Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра инженерной графики и прикладной механики
ПРИКЛАДНАЯ МЕХАНИКА.
КИНЕМАТИЧЕСКИЙ И ДИНАМИЧЕСКИЙ АНАЛИЗ ПЛОСКОГО ШАРНИРНО-РЫЧАЖНОГО МЕХАНИЗМА В СИСТЕМЕ АРМ WinMaсhine
Методические указания к выполнению лабораторной работы
для студентов всех форм обучения специальности 5В0717 – Теплоэнергетика
Алматы 2010
СОСТАВИТЕЛИ: А.Д.Динасылов, Р.К.Койлыбаева. Прикладная механика. Кинематический и динамический анализ плоского шарнирно-рычажного механизма в системе АРМ WinMaсhine. Методические указания к выполнению лабораторной работы для студентов всех форм обучения специальности 5В0717–Теплоэнергетика. – Алматы: АУЭС, 2010. - 20 с.
В лабораторной работе выполняется кинематический и динамический анализ плоского шарнирно-рычажного механизма с использованием программного модуля АРМ Dynamics, входящего в систему АРМ WinMaсhine. В результате выполнения работы и анализа результатов студенты закрепляют знания по темам «Кинематический анализ механизмов» и «Кинетостатический анализ механизмов», а также получают навыки выполнения расчетов в компьютерных системах. Работа выполняется за 2 академических часа.
Методические указания предназначены для студентов 2 курса специальности 5В0717 – Теплоэнергетика и могут быть полезными для студентов других специальностей, изучающих дисциплину «Прикладная механика».
Содержание
|
1 Цель работы и задание. Техническое и программное обеспечение |
4 |
|
2 Выполнение лабораторной работы |
5 |
|
2.1 Построение расчетной модели механизма |
5 |
|
2.2 Выполнение расчета и анализ полученных результатов |
15 |
|
Список литературы |
19 |
1 Цель работы и задание. Техническое и программное обеспечение
Целью данной лабораторной работы является отработка основных приемов работы по проведению кинематического и динамического анализа плоских шарнирно-рычажных механизмов в модуле АРМ Dynamics системы АРМ WinMachine, закрепление знаний по темам «Кинематический анализ механизмов» и «Кинетостатический анализ механизмов».
Работа выполняется в 2 этапа.
1 этап: в модуле АРМ Dynamics системы АРМ WinMachine создается расчетная модель плоского шарнирно-рычажного механизма, приведенного на рисунке 1.
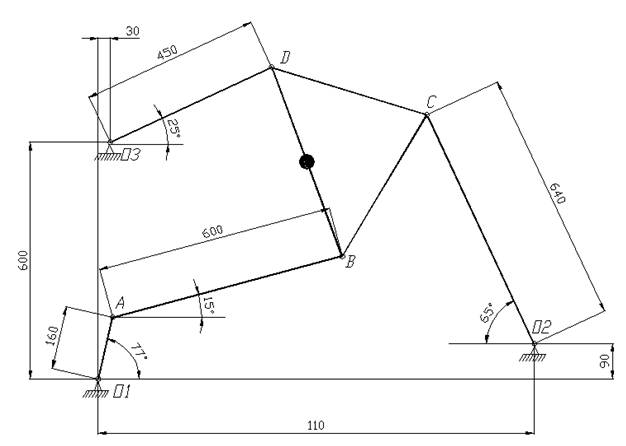
Рисунок 1
Механизм состоит из 5 подвижных звеньев (n=5), число кинематических пар p5=7, тогда число степеней свободы данного плоского механизма w=3n-2p5=1. Заданы длины звеньев O1A=160 мм, AB=600 мм, O2C=640 мм, O3D=450 мм. Сечения всех стержней – Труба 28х1.4 ГОСТ 10704-91, материал Сталь 45. В середине стержня BD расположена сосредоточенная масса 4 кг. К стержню O1A приложен постоянный вращающий момент 10Нм. Время движения – 1 с.
2 этап: проводится расчет механизма и анализ полученных результатов. Требуется получить и проанализировать графики следующих кинематических и динамических параметров:
а) угловая скорость звена O1A;
б) угол поворота звена O1A;
в) скорости узлов A, B, C, D;
г) силы реакции во всех узлах механизма.
Лабораторная работа выполняется на персональном компьютере с установленной в среде Windows XP системой АРМ WinMachine, имеющей в своем составе модуль АРМ Dynamics.
2 Выполнение лабораторной работы
Перед выполнением работы необходимо повторить теоретический материал и ознакомиться с описанием системы АРМ WinMachine и ее модуля АРМ Dynamics.
2.1 Построение расчетной модели механизма
Запустим программу расчета механизма через Пуск/Программы/АРМ WinMaсhine 2008 (v.9.5)/АРМ Dynamics, после чего откроется основное окно программы динамического анализа механизмов (см. рисунок 2).
