Некоммерческое акционерное общество
АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электропривода и автоматизации промышленных установок
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ СИСТЕМ АВТОМАТИКИ
Конспект лекций по курсу
для студентов всех форм обучения специальности 050718 – Электроэнергетика
Алматы 2007
СОСТАВИТЕЛИ: Ю.А. Цыба. Электрические машины систем автоматики. Конспект лекций для студентов всех форм обучения специальности 050718 – Электроэнергетика. – Алматы: АИЭС, 2007. – 52с.
Конспект лекций по курсу «Электрические машины систем автоматики» разработан в соответствии с типовой учебной программой для специальности Электроэнергетика. Рассмотрены вопросы теории работы и устройство электрических машин наиболее часто используемых в качестве основных элементов систем автоматики.
Конспект лекций предназначен для студентов дневной и заочной форм обучения специальностей электроэнергетического направления.
Ил. 37, библиогр. – 8 назв.
Рецензент: д-р техн. наук, проф. П.И. Сагитов.
Печатается по плану издания некоммерческого акционерного общества «Алматинский институт энергетики и связи» на 2007г.
Ó НАО «Алматинский институт энергетики и связи», 2007г.
Содержание
|
Введение…………………………………………………………………………. |
4 |
|
Лекция №1. Назначение и классификация электрических машин…………... |
5 |
|
Лекция №2. Конструктивное выполнение электрических машин…………… |
8 |
|
Лекция №3. Электрические машины постоянного тока……………………… |
11 |
|
Лекция №4. Виды машин постоянного тока и основные их характеристики.. |
15 |
|
Лекция №5. Электрические машины переменного тока, трехфазный асинхронный двигатель…………………………………………… |
20 |
|
Лекция №6. Однофазные асинхронные двигатели……………………………. |
24 |
|
Лекция №7. Трехфазные синхронные машины……………………………... |
28 |
|
Лекция №8. Однофазные синхронные машины и универсальные коллекторные двигатели………………………………………… |
32 |
|
Лекция №9. Шаговые и индукционные электрические двигатели………… |
34 |
|
Лекция №10. Электромашинные датчики (тахогенераторы)………………… |
38 |
|
Лекция №11. Поворотные трансформаторы………………………………… |
40 |
|
Лекция №12. Индукционные машины синхронной связи (сельсины)………. |
43 |
|
Лекция №13. Механические характеристики электродвигателей и основные их параметры……………………………………………………………. |
48 |
|
Список литературы……………………………………………………………… |
51 |
Введение
Электрические машины не только вырабатывают электрическую энергию и осуществляют высокоэкономичное преобразование ее в механическую, но и играют весьма большую роль в системах автоматического регулирования и управления.
Особенно широко применяются машины малой мощности, так называемые микромашины, которые выполняют очень важные функции в системах автоматики, обеспечивая быстродействующий привод, согласование вращения нескольких осей, усиление сигналов малой мощности, преобразование угловых перемещений в электрические сигналы, и осуществляют другие электромеханические преобразования.
Поэтому специалисты, занимающиеся проектированием, изготовлением и эксплуатацией указанных систем, должны хорошо знать конструкцию, принцип действия, особенности работы и характеристики основных типов электрических микромашин для того, чтобы уметь правильно выбрать требуемый тип машины и установить для нее наиболее подходящий эксплуатационный режим.
В данном конспекте лекций рассмотрены вопросы теории работы и устройство электрических машин, наиболее часто используемых в качестве основных элементов системы автоматики.
Лекция №1. Назначение и классификация электрических машин
Содержание лекции:
- назначение электрических машин и область их применения;
- классификация электрических машин.
Цели лекции:
- освоить назначение и область применения электрических машин;
- изучить основные принципы классификации электрических машин.
Машины, использующие явления электромагнитной индукции и предназначенные для преобразования электрической энергии в механическую или наоборот, называются электрическими [3,4,5,6].
По назначению электрические машины подразделяются на следующие виды:
-электрические генераторы, преобразующие механическую энергию в электрическую. Генераторы устанавливаются на электрических станциях, где приводятся во вращение с помощью паровых и гидравлических турбин. Кроме того, они широко применяются в различных транспортных устройствах: на автомобилях, самолетах, тепловозах, кораблях, передвижных электростанциях и др., где приводятся во вращение главным образом от двигателей внутреннего сгорания и газовых турбин, В ряде случаев генераторы используются в качестве источников питания в установках связи, устройствах автоматики, измерительной техники и пр.;
-электрические двигатели, преобразующие электрическую энергию в механическую. Электродвигатели приводят во вращение самые различные машины, механизмы и устройства, применяемые в промышленности, сельском хозяйстве, связи, на транспорте, в военном деле и быту. В современных системах автоматического управления они используются в качестве исполнительных, регулирующих и программирующих органов;
-электромашинные преобразователи, преобразующие переменный ток в постоянный и, наоборот, изменяющие величину напряжения переменного и постоянного тока, частоту, число фаз и др. Преобразователи широко используются в системе передачи и распределения электрической энергии, в промышленности, авиации, на транспорте и в военном деле;
-электромеханические преобразователи сигналов, генерирующие, преобразующие и усиливающие различные сигналы. Эти преобразователи, выполняемые обычно в виде электрических микромашин, широко используются в системах автоматического регулирования, а также в измерительных и счетно-решающих устройствах в качестве различных датчиков, приборов для функциональных преобразований, дифференцирующих и интегрирующих элементов, сравнивающих и регулирующих органов и др.
По характеру выполнения функций электрические микромашины подразделяются на следующие основные группы:
-исполнительные двигатели, преобразующие подводимый к ним электрический сигнал в механическое перемещение вала, т. е. отрабатывающие определенные команды;
-тахогенераторы, преобразующие механическое вращение в электрический сигнал - напряжение, пропорциональное скорости вращения;
-поворотные трансформаторы, дающие на выходе напряжение, пропорциональное той или другой функции угла поворота ротора, например, синусу или косинусу этого угла или же самому углу;
-машины синхронной связи, осуществляющие синхронный и синфазный поворот или вращение двух механически не связанных между собой осей;
-микродвигатели общего применения, служащие для привода различных маломощных механизмов: самопишущих приборов, вентиляторов, магнитофонов, насосов и др.
Электрические машины обладают свойством обратимости. Вращающиеся электрические машины могут работать как в генераторном, так и в двигательном режимах и переходить из одного режима в другой; каждый преобразователь может изменять направление преобразуемой им энергии. Однако выпускаемые электромашиностроительными заводами машины обычно предназначаются для какого-либо одного режима работы, например генераторного или двигательного. При этом оказывается возможным наилучшим образом приспособить электрическую машину к требуемым условиям работы, добиться наиболее рационального использования материалов, уменьшить ее вес, габариты и повысить к. п. д. В ряде случаев, однако, необходимо предусматривать работу электрических машин как в двигательном, так и в генераторном режимах. Такие условия имеют место, например, в электрических приводах, где генераторный режим используется в целях торможения.
Электрические машины широко применяются во многих отраслях промышленности. Они осуществляют преобразование энергии, а также различных электрических и других сигналов. Достоинствами их являются высокий к.п.д., достигающий в мощных электрических машинах 95¸99%, сравнительно малый вес и габаритные размеры, а также хорошее использование материалов.
Электрические машины могут быть выполнены на различные мощности (от долей ватта до сотен мегаватт) и скорости вращения, на различный род тока, а также различные величины напряжения и частоты. Они характеризуются высокой надежностью и долговечностью, простотой управления и обслуживания, удобством подвода и отвода энергии, а также небольшой стоимостью при массовом и крупносерийном производстве.
По роду тока электрические машины делятся на машины переменного и постоянного тока.
Машины переменного тока в зависимости от особенностей своей электромагнитной системы подразделяются на асинхронные, синхронные и коллекторные. К ним относят также трансформаторы - статические электромагнитные аппараты, у которых процесс преобразования энергии во многом подобен вращающимся электрическим машинам.
Трансформаторы широко применяются для преобразования напряжения в системах передачи и распределения электрической энергии, в выпрямительных установках, а также в устройствах автоматики, связи, радиоаппаратуре, вычислительной технике, для измерений и функциональных преобразований (поворотные трансформаторы) и др.
Асинхронные машины используются главным образом в качестве электрических двигателей трехфазного тока. Они широко применяются в различных отраслях техники благодаря простоте устройства и высокой надежности. В системах автоматического регулирования широко используются одно- и двухфазные асинхронные двигатели, асинхронные тахогенераторы, а также сельсины, осуществляющие синхронный поворот или вращение нескольких, не связанных друг с другом механически осей.
Синхронные машины применяются в качестве генераторов переменного тока и электрических двигателей. В устройствах автоматики широко используются различные типы синхронных машин малой мощности (реактивные, с постоянными магнитами, гистерезисные, шаговые, индукторные и пр.).
Коллекторные машины переменного тока применяются сравнительно редко и главным образом в качестве двигателей. Они имеют сложную конструкцию и требуют тщательного ухода. В устройствах автоматики, а также в различного рода электробытовых приборах широко используются универсальные коллекторные двигатели, работающие как на постоянном, так и на переменном токе.
Машины постоянного тока используются в качестве генераторов, двигателей, электромашинных усилителей, преобразователей скорости вращения в электрические сигналы (тахогенераторов) и преобразователей напряжения. В последние годы в связи с развитием управляемых полупроводниковых преобразователей все более широко применяются электроприводы с двигателями постоянного тока.
Вращающиеся электромашинные преобразователи, выполненные в виде одной или двух отдельных электрических машин (двигателя и генератора), механически связанных друг с другом, широко используются в системах электрического привода для питания устройств связи, различных радиотехнических установок и др. В последнее время они вытесняются статическими полупроводниковыми преобразователями, которые обладают рядом преимуществ перед вращающимися машинами.
По мощности электрические машины условно подразделяются на следующие группы:
- микромашины, имеющие мощность от долей ватта до »500 вт. Эти машины работают как на постоянном, так и на переменном токе нормальной и повышенной (400¸500 гц) частоты;
- машины малой мощности - от 0,5 до 10 квт. Они работают как на постоянном, так и на переменном токе нормальной или повышенной частоты;
- машины средней мощности – от 10 до нескольких сотен киловатт;
- машины большой мощности – свыше нескольких сотен киловатт.
Машины большой и средней мощности обычно предназначаются для работы на постоянном или переменном токе нормальной частоты. Кроме некоторых специальных случаев (авиация, морской флот и др.), где иногда используются довольно мощные машины повышенной частоты.
В зависимости от скорости вращения машины условно подразделяются на:
- тихоходные со скоростями вращения до 300 об/мин;
- средней быстроходности - 300¸1500 об/мин;
- быстроходные - 1500¸6000 об/мин;
- сверхбыстроходные – свыше 6000 об/мин.
Микромашины строятся для скоростей от нескольких до 30000 об/мин; машины большой и средней мощности – обычно до 3000 об/мин.
Лекция №2. Конструктивное выполнение электрических машин
Содержание лекции:
- конструкция электрических машин переменного тока;
- конструкция электрических машин постоянного тока;
- отличительные особенности конструкций электрических машин переменного и постоянного тока.
Цели лекции:
- изучить конструкцию электрических машин;
- изучить назначение основных конструктивных элементов электрических машин переменного и постоянного тока.
Вращающиеся электрические машины имеют следующие основные конструктивные элементы: магнитную систему; обмотки статора и ротора; коллектор (только в машинах постоянного тока и в коллекторных машинах
переменного тока); устройство для охлаждения, а также механические элементы, служащие для обеспечения прочности и жесткости конструкции машины, возможности ее перемещения и передачи вращающего момента к ротору (в генераторах) или от него (в двигателях).
Магнитная система машины состоит из статора 1 (рисунок 2.1) и ротора 4, между которыми имеется воздушный зазор 3. На статоре и роторе размещены обмотки 2 и 5. В некоторых машинах одна из обмоток (возбуждения) может отсутствовать и вместо нее могут использоваться постоянные магниты.

Рисунок 2.1 - Конструктивная схема вращающейся электрической машины
Охлаждение машины в большинстве случаев осуществляется с помощью системы вентиляционных каналов в роторе, статоре и коллекторе, через которые проходит охлаждающий воздух. Этот воздух подается вентилятором 9, установленным на валу ротора, или внешним вентилятором.
В некоторых случаях может быть применено охлаждение посредством какого-либо другого охлаждающего агента (воды, керосина, водорода).
