МИНИСТЕРСТВО ОБРАЗОВАНИЯ И КУЛЬТУРЫ РЕСПУБЛИКИ
КАЗАХСТАН
Алматинский институт энергетики и связи
А.С. Байкенов
ТРАНСПОРТНЫЕ СИСТЕМЫ ПЕРЕДАЧИ НА БАЗЕ АППАРАТУРЫ SMA1
Учебное пособие
Алматы 2009
В учебном пособии рассматривается мультиплексор фирмы SIEMENS как типичный представитель технологии синхронной цифровой иерархии SDH. Также изложены материалы по новому поколению аппаратуры NGSDH, являющейся основной для современных транспортных систем и сетей связи. Данное пособие является теоретической основой для проведения практических и лабораторных работ на оборудовании SMA-1.
Введение
Технология SDH появилась в начале 80-х годов и была призвана заменить системы PDH, которые имели ряд существенных недостатков, что делало их неэффективными в применении и обслуживании. Среди этих недостатков сложные схемы мультиплексирования с бит-стаффингом, из-за чего невозможно прямое извлечение из потока низкоскоростных компонентов без его демультиплексирования, а также слабые возможности в организации служебных каналов для целей контроля и управления потоком в сети и полное отсутствие средств маршрутизации низовых мультиплексированных потоков.
Применение технологии SDH упрощает сети, т.к. в синхронной сети один мультиплексор ввода/вывода заменяет целую «гирлянду» мультиплексоров PDH, позволяя вывести, например, сигнал E1 из потока STM-4. Сети SDH обладают повышенной надежностью, вследствии наличия механизмов самовосстановления, а также имеют развитые средства конфигурирования, мониторинга и обслуживания. Системы передачи SDH, благодаря использованию волоконно-оптических линий связи, позволяют создавать высокоскоростные каналы (до 40 Гбит/с), имеют высокий уровень достоверности передаваемой информации. Все это, а главное, наличие хорошо проработанных и проверенных временем стандартов, простота, низкие эксплуатационные расходы привели к тому, что сети SDH широко используются в качестве транспортных сетей операторов связи.
Основное применение SDH с момента ее появления — построение транспортных сетей для передачи цифровых потоков между телефонными коммутаторами.
С развитием компьютерных сетей, Интернета, технологий передачи данных (FR, ATM и т.д.) инфраструктуру транспортных сетей на основе SDH все чаще применяют для организации цифровых каналов сетей передачи данных (т.е. строят наложенные сети поверх SDH). Недостатки использования «классического» SDH для передачи данных наиболее остро стали проявляться при необходимости предоставления широкополосных услуг связи локальных сетей.
Во-первых, это необходимость в преобразовании интерфейсов LAN (Ethernet) к интерфейсам SDH (E1, E3, STM-1, STM-4 и т.д.), используя промежуточные устройства, такие, как FRAD, ATM IAD, IP маршрутизаторы и т.д. Во-вторых, небольшой ряд возможных скоростей передачи данных (который к тому же слабо корелируется с рядом скоростей LAN: 10, 100, 1000 Мбит/с), значительно ограничивает возможности эффективного предоставления услуг, либо требует применения в подключаемом оборудовании дополнительных схем (например, инверсное мультиплексирование). Т.о. типичный результат при добавлении служб данных к традиционным SDH сетям — увеличение сложности оборудования и повышение стоимости.
Для преодоления этих ограничений, производители SDH оборудования пошли по пути создания систем SDH следующего поколения (Next Generation SDH, NG SDH). Оборудование NG SDH имеет интегрированные интерфейсы передачи данных (в частности, Ethernet), а также использует новые технологии, которые позволяют более эффективно выделять требуемую полосу для служб данных и обеспечивать низкую стоимость внедрения этих технологий в уже существующие сети, так как поддержка дополнительной функциональности требуется только на граничных узлах сети.
Системы SDH следующего поколения — многофункцональные мультисервисные платформы, предоставляющие множество услуг без дороговизны и сложности наложенных сетей.
Однако основой технологии SDH остается структура первого модуля сигнала STM-1, поэтому в пособие основное внимание уделяется рассмотрению мультиплексора SMA-1 фирмы SIEMENS. Этому посвящена первая глава. Во второй главе описан программный имитатор мультиплексора SMA-1.Третья глава посвящена современному поколению технологии SDH- NGSDH. Четвертая и пятые главы посвящены описанию технологии Metro Ethernet поверх SDH. В шестой главе описана кольцевая технология RPR
1. Основные понятия и определения
1.1 Технология SDH
Синхронная цифровая иерархия (СЦИ) (Synchronous cligiiul hierarchy, SDH) -иерархические серии цифровых скоростей передачи и транспортных структур, стандартизированных рекомендациями МСЭ-Т.
Синхронные транспортные модули (STM-N) - временные циклы,
длительностью 125 мкс, скорости передачи которых соответствуют SDH.
Сеть SDH - совокупность среды передачи, трактов и каналов, объединенных едиными системами синхронизации, контроля, управления и обслуживания.
SDH строится по функциональным слоям. Самый верхний слой -слой пользователей. Его обслуживает слой каналов, которые, в свою очередь, обслуживают слой трактов, и т.д.
Характеристика функций сетевых слоев.
Слой каналов образует сеть, обслуживающую пользователей. Оконечное оборудование (терминалы) пользователей подключены к комплектам аппаратуры PDH или SDH соединительными линиями (СЛ). Сеть каналов соединяет различные терминалы аппаратуры SDH через коммутационные станции, например, ЭАТС.
Слой трактов также образует сеть, обслуживающую каналы. Группы каналов объединяются в групповые тракты низшего порядка, а тракты низшего порядка объединяются в тракты высшего порядка при этом в каждом слое может осуществляться коммутация (переключение) трактов.
Слой физической среды содержит линейные тракты, построение которых зависит от среды передачи, в качестве которой в сетях SDH могут использоваться либо оптическое волокно, либо слои атмосферы. Линейные тракты образуются из групповых трактов и содержат два вида секций. Верхний слой - мультиплексорная секция, выполняет часть функций аппаратуры группообразования: ввод и ответвление цифровых потоков, ввод частот синхронизации и т.д. Нижний слой - регенерационная секция содержит регенераторы, восстанавливающие форму линейного сигнала и осуществляющие, при необходимости, ввод и вывод цифровых потоков.
1.2 Транспортная сеть
Транспортная сеть (transport network) - часть сети связи, охватывающая
магистральные узлы, междугородные станции, а также соединяющие их каналы и узлы (национальные, междугородные) [I]. В таблице 3.1 показаны три модели транспортных сетей. Первая модель, является сетью SDH [2, 3, 4, 5, б]. Вторая модель соответствует сети ATM на базе SDH [19]. Третья модель является оптической сетью, созданной на основе сети SDH; составной частью этой модели являются волоконно-оптические системы передачи со спектральным уплотнением (WDM). Эта сеть фактически является фотонной, верхние уровни которой могут содержать электрические тракты и каналы.
Узел сетевой (network node) - комплекс технических средств, обеспечивающий соединение сетевых станций первичной сети, образование и перераспределение сетевых трактов, типовых каналов передачи и типовых физических цепей, а также предоставление их вторичным сетям и спецпотребителям.
Станция сетевая (network station) - комплекс технических средств, обеспечивающий образование и предоставление вторичным сетям типовых физических цепей, типовых каналов передачи и сетевых трактов, а также их транзит.
Тракт сетевой (network link) - типовой групповой тракт или несколько последовательно соединенных типовых групповых трактов с включенной на входе аппаратурой образования тракта.
Тракт системы передачи линейный - комплекс технических средств, обеспечивающий передачу сигналов электросвязи в полосе частот или со скоростью, соответствующей данной системе передачи.
В зависимости от среды распространения линейный тракт называют кабельным, радиорелейным, спутниковым или комбинированным, а по типу системы передачи - аналоговым или цифровым.
Транзит (transit) - соединение одноименных каналов передачи или трактов, обеспечивающее прохождение сигналов электросвязи без изменения полосы частот или скорости передачи.
1.3 Структура мультиплексирования SDH сигнала.
Рассмотрим группообразование синхронных транспортных модулей STM-1.
Информация, поступающая в сеть, согласовывается со структурами, с помощью которых поддерживается соединение. В SDH эти структуры образуются в сетевых слоях секций и трактов и транспортируют цифровые потоки, а также широкополосную информацию. В функции этих структур входят также компенсация возможных изменений скорости и фаз транспортируемых по сети SDH цифровых потоков. Такая компенсация обеспечивает функционирование SDH как синхронной сети, допускающей плезиохронный режим.
Синхронные мультиплексоры фирмы «GPT/SIEMENS» формируют потоки синхронной цифровой иерархии и плезиохронной цифровой иерархии. На рисунке 1.1 показаны организация и связи структур мультиплексирования иерархий SDH и PDH.
ETSI –
Европейский Институт Стандартов в области Связи (European Telecommunication
Standards Institute)
ANSI - –Американский Национальный Институт Стандартов
(American National Standards Institute)
Рисунок 1.1 – Процесс загрузки цифрового потока в синхронный транспортный модуль STM-1
Мультиплексирование начинается с формирования контейнера. Входящие потоки PDH упаковываются (мультиплексируется) в контейнеры SDH С-12, С-3 или С-4 в соответствии с плезиохронным методом выравнивая скоростей; каждая стандартная скорость передачи информации потока PDH постоянно назначается контейнеру определённого размера. Путём добавления к контейнерам заголовка тракта (LO-POH) из контейнеров создаются виртуальные контейнеры VC-12,VC-2,VC-3 или VC-4.
Виртуальный контейнер VC определяется по формуле:
VC=LO-POH+C (1.1)
где LO-POH – заголовок маршрута низкого уровня
С – контейнер с нагрузкой
Трактовый заголовок POH создаётся (ликвидируется при распаковки сигнала) в пунктах, в которых организуется (расформировывается при распаковки сигнала) VC, и контролирует тракт между этими пунктами. В функции POH входит контроль качества тракта и передача аварийной и эксплуатационной информации. Заголовок HO-POH тракта высшего порядка содержит так же информацию о структуре информационной нагрузки VC. Каждый виртуальный контейнер VC-12 или VC-2 генерирует, вместе с соответствующими указателями TU (указатель данных), трибутарную единицу TU-12 или TU-3.
Трибный блок TU определяется по формуле:
TU=PTR+VC (1.2)
где PTR – указатель (маркер) трибного блока
VC – виртуальный контейнер
TU обеспечивает согласование между сетевыми слоями трактов низшего и высшего порядков и содержит информационную нагрузку и TU указатель, показывающий отступ начала цикла нагрузки от начала цикла VC высшего порядка. Один или несколько TU, занимающих определённые фиксированные позиции в нагрузке VC высшего порядка, называют «группой трибутарных единиц» (TUG). TUG образуется путем генерирования байтов TU-12 или TU-3.
Группа трибутарных единиц определяется по формуле:
TUG-2 = 4 x TU-1 (1.3)
TUG-2 = 3 x TU-12
TUG-2 = 1 x TU-2
TUG-3 = 1 x TU-3
где TU-11/TU-12/TU-2/TU-3 – трибутарные блоки
(4,3,1) – количество трибутарных блоков
TUG-3 = 7 x TUG-2 (1.4)
где TUG-2 – группа трибутарных блоков
7 – количество групп трибутарных блоков
Виртуальный контейнер высшего уровня VC-4 формируется путём мультиплексирования контейнера C-4 или нескольких групп TUG-3 .
Виртуальный контейнер VC-4 определяется по формуле :
VC-4 = (3 x TUG-3) + HO-POH (1.5)
где TUG-3 – группа трибутарных блоков
3 – количество групп трибутарных блоков
HO-POH- заголовок маршрута высокого уровня
Из-за своего размера виртуальный контейнер VC-4 может передаваться только непосредственно в цикле STM-1. Виртуальный контейнер VC-4 вместе с соответствующим указателем AU-4PTR образует административную единицу AU-4.
Административный блок AU-4 определяется по формуле:
AU-4 = AU-4PTR + VC-4 (1.6)
где AU-4PTR – указатель (маркер) административного блока AU-4;
VC-4 - виртуальный контейнер высокого уровня
Указатель AU содержит разность фаз между циклами SDH более высокого порядка и соответствующим виртуальным контейнером VC-4. Один или несколько AU, занимающих определённые фиксированные позиции в нагрузке STM, называются «группой административных единиц» (AUG). Группа содержит однородный набор блоков AU-3 или один AU-4.
STM – 1 образуется побайтным соединением группы административных блоков и секционного заголовка, и определяется по формуле:
STM-N = SOH + AUG (1.7)
где SOH – секционный заголовок;
AUG – группа административных блоков.
1.4 Структура цикла модуля STM-1
Рассмотрим логическую структуру модуля STM-1, представленную в виде цикла STM-1 с его заголовками. Модуль STM-1 имеет скорость 155 Мбит/с. Кроме информационной нагрузки, модуль STM-1 имеет избыточные сигналы, обеспечивающие автоматизацию функций контроля, управления и обслуживания (ОАМ) и вспомогательные функции. Такие избыточные сигналы называются «заголовками» (OH). Поскольку STM используется в сетевом слое секций, его заголовок называется секционным (SOH). Он подразделяется на заголовки регенерационной (R SOH) и мультиплексной (M SOH) секций. R SOH передаётся между регенераторами, а M SOH между пунктами, в которых формируется и расформировывается STM сигнал, проходя регенераторы транзитом. R SOH – выполняет функции цикловой синхронизации, контроля ошибок, указания порядка синхронизируемого модуля, а также создаёт каналы передачи данных, служебной связи и пользователя. M SOH – выполняет функции контроля ошибок и создаёт каналы управления системой автоматического переключения на резерв, передачи данных и служебной связи. Структура цикла модуля STM-1 приведена на рисунке 1.2
Цикл STM имеет период повторения 125 мкс. Обычно цикл представляется в виде двумерной структуры (матрицы), формат которой: 9 строк на 270 однобайтных столбцов (9´270=2430 элементов). Каждый элемент соответствует одному байту (8 бит) информации и скорости 64 кбит/с. Весь цикл STM-1 имеет скорость передачи равную 155 520 кбит/с, и определяется по формуле :
V- STM-1 = 64´2430=155520 кбит/с (1.8)
Цикл STM-1 состоит из трёх групп полей: поле секционных заголовков регенерационной секции (R SOH) формата 3´9 байтов и мультиплексной секции (M SOH) формата 5´9 байтов; поле указателя AU-4 формата 1´9 байтов; поле полезной нагрузки формата 9´261 байтов.
 270
270
STM-1
9 261
3
261
1
5
HO-POH
Рисунок 1.2 - Структура цикла STM-1 и VC-4, VC-3 и заголовка
HO-POH
Блок AU-4 служит для переноса одного виртуального контейнера VC-4, имеющего свой маршрутный (трактовый) заголовок высокого уровня HO-POH Рис. 1.2 . Основное назначение HO-POH – обеспечить целостность на маршруте от точки сборки виртуального контейнера до точки его разборки. Следует отметить, что структура заголовка для VC-3 и VC-4 одинаковая.
Ниже представлены байты заголовка и их значение.
J1 байт – передаётся в 16-ти последовательных циклах и состоит из 15-ти байтовой последовательности идентификаторов маршрута и 1-го байта суммы CRC-7 для идентификации ошибок в трассе маршрута (рисунок. 1.3). Идентификаторы маршрута используются для того , чтобы принимаемый
 |
терминал получал подтверждение о связи с определённым передатчиком.
Рисунок. 1.3 - Структура информационного поля J1 с цикловой структурой.
B3 байт –контролирующий ошибки чётности в предыдущем контейнере;
C2 байт – указатель типа полезной нагрузки. Несёт информацию о наличии полезной нагрузки. Основные типы полезной нагрузки определены в ITU-T G.707 и приведены в таблице 1.1
Т а б л и ц а 1.1 - Значения Указателя Типа Полезной Нагрузки C2
G1 байт – указатель состояния маршрута. Используется для передачи информации о состоянии линии к удалённому терминалу. Предусмотренно использование G1 байта для передачи информации об ошибках двух категорий (Рисунок.1.5).
FEBE(Far End Block Error)-наличие блоковой ошибки на удалённом конце. Сигнал, посылаемый в ответ на получение на удалённом конце ошибки четности по BIP-8(метод контроля чётности-8)
 |
FERF(Far End Receive Failure)-наличие неисправностей на удалённом конце. Сигнал, посылаемый в случае возникновения на удалённом конце нескольких неисправностей.
Рисунок. 1.4 Значение байта G 1
F2,F3 – байты, которые могут быть задействованы для организации канала связи и используются оператором для решения внутренних задач обслуживания системы передач.
H4 байт является указателем и используется при организации сверхциклов SDH. Он указывает на номер цикла VC-1, VC-2 в сверхцикле TU-1, TU-2. Этот байт также используется в процедуре смещения указателя при распаковки сигнала.
К3 байт – индикатор автоматического переключения ( APS ) . Он используется для оперативного резервирования в системе SDH. Даже в случае отсутствия системы самодиагностики, байт K3 обеспечивает передачу команды перехода на резерв.
N1 байт – это байт мониторинга взаимного соединения (TCM). Необходимость введения процедуры мониторинга взаимного соединения была связана с тем, что байт В3 , обеспечивающий контроль чётности, устанавливается только для начала и конца маршрута и обеспечивает контроль качества сквозного соединения.
Если маршрут проходит через несколько секций, принадлежащим различным операторам, требуется не только сквозной, но и посекционный мониторинг параметров качества. Именно для этих целей была введена дополнительная процедура TCM. Согласно ей, сетевой узел обеспечивает контроль четности по HO-POH и LO-POH (контроль BIP-N ), а затем передаёт информацию об ошибках предыдущему узлу в байте N1 ( для HO-POH ) или в байте N1 ( для LO-POH ).
Структура заголовка низкого уровня LO-POH различна по своему строению cо структурой HO-POH . Она состоит из четырёх циклически повторяемых байтов – V5, J2, N2 и K4 . Для более чёткого представления структуры заголовка стоит отметить, что по закону асинхронного метода передачи (ATM) входящий сигнал 2Мбит/с разбивается на 4 части и к каждой из частей присваивается один из байтов заголовка (Рисунок.1.5). Наиболее важным для технологии передачи является байт V5, где передаётся информация о контроле чётности, индикации ошибок и типе нагрузки (Рис. 1.7). Байты J2, N2, K4 имеют анологичные значения с байтами J1, N1, K3 заголовка высшего уровня HO-POH.
 |
Рисунок. 1.5 - Структура заголовка LO-POH и метод асинхронной загрузки
потока 2Мбит/с в SDH модуль.
Рисунок. 1.6 - Структура байта V5
Назначение полей байта V5.
BIP-2 - контроль чётности VC-12;
REI - сообщение подтверждения ошибки BIP-2(ошибка на удалённом конце);
RFI - неисправность на удалённом конце;
RDI - индикация дефекта на удалённом конце(передаётся в случае потери цикловой синхронизации).
Рассмотрим структуру заголовков цикла STM-1. Заголовок SOH (рисунок 1.8) состоит из двух блоков: R SOH – заголовок регенераторной секции размером 3´9=27 байт и M SOH – заголовок мультиплексной секции размером 5´9=45 байт.
 9 байт
9 байт
-
![]()
![]() байты, зарезервированные для локального
использования.
байты, зарезервированные для локального
использования.
-
*
не шифруемые байты. Они не
должны содержать конфиденциальную информацию.
-
D
байты, зависимые от сферы
передачи.
Рисунок 1.7 - Структура заголовков SOH цикла STM-1
Байты заголовка R SOH и M SOH: .
байты А1, А2 являются индентификаторами наличия цикла STM-1 в цикле STM-N (A1=11110110, А2=00101000).
