Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ и СВЯЗИ
Кафедра электропривода и автоматизации промышленных установок
МАТЕМАТИЧЕСКИЕ ЗАДАЧИ И КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ В ЭЛЕКТРОПРИВОДЕ
Методические указания к лабораторным работам
для студентов всех форм обучения специальности 05B071800 –
Электроэнергетика
Алматы 2011 г.
СОСТАВИТЕЛЬ: С.Б. Алексеев. Математические задачи и компьютерное моделирование в электроприводе. Методические указания к выполнению лабораторных работ для студентов всех форм обучения специальности 05B071800 – Электроэнергетика.– Алматы: АУЭС, 2011. – 24с.
Методические указания содержат необходимые теоретические положения, программу выполнения работ, методику подготовки и проведения экспериментов, анализа полученных результатов.
Методические указания предназначены для студентов всех форм обучения специальности 05B071800 – Электроэнергетика.
Ил.14 , библиогр.- 3 назв.
Рецензент: канд. техн. наук, проф. Р.М. Шидерова.
Печатается по плану издания некоммерческого акционерного общества “Алматинский университет энергетики связи” на 2011 г.
ã НАО “Алматинский университет энергетики и связи”, 2011 г.
Сводный план 2011 г., поз. 87
Введение
Расчетные задачи, возникающие при разработке современных электрических и электромеханических систем, связаны с решением нелинейных систем дифференциальных уравнений высоких порядков. Решение и исследование этих уравнений аналитическими методами в большинстве случаев оказывается либо вовсе невозможным, либо слишком сложным и не приводит к результатам, пригодным для инженерных расчетов.
Поэтому в настоящее время получают широкое распространение методы математического моделирования и исследования подобных систем.
Математическое моделирование является способом исследования рассматриваемого объекта или характеристик изучаемого явления, основанным на использовании математического описания ( математической модели ) реальных физических процессов.
Целью математического моделирования является определение количественных соотношений между отдельными параметрами реального объекта путем изучения функциональных зависимостей, содержащихся в математической модели.
С помощью современного компьютера и соответствующего программного обеспечения моделирование может быть проведено непосредственно по системе дифференциальных уравнений, описывающих происходящие процессы в исследуемом объекте или с использованием структурной модели.
При структурном методе моделирования модель представляется в виде отдельных блоков, имитирующих работу физических узлов. Эти блоки представляют собой элементарные типовые звенья, применяемые в теории автоматического регулирования: усилительное (К), дифференцирующее (Тs), интегрирующие (1/Тs), апериодическое (1 /Тs +1), колебательное (К / sТ2 +2εsТ +1), запаздывающие (Ке-sТ).
В качестве параметров структурной схемы модели используются постоянные времени Т и коэффициенты усиления К, которые рассчитываются или определяются экспериментально.
Применение структурного метода моделирования требует наличия в применяемом программном обеспечении библиотеки стандартных схем отдельных электромеханических устройств, построенных на основе достаточно полного математического описания протекающих в них процессов.
В данной методической разработке моделирование осуществляется на базе прикладного программного пакета MATLAB, имеющего широкие возможности по моделированию электрических и электромеханических систем.
1 Лабораторная работа. Виртуальная модель трансформатора в определении параметров холостого хода и режима короткого замыкания
1.1 Основные положения к выполнению работы
Трансформатор состоит из замкнутого стального магнитопровода, на котором располагаются две или несколько обмоток, электрически не соединенных между собой (см. рисунок 1.1а).
 |
Часть магнитопровода, на которой располагаются обмотки, называется стержнем. Первичной обмоткой называется та, к которой подается электрическая энергия; к вторичной обмотке присоединяются приемники энергии.
а) б)
Рисунок 1.1 – а) трансформатор; б) электрическая схема для проведения измерений
С целью уменьшения потерь на вихревые токи магнитопровод собирается из листов электротехнической стали толщиной 0,35 или 0,5 мм. Листы изолируются друг от друга тонкой бумагой или лаком.
Для определения параметров трансформатора проводят опыты холостого хода и короткого замыкания [1].
1.1.1 Опыт холостого хода трансформатора
В опыте холостого хода трансформатора при выключенном рубильнике p2 (см. рисунок 1.1б) замыкают рубильник p1 и измеряют IX, PX и U2. При опыте необходимо, чтобы подведенное напряжение U1 было равно номинальному напряжению трансформатора.
Под действием приложенного напряжения в первичной обмотке возникнет переменный ток, который будет отставать от напряжения по фазе на угол, близкий к 90°, а в магнитопроводе трансформатора возникнет переменный магнитный поток.
