Коммерциялық емес акционерлік қоғам
АЛМАТЫ ЭНЕРГЕТИКИ ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ
«Электроника» кафедрасы
ЦИФРЛЫҚ ҚҰРЫЛҒЫЛАР ЖӘНЕ МИКРОПРОЦЕССОРЛАР
5B070400 – Есептеу техникасы және бағдарламалық қамтамасыз ету» мамандығы студенттері үшін курстық жұмыстарды орындауға арналған әдістемелік нұсқау
Алматы 2012
ҚҰРАСТЫРУШЫ: Амантаев К.О. Цифрлық құрылғылар және микропроцессорлар пәні бойынша 5B070400 – «Есептеу техникасы және бағдарламалық қамтамасыз ету» мамандық студенттері үшін курстық жұмыстарды орындауға арналған әдістемелік нұсқау – Алматы: АЭжБУ, 2012. – 17 б.
Әдістемелік нұсқауда құрастырушыға жазылған бағдарламаны кейінге қалдыруға және тексеруді жүзеге асыруына мүмкіндік беретін PIC және AVR симуляторының көмегімен өндірістегі микропроцессорлық жүйелерде басқарылатын параметрлердің технологиялық процесстерін басқарудың негізгі кезеңдерін жобалау болып табылады. Басқару параметрлерінің тұрақтылығы және басқару жүйесінің барлық кезеңіндегі технологиялық процесіндегі негізгі бағдарламаны қабылдау, цифрлау, өңдеу, сақтау және ақпаратты кескіндеу келтірілген. АЦТ және ЦАТ модулін пайдаланып, тіркеушілердің басқару параметрлерін бағдарламамен басқара отырып, оларды LCD-де кескіндеу арқалы USART модулінің көмегімен орталық процессорға жіберіп, параметрлерді тұрақтандыру және қадамдық қозғалтқышпен басқару мысалдары қарастырылды.
Әдістемелік нұсқау дәрістік мәліметтерді бекіту мақсатында құрылған және 5B070400 – «Есептеу техникасы және бағдарламалық қамтамасыз ету» мамандығында оқитын студенттерге арналған.
Без. 12, кесте. 5, әдеб.көрсеткіші – 6 атау.
Пікір беруші: тех.ғыл.д-ры, проф. Ш.А.Бахтаев
«Алматы энергетика және байланыс университеті» коммерциялық емес акционерлік қоғамының 2012 ж. баспа жоспары бойынша басылады.
© «Алматы энергетика және байланыс университеті» КЕАҚ, 2012 ж.
Кіріспе
Әдістемелік нұсқаулардың негізгі мақсаты, микроконтроллермен басқару жүйелерін әзірлеу бойынша студенттердің білімдерін бекіту және PIC ассемблер мен AVR-микроконтроллерлермен жабдықталған IDE симуляторында бағдарламалауды үйрену болып табылады.
Осы микроконтроллерлердің әрқайсысының өз ерекшеліктері, артықшылықтары және кемшіліктері бар. Микроконтроллерлердің екі типінің де артықшылықтарына, IAR Systems жоғары деңгейдегі бағдарламалау тілдері үшін компиляторларды әзірлеуші-фирмамен бірге жасалған команда жүйесі мен ядро архитектурасын жатқызуға болады. Нәтижесінде, C тілінде бағдарламалар жазу мүмкіншілігі пайда болады, бұл – бағдарламаларды әзірлеу мен өңдеу процессін оңайлатады әрі тездетеді.
Конвеерді қолдану АVR-дің көп артықшылықтарының бірі болды. Нәтижесінде АVR үшін машиналық цикл ұғымы жоқ болып кетті: командалардың көбі бір тактіде орындалады. Ал РIC микроконтроллері бір команданы 4 такт ішінде орындайды.
Бірақ командалар саны көбейіп кетті: AVR моделіне байланысты 90-нан 130-ға дейін, олардың 50-60 ғана бірегей, ал қалғандары өзара ауыспалы болып табылады.
PIC-пен салыстырғандағы АVR-архитектурасының ауқымды артықшылығы – 32 оперативті регистрінің бар болуында. Регистрлері тең хақылы емес, дегенменде біраз жағдайларда стекті пайдаланбауға және оперативті жадыны қолданбауға мүмкіншілік береді.
