Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра инженерной графики и прикладной механики
МЕХАНИКА
Методические указания и задания к выполнению расчетно-графических работ для студентов специальности
5В074600 – Космическая техника и технология
Алматы 2012
СОСТАВИТЕЛИ: Тойбаев С.Н., Динасылов А.Д. Механика. Методические указания и задания к выполнению расчетно-графических работ (для студентов всех форм обучения специальности 5В074600 – Космическая техника и технология). - Алматы: АУЭС, 2012. – 39 с.
Дисциплина «Механика» является обязательным предметом для студентов высших учебных заведений, обучающихся по специальности 5В074600 – Космическая техника и технология. В данной методической разработке, предназначенной для студентов, приводятся задания к расчетно-графическим работам, методические указания к их выполнению, примеры выполнения работ. Дан список рекомендуемой литературы.
Ил. 14, табл. 7, библиогр. – 6 назв.
Рецензент: д-р. техн. наук, профессор Иванов К.С.
Печатается по плану издания некоммерческого акционерного общества «Алматинского университета энергетики и связи» на 2012 г.
© НАО «Алматинский университет энергетики и связи», 2012 г.
Содержание
|
1 Общие требования и указания к выполнению расчетно-графических работ |
4 |
|
2 Задачи, входящие в расчетно-графическую работу №1, указания к их выполнению и примеры решения |
5 |
|
2.1 Задача 1. Равновесие плоской системы сил |
5 |
|
2.2 Задача 2. Равновесие пространственной системы сил |
8 |
|
3 Задачи, входящие в расчетно-графическую работу №2, указания к их выполнению и примеры решения |
11 |
|
3.1 Задача 3. Кинематика точки |
11 |
|
3.2 Задача 4. Вращательное движение твёрдого тела |
16 |
|
3.3 Задача 5. Сложное движение точки |
19 |
|
4 Задачи, входящие в расчетно-графическую работу №3, указания к их выполнению и примеры решения |
24 |
|
4.1 Задача 6. Относительное и колебательное движение материальной точки |
24 |
|
4.2 Задача 7. Применение теоремы об изменении кинетической энергии механической системы |
29 |
|
Список литературы |
38 |
1 Общие требования и указания к выполнению расчетно-графических работ
Согласно учебным планам студенты, обучающиеся по специальности 5В074600 – Космическая техника и технология выполняют 3 расчетно-графические работы (РГР) по дисциплине «Механика» в соответствии с числом кредитов, отводимых на изучение дисциплины.
Условия задач приведены в десяти схемах и десяти вариантах, кроме задачи 7. Студент должен взять для выполнения номер схемы, который показан римскими цифрами на соответствующем рисунке, по последней цифре шифра зачетной книжки, а вариант с цифровыми данными из соответствующей таблицы – по предпоследней цифре шифра. Так, студент, зачетная книжка которого имеет шифр 96452, должен для каждой задачи выбрать схему II и цифровые данные, соответствующие варианту 5. Если последняя цифра шифра нуль, то следует взять схему X, а если предпоследняя цифра нуль, то данные из таблицы принимаются по варианту 10. Данные для задачи 7 принимаются согласно номеру студента в списке группы (по журналу).
При окончательной сдаче РГР каждая работа должна быть сброшюрована отдельно. Выполненная работа состоит из текстовой и графической частей. Оформление работы должно выполняться четким почерком на листах белой бумаги формата А4: работа должна содержать титульный лист, содержание, задание, выполненные расчеты, графические построения, выводы и список литературы. Работа должна быть оформлена согласно принятым нормам (СТП 768-01-07-97); на листах текст должен быть только с одной стороны, в конце каждой РГР должен быть приведен список использованной литературы. Как графическая, так и расчетная часть работы, а также текстовый материал могут быть выполнены с помощью компьютерных средств (с разрешения преподавателя).
Прежде чем приступать к решению задачи, студент должен ознакомиться с соответствующим теме задачи теоретическим материалом по лекциям, учебникам и учебным пособиям, с указаниями к решению задачи и примерами, приведенными в настоящих методических указаниях. Выполненные РГР должны быть защищены студентов. Для защиты надо решить подобную задачу или ответить на 5-6 вопросов по теме.
2 Задачи, входящие в расчетно-графическую работу №1, указания к их выполнению и примеры решения
2.1 Задача 1. Равновесие плоской системы сил
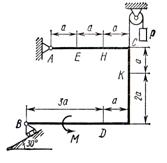
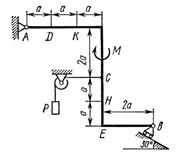
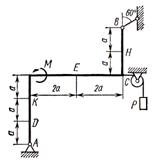
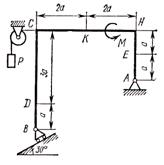
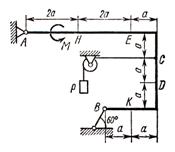
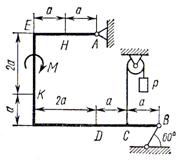
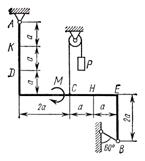
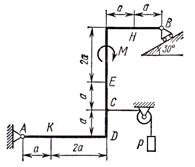
Жесткая рама (см. рисунок 1)
закреплена в точке ![]() шарнирно,
а в точке
шарнирно,
а в точке ![]() прикреплена
или к невесомому стержню
прикреплена
или к невесомому стержню ![]() , или к шарнирной опоре на катках;
стержень прикреплен к раме и к неподвижной опоре шарнирами.
, или к шарнирной опоре на катках;
стержень прикреплен к раме и к неподвижной опоре шарнирами.
В точке ![]() к раме привязан трос,
перекинутый через блок и несущий на конце груз весом
к раме привязан трос,
перекинутый через блок и несущий на конце груз весом ![]() . На раму действуют пара сил с
моментом
. На раму действуют пара сил с
моментом ![]() и
две силы, значения которых, направления и точки приложения указаны в таблице
(например, в условиях №1 на раму действуют сила
и
две силы, значения которых, направления и точки приложения указаны в таблице
(например, в условиях №1 на раму действуют сила ![]() под углом 30° к горизонтальной оси,
приложенная в точке
под углом 30° к горизонтальной оси,
приложенная в точке ![]() и
сила
и
сила ![]() под
углом 60° к горизонтальной оси, приложенная в точке
под
углом 60° к горизонтальной оси, приложенная в точке ![]() ).
).
Определить реакции связей в точках ![]() и
и ![]() , вызываемые заданными
нагрузками. При окончательных подсчетах принять
, вызываемые заданными
нагрузками. При окончательных подсчетах принять ![]() .
.
Т а б л и ц а 1
|
Сила |
|
|
|
|
||||
|
|
|
|
|
|
||||
|
Номер условия |
Точка прилож. |
|
Точка прилож. |
|
Точка прилож. |
|
Точка прилож. |
|
|
|
||||||||
|
0 |
– |
– |
|
60 |
|
45 |
– |
– |
|
1 |
|
30 |
– |
– |
– |
– |
|
60 |
|
2 |
– |
– |
|
45 |
|
30 |
– |
– |
|
3 |
|
60 |
– |
– |
– |
– |
|
30 |
|
4 |
– |
– |
|
30 |
|
60 |
– |
– |
|
5 |
|
60 |
– |
– |
|
30 |
– |
– |
|
6 |
– |
– |
|
30 |
– |
– |
|
45 |
|
7 |
|
45 |
– |
– |
|
60 |
– |
– |
|
8 |
– |
– |
|
60 |
– |
– |
|
30 |
|
9 |
|
30 |
– |
– |
– |
– |
|
60 |




Указания. Задача 1 является задачей на равновесие тела под действием плоской системы сил. Составляя уравнения равновесия, учесть, что уравнение моментов будет более простым (содержать меньше неизвестных), если брать моменты относительно точки, где пересекаются линии действия двух реакций
|
I |
II |
|
III |
IV |
|
V |
VI |
|
VII |
VIII |
|
IX |
X |
|
Рисунок 1 |
|


