ҚАЗАҚСТАН
РЕСПУБЛИКАСЫНЫҢ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТЕРЛІГІ
«Алматы
энергетика және байланыс университеті»
коммерциялық
емес акционерлік қоғамы
Ю.А. Цыба
Ж.Ж. Тойгожинова
ЭЛЕКТР ЖЕТЕГІН БАСҚАРУ ЖҮЙЕЛЕРІ
Оқу құралы
Алматы 2013
УДК 62 - 83 (075.8)
ББК 31.2 я 73
Ц 92 Электр жетегін басқару жүйелері:
Оқу құралы/ Ю.А. Цыба., Ж.Ж. Тойгожинова;
АЭжБУ. – Алматы, 2013. – 75 бет.
ISBN 978-601-7436-05-6
«Электр жетегін басқару жүйелері» курсы бойынша оқу құралында бейімдеумен (адаптивпен) және бағдарламамен басқарудың жұмыстарын бақылауды, моменттің және жылдамдықтың функциясын тұрақтандыруды орындайтын, электр жетегін автоматты басқарудың санды және санды аналогты жүйелерінің жұмысы мен құрылыстары, құру принциптері қарастырылған. Сонымен қатар ЭЕМ арқылы басқару жүйесін қазіргі кездегі әдістермен зерттеулер келтірілген.
Оқу құралы типтік оқу бағдарламасына сәйкес өңделген және 5В071800 – Электр энергетикасы мамандығының студенттеріне арналған.
Суреттер 54, әдеб. – 21 атау.
ББК 31.2 я 73
Пікір берушілер:К.Сатпаев атын.КазҰТУ,тех.ғыл.канд,проф.Д.Б. Акпанбетов
АЭжБУ, тех. ғыл. канд., профессор А.С. Байкенов
Алматы энергетика және байланыс университетінің Ғылыми кеңесі басуға ұсынады (№7 хаттама 21.05. 2013 ж.).
ISBN 978-601-7436-05-6
Ó «Алматы энергетика және байланыс университеті» КЕАҚ, 2013 ж.
|
|
Мазмұны
|
|
|
|
|
Кіріспе |
4 |
|
|
1 |
Жетектің электр механикалық жүйелерін қазіргі кездегі принциптермен тұрғызу |
5 |
|
|
1.1 |
Жүйе элементтерінің құрлысы және тағайындалуы |
5 |
|
|
1.2 |
Қосалқы жүйе ретіндегі электр жетегі |
6 |
|
|
1.3 |
Электр жетегі және қазіргі кездегі технологиялар |
7 |
|
|
1.4 |
Жетектің электр механикалық жүйесінің жалпы талаптары |
8 |
|
|
1.5 |
Электр жетегінде энергияның электр механикалық түрленуінің физикалық принципі |
10 |
|
|
2 |
Электр жетегі басқарылатын электр механикалық жүйе |
11 |
|
|
2.1 |
Басқару жүйесінің құрылысын тұрғызу принципі |
11 |
|
|
2.2 |
Басқару жүйесінің жіктелімдері |
15 |
|
|
2.3 |
Электр жетегін автоматты басқару жүйесінің сандық және санды аналогты жүйесін құру принципі |
20 |
|
|
2.4 |
Жылдамдықты тұрақтандыратын санды аналогты және сандық жүйелер |
25 |
|
|
2.5 |
Электр жетегінің жағдайын аналогты және санды аналогты жүйелермен басқару |
29 |
|
|
2.6 |
ЭЕМ басқарылатын жағдайды санды жүйемен басқару |
31 |
|
|
2.7 |
Бақылау электр жетегінің басқару жүйелері және оларды құрудың негізгі принциптері |
33 |
|
|
2.8 |
Бақылау электр жетегінің аналогты және санды жүйелері |
35 |
|
|
2.9 |
Электр жетегін бағдарламалық басқару жүйесі, құру принциптері және жіктелімі |
40 |
|
|
2.10 |
Электр жетегімен бағдарламалық басқарудың циклдік жүйелері |
43 |
|
|
2.11 |
Электр жетегін санды бағдарламалық басқару жүйелері |
47 |
|
|
2.12 |
ЭЕМ санды бағдарламалық басқару жүйелері |
53 |
|
|
2.13 |
Электр жетегін бейімделген жүйемен басқару және оны құру принциптері |
55 |
|
|
2.14 |
Электр жетегін басқарудың ізделмейтін бейімделген жүйелері |
57 |
|
|
2.15 |
Электр жетегін басқарудың бейімделген іздеу жүйесі |
62 |
|
|
3 |
Қазіргі уақытта ЭЕМ-да басқару жүйесін зерттеу әдістері |
63 |
|
|
3.1 |
Басқару жүйесінің компьютерлік үлгісі |
63 |
|
|
3.2 |
MATLAB-та модельдеудің нәтижелерін бағалау |
66 |
|
|
3.3 |
Simulink – модельдеудің интерактивті құралы |
71 |
|
|
Әдебиеттер тізімі |
75 |
||
|
|
|
|
|
Кіріспе
Электр энергиясын механикалық энергияға түрлендіретін қазіргі кездегі өндірістік механизмдер мен агрегаттар күрделі көп компонентті электр механикалық жүйелерден және электр жетегінен тұрады. Берілген жүйелер аспапты электр механикалық жүйеден бастап, әр түрлі технологиялық кешенге дейінгі адамның барлық жұмыс салаларында қолданылады.
Электр механикалық жүйелерде (ЭМЖ) автоматты басқару әдістерін және ондағы физикалық процестерді түсіну, қазіргі кездегі технологиялық шешімдерді білу, олардың қабілеттілігін қолданып, бағалай білу және тәжирибе жүзінде қолдану – бұның бәрі энергияның электрлік түрленуін қолданатын техникалық объектілерді құру немесе тасмалдаумен жұмыс жасайтын мамандарға қажет. Сондықтан электр жетегін басқару жүйелері техникалық пән бойынша электр жетегінің элементтерін құруға (электр машиналары, аппараттар, түрлендіргіштер және т.б.) немесе электр жетегі қолданатын техникалық объектілерді құруға (станоктар, жұмыстар, технологиялық машиналар, электр энергетика жүйелерінде, агрегаттарда және т.б.) байланысы бар мамандардың бағдарламасына кіреді.
Соңғы кездері әр түрлі технологиялық процестерді автоматтандыру кезінде жетектің электр механикалық жүйелерін санды басқару кең қолданылады. Бұл статистикалық және динамикалық режимдерде жүйе жұмысының дәлдігінің жоғарлауы, олардың тез әсер етуі және өндірістегі жабдықтардың өнімділігіне байланысты.
Машиналарды санды басқару кең дамығандықтан қазіргі кезде электр жетегін басқару жүйелері аппаратты құрылғылармен тұрғызылмайды, ал электр жетегін басқару алгоритмі бағдарламалы болатын машиналарды қолдану арқылы тұрғызылады. Бұл мұндай жүйелерді жобалап және орындауға көмектеседі. Сонымен қатар, бірдей ақпаратты басқару кешенінен бірдей технологиялық процеспен байланысқан үлкен өндірістік құрылғылардың электр жетектерін басқаруға мүмкіндік береді, бұл икемді басқарылатын өндірісті құру үшін өте қажет. Электр жетегі жүйелерінде машиналарды санды басқарудың қолданылуына байланысты, дисплейде электр жетегінің жұмысын бақылау және диагностикалық жүйені құру сияқты олардың жұмыстарына жаңа мүмкіндіктер туады. Берілген дәріс жинағында санды басқару жүйесі ғана емес, сонымен қатар сандық жүйені құрайтын аналогты жүйе де қарастырылған. Бұл электр жетегін қазіргі кездегі күрделі жүйелермен басқарудың даму кезеңдерін және олардың талдау мен синтез әдістерін көрсетеді.
1 Жетектің электр механикалық жүйелерін қазіргі кездегі принциптермен тұрғызу
1.1 Жүйе элементтерінің құрлысы және тағайындалуы
Электр жетегі - басқарылатын электр механикалық жүйе. Оның тағайындалуы - электр энергиясын механикалық энергияға түрлендіреді және керсінше механикалық энергияны электр энергиясына түрлендіреді, осы процестерді басқарады [1,2,3].
Электр жетегі күшті және ақпараттық каналдардан тұрады (1.1 суретті қара). Күштік канал бойынша түрленген энергия тасмалданады (1.1 суреттегі үлкен бағытты қара), ал ақпарат каналы бойынша энергия ағымы басқарылады, жүйенің құрылуы мен жағдайы туралы ақпаратты жинап, өңдейді және оның жөнделмейтіндігін анықтайды (1.1 суреттегі жіңішке бағытты қара).
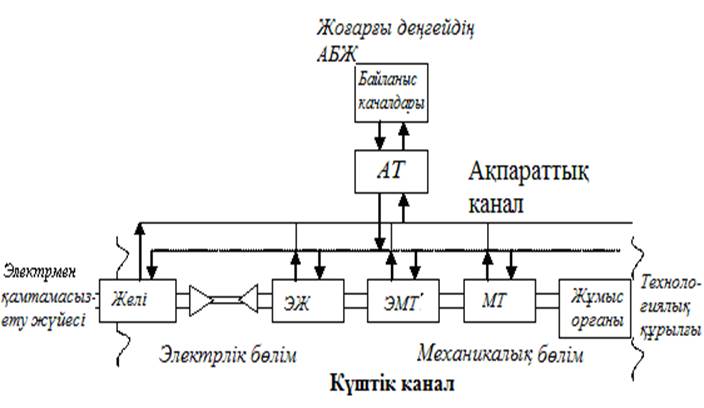
ЭЖ – электрлі түрлендіргіш; ЭМТ – электр механикалық түрлендіргіш; МТ – механикалық түрлендіргіш; АТ – ақпараттық түрлендіргіш.
1.1 сурет – Электр жетегінің жалпы құрылысы
Күштік канал электрлік, механикалық бөліктен және электр механикалық түрлендірудің байланыс буынынан тұрады.
Күштік каналдың электрлік бөлігі егер электр энергиясын түрлендіру қажет болса, қоректендіру көзінен (өндірістік электр жүйесінің шиналары, автономды электрлі генератор, аккумулятор батареялары және т.б.) электр механикалық түрлендіргішке немесе керсінше электр механикалық түрлендіргіштен қоректендіру көзіне электр энергияны беру құрылғысынан тұрады.
Механикалық бөлігі электр механикалық түрлендіргіштің қозғалмалы органынан, құрылғының орындау органынан және механикалық беруден тұрады, онда механикалық энергияны алу орындалады.
Ақпараттық канал ақпаратты түрлендірудің еңгізу, шығару құрылғыларынан және күштік каналының байланысынан тұрады.
1.2 Қосалқы жүйе ретіндегі электр жетегі
Электр жетегі техникалық жүйенің анықталған түрін көрсетеді. Басқа техникалық жүйелерге ұқсас, электр жетегі анықталған элементтерден тұрады және ірі жүйелерде өзі элемент (қосалқы жүйеде) ретінде қолданылады.
Электр жетегінің элементтеріне электрлі, электр механикалық, механикалық, ақпараттың түрлендіргіштері және ішкі өзара әсер ететін жүйелерден тұратын құрылғылардың байланысы жатады (1.1 суретті қара).
Электр жетегі электрді жабдықтау жүйесімен (электрлік желінің аймағымен байланысқан) немесе электр энергияның қоректендіру көзімен, техникалық құрылғылармен немесе машинамен (жұмыс органы арқылы байланысқан), жоғары деңгейлі ақпараттық жүйелермен, оператормен (байланыс каналына сәйкес жалғанған) өзара байланысып, әсер етеді (1.1 суретті қара).
Электр жетегі қосалқы жүйе ретінде берілген жүйеге кіреді және олардың бөлігі ретінде саналады. Электр жетегін электрмен жабдықтау маманын электр энергиясын пайдаланушы ретінде (1.2, а суретті қара), АБЖ тасмалдайтын немесе өңдейтін инженерді жүйені технологиялық процестермен немесе электрмен жабдықтау жүйесімен байланыстыратын дамыған интерфейс ретінде (1.2, б суретті қара), машинаны құраушы немесе технологты механикалық энергияның қоректендіру көзі ретінде қарастырады (1.2, в суретті қара).

1.2 сурет - Қосалқы жүйе ретіндегі электр жетегі
Электр жетегінің жүйесінде электр жетегінің ішіндегі барлық элементтер өзара байланысқан, ал электр жетегінің өзі жоғары деңгейлі жүйелермен байланысқан. Бұл өзара байланыстарды терең түсіну және есептеу тәжирибеде электр механикалық жүйелерді құру үшін аса қажет.
Ақпараттық каналда микропроцессорлық тәсілдерді қолдану күштік каналдың құрылу сапасына әсер етеді.
1.3 Электр жетегі және қазіргі кездегі технологиялар
Электр жетегі электрлі, электр механикалық және механикалық түрлендіргіштердің өзара әсер етуінен, басқаратын және ақпараттық құрылғылардан, сыртқы кедергілерден тұратын электрлі, механикалық, басқару және ақпараттық жүйелерден тұрады, жұмыс машиналарының орындау органдарын қозғалысқа келтіруге арналған және технологиялық процестерді орындау мақсатымен қозғалыстарды басқаратын электр механикалық жүйе.
Қазіргі кездегі технологияларда механикалық энергияға және қозғалысқа байланысты барлық процестер электр жетегімен орындалады. Элетрлі емес қозғалтқышты қолданатын автономды транспорттардың жабдықтарында (автомобильдер, ұшақтар, кей бір қозғалмалы құрылғылар) электр жетегі қолданбайды. Өнеркәсіптің қондырғыларында су жетегі кең қолданылады, пневможетегі аз қолданылады.
Электр жетегімен электр энергиясын кез-келген қашықтықта беруге болатындықтан, қолдануға әр уақытта дайын және кез-келген басқа энергиялардың түріне оңай өзгере алатындығына байланысты кең қолданылады.
Қазіргі уақытта аспаптық жүйелерде қуаты бір микроваттық электр жетегі қолданылады; газды айдайтын станциялардығы компрессор электр жетегінің қуаты он мегаватт, қазіргі кездегі электр жетектің қуаты мен жиілігінің деңгейі 1012 жоғары. Мысалы, жартылай өткізгіштердің кристалдарын тартатын қондырғының қозғалтқыш бірлігі қозғалыс бір қалыпты болу қажет деген қатаң талапта 10 сағатта 1 айналуы қажет. Қазіргі кездегі станоктың шлифті дөңгелегінің айналу жиілігі 150 000 айн/мин.
Қазіргі кездегі электр жетегі жасанды жүректен қадамды экскаваторға дейін, желдеткіштен радиотелескопқа дейін, киім жуатын машиналардан өндірістік жүйелерде кең қолданылады. Сондықтан осы ерекшелігінің технологиялық ортаға әсер етуіне байланысты электр жетегінің дамуына үлкен әсерін тигізді. Электр жетегі дами отырып технологиялық аймаққа оң әсер етеді және жаңа жетістіктерге жетеді.
Энергетикалық көзқарас бойынша электр жетегі негізгі энергияны қолданушы болып саналады. Қазіргі уақытта дамыған елдерде электр жетегінің 60% электр энергиясын қолданады. Энергетикалық ресурстардың тапшылығы электр жетегін энергиямен жабдықтауды қиындатады.
Мамандар қазіргі уақытта энергетика ресурстарының біреуін үнемдейді деп есептейді. Мысалы 1 тонналық жанармайды өңдеп алуға қарағанда, оның өзі екі есе арзан тұрады. Осыған байланысты жанар майды өңдеп алу қиындай түсетіндігін, ал оның қоры азаятындығын байқауға болады.
Электр жетегінің электр механикалық жүйелерінің даму қиындықтары: бірінші – әр түрлі технологиялық қолдану кезінде функционалдық мүмкіншілікті кеңейту қажет; екінші - энергияны және басқа ресурстарды үнемдеу арқылы қолдану қажет.
1.4 Жетектің электр механикалық жүйесінің жалпы талаптары
Энергетиканың электр механикалық түрленуін басқаратын жүйе ретінде жетектің жалпы талаптарын құрамыз және электр жетегін сипаттайтын негізгі көрсеткішті анықтаймыз.
Электр жетегі берілген функцияларды келісілген шартпен анықталған уақыт аралығында орындау қажет. Егер ол орындалмаса, онда оның барлық басқа сапасы қажетсіз болады, сондықтан сенімділік талабын бірінші қарастырамыз. Сенімділік жүйе құрамын ең бірінші жобалауда, оны құру мен тасмалдау процестерінде қажет.
Екінші жалпы көрсеткіш дәлдік деп аталады. Ол қозғалысты басқаруды орындайды, сондықтан электр жетегінің негізгі функциясы болып саналады. Қандайда бір қозғалыстың көрсеткіші берілген мәннен ерекше болмауын және берілген мәннен аспауын жетекпен қажетті дәлдікпен орындау. Мысалы, лифт кабинасын тоқтатудың дәлсіздігі ± 1 мм; щупты дайындау процесінде микросұлбаны тестілеуді орындайтын щупты құру қателігі ±10 мкм жоғары болмау керек және т.б. Электр жетегі жүктемеге, сымның немесе жіптің оралуы кезіндегі тартылу күшіне тәуелсіз транспортер лентасының қозғалысын берілген жылдамдық деңгейінде ұстап тұру қажет, сонымен қатар берілген мәннен ауытқуға болатын белгілі мәні болады, ол мәннен ауытқуға болмайды. Егер жетектің функциясы қандайда бір траекторияны қозғалысқа келтірсе (ондай жетек бақылау деп аталады), онда траекторияны қозғалысқа келтіруде шектеулер болады.
Үшінші көрсеткіш екінші көрсеткішке байланысты – жүйенің әртүрлі әсерлерге тез әсер етуі. Мысалы, радиотелескоп антенасының желдің әсерінен берілген жағдайдан ауытқуын секундқа жетпей өте тез түзету қажет.
Тез әсер ету мен дәлдіктің арасындағы байланысты мына мысалмен көрсетуге болады: егер берілген өте тез өзгерсе жетек оның өзгерісін тез өңдеу қажет, әйтпесе берілгенмен нақты траекторияның арасындағы өзгешелік берілген мәннен жоғарлап кетеді және рұқсат етілген аумақтан шығады.
Тез әсер ету жүйеде динамикалық процестермен уақыт бойынша өзгерістермен байланысқан. Онымен төртінші көрсеткіш байланысқан – динамикалық процестердің сапасы. Динамикалық процестердің уақыт бойынша өтуін анықталған заңдылықпен қамтамасыз ету. Мысалы, лифте жақсы жұмыс жасайтын жетек болғанда қозғалыстың үдеуі мен тоқтауы сезілмейді, егер нашар жұмыс жасайтын жетек болса динамикалық процестер кезінде қолайсыз жағдайлар болады.
Қазіргі уақытта ең маңызды бесінші көрсеткіш энергетикалық тиімділік деп аталады. Энергетиканы беру және түрлендірудің кез-келген процестері кезінде шығындар болатындықтан, осы шығындардың үдеулік бөлігі қандай екендігін білу қажет. Электр жетегінде бұл көрсеткіш технологиялық соңғы нәтижені алуда электр энергиясының үдеулі шығынымен анықталады. Мысалы, егер электр жетегі станок арқылы алынатын материалды және диаметрі берілген сымды шығанаққа орау операциясын орындағанда, сапасы берілген (бұл жерде көрсеткіштерін білу қажет) 1 тонналық дайын өнімдер үшін қанша электр энергия шығындалатындығын білу қажет.
Энергетикалық тиімділікті ПӘК бағалайды. ПӘК пайдалы шығындалған энергияның берілген процеске толық шығындалу қатынасы арқылы анықталады. Үлкен шығындар дегеніміз электрлік ресурстар мен адамдардың еңбектерін босқа шығындау және қоршаған ортаға зиянын тигізу.
Алтыншы көрсеткіш – электр жетегінің электрді жабдықтау жүйесімен және өте жоғары деңгейлі ақпараттық жүйемен сәйкестігі. Соңғы кездері электр жетегінің құрамына қоректендіру желісіне және электронды басқару құрылғысына күші кері әсерін тигізетін жоғары гармоникаларды түзететін жартылай өткізгішті түрлендіргіштердің енуіне байланысты электр жетегі технологиялық құрылғыларға да сәйкес болады.
Жетінші көрсеткіш ресурс сиымдылық деп аталады. Оған өндірістің технологиясына және құрамына берілген материал сиымдылығы және энергия сиымдылығы, монтаждау, дайындау, тасмалдау және жөндеу кезіндегі еңбек сиымдылығы жатады. Бұл көрсеткіш өте күрделі, ауқымды, технологияның дәрежесімен және көрсеткішімен, экономикалық жағдайларымен, көптеген басқа факторлармен байланысқан.
Мысалы, электр жетегінің негізгі элементі болып саналатын, өнеркәсіптің, қуаты 1-10 кВт болатын асинхронды қысқа тұйықталған электр қозғалтқыштың салмағының өзгеруін қарастырамыз. Табиғи ресурстары аз, технологиялық деңгейі жоғары Жапонияда 1950 жылдан 1986 жылға дейін мұндай қозғалтқыштардың материалының жақсаруы, оларды өңдеу сапасының жоғарлауы, құрлысы тиімді және т.б. болғандықтан салмағы орташа есеппен 2,5 есе төмендеді. Қозғалтқыш салмағының төмендеу процесі әлі де жалғасауда.
АСШ 70 жылдары осы қозғалтқыштардың салмағы төмендеген. Бірақ қазір энергияның бағасы жоғарлағандықтан және материалдың қоры көбейгендіктен энергияны үнемдеу қозғалтқыштарының өндірісі жоғарлады, сондықтан оның салмағы 40-50% жоғарлаған.
Келтірілген көрсеткіштердің бір жалпы құрамын атап өтейік. Әдетте қандайда бір көрсеткішті жақсы деңгейде алу қиын емес (яғни, онша қымбат емес). Микросұлбаны шығаратын, бірнеше микрометрлерден аспайтын құрылғының жұмыс органын құру қателігін микроскоппен алу қиын емес. Бірақ 0,5-0,6 м/с жылдамдықпен қозғалатын автоматты құрылғының жұмыс органын мұндай қателікпен тоқтату оңай емес және оны шешу біршама күшті, шығынды қажет етеді. Яғни, тек тез немесе дәл орындау күрделі емес, ал тез және дәл орындау күрделі. Тез, дәл және сенімді орындау өте күрделі, бірақ осы мақсаттарды және т.б. көптеген шарттарды орындауды қазіргі уақыттағы электр механикалық жүйелермен басқару кезінде инженер шешу қажет.
1.5 Электр жетегінде энергияның электр механикалық түрленуінің физикалық принципі
Кез келген электр жетегінің құрамына энергияны электр механикалық түрлендіретін – электр машинасы кіреді.
Қазіргі уақытта электр механикалық түрлендіргіштің бір ғана түрі белгілі, ол электр магнитті деп аталады.
Энергияның электр механикалық түрленуінің физикалық құбылысын және физикалық принципін қысқаша қарастырамыз.
Энергияны электр механикалық түрлендірудің бес физикалық құбылысы болады. Олар:
а) өткізгішке магнитті өрісте токпен күш әсер етеді. Өріс тұрақты магнитпен, арнайы ораммен немесе ток өткізгішімен пайда болады. Магнитті өріспен өткізгіш орын ауыстырған кезде, онда ЭҚК пайда болады;
б) ферромагнитті материалға магнитті өріспен оның орнын ауыстыруға тырысатын күш әсер етеді, онда өрістің әсері жоғары болады. Егер өріс токты ораммен пайда болса, онда орын ауыстыру кезінде өріс өзгереді және тармақтарында ЭҚК пайда болады;
в) зарядталған конденсаторды және диэлектрикті оқшаулағанда электр өрісіне күш әсер етеді. Олар өзара орналасқан кезде оқшаулағыштың заряды немесе кернеуі өзгереді;
г) анықталған бағытқа кернеуді берген кезде кейбір кристалдар аздап пішінін өзгертеді. Егер ондай кристалдардың пішінін өзгертсе электрлік заряд пайда болады. Бұл құбылыс пьезоэффект ретінде белгілі;
д) ферромагнитті материалдардың көбі магнитті өрістің әсерінен аздап пішінін өзгертеді. Пішінін өзгерткен материалдардың магнитті құрамы өзгереді. Бұл құбылыс магнитті стрикция деп аталады.
Энергияның электр механикалық түрленуіне жататын аталған бес физикалық құбылыстар қазіргі кездегі техникаларда қолданылады. Бірінші құбылыс бойынша магнит өрісіндегі өткізгіштік принципінің негізі арқылы барлық электр машиналары жұмыс жасайды.
Екінші құбылыс бірінші топқа қарағанда төменгі энергетикалық көрсеткіштен тұратындықтан және өте қарапайым техникалық шешімдерді алатындықтан әртүрлі электрлі аппараттарда кең қолданылады (электр магнитті реле, түйіспелер, іске қосқыштар және т. б. ).
Үшінші құбылыс осы уақытқа дейін электрлік машинаны құру мүмкіндігінің инерциялық емес үйлесімділігі ретінде қызмет атқарады, қажетті материалдардың болмауына байланысты тәжирибе жүзінде қолданылған жоқ, яғни сыйымдылықты түрлендіргіштер энергия сыйымдылығы (бірлік салмақ немесе көлемдегі энергия) бойынша электр магниттен жоғары болды, өте жоғары кернеуді және т.б. қажет етті. Сыйымдылықты құрылғылар ақпараттық түрлендіргіштер, әртүрлі бергіштер және т.б. ретінде қолданылды.
Төртінші және бесінші құбылыс өнеркәсіптегі электр жетекте әзірге қолданыс тапқан жоқ. Ол тек акустикалық құрылғыларда, әртүрлі бергіштерде және т.б. қолданылады.
2 Электр жетегі басқарылатын электр механикалық жүйе
2.1 Басқару жүйесінің құрылысын тұрғызу принципі
Бірінші бөлімде электр жетегін энергияның электр механикалық түрленуін басқаруды орындайтын физикалық жүйе ретінде қарастырдық.
Енді электр жетегін электр механикалық жүйелерді басқаратын түрде қарастырамыз.
Электр жетегінің алгоритмді құрылуы берілген мақсатқа жету үшін орындалудың қатаңдығымен, технологиялық процестерді қамтамассыздандырудың талап етілген сипаттамасымен орындалады. Мысалы, станокта бөлшекті жасау, сұйық металды шөмішпен А нүктесінен В нүктесіне жеткізу т.б.
Уақыт бойынша технологиялық процеспен анықталатын қалаулы заңның өзгеру шамалары басқарылатын немесе реттелетін айнымалылар (координат) деп аталады. Бұл жылдамдық және жұмыс органының жағдайы немесе үдеуі болып келеді. Реттеу координаттары жылдамдық ретінде беріледі, ал қалғандары осы координаттың талап етілген өзгеру заңына сәйкес өзгеруі қажет. Мұндай айнымалы негізгі реттелетін координат деп аталады. Электр жетегіндегі металды кесетін станок қозғалысының негізгі реттеу координаты шпиндель жылдамдығы болып саналады және т.б.
Электр энергияның механикалық энергияға түрленуі мына түрде ұйымдастырылады: реттелетін координатты уақыт бойынша қажетті заңмен өзгеруін қамтамасыз етеді, сонымен қатар электр жетегі мен технологиялық құрылғылардың қажетті құру алгоритімі құрылады. Мұны электр жетегінде басқару деп қарастырамыз. Негізгі реттелетін координат бойынша басқаруды бір мөлшерлі деп, ал бірнеше реттелетін координат бойынша басқаруды көп мөлшерлі деп атаймыз.
