Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра “Электрические станции, сети и системы ”
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
И ДИСПЕТЧЕРИЗАЦИЯ ЭЛЕКТРИЧЕСКИХ
СИСТЕМ
И ЭНЕРГООБЪЕДИНЕНИЙ
Конспект лекций
для специальности 6М071800 - «Электроэнергетика» (профильная магистратура)
Алматы 2013
СОСТАВИТЕЛИ: Черемисинов Ю.Г., Е.Г. Михалкова. Автоматизация управления и диспетчеризация электрических систем и энергообъеди-нений. Конспект лекций (для магистрантов специальности 6М071800 – «Электроэнергетика»). - Алматы: НАО АУЭС, 2013.- 54 с.
Дисциплина «Автоматизация управления и диспетчеризация электрических систем и энергообъединений» включает в себя основные разделы автоматизации и управления энергосистем и энергообъединений.
Ил. - 18, библиограф. - 15 назв.
Рецензент: канд. техн., наук, проф. АУЭС Цыба Ю.А.
Печатается по плану издания НАО «Алматинского университета энергетики и связи» на 2012 г.
©НАО «Алматинский университет энергетики и связи», 2013 г.
1 Лекция №1. Назначение и особенности автоматического управления
Содержание лекции: общие сведения об автоматическом управлении;
назначение и особенности автоматического управления.
Цель лекции: изучение назначения и особенностей автоматического управления.
1.1 Общие сведения
Процесс производства и передачи электроэнергии является столь динамичным и постоянно подверженным случайным возмущающим воздействиям, что без автоматического управления его функционирование невозможно. Такие его особенности, как равенство в каждый момент времени генерируемой и случайно изменяющейся, требуемой нагрузкой, мощностей, время от времени возникающие короткие замыкания, высокая быстротечность электромагнитных и электромеханических переходных процессов, обусловили развитие технических средств автоматического управления еще в начальный период становления электроэнергетики. Под автоматическим понимается управление процессом производств, передачи и потребления электроэнергии в целом, без непосредственного участия человека.
На современном этапе автоматическое управление производится отдельными электроэнергетическими объектами и их взаимодействующими совокупностями. Управление процессом производства и передачи электроэнергии в целом пока еще осуществимо лишь при некотором оперативном вмешательстве человека - диспетчера электроэнергетической системы (ЭЭС). Такое управление называется автоматизированным. Оно реализуется автоматизированной системой диспетчерского управления (АСДУ) (см. рисунок 1.1), важнейшей частью которой является управляющий вычислительный комплекс УВК, расположенный на диспетчерском пункте (ДП) электроэнергетической системы.
Автоматическое управление осуществляется на основе переработки информации о свойствах управляемых электроэнергетических объектов (УЭО), их состояниях и режимах работы, характеризующихся режимными параметрами Y и складывающейся ситуации в ЭЭС в результате возмущающих воздействий Z.
Информация в виде различных электрических сигналов поставляется автоматическими информационными устройствами АИУ по каналам высокочастотной связи с ее источниками: первичными измерительными преобразователями (ПИП) режимных параметров ПИПу управляемых электроэнергетических объектов и возмущающих воздействий ПИПz.
На устройства отображения УОИ поступают (постоянно или по вызову) результаты обработки информации УВК в виде рекомендаций Хр для действий диспетчера Д.
В соответствии с программой Хпр функционирования УВК, задаваемой человеком, управляющие ЭВМ вырабатывают программные задания Хпр1- Хпрn действия автоматических управляющих устройств АУУ1-АУУn, установленных на управляемых электроэнергетических объектах УЭ01-УЭ0n и непосредственно оказывающих на них управляющие воздействия Xy1-Xyn.

Рисунок 1.1 - Общая функциональная схема автоматизированного диспетчерского управления процессом производства электроэнергии
Управляющий вычислительный комплекс УВК с устройствами его информационного обеспечения АИУ и автоматические управляющие устройства АУУ образуют автоматическую управляющую систему.
В зависимости от видов используемой информации: известной заранее априорной или получаемой в реальном времени функционирования ЭЭС,
рабочей информации-автоматическое управляющее устройство АУУ совместно с управляемым электроэнергетическим объектом УЭО образует автоматическую систему с разомкнутой (см. рисунок 1.2, а и б), замкнутой (см. рисунок, в) или комбинированной (см. рисунок 1.2,г) цепями воздействия [1]. По разомкнутой схеме работают программные автоматические устройства (см. рисунок 1.2, а) и функционирующие только по возмущающим воздействиям Z (прямая связь ПС на рисунке 1.2, б), а по замкнутой — автоматические устройства, использующие рабочую информацию (по цепи обратной связи ОС) о режимных параметрах Y (см. рисунок 1.2, в) электроэнергетического управляемого объекта.
Технические средства автоматического управления процессом производства и передачи электроэнергии делятся на автоматику управления нормальными режимами работы ЭЭС и автоматические устройства противоаварийного управления - противоаварийную автоматику.
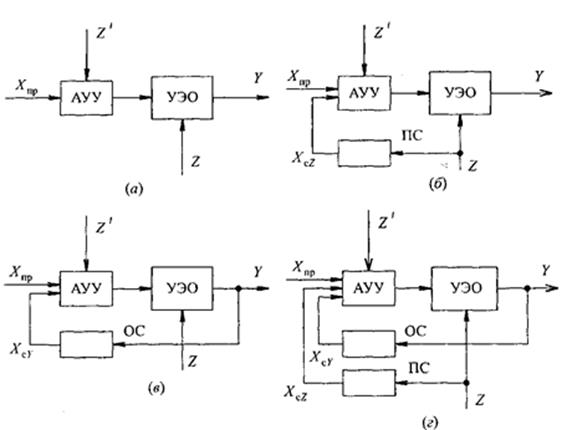
Рисунок 1.2 - Разомкнутые (а,б), замкнутая (б) и комбинированная (г) схемы автоматической системы управления
Автоматика управления нормальными режимами ЭЭС обеспечивает:
- автоматический пуск электроэнергетических блоков «турбина- генератор» и включение на параллельную работу синхронного генератора;
- автоматическое поддержание на заданном уровне напряжения на шинах электрических станций и реактивной мощности синхронных генераторов;
- автоматическое управление режимами ЭЭС по напряжению и реактивной мощности;
- автоматическое поддержание на неизменном уровне частоты вращения синхронно работающих генераторов;
-оптимальное (по характеристикам относительного прироста расхода условного топлива) распределение случайно изменяющейся электрической нагрузки ЭЭС между электрическими станциями и между электроэнергетическими блоками электростанций.
Указанные функции автоматики управления нормальными режимами реализуются автоматическими воздействиями на изменения впуска энергоносителя в турбины, автоматическим включением в определенный момент времени и при соответствующих условиях выключателя синхронного генератора, непрерывным управлением (регулированием) возбуждения синхронных генераторов и компенсаторов, дискретным управлением устройствами регулирования под нагрузкой (УРПН) трансформаторов и автотрансформаторов, регулированием реактивной мощности непрерывно управляемых ее источников — статических компенсаторов (СТК) и дискретным управлением мощностью конденсаторных установок.
Соответственно различаются: пусковые автоматы (ПА) гидротурбин и комплексы автоматических устройств управления пуском (КАУП) тепловых турбоагрегатов, автоматические регуляторы частоты вращения турбин (АРЧВ), устройства автоматической синхронизации гидро- и турбогенераторов (УАС), автоматические регуляторы возбуждения (АРВ) синхронных генераторов и компенсаторов, автоматические регуляторы частоты промышленного тока и активной мощности синхронных генераторов (АРЧМ), автоматические устройства оптимального распределения нагрузки (УРАН) электроэнергетической системы между часто-то регулирующими электростанциями, автоматические регуляторы коэффициентов трансформации (АРКТ) и автоматические регуляторы реактивной мощности статических установок ее генерирования или потребления (АРРМ).
Назначением противоаварийной автоматики является решение острой и специфической проблемы современных объединенных и единой электроэнергетической систем страны - обеспечение совместного функционирования (синхронной устойчивости) множества мощных электростанций, связанных длинными и сильно нагруженными линиями электропередачи в условиях больших возмущающих воздействий в виде неизбежных коротких замыканий (КЗ) и связанных с ними отключений мощных электроэнергетических объектов, обусловливающих скачкообразные изменения генерируемых, передаваемых и предельных (по устойчивости) мощностей.
Противоаварийная автоматика должна прежде всего ликвидировать возмущающее воздействие.
Особенно сложной, централизованной и иерархически построенной является АПНУ. Она функционирует на основе результатов постоянных, производимых циклически (через 5-10 с) расчетов устойчивости цифровыми ЭВМ.
Аналогичные противоаварийные воздействия характерны и для AJIAP. Если асинхронный режим ликвидировать не удается, действует делительная автоматика, отключающая от ЭЭС несинхронно работающую электростанцию.
Балансы мощностей в обеих частях нарушаются. В избыточной части ЭЭС частота и напряжение возрастают, а в недостаточной по мощности (дефицитной) части снижаются.
Начинает действовать противоаварийная автоматика предотвращения недопустимых, опасных изменений режимных параметров:
- автоматика ограничений снижений (АОСН) и повышений (АОПН) напряжения;
- автоматика ограничений снижений (АОСЧ) и повышений (АОПЧ) частоты.
Последующее восстановление связи между разделенными частями электроэнергетической системы производится автоматикой повторного включения с синхронизацией (АПВС).
1.2 Назначение и особенности автоматического управления
На электрических станциях (ЭС), вырабатывающих электроэнергию путем преобразования в нее механической энергии синхронных генераторов, вращаемых турбинами, выполняются сложные технологические процессы по образованию энергоносителя, особенно водяного пара, и превращению его потенциальной энергии в кинетическую энергию гидравлических и паровых турбин.
Необходимое для этого согласованное взаимодействие энергетического оборудования и механизмов ЭС обеспечивается их автоматическим управлением, реализуемым различными автоматическими устройствами управления
-устройствами автоматики, а управление производством электроэнергии в целом - автоматизированной системой управления технологическими процессами электростанций.
Автоматические управляющие устройства делятся на устройства технологической автоматики и автоматики управления электрической частью ЭС.
Особенностью технологической автоматики является формирование необходимой для функционирования автоматических устройств информации на основе преобразований в электрические сигналы в виде изменений информационных параметров напряжения или тока изменяющихся параметров энергоносителя, механических и гидравлических параметров.
Автоматическое управление основными электроэнергетическими агрегатами электрических станций — гидро- (ГГ) и турбогенераторами (ТГ)- сводится к управлению изменениями их состояния и обеспечению оптимальных режимов работы. Изменения состояния: нормальные или аварийные пуск и останов, включение на параллельную работу, перевод из генераторного в режим синхронного компенсатора (СК) и обратный перевод - производятся относительно редко и кратковременно автоматическими управляющими устройствами дискретного (релейного) действия.
Автоматическое управление существенно различно на гидро- (ГЭС) и тепловых (ТЭС) электростанциях и имеет особенности на гидроаккумулирующих (ГАЭС) и атомных (АЭС) электростанциях.
2 Лекция №2. Автоматическое управление пуском гидрогенераторов
Содержание лекции: формирование сигналов автоматического управления
Цель лекции: изучение формирования сигнала автоматического управления пуском гидрогенераторов.
Формирование сигналов автоматического управления. Всероссийским научно-исследовательским и проектно-изыскательским институтом «Гидропроект» разработаны типовой алгоритм и его реализация на логических элементах автоматического управления пуском, остановом и переводом в режим работы синхронным компенсатором и возвратом в генераторный режим гидрогенератора ГЭС (см. рисунок 2.1) с любыми типами гидротурбины и с применением последней модификации электрогидравлического автоматического регулятора частоты вращения ЭГР-2И.
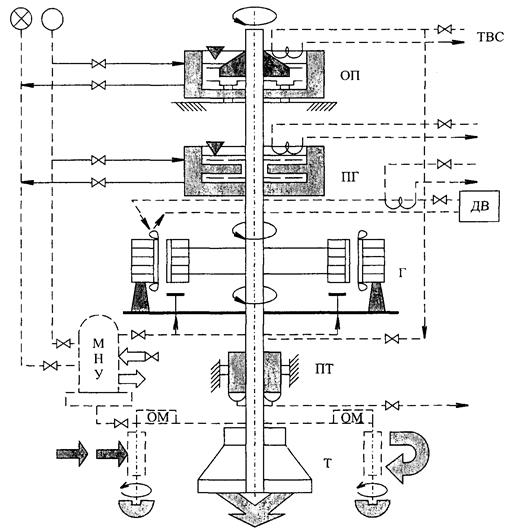
Рисунок 2.1 - Схема вертикального гидроагрегата и взаимодействия его вспомогательного оборудования
Алгоритм действия и типовая схема автоматического устройства обеспечивают полностью автоматическое управление технологическими процессами указанных изменений состояния гидрогенератора и предполагают выполнение следующих операций:
- контроль готовности турбины Т генератора Г к пуску с проверкой его исправности и работоспособности устройств технического водоснабжения ТВС, а также подшипника гидротурбины;
- охлаждение масла в ваннах подшипника синхронного генератора ПГ и опорного подшипника ОП;
- наличие достаточного давления в маслонапорной установке МНУ;
- нормальный и ускоренный пуск и включение синхронного генератора способом точной автоматической синхронизации и способом самосинхронизации соответственно с автоматическим набором нагрузки;
- пуск и перевод в режим синхронного компенсатора (СК) и перевод из режима СК в генераторный режим;
- нормальный и аварийный останов гидроагрегата.
На рисунке 2.2,а приведена логическая схема формирования сигналов командной информации по автоматическому управлению изменением состояния гидроагрегата.
Сигнал нормального пуска НП (см. рисунок 2.2,а) формируется через логический элемент DW1 (ИЛИ) от ключа управления SА1.1 или от АСУ технологическими процессами ГЭС, или от устройства противоаварийной автоматики УПА, запоминается статическим триггером ST1(вход записи 5), если на его считывающий вход R через элемент DW2 не приходит один из следующих приоритетных командных сигналов или сигналов неготовности синхронного генератора:
1) пуск в режим СК— от ключа управления SА2.1, или нормальный останов— от положения ключа SА1.2, или отмена пуска— от кнопки SB1;
2) генератор возбужден — от измерительного реле КА.1тока ротора, или его выключатель включен — от контакта Q.1.
