МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РЕСПУБЛИКИ
КАЗАХСТАН
Алматинский институт энергетики и связи
К.К. Жумагулов
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПОСТОЯННОГО ТОКА
Учебное пособие
Алматы 2006 г.
УДК 623.313.33
ББК 31.16 Я7
Ж 88
Электрические машины постоянного тока:
Учебное пособие / К.К. Жумагулов;
АИЭС. Алматы, 2005.- 100с.
В учебном пособии по курсу
«Электрические машины постоянного тока» рассмотрены принцип действия,
устройства машин постоянного тока. Также рассмотрены физические явления,
происходящие в машинах постоянного тока при различных режимах работы и их
математическое описание, основные характеристики машин.
Пособие рассчитано для студентов,
бакалавров электроэнергетических специальностей, может быть использовано в качестве
учебного пособия по курсу «Электрические машины» для разных форм обучения
электроэнергетических специальностей.
Ил. 100. Библиогр.
- 7 назв.
РЕЦЕНЗЕНТЫ:
Зав.каф. ЭАТК КазНТУ им. К.
Сатпаева
Доктор техн.
наук, профессор Бекбаев А.Б.
Профессор
кафедры ЭиАПУ АИЭС
Доктор техн. наук, профессор Новокшенов В.С.
Печатается
по плану издания Алматинского института энергетики и связи на 2005 г.
![]()
ISBN 9965 – 708 – 21 - 5
© Алматинский институт энергетики и связи, 2006 г.
Содержание
1
Принцип действия и устройство электрических машин
1.2
Устройство и основные элементы конструкции машины постоянного тока
1.3
Системы вентиляции электрических машин
2
Якорные обмотки машин постоянного тока
2.7
Электродвижущая сила обмотки якоря
2.8
Сравнительные характеристики обмоток различных типов
3
Магнитная цепь машины постоянного тока
3.1
Порядок расчета магнитной цепи электрической машины
3.2
Характеристика намагничивания машины
4
Реакция якоря машины постоянного тока
4.2
Поперечная и продольная намагничивающие силы якоря
5.2
Замедленная и ускоренная коммутации
5.4
Основные средства улучшения коммутации
5.5
Коммутационная реакция якоря
5.6
Экспериментальная проверка и наладка коммутации
5.7
Средства уменьшения радиопомех
6.1
Общие сведения о генераторах постоянного тока
6.2
Генератор независимого возбуждения
6.3
Генератор параллельного возбуждения
6.4
Генератор последовательного возбуждения
6.5
Генератор смешанного возбуждения
6.6
Параллельная работа генераторов постоянного тока
7.1 Общие сведения о двигателях постоянного
тока
7.2
Классификация и характеристики двигателей постоянного тока
7.3
Двигатель параллельного возбуждения
7.4
Двигатель последовательного возбуждения
7.5
Двигатель смешанного возбуждения
8
Потери в электрических машинах постоянного тока
и
коэффициент полезного действия
8.2
Коэффициент полезного действия
9 Специальные машины постоянного тока
9.2
Машины постоянного тока с беспазовым якорем
Введение
Краткие
исторические сведения об электрических машинах и трансформаторах.
Электромашиностроение начало развиваться с середины XIX в. Исследования
электромагнитных полей, проведенные в то время учеными, позволили приступить к
созданию моделей для практического применения.
Выдающиеся значения имели работы французского физика А.
Ампера, английского физика М. Фарадея и русских ученых Э. Ленца, Б. Якоби и
М.О. Доливо-Добровольского, работы которых дали мощный толчок использованию
переменного тока. К началу XX в. стали вполне очевидными достоинства и широкие
возможности использования в народном хозяйстве электрической энергии. Были
доказаны и практически реализованы такие замечательные свойства электрической
энергии, как простота выработки, преобразование, трансформация, распределение и
передача на большие расстояния.
Продолжительный период времени электрический генератор и
электрический двигатель развивались независимо друг от друга, и только в 70-х
годах XIX в. пути их развития объединились.
Электрические машины постоянного тока прошли четыре этапа
развития:
а) магнитоэлектрические машины с постоянными магнитами;
б) машины с электромагнитами с независимым возбуждением;
в) электрические машины
с самовозбуждением и элементарными якорями;
г) электрические машины с усовершенствованными якорями и
многополюсными системами.
Начальный период развития электрических машин связан
главным образом с постоянным током. Объясняется это тем, что потребителями
электрической энергии являлись установки, работающие исключительно на
постоянном токе (дуговые лампы, установки гальванопластики и др.).
Развитие электрических железных дорог значительно увеличило
спрос на электродвигатели и генераторы. В 80-х годах XVIII века возникла необходимость
передавать электроэнергию на расстояние. В 1882г. были проведены первые опыты
по передаче электроэнергии на постоянном токе. Однако высокое напряжение в
генераторах постоянного тока ухудшало работу коллектора и часто приводило к
авариям.
Большая заслуга в развитии переменного тока принадлежит
русскому ученому П. Н. Яблочкову, который в 1876 г. применил трансформатор для
питания изобретенных им электрических свечей. Трансформатор П. Н. Яблочкова
имел незамкнутый сердечник. Трансформаторы с замкнутым магнитопроводом,
применяемым в настоящее время, появились значительно позднее, в 1884 г. С
изобретением трансформатора возник технический интерес к переменному току,
который до этого времени не имел применения.
Выдающийся русский электротехник М.О. Доливо-Добровольский
в 1889 г. предложил трехфазную систему переменного тока, построил первый трехфазный
асинхронный двигатель и первый трехфазный трансформатор. На электротехнической
выставке во Франкфурте-на-Майне в 1891 г. М.О. Доливо-Добровольский
демонстрировал опытную высоковольтную электропередачу переменного тока
протяженностью 175 км (местечко Лауфен во Франкфурте-на-Майне). Трехфазный
генератор имел мощность 230 кВА при напряжении 95 В. При помощи трехфазных
трансформаторов напряжение генератора в Лауфене повышалось до 15 кВ и
понижалось во Франкфурте-на-Майне до 65 В (фазного значения), при котором
осуществлялось питание трехфазного асинхронного двигателя для насосной
установки мощностью 75 кВт. При дальнейших опытах напряжение в линии электропередачи
повышалось до 28 кВ посредством последовательного включения обмоток высшего
напряжения двух трансформаторов. Коэффициент полезного действия (к.п.д.)
электропередачи был 77,4% и считался тогда высоким.
В дальнейшем начали применяться масляные трансформаторы,
так как было установлено, что масло хороший изолятор и хорошая охлаждающая
среда для трансформаторов. Последнее столетие характеризуется быстрым ростом
промышленности и транспорта на базе электрификации. К трансформаторам и
электрическим машинам предъявлялись более высокие требования: повышение экономичности,
уменьшение массы и габаритов. Проводилась большая работа по изучению
электромагнитных и тепловых процессов, происходящих при работе трансформаторов
и электрических машин, поиску новых изоляционных материалов и улучшению свойств
электротехнической стали.
Общие
сведения об электрических машинах и трансформаторах
Электрическая машина, действие которой основано на использовании явления электромагнитной
индукции, предназначена для преобразования механической энергии в электрическую,
или электрической энергии в механическую, или электрической энергии в электрическую
энергию другого рода тока, другого напряжения, другой частоты.
Электрическую машину, преобразующую механическую энергию в
электрическую, называют генератором.
Вся электрическая энергия производится генераторами переменного тока
(синхронными), установленными на электростанциях. Преобразование электрической
энергии в механическую осуществляется двигателями. Любая электрическая машина
может быть использована как в качестве генератора, так и в качестве двигателя.
Свойство электрических машин изменять направление преобразуемой энергии
называют обратимостью.
Если в магнитном поле полюсов постоянных магнитов или
электромагнитов (рисунок В.1) N и S поместить проводник и под действием какой-либо
силы F1 перемещать его,
то в нем возникнет э.д.с.
е = BlV sin α = Blv
где B –
магнитная индукция в месте нахождения проводника;
l – длина проводника (его часть, находящаяся в
магнитном поле);
V – скорость перемещения проводника в магнитном поле;
α
– угол между векторами максимума магнитной индукции и скоростью перемещения
проводника (в рассматр. случае α =
π/2, т.е. sin α=1).
Направление э.д.с., индуктируемой в проводнике,
определяется согласно правилу правой руки (от зрителя за плоскость чертежа).
Если проводник замкнуть на какое-либо сопротивление приемника энергии, то в
образовавшейся цепи под действием э.д.с. протекает ток I, направление которого совпадает с направлением
э.д.с. проводника. В результате взаимодействия тока проводника с магнитным
полем полюсов создается электромагнитная сила FЭМ=lBI, направление которой определяется по правилу
левой руки. Эта сила направлена встречно силе F1 и при FЭМ= F1 проводник перемещается с постоянной скоростью.
Таким образом, механическая энергия, затрачиваемая на перемещение проводника,
преобразуется в электрическую, отдаваемую сопротивлению внешнего приемника
электрической энергии, т.е. машина будет работать в режиме генератора.
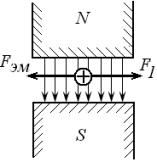
Рисунок 1 – Принцип действия электрической машины
Если от постороннего источника электрической энергии через
проводник пропустить ток, то в результате взаимодействия тока в проводнике и
магнитного поля полюсов создается электромагнитная сила FЭМ, под действием которой проводник начнет перемещаться
в магнитном поле, преодолевая силу торможения какого-либо механического приемника
энергии, т.е. машина будет работать как двигатель. Таким образом, в силу общности
законов электромагнитной индукции и электромагнитных сил любая электрическая
машина может работать как в режиме генератора, так и в режиме двигателя.
Электрические машины подразделяют на машины постоянного и
переменного токов. В машинах переменного тока возникает вращающееся магнитное
поле, частота вращения которого зависит от частоты тока сети.
Любая электрическая машина состоит из двух основных частей:
неподвижной – статора, и вращающейся – ротора.
Машины переменного тока можно подразделять на однофазные и
многофазные (обычно трехфазные), а в зависимости от принципа действия – на синхронные
и асинхронные. В синхронных машинах процесс преобразования энергии происходит
при синхронной скорости, т.е. при частоте вращения ротора, равной частоте
вращения магнитного поля. Синхронные машины широко применяют в качестве
генераторов, и вся вырабатываемая электрическая энергия производится
генераторами этого типа. Применение синхронных двигателей ограничивается
относительно небольшим кругом специальных назначений (постоянство частоты,
повышение cos φ и др.). В асинхронных машинах процесс преобразования
энергии происходит при несинхронной (асинхронной) частоте, т.е. при частоте вращения
ротора, не равной частоте вращения магнитного поля. В силу ряда существенных
достоинств асинхронные машины, применяемые в качестве двигателей, являются
наиболее распространенным типом электрических машин.
Кроме синхронных и асинхронных машин переменного тока
применяются коллекторные машины, используемые в качестве двигателей переменного
тока и допускающие экономичное регулирование скорости в широких пределах, у
которых регулировочные характеристики близки к характеристикам двигателей постоянного
тока.
Электрические машины, применяемые для преобразования
электрической энергии в электрическую энергию другого рода тока (другого
напряжения, числа фаз, частоты), называют преобразователями. Электрические машины, используемые в
качестве регуляторов и усилителей электромеханических сигналов, называют
соответственно электромашинными
регуляторами и усилителями.
К электрическим машинам в силу общности физических явлений
относятся трансформаторы, являющиеся
статическими электромагнитными преобразователями переменного тока одного
напряжения в переменный ток другого напряжения. Принцип работы трансформаторов
основан на использовании явления взаимоиндукции между двумя (или несколькими)
обмотками, помещенными на замкнутом стальном магнитопроводе. Трансформаторы
применяют при передаче электрической энергии на большие расстояния и распределении
ее между потребителями, а также в различных преобразовательных, измерительных,
защитных и других устройствах.
Материалы,
применяемые для электрических машин и трансформаторов
При изготовлении электрических машин и трансформаторов
используются материалы, которые можно подразделить на активные, изоляционные и
конструкционные.
Активные материалы. Такими материалами являются магнитные и
проводниковые (токопроводящие), обеспечивающие нормальное протекание электромагнитных
процессов при работе электрических машин и трансформаторов. К проводниковым
материалам относят, прежде всего, медь, обладающую малым удельным
сопротивлением. Из меди изготовляют контактные кольца и коллекторные пластины.
Наряду с медью применяют алюминий, а в некоторых случаях сплавы латуни и
бронзы. Из меди и алюминия изготовляют провода круглого и прямоугольного сечений
для обмоток электрических машин и трансформаторов.
В качестве магнитных материалов для сердечников
электрических машин и трансформаторов применяются электротехнические стали
различных марок (ГОСТ 802-58), буквы и цифры которых означают следующее: буква
Э – сталь электротехническая; первая цифра после буквы – степень легированности
стали (1 – слаболегированная, 2 – среднелегированная, 3 – повышенно-легированная, 4 – высоколегированная); вторая
цифра – гарантированные электромагнитные свойства стали (1 – нормальные, 2 –
пониженные и 3 – низкие удельные потери в стали при частоте 50 Гц; 4 –
нормальные удельные потери при частоте 400 Гц; 5 – нормальную и 6 – повышенную
магнитную проницаемость в полях менее 0,01 А/см; 7 – нормальную и 8 –
повышенную магнитную проницаемость в полях от 0,1 до 1 А/см; 0 – сталь
холоднокатаная); буква А после цифры – особо низкие удельные потери. Например,
сталь Э330А означает сталь повышенного легирования, холоднокатаная, с особо
низкими удельными потерями.
Потери в стали магнитопровода складываются из потерь на
вихревые токи и гистерезис (перемагничивание стали). Для уменьшения потерь на
вихревые токи магнитопроводы трансформаторов и электрических машин изготавливают
из отдельных пластин, изолированных друг от друга. Изоляционные прослойки,
оказывая вихревым токам чрезвычайно большое сопротивление, ограничивают сферу
действия токов небольшими участками и тем самым значительно уменьшают потери
электрической энергии. Кроме того, для уменьшения потерь па вихревые токи магнитопроводы
составляют из листов высоколегированной стали, удельное электрическое
сопротивление которой значительно больше, чем у обычной стали.
Потери на гистерезис и вихревые токи
PСТ= pGСТ,
где р – коэффициент удельных потерь, зависящий от
стали, толщины стальных листов, частоты и максимальной магнитной индукции,
Вт/кг;
GCT – масса магнитопровода, кг.
Холоднокатаная сталь отличается от горячекатаной не только
меньшими потерями, но и высокой магнитной проницаемостью, величина которой
зависит от направления магнитных линий. По направлению проката (вдоль) магнитная
проницаемость холоднокатаной стали больше в направлении, перпендикулярном
направлению проката, магнитная проницаемость меньше, чем магнитная
проницаемость горячекатаной стали. Поэтому стремятся выполнять магнитопроводы
электрических машин и трансформаторов так, чтобы их магнитный поток замыкался
вдоль направления проката стальных листов или ленты. Применение стали с более
высокой магнитной проницаемостью, позволяет повысить магнитную индукцию и
уменьшить сечение магнитопровода и его массу.
Изоляционные материалы. Это – одни из основных элементов
электрических машин и трансформаторов, так как надежность их работы в большой
степени зависит от качества изоляции. Изоляция должна обеспечивать надежную
работу электрической машины или трансформатора в условиях эксплуатации при
значительных колебаниях температуры. В зависимости от нагревостойкости
изоляционные материалы (ГОСТ 8865-70) разделяют на классы со следующими
предельно допустимыми температурами: класс У
- 90°С, класс А - 105°С, класс Е - 120°С, класс В - 130°С, класс F - 155°С, класс Н - 180°С, класс С - более 180°С.
К классу У относятся не пропитанные и не погруженные
в жидкий диэлектрик волокнистые электроизоляционные материалы из целлюлозы или
шелка, а также полимерные органические диэлектрики (полиэтилен, полистирол и
др.) с температурой размягчения не ниже 90-100°С. К классу А относятся волокнистые
электроизоляционные материалы из целлюлозы или шелка, пропитанные пли
погруженные в жидкий диэлектрик, изоляция эмальпроводов на основе масляных или
полиамидных лаков; дерево и древесные слоистые пластики. Пропитывающими
веществами для материалов класса А являются трансформаторное масло,
масляные лаки, битумные составы. К классу Е
относятся литьевые составы, изоляция эмальпроводов на основе поливинилацеталевых,
полиэфирных, эпоксидных и полиуретановых смол и синтетические материалы. К
классу В относятся электроизоляционные
материалы, изготовленные на основе неорганических диэлектриков (слюда, асбест,
волокнистое стекло), пропитанные лаками или смолами повышенной
нагревостойкости, а также пластмассы с неорганическим наполнителем. К классу F относятся электроизоляционные материалы, изготовленные на
основе неорганических диэлектриков и пропитанные лаками или смолами,
модифицированными кремнийорганическими соединениями. К классу Н относятся неорганические электроизоляционные
материалы, пропитанные кремнийорганическими лаками или смолами. Такие материалы
не содержат связывающих органических материалов с нагревостойкостью ниже 180°С.
К классу С относятся неорганические
изоляционные материалы, изготовленные без применения органических связывающих
устройств.
Конструкция обмоток электрических машин и трансформаторов
должна обеспечивать их хорошее охлаждение с тем, чтобы температура нагрева не
превышала пределов, установленных для соответствующих классов изоляции. При
нормальной работе электрической машины или трансформатора изоляция обмоток
должна выдерживать длительные воздействия переменного электрического поля,
кратковременные перенапряжения, возникающие в условиях эксплуатации,
механические воздействия, которым она подвергается в процессе сборки, в
условиях эксплуатации и при коротких замыканиях (к.з.).
Конструкционные материалы. Их применяют для изготовления
тех частей и деталей электрических машин и трансформаторов, которые служат главным
образом для передачи и восприятия механических воздействий. В электрических
машинах применяются чугун, сталь, цветные металлы и их сплавы и пластмассы, В
настоящее время чугун (простой, ковкий) применяют для магнитопроводов редко, вследствие
плохих магнитных свойств, сталь же (литую, кованую) применяют для
магнитопроводов станин машин постоянного тока, ободов роторов синхронных машин и др.
Нагревание и
охлаждение электрических машин и трансформаторов
Режим работы электрических машин или трансформаторов при
условиях, для которых они предназначены заводом-изготовителем, называют номинальным. Такой режим характеризуется
номинальными величинами, указанными на заводском щитке машин или
трансформаторов. Обычно электрические машины и трансформаторы предназначаются
для продолжительного режима работы, при котором они могут работать с установившимися
превышениями температуры их отдельных частей над температурой окружающей среды,
не превосходящими допускаемых общесоюзными стандартами.
При работе электрических машин и трансформаторов возникают
потери, преобразуемой ими энергии. Эти потери складываются из следующих видов:
а) электрические (потери в обмотках), идущие на нагревание
протекающими токами проводов обмоток, сопротивлений переходных контактов на коллекторе
или контактных кольцах;
б) гистерезисные, возникающие в перемагничиваемых
ферромагнитных частях машин или трансформаторов;
в) потери на вихревые токи в частях машин и
трансформаторов, находящихся в переменных магнитных полях. Обычно потери на
гистерезис и вихревые токи оцениваются совместно, как потери в стали, которые
зависят от марки стали, толщины листов или ленты, качества изоляции, частоты
перемагничивания и магнитной индукции;
г) механические, идущие на трение в подшипниках о воздух
(или газ), вращающихся частей машины, щеток о коллектор или контактные кольца;
д) потери, затрачиваемые на вращение вентилятора,
расположенного на валу машины.
Помимо перечисленных потерь возникают еще дополнительные,
вследствие неравномерности распределения магнитных полей и токов, а при высоких
напряжениях – диэлектрические. Возникающие при работе электрических машин и
трансформаторов потери энергии превращаются в теплоту, нагревая отдельные их
части. Теплота должна быть рассеяна в окружающую среду, чтобы температура
отдельных частей электрических машин и трансформаторов не превышала допустимых
пределов.
По способу охлаждения электрические машины подразделяются
на:
а) машины с естественным охлаждением, не имеющие
специальных устройств для охлаждения. Такие машины бывают малой мощности, так
как отвод тепла в них малоинтенсивен;
б) машины с самовентиляцией, на валу которых помещают
вентилятор, всасывающий или нагнетающий в машину при вращении ротора воздух и
прогоняющий его через внутреннюю полость машины.
В зависимости от того, в каком направлении движется
охлаждающий воздух по телу ротора, различают две основные системы вентиляции:
радиальную и осевую. При радиальной вентиляции охлаждающая среда перемещается в
радиальном направлении от вала к периферии ротора через промежутки между
пакетами стальных листов, образующих сердечник ротора. При осевой вентиляции в
сердечнике ротора устраивают осевые каналы, сквозь которые прогоняется воздух
параллельно валу машины.
Радиальная система вентиляции проста в конструктивном
отношении и надежна, потери энергии на вентиляцию малы и теплоотдача
равномерна. Однако она некомпактна и неустойчива в отношении количества
протекающего через машину воздуха. В машинах малой и средней мощности лучшие
результаты дает осевая вентиляция, а в машинах средней и большой мощности – радиальная;
в) машины с посторонним охлаждением, в которых охлаждающий
воздух (или водород) прогоняется по трубам вентилятором. Такое охлаждение применяют
для машин большой мощности.
В трансформаторах используется воздушное и масляное
охлаждение. В сухих трансформаторах нагретые поверхности обмоток и
магнитопровода отдают тепло омывающему их воздуху путем конвекции и излучения.
В масляных трансформаторах тепловая энергия передается в окружающую среду
специальным трансформаторным маслом, заливаемым в металлический бак, в который
помещен трансформатор.
Трансформаторное масло является хорошей охлаждающей средой
и хорошим изоляционным материалом, который обеспечивает высокую электрическую
прочность трансформатора при сравнительно малых изоляционных промежутках.
Последнее свойство позволяет создавать компактные конструкции обмоток и
магнитопровода, а масляное охлаждение дает возможность применять более высокие
электромагнитные нагрузки активных материалов (плотности тока и магнитной
индукции) и делать трансформаторы с малой массой этих материалов.
По способу защиты от влияния внешней среды различают
открытое, защищенное, брызгозащищенное, водозащищенное, герметическое и
взрывобезопасное исполнения машин. Открытой
считается машина, у которой вращающиеся и токоведущие части не имеют
защитных приспособлений. В защищенной
машине есть специальные защитные приспособления, препятствующие
проникновению внутрь машины посторонних предметов, а также защищающие от
случайных прикосновений к токоведущим или вращающимся частям.
В брызгозащищенной
машине есть специальные защитные приспособления, предохраняющие от
попадания внутрь водяных капель падающих сверху под углом до 45° к вертикали. Водозащищенной считается машина, закрытая со всех сторон
(негерметически плотно) и выдерживающая испытание обливанием струей воды. В герметической машине плотно
закрытый корпус не допускает проникновения влаги внутрь машины при ее погружении
в воду. Взрывобезопасная машина
должна противостоять взрыву газа внутри машины и не передавать его во внешнюю
среду.
1 Принцип действия и
устройство электрических машин
1.1 Принцип действия машин постоянного тока
Простейшим генератором постоянного тока может служить виток
из проводника в виде рамки, вращающийся в магнитном поле между двумя постоянными
магнитами N и S (рисунок 1.1).
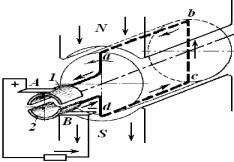
Рисунок 1.1 – Схема работы машины постоянного
тока
Концы витка abсd присоединяются к двум медным пластинам коллектора,
изолированным друг от друга и от вала, на котором они помещены. На пластинах
помещены неподвижные щетки А и В, к которым присоединена внешняя цепь, состоящая из
каких-либо приемников электроэнергии. При вращении витка с постоянной частотой
проводники ab и cd пересекают магнитные линии, при этом в проводниках индуктируется э.д.с.
При равномерном распределении магнитного поля в пространстве э.д.с. проводника
е = Е sin ωt, (1.1)
где ω= 2πf – угловая частота;
f – частота э.д.с.
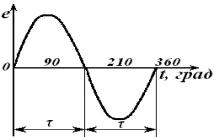
Таким образом, при условии равномерного распределения
магнитного поля в витке индуктируется переменная синусоидальная э.д.с. (рисунок
1.2, а) Направление индуктируемой в
проводнике э.д.с. определяется правилом правой руки, т.е. при перемещении
проводника ab под северным полюсом в нем наводится э.д.с.,
направленная из-за плоскости чертежа, а когда он проходит под южным полюсом, –
за плоскость чертежа. Таким образом, в проводнике ab наводится переменная во времени э.д.с.,
изменяющая свое направление 2 раза за один оборот витка.
а) б)
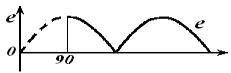
Рисунок 1.2 – Э.д.с., индуктируемая в витке (а) и на внешнем участке цепи (б)
Время Т, за
которое изменяется э.д.с., называют периодом.
Число периодов в одну секунду называют частотой. В общем случае, когда машина имеет р пар
полюсов, частота наводимой э.д.с. увеличивается пропорционально р, т.е. f=pn, где п – частота вращения витка в секунду.
Для нормальной работы генератора нужно установить щетки
так, чтобы наводимая в витке э.д.с. была равна нулю в момент перехода щетки с
одной пластины на другую. Каждая из щеток будет соприкасаться только с той коллекторной
пластиной и соответственно только с тем из проводников, которые находятся под
полюсом данной полярности. Например, в момент времени, показанный на рисунке
1.1, щетка А соприкасается с пластиной 1 и имеет положительный
потенциал, так как к ней подводится э.д.с. от проводника ab, находящегося под северным полюсом. При повороте
якоря на 90° виток будет расположен
так, что его проводники перемещаются вдоль магнитных линий поля, не пересекая
их. Поэтому э.д.с., наведенная в витке, равна нулю. Щетки соединяют
коллекторные пластины между собой и тем самым замыкают виток накоротко. При
повороте витка на 180° щетка А соприкасается
с пластиной 2, но
по-прежнему она имеет положительный потенциал, так как к ней подводится э.д.с.
от проводника cd, заменившего проводник ab под северным полюсом. Аналогично можно видеть,
что щетка В имеет всегда только отрицательный потенциал. Таким образом,
по витку abсd по-прежнему протекает переменный ток; при этом
по внешнему участку цепи ток проходит только в одном направлении, а именно от
положительной щетки А к отрицательной щетке В, т. е. происходит выпрямление
переменной э.д.с., наведенной в витке, в пульсирующую на внешнем участке цепи
(рисунок 1.2, б). Как
видно из рисунка, кривая э.д.с. помимо постоянной содержит большую переменную составляющую,
называемую пульсацией э.д.с. Для ее уменьшения следует увеличить число коллекторных
пластин. Если, например, в магнитном поле полюсов поместить два витка, оси
которых сдвинуты на 90° в
пространстве, и концы этих витков соединить с четырьмя коллекторными
пластинами, то при вращении витков индуктируемые в них э.д.с. окажутся
сдвинутыми по фазе на угол π/2.
Щетки в такой машине надо поместить так, чтобы они соприкасались с пластинами
того витка, в котором в данный момент э.д.с. имеет наибольшее значение и на
щетках будет э.д.с., пульсация которой много меньше,чем при двух коллекторных
пластинах. При дальнейшем увеличении числа коллекторных пластин пульсация
уменьшается и при 16 пластинах на пару полюсов становится менее 1%.
В действительности распределение магнитного поля в
пространстве неравномерно (рисунок 1.3).
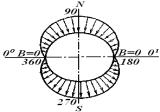
Рисунок 1.3 – Диаграмма распределения магнитной индукции под полюсом
Для увеличения э.д.с. (напряжения) на щетках электрические
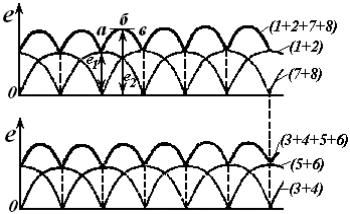
машины выполняют с многовитковыми обмотками якоря. На рисунке 1.4, а показаны схема двухполюсного
генератора постоянного тока, обмотка якоря которого состоит из четырех витков,
и схема токопрохождения в проводах обмотки. Коллектор генератора имеет четыре
пластины и на нем располагаются две неподвижные щетки, с помощью которых
обмотка якоря соединяется с внешней цепью. К этим щеткам параллельно приложены
две суммарные э.д.с.: одна от проводов 7, 8, 1, 2 и другая от проводов 6,
5, 4, 3. Причем э.д.с. проводов 7, 8 и проводов 1, 2 сдвинуты
относительно друг друга на угол 90°.
Также сдвинуты на 90° э.д.с. проводов
6, 5 и э.д.с. проводов 4, 3. На рисунке 1.4, б и в представлены
графики изменения э.д.с. в параллельных цепях обмотки якоря в зависимости от
времени.

