Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра ээлектрических с станций, сетей и систем
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЭЛЕКТРОЭНЕРГЕТИКЕ
Конспект лекций
для студентов специальности 5В071800 - Электроэнергетика
Алматы 2011
CОСТАВИТЕЛИ: В.Н. Сажин, К.К. Тохтибакиев, Кнь О.А. Переходные процессы в электроэнергетике. Конспект лекций для специальности 5В071800 – Электроэнергетика.- Алматы: АУЭС, 2011, - 62 с.
В методической разработке рассматриваются расчеты симметричных и несимметричных коротких замыканий, электромагнитные переходные процессы в дальних электропередачах, способы и средства ограничения токов КЗ. Во второй части рассмотрены вопросы статической и динамической устойчивости простейшей системы, а также мероприятия по повышению устойчивости электрических систем.
Ил. 39, библиогр. – 7 назв.
Рецензент: канд. техн. наук, проф. В.Н. Борисов.
Печатается по плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2011г.
© НАО «Алматинский университет энергетики и связи», 2011 г.
Введение
Дисциплина «Переходные процессы в электроэнергетике» является одной из профилирующих для электроэнергетических специальностей.
Переходные процессы возникают в электрических системах как при нормальной эксплуатации (включение и отключение нагрузок, источников питания, отдельных цепей и пр.), так и в аварийных условиях (обрыв нагруженной цепи или отдельной ее фазы, короткое замыкание, выпадение машины из синхронизма и т.д.). Изучение переходных процессов необходимо прежде всего для ясного представления причин возникновения и физической сущности этих процессов, а также для разработки практических критериев и методов их количественной оценки, с тем чтобы можно было предвидеть и заранее предотвратить опасные последствия таких процессов. Важно понимать переходные процессы, но еще важнее уметь сознательно управлять ими.
При любом переходном процессе происходит в той или иной мере изменение электромагнитного состояния элементов системы и нарушение баланса между моментом на валу каждой вращающейся машины и электромагнитным моментом.
В результате этого нарушения соответственно изменяются скорости вращения машин, т.е. некоторые машины испытывают торможение, в то время как другие – ускорение. Такое положение существует до тех пор, пока регулирующие устройства не восстановят нормальное состояние, если это вообще осуществимо при изменившихся условиях.
Из этого следует, что переходный процесс характеризуется совокупностью электромагнитных и механических изменений в системе. Последние взаимно связаны и, по существу, представляют единое целое.
1 Лекция. Общие сведения о переходных процессах
Содержание лекции: режимы работы электрических систем; короткие замыкания, причины их возникновения, последствия коротких замыканий.
Цель лекции: ознакомление с режимами работы системы, причинами возникновения коротких замыканий и их последствиями.
1.1 Основные понятия и определения
Электрическая система – это условно выделенная часть электроэнергетической системы, в которой осуществляется выработка, преобразование, передача и потребление электрической энергии. В результате аварийных ситуаций в системе возникают переходные процессы, в течение которых происходит переход от одного режима к другому.
Режим работы системы – это совокупность процессов, характеризующих работу электрической системы и ее состояние в любой момент времени. Параметры режима: напряжения, мощности, токи и т.п. – связаны между собой параметрами системы. Параметры системы: сопротивления, проводимости, коэффициенты трансформации, постоянные времени и т.п. – определяются физическими свойствами элементов. Различают несколько видов режимов электрических систем.
1. Установившийся нормальный режим – состояние системы, когда параметры режима изменяются в небольших пределах, позволяющих считать эти параметры неизменными.
2. Нормальные переходные режимы возникают при нормальной эксплуатации системы (включение и отключение каких–либо элементов системы, изменение нагрузки, несинхронное включение синхронных машин и т.п.).
3. Аварийные переходные режимы возникают в электрических системах при таких возмущениях (авариях), как: короткие замыкания, внезапные отключения элементов системы, повторные включения этих элементов, несинхронные включения синхронных машин и т.п.
4. Послеаварийные установившиеся режимы наступают после отключения поврежденных элементов электрической системы. При этом параметры послеаварийного режима могут быть как близкими к параметрам нормального (исходного) режима, так и значительно отличными от них.
При переходе от одного режима к другому изменяется электромагнитное состояние элементов системы и нарушается баланс между механическими и электромагнитными и электромагнитными моментами на валах генераторов и двигателей. Это означает, что переходные процесс характеризуется совокупностью электромагнитных и механических изменений в системе, которые взаимно связаны и представляют собой единое целое. Тем не менее очень часто переходный процесс делят на две стадии. На первой стадии из-за большой инерции вращающихся машин в системе преобладают электромагнитные изменения. Эта стадия длится от нескольких сотых до 0,1…0,2 с и называется электромагнитным переходным процессом. На второй стадии проявляются механические свойства системы, которые оказывают существенное влияние на переходные процессы. Эта стадия называется электромеханическим переходным процессом.
Наиболее частой причиной возникновения аварийных переходных процессов является короткое замыкание. Короткое замыкание – это не предусмотренное нормальными условиями эксплуатации замыкание между фазами или между фазами и землей. В системах с изолированной нейтралью замыкание одной фазы на землю называется простым.
В местах замыкания часто образуется электрическая дуга, сопротивление которой имеет нелинейный характер. Учет влияния дуги на ток КЗ представляет сложную задачу.
Кроме сопротивления дуги, в месте КЗ возникает переходное сопротивление, вызываемое загрязнением, наличием остатков изоляции и т.п. В случае, когда переходное сопротивление и сопротивление дуги малы, ими пренебрегают. Такое замыкание называют металлическим. Расчет максимально возможных токов проводится для металлических КЗ.
В электрических системах, работающих с заземленной нейтралью, различают четыре вида КЗ (см. рисунок 1.1):
а) трехфазное;
б) двухфазное;
в) двухфазное на землю, т.е. замыкание между двумя фазами с одновременным замыканием той же точки на землю;
г) однофазное.
Трехфазное короткое замыкание являются симметричным, так как при нем все фазы остаются в одинаковых условиях. Все остальные виды коротких замыканий являются несимметричными, поскольку при каждом из них фазы находятся уже не в одинаковых условиях, поэтому системы токов и напряжений при этих видах короткого замыкания в той или иной мере искажены.

Рисунок 1.1
1.2 Природа возникновения коротких замыканий
Из многих причин возникновения коротких замыканий можно выделить несколько основных:
1) нарушение изоляции электрооборудования, вызываемое ее старением, загрязнением поверхности изоляторов, механическими повреждениями;
2) механические повреждения элементов электрической сети (обрыв провода линии электропередачи, падение опоры и т.п.);
3) перекрытие токоведущих частей птицами и животными;
4) ошибки оперативного персонала подстанций при проведении переключений.
Уменьшение количества КЗ в электрических системах связано со строгим соблюдением Правил технической эксплуатации электроустановок и повышением качества продукции электротехнической промышленности.
1.3 Последствия коротких замыканий
Можно выделить следующие последствия КЗ:
1) Системная авария, вызванная нарушением устойчивости системы. Это наиболее опасное последствие коротких замыканий, оно приводит к значительным технико-экономическим ущербам.
2) Термическое повреждение электрооборудования, связанное с его недопустимым нагревом токами КЗ;
3) Механическое повреждение электрооборудования, вызываемое воздействием больших электродинамических сил между токоведущими частями.
4) Ухудшение условий работы потребителей. При понижении напряжения, например, до 60-70% от номинального, в течение 1с и более возможен останов двигателей промышленных предприятий, что, в свою очередь, может вызвать нарушение технологического процесса, приводящее к экономическому ущербу.
5) Наведение при несимметричных КЗ в соседних линиях связи и сигнализации ЭДС, опасных для обслуживающего персонала.
Наибольшая опасность при коротком замыкании угрожает элементам системы, прилегающим к месту его возникновения. В зависимости от места и продолжительности КЗ его последствия могут иметь местный характер (удаленное от источников питания КЗ) или отражаться на функционировании всей системы.
1.4 Назначение расчетов коротких замыканий
При проектировании и эксплуатации электроустановок и систем для решения многих технических вопросов и задач требуется предварительно произвести ряд расчетов, среди которых заметное место занимают расчеты электромагнитных переходных процессов и, в частности, процессов при внезапном коротком замыкании.
Под расчетом электромагнитного переходного процесса обычно понимают вычисление токов и напряжений в рассматриваемой схеме при заданных условиях. В зависимости от назначения такого расчета находят указанные величины для заданного момента времени или находят их изменения в течение всего переходного процесса.
Расчеты токов КЗ необходимы для:
1) определения условий работы потребителей в аварийных режимах;
2) выбора аппаратов и проводников и их проверки по условиям электродинамической и термической стойкости;
3) проектирования и настройки релейной защиты и автоматики;
4) сопоставления, оценки и выбора схемы электрических соединений;
5) проектирования и проверки защитных устройств;
6) определения влияния линий электропередачи на линии связи;
7) определения числа заземленных нейтралей и их размещения в ЭС;
8) анализа аварий.
Особенностью расчетов при решении задач, встречающихся в эксплуатации, является необходимость учета конкретных условий рассматриваемого переходного процесса. При проектировании часто ограничиваются приближенными данными. Поэтому в первом случае требуется большая точность.
2 Лекция. Общие указания к расчетам токов короткого замыкания
Содержание лекции: допущения при расчетах коротких замыканий, составление схем замещения и расчет их параметров. Система относительных единиц.
Цель лекции: знакомство со схемами замещения основных элементов электрических систем и их параметрами. Изучение системы относительных единиц.
2.1 Основные допущения, принимаемые при расчетах
Расчет переходного процесса в сложной электрической системе с учетом всех влияющих факторов – сложная и трудоемкая задача. Для ее упрощения вводят ряд допущений. Однако те из них, которые справедливы при решении одной задачи, могут быть совершенно неприемлены для другой. Поэтому ниже приводятся только те допущения, которые принимаются при решении большинства практических задач.
1. Сохранение симметрии трехфазной системы (она нарушается только в месте повреждения).
2. Пренебрежение токами намагничивания трансформаторов и автотрансформаторов.
3. Отсутствие насыщения магнитных систем (т.е. линейность всех элементов схемы).
4. Пренебрежение активными сопротивлениями ( кроме расчетов токов КЗ в сетях до 1000 В и при оценке постоянных времени).
5. Пренебрежение емкостными проводимостями линий (кроме расчета простых замыканий на землю).
6. Учет нагрузок постоянными сопротивлениями.
7. Скорость вращения синхронных машин постоянна (для начальной стадии переходного процесса t – 0,1…0,2 с).
8. Неучет сдвига по фазе векторов ЭДС расчетной схемы.
Применение вычислительной техники для расчетов переходных процессов позволяет отказаться от некоторых допущений и тем самым повысить точность расчетов, более полно учесть явления, характеризующие переходный процесс.
2.1 Составление схем замещения и расчет их параметров
Перед расчетом переходного режима электрической системы на основе ее принципиальной схемы составляют расчетную схему, которая отличается от принципиальной тем, что на ней в однолинейном изображении показывают только те элементы, по которым возможно протекание аварийных токов или их составляющих. При наличии в расчетной схеме трансформаторов целесообразно имеющиеся в ней магнитно-связанные цепи представить одной эквивалентной электрически связанной цепью. Схема замещения сложной электрической системы является соединением схем замещения отдельных ее элементов. В ней элементы соединены так же, как на расчетной схеме.
После составления схемы замещения рассчитываются ее параметры в именованных или относительных единицах, затем полученные значения приводятся к основной ступени напряжения.
2.2 Система относительных единиц
Расчет токов КЗ может производиться в абсолютных (именованных) или относительных единицах.
При расчетах в относительных единицах все величины сравниваются с основными или базисными.
Относительное выражение величин удобно для оценки влияния того или иного участка схемы или отдельного элемента на результат расчета. По способу относительных единиц просто определяется ток КЗ на выводах генератора или максимальный возможный ток КЗ за трансформатором, если известны их параметры.
Для расчета в относительных единицах сначала выбирают базисные величины или условия: мощность Sб, напряжение Uб, ток Iб и сопротивление Xб или Zб.
Обычно задаются двумя величинами – базовыми мощностью и напряжением, остальные две – ток и сопротивление – получают из уравнения мощности и закона Ома
![]()
![]()
![]()
![]()
За базисное напряжение обычно принимается номинальное Uном или среднее расчетное Uср напряжение какой-либо ступени трансформации.
При выборе базисной мощности руководствуются тем, чтобы порядок относительных значений, полученных при расчете, был удобен. Чаще всего базисную мощность принимают равной 100 МВА или 1000 МВА, но иногда останавливаются на номинальной мощности какого-либо элемента, если она несколько раз повторяется в схеме.
Относительные величины выражаются следующим образом
![]() (2.1)
(2.1)
![]() (2.2)
(2.2)
![]() ,
(2.3)
,
(2.3)
![]() ,
(2.4)
,
(2.4)
![]() .
(2.5)
.
(2.5)
Индекс * (звездочка) указывает на то, что речь идет об относительной величине, индекс «б» говорит о том, что она приведена к базисным условиям.
Базисное сопротивление Zб или Хб, как правило, непосредственно в формулы пересчета (2.4), (2.5) не вводится, а выражается через напряжение и ток или мощность:
 ,
(2.6)
,
(2.6)
![]() .
. ![]()
![]() (2.7)
(2.7)
Относительное базисное сопротивление показывает, какая часть базисного напряжения, приложенного к цепи, падает в рассматриваемом сопротивлении при прохождении по нему базисного тока.
3 Лекция. Трехфазное короткое замыкание в симметричной цепи
Содержание лекции: вычисление периодической составляющей и ударного тока трехфазного короткого замыкания.
Цель лекции: расчет трехфазного короткого замыкания в симметричной цепи.
Если трехфазная цепь симметрична, т.е. сопротивления фаз равны между собой, замыкание всех трех фаз в одной точке (см. рисунок 3.1) приводит к уменьшению их сопротивления, но не нарушает симметрии токов и напряжений. По сравнению с режимом нагрузки токи в цепи возрастают, а напряжения уменьшаются. Угол сдвига φ между током и напряжением, как правило, увеличивается за счет исключения из схемы активных сопротивлений нагрузки, достигая 900 при чисто индуктивном сопротивлении цепи.