В этом случае действующие значения напряжений и э.д.с , наведенных в первичной и вторичной обмотках, соответственно равны
U1 = E1 = 4,44 f ω1 ФМ ,
U2 = E2 = 4,44 f ω2 ФМ.,
где f – частота сети;
ω1 и ω2 — числа витков первичной и вторичной обмоток;
ФМ - максимальное значение магнитного потока в магнитопроводе.
Из данных опыта холостого хода определяются коэффициент трансформации- k,. полное, активное и индуктивное сопротивления холостого хода формулы (1.1), потери в стали.
.
k = U1н /U2
= ω1/ ω2;
zx =U1н /I1х;
rx =
P1х /I1х2
; xx = ![]() . (1.1)
. (1.1)
Так как потери в меди при холостом ходе ничтожно малы, то показания ватметра в опыте можно принять за мощность потерь в стали
РX = Pст.
.
1.1.2 Опыт короткого замыкания
В опыте короткого замыкания вторичная обмотка замыкается накоротко, а к первичной обмотке во избежание перегрева и повреждения трансформатора подводится пониженное напряжение с таким расчетом, чтобы ток находился в пределах номинального. Это напряжение называется напряжением короткого замыкания и составляет 5 ÷ 12% UH..
Из проведенных измерений определяются: полное zk; активное rk и реактивное xk сопротивления короткого замыкания формулы (1.2), потери в меди.
Zк =U1 /I1; rк = P1 /I12 ; xк = ![]() . (1.2)
. (1.2)
Ваттметр измерит мощность РK = РM+Рст.K. Однако, так как UK ≈ 0,05UH, то индукция в стали ничтожно мала, и потерями в стали при коротком замыкании Рст.K можно пренебречь. Тогда мощность измеренная в опыте короткого замыкания равна мощности потерь в меди
РK = PM .
Первичная мощность трансформатора
Ρ1 = U1 I1 cos φ1.
Вторичная мощность трансформатора
Ρ2 = U2 I2 cos φ2.
Разность между первичной P1 и вторичной P2 мощностями представляет собой мощность потерь. Потери в трансформаторе состоят из двух частей: 1) потери в меди обмоток РM и 2) потери в стали трансформатора от гистерезиса и вихревых токов Рст = Рг + Рс.
Мощность потерь в меди обмоток
PM = I12 r1 + I22 r2.
Для данного трансформатора ΡM зависит только от его нагрузки.
Коэффициент полезного действия трансформатора представляет собой отношение вторичной мощности Р2 к первичной мощности P1, т. е.
![]()
Благодаря отсутствию в трансформаторе вращающихся частей, потери его относительно малы, а к.п.д. высок, достигая для трансформаторов большой мощности 98 - 99 %.
1.2 Программа выполнения работы
1.2.1 Применяя блоки и элементы программного обеспечения Matlab Simulink, набрать модель исследования однофазного трансформатора (рисунок 1.2). Установить параметры элементов модели в соответствии с вариантом задания, выданным преподавателем.
1.2.2 Включить трансформатор вхолостую и измерить первичное и вторичное напряжения U1, и U2. Измерить мощность холостого хода ΡX и ток холостого хода IX . Подсчитать коэффициент трансформации, полное, активное и индуктивное сопротивления холостого хода, потери в стали и отношение (I1х /I1Н)100%.
1.2.3 Произвести изменения в модели для проведения опыта короткого замыкания и измерить: напряжение при коротком замыкании UK, мощность короткого замыкания РK, и ток в первичной обмотке I1= IH.
1.3.4 Подсчитать полное, активное и реактивное сопротивления короткого замыкания, uK = (UK/UH)100%..
1.2.4 Подключить нагрузку ко вторичной обмотке, в первичной установить номинальное напряжение. Измерить ток в первичной и вторичной обмотке, напряжение во вторичной обмотке. Зарисовать осциллограммы тока и напряжения в первичной и вторичной обмотках. Определить к.п.д. трансформатора.
1.3 Содержание отчета
1.3.1 Цель и программа работы
1.3.2 Расчеты необходимых параметров.
1.3.3 Схема модели.
1.3.4 Результаты измерений, осциллограммы
1.3.5 Анализ полученных результатов, выводы.
2 Лабораторная работа. Применение метода структурного моделирования при исследовании работы электродвигателя постоянного тока
Цель работы: с помощью программного обеспечения Matlab на базе математического описания электродвигателя постоянного тока с независимым возбуждением набрать модель электродвигателя и исследовать его работу.
