Коммерциялық емес акционерлік қоғам
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ
Инженерлік кибернетика кафедрасы
БІР ҮЛГІДЕГІ ТЕХНОЛОГИЯЛЫҚ ҮРДІСТЕР ЖӘНЕ ӨНДІРІСТЕРДІҢ АВТОМАТТАНДЫРУЫ
5В070200 – «Автоматтандыру және басқару»
мамандығы бойынша оқитын
студенттерге арналған зертханалық жұмыстарды
орындау үшін әдістемелік нұсқау.
Алматы 2011
Құрастырғандар: Иманғалиев Ш.И, Л.Н. Рудакова. Бiр үлгiдегi технологиялық үдерiстер және өндiрiстердiң автоматтандыруы. 5B070200 - Авттоматтандыру және басқару мамандығы бойынша оқитын студенттерге арналған зертханалық жұмыстарды орындау үшін әдістемелік нұсқау.- Алматы: АЭжБУ, 2011. – 27 б.
Берілген әдістемелік нұсқауда «Бiр үлгiдегi технологиялық үдерiстер және өндiрiстердiң автоматтандыруы» пәні бойынша автоматты жүйелерді тәртіпке келтіруді реттеу және орындаушы механизмдердің басқару сұлбаларын монтаждау бөлімінде тәжірибелік дағдыларын игеруге, білімін пысықтауға бағыттайтын 4 зертханалық жұмысты орындау сипаттамасы келтірілген. 5B070200 – Автоматтандыру және басқару мамандығы бойынша студенттерге арналған әдістемелік нұсқау.
Без.18, кесте.4, әдеб.көрсеткіші – 5 атау.
Пікір беруші: физ.-мат. ғыл. канд., проф. Л.К. Ибраева.
«Алматы энергетика және байланыс университетінің» коммерциялық емес акционерлік қоғамының 2011 жылғы жоспары бойынша басылады.
© «Алматы энергетика және байланыс университетінің» КЕАҚ, 2011 ж.
2011ж. жиынтық жоспары, реті 30
1 Зертханалық жұмыс. Реттеу объекттерінің динамикалық сипаттамаларын тәжірибе түрінде анықтау
Жұмыстың мақсаты: әртүрлі объекттердің динамикалық сипаттамаларын анықтау үшін тәжірибе жүргізу әдістемесін және тәжірибелік мәліметтерді өңдеу әдістемесін меңгеру.
1.1 Жұмыстың орындалу үлгісі
Зертханалық жұмыс келесі техникалық құралдарды қолданумен жүргізіледі:
- АЖР тренажеры (стенд № 1, 2);
- келіскен тақтайшасымен РП-160 тіркеушісі;
- бақылаушы вольтметр.
1.2 Жұмысты орындаудың тапсырмасы
Жұмысты бастамас бұрын АЖР тренажеры мен РП-160 регистраторының техникалық сипаттамаларымен танысу керек.
1.2.1 Статикалық инерциялық объекттің динамикалық сипаттамасын анықтау.
1.2.2 Астатикалық инерциялық объекттің динамикалық сипаттамасын анықтау.
1.3 Жұмыс тапсырмасын орындау әдістемесі
1.3.1 Статикалық инерциялық нысанның динамикалық сипаттамасын анықталуы.
 1.3.1.1
1.1 суретке сәйкес тәжірибе жүргізу сұлбасын жинау.
1.3.1.1
1.1 суретке сәйкес тәжірибе жүргізу сұлбасын жинау.
1.1 сурет – Тәжірибе жүргізу сұлбасы
1.3.1.2 Басқару мүшелерінің панелінен реттелу объектісі Д05 үлгісін шығарып, оның мүшелерін келесі түрде күйге келтіру:
№1 Канал
Қосқыш жұмыс режимін «А» жағдайына келтіру,
К1=1.0; Т1=10 с (мұғаліммен беріледі);
№2 Канал
Қосқыш жұмыс режимін «А» жағдайына келтіру,
К2=1.0; Т2=10 с (мұғаліммен беріледі).
1.3.1.3 Тренажерға 220В кернеу беру.
1.3.1.4 БУ-ға әсер ете отырып ОМ-ның шығыстағы білігін УП бойынша 50% жағдайға келтіру және 5 минутқа үзінді жасау.
1.3.1.5 Регистраторға қуат беру .
1.3.1.6 Келіскен приставкамен «корректор» мүшесіне әсер ете отырып, регистратор көрсеткіштерін оның шкаласы бойынша орташа жағдайға келтіру.
Жұмыс барысы
1.3.1.7 РП-160 регистраторының диаграмма лентасының орын ауыстыру жылдамдығын 2400 мм/сағ орнату.
1.3.1.8 Регистраторды іске қосу, «диаграмма қосулы» пернесін басу.
1.3.1.9 Орнатылған
режимді күту (диаграмма лентасының жазылу
ұзақтығы 50-60 мм), вольтметр көрсеткішін жазып алу
және ОМ шығыс білігінің жағдайын
![]() УП=
+10% өлшеміне өзгерту арқылы объектке
ауытқу келтіру. Команда берілу басы кезінде «ауытқу» пернесімен
лентаға қарама-қарсы жазу элементіне белгі салу.
УП=
+10% өлшеміне өзгерту арқылы объектке
ауытқу келтіру. Команда берілу басы кезінде «ауытқу» пернесімен
лентаға қарама-қарсы жазу элементіне белгі салу.
1.3.1.10 Орындалған күйдің түсуіне дейін тәжірибелік тарату қисығына регистрация жүргізу және вольтметр көрсеткішін жазып алу. Регистраторды тоқтату.
1.3.1.11
![]() УП=
«минус» 10% ауытқуында 1.3.1.8 - 1.3.1.10 пунктары бойынша
тәжірибені қайталау.
УП=
«минус» 10% ауытқуында 1.3.1.8 - 1.3.1.10 пунктары бойынша
тәжірибені қайталау.
1.3.1.12 Регистратордан диаграмма лентасын көшіріп алу және рекомендацияға сәйкес 1.5, 1.6 бөлімдері бойынша алынған тәжірибелік тарату қисығының мәндерін өңдеу. Нәтижесін 1.1 кестесіне енгізу.
