое быстродействие с хорошим качеством переходного процесса, обеспечиваемые аналоговой частью системы. Статическая точность цифровых систем определяется шагом квантования по времени, минимальное значение которого ограничено точностью измерения параметра регулирования и точностью преобразования его значений в цифровую форму.
Применение цифровых систем быстро увеличивается в связи с развитием ЭВМ и созданием микро-ЭВМ и микропроцессоров.
Лекция №7. Системы программного управления электроприводами, принципы их построения и классификация
Содержание лекции:
- назначение и основные принципы построения систем программного управления электроприводами;
- классификация систем программного управления электроприводами.
Цели лекции:
- изучить основные принципы построения систем программного управления электроприводами;
- изучить классификацию систем программного управления электроприводами.
Системами программного управления (СПУ) являются системы автоматического управления рабочей машиной или ее отдельным исполнительным органом — объектом управления (ОУ), осуществляющие управления в соответствии с заданной управляющей программой [11-14].

Рисунок 7.1 - Структурная схема системы программного управления:
а – разомкнутая; б – замкнутая
Обобщенная структурная схема СПУ приведена на рисунке 7.1. Она включает в себя программное (ПУ), управляющее (УУ) и исполнительное (ИУ) устройства, объект управления (ОУ) и обратную связь (ОС). ПУ содержит программоноситель (ПН), вводное (ВУ) и считывающее (СУ) устройства. ПН, в качестве, которого используются перфоленты, магнитные ленты, дискеты и диски, штекерные и другие матрицы или ЭВМ, хранит информацию задания или чертежа, введенную в него программистом или ЭВМ в виде управляющей программы. ВУ вводит информацию управляющей программы в управляющее устройство с помощью СУ, если она записана на ПН или непосредственно от ЭВМ. УУ корректирует потоки информации управляющей программы в соответствии с информацией обратной связи или других источников информации, например, интерполяторов, производит требуемые математические операции и вырабатывает управляющие воздействия на исполнительные элементы – электроприводы. В СПУ применяются быстродействующие регулируемые и следящие электроприводы постоянного и переменного тока, которые приводят в движение объект управления в соответствии с информацией управляющей программы. Обратную связь осуществляют датчики обратной связи, вырабатывающие поток информации о фактическом положении ИОРМ, которая может определяться непосредственно при установке на исполнительном органе или косвенно при установке датчика на валу электрического двигателя электропривода.
Программное управление используется во всех отраслях промышленности, но особенно широкое распространение получило в металлообрабатывающей промышленности, где оно позволяет изготовлять изделия сложной формы с высокой точностью и производительностью без непосредственного участия человека.
СПУ классифицируется следующим образом: по принципу задания программы; по принципу управления; по принципу действия; по назначению.
По принципу задания управляющей программы СПУ разделяются на аналоговые и числовые. В аналоговых СПУ задание управляющей программы производится аналоговым сигналом в виде задания уровня напряжения постоянного тока или фазы напряжения переменного тока.
Числовые СПУ получили распространение в станкостроении. Поэтому термины и определения для них приводятся согласно ГОСТ 20523-81 «Устройства числового программного управления металлообрабатывающего оборудования». В соответствии с этим ГОСТом программное управление с записью программы числовым кодом называется числовым программным управлением (ЧПУ) и определяется как управление обработкой заготовки на станке по управляющей программе, в которой данные записаны в цифровой (числовой) форме. Существует множество различных числовых кодов, с помощью которых кодируется числовая информация управляющей программы. Наибольшее распространение в СПУ получили единичный, двоичный и двоично-десятичные коды.
Управляющее устройство в ЧПУ называется устройством ЧПУ (УЧПУ), а система, определяемая как совокупность функционально взаимосвязанных и взаимодействующих технологических и программных средств, обеспечивающих ЧПУ, называется системой ЧПУ (СЧПУ).
В соответствии с международной классификацией СЧПУ по уровню технических возможностей делятся на следующие классы:
NC (Numerical Control) – СЧПУ с покадровым считыванием программы при обработке каждой заготовки;
SNC (Stored Numerical Control) – СЧПУ с однократным считыванием программы перед обработкой партии одинаковых заготовок;
СNC (Computer Numerical Control) – СЧПУ с мини-ЭВМ (микропроцессором);
DNC (Direct Numerical Control) – СЧПУ группами станков от одной ЭВМ;
HNC (Handled Numerical Control) – оперативные СЧПУ с ручным набором программ на пульте управления.
По принципу управления СПУ выполняются разомкнутыми и замкнутыми. Разомкнутые СПУ (рисунок 7.1, а) имеют один поток априорной информации от управляющей программы (УП). Они обеспечивают невысокую, но достаточную по технологии работы машины, точность отработки программы. Замкнутые СПУ (рисунок 7.1, б) имеют два потока информации от программы УП и обратной связи ОС. Они обеспечивают высокую точность отработки за счет непрерывного контроля и наличия информации о состоянии ИОРМ.
По принципу действия СПУ подразделяются на аналоговые, импульсные, комбинированные (аналого-импульсные и импульсно-аналоговые) и кодовые [6,7]. Необходимо отметить, что в связи с развитием ЧПУ с ЭВМ, такие СПУ выполненные на аппаратных средствах уже устарели. В настоящее время выпускаются только цифровые СЧПУ с импульсным шаговым электроприводом и с электроприводом постоянного и переменного тока непрерывного действия.
По назначению согласно технологическому признаку СПУ делятся на цикловые, позиционные и контурные.
Цикловые СПУ, или системы с цикловым программным управлением (ЦПУ), осуществляют управление одним или несколькими исполнительными органами рабочих машин ИОРМ, обеспечивающими требуемый технологический цикл, т. е. определенную обычно повторяющуюся последовательность отдельных ИОРМ или группы машин. Последовательность действия определяется управляющей программой, задаваемой обычно в виде простых дискретных команд на включение и отключение электроприводов, приводящих в движение ИОРМ. Системы ЦПУ выполняются в основном разомкнутыми, а наличие датчиков положения, фиксирующих положения ИОРМ и дающих команды на включение и отключение электроприводов, рассматриваются как квазиобратные связи.
Наиболее характерно деление СПУ на позиционные и контурные в ЧПУ металлорежущими станками, где согласно ГОСТ 20523-81 позиционное ЧПУ определяется как числовое программное управление станком при котором перемещение его рабочих органов происходит в заданные точки, причем траектории перемещения не задаются. Позиционное ЧПУ используется не только для управления движением в металлорежущих станках, но и в любых рабочих машинах, исполнительный орган которых требует перемещения с позиционированием. В таких системах важна точность установки заданного конечного положения исполнительного органа, а не траектории его перемещения.
Позиционные системы обычно осуществляют управление положением ИО в нескольких координатах на плоскости, где обеспечивается его точное позиционирование. В этом случае движение ИОРМ от одной координаты к другой происходит по любой траектории, но с минимальным временем перемещения для повышения производительности. Позиционные СПУ строятся на базе позиционных систем управления, в которых сигналы задания изменяются по заданной программе.