а)
б)
в)
Рисунок
1.4 – Генератор постоянного тока с обмоткой якоря
из
четырех витков
Если увеличить число коллекторных пластин и число проводов
(витков) обмотки якоря, то результирующая кривая э.д.с. становится близкой к
прямой линии с незначительной по величине пульсацией. Таким образом, коллектор
в генераторах постоянного тока выполняет роль преобразователя переменной
э.д.с., индуктируемой в обмотке якоря, в постоянную на щетках, т.е. осуществляет
выпрямление э.д.с.
Электрические машины чаще изготовляют многополюсными. На
рисунке 1.5 изображена схема четырехполюсного генератора постоянного тока.
Линию, перпендикулярную оси полюсов и проходящую между разноименными полюсами,
называют геометрической нейтралью, а часть
окружности якоря, соответствующую одному полюсу – полюсным делением. Рассматриваемая простейшая машина
может работать двигателем, если к обмотке ее якоря подвести постоянный ток от
внешнего источника.
Машина постоянного тока состоит из неподвижной части –
статора и вращающейся части – якоря, в котором происходит процесс
преобразования механической энергии в электрическую (генератор) или обратно –
электрической энергии в механическую (электродвигатель).
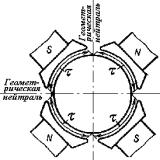
Рисунок 1.5 – Схема четырехполюсного генератора
1.2
Устройство и основные элементы конструкции машины постоянного тока
Между неподвижной и вращающейся частями имеется зазор.
Неподвижная часть (рисунок 1.6) состоит из станины 3, главных полюсов,
предназначенных для создания основного магнитного потока, добавочных полюсов 2,
служащих для достижения безыскровой работы щеток на коллекторе (улучшения
коммутации). К станине крепят болтами подшипниковые щиты, главные и дополнительные
полюсы.

Рисунок 1.6 – Неподвижная часть машины постоянного тока
Основной (главный) полюс (рисунок 1.7, а) имеет сердечник 4, набранный
из листов электротехнической стали толщиной 0,5
– 1 мм, стянутых шпильками. На сердечник насажены две катушки обмоток
возбуждения 2. Нижнюю часть сердечника – полюсный наконечник выполняют
так, чтобы воздушный зазор увеличивался от центра полюса к его концам. Это
делается для того, чтобы уменьшить искажение поля под действием реакции якоря и
рассеяние главного поля в зоне коммутации. У компенсированных машин постоянного
тока в полюсных наконечниках выштамповывают пазы для размещения компенсационной
обмотки. Число главных полюсов всегда четное, причем северные и южные полюсы
чередуются, что достигается соответствующим соединением катушек обмотки возбуждения
полюсов. Катушки всех полюсов соединяют последовательно. Полюсы крепятся к станине
1 болтами или шпильками.
а) б)
Рисунок
1.7 – Основной (а) и добавочный (б) полюсы
Добавочный полюс (рисунок 1.7, б) состоит из сердечника 1, изготовляемого
из стали, и обмотки 2, изготовляемой из медных шин прямоугольного сечения.
Обмотки добавочных полюсов соединяют последовательно с обмоткой якоря, а полюсы
устанавливают между главными полюсами и крепят к станине болтами. Воздушный
зазор под добавочными полюсами значительно больше, чем под главными. Поперечное
сечение добавочных полюсов расширяется в сторону корпуса. Это увеличивает
поверхность прилегания добавочного полюса к корпусу, что дает большую
устойчивость и предупреждает насыщение от большого потока рассеяния добавочных
полюсов.
Для создания электрического контакта с поверхностью
коллектора в машине устанавливают щетки, которые прикрепляют к щеткодержателю.
Щеткодержатель (рисунок 1.8) состоит из нажимных пластин 1; пружины 2,
передающей давление на щетку 3; из обоймы 4.

Рисунок
1.8 – Щеткодержатель
Для присоединения элементов электрической цепи машины к
щетке последняя снабжается гибким медным тросиком 5. Все щеткодержатели
одной полярности соединяются между собой сборными шинами, присоединенными к
выводам машины. Щеткодержатели крепят на траверсе.
Якорь машины постоянного тока состоит из сердечника якоря с
обмоткой, коллектора, вентилятора и вала с шарикоподшипником или роликоподшипником.
Сердечник якоря (рисунок 1.9, а) машины представляет собой пакет из
листов электротехнической стали толщиной 0,5 мм, которые для уменьшения потерь
от вихревых токов изолируют друг от друга лаком. Пакет запрессован на валу
якоря и удерживается в сжатом состоянии нажимными шайбами 1.Для лучшего охлаждения машины в сердечниках якоря устраивают
вентиляционные каналы. Каждый лист пакета (рисунок 1.9, б) имеет зубцы 1, пазы 2 и вентиляционные
отверстия 3. В пазы сердечника укладывают проводники обмотки якоря
(рисунок 1.9, в).

а)
б) в)
Рисунок 1.9 – Сердечник якоря: а
– якорь без обмотки; б – стальной
лист
сердечника якоря; в – необмотанный
якорь машины постоянного тока
Обмотку якоря присоединяют к пластинам коллектора. На
рисунке 1.10 показан коллектор, собранный из пластин 7 твердотянутой
меди, изолированных друг от друга и от вала якоря миканитовыми прокладками 4
и манжетами. Коллектор состоит из корпуса 1, болтов 2, нажимного кольца 3, микакитовых прокладок 4. Для удобства монтажа и обеспечения
прочности крепления коллекторные пластины 7
выполняют в форме «ласточкина хвоста» 6. Соединяют коллекторные пластины
с проводами обмотки якоря с помощью «петушков» 5, которые имеют прорези для
укладки и запайки в них концов секций обмотки якоря.
На рисунке 1.11 показано устройство машины постоянного
тока.
Рисунок 1.10 –
Устройство коллектора Рисунок
1.11 – Устройство машины
постоянного тока
1.3 Системы вентиляции
электрических машин
К станине 6 болтами крепят
главные полюсы, состоящие из сердечника 4 и катушки обмотки возбуждения 5. С торцовых сторон к станине крепят
боковые щиты 7 с подшипниками,
удерживающими вал машины. Якорь машины состоит из сердечника 3, обмотки 9 и коллектора 1.
На валу якоря укреплен вентилятор 8, на коллекторе помещены неподвижные щетки 2.
Электрические машины подразделяют в зависимости от способа охлаждения на машины с естественным охлаждением и машины с
самовентиляцией.
У машин с естественным охлаждением нет специальных
устройств для усиления эффективности охлаждения. Естественную вентиляцию
применяют в машинах малой мощности, так как условия их охлаждения сравнительно
легкие.
У машин с самовентиляцией охлаждение достигается с помощью
вентилятора (крылатки). Самовентиляция может быть внутренняя, когда воздух проходит
внутри машины, и наружная, когда вентилятор выносят наружу и он обдувает
внешнюю ребристую поверхность станины. Внутренняя самовентиляция в зависимости
от расположения вентилятора по отношению к потоку охлаждающего воздуха может
быть вытяжной или нагнетательной. При аксиальной вытяжной вентиляции (рисунок
1.12, а) вентилятор А создает
в машине разряжение: воздух под давлением атмосферы поступает в машину и затем
выбрасывается из нее наружу. При аксиальной нагнетательной вентиляции (рисунок
1.12, б) вентилятор
А забирает воздух, нагнетает в машину и затем выталкивает его наружу.

а) б)
Рисунок 1.12 – Аксиальные системы
самовентиляции машины постоянного тока
При аксиальной вентиляции охлаждающий воздух проходит по
внутренним вентиляционным каналам параллельно оси вала, а при радиальной вентиляции
– перпендикулярно (рисунок 1.13, а). Недостаток самовентиляции состоит в
том, что при снижении частоты вращения машины резко падает производительность
вентилятора, в результате чего ухудшается интенсивность охлаждения машины. На
рисунке 1.13, б изображена схема вентиляции с внешним обдувом корпуса
машины.

а) б)
Рисунок 1.13 – Машины с радиальной системой охлаждения (а)
и схема вентиляции с внешним обдувом корпуса (б)
Машины с независимым охлаждением. В таких машинах воздух
поступает от вентилятора, работающего независимо от машины. Вентиляция может
быть протяжной или замкнутой. При протяжной системе вентиляции холодные массы
воздуха подводятся извне, проходят через машину и выбрасываются в окружающую
атмосферу. Недостаток такой системы заключается в том, что на внутренних
поверхностях машины накапливаются пыль и грязь, которые всегда содержатся в
воздухе, вызывая ухудшение условий охлаждения машины. Это может быть причиной
аварии.
Применение фильтров на входе воздуха в машину
нерационально, так как их нужно часто очищать, и они увеличивают сопротивление
движению воздуха.
При замкнутой системе вентиляции (рисунок 1.14) охлаждающий
воздух проходит по замкнутому контуру через воздухоохладители ВО. При
такой вентиляции машина предохраняется от попадания в нее пыли. В качестве охлаждающей
среды допускается применение не только воздуха, но и водорода. При водородном
охлаждении вентиляционные потери снижаются почти в десять раз, а срок службы
изоляции увеличивается, так как исключаются окислительные процессы. Для
устранения взрыва, в случае образования внутри машины гремучего газа, через нее
предварительно пропускают углекислый газ. Затем машину заполняют водородом под
давлением выше атмосферного, что предупреждает попадание воздуха внутрь машины.
2 Якорные обмотки
машин постоянного тока
2.1 Устройство обмоток
Обмотка якоря – важнейший элемент машины, удовлетворяющий
следующим требованиям:
а) обмотка должна быть рассчитана на заданные величины
напряжения и тока нагрузки, соответствующие номинальной мощности, и иметь
необходимую электрическую, механическую и термическую прочности, обеспечивающие
достаточно продолжительный срок службы машины (до 20 лет);
б) конструкция обмотки должна обеспечить удовлетворительные
условия токосъема с коллектора без вредного искрения;
в) расход материала при заданных эксплуатационных
показателях (к.п.д. и др.) должен быть минимальным;
г) технология изготовления обмотки должна быть по возможности простой.

Рисунок 1.14 – Схема замкнутой системы вентиляции
В современных машинах постоянного тока обмотку якоря
укладывают в пазы на внешней поверхности якоря (рисунок 2.1), что упрощает
технологию ее изготовления, повышает использование провода и делает обмотку
более надежной. Обмотка состоит из ряда последовательно соединенных секций, каждая
из которых имеет две активные стороны, размещаемые в пазах якоря. На торцевых
сторонах сердечника якоря активные стороны соединяют лобовыми проводами. Для
того чтобы не было пересечения лобовых соединений, т.е. чтобы они не лежали в
одной плоскости, обмотки выполняют двухслойными (рисунок 2.2). Активные стороны
располагают в пазах 1, находящимися
между зубцами 2, а с
торцевых сторон скрепляют лобовыми соединениями 3. При этом одна
активная сторона каждой секции лежит в верхнем слое паза, а другая – в нижнем
(рисунок 2.3). Каждую активную сторону секции 2 изолируют и укладывают в
паз 3, предварительно
изолированный. После укладки всех активных сторон паз заклинивают немагнитным
клином 1. Для придания якорю большей
механической прочности лобовые соединения обмотки стягивают стальными бандажами.

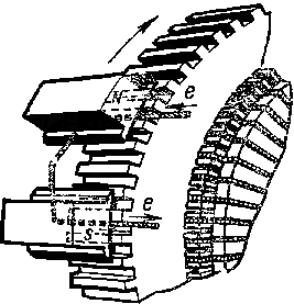
Рисунок 2.2
– Двухслойное
расположение обмотки якоря

Рисунок 2.1 – Расположение активных
Рисунок 2.3 – Поперечный разрез паза
сторон секции на сердечнике
якоря
с обмоткой
Секции обмоток машин постоянного тока могут быть
одновитковыми (рисунок 2.4, а), состоящими из двух активных проводов, и
многовитковыми (рисунок 2.4, б).
а) б)
Рисунок 2.4 – Секции обмоток якоря
Обмотки якорей машин постоянного тока подразделяют на
петлевые (параллельные), волновые (последовательные) и комбинированные
(параллельно-последовательные). Обмотки могут быть простыми и сложными (кратными),
причем последние образуются из нескольких простых обмоток. На рисунке 2.5, а
показана секция (катушка) многовитковой волновой обмотки. Полукатушка из
двух одинаковых полусекций волновой обмотки изображена на рисунке 2.5, б, а
петлевой – на рисунке 2.5, в. На развернутых схемах обмоток стороны секций
находящиеся в верхнем слое, изображают сплошными линиями, а стороны,
расположенные в нижнем слое, прерывистыми линиями (рисунок 2.6).


а)
б)
Рисунок 2.6 – Изображение секции на
развернутой схеме
в)
Рисунок 2.5 – Катушка (а),
полукатушка волновой
обмотки (б),
полукатушка секции петлевой обмотки (в)
Секции обмотки соединяют друг с другом в последовательную
цепь таким образом, что начало последующей
секции присоединяют вместе с концом предыдущей секции к общей коллекторной пластине.
Поскольку каждая секция имеет два конца и к каждой коллекторной пластине
присоединены также концы двух секций, то общее число пластин коллектора К равно числу секций обмотки S;
K=S=N/(2ω),
где N - число
активных проводов обмотки якоря;
ω – число витков в секции.
В простейшем случае в пазу находятся две секционные стороны
– одна в верхнем и другая в нижнем слое. При этом число пазов якоря Z=S. Для уменьшения пульсации выпрямленного напряжения,
а также во избежание чрезмерно большого напряжения между соседними
коллекторными пластинами число пазов должно быть достаточно большим. Однако
изготовление якорей с большим числом пазов нецелесообразно, так как при этом
пазы будут узкими, следовательно, значительная часть их площади занята
изоляцией секций от корпуса, и для проводников остается мало места, что
приводит к потере мощности машины. По этим причинам обычно в каждом слое паза
располагают рядом несколько (ип=2,3,4,5) секционных сторон (рисунок 2.7).
При этом K=S=unZ. В данном случае говорят, что в каждом реальном
пазу имеется и элементарных пазов, поэтому в каждом слое
элементарного паза – одна секционная сторона. Очевидно, что общее число
элементарных пазов якоря ZЭ=ипZ=S=К. В одном полюсном делении τ содержится ZЭ/2p элементарных пазов. Но часто
ZЭ не делится без остатка
на 2р, тогда вводят
дробную величину ξ, с помощью которой величина шага округляется до целого
числа
 (2.1)
(2.1)

Рисунок 2.7 – Подразделение реального паза на
элементарные
2.2 Петлевая обмотка
Простая петлевая обмотка. Простой петлевой (параллельной) обмоткой якоря называют
обмотку, у которой концы каждой секции присоединены к двум рядом лежащим коллекторным
пластинам (рисунок 2.8).
Если при выполнении обмотки конец секции присоединяют к
коллекторной пластине, находящейся справа от исходной, то такую обмотку
называют правоходовой или
неперекрещивающейся. При
смещении в левую сторону обмотку называют левоходовой или перекрещивающейся.
Левоходовые обмотки не находят практического применения, так как
увеличивают расход обмоточного провода. На рисунке 2.8 показаны шаги обмотки у1;
у2; у, которые будем определять числом элементарных пазов.
Первый частичный шаг у1= ZЭ/(2p) ± ξ определяет
расстояние по поверхности якоря между начальной «Н» и конечной «К» сторонами
секции: ξ – величина, меньшая единицы, вычитая или суммируя которую, можно
получить шаг у1, выраженный
целым числом.
Рисунок 2.8 – Развернутая
схема Рисунок 2.9 – Радиальная схема
простой петлевой обмотки
якоря: простой
петлевой обмотки:
Н – начало провода; К – конец провода, 2р=4;
S=К=16
п.п. – последний
провод
Второй частичный шаг обмотки у2 определяет
расстояние между конечной стороной данной секции и начальной стороной
последующей. Результирующий шаг обмотки у определяет расстояние между
начальными сторонами данной и последующей за ней секций.
Шаг по коллектору ук
определяет расстояние в коллекторных делениях между серединами коллекторных пластин,
к которым присоединены концы данной секции. Шаг по коллектору всегда равен
результирующему шагу обмотки: ук=у. В простой петлевой обмотке шаг по
коллектору ук=1.
Пример – На рисунке 2.9
изображена радиальная схема простой петлевой обмотки со следующими данными: 2р=4; S=К=ZЭ=16. Тогда у1=S/(2p)±ξ; у1=16/4–0=4;
у=ук=1; у2=у1–у; у2=4–1; у2=3. Для облегчения вычерчивания схемы удобно
обозначить одинаковыми цифрами секционные стороны, пазы и коллекторные
пластины, с которыми они соединены. Выполнение схемы начинают с соединения
секционных сторон, образующих секции в соответствии с первым шагом. Таким
образом, необходимо соединить верхнюю сторону 1 секции с нижней стороной, расположенной па расстоянии четырех
промежутков от стороны 1, т.е. с
нижней стороной 5. Начало первой
секции (сторону 1) соединяют с
коллекторной пластиной 1', а конец
первой секции (нижнюю сторону 5) – с
коллекторной пластиной 2', с которой
соединяют также начало 2 второй секции.
Вторая секция образована сторонами 2
и 6, и конец ее присоединяют к
пластине 3' и т.д. При вращении якоря
по часовой стрелке направление э.д.с. (согласно правилу правой руки) в
проводниках показано на рисунке 2.9
точками и крестиками. При обходе обмотки по схеме можно установить, что для рассматриваемого
положения якоря коллекторные пластины 1',
5', 9' и 13' являются
узловыми точками, к которым присоединены секции, имеющие встречное направление
э.д.с. Эти коллекторные пластины делят всю обмотку на участки с одинаковым
направлением э.д.с. в секциях. Если на эти пластины установить щетки, то щетки А1 и А2,
с которых поступает ток во внешнюю сеть, считаются положительными, а щетки В1 и В2
– отрицательными. Щетки одинаковой полярности соединяют между собой
параллельно. Для характеристики обмотки необходимо знать, как расположены в
магнитном поле ее секции и как они соединены между собой. На схеме обмотки
цилиндрическая поверхность якоря, разрезанная вдоль оси машины в любом месте,
из соображений удобства разворачивается на плоскость и представляется прямоугольником.
Развернутая схема рассмотренной выше обмотки изображена на рисунке 2.10. От каждой щетки отходят в
противоположные стороны две параллельные ветви обмотки и заканчиваются на соседних
щетках. Секции параллельной ветви размещаются под парой расположенных рядом полюсов,
и так как обмотка двухслойная, то на каждую пару полюсов приходятся две
параллельные ветви. Таким образом, общее количество параллельных ветвей обмотки
2а=2р. Для большей наглядности параллельные
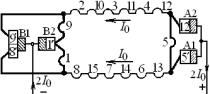
ветви рассмотренной обмотки показаны на рисунке 2.11. В данном примере четырехполюсной машины обмотка
образует четыре параллельные ветви, в каждой из которых протекает ток одной
параллельной ветви I0, а
во внешней цепи – I2=4I0.

Рисунок 2.10 – Развернутая
схема Рисунок 2.11 –
Параллельные
одноходовой петлевой
обмотки: ветви
одноходовой
2р=4; S=К=16 петлевой обмотки
Сложная петлевая обмотка. Сложную или кратную петлевую
обмотку можно рассматривать как сочетание нескольких (m=2,3,4...) простых петлевых обмоток. Такую обмотку называют также сложной параллельной. В рассматриваемой
обмотке секции и коллекторные пластины т простых обмоток по окружности
чередуются, и для отвода тока из обмотки необходимо, чтобы ширина щеток была не
меньше т коллекторных делений. Таким образом, т простых обмоток
включаются с помощью щеток параллельно и количество параллельных ветвей сложной
петлевой обмотки 2а=2рт. Результирующий шаг по элементарным
пазам и шаг по коллектору сложной петлевой обмотки у=ук–т. Шаги
у1 и у2 определяются так же, как и для
простой петлевой обмотки. Возможность получения в сложных обмотках большого
числа ветвей без увеличения числа полюсов составляет наиболее отличительную особенность
этих обмоток. Их применяют в мощных машинах низкого напряжения с большими
токами якоря, например в генераторах для электролиза.
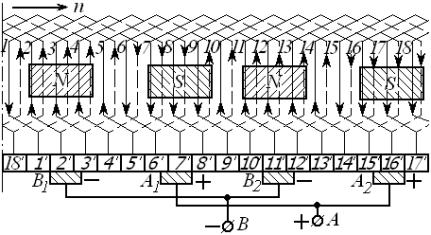
Рисунок 2.12 – Развернутая схема сложной петлевой обмотки:
2р=4; S=К=18; 2а=2тр=8
Пример – На рисунке 2.12 изображена
развернутая схема сложной петлевой обмотки для 2р=4; 5=k=18; т=2. Здесь у=ук=т=2; у1=18/4–2/4; у1=4; y2=у1–y, у2=4–2; у2=2. При
этом заметим, что если К/р равно
четному числу, то такая сложная петлевая обмотка называется симметричной, если
же К/р равно нечетному числу, –
несимметричной. Построение развернутой схемы обмотки начнем с пластины и секции
1, обойдем все нечетные
секции и пластины и вернемся к пластине 1', замкнув первый ход обмотки. Начав второй ход с пластины 2' и
секции 2, обойдем все четные
секции и пластины и снова вернемся к пластине 2, замкнув второй ход обмотки. Таким образом, мы имеем совокупность
двух отдельных обмоток, совмещенных на якоре и работающих параллельно, – это
сложная петлевая двукратнозамкнутая обмотка. В нашем случае имеем 2а=2∙4=8 ветвей. Число щеток остается
равным числу полюсов 2р, но
ширина каждой щетки должна быть такова, чтобы одновременно могли работать обе
обмотки.
2.3 Волновая обмотка
Простая волновая обмотка.
Простая волновая (последовательная) обмотка получается при последовательном соединении секций, находящихся под разными
парами полюсов. Концы секций волновой обмотки присоединены к коллекторным
пластинам, удаленным друг от друга на расстоянии шага обмотки по коллектору ук=у=(К±1)/р (рисунок 2.13).
За один обход по якорю последовательно соединяют столько
секций, сколько пар полюсов имеет машина. Таким образом, обойдя обмотку по окружности
якоря, попадаем в коллекторную пластину, расположенную рядом (слева) с той, от
которой начат обход.

Рисунок 2.13 – Схема построения простой волновой обмотки якоря:
п.о. – первый обход обмотки по якорю; в.о. – второй обход;
п.п. – последний провод обмотки
Затем делается второй, третий и все последующие обходы,
пока все провода не будут соединены между собой в одну замкнутую обмотку, конец
которой присоединяют к первой коллекторной пластине. Такую обмотку называют левоходовой. Если же эта
пластина расположена справа от исходной, то обмотку называют правоходовой. Для правоходовой
обмотки требуется больший расход обмоточного провода. Характерным свойством простой
волновой обмотки является то, что число ее параллельных ветвей не зависит от
числа полюсов и всегда равно двум: 2а=2.
У волновой обмотки результирующий шаг у равен сумме частичных шагов у1
и у2, т.е.
у=у1+у2. Секции
каждой параллельной ветви равномерно распределены под всеми полюсами машины. В
такой обмотке можно было бы ограничиться применением только двух щеток. Однако,
в этом случае нарушилась бы симметрия обмотки, так как число секций в параллельных
ветвях стало бы различным. Поэтому в машине обычно устанавливают столько щеток,
сколько основных полюсов, это позволяет уменьшить величину тока, приходящегося
на каждую щетку. Но в некоторых случаях устанавливают только две щетки с тем,
чтобы сделать доступной для осмотра и смены щеток не всю окружность коллектора,
а только ее часть. В простой волновой обмотке шаг по коллектору должен быть
обязательно равен целому числу. Если это условие не выполняется, то уменьшают
число элементарных пазов путем неприсоединения одной секции к коллектору. Такую
секцию называют «мертвой» секцией.
Развернутая схема волновой обмотки с «мертвой» секцией изображена на рисунке 2.14.

