АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС ИНСТИТУТЫ
Электроника кафедрасы
БАСҚАРУ ТЕОРИЯСЫНЫҢ НЕГІЗДЕРІ
5B0704 – Есептеу техникасы және бағдарламалы камтамасыздандыру
мамандығының студенттері үшін
зертханалық жұмыстарды орындауға арналған әдістемелік нұсқаулар
Алматы 2010
ҚҰРАСТЫРУШЫЛАР: Б.С.Байкенов, О.Т. Шанаев. Басқару теориясының негіздері. 050704 – Есептеу техникасы және бағдарламалы камтамасыздандыру мамандығының студенттеріне үшін зертханалық жұмыстарды орындауға арналған әдістемелік нұсқаулар. – Алматы: АЭжБИ, 2010. – 34 б.
Әдістемелік нұсқаулар Казахстан Республикасының Білім және ғылым министрлігі бекіткен Қалыптамалық оқу бағдарламасына сәйкесті және мамандықтың квалификациялық сипаттамасы мен Мемлекеттік стандарттардың талаптарына зертханалық жұмыстардың ұйымдастырылуы мен жүргізілуінің педагогикалық-психологиялық негіздеріне сай құрылған. Олар студенттерді, автоматты басқару жүйелерін зерттеуге пайдаланылатын, визуалды VisSim математикалық моделдеу бағдарламасымен таныстыруға арналған.
Әдістемелік нұсқауларда ажыратылған және тұйық жүйелердің құрылым схемаларын қарапайымдалау, уақыттық және жиіліктік сипаттамаларын анықтау және берілген реттелім көрсеткіштеріне сай үздіксіз басқару жүйелерін талдау мен құрудың негізгі тәсілдері баяндалған. Цифрлық және қисықты жүйелерді талдау мен құру және олардың тиянақтылығын анықтау мәселелері де қамтылған.
Әдістемелік нұсқаулар дәріс материалдарын бекіту және басқару теориясын автоматты басқару жүйелерін инженерлік жобалау үстінде қолдану мақсатында құрастырылған.
Кіріспе
Әдістемелік нұсқаулардың негізгі мақсаты студенттердің автоматикалық басқару жүйелерін құру мен жобалу жөніндегі теориялық білімдерін тиянақтап бекіту және оларды іс жүзінде жасауға қажетті мүмкіндіктерін қалыптастыру. Берілген сипаттамалары арқылы элементтер таңдау, таңдап алынған басқару тәртібіне сәйкесті құрылым сұлбасын құру қағидаларын орындау, жүйе тұрақтылығын талдау әдістерін пайдалану, жүйенің жиіліктік және уақыттық сипаттамаларын анықтау сияқты күрделі мәселелерді шешу үшін визуалды математикалық моделдеу бағдарламасы VisSim пайдаланылды.
VisSim жүйесінің аталымы Visual Simulation – визуалды симуляциялау немесе визуалды моделдеу деген сөз құрамасынан алынған, оны Visual Solution Inc фирмасы құрған. VisSim жүйесі сызықты және қисықты, үздіксіз және дискретті, бірөлшемді және көпөлшемді түрлерінен тұратын әртүрлі жүйелерді моделдеуге арналған.
Бағдарлама мәзірінің Blocks бөлімі мен аспаптар панелінде келтірілген блоктар қорының құрамы:
1. Animation – animate, lineDrow;
2. Annotation – comment, date, label, variable және т.б.;
3. Arithmetic – 1/x, -x, *, /, abs, gain, pow, sign, summingJunction ;
4. Boolean (алгебра логики)- >, <, ==, =>, <=, and, or, not, xor;
5. DDE (бағдарламалар арасындағы байланыс);
6. Integration (жинақталым) – integrator, limitedIntegrator, resetIntegrator;
7. Linear system – stateSpase, transferFunction;
8. Non linear (қисықты жүйелер) case, crossdetect, deadband, limit, max, min, merge, relay;
9. Optimization – constraint, cost, unknown, parameterunknown;
10. Random Generation (кезлейсоқ сандар генераторы) – gaussian, uniform, PRBS;
11. Real Time (іс жүзіндегі уақыт);
12. Signal Consumer (шығыс сигналын бейнелеу блоктары) – display, plot, meter, histogram, stripChart;
13. Signal Producer (кіріс сигналдары) – const, ramp, step, sinusoid, parabola;
14. Time Delay (кідірім уақыты) – timeDelay, unitDelay;
15. Transcendental (функциялар) – sin, cos, exp, ln, log10, tan, atan2, asin, acos;
16. Embed – пайдаланылмайды.
Моделдеу жүйесінің мүмкіндіктері:
- блок параметрлерін өзгерту;
- моделдеу параметрлерін және жинақтау алгоритмін өзгерту;
- кіріс және шығыс сигналдарының мәндерін информацияны бейнелеу құрылғылары арқылы бақылау.