Сөйтіп, курстық жұмыс әзірлеушіге микроконтроллердің әртүрлі типтерінің қарапайым және әмбебап екеніне, және сұлбатехникасының аса қиын емес екендігіне көз жеткізуге мүмкіншілік береді.
Мақсаты
Әдістемелік нұсқаудың мақсаты - жазылған бағдарламаны кейінге қалдыруға және тексеруді жүзеге асыруына мүмкіндік беретін PIC және AVR симуляторының көмегімен өндірістегі микропроцессорлық жүйелер басқарылатын параметрлердің технологиялық процесстерді басқарудың негізгі кезеңдерін жобалау болып табылады. Басқару параметрлерінің тұрақтылыға және басқару жүйесінің барлық кезеңіндегі технологиялық процесіндегі негізгі бағдарламны қабылдау, цифрлау, өңдеу, сақтау және ақпаратты кескіндеу келтірілген. АЦТ және ЦАТ модулін пайдаланып, тіркеушілердің басқару параметрлерін бағдарламалық басқара отырып, оларды LCD-де кескіндеу арқылы USART модулінің көмегімен орталық процессорға жіберіп, параметрлерді тұрақтандыру және қадамдық қозғалтқышпен басқару мысалдары қарастырылды.
Әдістемелік нұсқаудың міндеті дәрістік мәліметтерді бекітуге және 5B070400 – «Есептеу техникасы және бағдарламалық қамтамасыз ету» мамандығында оқитын студенттерге арналған.
1 Тапсырма
Бірінші тапсырманы оқу тобының нөмірі тақ болған студенттер орындайды, ал екінші тапсырманы оқу тобының нөмірі жұп болған студенттер орындайды. Бірінші тапсырма үшін нұсқа келесі формуламен анықталады
![]() , (1.1)
, (1.1)
екінші тапсырма үшін
![]() , (1.2)
, (1.2)
мұнда N – оқу тобының тізіміндегі реттік нөмірі.
1.1 кесте – Тапсырмалардың нұсқалары
|
|
№ нұсқа |
|||||||||
|
1 тапсырма |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ нұсқа |
|||||||||
|
2 тапсырма |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
Мысалы, студент топ тізімінде N=7 болып енгізілсін. Ол бірінші тапсырманы орындайды (тақ нөмір), 4 нұсқа (1.1 формула бойынша).
1. Тақырып: «AVR ATMega32 сериялы микроконтроллер базасына негізделген сейфті ашу үшін кодпен басқарылатын электржетегінің сұлбасын модельдеу».
Бастапқыда LCD-да шақыру пайда болады: "ENTER CODE". Терілген код берілген кодпен сәйкес келсе, сағат тілі бойынша айналатын қозғалтқыш қосылады, LCD экранында "WELCOME" хабарламасы пайда болады. D түймесін (ақырғы ажыратқыш) басқан кезде қадамдық қозғалтқыш тоқтайды, LCD-дегі мәтін өшеді. Содан соң қозғалтқыш сағат тіліне қарсы бағытта айналады, LCD экранында "BYE-BYE" хабарламасы жазылады. Е түймесін (ақырғы ажыратқыш) басқан соң қозғалтқыш тоқтайды. Процесс үздіксіз жүреді, яғни бағдарлама бастапқы қалпына қайта оралады.
1.2 кесте – Пернетақта түймелерінің атаулары
|
0 |
1 |
2 |
3 |
|
4 |
5 |
6 |
7 |
|
8 |
9 |
A |
B |
|
C |
D |
E |
F |
1.3 кесте – Бірінші тапсырманың нұсқатары
|
№ нұсқа |
Код |
||
|
1 |
0 |
5 |
A |
|
2 |
2 |
5 |
8 |
|
3 |
1 |
5 |
9 |
|
4 |
4 |
5 |
6 |
|
5 |
1 |
6 |
B |
|
6 |
3 |
6 |
9 |
|
7 |
2 |
6 |
A |
|
8 |
5 |
6 |
7 |
|
9 |
C |
9 |
6 |
|
10 |
F |
A |
5 |
2. Тақырып: «PIC16F877 микроконтроллерін қолданып ауа жағдайын басқару сұлбасын модельдеу».