связей
(в данном случае относительно точки А). При вычислении момента силы ![]() часто
бывает удобным разложить ее на составляющие
часто
бывает удобным разложить ее на составляющие ![]() и
и ![]() ,
для которых легко вычисляются плечи моментов (в частности, на составляющие, параллельные
координатным осям) и как следствие - использование теоремы Вариньона; тогда
,
для которых легко вычисляются плечи моментов (в частности, на составляющие, параллельные
координатным осям) и как следствие - использование теоремы Вариньона; тогда ![]() .
.
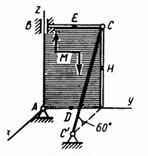
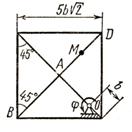
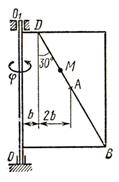
Пример 1. Жесткая пластина ABCD (см. рисунок 2) имеет в точке А неподвижную шарнирную опору, а в точке В – подвижную шарнирную опору на катках. Все действующие нагрузки и размеры показаны на рисунке.
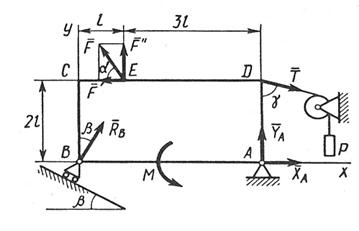
Рисунок 2 - Схема к примеру 1
Дано:
![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Определить: реакции в точках А и В, вызываемые действующими нагрузками.
Решение: рассмотрим равновесие пластины.
Проведем координатные оси
![]() и изобразим действующие на пластину силы: силу
и изобразим действующие на пластину силы: силу
![]() , пару сил с
моментом
М, натяжение троса
, пару сил с
моментом
М, натяжение троса ![]() (по модулю
Т =
Р) и реакции связей
(по модулю
Т =
Р) и реакции связей ![]() (реакцию неподвижной
шарнирной опоры
А
изображаем
двумя ее составляющими, реакция шарнирной опоры на катках направлена
перпендикулярно опорной плоскости).
(реакцию неподвижной
шарнирной опоры
А
изображаем
двумя ее составляющими, реакция шарнирной опоры на катках направлена
перпендикулярно опорной плоскости).
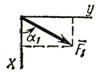
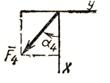
Для полученной плоской системы сил составим три
уравнения равновесия. При вычислении момента силы ![]() относительно точки
А
воспользуемся теоремой
Вариньона, т.е. разложим силу
относительно точки
А
воспользуемся теоремой
Вариньона, т.е. разложим силу ![]() на составляющие
на составляющие ![]() и учтем, что
и учтем, что ![]() . Получим
. Получим
![]()
![]()
![]()
Подставив в эти уравнения числовые значения заданных величин, решаем их и определяем искомые реакции.
Ответ:
![]() ,
, ![]() ,
, ![]() .
Знаки указывают, что силы
.
Знаки указывают, что силы ![]() и
и ![]() направлены противоположно
направлениям, показанным на рисунке 2. Для проверки правильности решения
следует воспользоваться каким-либо другим уравнением равновесия, например, в
виде суммы моментов всех сил относительно точки
С.
направлены противоположно
направлениям, показанным на рисунке 2. Для проверки правильности решения
следует воспользоваться каким-либо другим уравнением равновесия, например, в
виде суммы моментов всех сил относительно точки
С.
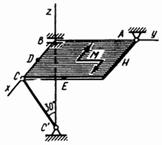
2.2 Задача 2. Равновесие пространственной системы сил
Однородная прямоугольная плита весом
![]() со
сторонами
со
сторонами
![]() закреплена
в точке A сферическим шарниром, а в точке
закреплена
в точке A сферическим шарниром, а в точке ![]() цилиндрическим шарниром (подшипником) и
удерживается в равновесии невесомым стержнем
цилиндрическим шарниром (подшипником) и
удерживается в равновесии невесомым стержнем ![]() (см. рисунок 3) и две силы. Значения
этих сил, их направления и точки приложения указаны в таблице 2; при этом силы
(см. рисунок 3) и две силы. Значения
этих сил, их направления и точки приложения указаны в таблице 2; при этом силы ![]() и
и ![]() лежат в плоскостях
параллельных
лежат в плоскостях
параллельных
![]() , сила
, сила ![]() - в плоскости,
параллельной
- в плоскости,
параллельной
![]() , сила
, сила ![]() в плоскости
параллельной
в плоскости
параллельной
![]() . Точки
приложения сил (
. Точки
приложения сил (![]() ,
,
![]() ,
, ![]() ) находятся в
серединах сторон плиты.
) находятся в
серединах сторон плиты.
Определить реакции связей в точках ![]() ,
, ![]() и
и ![]() . При окончательных подсчетах
принять
. При окончательных подсчетах
принять
![]() .
.
Указания. В этой задаче рассматривается равновесие тел под действием пространственной системы сил. При ее решении нужно учесть, что реакция
Т а б л и ц а 2
|
Сила |
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
Номер условия |
Точка прилож. |
|
Точка прилож. |
|
Точка прилож. |
|
Точка прилож. |
|
|
|
|
|||||||||
|
0 |
|
60 |
– |
– |
|
0 |
– |
– |
|
|
1 |
|
90 |
|
30 |
– |
– |
– |
– |
|
|
2 |
– |
– |
|
60 |
– |
– |
|
90 |
|
|
3 |
– |
– |
– |
– |
|
60 |
|
0 |
|
|
4 |
|
0 |
– |
– |
|
60 |
– |
– |
|
|
5 |
– |
– |
|
60 |
|
0 |
– |
– |
|
|
6 |
– |
– |
|
30 |
– |
– |
|
0 |
|
|
7 |
|
30 |
|
90 |
– |
– |
– |
– |
|
|
8 |
– |
– |
– |
– |
|
0 |
|
60 |
|
|
9 |
– |
– |
|
90 |
|
30 |
– |
– |
|
|
|
|
||||||||
|
|
|
||||||||
|
|
|
||||||||
|
|
|
||||||||
|
|
|
||||||||
|
Рисунок 3 |
|||||||||







сферического
шарнира имеет три составляющие, а реакция цилиндрического шарнира (подшипника)
– две составляющие, лежащие в плоскости, перпендикулярной оси шарнира. При
вычислении моментов силы ![]() также разложим ее на составляющие
также разложим ее на составляющие ![]() и
и ![]() , параллельные координатным
осям; тогда, по теореме Вариньона,
, параллельные координатным
осям; тогда, по теореме Вариньона, ![]() и т.д.
и т.д.
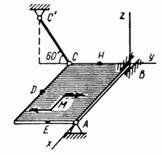
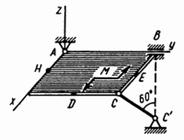
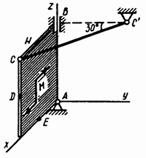
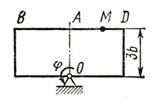
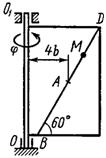
Пример 2. Вертикальная прямоугольная плита весом
P (см. рисунок 4)
закреплена сферическим шарниром в точке ![]() ,
цилиндрическим (подшипником) в точке
,
цилиндрическим (подшипником) в точке ![]() и невесомым
стержнем
и невесомым
стержнем ![]() , лежащим в плоскости,
параллельной плоскости
, лежащим в плоскости,
параллельной плоскости ![]() . На плиту действуют сила
. На плиту действуют сила ![]() (в плоскости
(в плоскости ![]() ), сила
), сила ![]() (параллельная оси
y) и пара сил с моментом
(параллельная оси
y) и пара сил с моментом ![]() (в
плоскости плиты).
(в
плоскости плиты).
 Дано:
Дано:
![]() ,
,
![]()
![]()
![]() Определить: реакции опор
Определить: реакции опор ![]() ,
,
![]() и стержня
и стержня ![]() .
.
Решение: 1) Рассмотрим равновесие плиты. На плиту действуют
заданные силы ![]() ,
,
![]() ,
, ![]() и пара сил с моментом
М, а также реакции связей. Реакцию сферического шарнира разложим на три
составляющие
и пара сил с моментом
М, а также реакции связей. Реакцию сферического шарнира разложим на три
составляющие ![]() ,
,
![]() ,
, ![]() , цилиндрического
(подшипника) – на две составляющие
, цилиндрического
(подшипника) – на две составляющие ![]() ,
, ![]() (в плоскости, перпендикулярной оси
подшипника), реакцию
(в плоскости, перпендикулярной оси
подшипника), реакцию ![]() стержня направим вдоль стержня,
предполагая, что он растянут.
стержня направим вдоль стержня,
предполагая, что он растянут.
2) Для определения шести неизвестных реакций составляем шесть уравнений равновесия для действующей на плиту пространственной системы сил
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]()
![]() (5)
(5)
![]() .
(6)
.
(6)
Для определения момента силы ![]() относительно оси
y разлагаем
относительно оси
y разлагаем ![]() на составляющие
на составляющие ![]() и
и ![]() , параллельные осям
x и
z
, параллельные осям
x и
z
![]() и применяем теорему Вариньона.
Аналогично можно поступить при определении моментов реакции
и применяем теорему Вариньона.
Аналогично можно поступить при определении моментов реакции ![]() относительно оси
x.
относительно оси
x.
Подставив в составленные уравнения числовые значения всех заданных величин и решив затем эти уравнения, найдем, чему равны искомые реакции.
Ответ: ![]()
![]()
![]()
![]()
![]()
![]()
![]() . Знаки (-) указывают, что реакции
. Знаки (-) указывают, что реакции ![]() ,
, ![]() и
и ![]() направлены в
сторону
направлены в
сторону![]() противоположную
направлениям, показанным на рисунке 4.
противоположную
направлениям, показанным на рисунке 4.
3 Задачи, входящие в расчетно-графическую работу № 2, указания к их выполнению и примеры решения
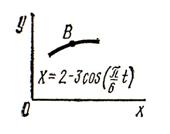
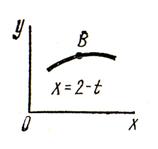
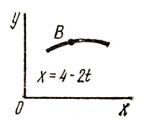
3.1 Задача 3. Кинематика точки
Точка ![]() движется в плоскости
движется в плоскости ![]() (траектория точки показана на
рисунке 5 условно). Закон движения точки задан уравнениями:
(траектория точки показана на
рисунке 5 условно). Закон движения точки задан уравнениями:
![]()
![]() , где
, где ![]() и
и ![]() выражены в сантиметрах, а
выражены в сантиметрах, а ![]() в секундах.
в секундах.
Т а б л и ц а 3
|
Вариант |
I – III |
IV –VII |
VIII - X |
|
|
|||
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|
7 |
|
|
|
|
8 |
|
|
|
|
9 |
|
|
|
|
10 |
|
|
|