Механические элементы конструкции включают в себя корпус (станину) 10, подшипники 6, подшипниковые щиты 7 или другие детали для их крепления и вал ротора 8
В машинах переменного тока корпус является только механическим элементом конструкции. Поэтому он может выполняться как из ферромагнитных материалов (чугун, литая сталь, сварная конструкция), так и из легких алюминиевых сплавов. В машинах же постоянного тока корпус служит частью магнитопровода и должен выполняться обязательно из ферромагнитного материала. Подшипниковые щиты в электрических машинах большой и средней мощности изготовляются из чугуна, а в машинах малой мощности и микромашинах - из алюминиевых сплавов.

1-корпус; 2-пакет статора; 3-сердечник ротора; 4-вал; 5-воздушный зазор; 6- обмотка возбуждения; 7-полюс
Рисунок 2.2 - Статор и ротор машины переменного (а и б) и постоянного (в) тока
В большинстве электрических машин переменного тока статор и ротор (рисунок 2.2, а и б) выполняют из изолированных друг от друга листов электротехнической стали, собранных в общий пакет. Пакет ротора удерживается в сжатом состоянии двумя нажимными шайбами и под прессом насаживается на вал. Пакет статора также скрепляется двумя нажимными шайбами и запрессовывается в корпус машины. Для предотвращения осевого сдвига и углового перемещения пакет статора укрепляется в корпусе шпонками, стопорными шпильками и др.
В машинах постоянного тока (рисунок 2.2, в) ротор
выполняют так же,
как и в машинах переменного тока. На статоре же расположены полюса с катушками,
создающими магнитный поток возбуждения. Полюса собраны из отдельных листов,
изолированных друг от друга. Часть полюса со стороны, обращенной к ротору,
выполняется более широкой и называется полюсным наконечником. Она служит для
поддержания катушки, а также для лучшего распределения магнитного потока по
поверхности ротора.
В некоторых типах синхронных машин (в машинах с явновыраженными полюсами) на роторе расположены полюса с цилиндрическими катушками, т. е. его конструкция подобна конструкции статора в машинах постоянного тока.

1-лист ротора; 2-зубец; 3-паз; 4-вентиляционный канал; 5-отверстие под вал; 6-лист статора; 7-лист полюса; 8-отверстие под шпильку; 9-отверстие под установочный стержень; 10-полюсный наконечник; 11-лист корпуса вместе с полюсами
Рисунок 2.3 - Листы ротора (а), статора (б), полюсов (в) и корпуса с полюсами (г)
Листы статора и ротора изготовляют из электротехнической стали толщиной от 0,35 до 1 мм. Для изготовления роторов машин всех типов и статоров машин переменного тока применяют листы толщиной 0,35 и 0,5 мм; для изготовления полюсов машин постоянного тока и синхронных машин - листы 0,5 и 1 мм. Листы изолируют относительно друг друга специальным лаком; при изготовлении асинхронных машин малой и средней мощности листы часто не покрывают изолирующим лаком, так как имеющаяся на их поверхности окалина (образующаяся при прокатке листов) является достаточной изоляцией. Листы штампуются с помощью штампов соответствующей конфигурации.
При изготовлении листов ротора и статора одновременно с вырубкой наружного контура листа в них штампуются пазы (рисунок2.3, а и б), в которые укладываются проводники обмотки ротора и статора, а также вентиляционные каналы для прохода охлаждающего воздуха (в листах ротора). В листах полюсов (рисунок 2.3, в) вырубаются отверстия под шпильки или же под установочный стержень; с помощью этих деталей листы скрепляются в общий пакет. При изготовлении микромашин в ряде случаев корпус и полюса выполняются в виде одного общего пакета, собранного из отдельных штампованных листов требуемой конфигурации (рисунок 2.3, г).
Лекция №3. Электрические машины постоянного тока
Содержание лекции:
- электрические генераторы постоянного тока, устройство и принцип действия, реакция якоря;
- электрические двигатели постоянного тока, устройство и принцип действия.
Цели лекции:
- изучить устройство и принцип действия генераторов постоянного тока;
- изучить устройство и принцип действия двигателей постоянного тока.
Электрические машины при всем их разнообразии подразделяются на две группы:
а) генераторы - электрические машины, с помощью которых вырабатывается электрическая энергия;
б) двигатели - электрические машины, с помощью которых электрическая энергия преобразуется в механическую.
Принцип действия электрического генератора основан на законе электромагнитной индукции, который формулируется так: «При всяком изменении магнитного потока, пронизывающего проводящий контур, в этом контуре наводится электродвижущая сила (ЭДС)». Использование этой ЭДС позволяет преобразовывать механическую энергию в электрическую.
Если магнитный поток пересекает проводник, по которому течет электрический ток, то на этот проводник будет действовать механическая сила, это позволяет преобразовывать электрическую энергию в механическую. Электрическая машина, работающая на этом принципе, является двигателем.
Машина постоянного тока состоит из неподвижной и вращающейся частей, называемых статором и якорем.
Принцип действия генератора постоянного тока рассмотрим с помощью рисунка 3.1. При вращении рамки 1 в магнитном поле с потоком ФВ в ней будет наводиться ЭДС, которая в зависимости от времени t будет изменяться по синусоидальному закону (рисунок 3.2). Подсоединим к концам рамки коллекторные пластины 2, которые при вращении рамки будут касаться двух неподвижных щеток 3. С помощью щеток коллекторные пластины окажутся соединенными с нагрузкой RП.
|
|
1-рамка; 2-коллекторные пластины; 3-щетки
Рисунок 3.1 – Простейшая модель генератора постоянного тока
При этом возникающая в цепи нагрузки ЭДС будет постоянной по направлению, но изменяющейся по величине (пульсирующей) (рисунок 5, б). С помощью коллекторных пластин происходит преобразование переменного тока в постоянный.
Для уменьшения пульсации ЭДС (рисунок 3.2, в) необходимо увеличивать число рамок и коллекторных пластин. Так, 16 пар коллекторных пластин уменьшают пульсацию до 1%.
Величина ЭДС генератора равна
Е = Вlv (3.1)
где: В - магнитная индукция;
l - длина активной части рамки;
v - скорость перемещения активной части рамки.
Направление ЭДС определяют по правилу правой руки: ладонь руки нужно расположить так, чтобы линии магнитной индукции входили в нее, а большой палец показывал направление движения проводника. Тогда вытянутые четыре пальца покажут направление ЭДС.
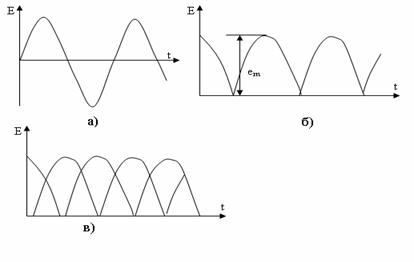
Рисунок 3.2 - Изменение ЭДС в рамке генератора (а), на щетках двухколлекторного генератора (б), на щетках многоколлекторного генератора постоянного тока (в)
Чтобы перевести генератор в режим двигателя, необходимо к обмоткам возбуждения статора и якоря подвести электрический ток от внешнего источника. В этом случае электрическая энергия внешнего источника будет преобразовываться в механическую энергию вращения якоря. Протекание тока в обмотке возбуждения - IВ создает магнитный поток полюсов, который, взаимодействуя с током рабочей обмотки якоря, создает вращающий момент, под действием которого якорь начинает вращаться.
При работе электрической машины в качестве двигателя силу, действующую на проводник с током I, помещенный в магнитное поле, можно определить из выражения
F=BlI . (3.2)
Направление силы F определяют по правилу левой руки: ладонь руки нужно расположить так, чтобы магнитные силовые линии входили в нее, четыре вытянутых пальца показывали направление тока, тогда отогнутый большой палец покажет направление силы, а следовательно, и направление вращения якоря.
Взаимодействие магнитного поля полюсов и тока якоря приводит к появлению электромагнитного момента. Электромагнитный момент генератора является тормозящим по отношению к вращающему моменту первичного двигателя. Условием постоянства скорости вращения якоря генератора является равенство указанных выше моментов. При уменьшении вращающего момента первичного двигателя уменьшается частота вращения якоря, а следовательно, будет уменьшаться э.д.с. генератора. Процесс этот продолжается до установления равенства тормозящего момента генератора вращающему моменту двигателя. При изменении нагрузки генератора и необходимости сохранения частоты вращения его якоря .потребуется также изменение вращающего момента -первичного двигателя.
В двигателях постоянного тока, где электрическая энергия преобразуется в механическую, взаимодействие тока в обмотке якоря с магнитным полем полюсов создает вращающий момент, который приводит якорь во вращение. Значение вращающего момента определяется, как и в случае генератора, конструктивными данными машины, магнитным потоком Ф и током в обмотке якоря. Развиваемый двигателем вращающий момент уравновешивается суммой моментов холостого хода, тормозного и динамического. Динамический момент возникает при всяком изменении скорости вращения и зависит от инерции вращающихся частей машины и угловой скорости вращения. В двигателях постоянного тока может создаться такая ситуация, при которой вращающий момент остается больше тормозного момента. В этом случае частота вращения начинает увеличиваться, что может привести к разрушению машины. В литературе подобный режим называют «разносом» двигателя.
Машина постоянного тока может работать как в режиме генератора, так и в режиме двигателя. Рассмотрим пример работы генератора постоянного тока с сетью постоянного тока. В нормальных условиях генератор выдает в сеть энергию постоянного тока. Изменяя ток обмотки возбуждения, можно получить э.д.с. генератора, равную напряжению сети, при этом ток в обмотке якоря будет равен нулю. Если дальше уменьшать величину тока возбуждения, то э.д.с. обмотки якоря будет меньше напряжения сети питания и направление тока в якоре изменится. Изменение направления тока в якоре в свою очередь изменит направление электромагнитного момента, и он из тормозного станет вращающим. Машина из режима генератора перейдет в режим двигателя.
При вращении ротора генератора и наличии магнитного потока возбуждения в роторной обмотке наводится ЭДС. Под воздействием этой ЭДС через коллекторные пластины, щетки и внешнюю цепь нагрузки будет протекать электрический ток. Протекание этого тока через обмотку ротора вызывает появление дополнительного магнитного поля с магнитным потоком Фр, который будет взаимодействовать с основным потоком Фв обмотки возбуждения 0В и изменять его (рисунок 3.3, а). Взаимодействие основного магнитного поля с возникающим магнитным полем обмотки ротора называют реакцией якоря (ротора). Реакция ротора искажает основное магнитное поле: на сбегающих краях магнитных полюсов оно усиливается, а на набегающих - ослабляется (рисунок 3.3, б). В результате магнитный поток ФВ будет уменьшаться, что вызовет уменьшение наводимой в обмотке ротора ЭДС.
|
|
При изменении сопротивления нагрузки генератора будут изменяться ток, протекающий по обмотке ротора, и создаваемый им магнитный поток Фр. Следовательно, изменится и реакция якоря. Величина выходного напряжения генератора
U = E - I å r (3.3)
где E - ЭДС, наводимая в обмотке ротора;
I - ток обмотки ротора;.
 |
år – сопротивление потерь или внутреннее сопротивление генератора.
Рисунок 3.3 – К понятию реакция якоря
Внутреннее сопротивление генератора включает в себя сопротивления щеток, обмотки ротора и переходное сопротивление коллектор-щетки.
При изменении сопротивления нагрузки происходит также искажение основного магнитного поля: изменяется положение линии физической нейтрали ФН (оси симметрии магнитного поля) относительно линии геометрической нейтрали (ГН) (рисунок 3.3, в). Это приводит к ухудшению коммутации и к усилению искрения щеток. Для улучшения коммутации вводятся дополнительные полюса, а щетки помещаются относительно геометрической нейтрали по направлению вращения.
Лекция №4. Виды машин постоянного тока и основные их характеристики
Содержание лекции:
- двигатели и генераторы с независимым, параллельным и смешанным возбуждением;
- основные характеристики двигателей и генераторов.
Цели лекции:
- изучить основные способы подключения обмотки возбуждения к обмотке якоря в трёх основных типах машин постоянного тока;
- изучить основные характеристики трёх основных типов машин постоянного тока.
В машинах постоянного тока магнитное поле возбуждения может быть получено либо с помощью постоянных магнитов, либо с помощью электромагнитов, которыми являются главные полюса.
