Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра инженерной графики и прикладной механики
ПРИКЛАДНАЯ МЕХАНИКА
Методические указания и задания к выполнению расчетно-графических работ
для студентов всех форм обучения специальностей
5B070200 – Автоматизация и управление,
5B071700 – Теплоэнергетика
Алматы 2012
СОСТАВИТЕЛИ: Динасылов А.Д., Тойбаев С.Н., Иванов К.С. Прикладная механика. Методические указания и задания к выполнению расчетно-графических работ для студентов всех форм обучения специальностей 5B070200 – Автоматизация и управление, B071700 – Теплоэнергетика. - Алматы: АУЭС, 2011. – 48 с.
Дисциплина «Прикладная механика» для студентов высших учебных заведений, обучающихся по специальностям бакалавриата 5B070200 – Автоматизация и управление, и 5B071700 – Теплоэнергетика, является дисциплиной по выбору. В данной методической разработке приводятся задания к расчетно-графическим работам, методические указания к их выполнению, примеры выполнения работ. Дан список рекомендуемой литературы.
Ил. 30, табл. 16, библиогр. – 10 назв.
Рецензент: канд. техн. наук, ст. препод. А.Т.Нурмагамбетова
Печатается по плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2011 г.
© НАО «Алматинский университет энергетики и связи», 2012 г.
Содержание
|
1 Общие требования и указания к выполнению расчетно-графических работ |
4 |
|
|
2 Задачи, входящие в расчетно-графические работы, указания к их выполнению и примеры |
5 |
|
|
|
2.1 3адача 1. Равновесие пространственной системы сил |
5 |
|
|
2.2 3адача 2. Задача на применение теоремы об изменении кинетической энергии системы |
8 |
|
|
2.3 3адача 3. Кинематический анализ механизма |
13 |
|
|
2.4 3адача 4. Кинетостатический анализ механизма |
25 |
|
|
2.5 Задача 5. Расчет на прочность при растяжении-сжатии |
30 |
|
|
2.6 3адача 6. Расчеты на прочность и жесткость при кручении |
33 |
|
|
2.7 Проектный расчет на прочность при изгибе |
44 |
|
Приложение А. Схемы механизмов и исходные данные к задачам 3 и 4 |
42 |
|
|
Список литературы |
47 |
|
1 Общие требования и указания к выполнению
расчетно-графических работ
Согласно учебным планам студенты, обучающиеся по специальности «Автоматизация и управление», выполняют 3 расчетно-графические работы (РГР), а обучающиеся по специальности «Теплоэнергетика» выполняют 4 РГР по дисциплине «Прикладная механика» в соответствии с числом кредитов, отводимых на изучение дисциплины. Тематика РГР относится к разделам «Теоретическая механика», «Теория механизмов» и «Сопротивление материалов» курса.
Условия задач приведены в десяти схемах и десяти вариантах. Студент должен взять для выполнения номер схемы, который показан римскими цифрами на соответствующем рисунке, по последней цифре шифра зачетной книжки, а вариант с цифровыми данными из соответствующей таблицы – по предпоследней цифре шифра. Так, студент, зачетная книжка которого имеет шифр 96472, должен для каждой задачи выбрать схему II и цифровые данные, соответствующие варианту 7. Если последняя цифра шифра нуль, то следует взять схему X, а если предпоследняя цифра нуль, то данные из таблицы принимаются по варианту 10.
При окончательной сдаче РГР каждая работа должна быть сброшюрована отдельно. Выполненная работа состоит из текстовой и графической частей. Оформление работы должно выполняться четким почерком на листах белой бумаги формата А4. Объем графической части в задачах 3 и 4 - два листа формата А3 (по одному на задачу). В этих задачах каждое графическое построение или группа однотипных построений должны иметь поясняющую надпись и масштабный коэффициент (с размерностью), который следует выбирать так, чтобы построения были достаточно крупными, и листы не имели пустых мест.
Каждая РГР должна содержать титульный лист, и по каждой задаче, входящей в РГР, должны быть приведены задания, выполненные расчеты, графические построения, выводы. Работа должна быть оформлена согласно принятым нормам (СТП 768-01-07-97); на листах текст должен быть только с одной стороны, в конце каждой РГР должен быть приведен список использованной литературы. Как графическая, так и расчетная часть работы, а также текстовый материал могут быть выполнены с помощью компьютерных средств.
Для студентов специальности «Автоматизация и управление» РГР №1 включает задачи 1, 2, РГР№2 – задачу 3, РГР№3 – задачи 5, 6, 7. Студенты специальности «Теплоэнергетика», кроме перечисленных выше работ, выполняют еще РГР №4, включающую в себя задачу 4.
Прежде чем приступать к решению задачи, студент должен ознакомиться с соответствующим теме задачи теоретическим материалом по лекциям, учебникам и учебным пособиям, а также с указаниями к решению задачи и с примером выполнения работы, приведенными в данной методической разработке.
Выполненные РГР должны быть защищены студентов. Для защиты надо решить подобную задачу или ответить на 4-5 вопросов по теме.
2 Задачи, входящие в расчетно-графические работы, указания к их выполнению и примеры
2.1 Задача 1. Равновесие пространственной системы сил
Однородная прямоугольная плита весом P
= 6 кН со сторонами AB = 3l, BC = 2l закреплена
в точке A сферическим шарниром, а в точке B цилиндрическим
шарниром (подшипником) и удерживается в равновесии невесомым стержнем CC'
(см. рисунок 1). На плиту действует пара сил с моментом М = 6 кН·м,
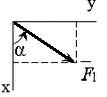
лежащая в плоскости плиты, и две силы. Значения этих сил, их направления и
точки приложения указаны в таблице 1; при этом силы
![]() и
и
![]() лежат
в плоскостях, параллельных плоскости xy, сила
лежат
в плоскостях, параллельных плоскости xy, сила
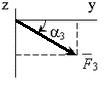
![]() - в плоскости, параллельной плоскости xz, сила
- в плоскости, параллельной плоскости xz, сила
![]() - в плоскости, параллельной плоскости yz.
Точки приложения сил (D, E, H) находятся в серединах сторон плиты.
- в плоскости, параллельной плоскости yz.
Точки приложения сил (D, E, H) находятся в серединах сторон плиты.
Т а б л и ц а 1
|
Сила |
|
|
|
|
||||
|
|
F1=14 кH |
F2=16 кH |
F3=8 кH |
F4=10 кH |
||||
|
|
||||||||
|
Номер условия |
Точка прилож. |
|
Точка прилож. |
|
Точка прилож. |
|
Точка прилож. |
|
|
1 |
D |
60 |
– |
– |
E |
0 |
– |
– |
|
2 |
H |
90 |
D |
30 |
– |
– |
– |
– |
|
3 |
– |
– |
E |
60 |
– |
– |
D |
90 |
|
4 |
– |
– |
– |
– |
D |
60 |
H |
0 |
|
5 |
E |
0 |
– |
– |
H |
60 |
– |
– |
|
6 |
– |
– |
D |
60 |
H |
0 |
– |
– |
|
7 |
– |
– |
H |
30 |
– |
– |
D |
0 |
|
8 |
E |
30 |
H |
90 |
– |
– |
– |
– |
|
9 |
– |
– |
– |
– |
D |
0 |
E |
60 |
|
10 |
– |
– |
E |
90 |
D |
30 |
– |
– |



Требуется определить реакции связей в точках А, B и C.
При окончательных подсчетах принять l = 1,0 м.
Указания.
Эта задача является задачей на равновесие тела под действием пространственной
системы сил. При ее решении нужно учесть, что реакция сферического шарнира (или
подпятника) имеет три составляющие, а реакция цилиндрического шарнира (подшипника)
– две составляющие, лежащие в плоскости, перпендикулярной оси шарнира. При вычислении
моментов силы ![]() зачастую
удобно разложить ее на составляющие
зачастую
удобно разложить ее на составляющие ![]() и
и ![]() , параллельные координатным осям; тогда,
по теореме Вариньона,
, параллельные координатным осям; тогда,
по теореме Вариньона, ![]() и т.д.
и т.д.
 Пример 1
- Вертикальная плита весом P (см. рисунок
2) закреплена сферическим шарниром в точке А, цилиндрическим подшипником
в точке В и невесомым стержнем DD´,
лежащим в плоскости, параллельной плоскости yz.
На плиту действуют сила
Пример 1
- Вертикальная плита весом P (см. рисунок
2) закреплена сферическим шарниром в точке А, цилиндрическим подшипником
в точке В и невесомым стержнем DD´,
лежащим в плоскости, параллельной плоскости yz.
На плиту действуют сила ![]() (в плоскости xz),
сила
(в плоскости xz),
сила ![]() (параллельная
оси y) и пара сил с моментом М ( в плоскости плиты).
(параллельная
оси y) и пара сил с моментом М ( в плоскости плиты).
Дано: P=5 кH, M=3 кH·м, F1=6 кH, F2=7,5 кH, α= 300, AB=1 м, ВС=2 м, СЕ=0,5АВ, ВК=0,5ВС.
Определить: реакции опор А, В и стержня DD´.
Решение:
а) рассмотрим
равновесие плиты. На плиту действуют заданные силы ![]()
![]() ,
, ![]() и пара сил с моментом М, а также реакции
связей. Реакцию сферического шарнира разложим на три составляющие
и пара сил с моментом М, а также реакции
связей. Реакцию сферического шарнира разложим на три составляющие ![]() ,
,![]() ,
, ![]() , цилиндрического подшипника – на две
составляющие
, цилиндрического подшипника – на две
составляющие ![]() ,
,
![]() (в
плоскости, перпендикулярной оси подшипника), реакцию
(в
плоскости, перпендикулярной оси подшипника), реакцию ![]() стержня направим вдоль стержня,
предполагая, что он растянут;
стержня направим вдоль стержня,
предполагая, что он растянут;
б) для определения шести неизвестных реакций составляем шесть уравнений равновесия для действующей на плиту пространственной системы сил:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4) ![]() (5)
(5)
![]() (6)
(6)
Для
определения момента силы ![]() относительно оси разлагаем
относительно оси разлагаем ![]() на составляющие
на составляющие ![]() и
и ![]() , параллельные осям x и z
, параллельные осям x и z ![]() , и применяем теорему
Вариньона. Аналогично можно поступить при определении моментов реакции
, и применяем теорему
Вариньона. Аналогично можно поступить при определении моментов реакции ![]() .
.
Подставив в составленные уравнения числовые значения всех заданных величин и решив эти уравнения, найдем, чему равны искомые реакции.
Ответ: XA=-5,2 кН, YA=-3,8 кН, ZA=28,4 кН, YB=-7,5 кН, ZB=-12,4 кН, N=14,5 кН. Отрицательный знак
указывает, что силы ![]() ,
,
![]() и
и ![]() направлены
противоположно направлениям, показанным на рисунке 2.
направлены
противоположно направлениям, показанным на рисунке 2.
2.2 Задача 2. Задача на применение теоремы об изменении кинетической энергии системы
Механическая система (см. рисунок 3) состоит из грузов 1 и 2 (коэффициент трения грузов о плоскость f = 0,1), цилиндрического сплошного однородного катка 3 и ступенчатых шкивов 4 и 5 с радиусами ступеней R4 = 0,3 м, r4 = 0,1 м, R5 = 0,2 м, r5 = 0,1 м (массу каждого шкива считать равномерно распределенной по его внешнему ободу). Тела системы соединены друг с другом гибкими нерастяжимыми нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям. Под действием силы F = F(s), зависящей от перемещения точки приложения силы, система приходит в движение из состояния покоя. При движении системы на шкивы 4 и 5 действуют постоянные моменты сил сопротивления M4 и M5.
Значения масс и моментов сопротивлений принять по таблице 2; там же указана величина, которую требуется определить (здесь обозначено: v1 – скорость груза 1, vС3 – скорость центра масс катка, w4 – угловая скорость тела 4 и т.д.). Значение искомой величины нужно найти для момента времени, когда перемещение точки приложения силы F равно s1. В случае, когда какая-либо масса равна нулю, соответствующий груз на схеме изображать не следует.
