Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электропривода и автоматизации промышленных
установок
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
Методические указания к лабораторным работам
для специальности 5В071800
Алматы 2014
СОСТАВИТЕЛИ: П.И. Сагитов, Ю.А. Цыба, Н.К. Алмуратова. Системы управления электроприводами. Методические указания к лабораторным работам для специальности 5В071800. – Алматы: АУЭС, 2013. – 50с.
Методические указания предназначены для студентов высших учебных заведений изучающих дисциплину «Системы управления электроприводами». Исследуются схемы построения, регулировочные, механические и динамические характеристики, способы регулирования и режимы работы электроприводов постоянного и переменного тока, разомкнутых и замкнутых систем управления.
Методические указания содержат необходимые теоретические и технические сведения, программу выполнения работ, методику подготовки, проведения экспериментов и анализа полученных результатов.
Методические указания предназначены для специальности 5В071800.
Ил. 11, табл. 14, библиогр. – 8 назв.
Рецензент: к.т.н., доцент кафедры ТОЭ Надиров Е.Г.
Печатается по плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2013г.
Ó НАО «Алматинский университет энергетики и связи», 2014г.
Введение
Изучение дисциплины базируется на широком использовании физических представлений и методов теории электропривода, положений общей теории автоматического управления, а также содержания предшествующих специальных дисциплин по электрическим машинам, элементам автоматизированного электропривода, электрическим аппаратам, промышленной электронике и вычислительной технике.
Изучение дисциплины предусматривает рассмотрение вопросов связанных с управлением технологическими объектами на базе систем управления электроприводами постоянного и переменного тока и анализом их работы в установившихся и динамических режимах при изменении возмущающих воздействий, таких, как изменение нагрузки, напряжения питающей сети, температуры окружающей среды и других дестабилизирующих факторов. Задачей управления является обеспечение требуемого закона изменения момента и скорости с целью получения необходимого ускорения и замедления исполнительного органа рабочей машины, а также обеспечения постоянства скорости в установившихся режимах. Рассматриваются принципы автоматического управления электроприводами, выполняющих функции стабилизации скорости и момента, точного позиционирования, слежения и работы с программным и адаптивным управлением на базе микропроцессорных устройств [1,2,3,4,5].
Представленные лабораторные работы направлены на закрепление, систематизацию и расширение полученных знаний по дисциплине: «Системы управления электроприводами».
Исследуются схемы построения, регулировочные, механические и динамические характеристики, способы регулирования скорости и режимы работы электроприводов постоянного и переменного тока, разомкнутых и замкнутых систем регулирования.
Методические указания содержат необходимые теоретические и технические сведения, программу выполнения 8 лабораторных работ, методику подготовки, проведения экспериментов и анализа полученных результатов.
1 Лабораторная работа №1. Исследование разомкнутой системы управления «Тиристорный преобразователь – двигатель постоянного тока»
Цель работы: исследование регулировочных характеристик разомкнутой системы «Тиристорный преобразователь – двигатель постоянного тока» (ТП-Д) и снятие осциллограмм переходных процессов системы.
1.1 Основные сведения о стенде и установленном оборудовании
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– силовой модуль (СМ);
– модуль преобразователя частоты (ПЧ);
– модуль тиристорного преобразователя (ТП);
– модуль регуляторов (МР);
– модуль ввода/вывода (МВВ).
Схема для исследования системы приведена на рисунке 1.1.
Рисунок 1.1 - Схема для исследования разомкнутой системы ТП-Д
Двигатель постоянного тока (ДПТ) подключается к модулю тиристорного преобразователя (ТП) через датчики тока и напряжения. Якорная обмотка присоединяется к выходам якорного преобразователя модуля ТП, Обмотка возбуждения – к выходам нерегулируемого источника напряжения =220 В модуля ТП.
Выход регулятора тока модуля регуляторов подключается к входу X1 модуля ТП, а также к входу ADC4 модуля ввода/вывода. На вход регулятора тока подается сигнал задания с потенциометра RP1 модуля.
В качестве нагрузочной машины выступает асинхронный электродвигатель, подключенный к преобразователю частоты ПЧ.
Преобразователь частоты запитывается трехфазным напряжением 3x380 В от модуля МП.
Выходы датчиков тока и напряжения, а также ПЧН силового модуля подключаются к входам АВС1, АВС2, АВС3 модуля ввода/вывода соответственно.
1.2 Программа работы
1.2.1 Изучить схему для снятия характеристик системы ТП-Д.
1.2.2 Снять регулировочные характеристики разомкнутой системы ТП-Д.
1.2.3 Снять переходные процессы при пуске/останове двигателя.
1.2.4 По полученным данным построить опытные кривые, составить отчет по работе.
1.3 Порядок и методика выполнения работы
1.3.1 Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
– перевести тиристорный преобразователь в режим регулирования скорости, установить переключатель SA3 в положение «Авт», SA4 – в положение "НМ", кнопку «Сеть» – в нижнее положение, SA6 – в нижнее положение;
– переключатель SA1 модуля ПЧ установить в нижнее положение, потенциометр RP1 – на минимум снимаемого напряжения (крайнее положение против часовой стрелки), переключатель SA2 – в среднее положение;
– потенциометр сигнала задания на модуле регуляторов установить в крайнее положение против часовой стрелки, переключатель SA5 установить в положение «3,5», SA6 установить в положение «0»;
– для проведения работы на персональном компьютере должно быть запущено ПО DeltaProfi и выбрана соответствующая работа;
– после сборки схемы необходимо настроить преобразователь частоты на режим регулирования момента.
1.3.2 Снятие регулировочных характеристик. Регулировочные характеристики представляют собой зависимости напряжения на выходе преобразователя, частоты вращения, мощности на выходе ТП и на валу, КПД электродвигателя постоянного тока от напряжения управления UУ при постоянном значении тока якоря IЯ т.е.: UЯ=f(UУ), ω=f(UУ), PЭЛ=f(UУ), PВ=f(UУ), η=f(UУ) при IЯ=const.
Для снятия данной характеристики необходимо при постоянном значении тока якоря изменять величину сигнала задания, фиксируя показания измерительных приборов.
Опыт проводится на холостом ходу и под нагрузкой, создаваемой ПЧ и в следующей последовательности:
– подать напряжение на тиристорный и частотный преобразователи, запустить ТП, установив выходное напряжение на уровне 200 В;
– с помощью преобразователя частоты установить ток якоря, заданный преподавателем;
– изменяя положение RP1 МР регулировать выходное напряжение тиристорного преобразователя. После установки определенного напряжения регулировкой потенциометра RP1 модуля ПЧ добиться заданного тока якоря ДПТ. Результаты занести в таблицу 1.1.
Таблица 1.1 – Данные для построения регулировочных характеристик
|
UУ, В |
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
IЯ, А |
|
|
|
|
|
|
|
UЯ, В |
|
|
|
|
|
|
|
iВ, А |
|
|
|
|
|
|
|
PЯ, Вт |
|
|
|
|
|
|
|
ΔPЭЛЯ, Вт |
|
|
|
|
|
|
|
ΔPЭЛВ, Вт |
|
|
|
|
|
|
|
PВ, Вт |
|
|
|
|
|
|
|
MВ, Н∙м |
|
|
|
|
|
|
|
ω, 1/с |
|
|
|
|
|
|
После проведения опыта необходимо снять нагрузку с электродвигателя переведением тумблера SA1 модуля ПЧ в среднее положение, остановить ДПТ, убрать разрешение на работу тиристорного преобразователя (SA6 в нижнее положение), выключить питание стенда.
Недостающие данные для построения регулировочных характеристик получают расчетным путем в соответствии ниже приведенными формулами.
Частота вращения электродвигателя, 1/с:
 . (1.1)
. (1.1)
Мощность на выходе тиристорного преобразователя, Вт:
![]() .
(1.2)
.
(1.2)
Электрические потери в якорной цепи электродвигателя, Вт:
![]() ,
(1.3)
,
(1.3)
где rЯ – сопротивление якорной цепи (17,5 Ом).
Электрические потери в цепи обмотки возбуждения двигателя, Вт:
![]() , (1.4)
, (1.4)
где rВ – сопротивление цепи обмотки возбуждения (820 Ом).
Мощность на валу электродвигателя, Вт:
![]() ,
(1.5)
,
(1.5)
где ![]() – механические потери ДПТ (15
Вт).
– механические потери ДПТ (15
Вт).
Момент на валу электродвигателя, Н∙м:
 .
(1.6)
.
(1.6)
По результатам опыта построить регулировочные характеристики системы для двух значений тока якоря, которые были заданы преподавателем.
1.3.3 Для снятия осциллограмм переходных процессов пуска/останова необходимо установить масштаб по времени в окне лабораторной работы на уровне 10 с и снять осциллограммы процесса пуска/останова при пониженном напряжении якоря ТП.
Опыт проводить в следующей последовательности:
– включить автоматические выключатели QF1 (МПС), QF2 (МП);
– включением кнопки «Сеть» модуля ТП подать напряжение на преобразователь;
– подав разрешение на работу ТП (SA6), установить частоту вращения на уровне 250…300 об/мин;
– остановить ДПТ, переведя переключатель SA5 в среднее положение;
– произвести последовательно включение и выключение ТП переведением SA5 из среднего положения в одно из крайних, а затем обратно, одновременно фиксируя переходные процессы на экране компьютера.
1.4 Содержание отчета
1.4.1 Краткое описание схемы для исследования разомкнутой системы управления ТП-Д.
1.4.2 По результатам опытов привести таблицу с опытными и расчетными данными.
1.4.3 По опытным и расчетным данным построить регулировочные характеристики для двух значений тока якоря и объяснить их отличие.
1.4.4 Привести осциллограммы переходных процессов пуска/останова системы и проанализировать их качество.
1.4.5 Сделать выводы по работе.
1.5 Контрольные вопросы
1.5.1 Какие способы регулирования частоты вращения ДПТ существуют?
1.5.2 Как осуществляется регулирование напряжения на выходе ТП?
1.5.3 В каком режиме работает двигатель при питании от ТП в следующих случаях:
– UЯ>0, n>0, M>0;
– UЯ>0, n=0, M>0;
– UЯ>0, n>0, M<0;
– UЯ>0, n<0, M>0;
– UЯ<0, n<0, M<0.
1.5.4 С помощью, какой обратной связи можно добиться горизонтальной механической характеристики:
– по напряжению;
– по скорости;
– по ЭДС;
– по току якоря.
1.5.5 В чем заключается отличие регулировочных характеристик системы при разных значениях тока якоря и чем оно объясняется?
2 Лабораторная работа №2. Исследование разомкнутой системы управления «Преобразователь частоты – асинхронный двигатель»
Цель работы: исследование регулировочных характеристик разомкнутой системы управления «Преобразователь частоты – асинхронный двигатель» (ПЧ-АД) и снятие осциллограмм переходных процессов системы.
2.1 Основные сведения о стенде и установленном оборудовании
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– силовой модуль (СМ);
– модуль преобразователя частоты (ПЧ);
– модуль тиристорного преобразователя (ТП);
– модуль ввода/вывода (МВВ).