Рисунок 3.1
С момента возникновения КЗ ток повреждения можно представить состоящим из двух составляющих: свободного апериодического тока – апериодической составляющей тока КЗ и вынужденного периодического тока, создаваемого ЭДС генератора, - периодической составляющей тока КЗ.
Значение периодической составляющей для начального момента КЗ зависит от ЭДС генератора, его внутреннего сопротивления и сопротивления внешней цепи. Быстрота затухания апериодической составляющей зависит от соотношения между активными и индуктивными сопротивлениями цепи КЗ: чем больше активное сопротивление цепи, тем затухание происходит быстрее.
3.1 Вычисление начального значение периодической составляющей тока трехфазного короткого замыкания
Условиями, характеризующими трехфазное КЗ, являются симметричность схемы и равенство нулю междуфазных и фазных напряжений в месте короткого замыкания:
Uk,АВ = Uk, ВС = Uk,СА= 0,
Uk,А = Uk, В = Uk,С= 0.
Таким образом, разность потенциалов цепи короткого замыкания от места подключения генерирующего источника до точки КЗ равняется ЭДС
данного источника.
Начальное действующее значение периодической составляющей можно определить по закону Ома
![]() ,
(3.1)
,
(3.1)
где I"(3) - сверхпереходный ток трехфазного КЗ;
Е" – междуфазная сверхпереходная ЭДС генератора;
![]() -
результирующее сопротивление цепи КЗ;
-
результирующее сопротивление цепи КЗ;
Х" – сверхпереходное индуктивное сопротивление генератора;
Хвш, Rвш - соответственно индуктивное и активное сопротивление внешней цепи от выводов генератора до точки КЗ.
Без учета активного сопротивления (3.1) упрощается
![]() ,
(3.2)
,
(3.2)
где ХΣ = Х" + Хвш – результирующее индуктивное сопротивление цепи КЗ.
В случае питания КЗ от энергосистемы расчетное выражение для определения периодической составляющей будет
 ,
(3.3)
,
(3.3)
где Uср – напряжение на шинах энергосистемы;
![]() -
результирующее сопротивление цепи КЗ;
-
результирующее сопротивление цепи КЗ;
Хс – результирующее индуктивное сопротивление системы относительно места ее подключения в расчетной схеме;
Хвш, Rвш - соответственно индуктивное и активное сопротивление от места подключения системы до точки КЗ.
Без учета активного сопротивления периодический ток будет равен
![]() ,
(3.4)
,
(3.4)
где ХΣ – результирующее индуктивное сопротивление цепи КЗ.
Зная ток КЗ, можно определить мощность короткого замыкания, которая в заданной точке КЗ при базисном напряжении определится как
![]() ,
(3.5)
,
(3.5)
где I(3) – ток в рассматриваемой точке КЗ, приведенный к напряжению Uср.
3.1 Вычисление ударного тока короткого замыкания
При расчетах токов трехфазного КЗ для выбора аппаратов и проводников по условию электродинамической стойкости необходимо знать максимальное значение тока короткого замыкания или ударный ток. Принято считать, что он наступает через 0,01 с с момента возникновения короткого замыкания.
Для схем с последовательно включенными элементами ударные ток определяется по выражению:
![]() ,
(3.6)
,
(3.6)
где Та – постоянная времени затухания апериодической составляющей тока КЗ;
куд – ударный коэффициент для времени t = 0,01 с.
Постоянная времени Та определяется
![]() ,
(3.7)
,
(3.7)
где ХΣ и RΣ – соответственно суммарное индуктивное и активное сопротивления схемы от источника питания до места КЗ.
При составлении расчетной схемы для определения Та необходимо учитывать, что синхронные машины вводятся в схему индуктивным сопротивлением обратной последовательности Х2 и активным сопротивлением статора Rs.
Для разветвленной схемы ударный ток КЗ определяется по выражению
![]() ,
(3.8)
,
(3.8)
где Та,э – эквивалентная постоянная времени затухания апериодической составляющей тока КЗ.
Постоянная времени Та,э определяется как
![]() ,
(3.9)
,
(3.9)
где ХΣ и RΣ – соответственно суммарное индуктивное и суммарное активное сопротивления, полученные из схемы замещения, составленной из индуктивных и активных сопротивлений, поочередным исключением из нее сначала всех активных, а затем всех индуктивных сопротивлений.
4 Лекция. Несимметричные короткие замыкания
Содержание лекции: особенности несимметричных коротких замыканий и методы их расчета.
Цель лекции: изучение методов расчета несимметричных коротких замыканий.
4.1 Общие положения
К несимметричным коротким замыканиям относятся двухфазное, двухфазное на землю и однофазное КЗ.
Для несимметричных КЗ характерны неодинаковые значения фазных токов и напряжений и различные углы сдвига между токами, а также между токами и соответствующими напряжениями.
Эта особенность несимметричных КЗ существенно усложняет их расчет, так как при расчетах трехфазных КЗ предполагается полная симметрия трех фаз рассматриваемой схемы, что позволяет составлять схему замещения и вести расчет для одной из фаз.
Поскольку при несимметричных КЗ токи и напряжения в разных фазах различны, для выполнения расчета обычным способом потребовалось бы составлять схему замещения для всех трех фаз рассматриваемой сети с учетом взаимоиндукции между фазами. Это серьезно усложнило бы расчет даже в случае сравнительно простых схем.
Для упрощения расчетов несимметричных КЗ применяется метод симметричных составляющих, который заключается в замене несимметричного режима трехфазной сети симметричным режимом или замене несимметричного повреждения условным трехфазным коротким замыканием.
По этому методу любая несимметричная трехфазная система может быть однозначно разложена на три симметричные системы, или последовательности – прямую, обратную и нулевую.
Напряжение в месте КЗ при несимметричном замыкании не равно нулю, как при трехфазном металлическом КЗ, и определяется для последовательностей следующими уравнениями:
Uk1 = E – Ik1 jX1Σ , (4.1)
Uk2 = 0 – Ik2 jX2Σ , (4.2)
Uk0 = 0 – Ik0 jX0Σ , (4.3)
где Е – результирующая или эквивалентная ЭДС источников питания.
Так как для каждого генератора трехфазная симметричная система ЭДС статора является системой прямой последовательности, в схемах обратной и нулевой последовательности ЭДС источников отсутствуют.
Создаваемые в схемах симметричных составляющих ЭДС самоиндукции от прохождения токов прямой, обратной и нулевой последовательности учитываются в виде падений напряжения с обратным знаком в сопротивлениях X1Σ, X2Σ и X0Σ.
Для определения результирующих сопротивлений X1Σ, X2Σ и X0Σ при расчете несимметричного КЗ составляются схемы прямой обратной и нулевой последовательности.
4.2 Схемы замещения прямой, обратной и нулевой последовательности
Схема замещения прямой последовательности составляется аналогично схеме замещения для расчета трехфазных КЗ, так как токи трехфазного КЗ являются токами прямой последовательности: система токов симметрична, уравновешена и имеет прямое чередование фаз.
Для всех элементов расчетной схемы Х1 = Х(3), т.е. сопротивление прямой последовательности соответствует индуктивному сопротивлению при симметричном режиме.
Схема замещения обратной последовательности составляется из тех же элементов, что и схема прямой последовательности, так как пути прохождения тока для обеих последовательностей одинаковы; ЭДС генераторов в схеме принимаются равными нулю.
Синхронные машины имеет разные сопротивления прямой и обратной последовательности. В расчетах можно принимать следующие значения: Х2 = 1,22Х″ для машин с демпферными обмотками и Х2 = 1,45Х′ для машин без демпферных обмоток. Для приближенных расчетов можно принимать Х2 ≈ Х1 ≈ Х″.
Для неподвижных элементов ( трансформаторов, реакторов, линий) изменение порядка чередования фаз не оказывает влияния на взаимоиндукцию с соседними фазами и поэтому Х2 ≈ Х1.
При несимметричных КЗ на землю возникают слагающие нулевой последовательности в системах тока и напряжения (см. рисунок 4.1). Токи нулевой последовательности представляют собой однофазный ток, разветвленный между тремя фазами. Возвращение токов 3I0 происходит через землю, а если линия защищена тросом, по тросу и земле.
Для составления схемы замещения нулевой последовательности выявляются контуры, по которым могут проходить токи, имеющие одинаковое направления во всех фазах. В точке КЗ, где фазы условно закорочены, и приложено напряжение Uк,0, контуры объединяются, и поэтому составление схемы замещения целесообразно начинать с этой точки. Чтобы получилась замкнутая цепь для прохождения токов нулевой последовательности, в схеме должна быть, по крайней мере, одна заземленная нейтраль. Если таких нейтралей несколько, то полученные цепи включаются параллельно.
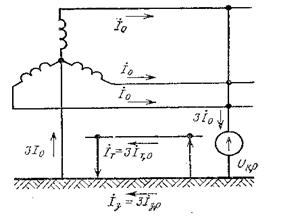
Рисунок 4.1
В схему замещения элементы вводятся своими сопротивлениями нулевой последовательности.
4.3 Однофазное короткое замыкание
Однофазное КЗ на землю одной из фаз, например фазы, А (см. рисунок 4.2), определяется следующими условиями:
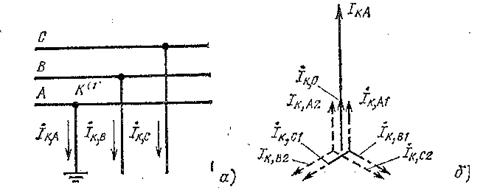
Рисунок 4.2
![]() ;
; ![]() ;
; ![]() .
.
Так как токи в двух фазах отсутствуют, симметричные составляющие поврежденной фазы А равны:
![]() .
.
Выражая напряжение ![]() через симметричные составляющие и их значения
в (4.1) – (4.3), получим:
через симметричные составляющие и их значения
в (4.1) – (4.3), получим:
![]()
и далее
![]() ,
,
откуда
![]() .
(4.4)
.
(4.4)
Абсолютное значение полного тока КЗ равно:
![]() . (4.5)
. (4.5)
Для начального момента времени
 , (4.6)
, (4.6)
где Е" – сверхпереходная междуфазная ЭДС.
При питании от энергосистемы
 . (4.7)
. (4.7)
5 Лекция. Токи и напряжения в месте двухфазного короткого
замыкания
Содержание лекции: расчет двухфазного короткого замыкания.
Цель лекции: изучение методов расчета двухфазного короткого замыкания.
Двухфазное короткое замыкание между фазами В и С (см. рисунок 5.1) характеризуется следующими условиями:
![]() ;
; ![]() ;
; ![]() .
.