2.1 Основные положения к выполнению работы
На рисунке 2.1 схематически показан двигатель постоянного тока с независимым возбуждением. Уравнения, которыми описываются электромагнитные и электромеханические процессы в этом двигателе при постоянном магнитном потоке имеют вид / 2 /
![]() ,
,
![]() , (2.1)
, (2.1)
e = cω,
M = c i,
Мс = сIc,
где e, i, rz ,Lz –соответственно э.д.с. , ток, сопротивление и индуктивность якоря двигателя; М – вращающий момент развиваемый двигателем; Мс – момент сопротивления на валу; с= кф - коэффициент определяющий магнитный поток двигателя (обмотка возбуждения ОВ).
 i ОВ
i ОВ
iB
u uB
Рисунок 2.1- Двигатель постоянного тока с независимым возбуждением
Учитывая, что Тя = Lя / rz -электромагнитная постоянная времени якоря двигателя, а Тм= Jrz / с2- электромеханическая постоянная времени двигателя запишем уравнения (2.1) в операторной форме (d / dt = s).
U – cω = rя (Тz s +1) i, (2.2)
i – Ic =![]() sω
sω
или i
=  ,
(2.3)
,
(2.3)
ω =  .
.
Уравнениям (2.3) соответствует структурная схема модели, представленная на рисунке 2.2, которая состоит из двух последовательно включенных типовых звеньев - апериодического 1/Тzs+1 и интегрирующего 1/Тм s.
Модель имеет два входа
управления ![]() -управление
по цепи якоря и вход Ic- возмущение по
моменту нагрузки.
-управление
по цепи якоря и вход Ic- возмущение по
моменту нагрузки.
Управление по цепи якоря подается несколько раньше для того, чтобы к моменту подачи возмущающего воздействия скорость уже установилась. Все время моделирования принимается равным 10с.
Параметры электродвигателя: rя, Lя, J берутся из Приложения А по заданию преподавателя. Коэффициент двигателя с рассчитывается из уравнения электромеханической характеристики [2].
![]() ;
;  .
(2.4)
.
(2.4)
2.2 Программа работы
2.2.1 По заданному преподавателем варианту (Приложение А) выписать необходимые параметры электродвигателя и рассчитать требуемые для моделирования значения ( с , Тя , Тм , см. п.2.2).
2.2.2 Применяя блоки и элементы программного обеспечения Matlab Simulink, набрать модель (см. рисунок 2.2). Установить параметры блоков и элементов модели в соответствии с вариантом задания. Произвести настройку параметров моделирования и регистрирующих приборов.
2.2.3 Произвести пуск модели и зарисовать полученные осциллограммы процесса набора скорости и изменения момента на валу двигателя в процессе пуска и наброса нагрузки. (Момент нагрузки задается в блоке Step 1)
2.2.4 Постепенно увеличивая момент (от 0 до 1) и фиксируя величину установившейся скорости для каждого момента нагрузки, получить зависимость ω = f (I), называемую электромеханической характеристикой.
2.2.5 Набрать схему (см. рисунок 2.3) на основе виртуальной электрической машины постоянного тока, имеющейся в библиотеке блоков Simulink (Machines). Установить номинальные параметры электрической машины и повторить проведенные ранее эксперименты.
2.2.6 Уменьшить напряжение на якоре электрической машины на 50%. Запустить модель и зафиксировать изменение скорости от номинальной.
2.2.7 Ослабить поток возбуждения машины уменьшив напряжение возбуждения на 30%, при номинальном напряжении якоря. Зафиксировать изменение скорости от номинальной.
2.2.8 По полученным результатам сделать выводы.
2.3 Содержание отчета
2.3.1 Цель и программа работы
2.3.2 Расчеты необходимых параметров.
2.3.3 Схемы моделирования.
2.3.4 Таблицы, графики, осциллограммы .
2.3.5 Анализ полученных результатов, выводы.
3 Лабораторная работа. Применение функциональных и виртуальных моделей в исследовании работы полупроводниковых выпрямителей.
Цель работы: исследовать работу схем полупроводниковых выпрямителей, применяемых в электроприводе постоянного тока, на основе их виртуальных моделей.
3.1 Основные положения к выполнению к выполнению работы
Выпрямители обеспечивают преобразование переменного напряжения сети в постоянное, необходимое для питания нагрузок постоянного тока [4 ]. При этом выпрямители могут быть, как нерегулируемыми, выполненными на диодах (см. рисунки 3.2а,б,в), так и регулируемыми, выполненными на тиристорах (см. рисунки 3.2г,д,е).