Моделдеу кезінде VisSim бағдарламасы блок-диаграмма құрамындағы теңдеулерді берілген шекті кеңістікте бекітілген қадамда санды түрде интегралдайды. Кеңістік басы мен соңы, шаг интегралдау қадамы және интегралдау тәсілі, мәзірдің Edit терезесінде сәйкесті параметрлерін Simulation Properties командасымен көрсету арқылы қойылады.
Блок параметрлерінің бастапқы мәндері мен интегралдау тәсілі моделдеуге жіберу мезетінен бұрын жүгіртпектің оң жақ түймесімен (ЖОТ) шақырылатын Block Properties диалог терезесінде қойылады.
VisSim бағдарламасында дифференциалды және айырымдық теңдеулерді санды интегралдауға әртүрлі әдістер пайдаланылады: Эйлер, трапецилар, 2-, 4- және 5-дәрежелі Рунге-Кутт, адаптивті Булич-Стоер және кері Эйлер алгоритмі. Жұмыс басында, жылдамдығы мен дәлдігі жағынан қанағаттандындырарлық, сөзсіз 2-дәрежелі Рунге-Кутт әдісі пайдаланылады.
VisSim бағдарламасы аса даму жағдайында, құрушылардың www.vissim.com сайтында оның VisSim 6.0 версиясы мен автоматика жүйелеріне арналған Vissim – Add Ons кеңейтпе бумасы және телекоммуникация мен байланыс жүйелеріне арналған VisSim/Com бумасы қойылған.
1 зертханалық жұмыс. Күрделі жалғанымды буынды жүйелерді моделдеу
1.1 Жұмыс мақсаты:
- буындары параллель-тізбе және параллель-қарсы жалғанған жүйелерді зерттеу;
- басқару және бұзбалау әрекеттері қамтылған ажыратылған және тұйық жүйелердің жіберім функцияларын (ЖФ) анықтау жолдарын игеру.
1.2 Жұмыс тапсырмасы
1.2.1 Бұзба әрекетінсіз тұйық жүйенің жіберім функциясын зерттеу
1.2.1.1. Күрделі жалғанымды буынды жүйені моделде.
Буындардың ЖФ-ның мәндері: W1 = 2; W2 = 3; W3 = 1/(0.1s + 1); W4 = 1/(0.2s + 1); W5 = 2; W6 = 1/s.
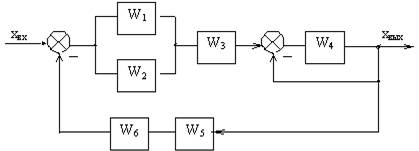
1.1 Сурет. Буындары күрделі жалғанған жүйенің АБЖ
Мәзірден блоктарды 1.1-суретке сәйкесті қойып, оларды өзара жалға, ол блок шығысын келесісінің кірісіне дейін ЖОТ арқылы созып жүзеге асырылады.
Const блогының параметрлерін қою үшін бағыттаушыны әрбір блокқа қойып, ЖОТ арқылы Const Properties терезесі шығады, онда 2 и 3 мәндерін қой.
Буынның ЖФ-сы бағдарлама мәзірінен Blocks – Linear System – Transfer Function тәртібінде жүгіртпектің сол жақ түймесімен (ЖСТ) шығарылады.
ЖФ блогының параметрлері бағыттаушыны блокқа бағыттап, ЖОТ арқылы жүзеге асырылады. Блок терезесінде:
- Polynomial айқында;
- Numerator (алымы) – 1 санын қой;
- Denominator (бөлімі) – сөзқуыс түймесі s әрпін қоятын етіп бастан анықталған, “+” белгісі қойылмайды. Мысалы, бөлімдегі 0.1s + 1 теңдеуін жазу үшін тізбелеп 0.1-сөзқуыс-1 теру керек;
- Gain – күшейту коэффициенті;
- ОК бас.
Plot (осциллограф) блогының параметрлері Plot properties терезесінде қойылады:
- Fixed Bounds жандандыр (ЖСТ арқылы белгі қой);
- Axis түймесін бас;
- У Upper Bound терезесінде 2 санын енгіз (У бойынша жоғарғы шек);
- У Lower Bound терезесінде -1 санын енгіз (У бойынша төменгі шек);
- Х Upper Bound терезесінде 3 санын енгіз (Х бойынша жоғарғы шек).
1.2 Сурет. Тұйық жүйенің үрдіс үдемесінің қисығы
1.2.1.2. Жүйенің балама сұлбасын моделде.
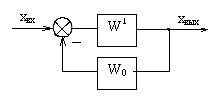
1.3 Сурет. АБЖ-ның балама сұлбасы
1.4 Сурет. Жүйенің балама сұлбасының үрдіс үдемесінің қисығы
1.2.1.3. Тұйық жүйенің ЖФ-сын анықтап, үрдіс үдемесінің қисығын ал.
