АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ
И СВЯЗИ
Кафедра электроснабжения промышленных предприятий
МАТЕМАТИЧЕСКИЕ
ЗАДАЧИ ЭНЕРГЕТИКИ И КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ
Методические указания к выполнению лабораторных работ
для студентов электроэнергетических специальностей
Алматы 2004
АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электроснабжения промышленных предприятий
УТВЕРЖДАЮ
Проректор по учебно-методической работе
______________________
“___”_________________2004 г.
МАТЕМАТИЧЕСКИЕ ЗАДАЧИ ЭНЕРГЕТИКИ И
КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ
Методические указания к выполнению лабораторных работ
для студентов электроэнергетических специальностей
СОГЛАСОВАНО Рассмотрено и одобрено на
Начальник УМО заседании кафедры ЭПП
________________ Протокол № _5__
“___”___________2004г. от “_09_”_января__ 2004г.
Зав. кафедрой ЭПП,
д.т.н., профессор
_____________А.В. Болотов
Редактор Составители:
Старший преподаватель
________________ кафедры ЭПП
__________Н.А. Туканова
“___”___________2004г. Инженер кафедры ЭПП
___________М.М. Махмат
Алматы 2004
СОСТАВИТЕЛИ: Н.А. Туканова, М.М. Махмат. Математические задачи энергетики и компьютерное моделирование. Методические указания к выполнению лабораторных работ для студентов электроэнергетических специальностей - Алматы, АИЭС, 2004. - 34 с.
Методические указания по курсу «Математические задачи энергетики и компьютерное моделирование», включают задания на выполнение лабораторных работ, исходные данные, указания и перечень рекомендуемой литературы.
Методические указания предназначены для студентов очного и заочного обучения.
Ил. 6, табл. 14, библиогр. - 11 назв.
Рецензент: к.т.н., доцент С.А. Бугубаев
Печатается по плану издания Алматинского института энергетики и связи на 2004 год.

Алматинский институт энергетики и связи 2004г.
![]()
Введение
С развитием промышленности получили дополнительное развитие электрические системы. Чтобы управлять и развивать электрические системы на помощь приходят математические методы прогнозирования, анализа и оптимизации. Решение оптимизационных задач очень важно для инженера-энергетика. Здесь необходимо учесть, что управление энергосистемой и её проектирование должны обеспечивать не только необходимые значения параметров режима, но и максимальную экономичность режима системы в целом при полном удовлетворении потребителей электроэнергией.
Зная алгоритм решения задачи линейного программирования, можно составить программу ее решения на ЭВМ. На сегодняшний день существуют много языков программирования (Pascal, Delhpi, С++, FoxPro, Basic)с помощью которых можно составлять программы для решения задач линейного программирования, математической статистики и т.д. Однако такие программы составить достаточно сложно, поэтому студентам предлагается решить поставленные задачи (на симплекс метод, транспортные задачи, задачи динамического программирования, сетевого моделирования) с помощью специально разработанной программы ПЭР (Пакет экономических расчетов).
При расчете
оптимизационных режимов электроэнергетических систем неоценимую помощь
оказывают универсальные компьютерные программы-симуляторы электрических систем.
Они позволяют на модели произвести экспериментальные исследования, которые
сложно и трудоемко выполнять в реальной системе.
Лабораторная работа № 1
Решение систем линейных уравнений и нахождение оптимальных решений с помощью Симплекс метода
1.1 Цель работы
Целью настоящей работы является решение математических задач энергетики с помощью линейного программирования.
1.2 Порядок проведения работы
1.2.1 Найти первоначальный опорный план.
1.2.2 Составить симплекс - таблицу (см. пример таблица 1.6.1).
1.2.3 Определить оптимальность опорного плана и при необходимости перейти к новому опорному плану.
1.2.4 Определить направляющие столбцы и строки.
1.2.5 По методу Жордана - Гаусса определить положительные компоненты нового опорного плана и записать в новой симплекс-таблице.
1.2.6 Проверить план на оптимальность. Если план не оптимален, то вернуться к пункту 1.2.3, а в случае оптимального плана или неразрешимости плана процесс решения заканчивается.
1.3 Оформление результатов работы
Отчет должен содержать:
1.3.1 Исходные данные в виде уравнения функции и системы линейных уравнений.
1.3.2 Первоначальный опорный план, записанный в виде симплекс-таблицы.
1.3.3 Все этапы решения (все симплекс – таблицы) до получения оптимального плана или неразрешимости плана.
1.4 Методические указания
Симплексный метод решения задачи линейного программирования основан на переходе от одного опорного плана к другому, при котором значение целевой функций возрастает (при условии, что данная задача имеет оптимальный план и каждый ее опорный план является невырожденным). Рассмотрим задачу, для которой требуется найти максимальное значение функции
![]()
при условиях
![]()
![]() ,
,
где, ![]()
![]()
![]()
![]() ,(
,(![]() и
и ![]() )- заданные постоянные числа. Векторная форма данной задачи
имеет следующий вид
)- заданные постоянные числа. Векторная форма данной задачи
имеет следующий вид
![]() (1.1)
(1.1)
при условиях
![]() (1.2)
(1.2)
![]() (
(![]() ), (1.3)
), (1.3)
где  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Так как ![]() , то по определению опорного плана
, то по определению опорного плана ![]() является опорным планом данной задачи (последние
является опорным планом данной задачи (последние ![]() компонентов вектора
компонентов вектора ![]() равны нулю). Этот план определяется системой единичных
векторов
равны нулю). Этот план определяется системой единичных
векторов ![]() которые образуют
базис
которые образуют
базис ![]() -мерного пространства. Поэтому каждый из векторов
-мерного пространства. Поэтому каждый из векторов ![]() а также вектор
а также вектор ![]() могут быть
представлены в виде линейной комбинации векторов данного базиса. Пусть
могут быть
представлены в виде линейной комбинации векторов данного базиса. Пусть ![]() . Так как векторы
. Так как векторы ![]() - единичные, то
- единичные, то ![]() и
и ![]() , а
, а ![]() .
.
Признаки оптимальности опорного плана:
1) Опорный план ![]() задачи (1.2)-(1.3) является оптимальным, если
задачи (1.2)-(1.3) является оптимальным, если ![]() для любого
для любого ![]() (
(![]() ).
).
2) Если ![]() для некоторого и
среди чисел
для некоторого и
среди чисел ![]() нет положительных
нет положительных![]() , то целевая функция (1.1) задачи (1.2)-(1.3) не ограничена
на множестве ее планов.
, то целевая функция (1.1) задачи (1.2)-(1.3) не ограничена
на множестве ее планов.
3) Если опорный
план ![]() задачи (1.2)-(1.3) не вырожден и
задачи (1.2)-(1.3) не вырожден и ![]() , но среди чисел
, но среди чисел ![]() есть положительные (не все
есть положительные (не все ![]() ), то существует опорный план
), то существует опорный план![]() такой, что
такой, что ![]() .
.
1.4.1 Этапы нахождение оптимального опорного плана симплекс-методом:
1 Найти опорный план
2 Составить симплекс – таблицу (таблица 1.6.1)
3
Проверить опорный план на оптимальность. Если имеется ли хотя бы одно
отрицательное число ![]() , то либо устанавливают неразрешимость задачи, либо переходят
к новому опорному плану. Если нет, то найденный опорный план оптимален.
, то либо устанавливают неразрешимость задачи, либо переходят
к новому опорному плану. Если нет, то найденный опорный план оптимален.
4
Найти направляющие столбец и строку. Направляющий столбец определяется
наибольшим по абсолютной величине отрицательным числом ![]() , а направляющая строка - минимальным из отношений компонент
столбца вектора
, а направляющая строка - минимальным из отношений компонент
столбца вектора ![]() к положительным
компонентам направляющего столбца.
к положительным
компонентам направляющего столбца.
5 По
методу Жордана - Гаусса определить положительные компоненты нового опорного
плана, коэффициенты разложения векторов ![]() по векторам
нового базиса и числа
по векторам
нового базиса и числа ![]() . Все числа записать в новой симплекс-таблице.
. Все числа записать в новой симплекс-таблице.
6 Проверить план на оптимальность. Если план не оптимален, то возвращаемся к 4 этапу, а в случае оптимального плана или неразрешимости плана процесс решения заканчивается.
1.5 Задание и исходные данные
Требуется найти максимальное или минимальное значение функции
![]()
при условиях
![]()
![]() ,
,
где, ![]() и f(x)
и f(x) ![]() min или max студент выбирает под начальной
буквой фамилий, а элементы
min или max студент выбирает под начальной
буквой фамилий, а элементы ![]() ,
, ![]() и знаки ограничений
выбираем по последней цифре номера зачетной книжки.