Каждая из схем выпрямителей характеризуется коэффициентом выпрямления, связывающим между собой средневыпрямленное напряжение Ud с величиной действующего входного переменного напряжения. Для однофазной мостовой схемы Ксх= 0,9 (Ud= 0,9 Uф), для трехфазной мостовой Ксх= 2,34 (Ud= 2,34 Uф).
Регулируемые выпрямители содержат в своем составе схему формирования импульсов управления, подаваемых на управляющие электроды тиристоров и обеспечивающих пропускание тока тиристором в заданный момент времени. Эти выпрямители позволят плавно регулировать напряжение Ud от нулевого до максимального значения воздействуя на угол управления тиристором α (см. рисунок 3.2г) и диаграмму напряжения на активной нагрузке для этой схемы на рисунке 3.1г. В своем составе программное обеспечение Matlab Simulink имеет блоки, позволяющие реализовать такое управление.
Ниже представлен вид осциллограмм напряжений на активной нагрузке для исследуемых схем.
 |
Рисунок 3.1- Осциллограммы напряжений: а) однофазного однополупериодного выпрямителя (см. рисунок 3.2а); однофазного мостового двухполупериодного выпрямителя (см. рисунок 3.2б); трехфазного мостового неуправляемого выпрямителя (см. рисунок 3.2в); для управляемого однофазного мостового тиристорного выпрямителя (см. рисунок 3.2г)
3.2 Программа работы
3.2.1 Для каждой, из представленных на рисунке 3.2 схем выпрямителей, рассчитать величину нагрузочного резистора по параметрам действующего входного напряжения и выпрямленного тока, заданных преподавателем и открыть проект в Matlab Simulink.
3.2.2 Набрать модель исследуемой схемы выпрямителя из элементов и блоков Matlab Simulink, подключить приборы для контроля тока и напряжения (см. рисунок 3.3). Установить параметры блоков в соответствии с заданием. Произвести настройку параметров моделирования и измерительных приборов. Исследованию подлежат схемы 3.2 (а, б, в, е).
3.2.3 Произвести пуск модели и зарисовать полученные осциллограммы напряжений и токов. Проверить соответствие полученных величин напряжений и токов расчетным.
3.2.4 Набрать модель схемы трехфазного мостового управляемого выпрямителя (см. рисунки 3.2е, 3.4). Установить параметры блоков в соответствии с заданием. Произвести настройку параметров моделирования и измерительных приборов. Установить начальный угол регулирования α = 0, запустить модель зарисовать, зарисовать осциллограммы. По заданию преподавателя установить требуемую величину угла α. Повторить измерения, сравнить полученные результаты, сделать выводы.
~ Uc
VD1 VD3
VD
~ Uc ZH
ZH VD3 VD2
а) б)
VD1 VD3 VD5 ~ Uc
A
B ZH VT
C
Рисунок 3.2 - Неуправляемые диодные (а-в) и управляемые тиристорные (г-е) схемы выпрямителей
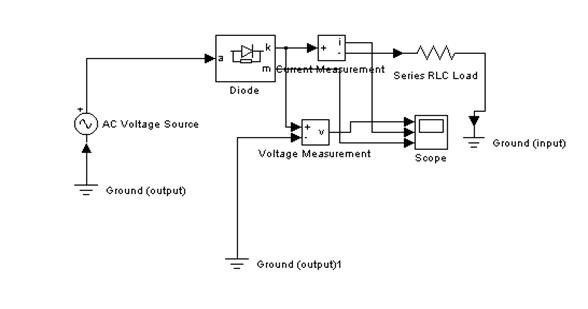
Рисунок 3.3 - Модель однополупериодного выпрямителя в Matlab Simulink
3.3 Содержание отчета
3.3.1 Цель и программа работы
3.3.2 Расчеты необходимых параметров.
3.3.3 Схемы моделирования.
3.3.4 Осциллограммы.
3.3.5 Анализ полученных результатов, выводы.
4 Лабораторная работа. Построение и исследование модели регулируемого полупроводникового электропривода постоянного тока.
Цель работы: на основе виртуальных моделей трехфазного мостового управляемого выпрямителя и электродвигателя постоянного тока с независимым возбуждением исследовать электропривод постоянного тока с регулированием скорости по цепи якоря.