Рисунок 2.14 – Развернутая схема волновой обмотки с «мертвой» секцией
Рисунок 2.15 – Радиальная схема Рисунок 2.16 – Развернутая схема
простой волновой
обмотки: обмотки: 2р=4; S=k=15
2р=4; S=k=15
Однако наличие несимметрии обмотки вызывает некоторые
осложнения в условиях коммутации в зонах «мертвой» секции, поэтому в мощных
машинах с напряженными условиями коммутации рекомендуется избегать применения
волновых обмоток с «мертвой» секцией.
Пример – На рисунке 2.15 изображена радиальная схема
простой волновой обмотки по данным: 2р=4; S=К=15. При выполнении обмотки мы соединяем между
собой: коллекторную пластину 1', начало секции 1 в пазу 1, конец ее в
пазу 1+3=4 и
коллекторную пластину 1'+7'=8'; отсюда идем к началу секции 8 в пазу 8, к концу
ее в пазу 11, к коллекторной
пластине 8'+7'=15' и
т.д. Схема той же обмотки в развернутом виде изображена на рисунке 2.16.
Секции, замкнутые накоротко щетками, показаны жирными линиями. Таким образом,
имеем только две параллельные ветви, хотя число полюсов 2/p=4. Схема токопрохождения внутри обмотки или
схема ветвей показана на рисунке 2.17. Поскольку каждая из ветвей волновой
обмотки проходит под всеми полюсами, то неравенство потоков полюсов не вызывает
неравенства э.д.с. и токов параллельных ветвей. Поэтому простая волновая
обмотка не нуждается в уравнительных соединениях.
Рисунок
2.17 – Параллельные ветви волновой обмотки
Сложная волновая обмотка.
Сложная волновая обмотка представляет собой несколько простых волновых
обмоток, уложенных в пазы одного якоря. Так как каждая простая волновая обмотка
имеет две параллельные ветви, то сложноволновая обмотка будет иметь число
параллельных ветвей 2а=2m, где т – число простых волновых обмоток, составляющих данную сложноволновую
обмотку. Между собой эти обмотки соединяются параллельно проводниками –
уравнительными соединениями, и щетками на коллекторе. Желательно, чтобы число
пластин, перекрываемое щеткой, было больше числа пар параллельных ветвей а.
Шаг обмотки по коллектору ук=у=(К±m)/р. При выполнении сложной волновой обмотки после
одного обхода р последовательно соединенных секций якоря, конец секции
присоединяют к коллекторной пластине, отстоящей от исходной на т пластин,
оставляя свободное место для укладки секций других простых обмоток. Сложные
волновые обмотки могут быть однократнозамкнутыми, когда одна простая обмотка
является продолжением другой, и многократнозамкнутыми, когда каждая простая
обмотка оказывается замкнутой на себя.
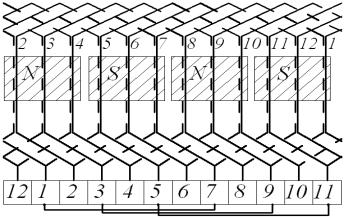
Пример. На рисунке 2.18 приведена схема двухходовой двукратнозамкнутой
волновой обмотки четырехполюсной машины S=K=ZЭ=18; yK=y(K±m)/p=8; y1=K/(2p)±ξ=4; y2=y–y1=4.
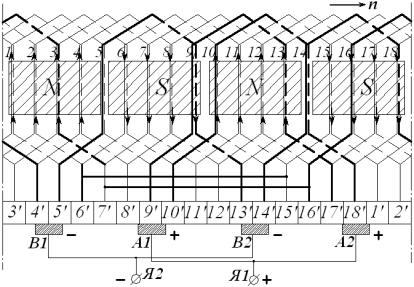
Рисунок 2.18 – Схема двухходовой двукратнозамкнутой волновой обмотки: 2р=4; Z=S=K=18
Построение схемы обмотки начинается с коллекторной пластины 1'. После первого обхода, в процессе которого
соединяют секции 1 и 9, конец девятой секции соединяют с
коллекторной пластиной 17', т.е. не
доходят до первой пластины на два коллекторных деления. При дальнейшем выполнении
обмотки соединяют по схеме все нечетные секции и коллекторные пластины, при
этом получают замкнутую одноходовую обмотку. Четные секции и коллекторные пластины
образуют вторую одноходовую обмотку. Обе обмотки включены параллельно при
помощи щеток и образуют двухходовую двукратнозамкнутую волновую обмотку.
2.4 Условия симметрии обмоток
Основное требование, которому должна удовлетворять обмотка
якоря, состоит в том, чтобы э.д.с. параллельных ее ветвей при любом положении
якоря были равны. Иначе, в обмотке якоря появляется ток, возникающий при работе
машины вхолостую. Этот ток, вызванный разностью э.д.с. параллельных ветвей,
называют уравнительным током. Уравнительный
ток нагревает обмотку якоря, увеличивает плотность тока под щетками, вызывая
искрение на коллекторе. Для того чтобы устранить возможность появления уравнительного
тока и добиться равенства э.д.с. параллельных ветвей обмотки якоря, необходимо
соблюдать определенные условия при выборе числа пазов Z и коллекторных пластин К обмотки якоря.
Эти условия называют условиями симметрии обмотки якоря, и состоят они в следующем:
а) число проводников во всех пазах должно быть одинаковым,
т.е. S=N/Z равняется целому числу;
б) каждая пара параллельных ветвей должна содержать
одинаковое число пазов, т.е. Z/a равняется целому числу;
в) каждая пара параллельных ветвей должна содержать
одинаковое число секций, т.е. S/a=K/a равняется целому числу;
г) каждой стороне секции, принадлежащей одной паре
параллельных ветвей, должны соответствовать секционные стороны других пар
параллельных ветвей, расположенных в одинаковых магнитных условиях. Для этого необходимо,
чтобы 2р/а равнялось целому числу.
2.5 Уравнительные
соединения
Опыт эксплуатации машин с петлевыми обмотками показывает,
что уравнительные токи в них возникают даже при выполнении условий симметрии.
Причина тому – магнитная асимметрия машин (неодинаковые зазоры под различными
полюсами, неточность сборки, наличие раковин в отливке станины и т.д.). При
петлевой обмотке каждая пара параллельных ветвей расположена под своей парой
полюсов. Вследствие магнитной асимметрии в них будут индуктироваться различные
э.д.с. При волновой обмотке параллельные цепи охватывают все полюсы машины и такого
явления не наблюдается. Уравнительные токи, складываясь с током нагрузки, вызывают
неравномерную нагрузку параллельных ветвей, увеличивая электрические потери, и
проходят из одной параллельной ветви обмотки в другую через щетки, в результате
чего при нормальной нагрузке машины плотность тока под щетками оказывается выше
нормы, что вызывает искрение на коллекторе. Для того чтобы уравнительные токи
не замыкались через щетки, простые петлевые обмотки снабжают специальными уравнительными
соединениями. При этом электрически соединяют точки на обмотке якоря, имеющие
теоретически равные потенциалы, тогда уравнительные токи замыкаются внутри
обмотки без выхода в щетки и соединяющие их шины. Эти уравнительные токи
вызывают магнитный поток такого направления, который стремится уменьшить
магнитную несимметрию машины. Уравнительные соединения, выравнивающие
несимметрию магнитной системы машины, называют уравнителями первого рода. Обычно такие уравнители соединяют
равнопотенциальные точки со стороны коллектора (рисунок 2.19).
уп=К/а=S/а=К/р.
а) б)
Рисунок 2.19 – Уравнительные соединения первого
рода
а – развернутая схема обмотки; б
– вид со стороны коллектора
Иногда соединяют на лобовых частях со стороны,
противоположной коллектору. Число точек равного потенциала, которую мы можем
найти в симметричной обмотке, а=р. Расстояние между двумя соседними
равнопотенциальными точками называют потенциальным
(уравнительным) шагом, измеряемым
числом коллекторных делений или числом секций, соответствующих одной паре ветвей:
Полное число уравнительных соединений первого рода Nyp, которое можно применить в
обмотке, Nyp=K/a. Однако такое количество уравнительных соединений
применяют только в машинах большой мощности, например в электродвигателях
прокатных станов.
В целях экономии меди и упрощения конструкции машины обычно
применяют неполное число уравнителей из медного провода с сечением, равным
½, ¼ сечения проводника обмотки якоря. Если простые волновые
обмотки не требуют никаких уравнительных соединений, то сложноволновые обмотки
могут хорошо работать только при выполнении их с уравнительными соединениями.
В сложноволновой обмотке соседние коллекторные пластины
принадлежат разным простым волновым обмоткам, составляющим ее. Если переходные
сопротивления между щетками и коллекторными пластинами, принадлежащим разным
обмоткам, не равны, то и токи в отдельных волновых обмотках также не равны.
Неравномерное распределение тока повлечет за собой и неравные падения напряжения
в обмотках, вследствие чего напряжения между соседними коллекторными пластинами
могут сильно увеличиться.
Для устранения
этого недостатка соединяют уравнительными проводами такие точки простых
волновых обмоток, которые теоретически должны иметь одинаковые потенциалы.
Уравнительные соединения, выравнивающие несимметрию распределения напряжения по
коллектору, называют уравнителями
второго рода (рисунок 2.20).
Рисунок 2.20 – Уравнители второго рода в сложной волновой обмотке
2.6
Обмотка смешанного типа
В машинах постоянного тока большой мощности иногда применяют
смешанную (лягушечью) обмотку якоря, представляющую
собой сочетание простой петлевой и сложной волновой обмоток, расположенных в
одних пазах якоря в четыре слоя и присоединенных к общему коллектору. При этом
к каждой пластине припаивают по четыре проводника.
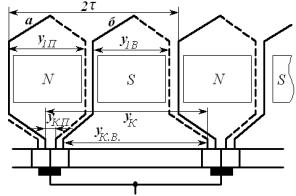
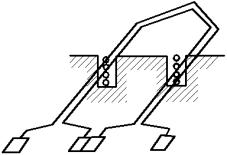
Рисунок 2.21 – Обмотка смешанного типа
На рисунке 2.21, а изображена развернутая схема
обмотки смешанного типа, на рисунке 2.21, б
– расположение одной секции этой обмотки в пазах. Основное достоинство этой
обмотки состоит в том, что она не требует уравнительных соединений. В ней волновая
обмотка выполняет функции уравнительных соединений первого рода для петлевой
обмотки, а петлевая обмотка выполняет функции уравнительных соединений второго
рода для волновой обмотки. Шаги обмоток по якорю, составляющих смешанную
обмотку, делают одинаковыми: y1петл=y1волн. Шаг обмотки равен сумме шагов обмоток: y1петл+y1волн = Zэ/(2p)+Zэ/(2p). Так как Zэ = K, то y1петл+y1волн= К/р. Потенциальный шаг по коллектору уп = К/р.
Пример – Определить шаг и число
уравнительных соединений простой петлевой обмотки, у которой 2p = 6; k =162.
Решение. Шаг уравнительных соединений yп=S/а=K/а=162/3=54. Число точек, соединяемых одним уравнителем, nn=а=3. Принимая, что каждая третья пластина
коллектора соединяется уравнителем, находим число коллекторных пластин,
соединяемых уравнительными соединениями Kу=К/3=162/3=54. Число уравнительных
соединений nу=Kу/nn=54/3=18. Между собой
соединяются следующие коллекторные пластины: 1-м уравнителем 1-55-109-1; 2-м
уравнителем 4-58-112-4; 3-м уравнителем 7-61-115-7 и т.д.
2.7 Электродвижущая сила обмотки якоря
В симметричной обмотке э.д.с. параллельных ветвей одинаковы
и являются общей э.д.с. обмотки якоря. Величину э.д.с. параллельной ветви определяют
на основании закона электромагнитной индукции.
Воздушный зазор δ
между главными полюсами и поверхностью якоря за счет формы наконечников полюсов
делается значительно больше по их краям (рисунок 2.22, а), в результате чего кривая
распределения магнитной индукции в воздушном зазоре имеет трапецеидальный
характер с высотой, равной Вδ
(рисунок 2.22, б). Заменив трапецию
прямоугольником с равновеликой площадью шириной b и высотой Вср,
можно считать, что магнитная индукция в магнитном зазоре является постоянной величиной.
В таком случае каждый проводник обмотки якоря будет пересекать при вращении
одинаковое число силовых магнитных линий в единицу времени.
а) б)
Рисунок 2.22 – Распределение магнитной индукции
в воздушном зазоре машины при гладкой поверхности якоря
Предположим, что обмотка якоря состоит из N активных
проводников и образует 2а параллельных
ветвей. Тогда число последовательно соединенных проводников в каждой ветви
равно N/(2a). Сумма э.д.с., наведенных в этих проводниках,
будет составлять э.д.с. обмотки якоря машины. Среднее значение э.д.с.,
наведенной в одном проводнике, определяемое по закону электромагнитной индукции,
ecp = Bcрeυ. (2.1)
Суммарная э.д.с., наведенная во всех проводниках
параллельной ветви обмотки,
Eя=ecp N/(2a)=BcрeυN/(2a). (2.2)
Линейная скорость вращения якоря
υ=πDn/60,
(2.3)
где n – частота
вращения якоря;
D – диаметр якоря.
Длину окружности по поверхности якоря, равную πD, можно определить также произведением полюсного деления τ на количество полюсов машины 2р: πD=τ2p, тогда
 ,
,  .
.
Произведение lτ есть площадь, которую пронизывают магнитные силовые линии (рисунок
2.23). Произведение площади и магнитной индукции дает магнитный поток Ф в воздушном зазоре машины, который
сцеплен с витками обмотки якоря: Ф=Bсрlτ. Подставив последнее выражение в формулу э.д.с. и произведя в ней
сокращения, получим
 .
(2.4)
.
(2.4)

Рисунок 2.23 – К выводу формулы э.д.с. обмотки якоря
Для каждой изготовленной машины р, N, а
неизменны, поэтому (2.4) можно записать в следующем
упрощенном виде
ЕЯ = kЕпФ,
(2.5)
где kЕ = pN/(60a) – постоянный коэффициент.
Э.д.с. параллельных ветвей зависит от их положения
относительно главных полюсов, которое определяется установкой щеток на
коллекторе. Если щетки установлены на коллекторных пластинах, соединенных с
узловыми точками (при переходе через которые изменяется направление э.д.с. в секции),
то э.д.с. параллельной ветви получается наибольшей (рисунок 2.24, а). Здесь
y1=τ При сдвиге щеток с этого положения в параллельную ветвь войдут секции
с э.д.с. противоположного направления и общая э.д.с. параллельной ветви будет
меньше (рисунок 2.24, б). Если выполнить обмотку с шагом, меньшим полюсного деления
(y1<τ), то секция будет сцеплена с меньшим магнитным потоком (рисунок 2.24,
в) и э.д.с. машины уменьшится.
а) б) в)
Рисунок 2.24 – Э.д.с. обмотки якоря
Пример – Определить э.д.с. машины
постоянного тока, если число проводников обмотки якоря N=360, число пар полюсов р=2, число пар параллельных ветвей обмотки якоря а=2, частота
вращения якоря п=2000 об/мин. Магнитный
поток полюсов Ф=0,01 Вб.
Решение. Значение э.д.с. по (2.4)

2.8 Сравнительные характеристики обмоток различных
типов
Для одной и той же мощности машин постоянного тока снижения
напряжения можно достичь за счет увеличения тока, и наоборот. Это соотношение –
определяющее при выборе типа обмоток якоря. Ориентировочно считаем, что машины
малой мощности – до 50 кВт, средней
мощности – 50-500 кВт, большой
мощности – больше 500 кВт. Машины
постоянного тока низкого напряжения – до 24
В включительно, пониженного напряжения – 60-80 В, нормального – 110-220
В, повышенного – 440-600 В и
высокого – больше 750 В. Для повышенных
значений тока применяют петлевую (параллельную) обмотку. Для повышенных
значений напряжений применяют волновую (последовательную) обмотку. Если эти
типы обмоток не удовлетворяют получению требуемой мощности, то применяют
сложную петлевую, сложную волновую или обмотку смешанного типа. Для машин нормального
и повышенного напряжения применяют волновую обмотку, так как в этой обмотке
наибольшее число проводников параллельной ветви соединено последовательно.
Простую петлевую обмотку широко применяют в машинах малой и средней мощности на
нормальное напряжение, сложную волновую обмотку – в машинах средней и большой
мощности повышенного напряжения, сложную петлевую обмотку – главным образом в
машинах низкого напряжения на большую величину тока, смешанную обмотку – в
машинах большой мощности. При технико-экономическом сравнении вариантов обмоток
учитывают влияние типа обмотки якоря на массогабаритные параметры машины. При
этом весьма существенным является учет частоты вращения якоря. Следует отметить
также, что на выбор типа обмотки большое влияние оказывает среднее значение
напряжения между коллекторными пластинами, от величины которого зависит безыскровая
работа коллекторного устройства.
3 Магнитная цепь машины постоянного тока
3.1 Порядок расчета магнитной цепи электрической машины
Намагничивающая сила н.с. обмотки возбуждения машины постоянного тока
создает магнитное поле, магнитные линии которого замыкаются через участки
машины, образующие ее магнитную систему. На поперечном разрезе машины (рисунок
3.1) показан путь магнитного потока. Весь магнитный поток Фп полюса делится на две неравные части. Большая часть –
основной магнитный поток Фδ
проникает через воздушный зазор в якорь и разветвляется в его сердечнике,
подходит к соседним полюсам и замыкается через ярмо.
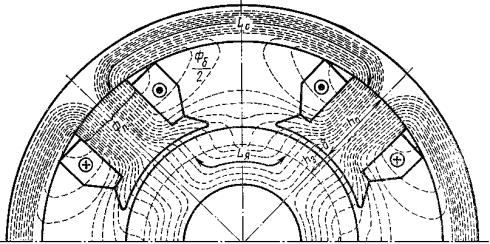
Рисунок 3.1 – Магнитная цепь машины постоянного тока
Под основным
магнитным потоком машины постоянного тока понимают поток в зазоре Фδ на площади, соответствующей
одному полюсному делению τ, при
холостом ходе машины. Меньшая часть потока рассеяния Фσ замыкается
между полюсами, минуя якорь. Тогда магнитный поток полюса
 ,
,
где  – коэф. рассеяния
основных полюсов.
– коэф. рассеяния
основных полюсов.
Для машин постоянного
тока kσ=1,12÷1,25. Путь основного магнитного
потока в машине состоит из замкнутых магнитных цепей, каждая из которых
охватывает пару полюсов. Вследствие магнитной симметрии отдельные магнитные
цепи многополюсной машины одинаковы и магнитные потоки (а также их составляющие
Фδ и Фσ) равны между собой;
поэтому рассматривается магнитная цепь одной пары полюсов. Участки магнитной
цепи отличаются друг от друга как своими геометрическими размерами, так и
физическими свойствами. По закону полного тока для замкнутого контура н.с. одной
пары полюсов
F=IВωB=ΣНl=ΣI,
(3.2)
где IВ – ток
возбуждения;
ωB – число витков обмотки
возбуждения;
H – напряженность магнитного поля, зависящая от
магнитной индукции и определяемая по кривым намагничивания (рисунок 3.2);
l – средняя длина данного участка магнитной
цепи.