Запоминание сигнала нормального пуска разрешается и при возбужденном генераторе, если включен ключ SA3 автоматического синхронизатора (см.ниже) — положение SА3.1: логический сигнал (единица) от SA3.1 на инверсном входе логического элемента DX (ЗАПРЕТ) не пропускает на элемент DW2 сигнал о наличии тока в обмотке возбуждения генератора. Для надежности действия сигнала на отмену пуска предусмотрено его поступление на вход DWU2 (ИЛИ-НЕ) и прохождение сигнала нормального пуска последовательно через DXU1(И-НЕ) и DWU2 с дополнительным контролем операции на отмену пуска от кнопки SB1.
Логическая схема на рисунке 2.2, а иллюстрирует и реализацию алгоритма прохождения сигнала на ускоренный пуск УП гидроагрегата от УПА, а именно: от измерительного реле KF снижения частоты в электроэнергетической системе. Он фиксируется триггером ST2 (вход записи 5), если на его вход считывания R через элемент DW3 не поступает один из сигналов: от SA1.2 (останов) или от SB1(отмена пуска), или от Q.2 (генератор включен),
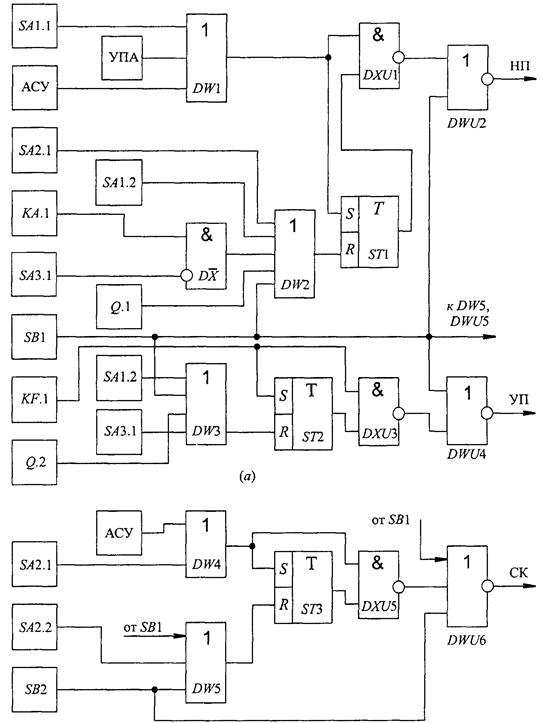
Рисунок 2.2 - Логическая схема формирования сигналов на пуск гидроагрегата (а) и перевод его из генераторного в режим синхронного
компенсатора (б)
или от SAЗ.1(точная синхронизация) — при ускоренном пуске гидрогенератор включается на параллельную работу более быстрым способом самосинхронизации.
При выполнении условий формирования сигнала от SA2. 1 или от АСУ (элемент DWA на рисунке 2.2, 6) на пуск гидрогенератора в режим работы синхронным компенсатором он запоминается триггером SТ3 при условии отсутствия на входах элемента DW5 одного из запрещающих сигналов от SA2.2 (вывод из режима СК) или от SB2 (отмена пуска в режим СК), или от SB1. Сигнал также проходит последовательно через элементы DXU5,DWU6, обеспечивающие, как указывалось, резервирование запретов на его выполнение сигналами от SB1 и SB2.
Аналогично формируется сигнал на останов гидроагрегата. Типовой алгоритм формирует и ряд дополнительных сигналов.
3 Лекция №3. Автоматическое управление пуском турбогенераторов
Содержание лекции: технологические особенности; управление пуском турбоагрегата.
Цель лекции: изучение технологических особенностей турбоагрегатов и управления их пуском.
3.1 Технологические особенности
Тепловые электрические станции (ТЭС) состоят из нескольких технологических частей (цехов), соответствующих основным технологическим процессам создания и преобразования энергоносителя — водяного пара: топливной, парогенераторной, турбинной и электрической. Современные мощные ТЭС имеют блочное построение — состоят из энергоблоков «парогенератор - турбина-электрический генератор – трансформатор».
По условиям работы ТЭС в современных электроэнергетических системах требуются довольно частые изменения состояний турбоагрегатов, а именно: их останов на нерабочие дни и практически еженедельный пуск. Все в большей мере мощные турбоагрегаты используются и для больших и экстренных изменений мощности электроэнергетической системы в аварийных условиях. Изменение состояния турбоагрегата ТЭС технически весьма сложно, производится при координированном автоматическом управлении топливным и парогенераторным технологическими процессами и требует значительного времени, особенно пуск турбины. Время пуска и последующего набора нагрузки (нагружения) определяется, главным образом, двумя факторами: постепенным и непрерывным прогревом пароподводящих и рабочих частей турбины и температурными линейными расширениями его конструктивных частей, особенно ротора турбины.
Тепловая схема (см. рисунок 3.1,а)паровой турбины включает парогенератор ПГ, паропроводы с главными паровыми задвижками ГПЗ, сепаратор-промперегреватель пара СПП, пускосбрасывающее пар устройство ПСБУ — быстродействующая редукционно-охладительная установка БРОУ, конденсатор отработанного пара К, различные насосы, в особенности питательные, и другое оборудование, которое должно координированно взаимодействовать, своевременно включаясь в действие и изменяя режимы работы в процессе пуска турбоагрегата.
Главная особенность пускового режима — необходимость постепенного и непрерывного прогрева конструктивных частей турбины и пароподводящих конструкций обусловливает, как указывалось, длительное время пуска турбоагрегата и постепенный длительный набор нагрузки — нагружения турбины. Даже при современном оптимальном автоматически управляемом пуске процесс разворота, включения в работу и нагружения турбоагрегата продолжается несколько часов.
Различаются пуски агрегата из остановленного, неостывшего и горячего состояний. Процесс пуска турбоагрегата разделяется на этапы: пред толчкового прогрева, толчковых оборотов, холостого хода, синхронизации и включения генератора, начального нагружения до 1/3 номинальной мощности, достижения заданной мощности и номинальных параметров пара.
3.2 Управление пуском турбоагрегата
Автоматическое управление производится автоматикой пуска турбины, входящей в состав АСУ ТП электростанции. Автоматика управляет доступом пара в турбину, воздействуя на соответствующие элементы турбоустановки и пускосбросных устройств и задавая автоматическим устройствам управления парогенератором возрастающие, соответственно тепловому состоянию турбины, скользящие параметры пара и производительность. Автоматика пуска включает в свой состав (см. рисунок 3.2,б): логическое устройство дискретного управления пусковыми операциями; комплекс пусковых автоматических регуляторов; информационное устройство контроля тепловых и механических параметров турбоустановки.
Логическое управляющее устройство ЛУУ проверяет выполнение условий, необходимых для начала очередной операции, производит запуск, технологических операций в требуемой последовательности их выполнения и проверяет выполнение условий, характеризующих окончание технологической операции.
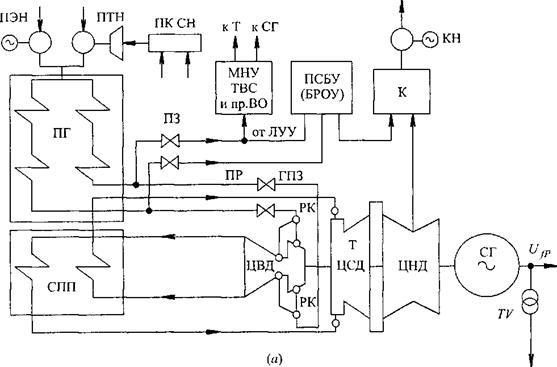
Рисунок 3.1 - Тепловая схема турбогенератора (а) и функциональная схема автоматической системы управления его пуском (б)

Рисунок 3.2 – Окончание
Комплекс основных пусковых автоматических регуляторов автоматики пуска образуют: регулятор разворота и начального нагружения АРР ЯЯ; регулятор теплового состояния турбины APTСТ; стерегущий регулятор мощности редукционно-охладительной установки САР МБ; регуляторы задания температуры свежего пара (пусковой регулятор парогенератора) и задания температуры пара промперегревателя APTПГ и ПП и автоматический регулятор частоты вращения АРЧВ.
Автоматические регуляторы — аналоговые электрические с унифицированными сигналами в виде изменяющегося в пределах 0-5 мА постоянного тока. Измерительные их части содержат измерительные преобразователи ИП изменений тепловых параметров в электрические сигналы.
Информационное автоматическое устройство ИАУ контроля тепловых и механических параметров обеспечивает отображение информации для оператора, получающего более сотни аналоговых и дискретных сигналов, и использование информации для изменений по ходу процесса пуска заданий автоматическим регуляторам и логическому устройству.
Логическое управляющее устройство на каждом этапе пуска формирует дискретные управляющие воздействия на оборудование маслонапорной установки и технического водоснабжения, на регулирующие клапаны РК турбины, главную паровую задвижку паропровода ГПЗ, паровую задвижку ПЗ
пускосбросных устройств ПСБУ (БРОУ) и другие исполнительные элементы, обеспечивающие выполнение очередной технологической операции, и выдает на щит управления ЩУ дискретную информацию для оператора.
На щите управления находятся ключ пуска КП1 и ключи перехода к очередной операции пуска KП2-KПN для возможности вмешательства оператора или выдачи (изменения) задания логическому управляющему устройству. Как указывалось, на ЩУ находятся современные технические средства отображения информации ТСОИ о ходе процесса пуска, текущих значениях тепловых и механических параметров парогенератора, турбины и синхронного генератора, включая и дисплей.
На первом этапе автоматического пуска турбоагрегата производится прогрев пароперепускных труб, главной паровой задвижки и клапанов турбины в закрытом их состоянии путем открытия байпасов (обходных пароперепускных труб) ГПЗ. Прогревается цилиндр высокого давления и сепаратор-пароперегреватель СПП (см. рисунок 3.1,а) пропуском пара через стопорные клапаны. Разворот турбины начинается с толчка ее ротора путем небольшого открытия регулировочных клапанов РК автоматическим регулятором разворота и начального нагружения АРР НН, который постепенно по мере дальнейшего повышения температуры турбины доводит частоту вращения до близкой к синхронной, при этом относительно быстро частота увеличивается лишь при 750 мин-1 - критической частоте по условию механического резонанса. Процессом набора мощности управляет автоматический регулятор частоты вращения генератора АРЧВ через исполнительный механизм управления турбиной ИМ под контролем автоматического регулятора теплового состояния APTСТ турбины.
Регулятор теплового состояния определяет темп роста нагрузки энергоблока и выдает задания для пускового регулятора мощности парогенератора ПГ, регулятора топлива, а после перехода на прямоточный режим - регулятора питательной воды, воздействующего на питательные турбонасосы ПТН, и стерегущему автоматическому регулятору САР МБ мощности БРОУ. Его уставка изменяется APTСТ с некоторым опережением нарастания давления с таким расчетом, чтобы паровые задвижки ПЗ были закрыты. Они открываются в случае, если парогенератор по какой-либо причине вырабатывает больше пара и более высоких параметров, что угрожает нарушению пусковой динамики теплового состояния турбины. При этом излишки пара сбрасываются в БРОУ и далее в конденсатор К турбины. Температура свежего и прошедшего ПВД после перегрева пара поддерживается соответствующими регуляторами APTПГ. Общее время автоматического пуска из холодного состояния от розжига горелок парогенератора до включения генератора энергоблоков прямоточными парогенераторами мощностью 300 МВт составляет около 2 ч, а мощностью 800 МВт - 3 ч. После включения генератора автоматическим синхронизатором АС набор мощности до номинальной длится 3 и 4 ч соответственно. Пуск после кратковременной остановки продолжительностью до 30 мин, т.е. из горячего состояния, по установленным нормам должен укладываться в 30 и 40 мин соответственно.
4 Лекция №4. Автоматическое управление включением синхронных генераторов на параллельную работу
Содержание лекции: способы автоматического управления; автоматическое включение по способу самосинхронизации.
Цель лекции: изучение автоматического управления включения синхронных генераторов на параллельную работу.
4.1 Способы автоматического управления
Синхронные генераторы всех электростанций вращаются с одинаковой установившейся (синхронной) частотой wc = 100π рад/с, соответствующей номинальной частоте промышленного синусоидального тока:
![]() .
.
Их ЭДС сдвинуты по фазе лишь на углы δН, определяемые передаваемой активной мощностью и сопротивлениями электропередачи и обусловливаемые сопровождающими выработку и передачу электроэнергии электромагнитными процессами (реактивной мощностью). Угол сдвига фаз и частота вращения изменяются лишь при электромеханических переходных процессах в электропередачах в пределах, не нарушающих синхронной динамической устойчивости электроэнергетической системы.
Для того чтобы включить выключателем Q (см. рисунок 4.1) синхронный генератор G на параллельную работу с синхронно вращающимися генераторами электростанции и ЭЭС, необходимо выполнить ряд операций. Используются два способа включения синхронных генераторов на параллельную работу: быстродействующий способ самосинхронизации и относительно медленный способ точной синхронизации. Соответственно различаются два вида автоматического управления, а именно: автоматическая самосинхронизация и автоматическая точная синхронизация.
При самосинхронизации выключатель гидро- и турбогенератора включается при близкой к синхронной частоте вращения wг, т.е. при малом скольжении
![]() (4.1)
(4.1)
при невозбужденном синхронном генераторе (практически при отсутствии его ЭДС Ег), и после тут же включаемого возбуждения синхронный генератор самостоятельно за время 1-2 с входит (втягивается) в синхронизм - начинает
работать синхронно.
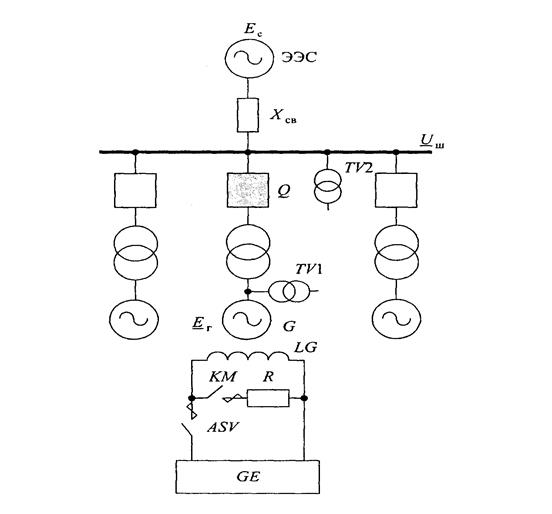
Рисунок 4.1 -Упрощенная электрическая схема электростанции с синхронизируемым генератором и ее связи с электроэнергетической системой
При точной автоматической синхронизации генератор возбуждается до ЭДС холостого хода Ег.х., практически равной напряжению Uш на шинах электростанции (при блочной схеме определяемому с учетом трансформатора). Выключатель синхронного генератора включается при весьма малом скольжении - s= 0,01÷0,025 -в момент совпадения по фазе его ЭДС и напряжения на шинах электростанции.