1.1 кесте
|
Ауытқу белгісі және өлшемі, %УП |
Үлгі коэффициенті |
t0, с |
Т0, с |
|
|
|
Т1 |
Т2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.3.1.13 Алынған t0, Т0, К0 мәндерін орташаландыру.
1.3.2 Нәтижені безендіру
Зертханалық жұмыс нәтижесінде келесілер болу керек:
1.3.2.1 Жұмыстың мақсаты.
1.3.2.2 Тарату қисығын анықтау үшін тәжірибе жүргізу схемасының қысқаша сипаттамасы.
1.3.2.3 Нәтижелер кестелер және графикалық материалдар түрінде.
1.3.2.4 Орташаландырылған t0, Т0, К0 коэффициенттерінің мәнін функцияға қою
 .
.
1.3.3 Бақылау сұрақтары
1.3.3.1 Реттеудің статикалық инерциялық объекттің динамикалық сипаттамаларын анықтау тәртібін түсіндіріңіз.
1.3.3.2 t0, Т0, К0 параметрлерін есептеу және динамикалық сипаттамаларын өңдеу тәртібін түсіндіріңіз.
1.3.4 Астатикалық инерциялық объекттің динамикалық сипаттамасының анықтамасы.
1.3.4.1 1.1 суретке сәйкес тәжірибе жүргізу сұлбасын жинау.
1.3.4.2 Басқару мүшелерінің панелінен реттелу объектісі Д05 үлгісін шығарып, оның мүшелерін келесі түрде күйге келтіру:
№1 Канал
Қосқыш жұмыс режимін «А» жағдайына келтіру,
К1=1.0; Т1=10 с (мұғаліммен беріледі);
№2 Канал
Қосқыш жұмыс режимін «А» жағдайына келтіру,
К2=1.0; Т2=10 с (мұғаліммен беріледі).
1.3.4.3 Тренажерға қуат беріп және оны 1.3.1.4 – 1.3.1.6 пунктарына сәйкес астатикалық инерциялық объекттің ерекшелігін ескере отырып жұмысқа дайындау (материалдық баланстың fвнеш и Хвх арасында шарттың орындалуы) .
Жұмыстың барысы 1.3.1 – 1.3.4 бөлімдері бойынша орындалады. Нәтижелерін 1.2 кестеге енгізу.
1.2 кесте
|
Ауытқу белгісі және өлшемі, %УП |
Үлгі коэффициенті |
t0, с |
t0, с |
|
|
|
Т1,с |
Т2,с |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.3.4.4 Алынған t0, Dt, e0 мәндерін орташалау.
1.3.5 Бақылау сұрақтары
1.3.5.1 Астатикалық инерциялық объекттің динамикалық сипаттамасын анықтау тәртібін түсіндіріңіз.
1.3.5.2 Тәжірибелік динамикалық сипаттамасы бойынша t0, Dt, e0 параметрлерін анықтау тәртібін түсіндіріңіз.
1.3.7 Нәтижені безендіру
1.3.7.1 Жұмыстың мақсаты.
1.3.7.2 Тәжірибенің қысқаша сипаттамасы.
1.3.7.3 Тәжірибенің графикалық және кестелік материалы.
1.3.7.4 Аппроксимирикалық тарату функциясы алынған коэффициент мәндерімен.
1.4 Қысқаша теориялық мәлімет
Істегі технологиялық құрылғыдағы АЖР реттеуі реттеу объекттерін анықтау үрдісінің кезеңдерінің бірі.
Идентификацияның негізгі тапсырмалары:
1.4.1 Объекттің тәжірибелік динамикалық сипаттамасын алу (қарапайым тарату қисығы);
1.4.2 Тәжірибелік мәліметтер мен реттеу объектісінің таратқыш функциясының динамикалық сипаттамасының параметрлерін анықтау;
Тәжірибенің тапсырмасы негізінде екі кезеңмен шешіледі:
- Хрп реттеу параметрін өлшеу үшін тәжірибені жүргізу және жоспарлау;
- зерттеліп отырған объекттің динамикалық қасиеттеріне жақын математикалық үлгісін анықтау;
Тәжірибені жоспарлау кезінде объект 1.2 суретте көрсетілгендей жеңіл түрінде ұсынылады.
 |
fвнутр, fвнеш – ішкі және сыртқы ауытқулар;
ОМ – орындаушы механизм;
ХИМ –орындаушы механизмның шығыс сигналы:
1.2 сурет – Тәжірибені жүргізу сұлбасы
Тәжірибе алдын
ала баспалдақты формадағы ![]() ХИМ сыналатын әсерлердің
орнатылған күй кезіндегі объекттің кірісінде болуын
қарастырады.
ХИМ сыналатын әсерлердің
орнатылған күй кезіндегі объекттің кірісінде болуын
қарастырады.
![]() ХИМ өлшемі мына шарттардан
таңдалады:
ХИМ өлшемі мына шарттардан
таңдалады:
- кедергілер деңгейіндегі оның байқалуы;
- басқару объектісінің экплуатация шарттары бойынша рұқсат етілулері;
Тәжірибені жүргізудің мақсаты – ұсынылатын Хрп(t) динамикалық сипаттамаларын алу арқылы беріліс функциясы W0(р) теплоэнергетикалық объекттер үшін жалпы түрде 1.1 өрнегі түрінде берілуі мүмкін
 ,
(1.1)
,
(1.1)
мұндағы K0 –объекттің беріліс коэффициенті;
t0 – кешігу уақыты, с.
Егер А0=0 – астатикалық инерциялық объект;
Егер А0=1 – статикалық инерциялық объект.
Астатикалық объекттің ерекшелігі материалдық теңсіздікте Хвн және fвнеш өлшемдері Хрп орнатылған күйге жетпеуі.
1.5 Статикалық инерциялық объекттер
Берілген объекттердің математикалық үлгісінің қарапайым есептеу түрлері 1.2 өрнекте келтірілген
 ,
(1.2)
,
(1.2)
мұндағы Т0 – уақыт тұрақтысы, с;
К0 – беріліс коэффициенті;
t0 – кешігу уақыты.