Электр жетегінің күштік каналына кіретін элементтердің жиынтығын басқару объектісі деп атаймыз: электрлік, электр механикалық, механикалық түрлендіргіш және жұмыс органы. Бұл элементтер кіріс-шығыс айналымдардың немесе құрылымдық сұлбалардың модельдері түрінде болады. Мысалы, тиристорлы түрлендіргіш – тұрақты токты қозғалтқыш жүйесінің моделі. Кіріс әсерінің u(u1,…,um) барлық векторлар жиынтығын екі топқа бөлуге болады: басқару және қоздыру әсерлері, олардың өзгеру заңы сыртқы факторлармен анықталады (МЖ біліктің жүктеме моменті, желіні қоректендіру UЖ кернеуі және т.б.). Басқару процесі дегеніміз шығыс реттелетін координатты өзгерту заңын құру үшін басқару объектісінде басқару әсерлерінің құрылуы, ал басқару құрылғылары дегеніміз басқару процесін қамтамасыз ететін техникалық жабдықтардың жиынтығы.
Жалпы жағдайда басқару құрылғысы ең жоғарғы деңгейлі басқару жүйесінен және (немесе) адам-оператордан (2.1 суретті қара) бастап бұйрықты қабылдауды (іске қосу, басқару процестерін тоқтату және т.б.) және реттелетін координаттарды құруды қамтамасыз етеді, осы «көрсеткішке» сәйкес басқару процесін орындайды. Егер барлық басқару функциялары адам-операторының көмегінсіз орындалса басқару автоматты деп аталады, мұндай басқару құрылғыларынан тұратын электр жетегі автоматтандырылған деп аталады.
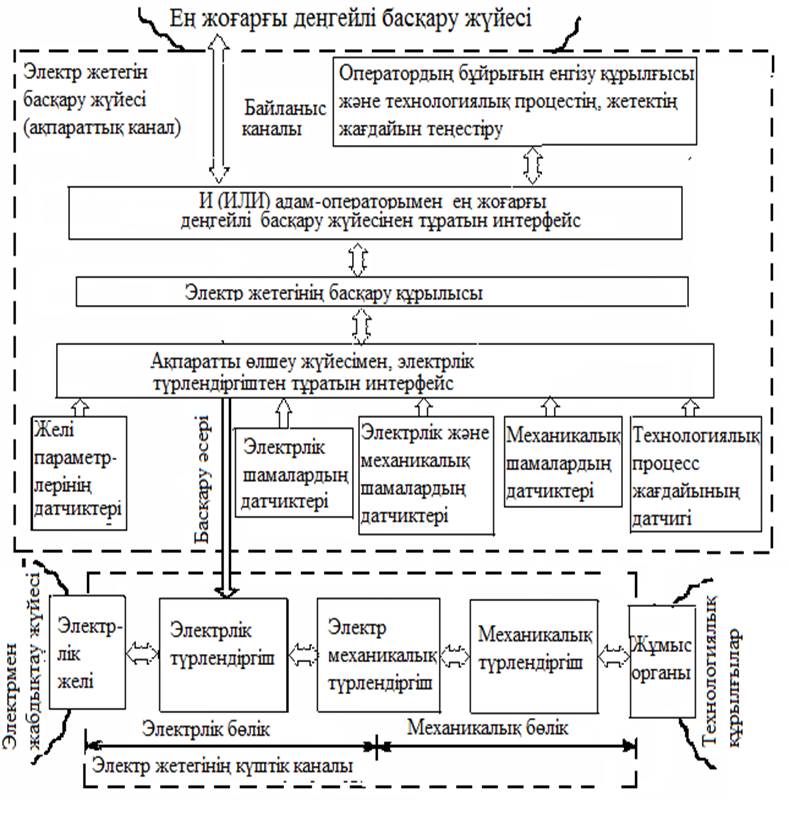
2.1 сурет - Электр жетегі басқарылатын электр механикалық жүйе
Басқару процесіне қатысатын ақпараттық канал элементтерінің жиынтығын электр жетегінің басқару жүйесі деп атаймыз (2.1 суретті қара). Ол басқару құрылғысынан, оператор бұйрығын еңгізу құрылғысынан, оператормен басқару мен бақылау шешімдерін қабылдау үшін технологиялық процестер мен жетектің жағдайы туралы ақпаратты еңгізу құрылғыларынан және ақпаратты өлшеу жүйелерінен және жоғарыда аталған құрылғылардан тұратын басқару құрылғыларының интерфейс сұлбаларынан тұрады (2.1 суретті қара).
Ақпаратты өлшеу жүйесі (АӨЖ) мыналардан тұрады: желі параметрлерінің бергіштері (датчиктері) (кернеу, жиілік және т.б.); электр түрлендіргішінің ішкі және шығыс қысқыштарындағы электрлік айнымалы бергіштер (кернеу, ток, қуат және т.б.); электр механикалық түрлендіргішті сипаттайтын электрлік және электр магниттік шамалардың бергіштері (кернеу, ток, ағым және т.б.); қозғалтқыш білігіндегі және (немесе) жұмыс органындағы (жылдамдық, жағдайы, үдеуі, момент, күшейткіш) механикалық айнымалы бергіштер; технологиялық процестердің параметрлер бергіштері (температуры, қысым, шығын және т.б.). Бергіштер дегеніміз физикалық айнымалы шамаларды электрлік сигналға түрлендіретін құрылғы. Анық бергіш айнымалының өлшенуі кезіндегі аралықта түрленудің сызықтылғын қамтамасыз етеді. АӨЖ құрамына бір немесе бірнеше бергіштер кіреді.
Басқару объектісі арқылы АӨЖ келіп түскен координаттың нақты мәндері туралы ақпараттар мен берілген әсерлердің мәндері туралы ақпараттың негізінде басқару құрылғысы басқару объектісінде басқару әсерлерін өңдейді. АӨЖ электр жетегінің ақпараттық және күштік каналдарының арасында орналасқан. Сондықтан оны басқару жүйесіне немесе кей кездері басқару объектісіне жатқызады. Электр жетегін жүйе ретінде бейнелеу автоматты басқару жүйесінде қолданылады (2.2 суретті қара).

2.2 сурет – Электр жетегін жүйе түрінде классикалық бейнелеу
«Электр жетегімен басқару жүйесі» және «Электр жетектермен басқару жүйелері» деген терминдерді бөлек электр жетегіне қатысты емес, ал технолгикалық қондырғыға қатысты ең жоғарғы басқару жүйесінің анықтамасы ретінде қолданамыз. Басқару жүйесіне қатысты мұндай қондырғыларда электр жетегі қосалқы жүйе болып саналады. Металды кесетін станоктың басқару жүйесі бірнеше қосалқы жүйемен басқарылады: негізгі қозғалыс жетегі, беру, көмекші жабдықтарымен (салқындатылған сұйықты өңдеу аймағына беретін сорғыштар, құралды автоматты ауыстыру құрылғысы және т.б.).
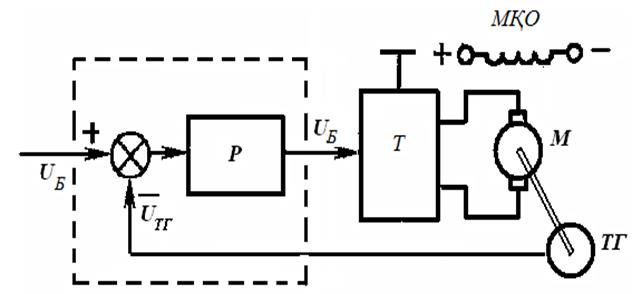
Бөлек электр жетегінің құрамын ең төменгі деңгейлі қосалқы жүйеге бөлуге болады. Мысал ретінде тиристорлы түрлендіргіштің басқару қосалқы жүйесін жатқызуға болады. Ол басқарудың ең төменгі деңгейінен тұрады. 2.3 суретте тиристорлы кіліттің басқару қосалқы жүйесі мысал ретінде келтірілген.

2.3 сурет – Түрлендіргіш – қозғалтқыш жүйесі бойынша электр жетегінде басқару сатысы
Көп деңгейлік сатылы басқару жүйесін құру принципі 2.4 суретте көрсетілген. Жоғарғы деңгейлі басқару жүйесі үшін барлық ең төменгі деңгейлі жүйелер басқару объектісі немесе қосалқы жүйе (ҚЖ) ретінде қарастырылады. Мұнда үшінші деңгейлі басқару құрылғысы (БҚ) n екінші деңгейлі қосалқы жүйе үшін басқару әсерін өңдейді, екінші деңгейлі басқару құрылғысы k бірінші қосалқы жүйе үшін басқару әсерін өңдейді және т.б. Әрбір қосалқы жүйеде өзінің жергілікті АӨЖ болады.
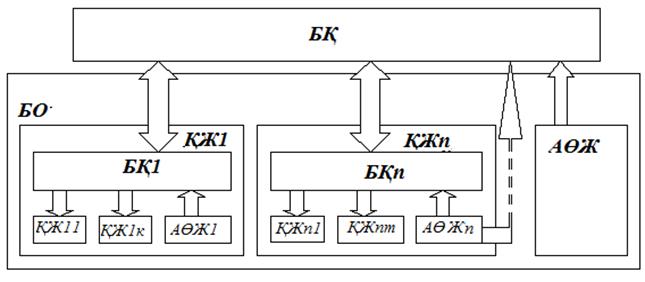
2.4 сурет – Көп деңгейлі басқару жүйесін құру принципі
Кейбір бергіштер (2.4 суретте үзік сызықпен көрсетілген) бір уақытта әртүрлі деңгейде басқару жүйесі ретінде қолданыла алады.
2.2 Басқару жүйесінің жіктелімдері
2.2.1 Басқару құрылғылары мен басқару объектісінің арасындағы ақпаратты беру каналдарының санына сәйкес барлық басқару жүйелері екі үлкен топқа бөлінеді: ажыратылған және тұйықталған. Ажыратылған жүйелерде басқару алгоритмі басқару объектісінің ағымдағы жағдайы туралы ақпараты болмағанда басқару құрылғысымен құрылады және ақпараттарды берудің бір ғана каналы болады, ол басқару әсерлерін басқару құрылғысынан басқару объектісіне дейін беру каналы. Сонымен ажыратылған жүйелерде реттелетін координаттың нақты өзгеруі бақыланбайды. Егер түрлендіргіш – қозғалтқыш жүйесі ажыратылған болса, онда жылдамдықты реттеу аймағы D=wMAX/wMIN болғанда және дәлдікті онша жоғары деңгейде талап етпеген кезде жұмыс органының жылдамдығын реттеуге қолданылады.
Басқарудың ажыратылған жүйелері кең қолданылады: реттелмейтін жетекте іске қосу, реверстеу және тежеудің автоматтандырылған сұлбасынан бастап, күрделі микропроцессорлық басқару жүйелеріне дейін, басқару алгоритімі электр жетегінің динамикалық теңдеуін нақты уақытта шешу негізінде құрылады. Оның мақсаты кез - келген қалаулы заңға y(t) реттелетін координаттың өзгерісін және талап етілген заңмен u(t) басқару әсерінің өзгеруін алу. Мұндай басқару модельді басқару деп аталады. Сонымен қатар, егер төменгі деңгейде мақсатты басқару сапалы түрде орындалса, онда төменгі деңгейлі жүйеге сенімді және оны бақыламай басқару жүйесінің жоғарғы деңгейі ажыратылған жүйеде жұмыс жасай алады. Қарапайым жағдайда ол төменгі деңгейлі автономды жұмыс жасайтын жүйелерді ғана іске қоса алады.
Ажыратылған жүйелердің негізгі кемшілігі - «егжей-тегжейін білмей» басқару. Орындау механизімінде мысалы, қозғалтқыш немесе түрлендіргіш істен шыққанның өзінде басқару құрылғысы өз функцияларын үздіксіз орындай береді.
Басқару жүйелерінің жұмыс сапасы мен сенімділігін ақпаратты өлшеу жүйесімен (АӨЖ), АӨЖ-нен басқару құрылғысына ақпаратты беру каналын және кері байланысты еңгізіп жоғарлатуға болады (2.1, 2.2, 2.4 суреттерін қара). Мұндай басқару жүйелерін тұйықталған деп атаймыз.
Кері байланысты қолданып реттелетін координатты тікелей басқару 2.5 суретінде көрсетілген (тұйық жүйе).
Мысалы түрлендіргіш – қозғалтқыш жүйесінде басқару мақсаты адам – оператор немесе жоғарғы деңгейлі басқару жүйесінен келіп түскен жылдамдықты беруді дәл қалпына келтіру болып саналсын (2.1 суретті қара). Қарастырылған басқару жүйесі тұрақтандыру жүйесінің класына жатады. Олардың негізгі белгілері: беру әсерлерінің өзгермеуі, берілістің уақыт өте келе өңделуімен салыстырғанда нақты берілістің өте баяу өзгеруі. Сонымен қатар реттелетін параметрлер қателіктің ұйғарылған шегінде кез келген қозуда тұрақты болады.
Жалпы жағдайда кері байланысты еңгізгенде басқару құрылғысына компараторлар (салыстыру құрылғылары) және кейбір алгоритімдермен келіспеушілік сигналдарын басқару әсерлеріне түрлендіретін құрылғылардың Р реттегіші қоса беріледі (2.5 суретті қара).
2.5 сурет – Реттеумен тұйық басқару жүйесі
WP(p)=1/Tир беріліс функциясымен реттегішті интегралды ретінде аламыз, мұндағы Ти – интегралдаудың тұрақтылығы. UБ=UК.Б кезінде жүйедегі қалыпты режим интегратор кірісіндегі сигнал нөлге тең болғанда болады. Сонымен қатар қалыпты режимдегі реттелетін координаты келіспеушілік сигналы мен берілісті нөлге тең етіп дәл құрады. Кейбір қоздырулар әсер еткенде келіспеушілік сигналдары нөл болатын басқару жүйелері астатикалық деп аталады, осы қоздыруларға сәйкес керсінше жағдай болса, онда оны статикалық деп атайды.
Статикалық жүйелерде қалыпты режим кезінде ылғида реттеудің қателігі болады. Реттелетін шамалар мен басқарылатын шамалардың арасында және қоздыру шамалары мен келіспеушілік (қателіктер) шамаларының арасында дәл сәйкестік болады. Статикалық сипаттама қалыптасқан қателіктің кіріс әсерінің шамаларына және қатені беру коэффицентіне тәуелділігін көрсетеді.
Бақыланатын келіспеушілік жоғалғанша басқару әсері модуль бойынша үздіксіз өсіуінің салдарынан астатикалық жүйелерде қозудың әр түрлі шамаларында реттеу қателігі нөл болады. Бұл жүйелер дәл болып келеді, бірақ қателікті жою үшін уақытты қажет етеді. Келіспеушілікті толық түзету уақытында басқару әсерінің шамасы кез келген болады.
2.2.2 Егер басқару әсері мен реттеу координатының арасындағы нүктеде басқа өлшенетін айнымалылар болса, онда осы айнымалылар арқылы кері байланыстар құрылады. Әрбір ішкі басқару контурлары қосалқы жүйелер болып саналады, бұл жағдайда ішкі контурдың басқару объектісінде басқару жүйесі көп контурлы болып келеді ( 2.6 суретті қара).
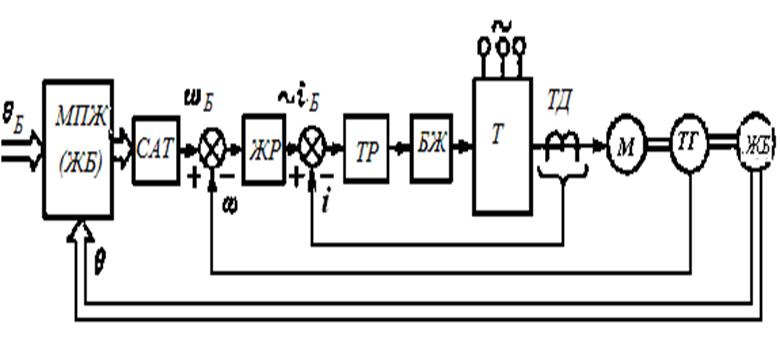
2.6 сурет – Жағдайды санды реттеуішінен тұратын көп контурлы аналогты санды басқару жүйесінің құрылымдық сұлбасы
Токты ТР, жылдамдықты ЖР және
жағдайды реттеулермен басқаруға бағындыру принципі
бойынша тұрғызылған, жұмыс органы жағдайын басқарудың
көп контурлы жүйе құрылысын синтездеу. Мұндай
жүйелердің реттеулерінің параметрлері электр жетегінде
кең қолданылуы [1,2,3] қарастырылған. 2.6 суретіндегі
жүйеде көрсетілген жағдайды реттеуде (ЖР) микропроцессорлық
жүйе (МПЖ) қолданылады. Мұнда ![]() беру сигналы мен
беру сигналы мен ![]() кері байланыс сигналы жағдай бергішінен
(ЖБ) кейін санды түрде МПЖ беріледі, МПЖ кейін санды код санды аналогты
түрлендіргішпен (САТ) басқару жүйесінің аналогты
бөлігін басқару үшін аналогты сигналға түрленеді.
кері байланыс сигналы жағдай бергішінен
(ЖБ) кейін санды түрде МПЖ беріледі, МПЖ кейін санды код санды аналогты
түрлендіргішпен (САТ) басқару жүйесінің аналогты
бөлігін басқару үшін аналогты сигналға түрленеді.
2.2.3 Егер беру әсері басқару объектісінде алдын ала берілген бағдарламамен уақыт функциясында басқару құрылғысымен құрылса, онда мұндай жүйе бағдарламалық басқару жүйесі деп аталады. Сондықтан басқару құрылғысының құрамында екі бөлім болатындығы белгілі – бағдарламаны қалпына келтіру мен еске сақтау құрылғылары. Мұндай жүйенің мысалы ретінде станоктарды санды бағдарламалық басқару жүйелерін (СББ) қарастыруға болады. Бұл өте күрделі микропроцессорлы басқару жүйесі. Алдымен инженер - технолог СББ-мен станокта бұйымды жасаудың технологиялық процесін жобалайды: құралдың қозғалыс траекториялары, құралдың түрі, өңдеу режимдері және т.б. Бұдан кейін инженер-бағдарламашы жұмысқа кіріседі. Ол арнайы тілмен барлық жұмыс органының қозғалыс траекторияларын бейнелейді де, соңында бұйым жасалынады. Бұл ақпарат басқару бағдарламасының тізбектелген кадрлар түрінде еске сақтау құрылғысына жазылады. Ағымдағы кадрдың ішінде нақты уақытта басқару әсерін құру үшін бағдарламаны қалпына келтірудің арнайы құрылғысы – интерполяторлар қолданылады. Интерполятор траекториялардың берілген тіректі нүктелерімен барлық траекторияларды қалпына келтіреді және басқару әсерін құрады. СББ жүйелерінде бұл әсерлер қозғалыстың қажетті траекториялары туралы жағдайы негізімен ғана емес, сонымен қатар жетектің моделін басқару объектісі ретінде есепке ала отырып құрылады. Сонымен қатар бағдарламалық басқару жүйелері тұйықталған жүйемен орындалады, сондықтан есепке алынбаған ауытқулар әсер еткенде траекторияларды қалпына келтіру қателігін түзетуге көмектеседі. Контурлы және позициялы СББ жүйелері болып бөлінеді.
2.2.4 Егер басқару объектісіне берілетін әсер алдын - ала белгілі емес заңмен өзгеретін болса, ал басқару жүйесінің мақсаты бұл әсерді талап етілген дәлдікпен өңдеу болса, онда мұндай басқару жүйесі бақылау жүйесі деп аталады.
Егер басқару әр түрлі аймақтарда орындалса, реттеу координаттарының өзгеруі әр түрлі басқару әсерлерімен құрылатын болса, онда басқару көп аймақты деп аталады (екі аймақты). Мысалы, түрлендіргіш – қозғалтқыш жүйесінде жылдамдықты реттеу, төменге негізгіден біліктегі кернеуді өзгерту арқылы және жоғарғыға негізгіден өрістің әлсіреуі арқылы орындалады.
Егер басқару кезінде бірнеше басқару әсерлері лезде құрылатын болса, онда мұндай басқару векторлы деп аталады. Мысалы, коллекторсыз тұрақты токты қозғалтқыштың жылдамдығын статордың қосынды кернеу (ток) векторларының фазалары мен амплитуда каналдары бойынша реттеу. Сонымен қатар фазалық басқару коммутация бұрышының өзгеруіне баламалы болып келеді (каллекторлы тұрақты токты машинада шөткелердің аналогты ығысуы бейтарапты болады).
2.2.5 Жұмыс шарттарының өзгеруіне байланысты басқару жүйесінің бейімделуі деген түсінік бар.
Қарастырылған қарапайым реттеу жүйелері жұмыс шарттарының өзгеруіне ілесе алмайды, олардың энергиядан тұратын сипаттамалары берілген басқару алгоритмі арқылы ілеседі.
Іздестіру (бейімделген) жүйелері сыналатын әсерлердің және олардың нәтижелерін талдау көмегімен объектінің жағдайы туралы көрсеткішті құрады.
Өзіндік бейімделген (адаптивті) жүйелер төмендегідей бөлінеді:
- өзіндік құру (мұндай жүйелер тасмалдау шартын мысалы, жүктемені, жылдамдықты, инерция моментін және т.б. өзгерту кезінде таңдалған реттеу элементтерінің параметрлерінің мәндерін өз бетінше өзгертеді);
- өзіндік ұйымдастыру (өзінің құрылысын өзгертеді - алгоритм және реттеу параметрлері);
- өзіндік бағдарламаланатын (өзінің алгоритімді құрылымын өзгертеді).
Олар өз құрамында объектіні басқару процессінде келіп түсетін қосымша ақпараттар негізінде реттеудің бағдарламасын немесе құрылысын, күйін өзгертетін арнайы құрылғылардан тұрады.
Бейімделген жүйелерге экстремалды реттегіштер жатады. Олар басқа параметрлердi түрлендіру кезінде реттеу шамаларының экстремалды мәндерін жүйеге автоматты түрде шығарады. Сонымен қатар объектінің дрейфті экстремалды сипаттамалары кезінде шектеу шартының болуынан берілген критериясы бойынша ең жақсы басқаруды таңдайды. Экстремалды реттегіштерді реттеу заңы – бұл басқару әсерін сынамалық өзгерту жолдарымен реттелетін шаманың экстремумын іздеу. Бұл жүйеде реттеу шамасы үздіксіз автотербелісті орындайды, бірақ релелік реттегіштен ерекшелігі берілген мәннен шыққанан кейін емес, ал жұмысқа еңгізген уақытта орындалады.
Жоғарыда аталған жүйеде толық бейімделу процесі үш кезеңмен орындалады: басқару объектісін теңестіру немесе толық жүйені басқару; реттеу параметрлерін есептеу; реттеуді құру және (немесе) оның құрылысын өзгерту.
Бейімделу жүйесі кейбір критерияларға қолайлы басқару нәтижелерін алуды қамтамасыз етеді және тиімді басқару теориялары зерттеледі.
Бейімделу жүйесі соңғы уақыттары микроэлектроникалар мен микропроцессорлық техникалардың дамуына байланысты әр түрлі технологиялық процестерде электр механикалық жүйелерді басқару үшін кең қолданылады.
2.2.6 Басқару жүйесін ақпаратты (сигналдың сипаттамасы) қолдану түрі бойынша жіктеуге болады.
Үздіксіз (бейімделген) жүйелер жұмыстың барлық уақыт ағымында объектіге әсер етеді және бір қалыпты өзгеретін немесе үздіксіз периодты сигналдарда қолданылады.
Дискреттік жүйелердің жұмысы сигналдың үзікті өзгерісіне (квантталулар, дискретизациялар) негізделген. Импульстік жүйелерде уақыт бойынша кванттау (басқару әсері үзіліспен бөлінген уақыттың қысқа аралығында құрылады), релелік жүйелерде деңгей бойынша кванттау (позициялар) орындалады, сандық жүйелерде осы екі тәсілдер де қолданылады.
Әдетте, сызықты дискреттік жүйелердің құрамында жүйенің сызықтық бөлiгінің (СБ) маңызды басымдылығында, үздіксіз шамалардың дискреттік шамаларға түрлендіру элементі болады (2.7, а суретті қара). Мысалы, импульсті реттегіштің амплитудалық модульяциялармен (дискретті сызықты) жұмысы Т0 уақыт аралығына тең ілесетін а импульстардың амплитудасы сызықты u кіріс шамасына тәуелді болуымен сипатталады (2.7, б суретті қара).
Релелі екі жағдайлы реттегіш сезгішсіз аймақсыз umax және umin шекті екі жағдайлды реттеуді орындайды (2.7, в суретті қара). Оның жұмысы жүйенің yбер берілген мәнге шыққаннан кейінгі, осы мәнге жуық реттелетін параметрлердің автотербелістерімен ілеседі. Автотербелістің амплитудасы мен жиілігі реттелетiн объектiнiң инерциялылығы мен басқару әсерінің деңгейіне тәуелді болады.
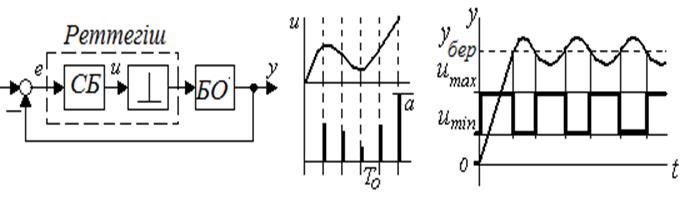
а) б) в)
а – дискреттік жүйенің құрлымдық сұлбасы; б – амплитудалық модуляциямен импульсті реттеу жұмысының уақыттық диаграммасы; в) релелі екі жағдайлы реттегіш жұмысының уақыттық диаграммасы.
2.7 сурет – Дискреттік жүйені құру принципі
2.3 Электр жетегін автоматты басқару жүйесінің сандық және санды аналогты жүйесін құру принципі
Электр жетегін аналогты жүйемен басқару арқылы орындалатын жылдамдықты 1 - 0,5 % нақты тұрақтандыруы кейбір өндірістік механизмдеріне қажетті 0,1 – 0,01 % нақты тұрақтылықты қамтамасыздандыра алмайды. Бұл аналогты бергіштермен, жылдамдық бергіштерінің координатты тұрақтандыру мәндерін нақты өлшей алмағандығынан және салыстыру (күшейткіштер) аналогты құрылғылардың дреф нөлі болғандықтан кері байланысты және берілген аз сигналдарды нақты салыстыру қаблетсіздігінен болады. Мұндай кемшіліктер, координатты 0,01 % және одан да жоғарғы пайызда нақты реттейтін сандық басқару жүйесін құратын сандық құрылғыларда болмайды.
Әдетте, электр жетегін жүйемен басқару электр жетегінің координатын бақылаумен жүзеге асады. Мысалы, жылдамдықты және басқару объектісінің жағдайын (жұмыс машинасының атқарушы органдары ЖМАО) бақылау, оның жағдайы ЭЖЖБ мен КБЖБ бергіштердің көмегімен орындалады (2.8 суретті қара). Мұндай жүйелерде (санды сигналды аналогты сигналға түрлендіретін) санды аналогты түрлендіргішпен (САТ) сандық беріліс құрылғысының қолданылуы (БҚ) берілетін әсерлердің дәлдігін жоғарылатады және оның нақты индикациясын орындайды (2.8, а суретті қара). Беру сандық құрылғысы (БС), КБЖБ кері байланысы және санды аналогты түрлендіргішпен (САТ) салыстыру құрылғысының (СҚ) (2.8, б суретті қара) қолданылуы толық дәл реттеуді жоғарылатады. Сонымен қатар сандық жүйеде электр жетегін аналогты жүйемен (2.8, в суретті қара), толық сандық немесе аналогты (2.8, г суретті қара) реттеумен (АР) басқарудың нақты сандық реттеуі (СР) қолданылады.
Құрылғылардың сандық және аналогты болып бөлінуі, осы құрылғылармен өңделген ақпараттың көрсетілу түріне және осы құрылғыларды құру үшін қажетті аппараттарға байланысты. Айнымалы аналогты түрі әртүрлі физикалық шамаларға (кернеу, ток, жылдамдық, жиілік, біліктің айналу бұрышы және т.б.) тура пропорционалдығымен сипатталады. Сандық түрі тек қана 0 және 1 сандарды қолданып, шаманы сандық кодпен сипаттайды. Санды жазған кезде біртұтас код арқылы санды білдіретін және санды тізбектей ілестіретін қажетті импульстар санымен қамтамасыздандырылады.