4.1 Основные положения к выполнению работы
Одним из основных способов регулирования скорости электродвигателей постоянного тока является регулирование напряжением по цепи якоря двигателя, что следует из уравнения электромеханической характеристики двигателя (см. уравнение 2.4). Получить регулируемое напряжение постоянного тока можно с помощью управляемого тиристорного выпрямителя. Подключив к тиристорному выпрямителю якорь электродвигателя мы получаем регулируемый электропривод постоянного тока (см. рисунок 4.1). Плавное изменение угла управления α выпрямителем, обеспечивает регулирование скорости электродвигателя от нулевой до номинальной (см. уравнение 4.1). Модель электропривода, реализующая такой принцип регулирования представлена на рисунке 4.2.
![]() (
4.1)
(
4.1)
VS1 – VS6
 |
UЗ ( угол управления -α)
Рисунок 4.1 - VS1- VS6 – тиристоры; Я – якорь электродвигателя;
ОВ- обмотка возбуждения; СУ- система управления
4.2 Программа работы
4.2.1 По заданному преподавателем варианту (Приложение А)
выписать необходимые для моделирования параметры электродвигателя.
4.2.2 Применяя блоки и элементы программного обеспечения Matlab Simulink, набрать модель (см. рисунок 4.2). Установить параметры блоков и элементов модели в соответствии параметрами заданного двигателя. Угол управления α = 0. Произвести настройку параметров моделирования и осциллографов.
4.2.3 Осуществить пуск модели, дождаться окончания переходного процесса и при работающей модели электропривода произвести наброс нагрузки. Зарисовать полученные осциллограммы напряжения на двигателе, процесса изменения скорости и тока.
4.2.4 Повторить проведенные испытания при угле управления α = 300,600, 750. Сравнить полученные осциллограммы, сделать выводы.
4.2.5 На основании полученных данных построить зависимость ω = f (α)
4.3 Содержание отчета
4.3.1 Цель и программа работы
4.3.2 Схемы моделирования, осциллограммы, графики.
4.3.3 Анализ полученных результатов, выводы.
5 Лабораторная работа. Метод структурного моделирования в исследовании динамики электропривода с системой подчиненного регулирования
Цель работы: в среде программного обеспечения Matlab Simulink произвести моделирование динамической системы тиристорный преобразователь – электродвигатель постоянного тока с системой автоматического управления, построенной по принципу подчиненного регулирования.
5.1 Основные положения к выполнению работы
Для расширения диапазона регулирования скорости, а также для улучшения динамических свойств и повышения точности регулирования, в электроприводе используются замкнутые системы автоматического управления. В них с помощью обратных связей, соединяющих выход системы с ее входом, автоматически компенсируется воздействие возмущающих факторов, и угловая скорость или момент могут с большей точностью поддерживаться на заданном уровне. При этом система должна быть устойчивой, а переходной процесс иметь затухающий характер. В электроприводах постоянного тока наибольшее распространение получили системы подчиненного регулирования c последовательной коррекцией..
Исследование динамических свойств такой системы можно провести с применением метода структурного моделирования на основе типовых передаточных функций (см. рисунок 5.1). Система имеет внутренний токовый контур (отрицательная обратная связь по току) и внешний контур по скорости (отрицательная обратная связь по скорости). В системе подчиненного регулирования появляется возможность раздельного регулирования переменных и раздельной настройки контуров. Настройка регуляторов осуществляется последовательно от внутреннего, первого контура, к внешнему.
 ω
ω
Uз
_ _
IД Uω
Рисунок 5.1- Структурная схема электропривода с подчиненным регулированием
W(P) – передаточные функции элементов электрической схемы электропривода, где:
WРС(P) – передаточная функция регулятора скорости;
WРТ(P) – передаточная функция регулятора тока;
WП(P) - передаточная функция преобразователя;
WД(P) – передаточная функция электродвигателя;
КТ - коэффициент обратной связи по току;
КС – коэффициент обратной связи по скорости.
Исследования, проводимые на модели, позволяют выбрать правильные настройки регуляторов Wрт(P), Wрс(P) и на реальном объекте ускорить процесс наладки. Правильность настроек регуляторов определяется показателями качества переходного процесса [1].
а) перерегулированием σ (%)
 ;
;
б) длительностью переходного процесса - tр;
в) числом колебаний за время переходного процесса.
Параметры системы необходимые для исследования рассчитываются по Приложению Б. Рассчитанные параметры подставляются в структурную схему (см. рисунок 5.2).