Байт В1 и три байта В2 формируют две кодовые последовательности, используемые для проверки на чётность с целью обнаружения ошибок в предыдущем фрейме: BIP-8 формирует 8-битную последовательность для размещения в В1 и BIP-24 – 24-битную последовательность для размещения в трёх В2;
байт J0 - трасса регенераторной секции. Он используется для передачи идентификатора секционного доступа так, что бы секционный приёмник мог проверить длительность связи с соответствующим передатчиком. Этот байт определён только для STM-1 потока;
байты D1-D12 формируют служебный канал передачи данных DCC: D1-D3 формируют канал регенераторной секции – DCCR (192 кбит/с), D4-D12 – канал мультиплексной секции (DCCM=576 кбит/с). DCC канал может использоваться встроенными системами самодиагностики и системами сетевого менеджмента TMN для удалённого контроля и реконфигурации сети ;
байты Е1, Е2 могут быть использованы для создания служебных каналов голосовой связи: Е1 для регенераторной секции (64 кбит/с), Е2 для мультиплексной секции (64 кбит/с);
байт F1 зарезервирован для создания канала передачи данных управления. Этот байт служит для передачи информации о результатах контроля чётности и обнаружения ошибок. В состав байта входят идентификаторы регенераторов RI и информационный бит S, где передаётся информация об ошибках.
Рисунок. 1.8 - Структура канала управления F1
байты К1 ,К2 обеспечивают резервное переключение и оперативную реконфигурацию сети (APS). В байте К1 передаётся запрос на резервное переключение и статус удалённого конца тракта. В байте К2 передаётся информация о параметрах моста , используемого в APS c
архитектурой 1:n , данные по архитектуре MSP и сообщения о несправностях, связанные с APS.
Конфигурация байтов K1 и К2 приводится в таблицах 1.1 и 1.2
Т а б л и ц а 1.1 – Значение байта К1

Т а б л и ц а 1.2 - Значение байта К2
Бит 5 |
Архитектура коммутатора MSP |
|
1 |
Архитектура 1:n |
|
0 |
Архитектура 1+1 |
|
Биты 678 |
Статус |
|
111 |
MS AIS |
|
110 |
MS FERF |
|
101 |
Для будущего использования |
|
100 |
Для будущего использования |
|
011 |
Для будущего использования |
|
010 |
Для будущего использования |
|
001 |
Для будущего использования |
|
000 |
Для будущего использования |
байты Z1, Z2 зарезервированы для будущих целей.
байт S1 – информационный байт статуса синхронизации (SSM). Определяет параметр качества источника синхронизации узла генирации транспортного модуля.
T а б л и ц а 1.3 Значения параметра источника синхронизации.
Параметр |
Приоритет при использовании |
Значение параметра |
|
0010 |
Наиболее высокий
|
G.811(PRC) Первичный источник синхронизации |
|
0100 |
|
G.812(SSU-A) Вторичный источник синхронизации транзитного узла |
|
1000 |
|
G.812(SSU-В) Вторичный источник синхронизации оконечного узла |
|
1011 |
|
G.813(SEC) Локальный источник синхронизации циф. оборудования |
|
1111 |
Наиболее низкий |
Не использовать для синх. |
|
0000 |
|
Качество не определено |
Информация о параметрах источника синхронизации передаётся комбинацией битов с 5 по 8. Значения возможных параметров источника синхронизации приведены в таблице 1.3.
Передача информации о качестве источника синхронизации конкретного узал даёт возможность авторегулирования процессов в системе синхронизации.
Байт М1 в потоке STM-1 используется для сообщения ошибки на удалённом конце уровня секции мультиплексирования (MS-RIE).
1.5 Конфигурация синхронного мультиплексора SMA 1
SMA 1, синхронный мультиплексор ввода и вывода, представляет собой комбинацию мультиплексора, коммутатора и оптической линейной системы для передачи широкополосного трафика со скоростью 155,52 Мбит/с, соответствующий первому уровню STM-1 (синхронный транспортный модуль), согласно рекомендациям G.707 МККТТ, объединённых в единой корзине. Он рассчитан на использование в сетях со стандартом мультиплексирования SDH, а также может использоваться в существующих PDH сетях. Устройство может быть быть скомпановано для различных приложений путём выбора комбинации плат и программного управления.
Основное его назначение состоит в транспортировке и коммутации широкополосных сигналов в сетях связи. Устройство может комплектоваться портами 2 Мбит/с, 34 Мбит/с, 45 Мбит/с, 140 Мбит/с ( G.703 ) для трибутарных потоков и портами 155,52 Мбит/с STM-1 ( G.709 ) как для линейных, так и для трибутарных потоков. Возможны варианты оптических или электрических портов.
Электрический интерфейс STM-1, в основном используется для соединения на дистанции до 10 метров. Оптический интерфейс способен передать сигнал на расстояние от нескольких километров до нескольких десятков километров. Этот параметр зависит от мощности оптического передатчика, от качества оптического волокна и сварных соединений на требуемом участке .
Предусмотрены интерфейсы для операторного контроля и управления либо с помощью местного терминала , либо с помощью удалённого терминала управления элементами сети – Система менеджмента EM. Местный терминал может быть подключён через интерфейс RS-232/V.24 к любому мультиплексору SMA1. Соединение устанавливается по принципу “когда требуется” , то есть терминал не является постоянной частью любого конкретного SMA1. Терминал используется для управления и контроля . Например, пуско-наладки или диагностики неисправностей мультиплексора, к которому он подключён в данный момент. Система сетевого менеджмента EM подключается через Q-интерфейс (согласно рекомендациям G.773 по МККТТ) к элементу сети, выполняющему функции сетевого шлюза. Сетевым шлюзом может быть любой мультиплексор SMA1, имеющий Q-интерфейс. С другими элементами сети он связан через выделенные в STM-1 каналы (DCC), чтобы обеспечивать возможности управления всей сетью.
В оборудовании следующего поколения возможна загрузка программного обеспечения через сетевой интерфейс . Это позволит осуществить модернизацию без физического доступа к оборудованию.
SMA1 представляет собой корзину с задней панелью, куда вставляются блок синхронизации, блок сетевого фильтра, блок вспомогательных интерфейсов и блок аварийных индикаторов (светодиодов).
Базовыми блоками являются карта контроллера (MC), карта коммутатора ( SW ) и карта питания ( PSU ).
Блоками, определяемыми пользователем, являются карта связи (COM),
линейные оптические и электрические карты (STM-1 OPT/ELEC), трибутарные катра 2 Мбит/с , 34 Мбит/с , 45 Мбит/с и 140 Мбит/с. Карты (STM-1 OPT/ELEC) могут использоваться не только как линейные карты, но и как трибутарные, если их соответственно вставить в трибутарные слоты .
Схема корзины синхронного мультиплексора SMA1 представлена на рисунке 1.9
Функции интерфейсов корзины SMA1.
1. Интерфейсная понель для базовых и дополнительных блоков (кард )
2. Панель вспомогательных интерфейсов
3. Дисплей индикаций
4. Интерфейсная зона ( позиция 4 )
5. Интерфейсная зона ( позиция 5 )
6. Интерфейсная зона ( позиция 6 )
7. Интерфейсная зона ( позиция 7 )
8. Блок аварийной сигнализации
9. Блок синхронизации
10. Блок фильтра питания.
11. Корзина синхронного мультиплексора SMA1
Рисунок. 1.9 - Схема корзины синхронного мультиплексора SMA1
Позиции интерфейсной панели для базовых и дополнительных модулей:
401. Позиция линейной STM-1 карты , направление-Запад А
402. Позиция линейной STM-1 карты , направление-Запад В
403. Позиция коммутационной карты А
404. Позиция трибутарных кард 1
405. Позиция трибутарных кард 2
406. Позиция трибутарных кард 3
407. Позиция трибутарных кард 4
408. Позиция резервной трибутарной катры
409. Позиция коммутационной карты В
410. Позиция линейной STM-1 карты , направление-Восток А
411. Позиция линейной STM-1 карты , направление-Восток В
412. Позиция карты связи А
413. Позиция карты связи В
414. Позиция контроллера
415. Позиция карты служебной связи.
416. Позиция карты питания А
417. Позиция карты питания В
1.6 Интерфейсная панель для базовых и дополнительных блоков
Интерфейсная панель для базовых и дополнительных блоков является главной панелью , расположенной на задней стенке корзины мультиплексора. Панель имеет 17 рядов ( позиций ) , каждая из которых предназначена для определённого вида интерфейса (карты). Механические ключи предотвращают возможность неправильной установки и включения карты. Номера позиций используются для идентификации целей в процессе ввода в эксплуатацию , контроля и управления. Передние панели карт являются составной частью системы экранирования. Если по условиям конфигурации некоторые позиции остаются свободными, то они должны быть закрыты соответствующими заглушками .
Позиции 401-402 используются для линейных карт , имеющих определённое направление – Запад ( West ).
Позиции 410 и 411 используются для линейных кард с направлением – Восток. ( East )
В свою очередь, линейные карты подразделяются на несколько видов.
Карта с электрическим интерфейсом (согласно G.703 по МККТТ ) используется для соединения линейной стороны на короткие дистанции до 10 метров. Целесообразность использования линейной карты с электрическим интерфейсом появилась при необходимости ввода или вывода PDH потоков из существующей магистрали , построеной на потоках уровня STM-16 и выше. ( Рисунок. 1.10)
Как правило, синхронные мультиплексоры обоих уровней устанавливаются как можно ближе друг к другу. Чаще всего в одной и той же стойке. В этом случае мультиплексор уровня STM-16 магистральной сети имеет электрический трибутарный интерфейс STM-1, который будет соединён с линейным электрическим интерфейсом мультиплексора уровня STM-1 . В этом случае мультиплексор уровня STM-1 будет считаться оконечным (терминальным) .
где 1 - Трибутарный электрический интерфейс STM-1
2 - Линейный электрический интерфейс STM-1
3 - Трибутарный PDH интерфейс
Рисунок. 1.10 - Схема соединения мультиплексоров уровней STM-16 и STM-1
При соединении двух мультиплексоров с электрическими интерфейсами применяется коаксиальный кабель с сопротивлением 75 Oм.
С внедрением SDH мультиплексоров следующего поколения, использование электрических интерфейсов как линейную часть стало не целесообразно. Многие производители SDH оборудования внедряют более гибкую систему распаковки PDH сигналов. Например в синхронных мультиплексорах нового поколения SMA16, SMA64 фирмы Siemens устанавливаются 2 Мбит/с интерфейсы в качестве трибутарной единицы. Это позволяет экономически и практически выгодно использовать оборудование в решении задач предоставления высококачественных услуг связи.
Оптические линейные интерфейсы ( согласно G.957 по MККТТ ) позволяют передавать сигнал на более длинные расстояния. В свою очередь оптические интерфейсы подразделяются на категории или классы применения.
Класс применения определяет основные характеристики оптического интерфейса. Ниже приведены основные классы применения.
Класс применения X- n .n
где X – дистанция
S ( Short range ) Короткая дистанция
I ( Intermediate range ) Cредняя дистанция
L ( Long range ) Длинная дистанция
n (первая)- Cкорость передачи
1: STM-1 (155.52 Мбит/с)
2: STM-4 (622 Мбит/с )
n (вторая)- Длинна волны в наномертах ( nm )
1: 1300 nm ( волновой диапазон 1280-1335 нм. )
2: 1550 nm ( волновой диапазон 1480-1580 нм. )
Оптический линейный интерфейс STM-1 ( Short Houl ) используется для передачи сигнала на короткие расстояния (до 45 километров) и принадлежит к классу применения S - 1.1
Оптический линейный интерфейс STM-1 ( Long Houl 1300 ) применяется для участков со средними оптическими секциями ( до 80 км ) и принадлежит к классу применения L - 1.1
Оптический линейный интерфейс STM-1 ( Long Houl 1550 ) применяется в сетях с длинными оптическими секциями (до 100 -115 км) и принадлежит к классу применения L – 1.2
Стоит пояснить, что длина волны 1300 нм. применяется для коротких и средних дистанций, а 1550 нм. для длинных дистанций.
Позиции 401 и 411,в основном, используются при сетевой конфигурации с линейным резервированием или резервированием секции мультиплексирования (MSP-Multiplex Section Protection). Резервирование линии STM-1 по схеме 1+1 обеспечивает полную защиту тракта от точки до точки между оборудованием. Реализация этой схемы требует дублирования линейных модулей STM-1 в обоих направлениях – Восток и Запад . То есть , если сушествует необходимость в резервировании линейного тракта, то в позиции 401 и 411 устанавливаются дополнительные линейные модули , эдентичные тем , которые установлены в позиции 402 и 410. Следовательно, принято считать линейный модули в позиции 402 и 410 “ рабочими ” , а модули в позиции 401 и 411 “ резервными “, хотя по своим техническим характеристикам в качестве “ рабочей “ или “ резервной “ может быть выбрана любая из выше перечисленных позиций. В случае выхода из строя линейного модуля в позиции 402 или 410 , происходит автоматическое переключение трафика ( APS-Automatic Protection Switch ) на резервный линейный модуль в позиции 401 или 411. Время переключения не должно превышать 50 мс ( согласно G. 841 по МККТТ )
Переключение осуществляет коммутационный модуль (SW ), расположенный в позициях 403 или 409. Характер переключения определяется и программируется оператором через локальный терминал или систему сетевого менеджмента.
Для управления резервным переключением используются байты К1 и К2 секционного заголовка. В байте К1 передаётся запрос на резервное переключение и статус удалённого конца тракта. В байте К2 передаётся информация о параметрах моста, используемого при автоматическом переключении трафика ( APS ) с архитектурой 1 : n, данные по архитектуре резервирования секции мультиплексирования (MSP) и сообщения о неисправностях, связанных с автоматическим переключением трафика (APS).
Различные варианты архитектуры резервирования (MSP) используются в различных схемах резервирования . Наибольшее распространение имеют две схемы, непосредственно связанные с кольцевой топологией сетей SDH - схема “горячего резервирования” ( Рисинок. 1.16 ) и схема “ распределённой нагрузки “ . В первом случае трафик передаётся как в прямом , так и в резервном направлении. В случае повреждения происходит реконфигурация и создаётся резервный канал. В схеме распределённой нагрузки половина трафика передаётся в прямом , половина – в обратном направлении. В этом случае при возникновении неисправности происходит переключение на уровне ресурсов.
Коммутационный модуль для SMA1 имеет матрицу с коммутационным полем STM-1 x 2 ( 155.52 Мбит/с x 2 ). ( Рисунок. 1.11)
Это позволяет производить как линейные , так и трибутарные соединения внутри системы.
Возможно применение двух коммутационных кард одновременно. Такая конфигурация называется – Резервирование коммутационного модуля. (Рисунок. 1.12) В случае выхода из строя рабочего коммутационного модуля (А) существующий трафик переключается на резервный модуль (В) . Соответственно меняется коммутационное поле, но при этом конфигурация соединений остается прежней. Cоединительная шина на задней панели мультиплексора изготовлена таким образом , что контроллер , линейные и трибутарные интерфейсы паралельно соединены с двумя коммутационными модулями. Из курса SDH технологии известно , что в формате STM-1 сигнала имеются внутренние интерфейсы, обеспечивающие доступ к заголовку ( POH ) каждой трибутарной единицы ( TU ). Данные диагностики включаются в байт V5 каждого заголовка трибутарной еденицы с помощью коммутационного модуля. Каждый модуль, несущий трафик, проверяет принятые диагностические данные в каждом заголовке трибутарной единицы, и любые расхождения между принятыми и ожидаемыми данными расцениваются как неисправность коммутационного модуля.
При возникновении неисправности коммутационного модуля, каждый несущий трафик модуль, обнаруживший неисправность, будет автоматически выбирать трибутарную единицу с другого коммутационного модуля.
Например, если рабочий коммутационный модуль в позиции 403 выходит из строя, и любой трибутарный или линейный модуль получает ошибку в заголовке трибутарной единицы , то этот модуль переключится на второй коммутационный модуль, от которого получает трибутарную единицу без ошибок в заголовке. Контроллер мультиплексора (позиция 414) будет информироваться о переходе на другой коммутационный модуль и скоординирует переход на этот модуль остальные модули , несущие трафик.Таким образом, контроллер мультиплексора обеспечивает переключение линейного модуля STM-1 и трибутарных модулей 2 Мбит/с, STM-1 на резервный коммутационный модуль.
После перехода всех модулей на резервный коммутационный модуль , неисправный модуль может быть удален или заменен.
Переход на резервный коммутационный модуль может осуществляться автоматически или управляться командами оператора. При автоматическом переходе схема возврата трафика на ранее работавший модуль невозможна, даже если неисправный коммутационный модуль будет заменён. Возврат может выполняться только по команде оператора.
Ручное управление имеет наивысший приоритет и будет превышать все другие требования.

Рисунок. 1.11 - Схема коммутационного модуля ( SW )
Модуль контроллера (МС) является мозговым центром мультиплексора и устанавливается в позиции 414. Данный модуль не имеет возможностей резервирования и возможна установка и использование только одного модуля (МС) в корзине мультиплексора.
Pисунок. 1.12 Схема резервирования коммутационного модуля ( SW )
Модуль (МС) осуществляет контроль и управление всех функций мультиплексора SMA1. В процессе старта мультиплексора, информация , находящаяся в банке данных, загружается в Програмное Запоминающее Устройство (ПЗУ) каждой карты. Время загрузки до 10 минут. На модуле (МС) установлен главный управляющий процессор , контролирующий все функциональные процессы и осуществляющий управление всего мультиплексора SMA1. На данном модуле установлена Электрически Стираемая Программируемая Постоянная Память (EEPROM), выраженная в двух мини модулях (А) и (В), установленных непосредственно на карте контроллера. В каждом из этих мини модулей хранится информация конфигурации мультиплексора и существующих линейных и трибутарных соединений. Мини модули (А) и (В) полностью идентичны и содержат одиниковый банк данных. Модуль (А) является основным (рабочим) , а модуль (В) - вторичным (резервным). Принцип дублирования банка данных необходим при сбоях основного источника , а так же при загрузке новой версии програмного обеспечения. Если по каким-либо причинам основной модуль (А) выходит из строя, то автоматически активируется модуль (В) и последующая загрузка осуществляется с резервного модуля (В). В данном случае мультиплексор является аварийным, поскольку работает с резервным банком данных и необходимо в кротчайшие сроки устранить неисправность.
Второй повод для использования концепции дублирование банка данных является загрузка нового программного обеспичения (модернизация). Загрузка осуществляется на рабочий модуль (А), при этом резервный модуль (В) становится активным на время проведения загрузки нового программного обеспечения. После модернизации программного обеспечения активируется основной модуль (А) и происходит загрузка уже нового програмного обеспечения без потери существующего трафика . Модернизация программного обеспечения подразумевает под собой открытие новых возможностей при существующей конфигурации и не влияет на существующий трафик и соединения.
Загрузка нового программного обеспечения возможна только на модуль (А). Программное обеспечение на модуле (В) остаётся с прежней версией . В случае если новое программное обеспечение по каким-либо причинам будет некорректно работать или произойдёт сбой программы, то автоматически ( или мануально) возможен переход на прежную версию программного обеспечения, хранящегося в банке данных модуля (В).
Модуль (МС) не только осуществляет текущий контроль всех элементов синхронного мультиплексора, но и выполняет подключение к локальному и удалённому оборудованию управления.
Непрерывный текущий контроль , конфигурирование и управление мультиплексором SMA1 осуществляются с помощью интерфейсов, приведённых в таблице 1.4
Т а б л и ц а. 1.4 Интерфейсы управления контроллера.
|
Интерфейс |
Тип интерфейса |
|
Q-B3 (QD2B3) |
Ethernet – интерфейс 10 Мбит/с |
|
Q-F (QD2F) |
RS 232 / V.24 9,6 кбит/с Асинхронный режим |
|
QD2-DCC |
DCCR (байты D1-D3) 192 кбит/с |
|
|
DCCM (байты D4-D12) 576 кбит/с |
Интерфейс Q-F (QD2F) представляет собой интерфейс RS 232 для управления локальным мультиплексором SMA1 терминала пользователя (LT) . Этот интерфейс сконфигурирован для реализации скорости передачи 9,6 кбит/с (асинхронный режим) в соответствии с ресомендациями МККТТ V.24 . Подключение осуществляется через порт (PC) на вспомогательной интерфейсной панеле. Для соединения используется Нуль-модемный кабель с наконечниками типа D-9 (9 пин).