В основном окне имеется 4 окна для видов: Вид
Спереди, Вид Сверху, Вид Слева и Произвольный вид (в
этом окне установлена прямоугольная изометрия, которую можно заменить на другой
вид с помощью кнопок поворота координатных осей ![]() на панели инструментов). Любое из этих окон
можно развернуть, свернуть, поменять в них масштаб вида. Если на мыши имеется
ролик для прокрутки, его можно использовать для
изменения масштаба вида. При прокрутке вверх изображение будет увеличиваться,
вниз – уменьшаться (зуммирование). Удерживая нажатой среднюю кнопку мыши
(ролик), можно перемещать модель относительно видового окна
(панорамирование).
на панели инструментов). Любое из этих окон
можно развернуть, свернуть, поменять в них масштаб вида. Если на мыши имеется
ролик для прокрутки, его можно использовать для
изменения масштаба вида. При прокрутке вверх изображение будет увеличиваться,
вниз – уменьшаться (зуммирование). Удерживая нажатой среднюю кнопку мыши
(ролик), можно перемещать модель относительно видового окна
(панорамирование).
Рассматриваемый механизм расположен в вертикальной плоскости, нам удобно выполнить построение модели механизма в окне Вид Спереди.
Построение расчетной модели механизма в модуле АРМ Dynamics включает в себя несколько шагов:
а) установка единиц измерения;
б) задание узлов и стержней механизма;
в) задание шарниров в узлах;
г) задание сосредоточенных масс;
д) задание сечений и материала стержней;
е) установка опор;
ж) задание внешних нагрузок;
з) установка датчиков кинематических и динамических параметров;
и) задание мониторов для отображения информации с датчиков.
При этом после выполнения а) и б) пункты в)-ж) могут выполняться в любой последовательности, пункт и) выполняется только после з).
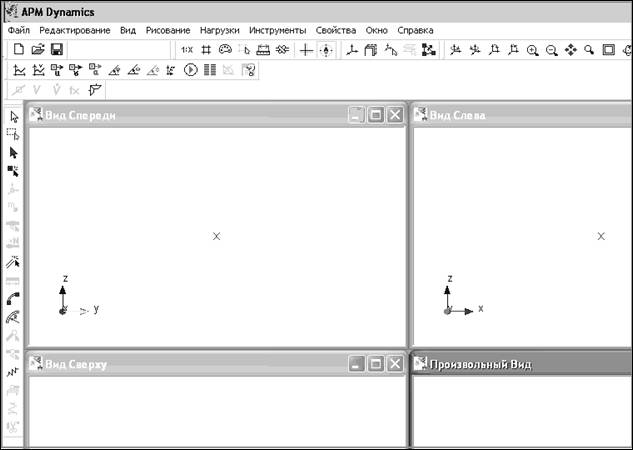
Рисунок 2
Ниже приведены инструкции для пошагового построения расчетной модели механизма:
а) установка единиц измерения. Для установки единиц
измерения нажмем
кнопку Единицы
измерения ![]() на панели
инструментов или выберем команду меню Вид/Единицы измерения. В появившемся диалоговом окне Установки на вкладке Единицы в полях ввода введем единицы измерения,
как показано на рисунке 3. При этом будут установлены следующие
единицы измерения: длина - мм, угол – градус, масса – кг, сила – Н, момент –
Нм и т.д.;
на панели
инструментов или выберем команду меню Вид/Единицы измерения. В появившемся диалоговом окне Установки на вкладке Единицы в полях ввода введем единицы измерения,
как показано на рисунке 3. При этом будут установлены следующие
единицы измерения: длина - мм, угол – градус, масса – кг, сила – Н, момент –
Нм и т.д.;
б) задание узлов и стержней механизма. Построение
начнем с узла O1, поместив его для удобства в начало
координат. Нажмем кнопку Новый узел ![]() на панели
инструментов (меню Рисование/Узел/По координатам), щелкнем левой
кнопкой мыши в произвольной точке окна Вид Спереди и затем нажмем правую
кнопку мыши. В появившемся диалоговом окне Узел введем координаты узла,
как показано на рисунке 4, и нажмем кнопку Ok. При этом точка будет
изображена во всех 4-ех окнах (см. рисунок 5). Для удобства развернем окно Вид
Спереди на весь экран и продолжим построение. Построим узел O2 (0,1100,90),
щелкнув еще раз левой кнопкой мыши в произвольной точке, затем нажимаем правую
кнопку мыши и вводим координаты узла (см. рисунок 6). Если второй узел не
виден на экране, используем зуммирование и панорамирование с помощью ролика
мыши. Аналогично построим узел O3 (0,30,600).