и знаки ограничений
выбираем по последней цифре номера зачетной книжки.
Таблица 1.5.1 – Исходные данные
|
Начальная буква фамилии
студента |
А, Д |
Б, Е |
В, Г, Я |
Ж, З, И, Л |
К |
М, О |
Н, П |
Р, Т, У, Ф |
С, Ч |
Х, Ш, Щ, Э, Ю |
|
Элементы целевой функций |
||||||||||
|
C1 |
1 |
2 |
1 |
-1 |
5 |
2 |
2 |
1 |
-4 |
5 |
|
C2 |
-2 |
1 |
5 |
3 |
2 |
1 |
3 |
-2 |
5 |
1 |
|
C3 |
3 |
-1 |
4 |
2 |
-1 |
-1 |
6 |
-3 |
6 |
-3 |
|
C4 |
10 |
-1 |
-6 |
- |
- |
-1 |
3 |
- |
- |
1 |
|
f(x) |
max |
min |
max |
min |
max |
min |
max |
min |
max |
min |
1.6 Используя программный продукт «Пакет экономических расчетов» рассмотрим решение примера 1.
Дано:
Все таблицы получены с помощью пакета экономических расчетов. Для этого открываем папку С/Program Files/ПЭР/Per.exe, открываем файл Per.exe и при нажатие любую клавишу зайдем в главную меню программы. В главном меню предложены 8 видов задач (программ) математического программирования, выбор программы производится клавишами: вниз, вверх и enter.
Таблица 1.5.2 – Исходные данные
|
|
Элементы Ai, Bj ,Cij |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Мощность источников
Aij |
a11 |
1 |
2 |
1 |
1 |
2 |
1 |
2 |
-1 |
1 |
6 |
|
a12 |
1 |
3 |
-1 |
1 |
1 |
1 |
-1 |
1 |
2 |
-1 |
|
|
a13 |
2 |
-4 |
2 |
2 |
1 |
2 |
1 |
2 |
-3 |
4 |
|
|
a14 |
-6 |
-5 |
-1 |
- |
- |
-1 |
2 |
- |
- |
2 |
|
|
a21 |
1 |
5 |
2 |
2 |
3 |
2 |
2 |
1 |
4 |
-9 |
|
|
a22 |
1 |
-6 |
1 |
-3 |
2 |
1 |
1 |
-5 |
6 |
8 |
|
|
a23 |
4 |
1 |
-3 |
1 |
1 |
-3 |
1 |
-1 |
2 |
7 |
|
|
a24 |
-8 |
-1 |
1 |
- |
- |
1 |
1 |
- |
- |
1 |
|
|
a31 |
4 |
4 |
1 |
2 |
5 |
1 |
-1 |
1 |
2 |
-4 |
|
|
a32 |
2 |
1 |
1 |
-5 |
3 |
1 |
4 |
1 |
-3 |
5 |
|
|
a33 |
1 |
-2 |
1 |
6 |
4 |
1 |
-2 |
3 |
1 |
6 |
|
|
a34 |
-4 |
3 |
1 |
- |
- |
1 |
-2 |
- |
- |
1 |
|
|
Мощность потребителей Bj |
b1 |
1 |
1 |
2 |
-5 |
5 |
2 |
1 |
2 |
4 |
5 |
|
b2 |
1 |
3 |
6 |
3 |
6 |
6 |
2 |
1 |
10 |
7 |
|
|
b3 |
3 |
2 |
7 |
5 |
7 |
7 |
3 |
5 |
1 |
||
|
b4 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
|
Знаки ограничений ( ≤ ; ≥; =) |
1 |
= |
≤ |
= |
≥ |
≤ |
= |
≤ |
≤ |
= |
≤ |
|
2 |
= |
≤ |
= |
≤ |
= |
= |
≤ |
≤ |
= |
≥ |
|
|
3 |
= |
≤ |
= |
≤ |
≥ |
= |
≤ |
≤ |
= |
≥ |
Для нашего примера мы выбираем программу (задачу) «Линейное программирование», далее заходим в окно /Функции/Ввод новой задачи/, где даем любое имя своей задачи (файл/<Лаб1>) и нажатием enter, выводится окно /Ввод данных Лаб1/. В этом окне предложено 7 пунктов соглашения, в дальнейшим вводим условие максимизации (минимизации) задачи - вводим <1>, количество переменных - <4>, ограничений - < 2>. Нажимая пробел, мы открываем окно, куда вводятся элементы целевой функции и ограничения (нажимаем enter, пробел и любую клавишу), выбираем в окне /Функций/ -<решение задачи> и /открываются опции меню для решение задачи Лаб1/, там выбираем опцию /решить и вывести все таблицы/, далее поэтапно получаем таблицу 1.6.1 "Начальную таблицу" и все итерации.
Таблица 1.6.1 - Начальная таблица
|
Базис |
C(j) |
X1 |
X2 |
X3 |
X4 |
A1 |
A2 |
B(i) |
B(i) |
|
8.000 |
6.000 |
0 |
0 |
- M |
- M |
A(i,j) |
|||
|
A1 |
- M |
5.000 |
2.000 |
1.00 |
0 |
1.00 |
0.00 |
20.00 |
0 |
|
A2 |
- M |
6.000 |
12.000 |
0 |
1.00 |
0 |
1.00 |
72.00 |
0 |
|
C(j)-Z(j) |
8.000 |
6.000 |
0 |
0 |
0 |
0 |
0 |
|
|
|
* Big M |
0 |
0 |
0 |
0 |
-1.00 |
-1.00 |
-92.0 |
|
|
где Х1,…Х4-переменные элементы системы; C(j)- базисные коэффициенты целевой функций; Х1,…,Х4 - коэффициенты ограничений; C(j)-Z(j)- коэффициенты целевой функции.
Таблица 1.6.2 – Итерация 1
|
Базис |
C(j) |
X1 |
X2 |
X3 |
X4 |
A1 |
A2 |
B(i) |
B(i) |
|
8.000 |
6.000 |
0 |
0 |
- M |
- M |
A(i,j) |
|||
|
A1 |
- M |
5.000 |
2.000 |
1.00 |
0 |
1.00 |
0.00 |
20.00 |
10.00 |
|
A2 |
- M |
6.000 |
12.000 |
0 |
1.00 |
0 |
1.00 |
72.00 |
6.000 |
|
C(j)-Z(j) |
8.000 |
6.000 |
0 |
0 |
0 |
0 |
0 |
|
|
|
* Big M |
11.00 |
14.00 |
1.00 |
1.00 |
0 |
0 |
-92.0 |
|
|
ВВОДИМ : X2 Выводим: A2
|
Базис |
C(j) |
X1 |
X2 |
X3 |
X4 |
A1 |
A2 |
B(i) |
B(i) |
|
8.000 |
6.000 |
0 |
0 |
- M |
- M |
A(i,j) |
|||
|
A1 |
- M |
4.000 |
0 |
1.00 |
-.167 |
1.00 |
-.167 |
8.000 |
2.000 |
|
X2 |
6.000 |
0.500 |
1.000 |
0 |
0.083 |
0 |
0.083 |
6.000 |
12.00 |
|
C(j)-Z(j) |
5.000 |
0 |
0 |
-.500 |
0 |
-.500 |
36.00 |
|
|
|
* Big M |
4.000 |
0 |
1.00 |
-.167 |
0 |
-1.17 |
-8.00 |
|
|
ТЕКУЩЕЕ ЗНАЧЕНИЕ ЦЕЛЕВОЙ ФУНКЦИИ (Max.) = 36 + (-8BigM)
ВВОДИМ : X1 Выводим: A1
Таблица 1.6.4 – Конечная таблица
|
Базис |
C(j) |
X1 |
X2 |
X3 |
X4 |
A1 |
A2 |
B(i) |
B(i) |
|
8.000 |
6.000 |
0 |
0 |
- M |
- M |
A(i,j) |
|||
|
X1 |
8.000 |
1.000 |
0 |
0.250 |
-.042 |
0.250 |
-.042 |
2.000 |
0 |
|
X2 |
6.000 |
0 |
1.000 |
-.125 |
0.104 |
-.125 |
0.104 |
5.000 |
0 |
|
C(j)-Z(j) |
0 |
0 |
-1.25 |
-.292 |
-1.25 |
-.292 |
46.00 |
|
|
|
* Big M |
0 |
0 |
0 |
0 |
-1.00 |
-1.00 |
0 |
|
|
(Max.) Оптимальная величина ЦФ = 46
Таблица 1.6.5 – Итоговый результат для контрольного примера
|
Переменн No.Имена |
РЕШЕНИЕ |
Двойственн.оцен |
Переменн No.Имена |
РЕШЕНИЕ |
Двойственн.оцен |
|
1 X1 2 X2 3 X3 |
2.0000 5.0000 0.0000 |
0.0000 0.0000 1.2500 |
4
X4 5
A1 6 A2 |
0.0000 0.0000 0.0000 |
0.2917 0.2917 0.2917 |
|
MAX величина цел.ф-и = 46 Итерац.= 2 |
|||||
1.7 Контрольные вопросы
1.7.1 Как строится первоначальный опорный план задачи линейного программирования и проверяется на оптимальность?