Схема для снятия регулировочных характеристик системы ПЧ-АД приведена на рисунке 2.1.
Двигатель постоянного тока (ДПТ) подключается к модулю тиристорного преобразователя (ТП). Якорная обмотка присоединяется к выходам якорного преобразователя модуля ТП через датчики тока и напряжения, которые находятся в силовом модуле системы. Обмотка возбуждения – к выходам нерегулируемого источника напряжения =220 В модуля ТП.
Асинхронный электродвигатель подключается к преобразователю частоты ПЧ. Преобразователь частоты запитывается напряжением 3x380 В от модуля питания через измеритель мощности (МИМ).
Для проведения работы на персональном компьютере должно быть загружено ПО DeltaProfi и соответствующая лабораторная работа.
Перед проведением работы при выключенном автомате QF1 МПС привести модули в исходное состояние:
– переключатель «Сеть» модуля ТП перевести в нижнее положение, тумблер SA3 – в положение «Руч», SA4, SA6 – в нижнее положение, SA5 – в среднее положение. Перевести ТП в режим регулирования момента;
– переключатель SA3 модуля ПЧ перевести в нижнее положение, SA1 – в среднее в положение «Стоп», потенциометр RP1 – в крайнее положение против часовой стрелки, установить перемычку между клеммами XS1 и XS2 модуля.
Рисунок 2.1 - Схема для снятия регулировочных
характеристик системы ПЧ-АД
2.2 Программа работы
2.2.1 Изучить принципы работы с модулем преобразователя частоты.
2.2.2 Изучить схему для снятия характеристик системы ПЧ-АД.
2.2.3 Снять регулировочные характеристики разомкнутой системы ПЧ-АД.
2.2.4 Снять переходные процессы при пуске/останове АД.
2.2.5 По полученным данным построить опытные кривые, составить отчет по работе.
2.3 Порядок и методика выполнения работы
2.3.1 Регулировочные характеристики представляют собой зависимости выходной частоты, напряжения, мощности от сигнала управления при постоянном моменте на валу двигателя: f, UC, P, S = f(UУ), МВ=сonst.
Для снятия характеристик необходимо:
– установить выходную частоту преобразователя частоты 60 Гц (параметр 0.02=60);
– задав нагрузку с помощью тиристорного преобразователя (значение IЯ задается преподавателем и выбирается в пределах 0…1А), уменьшать выходную частоту ПЧ, фиксируя необходимые параметры. Сигнал задания (параметр 7.01) отображается в процентах от максимального сигнала (10В). Выходная частота отображается в параметре 5.01. Напряжение статора можно смотреть на экране ПЧ (параметр 5.02), ток статора смотреть в параметре 4.01.
Результаты опыта занести в таблицу 2.1.
Таблица 2.1 – Данные для построения регулировочных характеристик
|
IЯ= |
||||||
|
UУ, В |
|
|
|
|
|
|
|
f, Гц |
|
|
|
|
|
|
|
UС, В |
|
|
|
|
|
|
|
IC, А |
|
|
|
|
|
|
|
UЯ, В |
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
IВХ, А |
|
|
|
|
|
|
|
PВХ, Вт |
|
|
|
|
|
|
|
SC, ВА |
|
|
|
|
|
|
|
ω, 1/с |
|
|
|
|
|
|
|
ΔPЭЛ, Вт |
|
|
|
|
|
|
|
ΔPЯ, Вт |
|
|
|
|
|
|
|
PЯ, Вт |
|
|
|
|
|
|
|
PВ, Вт |
|
|
|
|
|
|
|
PC, Вт |
|
|
|
|
|
|
|
ηАД |
|
|
|
|
|
|
|
ηПЧ-АД |
|
|
|
|
|
|
|
cos(φ)АД |
|
|
|
|
|
|
|
cos(φ)ПЧАД |
|
|
|
|
|
|
|
МВ, Н∙м |
|
|
|
|
|
|
Остальные параметры таблицы 2.1 рассчитываются по ниже приведенным формулам.
Полная выходная мощность преобразователя частоты, ВА:
![]() ,
(2.1)
,
(2.1)
где UСФ – фазное напряжение на выходе ПЧ, В.
Частота вращения электродвигателя, 1/с:
 .
(2.2)
.
(2.2)
Электрические потери в статорной обмотке электродвигателя, Вт:
![]() ,
(2.3)
,
(2.3)
где rС – активное сопротивление фазы статора, 19 Ом.
Электрические потери в цепи якоря ДПТ, Вт:
![]() ,
(2.4)
,
(2.4)
где rЯ – активное сопротивление якорной обмотки ДПТ, 17,5 Ом.
Выходная мощность ТП, Вт:
![]() .
(2.5)
.
(2.5)
Мощность на валу асинхронного электродвигателя, Вт:
![]() , (2.6)
, (2.6)
где ΔPМЕХ.ДПТ – механические потери ДПТ, 15 Вт.
Активная выходная мощность ПЧ, Вт:
![]() ,
(2.7)
,
(2.7)
где ΔPМЕХ.АД – механические потери АДКЗ, 11 Вт.
Коэффициент полезного действия электродвигателя:
 .
(2.8)
.
(2.8)
Сosφ асинхронного двигателя:
 .
(2.9)
.
(2.9)
Коэффициент полезного действия системы:
 .
(2.10)
.
(2.10)
Сosφ системы:
 .
(2.11)
.
(2.11)
Момент на валу асинхронного двигателя, Н∙м:
.
(2.12)
По результатам опыта построить регулировочные характеристики системы для значения тока якоря, которое было задано преподавателем.
2.3.2 Исследование способов торможения электродвигателя. Преобразователь частоты имеет возможность совершать различные способы торможения электродвигателя в зависимости от требования технологического процесса. В процессе работы рекомендуется опробовать следующие способы торможения электродвигателя:
– остановка на выбеге;
– остановка с заданным темпом;
– торможение с подпиткой постоянным током.
В данном опыте требуется заснять процессы торможения.
Торможение на выбеге включается установкой параметра 6.01=Coast.
Торможение с заданным темпом включается установкой параметра 6.01=rp. Время торможения задается параметром 0.04 и варьируется в пределах 0…3200 с.
Торможение с подпиткой постоянным током включается установкой в параметре 6.01 значения rp.dc1. Необходимо задать ток торможения (6.06) в процентах от номинального тока инвертора (0…150%), длительность торможения постоянным током (6.07) от 0 до 25с.
Для проведения опыта необходимо разогнать двигатель до 50 Гц, затем перевести переключатель SA1 модуля ПЧ в среднее положение. Происходит торможение по запрограммированному закону.
Рекомендуется нанести осциллограммы торможения на одной сетке и оценить различия переходных процессов.
2.4 Содержание отчета
2.4.1 Краткое описание схемы для исследования разомкнутой системы управления ПЧ -АД.
2.4.2 По результатам эксперимента привести таблицу с опытными и расчетными данными.
2.4.3 По опытным и расчетным данным построить регулировочные характеристики для значений тока якоря и объяснить их отличие.
2.4.4 Привести осциллограммы переходных процессов пуска/останова системы и проанализировать их качество.
2.4.5 Сделать выводы по работе.
2.5 Контрольные вопросы
2.5.1 Какие способы регулировки частоты вращения асинхронных электродвигателей вы знаете?
2.5.2 С какой целью при регулировании частоты вращения изменяются одновременно частота и напряжение на выходе преобразователя?
2.5.3 Укажите достоинства и недостатки применения частотного регулирования?
2.5.4 Объясните работу преобразователя в тормозном режиме. Где рассеивается энергия торможения двигателя?
3 Лабораторная работа №3. Исследование разомкнутой системы управления «Преобразователь частоты – синхронный двигатель»
Цель работы: исследование регулировочных характеристик системы управления «Преобразователь частоты – синхронный двигатель» (ПЧ - СД).
3.1 Основные сведения о стенде и установленном оборудовании
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– силовой модуль (СМ);
– модуль преобразователя частоты (ПЧ);
– модуль тиристорного преобразователя (ТП);
– модуль возбуждения (МВ);
– модуль ввода/вывода (МВВ);
– модуль измерения мощности (МИМ).
Схема для снятия характеристик системы ПЧ-СД приведена на рисунке 3.1.
Двигатель постоянного тока (ДПТ) подключается к модулю тиристорного преобразователя (ТП). Якорная обмотка присоединяется к выходам якорного преобразователя модуля ТП через датчики тока и напряжения, Обмотка возбуждения – к выходам нерегулируемого источника напряжения =220 В модуля ТП.
Статорная обмотка асинхронного двигателя (АД) подключается к ПЧ, а обмотка ротора к регулируемому источнику постоянного тока модуля МВ тем самым, обеспечивая синхронный режим работы двигателя.
Для контроля тока возбуждения в цепь ротора включается амперметр модуля измерительного.
Преобразователь частоты запитывается напряжением 3x380 В от модуля питания через измеритель мощности (МИМ).
Для проведения работы на персональном компьютере должно быть загружено ПО DeltaProfi и соответствующая лабораторная работа.
Перед проведением работы при выключенном автомате QF1 МПС привести модули в исходное состояние:
– переключатель «Сеть» модуля ТП перевести в нижнее положение, тумблер SA3 – в положение «Руч», SA4, SA6 – в нижнее положение, SA5 – в среднее положение. Перевести ТП в режим регулирования момента;
– переключатель SA1 модуля ПЧ перевести в нижнее положение, SA2 – в среднее положение «Стоп», SA3 – в положение «Скорость», потенциометр RP1 – в крайнее положение против часовой стрелки, установить перемычку между клеммами XS1 и XS2 модуля;
– кнопку «Сеть» модуля МВ перевести в нижнее положение, тумблер SA1 в положение «Руч», потенциометр RP1 установить в крайнее положение против часовой стрелки.
Рисунок 3.1 - Схема для снятия регулировочных характеристик разомкнутой системы ПЧ-СД
3.2 Программа работы
3.2.1 Изучить принципы работы с модулем преобразователя частоты.
3.2.2 Изучить схему для снятия характеристик системы ПЧ-СД.
3.2.3 Снять регулировочные характеристики системы.
3.2.4 По полученным опытным и расчетным данным построить регулировочные характеристики, составить отчет по работе.
3.3 Порядок и методика выполнения работы
3.3.1 Для выполнения работы необходимо осуществить плавный пуск синхронного электродвигателя от ПЧ. Он заключается в плавном повышении частоты и амплитуды питающего статор двигателя напряжения. Ток возбуждения задается заранее и остается неизменным все время пуска.
Порядок частотного пуска:
– включить автоматические выключатели QF1, QF2 модулей МПС и МП;
– включить кнопку «Сеть» модуля МВ;
– потенциометром RP1 модуля МВ установить ток возбуждения 0,5 А;
– подать разрешение на работу ПЧ (SA1), задать направление вращения (SA2), потенциометром RP1 установить частоту 50 Гц.
3.3.2 Снятие регулировочных характеристик. Регулировочные характеристики представляют собой зависимости выходной частоты, напряжения, мощности от сигнала задания при постоянном моменте на валу двигателя: f, UC, P, S = f(UЗ), МВ=сonst.
