АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра автоматической электросвязи
ТРАНСПОРТНЫЕ ТЕЛЕКОММУНИКАЦИОННЫЕ СЕТИ
Конспект лекций (для студентов специальности 050719 – Радиотехника, электроника и телекоммуникации
Алматы 2007
СОСТАВИТЕЛИ: А.С. Байкенов, К.С. Чежимбаева. Транспортные телекоммуникационные сети. Конспект лекций для студентов всех форм обучения специальности 050719 – Радиотехника, электроника и телекоммуникации. - Алматы: АИЭС, 2007.- 58с.
Изложены конспекты тринадцати лекций по дисциплине «Транспортные телекоммуникационные сети». В них представлены основы построения современных первичных транспортных цифровых сетей связи и методы их описания, цифровые методы передачи информации и принципы построения цифровых систем передачи, в особенности, систем мультиплексировании и их взаимодействии между собой.
Ил.39, табл. 2, библиогр.- 13 назв.
Рецензент: канд.техн.наук, доц. К. Х. Туманбаева.
Печатается по плану издания некоммерческого акционерного общества «Алматинский институт энергетики и связи» на 2007 г.
© НАО «Алматинский институт энергетики и связи», 2007 г.
Введение
Целью преподавания дисциплины является подготовка студентов, владеющих основными принципами построения транспортных сетей, реализованных на основе цифровых систем передачи (кабельных, оптических, радио), овладение студентами сущности явлений, происходящих при передаче информации, принципов действия технических устройств, аппаратуры и технологий PDH, SDH, WDM, PON, NGSDH; умение правильно рассчитывать, анализировать и разрабатывать проблемы, относящиеся к цифровой передаче информации; навыков эксплуатации ТТС, настройки аппаратуры, измерения основных характеристик и обработки результатов, использование современных научно-технических материалов в практической работе.
«Транспортные телекоммуникационные сети» (ТТС) - базовый теоретический курс для студентов вузов связи.
ТТС – это средства переноса информации электронными средствами или это сеть «электромагнитных проводных и радиодорог». Эта дисциплина является обобщением и развитием дисциплины «Цифровые системы передачи». В ней отражены новые технологии транспорта WDM, PON, NGSDH.
Рассмотрены принципы построения современных первичных - транспортных цифровых сетей связи и методы их описания, цифровые методы передачи информации и принципы построения цифровых систем передачи, в особенности, систем мультиплексирования и их взаимодествии между собой.
Задачами преподавания дисциплины являются овладение студентами методов проектирования транспортных сетей, расчета характеристик цифровых систем передачи построенных на современных технологиях коммутации каналов и пакетов.
Учебным планом для данной дисциплины отводится 3 кредита, всего 135 часов, из них для аудиторных занятий - 60, для самостоятельной работы – 75 час.
Кредиты |
Курс |
Семестр |
Лекции |
Практическиезанятия |
Лаборат.работы |
Курсовой проект |
Экзамен |
3 |
4 |
7 |
1.5 (26час.) |
0,5 (17 час.) |
1(17 час) |
7 |
7 |
1 Лекция 1. Транспортные сети и их функции
Цель лекции: ознакомление с транспортной - первичной сетью электросвязи и их функциями.
Содержание:
а) цели и задачи дисциплины;
б) основные понятия транспортной сети;
в) изучение функциональных принципов описания и классификации сетей и систем передачи;
г) изучение функции управления транспортной сетью, функции синхронизации, энергоснабжения, технического обслуживания и т.д;
д) этапы построения транспортной сети телекоммуникации.
Информация передается и обрабатывается в большинстве случаев в виде сигналов электросвязи - электромагнитных колебаний, в изменениях параметров которых и заложена передаваемая информация. Например, речевое сообщение, представляющее собой изменение звукового давления, посредством микрофона превращается в изменяющееся соответствующим образом электрическое напряжение. В этих изменениях и будет содержаться та информация, которая была в исходном сообщении. Характерно, что в данном случае напряжение непрерывно изменяется во времени -такие сигналы называются непрерывными.
Унификация различных видов передаваемой информации, что позволяет, в свою очередь, унифицировать оборудование передачи, обработки и хранения информации.
Компьютеризация телекоммуникационного оборудования, которая принципиально невозможна при использовании аналоговых сигналов. В условиях быстро нарастающего информационного обмена без компьютеризации невозможно обеспечить передачу и обработку информации с необходимым высоким качеством.
Интеграция систем передачи информации и систем коммутации - создание полностью цифровых телекоммуникационных сетей. Такие сети обладают высокой надежностью и эффективностью, поскольку позволяют организовывать альтернативные маршруты передачи и выравнивать сетевой трафик.
Цифровые методы передачи весьма эффективны при работе по оптическим линиям, позволяющим организовывать передачу высокоскоростных потоков информации с относительно редким расположением промежуточных станций.
Передача, обработка и коммутация сигналов в цифровой форме позволяют реализовывать весь аппаратный комплекс цифровой сети на чисто электронной основе с широким применением цифровых интегральных схем. Это значительно снижает стоимость оборудования, потребляемую энергию и габаритные размеры. Кроме того, существенно упрощается эксплуатация телекоммуникационных систем и повышается надежность оборудования.
Понятия транспортной — первичной сети электросвязи.
Передача информации из одного места к другому, например, из одного здания или города к другому, а также между множеством пунктов приводит к понятию сети передачи или транспортной сети электросвязи. В этой сети пункты приема и передачи информации называют узлами, которые соединены линиями связи. Для иллюстрации на рисунке 1.1 показана схема магистральных (междугородных) линий связи Казахстана. Если посмотреть на карту Казахстана, то можно видеть, что приведенная сеть совпадает со схемами других транспортных средств — шоссейными или железными дорогами
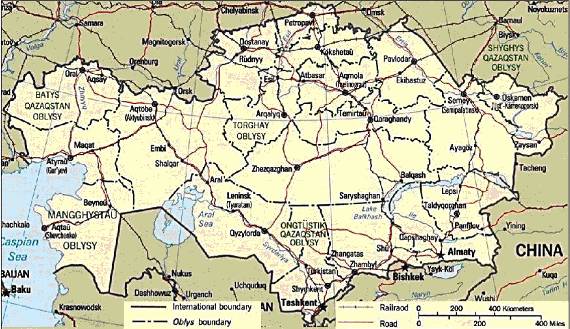
Рисунок 1.1 - Схематическое изображение междугородней (магистральной) транспортной сети
В основу определения транспортной сети положен функциональный принцип. Понятие "транспортная сеть" соответствует более привычному принятому у нас термину "первичная сеть". Первичная сеть определена как совокупность физических цепей (сред передачи), типовых каналов, трактов и линий передачи, соединяющих между собой узлы и оконечные устройства или же как совокупность технических и программных средств связи, обеспечивающих передачу и распределение информации.
Понятие первичной сети было введено около 50 лет назад при разработке Основных положений Единой Автоматизированной Сети Связи — ЕАСС СССР. Первичная сеть имеет иерархическую (уровневую, см. ниже) структуру и является основой телекоммуникационной инфраструктуры, обеспечивая организацию унифицированных (типовых) каналов и трактов передачи для пользователей и соединений между собой станций коммутации телефонной сети, передачи данных и т.д.
Основная функция первичной сети заключается в передаче — транспортировке информации между пунктами. Это может быть информация телефонных абонентов, пользователей Интернет, программы телевидения, различного рода управляющая информация для контроля и технического обслуживания сети, сигналы взаимодействия между коммутационными станциями, информация учета стоимости услуг — тарификации, выделенные сигналы синхронизации и т.д.
При переходе к функциональным принципам описания и классификации сетей и систем передачи, принятым МСЭ-Т, для сетей такого вида ввели термин "транспортные" по отмеченным выше аналогиям с перевозками грузов другими транспортными сетями.
В самом обобщенном виде такую сеть можно представить моделью в виде набора входов и выходов, подобно расписанию движения поездов или самолетов, где входы — это пункты отправления, а выходы — пункты приема. Схематично это представлено на рисунке 1.2.
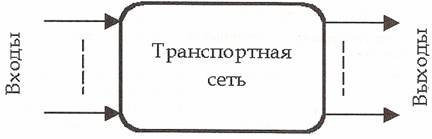
Рисунок 1.2 – Обобщенное представление транспортной сети
Основной принцип транспортной сети — "закон бит точности". Информация, представленная в сигналах электросвязи на входах транспортной сети, в зависимости от допустимого уровня снижения качества, более или менее достоверно (или с заданной вероятностью) воспроизводится на соответствующих выходах.
Основной принцип цифровой транспортной — первичной сети можно сформулировать как "закон бит точности", который следует понимать так:
вид, количество и последовательность цифровых сигналов на выходе должны точно соответствовать их виду, количеству и последовательности на входе.
Первичная и вторичная сети.
Понятия "первичное" и "вторичное" очень относительны. Согласно концепции ЕАСС, часть сетей электросвязи, функционально обеспечивающая передачу и образующая сеть типовых каналов и трактов с унифицированными стыками (интерфейсами) определена как первичная. Сети, образованные на базе первичной сети и использующие эти унифицированные тракты для организации телефонной передачи, передачи данных или телевизионных программ, определены как вторичные. Определение вторичной сети, предложенное ЕАСС, включает как функции коммутации, так и передачи, например, ТВ программ, по унифицированным трактам первичной сети. Однако с точки зрения современных принципов классификации сетей ключевым признаком вторичной сети следует считать то, что она непосредственно связанна с предоставлением услуг пользователю. По многим признакам вторичные сети совпадают с современными сетями предоставления прикладных или дополнительных услуг, "интеллектуальными сетями" и т.п., для которых характерно использование ресурсов уже созданных, существующих сетей передачи информации.
Сети поддержки — синхронизации, сигнализации и управления.
С точки зрения транспортной сети, её функции могут быть разделены на две группы - это основные (транспортные) и вспомогательные (поддержки). Первая функциональная транспортная группа обеспечивает передачу любой информации из одного места в другое. Вторая функциональная группа реализует различные вспомогательные операции. Другими словами, вторая группа представляет сети поддержки, обеспечивающие функции управления транспортной сетью, функции синхронизации, энергоснабжения, технического обслуживания и т.д.
2 Лекция 2. Принципы систематизации транспортной сети по уровням
Цель лекции: изучение обобщенного представления транспортной сети.
Содержание:
а) обобщенное представление транспортной (первичной) и вторичной сети;
б) принципы представления элементов сети в виде слоев или уровневой модели — слой линий передачи;
в) иерархическое (уровневое) представление транспортной сети;
г) принцип разделения на функциональные уровни;
д) уровневая модель транспортной сети и модель ВОС;
е) уровень (сеть) доступа транспортной сети.
2.1 Обобщенное представление транспортной сети
Первичная сеть в обобщенном виде представлена на рисунке 2.1. В центре рисунка расположено ядро транспортной сети электросвязи - три среды передачи: радио эфир - открытое пространство, металлические проводные и волоконно-оптические линии. Средства электросвязи и в открытом пространстве, и в металлических и волоконных направляющих системах - линиях - используют весь спектр от сверхнизких частот до частот оптического диапазона.

Рисунок 2.1 – Обобщенное представление транспортной (первичной) и вторичной сети
Ближайший к ядру транспортный слой представляют линейные Тракты, обеспечивающие передачу сигналов электросвязи по различным передающим средам. Линейные тракты и среда передачи в принятой в ЕАСС терминологии образуют линии передачи, а выражаясь языком принципов представления элементов сети в виде слоев или уровневой модели, слой линий передачи.
Следующий слой транспортной сети - это слой трактов и каналов и различных технологий разделения каналов (мультиплексирования) при многократном использовании слоев, образующих ядро. Принципы временного, частотного и кодового разделения каналов (ВРК, ЧРК, КРК), в том числе с волновым (частотным) разделением каналов (ЧРКО — WDM), объединение цифровых методов ВРК в плезиохронную и синхронную иерархию (ПЦИ, СЦИ).
2.2 Иерархическое (уровневое) представление транспортной сети
Одним из широко используемых методических приемов анализа систем передачи и сетей связи служит их представление в виде модели, состоящей из набора слоев или уровней. Каждый такой набор может быть упорядочен по какому-либо классифицирующему признаку.
В классификации первичных (транспортных) сетей предусматривается, например, возможность деления сети:
- по иерархическому административно-территориальному принципу: сети доступа, местные, внутриобластные (зоновые), магистральные т.д.;
- по иерархиям группообразования каналов в системах передачи, объединяемых в упорядоченные уровни трактов различного порядка, первичные, вторичные, третичные и т.д., линейные и т.п.;
- по выполняемым функциям.
На рисунке 2.2 в качестве примера показана модель транспортной сети, разделенная на 4 слоя (яруса) по административно-территориальному принципу: от местного до международного уровня. Такое представление первичной и вторичной сетей широко использовалось в ЕАСС.