на панели
инструментов (меню Рисование/Узел/По координатам), щелкнем левой
кнопкой мыши в произвольной точке окна Вид Спереди и затем нажмем правую
кнопку мыши. В появившемся диалоговом окне Узел введем координаты узла,
как показано на рисунке 4, и нажмем кнопку Ok. При этом точка будет
изображена во всех 4-ех окнах (см. рисунок 5). Для удобства развернем окно Вид
Спереди на весь экран и продолжим построение. Построим узел O2 (0,1100,90),
щелкнув еще раз левой кнопкой мыши в произвольной точке, затем нажимаем правую
кнопку мыши и вводим координаты узла (см. рисунок 6). Если второй узел не
виден на экране, используем зуммирование и панорамирование с помощью ролика
мыши. Аналогично построим узел O3 (0,30,600).
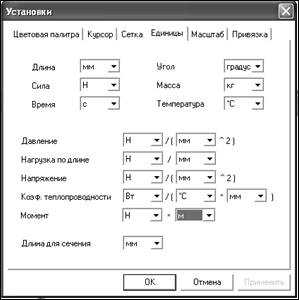
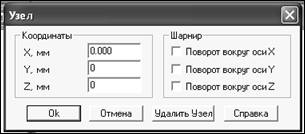
Рисунок 3 Рисунок 4
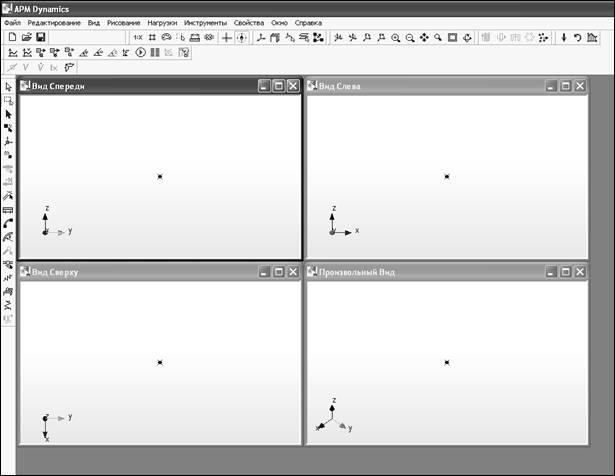
Рисунок 5
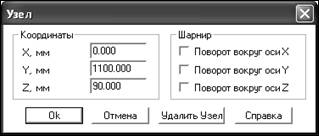
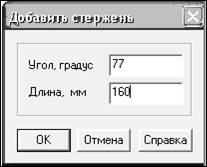
Рисунок 6 Рисунок 7
Если какой-то из узлов построен неверно, его можно
удалить или отредактировать. Для удаления необходимо выбрать узел, нажав кнопку Выбрать
![]() панели инструментов
(меню Редактирование/Выбрать элемент) и щелкнув по узлу, при этом узел
выделится другим цветом. Затем узел удаляется с помощью кнопки Удалить
выбранные элементы
панели инструментов
(меню Редактирование/Выбрать элемент) и щелкнув по узлу, при этом узел
выделится другим цветом. Затем узел удаляется с помощью кнопки Удалить
выбранные элементы ![]() на
панели инструментов или кнопкой Delete на клавиатуре. Для
редактирования узла надо использовать команду, с помощью которой выполнялось
построение узла (в данном случае кнопку Новый узел
на
панели инструментов или кнопкой Delete на клавиатуре. Для
редактирования узла надо использовать команду, с помощью которой выполнялось
построение узла (в данном случае кнопку Новый узел ![]() на панели инструментов или меню Рисование/Узел/По координатам).
Затем, подведя курсор к узлу, надо нажать правую кнопку мыши и в появившемся
диалоговом окне Узел исправить координаты узла.
на панели инструментов или меню Рисование/Узел/По координатам).
Затем, подведя курсор к узлу, надо нажать правую кнопку мыши и в появившемся
диалоговом окне Узел исправить координаты узла.
Построим стержни O1A, O2C,
O3D и AB,
используя
кнопку Стержень по длине и углу ![]() на панели инструментов (меню Рисование/Стержень/По
длине и углу). Щелкнем левой кнопкой мыши на построенном узле и переместим
курсор так, чтобы стержень потянулся за курсором. Нажмем правую клавишу мыши
для ввода параметров стержня, в появившемся диалоговом окне Добавить
стержень зададим угол наклона и длину стержня, как показано на рисунке 7. При
построении необходимо учитывать, что угол наклона отсчитывается от
горизонтали против хода часовой стрелки. Результат построения стержней O1A,
O2C, O3D и
AB
представлен на рисунке 8. Если какой-то
из стержней построен неверно, его можно удалить, как описано выше для узла. В
дальнейшем для установки датчика угла поворота стержня O1A нам
понадобится также дополнительный неподвижный горизонтально расположенный
стержень. Построим этот стержень из узла O1, задав угол
наклона 0 и произвольную длину, например, 150.