Различают три основных типа машин постоянного тока, отличающиеся способом подключения обмотки возбуждения к обмотке якоря:
-двигатели и генераторы с независимым и с параллельным возбуждением, у которых обмотка возбуждения подключена независимо или параллельно обмотке якоря (рисунок 4.1, а и б);
-двигатели и генераторы последовательного возбуждения, обмотка возбуждения которых включена последовательно с обмоткой якоря (рисунок 4.1, в);
-двигатели и генераторы смешанного возбуждения, у которых имеются две обмотки возбуждения – параллельная и последовательная (рисунок 4.1, г).
 |
Рисунок 4.1 - Схемы машин постоянного тока с независимым (а), параллельным (б), последовательным (в) и смешанным возбуждением (г)
Генераторы постоянного тока по способу питания обмотки возбуждения разделяются на генераторы с самовозбуждением, когда обмотка питается от обмотки якоря того же генератора, и с независимым возбуждением. В последнем случае ее питание осуществляется от независимого источника. В генераторах с самовозбуждением обмотки возбуждения могут включаться параллельно или последовательно с обмоткой якоря, а также последовательно – параллельно, т.е. смешанным образом.
Характеристика холостого хода генератора показывает зависимость э.д.с. якоря от тока возбуждения, снятую при постоянном числе оборотов. Для генераторов с независимым возбуждением при постоянстве частоты вращения э.д.с. обмотки якоря прямо пропорциональна магнитному потоку, т.е. она определяется магнитной характеристикой машины. Примерный вид этой характеристики приведен на рисунке 4.2.
Учитывая, что для генераторов параллельного и
смешанного
возбуждении при холостом ходе ток якоря составляет несколько
процентов номинального тока генератора, практически их характеристика холостого
хода не будет отличаться от аналогичной характеристики генераторов с независимым
возбуждением.
 Для
генератора последовательного
Для
генератора последовательного
возбуждения характеристика холостого
хода не имеет смысла, так как ток
возбуждения не отличается от тока якоря,
а последний равен нулю.
Внешняя характеристика
показывает зависимость изменения
напряжения на зажимах генератора от
изменения тока нагрузки при неизменных
значениях частоты вращения якоря и тока
возбуждения.
 |
Рисунок 4.3 – Внешние характеристики генератора постоянного тока:
а - с независимым возбуждением; б - с параллельным возбуждением и в - с последовательным возбуждением
В генераторах независимого возбуждения с увеличением тока нагрузки напряжение на его зажимах падает (рисунок 4.3, а), что объясняется снижением э.д.с. за счет реакции якоря и увеличением падения напряжения в его обмотке.
Внешняя характеристика генератора с параллельным возбуждением показана на рисунке 4.3, б. В начальной части она близка к характеристике, приведенной на рисунке 4.3, а. При дальнейшем увеличении тока нагрузки и уменьшении напряжения снижается также ток возбуждения. В области малых величин тока возбуждения изменения его оказывают существенное влияние на величину выходного напряжения. Таким образом, дальнейшее уменьшение величины сопротивления нагрузки приводит к уменьшению тока возбуждения и выходного напряжения генератора, вследствие чего ток нагрузки начинает падать, и в случае короткого замыкания зажимов генератора величина тока нагрузки существенно меньше, чем при номинальном режиме.
Внешняя характеристика генератора последовательного возбуждения приведена на рисунок 4.3, в.
В режиме холостого хода э.д.с. генератора создается за счет остаточного магнитного потока. По мере увеличения тока нагрузки увеличиваются также ток возбуждения и магнитный поток, что приводит к росту напряжения на зажимах генератора. При достижении насыщения стали и дальнейшем увеличении тока нагрузки напряжение на зажимах начинает уменьшаться, поскольку магнитный поток постоянен, а падение напряжения в якоре и его реакция увеличиваются.
Внешняя характеристика генератора смешанного возбуждения зависит от величины токов в параллельной и последовательной обмотках возбуждения. Предельные значения величин изменения выходного напряжения определяются графиками, показанными на рисунок 4.3, б и в. Если отсутствуют специальные требования, то относительные отклонения выходного напряжения генераторов параллельного возбуждения не превышают 20%, а генераторов смешанного возбуждения - 5%.
Свойства двигателей определяются в основном пусковыми, рабочими и регулировочными характеристиками.
В пусковом режиме поведение двигателя характеризуется пусковыми токами и вращающим моментом, которые обычно не должны превышать двукратных величин номинальных значений.
Рабочие характеристики показывают зависимость частоты вращения п, вращающего момента М, потребляемого от сети тока I, и к.п.д h от внешней нагрузки P2 при номинальном значении напряжения сети. Регулировочные характеристики определяют пределы изменения частоты вращения якоря. Последняя прямо пропорциональна напряжению, подводимому к двигателю, сопротивлению в цепи якоря и обратно пропорциональна магнитному потоку главных полюсов.
Рабочие характеристики двигателя параллельного возбуждения приведены на рисунке 4.4. С увеличением полезной мощности вращающий момент увеличивается. Ход кривой изменения вращающего момента несколько отличается от прямой линии из-за уменьшения магнитного потока за счет реакции якоря.
К.п.д. двигателя в момент пуска равен нулю. При увеличении нагрузки двигателя примерно до 0,3 номинальной величины к.п.д. возрастает почти прямолинейно, а затем при нагрузке от 0,5 и более изменяется незначительно. При больших нагрузках к.п.д. несколько уменьшается.
Ход кривой частоты вращения якоря показывает, что при увеличении нагрузки значение п на 5...8% уменьшается от установленного значения. Указанное снижение обусловливается увеличением падения напряжения в якоре. Противоположное воздействие оказывает уменьшение магнитного потока главных полюсов за счет реакции якоря.
Рабочие характеристики двигателя последовательного возбуждения приведены на рисунке 4.5.
Вращающий момент двигателя пропорционален квадрату тока нагрузки, и зависимость его изменения изображается параболой. При больших токах нагрузки из-за насыщения стали увеличение вращающего момента происходит практически по линейному закону.
Изменения к.п.д. описываются кривой, которая в начальной части резко поднимается. Затем подъем кривой к.п.д замедляется, а при больших нагрузках кривая незначительно падает.
Данный тип двигателя нельзя пускать при снятой нагрузке, так как в этом случае ток возбуждения весьма мал и резко возрастает частота вращения якоря. Принимают, что минимальная нагрузка двигателя составляет 25... 30% от номинального значения.
По мере роста тока нагрузки увеличивается магнитный поток, частота
вращения заметно снижается.
 |
Рабочие характеристики двигателей смешанного возбуждения зависят
от способа включения обмотки возбуждения и занимают среднее положение
между характеристиками двигателей параллельного и последовательного
возбуждений.
Лекция №5. Электрические машины переменного тока, трехфазный асинхронный двигатель
Содержание лекции:
- классификация машин переменного тока;
- устройство, принцип действия и основные характеристики трехфазного асинхронного двигателя.
Цели лекции:
- изучить классификацию машин переменного тока;
- изучить устройство, принцип действия и основные характеристики трехфазного асинхронного двигателя.
Электрические машины переменного тока подразделяются на синхронные и асинхронные. У синхронных машин частота вращения ротора определяется выражением
![]() (5.1)
(5.1)
т.е. число оборотов в минуту п и частота f в герцах наводимой ЭДС связаны между собой прямо пропорциональной зависимостью (частота вращения ротора и частота наводимой ЭДС синхронны); р - число пар полюсов машины. Синхронные машины наиболее часто используются в качестве генераторов. Синхронные двигатели менее распространены, и их используют там, где требуется постоянство частоты вращения при изменении нагрузки, а также в качестве компенсаторов для повышения коэффициента мощности электрических систем.
У асинхронных машин нет синхронности между частотой вращения ротора и частотой вращения магнитного поля. Асинхронные машины чаще используют в качестве двигателей.
Трехфазные асинхронные двигатели делятся на двигатели с короткозамкнутым и фазным роторами. Последний иногда называют двигателем с контактными кольцами или коллекторным.
Наибольшее распространение получили бесколлекторные двигатели с короткозамкнутым ротором, которые обладают лучшими эксплуатационными характеристиками и меньшей стоимостью по сравнению с коллекторными. Основное эксплуатационное преимущество их заключается в том, что они не имеют трущихся колец и щеток.
Двигатель состоит из станины, к которой крепятся статор и две боковины с подшипниками для опоры вала ротора. Статор содержит магнитопровод и обмотки, к которым подводится напряжение питающей сети. Магнитопровод представляет собой набор кольцеобразных пластин, изготовленных из электротехнической стали толщиной 0,35... 0,5 мм. С целью снижения потерь от вихревых токов пластины изолируются друг от друга окалиной, лаком или тонкой бумагой. На внутренней стороне пластины при штамповке вырубаются пазы, в которые после сборки пластин укладываются три обмотки, образующие трехфазную систему.
Концы обмоток выводятся на щиток, располагаемый на станине. В зависимости от схемы переключения обмоток можно получить соединение их либо звездой, либо треугольником. В первом случае двигатель включают на напряжение питания 380/220 В, во втором -220/127 В.
Для лучшего охлаждения двигателя пластины набираются в пакеты, между которыми прокладываются пластины с радиальными ребрами. Такие же пластины устанавливаются по обеим сторонам статора.
Ротор размещают внутри статора и с обеих сторон закрепляют в подшипниках. Сердечник ротора собирается из изолированных друг от друга пластин, изготовленных из электротехнической стали. В пластинах делаются пазы, в которые после сборки сердечника укладывается обмотка. В коллекторных двигателях обмотка может быть выполнена по схеме трехфазной звезды с выводами ее на изолированные коллекторные кольца, устанавливаемые на роторе. К коллекторным кольцам прижимаются угольные или медные щетки, с помощью которых обмотку можно нагрузить на сопротивление или замкнуть накоротко. Коллекторные двигатели обладают лучшими пусковыми и регулировочными характеристиками и выполняются на повышенные мощности. В бесколлекторных двигателях короткозамкнутый ротор имеет обмотку, в виде так называемой "беличьей клетки", которая выполняется, как правило, из алюминия, залитого в пазы сердечника. При такой обмотке все составляющие ее проводники замыкаются между собой на торцах ротора кольцами. Для вентиляции двигателя кольца могут отливаться с лопастями.
С целью уменьшения потерь зазор между статором и ротором двигателя должен быть минимальным. Обычно зазор составляет 0,3... 1,5 мм. В больших двигателях величина зазора может быть больше.
В основе принципа действия трехфазного асинхронного двигателя лежит взаимодействие вращающегося магнитного поля с короткозамкнутым проводником. Если по трехфазной обмотке пропустить ток, то создается вращающееся магнитное поле, частота вращения которого
![]() (5.2)
(5.2)
где f1 - частота питающей сети;
p - число пар полюсов обмотки статора.
Вращающееся магнитное поле статорной обмотки будет пронизывать ротор. Если на нем уложена замкнутая обмотка, то в ней будет наводиться ЭДС и потечет ток. Направление ЭДС можно определить по правилу правой руки. В свою очередь ток роторной обмотки создает магнитное поле, которое будет взаимодействовать с полем статора. В результате этого взаимодействия появляется электромагнитная сила F (рисунок 5.1), направление которой определяется по правилу левой руки. Под действием силы F возникает электромагнитный момент, приводящий ротор во вращение, направление которого совпадает с направлением вращения магнитного поля статора.
На рисунке 5.1 схематично показано устройство асинхронного двигателя. Частота вращения ротора п2 во всех случаях будет меньше частоты вращения магнитного поля статора п1. Если предположить, что эти частоты вращения будут равны, то роторная обмотка будет неподвижной относительно магнитного поля статора, следовательно, в ней не будет наводиться ЭДС и не возникнет механическая сила, которая привела бы ротор во вращение.
В то же время, чем больше разность этих частот, тем больше наводимая ЭДС и тем больше ток в обмотке ротора. Это приводит к увеличению электромагнитной силы F и развиваемого двигателем момента.