1.5 Сурет. Тұйық жүйенің үрдіс үдемесінің қисығы
Ауысу үрдісінің алынған сызбаларынан жүйенің және оның балама сұлбасының ЖФ-сы бірдей екендігі көрініп тұр.
1.2.2 Бұзба әрекетті тұйық жүйенің ЖФ-сын зерттеу
1.2.2.1. 1.6-суретте көрсетілген сұлбаны моделдеп, келесі жағдайлардағы үрдіс үдемесінің қисығын ал:
- f = 1 тұрақты бұзба әрекетінде;
- хкір = 1 тұрақты кіріс сигналында.

1.6 Сурет. Бұзба әрекетті тұйық жүйенің құрылым сұлбасы
Буын параметрлері 1.1-кестеде көрсетілген.
1.1 К е с т е. Тұйық жүйенің параметрлері
|
Нұсқа |
k |
Т1 |
Т2 |
|
1 |
2 |
0.2 |
0.3 |
|
2 |
5 |
0.8 |
0.1 |
|
3 |
8 |
0.9 |
0.2 |
|
4 |
10 |
0.3 |
0.8 |
|
5 |
4 |
0.4 |
0.5 |
|
6 |
7 |
0.1 |
0.6 |
1.3 Есептесім мазмұны
- жұмыс мақсаты;
- буындар мен жүйелердің ЖФ-ның өрнектері;
- 1.2.1- және 1.2.2-тараудағы моделдеу сұлбалары мен сызбалар;
- қорытындылар.
1.4 Тексерім сұрақтары
1. Тізбекті және параллель буындардың ЖФ-ның айырмашылықтары қандай?
2. Тұйық жүйенің бастау әрекетіне байланысты ЖФ-сы қандай?
3. Тұйық жүйенің бұзба әрекетіне байланысты ЖФ-сы қандай?
4. Бақылау жүйесінің ЖФ-сы қандай?
5. Ауытқу бойынша реттеудің артықшылықтары мен кемшіліктері қандай?
6. Бұзба бойынша реттеудің артықшылықтары мен кемістіктері қандай?
2 зертханалық жұмыс. Қалыпты буындардың динамикалық сипаттамаларын зерттеу
2.1 Жұмыс мақсаты:
- автоматты басқару жүйесінің қалыпты буындарының уақыттық және жиіліктік сипаттамаларын зерттеу.
2.2 Жұмыс тапсырмасы
2.2.1 Қарапайым буындардың уақыттық сипаттамаларын анықтау
2.2.1.1. Пропорционал буынның W(s) = k, k = 3 кезіндегі сұлбасын жина (2.1-сурет).
step блогы, h(t) жүйесінің ауысым сипаттамасын алуға арналған бұзба әрекет ретінде жиі пайдаланылатын, үрдіс үдемесінің қисығы деп аталатын, бірлік саты функциясын тудырады. Блок жұмысы
y = Am 1(t – td)
өрнегіне сәйкес келеді, бұндағы 1(t – td) – бірлік саты функциясы; t – кезекті моделдеу уақыты (іс жүзіндегі уақытпен шатыстырма); td – сатының кідіріс уақыты; Am – саты амплитудасы.
2.1 Сурет. Пропорциональ буынның ауысым сипаттамасы
2.2.1.2. Интегралдаушы W(s) = k/s буынының k = 2 кезіндегі сұлбасын жина (2.2-сурет).
2.2 Сурет. Интегралдаушы буынның ауысым сипаттамасы
Аспаптар тақтасында орналастырылған step блогы мен 1/s интегратор блогын енгізіп, оларды өзара дұрыс жалғау керек (ЖСТ арқылы step блогының шығысын 1/s блогының кірісіне). Бұдан кейін, Plot блогын енгізіп, оның параметрлерін қой:
- бағыттаушыны Plot блогына қойып, ЖОТ арқылы Plot properties диалог терезесін шығар;
- Fixed Bounds жандандыр (ЖСТ арқылы белгі қой);
- Axis түймесін бас;
- Y Upper Bound терезесінде 40 санын қой (Y бойынша жоғарғы шек);
- X Upper Bound терезесінде 40 санын қой (X бойынша жоғарғы шек).
Сосын интегратор блогының шығысын Plot блогының кірісіне жалға (кіріс түсі сызба түсін білдіреді).
Simulate блогының мәзірінде интегралдау қадамы мен әдісін қою үшін Simulation Properties командасын таңда:
- Range алқабында Start = 0 қой;
- Range алқабында Step Size = 0.01 қой;
- Range алқабында параметр End = 40 қой;
- Integration Method алқабында алгоритм таңда.
Жұмыс басында сөзсіз 2-дәрежелі Рунге-Кутт әдісі таңдалады.