|
I |
II |
|
III |
IV |
|
V |
VI |
|
VII |
VIII |
|
IX |
X |
|
Рисунок 5 |
|






Найти уравнение траектории точки; для момента
времени ![]() определить
скорость и ускорение точки, а также касательное и нормальное ускорения и радиус
кривизны в соответствующей точке траектории. Вычертить в масштабе траекторию
точки, показать ее начальное положение и положение в заданный момент времени,
показать на рисунке полные скорость и ускорение точки, их проекции на
координатные оси, касательное и нормальное ускорения точки. Зависимость
определить
скорость и ускорение точки, а также касательное и нормальное ускорения и радиус
кривизны в соответствующей точке траектории. Вычертить в масштабе траекторию
точки, показать ее начальное положение и положение в заданный момент времени,
показать на рисунке полные скорость и ускорение точки, их проекции на
координатные оси, касательное и нормальное ускорения точки. Зависимость ![]() указана
непосредственно на рисунке 5, а зависимость
указана
непосредственно на рисунке 5, а зависимость ![]()
![]() дана в таблице 3 (для схем I -
III во втором столбце, для схем IV - VII в третьем
столбце, для схем VIII - X в четвертом столбце).
дана в таблице 3 (для схем I -
III во втором столбце, для схем IV - VII в третьем
столбце, для схем VIII - X в четвертом столбце).
Указания. Задача 3 относится к теме «Кинематика
точки» и решается с помощью формул, ![]() по которым определяются скорость и ускорение
точки в декартовых координатах (координатный способ задания движения точки), а
также формул, по которым определяются нормальное и касательное ускорения точки.
по которым определяются скорость и ускорение
точки в декартовых координатах (координатный способ задания движения точки), а
также формул, по которым определяются нормальное и касательное ускорения точки.
В данной задаче все искомые величины нужно определить
только для момента времени
![]() . В некоторых вариантах задачи при определении
траектории или при последующих расчетах (для их упрощения) следует учесть
известные из тригонометрии формулы:
. В некоторых вариантах задачи при определении
траектории или при последующих расчетах (для их упрощения) следует учесть
известные из тригонометрии формулы: ![]() ;
; ![]() .
.
Пример 3. Даны уравнения движения точки в плоскости
![]()
 ,
,
где
![]() ,
, ![]() даны в сантиметрах,
даны в сантиметрах, ![]() в секундах.
в секундах.
Выполнить решение по условиям задачи 3.
Решение: 1) Для определения траектории точки исключим время ![]() из заданных уравнений
движения. Используем формулу
из заданных уравнений
движения. Используем формулу ![]() .
.
Из заданных уравнений движения выражаем соответствующие функции
 .
.
Подставляя эти выражения, получаем
 .
.
Это уравнение эллипса.
Траектория точки показана на рисунке 6, a; в начальный момент времени ![]() точка находится в положении
точка находится в положении ![]() , а когда
, а когда ![]() – в положении
M.
– в положении
M.
2) Скорость точки найдем по ее проекциям на координатные оси
 ,
,
 ,
,
![]() .
.
При ![]() .
.
 ,
,  ,
,
![]() .
.
3) Аналогично найдем ускорение точки
 ,
,
 ,
,
![]() .
.
При ![]() находим
находим
 ,
,
 ,
,
![]() .
.
4) Касательное ускорение найдем, дифференцируя по времени равенство
![]() .
.
Получаем
 .
.
Отсюда
 .
.
Подставив в полученное выражение числовые
значения соответствующих величин при ![]() , найдем
, найдем
![]() .
.
5) Нормальное ускорение точки находим, как
![]() .
.
6) Для определения радиуса кривизны траектории воспользуемся формулой
 ,
,
откуда
 .
.

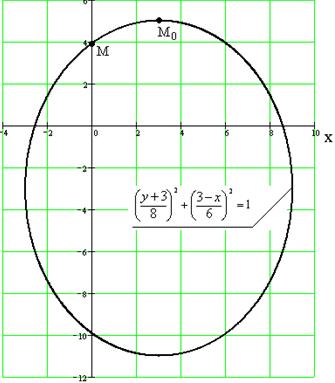
Рисунок 6 – Схема к примеру 3
Ответ: при
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
![]() .
.
На рисунке 6, б показаны скорости и ускорения точки в положении M.
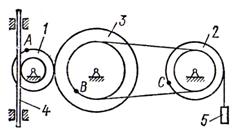
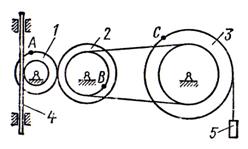
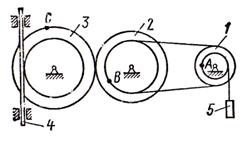
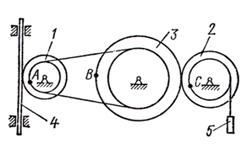
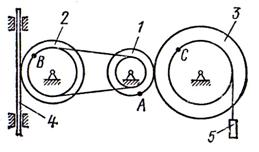
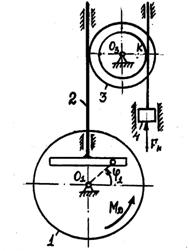
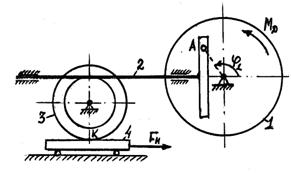
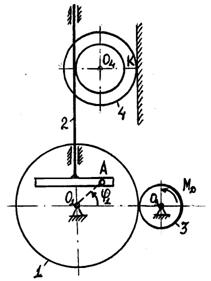
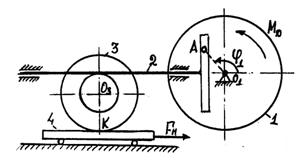
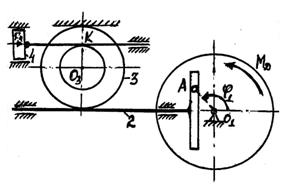
3.2 Задача 4. Вращательное движение твёрдого тела
Механизм состоит из
ступенчатых колес 1 - 3, находящихся в зацеплении или связанных ременной
передачей, зубчатой рейки 4, груза 5, привязанного к концу нити, намотанной на
одно из колес (см. рисунок 7). Радиусы ступеней колес равны соответственно: у
колеса ![]() ,
, ![]() , у колеса
, у колеса ![]() ,
, ![]() , у колеса
, у колеса ![]() ,
, ![]() . На ободьях колес расположены
точки
. На ободьях колес расположены
точки ![]() ,
, ![]() и
и ![]() (см. рисунок 7).
(см. рисунок 7).
В столбце «Дано» таблицы
указан закон движения или закон изменения скорости ведущего звена механизма,
где ![]() закон
вращения колеса 1,
закон
вращения колеса 1, ![]() закон
движения рейки 4,
закон
движения рейки 4, ![]() закон
изменения угловой скорости колеса 2,
закон
изменения угловой скорости колеса 2, ![]() закон изменения скорости груза 5 и т.д.
(везде
закон изменения скорости груза 5 и т.д.
(везде ![]() выражено
в радианах,
выражено
в радианах, ![]() в
сантиметрах,
в
сантиметрах, ![]() в
секундах). Положительное направление для
в
секундах). Положительное направление для ![]() и
и ![]() против хода часовой стрелки, для
против хода часовой стрелки, для ![]() ,
, ![]() и
и ![]() ,
, ![]() вниз.
вниз.
Определить в момент
времени ![]() указанные
в таблице в столбцах «Найти» скорости (
указанные
в таблице в столбцах «Найти» скорости (![]() линейные,
линейные, ![]() угловые) и ускорения (
угловые) и ускорения (![]() линейные,
линейные, ![]() угловые) соответствующих точек
или тел (так,
угловые) соответствующих точек
или тел (так, ![]() скорость
груза 5).
скорость
груза 5).
Указания. Задача 4 - на исследование вращательного движения твердого тела вокруг неподвижной оси. При решении задачи учесть, что когда два колеса находятся в зацеплении, скорость точки зацепления каждого колеса одна и та же, а когда два колеса связаны ременном передачей, то скорости всех точек ремня и, следовательно, точек, лежащих на ободе каждого из этих колес, в данный момент времени численно одинаковы; при этом считается, что ремень но ободу колеса не скользит.
Т а б л и ц а 4
|
Номер условия |
Дано |
Найти |
|
|
скорости |
ускорения |
||
|
|
|||
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|
7 |
|
|
|
|
8 |
|
|
|
|
9 |
|
|
|
|
10 |
|
|
|
|
I
|
II
|
|
|
III |
IV |
|
|
V |
VI |
|
|
VII |
VIII |
|
|
IX |
X |
|
|
Рисунок 7 |
||