Интерфейс Q-B3 (QD2B3) осуществляет подключение системы управления сетью ( к EM ). Интерфейс Q-B3 (Ethernet – интерфейс 10 Мбит/с) обеспечивает доступ к локальным и удалённым сетевым элементам. Подключение интерфейса Q-B3 к мультиплексору осуществляется через блок подключения к среде передачи (MAU) .
Этот блок является конвертером симметричного соединения от мультиплексора к сетевому коаксиальному выходу системы управления. Для соединения компьютера системы менеджмента и конвертера (MAU) используется коаксиальный кабель 50 Ом с наконечниками типа BNC.
Интерфейс Q-B3 обеспечивает быструю загрузку программного обеспечения и удалённый контроль сетевых элементов с помощью сетевой программы менеджмента. Соединение через данный интерфей требует установки дополнительной сетевой карты (COM) в позиции 412 или 413 . Сетевой элемент, имеющий Q-B3 интерфейс, называется шлюзовым мультиплексором, так как служит шлюзом между системой сетевого менеджмента и существующей SDH сетью.
Схема соединения интерфейсов Q-B3 и Q-F представлена на рисунке 1.13
Рисунок.1.13 Схема соединения
интерфейсов Q-B3 и Q-F .
Интерфейс QD2-DCC (байты заголовка D1-D12) обеспечивает доступ к байтам D1-D12 заголовка SOH в цикле STM. Байты заголовка D1 – D12 могут быть выборочно использоваться для двух каналов пердачи данных DCC.
Каналы DCC используются для передачи информации оборудования сетевого менеджмента (EM). Все сетевые элементы имеют доступ к каналу DCCR. Регенераторы не имеют доступа к кналу DCCM, который не является компонентом RSOH. В качестве протокола канального уровня для связи в сети используется протокол LAPD .
Этот протокол требует, чтобы каждая карта STM-1, независимо от занимаемой позиции (линейной или трибутарной), была определена как “ пользователь “, или как “ сеть “( User/Network). Другими словами, этот протокол работает при отношении ведущий – ведомый. Конфигурация DCC каналов в качестве сети или пользователя необходима для правильного функционирования протокола и передачи сообщений о событиях. Конфигурирование каналов DCC осуществляется только через локальный терминал. Система сетевого менеджмента ( EM) тоже имеет возможность изменить параметр DCC кнала, но следует заметить, что изменение конфигурации канала DCC через эту систему может привести к потере соединения между служебными каналами в сети без возможности восстановления.
Восстановить конфигурацию служебных каналов DCC можно только через локальный терминал.
Схема организации DCC каналов в сети SDH показана на рисунке 1.14
Рисунок. 1.14 - Схема организации DCC каналов в сети SDH.
Ещё одна функция модуля (MC) – это источник
синхронизации. На модуле расположен кварцевый синхрогенератор c фазовой
автоподстройкой, который подаёт тактовый сигнал с частотой 2048 кГц в случае
отказа всех внешних источников синхронизации и в течение 24 часов удерживает
качество синхросигнала PRC с последующим ухудшением. Качество локального
источника синхросигнала ![]() .
.
Позиции 404-407 в корзине мультиплексора SMA1 занимают трибутарные модули. Существуют несколько разновидностей трибутарных карт, обеспечивающих транспорт для сигналов разного формата. К ним относятся как PDH , так и SDH сигналы.
Модули, являющиеся портами для PDH сигналов.
Модуль 2 Мбит/с производит размещение и мультиплесирование первичных информационных сигналов в структуре STM-1.
Каждый трибутарный модуль может обработать 16 потоков 2 Мбит/с.
Модули 34 и 45 Мбит/с выполняет те же функции, что и модуль 2 Мбит/с и обрабатывают до трёх информационных потоков 34,68 и 44,76 Мбит/с.
Модуль 140 Мбит/с обрабатывает один поток 139,264 Мбит/с
Физический выход трибутарных PDH портов находится на интерфейсных панелях (4,5,6,7), расположенных в верхней части корзины мультиплексора. Каждая трибутарная позиция, находящаяся на панеле базовых и вспомогательных блоков, имеет жестко закреплённую позицию на интерфесных понелях.
Позиция 404 – интерфейс 4
Позиция 405 – интерфейс 5
Позиция 406 – интерфейс 6
Позиция 407 – интерфейс 7
В качестве трибутарного модуля может использоваться любая электрическая или оптическая карта STM-1, если она будет установлена в трибутарные позиции 404-406. Физический выход сигнала осуществляется непосредственно на трибутарной карте STM-1 в виде оптических или коаксиальных портов.
Трибутарная позиция 407 используется в качестве резервного слота в случае конфигурации с резервированием трибутарных модулей 1:n.
Резервирование осуществляется только на уровне сигнала 2 Мбит/с.
При конфигурации с резервированием трибутарных интерфейсов 1:1 используется иная физическая конфигурация карт. В качестве рабочей и резервной карт могут быть использованы позиции 404/405 и 406/407.
В этом случае пропускная способность трибутарных интерфейсов будет уменьшена, так одна или две (в зависимости от конфигурации сети) трибутарные позиции будут заняты под резервные модули.
Позиции 412-413 используются для модулей связи (COM).
Как было сказано выше, карта служит для связи программы сетевого менеджмента (ЕМ) с системным контроллером мультиплексора и обеспечивает соединение через Еthernet или интерфейс X.25. Мультиплексор, имеющий карту (COM) для связи с (ЕМ) является шлюзом по отношению к существующей сети и будет называтся шлюзовым мультиплексором .
Когда карта (СОМ) вставлена в позицию 412, связь обеспечивается через сеть Ethernet; когда она вставлена в позицию 413, обеспечивается связь через интерфейс X.25. Протокол X.25 (Q-B2)обеспечивает доступ через электрический порт V.28 (RS232) к терминалу управления сетевыми элементами (ЕМ) через модем в сеть передачи данных с пакетной коммутацией. Более практичным соединением , получившим большое применение в современных сетях, стало соединение через Ethernet (10 Мбит/с Q-B3).
В позиции 416-417 утанавливаются модули источника питания (PSU)
Номинальное напряжение – 48 V постоянного напряжения , поступающего из внешнего источника питания. Отклонения по напряжению допускаются от –40 до –57 V . Схемные предохранители –прерыватели в каждом проводе на 5 Ампер.
Экранированный соединительный кабель рассчитан на постоянный ток 10 Ампер.
Блок (PSU) не требует предварительной подготовки для установки и не имеет внешних соединений. Однако он имеет устройство механической блокировки, которое гарантирует, что модуль не может быть установлен или демонтирован, если его выключатель усановлен в позицию ON. Существует возможность использования двух модулей (PSU) одновременно. Оба модуля имеют паралельное соединение на задней шине мультиплексора к каждой интерфейсной позиции, и в случае выхода из строя одного из модулей (PSU) , питание будет осуществлятся от второго модуля. Для модулей питания позиции “рабочий”, ”резервный” строго не определены. Позиция 417 является позицией (А), а позиция 416 – (В).
Позиция 415 зарезервирована для вспомогательного модуля внешних подключений (AUX). Этот модуль обеспечивает три служебных канала с передачей данных 9,6 кбит/с . Один из основных принципов использования этих каналов – это организация удалённого доступа локального терминала. Как известно, локальный терминал не имеет возможности контролировать удалённые сетевые элементы через Ethernet (Q-B3 интерфейс) . Эту проблему возможно решить путем использования служебных каналов . Например, существует необходимость контроля одного из удалённых сетевых элементов. Для этого необходимо соединить один из доступных портов (AUX) с портом локального терминала (PC) на удалённом мультиплексоре, используя для соединения соответствующий соединительный кабель. На другом мултиплексоре, c которого будет осуществлятся контроль, подключить локальный терминал на соответствующий порт (AUX) .
Таким образом , используя служебный канал (AUX) мы устанавливаем соединение между локальным терминалом и удалённым мультиплексором.
1.7 Панель вспомогательных интерфейсов
На передней панели вспомогательного блока находятся внешние разъёмы для различных интерфейсов, кроме интерфейса локального терминала. Этот интерфейс используется во всех вариантах оборудования, остальные интерфейсы могут либо использоваться, либо не использоваться. Это зависит от типа оборудования и физической комплектации интерфейсных модулей мультиплексора.
Предполагается использование следующих видов соединений; порт (PC) используется для подключения локального терминала (LT) , используя интерфейс RS232/V.24 cо скоростью 9,6 кбит/с.
Порты AUX 1, AUX2, AUX3 обеспечивают выход трём служебным каналам со скоростью 9,6 кбит/с. Эти каналы функционируют , если в позицию 415 установлен модуль (AUX).
Порт (Alarm/Comms) обеспечивает доступ к входам и выходам аварийных сигналов контроллера, для целей определённых пользователем и открывает возможности для будущих приложений.
Порт (X.25) обеспечивает электрический порт V.28(RS232) c протоколом X.25 для доступа терминала управления сетевыми элементами (ЕМ) через модем в сеть передачи данных с пакетной коммутацией и является внешним интерфейсом для шлюзового мультиплексора. Данный порт активируется, если в позицию 413 вставлен модуль (СОМ).
Порт (AUI) обеспечивает интерфейс блока согласования для удлинения кабеля к внешнему блоку адаптации (MAU). Это внешний интерфейс Ethernet сети к шлюзовому мультиплексору, работающий в паре с модулем (COM) в позиции 412.
Тестовые разъёмы (Tx test) и (Rx test) обеспечивают несимметричные выходы с сопротивлением 75 Ом и кодом HDB3, что позволяет контролировать любой входящий или исходящий трафик с оборудования.
Порт (Test Bus Balanced) обеспечивает два симметричных выхода с сопротивлением 120 Ом и кодом HDB3, позволяющих осуществлять контроль входящего и исходящего трафика.
1.7.1 Интерфейсные зоны 4,5,6,7 и блок аварийной сигнализации Bw7R
Интерфейсные зоны 4, 5, 6 и 7 служат для физического ввода и вывода трибутарных потоков. Каждая интерфейсная зона строго закреплена за позицией на интерфейсном поле для базовых и дополнительных блоков. Тип карты на интерфесном поле трафика соответственно зависит от типа трибутарной карты, кроме трибутарного модуля STM-1. Выход трибутарного трафика STM-1 осуществляется с порта, расположенного непосредственно на этом модуле.
Блок аварийной сигнализации Bw7R генерирует сообщения об авариях и ошибках в соответствии с таблицей аварийных сигналов Bw7R 1.20 .
Т а б л и ц а 1.5 Таблица аварийных сигналов Bw7R
|
Cоединение с дисплеем индикации мултиплексора
|
|
Аварийный сигнал А (срочный аварийный сигнал) |
|
Аварийный сигнал В ( несрочный аварийный сигнал) |
|
Индикатор напоминания (рабочий контакт) |
|
Кнопка сброса RT |
|
Напряжение аварийной сигнализации |
|
Аварийные сигналы к оборудованию визуальной аварийной сигнализации
|
|
Аварийный сигнал А (свободный контакт) |
|
Аварийный сигнал В (рабочий контакт) |
|
Индикатор напоминания (рабочий контакт) |
|
Напряжение аварийной сигнализации +S |
|
Напряжение аварийной сигнализации -S |
|
Аварийные сообщения в систему центрального наблюдения за обслуживанием |
|
Аварийный сигнал ZA(A) (критический сбой линейного потока или информационного потока пользователя) |
|
Аварийный сигнал ZA(В) (некритический сбой линейного потока или информационного потока ) |
|
Аварийные сигналы LE (отказ линейного оборудования передачи) |
Конфигурирование выполняется исключительно программным обеспечением.
Сигнализация BW7R имеет соединение с внешним коммутационным модулем. Этот модуль распологается в непосредственной близости, а именно в верхней части стойки, в которой установлен мультиплескор. Он обеспечивает физическое подключение внешних аварийных контроллеров или внешних источников аварий. Также на этом модуле установлен звонок, сообщающий о возникновении аварии.
1.8 Интерфейс блока синхронизации и дисплей индикации
Интерфейс блока синхронизации служит для подключения к SMA1 внешних источников синхросигналов, а также для вывода сигнала синхронизации для других целей.
Для подключения внешних источников синхросигналов используется симметричный 120 Ом и несимметричный 75 Ом (коаксиальный) порты.
Также два порта с различным сопротивлением и разъёмами используются для вывода источника синхронизации для других целей.
Эти порты могут быть настроены на одну из возможных скоростей передачи через местный терминал при выполнении операции установки режима синхронизации.
Дисплей индикации, расположен на базовом блоке корзины мультиплексора. Этот блок имеет внутренний интерфейс и является частью станционной схемы аварийной сигнализации, обеспечивающей выполнение функций отображения состояния с помощью светодиодного дисплея. Дисплей содержит три светодиода и одну кнопку отмены аварии. Обозначения светодиодов начинаются сверху вниз. Первый светодиод красный и обозначает срочную аварию. Второй жёлтый светодиод обозначает несрочную аварию. Третья кнопка сброса аварий( или подтверждения аварии) . Четвёртый желтый светодиод показывает аварию, которая была активирована ранее(красный или жёлтый светодиод) , даже если в данный момент она исправлена.
Фильтр питания имеет два разьёма типа (D) для подвода питающего напряжения –48 В и обеспечивает филтрацию постоянного напряжения, поступающего от источника питания постоянного напряжения. Два входа питания используют в качестве резервирования источника питания.
Крайний левый порт считается основным, а правый – резервным. Оба порта имеют параллельные соединительные шины для модулей питания (PSU) , установленных в позиции 416-417.
1.9 Функциональная схема мультиплексора SMA1
Оборудование сетей SDH выполняет определённые функции обработки цифрового потока или поддержания работоспособности системы в целом. На определённом этапе развития сетей SDH, главным образом, в связи с формализацией задач управления такими сетями, появилась необходимость определить набор логических функций и провести их систематизацию. Это было сделано в рекомендации G.782, где была приведена схема мультиплексирования , составленная из обобщённых логических блоков, выполняющих определённую логическую функцию. Синхронные мультиплексоры разрабатываются различными зарубежными компаниями и имеют определённые различия характеристик и возможностей, но в силу высокого уровня стандартизации технологии SDH они в значительной степени унифицированы по основным параметрам.
Схемы функциональных блоков для различных видов оборудования, а точнее фирм производителей, будут иметь некоторые различия. Хотя в целом функциональные схемы будут похожи по принципу построения.
На рисунке 1.15 приведена функциональная схема построения блоков для синхронного мультиплексора SMA1 ( GPT )
Рисунок - . 1.15 Функциональная схема построения блоков синхронного мультиплексора SMA1 для сигналов низкого уровня VC-3
Данная функциональная схема показывает порядок прохождения трибутарных каналов низкого уровня (VC-3) в поток STM-1. Для трибутарных потоков высокого уровня (VC-4) функциональная схема требует некоторых изменений в структуре коммутационного и трибутарного блока. Схема представлена на рисунке 1.16
Система управления и характер возникновения аварийных сигналов для функциональных групп высокого и низкого уровней будут абсолютно одинаковыми.
Рисунок. 1.16 Функциональная схема построения блоков синхронного мультиплексора SMA1 для сигналов высокого уровня VC-4
На примере функциональной схемы для сигналов низкого уровня (рисунок. 1.16) дадим описание каждому функциональному блоку .
Функциональная группа TTF - транспортная функция терминала , образующая двунаправленный оптический или электрический интерфейс STM-1 и содержит физический интерфейс (SPI) , окончание регенераторной секции (RST) и окончание мультиплексорной секции (MST). Данная группа выполняет передачу и приём линейного сигнала STM-1, обеспечивает вставку/вывод секционного заголовка (SOH), разбивает группы административных блоков(AUG) на административные блоки(AU-4) и посылает сигнал в следующую функциональную группу (HOA).
Аварийные сигналы на приёме регенераторной секции (RST).
OOF - потеря цикла, если ошибки в байтах А1 и А2 более 625 мкс.
LOF - потеря цикловой синхронизации, если потеря цикла более 3мс
BIP Err - ошибка В1 , если нарушен контроль чётности (BIP8)
RS - TIM - Потеря идентификатора трассы, идентификация из тракта по байту J0.
При получении аварийных сигналов LOF и RS-TIM секция RST генерирует аварию сигнала индикации аварии (AIS) и посылает её в мультиплексорную секцию.
Аварийные сигналы для мультиплексорной секции (MST):
MS-BIP Err (Rx) - oшибка в байтах B2, нарушение контроля чётности (BIP24)
MS-REI (Tx) - ошибка на удалённом конце мультиплексорной секции , если биты с 1 по 8 байта М1 содержат ошибки по чётности В2.
MS-AIS - сигнал индикации неисправности мультиплексорной секции, при передаче все биты в байте К2 (МSOH) равны 1, а при приёме биты 6-8 байта К2 равны 111.
MS-RDI - индикация дефекта мультиплексорной секции на удалённом конце, биты 6,7,8 байта К2 равны 110 .
AU-AIS - сигнал индикации неисправности административного блока, используются байты H1, H2, H3. При передаче все биты AU3/4 равны 1 и при приёме байты Н1, Н2 тоже равны 1.
AU-LOP - потеря указателя административного блока, возникает при получении 8-10 некорректных указателей. Используются байты Н1, Н2.
При получении аврийных сигналов MS-AIS и AIS (из RST) секция генерирует сигнал AIS , посылая его в секцию маршрута высокого уровня и сигнал MS-RDI, посылая его на удалённый конец. При получении аварийного сигнала MS-BIP Err секция MST генерирует сигнал MS-REI, тем самым сообщая об аварии на удалённом оборудовании. Сигналы AU-AIS и AU-LOP, получаемые мультиплексорной секцией, также генерируют сигнал AIS в секцию маршрута высокого уровня.
Функциональная группа RTF - Транспортная функция регенератора, образующая двунаправленный оптический или электрический интерфейс STM-1 , содержит физический интерфейс (SPI) , окончание регенераторной секции (RST) и используется только в случае резервирования мультиплексорной секции в комплексе с функциональной группой MSPTF. Функциональная группа TTF обеспечивает линейный интерфейс сигнала STM-1 , но не производит обработку сигнала. В этом варианте сигнал обрабатывается в функциональной группе MSPTF.
Аварийные сигналы для регенераторной секции (RST).
OOF - потеря цикла, если ошибки в байтах А1 и А2 более 625 мкс.
LOF - потеря цикловой синхронизации, если потеря цикла более 3мс
BIP Err - ошибка В1 , если нарушен контроль чётности (BIP8)
RS - TIM - потеря идентификатора трассы, идентификация из тракта по байту J0
При получении аварийных сигналов LOF и RS-TIM секция RST генерирует аварию сигнала индикации аварии (AIS) и посылает её в мультиплексорную секцию.
Функциональная группа MSPTF выполняет функцию резервирования окончания мультиплексорной секции для потока STM-1 , она обеспечивает режим переключения на резерв для потока STM-1 на уровне административного блока (AU-4), основанный на использовании двух потоков без переключения на резерв. Далее сигнал посылается на функциональную группу HOA.
Аварийные сигналы для мультиплексорной секции (MST).
MS-BIP Err (Rx) - oшибка в байтах B2, нарушение контроля чётности (BIP24)
MS-REI (Tx) - ошибка на удалённом конце мультиплексорной секции , если биты с 1 по 8 байта М1 содержат ошибки по чётности В2.
MS-AIS (RX)- сигнал индикации неисправности мультиплексорной секции, при передаче все биты в байте К2 (МSOH) равны 1, а при приёме биты 6-8 байта К2 равны 111.
MS-RDI (Tx) - индикация дефекта мультиплексорной секции на удалённом конце, биты 6,7,8 байта К2 равны 110 .
AU-AIS (Rx) - сигнал индикации неисправности административного блока, используются байты H1, H2, H3. При передаче все биты AU3/4 равны 1, и при приёма байты Н1, Н2 тоже равны 1.