Такое построение первичной сети характерно для всех стран СНГ и отображает существующую государственную административную структуру. Может быть, именно потому в таком представлении первичной сети не нашлось места для сети доступа. Первичная сеть создавалась как совокупность местных (городских и сельских), внутризоновых (как правило, внутри областей, краев или автономий) и магистральных — межобластных, междугородных (в пределах государственных границ) сетей связи.
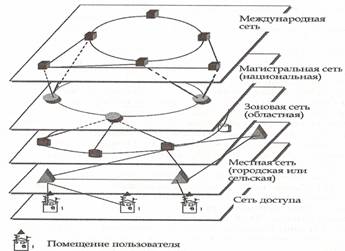
Рисунок 2.2 - Пример многоуровневого построения транспортного моста
2.3 Принцип разделения на функциональные уровни
В транспортной сети одни и те же функции могут быть реализованы различными техническими средствами. Следует понимать, что упорядоченные тем или иным способом различные системы понятий, которые широко используются при анализе и описании таких моделей сетей, носят условный, отвлеченный и обобщающий характер. В каждой такой системе каждый уровень взаимодействует со смежными уровнями: как правило, использует характеристики и детали нижних уровней и обобщает их, скрывая ненужные детали для работы более высокого уровня абстракции. Такой подход позволяет на каждом этапе сосредотачиваться на существенных свойствах каждого слоя, упрощая, таким образом, разработку сложных систем.
Например, введение понятий первичной и вторичной сетей (или транспортной сети и сети услуг) позволяет разделить этапы создания сети средств передачи и выбора необходимой пропускной способности трактов. Кроме того, такое разделение позволяет учитывать особенности административных требований и (или) систем управления при построении транспортной сети. Конечно, первичная и вторичная системы взаимосвязаны. Вторичные системы определяют информационную нагрузку (трафик) и, следовательно, требования к пропускной способности трактов транспортной сети. Более того, подобно, например, автодорожным транспортным сетям, кроме объемов перевозок, существенны показатели тяготения в распределении нагрузки (трафика). Например, для АТС больших городов характерно распределение трафика в соотношении 20/80%,т.е. из 100 исходящих вызовов 80 направляются к другим АТС, а 20 внутри ее. Для телефонной нагрузки внутри области, характерно тяготение к областному центру: около 80%, а 20% к другим областным пунктам.
Уровневая модель транспортной сети и модель ВОС.
Уровневую модель транспортной сети не следует путать с семиуровневой моделью протоколов взаимодействия открытых систем (ВОС).
Протоколы взаимодействия выполнены обычно в виде программных модулей, упорядоченных в соответствии с уровневой моделью. Наборы протоколов сформированы так, что протоколы данного уровня обслуживают протоколы верхнего уровня и используют услуги более низких уровней. С увеличением уровня абстракции, протоколы верхних уровней определяют услуги сетевой маршрутизации (сетевой уровень), услуги переноса через сеть (транспортный уровень) и так до прикладных услуг, предоставляемых непосредственно конечному пользователю.
Уровень ВОС предлагает использование конкретных свойств одного протокола из множества различных протоколов взаимодействия. Транспортная иерархическая сеть, напротив, предлагает использование одинаковых (одних и тех же) свойств конкретного протокола обмена информации от входа к выходу каждого слоя.
Уровень (сеть) доступа транспортной сети.
Сети, обеспечивающие транспортные функции (т.е. перенос информации) на участке между пользователем (абонентом) и обслуживающим узлом (пунктом предоставления услуг), называют сетями доступа (СД) Схематически сеть доступа показана на рисунке 2.3.
Необходимо отметить, что в современных сетях фрагменты сети доступа и базовой сети (например, магистральной) могут находиться в одном кабеле, использовать соседние тракты одной системы передачи, переносить одинаковую информацию, и единственное, но определяющее отличие заключается в том, между какими точками подключения исполняются одни и те же функции.
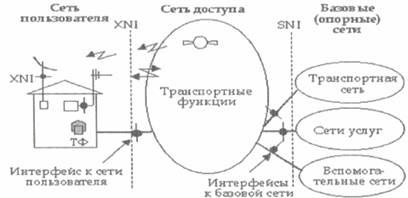
Рисунок 2.3 – Модель транспортной сети доступа
3 Лекция 3. Цифровые системы передачи в сетях связи. Цифровые методы модуляции
Цель лекции: изучение импульсно-кодовой модуляции (ИКМ), нелинейные коды.
Содержание:
а) ИКМ сигналы;
б) нелинейные коды;
в) фазовые флуктуации цифрового сигнала и проскальзывание.
Импульсно – кодовая комбинация
ИКМ осуществляется в 3 этапа:
а) дискретизация по времени исходного сигнала;
б) квантование АИМ сигнала по уровню;
в) кодирование формирование с кодовых групп.
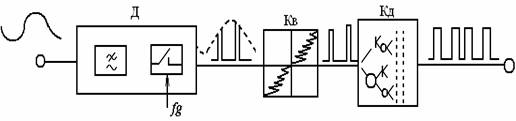
Рисунок 3.1 – Структурная схема ИКМ сигнала
Дискретизация по времени состоит в том, что аналоговый сигнал заменяется АИМ сигналом, амплитуда импульса в котором равно (соответствующему) мгновенному значению информационного сигнала в соответствии момента времени.
Частота дискретизации выбирается в соответствии по теореме Котельникова.
fg≥ fmax
в том, случае, когда ширина спектра < октавы 2fmin> fmax, maх fmax≤tg≤2
fmin.
После дискретизирующего полученного АИМ сигнала подвергают квантованию по уровню или амплитуде.
Сущность квантования по уровню заключается в том, что мгновенному значению амплитуды импульса присваивается ближайшие разрешенные значения сигналов.
От 0 до 7 динамический диапазон квантования. Расстояние между соседними уровнями квантования называется – шагом квантования.
Поскольку в процессе квантования значения квантованного сигнала отличаются от истинного значения сигнала в соответствующие моменты времени, то возникает ошибка квантования.
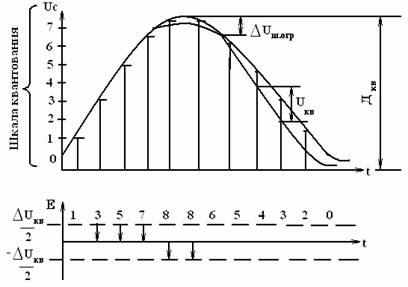
Рисунок 3.2 – Процесс квантования
![]() .
(3.1)
.
(3.1)
Это
ошибка кв-я ε, при данном способе квантования ![]() называются шагам квантования.
называются шагам квантования.
Средняя мощность шумов квантования при равномерном квантовании:
![]() (3.2)
(3.2)
В процессе квантования возможно появление шумов ограничения, когда амплитуда дискретирующего сигнала превышает max возможный уровень квантования.
Величину
шума ограничения ![]() можно
ограничить или изменить соответствующим выбором уровня квантования.
можно
ограничить или изменить соответствующим выбором уровня квантования.
Формирование ИКМ сигнала заключается кодированием, т.е. превращением отдельных импульсов квантованного сигнала в кодовую группу, предоставляющую собой комбинацию цифровых символов.
Эти устройства осуществляются в кодерах и декодерах или в кодеках.
Кодом называется закон, который устанавливает соответствующие между уровнем квантованной амплитуды и составом кодированной группы. Различают равномерные и неравномерные коды. Если кодовая группа состоит из одинакового числа символов, код называется равномерным, если из разного числа символов, то неравномерным.
В системах ИКМ (РСМ) импульсная кодовая модуляция, использует равномерные двоичные коды. Для передачи всех возможных значений квантованного АИМ, сигнала необходимо, чтобы число уровней квантования ≤2m, где m – разрядность кода.
Если число уровней квантования =8, то m=3; 23=8 при симметричном и ассиметричном, при ассиметричном кодировании используется натуральные двоичные коды 1,2,4,6,8,16…и т.д. В том случае, когда мы имеем двухполярный сигнал, то для кодирования его с помощью ассиметричного кода, мы должны к этому сигналу добавить постоянную составляющую равную половине динамичного диапазона квантования, т.е. сделать его однополярным. В этом случае все отсчеты будут постоянны.
При передаче двухполярных сигналов, например, речевых применяются двоичные коды, значение первого разряда кодовой комбинации которых определяет полярность передаваемого, а значение остальных разрядов – амплитуду. Такие коды называются двоичными кодами. В современных ИКМ и квантование по уровню, и кодирование осуществляется в кодере или АЦП. Устройство, выполняющее обратную функцию, осуществляется в декодере или ЦАП-е.
В зависимости от вида шкалы квантования различают линейные и нелинейные кодеры.
У линейных кодеров шкала квантования равномерная или линейная, а у нелинейных кодеров наоборот.
Одним
из параметров характеристик их качества кодера или АЦП является отношение
средней мощности сигнала к средней мощности шумов квантования ![]() .
.
При линейном АЦП величина шумов квантования.
Уровень мощности шумов квантования не будет зависеть от уровня сигнала, а при уменьшении уровня сигнала, относительная погрешность АЦП будет увеличиваться.
Для обеспечения требуемой помехозащищенности от шумов квантования.
![]() (3.3)
(3.3)
Это потребовало бы увеличения разрядности кода в ИКМ (РСМ) системных до 12, что привело бы повышению быстродействия всех систем в 1,5 раза полосы пропускания тракта (удорожание) и т.д. Поэтому число разрядов кода желательно иметь как можно меньше. С этой целью применяется неравномерное и нелинейное кодирование. При неравномерном или нелинейном, которой, величина шага является постоянной не зависит от уровня сигнала.
В
этом случае при измерении уровня сигнала отношение ![]() будет оставаться постоянным и
не зависит от уровня сигнала. Неравномерное и нелинейное явление может быт
получено путем соединения линейного кодера с компондерным устройством,
реализующим логарифмическую характеристику.
будет оставаться постоянным и
не зависит от уровня сигнала. Неравномерное и нелинейное явление может быт
получено путем соединения линейного кодера с компондерным устройством,
реализующим логарифмическую характеристику.
Применение неравномерного явления позволяет повысить помехоустойчивость, от шумов являющая на 26-33 дб и уменьшить число разрядов кодированной группы до 8.
Коды
При выборе кода передачи в дополнение к требованиям синхронизации необходимо также учитывать спектр кода в линии и имеющуюся в распоряжении полосу, уровни шумов и помех, длительность вхождения в синхронизм, контроль характеристик и требования реализации. Применяется следующие коды:
код без возвращения к нулю (БВН), коды с замещением серий нулей, парно-селективный троичный код, преобразование к троичным кодам, абсолютный биимпульсный код, многоуровневые коды, передача методом частичного отклика.
4 Лекция 4. Принцип частотного разделения и технология WDM
Цель лекции: изучение принципа ЧРК. Оптическое частотное мультиплексирование –WDM/DWDM.
Содержание:
а) компоненты системы WDM;
б) мультиплексоры и демультиплексоры;
в) оптические мультиплексоры ввода/вывода каналов.
4.1 Компоненты системы WDM
Оптическое волокно оказалось той средой передачи, которая смогла справиться с огромными потоками информации. В первое время для деления громадной полосы пропускания отдельного волокна на выделенные каналы связи применялось временное мультиплексирование TDM (Time Division Multiplexing).
Рост сложности оборудования для модуляции и мультиплексирования при увеличении скоростей передачи данных ограничил применение этой технологии. Дальнейшее увеличение полосы пропускания смог обеспечить альтернативный подход – волновое мультиплексирование WDM (Wavelength Division Multiplexing). Мультисервисность – передача STM-16, STM-64, GE, других форматов
Основное требование к компонентам систем WDM состоит в том, что они должны одинаково обрабатывать все каналы на всем протяжении оптического пути линии связи. Для этого требуется тщательный выбор оптических передатчиков, мультиплексоров, демультиплексоров, усилителей и волокна.
Все оптические характеристики пассивных и активных компонентов сети – вносимые потери, потери на отражение, дисперсия, поляризационные эффекты и так далее - должны измеряться как функция длины волны во всем диапазоне длин волн, используемом для передачи в системе WDM. В системах WDM часто используют значительно более сложные устройства, чем в системах с одной рабочей длиной волны, и проводить тестирование характеристик таких устройств намного сложнее. В мультиплексорах, демультиплексорах, узкополосных фильтрах систем WDM используются тонкопленочные фильтры, сварные биконические разветвители BFT (Fused Biconic Tapered Coupler), решетки на основе массива волноводов AWG (Array Waveguide Grating), волоконные брэгговские и обычные дифракционные решетки. Необходимо исследовать влияние активных компонентов (в особенности, оптических усилителей) и взаимной интерференции каналов на целостность передаваемых сигналов для минимизации потенциальной возможности их неблагоприятного воздействия.
Несмотря на то, что все материалы и компоненты при производстве тестируются на соответствие стандартам, возможно ухудшение их характеристик при непосредственной установке в полевых условиях. При объединении отдельных компонентов в единую систему небольшие различия их характеристик могут накапливаться и непредсказуемым образом влиять на параметры сети в целом. Для обеспечения гарантированной надежности сети необходимо выполнять тестирование не только каждого компонента в отдельности, но и всей системы в целом.