2.2.2 1-дәрежелі буындардың уақыттық сипаттамаларын анықтау
2.2.2.1 Инерциалы W(S) = k/(TS + 1) буынының k = 2, T = 5с кезіндегі сұлбасын жина (2.3-сурет).
2.3 Сурет. Инерциалы звена 1-дәрежелі буынның сұлбасы
Буынның ЖФ-сы Blocks – Linear Systems – Trasfer Function мәзірінен шығарылады (ЖСТ арқылы).
Буынның ЖФ-ның коэффициенттерін қой:
- Бағыттаушыны ЖФ блогында қойып, оны ЖОТ арқылы белгіле;
- Polynomial айқында;
- Numerator (алымы) – қажетті санды тер;
- Denominator (бөлімі) – сөзқуыс түймесі s әрпін анықтайды, “+” белгісі қойылмайды. Мысалы, бөлімдегі 10s2 + 2s + 1 теңдеуін жазу үшін тізбелеп 10-екі сөзқуыс-2-сөзқуыс-1 теру керек;
- Gain – күшейту коэффициенті;
- ОК бас.
Бұрын Simulate блогында таңдалған интегралдау әдісі мен қадамын өзгеріссіз қалдыруға болады.
plot блогының Y Upper Bound терезесінде 1 санын қой (Y бойынша жоғарғы шек);
2.2.2.2 Инерциалы-дифференциалды W(s) = ks/(Ts + 1) буынының k = 10, T = 5с кезіндегі сұлбасын жина (2.4-сурет).

2.4 Сурет. Инерциалы-дифференциалды буынның үрдіс үдемесінің қисығы
2.2.3 2-дәрежелі буындардың уақыттық сипаттамаларын анықтау
2.2.3.1.
2-дәрежелі периодсыз ![]() буынының к = 2, Т1 =
0,2с, Т2 = 0,3с кезіндегі сұлбасын жина (2.5-сурет).
буынының к = 2, Т1 =
0,2с, Т2 = 0,3с кезіндегі сұлбасын жина (2.5-сурет).
2.5 Сурет. Периодсыз 2-дәрежелі буынның үрдіс үдемесінің қисығы
2.2.3.2. Тербелмелі W(s) = k./(T2 s2 + 2ξTs +1) буынының k = 2, T = 3,16c, ξ = 0,316 кезіндегі сұлбасын жина (2.6-сурет).

2.6 Сурет. Тербелмелі буынның үрдіс үдемесінің қисығы
2.2.3.3. Консервативті W(s) = k./(T2 s2 +1) буынының k = 2, T = 1c, ξ = 0 кезіндегі сұлбасын жина (2.7-сурет).
2.7 Сурет. Консервативті буынның үрдіс үдемесінің қисығы
2.2.4 Ерекше буындардың уақыттық сипаттамаларын анықтау
2.2.4.1. 1-дәрежелі минималсыз-фазалық W(s) = k./(Ts - 1) буынының k = 2, T = 5c кезіндегі сұлбасын жина (2.8-сурет).
2.8 Сурет. Минималсыз-фазалық буынның үрдіс үдемесінің қисығы
2.2.4.2.
Кідірмелі ![]() буынының сұлбасын
жина (2.9-сурет).
буынының сұлбасын
жина (2.9-сурет).
Кідіріс блогы ![]() Blocks – Time Delay – timeDelay
мәзірінде орналасқан, оның кідірім уақыты блок кірісіне
жалғанатын const блогы арқылы шығарылады (2.9-сурет).
Blocks – Time Delay – timeDelay
мәзірінде орналасқан, оның кідірім уақыты блок кірісіне
жалғанатын const блогы арқылы шығарылады (2.9-сурет).
2.9 Сурет. Кідірмелі буынның үрдіс үдемесінің қисығы (τз = 1с)
2.1 Есептесім мазмұны
- жұмыс мақсаты;
- қысқаша теориялық мәліметтер;
- қалыпты буындардың сұлбалары мен үрдіс үдемесінің қисықтары;
- қорытындылар.
2.2 Тексерім сұрақтары
1. Үрдіс үдемесі деген не?
2. Жіберім функциясы деген не?
3. АФЖС қалай салынады?
4. АЖС мен ФЖС ерекшелігі неде?
5. Ауысым сипаттамасы мен импульстік сипаттаманың ерекшелігі неде?
6. Статикалық және динамикалық сипаттамалардың ерекшелігі неде?
3 зертханалық жұмыс. Сызықты жүйелердің тиянақтылығын Михайлов шартнамасы бойынша зерттеу
3.1 Жұмыс мақсаты:
- тұйық жүйенің жіберім функциясының полюстерінің жүйенің тиянақтылығына және Михайлов годографына әсерін зерттеу.
3.2 Жұмыс тапсырмасы
3.2.1 Тұйық жүйелердің ауысым сипаттамаларын анықтау
3.2.1.1. Параметрлері берілген тұйық жүйенің сұлбасын жинап, оның ауысым сипаттамасын шығар (3.1-сурет).