Т а б л и ц а 2
|
Вари- aнт |
m1, кг |
m2, кг |
m3, кг |
m4, кг |
m5, кг |
M4, Н м |
M5, Н м |
F = F(s), Н |
s1, м |
Найти |
|
|
||||||||||
|
1 |
2 |
0 |
4 |
6 |
0 |
0 |
0.8 |
50 (2+3s) |
1.0 |
v1 |
|
2 |
6 |
0 |
2 |
0 |
8 |
0,6 |
0 |
20 (5+2s) |
1.2 |
w5 |
|
3 |
0 |
4 |
6 |
8 |
0 |
0 |
0.4 |
80 (3+4s) |
0.8 |
vC3 |
|
4 |
0 |
2 |
4 |
0 |
10 |
0.3 |
0 |
40 (4+5s) |
0.6 |
v2 |
|
5 |
8 |
0 |
2 |
6 |
0 |
0 |
0.6 |
30 (3+2s) |
1.4 |
w4 |
|
6 |
8 |
0 |
4 |
0 |
6 |
0.9 |
0 |
40 (3+5s) |
1.6 |
v1 |
|
7 |
0 |
6 |
2 |
8 |
0 |
0 |
0.8 |
60 (2+5s) |
1.0 |
w4 |
|
8 |
0 |
4 |
6 |
0 |
10 |
0.6 |
0 |
30 (8+3s) |
0.8 |
w5 |
|
9 |
6 |
0 |
4 |
0 |
8 |
0.3 |
0 |
40 (2+5s) |
1.6 |
vC3 |
|
10 |
0 |
4 |
6 |
10 |
0 |
0 |
0.4 |
50 (3+2s) |
1.4 |
v2 |
Указания. Задача 2 является задачей на применение теоремы об изменении кинетической энергии системы (раздел «Основы динамики твердого тела и системы»). При решении задачи следует учитывать, что кинетическая энергия системы равна сумме кинетических энергий всех входящих в систему тел. Эту энергию надлежит выразить через ту скорость, которую требуется определить в задаче.
При вычислении энергии катка, находящегося в плоскопараллельном движении, для установления зависимости между угловой скоростью и скоростью его центра масс нужно воспользоваться понятием о мгновенном центре скоростей. При определении работы все перемещения следует выразить через заданное перемещение s1, учитывая, что зависимость между перемещениями будет такой же, как между соответствующими скоростями.
Пример 2 - Механическая система (см. рисунок 4) состоит из сплошного цилиндрического катка 1, ступенчатого шкива 2 с радиусами ступеней r2 и R2 (массу шкива считать распределенной равномерно по его ободу) и груза 3 (коэффициент трения груза о плоскость равен f). Тела системы соединены между собой гибкими нерастяжимыми нитями, намотанными на шкив 2. Под действием силы F =F(s), зависящей от перемещения s точки ее приложения, система приходит в движение из состояния покоя. На шкив при движении действует момент сил сопротивления M2.
Определить: скорость центра масс катка vС1 в момент времени, когда s =s1.
Дано: m1 = 4 кг; m2 = 10 кг; m3 = 8 кг; R2 = 0,2 м; r2 = 0,1 м; f = 0,2; M2 =0,6 Н·м; F = 2(1 +2s) Н; s1 = 2 м.
Решение.
Рассмотрим движение неизменяемой механической системы,
состоящей из тел 1, 2 и 3, соединенных нитями. Изобразим все действующие на
систему внешние силы: активные ![]() , момент сопротивления
M2, реакции
, момент сопротивления
M2, реакции ![]() и силы трения
и силы трения
![]() .
.![]()
Скорость vС1 будем определять, исходя из теоремы об изменении кинетической энергии системы, согласно которой для неизменяемой механической системы изменение кинетической энергии за какое-либо время движения равно сумме работ, которые совершают все внешние силы, действующие на систему, за тот же отрезок времени
T-T0
=
![]() .
(1)
.
(1)
Определяем T0 и T. Т.к. в начальный момент система находится в покое, то T0 = 0. Величина T равна сумме энергий всех тел системы
T = T1+T2+T3. (2)
Учитывая, что тело 1 движется плоскопараллельно, тело 3 – поступательно, а тело 2 вращается вокруг неподвижной оси, получаем
T1 =
![]() ,
T2 =
,
T2 =
![]() ,
T3 =
,
T3 =
![]() . (3)
. (3)
Все скорости, входящие в это выражение, нужно выразить через искомую скорость vС1. Учитывая, что точка K1 является мгновенным центром скоростей катка 1, и, обозначив радиус катка через r1, получаем
![]() ,
,
![]() ,
, ![]() . (4)
. (4)
Моменты инерции определяются как![]()
IC1 =
0,5m1·r![]() ,
I2 =
m2·R
,
I2 =
m2·R![]() ,
(5)
,
(5)
Подставляя выражения (6) и (5) в формулы (3) и используя равенство (2), получаем
T
= ![]() .
(6)
.
(6)
Находим сумму работ всех действующих на систему сил на перемещениях, соответствующих перемещению точки С1 на величину s1. При этом все перемещения выразим через s1, для чего учтем, что зависимости между перемещениями имеют такой же вид, как зависимости между соответствующими скоростями в формулах (4), то есть: φ2 = s1/R2, s3 = s1∙ (r2/R2). Тогда
W(![]() ) =
) =
 ,
,
W(![]() ) = G1·s1·sin60˚,
) = G1·s1·sin60˚,
W(![]() ) = - M2·
) = - M2·![]() = - M2∙
= - M2∙![]() ,
,![]()
W(![]() ) = - G3·s3sin30˚= - G3·s1∙
) = - G3·s3sin30˚= - G3·s1∙![]() sin30˚,
sin30˚,
![]() .
.
Работа остальных сил равна нулю, так как точка
K1, где приложены силы ![]() и
и
![]() –
мгновенный центр скоростей, точка O, где приложены
–
мгновенный центр скоростей, точка O, где приложены ![]() и
и
![]() ,
неподвижна, а реакция
,
неподвижна, а реакция ![]() перпендикулярна перемещению груза 3.
Тогда окончательно
перпендикулярна перемещению груза 3.
Тогда окончательно
![]() (7)
(7)
Подставляя выражения (6) и (7) в уравнение (1) и учитывая, что
T0 = 0, получаем
![]()
(8)
Подставляя сюда числовые значения, найдем vC1= 0,23 м/с.
2.3 Задача 3. Кинематический анализ механизма
Для заданных схемы механизма (см. рисунки А.1-А.10 в приложении А), варианта числовых данных (см. таблицы А.1-А.10 в приложении А) и расчетного положения требуется выполнить следующее:
а) провести структурный анализ механизма;
б) построить план положений механизма (при общем
изображении стойки). Размеры звеньев согласно обозначению их точек на схеме
механизма и угловой скорости ![]() входного звена 1 указаны в
соответствующем вертикальном столбце таблицы числовых данных;
входного звена 1 указаны в
соответствующем вертикальном столбце таблицы числовых данных;
в) для расчетного положения механизма построить план скоростей. На плане показать векторы скоростей всех точек, обозначенных на схеме механизма буквами, в том числе и точек S - центров масс звеньев, которые при стержневой форме звена считать находящимися на серединах их полных длин;
г) построить план ускорений механизма для расчетного положения механизма. Найти векторы ускорений всех точек, указанных в пункте в.
Указания. Для успешного выполнения задания рекомендуется:
а) изучить теоретический материал по теме работы, используя учебную и методическую литературу, например, [2-4], а также конспект лекций;
б) проработать материал §6 сборника задач [4]: ознакомиться с методическими указаниями, содержащими подробно разобранные примеры (с.37-39, 43-56); просмотреть задачи 91-126, ответы к которым приведены в графической форме;
в) для задач 3 и 4, кроме номера схемы и варианта, задается расчетное положение механизма, которое следует принять по третьей от конца цифре шифра зачетной книжки.
Пример 3 - Для схемы механизма (см. рисунок 5) и числовых данных, приведенных в
таблице 3, выполнить решение по приведенным выше условиям. В таблице 3, кроме
размеров всех звеньев и скорости ![]() входного звена, приведено значение угла поворота
входного звена, приведено значение угла поворота ![]() соответствующее
расчетному положению механизма.
соответствующее
расчетному положению механизма.
Т а б л и ц а 3
|
w1, c – 1 |
j1, град |
lOA, м |
lAB, м |
lAC, м |
lCM, м |
lBC = lOU = lBU, м |
lDU, м |
|
|
|||||||
|
15 |
15 |
0,05 |
0,096 |
0,028 |
0,18 |
0,1 |
0,06 |
1) Структурный анализ механизма
Задачей
структурного анализа является определение класса механизма на основе
классификации Ассура-Артоболевского, идея которой состоит в том, что любой
плоский шарнирно-рычажный механизм может быть образован путём присоединения к
ведущему звену (или звеньям) групп нулевой подвижности. Т.о., механизм можно
представить состоящим из ведущего звена (или нескольких ведущих звеньев) и
указанных групп звеньев, получивших название групп Ассура. Количество ведущих
звеньев механизма определяется степенью подвижности ![]() , вычисляемой по формуле
Чебышёва
, вычисляемой по формуле
Чебышёва
![]()
где n – число подвижных звеньев;
![]() – число низших кинематических
пар.
– число низших кинематических
пар.
Шарнирно–рычажные
механизмы характеризуются наличием только низших кинематических пар. К этой
категории относится и исследуемый механизм. Определяем степень его подвижности ![]() .
.
Полученное
значение ![]() показывает,
что в рассматриваемом механизме есть одно ведущее звено, которым является
кривошип. Остальные звенья составляют группы Ассура. Простейшей группой Ассура
является комбинация из двух звеньев (диад Сильвестра) и трёх кинематических
пар, получивших название двухповодковых групп.
показывает,
что в рассматриваемом механизме есть одно ведущее звено, которым является
кривошип. Остальные звенья составляют группы Ассура. Простейшей группой Ассура
является комбинация из двух звеньев (диад Сильвестра) и трёх кинематических
пар, получивших название двухповодковых групп.
Расчленение механизма на структурные группы осуществляется методом попыток. Отсоединяя двухповодковую группу, проверяем степень подвижности оставшегося механизма. Если она не изменяется, то отсоединение произведено верно. При неудавшихся попытках следует пытаться расчленить механизм на группы более высокого порядка, например, трёхповодковые, состоящие их четырёх звеньев и шести кинематических пар и т.д.
Рассматриваемый механизм состоит из одного ведущего звена и двух двухповодковых групп (см. рисунок 6) и принадлежит к механизмам второго класса.
Расчленение механизма на группы Ассура в значительной мере облегчает дальнейшее проведение кинематического исследования механизма. В нашем случае:
![]() общее количество
звеньев,
общее количество
звеньев,
![]() количество подвижных
звеньев,
количество подвижных
звеньев,
![]() количество
кинематических пар 5-го класса,
количество
кинематических пар 5-го класса,
![]() кинематическая пара
5-го класса (вращательная),
кинематическая пара
5-го класса (вращательная),
![]() кинематическая пара
5-го класса (вращательная),
кинематическая пара
5-го класса (вращательная),
![]() кинематическая пара
5-го класса (вращательная),
кинематическая пара
5-го класса (вращательная),
![]() кинематическая пара
5-го класса (вращательная),
кинематическая пара
5-го класса (вращательная),
![]() кинематическая пара
5-го класса (вращательная),
кинематическая пара
5-го класса (вращательная),
![]() кинематическая пара
5-го класса (вращательная),
кинематическая пара
5-го класса (вращательная),
![]() кинематическая пара
5-го класса (поступательная).
кинематическая пара
5-го класса (поступательная).
Механизм
образован присоединением к начальному механизму двух групп Ассура 2-го класса:
группы 1-го вида, состоящей из звеньев 2 и 3, и группы 3-го вида,
состоящей из звеньев 4 и 5. Точку звена 5, совпадающую в
рассматриваемом положении с точкой D, обозначим
через ![]() .
Формула строения механизма
.
Формула строения механизма
1(1) ®2(2,3) ®2(4,5).
Из формулы строения механизма видно, что наивысший класс присоединённой группы – второй, поэтому данный механизм при ведущем звене 1 следует отнести ко второму классу (по Джолдасбекову).
 |
![]()
2) Построение плана положений механизма
Обычно при проведении кинематического анализа механизма строят планы положений механизма. Планом положения называется графическое изображение взаимного расположения звеньев, соответствующее выбранному моменту времени. Так как во время движения механизма взаимное расположение звеньев всё время меняется, то для того, чтобы наглядно проследить за его движением, строят целый ряд последовательных планов положения механизма. Такое построение особенно удобно по отношению к механизмам с периодическим движением, у которых период равен времени одного оборота кривошипа. Последовательные планы положения механизма соответствуют в точности стробоскопическому эффекту его движения. Для подобных механизмов строят не менее 12 планов положения механизма.