Берілген диапазоны: жоғарғы шегі 256-дан аспайды, ал төменгісі 0-ге тең. Аналогтық температура датчигі микроконтроллердің АЦТ каналымен жалғасқан. Рұқсатты шамадан асып кеткен кезде сағат тілі бойынша айналатын қозғалтқыш қосылады, ал температура төмендеп кеткен кезде сағат тіліне қарсы айналатын қозғалтқыш қосылады. Рұқсатты мәнімен теңескен кезде LCD экранында "NORMAL" жазуы жанады, асып кеткенде "HIGHER" және төмендегенде "LOWER". Процесс үздіксіз жүреді, яғни бағдарлама бастапқы қалпына оралады.
1.4 кесте – Рұқсатты температураның мәндері
|
№ нұсқа |
Рұқсат |
№ нұсқа |
Рұқсат |
|
1 |
18 |
6 |
38 |
|
2 |
22 |
7 |
42 |
|
3 |
26 |
8 |
46 |
|
4 |
30 |
9 |
50 |
|
5 |
34 |
10 |
50 |
1.5 кесте – АЦТ каналының нөмірі
|
№ нұсқа |
Канал |
№ нұсқа |
Канал |
|
1 |
7 |
6 |
2 |
|
2 |
6 |
7 |
1 |
|
3 |
5 |
8 |
0 |
|
4 |
4 |
9 |
5 |
|
5 |
3 |
10 |
4 |
Курстық жұмыстың мазмұны келесі тараулардан тұруы керек:
Тапсырма
Мазмұны
Кіріспе
1 IDE симуляторында жүйе моделін әзірлеу
1.1 АБЖ классификациясы
1.2 Жүйенің құрылымдық сұлбасы
1.3 Симулятордағы жүйе моделі
2 Модель симуляторының негізгі модульдері
2.1 Түймелі панель
2.2 АЦТ
2.3 Сұйықкристалды индикатор
2.4 Қадамдық қозғалтқыш
3 Жүйенің бағдарламамен қамтамасыз ету
3.1 Жүйенің жұмыс істеу алгоритмының блок-сұлбасы
3.2 Бағдарламаның листингі
Қорытынды
Әдебиеттер тізімі
Беттердің нөмірленуі тек кіріспе бөлімінен ғана басталады (астында – 14 шрифт) титулды парағын бірге қосса, яғни кіріспе нөмірі 4 т.с.с. Курстық жұмыстың көлемі 15 беттен аспауы тиіс.
2 IDE симуляторында жүйенің моделін әзірлеу
2.1 АБЖ-ның классификациясы
Басқару мәселесі – алға қойылған мақсатқа жету үшін басқару объектісінде өтіп жатқан порцестерді тиісті командалар көмегімен өзгерту.
Басқарудың түбегейлі принциптері:
- тұйықталмаған басқару принципі;
- компенсациялау принципі – өршу бойынша басқару;
- кері байланыс (КБ) принципі болып табылады.
Сөйтіп, автоматты басқару жүйесі (АБЖ) – бұл КБ принципіне негіздеп салыстыратын және басқару сигналдарын пайдаланатын, басқару айнымалыларының қажетті х(t) мен нақты у(t) мәндерінің арасындағы өзара келіспеушілігін (қателік) ε(t) рұқсат етілген шекарада сақтауға ұмтылатын жүйе.
Барлық басқару аралығында кіріс сигналы х(t) белгілі функция (детерминирленген сигнал) болатын болса, мұндай жүйе бағдарламалық басқару жүйесі деп аталады.
Бергіш кіріс сигналы х(t)=const болса, тұрақтандыру жүйесі деп аталады.
Егер жүйенің бергіш кіріс сигналы х(t) кездейсоқ функция болса, онда ол қадағалау жүйесі деп аталады. Тек бір ғана шығыс шамасын басқаратын жүйені, бірөлшемді деп атайды. Бірөлшемді жүйелер бағдарламамен басқару жүйелері, тұрақтандыру жүйелері және қадағалау жүйелері бола алады.
Осылардан басқа практикада келесі түрлері де пайдаланылады:
- сапа көрсеткішінің экстремумын іздейтін жүйе;
- оңтайлы басқару жүйесі;
- адаптивті жүйе;
- интеллектуалды жүйелер.