на панели инструментов (меню Рисование/Стержень/По
длине и углу). Щелкнем левой кнопкой мыши на построенном узле и переместим
курсор так, чтобы стержень потянулся за курсором. Нажмем правую клавишу мыши
для ввода параметров стержня, в появившемся диалоговом окне Добавить
стержень зададим угол наклона и длину стержня, как показано на рисунке 7. При
построении необходимо учитывать, что угол наклона отсчитывается от
горизонтали против хода часовой стрелки. Результат построения стержней O1A,
O2C, O3D и
AB
представлен на рисунке 8. Если какой-то
из стержней построен неверно, его можно удалить, как описано выше для узла. В
дальнейшем для установки датчика угла поворота стержня O1A нам
понадобится также дополнительный неподвижный горизонтально расположенный
стержень. Построим этот стержень из узла O1, задав угол
наклона 0 и произвольную длину, например, 150.
Остальные стержни строим по узлам, используя кнопку
Новый
стержень ![]() панели инструментов (или меню Рисование/Стержень/По
координатам). Поскольку режим объектных привязок установлен автоматически,
используем для построения ранее построенные узлы. Для указания узла подводим
курсор к соответствующему узлу и щелкаем левой кнопкой мыши. Результат
построения всех стержней представлен на рисунке 9;
панели инструментов (или меню Рисование/Стержень/По
координатам). Поскольку режим объектных привязок установлен автоматически,
используем для построения ранее построенные узлы. Для указания узла подводим
курсор к соответствующему узлу и щелкаем левой кнопкой мыши. Результат
построения всех стержней представлен на рисунке 9;
в) задание шарниров в узлах. Поскольку шарниры
имеются во всех узлах, используем кнопку Шарнир всем узлам ![]() на панели инструментов (меню Рисование/Шарнир/В
узле/Создать всем).
Поскольку
в окне Вид спереди ось X глобальной системы координат направлена на
пользователя, в появившемся диалоговом окне Шарнир в узле отметим Поворот
относительно оси X и нажмем кнопку Ok (см. рисунок 10). Шарниры
будут автоматически созданы во всех выделенных узлах, при этом они изобразятся
кружочками;
на панели инструментов (меню Рисование/Шарнир/В
узле/Создать всем).
Поскольку
в окне Вид спереди ось X глобальной системы координат направлена на
пользователя, в появившемся диалоговом окне Шарнир в узле отметим Поворот
относительно оси X и нажмем кнопку Ok (см. рисунок 10). Шарниры
будут автоматически созданы во всех выделенных узлах, при этом они изобразятся
кружочками;
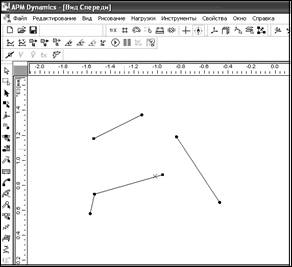
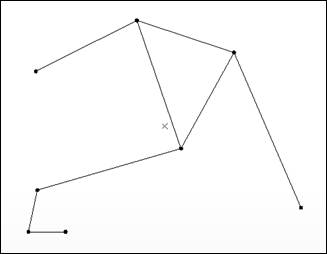
Рисунок 8 Рисунок 9

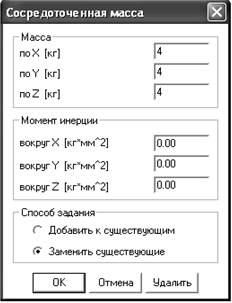
Рисунок 10 Рисунок 11
г) задание сосредоточенных масс. Сосредоточенная
масса 4 кг расположена в середине стержня
BD. Так
как в данной программе сосредоточенную массу можно задать только в узле, сначала
создадим дополнительный узел в середине стержня. Нажмем кнопку
Разбить стержень ![]() на панели инструментов (меню Редактирование/Стержень/Разбить
стержень). Далее щелкнем левой кнопкой мыши по стержню
BD
и в появившемся
диалоговом окне Разбить стержень введем число стержней 2 и нажмем
кнопку Ok. Чтобы поместить сосредоточенную массу в созданном узле, нажмем
кнопку Масса в узле
на панели инструментов (меню Редактирование/Стержень/Разбить
стержень). Далее щелкнем левой кнопкой мыши по стержню
BD
и в появившемся
диалоговом окне Разбить стержень введем число стержней 2 и нажмем
кнопку Ok. Чтобы поместить сосредоточенную массу в созданном узле, нажмем
кнопку Масса в узле ![]() (меню Рисование/Узел/Масса) и щелкнем
по созданному узлу. В появившемся диалоговом окне Сосредоточенная масса
введем 4 кг в направлениях X, Y и Z и нажмем кнопку Ok
(см.рисунок 11). После этого модель механизма выглядит так, как показано на
рисунке 12;
(меню Рисование/Узел/Масса) и щелкнем
по созданному узлу. В появившемся диалоговом окне Сосредоточенная масса
введем 4 кг в направлениях X, Y и Z и нажмем кнопку Ok
(см.рисунок 11). После этого модель механизма выглядит так, как показано на
рисунке 12;
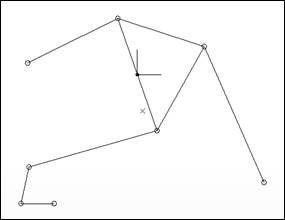
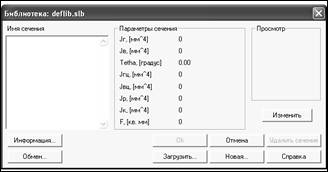
Рисунок 12 Рисунок 13
д) задание сечений и материала стержней. Для задания сечения Труба 28x1.4 мм ГОСТ 10704-91 можно использовать стандартные библиотеки сечений, поставляемые с системой APM WinMachine. Нестандартное сечение должно быть заранее создано и помещено в одну из библиотек сечений. Зададим сечение всем стержням, для этого используем команду меню Свойства/Сечение всей Конструкции, после этого появится диалоговое окно Библиотека: deflib.slb (см. рисунок 13). Для загрузки требуемой библиотеки нажмем кнопку Загрузить и укажем путь к этой библиотеке. Стандартные библиотеки находятся в той же самой папке, где установлена система APM WinMachine. Загрузим библиотеку Трубы электросварные прямошовные по ГОСТ 10704-91, выберем сечение Труба 28x1.4 ГОСТ 10704-91 и нажмем Ok (см. рисунок 14). После этого система предложит подтвердить задание всем стержням выбранного сечения.