Построение планов положения механизма имеет своей целью:
- использование его для дальнейших кинематических исследований;
- предохранение от ошибок при выборе размеров звеньев, так как размеры иногда могут быть выбраны такими, что механизм может заклинить;
- получение габаритов машины, так как можно говорить о габаритах машины только имея взаимное расположение звеньев для целого периода её движения.
Для построения планов положения механизма должны быть заданы кинематическая схема механизма, размеры звеньев, закон движения ведущего или начального звена.
В
рассматриваемом движении данного механизма ведущее звено движется с постоянной
угловой скоростью ![]() .
Будем строить план положения механизма только для заданного расчетного
положения.
.
Будем строить план положения механизма только для заданного расчетного
положения.
Для подсчёта
масштабного коэффициента длин ![]() длиной звена OA
на чертеже задаёмся произвольно. Длину отрезка
длиной звена OA
на чертеже задаёмся произвольно. Длину отрезка ![]() , изображающего на чертеже размер
ведущего звена, принимаем, например, равной 50мм. Тогда масштабный
коэффициент длин схемы механизма будет ml = lOA/(OA) = 0,05/50 =
0,001 м/мм, и по нему из таблицы исходных данных
длины всех звеньев и расстояния между точками переводим в миллиметры. При построении
плана положения механизма пользуемся методом засечек. Вначале отмечаем на чертеже
положение неподвижных точек O и U. По заданному начальному углу
, изображающего на чертеже размер
ведущего звена, принимаем, например, равной 50мм. Тогда масштабный
коэффициент длин схемы механизма будет ml = lOA/(OA) = 0,05/50 =
0,001 м/мм, и по нему из таблицы исходных данных
длины всех звеньев и расстояния между точками переводим в миллиметры. При построении
плана положения механизма пользуемся методом засечек. Вначале отмечаем на чертеже
положение неподвижных точек O и U. По заданному начальному углу ![]() строится положение ведущего
звена, и определяем положение точки A. На этом
чертеже строится план положения групп Ассура. Положение точки B определяем методом засечек, проводя дуги окружностей с
центрами в точках A и U.
Пересечение этих дуг даст точку B. Положение
точки C находим на пересечении дуг окружностей
с центрами в точках A
строится положение ведущего
звена, и определяем положение точки A. На этом
чертеже строится план положения групп Ассура. Положение точки B определяем методом засечек, проводя дуги окружностей с
центрами в точках A и U.
Пересечение этих дуг даст точку B. Положение
точки C находим на пересечении дуг окружностей
с центрами в точках A![]() и D
и D![]() и радиусами, равными (AC) и (BC)
соответственно. Так как, судя по заданным сторонам, треугольник ABC прямоугольный, то можно положение точки C найти, другим путём – нужно провести от точки A линию, перпендикулярную построенной стороне (AB), и на этом направлении отложить отрезок (AC). При этом обход контура треугольника должен быть
таким же, как в заданной исходной схеме. Далее, на продолжении линии BU по длине отрезка DU
получим точку D. Через точки C и D проводим направление
Cy и, откладывая на нём отрезок (CM), получаем точку M.
и радиусами, равными (AC) и (BC)
соответственно. Так как, судя по заданным сторонам, треугольник ABC прямоугольный, то можно положение точки C найти, другим путём – нужно провести от точки A линию, перпендикулярную построенной стороне (AB), и на этом направлении отложить отрезок (AC). При этом обход контура треугольника должен быть
таким же, как в заданной исходной схеме. Далее, на продолжении линии BU по длине отрезка DU
получим точку D. Через точки C и D проводим направление
Cy и, откладывая на нём отрезок (CM), получаем точку M.
![]() ,
,
![]()
![]() мм,
мм, ![]()
![]()
![]()
![]()
3) Построение плана скоростей
Для данного
положения механизма определяются скорости точек графическим методом (см. рисунок
5). Вначале определяем скорость точки ![]() , принадлежащей ведущему звену, которое
вращается равномерно с постоянной угловой скоростью
, принадлежащей ведущему звену, которое
вращается равномерно с постоянной угловой скоростью ![]() . Скорость этой точки по модулю
равна
. Скорость этой точки по модулю
равна ![]() и направлена
перпендикулярно оси звена OA в сторону
вращения. Отложим (см. рисунок 7) от произвольной точки p,
называемой полюсом плана скоростей, отрезок (pa).
Длину отрезка (pa) выбираем равной (OA): (pa) =(OA)= 50 мм. Вычисляем масштабный коэффициент скоростей
и направлена
перпендикулярно оси звена OA в сторону
вращения. Отложим (см. рисунок 7) от произвольной точки p,
называемой полюсом плана скоростей, отрезок (pa).
Длину отрезка (pa) выбираем равной (OA): (pa) =(OA)= 50 мм. Вычисляем масштабный коэффициент скоростей
![]() .
.
Строим план скоростей для группы звеньев 2 и 3. Определяем скорость точки B по следующим двум векторным уравнениям

где ![]() - скорость точки
- скорость точки ![]() , нам известная;
, нам известная;
![]() - скорость точки B
при вращении звена BA вокруг оси шарнира A, по модулю равная
- скорость точки B
при вращении звена BA вокруг оси шарнира A, по модулю равная ![]() (
(![]() – угловая скорость звена BA, которая пока нам неизвестна) и направленная
перпендикулярно линии BA;
– угловая скорость звена BA, которая пока нам неизвестна) и направленная
перпендикулярно линии BA;
![]() – скорость точки U стойки 6 (она равна нулю, так как звено 6
неподвижно);
– скорость точки U стойки 6 (она равна нулю, так как звено 6
неподвижно);
![]() – скорость точки B при вращении звена BU
вокруг оси шарнира U, по модулю равная
– скорость точки B при вращении звена BU
вокруг оси шарнира U, по модулю равная ![]() (
(![]() -
угловая скорость звена BU, которая пока нам
неизвестна) и направленная перпендикулярно линии BU.
-
угловая скорость звена BU, которая пока нам
неизвестна) и направленная перпендикулярно линии BU.
Построение
плана скоростей ведём в такой последовательности. Строим решение первого
векторного уравнения, указанного выше: из точки ![]() проводим направление скорости
изображающий
проводим направление скорости
изображающий ![]() - линию, перпендикулярную BA. Строим решение второго векторного уравнения: из
точки p надо отложить скорость
- линию, перпендикулярную BA. Строим решение второго векторного уравнения: из
точки p надо отложить скорость ![]() , но она равна нулю,
поэтому точку u совмещаем с полюсом плана
скоростей p; из точки u
или, что то же, p проводим направление
скорости
, но она равна нулю,
поэтому точку u совмещаем с полюсом плана
скоростей p; из точки u
или, что то же, p проводим направление
скорости ![]() - линию, перпендикулярную BU, до пересечения с линией, проведённой перпендикулярно
BA, и получаем точку b - конец вектора
скорости точки B. Помещаем в полюс плана точку O. Скорость точки C
находим по правилу подобия треугольников:
- линию, перпендикулярную BU, до пересечения с линией, проведённой перпендикулярно
BA, и получаем точку b - конец вектора
скорости точки B. Помещаем в полюс плана точку O. Скорость точки C
находим по правилу подобия треугольников: ![]() . От точки a
проводим линию, перпендикулярную отрезку (ab).
На этой линии лежит точка c.
. От точки a
проводим линию, перпендикулярную отрезку (ab).
На этой линии лежит точка c.
Составляем пропорцию
![]()
Затем откладываем на проведённой линии от точки a отрезок (ac). Точку c соединяем с полюсом плана p. Вектор (pc) изображает абсолютную скорость точки C.
Точку d (конец вектора скорости точки D) находим аналогично
![]()
Переходим к построению плана скоростей группы звеньев 4 и 5. Этот план строим по векторным уравнениям

где ![]() – скорость точки
– скорость точки ![]() звена 5,
которая лежит под точкой D;
звена 5,
которая лежит под точкой D;
![]() – скорость точки C, она найдена предыдущим построением (отрезок
– скорость точки C, она найдена предыдущим построением (отрезок ![]() );
);
![]() – скорость точки
– скорость точки ![]() во вращении звена 5
относительно точки C, по модулю равная
во вращении звена 5
относительно точки C, по модулю равная ![]() и направленная
перпендикулярно
и направленная
перпендикулярно ![]() (пока
нам неизвестна);
(пока
нам неизвестна);
![]() – скорость точки D , она найдена предыдущим построением (отрезок
– скорость точки D , она найдена предыдущим построением (отрезок ![]() );
);
![]() – скорость точки
– скорость точки ![]() относительно точки D, по модулю неизвестная и направленная параллельно линии
относительно точки D, по модулю неизвестная и направленная параллельно линии
![]() . Построение
плана сведётся к проведению через точку
. Построение
плана сведётся к проведению через точку ![]() линии, перпендикулярной
линии, перпендикулярной ![]() (направления
скорости
(направления
скорости ![]() ),
и через точку
),
и через точку ![]() линии,
параллельной
линии,
параллельной ![]() (направления
скорости
(направления
скорости ![]() ,
точка
,
точка ![]() ).
Точка пересечения этих линий является концом вектора скорости точки
).
Точка пересечения этих линий является концом вектора скорости точки ![]() (отрезок
(отрезок ![]() ). Точку m – конец вектора скорости точки M
во вращении вокруг полюса C – находим по
правилу подобия из соотношения
). Точку m – конец вектора скорости точки M
во вращении вокруг полюса C – находим по
правилу подобия из соотношения
![]()
Полученную
точку m соединяем с полюсом плана p. Вектор ![]() изображает абсолютную скорость точки M. На этом заканчиваем построение плана скоростей
механизма.
изображает абсолютную скорость точки M. На этом заканчиваем построение плана скоростей
механизма.
Определяем
скорость точки B![]() 73×0,015 »
1,1 м/c.
73×0,015 »
1,1 м/c.
Определяем скорость точки C
![]() 34×0,015 = 0,51 м/c.
34×0,015 = 0,51 м/c.
Определяем скорость точки B относительно точки A
![]() 95×0,015 = 1,425 м/c.
95×0,015 = 1,425 м/c.
Определяем скорость точки D
![]() 44×0,015 = 0,66 м/c.
44×0,015 = 0,66 м/c.
Определяем
скорость точки ![]()
![]() м/c.
м/c.
Определяем
скорость точки ![]() относительно
точки C
относительно
точки C
![]() м/c.
м/c.
Определяем
скорость точки ![]() относительно
точки D
относительно
точки D
![]() м/c.
м/c.
Определяем скорость точки M
![]() м/c.
м/c.
Определяем
угловую скорость ![]() звена
AB
звена
AB
 Направление
угловой скорости
Направление
угловой скорости ![]() может
быть определено следующим образом. Мысленно прикладывая вектор
может
быть определено следующим образом. Мысленно прикладывая вектор ![]() к точке B, видим, что вращение звена 2 вокруг оси шарнира
A, принятой за полюс, происходит против вращения
часовой стрелки. Отмечаем нужное направление вращения в виде дуговой стрелки на
плане положения.
к точке B, видим, что вращение звена 2 вокруг оси шарнира
A, принятой за полюс, происходит против вращения
часовой стрелки. Отмечаем нужное направление вращения в виде дуговой стрелки на
плане положения.
Определяем угловую скорость звена BD
![]() Направление
угловой скорости
Направление
угловой скорости ![]() звена
3 определяется таким же образом, как и
звена
3 определяется таким же образом, как и ![]() . Мысленно прикладывая вектор
. Мысленно прикладывая вектор ![]() к точке B, видим, что вращение звена 3 вокруг оси шарнира U, принятой за полюс, противоположно направлению вращения
часовой стрелки. Отмечаем нужное направление вращения звена в виде дуговой
стрелки.
к точке B, видим, что вращение звена 3 вокруг оси шарнира U, принятой за полюс, противоположно направлению вращения
часовой стрелки. Отмечаем нужное направление вращения звена в виде дуговой
стрелки.