АБЖ-ны класс және істеу принциптері бойынша классификациялауға болады.
Дифференциал теңдеулер класстары бойынша:
Егер жүйе сызықты дифференциал теңдеулермен бейнеленсе, онда ол сызықты жүйе деп аталады, ал олай бейнеленбесе жүйе бейсызықтылар класына кіреді. Сызықты және бейсызықты дискретті жүйелер сәйкесінше сызықты және бейсызықты айырмалық теңдеулермен немесе айырмалық теңдеулер жүйелерімен бейнеленеді.
Сызықты және бейсызықты стационар жүйелер тұрақты коэффициенттері бар дифференциалдық теңдеулермен бейнеленеді, ал бейстационар жүйелер айнымалы коэффициенттері бар дифференциалдық теңдеулермен бейнеленеді.
Жинақталған жүйелер немесе параметрлері жинақталған жүйелер қарапайым дифференциалдық теңдеулермен бейнеленеді.
Таралған жүйелер немесе параметрлері таралған жүйелер дербес туындылы дифференциалдық теңдеулермен бейнеленеді.
Екі басқару заңы бар: шығыс шамасының ауытқуы бойынша және өршу бойынша.
Ауытқу бойынша АБЖ – Ползунов И.И. принципі, 1765 жылы ұсынған. Қазіргі таңда өнеркәсіптік АБЖ-дың 90%-ы қолданылады.
АБЖ-ның ауытқу бойынша артықшылығы берілген мәннен шығыс сигналының y мәнінің өзгеруіне әкеп соққан кез-келген өршу әсері ықпалының компенсациялауы болып табылады. Бұл өзгерісті датчик тіркеп отырады және бақыланатын параметрдің сигналы теріс кері байланыс (ТКБ) тізбегі арқылы салыстырушы құрылғысының кірісіне кіреді. Ол құрылғы реттеуішке баратын ауытқу сигналын ε = х - хос өндіреді, ал сосын орындаушы механизмге (ИМ) жібереді.
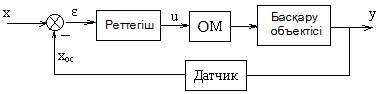
2.1 сурет – Ауытқу бойынша АБЖ құрылымдық сұлбасы
Ауытқу бойынша АБЖ – Ж.Понселе принципі, 1830 жылы ұсынылған. Егер f объектісіне деген өршу әрекеті болса, оны өлшейді және кіріс сигналының мәнін өзгертетін басқару сигналын өндіру және берілген мәнмен салыстыру үшін реттегішке береді (2.2 суретті қараңыз).
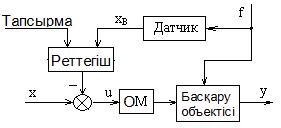
2.2 сурет – Өршу бойынша АБЖ құрылымдық сұлбасы
Басқарудың осындай принципінде өршу ықпалының өзгеруі объектінің технологиялық жұмыс режимін бұзғанға дейін реттегішпен компенсацияланады. Бірақ елеулі кемшілігі – басқа өршулік әсерлердің ықпалын компенсациялай алмауы.
Өршу бойынша АБЖ тұйық болып табылады, яғни шығыс сигнал бойынша кері байланысы жоқ.
Қосарланған АБЖ екі басқару заңын біріктіреді және қарастырылған сұлбалардың көптеген кемшіліктерінен айырылған.
Бергіштің шығыс сигналының өзгеру заңы бойынша стабилизациялық, бағдарламалық және қадағалаулық АБЖ түрлерін ажыратады.
Реттегішптің шығыс сигналының өзгеру заңы бойынша дискретті (екі-, үшпозициялы) және үздіксіз (аналогтық) АБЖ түрлерін ажыратады.
Екіпозициялы (қосу-өшіру) жүйелер сенімді (суық орнатылымдар), арзан, бірақ реттеу дәлдігі төмен.
Үшпозициялы (көп-норма-аз) жүйелердің сапасы жоғары, бірақ сенімділігі төмен.
Аналогтық жүйелерде реттегіштың шығыс сигналы белгілі стандартталған диапазонда уақыт бойынша үздіксіз өзгереді.