5.2 Программа работы
5.2.1 На основании структурной схемы (см. рисунок 5.2) набрать схему модели из элементов Matlab Simulink, установив параметры и коэффициенты передаточных функций. На вход системы регулирования подать управляющее воздействие в виде единичного, ступенчатого сигнала.
5.2.2 Запустить модель и получить осциллограммы переходных процессов по скорости и току. По осциллограммам определить время окончания переходного процесса и перерегулирование.
5.2.3 Повторить эксперимент для значений входного сигнала равных 0,5; 1,5; 2. Проанализировать результаты, построить зависимости перерегулирования и времени переходного процесса от величины управляющего сигнала.
5.2.4 Задать единичное управляющее воздействие на вход системы и по окончании переходного процесса подать возмущающее воздействие в виде единичного сигнала. Зафиксировать параметры возникшего переходного процесса.
5.3 Содержание отчета
5.3.1 Цель и программа работы
5.3.2 Расчеты параметров схемы
5.3.3 Схемы моделирования, осциллограммы, графики.
5.3.4 Анализ полученных результатов, выводы
Приложение А
|
№ варианта |
Мощность Р,кВт |
Ном. напряж.Uн,В |
Ток якоря, Iн,А |
Актив. сопр. Rя,Ом |
Инд. сопр. Lя,Гн |
Частота вращ. ωнрад/с |
Ном. момент Мн,Н·м |
Момент инерции Jя,кг·м2 |
|
1 |
1,5 |
220 |
9 |
1,99 |
0,446 |
314 |
4,6 |
0,042 |
|
2 |
2,2 |
220 |
12,5 |
1,03 |
0,321 |
314 |
6,8 |
0,052 |
|
3 |
3,2 |
220 |
17,5 |
0,642 |
0,229 |
314 |
10 |
0,09 |
|
4 |
4,5 |
220 |
24,3 |
0,352 |
0,165 |
314 |
14 |
0,116 |
|
5 |
6 |
220 |
33 |
0,36 |
0,122 |
314 |
18,6 |
0,15 |
|
6 |
11 |
220 |
59 |
0,121 |
0,068 |
314 |
34 |
0,008 |
|
7 |
19 |
220 |
98,6 |
0,054 |
0,041 |
314 |
59 |
0,14 |
|
8 |
2,2 |
220 |
12 |
1,205 |
0,335 |
157 |
13,6 |
0,116 |
|
9 |
3,2 |
220 |
18,4 |
1,032 |
0,218 |
157 |
20 |
0,15 |
|
10 |
4,5 |
220 |
25,4 |
0,78 |
0,158 |
157 |
28 |
0,18 |
|
11 |
6 |
220 |
33,2 |
0,472 |
0,121 |
157 |
37,2 |
0,35 |
|
12 |
8 |
220 |
43,5 |
0,269 |
0,092 |
157 |
49,7 |
0,4 |
|
13 |
11 |
220 |
59,5 |
0,187 |
0,067 |
157 |
68,3 |
0,56 |
|
14 |
14 |
220 |
73,5 |
0,128 |
0,055 |
157 |
87 |
0,65 |
|
15 |
19 |
220 |
103 |
0,124 |
0,039 |
157 |
118 |
1,4 |
|
16 |
6.5 |
220 |
37.5 |
0.58 |
0,115 |
157 |
22 |
0.95 |
|
17 |
9.5 |
220 |
53 |
0.35 |
0,071 |
157 |
36 |
1.15 |
|
18 |
14.5 |
220 |
78 |
0.23 |
0,052 |
157 |
42 |
2.25 |
|
19 |
18.5 |
220 |
93 |
0.18 |
0,045 |
157 |
58 |
2.68 |
|
20 |
17.5 |
220 |
94 |
0.19 |
0,058 |
157 |
55 |
5.85 |
Приложение Б
Мостовой управляемый выпрямитель может быть представлен в виде инерционного звена
W(P) = ![]() ,
,
где Тп – постоянная времени выпрямителяТп = 0,01с;
Кп – коэффициент усиления выпрямителя ( Кп= 25 ).
Регулятор тока пропорционально–интегральный (ПИ – регулятор )
W(P) =  ,
,
где ТЯ - электромагнитная постоянная цепи якоря
ТЯ = ![]() ,
,
КТ – коэффициент усиления датчика тока ( КТ = 0,07 ).
Регулятор скорости для статической системы пропорциональный –
Wрс(Р)
= ,
,
где Кω – коэффициент датчика скорости (Кω = 0,5 ).