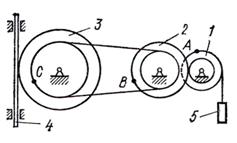



Пример 4. Рейка 1, ступенчатое
колесо 2 с радиусами ![]() и
и ![]() и колесо 3 радиуса
и колесо 3 радиуса ![]() , скрепленное с валом радиуса
, скрепленное с валом радиуса ![]() , находятся в
зацеплении; на вал намотана нить с грузом 4 на конце (см. рисунок 8). Рейка
движется по закону
, находятся в
зацеплении; на вал намотана нить с грузом 4 на конце (см. рисунок 8). Рейка
движется по закону ![]() .
.
Дано: ![]() см,
см, ![]() ,
, ![]() ,
, ![]() ,
, ![]() (
(![]() в сантиметрах,
в сантиметрах, ![]() в секундах),
в секундах), ![]() точка обода колеса 3,
точка обода колеса 3,
![]() .
.
Определить: ![]() , в момент времени
, в момент времени ![]() .
.
Решение: условимся
обозначать скорости точек, лежащих на радиусах ![]() , через
, через ![]() , а точек, лежащих на радиусах
, а точек, лежащих на радиусах ![]() , - через
, - через ![]() .
.
 1) Определяем сначала угловые скорости
всех колес как функции времени
1) Определяем сначала угловые скорости
всех колес как функции времени ![]() . Зная закон движения рейки 1, находим ее
скорость
. Зная закон движения рейки 1, находим ее
скорость
![]() .
(1)
.
(1)
Так как рейка и колесо 2 находятся в зацеплении,
то ![]() или
или ![]() . Но колеса 2 и 3 тоже
находятся в зацеплении, следовательно,
. Но колеса 2 и 3 тоже
находятся в зацеплении, следовательно, ![]() или
или ![]() . Из этих равенств находим
. Из этих равенств находим
![]()
 ,
,  .
(2)
.
(2)
Тогда для момента времени ![]() получим
получим ![]() .
.
2) Определяем ![]() . Так как
. Так как ![]() , то при
, то при ![]()
![]() .
.
3) Определяем ![]() . Учитывая второе из
равенств (2), получим
. Учитывая второе из
равенств (2), получим ![]() . Тогда при
. Тогда при ![]() .
.
4) Определяем ![]() . Для точки
. Для точки ![]() , где численно
, где численно ![]() ,
, ![]() . Тогда для момента времени
. Тогда для момента времени ![]() имеем
имеем
![]() ,
,
![]() ,
,
![]() .
.
Все скорости и ускорения точек, а также направления угловых скоростей показаны на рисунке 8.
Ответ: при ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
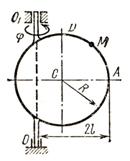
3.3 Задача 5. Сложное движение точки
Прямоугольная пластина
(схемы
I
-
V) или круглая пластина
радиуса ![]() (схемы
VI -
X) вращается вокруг
неподвижной оси по закону
(схемы
VI -
X) вращается вокруг
неподвижной оси по закону ![]() , заданному в таблице 5 (см.
рисунок 9).
Положительное направление отсчета угла
, заданному в таблице 5 (см.
рисунок 9).
Положительное направление отсчета угла ![]() показано на рисунках дуговой стрелкой.
На схемы
I,
II,
III,
IV,
VI,
ось вращения перпендикулярно плоскости пластины и
проходит через точку
показано на рисунках дуговой стрелкой.
На схемы
I,
II,
III,
IV,
VI,
ось вращения перпендикулярно плоскости пластины и
проходит через точку ![]() (пластина вращается в своей плоскости);
на рис.
VI,
V,
VIII,
X
ось вращения
(пластина вращается в своей плоскости);
на рис.
VI,
V,
VIII,
X
ось вращения ![]() , лежит в плоскости
пластины (пластина вращается в пространстве).
, лежит в плоскости
пластины (пластина вращается в пространстве).
По пластине вдоль прямой ![]() (схемы
I -
V) или по окружности
радиуса
(схемы
I -
V) или по окружности
радиуса ![]() (схемы
VI -
X) движется точка М;
закон ее относительного движения, т. е. зависимость
(схемы
VI -
X) движется точка М;
закон ее относительного движения, т. е. зависимость ![]() (
(![]() выражено в сантиметрах,
выражено в сантиметрах, ![]() - в секундах), задан
в таблице отдельно для схемы
I -
V и для схемы
VI -
X; там же даны размеры
- в секундах), задан
в таблице отдельно для схемы
I -
V и для схемы
VI -
X; там же даны размеры ![]() и
и ![]() . На рисунках точка
. На рисунках точка ![]() показана в положении,
при котором
показана в положении,
при котором ![]() (при
(при
![]() точка
точка ![]() находится по другую
сторону от точки
находится по другую
сторону от точки ![]() ).
).
Найти абсолютную
скорость и абсолютное ускорение точки ![]() в момент времени
в момент времени ![]() .
.
Т а б л и ц а 5
|
Номер условия |
Для всех рисунков
|
Для схемы I - V |
Для схемы VI - X |
||||
|
|
|
|
|
||||
|
|
|||||||
|
1 |
|
12 |
|
|
|
||
|
2 |
|
16 |
|
|
|
||
|
3 |
|
10 |
|
|
|
||
|
4 |
|
16 |
|
|
|
||
|
5 |
|
8 |
|
|
|
||
|
6 |
|
20 |
|
|
|
||
|
7 |
|
12 |
|
|
|
||
|
8 |
|
8 |
|
|
|
||
|
9 |
|
10 |
|
|
|
||
|
10 |
|
20 |
|
|
|
||
|
I |
II |
|
|||||
|
III |
IV |
|
|||||
|
V |
VI |
|
|||||
|
VII |
VIII |
|
|||||
|
IX |
X |
|
|||||
|
Рисунок 9 |
|
||||||