Как указывалось, быстродействующая самосинхронизация применяется при автоматических ускоренном пуске и пуске в режим работы синхронным компенсатором гидрогенераторов и при попытках незамедлительного восстановления нормального режима работы отключившихся турбогенераторов. При автоматическом управлении нормальным пуском гидро- и турбогенераторы включаются на параллельную работу автоматическим устройством точной синхронизации.
4.2 Автоматическое включение по способу самосинхронизации
Процесс самосинхронизации. В момент включения выключателя Q в обмотках статора генератора возникает ток включения I"В.С., ограниченный суммой сверхпереходного сопротивления генератора Xd" >Xг" > Xq" — в зависимости от положения ротора — и сопротивления связи Хсвс источником эквивалентной ЭДС электроэнергетической системы Ес.
Ток I"В.С вызывает динамическое воздействие на обмотки и обусловливает возникновение ударного вращающего момента МB.C на валу гидроагрегата. Вращающий момент асинхронный, его значение зависит от скольжения sи угла δB между продольной осью ротора и магнитной осью вращающегося магнитного поля статора и имеет максимум при угле δB, равном или кратном π/4.
Однако указанные воздействия на синхронный генератор менее интенсивны, чем при трехфазном КЗ на его выводах, поскольку ток КЗ ограничивается только сверхпереходным сопротивлением Xd", с учетом которого генератор рассчитывается по условиям механической прочности при его проектировании. Поэтому самосинхронизация практически всегда допустима.
Асинхронный вращающий момент создается трехфазной системой токов, наведенных в проводящих частях ротора - магнитопроводе и успокоительных обмотках с частотой скольжения. Однофазный индуцированный ток в обмотке возбуждения ротора, замкнутой через гасительный резистор R, создает пульсирующий магнитный поток, который не влияет на результирующий процесс самосинхронизации генератора. Направление зависящего от скольжения асинхронного вращающего момента Мас всегда уменьшает скольжение генератора: при wг<wс момент Мас разгоняет генератор, а при wг>wс отрицательный Мас снижает частоту его вращения. Установившееся скольжение sy определяется равенством Мас.у небольшому механическому моменту Мм на валу энергоагрегата, развиваемому турбиной (см. рисунок 4.2, а).
На вал гидрогенератора воздействует и реактивный вращающий момент Мр, обусловленный явнополюсностью ротора и изменяющийся с двойной частотой скольжения (см. рисунок 4.1, б):
![]() . (4.2)
. (4.2)
При малом механическом моменте Мм в течение периода скольжения турбины реактивный момент дважды с равной вероятностью снижает частоту скольжения до ws = 0 и может зафиксировать положение ротора как при углах δ1≈0, так и при δ2≈π. Второе из указанных положений ротора неправильно: при углах δ>πотрицательный синхронный электромагнитный момент Мс появляющийся после включения возбуждения генератора, ударно вытолкнет ротор на одно полюсное деление, дополнительно механически воздействуя на вал энергоагрегата. Поэтому возбуждение генератора включается (автоматом ASV) немедленно после его подключения к шинам электростанции вспомогательным контактом выключателя. После включения возбуждения генератор под воздействием нарастающего момента Мс самостоятельно в течение 1-2 с втягивается в синхронизм. Втягивание генератора в синхронизм с фиксированием установившегося положения ротора при угле δ=0 производится нарастающим экспоненциально (отражено на начальном участке графика Мс = f(δ,t)на рисунке 4.2, в) синхронным моментом.
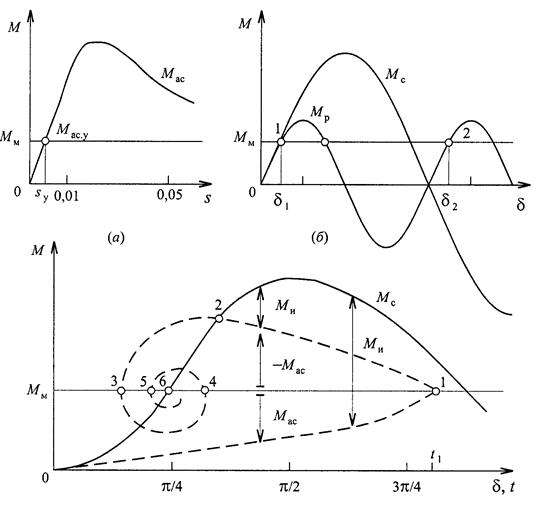
Рисунок 4.2 - Графики асинхронного (а), реактивного и синхронного (б) вращающих моментов и график процесса самосинхронизации (е) генератора
При этом синхронный режим может наступить в течение одного (0<δ <π) или нескольких полупериодов скольжения. Процесс начинается с упоминавшегося установившегося за счет асинхронного момента Мас.у = | -Мм| положительного (wг<wс) скольжения syи угла δ, принятого на рисунке 5.1,е в целях упрощения δ=0. Возникающий ускоряющий генератор синхронный момент Мс уменьшает скольжение s<sy (угол δ=wst увеличивается). При этом уменьшается и средний ускоряющий асинхронный момент +Мас (см. рисунок 4.2, а). В момент времени t1 скольжение и асинхронный момент снижаются до нуля (точка 1 на рисунке 4.2, в). Однако по инерции, за счет избыточной кинетической энергии, ротор продолжает ускоряться, скольжение, поскольку wт>wс, согласно (4.1) меняет знак. Снова возникающий, но отрицательный асинхронный момент — Мас становится тормозным, нарастает по абсолютному значению, пока не уравновешивает положительный избыточный момент, создаваемый синхронным вращающим моментом Ми = Мс— Мас — Мм (точка 2), и затем более интенсивно снижает скольжение. Точка 3 снова соответствует отсутствию скольжения и асинхронного момента. На участке графика между точками 3 и 4 скольжение и асинхронный момент снова положительны (wг<wс), ротор ускоряется. На рисунке 5.1, в показаны также участки графика изменения отрицательного и положительного асинхронного момента между точками 4, 5 и 5, 6 соответственно. В момент времени, соответствующий точке 6, наступает установившийся синхронный режим работы.
5 Лекция №5. Автоматическое управление включением синхронных генераторов на параллельную работу
Содержание лекции: устройство автоматической самосинхронизации; автоматическое включение по способу точной синхронизации; воздействия на генератор при точной синхронизации; автоматическое включение по способу самосинхронизации;
Цель лекции: изучение автоматического управления включения синхронных генераторов на параллельную работу.
5.1 Устройство автоматической самосинхронизации
Устройство автоматической самосинхронизации входит в состав автоматической системы управления изменением состояния гидрогенератора. Измерительной его частью является измерительное реле KFF (см. рисунок 5.1) разности частот ИРРЧ с двумя входными воздействующими величинами: вторичным напряжением Uш первичного измерительного трансформатора напряжения TV2 шин электростанции и остаточной ЭДС синхронного генератора, возбуждаемой остаточной намагниченностью его ротора. Относительно низкое ее значение ЕГ.ОСТ ≈ 0,02ЕГ.Х и интенсивное возрастание до ЭДС холостого хода Ег.х в процессе возбуждения генератора определяют особенности цепи подключения ИРРЧ к трансформатору напряжения TV1генератора и необходимость его автоматического отключения максимальным измерительным реле напряжения KV2.
Устройство автоматической самосинхронизации включается в работу контактами реле KL8при включенном положении ключа самосинхронизации SAF. Замыкающим контактом SAF разрешается исполнение сигнала на ускоренный пуск гидроагрегата. Контактами KL8.3, KL8Aи KL8.5 подготавливаются цепи подключения реле разности частот KFF и включается в работу релейно-контактная логическая часть автоматического устройства соответственно (см. рисунок 5.2).
Цепь подключения ИРРЧ к измерительному трансформатору напряжения TV1(к остаточной ЭДС синхронного генератора) контролируется размыкающими контактами KV2.1 реле напряжения (отсутствие напряжения генератора), KL9.1 реле включения выключателя синхронного генератора (выключатель отключен) и вспомогательным контактом ASV.1 автомата включения возбуждения — генератор невозбужден. Цепь замыкается с выдержкой времени реле КТ и размыкается контактом ASF.4 исполнительного реле устройства самосинхронизации.
При достижении гидрогенератором частоты вращения wг, близкой к синхронной, т.е. при разности частота ws= |wс—wг|, равной или меньшей установленной частоты срабатывания ИРРЧ, оно кратковременно замыкает свой контакт KFF и возбуждает исполнительное реле ASF,которое контактом ASF.2 самоудерживается (запоминает срабатывание ИРРЧ), а контактом ASFAпри замкнувшемся ранее контакте KL8.2 возбуждает реле KL9 включения выключателя Q синхронного генератора. Затем его вспомогательным контактом Q.1замыкается цепь питания обмотки автомата ASVвключения возбуждения синхронного генератора.

Рисунок 5.1 - Схема измерительной (а)и логической (б)частей устройства автоматической самосинхронизации
При этом обмотка контактора КМ,замыкающего, как указывалось, обмотку ротора генератора на гасительный резистор R (см. рисунок 4.1), обесточивается (на схеме не показано) и его контакт КМ размыкается. Реле разности частот KFF отключается от измерительного трансформатора напряжения TV1синхронного генератора поочередно размыкающимися контактами KV2.1, KL9.A,ASV.1(см. рисунок 5.1, а).
5.2 Автоматическое включение по способу точной синхронизации
При точной синхронизации, как указывалось, генератор включается в возбужденном состоянии при ЭДС холостого хода Ег,х. Спокойное - без динамических воздействий на обмотки и вал - и успешное включение синхронного генератора на параллельную работу обеспечивается при следующих условиях точной синхронизации:
- равенство амплитуд ЭДС Егх и напряжения Uш на шинах электростанции (вторичных напряжений первичных измерительных трансформаторов напряжения TV1и TV2 (см. рисунок 4.1), установленных на выводах генератора и шинах электростанции);
- близкая к синхронной wс частота вращения генератора wг;
- совпадение по фазе ЭДС Егх и напряжения Uш в момент включения (соединения контактов) выключателя Q синхронного генератора (с учетом сдвига по фазе, создаваемого трансформатором блока).
Первое условие очевидно и его выполнение не вызывает затруднений. Третье обусловливается неизбежным отличием частоты вращения генератора при подготовке его к включению от синхронной: происходит относительное вращение векторов Егх и Uш с разностью частот ws=wс-wг и необходимостью ws≠0 для функционирования автоматики синхронизации. При этом угол сдвига фаз между ними δ=wst непрерывно изменяется. На щите управления электростанцией он отображается синхроноскопом с круговой шкалой и вращающейся с частотой ws стрелкой (см. рисунок 5.2,а).
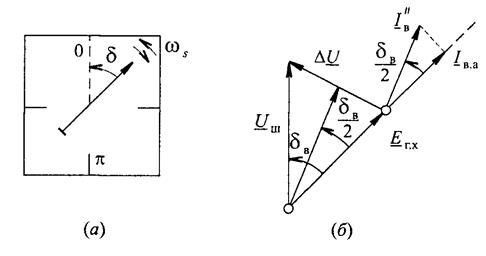
Рисунок 5.2 - Схема синхроноскопа (а), векторная диаграмма электрических величин в момент включения синхронного генератора (б)
Обеспечение совпадения векторов Ехг и Uш в момент включения выключателя достигается упреждающим включением привода при наличии уменьшающегося угла сдвига фаз — угла опережения δоп— с таким расчетом, чтобы за время действия привода — время tB включения выключателя — угол δ сдвига фаз уменьшился до δ=0. Например, при равномерном вращении генератора (ws = const) угол δоп должен быть равен
![]() (5.1)
(5.1)
Ограничение разности частот ws<wsд связано с выбором угла опережения. Однако значения допустимой wsд ограничиваются и условием успешности синхронизации, т.е. устойчивой параллельной работой синхронного генератора после его включения.
5.3 Воздействия на генератор при точной синхронизации
В реальных условиях включение генератора на параллельную работу практически всегда происходит при некотором угле сдвига фаз между ЭДС Егх и напряжением Uш— угле включения δВ. Даже современные достаточно совершенные автоматические устройства точной синхронизации полностью не исключают его. Поэтому синхронный генератор подвергается менее или более интенсивным динамическим воздействиям и при точной автоматической синхронизации.
Напряжение ΔU (см. рисунок 5.2, б), обусловленное углом δВ и равное при Егх=Uш = Е
![]() (5.2)
(5.2)
вызывает начальный периодический ток включения генератора, ограниченный его сверхпереходным сопротивлением X˝d и сопротивлением связи Xcв с источником эквивалентной ЭДС электроэнергетической системы:
 (5.3)
(5.3)
Как и при самосинхронизации, ток I˝в оказывает динамическое воздействие на обмотки статора синхронного генератора. При этом возникает ударный электромагнитный синхронный вращающий момент на валу генератора, равный в относительных единицах мощности, создаваемой активной составляющей тока включения Iв.а (см. рисунок 5.3,б):
![]() (5.4)
(5.4)
Свободные апериодические токи в обмотках статора, создавая неподвижное в пространстве магнитное поле, взаимодействующее с магнитным полем вращающегося ротора, создают свободную затухающую составляющую электромагнитного момента, изменяющуюся в функции, в частности, косинуса угла δГ= wгt вращения неявнополюсного турбогенератора, равную при неучете затухания
 (5.5)
(5.5)
Опасным для генератора является максимальный результирующий вращающий момент Мвмах = Мс + Мсвмах, возникающий при угле включения δВ≈2π/3 и wгt=π-(δВ/2). Однако угол включения, обеспечиваемый автоматическим устройством точной синхронизации, относительно небольшой, и поэтому синхронный генератор при его включении на параллельную работу по способу точной автоматической синхронизации подвергается менее интенсивным динамическим воздействиям, чем при самосинхронизации.
6 Лекция №6. Автоматическое регулирование частоты вращения
гидро- и турбогенераторов
Содержание лекции: назначение и особенности; гидродинамические регуляторы частоты вращения турбогенераторов. Регуляторы тепловых станций.
Цель лекции: изучение автоматического регулирование частоты вращения гидро- и турбогенераторов.
6.1 Назначение и особенности
Частота вращения гидравлической или тепловой турбины определяет частоту синусоидального напряжения синхронного генератора как важнейшего показателя качества вырабатываемой им электрической энергии. По требованиям ГОСТ частота должна быть высокостабильной: допустимые ее отклонения Δf от номинальной промышленной fном = 50 Гц не должны превышать Δf=±0,1 Гц.