Рисунок 5.1
Так как сумма фазных токов равна нулю, то система
является уравновешенной и, следовательно, ![]() .
.
Разложим ток фазы А на симметричные составляющие:
![]() ,
,
откуда
![]() .
(5.1)
.
(5.1)
Исходя из условия ![]() , можно убедится в том, что
, можно убедится в том, что
![]() .
(5.2)
.
(5.2)
Из (5.2), (4.1) и (4.2) вытекает равенство
![]() j X1Σ = -
j X1Σ = - ![]() j X2Σ,
j X2Σ,
заменив в котором - ![]() на
на ![]() согласно (5.1), получим расчетное выражение
для определения тока при двухфазном КЗ:
согласно (5.1), получим расчетное выражение
для определения тока при двухфазном КЗ:
![]() .
(5.3)
.
(5.3)
Комплексная форма выражения (5.3) означает, что ток отстает от фазной ЭДС на угол 90о (деление на j) и по абсолютному значению равен:
![]() .
(5.4)
.
(5.4)
Используя метод симметричных составляющих, находим токи в поврежденных фазах:
![]() ; (5.5)
; (5.5)
![]() . (5.6)
. (5.6)
Абсолютное значение полного тока при двухфазном КЗ определится из (5.4) - (5.6):
 .
(5.7)
.
(5.7)
На основании (5.7) для момента возникновения КЗ
![]()
 ,
(5.8)
,
(5.8)
где ![]() - сверхпереходная междуфазная ЭДС.
- сверхпереходная междуфазная ЭДС.
В случае питания КЗ от энергосистемы
 .
(5.10)
.
(5.10)
На рисунке 5.1,б приведено построение симметричных составляющих и полных токов для двухфазного короткого замыкания фаз В –С.
Для определения напряжений в месте КЗ следует учесть
следующее: для систем с заземленной нейтралью, когда сопротивление
X0Σ имеет конечное значение, напряжение ![]() при
при ![]() на основании (4.3)
также равно нулю; для систем с изолированной нейтралью, когда Х0
Σ = ∞ и
на основании (4.3)
также равно нулю; для систем с изолированной нейтралью, когда Х0
Σ = ∞ и ![]() = - ∞∙0 – неопределенность,
короткие замыкания не влияют на смещение нейтрали системы относительно земли и
= - ∞∙0 – неопределенность,
короткие замыкания не влияют на смещение нейтрали системы относительно земли и ![]() в уравнениях
напряжений не рассматриваются.
в уравнениях
напряжений не рассматриваются.
Симметричные составляющие напряжений ![]() и
и ![]() можно определить по (4.1) и
(4.2), после чего, используя метод симметричных составляющих, определить
напряжения в месте КЗ.
можно определить по (4.1) и
(4.2), после чего, используя метод симметричных составляющих, определить
напряжения в месте КЗ.
5.1 Соотношение токов двухфазного и трехфазного короткого
замыкания и ударный ток двухфазного короткого замыкания
В практических расчетах, как правило, принимают X1Σ = X2Σ. После замены X2Σ на X1Σ ток двухфазного КЗ в начальный момент времени определится:
![]() (5.11)
(5.11)
и
![]() .
(5.12)
.
(5.12)
Обозначим начальное значение тока через Iпо и, поделив (5.11) на (3.2), а также (5.12) на (3.4), получим искомое соотношение токов для двухфазного и трехфазного КЗ
![]() , (5.13)
, (5.13)
где ![]() и
и ![]() - соответственно действующие значения
периодической составляющей тока двухфазного и трехфазного КЗ для
t
=0.
- соответственно действующие значения
периодической составляющей тока двухфазного и трехфазного КЗ для
t
=0.
Так как при определении тока прямой последовательности двухфазное КЗ можно условно представить как некоторое трехфазное за сопротивлением X1Σ + X2Σ, ударный ток двухфазного КЗ можно выразить по аналогии с трехфазным
![]() .
(5.14)
.
(5.14)
Ударный коэффициент определяют в зависимости от вида
расчетной схемы на основании (3.6) или (3.8), применяя для расчета ![]() увеличенные по
сравнению с трехфазными КЗ значения Х∑ и
R∑ соответственно на
∆Х = Х2∑ и ∆R2∑.
увеличенные по
сравнению с трехфазными КЗ значения Х∑ и
R∑ соответственно на
∆Х = Х2∑ и ∆R2∑.
Исходя из условия
X1Σ = X2Σ
и заменяя в (5.14) ![]() в
соответствии с (5.13), получим:
в
соответствии с (5.13), получим:
![]() .
.
При равенстве ударных коэффициентов ударный ток трехфазного КЗ превосходит по значению ток двухфазного КЗ, причем соотношение токов составляет:
 .
.
5.2 Алгоритм расчета тока несимметричного короткого замыкания
Структура выражений для токов в месте несимметричных КЗ позволяет получить универсальную формулу для расчета тока любого несимметричного КЗ:
![]() ,
(5.15)
,
(5.15)
где ![]() - результирующая ЭДС прямой последовательности;
- результирующая ЭДС прямой последовательности;
![]() - суммарное сопротивление схемы
замещения прямой последовательности;
- суммарное сопротивление схемы
замещения прямой последовательности;
![]() - коэффициент, характеризующий
рассчитываемый вид КЗ, причем
- коэффициент, характеризующий
рассчитываемый вид КЗ, причем
![]() ,
, ![]() ,
,
 ,
,
![]() - шунт несимметричного КЗ, который включается между началом и концом
схемы прямой последовательности и определяется суммарными сопротивлениями
обратной и нулевой последовательностей:
- шунт несимметричного КЗ, который включается между началом и концом
схемы прямой последовательности и определяется суммарными сопротивлениями
обратной и нулевой последовательностей:
![]() ,
, ![]() ,
, ![]() .
.
Расчет тока в точке несимметричного КЗ можно разбить на несколько основных этапов:
1) Составляются схемы замещения прямой, обратной и нулевой последовательностей.
2) Производятся расчет и приведение параметров схемы замещения. При этом учитываются различия параметров прямой, обратной и нулевой последовательностей отдельных элементов схемы.
3) Определяются суммарные сопротивления схем прямой, обратной и нулевой последовательностей. Преобразования проводятся относительно начала и конца схемы каждой последовательности.
4) Находится результирующая ЭДС схемы прямой последовательности. Если схема замещения прямой последовательности содержит более одной ЭДС, то их эквивалентирование производится относительно начала и конца схемы.
5) Вычисляется коэффициент рассчитываемого короткого
замыкания ![]() .
.
6) Определяется шунт короткого замыкания ![]() .
.
7) Рассчитывается полный ток в месте КЗ по выражению (5.15).
Если задачей расчета является определение напряжений в месте КЗ либо их симметричных составляющих, то используют выражения (4.1) – (4.3).
6 Лекция. Электромагнитные переходные процессы в дальних электропередачах
Содержание лекции: особенности переходных процессов в протяженных линиях электропередачи.
Цель лекции: изучение методики расчета параметров периодических свободных составляющих.
Нормальные и переходные режимы электропередач большой протяженности характеризуются особенностями, которые обусловлены волновым характером распределения электромагнитной энергии и соотношением удельных параметров линии. В составе токов и напряжений электромагнитного переходного процесса появляются периодические свободные составляющие. Токи и напряжения переходного режима можно представить в виде
![]() , (6.1)
, (6.1)
где ![]() - вынужденная составляющая;
- вынужденная составляющая;
![]() - апериодическая и
периодическая свободные составляющие соответственно.
- апериодическая и
периодическая свободные составляющие соответственно.
Для обеспечения надежной работы сетей напряжения 500 кВ и выше необходимо, чтобы время действия пусковых органов основной защиты линий не превышало 0.04 с. Время затухания электромагнитных переходных процессов в линиях длиной 1000 км и выше составляет несколько десятых долей секунды, поэтому защитам приходится работать в условиях переходного процесса.
Большинство современных защит реагируют на изменение параметров промышленной частоты. Для снижения влияния периодических свободных составляющих применяют специальные частотные фильтры. Но они не решают полностью проблемы отстройки, так как в составе токов и напряжений при КЗ в определенных местах длинной линии возникают периодические свободные составляющие с частотами, близкими к промышленной. Это заставляет сужать полосу пропускания фильтров, что в свою очередь увеличивает время действия пусковых органов. Поэтому возникает задача выявления возможности отказа от применения фильтров. Для ее решения необходимо установить закономерность изменения параметров периодических свободных составляющих и разработать новые способы защиты, ее использующие. С этой целью расчет переходного процесса проводится волновым методом с учетом всех нелинейностей и последующим частотным разложением кривых мгновенных значений токов и напряжений и приведением их к форме (6.1).
6.1 Метод расчета параметров периодических свободных
составляющих
Электромагнитные процессы в линии с распределенными параметрами описываются системой дифференциальных уравнений в частных производных:
![]()
![]() ,
(6.2)
,
(6.2)
где
![]()
![]()
![]()
![]() -
удельные параметры линии.
-
удельные параметры линии.
Методы расчета электромагнитных переходных процессов можно разделить на две группы: частотные, в основе которых лежит решение системы (6.2) в форме Фурье, и волновые, в которых для решения этой системы используется форма Даламбера.
Волновые методы, отличаясь простотой расчетных выражений и возможностью учета нелинейных характеристик элементов электрической системы, дают результат в виде мгновенных значений параметров переходного режима. Это делает невозможным их применение без дополнительных преобразований для оценки влияния переходного процесса на действие защиты. Частотные методы дают результат вычислений в виде суммы вынужденной и свободных составляющих, что не позволяет производить расчет в нелинейных схемах, так как эти методы базируются на принципе наложения. Особенности дальних электропередач (наличие разрядников, существенное влияние короны на параметры переходного процесса) исключают применение частотных методов из-за нелинейного характера разрядников и короны.
Задача расчета параметров свободных составляющих решается методом выделения скрытых периодичностей и формулируется следующим образом. На конечном интервале (- L, L) задана функция X(t), которая может быть представлена непрерывной записью (графиком или таблично) в виде совокупности значений в дискретные моменты времени.
Любой процесс, изображаемый функцией X(t), можно описать суммой двух составляющих:
![]()
где
![]() -
непериодический процесс (помеха);
-
непериодический процесс (помеха);
![]() - сумма периодических компонентов,
скрытых в процессе x(t), которая определяется по формуле
- сумма периодических компонентов,
скрытых в процессе x(t), которая определяется по формуле
![]()
(![]() - независимые
амплитуды, фазы i-х гармоник, частоты соответственно).
- независимые
амплитуды, фазы i-х гармоник, частоты соответственно).
В большинстве случаев принимается, что процесс X(t) - полигармонический:
![]()
Задача расчета параметров скрытых периодичностей
сводится к определению параметров ![]() и может ставиться как задача нахождения
таких преобразований, которым надо подвергнуть исходную функцию
X(t)
для вычисления параметров периодических компонент. Обзор методов выделения
скрытых периодичностей дан в работе [28], где все методы разделены на определяющие
только частоты периодических компонент, их частоты и амплитуды и, наконец,
частоты, амплитуды и фазы.
и может ставиться как задача нахождения
таких преобразований, которым надо подвергнуть исходную функцию
X(t)
для вычисления параметров периодических компонент. Обзор методов выделения
скрытых периодичностей дан в работе [28], где все методы разделены на определяющие
только частоты периодических компонент, их частоты и амплитуды и, наконец,
частоты, амплитуды и фазы.
Задача исследования влияния электромагнитных переходных процессов на действие защиты требует определения всех параметров периодических компонент, поэтому для расчета свободных составляющих выбран метод, использующий свойства взаимной корреляции между исследуемой функцией Х(t) и детерминированной функцией
![]() ,
,
где ![]() - постоянная величина;
- постоянная величина;
![]() - переменная круговая частота,
выбираемая из условий равенства частоте, которая находится в результате
преобразования;
- переменная круговая частота,
выбираемая из условий равенства частоте, которая находится в результате
преобразования;
![]() - фаза, независимая от
- фаза, независимая от
![]()
Выражение для взаимно-корреляционной функции между
функциями ![]() и
и
![]() имеет вид
имеет вид
где
![]() - весовая
функция, причем
- весовая
функция, причем ![]() ,
если 0 < t >
,
если 0 < t > ![]() , и
, и ![]() = 0, если
= 0, если
![]() < 0 >
< 0 >
![]()
7 Лекция. Периодические свободные составляющие при коротком замыкании в дальней электропередаче
Содержание лекции: расчет и анализ свободных составляющих при коротком замыкании в дальней линии.
Цель лекции: изучение методов анализа свободных составляющих на примере блочной электропередачи.
Рассмотрим блочный вариант исполнения дальней электропередачи, который позволяет упростить расчет и анализ свободных составляющих. Для этого варианта проведена серия расчетов переходных процессов.
При коротких замыканиях расчет токов и
напряжений проводится в начале и конце линии. Рассмотрены как симметричные,
так и несимметричные однофазные КЗ. Расчетные условия коротких замыканий
определены, угол включения КЗ для частот свободных составляющих выше
промышленной равен ![]() и
нулю для частот ниже промышленной и апериодической составляющих; предшествующий
режим - режим натуральной мощности, особая фаза -А. Изменение напряжения и
тока в начале линии при трехфазном КЗ в точке 120 км показано на рисунка 7.1. Кривые напряжений и токов свидетельствуют о наличии в их составе
высших гармонических составляющих.
и
нулю для частот ниже промышленной и апериодической составляющих; предшествующий
режим - режим натуральной мощности, особая фаза -А. Изменение напряжения и
тока в начале линии при трехфазном КЗ в точке 120 км показано на рисунка 7.1. Кривые напряжений и токов свидетельствуют о наличии в их составе
высших гармонических составляющих.
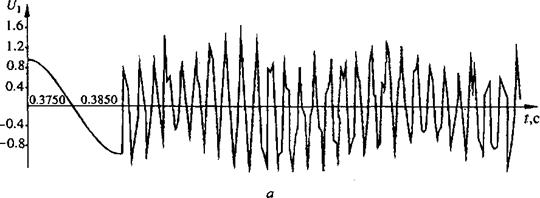
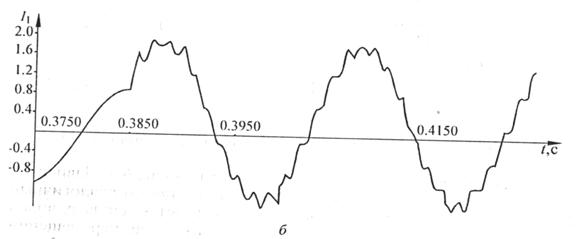
Рисунок 7.1
Частотный анализ этих кривых по методу, описанному в лекции 6, позволил получить амплитудно-частотные характеристики, определяющие параметры свободных составляющих напряжения (см. рисунок 7.2). Результаты расчета переходных процессов и их спектров позволили построить зависимости частот свободных составляющих от расстояния до точки КЗ.
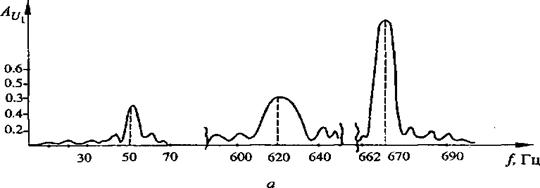
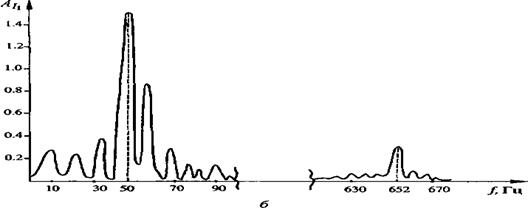
Рисунок 7.2
Эти зависимости для трехфазного КЗ приведены на рисунке 7.3. Зависимости ![]() для однофазных и
двухфазных КЗ имеют аналогичный характер. Общей особенностью этих зависимостей
для всех видов КЗ является монотонное уменьшение частот при перемещении точки
КЗ вглубь линии. Свободные составляющие напряжения и тока имеют частоты,
близкие по величине, и одинаковый характер изменения. Не менее важным параметром
свободных составляющих является их амплитуда, на которую существенное влияние
оказывает фаза включения КЗ.
для однофазных и
двухфазных КЗ имеют аналогичный характер. Общей особенностью этих зависимостей
для всех видов КЗ является монотонное уменьшение частот при перемещении точки
КЗ вглубь линии. Свободные составляющие напряжения и тока имеют частоты,
близкие по величине, и одинаковый характер изменения. Не менее важным параметром
свободных составляющих является их амплитуда, на которую существенное влияние
оказывает фаза включения КЗ.
На рисунке 7.4 приведены зависимости амплитуды первой составляющей напряжения от расстояния до точки КЗ при двух углах включения. Существенное влияние на частоты и амплитуды свободных составляющих оказывают такие характерные для линий сверхвысокого напряжения явления, как
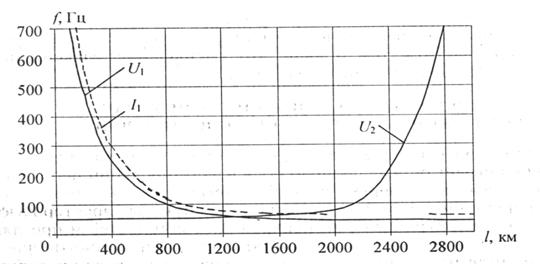
Рисунок 7.3

