Комерциалық емес акционерлік қоғам
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ
Инженерлік графика және қолданбалы механика кафедрасы
МЕХАНИКА
Есептеу-графикалық жұмыстарды орындауға әдістемелік нұсқаулар және тапсырмалар
(5В074600 – Ғарыштық техника және технология мамандығы студенттеріне арналған)
Алматы 2012
ҚҰРАСТЫРҒАНДАР: С.Н. Тойбаев., А.Д. Динасылов Механика. Есептеу-графикалық жұмыстарды орындауға әдістемелік нұсқаулар және тапсырмалар(5В074600 – Ғарыштық техника және технология мамандығы студенттеріне арналған). - Алматы: АЭБУ, 2012. – 39 б.
«Механика» пәні жоғарғы оқу орындарында оқитын 5В074600–Ғарыштық техника және технология студенттері үшін міндетті болып табылады. Әдістемелік нұсқауда көрсетілген мамандық студенттері орындайтын есептеу-графикалық жұмыстарының тапсырмалары және орындалу мысалдары келтірілген. Қажетті оқулықтар тізімі берілген.
Без. 14, кесте. 7, әдеб. көрсетккіші – 9 атау.
Пікір беруші: техн. ғыл. канд., Тулбаев А.А.
«Алматы энергетика және байланыс университетінің» комерциялық емес акционерлік қоғамының 2012 жылғы жоспары бойынша басылады.
© «Алматы энергетика және байланыс университетінің» КЕАҚ, 2012 ж.
Мазмұны
|
1 Есептеу-графикалық жұмыстарды орындауға қойылатын жалпы талаптар және оларға әдістемелік нұсқаулар |
4 |
|
2 №1-есептеу-графикалық жұмыстар, оларды орындау әдістемелері және мысалдар |
5 |
|
2.1 1-есеп. Жазық күштер жүйесінің тепе-теңдігі |
5 |
|
2.2 2-есеп. Кеңістік күштер жүйесінің тепе-теңдігі |
8 |
|
3 №2-есептеу-графикалық жұмыстар, оларды орындау әдістемелері және мысалдар |
11 |
|
3.1 3-есеп. Нүкте кинематикасы |
11 |
|
3.2 4-есеп. Дененің қарапайым қозғалыстары |
16 |
|
3.3 5-есеп. Нүктенің күрделі қозғалысы |
19 |
|
4 №3-есептеу-графикалық жұмыстар, оларды орындау әдістемелері және мысалдар |
24 |
|
4.1 6-есеп. Материалық нүктенің тербелмелі және салыстырмалы қозғалысы |
24 |
|
4.2 7-есеп. Механикалық жүйенің кинетикалық энергиясының өзгеруі туралы теорема |
29 |
|
Әдебиеттер тізімі |
38 |
1 Есептеу-графикалық жұмыстарды орындауға қойылатын жалпы талаптар және оларға әдістемелік нұсқаулар
«Механика» пәнінің кредиттер санына сәйкес, оқу жоспары бойынша, 5В074600 –Ғарыштық техника және технология 3 есептеу-графикалық жұмыс орындайды.
Есеп он сұлба және он нұсқа арқылы берілген. Студент есепті шығару үшін, сәйкес суретте рим цифрымен көрсетілген сұлба номерін сынақ кітапшасы бойынша соңғы цифрымен, ал шарттың номерi сәйкес кестеден соңғы цифрдың алдындағы цифрымен қабылдайды. Мысалы, сынақ кітапшасындағы шифры 96472 студент, әрбір есепте ІІ–сұлбаны және кестеден 7–шарт номерiн қабылдайды. Егер шифрдың соңғы цифры нөл болса, онда X–сұлбаны, ал соңғы шифрдың алдындағы цифры нөл болса, онда берілген кестеден 10–нұсқаны қабылдайды. Соңғы 7-есепті оқу журналындағы тізім номерімен қабылдайды.
Есептеу-графикалық жұмысты біржола тапсырар алдында әрбір жұмысты түптеу керек. Орындалған жұмыс түсіндірме жазбасынан және графикалық бөлімінен тұрады. Жұмыс форматы А4 ақ қағазда мұқият орындалуы қажет: жұмыс мұқабадан, есептің берілгенінен, есептеудің орындалуынан, графикалық тұрғызулардан, қорытындыдан тұрады. Жұмыс қабылданған нормалар бойынша безендіріліу қажет (СТП 768-01-07-97); түсіндірме жазбасы парақтың бір жағында болуы керек және ЕГЖ басында мазмұны, соңында пайдаланған әдебиеттер тізімі келтірілуі қажет. Жұмыстың графикалық, есептеу және түсіндірме жазба бөлімдерін компьютер көмегімен де орындауға болады.
Есепті шешуге кіріспес бұрын студент сәйкес теориялық тақырыптармен дәріс, оқулықтар және оқу құралдары бойынша, осы әдістемелік нұсқауда көрсетілген есепті шығару мысалымен танысуы қажет.
Орындалған ЕГЖ-ны студенттер қорғауы қажет. Жұмысты қорғау үшін тақырып бойынша 2-3 сұраққа жауап беруі немесе жеке жағдайда ұқсас есеп шығаруы қажет.
2 №1-есептеу-графикалық жұмыс есептері, оларды орындау әдістемелері және мысалдар
2.1 1-есеп. Жазық күштер жүйесінің тепе-теңдігі
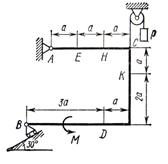
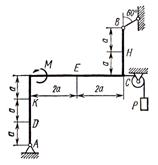
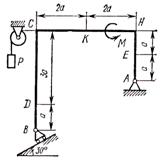
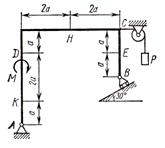
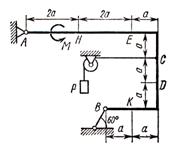
Қатаң жақтау (рама)
![]() нүктесiнде жылжымайтын топса арқылы, ал
нүктесiнде жылжымайтын топса арқылы, ал
![]() нүктесiнде шеттерiнде топсалары бар салмақсыз
нүктесiнде шеттерiнде топсалары бар салмақсыз
![]() сырық немесе
жылжымалы топса арқылы бекiтiлген (1 суретті қара).
Жақтаудың
сырық немесе
жылжымалы топса арқылы бекiтiлген (1 суретті қара).
Жақтаудың
![]() нүктесiне шығыр (блок) арқылы
асылған және ұшында салмағы
нүктесiне шығыр (блок) арқылы
асылған және ұшында салмағы
![]() болатын жүгi бар трос байланған. Жақтауға
моментi
болатын жүгi бар трос байланған. Жақтауға
моментi ![]() болатын қос күш және мәндерi,
бағыттары, түсу нүктелерi кестеде көрсетiлген екi
күш әсер етедi (мысалы, №1 нұсқада жақтауға
болатын қос күш және мәндерi,
бағыттары, түсу нүктелерi кестеде көрсетiлген екi
күш әсер етедi (мысалы, №1 нұсқада жақтауға
![]() нүктесінде горизонталь өспен 30° бұрыш
жасай
нүктесінде горизонталь өспен 30° бұрыш
жасай ![]() күші және
күші және
![]() нүктесінде горизонталь өспен 60° бұрыш
жасай
нүктесінде горизонталь өспен 60° бұрыш
жасай ![]() күші түсірілген). Есептеулер кезiнде
күші түсірілген). Есептеулер кезiнде
![]() деп алу керек.
деп алу керек.
Берiлген жүктемелері әсерiнен
туындайтын
![]() және
және
![]() нүктелерiндегi байланыс реакция
күштерін анықтау керек.
нүктелерiндегi байланыс реакция
күштерін анықтау керек.
1 К е ст е
|
Күштер |
|
|
|
|
||||
|
|
|
|
|
|
||||
|
Шарт номерi |
Түсу нүктесi |
|
Түсу нүктесi |
|
Түсу нүктесi |
|
Түсу нүктесi |
|
|
|
||||||||
|
0 |
– |
– |
|
60 |
|
45 |
– |
– |
|
1 |
|
30 |
– |
– |
– |
– |
|
60 |
|
2 |
– |
– |
|
45 |
|
30 |
– |
– |
|
3 |
|
60 |
– |
– |
– |
– |
|
30 |
|
4 |
– |
|
|
30 |
|
60 |
– |
– |
|
5 |
|
60 |
– |
– |
|
30 |
– |
– |
|
6 |
– |
|
|
30 |
– |
– |
|
45 |
|
7 |
|
45 |
– |
– |
|
60 |
– |
– |
|
8 |
– |
|
|
60 |
– |
– |
|
30 |
|
9 |
|
30 |
– |
– |
– |
– |
|
60 |




Нұсқау. 1–есепте жазық күштер жүйесі әсер еткендегі қатты дененің тепе–теңдігі қарастырылады. Егер екі реакция күші бір нүктеде қиылысатын болса, онда тепе–теңдік теңдеуін құрғанда осы нүктеге қатысты моменттер
|
I |
II |
|
III |
IV |
|
V |
VI |
|
VII |
VIII |
|
IX |
X |
|
1 Сурет |
|