К0, t0, Т0 коэффициенттері 1.3 суретінде көрсетілгендей ию нүктесіне жанама жүргізу жолымен тәжірибелік тарату қисығынан тікелей анықталуы мүмкін (Хрп жылдамдықтың максимумы).
 |
1.3 сурет – Инерциялық статикалық объекттің тарату қисығы
Уақыт өсіне жанама бөлігінің проекциясы Т0 болып келеді, ал t0 – ауытқу басталғаннан жанама мен уақыт өсінің қиылысу нүктесіне дейін есептеледі.
 . (1.3)
. (1.3)
Нақты есептеулер үшін мына түрдегі объекттің үлгісі қолданылады
 ,
(1.4)
,
(1.4)
мұндағы К0, t0, a1, а2 коэффициенттері Хрп(t) қисықтың белгілі әдістері бойынша анықталуы мүмкін.
1.6 Астатикалық инерциялық объект
Берілген объекттердің математикалық үлгісінің қарапайым есептеу түрлері 1.5 өрнекте келтірілген
 , (1.5)
, (1.5)
мұндағы e0 – объекттің тарату жылдамдығы;
t0 – кешігу уақыты.
Берілген коэффициенттер 1.4 суретінде көрсетілгендей тәжірибелік тарату қисығынан тікелей анықталуы мүмкін.
 |
1.4 сурет – Астатикалық инерциялық объекттің қисығы
t0 коэффициенті графикалық түрде анықталады, ал e0 келесі өрнектен анықталады
 . (1.6)
. (1.6)
Аппроксимирикалық астатикалық инерциялық объекттерден басқа да математикалық үлгілері бар, мысалы
 . (1.7)
. (1.7)
Статикалық инерциялық объекттің мысалы.
1.5 суретте бужылытқыштың тарату қисығы конденсаттың шашу шығыны кезіндегі ауытқуымен көрсетілген.
Беріліс функциясының түрін табу
 . (1.8)
. (1.8)
Шешуі:
Өтпелі процесс регистратор лентасының жылдамдығының орын ауыстыруымен жазылған:
![]() .
.
 |
1.5 сурет – Бужылытқыштың тарату қисығы
Тарату қисығының ию нүктесіне жанама жүргіземіз, уақыт өсі және орнатылған күйдегі сызықпен қиылысқан нүктесін табамыз. Сызғышпен t0 және Т0 бөліктерін өлшейміз (мм).
Алатынымыз
![]() =26мм=
=26мм=![]() =
=![]() ;
;
![]() .
.
Осыдан
![]()
 .
.
Астатикалық инерциялық объекттің мысалы.
1.6 суретте турбинаның бужылытқыштағы жоғары қысым деңгейі бойынша тарату қисығы көрсетілген. Беріліс функциясының мына түрін табу
 .
.
1.6 сурет- БЖҚ турбинасының тарату қисығы
Шешуі:
Өтпелі процесс регистратор лентасының жылдамдығының орын ауыстыруымен жазылған:
![]() .
.
Тарату қисығына жанама жургізіп, өлшемді сызғышпен өлшей отырып мәндерді аламыз:
![]()
![]() ;
;
![]() ;
;
![]() .
.
Алатынымыз
![]()
Осыдан
 ,
,
![]() .
.
2 Зертханалық жұмыс. Реттеудi объекттiң эксперименталдi динамикалық сипаттамалары бойынша АЖР-дың күйге келтiру параметрлерiмен анықтау
Жұмыстың мақсаты: реттеудi объекттiң эксперименталдi динамикалық сипаттамасы ПИ – реттеуіш пен параметрлерге дейiн бiр контурлы АЖР-дың күйге келтiруiнiң параметрлерiнiң есептеуiнiң әдiстемесiн меңгеріп, ауыспалы процесстiң формасына күйге келтiрудiң параметрлерiнiң ықпалын бағалау.
2.1 Жұмыстың орындалу үлгісі
Зертханалық жұмыс келесі техникалық құралдарды қолданумен жүргізіледі:
- АЖР тренажеры;
- РП-160 тіркеушісі;
- бақылаушы вольтметр.
2.2 Жұмыстың тапсырмасы
2.2.1 Реттеу объектісінің экспериментальды тарату қисығын анықтау.
2.2.2 АЖР күйне келтіру параметрлерінің есептеуін жүргізу.
2.3 Жұмыс тапсырмасын орындау әдістемесі
2.3.1 Даярлық кезең
2.3.1.1 Тренажердiң теру өрiсiне 2.1 суретiне сәйкес схеманы жинап, оқытушы реттеудiң күйге келтiруін органдар объектісін үлгi бойынша басқару панелiнде нұсқауларға сәйкес орнату.
2.3.1.2 РП4-У мүшелерінің күйге келтіруін орнату
a1=1.0; a2=0; a3=0; ae=1; aп=0.5; tп=0; Тф=0; Ти=0.1; D=1 %.
2.3.1.3 РП4-У-дың Y1-Y0 ұяларына бақылаушы вольтметрді қосу.
2.3.1.4 Тапсырыс берушіні 50% жағдайына орнату.
2.3.1.5 БУ-21 басқару блогын «ручное» жағдайына қою.
2.3.1.6 Тренажерға кернеу беріп, УП бойынша ОМ шығыс білігін 50% жағдайға орнату.
2.3.1.7 Бақылаушы вольтметрдің көрсеткіштері бойынша «задание плавно» күйге келтіру мүшесіне әсер ете отырып 1 минуттан кейін кернеуді РП4-У-дың Y1-Y0 ұяларының нөлге тең келіспеушілік жағдайға орнату (РП4-У-дың сигналдық шамдары өшіп тұру керек). Бұл рәсім статикалық тепе-теңдік деп аталады.
2.1сурет –ПИ-реттеуіші мен бір контурлы АЖР-дың жинақтау сұлбасы
2.3.1.8 Бас терiс керi байланыстың таңбасының дұрыстығын тексеру
(Хрп-тың сигналы реттейтiн органды сыналатын әсердiң беруiнiң жанында үлкеюге қарай «меньше» және кері командалар пайда болу керек ) .