3.1 Сурет. Тұйық жүйенің ауысым сипаттамасы (3.2.1.1.)
3.2.1.2. Есептеу жолымен тұйық жүйенің ауысым сипаттамасын шығарып, оның сұлбасын жина (3.2-сурет).
3.2 Сурет. Тұйық жүйенің ауысым сипаттамасы (3.2.1.2.)
3.2.2 Михайлов қисығын зерттеу
3.2.2.1. Сипаттамалық теңдеудің нақты және жалған бөліктерін есептеп, Михайлов қисығын салуға арналған сұлба жина (3.3-сурет).
Тұйық жүйенің сипаттамалық теңдеуінің түрі
0,06s3 + 0,5s2 + s + 1 = 0
s = jω ауыстырымы арқылы Михайлов функциясының нақты және жалған бөліктерін аламыз
Real = X = a0 – a2ω2 = 1 – 0,5 ω2 және Im = Y = a1ω – a3ω3 = ω – 0,06ω3.
ramp блогы арқылы ω жиілігін 0 мен ∞ арасында өзгерте отырып, Михайлов қисығын аламыз (3.3-сурет). pow блогының қасиеттер терезесінде қажетті дәреже қойылады: 2 немесе 3.
3.3 Сурет. Тұйық жүйенің Михайлов қисығы
3.2.2.2. .1-суретте келтірілген тұйық жүйенің тура арнасына уақыт тұрақтысы Т3 және күшейту коэффициенті К инерциалы буын қос.
3.2.2.3. Буын параметрлері 3.1-кестеде көрсетілген тұйық жүйе үшін Михайлов годографын сал.
3.1 К е с т е. Жүйе параметрлері
|
Нұсқа № |
1 |
2 |
3 |
4 |
5 |
6 |
|
К |
4 |
6 |
8 |
1 |
3 |
6 |
|
Т1 |
0,6 |
0,3 |
0,9 |
0,2 |
0,5 |
0,7 |
|
Т2 |
0,2 |
0,5 |
0,3 |
0,8 |
0,3 |
0,7 |
|
Т3 |
0,3 |
0,8 |
0,2 |
0,5 |
0,9 |
0,3 |
3.1 Есептесім мазмұны
- жұмыс мақсаты;
- қысқаша теория;
- жүйе сұлбасы мен оның ауысым сипаттамасы (үрдіс үдемесінің қисығы);
- Михайлов годографы;
- қорытындылар.
3.2 Тексерім сұрақтары
1. Михайлов шартнамасының мағынасы неде?
2. ω жиілігінің –∞ мен +∞ арасындағы өзгерісінде (jω – рm) векторы қандай бұрышқа бұрылады?
3. Теріс полюстер қосылғанда годограф қалай өзгереді?
4. Оң полюстер қосылғанда годограф қалай өзгереді?
5. Михайлов қисығының бітер квадранты нені анықтайды?
6. Михайлов шартнамасының әрекет нәтижесі неде?
4 зертханалық жұмыс. Жүйелердің тиянақтылығын Найквист шартнамасы бойынша зерттеу
4.1 Жұмыс мақсаты:
- АЖС мен ФЖС анықтау жолдарын игеру;
- жүйе тиянақтылығын Найквист шартнамасына байланысты анықтау;
- жүйе тиянақтылығын САЖС түріне қарай анықтау.
4.2 Жұмыс тапсырмасы
4.2.1 Берілген тұйық жүйені құрып, оның К = 0,5 және К = 6,1 кезіндегі үрдіс үдемесінің қисығын шығар.

4.1 Сурет. Тиянақты тұйық жүйенің үрдіс үдемесінің қисығы (К = 0.5)
Тұрақты сигнал генераторы slider бағдарлама мәзірінің Blocks-Signal producer-slider блогында орналасқан. Сұлбада ол АБЖ-нің реттеушісінің қызметін атқарады.
4.2 Сурет. Тиянақсыз тұйық жүйенің үрдіс үдемесінің қисығы (К = 6.1)
4.2.2 Ажыратылған жүйенің К = 0,5 кезіндегі АЖС мен ФЖС-ын шығар.
Ол үшін амплитуда мен фаза арасындағы қатынасты өлшеу үшін Diagrams-Toolbox-Tools-Magnitude Phase мәзіріндегі mag_has блогы керек. Сосын оның көшірімін алып, оны негізгі сұлбаның терезесіне орналастыру керек (ЖСТ арқылы Edit-Copy анықтап, Magnitude Phase терезесін жап). Негізгі бағдарламаның терезесінде mag_has блогын енгіз (Edit-Paste арқылы). Sin блогында амплитудаға 1 және Td = 0,5 с қойып, онда жиілікті өзгерте отырып, өлшенген A(ω) и φ(ω) мәндерін кесте түрінде жазып ал. Амплитудалар қатынасы (жоғарғы индикатор көрсетімі) 1 болатын жиілікті ұстау қажет.