Удержать частоту в указанных пределах в специфических условиях работы гидро- и турбогенераторов, обусловленных необходимостью равенства генерируемой и потребляемой активной мощности в каждый момент времени при непрерывно и случайно изменяющейся нагрузке электроэнергетической системы, можно только непрерывным автоматическим управлением частотой вращения турбин.
Непрерывное автоматическое управление называется автоматическим регулированием, а именно: стабилизирующим регулированием, поддерживающим частоту вращения на неизменном установленном (предписанном) уровне wпр=100πрад/с. Оно осуществляется автоматическими регуляторами частоты вращения (АРЧВ).
В режиме пуска паровой турбины АРЧВ функционирует как программный регулятор при изменяющемся предписанном значении частоты вращения, определяемом технологическими условиями ее разворота. В процессе подготовки генератора к включению на параллельную работу способом точной синхронизации АРЧВ, взаимодействуя с автоматическим устройством управления частотой скольжения синхронного генератора, обеспечивает целесообразную для функционирования автоматического синхронизатора частоту скольжения wsy.
Взаимодействие АРЧВ гидравлических и паровых турбин с АРМ оказывается существенно различным, ввиду подвижности (мобильности) первых и чрезвычайной инерционности, обусловленной технологией подготовки пара, вторых. Гидроагрегаты могут изменять свою нагрузку быстро и в полном диапазоне от холостого хода до номинальной. Загрузка теплового энергоагрегата, как указывалось, происходит длительно и при автоматическом управлении; снижение мощности паровой турбины ограничивается технологическим минимумом производительности парогенератора.
Еще одна особенность АРЧВ обусловливается различным поведением турбины синхронного генератора как регулируемого объекта при механическом переходном процессе — пуске и подготовке генератора к синхронизации или при его холостом ходе и при электромеханическом переходном процессе, возникающем в нагруженном режиме его параллельной работы в электроэнергетической системе. При механическом переходном процессе турбина описывается передаточной функцией интегрирующего звена, а при электромеханическом переходном процессе в нагруженных гидро- или турбогенераторе — передаточной функцией апериодического звена.
6.2 Гидродинамические регуляторы частоты вращения турбогенераторов. Регуляторы тепловых станций
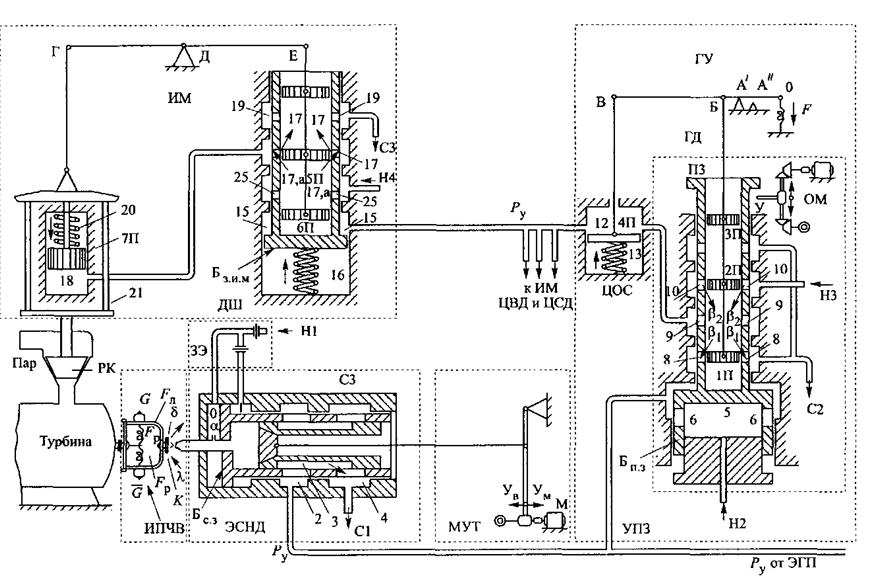
Тепловой гидродинамический АРЧВ паровых турбин ТЭС выпускается для турбогенераторов мощностью от 200 до 1200 МВт [11]. Он выполнен из унифицированных гидродинамических функциональных элементов: центробежного измерительного преобразователя частоты вращения в давление масла, гидромеханического элемента сравнения давлений, усилителя в виде гидравлического двигателя двухстороннего действия, охваченного местной жесткой отрицательной обратной связью и наименее инерционного исполнительного механизма в виде гидравлического усилителя одностороннего действия (см. рисунок 6.1).
Упрощенная гидрокинематическая схема автоматической системы регулирования частоты вращения конденсационной паровой турбины с указанным гидродинамическим регулятором приведена на рисунок 6.1.
Показан исполнительный механизм ИМ только одного из регулирующих клапанов РК турбины. Центробежный измерительный преобразователь ИПЧВ имеет облегченную ленточную конструкцию и расположен непосредственно на валу турбины. Он состоит из ленточной пружины Fn с грузами G, удерживаемыми радиальными пружинами Fp. С изменением частоты вращения турбины под воздействием центробежной силы, развиваемой грузами, ленточная пружина деформируется, сокращаясь и удлиняясь по горизонтальной оси и изменяя просвет S между отбойным кольцом К и выходным концом (соплом) трубки Л, через который вытекает масло из камеры 0 (отверстие а) цилиндра струйного следящего золотника СЗ. Таким образом, частота вращения преобразуется в давление масла (сигнал Хсш).
Следящий золотник выполняет функцию элемента сравнения давления масла ЭСНД, пропорционального частоте вращения (в камере 0) с давлением, установленным дросселирующими шайбами ДШ напорной масляной линии H1 в камере 1 золотника и моделирующим установленную, в частности, номинальную частоту вращения wном = π·102 рад/с. При указанных изменениях просвета δ давление в камере 0 увеличивается (при снижении частоты вращения) или уменьшается (при ее возрастании). В результате букса Бс.з золотника перемещается по горизонталью оси в том же направлении, что и кольцо К ленточной пружины ИПЧВ [11].
Перемещаясь, букс Бс.з изменяет открытие окон 2 и 4, через которые масло под давлением уходит к промежуточному золотнику ПЗ по линии управления УПЗ и на слив С1. Управляющее давление ру определяется разностью давлений в камерах 0 и 1 следящего золотника, т.е. моделирует сигнал об отклонении частоты вращения.
Например, при повышении частоты вращения и увеличении просвета δ
 букса Бс.з под воздействием уменьшающегося давления в
камере О перемещается влево (по расположению на схеме) и приоткрывает окно 4 на
слив масла С1. Поэтому давление ру в линии УПЗ и в
камере 7 промежуточного золотника ПЗ гидравлического усилителя ГУ
снижается. Его букса Бс.з смещается вверх. При этом отсечным
поршнем 1П золотника приоткрываются окна 8, соединяющие через просвет β1
окно 9 с линией слива С2. В результате давление масла в камере 12
цилиндра отрицательной обратной связи ЦОС и в камере 15 золотника
исполнительного механизма ИМ падает. Под воздействием избыточного давления
пружины 16 букса золотника Бз.и.м перемещается
вверх и, приоткрывая отсечным поршнем 5П окно и его просвет 17, соединяет через
окно 19 и масляную линию камеру 18 цилиндра гидравлического двигателя ИМ
одностороннего действия с линией слива масла СЗ. Давление в камере 18
букса Бс.з под воздействием уменьшающегося давления в
камере О перемещается влево (по расположению на схеме) и приоткрывает окно 4 на
слив масла С1. Поэтому давление ру в линии УПЗ и в
камере 7 промежуточного золотника ПЗ гидравлического усилителя ГУ
снижается. Его букса Бс.з смещается вверх. При этом отсечным
поршнем 1П золотника приоткрываются окна 8, соединяющие через просвет β1
окно 9 с линией слива С2. В результате давление масла в камере 12
цилиндра отрицательной обратной связи ЦОС и в камере 15 золотника
исполнительного механизма ИМ падает. Под воздействием избыточного давления
пружины 16 букса золотника Бз.и.м перемещается
вверх и, приоткрывая отсечным поршнем 5П окно и его просвет 17, соединяет через
окно 19 и масляную линию камеру 18 цилиндра гидравлического двигателя ИМ
одностороннего действия с линией слива масла СЗ. Давление в камере 18
Рисунок 6.1 - Схема гидродинамического регулятора частоты вращения турбогенератора
падает, и под воздействием избыточного усилия пружины 20 поршень 7П и сочлененный с ним через раму 21 регулирующий клапан турбины РК перемещаются вниз, уменьшая впуск пара в турбину. Частота ее вращения уменьшается.
Новое состояние вращения турбины наступает благодаря действию местной жесткой отрицательной гидромеханической обратной связи — рычаг ОБВ с поршнем ЦОС, охватывающей гидравлический двигатель двухстороннего действия ГД (промежуточный золотник ПЗ). В связи с уменьшением давления в камере 12 ЦОС, под воздействием пружины поршень 4П перемещается вверх и через рычаг ОБВ приподнимает поршни 1П-ЗП, закрывая поршнем 1П окно 8 в цилиндре ПЗ и тем самым останавливая дальнейшее снижение давления масла ру в линии, подводящей его к исполнительным механизмам ИМ. Указанная обратная связь является функциональной, определяющей согласно формуле (3.10) при Но.с(р) = Ко.с и структурной схеме на рисунке 3.5, а пропорциональный алгоритм автоматического регулирования. Коэффициент обратной связи К0.С, определяемый соотношением плеч АБ и АВ рычага, может дискретно изменяться перестановкой положений Аʹ, А" его опоры. Соответственно изменяется и статизм характеристики регулирования. Перестановка производится в процессе пуска для устойчивости АСРЧВ: при малых оборотах требуется большой статизм. Поэтому характеристика регулирования частоты вращения 4 имеет излом.
Механизм управления турбиной МУТ служит задающим элементом установки предписанной частоты вращения wпр (уставки АСРЧВ). Она изменяется смещением поршня следящего золотника СЗ рычагом, поворачиваемым червячным редуктором электродвигателя М или вручную. При смещении поршня, например, влево (по чертежу), окно 4 буксы Бс.з на слив С1 масла прикрывается, частота вращения wпр увеличивается Ув, поскольку давление в камере 1 возрастает и для его восстановления требуется большее перемещение влево буксы, т.е. смещение влево кольца К ленточного центробежного маятника ИПЧВ, что происходит при большей частоте вращения турбины.
Электродвигатель служит исполнительным элементом автоматической системы регулирования частоты и мощности электростанции и является исполнительным механизмом с постоянной скоростью движения, который замещается интегрирующим звеном при дискретном воздействии от позиционного регулятора.
На рисунке 6.1 показана также масляная линия пропорционального воздействия на гидравлический усилитель ГУ от электрогидравлического преобразователя ЭГП электрического регулятора мощности синхронного генератора. Показан и механический ограничитель мощности турбины ОМ в виде перемещаемого ручным или электрическим приводом упора У, препятствующего дальнейшему перемещению вниз буксы Бс.з.
7 Лекция №7. Автоматическое управление мощностью гидро- и турбогенераторов
Содержание лекции: назначение и особенности; автоматические регуляторы мощности турбогенераторов.
Цель лекции: изучение автоматического управления мощности гидро- и турбогенераторов.
7.1 Назначение и особенности
Основная задача автоматического управления активной мощностью синхронных генераторов - обеспечить выработку и передачу электроэнергии при наименьшем удельном расходе условного топлива. Она решается оптимизацией режимов работы гидро- и турбогенераторов и электрических станций в целом по активной мощности. Как известно, оптимальность режима достигается при равенстве относительных приростов расхода условного топлива электростанциями с учетом потерь электроэнергии на ее передачу и равенстве относительных приростов расхода топлива энергоагрегатами электростанции. Однако существенно различные технические возможности гидро- и турбогенераторов вынуждают по-разному подходить к их использованию при автоматическом управлении активной мощностью. Как указывалось, автоматическое управление мощностью органически связано с автоматическим регулированием частоты вращения энергоагрегатов. При этом одно из них оказывается главным, определяющим режим работы синхронного генератора.
Крайне инерционные и малоподвижные громоздкие электроэнергетические блоки парогенератор-турбина-электрогенератор тепловых и особенно атомных электростанций практического участия в автоматическом регулировании частоты промышленного тока не принимают. Они подвергаются автоматическому управлению исключительно по мощности и покрывают базовую прогнозируемую часть графика нагрузки энергосистемы. Их режимы работы определяются автоматическими регуляторами активной мощности, воздействующими на автоматическиерегуляторы частоты вращения. Поэтому на турбогенераторах применяются статические АРЧВ со значительным статизмом, обусловливающим практическую независимость их мощности от частоты при обычно малых ее отклонениях от номинальной.
Автоматические регуляторы распределяют мощность нагрузки электростанции между параллельно работающими турбогенераторами по указанному критерию оптимальности режимов работы по активной мощности и поддерживают ее на заданном уровне.
Подвижные, легко переносящие любые изменения нагрузки, гидрогенераторы покрывают случайно изменяющуюся часть графика нагрузки под воздействием астатических ПИ-регуляторов частоты вращения. Автоматическое регулирование частоты промышленного тока - главная задача автоматического управления мощностью гидрогенераторов. Все гидроэлектростанции являются частота регулирующими. Автоматическое управление мощностью практически сводится к уравниванию активных мощностей, т.е. равномерному распределению нагрузки электростанции между однотипными гидрогенераторами.
В соответствии с указанными особенностями изменения мощности турбо- и гидрогенераторов автоматические регуляторы мощности работают в одном из двух указанных режимов: автоматическое регулирование мощности с дополнительным воздействием по частоте; автоматическое регулирование частоты промышленного тока с дополнительным воздействием по мощности. Первый режим характерен для турбогенераторов, а второй - для гидрогенераторов. Автоматические регуляторы мощности реализуют задаваемое
общестанционной автоматической системой управления частотой и мощностью (АСРЧМ) вторичное регулирование частоты промышленного тока: АРЧВ турбин выполняют функцию первичных регуляторов частоты.
Турбогенераторы, как указывалось, практически не принимают участия в поддержании частоты в нормальных режимах работы при ее допустимых отклонениях Δf= ±0,1 Гц. Однако при значительных снижениях частоты автоматические регуляторы мощности турбогенераторов увеличивают их нагрузку по сигналу отклонения частоты.