1.7.2 Как определить вектор, подлежащий исключению из базиса?
1.7.3 Какой метод решения систем линейных уравнений лежит в основе симплекс - метода?
1.7.4 Какой элемент называется разрешающим?
1.7.5 Как определяется вектор для включения в базис, если первоначальный план не является оптимальным?
1.7.6 Этапы нахождение оптимального опорного плана симплекс – методом?
Лабораторная работа
№ 2
Определение оптимального плана электроснабжения потребителей с помощью транспортных задач
2.1 Цель работы
Целью настоящей работы является составление такого плана перевозок, который обеспечивал бы минимальные стоимости передачи (перевозок) единицы мощности энергии, и который удовлетворял бы спрос всех потребителей за счет распределения энергии, произведенной всеми пунктами источников питания.
2.2 Порядок проведения работы
2.2.1 Проверить транспортную задачу на условие разрешимости и составить матрицу планирования (см. пример таблица 2.6.1).
2.2.2 Найти первоначальный опорный план методом северо-западного угла с помощью пакета экономических расчетов.
2.2.3 Определить оптимальность опорного плана и при необходимости перейти к новому опорному плану.
2.2.4 Построить системы потенциалов и проверить выполнение условия оптимальности для незанятых клеток.
2.2.5 Выбрать клетку, в которую необходимо послать перевозку и построить замкнутый цикл, определив величины перераспределения груза.
2.2.7 Новый план проверить на оптимальность. Если план неоптимальный, то перейти к п. 2.2.5, в противном случае процесс решения заканчивается.
2.3 Оформление результатов работы
Отчет должен содержать:
2.3.1 Исходные данные оформляются как в примере 2.
2.3.2 Все таблицы должны быть заполнены, итоговый результат записан.
2.4 Методические указания
В ![]() - пунктах источниках питания
- пунктах источниках питания ![]() находится однородный
продукт, (энергия) в количествах, соответственно мощностью источников
находится однородный
продукт, (энергия) в количествах, соответственно мощностью источников ![]() , который должен быть доставлен
, который должен быть доставлен ![]() - потребителям
- потребителям ![]() в количествах, соответственно
мощности потребителей
в количествах, соответственно
мощности потребителей ![]() . Известны стоимость передачи единицы продукта
. Известны стоимость передачи единицы продукта ![]() , связанные с перевозкой единицы продукций из
, связанные с перевозкой единицы продукций из ![]() пункта в пункт
пункта в пункт![]() .
.
Требуется составить такой план перевозок, который обеспечивал бы при минимальных стоимости передачи (перевозок) единицы мощности энергии и удовлетворял бы спрос всех потребителей за счет распределения энергии, произведенной всеми пунктами источников питания.
Необходимым и достаточным условием разрешимости задачи является равенство (2.1*)
![]() (2.1*)
(2.1*)
Если
![]() или
или ![]() , то имеем транспортную задачу с открытой моделью.
, то имеем транспортную задачу с открытой моделью.

![]() - матрица расходов
(затрат) или матрица стоимости передачи единицы мощности.
- матрица расходов
(затрат) или матрица стоимости передачи единицы мощности.
Планом ТЗ называется ![]() , где каждое число
, где каждое число ![]() обозначает количество
единиц груза, который надо доставить из
обозначает количество
единиц груза, который надо доставить из ![]() -го пункта отправления в
-го пункта отправления в ![]() -го назначения.
-го назначения.
![]() - матрица перевозок
(передач).
- матрица перевозок
(передач).
Общие суммарные затраты, связанные с реализацией плана перевозок можно представить целевой функцией:
![]() (2.1)
(2.1)
Математическая модель:
![]() (
(![]() )
)
(2.2)
 (
(![]() )
)
![]() (
(![]() ;
;![]() )
(2.3)
)
(2.3)
Система ограничений задачи содержит ![]() уравнений с m n переменными
уравнений с m n переменными ![]() .
.
Необходимым и достаточным условием решения задачи является
то, что ранг матрицы ТЗ должен быть на единицу меньше числа уравнений, т.е. ![]() .
.
Из условия следует, что каждый опорный
план имеет ![]() базисных переменных и
базисных переменных и
![]() -(
-(![]() )=
)= ![]() свободных переменных,
равных нулю.
свободных переменных,
равных нулю.
2.4.1 Исходный опорный план можно получить следующими методами
2.4.1.1
Метод северо-западного угла. Для составления исходного опорного плана,
заполняем таблицу с левого верхнего (северо-западного) угла, двигаясь далее по
строке вправо или по столбцу вниз. Этот
метод обычно оказывается далеким от оптимальности, так как не учитывает
величины ![]()
затрат (расходов) ![]() .
.
2.4.1.2 Методом минимального элемента. Сущность его состоит в
том, что заполнение начинается с клетки, которая соответствует минимальному
элементу матрицы стоимости передачи единицы мощности (расходов).
Полученные опорные решения транспортной задачи необходимо проверить на оптимальность с помощью метода потенциалов.
2.4.2 Проверка опорного решения на оптимальность проводится с помощью метода потенциалов.
Первоначальный опорный план оптимален при следующих условиях:
1) для каждой занятой клетки сумма потенциалов должна быть равна стоимости единицы перевозок, стоящей в этой клетке
U*i + V*j
=Cij (2.4)
2) для каждой незанятой клетки сумма потенциалов должна быть меньше или равна единицы перевозки, стоящей в этой клетке
U*i + V*j ≤Cij (2.5)
Если хотя бы одна незанятая клетка не удовлетворяет условию, то опорный план является неоптимальным и его можно улучшить, вводя в базис вектор, соответствующий клетке, для который нарушается условие оптимальности (в клетку max [(U*i+V*j)-Cij] надо переместить некоторое количество единиц груза, т.е. загрузить).
2.5 Задание и исходные данные
Пусть имеются A![]() - электростанций с мощностями
- электростанций с мощностями ![]() , и B
, и B![]() -потребители с мощностью потребление
-потребители с мощностью потребление ![]() . Дана матрица стоимости передачи единицы мощности
. Дана матрица стоимости передачи единицы мощности ![]()
 . Требуется найти минимальную стоимость передачи
электроэнергии от электростанций к потребителям.
. Требуется найти минимальную стоимость передачи
электроэнергии от электростанций к потребителям.
Для этого: ![]() мощность
электростанций,
мощность
электростанций, ![]() - мощность потребителей,
- мощность потребителей, ![]() -элементы выбирают по предпоследней цифре номера зачетной
книжки по таблице 2.5.1.
-элементы выбирают по предпоследней цифре номера зачетной
книжки по таблице 2.5.1.
2.6 Пример выполнения задания
Используя программный продукт ПЭР (Пакет экономических расчетов), рассмотрим пример 2.