Отставание частоты вращения ротора от частоты вращения магнитного поля характеризуется так называемой величиной скольжения S. Под скольжением понимают разность между частотой вращения поля статора п1 и частотой вращения ротора п2 , выраженную в процентах от частоты вращения поля статора
S= (n1 - n2) 100% /n1. (5.3)
Величина скольжения асинхронного двигателя в зависимости от режима его работы может изменяться от 0 до 1. Случай S = 1 соответствует тому моменту, когда частота вращения ротора п2 равна нулю, а это имеет место при пуске двигателя, а также в том случае, когда тормозящий момент нагрузки больше вращающего момента. Для асинхронных двигателей всегда указывается величина скольжения при номинальной нагрузке. Для двигателя с мощностью от I до 1000 кВт номинальное скольжение лежит в пределах 0,06 - 0,01. Из (5.3) нетрудно определить частоту вращения асинхронного двигателя
n2 = n1 (1-s). (5.4)
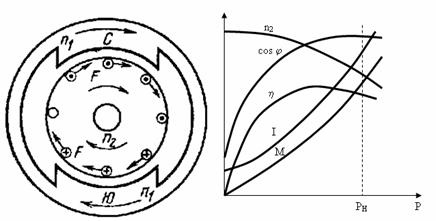
Рисунок 5.1 - Простейшая модель Рисунок 5.2 - Характеристики
асинхронного двигателя
Ввиду того, что обмотка ротора обладает индуктивностью, протекающий по ней ток имеет активную и реактивную составляющие. Механическую силу в двигателе создает только активная составляющая тока ротора, величина которой зависит от соотношения между активным и индуктивным сопротивлением обмотки ротора. Индуктивное сопротивление обмотки ротора равно ХL = 2лf2L, где L - индуктивность обмотки ротора; f2 - частота изменения наводимой в нем ЭДС.
Выше говорилось о том, что ЭДС ротора наводится за счет наличия разности частот п1 - п2. Подставляя эту разность в общую формулу f=pn/60, получаем частоту ЭДС ротора
 . (5.5)
. (5.5)
Так как частота f2 меняется с изменением нагрузки, то с изменением нагрузки меняется и индуктивное сопротивление XL ротора.
Изменение частоты вращения ротора при изменений нагрузки от режима холостого хода до номинальной величины, хотя и незначительно, но имеет место. По этой причине этот вид двигателей называют асинхронными, в отличие от синхронных, в которых частота вращения ротора не зависит от нагрузки и синхронна частоте вращения поля статора. У асинхронных двигателей довольно жесткая скоростная характеристика - зависимость числа оборотов от величины нагрузки или полезной мощности двигателя Р, отдаваемой в нагрузку n2=f(P). Так, если нагрузка увеличивается от нуля до номинальной, то частота вращения ротора меняется всего на 1—6%.
Зависимость коэффициента мощности соз j от нагрузки довольно резко выражена (рисунок 5.2). Значение созj резко уменьшается (до 0,2) при сбросе нагрузки. Это объясняется тем, что в режиме холостого хода активная составляющая тока в роторе близка к нулю и ток в роторе имеет чисто реактивный характер. По мере увеличения нагрузки начинает возрастать активная составляющая тока I, что влечет за собой увеличение коэффициента мощности. При нагрузке, близкой к номинальному значению мощности РН, коэффициент мощности достигает своей максимальной величины (0,8-0,9), а при дальнейшем увеличении нагрузки - падает. Уменьшение коэффициента мощности при увеличении нагрузки вызвано возрастанием разности частот п1 - п2, увеличением индуктивного сопротивления ротора и, следовательно, возрастанием индуктивной составляющей тока.
Для повышения коэффициента мощности необходимо, чтобы нагрузка асинхронного двигателя была номинальной или близкой к ней. Если нагрузка не превышает 50% номинальной, для повышения коэффициента мощности целесообразно уменьшить подводимое к двигателю напряжение. Для этой цели статорную обмотку переключают с треугольника на звезду.
Двигатель имеет максимальное значение КПД - h (рисунок 5.2) при мощности, несколько меньшей номинальной.
Лекция №6. Однофазные асинхронные двигатели
Содержание лекции:
- однофазный асинхронный двигатель, схемы включения, устройство и принцип действия;
- однофазный асинхронный двигатель с короткозамкнутым витком, устройство и принцип действия.
Цели лекции:
- изучить схемы включения, устройство и принцип действия однофазного асинхронного двигателя;
- изучить устройство, принцип действия однофазного асинхронного двигателя с короткозамкнутым витком.
 |
Однофазный асинхронный двигатель получил наибольшее распространение при мощностях менее 0,5 кВт. Схема включения его
Рисунок 6.1 – Схема однофазного асинхронного двигателя
 |
показана на рисунке 6.1, а. Он имеет однофазную (рабочую) обмотку статора 1, подобную двум фазам трехфазной обмотки, соединенной в звезду, и короткозамкнутый ротор3. Переменный ток I1 обмотки статора вызывает пульсирующее магнитное поле, которое не создает пускового момента. Для создания этого момента на статоре помещена вторая обмотка 2, вспомогательная располагаемая со сдвигом на 900 относительно рабочей. Эта обмотка присоединяется последовательно с конденсатором к общей с рабочей обмоткой питающей сети. Ток I2 вспомогательной обмотки сдвинут по фазе на 1/4 периода относительно тока I1.
Два тока, смещенные на 1/4 периода друг относительно друга и протекающие в двух обмотках, сдвинутых между собой в пространстве на электрический угол на 900, создают двухфазное вращающее поле. Этим полем в короткозамкнутой обмотке ротора наводятся Э.Д.С. и токи, взаимодействием которых с полем создается вращающий момент. Ротор начинает вращаться, и пусковая (вспомогательная) обмотка 2 отключается, а ротор продолжает вращаться в пульсирующем магнитном поле рабочей обмотки 1 как однофазный.
Объяснить это явление можно следующим образом. Пусть две м.д.с F1 и F2, неизменные и равные между собой (рисунок 6.2, а), вращаются с частотой вращения n1 в разные стороны и за один период тока делают один оборот. В положении векторов F1 и F2 (рисунок 6.2, а) сумма их равна F1+ F2=2F1. Ось суммарной м.д.с совпадает с осью этих м.д.с.
Через 1/6 периода (рисунок 6.2, б) м.д.с. повернутся в разные стороны на 600, суммируются и дадут результирующую м.д.с. F=F1+F2. Через 1/4 периода (рисунок 6.2, в) сумма их равна нулю и т.д. Однако ось пульсирующей м.д.с. остается неподвижной. Отсюда следует, что две м.д.с. равной амплитуды, вращающиеся в разные стороны с равной частотой вращения, дают суммарную м.д.с., пульсирующую с частотой тока по неподвижной оси и достигающую положительного и отрицательного максимумов, равных арифметической сумме двух вращающихся м.д.с.
Таким образом, если однофазный двигатель пускать, разомкнув пусковую обмотку 2 (рисунок 6.1, а), то пульсирующее магнитное поле, созданное пульсирующей м.д.с. Fп статора, можно считать состоящим из двух разных полей, вращающихся в разные стороны с равными частотами и созданных каждое своей м.д.с. Эти поля наводят в неподвижной обмотке ротора две э.д.с. и два разных тока, которые создают со своими полями два разных вращающих момента, действующих в разные стороны. Естественно, что ротор вращаться не может.
Если пусковая обмотка включена, то двухфазное вращающееся поле создает вращающий момент, и ротор начинает вращаться, как в трехфазном двигателе, в сторону поля с частотой вращения п2»п1, т.е. почти синхронно. То поле, в сторону которого вращается ротор, называют прямым полем, а поток, сцепленный с рабочей обмоткой, - прямым потоком ФПР.
Если пусковую обмотку вращающегося двигателя отключить, то, как уже говорилось, ротор двигателя будет продолжать вращаться. Это происходит по следующей причине.
Прямой
поток ФПР создает в роторе, вращающемся с частотой вращения п2,
э.д.с. Е2ПР и ток I2ПР, а в
результате - вращающий момент МПР, как в трехфазном двигателе. При
этом скольжение SПР=![]() , так как п2»п1.
, так как п2»п1.
Вторая м.д.с., вращающаяся встречно
ротору, и созданный ею поток называются обратными (FОБР и ФОБР). Они вращаются по отношению к ротору с
частотой вращения ![]() ,
т.е при скольжении S=
,
т.е при скольжении S=![]() . Частота Е2ОБР
и IОБР, наведенных обратным потоком статора в роторе,
приблизительно равна 2f1. Поэтому реактивное
сопротивление обмотки ротора х2ОБР=2pf2L2 так велико, что ток I2ОБР отстает от э.д.с. Е2ОБР
почти на 90°. Следовательно, ток I2ОБР почти целиком реактивный и создает с ФОБР очень малый вращающий момент МОБР
противоположного направления. Таким образом, результирующий вращающий момент
двигателя
. Частота Е2ОБР
и IОБР, наведенных обратным потоком статора в роторе,
приблизительно равна 2f1. Поэтому реактивное
сопротивление обмотки ротора х2ОБР=2pf2L2 так велико, что ток I2ОБР отстает от э.д.с. Е2ОБР
почти на 90°. Следовательно, ток I2ОБР почти целиком реактивный и создает с ФОБР очень малый вращающий момент МОБР
противоположного направления. Таким образом, результирующий вращающий момент
двигателя
М = МПР - МОБР » МПР (6.1)
и двигатель может работать.
Такое же явление наблюдается и в трехфазном двигателе. При отключении на ходу одной фазы ротор двигателя продолжает вращаться при нагрузке, не большей 50-55% номинальной, но пустить неподвижный трехфазный двигатель при обрыве одной фазы нельзя.
Приведенные выше соображения дают возможность использования трехфазного асинхронного двигателя при питании от однофазной цепи (рисунок 6.1, б, в). Здесь, так же как и в случае трехфазного двигателя, напряжение на зажимах фазы обмотки статора UФ должно оставаться неизменным при всех схемах включения, т.е. UФ= UФ.Н. Конденсатор двигателя Ср обеспечивает это условие, остается постоянно включенным и представляет собою рабочую емкость Ср.н. Она может быть приближенно подсчитана по соотношениям
Схема рисунка 14, б – Ср » 2800IН/U,
Схема рисунка 14, в – Ср » 4800IН/ U
где ток - фазный, а напряжение - линейное по паспорту.
При необходимости получить большой пусковой момент на время пуска подключается пусковая емкость СП. Двигатель с постоянно включенной емкостью СР.Н называется конденсаторным.
Предельной мощностью конденсаторного двигателя следует считать мощность 1,7 кВт, так как стоимость конденсатора уже при номинальной мощности 1 кВт примерно равна стоимости двигателя.
Однофазный двигатель по сравнению с трехфазным имеет худшие эксплуатационные качества, меньшие к. п. д. и cosj.
В однофазном двигателе с короткозамкнутым витком на статоре обмотка статора, присоединяемая к сети, выполняется обычно сосредоточенной и укрепляется на явно выраженных полюсах (рисунок 6.3, а), листы которых штампуются совместно со статором.
Один из наконечников охватывается короткозамкнутым витком, который является вспомогательной обмоткой. В двухполюсной машине короткозамкнутые витки расположены по диаметру, в четырехполюсной – под углом 90°. Ротор двигателя короткозамкнутый обычного типа.
Магнитный поток машины, создаваемый обмоткой статора, можно представить в виде суммы двух составляющих
![]() (6.2)
(6.2)
где ![]() - поток замыкающийся через полюс, не
охваченный короткозамкнутым витком;
- поток замыкающийся через полюс, не
охваченный короткозамкнутым витком;
![]() - поток, сцепленный короткозамкнутым
витком.
- поток, сцепленный короткозамкнутым
витком.
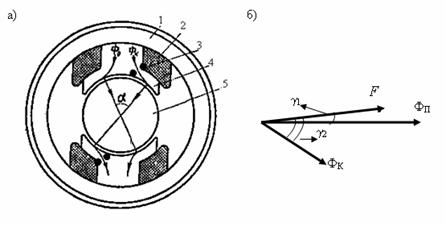
1 – статор; 2 – обмотка статора; 3 – короткозамкнутый виток;
4 – полюсный наконечник; 5 - ротор
Рисунок 6.3 – Схематический разрез однофазного двигателя с короткозамкнутым витком на статоре (а) и векторная диаграмма его магнитных потоков (б)
Эти составляющие потока замыкаются в разных частях полюсного наконечника, т.е. смещены в пространстве. Кроме того, они сдвинуты по фазе относительно намагничивающей силы F обмотки статора на различные углы g1 и g2 (рисунок 6.3, б). Это объясняется тем, что каждый полюс такого двигателя можно рассматривать в первом приближении как трансформатор, первичной обмоткой которого является обмотка статора, а вторичной - короткозамкнутый виток. Так как поток ФП не охватывает короткозамкнутый виток, то угол g1 будет сравнительно небольшим (4¸9°) - примерно таким же, как угол сдвига фаз между потоком трансформатора и намагничивающей силой первичной обмотки в режиме холостого хода. Угол же g2 будет значительно большим (около 45°), так как потери мощности, от которых зависит этот угол, будут определяться не только потерями мощности в стали, но и электрическими потерями в короткозамкнутом витке.