В позиционных ЧПУ применяются быстродействующие электроприводы в основном постоянного тока, удовлетворяющие требованиям позиционных электроприводов.
Под контурным ЧПУ понимается числовое программное управление станком (любой рабочей машины), при котором перемещение его исполнительных органов происходит по заданной траектории и с заданной скоростью для получения необходимого контура обработки (движения по контуру).
Контурные СЧПУ предназначены для управления перемещением ИОРМ (объекта управления) с непрерывно изменяющейся информацией управления, сигналы которой являются функциями времени, скорости, пути или любого другого параметра. Такие СПУ реализуют криволинейное движение объекта по заданному контуру, как на плоскости, так и в пространстве. Характерная особенность таких СПУ состоит в непрерывной координации движений ИО в каждый момент времени как по пути, так и по скорости.
Контурные системы более сложны, чем позиционные, как по алгоритмам управления, так и по требованиям к электроприводу. Обязательными блоками управляющих устройств контурных СПУ являются линейные и круговые интерполяторы, которые осуществляют программирование траекторий движения ИОРМ по опорным точкам, в управляющей программе, и преобразуют информацию цифрового кода программы в информацию в унитарном коде, обеспечивающую сигналы управления электроприводом.
Разработка самоприспосабливающихся адаптивных систем расширило классификацию ЧПУ по числу потоков информации. Создано адаптивное ЧПУ (АЧПУ), определяемое как числовое программное управление, при котором происходит автоматическое приспособление процесса обработки заготовки к изменяющимся условиям обработки по определенным критериям. Поэтому в современных ЧПУ появились дополнительные потоки информации кроме основных потоков, определяемых только управляющей программой и главной обратной связью.
Лекция №8. Цикловые системы программного управления
электроприводами
Содержание лекции:
- назначение, устройство и принцип действия цикловых систем программного управления электроприводами с жесткой неизменяемой программой;
- устройство и принцип действия цикловых систем программного управления электроприводами с программируемым контроллером.
Цели лекции:
- освоить основные принципы построения цикловых систем программного управления электроприводами;
- изучить устройство и принцип действия цикловых систем программного управления электроприводами и отдельных её компонентов.
Цикловые СПУ обеспечивают работу одного или нескольких объектов управления, в которых ИОРМ осуществляют различные движения с повторяющимися одинаковыми циклами. Последовательность этих движений задается управляющей программой[11].
Управляющие программы в системах ЦПУ выполняются в виде жесткой неизменяемой и изменяемой программ. Жесткая неизменяемая управляющая программа задается в виде определенной схемы электроавтоматики, включение и отключение управляющих элементов которой производится по времени или по технической готовности ИОРМ.
Изменяемые жесткие управляющие программы в цикловых СПУ обычно строятся по схеме матрицы с заданием программы в виде наборов переключателей, штепсельных коммутаторов, командоаппаратов с переставными кулачками и с помощью программируемых контроллеров, представляющих собой электронные вычислительные устройства, реализующие логические функции релейных схем.
Управляющие программы в сложных цикловых СПУ задаются также в цифровом виде (ЧПУ) и памяти ЭВМ. Однако такие программы содержат только информацию о цикле и технологических режимах, а перемещение задается установкой упоров, воздействующих на путевые переключатели.
В цикловых СПУ используются электроприводы постоянного, а чаще переменного тока.
Цикловые СПУ с жесткой неизменяемой программой выполняются с релейно-контакторными и бесконтактными аппаратами. В свое время широкое распространение получили релейно-контакторные схемы, используемые до настоящего времени. Для примера на рисунке 8.1 приведена простейшая цикловая СПУ двух ИОРМ, например агрегатного станка, где ИО1 совершает вращательное движение, а ИО2 поступательное. Пусть требуется осуществить следующий простой автоматически повторяющийся цикл: поворот ИО1 из положения а в положение б; перемещение ИО2 из положения в в положение г; перемещение ИО2 в исходное положение в, перемещение ИО1 в исходное положение а.
Управление перемещениями ИО1 и ИО2 осуществляется
с контролем положений а – г, обеспечиваемыми конечными выключателями
SQ1 – SQ4. В исходном положении ИО1 и ИО2 находятся
соответственно в положениях а и в, нажаты SQ1 и SQ3. После подачи напряжения на
схему управления выключателем S включается контактор K
и двигатель M1
перемещает ИО1 в положение б,
где он останавливается, так как нажимается выключатель SQ2, отключается K1, а включается
K3. Включается
двигатель M2 и перемещает
И02 в положение г, где нажимается выключатель SQ4, отключается K3 и включается K4. Двигатель M2 реверсируется и перемещает И02 в исходное
положение в, где выключатель SQ3 отключает K4 и включает K2. Двигатель M2 выключается, а включается M1, который
поворачивает ИО1 в исходное положение а. Далее цикл автоматически
повторяется до отключения S.
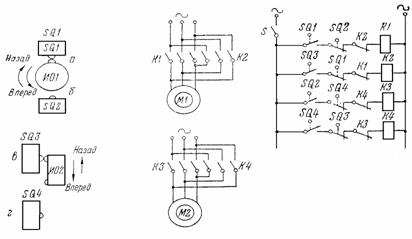
Рисунок 8.1 - Упрощенная принципиальная схема цикловой системы программного управления с релейно-контакторным управлением
Такие контактные цикловые СПУ имеют невысокую точность работы, большие габариты, а главное, малую надежность и малую долговечность из-за механических конструкций реле, которые часто ломаются, особенно в больших схемах, работающих с большим числом контактосрабатываний.
Более надежны цикловые СПУ, схемы которых собраны на бесконтактных логических элементах с применением микросхем. Однако создание схем цикловых СПУ на контактных аппаратах и бесконтактных логических элементах с жесткой неизменяемой программой требует большой затраты труда их установке, монтажу и наладке.
Для осуществления больших схем цикловых СПУ используются программируемые контроллеры (программируемые командоаппараты) – ПК, представляющие собой специализированную управляющую мини-ЭВМ с устройствами входа и выхода, которые осуществляют логические функции любой схемы управления, записанные в виде введенной в память ЭВМ программы. ПК подключается к объекту управления каналами связи и работает с ним в непосредственном взаимодействии в реальном масштабе времени. Такая СПУ (рисунок 8.2) включает в себя программируемый контроллер ПК, входные и выходные устройства ВУ, устройства силовой автоматики УСА и источники питания ИП. ПК содержит центральное процессорное устройство ЦПУ (УВМ), обеспечивающее хранение и реализацию управляющей программы, и устройства сопряжения с входами УСвх и выходами УСвых осуществляющие согласование параметров электрических внешних и внутренних цепей СПУ, и автономный источник питания АИП. Входными устройствами являются командные органы КО и датчики индикации состояния объекта управления Д, выходными – исполнительные элементы управления ИЭУ и сигнализации ИЭС и электрические двигатели ЭД.