2.3.1.9 Задатчиктi қосудын дұрыстығын тексеру (тапсырма сигналының үлкеюi «больше» командасының пайда болуына алып келуi керек ) .
2.3.2 Жұмыстың барысы
2.3.2 1 зертханалық жұмыстың әдiстемелiк нұсқауларына сәйкес реттеу объектісінің эксперименталдi таратып жiберу қисығын анықтау. Тәжiрибенiң нәтижелерiн өңдеу
2.3.2.2 Кр және Ти параметрлерінің есептеуін жүргізіп оларды РП4-У блогында іске асыру керек.
2.3.2.3 АЖР-ды қосып және ауытқу кезінде УП% бекiтiлген шамаға Хрп(t )реттейтiн органмен тiркеу жасау.
2.3.2.4 Өтпелі процесс кезінде есептелетін (y=0.9) шамасын А1 және А3 амплитудаларынан алынған параметрлерінің мәнімен салыстыру.
2.3.2.5 y<yопт немесе y>yопт мәндерін алғанда қадам сайын ықшамдау әдiсімен Кр және Ти параметрлерiне коррекция жасау.
2.3.2.6 Коррекция
бойынша жасалынған тәжірибеде Кр(![]() )
және Ти параметрлерін 2.1 кестесіне енгізу керек.
)
және Ти параметрлерін 2.1 кестесіне енгізу керек.
2.1 кестесі
|
Тәжірибе № |
aп ( Кр),
|
Ти, с |
y= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.4 Бақылау сұрақтары
2.4.1 Кр және Ти параметрлерінің реті қалай болады?
2.4.2 Кр және Ти параметрлерін қалай іске асырады?
2.4.3 Қадам сайын ықшамдау әдісінің мәні неде?
2.4.4 Кр(![]() )
параметрі өтпелі процес кезіндегі ықтималдылыққа
қалай әсер етеді?
)
параметрі өтпелі процес кезіндегі ықтималдылыққа
қалай әсер етеді?
2.4.5 Ти параметрі өтпелі процес кезіндегі ықтималдылыққа қалай әсер етеді?
2.5 Нәтижені безендіру
Зертханалық жұмыс нәтижесінде келесілер болу керек:
2.5.1 Жұмыстың мақсаты.
2.5.2 Қысқаша жұмыстың мазмұны.
2.5.3 АЖР-дың құрылымдық схемасы.
2.5.4 Алынған нәтиже мен куйге келтіру параметрлерінің есептелуі.
2.5.5 Кестелік материал және жасалынған тәжірибелерге байланысты өтпелі процесстер.
2.5.6 Жасалынған жұмыс бойынша қорытынды.
2.6 Қысқаша теориялық мәліметтер
Жұмыс iстейтiн жабдықтағы АЖР-ды реттегеннен кейін объекттiң динамикалық сипаттамасының параметрлерiнiң табылуы (t0, K0, T0 № 1зертханалық жұмысынан) күйге келтiру параметрлер анықтау процесі келесi кезеңдерден тұрады:
2.6.1 Кр және Ти параметрлерінің есептелуі (негізінде нақты мәндер үшін y-өтпелі процестің өшу дәрежесі болып табылады);
2.6.2 Нақты АЖР құрылғысы үшін есептелген мәндердің іске асуы;
2.6.3 Жұмысқа қосылып тұрған АЖР-дың есептелген мәндерінің дұрыстығын тексеру.
2.7 Есептеудің реті
2.7.1 1 зертханалық жұмыста эксперименталді түрде алынған реттеу объектісінің эксперименталді тарату қисығына байланысты t0, K0, T0 коэффициенттерін анықтайды.
2.7.2 Объекттің сипаттамалық коэффициентін есептейді
![]() .
(2.1)
.
(2.1)
2.7.3 ПИ - реттеуіштің Кр және Ти параметрлерін өлшемдердің қатынасына байланысты берілген өрнекке сәйкес есептейді (2.1):
егер 0![]()
![]()
![]() 0.1
0.1
 |
егер 0,1![]()
|
![]() егер
егер ![]()
|
егер

|
2.8 Кр және Ти есептелген мәндерінің іске
Іске асырылу кезеңі қолданатын құрылғының автореттеуішіне байланысты. АКЭСР, «Каскад» құрылғылары үшін күйге келтiру секундтердегi бөлулерi бар шкаласы болатын тиiстi органмен тiкелей бекiтiледi.
АЖР оқу құрылғысы РП4-У блок типті реттеп отыратын АКЭСР-2 құрылғысымен қаматамасыздандырылған.
2.8.1 Есептелетін Ти
өлшемінің күйге келтіру органы «![]() »
реттеуіш блоктың пернесінде бекітіледі.
»
реттеуіш блоктың пернесінде бекітіледі.
2.8.2 Кр есептелетін мәнін іске асыру мыналарға байланысты:
- ОМ-ның толық жұмыс барысының уақыттық өлшемін анықтау-Тим секунд бойынша УП бойынша 0-100%диапазон аралығында;
- РП 4-У-дың кірісіндегі Хрп реттеуіш параметрінен сигнал датчигінің a масштабтау коэффициентін беру;
- Келіспеушілік сигналының ae масштабтау коэффициентінің өлшемін беру;
Кр өлшемі аталып өткен коэффициенттер көмегімен анықталады
 ,
(2.6)
,
(2.6)
мұнда aп - реттеуіш құрылғының беріліс коэффициенті;
Кр – (2.2-2.5) өрнегінен алынған есептелген мән;
(2.6) өрнегіне Тим, a=0.5, ae=1 және Кр есептелген мәнін қойып, aп өлшемін есептейді
 .
(2.7)
.
(2.7)
2.9 Кр(aп) және Ти-дың нақты
ықтималдылығы ![]() УП% өлшеміне ішкі ауытқу тудырған
іске қосылған АЖР-дың көмегімен іске асады.
УП% өлшеміне ішкі ауытқу тудырған
іске қосылған АЖР-дың көмегімен іске асады.