Автоматические регуляторы мощности синхронных генераторов являются электрическими следящими (за изменяющейся предписанной общестанционной АСРЧМ мощностью) инерционными, функционирующими по И-алгоритму, регуляторами, воздействующими на АРЧВ через задающие их элементы - МУТ или МИМ. Автоматические регуляторы мощности обеспечивают астатическое регулирование мощности в первом из указанных режимов и астатическое регулирование частоты во втором режиме.
Особенность управления мощностью турбогенераторов - ее кратковременное (импульсное) снижение в аварийных режимах в целях предотвращения нарушения динамической устойчивости параллельной работы электростанции с электроэнергетической системой, обусловила оборудование современных мощных турбогенераторов двумя АРМ: обычно достаточно инерционным автоматическим регулятором их нагрузки в нормальных режимах и быстродействующим регулятором активной мощности (БАРМ) в аварийных режимах кратковременного действия. Используются и возможности длительного, ограниченного технологическими особенностями тепловых энергоблоков, снижения вырабатываемой ими электроэнергии для предотвращения нарушения статической устойчивости в послеаварийных режимах.
7.2 Автоматические регуляторы мощности турбогенераторов
Типовой АРМ турбогенераторов (см. рисунок 7.1) содержит достаточно сложную измерительную часть ИЧ,обеспечивающую необходимое его функционирование не только в нормальных режимах, но и при пуске и синхронизации генератора, а также взаимодействие с автоматическими регуляторами парогенератора (АРПГ).
Выполнение основной задачи - оптимизации режимов работы турбогенераторов по активной мощности - достигается двумя главными функциональными элементами измерительной части АРМ: интегрирующим задающим элементом мощности ИЗЭМ, управляемым от АСРЧМ электростанции и устанавливающим предписанную нагрузку синхронного генератора сигналом в виде тока Iрпр, и измерительным преобразователем ИПМ истинной активной мощности генератора с выходным током (сигналом) Iрг. Сигналы сопоставляются активным микросхемным элементом сравнения сигналов непрерывного действия ЭСНДпутем вычитания токов на входах интегрального операционного усилителя (ИОУ) А5.
На один из входов элемента сравнения ЭСНД поступает и сигнал IΔf от измерительного органа частоты ИОЧ, особенностью которого является нечувствительность к малым ее отклонениям. Измерительный орган ИОЧ содержит измерительный, в частности, интегрирующий, преобразователь частоты ИПЧ и два интегрирующих задающих элемента частоты (на рисунке 7.1 показан один ИЗЭЧ),аналогичных ИЗЭМ, и активный элемент сравнения сигналов о предписанном и истинном значениях частоты (выполнен на ИОУ A3).
Один из них используется в пусковом режиме - управляется от автомата пуска турбины АПТ. Второй - при подготовке генератора к синхронизации: на него воздействует устройство подгонки частоты скольжения автоматического синхронизатора АС. Он же задает предписанную частоту в нормальных режимах работы синхронного генератора.
В измерительную часть АРМ входит и измерительный орган давления свежего пара перед ЦВД турбины ИОДП, содержащий измерительный преобразователь ИПДП, задающий элемент ЭЗДП давления пара и элемент сравнения их сигналов (выполнен на ИОУ А4). В зависимости от режима работы турбины, он следит за постоянным или скользящим давлением пара (воздействие от АРПГ).В частности, при его падении АРМ снижает нагрузку синхронного генератора (сигнал IΔр).
Выходной сигнал элемента сравнения ЭСНД измерительной части АРМ после усилителя сигнала непрерывного действия УС(ИОУА6) поступает на усилитель-преобразователь релейного действия УП,состоящий из двух бесконтактных реле, выполненных на ИОУА1и А8, охваченных положительными обратными связями.
Импульсные сигналы УП транзисторным исполнительным усилителем ИУпревращаются в управляющие воздействия на электродвигатель МУТтурбины, который является задающим элементом ее АРЧВ.
В автоматическом регуляторе применяются типовые функциональные элементы агрегатированного комплекса электрических средств регулирования в микросхемном исполнении (АКЭСР-2). При этом используются операционные усилители А1-А8 серий интегральных микросхем УД140 и УД553, охваченные отрицательными (элементы непрерывного действия: фильтры нижних частот ZF1-ZF3,элементы сравнения сигналов, усилитель УС)и положительными (релейные элементы УП) обратными связями.. Свойством частотного фильтра обладает и ЭСНД,выполненный и как сумматор сигналов на одном из входов операционного усилителя А5.
Специфичным является интегральный задающий элемент ИЗЭМ. Он выполнен с использованием шагового электродвигателя ШМ, управляемого генератором импульсов ГИ и кольцевым счетчиком КС, запускаемых сигналом от АСРЧМ электростанции. Электродвигатель перемещает якорь индукционного измерительного преобразователя ИИП(датчика), в котором угол поворота механического редуктора преобразуется в ЭДС повышенной частоты. Выпрямителем VS и активным ФНЧ ZFI ее амплитуда преобразуется в постоянный, пропорциональный предписанный мощности генератора, ток Ipпp.
Измерительный преобразователь активной мощности ИПМ синхронного генератора показан на схеме (см. рисунок 7.1) как трехфазный с двумя перемножителями АХ1,АХ2 мгновенных междуфазных напряжений и и фазных токов i, включенными по схеме двух ваттметров. Постоянные составляющие их выходных напряжений суммируются и выделяются ФНЧ ZF2 в виде пропорционального активной мощности синхронного генератора постоянного тока Iрг.
Действие АРМ, например, на увеличение нагрузки синхронного генератора, вследствие возрастания тока Iрпр по заданию АСРЧМ, или при появлении тока IΔf, вследствие снижения частоты Δf>ΔfНЧ происходит следующим образом.
Один из указанных токов на неинверсном входе операционного усилителя А5приводит к появлению положительных напряжения UЭC на его выходе и тока IЭС на инверсном входе ИОУ А6 транзистора VT1,который открывается и запускает электродвигатель МУТ в сторону увеличения нагрузки генератора. Под воздействием напряжения Up1 начинает экспоненциально нарастать ток iо.c отрицательной.
В результате на выходе усилителя УС появляется отрицательное напряжение Uyc,которое переключает реле, если Uyc превышает напряжение срабатывания реле на ИОУ А7,создаваемое источником питания +ЕП на его инверсном входе и удерживающее реле в исходном состоянии, при котором на его выходе напряжение Upi отрицательно (транзистор VT1закрыт).
В результате реле на ИОУ А7 возвращается, и воздействие на МУТ прекращается. Ток io.с экспоненциально уменьшается, ток на входе А6 возрастает, и реле снова срабатывает и запускает электродвигатель МУТ.
После компенсации тока Iрпр от ИЗЭМ током Iрг от ИПМ,
нарастающим вследствие увеличивающейся мощности синхронного генератора на инверсном входе А5,или исчезновения тока IΔf от ИОЧ, вследствие восстановления частоты, схема в целом переходит в исходное состояние, при котором оба транзистора VT1,VT2 закрыты.
 После воздействия от АСРЧМ на уменьшение предписанной
мощности ток Iрпр становится меньше тока Iрг от ИПМ. Появляющийся
положительный ток на инверсном входе ИОУ А5 или отрицательный ток IΔр на его неинверсном входе, обусловленный снижением
давления свежего пара рс.п перед ЦВД турбины, приводят
к нарастаниям абсолютного значения отрицательного UЭC и
положительного Uyc напряжений
на выходах элемента сравнения ЭСНД и
усилителя УС соответственно.
После воздействия от АСРЧМ на уменьшение предписанной
мощности ток Iрпр становится меньше тока Iрг от ИПМ. Появляющийся
положительный ток на инверсном входе ИОУ А5 или отрицательный ток IΔр на его неинверсном входе, обусловленный снижением
давления свежего пара рс.п перед ЦВД турбины, приводят
к нарастаниям абсолютного значения отрицательного UЭC и
положительного Uyc напряжений
на выходах элемента сравнения ЭСНД и
усилителя УС соответственно.
Рисунок 7.1 – Функциональная схемы автоматического регулятора мощности турбогенератора
Положительное напряжение Uyc приводит к срабатыванию реле на ИОУ А8,а именно: изменению отрицательного напряжения UP2 (транзистор VT2 закрыт), создаваемого положительным напряжением Еп на его инверсном входе, на положительное, возбуждающее ток Iб2 насыщения транзистора VT2.Он открывается и запускает электродвигатель МУТ в сторону уменьшения нагрузки синхронного генератора. Положительное напряжение Uр2 обусловливает нарастание тока отрицательной обратной связи iо.с и кратковременный возврат реле.
8 Лекция №8. Автоматическое регулирование напряжения и реактивной мощности синхронных генераторов
Содержание лекции: назначение автоматического регулирования напряжения и реактивной мощности; возбудители синхронных генераторов.
Цель лекции: изучение автоматического регулирования напряжения и реактивной мощности синхронных генераторов.
8.1 Назначение автоматического регулирования напряжения и
реактивной мощности
Техническая необходимость и экономическая целесообразность автоматического регулирования напряжения и реактивной мощности обусловливаются специфическими особенностями процесса производства и распределения электроэнергии. Напряжение, определяемое возбуждением синхронных генераторов, различно по абсолютному значению и по фазе в каждом из узлов схемы электроэнергетической системы. Оно является многомерным вектором (см. рисунок. 8.1,б). Различие напряжений необходимо для передачи (транспортировки) электроэнергии. Напряжение Uл в начале линии электропередачи (см.рисунок 8.1,а) от гидро- или тепловой электростанции ЭС в электроэнергетическую систему ЭЭС отличается от напряжения Uс системы на ΔU,определяемое активной Рл и реактивной Qл мощностями в линии:
![]() (8.1)
(8.1)
Из (8.1) и векторной диаграммы рисунка 8.1,б видно, что:
- различие напряжений по фазе необходимо для передачи активной мощности
![]() ; (8.2)
; (8.2)
- различие абсолютных значений напряжений определяется реактивной мощностью электропередачи.
При неизменных абсолютных значениях напряжений Uл и Uc и угле δл.пр = π/2 по линии передается, как известно, наибольшая возможная мощность -предельная мощность линии Рл.пр.
Если напряжение Uл по мере возрастания мощности Рл уменьшается, что имеет место при неизменной нерегулируемой ЭДС генераторов электростанции, то угол δл достигает предельного значения δл.пр при Рл<Рл.пр.
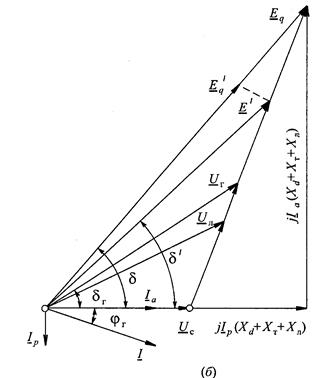

Рисунок 8.1- Схема (а) и векторная диаграмма напряжений (б)
электропередачи
Основными задачами автоматического регулирования напряжения и реактивной мощности являются:
- обеспечение рациональных потоков реактивной мощности в процессе передачи электроэнергии от электрических станций к потребителям;
- сохранение или повышение статической устойчивости электропередач в нормальных режимах работы;
- повышение динамической и результирующей устойчивости электроэнергетической системы в аварийных режимах;
- обеспечение требуемого напряжения у потребителей, т.е. обеспечение одной из норм качества электроэнергии.
Указанные задачи решаются:
- автоматическим регулированием возбуждения синхронных генераторов электростанций;
- регулированием возбуждения синхронных компенсаторов и двигателей;
- регулированием мощности управляемых статических источников реактивной мощности;
- автоматическим регулированием коэффициентов трансформации трансформаторов.
8.2 Возбудители синхронных генераторов и их характеристики.
Виды возбудителей
Напряжение и реактивная мощность синхронного генератора определяются состоянием его возбудителя, воспринимающего управляющее воздействие автоматического регулятора возбуждения (АРВ).
Классическим возбудителем синхронного генератора G является электрическая машина GE постоянного тока с параллельным самовозбуждением — положительной обратной связью по напряжению (см. рисунок 8.1,а). В связи с его существенным техническим недостатком — низкой надежностью действия и ограниченной пропускной (по току) способностью щеточного коллектора, по мере роста мощности синхронных генераторов появился возбудитель, состоящий из индукторного генератора GE переменного тока повышенной частоты с последовательным самовозбуждением (положительной обратной связью по току) и неуправляемого полупроводникового (диодного) выпрямителя VS (см. рисунок 8.1,б).
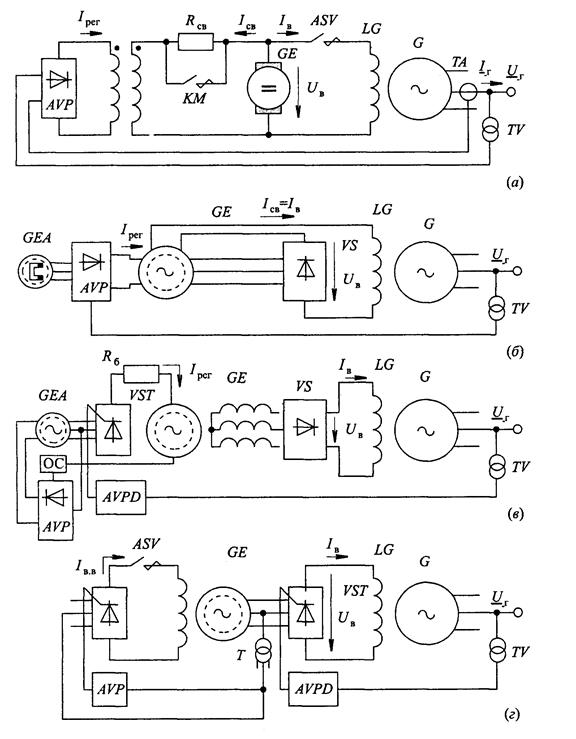
Рисунок 8.1 - Схемы возбуждения синхронных генераторов
Современная модификация такого возбудителя содержит обращенный (с обмотками переменного тока на роторе) многополюсный генератор GE и вращающийся (расположенный на валу синхронного генератора G)диодный выпрямитель VS,жестко соединенный с обмоткой возбуждения LG,— бесщеточное возбуждение (см. рисунок 8.1,в). Питание цепи возбуждения обращенного генератора GE производится от вспомогательного многополюсного генератора GEA с возбуждением постоянными магнитами (см. рисунок 5.3,б)или индукторного генератора с самовозбуждением (см. рисунок 8.1,в).
Возбудителем современных мощных синхронных генераторов с кольцами ротора служит вспомогательный синхронный генератор GE и управляемый тиристорный преобразователь VST - тиристорное независимое возбуждение (см. рисунок 8.1,г).