Для снятия характеристик необходимо:
– установить выходную частоту преобразователя частоты 60 Гц (параметр 0.02=60);
– задав нагрузку с помощью тиристорного преобразователя (значение IЯ задается преподавателем и выбирается в пределах 0…1А), уменьшать выходную частоту ПЧ, фиксируя необходимые параметры. Сигнал задания (параметр 7.01) отображается в процентах от максимального сигнала (10В). Выходная частота отображается в параметре 5.01.
Результаты опыта занести в таблицу 3.1, остальные параметры таблицы рассчитываются по ниже приведенным формулам.
Полная выходная мощность преобразователя частоты, ВА:
![]() ,
(3.1)
,
(3.1)
где UСФ – фазное напряжение на выходе ПЧ, В.
Частота вращения электродвигателя, 1/с:
 .
(3.2)
.
(3.2)
Электрические потери в статорной обмотке электродвигателя, Вт:
![]() ,
(3.3)
,
(3.3)
где rС – активное сопротивление фазы статора, 19 Ом.
Электрические потери в цепи ротора, Вт:
![]() ,
(3.4)
,
(3.4)
где rР - активное сопротивление роторной цепи, 25 Ом.
Сопротивление роторной цепи рассчитывается, исходя из схемы соединения фаз ротора и сопротивления фазы rФР=25 Ом.
Электрические потери в цепи якоря ДПТ, Вт:
![]() ,
(3.5)
,
(3.5)
где rя – активное сопротивление якорной обмотки ДПТ, 17,5 Ом.
Выходная мощность ТП, Вт:
![]() .
(3.6)
.
(3.6)
Мощность на валу синхронного электродвигателя, Вт:
![]() ,
(3.7)
,
(3.7)
где ΔPМЕХ.ДПТ – механические потери ДПТ, 15 Вт.
Активная выходная мощность ПЧ, Вт:
![]() , (3.8)
, (3.8)
где ΔPМЕХ.АД – механические потери АДКЗ, 11 Вт.
Коэффициент полезного действия электродвигателя:
 .
(3.9)
.
(3.9)
Cosφ синхронного двигателя:
 .
(3.10)
.
(3.10)
Коэффициент полезного действия системы:
 .
(3.11)
.
(3.11)
Cosφ системы:
 . (3.12)
. (3.12)
Момент на валу синхронного двигателя, Н∙м:
 .
(3.13)
.
(3.13)
Таблица 3.1 – Данные для построения регулировочных характеристик
|
IЯ= |
||||||
|
UУ, В |
|
|
|
|
|
|
|
f, Гц |
|
|
|
|
|
|
|
UС, В |
|
|
|
|
|
|
|
IC, А |
|
|
|
|
|
|
|
IВ А |
|
|
|
|
|
|
|
UВ, В |
|
|
|
|
|
|
|
UЯ, В |
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
UВХ, В |
|
|
|
|
|
|
|
IВХ, А |
|
|
|
|
|
|
|
PВХ, Вт |
|
|
|
|
|
|
|
SC, ВА |
|
|
|
|
|
|
|
ω, 1/с |
|
|
|
|
|
|
|
ΔPЭЛСТ,Вт |
|
|
|
|
|
|
|
ΔPЭЛР,Вт |
|
|
|
|
|
|
|
ΔPСТ, Вт |
|
|
|
|
|
|
|
PЯ, Вт |
|
|
|
|
|
|
|
PВ, Вт |
|
|
|
|
|
|
|
PC, Вт |
|
|
|
|
|
|
|
ηАД |
|
|
|
|
|
|
|
ηПЧ-АД |
|
|
|
|
|
|
|
cos(φ)АД |
|
|
|
|
|
|
|
cos(φ)ПЧАД |
|
|
|
|
|
|
|
МВ, Н∙м |
|
|
|
|
|
|
По полученным опытным и расчетным данным построить регулировочные характеристики системы: f, UC, P, S = f(UУ) при МВ=сonst для значений тока якоря, которые задаются преподавателем.
3.4 Содержание отчета
3.4.1 Краткое описание схемы для исследования разомкнутой системы управления ПЧ -СД.
3.4.2 По результатам опытов привести таблицу с опытными и расчетными данными параметров системы.
3.4.3 По опытным и расчетным данным построить регулировочные характеристики системы для разных значений тока якоря при МВ=сonst.
3.4.4 Сделать выводы по работе.
3.5 Контрольные вопросы
3.5.1 Какие способы регулировки частоты вращения синхронных электродвигателей вы знаете?
3.5.2 Достоинства и недостатки применения частотного регулирования?
3.5.3 С какой целью при регулировании частоты вращения изменяются одновременно частота и напряжение на выходе преобразователя?
3.5.4 Объясните работу преобразователя в тормозном режиме. Где рассеивается энергия торможения двигателя?
4 Лабораторная работа № 4. Элементы замкнутых систем управления электропривода
Цель работы: изучение схем, принципов работы и характеристик элементов замкнутых систем управления электроприводов: задатчика интенсивности, П-, И- и ПИ-регуляторов.
4.1 Основные сведения о стенде и установленном оборудовании
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль регуляторов (МР);
– модуль ввода/вывода (МВВ).
Все используемые в работе элементы систем управления электропривода располагаются на модуле регуляторов. На лицевой стороне этого модуля представлены схемы используемых элементов с указанием ручек потенциометров и переключателей, с помощью которых меняются параметры используемых элементов.
Все измерения производятся с помощью персонального компьютера. Для этого на компьютере должно быть загружено ПО DeltaProfi и загружена соответствующая работа.
Лицевая панель модуля регуляторов представлена на рисунке 4.1.
На элементе DА1 реализован задатчик интенсивности (ЗИ). Входное напряжение на ЗИ подается с потенциометра RP1. Потенциометр RP2 задает темп изменения выходного напряжения ЗИ.
На операционном усилителе DА2 реализуется ПИ-регулятор с блоком ограничения выходного напряжения AQ1. На этом же регуляторе при выключенном с помощью переключателя SА4 конденсаторе С1 исследуется П-регулятор, при выключенном с помощью переключателя SА2 резисторе R3 исследуется И-регулятор, при одновременно включенных С1 и R3 исследуется ПИ-регулятор.
Регулятор на базе операционного усилителя DА3 используется для реализации контура регулирования тока в работах по исследованию систем подчиненного регулирования и в данной работе не используется.
Как таковой сборки схемы в этой работе не предусматривается. Осциллографирование входных и выходных напряжений элементов осуществляется подключением контрольных точек к аналоговым входам ADC1…ADC4 модуля ввода/вывода. Назначение аналоговых входов поясняется на экране компьютера.
Включение стенда в работу производится включением автомата QF1 модуля питания стенда. При этом получают питание все измерительные и усилительные устройства стенда, используемые в работе.
Рисунок 4.1 – Лицевая панель модуля регуляторов
4.2 Программа работы
4.2.1 Изучить схему для экспериментального исследования элементов систем управления электроприводов, используемую измерительную и регистрирующую аппаратуру.
4.2.2 Снять статические и динамические характеристики задатчика интенсивности (ЗИ).
4.2.3 Снять статические и динамические характеристики П-регулятора с блоком ограничения.
4.2.4 Снять статические и динамические характеристики И- и ПИ-регуляторов.
4.2.5 Обработать экспериментальные данные, составить отчет и сделать заключение по работе.
4.3 Порядок и методика выполнения работы
4.3.1 Снятие характеристик задатчика интенсивности. Для снятия статической характеристики ЗИ необходимо установить потенциометр RP2 в крайнее левое положение (минимальная постоянная времени ЗИ), а переключатель SA1 в левое или правое положение. Изменяя уровень входного сигнала с помощью потенциометра RP1 от минимального до максимального положений фиксировать входное и выходное напряжения ЗИ (входы A1, А3 модуля ввода/вывода). Результаты занести в таблицу 4.1 и рассчитать коэффициент передачи КЗИ задатчика интенсивности:
 .
.
Таблица 4.1 – Данные для построения статической характеристики ЗИ
|
UВХ, В |
|
|
|
|
|
|
UВЫХ, В |
|
|
|
|
|
|
KЗИ, В/В |
|
|
|
|
|
Для снятия динамических характеристик ЗИ необходимо подключить ко входу ЗИ канал А1, а к выходу – канал A3 модуля ввода/вывода. Потенциометр RР2 поставить в крайнее левое положение (минимальная постоянная времени), а потенциометром RР1 задать напряжение на входе ЗИ UВХ= 4…10 В.
При включении переключателя SA1 в левое или правое положения зафиксировать переходный процесс на выходе ЗИ. Аналогичным образом выполнить опыт для среднего и крайнего правого положений потенциометра RP2.
4.3.2 Исследование П-регулятора с блоком ограничения. Исследование П-регулятора проводится на операционном усилителе DA2 при выведенном в максимум блоке ограничения (переключатель SA3 в положение 5).
Исследование заключается в снятии статической характеристики регулятора при нескольких значениях коэффициента усиления.
Для проведения опыта необходимо:
– убрать интегральный канал регулятора (SA4 в положение 0);
– задать любой коэффициент усиления переключателем SA2;
– задавая сигнал на входе регулятора потенциометром RP1 снять статическую характеристику регулятора, занося результаты в таблицу 4.2. Сигналы подавать соответственно на входы A1 и А2 модуля ввода/вывода.
Опыт повторить для 3 значений коэффициента усиления.
По данным опыта рассчитать коэффициенты усиления для каждого случая и построить статические характеристики П - регулятора для полученных значений коэффициента усиления.
Таблица 4.2 – Данные для построения статической характеристики П-регулятора
|
UВХ, В |
|
|
|
|
|
|
UВЫХ, В |
|
|
|
|
|
|
К |
|
|
|
|
|
На рисунке 4.2 приведен общий вид статической характеристики П-регулятора.
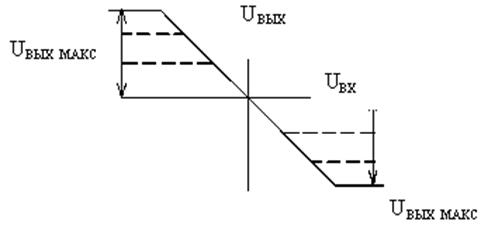
Рисунок 4.2 - Статическая характеристика
пропорционального регулятора
Блок ограничения служит для ограничения выходного сигнала регулятора на установленном уровне.
Для исследования блока ограничения необходимо:
– установить максимальный коэффициент усиления регулятора;
– установить максимальный сигнал задания на входе регулятора;
– записав значение напряжения на выходе регулятора, изменить уставку блока ограничения и зафиксировать показания в таблице 4.3.
|
Положение SA3 |
0 |
0,5 |
1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
4,5 |
5 |
|
UВЫХ, В |
|
|
|
|
|
|
|
|
|
|
|
Таблица 4.3 – Данные для исследования блока ограничения
4.3.4 Исследование И-регулятора и ПИ-регулятора. Исследование проводится на том же регуляторе, реализованном на операционном усилителе DА2.
Собрать схему И - регулятора путем перевода переключателя SA2 в положение «0». Переключатель SA3 установить в положение «5». С помощью переключателя SA4 установить требуемое значение интегрирующей емкости в цепи обратной связи операционного усилителя.