AU-LOP (Rx) - потеря указателя административного блока, возникает при получении 8-10 некорректных указателей. Используются байты Н1, Н2.
При получении аврийных сигналов MS-AIS и AIS (из RST) секция генерирует сигнал AIS , посылая его в секцию маршрута высокого уровня и сигнал MS-RDI, посылая его на удалённый конец. При получении аварийного сигнала MS-BIP Err секция MST генерирует сигнал MS-REI, тем самым сообщая об аварии на удалённом оборудовании. Сигналы AU-AIS и AU-LOP, получаемые мультиплексорной секцией, также генерируют сигнал AIS в секцию маршрута высокого уровня.
Функциональная группа HOA выполняет адаптацию различных уровней трибутарных блоков к контейнеру высокого уровня (VC-4) , а именно: добавления TU-указателя в виртуальный контейнер VC12 , тем самым образовывая трибутарный блок TU-2, группирование трибутарных блоков (TU) в группы трибутарных блоков (TUG-2, TUG-3) и дальнейшая вставка его в VC-4 .
Аварийные сигналы.
HP-UNEQ (Rx) - нет индикации типа нагрузки на маршруте высокого уровня (VC3/4), используется байт С2, значения байта будут C2=00.
НP-TIM (RX) - потеря идентификатора трассы маршрута высокого уровня. Идентификация из тракта, используя байт J1.
Два выше перечисленных вида аварий генерируют сигнал AIS в секцию маршрута низкого уровня и аварию HP- RDI на удалённый источник сигнала.
HP-BIP Err (Rx) - ошибка контроля чётности в маршруте высокого уровня. Используется байт В3. Данная ошибка генерирует сигнал HP-REI и передаёт её на удалённый конец.
TU-AIS (Rx) - сигнал индикации неисправности трибутарного блока (TU) , при передаче все биты TU = 1. При передаче биты V1, V2 =1
TU-LUP (Rx) - потеря указателя трибутарного блока , если получено 8-10 некорректных укозателя. Используются байты V1, V2 .
TU-LOM (Rx) - потеря сверхцикла трибутарного блока. Используются биты 7, 8 байта Н4 не в последовательности 00, 01, 10, 11 .
HP-PLM (Rx) - потеря идентификатора типа нагрузки маршрута высокого уровня , ошибка данных в C1. Используется бит С2.
Байты TU-AIS, TU-LUP, TU-LOM, HP-PLM генерируют аварийный сигнал AIS в секцию маршрута низкого уровня.
Функциональные группы LPX VC3, LPX VC12 представляют собой логические коммутационные поля для двух различных скоростей передач. В этих группах происходит коммутация трибутарных блоков соответственных уровней с последующей посылкой либо в секцию маршрута высокого уровня (HOA) , либо в секцию маршрута низкого уровня (LOI).
Функциональная группа LОI 2M образует двунаправленный электрический интерфейс 2 Мбит/с (в качестве трибутарного интерфейса) и содержит физический интерфейс. В этой группе выполняется упаковка плезиохронного потока в синхронный и наоборот.
Аварийные сигналы.
LP-UNEQ (Rx) - отсутствует индикация типа нагрузки в секции маршрута низкого уровня. Используются байты C2/V5. Критерии обнаружения при VC3: C2=00 , VC11, 12, 2: биты V5 байта с 5 по 7 = 0
LP-TIM (Rx) - потеря идентификатора трассы низкого уровня, идентификация из тракта через байт J2.
Аварийные сигналы LP-UNEQ и LP-TIM обеспечивают генерацию аврийного сигнала AIS на выход нагрузки (канала 2 Мбит/с) и сигнала LP-RDI на удалённый конец. При LP-RDI используются следующие байты: G1, V5, K4 .
LP-BIP Err (Rx) - ошибка контроля чётности в байте V5. Эта авария генерирует аварийный сигнал для удалённого конца LP-REI, используя байты G1 и V5.
LP-PLM (Rx) - аварийный сигнал потери идентификатора типа нагрузки при ошибке данных в С1. Используются байты С2, V5. Эта же авария регенерируется и посылается на выход нагрузки (2 Мбит/с).
SEMF - функциональная группа, служащая для управления синхронным мультиплексором SMA1.
Функция MCF упрявляет стеками MCF и, следовательно, всеми параметрами стеков, однако сама она стека не образует. Другими словами в функцию MCF входит организация третьего и четвёртого уровней модели OSI ( транспортный и сетевой уровни) , организация служебных каналов DCC, обеспечение соединения по Q-интерфейсу .
Функциональная группа SET - осуществляет синхронизацию сетевого элемента. Она используется также для выбора источника синхросигналов для синхронизации сетевого элемента.
Классификация аварийных сообщений (видов аварий) для различных функциональных групп была построена на базе пятиуровневой модели классификации сигналов и сообщений о неисправностях в системе SDH
Аварийные сообщения разделяются по уровням возникновения неисправностей.
Уровень 1 - Физический уровень ( сигнал LOS )
Уровень 2 - Регенераторная секция (сигнал LOF )
Уровень 3 - Мультиплексорная секция (сигналы MS-AIS, MS-RDI)
Уровень 4 - Маршрут высокого уровня (сигналы HP-RDI, HP-TM)
Уровень 5 - Маршрут низкого уровня (сигналы TU-LOP, LP-RDI)
Между сигналами неисправности имеются логические взаимосвязи, определяемые процессами, проистекающими в системе передач.
Далее приведены возможные элементы аварийных процессов на индивидуальных картах синхронного мультиплексора SMA1.
Аварии Оптической /Электрической мультиплексорной карты STM-1.
Frequency Out Of Range - Частота вне диапазона
Tx Laser Power High - Лазерный передатчик превышает допустимую мощность.
Тx Laser Power Low - Низкая мощность передающего лазера.
Tx OH Bus Disparity Fall - Ошибка паритета шины заголовка OH на передаче.
Scrambler Fall - Неисправность скремблера
2 Описание имитатора локального терминала SMA1
2.1 Описание меню имитатора
Изучения этого оборудования будет основано на применении имитатора локального терминала SMA1, который является точной копией рабочего варианта локального терминала для данного типа оборудования. Имитатор локального терминала обеспечивает возможность изучения и получения навыков по обслуживанию SMA1 на основных этапах и режимах работы. В процессе работ будут получены теоретические навыки построения SDH сетей.
Имитатор локального терминала (LT) представляет собой программу, позволяющую производить настройку синхронного мультиплексора SMA1.
В программе LT использованы функции для построения конфигурации мультиплексора согласно требуемой схеме, установка соединений на уровне 2Мбит/с , установка синхронизции и некоторых сетевых параметров.
Далее описаны основные элементы управления имитатора локального терминала.
Вход в систему.
Выбрать в меню команды в следующей последователности
Window /Configuration . В появивщемся окне выбрать в графе Operator команду System Operator. Данный параметр устанавливает уровень системного оператора, позволяющий производить полный контроль мультиплексора. Первый уровень Casual Operator предоставляет только возможности мониторинга без изменения существующей конфигурации.
После выбора уровня доступа к мультиплексору необходимо ввести пароль в графу Password и нажать OK. Пароль SDHMUX.
Схема статива SMA1.
Далее на экране появится структурная схема cтатива мультиплесора SMA1. Статив состоит из 17 слотов (позиций), каждая из которых закреплена под определённый интерфейсный модуль (карту).
В нижней части статива под каждым слотом написан номер позиции и тип интерфейса.
401 LWB - Линейная слот , направление Запад (В) (резерв)
402 LWA - Линейная слот , направление Запад (А) (рабочая)
403 SA - Коммутационный слот (А) (рабочая)
404 Т1 - Трибутарная слот (1)
405 Т2 - Трибутарная слот (2)
406 Т3 - Трибутарная слот (3)
407 Т4 - Трибутарная слот (4)
408 ТР - Трибутарная слот (резерв)
409 SB - Коммутационный слот (В) (резервная)
410 LEA - Линейная слот , направление Восток (рабочая)
411 LEB - Линейная слот , направление Восток (резерв)
412 ССА - Слот сетевой карты (А)
413 ССВ - Слот сетевой карты (В)
414 МС - Слот контроллера мультиплексора
415 AUX - Слот для вспомогательной карты
416 PSUB - Слот катры питания (В)
417 PSUA - Слот карты питания (А)
Меню управления
В верхнней части окна расположено командное меню.
Window-Окно
Команда Refresh позволяет оператору произвети регенерацию экрана. Эта команда полностью регенерирует экран, дающий оператору кадр последнего состояния, а также стирает любые негативные события в этот момент.
Команда Logout обеспечивает выход из системы управления.
Сonfig-Конфигурация
Команда Shelf Details выводит окно с данными конфигурации статива, состояние карт в тех или иных позициях.
Команда Shelf Configuration выводит в новом окне вид статива, в котором возможна установка, замена или демонтаж карты.
Манипуляции производятся нажатием указателя на требуемую позицию и выбор нужной карты из появляющегося меню.
После окончания конфигурации нажать кнопку Apply (применить) для сохранения выбранной конфигурации. Для выхода из этого меню нажать клавишу Cancel.
Команда Shelf Inventory показывает характеристики модулей в стативе.
Команда Shelf Software Details показывает серийные номера программного обеспечения ПЗУ каждой карты .
Команда Comms даёт доступ с меню настройки сетевых параметров мультиплексора, путём выбора одного из предствленных протоколов .
Команды в меню Сomms :
Transport Layer – транспортный уровень, позволяющий осуществить настройки параметров передачи пакетов
Ethernet MAC – установка MAC адреса для Ethernet соединения
X.25 – доступ в сеть используя протокол X.25
Network Layer – сетевой уровень, требующий утановки адреса (NSAP) данного мультиплексора для доступа в сеть
LAPD – установка сетевых параметров для DCC каналов
X25 PLP – протоколо доступа в сеть X.25 PLP
Команда Multiplexing Path показывает действующую структуру формирования STM сигнала
Команда Sync даёт доступ в меню для установки параметров синхронизации
Команды меню Sync.
Sync Select – выбор приоритета синхронизации. В этом окне требуется назначить приоритеты источникам синхронизации Source для потребителей синхронизации Destinations, путем установления цифровых значений во втором, третьем и четвёртом столбцах. Высший приоритет имеет цифра 1 , низший цифра 5.
Trib Potr Sync Origin – трибутарный порт источника синхронизации, позволяющий назначить источником синхронизации любой порт на одной из трибутарных кард.
External Trib Sync Origin - внешний источник синхронизации. Им может быть трибутарная шина или один из двух возможных внешних подключений синхросигнала с частотой 2048 кГц. Выбор осуществляется назначение приоритета одному из трёх источников.
Sync Mode – выбор режима синхронизации. Этот режим позволяет установить следующие параметры:
Revertive/Non-Revertive – режим с возвратом или без при восстановлении источника синхронизации с высшим приоритетом
Synchronization Mode – выбор режима синхронизации Normal при использовании получаемой синхронизации и Free Running при использовании источника часов мультиплексора.
SSMD Mode – активация или деактивация доступа к байту S1 в заголовке STM сигнала, в случае если синхросигнал получают по потоку STM.
Wait To Restore Period – время восстановления при переключении на предыдущий источник синхронизации (см. Revertive/Non-Revertive )
External Output Clock Rate – активация внешнего источника синхронизации с частотой 2,048 МГц.
Команда Data and Time позволяет установить системное время.
Команда Change Password предоставляет возможность изменить пароль доступа в локальный терминал.
Status-Статус
Global Event Reporting – активизацияция общего контроля событий.
Сonsequential Actions – позволяет вводить в рабочий тракт дефекты AIS (сообщение о неисправности EBER > 10 в степени -3) и возбуждение аварии FERF (неисправность приёмника удалённого конца/байт С2 отличается от байта, принятого в мультиплексор)
Controller Status – отображение состояние контролера.
Decommission – команда, при которой происходит сброс существующих настроек конфигурации мультиплексора. Например, эта команда применяется при установке мультиплексора с существующей конфигурации в другую сеть, требующую других программных установок.
Connections-Соединения
Любая из команд в этом меню открывает одно и то же окно для создания трибутарных соединений.
Внимание! Активными командами будут только те, которые имеют соответствующе установленную карту в требуемую позицию статива мультиплексора.
Создание кросс-соединений
В графе источника сигнала Source Slot выбрать порт из которого будет взят трибутарный канал. Ниже активируется поле, показывающее количество существующих или доступных трибутарных каналов. Выделить нужный канал. Далее в графе потребителя Destination выбрать поток, в который будет адресован выбранный ранее трибутарный канал. Ниже в поле с доступными трибутарными каналами выбрать нужный канал и подтвердить создание соединения нажатием на клавишу Connect. При разрыве соединения выбрать требуемый канал и нажать клавишу Disconnect.
Создания кросс-соединения с резервированием
В первом поле с доступными каналами выбрать существующее соединение. Ниже в графе Protection Slot выбрать требуемый парт и выбрать в поле этого порта любой трибутарный канал. Для подтверждения создания резервирования нажать клавишу Protect.
Alarms-Аварии
Команда Events даёт доступ в меню настройки событий .
Alarms Event Report – активизация автоматической сигнализации обо оповещении аварии.
Local Terminal Filter – фильтрация аварий, представляющая собой процесс выбора порогового уровня приоритета для каждого из получателей аварийных сообщений для местного терминала.
Alarm Log Filter - фильтрация аварий, представляющая собой процесс выбора порогового уровня приоритета для каждого из получателей аварийных сообщений для аварийного журнала.
Alarm Reduction – уменьшение числа аварий. Представляет собой выбор только высокоприоритетных аварий для передачи на местный терминала и терминал управления сетевыми элементами.
Audible Alarms ON – активизация звуковой сигнализации при получении аварийного сигнала.
Команда Alarm Log показывает записи аварийных событий в аварийный журнал.
Команда Alarm Bus Driver – драйвер аварийной шины, который управляет через контроллер мультиплексора выводом данных аварийного сигнала о местных авариях на схемы индикации стойки и статива SMA1.
Команда On-Card LEDs включает или отключает драйвер диодной сигнализации о неисправностях карты на передней панели.
Команда Card Alarm State которая, высвечивает на изображении статива SMA1 колокольчики на тех картах, которые имеют аварийные сигналы.
Protection-Резервирование
Меню процедуры резервирования.
Команда SD Thresholds позволяет выставлять пороги чувствительности деградации следующих сигналов.
MS SD Threshold – порог деградации сигнала в мультиплексороной секции.
VC SD Threshold – порог деградации сигнала в виртуальных контейнерах.
Trib Input SD Threshold – порог деградации трибутарного сигнала на входе.
Команда 1+1 MSP WTR Period определяет период возврата на восстановленный рабочий тракт.
Команда 1+1 MSP Persistancy осуществляет контроль устойчивости.
Команда 1+1 VC Path WTR Period определяет установку режима возврата к восстановленному рабочему тракту при схеме 1+1 VC и время задержки при возврате.
Команда 1+1 VC Path Persistency Threshold устанавливает контроль устойчивости при резервировании трактов по схеме 1+1 VC.
Команда Plesiochronous Trib Protection служит для отображения статуса резервирования трибутарных карт.
Performance-Диагностика
В этом меню представлены команды управления диагностикой мультиплексора.
Команда Perf Event Reporting активизирует функцию передачи сообщений о контроле, повторяющиеся с интервалом 15 минут и 24 часа.
Команда 24hr Period Start/End Time устанавливает время начала/конца 24 часового интервала.
Команда Perf Threshold устанавливает пороги контроля для функционирования всего оборудования.
Команда Clear Perf Reports очищает буфер с сообщениями для 15 минутного и 24 часового контроля.
Logs-Журналы событий
В этом меню представлены журналы с общими событиями мультиплексора.
Команда Alarm Events выводит на экран журнал со всеми аварийными событиями.
Команда Exception Events выводит на экран журнал с особыми событиями (превышающими пороги контроля) появившимися в течение заданного периода времени.
Команда Schedule Events показывает журнал с событиями контроля в данный период времени.
Help-Помощь
Данное меню содержит информацию о программном продукте и поясняет основные функции программы локального терминала.
3 Технология NG SDH
3.1 Компоненты NG SDH
Принято считать, что система SDH относится к новому поколнию, если она включает поддержку следующих компонент:
- общая процедура разбиения на кадры (General Framing Procedure, GFP), которая обеспечивает адаптацию асинхронного трафика данных на основе кадров переменной длины к байт ориентированному трафику SDH с минимальными задержками и избыточностью заголовков; ITU-T G.7041;
- виртуальная конкатенация (Virtual Concatenation, VCAT), обеспечивает возможность объединения на логическом уровне нескольких контейнеров VC-12, VC-3 или VC-4 в один канал передачи данных. ITU-T G.707, G.783 ;
- cхема регулировки емкости канала (Link Capacity Adjustment Scheme, LCAS) — позволяет реализовать любые изменения пропускной способности без прекращения передачи данных. ITU-T G.7042/
3.2 Протокол GFP
GFP была создана для замены HDLC подобных методов инкапсуляции данных поверх SDH и одновременно уменьшения стоимости и сложности реализации метода в оборудовании.
Метод GFP поддерживает инкапсуляцию таких служб, как 10/100/1000 Мбит/с Ethernet, IP, PPP, протоколы сетей хранения данных FiberChannel (FC), FICON, ESCON, а в будущем предполагается поддержка цифровых широковещательных видеосигналови DVB-ASI. GFP адаптирует поток данных на основе кадров переменной длины к байт-ориентированному потоку данных сети SDH, отображая различные службы в кадр общего назначения, который затем отображается в кадры SDH. Эта кадровая структура лучше определяет и исправляет ошибки и обеспечивает большую эффективность использования полосы, чем традиционные методы инкапсуляции.
GFP кадр содержит следующие составляющие (Рисунок.3.1): основной заголовок (GFP Header), заголовок полезной нагрузки (Payload Header), область полезной нагрузки (Payload Area), необязательное поле контроля ошибок полезной нагрузки FCS.
Рисунок 3.1 - Структура кадра GFP
Основной заголовок, в свою очередь, содержит длину GFP кадра PLI и поле cHEC (core Header Error Control) для определения и коррекции ошибок заголовка.
cHEC используется совместно с PLI для нахождения начала кадров (кадровая снхронизация). Эта процедура использует те же принципы, что и в технологии ATM для синхронизации к потоку ячеек. Сначала приемник GFP кадров находится в состоянии поиска начала кадра (Hunt State), сканируя бит за битом и сравнивая вычисленный cHEC для PLI с полученным из потока cHEC. При обнаружении совпадения приемник переходит в состояние Pre-Sync State, в котором ему уже известна начальная точка следущего GFP кадра. Если для следующего кадра вычисленный cHEC совпадает с полученным, то считается, что кадровая синхронизация установлена и приемник переходит в нормальное состояние синхронизации Sync State.
Преимущество такого подхода (по сравнению с HDLC методами резервирующими символ, обычно 0×7E, указывающий начало кадра) — нет необходимости вставлять в кадр дополнительные управляющие символы (обычно 0×7d): если символ 0×7E встречается в поле полезной нагрузки, он заменяется парой 0×7d, 0×5e, а символ 0×7d — парой 0×7d, 0×5d. Такие вставки приводят к недетерминированному изменению размеров кадра и усложняют приемо-передающее оборудование.
На данный момент применяются два типа адаптации клиентского сигнала: GFP-Framed (GFP-F) и GFP-Transparent (GFP-T).
Метод GFP-F ориентирован на инкапсуляцию в один кадр GFP одного кадра клиентского сигнала (PDU) и имеет следующие особенности:
- PDU буферизуется перед инкапсуляцией (т.к. имеет переменную длину);
- PDU может отображаться к различным скоростям передачи (в т.ч. и переменным при использовании VCAT/LCAS);
- работает на уровне 2 (Layer 2), т.е. использует байтовую последовательность PDU, извлеченную из физического уровня;
- заголовок полезной нагрузки (Payload Header) содержит информацию об инкапсулируемом протоколе;
Хорошо подходит для трафика данных (Ethernet, IP), однако задержки могут быть неприемлимы для протоколов сетей хранения данных (SAN).