Ввиду того что потоки ФП и ФК смещены в пространстве и сдвинуты по фазе во времени на угол g2 - g1, они образуют вращающееся магнитное поле, которое создает вращающий момент, действующий на ротор двигателя в направлении от полюсного наконечника, охватываемого короткозамкнутым витком, ко второму наконечнику.
Двигатель с короткозамкнутым витком на статоре имеет ряд существенных недостатков: низкий соsj, низкий к.п.д. из-за больших потерь в короткозамкнутом витке, небольшой пусковой момент и т. д. Достоинствами двигателя являются простота конструкции и вследствие этого высокая надежность в эксплуатации. Благодаря отсутствию зубцов на статоре шум двигателя незначителен, и поэтому он часто употребляется в устройствах по воспроизводству музыки и речи.
Лекция №7. Трехфазные синхронные машины
Содержание лекции:
- конструкция и принцип действия синхронных машин в генераторном и двигательном режимах работы;
- характеристики синхронных машин в генераторном и двигательном режимах работы.
Цели лекции:
- изучить конструкцию и принцип действия синхронных машин в генераторном и двигательном режимах работы;
- изучить характеристики синхронных машин в генераторном и двигательном режимах работы.
Синхронные машины выполняются с неподвижным или вращающимся якорем. Машины большой мощности выполняются с неподвижным якорем (рисунок 7.1, а) для удобства отвода электрической энергии со статора. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3 – 2%), подвод постоянного тока к обмотке возбуждения с помощью двух колец не вызывает особых затруднений. Синхронные машины небольшой мощности выполняются как с неподвижным, так и с вращающимся якорем. Синхронная машина с вращающимся якорем и неподвижным индуктором (рисунок 7.1, б) называется обращенной.
В машине с неподвижным якорем применяются две различные конструкции ротора: явнополюсная (с явновыраженными полюсами) (рисунок 7.2, а) и неявнополюсная (с неявновыраженными полюсами) (рисунок 7.2, б). Явнополюсный ротор обычно используется в машинах с
четырьмя и большим числом полюсов. Обмотка возбуждения выполняется в
 этом случае в виде цилиндрических катушек прямоугольного сечения,
которые размещаются на сердечниках полюсов и укрепляются при помощи полюсных наконечников.
Ротор, сердечники полюсов и полюсные
этом случае в виде цилиндрических катушек прямоугольного сечения,
которые размещаются на сердечниках полюсов и укрепляются при помощи полюсных наконечников.
Ротор, сердечники полюсов и полюсные
 |
наконечники изготавливаются из листовой стали. Двухполюсные и четырехполюсные машины большой мощности, работающие при скорости вращения ротора 1500 и 3000 об/мин, изготовляются, как правило, с неявнополюсным ротором. Применение в них явнополюсного ротора невозможно по условиям обеспечения необходимой механической прочности крепления полюсов и обмотки возбуждения. Обмотка возбуждения в такой машине размещается в пазах сердечника ротора, наполненного из массивной
стальной поковки, и укрепляется в них немагнитными металлическими клиньями. Примерно 1/3 каждого полюсного деления ротора не имеет пазов; эти части образуют так называемые «большие зубцы», через которые входит и выходит поток возбуждения. В синхронных двигателях с явнополюсным ротором в полюсных наконечниках размещаются стержни беличьей клетки выполненной из материала с повышенным удельным сопротивлением (латунь и др.). Эта клетка служит в качестве пусковой обмотки. В последнее время синхронные двигатели часто выполняются без пусковой обмотки, но с массивными полюсами. В этих полюсах при пуске возникают вихревые токи, которые, взаимодействуя с вращающимся магнитным полем, создают пусковой момент.
Принцип действия синхронного генератора основан на явлении электромагнитной индукции. Если в обмотку возбуждения ротора подать постоянный ток и ротор вращать, то в обмотке статора будет наводиться э.д.с., действующее значение которой равно
Е=4,44 kfWФ (7.1)
где k - обмоточный коэффициент; f - частота получаемого тока; W - число последовательно соединенных витков фазы обмотки генератора; Ф - основной магнитный поток полюсов.
 Для получения трехфазного напряжения в
якоре размещаются три обмотки, которые по окружности сдвинуты относительно друг
друга на 120°. .Эти обмотки соединяются
между собой в звезду или треугольник. При вращении ротора в обмотках наводятся
э.д.с., сдвинутые на 120°.
Для получения трехфазного напряжения в
якоре размещаются три обмотки, которые по окружности сдвинуты относительно друг
друга на 120°. .Эти обмотки соединяются
между собой в звезду или треугольник. При вращении ротора в обмотках наводятся
э.д.с., сдвинутые на 120°.
Если к генератору подключить внешнюю нагрузку, то протекание переменного тока в обмотках якоря вызывает появление вращающегося магнитного поля, частота вращения которого равна частоте вращения ротора (5.2), т.е. частоты вращения магнитных полей якоря и полюсов равны между собой. В этом случае говорят, что они вращаются синхронно, и такие генераторы получили названия синхронных. Частота э.д.с. генератора равна f=np/60, где п - частота вращения ротора, мин-1, р - число пар полюсов.
Синхронные генераторы, как и генераторы постоянного тока, обладают свойством обратимости, поэтому каждый синхронный генератор можно использовать как двигатель без изменения конструкции.
Представим себе, что ротор вращается механическим двигателем и совершает строго синхронное число оборотов (рисунок 7.3). Если при этом в статор включить трехфазный ток от постороннего источника, а первичный двигатель отсоединить от генератора, то ротор будет продолжать вращаться с неизменным числом оборотов (5.2). Происходить это потому, что в момент включения трехфазного тока в статор в нем создается вращающееся магнитное поле, которое взаимодействует с полюсами ротора (одноименные полюсы отталкиваются, а разноименные притягиваются) и таким образом поддерживает неизменным его вращение. Направление вращения поля всегда можно получить такое же, как и у ротора, если соблюдать определенное чередование фаз в статоре при подведении к нему трехфазного тока. Число оборотов поля n (5.2) зависит от частоты тока, а также от количества пар полюсов. Эти обороты для ротора двигателя называются синхронными.
Синхронная машина в режиме двигателя успешно заменяет асинхронные двигатели для привода механизмов работающих при постоянной скорости, например насосов, воздуховодов и т.д. При способности к перегрузке ММ/МН=1,8¸2,5 синхронный двигатель обладает ценным свойством работать с cosj, равным единице.
На рисунке 7.4 показаны внешние характеристики генератора при активной (1), индуктивной (2) и емкостной (3) нагрузках. Некоторое снижение кривой 1 в области больших нагрузок объясняется увеличением падения напряжения в обмотке якоря.
 |
Регулировочная характеристика определяет зависимость между током нагрузки и током возбуждения, который следует поддерживать для получения неизменной величины выходного напряжения генератора при постоянной частоте вращения ротора. Вид регулировочных характеристик показан на рисунке 7.5. Из анализа хода кривых 1 и 2 следует, что при активной и индуктивной нагрузках для поддержания постоянным выходного напряжения ток возбуждения должен быть увеличен, а при емкостной (3) - уменьшен.
Характеристика холостого хода (рисунок 7.6) определяет зависимость выходного напряжения генератора от тока возбуждения при снятой нагрузке.
Начало характеристики при отсутствии тока возбуждения зависит от величины остаточного магнетизма генератора.
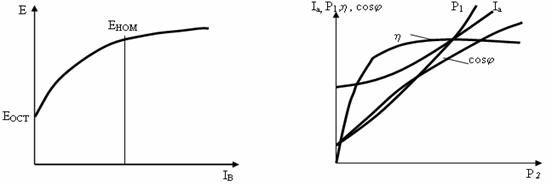
Рисунок 7.6 – Характеристика холостого Рисунок 7.7 – Рабочие
хода генератора характеристики синхронного
двигателя
Рабочие характеристики (рисунок 7.7) представляют собой зависимости тока Ia, электрической мощности P1, поступающей в обмотку якоря, к.п.д. h и созj от отдаваемой механической мощности Р2 при UC=const, fC=const и неизменном токе возбуждения. Поскольку скорость вращения двигателя постоянна, зависимость n=f(P2) обычно не приводится; не приводится также и зависимость М=f(P2), так как вращающий момент М пропорционален P. Зависимости Ia=f(P2) и P1=f(P2 ) имеют характер, близкий к линейному. Ток холостого хода Ia0 определяется реактивной составляющей и активным током, компенсирующим потери в стали и механические потери. Мощность холостого хода P0 равна сумме возникающих при этом режиме потерь. Кривая h=f(P2) имеет характер, общий для всех электрических машин. Синхронные двигатели могут работать соsj=1, но обычно они рассчитываются на работу при номинальной нагрузке с опережающим током, при этом cosj=0,9¸0,8. В этом случае улучшается суммарный cosj сети, от которой питаются синхронные двигатели, так как создаваемая ими опережающая реактивная составляющая тока Ia компенсирует отстающую реактивную составляющую тока асинхронных двигателей. Зависимость cosj=f(P2) при работе машин с перевозбуждением имеет максимум в области Р2>РНОМ. При уменьшении Р2 величина cosj уменьшается, а отдаваемая в сеть реактивная мощность возрастает.
Лекция №8. Однофазные синхронные машины и универсальные коллекторные двигатели
Содержание лекции:
- конструкция и принцип действия однофазных синхронных машин и универсальных коллекторных двигателей;
- назначение и область применения выше перечисленных электрических машин.
- Цели лекции:
- изучить конструкцию и принцип действия однофазных синхронных машин и универсальных коллекторных двигателей;
- освоить назначение и область применения выше перечисленных электрических машин.
 |
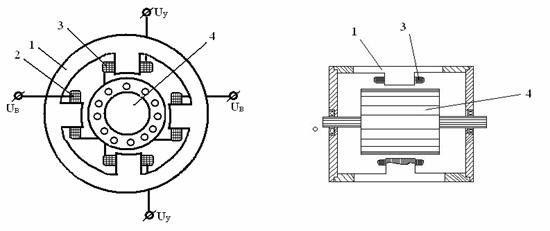
Однофазная синхронная машина может работать в качестве генератора и двигателя. На статоре машины укладывается обмотка якоря, (рисунок 8.1, а), занимающая примерно 2/3 его окружности. Располагать обмотку якоря по всей окружности статора нецелесообразно, так как при этом расход меди увеличится в 1,5 раза, а мощность поднимается незначительно – примерно на 15%. Это объясняется тем, что по мере увеличения числа пазов уменьшается обмоточный коэффициент, который для машины с равномерно распределенной обмоткой якоря составляет около 0,64. Однако из-за того что не вся окружность статора заполнена проводниками, мощность однофазной машины примерно в 1,42% меньше мощности трехфазной машины с одинаковым диаметром статора и при одинаковых потерях мощности в его обмотке. При протекании однофазного тока по обмотке якоря возникают как прямое Фпр, так и обратное Фобр магнитные поля. Прямое поле относительно ротора неподвижно; обратное же вращается с угловой скоростью 2w и
индуктирует в обмотке возбуждения э.д.с., частота которой в два раза больше частоты э.д.с. в обмотке якоря.
Протекающий при этом ток двойной частоты может вызвать искрение на щетках возбудителя и ряд других нежелательных последствий. Для устранения этого явления на роторе однофазной машины обязательно размещают короткозамкнутую демпферную обмотку типа беличьей клетки. В стержнях демпферной обмотки обратное поле индуктирует э.д.с. двойной частоты, вследствие чего создаваемая этой обмоткой н.с. FД (намагничивающая сила) будет вращаться с той же скоростью и в том же направлении, что и обратное поле, созданное н.с. FОБР обмотки статора. Векторная диаграмма, иллюстрирующая взаимодействие этих н.с., приведена на рисунке 8.1, б. При этом н.с. FОБР, результирующая н.с. FРЕЗ и создаваемый ею поток ФРЕЗ, а также э.д.с. ЕД в демпферной обмотке и ЕВ в обмотке возбуждения резко уменьшаются. Таким образом, благодаря наличию демпферной обмотки обратное поле почти полностью гасится и через обмотку возбуждения переменный ток практически не проходит.