Для исследования влияния емкости на характер переходного процесса выходного сигнала регулятора подключить на выход регулятора канал А2 модуля ввода/вывода.
Порядок проведения опыта:
– на потенциометре RP1 установить напряжение в пределах 1,0…3,0 В;
– SА1 установить в среднее положение;
– подключить вход И-регулятора к потенциометру RP1;
– при включении SА1 в левое или правое положение зафиксировать переходный процесс на выходе И-регулятора. Осциллографирование провести для нескольких выбранных положений переключателя SА4. По полученным осциллограммам экспериментально определить постоянные времени интегрирования.
Для получения ПИ-регулятора переключателем SА2 в цепь обратной связи DА2 последовательно с конденсатором С1 вводится сопротивление резистора R3. Для двух выбранных положений переключателей SА2 и SА4 снять переходную характеристику ПИ-регулятора по методике, использованной при работе с И-регулятором. Экспериментально определить постоянную времени интегрирования и коэффициент пропорциональности.
Представляемые в отчете осциллограммы должны быть обработаны и сделаны выводы об их характере и полученных параметрах.
4.4 Содержание отчета
4.4.1 Краткое описание элементов замкнутых систем управления электроприводом.
4.4.2 По результатам эксперимента по исследованию ЗИ построить опытные статические и динамические характеристики.
4.4.3 По результатам эксперимента по исследованию П-регулятора с блоком ограничения привести таблицу с опытными данными, и построить его опытные статические характеристики при разных значениях коэффициента усиления.
4.4.4 При исследовании И-регулятора и ПИ-регулятора представить результаты анализа по обработке осциллограмм переходных характеристик.
4.4.5 Сделать выводы по работе.
4.5 Контрольные вопросы
4.5.1 Для чего служит задатчик интенсивности?
4.5.2 Чем реализуется темп нарастания напряжения задатчика?
4.5.3 Как ограничивается уровень выходного напряжения задатчика?
4.5.4 Что такое регулятор и какие функции он выполняет в замкнутой системе управления?
4.5.5 Какие существуют схемы ограничения выходного сигнала операционного усилителя и принцип их действия?
4.5.6 Как расчетным путем определить передаточную функцию регулятора?
4.5.7 Как экспериментально определить параметры П-, И-, ПИ- регуляторов?
5 Лабораторная работа №5. Исследование системы управления «Тиристорный преобразователь – двигатель постоянного тока» с обратной связью по скорости
Цель работы: изучение методики настройки регулятора скорости.
Изучение регулировочных, механических и электромеханических характеристик электропривода с отрицательной обратной связью по скорости.
5.1 Основные сведения о стенде и установленном оборудовании
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС) и модуль питания (МП);
– силовой модуль (СМ);
– тиристорный преобразователь (ТП);
– модуль регуляторов (МР);
– преобразователь частоты (ПЧ).
Модуль регуляторов (МР), используемый для реализации системы, включает в себя два операционных усилителя DА1, DА2.
На DА1 реализован задатчик интенсивности ЗИ. Потенциометром RP1 изменяется уровень напряжения на выходе ЗИ, потенциометром RP2 – темп изменения напряжения. Трехпозиционный переключатель SА1 обеспечивает изменение полярности напряжения на входе ЗИ и отключение питания RP1.
На DА2 реализуется ПИ-регулятор скорости (РС). Переключателями SА2 и SА4 изменяются параметры регулятора. Звено AQ1 ограничивает уровень выходного напряжения РС. Уровень максимального выходного напряжения РС устанавливается переключателем SА3. Выходное напряжение РС является напряжением управления Uу тиристорного преобразователя ТП.
Перед проведением работы привести модули в исходное состояние:
– отключить кнопку «Сеть» модуля ТП, тумблер SA6 «Разрешение» установить в нижнее положение, тумблер SA2 перевести в положение «Скорость», тумблер SA4 перевести в положение «П»;
– переключатель SA3 модуля ПЧ установить в нижнее положение, SA1 – в среднее положение, потенциометр RP1 – в крайнее левое положение;
– тумблер SA1 модуля МР перевести в среднее положение, переключатели SA2, SA4 установить в положение «0», потенциометры RP1 и RP2 установить в нулевое положение (крайнее левое), SA3 – установить в максимальное положение;
– для проведения работы на персональном компьютере запустить программу DeltaProfi и выбрать соответствующую работу.
5.2 Программа работы
5.2.1. Изучить схему для исследования электропривода с обратной связью по скорости, состав и назначение модулей, используемых в работе.
5.2.2 Собрать схему для экспериментального исследования электропривода с системой отрицательной обратной связи по скорости.
5.2.3 Настроить контур регулирования скорости ДПТ.
5.2.4 Снять регулировочные характеристики замкнутой системы электропривода.
5.2.5 Снять механические характеристики замкнутой системы электропривода.
5.2.6 Провести обработку экспериментальных данных, составить отчет и сделать заключение по работе.
5.3 Порядок и методика выполнения работы
5.3.1. Настройка замкнутого контура скорости. Настройка замкнутого контура регулирования скорости производится на холостом ходу двигателя и сводится к экспериментальному подбору оптимальных величин параметров R3 и С1.
Сигнал обратной связи контура скорости подключается к входу АDC3 модуля МВВ (на рисунке не показан).
Значение частоты вращения наблюдать на компьютере, а также на индикаторе модуля СМ.
Схема для исследования замкнутой системы, и настройки контура скорости представлена на рисунке 5.1.
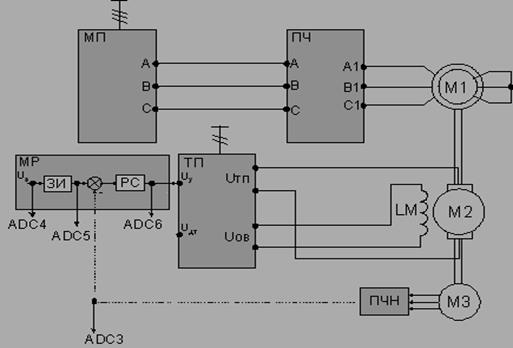
Рисунок 5.1 - Схема для исследования замкнутой системы ТП-ДПТ
Опыт провести в следующей последовательности:
– переключатель SA2 модуля МР перевести в положение «1»;
– включить кнопку «Сеть» модуля ТП, SA6 «Разрешение» перевести в верхнее положение;
– тумблер SA1 модуля МР установить в любое крайнее положение;
– плавно изменяя потенциометр RP1 модуля МР установить в режиме холостого хода частоту вращения ДПТ в пределах 0,2…0,3 от номинальной частоты вращения (1500 об/мин);
– кратковременно подключить перемычку с выхода ПЧН модуля СМ к клемме Х4 модуля МР, если частота вращения двигателя уменьшилась, то обратная связь по скорости отрицательная. В противном случае необходимо SA1 и RP1 модуля МР привести в исходное положение. Тумблер SA6 «Разрешение» модуля ТП перевести в нижнее положение, отключить кнопку «Сеть» модуля ТП. Изменить полярность подключения обмотки возбуждения;
– вновь повторить проверку знака обратной связи по скорости.
После определения полярности обратной связи по скорости осуществляется последовательно настройка П и И - каналов регулятора скорости, а также задатчика интенсивности разгона.
Настройку П-регулятора РС проводить по переходной функции замкнутого контура регулирования скорости, начиная с минимального значения коэффициента усиления П-регулятора РС. Скачок входного сигнала РС удобнее создавать переключателем SА1. При этом постоянная времени ЗИ минимальна. Выходную координату следует наблюдать на выходе ПЧН с помощью компьютера. Критерием оптимизации переходной функции принимается минимум перерегулирования и максимум быстродействия контура регулирования скорости. Зафиксировать в ходе настройки различные значения R3. Снять осциллограмму n(t) при скачке значения скорости.
Для настройки И-канала регулятора скорости. следует при помощи переключателя SА4 ввести конденсатор С в цепь обратной связи РС и, сняв серию переходных функций замкнутого контура регулирования скорости с ПИ-регулятором скорости, выбрать оптимальное значение емкости конденсатора. При введении И-канала регулятора может возникнуть неустойчивость системы. При этом следует увеличить коэффициент П-канала регулятора. Зафиксировать выбранные в ходе настройки значения R3 и С1.
5.3.2 Настройка ЗИ сводится к экспериментальному подбору такого темпа нарастания и спадания сигнала на выходе ЗИ, чтобы при разгоне электропривода от нуля до номинального значения скорости вращения ДПТ динамическая составляющая тока якоря не превышала (0,4…0,6)IЯН, IЯН =(1,3А). Установка желаемого темпа нарастания и спадания выходного сигнала ЗИ осуществляется при помощи потенциометра RР2. В дальнейшем уставку темпа разгона привода в задатчике интенсивности изменять не следует. Выход задатчика интенсивности UЗИ подключается к входу ADC5 модуля МВВ.
После настройки контуров следует тумблер SA1 модуля МР установить в среднее положение. Потенциометр RP1 Модуля МР установить в положение «0». Отключить тумблер SA6 «Разрешение» модуля ТП, отключить кнопку «Сеть» модуля ТП. Выключить автомат QF2 модуля МП.
5.3.3 Снятие регулировочных характеристик замкнутой системы. Регулировочные характеристики настроенной замкнутой системы электропривода снимаются при фиксированном моменте статической нагрузки Мс = const. Момент статический пропорционален току якоря. Изменяя потенциометром RР1 напряжение на входе ЗИ, экспериментально (см. рисунок 5.1) снять следующие характеристики:
– частоты вращения ДПТ, n = f(UЗ);
– напряжение на выходе ТП, UТП = f(UЗ);
– тока якоря ДПТ IЯ = f(UЗ);
– напряжение на выходе РС UРС = f(UЗ).
Нагрузка задается асинхронным электродвигателем, который подключен к преобразователю частоты. При этом преобразователь частоты перевести в режим регулирования момента.
Сигнал задания UЗ, напряжение на выходах РС UРС, ток якоря IЯ, напряжение якоря UЯ и частота вращения n измеряются компьютером.
Опыт провести в следующей последовательности:
– включить автоматы QF1 и QF2 модулей МПС и МП соответственно;
– включить кнопку «Сеть» модуля ТП, SA6 «Разрешение» перевести в верхнее положение;
– SA1 модуля МР перевести в крайнее положение, потенциометром RP1 задать частоту вращения (800…1000 об/мин);
– установить SA3 модуля ПЧ в верхнее положение и переключателем SA1 модуля выбрать направление вращения. Потенциометром RP1 задать ток нагрузки (0,2…0,7А);
– изменяя потенциометром RР1 напряжение на входе ЗИ, снять характеристики.
Данные занести в таблицу 5.1.
Таблица 5.1 - Данные для построения регулировочных характеристик
|
UЗ, В |
|
|
|
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
|
|
|
UТП,В |
|
|
|
|
|
|
|
|
|
|
IЯ, А |
|
|
|
|
|
|
|
|
|
|
UРС |
|
|
|
|
|
|
|
|
|
После проведения опыта тумблер SA1 модуля ПЧ установить в среднее положение, потенциометр RP1 модуля ПЧ установить в положение «0», SA3 установить в нижнее положение.