Метод GFP-T ориентирован на сигналы, использующие кодирование 8B/10B (Gigabit Ethernet, протоколы SAN).
Схема кодирования 8B/10B отображает 256 возможных значений байт данных в 1024 возможных значений 10 битовых кодовых символов таким образом, что обеспечивается сбалансированность в линии последовательностей нулей и единиц, необходимая для корректной синхронизации и приема данных. Код 8B/10B имеет 25% избыточность. В GFP-T сначала последовательность 8B/10B декодируется к исходным 8 битам, затем кодируется снова в более эффективный суперблок 64B/65B.
3.2.1 Основные особенности GFP-T:
Работает на уровне 1 (Layer 1), т.е. использует кодовые символы линейного кода исходного сигнала;
Кадр GFP не содержит информации об инкапсулируемом протоколе;
Скорости передачи фиксированы и определены клиентским протоколом.
Сравнительная характеристика GFP-F и GFP-T приведена в Таблице 3.1.
Т а б л и ц а 3.1 Описание протокола GFP
|
Режим |
Описание |
Применение |
|
GFP-F |
Инкапсуляция
кадров данных в GFP кадр (Layer 2). |
E/FE/GbE, IP, PPP |
|
GFP-T |
Инкапсудяция
кодовых символолв в GFP кадр (Layer 1). |
GbE, Fiber Cannel, FICON, ESCON, DVB-ASI |
3.2.2 Основные преимущества GFP:
Стандартизация — обеспечивает глобальную совместимость и приводит к низкой стоимости компонент.
Масштабируемость — GFP на сегодняшний день поддерживает службы данных на скоростях от 10 Мбит/с до 10 Гбит/с.
Широкая применимость — GFP может быть использован для передачи широкого спектра сигналов поверх SDH, получил одобрение рабочей группы IEEE 802.17 RPR и IETF, также подходит для применения в будущих сетях, основанных на OTN архитектуре
Простота — GFP имеет более простую технику инкапсуляции чем HDLC с механизмом разграничения кадров, проверенном на ATM и не требующем интенсивной обработки, что в результате делает программно-аппаратную реализацию GFP проще и дешевле.
QoS — невысокий уровень задержек для GFP-F и минимальный для GFP-T позволяет поддерживать приложения, требовательные к качеству обслуживания.
Хотя GFP имеет множество присущих ему преимуществ, тем не менее для поддержки передачи служб данных по сети SDH из конца в конец нужны технологии которые выделяют в сети необходимую полосу и обеспечивают возможность ее динамической настройки. Этим требованиям удовлетворяют VCAT и LCAS.
3.3 Протокол VCAT
Традиционный метод конкатенции определен только для VC-4 в стандарте ITU-T G.707 термином «смежная». Это означает, что соседние контейнеры комбинируются и транспортируются через SDH сеть как один контейнер. Ограничения смежной конкатенции включают:необходимость тог, чтобы все сетевые узлы, через которые проходит тракт передачи были способны распознать и обработать связанные (объединенныйе) контейнеры; недостаточная степень детализации (гранулированности) полосы, которая делает транспортировку многих сигналов данных неэффективной. Виртуальная конкатенация (объединение), определенная недавно ITU-T, устраняет ограничения смежного метода. Виртуальная конкатенация логически связывает индивидуальные контейнеры в одно соединение. Любое количество контейнеров любого типа (VC-12 , VC-3 или VC-4) может быть сгруппировано вместе, образуя логический канал. Это обеспечивает лучшую степень детализации полосы, чем достигается использованием традиционной техники и дает возможность гибкого выделения полосы для трафика данных с высокой степенью гранулированности, позволяя эффективно использовать пропускную способность SDH. В традиционной сети SDH степень детализации полосы определяется транспортной емкостью контейнеров VC-12, VC-3, VC-4 и смежных групп, например, VC-4-4c — четыре смежных VC-4. Так, например, транспортировка 1 Gigabit Ethernet в традиционной сети требует выделения VC-4-16c (шестнадцать смежных VC-4), эффективность использования канала в этом случае составляет 42%. С другой стороны группа логически объединенных контейнеров VCG (Virtual Concatenated Group) VC-4-7v, где VC-4 обозначает тип контейнера, на основе которого создается группа, а 7v — количество членов в группе, обеспечивает приблизительно 85% эффективность (смотрите Таблицу 3.2).
Т а б л и ц а 3.2 - Протокол VCAT
|
Служба |
Эффективность использования канала без VCAT |
Эффективность использования канала с VCAT |
|
Ethernet 10 Мбит/с |
VC-3 — 20% |
VC-12-5v — 92% |
|
Fast Ethernet 100 Мбит/с |
VC-4 — 67% |
VC-12-47v — 100% |
|
Gigabit Ethernet 1000 Мбит/с |
VC-4-16c — 42% |
VC-4-7v — 85% |
Так как промежуточные узлы интерпретируют каждый контейнер в соединении как стандартный, то только оборудование на котором начинается и заканчивается тракт передачи должно уметь распознавать и обрабатывать структуру логически объединенного сигнала. Это означает, что каждый индивидуальный контейнер в логической связке может иметь свой путь через сеть, что может приводить к фазовым расхождениям между контейнерами прибывающими на оборудование терминирования тракта передачи, что требует от оборудования сглаживания таких задержек.
Параметры, отвечающие за компенсацию задержек (до 512 мс) и гарантирующие целостность всех членов группы передаются в заголовке тракта индивидуальных контейнеров ( байт H4 для VC-4/VC-3 и байт K4 для VC-12).
3.4 Протокол LCAS
Один из последних разработанных стандартов для NG SDH- протокол LCAS, который выполняется между двумя сетевыми элементами (NE), соединяющими пользовательские интерфейсы в сети SDH. Каждый байт H4/K4 передает управляющий пакет, состоящий из информации об виртуальной конкатенации и протоколе LCAS.
На основании данных управляющего пакета, протокол LCAS определяет, какой из членов VCG активизирован и как они используются, и позволяет исходящему оборудованию динамически изменять количество контейнеров в группе конкатенации в ответ на производимые в реальном времени запросы по изменению полосы.
Эти увеличения или уменьшения полосы соединения выполняются без какого-либо негативного воздействия на услуги.
Например, компания, которая использует канал 50 Мбит/с между подразделениями в течение рабочего дня, может нуждаться в большей полосе для выполнения операций резервного копирования во внерабочее время. LCAS позволяет автоматически добавить необходимую полосу без прерывания связи.
Данный метод позволяет обеспечить альтернативную схему защиты в сети SDH: связанные VCAT контейнеры проходят разными сетевыми маршрутами и в случае отказа на одном из маршрутов механизмы LCAS оставляют в соединении незатронутые отказом виртуальные контейнеры, тем самым сохраняя работоспособность соединения, хотя и с меньшей пропускной способностью. После устранения отказа соединение восстанавливается к исходному состоянию.
4. Ethernet поверх SDH
4.1 Технологии Metro Ethernet
Ethernet поверх SDH (EoS) — самая распространенная реализация систем NG SDH. Так опрос Light Reading более 150 операторов, предоставляющих на своих сетях услуги Ethernet, показал, что подавляющее большинство (42%) приходится на Ethernet поверх SONET/SDH (на втором месте Ethernet поверх MPLS с 16%). Применение интерфейсов Ethernet в системах NG SDH естественно и закономерно:
- один и тот же физический интерфейс может работать в широком диапазоне скоростей, позволяя при необходимости изменять скорость подключения без замены оборудования;
- устраняется необходимость промежуточного преобразования интерфейсов при передаче данных из одной локальной сети в другую (а такой трафик составляет основной объем от всего трафика данных);
- значительно снижаются затраты на подключение.
На рисунке 4.1 приведена функциональная схема реализации служб Ethernet в рамках технологии NG SDH.
Рисунок . 4.1 - Функциональная схема Ethernet поверх SDH
Встроенный Ethernet коммутатор является опциональным, однако его наличие расширяет набор реализуемых в сети Ethernet служб. Встраиваемая в Ethernet коммутатор поддержка VLAN (802.1Q), технологии Q-in-Q (802.1ad), приоритезации кадров 802.1p в сочетании с GFP, VCAT, LCAS и остальными возможностями SDH позволяют строить региональные Ethernet сети (Metro-Ethernet) операторского класса. К таким дополнительным возможностям относятся схемы самовосстановления сети и средства эксплуатации, администрирования и обслуживания.
Схемы самовосстановления в такой сети с третьего или второго уровней (перемаршрутизация, STP и т.п.) переносятся на уровень SDH, что многократно повышает их надежность и скорость (в пределах 50 мс). Это позволяет рекомендовать применение EoS там, где критичны надежность и скорость восстановления для обеспечения услуг «прозрачных» к сбоям в сети.
Технология Ethernet не имеет встроенных средств эксплуатации, администрирования и обслуживания (OA&M), обеспечивающих развитые средства диагностики, обнаружения и локализации аварий, мониторинг производительности. При реализации EoS эти функции обеспечиваются встроенными в SDH средствами OA&M. Это важно и критично для тех сетей и тех операторов, которые предоставляют услуги на основе SLA. Поэтому, если сравнивать сеть EoS с коммутаторами Ethernet поверх «темного волокна», то в последнем случае мы имеем дешевый и прямолинейный способ поддержки служб Ethernet, не оставляющий сомнений в том, за что придется платить. И если это, т.н. домовая сеть, предоставляющая своим абонентам широкополосный доступ в Интернет, то такой подход вполне оправдан. Когда нам надо обеспечить надежный Ethernet транспорт для бизнес приложений (особенно в сочетании со службами выделенных каналов E1), то зачастую EoS наиболее эффективный способ.
Технология Ethernet в своем развитии перешагнула уровень локальных сетей. Она избавилась от коллизий, получила полный дуплекс и гигабитные скорости. Для обеспечения Ethernet-подключения новых зданий к городским сетям (MAN) провайдеры сетевых услуг обычно используют «темное» оптоволокно. Основным преимуществом такого доступа является высокая скорость и большие расстояния – до 100 км без промежуточного усиления и регенерации при потенциально неограниченной пропускной способности. Гигабитный Ethernet (1 и 10 Гбит/с) стал привлекательным с точки зрения цена/производительность и удачным выбором для магистральных приложений не только в выделенных корпоративных сетях, но и для построения операторских сетей Metro Ethernet. Широкий спектр дешевых решений для оптического транспорта – одномодовые и многомодовые конвертеры и модули позволяют внедрять Ethernet на магистралях.
4.1.1 Универсальная технология ATM наложением на существующую инфраструктуру SONET/SDH
В свое время, с целью создания мультисервисной (для всех существовавших видов трафика: голос, видео, интернет) и высокоскоростной технологии передачи данных появилась Asynchronous Transfer Mode – ATM. Повсеместного распространения (несмотря на известный лозунг "ATM everywhere") не получилось (в локальных сетях победил Ethernet), но для построения магистралей ATM стала базовой на многие годы.
Ориентация на высокие скорости определила наиболее предпочтительную физическую среду передачи для ATM – оптическое волокно. Очень часто магистральные сети ATM выполняются наложением на существующую инфраструктуру SONET/SDH, что изначально предусмотрено стандартом. Этот метод, определенный в документе RFC 1483 консорциума Internet Engineering Task Force (IETF), сводится к простому встраиванию пакетов Ethernet в блоки данных (PDU) пятого адаптационного уровня ATM (AAL5), которые затем транспортируются по соединениям PVC. Основные преимущества такого решения заключаются в простоте реализации и совместимости с огромным парком оборудования Ethernet, используемого по всему миру. Недостаток состоит лишь в том, что конечный сегмент сети доступа остается ориентированным на классическую пакетную передачу. Это обстоятельство не сулит особых неприятностей, если все ограничивается обычной Web-навигацией или удаленным доступом к файлам на корпоративном сервере, однако негативно сказывается на работе пользователей, когда дело доходит до передачи мультимедиа-трафика или запуска приложений реального времени. Впрочем, неэффективность транспортировки больших пакетов путем их разбиения на ячейки ATM (которые к тому же должны сосуществовать с "естественными" 53-байтными ячейками) минимизируется благодаря высокой скорости на линиях ADSL.
4.1.2 Инкапсуляции трафика Ethernet в SDH
Технология Ethernet (E) была разработана компанией Xerox в 1976 году и стандартизована институтом IEEE как технология IEEE 802.3. Уже в 80-х годах она достигла лидирующего положения среди других технологий ЛВС стандартов IEEE 802. n (ArcNet, Token Ring и FDDI).
Как и все технологии ЛВС этого стандарта, она является асинхронной и дейтаграммной (не рассчитанной на предварительное установление соединения), использующей метод CSMA/CD - множественного доступа (к среде передачи, сформированной как про-
водная локальная сеть) с контролем несущей и обнаружением коллизий/столкновений. Номинально скорость передачи по сети составляла 10 Мбит/с, а фактически меньше, учитывая коллизии, заставляющие повторять передачу.
Данные по сети передаются последовательно кадрами в режиме пакетной передачи. Кадр в общем случае имеет переменную длину (максимально 1526 байт) и состоит из заголовка (22 байта), поля данных переменной длины (до 1500 байт) и концевик (4 байта). Не вдаваясь в описание различных версий Ethernet (а мы будем рассматривать только версию IEEE 802.3) и используемых типов сред передачи (коаксиал, витая пара, оптоволокно), которое можно найти во многих источниках, укажем, что эта технология быстро стала применять коммутаторы, которые формально могли обеспечить на сегменте сети скорость 10 Мбит/с, но требовали организации магистрали с более высокой скоростью передачи. В поддержку этого в 1992 году была разработана версия 100-мегабитного (быстрого) Ethernet, или Fast Ethernet (FE), стандартизованная в 1995 году (ITU-T 802.3u).
Стремление еще больше увеличить скорость магистральной передачи привело к разработке гигабитного Ethernet (GE), стандартизованного в 1998 году (ITU-T 802.3z), который позволил внедрить на сети Ethernet некую иерархию скоростей: 1000 (магистральные коммутаторы), 100 (коммутаторы рабочих групп) и 10 Мбит/с (ПК как терминалы виртуальной ЛВС данной рабочей группы). Это упорядочение скоростей и топологии привело к дополнительному росту популярности технологии Ethernet, усилило ее претензии (наряду с АТМ) на роль магистральной технологии корпоративных сетей и поставило вопрос о необходимости использовать какую-то транспортную технологию для связи островов Ethernet-ЛВС в единую корпоративную или глобальную сеть Ethernet.
Успехи гигабитного Ethernet привели, наконец, к разработке и стандартизации в 2002 году 10-мегабитного Ethernet (ITU-T 802.3ae), который в настоящее время находится в стадии внедрения не только в ЛВС, но и в магистральных сетях SDH/WDM.
В принципе, для передачи трафика Ethernet (10/100/1000 Мбит/с) можно было использовать и старые сети SDH путем инкапсуляции трафика в контейнеры VC-3 (E), VC-4 или VC-4-4c (FE), VC-4-16c (GE), однако такая инкапсуляция была неэффективной ввиду пропадания большой неиспользуемой емкости каналов SDH, особенно для гигабитного Ethernet. Эта ситуация способствовала разработке новых процедур конкатенации VC в SDH и механизмов инкапсуляции трафика Ethernet в мультиконтейнеры.
VCAT Virtual Concatenation – Виртуальная конкатенация
VCAT позволяет правильно настроить размер транспортных каналов для различных видов трафика, позволяя каналам SONET/SDH мультиплексироваться в произвольном порядке. VCAT разбивает пакеты данных и вкладывает их в базовые единицы TDM: например, в STS-1 (51 МБ/с) для SONET, и AU4 (155 МБ/с) для SDH. Затем эти данные группируются в потоки различных размеров для создания большего сводного потока, с оптимальным размером, подходящим под емкость каналов SONET/SDH. VCAT применяется на оконечных точках маршрута, что позволяет каждому используемому каналу передаваться независимо через старую транспортную сеть, не поддерживающую функции следующего поколения. Инкапсуляция данных обычно производится с помощью GFP. Стандарт ITU для VCAT - G.707.
GFP Generic Framing Procedure – обобщенная процедура формирования кадров
GFP является протоколом по адаптации трафика, обеспечивающий объединение сетей с коммутацией пакетов и транспортных сетей. GFP элегантно преобразовывает пакетные протоколы, такие, как Ethernet, Fibre Channel, FICON, ESCON, а также различные виды цифрового видео в SONET/SDH, обычно с использованием VCAT для обеспечения правильного выбора размеров каналов для сервисов передачи данных. По сравнению со старыми схемами формирования кадров такими, как PoS (Packet over SONET/SDH), ATM (Asynchronous Transfer Mode) и кодированием 8B/10B, GFP предлагает значительно уменьшенное время задержки и улучшенное использование полосы пропускания. GFP имеет два различных режима преобразования: GFP-T и GFP-F. GFP-F обычно используется для инкапсуляции пакетов и кадров различных протоколов, таких как IP/PPP или Ethernet/MAC. Кадр полностью собирается перед передачей через сеть SONET/SDH.
LCAS Link Capacity Adjustment Scheme – Схема подстройки емкости (пропускной способности) линии
LCAS позволяет провайдерам, использующим сети SONET/SDH следующего поколения, предлагать такую услугу как полоса пропускания по требованию для таких пользователей, как клиенты частных Ethernet линий. Такой динамический контроль полосы пропускания также может быть использован провайдером для защиты или выживаемости сети при возникновении проблем. LCAS работает с VCAT для динамического назначения полосы пропускания, путем изменения конфигурации групп VCAT в реальном времени. LCAS является двунаправленным сигнальным протоколом между сетевыми элементами, который постоянно отслеживает состояние линии, позволяя удостовериться, что изменения в емкости сети не повлияют на передачу трафика клиента. Стандарт для LCAS – ITU G.7042.
5.Методы передачи в Метро SDH
5.1.Методы конкатецации в SDH
В 2000 году появилась новая редакция стандарта ITU-T G.707, в которой возможности конкатенации виртуальных контейнеров SDH были существенно расширены. Для традиционного варианта конкатенации, названного позднее смежной конкатенацией (contiguous concatenation), был расширен набор коэффициентов Х: 4, 16, 64 и 256 с учетом появления новых модулей STM-64 (10 Гбит/с) и STM-256 (40 Гбит/с). Кроме этого, был предложен новый вариант конкатенации, названный виртуальной конкатенацией (virtual concatenation - VCAT), позволяющий использовать для конкатенации не один, а все типы виртуальных контейнеров и значительно расширить диапазон использования возможных коэффициентов Х. Более того, в поддержку новых возможностей в новой редакции стандарта ITU-T G.783 описывался механизм конвертирования между виртуальной и смежной конкатенацией на базе контейнеров VC-4. Рассмотрим новые возможности конкатенации. Теперь для конкатенации можно использовать контейнеры:
- VC-3/VC-4, если полезная нагрузка
требует большей емкости,
чем может дать один VC-3/VC-4;
- VC-2, если полезная нагрузка
требует большей емкости, чем
обеспечивает VC-2 (вариант годится только для технологии
SONET/SDH, учитывая, что VC-2 отсутствует в схеме мультиплексирования SDH);
- VC-11/VC-12, если полезная
нагрузка требует емкости, превы
шающей возможности VC-11/VC-12 (вариант VC-11 годится только для технологии
SONET/SDH).
Оба метода конкатенации обеспечивают пропускную способность в Х раз большую, чем исходная емкость контейнеров VC-n. Различие между ними заключается в том, что смежная конкатенация поддерживает требуемую емкость смежных контейнеров на всем пути их транспортировки, тогда как виртуальная конкатенация оперирует емкостями отдельных VC-n, транспортирует их раздельно и собирает вместе до требуемой смежной емкости только в конечной точке передачи. Таким образом, виртуальная конкатенация требует функциональности мультиконтейнера только в рамках оборудования в точке терминирования маршрута (path), тогда как смежная конкатенация требует этого от каждого сетевого элемента. Как указывалось, можно конвертировать типы конкатенации, но пока только на уровне контейнеров VC-4.