Дано:
S1 =30 D1=20,
D4=10
S2=40 D2=25
S3=20 D3=35
Cij =
Таблица 2.5.1 – Исходные данные

|
|
Элементы Ai, Bj , Cij |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Мощность источников Ai |
a1 |
140 |
280 |
180 |
70 |
510 |
180 |
150 |
180 |
85 |
120 |
|
a2 |
180 |
175 |
350 |
40 |
90 |
160 |
170 |
300 |
112 |
280 |
|
|
a3 |
160 |
125 |
20 |
50 |
120 |
140 |
110 |
70 |
72 |
160 |
|
|
a4 |
- |
130 |
- |
40 |
- |
220 |
- |
100 |
120 |
- |
|
|
a5 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
|
Мощность потребителей Bj |
b1 |
60 |
90 |
110 |
30 |
270 |
150 |
110 |
100 |
75 |
130 |
|
b2 |
70 |
180 |
90 |
50 |
140 |
250 |
120 |
100 |
125 |
220 |
|
|
b3 |
120 |
310 |
120 |
30 |
200 |
120 |
80 |
130 |
64 |
60 |
|
|
b4 |
130 |
130 |
80 |
80 |
110 |
180 |
50 |
180 |
65 |
70 |
|
|
b5 |
100 |
- |
150 |
- |
- |
- |
70 |
140 |
60 |
- |
|
|
Стоимость передачи единицы мощности C ij |
c11 |
2 |
4 |
7 |
1 |
1 |
18 |
7 |
7 |
7 |
1 |
|
c12 |
3 |
5 |
12 |
6 |
4 |
2 |
2 |
12 |
1 |
7 |
|
|
c13 |
4 |
3 |
4 |
4 |
7 |
3 |
11 |
4 |
4 |
9 |
|
|
c14 |
2 |
7 |
8 |
0 |
3 |
12 |
5 |
6 |
5 |
5 |
|
|
c15 |
4 |
- |
5 |
- |
- |
- |
9 |
5 |
2 |
- |
|
|
c21 |
8 |
7 |
1 |
5 |
5 |
3 |
8 |
1 |
13 |
4 |
|
|
c22 |
4 |
6 |
8 |
2 |
6 |
4 |
4 |
8 |
4 |
2 |
|
|
c23 |
1 |
2 |
6 |
7 |
8 |
8 |
3 |
6 |
7 |
6 |
|
|
c24 |
4 |
9 |
5 |
3 |
9 |
7 |
6 |
1 |
6 |
8 |
|
|
c25 |
1 |
- |
3 |
- |
- |
- |
1 |
3 |
3 |
- |
|
|
c31 |
9 |
1 |
6 |
3 |
7 |
4 |
3 |
6 |
3 |
3 |
|
|
c32 |
7 |
3 |
13 |
4 |
2 |
5 |
5 |
13 |
8 |
8 |
|
|
c33 |
3 |
9 |
8 |
1 |
4 |
6 |
10 |
2 |
0 |
1 |
|
|
c34 |
7 |
8 |
7 |
3 |
8 |
12 |
7 |
7 |
18 |
2 |
|
|
c35 |
2 |
- |
4 |
- |
- |
- |
8 |
4 |
12 |
- |
|
|
c41 |
- |
2 |
- |
5 |
- |
7 |
- |
1 |
9 |
- |
|
|
c42 |
- |
4 |
- |
7 |
- |
1 |
- |
5 |
5 |
- |
|
|
c43 |
- |
5 |
- |
2 |
- |
5 |
- |
0 |
3 |
- |
|
|
c44 |
- |
6 |
- |
3 |
- |
6 |
- |
4 |
4 |
- |
|
|
c45 |
- |
- |
- |
- |
- |
7 |
- |
3 |
7 |
- |
Для нашего примера мы выбираем программу (задачу)
«Транспортная задача», далее заходим в окно /Функций/ Ввод новой
задачи/, где даем любое имя своей задачи. Задача называется - (файл/<Лаб2>)
и нажатием enter,
выводится окно /Ввод данных Лаб1/. В этом окне предложено 7 пунктов
соглашения, в дальнейшим вводим условие максимизации =1 (минимизации=2) задачи
вводим <1>,
количество поставщиков - <3>, потребителей - <4>.
Нажимая пробел, мы открываем окно, куда вводится объем поставок и запрос
потребителей (нажимаем enter,
пробел и любую клавишу), заходим в окно, куда вводятся коэффициенты матрицы
перевозок единицы мощности (нажимаем enter, пробел и любую клавишу), выбираем в окне /Функций/-<решение
задачи>
и /открываются опции меню для решение задачи Лаб2/, там выбираем опцию /решить
и вывести каждую итерацию/, далее поэтапно получаем "Начальную
таблицу", т.е. матрицу планирования и все итерации. На последнем итерации
"Конечная таблица", нажимая любую клавишу, выводим конечное решение,
т.е. выводим итоговый результат для Лаб2 .
Таблица 2.6.1 – Начальная таблица «Матрица планирования»
|
Из\В |
D1 |
D2 |
D3 |
D4 |
Пост |
Ui |
|
S1 |
2 |
3 |
5 |
4 |
30 |
0 |
|
S2 |
3 |
2 |
4 |
1 |
40 |
0 |
|
S3 |
4 |
3 |
2 |
6 |
20 |
0 |
|
Потр |
20 |
25 |
35 |
10 |
|
0 |
|
Vj |
0 |
0 |
0 |
0 |
|
|
Таблица 2.6.2 - Итерация 1
|
Из\В |
D1 |
D2 |
D3 |
D4 |
Пост |
Ui |
|
S1 |
20 2 |
10
3 |
5 |
4 |
30 |
0 |
|
S2 |
3 |
15
2 |
25 4 |
** 1 |
40 |
-1 |
|
S3 |
4 |
3 |
10
2 |
10 6 |
20 |
-3 |
|
Потр |
20 |
25 |
35 |
10 |
|
0 |
|
Vj |
2 |
3 |
5 |
9 |
|
|
Текущая MIN величина ЦФ = 280 с e( 2, 4) =-7
Таблица 2.6.3 – Конечная таблица
|
Из\В |
D1 |
D2 |
D3 |
D4 |
Пост |
Ui |
|
S1 |
20
2 |
10 3 |
5 |
4 |
30 |
0 |
|
S2 |
3 |
15 2 |
15 4 |
10 1 |
40 |
-1 |
|
S3 |
4 |
3 |
20 2 |
6 |
20 |
-3 |
|
Потр |
20 |
25 |
35 |
10 |
|
0 |
|
Vj |
2 |
3 |
5 |
2 |
|
|
MIN величина
ЦФ = 210
Таблица 2.6.4 – Итоговый результат для ЛАБ 2
|
ИЗ |
В |
Поставка |
Оценка |
ИЗ |
В |
Поставка |
Оценка |
|
S1 |
D1 |
20.0 |
2.000 |
S2 |
D3 |
15.0 |
4.000 |
|
S1 |
D2 |
10.0 |
3.000 |
S2 |
D4 |
10.0 |
1.000 |
|
S1 |
D3 |
0.0 |
5.000 |
S3 |
D1 |
0.0 |
4.000 |
|
S1 |
D4 |
0.0 |
4.000 |
S3 |
D2 |
0.0 |
3.000 |
|
S2 |
D1 |
0.0 |
3.000 |
S3 |
D3 |
20.0 |
2.000 |
|
S2 |
D2 |
15.0 |
2.000 |
S3 |
D4 |
0.0 |
6.000 |
MIN величина ЦФ = 210 (возм. неоднозн.) Итераций = 1
2.7 Контрольные вопросы
2.7.1 Построение первоначального опорного плана транспортной задачи линейного программирования (методы построения).
2.7.2 Сформулируйте транспортную задачу линейного программирования и запишите ее математическую модель.
2.7.3 Дайте определение открытой и закрытой транспортных задач, в чем отличительные особенности их решения?
2.7.4 Метод потенциалов.
2.7.5 Условия оптимальности плана транспортной задачи линейного программирования?
Лабораторная работа
№ 3
Имитационные исследования трансформаторов в среде Electronics Workbench.
3.1 Цель работы
3.1.1 Изучить принцип действия и основные закономерности электромагнитных процессов, происходящие в трансформаторах.
3.1.2 В среде Electronics Workbench имитировать процесс исследования трансформаторов в режимах холостого хода, короткого замыкания и под нагрузкой.
3.1.3 Провести анализ осциллограмм тока I2(t), напряжения U2(t) при активной, индуктивной и смешанной нагрузке трансформатора.
3.2 Средства для имитационного исследования
трансформаторов
В лабораторной работе используются следующие элементы Electronics Workbench:
¨ источники переменного напряжения;
¨ резисторы;
¨ конденсаторы;
¨ катушки индуктивностей;
¨ трансформаторы;
¨ вольтметры;
¨ амперметры;
¨ осциллографы;
¨ блок ваттметра.
3.3 Краткие теоретические сведения
Трансформатор состоит из замкнутого стального
магнитопровода, на котором располагаются две или несколько обмоток,
электрически не соединенные между собой.
Часть магнитопровода, на котором располагаются обмотки, называется стержнем. Обмотка, к которой электрическая энергия подается, называется первичной; другая обмотка, к которой присоединяются приемники энергии, называется вторичной.
3.3.1 Режим холостого хода трансформатора
Подведем к первичной обмотке трансформатора синусоидальное напряжение u1 = U1M sin ωt (рисунок 3.1).
Рассмотрим процессы при разомкнутом рубильнике p2, т.е. когда вторичная обмотка трансформатора не замкнута (режим холостого хода).
Под действием приложенного напряжения в первичной обмотке возникнет переменный ток, который аналогично току в цепи с индуктивностью будет отставать от напряжения по фазе на угол, близкий к 90°, а в магнитопроводе трансформатора возникнет переменный магнитный поток, практически совпадающий по фазе с током и пронизывающий витки обеих обмоток трансформатора. Переменный магнитный поток наводит в первичной и во вторичной обмотках трансформатора э.д.с.