Потенциометр RP1 модуля МР установить в положение «0», тумблер SA1 модуля МР установить в среднее положение.
5.3.4 Снятие механических и электромеханических характеристик замкнутой системы. Механические и электромеханические характеристики в настроенной системе электропривода снимаются в двигательном режиме работы ДПТ. При работе ДПТ в двигательном режиме АД включается на направление вращения встречно вращению ДПТ. Характеристики снимаются при двух сигналах задания, величина которых задается преподавателем.
Момент статический пропорционален току якоря.
Экспериментально снять статические характеристики электропривода:
– механическую n = f(MС);
– электромеханическую n = f(IЯ);
– внешнюю UЯ = f(MС);
– регуляторные UРС = f(MС).
Опыт проводится в следующей последовательности:
– тумблер SA1 модуля МР перевести в крайнее положение, потенциометром RP1 установить частоту вращения в диапазоне 800…1200 об/мин;
– перевести SA3 модуля ПЧ в верхнее положение и тумблером SA1 модуля выбрать направление вращения;
– потенциометром RP1 модуля ПЧ задавать момент нагрузки.
Данные занести в таблицу 5.2.
Таблица 5.2 - Экспериментальные данные для построения механических и электромеханических характеристик
|
МС, Н·м |
|
|
|
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
|
|
|
IЯ, А |
|
|
|
|
|
|
|
|
|
|
UЯ, В |
|
|
|
|
|
|
|
|
|
|
UРС, В |
|
|
|
|
|
|
|
|
|
|
МС, Н·м |
|
|
|
|
|
|
|
|
|
После проведения опыта потенциометр RP1 модуля ПЧ установить в положение «0», тумблер SA1 модуля ПЧ в среднее положение, убрать разрешение на работу ПЧ (SA3).
Тумблер SA1 модуля МР установить в среднее положение, потенциометр RP1 установить в положение «0».
Расчетные формулы:
Момент статический, Н·м:
![]() ;
;
 ,
,
где UН – номинальное напряжение ДПТ (220 В);
wН – номинальная частота вращения ДПТ (1500 об/мин).
5.4 Содержание отчета
5.4.1 Краткое описание схемы для исследования замкнутой системы управления ТП – ДПТ с отрицательной обратной связью по скорости.
5.4.2 По результатам экспериментов привести таблицы 5.1 и 5.2 с опытными и расчетными данными параметров системы.
5.4.3 По опытным и расчетным данным построить регулировочные, механические и электромеханические характеристики системы.
5.4.4 Сделать выводы по работе.
5.5 Контрольные вопросы
5.5.1. С какой целью, и на каких этапах исключаются конденсаторы в регуляторах РС и РТ?
5.5.2 Как определить знак обратной связи по скорости в контуре регулирования скорости?
5.5.3 Как экспериментально на стенде выставить и проверить величину коэффициента усиления П-канала регулятора?
5.5.4 С какой целью статическая характеристика регулятора скорости выполнена с насыщением?
5.5.5 Какие показатели процессов нужно обеспечить при настройке регулятора скорости?
6 Лабораторная работа №6. Исследование системы подчиненного регулирования с внешним контуром скорости
Цель работы: изучение методики настройки регуляторов системы подчиненного регулирования тиристорного электропривода.
Изучение регулировочных, механических и электромеханических характеристик тиристорного электропривода с подчиненным регулированием.
6.1 Основные сведения о стенде и установленном оборудовании
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– силовой модуль (СМ);
– тиристорный преобразователь (ТП);
– модуль добавочных сопротивлений №1 (МДС1);
– модуль регуляторов (МР);
– преобразователь частоты (ПЧ).
Модуль регуляторов (МР), используемый для реализации системы подчиненного регулирования, включает в себя три операционных усилителя DА1, DА2 и DА3.
На DА1 реализован задатчик интенсивности ЗИ, а на DА2 реализуется регулятор скорости (РС). Описание и назначение задатчика интенсивности ЗИ и регулятора скорости (РС) приводится в методических указаниях предназначенных для выполнения лабораторной работы №5 (см. страницу 23).
На DА3 реализуется РТ. Переключателями SА5 и SА6 изменяются параметры РТ. Выходное напряжение РТ является напряжением управления Uу тиристорного преобразователя ТП.
Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
– отключить кнопку «Сеть» модуля ТП, тумблер SA6 «Разрешение» установить в нижнее положение, тумблер SA2 перевести в положение «Скорость», тумблер SA4 перевести в положение «П»;
– переключатель SA3 модуля ПЧ установить в нижнее положение, SA1 – в среднее положение, потенциометр RP1 – в крайнее левое положение;
– тумблер SA1 модуля МР перевести в среднее положение, переключатели SA2, SA4, SA5, SA6 установить в положение «0», потенциометры RP1 и RP2 установить в нулевое положение (крайнее левое), SA3 – установить в максимальное положение;
– переключатель SA1 МДС1 установить в положение «0»;
– для проведения работы на персональном компьютере запустить программу DeltaProfi и выбрать соответствующую работу.
6.2 Программа работы
6.2.1 Изучить схему для экспериментального исследования электропривода с системой подчиненного регулирования, основной состав и назначение модулей стенда, используемых в работе.
6.2.2 Собрать схему для экспериментального исследования электропривода с системой подчиненного регулирования.
6.2.3 Настроить контур регулирования тока якоря ДПТ.
6.2.4 Настроить контур регулирования скорости ДПТ.
6.2.5 Снять регулировочные характеристики замкнутой системы электропривода.
6.2.6 Снять механические и электромеханические характеристики замкнутой системы электропривода.
6.2.7 Провести обработку экспериментальных данных, составить отчет и сделать заключение по работе.
6.3 Порядок и методика выполнения работы
6.3.1 Настройка контура регулирования тока осуществляется при заторможенном двигателе путем установки металлического стержня в отверстие полумуфты.
Схема настройки контура тока представлена на рисунке 6.1.
Последовательно в цепь между ТП и якорем ДПТ для ограничения бросков тока включено регулируемое сопротивление RР1 модуля МДС1. Оно включается только при настройке системы и затем устанавливается переключателем SА1 на нулевое значение.
Настройка замкнутого контура регулирования тока якоря сводится к экспериментальному подбору оптимальных величин параметров ПИ-регулятора тока.
Сигнал обратной связи контура тока UДТ подключается к входу АDC1 модуля МВВ.
Значение тока якоря IЯ наблюдать на компьютере.
Рисунок 6.1 - Схема настройки контура регулирования тока
С целью определения знака обратной связи контура тока опыт проводится в следующей последовательности:
– переключателем SA1 модуля МДС1 ввести добавочное сопротивление (50-100 Ом);
– включить выключатель QF1 модуля МПС;
– включить кнопку «Сеть» модуля ТП, тумблер SA6 «Разрешение» перевести в верхнее положение;
– тумблером SA2 модуля МР задать единичный коэффициент усиления контура скорости;
– тумблер SA1 модуля МР перевести в любое крайнее положение;
– плавным изменением потенциометра RP1 модуля МР установить ток якорной цепи ДПТ (0,2…0,3А);
– кратковременно подключить выход ДТ модуля ТП к клемме Х7 модуля МР, если при этом ток якоря уменьшится, то обратная связь по току отрицательная. В противном случае обратная связь положительная.
– потенциометром RP1 модуля МР установить ток якоря равным нулю;
– переключателем SA1 модуля МДС1 установить сопротивление RP1 равным нулю.
После определения полярности обратной связи контура тока осуществляется настройка П и И каналов регулятора тока и блока ограничения.
Настройку П-канала регулятора тока производить по переходной функции замкнутого контура, начиная с минимального значения коэффициента усиления пропорционального канала РТ. Скачок входного сигнала удобнее создавать тумблером SА1 модуля МР. При этом постоянная времени ЗИ минимальна, а РС – пропорциональный. Уставку задания следует принять такой, чтобы ток якоря на установившемся участке переходной функции не превышал 0,5IЯН (IЯН=1,3 А). Выходную координату следует наблюдать на выходе ДТ с помощью компьютера. Критерием оптимизации переходной функции принимается минимум перерегулирования и максимум быстродействия контура регулирования тока. Зафиксировать полученные в ходе настройки оптимальное значение П-регулятора тока. Снять осциллограмму IЯ (t) при скачке задания тока.
Настройку И-канала регулятора тока производить по переходной функции замкнутого контура. Для этого следует ввести с помощью переключателя SА6 конденсатор в цепь обратной связи РТ. Сняв серию переходных функций замкнутого контура регулирования тока с ПИ-регулятором тока, выбрать оптимальное значение емкости конденсатора. Зафиксировать полученные в ходе настройки оптимальные значения R6 и С2. Снять осциллограмму IЯ (t) при скачке задания тока. Переключатель SA6 «Разрешение» модуля ТП перевести в нижнее положение.
6.3.2 Для настройки блока ограничения устанавливается ток упора ДПТ в пределах (1…1,3)IЯН (в соответствии с указанием преподавателя). При этом настройку блока ограничения провести в следующей последовательности:
– переключатель SA4 установить в положение «1»;
– с помощью переключателя SА3 установить минимальный уровень насыщения РС;
– переключатель SA6 «Разрешение» перевести в верхнее положение;
– с помощью RР1 подать на вход РС максимальный входной сигнал;
– увеличивая постепенно переключателем SА3 выходное напряжение РС, установить заданный ток якоря ДПТ.
В дальнейшем уставку блока ограничения AQ1 изменять не следует. Потенциометр RР1 поставить на минимум снимаемого напряжения.
Тумблер SA1 установить в среднее положение. Переключатель SA2 установить в положение «0». Тумблер SA6 «Разрешение» модуля ТП установить в нижнее положение. Отключить кнопку «Сеть» модуля ТП.
После настройки контура тока из агрегата удалить металлический стержень.
6.3.3 Настройка замкнутого контура регулирования скорости сводится к экспериментальному подбору оптимальных величин параметров R3 и С1.
Подробное описание настройки контура скорости, П и И каналов регулятора скорости приведено в методических указаниях для выполнения лабораторной работы №5 (см. страницу 24, п/п 3.2.1).
6.3.4 Настройка задатчика интенсивности также выполняется по методическим указаниям к лабораторной работе №5 (см. страницу 25, п/п 3.2.2).
6.3.5 Снятие регулировочных характеристик замкнутой системы. Регулировочные характеристики настроенной замкнутой системы электропривода снимаются при фиксированном моменте статической нагрузки МС = const. Момент статический пропорционален току якоря.
Изменяя потенциометром RР1 напряжение на входе ЗИ, экспериментально снять следующие характеристики:
– частоту вращения ДПТ n = f(UЗ);
– ток якоря ДПТ IЯ = f(UЗ);
– напряжение на выходе РС UРС = f(UЗ);
– напряжение на выходе РТ UРТ = f(UЗ).
Нагрузка задается асинхронным электродвигателем, который подключен к преобразователю частоты. При этом преобразователь частоты перевести в режим регулирования момента.
Сигнал задания UЗ, напряжение на выходах РС UРС и РТ UРТ, ток якоря IЯ, напряжение якоря UЯ и частота вращения n измеряются компьютером.