Рисунок 3.2 – Характеристики намагничивания
электротехнической
и литой сталей и стального проката
В магнитной цепи электрической машины напряженность
магнитного поля изменяется на границе участков из различных материалов. По
этому признаку магнитную цепь машины постоянного тока можно разделить на пять
участков, характерные величины магнитной цепи которых приведены в таблице 3.1.
Таблица 3.1
|
Наименование участка |
Поток участка |
Индукция на
участке |
Площадь поперечного сечения |
Напряженность магнитного поля |
Длина
пути на пару полюсов |
Н.с.
на пару полюсов |
|
Зазор |
Ф0 |
Вδ |
Sδ |
Нδ |
2δ |
Fδ |
|
Зубцовый
слой (зубцы) |
Ф0 |
ВЗ |
SЗ |
НЗ |
2hЗ |
FЗ |
|
Сердечник
якоря |
ФЯ=0,5Ф0 |
ВЯ |
SЯ |
НЯ |
LЯ |
FЯ |
|
Сердечник полюса
с наконечником |
ФП=kσФ0 |
ВП |
SП |
НП |
2hП |
FП |
|
Ярмо
(станина) |
ФC=0,5ФП |
ВС |
SС |
НС |
LС |
FС |
Здесь Fδ – для двойного зазора; FЗ – для двойной
зубцовой зоны якоря; FЯ – для сердечника якоря; FП – для двух полюсов; FС – для ярма (станины).
Рассчитанная на пару полюсов основная н. с. машины равна
F0=Fδ+FЗ+FЯ+FП+FС. (3.3)
Это уравнение показывает, что для определения н.с. нужно
для каждого из пяти участков найти соответствующую ему напряженность магнитного
поля Н и умножить ее на длину пути потока на этом участке. Размеры участков
магнитной цепи или известны (в выполненной машине), или устанавливаются по
рекомендуемым магнитным индукциям (при проектировании машины), поэтому для
необходимого магнитного потока на всех участках магнитной цепи может быть
определена индукция В=Ф/S, где Ф
– магнитный поток на участке; S – площадь
сечения участка.В соответствии с рисунком 3.1 основная н.с. машины
F0=Нδ2δ+НЗ2hЗ+НЯLЯ+НП2hП+НСLC, (3.3)
где δ –
длина воздушного зазора, м;
hЗ – высота зубцов якоря, м;
hП – высота главных полюсов, м;
LЯ – длина участка по сердечнику якоря, м;
LС – длина участка по станине (ярмо), м;
Н – соответственно напряженность
магнитного поля участка цепи, А/м.
Будем считать, что номинальному значению напряжения и
номинальной частоте вращения машины соответствует номинальное значение основного
потока Ф0=1. Задавшись
рядом значений основного потока: 0,5Ф0;
0,8Ф0; 1Ф0; 1,2Ф0, можем для каждого из них рассчитать F0
Н.с. воздушного зазора. Наибольшее сопротивление магнитному
потоку оказывает воздушный зазор. В зубчатом якоре магнитное поле в зазоре
распределяется неравномерно: у поверхности зубцов плотность магнитных линий
больше, а в пазах меньше (рисунок 3.3), так как магнитное сопротивление на
участке с зубцом меньше, чем с пазом. На рисунке 3.4 показано распределение
магнитной индукции в воздушном зазоре в поперечном и продольном разрезах
машины. Так как магнитная индукция в зазоре изменяется как по окружности якоря,
так и по его длине, то вводят понятие о расчетной индукции в зазоре, используя
для этого метод приведения. Сущность этого метода заключается в следующем.
Заменяют сложную кривую распределения магнитной индукции в зазоре равновеликим
прямоугольником с высотой Вδ. Основание такого прямоугольника в первом случае дает расчетную полюсную
дугу b', а во втором случае
– расчетную длину якоря l'. Отношение b/τ=α' называют расчетным коэффициентом полюсного
перекрытия, от величины которого зависит максимальное значение напряжения
между коллекторными пластинами. В машинах постоянного тока с добавочными
полюсами α'=0,62–0,72 с достаточной точностью определяют
расчетную длину якоря l"=(lП+l')/2, где lП – длина полюса по оси машины; l' – длина якоря без вентиляционных каналов. Если bB – ширина вентиляционного канала, а пВ
– число каналов, то l=lЯ–пВbB, где lЯ – длина якоря в
осевом направлении. Пользуясь расчетными величинами Вδ, b', l', определяем
основной магнитный поток машины Ф0=Вδb'l'=Вδ α'τl' откуда Вδ=Ф0/(α'τl'). Для
упрощения расчета зубчатый якорь приводится к гладкому путем увеличения
величины действительного воздушного зазора δ
до расчетного δ'=δkδ где kδ=(t1+10δ)/(bЗ1–10δ) – коэффициент
воздушного зазора; t1=πDЯ/z –
зубцовый шаг; bЗ1 – ширина верхней части зубца по окружности якоря; DЯ – диаметр якоря.
Необходимая для проведения магнитного потока через зазор
намагничивающая сила
Fδ=2Вδδ'/μ0=2Вδδkδ/μ0. (3.5)
 а) б)
а) б)
Рисунок 3.3 – Магнитная индукция Рисунок 3.4 – Распределение магнитной
в зазоре зубчатого якоря индукции под полюсом:
а – на полюсном делении;
б – по
длине полюса
Н.с. зубцового слоя. При определении магнитной индукции в зубцах якоря
могут быть рассмотрены два случая: первый, когда ВЗ<1,8 Тл и
когда B3>1,8 Тл.
Принимаем, что в первом случае весь поток проходит через зубцы, во втором –
часть потока проходит через пазы.
Второй случай является более общим. Расчет н.с. при этом будем
вести на один зубцовый шаг. Приходящийся на один зубцовый шаг магнитный поток Фt=Bδt1l'=ФЗ+Фпаз, где ФЗ, Фпаз – потоки в зубце и пазе
соответственно. Расчетная магнитная индукция
ВЗ'=ВЗ+ВПkЗ, (3.6)
где ВЗ=ФЗ/SЗ – действительная индукция в зубце;
ВП=ФП/SП – индукция паза;
kЗ – зубцовый коэффициент, определяемый
геометрическими размерами зубца и паза.
Пользуясь (3.6) и эскизом зубца и паза якоря, находим
величину магнитной индукции в верхнем, среднем и нижнем сечениях зубца (рисунок 3.5). В зависимости
от этих значений индукция по кривым намагничивания зубцов BЗ=f(HЗ) (рисунок 3.2), определяем напряженность
магнитного поля зубцов верхнего, среднего и нижнего сечений. Для зубцов
расчетное значение напряженности магнитного поля НЗ=(НЗ1+4НЗ.ф+НЗ2)/6,
значение н.с. FЗ=HЗ2hЗ.
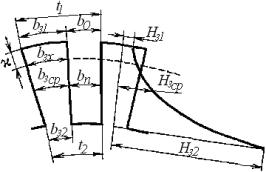
Рисунок 3.5 – Намагничивающая сила зубцов
Н.с. сердечника якоря, полюсов и станины. Магнитный поток в сердечнике якоря ФЯ=0,5Ф0=ВЯSЯя. Площадь поперечного сечения якоря SЯ=hЯlkС, где hЯ – высота сердечника
якоря, kС=0,88÷0,93 – коэффициент заполнения
сталью. Для сердечника якоря магнитная индукция ВЯ=Ф0/(2hЯlkС). По кривой намагничивания для стали рассматриваемой марки находим
напряженность поля якоря Hя, и тогда н.с.
сердечника якоря FЯ=НЯLЯ, где LЯ – длина средней магнитной линии в сердечнике якоря. В сердечнике
полюса магнитная индукция ВП=ФП/SП=Ф0kσ/SП, где ФП – магнитный поток полюса; SП – поперечное сечение полюса. По кривой
намагничивания стали полюса находим напряженность поля НП и
тогда н.с. полюса FП=HПLП=HП2hП, где hП – высота сердечника полюса. В станине магнитный
поток ФС=0,5ФП=0,5Ф0kσ, индукция ВС=ФС/SС=Ф0kσ/(2SС). Сечение SС определяют по геометрическим размерам ярма. По характеристике
намагничивания для материала ярма находим напряженность поля НC, тогда н.с. FC=HCLC,
где  – длина средней
магнитной линии в ярме.
– длина средней
магнитной линии в ярме.
3.2 Характеристика намагничивания машины
Зависимость Ф0=f(F0) построенная в прямоугольных координатах, называется
кривой намагничивания машины или магнитной характеристикой (рисунок 3.6). В
начальной части магнитная характеристика имеет прямолинейный характер, так как
при малых значениях потока Фδ
сталь машины слабо насыщена и н.с. затрачивается на проведение потока через
зазор. Продолжение прямолинейной части кривой позволяет выделить н.с. для зазора
при различных значениях потока Фδ
(линия 0b) т.е. получить
зависимость Fδ=f(Фδ). По мере увеличения
магнитного потока большая часть н.с. затрачивается на проведение потока по
стальным участкам. Эта часть н.с. соответствует отрезку bс. По отношению kН=ac/ab, называемым
коэффициентом насыщения, можно судить о степени насыщения магнитной цепи машины
при заданном значении потока Фδ.
Строить машину с насыщенной магнитной цепью невыгодно, так как при этом
материалы будут недоиспользованы и машина получится тяжелой.
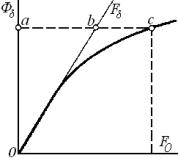
Рисунок 3.6 – Характеристика намагничивания
Нецелесообразна также чрезвычайно насыщенная магнитная
цепь, так как в этом случае необходимо выполнить мощную обмотку возбуждения с
большим расходом меди или алюминия и с большими потерями мощности на возбуждение.По
этим причинам электрические машины изготовляют с умеренным насыщением при
номинальном режиме. При этом рабочая точка лежит несколько выше колена
магнитной характеристики. Обычно kН=1,1÷1,35, а в некоторых случаях kН≈1,7÷2.
4. Реакция якоря
машины постоянного тока
4.1 Понятие о реакции
якоря
Когда машина работает в режиме холостого хода (х.х.), т.е. при отсутствии
тока в обмотке якоря, единственным источником магнитного поля в машине является
н.с. обмотки возбуждения, создающая основной поток Ф. При нагрузке электрической машины, когда возникает ток в цепи
якоря, состоящей из нескольких обмоток (якоря, добавочных полюсов,
последовательного возбуждения и компенсационной), кроме основного магнитного
потока, существуют магнитные поля обмоток цепи якоря. Поэтому магнитный поток в
воздушном зазоре и пространственное распределение магнитного поля при нагрузке
машины будут определяться совместным действием н.с. полюсов и цепи якоря. Таким
образом, магнитный поток, который существует в машине при работе ее под
нагрузкой, следует рассматривать как результирующий поток, созданный
результирующей н.с. Воздействие н.с. якоря на н.с. основных полюсов называют реакцией якоря. При анализе
этого явления мы воспользуемся методом наложения, для этого отдельно строим
распределение основного поля полюсов и поля якоря, а затем совмещаем их в
результирующее магнитное поле машины. Этот метод дает правильные результаты в
том случае, если при наложении параметры машины не изменяются. Таким параметром
является степень насыщения магнитной цепи машины, которую будем считать
постоянной величиной. Для выведения выражения н.с. якоря вводится понятие о
линейной нагрузке. Для этого зубчатый якорь приводится к гладкому с расчетным
воздушным зазором и с равномерно распределенным по окружности якоря слоем
проводников.
Линейной нагрузкой якоря называют число проводов, приходящееся на 1 см длины окружности
якоря А=NIЯ(πD), где N – число
всех проводников обмотки; IЯ – ток в проводнике
обмотки якоря, A; D – диаметр
якоря, см.
Распределение основного потока в двухполюсной машине при
х.х., показанное на рисунке 4.1, а,
имеет симметричный характер как относительно осевой линии dd основных полюсов,
так и относительно геометрической нейтрали, занимающих неизменное положение в
пространстве. Распределение магнитной индукции в зазоре под полюсом представляет
собой трапецеидальную кривую (рисунок 4.1, б). При вращении якоря по часовой
стрелке в его обмотке наводятся э.д.с. в направлениях, показанных на рисунке
4.1, а крестами и точками, но ток в обмотке якоря отсутствует, так как
цепь разомкнута.
а)
б)
Рисунок 4.1 – Основной магнитный поток машины при х.х. (а)
и кривая распределения н.с. и индукции под главными полюсами (б)
На рисунке 4.2, а показано распределение магнитного
поля якоря. Машина не возбуждена а якорь неподвижен: IB=0 и n=0. Щетки поставим по линии
геометрической нейтрали и подведем к ним ток от какого-нибудь постороннего
источника постоянного тока в таком направлении, чтобы направления токов в ветвях
обмотки совпадали с направлением э.д.с., изображенными на рисунке 4.1, а.
В этом случае магнитные линии поля якоря, направление которых определяем,
руководствуясь направлением тока в проводниках обмотки якоря по правилу буравчика, выходят из якоря
слева и входят справа.
Так как магнитные линии выходят из северного полюса и
входят в южный, то левая сторона якоря обладает северной полярностью, а правая
– южной. Такое поле якоря называется поперечным полем и определяется поперечной
н.с. якоря FЯq. Как видно из рисунка 4.2, б, якорь представляет собой электромагнит, ось которого совпадает
с линией щеток. Н.с. якоря по линии геометрической нейтрали имеет максимальное
значение, так как соответствующая магнитная линия охватывает наибольший ток
(кривая 1), однако магнитная
индукция от потока якоря в этих точках имеет небольшое значение (кривая 2), что объясняется увеличением
магнитного сопротивления потоку якоря в межполюсном пространстве. График
магнитной индукции поля якоря имеет седлообразный вид, индукция равна нулю под
серединой полюсов и достигает наибольшего значения под краями полюсных наконечников.

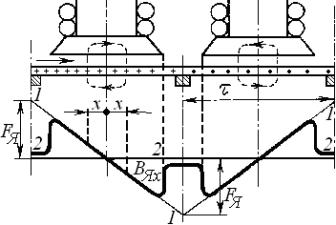 а)
б)
а)
б)
Рисунок 4.2 – Магнитное поле якоря (а) и кривая н.с. индукции поля якоря (б)
4.2 Поперечная и продольная намагничивающие силы
якоря
Если щетки стоят на линии геометрической нейтрали qq (рисунок 4.3, а), то поле якоря направлено под углом 90°, т.е. поперек осевой
линии основных полюсов dd. Такое поле якоря
называют поперечным, и
определяется оно поперечной н.с. якоря FЯq. Положение щеток по линии геометрической
нейтрали является их первым основным положением.
 а) б) в)
а) б) в)
Рисунок 4.3 – Направление н.с. якоря
При сдвиге щеток с нейтрали на угол ±90° ось поля якоря устанавливается по оси полюсов dd вверх или вниз от оси абсцисс (рисунок 4.3, б). Такое поле якоря называют продольным, и определяется оно продольной
н.с. якоря FЯd. Положение щеток по осевой линии полюсов – второе основное положение. В
общем случае щетки могут быть сдвинуты с нейтрали на угол β или соответственно по окружности якоря на дугу bC (рисунок 4.3, в). В этих условиях можно рассматривать якорь как два совмещенных
электромагнита, из которых один, образованный частью обмотки и находящийся в
двойном углу 2β, создает продольную
н.с. якоря FЯd=2AbС, а другой, образованный
остальной частью обмотки по дуге τ–2bС, создает поперечную н.с. якоря FЯq=А(τ–2bС).
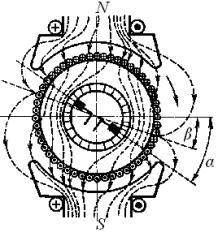
Рисунок 4.4 – Результирующее магнитное поле машины
При нагрузке машины будет иметь место результирующее
магнитное поле (рисунок 4.4), которое уже не является симметричным относительно оси полюсов.
Причина деформации магнитного поля заключается в том, что направления магнитных
линий поперечного поля якоря и поля полюсов под сбегающим краем полюса
совпадают, отчего результирующее поле под сбегающим краем полюса усиливается, а
под набегающим краем полюса эти поля направлены встречно, поэтому
результирующее поле уменьшается. Следствием искажения распределения магнитного
поля является смещение по направлению вращения физической нейтрали на некоторый
угол β, величина которого зависит
от нагрузки машины. Физической
нейтралью называют прямую, проходящую через центр, и точки на окружности
якоря с нулевой магнитной индукцией, т.е. прямую, перпендикулярную оси результирующего
магнитного поля. Для получения удовлетворительной работы щеток (без искрения) в
машинах без дополнительных полюсов щетки приходится сдвигать с геометрической
нейтрали в том же направлении на угол α,
являющийся несколько большим угла β.
4.3 Реакция якоря
Реакция якоря в генераторе. Чтобы
определить в генераторе, какое действие оказывает н.с. якоря на н.с. полюсов,
предположим, что якорь вращается по часовой стрелке с некоторой постоянной
частотой, а щетки стоят на нейтрали. На рисунке 4.5, а показана в развернутом
виде пара полюсов. Создаваемое ими основное поле во всех случаях изображается
трапецеидальной кривой 1. При вращении якоря в заданном направлении в
левой ветви обмотки якоря индуктируются э.д.с., направленные за плоскость
чертежа, а в правой – в обратную сторону. В том же направлении проходят по обмотке
и токи. Это позволяет построить кривую поля якоря 2. Чтобы получить
кривую 3 результирующего поля, нужно в каждой точке сложить ординаты
кривых 1 и 2. Мы видим, что
под набегающими (левыми) краями полюсов N и S поле якоря стремится
ослабить основное поле, т.е. действует размагничивающим образом, а под
сбегающими (правыми) усиливает его, т.е. действует намагничивающим образом. Размагничивающее
и намагничивающее действия взаимно компенсируются, поэтому результирующий поток
машины практически не  отличается по величине от основного потока полюсов, если магнитная цепь
машины не насыщена, но он искажается, т.е. перестает быть симметричным
относительно оси полюсов. При этом точки а и b, в которых результирующее поле проходит через нуль, смещаются
относительно геометрической нейтрали на некоторый угол α по направлению вращения якоря. Через эти точки проходит
физическая нейтраль. Обычно индукция под сбегающим краем полюса настолько
возрастает, что сталь полюсов и зубцов на этом участке довольно сильно насыщается.
Вследствие этого магнитное сопротивление участка увеличивается и распределение
индукции определяется кривой 4,
проходящей ниже кривой 3 под сбегающим краем полюса. Мы видим,
что поле якоря ослабляет основное поле на набегающем крае полюса в большой
степени, чем усиливает его на сбегающем, в результате происходит уменьшение
основного поля. Если сдвинуть щетки с нейтрали по направлению вращения якоря на
угол +β (рисунок 4.5, б), то кривая 2 поля якоря
переместится на угол β по направлению
вращения якоря, а кривая 1 основного поля остается на прежнем месте.
Сложив ординаты кривых 1 и 2, получим кривую 3 результирующего поля.
отличается по величине от основного потока полюсов, если магнитная цепь
машины не насыщена, но он искажается, т.е. перестает быть симметричным
относительно оси полюсов. При этом точки а и b, в которых результирующее поле проходит через нуль, смещаются
относительно геометрической нейтрали на некоторый угол α по направлению вращения якоря. Через эти точки проходит
физическая нейтраль. Обычно индукция под сбегающим краем полюса настолько
возрастает, что сталь полюсов и зубцов на этом участке довольно сильно насыщается.
Вследствие этого магнитное сопротивление участка увеличивается и распределение
индукции определяется кривой 4,
проходящей ниже кривой 3 под сбегающим краем полюса. Мы видим,
что поле якоря ослабляет основное поле на набегающем крае полюса в большой
степени, чем усиливает его на сбегающем, в результате происходит уменьшение
основного поля. Если сдвинуть щетки с нейтрали по направлению вращения якоря на
угол +β (рисунок 4.5, б), то кривая 2 поля якоря
переместится на угол β по направлению
вращения якоря, а кривая 1 основного поля остается на прежнем месте.
Сложив ординаты кривых 1 и 2, получим кривую 3 результирующего поля.
Рисунок 4.5 – Намаг-ничивающая сила и ин-дукция
результирующего поля
Нетрудно видеть, что поле якоря не только искажает основное
поле, но и ослабляет его. Вследствие смещения щеток произошло изменение
направления тока на обратное в той части обмотки якоря, которая находится между
геометрической нейтралью и каждой из щеток. Таким образом, н.с. реакции якоря генератора,
щетки которого сдвинуты с нейтрали по направлению вращения якоря, имеет две составляющие:
продольно-размагничивающую н.с., ослабляющую магнитное поле полюсов, и поперечную
н.с., искажающую его. Соответственно при сдвиге щеток против направления
вращения якоря возникает продольная намагничивающая н.с. реакции якоря. Кривые
полей, отвечающие этому случаю, показаны на рисунке 4.5, в. Необходимо,
однако, отметить, что сдвиг щеток в генераторе против направления вращения
якоря не допускается, так как при этом резко ухудшаются условия безыскровой работы
машины.
Реакция якоря в двигателе. При заданных полярности полюсов
и направлении вращения якоря наводимые в генераторе и в двигателе э.д.с. имеют
одно и то же направление, но токи проходят по обмотке якоря в разных направлениях.
Поэтому в двигателе полярность магнитного поля якоря изменяется, и реакция
якоря в двигателях воздействует на основной магнитный поток иначе, чем в генераторах:
а) при положении щеток на линии геометрической нейтрали
поперечная н.с. якоря искажает основное поле, ослабляя его на сбегающем крае
полюса и усиливая на набегающем;
б) при сдвиге щеток с нейтрали по вращению якоря в
двигателе возникает продольная намагничивающая н.с. якоря. Однако сдвиг щеток в
двигателе делают только против направления вращения якоря.
5 Коммутация
5.1 Сущность процесса коммутации
Коммутацией называют совокупность явлений, связанных с изменением тока в проводниках
обмотки якоря при переходе секций из одной параллельной ветви в другую при
замыкании этих секций щетками. Процесс коммутации имеет очень большое значение
в теории электрических машин постоянного тока, так как искрение, имеющее место
на коллекторе этих машин, большей частью происходит вследствие неправильного
протекания этого процесса. На рисунке 5.1 представлено распределение токов при
коммутации одной секции простой петлевой обмотки для пяти следующих друг за
другом положений якоря через интервалы времени TК/4, где ТК – период коммутации. Ширина bЩ щетки равна bК коллекторному
делению, толщину изоляции между коллекторными пластинами не учитывают.
Предполагается, что нагрузка машины постоянна и ток в каждой параллельной ветви
равен IЯ. Короткое замыкание рассматриваемой секции
начинается в момент t=0 и заканчивается в момент t=TК. Для первого
момента времени щетка касается только коллекторной пластины 2, а коммутируемая секция входит в
число секций левой параллельной ветви обмотки и в ней протекает ток i=IЯ. Токи в соединительных проводах между коллектором
и обмоткой для этого момента времени будут: i1=0 и i2=2IЯ (рисунок 5.1, а); они соответствуют началу
коммутации. В следующий момент (рисунок 5.1, б) при вращении коллектора пластина 2 постепенно сбегает
со щетки и на смену ей набегает пластина 1.
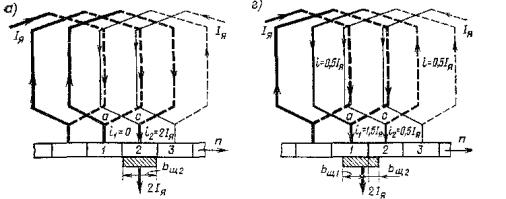


Рисунок 5.1 – Взаимное положение щетки и коллектора в процессе
коммутации
Для нашего примера левый край щетки называют набегающим, а правый – сбегающим. Как только щетка войдет
в контакт с коллекторной пластиной 1, коммутируемая секция окажется замкнутой накоротко щеткой и ток
в ней постепенно начнет уменьшаться. Следовательно, через коллекторную пластину
1 будет проходить ток i1=0,5IЯ, а через пластину 2 протекает больший
ток i2=1,5IЯ, так как площадь соприкосновения пластины 2
со щеткой больше и потому сопротивление контакта между щеткой и
коллекторной пластиной меньше. Ток в коммутируемой секции будет иметь то же
направление, что и до начала коммутации, но величина его будет меньше, чем IЯ(i=0,5IЯ). Когда же контактная поверхность щетки
равномерно перекроет обе коллекторные пластины RЩ1=RЩ2 (рисунок 5.1, в), ток в коммутируемой секции станет
равным нулю i=0, так как i1=i2=0,5IЯ. Для последующего момента времени (рисунок
5.1, г) токи в
соединительных проводах примут значения: i1=1,5IЯ, i2=0,5IЯ. В конце
коммутации для пятого момента времени (рисунок 5.1, д) щетка будет полностью
касаться коллекторной пластины 1 и
коммутируемая секция уже не будет замкнута накоротко щеткой. При этом она будет
принадлежать первой параллельной ветви обмотки якоря, и ток в ней становится
равным IЯ, но противоположно направленным току в начале
коммутации. Токи в соединительных проводах i1=2IЯ и i2=0. Общий ток равен 2IЯ. Таким образом, за время перехода щетки с коллекторной пластины 2 на
пластину 1 произошло изменение тока в
коммутируемой секции от +IЯ до 0
и от 0 до –IЯ. Указанное изменение тока происходит очень
быстро 0,0003-0,001 сек. На рисунке
5.1, е изображено положение щетки на коллекторных пластинах в процессе
коммутации.
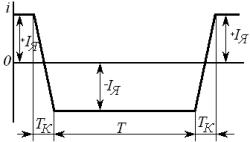
Рисунок 5.2 – График изменения тока секции во времени
На рисунке 5.2 представлен график изменения тока в секции
по времени при переходе ее дважды из одной параллельной ветви в другую. Время ТК, в течение которого происходит
процесс коммутации в секции, называют периодом
коммутации. За время Т секции передвигаются между щетками
различной полярности. Короткозамкнутый контур ( рисунок 5.1, б) состоит из секции, двух коллекторных
пластин и щетки; сопротивлениями самой секции и соединительных проводников
между секцией и коллекторными пластинами пренебрегаем, так как они незначительны
по сравнению с сопротивлениями переходного контакта между щеткой и
коллекторными пластинами. Обозначив сопротивления переходных контактов сбегающего
и набегающего краев щетки через RЩ2 и RЩ1, составим
уравнение по второму закону Кирхгофа: Σе=0.
Это предположение соответствует, например, если п≈0 или полному уравновешиванию всей
суммы э.д.с. в контуре секции
Σе=RЩ2i2 – RЩ1i1=0. (5.1)
Кроме того, для узлов а
и с по первому закону Кирхгофа
i1=IЯ–i ; i2=IЯ+i, (5.2)
где i – ток
коммутируемой секции.
Изменение тока секции i определяется только изменением RЩ1 и RЩ2,
вследствие чего этот случай называют коммутацией
сопротивлением. В рассматриваемые моменты времени щетка
перекрывает по ширине участки коллекторных пластин: bЩ1=υКt; bЩ2=υК(TK–t); bЩ=υКT, где υК – окружная скорость
коллектора. Площади касания щетки с коллекторными пластинами 2 и 1 будут: S=bЩ1lЩ1; S2=bЩ2lЩ,
полная площадь контакта SЩ=bЩlЩ, где l длина
щеток. Учитывая, что контактное сопротивление обратно пропорционально площади
контакта, выражения для переходных сопротивлений между щеткой и коллекторной пластиной
запишем в следующем виде
 ;
;
 ,
,
откуда  ;
;  . (5.3)
. (5.3)
Подставляя в (5.1) значения токов i1 и i2 из (5.2) и сопротивлений RЩ1 и RЩ2 из (5.3), получим
 . (5.4)
. (5.4)
Коммутацию, соответствующую изменению тока по (5.4),
называют прямолинейной, так как
ток в короткозамкнутой секции изменяется по прямолинейному закону. На рисунке
5.3 показан график изменения тока в коммутируемой секции i=f(t), построенный согласно (5.4). Прямолинейная коммутация является наиболее
благоприятной, так как только при ней обеспечивается одно из основных условий
работы щеток без искрения, а именно – равномерная плотность тока под щетками
 ;
;  .
(5.5)
.
(5.5)
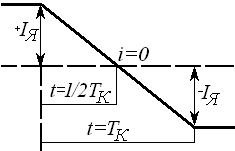
Рисунок 5.3 График прямолинейной коммутации
5.2 Замедленная и ускоренная коммутации
В действительности Σе≠0. В
коммутируемой секции возникают э.д.с. самоиндукции еL , взаимоиндукции еМ и вращения еК.
Э.д.с. самоиндукции eL. Так как период коммутации очень мал (≈10-4
с), то в коммутируемой секции возникает э.д.с. самоиндукции eL=-L(di/dt) (L – индуктивность секции), которая стремится замедлить коммутацию, так
как в результате самоиндукции изменение тока в цепи всегда замедляется.
Э.д.с. взаимоиндукции еМ. Обычно щетка машины перекрывает
несколько коллекторных пластин, т.е. bЩ>bК. Поэтому
коммутация происходит одновременно в нескольких секциях, которые могут
находиться как в одном и том же пазу, так и в рядом лежащих, следовательно, в
коммутируемых секциях возникают э.д.с. взаимоиндукции еМ=–M(di/dt), где М – взаимная индуктивность одновременно коммутируемых секций.
Э.д.с. самоиндукции и взаимоиндукции создают результирующую реактивную э.д.с. eР=eL+eM, которая препятствует
процессу изменения тока в коммутируемой секции.
Э.д.с. вращения еК.
Кроме э.д.с. самоиндукции и взаимоиндукции в короткозамкнутой секции при
вращении якоря индуктируется э.д.с. вращения еК вызванная
тем, что стороны короткозамкнутой секции пересекают внешнее магнитное поле,
которое может возбуждаться в зоне коммутации. Поле реакции якоря и внешнее
поле, создаваемое добавочными полюсами, образуют в зоне коммутируемых секций
коммутирующее поле. Это поле индуктирует э.д.с. вращения, направление которой
зависит от направления магнитных линий поля и направления вращения якоря: еК=2ВКlυωС, где ВК
– магнитная индукция коммутирующего поля; l – длина активных сторон секции; υ – линейная скорость движения секции; ωС – число витков в секции.Таким образом, в коммутирующей секции
возникает сумма э.д.с. Σе=еР+еК.
С учетом (5.1), (5.2) и (5.3) ток в коммутируемой секции
 ,(5.6)
,(5.6)
где  – ток прямолинейной коммутации;
– ток прямолинейной коммутации;
 – добавочный ток коммутации.
– добавочный ток коммутации.
Действие добавочного тока коммутации зависит от направления
Σе. При Σе>0 ток tK, складываясь с линейным током iЛ, вызывает замедленный процесс коммутации. Когда ток i проходит
через нулевое значение за время, прошедшее от начала коммутации tК>TK/2, то плотность тока под сбегающим краем щетки больше, чем под набегающим,
что может стать причиной возникновения искрения под сбегающим краем щетки.
Размыкание контура короткозамкнутой секции подобно выключению или разрыву цепи
с R и L.
На рисунке 5.4, а изображен график криволинейной
замедленной коммутации. Для сравнения на том же рисунке показан и график
прямолинейной коммутации. При Σе<0
добавочный ток коммутации iК имеет
противоположный знак, и характер изменения токов будет ускоренный (рисунок
5.4,б). В этом случае токи i, i1 и i2 изменяются быстро
в начале коммутации и медленно в конце. Ток и плотность тока под набегающим
краем щетки уже в начале коммутации становятся большими. В конце же процесса
ускоренной коммутации ток, а также плотность тока под сбегающим краем щетки
малы. Поэтому размыкание цепи короткозамкнутой секции при такой ускоренной
коммутации происходит в благоприятных условиях подобно размыканию цепи с малым
током. Замедленная коммутация неблагоприятна и нежелательна, а слегка ускоренная,
наоборот, желательна, поэтому на практике стремятся достичь именно такой
коммутации.
а)
б)
Рисунок 5.4 Криволинейная коммутация
5.3 Причины искрения щеток
Согласно ГОСТ 183-74 степень искрения на коллекторе должна
оцениваться по шкале искрения (классам коммутации), приведенной в таблице 5.1.
Степень искрения коллекторных машин указывают в стандартах на отдельные виды
машин, а при отсутствии стандартов – в технических условиях (ТУ) на эти машины.
Если степень искрения машин не оговорена, то она при нормальном режиме работы
машины должна быть не выше 1½.
Механические причины искрения щеток обусловлены неровностью
поверхности коллектора, выступанием слюдяных изолирующих прокладок между
пластинами коллектора, вибрацией щеточного устройства, неправильным расположением
и неравномерным давлением щеток и др.
Причины потенциального характера. Испытания показали, что
коммутация проходит нормально, если максимальное значение напряжения между коллекторными
пластинами 25÷35 В для машин
большой и средней мощности и 50÷60
В для машин малой мощности. Если это напряжение выходит за указанные
пределы, то между соседними пластинами появляется искрение или даже дуга.
Механические причины искрения щеток обусловлены неровностью
поверхности коллектора, выступанием слюдяных изолирующих прокладок между
пластинами коллектора, вибрацией щеточного устройства, неправильным расположением
и неравномерным давлением щеток и др.
Таблица 5.1
|
Степень искрения |
Характеристика степени искрения |
Состояние коллектора и щеток |
|
1 |
Отсутствие искрения |
Отсутствие почернения на коллекторе и следов нагара на щетках |
|
1 ¼ |
Слабое искрение под небольшой частью края щетки |
|
|
1 ½ |
Слабое искрение под большей частью края щетки |
Появление следов почернения на коллекторе и следов нагара на щетках,
легко устраняемых протиранием поверхности коллектора бензином |
|
2 |
Искрение под всем краем щетки. Допускается только при кратковременных
толчках нагрузки и перегрузке |
Появление следов почернения на коллекторе и следов нагара на щетках,
не устраняемых протиранием поверхности коллектора бензином |
|
3 |
Значительное искрение под всем краем щетки с появлением крупных и
вылетающих искр. Допускается только для моментов прямого включения или реверсирования
машин, если при этом коллектор и щетки остаются в состоянии, пригодном для
дальнейшей работы |
Значительное почернение на коллекторе, не устраняемое протиранием поверхности
коллектора бензином, а также подгар и частичное разрушение щеток |
Причины потенциального характера. Испытания показали, что
коммутация проходит нормально, если максимальное значение напряжения между коллекторными
пластинами 25÷35 В для машин
большой и средней мощности и 50÷60
В для машин малой мощности. Если это напряжение выходит за указанные
пределы, то между соседними пластинами появляется искрение или даже дуга.
Причины электромагнитного характера обусловлены величиной
запаса электромагнитной энергии коммутируемой секции 0,5LСi2 в момент ее размыкания.
Разряд электромагнитной энергии и является причиной искрения. Таким образом,
причины электромагнитного характера зависят от величины реактивной э.д.с. еР и вызываемого ею добавочного
тока коммутации iK. Сильное искрение может перейти в круговой огонь
на коллекторе, что приводит к повреждению щеточно-коллекторного устройства
машины.
5.4 Основные средства улучшения коммутации
Основная причина неудовлетворительной коммутации в машинах
постоянного тока – добавочный ток коммутации iК=Σe/ΣRK=(eР±eK)/ΣRK, где RК – сумма электрических сопротивлений добавочному
току коммутации iK. В сумму входят сопротивления щетки, секций,
пайки в «петушках» и контактное сопротивление между щеткой и коллектором.
Однако из перечисленных сопротивлений наибольшую величину имеют контактное
сопротивление и сопротивление щетки. Уменьшения тока iК можно достичь следующими способами:
уменьшением реактивной э.д.с еР;
созданием в коммутирующей зоне магнитного поля такой величины и такой
полярности, чтобы э.д.с. вращения еК скомпенсировала бы э.д.с
еР; увеличением
сопротивления ΣRК. Реактивная э.д.с. еР может
быть уменьшена чисто конструктивными методами. Для этого надо при
проектировании машины предусматривать секции с укороченным шагом и с возможно
меньшим числом витков, уменьшать частоту вращения и линейную нагрузку якоря,
устанавливать соответствующие размеры щеток, коллектора и секций. Однако выполнение
всех этих условий может быть использовано лишь в ограниченной степени из-за
увеличения габаритов машины и соответственно ее стоимости.
Для создания в зоне коммутации магнитного поля,
индуктирующего компенсирующую э.д.с. вращения еК в машинах
постоянного тока применяют добавочные полюсы (рисунок 5.5). Намагничивающая
сила добавочных полюсов должна обеспечивать магнитную индукцию ВК
в зоне коммутации такой величины, чтобы э.д.с. вращения еК была
равна э.д.с. еР по величине и противоположна по направлению,
т.е. чтобы для любого момента времени выполнялось равенства еР–eК=0.
Рисунок 5.5 – Полярность
добавочных Рисунок 5.6 – Намагничивающая
полюсов при работе машины генератором Г сила генератора с добавочными
и
двигателем Д полюсами
Ha рисунок 5.6 показаны н.с. генератора с добавочными полюсами. Кривая 1
представляет собой н.с. главных полюсов, кривая 2 – н.с. якоря,
кривая 3 – н.с. добавочных полюсов, кривая 4 – результирующую н.с. генератора с
добавочными полюсами, полученную путем сложения ординат кривых 1, 2 и 3.
Кроме того, магнитный поток добавочных полюсов должен быть направлен навстречу
поперечному потоку реакции якоря, т.е. компенсировать размагничивающее и
искажающее действие поперечной реакции якоря в зоне между главными полюсами.
Поэтому полярность добавочного полюса в генераторе должна быть такой же, как и
у следующего по направлению вращения главного полюса, а в двигателе – как у
предшествующего главного полюса (рисунок 5.5).
Так как н.с. поперечной реакции якоря и реактивная э.д.с.
еР пропорциональны току якоря, то для их компенсации н.с.
добавочного полюса и магнитная индукция ВК также должны быть
пропорциональны току якоря. Для удовлетворения этого условия обмотку добавочных
полюсов соединяют последовательно с обмоткой якоря, а добавочные полюсы
выполняют ненасыщенными при номинальной нагрузке машины. Для этого увеличивают
зазор под добавочным полюсом по сравнению с зазором под главным полюсом, берут
индукцию в сердечнике добавочного полюса не более 0,8÷1 Тл, чтобы не сказывалось насыщение стали. Число
добавочных полюсов обычно равно числу главных полюсов, и только в машинах малой
мощности их иногда уменьшают в два раза. Добавочные полюсы располагают между
главными полюсами по линиям геометрических нейтралей. Щетки устанавливают по
этим же линиям и оставляют в этом положении при всех нагрузках.
В машинах без добавочных полюсов магнитное поле,
необходимое для создания компенсирующей э.д.с. вращения, можно получить сдвигом
щеток с геометрической нейтрали (рисунок 5.7). Предположим, что машина работает
генератором и якорь вращается по часовой стрелке. Если щетки установлены на
геометрической нейтрали 1–1', то в зоне коммутации имеется только
поперечное поле якоря. При вращении в этом поле коммутируемых секций в них
будет наводиться э.д.с., направленная так же, как они были направлены до
вступления секций в зону коммутации. Следовательно, э.д.с. вращения еК, обусловленные поперечным полем
якоря, будут действовать в том же направлении, что и э.д.с. самоиндукции eL и э.д.с. взаимоиндукции еМ, и будут замедлять процесс коммутации.
Если щетки передвинуть в зону 2–2', где поле якоря полностью компенсировано
полем полюсов (физическая нейтраль), то э.д.с. вращения еК в
коммутируемых секциях были бы равны нулю, однако э.д.с. eL и еМ по-прежнему замедляли бы
процесс коммутации. Для того чтобы скомпенсировать и эти э.д.с., необходимо
щетки сдвинуть еще дальше – в положение 3–3', где результирующее поле в воздушном
зазоре имеет направление, обратное направлению поля тех полюсов, под которыми
секции находились до начала коммутации. Как видно из рисунка 5.7, для создания
коммутирующего поля необходимо сдвигать щетки с геометрической нейтрали по
направлению вращения якоря в генераторном режиме и против направления вращения
в режиме двигателя.
Если щетки передвинуть в зону 2–2', где поле якоря полностью компенсировано
полем полюсов (физическая нейтраль), то э.д.с. вращения еК в
коммутируемых секциях были бы равны нулю, однако э.д.с. eL и еМ по-прежнему замедляли бы
процесс коммутации. Для того чтобы скомпенсировать и эти э.д.с., необходимо
щетки сдвинуть еще дальше – в положение 3–3', где результирующее поле в воздушном
зазоре имеет направление, обратное направлению поля тех полюсов, под которыми
секции находились до начала коммутации. Как видно из рисунка 5.7, для создания
коммутирующего поля необходимо сдвигать щетки с геометрической нейтрали по
направлению вращения якоря в генераторном режиме и против направления вращения
в режиме двигателя. Недостаток рассмотренного метода – в том, что коммутирующее
поле не изменяется автоматически пропорционально току якоря, и требуемая
компенсация поля якоря и э.д.с. eL и еМ получается
лишь при определенной нагрузке машины. При других нагрузках условия коммутации
получаются менее благоприятными. Осуществить автоматическое изменение сдвига
щеток при изменениях нагрузки практически невозможно.