На основании второго правила Кирхгофа, пренебрегая падением напряжения в первичной обмотке, можно определить действующее значение напряжения на зажимах первичной обмотки и действующее значение э.д.с, наведенной в первичной обмотке
U1 = E1 = 4,44 f ω1 ФМ. (3.1)
Мгновенное значение напряжения на зажимах разомкнутой вторичной обмотки равно мгновенному значению е2 . Таким образом,
u2 = e2
U2 = E2 = 4,44 f ω2 ФМ. (3.2)
Схема соединения трансформатора
Рисунок 3.1
Отношение э.д.с обмотки высшего напряжения к э.д.с. обмотки низшего напряжения называется коэффициентом трансформации (обозначение k.). При холостом ходе оно равно
k = U1/U2 (3.3)
или
![]()
![]() . (3.4)
. (3.4)
Если ![]() >l
трансформатор носит название понижающего,
то при
>l
трансформатор носит название понижающего,
то при ![]() <1 - повышающего. Как было уже упомянуто, ток в
первичной обмотке при режиме холостого хода отстает от напряжения на угол φ1, близкий к
90°. Косинус угла φ1 при холостом ходе
составляет около 0,1. Величина тока IX при
холостом ходе составляет (3 ÷ 8)% номинального тока первичной обмотки.
Произведение IX ω1
при холостом ходе называется намагничивающей силой трансформатора и
обозначается FX. Таким образом,
<1 - повышающего. Как было уже упомянуто, ток в
первичной обмотке при режиме холостого хода отстает от напряжения на угол φ1, близкий к
90°. Косинус угла φ1 при холостом ходе
составляет около 0,1. Величина тока IX при
холостом ходе составляет (3 ÷ 8)% номинального тока первичной обмотки.
Произведение IX ω1
при холостом ходе называется намагничивающей силой трансформатора и
обозначается FX. Таким образом,
FX
= IX ω1. (3.5)
3.3.2 Работа нагруженного трансформатора
Присоединим ко вторичной обмотке трансформатора приемник энергии. В цепи вторичной обмотки возникнет ток I2. Величина этого тока зависит от E2 и полного сопротивления вторичной цепи. При смешанной индуктивной нагрузке ток I2 отстает по фазе от E2 на угол ψ2.
Токи I1 и I2 сдвинуты по фазе на угол, близкий к 180°.
При неизменном значении первичного напряжения и изменении нагрузки трансформатора Р2 от нуля до номинальной будет увеличиваться как вторичный, так и первичный токи трансформатора, будут увеличиваться и падения напряжения в его обмотках (I1z1 и I2z2), а напряжение на зажимах вторичной обмотки будет уменьшаться.
Если обозначить U2 напряжение на зажимах вторичной обмотки трансформатора при нагрузке, а U2X - при холостом ходе, то величина
![]() , (3.6)
, (3.6)
называется процентным изменением напряжения трансформатора.
Величина ΔU% зависит не только от величины тока нагрузки, но и от характера нагрузки, т.е. от cos φ2.
Процентное изменение напряжения в современных трансформаторах незначительно, порядка 2¸3%.
3.3.3 Мощность трансформатора и к.п.д.
Первичная мощность трансформатора
Ρ1 = U1 I1 cos φ1. (3.7)
Вторичная мощность трансформатора
Ρ2 = U2 I2 cos φ2. (3.8)
Разность между первичной и вторичной мощностями (P1—P2) представляет собой мощность потерь. Потери в трансформаторе состоят из двух частей: 1) потери в меди обмоток РM и 2) потери в стали трансформатора от гистерезиса и вихревых токов Рст = Рг + Рс.
Потери в стали могут быть определены из опыта холостого хода, т.е., когда рубильник р2 разомкнут, а рубильник p1 замкнут и к трансформатору подведено U1 = U1H. В этом случае ваттметр покажет
РX = Pст + РMX.
Так как потери в меди при холостом ходе РMX ничтожно малы, то
РX = РM. (3.9)
Потери в меди определяются опытом короткого замыкания, когда зажимы вторичной обмотки ах замкнуты накоротко, а к первичной обмотке подведено такое пониженное напряжение UK, при котором токи в обмотках будут номинальными. Это напряжение называется напряжением короткого замыкания и составляет 5 ÷ 12% UH..
Ваттметр измерит мощность РK = РM+Рст.K. Однако, так как UK ≈ 0,05UH,, то индукция в стали ничтожно мала и потерями в стали при коротком замыкании Рст.K можно пренебречь. Тогда
РK = PM . (3.10)
Коэффициент полезного действия трансформатора представляет собой отношение вторичной мощности Р2 к первичной мощности P1, т.е.
![]() (3.11)
(3.11)
3.4 Содержание лабораторной работы
3.4.1 Схема эксперимента предоставлена на рисунке 3.2 в среде Electronics Workbench.
Режим нагрузки выбирается по варианту, выданному преподавателем, в соответствии с таблицей 3.1.
3.4.2 Включить трансформатор вхолостую и измерить первичное
и вторичное напряжения U1, и U2. Измерить мощность холостого хода ΡX и ток холостого хода IX .
Подсчитать коэффициент трансформации, потери в стали и отношение (IX/IH)100%.
3.4.3 Произвести опыт короткого замыкания и измерить: напряжение при коротком замыкании UK, мощность короткого замыкания РK, и ток в первичной обмотке I1= IH..
3.4.4 Рассчитать uK = (UK/UH)100%,
к.п.д. трансформатора при номинальном токе I1 = IH и a)
cos φ2 = 1 и б) cos φ2 =
0,8.
3.4.5 Подключить нагрузку и измерить ток в первичной и
вторичной обмотке, напряжение во вторичной обмотке. Как изменились их значения?
Зарисовать осциллограмму тока и напряжения во вторичной обмотке.
3.5 Описание работы
Включение трансформатора производится по схеме и ее аналогу на рисунке 3.2. Для опыта холостого хода трансформатора при выключенном рубильнике p2 замыкают рубильник p1 и измеряют IX, PX и U2. Перед включением рубильника токовую цепь амперметра и ваттметра шунтируют проводом малого сопротивления, как показано пунктиром на рисунке 3.1. После включения размыкают рубильник р3 и производят измерения. При опыте необходимо, чтобы подведенное напряжение UХ было равно указанному на щитке трансформатора, т.е. UН. Когда измеряют мощность PX, вольтметр во вторичной цепи должен быть отключен. По полученным данным определяют:
1) коэффициент трансформации k = U1/U2;
2) потери в стали Рст = РX;
3) (IX/I1H)100%; обычно равное (10÷2,5)%IK.
Для опыта короткого замыкания зажимы вторичной обмотки ax должны быть замкнуты накоротко проводом малого сопротивления, а к первичной подводится пониженное напряжение с таким расчетом, чтобы ток в первичной обмотке был равен номинальному (I1 =I1H). После этого измеряют UK, I1H и PK. Тогда подсчитывают:
1) напряжение короткого замыкания uK = (UK/UH)100%, равное обычно (3¸12%)UH
2) потери в меди при номинальном токе ΡМ = РK;
3) К.П.Д. ![]()
для cos φ2 = 1 и cos φ2 = 0,8.
Здесь
SH = U2HI2H.
Технические данные указаны на щитке трансформатора.
В таблице 3.1 параметры трансформатора и нагрузки обозначены следующим образом:
K – коэффициент трансформации;
LP – индуктивность рассеивания (Гн);
L1 – индуктивность первичной обмотки (Гн);
R1 – сопротивление первичной обмотки (Ом);
R2 – сопротивление вторичной обмотки (Ом);
RH, LH, CH – характер и
значения нагрузочного сопротивления zH трансформатора.
Для испытаний
принимаем трансформатор на Р= 200Вт с номинальными параметрами : UH = 220В; UX = 12В (для варианта №1).
Схема имитационных
исследований трансформатора
в среде Electronics Workbench
б) а)
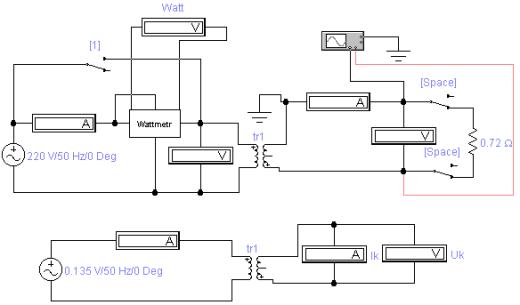
Рисунок 3.2
3.5 Контрольные вопросы
3.5.1 Объясните
принцип действия трансформаторов.