Задание материала выполняется с помощью меню Свойства/Материалы, после чего откроется диалоговое окно Материалы (см. рисунок 15). Кнопка Изменить… в этом окне позволяет изменить механические свойства уже созданного материала. После ее нажатия на экран выводится диалоговое окно Материал (см. рисунок 16). Кнопка DB… в этом окне вызывает окно для выбора материала из базы данных. Выйдем из диалогового окна Материал, не меняя установленные по умолчанию параметры материала, и в окне Материалы нажмем кнопку Задать всем и затем Ok;

Рисунок 14
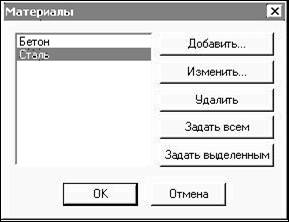
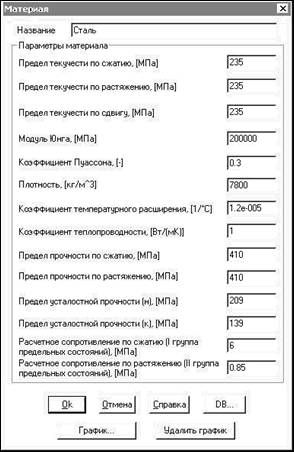
Рисунок 15 Рисунок 16
е) установка опор. Для установки опор используем меню Рисование/Опора
или кнопку Опора ![]() на панели инструментов. Щелкнем левой кнопкой
мыши в месте установки опоры и в появившемся диалоговом окне Установка опоры
для шарнирно-неподвижной опоры устанавливаем флажки, как показано на рисунке 17,
или указываем тип опоры с помощью кнопки
на панели инструментов. Щелкнем левой кнопкой
мыши в месте установки опоры и в появившемся диалоговом окне Установка опоры
для шарнирно-неподвижной опоры устанавливаем флажки, как показано на рисунке 17,
или указываем тип опоры с помощью кнопки ![]() . Таким образом
установим шарнирно-неподвижные опоры в узлах O1, O2,
O3. Также установим жесткую опору на конце дополнительно
введенного горизонтального стержня, для этого в окне Установка опоры
установим флажки во всех полях или укажем тип опоры с помощью кнопки
. Таким образом
установим шарнирно-неподвижные опоры в узлах O1, O2,
O3. Также установим жесткую опору на конце дополнительно
введенного горизонтального стержня, для этого в окне Установка опоры
установим флажки во всех полях или укажем тип опоры с помощью кнопки ![]() .
Если какая-то из опор установлена неверно, ее можно удалить или
отредактировать, для этого надо нажать кнопку Опора и, подведя к опоре,
щелкнуть правой кнопкой мыши, после чего в появившемся диалоговом окне Установка
опоры для удаления опоры надо нажать кнопку Удалить, а для ее
редактирования надо изменить установку флажков и нажать кнопку Заменить.
После установки опор расчетная схема механизма будет выглядеть так, как показано
на рисунке 18;
.
Если какая-то из опор установлена неверно, ее можно удалить или
отредактировать, для этого надо нажать кнопку Опора и, подведя к опоре,
щелкнуть правой кнопкой мыши, после чего в появившемся диалоговом окне Установка
опоры для удаления опоры надо нажать кнопку Удалить, а для ее
редактирования надо изменить установку флажков и нажать кнопку Заменить.