Такие ПК надежны, имеют малую трудоемкость введения и отладки программы и позволяют осуществлять индикацию работы схемы с помощью световой сигнализации и дисплея и проводить диагностику их работы. Два источника питания в ПК (ИП и АИП) обеспечивают энергозависимую и энергонезависимую памяти. При этом первая не сохраняет (обнуляет) свои данные при отключении внешних источников энергии, являясь как бы нулевой защитой ПК, а вторая сохраняет свои данные при отключении энергии, сохраняя тем самым алгоритм работы процессора, содержание команд, необходимых для реализации рабочей программы.
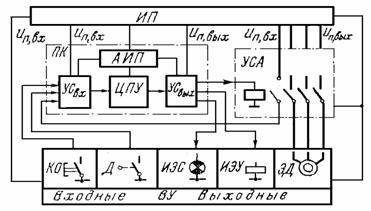
Рисунок 8.2 - Функциональная схема цикловой системы программного управления с программируемым контроллером
Структура ПК организуется по блочно-модульном принципу, что позволяет подобрать конкретный комплект модулей в соответствии с характеристиками автоматизированного объекта. При этом можно реализовать как простые схемы управления циклами, так и сложные системы комплексного управления оборудованием с решением задач технической диагностики, неисправностей и т. д.
Принцип действия ПК объясняется его функциональной схемой (рисунок 8.3). Вначале ПК работает в режиме записи программы, которая набирается на программной панели (загрузчике программы) и записывается (загружается) в постоянное запоминающее устройство (ПЗУ). Далее ПК переключается в режим работы, в котором сканнер (генератор тактовых импульсов) последовательно опрашивает ПЗУ и входные и выходные регистры устройств сопряжения с входами и выходами, и согласно адресу программы (операнда) выбираются соответствующие ячейки регистров ввода и вывода и подключаются к процессору. Процессор в соответствии с командами (шагами) программы, поступающих из ПЗУ, совершает логические операции над сигналами входов и выходов и преобразует состояние входов в состояние выходов. Если состояние входов не изменилось по сравнению с предыдущим циклом опроса, то процессор подтверждает текущее состояние выходов; если изменилось, то процессор изменяет состояние выходов, согласно программе, записанной в ПЗУ. Опрос участков программы производится циклично, один за другим, в порядке размещения их в программе с возвращением к началу программы после окончания полного цикла опроса.
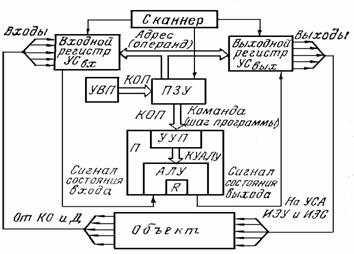
Рисунок 8.3 - Функциональная схема программируемого контроллера
Центральной частью ПК является процессор П, структура которого определяет параметры ПК: быстродействие, систему команд, число входов и выходов, количество таймеров и счетчиков, объем памяти для хранения программы. Процессором выполняются операции считывания и обработки команд, запроса операндов из памяти, передачи управляющих команд на выходные устройства. Процессор состоит из арифметическо-логического устройства АЛУ которое осуществляет логические операции программы; устройства управления процессора УУП, обеспечивающего преобразование кода программы в код управления АЛУ; регистра памяти результата вычисления R; счетчиков адресов шагов программы (САШП) и адресов запоминающего устройства САЗУ, считывающих соответственно шаги программы и операнды (адреса входа); шин адреса для передачи адреса шагов программы и шин данных для передачи операндов.
Связь процессора с модулями входа – выхода реализуется через модули процессора, называемые адаптерами, с их помощью осуществляются передача текущего значения входного сигнала в ПЗУ и выдача управляющих воздействий на выходные модули, адрес которых задан операндом. Если управление в модулях выхода выполняется не дискретными исполнительными сигналами, а аналоговыми, то используются устройства ЦАП и АЦП.
Рабочий цикл ПК разделяется на три этапа. На первом этапе, называемом сканированием входных сигналов, происходит загрузка в П3У опрашиваемых входных модулей. На втором этапе обеспечивается обработка программы, а на третьем, заключительном — передача управляющих сигналов выходные модули. Возможно, совмещение во времени этих этапов. Время цикла определяется длиной программы. Окончание программы и переход к другому циклу в ПК осуществляются двумя способами: командой конца программы и обработкой всего объема ПЗУ.
Лекция №9. Системы числового программного управления электроприводами
Содержание лекции:
- устройство и принцип действия систем числового программного управления электроприводами;
- устройство и принцип действия импульсно-шаговой системы числового программного управления.
Цели лекции:
- освоить основные принципы построения систем числового программного управления электроприводами;
- изучить устройство и принцип действия импульсно-шаговой системы числового программного управления.
Система числового программного управления (СЧПУ) состоит из устройства ЧПУ (УЧПУ) и исполнительного устройства в виде следящего электропривода [11,13,14]. Структура канала управления СЧПУ приведена на рисунке 9.1. Она включает в себя устройство ввода информации программы УВП, пульт ручного управления ПРУ, блок запоминания информации программы БЗП, интерполятор И, блок преобразования сигналов управления электроприводом БПСУ, электропривод ЭП, объект управления ИОРМ и датчик обратной связи по положению ДОСП.
УВП содержит программоноситель ПН, вводное ВУ и считывающее СУ устройства (см. рисунок 7.1). В качестве ПН в УЧПУ, на которые записывается программа в двоичном коде, используются дискеты, диски и т.д. Числовая информация о перемещении ИОРМ записывается количеством импульсов унитарного кода, определяющим нужное перемещение в миллиметрах, при известном шаге перемещения ИОРМ от одного импульса.
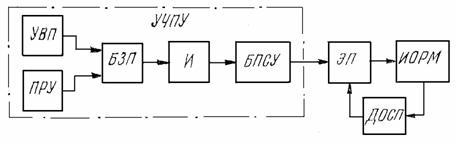
Рисунок 9.1 - Структура канала управления СЧПУ
Информация из программоносителя ПН поступает в БЗП (рисунок 9.1), который запоминает информацию, считанную с ПН, осуществляет ее контроль и формирует сигнал при ошибке в записи программы. БЗП необходим, так как информация считывается с ПН последовательно (построчно), а используется в УЧПУ параллельно, т. е. вся сразу в пределах одного кадра. В контурных СПУ перерыв информации недопустим, поэтому в БЗП используются два блока памяти, из которых в один записывается информация, а из другого считывается и наоборот после переключения этих блоков. Блок, в который записывается информация, называют буферным (БП), а из которого считывается – рабочим (РП).
После записи информации каждого кадра информация переписывается из буферной памяти в рабочую или блоки памяти переключаются, т. е. меняются местами.
Информация из рабочей памяти поступает в интерполятор, который преобразует информацию, записанную в РП в двоичном коде в число импульсов, следующих в единичном унитарном коде, и обеспечивает линейную или круговую интерполяцию траектории движения ИОРМ между двумя или более заданными точками в двухкоординатной СЧПУ.