Тестирование компонентов может вызвать много сложностей. Разница длин волн соседних каналов в системах WDM очень мала, и параметры многих компонентов (например, мультиплексоров) должны строго соответствовать пределам допустимых отклонений. При большом числе каналов используемый спектральный диапазон становится достаточно широким, и поддержание близких значений параметров для всех каналов (коэффициента усиления, дисперсии, уровня вносимых шумов и так далее) становится достаточно сложной задачей.
Мультиплексоры и демультиплексоры.
Каждый лазерный передатчик в системе WDM выдает сигнал на одной из заданных частот. Все эти сигналы (каналы) необходимо мультиплексировать (объединить друг с другом) в единый составной сигнал. Устройство, которое выполняет эту функцию, называется оптическим мультиплексором MUX (или OM). Аналогичное устройство на другом конце линии связи разделяет составной сигнал на отдельные каналы и называется оптическим демультиплексором DEMUX (или OD) (рисунок 1.6). В отличие от систем TDM, в которых подобные операции уплотнения каналов происходят во временной области и основное внимание уделяется точности синхронизации приемника и передатчика, в системах WDM мультиплексированию и демультиплексированию подвергаются спектральные компоненты отдельных сигналов, характеристики которых всегда известны заранее.
Оптическое мультиплексирование и демультиплексирование основано на комбинированных или расположенных последовательно друг за другом узкополосных фильтрах. В частности, для фильтрации применяют тонкопленочные фильтры, волоконные или объемные брэгговские дифракционные решетки, сварные биконические волоконные разветвители, фильтры на основе жидких кристаллов, устройства интегральной оптики (матрицы фазовых волноводных дифракционных решеток или фазары).
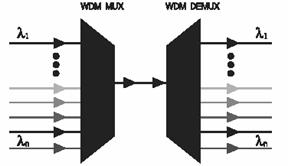
Рисунок 4.1 - Мультиплексор и демультиплексор
В настоящее время наибольшее распространение получили устройства оптического мультиплексирования и демультиплексирования с частотным интервалом между отдельными каналами в 100 ГГц (~0,8 нм), наиболее распространенный в существующих системах WDM. Появляющиеся в последнее время мультиплексные устройства могут обеспечить большую плотность размещения каналов с частотным интервалом 50 ГГц и меньше. Современные оптические мультиплексоры создаются преимущественно на основе тонкопленочных фильтров и, немного реже, на матрицах волноводных дифракционных решеток и волоконных брэгговских решетках.
Оптические мультиплексоры ввода/вывода каналов.
Мультиплексоры и демультиплексоры с помощью различных методов волнового разделения объединяют несколько оптических сигналов для передачи по одному волокну и разделяют эти сигналы после передачи. Однако часто требуется добавить в составной сигнал или выделить из него только один канал, не меняя при этом всю структуру сигнала. Для этого применяют мультиплексоры ввода/вывода каналов OADM (Optical Add/Drop Multiplexer), которые выполняют эту операцию, не преобразуя сигналы всех каналов в электрическую форму, и затем обратно (рисунок 4.2).
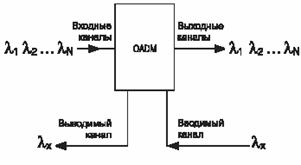
Рисунок 4.2 - Мультиплексор ввода/вывода каналов
Необходимо организовать передачу данных между городами, указанными заказчиком. Информационный поток организован 4-мя каналами синхронной цифровой иерархии STM-16. Осуществить возможность ввода/вывода одного потока STM-16 в промежуточных точках для дальнейшего мультиплексирования и обеспечения подключения потребителей. Осуществить ввод/вывод дополнительного потока STM-16 в одном из промежуточных пунктов. Предусмотреть возможность подключения в ближайшее время еще 8-х потоков уровня до STM-64 (иметь возможность наращивания числа каналов до 12 без остановки передачи данных). Подключаемые потоки до STM-64 имеют несколько точек ввода/вывода.

Рисунок 4.3 - Организация сети DWDM
Рассмотрим организацию транспортной структуры с использованием технологии DWDM. Использование существующей инфраструктуры узловых станций для установки оборудования, что позволит минимизировать капитальные вложения на строительство. Данная схема обеспечивает передачу 12 спектральных каналов с возможностью расширения числа каналов на скоростях до 10 Гб/с. В конечных пунктах предусмотрена инсталляция оборудования для организации следующих каналов передачи: 4 STM-16, 4 STM-64. Каналы 9-12 могут быть использованы для передачи любых цифровых интерфейсов вплоть до STM-64 по мере возрастания потребностей и расширение сети. Оптические мультиплексоры ввода/вывода узловых станций позволяют производить вывод двух спектральных каналов на каждом пункте. Один из этих каналов STM-16 подается на аппаратуру SDH для организации Зоновой связи. Второй канал используется для управления и мониторинга сети.
5 Лекция 5. Принцип временного разделения каналов ВРК
Цель лекции: изучить принцип ВРК.
Содержание:
а) объединение цифровых сигналов по группам и по символам;
б) синхронное объединение и разделение цифровых сигналов;
в) алгоритм цикловой синхронизации;
г) асинхронные цифровые потоки;
д) механизм возникновения проскальзывании;
е) выравнивание скоростей цифровых потоков.
При временном объединении общий тракт передачи предоставляется каждому каналу или тракту, входящему в группу, только на определенное время. При объединении нескольких цифровых потоков в ЦСП с ИКМ образуется временной цикл группового сигнала, равный сумме временных интервалов объединяемых сигналов
Тц=ΣτКИ (5.1)
где Тц — длительность цикла — период объединения;
τКИ — длительность i-гo канального интервала.
Операция мультиплексирования может производиться последовательно несколько раз, постепенно наращивая число объединяемых каналов и, соответственно, скорость передачи в группах. Упорядоченные системы с последовательными этапами временного группообразования образуют так называемые цифровые иерархии ЦСП.
Группообразование цифровых систем передачи имеет такие же цели, что и аналоговых, т.е. обеспечение взаимодействия различных сетей, оснащенных оборудованием разных производителей. Для этого введены единые правила образования групп и унифицированы параметры стыков на различных иерархических уровнях. Такие решения позволяют строить гибкие и надежные национальные и международные сети связи.
Следует также учитывать, что становление процесса группообразования проходило постепенно в процессе исторического развития техники, ограниченного технологическими возможностями своего времени.
Временное объединение (мультиплексирование) может выполняться по группам символов (поканальное, побайтное объединение) или по одному символу, синхронно или асинхронно. Ниже подробно рассматриваются особенности этих процессов. Большее внимание уделено асинхронному мультиплексированию как самой общей процедуре, связанной с проскальзываниями при записи/считывании и процессами выравнивания цифровых сигналов. Кратко представлены задачи и общие правила организации циклов и циклового синхронизма. В этом же аспекте рассматриваются временные искажения — джиттер времени ожидания и его сглаживание в оборудовании временного группообразования.
Объединение цифровых сигналов по группам и по символам.
1. Объединение по группам
При групповом (поканальном или побайтном) объединении к общему тракту поочередно подключаются группы импульсов от каждого источника сигналов.
2. Объединение по символам
При посимвольном объединении цифровые потоки объединяются символ за символом. Такие схемы не требуют запоминания символов, лишь в нескольких каналах на время переключения входов нужна небольшая задержка.
Синхронное объединение и разделение цифровых сигналов.
При синхронном объединении тактовые частоты входных сигналов и группового сигнала жестко связаны между собой, и временные соотношения между значащими моментами сигналов в течение времени не изменяются. Синхронное мультиплексирование/демультиплексирование используется в тех случаях, когда возможно поддерживать синхронизм группового и объединяемых потоков, например, внутри первичных мультиплексоров с аналого-цифровым преобразованием, цифровых коммутационных станций или в синхронной цифровой иерархии СЦИ (SDH), начиная с уровня СТМ-1 и выше.
Демультиплексирование всех ЦСП производится по синхронной схеме, так как в ЦСП вся приемная часть синхронизируется от одного устройства — выделителя тактовой частоты из группового потока.
При синхронном объединении скорость группового сигнала
В= n*b, бит/с (5.2)
где n — число объединяемых сигналов;
b — скорость объединяемых сигналов.
Алгоритм цикловой синхронизации.
Цикловая синхронизация имеет первостепенную важность в цифровой передаче. Значение принимаемых бит или же, например, правильное демультиплексирование составляющих сигналов зависит от точного определения цикла.
При цикловой синхронизации используют специальную комбинацию символов — цикловой синхросигнал ЦСС (синхрослово), обычно его размещают в начале цикла.
Задачу разработки эффективного алгоритма цикловой синхронизации можно сформулировать следующим образом:
а) в нормальных условиях минимизировать вероятность потери циклового синхронизма из-за ошибок в линии (вынужденной потери синхронизма);
б) при отсутствии синхронизма минимизировать вероятность ложного синхронизма в результате имитации комбинации ЦСС случайным потоком принимаемых бит;
в) в случае потери циклового синхронизма минимизировать время его восстановления.
Асинхронные цифровые потоки.
Асинхронное (не синхронное) сложение цифровых потоков представляет собой более общий случай мультиплексирования, чем синхронное сложение. При асинхронном сложении цифровые сигналы могут находиться между собой в произвольных временных соотношениях, а скорость изменяется во времени в допустимых пределах. Такие цифровые сигналы (потоки),значащие моменты которых имеют одинаковую номинальную среднюю скорость, но действительные значения скорости различный изменяются внутри оговоренных границ, называют плезиохронными, квазисинхронными или псевдосинхронными.
Механизм возникновения проскальзываний.
Возникновение проскальзываний при различных соотношениях скоростей записи и считывания схематически показано на рисунке 5.1. Вариант а) соответствует случаю равенства частот записи и считывания. В этом случае каждому биту на входе устройства записи соответствует бит на выходе. В варианте б) скорость считывания превышает скорость записи Fr > Fw. В этом случае считывание бита происходит дважды. На рисунке 5.1б стрелками отмечены биты, соответствующие "правильному" биту на входе (на рисунке 5.1 а) последовательности на входе и выходе совпадают), штриховкой отмечен "лишний", повторно считанный бит.
В варианте в) скорость считывания меньше скорости записи Fr < Fw. В этом случае из-за запаздывания считывания бит потерян. На рисунке 5.1 в, пунктиром показано место, на котором должен был находиться бит.
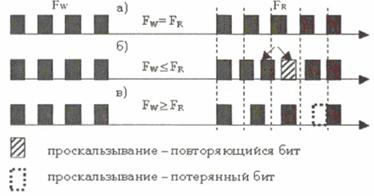
Рисунок 5.1 – Возникновение проскользываний
Скорость плезиохронного цифрового потока изменяется в границах: fH ± Δf, где fH — номинальное значение частоты,a Δf — допустимое отклонение от номинального значения. Тактовая частота задающего генератора оборудования мультиплексирования также имеет определенную нестабильность Δ f1/fH, и H находится в границах fH ± Δ f1. Таким образом, абсолютное значение разности частот записи и считывания равно
ΔF = | Fw - FR | = | (fH ±vfw) - (fH ± ΔfR) | = | Δfw ± ΔfR| (5.3)
где ±Δfw — абсолютные отклонения частоты записи;
± ΔfR — абсолютные отклонения частоты считывания;
L — номинальное значение частоты.
Если номинальные значения и допустимые отклонения частот записи и считывания равны, то (5.3) можно записать в виде
ΔF = 2Δf. (5.4)
Абсолютное значение величины (5.4) может изменяться от 0 до максимального значения 2Δf.
Выравнивание скоростей цифровых потоков.
При временном объединении асинхронных цифровых потоков используется процедура так называемого выравнивания скоростей цифровых потоков относительно частот записи/считывания.
Процесс управления скоростью цифрового потока осуществляется таким образом, чтобы этот цифровой поток мог быть переписан с другой скоростью, отличающейся от его собственной, без потери информации. Такой процесс называют выравниванием (alignment),согласованием (justification), коррекцией (adjustment) скоростей цифровых потоков или методом стаффинга (stuffing) — вставок.
Сущность этого способа заключается в том, что в буферных ЗУ из входящего потока исключается повторно считанный, "лишний" бит или вводится символ вместо пропущенного бита (см. рисунок 5.1 в). Одновременно информация об этих операциях передается по служебному каналу, входящему в групповой поток. На основании этой информации на приемной стороне в устройстве временного разделения биты информации соответственно виду согласования исключаются или вставляются, и исходная скорость цифрового потока восстанавливается. В зависимости от типа применяемой коррекции различают положительное, отрицательное и двустороннее согласования скоростей передачи цифрового сигнала.
При положительном выравнивании максимальная скорость записи сигналов должна быть меньше минимальной скорости считывания, отведенной для их передачи в групповом потоке. Так как в этом случае информация считывается быстрее, чем записывается (рисунок 5.1 б), то это приводит к опустошению памяти. Для сохранения целостности выходного сигнала в него вводятся дополнительные "пустые" тактовые интервалы - вставки, "выравнивающие" скорость цифрового потока, а по дополнительным служебным каналам передается сигнал о введении дополнительного бита. Такой служебный канал называют каналом согласования скоростей (КСС).