3.5.2 Изобразите
векторную диаграмму трансформатора при холостом ходе.
3.5.3 Изобразить
векторную диаграмму намагничивающих сил.
3.5.4 От чего зависит
КПД трансформатора.
3.6 Контрольный пример
Контрольный пример по
лабораторной работе № 3 приводится в файле LAB17_1K.ewb.
3.7 Список файлов к лабораторной работе № 3
LAB – База
данных лабораторного комплекса
LAB17_1.ewb – Файл
– схема
LAB17_1K.ewb
– Контрольный пример по лабораторной работе № 3*.
Таблица 3.1 -
Параметры вариантов имитационных исследований
|
№ пп |
K |
LP, Гн |
L1, Гн |
R1, Ом |
R2, Ом |
zH |
|
|||||||||||
|
RH,
Ом |
LH,
Гн |
CH,
мкФ |
|
|||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|||||||||
|
1 |
18.5 |
0.023 |
38.5 |
1.2 |
0.001 |
0.72 |
- |
- |
|
|||||||||
|
2 |
17.5 |
0.027 |
39.5 |
1.4 |
0.0012 |
- |
|
- |
|
|||||||||
|
3 |
17 |
0.024 |
40.0 |
1.2 |
0.0013 |
- |
- |
|
|
|||||||||
|
4 |
18.3 |
0.030 |
38.8 |
1.3 |
0.0015 |
0.3 |
|
- |
|
|||||||||
|
5 |
18.4 |
0.029 |
40.5 |
1.2 |
0.001 |
0.3 |
- |
|
|
|||||||||
|
6 |
17.7 |
0.025 |
38.6 |
1.2 |
0.0014 |
0.2 |
|
- |
|
|||||||||
|
7 |
17.9 |
0.023 |
38.9 |
1.5 |
0.0011 |
- |
|
|
|
|||||||||
|
8 |
17.4 |
0.029 |
39.3 |
1.2 |
0.001 |
0.4 |
|
|
|
|||||||||
|
9 |
17.2 |
0.030 |
39.9 |
1.5 |
0.0012 |
0.55 |
|
- |
|
|||||||||
|
10 |
17.3 |
0.028 |
38.5 |
1.5 |
0.0015 |
0.32 |
- |
|
|
|||||||||
|
11 |
18.4 |
0.024 |
39.6 |
1.4 |
0.0014 |
0.23 |
|
|
|
|||||||||
|
12 |
18.5 |
0.026 |
39.7 |
1.3 |
0.0013 |
- |
|
|
|
|||||||||
|
13 |
17.7 |
0.025 |
38.7 |
1.4 |
0.0015 |
0.67 |
- |
- |
|
|||||||||
|
14 |
18 |
0.027 |
38.5 |
1.3 |
0.0011 |
0.21 |
|
- |
|
|||||||||
|
15 |
18.1 |
0.024 |
40 |
1.3 |
0.0012 |
- |
|
- |
|
|||||||||
|
16 |
18.3 |
0.023 |
40.4 |
1.2 |
0.001 |
- |
- |
|
|
|||||||||
|
17 |
17.4 |
0.028 |
40.2 |
1.5 |
0.001 |
0.41 |
|
- |
|
|||||||||
|
18 |
17.9 |
0.029 |
38.6 |
1.4 |
0.0014 |
0.25 |
- |
|
|
|||||||||
|
19 |
18.5 |
0.024 |
40.1 |
1.4 |
0.0012 |
0.48 |
|
- |
|
|||||||||
|
20 |
18 |
0.025 |
39.1 |
1.2 |
0.0011 |
0.7 |
|
- |
|
|||||||||
|
21 |
17 |
0.027 |
39.8 |
1.5 |
0.0013 |
0.62 |
|
|
|
|||||||||
|
22 |
17.3 |
0.026 |
40.3 |
1.2 |
0.0015 |
0.59 |
|
- |
|
|||||||||
|
23 |
17.7 |
0.029 |
38.5 |
1.2 |
0.0015 |
- |
- |
|
|
|||||||||
|
24 |
18.3 |
0.030 |
40.1 |
1.4 |
0.0012 |
- |
|
- |
|
|||||||||
|
25 |
17 |
0.030 |
40.5 |
1.5 |
0.0015 |
0.33 |
|
|
|
|||||||||
Примечание: при использовании
осциллографа следует учитывать, что при снятии значения тока по каналу «А»,
реальный ток в цепи в 1000 раз больше.
Лабораторная работа № 4
Исследование электромагнитных процессов в асинхронных двигателях
4.1 Цель работы
4.1.1 Изучить принцип действия асинхронного двигателя с помощью математической модели.
4.1.2 Изучить закономерности, описывающие электромагнитные и электромеханические процессы в асинхронных двигателях.
4.1.3 Исследовать электромагнитные и электромеханические процессы в цепях асинхронных двигателей (АД) в пусковых режимах.
4.2 Средства и системы исследования асинхронных
двигателей
Процессы, происходящие в асинхронных двигателях описываются
громоздкими математическими зависимостями, которые с достаточной степенью
точности сложно реализовать в среде Electronics
Workbench, поэтому в качестве средств для исследования АД в настоящей работе
предлагается использовать систему структурно-функционального имитационного
моделирования MVTU /4/.
4.3 Краткие теоретические сведения
Принцип устройства электродвигателей трехфазного тока основан на явлении вращающегося магнитного потока.
В двигателях трехфазного тока обмотка образована тремя катушками, расположенными на неподвижной станине - статоре; внутри статора помещен стальной барабан - ротор, вдоль образующих которого в пазах уложены провода, соединенные между собой на обоих торцах кольцами.
Вращающийся магнитный поток статора пересекает проводники обмотки ротора и наводит в них э.д.с., а так как проводники замкнуты, то в них возникает ток. Ток, взаимодействуя с вращающимся магнитным потоком, вызывает силу, увлекающую ротор вслед за вращающимся потоком. С ростом скорости вращения ротора уменьшается скорость, с которой проводники ротора пересекают магнитные линии; если бы ротор достиг той же скорости вращения, что и магнитный поток статора, то пересечения проводников вообще не происходило бы, и ток в роторе стал бы равен нулю. Но при отсутствии тока в роторе вращающий момент также равен нулю: следовательно, при наличии тормозного момента магнитный поток и ротор не могут вращаться с той же скоростью, что и поток статора (синхронно); скорость вращения ротора всегда несколько меньше. Поэтому двигатели такого типа называются асинхронными (т.е. несинхронными).
Известны три основных закона, определяющие процессы, происходящие в асинхронных двигателях.
I Электромеханическое преобразование энергии не может осуществляться с КПД, равным 100%.
Распределение потоков энергии в электрической машине
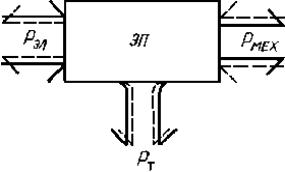
Рисунок 4.1
———— - направление потоков энергии в двигательном режиме;
— — — - направление потоков энергии в генераторном режиме.
При создании электромеханических преобразователей энергии (ЭП) стремятся уменьшить потери - потоки тепловой энергии, что приводит к уменьшению габаритов и удешевлению ЭП. Созданы ЭП с КПД, равным 98%, а в трансформаторах достигнут КПД, равный 99,8%. Такие высокие КПД являются исключительным техническим достижением, а в естественных электромеханических преобразователях распределение потоков электрической, механической и тепловой энергий близко друг к другу (рисунок 4.1).
Следует иметь в виду, что высокие КПД имеются в электрических машинах большой мощности. В ЭП небольшой мощности КПД может составлять всего несколько процентов, т.е. большая часть механической или электрической энергии преобразуется в теплоту.
Нельзя создать электрическую машину, в которой не происходило бы преобразования энергии в теплоту. Для этого она должна быть выполнена со сверхпроводящими обмотками.
II Все ЭП обратимы, т.е. они могут работать как в двигательном, так и в генераторном режимах.
Работа в двух режимах является важнейшим преимуществом ЭП перед другими преобразователями энергии (паровыми турбинами, дизелями, реактивными двигателями и т.п.). Режим работы электрической машины зависит от момента сопротивления на валу MС.. Если электрическая энергия потребляется из сети, ЭП работает в режиме двигателя. Если поток механической энергии, поступающий через вал ЭП, преобразуется в поток электромагнитной энергии, устанавливается генераторный режим работы ЭП.
Активная мощность в двигательном и генераторном режимах изменяет направление, однако, поток тепловой энергии, как правило, направления не изменяет. Потери в обычных ЭП необратимы.