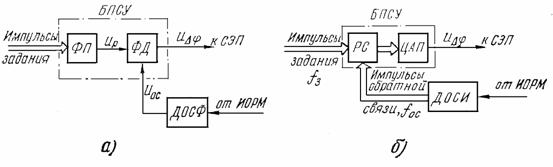
Рисунок 9.2 - Блок преобразования сигнала управления: а – фазовый;
б – цифровой
Импульсная информация с интерполятора поступает в блок преобразования импульсных сигналов в сигналы управления электроприводом (рисунок 9.1), в качестве которого используется следящий электропривод с двигателями непрерывного действия, реализующий заданное перемещение ИОРМ. В этом случае БПСУ включает в себя ЦАП в виде фазового преобразователя ФП (рисунок 9.2, а), который преобразует последовательность импульсов в сдвиг фазы φ рабочего сигнала переменного тока uP относительно опорногоU0, равного
![]()
Здесь сдвиг фазы от каждого импульса определяется
![]()
где n –
число пришедших импульсов; nфn – коэффициент деления ФП,
т. е. число импульсов, сдвигающих фазу на 360 º. При nфn =100
– 200 дискретный сдвиг фазы от одного импульса ![]() . При непрерывном следовании импульсов с
частотой
. При непрерывном следовании импульсов с
частотой ![]() имеем
имеем
![]() ; тогда
заданный сдвиг фазы равен
; тогда
заданный сдвиг фазы равен
![]()
где ![]() – круговая частота следования импульса.
– круговая частота следования импульса.
В этом случае на
выходе ФП возникает отклонение круговой частоты от опорной, так как частота
может быть равна ![]() или
или
![]() в
зависимости от направления движения. Это отклонение и определяет фазу сигнала
задания на следящий электропривод.
в
зависимости от направления движения. Это отклонение и определяет фазу сигнала
задания на следящий электропривод.
В качестве датчика обратной связи в таких СПУ в следящем электроприводе используются вращающиеся трансформаторы (ВТ), работающие в режиме фазовращателя и обеспечивающие на выходе сигнал переменного тока
![]()
Фаза ВТ ![]() определяется углом поворота его ротора,
связанного с перемещением S ИОРМ
определяется углом поворота его ротора,
связанного с перемещением S ИОРМ
![]()
где ![]() – шаг системы.
– шаг системы.
Устройством сравнения uр и uос является фазовый дискриминатор ФД, обеспечивающий перемножение uр и uос и выходной сигнал погрешности в виде напряжения постоянного тока
![]()
При использовании в следящем электроприводе
импульсного датчика обратной связи в БПСУ используется реверсивный счетчик РС
и ЦАП (рисунок 9.2, б). Счетчик, получая импульсы задания
(с интерполятора) и импульсы обратной связи с ДОСИ, следующие с
частотами ![]() и
и
![]() ,
определяет их разницу, которая затем в ЦАП преобразуется в напряжение
погрешности постоянного тока uD j .
,
определяет их разницу, которая затем в ЦАП преобразуется в напряжение
погрешности постоянного тока uD j .
При использовании шагового электропривода используются простые разомкнутые импульсно-шаговые ЧПУ с шаговыми двигателями ШД, функциональная схема одной координаты, которой приведена на рисунке 9.3.
Импульсы программы из интерполятора УЧПУ в унитарном коде поступают по двум информационным каналам, определяющим направление движения ИОРМ «вперед» (+) и «назад» (–), в усилитель-формирователь УФ, где усиливаются и формируются в импульсы требуемой длительности и формы с крутыми фронтами. Далее импульсы управления поступают в распределитель импульсов РИ, усиливаются усилителями мощности УМ и распределяются по обмоткам ШД. В ЧПУ на металлорежущих станках применяется двигатель типа ШД5Д-1М с шагом 6º и моментом на валу 0,06 Н·м использующийся с гидроусилителем [10, 15]. В принципе можно взять любой силовой ШД, например четырехфазный индукторный ШД типа ШДА-Ф с шагом 22,5° и моментом до 1 Н·м.
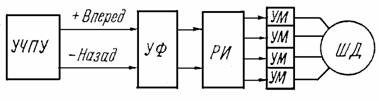
Рисунок 9.3 - Функциональная схема одной координаты импульсно-шаговой СЧПУ
Распределитель импульсов служит для преобразования импульсов управления в многоканальную систему напряжений питания ШД. Схем РИ существует много. Они построены на основе реверсивных счетных кольцевых схем. В последнее время в связи с развитием микроэлектроники РИ выполняются на интегральных микросхемах, построенных на основе сдвиговых регистров и счетчиков с дешифраторами. Одна из таких схем показана на рисунке 9.4, а [6,15,17], где используются две микросхемы, счетчик D1 и дешифратор D2. Управляющие импульсы по каналам «вперед» и «назад» соответственно поступают на суммирующий +1 и вычитающий –1 входы счетчика. При поступлении импульсов команды «вперед» состояние счетчика меняется в направлении десятичного счета 0, 1, 2, 3, 0, 1 и т.д., осуществляя коммутацию фаз ШД в направлении его вращения «вперед», а при приходе команды «назад» — состояние счетчика меняется в направлении уменьшения десятичного числа, записанного в счетчик, 3, 2, 1, 0, 3, 2 и ШД вращается в направлении «назад». Работу такого РИ иллюстрируют диаграммы на рисунке 9.4, б. Требуемое двоичное число в счетчик записывается на входы D1 и D2 (при наличии стробирующего сигнала на входе C). По входу R счетчик устанавливается в нуль.
Импульсы с РИ усиливаются усилителями мощности (УМ) на транзисторах (рисунок 9.5). Схема, используемая в старых установках (рисунок 9.5, а), обеспечивает форсирование нарастания тока в обмотке (ОУ) ШД с помощью резистора R, ограничивающего ток при повышенном напряжении питания. Недостаток схемы состоит в наличии потерь энергии в резисторе R. В новых разработках применяется схема (рисунок 9.5, б) с обратной связью по току обмотки ШД и релейным управлением включением транзистора VT, осуществляемым триггером Шмидта [17]. Диод VD служит для защиты ОУ от перенапряжений.
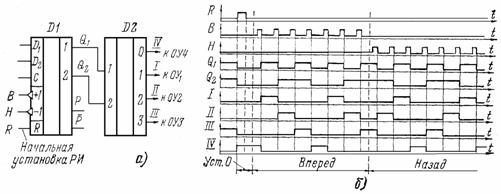
Рисунок
9.4 - Распределитель импульсов: а – схема; б – диаграмма работы

Рисунок 9.5 - Схема усилителя мощности: а – разомкнутая;
б –замкнутая по току
Недостатками импульсно-шаговых ЧПУ являются невысокий КПД, невысокая точность отработки перемещения ИОРМ без его контроля из-за использования разомкнутой системы управления. В настоящее время разработаны замкнутые системы управления ШД с датчиками положения [6,10,14].
Лекция №10. Системы числового программного управления с ЭВМ
Содержание лекции:
- основные принципы построения систем числового программного управления с ЭВМ;
- принцип действия системы числового программного управления с ЭВМ на примере СЧПУ для токарных станков.