При отрицательном согласовании скорость записи сигналов превышает максимальную в цифровом потоке - скорость считывания, что ведет к переполнению памяти (рисунок 5.1 в). Поэтому в зависимости от соотношения между требуемой скоростью и скоростью передачи входящего потока тактовые интервалы исключаются из входящего цифрового потока. В этот момент запись запрещается на один тактовый интервал, а пропущенный символ передается на приемную часть по низкоскоростному служебному каналу вместе с информацией о положении пропущенного тактового интервала.
6 Лекция 6. Устройство эластичной памяти. Джиттер времени ожидания
Цель лекции: изучить процесс цифрового выравнивания.
Содержание:
а) устройство эластичной памяти;
б) джиттер времени ожидания.
Устройство эластичной памяти.
Рассмотренный выше процесс цифрового выравнивания требует использования на входе оборудования цифрового группообразования специального устройства эластичной памяти для каждого из объединяемых сигналов. Емкость памяти должна быть подобрана таким образом, чтобы она могла поглощать наибольшее изменение фазы, охватывающее как введение циклового синхросигнала, так и фазовое дрожание во входном сигнале, вызванное линейным трактом.
При выравнивании скоростей методом вставок эластичная память может состоять всего лишь из одной ячейки, так как в каждом цикле импульс вставки является единственным. Однако при группообразовании некоторые операции также требуют определенной эластичной задержки, поэтому на практике используют устройства эластичной памяти с четырьмя или большим числом ячеек памяти.
Входящие символы записываются в устройство памяти под управлением тактовой частоты, выделяемой из входящего цифрового сигнала, а считывание информации осуществляется под управлением независимого местного задающего генератора. Поскольку число запоминаемых символов ограничивается числом ячеек памяти, принятым при разработке аппаратуры, задержка между записью и считыванием ограничивается объемом памяти.
Устройства эластичной памяти могут быть выполнены различными способами. Одно из устройств, представленное на рисунке 6.1, аналогично коммутатору. Сегменты коммутатора соединены с ячейками памяти. Одна щетка служит для записи информации в ячейки памяти, другая — для считывания информации. Угловые скорости вращения щеток соответствуют тактовым частотам записи и считывания. Если тактовая частота считывания ниже частоты записи, то считывающая щетка будет медленно отставать, и записывающая щетка, в конце концов, догонит считывающую щетку. В этот момент произойдет потеря информации, которая содержится в одном блоке символов. И наоборот, если считывание производится с большей скоростью, то считывание догонит запись; в результате этого один блок символов будет повторен, если считывание производится без стирания записанной информации. В обоих этих случаях говорят, что эластичная память переполнена.
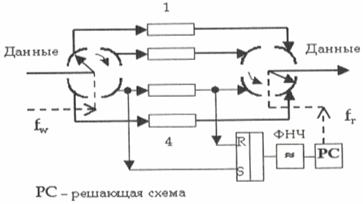
Рисунок 6.1 - Устройство эластичной памяти
![]() Для предотвращения
переполнения эластичной памяти скорости записи и считывания синхронизируются.
Для предотвращения
переполнения эластичной памяти скорости записи и считывания синхронизируются.
Управление заполнением памяти обеспечивается вставкой импульсов, что восстанавливает правильную последовательность символов. При этом необходимы два условия:
тактовая частота считывания должна быть больше частоты записи, и вставка дополнительных символов должна производиться в заранее установленные моменты времени с тем, чтобы обеспечить правильное удаление дополнительных символов на приеме.
Первое условие обеспечивается соответствующим выбором номинальных значений частот и допустимых отклонений, второе — периодическим контролем задержки между записью и считыванием. Когда задержка оказывается меньше заданной пороговой величины, такт считывания задерживается на ячейке памяти еще на один дополнительный тактовый интервал.
Задержка между записью и считыванием измеряется с помощью фазового компаратора, как показано на рисунке 6.2. Этот метод реализуется с помощью триггера, который переводится в одно из устойчивых состояний при записи информации в данную ячейку памяти и переводится в другое устойчивое положение при считывании информации с данной ячейки. В нормальных условиях, когда считывание с каждой ячейки памяти производится в середине промежутка времени между моментами записи, триггер будет генерировать периодическую последовательность импульсов со скважностью, равной двум. При изменении задержки при записи и считывании будет изменяться и скважность импульсов. Среднее значение сигнала на выходе триггера является мерой скважности импульсов и, следовательно, мерой заполнения памяти (рисунок 6.2).
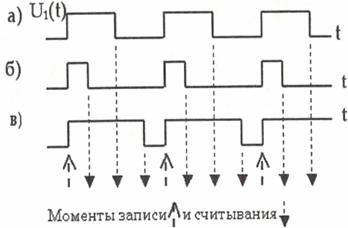
Рисунок 6.2 – Форма сигнала на выходе фазового компаратора
При использовании вставок выходная последовательность импульсов является непериодической даже при периодическом входном сигнале. Она будет иметь случайные перерывы в тех местах, где информационные символы чередуются с импульсами стаффинга. Таким образом, даже после удаления импульсов вставки (стаффинга) в принимаемом сигнале на выходе имеет место джиттер. Перед дальнейшей обработкой сигнала джиттер должен быть сглажен. Сглаживание джиттера является функцией приемного устройства эластичной памяти и ее цепи фазовой автоподстройки.
Джиттер времени ожидания.
Очевидно, что процесс стаффинга сопровождается появлением джиттера с амплитудой, равной одному тактовому интервалу. Однако процессу стаффинга свойствен и другой вид джиттера, вызываемый тем фактом, что вставка дополнительных импульсов выполняется не в тот момент, когда в ней возникла необходимость, а только в заранее определенных, предусмотренных для этого тактовых интервала. Такой джиттер называют джиттером времени ожидания.
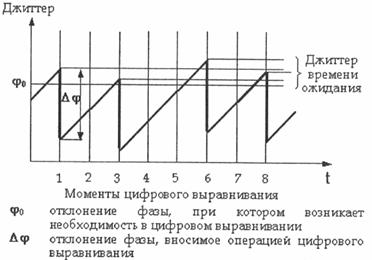
Рисунок 6.3 – Механизм возникновения джиттера времени ожидания
Эластичная память приемной части оборудования группообразования рассчитана на фильтрацию джиттера всех видов. Однако джиттер времени ожидания не будет полностью устранен из-за наличия в нем низкочастотных составляющих. По указанной причине процесс стаффинга неизбежно вносит в цифровой сигнал низкочастотный джиттер, влияние которого можно сделать незначительным при соответствующем выборе параметров оборудования группообразования. Обычно при последовательном включении нескольких систем цифрового группообразования низкочастотные составляющие джиттера ожидания имеют тенденцию к сложению по линейному закону. Это не будет вызывать каких-либо трудностей при цифровой передаче сигналов, поскольку величина низкочастотного джиттера заранее предопределяется операциями стаффинга, цепями фазовой автоподстройки и регенераторами цифрового сигнала. Указанный низкочастотный джиттер проходит через цифро-аналоговый преобразователь и содержится в декодированном аналоговом сигнале. Поскольку частотные составляющие остаточного джиттера находятся в достаточно низком диапазоне, его влияние на качество передачи сигналов незначительно.
7 Лекция 7. Плезиохронная цифровая иерархия
Цель лекции: изучить основные стандарты ПЦИ.
Содержание:
а) иерархия плезиохронных цифровых систем передачи
б) основные принципы мультиплексирования
в) структура цикла E-12
г) аппаратурная реализация систем первичного группообразования
Иерархия цифровых систем передачи (рисунок 7.1) не заканчивается. Можно продолжать укрупнять потоки и дальше.
Рисунок 7.1 - Иерархия плезиохронных цифровых систем передачи
Дело в том, что в системах передачи, начиная со второй ступени иерархии (это аппаратура ИКМ-120, ИКМ-480, ИКМ-1920 и т.д.), объединение потоков выполняется по принципу чередования битов. Таких потоков – четыре, и скорость каждого из них 2,048 Мбит/с.
Структура цикла.
Характеристики циклов первичных ЦСП определены Рекомендациями МСЭ-Т G.732,G.734 и ГСТУ 45-007-97. Согласно Рекомендации G.732, структура цикла первичного цифрового потока E12/P12s имеет следующие характеристики (см. рисунок 7.2):
- число канальных интервалов в цикле — 32 (нумерация с 0 по 31);
- число символов в канальном интервале — 8 (нумерация с 1 по
8);
- число символов в цикле — 256;
- частота повторения циклов — 8 кГц; длительность тактового интервала (ЕЙ) — 488нс; длительность импульса — 244 нс;
- частота следования сигнала цикловой синхронизации — 4 кГц;
- частота следования сверхциклов — 500 Гц (период сверхцикла — 2 мс);
- период цикла контроля CRC-4 - 2 мс.
Рассмотрим перечисленные характеристики более подробно.
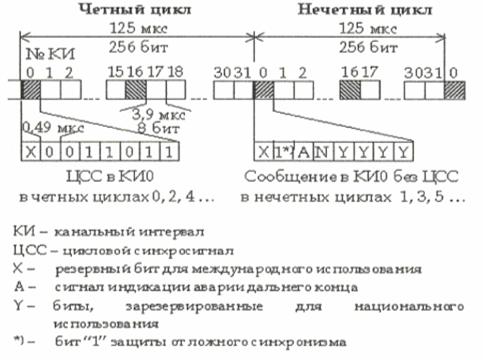
Рисунок 7.2 – Структура цикла первичного цифрового потока Е12/Р12s
На практике канал 64 кбит/с в КИ 16 используется либо для организации общего канала сигнализации ОКС (ССS — Common channel signalling), либо для поканальной сигнализации (CAS — Channel-Associated-signalling).
В случае поканальной сигнализации в КИ 16 организуется сверхцикл с периодом 2 мс, объединяющий 16 последовательных циклов, пронумерованных от 0 до 15. Сверхцикловой синхросигнал 0000 указывает на начало сверхцикла. Эти четыре бита расположены на позициях 1 ... 4 в КИ 16 цикла 0. Для каждого речевого канала имеется четыре канала сигнализации со скоростью 500 бит/с, обозначенные буквами а,b,с и d. Одновременно передаются данные сигнализации, относящиеся к двум речевым каналам; причем данные сигнализации каналов n и n + 15 передаются в одно и то же время. Неиспользуемые биты сигнализации даются постоянными величинами: а = 1,Ь = 1,с = 0 и d = 1.
Принцип первичного мультиплексирования.
На рисунке 7.3 в упрощенном виде представлен принцип работы первичного мультиплексора. Входные аналоговые сигналы (от 1 до 30) преобразуются в цифровую форму кодерами ИКМ. На приемной стороне выполняются аналогичные операции в обратном порядке.
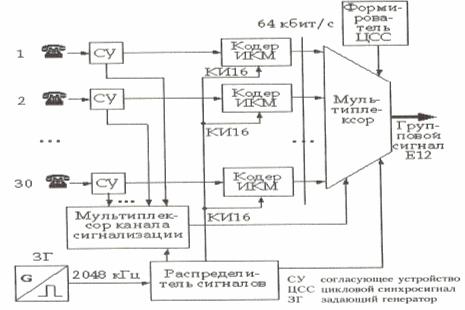
Рисунок 7.3 – Принцип работы мультиплексора ИКМ
Аппаратурная реализация систем первичного группообразования.
Аппаратура включает собственно блок мультиплексирования-демультиплексирования (МДМ), который является общим для всех конфигураций оборудования, и ряд канальных блоков, которые осуществляют согласование аппаратуры с различными вариантами использования каналов 64 кбит/с или, как говорят, с различными вариантами доступа к транспортной сети.
Внутренние связи между блоками аппаратуры реализованы с помощью шинной структуры с временным разделением. Это позволяет очень гибко использовать возможности аппаратуры.
Аппаратура гибкого мультиплексирования поддерживает большую часть функций управления, сигнализации и контроля.
Все управление аппаратурой осуществляется через служебный стык аппаратуры (MI - Management Interface),который может быть связан со служебным терминалом или системой технической эксплуатации. В этом случае аппаратура может управляться дистанционно.
Структура аппаратуры первичного мультиплексирования позволяет, с помощью блока мультиплексирования и канальных блоков, организовать однонаправленное ответвление. С помощью оборудования ответвления из приходящего сигнала можно выделить речевые каналы или каналы передачи данных 64 кбит/с и добавить данные в передаваемый сигнал.
На рисунке 7.4 показана функциональная схема первичного мультиплексора с традиционным обозначением функциональных элементов и обозначением функциональных групп элементов через элементарные функции в соответствии с Рекомендацией МСЭ-Т G.705/ Можно видеть, что оборудование ИКМ состоит из двух частей — передающей (верхняя половина рисунка) и приемной (нижняя половина), функционально не связанных между собой.