5.1.1 Смежная конкатенация
Структура мультиконтейнера VC-4-Xc при смежной конкатенации показана на рис. 3.1. Она состоит из составного маршрутного заголовка-
1 хс-4-Хс
|
J1 |
Фиксированный наполнитель |
С-4-Хс |
|
B3 |
||
|
C2 |
||
|
G1 |
||
|
F2 |
||
|
H4 |
||
|
F3 |
||
|
K3 |
||
|
|
||
|
1 |
х-1 |
х*260 |
|
х*261 |
||
|
|
||
Рисунок. 5.1 - Структура смежного мультиконтейнера верхнего уровня VC-4-Xc
РОН (9 Х), в котором используется только POH первого VC-4 (9 -1), а остальные составляют фиксированное заполнение размера 9 -(Х-1). Формируемое поле полезной нагрузки равно Х -260 и состоит из смежных полей административных блоков AU-4 модуля STM-N. Так как структура смежных полей рассматривается как целое, то для определения ее местоположения достаточно одного POH первого VC-4, всегда расположенного в первом AU-4 [1]. Указатель этого AU-4 определяет позицию байта Л первого VC-4 в мультикон-тейнере VC-4-Xc. Указатели остальных смежных блоков AU-4 установлены в положение "конкатенированный" с использованием байтов заполнения. Полученные емкости (скорости) мультиконтейне-ров приведены в табл.3.1.
Указанные емкости могут использоваться без ограничений при схеме передачи точка-точка.
Т а б л и ц а5.1- Скорость мультиконтейнеров при смежной конканенации
|
Уровень STM-N |
STM-4 |
STM-16 |
STM-64 |
STM-256 |
|
Коэффициент Х |
4 |
16 |
64 |
256 |
|
Скорость VC-4Xc Мбит/с |
599,040 |
2396,160 |
9584,640 |
38338,560 |
|
VC-2-Xc |
|||
|
|
Фиксированный наполнитель |
С-2-Хс |
|
|
J2 |
|||
|
N2 |
|||
|
K4 |
|||
|
1 |
х-1 |
x*106 |
|
|
x*107 |
|||
Рисунок.5.2 - Структура смежного мультиконтейнера нижнего уровня VC-2-Xc.
Если же используется кольцевая схема защиты MSSPRing, то скорости VC-4-Xc могут быть ограничены например, Х64, если возникнет необходимость резервирования 50% полосы STM-N для схемы защиты.
Для сетей SONET и SONET/SDH, поддерживающих формат контейнера VC-2, допустимо объединение X смежных контейнеров VC-2. При этом формируется мультиконтейнер нижнего уровня VC-2-Xc (рис.2) с емкостью полезной нагрузки (X 4 -106) = X 424 байта и структурой фрейма, повторяемого с частотой 2000 Гц (1/500 мкс). В результате формируется поток со скоростью X €784 кбит/с. Учитывая, что коэффициент Х может изменяться от 1 до 7 (в соответствии со схемой мультиплексирования SONET [1]), окончательно получаем, что допустимая емкость мультиконтейнера может изменяться от 6,784 до 47,488 Мбит/с с шагом 6,784 Мбит/с. Этот мультиконтейнер располагается в Х смежных трибных блокахTU-2 контейнера VC-3 так, что 1 -й столбец VC-2-Xc располагается в первом TU-2, а его начало (байт V5) определяется указателем этого TU-2 (указатели остальных смежных TU-2 фиксируют факт использования конкатенации).
5.1.2 Виртуальная конкатенация
Рассмотрим особенности виртуальной конкатенации с использованием контейнеров верхнего уровня: VC-3 и VC-4. Использующие их виртуальные мультиконтейнеры обозначаются как VC-3/4-Xv (т.е. VC-3-Xv или VC-4-Xv). Эти контейнеры сформированы путем последовательного логического (виртуального) объединения (конкатенации) Х отдельных контейнеров VC-3/4, как показано на рисунке3.3. Факт объединения и номер в последовательности контейнеров указаны в байте H4 заголовка POH каждого контейнера VC-3/4.
В соответствии с рисунком.3.3. и учитывая, что фреймы контейнеров VC-3/4 ( 9 -260 байт) повторяются с частотой 8 кГц, формируются
|
|
1 |
|
|
|
|
X*84/260 |
|
||
|
1 |
|
|
|
C-3-Xc/C-4-Xc |
|
||||
|
|
|
|
|
||||||
|
|
|
|
|
||||||
|
|
|
|
|
||||||
|
9 |
|
|
125мкс |
||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
85/261 |
|
||
|
|
|
|
J1 |
|
|
|
|||
|
|
|
|
B3 |
|
|||||
|
1 |
J1 |
|
|
|
|||||
|
|
B3 |
|
|||||||
|
|
C2 |
VC-3/4-x |
|||||||
|
|
G1 |
|
|||||||
|
|
F2 |
|
|||||||
|
|
H4 |
|
|||||||
|
|
F3 |
|
|||||||
|
|
K3 |
Vc-3/4*x |
|
||||||
|
9 |
N1 |
125мкс |
|
|
|||||
Рисунок.5.3 - Структура виртуальных мультиконтейнеров верхнего уровня VC-3/4-Xv
Т а б л и ц а 5.2 - Скорости мультиконтейнеров VC-3-Xv при виртуальной конкатенации
|
Тип Контейнера |
Упакован в модуль STM-N |
X |
Скорость Мбит/с |
Шаг Мбит/с |
|
VC-3-Xv |
STM-4 |
1-4 |
48.384-193.536 |
48.384 |
|
VC-3-Xv |
STM-16 |
1-16 |
48.384- 774.144 |
48.384 |
|
VC-3-Xv |
STM-4 |
1-4 |
149.76- 599.04 |
149.76 |
|
VC-3-Xv |
STM-16 |
1-16 |
149.76-396.16 |
149.76 |
мультиконтейнеры верхнего уровня VC-3/4-Xv с полезной нагрузкой емкостью 48,384X (VC-3-Xv) и 149,760 (VC-4-Xv) Мбит/с. Множитель Х при этом может меняться от 1 до 4/16/64/256 в зависимости от максимального уровня иерархии используемого оборудования SDH. Формируемые при этом емкости полезных нагрузок мультиконтейнеров VC-3/4-Xv приведены в табл 3.2. (максимальная емкость VC-4-Xv такая же, как и VC-4-Xc, см. табл. 3.1.).
Как отмечалось выше, каждый из контейнеров VC-3/4 виртуального мультиконтейнера транспортируется по сети отдельно, что приводит к различным задержкам при их распространении, которые должны быть скомпенсированы в точке терминирования для формирования единого поля полезной нагрузки мультиконтейнера. Компенсируемая разница в задержках должна быть, по крайней мере, не меньше 125 мкс. Детальная структура байтов H4, схема формирования 4-битных индикаторов мультифреймов (MFI1, MFI2)
Рассмотрим особенности виртуальной конкатенации с использованием контейнеров нижнего уровня: VC-2, VC-12 и VC-11. Использующие их виртуальные мультиконтейнеры обозначаются как VC-2/1 -Xv (т.е. VC-2-Xv, VC-12-Xv или VC-11 -Xv). Эти контейнеры сформированы путем последовательного логического объединения Х отдельных контейнеров VC-2/12/11, как показано на рис.3.4 (он совмещен для всех трех типов контейнеров, параметры которых указаны через разделительную черту). Факт объединения и номер в последовательности контейнеров указаны в байтах V5 и K4 заголовка POH каждого контейнера VC-2/1.
Как и в отношении VC-3/4, каждый из контейнеров VC-2/12/11 виртуального мультиконтейнера также транспортируется по сети отдельно, и это приводит к различным задержкам при их распространении. Эти задержки должны быть скомпенсированы в точке терминирования для формирования единого поля полезной нагрузки мультиконтейнера.. Компенсируемая разница в задержках должна
|
|
1 |
|
х |
|
X*34/106 |
|
||||
|
1 |
|
|
|
C-12Xc/C-2-Xc |
|
|||||
|
|
|
|
|
|||||||
|
|
|
|
|
|||||||
|
4 |
|
|
500мкс |
|||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
|
|
35/107 |
|
|||
|
|
|
1 |
V5 |
|
|
|
|
|||
|
|
|
|
J5 |
VC-12/2-Xv |
||||||
|
1 |
V5 |
|
|
|
||||||
|
|
J5 |
|
||||||||
|
|
N2 |
VC-12/2*Xv |
||||||||
|
4 |
K4 |
500мкс |
|
|||||||
|
|
|
|
|
|
VC-12/2*1 |
|
|
|||
Рисунок.5.4 - Структура виртуальных мультиконтейнеров нижнего уровня VC-2/1-Xv
Т а б л и ц а 5.3 - Скорости мультиконтейнеров нижнего уровня при виртуальной конкатенации
|
Тип Контейнера |
Упакован в контейнер |
X |
Скорость Мбит/с |
Шаг Мбит/с |
|
VC-11-Xv |
VC-3 |
1-28 |
1.600 - 44.800 |
1.600 |
|
VC-11-Xv |
VC-4 |
1-64** |
1.600 – 102.400 |
1.600 |
|
VC-11-Xv |
Не определено |
1-64 |
1.600 – 102.400 |
1.600 |
|
VC-12-Xv |
VC-3 |
1-21 |
2.176 – 45.696 |
2.176 |
|
VC-12-Хv |
VC-4 |
1-63 |
2.176 – 137.088 |
2.176 |
|
VC-12-Хv |
Не определено |
1-64 |
2.176 – 139.264 |
2.176 |
|
VC-2-Хv |
VC-3 |
1-7 |
6.784 – 47.488 |
6.784 |
|
VC-2-Хv |
VC-4 |
1-21 |
6.784 – 142.464 |
6.784 |
|
VC-2-Хv |
Не определено |
1-64 |
6.784 – 434.176 |
6.784 |
быть также не меньше 125 мкс. Формируемые при этом емкости полезной нагрузки мультиконтейнеров приведены в таблице.5.3.
Для сетей SDH из таблицы.5.3. можно воспользоваться только опциями мультиконтейнеров VC-12-Xv, объединяющих контейнеры VC-12. При этом формируется полезная нагрузка (Х4-34) = Х-136 байт со структурой фрейма, повторяемого с частотой 2000 Гц (1/500 мкс). В результате формируется поток со скоростью Х-2,176 Мбит/с.
Для сетей SONET и SONET/SDH, поддерживающих форматы контейнеров VC-11 и VC-2, допустимо объединение X смежных контейнеров VC-11 и VC-2. При этом для VC-11 формируется мультикон-тейнер VC-11-Xv c полезной нагрузкой (X 4 -25) = Х-100 байт и структурой фрейма, частота повторения которого 2000 Гц (1/500 мкс). Сформированный в результате этого поток имеет скорость Х -1,600 Мбит/с. При использовании VC-2 получаем мульти-контейнер VC-2-Xv с аналогичной мультиконтейнеру VC-2-Xc емкостью полезной нагрузки, формирующей поток со скоростью Х6784кбит/с.
5.2 Инкапсуляция трафика Metro Ethernet в контейнеры SDH
5.2.1Типы мультиконтейнеров, требуемых для передачи трафика
Как уже отмечалось, трафик Ethernet может быть инкапсулирован в контейнеры и мультиконтейнеры SDH путем использования и традиционной (смежной) инкапсуляции, однако это приводит к большим потерям емкости контейнеров. Эти потери вызваны несовпадением формируемых ими потоков 34-150-600-2400-9600-38400 Мбит/с (имеющих кратность 4) с потоками, формируемыми технологиями Ethernet: 10-100-1000-10000 Мбит/с (имеющих кратность 10).
Выход из создавшейся ситуации - в использовании возможностей виртуальной конкатенации. С помощью данных, приведенных в таблицах 5.1., 5.2 и 5.3, можно определить коэффициенты Х и типы виртуальных контейнеров, которые наилучшим образом (с максимальным коэффициентом заполнения) инкапсулируют трафик различных технологий Ethernet. В результате получаем табл. 3.4, в которой указаны типы возможных мультиконтейнеров для соответствующих технологий, их емкости (скорости) в Мбит/с и процент заполнения их полезной нагрузки (PL) трафиком Ethernet.
Из табл. 3.4. видно, что процент использования полезной нагрузки исключительно высок: от 91,91 до 99,90 для контейнеров VC-12 (2 Мбит/с) при инкапсуляции E и FE; от 95,39 до 98,42 для контейнеров VC-3 и VC-4 (34/140 Мбит/с) при инкапсуляции GE; от 99,37 до 99,66 для контейнеров VC-3 и VC-4 (34/140 Мбит/с). Очевидно также, что для инкапсуляции низкоскоростного трафика (10/100 Мбит/с) оптимальным является использование мультиконтейнеров нижнего уровня с большей гранулярностью, тогда как для инкапсуляции высокоскоростного трафика (1/10 Гбит/с) оптимальным является использование мультиконтейнеров верхнего уровня с меньшей гранулярностью.
Что касается заголовков (SOH и POH) и пустых столбцов фиксированных наполнителей (стаффинга), которые используются при сборке фреймов SDH, то их легко учесть, принимая во внимания схему сборки конкретного мультиконтейнера. Например, для мультиконтейнера VC-4-7v можно оценить, что эффективность использования полезной нагрузки для передачи GE составляет с учетом SOH 96,66% и POH VC-4 99,62%. Это дает конечную эффективность виртуальной конкатенации (95,39%) порядка 91,85%. Если же использовать для той же цели мультиконтейнер VC-3-21 v, то мы получим практически тот же процент использования (даже при условии, что за счет POH VC-3 эффективность снижается до 96,55%). Говорить о том, что еще 50% может быть снято в результате резервирования, не совсем корректно, потому что можно и не резервировать трафик Ethernet или резервировать его за счет использования пары дополнительных волокон.
Вместе с тем нужно иметь в виду, что на практике могут применяться и другие схемы виртуальной конкатенации. Например, для передачи FE в большинстве случаев используется более простая схема конкатенации VC-3-2v, несмотря на то, что емкость мультиконтейнера при этом составляет 96,768 Мбит/с, т.е. формально меньше требуемой, что напоминает, например, ситуацию с "овербукингом" (когда суммарные обязательства провайдера услуг превышают возможности сети) в сетях Frame Relay. Однако снижение полезной пропускной способности при этом будет незначительным и может наблюдаться только для кадров максимальной длины (1500 байт).
Существуют и другие ситуации, когда требуется корректировка размера мультиконтейнера. Например, если используется помехоустойчивое кодирование с помощью кодеков Рида-Соломона, то вместо мультиконтейнера VC-4-67v для передачи 10GE применяют мультиконтейнер VC-4-68v емкостью 10183,680 Мбит/с, что приводит к уменьшению процента использования полезной нагрузки с 99,66% до 98,2%. На это идут сознательно для улучшения надежности, т.е. для уменьшения уровня BER.
Есть и еще одна возможность использования существенно меньшей емкости мультиконтейнера, например, так, как это делает Lucent в системах SDH уровня STM-4, а именно: использовать мультиконтейнеры VC-4-4v емкостью примерно 600 Мбит/с для
Т а б л и ц а 5.4 - Типы и емкости виртуальных мультиконтейнеров для передачи трафика Ethernet
|
Уровень STM:N |
STM:4 |
STM:4 |
STM:4 |
STM:4 |
STM:4 |
STM:16 |
STM:64 |
STM:64 |
STM:64 |
STM:256 |
|
Ethernet |
VC-11-7v |
VC-12-5v |
VC-11-63-v |
VC-12-46v |
VC-2-15v |
VC-3-2v |
VC-3-21v |
VC-4-7v |
VC-3-208v |
VC4-67v |
|
10 Мбит/с |
11,200 |
10,880 |
– |
– |
– |
– |
– |
– |
– |
– |
|
100 Мбит/с |
– |
– |
100,800 |
100,096 |
101,760 |
96,768 |
– |
– |
– |
– |
|
1 Гбит/с |
– |
– |
– |
– |
– |
– |
1016,064 |
1048,320 |
– |
– |
|
10 Гбит/с |
– |
– |
– |
– |
– |
– |
– |
– |
10063,872 |
10033,920 |
|
% от PL |
89,290 |
91,910 |
99,210 |
99,900 |
98,270 |
103,340 |
98,420 |
95,390 |
99,370 |
99,660 |
передачи трафика GE, с возможностью применять механизм инверсного статистического мультиплексирования при условии наличия нескольких входных портов карты Ethernet и гибкого использования набора мультиконтейнеров VC-3-Xv (X=1,2) и VC-4-Xv (X=1 -4) емкостью в диапазоне от 50 до 600 Мбит/с.
Возможность динамического изменения емкости звена связи
Известно, что в процессе передачи могут возникнуть различные ситуации, приводящие к изменению емкости звена связи и требующие не только общих управляющих воздействий (что является прерогативой системы управления TMN), но и специального менеджмента на уровне поддержания трафика, использующего виртуальную конкатенацию. С учетом этого для систем SDH нового поколения была разработана схема (процедура) динамического изменения пропускной способности звена связи (Link Capacity Adjustment Scheme - LCAS). Эта схема является, по сути, расширением виртуальной конкатенации и позволяет динамически изменять число контейнеров в связке, называемой группой виртуальной конкатенации (Virtual Concatenation Group - VCG).
С помощью LCAS каналы (поток контейнеров с установленными точками формирования/сборки и расформирования/разборки) могут быть добавлены в VCG и удалены из нее без потери трафика пользователей. LCAS допускает регулировку полосы пропускания (масштабирование производительности) в нормальном режиме. Даже если произойдет авария и часть соединений невозможно будет установить, оставшиеся каналы будут продолжать передачу трафика в режиме с уменьшенной полосой пропускания. Полоса автоматически восстановится, как только авария будет ликвидирована или произойдет защитное резервное переключение.
Синхронизация изменений емкости каналов осуществляется для передающей (So) и приемной (Sk) сторон с помощью управляющего пакета. Каждый такой пакет описывает состояние звена передачи. Все изменения посылаются заранее, так, чтобы приемная сторона могла переключиться на новую конфигурацию в момент прихода вновь сконфигурированного потока данных.
Пакет управления от So к Sk содержит указатель мультифрейма (MFI), указатель последовательности (SQ), поле управления (CTRL) и идентификатор группы (GID), а пакет управления от Sk к So содержит поле статуса члена VCG (контейнера), т.е. (MST), и подтверждение присвоения новых номеров контейнеров - членов группы RS-Ack.
Указатель мультифрейма МП на стороне So одинаков для всех членов группы VCG и увеличивается с каждым фреймом. На стороне Sk он позволяет определить дифференциальную задержку между членами той же группы VCG и используется для выравнивания полезной нагрузки всех членов этой группы. Указатель последовательности SQ содержит последовательный номер, присвоенный конкретному члену группы VCG.
При добавлении новых членов группы, а также при их временном или окончательном удалении, нумерация контейнеров мультикон-тейнера меняется в соответствии с протоколом LCAS. Разработчики также предусмотрели возможность нормального взаимодействия SDH-оборудования различных поколений, одни из которых поддерживают VCAT и LCAS, а другие нет.
5.3.Методы пакетизации трафика Ethernet для передачи по сети SDH.
Для передачи трафика по сети SDH традиционно использовались несколько методов упаковки трафика (кадров) Ethernet во фреймы SDH:
- процедура доступа к звену передачи для SDH, или упаковка с помощью процедуры LAPS;
передача Ethernet поверх SDH, или упаковка с помощью процедуры EOS;
- обобщенная процедура фреймирования - упаковка с помощью процедуры GFP.
Процедура LAPS в схеме упаковки кадра представлена на рисунке 5.5.
|
MAG -кадр Еthernet (IEEE 802,3xx) |
|
Подуровень соглосования |
|
Интерфейсы MII/GMII/XGMII |
|
Процедура LAPS |
|
Адоптация скорости передачи |
|
Физический уровень SDH |
Рисунок.5.5 - Место процедуры LAPS в схеме упаковки кадра
5.3.1 Процедура (протокол) LAPS
LAPS (Link Access Procedure - SDH) - процедура доступа к звену передачи для SDH - протокол уровня 2 семиуровневой модели OSI, разработанный для технологии SDH сначала для передачи пакетного трафика IP (ITU-T X.85,), а затем Ethernet (ITU-T X.86 ) и других пакетных технологий. Этот протокол, как и другие процедуры типа LAPx, основанные на протоколе HDLC, использует поле данных для инкапсуляции MAC-кадра Ethernet (IEEE 802.3), как показано на рис.3.5, для последующей дуплексной передачи в сети SDH с топологией точка-точка.