Определяем угловую скорость звена
CM
 План скоростей
механизма
План скоростей
механизма
Направление
угловой скорости ![]() звена
5 определяем следующим образом. Мысленно прикладывая вектор
звена
5 определяем следующим образом. Мысленно прикладывая вектор ![]() к точке D, видим, что вращение звена 5 вокруг оси шарнира C, принятой за полюс, происходит против хода часовой
стрелки. Отмечаем нужное направление вращения в виде дуговой стрелки на плане
положения. Замечаем, что угловые скорости звеньев 4 и 5
совпадают, т.е.
к точке D, видим, что вращение звена 5 вокруг оси шарнира C, принятой за полюс, происходит против хода часовой
стрелки. Отмечаем нужное направление вращения в виде дуговой стрелки на плане
положения. Замечаем, что угловые скорости звеньев 4 и 5
совпадают, т.е. ![]() ,
так как эти звенья входят в поступательную кинематическую пару.
,
так как эти звенья входят в поступательную кинематическую пару.
4) Построение плана ускорений
Ускорения точек находятся методом плана ускорений (см. рисунок 8). Строим план ускорений для группы звеньев 2 и 3. Этот план строится по двум векторным уравнениям
![]()
где ![]() - полное ускорение точки A, равное нормальному ускорению
- полное ускорение точки A, равное нормальному ускорению ![]() , так как звено 1
(кривошип) вращается равномерно и угловое ускорение равно нулю, следовательно,
равно нулю и тангенциальное ускорение
, так как звено 1
(кривошип) вращается равномерно и угловое ускорение равно нулю, следовательно,
равно нулю и тангенциальное ускорение ![]() . Тогда
. Тогда ![]() и
оно направлено параллельно линии
и
оно направлено параллельно линии ![]() от точки A
к точке O (к центру кривизны траектории);
от точки A
к точке O (к центру кривизны траектории);
![]() - нормальное ускорение точки B во вращательном движении звена AB
вокруг точки A, по модулю равное
- нормальное ускорение точки B во вращательном движении звена AB
вокруг точки A, по модулю равное

и направленное параллельно линии
AB от точки
B к точке A (![]() );
);
![]() - тангенциальное ускорение точки B в том же движении
звена AB, по модулю равное
- тангенциальное ускорение точки B в том же движении
звена AB, по модулю равное ![]() (
(![]() -
угловое ускорение звена AB, пока нам
неизвестное) и направленное перпендикулярно линии AB;
-
угловое ускорение звена AB, пока нам
неизвестное) и направленное перпендикулярно линии AB;
![]() - ускорение точки U,
равное нулю, так как звено 6 неподвижно;
- ускорение точки U,
равное нулю, так как звено 6 неподвижно;
![]() - нормальное ускорение точки B во вращательном
движении звена BU вокруг точки U, по модулю равное
- нормальное ускорение точки B во вращательном
движении звена BU вокруг точки U, по модулю равное

и направленное параллельно линии BU от точки B к точке U (![]() );
);
![]() - тангенциальное ускорение точки B в том же движении
звена BU, по модулю равное
- тангенциальное ускорение точки B в том же движении
звена BU, по модулю равное ![]() (
(![]() -
угловое ускорение звена BU, пока нам
неизвестное) и направленное перпендикулярно линии BU.
-
угловое ускорение звена BU, пока нам
неизвестное) и направленное перпендикулярно линии BU.
Построение
плана ускорений ведём в следующей последовательности. Строим решение первого векторного
уравнения, указанного выше, для чего от полюса плана π откладываем
отрезок ![]() ,
изображающий ускорение
,
изображающий ускорение ![]() , параллельно линии OA.
Длину отрезка
, параллельно линии OA.
Длину отрезка ![]() принимаем
равной 50 мм, тогда масштаб ускорений будет равен
принимаем
равной 50 мм, тогда масштаб ускорений будет равен
![]() .
.
От точки a откладываем отрезок ![]() , изображающий ускорение
, изображающий ускорение ![]() . Длина отрезка
. Длина отрезка ![]() вычисляется так
вычисляется так

Через точку ![]() проводим направление
ускорения
проводим направление
ускорения ![]() - линию, перпендикулярную линии
- линию, перпендикулярную линии ![]() . Переходим к
построению решения второго векторного уравнения, указанного выше. Для этого от
полюса плана π откладываем вектор ускорения
. Переходим к
построению решения второго векторного уравнения, указанного выше. Для этого от
полюса плана π откладываем вектор ускорения ![]() , но оно равно нулю, поэтому
точку u совмещаем с точкой π. От точки π откладываем отрезок
, но оно равно нулю, поэтому
точку u совмещаем с точкой π. От точки π откладываем отрезок ![]() , изображающий
ускорение
, изображающий
ускорение ![]() .
Длина отрезка
.
Длина отрезка ![]() вычисляется
так
вычисляется
так

Через точку ![]() проводим направление
ускорения
проводим направление
ускорения ![]() прямую, перпендикулярную отрезку BU. Точка пересечения её с
линией, проведённой перпендикулярно AB, даёт
точку b - конец вектора ускорения точки B. Соединяем точки
прямую, перпендикулярную отрезку BU. Точка пересечения её с
линией, проведённой перпендикулярно AB, даёт
точку b - конец вектора ускорения точки B. Соединяем точки ![]() и
и ![]() и получаем вектор полного ускорения
точки B при
вращении звена AB относительно точки A, т.е.
и получаем вектор полного ускорения
точки B при
вращении звена AB относительно точки A, т.е. ![]() Точку o
совмещаем с точкой π (полюсом плана). Ускорение точки C находим, как и в плане скоростей, по правилу подобия
треугольников:
Точку o
совмещаем с точкой π (полюсом плана). Ускорение точки C находим, как и в плане скоростей, по правилу подобия
треугольников: ![]() .
Составляем пропорцию
.
Составляем пропорцию
![]()
Точку d - конец вектора ускорения точки D - находим по правилу подобия из соотношения
![]()
Переходим к
построению плана скоростей группы звеньев 4 и 5. Сначала
определим ускорение точки ![]() , которая принадлежит звену 5.
Для этого пользуемся уравнениями
, которая принадлежит звену 5.
Для этого пользуемся уравнениями

где ![]() - ускорение точки
- ускорение точки ![]() звена 5, которая в
данный момент совпадает с точкой D;
звена 5, которая в
данный момент совпадает с точкой D;
![]() - ускорение точки C
(отрезок
- ускорение точки C
(отрезок ![]() ),
его изображающий, найден при построении плана ускорений для группы, состоящей
из звеньев 2 и 3);
),
его изображающий, найден при построении плана ускорений для группы, состоящей
из звеньев 2 и 3);
![]() - нормальное ускорение точки
- нормальное ускорение точки ![]() во вращении звена 5
относительно точки C, по модулю равное
во вращении звена 5
относительно точки C, по модулю равное

и направленное параллельно линии Cy;
![]() - тангенциальное ускорение точки
- тангенциальное ускорение точки ![]() в том же движении
звена 5, равное по модулю
в том же движении
звена 5, равное по модулю ![]() и направленное перпендикулярно Cy;
и направленное перпендикулярно Cy;
![]() ускорение точки D (отрезок
ускорение точки D (отрезок ![]() ), его изображающий, найден ранее);
), его изображающий, найден ранее);
![]() ускорение Кориолиса в
движении точки
ускорение Кориолиса в
движении точки ![]() относительно
звена 4, по модулю равное
относительно
звена 4, по модулю равное ![]() . Это ускорение имеет направление
вектора
. Это ускорение имеет направление
вектора ![]() , повёрнутого
на угол, равный 90°, в сторону вращения
звена 5 или, что то же, звена 4 (звенья 4 и 5
входят в поступательную кинематическую пару, поэтому их угловые скорости одинаковы,
т.е.
, повёрнутого
на угол, равный 90°, в сторону вращения
звена 5 или, что то же, звена 4 (звенья 4 и 5
входят в поступательную кинематическую пару, поэтому их угловые скорости одинаковы,
т.е. ![]() ).
Ускорение
).
Ускорение ![]() - релятивное ускорение точки
- релятивное ускорение точки ![]() относительно точки D, неизвестное по модулю и направленное параллельно
линии Cy.
относительно точки D, неизвестное по модулю и направленное параллельно
линии Cy.
Строим решение
первого векторного уравнения, указанного выше. От точки c
откладываем отрезок ![]() ускорение
ускорение
![]() , длина
которого
, длина
которого
![]() далее через точку
далее через точку ![]() проводим направление
ускорения
проводим направление
ускорения ![]() линию,
перпендикулярную Cy.
линию,
перпендикулярную Cy.
Переходим к
построению решения второго векторного уравнения, указанного выше. От точки d откладываем отрезок ![]() ускорении Кориолиса
ускорении Кориолиса ![]() , длина которого
, длина которого
 .
.
Далее через точку
k проводим направление релятивного ускорения ![]() линию, параллельную Cy, до пересечения с ранее проведённой прямой,
перпендикулярной Cy (т.е.
направлением ускорения
линию, параллельную Cy, до пересечения с ранее проведённой прямой,
перпендикулярной Cy (т.е.
направлением ускорения ![]() ). Точка
). Точка ![]() пересечения есть конец отрезка
пересечения есть конец отрезка ![]() , изображающего
абсолютное ускорение
, изображающего
абсолютное ускорение ![]() .
.
Точку m - конец вектора ускорения точки M находим по правилу подобия из соотношения
![]()
Соединяем
полученную точку m с полюсом плана ускорений π.
Отрезок ![]() изображает
абсолютное ускорение точки M.
изображает
абсолютное ускорение точки M.
Величины абсолютных ускорений точек определяются так
![]() ,
,
![]() ,
,
![]() .
.
По правилу
подобия найдём ускорения центров масс подвижных звеньев. Точки ![]() и
и ![]() находятся на
серединах соответствующих звеньев, а центр масс звена 4 (камня кулисы)
совпадает с точкой D. На плане ускорений это
будут векторы:
находятся на
серединах соответствующих звеньев, а центр масс звена 4 (камня кулисы)
совпадает с точкой D. На плане ускорений это
будут векторы: ![]() и
и
![]() . Определяем
абсолютные величины ускорений этих центров масс
. Определяем
абсолютные величины ускорений этих центров масс
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Величина углового ускорения звена AB равна
![]() .
.
Направление
углового ускорения ![]() звена
2 (звена
звена
2 (звена ![]() )
может быть определено следующим образом. Перенося мысленно вектор
)
может быть определено следующим образом. Перенося мысленно вектор ![]() в точку
в точку ![]() , видим из точки
, видим из точки ![]() , принятой за полюс,
что направление
, принятой за полюс,
что направление ![]() противоположно
направлению вращения часовой стрелки. Обозначаем направление углового
ускорения
противоположно
направлению вращения часовой стрелки. Обозначаем направление углового
ускорения ![]() на
плане положения звена 2 дуговой стрелкой.
на
плане положения звена 2 дуговой стрелкой.
Величина углового ускорения звена BD равна
![]() .
.
Направление
углового ускорения ![]() звена
3 (звена BU) может быть определено таким
же образом, как и
звена
3 (звена BU) может быть определено таким
же образом, как и ![]() .
Перенося мысленно вектор
.
Перенося мысленно вектор ![]() в точку
в точку ![]() , видим из точки
, видим из точки ![]() , принятой за полюс, что
направление
, принятой за полюс, что
направление ![]() противоположно
направлению вращения часовой стрелки. Обозначаем направление углового ускорения
противоположно
направлению вращения часовой стрелки. Обозначаем направление углового ускорения
![]() на плане
положения звена 3 дуговой стрелкой.
на плане
положения звена 3 дуговой стрелкой.
Величина углового ускорения звена 5 (звена CM) равна
![]() .
.
Направление
углового ускорения ![]() звена
5 (звена CM) может быть определено таким
же образом, как и
звена
5 (звена CM) может быть определено таким
же образом, как и ![]() .
Перенося мысленно вектор
.
Перенося мысленно вектор ![]() в точку D,
видим из точки C, принятой за полюс, что
направление
в точку D,
видим из точки C, принятой за полюс, что
направление ![]() противоположно
направлению вращения часовой стрелки. Обозначаем направление углового
ускорения
противоположно
направлению вращения часовой стрелки. Обозначаем направление углового
ускорения ![]() на
плане положения звена 5 дуговой стрелкой. Звенья 4 и 5
входят в одну поступательную кинематическую пару, поэтому их угловые ускорения
совпадают, т.е.