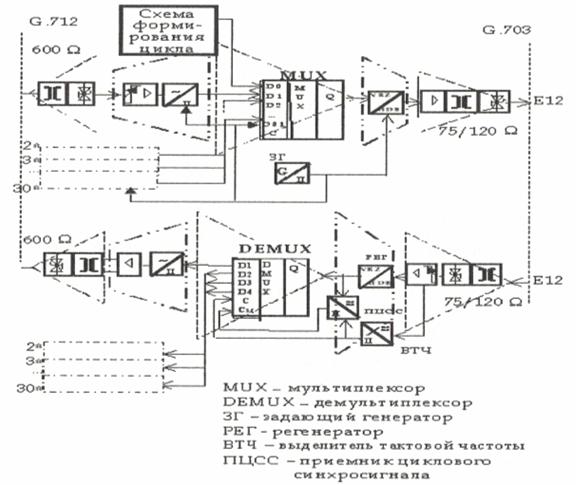
Рисунок 7.4 – Структурная схема первичного мультиплексора ИКМ
8 Лекция 8. Пассивные оптические сети (PON)
Цель лекции: изучить технология пассивных оптических сетей PON.
Содержание:
а) пассивные оптические сети PON;
б) принцип действия PON;
в) архитектуры APON, EPON И GPON.
Пассивные оптические сети PON.
Технология пассивных оптических сетей PON (passive optical network). Распределительная сеть доступа PON, основанная на древовидной волоконной кабельной архитектуре с пассивными оптическими разветвителями на узлах, возможно, представляется наиболее экономичной и способной обеспечить широкополосную передачу разнообразных приложений. При этом архитектура PON обладает необходимой эффективностью наращивания как узлов сети, так и пропускной способности в зависимости от настоящих и будущих потребностей абонентов.
Волокно в сетях доступа.
Строительство сетей доступа в настоящее время идет, главным образом, по четырем направлениям:
- сети на основе существующих медных телефонных пар и технология xDSL;
- гибридные волоконно-коаксиальные сети;
- беспроводные сети;
- волоконно-оптические сети.
Использование постоянно
совершенствующейся технологии xDSL – это самый простой и недорогой способ
увеличения пропускной способности существующей кабельной системы на основе
медных витых пар.
Для операторов, когда требуется обеспечить скорость до 1 Мбит/с, такой путь
является наиболее экономичным и оправданным. Однако скорость передачи до
десятков мегабит в секунду на существующих кабельных системах, с учетом больших
расстояний (до нескольких километров) и низкого качества меди, представляется
непростым и более дорогим решением.
Другое традиционное решение – гибридные волоконно-коаксиальные сети HFC (hybrid fiber-coaxial). Подключение множества кабельных модемов на один коаксиальный сегмент приводит к снижению средних затрат на построение инфраструктур сети в расчете на одного абонента и делает привлекательными такие решения. В целом же здесь сохраняется конструктивное ограничение по полосе пропускания.
Беспроводные сети доступа могут быть эффективны там, где возникают технические трудности для использования кабельных инфраструктур. Беспроводная связь по своей природе не имеет альтернативы для мобильных служб. В последние годы наряду с традиционными решениями на основе радио и оптического Ethernet доступа все более массовой становится технология WiFi, позволяющая обеспечить общую полосу до 10 Мбит/с и в ближайшей перспективе – до 50 Мбит/с. Следует отметить, что для всех трех перечисленных направлений дальнейшее увеличение пропускной способности сети связано с большими трудностями, которые отсутствуют при использовании такой среды передачи, как волокно.
Таким образом, единственный путь, который позволяет заложить способность сети работать с новыми приложениями, требующими все большей скорости передачи – это прокладка оптического кабеля (ОК) от центрального офиса до дома или до корпоративного клиента. Это весьма радикальный подход. И еще 5 лет назад он считался крайне дорогим. Однако в настоящее время благодаря значительному снижению цен на оптические компоненты, этот подход стал актуален. Сегодня прокладывать ОК для организации сети доступа стало выгодно и при обновлении старых, и при строительстве новых сетей доступа (последних миль). При этом имеется множество вариантов выбора волоконно-оптической технологии доступа. Наряду со ставшими традиционными решениями на основе оптических модемов, оптического Ethernet, технологии Micro SDH, появились новые решения с использованием архитектуры сетей PON.
Можно выделить следующие топологии оптических сетей доступа: точка и точка, кольцо, дерево с активными узлами, дерево с пассивными оптическими элементами.
Принцип действия PON
Основная идея архитектуры PON – использование всего одного приемо-передающего модуля в OLT для передачи информации множеству абонентских устройств ONU и приема информации от них. Реализация этого принципа показана на рисунке 9.1.
Число абонентских узлов, подключенных к одному приемо-передающему модулю OLT, может быть настолько большим, насколько позволяет бюджет мощности и максимальная скорость приемопередающей аппаратуры. Для передачи потока информации от OLT к ONU – прямого (восходящего) потока, как правило, используется длина волны 1550 нм. Наоборот, потоки данных от разных абонентских узлов в центральный узел, совместно образующие обратный (нисходящий) поток, передаются на длине волны 1310 нм. В OLT и ONU встроены мультиплексоры WDM, разделяющие исходящие и входящие потоки.
Прямой поток.
Прямой поток на уровне оптических сигналов является широковещательным. Каждый ONU, читая адресные поля, выделяет из этого общего потока предназначенную только ему часть информации (рисунок 8.1). Фактически мы имеем дело с распределенным демультиплексором.
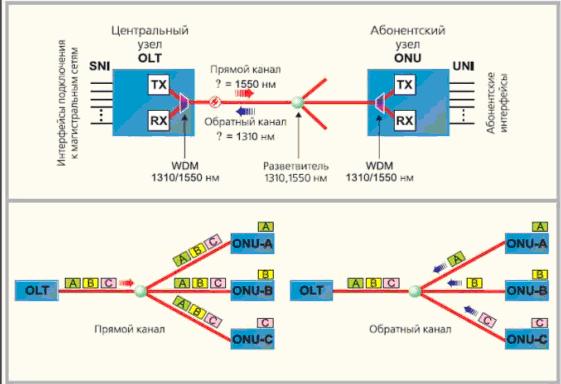
Рисунок 8.1 – Основные элементы архитектуры PON и принцип действия
Обратный поток.
Все абонентские узлы ONU ведут передачу в обратном потоке на одной и той же длине волны, используя концепцию множественного доступа с временным разделением TDMA (time division multiple access). Для того чтобы исключить возможность пересечения сигналов от разных ONU, для каждого из них устанавливается свое индивидуальное расписание по передаче данных c учетом поправки на задержку, связанную с удалением данного ONU от OLT. Эту задачу решает протокол TDMA MAC.
Архитектуры APON, EPON И GPON.
Первые шаги в технологии PON (passive
optical networks ) были предприняты 1995 г., когда влиятельная группа из семи компаний (British Telecom, France Telecom, Deutsche Telecom, NTT, KPN,
Telefoniсa и Telecom Italia) создала консорциум для того, чтобы претворить в
жизнь идеи множественного доступа по одному волокну. Эта неформальная
организация,
поддерживаемая ITU-T, получила название FSAN (full service access network).
Много новых членов как операторов, так и производителей оборудования, вошли в
нее в конце 90-х гг прошлого века. Целью FSAN была разработка общих
рекомендаций и требований к оборудованию PON для того, чтобы производители
оборудования и операторы могли сосуществовать вместе на конкурентном рынке
систем доступа PON. На сегодня FSAN насчитывает 40 операторов и производителей
и работает в тесном сотрудничестве с такими организациями по стандартизации,
как ITU-T, ETSI и ATM форум.
Т а б л и ц а 8.1 – Характеристика и спецификация
|
Характеристика |
Спецификация |
|
Длина волны для нисходящего потока (потока к абонентам) |
Базовая 1550 нм, наращивание в DWDM 15 хх нм, C-band |
|
Длина волны для восходящего потока |
Базовая 1310 нм, наращивание в DWDM 15 хх нм, C-band |
|
Суммарная скорость передачи для нисходящего потока |
155 Мбит/с; 622 Мбит/с |
|
Суммарная скорость передачи для восходящего потока |
155 Мбит/с; 622 Мбит/с |
|
Бюджет оптической линии учитывается при определении величины максимального расщепления сигнала на сплиттере и максимального расстояния, дБ
|
Класс А: 5-20 Класс В: 10-25 Класс С: 15-30 |
|
Максимальный разброс потерь по оптическим путям, дБ |
15
|
|
Тос 336115Поддерживаемые типы волокон и требования к линии связи Тос 336115 |
ITU G.652стандартное одномодовое волокно с нулевой дисперсией с окрестности 1310 нм |
|
Максимальное число абонентских узлов (ONU), которые можно подключить на одно волокно, идущее из центрального узла(OLT) |
32 |
|
Максимальное расстояние OLT –ONU |
20 км |
|
Тип оптических соединителей PON |
SC- PC или FC –PC коэффициентом обратного отражения -35 дБ и лучше |
|
Требования к оптическим компонентам (разветвители, соединители, демультиплексоры WDM) |
Согласно рекомендации G.671 |
9 Лекция 9. Системы передачи с синхронной цифровой иерархией
Цели: изучить построение разработки SDH. Модель SDH. Структура кадра STM-N. Схема мультиплексирования SONET/SDH
Содержание:
а) цели и задачи разработки SDH;
б) модель SDH;
в) структура кадра STM-N.
Синхронная цифровая иерархия (SDH) — технология широкополосных транспортных сетей, которые являются инфраструктурой для подключения пользователя к широкому спектру услуг. Сети SDH позволяют передавать информационные потоки на скоростях до 10 Гбит/сек, предоставляют широкий диапазон скоростей доступа, в том числе совместимых с плезиохронной цифровой иерархией, прозрачны для трафика любой природы (голос, данные, видео). Заложенная в структуру SDH сигнала служебная информация обеспечивает возможность централизованного управления сетевыми устройствами и сетью в целом, позволяя гибко и оперативно обслуживать сеть и предоставлять пользователям необходимые потоки, а также реализует механизмы защиты информационных потоков в сети от возможных аварий.
Но прежде, чем рассказывать об основах SDH, вкратце рассмотрим методы передачи сигналов, сложившиеся в электросвязи до появления SDH, и их недостатки, давшие толчок к созданию новой технологии.
Цели и задачи разработки SDH. Основные понятия.
Желание преодолеть недостатки PDH привели к разработке в США иерархии синхронной оптической сети (SONET), а в Европе аналогичной синхронной цифровой иерархии (SDH), предложенными для использования на волоконно-оптических линиях связи.
Целью разработки, в обоих случаях, было создание иерархии, которая позволила бы:
- вводить/выводить исходные потоки без необходимости производить сборку разборку;
- разработать структуру кадров, позволяющую осуществлять развитую маршрутизацию и управление сетями с произвольной топологией;
- загружать и переносить в кадрах новой иерархии кадры PDH иерархии и других типов трафика (АТМ, IP);
- разработать стандартные интерфейсы для облегчения стыковки оборудования.
Однако, считаясь с необходимостью облегчить процедуру взаимодействия американской и европейской PDH, разработчиками SONET и SDH был принят окончательный вариант, названный SONET/SDH, в котором путем согласования рядов скоростей и схем мультиплексирования каждой из иерархий, стало возможным заключать в оболочки кадров синхронных потоков все форматы кадров американской и европейской PDH, кроме Е2. Три основополагающие рекомендации по SDH были опубликованы в 1989 году — Rec. G.707, G.708 и G.709.
В сетях SDH и SONET используются синхронные схемы передачи с байт-интерливингом при мультиплексировании. В качестве формата основного сигнала первого уровня в иерархии SDH был принят синхронный транспортный модуль STM-1 с размером кадра 2430 байт и стандартным периодом повторения кадров 125 мкс, что дает скорость передачи 155.52 Мбит/сек. Мультиплексирование с коэффициентом кратности 4 дает следующий ряд скоростей SDH иерархии: STM-4, STM-16, STM-64 или соответственно 622.08, 2488.32, 9953.28 Мбит/сек. Ряд скоростей SONET начинается с сигнала ОС-1, имеющего скорость 51.84 Мбит/сек, а далее сигналы ОС-3, ОС-12, ОС-48 совпадают по скорости с STM-1, STM-4, STM-64.
Модель SDH.
Телекоммуникационные технологии обычно объясняют, используя так называемую многоуровневую модель. SDH может быть также представлена в виде транспортных сетевых уровней, которые напрямую соотносятся к топологии сети (рисунок 9.1).
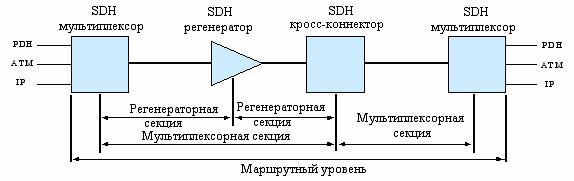
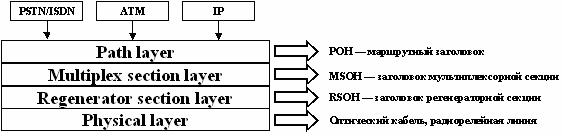
Рисунок 9.1 - Многоуровневая модель SDH
Самый низкий — физический уровень, представляющий передающую среду.