После установки опор расчетная схема механизма будет выглядеть так, как показано
на рисунке 18;

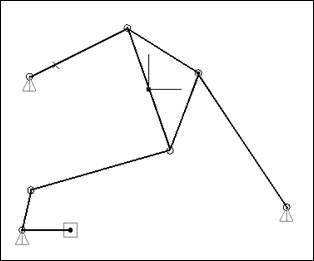
Рисунок 17 Рисунок 18
ж) задание внешних нагрузок. К стержню О1А приложен постоянный вращающий момент 10 Нм. Для его задания используем меню Нагрузка/Момент к узлу и щелкаем левой кнопкой мыши по узлу О1. В появившемся диалоговом окне Момент заполним поля ввода, как показано на рисунке 19. После этого расчетная схема механизма будет выглядеть так, как показано на рисунке 20;
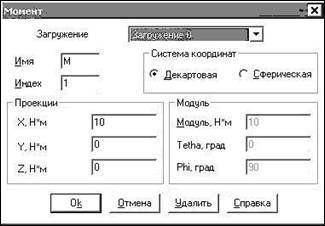
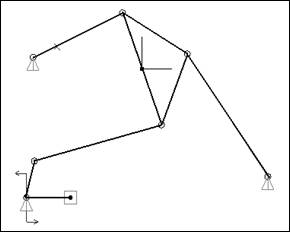
Рисунок 19 Рисунок 20
з) установка датчиков кинематических и динамических параметров. Основные команды для работы с динамической моделью расположены на панели инструментов Датчики и мониторы (см. рисунок 21).
![]()
Рисунок 21
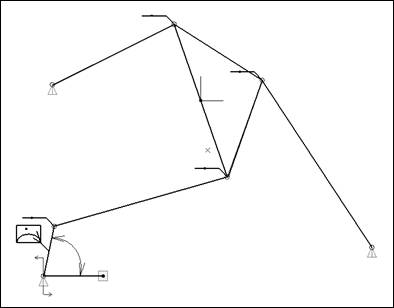
Рисунок 22
Для создания датчика угла поворота стержня О1А
надо нажать кнопку выбора ![]() и, удерживая нажатой клавишу Shift, выделить
три узла угла в следующей последовательности: А, О1,
узел с жесткой опорой, затем нажимаем кнопку
и, удерживая нажатой клавишу Shift, выделить
три узла угла в следующей последовательности: А, О1,
узел с жесткой опорой, затем нажимаем кнопку ![]() . Для задания датчика угловой скорости стержня
О1А выберем его и нажмем кнопку
. Для задания датчика угловой скорости стержня
О1А выберем его и нажмем кнопку![]() . В появившемся диалоговом окне Угловая
скорость элемента укажем Относительно оси Х и нажмем кнопку Ok.
Зададим также датчики скоростей точек А,
B,
C,
D, используя кнопку
. В появившемся диалоговом окне Угловая
скорость элемента укажем Относительно оси Х и нажмем кнопку Ok.
Зададим также датчики скоростей точек А,
B,
C,
D, используя кнопку ![]() . При этом в диалоговом окне Скорость узла
указываем Абсолютное значение и нажимаем Ok. После задания
датчиков кинематических параметров расчетная схема механизма будет выглядеть
так, как показано на рисунке 22.
. При этом в диалоговом окне Скорость узла
указываем Абсолютное значение и нажимаем Ok. После задания
датчиков кинематических параметров расчетная схема механизма будет выглядеть
так, как показано на рисунке 22.
Зададим датчики для динамических параметров, а именно:
для усилий во всех узлах механизма. Для этого выделяем последовательно стержни O1A,
O2C, O3D, AB
и нажимаем кнопку ![]() . В появившемся диалоговом окне Силовой
фактор галочкой отмечаем поля, как показано на рисунке 23. При этом для
стержня AB не ставим галочку напротив Узел 0, так как
начальный узел для него является конечным узлом для O1A. После
этого расчетная схема механизма будет выглядеть так, как показано на рисунке 24;
. В появившемся диалоговом окне Силовой
фактор галочкой отмечаем поля, как показано на рисунке 23. При этом для
стержня AB не ставим галочку напротив Узел 0, так как
начальный узел для него является конечным узлом для O1A. После
этого расчетная схема механизма будет выглядеть так, как показано на рисунке 24;
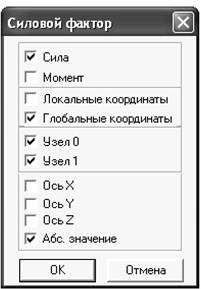
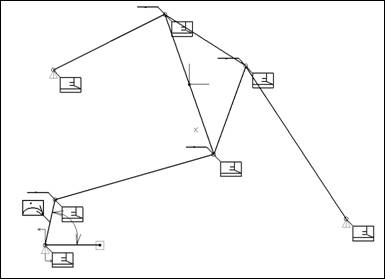
Рисунок 23 Рисунок 24
и) задание мониторов для отображения информации с
датчиков. Установленные датчики для отображения информации с них должны
быть подключены к монитору. Для этого используем кнопку ![]() задания мониторов движения
относительно времени. В появившемся диалоговом окне (см. рисунок 25)
представлен список всех установленных датчиков.