теңдеуі (белгісіз шамалар саны құрамында аз болатын) қарапайым болады
(берілген
жағдайда А нүктесіне қатысты).
![]() күшінің
моментін есептегенде, иіндері жеңіл анықталатын
күшінің
моментін есептегенде, иіндері жеңіл анықталатын
![]() және
және
![]() құраушы
күштерге жіктеп (құраушы күшері өстерге параллель
болатындай) және Вариньон теоремасын пайдаланған дұрыс; онда
құраушы
күштерге жіктеп (құраушы күшері өстерге параллель
болатындай) және Вариньон теоремасын пайдаланған дұрыс; онда
![]() .
.
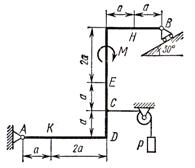
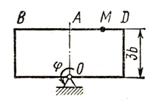
1-мысал. Қатаң тілімше ABCD (2 суретті қара) А нүктесінде қозғалмайтын , ал В нүктесінде қозғалмалы топсалар көмегімен бекітілген. Барлық өлшемдер және әсер етуші күштер суретте көрсетілген.
 |
Берілгені: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Табу қажет: сыртқы күштер әсерінен туындайтын А және В нүктелеріндегі реакция күштерін.
Шешуі: тілімшенің
тепе-теңдігін қарастырайық. ![]() координаттар өстерін
жүргіземіз және тілімшеге әсер етуші барлық
күштерді көрсетеміз.
координаттар өстерін
жүргіземіз және тілімшеге әсер етуші барлық
күштерді көрсетеміз.
Олар:
![]() күші,
моменті М болатын қос күш, арқанның керуші
күші
күші,
моменті М болатын қос күш, арқанның керуші
күші
![]() (шамасы
жөнінен Т = Р ) және
(шамасы
жөнінен Т = Р ) және
![]() байланыстардың
реакция күштері (А нүктесіндегі қозғалмайтын
топса реакция күшін екі құраушыға жіктейміз, ал
қозғалмалы топсаның реакция күшін тірелу жазықтығына
перпендикуляр бағыттаймыз).
байланыстардың
реакция күштері (А нүктесіндегі қозғалмайтын
топса реакция күшін екі құраушыға жіктейміз, ал
қозғалмалы топсаның реакция күшін тірелу жазықтығына
перпендикуляр бағыттаймыз).
Алынған
жазық күштер жүйесі үшін үш тепе–теңдік
теңдеулерді құрамыз.
![]() күшінің
А нүктесіне қатысты моментін анықтағанда
Вариньон теоремасын пайдаланамыз, яғни
күшінің
А нүктесіне қатысты моментін анықтағанда
Вариньон теоремасын пайдаланамыз, яғни
![]() күшін
күшін
![]() құраушы
күштерге жіктейміз
құраушы
күштерге жіктейміз
![]() және
және
![]() формуласын
ескереміз. Алатынымыз
формуласын
ескереміз. Алатынымыз



Осы теңдеулер жүйесіне берілген шамалардың сан мәндерін қойып, шешімін тауып белгісіз реакция күштерін анықтаймыз.
Жауабы: ![]() ,
, ![]() ,
, ![]() .
.
![]() және
және
![]() реакция
күштерінің алдындағы теріс таңбалары 2–суретте
көрсетілген бағыттарына қарама–қарсы бағытталатынын
көрсетеді. Шешімнің дұрыстығын тексеру үшін,
қандай да басқа бір нүктеге қатысты моментер теңдеуін,
мысалы барлық күштердің Е немесе Д нүктесіне
қатысты моментерінің қосындысы түріндегі теңдеуді,
пайдалану кажет, мысалы
реакция
күштерінің алдындағы теріс таңбалары 2–суретте
көрсетілген бағыттарына қарама–қарсы бағытталатынын
көрсетеді. Шешімнің дұрыстығын тексеру үшін,
қандай да басқа бір нүктеге қатысты моментер теңдеуін,
мысалы барлық күштердің Е немесе Д нүктесіне
қатысты моментерінің қосындысы түріндегі теңдеуді,
пайдалану кажет, мысалы
![]()
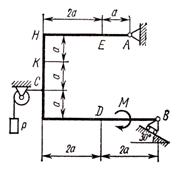
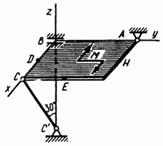
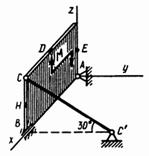
2.2 2-есеп. Кеңістік күштер жүйесінің тепе-теңдігі
Салмағы ![]() ,
қабырғалары
,
қабырғалары
![]() бiртектi тiкбұрышты плита
бiртектi тiкбұрышты плита
![]() нүктесiнде
сфералық топса көмегімен,
нүктесiнде
сфералық топса көмегімен,
![]() нүктесiнде
цилиндрлiк топса көмегімен және салмақсыз
нүктесiнде
цилиндрлiк топса көмегімен және салмақсыз
![]() сырығымен
бекiтiлген (3 суретті қара). Плитаға моментi
сырығымен
бекiтiлген (3 суретті қара). Плитаға моментi ![]() болатын плитаның
жазықтығында жатқан қос күш және одан
басқа екi күш әсер етедi. Бұл күштердiң сан
мәндерi, олардың бағыттары және түсу
нүктелерi 2 кестеде көрсетiлген.
болатын плитаның
жазықтығында жатқан қос күш және одан
басқа екi күш әсер етедi. Бұл күштердiң сан
мәндерi, олардың бағыттары және түсу
нүктелерi 2 кестеде көрсетiлген. ![]() және
және ![]() күштерi xy
жазықтығына параллель жазықтықта,
күштерi xy
жазықтығына параллель жазықтықта, ![]() күшi – xz жазықтығына
параллель жазықтықта және
күшi – xz жазықтығына
параллель жазықтықта және ![]() күшi yz
жазықтығына параллель жазықтықта орналасқан.
Күштердiң (D, E, H) түсу нүктелерi плита
қабырғаларының орталарында орналасқан. Есептеулер
барысында
күшi yz
жазықтығына параллель жазықтықта орналасқан.
Күштердiң (D, E, H) түсу нүктелерi плита
қабырғаларының орталарында орналасқан. Есептеулер
барысында ![]() деп
алу керек.
деп
алу керек.
А, В және С нүктелерiндегі байланыс реакция күштерін анықтау қажет.
Нұсқау.
2-есепте кеңістік күштер жүйесі
әсеріндегі қатты дененің тепе–теңдігі
қарастырылады. Есепті шешу кезінде сфералық топса реакция
күшін координаттар өстеріне параллель үш құраушы
күштерге, ал цилиндрлік топса реакция күшін топса өсіне
перпендикуляр жазықтықта жататын екі құраушы күштерге
жіктеу қажет.
![]() күшінің
өске қатысты моментін есептегенде, өске
күшінің
өске қатысты моментін есептегенде, өске
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 Сурет |
|





2 К е с т е
|
Күштер |
|
|
|
|
||||
|
|
|
|
|
|
||||
|
Шарт номерi |
Түсу нүктесi |
|
Түсу нүктесi |
|
Түсу нүктесi |
|
Түсу нүктесi |
|
|
|
||||||||
|
0 |
|
60 |
– |
– |
|
0 |
– |
– |
|
1 |
|
90 |
|
30 |
– |
– |
– |
– |
|
2 |
– |
– |
|
60 |
– |
– |
|
90 |
|
3 |
– |
– |
– |
– |
|
60 |
|
0 |
|
4 |
|
0 |
– |
– |
|
60 |
– |
– |
|
5 |
– |
– |
|
60 |
|
0 |
– |
– |
|
6 |
– |
– |
|
30 |
– |
– |
|
0 |
|
7 |
|
30 |
|
90 |
– |
– |
– |
– |
|
8 |
– |
– |
– |
– |
|
0 |
|
60 |
|
9 |
– |
– |
|
90 |
|
30 |
– |
– |




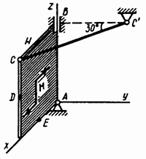
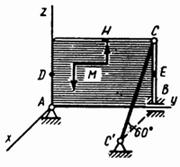
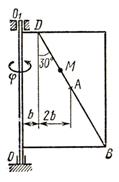
 2–мысал. Бiртектi тiк
бұрышты вертикаль плита А нүктесiнде сфералық топса
көмегімен, В нүктесiнде цилиндрлiк топса көмегімен
және yz жазықтығына параллель жазықтықта
жататын салмақсыз DD´ сырығымен бекiтiлген (4 суретті
қара). Плитаға моментi М болатын плита
жазықтығында жатқан қос күш, және одан
басқа екi күш
2–мысал. Бiртектi тiк
бұрышты вертикаль плита А нүктесiнде сфералық топса
көмегімен, В нүктесiнде цилиндрлiк топса көмегімен
және yz жазықтығына параллель жазықтықта
жататын салмақсыз DD´ сырығымен бекiтiлген (4 суретті
қара). Плитаға моментi М болатын плита
жазықтығында жатқан қос күш, және одан
басқа екi күш
![]() (xz жазықтығында),
(xz жазықтығында),
![]() (y
өсіне параллель) күштері түсірілген.
(y
өсіне параллель) күштері түсірілген.
Берілгені: ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
Табу керек: түсірілген күштер әсерінен А және В нүктелерінде туындайтын реакция күштерін және салмақсыз DD´ сырықтың реакция күшін.
Шешуі:1) Плитаның
тепе–теңдігін қарастырамыз. Плитаға берілген
![]() ,
,
![]() ,
,
![]() күштері
және қос күш моменті М, сонымен қатар байланыс
реакция күштері әсер етеді. Сфералық топса реакция
күшін үш
күштері
және қос күш моменті М, сонымен қатар байланыс
реакция күштері әсер етеді. Сфералық топса реакция
күшін үш
![]() ,
,
![]() ,
,
![]() құраушы
реакция күштеріне, цилиндрлік топса реакция күшін екі
құраушы
реакция күштеріне, цилиндрлік топса реакция күшін екі
![]() ,
,
![]() реакция
күштеріне (цилиндрлік топса өсіне перпендикуляр
жазықтықта жататын) жіктейміз, сырықтың
реакция
күштеріне (цилиндрлік топса өсіне перпендикуляр
жазықтықта жататын) жіктейміз, сырықтың
![]() реакция күшін
сырық бойымен бағыттаймыз.
реакция күшін
сырық бойымен бағыттаймыз.
2) Алты белгісіз реакция күштерін анықтау үшін, плитаға түсірілген кеңістік күштер жүйесі үшін алты тепе-теңдік теңдеулер жүйесін құрамыз
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)
![]() . (6)
. (6)
![]() күшінің
моментін анықтау үшін x және z өстеріне
параллель
күшінің
моментін анықтау үшін x және z өстеріне
параллель
![]() ,
,
![]() құраушы
күштеріне жіктейміз
құраушы
күштеріне жіктейміз
![]() және
Вариньон теоремасын пайдаланамыз.
және
Вариньон теоремасын пайдаланамыз. ![]() реакция
күшін анықтау үшін де Вариньон теоремасын пайдалануға
болады.
реакция
күшін анықтау үшін де Вариньон теоремасын пайдалануға
болады.
Осы теңдеулер жүйесіне берілген шамалардың сандық мәндерін қойып, оларды шешеміз және белгісіз реакция күштерін анықтаймыз.
Жауабы:
![]()
![]() .
.
![]() және
және
![]() реакция күштерінің алдындағы
таңбалары осы күштер 4 суретте көрсетілген бағыттарына
қарама–қарсы бағытталатынын көрсетеді.
реакция күштерінің алдындағы
таңбалары осы күштер 4 суретте көрсетілген бағыттарына
қарама–қарсы бағытталатынын көрсетеді.
3 № 2 есептеу-графикалық жұмыс есептері, оларды орындау әдістемелері және мысалдар
3.1 3-есеп. Нүкте кинематикасы
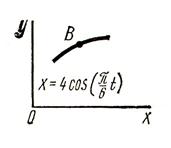
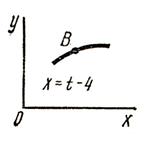
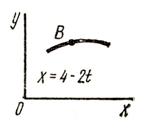
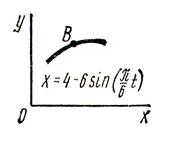
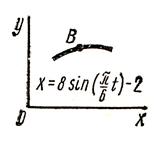
В нүктесi ху жазықтығында қозғалады;
суреттерде нүктенiң траекториясы шартты түрде берiлген.
Нүкте қозғалысының заңы
![]() теңдеулерiмен берiлген (5 суретті
қара), бұл жердегi
теңдеулерiмен берiлген (5 суретті
қара), бұл жердегi ![]() және
және
![]() сантиметрмен,
сантиметрмен, ![]() секундпен өлшенедi.
секундпен өлшенедi.
![]() тәуелдiлiгi суреттерде, ал
тәуелдiлiгi суреттерде, ал
![]() тәуелдiлiгi 3 кестеде көрсетiлген.
тәуелдiлiгi 3 кестеде көрсетiлген.
Нүктенiң траекториясының теңдеуiн табу керек; t1=1c уақыт мезетi үшiн нүктенiң жылдамдығы мен үдеуiн, сонымен қатар оның жанама және нормаль құраушы үдеулерiн және траекторияның осы нүктесiне сәйкес қисықтық радиусын анықтаңыз.
Нұсқау. 3-есеп «Нүкте кинематикасы» тақырыбына арналған, және декарттық координаттар жүйесінде нүкте жылдамдығы, үдеуі анықталатын формулалар арқылы шешіледі, сонымен қатар нүктенің жанама және нормаль үдеулері анықталатын формулалар қолданылады.
3 К е с т е
|
Шарт номерi |
I – III |
IV –VII |
VIII - X |
|
|
|||
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|
7 |
|
|
|
|
8 |
|
|
|
|
9 |
|
|
|
|
10 |
|
|
|