Цели лекции:
- освоить основные принципы построения систем числового программного управления с ЭВМ;
- изучить устройство и принцип действия системы числового программного управления с ЭВМ для токарных станков.
Широкое распространение в СПУ получили ЭВМ, начиная с использования их для расчета и составления управляющих программ и до управления электроприводами, осуществляющими движения ИОРМ [12]. В связи с развитием микроэлектроники и появлением микро-ЭВМ и микропроцессоров в СПУ произошел переход от использования малогабаритных ЭВМ с микросхемами малой и средней степени интеграции к микро-ЭВМ с микропроцессорными наборами и большими интегральными схемами памяти (БИС). Это обусловило коренные изменения структуры ЧПУ и появление оперативных СЧПУ с преимущественной подготовкой управляющих программ непосредственно у рабочей машины (станка), так называемой ОСУ – оперативной системы управления класса CNC (Computer Numerical Control). Используются также универсальные СЧПУ (универсальная система управления – УСУ) с подготовкой управляющих программ в вычислительном центре и непосредственно у станка.
Принципиальным отличием ОСУ класса CNC является их структура, соответствующая структуре ЭВМ и включающая в свой состав вычислительное устройство (процессор), блоки памяти и блоки ввода и вывода информации. При этом объем функций, характер проводимых операций и их последовательность определяются не специальными схемами, а специальными программами функционирования, которые вводятся в блок памяти устройства и там хранятся постоянно или до замены. Переработка исходной информации управляющих программ ведется в соответствии с программами функционирования, по которым формируются команды на исполнительные электроприводы и электроавтоматику управления рабочей машиной.
Система ЧПУ типа ОСУ (CNC) позволяет резко расширить функциональные возможности программного управления и ввести новые функции, такие, как хранение программы и ее редактирование непосредственно на рабочем месте, широкую систему диагностики, индикацию на дисплее, диалоговое общение с оператором, возможность изменения функций рабочей машины и ее электроавтоматики программным способом в процессе эксплуатации.
Поэтому все последние разработки СЧПУ основаны на применении микропроцессорной техники и БИС. Центральным узлом современных УЧПУ является микрокомпьютер, состоящий из микропроцессора и БИС-памяти.
В качестве примера рассмотрим двухкоординатную контурную оперативную СЧПУ с ЭВМ, предназначенную для токарных станков. Эта СЧПУ обеспечивает управление двумя исполнительными органами станка по координатам X и Z поперечного и продольного перемещения по 999999 импульсов каждое. Движение осуществляется двумя следящими электроприводами с фотоимпульсными датчиками обратной связи, контуры которых осуществлены в ЭВМ программно. Функциональная схема СЧПУ приведена на рисунке 10.1.
![]()
![]()
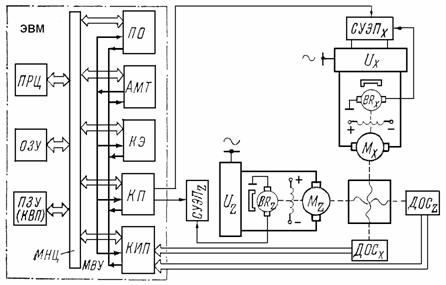
Рисунок 10.1 - Функциональная схема СЧПУ с ЭВМ
УЧПУ выполнено на ЭВМ, которая включает в себя пульт оператора ПО; процессор ПРЦ; оперативное ОЗУ и постоянное ПЗУ запоминающие устройства, где ПЗУ выполнено в виде кассеты внешней памяти КВП; адаптер магистрали и таймеров АМТ. В ЭВМ имеются интерфейсы выводов в виде контроллеров привода КП и импульсных преобразователей датчиков обратных связей КИП, и электроавтоматики КЭ.
Программа задается (вводится) с пульта оператора (рисунок 10.2) с помощью клавиатуры, на которой обозначены символы задания программы и управления СЧПУ. Все элементы на пульте объединены в функциональные группы, обведенные штриховыми линиями, где ПД – панель выбора направления движения по координатам X и Z с клавишами движений вперед и назад с рабочей и ускоренной подачами;

Рисунок 10.2 - Пульт оператора ЭВМ
ПР – панель режимов с клавишами и сигнализаторами режимов, задающими режимы работы от маховичка, ручной или автоматической работы, режимы ввода кадров управляющей программы и индикации (проверки) введенных в память кадров и др.; ПА – панель адресов с клавишами буквенных адресов и цифровых команд и др. На ПО также расположены цифровые индикаторы: ИП – индикатор подачи; ИН – индикатор номера кадра; ПА – индикатор программируемых чисел соответствующего буквенного адреса и сигнальные лампы (светодиоды): ВНИМАНИЕ – сигнализатор ошибок или аварийных ситуаций; БАТАРЕЯ ЗАРЯЖЕНА – сигнализатор аварии питания; сигнализаторы относительной системы отсчета и ускоренного перемещения; сигнализаторы движения под углом ±45° и сигнализаторы буквенных адресов. На ПД, ПР, ПА имеются сигнализаторы соответствующих команд.
Программа с ПО задается так же, как и на перфоленте. Ввод информации программы осуществляется по кадрам. Конец программы кодируется командой МЗО. При наборе программы так же, как на ленте, используется буквенная и цифровая информации. При этом применяются буквы: N — номер кадра, X и Z – поперечное и продольное перемещения, S – частота вращения шпинделя, F – скорость подачи, G – подготовительная и M – вспомогательная функции и др. Перемещения задаются числом импульсов в соответствии с ценой импульсов в миллиметрах. При введении программы каждая команда в ЭВМ кодируется в восьмеричном коде и поступает в регистр кодов клавиатуры. Процессор по программе обслуживания пульта оператора опрашивает регистр кода клавиатуры и преобразует записанную в нем информацию во внутреннее представление ЭВМ и переводит ее в ОЗУ.
При подаче команды «ОТРАБОТКА ПРОГРАММЫ» процессор считывает из ОЗУ последовательно все кадры управляющей программы и с помощью программы «интерполятор» разбивает заданное перемещение X или Z с учетом скорости перемещения F на дискреты задания N за время Δt = 10мс равные NЗ = (X / F) Δt .
Процессор опрашивает АЦП обратной связи, преобразуя сигналы датчика обратной связи ДОС также в числовые дискреты обратной связи NОС . Далее процессор определяет числовой сигнал управления в виде дискрет, равных Nу = NЗ – NОС , который в ЦАП преобразуется в напряжение uЗС, подаваемое в систему управления электропривода, обеспечивающую работу электропривода, отрабатывающего заданное перемещение ИОРМ.
Адаптер магистрали и таймеров АМТ выполняет преобразование интерфейса общей шины управления, называемой магистралью МНЦ, в интерфейс контроллеров связи. Управление осуществляется по магистрали внешних устройств МВУ.
Системы числового программного управления с ЭВМ используются не только для управления движением в металлорежущих станках, но и в любых рабочих машинах, исполнительный орган которых требует перемещения с позиционированием. В таких системах важна точность установки заданного конечного положения исполнительного органа, а не траектории его перемещения.