Рисунок 5.7 – Сдвиг щеток для улучшения коммутации
Увеличение сопротивления цепи коммутируемой секции в
принципе возможно за счет выполнения «петушков» с повышенным сопротивлением.
Однако это приводит к уменьшению к.п.д. машины, а также к увеличению плотности
тока у сбегающего края щетки. Кроме того, такие «петушки» ненадежны в работе.
Существенным является подбор щеток с
надлежащими характеристиками и сохранение оксидной пленки на поверхности коллектора.
При выборе марки щеток часто приходится находить компромиссное решение взаимно
противоречивых требований. Например, с точки зрения улучшения коммутации
выгодно выбирать твердые сорта щеток. Однако это приводит к повышенному износу
коллектора и к увеличению размеров всего щеточного аппарата и коллектора
вследствие меньшей допустимой плотности тока этих сортов щеток. В настоящее
время в машинах обычного исполнения широко применяют графитные щетки, в машинах
с более тяжелым режимом работы – угольнографитные и электрографитные, в
низковольтных машинах – медно- или бронзографитные. На контактное сопротивление
между щеткой и коллектором большое влияние оказывает химическое состояние
поверхности коллектора. При нормальной работе коллектор должен быть покрыт
тонкой оксидной пленкой, обладающей повышенными прочностью и электрическим
сопротивлением. Добавочные полюсы компенсируют действие реакции якоря только в
междуполюсном пространстве (в зоне коммутации). Непосредственно под главными
полюсами реакция якоря остается нескомпенсированной, что приводит к искажению
основного поля и резкой разнице между э.д.с., наведенными в соседних секциях обмотки
якоря, вследствие чего возникает искрение потенциального характера. Для компенсации
реакции якоря в зоне главных полюсов применяют компенсационную обмотку (рисунок
5.8).

Рисунок 5.8 – Станина машины Рисунок 5.9 – Направление тока в
постоянного тока
с
компенсационной обмотке
компенсационной обмоткой
В пазу полюсных наконечников укладывают изолированные
проводники, которые соединяют так, что они образуют обмотку с магнитной осью,
совпадающей с геометрической нейтралью (рисунок 5.9). Компенсационную обмотку
включают последовательно с обмоткой якоря. Намагничивающая сила компенсационной
обмотки распределена по длине полюсной дуги, ее направление противоположно
направлению н.с. поперечной реакции якоря и равна ей по величине. Наличие
компенсационной обмотки повышает надежность работы машины, увеличивая ее стоимость
и потери в цепи якоря, поэтому ее применяют в машинах малой мощности,
работающих в тяжелых условиях (тяговые электродвигатели, крановые), а также в
машинах большой мощности с резкими колебаниями нагрузки (электродвигатели
прокатных станов).
5.5 Коммутационная реакция якоря
При отклонении коммутации от прямолинейной токи в
коммутируемых секциях создают дополнительную реакцию якоря. Под коммутационной реакцией якоря понимают
действие н.с., создаваемой токами коммутируемых секций, на основной поток
машины. Если ток в секции изменяется прямолинейно, то в этом положении секция
не оказывает влияния на магнитный поток главного полюса.
Если щетки передвинуть в зону 2–2', где поле якоря полностью компенсировано
полем полюсов (физическая нейтраль), то э.д.с. вращения еК в
коммутируемых секциях были бы равны нулю, однако э.д.с. eL и еМ по-прежнему замедляли бы
процесс коммутации. Для того чтобы скомпенсировать и эти э.д.с., необходимо
щетки сдвинуть еще дальше – в положение 3–3', где результирующее поле в воздушном
зазоре имеет направление, обратное направлению поля тех полюсов, под которыми
секции находились до начала коммутации. Как видно из рисунка 5.7, для создания
коммутирующего поля необходимо сдвигать щетки с геометрической нейтрали по
направлению вращения якоря в генераторном режиме и против направления вращения
в режиме двигателя. Недостаток рассмотренного метода – в том, что коммутирующее
поле не изменяется автоматически пропорционально току якоря, и требуемая
компенсация поля якоря и э.д.с. eL и еМ получается
лишь при определенной нагрузке машины. При других нагрузках условия коммутации
получаются менее благоприятными. Осуществить автоматическое изменение сдвига
щеток при изменениях нагрузки практически невозможно.

Рисунок 5.10 – Направление н.с. переключаемой секции (для режима двигателя)
В течение времени 0<t<0,5ТК магнитная цепь FC секции располагается по одну сторону геометрической
нейтрали (рисунок 5.10, а), а при 0,5TК<t<TК – по другую ее сторону (рисунок 5.10, б). Поперечная составляющая н.с.
переключаемой секции сохраняет неизменное направление и с н.с. других секций обмотки
создает поперечную реакцию якоря. Продольная составляющая н.с. переключаемой
секции при t=0,5TK изменяет направление на противоположное, и ее
намагничивающее действие (в режиме двигателя) за первую половину периода
коммутации компенсируется размагничивающим действием за вторую половину TK. При замедленной
коммутации ток в переключаемой секции в течение большей части периода
коммутации сохраняет направление тока до переключения, следовательно, точка
перехода тока в секции через нуль сдвигается по вращению якоря и переключаемая
секция оказывает размагничивающее действие на главные полюсы в генераторе и
намагничивающее действие в двигателе (рисунок 5.10, в). При ускоренной коммутации ток в
переключаемой секции достигает нулевого значения за время t<TК и точка перехода тока в секции через нуль
сдвигается против вращения якоря; в этом случае коммутационная реакция якоря будет
намагничивающей в генераторе и размагничивающей в двигателе. При нормальной
работе машины н.с. коммутационной реакции якоря мала по сравнению с н.с. обмотки
возбуждения главных полюсов и не оказывает влияние на магнитный поток машины.
При большом токе якоря, например к.з. генератора или при пуске двигателя, когда
вследствие насыщения магнитной цепи добавочных полюсов преобладает реактивная
э.д.с. и коммутация становится очень замедленной, н.с. коммутационной реакции
значительно возрастает и может оказывать существенное влияние на работу машины.
5.6 Экспериментальная проверка и наладка коммутации
Ввиду сложности коммутационного процесса теория коммутации
основывается на ряде допущений и упрощений. В результате не удается определить
точное число витков добавочного полюса, установить точную величину зазора под
добавочным полюсом и др. Практика электромашиностроения показывает, что вновь
изготовляемые машины почти всегда нуждаются в настройке коммутации, которая
состоит, главным образом, в регулировке добавочных полюсов – изменении
сопротивления магнитной цепи или н.с. их обмотки возбуждения.
Наиболее распространенный метод экспериментального анализа
коммутации – снятие кривых подпитки добавочных полюсов. В 1934 г. В.Т. Касьяновым
и М.П. Костенко на заводе «Электросила» им. С.М. Кирова был разработан способ
снятия безыскровой зоны работы машины, сущность которого в том, что обмотку
добавочных полюсов подпитывают от особого источника постоянного тока и снимают
подпиточные кривые, которые позволяют выявить зону безыскровой работы и с необходимой
точностью определить наивыгоднейшее число витков добавочного полюса и величину
зазора δ. Для этого собирают
схему, показанную на рисунке 5.11, где Я – якорь испытуемой машины; Д1 Д2 –
обмотка добавочных полюсов; Г – генератор постоянного тока независимого
возбуждения для подпитки добавочных полюсов; П – переключатель для
изменения полярности генератора Г.
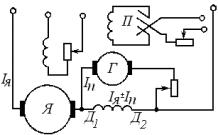
Рисунок 5.11 – Схема для снятия кривых подпитки
При испытании машина может работать как в нагрузочном
режиме, так и в режиме к.з. Снятие кривых подпитки начинают с холостого хода (IЯ=0). Подпитывая добавочные полюсы сначала в одном
направлении, а затем в другом, мы можем установить величину тока ΔIП=±IП100%/Iном, при котором начинается первое заметное на
глаз искрение. Причина искрения – избыточная э.д.с. Δе=±еК, создаваемая в коммутируемой секции полем
добавочных полюсов. Если в машине постоянного тока реактивная и коммутирующая
э.д.с. еР и еК
находились бы всегда во взаимном равновесии, то кривые подпитки имели бы
вид двух прямых, параллельных оси абсцисс и находящихся от нее на одинаковом расстоянии.
Но так как в машинах нельзя добиться полной компенсации э.д.с. еР, то остаточная э.д.с.
растет с увеличением нагрузочного тока I, при некотором значении которого машина начинает искрить даже при
правильно подобранном числе витков добавочных полюсов.
Таким образом, машину можно нагрузить лишь до такого
предельного тока, при котором уже никакой регулировкой добавочных полюсов
невозможно получить удовлетворительную коммутацию. Кривые подпитки (рисунок
5.12) не параллельны оси абсцисс, а пересекаются в точках С1, C2 или С3
в зависимости от того, в каком соотношении находятся между собой э.д.с. еР и еК.

а) б) в)
Рисунок 5.12 – Кривые подпитки при коммутациях
Если они скомпенсированы, т.е. число витков добавочных
полюсов подобрано правильно, то кривые подпитки пересекутся в точке С1 на оси абсцисс и средняя
линия этих кривых совпадет с осью абсцисс – линейная коммутация (рисунок 5.12, а). Если при работе машины без
подпитки преобладает реактивная э.д.с. еР и, следовательно,
коммутация носит замедленный характер, то нужно подпитывать добавочные полюсы в
положительном направлении, усиливая создаваемое ими поле в зоне коммутации. В
этом случае средняя линия кривой пойдет выше оси абсцисс и точка пересечения
кривых С2 – замедленная коммутация (рисунок 5.12, б). Если преобладает э.д.с. еК, то нужно подпитывать добавочные
полюсы в отрицательном направлении, ослабляя создаваемое ими поле. В этом
случае средняя линия кривой подпитки пойдет ниже оси абсцисс к точке
пересечения кривых С3 –
ускоренная коммутация (рисунок 5.12, в). Сопоставляя между собой эти кривые, легко видеть, что в
первом случае машина может работать без искрения при больших перегрузках, чем
во втором и третьем. Кривые подпитки позволяют определить наивыгоднейшее число
витков добавочного полюса при заданной величине зазора под добавочным полюсом
или наивыгоднейший размер этого зазора при заданном числе витков добавочного
полюса. Первый способ обычно применяют в машинах малой и средней мощности,
второй – в машинах большой мощности с малым числом витков добавочного полюса.
Кроме того, кривые подпитки дают возможность предопределять в известных
пределах условия коммутации при изменении режима работы машины.
5.7 Средства уменьшения радиопомех
Процесс коммутации машин постоянного тока сопровождается
образованием высокочастотных электромагнитных волн, которые вызывают помехи в
радиоприемных и телевизионных устройствах. Процесс выпрямления э.д.с. при
помощи коллектора может также явиться источником радиопомех. Однако интенсивность
радиопомех зависит от степени искрения под щетками, вызывающими непрерывный
треск и шум в радиоприемной аппаратуре. Поэтому уровень радиопомех не должен
превосходить уровня норм, установленных стандартом. Для уменьшения радиопомех
применяют электрические фильтры, экранируют машины и симметрируют обмотки,
включенные последовательно с якорем. В некоторых случаях для улучшения
фильтрации высокочастотных напряжений и токов включают фильтр, состоящий из
конденсаторов, соединяемых параллельно с якорем, и индуктивных катушек, включаемых
последовательно с ним (рисунок 5.13).
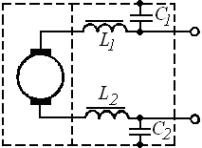
Рисунок 5.13 Схема защиты от радиопомех в электрических машинах
6 Генераторы постоянного тока
6.1 Общие сведения о генераторах постоянного тока
В тех случаях, когда по условиям производства необходим или
предпочтителен большой ток (предприятия химической и металлургической промышленности,
транспорт и др.), его получают, преобразуя переменный ток в постоянный с
помощью преобразователей, в качестве которых широко применяют установки
двигатель-генератор. В качестве источника энергии генераторы постоянного тока
работают, главным образом, в изолированных установках (как возбудители
синхронных машин), на автомашинах, самолетах, при сварке дугой, для освещения поездов,
на кораблях и др.
Таким образом, область применения генераторов постоянного
тока достаточно широка и соответственно многообразны предъявляемые к ним требования
в отношении мощностей, напряжений, частоты вращения, надежности работы, срока
службы и др. Для работы ротора необходимо наличие в нем магнитного поля. В
зависимости от способа создания магнитного поля генераторы делят на генераторы
независимого возбуждения с электромагнитным возбуждением, с возбуждением
постоянными магнитами (магнитоэлектрические) и с самовозбуждением, в которых
ток для обмотки возбуждения поступает от якоря генератора. При независимом
возбуждении генератора обмотка возбуждения его получает питание от независимого
источника постоянного тока. Магнитоэлектрическое возбуждение находит применение
лишь в машинах очень малой мощности. При самовозбуждении возможны три варианта
соединения обмотки возбуждения с обмоткой якоря: параллельное (шунтовое),
последовательное (сериесное) и смешанное (компаундное). В соответствии с этим
различают генераторы параллельного, последовательного и смешанного возбуждения,
имеющие две обмотки возбуждения: одну включенную параллельно, а другую – последовательно.
Характеристики генератора постоянного тока. Свойства
генераторов анализируют с помощью характеристик, устанавливающих зависимость
между основными величинами, определяющими работу генератора: э.д.с. Е, напряжение на зажимах генератора U, ток возбуждения IВ, ток в якоре IЯ и частота
вращения п. Так как
генераторы чаще всего работают с постоянной частотой вращения, то основную
группу характеристик снимают при неизменной частоте вращения (n=const). Напряжение U имеет наибольшее значение, поскольку оно
определяет свойства генератора в отношении той сети, на которую он работает. Поэтому
основными характеристиками являются:
а) нагрузочная U=f(IВ) при IЯ–const. В частном случае, когда IЯ=0, нагрузочная характеристика
переходит в характеристику х.х., имеющую важное значение для оценки генератора
и построения других характеристик;
б) внешняя U=f(IЯ) при RВ=соnst;
в) регулировочная IВ=f(I) при U=const. В частном случае, когда U=0, регулировочная характеристика
переходит в характеристику к.з. IК=f(IВ). Режим работы электрической машины при условиях,
для которых она предназначена, называют номинальным
режимом работы. Номинальный режим работы характеризуется
величинами, обозначенными на заводском щитке машины как номинальные: напряжение,
мощность, ток, частота вращения. Номинальной
мощностью генератора постоянного тока называют полезную
электрическую мощность машины, выраженную в ваттах или киловаттах. Термин
«номинальный» может относиться и к величинам, не указанным на паспортном щитке
машины, но характеризующим номинальный режим работы: такие, как момент, ток возбуждения,
к.п.д.
Энергетический процесс и уравнение э.д.с генератора
постоянного тока. В основе работы генератора лежит процесс преобразования
подводимой к нему механической энергии в электрическую. Рассмотрим процесс
преобразования энергии на примере генератора независимого возбуждения,
приводимого во вращение с постоянной частотой (n=const). При независимом возбуждении мощность РВ необходимая для покрытия
потерь в цепи возбуждения, не входит в мощность Р1, подводимую к генератору от первичного двигателя
(рисунок 6.1). При преобразовании энергии часть мощности Р1 тратится на покрытие механических потерь PМХ и потерь в стали РС, а остальная часть преобразовывается
в электромагнитную мощность
РЭМ=EЯIЯ=Р1–(PМХ+PС).
Полезная мощность P2=UIЯ отдаваемая
генератором в сеть, меньше мощности РЭМ
на величину электрических потерь PМ+PЩ в цепи якоря и в
щеточных контактах
Р2=РЭМ–(PМ+PЩ). (6.2)
Так как Р2=UIЯ; РЭМ=ЕЯIЯ и РM+РЩ=IЯ2RЯ, где RЯ – сопротивление всех обмоток в цепи якоря и щеточного контакта, то Р2=UIЯ=EЯIЯ – IЯ2RЯ. После сокращения обеих частей этого равенства на IЯ получаем уравнение э.д.с. генератора:
ЕЯ=U+RЯ. (6.3)

Рисунок 6.1 – Энергетическая диаграмма
генератора постоянного тока
независимого возбуждения
Уравнение моментов генератора. Предположим, что первичный
двигатель развивает на валу генератора момент М0 приводящий генератор во вращение по часовой стрелке с
некоторой постоянной частотой п (рисунок 6.2). Если генератор возбужден,
то в проводнике, находящемся под северным полюсом, наводится э.д.с.,
направленная за плоскость чертежа. Если генератор работает в режиме х.х., то
для вращения якоря нужен небольшой момент M0. Этот момент
затрачивается на преодоление трения в подшипниках, щеток о коллектор, вращающихся
частей о воздух, а также на покрытие потерь стали сердечника якоря.
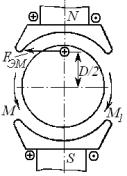
Рисунок 6.2 – Схема работы генератора
При работе нагруженного генератора в проводах обмотки якоря
появляется ток iЯ=IЯ/(2a), в результате взаимодействия которого с
основным магнитным полем машины на каждый проводник обмотки якоря действует
сила
FЭМ=BСРliЯ,
(6.4)
где BСР – среднее
значение магнитной индукции в зазоре;
l – длина якоря.
Определив по правилу «левой руки» направление этих сил,
убеждаемся, что создаваемый ими электромагнитный момент направлен против
вращающего момента первичного двигателя М1.
Величина электромагнитного момента (Н·м).
M=FЭМ0,5DN=BСРliЯ0,5DN,
где N – число активных проводников обмотки якоря.
Имея в виду, что iЯ=IЯ/(2a); πD=2рτ; и магнитный поток
возбуждения Ф=ВСРlτ, получим M=BСРl(IЯ/2a)·(2рτ/2π); N=рNIЯФ/(2πа), или
М=СМIЯ Ф, (6.5)
где СМ=рN/(2πа) – величина, постоянная для данной машины.
При неизменной частоте вращения (n=const) вращающий
момент первичного двигателя М1 уравновешивается суммой
противодействующих моментов: моментом х.х. М0 и
электромагнитным моментом М, т.е.
М1=М0+М. Полученное
выражение представляет собой уравнение моментов для генератора при п=const.
6.2 Генератор независимого возбуждения
Независимое возбуждение применяют достаточно широко: в
генераторах низкого (4 – 24 В) и высокого напряжений (свыше 600 В), в машинах
большой мощности, где требуется широкое регулирование напряжения (на судах в
рулевых электроприводах, в гребных электрических установках постоянного тока в
качестве главных генераторов и возбудителей и в других устройствах).
Характеристика холостого хода. U=f(IB) при IЯ=0 и n=const. Схема для
снятия характеристики х.х. представлена на рисунке 6.3. Отключив рубильником
нагрузку, устанавливают номинальную частоту вращения. Затем постепенно увеличивают
ток в обмотке возбуждения IВ от нуля до +IВ.МАХ=0а (рисунок 6.4), при котором напряжение U0 растет по кривой 1 до значения +U0.МАХ=(1,1~1,25)UНОМ. Так как IЯ=0, то U=Е=сепФ=сeФ, где сe – постоянный коэффициент.
Таким образом, характеристика х.х. U=сеФ=f(IВ) представляет собой в ином масштабе характеристику
намагничивания машины. При уменьшении тока возбуждения до IВ=0, изменяя его направление, можно получить
кривую 2, называемую нисходящей ветвью характеристики. Она
располагается в первом квадранте выше кривой 1 вследствие увеличения остаточного
магнитного потока. Если же повторить опыт изменения тока возбуждения в обратном
направлении, то получим кривую 3,
называемую восходящей ветвью
характеристики х.х. Нисходящая и восходящая ветви образуют петлю
гистерезиса, определяющую свойства стали полюсов и ярма. Проведя между кривыми 2 и 3 среднюю линию 4, получим расчетную характеристику
х.х.