3-мысал. XY жазықтығында қозғалатын
нүктенің қозғалыс теңдеулері берілген
 ,
,
мұндағы:
![]() ,
, ![]() сантиметрмен, ал t секундпен өлшенеді.
сантиметрмен, ал t секундпен өлшенеді.![]()
|
I |
II |
|
III |
IV |
|
V |
VI |
|
VII |
VIII |
|
IX |
X |
|
5 Сурет
|
|





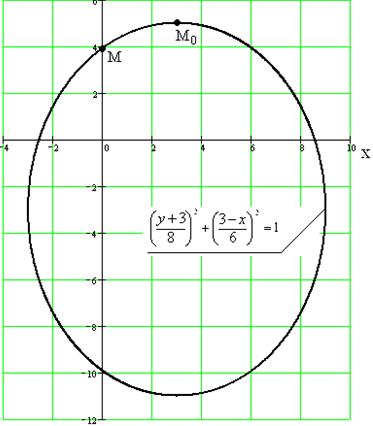
Шешуі: нүктенің траекториясын анықтау үшін берілген теңдеулерден t уақытты аластаймыз, ол үшін тригонометрия байланыстарын қолданамыз
 .
.
Екі теңдікті квадрат дәрежесіне шығарып, екеуін қосамыз, сонда
 .
.
Бұл эллипстің теңдеуі.
Нүктенің
траекториясы 6 а – суретте көрсетілген;
![]() бастапқы
уақыт мезгілінде нүктенің орны M0, ал
бастапқы
уақыт мезгілінде нүктенің орны M0, ал
![]() уақыт
мезгілінде нүктенің орны M.
уақыт
мезгілінде нүктенің орны M.
Нүктенің жылдамдығын оның координаттар өстеріне проекциялары арқылы анықтаймыз
 ,
,
 ,
,
![]() .
.
![]() болғанда
болғанда
 ,
,  ,
,
![]() .
.
Дәл осылай нүктенің үдеуін анықтаймыз
 ,
,
 ,
,
![]() .
.
![]() болғанда
болғанда
 ,
,
 ,
,
![]() .
.
![]() теңдігін уақыт
бойынша дифференциалдап, жанама үдеуді анықтаймыз
теңдігін уақыт
бойынша дифференциалдап, жанама үдеуді анықтаймыз
 ,
,
осыдан
 .
.
![]()
![]()
Осы теңдікке
![]() уақыт мезгіліндегі
шамаларының сан мәндерін қойып
уақыт мезгіліндегі
шамаларының сан мәндерін қойып
![]() шамасын анықтаймыз
шамасын анықтаймыз
![]() .
.
![]() формуланы пайдаланып
формуланы пайдаланып
![]() шамасын анықтаймыз
шамасын анықтаймыз
![]() .
.
Траекторияның қисықтық радиусын анықтау үшін, мынадай формуланы пайдаланамыз
 ,
,
осыдан
 .
.
Жауабы:
![]() уақыт мезгілінде
уақыт мезгілінде ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
![]() =3,43 cм/c,
=3,43 cм/c,
![]() =2,07 см/c2,
=2,07 см/c2,
6, б–суретте М нүктесінің жылдамдықтары мен үдеулері көрсетілген.
3.2 4-есеп. Дененің қарапайым қозғалыстары
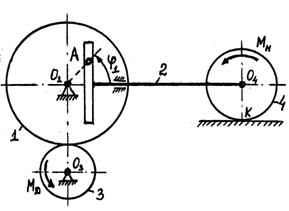
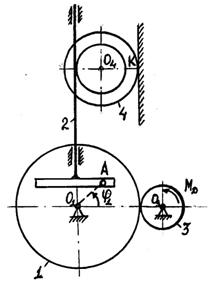
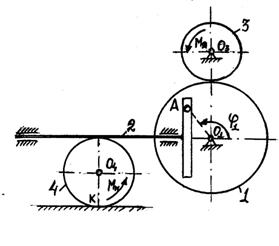
Механизм бiр-бiрiмен түйiсу немесе белдікті берiлiс арқылы байланысқан 1-3 сатылы дөңгелектерiнен, 4-тiстi рейкасы мен дөңгелектердiң бiрiне оралған жiптiң ұшына байланған 5-жүгiнен тұрады (7 суретті қара).
4 К е с т е
|
Шарт номерi |
Берiлгені |
Табу керек |
|
|
жылдамдықтарды |
үдеулерді |
||
|
|
|||
|
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
4 |
|
|
|
|
5 |
|
|
|
|
6 |
|
|
|
|
7 |
|
|
|
|
8 |
|
|
|
|
9 |
|
|
|
|
10 |
|
|
|
|
I
|
II
|
|
|
III |
IV |
|
|
V |
VI |
|
|
VII |
VIII |
|
|
IX |
X |
|
|
7 Сурет |
||
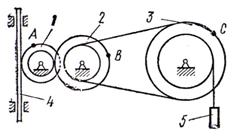
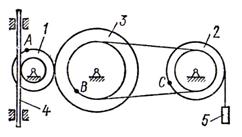
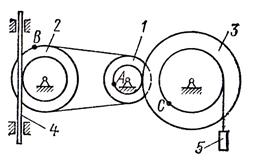

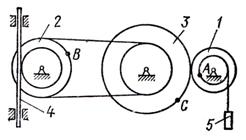
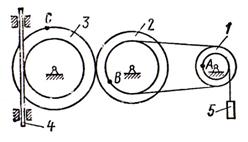