На рисунке 8.2 показана схема включения универсального коллекторного двигателя. Если присоединить этот двигатель к сети постоянного тока зажимами “+” и “-“, то он будет работать как обычный двигатель последовательного возбуждения, о характеристиках и свойствах которого было сказано выше. Известно, что при одновременном изменении направления тока в якоре и в обмотке возбуждения направление вращающего момента не изменяется. Следовательно, двигатель будет вращаться, если его подключать и к сети переменного тока.
|
Рисунок 8.2 – Схема универсального двигателя |
 Однако в массивных частях магнитной
цепи машины постоянного тока при питании ее переменным током возникнут большие
тепловые потери, а обмотка возбуждения для переменного тока будет обладать
большим индуктивным сопротивлением. Поэтому универсальные двигатели
выполняются со станиной и полюсами, шихтованными из листовой электротехнической
стали, как и якорь. Дополнительных полюсов они не имеют. Для уменьшения
индуктивного сопротивления при работе на переменном токе под напряжение
включается только часть обмотки возбуждения (рисунок 8.2).
Однако в массивных частях магнитной
цепи машины постоянного тока при питании ее переменным током возникнут большие
тепловые потери, а обмотка возбуждения для переменного тока будет обладать
большим индуктивным сопротивлением. Поэтому универсальные двигатели
выполняются со станиной и полюсами, шихтованными из листовой электротехнической
стали, как и якорь. Дополнительных полюсов они не имеют. Для уменьшения
индуктивного сопротивления при работе на переменном токе под напряжение
включается только часть обмотки возбуждения (рисунок 8.2).
Показатели двигателя при работе на переменном токе несколько хуже, чем на постоянном.
Лекция №9. Шаговые и индукционные электрические двигатели
Содержание лекции:
- конструкция и принцип действия шаговых и индукционных электрических двигателей;
- назначение и область применения этих электрических двигателей.
Цели лекции:
- изучить конструкцию и принцип действия шаговых и индукционных двигателей;
- освоить назначение и область применения этих двигателей.
 Известны электромеханические преобразователи с ограниченным
вращательным движением, например шаговые распределители. Электрические
импульсы в таких устройствах превращаются в ограниченные углы поворота. При
прекращении импульсов эти устройства возвращаются в исходное положение. Выше были приведены примеры двигателей постоянного и переменного
тока с неограниченным вращательным движением. При подаче питания такие
двигатели вращаются до тех пор, пока их не отключат.
Известны электромеханические преобразователи с ограниченным
вращательным движением, например шаговые распределители. Электрические
импульсы в таких устройствах превращаются в ограниченные углы поворота. При
прекращении импульсов эти устройства возвращаются в исходное положение. Выше были приведены примеры двигателей постоянного и переменного
тока с неограниченным вращательным движением. При подаче питания такие
двигатели вращаются до тех пор, пока их не отключат.
|
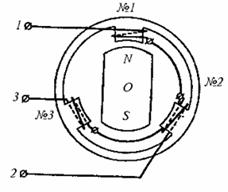
Рисунок 9.1 – Конструкция шагового двигателя
|
В практике встречаются случаи, когда желательно иметь такие электромеханические устройства, которые совмещали бы в себе как те, так и другие качества, т. е. при подаче одиночного импульса питания поворачивались бы на определенный угол (шаг), а при его прекращении останавливались. При подаче каждого последующего импульса эти устройства должны делать такой же шаг дальше, не возвращаясь в исходное положение. Похожим образом работают шаговые распределители с электромагнитным приводом, но, как правило, они используются только для поворота переключателей.
В ряде устройств, особенно в таких, где требуется превращать импульсные электрические сигналы в неограниченные углы поворота (счетчики, цифровые следящие системы и т.п.), с успехом применяются шаговые двигатели. Наиболее удобны шаговые двигатели с ротором в виде постоянного магнита, так как такой ротор четко фиксируется в любом из своих устойчивых состояний даже при выключении питания, т. е. обладает свойством запоминания.
Схематическое изображение такого двигателя показано на рисунке 9.1. Статор состоит из трех явно выраженных полюсов с обмотками, соединенными в звезду. Питание двигателей осуществляется по трем проводам, причем так, что к одному проводу подводится напряжение одной полярности, а к двум другим – напряжение противоположной полярности. Порядок коммутации при вращении ротора по часовой стрелке приведен в таблице 9.1
Таблица 9.1 – Порядок коммутации обмоток статора
|
|
S |
S |
N |
N |
N |
S |
|
То же №2 |
N |
S |
S |
S |
N |
N |
|
То же №3 |
N |
N |
N |
S |
S |
S |
|
Угол поворота ротора |
0° |
60° |
120° |
180° |
240° |
270° |

Нетрудно заметить, что при каждом шаге двигателя требуется изменение полярности только одного из полюсов. Такую коммутацию нетрудно осуществить как контактным (с помощью реле или переключателя), так и бесконтактным способом. При изменении порядка коммутации ротор двигателя будет вращаться в противоположную сторону. Шаг двигателя составляет 60°. Если сделать статор шестиполюсным, то шаг двигателя может быть сделан равным 30°.
При отключении питания ротор фиксируется в своем последнем положении, так как полюса его магнита притягиваются к явновыраженным полюсам статора. Практически используемые шаговые двигатели развивают на валу мощность до нескольких ватт и могут делать до 50 шагов в секунду.
Рассмотрением наиболее распространенный в регулируемом электроприводе двухфазный индукционный двигатель. Двигатель (рисунки 9.2 и 9.3) состоит из статора, имеющего две обмотки (возбуждения и управления), и короткозамкнутого ротора. Статорные обмотки расположены в пространстве под углом 90º одна к другой. На рисунках статор показан явнополюсным только для наглядности. Практически обмотка статора выполняется обычно распределенной и закладывается в пазы. Обмотка возбуждения питается от сети переменного тока напряжением неизменной амплитуды, а управляющая обмотка питается от усилителя напряжением, сдвинутым по фазе на +90 или -90º относительно напряжения возбуждения и меняющимся по амплитуде. Величина и направление скорости вращения индукционного двигателя зависят от величины и знака напряжения на управляющей обмотке. При изменении фазы управляющего напряжения с +90 на -90º направление вращения ротора меняется на обратное.
|
1-наружный статор; 2-обмотка возбуждения; 3-обмотка управления; 4-ротор
Рисунок 9.2 – Конструкция двухфазного индукционного двигателя с ротором типа «беличье колесо»
|
Роторы индукционных двигателей выполняются в виде «беличьего колеса» (рисунок 9.2), или в виде тонкостенного стакана (рисунок 9.3). Ротор типа «беличье колесо» состоит из магнитопроводящего цилиндра (набранного из изолированных стальных листов для уменьшения потерь), в продольные пазы которого заложены отдельные проводники из меди или алюминия, замыкаемые с торцов двумя токопроводящими кольцами. Во второй конструкции магнитопровод и токоведущие части разделены: магнитопровод выполнен в виде неподвижного гладкого цилиндра (без пазов), а ротор - в виде тонкостенного стакана из алюминия (алюминий как самый легкий металл выбран для уменьшения момента инерции). Принцип действия и основные характеристики у обоих типов машин одинаковы.
Вращающий момент в двухфазном индукционном двигателе возникает за счет взаимодействия индукционных токов, наводимых в роторе, с полями статора. Этот момент пропорционален произведению потоков возбуждения и управления или (при ненасыщенном железе машины) произведению напряжений возбуждения и управления и синусу угла сдвига фаз между ними
Мвращ=k1UBUУsinγ (9.1)
где UB – напряжение возбуждения;
UУ – напряжение управления;
γ - угол сдвига фаз между ними; обычно принимают γ=90º, т.е. sinγ=1;
k1 - коэффициент пропорциональности.

|
1-наружный статор; 2-обмотка возбуждения; 3-обмотка управления; 4-ротор; 5-внутренний статор.
Рисунок 9.3 – Конструкция двухфазного индукционного двигателя с тонкостенным ротором
|
Индукционные двигатели находят применение в системах переменного тока различной частоты: от 50 до 1000 гц. Поскольку увеличение частоты означает увеличение скорости холостого хода, это одновременно приводит к росту электромеханической постоянной времени. Для примера можно указать, что среднее значение Тэм для индукционных двигателей на 50 гц составляет около 0,03-0,05 сек, а для двигателей на 400 гц – около 0,1-0,2 сек.
Так как индукционные двигатели по самому принципу своей работы не требуют подвода тока к ротору, т.е. не имеют щеток, то момент трения в них может иметь очень малую величину, и кратность регулирования скорости вращения получается соответственно в 2-3 раза выше, чем для двигателей постоянного тока. Известным недостатком двигателей переменного тока является их сравнительно больший вес, в 2-3 раза превышающей вес двигателей постоянного тока той же мощности. Однако высокая надежность индукционных двигателей (отсутствие щеток, требующих осмотра и смены) во многих случаях компенсирует указанный недостаток
Лекция №10. Электромашинные датчики (тахогенераторы)
Содержание лекции:
- устройство и принцип действия тахогенераторов и поворотных трансформаторов;
- назначение и область применения электромашинных датчиков.
Цели лекции:
- изучить типы электромашинных датчиков и принцип их действия;
- освоить назначение и область применения электромашинных датчиков.
Среди электромашинных датчиков наиболее распространенными являются тахогенераторы. Тахогенераторы служат для получения напряжения, пропорционального скорости вращения, и используются как электрические датчики угловой скорости. В зависимости от вида выходного напряжения они разделяются на тахогенераторы постоянного и переменного тока [6,7,8].
Тахогенераторы постоянного тока конструктивно подобны электродвигателям постоянного тока и выполняются как с возбуждением от постоянных магнитов, так и от электромагнитов. Электродвижущая сила тахогенератора определяется выражением
![]() (10.1)
(10.1)
где ![]() - коэффициент, зависящий от конструкции
и схемы якоря; Ф - поток возбуждения; w - угловая скорость.
- коэффициент, зависящий от конструкции
и схемы якоря; Ф - поток возбуждения; w - угловая скорость.
Если поток Ф создается постоянным магнитом, т.е. является величиной постоянной, то э.д.с. Е зависит только от скорости вращения. Если же поток создается током возбуждения, то его можно менять, и тогда э.д.с. будет зависеть и от скорости вращения, и от тока возбуждения. При ненасыщенной магнитной цепи поток Ф можно считать прямо пропорциональным току возбуждения IВ, т. е.
![]() (10.2)
(10.2)
а - коэффициент пропорциональности.
Это позволяет использовать тахогенератор с внешним электрическим возбуждением для умножения двух величин, из которых одна выражена током возбуждения, а другая - скоростью вращения.
Одним из основных требований, предъявляемых к тахогенераторам, является требование обеспечения точности.
Причинами погрешностей тахогенераторов постоянного тока могут явиться:
а) в тахогенераторе с постоянным магнитом изменение потока магнита в результате старения магнита или влияния температуры; для обычно применяемых магнитных сплавов увеличение температуры на +10°С вызывает уменьшение потока на 0,2-0,3%;
б) в тахогенераторе с электромагнитами изменение сопротивления обмотки возбуждения при изменении температуры (для уменьшения этого влияния приходится последовательно с обмоткой возбуждения, выполненной из медного провода, включать сопротивление, не зависящее от температуры);
в) в тахогенераторах обоих типов при работе на нагрузку с небольшим сопротивлением влияние тока нагрузки, вызывающее изменение напряжения на выходе тахогенератора как вследствие падения напряжения в обмотке его якоря и щеточных контактах, так и вследствие реакции якоря.
Тахогенераторы переменного тока разделяются на синхронные и асинхронные.

Тахогенераторы синхронного типа представляет
собой небольшую синхронную машину с ротором в виде постоянного магнита (рисунок
10.1). Выходное напряжение такого тахогенератора имеет амплитуду и частоту,
пропорциональные скорости вращения. Выходное напряжение тахогенератора обычно
выпрямляется полупроводниковым выпрямителем.
Этот тахогенератор имеет два основных недостатка:
а) выходное напряжение имеет переменную частоту, что затрудняет
использование его в обычных схемах переменного тока;
б) тахогенератор нечувствителен к изменению направления вращения скорости вращения; частота выходного напряжения не меняется.