Өтпелі процесс кезіндегі ХРП(t) –ның y критерий мәніне сәйкестігін бағалау үшін оның мәнін (2.8) өрнегімен есептейді
![]() , (2.8)
, (2.8)
мұнда А1 және А3 - 2.2 суретінде көрсетілген ХРП(t) - ның бірінші және екінші амплитудаларының ауытқуы
 |
2.2 сурет – Ішкі ауытқу кезіндегі өтпелі процесс
Егер y критерийі есептелетін мәнге сәйкес келмесе,онда Кр (aп) және Ти өлшемдерін қадамдық оптимизация әдісімен оптималді мәнге дейін корректировка жасайды.
2.10 Мысал. Эксперименталді тарату қисығы РП4-У-дың Y1-Y0 ұяларын өтпелі процесс кезінде тіркеумен табылған.
![]() .
.
Құрылғы унификацияланған шығыс сигналымен жұмыс атқаратындықтан, оның Ко мәнін %-бен ХРП реттеуішінен 10В өлшеу диапазоны аралығында қайтадан санау керек.
Получим
![]() .
.
2.10.1 Мына
өлшемді табамыз ![]() .
.
2.10.2
![]() өлшемі
бойынша Кр және Ти мәндерін есептеу
үшін (2.3) өрнегін таңдаймыз
өлшемі
бойынша Кр және Ти мәндерін есептеу
үшін (2.3) өрнегін таңдаймыз ,
,
![]()
2.10.3 Есептелген мәндердің іске асуы.
Орындаушы механизм Тим=2.5 с уақытқа тең толық жұмыс барысын қамтиды ,
осыдан
 .
.
aп және Ти есептелген мәндері өзіне тиісті органдардың ең жақын бөліктерінде орналасады.
3 Зертханалық жұмыс. Өтпелі процесс формасы бойынша АЖР-ды икемдеу
Жұмыстың мақсаты: ұтымды параметрлердiң тәжірибелік iздестiру әдiстемесін меңгеру, өтпелі процесстердiң сапа көрсеткiштерiн анықтау әдiстемесін бекiту.
3.1 Жұмыстың орындалу үлгісі
Зертханалық жұмыс келесі техникалық құралдарды қолданумен жүргізіледі:
- бір контурлы АЖР тренажеры;
- регистратор (бақылаушы вольтметр).
3.2 Жұмыстың тапсырмасы
3.2.1 Пи - реттеуiш пен статикалық инерция объектiсі арқылы АЖР-ды күйге келтiрудiң ұтымды параметрлерiн табу.
3.2.2 Өтпелi процесстердiң сапа көрсеткiштерiн анықтау.
3.3 Жұмыс тапсырмасын орындау әдістемесі
3.3.1 Даярлайтын кезең 2 зертханалық жұмыстың орындауына әзiрлеуге ұқсас.
3.3.2 Жұмыстың барысы.
3.3.2.1 Kp (a1 и aп) күйін кез келген жағдайларға келтіру РП4-У мүшесін орнату. (жұмыс iстейтiн технологиялық жабдықта реттелетiн параметрдiң дәлдiктің сүйемелдеуi статикалық есептеуiмен беріледі).
3.3.2.2 Күйге келтіру мүшелеріне "дөрекі әсер"(тура ) ете отырып, Y1-Y0-дың ұяларында бақылау вольтметрiнiң көрсеткіштері бойынша берілген параметрлерінiң сүйемелдеуiне РП4-У-ды күйге келтiру.
3.3.2.3 Мүшелерді Ти=100с тұрақты интегралдау күйіне келтiруді орнату.
3.3.2.4 Орындаушы механизмның қолмен басқару мүшесіне әсер ете отырып АЖР-ға iшкi ауытқулар енгізу және оның жұмысын қосу.
3.3.2.5 Регистратор
немесе бақылаушы вольтметр көрсеткіштері бойынша алынған
өтпелі процестің жазықтықтағы Кр
және ![]() ағдайын бағалау.
ағдайын бағалау.
3.3.2.6 Әдiстемелiк нұсқаудың 3.6.1-3.6.3 пунктерін қолдана отырып күйге келтiрудiң ұтымды параметрлерiн анықтау. Әрбiр тәжiрибеде бастапқы деректер мен алынған нәтижелерді 3.1кестеге жазу.
3.1кесте
|
Тәжірибе№
|
|
Ти, с |
Өтпелі процесстiң мысалдық формасы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.4 Бақылау сұрақтары
3.4.1 Ұтымды өтпелі процесс қандай параметрлермен сипатталады?
3.4.2 Кр және Ти параметрлерінің ұтымды мәндерін қалай анықтауға болады?
3.5 Нәтижені безеңдіру
Зертханалық жұмыс нәтижесінде келесілер болу керек:
3.5.1 Жұмыстың мақсаты.
3.5.2 Қысқаша жұмыстың мазмұны.
3.5.3 АЖР-дың құрылымдық схемасы.
3.5.4 Тәжірибелі мәлiметтерімен кестелiк материал.
3.5.5 Әрбір күйге келтіру кезеңдері бойынша өтпелі процестер (бастапқы және соңғы нәтижелер).
3.6 Қысқаша теориялық мәліметтер
Осы әдiстемелiк нұсқауда тәжірибелi әдiспен АЖР-ды ПИ-реттеуiшімен және статикалық инерция объектiсімен күйге келтіру параметрлерін анықтау бойынша тәжірибелік ұсыныстары бар. Қаралатын әдiс АЖР-ды күйге келтірудің әртүрлі параметрлерінің және ПИ - реттеуішінің күйге келтіру параметрлері болып келетін жазықтықтағы (абсциссалар өсі) және (ординаталар өсi) сәйкес нүктелердің орналасуының өтпелі процесс формаларының өзара байланысында негізделеді. 1 суретте көрсетілгендей берілген жазықтықта өшу деңгейлері бірдей түзулері бар. ПИ - реттеушінің күйге келтіру параметрлерінің y облысының берілген жазықтығының шектері.