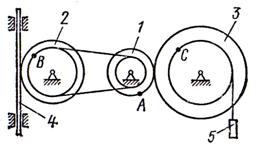
Дөңгелек сатыларының радиустары: 1
дөңгелегi үшiн![]() ,
,
![]() , 2 дөңгелегi үшiн
, 2 дөңгелегi үшiн![]() ,
,
![]() , 3 дөңгелегi үшiн
, 3 дөңгелегi үшiн![]() ,
,
![]() . Дөңгелектердiң бойында
. Дөңгелектердiң бойында
![]() ,
,
![]() және
және
![]() (7
суретті қара) нүктелерi орналасқан.
(7
суретті қара) нүктелерi орналасқан.
Кестенiң «Берiлген» бағанында
механизмнiң жетекшi буынының қозғалыс заңы немесе
жылдамдығының өзгеру заңы көрсетiлген:
![]() 1-дөңгелегiнiң айналу заңы,
1-дөңгелегiнiң айналу заңы,
![]() 4-рейкасының қозғалыс заңы,
4-рейкасының қозғалыс заңы,
![]() 2-дөңгелегiнiң бұрыштық
жылдамдығының өзгеру заңы,
2-дөңгелегiнiң бұрыштық
жылдамдығының өзгеру заңы,
![]() 5-жүк жылдамдығының өзгеру заңы
және т.с.
5-жүк жылдамдығының өзгеру заңы
және т.с. ![]() және
ω үшiн оң бағыт сағат
тiлiнiң қозғалысына қарсы, ал
және
ω үшiн оң бағыт сағат
тiлiнiң қозғалысына қарсы, ал
![]() ,
,
![]() және
және
![]() ,
, ![]() үшiн - төмен бағытталған,
үшiн - төмен бағытталған,
![]() радианмен,
радианмен,
![]() сантиметрмен,
сантиметрмен,
![]() секундпен өлшенедi.
секундпен өлшенедi.
![]() уақыт мезетiне сәйкес кестенiң «Табу керек»
бағанында көрсетiлген нүктелер мен денелердiң жылдамдықтары
мен үдеулерiн анықтау қажет.
уақыт мезетiне сәйкес кестенiң «Табу керек»
бағанында көрсетiлген нүктелер мен денелердiң жылдамдықтары
мен үдеулерiн анықтау қажет.
Нұсқау. 4-есеп қатты дененің қозғалмайтын өсті айнала қозғалысын зерттеуге арналған. Есепті шешу кезінде, егер екі дөңгелек іліністе болса, онда олардың түйісуіндегі әрбір дөңгелек нүктелерінің жылдамдықтары бірдей, ал екі дөңгелек белдікті байланыста болып дөңгелектің бетінде сырғанамайтын болса, онда белдік нүктелерінің және екі дөңгелек бетінде жатқан нүктелердің жылдамдықтары өзара тең болатындығын ескеру қажет.
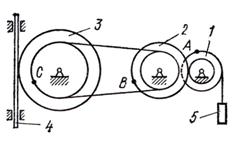
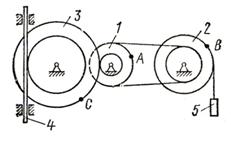
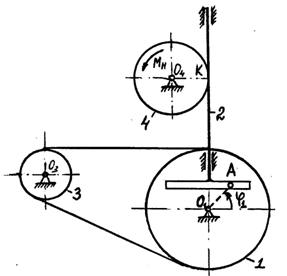
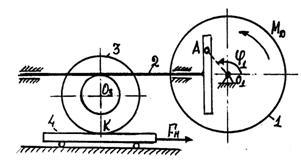
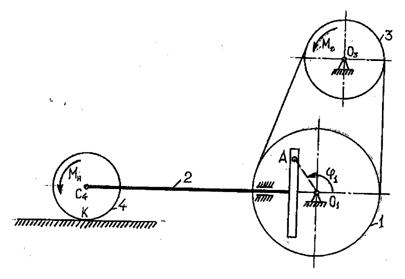
4-мысал.
Рейка 1, радиустары ![]() және
және
![]() сатылы дөңгелек 2, радиусы
сатылы дөңгелек 2, радиусы
![]() валға бекітілген радиусы
валға бекітілген радиусы
![]() дөңгелек 3 түйіскен
берілісте болады, ал валға жүк 4 ілінген жіп оралған, жіпке
жүк ілінген (8 суретті қара). Рейканың қозғалысы
дөңгелек 3 түйіскен
берілісте болады, ал валға жүк 4 ілінген жіп оралған, жіпке
жүк ілінген (8 суретті қара). Рейканың қозғалысы
![]() .
.
 Берілгені:
Берілгені: ![]() см,
см,
![]() ,
,
![]() ,
,
![]() ,
,
![]() (
(![]() сантиметрмен, ал
сантиметрмен, ал
![]() секундпен өлшенеді),
секундпен өлшенеді),
![]() дөңгелек 3-тің бетіндегі нүкте ,
дөңгелек 3-тің бетіндегі нүкте ,
![]() .
.
Табу қажеті: ![]() уақыт мезетінде
уақыт мезетінде
![]() .
.
Шешуі: дөңгелектердің (радиустары
![]() ) сыртқы бетіндегі нүктелерінің жылдамдықтарын
) сыртқы бетіндегі нүктелерінің жылдамдықтарын
![]() арқылы, ал (радиустары
арқылы, ал (радиустары
![]() ) ішкі бетіндегі нүктелерінің жылдамдықтарын
) ішкі бетіндегі нүктелерінің жылдамдықтарын
![]() арқылы белгілеуді қабылдаймыз.
арқылы белгілеуді қабылдаймыз.
 1) Алдымен барлық
дөңгелектердің бұрыштық жылдамдықтарын
1) Алдымен барлық
дөңгелектердің бұрыштық жылдамдықтарын
![]() уақытқа тәуелді функция ретінде анықтаймыз. Рейка
1-дің қозғалыс заңдылығын біле отырып, оның
жылдамдығын анықтаймыз
уақытқа тәуелді функция ретінде анықтаймыз. Рейка
1-дің қозғалыс заңдылығын біле отырып, оның
жылдамдығын анықтаймыз
![]() . (1)
. (1)
Рейка және дөңгелек 2 түйіскен
берілісте болғандықтан ![]() немесе
немесе
![]() . Сонымен қатар дөңгелектер 2 және 3
түйіскен берілісте болғандықтан, яғни
. Сонымен қатар дөңгелектер 2 және 3
түйіскен берілісте болғандықтан, яғни
![]() немесе
немесе ![]() . Осы теңдіктерден анықтайтынымыз
. Осы теңдіктерден анықтайтынымыз
 ,
,  .
(2)
.
(2)
Онда ![]() уақыт мезетінде
уақыт мезетінде
![]() болады.
болады.
2) Жүктің ![]() жылдамдығын анықтаймыз.
жылдамдығын анықтаймыз.
![]() болғандықтан,
болғандықтан,
![]() уақыт мезетінде
уақыт мезетінде
![]() болады.
болады.
3) Дөңгелек 3-тің
![]() бұрыштық үдеуін анықтаймыз. (2)-теңдікті
ескере отырып,
бұрыштық үдеуін анықтаймыз. (2)-теңдікті
ескере отырып, ![]() болатындығын анықтаймыз. Онда
болатындығын анықтаймыз. Онда
![]() уақыт мезетінде
уақыт мезетінде
![]() болады.
болады.
4) ![]() нүктесінің
нүктесінің
![]() үдеуін анықтаймыз.
үдеуін анықтаймыз.
![]() нүктесі үшін
нүктесі үшін
![]() , мұндағы
, мұндағы
![]() ,
, ![]() . Онда
. Онда
![]() уақыт мезетінде
анықтайтынымыз
уақыт мезетінде
анықтайтынымыз
![]() ,
,
![]() ,
,
![]() .
.
Барлық нүктелердің жылдамдықтары және үдеулері, сонымен қатар бұрыштық жылдамдықтардың бағыттары 8 суретте көрсетілген.
Жауабы: ![]() уақыт мезетінде
уақыт мезетінде
![]() ,
, ![]() ,
,
![]() ,
,
![]() .
.
3.3 5-есеп. Нүктенің күрделі қозғалысы
Тiкбұрышты немесе радиусы
![]() дөңгелек пластина 5 кестеде берiлген
дөңгелек пластина 5 кестеде берiлген
![]() заңы бойынша қозғалмайтын өстiң төңiрегiнде
айналады (9 суретті қара).
φ бұрышын
есептеудiң оң бағыты суреттерде доғалы стрелкамен көрсетiлген.
I, II, III, VI, VII сұлбаларда айналу
өсi пластина жазықтығына перпендикуляр және О
нүктесi арқылы өтедi, яғни пластина өз
жазықтығында айналады; IV, V, VIII, IX,
X сұлбаларда ОО1 айналу өсi пластина
жазықтығында жатыр, яғни пластина кеңiстiкте айналады.
заңы бойынша қозғалмайтын өстiң төңiрегiнде
айналады (9 суретті қара).
φ бұрышын
есептеудiң оң бағыты суреттерде доғалы стрелкамен көрсетiлген.
I, II, III, VI, VII сұлбаларда айналу
өсi пластина жазықтығына перпендикуляр және О
нүктесi арқылы өтедi, яғни пластина өз
жазықтығында айналады; IV, V, VIII, IX,
X сұлбаларда ОО1 айналу өсi пластина
жазықтығында жатыр, яғни пластина кеңiстiкте айналады.
![]() уақыт мезетiндегi М нүктесiнiң абсолют
жылдамдығы мен абсолют үдеуiн табу қажет.
уақыт мезетiндегi М нүктесiнiң абсолют
жылдамдығы мен абсолют үдеуiн табу қажет.
Нұсқау. 5-есеп нүктенің күрделі қозғалысына тақырыбына негізделген.
Есепті шешу үшін жылдамдықтарды және үдеулерді қосу теоремаларын қолдану қажет.
Есептеуді бастамас бұрын, табу керек шартына
сәкес ![]() уақыт мезетінде пластинада
уақыт мезетінде пластинада
![]() нүктесінің орнын көрсету
қажет.
нүктесінің орнын көрсету
қажет.
VI![]() X сұлбаларында, есепті шешу кезінде
X сұлбаларында, есепті шешу кезінде
![]() уақыт мезетінде пластинада
уақыт мезетінде пластинада
![]() нүктесінің орны және
нүктесінің орны және
![]() ,
,
![]() радиустарының арасындағы бұрыштары
анықталмайынша,
радиустарының арасындағы бұрыштары
анықталмайынша, ![]() -дің сандық мәнін қоюдың
қажеті жоқ.
-дің сандық мәнін қоюдың
қажеті жоқ.
Пластинадағы BD (I - VI
сұлбалар) түзуiнiң бойымен немесе радиусы R (VI - X
сұлбалар) шеңбер бойымен М нүктесi
қозғалады. Ол нүктенiң салыстырмалы
қозғалысы, яғни ![]() (
(![]() сантиметрмен,
сантиметрмен,
![]() –
секундпен өлшенедi) тәуелдiлiгi 5-кестеде I - VI сұлбалары
үшiн және VII - X сұлбалары үшiн бөлек
берiлген. Сол кестеде
–
секундпен өлшенедi) тәуелдiлiгi 5-кестеде I - VI сұлбалары
үшiн және VII - X сұлбалары үшiн бөлек
берiлген. Сол кестеде ![]() және
және
![]() өлшемдерi де берiлген.
Суреттердегi М нүктесiнiң орны s=AM>0 жағдайына
сәйкес келедi, ал s<0 болса М нүктесi А
нүктесiнiң басқа жағында орналасады.
өлшемдерi де берiлген.
Суреттердегi М нүктесiнiң орны s=AM>0 жағдайына
сәйкес келедi, ал s<0 болса М нүктесi А
нүктесiнiң басқа жағында орналасады.
5 К е с т е
|
Шарт номері |
Барлық сұлбалар
үшiн |
I - V сұлбалар үшiн |
VI – X сұлбалар үшiн |
||
|
|
|
|
|
||
|
|
|||||
|
1 |
|
12 |
|
|
|
|
2 |
|
16 |
|
|
|
|
3 |
|
10 |
|
|
|
|
4 |
|
16 |
|
|
|
|
5 |
|
8 |
|
|
|
|
6 |
|
20 |
|
|
|
|
7 |
|
12 |
|
|
|
|
8 |
|
8 |
|
|
|
|
9 |
|
10 |
|
|
|
|
10 |
|
20 |
|
|
|
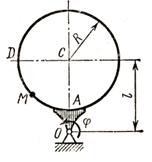
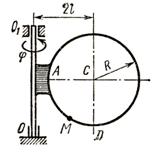
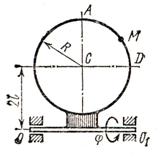
5-мысал.
Радиусы ![]() шар
(10 суретті қара)
шар
(10 суретті қара)
![]() диаметрін
диаметрін
![]() (есептеудiң оң бағыты суретте доғалы
стрелкамен көрсетiлген) заңдылығымен айнала
қозғалады. Үлкен шеңбер («меридианмен)
(есептеудiң оң бағыты суретте доғалы
стрелкамен көрсетiлген) заңдылығымен айнала
қозғалады. Үлкен шеңбер («меридианмен)
![]() бойымен
бойымен
![]() нүктесі
нүктесі
![]() (
(![]() -тің оң бағыты
-тің оң бағыты
![]() -дан
-дан
![]() -ға қарай есептеледі) заңдылығымен
қозғалады.
-ға қарай есептеледі) заңдылығымен
қозғалады.
|
I |
II |
|
III |
IV |
|
V |
VI |
|
VII |
VIII |
|
IX |
X |
|
9 Сурет |
|