8.3 Показатели и характеристики возбудителей
Установлены два показателя для оценки возбудителя синхронного генератора: скорость нарастания напряжения на обмотке ротора LG в переходном процессе его изменения от номинального до наибольшего возможного значения (в процессе форсировки возбуждения); кратность форсировки возбуждения, равная отношению наибольшего возможного установившегося тока ротора (тока форсировки) Iв.ф к номинальному Iв.ном.
Средняя скорость нарастания напряжения возбуждения (dUB/dt)cp практически с учетом нелинейности характеристики возбудителя определяется как:
![]() (8.1)
(8.1)
где ΔT — время нарастания напряжения UB от номинального до значения
![]() (8.2)
(8.2)
Тиристорный возбудитель практически безынерционен. Поэтому принимается, что у тиристорного возбудителя скорость нарастания напряжения (dUB/dt)— ∞.
Для инерционных возбудителей скорость нарастания напряжения ротора установлена не менее (dUB/dt)cp= 2 ед.в./с. За единицу возбуждения (ед.в.) принимается номинальное напряжение Uв.ном возбуждения синхронного генератора.
Кратность форсировки Kф возбуждения может определяться по отношению наибольшего возможного (предельного) напряжения Uв.ф к номинальному Uв.ном или, как указывалось, по отношению токов Iв.ф и Iв.ном. Кратность форсировки электромашинного возбудителя обычно не превышает 2, а тиристорного составляет примерно 4.
Быстродействующие тиристорные возбудители: собственно тиристорный (см. рисунок 8.1,г) и бесщеточный с тиристорным преобразователем в цепи возбуждения обращенного генератора (см. рисунок 8.1,в).
Малая инерционность бесщеточного возбудителя обеспечивается за счет мощности тиристорного преобразователя, рассеиваемой на балластном резисторе в цепи возбуждения обращенного генератора GE значительного сопротивления и жесткой отрицательной обратной связи (ОС), снижающей его постоянную времени Те.
9 Лекция №9. Автоматическое управление режимами работы электрических станций и электроэнергетических систем
Содержание лекции: назначение и осуществление автоматического управления электростанциями.
Цель лекции: изучение назначения и осуществления автоматического управления электростанциями.
9.1 Назначение и осуществление автоматического управления
электростанциями
Электрическая станция как главная производственная единица электроэнергетической системы в связи с особенностями процесса производства и передачи электрической энергии должна управляться полностью автоматически, т.е. без непосредственного участия человека (оператора). Однако в настоящее время полностью автоматизированы только гидроэлектростанции.
Тепловые и атомные электростанции управляются автоматизированными системами, предполагающими эпизодическое вмешательство в их функционирование дежурного оператора электростанции. Громоздкая, обусловленная сложностью тепловых процессов технологическая автоматика ТЭС и АЭС обусловливает наименование систем управления ими как автоматизированных систем управления технологическими процессами (АСУ ТП).
Автоматизированное управление режимами работы электроэнергетических систем осуществляется АСУ ЭЭС, ОЭС и АСУ ЕЭС соответственно. Их техническая реализация стала возможной лишь с появлением цифровой вычислительной техники.
Конкретные задачи АСУ электростанций сводятся к следующим:
- поддержание активной мощности электроэнергетических блоков на предписанном постоянной прогнозируемой (плановой) частью графика нагрузки электростанции уровне;
- изменение активной мощности энергоблоков под воздействием сигналов АСУ ЭЭС, поступающих по каналам передачи информации, для покрытия случайно изменяющейся неплановой нагрузки электроэнергетической системы;
- экономичное распределение плановой и неплановой активных мощностей электростанции между параллельно работающими электроэнергетическими блоками;
- поддержание частоты напряжения на шинах электростанции на номинальном уровне с заданной точностью (отклонениями не более Δf= ±0,1 Гц)
- вторичное автоматическое регулирование частоты;
- изменение амплитуды напряжения на шинах электростанции в соответствии с графиком;
- изменение обусловленной режимами работы ЭЭС реактивной мощности электростанции и оптимальное ее распределение между синхронными генераторами;
- взаимодействие с автоматическими устройствами противоаварийного управления и защиты энергоблоков — противоаварийной автоматики (УПА).
Автоматизированная система управления выполняет и ряд технико-экономических и планово-производственных и даже коммерческих функций.
Разработка научно-исследовательскими организациями (ВТИ, ВЭИ, ВНИИЭ, ОАО «Энергосетьпроект», ВНИИР) и внедрение автоматизированных систем управления на основе ставшей доступной для широкого применения цифровой вычислительной техники началось еще в 70-х годах.
В настоящее время создается уже третье — интегрированное поколение АСУ ГЭС и АСУ ТП тепловыми и атомными электростанциями на основе разработанных в ВЭИ микропроцессорных средств для автоматизации электроэнергетических комплексов (МС АЭК), удовлетворяющих требуемой надежности функционирования автоматических устройств электроэнергетических систем.
Разработана система комплектных автоматических устройств управления на микропроцессорах (САУ-М) для технической реализации АСУ ТП. Предприятием «АББ Реле - Чебоксары» поставляется программно-технический комплекс (ПТК) микропроцессорных средств.
Верхний уровень АСУ включает подсистему автоматического управления нормальными режимами общестанционного уровня, состоящую из автоматических устройств:
- общестанционного регулирования частоты и активной мощности электростанции (ОРЧМ);
- общестанционного регулирования напряжения и реактивной мощности (ОРНМ);
- управления изменениями состояний энергоагрегатов (с условным названием ПУСК) и противоаварийного управления.
Нижний уровень образует комплекс автоматических устройств управления гидро- и турбогенераторами: автоматика изменения состояния, автоматический синхронизатор, автоматические регуляторы частоты вращения, мощности и возбуждения синхронного генератора, автоматические регуляторы трансформаторов.
До появления и внедрения АСУ управление изменениями состояний, частотой и активной нагрузкой, напряжением и реактивной мощностью электростанции осуществлялось отдельными аналоговыми автоматическими устройствами: автоматикой пуска и устройствами, соответствующими ОРЧМ и ОРНМ, которые назывались устройствами группового управления частотой вращения и возбуждением синхронных генераторов. Наиболее современными из них были автоматические устройства группового управления с центральными общестанционными автоматическими регуляторами частоты (ЦАРЧ) и напряжения (ЦАРН), обеспечивающими поддержание частоты и амплитуды напряжения на шинах электростанции, и элементами (устройствами) оптимального распределения активной (УРАН) и реактивной (УРРН) нагрузок между синхронными генераторами по их технико-экономическим показателям.
На рисунке 9.1 приведены совмещенные статические характеристики 1, 2 регулирования w=f(Pr)или U=f(Qr)для двух синхронных генераторов, иллюстрирующие определенность их нагрузок P1, P2 или Q1,Q2 при наличии отклонения частоты Δw или напряжения ΔU от предписанных значений wnp1, Unp1, поддерживаемых только при холостом ходе. Мощности определяются коэффициентами статизма характеристик, например,
![]() .
.
Очевидно, что при астатических - горизонтальных характеристиках (Kст = 0) возникает неопределенность распределения мощностей.
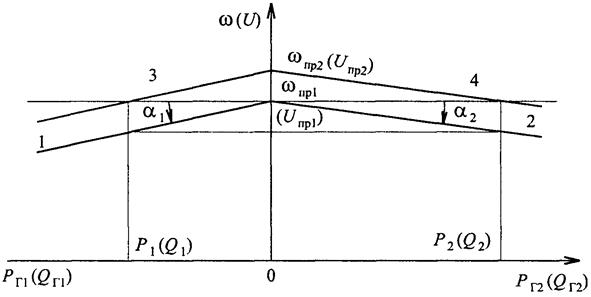
Рисунок 9.1 - Графики, иллюстрирующие определенность распределения нагрузки электростанциями между синхронными генераторами
Наиболее современные из таких устройств производят выдачу заданий по мощностям и контроль их исполнения по принципу следящего астатического регулирования. Частота и напряжение поддерживаются воздействиями ЦАРЧ и ЦАРН на задающие элементы статических АРЧВ и АРВ, увеличивающих предписанные значения частоты wnp2>wпр1 и напряжения Uпр2>Uпр1, т.е. перемещающих статические характеристики 1, 2 регулирования вверх до положений 3,4 при сохранении определенности в распределении мощностей.
10 Лекция №10. Особенности и задачи противоаварийного автоматического управления энергетическими системами
Содержание лекции: режимы работы электроэнергетических систем управления ими; возмущающие воздействия на электроэнергетические системы и управляющие противоаварийные воздействия; противоаварийные управляющие воздействия.
Цель лекции: изучение противоаварийной автоматики.
10.1 Особенности и задачи противоаварийного автоматического управления электроэнергетическими системами
Процесс производства, передачи и распределения электроэнергии является динамичным, характеризующимся необходимым равенством в каждый момент времени генерируемой и требуемой потребителями электрической энергии (балансом мощности) и подверженным случайным возмущающим воздействиям, относительно слабым (малым), обусловленным случайно изменяющейся нагрузкой, и интенсивным (большим), связанным с повреждениями и отключениями генерирующего и передающего энергию электрооборудования.
Обычно электроэнергетические системы работают в нормальном режиме, в котором основные режимные параметры: амплитуды (действующие значения) — далее просто напряжение и частота напряжения — при непрерывных изменениях нагрузки остаются практически неизменными, т.е. номинальными; распределение активной и реактивной мощностей между генерирующими электроэнергию управляемыми объектами оптимально, а перетоки мощностей по передающим электроэнергию линиям связи между электроэнергетическими системами и их объединениями, образующими единую энергосистему, находятся в пределах, ограничиваемых нормируемым запасом мощности по статической устойчивости параллельной работы электрических станций. К нормальному относится и неоптимальный, обычно кратковременный, режим по мощности, при котором напряжения и частота не выходят за пределы длительно допустимых ГОСТ отклонений.
Нормальный режим обеспечивается автоматическим управлением электроэнергетическими объектами ранее рассмотренным арсеналом управляющих автоматических устройств и систем.
Основная задача автоматического управления нормальным режимом — обеспечить производство и передачу электроэнергии при минимальных затратах энергоресурсов (условного топлива) и обеспечить надежность электроснабжения потребителей электроэнергией требуемого качества.
Под воздействием внезапных интенсивных возмущений в виде неизбежных коротких замыканий или случайных отключений генерирующих или передающих электроэнергетических объектов ЭЭС, ОЭС или ЕЭС в целом переходят в утяжеленный или в аварийный режим.
Утяжеленный режим характеризуется отклонениями режимных параметров, обычно пониженными значениями напряжений и частоты, допустимыми лишь кратковременно. Перетоки мощностей могут превышать длительно допустимые в нормальном режиме, но не доходить до опасных для статической устойчивости значений. Задача автоматического управления: «... в утяжеленном режиме — не допустить его дальнейшего утяжеления, что может привести к переходу в аварийный режим; устранить причину, вызвавшую ... » его и « ... восстановить нормальный режим».
Если хотя бы один из режимных параметров достигает недопустимых даже кратковременно значений, режим становится аварийным.
Аварийный режим развивается из утяжеленного или непосредственно вследствие интенсивных возмущающих воздействий. Основными задачами автоматического управления в аварийном режиме являются: выявление и устранение, если возможно, возмущающего воздействия; предотвращение дальнейшего развития аварийной ситуации и ее распространения; восстановление нормального режима.
Автоматическое управление в утяжеленном и особенно аварийном режимах производится управляющими автоматическими устройствами противоаварийного управления. В результате противоаварийного управления наступает послеаварийный режим или восстанавливается нормальный режим работы. Задача автоматического управления в послеаварийном режиме состоит в скорейшем восстановлении нормального режима.
При организации противоаварийного управления реализуется еще и ремонтный режим, в частности ремонтная схема ЭЭС, характеризующийся выводом в ремонт отдельных электроэнергетических объектов.
10.2 Возмущающие воздействия на электроэнергетические системы и управляющие противоаварийные воздействия
Возмущающие воздействия вызывают внезапные скачкообразные изменения мощностей, передаваемых по линиям электропередачи, и интенсивные и в широких пределах изменения режимных параметров работы электроэнергетической системы. По степени тяжести различаются три категории или группы опасных возмущающих воздействий.
К первой группе относятся отключения линии электропередачи напряжением 500 кВ и ниже (линий связи с АЭС 750 кВ) при однофазных КЗ на землю с успешным или неуспешным однофазным автоматическим повторным включением на указанных линиях или линиях более высокого напряжения при успешном ОАПВ и отключение одного блока генератор-трансформатор, кроме наиболее мощного в ОЭС.
Вторую группу составляют отключения линий электропередачи любого напряжения при двухфазных КЗ на землю и успешном или неуспешном ТАПВ, отключение наиболее мощного синхронного генератора или двух генераторов АЭС, относящихся к одному ядерному реактору, одновременное отключение двух цепей или линий.
К третьей, наиболее тяжелой, категории относятся возмущающие воздействия, обусловленные однофазными КЗ на землю на линии или шинах любого напряжения при отказе одного из выключателей и действии устройства резервирования отказов выключателей на отключение неповрежденного элемента и отключениями синхронных генераторов одной системы (секции) шин или распредустройства одного из напряжений суммарной мощностью, составляющей половину мощности электростанции.
10.3 Противоаварийные управляющие воздействия
Для предотвращения нарушения динамической устойчивости необходимы быстродействующие, интенсивные, но кратковременные управляющие воздействия. Обеспечение статической устойчивости достигается также появляющимися практически безынерционно, однако длительно существующими управляющими воздействиями.
Поскольку противоаварийное управление производится при электро-механических переходных процессах, а опасность нарушения синхронной параллельной работы определяется развивающимися снижением и повышением частот вращения синхронных генераторов, начинающихся после возмущающего воздействия, в одной — дефицитной по мощности (обычно приемной), и в другой — избыточной по мощности (передающей) частях электроэнергетической системы соответственно, то противоаварийные управляющие воздействия должны главным образом изменять генерируемые мощности, а в крайних случаях и снижать мощности нагрузки.
Конкретно противоаварийные управляющие воздействия производят:
- повышение пропускной способности электропередачи, т.е. ее предельную передаваемую мощность;
- снижение генерируемой мощности в избыточной передающей части ЭЭС, частота вращения синхронных генераторов в которой увеличивается;
- увеличение генерируемой мощности в дефицитной приемной части, синхронные генераторы которой уменьшают частоту своего вращения;
- уменьшение мощности, потребляемой нагрузкой приемной части электроэнергетической системы;
- увеличение нагрузки синхронных генераторов передающей части.