1, 2, 3, 4 нүктелеріне
![]() =0.9
кездегі Кр және Ти әртүрлі
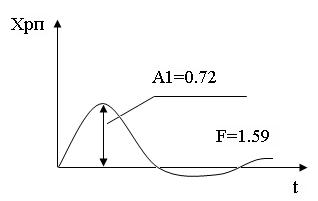
тіркестерінде алынған өтпелі процесс сәйкес келеді. Дегенмен
реттеудiң басқа сапа көрсеткiштерi - А1 максимал
динамикалық ауытқуы, өтпелі процесстiң уақыты
және өтпелі процесс қисығының астындағы
F-тың ауданы әр түрлi болып табылады 3.2 сурет. Кр
және Ти ұтымды мәндерінде F=min, яғни
ұтымды күйге келтіру 3 нүктенің аймағында
орналасқан. 3-шi нүктенiң аймағындағы
бөлiмшесi тең өшудің түзуін 2 бөлiкке
бөледi:
=0.9
кездегі Кр және Ти әртүрлі
тіркестерінде алынған өтпелі процесс сәйкес келеді. Дегенмен
реттеудiң басқа сапа көрсеткiштерi - А1 максимал
динамикалық ауытқуы, өтпелі процесстiң уақыты
және өтпелі процесс қисығының астындағы
F-тың ауданы әр түрлi болып табылады 3.2 сурет. Кр
және Ти ұтымды мәндерінде F=min, яғни
ұтымды күйге келтіру 3 нүктенің аймағында
орналасқан. 3-шi нүктенiң аймағындағы
бөлiмшесi тең өшудің түзуін 2 бөлiкке
бөледi:
- төмен жиілікті нүктелер 1 және 2;
- жоғарғы жиілікті нүкте 3.
 |
3.1сурет - ПИ-реттеушінің күйге келтіру параметрлерінің y облысының
берілген жазықтығының шектері
Өтпелі процесстердің төменгі жиiлiктi бөлiкте үлкен периоды, динамикалық қателігі және өтпелі процесс қисығының астындағы ауданы бар. Өтпелі процесстер жоғары жиiлiктi бөлiгiнде созылуымен сипатталады, яғни апериодикалық құраушының болуымен сипатталады.
 |
 |
3.2
сурет – 1, 2, 3
және 4 нүктелеріндегі
![]() =0.9 кездегі өтпелі
процестер
=0.9 кездегі өтпелі
процестер
Ұтымды күйге келтіруді өтпелі процестің түрі бойынша тәжірибелік әдістің көмегімен табу 3.3 суретіне сәйкес 3 кезеңнен тұрады.
 |
3.3 сурет - Тәжірибелік әдіспен күйге келтірудің тізбектелуі
3.6.1 Жоғарғы жиілікті бөлік тармағының шығысы өшу деңгейіне тең. (1 кезең).
Кр-дың кез келген мәні және Ти-дің көтерілген мәні орнатылады. Осы параметрлер арқылы 3.4 суретте көрсетілшен өтпелі процесс 2-ны алуға болады.
3.4 сурет – Өтпелі процесс 2
 |
3.5 сурет - Өтпелі процесс 3
Тиiстi тарабына Кр-дің әсерiмен Ти=соnst болғандағы апериодикалық құрастырушыдан басқа ұтымдының жақын мәнінің аймағындағы өшуге қол жеткiзуге керек.
3.6.2 Апериодикалық құрастырушыны жою (2 кезең).
Кр=const кезіндегі Ти-дің біртіндеп кішіреуімен апериодикалық құрастырушыны жляды (3.6 суреттегі 4 және 5 процестер).
3.6.3 Өшу деңгейін ацқындау (3 кезең).
Ти=const кезінде Кр
қажетті ![]() мәнге дейін азаяды (3.7 суреттегі 6 өтпелі
процесс).
мәнге дейін азаяды (3.7 суреттегі 6 өтпелі
процесс).
3.6 сурет – 4 және 5 өтпелі процестер
 |
3.7 сурет - Өтпелі процесс 6
4 Зертханалық жұмыс. П-реттеуішін тәжірибелік күйге келтіру
Жұмыстың мақсаты: П-реттеушінің импульсты шығысты сигналымен және тұрақты жылдамдықтағы орындаушы механизмімен ПИ-реттеуші негізінде құрастыру принципін оқып білу, оның сипаттамаларының анықтамасын және күйге келтіру әдісін тәжірибелік амалмен меңгеру.
4.1 Жұмыстың орындалу үлгісі
Зертханалық жұмыс келесі техникалық құралдарды қолданумен жүргізіледі:
- АЖР тренажеры № 1 (2);
- РП-160 тіркеушісі;
- бақылаушы вольтметр V1 және V2.
4.2 Жұмыстың тапсырмасы
4.2.1 П-реттеушінің импульсты шығысты сигналымен және тұрақты жылдамдықтағы орындаушы механизмімен ПИ-реттеуші негізінде құрастыру принципін оқып білу.
4.2.2 ПИ-реттеуіші негізінде П-реттеуіштің сипаттамасын анықтау..
4.3 Жұмыс тапсырмасын орындау әдістемесі
4.3.1 Даярлық кезең.
4.3.1.1 Тренажердың жинақтау жазықтығында 4.1 суретке сәйкес сұлбаны жинап, басқару панелінде мұғалімнің нұсқауына сәйкес реттеу объектісінің үлгісін орнату.
ДП – ОМ-ның шығыс білігінің орналасу датчигі;
УП – ОМ(0-100%) шығыс білігінің орналасу көрсеткіші, реттеуіштің шығыс сигналын сипаттайды;
Х3 – басты кері теріс байланыстың сигнал датчигі (V1 вольтметрімен өлшенеді);
Хдп – қатаң кері теріс байланыстың сигнал датчигі(ДП) (V2 вольтметрімен өлшенеді);
α1 – басты кері теріс байланыстың сигнал датчигінің масштабтау коэффициенті (0 - 1);
α2 - ДП (0-1) сигналының масштабтау коэффициенті;
Хзд – тапсырманың % түрінде беретін сигналы;
Хe - Y1-Y0 ұяларында РП4-У алдыңғы панелінде вольтметрмен өлшенетін келіспеушілік сигналы;
ИВ – объект үлгісіндегі ішкі ауытқудың имитациялық көзі;
Хв – сыртқы ауытқулар сигналы вольтпен.