Берілгені: ![]() ,
,
![]()
![]() (
(![]() радианмен,
радианмен,
![]() метрмен,
метрмен,
![]() секундпен өлшенеді). Табу қажеті:
секундпен өлшенеді). Табу қажеті:
![]() . мезетінде
. мезетінде
![]() және
және
![]() .
.
Шешуі: ![]() доғаның бойымен қозғалысын
салыстырмалы (
доғаның бойымен қозғалысын
салыстырмалы (![]() нүктенің салыстырмалы траекториясы), ал
шардың айналмалы қозғалысын
нүктенің салыстырмалы траекториясы), ал
шардың айналмалы қозғалысын![]() тасымал қозғалыс деп есептеп,
нүкте
тасымал қозғалыс деп есептеп,
нүкте ![]() -нің қозғалысын күрделі қозғалыс
ретінде қарастырамыз. Онда нүктенің
-нің қозғалысын күрделі қозғалыс
ретінде қарастырамыз. Онда нүктенің
![]() абсолюттік жылдамдығы және
абсолюттік жылдамдығы және
![]() абсолюттік үдеуі төмендегі формулалармен анықталады
абсолюттік үдеуі төмендегі формулалармен анықталады
![]() , (1)
, (1)
мұндағы, ![]() .
.
Салыстырмалы және тасымал қозғалыстардың сипаттамаларын анықтаймыз.
1) Салыстырмалы қозғалыс. Бұл қозғалыс төмендегі заңдылықпен мүмкін болады
![]() . (2)
. (2)
Бірішіден, ![]() уақыт мезетінде
уақыт мезетінде
![]() доғаның бойында
доғаның бойында
![]() нүктесі қайсы аралықта болатынын белгілейміз.
нүктесі қайсы аралықта болатынын белгілейміз.
![]() . уақыт мезетінде (2)-теңдеуден алатынымыз
. уақыт мезетінде (2)-теңдеуден алатынымыз
![]() .
.
онда
![]() , немесе
, немесе
![]() °.
°.
Анықталған бұрышқа
сәйкес 10-суретте нүктенің орнын көрсетеміз (![]() нүктесі).
нүктесі).
Енді ![]() мәндерін табамыз
мәндерін табамыз
 ,
,
мұндағы ![]() салыстырмалы траекторияның
қисықтық радиусы, яғни
салыстырмалы траекторияның
қисықтық радиусы, яғни
![]() доғасы.
доғасы. ![]() болатынын ескере отырып,
болатынын ескере отырып,
![]() . уақыт үшін алатынымыз
. уақыт үшін алатынымыз
![]() ,
,
![]() ,
,
 . (3)
. (3)
Таңбалары ![]() векторы
векторы
![]() аралықты есептеудің оң
бағытымен, ал
аралықты есептеудің оң
бағытымен, ал ![]() кері бағытта,
кері бағытта,
![]() векторы
векторы
![]() доғасының С орталығына бағытталатынын
көрсетеді. Барлық осы векторларды 10-суретте көрсетеміз.
Көрнекі болу үшін 10 б-суретте
доғасының С орталығына бағытталатынын
көрсетеді. Барлық осы векторларды 10-суретте көрсетеміз.
Көрнекі болу үшін 10 б-суретте
![]() доғасы чертеж жазықтығымен беттестірілген.
доғасы чертеж жазықтығымен беттестірілген.
2) Тасымал қозғалыс. Бұл қозғалыс төмендегі заңдылықпен мүмкін болады (айналмалы)
![]() .
.
Тасымал айналмалы қозғалыстың
![]() бұрыштық жылдамдығын және
бұрыштық жылдамдығын және
![]() бұрыштық үдеуін анықтаймыз
бұрыштық үдеуін анықтаймыз
![]() .
.
![]() мезетінде
мезетінде
![]() . (4)
. (4)
Таңбасы уақыт мезеті
![]() болғанда,
болғанда, ![]() -нің бағыты
-нің бағыты
![]() бұрылу бұышының оң
есептеу бағытымен, ал
бұрылу бұышының оң
есептеу бағытымен, ал ![]() -ның бағыты оған қарсы
бағытталатынын көрсетеді. 10 а-суретте сәйкес
доғалық срелкамен көрсетеміз.
-ның бағыты оған қарсы
бағытталатынын көрсетеді. 10 а-суретте сәйкес
доғалық срелкамен көрсетеміз.
Нүктенің тасымал ![]() жылдамдығын және
жылдамдығын және
![]() тасымал үдеуін анықтау үшін,
алдымен нүкте
тасымал үдеуін анықтау үшін,
алдымен нүкте ![]() ден айналу өсіне дейінгі
ден айналу өсіне дейінгі
![]() қашықтықты тауып аламыз, ол
қашықтықты тауып аламыз, ол
![]() . Онда
. Онда
![]() уақыт мезетінде (4) – теңдікті ескере
отырып, алатынымыз
уақыт мезетінде (4) – теңдікті ескере
отырып, алатынымыз
![]() ,
,
![]() ,
,
![]() . (5)
. (5)
![]() және
және ![]() бағыттарын ескере отырып
бағыттарын ескере отырып
![]() ,
,
![]() , бағытарын және
, бағытарын және
![]() векторын (өске қарай
бағытталған) 10 а–суретте көрсетеміз.
векторын (өске қарай
бағытталған) 10 а–суретте көрсетеміз.
3) Кориолис үдеуі. ![]() векторы мен айналу өсінің (
векторы мен айналу өсінің (![]() векторының) арасындағы
бұрыш 60° болғандықтан
векторының) арасындағы
бұрыш 60° болғандықтан ![]() уақыт мезетінде [(3) және (4)–теңдікті
қара]
уақыт мезетінде [(3) және (4)–теңдікті
қара]
![]() . (6)
. (6)
![]() векторын айналу өсіне перпендикуляр жазықтыққа
проекциялап және жазықтықтағы осы проекциясын
векторын айналу өсіне перпендикуляр жазықтыққа
проекциялап және жазықтықтағы осы проекциясын
![]() бағытымен, яғни сағат тілі бағытымен 90°-қа
бұрып
бағытымен, яғни сағат тілі бағытымен 90°-қа
бұрып ![]() бағытын анықтаймыз. Басқаша
бағытын анықтаймыз. Басқаша
![]() ескеріп
ескеріп
![]() бағытын анықтауға болады. 10 а–суретте
бағытын анықтауға болады. 10 а–суретте
![]() векторының бағытын көрсетеміз.
векторының бағытын көрсетеміз.
Енді
![]() және
және
![]() шамаларын есептеуге болады.
шамаларын есептеуге болады.
4) Абсолюттік жылдамдық ![]() -ны анықтау.
-ны анықтау.
![]() , ал
, ал
![]() және
және
![]() векторлары өзара перпендикуляр болғандықтан,
векторлары өзара перпендикуляр болғандықтан,
![]() мезетінде
мезетінде
 .
.
5) Абсолют үдеу ![]() -ны анықтау. Үдеулерді қосу
теоремасы негізінде
-ны анықтау. Үдеулерді қосу
теоремасы негізінде
![]() . (7)
. (7)
Абсолют үдеу ![]() -ны анықтау үшін
-ны анықтау үшін
![]() координаттар жүйесін жүргіземіз (
координаттар жүйесін жүргіземіз (![]() суретті қара) және
суретті қара) және
![]() векторының осы өстерге проекцияларын есептейміз.
векторының осы өстерге проекцияларын есептейміз.
![]() және
және ![]() векторлары
векторлары
![]() өсінің бойында, ал
өсінің бойында, ал
![]() ,
,
![]() және
және
![]() векторлары
векторлары
![]() доға жазықтығында
орналасқанын ескереміз, яғни
доға жазықтығында
орналасқанын ескереміз, яғни ![]() жазықтығында (10 суретті қара). (3),
(5), (6) теңдіктерін ескере отырып (7) - теңдіктің екі
жағын да координаттар өстеріне проекциялап,
жазықтығында (10 суретті қара). (3),
(5), (6) теңдіктерін ескере отырып (7) - теңдіктің екі
жағын да координаттар өстеріне проекциялап,
![]() уақыт мезетінде алатынымыз
уақыт мезетінде алатынымыз
![]() .
.
![]() .
.
![]()
Осыдан ![]() уақыт мезетінде абсолют үдеу
уақыт мезетінде абсолют үдеу
![]() ның шамасын табамыз
ның шамасын табамыз
![]() .
.
Жауабы: ![]() болғанда,
болғанда,
![]() ,
, ![]()
4 № 3 есептеу-графикалық жұмыс есептері, оларды орындау әдістемелері және мысалдар
4.1 6-есеп. Материалық нүктенің тербемелі және салыстырмалы қозғалысы
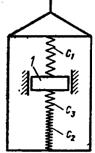
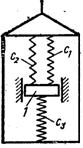
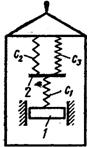
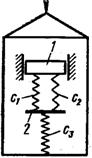
Массасы ![]() жүк 1 лифтаның ішіндегі ілгекке ілінген
серіппеге бекітілген (11 суретті қара). Лифт вертикаль
жүк 1 лифтаның ішіндегі ілгекке ілінген
серіппеге бекітілген (11 суретті қара). Лифт вертикаль ![]()
![]() заңдылығымен қозғалады (
заңдылығымен қозғалады (![]() өсі вертикаль жоғары бағытталған;
өсі вертикаль жоғары бағытталған;
![]() метрмен өлшенеді,
метрмен өлшенеді,
![]() секундпен).
секундпен).
Жүкке ![]() ортаның кедергі күші әсер етеді,
мұндағы
ортаның кедергі күші әсер етеді,
мұндағы ![]() жүктің лифтаға қатысты
жылдамдығы.
жүктің лифтаға қатысты
жылдамдығы.
|
I |
II |
|
III |
IV |
|
V |
VI |
|
VII |
VIII |
|
IX |
X |
|
11 Сурет |
|