Рисунок 7.4
поверхностный эффект, корона, а также работа разрядников. Изучение влияния этих факторов показывает следующее:
- коронный разряд, сопровождающий переходный процесс при КЗ на воздушных линиях, незначительно (3 - 5 %) изменяет частоты свободных составляющих и уменьшает на 30 - 50 % их амплитуды;
- работа разрядников не оказывает существенного влияния на частоты свободных составляющих, она значительно увеличивает затухание переходного процесса и уменьшает амплитуды свободных составляющих на 20 - 30 %;
- влияние поверхностного эффекта на частоты свободных составляющих несущественно. Амплитуды уменьшаются, причем чем выше частота, тем больше это уменьшение. Максимальное уменьшение составляет не более 30 %.
8 Лекция. Ограничение токов короткого замыкания
Содержание лекции: средства ограничения токов короткого замыкания.
Цель лекции: изучение средств ограничения токов короткого замыкания на стадии проектирования и в условиях эксплуатации.
8.1 Средства ограничения токов КЗ
Рост уровней токов КЗ вызывает снижение эксплуатационной надежности всех элементов электрической системы. В первую очередь страдают жесткие шины, кабели, электрические аппараты. В меньшей степени повышение уровней токов КЗ затрагивает генераторы и трансформаторы, хотя и для них необходимо предусматривать отрицательные последствия этого повышения.
Ограничению токов КЗ в энергосистемах всегда уделяется достаточно большое внимание. Для этого применяются как схемные решения, так и специальные устройства. Наиболее широко используются:
- оптимизация структуры и параметров сети;
- стационарное или автоматическое деление сети;
- применение токоограничивающих устройств;
- оптимизация режима заземления нейтралей в электрических сетях.
В зависимости от местных условий, требуемой степени ограничения токов при различных видах КЗ, а также технико-экономических показателей в сетях энергосистемы используются различные средства ограничения или их комбинации, дающие наибольший технико-экономический эффект.
8.1.1 Оптимизация структуры и параметров сети (схемные решения)
Схемные решения принимаются, как правило, на стадии проектирования схем развития энергосистем, при этом выбираются оптимальные схемы выдачи мощности электростанций и параметры элементов сетей энергосистем.
Оптимизация структуры сети являются эффективным средством ограничения токов КЗ. С этой целью применяется периферийное ( продольное) разделение сетей, при котором части территории сетей (районы) одного напряжения связываются между собой только через сеть повышенного напряжения (см. рисунок 8.1, а). Местное, или поперечное, разделение сетей (см. рисунок 8.1, б) осуществляется наложением сетей одного и того же напряжения на площади какого-либо района и связью этих сетей через сеть повышенного напряжения.