задания мониторов движения
относительно времени. В появившемся диалоговом окне (см. рисунок 25)
представлен список всех установленных датчиков.
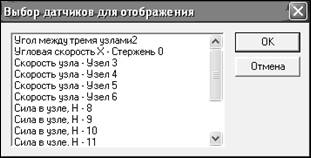

Рисунок 25 Рисунок 26
Для создания монитора выберем в списке датчик и нажмем
кнопку ОК. Перед созданием монитора система предложит ввести имя
монитора (см. рисунок 26). По умолчанию можно оставить имя датчика, но лучше
дать имя монитору в соответствии с расчетной схемой механизма, например, имя Скорость
узла А, для этого надо точно знать последовательность создания датчиков. Подключение
датчика позволяет получить график параметра датчика в зависимости от времени
движения. Создадим мониторы для всех созданных ранее датчиков. Если создание
датчиков выполнялось в той последовательности, как было указано выше, имена
мониторов будут следующими: Угол поворота ОА, Угловая скорость ОА,
Скорость узла А, Скорость узла В, Скорость узла С, Скорость
узла D, Сила в узле О1, Сила в узле А, Сила
в узле О2, Сила в узле С, Сила в узле О3,
Сила в узле D,
Сила в узле В. Список созданных датчиков и мониторов можно
просмотреть, нажав кнопку ![]() на панели инструментов Датчики и мониторы.
В появившемся диалоговом окне (см. рисунок 27) слева отображаются установленные
датчики, а справа – мониторы. Причем если для одного и того же датчика создано
несколько мониторов, то все они будут присутствовать в списке. Анимационный
сенсор и монитор присутствуют в списке независимо от установленных датчиков и
мониторов и используются для отображения анимации механизма.
на панели инструментов Датчики и мониторы.
В появившемся диалоговом окне (см. рисунок 27) слева отображаются установленные
датчики, а справа – мониторы. Причем если для одного и того же датчика создано
несколько мониторов, то все они будут присутствовать в списке. Анимационный
сенсор и монитор присутствуют в списке независимо от установленных датчиков и
мониторов и используются для отображения анимации механизма.
Для удаления ненужного монитора надо выбрать мышью
монитор и нажать кнопку Delete. При этом будет удален и соответствующий
монитору датчик. Анимационный сенсор и монитор не могут быть удалены. Для
выхода из режима просмотра списка надо снова нажать кнопку ![]() .
.

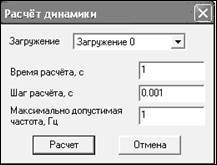
Рисунок 27 Рисунок 28
2.2 Выполнение расчета и анализ полученных результатов
Для выполнения расчета нажмем кнопку ![]() панели инструментов Датчики и
мониторы и введем параметры расчета, как показано на рисунке 28. После
выполнения расчета результаты представлены в виде анимации движения механизма,
а также в виде созданных ранее мониторов датчиков. Для просмотра результатов
расчета нажимаем кнопку
панели инструментов Датчики и
мониторы и введем параметры расчета, как показано на рисунке 28. После
выполнения расчета результаты представлены в виде анимации движения механизма,
а также в виде созданных ранее мониторов датчиков. Для просмотра результатов
расчета нажимаем кнопку ![]() панели
инструментов Датчики и мониторы. После этого на экране последовательно
будут представлены графики зависимости от времени кинематических и динамических
параметров (см. рисунок 29). При перемещении курсора мыши в верхней части будут
динамически отображаться координаты, при этом абсцисса означает время, ордината
- соответствующий параметр (на рисунке 29 ордината означает угловую скорость
звена ОА в градус/с).
панели
инструментов Датчики и мониторы. После этого на экране последовательно
будут представлены графики зависимости от времени кинематических и динамических
параметров (см. рисунок 29). При перемещении курсора мыши в верхней части будут
динамически отображаться координаты, при этом абсцисса означает время, ордината
- соответствующий параметр (на рисунке 29 ордината означает угловую скорость
звена ОА в градус/с).