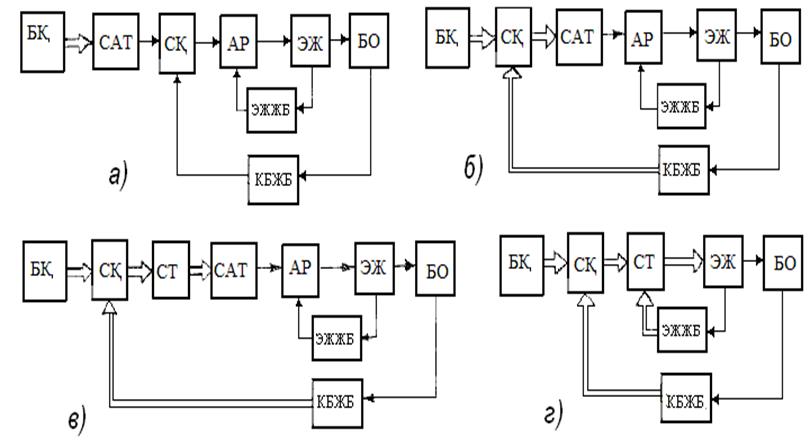
а – санды беру; б – санды беру және жағдайды бақылау; в – жағдайды санмен басқару; г – жағдайды және жылдамдықты санмен басқару.
2.8 сурет - Электр жетегін санды аналогты басқару жүйесі
Сигналды сан ретінде қарастырсақ, аналогты сигналдың деңгейі анықталған дискреттік уақыт немесе сигнал деңгейінің аралығында пайда болады. Онда аналогты сигналдың үздіксіз функциясы сатылы функцияға айналады. Бұл операция сигналдың квантталуы деп аталады [6]. Егер дискреттелу Т0 әртүрлі уақыт аралығында орындалса, онда мұндай квантталу уақыт бойынша квантталу деп аталады (2.9, а суретті қара), ал егер дискреттелу q мәні әртүрлі болғанда, шығыс сигналы бойынша квантталу болса, онда деңгей бойынша квантталу деп аталады (2.9, а суретті қара). Т0 және q аралығы квантталу қадамы деп аталады.
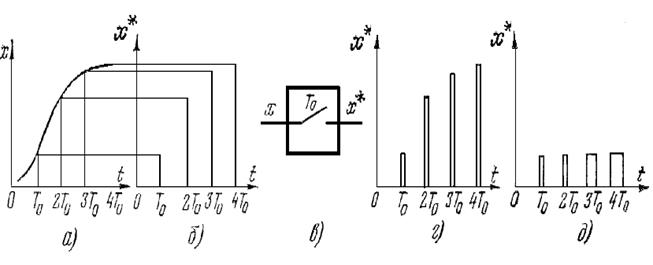
а – үздіксіз функция; б –торлы функция; в – импульсті элементтің шартты белгісі; г – амплитуда-импульсті модуляция; д – ендiк-импульстi модуляция. 2.9 сурет – Уақытпен шамаларды дискретизациялау
Уақыт бойынша кванттаған кезде үздіксіз сигнал (2.9, а суретті қара) торлы түрге өзгереді (2.9, б суретті қара)
|
|
(2.1)
|
мұндағы Т0 – дискреттік аралық.
Бұл операция импульстік элементпен (дискретизатормен) орындалады. Оның шартты белгіленуі 1.2, в суретте көрсетілген. Әдетте, дискретизатор ретінде модулятор қолданылады. Импульстардың амплетудасы (2.9, г суретті қара, амплитуда-импульсті модуляция – АИМ), импульстардың ұзақтығы, көлемі және т.б. бойынша үздіксіз кіріс сигналымен дискреттік аралықта Т0 импульлстардың тізбектігін модульдейді (2.9, д суретті қара, көлем-импульсті модуляция – КИМ). Сонымен қатар импульсті ілестіру жиілігі бойынша модуляция (ЖИМ-жиіллікті импульсті модуляция) қолданылады, ал фаза импульстері бойынша фаза импульсті модуляция (ФИМ) қолданылады.
Жиілікті кванттау дискретизациясының
нәтижесінде![]() о=2
о=2![]() /То=2
/То=2![]() fо дискретті функция
мына формуламен анықталады
fо дискретті функция
мына формуламен анықталады
|
|
(2.2) |

х(0)=0 болғанда жазылған дискретті
функция п=0 кезде (1.2) теңдеу арқылы алынған![]() о жиілігінің пайдалы сигналын құрады. Дискреттік
моменттер арасындағы аралықта ақпараттың
жоғалуынан пТ0 –ден жиілікпен солға және оңға
ығысқан көлденең жоғарғы жиілікті
гармоникалар пайда болады.
о жиілігінің пайдалы сигналын құрады. Дискреттік
моменттер арасындағы аралықта ақпараттың
жоғалуынан пТ0 –ден жиілікпен солға және оңға
ығысқан көлденең жоғарғы жиілікті
гармоникалар пайда болады.
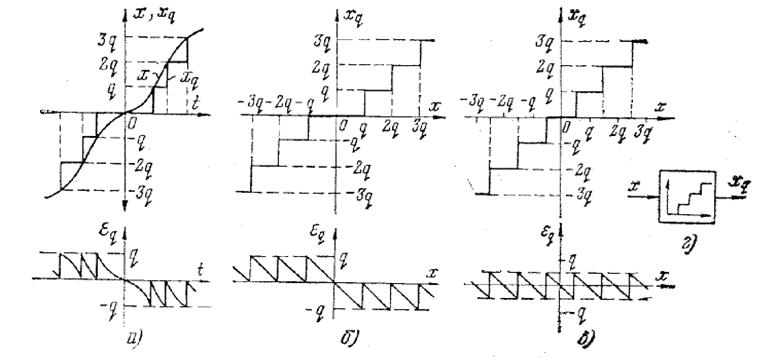
а – деңгей бойынша үздіксіз функцияның дискреттік функцияға өзгертілуі; б, в – квантталудың статискикалық сипаттамалары және оған сәйкес келетін квантталудың қателіктері; г – квантталудың шартты белгіленуі.
2.10 сурет – Шаманы деңгей бойынша кванттау
Сандық құрылғыларда деңгей бойынша кванттау кең қолданылады. Онда квант аралығы уақытпен анықталатын үздіксіз функция дискреттік функцияға өзгертіледі (2.10, а суретті қара). Бұл жағдайда үздіксіз сигнал сандық мәнде көрсетіледі. Оны мына формуламен анықтайды
|
|
(2.3) |
мұндағы k – k = 1 тең кванттау сипаттамасының тіктілігі (2.10 суретті қара); ent - бұртін бөлігі; n = 0, ±1, ±2,… - кванттау шкаласының арасындағы номер.
Деңгей бойынша кванттау хq шығыс х кіріс сигналдарының арасындағы айырымдарға тең қателіктермен анықталады (2.10, а cуретті қара).
|
|
(2.4) |
|
|
|
Қателік модулі кванттау
сипаттамасының түріне тәуелді және 2.10, б мен
2.10, в суреттерінде көрсетілген
сипаттамаларға сәйкес
![]() q
және
q
және ![]() q/2 тең. Кванттаудың
санды аналогты (АСТ) түрде шартты белгіленуі 2.10, г суретінде
көрсетілген.
q/2 тең. Кванттаудың
санды аналогты (АСТ) түрде шартты белгіленуі 2.10, г суретінде
көрсетілген.
Уақыт бойынша квантталу кезінде
дискреттелген сигналдардың аналогты сигналдарға түрленуі
демодуляция деп, ал қисық торлы функциялардың орнықты
қалпына келуі – интерполяция деп аталады. Мұндай түрленулерді
демодулятор немесе интерполятор деп аталатын құрылғылармен
орындайды. Олар төменгі жиіліктің фильтрлары болып саналады.
Олардың шартты белгіленулері 2.11, а суретінде көсетілген.
Котельников анықтамасы [6,7] бойынша дискретизация ![]() 0
жиілігі арқылы орындалады. Егер х(t) функциясы 0,5 Тс -дан
жоғары жиілікті болмаса, Тс уақыттың
тізбекті аралығы үшін уақытпен берілген аймақта х(t)
үздіксіз функция толық өзінің ординаттарымен
анықталады. Осыған байланысты дискретизация жиілігі
0
жиілігі арқылы орындалады. Егер х(t) функциясы 0,5 Тс -дан
жоғары жиілікті болмаса, Тс уақыттың
тізбекті аралығы үшін уақытпен берілген аймақта х(t)
үздіксіз функция толық өзінің ординаттарымен
анықталады. Осыған байланысты дискретизация жиілігі
|
|
(2.5) |
мұндағы
–![]() =2
=2![]() / Тс
=2
/ Тс
=2![]() f0 х(t) функция спекторының ең
жоғарғы жиілігі.
f0 х(t) функция спекторының ең
жоғарғы жиілігі.
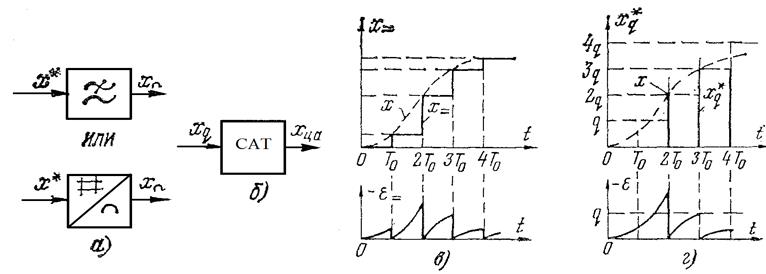
а – төменгі жиілік сүзгісінің шартты белгіленуі – интерполятор; б – санды аналогты түрлендіргіштің шартты белгіленуі; в – қисық торлы функцияларды және оның қателігін қалпына келтіру; г – торлы функция деңгейімен кванттау және оның интерполяторын қалпына келтіру қателігі.
2.11 сурет – Шамалардың интерполяциясы
Электр жетегін басқару жүйелерінде
қарапайым нөлдік қатардың интерполяторы кең
қолданылады. Ол толық дискреттеу кезінде дискреттік сигналдың
мәнін анықтайды және торлы функцияны тұрақты
бөлікке түрлендіреді (2.11, в суретті қара). Бұл
түрлендіру ![]() = = х= – х ең жоғарғы деңгейдегі
күрделі интерполяторларды қолдану кезінде төмендетілуі
мүмкін интерполяция қателігімен орындалады.
= = х= – х ең жоғарғы деңгейдегі
күрделі интерполяторларды қолдану кезінде төмендетілуі
мүмкін интерполяция қателігімен орындалады.
Деңгей бойынша сигналдарды кванттау кезінде санды ақпараттың аналогты ақпаратқа түрленуі санды аналогты түрлендіргішпен орындалады (САТ), оның шартты белгіленуі 2.11, б суретінде көрсетілген. САТ хq санды сигналды xс,а санды аналогты шамаға сызықты сандық аналог түрінде түрлендіреді. Нақты xс,а шамасы аналогты болып саналмайды, ал статистикалық режимде бастапқы тұрақты бөлікті квантталған хq функциясының түрінде болады (2.10, а суретті қара).
Санды аналогты құрылғыларда және электр жетегін басқару жүйелерінде х*(t) дискреттік шамалар аналогты түрде көрсетіледі (2.9, б суретті қара), ал х*q(t) сандық шамалар e =хq - х қателік деңгейінде квантталған торлы функциялар түрінде көрсетіледі (2.11, г суретті қара). Бірінші жағдайда құрылғылар импульсті деп, ал екінші жағдайда импульс-кодты деп аталады.
2.4 Жылдамдықты тұрақтандыратын санды аналогты және сандық жүйелер
Қозғалтқыш моментін және жылдамдықты санды аналогты жүйемен тұрақтандыру аналогты жүйеге ұқсас реттеуге тәуелді координат құрылысы бойынша орындалады. Олар аналогты және сандық бөліктен тұрады, сондықтан санды аналогты деп аталады. Мұндай жүйелердің аналогты элементтеріне түрлендіргіштер мен қозғалтқыштар жатады. Сондықтан ток бергіштері қозғалтқыш тоғын өлшейді. Жүйедегі ток контуры аналогты түрде орындалады. Электр жетегі жүйесінің сандық бөлігіне жылдамдықты реттеу контуры жатады. Ол бергіш пен жылдамдықты реттеу түріндегі жылдамдықтың ақпаратты өлшеу және жылдамдықты берудің сандық құрылғыларынан тұрады.
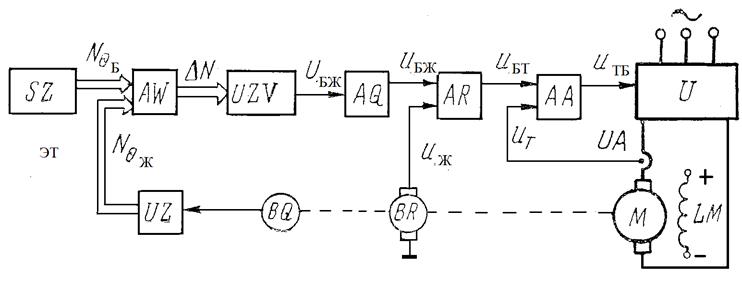
Жылдамдықты реттеудің дәлдігі төмен жүйелерде жылдамдық контуры аралас және санды аналогты етіп жасалады. Жылдамдықты реттеудің пропорционалды бөлігі аналогты, ал интегралдаушы бөлігі санды болады. Мұндай жүйеде жылдамдықты беру санды түрде болады. Бұл жүйенің функционалдық сұлбасы 2.12 суретінде көрсетілген. Электр жетегінің жылдамдығын беру SZ тапсырманы енгізу құрылғысының көмегімен NЖБ сандық түрде енгізіледі. Берілген жылдамдықтың және кернеудің жоғарлауы SJZ күшейткіш санды датчикпен орындалады. UZV санды аналогты түрлендіргішпен (САТ) N’ЖБ санды сигналды беру UЖБ жылдамдықты берудің аналогты сигналына түрленеді және жылдамдықты аналогты реттеуге беріледі АR. Басқарылатын А1 жиілікті бөлгіште бір уақытта пайда болған N’ЖБ сан жоғары тұрақты Gf кварцтық генератормен берілген, fЭ эталонды жиілік импульстарымен орындалатын fБ жылдамдықты берудің импульстерін бақылау жиілігін анықтайды.
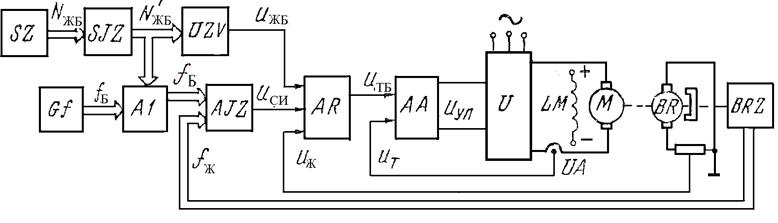
2.12 сурет – Электр жетегінің жылдамдығын санды аналогты тұрақтандыру жүйесінің функционалдық сұлбасы
fБ жиілігімен берілетін импульстар АJZ (СИ) сандық интеграторға беріледі. Сандық интегратор жылдамдықты реттеудің интегралдаушы бөлігі болып саналады және оған да жылдамдық бойынша кері байланыс арқылы қозғалтқыштың жылдамдығына пропорционалды fЖ жиілікпен, ВRZ жылдамдық импульс бергішімен бақыланатын импульстар беріледі. СИ негізгі үш түйіннен тұрады: уақыт бойынша кері байланыс және берілген импульстардың бөліну түйіні (ИБТ), реверсивті санағыш РС және САТ (2.13, а суретті қара). ИБТ fБ және fЖ жиіліктермен уақыт бойынша импульстерді РС тізбектей беру үшін (fЖ үзілісі кезінде fБ беруге және керсінше fБ үзілісі кезінде fЖ беруге) таратады. Реверсивті санағыш екі кірістен тұрады: күрделі және есептегіш. Оларға fБ және fЖ импульстары тізбектей беріледі. РС fБ және fЖ импульстардың мөлшерін санайды. Сонымен қатар, егер fБ = fЖ болса, онда қозғалтқыш жылдамдығы берілген мәнге тең, санағыш кірістегі санды өзгертпейді; егер fЖ < fБ (қозғалтқыш жылдамдығы берілген мәннен аз), онда санағыш + f = fБ - fЖ мәнін есептейді, САТ сандық интегратор кірісіндегі UСИ кернеуді жоғарлатады. Ол қозғалтқыш жылдамдығы мен UБТ кернеуінің және жылдамдық реттегішінің интегралды құрайтын келiспеушіліктері болып саналады (2.12 суретті қара). Егер fЖ >fБ болса, қозғалтқыш жылдамдығы берілген мәннен жоғары, онда кірістегі UСИ мәнін, UБТ мәнін және қозғалтқыш жылдамдығын төмендету үшін санағыш – f = fЖ – fБ мәнін есептейді. Сонымен санағыш кері байланыс пен импульсті беру арасындағы UСИ интегралды құрайтын, САТ пен СИ аналогты сигналға түрлендіретін, шамасы санағышта жазылған санға пропорционалды fБ және fЖ жиіліктермен ілесетін интегралдауды қамтамассыздандырады. UСИ сигналы UБС-мен АR-ға арифметикалық қалыптасып, қозғалтқыш жылдамдығын жоғарылатады немесе төмендетеді.

а – функционалды сұлбасы; б – сипаттамасы.
2.13 сурет – Сандық интегратор
СИ жұмысы fкір кіріс сигнал жиілігінің тұрақты кезіндегі UСИ (t )өтпелі функциясымен 2.13, б суретінде көрсетілген. СИ кірісіндегі сигнал q=UСИмах /N дискретімен дискретті түрде жоғарылайды, мұндағы N - Ткір=1/fкір ілесу аралығымен әрбір кіретін импульстің түсуі кезіндегі СИ санағышының санды сыйымдылығы. Кіріс импульстерінің мәні мен жиілігі үлкен болғанда СИ өтпелі функциясы түзу сызықтан жоғары болады.
СИ шығыс кернеуі және оның полярлығы кіріс жиілігінің интеграл айырымдарымен анықталады (берілген және кері байланыспен)
|
|
(2.6) |
немесе
|
|
(2.7) |
мұндағы ![]() - кіріс жиілігінің импульстер тізбектілігінің
фаза айырмашылығы.
- кіріс жиілігінің импульстер тізбектілігінің
фаза айырмашылығы.
Дискретті түрдегі СИ өтпелі функциясы мына теңдеумен анықталады
|
|
(2.8) |
Егер ![]() дәрежелi қатарға жiктеп
және жiктеудiң екi бiрiншi мүшелерiмен шектесе, онда
дәрежелi қатарға жiктеп
және жiктеудiң екi бiрiншi мүшелерiмен шектесе, онда
|
|
(2.9) |
Онда
|
|
(2.10) |
мұндағы ТСИ =Ткір/q – интегратордың тұрақты уақыты.
Жылдамдықты реттеу жүйесінің дәлдігі жылдамдықтың сандық контуры болғанда орындалады. Жүйенің функционалдық сұлбасы 2.14 суретінде көрсетілген. Электр жетегінің мұндай жүйесінде жылдамдықты беру қозғалтқыш жылдамдығына сәйкес N’ЖБ(nT0) жылдамдықты беру сигналының қажетті деңгейге дейін өсуін қамтамасыз ететін SJZ бергіш қарқындылығын қолдана отырып, секірме және уақыт функциясы түрінде орындалады.
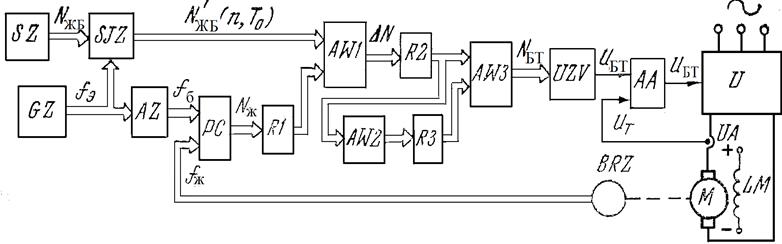
2.14 сурет – Электр жетегінің жылдамдығын тұрақтандырудың санды жүйесінің функционалдық сұлбасы
Жылдамдық бойынша кері байланыс сигналы ВRZ жылдамдық импульсті бергішімен орындалады. Жылдамдық бергішінің импульсі санды жүйенің f0 дискреттік жиілігімен (Т0=1/f0) анықталатын, бекiтiлген дискреттi Т0 уақыт аралығында санағышпен есептелінеді. Дискреттеу жиілігі АZ жиілік бөлгіш арқылы жоғары тұрақтылықты кварцтық генератордың Gf эталонды жиілігімен беріледі (f0=fЭ/kд). t=пТ0 уақыт аралығындағы электр қозғалтқышының ағымдағы жылдамдығы есептелген импульстар санына пропорционалды
|
|
(2.11) |
мұндағы m – уақыт аралығындағы жылдамдық бергішінің импульстер саны [(п-1)Т0 – пТ0]; z – біліктің бір айналымы кезіндегі импульстер саны.
РС санағышының шығысында уақыт аралығының өтуі кезінде жылдамдық бойынша кері байланыстың санды сигналы тәрізді Nc[пТ0] сан пайда болады. Бұл сан R1 регистрда келесі [пТ0 - (n +1)Т0] аралық басталғанша сақталады және NЖБ жылдамдық беру санымен АW1 қосындылауда салыстырылады. АW1 шығысында санды басқару сигнал түріндегі айырмашылық пайда болады
|
|
(2.12) |
Ол R2 регистрінде сақталып, UZV САТ беріледі. Егер жүйеде алгоритм бойынша жұмыс жасайтын жылдамдықты пропорционалды реттеу қолданса, онда
|
|
(2.13) |
мұндағы k1 - көлемдік коэффициент.
Егер алгоритм бойынша жұмыс жасайтын жылдамдықтың ПИ реттегіші қолданса
|
|
(2.14) |
|
|
|
онда санды бөлікте қосымша AW2 сумматор және
R3 регистр қолданылады. Нәтижелері R3 регистрде сақталып және AW2 қосындылауда
жинақталған ![]() [пТ0] жылдамдықтың ауытқыған ағымдағы
мәндерінің тізбектей алгебралық қосындысы интегралды
құрады.
[пТ0] жылдамдықтың ауытқыған ағымдағы
мәндерінің тізбектей алгебралық қосындысы интегралды
құрады.
Жылдамдықты санды реттеу және басқа санды құрылғылар өндірісте шығарылатын стандарттық блокпен орындалады [6]. Егер электр жетегін басқару сәйкес келетін бағдарлама арқылы ЭЕМ орындалса, онда бұл құрылғылардың құрылуы оңай болады.
Соңғы уақытта импульсті фазалық басқару жүйесін (ИФБЖ) қолданбай, ЭЕМ арқылы тиристорлы түрлендіргішпен жылдамдықты реттеу жүйесі өңделуде, ол тура басқару деп аталады. Мұндай жүйеде жүйенің аналогты бөлігі ретінде түзеткіш – қозғалтқыш күштік бөлігі, ал ток және жылдамдық контурлары санды бөлігі болып саналады. Қажетті уақыт аралығында басқару импульстерін түзеткіш тиристорларына беріп және ИФБЖ функцияларын орындайтын «Тура» басқару ЭЕМ орындалады. Жылдамдықты және токты санды реттеу бағдарламалық әдіспен ЭЕМ орындалады.
2.5 Электр жетегінің жағдайын аналогты және санды аналогты жүйелермен басқару
Механизмдерді автоматтандыру кезінде негізгі жұмыс қозғалысы орындаушы органның сызықты немесе бұрышты орналасуы болып саналады. Оны қажетті жағдайда тоқтату үшін жағдайды басқару жүйесімен электр жетегі кең қолданылады. Жағдайды автоматты басқарудың екі түрі болады:
а) жолдық бергіштердің дискреттік сигналдарымен, жолдың берілген нүктелерінде электр жетегінің дискретті орындалуы;
б) берілген бағдарламамен немесе мөлшерленген орын ауыстыруды орындау үшін ауытқу бойынша жағдайды үздіксіз автоматты басқару.
Басқару әдісіне тәуелсіз электр жетегі дискретті немесе үздіксіз жағдайды беруді, берілген жағдайда жылдамдықтың орын ауыстыруына тәуелді жұмыс машинасының өнімділігі мен орындау органының дәл тоқтатуын талап етуімен анықталатын жағдайдың орын ауыстыруын бақылауды, берілген жағдайда дәл тоқтатуды қамтамасыз етеді.
Дискретті орналастыру кезінде орындау органының анықталған шекті жағдайы беріледі. Бұл жағдайды бақылау түйiскен және түйіспесіз немесе іске қосылу қателігі 1– 0,01 мм жол ажыратқыштармен дискретті датчик жағдайымен орындалады. Бұл жағдайда механикалық тоқтатуды қолданып, берілген жағдайда электр жетегін тоқтатуды қамтамасыз ететін электр жетегін басқарудың ажыратылған жүйесі қолданылады. Мұндай басқару түрі орын ауыстыруларды сирек қайта өңдеушi циклімен дәлдігі жоғары емес орналастыру кезінде қолданылады.
Жағдайды үздіксіз басқару кезінде орындау органының жағдайын бақылау берілген жағдайда, тоқтағанға дейін үздіксіз орын ауыстырудың орындалуы кезінде жүзеге асады. Осы мақсатпен жоғарғы дәлдікпен (0,001 мм дейінгі) сипатталатын үздіксіз аналогты немесе санды орын ауыстыру датчиктері қолданылады. Мұндай басқару түрі жиі орын ауыстыруларды қайта өңдеушi циклімен, жоғары дәлдікпен орындалатын жүйелерде қолданылады. Орындау дәлдік жүйелері тұрақты токты қозғалтқышпен реттеуге бағынатын принциппен және жылдамдық пен токтың ішкі контурына жағдайдың аналогты немесе санды контуры енгізілуі бойынша құрылады.

2.15 сурет – Жағдайды басқаратын аналогты жүйенің функционалды сұлбасы
Жағдаймен басқарылатын аналогты
жүйенің функционалды сұлбасы 2.15
суретінде көрсетілген. Бұл функционалдық сұлба ток,
жылдамдық және жағдай контурларымен, ток және
жылдамдықтың реттеуге бағынатын принципі бойынша
тұрғызылған үш деңгейлі жүйемен
басқарылатын тұрақты токты тиристорлы электр жетегі
қолданылады. Жағдайды беру сигналы UЖБ
жағдайды реттеуге АQ беріледі, оған жағдай бергіші
арқылы BQ UЖ
жағдай бойынша кері байланыс сигналы беріледі. Ток және
жылдамдықтың ішкі контурлары жылдамдықты
тұрақтандыру жүйесіне ұқсас орындалған [4,5]. Мұндай электр жетегінің
басқару жүйелерінде орын ауыстыру бергіші ретінде айналдыру
трансформатор түріндегі немесе сельсиндер түріндегі
бұрыштық орын ауыстыру бергіші қолданылады. Олардың
білігі қозғалтқыш білігіне, тікелей ЖМАО білігіне
ұқсас немесе редукторлар арқылы жалғанады (3.2 суретіне
қараңыз). Сельсинмен немесе айналдыру трансформаторымен ілескен
анықталған фазаның айнымалы токты басқару сигналын
түрлендіруге және анықталған полярмен
тұрақты токты сигналды басқару үшін сұлбада фаза
сезгіш түзеткіш қолданылады (ФСТ) UВ. Жағдайды беру қажетті qБ
берілген бұрышқа айналатын және ЖМАО орын ауыстыруын талап
етуін анықтайтын бергішпен (сельсинді-датчик ВС) орындалады. ЖМАО ағымдағы
жағдайы ВЕ сельсин-қабылдағыш деп аталатын
жағдай бергішімен бақыланады. Қарастырылған
басқару жүйелерінің мақсаты берілген жағдайларда
ЖМАО мен қозғалтқышты дәл тоқтату. Бұл мақсат
қозғалтқыш немесе ЖМАО qБ берілген бұрышта жұмыс жасап
өтегенсоң және ВЕ сельсин қабылдағыштың
бұрышы берілген бұрышқа тең болғанда (qҚ =qБ), ал кліспеушіліктері нөлге тең
болғанда (qБ -qҚ =![]() =0) орындалады.