Как и в большинстве преобразователей энергии, в электрических машинах имеется резонанс. Электрические и механические явления в большинстве ЭП настроены в резонанс. В электрических машинах имеется электромеханический резонанс, когда частота вращения поля f1 и механическая частота вращения ротора п, выраженная в оборотах в секунду, определяются соотношением
f1 = pn, (4.1)
где p - число пар полюсов.
III Электромеханическое преобразование энергии осуществляется
полями, неподвижными относительно друг друга.
Неподвижные относительно друг друга поля ротора и статора в воздушном зазоре машины создают результирующее поле и электромагнитный момент
MЭ = ωс-1 Рэ.м, (4.2)
где ωс - угловая скорость вращения поля; Pэм - электромагнитная мощность.
Поля, перемещающиеся в воздушном зазоре относительно друг друга, создают поток тепловой энергии, косвенно влияя на распределение потоков механической и электрической энергии.
Обмотки электрических машин выполняют таким образом, что в воздушном зазоре создается вращающееся поле. Вращающееся поле может создаваться двухфазной системой токов, если обмотки сдвинуты в пространстве на 90°, а ток - во времени на 90°; трехфазной системой токов - при сдвиге обмоток в пространстве на 120° и во времени на 120°. В общем случае вращающееся поле создается m-фазной системой токов при сдвиге обмоток в пространстве на 360°/m и токами со сдвигом во времени на 360°/m. Вращающееся поле может также создаваться постоянным током. Для этого обмотка, обтекаемая постоянным током, должна вращаться. При наличии переменных токов обмотки обычно неподвижны.
В асинхронных машинах частота тока в роторе
f2 = f1 s, (4.3)
где s - скольжение (относительная скорость),
s = (ωc ± ωp)/ωc. (4.3.а)
Поэтому скорость ротора ωp плюс скорость вращения поля ротора относительно ротора всегда равна скорости поля ωc. Если ротор вращается со скоростью, большей ωс в ту же сторону, что и поле, созданное токами статора, поле ротора движется в обратную сторону вращения ротора, и поля статора и ротора снова неподвижны.
Третий закон облегчает анализ процессов преобразования энергии в ЭП, на его основе производится запись уравнений электромеханического преобразования энергии.
Так как электромеханика является частью физики, к электрическим машинам применимы все основные законы физики. К ним, в первую очередь, относятся законы сохранения энергии, полного тока, закон Ома и др. В основе уравнений, описывающих преобразования энергии в электрических машинах, лежат уравнения Максвелла и уравнения Кирхгофа.
Все электрические машины одинаковы в том понимании, что они преобразуют электрическую энергию в механическую и обратно.
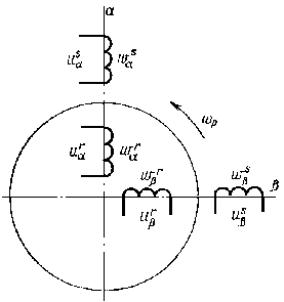
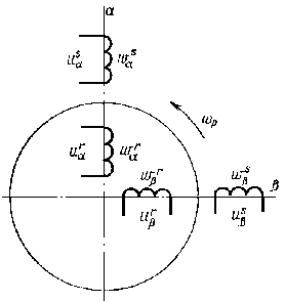
Основные типы электрических машин можно свести к обобщенной электрической машине, представляющей собой комбинацию двух пар обмоток, перемещающихся относительно друг друга (рисунок 4.2). На рисунке показана схема идеализированной симметричной электрической машины, имеющей гладкий воздушный зазор, магнитное сопротивление, равное нулю, и синусные обмотки. В такой машине при синусоидальном питании в воздушном зазоре создается круговое поле. При симметричных обмотках и синусоидальном симметричном напряжении питания поле в воздушном зазоре также синусоидальное.
Обобщенная электрическая машина
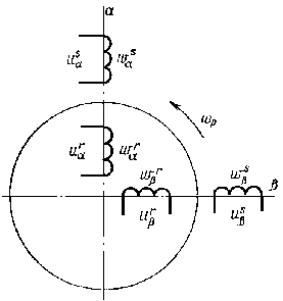
Рисунок 4.2
Обобщенной электрической машиной принято называть двухполюсную двухфазную симметричную идеализированную машину, имеющую две пары обмоток, на роторе и статоре (рисунок 4.2). Здесь was, wbs - обмотки статора по оси α и β; war, wbr - обмотки ротора по оси α и β; uas, ubs, uar, ubr - соответственно напряжения по осям α и β на статоре и роторе; wp - частота вращения ротора.
Рассмотрим двухполюсную машину, потому что рабочие процессы в многополюсной машине можно свести к процессам в двухполюсной машине.
Асинхронная машина из схемы обобщенной машины получается, когда к обмоткам статора was и wbs подводятся синусоидальные напряжения частотой f1, сдвинутые во времени на 90°. В обмотках ротора при этом проходят токи частотой f2 = f1 S, которые создаются приложенными к ротору напряжениями или наводятся токами обмоток статора. В асинхронной машине скорость ротора ωp ≠ ωc (синхронной скорости поля), а поля ротора и статора неподвижны относительно друг друга, так как скорость поля ротора плюс скорость поля ротора относительно ротора равна ωc.
Имея математическое описание процессов в электрических машинах можно установить, как же происходит в них преобразование энергии. Общий вывод сводится к следующему: электромеханическое преобразование энергии возможно, если в уравнениях, описывающих это преобразование, что-либо изменяется.
Рассмотрим двухфазную двухполюсную электрическую машину (рисунок 4.3). Она имеет две ортогональные системы обмоток статора ωar и ωbr и обмоток ротора ωas и ωbs, с осями которых совмещены ортогональные системы координат статора as, bs и ротора аr, br. Системы координат ротора и статора перемещаются относительно друг друга, и угол θ между осями определяет относительную частоту вращения.
Модель машины
Рисунок 4.3

При неподвижном статоре
![]() (4.4)
(4.4)
Дифференциальные уравнения напряжений в естественных или фазовых не преобразованных координатах имеют следующий вид
 (4.5)
(4.5)
В (4.5) частоты токов в статоре и роторе
различны, а знаки минус перед напряжениями ротора означают, что направление
активной мощности - от статора на вал (двигательный режим).
Потокосцепления обмоток
 (4.6)
(4.6)
Здесь коэффициенты перед токами изменяются с
такой же частотой, что и токи.
Систему координат α, β целесообразно
применять для исследования асинхронных машин.
4.4 Математические модели электромагнитных
процессов в обобщенной асинхронной машине
Уравнения математической модели асинхронного двигателя в токах имеет вид /3/
 (4.7)
(4.7)
 (4.8)
(4.8)
 (4.9)
(4.9)
 (4.10)
(4.10)
![]() (4.11)
(4.11)
![]() (4.12)
(4.12)
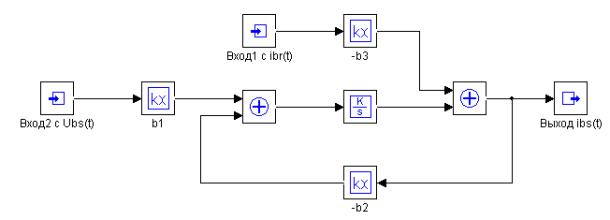
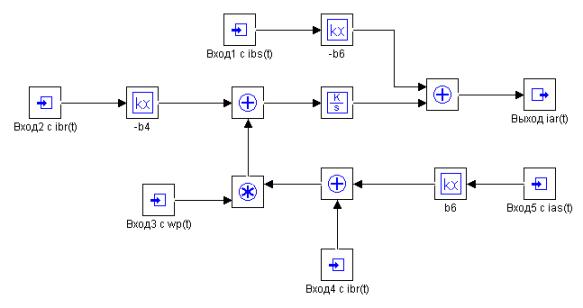
Схема модели электромагнитных и электромеханических процессов (по току) асинхронного двигателя (4.7)-(4.12) приводятся на рисунке 4.4.
Схема модели электромагнитных и электромеханических процессов (по току) асинхронного двигателя
а)

б)
в)
г)

е) д)


ж)
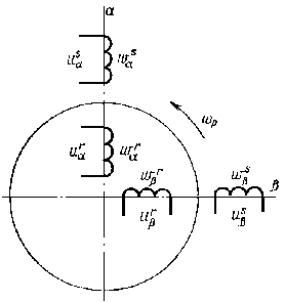
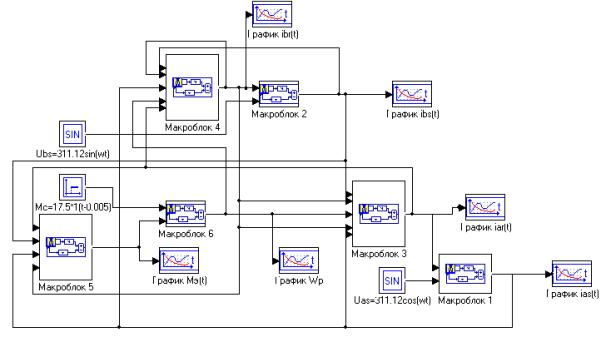
Рисунок 4.4
а) – Макроблок №1, б) – Макроблок №2, в) – Макроблок №3, г) – Макроблок №4, д) – Макроблок №5, е) – Макроблок №6, ж) – Схема модели.