Рисунок 8.1
8.1.2 Стационарное или автоматическое деление сети
Деление сети применяют в процессе эксплуатации, когда требуется ограничить уровни токов КЗ при ее развитии. Различают деление сети стационарное (СДС) и автоматическое (АДС).
Стационарное деление сети осуществляется в нормальном режиме с помощью секционных, шиносоединительных и линейных выключателей. Оно производится тогда, когда уровень тока КЗ в узле сети превышает допустимые значения для параметров установленного оборудования. На рисунке 8.2 показан пример деления сети на электростанции с двумя распределительными устройствами двух повышенного напряжения. Деление производится в результате разрыва трансформаторной связи между распредустройствами двух повышенных напряжений. СДС оказывает существенное влияние на режимы, устойчивость и надежность работы электрической системы, также на потери мощности в сетях.
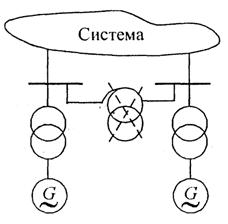
Рисунок 8.2
АДС производится в аварийном режиме для обеспечения работы коммутационных аппататов. Оно осуществляется на секционных или шиносоединительных выключателях, иногда – на выключателях мощных присоединений. При АДС образуется система каскадного отключения токов КЗ. Однако АДС имеет некоторые недостатки:
- возможность появления в послеаварийном режиме значительных небалансов мощностей источноков и нагрузки в разделившихся частях сети;
- увеличение времени восстановления нормального режима.
Несмотря на это, устройства АДС широко применяются в энергосистемах, так как дешевы, просты и надежны.
8.1.3 Токоограничивающие устройства
Токоограничивающие устройства, выполняя свою основную задачу – ограничение токов КЗ, не должны существенно влиять на нормальный режим работы сети, должны иметь стабильные характеристики при изменении схемы и параметров режима.
Токоограничивающие реакторы могут иметь различные конструктивные исполнения и параметры.
Реакторы с линейной характеристикой, включаемые последовательно в соответствующую линию, ограничивают ток КЗ и поддерживают относительно высокий уровень остаточного напряжения в узле подключения. Но в них в нормальном режиме теряются активная и реактивная мощности, а также возникают потери и падение напряжения. Возможные схемы включения линейных и секционных реакторов приведены на рисунке 8.3.
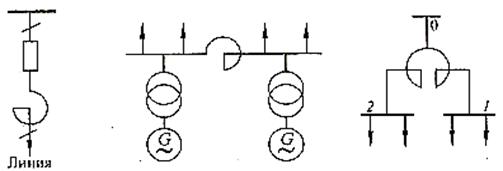
Рисунок 8.3
Реакторы с нелинейной характеристикой.. К этой группе относятся управляемые и насыщающиеся реакторы.
Управляемый реактор – это регулируемый реактор со сталью, изменение сопротивления которого осуществляется подмагничиванием магнитопровода полем постоянного тока. При КЗ сопротивление реактора увеличивается и происходит ограничение тока КЗ.
Насыщающий реактор – это неуправляемый реактор в нелинейной характеристикой ( со сталью), которая определяется насыщением магнитопровода полем обмотки переменного тока. Эквивалентное сопротивление реактора растет с увеличением тока. Это свойство реактора используется для ограничения тока КЗ.
Токоограничивающие коммутационные аппараты уменьшают ударный ток КЗ, т.е являются аппаратами безынерционного действия. К ним относятся токоограничивающие предохранители и ограничители ударного тока взрывного действия.
Токоограничивающие предохранители изготавливают на напряжение 6 – 35 кВ. Они отличаются простотой конструкции и небольшой стоимостью, но имеют ряд недостатков:
- одноразовое действие, что затрудняет применение автоматического повторного включения;
- нестабильность токовременных характеристик;
- неуправляемость со стороны внешних устройств (релейной защиты) и т.д., в связи с чем предохранители устанавливаются в цепях менее ответственных потребителей.
Ограничители ударного тока взрывного действия – сверхбыстродействующие управляемые коммутационные аппараты одноразового действия. Конструктивно – это герметизированный цилиндр, внутри которого располагается токонесущий проводник с вмонтированным в него пиропатроном. Сигнал на взрыв пиропатрона подается от внешнего управляющего устройства, получающего информацию о КЗ от измерительного органа, фиксирующего величину ток КЗ и ее производную. Ограничение тока достигается за время порядка 0,5 мс, полное время отключения цепи составляет 5 мс, т.е. ¼ периода промышленной частоты.
Резонансные токоограничивающие устройства. Принцип их действия основан на использовании эффекта резонанса напряжений при работе в нормальном режиме и расстройке резонанса в аварийном режиме.
Кроме того, известны другие токоограничивающие устройства:
- токоограничивающие устройства трансформаторного и реакторно- вентильного типов;
- вставки постоянного тока;
- сверхпроводниковые токоограничивающие устройства.
9 Лекция. Устойчивость электрических систем
Содержание лекции: основные понятия и определения устойчивости, допущения принимаемые при анализе устойчивости. Задачи расчета устойчивости электрических систем.
Цель лекции: ознакомление с основными понятиями и определениями устойчивости, рассмотрение допущений при расчете устойчивости, знакомство с задачами расчета устойчивости.
9.1 Основные понятия и определение устойчивости
В установившимся режиме реальной системы его параметры постоянно меняются, что связано со следующими факторами:
- изменением нагрузки и реакцией на эти изменения регулирующих устройств;
- нормальными эксплуатационными изменениями схемы коммутации системы;
- включением и отключением отдельных генераторов или изменением их мощности.
Таким образом, в установившимся режиме системы всегда есть малые возмущения параметров ее режима, при которых она должна быть устойчива.
Статическая устойчивость – это способность системы восстанавливать исходный (или близкий к исходному) режим после малого его возмущения.
Аварийные режимы в электрической системе возникают при КЗ, аварийных отключениях нагруженных агрегатов или линий и т.п. Под действием больших возмущений возникают резкие изменения режима.
Динамическая устойчивость – это способность системы возвращаться в исходное ( или близкое к нему) состояние после большого возмущения. Когда после большого возмущения синхронный режим системы нарушается, а затем после допустимого перерыва восстанавливается, то говорят о результирующей устойчивости системы.
Исходя из определения статической устойчивости системы, можно заключить, что существует такой режим, при котором очень малое увеличение нагрузок вызывает нарушение его устойчивости. Такой режим называется предельным, а нагрузки системы – максимальными или предельными нагрузками по условиям статической устойчивости.
Ограничение нагрузок может быть вызвано и другими обстоятельствами, например, нагревом элементов электрической системы (генераторов, трансформаторов и т.п.). В этом случае говорят о предельных нагрузках по условию нагрева и устанавливают также максимальное время существования режима.
Возможны ограничения нагрузок по уровням напряжения в узлах, напряжению короны и т.п.
Пропускной способностью элемента системы называют наибольшую мощность, которую можно передать через этот элемент с учетом всех ограничивающих факторов (нагрева, устойчивости, напряжения в узлах и т.п.).
Понятие о пропускной способности справедливо и для динамической устойчивости. В этом случае говорят о пределе передаваемой мощности по условиям динамической устойчивости при КЗ в какой-либо точке, отключении линии и т.п.
Статические характеристики – это связи параметров режима системы, представленные аналитически или графически и не зависящие от времени. Эти связи выявляются в основном в установившимся режиме системы.
Динамические характеристики – это связи параметров, полученных при условии, что они зависят от времени. В этом случае отражается влияние первых, а возможно, и более высоких производных рассматриваемых параметров.
Динамический переход от одного режима к другому подвергается качественной оценке. При этом оцениваются характер протекания переходного процесса (быстрый, медленный, монотонный, апериодический) и характер нового установившегося режима. Считается, что качество переходного процесса хорошее, если наблюдаются быстрое его затухание, апериодичность или монотонность. Режим, наступающий после переходного процесса, должен иметь достаточный запас устойчивости, который проверяется изменением какого-либо параметра. Наибольшая величина отклонения, при которой система еще сохраняет устойчивость, определяет запас устойчивости, выражаемый коэффициентом запаса. Например, запас по напряжению определяется
![]() ,
,
запас по мощности
![]() .
.
9.2 Допущения, принимаемые при анализе устойчивости
В дополнение к принятым при анализе электромагнитных переходных процессов допущениям принимаются еще несколько, упрощающих оценку устойчивости и обеспечивающих достаточную для инженерных расчетов точность.
1.Предполагается, что скорость вращения роторов синхронных машин при протекании электромеханических переходных процессов изменяется в небольших пределах (2-3%) синхронной скорости.
2. Считается, что напряжения и токи статора и ротора генератора изменяются мгновенно.
3. Нелинейность параметров системы не учитывается. Нелинейность параметров режима учитывается. Если же это не учитывать, то считают систему линеаризованной.
4. Перейти от одного режима электрической системы к другому можно, изменив собственные и взаимные сопротивления системы, также ЭДС генераторов и двигателей.
5. Исследование динамической устойчивости при несимметричных возмущениях производится в схеме прямой последовательности. Считается, что движение роторов генераторов и двигателей обусловлено моментами, создаваемыми токами прямой последовательности.
9.3 Задачи расчета устойчивости электрических систем
При анализе статической устойчивости возникает ряд задач, которые решаются в проектных и эксплуатационных организациях. К таким задачам относятся:
1) Расчет параметров предельных режимов (предельной передаваемой мощности по линиям энергосистемы, критического напряжения узловых то-
чек системы, питающих нагрузку, и т.д).
2) Определение значений коэффициентов запаса. Вместе с коэффициентами запаса по напряжению и мощности могут вычисляться коэффициенты запаса по настроечным параметрам АРВ:
![]() ,
,
где ![]() и
и ![]() - максимальное и минимальное значение
настроечных параметров, соответствующих границе области статической
устойчивости.
- максимальное и минимальное значение
настроечных параметров, соответствующих границе области статической
устойчивости.
3) Выбор мероприятий по повышению статической устойчивости энергосистем или обеспечению заданной пропускной способности передачи.
4) Разработка требований, направленных на улучшение устойчивости систем. Выбирается настройка АРВ, обеспечивающая требуемую точность поддержания напряжения.
Решение перечисленных задач проводится с учетом возможности возникновения самораскачивания системы.
Задачи анализа динамической устойчивости связаны с переходом системы от одного установившегося режима к другому. Это следующие задачи:
а) расчет параметров динамического перехода при эксплуатационном или аварийном отключениях нагруженных элементов электрической системы;
б) определение параметров динамических переходов при коротких замыканиях в системе с учетом различных факторов:
- возможного перехода одного несимметричного КЗ в другое (например, однофазного в двухфазное);
- работы автоматического повторного включения элемента, отключившегося после КЗ, и т.д.
Результатами расчета динамической устойчивости являются:
- предельное время отключения расчетного вида КЗ в наиболее опасных точках системы;
- паузы систем АПВ, установленных на различных элементах электрической системы;
- параметры систем автоматического ввода резерва (АВР).
Расчеты ведутся, как правило, с учетом нелинейностей и существенных динамических характеристик.
10 Лекция. Статическая устойчивость простейшей системы
Содержание лекции: характеристика мощности генератора, признак статической устойчивости системы.
Цель лекции: вывод уравнения мощности генератора, рассмотрение режимов работы простейшей системы при малых возмущениях.
Под простейшей системой понимается такая, в которой одиночная электростанция (эквивалентный генератор) связана с шинами (системой) неизменного напряжения трансформаторами и линиями, по которым передается мощность от станции в систему (см. рисунок 10.1). Принимается, что суммарная мощность электрических станций системы во много раз превышает мощность рассматриваемой станции. Это позволяет считать напряжение на шинах системы неизменным (U = const) при любых режимах ее работы.
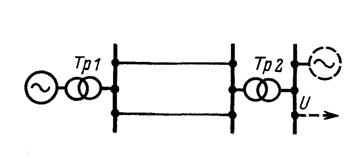
Рисунок 10.1
На рисунке 10.2 дана схема замещения данной электропередачи, в которой отсутствуют активные сопротивления и емкости и элементы схемы представлены только их индуктивными сопротивлениями.
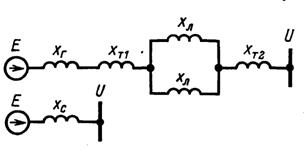
Рисунок 10.2
Сумма индуктивных сопротивлений генераторов, трансформаторов и линий дает результирующее индуктивное сопротивление системы:
Хс = Хг + Хт1 + 0,5Хл + Хт2 .
Здесь, и в дальнейшем, под индуктивным
сопротивлением генератора следует понимать его переходное сопротивление ![]() .
.
На рисунке 10.3 показана векторная диаграмма нормального режима работы электропередачи, из которой ввиду равенства отрезков ОА = E sinδ и ВС = Iа Хс вытекает соотношение
![]() ,
,
где Iа – активный ток;
δ – угол сдвига вектора ЭДС ![]() относительно вектора
напряжения приемной системы
относительно вектора
напряжения приемной системы ![]() .
.
Умножая обе части равенства на U/Xc, получим:
![]() ,
,
или
![]() ,
(10.1)
,
(10.1)
где Р – активная мощность, выдаваемая генератором;
![]() - переходная ЭДС генератора.
- переходная ЭДС генератора.
Зависимость (10.1) имеет синусоидальный характер и называется характеристикой мощности генератора.. С увеличением угла δ мощность Р сначала возрастает, но затем, достигнув максимального значения, начинает падать (см. рисунок 10.4).
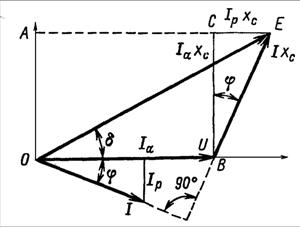
Рисунок 10.3
При данном значении ЭДС генератора Е и напряжения приемника U существует определенный максимум передаваемой мощности
![]() ,
(10.2)
,
(10.2)
который называется идеальным пределом мощности рассматриваемой простейшей электрической системы. Равновесие между мощностью турбины и генератора достигается лишь при значениях мощности меньших Рm, причем данному значению мощности турбины Ро соответствуют две возможные точки равновесия на характеристике мощности генератора и, следовательно, два значения угла δа и δb (см. рисунок 10.4). Однако в действительности устойчивый установившийся режим работы электропередачи возможен только при угле δа. Режим в точке b на падающей части характеристики неустойчив и длительно существовать не может.
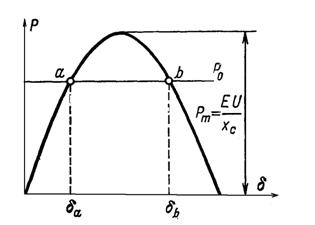
Рисунок 10.4
Рассмотрим режим работы в точке а. В этой точке мощности турбины и генератора уравновешивают друг друга. Если допустить, что угол δа получает небольшое приращение Δδ, то мощность генератора по синусоидальной зависимости от угла также изменится на величину ΔР, причем в точке а положительному приращению угла Δδ соответствует также положительное изменение мощности генератора ΔР. Мощность турбины не зависит от угла δ и при любых его изменениях остается постоянной и равной Ро. В результате изменения мощности генератора равновесие моментов турбины и генератора оказывается нарушенным и на валу машины возникает избыточный момент тормозящего характера, поскольку тормозящий момент генератора в силу положительного изменения мощности ΔР преобладает над вращающим моментом турбины.
Под влиянием тормозящего момента ротор генератора
начинает замедляться, что обусловливает перемещение связанного с ротором
вектора ЭДС ![]() в
сторону уменьшения угла δ. В результате уменьшения угла вновь восстанавливается
исходный режим работы в точке а и, следовательно, этот режим должен быть
устойчивым. То же самое может быть и при отрицательном приращении угла
Δδ в точке а.
в
сторону уменьшения угла δ. В результате уменьшения угла вновь восстанавливается
исходный режим работы в точке а и, следовательно, этот режим должен быть
устойчивым. То же самое может быть и при отрицательном приращении угла
Δδ в точке а.
Совершенно другая получается картина в точке
b. Здесь положительное приращение угла Δδ сопровождается не
положительным, а отрицательным изменением мощности генератора ΔР.
Изменение мощности генератора вызывает появление избыточного момента ускоряющего
характера, под влиянием которого угол δ не уменьшается, а возрастает. С ростом
угла мощность генератора продолжает падать, что приводит к дальнейшему увеличению
угла и т.д. Процесс сопровождается непрерывным перемещением вектора ЭДС ![]() относительно
вектора напряжения приемной системы
относительно
вектора напряжения приемной системы ![]() (см. рисунок 10.5) и станция выпадает из
синхронизма. Таким образом, режим работы в точке b статически неустойчив и практически
неосуществим.
(см. рисунок 10.5) и станция выпадает из
синхронизма. Таким образом, режим работы в точке b статически неустойчив и практически
неосуществим.
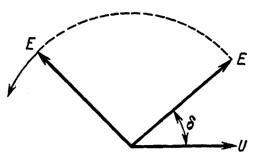
Рисунок 10.5
Точка а и любая другая точка на возрастающей части синусоидальной характеристики мощности отвечают статически устойчивым режимам и, наоборот, все точки падающей части характеристики – статически неустойчивым.
Формальным признаком статической устойчивости электрической системы может служить знак приращения мощности к приращению угла. Если ΔР/Δδ > 0, то система устойчива, если это отношение отрицательно, то неустойчива. Переходя к пределу, можно записать критерий устойчивости простейшей системы:
![]() > 0.
> 0.
Увеличение мощности турбины приводит к возрастанию угла ротора и уменьшению запаса статической устойчивости. Запас устойчивости электропередачи, связывающей станцию с шинами энергосистемы, должен быть не менее 20% в нормальном режиме и 8% в кратковременном послеаварийном.
11 Лекция. Уравнение движения ротора генератора. Характеристика мощности электропередачи с регулируемыми генераторами
Содержание лекции: уравнение движения ротора генератора, характеристика мощности генератора с АРВ, типы АРВ.
Цель лекции: вывод уравнения движения ротора генератора, ознакомление с режимами работы генераторов, имеющих АРВ, типы АРВ.
11.1 Уравнение движения ротора генератора
Незначительное возмущение в цепи статора генератора вызывает движение ротора в сторону увеличения или уменьшения угла δ (это зависит от знака избыточного момента). Возмущение сообщает ротору некоторое ускорение α, которое в относительных единицах пропорционально избыточному моменту ΔМ и обратно пропорционально постоянной инерции Tj:
![]() . (11.1)
. (11.1)
Здесь принимается, что при небольших изменениях
скорости ![]() ;
Tj – время, в течение которого скорость ротора
изменяется от нуля до номинальной под действием номинального избыточного
момента и при постоянном моменте сопротивления. Оно определяется:
;
Tj – время, в течение которого скорость ротора
изменяется от нуля до номинальной под действием номинального избыточного
момента и при постоянном моменте сопротивления. Оно определяется:
![]() (с) ,
(11.2)
(с) ,
(11.2)
где GD2 – маховый момент, т м2;
n – скорость вращения, об/мин;
Sном – номинальная мощность генератора, кВА.
Возвращаясь к уравнению (11.2) и учитывая, что ускорение представляет собой вторую производную от угла по времени
 ,
(11.3)
,
(11.3)
получаем
![]() ,
(11.4)
,
(11.4)
где Ро – мощность турбины;
Pmax – максимальное значение мощности аварийного режима.
Уравнение (11.4) называется уравнением движения ротора генератора. Его решение в форме δ = f(t) дает картину изменения угла δ во времени и позволяет судить об устойчивости генератора.
11.2 Характеристика мощности электропередачи с регулируемыми генераторами
Рассмотрим простейшую систему, принципиальная схема и схема замещения которой показана на рисунке 11.1. Из схемы замещения определим суммарное индуктивное сопротивление Хс = Хг + Хт1 + Хл + Хт2. Предположим, что у генераторов отсутствует система регулирования напряжения.
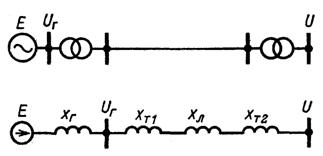
Рисунок 11.1
Построим векторную диаграмму рассматриваемой
системы. Значение напряжения на шинах генераторов ![]() можно получить, прибавляя к вектору
напряжения приемника
можно получить, прибавляя к вектору
напряжения приемника ![]() падение напряжения в суммарном
индуктивном сопротивлении трансформаторов и линии Хтл = Хт1
+ Хл + Хт2. Прибавляя далее к вектору
падение напряжения в суммарном
индуктивном сопротивлении трансформаторов и линии Хтл = Хт1
+ Хл + Хт2. Прибавляя далее к вектору ![]() падение напряжения в синхронном
индуктивном сопротивлении генератора Хг, находим ЭДС генератора в
данном режиме
падение напряжения в синхронном
индуктивном сопротивлении генератора Хг, находим ЭДС генератора в
данном режиме![]() .
Вектор напряжения на шинах генератора
.
Вектор напряжения на шинах генератора ![]() делит вектор полного падения напряжения
делит вектор полного падения напряжения ![]() на два отрезка:
IХтл
и IХг – в отношении значений индуктивных
сопротивлений Хтл и Хг. При увеличении угла δ на
Δδ вектор ЭДС генератора
на два отрезка:
IХтл
и IХг – в отношении значений индуктивных
сопротивлений Хтл и Хг. При увеличении угла δ на
Δδ вектор ЭДС генератора ![]() займет новое положение, показанное на
диаграмме (см. рисунок 11.2) штриховой линией. Положение вектора напряжения
генератора
займет новое положение, показанное на
диаграмме (см. рисунок 11.2) штриховой линией. Положение вектора напряжения
генератора ![]() в
новом режиме можно найти, разделив в том же отношении значений индуктивных
сопротивлений Хтл и Хг вектор полного падения напряжения,
соединяющий концы векторов
в
новом режиме можно найти, разделив в том же отношении значений индуктивных
сопротивлений Хтл и Хг вектор полного падения напряжения,
соединяющий концы векторов ![]() и
и ![]() .
.
Как вытекает из диаграммы, вектор напряжения ![]() при увеличении угла
δ поворачивается, следуя за вектором
при увеличении угла
δ поворачивается, следуя за вектором ![]() , и при этом уменьшается. Этот вывод
справедлив для напряжения любой другой точки схемы электропередачи: на шинах
подстанции, на линии и т.д.
, и при этом уменьшается. Этот вывод
справедлив для напряжения любой другой точки схемы электропередачи: на шинах
подстанции, на линии и т.д.