Секционный уровень отвечает за сборку синхронных модулей STM-N и транспортировку их. Он подразделяется на регенераторной и мультиплексорной секции.
Маршрутный уровень отвечает за доставку сигналов, предоставляемых сетью для конечного пользователя (PDH, ATM и др.) и упакованных в полезной нагрузке STM-N. Согласно терминологии SDH, эти сигналы называют компонентными или трибутарными сигналами, а предоставляемые пользователю интерфейсы доступа к сети — трибутарными интерфейсами.
Передача сигнальной информации для каждого уровня в SDH осуществляется при помощи механизма заголовков. Каждый STM-N кадр имеет секционный заголовок SOH (Section OverHead), состоящий из двух частей: заголовка регенераторной секции RSOH (Regenerator Section OverHead) и мультиплексорной секции MSOH (Multiplex Section OverHead).
Для упаковки и транспортировки в STM-N трибутарных сигналов предложена технология виртуальных контейнеров. Виртуальный контейнер состоит из поля полезной нагрузки — контейнера, на которое отображается трибутарный сигнал, и маршрутного заголовка POH (Path OverHead), который указывает тип контейнера и служит для сбора статистики о прохождении контейнера по сети.
Принципы организации иерархии.
Базовый формат линейного сигнала СЦИ — синхронный транспортный модуль уровня 1 (СТМ-1) состоит из 2430 байт, размещенных на интервале между двумя отсчетами, следующими с частотой 8кГц (длительность цикла — 125 мкс). Таким образом, каждый байт на определенной позиции в пределах цикла может переносить один телефонный канал или, что эквивалентно, цифровой канал с пропускной способностью 64 кбит/с.
Количество бит в цикле СТМ-1 равно:
n = 2430x8= 19 440 бит.
Скорость передачи модуля СТМ-1 составляет:
Встм-. = n ![]() 1/Тц = n
1/Тц = n ![]() 8кГц = 19 440
8кГц = 19 440 ![]() 8кГц = 155 520 кбит/с.
8кГц = 155 520 кбит/с.
Сигналы СЦИ высших порядков, обозначаемые как CTM-N, имеют скорости передачи в N раз большие, чем СТМ-1:
Bстм-n=Bстм-1 ![]() В =155 520
В =155 520 ![]() N (9.1)
N (9.1)
где N — номер иерархического уровня (N= 1,4,16,64,256). Значения скоростей передачи BCTM-N приведены в таблице 9.1.
Т а б л и ц а 9.1
|
Уровень иерархии СЦИ |
Скорость передачи В, кбит/с |
|
СТМ-1 |
155 520 |
|
СТМ-4 |
622 080 |
|
СТМ-16 |
2 488 320 |
|
СТМ-64 |
9 953 280 |
|
СТМ-256 |
39 813 120 |
Скорость 40 Гбит/с (СТМ-256) считается физической границей практической реализуемости цифровых электронных схем при очень высоких затратах. Чтобы добиться более высокой пропускной способности по одному волокну, применяется мультиплексирование с разделением по длине волны DWDM, позволяющее мультиплексировать в оптической частотной области сотни сигналов СЦИ и достигнуть огромной пропускной способности: свыше 1 Тбит/с по одному волокну.
Структура кадра STM-N.
Кадр STM-1 представляют в виде матрицы байт из 9 строк и 270 столбцов (Рис.4). Передача кадра производится построчно, начиная с байта в левом верхнем углу, и кончается правым нижним байтом. Кадр повторяется каждые 125 мксек. Каждый байт кадра эквивалентен 64 Кбит/сек каналу.
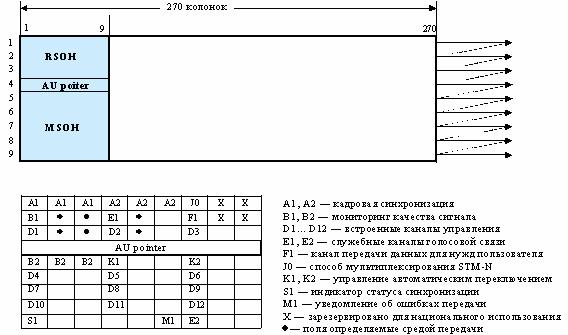
Рисунок 9.2 - Формат кадра STM-1
Первые девять столбцов — секционный заголовок. Оставшиеся 261 столбец — байты полезной нагрузки.
Первые три строки секционного заголовка — RSOH, последние пять строк — MSOH. Назначение байт заголовка указано на Рис. 4. Более подробно о некоторых из них будет рассказано ниже.
Мультиплексирование STM-1 в STM-N может осуществляться как каскадно: 4xSTM-1 = STM-4, 4xSTM-4 = STM-16, 4xSTM-16 = STM-64, так и непосредственно: 4xSTM-1 = STM-4, 16xSTM-1 = STM-16, 64xSTM-1 = STM-64. Следовательно, STM-N можно представить как матрицу из 9 строк и 270xN столбцов, где первые 9xN столбцов — секционный заголовок.
10 Лекция 10. Схема мультиплексирования SONET/SDH и базовые элементы
Цель лекции: изучение схемы мультиплексирования и базовых элементов.
Содержание:
а) схема мультиплексирования;
б) базовые элементы сетей SDH;
в) управление сетями SDH.
Схема мультиплексирования низкоскоростных потоков в STM-N.
Базовый модуль для переноса трибутарного сигнала — контейнер. Для каждого PDH сигнала отводится определенный контейнер С-n, размер которого больше размера кадра переносимого им сигнала. Избыточная емкость используется для частичного выравнивания временных неточностей в PDH сигналах. Контейнер C-n с добавленным к нему маршрутным заголовком POH образует виртуальный контейнер VC-n. Виртуальный контейнер — логический блок, который передается по сети из конца в конец. Следующий шаг к формированию содержимого STM-N сигнала — добавление указателя на начало POH. Блок, образованный из указателя и виртуального контейнера, называется административным блоком (AU-n) или трибутарным блоком
(TU-n). Мультиплексирование с байт-интерливингом нескольких однотипных трибутарных блоков образует группу трибутарных блоков (TUG-n), которые затем собираются в виртуальный контейнер более высокого уровня. Один или более AU формируют группу административных блоков (AUG). И, наконец, добавление к AUG секционного заголовка дает STM-N. Объединенная схема мультиплексирования SONET/SDH согласно Рекомендации G.707 ITU-T приведена на Рис.5. Пару слов скажем о так называемом сигнале sub-STM или STM-0, указанном на этой схеме. Этот интерфейс используется при связях сетей SONET и SDH, а также в радиорелейных и спутниковых соединениях.
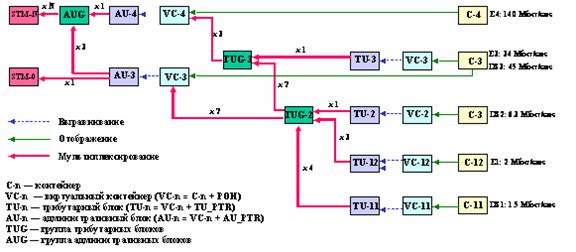
Рисунок 10.1 - Схема мультиплексирования SONET/SDH
Одна из особенностей схемы мультиплексирования SDH - использование указателей. Например, указатель административного блока AU-4, расположенный в четвертой строке секционного заголовка, фиксирует положение VC-4. Благодаря наличию этого указателя, VC-4 может начинаться в любом месте поля полезной нагрузки и в общем случае пересекает границу кадра. Все TU-n занимают целое количество 9-ти байтовых столбцов в поле полезной нагрузки VC-4. Указатели TU-n занимают первый байт первого столбца (для TU-12) или первые три байта первого столбца (для TU-3). Следовательно, все указатели трибутарных блоков, составляющих VC-4, располагаются на фиксированных позициях. Используя цепочу указателей, можно легко найти положение любого трибутарного сигнала в синхронном транспортном модуле и при необходимости извлечь его не прибегая к демультиплексированию в несколько стадий, как в PDH.
Еще одно из преимуществ использования указателей — передача асинхронных, по отношению к сети SDH, трибутарных потоков или виртуальных контейнеров, что может иметь место в соединениях, проходящих через сети разных операторов связи. Например, при передаче VC-4 указатель административного блока в каждом четвертом кадре может содержать индикацию на наличие 3 байтового сдвига. Если VC-4 более медленный, по отношению к STM-N, то следующие за таким указателем три байта игнорируются (положительное выравнивание). Если VС-4 имеет большую скорость, то последней три байта указателя используются байтами полезной нагрузки VC-4 (отрицательное выравнивание). Для виртуальных контейнеров нижнего уровня, например, для VC-12, указатель трибутарного блока которого состоит из одного байта, рассматривается мультифрейм с частотой повторения 500 мкс. За счет одного из байта указателя в составе этого мультифрейма внутри него могут «плавать» VC-12.
Базовые элементы сетей SDH.
Сети SDH строятся из четырех типов функциональных модулей (сетевых элементов): регенераторы, терминальные мультиплексоры, мультиплексоры ввода/вывода и кросс-коннекторы.
Регенератор используется для увеличения допустимого расстояния между узлами сети путем восстановления входящих сигналов SDH. Это расстояние зависит от степени затухания сигнала в передающей среде и параметров приемо-передающего оборудования. Для одномодового оптического кабеля оно составляет 15-40 км для длины волны 1310 нм и 40-110 км для 1550 нм.
Терминальный мультиплексор (TM) (рисунок 10.3) предназначен для мультиплексирования и демультиплексирования сигналов PDH и STM (в терминологии SDH их называют трибутарными или компонентными интерфейсами) в агрегатный поток STM-N. Он также может осуществлять локальную коммутацию с одного трибутарного интерфейса на другой.
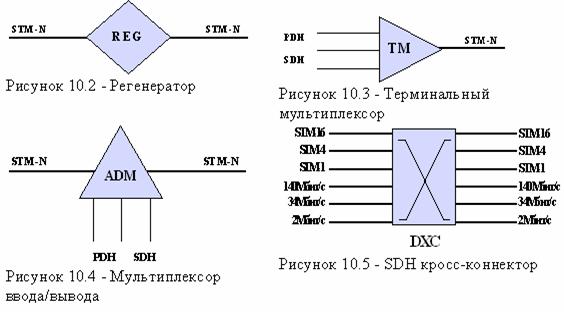
Мультиплексор ввода/вывода (ADM) (рисунок 10.4) имеет на входе те же наборы интерфейсов, что и ТМ, и, как правило, два агрегатных потока STM-N (условно называемых "восточный" и "западный"). В этих мультиплексорах плезиохронные или синхронные сигналы могут быть извлечены из или добавлены в поток STM-N, при этом часть полезной нагрузки сигнала STM-N проходит через устройство транзитом. Это дает возможность создавать самовосстанавливающиеся кольцевые структуры (Self Healing Ring — SHR), которые, в случае аварии, автоматически коммутируют потоки в обход поврежденных участков или элементов сети.
Кросс-коннектор (DXC) (рисунок 10.5) - распределительный узел сети, осуществляющий неблокируемые перекрестные соединения между любыми его портами. SDH кросс-коннекторы выполняют эти функции на уровне виртуальных контейнеров VC-n, для этого PDH сигналы отображаются на виртуальные контейнеры соответствующего уровня. Следует отметить, что возможность осуществления коммутации заложена также и в SDH мультиплексоры.
Основные функции, выполняемые сетевыми элементами SDH, следующие:
- маршрутизация виртуальных контейнеров, проводимая на основе использования информации в маршрутном заголовке РОН соответствующего контейнера;
- консолидация или объединение виртуальных контейнеров;
- трансляция потока от точки к нескольким точкам (point-to-multipoint);
- сортировка или перегруппировка (grooming) виртуальных контейнеров, осуществляемая с целью создания нескольких упорядоченных, например, по типу переносимого сервиса, потоков;
- ввод/вывод виртуальных контейнеров.
Управление сетями SDH.
Рассматривая базовые функциональные блоки сетей SDH, мы не упомянули еще один важный элемент синхронных сетей - систему управления. Все элементы сети SDH являются программно управляемыми. Возможность мониторинга работоспособности сети и удаленного конфигурирования узлов — одно из наиболее важных свойств SDH.
Системы управления сетями SDH базируются на модели TMN (Telecommunications Managemet Network - сеть управления телекоммуникациями). Принципы TMN были изложены в 1989 г. в Рекомендации М.3010 ITU-T.
Функции TMN (рисунок 10.6) суммированы в выражении «Operation, administration, maintenance and provisioning» (Управление, администрирование, обслуживание и обеспечение) - OAM&P, что, среди прочего, включает мониторинг работоспособности и контроль сообщений об ошибках.