Рисунок 6.3 – Схема генератора Рисунок 6.4
– Характеристика х.х.
независимого возбуждения генератора независимого
возбуждения
Прямолинейная часть характеристики х.х. соответствует
ненасыщенному состоянию магнитной системы. При значительных токах возбуждения
сталь машины насыщается, и характеристика приобретает криволинейный характер.
Точка, соответствующая номинальному напряжению, обычно лежит на «колене»
кривой, так как работа машины на прямолинейном участке характеристики приводит
к значительным колебаниям напряжения, а работа в области насыщения требует
большого тока возбуждения и ограничивает пределы регулировки напряжения.
Нагрузочная характеристика.
Для снятия нагрузочной характеристики U=f(IВ) при IЯ=const возбуждают
генератор и устанавливают требуемый ток нагрузки IЯ при помощи нагрузочного реостата R. Затем постепенно уменьшают ток возбуждения IВ, но при этом также уменьшают величину сопротивления нагрузки таким образом,
чтобы при каждом отсчете параметров IВ и U ток нагрузки оставался неизменным. При нагрузке
напряжение генератора снижается вследствие падения напряжения в цепи якоря IЯRЯ и размагничивающего
действия реакции якоря. Поэтому нагрузочная характеристика проходит ниже
характеристики х.х., причем тем ниже, чем больше нагрузочный ток IЯ (рисунок 6.5).
Чтобы учесть влияние этих двух факторов на снижение
напряжения генератора при нагрузке, рассмотрим построение характеристического
треугольника авс по характеристикам х.х. и нагрузочной при IЯ=IНОМ. Пусть точка с нагрузочной характеристики соответствует номинальному
напряжению генератора UНОМ при
номинальном токе возбуждения IB.НОМ и номинальном токе нагрузки IНОМ. Если отключить
нагрузку, то по характеристике х.х. току возбуждения IВ.НОМ, будет соответствовать напряжение U0. Следовательно, отрезок kc характеризует снижение напряжения генератора
при нагрузке. Измерив величину сопротивления цепи якоря ΣRЯ и подсчитав
падение напряжения IЯΣRЯ, определяем
э.д.с. генератора при заданном токе нагрузки
E=U+IЯΣRЯ, (6.6)
где E<U0.

Рисунок 6.5 – Нагрузочная характеристика генератора
независимого возбуждения
Отрезок bk характеризует снижение напряжения вследствие размагничивающего действия
реакции якоря. Электродвижущей силе ЕНОМ
соответствует ток возбуждения I´В.НОМ. Таким образом, если бы в машине не
было размагничивающего действия реакции якоря, то в обмотке возбуждения достаточно
было бы установить ток I´В.НОМ, при
котором генератор имел бы номинальное напряжение UНОМ при номинальной нагрузке. Но для компенсации размагничивающего
действия реакции якоря надо установить в обмотке возбуждения ток IВ.НОМ>I´В.НОМ. Величина
отрезка ab=IВ.НОМ–I´В.НОМ характеризует
размагничивающее действие реакции якоря, а величина отрезка bс изображает падение
напряжения IНОМRЯ. Прямоугольный треугольник abc называют характеристическим
треугольником. Второй характеристический треугольник a'b'c' построен для другого значения тока возбуждения IВ. Сторона с'b' треугольника осталась неизменной (с'b'=сb), что объясняется
неизменностью тока нагрузки, но сторона а'b' уменьшилась (а'b'<аb), так как
уменьшилось размагничивающее действие реакции якоря.
Внешняя характеристика.
Для снятия внешней характеристики (рисунок 6.6, а) пользуются схемой, изображенной на рисунке
6.3. Замкнув рубильник, нагружают генератор, уменьшая величину сопротивления R до номинального тока IВ=IНОМ при номинальном напряжении U=UНОМ. Затем постепенно уменьшают нагрузку до нуля и
снимают при этом показания приборов. Сопротивление цепи возбуждения RВ, а следовательно, и ток возбуждения IВ=UВ/RВ в течение опыта остаются постоянными. Снижение
напряжения генератора при нагрузке происходит по двум причинам: вследствие падения
напряжения в сопротивлении цепи якоря IЯRЯ и из-за размагничивающего действия реакции якоря. Степень наклона внешней
характеристики к оси абсцисс, т.е. жесткость внешней характеристики, оценивается
изменением напряжения генератора при номинальной нагрузке, называемым
номинальным изменением напряжения генератора. Относительное изменение
напряжения равно разности напряжения при х.х. и напряжения при номинальной
нагрузке в долях номинального напряжения: ΔU = (U0–UНОМ)UНОМ=ΔUНОМ/UНОМ. При к.з. генератора напряжение на его зажимах падает до нуля (U=0), а ток к.з. IК.З. во много
раз превосходит номинальный. Поэтому к.з. генератора независимого возбуждения –
чрезвычайно опасно. Внешнюю характеристику можно построить также с помощью
характеристики х.х. и характеристического треугольника. Для этого проведем
(рисунок 6.6, б) вертикальную прямую dk, соответствующую
заданному току возбуждения IВ.НОМ=const. Тогда dk=0Г0 соответствует U0 при IЯ=0 и определяет начальную точку внешней характеристики. Расположен
характеристический треугольник abc для тока IЯ=IНОМ таким
образом, чтобы его вершина а лежала на характеристике, а катеты ab и bс были параллельны – первый оси абсцисс, а второй – оси ординат. Этим
определяется положение точки с, соответствующей
напряжению U=UHOМ. Чтобы получить промежуточные точки внешней характеристики, например
точку для тока I=0,5IНОМ, нужно повторить построение, уменьшив каждую
из сторон треугольника abc в два раза. Но вместо этого можно разделить гипотенузу ас пополам
в точке G и перенести отрезок cG параллельно гипотенузе ас в положение а1с1. После этого из точки с1
проводим прямую, параллельную оси абсцисс, до пересечения с ординатой 0,5 IНОМ; получаем точку г1, а затем по точкам г0, г1, гНОМ
строим внешнюю характеристику.
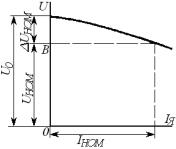
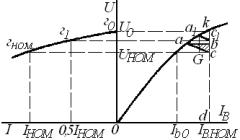
а)
б)
Рисунок 6.6 – Внешняя характеристика генератора
независимого возбуждения (а) и ее
построение (б).
Регулировочная характеристика.
Если регулировать ток возбуждения генератора так, чтобы при
увеличении тока нагрузки напряжение генератора оставалось постоянным и равным
номинальному, то соответствующая кривая зависимости тока возбуждения IВ от нагрузочного тока IЯ будет представлять собой регулировочную
характеристику машины, IВ=f(IЯ) при U=const и n=const. Для снятия
регулировочной характеристики пользуются схемой, показанной на рисунке 6.3. При
разомкнутом рубильнике устанавливают номинальное напряжение. Затем включают
нагрузку и постепенно увеличивают ток до IHOM. Для поддержания неизменным напряжения генератора увеличивают ток возбуждения, уменьшая сопротивление регулировочного
реостата. На рисунке 6.7, а представлена регулировочная характеристика
генератора независимого возбуждения. Изменение тока возбуждения ΔIВ.НОМ=(IВ.НОМ–IВ0)/IВ.НОМ.
Регулировочная характеристика может быть построена по
данным характеристики х.х. и характеристическому треугольнику, как показано на
рисунке 6.7, б. Строим характеристику х.х. и проводим линию ге параллельно
оси абсцисс на расстояние 0г.
Построив характеристический треугольник abc, например, для номинального тока IНОМ мы должны расположить этот треугольник так, чтобы вершина а лежала
на характеристике х.х., а вершина с – на прямой ге;
этим определяется необходимый для создания напряжения UНОМ ток возбуждения IВ.НОМ=ож. Перенося точку ж вниз от оси абсцисс соответственно току IНОМ, получим точку н регулировочной
характеристики для номинальной нагрузки. Также строятся и другие точки
регулировочной характеристики, например точка м для IЯ=0,5IНОМ. Для х.х. имеем IВ0=Ож0. По точкам ж0мн проводим
регулировочную характеристику.
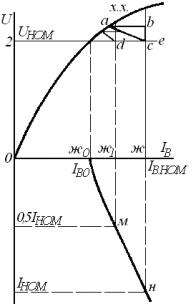
а) б)
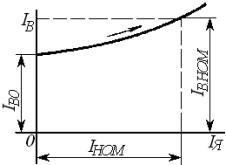
Рисунок 6.7 – Регулировочная характеристика
генератора независимого возбуждения (а)
и ее построение (б)
6.3 Генератор параллельного возбуждения
Условия
самовозбуждения.
Схема генератора параллельного возбуждения изображена на
рисунке 6.8. Для самовозбуждения генератора необходимо, чтобы в нем был
небольшой поток остаточного намагничивания ФОСТ
(2-3% от номинального). При вращении якоря генератора в его обмотке
магнитным потоком ФОСТ
наводится остаточная э.д.с. EОСТ=(2-3%)EОСТ, которая
создает в обмотке возбуждения небольшой ток. Этот ток при согласном направлении
намагничивающего и остаточного потоков усилит магнитный поток полюсов и вызовет
соответствующее увеличение э.д.с., индуктированной в обмотке якоря. Увеличение
э.д.с. повлечет за собой увеличение тока возбуждения, а, следовательно, и магнитного
потока главных полюсов, и т.д. Так как ток возбуждения непрерывно изменяется,
то в цепи возбуждения действуют следующие э.д.с.: 1) напряжение UВ на зажимах цепи возбуждения, которое в то же
время является и напряжением на зажимах якоря; 2) падение напряжения IВ RВ; 3) э.д.с. самоиндукции – LB(dIВ/dt), где LB – индуктивность
цепи возбуждения. Таким образом
 или
или  . (6.7)
. (6.7)
Обычно процесс самовозбуждения происходит при х.х. и RВ=const. Тогда зависимость
UB=f(IB) изображается кривой х.х. (кривая 1 на рисунке
6.9), зависимость IВRВ=f(IB) определяется прямой 2, a LB(dIВ/dt) – отрезками ординат между кривой 1
и прямой 2.
Рисунок 6.8 –
Схема генератора Рисунок 6.9 –
Самовозбуждение генератора
параллельного
возбуждения
параллельного возбуждения
В точке A1 пересечения
кривой 1 и прямой 2 э.д.с.
самоиндукции LB(dIВ/dt)=0, а так как IВ конечная величина, то dIВ/dt=0 и, следовательно, IВ=const. Таким образом, в точке A1 процесс самовозбуждения
прекращается. Для получения этой точки проводят прямую под углом α, тангенс которого в определенном
масштабе пропорционален величине суммарного сопротивления цепи возбуждения, tgα=U/IВ=RB, где RB – сопротивление обмотки возбуждения и регулировочного реостата. Если
будем увеличивать сопротивление RB, т.е. угол α, то точка А1 будет
перемещаться по характеристике х.х. в направлении к 0. Если RB увеличить до такой степени, что прямая 2 будет касательной к начальной
части характеристики х.х. (прямая 5), то в этих условиях генератор не
возбуждается. Сопротивление цепи возбуждения, при котором прекращается
самовозбуждение генератора, называют критическим
сопротивлением RB.КР, и угол α, соответствующий этому сопротивлению,
– критическим углом. Следовательно, самовозбуждение генератора параллельного
возбуждения возможно при соблюдении следующих условий:
а) магнитная система машины должна
обладать остаточным магнетизмом;
б) магнитный поток, создаваемый обмоткой возбуждения,
должен совпадать по направлению с потоком остаточного магнетизма;
в) сопротивление цепи возбуждения должно быть меньше
критического: RВ<RВ.КР;
г) сопротивление нагрузки не должно быть очень малым.
Характеристика холостого хода.
Так как генератор параллельного возбуждения
самовозбуждается только в одном направлении, то и характеристика холостого хода
U0=f(IВ) при I=0 и n=const может быть снята
тоже только в одном направлении (рисунок 6.10).
Так как падением напряжения в якоре от тока возбуждения IВ можно пренебречь, то характеристики х.х. и нагрузочная
характеристика практически совпадают с
аналогичными характеристиками генератора независимого возбуждения.
Рисунок 6.10 –
Характеристика Рисунок 6.11 – Внешние
характеристики
х.х. генератора генераторов параллельного 1 и
параллельного
возбуждения
независимого 2 возбуждения
Внешняя характеристика.
Эти характеристики имеют вид: U=f(I) при RВ=const и n=const. Если у генератора
независимого возбуждения ток возбуждения оставался неизменным, то у генератора
параллельного возбуждения он меняется с изменением нагрузки. При увеличении
нагрузки напряжение на зажимах генератора под влиянием реакции якоря и падения
напряжения в цепи якоря уменьшается. Снижение напряжения вызывает уменьшение
тока возбуждения IВ=U/RВ. В свою очередь, уменьшение IВ вызывает ослабление основного магнитного потока,
а, следовательно, уменьшение э.д.с. и напряжения на зажимах генератора. С
понижением напряжения происходит дальнейшее уменьшение IВ. При этом магнитная система генератора
постепенно размагничивается. В генераторе с параллельным возбуждением ток нагрузки
увеличивается лишь до определенного критического значения IКР, превышающего номинальное не более чем в 2-2,5
раза. Величина тока нагрузки зависит от двух факторов: величины напряжения
генератора и сопротивления нагрузки. При увеличении нагрузки уменьшается
напряжение на зажимах генератора (рисунок 6.11). В начале, когда магнитная
система насыщена, размагничивание идет медленно и напряжение U изменяется незначительно, вследствие чего ток
в цепи якоря увеличивается. Однако при дальнейшем увеличении тока степень
насыщения магнитной системы резко уменьшается, и напряжение начинает быстро
падать. Преобладающим будет уже не уменьшение сопротивления цепи, а понижение
напряжения. Поэтому ток, достигнув критического значения, начнет уменьшаться.
При к.з. IВ=0, так как U=0. Величина IК.З. будет определяться только величиной э.д.с. остаточной
индукции: IК.3.=EОСТ/RЯ. Таким образом, к.з., вызванное постепенным
уменьшением сопротивления нагрузки, не опасно для генератора параллельного
возбуждения. Но при внезапном коротком замыкании магнитная система генератора
не успевает сразу размагнититься, и ток IК.З. достигает опасных для машины значений. При таком резком возрастании тока
на валу генератора возникает значительный тормозящий момент, а на коллекторе появляется
сильное искрение, переходящее в круговой огонь.
Регулировочная характеристика.
Регулировочная характеристика генератора параллельного
возбуждения IB=f(I) при U=const и n=const имеет такой же вид, как и у генератора независимого возбуждения.
6.4 Генератор последовательного возбуждения
В генераторе последовательного возбуждения ток возбуждения IВ=IЯ (рисунок 6.12, а), а поэтому свойства этого генератора определяются лишь внешней
характеристикой (рисунок 6.12, б).

а)
б)
Рисунок 6.12 – Схема (а) и внешняя характеристика (б) генератора
последовательного возбуждения
Все другие характеристики генератора могут быть сняты
только при включении его на независимое возбуждение. Внешняя характеристика
генератора последовательного возбуждения показывает, что с увеличением тока нагрузки
от нуля до номинального напряжения на зажимах генератора в начале, когда
магнитная цепь еще не насыщена, растет почти прямо пропорционально току
нагрузки. Затем рост напряжения постепенно уменьшается и, наконец, прекращается.
Объясняется это тем, что IЯ одновременно
является и током возбуждения IВ, и с ростом
нагрузки происходит насыщение стали. Однако повременно с ростом тока якоря
увеличивается как размагничивающее влияние реакции якоря, так и падение
напряжения в сопротивлениях цепи якоря и обмотки возбуждения, вызывающее уменьшение
напряжения на зажимах генератора. При большом насыщении стали магнитной цепи машины
рост магнитного потока э.д.с. практически прекращается. В то же время падение
напряжения и реакция якоря будут продолжать возрастать. При к.з. напряжение
генератора будет равно нулю, а ток к.з. намного превышать номинальный ток
машины. Генератор последовательного возбуждения практического применения не
имеет, так как не удовлетворяет требованиям большинства потребителей в
отношении постоянства напряжения.
6.5 Генератор смешанного возбуждения
Так как генератор смешанного возбуждения имеет параллельную
и последовательную обмотки возбуждения (рисунок 6.13, а), то он совмещает в себе свойства генераторов обоих типов. Поток
возбуждения создается в основном параллельной обмоткой, а последовательную
обмотку включают согласно с параллельной (чтобы н.с. обмоток складывались).


а) б)
Рисунок 6.13 – Схема (а) и
внешние характеристики генератора
смешанного возбуждения (б)
Свойства генератора зависят от соотношения н.с. этих
обмоток. При подключении нагрузки в цепи якоря появляется ток, и возбуждение
генератора осуществляется одновременно действием н.с. параллельной и последовательной
обмоток. Форма внешней характеристики генератора смешанного возбуждения
(рисунок 6.13, б) зависит
от соотношения витков обмоток возбуждения. При соответствующем подборе витков
обмотки последовательного возбуждения ее н.с. может компенсировать падение
напряжения генератора и действие реакции якоря, а напряжение на зажимах
генератора при изменении нагрузки остается почти неизменным (кривая 1). Чтобы иметь возможность поддерживать
постоянное напряжение на зажимах потребителя (в конце линии), нужно
скомпенсировать падение напряжения в проводах линии. В этом случае усиливают
последовательную обмотку возбуждения так, чтобы внешняя характеристика имела
вид кривой 2.
При встречном включении обмоток возбуждения напряжение
генератора с ростом тока нагрузки резко уменьшается (кривая 3), что объясняется
размагничивающим действием последовательной обмотки возбуждения, н.с. которой
направлена встречно н.с. параллельной обмотки. Встречное включение обмоток
применяется в генераторах специального назначения, например в сварочных генераторах,
где требуется получить крутопадающую внешнюю характеристику для ограничения
токов к.з. Нагрузочные характеристики генератора смешанного возбуждения U=f(IB) при I=const и п=const имеют тот же вид, что и соответствующие
характеристики генератора параллельного возбуждения, но при достаточно сильной
последовательной обмотке они могут расположиться выше характеристики х.х.
Постоянство напряжения на зажимах генератора обычно поддерживают регулированием
тока в обмотке параллельного возбуждения. Вид регулировочной характеристики
зависит от соотношения н.с. обмотки последовательного возбуждения,
размагничивающего действия реакции и падения напряжения в цепи якоря. На
рисунке 6.14 показаны регулировочные характеристики при нормальном возбуждении
(кривая 1) и при перевозбуждении (кривая
2).

Рисунок 6.14 – Регулировочные характеристики
генератора смешанного возбуждения
6.6 Параллельная работа генераторов постоянного тока
На электростанциях постоянного тока обычно устанавливают
несколько генераторов, включенных параллельно на общие шины. Суммарная мощность
этих генераторов должна соответствовать мощности питаемых ими потребителей.
Кроме того, на случай аварии одного из работающих генераторов или остановки его
на профилактический ремонт необходим резервный генератор. Установка нескольких
генераторов вместо одного суммарной мощности обеспечивает более эффективное
использование агрегатов. Так, при уменьшении нагрузки часть генераторов может
быть отключена, чтобы остальные работали с полной нагрузкой, а следовательно, с
более высоким к.п.д. В параллельной работе чаще применяют генераторы
параллельного возбуждения. При включении их на параллельную работу необходимо
выполнять ряд условий и обеспечивать возможность перевода нагрузки с одного
генератора на другой.
Включение генераторов на параллельную работу.
Из двух генераторов (рисунок 6.15) один ГI включен в сеть,
т.е. рубильник Р1 замкнут. Для присоединения генератора ГII к этой же сети необходимо создать такие условия, чтобы ток в цепи якоря
второго генератора ГII был минимальным.
Для этого сумма э.д.с. в замкнутом контуре, образованном цепями якорей
генераторов и участком сети между ними, должна быть равна нулю, т.е. ЕГI+EГII=0. Из этой формулы ЕГI=–EГII, т.е. э.д.с. генераторов
должны быть равны и направлены встречно. Пользуясь специальным переключателем,
можно поочередно вольтметром V измерить напряжение генератора и сети. При правильной полярности
генераторов стрелка вольтметра отклоняется в одну сторону. Если стрелка
отклоняется в разные стороны, то нужно изменить полярность включаемого генератора.
Регулируют э.д.с. генератора ГII реостатом, включенным в цепь его возбуждения. Обычно генератор ГII включают в сеть рубильником Р2, когда генератор ГI уже нагружен. В этом случае UСЕТИ=ЕГI–IГIRГI и для включения
генератора ГII необходимо выполнить условие правильной полярности и установить
реостатом в цепи возбуждения такой ток, чтобы э.д.с. генератора была равна напряжению
сети: EГII=UСЕТИ.
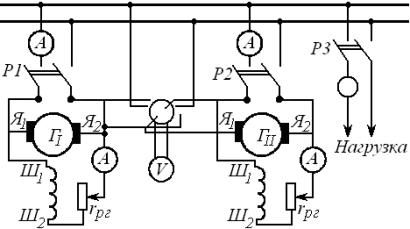
Рисунок 6.15 – Схема генераторов параллельного возбуждения
при параллельной работе
Распределение и перевод нагрузки.
При параллельной работе генераторов напряжения на их
зажимах должны быть одинаковы, так как они включены на общую сеть с напряжением
UСЕТИ. Из уравнения равновесия э.д.с. генератора постоянного
тока имеем
UСЕТИ=ЕГI–IГI RГI , UСЕТИ=EГII–IГII RГII,
откуда
II=(ЕГI–UСЕТИ)/RГI, III=(EГII–UСЕТИ)/RГII. (6.8)
После включения ГII в сеть требуется
перевести на него нагрузку с ГI. Для этого необходимо
повысить его э.д.с. EГII увеличением тока возбуждения. При этом в цепи
якоря ГII установится ток IГII, а в цепи якоря ГI ток IГI уменьшится и в результате этого напряжение
сети увеличится, что может нарушить нормальную работу приемников
электроэнергии. Для того чтобы при переводе нагрузки напряжение сети оставалось
неизменным, необходимо одновременно увеличивать ток возбуждения на ГII и уменьшать ток возбуждения на ГI. Таким образом, изменением тока возбуждения работающих параллельно
генераторов можно переводить нагрузки с одного генератора на другой и
поддерживать постоянным напряжение сети.
Перед отключением ГI необходимо перевести его нагрузку на ГII т.е. выполнить условие IГI=0 за счет уменьшения тока возбуждения ГI и одновременного увеличения тока возбуждения на ГII. При большом
изменении э.д.с. ЕГI разность ЕГI–UСЕТИ может стать отрицательной и ток IГI изменит направление относительно э.д.с. ЕГI т.е. ГI станет работать двигателем, потребляя энергию
от ГII. Наличие двух двигателей на одном валу может привести к аварии,
поэтому в схемах генераторов предусматривается защита, отключающая генератор
при изменении направления тока якоря.
Если генераторы работают параллельно без регулирования
токов возбуждения, то распределение нагрузок между ними зависит от наклона их
внешних характеристик.
На рисунке 6.16 приведены внешние характеристики генераторов
ГI и ГII. Если генераторы включены на параллельную
работу при х.х., то эти характеристики исходят из одной точки U0 на оси ординат.

Рисунок 6.16 – Распределение тока между генераторами
Если затем подключить к генераторам нагрузку, то напряжение
понизится до некоторого значения UСЕТИ, общего для обоих генераторов. При этом ГI, имеющий характеристику с большим наклоном, чем ГII, будет нагружаться меньшим током IГI. Поэтому желательно, чтобы генераторы одинаковой мощности, включаемые
на параллельную работу, имели совпадающие внешние характеристики, генераторы
различной мощности – одинаковые изменения напряжения при номинальной нагрузке.
Параллельная работа генераторов смешанного возбуждения.
Схема генераторов смешанного возбуждения при параллельной
работе показана на рисунке 6.17.