Указания. Задача 5 - на
сложное движение точки. Для ее решения воспользоваться теоремами о сложении
скоростей и о сложении ускорений. Прежде чем производить все расчеты, следует
по условиям задачи определить, где находится точка ![]() на пластине в момент времени
на пластине в момент времени ![]() , и изобразить точку
именно в этом положении (а не в произвольном, показанном на рисунках к задаче).
, и изобразить точку
именно в этом положении (а не в произвольном, показанном на рисунках к задаче).
В случаях, относящихся к
схемы
VI -
X, при решении задачи не
подставлять числового значения ![]() , пока не будут определены положение
точки
, пока не будут определены положение
точки ![]() в
момент времени
в
момент времени ![]() и
угол между радиусами
и
угол между радиусами ![]() и
и ![]() в этот момент.
в этот момент.
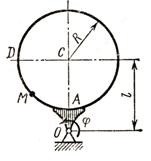
Пример 5. Шар радиуса ![]() (см. рисунок 10, а)
вращается вокруг своего диаметра
(см. рисунок 10, а)
вращается вокруг своего диаметра ![]() по закону
по закону ![]() (положительное направление отсчета угла
(положительное направление отсчета угла ![]() показано на рис. 10,
а в дуговой стрелкой). По
дуге большого круга («меридиану»)
показано на рис. 10,
а в дуговой стрелкой). По
дуге большого круга («меридиану») ![]() движется точка
движется точка ![]() по закону
по закону
![]() ; положительное направление отсчета
; положительное направление отсчета ![]() от
от ![]() к
к ![]() .
.
Дано: ![]() ,
, ![]() (
(![]() в радианах,
в радианах, ![]() в метрах,
в метрах, ![]() в секундах). Определить:
в секундах). Определить: ![]() и
и ![]() в момент времени
в момент времени ![]() .
.
 |
Решение: рассмотрим
движение точки ![]() как
сложное, считая ее движение по дуге
как
сложное, считая ее движение по дуге ![]() относительным (
относительным (![]() относительная траектория
точки), а вращение шара — переносным движением. Тогда абсолютная скорость
относительная траектория
точки), а вращение шара — переносным движением. Тогда абсолютная скорость ![]() и абсолютное
ускорение
и абсолютное
ускорение ![]() точки
найдутся по формулам
точки
найдутся по формулам
![]() , (1)
, (1)
где, в свою очередь, ![]() .
.
Определим все характеристики относительного и переносного движений.
1) Относительное движение. Это движение происходит по закону
![]() . (2)
. (2)
Сначала установим, где
будет находиться точка ![]() на дуге
на дуге ![]() в момент времени
в момент времени ![]() . Полагая в уравнении
. Полагая в уравнении ![]() , получим
, получим
![]() .
.
Тогда ![]() , или
, или ![]() °.
°.
Изображаем на рисунке
10, а точку в положении, определяемом этим углом (точка ![]() ).
).
Теперь находим числовые
значения ![]() .
.
![]()
 ,
,
где ![]() радиус кривизны относительной траектории,
т. е. дуги
радиус кривизны относительной траектории,
т. е. дуги ![]() . Для момента времени
. Для момента времени ![]() , учитывая, что
, учитывая, что ![]() , получим
, получим
![]() ,
, ![]() ,
,  . (3)
. (3)
Знаки показывают, что
вектор ![]() направлен
в сторону положительного отсчета расстояния
направлен
в сторону положительного отсчета расстояния ![]() , а вектор
, а вектор ![]() - в противоположную сторону; вектор
- в противоположную сторону; вектор ![]() направлен к центру
направлен к центру ![]() дуги
дуги![]() . Изображаем все эти
векторы (рисунок 10, а). Для наглядности приведен рисунок 10,
. Изображаем все эти
векторы (рисунок 10, а). Для наглядности приведен рисунок 10, ![]() , где дуга
, где дуга ![]() совмещена с
плоскостью чертежа.
совмещена с
плоскостью чертежа.
2) Переносное движение.
Это движение (вращение) происходит по закону ![]() . Найдем угловую скорость
. Найдем угловую скорость ![]() и угловое ускорение
и угловое ускорение ![]() переносного вращения
переносного вращения
![]() ,
,
и при
![]()
![]() . (4)
. (4)
Знаки указывают, что при
![]() направление
направление
![]() совпадает с
направлением положительного отсчета угла
совпадает с
направлением положительного отсчета угла ![]() , а направление
, а направление ![]() ему противоположно; отметим
это на рисунке 10,
ему противоположно; отметим
это на рисунке 10, ![]() соответствующими
дуговыми стрелками.
соответствующими
дуговыми стрелками.
Для определения ![]() и
и ![]() находим сначала
расстояние
находим сначала
расстояние ![]() точки
точки
![]() от оси
вращения. Получаем
от оси
вращения. Получаем ![]() .
Тогда в момент времени
.
Тогда в момент времени ![]() , учитывая равенства (4), получим
, учитывая равенства (4), получим
![]() ,
, ![]() ,
, ![]() . (5)
. (5)
Изображаем на рисунке 10,
а векторы ![]() и
и
![]() с учетом
направлений
с учетом
направлений ![]() и
и
![]() и вектор
и вектор ![]() (направлен к оси
вращения).
(направлен к оси
вращения).
3) Кориолисово
ускорение. Так как угол между вектором ![]() и осью вращения (вектором
и осью вращения (вектором ![]() ) равен 60°, то
численно в момент времени
) равен 60°, то
численно в момент времени ![]() [см. равенства (3) и (4)]
[см. равенства (3) и (4)]
![]() . (6)
. (6)
Направление ![]() найдем, спроецировав
вектор
найдем, спроецировав
вектор ![]() на
плоскость, перпендикулярную оси вращения (проекция направлена так же, как
вектор
на
плоскость, перпендикулярную оси вращения (проекция направлена так же, как
вектор ![]() ), и
повернув затем эту проекцию в сторону
), и
повернув затем эту проекцию в сторону ![]() , т. е. по ходу часовой стрелки, на 90°.
Иначе направление
, т. е. по ходу часовой стрелки, на 90°.
Иначе направление ![]() можно
найти, учтя, что
можно
найти, учтя, что ![]() .
Изображаем вектор
.
Изображаем вектор ![]() на
рисунке 10, а.
на
рисунке 10, а.
Теперь можно вычислить
значения ![]() и
и ![]() .
.
4) Определение ![]() . Так как
. Так как ![]() а векторы
а векторы ![]() и
и ![]() взаимно перпендикулярны (см.
рис. 10, а), то в момент времени
взаимно перпендикулярны (см.
рис. 10, а), то в момент времени ![]()
 .
.
5) Определение ![]() . По теореме о
сложении ускорений
. По теореме о
сложении ускорений
![]() . (7)
. (7)
Для определения ![]() проведем координатные
оси
проведем координатные
оси ![]() (см.
рисунок 10, а) и вычислим проекции вектора
(см.
рисунок 10, а) и вычислим проекции вектора ![]() на эти оси. Учтем при этом, что векторы
на эти оси. Учтем при этом, что векторы ![]() и
и ![]() лежат на проведенной оси
лежат на проведенной оси ![]() , а векторы
, а векторы ![]() ,
, ![]() и
и ![]() расположены в плоскости дуги
расположены в плоскости дуги ![]() , т. е. в плоскости
, т. е. в плоскости ![]() (см. рисунок 10, б).
Тогда, проецируя обе части равенства (7) на координатные оси и учтя
одновременно равенства (3), (5), (6), получим для момента времени
(см. рисунок 10, б).
Тогда, проецируя обе части равенства (7) на координатные оси и учтя
одновременно равенства (3), (5), (6), получим для момента времени
![]()
![]() ,
,
![]() .
.
Отсюда находим значение ![]() в момент времени
в момент времени
![]()
![]() .
.
Ответ: при ![]() ,
, ![]() ,
, ![]() .
.
4 Задачи, входящие в расчетно-графическую работу № 3, указания к их выполнению и примеры решения
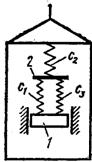
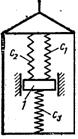
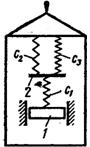
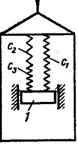
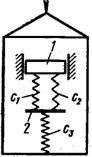
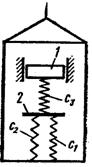
4.1 Задача 6. Относительное и колебательное движение материальной точки
Груз 1 массой ![]() укреплен на пружинной
подвеске в лифте (см. рисунок 11). Лифт движется вертикально по закону
укреплен на пружинной
подвеске в лифте (см. рисунок 11). Лифт движется вертикально по закону
![]()
![]() (ось
(ось ![]() направлена по вертикали вверх,
направлена по вертикали вверх, ![]() выражено в метрах,
выражено в метрах, ![]() в секундах). На груз
действует сила сопротивления среды
в секундах). На груз
действует сила сопротивления среды ![]() , где
, где ![]() скорость груза по отношению к лифту (см.
рисунок 11).
скорость груза по отношению к лифту (см.
рисунок 11).
Найти закон движения
груза по отношению к лифту, т. е, ![]() ; начало координат поместить в положении
статического равновесия груза при неподвижном лифте (во избежание ошибок в
знаках, направить ось
; начало координат поместить в положении
статического равновесия груза при неподвижном лифте (во избежание ошибок в
знаках, направить ось ![]() в сторону удлинения пружины, а груз
изобразить в положении, при котором
в сторону удлинения пружины, а груз
изобразить в положении, при котором ![]() и пружина растянута). При подсчетах
можно принять
и пружина растянута). При подсчетах
можно принять ![]() .
Массой пружин и соединительной планки 2 пренебречь.
.
Массой пружин и соединительной планки 2 пренебречь.
В таблице обозначено:
![]() коэффициенты жесткости пружин;
коэффициенты жесткости пружин;
![]() удлинение пружины с эквивалентной жесткостью в
начальный момент времени
удлинение пружины с эквивалентной жесткостью в
начальный момент времени ![]() ;
;
![]() начальная скорость груза по отношению к лифту
(направлена вертикально вверх). Прочерк в столбцах
начальная скорость груза по отношению к лифту
(направлена вертикально вверх). Прочерк в столбцах ![]() означает, что соответствующая
пружина отсутствует и на чертеже изображаться не должна.
означает, что соответствующая
пружина отсутствует и на чертеже изображаться не должна.
Т а б л и ц а 6
|
Номер условия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
0 |
1 |
300 |
150 |
- |
0 |
0,1 |
0 |
15 |
0 |
0 |
0 |
|
1 |
0,8 |
- |
240 |
120 |
-0,5 |
0 |
0 |
- |
8 |
0,1 |
0 |
|
2 |
0,5 |
- |
100 |
150 |
0 |
0,8 |
0 |
5 |
0 |
0 |
4 |
|
3 |
1 |
240 |
- |
160 |
0 |
0 |
0,5 |
6 |
0 |
0 |
0 |
|
4 |
0,5 |
80 |
120 |
- |
|
0 |
0 |
- |
6 |
0,15 |
0 |
|
5 |
2 |
- |
400 |
400 |
0 |
0 |
0,1 |
16 |
0 |
0 |
0 |
|
6 |
0,4 |
60 |
- |
120 |
|
0 |
0 |
- |
4 |
0 |
2 |
|
7 |
0,5 |
120 |
- |
180 |
0 |
0,1 |
0 |
20 |
0 |
0 |
0 |
|
8 |
0,4 |
50 |
200 |
- |
0 |
0 |
0,2 |
20 |
0 |
0,15 |
0 |
|
9 |
1 |
200 |
- |
300 |
1,5 |
0 |
0 |
- |
20 |
0 |
3 |
|
I |
II |
|
III |
IV |
|
V |
VI |
|
VII |
VIII |
|
IX |
X |
|
Рисунок 11 |
|