|
а – схема; б – выходное напряжение тахогенератора при различных значениях скорости вращения; частота выходного напряжения не меняется Рисунок 10.2 – Тахогенератор асинхронного типа
|
От этих недостатков свободен асинхронный тахогенератор (рисунок 10.2). Конструкция этого тахогенератора подобна конструкции двухфазного двигателя с тонкостенным ротором. Обмотка возбуждения тахогенератора питается от сети переменного тока, а в выходной обмотке наводится э.д.с. переменного тока, имеющая частоту сети и амплитуду, пропорциональную величине скорости. При изменении направления вращения фаза выходного напряжения меняется на обратную.
Используют их в основном для измерения частоты вращения различных механизмов и машин, подключая непосредственно к вольтметру со шкалой, отградуированной в об/мин или системах автоматики в цепи обратной связи.
Лекция №11. Поворотные трансформаторы
Содержание лекции:
- устройство и принцип действия поворотных трансформаторов;
- назначение и область применения поворотных трансформаторов.
Цели лекции:
- изучить устройство и принцип действия поворотных трансформаторов;
- освоить назначение и область применения поворотных трансформаторов.
Поворотными трансформаторами называют электрические микромашины переменного тока, преобразующие угол поворота ротора a в напряжение, пропорциональное некоторым функциям этого угла или самому углу. В зависимости от закона изменения напряжения на выходе машины они подразделяются на следующие типы:
а) синусно-косинусный трансформатор, позволяющий получать на выходе два напряжения, одно из которых пропорционально sina, а другое - соsa;
б) линейный поворотный трансформатор, выходное напряжение которого пропорционально углу a;
в) трансформатор-построитель, выходное напряжение которого связано с подаваемыми первичными напряжениями U1 и U 2 формулой
![]() (11.1)
(11.1)
где С - постоянная.
 Для получения поворотных трансформаторов
различных типов может быть использована одна и та же машина с двумя обмотками
на статоре и двумя на роторе при различных способах включения обмоток.
Для получения поворотных трансформаторов
различных типов может быть использована одна и та же машина с двумя обмотками
на статоре и двумя на роторе при различных способах включения обмоток.
Поворотные трансформаторы широко применяются в автоматических и вычислительных устройствах, предназначенных для решения геометрических и тригонометрических задач, связанных с выполнением различных математических операций, построением треугольников, преобразованием координат, разложением и построением векторов и пр. В системах автоматического регулирования они используются в качестве измерителей рассогласования, фиксирующих отклонение системы от некоторого заданного положения.
Поворотный трансформатор может работать в режиме поворота ротора или в режиме вращения. В первом случае положение ротора относительно статора задается поворотным механизмом (исполнительным двигателем с редуктором).При работе в этом режиме одна из обмоток статора - обмотка возбуждения В (рисунок 11.1) - присоединяется к сети переменного тока, а другая - компенсационная или квадратурная обмотка К - подключается к некоторому сопротивлению или замыкается накоротко. В некоторых случаях обе статорные обмотки получают независимое питание переменным током. Обмотки статора В и К могут выполняться разделенными или включаться по мостовой схеме. Обмотки ротора S (синусная) и С (косинусная) присоединяются к контактным кольцам.
Для уменьшения числа контактных колец концы двух обмоток ротора присоединяются к одному общему кольцу и через медную щетку подводятся к общему зажиму. Начала этих обмоток выводятся через соответствующие кольца и щетки к двум другим зажимам. Применяется также токосъем с помощью спиральных пружин, но в этом случае угол поворота ротора ограничен в пределах 1,8¸2 оборота.
При работе поворотного трансформатора в режиме непрерывного вращения обмотку возбуждения и компенсационную обмотку с целью уменьшения числа скользящих контактов обычно размещают на роторе, а синусную и косинусную - на статоре. При этом компенсационную обмотку замыкают накоротко, а выводы обмотки возбуждения подключают к двум контактным кольцам.
При подключении обмотки возбуждения В к
сети переменного тока в машине возникает продольный магнитный поток Фd, пульсирующий во времени с частотой
сети. При холостом ходе в обмотках ротора S и С этот поток будет индуктировать э.д.с. ЕS0 и ЕC0, частота которых будет равна частоте сети
f1, а действующее значение будет зависеть от положения ротора относительно
статора. При этом выходное напряжение косинусной обмотки
при холостом ходе будет определяться выражением
![]() (11.2)
(11.2)
где ![]() и
и ![]() -
число витков и обмоточный
коэффициент обмотки ротора;
-
число витков и обмоточный
коэффициент обмотки ротора;
![]() - максимальное
значение потока.
- максимальное
значение потока.
Обмотка ротора S сдвинута относительно обмотки С на угол ![]() , следовательно, выходное
напряжение в этой обмотке
, следовательно, выходное
напряжение в этой обмотке
![]() . (11.3)
. (11.3)
В выражениях (11.2) и (11.3) величина ЕВ
представляет собой э.д.с., которую индуктирует поток Фd
в обмотке статора "В" при коэффициенте трансформаторной связи - ![]() между обмотками
статора и ротора. Обмотка статора К с
потоком Фd не связана, и он не индуктирует в ней э.д.с. Она
используется для компенсации поперечных потоков, создаваемых обмотками ротора
при нагрузке поворотного трансформатора. Если вместо обмотки В присоединить к
сети переменного тока обмотку К, то она создаст поперечный поток, по отношению
к которому обмотка S будет косинусной, а обмотка С - синусной. Таким образом,
в обмотках ротора при холостом ходе индуктируются э.д.с., пропорциональные
синусу или косинусу угла поворота ротора относительно соответствующего потока.
Применяя различные схемы включения обмоток статора и ротора, можно получить и
другие функциональные зависимости, а также уменьшить погрешности, вызываемые
током нагрузки.
между обмотками
статора и ротора. Обмотка статора К с
потоком Фd не связана, и он не индуктирует в ней э.д.с. Она
используется для компенсации поперечных потоков, создаваемых обмотками ротора
при нагрузке поворотного трансформатора. Если вместо обмотки В присоединить к
сети переменного тока обмотку К, то она создаст поперечный поток, по отношению
к которому обмотка S будет косинусной, а обмотка С - синусной. Таким образом,
в обмотках ротора при холостом ходе индуктируются э.д.с., пропорциональные
синусу или косинусу угла поворота ротора относительно соответствующего потока.
Применяя различные схемы включения обмоток статора и ротора, можно получить и
другие функциональные зависимости, а также уменьшить погрешности, вызываемые
током нагрузки.
Лекция №12. Индукционные машины синхронной связи (сельсины)
Содержание лекции:
- устройство и принцип действия контактных и бесконтактных сельсинов;
- индикаторный и трансформаторный режимы работы сельсинов;
- Назначение и область применения сельсинов.
Цели лекции:
- изучить устройство и принцип действия контактных и бесконтактных сельсинов;
- освоить индикаторный и трансформаторный режимы работы сельсинов;
- изучить назначение и область применения сельсинов.
Электрические машины синхронной связи служат для синхронного и синфазного поворота или вращения двух или нескольких осей, механически не связанных между собой. В простейшем случае синхронная передача угла (синхронная связь) осуществляется с помощью двух одинаковых электрически соединенных между собой индукционных машин, называемых сельсинами (от слов self sinchroniring - самосинхронизирующийся). Одна из этих машин механически соединяется с ведущей осью и называется датчиком, а другая - с ведомой осью (непосредственно или с помощью промежуточного исполнительного двигателя) и называется приемником [6,7].
Сельсины имеют две обмотки: первичную, или обмотку возбуждения, и вторичную, или обмотку синхронизации. В зависимости от числа фаз обмотки возбуждения различают однофазные и трехфазные сельсины; обмотка синхронизации в обоих типах сельсинов обычно выполняется по типу трехфазной. В системах автоматики преимущественно применяются однофазные сельсины.
Однофазные сельсины могут быть контактными и бесконтактными. В контактных сельсинах одна из обмоток расположена на статоре, а другая - на роторе. Принцип действия сельсина не зависит от места расположения каждой из обмоток. Однако чаще всего применяют сельсины, у которых обмотка возбуждения расположена на роторе, а обмотка синхронизации - на статоре. Такие сельсины более надежды в работе и имеют большую точность.
Однофазный сельсин представляет собой
синхронную машину, в которой обмотка возбуждения создает пульсирующий магнитный
поток. Этот поток индуктирует в трех фазах обмотки синхронизации э.д.с.,
величина которых зависит от угла поворота ротора ![]() . При повороте ротора
взаимоиндуктивность между обмоткой возбуждения и каждой из фаз обмотки
синхронизации плавно изменяется по закону косинуса, вследствие чего э.д.с.,
индуктируемая в этих фазах, пропорциональна соз
. При повороте ротора
взаимоиндуктивность между обмоткой возбуждения и каждой из фаз обмотки
синхронизации плавно изменяется по закону косинуса, вследствие чего э.д.с.,
индуктируемая в этих фазах, пропорциональна соз![]() . Следует отметить, что э.д.с.,
индуктированные во всех трех фазах обмотки синхронизации, имеют одну и ту же
временную фазу, поэтому более правильно было бы назвать их не фазами, а лучами.
Однако более
распространенный термин
«фаза».
. Следует отметить, что э.д.с.,
индуктированные во всех трех фазах обмотки синхронизации, имеют одну и ту же
временную фазу, поэтому более правильно было бы назвать их не фазами, а лучами.
Однако более
распространенный термин
«фаза».
Различают два основных режима работы сельсинов; индикаторный и трансформаторный.
|
Рисунок 12.1 - Схема включения сельсинов при работе их в индикаторном режиме
|
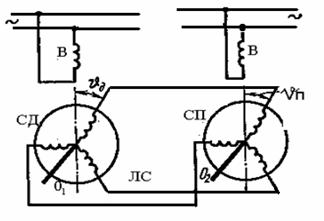 Индикаторный режим работы применяют его в том случае,
когда к ведомой оси приложен весьма малый момент сопротивления (когда ось
нагружена стрелкой или шкалой). При работе системы поворот ротора
сельсина-датчика на некоторый угол приводит к появлению в обмотках
синхронизации обоих сельсинов электрического тока и к возникновению в
сельсине-приемнике синхронизирующего момента, под действием которого его ротор
стремится повернуться на такой же угол
Индикаторный режим работы применяют его в том случае,
когда к ведомой оси приложен весьма малый момент сопротивления (когда ось
нагружена стрелкой или шкалой). При работе системы поворот ротора
сельсина-датчика на некоторый угол приводит к появлению в обмотках
синхронизации обоих сельсинов электрического тока и к возникновению в
сельсине-приемнике синхронизирующего момента, под действием которого его ротор
стремится повернуться на такой же угол ![]() П. Синхронизирующий момент
создается при наличии между роторами обоих сельсинов некоторого
пространственного угла
П. Синхронизирующий момент
создается при наличии между роторами обоих сельсинов некоторого
пространственного угла ![]() =
=![]() Д –
Д – ![]() П, называемого
углом рассогласования. Как уже выше отмечалось, в индикаторном режиме на валу
сельсина-приемника имеется незначительный момент
сопротивления, поэтому для поворота ротора приемника вслед за поворотом ротора
датчика требуется небольшой вращающий момент, который может быть получен от
самого сельсина-приемника без дополнительных усилительных устройств. При
работе сельсинов в рассматриваемом режиме обмотки возбуждения В
сельсина-датчика СД и сельсина-приемника СП включены в общую сеть переменного
тока (рисунок 12.1), а обмотки синхронизации соединены между собой линией связи
ЛС. Пульсирующие магнитные потоки, создаваемые обмотками возбуждения датчика и
приемника, индуктируют в трех фазах обмоток синхронизации э.д.с. Если между
ротором датчика и приемника имеется некоторый угол рассогласования Ф, то по обмоткам
синхронизации будут протекать токи, которые, взаимодействуя с потоком возбуждения,
создают в датчике и приемнике синхронизирующие моменты. Эти моменты имеют
противоположные направления и стремятся свести к нулю угол рассогласования.