6 К е с т е
|
Шарт номері |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
1 |
1 |
300 |
150 |
- |
0 |
0,1 |
0 |
15 |
0 |
0 |
0 |
|
2 |
0,8 |
- |
240 |
120 |
-0,5 |
0 |
0 |
- |
8 |
0,1 |
0 |
|
3 |
0,5 |
- |
100 |
150 |
0 |
0,8 |
0 |
5 |
0 |
0 |
4 |
|
4 |
1 |
240 |
- |
160 |
0 |
0 |
0,5 |
6 |
0 |
0 |
0 |
|
5 |
0,5 |
80 |
120 |
- |
|
0 |
0 |
- |
6 |
0,15 |
0 |
|
6 |
2 |
- |
400 |
400 |
0 |
0 |
0,1 |
16 |
0 |
0 |
0 |
|
7 |
0,4 |
60 |
- |
120 |
|
0 |
0 |
- |
4 |
0 |
2 |
|
8 |
0,5 |
120 |
- |
180 |
0 |
0,1 |
0 |
20 |
0 |
0 |
0 |
|
9 |
0,4 |
50 |
200 |
- |
0 |
0 |
0,2 |
20 |
0 |
0,15 |
0 |
|
10 |
1 |
200 |
- |
300 |
1,5 |
0 |
0 |
- |
20 |
0 |
3 |
Лифтаға қатысты жүктің
қозғалыс заңын табу қажет, яғни
![]() ; бас нүктені лифта тыныштықта болғанда
жүктің статикалық тепе-теңдік орнына орналастыру
қажет (таңбасынан қателік жіберіп алмас үшін,
; бас нүктені лифта тыныштықта болғанда
жүктің статикалық тепе-теңдік орнына орналастыру
қажет (таңбасынан қателік жіберіп алмас үшін,
![]() өсін серіппенің
өсін серіппенің
ұзару бағытында бағыттау, ал
жүктің орнын ![]() , яғни серіппенің ұзару
бағытында көрсету қажет). Есептеу кезінде
, яғни серіппенің ұзару
бағытында көрсету қажет). Есептеу кезінде
![]() қабылдауға болады. Серіппе және белдеме 2-нің
массалары нөлге тең.
қабылдауға болады. Серіппе және белдеме 2-нің
массалары нөлге тең.
6-кестедегі белгілеулер:
![]() серіппенің қатаңдық коэффициенті;
серіппенің қатаңдық коэффициенті;
![]() бастапқы
бастапқы
![]() уақыт мезетіндегі эквивалентті
қатаңдығымен серіппенің ұзаруы;
уақыт мезетіндегі эквивалентті
қатаңдығымен серіппенің ұзаруы;
![]() жүктің лифтаға қатысты бастапқы
жылдамдығы (жоғары вертикаль бағытталған).
жүктің лифтаға қатысты бастапқы
жылдамдығы (жоғары вертикаль бағытталған).
![]() бағанасындағы сызықшалар сәйкес серіппелер
жоқ және чертежде көрсетілмейді.
бағанасындағы сызықшалар сәйкес серіппелер
жоқ және чертежде көрсетілмейді.
Егер кейбір жағдайларда серіппенің соңы бос қалса, онда сәйкес орнында немесе жүкке немесе лифтаның төбесіне (еденіне), егер 2-белдемемен бекітілген орны бос қалса, онда серіппелердің соңдарын өзара бекіту қажет.
![]() шарты кедергі күші
шарты кедергі күші
![]() -дің жоқ екенін көрсетеді.
-дің жоқ екенін көрсетеді.
Нұсқау. 6-есеп нүктенің тербелмелі және салыстырмалы қозғалыстарын бір уақытта қамтиды. Біріншіден әсер ететін күштерге тасымал инерция күшін тіркестіріп есепте қарастырылатын жүктің салыстырмалы дифференциалдық теңдеуін (лифтаға қатысты) құрастыру қажет. Бұл үшін серіппелердің эквивалентті қатаңдығын бір серіппенің қатаңдығымен ауыстыру керек. Содан кейін бастапқы шартын ескере отырып, алынған 2-текті сызықты дифференциалдық теңдеуді интегралдау керек.
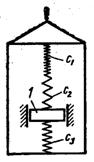
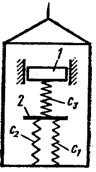
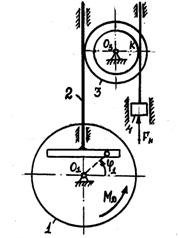
6-мысал. Қатаңдық коэффициентері
![]() және
және ![]() тізбектеліп жалғасқан екі серіппелерге
бекітілген массасы
тізбектеліп жалғасқан екі серіппелерге
бекітілген массасы ![]() жүк
жүк
![]() призмалық арбаның
призмалық арбаның
![]() сайымен орын ауыстырады (12 а суретті қара). Арба
сайымен орын ауыстырады (12 а суретті қара). Арба
![]() заңдылығымен қозғалады. Эквиалентті
қатаңдықты серіппенің бастапқы ұзаруы
заңдылығымен қозғалады. Эквиалентті
қатаңдықты серіппенің бастапқы ұзаруы
![]() , ал арбаға қатысты жүктің бастапқы
жылдамдығы
, ал арбаға қатысты жүктің бастапқы
жылдамдығы ![]() (
(![]() -дан
-дан
![]() -ға қарай бағытталған).
-ға қарай бағытталған).
Берілгені: ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() , (
, (![]() метрмен,
метрмен,
![]() секундпен өлшенеді). (1)
секундпен өлшенеді). (1)
Табу қажет: Арбаға қатысты
жүктің қозғалыс теңдеуі
![]() ті.
ті.
Шешуі: 1) Жүкке бекітілген серіппелерді
қатаңдық коэфициенті ![]() болатын бір серіппемен ауыстырамыз. Қатаңдық
коэффициенті
болатын бір серіппемен ауыстырамыз. Қатаңдық
коэффициенті ![]() -ның
мәні серіппелердің кез келген қимасында ішкі күш факторлары
тең болатын шартпен анықталады және
-ның
мәні серіппелердің кез келген қимасында ішкі күш факторлары
тең болатын шартпен анықталады және
![]() -ға тең. Егер серіппелердің сәйкес
ұзарулары
-ға тең. Егер серіппелердің сәйкес
ұзарулары ![]() және
және
![]() болса, онда серіппелердің эквивалентті
ұзаруы
болса, онда серіппелердің эквивалентті
ұзаруы ![]() және
және
![]() мүмкін болады, осыдан
мүмкін болады, осыдан
![]()
![]() .
.
![]() болса, онда
болса, онда
 и
и
 Н/м. (2)
Н/м. (2)
2) Енді жүктің салыстырмалы
қозғалысының дифференциалдық теңдеуін
құрамыз (арбаға қатысты). Арба тыныштықта
болғанда бірінші байқайтынымыз, жүктің статикалық
тепе-теңдік орнында ![]() салмақ күші әсерінен эквивалентті серіппе
(оның деформацияға ұшырамаған жағдайында
ұзындығын
салмақ күші әсерінен эквивалентті серіппе
(оның деформацияға ұшырамаған жағдайында
ұзындығын ![]() деп белгілейміз)
деп белгілейміз)
![]() мәніне сығылады (12 б-суретті қара).
Тепе-теңдік теңдеуінен алатынымыз
мәніне сығылады (12 б-суретті қара).
Тепе-теңдік теңдеуінен алатынымыз
![]() және
және ![]() . (3)
. (3)
 Онда жүктің статикалық
тепе-теңдік орнына бас нүктесін орналастырып, қозғалмалы
санақ жүйесі
Онда жүктің статикалық
тепе-теңдік орнына бас нүктесін орналастырып, қозғалмалы
санақ жүйесі ![]() -ті арбаға бекітеміз, ал
-ті арбаға бекітеміз, ал
![]() өсін арна
өсін арна
![]() сайы бойымен серіппенің ұзару
бағыттында бағыттаймыз (12 б суретті қара).
сайы бойымен серіппенің ұзару
бағыттында бағыттаймыз (12 б суретті қара).
 Серіппе ұзарғанда және
Серіппе ұзарғанда және
![]() болғандағы жүктің орнын қарастырамыз;
жүкке түсірілген күштерді көрсетеміз:
болғандағы жүктің орнын қарастырамыз;
жүкке түсірілген күштерді көрсетеміз:
![]() салмақ күшін,
салмақ күшін,
![]() серпімділік күшін және
серпімділік күшін және
![]() сайдың реакция күшін. Жүктің салыстырмалы
қозғалысының дифференциалдық теңдеуін кұру
үшін осы күштерге тасымал инерция күшін
сайдың реакция күшін. Жүктің салыстырмалы
қозғалысының дифференциалдық теңдеуін кұру
үшін осы күштерге тасымал инерция күшін
![]() қосамыз; тасымал қозғалыс (арбаның
қозғалысы) ілгерілемелі болғандықтан кориолис инерция
күші нөлге тең. Онда салыстырмалы қозғалыс
теңдеуі векторлы түрде төмендегі өрнек арқылы
жазылады
қосамыз; тасымал қозғалыс (арбаның
қозғалысы) ілгерілемелі болғандықтан кориолис инерция
күші нөлге тең. Онда салыстырмалы қозғалыс
теңдеуі векторлы түрде төмендегі өрнек арқылы
жазылады
![]() .
.
Теңдіктің екі жағын
![]() өсіне проекциялап, алатынымыз
өсіне проекциялап, алатынымыз
![]() . (4)
. (4)
![]() және
және ![]() жүктің орны
жүктің орны
![]() координатымен анықталатын
болғандықтан (12 суретті қара), эквивалент серіппенің
ұзаруы
координатымен анықталатын
болғандықтан (12 суретті қара), эквивалент серіппенің
ұзаруы ![]() -ға тең, онда
-ға тең, онда
![]() . Сонымен қатар
. Сонымен қатар
![]() , мұндағы
, мұндағы
![]() арбаның үдеуі, табатынымыз
арбаның үдеуі, табатынымыз
![]() . Сонымен қатар,
. Сонымен қатар,
![]() . Барлық осы мәндерді (4)-теңдеуге
қойып, табатынымыз
. Барлық осы мәндерді (4)-теңдеуге
қойып, табатынымыз
![]() .
.
(3)-теңдікке сәйкес
![]() және
және ![]() мүшелері теңдіктің оң