Если при этом конец одной из оставшихся пружин окажется свободным, его следует прикрепить в соответствующем месте или к грузу или к потолку (полу) лифта; то же следует сделать, если свободными окажутся соединенные планкой 2 концы обеих оставшихся пружин.
Условие
![]() означает,
что сила сопротивления
означает,
что сила сопротивления ![]() отсутствует.
отсутствует.
Указания. Задача 6 охватывает одновременно темы относительное движение и колебания материальной точки. Сначала нужно составить дифференциальное уравнение относительного движения (по отношению к лифту) рассматриваемого в задаче груза, для чего присоединить к действующим силам переносную силу инерции. При этом заменить подвеску одной пружиной с жесткостью, эквивалентной жесткости подвески. Затем проинтегрировать полученное линейное дифференциальное уравнение 2-го порядка, учтя начальные условия.
Пример 6. Груз ![]() массой
массой ![]() , прикрепленный к двум
последовательно соединенным пружинам с коэффициентами жесткости
, прикрепленный к двум
последовательно соединенным пружинам с коэффициентами жесткости ![]() и
и ![]() , перемещается по пазу
, перемещается по пазу ![]() призматической
тележки (см. рисунок 12, а). Тележка движется по закону
призматической
тележки (см. рисунок 12, а). Тележка движется по закону ![]() . Начальное удлинение
пружины эквивалентной жесткостью
. Начальное удлинение
пружины эквивалентной жесткостью ![]() , а начальная скорость груза по отношению
к тележке
, а начальная скорость груза по отношению
к тележке ![]() (направлена
от
(направлена
от ![]() к
к ![]() ).
).
Дано: ![]() ,
, ![]() Н/м,
Н/м, ![]() Н/м,
Н/м, ![]() м,
м, ![]() м/с,
м/с, ![]() ,
, ![]() (
(![]() в метрах,
в метрах, ![]() в секундах).
в секундах).
Определить: ![]() закон движения груза
по отношению к тележке.
закон движения груза
по отношению к тележке.
Решение: 1) Заменим прикрепленные
к грузу пружины одной эквивалентной пружиной с коэффициентом жесткости ![]() . Значение с здесь
определяется из условия, что при равновесии под действием какой-нибудь
приложенной к свободному концу пружин силы
. Значение с здесь
определяется из условия, что при равновесии под действием какой-нибудь
приложенной к свободному концу пружин силы ![]() усилия в любом поперечном сечении пружин
одинаковы и равны
усилия в любом поперечном сечении пружин
одинаковы и равны ![]() .
Тогда если удлинения пружин равны соответственно
.
Тогда если удлинения пружин равны соответственно ![]() и
и ![]() , то удлинение эквивалентной пружины
, то удлинение эквивалентной пружины ![]() и должно быть
и должно быть ![]() , откуда
, откуда ![]() . Но так как
. Но так как
![]() ,
(1)
,
(1)
то
 и
и  Н/м. (2)
Н/м. (2)
2) Составим теперь
дифференциальное уравнение относительного движения груза (по отношению к
тележке). Сначала заметим, что при неподвижной тележке в положении статического
равновесия груза эквивалентная пружина (длину ее в недеформированном состоянии
обозначим ![]() )
под действием силы тяжести
)
под действием силы тяжести ![]() будет сжата на величину
будет сжата на величину ![]() (см. рисунок 12, б).
Из условия равновесия следует, что
(см. рисунок 12, б).
Из условия равновесия следует, что
![]() и
и ![]() .
(3)
.
(3)
 Свяжем тогда с тележкой
подвижную систему отсчета
Свяжем тогда с тележкой
подвижную систему отсчета ![]() , начало
, начало ![]() которой поместим в положении статического
равновесия груза, а ось
которой поместим в положении статического
равновесия груза, а ось ![]() направим вдоль паза
направим вдоль паза ![]() в сторону удлинения пружины (см.
рисунок 12, б). Рассмотрим груз в положении, при котором
в сторону удлинения пружины (см.
рисунок 12, б). Рассмотрим груз в положении, при котором ![]() и пружина растянута;
изобразим действующие на груз силы: силу тяжести
и пружина растянута;
изобразим действующие на груз силы: силу тяжести ![]() , силу упругости
, силу упругости ![]() и реакцию паза
и реакцию паза ![]() . Для составления
уравнения относительного движения груза присоединим к этим силам переносную
силу инерции
. Для составления
уравнения относительного движения груза присоединим к этим силам переносную
силу инерции ![]() ;
кориолисова сила инерции здесь равна нулю, так как переносное движение
(движение
;
кориолисова сила инерции здесь равна нулю, так как переносное движение
(движение ![]() тележки) является
поступательным. Тогда уравнение относительного движения в векторной форме будет
иметь вид
тележки) является
поступательным. Тогда уравнение относительного движения в векторной форме будет
иметь вид
![]() .
.
Проецируя обе его части
на ось ![]() ,
получим
,
получим
![]() .
(4)
.
(4)
Найдем значения ![]() и
и ![]() так как при положении груза,
определяемом координатой
так как при положении груза,
определяемом координатой ![]() (см. рисунок 12, б),
эквивалентная пружина имеет удлинение
(см. рисунок 12, б),
эквивалентная пружина имеет удлинение ![]() , то
, то ![]() . Далее
. Далее ![]() , где
, где ![]() ускорение тележки. Из равенства (1) находим,
что
ускорение тележки. Из равенства (1) находим,
что ![]() . Кроме
того,
. Кроме
того, ![]() .
Подставляя все эти величины в уравнение (4), получим
.
Подставляя все эти величины в уравнение (4), получим
![]() .
.
Согласно равенству (3)
члены ![]() и
и ![]() в правой части
сокращаются, и окончательно дифференциальное уравнение относительного движения
груза примет вид
в правой части
сокращаются, и окончательно дифференциальное уравнение относительного движения
груза примет вид
![]() ,
(5)
,
(5)
где обозначено
![]() . (6)
. (6)
3) Для определения закона движения груза надо проинтегрировать уравнение (5). Его общее решение, как известно из теории дифференциальных уравнений
![]() ,
(7)
,
(7)
где ![]() общее решение однородного
уравнения
общее решение однородного
уравнения ![]() ,
т. е.
,
т. е.
![]() ,
(8)
,
(8)
а ![]() частное решение уравнения (5). Учитывая,
каковы правая и левая части этого уравнения, ищем
частное решение уравнения (5). Учитывая,
каковы правая и левая части этого уравнения, ищем ![]() в виде
в виде
![]() .
(9)
.
(9)
Для определения
постоянных ![]() и
и
![]() находим
находим ![]() , подставляем
значения
, подставляем
значения ![]() и
и ![]() в уравнение (5) и
приравниваем в его обеих частях свободные члены и коэффициенты при
в уравнение (5) и
приравниваем в его обеих частях свободные члены и коэффициенты при ![]() . В результате,
принимая во внимание обозначения (6), получим
. В результате,
принимая во внимание обозначения (6), получим
![]() .
.
Тогда из равенств (7)—(9),
учитывая, что ![]() ,
получим следующее общее решение уравнения (5)
,
получим следующее общее решение уравнения (5)
![]() . (10)
. (10)
Для определения
постоянных интегрирования ![]() и
и ![]() найдем еще
найдем еще ![]()
![]() . (11)
. (11)
По условиям задачи при ![]() . Тогда, как видно из
рисунок 12, б и равенства (3),
. Тогда, как видно из
рисунок 12, б и равенства (3), ![]() . Подставив эти начальные данные в
уравнения (10) и (11), найдем из них, что
. Подставив эти начальные данные в
уравнения (10) и (11), найдем из них, что![]() . В результате уравнение (10) примет
окончательно вид
. В результате уравнение (10) примет
окончательно вид
![]() . (12)
. (12)
Это уравнение и определяет искомый закон относительного движения груза, т. е. закон совершаемых им колебаний.
Примечания:
1) Если груз был бы
прикреплен к двум параллельным пружинам, то при равновесии под действием
некоторой силы ![]() каждая
из пружин и эквивалентная пружина имели бы одно и то же удлинение
каждая
из пружин и эквивалентная пружина имели бы одно и то же удлинение ![]() . Тогда для двух
пружин
. Тогда для двух
пружин ![]() , а
для эквивалентной пружины
, а
для эквивалентной пружины ![]() , отсюда и определяется значение
, отсюда и определяется значение ![]() .
.
2) Если пружины были бы
прикреплены к тележке в точке ![]() (см. рисунок 12, а), а груз
(см. рисунок 12, а), а груз ![]() находился на другом
их конце, то в положении статического равновесия эквивалентная пружина была бы
растянута на величину
находился на другом
их конце, то в положении статического равновесия эквивалентная пружина была бы
растянута на величину ![]() , а не сжата, что следует учесть при
изображении схемы, подобной показанной на рисунке 12, б, и при
определении зависимости между
, а не сжата, что следует учесть при
изображении схемы, подобной показанной на рисунке 12, б, и при
определении зависимости между ![]() ,
, ![]() и
и ![]() (в этом случае
(в этом случае ![]() ).
).
Ответ: ![]() .
.
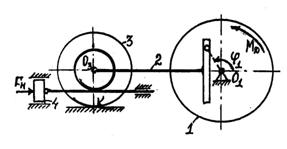
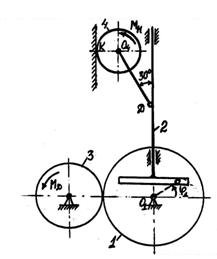
4.2 Задача 7. Теорема об изменении кинетической энергии механической системы
Расчет предназначен для обучения методике исследования динамики машин с использованием дифференциальных уравнений движения. Исходные данные подобраны таким образом, что машина работает вблизи установившегося режима. Путем интегрирования на ПК дифференциальных уравнений определяются движения машины.
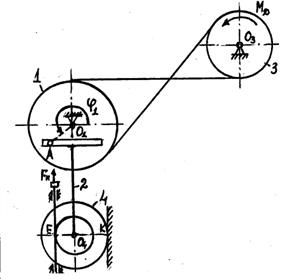
Варианты схем машин представлены на рисунке 13.
Элементы конструкции машин считаются абсолютно жесткими, ремни нерастяжимыми и
безинерционными. Проскальзывание колес ремней и т.д. отсутствует. Трением между
пальцем ![]() кривошипа
и прорезью кулисы пренебрегаем.
кривошипа
и прорезью кулисы пренебрегаем.
Машины приводятся в движение электродвигателем,
развивающим момент ![]() .
Полезная нагрузка моделируется для разных вариантов либо силой
.
Полезная нагрузка моделируется для разных вариантов либо силой ![]() , либо моментом
, либо моментом ![]() .
.
Исходные данные для расчета задаются формулами (1), параметры по вариантам приведены в таблице 7.
![]() ,
,
![]() ,
,
![]() ,
, ![]() , (1)
, (1)
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Здесь и далее для масс, весов, угловых
скоростей, радиусов, моментов и радиусов инерции приняты обозначения ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() с индексами, соответствующими номерам звеньев
машины, указанным на рисунке 13. Через
с индексами, соответствующими номерам звеньев
машины, указанным на рисунке 13. Через ![]() обозначены скорости точек,
обозначены скорости точек, ![]() ,
,
![]()
![]()
![]() константы, значения которых указаны в
таблице 7.
константы, значения которых указаны в
таблице 7. ![]() интервал
времени интегрирования, величина которого близко времени полного оборота
маховика в установившемся режиме.
интервал
времени интегрирования, величина которого близко времени полного оборота
маховика в установившемся режиме. ![]() номер студенческой группы,
номер студенческой группы,
![]() номер факультета. Радиус
маховика
номер факультета. Радиус
маховика ![]() ,
, ![]() .
Угол
.
Угол ![]() указан на рисунках.
Числовые значения величин задаются в системе СИ.
указан на рисунках.
Числовые значения величин задаются в системе СИ.
Требуется составить дифференциальное уравнение движения машины.
|
|
|
||||||
|
|
|
||||||
|
|
|
||||||
|
Рисунок 13 |
|||||||
|
|
|
||||||
|