Для предоставления этих функций TMN использует объектно-ориентированный подход, основанный на эталонной модели OSI. В модели TMN один менеджер общается с несколькими агентами. Агенты предназначены для работы с определенными управляемыми объектами MO (managed objects). Менеджер подключается к операционной системе (OS), которая есть управляющий центр для сети в целом или ее части.
В SDH сети агенты локализованы в сетевых элементах (NE). MO могут быть как физическими устройствами (интерфейсные карты, блоки питания и т.п.), так и логическими элементами (виртуальные соединения).
В TMN также различают логические модули управления. Например, один модуль управления оперирует на уровне элементов сети (управление индивидуальным NE), другой на сетевом уровне (управление маршрутами в сети и т.п.), третий на сервисном уровне (сбор биллинговой информации и пр.).
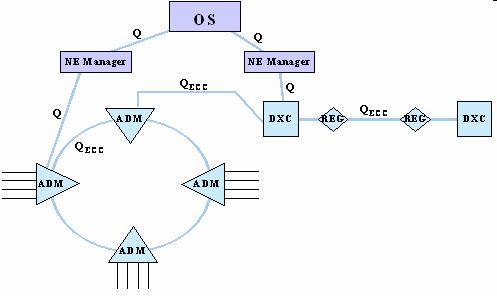
Рисунок 10.6 - Схема TMN для сети SDH
11 Лекция 11. Топология сетей SDH
Цель лекции: изучение топологии сетей SDH
Содержание:
а) топология «точка-точка»;
б) топология «последовательная линейная цепь»;
в) топология «звезда»;
г) топология «кольцо».
При построении сетей SDH одной из первых задач, которую необходимо решать, является задача выбора топологии. Рассмотрим набор базовых стандартных топологий из комбинации, которых может быть составлена сеть в целом.
Топология «точка-точка».
Это простейшая топология, включающая два терминальных мультиплексора, соединенных оптической линией связи с или без регенератора. Каждый из мультиплексоров действует как концентратор трибутарных потоков Е1, Е3 и др.
Эта топология широко используется при передаче больших потоков данных по высокоскоростным магистральным каналам. Она может быть реализована как по схеме без резервирования канала, так и по схеме со 100% резервированием типа 1+1, использующей основной и резервный агрегатные каналы.
Топология «последовательная линейная цепь».
Эта топология используется тогда, когда существует необходимость ответвлений в ряде точек линии, где могут вводиться и выводится каналы доступа. Реализуется она путем включения вдоль линии связи мультиплексоров ввода/вывода.
Топология «звезда».
В этой топологии один из узлов сети (кросс-коннектор) играет роль концентратора (или хаба), распределяя часть трафика по другим удаленным узлам, а оставшуюся часть на терминалы пользователей.
Топология «кольцо».
Эта топология наиболее широко используется при построении SDH сетей первых двух уровней иерархии (STM-1 и STM-4). Строительными блоками этой архитектуры являются мультиплексоры ввода/вывода, которые соединяются в кольцо с однонаправленной либо двунаправленной передачей трафика.
Широкое использование кольцевой топологии обусловлено тем, что построенные на ее основе сети способны самовосстанавливаться после некоторых достаточно характерных типов отказов.
Механизмы самовосстановления и схемы резервирования
Отказы в телекоммуникационных сетях, вследствие ошибок персонала или поломки оборудования, могут нанести значительный ущерб пользователям и операторам связи. С целью увеличения надежности сетей в SDH предусмотрены механизмы, позволяющие компенсировать отказы элементов сетевой среды.
Рассмотрим два основных метода, используемых в SDH, для защиты соединений, проложенных через сеть. Это линейная защита и, так называемая, кольцевая защита.
Линейная защита.
Простейшая форма реализации этой защиты — защита 1+1, используемая в соединениях точка-точка, где на каждую рабочую линию отводится одна резервная. При обнаружении потери сигнала на рабочей линии оборудование на обоих концах автоматически переключается на резервную.
Более экономичный вариант — защита 1:N, используемый, в основном, на магистральных участках большой протяженности. В этом случае на несколько рабочих линий отводится одна резервная. Резервная линия может быть использована для передачи низкоприоритетного трафика, который просто прерывается, если необходимо подменить вышедшую из строя рабочую линию.
Механизмы защиты 1+1 и 1:N стандартизированы ITU-T в Рекомендации G.783.
Кольцевая защита.
Топология «кольцо» допускает несколько механизмов защиты, которые описаны в Рекомендации G.841 ITU-T и различаются для кольцевых структур с однонаправленными и двунаправленными соединениями.
В однонапревленном кольце все данные передаются по одной оптической жиле в одном направлении. Вторая оптическая жила, с противоположным направлением передачи, рассматривается как резервная. В случае аварии на одном из сегментов кольца, передача в направлении поврежденного участка автоматически коммутируется на резервное кольцо (рисунок 11.1).
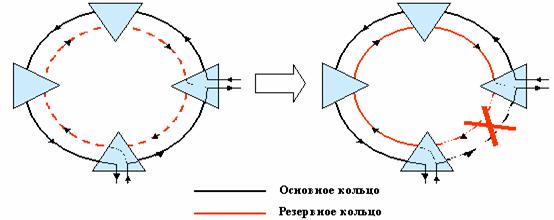
Рисунок 11.1 - Схема самовосстановления однонаправленного кольца
В двунаправленном кольце обе оптические жилы используются для передачи и приема сигналов между элементами сети. Емкость канала разбивается на несколько двунаправленных рабочих линий. При разрыве кольца на концах поврежденного сегмента потоки коммутируются на резервную рабочую линию в обход этого сегмента (рисунок 11.2).
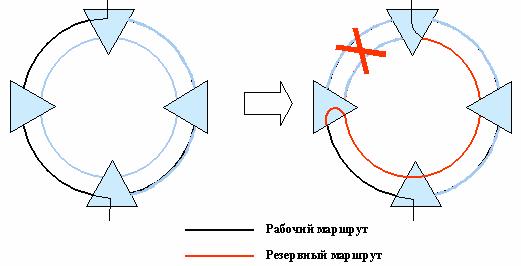
Рисунок 11.2 - Схема резервирования в двунаправленном кольце
Еще большую степень защиты обеспечивает двунаправленное кольцо с четырьмя оптическими жилами, однако этот способ является и наиболее дорогим.
Сигнальная информация, необходимая SDH устройствам для реализации механизма защиты, передается в байтах K1 и K2 секционного заголовка STM-N. Время восстановления сети не превышает 50 миллисекунд.
Синхронизация
Оборудование SDH, как и любые другие цифровые устройства, имеет встроенные источники тактовых импульсов (часы), к которым «привязаны» рабочие циклы его подсистем. Если в сети часы различных устройств работают несинхронное (различаются длительность и фазы тактовых импульсов), то это может приводить к «проскальзыванию» бит принимаемых потоков, а при мультиплексировании этих сигналов, для их выравнивания, необходимо осуществлять процедуры вставки или изъятия бит (что, как отмечалось выше, и делается в PDH).
В SDH, где приняты синхронные схемы мультиплексирования, исключающие возможность вставки/изъятия бит, задача синхронизации узлов в сети выходит на первый план.
Общие принципы синхронизации сетей SDH определены в Рекомендациях ITU-T G.811, G.812, G.813.
Согласно этим рекомендациям, элементы сети должна быть синхронизованы от центральных часов, называемых первичными эталонными часами (PRC — Primary Reference Clock), генерирующими 2048 КГц сигнал с точностью 10-11. Этот сигнал должен быть распределен по сети. Для этого используется иерархическая структура: сигнал синхронизации транслируется устройствами поддержки синхронизации (SSU — Synchronization Supply Units) и часами оборудования SDH (SEC — SDH Equipment Clock). Тактовый сигнал, регенерируемый SSU и SEC, подстраивается по фазе и частоте к сигналу синхронизации, приходящему на специальный порт или выделяемому из агрегатного или трибутарного потока.
При раздаче синхронизации в сети необходимо соблюдать определенные правила:
- узлы сети должны получать сигнал синхронизации только от устройств, которые содержат часы такого же или более высокого качества;
- наиболее надежное оборудование (с наименьшей вероятностью отказов) должно выбираться в качестве синхронизирующего оборудования;
- общее количество сетевых элементов в последовательности от PRC должно быть минимизировано (не более 10 SSU и не более 60 SEC);
- нельзя допускать формирования замкнутых петель, например, когда узел А получает синхронизацию от В, В — от С, С — от А.
В сетях SDH предусмотрены механизмы, по возможности, предотвращающие потерю синхронизации элементами сети. Если в результате аварии сетевое устройство перестает получать сигнал синхронизации, то оно переключается на другой источник временных сигналов с более низким приоритетом. Если это невозможно, то устройство переходит в режим удержания (hold-over mode). В этом режиме часы устройства корректируются в соответствии с данными о корректировках, сохраненными за предыдущее время работы, с поправкой на колебания температуры. Сообщения о состоянии синхронизации SSM (Synchronization Status Messages) элемента сети передаются в байте S1 секционного заголовка его соседям.
Отдельная проблема — стыковка между сетями с независимыми источниками синхронизации. Если расхождения часов находятся в определенных пределах, то в SDH сети эта проблема решается с использованием указателей.
12 Лекция 12. Современные системы NGSDH
Цель лекции: изучить новую концепцию систем SDH.
Содержание:
а) новая концепция систем передачи;
б) протоколы системы NGSDH.
NGSDH=GFP+LCAS+VCAT.
Тем не менее, решение нашлось в виде целого семейства технологий, обеспечивающих «связку» трафика разнородных приложений (в особенности, IP и Ethernet-трафика) с разнородными системами передачи (рисунок 12.1). В результате сформировалась новая концепция «транспортной среды», которая включает не только системы передачи, но и все 5 уровней современной технологии (в связи с бурным ростом технологии IP про 7-уровневую модель в настоящее время как-то забыли, перейдя на 5-уровневую).
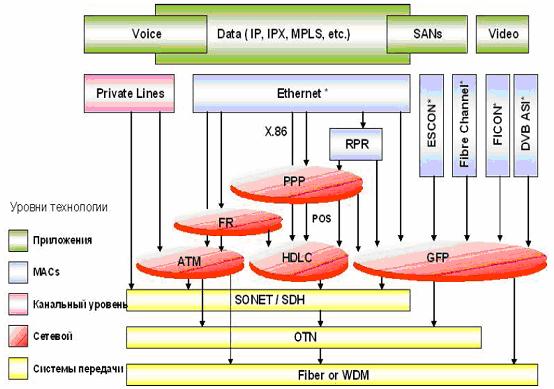
Рисунок 12.1 - Новая концепция систем передачи: от первичной сети к транспортной среде
Новая концепция систем передачи требует от технологических решений совершенно иных функций, а именно:
а) гибкость с точки зрения передачи самого разнородного трафика в эпоху NGN (теперь это нее только передача данных, но также и мультимедиа, данные от систем хранения информации SAN и т.д.);
б) высокая эффективность использования ресурсов сети, заложенная в самой технологии, а не искусственно гарантированная какими-то дополнительными ухищрениями;
в) стабильность, надежность и управляемость работы транспортной сети.
Из рисунка 12.1 видно, что новый протокол преобразования трафика GFP представляется в рамках единой концепции наиболее прочным и широким «мостом».
Лучше всего эффективность протокола GFP видна на сравнении его с его непосредственным предшественником – протоколом LAPS. На рисунке 12.2 представлен формат кадра LAPS.
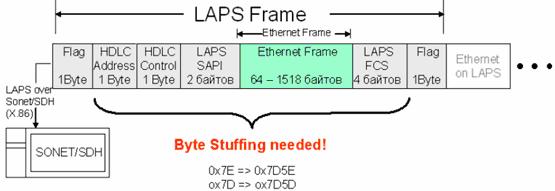
Рисунок 12.2 - Формат кадра Ethernet over LAPS
Он во многом напоминает структуру кадра HDLC. Для работы LAPS потребовалось использовать процедуру байтового стаффинга, которая существенно конфликтовала с процедурами обеспечения параметров качества передачи QoS. Кроме того, используемый в LAPS переменный заголовок (как и в HDLC) привел к очень низкой эффективности расходования полосы пропускания систем передачи (рисунок 12.3)
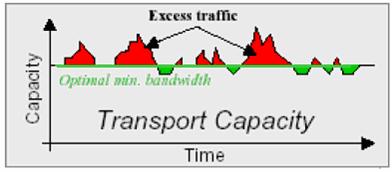
Рисунок 12.3 - LAPS оказывается неэффективным из-за
переменного заголовка кадра
В противоположность LAPS использование АТМ дает намного лучшие результаты (рисунок 12.4).
Фиксированный размер ячейки здесь обеспечивает высокую эффективность загрузки в SDH и позволяет добиться высоких показателей по обеспечению QoS. Единственным недостатком АТМ оказывается необходимость дополнительного уровня сегментации (SAR), реализация которого обходится слишком дорого производителям оборудования.