жағырда қысқарады және қорытынды
жүктің салыстырмалы дифференциалдық теңдеуі
төмедегі түрде болады
мүшелері теңдіктің оң
жағырда қысқарады және қорытынды
жүктің салыстырмалы дифференциалдық теңдеуі
төмедегі түрде болады
![]() ,
(5)
,
(5)
мұндағы белгілеулер
![]() . (6)
. (6)
3) Жүктің қозғалыс заңдылығын анықтау үшін (5) теңдеуді интегралдау қажет. Оның жалпы шешімі, дифференциалдық теңдеудің теориясы бойынша
![]() , (7)
, (7)
мұндағы ![]()
![]() теңдеуінің жалпы шешімі,
яғни
теңдеуінің жалпы шешімі,
яғни
![]() , (8)
, (8)
ал ![]() (5)-теңдеудің дербес шешімі.
Теңдеудің дербес шешімін келесі түрде іздейміз
(5)-теңдеудің дербес шешімі.
Теңдеудің дербес шешімін келесі түрде іздейміз
![]() .
(9)
.
(9)
Тұрақтылар ![]() және
және
![]() -ны анықтау үшін
-ны анықтау үшін ![]() -ны табамыз,
-ны табамыз,
![]() және
және
![]() мәндерін (5) –теңдеуге қойып,
мәндерін (5) –теңдеуге қойып,
![]() функциясының коэффициенттерін теңестіреміз. (6)-белгілеулерді
ескере отырып, алатынымыз
функциясының коэффициенттерін теңестіреміз. (6)-белгілеулерді
ескере отырып, алатынымыз
![]() .
.
Онда ![]() болатынын ескеріп (7) - (9) теңдіктерден келесі
(5)-теңдеудің жалпы шешімін аламыз
болатынын ескеріп (7) - (9) теңдіктерден келесі
(5)-теңдеудің жалпы шешімін аламыз
![]() . (10)
. (10)
Интеграл тұрақтылары
![]() және
және ![]() -ні анықтау үшін
-ні анықтау үшін
![]() -ні табамыз
-ні табамыз
![]() . (11)
. (11)
Есептің шарты бойынша ![]() үшін
үшін
![]() . Онда 12, б-суретіне және (3) теңдікке сәйкес
. Онда 12, б-суретіне және (3) теңдікке сәйкес
![]() . Осы бастапқы мәндерін (10) және (11)
теңдеулеріне қойып, олардан
. Осы бастапқы мәндерін (10) және (11)
теңдеулеріне қойып, олардан ![]() табамыз. Қорытынды (10) теңдеу
төмендегі түрде жазылады
табамыз. Қорытынды (10) теңдеу
төмендегі түрде жазылады
![]() . (12)
. (12)
Осы теңдеу жүктің салыстырмалы қозғалысының заңдылығын анықтайды, яғни тербеліс жасайтын заңдылығын.
Ескертулер:
1) Егер жүк екі параллель серіппелерге
бекітілген болса, онда қандай да бір күштің әсерінде
тепе-теңдікте болғана, әрдір серіппе және эквивалентті
серіппе бірдей ![]() шамасына ұзарған болар еді.
шамасына ұзарған болар еді.
Онда екі серіппе үшін ![]() , ал эквивалентті серіппе үшін
, ал эквивалентті серіппе үшін
![]() , осыдан
, осыдан ![]() мәндері анықталады.
мәндері анықталады.
2) Егер серіппе тележканың
![]() нүктесіне бекітілген болса (12, а суретті қара), ал
жүк
нүктесіне бекітілген болса (12, а суретті қара), ал
жүк ![]() олардың басқа соңында орналасса,
онда статикалық тепе-теңдік орнында эквивалентті серіппе
олардың басқа соңында орналасса,
онда статикалық тепе-теңдік орнында эквивалентті серіппе
![]() мәніне созылған болар еді, сығылған емес, 12
б-суретінде көрсетілгендей, және
мәніне созылған болар еді, сығылған емес, 12
б-суретінде көрсетілгендей, және ![]() ,
, ![]() и
и
![]() арасындағы байланыстарды анықтау
үшін (бұл жағдайда
арасындағы байланыстарды анықтау
үшін (бұл жағдайда ![]() ), есептеу сұлбасында ескеру қажет болады.
), есептеу сұлбасында ескеру қажет болады.
Жауабы: ![]() .
.
4.2 7-есеп. Механикалық жүйенің кинетикалық энергиясының өзгеруі туралы теорема
Есептеу, қозғалыстың дифференциалдық теңдеулерін пайдаланып, машина динамикасын зерттеу әдістемесін оқып үйренуге арналған. Машина қозғалыстары, дифференциалдық теңдеулерді арнайы компютерді пайдаланып интегралдау арқылы анықталады.
Машиналардың сұлба нұсқаулары 13 - суретте көрсетілген. Машинаның құрылым элементтері абсолют қатты деп саналады, белдіктер инерциялы емес. Дөңгелектер, белдіктер т.б. сырғанамайды. А жұдырықшасы мен қосиіннің және жылжыманың үйкеліс күштері есепке алынбайды.
Машина электр қозғалтқышта пайда
болатын ![]() моменті
әсерімен қозғалысқа келтіріледі. Пайдалы әсер
әр-түрлі нұсқауларда
моменті
әсерімен қозғалысқа келтіріледі. Пайдалы әсер
әр-түрлі нұсқауларда ![]() күшімен немесе
күшімен немесе ![]() моментімен көрсетілген.
моментімен көрсетілген.
Есептеуде тапсырманың берілгенін ретке келтіру 7 кесте және 1-формулалармен беріледі
![]() ,
,
![]() ,
,
![]() ,
,
![]() , (1)
, (1)
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Мұндағы,
массалар, салмақ күші, бұрыштық жылдамдықтар,
радиустар, инерция моменттері және инерция радиустары және жылдамдықтар
үшін 13-суретте көрсетілген машиналар буындарының
сәйкес индекстерімен келесі
![]() белгілеулер қабылданған.
белгілеулер қабылданған.
![]()
![]() кестеде мәндері
көрсетілген тұрақтылар.
кестеде мәндері
көрсетілген тұрақтылар. ![]() интегралдаудың уақыт
аралығы, яғни тегершіктің толық айналу уақыты
шамасына жақын шама,
интегралдаудың уақыт
аралығы, яғни тегершіктің толық айналу уақыты
шамасына жақын шама, ![]() студенттік топтар,
студенттік топтар, ![]() факультет номері.
Тегершіктің радиусы
факультет номері.
Тегершіктің радиусы ![]()
![]() бұрышы суретте көрсетілген.
Шамалардың сандық
бұрышы суретте көрсетілген.
Шамалардың сандық
мәні СИ жүйесінде берілген.
Механикалық жүйенің кинетикалық энергиясының өзгеруі туралы теореманы пайдалана отырып машина қозғалысының дифференциалдық теңдеуін құрастыру қажет.
7 К е с т е
|
Шарт номері
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
1 |
-27 |
0,2 |
289 |
1,5 |
15 |
7,7 |
16 |
0,09 |
- |
- |
0,24 |
0,08 |
0,12 |
1,57 |
|
2 |
102 |
3,3 |
331 |
2,0 |
15 |
10 |
20 |
0,13 |
- |
- |
- |
- |
- |
0 |
|
3 |
-34 |
0,3 |
3,56 |
1,5 |
20 |
7,72 |
24 |
0,12 |
- |
- |
0,12 |
- |
- |
3,1 |
|
4 |
26 |
0,2 |
3,48 |
1,7 |
26 |
4,63 |
20 |
0,09 |
- |
- |
0,09 |
- |
- |
1,6 |
|
5 |
105 |
3,5 |
639 |
2,0 |
10 |
15 |
20 |
0,12 |
0,08 |
0,09 |
- |
- |
- |
1,5 |
|
6 |
-53 |
0,8 |
4,72 |
1,4 |
24 |
9,26 |
24 |
0,18 |
- |
- |
0,10 |
- |
- |
3,2 |
|
7 |
108 |
3,5 |
222 |
2,0 |
10 |
20 |
15 |
0,10 |
0,08 |
0,08 |
- |
- |
- |
3,1 |
|
8 |
-27 |
0,2 |
20,6 |
1,5 |
20 |
7,72 |
20 |
0,09 |
- |
- |
0,12 |
0,08 |
0,1 |
1,6 |
|
9 |
-27 |
0,2 |
20,6 |
1,4 |
15 |
9,26 |
30 |
0,09 |
- |
- |
0,12 |
0,08 |
0,1 |
1,6 |
|
10 |
110 |
3,8 |
571 |
2,0 |
12 |
20 |
20 |
0,18 |
0,08 |
0,12 |
- |
- |
- |
3,1 |
|
11 |
37 |
0,4 |
11,5 |
1,7 |
22 |
4,63 |
32 |
0,12 |
- |
- |
0,12 |
0,06 |
0,1 |
4,7 |
|
12 |
112 |
3,7 |
246 |
2,0 |
14 |
24 |
12 |
0,16 |
0,12 |
0,14 |
- |
- |
- |
0 |
|
13 |
113 |
3,7 |
342 |
2,0 |
12 |
25 |
10 |
0,12 |
- |
- |
- |
- |
- |
3,1 |
|
14 |
114 |
3,8 |
256 |
2,0 |
15 |
20 |
28 |
0,10 |
0,06 |
0,08 |
- |
- |
- |
4,7 |
|
15 |
115 |
3,9 |
2234 |
2,0 |
16 |
18 |
30 |
0,20 |
0,06 |
0,14 |
- |
- |
- |
3,2 |
|
16 |
116 |
3,9 |
2654 |
2,0 |
18 |
20 |
16 |
0,10 |
0,05 |
0,08 |
- |
- |
- |
0 |
|
17 |
39 |
0,4 |
6,95 |
1,4 |
23 |
9,26 |
32 |
0,12 |
- |
- |
0,12 |
- |
|
0 |
|
18 |
118 |
3,9 |
337 |
2,0 |
12 |
16 |
10 |
0,08 |
- |
- |
- |
- |
- |
0 |
|
19 |
119 |
3,9 |
3231 |
2,0 |
20 |
30 |
40 |
0,14 |
0,07 |
0,08 |
- |
- |
- |
0 |
|
20 |
120 |
4,0 |
324 |
2,0 |
10 |
12 |
16 |
0,06 |
- |
- |
- |
- |
- |
3,1 |
|
21 |
121 |
4,0 |
1380 |
2,0 |
24 |
32 |
16 |
0,07 |
- |
- |
- |
- |
- |
3,2 |
|
22 |
122 |
4,1 |
700 |
2,0 |
12 |
22 |
18 |
0,18 |
0,06 |
0,12 |
- |
- |
- |
0 |
|
23 |
-41 |
0,4 |
6,10 |
1,5 |
15 |
7,2 |
20 |
0,12 |
- |
- |
0,10 |
- |
- |
1,5 |
|
24 |
-31 |
0,2 |
49,2 |
1,7 |
25 |
4,63 |
36 |
0,09 |
- |
- |
0,16 |
0,08 |
0,1 |
3,1 |
|