на
плане положения звена 5 дуговой стрелкой. Звенья 4 и 5
входят в одну поступательную кинематическую пару, поэтому их угловые ускорения
совпадают, т.е. ![]() .
.
На этом кинематическое исследование механизма закончено.
2.4 Задача 4. Кинетостатический анализ механизма
Для схемы механизма, рассмотренной к задаче 3, используя результаты, полученные при решении этой задачи, требуется выполнить следующее:
а) определить инерционные нагрузки механизма в
расчетном положении и нанести их на звенья, используя построенный в задаче 3
план ускорений. Массу ![]() звеньев-стержней следует находить
по их полной длине
звеньев-стержней следует находить
по их полной длине ![]() и
массе
и
массе ![]() ,
приходящейся на 1 м длины звена:
,
приходящейся на 1 м длины звена: ![]() , приняв
, приняв ![]() кг/м. Массу
звеньев-ползунов определять по найденной массе
кг/м. Массу
звеньев-ползунов определять по найденной массе ![]() ведущего звена 1. Масса ползуна 3 в
кривошипно-ползунном механизме
ведущего звена 1. Масса ползуна 3 в
кривошипно-ползунном механизме ![]() , в синусном механизме массы ползунов 2 и
3 принять соответственно
, в синусном механизме массы ползунов 2 и
3 принять соответственно ![]() и
и ![]() . Моменты инерции звеньев-стержней
относительно оси, проходящей через центр масс
. Моменты инерции звеньев-стержней
относительно оси, проходящей через центр масс ![]() перпендикулярно плоскости движения,
определять, как
перпендикулярно плоскости движения,
определять, как
![]() ;
;
б) определить реакции в кинематических парах группы звеньев 2 и 3 от действия инерционных нагрузок и сил веса, не учитывая трения. Следует вычертить группу звеньев 2 и 3 и нанести на звенья действующие нагрузки. Рядом поместить план сил группы. Если какая-либо сила относительно мала и при достаточно больших векторах других сил должна изображаться вектором меньше миллиметра, то его на плане сил можно не показывать. Однако в общих буквенных выражениях и при подстановках в них значений следует приводить все силы и их плечи, пренебрегать действием силы можно только после того, как будет показана его незначительность по сравнению с действием других сил;
в) определить уравновешивающий момент на кривошипе 1 и
уравновешивающую силу, условно считая ее приложенной в точке ![]() перпендикулярно
кривошипу
перпендикулярно
кривошипу ![]() для
данного расчетного положения. Найти реакцию в опоре
для
данного расчетного положения. Найти реакцию в опоре ![]() учитывая действие
уравновешивающей силы. Выяснить роль уравновешивающей силы в данном положении
механизма: является она движущей силой или сопротивлением (уравновешивающей в
истинном смысле). Следует изобразить отдельно ведущее звено со стойкой, показав
действующие на стойку нагрузки, и рядом поместить план сил для ведущего звена.
учитывая действие
уравновешивающей силы. Выяснить роль уравновешивающей силы в данном положении
механизма: является она движущей силой или сопротивлением (уравновешивающей в
истинном смысле). Следует изобразить отдельно ведущее звено со стойкой, показав
действующие на стойку нагрузки, и рядом поместить план сил для ведущего звена.
Указания. Для успешного выполнения задания рекомендуется:
а) изучить теоретический материал по теме работы, используя учебную и методическую литературу, например, [2-4], а также конспект лекций;
б) проработать материал методических указаний к §9 сборника задач [4] с примером (с.78-81) и изучить материал методических указаний к §12 того же сборника с примерами 1, 2 (с.103-109).
Пример 4 - Для механизма, кинематический анализ которого выполнен в примере 3, выполнить кинетостатический анализ по сформулированным выше условиям задачи.
Решение.
1) Определение веса звеньев механизма
Массой
кривошипа зададимся![]() ,
так как кривошип связан с маховиком. Массу звеньев-стержней находим по их
полной длине l и удельной массе q, приходящейся на один метр длины звена
,
так как кривошип связан с маховиком. Массу звеньев-стержней находим по их
полной длине l и удельной массе q, приходящейся на один метр длины звена
![]() = (0,1 + 0,06)×0,5 = 0,08 кг,
= (0,1 + 0,06)×0,5 = 0,08 кг,
![]() = 0,18×0,5 = 0,09 кг.
= 0,18×0,5 = 0,09 кг.
Массу звена-треугольника
находим по его наибольшей стороне ![]() , удельной массе q
и коэффициента
, удельной массе q
и коэффициента ![]()
![]() кг.
кг.
Массу звена 4 (ползуна или камня кулисы) задаём равной 0,01 кг.
Определяем веса
звеньев. Ускорение свободного падения ![]() , тогда
, тогда
![]() 0,25×9,8 = 2,45 H,
0,25×9,8 = 2,45 H, ![]() 0,06×9,8 = 0,59 H,
0,06×9,8 = 0,59 H,
![]() 0,08×9,8 = 0,784 H,
0,08×9,8 = 0,784 H,
![]() 0,01×9,8 = 0,098 H,
0,01×9,8 = 0,098 H,
![]() 0,09×9,8 = 0,088 H.
0,09×9,8 = 0,088 H.
2) Определение инерционной нагрузки на звенья механизма
Силы инерции определяем, используя построенный план ускорений. Сила инерции рассматриваемого звена равна
![]()
где m – масса звена, кг;
![]() – ускорение центра
масс звена,
– ускорение центра
масс звена, ![]() .
Направление силы инерции
.
Направление силы инерции ![]() противоположно направлению вектора
противоположно направлению вектора ![]() . Её размерность -
. Её размерность - ![]() , то есть она
измеряется в ньютонах (Н). Считаем, что звено совершает
плоскопараллельное движение. При этом в качестве точки приложения сил инерции
берём центр масс звена, так как при этом упрощается выражение момента пары сил
инерции или инерционного момента. Он равен
, то есть она
измеряется в ньютонах (Н). Считаем, что звено совершает
плоскопараллельное движение. При этом в качестве точки приложения сил инерции
берём центр масс звена, так как при этом упрощается выражение момента пары сил
инерции или инерционного момента. Он равен
Mu = - IS×e,
где IS (кг×м2) – момент инерции масс звена относительно оси, проходящей через его центр масс перпендикулярно плоскости его материальной симметрии, или, иначе, центральный момент инерции звена;
![]() – угловое ускорение
звена,
– угловое ускорение
звена, ![]() .
.
Инерционный
момент ![]() имеет
размерность
имеет
размерность ![]() =
Н×м. Плоскость, на
которой он действует, параллельна плоскости движения звена, она направлена в
сторону, противоположную направлению углового ускорения
звена.
=
Н×м. Плоскость, на
которой он действует, параллельна плоскости движения звена, она направлена в
сторону, противоположную направлению углового ускорения
звена.
Сила инерции кривошипа по модулю равна
![]() » 0,25×5,6 » 1,4 H,
» 0,25×5,6 » 1,4 H,
приложена в центре масс кривошипа
![]() и по
направлению противоположна вектору ускорения
и по
направлению противоположна вектору ускорения ![]() этого звена.
этого звена.
Сила инерции звена 2 (шатуна) по модулю равна
![]() » 0,06×25,4 » 1,52 H,
» 0,06×25,4 » 1,52 H,
приложена в центре масс шатуна ![]() и по направлению
противоположна вектору ускорения
и по направлению
противоположна вектору ускорения ![]() этого звена.
этого звена.
Сила инерции звена 3 (двуплечего коромысла) по модулю равна
![]() =
0,08×7,65 = 0,61
H,
=
0,08×7,65 = 0,61
H,
приложена в центре масс этого
звена ![]() и по
направлению противоположна вектору ускорения
и по
направлению противоположна вектору ускорения ![]() .
.
Сила инерции звена 4 (ползуна или камня кулисы) по модулю равна
![]() » 0,01×22,7 = 0,23 H,
» 0,01×22,7 = 0,23 H,
приложена в центре масс ![]() и по направлению
противоположна вектору ускорения
и по направлению
противоположна вектору ускорения ![]() этого звена.
этого звена.
Сила инерции звена 5 (кулисы) по модулю равна
![]() » 0,09×40,7 =
3,66 H,
» 0,09×40,7 =
3,66 H,
приложена в центре масс ![]() и по направлению противоположна
вектору ускорения
и по направлению противоположна
вектору ускорения ![]() этого
звена.
этого
звена.
Инерционный
момент ![]() звена
2 (шатуна), имеющего форму треугольника, равен
звена
2 (шатуна), имеющего форму треугольника, равен
![]() » 0,2·0,06·0,12·169 » 0,02Н·м
» 0,2·0,06·0,12·169 » 0,02Н·м
и направлен противоположно
угловому ускорению ![]() .
.
Инерционный
момент ![]() звена
3 (двуплечего коромысла), имеющего форму стержня, равен
звена
3 (двуплечего коромысла), имеющего форму стержня, равен
![]() » 0,1·0,08·0,162·362
» 0,074
Н·м
» 0,1·0,08·0,162·362
» 0,074
Н·м
и направлен противоположно
угловому ускорению ![]() .
.
Инерционным
моментом ![]() звена
4 (ползуна или камня кулисы), из-за малых его размеров, пренебрегаем.
звена
4 (ползуна или камня кулисы), из-за малых его размеров, пренебрегаем. ![]() » 0.
» 0.
Инерционный
момент ![]() звена
5 (кулисы), имеющего форму стержня, равен
звена
5 (кулисы), имеющего форму стержня, равен
![]() » 0,1·0,09·0,182·547
» 0,16Н·м
» 0,1·0,09·0,182·547
» 0,16Н·м
и направлен противоположно
угловому ускорению ![]() .
.
3) Силовой расчёт механизма
В задачу
силового расчёта входит определение всех сил и моментов пар сил, которые
приложены к каждому отдельному звену механизма. Эти силы или моменты надо
знать, например, для расчёта на прочность отдельных звеньев механизма или их
частей (деталей). Для того чтобы механизм находился в равновесии пол
воздействием внешних сил, к одному из звеньев его должна быть приложена
уравновешивающая сила ![]() или уравновешивающая пара сил,
характеризуемая её моментом
или уравновешивающая пара сил,
характеризуемая её моментом ![]() уравновешивающим моментом. Эту силу
уравновешивающим моментом. Эту силу ![]() или момент
или момент ![]() обычно считают
приложенными к ведущему звену. Так как при силовом расчёте механизма в число
известных внешних сил, приложенных к его звеньям, входит инерционная нагрузка
на звенья, то силовой расчёт механизма называется кинетостатическим. Трением в
кинематических парах механизма пренебрегаем.
обычно считают
приложенными к ведущему звену. Так как при силовом расчёте механизма в число
известных внешних сил, приложенных к его звеньям, входит инерционная нагрузка
на звенья, то силовой расчёт механизма называется кинетостатическим. Трением в
кинематических парах механизма пренебрегаем.
Проводится силовой расчёт каждой группы Ассура в отдельности, так как группа Ассура является статически определимой системой. Расчёт следует начинать с группы Ассура, присоединённой к механизму при его образовании в последнюю очередь; затем перейти к следующей группе и так до тех пор, пока не будет произведён силовой расчёт всех групп, образовавших ведомую часть механизма. В заключение производится силовой расчёт ведущего звена. Задачи решают графоаналитическим методом, используя известные из теоретической механики уравнения равновесия всей группы или отдельных её звеньев в форме
![]()
В число сил и моментов, входящих в эти уравнения, включаются реакции и моменты реакций в кинематических парах группы.
Для реакций,
возникающих между элементами кинематических пар, приняты следующие обозначения:
реакция со стороны звена k на звено l обозначается ![]() , реакция же со стороны звена l на звено k соответственно
обозначается
, реакция же со стороны звена l на звено k соответственно
обозначается ![]() .
Очевидно, что
.
Очевидно, что ![]() .
.
a) Силовой расчёт группы звеньев 4 и 5
Сначала показываем инерционную нагрузку на звенья данной группы Ассура (см. рисунок 9).