Здесь МАС-кадр Ethernet соответствует кадрам различных вариантов Ethernet: IEEE 802.3 (E), 802.3u (FE), 802.3ab (GE) или 802.3ae (10GE). MII/GMII/XGMII - Media/Gigabit Media/10 Gigabit Media Independent Interface - интерфейс/гигабитный интерфейс/10-гигабитный интерфейс, независимый от среды передачи - спецификация подуровня физического уровня для высокоскоростных (100 Мбит/с и выше), гигабитных (1 Гбит/с) и 10-гигабитных (10 Гбит/с) технологий Ethernet (на момент публикации версия LAPS, обслуживающая 10GE, отсутствовала). Адаптация скорости -механизм, приводящий в соответствие скорость Ethernet МАС MII/GMII и скорость виртуальных контейнеров VC SDH, учитывая различный характер функционирования Ethernet и SDH.
Общий стек протоколов/уровней модели взаимодействия Ethernet-LAPS-SDH показан на рисунке 5.6. В этой модели со стороны SDH могут быть использованы как виртуальные контейнеры верхнего уровня VC-3/VC-4, так и нижнего уровня VC-11, VC-12 и VC-2, причем в последнем случае они могут быть ориентированы не только на стандартные скорости модулей STM-N в соответствии с рекомендацией ITU-T G.707, но и на скорости субмодулей sSTM-n в соответствии с рекомендацией ITU-T G.708. Этот факт позволяет использовать на физическом уровне не только электрические и оптические секции (E/O), но и радиорелейные (E/O/R).
Указанный стек протоколов соответствует трехуровневой модели OSI и может быть представлен развернутой моделью взаимодействия сетей ЛВС Ethernet (пограничный узел А с пограничным узлом Б) через сеть SDH, представленную двумя узлами (рисунке.5.7).
Сопоставление рисунков.5.6. и 3.5. показывает, что физический уровень, представленный SDH, фактически состоит из четырех подуровней модели SDH: подуровня виртуальных контейнеров VC-n, подуровней мультиплексной и регенераторной секций и секции
|
MAG -кадр Еthernet (IEEE 802,3xx) |
Еthernet последовательности |
|||
|
Процедура LAPS |
|
|
|
|
|
LO/HO VC-n |
VC-11/VC-12/VC-2 |
G.707/Y.1322 |
||
|
Мультипликационная секция SDH |
G.707(STM-N)/G.708(sSTM-n) |
|||
|
Регенераторная секция SDH |
|
|
|
|
|
E/O-секции SDH |
E/O/R-секции SDH |
G.703/G.957(STM-N)/G.708(sSTM-n) |
||
Рисунок.5.6 - Стек протоколов/уровней модели взаимодействия Ethernet-LAPS-SDH
|
IPv4/IPv6/IPX |
|
IPv4/IPv6/IPX |
|
IPv4/IPv6/IPX |
|
IPv4/IPv6/IPX |
|
LLC |
|
LLC |
|
LLC |
|
LLC |
|
MAC |
|
MAC |
|
MAC |
|
MAC |
|
|
LAPS
|
|
LAPS |
|
||
|
ЛВС-А |
|
|
|
ЛВС-Б |
||
|
Пограничный |
|
|
|
Пограничный |
||
|
узел |
|
SDH |
|
SDH |
|
узел |
|
|
|
|
|
|
|
|
|
|
|
Сеть Ethernet LAPS SDH |
|
|
||
Рисунок.5.7 - Конфигурация протоколов сети Metro Ethernet-LAPS-SDH
конвертации фреймовой SDH-последовательности в электрический, оптический или радиосигнал, подаваемый в линию связи.
Скорость передачи в линии связи определяется несколькими факторами: типом используемого стандарта Ethernet; скоростью синхронного модуля STM-N или субмодуля sSTM-n; выбранной схемой конкатенации контейнеров, описанной выше; коэффициентом избыточности схемы шифрования/дешифрации, используемой при вводе/выводе информации в поле/из поля полезной нагрузки.
Протокол LAPS фактически функционирует как подуровень физического кодирования, обеспечивающего передачу в режиме "точка-точка" виртуальных контейнеров через сеть SDH и требуемые интерфейсные скорости. Как и другие протоколы типа LAPx (например, LAPD), он поддерживает сервис передачи информации без подтверждения приема (Unacknowledged Information Transfer Service - UITS), характерный для дейтаграммных сетей (ЛВС), и использует адаптацию по скорости между LAPS и SDH, а именно: согласование скорости на интерфейсе Ethernet MAC МП (см. таб.3.5.) и скорости контейнеров SDH VC. Такое согласование нужно, чтобы предотвратить возможность записи MAC-кадра в заголовок модуля
Т а б л и ц а 5.5 - Формат кадра LAPS с упакованным Ethernet MAC-кадром
|
Флаг (7е:01111110) |
1 байт |
|
Адрес HDLC (04:00000100) |
1 байт |
|
Упровление HDLC (03:0000011) |
1 байт |
|
SAPI LAPS |
2 байт |
|
MAC - кадр: адрес назначения (DA) |
6 байт |
|
MAC - кадр: адрес источника (SA) |
6 байт |
|
MAC - кадр: длинна поля данных |
2 байт |
|
MAC - кадр: поля данных |
46-1500 байт |
|
MAC - кадр:байты дополнения (PAD) |
|
|
МАС - кадр: поле FCS |
4 байта |
|
Поле FCS LAPS |
4 байта |
|
Адаптация скорости (стафинг) (7d,dd) |
переменной длины |
|
Флаг (7е:01111110) |
1 байт |
|
Межкадровый зазор |
1 байт |
SDH, учитывая различный характер функционирования SDH (синхронизируемая периодическая последовательность модулей) и Ethernet MAC-уровня (монопольная пакетная передача).
Всякое согласование скоростей требует, как известно, использования процедур стаффинга (в PDH/SDH это добавление битов/байтов наполнителей , а здесь кадров паузы - PF), что вызывает негативную реакцию у специалистов , записывающих штрафные очки данному методу/протоколу упаковки трафика Ethernet при его передаче по сети SDH. Этот метод, однако, широко используется и в оборудовании SDH новой генерации (см., например, карты X8PL мультиплексора SDH новой генерации компании Lucent наряду с протоколом GFPФормат кадра протокола LAPS. Кадр Ethernet стандарта IEEE 802.3 имеет переменную длину поля данных и состоит из 8 полей, из которых первые два: преамбула -7 байт и ограничитель начала кадра (SFD) - 1 байт, отбрасываются при инкапсуляции в поле протокола LAPS. Максимальная длина остальных (инкапсулируемых) шести полей равна 1518 байтам: по 6 байт - адрес назначения (DA) и адрес источника (SA), 2 байта - длина поля данных (L), 46-1500 - поле данных (Data) c фиксированным наполнителем поля данных до минимальной длины: 46 байт (PAD), если требуется, и 4 байта последовательности контроля кадра (FCS).
Кадр протокола LAPS имеет переменную длину и состоит из 7 полей : первое и последнее поля - флаги (по 1 байту); второе поле - адрес (1 байт); третье - управление (1 байт); четвертое - идентификатор точки доступа к сервису- SAPI (2 байта); пятое -поле данных, куда и упаковывается кадр Ethernet (после отбрасывания преамбулы и SFD) максимальной длины 1518 байт; шестое -поле FCS, используемое для контроля LAPS (4 байта). Максимальная длина кадра LAPS при этом 1528 (1518+10) байт.
Можно констатировать, что при отсутствии адаптации скорости кадр протокола LAPS отличается от кадра Ethernet всего на 2 байта (1528 против 1526). Однако при необходимости выравнивания (адаптации) скоростей процедура LAPS вставляет последовательности (7d,dd), или (01111101, 11011101), перед конечным флагом, прежде чем отправить кадр LAPS в сеть SDH. Эти вставки и есть стаффинг.
Процедура GFP (Generic Framing Procedure – основная процедура фреймирования была разработана для того, чтобы обеспечить общий механизм адаптации трафика пользователя, передаваемого через транспортную сеть с верхних уровней модели OSI (МВОС), перед тем, как инкапсулировать его в полезную нагрузку фреймов SDH.
Термин фреймирование понимается здесь обобщенно как отображение потока данных на поле полезной нагрузки кадра переносчика (GFP) или как отображение кадра GFP на поле полезной нагрузки фрейма переносчика (SONET/SDH).
Трафик пользователя может быть двух типов, которые требуют соответственно два различных режима инкапсуляции:
- GFPтF (FrameтMapped GFP) – основная процедура фреймирования с отображением кадров – режим инкапсуляции GFP, ориентированный на использование протокольного блока данных(PDU) кадров типа IP/PPP или MAC кадров Ethernet (типа E, FEи GE). В этом случае отдельный кадр клиентского (пользовательского) трат фика инкапсулируется, т.е. отображается, или упаковывается, в полезную нагрузку одного кадра GFP;
- GFPтT (Transparent GFP) – прозрачная основная процедура фреймирования
– режим инкапсуляции GFP, ориентированный на применение блокового кодирования потока данных с постоянной битовой скоростью, например потоков, формируемых для прохождения через интерфейсы типа Fiber Channel, ESCON/FICON, или же потоков данных, формируемых технологиями Ethernet (GE и 10GE). В этом случае последовательность символов данных пользователя отображается в эффективные кодовые блоки, инкапсулируемые в полезную нагрузку одного GFPткадра.
Так как нас интересует прежде всего передача пакетного трафика Ethernet (E, FE и GE), учитывая, что трафик 10GE хорошо приспособлен для передачи по сети SDH, то в рамках данной статьи мы ограничимся рассмотрением только режима GFPтF. Он ориентирован на PDU и дает возможность обрабатывать как Ethernetт, так и IP трафик.
В рамках этой модели функция инкапсуляции (и предшествующая ей функция адаптации скорости) потока клиента/пользователя в GFP может работать на уровне звена передачи данных (или на более высоких уровнях). Это значит, что клиентский PDU должен быть получен из сети уровня звена передачи данных (от IPтмаршрутизат тора или коммутатора Ethernet или через функцию моста коммутатора маршрутизатора в транспортном сетевом элементе (TNE – Transport Network Element). В этом последнем случае клиентский PDU принимается, например, через интерфейс Ethernet. Используя эту модель, можно установить соединение между портами A и A'; C и C'; A и C'; C и A'.
5.4.Формат GFP кадра
В составе клиентского GFP кадра можно выделить (грубо) два блока: основной заголовок и область полезной нагрузки (рис3.8, левый пунктирный столбец). Заголовок состоит из двух полей: индикатора длины клиентского PDU – PLI (Payload Indication) и поля контроля ошибок основного заголовка – cHEC (Header Error Control), фактически
 |
![]()
Рисунок - 5.8 - Формат клиентского GFPткадра
реализующего хорошо известную процедуру CRC-16. Полезная нагрузка состоит из трех полей: заголовка полезной нагрузки – PLH (Payload Header), поля клиентской полезной нагрузи – CPL
(Client Payload), куда в нашем случае загружается MAC кадр Ethernet, и необязательного поля контрольной последовательности кадра – FCS (Frame Check Sequence), фактически реализующего известную процедуру CRCт32. Основной заголовок допускает независимое от содержимого PDU верхних уровней выравнивания кадра GFP.
Поле PLI (2 байта) содержит двоичный эквивалент числа байтов(октетов), определяющих емкость полезной нагрузки.
Минимальная емкость PL равна 4 байтам, она может содержать только PLH.
Поле cHEC (2 байта) содержит код контроля ошибок основного заголовка CRC-16, позволяющего исправлять его одиночные ошибки и обнаруживать кратные ошибки. Кроме этого, основной заголовок дополнительно кодируется (скремблируется) для улучшения устойчивости процедуры выравнивания кадра GFP и обеспечения достаточного числа переходов 0-1 и 1-0 при передаче пустых кадров IF (Idle Frame).
Область полезной нагрузки служит для передачи протокольных данных верхних уровней и имеет переменную длину от 4 до 65535 байтов. Она состоит из двух общих полей: заголовка PLH (4–64 байта) и полезной нагрузки длиной от 0 до 65535тХ байтов, которая зависит от переносимых приложений и должна быть не меньше 1600 байтов. Заголовок PLH имеет переменную длину (4–64 байта), чтобы поддержать процедуры административного управления (менеджт мента), характерные для верхних уровней клиентских приложений. PLH состоит из двух обязательных полей длиной 2 байта: поля тип заголовка (Type) и поля контроля его ошибок (tHEC), а также дополнительного поля расширения заголовка (EXH) переменной длины (0–58 байтов) и поля контроля его ошибок (eHEC) длиной 2 байта (см. рисунок 5.8). Поля tHEC и eHEC содержат стандартные циклические коды CRC-16 для защиты целостности контролируемых ими полей Type и EXH и позволяют корректировать все одиночные и выявлять множественные ошибки (пачки). Наличие поля расширения заголовка (его общий формат имеет длину 0–60 байтов) и поля FCS для нагрузки GFP определяется полем Type, которое, в свою очередь, делится на несколько полей, описывающих не только типы кадров GFP, но и различные сервисы в случае мультисервисного обслуживания. Эти поля: PTI, PFI, EXI и UPI (см. рисунок 5.8) - несут следующую функциональную нагрузку:
![]() - PTI (Payload Type Identifier) – идентификатор типа нагрузки (3
бита) – определяет в настоящее время только два типа нагрузки: PTI=000 для
кадров данных пользователя (UD) и PTI=100 для кадров административного
управления со стороны пользователя;
- PTI (Payload Type Identifier) – идентификатор типа нагрузки (3
бита) – определяет в настоящее время только два типа нагрузки: PTI=000 для
кадров данных пользователя (UD) и PTI=100 для кадров административного
управления со стороны пользователя;
- PFI (Payload FCS field Identifier) – указатель наличия поля FCS для нагрузки GFP (1 бит): PFI=1, если FCS присутствует, и PFI=0, если FCS отсутствует;
- EXI (Extension head Identifier) – идентификатор расширенного заголовка (4 бита) – определяет в настоящее время только три типа расширенного заголовка: EXI=0000 - для нулевого расширения; EXI=0001- для кадра с топологией "линейная цепь" и EXI=0010 - для кадра кольцевой топологии;
- UPI (User Payload Identifier) – идентификатор нагрузки пользователя (8 битов) – определяет тип нагрузки, переносимой в поле информационной полезной нагрузки GFP. Этот тип нагрузки зависит от типа кадра данных пользователя, инкапсулируемого в GFP, а он, в свою очередь, определяется полем PTI. Определяемые идентификатором UPI значения кадров данных пользователя (т.е. кадров, соответствующих значению PTI=000)
5.5. Управляющие кадры GFP
Для управления GFP соединением должны использоваться управляющие кадры. В настоящее время описан только один тип такого кадра – пустой кадр IF. Он имеет длину четыре байта и фактически имитирует основной заголовок GFP, в котором поля PLI и cHEC (см. рис.3.8) установлены нулевыми (область полезной нагрузки отсутствует).
Пустые кадры используются как кадры заполнения в процессе адаптации скорости (емкости) источника данных при инкапсуляции потока данных в GFP, если емкость транспортного канала среды передачи выше, чем требуется для размещения клиентского сигнала. Учитывая процедуру скремблирования Баркера, фактически пустой кадр представлен последовательностью из четырех байтов вида (16-ричное значение байтов показано в нумерации справа на лево):
E0 31 AB B6
Другие типы управляющих кадров с PLI=1,2,3 находятся в стадии разработки.
Процедура фреймирования данных пользователя в кадр GFP на входе может быть в общем случае представлена как процедура мультиплексирования потока байтов клиентских сигналов и пустых кадров (при отсутствии сигналов), управляемая процессом адаптации скорости сигналов и менеджментом со стороны клиента. На выходе мультиплексора агрегированный поток скремблируется раздельно для основного заголовка и полезной нагрузки. На выходе осуществляется логически обратный процесс.
При наличии множества портов и множества типов клиентского трафика мультиплексирование осуществляется в режиме покадрового (кадры GFP) интерливинга
5.6 Инкапсуляция кадров GFP в фреймы SONET/SDH
Поток кадров GFP упаковывается в контейнер Cтn, где n =11, 12, 2
(SONET), 3, 4, 4тXc, 11/12/2/3/4тXv, причем так, что границы байтов кадров GFP оказываются выровненными с границами такого контейнера C-n. Этот контейнер затем упаковывается в виртуальный контейнер VC-n, к которому добавляется соответствующий заголовок POH. Однако, учитывая, что емкость контейнера C-n не является целым кратным длины кадра GFP, какой -то из кадров может пересечь границу одного из фреймов C-n (аналогично тому, что имеет место при упаковке ячеек ATM во фреймы SDH. Вместе с тем, благодаря процедуре адаптации, основанной на вставке пустых кадров, емкость прибывающего потока кадров GFP идентична емкости полезной нагрузки VC-мультиконтейнера.
Еще раз подчеркнем, что процедура адаптации скорости и скремблирование осуществляется на первом этапе – этапе фреймирования потока Ethernet в кадры GFP, а не на втором этапе – этат пе упаковки кадров GFP во фреймы SONET/SDH. Этим, главным образом (если забыть о гибкости и универсальности), и отличаются процедуры GFP и LAPS, а не тем, что GFP позволяет избежать протцедуры стаффинга . Вставка пустых ячеек на этапе адаптации мало чем отличается от стаффинга, используемого в процедуре LAPS. Весь вопрос в том, для каких технологий, когда и как это делается и что получается в результате!
Наиболее важным преимуществом процедуры GFP является ее гибкость и универсальность, позволяющие дополнительно поддерживать трафик данных, использующий интерфейсы типа: FICON, ESCON/SBCON, а также трафик цифрового видеовещания (DVB).
6 Технология RPR
6.1 Кольцевая технология RPR
Кольцевая топология — одна из наиболее популярных в сетях связи, особенно при развертывании транспортных сетей SDH. Однако, при наличии в транспортной сети больших объемов пакетного трафика механизмы защиты и транспорта сети SDH становятся малоэффективными, в силу отсутствия механизмов статистического мультиплексирования на уровне кольца (в NG SDH статистическое мультиплексирование может быть реализовано только на уровне узлов) и необходимости выделять неиспользуемую в штатном режиме полосу для защиты трафика.[7]
Отказоустойчивое пакетное кольцо (Resilient packet ring — RPR) представляет новую сетевую архитектуру и технологию, определенную спецификацией IEEE 802.17 и разработанную для пакетно-ориентированных сетей регионального масштаба (Metropolitan Area Network — MAN). Эта технология сочетает простоту и надежность SDH с эффективностью пакетной передачи. Она обеспечивает 50 мс защитную коммутацию и в то же время за счет пакетного транспорта использует выгоды статистического мультиплексирования для лучшей утилизации всей доступной полосы, включая полосу, отводимую под защиту. Более того, RPR предлагает несколько уровней QoS для поддержки различных типов служб, транспортируемых в региональной сети.
RPR способна поддерживать до 255 узлов в кольце общей протяженностью до 2000 км.
Сеть RPR основывается на кольцевой архитектуре, которая состоит из узлов пакетной коммутации соединенных с соседними узлами в кольце одной парой оптического волокна. Сетевая топология основывается на двух, передающих в противоположных направлениях кольцах. Оба кольца (внутреннее и внешнее) используются для транспорта рабочего трафика между узлами. В терминологии RPR эти кольца называют «ринглетами» (от англ. ringlet — колечко), которые идентифицируются как ринглет-0 и ринглет-1. Используя оба ринглета, без явного резервирования одного из них для защиты, RPR утилизирует всю доступную полосу в кольце. Ринглеты также используются для переноса сигнальной информации (обновление топологии, защита, управление полосой). Управляющие сообщения передаются в направлении обратном трафику, к которому они относятся. Например, трафик управления внешнего кольца передается по внутреннему кольцу к узлам, расположенным вверх по потоку (по отношению к направлению передачи внешнего кольца).