Соответственно для предотвращения нарушения динамической устойчивости противоаварийные управляющие воздействия осуществляют:
- программную форсировку возбуждения ФВ (см. рисунок 10.1) синхронных генераторов — быстрое кратковременное увеличение ЭДС генераторов до допустимого по их термической стойкости уровня, обусловливающего повышение напряжений на шинах электростанции и предел передаваемой мощности электропередачи;
- интенсивное кратковременное снижение мощности, развиваемой паровыми турбинами, - импульсную разгрузку турбоагрегатов ИРТ;
- быстрое кратковременное подключение, обычно к гидрогенераторам передающей части, искусственной резистивной нагрузки — электрическое торможение ЭТ гидроагрегатов;
- быстрый перевод тиристорных преобразователей в инверторный режим накопителей электроэнергии в приемной части — их форсировку на выдачу энергии в нагрузку ФНЭЭ.
Для сохранения статической устойчивости в послеаварийном режиме используются противоаварийные управляющие воздействия, обеспечивающие:
- изменение настройки автоматических регуляторов возбуждения сильного действия ИН АРБ в целях достижения максимально возможной пропускной способности электропередачи в сложившихся после возмущающего воздействия условиях;
- увеличение емкостного сопротивления устройства продольной компенсации индуктивного сопротивления линии, повышающего предельную передаваемую мощность линии, - форсировку продольной компенсации ФПК;
- отключение реакторов ОР, повышающее напряжения в начале и в конце линии;
- отключение гидрогенераторов ОГ передающих ГЭС и длительное снижение мощности - длительную разгрузку турбоагрегатов ТЭС ДРТ;
- быстродействующую загрузку недогруженных гидрогенераторов БЗГ приемной части электроэнергетической системы и перевод гидрогенераторов из режима работы синхронным компенсатором в генераторный режим СК - Г;частичное программное отключение нагрузки ОН приемной части до развития процесса снижения частоты.
При недостаточности указанных воздействий для предотвращения снижения частоты производится частотный (ускоренный) пуск, самосинхронизация и быстрый набор нагрузки резервных гидрогенераторов ЧПГ и отключение нагрузки - автоматическая частотная разгрузка приемной части электроэнергетической системы.
Противоаварийные управляющие воздействия общесистемной противоаварийной автоматики вырабатываются управляющим вычислительным комплексом УВК, расположенным на диспетчерском пункте ДП. Необходимые сигналы информации о параметрах предшествующего возмущающему воздействию и послеаварийного режимов, о схеме электроэнергетической системы и о происходящих отключениях выключателей - возмущающих воздействиях и противоаварийные управляющие воздействия передаются по высокочастотным каналам связи В ЧКС, осуществляемым по проводам линий электропередачи путем установки по их концам высокочастотных заградителей в виде параллельных резонансных LC-контуров и конденсаторов связи Ссв, устройствами телеизмерений УТИ, телесигнализации УТС и быстродействующими устройствами передачи сигналов противоаварийной автоматики БСПА.
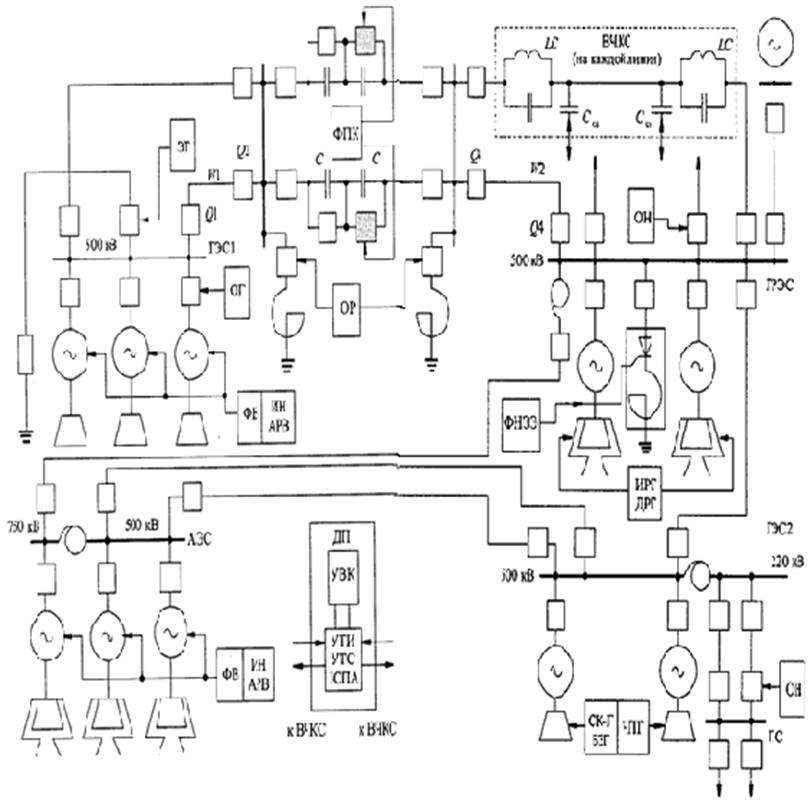
Рисунок 10.1 -Фрагмент электрической схемы объединенной
электроэнергетической систем
11 Лекция №11. Особенности и задачи противоаварийного автоматического управления энергетическими системами
Содержание лекции: основные функции и особенности управляющих устройств и систем противоаварийной автоматики; назначение и виды противоаварийной автоматики.
Цель лекции: изучение противоаварийной автоматики.
11. 1 Основные функции и особенности управляющих устройств
и систем противоаварийной автоматики
Автоматические устройства и системы противоаварийного управления, воздействующие на электроэнергетические объекты, выполняют следующие основные функции:
- фиксацию возмущающего воздействия или опасных изменений
режимных параметров;
- запоминание исходного (накануне возмущающего воздействия) и оценку послеаварийного режимов, прежде всего путем фиксирования активных мощностей и их изменений;
- оценку степени тяжести возмущающего воздействия и необходимости управляющих воздействий;
- выработку видов, интенсивности и длительности (дозировку) противоаварийных управляющих воздействий и выбор управляемых электроэнергетических объектов;
- запоминание интенсивности управляющих воздействий и эффективную их реализацию на управляемых объектах.
Эффективность автоматических устройств противоаварийного управления определяется главным образом их быстродействием и дозировкой управляющих воздействий, что является их главной и специфической особенностью.
Трудности обеспечения эффективности противоаварийного управления связаны с большим разнообразием и рассредоточенностью возмущающих воздействий, изменениями исходных режимов и необходимостью в реальном времени переходных процессов в электроэнергетической системе корректировки управляющих воздействий в соответствии с достигаемыми при их реализации результатами. Поэтому наиболее сложные иерархические общесистемные комплексы АПНУ (см. введение), управляющие многими электростанциями, подстанциями и линиями электропередачи и электроэнергетической системой в целом, осуществляются на основе цифровых ЭВМ управляющего вычислительного комплекса (см. рисунок 11.1), который, как указывалось, располагается на диспетчерском пункте. В УВК поступает вся информация о текущих режимных параметрах и о схеме электроэнергетической системы по каналам технических средств - УТИ, УТС сбора и передачи информации.
11.2 Назначение и виды противоаварийной автоматики
Назначением технических средств противоаварийного управления электроэнергетическими системами - противоаварийной автоматики является «... предотвращение возникновения и развития аварийных процессов в энергосистеме и ускорение восстановления нормальных режимов ...»: противоаварийная автоматика предотвращает общеэнергосистемные аварии с нарушением электроснабжения на длительное время и на значительной территории, приводящие к катастрофическим последствиям.
Как указывалось, к противоаварийному управлению, по существу, относятся прежде всего технические средства автоматической защиты электроэнергетической системы от неизбежных КЗ - автоматические устройства релейной защиты (АУРЗ), отключающие поврежденные электроэнергетические объекты (см. рисунок 11.1).
В соответствии с особой опасностью коротких замыканий основным свойством АУРЗ является мгновенное определение их расположения и воздействие на отключение соответствующего выключателя. Поэтому современные АУРЗ очень сложны и используют организованные по проводам линий электропередач высокочастотные каналы обмена информацией (см. рисунок 10.1).
Самые быстродействующие из них вырабатывают противоаварийные управляющие воздействия в течение длительности одного периода промышленной частоты. Однако не всегда противоаварийные управляющие воздействия исполняются современными сложными быстродействующими выключателями поврежденных электроэнергетических объектов. Поэтому АУРЗ дополняются автоматическими устройствами резервирования отказов выключателей (УРОВ).
Собственно к противоаварийной автоматике относятся бурно развивавшиеся, по мере усложнения электроэнергетики - создания объединенных и единой электроэнергетических систем специфические технические средства предотвращения развития аварийных ситуаций после действия автоматических устройств релейной защиты, создающей не менее опасные, чем КЗ, возмущающие воздействия на ЭЭС, ОЭС и ЕЭС: отключение мощных генерирующих и сильно загруженных магистральных линий электропередач, вызывающих внезапные скачкообразные нарушения баланса мощностей, обычно и приводит к развитию аварий.
Прежде всего действует автоматика повторного (АПВ) и резервного (АВР) включения отключенных АУРЗ или соответственно резервных выключателей, пытающаяся устранить возмущающее воздействие.
Эффективность АПВ обусловлена неустойчивостью (самоликвидацией) дуговых КЗ (особенно однофазных на землю). Поэтому на линиях сверхвысокого напряжения, кроме трехфазного, применяется однофазное автоматическое повторное включение отключенного АУРЗ провода с однофазным КЗ на землю. Устройства АВР обеспечивают необходимую надежность функционирования собственных нужд ЭС и надежность электроснабжения от подстанции с секционированными шинами низшего напряжения.
Существенно облегчает возмущающее воздействие на электроэнергетическую систему коротких замыканий автоматика релейной форсировки возбуждения (АРВФ) синхронных генераторов, компенсаторов и синхронных электродвигателей до технически возможного или ограничиваемого термической стойкостью современных мощных синхронных генераторов уровня. При этом за счет возрастания их ЭДС повышаются и остаточные напряжения (при КЗ) на шинах электростанций и подстанций.
При неудачном действии АПВ и неэффективности АРФВ аварийная ситуация обычно начинается с потери динамической или нарушения статической, после отключения поврежденного электрооборудования, устойчивости параллельной работы ЭС, развивается с наступлением асинхронного режима отдельных частей электроэнергетической системы, усугубляется снижениями напряжения и частоты, обусловливающими уменьшение производительности агрегатов собственных нужд тепловых электростанций, и нарушениями устойчивости работы электромеханической нагрузки.
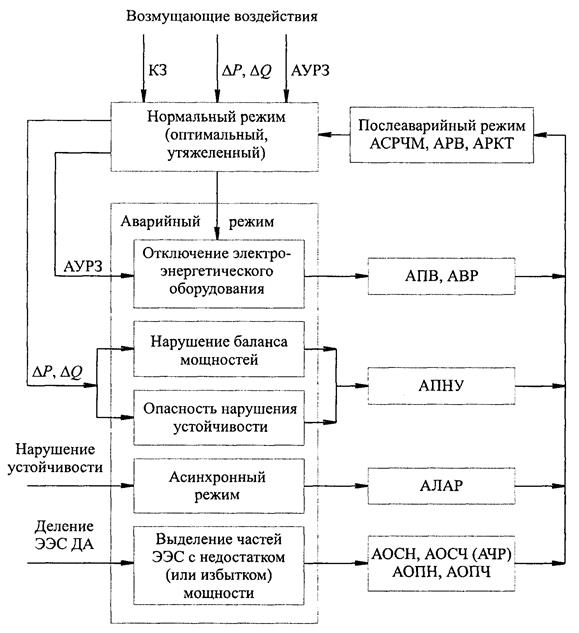
Рисунок 11.1 - Схема функционирования противоаварийной автоматики
Сохранение динамической или статической устойчивости в аварийных ситуациях является задачей централизованной и рассредоточенной иерархической автоматической системы — автоматики предотвращения нарушения устойчивости АПНУ (см. рисунок 11.1), которая функционирует на основе современной управляющей цифровой вычислительной техники.
При нарушении, несмотря на действие АПНУ, устойчивости параллельной работы и наступлении асинхронного режима вступает в действие второй комплекс технических средств противоаварийного управления, имеющий назначением обеспечить результирующую устойчивость ЭЭС путем ресинхронизации выпавшей из синхронизма ЭС или ЭЭС - автоматика ликвидации асинхронного режима АЛАР. При не успешности попыток устранить несинхронную работу АЛАР отключает линию связи между несинхронно работающими частями электроэнергетической системы - действует делительная автоматика ДА.
Развитие аварийной ситуации, обусловленной дискретными изменениями активной АР и реактивной AQ мощностей, вызывающих возникновение их небаланса, сопровождается отклонением основных показателей нормального режима работы и качества электроэнергии - напряжения и частоты от номинальных.
Применяется автоматика ограничения снижений напряжения АОСН и частоты АОСЧ и их повышения АОПН, АОПЧ. К АОСН относится, прежде всего, АУРЗ минимального напряжения электродвигательных объектов. Наиболее широко из АОСЧ применяется автоматика частотной разгрузки АЧР дефицитной по мощности части ЭЭС, эффективно ограничивающая и даже предотвращающая снижение частоты путем адаптивного по мощности отключения нагрузки. Нежелательные для потребителей электроэнергии действия АОСН и АОСЧ компенсируются устройствами автоматического повторного пуска электродвигателей и адаптивного по частоте (частотного) повторного включения по мере восстановления напряжения и частоты.
Эффективной в послеаварийном режиме является автоматика тепловых электростанций, отключающая отдельные синхронные генераторы от общих шин электростанций и выделяющая их только для снабжения электроэнергией нормального качества собственных нужд и обеспечения максимальной производительности электростанций в условиях аварийного и восстановления нормального режимов.
Целесообразно различать следующие основные групповые виды автоматики противоаварийного управления электроэнергетическими системами:
- автоматика ликвидации и снижения тяжести возмущающих воздействий - автоматика отключений коротких замыканий и повторного или резервного включения;
- общесистемная автоматика ликвидации нарушения синхронной устойчивости электроэнергетических систем;
- автоматика ликвидации асинхронного режима;
- автоматика предотвращения недопустимых изменений режимных параметров электроэнергетических систем.
12 Лекция №12. Автоматика отключений коротких замыканий,
повторного и резервного включений
Содержание лекции: автоматика отключений коротких замыканий; автоматика повторного включения; устройства автоматического включения резерва.
Цель лекции: изучение автоматики отключений коротких замыканий, повторного и резервного включений.