К звену 5
приложены следующие силы: ![]() (реакция в шарнире С
со стороны звена 2 на звено 5),
(реакция в шарнире С
со стороны звена 2 на звено 5), ![]() (реакция в точке D
со стороны звена 3, направленная перпендикулярно направляющей
поступательной пары, т.е. звену 5),
(реакция в точке D
со стороны звена 3, направленная перпендикулярно направляющей
поступательной пары, т.е. звену 5), ![]() (сила инерции центра масс звена 5,
приложенная в середине
(сила инерции центра масс звена 5,
приложенная в середине ![]() звена),
звена), ![]() (сила тяжести звена 5,
приложенная там же),
(сила тяжести звена 5,
приложенная там же), ![]() (сила инерции центра масс звена 4,
приложенная в точке D),
(сила инерции центра масс звена 4,
приложенная в точке D), ![]() (сила тяжести звена 4,
приложенная там же) и пара сил инерции с моментом
(сила тяжести звена 4,
приложенная там же) и пара сил инерции с моментом ![]() .
.
Составляем уравнение равновесия для группы
![]()
В этом
уравнении содержатся три неизвестных: величина и направление реакции ![]() и величина реакции
и величина реакции ![]() . Для того чтобы его
решить, т.е. чтобы построить представленную им векторную сумму, разложим
реакцию
. Для того чтобы его
решить, т.е. чтобы построить представленную им векторную сумму, разложим
реакцию ![]() на
две составляющие:
на
две составляющие: ![]() ,
направленную перпендикулярно оси звена CM и
,
направленную перпендикулярно оси звена CM и ![]() , направленную
параллельно оси звена CM. Теперь геометрическая
сумма сил, приложенных к группе, равна
, направленную
параллельно оси звена CM. Теперь геометрическая
сумма сил, приложенных к группе, равна
![]()
Величину силы ![]() найдём, рассматривая
равновесие звена 5. Напишем равенство нулю суммы моментов относительно
точки D всех сил,
приложенных к звену 5 (тем самым исключим из него моменты неизвестных
реакций
найдём, рассматривая
равновесие звена 5. Напишем равенство нулю суммы моментов относительно
точки D всех сил,
приложенных к звену 5 (тем самым исключим из него моменты неизвестных
реакций ![]() и
и ![]() ). Это уравнение
пишется так:
). Это уравнение
пишется так: ![]() ,
которое, будучи развёрнутым, примет вид
,
которое, будучи развёрнутым, примет вид
![]()
откуда
![]()
Здесь плечи известных сил найдены по чертежу (см. рисунок 9) и выражены в метрах. Остальные две неизвестные силы найдём по первому векторному уравнению равновесия всей группы. Для этого строим план сил в принятом масштабе сил (см. рисунок 10). Здесь масштабный коэффициент сил равен
![]() .
.
 |
Порядок построения векторной суммы безразличен, но применительно к группам Ассура можно рекомендовать следующий: назначаем обход контура группы в каком-либо направлении (например, по ходу часовой стрелки) и силы на плане откладываем в такой последовательности, в какой мы эти силы встречаем на группе при обходе её контура в выбранном направлении. В нашем случае принят обход контура по ходу часовой стрелки. Отложим:
от точки a силу ![]() в виде отрезка
в виде отрезка
![]()
от точки b откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
от точки c откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
от точки d откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
от точки ![]() откладываем силу
откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
Через точку a проводим прямую, параллельную оси звена CM. Это будет линия действия силы ![]() , а через точку f - прямую, перпендикулярную оси звена CM,
которое является подвижной направляющей. Последняя прямая будет линией
действия силы
, а через точку f - прямую, перпендикулярную оси звена CM,
которое является подвижной направляющей. Последняя прямая будет линией
действия силы ![]() (в
поступательной паре направление реакции всегда перпендикулярно оси направляющих
пары, т.е.
(в
поступательной паре направление реакции всегда перпендикулярно оси направляющих
пары, т.е. ![]() ).
Находим точку g пересечения этих двух прямых.
).
Находим точку g пересечения этих двух прямых.
Отрезок ![]() в масштабе
в масштабе ![]() даёт искомую
реакцию
даёт искомую
реакцию ![]() , а
отрезок
, а
отрезок ![]() в
том же масштабе – реакцию
в
том же масштабе – реакцию ![]() , и, наконец, отрезок
, и, наконец, отрезок ![]() даёт искомую реакцию
даёт искомую реакцию ![]() . По полученным отрезкам
вычисляем модули искомых сил. Реакция
. По полученным отрезкам
вычисляем модули искомых сил. Реакция ![]()
![]() H. Полная реакция
H. Полная реакция ![]() H. Реакция
H. Реакция ![]()
![]() H.
H.
Для определения
реакции ![]() запишем
условие равновесия звена 5
запишем
условие равновесия звена 5
![]()
На
плане сил видно, что отрезок ![]() в масштабе соответствует искомой
реакции
в масштабе соответствует искомой
реакции ![]() . Тогда
. Тогда ![]() H.
H.
б) Силовой расчёт группы звеньев 2 и 3
Сначала
показываем инерционную нагрузку на звенья данной группы Ассура (см. рисунок 11).
К звену 3 приложены следующие силы: ![]() (реакция в шарнире A
со стороны звена 1 на звено 2),
(реакция в шарнире A
со стороны звена 1 на звено 2), ![]() (реакция в шарнире C
со стороны звена 5 на звено 2),
(реакция в шарнире C
со стороны звена 5 на звено 2), ![]() (сила инерции центра масс звена 2),
(сила инерции центра масс звена 2),
![]() (сила тяжести
звена 2),
(сила тяжести
звена 2), ![]() (сила
инерции центра масс звена 3),
(сила
инерции центра масс звена 3), ![]() (сила тяжести звена 3),
(сила тяжести звена 3), ![]() (реакция в шарнире U со стороны стойки 6 на
звено 3),
(реакция в шарнире U со стороны стойки 6 на
звено 3), ![]() (реакция
в точке D со стороны звена 5 на звено 3), пары сил инерции
с моментами
(реакция
в точке D со стороны звена 5 на звено 3), пары сил инерции
с моментами ![]() и
и
![]() .
.
Составляем уравнение равновесия этой группы
![]()
 |
Чтобы найти
неизвестную силу ![]() ,
используем уравнение моментов сил, приложенных к звену 2, относительно
точки B
,
используем уравнение моментов сил, приложенных к звену 2, относительно
точки B
![]()
![]()
Это уравнение с одним неизвестным. Отсюда находим
![]()
Размеры плеч
сил ![]() = 0,047 м,
= 0,047 м, ![]() = 0,008 м и
= 0,008 м и ![]() = 0,099 м найдены по чертежу и выражены в метрах.
= 0,099 м найдены по чертежу и выражены в метрах.
Чтобы найти
неизвестную ![]() ,
используем уравнение моментов сил, приложенных к звену 3, относительно
точки B
,
используем уравнение моментов сил, приложенных к звену 3, относительно
точки B
![]()
![]() .
.
Из этого уравнения находим
Строим план сил
(см. рисунок 12) в масштабе ![]()
Отложим:
от точки a силу ![]() в виде отрезка
в виде отрезка
![]()
от точки b откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
от точки c откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
от точки d откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
от точки e откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
от точки f откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
от точки g откладываем силу ![]() в виде отрезка
в виде отрезка
![]()
от точки h отложим силу ![]() в виде отрезка
в виде отрезка
![]()
 |
 |
Через точку a проводим прямую, параллельную отрезку AB. Это будет линия действия силы ![]() , а через точку i - прямую, параллельную отрезку
, а через точку i - прямую, параллельную отрезку ![]() . Она будет линией действия
силы
. Она будет линией действия
силы ![]() .
Находим точку пересечения j этих двух прямых. Отрезок
.
Находим точку пересечения j этих двух прямых. Отрезок
![]() в масштабе
в масштабе
![]() даёт
искомую реакцию
даёт
искомую реакцию ![]() ,
а отрезок
,
а отрезок ![]() в
том же масштабе – реакцию
в
том же масштабе – реакцию ![]() . Отрезок
. Отрезок ![]() даёт полную реакцию
даёт полную реакцию ![]() , и, наконец, отрезок
, и, наконец, отрезок ![]() даёт полную искомую
реакцию
даёт полную искомую
реакцию ![]() .
.
Реакция ![]() H.
H.
Полная реакция
![]() H.
H.
Реакция ![]() H.
H.
Полная реакция
![]() H.
H.
Для нахождения
реакции ![]() напишем
условие равновесия звена 2
напишем
условие равновесия звена 2
![]() .
.
На плане сил видно, что отрезок ![]() в масштабе
в масштабе ![]() соответствует
искомой реакции
соответствует
искомой реакции ![]() Реакция
Реакция
![]() H.
H.
в) Силовой расчёт ведущего звена
К звену 1
приложены (см. рисунок 13) силы: ![]() (реакция в шарнире A
со стороны звена 2 на звено 1),
(реакция в шарнире A
со стороны звена 2 на звено 1), ![]() (уравновешивающая сила, приложенная в
шарнире A перпендикулярно кривошипу OA),
(уравновешивающая сила, приложенная в
шарнире A перпендикулярно кривошипу OA), ![]() (сила инерции центра масс звена 1,
приложенная в середине звена
(сила инерции центра масс звена 1,
приложенная в середине звена ![]() ),
), ![]() (сила тяжести, приложенная там же) и
(сила тяжести, приложенная там же) и ![]() (реакция в
неподвижном шарнире O). Из этих сил неизвестными
являются две силы:
(реакция в
неподвижном шарнире O). Из этих сил неизвестными
являются две силы: ![]() (неизвестен
модуль) и
(неизвестен
модуль) и ![]() (неизвестны
модуль и направление).
(неизвестны
модуль и направление).
Из уравнения моментов сил относительно точки O, приложенных к кривошипу (звено 1), находим величину момента уравновешивающей паря сил
![]()
![]() .
.
Отсюда находим
уравновешивающую силу ![]() , считая её приложенной в точке A и действующей перпендикулярно к кривошипу
, считая её приложенной в точке A и действующей перпендикулярно к кривошипу
![]() .
.
Для определения
реакции ![]() неподвижного
звена 6 (стойки) на звено 1 составим уравнение равновесия
сил, приложенных к кривошипу
неподвижного
звена 6 (стойки) на звено 1 составим уравнение равновесия
сил, приложенных к кривошипу
![]() .
.
Строим план сил
(см. рисунок 14) по уравнению
равновесия в том же масштабе сил ![]() .
.
 |
Отложим:
реакцию ![]() от произвольной точки
a в виде отрезка
от произвольной точки
a в виде отрезка ![]() ;
;
уравновешивающую
силу ![]() – в
виде отрезка
– в
виде отрезка ![]() ,
,![]() ;
;
силу инерции ![]() – в виде
– в виде
![]()
вес кривошипа ![]() – в виде
– в виде ![]() .
.
Отсюда по длине
отрезка (ea) находим модуль реакции ![]() как
как ![]()
![]() H. На этом
кинетостатическое исследование механизма закончено.
H. На этом
кинетостатическое исследование механизма закончено.
2.5 Задача 5. Расчет на прочность при растяжении-сжатии
Для заданной схемы (см. рисунок 15) требуется проверить прочность стержней, работающих на растяжение и (или) сжатие, приняв допускаемое напряжение на растяжение [sр] = 160 МПа и на сжатие [sс] = 120 МПа. Данные взять из таблицы 4.
Указания. Задача 5 является задачей проверочного расчета на прочность при растяжении-сжатии. Для решения задачи следует проверить выполнение условия прочности для элементов конструкции, для чего следует сравнить расчетные напряжения с допускаемыми напряжениями. Расчетные напряжения определяются через значения продольных усилий в стержнях; для нахождения последних используются уравнения равновесия, которые в зависимости от расчетной схемы (произвольная плоская система или плоская система сходящихся сил) имеют тот или иной вид. Для плоской системы сходящихся сил можно составить два независимых уравнения равновесия, а для произвольной плоской системы сил можно составить три уравнения. Для рассматриваемых в данной задаче схем в последнем случае необходимости в составлении всех трех уравнений равновесия нет, так как нас интересует только продольная сила в растянутом или сжатом стержне, поэтому можно обойтись одним уравнением равновесия.