6.2 MAC уровень
IEEE 802.17 определяет свой уровень контроля доступа к среде передачи (MAC), который не зависит от физического уровня и среды передачи. Каждая станция в кольце имеет уникальный 48-ми битный MAC адрес. Поддерживается передача одноадресного, многоадресного и широковещательного трафика.
MAC уровень является центральной компонентой RPR технологии на котором реализуются все ее ключевые свойства и преимущества. Собственно, сам стандарт 802.17 и есть в основе своей описание функционирования MAC уровня.
MAC уровень в RPR можно разделить на два подуровня: подуровень тракта данных и подуровень управления MAC.
Подуровень тракта данных, как следует из его названия, отвечает за прием и передачу пакетов данных.
Основное преимущество пакетного кольца в том, что пакет, посланный по кольцу в конечном счете достигнет назначенного узла, вне зависимости, какой путь вокруг кольца был выбран. А раз узлы «знают», что они находятся на кольце, то только три базовые операции по обработке пакетов необходимы: вставка (добавление пакетов в кольцо), копирование (дублирование проходящего пакета для передачи на вышележащий уровень или подуровень управления MAC) и сброс (изъятие пакета из кольца). Так операция копирования применяется для широковещательных пакетов, одноадресных или многоадресных пакетов, если адрес назначения пакета совпадает с адресом станции или групповым адресом. Операция сброс применяется, когда одноадресный пакет достиг узла назначения, или когда пакет сделал полный круг и достиг узла источника или закончилось время жизни пакета, заданное в поле TTL.
Таким образом, RPR устройства реализуют идею транзитного пути. На каждом узле трафик, который не предназначен для этого узла просто проходит насквозь. Транзитный путь становится частью среды передачи и делает из RPR кольца одну непрерывную разделяемую всеми RPR узлами среду. Так как узлы не обрабатывают транзитный трафик, то значительно снижается задержки пакетов и архитектура узла может легче масштабироваться к более высоким скоростям передачи. Если сравнивать кольцевую архитектуру, например, с ячеистой (mesh) топологией, то там каждый узел, помимо продвижения пакета, должен принять решение на какой выходной порт его направлять.
На этом же подуровне реализуются функции управления полосой и формирование трафика через механизм очередей, гарантирования качества предоставляемых услуг.
На подуровне управления MAC реализуются функции изучения топологии кольца и защиты, алгоритм «справедливого» разделения полосы в кольце, а также поддержка функций эксплуатации, администрирования и обслуживания (OA&M).
6.3 Определение топологии и защита
Под определением топологии RPR кольца понимается изучение узлами кольца наличия других узлов в кольце их статус, взаимное расположение, состояние оптических соединений между смежными узлами. Технология RPR обеспечивает надежное и точное средство изучения топологии кольца, а также механизм быстрого определения изменений топологии. Это позволяет добавлять или удалять узлы в кольце без каких-либо дополнительных ручных настроек. При этом функции определения топологии и защиты разделяют общий механизм управляющих сообщений.
Узлы в кольце периодически передают в обе стороны кольца специальное сообщение — кадр TP (topology & protection). Каждый узел, получающий это сообщение использует его для проверки или обновления хранящейся в узле топологической базы данных кольца. Эта база содержит состав узлов кольца, их взаимное расположение, состояние, а также состояние оптических соединений между ними. Информация в топологической базе данных также используется подуровнем тракта данных MAC, алгоритмом, отвечающим за справедливый доступ к ресурсам кольца и функциями OA&M.
Протокол защиты RPR обеспечивает надежный механизм защитной коммутации в пределах 50 миллисекунд для всего защищаемого трафика на кольце. Защита реализуется двумя способами: перенаправление (steering) или заворот (wrapping) трафика. Этот протокол гарантирует, что каждая станция, получившая информацию об изменении статуса оптических связей или узлов кольца сделает решение о защитной коммутации надлежащим образом и в требуемый промежуток времени. При этом перенаправление или заворот будут сделаны в соответствии с защитной иерархией.
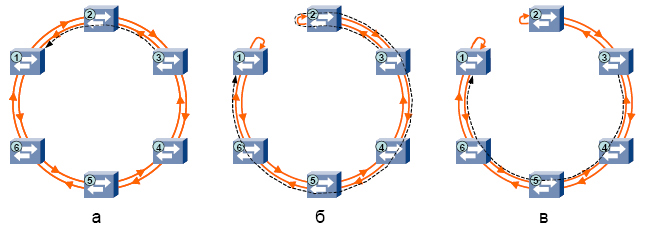
Рисунок. 6.1 - Защитное переключение в RPR
Рисунок 1 представляет пример путей передачи данных до и после события обрыва волокна. До обрыва волокна узел 3 передавал трафик к узлу 1 через узел 2 (Рисунок 1а). После обрыва волокна (между узлами 1 и 2), узел 1 завернет трафик внешнего кольца к внутреннему и узел 2 завернет трафик внутреннего кольца к внешнему. После заворота трафик из узла 3 к узлу 1 будет проходить не по оптимальному пути (Рисунок 1б). Но такое защитное переключение будет сделано очень быстро (в пределах 50 мс), так как решение о нем принимается локально в узлах 1 и 2, которые идентифицируют разрыв соединения. Впоследствии, на основе протокола определения топологии, остальные узлы в кольце обнаруживают изменение в топологии и используют уже новый оптимальный путь (Рисунок 1в). Это обнаружение изменений может занять от сотен миллисекунд до нескольких секунд, после которого удвоенная емкость кольца будет восстановлена. Таким образом, в отличие от SDH колец, которые всегда платят за защиту резервируемой (и неиспользуемой в штатном режиме) полосой, кольцо RPR после аварии уменьшает свою емкость максимум на несколько секунд.
Одно из основных свойств RPR протокола — его возможность пространственного переиспользования полосы. Пространственное переиспользование является концепцией, применяемой в кольцевых топологиях для увеличения общего агрегированного в кольце трафика. Это возможно за счет пропуска двунаправленного трафика по кольцу только на промежутке между узлом источником и узлом назначения. Узел назначения удаляет свои пакеты из кольца, освобождая полосу в другом сегменте кольца для использования другими пакетами.
Это отличается от более ранних кольцевых протоколов, таких как token ring и FDDI, где трафик удалался из кольца узлом источником, занимая без необходимости полосу в части кольца. RPR похожа в этом смысле на кольцо SDH, но в отличие от SDH, она допускает полную утилизацию полосы кольца негарантируемым трафиком.
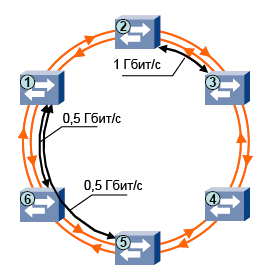
Рисунок. 6.2 - Пример пространственного переиспользования полосы в кольце.
Рисунок 2 демонстрирует как работает пространственное переиспользование. Предположим, что есть RPR кольцо 1 Гбит/с.В этом примере узел 6 передает 0,5 Гбит/с трафик к узлу 1 и узел 5 передает 0,5 Гбит/с трафик к узлу 1. В традиционном кольце SDH при защите этого трафика, свободная емкость будет отсутствовать, в то время как в RPR кольце узлы 3 и 2 могут использовать полную полосу для негарантированного трафика.
6.4 Алгоритм справедливого доступа
Справедливость - наиболее важное свойство в сети операторского класса. Справедливость достигается, когда характеристики потоков трафика двух служб, которые имеют идентичные уровни обслуживания (SLA) независимы от их источника и назначения в сети. Протокол RPR может гарантировать выполнение условий справедливости через всю сеть. Каждый RPR узел выполняет алгоритм, который гарантирует, что все узлы в кольце будут получать свою справедливую долю полосы.
В сети с динамически изменяющимся наполнением трафика (что как раз характерно для пакетных сетей) способ оптимизации утилизации сети без потери трафика включает наличие механизма обратной связи встроенной в сеть. В RPR каждый узел отслеживает загруженность примыкающих к нему соединений и делает эту информацию доступной всем узлам в кольце. Другие узлы на основании этой информации могут увеличить или уменьшить скорость передачи данных в кольцо. Ограничения на скорость передачи реализуется на подуровне продвижения данных MAC.
Алгоритм справедливости рассматривает имеющуюся полосу в кольце, как один глобальный ресурс и оптимизирует его использование на уровне всего кольца.
Применяется алгоритм только к трафику с негарантированной полосой пропускания. Трафик класса А с гарантированной полосой пропускания и трафик класса B в пределах согласованной скорости CIR вычитается из доступной емкости при применении данного алгоритма.
В направлении противоположном направлению передаваемых данных (т.е. через другой ринглет) периодически посылаются специальные кадры, которые обрабатываются узлами и переносят идентификатор узла, испытывающего наибольшую перегрузку из-за этого трафика и определенным образом рассчитанную величину допустимой скорости передачи этих данных. При расчете «справедливой» скорости доступа к кольцу, поддерживается взвешенная справедливость, пропорциональная полосе купленной пользователем. В отсутствии перегрузки узлы могут получить дополнительную доступную полосу, которая выше чем их справедливая доля на локальном сегменте кольца, до тех пор, пока это не наносит ущерб другим узлам в кольце.
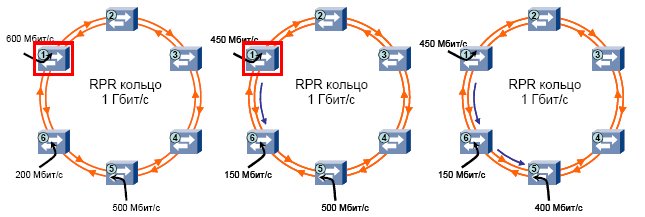
Рисунок. 6.3 - Алгоритм справедливого доступа к среде передачи
Рисунок 6.3 демонстрирует работу алгоритма справедливого доступа. До применения алгоритма все узлы передают в кольцо данные на их пиковой скорости. В какой-то момент узел 1 испытывает перегрузку и запрашивает узлы вверх по потоку уменьшить их скорость передачи до допустимого уровня. После схождения алгоритма, каждый узел получит свою справедливую долю полосы, в то время как узлы 2 и 3, передающие данные друг другу без создания перегрузки для остальных узлов, будут продолжать передачу на их пиковой скорости.

Рисунок. 6.4 - Распределение скоростей доступа в цепочке Ethernet коммутаторов
Другие оптимизированные для данных технологии, такие как Ethernet, не обеспечивают справедливость операторского класса. В цепочке Ethernet коммутаторов мы видим (Рис. 4), что скорость доступа узла 4 в Интернет зависит от полосы потребляемой узлами 1, 2 и 3. Обычно Ethernet коммутаторы поровну распределяют полосу выходного порта между входными портами. В этих условиях узел 1 будет получать половину доступной полосы, в то время как узел 2 получит 25% и узлы 3 и 4 будут каждый получать по 12,5% доступной полосы. С ростом количества коммутаторов в цепочке несправедливость по отношению к узлам, стоящим вверх по потоку становиться еще большей. Одно из решений — ограничить скорость входящего трафика на каждом узле в 250 Мбит/с (для случая на Рис 4). Но такое ограничение не позволяет узлу 4 захватить всю полосу, если она не используется узлами 1, 2 и 3.
6.5 Управление полосой и QoS
Качество обслуживания (Quality of Service — QoS) требуется для того, чтобы предоставлять различные параметры передачи для трафика пользователей, а в конечном итоге позволить оператору эффективно взимать плату за услуги, которые он предлагает.
Имеется несколько параметров, которые более чем другие определяют характеристики доставляемой услуги: доступность услуги, задержка, вариация задержки, уровень потери пакетов. Приложения передачи данных требуют низкого уровня потери пакетов, в то время, как приложения реального времени, такие как голос, требуют низкой задержки и ее вариации. Доступность услуги зависит от надежности сетевого оборудования, также как и от характеристик живучести сети. Из вышесказанного ясно, RPR способна поддерживать необходимый уровень доступности сети.
ATM обещала доставку множества услуг из-за ее богатого набора QoS. Однако службы, предлагаемые оператором, должны быть просты. Пользователи должны ясно понимать различие в службах за которые с них требуют плату. Часто слишком богатый набор свойств QoS усложняет и делает малопонятными предлагаемые услуги.
Подход, предложенный в стандарте 802.17, требует от транспортного механизма в сети поддержку всего трех базовых служб:
Служба Класса А — обеспечивается гарантированной полосой с низкой задержкой из конца в конец и ограниченным джиттером. Этот класс имеет приоритет над всеми другими классами.
Служба Класса В — обеспечивается гарантированной полосой с ограниченной задержкой и джиттером и возможностью доступа к дополнительной (не гарантируемой) полосе без гарантий по ограничению задержки и джиттера в этой полосе. Класс В имеет приоритет над классом С.
Служба Класса С — обеспечивает доставку по мере возможностей (best effort) без гарантий скорости данных и ограничений на задержку и джиттер.
Здесь следует также отметить, что наличие эффективного механизма устранения перегрузок в RPR кольце (справедливый доступ), позволяет минимизировать потерю пакетов.
Если взять наиболее обсуждаемые в последнее время услуги по доставке на единой технологической основе служб Голоса, Видео и Данных (Triple Play), то RPR здесь представляется как наиболее предпочтительная технология для агрегации трафика в региональной сети.
Каждая из служб Triple Play имеет свои нюансы. Голосовые службы могут включать голосовой трафик реального времени, т.е. телефонные вызовы, или не являющуюся службой реального времени трансляцию музыки. Видео службы традиционно включают потоковое видео, но могут также включать видеоконференции, которые являются службой реального времени.
Исходя из этого набора служб, ясно, что службы реального времени для Голоса или Видео будут использовать Класс А для того, чтобы обеспечить гарантированную полосу и наименьшую задержку сигнала. Потоковое Видео или Голос будут использовать Класс В. Службы данных будут использовать класс С. Конечно, эти пары полностью зависят от того, что предлагает поставщик услуг. Некоторые поставщики услуг могут предоставлять Класс В для служб данных пользователям, согласным за это платить.
6.6 Физический уровень
RPR пакеты могут быть транспортированы поверх физических уровней как SDH, так и Ethernet. Может поддерживаться множество скоростей. 1G транспорт использует Gigabit Ethernet на физическом уровне, 2,5G транспорт использует STM-16, а 10G использует STM-64 или 10 GbE на физическом уровне. Физический уровень SONET/SDH предлагает превосходный мониторинг ошибок и производительности. Пакеты RPR могут быть инкапсулированы внутри полезной нагрузки, используя HDLC подобную или GFP инкапсуляцию. Протокол первого уровня SONET/SDH предлагает такую информацию, как потеря или деградация сигнала для использования механизмом защиты RPR. Когда используется физический уровень SONET/SDH, RPR может переноситься поверх TDM транспорта SONET/SDH или по темному волокну.
Ethernet обеспечивает экономный физический уровень для RPR сетей.
RPR системы, использующие физический уровень SDH не будут совместимы с системами, основанными на Ethernet в том же самом кольце.
6.7 Реализация и применение RPR
Производители оборудования, поддерживающие технологию RPR в своих мультисервисных платформах, реализуют два подхода.
Первый подход можно назвать, как RPR поверх SDH, когда SDH платформы следующего поколения поддерживают эту технологию для передачи данных. Пользователям предоставляются Ethernet интерфейсы и транспорт пакетов данных осуществляется через RPR кольцо, которое конфигурируется в сети SDH выделением группы виртуальных контейнеров. В этом подходе TDM транспорт поддерживается через технологию SDH, а RPR применяется для обеспечения более эффективного (нежели Ethernet поверх SDH) транспорта пакетных данных.
Второй подход — мультисервисные платформы, которые в чистом виде реализуют пакетный транспорт RPR. Однако производители оборудования расширяют их возможности функциями, которые непосредственно не описаны в стандарте 802.17. Это поддержка передачи TDM трафика поверх RPR и поддержка не только кольцевой топологии, но и более сложных, например, сопряженные кольца. Для такого расширении RPR уже есть термин: отказоустойчивый пакетный транспорт (Reilient Packet Transport — RPT).
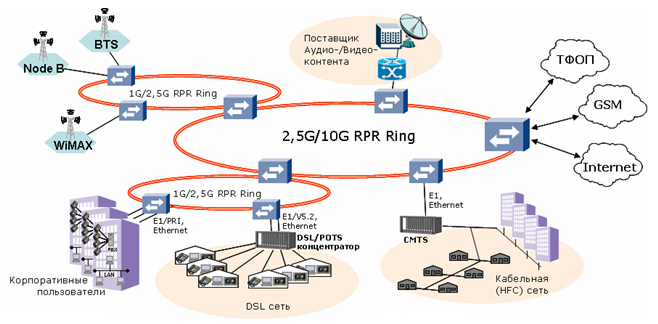
Рисунок 6.5 - Пример городской сети с применением технологии RPR
Оба этих подхода делают RPR хорошим решением при эволюции от TDM к преимущественно пакетным сетям. Рисунок 5 демонстрирует типичный пример региональной сети RPR, которая обеспечивает сбор трафика от различных источников и его доставку. Вдобавок RPR основана на кольцевой топологии, поэтому она может быть легко адаптирована к существующим линиям оптического кабеля, где используется SDH.
Список литературы
1. Слепов Н.Н. Синхронные цифровые сети SDH.- М.: ЭКО-ТРЕНДЗ, 1999. - 149с.
2. Бакланов И.Г. Технологии измерений первичной сети. - М.: ЭКО-ТРЕНДЗ, 2006. - 725с.
3. Бакланов И.Г. SDH-NGSDH: практический взгляд на развитие транспортных сетей М.: ЭКО-ТРЕНДЗ, 2000. - 143с.
3. Шмалько А.В. Цифровые сети связи: основы планирования и построения. – М.: ЭКО-ТРЕНДЗ, 2001. - 284с.
4. Тепляков И.М. Основы построения телекоммуникационных систем и сетей. М.: Радио и связь, 2004. -328 с.
5. Основы построения телекоммуникационных систем и сетей: Учебник для вузов/ ВВ Крухмалев и др. – М.: Горячая линия – Телком. 2004. -510.
6. Транспортные сети и системы электросвязи. Системы мультиплексирования: Учебник для студентов по специальности «Телекоммуникации». / Под ред. В.К. Стеклова. – К. 2003. -352 с
7. Http://www.nstel.ru
Содержание
Введение
1. Основные понятия и определения
1.1 Технология SDH
1.2 Транспортная сеть
1.3 Структура мультиплексирования SDH сигнала
1.4 Структура цикла модуля STM-1
1.5 Конфигурация синхронного мультиплексора SMA
1.6 Интерфейсная панель для базовых и дополнительных блоков
1.7 Панель вспомогательных интерфейсов
1.8 Интерфейс блока синхронизации и дисплей индикации.
1.9 Функциональная схема мультиплексора SMA1
2 Описание имитатора локального терминала SMA1
2.1 Описание меню имитатора
3 Технология NG SDH
3.1 Компоненты NG SDH
3.2 Протокол GFP
3.3 Протокол VCAT
3.4 Протокол LCAS
4. Ethernet поверх SDH
4.1 Технологии Metro Ethernet
5.Методы передачи в Метро.SDH
5.1.Методы конкатецации в SDH
5.2. Инкапсуляция трафика Metro Ethernet в контейнеры SDH
5.3.Методы пакетизации трафика Ethernet для передачи по сети SDH
5.4.Формат GFP кадра
5.5 Управляющие кадры GFP
5.6 Инкапсуляция кадров GFP в фреймы SONET/SDH
6 Технология RPR
6.1 Кольцевая технология RPR
6.2 MAC уровень
6.3 Определение топологии и защита
6.4 Алгоритм справедливого доступа
6.5 Управление полосой и QoS
6.6 Физический уровень
6.7 Реализация и применение RPR
Список литературы