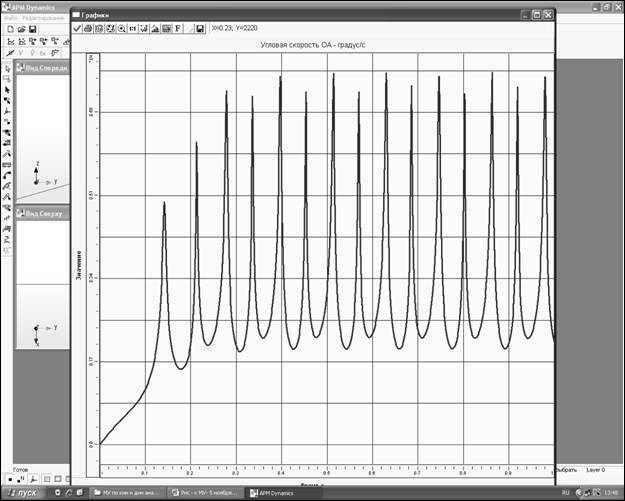
Рисунок 29
После просмотра графиков отобразится анимационный монитор, который создается вне зависимости от установки датчиков. Он позволяет контролировать адекватность построения модели механизма: обеспечена ли подвижность механизма; везде ли, где необходимо, установлены шарниры и т.д. Окно анимации отображает движение механизма в произвольном виде APM Dynamics и содержит стандартные кнопки управления анимацией, а также бегунок прокрутки. Скорость анимации можно регулировать при помощи регулятора скорости, расположенного в правом нижнем углу. Дя более медленного движения механизма установите скорость анимации 1/5х, нажимая нижнюю точку в правом нижнем углу (см. рисунок 30), и запустите просмотр. После окончания просмотра механизм будет изображен в конечный момент времени (см. рисунок 31).
Просмотрите результаты расчета и проведите их анализ:
1) по графику угловой скорости звена О1А определите момент времени, когда движение станет установившимся, т.е. будет иметь периодический характер;
2) по графикам кинематических и динамических параметров установите их максимальные значения и заполните таблицу 1;
3) по графикам кинематических параметров найдите скорости узлов механизма для заданного на рисунке 1 положения механизма;
4) увеличьте сосредоточенную массу в 2 раза и просмотрите, как это повлиет на кинематические и динамические параметры.
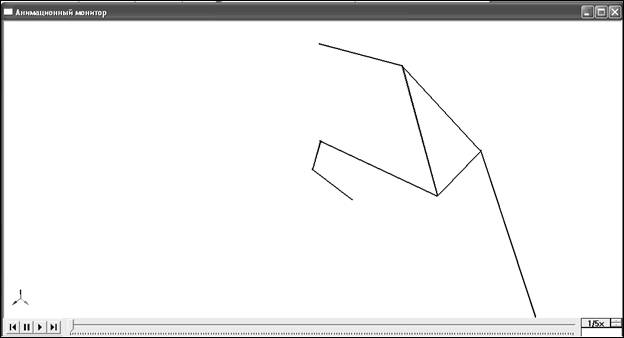
Рисунок 30
Рисунок 31
Т а б л и ц а 1 – Максимальные значения кинематических и динамических параметров
|
№ пп |
Наименование параметра |
Максимальное значение |
Момент времени, сек |
|
1 |
Угловая скорость звена О1А, градус/с |
|
|
|
2 |
Скорость точки А, м/с |
|
|
|
3 |
Скорость точки В, м/с |
|
|
|
4 |
Скорость точки С, м/с |
|
|
|
5 |
Скорость точки D, м/с |
|
|
|
6 |
Сила в узле О1, Н |
|
|
|
7 |
Сила в узле О2, Н |
|
|
|
8 |
Сила в узле О3, Н |
|
|
|
9 |
Сила в узле А, Н |
|
|
|
10 |
Сила в узле В, Н |
|
|
|
11 |
Сила в узле С, Н |
|
|
|
12 |
Сила в узле D, Н |
|
|
Анализ результатов расчета показывает, что движение устанавливается через 0,4 секунды от начала движения, далее движение носит периодический характер. За время расчета, равное 1 секунде, выполняется около 3,5 оборотов, при этом первый оборот выполняется за 0,4 с, а последующие - за 0,25 с. В установившемся режиме угловая скорость стержня О1А меняется от 710 градус/с (12,4 рад/с) до 6660 градус/с (116,2 рад/с). Скорость узла А меняется от 2 м/с до 18,6 м/с, узла В – от 5,3 м/с до 5,56 м/с, узла С – от 1,8 м/с до 4,95 м/с, узла D – от 0 до 2,37 м/с. Наибольшее усилие возникает в узле С и равно 705 Н.
В случае сосредоточенной массы, равной 8 кг, увеличивается время установления движения, при этом за 1 секунду совершается около 2,5 оборотов, первый оборот выполняется за 0,54 с, а последующие - за 0,35 с. Максимальные значения всех кинематических и динамических параметров уменьшаются, например, скорость узла А меняется от 1,3 м/с до 17,5 м/с, усилие в узле С не превышает 612 Н.
Список литературы
1. Иосилевич Г.Б., Строганов Г.Б., Маслов Г.М. Прикладная механика. - М.: Высш.шк.,1989.
2. Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1988.
3. Шелофаст В.В. Основы проектирования машин. – М.: Изд-во АПМ. 2004. – 472 с.
4. Шелофаст В.В., Чугунова Т.Б. Основы проектирования машин. Примеры решения задач. – М.: Изд-во АПМ. 2004. – 240 с.