Рисунок 11.2
При наличии у генераторов автоматических регуляторов возбуждения контролирующих напряжение Uг, регуляторы, реагируя на понижение напряжения при возрастании угла δ, будут увеличивать ток возбуждения генераторов, а с ними ЭДС до тех пор, пока не восстановят прежнего значения напряжения.
Рассматривая установившиеся режимы работы генератора с АРВ при различных значения угла δ, исходят из постоянства напряжения Uг. Значение же ЭДС генератора при этом будет возрастать с увеличением угла δ. На рисунке 11.3 показано семейство характеристик Р = f (δ), построенных для различных значений ЭДС.
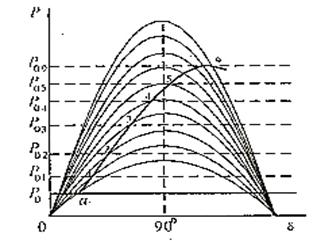
Рисунок 11.3
Если принять за исходную точку нормального режима точку а, то при увеличении мощности Ро (сопровождающемся увеличением угла δ) точки новых установившихся режимов будут определяться переходом с одной характеристики на другую в соответствии с векторной диаграммой (см. рисунок 11.2). Соединив между собой точки установившихся режимов при разных уровнях возбуждения, получим внешнюю характеристику генератора. Она возрастает даже в области углов δ > 90 о, и ее максимум достигается при угле δг = 90 о, где
δг – угол вектора напряжения на шинах генератора Uг. Но возможность работы в области углов больших 90о зависит от типа регулятора возбуждения.
11.3 Типы автоматических регуляторов возбуждения (АРВ)
В настоящее время применяются два типа АРВ – пропорционального и сильного действия.
АРВ сильного действия дают принципиальную возможность поддерживать практически постоянное напряжение на шинах генераторов или на стороне высшего напряжения трансформатора во всех режимах.
АРВ пропорционального действия поддерживают близкой к постоянной ЭДС (Eq ≈ const).
Параметрами АРВ являются коэффициенты усиления и постоянные времени его элементов.
Коэффициенты усиления по отклонению определяют точность поддержания напряжения при изменении установившегося режима, меняют параметры установившегося режима, деформируют статические характеристики системы: P (δ), U (δ), U (P), Q (δ) и др.
Коэффициентами усиления по производным называются коэффициенты стабилизации. Эти коэффициенты, не меняя статических характеристик, деформируют динамические характеристики системы и вводят в систему положительное демпфирование. Благодаря этому улучшается затухание переходных процессов.
В проектных расчетах синхронную машину представляют схемой замещения: U = const, Хг = 0 (АРВ сильного действия) или Е'q = const, Хг = Х'd (АРВ пропорционального действия).
12 Лекция. Динамическая устойчивость простейшей системы
Содержание лекции: анализ динамической устойчивости простейшей системы.
Цель лекции: рассмотрение режимов работы системы при внезапном отключении одной из двух параллельных цепей электропередачи.
Рассмотрим простейших случай, когда электростанция работает через двухцепную линию на шины бесконечной мощности. Условие постоянства напряжения на шинах системы (U = соnst) исключает качания генераторов приемной системы и значительно упрощает анализ динамической устойчивости.
Для выяснения принципиальных положений динамической устойчивости рассмотрим явления, возникающие при внезапном отключении одной из двух параллельных цепей электропередачи (см. рисунок 12.1), связывающей удаленную станцию с шинами неизменного напряжения.

Рисунок 12.1
Схема замещения в нормальном режиме (до отключения цепи) представлена на рисунке 12.2,а. Индуктивное сопротивление системы
Хс = Хг + Хт1 + 0,5Хл + Хт2 ,
определяет амплитуду характеристики мощности в этих условиях:
![]() .
.

Рисунок 12.2
При отключении одной цепи линии электропередачи индуктивное сопротивление системы получает новое значение
Хс1 = Хг + Хт1 + Хл + Хт2 ,
которое больше, чем в нормальном режиме. Амплитуда характеристики мощности при отключении цепи соответственно уменьшается до значения ЕU/Хс1.
Характеристики мощности в условиях нормального режима и при отключенной цепи показаны на рисунке 12.3.

Рисунок 12.3
Нормальному режиму соответствует кривая I, режиму после отключения – кривая II. Точка а и угол δ0 при мощности Р0 определяют режим работы до отключения. Точка b определяет режим работы после отключения при том же значении угла δ = δ0 , что и в нормальном режиме.
Таким образом, в момент отключения цепи режим работы изменяется и характеризуется не точкой а, а точкой b на новой характеристике, что обусловливает внезапное уменьшение мощности генератора. Мощность турбины остается при этом неизменной и равной Р0, так как регуляторы турбин реагируют на изменение частоты вращения агрегата, которая в момент отключения цепи сохраняет свое нормальное значение.
Неравенство мощностей, а следовательно, и моментов на
валу турбины и генератора вызывает появление избыточного момента, под влиянием
которого агрегат турбина – генератор начинает ускоряться. Связанный с ротором
генератора вектор ЭДС ![]() начинает вращаться быстрее, чем
вращающийся с неизменной синхронной скоростью ω0 вектор напряжения
шин приемной системы
начинает вращаться быстрее, чем
вращающийся с неизменной синхронной скоростью ω0 вектор напряжения
шин приемной системы ![]() .
.
Изменение относительной скорости вращения приводит к увеличению угла δ, и на характеристики мощности генератора при отключенной цепи рабочая точка перемещается из точки b по направлению к точке с. При этом мощность генератора начинает возрастать. Однако вплоть до точки с мощность турбины все еще превышает мощность генератора и избыточный момент, хотя и уменьшается, но сохраняет свой знак, благодаря чему относительная скорость вращения непрерывно возрастает. В точке с мощность турбины и генератора вновь уравновешивают друг друга и избыточный момент равен нулю. Однако процесс не останавливается в этой точке, так как относительная скорость вращения ротора достигает здесь наибольшего значения и ротор проходит точку с по инерции.
При дальнейшем росте угла δ мощность генератора
уже не превышает мощность турбины и избыточный момент изменяет свой знак. Он
начинает тормозить агрегат. Относительная скорость вращения
v
теперь уменьшается и в некоторой точке
d становится
равной нулю. Это означает, что в точке
d вектор ЭДС
![]() вращается с
той же угловой скоростью, что и вектор напряжения
вращается с
той же угловой скоростью, что и вектор напряжения ![]() и угол δ между ними больше не
возрастает. Однако процесс еще не останавливается, так как вследствие
неравенства мощностей турбины и генератора на валу агрегата существует
избыточный момент тормозящего характера, под влиянием которого частота вращения
продолжает уменьшаться, и рабочая точка, характеризующая процесс на
характеристике мощности, перемещается в обратном направлении к точке с.
Эту точку ротор вновь проходит по инерции, и около точки
b
угол достигает своего нового минимального значения, после чего вновь начинает
возрастать. После ряда постепенно затухающих колебаний в точке с
устанавливается новый установившийся режим с прежним значением передаваемой
мощности Р0 и новым значением угла δуст. Картина колебаний
угла δ во времени показана на рисунке 12.4.
и угол δ между ними больше не
возрастает. Однако процесс еще не останавливается, так как вследствие
неравенства мощностей турбины и генератора на валу агрегата существует
избыточный момент тормозящего характера, под влиянием которого частота вращения
продолжает уменьшаться, и рабочая точка, характеризующая процесс на
характеристике мощности, перемещается в обратном направлении к точке с.
Эту точку ротор вновь проходит по инерции, и около точки
b
угол достигает своего нового минимального значения, после чего вновь начинает
возрастать. После ряда постепенно затухающих колебаний в точке с
устанавливается новый установившийся режим с прежним значением передаваемой
мощности Р0 и новым значением угла δуст. Картина колебаний
угла δ во времени показана на рисунке 12.4.
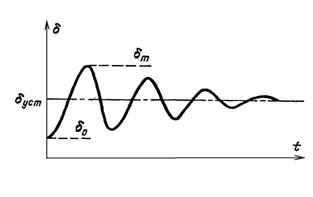
Рисунок 12.4
Возможен и другой исход процесса (см. рисунок 12.5). Торможение ротора, начиная с точки с, уменьшает относительную скорость вращения ЭДС v. Однако угол в этой фазе процесса все еще возрастает, и если он успеет достигнуть критической величины δкр в точке с на пересечении падающей ветви синусоиды мощности генератора с горизонталью мощности турбины Р0 прежде, чем относительная скорость v упадет до нуля, в дальнейшем избыточный момент на валу машины становится вновь ускоряющим, скорость v начнет быстро возрастать и генератор выпадает из синхронизма (см. рисунок 12.6).
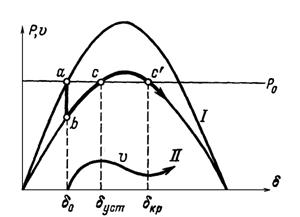
Рисунок 12.5
Таким образом, если в процессе качаний будет пройдена точка с', то возврат к установившемуся режиму уже невозможен.

Рисунок 12.6
Можно сделать вывод, что, несмотря на теоретическую возможность существования нового установившегося (и статически устойчивого) режима в точке с, процесс качания машины при переходе к этому режиму может привести к выпадению машины из синхронизма. Такой характер нарушения устойчивости называется динамическим.
Основной причиной нарушений динамической устойчивости электрических систем являются обычно короткие замыкания, резко уменьшающие амплитуду характеристики мощности.
13 Лекция. Динамическая устойчивость при коротком
замыкании на линии
Содержание лекции: динамическая устойчивость при КЗ на линии.
Цель лекции: анализ колебаний по правилу площадей.
Наиболее распространенным видом возмущений, приводящим к необходимости анализа динамической устойчивости, является короткое замыкание.
Рассмотрим сначала простейший случай работы электростанции через двухцепную линию электропередачи на шины бесконечной мощности (см. рисунок 13.1).

Рисунок 13.1
На рисунке 13.2 приведена упрощенная схема замещения рассматриваемой системы при нормальном режиме, представляющая собой последовательное соединение индуктивных сопротивлений элементов системы
Хс = Хг + Хт1 + 0,5Хл + Хт2 .

Рисунок 13.2
Характеристика мощности в нормальном режиме определяется
![]() .
.
Эта зависимость представлена на рисунке 13.4 (кривая I). Предположим, что в начале одной из цепей линии в точке К произошло несимметричное КЗ. Схема замещения для этого режима представлена на рисунке 13.3 а, где в точке К включено эквивалентное шунтирующее сопротивление КЗ Хк, состоящее из сопротивлений обратной и нулевой последовательностей.
В связи с изменением
конфигурации схемы вследствие КЗ при неизменной ЭДС генератора значение
передаваемой системе мощности изменяется. Выражение для передаваемой мощности
при КЗ можно найти с помощью простых преобразований схемы замещения для
аварийного режима. Эта схема представляет собой с лучами Хк, Ха
= Хг + Хт1 и Хb = 0,5Хл + Хт2, причем для
однофазного КЗ Хк = Х2 + Х0, для двухфазного
КЗ Хк = Х2, а для двухфазного замыкания на землю ![]() .
.
После преобразования звезды в треугольник (см. рисунок 13.3 б), получим
![]() ;
; ![]() ;
; ![]() . (13.1)
. (13.1)
Индуктивные сопротивления ![]() и
и ![]() , подключенные
непосредственно к ЭДС Е и напряжению U,
не влияют на значение активной мощности генератора в аварийном режиме и могут
не учитываться.
, подключенные
непосредственно к ЭДС Е и напряжению U,
не влияют на значение активной мощности генератора в аварийном режиме и могут
не учитываться.