Лекция №11. Адаптивные системы управления электроприводами и принципы их построения
Содержание лекции:
-
основные принципы построения
адаптивных систем
управления электроприводами;
- классификация адаптивных систем управления.
Цели лекции:
-
освоить основные принципы
построения систем адаптивных систем
управления электроприводами;
- изучить классификацию адаптивных систем управления.
В процессе эксплуатации электроприводов изменяются их динамические и статические характеристики из-за изменения параметров (сопротивлений резисторов, индуктивностей, коэффициентов усиления и передачи), а также задающих и возмущающих воздействий. Изменяются также характеристики передающих устройств и самих объектов управления. Эти изменения чаще всего заранее неизвестны, и информация о них в процессе эксплуатации не полная.
Отметим, что рассмотренные ранее разомкнутые и замкнутые системы управления электроприводами относятся к таким системам, у которых изменение характеристик и неполнота информации незначительны и существенно не влияют на достижение цели управления, а поэтому могут не учитываться.
Изменение характеристик нельзя учесть заранее, так как они изменяются непрерывно. Поэтому учитывать изменения должна сама система управления электроприводом в процессе работы, непрерывно пополняя информацию об электроприводе и объекте управления и используя ее для управления. Такие системы управления электропривода приспосабливаются в процессе работы к возникшим условиям, т. е. адаптируются, поэтому их называют адаптивными [2,3,4,6,16].
Адаптивные системы электропривода – это системы, которые требуют учета изменения характеристик и пополнения информации об объекте в процессе работы. Здесь имеется некоторая «дуальность» управления: система сама определяет текущую информацию об объекте и использует ее для оптимального управления объектом.
В адаптивных системах управления электропривода управляющие воздействия или алгоритмы управления автоматически изменяются с целью осуществления лучшего в каком-либо смысле управления объектом.
На рисунке 11.1 представлена простейшая функциональная схема адаптивной системы управления электроприводом с изменчивостью характеристик и неполной информацией, позволяющая описать принцип работы адаптивной системы управления. В схеме обозначено: УУ – управляющее устройство; ОУ – объект управления; УА – устройство адаптации; f – помехи; u, n – сигналы управления; x, y – входной и выходной сигналы.
Принцип действия простейшей адаптивной системы состоит в том, что она имеет заданный критерий качества и должна заставить объект управления работать так, чтобы выполнялся экстремум критерия качества.
В адаптивной системе основная роль принадлежит устройству адаптации УА, которое получает сигналы входа x и выхода y, а также сигнал управления объектом u.

Рисунок 11.1 - Функциональная схема системы адаптивного управления электроприводом: а – схема; б – характеристика объекта
Эти сигналы могут иметь высокую размерность и служат
для подсчета значений критерия качества. УА вырабатывает сигнал ![]() , который также может
иметь высокую размерность и управляет УУ таким образом, чтобы при
определенных значениях сигнала x, при
наличии обратной связи по y и
любой сложности возмущений f получать в каждый момент
времени в объекте отработку с экстремальным значением показателя качества
(производительности, себестоимости и др.).
, который также может
иметь высокую размерность и управляет УУ таким образом, чтобы при
определенных значениях сигнала x, при
наличии обратной связи по y и
любой сложности возмущений f получать в каждый момент
времени в объекте отработку с экстремальным значением показателя качества
(производительности, себестоимости и др.).
К классу адаптивных систем управления относятся самонастраивающиеся и саоорганизующиеся системы. В самонастраивающихся системах устройство адаптации на основе собранной информации о входных x, выходных y и управляющих u сигналах подает команды в УУ на изменение уставок или параметров регуляторов таким образом, чтобы добиться заданной цели управления. В самоорганизующихся системах наряду с этим производится изменение структуры системы так, чтобы лучше осуществить цель управления.
В самонастраивающихся системах целью управления может быть, например, достижение экстремума некоторого статического показателя качества, причем положение экстремума, обусловленное контролируемыми координатами системы управления и неконтролируемыми возмущающими воздействиями, может в процессе эксплуатации изменяться неопределенным образом. В таких системах для достижения цели управления и работы в области экстремума управляющее устройство изменяет соответствующим образом задания регуляторов системы.
Целью управления может быть и достижение требуемого динамического показателя качества, характеризующего динамические свойства системы управления электропривода. Обычно это функционал, зависящий от координат и параметров системы, например один из интегральных критериев погрешности. В этом случае достижение экстремума показателя качества обеспечивается автоматическим изменением параметров системы управления (коэффициентов усиления, постоянных времени регуляторов и обратных связей). Такие системы называют системами с самонастраивающимися корректирующими устройствами.
В зависимости от информации об электроприводе и объекте управления различают два вида самонастраивающихся систем с динамическим показателем качества. В беспоисковых адаптивных системах на основе имеющейся информации создается эталонная модель объекта, обеспечивающая работу системы с требуемым показателем качества. В поисковых адаптивных системах информация об объекте не полная и заранее получена быть не может, а должна быть измерена в процессе работы.
Лекция. №12. Беспоисковые адаптивные системы управления электроприводами
Содержание лекции:
- устройство и принцип действия адаптивных систем управления с моделью;
- устройство и принцип действия адаптивных систем управления с параметрической и сигнальной самонастройкой.
Цели лекции:
- изучить устройство и принцип действия адаптивных систем управления с моделью;
- изучить устройство и принцип действия адаптивных систем управления с параметрической и сигнальной самонастройкой.
В беспоисковых адаптивных системах управления требуемый показатель качества достигается с помощью эталонной модели объекта управления. Такая модель создается на основании заранее известной информации об объекте и включается в адаптивную систему управления, как показано на рисунке 12.1, а. Эталонная модель (ЭМ) входит в устройство управления УУ, но для наглядности на рисунке 12.1 вынесена из него.
Модель управляется сигналом nм из устройства адаптации. Она также получает сигнал управляющих воздействий uм, идущий от сигнала u, но через УУ. Выходным сигналом модели является сигнал yм, поступающий на вход УУ. Модель выполняет функции корректирующего устройства, по сигналам которого УУ изменяет характеристики системы. Модель создается по известному показателю качества объекта, причем желательно, чтобы показатели модели и объекта были близки. Одна из схем включения модели приведена на рисунке 12.1, б. На модель ЭМ и на объект ОУ подается один задающий сигнал x, характеризующий требуемый показатель качества объекта. В процессе работы системы выходные сигналы модели yм и объекта y, характеризующие соответственно показатели качества модели и объекта, сравниваются вычислителем критерия соответствия (ВКС) модели объекту. При отклонении сигнала объекта y от сигнала модели yм ВКС вырабатывает воздействие n, пропорциональное отклонению y от yм, и подает его на управляющее устройство УУ, которое в свою очередь подает соответствующий сигнал uу на регулятор Р, системы управления объектом. Регулятор изменяет (корректирует) управляющий сигнал объекта u, в результате чего объект изменяет свой выходной сигнал y, приближая его к эталонному сигналу модели yм. Такая самонастройка системы с изменением параметров регулятора называется параметрической.