=0) орындалады.
2.16 сурет - Жағдайды басқаратын аналогты жүйенің қысқартылған принципиалдық сұлбасы
Орындауға жоғары талаптар
қойылғанда жағдайды санды аналогты жүйемен
басқару қолданылады. Орындау жүйесі электр жетегі тоғын
және жылдамдығын дәл реттеуге жоғарғы талап
қоймайтындықтан, жүйе ток пен жылдамдықтың
аналогты контурларымен, жағдайдың санды контурымен орындалады.
Мұндай жүйенің функционалдық
сұлбасы 2.17 суретінде көрсетілген. Сұлба
қозғалтқыш пен түрлендіргіштің күштік
және аналогты бөлігінен, ток пен жылдамдық контурларымен
басқарылатын жүйеден, АА және АR аналогты реттегіштерден
және UА, ВR ток пен жылдамдық бергіштерінен тұрады.
Реттеу жағдайы АQ аналогты бөліммен санды аналогты
түрде орындалған. Контурдың санды бөлігіне арифметикалық
құрылғылар (АҚ) АW, санды аналогты түрлендіргіштер (САТ) UZV жатады. Арифметикалық
құрылғы кірісінде берілген SZ мәнді
енгізудің сандық құрылғысымен NӨБ
жағдайды берудің санды сигналын және нақты
жағдайға сәйкес NӨТ санды сигналды
қабылдайды. Бұл сигнал BQ жағдай бергішіне беріледі
және UZ кодты түрлендіргішпен санды сигналға
түрленеді. NӨБ және NӨТ сандары
автоматты басқаруда (АБ) екі-параллельдік кодпен беріледі. АБ NӨБ
мен NӨТ сандарын салыстырып және
кірісінде ![]() N = N
N = N![]() = NӨБ
- NӨТ айырымдарға тең санды басқару
сигналын өңдейді. Бұл сан UZV санды аналогты түрлендіргіш
арқылы ЖБ аналогты бөлікке берілетін UТБ
жағдайды берудің аналогты сигналына түрленеді.
Жүйенің қалған бөлігі аналогты түрде
жұмыс жасайды.
= NӨБ
- NӨТ айырымдарға тең санды басқару
сигналын өңдейді. Бұл сан UZV санды аналогты түрлендіргіш
арқылы ЖБ аналогты бөлікке берілетін UТБ
жағдайды берудің аналогты сигналына түрленеді.
Жүйенің қалған бөлігі аналогты түрде
жұмыс жасайды.
2.17 сурет – Жағдаймен санды аналогты басқару жүйесінің функционалдық сұлбасы
2.6 ЭЕМ басқарылатын жағдайды санды жүйемен басқару
Қазіргі уақытта жағдайды санды басқаратын ЭЕМ-мен электр жетегінің жүйесі өңделуде. Мұндай жүйенің функционалдық сұлбасы 2.18 суретінде көрсетілген. Электр жетегінің ток және жылдамдық графиктерінің құрылуы ток пен жылдамдықтың аналогты контурларымен орындалады. Берілген сызықты S орын ауыстырумен өңделетін жағдайдың контуры микро-ЭЕМ-мен бағдарламалық түрде орындалады. Микро-ЭЕМ микропроцессор МП, оперативті ОЕСҚ және тұрақты ТЕСҚ еске сақтау құрылғыларынан, Инт- кіріс және шығыс интерфейстерінен, БШ-берілген шыналардан, ША- адресінен және ШБ-басқару шынасынан тұрады. Микро-ЭВМ-ның электр жетегінің аналогты бөлігімен байланысы САТ арқылы орындалады.
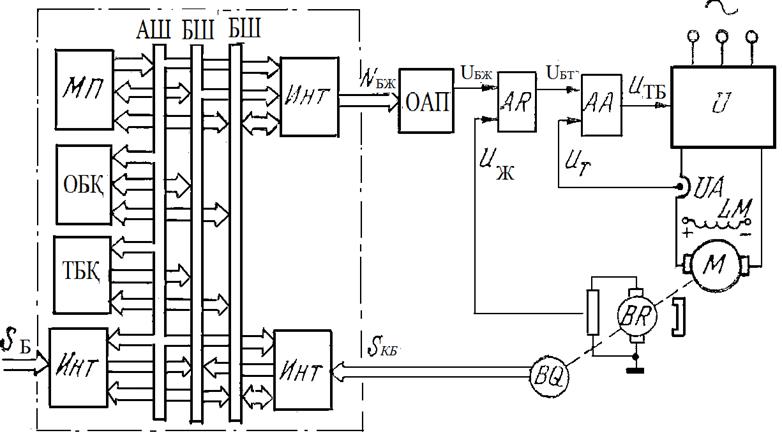
2.18 сурет - Микро-ЭЕМ жағдайымен сандық басқару жүйесінің функционалдық сұлбасы
Микро-ЭВМ бағдарлама
әдісінің көмегімен параболалық П, ПИ кез келген
түрімен жағдайды реттеуді (ЖР) құруға болады. ЖР
сызықты параболалық сипаттамасы ең күрделі түрі
болып саналады (2.19 суретті қара). Бұл
сипаттама санды кодпен кодталады, NЖБ жылдамдықты санды кесте
түрде беруге сәйкес ОБҚ жазылады және орын ауыстыруы![]() S=SБ-SКБ түрленеді. Мысалдағы жүйенің әсер ету
принципі NЖБ кодтау мен
S=SБ-SКБ түрленеді. Мысалдағы жүйенің әсер ету
принципі NЖБ кодтау мен ![]() S екілік кодтың төртінші разряды бойынша орындалған.
Сонымен қатар талап етілген NЖБ қарағанда,
NЖБ* жазғандағы қателігі жоғары
болады. Микро-ЭВМ NЖБ=f(
S екілік кодтың төртінші разряды бойынша орындалған.
Сонымен қатар талап етілген NЖБ қарағанда,
NЖБ* жазғандағы қателігі жоғары
болады. Микро-ЭВМ NЖБ=f(![]() S) тәуелділіктің жеткілікті дәлдігін қамтамасыз
ететін екілік кодтың сегіз разряды қолданылады және 28 =
256 нүктеге кодталады. Контур жағдайының жұмысы 2.20
суретте көрсетілген алгоритм бойынша құрылады. SБ
қозғалысты беру ҚБТ жазылады, микро-ЭВМ SБ
және SКБ мәндерін салыстырады және
ОБҚ жазылған ЖБ сипаттамасы бойынша NЖБ
анықталатын
S) тәуелділіктің жеткілікті дәлдігін қамтамасыз
ететін екілік кодтың сегіз разряды қолданылады және 28 =
256 нүктеге кодталады. Контур жағдайының жұмысы 2.20
суретте көрсетілген алгоритм бойынша құрылады. SБ
қозғалысты беру ҚБТ жазылады, микро-ЭВМ SБ
және SКБ мәндерін салыстырады және
ОБҚ жазылған ЖБ сипаттамасы бойынша NЖБ
анықталатын ![]() S өңдейді.
Қозғалыстың басында РПрп
SКБ мәні аз болғанда,
S өңдейді.
Қозғалыстың басында РПрп
SКБ мәні аз болғанда, ![]() S жоғарғы
мәнде болады және
микро-ЭВМ UЖБмах сәйкес келетін NЖБмах
мәнін береді, электр жетегі максималды жылдамдықта болады.
S жоғарғы
мәнде болады және
микро-ЭВМ UЖБмах сәйкес келетін NЖБмах
мәнін береді, электр жетегі максималды жылдамдықта болады. ![]() S
мәні 1111
мәнінен төмен болса, микро-ЭВМ
NЖБ және UЖБ мәндерін төмендетеді және
жылдамдықты беру төмендейді. Орын ауыстыру соңында SКБ = SБ және
S
мәні 1111
мәнінен төмен болса, микро-ЭВМ
NЖБ және UЖБ мәндерін төмендетеді және
жылдамдықты беру төмендейді. Орын ауыстыру соңында SКБ = SБ және ![]() S=0 болғанда, онда NБЖ
= 0 және UБЖ =0, берілген орын ауыстыруды орындап болып
қозғалтқыш тоқтайды.
Егер қайта реттеу керек
болса, онда
S=0 болғанда, онда NБЖ
= 0 және UБЖ =0, берілген орын ауыстыруды орындап болып
қозғалтқыш тоқтайды.
Егер қайта реттеу керек
болса, онда ![]() S
кері мәнде болады,
яғни - NЖБ және -UЖБ, қозғалтқыш реверстеледі
және ЖМАО бастапқы жағдайға келеді.
S
кері мәнде болады,
яғни - NЖБ және -UЖБ, қозғалтқыш реверстеледі
және ЖМАО бастапқы жағдайға келеді.
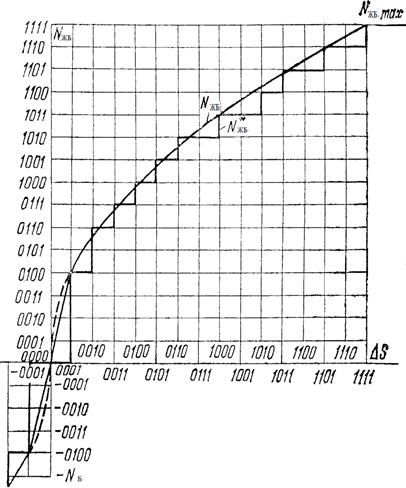

2.19 сурет – Жағдайды реттеу 2.20 сурет – Жағдай контурының
сипаттамасы жұмыс алгоритмі
2.7 Бақылау электр жетегінің басқару жүйелері және оларды құрудың негізгі принциптері
Бақылау электр жетегінің басқару жүйелері (БЭЖ БЖ) – кірісте уақыт бойынша өзгеретін айнымалы сигналды қабылдайтын және шығыста оны бақылау қателігі берілген мәннен жоғарлап кетпес үшін өңдейтін тұйық динамикалық жүйе. Өндірістік механизмнің бақылау электр жетегі тағайындалуы бойынша бұрышпен бақылау электр жетегі немесе ЖМАО сызықты орын ауыстыруы болып бөлінеді. Қолданылуы бойынша электрлі тұрақты токты және айнымалы токты қозғалтқыштар, басқару жүйесі бойынша қосындылау күшейткіштерінен тұратын жүйе және координатты бағыныңқы реттеу жүйесі, әсер ету принципі бойынша аналогты, дискретті (релелік және импульсті) және санды жүйелер болып бөлінеді [8,9,10].
Жалпы БЭЖ БЖ құрылымдық сұлбасы 2.21 суретінде көрсетілген. Бұл жүйе АW өлшеу құрылғыларынан, UВ түрлендіргіш құрылғысынан, А аралық қосындылау күшейткішінен, ЭЖ электр жетегі U түрлендіргіш және М электр қозғалтқышынан тұрады. Электр қозғалтқышы Rеd редуктор арқылы өндірістік механизмнің орындау органына (БО басқару органына) әсер етеді. Шығыс координаты qшығ бұрыш түрінде, кері байланыстар: ішкі немесе (НКБ) негізгі және (СКБ) сыртқы байланыстар ретінде көрсетілген.
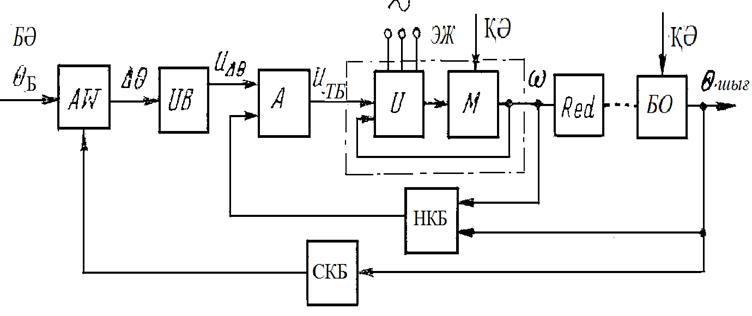
2.21 сурет – ЭЖЖ БЖ құрылымдық сұлбасы
БЭЖ БЖ кірісінде уақыт бойынша
өзгеретін ![]() бұрыш түріндегі және объектіні талап
етілген заңмен басқаруды қамтамасыз ететін беру әсері
(БӘ) берілген. Электр жетегі мен басқару объектісіне беру
әсерінен басқа берілген басқару заңынан реттеу шамасының
ауытқуы болатын әртүрлі сыртқы қоздырушы әсерлер
ҚӘ әсер
етеді. Сыртқы қоздыруға электр қозғалқыш
білігінің жүктемесінің өзгеруі, ал ішкі
қоздырғышқа БЭЖ БЖ құрылғыларына әсер
ететін әртүрлі кездейсоқ кедергілер және
өзгерістер жатады.
бұрыш түріндегі және объектіні талап
етілген заңмен басқаруды қамтамасыз ететін беру әсері
(БӘ) берілген. Электр жетегі мен басқару объектісіне беру
әсерінен басқа берілген басқару заңынан реттеу шамасының
ауытқуы болатын әртүрлі сыртқы қоздырушы әсерлер
ҚӘ әсер
етеді. Сыртқы қоздыруға электр қозғалқыш
білігінің жүктемесінің өзгеруі, ал ішкі
қоздырғышқа БЭЖ БЖ құрылғыларына әсер
ететін әртүрлі кездейсоқ кедергілер және
өзгерістер жатады.
БЭЖ БЖ әсер етуі бойынша қоздыру әсерлерімен және жүйенің параметрлерімен анықталатын қателігі төмен басқару әсерін толық өңдейтін астатикалық болып саналады. Басқарулар кезінде БЭЖ БЖ жұмысының дәлдігін зерттеулерде тұрақты үдеумен немесе гармоникалық заңмен, тұрақты жылдамдықпен өзгертілген берілген сигналды қайта қалпына келтірудің дәлдігімен бағалайды.
БЭЖ БЖ өлшеу құрылғыларына потенциометрлер, сельсиндар және синус-косинусты айналу трансформаторлары (СКАТ) жатады. Олардың зерттеулерде болатын қателiктері: потенциометрларде 0,2– 0,6%, сельсиндерде 0,25 – 1o және айналу трансформаторларында – бұрыштық минуты бірге тең.
Түрлендіргіш құрылғысы
(ТҚ)
UВ![]() қателікке пропорционалды U
қателікке пропорционалды U![]() үйлесімсіздік кернеуін алу үшін
қолданылады. Мұны шығыс
сигналы үйлесімсізді кернеу болатын өлшеу құрылғылары
орындайды. Сельсиндарды және СКАТ қолданған кезде ТҚ-на
айнымалы токты сигналды тұрақты токты сигналға
түрлендіретін фаза сезгіш түзеткіші (ФСТ) қолданылады.
үйлесімсіздік кернеуін алу үшін
қолданылады. Мұны шығыс
сигналы үйлесімсізді кернеу болатын өлшеу құрылғылары
орындайды. Сельсиндарды және СКАТ қолданған кезде ТҚ-на
айнымалы токты сигналды тұрақты токты сигналға
түрлендіретін фаза сезгіш түзеткіші (ФСТ) қолданылады.
БЭЖ БЖ аралық күшейткіштері ретінде түзеткіш кері байланыстың берілген сигналдарын қосындылайтын тұрақты токты операторлық күшейткіштер қолданылады. БЭЖ БЖ тұрақты токты күшейткіштің нөлге ығысуы кезінде айнымалы токтың күшейткіштері қолданылады. Ол тұрақты токты сигналды айнымалы токты сигналға түрлендіретін (модулятор) және күшейтілген айнымалы токты сигналды (күшейткіш) тұрақты токтың сигналына түрлендіретін (демодулятор), модулятор – күшейткіш – демодулятор ретінде жұмыс жасайды.
БЭЖ БЖ орындау құрылғылары ретінде тұрақты, айнымалы токты тиристорлы және транзисторлы электр жетектері қолданылады. Тұрақты токты электр жетектерінде ТМҚ және ПБВ [17] сериялық жоғарғы моментті қозғалтқыштар кең қолданылады. Олар білік моментінің инерциялары мен орамдардың индуктивтілігінің аздығына байланысты тез әсерді қамтамасыз етеді, сонымен қатар номиналды мәнді сегіз есе жоғарылататын жоғарғы іске қосу моменттермен қамтамасыз етеді.
Бақылау электр жетектерін қоректендіру өндірістік тізбекте 50Гц жиілікті айнымалы токпен және тұрақты токтың өзіндік қоректендіру көздерімен жүзеге асады. Аз қуатты электр жетектері 400 Гц жиілікті қоректендіру көзімен қоректенеді. Өлшеу, түрлендіргіш құрылғылары және аралық күшейткіштер 400 Гц жиілікті айнымалы токпен қоректенеді. Сондықтан бұл құрылғылардың көлемі мен инерциялығы төмендетеді.
Шығыс координатындағы негізгі кері байланыстың жүйесі қарапайым түзетілмеген БЭЖ БЖ болып саналады. Оны пропорционалды реттеу жүйесі деп те атайды. БЭЖ БЖ синтездеу мен талдау кезінде шығыс координаты ретінде өлшеу құрылғысында қабылдағышпен өлшенетін координатты айтады. Егер қабылдағыш ЖМАО тәуелсіз орналасқан болса, онда біліктің орын ауыстыруы немесе айналу бұрышы шығыс координаты болып саналады. Көп жағдайда бақылау электр жетегінде өлшеу құрылғысындағы қабылдағыш қозғалтқыш білігіне орналасады, ал жоғарғы моментті қозғалтқыштарда қабылдағыш қозғалтқышқа орналасады. Бұл жағдайда шығыс координаты ретінде айналу бұрышына немесе ЖМАО орын ауыстыруына сәйкес келетін қозғалтқыштың айналу бұрышы қолданылады.
2.8 Бақылау электр жетегінің аналогты және санды жүйелері
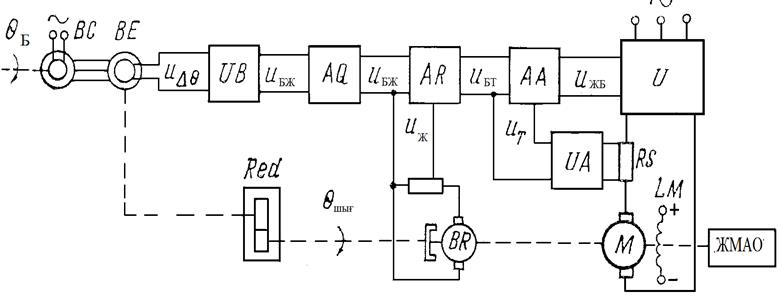
Тұрақты токты қозғалтқышпен, шығыс бұрышы бойынша негізгі кері байланыспен бақыланатын электр жетегінің түзетілмеген қарапайым аналогты басқару жүйесінің функционалдық жүйесі, яғни пропорционалды реттеу жүйесі 2.22 суретінде көрсетілен. Сұлбада сельсинды өлшеу құрылғылары (ВС және ВЕ) қолданылады. Түрлендіргіш құрылғысында UВ ФСТ, кернеуді күшейткіш ретінде тұрақты токты А инерционды емес күшейткіш және U-М тиристорлы электр жетегімен басқарылатын инерционды емес қуат күшейткіші қолданылады.
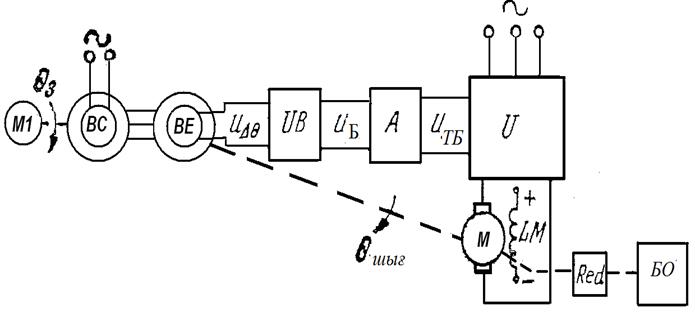
2.22 сурет - Күштік
қосындылармен аналогты БЭЖ БЖ функционалдық сұлбасы
ЭЖЖ БЖ кірісіндегі![]() бұрышпен қозғалтқыш білігі және ЖМАО (жұмысты орындау осі) білігі
ілесіп, беру сигналын өңдейтін және бақылау электр жетегінің
жүйесін басқаратын
бұрышпен қозғалтқыш білігі және ЖМАО (жұмысты орындау осі) білігі
ілесіп, беру сигналын өңдейтін және бақылау электр жетегінің
жүйесін басқаратын ![]() қателігінен тұрады.
қателігінен тұрады.
ЭЖЖ БЖ жұмысының дәлдігін
жоғарлату үшін қатаң (ҚЕ)
және дәл (ДЕ) есептеулермен, екі есептеу нәтижесінен
тұратын өлшеу элементтері қолданылады (2.23 суретті
қара). Қатаң есептеудің ВС1 және ВЕI сельсин-бергіші
мен сельсин-қабылдағышы берілген және шығыс остерімен
жалғанады, ал дәл есептеудің ВС2 және ВЕ2 сельсиндері
Rеd1 және Rеd2 редукторлары арқылы жалғанады.
Онда ДЕ сельсиндерінің қателігі редуктордың беріліс
қатынасына тең төмендейді. Мұндай жүйеде
қатаң есептеу сельсиндары бастапқы келіспеушілігі бар
үлкен бұрыштарды өңдегеннен кейін жұмыс жасайды,
ал дәл есептеу сельсиндары аз бұрышта бақылау режимінде
жұмыс жасайды. ҚЕ және ДЕ сельсиндары арнайы S
селектор арқылы таңдалады. Селектор ҚЕ сельсиндар сигналын ![]() айырмашылығы үлкен мәнде болғанда
қолдануды, ал ДЕ сельсиндар сигналын
айырмашылығы үлкен мәнде болғанда
қолдануды, ал ДЕ сельсиндар сигналын ![]() айырмашылығы аз болғанда қолдануды
қамтамасыз етеді. Селекторлардың әртүрлі
сұлбалары қолданылады. Ең көп қолданылатын
түрі 2.23 [5,8] суретінде көрсетілген. Бұл сұлбада
сигналдардың келіспеушіліктері жоғары болғанда ҚЕ
сельсин-қабылдағыш сигналы U0 тірек кернеуінен жоғарлап,
V1 және V2 диодтарды ашып, сұлбаның
шығысына беріледі (қатаң есептеу нәтижесі). Сонымен
қатар R2>>R1 болатындықтан, ВЕ2 сигналы
әсер етпейді. Сигналдардың келіспеушіліктері аз
болғанда диодтар жабық болады және сұлбаның
шығысына тек ғана ДЕ сельсин-қабылдағыштың
сигналы өтеді ДЕ (дәл есептеу нәтижесі).
айырмашылығы аз болғанда қолдануды
қамтамасыз етеді. Селекторлардың әртүрлі
сұлбалары қолданылады. Ең көп қолданылатын
түрі 2.23 [5,8] суретінде көрсетілген. Бұл сұлбада
сигналдардың келіспеушіліктері жоғары болғанда ҚЕ
сельсин-қабылдағыш сигналы U0 тірек кернеуінен жоғарлап,
V1 және V2 диодтарды ашып, сұлбаның
шығысына беріледі (қатаң есептеу нәтижесі). Сонымен
қатар R2>>R1 болатындықтан, ВЕ2 сигналы
әсер етпейді. Сигналдардың келіспеушіліктері аз
болғанда диодтар жабық болады және сұлбаның
шығысына тек ғана ДЕ сельсин-қабылдағыштың
сигналы өтеді ДЕ (дәл есептеу нәтижесі).
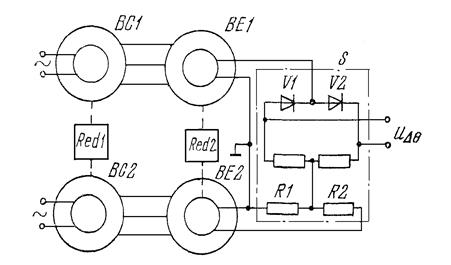
2.23 сурет – ЭЖЖ БЖ екі есептеу нәтижесінен тұратын өлшеу құрылғысының электрлік сұлбасы
Бақылау жүйелерінің жеке түйіндерінің жұмысын оқып болғаннан кейін, үздіксіз әсерлі бақылау жүйесінің жалпы құрастырылуын қарастырамыз. Оның функционалдық сұлбасы 2.24 суретінде көрсетілген. Сұлбадағы белгіленулері: АW1 – бұрышты (немесе сызықты) орын ауыстырулардың қатаң (ВС1, ВЕ1) және дәл (ВС2, ВЕ2) есептеу нәтижелерінің ВС бергіштері мен ВЕ қабылдағыштарынан тұратын келіспеушіліктерді өлшеуіші; S – қатаң және дәл есептеулердің селекторы; АW2 – АW5 – қосындылаулар; UВ1, UВ 2 – фаза сезгіш түзеткіштер (ФСТ); АD1 – АDЗ және ВR1, ВR2 – тізбектей және параллельді түзеткіш құрылғылар; UR – модулятор; А – күшейткіш; U – кернеудің күштік тиристорлы түрлендіргіш; М – қозуға тәуелсіз тұрақты токты қозғалтқыш.
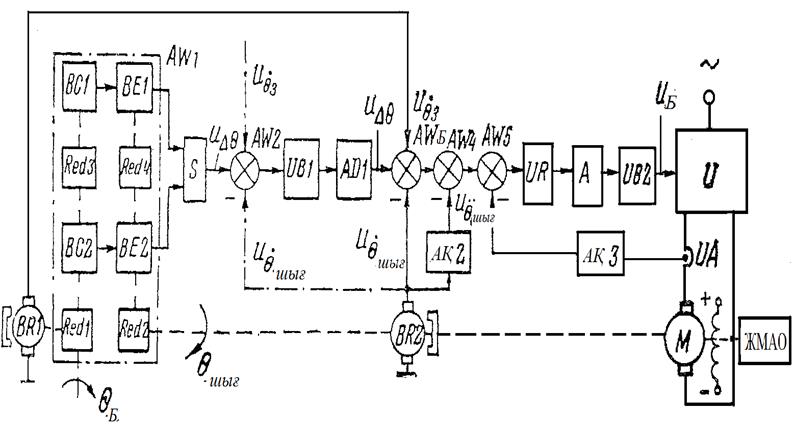
2.24 сурет – Аналогты ЭЖЖ БЖ функционалды сұлбасы
Келіспеушіліктерді өлшеу ретінде басқару дәлдігіне байланысты потенциометрлер, сельсиндер немесе синус-косинусті бұрылатын трансформаторлары қолданылады. Егер АW1 сельсиндар немесе бұрылатын трансформаторлар қолданса, онда ФСТ қолданылады.
ЭЖЖ БЖ ![]() беру сигналы ВС бергіші
арқылы берілетін болса, онда
беру сигналы ВС бергіші
арқылы берілетін болса, онда ![]() кері байланыс сигналы ВЕ бергіші арқылы беріледі. АW1 бұрыштың орын
ауыстыруының келіспеуін өлшеу бұрыш келіспеуіне
пропорционалды U
кері байланыс сигналы ВЕ бергіші арқылы беріледі. АW1 бұрыштың орын
ауыстыруының келіспеуін өлшеу бұрыш келіспеуіне
пропорционалды U![]() келіспеу сигналын
қамтамасыз етеді. Селектор
қатаң есептеу нәтижелерінің (үлкен
келіспеушіліктер болғанда) немесе дәл есептеу (аз келіспеушіліктер
болғанда) нәтижелерінің сұлбасын құрады.
келіспеу сигналын
қамтамасыз етеді. Селектор
қатаң есептеу нәтижелерінің (үлкен
келіспеушіліктер болғанда) немесе дәл есептеу (аз келіспеушіліктер
болғанда) нәтижелерінің сұлбасын құрады.