Рисунок 6.17 – Схема генераторов смешанного возбуждения
при параллельной работе
Ее отличительная особенность состоит в том, что точки С2С2, в которых последовательные обмотки
подключены к одноименным зажимам якоря, соединены между собой уравнительным проводом.
Если этот провод отсутствует, то устойчивая параллельная работа невозможна.
Допустим, ток IГI первого генератора по какой-либо причине
(например, вследствие увеличения частоты вращения) несколько увеличился, тогда
магнитное поле последовательной обмотки возбуждения этого генератора усилится,
его э.д.с. ЕГI возрастет, что вызовет
дальнейшее увеличение тока IГI и т.д.
Одновременно ток IГII и э.д.с. ЕГII второго генератора будут беспрерывно уменьшаться. В результате один
генератор будет нагружаться, а второй разгружаться и параллельная работа их
становится неустойчивой. При наличии уравнительного провода параллельная работа
будет протекать нормально, так как случайное приращение тока якоря одного
генератора распределится между последовательными обмотками возбуждения обоих
генераторов и вызовет увеличение э.д.с. генераторов. Нагрузка с одного
генератора на другой переводится так же, как в генераторах параллельного
возбуждения.
7. Двигатели постоянного тока
7.1 Общие сведения о двигателях постоянного тока
Двигатели постоянного тока находят широкое применение в
промышленных, транспортных, крановых и других установках, где требуется широкое
плавное регулирование частоты вращения. Одна и та же электрическая машина может
работать как в режиме генератора, так и в режиме двигателя. Это свойство
электрических машин называют обратимостью.
Предположим, что к двигателю подведено напряжение UСЕТИ = const. При заданной на
рисунке 7.1 полярности полюсов и направлении тока IЯ в якоре (обмотка якоря показана только одним проводником) на валу
двигателя создается вращающий электромагнитный момент М, направленный против вращения
часовой стрелки. Под действием этого момента двигатель вращается в направлении
момента с постоянной частотой п.
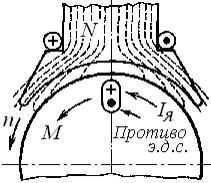
Рисунок 7.1 – Направление момента и противо-э.д.с. обмотки якоря
двигателя
Применяя правила правой руки, находим, что в проводнике
(обмотке) якоря наводится э.д.с. еЯ, направленная встречно относительно тока якоря, и поэтому ее
называют противо-э.д.с. якоря и рассматривают как электромагнитное
противодействие двигателя относительно напряжения сети UСЕТИ.
Для двигателя, работающего с постоянной частотой вращения,
можно составить уравнение э.д.с.
UСЕТИ=ЕЯ+IЯRЯ ,
где ЕЯ и IЯ – э.д.с и ток,
соответствующие установившемуся режиму работы;
IЯRЯ – падение
напряжения в сопротивлениях цепи якоря двигателя.
Уравнение моментов двигателя. Электромагнитный момент
двигателя
М=(1/π)NIЯpФ/(2а)=CМIЯФ (7 2)
создается в результате взаимодействия основного магнитного поля Ф и тока в обмотке якоря IЯ и расходуется на преодоление тормозящих моментов:
а) момента х.х. М0;
б) полезного момента М2;
в) динамического момента Mj.
Момент х.х. М0
существует при любом режиме работы двигателя и определяется трением в подшипниках,
трением щеток о коллектор, вентиляционными потерями и потерями в стали.
Полезный момент М2
определяется свойствами рабочей машины и характером производственного процесса.
Динамический момент возникает при всяком изменении частоты вращения двигателя
Mj=±J(dω/d), (7.3)
где J – момент
инерции всех вращающихся частей;
ω –
угловая скорость вращения якоря.
Если частота вращения двигателя увеличивается, то момент Еj положителен и, складываясь с моментами М0 и М2, увеличивает тормозной момент на валу
двигателя. При уменьшении п момент Mj отрицателен и
уменьшает общий тормозной момент. Зависимость между вращающим и тормозным
моментами двигателя на его валу определяется законом равновесия моментов: в
любых условиях работы двигателя эти моменты находятся во взаимном равновесии,
т.е. равны друг другу по величине, но направлены в противоположные стороны. При
n=const момент Mj=0 и тогда
М=М0+М2=МСТ (7.4)
где МСТ – статический момент
сопротивления на валу двигателя.
Следовательно, двигатель работает устойчиво и вращается с
постоянной частотой, если развиваемый и вращающий момент равен противодействующему
моменту М=МСТ. Точкой
установившегося режима работы двигателя является точка пересечения механических
характеристик электродвигателя М=f(n) и исполнительного механизма MСТ=f(n).
Если двигатель и приводимый им во вращение исполнительный
механизм имеют механические характеристики M=f(n) и MСТ=f(n) (рисунок 7.2, а), то
при случайном увеличении частоты вращения от п до п' равенство
моментов нарушится..

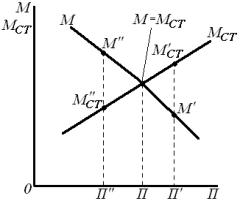 а) б)
а) б)
Рисунок 7.2 – К понятию об устойчивой работе двигателя
Момент, развиваемый
двигателем, уменьшится и станет меньше тормозного (М'<МСТ). Поэтому двигатель будет
затормаживаться до значения п, при
котором М=МСТ. Наоборот,
при случайном уменьшении частоты п до значения п" вращающий
момент двигателя М" становится больше противодействующего момента М"СТ, и якорь двигателя получает
ускорение, возвращающее его к исходной частоте п. Таким образом, в
рассматриваемом случае работа двигателя устойчива, так как (dM/dп)<(dMCT/dn). Если же механические характеристики M=f(n) и MСТ=f(n) имеют вид, показанный на рисунке 7.2, б, работа электродвигателя становится неустойчивой
Действительно, при случайном изменении частоты вращения от п
до п' избыточный вращающий момент двигателя М' вызывает
дальнейшее увеличение частоты вращения. Если же произойдет изменение частоты
вращения от п до п",
то избыточный противодействующий момент вызывает дальнейшее уменьшение
частоты вращения, следовательно, работа двигателя будет неустойчивой, так как (dM/dп)>(dMCT/dn).
Энергетическая диаграмма двигателя. На рисунке 7.3
изображена энергетическая диаграмма двигателя параллельного возбуждения,
работающего в установившемся режиме, т.е. при n=const. К двигателю из сети подводится мощность P1=UCI, которая покрывает потери в цепи возбужденияRВ и электрические потери в цепи якоря I2ЯRЯ, а оставшаяся ее часть составляет электромагнитную
мощность якоря РЭМ=ЕЯIЯ преобразующуюся в полную механическую мощность РМ двигателя. Полезная механическая
мощность на валу двигателя Р2 меньше полной механической
мощности РМ на величину
мощности P0 необходимой для
покрытия потерь в стали РС и механических потерь РМЕХ,
т.е.
Р2=РМ – (РС+РМЕХ).
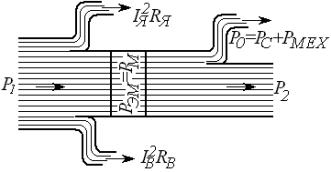
Рисунок 7.3 – Энергетическая диаграмма двигателя
параллельного возбуждения
7.2 Классификация и характеристики двигателей постоянного тока
В зависимости от способа включения обмотки возбуждения и
обмотки якоря различают следующие типы двигателей постоянного тока:
а) параллельного возбуждения;
б) последовательного возбуждения;
в) смешанного возбуждения, в которых имеются две обмотки
возбуждения: параллельная и последовательная. Двигатели постоянного тока оцениваются
по совокупности следующих видов характеристик: пусковых, рабочих, регулировочных
и механических.
Пусковые характеристики.
Пусковые характеристики определяются следующими величинами:
а) пусковым током IПУСК характеризуемым отношением IПУСК/IНОМ;
б) пусковом моментом МПУСК, характеризуемым
отношением МПУСК/МНОМ
в) плавностью пусковой операции;
г) временем пуска в ход tПУСК;
д) экономичностью операции, определяемой стоимостью
пусковой аппаратуры.
В начальный момент пуска двигателя его якорь неподвижен,
противо-э.д.с. в обмотке якоря равна нулю и ток в якоре двигателя IЯ=UС/RЯ. Сопротивление цепи якоря невелико, поэтому пусковой ток превышает
номинальный в 20 и более раз. Резкий скачок тока при пуске создает на валу
двигателя большой пусковой момент, который может вызвать механические
разрушения, как самого двигателя, так и исполнительного механизма, привести к
резкому падению напряжения в сети и вызвать интенсивное искрение под щетками.
Поэтому при пуске двигателя в ход для ограничения пускового тока применяют пусковые
реостаты, включаемые последовательно в цепь якоря (рисунок 7.4). По мере
увеличения частоты вращения якоря противо-э.д.с. увеличивается, а ток якоря
уменьшается, поэтому сопротивление реостата следует уменьшить так, чтобы в
конце пуска оно было полностью выведено, и чтобы пусковой ток превышал
номинальный не более чем в два-три раза.
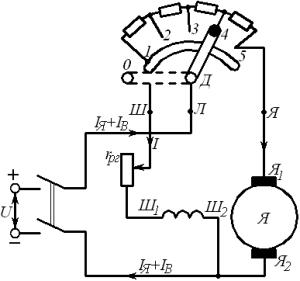
Рисунок 7.4 – Схема включения пускового реостата в цепь двигателя
параллельного возбуждения
Рабочие характеристики.
Под рабочими характеристиками понимают зависимости частоты
вращения, вращающего момента и к.п.д. от полезной мощности на валу или от тока
якоря п; М и η=f(P2) или f(IЯ) при U=UНОМ=const и номинальном токе возбуждения. Частоту вращения п определяют
из уравнения э.д.с. UС=ЕЯ+IЯRЯ=сеnФ+IЯRЯ, откуда п=(UС–IЯRЯ)/(сеФ). Так UС=const, то форма
частотной характеристики зависит только от падения напряжения IЯRЯ и изменения
потока Ф.
Регулировочные характеристики.
Эти характеристики определяют свойства двигателей при
регулировании частоты вращения. К ним относятся:
а) пределы регулирования, определяемые отношением nМАКС/nМИН
б) экономичность регулирования (первоначальные затраты на
оборудование и последующие эксплуатационные расходы);
в) характер регулирования – плавный или ступенчатый;
г) простота регулировочной аппаратуры и операций по
регулированию частоты вращения. Двигатели постоянного тока обладают
многообразными и гибкими регулировочными характеристиками и поэтому являются
незаменимыми в установках с широко регулируемой частотой вращения.
Механические характеристики. Для электропривода
производственных механизмов важное значение имеют механические характеристики,
представляющие собой зависимость n=f(М) при =const и постоянном сопротивлении в цепи якоря (при
условии, что регулирование тока в цепи возбуждения двигателя не производится).
7.3 Двигатель параллельного возбуждения
Для пуска в ход двигателей постоянного тока применяют
двух-, трех- и четырехзажимные пусковые реостаты. На рисунке 7.4 представлена
схема включения трехзажимного пускового реостата для двигателя параллельного возбуждения.

Рисунок 7.5 – Диаграмма процесса пуска двигателя в ход
Реостат имеет шесть контактов: пять рабочих (1, 2, 3, 4, 5)
и один холостой (нулевой 0); три зажима
Л, Ш, Я, которые
соответственно подключаются к линии, обмотке возбуждения и к якорю. Скользящий
контакт реостата перемещается по неподвижным контактам и контактной дуге Д, благодаря которой обмотка
возбуждения оказывается включенной на полное напряжение сети. Регулировочный
реостат в цепи возбуждения rРГ следует вывести,
так как в этом случае ток возбуждения IВ, магнитный поток Ф и
вращающий момент двигателя достигают наибольшей величины, что облегчает пуск
двигателя в ход. Пусковой реостат рассчитывают на кратковременный режим работы,
когда количество его секций определяется условиями плавности пуска двигателя.
Так как в первый момент пуска n=0, то и противо-э.д.с. ЕЯ=0, и IП.МАКС=UС/(RЯ+ΣRП), где RП – сумма сопротивлений всех секций пускового реостата.
Пусковой реостат можно рассчитать так, чтобы при
последовательном выключении его секций пусковой ток изменялся в пределах от IП.МАКС до IП.МИН. В этом
случае IП=0,5 (IП.МАКС+IП.МИН) , На рисунке 7.5 показана диаграмма реостатного
пуска двигателя. После того как с увеличением частоты вращения пусковой ток
уменьшится до значения IП.МИН, рукоятку
реостата переводят на второй контакт, выводя тем самым сопротивление первой
секции. Пусковой ток снова возрастает до IП.МАКС, после чего частота вращения двигателя начнет возрастать по кривой b, а ток – уменьшаться по кривой В.
В дальнейшем пусковой процесс идет в том же порядке до тех пор, пока не будет
выведен весь реостат, после чего двигатель будет работать в установившемся
режиме при токе I и частоте вращения п. Останавливают
двигатель быстрым переводом рукоятки пускового реостата в нулевое положение и
отключением рубильника Р (рисунок 7.4).
Рабочие характеристики двигателя.
Они имеют вид п; М; η=f(IЯ) при U=UНOM=const и ТB=const.
Схема двигателя показана на рисунке 7.6, а; реостат в цепи возбуждения rрг должен быть отрегулирован так, чтобы двигатель
развивал номинальную мощность РНОМ при номинальных значениях напряжения UНOM, тока IНОМ и частоте вращения пНОМ. В этом положении реостат должен оставаться в
неизменном положении. Рабочие характеристики показаны на рисунке 7.6, б. Частота
вращения якоря п=(U–IЯRЯ)/(сеФ); так как, по
условию, величины U и IВ являются
постоянными, то в этих условиях на частоту вращения двигателя влияют
незначительно два факта: падение напряжения в якоре IЯ и реакция якоря. При увеличении тока нагрузки IЯ падение напряжения увеличивается, а частота
вращения уменьшается. Одновременно реакция якоря размагничивает двигатель, т.е.
приводит к уменьшению магнитного потока главных полюсов и, следовательно,
стремится увеличить его частоту вращения.
Таким образом, указанные
факты оказывают противоположные влияния на частоту вращения якоря, и в зависимости
от преобладания одного из этих факторов происходит уменьшение или увеличение
частоты вращения при нагрузке двигателя. Чтобы работа двигателей параллельного
возбуждения была устойчива даже при преобладании реакции якоря, необходимо
ставить на главных полюсах стабилизирующую обмотку, которая соединяется последовательно
с обмоткой якоря и включается согласно с параллельной обмоткой возбуждения. В
этом случае при увеличении тока нагрузки размагничивающее действие реакции
якоря компенсируется намагничивающим действием стабилизирующей обмотки.
Таким образом, внешняя характеристика двигателя
параллельного возбуждения п=f(IЯ) имеет вид почти прямой линии, слабо
наклоненной к оси абсцисс. Изменение частоты вращения при увеличении нагрузки
от нуля до номинальной составляет 2÷8%.
Подобный вид внешней характеристики составляет одно из наиболее отличительных
свойств двигателя параллельного возбуждения; такую характеристику называют
жесткой. Зная характер зависимости п=f(IЯ), нетрудно объяснить характеристику вращающего
момента М=f(IЯ). Согласно уравнению моментов, при установившемся
режиме работы имеем: М=сМIяФ=М0+М2=МСТ. При холостом
ходе М=М0=сМI0Ф. Если бы поток возбуждения оставался
постоянным, то характеристика М=f(IЯ) представляла бы прямую линию.
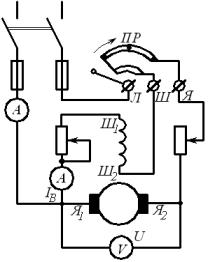
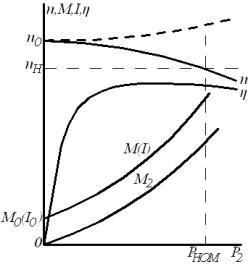
а) б)
Рисунок 7.6 – Схема двигателя параллельного
возбуждения (а)
и его рабочие характеристики (б)
В действительности же поток Ф при увеличении тока IЯ несколько
уменьшается в результате размагничивающего действия поперечной реакции якоря,
поэтому характеристика М=f(IЯ) несколько отклоняется от прямой линии к оси
тока. Характеристика полезного момента М2=f(IЯ) должна идти ниже характеристики М=f(IЯ) на величину момента холостого хода М0, который практически не
зависит от нагрузки. На рис. 7.6, б представлена также кривая зависимости
коэффициента полезного действия от нагрузки η=f(IЯ). К.п.д. быстро увеличивается в пределах от I= I0 до I≈0,25IНОМ,
достигает максимума примерно при I≈0,5IНОМ до I≈IНОМ, а затем
в пределах изменения нагрузки от I≈0,5IНОМ до I≈IНОМ остается почти постоянным. Из графика к.п.д.
видно, что для работы электродвигателя с высоким к.п.д. надо стремится к его
номинальной загрузке. Обычно в двигателях малой мощности η=75÷85%, в двигателях средней и большей мощности η=85÷94%.
Регулировочные характеристики.
Одним из основных достоинств двигателей постоянного тока
является возможность плавного регулирования частоты вращения в широких
пределах. В общем случае в цепь якоря двигателя может быть включен регулировочный
реостат Rрг. Тогда из формулы п=[U–IЯ(RЯ+Rрг)]/(сеФ) следует, что
частоту вращения двигателей постоянного тока можно регулировать:
а) изменением напряжения сети U;
б) изменением падения напряжения в сопротивлениях цепи
якоря IЯ(RЯ+Rрг);
в) изменением потока возбуждения, а следовательно,
изменением тока возбуждения IЯ.
Первый способ возможен только в специальных установках,
допускающих регулирование напряжения сети U. Реостат Rpг в цепи якоря
должен быть подобран так, чтобы можно было регулировать частоту вращения в
желаемых пределах. Предположим, что напряжение сети и ток возбуждения остаются
постоянными, т.е. U=const и IЯ=const, кроме того,
статический момент МСТ=М0+М2 не зависит
от частоты вращения двигателя. При выведенном реостате Rpг установившийся
режим работы двигателя характеризуется вращающим моментом М2, частотой вращения п1, и током в цепи якоря I21. Сразу же после
введения регулировочного реостата Rpг частота вращения и противо-э.д.с. остаются без изменения вследствие
значительного момента инерции якоря, а ток в цепи якоря уменьшается до значения
I21'. Соответственно уменьшается и вращающий момент
двигателя.
Превышение нагрузочного момента над вращающим моментом
приводит к снижению частоты вращения якоря, уменьшению противо-э.д.с. и увеличению
тока в цепи якоря (рисунок 7.7). Новое значение тока I22 и частота вращения п2 устанавливаются
при равенстве вращающего момента двигателя и нагрузочного момента приводимого
им во вращение механизма. При постоянном токе возбуждения и нагрузочном моменте
М2 установившееся значение
тока в цепи якоря I22= I21 и частота вращения якоря n2=п1[U–I21(RЯ+Rpг)]/(U–I21RЯ). Подведенная к двигателю мощность Р1=U(IЯ+IВ) в установившихся режимах сохраняется
неизменной. Полезная мощность Р2=М2ω=М22πп2/60
уменьшается пропорционально частоте вращения. Недостатки этого способа
регулирования частоты вращения – малая экономичность и ухудшение условий
охлаждения, поэтому его применяют, главным образом, для регулирования частоты
вращения двигателей малой мощности. Если двигатель работает в установившемся
режиме при неизменном напряжении на зажимах якоря и токе в обмотке возбуждения,
то для необходимого вращающего момента М2 по соответствующим
рабочим характеристикам могут быть определены частота вращения п1 ток I21 в цепи якоря и вычислена противо-э.д.с. Е21. При уменьшении тока возбуждения до значения IВ2 уменьшается магнитный поток. Вследствие
значительного момента инерции якоря частота вращения его сразу же после
изменения тока возбуждения остается прежней, противо-э.д.с. уменьшается до
значения Е21' пропорционально
магнитному потоку, ток в цепи якоря увеличивается до значения I21'=(U–Е21')/RЯ. Так как падение
напряжения в цепи якоря составляет небольшую часть напряжения сети, то
относительное увеличение тока (I21'–I21)/I21=(Е21–Е21')/(U–Е21)=(Е21–Е21')/IЯRЯ значительно превосходит
относительное уменьшение магнитного потока. Это приводит к увеличению
вращающего момента и к ускорению вращения якоря. Противо-э.д.с. в обмотке якоря
увеличивается, ток уменьшается, пока не наступит равновесие между вращающим
моментом двигателя и нагрузочным моментом приводимого им во вращение механизма
при новых установившихся значениях тока I22 и частоте вращения п2 (рисунок 7.7). Подведенная к двигателю мощность Р2=U(IЯ+IВ) и полезная мощность P2=M22πп/60 увеличиваются в одинаковой мере,
следовательно, к.п.д. двигателя при этом способе регулирования частоты вращения
практически не изменяется. Зависимость частоты вращения п от величины
тока возбуждения IВ выражается регулировочной характеристикой
двигателя п=f(IВ) при IЯ=const и U=const. На рисунке 7.8 представлены две
регулировочные характеристики двигателя, снятые при различных значениях тока
якоря: при IЯ<IНОМ и при IЯ=IНОМ. Из этих характеристик видно, что при малом
значении тока возбуждения, а тем более при обрыве цепи возбуждения IВ=0 частота вращения неограниченно возрастает, что
приводит к «разносу» двигателя.
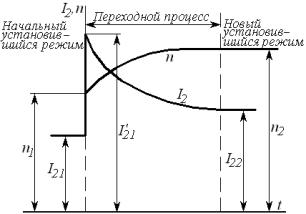

Рисунок 7.7 – Процесс регулирования Рисунок 7.8 – Регулировочная
частоты вращения
реостатом в
характеристика двигателя
цепи якоря (а) и в цепи
возбуждения (б)
7.4 Двигатель последовательного возбуждения
На рисунке 7.9 приведена схема
включения двигателя последовательного возбуждения. Пуск в ход этого двигателя
осуществляется с помощью двухзажимного пускового реостата РП, так же как и двигателя
параллельного возбуждения.
Рабочие характеристики двигателя.
Они имеют вид п; М и η=f(IЯ) при U=UНОМ=const. В двигателях последовательного возбуждения ток якоря одновременно
является током возбуждения (IЯ=IВ=I), поэтому
магнитный поток Ф при различной
нагрузке машины испытывает значительные изменения, и это составляет его
характерную особенность. Из уравнения равновесия э.д.с. имеем ту же, что и для
двигателя параллельного возбуждения, формулу для частоты вращения: п=(U–IЯRЯ)/(сеФ). При работе
двигателя последовательного возбуждения главное значение имеет изменение
основного магнитного потока полюсов, если не учитывать падения напряжения IЯRЯ и реакцию якоря.
При малых и средних нагрузках магнитную цепь
двигателя можно считать ненасыщенной, и в этом случае Ф=kФIЯ, следовательно, п=(U–IЯRЯ)/(сеkФIЯ). Коэффициент пропорциональности kФ в значительном диапазоне нагрузок при IЯ<IНОМ – практически постоянен и лишь при IЯ>(0,8÷0,9)IНОМ
вследствие насыщения магнитной цепи kФ начинает
несколько уменьшаться.
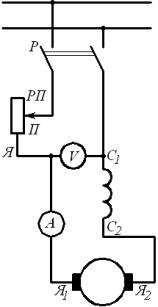
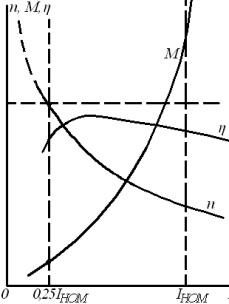
Рисунок 7.9 – Схема двигателя
Рисунок 7.10 – Рабочие характеристики
последовательного возбуждения
двигателя последовательного возбуждения
На рисунке 7.10 представлены рабочие характеристики
двигателя последовательного возбуждения. Характеристика частоты вращения –
мягкая, т.е. частота вращения резко меняется при изменениях нагрузки, и имеет
гиперболический характер. Однако при значительном уменьшении нагрузки двигатель
начинает развивать все большую частоту вращения или, как говорят, идет в
«разнос», что может привести к разрушению машины. Поэтому двигатель последовательного
возбуждения нужно ставить в такие условия работы, при которых ни пуск в ход без
нагрузки, ни х.х. при работе были бы невозможны. Эти двигатели должны
выдерживать без вредных последствий повышение частоты вращения на 20% сверх наибольшей, указанной на
заводском щитке, но не более 50%
сверх номинальной. Характеристика M=f(IЯ) при U=UНОМ=const двигателя последовательного возбуждения при слабом насыщении стали
представляет собой параболу. Так как Ф=kФIЯ, а М=сМIЯФ, то М=сМ'IЯ2. По мере увеличения
тока IЯ двигатель насыщается, т.е. Ф=const, не зависит от тока IЯ и характеристика
момента спрямляется, приближаясь к прямой. В этих условиях момент изменяется
почти пропорционально току, как у двигателя параллельного возбуждения: М=сМIЯФ. Свойство
двигателя последовательного возбуждения развивать момент, пропорциональный
квадрату тока, имеет очень важное значение в тех случаях, когда нужен большой
пусковой момент (краны, электровозы), и там, где необходима большая перегрузочная
способность двигателя. Полезная мощность Р2=М2ω=М22πп/60
с увеличением нагрузки
увеличивается медленнее, чем вращающий момент, вследствие значительного
уменьшения частоты вращения. Подведенная мощность Р1=UI, пропорциональная току двигателя, также увеличивается медленнее
вращающего момента. Характеристика к.п.д. имеет такой же вид, как и у двигателей
параллельного возбуждения.
Регулировочная характеристика двигателя.
Частота вращения двигателей последовательного возбуждения
регулируется также изменением напряжения.
Этим способом можно регулировать частоту вращения и у двигателей параллельного
возбуждения. Рассматриваемый способ применяют в тяговых установках (кранах,
метро, трамваях и др.), где устанавливают несколько двигателей, причем на малых
частотах вращения их включают последовательно, а на больших – параллельно, одновременно
используя и включение регулировочного реостата Rрг, как показано на рисунке 7.11, а.
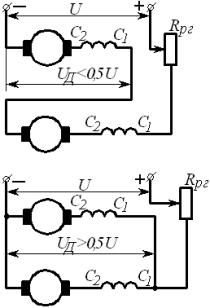 а) б) в)
а) б) в)