4.1 сурет – АЖР-дың П-реттеуішімен жинақтық сұлбасы
4.3.1.2 РП4-У мүшелерінің күйге келтіруін орнату:
a1=0.0; a2=1.0 (ЖОС контуры қосулы); a3=0; ae=1; aп=0.5; tп=0; Тф=0; Ти=0.1; D=1 %.
4.3.1.3 РП4-У-дың Y1-Y0 ұяларына бақылаушы вольтметрді қосу.
4.3.1.4 Тапсырыс берушіні 50% жағдайына орнату.
4.3.1.5 БУ-21 басқару блогын «ручное» жағдайына қою.
4.3.1.6 Тренажерға кернеу беріп, УП бойынша ОМ шығыс білігін 50% жағдайға орнату.
4.3.1.7 Бақылаушы вольтметрдің көрсеткіштері бойынша «задание плавно» күйге келтіру мүшесіне әсер ете отырып 1 минуттан кейін кернеуді РП4-У-дың Y1-Y0 ұяларының нөлге тең келіспеушілік жағдайға орнату (РП4-У-дың сигналдық шамдары өшіп тұру керек). Бұл рәсім статикалық тепе-теңдік деп аталады.
4.3.1.8 ЖОС контурының белгісін тексеру. РП4-У кері байланыстың теріс белгісінде «меньше» командасын қалыптастырса БУ-21-ден «больше» командасы беру. Ал егер РП4-У «больше» командасын қалыптастырса онда ДП датчигінің полярлық қосылуын өзгерту керек.
4.3.1.9 ДП орналасу датчигінің Кдп өлшемін анықтау керек. Ол үшін УП және бақылаушы вольтметрдің көрсеткіштерін жазып, «больше» («меньше») командасын беріп Δ Хдп және Δ УП өлшемдерін тағы жазып алу. Содан 4.4 формуласы бойынша Кдп өлшемін есептеу керек.
4.3.1.10 Кр және α1 мәндерін қолдана отырып 4.7 формула бойынша α2 өлшемін есептеу.
4.3.2 Қатаң теріс кері байланыстың контурын күйге келтіру.
4.3.2.1 α2 –нің есептелген мәнін орнату және РП4-У-дың статикалық тепе-теңдігін жүргізу.
4.3.2.2 БУ-21-ге қосқышты «АВТ» жағдайында орнату.
4.3.2.3 ДП шығысына немесе РП4-У-дың Y1-Y0 ұяларына регистраторды қосу. К
4.3.2.4 Задатчикпен оның шкаласы бойынша 50%-тік ауытқу беру(Δ Х3 реттелетін параметрінің өзгерісінің имитациясы) және Хдп-ның шығыс сигналы бойынша өтпелі процесті жазып алукерек. Сондай-ақ реттеуіш орындаушы механизмді Δ УП өлшеміне 1-2 қосылуда тербеліссіз орналастыру керек.
Егер реттеуші тұрақсыз болса,яғни автотербеліс режімінде болса, онда тәжірибені қайталап, өтпелі процестің тұрақтылығына РП4-У күйге келтіру панелінде tп = 5 с (тұрақты интегралдық) болғандағы aп күйге келтіру параметрінің өзгерісімен қол жеткізу керек.
Қажетті өтпелі процесс 4.2 суретке сәйкес түрде болу керек.
4.3.2.5 Кр-дың өткізілген мәнін соңғы тәжірибелік мәндермен 4.1 формуласы бойынша тәжірибелі тексеру керек. Сондай-ақ бастапқыдан кернеудің өлшемін задатчик оның жағдайын 50%-ке өзгертуде құрастыратын, яғни Δ Х3 өлшемін, Y1-Y0 ұяларында вольтметрмен анықтау керек.
 |
4.2 сурет – П-реттеушінің ЖОС контурының өтпелі процесі
4.3.2.1 α1 (α2=0) есептелген мәндерін орнату және РП4-У-дың статикалық тепе-теңдігін жүргізу керек.
4.3.2.2 Х3 параметрінің контур белгісін тексеру. РП4-У кері байланыстың теріс белгісінде «меньше» командасын қалыптастырса БУ-21-ден «больше» командасы беру. Ал егер РП4-У «больше» командасын қалыптастырса онда Х3 параметрінің полярлық қосылуын өзгерту керек.
4.3.2.3 α1 және α2 есептелген мәндерін орнатып, РП4-У-дың статикалық тепе-теңдігін қайта жүргізу керек.
4.3.2.4 БУ-21-ге қосқышты «АВТ» жағдайында орнату.
4.3.2.5 Регистраторды реттеуші объект үлгісінің Х3ұясына қосу және Х3о-дың(бастапқы мәні) кезектік мәнін жазып алу.
4.3.2.6 f ср (сыртқы ауытқу) моделінің кірісіне сыртқы ауытқу имитаторынан 0,5В сигнал беру және өтпелі процесті жазып алу. График бойынша Х3к-ның соңғы тұрақталған мәнін анықтау. Статикалық қателіктің δ мәнін есептеу.
Δ= Х3к – Х3о.
4.3.2.7 α2 мәнін кішірейту және тәжірибе рәсімін 4.2.3.3 - 4.3.2.6 пункттері бойынша қайталау. α2-ның δ-ға әсері туралы қорытынды жасау.
4.4 Бақылау сұрақтары
4.4.1 П - реттеушісін стандартты реттегіш құрылғысымен қалай құрастыруға болады?
4.4.2 АЖР мен П және ПИ - реттеушінің өтпелі процесс формасы бойынша қандай айырмашылықтары бар?
4.4.3 ЖОС деңгейінің өлшемі АЖР-дың статикалық қателігіне қалай әсер етеді?
4.5 Нәтижені безеңдіру
Зертханалық жұмыс нәтижесінде келесілер болу керек:
4.5.1 Жұмыстың мақсаты.
4.5.2 Қысқаша жұмыстың мазмұны.
4.5.3 П - реттеуші жинағының сұлбасы.