Т а б л и ц а 4
|
Вари -ант |
F1, кН |
F2, кН |
a, град |
b, град |
a, м |
b, м |
Сечения стержней |
|
|
1 |
2 |
|||||||
|
|
||||||||
|
1 |
40 |
35 |
50 |
45 |
0,7 |
0,7 |
уг 40´3 |
Æ25 |
|
2 |
45 |
30 |
55 |
40 |
0,6 |
0,4 |
2 уг 20´4 |
Æ11 |
|
3 |
50 |
25 |
60 |
35 |
0,5 |
0,7 |
2 уг 25´4 |
Æ12 |
|
4 |
55 |
20 |
65 |
40 |
0,4 |
0,8 |
уг 45´3 |
Æ14 |
|
5 |
60 |
15 |
70 |
45 |
0,8 |
0,5 |
2 уг 45´4 |
Æ16 |
|
6 |
40 |
35 |
50 |
45 |
0,7 |
0,7 |
2 уг 20´3 |
Æ18 |
|
7 |
15 |
45 |
25 |
60 |
1,2 |
0,8 |
уг 50´3 |
Æ20 |
|
8 |
20 |
50 |
30 |
65 |
1,0 |
0,7 |
уг 50´4 |
Æ20 |
|
9 |
25 |
55 |
35 |
70 |
0,8 |
0,6 |
2 уг 36´3 |
Æ12 |
|
10 |
30 |
60 |
40 |
75 |
0,9 |
0,5 |
2 уг 32´3 |
Æ10 |
|
Примечания
1 Обозначение уг 50´4 означает, что стержень
изготовлен из равнобокого уголка с шириной полок 50 мм и толщиной полок 4 мм; обозначение
2
уг 40 2 На некоторых схемах рисунка 7 отдельные параметры, указанные в таблице 3, отсутствуют; в таких случаях численные значения этих величин не следует принимать во внимание. 3 Для схем, где имеется два стержня, работающих на растяжение (сжатие), расчет следует выполнить для обоих стержней. |
||||||||
Пример 4 - Для заданной схемы (см. рисунок 16,а) проверить прочность стержня 1, работающего на растяжение или сжатие, приняв допускаемое напряжение на растяжение [sр]=160 МПа и на сжатие [sс]=120 МПа. Дано: F1 = 60 кН, a = 60°, а = 1,2 м, b = 0,8 м, сечение стержня - 4 уголка 36´3.
Условие прочности при растяжении-сжатии имеет вид
![]()
где
σ – расчетное напряжение в поперечном сечении стержня;
N – нормальная (продольная) сила;
А – площадь поперечного сечения;
[σ] – допускаемое напряжение (на растяжение или сжатие соответственно тому, что испытывает стержень).
 |
Определим продольную силу в стрежне 1. Отбросим мысленно шарнирную опору в точке B, заменив ее действие двумя реакциями HA и VA, а также разрежем стержень 1, заменив действие отброшенной части силой N (см. рисунок 8,б). Имеем произвольную плоскую систему сил. Три неизвестные силы HA, VA, и N могут быть определены из трех уравнений равновесия. Однако в рассматриваемой задаче реакции HA и VA можно не определять, так как нас интересует только нормальная сила N в стержне 1. Уравнение равновесия запишем в виде å МА = 0, тогда реакции HA и VA в него не войдут. Имеем
N×a - F1×(a+b)×sin a = 0,
откуда
N = F1×(a+b)×sin a)/а = 60 ×(1,2+0,8)×sin 60°/1,2 = 86,7 кН (стержень 1 сжат).
Определим площадь поперечного сечения стержня 1. Так как стержень представляет собой четыре уголка 36´3, то его поперечное сечение найдем как учетверенное значение площади поперечного сечения уголка, которое найдем в таблицах прокатных профилей. Находим Aуг = 2,1 см2 и площадь поперечного сечения стержня A=4Aуг=840 мм2.
Определим нормальные напряжения в поперечных сечениях стержней и сравним с допускаемым напряжением
![]()
Условие прочности выполняется для стержня и для конструкции в целом.
2.6 Задача 6. Расчеты на прочность и жесткость при кручении
К стальному валу приложены четыре момента (см. рисунок
17, таблица 5). Требуется: построить эпюру крутящих моментов; при заданном
значении допускаемого напряжения при кручении ![]() определить диаметры вала
d
и d1 из
расчета на прочность; построить эпюру максимальных касательных напряжений по
длине бруса; вычислить угол закручивания концевого сечения вала при найденных
размерах.
определить диаметры вала
d
и d1 из
расчета на прочность; построить эпюру максимальных касательных напряжений по
длине бруса; вычислить угол закручивания концевого сечения вала при найденных
размерах.
Указания. Задача 6 является задачей проектного расчета на прочность при кручении. Для решения задачи следует прежде всего построить эпюру крутящих моментов, а затем из условия прочности при кручении выразить полярный момент сопротивления поперечных сечений. Далее по формуле полярного момента нужно найти необходимые значения диаметров вала.
После того, как диаметры вала на двух участках будут определены, нужно построить эпюру максимальных касательных напряжений по длине бруса, причем на эпюре можно откладывать абсолютные значения максимальных касательных напряжений, так как для изотропного материала знак касательных напряжений не имеет значения. Последний пункт задания – определение угла закручивания концевого сечения вала - относится к расчетам на жесткость; здесь по найденным диаметрам надо подсчитать значения полярных моментов инерции, а затем воспользоваться формулой для определения угла закручивания.
Т а б л и ц а 5
|
Номер условия
|
Размеры, м |
Моменты, кН·м |
МПа |
||||||
|
a |
b |
c |
M1 |
M2 |
M3 |
M4 |
|||
|
|
|||||||||
|
1 |
0,8 |
0,6 |
1,4 |
1,1 |
1,4 |
1,0 |
1,0 |
125 |
|
|
2 |
0,5 |
0,7 |
1,5 |
0,7 |
1,5 |
1,2 |
0,9 |
90 |
|
|
3 |
1,2 |
1,0 |
0,6 |
1,0 |
1,6 |
1,4 |
1,2 |
100 |
|
|
4 |
1,0 |
1,2 |
0,7 |
0,9 |
0,7 |
1,7 |
1,0 |
110 |
|
|
5 |
1,5 |
0,8 |
1,2 |
0,6 |
0,7 |
0,4 |
1,2 |
120 |
|
|
6 |
0,5 |
1,0 |
1,3 |
1,3 |
1,0 |
0,6 |
0,8 |
140 |
|
|
7 |
0,8 |
0,6 |
1,4 |
1,0 |
1,4 |
1,0 |
1,1 |
85 |
|
|
8 |
0,6 |
1,1 |
0,8 |
0,6 |
0,8 |
1,2 |
1,0 |
150 |
|
|
9 |
1,0 |
1,3 |
0,9 |
0,7 |
0,9 |
1,2 |
1,0 |
75 |
|
|
10 |
0,8 |
1,4 |
1,0 |
0,9 |
1,0 |
1,4 |
0,6 |
80 |
|
Пример 6 - Решить по приведенным выше условиям задачу для схемы, показанной на рисунке 18,а, приняв а = 1,1 м, b = 1,5 м, с = 1,2 м, [t] = 85 МПа, М1 = 0,8 кН×м, М2 = 1,1 кН×м, М3 = 1,7 кН×м, М4 = 0,6 кН×м.
Решение. Сначала построим эпюру крутящих моментов T. Для этого воспользуемся формулой T=∑M и правилом знаков для крутящих моментов. Начинаем строить эпюру от незакрепленного конца вала (рисунок 18,б). Тогда
T4=M4=0,6 кН×м,
T3=-M3+M4=-1.1 кН×м,
T2=-M2-M3+M4=-2,2 кН×м,
T1=-M1-M2-M3+M4=3 кН×м.
Теперь по заданному значению допускаемого напряжения при кручении [t] определим диаметры вала d и d1 из расчета на прочность.
Найдём диаметр вала d, общий для двух участков слева. Из условия прочности вала при кручении следует, что полярный момент сопротивления поперечного сечения вала должен отвечать условию

Так как для круглого сечения
![]() ,
то
,
то 
Аналогично найдём диаметр d1, общий для двух участков справа

 |
Окончательно примем значения диаметров вала из ряда предпочтительных чисел d=56 мм и d1=40 мм. Очевидно, что при этом будет некоторая перегрузка по напряжениям, однако в дальнейшем мы убедимся, что она пренебрежимо мала.
Чтобы построить эпюру максимальных касательных напряжений τmax по длине бруса, сначала пересчитаем значения полярных моментов сопротивления. Найдем
![]() ,
,
![]() .
.
Тогда τmax определятся, как
I
участок: ![]() ,
,
II
участок: ![]() ,
,
III
участок: ![]() ,
,
IV участок: ![]() .
.
Как видим, максимальная перегрузка имеет место на 3-м участке и составляет
![]() ,
что можно считать приемлемым.
,
что можно считать приемлемым.
Эпюра τmax приведена на рисунке 18,в.
Вычислим угол закручивания концевого сечения вала при найденных размерах. Для этого предварительно определим значения полярных моментов инерции поперечных сечений вала, входящих в формулы Jp Jp1 для углов закручивания. Получаем
![]() мм4,
мм4, ![]() мм4.
мм4.
Теперь, принимая модуль сдвига G= 8·104 МПа для стали, найдем углы закручивания граничных сечений вала, воспользовавшись формулами
![]() , где
, где ![]() .
.
Просчитаем все φ
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
В рассматриваемом случае крутящий момент на трех участках слева имеет одинаковый знак, поэтому значение угла закручивания возрастает – все сечения закручиваются по часовой стрелке, если смотреть со стороны правого торца вала. На четвертом участке знак крутящего момента другой, поэтому знак приращения угла закручивания на этом участке другой, однако концевое сечение все равно повернуто по часовой стрелке, если смотреть со стороны правого торца вала. На рисунке 18,г показана эпюра углов закручивания (по условиям задачи не требуется).
2.7 Задача 7. Проектный расчет на прочность при изгибе
Для заданной схемы балки (см. рисунок 19) требуется: а) написать выражения для поперечной силы Q и изгибающего момента M для каждого участка в общем виде; б) построить эпюры Q и M; в) из условия прочности выбрать сечение балки в виде стандартного прокатного двутавра или швеллера, приняв для стали Ст.3 допускаемое напряжение [s] = 160 МПа. Данные взять из таблицы 6.
Указания. Эта задача относится к теме «Изгиб». Так как рассматривается балка на двух опорах, то прежде всего надо определить опорные реакции из уравнений статики и проверить их правильность.
При построении эпюр также следует контролировать их правильность, в том числе и с помощью дифференциальных зависимостей Журавского между изгибающим моментом, поперечной силой и интенсивностью распределенной нагрузки. В частности, следует помнить, что изгибающий момент имеет экстремальное значение в сечении, где поперечная сила проходит через нулевое значение.
Т а б л и ц а 6
|
Вариант |
Значения величин |
|||||||
|
l2, м |
a1/a |
а2/a |
а3/a |
F, кН |
M, кН· м |
q, кН/м |
Тип профиля |
|
|
|
||||||||
|
1 |
10 |
2,0 |
0,8 |
1,6 |
5 |
14 |
20 |
двутавр |
|
2 |
9 |
2,2 |
1,0 |
1,8 |
6 |
12 |
18 |
швеллер |
|
3 |
8 |
2,4 |
1,2 |
2,0 |
7 |
10 |
16 |
двутавр |
|
4 |
7 |
2,6 |
1,4 |
2,2 |
8 |
8 |
14 |
швеллер |
|
5 |
6 |
2,8 |
1,6 |
2,4 |
9 |
7 |
12 |
двутавр |
|
6 |
5 |
3,0 |
1,8 |
2,6 |
10 |
6 |
10 |
швеллер |
|
7 |
4 |
3,2 |
2,0 |
1,4 |
11 |
5 |
8 |
двутавр |
|
8 |
3 |
1,0 |
2,2 |
1,2 |
12 |
4 |
6 |
швеллер |
|
9 |
11 |
1,6 |
2,4 |
1,0 |
14 |
16 |
5 |
двутавр |
|
10 |
12 |
1,5 |
2,6 |
0,8 |
16 |
18 |
4 |
швеллер |
|
Примечание - В расчетах принять длину балки l2=10a. |
||||||||
Опасным с точки зрения прочности сечением для балки постоянного поперечного сечения, изготовленной из материала, одинаково сопротивляющегося растяжению и сжатию, является то сечение, где максимален по абсолютной величине изгибающий момент.
 |
Так как задача представляет собой задачу проектного расчета, то далее следует выразить из условия прочности при изгибе необходимую величину осевого момента сопротивления поперечного сечения Wx. По этому значению для стандартных прокатных профилей определяют по таблицам сортамента номер профиля с ближайшим и, как правило, большим значением Wx. После этого следует определить недогрузку или перегрузку балки в процентах. При решении данной задачи перегрузку более 4% будем считать недопустимой.