12.1 Автоматика отключений коротких замыканий
Главное возмущающее воздействие - короткое замыкание, разрушающее электроэнергетическое оборудование и угрожающее развитием общесистемной аварии, отключается автоматическими устройствами релейной защиты (см. рисунок 11.2). Они являются, как уже указывалось, самыми первыми и необходимыми устройствами противоаварийного автоматического управления.
Автоматика отключений коротких замыканий функционирует на основе характерных возрастаний амплитуды и изменений фазы, как правило, принужденных составляющих тока и снижений амплитуды напряжения электромагнитного переходного процесса. Поэтому широко распространенными являются простые ступенчатые токовые АУРЗ (с временными задержками отключения). Более сложные дифференциальные токовые по принципу действия устройства обеспечивают практически мгновенное воздействие на отключение короткого замыкания.
Одновременное использование указанных изменений тока и напряжения характерно для дистанционных (с измерительными реле сопротивления) устройств релейной защиты. При наличии обмена информации они также обеспечивают необходимое быстродействие на отключение короткого замыкания.
Наиболее современные и практически безынерционные АУРЗ используют появление симметричных составляющих обратной и нулевой последовательностей принужденных токов и напряжений переходного процесса короткого замыкания. Такими являются фильтровая направленная (по мощности обратной последовательности) и дифференциально-фазная высокочастотные устройства защиты линий электропередач сверхвысокого напряжения.
В связи с особой ответственностью АУРЗ, обусловленной обязательностью отключения короткого замыкания, «... поскольку работа энергосистемы с не отключёнными КЗ невозможна ... », предусматривается резервирование их действия: «...дальнее— на соседних подстанциях и ближнее— на своей подстанции».
Как указывалось, АУРЗ совместно с УРОВ, исторически развиваясь с самого начала становления электроэнергетики и в связи с созданием поистине огромного их арсенала, выделились в отдельную область автоматики противоаварийного управления. Однако в последнее время в противоаварийную автоматику электроэнергетических систем бурно внедряются методы и технические средства обработки информации цифровой вычислительной техники. Создаются микропроцессорные многофункциональные автоматические комплексы противоаварийного управления, в которых функции АУРЗ, как и автоматических устройств собственно противоаварийной автоматики, выполняются программно во взаимодействии.
12.2 Автоматика повторного включения
Автоматика повторного включения отключенных АУРЗ выключателей поврежденных (а иногда и неповрежденных) электроэнергетических объектов высокоэффективна, поскольку в большинстве случаев ликвидирует возмущающее воздействие, восстанавливает схему и нормальный, хотя нередко вышедший из оптимального, режим работы ЭЭС, ОЭС и ЕЭС в целом. Ее эффективность в плане сохранения нормального режима немного снижается из-за небольшой задержки действия устройств АПВ, необходимой для восстановления диэлектрической прочности воздушной изоляции в области горения электрической дуги КЗ (ее деионизации). В зависимости от напряжения 110-750 кВ, она составляет 0,2-0,5 с. Ею и ограничивается выполнение главного требования к устройствам АПВ - быстродействия.
Из других сформулированных в директивных технических материалах по противоаварийной автоматике требований указываются: заданная кратность действия (обычно однократное АПВ, реже двукратное); пуск по цепи несоответствия положения ключа управления и состояния выключателя и, следовательно, недействие при отключении выключателя оператором; недействие после отключения АУРЗ ошибочно включенного ключом управления выключателя на искусственное КЗ (забытую, не снятую после ремонта закоротку); запрет действия от АУРЗ, срабатывающих при устойчивых КЗ, например, от газовой защиты трансформатора; повторное включение только одного выключателя линии с двусторонним питанием шин; ускорение действия АУРЗ; автоматическая подготовка (с выдержкой времени) к новому действию.
Автоматика повторного включения, как правило, является трехфазной (ТАПВ). Однако на линиях сверхвысокого напряжения от 500 кВ с пофазным управлением выключателями, на которых обычно возникают однофазные дуговые, обусловленные грозовыми перенапряжениями, КЗ, применяется и однофазная автоматика повторного включения - ОАПВ. При этом определение поврежденного провода линии возлагается именно на ОАПВ, а отключение выключателей провода с двух сторон линии производится при взаимодействии АУРЗ и специальных избирательных измерительных органов ОАПВ, определяющих поврежденную фазу.
Различают несколько видов ТАПВ магистральных и системообразующих линий электропередач, применяемых в зависимости от конкретных технических возможностей, типов выключателей и установленных АУРЗ. На линиях напряжением 35-220 кВ с масляными выключателями и ступеньчатыми АУРЗ прежде всего проверяется возможность использования несинхронного повторного включения (НАПВ). Оно допустимо, если ток несинхронного включения Iнс, определяемый по удвоенному номинальному напряжению (в предположении противофазы напряжений на конце линии и шинах ЭС или ПС), распределяясь между синхронными генераторами, не превышает в генераторе с наибольшей его частью Iнсimах допустимого относительного значения, а именно: в общем случае:
![]() (12.1)
(12.1)
где Kрmах — наибольший коэффициент распределения тока, Kрmах = =Iнсimax/ Iнс; Хсв— сопротивление связи между эквивалентными ЭДС несинхронно работающих частей ЭЭС.
Установленный на основе фундаментальных теоретических исследований электромеханических переходных процессов и проверенный экспериментально указанный критерий допустимости НАПВ имеет различные для разных типов синхронных генераторов значения. Производится также проверка трансформаторов по динамической стойкости при воздействиях тока Iнс.
При НАПВ сначала включается только один выключатель линии при условии полного отсутствия на ней напряжения (ОН), а затем после появления на противоположном ее конце симметричного трехфазного напряжения (его наличия - НСН) включается второй выключатель без контроля угла сдвига фаз между напряжениями на линии и шинах ЭС или ПС. Несинхронное АПВ, называемое также ускоренным с контролем отсутствия или наличия напряжения - АПВ-ОН (НСН), продемонстрировало высокую эффективность: синхронный режим, как правило, восстанавливается.
12.3 Устройства автоматического включения резерва
Устройства автоматического включения резервных источников питания и резервного электрооборудования обеспечивают надежность электроснабжения и необходимую производительность собственных нужд ЭС и повышают безопасность обслуживания АЭС. Обязательной является установка устройств АВР на выключателях резервных трансформаторов собственных нужд ЭС, а также резервных маслонасосах и питающих водой парогенераторы насосах, вентиляторах топок парогенераторов и на другом ответственном оборудовании, обеспечивающем нормальное функционирование электростанций. Они широко распространены в системах электроснабжения, прежде всего, на секционных выключателях двухтрансформаторных ПС.
Главное требование к ним - быстродействие, особенно при наличии подключенных к секциям шин синхронных электродвигателей, выпадение из синхронизма которых в бестоковую паузу после исчезновения рабочего питания технологически недопустимо.
На рисунке 12.1 приведена часть типовой схемы устройства АВР трансформатора собственных нужд тепловой электростанции, а на рисунке 12.2,б - функциональная схема быстродействующего автоматического устройства включения секционного резервного выключателя (БАВР) подстанции (см. рисунок 12.2,а), питающей от двух частей ЭЭС ИП1, ИП2 мощные синхронные электродвигатели M1, М2 водонасосных или нефтеперекачивающих станций, выпадение из синхронизма которых в цикле АВР приводит к гидравлическим ударам с разрывами магистральных трубопроводов – авариям с экологичискими последствия.
Фрагмент цепей управления выключателями, например, Q1рабочего Т1и QZ резервного ТЗ (см. рисунок 12.1,а,е,г) трансформаторов собственных нужд (в предположении включенного выключателя Q5), иллюстрирует сказанное о релейно-контактной исполнительной части устройства АВР: электромагнитное реле однократности действия KQCT (реле фиксации включенного состояния Q1)включено в цепь управления выключателем рабочего трансформатора (см. рисунок 12.1,в) и возбуждено его вспомогательным (сигнальным) замыкающим контактом Q1.1; в цепи обмотки контактора КМЗ управления электромагнитом YАС3 включения резервного выключателя (см. рисунок 12.1,г) находится размыкающий сигнальный контакт Q1.2 и замыкающий, размыкающийся с указанной выше задержкой tз.о контакт KQCT,- цепь включения выключателя Q3 резервного трансформатора подготовлена, но разомкнута контактом Q1.2.
При отключении рабочего выключателя Q1его сигнальные контакты Q1.1 и Q1.2 переключаются - приходят в показанные на схеме состояния; обмотка электромагнитного реле KQCT контактом Q1.1отсоединяется от шин управления ШУ1, но не обесточивается: через диод VD в ней циркулирует экспоненциально затухающий ток, обусловленный исчезающим магнитным потоком реле, который удерживает его якорь в притянутом положении в течение времени tз.о. На это время, достаточное лишь для одного включения резервного выключателя Q3, через контакт Q1.2 возбуждается контактор КМЗ в цепи электромагнита включения YAC3 (см. рисунок 12.1,г). На схемах показаны также обмотка тока KBS1.1и контакт KBS3.1реле предотвращения возможных многократных включений выключателей Q1и Q3, в частности, от ключей управления SA1, SA3: показанное точками замкнутое состояние их цепей соответствует положениям «отключить» Q1и «включить» Q3 соответственно.
На рисунке 12.1,б приведены схемы пускового органа минимального напряжения: минимальные измерительные реле с выдержкой времени KVT1,KVT2 и фильтр-реле KVZ2 напряжения обратной последовательности,

Рисунок 12.1 -Схемы питания собственных нужд электростанции (а), пускового органа минимального напряжения (б), цепей управления отключением рабочего (в) и одного из резервных выключателей (г)
подключенные ко вторичным цепям первичного измерительного трансформатора напряжения TVI(см. рисунок 12.1,а), и цепей контроля напряжения резервного источника максимальным измерительным реле напряжения KVZ,подключенным к трансформатору напряжения TVS.Их контакты: замыкающий KVЗ и размыкающие KVTI, KVT2 и KVZ собирают цепь отключения рабочего выключателя Q1при исчезновении напряжения рабочего источника по другим (кроме отключения Q1) причинам.
Пусковой орган выполнен с двумя реле KVTI, KVT2 и дополнен фильтром-реле KVZ2для предотвращения его излишнего срабатывания при перегорании плавкой вставки одной из фаз предохранителя F1в цепи подключения TV1 - срабатывает одно из них: KVTI или KVT или оба при расплавлении вставки фазы В. При этом срабатывает фильтр-реле напряжения обратной последовательности AVZ2.При исчезновении напряжения все три реле невозбуждены и их контакты замкнуты, реле KVZ возбуждено напряжением на выходе TV3и его контакт KV3также замкнут: как указывалось, производится отключение Q1и включение Q3.
.
Список литературы
1. Овчаренко Н.И. Автоматика электрических станций и электроэнергетических систем: Учебник для вузов /под.ред. А.Ф. Дьякова. – М.: Изд-во НЦ ЭНАС, 2000. – 504 с.:ил.
2. Дьяков А.Ф., Окин А. А., Семенов В. А. Диспетчерское управление мощными энергообъединениями. — М.: Изд-во МЭИ, 1996. — 244 е.: ил.
3. Прокопенко А. Г., Мысак И. С. Стационарные, переменные и пусковые режимы энергоблоков ТЭС. — М.: Энергоатомиздат, 1990.
4. Плетнев Г. П. Автоматизированные системы управления объектами тепловых электростанций. — М.: Изд-во МЭИ, 1995.
5. Методические указания по техническому обеспечению автоматического синхронизатора СА-1. — М.: Союзтехэнерго, 1980.
6. Соловьев И. И. Автоматические регуляторы синхронных генераторов. — М.: Энергоиздат, 1981.
7. Гидротехническое и вспомогательное оборудование гидроэлектростанций. Справочное пособие: В 2 т. / Под ред. Ю.С. Васильева, Д. С. Щавелева. — М.: Энергоатомиздат, 1988. — Т. 1.
8. Создание автоматизированных систем управления гидроэлектростанциями / В. Д. Ковалев, А.Н. Кузнецов, В.Н. Орлов и др. / / Высоковольтная и преобразовательная техника: Системы управления электротехническим и энергетическим оборудованием / Тр. ВЭИ. — М.: Эколинк, 1996. — С. 99-101.
9. Карпов В. А. Принципы построения АСУ ТП общестанционного уровня ГЭС (ГАЭС) // Автоматическое регулирование и управление в энергосистемах / Тр. ВЭИ. — М.: Энергоатомиздат, 1983. — 38-41.
10. Цифровая система автоматического регулирования частоты и активной мощности в энергообъединении Сибири / Ю.С. Венев- цев, Б. И. Гвоздев, В. П. Нестеренко, Т. С. Яковлева // Электрические станции. — 1984. — № 1. — С. 49-52.
11. Окин А. А. Противоаварийная автоматика. — М.: Изд-во МЭИ, 1995.
12. Беркович М. А., Комаров А.Н., Семенов В. А. Основы автоматики энергосистем. — М.: Энергоиздат, 1981.
13. Окин А. А., Семенов В. А. Противоаварийные управления в ЕЭС России / Под ред. А. Ф. Дьякова. — М.: Изд-во МЭИ, 1996. — 156 е.: ил.
14. Чернобровое Н.В., Семенов В. А. Релейная защита энергетических систем: Учеб. пособие для техникумов. — М.: Энергоатом- издат, 1998. — 800 е.: ил.
15. Беркович М. А., Гладышев В. А., Семенов В. А. Автоматика энергосистем. — М.: Энергоатомиздат, 1991.
Содержание
1 Лекция №1. Назначение и особенности автоматического управления
2 Лекция №2. Автоматическое управление пуском гидрогенераторов
3 Лекция №3. Автоматическое управление пуском турбогенераторов
4 Лекция №4. Автоматическое управление включением синхронных генераторов на параллельную работу
5 Лекция №5. Автоматическое управление включением синхронных
генераторов на параллельную работу
6 Лекция №6. Автоматическое регулирование частоты вращения гидро-и турбогенераторов
7Лекция №7. Автоматическое управление мощностью гидро- и турбогенераторов
8 Лекция №8. Автоматическое регулирование напряжения и реактивной мощности синхронных генераторов
9 Лекция №9. Автоматическое управление режимами работы электри-
ческих станций и электроэнергетических систем
10 Лекция №10.Особенности и задачи противоаварийного автоматического управления энергетическими системами 39
11 Лекция №11. Особенности и задачи противоаварийного автоматического управления энергетическими системами
12 Лекция №12.Автоматика отключений коротких замыканий, повторного и резервного включений
Список литературы
Сводный план 2013 г., поз. 270