4.3 Сурет. Ажыратылған жүйенің АЖС мен ФЖС (f = 1.6 рад/с)
4.2.3 Ажыратылған жүйенің К = 6.1 кезіндегі АЖС мен ФЖС-ын шығар.
4.3 Есептесім мазмұны
- жұмыс мақсаты;
- қысқаша теория;
- тұйық жүйенің құрылым сұлбасы;
- тұйық жүйенің АЖС мен ФЖС-ы;
- тиянақты және тиянақсыз жүйелердің СФЖС-ы;
- қорытындылар.
4.4 Тексерім сұрақтары
1. Тиянақтылықты СФЖС арқылы анықтау негізінде қандай шарт жатыр?
2. Кесілім жиілігі деген не?
3. Бірінші түрдегі АФС-лы жүйелердің тиянақтылық шарттарын келтір.
4. Екінші түрдегі АФС-лы жүйелердің тиянақтылық шарттарын келтір.
5. Кідірімді буынның ЖФ-ы қандай болады?
6. Кідірімді жүйенің шектемелік жиілігі ωкр деген не?
5 зертханалық жұмыс. Жүйелердің реттелу дәрежесін зерттеу
5.1 Жұмыс мақсаты:
- реттелу көрсеткіштері берілген жүйенің тиянақтылығына П-реттеуіштің параметрінің әсерін зерттеу.
5.2 Жұмыс тапсырмасы
6.2.1 Жүйенің берілген құрылым сұлбасын моделдеп, бұзба әрекетінің жоқ кезіндегі (f = 0) оның ауысым процесінің сызбалары ε(t) мен үрдіс үдемесінің қисығын h(t) берілген сапа көрсеткіштерімен шығар (5.1-сурет).

5.1 Сурет. Жүйе моделі (Кp = 1.9, f = 0)
6.2.2 Бұзба әрекеті f = 1 кезіндегі жүйе моделінің ауысым процестерінің сызбалары ε(t) мен үрдіс үдемесінің қисығын h(t) шығар (5.2-сурет).

5.2 Сурет. Ауысым процесі мен үрдіс үдемесінің қисықтары (f = 1)
5.2.1 Жүйе моделін пайдаланып, бұзба әрекет f = 1 кезіндегі оның ауысым процестерінің сызбалары ε(t) мен үрдіс үдемесінің қисығын h(t) берілген сапа көрсеткіштерімен шығар.
5.2.2 slider блогы арқылы Кр мәнін өзгерте отырып, бұзба әрекет f = 1 кезінде тиянақтылық шегінде тұрған жүйенің ауысым процестерінің сызбалары ε(t) мен үрдіс үдемесінің қисығын h(t) шығар (5.3-сурет).
5.3 Сурет. Тиянақтылық шегінде тұрған жүйенің моделі
5.2.3 Тұрақты бұзба әрекет х = 1 кезіндегі тиянақты жүйенің ауысым процестерінің сызбалары R(t) мен үрдіс үдемесінің қисығын h(t) берілген сапа көрсеткіштерімен шығар (5.4-сурет).
5.4 Сурет. Ауысым процесінің сызбасы мен үрдіс үдемесінің қисығы (R(t),х = 1)
Берілім кезіндегі және бұзба әрекет кезіндегі ауысым процестерінің едәуір ерекшелігі бар (5.1- және 5.4-суреттерге сәйкесті). Біріншісі алдыңғы тиянақталған мәнінен (шартты түрде нөл деп алынатын) жаңа тиянақты мәніне ұмтылады. Бұзба әрекет f кезіндегі ауысым процестері, реттеуші астатикалық жүйеде сыртқы бұзбаны толықтай немесе статикалық жүйеде σст дәлдігімен теңестіруі керек болғандықтан, бұрынғы тиянақталған мәніне ұмтылу керек.
Барлық моделде де, диаграмма блоктарын
ыңғайлы орналастыруға мүмкіндік беретін, жалғаныс
бекіту блогы wirePositioner
пайдаланылады. Бұл блок ![]() Blocks
- Annotation – wirePositioner мәзірінде орналасқан.
Blocks
- Annotation – wirePositioner мәзірінде орналасқан.
Бұл моделдерде пайдаланылатын тағы бір блок – тұрақты сигнал шығаратын және оның мәнін реттеуіш жылжытқышымен (ЖСТ арқылы) өзгертуге болатын, slider блогы. slider блогы Blocks – Signal Producer – slider мәзірінде орналасқан.
![]()
5.5 Сурет. slider блогының шартты белгісі
Бағыттауышты блокқа қойылғаннан кейін, ЖОТ арқылы қасиеттер терезесі шығарылып, онда моделдердің келесі көрсеткіші қойылады:
- Current Value (кезекті мәні, бастапқысы 0);
- Upper Bound (жоғарғы шек 10, бастапқысы 100);
- Lower Bound (төменгі шек 0, бастапқысы -100).