Схема для исследования замкнутой системы электропривода представлена на рисунке 6.2.
Рисунок 6.2 - Схема для исследования тиристорного электропривода с системой подчиненного регулирования
Опыт провести в следующей последовательности:
– включить автоматы QF1 и QF2 модулей МПС и МП соответственно;
– включить кнопку «Сеть» модуля ТП, SA6 «Разрешение» перевести в верхнее положение;
– SA1 модуля МР перевести в крайнее положение, потенциометром RP1 задать частоту вращения (800…1000 об/мин);
– установить SA3 модуля ПЧ в верхнее положение и переключателем SA1 модуля выбрать направление вращения. Потенциометром RP1 задать ток нагрузки (0,2…0,7А);
– изменяя потенциометром RР1 напряжение на входе ЗИ, снять характеристики.
Данные эксперимента занести в таблицу 6.1.
Таблица 6.1 - Данные для построения регулировочных характеристик
|
UЗ, В |
|
|
|
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
|
|
|
IЯ, А |
|
|
|
|
|
|
|
|
|
|
UРС, В |
|
|
|
|
|
|
|
|
|
|
UРТ, В |
|
|
|
|
|
|
|
|
|
После проведения опыта тумблер SA1 модуля ПЧ установить в среднее положение, потенциометр RP1 модуля ПЧ установить в положение «0», SA3 установить в нижнее положение.
Потенциометр RP1 модуля МР установить в положение «0», тумблер SA1 модуля МР установить в среднее положение.
6.3.6 Снятие механических характеристик замкнутой системы. Механические и электромеханические характеристики в настроенной системе электропривода снимаются в двигательном режиме работы ДПТ. При работе ДПТ в двигательном режиме АД включается на направление вращения встречно вращению ДПТ. Характеристики снимаются при двух сигналах задания, величина которых задается преподавателем.
Момент статический пропорционален току якоря.
Экспериментально снять статические характеристики электропривода:
– механическую n = f(MС);
– электромеханическую n = f(IЯ);
– внешнюю UЯ = f(MС);
– регуляторные UРС = f(MС), UРТ = f(MС).
Опыт проводится в следующей последовательности:
– тумблер SA1 модуля МР перевести в крайнее положение, потенциометром RP1 установить частоту вращения в диапазоне 800…1200 об/мин;
– перевести SA3 модуля ПЧ в верхнее положение и тумблером SA1 модуля выбрать направление вращения;
– потенциометром RP1 модуля ПЧ задавать момент нагрузки.
Данные занести в таблицу 6.2.
Т а б л и ц а 6.2 - Данные для построения механических характеристик
|
МС, Н·м |
|
|
|
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
|
|
|
IЯ, А |
|
|
|
|
|
|
|
|
|
|
UЯ, В |
|
|
|
|
|
|
|
|
|
|
UРС, В |
|
|
|
|
|
|
|
|
|
|
UРТ, В |
|
|
|
|
|
|
|
|
|
После проведения опыта потенциометр RP1 модуля ПЧ установить в положение «0», тумблер SA1 модуля ПЧ в среднее положение, убрать разрешение на работу ПЧ (SA3).
Тумблер SA1 модуля МР установить в среднее положение, потенциометр RP1 установить в положение «0».
Расчетные формулы.
Момент статический, Н·м:
![]() ;
;
 ,
,
где UН – номинальное напряжение ДПТ (220 В);
wН – номинальная частота вращения ДПТ (1500 об/мин).
6.4 Содержание отчета
6.4.1 Краткое описание схемы для исследования системы подчиненного регулирования с внешним контуром скорости.
6.4.2 Привести таблицы 6.1 и 6.2 с опытными и расчетными данными параметров системы.
6.4.3 По опытным и расчетным данным построить регулировочные, механические и электромеханические характеристики системы.
6.4.4 Сделать выводы по работе.
6.5 Контрольные вопросы
6.5.1 С какой целью и на каких этапах исключаются конденсаторы в регуляторах РС и РТ?
6.5.2 С какой целью и на каких этапах настройки системы электропривода в цепь якоря ДПТ вводится добавочный резистор МДС №2?
6.5.3 Как определить знак обратной связи по току в контуре тока?
6.5.4 Как экспериментально на стенде выставить и проверить величину коэффициента усиления П-канала регулятора?
6.5.5 Какие показатели процессов нужно обеспечить при настройке РТ?
6.5.6 Какие показатели процессов нужно обеспечить при настройке РС?
6.5.7 Как выставить требуемую величину тока упора ДПТ?
7 Лабораторная работа №7. Исследование системы подчиненного регулирования с внешним контуром напряжения
Цель работы: изучение методики настройки регуляторов в системе подчиненного регулирования тиристорного электропривода с внешним контуром напряжения.
Изучение статических и динамических характеристик тиристорного электропривода с подчиненным регулированием.
7.1 Основные сведения о стенде и установленном оборудовании
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– силовой модуль (СМ);
– тиристорный преобразователь (ТП);
– модуль добавочных сопротивлений №1 (МДС1);
– модуль регуляторов (МР);
– преобразователь частоты (ПЧ);
– модуль ввода/вывода (МВВ).
При настройке системы используется модуль регуляторов, содержащий операционные усилители DА1, DА2 и DА3.
На DА1 реализован задатчик интенсивности ЗИ, назначение элементов которого приведено в методических указаниях к лабораторным работам №5 и №6.
На DА2 реализуется ПИ-регулятор напряжения РН. Переключателями SА2 и SА4 изменяются параметры регулятора. Звено AQ1 ограничивает уровень выходного напряжения РН, которое является заданием для регулятора тока РТ. Уровень максимального выходного напряжения РН устанавливается переключателем SА3.
На DА3 реализован регулятор тока РТ, назначение элементов которого приведено в методических указаниях к лабораторной работе №6. Выходное напряжение РТ является напряжением управления Uу тиристорного преобразователя ТП.
Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
– отключить кнопку «Сеть» модуля ТП, тумблер SA6 «Разрешение» установить в нижнее положение, тумблер SA2 перевести в положение «Скорость», тумблер SA4 перевести в положение «П», SA3 – в положение «Руч»;
– переключатель SA1 модуля ПЧ установить в среднее положение, потенциометр RP1 – в крайнее левое положение, SA3 – в нижнее положение;
– тумблер SA1 модуля МР перевести в среднее положение, переключатели SA2, SA4, SA5, SA6 установить в положение «0», потенциометры RP1 и RP2 установить в нулевое положение (крайнее левое), SA3 – установить в максимальное положение;
– переключатель SA1 МДС1 установить в положение «0»;
– для проведения работы на персональном компьютере запустить программу DeltaProfi и выбрать соответствующую работу.
7.2 Программа работы
7.2.1 Изучить схему для экспериментального исследования электропривода с системой подчиненного регулирования, основной состав и назначение модулей стенда, используемых в работе.
7.2.2 Собрать схему для экспериментального исследования электропривода с системой подчиненного регулирования.
7.2.3 Настроить контур регулирования тока якоря ДПТ.
7.2.4 Настроить контур напряжения ДПТ.
7.2.5 Снять регулировочные характеристики замкнутой системы электропривода.
7.2.6 Снять механические характеристики замкнутой системы электропривода.
7.2.7 Провести обработку экспериментальных данных, составить отчет и сделать заключение по работе.
7.3 Порядок и методика выполнения работы
7.3.1 Настройка контура регулирования тока. Настройка замкнутого контура регулирования тока якоря сводится к экспериментальному подбору оптимальных величин параметров ПИ-регулятора цепи обратной связи РТ.
Подробное описание методики настройки замкнутого контура регулирования тока приведено в предыдущей лабораторной работе №6 (см. страницу 29, п/п 6.3.1).
7.3.2 Настройка блока ограничения. Подробное описание методики настройки блока ограничения также приведено в предыдущей лабораторной работе №6 (см. страницу 31, п/п 6.3.2).
7.3.3 Настройка контура регулирования напряжения. Настройка контура напряжения производится на холостом ходу и сводится к экспериментальному подбору оптимальных величин параметров R3 и С1.
Сигнал обратной связи контура напряжения UДН подключается к входу АDC3 модуля МВВ (на рисунке не показан).
Значение частоты вращения наблюдать на индикаторе модуля СМ.
Схема настройки контура напряжения представлена на рисунке 7.1.

Рисунок 7.1 - Схема настройки контура напряжения
С целью определения знака обратной связи контура напряжения опыт провести в следующей последовательности:
– запомнив положение переключателя SA6, вывести его в положение «0»;
– переключатель SA2 модуля МР перевести в положение «1»;
– включить кнопку «Сеть» модуля ТП, SA6 «Разрешение» перевести в верхнее положение;
– тумблер SA1 модуля МР установить в любое крайнее положение;
– плавно изменяя потенциометр RP1 модуля МР установить в режиме холостого хода напряжения якоря ДПТ в пределах 0,2…0,3 от номинального напряжения (220 В);
– кратковременно подключить перемычку с выхода ДН модуля ТП к клемме Х4 модуля МР, если напряжение якоря двигателя уменьшилась, то обратная связь по напряжению отрицательная.
После определения полярности обратной связи контура напряжения осуществляется настройка П и И каналов регулятора напряжения.
Настройку П-канала регулятора напряжения необходимо проводить по переходной функции замкнутого контура регулирования напряжения, начиная с минимального значения коэффициента усиления П-канала РН. Скачок входного сигнала РН удобнее создавать переключателем SА1. При этом постоянная времени ЗИ должна быть минимальной. Выходную координату следует наблюдать на выходе ДН с помощью компьютера. Критерием оптимизации переходной функции принимается минимум перерегулирования и максимум быстродействия контура регулирования напряжения. Зафиксировать в ходе настройки различные значения R3. Снять осциллограмму UЯ(t) при скачке значения напряжения.
Для настройка И-канала регулятора напряжения следует при помощи переключателя SА4 ввести конденсатор С в цепь обратной связи РН и, сняв серию переходных функций замкнутого контура регулирования напряжения с ПИ-регулятором напряжения, выбрать оптимальное значение емкости конденсатора. При введении И-канала регулятора система может стать неустойчивой. При неустойчивой работе системы следует увеличить коэффициент П-канала регулятора. Зафиксировать выбранные в ходе настройки значения R3 и С1. Снять осциллограмму UЯ(t) при скачке значения напряжения.
7.3.4 Настройка задатчика интенсивности сводится к экспериментальному подбору такого темпа нарастания и спадания сигнала на выходе ЗИ, чтобы при разгоне электропривода от нуля до номинального значения скорости вращения ДПТ динамическая составляющая тока якоря не превышала (0,4…0,6) IЯН. Подробное описание методики настройки ЗИ приведено в лабораторной работе №5 (см. страницу 25, п/п 3.2.2).
7.3.5 Снятие регулировочных характеристик замкнутой системы. Схема для исследования замкнутой системы представлена на рисунке 7.2.