Селектордың шығысында
түзетілген сигналмен U![]() күрделі
сигналдардың келіспеушіліктері өңделеді. Мұнда егер ВR1
және ВR2 айнымалы токты тахогенераторлар қолданылатын
болса, онда U1
күрделі
сигналдардың келіспеушіліктері өңделеді. Мұнда егер ВR1
және ВR2 айнымалы токты тахогенераторлар қолданылатын
болса, онда U1![]() берілген әсердің бірінші туындысы ВR1 беру тахогенераторы арқылы алынады, ал U1
берілген әсердің бірінші туындысы ВR1 беру тахогенераторы арқылы алынады, ал U1![]() шығыс бұрышының бірінші туындысы ВR2
шығыстағы тахогенератор арқылы алынады (үзік
сызықпен берілген сызықты қараймыз). Айнымалы токты
сигналдардың қосындысы ФСТ (UВ1) түрленеді. ФСТ кейін
дифференциатор түріндегі тізбектелген АD1 түзеткіш
құрылғысы қосылады. Ол келіспеу сигналдарын
қосымша оның U1
шығыс бұрышының бірінші туындысы ВR2
шығыстағы тахогенератор арқылы алынады (үзік
сызықпен берілген сызықты қараймыз). Айнымалы токты
сигналдардың қосындысы ФСТ (UВ1) түрленеді. ФСТ кейін
дифференциатор түріндегі тізбектелген АD1 түзеткіш
құрылғысы қосылады. Ол келіспеу сигналдарын
қосымша оның U1![]() бірінші туындысымен қамтамасыз етеді. Дифференциатор
ФСТ бірге жұмыс жасайды. Келіспеу сигналына және оның
туындысына АD2 параллелді реттелетін құрылғының
сигналы қосылады. Онда U11
бірінші туындысымен қамтамасыз етеді. Дифференциатор
ФСТ бірге жұмыс жасайды. Келіспеу сигналына және оның
туындысына АD2 параллелді реттелетін құрылғының
сигналы қосылады. Онда U11![]() шығыс бұрышындағы екінші туынды
жылдамдық бойынша сигналдың туындысы ретінде алынады немесе UА
ток датчигімен АDЗ қозғалтқыш тоғының
сигналы бойынша алынады (үдеу бойынша теріс кері байланыс). Бұған
U1
шығыс бұрышындағы екінші туынды
жылдамдық бойынша сигналдың туындысы ретінде алынады немесе UА
ток датчигімен АDЗ қозғалтқыш тоғының
сигналы бойынша алынады (үдеу бойынша теріс кері байланыс). Бұған
U1![]() және U1
және U1![]() сигналдарын беруге болады (егер ВR1 және ВR2
тахогенераторлары тұрақты токты болса). Сигналдардың
қосындысы тұрақты токты күшейткішпен
түзетілгеннен кейін күшейеді. Бақылау электр жетегінде тура күшейту
үшін тұрақты токты күшейткіштің дрейф нөлі
ретінде айнымалы токты модулятор – күшейткіш демодулятор UR – А – UB2 принципі
бойынша жұмыс жасайтын күшейткіштер кең қолданылады. Демодулятор ретінде айнымалы токты
тұрақты тоқа түрлендіретін екінші ФСТ UВ2
қолданылады. Сигнал тұрақты токты транзисторлы немесе
тиристорлы электр жетегіне беріледі. Оның құрамы
күшейткіштен, СИФҚ, токты шектеу жүйесінен, U
түрлендіргіштен және берілген орын ауыстыруды орындайтын М
тұрақты токты қозғалтқыштан тұрады.
сигналдарын беруге болады (егер ВR1 және ВR2
тахогенераторлары тұрақты токты болса). Сигналдардың
қосындысы тұрақты токты күшейткішпен
түзетілгеннен кейін күшейеді. Бақылау электр жетегінде тура күшейту
үшін тұрақты токты күшейткіштің дрейф нөлі
ретінде айнымалы токты модулятор – күшейткіш демодулятор UR – А – UB2 принципі
бойынша жұмыс жасайтын күшейткіштер кең қолданылады. Демодулятор ретінде айнымалы токты
тұрақты тоқа түрлендіретін екінші ФСТ UВ2
қолданылады. Сигнал тұрақты токты транзисторлы немесе
тиристорлы электр жетегіне беріледі. Оның құрамы
күшейткіштен, СИФҚ, токты шектеу жүйесінен, U
түрлендіргіштен және берілген орын ауыстыруды орындайтын М
тұрақты токты қозғалтқыштан тұрады.
Санды ЭЖЖ БЖ ретінде санды құрылғылар немесе ЭЕМ қолданылады [5,9]. Мұндай жүйелер басқару сигналын санды кодпен өңдейді, оны электр жетегін басқару үшін үздіксіз сигналға түрлендіреді және орын ауыстыруды өңдеуді бақылауды, беруді қамтамасыз етеді.
ЭЖЖ БЖ санды аналогты және санды болады. Мұндай жүйелер жоғарыда қарастырылған жағдайды реттеу жүйелерімен орындалады (2.17 және 2.18 суреттерді қара), онда NӨБ беру сандық сигналдары талап етілген басқару алгоритмімен өзгереді, ал жағдайды басқару жүйелерінде қолданылатын толқын түрінде өзеруі ЭЖЖБЖ жұмысының меншікті жағдайы болып саналады.
Жалпы түрдегі санды ЭЖЖ БЖ 2.25 суретінде құрылымдық сұлба арқылы көрсетілген.
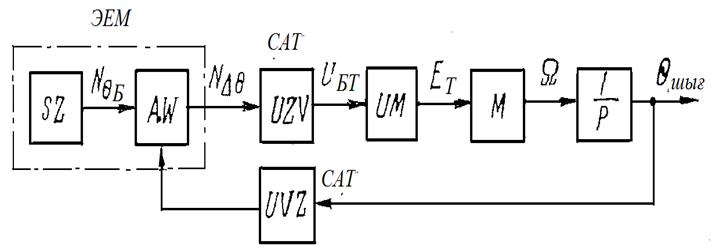
2.25 сурет – Сандық ЭЖЖ БЖ құрылымдық сұлбасы
Жағдайды басқару ЭЕМ арқылы
орындалады. Ол басқару алгоритмін береді және оның
өңделуін бақылайды. Беру NӨБ санды
кодпен орындалады. Жағдай бойынша кері байланыс сигналы АСТ
UVZ көмегімен алынған NӨшығ
санды кодпен орындалады. АСТ уақыт және деңгей бойынша
үздіксіз шамаларды кванттауды, аналогты сигналдарды санды
сигналдарға түрлендіреді, кодтауды орындайды. ЭЕМ салыстыру
құрылғылары кері байланыс, беру санды сигналдарын салыстырады
және ![]() басқарудың санды сигналын өңдейді. Бұл
санды сигнал САТ кодталады және басқару электр жетегінің
жылдамдығын берудің UТБ аналогты сигналына
айналады; егер ЭЕМ жылдамдық пен токты санды түрде реттеуді
қамтамасыз етсе, онда электр жетегін тура басқару орындалады.
басқарудың санды сигналын өңдейді. Бұл
санды сигнал САТ кодталады және басқару электр жетегінің
жылдамдығын берудің UТБ аналогты сигналына
айналады; егер ЭЕМ жылдамдық пен токты санды түрде реттеуді
қамтамасыз етсе, онда электр жетегін тура басқару орындалады.
Санды техникалардың қолданылу мүмкіндігі санды ЭЖЖ БЖ негізгі артықшылығы болып саналады: жоғары дәлдік, кедергілерден қорғануы, ЭЕМ көмегімен күрделі алгоритмді басқаруды құру және электр жетегі жұмысының санды индикацияларын құру.
Санды аналогты ЭЖЖ БЖ санды құрылғылармен реттеудің жоғары статистикалық дәлдігін алуды (қателік 0,01 — 0,001%), аналогты жүйелермен орындалатын өтпелі процестердің жоғарғы сапасымен тез әсер етуін орындайды. Санды жүйелердің статистикалық дәлдігі уақыт бойынша квантталу қадамымен анықталады, оның минималды мәні реттеу параметрін өлшеу дәлдігімен және оның мәнінің санды түрге түрлену дәлдігімен шектеледі.
ЭЕМ, микро-ЭЕМ және микропроцессорладың дамуының салдарынан санды жүйелерді қолдану тез өсуде.
2.9 Электр жетегін бағдарламалық басқару жүйесі, құру принциптері және жіктелімі
Бағдарламалық басқару жүйесі (ББЖ) жұмыс машинасын автоматты басқару жүйесі немесе берілген басқару бағдарламасына сәйкес басқаруды орындайтын жеке орындау органы (БО – басқару объектісі) болып саналады [11-14].
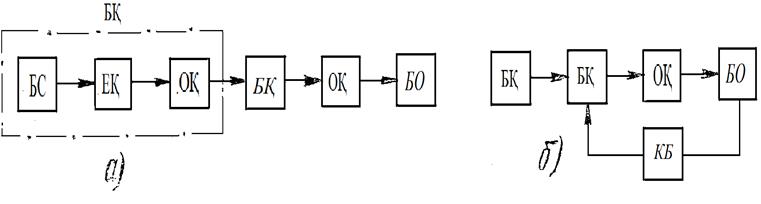
а – ажыратылған; б – тұйықталған.
2.26 сурет – Бағдарламалық басқару жүйесінің құрылымдық сұлбасы
Бағдарламалық басқару жүйесінің кең қолданылатын құрылымдық сұлбасы 2.26 суретінде көрсетілген. Жүйе бағдарламалық (БҚ), басқару (БҚ) және орындау құрылғыларынан (ОҚ), басқару объектісі (БО) мен кері байланыстан (КБ) тұрады. БҚ бағдарламаны сақтаушыдан (БС), енгізу (ЕҚ) мен оқитын (ОҚ) құрылғылардан тұрады. Бағдарламаны сақтаушы ретінде магнитті ленталар, дискеталар және дисктер, штекерлі және басқа түрдегі матрицалар немесе ЭЕМ, бағдарламашы немесе ЭЕМ енгізген бағдарламаны басқару сызбасын немесе ақпартатты беруді сақтау жатады. ЕҚ енгізу құрылғысы БС бағдарламаны сақтаушыға немесе ЭЕМ тікелей жазылған бағдарламаны басқаратын ақпаратты ОҚ көмегімен басқару құрылғысына енгізеді. БҚ басқару құрылғысы кері байланыс ақпаратына немесе басқа ақпарат көздеріне сәйкес басқару бағдарламасының ақпарат ағымдарын түзетеді. Мысалы интерполяторлар қажетті математикалық операцияларды өңдейді және орындау элементтеріне (электржетегіне) басқару әсерін өңдеп шығарады. ББЖ тұрақты және айнымалы токты тез әсерететін, реттелетін және бақыланатын электр жетегі қолданылады. Ол басқарылатын ақпаратқа сәйкес басқару объектісін қозғалсықа келтіреді. Кері байланыс ЖМАО нақты жағдайы туралы ақпарат ағымын өңдейтін кері байланыстың бергішімен орындалады. Ол бергішті орындау органына немесе электр жетегінің электр қозғалтқышының білігіне жанама орналастыруымен анықталады.
Бағдарламалық басқару өнеркәсіптің барлық салаларында қолданылады. Күрделі пішінді бұйымды жоғарғы дәлдікпен орындайтын және тікелей адамның қатысуынсыз өндірілетін металды өңдеу өнеркәсібінде кең қолданылады.
ББЖ жіктеу бойынша келесі түрге бөлінеді: бағдарламаны беру принципі; басқару принципі; әсер ету принципі; тағайындалуы.
Басқару бағдарламасын беру принципі бойынша ББЖ аналогты және санды болып бөлінеді. Аналогты ББЖ басқару бағдарламасын беру тұрақты токты кернеу деңгейін немесе айнымалы токты кернеу фазасын беру түрінде аналогты сигналмен орындалады.
Санды ББЖ станокты құруда кең қолданылады. Сондықтан олар үшін терминдер мен анықтамалар «Метал өңдеу жабдықтарын санды бағдарламамен басқару құрылысы» деген 20523-81 МТ сәйкес келеді. Осы МТ сәйкес бағдарламаны санды кодпен жазудан тұратын басқару бағдарламасы санды бағдарламамен басқару (СББ) деп аталады және берілгендері санды түрде жазылған, басқару бағдарламасымен станокта өңделетін бұйымды басқарумен анықтайды. Бағдарламаны басқаратын санды ақпаратты кодтайтын әртүрлі санды кодтар болады. ББЖ-де бірлік, екілік және екілік-ондық кодтар кең қолданылады.
СББ-да басқару құрылғысы СББ құрылғысы деп аталады (СББҚ), ал СББ қамтамасыз ететін технологиялық және бағдарламалық құралдарына функционалды өзара әсер ететін, өзара байланысқан жиынтығын анықтауды СББ (СББЖ) жүйесі деп аталады.
Халықаралық классификацияға сәйкес СББҚ техникалық деңгейінің мүмкінділігіне қарай төмендегі класстарға бөлінеді:
NC (Numerical Control) – әрбір бұйымды дайындауды өңдеу кезінде бағдарламаны кадрлық есептеу СББҚ;
SNC (Stored Numerical Control) – бірдей бұйымды дайындауды өңдеудің алдында бағдарламаны бір рет есептеу СББҚ;
СNC (Computer Numerical Control) – мини-ЭЕМ (микропроцессормен) тұратын СББҚ;
DNC (Direct Numerical Control) – бір ЭЕМ-мен станоктар топтарынан тұратын СББҚ;
HNC (Handled Numerical Control) – пультпен басқару арқылы бағдарламаны қолмен терудің оперативті СББҚ.
ББЖ басқару принципі бойынша ажыратылған және тұйықталған болып келеді. Ажыратылған ББЖ (2.26, а суретті қара) басқару бағдарламасында (ББ) ақпаратты берудің бір ағымынан тұрады. Олар машинаны қажетті технологиялық жұмыспен және бағдарламаны дәл өңдеуді қамтамасыз етеді. Тұйықталған ББЖ (2.26, б суретті қара) басқару бағдарламасы ББ және кері байланыс КБ бойынша екі ақпараттық ағымнан тұрады. Олар ЖМАО жағдайы туралы ақпараттың болуынан және үздіксіз бақылаудың салдарынан ақпаратты өңдеудің жоғарғы дәлдігін қамтамасыз етеді.
ББЖ әсер ету принципі бойынша аналогты, импульсті, аралас (аналог-импульсті және импульс-аналогты) және кодты болып бөлінеді [6,7]. Қазіргі кезде СББ ЭЕМ дамуының салдарынан аппараттық құралдармен орындалатын ББЖ ескірді. Сондықтан үздіксіз әсер ететін тұрақты және айнымалы токты электр жетегімен және импульсті қадамдық электр жетегімен орындалатын санды СББҚ ғана шығарылады.
Тағайындалуы бойынша технологиялық белгісіне сәйкес ББЖ циклді, позициялық және контурлы болып бөлінеді.
Циклді бағдарламалық басқару жүйесі (ЦББ), ЖМАО жұмыс машинасының бір немесе бірнеше орындау органдарымен басқаруды орындайды. Ол әдетте жеке ЖМАО немесе топты машиналардың тізбектілігін қайталаумен анықталатын, қажетті технологикалық циклді қамтамасыз етеді. Әсер ету тізбектілігі ЖМАО қозғалысқа келтіретін, электр жетегін қосу мен өшіру үшін қарапайым дискреттік бұйрықпен берілетін басқару бағдарламасымен орындалады. ЦББ жүйесі негізі ажыратылған күйде орындалады, ал ЖМАО жағдайын белгілейтін және электр жетегін қосу мен өшіру бұйрығын беретін жағдай датчигі кері байланыс ретінде қарастырылады.
Металды кесу станоктарымен СББ-да ББЖ позициялық және контурлық ретінде екіге бөлінеді. 20523-81 МТ сәйкес позициялық СББ станокты санды бағдарламамен басқарумен анықталады. Станоктың жұмыс органдарының орын ауыстыруы берілген нүктеде орындалады, бірақ орын ауыстыру траекториялары берілмейді. Позициялық СББ металды кесетін станогтың қозғалысын бақылау үшін ғана қолданылады, сонымен қатар кез келген жұмыс машиналарында орындау органдарының орнынын анықтап, орнын ауыстыруға қолданылады. Мұндай жүйеде берілген соңғы жағдайда дәл орналастыру маңызды, ал оның орналастыру траекторияларының дәлдігі маңызды емес.
Позициялық жүйелер жазықтықта, бірнеше координатта дәл орны анықталатын орындау органының жағдайын басқаруды жүзеге асырады. Бұл жағдайда ЖМАО бір координаттан екінші координатқа қозғалуы кез келген траекторияларда орындалады, бірақ өнімділігі жоғары болу үшін орын ауыстыру уақыты аз болады. Позициялық ББЖ позициялық басқару жүйелерінің базасы арқылы тұрғызылады, онда берілген сигналдар берілген бағдарламамен өзгереді.
Позициялық СББ негізі тұрақты токты тез әсер ететін электр жетектері қолданылады, олар позициялық электр жетектерінің талаптарын қанағаттандырады.
Контурлы СББ дегеніміз станокпен (кез келген жұмыс машинасымен) санды бағдарламалық басқару, оның орындау органдарының орын ауыстыруы қажетті өңдеу контурын (контур бойынша қозғалыс) алу үшін берілген траекториялармен және берілген жылдамдықпен орныдалады.
Контурлы СББҚ сигналы уақыт функциясы, жылдамдық, жолдар немесе кез-келген басқа параметрлер болатын, басқару ақпаратының үздіксіз өзгеруінен тұратын ЖМАО (басқару объектісі) орын ауыстыруын басқару үшін арналған. Мұндай ББЖ берілген контур бойынша жазықтықта және кеңістікте объектінің қисық сызықты қозғалысын құрады. Сонымен қатар ББЖ сипаттамалық ерекшелігі жылдамдық пен жол бойынша әрбір уақыт моментінде орындау органының үздіксіз үйлесімді қозғалысы.
Басқару алгоритмі мен электр жетегінің талабы бойынша контурлы жүйе позициялы жүйеге қарағанда өте күрделі болып келеді. Контурлы ББЖ басқару құрылғыларының негізгі блоктары ретінде сызықты және шеңберлі интерполяторлар қолданылады. Олар басқару бағдарламасында тірек нүктесімен ЖМАО қозғалыс траекториясын бағдарламалауды жүзеге асырады және электр жетегімен сигналдарды басқаруды қамтамасыз ететін бағдарламаның санды кодтық ақпаратын бірыңғай код ақпаратына түрлендіреді.
Өздiгiнен бейiмделетiн адаптивтік жүйені өңдеу ақпараттың ағымдарының саны бойынша СББ жіктелімін кеңейтті. Санды бағдарламалық басқару ретінде анықталатын адаптивті СББ (АСББ) құрылды. Онда анықталған критериялар бойынша өңдеу шартымен өзгеретін бұйымды дайындауды өңдеу процессі автоматты бейімделеді. Сондықтан қазіргі кездегі СББ ақпараттың негізгі ағымдармен бірге кері байланыспен және басқару бағдарламасымен ғана анықталатын қосымша ағымдар пайда болды.
2.10 Электр жетегімен бағдарламалық басқарудың циклдік жүйелері
Циклді ББЖ бір немесе бірнеше басқару объектісінің жұмысын қамтамасыз етеді, онда ЖМАО бірдей циклмен қайталанатын әртүрлі қозғалысты орындайды. Бұл қозғалыстардың тізбектілігі басқару бағдарламасымен беріледі [11].
СББ жүйесінде басқару бағдарламасы қатаң өзгермейтін және өзгеретін бағдарламамен орындалады. Қатаң өзгермейтін басқару бағдарламасы электр автоматтандырудың анықталған сұлбасы түрінде беріледі, мұнда басқару элементтерін қосу мен ажырату уақыт бойынша немесе ЖМАО техникалық дайын болуы кезінде қосылады.
Циклдік ББЖ-де қатаң басқару бағдарламасының өзгеруі штепсельді коммутаторларды, бұйрық аппараттарын, ауыстырып қосқыштарды жинақтау түріндегі бағдарламаны беруден тұратын матрица түріндегі сұлба бойынша және реле сұлбасының логикалық функцияларын құратын, электронды есептеу құрылғысы ретінде көрсетілген бағдарламалау контроллердің көмегімен құрастырылады.
Күрделі циклдік ББЖ-де басқару бағдарламалары ЭЕМ және санды (СББ) түрде беріледі. Бірақ мұндай бағдарламалар циклді және технологиялық режимдер туралы ғана ақпараттан тұрады, ал орын ауыстыруы жолдағы ауыстырып қосқыштарға әсер ететін тіреу құрылғысымен беріледі.
Циклдік ББЖ тұрақты токты және жиі айнымалы токты электр жетектері қолданылады.
Циклді ББЖ қатаң өзгермейтін бағдарламамен реле түйіспелі және түйіспесіз аппараттармен орындалады. Қазіргі кезге дейін реле түйіспелі сұлбалар кең қолданылған. Мысал ретінде 2.27 суретінде екі ЖМАО қарапайым циклдік ББЖ көрсетілген, онда агрегаттық станокта орындау органы (ОО1) айналдыру қозғалысын, ал ОО2 келіп түскен қозғалысты келтіреді. Мысалы қарапайым автоматты қайталанатын циклді орындау қажет болсын: ОО1 а жағдайдан б жағдайға қарай айналсын; ОО2 в жағдайдан г жағдайға қарай орын ауыстырсын; ОО2 бастапқы в жағдайына орын ауыстыруы, ОО1 бастапқы а жағдайына орын ауыстыруы.
ОО1 және ОО2 орын ауыстыруын басқару SQ1 – SQ4 соңғы қосқыштарымен, а – г жағдайын бақылау арқылы орындалады. ОО1 және ОО2 бастапқы жағдайлары SQ1 және SQ3 басылған, а және в жағдайына сәйкес орналасқан. S ажыратқышымен басқару сұлбасына кернеу бергеннен соң K түйістіргіші қосылады, M1 қозғалтқышы ОО1 б жағдайына орналастырады, SQ2 ажыратқышы қосылған кезде K1 ажыратылады K3 қосылады да, қозғалтқыштың қозғалысы тоқтайды. M2 қозғалтқышы қосылады және ОО2 г жағдайына орналастырады, SQ4 ажыратқышы қосылады K3 ажыратылады және K4 қосылады. M2 қозғалтқышы реверстеледі және ОО2 бастапқы в жағдайына орналастырады, SQ3 ажыратқышы K4 ажыратады және K2 қосады. M2 қозғалтқышы ажыратылады, ал M1 қосылады, ол ОО1 бастапқы а жағдайына айналдырады. Бұл цикл S ажырағанша автоматтты түрде қайталанады.
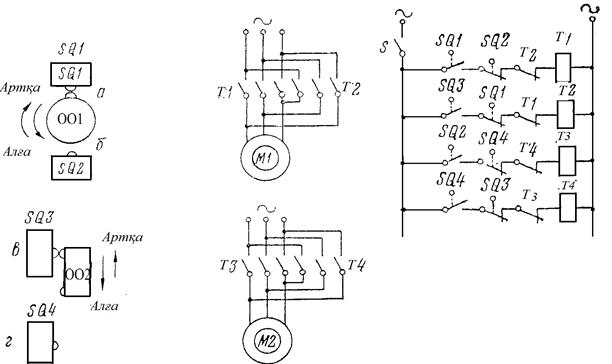
2.27 сурет – Реле-түйіспеден тұратын бағдарламаны басқарудың циклдік сұлбасының қарапайым принципиалды сұлбасы
Мұндай түйіспелі циклді ББЖ-ң жұмыс дәлдігі жоғары емес, көлемі үлкен және түйіспенің іске қосылуы үлкен санмен жұмыс жасайтын, үлкен сұлбаларда жиі сынатын реленің механикалық құрылысына байланысты жұмыс жасау сенімділігі мен ұзақ уақытқа жарамдығы төмен болады.
Сұлбасы микросұлбаларды қолданып, түйіспесіз логикалық элементтерде жиналған циклдік ББЖ жұмыс жасау сенімділігі жоғары болады. Бірақ қатаң өзгермейтін бағдарламамен түйіспесіз логикалық элементтерде және түйіспелі аппараттарда циклдік ББЖ сұлбасын құру үлкен еңбек шығынын, монтаждау мен жөндеуді қажет етеді.
Циклдік ББЖ үлкен сұлбасын құру үшін кіріс және шығыс құрылғыларымен басқарылатын мини-ЭЕМ түріндегі бағдарламалық контроллерлер (бағдарламалық бұйрық аппараттары) – БК қолданылады, ол ЭЕМ еске сақтауына еңгізілген бағдарламаға жазылған кез келген басқару сұлбасының логикалық функцияларын орындайды. БК басқару объектісіне байланыс каналы бойынша қосылады және онымен нақты уақыт масштабымен тізбектей әсерлесіп жұмыс жасайды. Мұндай ББЖ (2.28 суретті қара) БК бағдарламалық контроллерден, КҚ кіріс және шығыс құрылғыларынан, КАҚ күштік автоматты құрылғыдан және ҚК қоректендіру көзінен тұрады. БК басқару бағдарламасын құру мен сақтауды қамтамасыз ететін орталық процессорлық құрылғыдан, ББЖ электрлік ішкі, сыртқы тізбектерінің параметрлерін тізбектілігін орындайтын ТҚкір кіріс және ТҚшығ шығыстың түйіндестер құрылғысынан және АҚК автономды қоректендіру көзінен тұрады. Кіріс құрылғылары БО бұйрық органдары мен басқару объектісінің жағдайын индикациялау Б бергіштерінен, шығыс – БОЭ басқаруды орындау және СБЭ сигнал беру элементтерінен, ЭҚ электр қозғалтқышынан тұрады.
Мұндай БК бағдарламаны енгізу мен ретке келтіру үшін аз еңбек сыйымдылығынан тұрады, дисплей және жарықпен сигнал берудің көмегімен жұмыс сұлбасын индикациялауды орындайды, сонымен қатар оның жұмысына диагностика жасайды. БК екі қоректендіру көзі (ҚК және АҚК) энергияға тәуелді және энергияға тәуелсіз еске сақтауды қамтамасыз етеді. Сонымен қатар біріншісі ішкі энергия көзінен ажыратылған кезде өзінің берілгендерін сақтамайды (БК нөлдік сақтандыру ретінде қолданылады), ал екіншісі энергиядан ажыраған кезде жұмыс бағдарламасын құру үшін процессордың жұмыс алгоритмін, бұйрықтың құрамын және өзінің берілгендерін сақтайды.
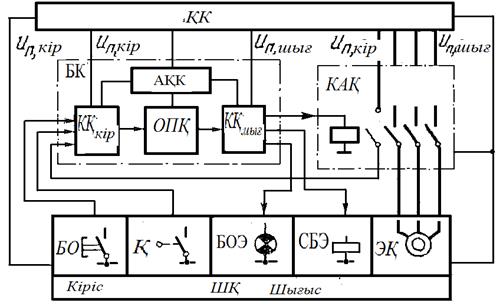
2.28 сурет – бағдарламаланған контроллермен бағдарламалық басқарудың циклдік жүйесінің функционалдық сұлбасы
Автоматтандырылған объектінің сипаттамасына сәйкес модульдің нақты жиынтығын алу үшін БК блок-модульдік принцип бойынша құрылады. Сонымен қатар техникалық диагностиканың, жөнделмейтіндігін және т.б. жағдайларды шешетін құрылғылармен кешенді басқарудың күрделі жүйелерін және қарапайым циклді басқару сұлбаларын құруға болады.
БК әсер ету принципі функционалдық сұлбамен түсіндіріледі (2.29 суретті қара). Бастапқыда БК бағдарламалық панельде (бағдарламаны жүктеуде) терілетін және тұрақты еске сақтау құрылғысына (ТЕҚ) жазылатын (жүктеледі) бағдарламаны жазу режимінде жұмыс жасайды. БК сканнер (токты импульстар генераторы) ТЕҚ сұрайтын жұмыс режиміне қосылады және құрылғылардың регисторларының кірісі мен шығысы жүйенің кіріс, шығысына түйіндес болады. Бағдарламаның адресі бойынша (операндасы) енгізу және шығару регисторларының ұяшықтары таңдалып, процессорға қосылады. Процессор ТЕҚ арқылы келіп түскен бағдарламаның бұйрығына (қадаммен) сәйкес кіріс, шығыс сигналдарына логикалық операциялар жасайды және кіріс жағдайын шығыс жағдайына түрлендіреді. Егер кіріс жағдайы бастапқы циклді сұраумен салыстырғанда өзгермесе, онда процессор шығыстың ағымдағы жағдайын қайталайды; егер өзгерсе, онда процессор ТЕҚ жазылған бағдарламамен шығыс жағдайын өзгертеді.