- Increment (өсімшесі, бастапқысы 1).
Сигналды кез келген өсімшемен өзгерту үшін реттеуіш жылжытқышы ЖСТ арқылы ығыстырылады.
5.3 Есептесім мазмұны
- жұмыс мақсаты;
- жүйенің Гурвиц шартнамасына байланысты тиянақтылығы;
- сұлбалар мен сызбалар;
- қорытындылар.
5.4 Тексерім сұрақтары
1. Ауысым процесінің сапасы қандай көрсеткіштермен бағаланады?
2. Реттелім уақыты деген не?
3. Реттелім асылымы деген не?
4. Тербеліс санының жарамды мәні қандай?
5. Жүйе сапасын бағалаудың қандай тура әдістері бар?
6. Жүйе сапасын бағалаудың жанама әдістерінің негізгі артықшылығы қандай?
6 зертханалық жұмыс. Қалыпты реттеу заңдарын моделдеу
6.1 Жұмыс мақсаты:
- қалыпты реттеу заңдарын зерттеу;
- реттеуіштерді құру тәртібін игеру.
6.2 Жұмыс тапсырмасы
6.2.1 Жүйе тиянақтылығын және АБЖ-нің талапқа сай сапасын қамтамасыз етуші П-реттеуіштің параметрлерін анықтау керек.
АБЖ басқару функциясы
түріндегі басқару объектісінен БО, жіберім функциясы
![]()
түріндегі орындаушы құрылғыдан ОҚ және жіберім функциясы Wрег (s) түріндегі реттеуіштен тұрады.
ТКБ-ты бақылау жүйесінің құрылым сұлбасы 6.1-суретте келтірілген.
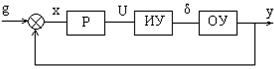
6.1 Сурет. Бақылау жүйесінің құрылым сұлбасы
6.2.2 Параметрлері Т1 = 1с; Т2 = 2с; Т3 = 3с және Wрег (s) = К бақылау жүйесін моделде.
П-реттеуіштің жіберім коэффициентінің Гурвиц шартнамасы бойынша шектемелік коэффициенті:
Ккр = (1 + τ2 + τ3) (1 + 1/τ2 + 1/τ3) – 1 = 11 – 1 = 10,
бұндағы τ2 = Т2/T1 = 2; τ3 = Т3/T1 = 3.
П-реттеуіштің жіберім коэффициентін К < 10 өзгерте отырып, жүйе тұрақтылығына және оның реттелуімінің қажетті сапасына жету керек.
6.2 Сурет. Wрег (s) = К = 6.2 кезіндегі тиянақты жүйе
Реттелім сапасының көрсеткіштері:
- дәлдігі ∆ = 0,1Y0 ;
- реттелім асылымы σ <30%.
6.2.3 Бақылау жүйесінің сұлбасын өзгертпей, ПИ-реттеуіш параметрлерін К = Var и Ти = 0.1с қой (6.3-сурет).

6.3 Сурет. ПИ-реттеуішті бақылау жүйесі
6.2.4 Бақылау жүйесін (6.4-сурет) жинап, кірістік қойылым сигналының шығарылу қателігін тексер.
6.4 Сурет. Бақылау жүйесінің сұлбасы
6.2.5 Сұлбаға ПИ-реттеуішті қосып, қойылым сигналының шығарылу қателігін тексер (6.5-сурет).
PI блогы Diagrams-Toolbox-Controls-PI мәзірінде орналасқан. Жөнделім параметрлері Variable блоктары арқылы, бірақ ол Proportional Gain мен Integral Gain аталымдарына сәйкесті жүзеге асырылады.
6.5 Сурет. ПИ-реттеуішті бақылау жүйесінің сұлбасы
6.2.6 Сұлбаға ПИД-реттеуішті қосып, қойылым сигналының шығарылу қателігін тексер.
PID блогы Diagrams-Toolbox-Controls-PID мәзірінде орналасқан. Теріс кірісті қосуыш блок құрамына кіреді, сондықтан ол сұлбада жоқ .
6.6 Сурет. ПИД- реттеуішті бақылау жүйесінің сұлбасы
Сызбадан басқару сигналының шығарылуының ешқандай қателігінің жоқтығы көрініп тұр. Variable блогы арқылы ПИД-реттеуішінің параметрлерін өзгертуге болады. ПИД-реттеуішінің бастан қойылған параметрлері К = 10, Ти = 1с, Тд = 0,1с.
6.7 Сурет. ПИД-реттеуішінің жөнделім параметрлері
6.3 Есептесім мазмұны
- жұмыс мақсаты;
- реттеуіштердің ЖФ-сы;
- есептемелер, сұлбалар және сызбалар;
- қорытындылар.