Программный аналог модели (4.7)-(4.12) в среде программной системы MVTU получил имя LAB16_1.prj.
Исходные данные (для нечетных вариантов) приводятся в таблице 4.1.
Примечание:
Rr = rαr = rβr;
Rs = rαs = rβs;
Ls = Lαs = Lβs;
Lн = Lαн = Lβн
Условия математической модели асинхронного двигателя в потокосцеплениях имеет вид
 (4.13)
(4.13)
 (4.14)
(4.14)
 (4.15)
(4.15)
 (4.16)
(4.16)
![]() , (4.17)
, (4.17)
![]() , (4.18)
, (4.18)
 , (4.19)
, (4.19)
 , (4.20)
, (4.20)
 , (4.21)
, (4.21)
 . (4.22)
. (4.22)
На рисунках 4.4 введены следующие обозначения в модели по току
 (4.23)
(4.23)
В модели на потокосцепление
 (4.25)
(4.25)
Исходные данные модели асинхронного двигателя в потокосцеплениях (для четных вариантов) приводятся в таблице 4.1.
4.5 Содержание лабораторной работы
4.5.1 По заданию
преподавателя рассчитать коэффициенты ai
и bi для заданных
преподавателем вариантов l, l+1, где l - нечетный номер из таблицы 4.1 (т.е. для модели по току и по
потокосцеплению)
4.5.2 Провести
моделирование процессов в асинхронном двигателе для математической модели по
току и потокосцеплению для двух значений тормозного момента:
Mc(t)=Mн×1(t-t), (4.26)
Me(t)=0.5×Mн×1(t-t), Mн=17.5 Н×м, t=0.005. (4.27)
Для экспериментов выбран трехфазный короткозамкнутый двигатель А 42‑6. Двигатель имеет следующие номинальные данные Р2н=1.7 кВт,
Uн=220 В, Iн=7.5 А, nн=930 об/мин, Мн=9550Р/n=17.5 Н×м. Параметры двигателя при рабочей температуре 750С:
4.5.3 Принять в
качестве напряжений на обмотках статора следующие значения: w=2×pf, f=50, Uм=Uн×![]() =220×
=220×![]() .
.
4.5.4 В модели по току
результатом исследований, представленных в виде временных зависимостей,
принять:
![]() .
.
4.5.5 Модель по
потокосцеплению студенту предлагается разработать самостоятельно. В модели по
потокосцеплению результатом исследований, представленных в виде временных
зависимостей, принять:
![]()
![]()
4.5.6 Провести анализ
результатов полученных в пп. 4.5.4, 4.5.5.
4.6 Контрольные вопросы
4.6.1
Сформулируйте и поясните первый закон электромеханического преобразования
энергии.
4.6.2 Сформулируйте
и поясните второй закон электромеханического преобразования энергии.
4.6.3 Сформулируйте
и поясните третий закон электромеханического преобразования энергии.
4.6.4 От чего
зависит электромагнитный момент асинхронного двигателя?
4.6.5 Какая связь
существует между электромагнитным моментом асинхронного двигателя и
динамическим моментом электропривода с асинхронным двигателем?
4.7 Список файлов к лабораторной работе № 4
LAB16_1.prj —
в среде MVTU.
4.8 Контрольный пример
Контрольный пример по
лабораторной работе № 4 приводится в файле LAB16_1K.prj.
Таблица
4.1 - Исходные данные
|
№№ п/п |
Параметры двигателя |
|||||
|
|
|
|
M |
|
p |
|
|
1 |
3,8 |
3,57 |
0,279 |
0,263 |
0,289 |
3 |
|
2 |
4 |
3,7 |
0,285 |
0,26 |
0,28 |
2 |
|
3 |
3,6 |
3,7 |
0,285 |
0,26 |
0,28 |
1 |
|
4 |
4 |
3,5 |
0,285 |
0,26 |
0,28 |
3 |
|
5 |
3,6 |
3,5 |
0,285 |
0,26 |
0,28 |
3 |
|
6 |
4 |
3,7 |
0,285 |
0,25 |
0,28 |
2 |
|
7 |
3,6 |
3,7 |
0,285 |
0,25 |
0,28 |
3 |
|
8 |
4 |
3,5 |
0,285 |
0,25 |
0,28 |
3 |
|
9 |
3,6 |
3,5 |
0,285 |
0,25 |
0,28 |
2 |
|
10 |
4 |
3,7 |
0,275 |
0,26 |
0,28 |
2 |
|
11 |
3,6 |
3,7 |
0,275 |
0,26 |
0,28 |
3 |
|
12 |
4 |
3,5 |
0,275 |
0,26 |
0,28 |
2 |
|
13 |
3,6 |
3,5 |
0,275 |
0,26 |
0,28 |
3 |
|
14 |
4 |
3,7 |
0,275 |
0,25 |
0,28 |
1 |
|
15 |
3,6 |
3,7 |
0,275 |
0,25 |
0,28 |
2 |
|
16 |
4 |
3,5 |
0,275 |
0,25 |
0,28 |
3 |
|
17 |
3,6 |
3,5 |
0,285 |
0,25 |
0,28 |
1 |
|
18 |
4 |
3,7 |
0,285 |
0,26 |
0,27 |
3 |
|
19 |
3,6 |
3,7 |
0,285 |
0,26 |
0,27 |
2 |
|
20 |
4 |
3,5 |
0,285 |
0,26 |
0,27 |
3 |
|
21 |
3,6 |
3,5 |
0,285 |
0,26 |
0,27 |
2 |
|
22 |
4 |
3,7 |
0,285 |
0,25 |
0,27 |
3 |
|
23 |
3,6 |
3,7 |
0,285 |
0,25 |
0,27 |
1 |
|
24 |
4 |
3,5 |
0,285 |
0,25 |
0,27 |
3 |
Примечание: 1) для всех вариантов принять J=152×10-5 кг×м2, m=3, Uн=220/380 В; 2) четные варианты осуществляют моделирование через токи, нечетные - через потокосцепления.
Список литературы
1. Мансуров И.И., Попов В.С.
Теоретическая электротехника, М., Энергия, 1986. – 516 с.
2. Бессонов Л.А. «Теоретические
основы электротехники: электрические цепи» 9е изд., - М; ВШ,1991
3. Копылов И.П. Применение
вычислительных машин в инженерно-экономических расчетах (Электрические машины):
М. - Высшая школа, 1980. -256 с.
4. MVTU. Комплекс лабораторных
работ LAB_TOE.
5. Электрические системы. Математические задачи электроэнергетики Под ред. В.А. Веникова. - М.: Высшая школа, 1981.- 288 с.
6. Кузнецов А.В., Холод Н.И., Костевич Л.С. Руководство к решению задач по математическому программированию. - Минск: Высшая школа, 1978. - 256 с.
7. Применение цифровых вычислительных машин в электроэнергетике. Учебное пособие для вузов / О.В. Щербачев, А.П. Зейлингер, К.П. Кадомская и др. - Л.: Энергия, 1980. - 240 с.
8. Арзамасцев Д.А., Липес А.В., Мызин А.Л. Модели оптимизации развития энергосистем. - М,: Высш. шк., 1987 г.
9. Электрические сети и системы в примерах и иллюстрациях: Учеб. пособие для электроэнерг. спец./В.В. Ежков. Г.К., Зарудский. Э.Н., Зуев и др.; Под ред. В.А. Строева. - М.: Высш. шк., 1999 – 352 с.
10. Рокотян И.С., Федоров Д.А. Применение нелинейного математического программирования в энергетических задачах.–М.: МЭИ, 1983.
11. Строев В.А., Рокотян И.С. Методы математической оптимизации в задачах электроснабжения. – М.: МЭИ, 1993.
Содержание
|
Введение |
3 |
|
1 Лабораторная работа № 1 |
3 |
|
2 Лабораторная работа № 2 |
9 |
|
3 Лабораторная работа № 3 |
15 |
|
4 Лабораторная работа № 4 |
22 |
|
Список литературы |
34 |