4.5.4 Хдп және Х3 параметрлері бойынша өтпелі процестер.
4.6 Қысқаша теориялық мәліметтер
П-реттеуіштердің типтік технологиялық процестері автоматизация жүйелерінде кең қолданыс тапқан.
П-реттеуішінің 2 зертханалық жұмыста қарастырылған ПИ-реттеуішінен тұйық жүйедегі өтпелі процестердің сипаттамалары бойынша айрықша ерекшелігі реттеушінің автоматикалық жүйесіне сыртқы ауытқулар әсер етуінен статикалық қателіктің δ бар болуы 4.3 сурет. Статикалық қателік δ П-реттеуішінің бір Кр-ді (пропорционал коэффициенті) күйге келтіру параметріне негізделген және ПИ-реттеуішіне тиісті Ти-тұрақты интегралдау уақытын күйге келтіру екінші параметрінің жоқтығы.
 |
4.3 сурет – П (1) және ПИ-реттеуіштері арасында (2) өтпелі процесс
Стандартты техникалық реттеуіштің көмегімен П - реттеуіші ПИ-реттеуішке қатысты катаң кері теріс байланысын қамтиды:
- ОМ-нің шығыс білігінің орналасу датчигінен келген сигналымен;
- Реттеуіш объектісінің кірісінде өлшенетін аралық техникалық параметрінің сигналымен (мысалы, жұмыс ортасының шығыны);
2 зертханалық жұмыста карастырылған жинақтық сұлбасына сәйкес ПИ – реттеуіштің жинақтық сұлбасы 2.1 сурет П - реттеуішінің АЖР зертханалық стендінің жалпы түрі 4.1 суреттегідей болады.
Тұйық емес жүйеде (мысалы, ОМ шығыс білігі реттеуші қақпақшадан ажыратылған) П - реттеушінің күйге келтірген беріліс коэффициенті Кр тәжірибе арқылы анықтауға болады. Егер Х3 сигналын ΔХ3 өлшеміне өзгертсек және өңдеуден кейінгі берілген ауытқудың ΔУП өсімше өлшемін П-реттеушімен өлшейміз. Содан кейін формула бойынша Кр мәнін есептейміз
Кр = Δ УП / Δ Х3 (%УП / В). (4.1)
Орнатылған күйде П - реттеуші басты теріс кері байланыстың сигнал өсімшесінің және олардың α1 және α2 есептi масштабтау коэффициенттерiнiң есепке алуымен реттеушінің (У1-У0 ұялары) кірісінде вольтметрмен өлшенетін ДП сигналының өсімшесінің тепе-теңдігімен сипатталады. Сонымен бірге тепе-теңдік теңдеуң мына түрде болады
Δ Х3 * α1 = Δ Хдп * α2 (4.2)
немесе
Δ Х3 * α1 = Δ УП*Кдп * α2, (4.3)
мұндағы Кдп – ДП-ның беріліс коэффициенті, ол тәжірибе арқылы анықталады және мынаған тең
Кдп = Δ Хдп / Δ УП (В / %) . (4.4)
(4.3) теңдеуін екі бөлігінде Δ Х3 бөлу арқылы шешеміз және (4.1) есепке алу арқылы аламыз
α1 = Кр * Кдп * α2. (4.5)
Осыдан П-реттеушінің Кр өлшемі келесіге тең
Кр = α1/ Кдп * α2 . (4.6)
Осылай, Кр беріліс коэффициентін есептеумен П-реттеушіні іске асыру үшін біріншіден (4.6) өрнекке сәйкес α2 өлшемін анықтау керек:
- тәжірибелік жолмен (4.4) формуласы бойынша Кдп өлшемі анықталады;
- (4.6) формулаға Кр-дың есептелген мәні (2 зертханалық жұмыста табылған) және α1=0.5 кез келген мәні беріледі, яғни
α2 = α1/ Кр * Кдп . (4.7)
Осыдан шығытыны, П-реттеушіні күйге келтіру параметрі қатаң теріс кері байланыспен реттелетін қамту дәрежесін сипаттайтын және оның мәні объектке сыртқы ауытқу әсерімен Х3 реттелетін параметрінің δ статикалық қателіктің өлшемін анықтайтын α2 өлшемі болып келеді 4.1 сурет.
4.2 суретке сәйкес П - реттеуші екі тұйық контурдан тұрады:
- қатаң теріс кері байланыс контуры (барлық реттелу жүйесініің тұрақтығын анықтайды);
- негізгі реттелетін параметрдің контуры.
Осыдан, П - реттеушінің тәжірибелік күйге келтіруі көрсетілген контурлардың тізбектей күйге келуімен қорытындыланады.
Әдебиеттер тізімі
1. Стефани Е.П. Основы расчетов настройки регуляторов теплоэнерге-тических процессов. – М.: Энергия, 1972.
2. Наладка средств автоматизации и автоматических систем регулиро-вания: Справочник/Под ред. А. С. Клюева. – М: Энергоатомиздат, 1989.
3. Дорф Р. Современные системы управления/ Р. Дорф, Р. Бишоп. Пер. с англ. Б.И. Копылова. – М.: Лаборатория базовых знаний, 2002.- 832 с.: ил.
4. Аристова Н.И., Корнеева А.И. Промышленные программно-аппаратные средства на российском рынке АСУТП. - М.: Научтехлитиздат, 2001.
5. Бородин И.Ф., Судник Ю.А. Автоматизация технологических процессов. - Колос, 2004.
Мазмұны
|
1. |
Зертханалық жұмыс. Реттеу объекттерінің динамикалық сипаттамаларын тәжірибе түрінде анықтау |
3 |
|
2. |
Зертханалық жұмыс. Реттеудi объекттiң эксперименталдi динамикалық сипаттамалары бойынша АЖР-дың күйге келтiру параметрлерiмен анықтау |
11 |
|
3. |
Зертханалық жұмыс . Өтпелі процесс формасы бойынша АЖР - ды икемдеу. |
17 |
|
4. |
Зертханалық жұмыс. П - реттеуішін тәжірибелік күйге келтіру. |
22 |
|
5. |
Әдебиеттер тізімі |
28 |