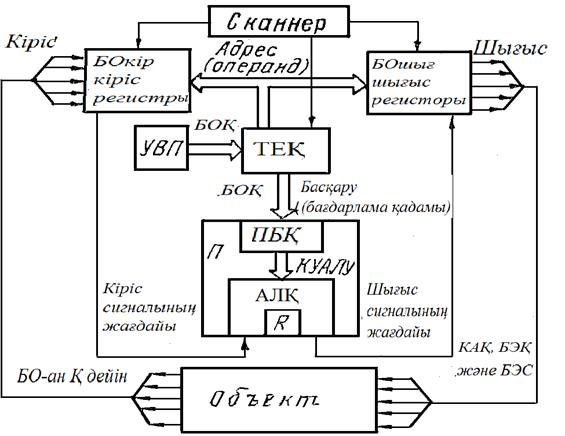
2.29 сурет – Бағдарламаланған контроллердің функционалдық сұлбасы
БК орталық бөлігі П процессор, оның құрылысы БК параметрлерін анықтайды: тез әсер ететін, бұйрық жүйесі, кіріс және шығыс сандары, таймерлер мен есептегіштердің саны, бағдарламаны сақтау үшін еске сақтау көлемі. Процессормен бұйрықты өңдеу мен есептеу операциялары, еске сақтаудан операндтарды алуды және шығыс құрылғыларына басқару бұйрығын беруді орындайды. Процессор арифметика-логикалық құрылғылардан АЛҚ тұрады, ол бағдарламаның логикалық операцияларын орындайды; бағдарламаның кодын АЛҚ басқару кодына түрлендіретін процессорды басқару құрылғысы ПБҚ; есептелген R нәтижесін еске сақтауға еңгізуден; бағдарламаның қадамының адрестерін санағыштан (БҚАС) және еске сақтау құрылғысының адрестерінен ЕСҚА, операндтардың (кіріс адресі) және бағдарламалардың қадамдарын санағыштан, бағдарлама қадамдарының адрестерін беру шиналарынан және операндтарды беру үшін берілгендер шинасынан тұрады.
Процессордың кіріс, шығыс модульдерімен байланысы модуль процессоры арқылы орындалады, ол адаптер деп аталады. Оның көмегімен кіріс сигналының ағымдағы мәні ТЕҚ беріледі және адресі операндпен берілген басқару әсерін шығыс модуліне береді. Егер шығыс модулінде басқару дискретті емес аналогты орындау сигналдарымен орындалса, онда САТ және АСТ құрылғылары қолданылады.
БК жұмыс циклі үш этапқа бөлінеді. Бірінші этап кіріс сигналдарын сканерлеу деп аталады, онда кіріс модульінің ТЕҚ жүктеледі. Екінші этапта бағдарлама өңделеді, ал үшінші этап соңғы – шығыс модуліне басқару сигналдары беріледі. Бұл этаптардың орындалуы бір уақытта болуы мүмкін. Цикл уақыты бағдарламаның ұзақтығына байланысты анықталады. БК-да бағдарламаның бітуі және басқа циклге ауысуы екі әдіспен орындалады: бағдарламаның бұйрықпен соңы және ТЕҚ барлық көлемін өңдеу.
2.11 Электр жетегін санды бағдарламалық басқару жүйелері
Санды бағдарламалық басқару жүйесі (СББЖ) СББ құрылғысынан және бақылау электр жетегі түріндегі СББ (СББҚ) құрылғысынан тұрады [11,13,14]. СББҚ басқару каналының құрлысы 2.30 суретінде көрсетілген. Ол бағдарлама ақпаратын енгізу құрылғысынан БЕҚ, қолмен басқарылатын пульттан ҚБП, бағдарлама ақпаратын еске сақтау блогынан БЕСБ, интерполятордан И, электр жетегін басқару сигналдарын түрлендіру блогынан БСТБ, электр жетегінен ЭЖ, ЖМАО басқару объектісінен және жағдай бойынша кері байланыс датчигінен ЖКБД тұрады.
БЕҚ бағдарлама сақтаушыдан БС, енгізу ЕҚ және есептеу ЕҚ құрылғыларынан тұрады (2.26 суретті қара). БС ретінде СББҚ-да екілік кодпен бағдарлама жазылатын дискеталар, дисктер және т.б. қолданылады. ЖМАО орын ауыстыруы туралы санды ақпарат унитарлық кодтың импульстер санына қарай жазылады, ол бір импульста ЖМАО орын ауыстыру қадамы белгілі болған кезде қажетті орын ауыстыруды миллиметрмен анықтайды.

2.30 сурет – СББҚ басқару каналының құрылысы
Ақпарат БС бағдарламаны сақтаушыдан ақпаратты еске сақтайтын БЕСБ беріледі (2.30 суретті қара), БС арқылы есептелінген ақпарат оны бақылайды және бағдарламаны жазғанда болатын қатенің сигналын құрады. Ақпарат тізбектей БС арқылы оқылатындықтан БЕСБ қажет, ал СББҚ параллель қолданылады. ББЖ контурында ақпарат үздіксіз оындалуы қажет, сондықтан БЕСБ екі еске сақтау блогы қолданылады. Оның біреуі ақылы ақпарат жазылады, ал екіншісі арқылы ақпарат оқылады және бұл блоктар қайта қосылғаннан кейін керсінше орындалады. Ақпарат жазылатын блок буферлі (ББ), ал ақпарат оқылатын блок жұмыс (ЖБ) блогы деп аталады.
Ақпарат жазылғаннан кейін ақпараттың әрбір кадры буферлі еске сақтаудан жұмысты еске сақтауға жазылады немесе еске сақтау блоктары қайта қосылады, яғни орындары ауыстырылады.
Ақпарат жұмысты еске сақтауынан интерполяторға беріледі, онда ЖБ жазылған ақпаратты сандық импульстермен екілік кодка, қалғанын бірлік бірыңғай кодка түрлендіреді және екі координатты СББҚ екі немесе одан да көп нүктелермен ЖМАО қозғалысының траекторияларын сызықты немесе шеңбер түрінде интерполяциялайды.
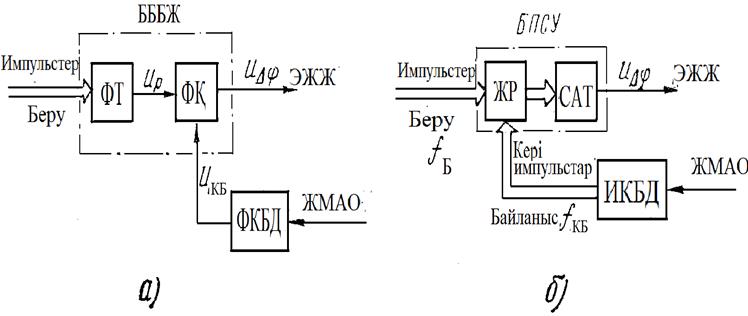
а – фазалық; б – сандық.
2.31 сурет – Басқару сигналының түрлену блогы
Импулсті ақпарат интерполятор арқылы электр жетегін басқару сигналымен импулсті сигналдардың түрлену блогына беріледі (2.30 суретті қара), мұнда ЖМАО берілген орын ауыстыруын құратын үздіксіз әсер ететін қозғалтқыштан тұратын бақылау электр жетегі қолданылады. Бұл жағдайда БББЖ-де фазалық түрлендіргіш ФТ түріндегі САТ қолданады (2.31, а суретті қара), ол φ фаза ығысуының импульстер тізбектігін тіректі U0 сәйкес uЖ айнымалы токты жұмыс сигналына түрлендіреді, ол мына теңдеумен анықталады
|
|
|
Мұнда әрбір импульстер бойншы фазаның ығысу мына теңдеумен анықталады
|
|
|
мұндағы n –
берілген импульстер саны; nфт – ФТ бөлу коэффициенті, яғни фазаны
360º ығыстыратын импульстер саны. nфт =100
– 200 болғанда, бір
импульстен фазаның дискретті ығысуы ![]() .
. ![]() жиілікпен импульстердің үздіксіз орындалуы
кезінде
жиілікпен импульстердің үздіксіз орындалуы
кезінде ![]() ; онда берілген фазаның ығысуы
; онда берілген фазаның ығысуы
|
|
|
мұндағы ![]() – импульс қозғалысының айнымалы
жиілігі.
– импульс қозғалысының айнымалы
жиілігі.
Бұл жағдайда ФТ шығысында
қозғалыстың бағытына тәуелді жиілік![]() немесе
немесе![]() тең болатындықтан, айнымалы жиілік тіректі
жиіліктен ауытқиды. Бұл ауытқу бақылау электр жетегіне
берілетін сигнал фазасын анықтайды.
тең болатындықтан, айнымалы жиілік тіректі
жиіліктен ауытқиды. Бұл ауытқу бақылау электр жетегіне
берілетін сигнал фазасын анықтайды.
Мұндай ББЖ бақылау электр жетегінде кері байланыс датчигі ретінде фазаны айналдыру режимінде жұмыс жасайтын және сигналдың шығысында айнымалы токпен қамтамасыз ететін айналу трансформаторы қолданылады (АТ), кері байланыс сигналы мына теңдеумен анықталады
|
|
|
FТ ![]() фазасы ЖМАО S орын ауыстыруымен байланысқан біліктің айналу бұрышымен
анықталады
фазасы ЖМАО S орын ауыстыруымен байланысқан біліктің айналу бұрышымен
анықталады
|
|
|
мұндағы ![]() – жүйе қадамы.
– жүйе қадамы.
uр және uкб салыстыру құрылғылары ретінде фазалық дискриминатор ФД қолданылады, ол uр және uкб көбейтуді және сигналдың шығыс қателігін тұрақты токты кернеу түрінде қамтамасыз етеді
|
|
|
Бақылау электр жетегінде БББЖ кері
байланыста импульсті бергіш қолданған кезде реверсивті
санағыш РС және САТ (2.31, б суретті қара) қолданылады.
Санағыш ИКБД арқылы ![]() ,
, ![]() жиіліктерімен бірге өтетін кері байланыс
импульсін және беру (интерполятордан) импульсін қабылдай отырып,
олардың арасындағы айырмашылықтарын анықтайды. Одан
кейін САТ uDj тұрақты токты қателіктің кернеуіне
түрленеді.
жиіліктерімен бірге өтетін кері байланыс
импульсін және беру (интерполятордан) импульсін қабылдай отырып,
олардың арасындағы айырмашылықтарын анықтайды. Одан
кейін САТ uDj тұрақты токты қателіктің кернеуіне
түрленеді.
Қадамдық электр жетегін қолдану кезінде қарапайым қадамдық қозғалтқышпен ҚҚ ажыратылған импульс қадамды СББ қолданылады, оның бір координатының функционалдық сұлбасы 2.32 суретінде көрсетілген. Бағдарламаның импульстері СББҚ импульстары арқылы біркелкі кодпен екі ақпараттық каналға беріледі. Ол ЖМАО қозғалыс бағытын («алға» (+) және «артқа» (–)) күшейткіш – құру КҚ арқылы анықтайды. Күшейткіш құру құрылғысында қажетті қашықтыққа дейін импульстер күшейіп құрылады. Басқару импульстары импульстарды таратуға беріледі, күшейткіш қуатымен күшейтіледі және ҚҚ орамдары бойынша таралады. Металды кесу станоктарындағы СББ су күшейткішті қолданатын, білігіндегі моменті 0,06 Н·м және қадамы 6º болатын ҚҚ5Қ – 1М түріндегі қозғалтқыш қолданылады [10, 15]. Негізі кез-келген күштік ҚҚ алуға болады, мысалы моменті 1 Н·м және қадамы 22,5º болатын АҚҚ – Ф түріндегі қозғалтқыш.
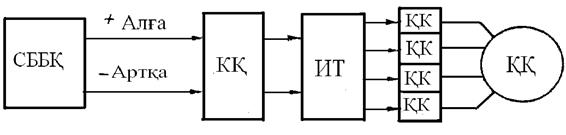
2.32 сурет – импульс-қадамдық СББҚ бір координатының функционалдық сұлбасы
Импульстарды тарату басқару импульстарын ҚҚ қоректендіру кернеуінің көп каналды жүйесіне түрлендіру үшін қолданылады. ИТ сұлбалары өте көп. Олар реверсивті санағыш шеңберлі сұлбаның негізімен тұрғызылған. Қазіргі уақытта микроэлектрониканың дамуына байланысты ИТ қозғалатын регисторлар және дешифраторлы санағыштардың негізімен тұрғызылған интегралдық микросұлбаларда орындалады. Мұндай сұлбаның біреуі 2.33, а суретінде көрсетілген [6,15,17], мұнда D1 санағыш және D2 дешифратордан тұратын екі микросұлба қолданылады. Басқару импульстары «алға» және «артқа» деген каналдар арқылы +1 қосындылайтын және –1 санайтын санағыштың кірісіне беріледі. «Алға» деген бұйрықтың импульстары берілген кезде санағыштың жағдайы 0, 1, 2, 3, 0, 1 және т.б. ондық санағыш бағытына өзгереді және ҚҚ фазасы коммутацияланады, ҚҚ«алға» айналады, ал «артқа» деген бұйрық берілгенде санағыштың жағдайы санағышта жазылған ондық санан 3, 2, 1, 0, 3, 2 төмендейді және ҚҚ «артқа» айналады. ИТ мұндай атқарылған жұмысы 9.4, б суретінде көрсетілген. Санағышта талап етілген екілік сан D1 және D2 кірісіне жазылады. R кірісінде санағыш нөлге келеді.
ИТ импульстері транзисторда қуатты күшейткішпен (ҚК) күшейеді (2.34 а суретті қара). Сұлба ескі құрылғыларда қолданылады және жоғарғы кернеумен қоректендіру кезінде токты шектейтін R резисторының көмегімен ҚҚ орамындағы (БО) токтың өсуін құруын орындайды. Сұлбаның кемшілігі R резисторында энергия шығынының болуы. Жаңадан өңделген жүйелерде ҚҚ орамының ток бойынша кері байланысынан және Шмидтің триггерімен орындалатын VT тиристорды қосу арқылы релемен басқарудан тұратын сұлбалар (2.34, б суретті қара) [17] қолданылады. VD диоды БО аса кернеуліктен сақтау үшін қолданылады.
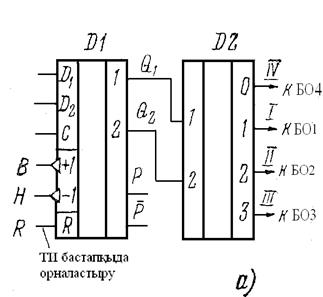

а – сұлба; б – жұмыс диаграммасы.
2.33 сурет - Импульстарды тарату
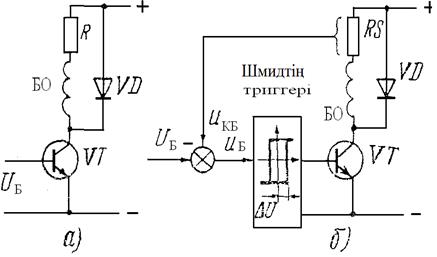
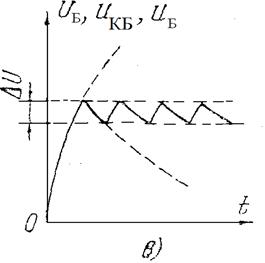
а – ажыратылған; б – ток бойынша тұйықталған.
2.34 сурет – Қуатты күшейту сұлбасы
Импульсті қадамдық СББ кемшілігі ПӘК төмен және ажыратылған басқару жүйесін қолдануына байланысты ЖМАО орын ауыстыруын өңдеу дәлдігі төмен. Қазіргі уақытта бергіш жағдайымен ҚҚ тұйықталған жүйесі өңделген [6,10,14].
2.12 ЭЕМ санды бағдарламалық басқару жүйелері
Басқару бағдарламасын есептеу мен құрудан бастап, ЖМАО қозғалысын орындайтын басқару электр жетегіне дейінгі СББ ЭЕМ-де кең қолданылады [12]. Микро-ЭЕМ және микропроцессорлардың пайда болуы мен микроэлектрониканың дамуна байланысты СББ еске сақтаудың үлкен интегралды сұлбаларымен (ҮИС), микропроцессорлық жинақталған микро-ЭЕМ, орташа және аз интеграциялы микросұлбасымен микро-ЭЕМ қолданылады. Осыған байланысты CNC (Computer Numerical Control) класты оперативті жүйемен басқару ОЖБ деп аталатын жұмыс машинасының (станоктың) басқару бағдарламасын дайындауда оперативті СББЖ пайда болуына және СББ құрлысының өзгеруіне әсер етті. Сонымен қатар станоктың және есептеу орталығындағы басқару бағдарламасын дайындайтын универсальді СББЖ (универсальді басқару жүйесі – УБЖ) қолданылады.
CNC класының ОЖБ принципиалдық ерекшелігі оның құрылысының ЭЕМ құрылысына ұқсас болуы және оның құрамына есептеу құрылғылары (процессор), еске сақтау блоктары және ақпаратты еңгізу, шығару блоктары жатады. Сонымен қатар функцияның көлемі, өткізілетін операциялардың сипаттамалары және олардың тізбектілігі арнайы сұлбалармен анықталмайды, ал құрылғының еске сақтау блогына еңгізілетін арнайы құру бағдарламасымен анықталады, онда басқа бағдарламамен аустырылғанша сақталады. Басқару бағдарламасымен шыққан ақпаратты өңдеу құру бағдарламасына сәйкес орындалады, ондағы орындау электр жетегіне және электрлі автоматтандыруына жұмыс машинасын басқару бұйрығы құрылады.
(CNC) түрдегі СББ жүйесі бағдарламаны сақтау мен оны жұмыс орнында түзетуді, кең көлемді жүйені диагностикалауды, дисплейде индикациялауды, оператормен диалогты сөйлесу, жұмыс машинасының құрылысының өзгеруін және оны тасымалдау процесі кезінде бағдарламалық әдіспен электрлі автоматтандыру сияқты бағдарламалық басқарудың функционалдық мүмкіндіктерін шешуді және жаңа функцияларды шығаруды орындайды.
Сондықтан СББЖ соңғы кездегі өңделген түрі микропроцессорлық техникаларды және БИС қолдануға негізделген. Қазіргі кездегі СББЖ орталық түйіні ретінде микропроцессордан және БИС тұратын микрокомпьютерлер қолданылады.
Мысал ретінде ЭЕМ-мен екі координатты, контурлы оперативті СББЖ қарастырамыз. Ол металл, ағаш жонатын станокқа арналған. Бұл СББЖ екі орындау органымен әрқайсысы 999999 импульстан тұратын X және Z координаттарында көлденең, бойлықпен орналасқан станокты басқаруға қолданылады. Қозғалысы контуры ЭЕМ бағдарламамен орындалған және кері байланысы фото импульсті бергіштен тұратын екі бақылау электр жетегімен орындалады. СББЖ функционалдық сұлбасы 10.1 суретінде көрсетілген.
![]()
![]()
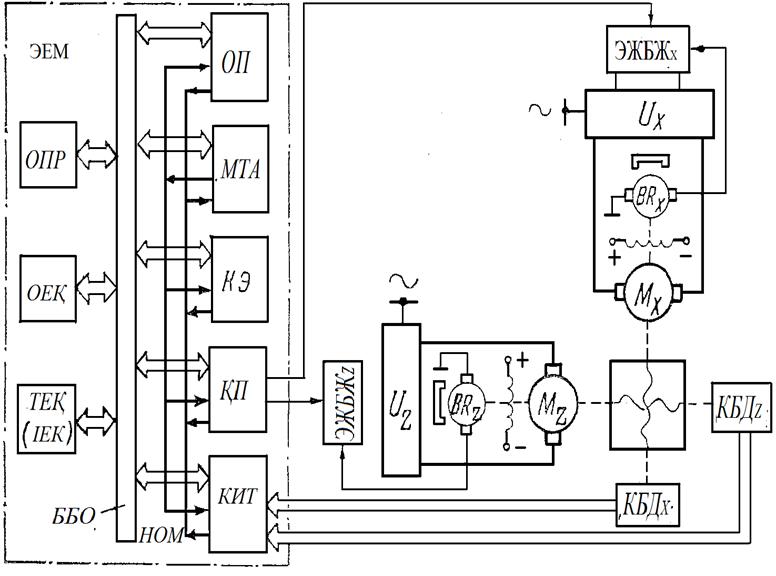
2.35 сурет – ЭЕМ тұратын СББЖ функционалдық сұлбасы
СББЖҚ ЭЕМ орындалады. Оның құрылысы оператор пультінен ОП; процессордан ОПР; оперативті ОЕҚ және тұрақты ТЕҚ еске сақтау құрылғыларынан тұрады, мұнда ТЕҚ ішкі еске сақтаудың кассетасы ІЕК түрінде жасалған; магистралдің адаптері мен таймерлерден МТА тұрады. ЭЕМ жетекті бақылау ЖБ түріндегі интерфейс шығыстарынан, кері байланыстың импульсті түрлендіру бергішінен КИТ және электр автоматтандырудан КЭ тұрады.
Бағдарлама клавиатураның көмегімен оператор пультімен беріледі (2.35 суретті қара), онда СББЖ басқару мен бағдарламаны беру белгісі белгіленген. Барлық пульттағы элементтер функционалдық топқа жинақталған және үзік сызықтармен белгіленген, мұндағы ҚП – X және Z координаттары бойынша алға және артқа қозғалтатын клавишалардың көмегімен қозғалыстың бағытын таңдау панелі;
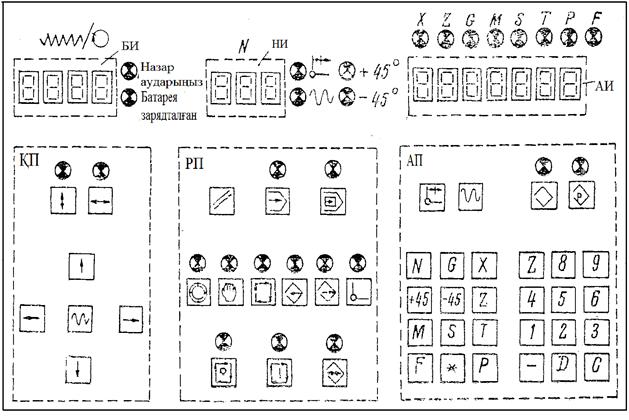
2.36 сурет – ЭЕМ операторының пульті
РП – режимдердің сигнал берулері мен клавишаларынан тұратын режимдер панелі, ол арқылы маховиктен автоматтың көмегімен немесе қолмен жұмыс режимін береді, еске сақтау кадрларына және т.б. еңгізілген басқарылатын бағдарламалар мен индикацилардың (тексерулердің) кадрларын еңгізу режимдері орындалады; АП – адрестер панелі дыбыстық адрестер клавишаларынан, санды бұйрықтардан және т.б. тұрады. ОП санды индикаторлар орналасқан: БИ – беру индикаторы; НИ – кадр номерінің индикаторы; АБ – сигналды шамға және дыбыстық адреске сәйкес келетін бағдарламалық санның индикаторы (жарық диодтары): НАЗАР АУДАРЫҢЫЗ – сигнал беру немесе қауіпті жағдайдың қатесі; БАТАРЕЯ ЗАРЯДТАЛҒАН – қоректендірудің қауіптілігі жайлы сигнал беру; есеп беру жүйесініне және қысқа аралықта орын ауыстыруға қатысты сигнал беру; ±45° бұрышпен қозғалысқа және дыбыстық адрестерге сигнал беру. ҚП, РП, АП бұйрықтарға сәйкес келетін сигнал берулер болады.
Бағдарлама перфотаспаға ұқсас ОП беріледі. Ақпаратты бағдарламаға еңгізу кадрлармен орындалады. Бағдарламаның соңы МБО бұйрығымен кодталады. Бағдарламаны лентадағыға ұқсас терген кезде дыбыстық және сандық ақпараттар қолданылады. Сонымен қатар дыбыстар қолданылады: N — кадр нөмері, X және Z – көлденең және бойлық орын ауыстырулар, S – шпинделдің айналу жиілігі, F – беру жиілігі, G – дайындау, M – көмекші функциялар және т.б. Орын ауыстыру миллиметрлі импульстер құнына сәйкес импульстер санымен беріледі. Бағдарламаны еңгізу кезінде ЭЕМ әрбір бұйрықтар сегіздік кодпен кодталады және клавиатураның тіркеу кодтарына беріледі. Оператор пультін қамтамассыздандыру бағдарламасы бойынша процессор клавиатураның еңгізу кодын талап етеді, оған жазылған ақпаратты ЭЕМ ішкі құрлысын көрсету үшін түрлендіреді және оны ББО ауыстырады.
«БАҒДАРЛАМАНЫ ӨҢДЕУ» бұйрығын берген кезде процессор ББО -дан басқару бағдарламасының барлық кадрларын тізбектей оқиды және «интерполятор» бағдарламасының көмегімен Δt = 10 мс уақыт аралығында NБ = (X / F) Δt тең N дискретті берудің F орын ауыстыру жылдамдығын есепке ала отырып, X немесе Z берілген орын ауыстыруды бөледі.
Процессор АСТ кері байланысты талап етеді, КБД кері байланыс бергішінің сигналы NКБ санды дискретті кері байланысқа түрленеді. Одан кейін процессор NБ = NБер – NКБ тең, дискрет түрінде санды сигналды басқаруды анықтайды, онда САТ ЖМАО берілген орын ауыстыруын өңдейтін, электр жетегінің жұмысын қамтамасыз ететін және электр жетегін басқару жүйесіне берілетін uСБ кернеуіне түрленеді.
Магистралдар мен таймерлердің адаптерлері МТА интерфейстің жалпы басқару шинасына түрленуін орындайды, ол интерфейстің байланысын бақылаудың НОМ магистралі деп аталады. Басқару ішкі құрылғылардың магистралдары ІҚМ бойынша орындалады.
ЭЕМ-мен санды бағдарламалық басқару жүйесі металлды кесетін станоктың қозғалысын ғана басқаруды орындамайды, сонымен қатар орындау органы жағдайдың орнын ауыстыруды талап ететін кез-келген машиналарда да қолданылады. Мұндай жүйелерде орындау органының соңғы берілген жағдайын дәл құру маңызды, ал оның орын ауыстыру траекториялары маңызды емес.
2.13 Электр жетегін бейімделген жүйемен басқару және оны құру принциптері
Электр жетектерін тасымалдау процесстерінде параметрлері (резисторлардың кедергілері, индуктивтілігі, беру мен күшейту коэффициенттері) мен берілген, қоздыру әсерлері өзгеруінің салдарынан оның динамикалық және статистикалық сипаттамалары өзгереді. Сонымен қатар басқару объектісінің және сигналды беру құрылғылардың сипаттамалары өзгереді. Бұл өзгерістер бастапқы кезде белгісіз болады және тасымалдау процесі кезінде олар туралы ақпарат толық болмайды.
Жоғарыда қарастырылған ажыратылған және тұйықталған электр жетегін басқару жүйелері сипаттаманың өзгеруі мен ақпараттың толық болмауы маңызды емес жүйелерге жатады және басқару мақсатына жетуіне әсер етпейді, сондықтан есепке алынбайды.
Сипаттамалардың өзгерісі үздіксіз өзгеретіндіктен алдын-ала есепке алуға болмайды. Сондықтан өзгерісті жұмыс процесі кезінде басқару объектісі мен электр жетегі туралы ақпаратты үздіксіз толықтыра отырып және оны басқаруға қолданып электр жетегін басқару жүйесі есепке алу қажет. Мұндай электр жетегін басқару жүйелері пайда болған шартпен жұмыс процесіне бейімделеді, сондықтан оларды бейімделген деп атайды [2,3,4,6,16].