Обычно ротор датчика заторможен, поэтому его синхронизирующий момент
воспринимается механизмом, поворачивающим ведущую ось 01;
синхронизирующий же момент приемника поворачивает его ротор в ту же сторону и
на тот же угол
П, называемого
углом рассогласования. Как уже выше отмечалось, в индикаторном режиме на валу
сельсина-приемника имеется незначительный момент
сопротивления, поэтому для поворота ротора приемника вслед за поворотом ротора
датчика требуется небольшой вращающий момент, который может быть получен от
самого сельсина-приемника без дополнительных усилительных устройств. При
работе сельсинов в рассматриваемом режиме обмотки возбуждения В
сельсина-датчика СД и сельсина-приемника СП включены в общую сеть переменного
тока (рисунок 12.1), а обмотки синхронизации соединены между собой линией связи
ЛС. Пульсирующие магнитные потоки, создаваемые обмотками возбуждения датчика и
приемника, индуктируют в трех фазах обмоток синхронизации э.д.с. Если между
ротором датчика и приемника имеется некоторый угол рассогласования Ф, то по обмоткам
синхронизации будут протекать токи, которые, взаимодействуя с потоком возбуждения,
создают в датчике и приемнике синхронизирующие моменты. Эти моменты имеют
противоположные направления и стремятся свести к нулю угол рассогласования.
Обычно ротор датчика заторможен, поэтому его синхронизирующий момент
воспринимается механизмом, поворачивающим ведущую ось 01;
синхронизирующий же момент приемника поворачивает его ротор в ту же сторону и
на тот же угол![]() П,
на который поворачивается ротор датчика.
П,
на который поворачивается ротор датчика.
Трансформаторный режим работы применяется тогда, когда к ведомой оси приложен значительный момент сопротивления, т.е. когда приходится поворачивать какой-либо механизм. В этом случае сельсин-приемник отрабатывает заданный угол не самостоятельно, а с помощью электрически и механически связанного с ним исполнительного двигателя.

При работе сельсинов в трансформаторном режиме обмотка возбуждения сельсина-датчика СД (рисунок 12.2), механически связанного с ведущей осью О1, подключается к сети однофазного тока, а обмотка возбуждения сельсина-приемника СП - к усилителю У, подающему питание на обмотку управления исполнительного двигателя ИД. Обмотки синхронизации обоих сельсинов соединяются между собой линией связи ЛС.
Переменный ток, проходящий по обмотке возбуждения сельсина-датчика, создает в нем пульсирующий магнитный поток, который индуктирует э.д.с. в трех фазах обмотки синхронизации. Так как обмотки синхронизации датчика и приемника соединены между собой линией связи, то по ним будет протекать ток, вследствие чего в сельсине-приемнике создается свой пульсирующий магнитный поток. Направление оси этого потока зависит от углового положения ротора.
Если при этом в сельсине-приемнике возникает продольная составляющая потока, то она индуктирует в его обмотке возбуждения некоторую э.д.с., т.е. на зажимах этой обмотки возникает некоторое выходное напряжение. Это напряжение подается через усилитель на обмотку управления исполнительного двигателя, который поворачивает ведомую ось 02 совместно с ротором сельсина-приемника. Когда ось магнитного потока, создаваемого ротором сельсина-приемника, будет перпендикулярна к оси обмотки возбуждения, выходное напряжение станет равным нулю и вращение ведомой оси прекратится.
Таким образом, для работы рассмотренной системы необходимо, чтобы ток в роторе сельсина-приемника создавал продольную составляющую магнитного потока. В согласованном положении роторов продольная составляющая потока должна отсутствовать.
Сельсины могут работать в режиме поворота и в режиме вращения. В первом случае угол рассогласования между осями датчика и приемника после отработки заданного угла поворота характеризует статическую ошибку системы синхронной связи. Во втором случае ротор приемника вращается с той же скоростью, что и ротор датчика, а возникающий между ними в процессе вращения угол рассогласования характеризует динамическую точность системы.
Сельсин это электрическая машина небольших размеров, схожая по конструкции и схеме с трехфазным синхронным генератором.
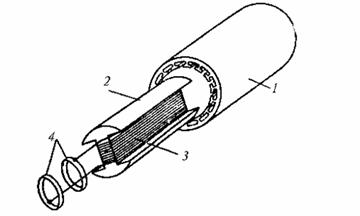
|
1 - статор; 2 - ротор; 3 - обмотка ротора; 4 - контактные кольца; Рисунок 12.3 - Конструкция сельсина
|
Типовая конструкция сельсина показана на рисунке 12.3. Статор и ротор для уменьшения потерь набраны из тонкой листовой электротехнической стали. Статор имеет равномерно распределенные пазы, в которые укладывается трехфазная обмотка. Ротор имеет явновыраженные полюсы, на которые наложена обмотка возбуждения и контактные кольца, через которые подводится питание. Встречаются также конструкции, в которых ротор выполнен с неявно выраженными полюсами. Один сельсин-датчик может работать на несколько сельсин - приемников, статорные обмотки которых соединены по группам в параллель, а роторные обмотки подключены к сети. Вследствие обратимости сельсинной передачи может наблюдаться влияние приемников друг на друга. Так, например, если ротор одного из приемников вследствие механического повреждения не сможет вращаться («заклинит»), то показания других приемников будут искажены. При работе на несколько приемников датчик иногда делают более мощным и больших габаритов, чем сельсин-приемники. Большим недостатком контактных сельсинов является наличие в них скользящих контактов, переходное сопротивление которых может изменяться. Это снижает надежность работы систем синхронной связи и приводит к увеличению их погрешностей.

|
1 - обмотка возбуждения; 2 - обмотка синхронизации; 3 - пакет ротора; 4 - немагнитный промежуток; 5 - тороиды; 6 - пакет статора; 7 - внешний магнитопровод; 8 - корпус; 9 - пазы статора Рисунок 12.4 - Устройство бесконтактного сельсина
|
В настоящее время широко применяются бесконтактные сельсины с однофазной обмоткой возбуждения и трехфазной обмоткой синхронизации, расположенными на статоре, вследствие чего отпадает необходимость в скользящих контактах. Ротор бесконтактного сельсина (рисунок 12.4) имеет два стальных пакета, разделенных косым промежутком из немагнитного материала. Пакеты ротора собраны из стальных листов, размещенных в плоскости, параллельной оси вала. На статоре расположены стальной пакет с распределенной обмоткой синхронизации, два боковых кольца (тороиды), две тороидальных катушки обмотки возбуждения и внешний магнитопровод. Стальной пакет, в котором размещается обмотка синхронизации, и тороиды собраны из листов, расположенных перпендикулярно оси вала, а внешний магнитопровод - из листов, расположенных параллельно оси вала. Следовательно, во всех элементах магнитной системы сельсина плоскость листов параллельна направлению силовых магнитных линий. Тороидальные катушки обмотки возбуждения должны быть включены так, чтобы направление тока в них в любой момент времени было согласованным.
Магнитный поток, создаваемый обмоткой возбуждения, замыкается в каждом элементе магнитной системы сельсина по пути, показанному на рисунке 35 пунктирными стрелками. Из одного пакета ротора он проходит через небольшой воздушный зазор в статор, а затем по статору переходит во второй пакет ротора, охватывая проводники обмотки синхронизации. Непосредственному переходу потока из одного пакета ротора в другой препятствует широкая немагнитная щель. Из второго пакета ротора поток через тороиды и внешний магнитопровод переходит в первый пакет. При повороте ротора изменяется расположение оси потока относительно обмоток синхронизации, поэтому э.д.с., индуктируемая в фазах обмотки синхронизации, будет зависеть от угла поворота ротора, так же как и в контактных сельсинах, вследствие чего принцип действия этих видов сельсинов будет одинаковым.
Недостатком бесконтактных сельсинов является худшее использование материалов, чем в контактных сельсинах, из-за больших потоков рассеяния и увеличенного тока холостого хода. При одинаковом удельном синхронизирующем моменте вес бесконтактного сельсина примерно в 1,5 раза больше, чем контактного.
Лекция №13. Механические характеристики электродвигателей и основные их параметры
Содержание лекции:
- механические характеристики электродвигателей, понятие жесткости и скольжения;
- основные параметры двигателей постоянного и переменного тока.
Цели лекции:
- изучить механические характеристики двигателей;
- освоить основные параметры электрических двигателей.
Любой механизм, приводимый в движение электрическим двигателем, может работать производительно и экономично только в том случае, если свойства двигателя удовлетворяют требованиям механизма. Одним из критериев для оценки свойств двигателя служит его механическая характеристика, которая представляет зависимость между скоростью вращения w и моментом М, развиваемым на валу двигателя.
Кроме механической характеристики, часто используется электромеханическая или иначе скоростная характеристика - зависимость между скоростью вращения w и током двигателя I [1,3,8].
Все характеристики разделяются на естественные и искусственные. Естественной называют характеристику двигателя при номинальных параметрах питающей сети, нормальной схеме включения и отсутствии добавочных сопротивлений в цепях двигателя. Все прочие характеристики двигателя, полученные при несоблюдении хотя бы одного из этих условий, называют искусственными.
Характеристики выражают аналитически в виде формул или графически. Одним из критериев для сравнения механических характеристик является их жесткость, оцениваемая коэффициентом жесткости
![]() . (13.1)
. (13.1)
В соответствии с этим критерием характеристики электрических двигателей делятся на абсолютно жесткие (b=¥), жесткие (b»40-10%) и мягкие (b»10% и менее).
Абсолютно жесткую характеристику имеет синхронный двигатель, скорость которого при изменении нагрузки остается постоянной.
Жесткие характеристики имеют двигатели постоянного тока параллельного возбуждения и двигатели смешанного возбуждения при больших нагрузках на валу, а также асинхронные двигатели (линейная часть характеристики).
Мягкой характеристикой обладают двигатели постоянного тока последовательного возбуждения и двигатели смешанного возбуждения при малых нагрузках на валу.
Характерными точками большинства механических характеристик являются: точка идеального холостого хода, точка номинального режима работы, точка короткого замыкания (рисунок 13.1 и рисунок 13.2).

 При идеальном
холостом ходе отсутствует момент на валу двигателя (М=0). Скорость вращения
двигателя в этом случае называется скоростью идеального холостого хода (w0). Точка номинального режима характеризует
номинальные значения момента (МН) и скорости (wН).
При идеальном
холостом ходе отсутствует момент на валу двигателя (М=0). Скорость вращения
двигателя в этом случае называется скоростью идеального холостого хода (w0). Точка номинального режима характеризует
номинальные значения момента (МН) и скорости (wН).
Разность между скоростью w0 и текущим значением скорости, соответствующим определенной нагрузке, называется падением скорости (Dw). Для М=МН, DwН=w0-wН. Отношение Dw к скорости w0 называется "скольжением" (s)
![]() .
(13.2)
.
(13.2)
Величина скольжения при номинальном моменте sН также может служить критерием для оценки жесткости характеристик.
В точке короткого замыкания скорость двигателя равна нулю. Момент на валу двигателя, соответствующий этой скорости, называется моментом короткого замыкания (МКЗ). Иногда момент МКЗ называют также пусковым моментом.
Часто параметры двигателя выражают в относительных единицах, именуемых долевыми единицами. Для получения какой-либо величины в относительных единицах необходимо ее абсолютное значение разделить на величину, принятую условно за базисную. В качестве базисных величин обычно принимают: UH - номинальное напряжение; IH - номинальный ток; МH - номинальный момент; RH - номинальное сопротивление, равное частному от деления номинального напряжения на номинальный ток двигателя; wH - номинальную скорость вращения.
Для синхронных и асинхронных двигателей, а также для двигателей постоянного тока параллельного возбуждения за базисную скорость принимают скорость идеального холостого хода w0.
Параметры двигателя, выраженные в
относительных единицах, обозначают следующим образом: ![]() и т.д.
и т.д.
Использование относительных единиц во многих случаях значительно упрощает расчеты.
Список литературы
1. Ильинский Н.Ф., Козаченко В.Ф. Общий курс электропривода. –М.: Энергоатомиздат, 1992. – 543с.
2. Зеленов А.Б., Карочкин А.В. Автоматизированный электропривод и следящие системы. – Харьков: ХГУ, 1965. – 363с.
3. Копылов И.П. Электромеханика планеты земля. – М.: МАИ, 1998. - 260с.
4. Копылов И.П. Электрические машины. – М.: Логос, 2000. – 606с.
5. Пиотровский Л.М. Электрические машины. – Л-д.: Энергия, 1972. – 497с.
6. Брускин Д.Е., Зорохович А.Е., Хвостов В.С. Электрические машины и микромашины. – М.: Высшая школа, 1972. – 430с.
7. Гинзбург С.А., Лехтман И.Я., Малов В.С. Основы автоматики и телемеханики. – М.: Энергия, 1968. – 512с.
8. Сагитов П.И., Цыба Ю.А. «Электрические машины систем автоматики»: Учебное пособие для ВУЗов. – Алматы: АИЭС,2004. – 90 с.