Пример 7 - Для схемы, изображенной на рисунке 20,а, выполнить решение по условиям задачи 7. Дано: F=7 кН, M0=10 кН·м, q=9 кН/м, l=14 м, a=3,8 м, b=5 м, c=2,2 м, требуется подобрать сечение балки в виде двутавра..
 |
Решение. Определяем реакции RA и RB (см. рисунок 20,б) из уравнений равновесия
![]()
![]()
Получаем
 кН,
кН,  кН.
кН.
Проверяем правильность найденных значений реакций
![]() .
.
Запишем уравнения для поперечной силы Q и изгибающего момента M на участках I – IV и построим эпюры.
I участок
![]() :
:
![]() ;
при z1 = 0 Q = RA = 30,8 кН;
;
при z1 = 0 Q = RA = 30,8 кН;
при z1 = a = 3,8 м Q = RA-q·a = -3,4 кН.
![]() ;
при z1 = 0 M = RA = 0;
;
при z1 = 0 M = RA = 0;
при z1 = a = 3,8 м M = 52 кН∙м.
Так как эпюра Q на участке I проходит через
нулевое значение, меняя знак с положительного на отрицательный, то в сечении,
где Q равна нулю, на эпюре M
имеет место максимальное значение. Чтобы найти его, определим значение
координаты ![]() ,
при котором Q = 0:
,
при котором Q = 0: ![]() ;
;
![]() м.
м.
Тогда ![]()
![]() кН∙м.
кН∙м.
IV участок ![]() :
:
![]()
![]() кН∙м.
кН∙м.
III
участок ![]() :
:
![]() кН;
кН;
![]() при
z3 = 0 M = -M0 = -10 кН м;
при
z3 = 0 M = -M0 = -10 кН м;
при z3 = b = 5 м M = -M0 + RB ∙b= 42 кН∙м;
II
участок ![]() :
:
![]() кН;
кН;
![]() при
z2 = 0 M = -42 кН∙м;
при
z2 = 0 M = -42 кН∙м;
при z2 = 3 м M = 52 кН∙м.
Эпюры Q и M приведены на рисунке 20,в г.
Из условия прочности при изгибе
для балки постоянного сечения ![]() .
.
определяем необходимую величину осевого момента сопротивления
![]()
Из таблицы сортамента выбираем двутавр №24а, для которого Wx=317 см3; при этом
![]()
Так что перегрузка составляет ![]() что приемлемо.
что приемлемо.
Приложение А
Схемы механизмов и исходные данные к задачам 3 и 4
 |
Рисунок А.1 - Cхема 1. Кривошипно-ползунный механизм
Т а б л и ц а А.1
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
|
OA, мм |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
240 |
20 |
22 |
|
le , мм |
30 |
40 |
30 |
25 |
28 |
0 |
80 |
90 |
14 |
16 |
|
lAB, мм |
180 |
240 |
300 |
340 |
365 |
400 |
550 |
900 |
68 |
75 |
|
lAE, мм |
80 |
120 |
80 |
180 |
90 |
200 |
250 |
40 |
26 |
35 |
|
w1, рад/c |
32 |
18 |
26 |
15 |
80 |
30 |
60 |
25 |
30 |
35 |
Рисунок А.2 - Схема 2. Кривошипно-ползунный механизм
Т а б л и ц а А.2
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
|
lOA, мм |
65 |
75 |
100 |
120 |
130 |
150 |
170 |
230 |
22 |
24 |
|
le, мм |
20 |
35 |
60 |
20 |
30 |
0 |
10-0 |
80 |
12 |
15 |
|
lAB, мм |
200 |
250 |
320 |
300 |
330 |
360 |
500 |
650 |
75 |
86 |
|
lBE, мм |
60 |
100 |
150 |
125 |
150 |
140 |
250 |
200 |
20 |
28 |
|
w1, рад/c |
20 |
18 |
12 |
15 |
100 |
30 |
28 |
34 |
14 |
25 |
 |
Рисунок А.3 - Схема 3. Шарнирный четырехзвенник
Т а б л и ц а А.3
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
|
lOA, мм |
55 |
75 |
90 |
115 |
130 |
150 |
170 |
200 |
22 |
24 |
|
lOC, мм |
120 |
200 |
240 |
250 |
300 |
400 |
450 |
400 |
45 |
40 |
|
lBC, мм |
150 |
160 |
200 |
300 |
350 |
300 |
350 |
500 |
55 |
60 |
|
lAB, мм |
180 |
240 |
280 |
350 |
400 |
500 |
540 |
600 |
60 |
64 |
|
lAE, мм |
70 |
80 |
75 |
150 |
200 |
210 |
190 |
240 |
28 |
25 |
|
w1, рад/c |
19 |
14 |
25 |
60 |
50 |
30 |
35 |
15 |
24 |
20 |
 |
Рисунок А.4 - Cхема 4. Шарнирный четырехзвенник
Т а б л и ц а А.4
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
|
lOA, мм |
60 |
58 |
80 |
75 |
100 |
105 |
120 |
125 |
14 |
140 |
|
lOC, мм |
120 |
140 |
160 |
200 |
200 |
240 |
245 |
250 |
30 |
300 |
|
lBC, мм |
150 |
160 |
200 |
200 |
250 |
230 |
300 |
320 |
34 |
320 |
|
lAB, мм |
150 |
180 |
200 |
200 |
250 |
300 |
300 |
360 |
34 |
400 |
|
lBE, мм |
150 |
100 |
180 |
150 |
200 |
140 |
180 |
200 |
25 |
200 |
|
w1, рад/c |
25 |
22 |
20 |
60 |
21 |
40 |
30 |
16 |
30 |
28 |
 |
Рисунок А.5 - Схема 5. Шарнирный четырехзвенник
Т а б л и ц а А.5
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
|
lOA, мм |
60 |
80 |
100 |
120 |
140 |
160 |
180 |
200 |
22 |
240 |
|
lOC, мм |
140 |
180 |
280 |
240 |
320 |
380 |
440 |
420 |
46 |
400 |
|
lBC, мм |
160 |
200 |
180 |
300 |
300 |
320 |
300 |
500 |
50 |
600 |
|
lAB, мм |
200 |
260 |
300 |
360 |
400 |
480 |
500 |
600 |
60 |
700 |
|
lAE, мм |
100 |
120 |
150 |
200 |
200 |
240 |
200 |
250 |
35 |
250 |
|
w1, рад/c |
31 |
21 |
30 |
60 |
12 |
30 |
28 |
25 |
20 |
24 |
 |
Рисунок А.6 - Схема 6. Синусный механизм
Т а б л и ц а А.6
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
||||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
||||||||||
|
lOA, мм |
50 |
100 |
150 |
25 |
60 |
80 |
120 |
200 |
140 |
175 |
|
|
le, мм |
10 |
30 |
60 |
10 |
30 |
40 |
60 |
80 |
70 |
100 |
|
|
lAE, мм |
20 |
40 |
30 |
10 |
25 |
30 |
50 |
100 |
56 |
80 |
|
|
a, рад |
π/6 |
0 |
π/2 |
π/3 |
π/2 |
π/4 |
π/3 |
π/2 |
0 |
π/3 |
|
|
w1, рад/c |
40 |
25 |
15 |
28 |
18 |
20 |
15 |
30 |
50 |
35 |
|
 |
Рисунок А.7 - Схема 7. Двухкривошипный шарнирный четырехзвенник
Т а б л и ц а А.7
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
|
lOA, мм |
150 |
200 |
50 |
240 |
70 |
80 |
35 |
60 |
60 |
50 |
|
lOC, мм |
55 |
100 |
20 |
75 |
40 |
50 |
20 |
10 |
24 |
30 |
|
lBC, мм |
170 |
240 |
60 |
200 |
80 |
100 |
40 |
80 |
64 |
60 |
|
lAB, мм |
120 |
200 |
52 |
160 |
75 |
90 |
37 |
70 |
40 |
55 |
|
lBE, мм |
50 |
80 |
30 |
85 |
40 |
60 |
30 |
40 |
20 |
35 |
|
w1, рад/c |
30 |
50 |
40 |
35 |
45 |
15 |
12 |
40 |
10 |
15 |
 |
Рисунок А.8 - Схема 8. Кривошипно-ползунный механизм с большим дезаксиалом
Т а б л и ц а А.8
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
|
lOA, мм |
40 |
100 |
200 |
150 |
80 |
60 |
120 |
70 |
110 |
30 |
|
le, мм |
60 |
120 |
220 |
210 |
90 |
120 |
150 |
80 |
130 |
40 |
|
lAB, мм |
160 |
320 |
650 |
550 |
250 |
280 |
400 |
220 |
360 |
110 |
|
lBE, мм |
50 |
80 |
200 |
150 |
60 |
100 |
120 |
60 |
110 |
40 |
|
w1, рад/c |
40 |
12 |
37 |
26 |
80 |
60 |
30 |
20 |
15 |
35 |

Рисунок А.9 - Схема 9. Двухкривошипный шарнирный четырехзвенник
Т а б л и ц а А.9
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
|
lOA, мм |
60 |
80 |
64 |
40 |
100 |
80 |
200 |
60 |
240 |
170 |
|
lOC, мм |
25 |
10 |
20 |
20 |
50 |
40 |
75 |
20 |
100 |
60 |
|
lBC, мм |
50 |
60 |
60 |
35 |
80 |
70 |
240 |
50 |
200 |
150 |
|
lAB, мм |
55 |
70 |
40 |
36 |
90 |
75 |
160 |
52 |
200 |
130 |
|
lAE, мм |
30 |
35 |
25 |
26 |
40 |
40 |
70 |
25 |
120 |
60 |
|
w1, рад/c |
30 |
15 |
32 |
12 |
16 |
35 |
28 |
30 |
45 |
25 |

Рисунок А.10 -Схема 10. Шарнирный четырехзвенник c большим коромыслом
Т а б л и ц а А10
|
Величина |
Предпоследняя цифра шифра (вариант числовых данных) |
|||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
||||||||||
|
lOA, мм |
40 |
20 |
100 |
60 |
50 |
80 |
25 |
100 |
120 |
90 |
|
lOC, мм |
80 |
30 |
180 |
100 |
150 |
200 |
100 |
400 |
300 |
315 |
|
lBC, мм |
160 |
60 |
350 |
200 |
250 |
400 |
150 |
550 |
420 |
315 |
|
lAB, мм |
140 |
60 |
320 |
190 |
200 |
300 |
90 |
300 |
350 |
250 |
|
lBE, мм |
40 |
15 |
50 |
40 |
100 |
100 |
40 |
75 |
100 |
65 |
|
w1, рад/c |
16 |
40 |
20 |
15 |
22 |
30 |
35 |
12 |
15 |
20 |
Список литературы
1. Тарг С.М. Краткий курс теоретической механики. - М.: Высш. шк., 1986.
2. Иосилевич Г.Б., Строганов Г.Б., Маслов Г.М. Прикладная механика. - М.: Высш. шк., 1989.
3. Кореняко А.С. Теория механизмов и машин. – Киев: Вища школа, 1976.
4. Сборник задач по теории механизмов и машин /Артоболевский И.И. и Эдельштейн Б.В. – М.: Наука, 1973.
5. Степин П.А. Сопротивление материалов. - М.: Высш. шк., 1988.
6. Буланов Э.А. Решение задач по сопротивлению материалов. – М.: Высш. шк., 1994.
7. Пособие к решению задач по сопротивлению материалов /Миролюбов И.Н. и др. – М.: Высш.шк., 1985.
8. Аркуша А.И. Техническая механика. Теоретическая механика и сопротивление материалов. - М.: Высш. шк., 2003.
9. Аркуша А.И. Техническая механика. Руководство к решению задач по теоретической механике. - М.: Высш. шк., 2002.
10. Расчетные и курсовые работы по сопротивлению материалов /Ф.З.Алмаметов, С.И.Арсеньев, С.А.Енгалычев и др. – М.: Высш.шк., 1992.
11. Динасылов А.Д. Прикладная механика. Основы расчетов на прочность и жесткость. – Алматы, АИЭС, 2009.
Сводный план 2011 г., поз. 270