|
|
||||||
|
|
|
||||||
|
Продолжение рисунка 13 |
|||||||
|
|
|
||||||
|
|
|
||||||
|
|
|
||||||
|
Продолжение рисунка 13 |
|||||||
|
|

|
||||||
|

|
|
||||||
|
|

|
||||||
|
Окончание рисунка 13 |
|||||||

Т а б л и ц а 7
|
Вариант
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
1 |
-27 |
0,2 |
289 |
1,5 |
15 |
7,7 |
16 |
0,09 |
- |
- |
0,24 |
0,08 |
0,12 |
1,57 |
|
2 |
102 |
3,3 |
331 |
2,0 |
15 |
10 |
20 |
0,13 |
- |
- |
- |
- |
- |
0 |
|
3 |
-34 |
0,3 |
3,56 |
1,5 |
20 |
7,72 |
24 |
0,12 |
- |
- |
0,12 |
- |
- |
3,1 |
|
4 |
26 |
0,2 |
3,48 |
1,7 |
26 |
4,63 |
20 |
0,09 |
- |
- |
0,09 |
- |
- |
1,6 |
|
5 |
105 |
3,5 |
639 |
2,0 |
10 |
15 |
20 |
0,12 |
0,08 |
0,09 |
- |
- |
- |
1,5 |
|
6 |
-53 |
0,8 |
4,72 |
1,4 |
24 |
9,26 |
24 |
0,18 |
- |
- |
0,10 |
- |
- |
3,2 |
|
7 |
108 |
3,5 |
222 |
2,0 |
10 |
20 |
15 |
0,10 |
0,08 |
0,08 |
- |
- |
- |
3,1 |
|
8 |
-27 |
0,2 |
20,6 |
1,5 |
20 |
7,72 |
20 |
0,09 |
- |
- |
0,12 |
0,08 |
0,1 |
1,6 |
|
9 |
-27 |
0,2 |
20,6 |
1,4 |
15 |
9,26 |
30 |
0,09 |
- |
- |
0,12 |
0,08 |
0,1 |
1,6 |
|
10 |
110 |
3,8 |
571 |
2,0 |
12 |
20 |
20 |
0,18 |
0,08 |
0,12 |
- |
- |
- |
3,1 |
|
11 |
37 |
0,4 |
11,5 |
1,7 |
22 |
4,63 |
32 |
0,12 |
- |
- |
0,12 |
0,06 |
0,1 |
4,7 |
|
12 |
112 |
3,7 |
246 |
2,0 |
14 |
24 |
12 |
0,16 |
0,12 |
0,14 |
- |
- |
- |
0 |
|
13 |
113 |
3,7 |
342 |
2,0 |
12 |
25 |
10 |
0,12 |
- |
- |
- |
- |
- |
3,1 |
|
14 |
114 |
3,8 |
256 |
2,0 |
15 |
20 |
28 |
0,10 |
0,06 |
0,08 |
- |
- |
- |
4,7 |
|
15 |
115 |
3,9 |
2234 |
2,0 |
16 |
18 |
30 |
0,20 |
0,06 |
0,14 |
- |
- |
- |
3,2 |
|
16 |
116 |
3,9 |
2654 |
2,0 |
18 |
20 |
16 |
0,10 |
0,05 |
0,08 |
- |
- |
- |
0 |
|
17 |
39 |
0,4 |
6,95 |
1,4 |
23 |
9,26 |
32 |
0,12 |
- |
- |
0,12 |
- |
- |
0 |
|
18 |
118 |
3,9 |
337 |
2,0 |
12 |
16 |
10 |
0,08 |
- |
- |
- |
- |
- |
0 |
|
19 |
119 |
3,9 |
3231 |
2,0 |
20 |
30 |
40 |
0,14 |
0,07 |
0,08 |
- |
- |
- |
0 |
|
20 |
120 |
4,0 |
324 |
2,0 |
10 |
12 |
16 |
0,06 |
- |
- |
- |
- |
- |
3,1 |
|
21 |
121 |
4,0 |
1380 |
2,0 |
24 |
32 |
16 |
0,07 |
- |
- |
- |
- |
- |
3,2 |
|
22 |
122 |
4,1 |
700 |
2,0 |
12 |
22 |
18 |
0,18 |
0,06 |
0,12 |
- |
- |
- |
0 |
|
23 |
-41 |
0,4 |
6,10 |
1,5 |
15 |
7,2 |
20 |
0,12 |
- |
- |
0,10 |
- |
- |
1,5 |
|
24 |
-31 |
0,2 |
49,2 |
1,7 |
25 |
4,63 |
36 |
0,09 |
- |
- |
0,16 |
0,08 |
0,1 |
3,1 |
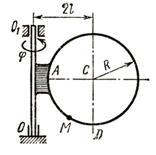
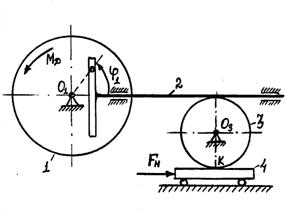
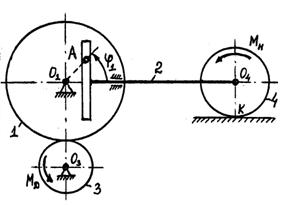
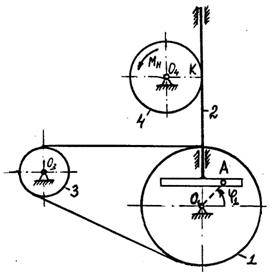
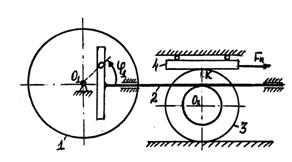
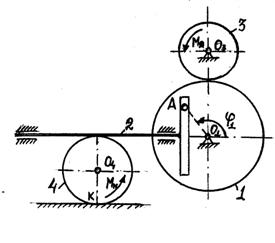
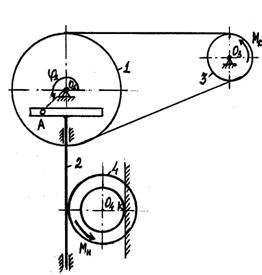
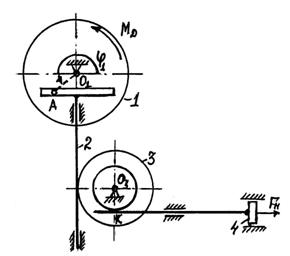
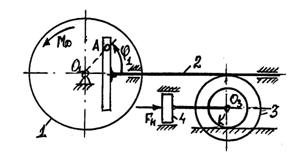
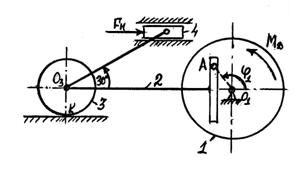
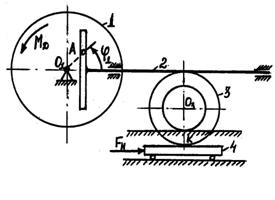
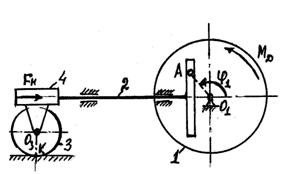
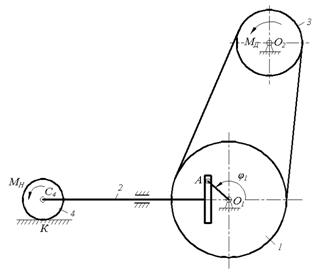
Пример 7. Кинематическая схема машины с
кривошипно-кулисным механизмом изображена на рисунке 14. Движущий момент ![]() приложен к шкиву 3.
Шкив связан с маховиком ременной передачей. Полезная нагрузка моделируется
моментом
приложен к шкиву 3.
Шкив связан с маховиком ременной передачей. Полезная нагрузка моделируется
моментом ![]() Числовые
данные:
Числовые
данные:
![]()
![]()
![]()
![]() ,
,
![]()
![]()
![]()
![]() .
.
Предполагается, что ремень невесомый, нерастяжимый, проскаль-зывание его относительно шкива и маховика отсутствует. Каток 4 относительно плоскости не проскальзывает.
Составить диффе-ренциальное уравнение движения машины.
Решение. Положение тел данной механической системы определяется следующими геометри-ческими параметрами:
![]() 1) маховик 1 - углом поворота
1) маховик 1 - углом поворота ![]() ;
;
2) кулиса 2 - координатами ![]() и
и ![]() центра масс кулисы;
центра масс кулисы;
3) шкив 3 - углом поворота ![]() ;
;
4) каток 4 - координатами ![]() и
и ![]() . центра масс катка и углом
поворота
. центра масс катка и углом
поворота ![]() .
относительно оси, проходящей через точку
.
относительно оси, проходящей через точку ![]() перпендикулярно плоскости чертежа.