Электр жетегінің бейімделген жүйелері дегеніміз жұмыс процесі кезінде объект туралы ақпаратты толықтыру мен сипаттаманың өзгерісін есепке алуды қажет ететін жүйе. Мұнда объект туралы ағымдағы ақпаратты жүйе өзі анықтайды және оны объектімен тиімді басқаруда қолданады.
Электр жетегін бейімделген жүйелермен басқаруда басқару әсері немесе автоматты басқару алгаритімі объектіні жақсы басқаруды орындау үшін автоматты өзгереді.
2.37 суретінде толық ақпаратсыз және сипаттамалардың өзгеруінен тұратын, бейімделген жүйелермен басқарудың жұмыс принципі көрсетілген электр жетегін бейімделген жүйелермен басқарудың қарапайым функционалдық сұлбасы келтірілген. Сұлбада белгіленгендер: БҚ – басқару құрылғысы; БО – басқару объектісі; БҚ – бейімбелу құрылғысы; f – кедергілер; u, n – басқару сигналдары; x, y – кіріс және шығыс сигналдары.
Қарапайым бейімделген жүйенің әсер ету принципі берілген критериялар бойынша сападан тұрады және критерия сапасының экстремумы орындалу үшін басқару объектісін жұмыс жасату қажет.
Бейімделген жүйеде x кіріс, y шығыс сигналдарын және u объектіні басқару сигналын алатын БҚ бейімделген құрылғысы негізгі ролді атқарады.
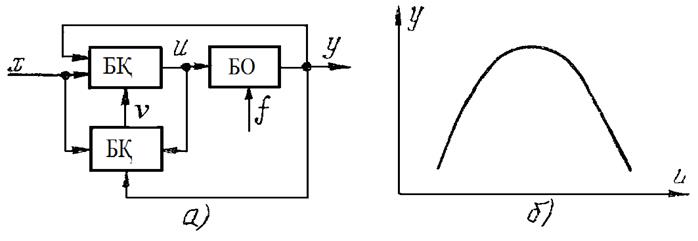
а – сұлба; б – объектінің сипаттамасы.
2.37 сурет – Электр жетегін бейімделген жүйемен басқарудың функионалдық сұлбасы
Бұл сигналдар үлкен өлшемнен
тұрады және критерия сапасының мәнін есептеу үшін
қызмет атқарады. Бейімделу құрылғысы ![]() сигналын өңдейтін үлкен өлшемнен тұрады.
Сонымен қатар анықталған x сигнал мәнімен, y
кері байланыстан түратын және кез-келген күрделі f
қоздыру әсерімен, әрбір уақыт аралығында
тәжирибелік мәнмен объектінің өңделу
сапасының (өнімділіктің, өзіндік құны
және т.б.) көрсеткішін алатын БҚ басқарылады.
сигналын өңдейтін үлкен өлшемнен тұрады.
Сонымен қатар анықталған x сигнал мәнімен, y
кері байланыстан түратын және кез-келген күрделі f
қоздыру әсерімен, әрбір уақыт аралығында
тәжирибелік мәнмен объектінің өңделу
сапасының (өнімділіктің, өзіндік құны
және т.б.) көрсеткішін алатын БҚ басқарылады.
Бейімделген жүйемен басқару класына өзіндік түзетілетін және өзіндік ұйымдастырылатын жүйелер жатады. Өзіндік түзетілетін жүйелерде бейімделген құрылғылар x кіріс, y шығыс және u басқару сигналдары туралы жиналған ақпараттардың негізінде, берілген мақсатта басқаруды орындау үшін БҚ реттеу параметрлерін өзгерту командасын береді. Ұйымдастырылатын жүйелерде басқару мақсатын орындау үшін жүйенің құрлысы өзгертіледі.
Өзіндік түзетілетін жүйелерде бақылау мақсаты сапаның статистикалық көрсеткішінің экстремумына жету болып саналады. Мұнда экстремум жағдайы басқару жүйесінің бақыланатын координаттарымен және бақыланбайтын қоздыру әсерімен қамтамасыз етіледі. Мұндай жүйелерде басқару мақсатына жету үшін және экстремум аймағында жұмыс жасау үшін басқару құрылғысы жүйенің реттеулерін беруді өзгертеді.
Басқару мақсаты электр жетегін басқару жүйесінің динамикалық құрлысын сипаттайтын талап етілген сапаның динамикалық көрсеткішіне жету. Әдетте бұл жүйенің параметрлеріне және координаттарына тәуелді болатын функционал, мысалы оған қателіктің бір интегралдық критериялары жатады. Бұл жағдайда сапа көрсеткішінің экстремумына жету басқару жүйесінің параметрлерін (күшейткіш коэффициенттері, реттеулердің тұрақты уақыты және кері байланыс) автоматты өзгертумен орындалады. Мұндай жүйелер реттеу құрылғыларымен өзіндік түзетілетін жүйелер деп аталады.
Электр жетегі және басқару объектісі туралы ақпарат бойынша өзіндік түзетілетін жүйелер сапаның динамикалық көрсеткішімен екіге бөлінеді. Ізделмейтін бейімделген жүйелерде берілген ақпарат негізінде, талап етілген сапа көрсеткішімен жүйенің жұмысын қамтамасыз ететін объектінің эталонды үлгісін құрылады. Ізделетін бейімделген жүйелерде объект туралы ақпарат толық емес және алдын-ала алынуы мүмкін емес, ол жұмыс процесінде өлшенуі қажет.
2.14 Электр жетегін басқарудың ізделмейтін бейімделген жүйелері
Ізделмейтін бейімделген жүйелерде талап етілген сапамен басқару, басқару объектісінің эталонды үлгісінің көмегімен орындалады. Мұндай үлгі алдын-ала белгілі объекті туралы ақпараттың негізінде құрылады және 2.38, а суретінде көрсетілген бейімделген басқару жүйесіне қосылады. Эталонды үлгі (ЭҮ) БҚ басқару құрылғысына кіреді, бірақ 2.38 суретте анық көрінуі үшін жеке көрсетілген.
Үлгілеу бейімделген құрылғысындағы nү сигналымен басқарылады. Ол u сигналы арқылы өтетін uү әсерін басқаратын сигналды БҚ арқылы қабылдайды. БҚ келіп түскен yү үлгінің шығыс сигналы болып саналады. Үлгі реттеу құрылғысының функциясын орындайды, сигнал бойынша БҚ жүйенің сипаттамасын өзгертеді. Үлгі объектінің белгілі сапасының көрсеткішімен құрылады. Мұнда объектінің және үлгінің көрсеткіші бірдей болу қажет. Үлгінің қосылу сұлбасы 2.38, б суретінде көрсетілген. ЭМ үлгісіне және БО басқару объектісіне объектінің талап етілген сапасын сипаттайтын бір x беру сигналы беріледі. Жүйенің жұмыс процесінде үлгі мен объектінің сапа көрсеткішін сипаттайтын y объектінің және yҮ үлгінің шығыс сигналдары критерияны есептеумен (КЕ) үлгісінің объектіге сәйкестігі салыстырылады. y объектінің сигналын yү үлгілеу сигналынан ажыратқан кезде КЕ y-ң yү-дан ауытқуына пропорционалды n әсерін өңдейді, оны БҚ басқару құрылғысына береді. Басқару құрылғысы арқылы объектіні басқару жүйесіне uқ сәйкес сигналды Р реттеуге береді. Реттеу (реттейді) объектінің u басқару сигналын өзгертеді, нәтижесінде объект өзінің шығыс y сигналын yү үлгінің эталонды сигналына жуық өзгертеді. Жүйенің мұндай өзіндік құрылуы реттеу параметрлерінің өзгеруінен параметрлік деп аталады.
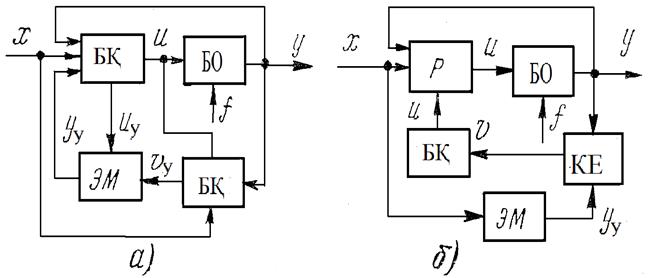
а – жалпы; б – үлгімен, объектімен параллель қосылған.
2.38 сурет – Үлгімен бейімделген басқару жүйесінің функционалдық сұлбасы
Мұндай жүйелерде БҚ түзету сигналдары реттеуге берілмейді, ал 2.38, а суретінде көрсетілген объектіні басқарудың кірісіне беріледі. Бұл жағдайда реттеу параметрлері өзгермейді. Мұндай жүйенің өзіндік құрылуы сигналды деп аталады.
Ізделмейтін бейімделген жүйелерде электр жетегінің динамикалық құрылысы тұрақтандырылады. Сондықтан этолонды үлгі анықталған беріліс функциясымен динамикалық буын түрінде көрсетіледі. КЕ басқару объектісінің динамикалық сипаттамасы туралы ақпаратты алу қажет немесе оны өлшенетін координатпен жанама анықтау қажет. y және yү тікелей өлшеу кезінде КЕ D y = yү – y ауытқуын анықтайтын сумматордың ролін атқарады.
Параметрлік құрылған бейімделген жүйені 2.39, а суретіндегі қысқартылған құрлымдық сұлба түрінде, ал сигналды құрылған бейімделген жүйені 2.39, б суретіндегі қысқартылған құрлымдық сұлба түрінде көрсетуге болады. Үлгінің әсерін анықтау үшін сигналмен құрылған сұлбаны қарастырамыз (2.39, б суретті қара). x беру сигналы объектіні және үлгіні басқару жүйесіне параллель беріледі. Оның y және yү шығыс сигналдары КЕ ролін атқаратын AW2 сумматорымен салыстырылады, ал олардың арасындағы D y = yү – y ерекшеліктері uу кері байланыс сигналы түрінде, AW3 сумматордың көмегімен объектіні басқару жүйесінің кірісіне беріледі.

а – параметрлі өзіндік құрылуымен; б – сигналмен өзіндік құрылуымен.
2.39 сурет – Үлгіден тұратын бейімделген жүйемен басқарудың құрылымдық сұлбасы
Жүйенің беріліс функциясы:
|
|
(2.15) |
 ,
,
мұндағы WБО, WҮ(р), WКБ(р) – басқару объектісінің, үлгінің және кері байланыс тізбегінің беріліс функциялары.
Егер кері байланысқа үлкен коэффициент берсек, онда WҮ(р), WКБ(р) сәйкес алымы мен бөліміндегі бірлікпен қосындыларын елемеуге болады. Онда беріліс функциясын мына түрде жазуға болады
|
|
(2.16) |
 немесе
немесе
(2.16) теңдеуінде басқару объектісінің шығыс координаты үлгінің динамикалық құрлысымен анықталатыны көрсетілген.
Үлгіден тұратын бейімделген
жүйемен басқарудың өзіндік құрылатын
жұмысын тұрақты токты қозғалтқыштың
жылдамдығын басқару жүйесінде мысал ретінде
қарастырамыз. Оның құрылымдық
сұлбасы 2.40 суретінде көрсетілген.
Қозғалтқыштың динамикалық процесінің сапа
көрсеткіші қозғалтқыштың жылдамдығы
және оның бірінші, екінші туындылары. Сондықтан uжм
қажетті жылдамдық мәнін және оның u·см бірінші, u··см екінші
туындыларын анықтайтын сигналдар эталонды үлгінің
шығысы болып саналады. Объектінің шығыс сигналдары -
тұрақты токты тиристорлы электр жетегі - w қозғалтқыш
жылдамдығын және оның бірінші, екінші туындыларын сипаттайды.
Қозғалтқыш жылдамдығына пропорционалды uс,о
сигналы тахогенератормен алынады, ал u· с,о бірінші және u·· с,о екінші туындыларына пропорционалды сигналдар бақылау
құрылғысымен анықталады. Оған
қозғалтқыш жылдамдығын сипаттайтын UЖБ
жылдамдықты беру және жылдамдық бойынша кері байланыс сигналдары
беріледі. Үлгінің uжм, u·см және u··см шығыс сигналдары эталонды үлгімен объектінің uс,о, u·с,о, u··с,о шығыс сигналдарымен AW1 – AW3 сумматорлар
арқылы салыстырылады. Олар Duж = uжм – uс,о,
Du·ж = u·жм – u·с,о, Du··с = u··жм – u··с,о сигналдардың айырымына сәйкес болады
және өзінің ![]() ,
, ![]() ,
, ![]() салмақтық коэффиценттерін есепке ала
отырып AW4 сумматормен, өзіндік құрылу арқылы Duå бірдей
сигналға қосындыланады.
Бұл сигнал Ашек
шектеу
құрылғысы арқылы электр жетегін басқару
жүйесінің кірісіне беріледі (AW сумматор) және тиристірлі түрлендіргіштің
жұмыс режимдерімен байланысқан, объектінің
параметрлерінің өзгеруін қалпына келтіретін өзіндік
құру сигналының кері байланысын құрады.
салмақтық коэффиценттерін есепке ала
отырып AW4 сумматормен, өзіндік құрылу арқылы Duå бірдей
сигналға қосындыланады.
Бұл сигнал Ашек
шектеу
құрылғысы арқылы электр жетегін басқару
жүйесінің кірісіне беріледі (AW сумматор) және тиристірлі түрлендіргіштің
жұмыс режимдерімен байланысқан, объектінің
параметрлерінің өзгеруін қалпына келтіретін өзіндік
құру сигналының кері байланысын құрады.
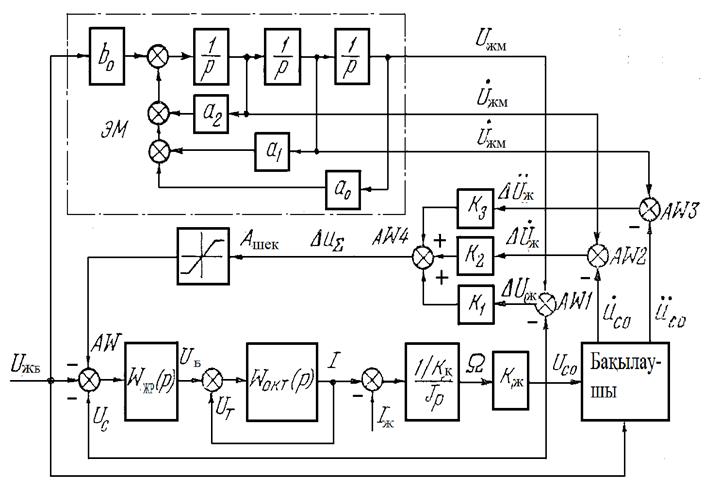
2.40 сурет – Тұрақты токты қозғалтқышты басқарудың өзіндік құрылу жүйесінің құрылымдық сұлбасы
Қарастырылған үлгі және бақылау эталондарынан тұратын тұрақты токты қозғалтқыштың бейімделген жүйесі берілетін және қоздыру әсерлері кезінде жүйені жоғарғы тез әсеретумен, аз қайта реттеумен және бір тербеліспен тиімді өтпелі процесін қамтамасыз етеді.
Параметрлі өзіндік құрудан тұратын өзіндік құру жүйесінің мысалы ретінде бейімделген реттеу тоғымен (БРТ) өзіндік құрудан тұратын жүйе қарастырылады. Оның функционалдық сұлбасы 2.41, а суретінде көрсетілген. Мұндай БРТ реттеу координатына бағынатын тұрақты тоқты тиристорлы электр жетегінде қолданылады. Бұл жүйелерде қолданылатын ПИ-ток реттеуі электр жетегі үздіксіз ток режимінде жұмыс жасау кезінде таңдалады.
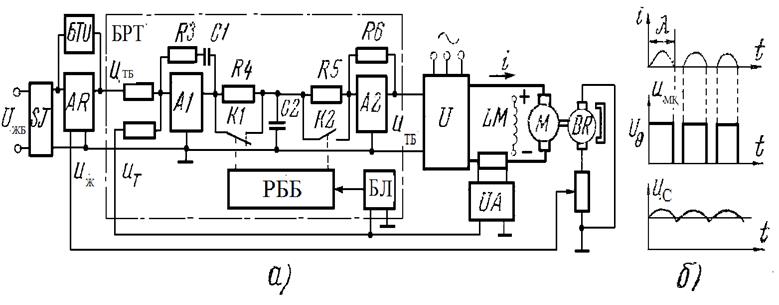
2.41 сурет – Бейімделген реттеу тоғымен тиристорлы электр жетегінің өзіндік құру жүйесінің қысқартылған принципиалдық сұлбасы
Токтардың үзіліс режимдерінде түрлендіргіштің RЭЖ эквивалентті кедергісі өседі, бұл жағдайда тиристорлардың өткізгіштігі l бұрыш функциясы болып саналады
|
|
(2.17) |
мұндағы fЖ – жүйені қоректендіретін жиілік тоғы; m – тиристорлы түрлендіргіштің күштік сұлбасының пулсі; L – П – Қ білік тізбегінің толық индуктивтілігі.
Сонымен қатар ТР ток реттеуінің ТРТ тұрақты уақыты өзгереді, осыған сәкес электр жетегінде үздіксіз ток режимінен үзік ток режиміне өту кезінде ТР құрлысын өзгерту қажет және ПИ-реттеуінен И – реттеуіне өтіп, l2 пропорционалды Т\ТР өзгерту қажет.
2.41, а суретінде
көрсетілген БРТ сұлбасы
[6] қажетті қосылуларды қамтамасыз етеді. БРТ A1 күшейткішінде ПИ-реттеуінен,
R4 – C2
инерциалық буыннан және A2 күшейткішінен тұрады.
Жүйенің қосылуы реттеумен блокты басқару РББ
арқылы орындалады. Білік тоғын логика блогы ЛБ бақылайды. Үздіксіз ток режимінде БРТ жұмыс
жасамайды, K1 кіліті тұйықталған, ал K2 ажыратылған.
R4 резисторы шунтталған, R5=R6 кезінде A2 күшейткіш
коэффициенті бірге тең болғандықтан ПИ-реттеу
тоғы пайда болады. Үздік ток режимінде ЛБ токтың
жоқтығын анықтайды және БРТ қосады. K кіліті
тұйықталады R4, резистор және C2 конденсатор TТР=R4C2
тең ПИ-ТР тұрақты уақытпен инерциалық
буынды құрады. K2 кілті БРТ-ғы ендiк – импульстiк модулятордың ЕИМ көмегімен
R5 резисторын ![]() пропорционалды коммутациялайды. Сонымен қатар БРТ
тұрақты уақытпен өзгеретін И- реттеуіші болып
саналады.
пропорционалды коммутациялайды. Сонымен қатар БРТ
тұрақты уақытпен өзгеретін И- реттеуіші болып
саналады.
K2 кілтін коммутациялайтын құрылғы 2.41, б суретінде көрсетілгендей жұмыс жасайды. U0 тұрақты кернеу uмқ кернеуіне модулятор арқылы үлгіленеді, анықталған l түзетіліп және l пропроционалды ul кернеуіне түрленеді. Сонымен қатар R5 резистор кедергісі u2l пропорционалды өзгереді.
2.15 Электр жетегін басқарудың бейімделген іздеу жүйесі
Іздеу жүйесі дегеніміз объекті туралы толық ақпараттың болмауы мен оның сипаттамаларының өзгеруі кезінде автоматты іздеуді тиімді басқаруды шешетін жүйе.
Автоматты іздеуді бейімделген іздеу жүйесі бір координатты болады деп қарастырып, 2.42, а суреті арқылы түсіндіруге болады. БҚ құрылғысы БО басқару объектісіне импульстік немесе гармоникалық сигналдар түрінде әсер берсін деп қарастырайық. Бейімдеу құрылғысы БҚ оның нәтижелерін талдайды, БҚ арқылы объектіні басқарады және оны «тиімді жағдайға» келтіреді.
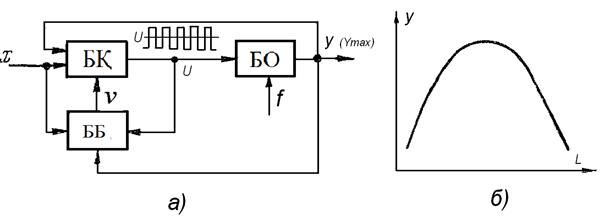
а – сұлба; б – объектінің сипаттамасы.
2.42 сурет – Электр жетегін басқарудың бейімделген бір контурлы іздеу жүйесінің функционалды сұлбасы
Электр жетегін басқару үшін бейімделген іздеу жүйесінде y(u) статистикалық сипаттамадан тұратын және бұл сипаттаманың экстремумға шығуын автоматты басқаруды талап ететін автоматты іздеуді жиі орындау қажет болады. ды талап етеді (2,42 б суретті қара). Егер бейімделген іздеу жүйесінің жағдайы берілген уақыттың A нүктесімен сипатталатын болса, онда басқару сигналы Du жоғарлаған кезде y сигналы Dy сигналына өзгереді. Мұндағы
|
|
(2.18) |
Бнүктесі үшін керсінше,
|
|
(2.19) |
Яғни, Ymax максимумына шығу үшін бірінші жағдайда u жоғарлау қажет, ал екінші жағдайда u төмендеу қажет.
Мұнда басқару объектісі жұмыс процесі кезінде f және t тәуелділігіне өзгеруі мүмкін экстремалды статистикалық сипаттамалардан тұрады.
Электр жетегінің бейімделген іздеу жүйесінің мақсаты уақыт өте келе өзі өзгеруі мүмкін, y шығыс координатының мәні Ymax экстремум нүктесіне максималды жақындауы.
Мұнда өтпелі процестері объектіге берілетін uА + DuА немесе uБ + DuБ сигналдардың өңделуі түрінде орындалады. y координатының максималды мәнге жақындауы бірнеше «қадамдармен» орындалады.
Экстремумды іздеу принципі 2.43 суретінде көрсетілген. Басқару және объектінің БО сигналдарын іздеу үшін алдымен u жоғарлайды, одан кейін төмендейді. u сигналының жоғарлауы шығыс сигналы Ymax экстремумға жеткенде орындалады және басқару объектісінің сипаттамасына қарай төмендейді. Бейімдеу құрылғысымен БҚ белгілеу кезінде Dy тең іздеу аймағы ІА басқару сигналын төмендету бұйрығын береді, одан кейін y шығыс координатасы алдымен жоғарлайды, сосын БО сипаттамасына сәйкес төмендейді. Іздеу аймағымен анықталатын y сигналы Dy төмендеген кезде БҚ басқару сигналын қайта реверстейді.
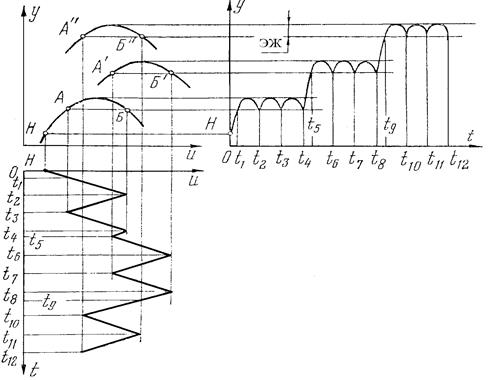
2.43 сурет – Адаптивті іздестіру жүйесінде экстремумды іздеу принципі
Ymax мәні жоғарлағанда, объектінің сипаттамалары жылжығанда және y жаңа экстремалдық мәнге жеткенше u сигналы реверстелмейді. Іздеу осы қалпында жүзеге асырылады, бірақ Ymax басқа мәнде болады.
3 Қазіргі уақытта ЭЕМ-да басқару жүйесін зерттеу әдістері
3.1 Басқару жүйесінің компьютерлік үлгісі
Зерттеу мақсатына қажетті құрамнан тұратын нақты объектінің (түпнұсқаның) бейнеленуі модель деп аталады. Модель түпнұсқаның барлық параметрлерінен тұрмауы қажет, егер түпнұсқаның барлық параметрлерінен тұратын болса, онда ол өзі түпнұсқа болып саналады.
Модельдеу – бұл түпнұсқаны шартты бейнемен немесе басқа объектімен орынын ауыстыру (модельмен) және модельдің құрылысын зерттеу арқылы түпнұсқаның құрылысын оқу. Толық тексерілуден өтпеген кез келген модельдерде шыққан нәтижелердің дұрыс болмауы мүмкін, сондықтан мұндай модельдерді мұқият қарау қажет. Модельдің баламалылығы басқа көздердің тәжирибелерімен тексеріледі.
Модельдеу кезінде модель мына жағдайларды орындайды деп жобаланады:
- түпнұсқа құрылысын дұрыс (баламалы) бейнелеуді қамтамасыз етеді;
- нақты объектіні зерттеуге кедергі жасайтын қиындықтарды шешеді (объектінің мөлшерлері, уақыт масштабы, зерттеудің қайталануының мүмкін еместігі және т.б.).
Әрбір объект құрылыстары бойынша бір-біріне ұқсас болып келеді, модельдеу осыған негізделген. Бұл төмендегі принциптермен көрсетілген:
- табиғаттың негізгі заңдарының сандарын шектеу принципі;
- ұқсастық принципі (әр түрлі физикалық табиғаттың құбылысы бірдей математикалық тәуелділікпен бейнеленеді).
Сәйкесінше, модельдерді физикалық (геометриялық тәрізді, физикалық заңға ұқсас) және абстрактілі (сөздік, математикалық) деп екіге бөлуге болады. Математикалық модельдер графикалық (құрылымдық сұлбалар, кескіндер), кестелік (кестелік мәліметтер), алгоритмді (ЭЕМ үшін бағдарламалар), және аналитикалық (формулалар) болып бөлінеді.
Модельдеудің екі қатынасы болады. Бірінші қатынас бойынша модель арқылы объекті туралы жаңа мағлұмат алуға болмайды деп болжайды, себебі модельді құру кезінде оған белгілі байланыстар ғана жинақталады. Сәйкесінше модель дегеніміз түпнұсқаның орнын ауыстыратын есептеу объектісі. Екінші қатынас бойынша жүйенің белгілі элементтер жиынтығы мен олардың бір-бірімен байланыстарында жеке элементтерде болмайтын жаңа құрылымдар және жаңа мағлұматтар пайда болады. Бірақ түпнұсқамен салыстыру арқылы олардың дұрыстығы расталады немесе терiске шығарылады.
Компьютерлік модельдеу – бұл есептеу техникасының тәсілдерін қолдана отырып объектіні математикалық модельдеу. Әдетте ол модельдің мақсатын анықтау, тұжырымды модельді өңдеу, модельді құру, модельді бағдарламалық құру, модельдік зерттеулерді жобалау, зерттеулерді құру, зерттеулер нәтижесін талдау және түсiндiруден тұрады.
Әрбір кезеңнің мазмұны модельдеу әдісін қабылдау мен оны орындаушыларға тарату болып саналады. Лабораториялық тәжирибеде студенттер зерттеулерді құру мен оны талдауды орындайды. Аналитикалық модельдеу кезінде математикалық модель дайын алгебралық, дифференциалдық немесе шектеумен құрылған кіріс айнымалыны шығыс айнымалымен байланыстыратын басқа теңдеулер арқылы беріледі. Мұнда дәл шешімді алу үшін бір мәнді есептеу тәртібі болады. Еліктеу модельдеуінде математикалық модель зерттеушілермен таңдалған, қоршаған ортаның және жүйе параметрлерінің мәндерінің әртүрлілігі үшін уақыт бойынша зерттелетін жүйенің алгоритмін (логиканы) құрады.
Компьютерлік модельдеуде уақыттың үш түрі болады. Біріншісі нақты деп аталады - мұнда жүйе қозғалады, екіншісі модельді (жүйелі) уақыт, мұнда мөлшермен жұмыс модельдері құрылады, үшіншісі машина уақыты, ол еліктеу процесіне кететін ЭЕМ шығынын сипаттайды. Модельді уақыт нақты процестің өту ұзақтылығымен салыстырғанда үлкен және аз мөлшерден тұрады. Ол тұрақты қадаммен немесе ерекше жағдаймен өзгереді.