|
|
||||
|
|
|
||||
|
|
|
||||
|
13 Сурет |
|||||
|
|
|
||||
|

|
|
||||
|

|

|
||||
|
13 суреттің жалғасы |
|||||
|

|

|
||||
|
|

|
||||
|

|
|
||||
|
13 суреттің жалғасы |
|||||
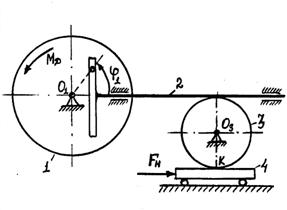
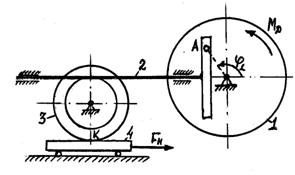
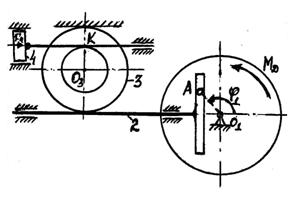
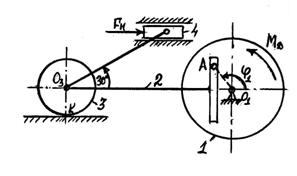
7-мысал. Қосиінді–кулисалы
механизмімен машинаның кинематикалық сұлбасы 14-суретте
қөрсетілген. шкив 3-ке қозғаушы момент
![]() түсірілген. Шкив пен тегершік белбеу арқылы
байланысқан. Пайдалы әсер мынадай
түсірілген. Шкив пен тегершік белбеу арқылы
байланысқан. Пайдалы әсер мынадай
![]() формуламен анықталады. Сан мәндерімен
берілгені:
формуламен анықталады. Сан мәндерімен
берілгені:
![]()
![]()
![]() .
.
Белбеу салмақсыз, созылмайды деп қарастырылады. Белбеу шкив пен тегершіктің бетінде сырғанамайды (14 суретті қара).
Механикалық жүйенің кинетикалық энергиясының өзгеруі туралы теореманы пайдалана отырып машина қозғалысының дифференциалдық теңдеуін құрастыру қажет.
Қарастырып отырған механикалық жүйе денелерінің орны мынадай геометриалық параметрлермен анықталады:
1)
тегершік 1-![]() бұрылу
бұрышымен;
бұрылу
бұрышымен;
2) кулиса 2- массалар орталығы ![]() координаталарымен;
координаталарымен;
3) шкив 3-![]() бұрылу бұрышымен;
бұрылу бұрышымен;
4) дөңгелек 4-массалар центрі ![]() координаталарымен
және
координаталарымен
және ![]() нүктесі
арқылы өтетін өске қатысты
нүктесі
арқылы өтетін өске қатысты ![]() бұрылу бұрышымен.
бұрылу бұрышымен.
14 Сурет - 7-мысалдың сұлбасы
Айтылған параметрлер мынадай кинематикалық қатынастармен байланысты:
а) тегершік 1-ге және шкив 3-ке қатысты
белдік сырғанамайтын болғандықтан, тегершіктің ![]() және
шкивтің
және
шкивтің ![]() нүктелерінің
жылдамдықтары өзара тең
нүктелерінің
жылдамдықтары өзара тең
![]()
![]() ,
, ![]() , (2)
, (2)
![]() , (3)
, (3)
осыдан
 ,
(4)
,
(4)
б) кулиса 2-нің ілгерілемелі және түзу сызықты қозғалуы нәтижесінде
![]() , (5)
, (5)
![]() немесе
немесе
![]() , (6)
, (6)
в) дөңгелек 4-тің жазықтық бетінде абсолют қозғалысының үздіксіз шартынан алатынымыз
![]() , (7)
, (7)
г) дөңгелек 4 жазықтық бетінде сырғанамайтын болғандықтан
![]() ,
(8)
,
(8)
![]() немесе
немесе  . (9)
. (9)
Осылайша, жеті
параметрлер ![]() алты
(4)
алты
(4) ![]() (9)
кинематикалық қатынастармен байланысқан. Осыдан, жеті параметрлердің
ішінде бір параметрі тәуелсіз болады. Шкивтің
(9)
кинематикалық қатынастармен байланысқан. Осыдан, жеті параметрлердің
ішінде бір параметрі тәуелсіз болады. Шкивтің ![]() бұрылу бұрышын
негізгі деп қабылдап және
бұрылу бұрышын
негізгі деп қабылдап және ![]() арқылы қалғандарын
есептейміз
арқылы қалғандарын
есептейміз
 ,
(10)
,
(10)
![]() ,
(11)
,
(11)
![]() ,
(12)
,
(12)
 .
(13)
.
(13)
Машинаның қозғалысын анықтау үшін жүйенің кинетикалық энергиясының өзгеруі туралы теореманы дифференциалдық түрін пайдаланамыз
![]() .
(14)
.
(14)
Берілген маханикалық жүйенің кинетикалық энергиясы төмендегі өрнекпен анықталады
![]()
мұндағы:
![]() тегершік
1-дің
тегершік
1-дің
![]() ге қатысты
тегершіктің айналмалы қозғалысының кинетикалық
энергиясы;
ге қатысты
тегершіктің айналмалы қозғалысының кинетикалық
энергиясы;
![]() кулиса
2-нің ілгерілемелі қозғалыстағы кинетикалық
энергиясы;
кулиса
2-нің ілгерілемелі қозғалыстағы кинетикалық
энергиясы;
![]() шкив
3-тің
шкив
3-тің
![]() -ке қатысты
айналмалы қозғалысының кинетикалық энергиясы;
-ке қатысты
айналмалы қозғалысының кинетикалық энергиясы;
![]() дөңгелек
4-тің жазық параллель қозғалысының
кинетикалық энергиясы.
дөңгелек
4-тің жазық параллель қозғалысының
кинетикалық энергиясы.
![]() -ті
(9)-(12) формулаларымен ауыстырсақ, алатынымыз
-ті
(9)-(12) формулаларымен ауыстырсақ, алатынымыз
 ,
(15)
,
(15)
мұндағы
 .
.
Қозғаушы
момент
![]() және
пайдалы әсер моменті
және
пайдалы әсер моменті
![]() тың
жұмысын есепке ала отырып, элементар жұмыстардың
қосындысын есептейміз
тың
жұмысын есепке ала отырып, элементар жұмыстардың
қосындысын есептейміз
![]() (16)
(16)
(10)![]() (13)
формулаларынан элементар орын ауыстыру қатынастарын аламыз
(13)
формулаларынан элементар орын ауыстыру қатынастарын аламыз
 ,
(17)
,
(17)
 (18)
(18)
(17), (18)
қатынастарымен бірге
![]() -ті есепке ала
отырып, мынадай өрнек аламыз
-ті есепке ала
отырып, мынадай өрнек аламыз
 (19)
(19)
Кинетикалық энергияның дифференциалы
![]() .
(20)
.
(20)
(19), (20) теңдіктерін пайдалана отырып, (14)-ші теңдеуден машина қозғалысының дифференциалдық теңдеуін аламыз
 .
.
Бұл теңдеу сызықты емес, аналитикалық шешімін табу мүмкін емес, сондықтан Mathcad жүйесінде сандық шешімін іздейміз. Ол үшін алынған дифференциальдық теңдеуді төмендегі түрде жазамыз
 . (21)
. (21)
Алынған екінші текті дифференциальдық теңдеуді бірінші текті екі теңдеулер жүйесі түрінде жазамыз
 (22)
(22)
Јдебиеттер тізімі
1. Жолдасбеков Ө.А., Сағитов М.Н.. Теориялық механика. – Алматы: Ғылым, 2002.
2. Тойбаев С.Н. Теориялық механика. Оқу құралы. – Алматы: «Бастау», 2006.
3. Нұғыман А.М. Теориялық механика негіздері.– Семей: Шәкәрім атындағы СМУ, 2002.
4. Бутенин Н.В., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. Учебник: в 2-х т. – М.: Наука, 2002.
5. Мещерский И.В. Сборник задач по теоретической механике. Учеб. пособие. – СПб.: Изд-во «Лань», 2005.
6. Никитин Н.Н. Курс теоретической механики. Учебник. – М.: Высшая школа, 1990.
7. Тарг С.М. Краткий курс теоретической механики. Учебник. – М.: Наука, 2002.
8. Яблонский А.А. Курс теоретической механики. Учебник: в 2-х т. – М.: Высшая школа, 2002.
9. Сборник заданий для курсовых работ по теоретической механике. Учебное пособие./Под ред. А.А.Яблонского. – М.: Высшая школа, 1985.
2012ж. Жиынтық жоспары, реті. 244