2.2 Жүйенің құрылымдық сұлбасы
2.2.1 Электржетегін кодпен басқарудың құрылымдық сұлбасы.
Кодпен басқару жүйесі тұйықталмаған болып табылады, яғни шығыс сигналы бойынша кері байланысы жоқ. Оның құрылымдық сұлбасы мынандай:
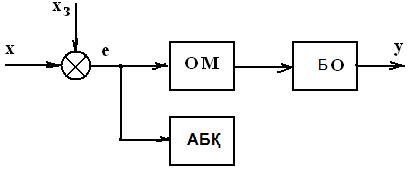
Х – кодтың ағымдық мәні; Хз – берілген код (рұқсат ету); ОУ – сейфтің есігі; ИМ – қадамдық қозғалтқыш; УОИ – сұйықкристалды индикатор.
2.3 сурет – Электржетегін кодпен басқарудың құрылымдық сұлбасы
2.2.2 Ауа басқарушының құрылымдық сұлбасы.
Беретін кіріс сигналы тұрақты, температураның автоматты тұрақтандыру жүйесі, шығыс сигналы y(t) бойынша теріс кері байланысты (ТКБ) тұйықталған жүйе болып табылады.
Климат-контрольдің құрылымдық сұлбасының көрінісі:
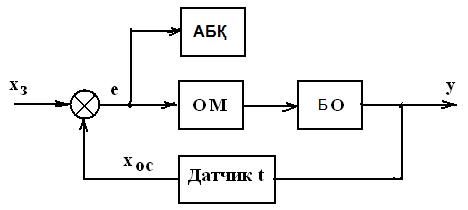
Хз – температураның берілген шамасы; У – бөлме ішіндегі температура; Хос – цифрлық температура датчигіндегі кері байланыс сигналы; ИМ – қадамдық қозғалтқыш; ОУ – кондиционер.
2.4 сурет – Ауа басқарушының құрылымдық сұлбасы
2.3 Симулятордағы жүйе моделі
2.3.1 Электржетегін кодпен басқару жүйесінің моделі.
ATMega32 микроконтроллері құрылымдық сұлбаға сәйкес (2.3 суретті қараңыз) келесі әрекеттерді орындайды:
- пайдаланушыдан келіп тұрған Х кодты бағдарламалық жолмен берілген Хз кодпен салыстыру – басылған түймені сұрау арқылы (Keypad Matrix модулі);
- қадамдық қозғалтқышты басқару (Stepper Motor Phase Simulation модулі);
- көрсету құрылғысына (LCD модулі) ақпарат беру.
Сонда жүйе моделі мынандай түрге ие болады:
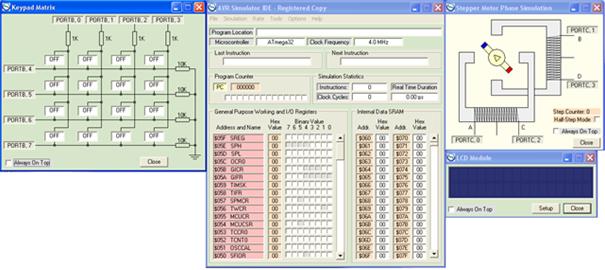
2.5 сурет – AVR Simulator IDE-дегі модель көрінісі
2.3.2 Ауа басқарушы жүйесінің моделі.
PIC16F877 микроконтроллері құрылымдық сұлбаға сәйкес (1.4 суретті қараңыз) келесі әрекеттерді орындайды:
- Хос температура датчигінің (Microcontroller View PIC16F877 модулі) цифрландырылған сигналымен Хз рұқсат етілген температураның берілген шамасын салыстыру;
- қадамдық қозғалтқышты басқару (Stepper Motor Phase Simulation модулі);
- көрсету құрылғысына (LCD модулі) ақпарат беру.
Сонда жүйе моделі мынандай түрге ие болады:

2.6 сурет – PIC Simulator IDE-дегі модельдің көрінісі
3 Модель симуляторының негізгі модульдері
3.1 Түймелі панель
Түймелі панель (Keypad Matrix модулі) немесе 4х4 өлшемді пернетақта бұрынғы қалпы бойынша (по умолчанию) В портына қосылған. Түймені басуды сұрау үшін порт шықпаларының бағытын өзгерту керек, ол үшін DDRB бағыт регистрін пайдалана отырып, шығысына порттың кіші байтын (РB0-РB3), ал кірісіне үлкен байтын (РB4-РB7) белгілейміз.