перпендикулярно плоскости чертежа.
Перечисленные параметры связаны следующими кинематическими соотношениями:
а) в силу нерастяжимости ремня и непроскальзывания
его, относительно маховика 1 и шкива 3, скорости точек В маховика и
![]() шкива равны
шкива равны
![]()
![]() ,
, ![]() ,
, ![]() , (2)
, (2)
откуда следует
 ;
(3)
;
(3)
б) так как кулиса 2 движется поступательно и прямолинейно, имеем
![]() ,
(4)
,
(4)
![]() ;
(5)
;
(5)
в) из условия неразрывности движения абсолютно твердого катка 4 по плоскости получаем
![]() ;
(6)
;
(6)
г) так как качение катка 4 по плоскости
происходит без скольжения (т.е. в точке ![]() МЦС катка), запишем
МЦС катка), запишем
![]() ,
(7)
,
(7)
![]() или
или  . (8)
. (8)
Таким образом, семь геометрических параметров ![]()
![]() связаны шестью
кинематическими соотношениями (3)-(8). Следовательно, независимым является один
параметр из семи. Принимаем за основную угол поворота
связаны шестью
кинематическими соотношениями (3)-(8). Следовательно, независимым является один
параметр из семи. Принимаем за основную угол поворота ![]() маховика 1 и выражаем через
маховика 1 и выражаем через ![]() остальные
остальные
 (9)
(9)
![]() (10)
(10)
![]() (11)
(11)
 (12)
(12)
Для определения движения машины применим теорему об изменении кинетической энергии системы в дифференциальной форме
![]() .
(13)
.
(13)
Кинетическая энергия данной механической системы определяется выражением
![]() (14)
(14)
где
![]() кинетическая
энергия маховика 1 во вращательном движении неподвижной оси;
кинетическая
энергия маховика 1 во вращательном движении неподвижной оси;
![]() кинетическая энергия кулисы 2 в поступательном
движении;
кинетическая энергия кулисы 2 в поступательном
движении;
![]() кинетическая энергия шкива во вращательном
движении вокруг неподвижной оси
кинетическая энергия шкива во вращательном
движении вокруг неподвижной оси ![]()
![]() кинетическая энергия 4 в плоском движении.
кинетическая энергия 4 в плоском движении.
Заменяя ![]() по формулам (9) - (12) получаем
по формулам (9) - (12) получаем
 ,
(15)
,
(15)
где
 .
.
Учитывая, что совершают работу движущий момент ![]() и полезная нагрузка
и полезная нагрузка ![]() , вычисляем сумму элементарных работ
, вычисляем сумму элементарных работ
![]() (16)
(16)
Из уравнений (9) - (12) получаем соотношения для элементарных перемещений
 (17)
(17)
 (18)
(18)
Учитывая, что ![]() с учетом (17), (18) находим
с учетом (17), (18) находим
 (19)
(19)
Дифференциал кинетической энергии
![]() . (20)
. (20)
Подставляя
полученные выражения в теорему об изменении кинетической энергии системы и
сокращая на
![]() , получаем
, получаем
 . (21)
. (21)
Это и есть дифференциальное уравнение движения механической системы. Оно является нелинейным, его аналитическое решение найти невозможно, поэтому будем интегрировать его численно, для чего вначале запишем полученное дифференциальное уравнение в виде
 . (22)
. (22)
Далее запишем данное дифференциальное уравнение 2-го порядка в виде системы двух дифференциальных уравнений 1-го порядка
 (23)
(23)
которая может быть проинтегрирована, например, в системе Mathcad методом Рунге-Кутты.
Список литературы
1. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. Учебник: в 2-х т. – М.: Наука, 2002.
2. Мещерский И.В. Сборник задач по теоретической механике. Учеб. пособие. – СПб.: Изд-во «Лань», 2005.
3. Никитин Н.Н. Курс теоретической механики. Учебник. – М.: Высшая школа, 1990.
3. Тарг С.М. Краткий курс теоретической механики. Учебник. – М.: Наука, 2002.
4. Яблонский А.А. Курс теоретической механики. Учебник: в 2-х т. – М.: Высшая школа, 2002.
5. Мещерский И.В. Сборник задач по теоретической механике. Учеб. пособие. – СПб.: Изд-во «Лань», 2005.
6. Сборник заданий для курсовых работ по теоретической механике. Учебное пособие./Под ред. А.А.Яблонского. – М.: Высшая школа, 1985.
7. Динасылов А.Д., Койлыбаева Р.К. Механика. Сборник заданий для самостоятельной работы студентов: Учебное пособие. – Алматы: АУЭС, 2012.
Сводный план 2012 г., поз. 243