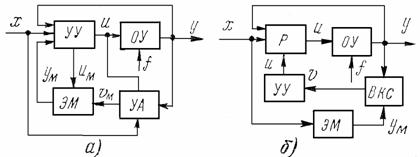
Рисунок 12.1 - Функциональная схема системы адаптивного управления с моделью: а – общая; б – с моделью, включенной параллельно объекту
Корректирующие сигналы УУ в таких системах могут подаваться не на регулятор, а на вход системы управления объектом, как показано на рисунке 12.1, а; в этом случае параметры регулятора не меняются. Такая самонастройка называется сигнальной.
В беспоисковых адаптивных системах осуществляется стабилизация динамических свойств электропривода. Поэтому эталонная модель может быть представлена в виде динамического звена с определенной передаточной функцией. ВКС при этом должен получать информацию или непосредственно о динамических характеристиках объекта управления или определять ее косвенно по возможным измеряемым координатам. При непосредственном измерении y и yм ВКС может выполнять роль сумматора, определяющего отклонение D y = yм – y.
Адаптивную систему с параметрической настройкой можно представить упрощенной структурной схемой на рисунке 12.2, а, а с сигнальной настройкой – структурной схемой на рисунке 12.2, б. Для выяснения действия модели рассмотрим схему с сигнальной настройкой (рисунок 12.2, б). Сигнал задания x поступает параллельно на систему управления объектом и модель. Их выходные сигналы y и yм сравниваются сумматором AW2, выполняющим роль ВКС, а их разница D y = yм – y подается в виде сигнала обратной связи uу на вход системы управления объектом с помощью сумматора AW3.
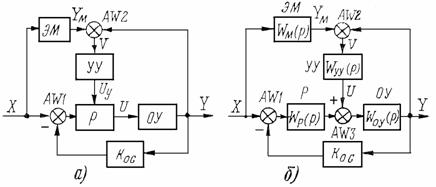
Рисунок 12.2 - Структурная схема системы адаптивного управления с моделью: а – при параметрической самонастройке; б – при сигнальной самонастройке
Передаточная функция такой системы имеет вид

(12.1)
где Wоу, Wм(р), Wос(р) – передаточные функции соответственно объекта управления, модели и цепи обратной связи.
Если обеспечить большой коэффициент обратной связи, то единицей в слагаемых числителя и знаменателя по сравнению с Wм(р), Wос(р) можно пренебречь. Тогда
![]() (12.2)
(12.2)
Из (12.2) видно, что выходная координата объекта управления определяется лишь динамическими свойствами модели.
Работу самонастраивающейся адаптивной системы
управления с моделью рассмотрим на примере системы управления скоростью
двигателя постоянного тока, структурная схема которой приведена на рисунке 12.3.
Показателями качества динамического процесса двигателя являются скорость двигателя
и ее первая и вторая производные. Поэтому выходы эталонной модели представляют
сигналы, определяющие желаемое значение скорости uсм, ее первой u·см, второй u··см производных.
Выходные сигналы объекта – тиристорного электропривода постоянного тока – также
характеризуют скорость двигателя w, ее первую и вторую производные. Сигнал uс,о, пропорциональный скорости двигателя, снимается с
тахогенератора, а сигналы, пропорциональные первой u·с,о, и
второй u··с,о,
производным, обеспечиваются устройством, называемым наблюдателем, на который
подаются сигнал задания скорости Uзс и сигнал обратной связи по скорости, характеризующий
скорость двигателя. Выходные сигналы модели uсм, u·см и u··см сравниваются
с эталонной моделью с выходными сигналами объекта uс,о, u·с,о, u··с,о сумматорами
AW1 – AW3. Соответствующие разностные сигналы Duс = uсм – uс,о, Du·с = u·см –
u·с,о, Du··с = u··см –
u··с,о с
учетом своих весовых коэффициентов ![]() ,
, ![]() ,
, ![]() суммируются сумматором AW4 в единый сигнал
самонастройки Duå . Этот сигнал через
ограничивающее устройство Аогр подается на вход системы
управления электропривода (сумматор AW), образуя контур сигнальной самонастройки, который
компенсирует изменения параметров объекта, связанные с режимами работы
тиристорного преобразователя.
суммируются сумматором AW4 в единый сигнал
самонастройки Duå . Этот сигнал через
ограничивающее устройство Аогр подается на вход системы
управления электропривода (сумматор AW), образуя контур сигнальной самонастройки, который
компенсирует изменения параметров объекта, связанные с режимами работы
тиристорного преобразователя.
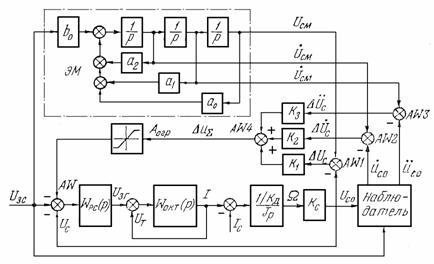
Рисунок 12.3 - Структурная схема самонастраивающейся системы управления электроприводом постоянного тока
Рассмотренная адаптивная система электропривода постоянного тока с эталонной моделью и наблюдателем обеспечивает оптимальные переходные процессы с одним колебанием, минимальным перерегулированием и высокое быстродействие системы при задающих и возмущающих воздействиях.
Примером самонастраивающейся системы с параметрической самонастройкой может служить система с самонастраивающимся адаптивным регулятором тока (АРТ), функциональная схема которой приведена на рисунке 12.4, а. Такая АРТ применяется в тиристорных электроприводах постоянного тока с подчиненным регулированием координат. В этих системах принимаемый ПИ-регулятор тока выбирается при работе электропривода в режиме непрерывных токов.
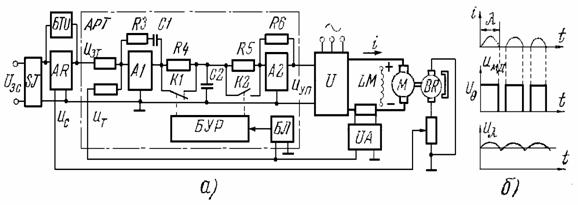
Рисунок 12.4 - Упрощенная принципиальная схема самонастраивающейся системы тиристорного электропривода с адаптивным регулятором тока
В режиме прерывистых токов возрастает эквивалентное сопротивление преобразователя RЭП, которое в этом случае является функцией угла l проводимости тиристоров ![]() (12.3)
(12.3)
где fc – частота тока питающей сети; m – пульсность силовой схемы тиристорного преобразователя; L – полная индуктивность цепи якоря П – Д.
При этом изменяется постоянная времени ТРТ регулятора тока РТ, а следовательно, при переходе в электроприводе от режима непрерывного тока к режиму прерывистого тока нужно изменить структуру РТ и перейти от ПИ-регулятора к И - регулятору и изменять Т\РТ пропорционально l2.