Регулировочные характеристики настроенной замкнутой системы электропривода снимаются при фиксированном моменте статической нагрузки Мс = const. Момент статический пропорционален току якоря. Изменяя потенциометром RР1 напряжение на входе ЗИ, экспериментально снять следующие характеристики:
– напряжения якоря ДПТ UЯ = f(UЗ);
– частоты вращения ДПТ n = f(UЗ);
– тока якоря ДПТ IЯ = f(UЗ);
– напряжение на выходе РС UРС = f(UЗ);
– напряжение на выходе РТ UРТ = f(UЗ).
Нагрузка задается асинхронным электродвигателем, который подключен к преобразователю частоты.
Преобразователь частоты перевести в режим регулирования момента.
Сигнал задания UЗ, напряжение на выходах РН UРН и РТ UРТ, ток якоря IЯ, напряжения якоря UЯ измеряются компьютером.
Рисунок 7.2 - Схема для исследования системы подчиненного регулирования с внешним контуром напряжения
Опыт проводится в следующей последовательности:
– включить автоматы QF1 и QF2 модулей МПС и МП соответственно;
– включить кнопку «Сеть» модуля ТП, SA6 «Разрешение» перевести в верхнее положение;
– SA1 модуля МР перевести в крайнее положение, потенциометром RP1 задать напряжение якоря (100…200В);
– подать разрешение на работу ПЧ (SA3), тумблером SA1 модуля выбрать направление вращения, потенциометром RP1 задать ток нагрузки (0,2…0,7А);
– изменяя потенциометром RР1 напряжение на входе ЗИ, снять характеристики.
Данные занести в таблицу 7.1.
Таблица 7.1 - Данные для построения регулировочных характеристик
|
UЗ, В |
|
|
|
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
|
|
|
IЯ, А |
|
|
|
|
|
|
|
|
|
|
UЯ, В |
|
|
|
|
|
|
|
|
|
|
UРН, В |
|
|
|
|
|
|
|
|
|
|
UРТ, В |
|
|
|
|
|
|
|
|
|
|
IС, А |
|
|
|
|
|
|
|
|
|
После проведения опыта тумблер SA1 модуля ПЧ установить в среднее положение, потенциометр RP1 модуля ПЧ установить в положение «0», SA3 установить в нижнее положение.
Потенциометр RP1 модуля МР установить в положение «0», тумблер SA1 модуля МР установить в среднее положение.
7.3.6. Снятие механических характеристик замкнутой системы. Механические и электромеханические характеристики в настроенной системе электропривода снимаются в двигательном режиме работы ДПТ. При работе ДПТ в двигательном режиме АД включается на направление вращения встречно вращению ДПТ. Характеристики снимаются при двух сигналах задания, величина которых задается преподавателем.
Момент статический пропорционален току якоря
Экспериментально снять статические характеристики электропривода:
– механическую n = f(MС);
– электромеханическую n = f(IЯ);
– внешнюю UЯ = f(MС);
– регуляторные UРН = f(MС), UРТ = f(MС).
Опыт проводится в следующей последовательности:
– тумблер SA1 модуля МР перевести в крайнее положение, потенциометром RP1 установить напряжения якоря в диапазоне 100…200 В;
– подать разрешение на работу ПЧ (SA3), тумблером SA1 модуля выбрать направление вращения;
– потенциометром RP1 модуля ПЧ задавать момент нагрузки.
В двигательном режиме снять несколько точек для разных значений момента нагрузки.
Данные занести в таблицу 7.2.
Таблица 7.2 - Данные для построения механических характеристик
|
МС, Н·м |
|
|
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
|
|
IЯ, А |
|
|
|
|
|
|
|
|
|
UЯ, В |
|
|
|
|
|
|
|
|
|
UРН, В |
|
|
|
|
|
|
|
|
|
UРТ В |
|
|
|
|
|
|
|
|
После проведения опыта потенциометр RP1 модуля ПЧ установить в положение «0», тумблер SA1 модуля ПЧ в среднее положение.
Тумблер SA1 модуля МР установить в среднее положение, потенциометр RP1 установить в положение «0».
Тумблер SA6 «Разрешение» модуля ТП установить в нижнее положение.
Расчетные формулы
Момент статический, Н·м:
![]() ,
,
 ,
,
где UН – номинальное напряжение ДПТ (220 В);
w0 – номинальная частота вращения ДПТ (1500 об/мин).
7.4 Содержание отчета
7.4.1 Краткое описание схемы для исследования системы подчиненного регулирования с внешним контуром напряжения.
7.4.2 Привести таблицы 7.1 и 7.2 с опытными и расчетными данными параметров системы.
7.4.3 По опытным и расчетным данным построить регулировочные, механические и электромеханические характеристики системы.
7.4.4 Сделать выводы по работе.
7.5 Контрольные вопросы
7.5.1 С какой целью и на каких этапах исключается И-канал в РН и РТ?
7.5.2 С какой целью и на каких этапах настройки системы электропривода в цепь якоря ДПТ вводится добавочный резистор?
7.5.3 При каких настройках отключается возбуждение ДПТ?
7.5.4 Как определить знак обратной связи по току и по напряжению?
7.5.5 Как определить знак обратной связи по напряжению в контуре регулирования напряжения?
7.5.6 Как экспериментально на стенде выставить и проверить величину коэффициента усиления П-канала регулятора?
7.5.7 Какие показатели процессов нужно обеспечить при настройке регулятора тока и регулятора напряжения?
7.5.8 Как выставить требуемую величину тока упора ДПТ?
7.5.9 Почему при П-регуляторе всегда существует статическая ошибка?
7.5.10 Почему в системах чаще используют ПИ-регуляторы?
8 Лабораторная работа №8. Исследование замкнутой системы «преобразователь частоты – асинхронный двигатель»
Цель работы: изучить работу частотного преобразователя в замкнутой системе.
Изучить методику настройки контуров регулирования тока и скорости замкнутой системы электропривода. Снять экспериментальные характеристики замкнутой по скорости системы ПЧ-АД.
8.1 Основные сведения о стенде и установленном оборудовании
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– силовой модуль (СМ);
– модуль преобразователя частоты (ПЧ);
– модуль тиристорного преобразователя (ТП);
– модуль ввода/вывода (МВВ).
Схема для снятия характеристик системы ПЧ-АД приведена на рисунке 8.1.

Рисунок 8.1 - Схема для снятия характеристик системы ПЧ-АД
Двигатель постоянного тока (ДПТ) подключается к модулю тиристорного преобразователя (ТП). Якорная обмотка присоединяется к регулируемому источнику постоянного тока модуля ТП, Обмотка возбуждения – к выходам нерегулируемого источника напряжения =220 В модуля ТП.
Тиристорный преобразователь должен быть переведен в режим регулирования момента.
Асинхронный электродвигатель подключается к преобразователю частоты через датчики тока и напряжения силового модуля.
Выходы датчиков тока и напряжения силового модуля, а также ПЧН подключаются непосредственно к входам ADC1, ADC2, ADC3 модуля МВВ.
Выход датчика тока модуля ТП подключается ко входу АDC4 модуля МВВ, а датчика напряжения – ко входу ADC5.
ПЧ запитывается напряжением 3x380 В от модуля питания.
Исследуемый асинхронный электродвигатель с короткозамкнутым ротором входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель М1, нагрузочную машину – ДПТ независимого возбуждения – М2, импульсный датчик скорости М3:
– переключатель «Сеть» модуля ТП перевести в нижнее положение, тумблер SA3 – в положение «Руч», SA4 – в положение «НМ», SA6 – в нижнее положение, SA5 – в среднее положение;
– переключатель SA3 модуля ПЧ перевести в нижнее положение, SA1 – в среднее положение «Стоп», SA2 – в положение «Скорость» потенциометр RP1 – в крайнее положение против часовой стрелки, установить перемычку между клеммами XS1 и XS2 модуля, соединить специальным кабелем разъемы «ДС» модуля ПЧ и X1 силового модуля;
– собрать схему для исследования системы ПЧ-АД.
Для проведения работы на персональном компьютере должно быть загружено ПО DeltaProfi и лабораторная работа «Исследование замкнутой системы ПЧ-АД».
8.2 Программа работы
8.2.1 Изучить принципы работы с модулем преобразователя частоты.
8.2.2 Изучить схему для снятия характеристик системы ПЧ-АД.
8.2.3 Подготовить преобразователь к работе.
8.2.4 Настроить ПИ-регулятор контура тока статора.
8.2.5 Настроить ПИ-регулятор контура скорости.
8.2.6 Исследовать замкнутую систему электропривода.
8.2.7 Составить отчет и сделать заключение по работе.
8.3 Порядок и методика выполнения работы
8.3.1 Подготовка частотного преобразователя для работы в замкнутой системе. В режиме замкнутой по скорости системы преобразователь частоты держит заданную частоту вращения электродвигателя, изменяя выходную частоту и напряжение в соответствии с сигналом обратной связи по скорости, поступающим с импульсного датчика скорости, установленном на валу двигателя.
Для переведения ПЧ в данный режим необходимо:
– подать напряжение на ПЧ последовательным включением автоматов QF1, QF2 МПС и МП соответственно;
– на экране появится сообщение об ошибке Br.th;
– установить переключатель SA3 «Разрешение» в положение 0;
– в параметре 0.00 вести значение 1233 (сброс параметров ПЧ на заводские настройки);
– установить значение параметра 0.00 на 1253 (разрешение на изменение работы преобразователя);
– установить значение параметра 0.48 на CL.VECT (выбор режима работы преобразователя как замкнутой системы);
– нажать кнопку «Стоп-Сброс».
– установить в параметре 0.51 значение 8;
– нажать кнопку «Стоп/сброс».
Ввести паспортные данные подключенного электродвигателя:
– число полюсов (0.42);
– номинальный коэффициент мощности (0.43);
– номинальное напряжение двигателя (0.44);
– номинальная скорость (0.45);
– номинальный ток двигателя (0.46);
– номинальная частота питающего двигатель напряжения (0.47).
Для просмотра всех параметров меню необходимо занести в параметр 0.49 значение L2, нажать кнопку «Стоп-Сброс»;
В параметр 03.34 занести количество импульсов на один оборот датчика скорости (500 имп/об).
Параметр 3.40 установить в «0».
После записи этих параметров необходимо произвести автонастройку ПЧ:
– в параметр 0.40 ввести значение «2»;
– подать разрешение на работу ПЧ (тумблер SA3);
– выбрать направление вращения (переключатель SA1) – преобразователь начнет процедуру самонастройки. Если появится сообщение tunE2, убрать разрешение на работу ПЧ и поменять местами фазы А и В электродвигателя, после чего нажать кнопку «Сброс». Повторить автонастройку. В случае успешного проведения процедуры параметр 0.40 устанавливается в «0».
После процедуры автонастройки установить режим быстрой рампы (2.04=FAST), установить время торможения при полной мощности (10.30=2).
8.3.2 Настройка ПИ-регулятора контура регулирования тока статора. Настройка замкнутого контура регулирования тока (КРТ) статора выполняется при заторможенном роторе электродвигателя. Торможение двигателя осуществляется путем установки металлического стержня полумуфту электромашинного агрегата.
Настройку П-канала регулятора тока статора производить по переходной функции замкнутого контура, начиная с минимального значения коэффициента усиления пропорционального канала РТ.