Модельдің тұрақтылығы оның барлық аралықта қолданылуы кезінде түпнұсқаға сәйкес болуымен немесе жүйенің құрылысына өзгеріс еңгізумен сипатталады.
Модельді құру объектіні теңестіру деп аталады, оған мыналар жатады:
- процесс кезінде объектіге сәйкес келетін модельдің түрі таңдалатын және құрамында модельдің элементтері (құрылысы) құрылатын құрылымдық теңестіру;
- таңдалған модель түріне маңызды және зерттелу мәліметтері бойынша параметрлердің мәндерін есептейтін параметрлік теңестіру. Ол мәліметтерді өңдеуден, мысалы жуықтатудан (аппроксимация) және т.б. тұрады;
- баламалылықты тексеру, объектінің және модельдің жақындығын тексеру.
Теңестірудің мақсаты – объектінің кіріс және шығыс сигналдарын бақылау, уақыттың бірнеше аралығында бұл сигналдарды байланыстыратын оператордың түрін анықтау және қателік тудыратын бөгет пен дыбысты өлшеу шарттарымен оны мөлшермен бағалау. Теңестірудің ең қарапайым мақсаты сызықты үзіксіз стационарлық динамикалық объектілер үшін шешіледі.
Сонымен қатар зерттеу уақытын және қадамның ұзындығын таңдау маңызды рөлді атқарады. Зерттеу аралығын таңдау үшін мысалы лабораториялық жұмысты орындау кезінде әр түрлі бастапқы мәліметтермен бірнеше сыналатын зерттеулер жүргізіледі және нәтижесі талданады. Қадамның ұзындығын таңдау әр түрлі жағдайдың пайда болуының орташа үдемелілігі бойынша орындалады. Ерекше жағдайы бөтен тәсiлдермен айқындалады, мысалы өтпелі процесті құруда арақашықтықты автоматты таңдау үшін жүйенің полином сипаттамалық түбірін зерттейді.
ЭЕМ қолданып басқару жүйесін теңестіру мақсаты мына түрге бөлінеді: объектінің түрі бойынша (сызықты, сызықты емес, стационарлы, стационарлы емес, үзіксіз, дискретті), модель түрі бойынша (дифференциалды теңдеу, беріліс функциясы, импульсті сипаттама, өтпелі сипаттамалар, жиілікті сипаттамалар, әр түрлі теңдеулер), ақпаратты өңдеу тәсілдері бойынша (статистикалық емес немесе анықталынған тәсiл, статистикалық немесе ықтималдылық тәсілі). Теңестіру пассивті тәжірибе (объектінің кіріс - шығысын қарапайым бақылау және мәліметтерді өңдеу), немесе активті тәжірибе арқылы (зерттеуші әсер ету ісін өзі құрып таңдауы) орындалады.
Басқару жүйесін модельдеудің бастапқы жабдықтары ретінде шешу блоктарын (операциялық күшейткіштер) жинаудан тұратын аналогты есептеу машиналары (АЕМ), өткізгіштердің көмегімен сұлбаны құру ағымы, параметрлер мен индикаторларды (көрсету аспаптары, осциллограф) реттеу элементтері қызмет етеді. АЕМ көмегімен объекті мен модельдердің физикалық заңдарына негізделген модель құрылады.
Қазіргі уақыттағы басқару жүйелерін зерттеу санды ЭЕМ қолдану арқылы орындалады. Әр түрлі ұйымдармен өзіндік бағдарламалық жабдықтар өңделеді. Мысалы, Павлодар Мемлекеттік университінде LinCAD бағдарлама жиынтығы нақты шешім үшін ыңғайландырылған [18].
LinCAD кітапханасы DOS басқаруы арқылы сызықты жүйені зерттеу үшін бағдарламалардың жиынтығынан тұрады [18] және білім беру мақсатымен қолданылады. Лабораториялық тәжірибеде [19] басқару жүйесіне сәйкес кітапхананың жартылай бағдарламасы қолданылады. Олар: TIMECHAR "Уақыттық сипаттамалар", FREQCHAR "Жиілікті сипаттамалар", MICHCHAR "Михайлов критериялары", DRAZBTWO "D-екі параметрлер бойынша бөлу", ROOTLOCS "Түбірлі годограф", EILERPIC "Өтпелі сипаттамалар", BODECHAR "Логарифмдік сипаттамалар".
Кең көлемді тағайындалған әр жақты бағдарламалық жабдықтар бір уақытта дамып және кең қолданылады. Оған The Math Works, Inc фирманың MATLAB жатады.
MATLAB – интерпретатор ретінде жұмыс жасайтын, әр түрлі есептеулерді орындау үшін көп командалардың жиынтығынан тұратын, мағлұматтардың құрылымын беру мен ақпаратты кесте түрінде бейнелейтін жоғарғы деңгейлі бағдарламалау жүйесі. Сонымен қатар Control System Toolbox қолданбалы бағдарламалардың пакет командасы қолданылады, ол басқару жүйесінің LTI – модельдерімен (Linear Time Invariant Models) жұмыс жасау үшін арналған [20].
MATLAB Simulink – кітапхана блоктарының негізінде динамикалық жүйелерді модельдеу, талдау мен синтездеу үшін арналған интерактивті құрал [20,21]. Simulink MATLAB-тың дербес құралы, бірақ MATLAB құрамына және оның басқа құралдарына кіру ашық болады.
Сонымен қатар әр түрлі аймақта қолданылатын блоктың қосымша кітапханалары болады (электр техникалық құрылғыларды модельдеу, санды құрылғыларды өңдеу үшін блоктардың жиынтығы және т.б.).
Мамандандырылған өнім көлемі аз, құрылуы және қолданылуы оңай болады. Әр жақты өнім әр түрлі есептерді шешу үшін бір уақытта қолданылады, бірақ көлемі үлкен және бағасы қымбат.
3.2 MATLABта модельдеудің нәтижелерін бағалау
Кез келген модельді (сонымен қатар компьютерлік модельдерді) қолдану нақты нәтижелердің баламалылығын және талдауын мұқият тексеруді қажет ететіндіктен, ТМД оқу әдебиеттеріндегі жалпы қабылданған анықтама арқылы MATLAB-тағы сапаның тура көрсеткішін бағалау кезінде болатын сәйкессіздікті қарастырамыз.
MATLAB-тағы өтпелі процестің типтік грфигі (3.1 суретті қара) арқылы реттеудің тура көрсеткішін бағалу принципі түсіндіріледі.
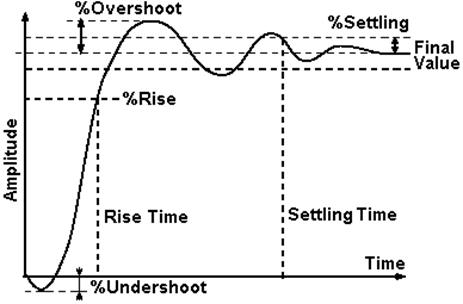
3.1 сурет - MATLAB-тағы өтпелі процестің типтік графигі
Суретте өтпелі процестің берілген мән бойынша жоғарлайтындығын (Overshoot) және бастапқы мәннен (Init) төмен құлайтындығын (Undershoot) бағдарлама ажырата алатындығы көрсетілген. MATLAB анықтамасында реттеу уақытын бағалау Δ (% Settling) аймағы 5 % тең деп айтылған, бірақ нақты жағдайда 2 % ретінде берілген және уақыттың өсу аралығын бағалау 10-нан 90 % дейін болады. Анықтама бойынша осы екі шамалар қалыптасқан мәнмен (Final Value) есептелінетіндігі көрсетілген, бірақ тәжірибеде бұл кей кездері іске аса бермейді. MATLAB қалыптасқан мәннің ең көп ауытқуын максимум есептейді (Peak Response). Реттеу жүйесін зерттеу кезінде беріліс функциясының үш түрі болады: m = 0 (нөлдер болмайды) – бұл беру кірісінен r(t) реттеу шығысына y(t) дейінгі негізгі беріліс функциясы болып саналады; m = n (алымындағы m полином қатары бөліміндегі n полином қатарына тең болады) – бұл берілістен реттеу қателігін беру функциясына сәйкес келеді; 0 < m < n (бұл функциялар, ауытқудың реттеу шамасына және реттеу қателігіне әсері).
MATLAB-та модельдеу нәтижелерінің талдауы m = n кезіндегі жүйе үшін сапаның көрсеткіші дұрыс болмауы мүмкін екендігін көрсетті, ал жеке алғанда қайта реттеу және уақыт мәні жоғары болады.
Беріліс функциялы жүйелер үшін қайта реттеудің (Overshoot)
статистикалық жүйе қателігі өтпелі функцияның графигінде 200 % мәнімен көрсетілген (3.2 суретке қараңыз), осы жүйені түбірлі әдіспен бағалағанда беріліс функцияларының полюстары бойынша MATLAB бағдарламасы қайта реттеудің 10,8 % мәнін береді. Егер оқулықтағы стандарттық ережені қолдана отырып өзіміз қисық сызық бойынша есептесек, онда қайта реттеу (0.333-0.261)/(1.000-0.333) = 0.072/0.667=0.108, және 10,8 % тең болады.
Яғни, бұл дегеніміз нөлдік жүйеден (m = 0)
толық алып тастағанда өтпелі сипаттама бойынша
бағдарлама 10,8 % мәнді шығарады, мысалы, негізгі беріліс
функциясы үшін  . Қайта реттеу
шамасы бойынша жүйені қалай бағалауға болады – ол нашар ма (200 %) немесе жақсы ма (10,8 %)?
. Қайта реттеу
шамасы бойынша жүйені қалай бағалауға болады – ол нашар ма (200 %) немесе жақсы ма (10,8 %)?
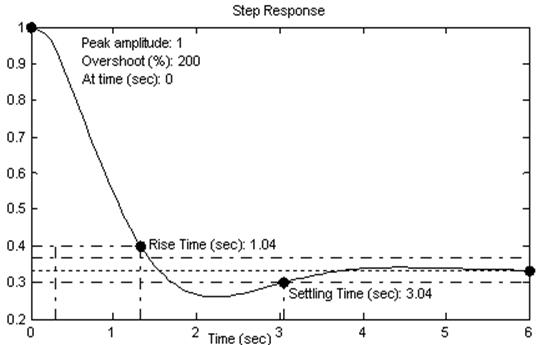
3.2 сурет - Overshoot – 200% кезіндегі жүйенің өтпелі функцияларының графигі
Бағдарлама реттеу уақытын бағалау үшін Δ шаманы ұсынылған тәсілге сәйкес, 0.05·(1.000-0.333) = 0.05·0.667=0.033 болатын бастапқы және қалыптасқан мәндердің айырмынан 5 % алады. Бұл тәсіл өсу уақытын есептеу үшін де қолданылады. Бағдарлама қайта реттеуді түбірлік бағалауды және стандарттық әдістермен есептеуді қолданбайды. Себебі реттеу шамасының ырғытуы кезінде оған өз жүйесінің құрылысын анықтау маңызды емес, оған бұл ырғудың тұтынушыларға әкелетін зияндығы маңызды. m = n жағдайы реттеудің шығысына тән емес, ал тұтынушылар болмайтын шығыс қателігіне тән болады. Бірақ бағдарлама қандай шығыста сапа процессі болатынын көрсете алмайды, бұл компьютердің алдында отырған адамның міндеті.
Мысалда бағдарламаның өнімі өте мықты болғанымен қажетті нәтижені алу үшін модельдеу нәтижесін әр түрлі тәсілдермен тексеріп көру қажеттігі айтылған.
Беріліс функциясының бастапқы мәні туралы теоремаға сәйкес t = 0 кезіндегі сипаттаманың шегі жүйенің полином сипаттамасы арқылы емес, ал алымында және беріліс функциясының бөлімінде s үлкен дәрежелі болғандағы коэффиценттердің ара қатынастары арқылы анықталады. Бұл өз жүйесінің құрылыстарымен байланыспаған, кешенді жазықтықта плюстер мен нөлдердің орналастырылуынан ауытқи алмайды. Қорыта келгенде, MATLAB-та реттеу сапасын бағалау кезінде уақыттық және түбірлік модельдер бір-біріне қарама қарсы нәтижелерді беруі мүмкін.
Беріліс функциясы
W(s)=(s^3+2s^2+3s)/(s^4+2s^3+3s^2+4s+1.2)
өтпелі сипаттама нөлден басталып нөлден бітетіндігін сипаттайды (3.3 суретті қараңыз). Қайта реттеу мәні шексіздікке (Inf) тең! Түбір картасы 83,5 % табиғи және басқа мәнді береді. Егер оқулықтың ұсынысына жүгінсек, онда қайта реттеуді максимумның бір толқынның өзгерісіне қатынасы арқылы қарастырады, яғни 105 %, немесе екінші максимумның бірінші максимумға қатынасы, немесе 0,237/1,05 = 0,226 (22,6 %) арқылы қарастырады. Жүйе өте келісімді болып келеді.

3.3 сурет - Overshoot – Inf кезіндегі жүйенің өтпелі сипаттамасы
Жалпы жағдайда қайта реттеу бірінші максимум арқылы анықталуы қажет. tmax – бірінші максимумның жеткен уақыты. Бірақ MATLAB қисық сызық бойынша бірінші емес үшінші максимумды алады, яғни жергілікті максимум емес және тізім бойынша біріші емес, ал ең үлкен максимумды (абсолютті) алады (3.4 суретті қара). Түбірлік әдіске бұл принцип ешқандай қатынасы жоқ, бірақ ең жоғарғы ауытқу таңдалатындықтан тұтынушыларды қорғауды қамтамасыз етеді (жоғарыда атйтылып өткен).
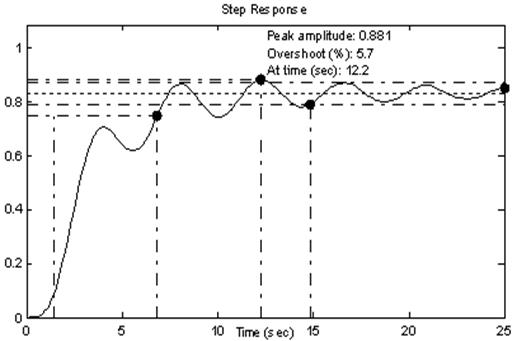
3.4 сурет – MATLAB аймағында қайта реттеу шамасын анықтау
Қайта реттеуді стандартты анықтауға қарамастан бағдарлама максимум ретінде кері жартылай тербелістің экстремум таңдай алады (3.5 суретті қара). Мұнда қалыптасқан мәні кері болып келеді, кесте нөлден басталады, сондықтан қалыпты мәндегі сызық арқылы төмен құлауы қайта реттеу болып саналуы керек.
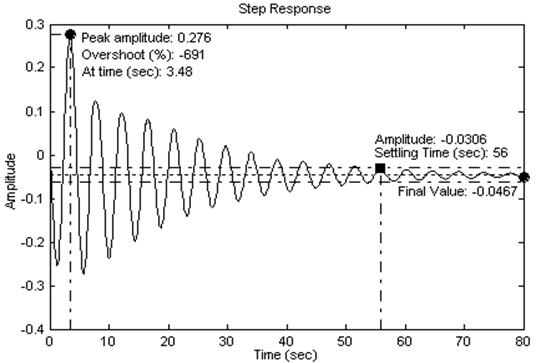
3.5 сурет - MATLAB аймағында кері жартылай толқынның экстремумын анықтау
Сонымен, MATLAB бірінші емес, ал оның белгісіне және реттік нөмеріне қарамастан (оңға немесе солға қарй нөлден ең үлкен ауытқуы) абсолютті максимумды таңдайды және мәні оң немесе теріс болсын қалыптасқан мән үшін қайта реттеуді есептейді. Сонымен қатар қайта реттеу мәні теріс болуы мүмкін (-691%), ТМД оқу әдебиетінде мұндай жағдайлар ескерілмеген.
|
|
|
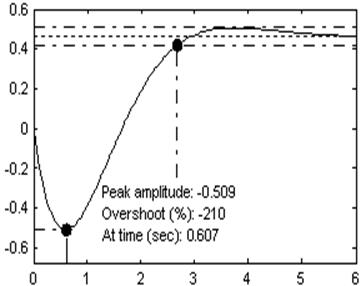
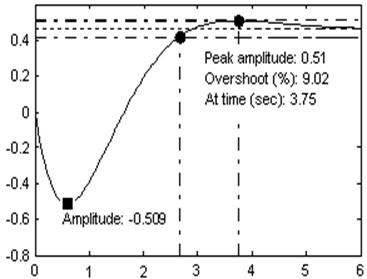
Сонымен W(s)=(-2s+0.93)/(s^2+2s+2) және W(s)=(-2s+0.935)/(s^2+2s+2) беріліс функцияларынан тұратын өтпелі сипаттамалар 3.6 суретте көрсетілген .
3.6 сурет – Екі жүйенің өтпелі сипаттамалары
Бірінші жүйе -1±1j және нөл 0.465 полюстерінен тұрады. Реттеу уақыты 2,67 с; өсу уақыты 0.952 с; ауытқуы -0.509, максимум 0.507, қайта реттеу -210 % тең. Екінші жүйе -1±1j және нөл 0.468 полюстерінен тұрады. Реттеу уақыты 2,67 с; өсу уақыты 0.953 с; ауытқуы -0.509, максимум 0.51, п қайта реттеу 9.02 % тең.
Буындар мен сипаттамалар параметірлерінің айырмашылығы өлшеу қателіктерінің шегінде болады (бірінші жағдайдағы нөл 0.465 тең, екінші жағдайда 0.468 тең; біріші жағдайдағы максимум 0.507, екінші жағдайда 0.51). Іс жүзінде жүйелер мен олардың сипаттамалары ерекшелінбейді. Бірақ Overshoot есептелінген мән MATLAB-та реті бойынша ерекшеленеді және таңбасы бойынша да ерекшеленеді.
Сонымен MATLAB-та модельдеу кезінде алынған нәтижелер анықтамасы бойынша және бір - біріне көбiнесе қарама қарсы болып келедi. Оларды өте абайлап қолдану қажет, әсіресе өтпелі сипаттама нөлден басталмағанда (яғни m=n болғанда); нөлден біткенде (астатикалық буын, bm=0); бірдей деңгейде басталып және біткенде; әр түрлі полярлық мәндерден тұрғанда.
3.3 Simulink – модельдеудің интерактивті құралы
Simulink-та жүйенің құрылымдық сұлбасы бағдарлама кітапханасындағы дайын шартты кестелік белгілеудің (ШКБ) көмегімен құрылады [20,21]. Ол үшін File-New-Model опциямен Simulink немесе Library Browser кнопкасымен жұмыс бағанасын және кітапхана каталогын ашу қажет. m > n болғанда кеңістік жағдайында жеке дифференциялдау буыны берілуі мүмкін емес.
Тышқан арқылы қажетті блоктарды элементтер терезесінен құрастыру терезесіне Беріліс функциясын (Transfer Fcn – Continues), Күшейткіш Gain және Қосындылауды Sum (Commonly Used Blocks бөлімі) сүйреп шығарып алса жеткілікті және олардың кірісін шығыспен жалғап жүйенің құрылымдық сұлбасын құруға болады. Блоктың түйінін және кірісін жалғаған кезде жалғау сызығын кірістен бастаған дұрыс. Format контекстiк мәзiрінің Flip және Rotate бұйрықтарын блок бағдары арқылы өзгертуге болады. Блоктардың стандарттық аталуын қалаулыға өзгерту қажет.
Тышқанның оң немесе сол кнопкасын екі рет басып элементтің құрылысын ашып (Block parameters), сандық шамаларды беру қажет. Полиномдар коэффициенттері s жоғарғы дәрежелі коэффиценттен бастап, пробелмен бөліне отырып, тізбектей, тік жақшалармен векторлар түрінде жазылады (айнымалы s жазбайды). Егер блоктың бейнеленуінде толық коэффиценттер көрінбесе немесе олар жазумен алмастырылған болса, онда блоктың көріну мөлшерін жоғарлату қажет (тік бұрышты созу).
Сол сияқты қосындылаудың құрамын ашып түрлендіргіштің кірісіндегі қосуды алуға алмастырады (3.7 суретті қара). Қосындылаудың кірісі сол ортаға қатысты симметриялы орналасады, көлденеңдігі кірістің қолданылмайтын бөлігіне сәйкес болады. Мысалы, ++| дегеніміз кірістердің ортаға және жоғарыға орналасуын білдіреді, |+- дегеніміз ортада инвертцияланбайтын кірісті және төменгіде инвертцияланатын кірісті білдіреді, +|+ дегеніміз жоғарыда және төменде бір кірістен тұратындығын білдіреді.
3.7 сурет – Модель элементінің сұлбасы
Сұлба кірісіне сигналдар көзін қосып (Sources), ал оның шығысына бейнелеу құралын қосып (Sincs) және кеңейтілген файл түрінде оны сақтап mdl. дайын сұлбаны сынауға болады. Егер жүйе кіріс (Input) және шығыс (Output) блоктарымен байланысқан болса, онда Tools-Control Design-Linear Analysis (Құралдар-Басқару жүйесін жобалау-Сызықты талдау) мәзірі арқылы Control and Estimation Tools Manager терезесін ашып, Linearize Model (Модельді алу) бұйрығы арқылы жүйенің математикалық моделінің санды параметрлерін кестелік талдауға беруге болады. Оның терезесінде LTI Viewer: Linearization Quick Plot өтпелі сипаттамалар тұрғызылады. Модельдің параметрлерін MATLAB бағдарламасының WorkSpace мәліметтер базасына беру үшін File-Export мәзірі арқылы LTI Viewer Export диалогты терезені ашып, тышқанмен екі рет басып Export As жолына модельдің атын жазу қажет, одан кейін Export to WorkSpace бұйрығымен мәліметтерді беріп, жобаны сақтамай соңғы үш терезені жабу қажет.
Егер жүйе кіріс (Input) және шығыс (Output) блоктарымен байланысқан болса, онда оның матрицалар түрінде жазылған A, B, C, D параметрлерін[a, b, c, d] = linmod (‘модельдің аты’) арқылы анықтауға болады, одан кейін ss(a, b, c, d) функция жағдайы туралы анықтаманы алады. Назар аударыңыз! Жүйенің кіріс және шығысы (олардың нөмерлеріне) қандай ретпен қосылатыны айнымалы жағдай индекстерінің тағайындалуына тәуелді болады. [num, den] = linmod (‘модельдің аты’) арқылы жүйенің сызықты модельінің беріліс функциясының бөліміндегі және алымындағы коэффициенттерінің векторларын алуға болады.
Кешігу буыны (Transport Delay) Паде ретіне жіктелген Simulink-та модельденеді. Сұлбаны құрған кезде типтік блоктың құрамындағы n жіктелу ретін және кідіру уақытын τ (секунд) көрсету қажет.
Құрылған модельді қолдана отырып уақыт аймағы бойынша негізгі сипаттамаларын алуға болады. Мысалы, объектінің параметрлеріне сәйкес бақылау коэффициенттерінің мәнін береміз: b = 0.25, a10 = 0.5, a20 = 0.25.
Қалаулы сипаттамалық полином ретінде a0 = 1, a1 = 1.41, a2 = 1 коеффициенттерінен тұратын екінші реттік Баттерворттың мөлшерлелген полиномның тұйықталған жүйесін таңдаймыз. Осы арқылы tр = 2.9 с, σ= 4.5 % жағдайды реттеумен жүйенің сапа көрсеткішін алуға болады. Коэффициент мәнін реттеуде болатын нөлдік қателік шарты бойынша K = a2/b = 1/0.25 = 4, онда айнымалы жағдай бойынша кері байланыс коэффициенттерінің мәні мына түрде анықталады


Simulink-те реттеу объектісінен, бақылаушы мен модельді реттегіштен тұратын құрылымдық сұлбаны құрамыз (3.8 суретті қара). Оның параметрлерін жұмыс аймағына береміз, екі шығыс бойынша бірдей серпімділіктегі әсерлерді тұрғызамыз.
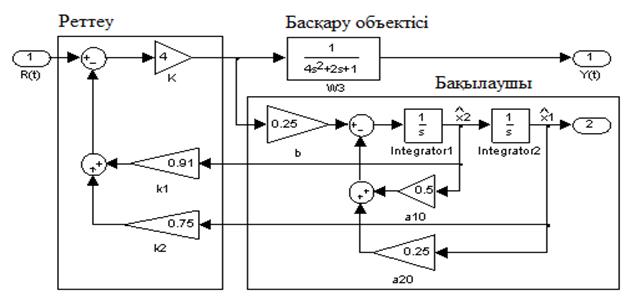
3.8 сурет - Simulink арасындағы жүйенің құрылымдық сұлбасы
Өтпелі сипаттамалар қажетті сапа көрсеткішін (қайта реттеу 4.4 %, реттеу уақыты 2.92 с, берілген мән 1.0) алуды (3.9 суретті қара) және бастапқы шарттың бірдей болуы кезінде y(t) реттеу объектісіні мен x1(t) бақылаушының шығысындағы әсердің бірдей болуын орындайды.
3.9 сурет - Simulink арасындағы жүйенің өтпелі сипаттамалары
Әдебиеттер тізімі
1. Ильинский Н.Ф., Козаченко В.Ф. Общий курс электропривода. – М.: Энергоатомиздат, 1992. – 543с
2. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. – Л.: Энергоиздат, 1982. – 392с
3. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. – М.: Высш. Школа, 1979. – 318с.
4. Электропривод с цифровым управлением. – Материалы семинара / Под ред. А.Е. Козярука. – ЛДНТП, Ленинград, 5-6 февраля, 1991. – 92с.
5. Елисеев В.А. Цифровые системы управления электроприводами: Учебное пособие. – М.: МЭИ, 1985. – 104 с.
6. Перельмутер В.М., Соловьев А.К. Цифровые системы управления тиристорным электроприводом. – Киев: Техника, 1983. – 104с.
7. Ахиетжанов А.А., Кочемасов А.В. Следящие системы и регуляторы. – М.: Энергоатомиздат. 1986. – 288с.
8. Следящие электроприводы / Под ред. Б.К. Чемоданова. – М.: Энергия, 1976. – 480 с.
9. Гумен В.Ф., Калининская Т.В. Следящий шаговый электропривод. – Л.: Энергия Ленингр. отд – ние, 1980. – 168с.
10. Ивоботенко Б.А. Козаченко В.Ф. Шаговый электропривод в робототехнике. – М.: МЭИ, 1985. – 104с.
11. Срибнер Л.А. Цикловое программное управление оборудованием – М.: Машиносроение, 1980. – 152с.
12. Управление автоматическими линиями с помощью ЭВМ / Крыленко В.В. и др. – М.: Машиностроение, 1983. – 152с.
13. Программное управление станками / Сосонкин В.Л. Михайлов О.П. и др.: Под. ред. В.Л. Сосонкина. – М.: Машиностроение, 1981. – 398с.
14. Станки с числовым программным управлением / Под ред. В.А. Лещенко. – М.: Машиностроение, 1987. – 592с.
15. Цыба Ю.А. Системы управления электроприводами: Конспект лекций. – Алматы: АИЭС, 2007.- 50с.
16. Сагитов П.И., Цыба Ю.А. Электрические машины систем автоматики: Учебное пособие. – Алматы: АИЭС, 2004. – 90с.
17. Бутырин Н.Г. Микропроцессоры в системах автоматического управления: Учебное пособие. – Ленинград: Гос. техн. ун-т., 1991. – 132с.
18. Бороденко В.А. Практический курс теории линейных систем автоматического регулирования: Учебное пособие. ПГУ – Павлодар, 2007– 200с.
19. Бороденко В.А. Теория автоматического управления. Лабораторный практикум. – Павлодар, Изд-во ПГУ, 2004. – 15с.
20. Лазарев Ю. Моделирование процессов и систем в MATLAB. Учебный курс. – СПб.: Питер, 2005. – 512с.
21. Лурье Б.Я., Энрайт П.Дж. Классические методы автоматического управления. – СПб.: БХВ – Петербург, 2004. – 640с.