Показанная на рисунке 12.4, а схема АРТ
[6] обеспечивает требуемые переключения. АРТ содержит ПИ-регулятор
на усилителе A1, инерционное
звено R4 – C2
и усилитель A2.
Переключения осуществляет блок
управления регулятором БУР. Ток якоря контролирует блок логики БЛ.
В режиме непрерывного тока БУР не работает, ключ K1
замкнут, а K2
разомкнут. При этом получается ПИ-регулятор
тока, так как резистор R4 зашунтирован,
а коэффициент усиления A2 при R5=R6
равен единице. В режиме прерывистого
тока БЛ фиксирует отсутствие тока и подключает БУР. Ключ K размыкается,
резистор R4 и
конденсатор C2 образуют
инерционное звено с постоянной времени ПИ-РТ, равной TРТ=R4C2.
Ключ K2 с помощью имеющегося в БУР широтно-импульсного
модулятора ШИМ коммутирует резистор R5 со скважностью,
пропорциональной ![]() .
При этом АРТ становится И- регулятором с изменяющейся постоянной
времени.
.
При этом АРТ становится И- регулятором с изменяющейся постоянной
времени.
Устройство, обеспечивающее коммутацию ключа K2, работает, как показано на рисунке 12.4, б. Постоянное напряжение U0 модулируется модулятором в напряжение uмд со скважностью, определяемой l, которое сглаживается и преобразуется в напряжение ul, пропорциональное l. При этом сопротивление резистора R5 изменяется пропорционально u2l.
Лекция №13. Поисковые адаптивные системы управления электроприводами
Содержание лекции:
- сущность автоматического поиска в адаптивных системах управления;
- принцип поиска экстремума в адаптивных системах управления.
Цели лекции:
- освоить сущность автоматического поиска в адаптивных системах управления;
- изучить принцип поиска экстремума в адаптивных системах управления.
Поисковыми называются системы, решающие задачу оптимального управления с автоматическим поиском при неполной информации об объекте и изменяющихся его характеристиках.
Сущность автоматического поиска можно объяснить, обратившись к рисунку 13.1, а и приняв для упрощения, что поисковая адаптивная система является однокоординатной. Пусть устройство УУ дает на управляемый объект УО пробные воздействия в виде импульсных или гармонических сигналов. Устройство адаптации УА анализирует их результаты и через УУ управляет объектом, приводя его в «оптимальное состояние».
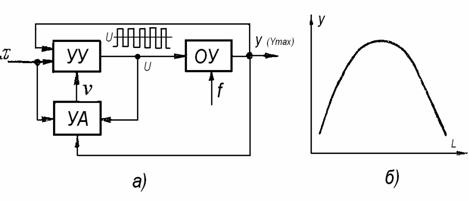
Рисунок 13.1 - Функциональная схема поисковой однокоординатной системы адаптивного управления электроприводом: а – схема; б – характеристика объекта
Часто требуется осуществлять автоматический поиск в поисковой адаптивной системе управления электропривода, имеющей статические характеристики y(u) и требующей автоматического управления с выходом на экстремум этой характеристики (рисунок 13,1 б). Если состояние поисковой адаптивной системы в данный момент времени характеризует точка A, то при увеличении сигнала управления на Du имеем приращение сигнала y на Dy. Здесь ![]() (13.1)
(13.1)
Для точки Б, наоборот,
Очевидно, что для выхода на максимум Ymax в первом случае u должно возрастать, а во втором – уменьшаться.
Здесь объект управления имеет экстремальную статическую характеристику, которая в процессе работы может изменяться в зависимости от f и t.
Задачей поисковой адаптивной системы электропривода является максимальное приближение значений выходной координаты y в точке экстремума к Ymax, которая со временем сама может изменяться.
Следует отметить, что переходные процессы здесь могут происходить в виде отработки подаваемых на объект сигналов uА + DuА или uБ + DuБ. Приближение к максимуму координаты y осуществляется при этом за несколько «шагов».
Принцип поиска экстремума показан на рисунке 13.2. Для поиска сигнал управления u объекта УО сначала увеличивается, а затем уменьшается. Увеличение сигнала u происходит до момента, когда выходной сигнал достигает экстремума Ymax, и начнет снижаться согласно характеристике объекта управления. При фиксации устройством адаптации УА зоны поиска ЗП, равной Dy, оно подает команду на уменьшение сигнала управления, при этом выходная координата y сначала возрастает, а потом согласно характеристике ОУ снижается. При уменьшении y на Dy, определяемой зоной поиска, УА вновь реверсирует сигнал управления.

Рисунок 13.2 - Принцип поиска экстремума в адаптивной поисковой системе
При смещении характеристики объекта и повышении значения Ymax, сигнал u не реверсируется, пока y не достигнет нового экстремального значения. Теперь поиск будет осуществляться так же, но с другим значением Ymax .
Список литературы
1. Ключев В.И. Теория электропривода. – М.: Энергоатомиздат, 1985. – 560 с.
2. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. – Л.: Энергоиздат, 1982. – 392 с.
3. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. – М.: Высш. Школа, 1979. – 318 с.
4. Сиротин А.А. Автоматическое управление электроприводами. – М.: Энергия, 1969, – 560 с.
5. Елисеев В.А. Непрерывное управление движением электроприводов – М.: МЭИ, 1982. – 100 с.
6. Елисеев В.А. Цифровые системы управления электроприводами. – М.: МЭИ, 1985. – 104 с.
7. Перельмутер В.М., Соловьев А.К. Цифровые системы управления тиристорным электроприводом. – Киев: Техника, 1983. – 104 с.
8. Ахиетжанов А.А., Кочемасов А.В. Следящие системы и регуляторы. – М.: Энергоатомиздат. 1986. – 288 с.
9. Следящие электроприводы. / Под ред. Б.К. Чемоданова. – М.: Энергия, 1976. – 480 с.
10. Гумен В.Ф., Калининская Т.В. Следящий шаговый электропривод. – Л.: Энергия Ленингр. отд – ние, 1980. – 168 с.
11. Срибнер Л.А. Цикловое программное управление оборудованием – М.: Машиносроение, 1980. – 152 с.
12. Управление автоматическими линиями с помощью ЭВМ / Крыленко В.В. и др. – М.: Машиностроение, 1983. – 152 с.
13. Программное управление станками / Сосонкин В.Л. Михайлов О.П. и др.: Под. ред. В.Л. Сосонкина. – М.: Машиностроение, 1981. – 398 с.
14. Станки с числовым программным управлением / Под ред. В.А. Лещенко. – М.: Машиностроение, 1987. – 592 с.
15. Ивоботенко Б.А. Козаченко В.Ф. Шаговый электропривод в робототехнике. – М.: МЭИ, 1985. – 104 с.
16. Цыба Ю.А., Сагитов П.И. «Элементы теории автоматического управления»: Учебное пособие для ВУЗов. – Алматы: КАУ, 2006. – 144 с.
17. Сагитов П.И., Цыба Ю.А. «Электрические машины систем автоматики»: Учебное пособие для ВУЗов. – Алматы: АИЭС,2004. – 90 с.