Рисунок 13.3
Весь поток активной мощности
генератора будет протекать через индуктивное сопротивление ![]() , связывающее ЭДС генератора с
напряжением приемной системы. В этом случае характеристика мощности генератора
имеет вид
, связывающее ЭДС генератора с
напряжением приемной системы. В этом случае характеристика мощности генератора
имеет вид
![]() ,
(13.2)
,
(13.2)
где ![]() =
= ![]() .
.
Зависимость от угла имеет синусоидальный характер, но амплитуда ее меньше, чем при нормальном режиме. Обе характеристики приведены на рисунке 13.4.
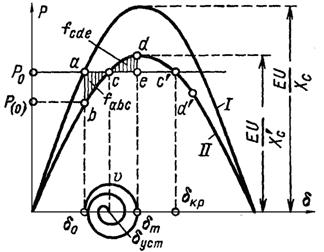
Рисунок 13.4
Отдаваемая генератором мощность и угол между ЭДС Е и напряжением U в нормальном режиме обозначены соответственно через Р0 и δ0. В момент КЗ в связи с изменением параметров схемы происходит переход с одной характеристики мощности на другую, и так как вследствие инерции ротора угол δ мгновенно измениться не может, то отдаваемая генераторами мощность уменьшается до значения Р(0), определяемого углом δ0 на кривой II. Мощность турбины остается неизменной и равной Р0.
В результате на валу машины возникает некоторый избыточный момент, обусловленный избытком мощности ΔР(0) = Р0 – Р(0). Под влиянием этого момента ротор машины начинает ускоряться, увеличивая угол δ. В дальнейшем процесс протекает качественно так же, как и при внезапном отключении нагруженной линии. После нескольких колебаний с постепенно затухающей амплитудой относительное движение ротора прекратится и его положение будет определяться точкой с, являющейся точкой установившегося режима на новой характеристике мощности. Если бы ротор при первом отклонении прошел угол δкр, соответствующий мощности Р0 на подающей ветви характеристики II, то избыточный момент вновь изменил бы свой знак и сделался бы снова ускоряющим. С дальнейшим увеличением угла ускоряющий момент стал бы нарастать и генератор выпал бы из синхронизма.
Приведенные на рисунке 13.4 характеристики дают возможность определить максимальное отклонение угла ротора и установить, сохраняет ли система устойчивость. Действительно, ординаты заштрихованных площадок представляют собой избыток мощности ΔР = Р0 – Р, создающий избыточный момент того или иного знака. Избыточный момент в относительных единицах может быть принят численно равным избытку мощности, т.е ΔМ = ΔР.
В рассматриваемом случае избыточный момент сначала ускоряет вращение ротора, и работа, совершаемая в период ускорения при перемещении ротора от δ0 до δуст, равна:
 ,
,
где ![]() - заштрихованная на
рисунке 13.4 площадка abc.
- заштрихованная на
рисунке 13.4 площадка abc.
Таким образом, кинетическая
энергия, запасенная ротором в период его ускорения, равна площадке ![]() . Эта площадка
называется площадью ускорения.
. Эта площадка
называется площадью ускорения.
После того как ротор пройдет точку своего установившегося положения на новой характеристике мощности, избыточный момент меняет свой знак и начинает тормозить вращение ротора. Изменение кинетической энергии в период торможения при перемещении ротора от δуст до δm равно:
 .
.
Площадка ![]() называется площадь
торможения.
называется площадь
торможения.
В период торможения ротор
возвращает запасенную им ранее избыточную кинетическую энергию. Когда вся
запасенная ротором избыточная энергия будет израсходована, т.е когда работа
торможения Аторм уравновесит работу ускорения Ауск,
относительная скорость становится равной нулю, т.к кинетическая энергия пропорциональна
квадрату скорости. В этот момент ротор останавливается в своем относительном
движении и достигнутый им при этом угол δm
является максимальным углом отклонения ротора машины. Таким образом, для
определения угла δm оказывается
достаточным равенство ![]() , или то же самое,
, или то же самое,
![]() .
(13.3)
.
(13.3)
Уравнение (13.3) показывает, что при максимальном угле отклонения площадь торможения должна быть равна площади ускорения и, следовательно, задача сводиться к тому, чтобы найти положение точки d, удовлетворяющее этому условию (см. рисунок 13.4), что может быть сделано графически.
Максимально возможная
площадь торможения равна площадке ![]() . Если бы эта площадь оказалась меньше
площади ускорения
. Если бы эта площадь оказалась меньше
площади ускорения ![]() ,
то система выпала бы из синхронизма. Отношение возможной площади торможения к
площади ускорения называется коэффициентом запаса устойчивости
,
то система выпала бы из синхронизма. Отношение возможной площади торможения к
площади ускорения называется коэффициентом запаса устойчивости ![]() .
.
Когда возможная площадь торможения получается меньше площади ускорения, иногда возможно добиться устойчивой работы, достаточно быстро отключив поврежденную цепь. Мощность, которую можно передать по второй, оставшейся в работе цепи, обычно больше мощности, передаваемой по двум цепям при КЗ. Уравнение мощности при отключении поврежденной цепи имеет следующий вид:
![]() ,
,
где ![]() .
.
Эта зависимость показана на рисунке 13.5 в виде кривой III. Кривые I и II представляют собой характеристики при нормальном режиме и при КЗ.
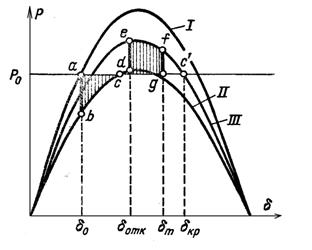
Рисунок 13.5
В момент КЗ передаваемая
мощность падает, и ротор начинает ускоряться. Пусть в некоторой точке d происходит отключение поврежденной цепи. В момент
выключения работа переходит в точку е на кривой III,
и отдаваемая генераторами мощность значительно повышается. Благодаря этому максимально
возможная площадь торможения ![]() получается значительно больше, чем при
длительном неотключенном КЗ, и это увеличение тем больше, чем раньше происходит
отключение, т.е. чем меньше угол отключения δотк. Таким
образом, быстрая ликвидация аварий может значительно повысить устойчивость системы.
получается значительно больше, чем при
длительном неотключенном КЗ, и это увеличение тем больше, чем раньше происходит
отключение, т.е. чем меньше угол отключения δотк. Таким
образом, быстрая ликвидация аварий может значительно повысить устойчивость системы.
С помощью рисунка 13.5, пользуясь правилом площадей, можно графически найти предельное значение угла δотк, при котором нужно произвести отключение поврежденной для того, чтобы добиться устойчивой работы. Значение этого угла определяется равенством площади ускорения и максимальной возможной площади торможения.
Однако для практических целей этого недостаточно. Необходимо знать не угол δотк, а тот промежуток времени, в течение которого ротор успевает достигнуть этого угла, т.е так называемое предельно допустимое время отключения КЗ, которое определяется методом последовательных интервалов.
14 Лекция. Асинхронные режимы в электрических системах
Содержание лекции: возникновение асинхронного режима, установившийся асинхронный режим.
Цель лекции: изучение процесса установившегося асинхронного режима.
Асинхронными называют такие режимы работы генератора или двигателя, при которых скорость вращения роторов значительно отклоняется от синхронной. К асинхронным режимам относятся:
- работа синхронной машины после ее выпадения из синхронизма;
- асинхронный пуск двигателей или синхронных компенсаторов;
- самозапуск двигателей.
В асинхронном режиме вектор ЭДС синхронной машины, выпавшей из синхронизма, вращается относительно вектора ЭДС машин, работающих синхронно.
14.1 Возникновение асинхронного режима
Асинхронный режим может возникнуть в результате нарушения динамической устойчивости, вследствие потери возбуждения синхронной машины.
Рассмотрим переход генератора в асинхронный режим работы из-за нарушения динамической устойчивости (см. рисунок 14.1).
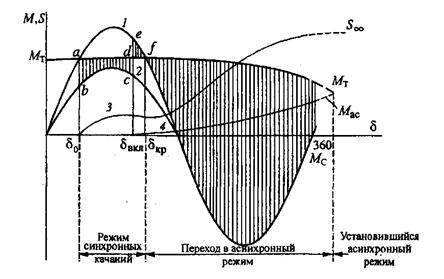
Рисунок 14.1
Пусть одна из линий электропередачи внезапно
отключается, а затем включается вновь. При этом происходит переход с
характеристики 1 на характеристику 2 и обратно. Но угол включения ![]()
![]() (см. рисунок 14.1) столь велик,
что площадь ускорения
(см. рисунок 14.1) столь велик,
что площадь ускорения ![]()
![]() превосходит наибольшую возможную площадь торможения
превосходит наибольшую возможную площадь торможения
![]() . Угол
вектора эквивалентного генератора G превышает критическое значение
. Угол
вектора эквивалентного генератора G превышает критическое значение ![]() . На ротор начинает
действовать ускоряющий избыточный момент, приводящий к дальнейшему увеличению
угла
. На ротор начинает
действовать ускоряющий избыточный момент, приводящий к дальнейшему увеличению
угла ![]() .
.
Как только скорость ротора станет отличаться
от синхронной, появляется скольжение S, растущее с увеличением разности скоростей.
Скольжение обусловливает появление асинхронного момента, который также зависит
от напряжения на зажимах генератора и его параметров. Причем приближенно можно
принять![]() .
.
С увеличением скольжения начинают действовать
регуляторы мощности турбины, уменьшая ![]() . Синхронная мощность приобретает
пульсирующий характер и, являясь функцией скольжения, будет, в свою очередь,
влиять на него, вызывая его пульсации. При некотором значении скольжения
. Синхронная мощность приобретает
пульсирующий характер и, являясь функцией скольжения, будет, в свою очередь,
влиять на него, вызывая его пульсации. При некотором значении скольжения ![]() момент турбины
уравновесится средним асинхронным моментом
момент турбины
уравновесится средним асинхронным моментом ![]() Это условие определяет начало
установившегося асинхронного режима (хода).
Это условие определяет начало
установившегося асинхронного режима (хода).
14.2 Установившийся асинхронный режим
Установившийся асинхронный ход характеризуется
скольжением ![]() которое
в соответствии с рисунком 14.2 определяется точкой пересечения характеристик
момента турбины и асинхронного момента. Если выпавшая из синхронизма машина
возбуждена, то кроме взаимно уравновешивающих друг друга асинхронного момента и
момента турбины на вал генератор-турбина будет действовать также синхронный
вращающий момент. Этот знакопеременный момент вызывает периодическое изменение
скорости вращения ротора в асинхронном режиме, а следовательно, и пульсации
скольжения, изменяющегося от
которое
в соответствии с рисунком 14.2 определяется точкой пересечения характеристик
момента турбины и асинхронного момента. Если выпавшая из синхронизма машина
возбуждена, то кроме взаимно уравновешивающих друг друга асинхронного момента и
момента турбины на вал генератор-турбина будет действовать также синхронный
вращающий момент. Этот знакопеременный момент вызывает периодическое изменение
скорости вращения ротора в асинхронном режиме, а следовательно, и пульсации
скольжения, изменяющегося от ![]() до
до ![]() около своего среднего значения
около своего среднего значения![]() (см. рисунок 14.3).
Очевидно, что чем больше амплитуда синхронного момента, тем больше разница
между максимальным и минимальным значениями пульсирующего скольжения.
Уравнение движения ротора генератора в асинхронном режиме может быть записано в
следующем виде:
(см. рисунок 14.3).
Очевидно, что чем больше амплитуда синхронного момента, тем больше разница
между максимальным и минимальным значениями пульсирующего скольжения.
Уравнение движения ротора генератора в асинхронном режиме может быть записано в
следующем виде:
Преобразуем это уравнение, введя в его левую часть скольжение.