Электродвигатель представлен двумя последовательно включенными звеньями – инерционным и интегрирующим:
W(P) =
 ; W(P) =
; W(P) = ![]() ,
,
где Тм - электромеханическая постоянная двигателя
![]() .
.
С - коэффициент двигателя
![]() .
.
Список литературы
1. Вольдек А.И. Электрические машины.-СПб Питер, 2007.-320 с.
2. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие.- СПб.: КОРОНА, 2001.-320 с.
3. Алексеев С.Б. Силовые преобразовательные устройства: Учебное пособие.- Алматы.: АИЭС, 2006.-90 с.
Содержание
Введение 3
1.Лабораторная работа. Виртуальная модель трансформатора в определении параметров холостого хода и режима короткого замыкания 4
2 Лабораторная работа.Применение метода структурного моделирования при исследовании работы электродвигателя постоянного тока 8
3.Лабораторная работа. Применение функциональных и виртуальных моделей в исследовании работы полупроводниковых выпрямителей 12
4.Лабораторная работа. Построение и исследование модели регулируемого полупроводникового электропривода постоянного тока 16
5.Лабораторная работа. Метод структурного моделирования в исследовании динамики электропривода с системой подчиненного регулирования 19
Приложение А
Приложение Б
Список литературы
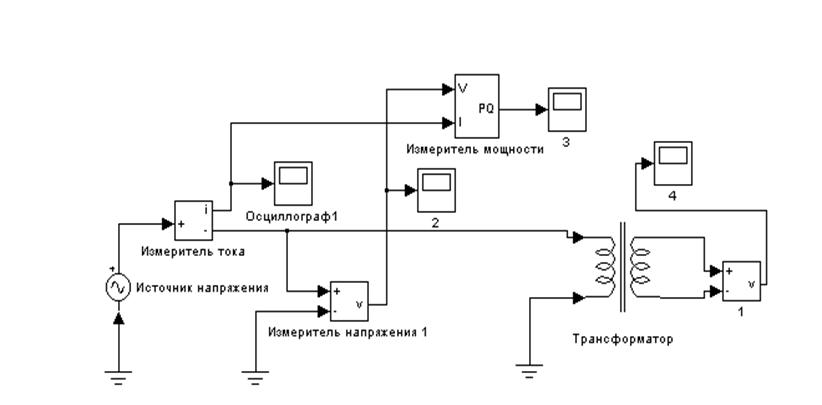
Рисунок 1.2
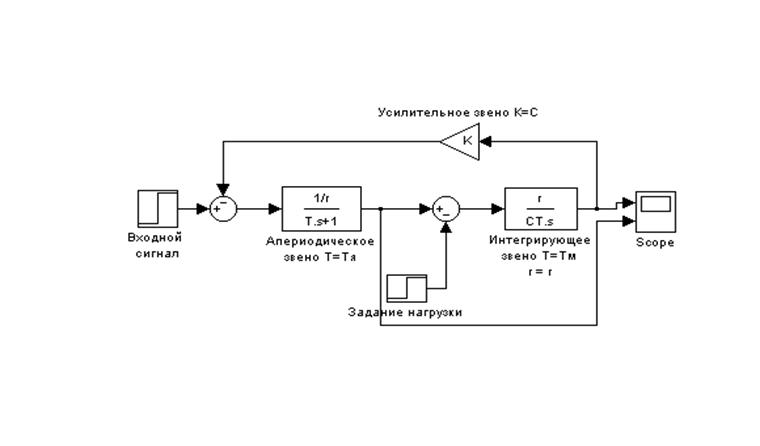
Рисунок 2.2
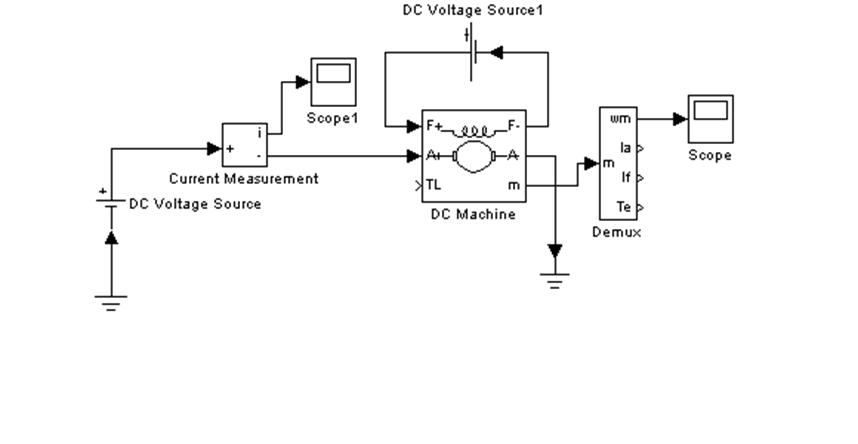
Рисунок 2.3
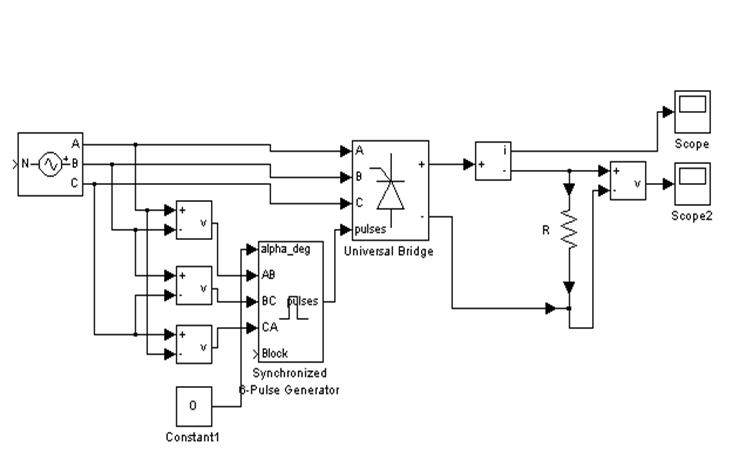
Рисунок 3.3
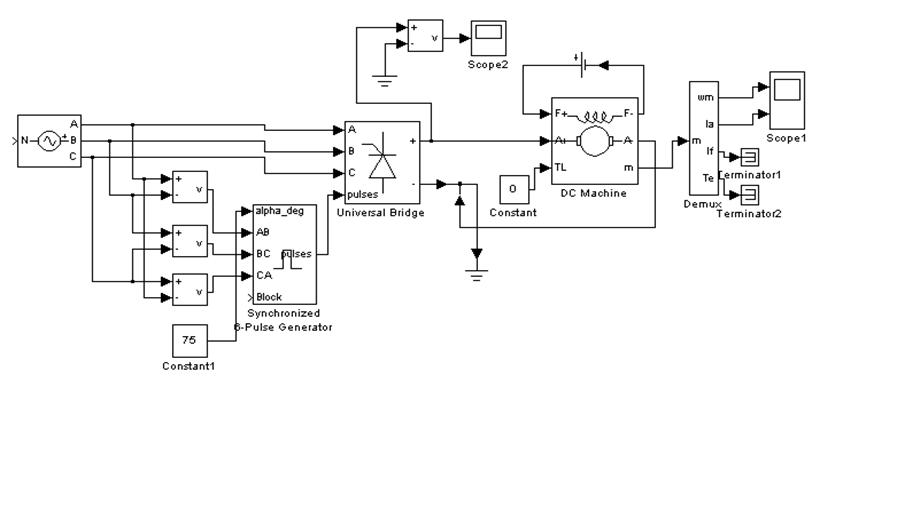
Рисунок 4.2
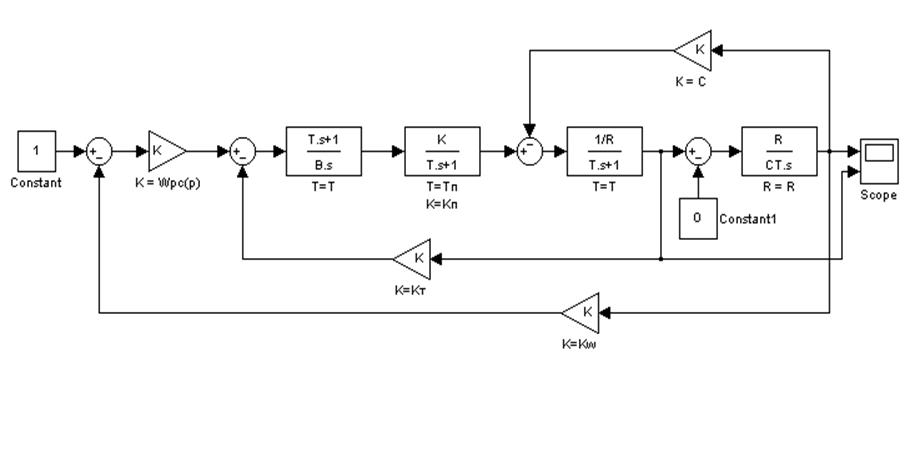
Рисунок 5.2