3.1 сурет – Keypad Matrix модулінің көрінісі
3.2 АЦТ
ATMega32 микроконтроллерінің аналог-цифрлық түрлендіргіші (АЦТ) модулінің А портты сегіз ADC0-ADC7 каналы бар.
АЦТ-ны басқару үшін микроконтроллердің 4 регистрі қолданылады:
- ADСH (үлкен байт) нәтижесінің регистрі;
- ADСL (кіші байт) нәтижесінің регистрі;
- ADCSRA басқару регистрі;
- ADMUX басқару регистрі.
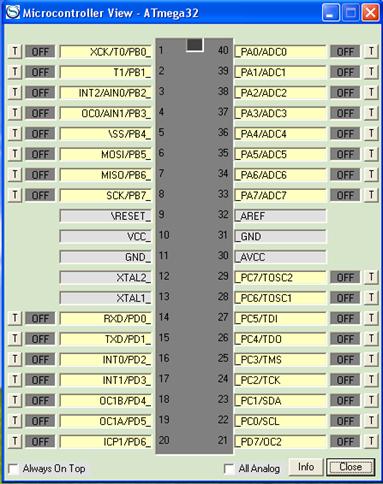
3.2 сурет – Microcontroller View ATMega32 модулінің көрінісі
ADCSRA регистрі АЦП модулінің жұмысын қалыпқа келтіру үшін пайдаланылады. Ал ADMUX регистрінің көмегімен нәтиженің түзетілу типі және АЦП модулімен қандай каналдарға пайдаланылатыны орнатылады.
3.3 Сұйықкристалды индикатор
Әдетте 8-биттік мәліметтер шинасы пайдаланылады және СКИ үшін жалпы алғанда 11 мәліметтер желісі (3 басқару желісі, 8 желі мәліметтер шинасы үшін) қажет болады.
Үш басқару (бақылау) желілері EN, RS, және R/W деп аталады.
EN желісі "Қосу" (Enable) деп аталады. Басқару желісі, сіздің мәліметтерді жіберетініңізді СКИ-ға хабарлау үшін пайдаланылады. LCD-ға мәліметтерді беру үшін, бағдарлама бұл желі төмен (0 орнатылған) екеніне илануы тиіс, ал содан соң басқа екі бақылау желілерін орнату керек және/немесе мәліметтерді мәліметтер шинасына орналастырыңыз. Қашан басқа желілер толығымен дайын болғанда, EN-ді жоғары (1 орнатылған) етіңіз және күте тұрыңыз, LCD мәліметіне қажетті (бұл LCD типіне тәуелді), ақырында оны 0-ге тағы бір рет келтіріңіз.
RS желісі “Регистр таңдау” (Register Select) желісі болып табылады. RS төмен (0) болғанда, мәліметтерді команда немесе арнайы инструкция (мысалы, экранды тазалау, меңзердың позициясы және т.б.) ретінде қарастыру керек. RS жоғары (1) болғанда, берілетін мәліметтер – ол мәтіндік мәліметтер, олар экранда көрініп тұрады. Мысалы, “T” әрпі экранда көрінуі үшін сіз RS жоғары (1) етіп орнатуыңыз қажет.
RW желісі – бұл “Оқу/жазу” (Read/Write) басқару желісі. RW төмен (0) болғанда, мәліметтер шинасының ақпаратсы СК-дисплейде жазылады. RW жоғары (1) болғанда, бағдарлама LCD түрінде сұрайды (немесе оқиды).
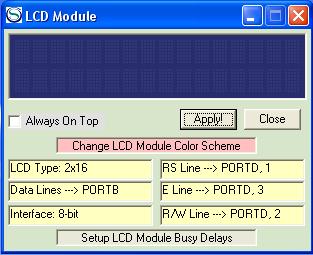
3.3 сурет – LCD модулінің көрінісі
3.4 Қадамдық қозғалтқыш
Қадамдық қозғалтқыш рұқсат түймелерін дұрыс терген жағдайда ғана іске қосылады.