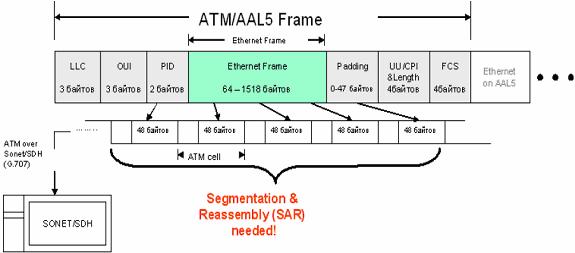
Рисунок 12.4 - Формат кадра Ethernet over ATM
Тем не менее, за счет фиксированного размера ячеек, система передачи SDH используется очень эффективно, без негативных скачков в пропускной способности (рисунок 12.5).

Рисунок 12.5 - АТМ оказывается эффективным из-за фиксированного размера ячейки
Протокол GFP.
Вновь разработанный протокол GFP позволил сочетать фиксированный размер кадра, необходимый для высокой эффективности использования систем передачи с простотой реализации (рисунок 12.6).
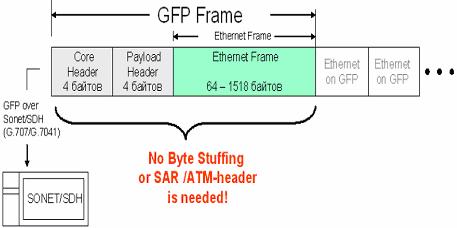
Рисунок 12.6 - Формат кадра Ethernet over GFP
Нет необходимости байтового стаффинга и SAR.
Этот протокол не требует ни процедуры байтового стаффинга, ни дорогой сегментации. В результате его структура оказывается простой, а система передачи используется эффективно (рисунок 12.7)
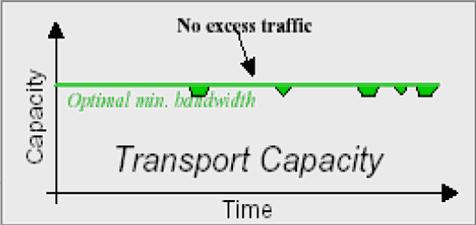
Рисунок 12.7 - По уровню эффективности GFP может быть сравним с АТМ
13 Лекция 13. Конкатенация в сетях SDH и процедура VCAT NGSDH.
Цель лекции: изучить конкатенацию в сетях SDH.
Содержание:
а) конкатенация в сетях SDH;
б) процедура VCAT.
Особенное внимание при разработке решений NGSDH было отведено оценке эффективности загрузки сети. Очень важным шагом по пути достижения эффективности стала разработка процедуры виртуальной конкатенации в сетях SDH (VCAT).
Обычная конкатенация в сетях SDH стала уже нормой. Она подразумевает сцепку контейнеров разного уровня, так что сеть рассматривает их как единый контейнер (рисунок 13.1)
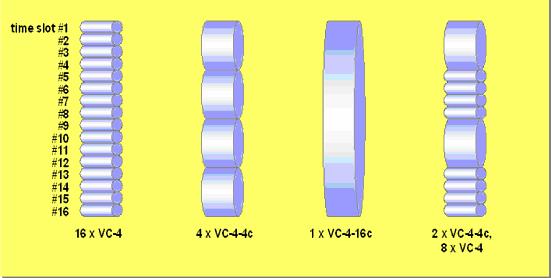
Рисунок 13.1 - Конкатенация в сетях SDH
Но использование конкатенированных контейнеров снова уменьшает КПД системы SDH, если речь идет о трафике Ethernet. Дело в том, что стандарты SDH оказываются несопоставимыми по скоростям со стандартами Ethernet. Например, наиболее распространенным в настоящее время стандартом для систем Ethernet является Gigabit Ethernet со скоростью передачи в 1,25 Гбит/с с учетом заголовков на преобразование. Для формирования «моста» в системе SDH с учетом конкатенации контейнеров нужно использовать VC-4-16c, емкостью в 2,5 Гбит/с, так что мы получаем уменьшение эффективности в 2 раза (если быть точным – на 58%). КПД такой системы SDH станет равным 17% только из-за конкатенации.
Процедура VCAT.
Чтобы преодолеть полученный тупик была предложена схема виртуальной конкатенации VCAT (рисунок 13.2). Согласно этой процедуре мультиплексор, оснащенный VCAT, формирует виртуально-конкатенированный контейнер из 7 контейнеров VC-4. В результате «мост» имеет пропускную способность 1,05 Гбит/с и используется на 85% эффективности, что уже приемлемо.
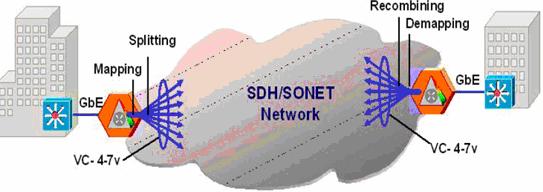
Рисунок 13.2 - Процедура VCAT в системе NGSDH
Интересно, что процедура VCAT не требует модернизации сети SDH. По сети контейнер VCAT передается как 7 независимых контейнеров VC-4, и только в точке сборки должен стоять мультиплексор с функцией VCAT. Такая технология оказывается удобной не только для развертывания, но и для маркетинга. Совершенно незначительные изменения (пара плат в мультиплексоры МВВ по сторонам «моста») – и трафик передачи данных начинает наполнять систему SDH. Для операторов первичной сети это очень привлекательное решение, позволяющее привлечь в свои сети новые категории трафика.
И третьим компонентом NGSDH наравне с VCAT и GFPстала подсистема LCAS, представляющая эквивалент протокола сигнализации в системе SDH. Часто требуется быстрая реконфигурация в сети SDH, чтобы выделить ресурс в заданной точке сети. Сейчас эта реконфигурация производится системой управления путем прописывания различных маршрутов. NGSDH позволяет оператору действовать более оперативно. Для этого внутри сети используется подсистема сигнализации, сходная с протоколами систем коммутации (рисунок 13.3). На рисунке показано, как в сети с использованием процедуры VCAT устанавливается новый канал пропускной способности 150 Мбит/с по требованию одного из узлов.
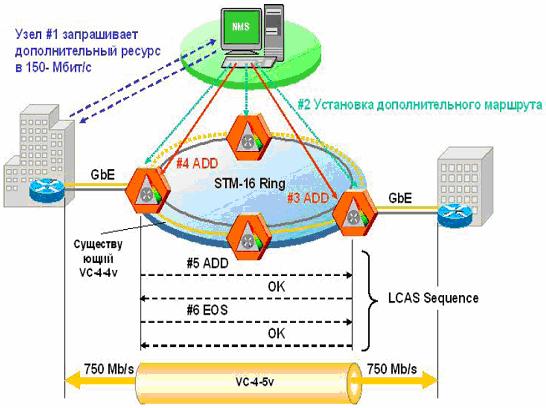
Рисунок 13.3 - Процедура LCAS
Совокупность трех новых подсистем: VCAT, GFP и LCAS формирует новое поколение технологии SDH – NGSDH.
Изменение отношения к SDH и новый взгляд на системы передачи.
Размах преобразования технологии SDH не может не считаться революционным. На наших глазах система SDH преобразуется из технологии первичной сети в технологию транспорта эпохи NGN.
Сейчас среди системщиков распространено мнение, что именно NGSDH вытеснит АТМ с рынка, объединив гибкость и популярность IP и Ethernet и стабильность, надежность и высокие показатели QoS SDH. Уже только по этой причине мы не можем игнорировать изменения в технологии SDH.
Как и всякий революционный процесс, NGSDH затрагивает все стороны технологии, в том числе и технологию измерений и эксплуатации систем передачи.
Сейчас, вспоминая более чем 10-летний опыт эксплуатации сетей SDH в мире, мы можем сказать, что отношение к SDH необратимо изменяется. Если раньше операторов интересовали показатели стабильности, процедуры самовосстановления внутри систем SDH, надежность работы системы передачи и показатели качества, то теперь на первый план выступает гибкость, способность к передаче разнородного трафика, оперативность реконфигурации и т.д.
Например, столь популярные в прошлом измерения по контролю реконфигурации сетей (анализ эффективности APS) вот уже пять лет никого не интересуют, поскольку все связное сообщество уже не сомневается, что система SDH любого производителя легко выйдет на резерв в течение отведенных ей 50 мсек. Стоит ли для этого обрывать канал на работающей системе и загружать байты К для последующего анализа? И действительно, ни на западе, ни у нас измерения APS вот уже 3-5 лет не актуальны. Вместо этого становится важной проверка правильности процессов VCAT, формирование корректных кадров GFP, сбор и обработка статистики по QoS на уровне GFP/SDH и т.д., о чем предыдущие поколения связистов и не помышляли.
Меняется и само понимание системы SDH. Во всех монографиях про SDH она до сих пор представлена как совокупность маршрутов разного уровня, своего рода транспортная колея, по которой туда-сюда бегут поезда. Теперь это совсем не та картина. NGSDH – это даже не фабрика каналов фиксированного размера, как недавно представляли любую первичную сеть.
Уже сейчас это гибкий ресурс со встроенной системой коммутации, до определенной степени гибкими каналами, протоколом LCAS оперативного формирования ресурсов и т.д.
И такое изменение в понимании, требованиях и ожиданиях от технологии неизбежно отразится на специфике эксплуатации, так что уже в ближайшие несколько лет технология измерений и эксплуатации сетей SDH должна будет пережить революционные изменения.
В полной мере мы не можем сейчас их представить, но можно составить методологию эксплуатационных измерений в общих чертах.
Список литературы
1. Транспортные сети и системы электросвязи. Системы мультиплексирования: Учебник для студентов по специальности «Телекоммуникации». / Под ред. В.К. Стеклова. – К., 2003. -352 с.
2. Тепляков И.М. Основы построения телекоммуникационных систем и сетей.- М.: Радио и связь, 2004. -328 с.
3. Шмалько А.В. Цифровые сети связи: основы планирования и построения. – М.: ЭКО-ТРЕНДЗ, 2001. - 284с.
4. Бакланов И.Г. Технологии измерений первичной сети. - М.: ЭКО-ТРЕНДЗ, 2000. - 143с.
5. Основы построения телекоммуникационных систем и сетей: Учебник для вузов/ ВВ Крухмалев и др. – М. Горячая линия – Телком. 2004. -510.
6. Крухмалев В.В., Гордиенко В.Н., Моченов А.Д. Цифровые системы передачи. – М.: Горячая линия – Телеком, 2007. -351с.
7. Цифровые и аналоговые системы передачи / В.И. Иванов и др. – М.: Радио и связь, 1995. – 232 с.
8. Левин Л.С., Плотник М.А. Цифровые системы передачи информации. - М.: Радио и связь, 1982. - 215с.
9. Скалин Ю.В., Берштеин А.Г., Финкевич А.Д. Цифровые системы передачи. –М.:Радио и связь, 1988. - 272с.
10. Проектирование и техническая эксплуатация систем передачи: Учеб. Пособие для вузов/В.В. Крухмалев, В.Н. Гордиенко, В.И. Иванов и др.; Под ред. В.Н. Гордиенко и В.В Крухмалев.-М.:Радио и связь, 1996.- 344 с.
11. Баева Н.Н. Многоканальная электросвязь и РЛЛ. - М.: Радио и связь, 1988. - 312 с.
12. Многоканальные системы передачи / Баева Н.Н. и др. – М.: Радио и связь, 1996.
13. Многоканальная электросвязь и РРЛ / Баева Н.Н. и др. – М.: Радио и связь, 1984.
14. Беллами Дж. Цифровая телефония. -М: Радио и связь, 1986. - 544с.
15. Слепов Н.Н. Синхронные цифровые сети SDH.- М.: ЭКО-ТРЕНДЗ, 1999. - 149с.
Содержание
|
Введение…..…………………………………………………………………... |
3 |
|
1 Лекция 1. Транспортные сети и их функции…………………………….. |
4 |
|
2 Лекция 2. Принципы систематизации транспортной сети по уровням… |
8 |
|
3 Лекция 3. Цифровые системы передачи в сетях связи. Цифровые методы модуляции …………………………………………………………… |
12 |
|
4 Лекция 4. Принцип частотного разделения и технология WDM………... |
16 |
|
5 Лекция 5. Принцип временного разделения сигналов (каналов) ВРК...... |
20 |
|
6 Лекция 6. Устройство эластичной памяти. Джиттер времени ожидания………………………………………………………………… |
24 |
|
7 Лекция 7. Плезиохронная цифровая иерархия…………………………… |
28 |
|
8 Лекция 8. Пассивные оптические сети (PON)…………………………… |
32 |
|
9 Лекция 9. Системы передачи с синхронной цифровой иерархией (SDH)…………………………………………………………………………... |
36 |
|
10 Лекция 10. Схема мультиплексирования SONET/SDH и базовые элементы………………………………………………………………………. |
40 |
|
11 Лекция 11. Топология сетей SDH………………………………………... |
44 |
|
12 Лекция 12. Современные системы NGSDH……………………………... |
48 |
|
13 Лекция 13. Конкатенация в сетях SDH и процедура VCAT……………. |
52 |
|
Список литературы…………………………………………………………… |
56 |