Последовательность действий следующая:
– установить параметр 04.11 на 1 (разрешение регулирования момента);
– установить параметр 04.08 на 0 (задание момента в КРТ);
– установить параметр 04.14 на 0 (коэффициент усиления И–канала звена регулятора тока);
– установить параметр 04.13 на 50 (минимальный коэффициент усиления П–канала регулятора);
– включить переключатель SA3 «Разрешение» на лицевой панели модуля в положение «1»;
– включить переключатель SA1 в положение «Вперед»;
– установить значение параметра 04.08 на 100, задавая, таким образом, скачок задания на вход контура тока;
– на дисплее ПК наблюдать процесс нарастания момента (активного тока) двигателя;
– установить значение параметра 04.08 на 0;
– повторить пункты, установив другое значение параметра 04.13.
Критерием оптимизации переходной функции принимается минимум перерегулирования и максимум быстродействия контура регулирования тока.
Зафиксировать полученные в ходе настройки оптимальные значения П-регулятора тока. Снять осциллограмму IЯ(t) при скачке задания тока.
Настройку И-канала регулятора тока статора производить по переходной функции замкнутого контура.
Последовательность действий следующая:
– установить значение параметра 04.08 на 0 (задание момента в КРТ);
– установить значение параметра 04.14 на 100 (минимальный коэффициент усиления И-канала регулятора тока);
– установить значение параметра 04.08 на 100, задавая, таким образом, скачок сигнала задания на вход контура тока;
– на дисплее ПК наблюдать процесс нарастания момента (активного тока) двигателя;
– установить значение параметра 04.08 на 0;
– повторить пункты, установив другое значение параметра 04.14.
Зафиксировать полученные в ходе настройки оптимальное значение. Снять осциллограмму IЯ (t) при скачке задания тока.
Переключатель SA3 «Разрешение» перевести в нижнее положение, SA1 – в среднее положение.
После настройки контура тока из агрегата удалить металлический стержень и установить параметр 04.11=0.
8.3.3 Настройка ПИ-регулятора контура регулирования скорости (частоты) вращения. Настройка замкнутого контура регулирования скорости выполняется на холостом ходу и сводится к экспериментальному подбору оптимальных величин параметров П- и И-каналов регулятора. Значение частоты вращения снимается с виртуальных приборов компьютера, а также на индикаторе модуля СМ.
Настройку П-канала регулятора скорости производить по переходной функции замкнутого контура, начиная с минимального значения коэффициента усиления пропорционального канала РТ.
Последовательность действий следующая:
– в параметре 6.01 установить значение COAST (торможение на выбеге);
– установить значение параметра 03.16 на 0;
– установить значение параметра 0.08 (03.11) на 0 (коэффициент усиления И–канала регулятора скорости РС);
– установить значение параметра 0.09 (03.12) на 0 (коэффициент усиления Д–канала звена РС);
– установить коэффициент усиления П-канала звена РС на 0.0010 – параметр 0.07 (3.10);
– установить значение параметра 0.03, 0.04 на 0 (время разгона и торможения привода);
– включить переключатель SA3 «Разрешение» в положение «1»;
– включить переключатель SA2 в положение «Вперед»;
– потенциометром RP1 установить скорость вращения вала электродвигателя 0,1– 0,2 от номинальной;
– на дисплее ПК наблюдать процесс нарастания скорости двигателя. Подавая и снимая скачок задания скорости переключателем «Вперед», снять переходные процессы системы электропривода;
– подобрать и запомнить оптимальный коэффициент усиления П-канала звена РС с заданным уровнем вращения двигателя параметр 0.07 (3.10).
Зафиксировать в ходе настройки различные значения П-канала. Снять осциллограмму n(t) при скачке значения скорости.
Критерием оптимизации переходной функции принимается минимум перерегулирования и максимум быстродействия контура регулирования скорости.
Настройку И-канала регулятора скорости производить по переходной функции скорости замкнутого контура.
Последовательность действий следующая:
– установить значение параметра 0.08 (03.11) на 0.10 (коэффициент усиления И-канала регулятора скорости РС);
– подавая и снимая скачок задания скорости переключателем «Вперед», снять переходные процессы системы электропривода;
зафиксировать в ходе настройки различные значения ПИ-регулятора. Снять осциллограмму n(t) при скачке значения скорости.
8.3.4 Снятие регулировочных характеристик замкнутой системы. Регулировочные характеристики настроенной замкнутой системы ПЧ-АД снимаются при фиксированном моменте статической нагрузки Мс = const.
Экспериментально снять следующие характеристики:
– частоту вращения АД n = f(fС);
– ток статора IС = f(fС);
– напряжение статора UС = f(fС).
Нагрузка задается двигателем постоянного тока.
В преобразователе частоты наблюдать следующие параметры:
4.02 – активный ток статора;
4.17 – ток намагничивания;
5.01 – частота задания.
Напряжение статора UС, ток статора IС, ток нагрузки IЯ и частоту вращения n наблюдать на компьютере.
Опыт провести в следующей последовательности:
– ТП перевести в режим регулирования момента;
– SA3 «Разрешение» модуля ПЧ перевести в верхнее положение;
– переключателем SA1 модуля ПЧ выбрать направление вращения;
– потенциометром RP1 задать выходную частоту 50 Гц;
– включить кнопку «Сеть» модуля ТП, SA6 «Разрешение» перевести в верхнее положение;
– переключателем SA5 модуля ТП выбрать направление вращения;
– потенциометром RP1 модуля ТП задать ток нагрузки 0,5…1 А;
– изменяя потенциометром RP1 модуля ПЧ частоту задания, снять характеристики, а данные опыта занести в таблицу 8.1.
Таблица 8.1 - Данные опыта для построения регулировочных характеристик
|
IЯ = |
|||||||
|
IC, А |
|
|
|
|
|
|
|
|
IА, А |
|
|
|
|
|
|
|
|
Im, А |
|
|
|
|
|
|
|
|
UC, В |
|
|
|
|
|
|
|
|
n, рад/с |
|
|
|
|
|
|
|
После проведения опыта убрать нагрузку, SA5 модуля ТП перевести в среднее положение, SA6 «Разрешение» – в нижнее положение. Снять частоту задания ПЧ, SA1 перевести в среднее положение, SA3 в нижнее положение.
8.3.5 Снятие механических характеристик замкнутой системы. Механические и электромеханические характеристики в настроенной системе электропривода снимаются в двигательном режиме работы АД. При этом ДПТ включается встречно вращению АД. Характеристики снимаются при двух сигналах задания, величина которых задается преподавателем.
Экспериментально снять статические характеристики электропривода:
– механическую n = f(MС);
– электромеханическую n = f(IС);
– внешнюю UС = f(MС).
Опыт провести в следующей последовательности:
– переключатель SA3 модуля ПЧ перевести в верхнее положение;
– переключателем SA1 модуля ПЧ выбрать направление вращения;
– потенциометром RP1 модуля ПЧ задать частоту вращения (указывается преподавателем);
– переключателем SA5 модуля ТП выбрать направление вращения;
– изменяя потенциометром RP1 модуля ТП задать ток нагрузки.
Данные опыта занести в таблицу 8.2.
Т а б л и ц а 8.2 – Данные опыта для построения механических характеристик
|
МС, Н·м |
|
|
|
|
|
|
|
|
|
|
n, об/мин |
|
|
|
|
|
|
|
|
|
|
IЯ, А |
|
|
|
|
|
|
|
|
|
|
UС, В |
|
|
|
|
|
|
|
|
|
|
IC, А |
|
|
|
|
|
|
|
|
|
После проведения опыта убрать нагрузку, SA5 модуля ТП перевести в среднее положение, SA6 «Разрешение» – в нижнее положение. Снять частоту задания ПЧ, SA1 перевести в среднее положение, SA3 в нижнее положение.
Расчетные формулы
Момент статический, Н·м:
![]() ;
;
 ;
;
где UН – номинальное напряжение ДПТ (220 В);
wН – номинальная частота вращения ДПТ (1500 об/мин).
8.4 Содержание отчета
8.4.1 Краткое описание схемы для исследования замкнутой системы ПЧ-АД.
8.4.2 Привести таблицы 8.1 и 8.2 с опытными и расчетными данными параметров системы.
8.4.3 По опытным и расчетным данным построить регулировочные, механические и электромеханические характеристики системы.
8.4.4 Сделать выводы по работе.
8.5 Контрольные вопросы
8.5.1 Что такое система подчиненного регулирования?
8.5.2 Какие контуры регулирования в настраиваемой системе регулирования существуют?
8.5.3 В каком порядке выполняется настройка замкнутой системы регулирования?
8.5.4 Для чего предназначен П-канал регулятора? И-канал? В чем разница в их настройке?
8.5.5 Что можно сказать о соотношении качественных показателей контура регулирования тока и скорости?
Список литературы
1. 3имин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. -М.: Высшая школа, 1979.
2. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. -Л.: Энергоиздат, 1982.
3. Терехов В.М., Осипов О.И. Системы управления электроприводов. Учебник – М.: Издательский центр Академия, 2005 – 298 с.
4. Цыба Ю.А. Автоматическое управление электромеханическими системами. Учебное пособие.- Алматы: АИЭС, 2008.– 77 с.
5. Терёхин В.Б. Моделирование систем электропривода в Simulink (Matlab 7.0.1): учебное пособие / В.Б. Терёхин. – Томск: Изд-во Томского политехнического университета, 2008. – 320 с.
Содержание
|
Введение |
3 |
|
1 Лабораторная работа № 1. Исследование разомкнутой системы управления «Тиристорный преобразователь – двигатель постоянного тока» |
4 |
|
2 Лабораторная работа № 2. Исследование разомкнутой системы управления «Преобразователь частоты – асинхронный двигатель» |
8 |
|
3 Лабораторная работа № 3. Исследование разомкнутой системы управления «Преобразователь частоты – синхронный двигатель» |
13 |
|
4 Лабораторная работа № 4. Элементы замкнутых систем управления электропривода |
18 |
|
5 Лабораторная работа №5. Исследование системы управления «Тиристорный преобразователь – двигатель постоянного тока» с обратной связью по скорости |
23 |
|
6 Лабораторная работа №6. Исследование системы подчиненного регулирования с внешним контуром скорости |
28 |
|
7 Лабораторная работа №7. Исследование системы подчиненного регулирования с внешним контуром напряжения |
34 |
|
8 Лабораторная работа №8. Исследование замкнутой системы «преобразователь частоты – асинхронный двигатель» |
41 |
|
Список литературы |
48 |
Св. пл. 2013 поз. 21
Пулат Исмаилович Сагитов
Юрий Александрович Цыба
Нургуль Канаевна Алмуратова
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
Методические указания к лабораторным работам
для специальности 5В071800
Редактор Н.М. Голева
Специалист по стандартизации Н.К.
Молдабекова
Подписано в печать ______
Формат 60x84 1/16
Тираж 50 экз.
Бумага типографская № 1
Объем 3,1 уч. - изд. л.
Заказ____ Цена 1550 тг.
Копировально – множительное бюро
некоммерческого акционерного общества
,,Алматинский университет энергетики и связи”
050013, Алматы, ул. Байтурсынова, 126