Қадамдық қозғалтқыш (ҚҚ) – статор орамаларының біреуіне берілген ток роторда фиксациясын тудыратын, бірнеше орамалары бар щеткасыз электрқозғалтқыш. Қозғалтқыштың орамаларын тізбектей активациялау ротордың дискретті бұрыштық ығысуларын (қадамдар) туғызады. Симуляторда тұрақты магнитті төртфазалы қадамдық қозғалтқыш (ҚҚ) пайдаланылады.
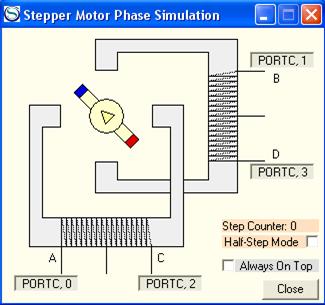
3.4 сурет – Stepper Motor Phase Simulation модулінің көрінісі
ҚҚ моделін ашу үшін Tools мәзірінің Stepper Motor Phase Simulation пунктін таңдау керек.
4 Жүйені бағдарламалық қамтамасыз ету
4.1 Электржетекті кодтық басқару алгоритмінің блок-сұлбасы
Бағдарлама келесі әрекеттерді орындауы тиіс.
Бастапқыда LCD-да шақыру пайда болады: "ENTER CODE". Пернетақтамен енгізілген код пен берілген код сәйкес келсе, сағат тілі бойынша айналатын қозғалтқыш қосылады, осы кезде LCD экранында "WELCOME" хабарламасы пайда болады. D түймесін (ақырғы ажыратқыш) басқан кезде қадамдық қозғалтқыш тоқтайды, LCD-дағы мәтін өшеді. Сосын қозғалтқыш сағат тіліне қарсы бағытта айналады, LCD экранында "BYE-BYE" хабарламасы жүреді. Е түймесін (ақырғы ажыратқыш) басқаннан кейін қозғалтқыш тоқтайды. Процесс үздіксіз, яғни бағдарлама бастапқы күйіне қайтып оралады.
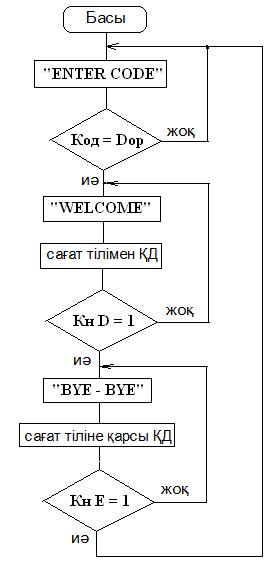
4.1 сурет – Электржетегін кодтық басқарудың алгоритмінің блок-сұлбасы
4.2 Электржетегін кодтық басқару бағдарламасының листингі
.ORG 0x000000
CLR R15
LDI R16,low RAMEND
OUT SPL,R16
LDI R16,high RAMEND
OUT SPH,R16
START:
; LCD Инициализация
CBI PORTD,3 ; тазалау PORTD,3=0
CBI PORTD,1 ; тазалау PORTD,1=0
CBI PORTD,2 ; тазалау PORTD,2=0
SBI DDRD,3 ; PORTD,3 - шығу
SBI DDRD,1 ; PORTD,1 - шығу
SBI DDRD,2 ; PORTD,2 - шығу
SER R16 ; R16=0xFF
OUT DDRA,R16 ; PORTA - шығу
LDI R24,0x02
LDI R25,0x00 ; R25,R24 ==0002 - 2 цикл
RCALL W001 ; п/п уақыттың кідірісі 1мс
……………….. және т.б.
4.3 Ауа жағдайын басқару жүйесі алгоритмінің блок-сұлбасы
Бағдарлама келесі әрекеттерді орындауы тиіс.
Рұқсатты шамадан асқан кезде сағат тіліне бағыттас айналатын қозғалтқыш қосылады, ал температура азайған кезде сағат тіліне қарама-қарсы бағытта айналатын қозғалтқыш қосылады. Рұқсатты теңдік кезінде LCD экранында "NORMAL" жазуы жанады, асып кеткен жағдайда "HIGHER", ал азайғанда "LOWER". Процесс үздіксіз, яғни бағдарлама бастапқы күйіне қайтып оралады.