Рисунок 14.2
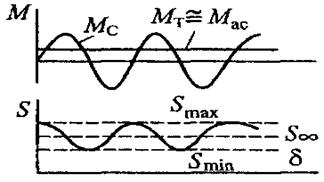
Рисунок 14.3
Ускорение ротора двигателя может быть записано в виде
![]() (14.2)
(14.2)
где![]() - разность между
текущей и синхронной скоростями ротора.
- разность между
текущей и синхронной скоростями ротора.
В относительных единицах она может быть представлена так:
![]() .
(14.3)
.
(14.3)
Подставляя формулу (14.3) в (14.2), получаем
![]() .
.
Следовательно, уравнение (14.1) запишется в виде
![]() .
(14.4)
.
(14.4)
Предположим, что![]() заданы как функции угла
заданы как функции угла ![]() Тогда, проинтегрировав
уравнение (14.4), получим
Тогда, проинтегрировав
уравнение (14.4), получим
 ,
,
откуда можно найти значение скольжения в любой момент времени
 .
(14.5)
.
(14.5)
15 Лекция. Ресинхронизация синхронных генераторов и
двигателей
Содержание лекции: ресинхронизация синхронных генераторов и двигателей.
Цель лекции: изучение процесса восстановления нормальной работы генератора, выпавшего из синхронизма.
Для большинства синхронных машин асинхронный режим не представляет опасности. Сомнения в допустимости этого режима могут возникнуть в связи с опасностью нарушения устойчивости остальной части системы, в которой мощный генератор работает асинхронно. В этом режиме генератор обычно потребляет из системы значительную реактивную мощность. Это приводит к увеличению тока статора. Поскольку предельная величина тока статора ограничена, предельная активная мощность генератора также ограничивается 50...70 % номинальной мощности, а у крупных турбогенераторов - 30...50 %. Это приводит к дефициту активной мощности в системе, что является существенным недостатком асинхронного режима.
Возможность работы в асинхронном режиме и ее длительность ограничены опасностью повреждений самого генератора. Турбогенератору разрешается работать в асинхронном режиме 15...30 минут, длительность работы гидрогенератора более кратковременна и составляет несколько минут.
Восстановление нормальной работы возможно без отключения от сети выпавшего из синхронизма генератора. Можно оставить его на некоторое время в асинхронном режиме, а затем заставить снова войти в синхронизм, осуществив ресинхронизацию.
Если скольжение, с которым работает генератор в асинхронном режиме, станет равным нулю, то это означает, что скорость вращения генератора стала синхронной, при этом
 .
.
В этом случае среднее значение скольжения
 .
.
Условие S = 0 необходимое, но недостаточное для втягивания генератора в синхронизм. Для выявления второго условия рассмотрим протекание процесса ресинхронизации, показанного на рисунке 15.1. Предположим, что увеличение тока возбуждения повышает синхронный вращающий момент, что в свою очередь приводит к росту пульсаций скольжения. При каком-то значении синхронного момента скольжение пройдет через нуль, что свидетельствует о наступлении синхронного режима. Избыточный момент, определяющий движение генератора в асинхронном режиме, состоит из трех составляющих:
![]() ,
,
где
![]() - момент
турбины;
- момент
турбины;
![]() - синхронный и асинхронный моменты.
- синхронный и асинхронный моменты.
Когда скольжение становится равным нулю, асинхронный момент также равен нулю. Следовательно, условием втягивания генератора в синхронизм будет Мс > Мт.
При таком соотношении моментов и
S = 0
на вал генератора действует тормозной избыточный момент, который вызывает уменьшение
угла![]() . Ротор
генератора начинает движение в сторону его уменьшения, площадь торможения
abc
уравновешивается площадью ускорения cde, происходят затухающие
колебания около точки с. Ввиду того, что ток возбуждения продолжает увеличиваться,
отсчет площадей производится от характеристики синхронного момента, соответствующего
более высокому току возбуждения (изображена пунктирной линией). Необходимо подчеркнуть,
что увеличение тока возбуждения в процессе ресинхронизации приводит к более
быстрому втягиванию генератора в синхронизм, демпфированию колебаний угла
. Ротор
генератора начинает движение в сторону его уменьшения, площадь торможения
abc
уравновешивается площадью ускорения cde, происходят затухающие
колебания около точки с. Ввиду того, что ток возбуждения продолжает увеличиваться,
отсчет площадей производится от характеристики синхронного момента, соответствующего
более высокому току возбуждения (изображена пунктирной линией). Необходимо подчеркнуть,
что увеличение тока возбуждения в процессе ресинхронизации приводит к более
быстрому втягиванию генератора в синхронизм, демпфированию колебаний угла ![]() во времени.
во времени.
Если условие ![]() >
>![]() не выполняется, то ресинхронизация будет
неуспешной, угол продолжит возрастать, а генератор останется в асинхронном режиме.
не выполняется, то ресинхронизация будет
неуспешной, угол продолжит возрастать, а генератор останется в асинхронном режиме.
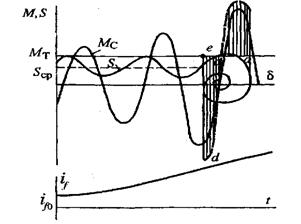
Рисунок 15.1
После вхождения в синхронизм регулятор скорости турбины начинает увеличивать впуск энергоносителя, вследствие чего возрастает момент турбины. Это приводит к увеличению площади ускорения и уменьшению площади торможения, что может вызвать выпадение из синхронизма в одном из последующих циклов качаний. Избежать выпадения из синхронизма можно, регулируя надлежащим образом ток возбуждения.
Процесс ресинхронизации может быть рассчитан методом последовательных интервалов с учетом характеристик турбин и их регуляторов скорости.
Восстановление синхронного режима работы синхронных двигателей производится для ответственных механизмов, сохранение которых в работе необходимо по условиям техники безопасности или технологии производства. Оно может осуществляться разными способами:
- ресинхронизацией;
- ресинхронизацией с автоматической разгрузкой рабочего механизма (если она допустима) до такой степени, при которой обеспечивается втягивание двигателя в синхронизм;
- отключением двигателя и повторным его автоматическим пуском.
В последнем способе при сохранении возбуждения двигателя важное значение имеет его синхронное включение. При несовпадении по фазе векторов напряжений синхронизируемого двигателя и сети возникает ударный ток включения, который приближенно может быть определен как
![]() ,
,
где
![]() -
геометрическая разность между ЭДС двигателя
-
геометрическая разность между ЭДС двигателя ![]()
![]() и напряжением сети;
и напряжением сети;
![]() - сопротивление двигателя и системы.
- сопротивление двигателя и системы.
При ![]() ударный ток имеет наибольшее значение и
может вызвать повреждение обмоток двигателя при его включении. Если работа
устройства, осуществляющего ускоренную синхронизацию, основана на регистрации
мгновенных значений напряжений на синхронизируемых шинах, то происходит
постоянное сравнение значений напряжений по концам выключателя,
осуществляющего ресинхронизацию. Как только разность
ударный ток имеет наибольшее значение и
может вызвать повреждение обмоток двигателя при его включении. Если работа
устройства, осуществляющего ускоренную синхронизацию, основана на регистрации
мгновенных значений напряжений на синхронизируемых шинах, то происходит
постоянное сравнение значений напряжений по концам выключателя,
осуществляющего ресинхронизацию. Как только разность
![]() U=
U=![]() превысит наперед
заданное значение
превысит наперед
заданное значение![]() ,
зависящее от погрешности измерения, начнется определение ускорения расхождения
векторов
,
зависящее от погрешности измерения, начнется определение ускорения расхождения
векторов![]() :
:
![]() ,
,
где
![]() и
и![]() - скорости вращения
векторов напряжений
- скорости вращения
векторов напряжений![]() ;
;
![]() - время, за которое произошло увеличение
скорости с
- время, за которое произошло увеличение
скорости с ![]() до
до
![]()
После определения ускорения вычисляются текущий
угол и угол опережения. Текущий угол находится по моментам прохождения через
нуль напряжений ![]() и
и
![]() Для
включения двигателя после проворота его ротора при угле
Для
включения двигателя после проворота его ротора при угле ![]() необходимо команду на
включение выключателя подавать с некоторым опережением по времени. При этом
угол опережения получают из соотношения
необходимо команду на
включение выключателя подавать с некоторым опережением по времени. При этом
угол опережения получают из соотношения
![]() ,
,
где
S, ![]() - текущие значения скольжения и
ускорения ротора;
- текущие значения скольжения и
ускорения ротора;
![]() - собственное время включения двигателя.
- собственное время включения двигателя.
Условие срабатывания выключателя запишется в
виде ![]() >
2л , при его выполнении подается сигнал на включение выключателя.
>
2л , при его выполнении подается сигнал на включение выключателя.
Описанный алгоритм обеспечивает ускоренную синхронизацию в случае кратковременной потери питания двигателя, которая может возникнуть из-за КЗ на питающей линии либо ее отключения, а затем включения от АПВ двигателя.
16 Лекция. Мероприятия по повышению устойчивости
электрических систем
Содержание лекции: мероприятия по повышению устойчивости электрических систем.
Цель лекции: изучение мероприятий, повышающих надежность и устойчивость электрических систем.
Повысить уровень устойчивости электрической системы можно изменением параметров ее элементов, параметров ее режима или введением дополнительных устройств. При этом необходимо учитывать следующие условия и ограничения:
- изменение параметров основных элементов не должно приводить к ухудшению нормального режима работы системы и его экономичности;
- применение устройств для улучшения устойчивости должно сопровождаться сопоставлением его стоимости и ущерба от нарушения того вида устойчивости, для которого оно предназначено. При выборе мероприятия по повышению устойчивости необходима технико-экономическая оценка предлагаемого варианта.
16.1 Мероприятия по улучшению параметров элементов
электрической системы
Генераторы. Параметры генераторов оказывают существенное влияние как на статическую, так и на динамическую устойчивость.
При использовании на генераторах АРВ с зоной нечуствительности на статическую устойчивость влияет синхронное индуктивное сопротивление Хd, на динамическую – переходное сопротивление Хd' и постоянная инерции Tj,
Постоянная инерции постоянная инерции существенно влияет на динамическую устойчивость генератора. Чем больше Tj («тяжелее» машина), тем медленнее изменяется скорость ее ротора под действием избыточного момента. Это увеличивает предельно допустимое время существования аварийного режима, повышая устойчивость системы.
Регулирование возбуждения синхронной машины может рассматриваться как средство улучшения ее параметров. Регуляторы сильного действия генератора с высокими потолками тока возбуждения в сочетании с дополнительными устройствами по повышению динамической устойчивости позволяют отказаться от уменьшения индуктивных сопротивлений. Появляется возможность применять генераторы с Хd = 1,5 – 2,0 и Хd' = 0,3 – 0,4 и снижать постоянную инерции, уменьшая вес машины и снижая ее стоимость.
Выключатели. Быстрое отключение КЗ имеет решающее значение для улучшения динамической устойчивости. Время отключения КЗ складывается из собственного времени выключателя tв и времени действия релейной защиты:
Тоткл = tв + tрз .
Уменьшение времени отключения КЗ увеличивает запас динамической устойчивости.
Линии электропередачи. Параметры линий и их номинальное напряжение оказывают существенное влияние на устойчивость системы.
Индуктивное сопротивление линии может быть снижено расщеплением проводов, применяемым с целью уменьшения потерь на корону. Расщепление фазы на три провода (ВЛ 500 кВ) уменьшает реактивное сопротивление линии на 25 – 30 %.
Уменьшить индуктивное сопротивление линии можно, применяя продольную (емкостную) компенсацию реактивного сопротивления ВЛ, которая осуществляется последовательным включением в линию статических конденсаторов. При этом эквивалентное сопротивление линии определиться как
Хэкв = х0L – Хс.
Чем больше сопротивление конденсаторов Хс, тем выше степень компенсации параметров линии и выше предел передаваемой мощности электропередачи, в состав которой входит компенсированная линия. Для повышения пропускной способности дальних электропередач применяются промежуточные синхронные компенсаторы и управляемые конденсаторы.
16.2 Дополнительные устройства для повышения устойчивости
Сопротивления, включенные в нейтраль трансформатора.. Если сеть с глухозаземленной нейтралью заземлить через небольшое сопротивление, не повышающее напряжение на нейтрали, то условия работы изоляции не изменяются, а динамическая устойчивость системы при несимметричных КЗ улучшится. Рассмотрим несимметричное КЗ в электропередаче, схема которой показана на рисунке 16.1.
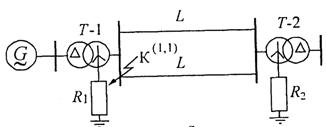
Рисунок 16.1
Схема замещения нулевой последовательности с учетом активных сопротивлений приведена на рисунке 16.2. Из нее следует, что активные сопротивления увеличивают суммарное сопротивление нулевой последовательности:
![]() .
.
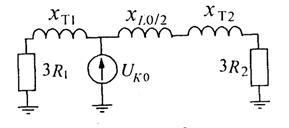
Рисунок 16.2
Вследствие этого увеличивается и сопротивление шунта КЗ:
![]() .
.
Тогда взаимное сопротивление схемы прямой последовательности (см. рисунок 16.3) уменьшится. Это вызовет возрастание амплитуды характеристики мощности аварийного режима (см. характеристику II на рисунке 13.5), что в свою очередь уменьшит площадь ускорения abcd. Уменьшение площади ускорения приводит к увеличению коэффициента запаса динамической устойчивости.
Рисунок 16.3
Электрическое торможение генераторов используется для повышения устойчивости при симметричных КЗ. Генератор, ротор которого ускоряется из-за какого-либо возмущения, тормозится активными сопротивлениями, включаемыми последовательно или параллельно (см. рисунок 16.4).

а б
Рисунок 16.4
Регулирование турбин. Небаланс мощности, возникающий при возмущении генератора, может быть уменьшен или полностью скомпенсирован снижением мощности турбины. Если бы регуляторы турбины были безынерционны, т.е. могли мгновенно реагировать на изменение электрической мощности, то возможность нарушения динамической устойчивости была бы исключена. Однако обычные регуляторы турбин являются инерционными системами со значительной зоной нечувствительности. При качаниях генераторов они не реагируют на изменение скорости. Кроме того, необходимо иметь в виду, что быстрое прекращение впуска энергоносителя приводит к гидравлическому удару (в случае гидротурбины) или расширению пара в объемах между регулирующим клапаном и первым рядом сопел паровой турбины. Эти явления вызывают дополнительное механическое усилие в системе регулирования.
Большими возможностями регулирования обладают газовые турбины, у которых удается быстро изменять механическую мощность при синхронных качаниях генераторов.
Список литературы
1 Ульянов С.А. Электромагнитные переходные процессы в электрических системах. – М.: Энергия, 1970.
2. Ульянов С.А. Сборник задач по электромагнитным переходным процессам в электрических системах. – М.: Энергия,1968.
3. Веников В.А. Переходные электромеханические процессы в электрических системах. - М.: Высшая школа, 1978.
4. Жданов П.С. Вопросы устойчивости электрических систем / Под ред. Жукова В.А. – М.: Энергоатомиздат,1979.
5. Электроэнергетические системы в примерах и иллюстрациях / Под ред. Веникова В.А. – М.: Энергоатомиздат,1983.
6. Переходные процессы электрических систем в примерах и иллюстрациях: Уч. пособие. Под ред. В.А. Строева. – М., 1996.
7. Куликов Ю.А. Переходные процессы в электрических системах: учеб.пособие для вузов/ М-во образ. РФ. Новосибирский ГТУ. – Новосибирск – Москва: НГТУ, Мир, АСТ, 2003.
Содержание
Введение 3
1 Лекция Общие сведения о переходных процессах 4
2 Лекция Общие указания к расчетам токов короткого замыкания 7
3 Лекция Трехфазное короткое замыкание в симметричной цепи 10
4 Лекция Несимметричные короткие замыкания 13
5 Лекция Токи и напряжения в месте двухфазного короткого замыкания 16
6 Лекция Электромагнитные переходные процессы в дальних
электропередачах 21
7 Лекция Периодические свободные составляющие при КЗ в дальней
электропередаче 23
8 Лекция Ограничение токов короткого замыкания 27
9 Лекция Устойчивость электрических систем 30
10 Лекция Статическая устойчивость простейшей системы 33
11 Лекция Уравнение движения ротора генератора. Характеристика 37
мощности электропередачи с регулируемыми генераторами
12 Лекция Динамическая устойчивость простейшей системы 41
13 Лекция Динамическая устойчивость при коротком замыкании на линии 45
14 Лекция Асинхронные режимы в электрических системах 50
15 Лекция Ресинхронизация синхронных генераторов и двигателей 53
16 Лекция Мероприятия по повышению устойчивости электрических систем 56
Список литературы 60