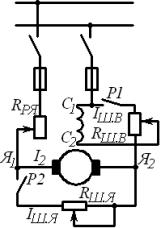
Рисунок 7.11 – Схемы регулирования частоты вращения двигателя последовательного
возбуждения:
а – изменением схемы
включения; б – изменением тока возбуждения;
в – секционированием обмотки
возбуждения.
Регулирование частоты вращения изменением магнитного потока
возбуждения. При обычной схеме включения
обмоток двигателя ток в обмотке возбуждения равен току якоря. Если замкнуть рубильник
Р1 (рисунок 7.11, б), то ток
возбуждения уменьшится, увеличивая частоту. При повышении частоты вращения
условия коммутации ухудшаются и ограничивают верхний предел частоты вращения
якоря, который не превышает 1,4 номинальной.
Для оценки этого способа регулирования частоты вращения введено понятие о
коэффициенте ослабления поля kО.П.=RШ.В/(RВ+RШ.В), где RШ.В – шунтирующее сопротивление параллельной
обмотки возбуждения. Аналогичное увеличение частоты вращения якоря можно
получить, если выполнить обмотку возбуждения секционированной, т.е. сделать отводы
от некоторых витков обмотки возбуждения и производить изменения н.с. этой обмотки
(рисунок 7.11, в). Изменение сопротивления
регулировочного реостата в цепи якоря также позволяет регулировать частоту
вращения двигателя (UД – напряжение на двигателе).
7.5 Двигатель смешанного возбуждения
Двигатель смешанного возбуждения имеет две обмотки
возбуждения, одна Ш из которых включается параллельно обмотке якоря, а
вторая С – последовательно (рисунок 7.12).
Рисунок 7.12 – Схема включения
Рисунок 7.13 – Рабочие характеристики
двигателя смешанного возбуждения двигателя смешанного возбуждения
Соотношение н.с. обмоток может быть различным, но обычно
одна из обмоток создает большую н.с., ее называют основной. Частота вращения
двигателя п=(U–IЯRЯ)[се(Ф1±Ф2)], где Ф1, Ф2– магнитные потоки
параллельной и последовательной обмоток возбуждения соответственно. Знак плюс
соответствует согласному включению обмоток возбуждения, когда н.с. обмоток
складываются. Поэтому магнитный поток с увеличением нагрузки возрастает, что
ведет к уменьшению частоты вращения двигателя. При встречном включении обмоток
магнитный поток Ф2 при
увеличении нагрузки размагничивает машину (знак минус), увеличивая частоту
вращения. При пуске двигателя смешанного возбуждения со встречным включением
обмоток возбуждения магнитный поток последовательной обмотки Ф2 может заметно ослабить
результирующий поток двигателя и этим осложнить процесс пуска. Чтобы избежать
этого, последовательную обмотку таких двигателей иногда замыкают накоротко на
все время пуска.
Рабочие характеристики двигателя смешанного возбуждения
(рисунок 7.13) приближаются к характеристикам двигателя параллельного или
последовательного возбуждения, смотря по тому, какая из обмоток возбуждения играет
основную роль. Этот двигатель имеет ряд преимуществ по сравнению с двигателем
последовательного возбуждения. Он может работать вхолостую, так как поток параллельной
обмотки Ф1 ограничивает
частоту вращения двигателя в режиме х.х. и устраняет опасность «разноса».
Регулируют частоту вращения реостатом в цепи параллельной обмотки возбуждения.
Двигатель смешанного возбуждения применяют тогда, когда требуется значительный
пусковой момент, быстрое ускорение при пуске и допустимы относительно большие
изменения частоты вращения при изменении нагрузки. В связи с этим двигатели
смешанного возбуждения применяют для привода на постоянном токе компрессоров,
станков, прокатных станов, подъемников, электрической тяги и др.
8. Потери в электрических
машинах постоянного тока и коэффициент полезного действия
8.1 Виды потерь
При работе электрической машины часть потребляемой ею
энергии теряется бесполезно и рассеивается в виде тепла, нагревая отдельные
части машины. Потери в электрических машинах подразделяют на основные и добавочные.
Основные потери возникают в результате происходящих в машине основных
электромагнитных и механических процессов, а добавочные – вследствие продольной
пульсации потока, обусловленной зубчатостью якоря, от неравномерного
распределения в пазу основного магнитного потока и др. Независимо от режима, в
котором работает машина (генератором или двигателем), основные потери
подразделяются на электрические, магнитные, или потери в стали, и механические.
Электрические потери.
Электрические потери в каждой обмотке РЭЛ=I2R.Сопротивление
обмотки зависит от ее температуры. Поэтому ГОСТ 2582-72 предусматривает определение
потерь в обмотках при расчетной температуре 75°С
для классов изоляции обмоток А; 115°С для классов изоляции Е и В;
130°С для классов F и Н. Обычно рассчитывают потери в цепи
якоря РЭЛ.Я=IЯ2RЯ и в цепи
возбуждения РЭЛ.В=UВIВ (для
параллельной обмотки возбуждения). При температуре θ сопротивление обмотки
Rθ=R0[1+α(θ–θ0)],
(8.1)
где R0 – сопротивление
обмотки при температуре θ0;
α – температурный коэффициент
сопротивления (для меди α=0,004).
К электрическим потерям относят также потери в щеточных контактах.
Для двух щеток различной полярности величина потерь РЭЛ.Щ=ΔUЩIЯ, где ΔUЩ – переходное падение напряжения на щетках,
принимаемое в соответствии с маркой щеток: для угольных и графитных 2 В, для металлографитных 0,6 В.
Магнитные потери.
Магнитные потери включают в себя потери на гистерезис и
вихревые токи, вызванные перемагничиванием стали. Величина магнитных потерь
зависит от магнитной индукции и частоты перемагничивания сердечника якоря f; так как f=рп/60 и не зависит от нагрузки машины, то при n=const их можно считать постоянными. Потери от гистерезиса
(Вт/кг)
РГ=σГfВ2100 , (8.2)
где σГ=3,2÷4,4
– коэффициент, зависящий от марки стали;
f=pп/60 – частота перемагничивания;
В –
наибольшее значение магнитной индукции в стали.
Потери от вихревых токов
РВИХ=σВИХ(fВ/100)2 , (8.3)
где σВИХ
– коэффициент, зависящий от марки и толщины листов стали (для слабо-и среднелегированных
марок стали σВИХ=3,6÷2,9,
для высоколегированной σВИХ=1÷0,6).
Механические потери.
Механические потери РМЕХ
состоят из потерь в подшипниках, на трение щеток о коллектор и вентиляционных
(потери на трение о воздух вращающихся частей машины). Потери в подшипниках
зависят от типа подшипников, от состояния трущихся поверхностей, вида смазки и
др. При работе электрической машины эти потери зависят только от частоты
вращения и не зависят от нагрузки. Потери в подшипниках PПШ=kТРFПШυШ, где kТР – коэффициент трения; FПШ – давление на подшипник; υШ – частота вращения
шейки вала. Потери на трение щеток РТР.Щ=kТРfЩSЩυК, где fЩ – удельное давление на щетку; SЩ – контактная поверхность всех щеток; υК
– окружная скорость коллектора. Потери на вентиляцию РВЕН зависят от конструкции машины и рода вентиляции. В
самовентилируемых машинах со встроенным вентилятором потери на вентиляцию РВЕН=kВЕНQυ2, где kВЕН – коэффициент; Q – количество вентилируемого
воздуха, м3/с; υ – скорость на внешней окружности вентилятора,
м/с. Общие механические потери РМЕХ=PПШ+РТР.Щ+РВЕН. Сумма
магнитных и механических потерь составляет потери х.х. Р0=РС+РМЕХ.
Добавочные потери.
Добавочные потери трудно учитываемые – это потери в
полюсных наконечниках, возникающие при вращении якоря и обусловленные его
зубчатостью, потери в стали якоря вследствие искажения основного поля реакцией
якоря и др. Поэтому в машинах без компенсационной обмотки величину добавочных
потерь принимают равной 1% от
полезной мощности для генераторов или 1%
от подводимой мощности для двигателей. В машинах с компенсационной обмоткой
величина добавочных потерь принимается равной 0,5%.
8.2 Коэффициент полезного действия
Зная потери в машине, можно определить коэффициент
полезного действия (к.п.д.) машины. Как известно, для генераторов к.п.д.
представляет собой отношение электрической полезной мощности к механической
мощности на валу: η=Р2100%/Р1.
Здесь Р1=Р2+ΣР,
где ΣР – сумма всех потерь в
машине; P2=UI для генератора; U – напряжение на зажимах генератора; I – ток, отдаваемый им в сеть. Тогда для
генератора
 . (8.4)
. (8.4)
В двигателях подводимая мощность P1=UI, где U –
напряжение на зажимах двигателя, I – потребляемый
двигателем ток. Тогда для двигателя
![]() . (8.5)
. (8.5)
Так как к.п.д. машины зависит от суммы потерь, то он –
величина постоянная, т.е. зависит от нагрузки. При х.х. машин, когда полезная
мощность равна нулю, η=0. По
мере увеличения нагрузки к.п.д. машины быстро увеличивается. Наибольшее
значение он имеет при нагрузке, равной (0,8–1)РНОМ,
когда постоянные потери равны переменным. При значительных перегрузках
вследствие увеличения потерь в сопротивлениях цепи якоря к.п.д. снова
снижается.

Рисунок 8.1 – Зависимость к.п.д. от нагрузки
На рисунке 8.1 представлена зависимость к.п.д. машины η=f(I) при U=UНОМ=const и п=пНОМ=const. Современные электрические машины имеют
высокий к.п.д. Так, для машин постоянного тока мощностью 10 кВт к.п.д. η=0,83÷0,87; мощностью 100 кВт η=0,88÷0,93; мощностью 1000 кВт η=0,92÷0,96.
Машины малой мощности имеют меньшее значение к.п.д., например, для двигателя
мощностью 10 Вт η=0,3÷0,4. Применяемые методы опытного определения
к.п.д. разделяют на прямой и косвенный. Существует ряд способов прямого
определения к.п.д. по экспериментальным значениям Р1 и Р2:
а) способ двигателя-генератора, при котором две одинаковые
машины соединяются на одном валу, причем одна из них работает двигателем, а
другая – генератором;
б) способ тарированной машины, при котором испытуемая
машина служит двигателем и приводит во вращение тарированную электромашину;
в) способ двигателя, при котором испытуемая машина работает
в режиме двигателя. Прямой метод определения к.п.д. может дать существенную
неточность, поскольку, во-первых, Р1 и Р2 являются близкими величинами, и во-вторых, их
экспериментальное определение связано с погрешностями. Поэтому ГОСТ 11828-72
предписывает для машины с η>70%
косвенный способ определения к.п.д., при котором по экспериментальным данным
определяют сумму потерь ΣP.
9 Специальные машины постоянного тока
9.1 Электромашинные усилители
В современных производственных электроустановках широко
применяют системы непрерывного автоматического регулирования и управления. Один
из основных элементов этой системы – усилитель мощности. Существуют различные
типы усилителей: электронные, электромагнитные и электромашинные. Последние
представляют собой специальную разновидность электромашинных генераторов,
которые приводятся во вращение приводными электродвигателями с п=const. Эти машины позволяют получить при малой мощности управления на выходе
достаточно большую мощность за счет мощности, получаемой от приводного
двигателя. Одной из основных характеристик электромашинных усилителей (ЭМУ)
является коэффициент усиления мощности, равный отношению выходной электрической
мощности Р2 к мощности
управления РУ
kУ=P2/P1. (9.1)
Важное требование к системе регулирования – наименьшее
время передачи сигнала управления, но ЭМУ обладает электромагнитной инерцией,
обусловленной потоком возбуждения. Быстродействие ЭМУ определяется электромагнитными
постоянными времени обмоток
Т=L/R, (9.2)
где L и R –
индуктивность и активное сопротивление обмоток управления.
С увеличением коэффициента усиления возрастает также и
постоянная времени усилителя. Сопоставляют усилители с различным kУ и Т
по коэффициенту добротности
kД=kУ/T
(9.3)
и называют их одноступенчатыми.
В многоступенчатых усилителях происходит последовательное
многократное усиление мощности. По способу возбуждения различают ЭМУ с
продольным и поперечным потоком. В усилителях продольного поля основной поток
возбуждения направлен по продольной оси машины.
Конструктивно одноступенчатый ЭМУ с продольным потоком
(рисунок 9.1, а) представляет собой
генератор параллельного возбуждения, имеющий одну обмотку независимого
возбуждения, которую называют обмоткой управления (ОУ). Цепь самовозбуждения
ЭМУ с обмоткой самовозбуждения (ОС) в настроенном состоянии имеет
сопротивление, равное критическому или несколько превышающее его по условию
возникновения процесса самовозбуждения. При этом напряжение на выходе
усилителя, как генератора с самовозбуждением, равно нулю, так как вольтамперная
характеристика 2 пересекает характеристику холостого хода 1 в начале координат (рисунок 9.1, б). Если в обмотке управления ОУ
пропустить некоторый ток IУ, то под действием ее н.с. генератор быстро
самовозбудится до точки А характеристики х.х. При этом прямая займет
положение 2'.
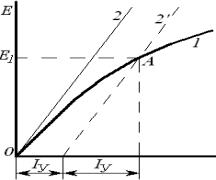

а) б)
Рисунок 9.1 – Схема электромашинного усилителя с продольным полем (а)
и его характеристика холостого хода (б)
Электромашинные усилители с поперечным полем самые распространенные,
их изготовляют обычно с неявновыраженными полюсами с 2р=2. В обычной машине постоянного тока поперечная реакция якоря искажает
поле главных полюсов и часто нарушает коммутацию, поэтому принимаются меры для
ослабления поперечной реакции якоря. В ЭМУ с поперечным полем поперечный поток
реакции якоря используется для получения э.д.с. Для этой цели на коллекторе
помещают дополнительную пару вертикальных щеток 2, ось которых перпендикулярна оси основных горизонтальных щеток 1 (рисунок 9.2).
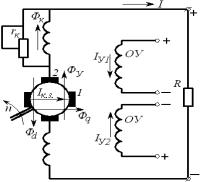

Рисунок 9.2 – Схема соединения обмоток Рисунок 9.3 –
ЭМУ с поперечным
потоком
Внешние характеристики ЭМУ
После подачи входных сигналов на обмотки управления токи
этих обмоток IУ создают н.с. и поток ФУ, который действует в
направлении поперек оси короткозамкнутых щеток 1. При пересечении этого
относительно небольшого потока в обмотке якоря индуктируется э.д.с., под
действием которой создается ток IКЗ. Это является первой ступенью усиления, что по
существу представляет собой генератор независимого возбуждения, работающий в режиме
к.з. Ток IКЗ создает поперечный поток реакции якоря Фq, который направлен вдоль оси горизонтальных щеток 1 и
перпендикулярно к оси вертикальных щеток 2. Под действием потока Фq в обмотке якоря наводится э.д.с., приложенная между щетками 2. Если к этим щеткам подключена
нагрузка, то в цепи вертикальных щеток 1
возникает ток нагрузки I. Следовательно, вторая ступень усиления ЭМУ –
цепи поперечных и продольных щеток. Ток нагрузки I создает
продольный поток реакции якоря Фd, направление которого совпадает с осью вертикальных щеток 2 и является
встречным по отношению к потоку ФУ
обмотки управления. Если не принять мер по компенсации потока Фd, машина окажется
размагниченной и неработоспособной. Поэтому в станину ЭМУ обязательно укладывают
компенсационную обмотку, поток которой ФК
направлен навстречу потоку Фd. Точную настройку компенсации осуществляют
реостатом rК, включенным
параллельно компенсационной обмотке. Для улучшения коммутации над вертикальными
щетками 2, через которые
проходит ток нагрузки I, устанавливаются дополнительные полюсы.
Ввиду того, что магнитная цепь усилителя ненасыщенна,
напряжение U является линейной функцией тока нагрузки I, т.е.
внешняя характеристика ЭМУ представляет собой прямую линию (рисунок 9.3). При
недокомпенсации реакции якоря при увеличении нагрузки напряжение усилителя падает
(кривая 1). При полной
компенсации напряжение ЭМУ изменяется незначительно, только за счет изменения
падения напряжения на якоре (кривая 2). При значительной перекомпенсации (кривая 3) возможно самовозбуждение усилителя,
т.е. произвольный рост напряжения при постоянстве тока в обмотке управления.
Общий коэффициент усиления ЭМУ с поперечным полем находится в пределах 2000÷10 000, но иногда достигает 100 000.
9.2 Машины постоянного тока с беспазовым якорем
Современные системы автоматического регулирования
предъявляют к исполнительным двигателям постоянного тока жесткие требования:
быстродействие, максимальная точность регулирования частоты вращения, высокая
коммутационная надежность. В последнее время появились двигатели, у которых
обмотку якоря располагают не в пазах, а непосредственно на сердечнике якоря.
Машины с гладкими якорями обладают следующими особенностями: обмотка якоря
имеет относительно меньшую индуктивность, чем обмотка, размещенная в пазах;
отсутствие зубцов дает возможность значительно повысить магнитную индукцию в
воздушном зазоре. Уменьшение индуктивности обмоток снижает реактивную э.д.с. в
коммутируемых секциях. Наличие относительно большого немагнитного участка
магнитной цепи машины уменьшает реакцию якоря, поэтому двигатели с гладким
якорем имеют прямолинейные устойчивые характеристики частоты вращения и прямолинейную
зависимость момента от тока якоря даже при больших перегрузках. Кроме того,
вследствие отсутствия зубцов в двигателе практически отсутствуют пульсации основного
магнитного потока, что очень важно при эксплуатации электродвигателя. Целесообразность
применения гладкого якоря обусловлена в машинах малой мощности улучшением их
характеристик, а в машинах большой мощности – обеспечением достаточной коммутационной
надежности и улучшением распределения потенциалов на коллекторе. Обмотка якоря
крепится либо непосредственно на изолированном сердечнике, либо в пластмассовом
слое.
Рисунок 9.4 – Гладкий якорь с пластмассовыми сегментами
до укладки обмотки
В первом случае на изолированный сердечник укладывают
пропитанные эпоксидной смолой секции якорной обмотки, которые закрепляют с
помощью бандажной стеклоленты. Во втором случае на гладкой поверхности сердечника
якоря устанавливают пластмассовые сегменты, в пазы которых укладывают обмотку
(рисунок 9.4). Одна из главных проблем, возникающих при изготовлении машин с
гладкими якорями,– создание обмотки возбуждения, обеспечивающей большую н.с.
при ограниченных габаритах. Применяют такие двигатели в приводах, работающих с
широким регулированием частоты вращения и нагрузки (прокатные станы,
подъемно-транспортные устройства).
9.3 Униполярные машины
Униполярные генераторы позволяют получать большой
постоянный ток (до 500 000 А) при
низком напряжении (например, в электролизных установках). Одна из схем униполярного
генератора показана на рисунке 9.5.
Массивный стальной ротор 1 вращается в магнитном
поле, которое создается неподвижными кольцевыми катушками обмотки возбуждения 2. Основной магнитный поток Ф в центральной активной части машины
имеет по всей окружности одинаковую полярность, отсюда и происходит название
машины. Индуктируемая в стержнях обмотки ротора при его вращении в магнитном поле
э.д.с. E=Blυ также имеет по всей окружности одинаковое направление.
Ток с ротора снимается с помощью неподвижных щеток 3. Применение униполярных генераторов
ограничено в связи с трудностями отвода тока, так как щеточный аппарат
получается громоздким. В настоящее время с ротора отводят ток с помощью жидких
металлов (ртуть, натрий).

Рисунок 9.5 – Униполярный генератор
Униполярная индукция используется также в магнитогидродинамических
(МГД) генераторах. В этих генераторах вместо движущегося проводника используется
поток раскаленных ионизированных газов, называемый «плазма».
9.4 Исполнительные двигатели
Исполнительными двигателями называют двигатели, которые применяют
в системах автоматического управления и регулирования различных автоматизированных
установок и которые предназначены для преобразования электрического сигнала
(напряжения управления), получаемого от какого-то измерительного органа или
датчика, в механическое перемещение (вращение) вала с целью воздействия на
соответствующий регулирующий или управляющий аппарат. Если напряжение и мощность
сигнала малы для управления исполнительным двигателем, то применяют
промежуточные усилители мощности (магнитные или электронные). Номинальная
мощность исполнительных двигателей обычно мала – до 500÷600 Вт. К этим двигателям предъявляют требования по
точности работы и быстродействию: требуется, чтобы зависимости момента М и
частоты вращения п от напряжения сигнала (управления) были по возможности
линейными.
На рисунке 9.6 показан исполнительный двигатель постоянного
тока с печатной обмоткой якоря. Якорь этого двигателя имеет вид тонкого диска 5 из немагнитного материала (текстолит,
стекло и др.), на обеих сторонах которого печатным способом нанесены проводники
обмотки якоря 8. Принцип
работы этого двигателя такой же, что и двигателей с цилиндрическим якорем. При
включении двигателя в сеть ток в обмотке якоря взаимодействует с магнитным
полем возбуждения постоянных магнитов 2, расположенных на статоре двигателя и обращенных своими
полюсными наконечниками 3 к одной стороне пластмассового диска якоря.
С другой стороны диска расположено кольцо 4 ферромагнитного
материала. Это кольцо выполняет те же функции, что и сердечник якоря в двигателях
обычной конструкции, т.е. является элементом магнитной системы машины, через
который замыкается основной магнитный поток. Якорь двигателя закрепляется на
валу 6 втулкой 7.

Рисунок 9.6 – Конструкция двигателя постоянного тока с печатной обмоткой
Включение двигателя в сеть осуществляется через щеточный контакт
с щеткодержателем 1. Так как секции печатной
обмотки одновитковые, а количество секций в обмотке ограничено площадью поверхности
диска, то двигатели с печатной обмоткой выполняют обычно на низкое напряжение сети.
9.5 Тахогенераторы
Тахогенераторами называют электрические микромашины, работающие в генераторном режиме и
служащие для преобразования частоты вращения в пропорциональный электрический
сигнал. При этом пропорциональность преобразования определяется видом выходной
характеристики тахогенератора, т.е. зависимостью между входной величиной (частотой
вращения вала п) и выходной (напряжением
UВЫХ в выходной обмотке). Большинство тахогенераторов
имеет обычную конструкцию машин постоянного тока с независимым возбуждением при
IB=const или с постоянными
магнитами, у которых Ф=const. При постоянстве магнитного потока ЕЯ=kЕпФ=kЕп – э.д.с. генератора, ЕЯ=U+IЯRЯ=U(1+RЯ/R), где IЯ=U/R – ток якоря
генератора; R – сопротивление внешней цепи, на которую включен генератор. Таким
образом, U=ЕЯ(1+RЯ/R)kЕп/(1+RЯ/R), т.е. при постоянстве сопротивления нагрузки и цепи якоря сохраняется
пропорциональность между напряжением генератора и частотой вращения его якоря.
Характеристики тахогенератора приведены на рисунке 9.7 для нескольких
значений R. По мере
увеличения тока IЯ якоря начинает проявляться размагничивающее
действие реакции якоря. Характеристики тахогенератора приведены на рисунке 9.7
для нескольких значений R. По мере увеличения тока IЯ якоря начинает проявляться размагничивающее действие реакции якоря.
Величина магнитного потока уменьшается, и характеристика тахогенератора отклоняется
от прямой линии вниз. Применение измерительных приборов с большим внутренним
сопротивлением уменьшает нелинейность выходной характеристики.

Рисунок 9.7 – Характеристики тахогенератора
Важный показатель тахогенератора – крутизна выходной
характеристики, которая представляет собой отношение приращения выходного
напряжения к приращению частоты вращения [В/(об/мин)]:
е=ΔUВЫХ/Δп, где ΔUВЫХ – приращение
выходного напряжения, В; Δп – приращение частоты вращения. В
процессе работы тахогенераторов крутизна выходной характеристики может изменяться
под действием температуры обмотки возбуждения и переходного падения напряжения
в щеточном контакте.
9.6 Тяговые электродвигатели
Тяговые электродвигатели приводят в движение подвижной
состав на самых различных видах транспорта: на городских, пригородных и
магистральных электрических железных дорогах, на водном, внутризаводском, рудничном
транспорте и др. В соответствии с этим тяговые двигатели постоянного тока
выполняют на различные мощности и напряжения. По сравнению с машинами стационарного
типа условия работы тяговых электродвигателей значительно тяжелее, так как
габариты двигателя ограничены диаметром ведущих колес и шириной колеи.
Работа двигателя протекает в условиях частого пуска при значительных
ускорениях подвижного состава и сопровождается резкими изменениями напряжения
на зажимах двигателя, тока и частоты вращения.
Тяговые двигатели пульсирующего тока.
Особенность таких двигателей в том, что их питают от сети
переменного тока через выпрямительный блок из кремниевых диодов. Величину
пульсации тока оценивают коэффициентом пульсации kПУЛ=(IМАКС–IМИН)/(IМАКС+IМИН). Существенный недостаток электродвигателя
пульсирующего тока – напряженные потенциальные условия на коллекторе, способствующие
возникновению на нем кругового огня.
Литература
1. Вольдек
А.И. Электрические машины. -Л-д: Энергия, 1985.-380с.
2. Костенко
М.П., Пиотровский Л.М.Электрические машины.-Изд.2-е.-Л-д: Энергия, 1964.-548с.
3. Пиотровский
Л.М. Электрические машины. -Л-д:
Энергия, 1972.-497с.
4. Копылов
И.П. Электромеханика планеты земля. -М.:
МЭИ, 1998.
5. Токарев
Б.Ф. Электрические машины. -М.: Энергоатомиздат,1990.-200с.
6. Сипайлов
Г.А., Кононенко Е.В., Хорьков К.А. Электрические машины. -М.: -Высш.
Шк.,1987.-243с.
7. Копылов
И.П. Электрические машины.- М.: Логос,2000.-606с.
Жумагулов
Куаныш Калтаевич
Электрические
машины постоянного тока
Учебное
пособие
Редактор Курманбаева Т.С.
Св. тем.план 2005., поз. 6
Сдано в набор
Формат 60 х 84 1/16
Бумага типографская №2
Уч. – изд. лист.- 6,3 Тираж
100 экз. Заказ 601 Цена 630 т.
Подписано в печать
Копировально-множительное
бюро
Алматинского
института энергетики и связи
050013,
Алматы, ул. Байтурсынова, 126