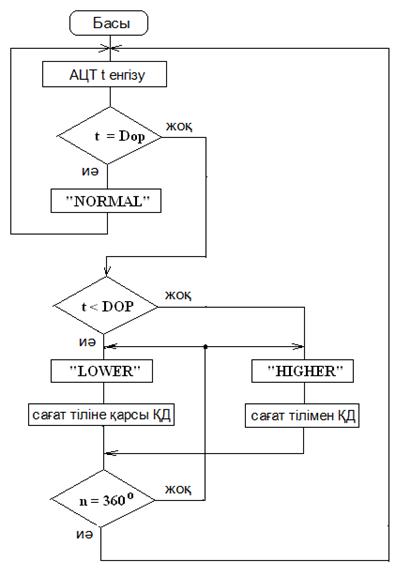
4.2 сурет – Ауа жағдайын басқару жүйесі алгоритмінің блок-сұлбасы
4.4 Ауа жағдайын басқару жүйесі бағдарламасының листингі
DOPUSK EQU 0x12
DVP EQU 0x01
R0L EQU 0x20
R0H EQU 0x21
R1L EQU 0x22
R1H EQU 0x23
R2L EQU 0x24
R2H EQU 0x25
R3L EQU 0x26
R3H EQU 0x27
R4L EQU 0x28
R4H EQU 0x29
ORG 0x0000
BCF PCLATH,3
BCF PCLATH,4
GOTO L0003
ORG 0x0004
RETFIE ; п\п-дан қайта үзу
L0003:
BSF STATUS,RP0 ; bank 1
………….. және т.б.
Әдебиеттер тізімі
1. Евстифеев А.В. Микроконтроллеры семейства Classic фирмы ATMEL. – М.: Додэка - ХХI, 2006. – 288 с.
2. Новиков Ю.В., Скоробогатов П.К. Основы микропроцессорной техники. – М.: БИНОМ. Лаборатория знаний, 2006. – 359 с.
3. Тавернье К. PIC–микроконтроллеры. – М.: ДМК Пресс, 2003. – 272 с.
4. Техническая документация. Однокристальные 8-разрядные FLASH микроконтроллеры. – М.: ООО «Микро-Чип», 2002. – 163 с.
5. Трамперт В. AVR-RISC микроконтроллеры. – К.: МК-Пресс, 2006. –464 с.
6. Ревич Ю.В. Практическое программирование микроконтроллеров Atmel AVR на языке ассемблера. – СПб.: БХВ-Петербург, 2011. – 352 с.
7. Вальпа О. Полезные схемы с применением микроконтроллеров и ПЛИС(+СД).- М.: Изд.дом «Додэка-ХХ1», 2006. – 416 с.
8. Казначеев В. Микросхемы для управления электродвигателями. – М.:Додэка, 1999. – 288 с.
9. Шпак Ю.А. Программирование на языке С для AVR и PIC микроконтроллеров. – СПб.: КОРОНА-ВЕК, 2011. – 544 с.
10. Юров В.И. Assembler.- СПб.: Питер, 2007. – 637 с.
Мазмұны
|
1 Кіріспе |
3 |
|
2 Мақсаты |
3 |
|
3 Тапсырма |
4 |
|
4 IDE симуляторында жүйенің моделін әзірлеу |
6 |
|
5 АБЖ классификациялау |
6 |
|
6 Жүйенің құрылымдық сұлбасы |
8 |
|
7 Симулятордағы жүйе моделі |
9 |
|
8 Модель симуляторының негізгі модульдері |
11 |
|
9 Түймелі панель |
11 |
|
10 АЦТ |
11 |
|
11 Сұйықкристалды индикатор |
12 |
|
12 Қадамдық қозғалтқыш |
13 |
|
13 Жүйенің бағдарламалық қамтамасыздандырылуы |
14 |
|
14 Электржетекті кодтық басқару алгоритмінің блок-сұлбасы |
14 |
|
15 Электржетегін кодтық басқару бағдарламасының листингі |
15 |
|
16 Ауа жағдайын басқару жүйесі алгоритміның блок-сұлбасы |
16 |
|
17 Ауа жағдайын басқару жүйесі бағдарламасының листингі |
17 |
|
Әдебиеттер тізімі |
18 |
2012 ж.жинақ жоспар, реті 173