6.4 Тексерім сұрақтары
1. Қандай реттелім заңдары бар?
2. П-реттеуіштің кемшіліктері қандай?
3. ПИ-реттеуіштің артықшылығы қандай?
4. Реттеуіштің жөнделімі іс жүзінде қалай?
5. Вишнеградский шартнамасының мағынасы неде?
6. ПИД-реттеуіштің басты артықшылығы неде?
7 зертханалық жұмыс. Цифрлық жүйелердің динамикалық сипаттамаларын зерттеу
7.1 Жұмыс мақсаты:
- цифрлық БИХ-фильтрлердің сипаттамаларын зерттеу;
- цифрлық жүйелерді моделдеу мүмкіндіктерімен танысу.
7.2 Жұмыс тапсырмасы
7.2.1 Үздікіз және цифрлық сигналдардың БИХ-фильтрінің уақыттық сипаттамаларын анықтау.
7.2.1.1. Параметрлері К = 2, Т1 = 2, Т2 = 3, Td = 2 кідірімді БИХ-фильтр үздіксіз сигналдардың жіберім функциясымен суреттеледі:
![]() .
.
Үздікіз сигналдардың БИХ-фильтрінің үрдіс үдемесінің қисығы 7.1-суретте келтірілген.
7.1 Сурет. БИХ-фильтрдің үрдіс үдемесінің қисығы
7.2.1.2. БИХ-фильтрдің дискретті ЖФ-сы s-тен z-ке кесте түрінде ауысу арқылы алынады да, ол

түрін қабылдайды, бұндағы Т = 0.1с – кванттау қадамы.
БИХ-фильтрдің дискретті ЖФ-сының сұлбасы 7.2-суретте келтірілген.
7.2 Сурет. Дискретті ЖФ-лы БИХ-фильтрдің үрдіс үдемесінің қисығы
ЖФ-ның қасиеттер блогындағы масштабтау коэффициенті Gain 0.01. Discrete алқабында белгі қойылып (z-функцияға ауысу),одан кейін дискреттеу уақытының кеңістігін dT = 0.01 қой.
7.2.2 Цифрлық ТЖФ-дің сипаттамаларын анықтау.
Оның z- түрлендірімі
![]()
7.2.2.1. Цифрлық ТЖФ-дің уақыттық сипаттамаларын анықта.
7.3 Сурет. Цифрлық ТЖФ-нің үрдіс үдемесінің қисығы
Фильтр шығысы: y(z) = x(z) + 0,2x(z)z -1 + 0,9y(z)z -1
![]() блогын келесі блоктардан құруға болады: кідіріс регистрі
(Blocks – Time Delay – unitDelay) және константа блогы
блогын келесі блоктардан құруға болады: кідіріс регистрі
(Blocks – Time Delay – unitDelay) және константа блогы ![]() . Анықтау
арқылы z^-1 аталымды күрделі блок
құр. Онда фильтр сұлбасы 7.4-суреттегідей болады.
. Анықтау
арқылы z^-1 аталымды күрделі блок
құр. Онда фильтр сұлбасы 7.4-суреттегідей болады.
7.4 Сурет. Цифрлық ТЖФ-нің үрдіс үдемесінің қисығы
7.2.2.2. ТЖФ-нің f = 0.1, 10, 100 рад/с кезіндегі АЖС-сын mag_phas блогын пайдалану арқылы шығар. Блок адресі Diagrams-Toolbox-Tools-Magnitude Phase мәзірінде.
7.3 Есептесім мазмұны
- жұмыс мақсаты;
- ТЖФ-нің үрдіс үдемесінің қисығы;
- қорытындылар.
7.4 Тексерім сұрақтары
1. Импульстік буын деген не?
2. Импульстік АБЖ-нің аналогтыдан айырмашылығы қандай?
3. Қалыптастыру буыны қандай қызмет атқарады?
4. Келтірілген жүйенің үздіксіз бөлігінің ЖФ-сы қандай?
5. Цифрлық жүйелерді суреттеу үшін неге z-түрлендірім пайдаланылады?
8 зертханалық жұмыс. Цифрлық жүйелердің тиянақтылығын зерттеу
8.1 Жұмыс мақсаты:
- цифрлық тұйық жүйенің параметрлерінің оның тиянақтылығына әсерін зерттеу;
8.2 Теориялық мәлімет
8.1-суретте цифрлық бақылау жүйесінің құрылым сұлбасы көрсетілген.
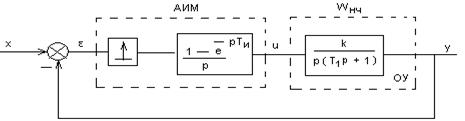
8.1 Сурет. цифрлық бақылау жүйесінің құрылым сұлбасы
Келтірілген деңгей бойынша кванттаусыз цифрлық тұйық АБЖ-нің құрамындағы WНЧ – оның үздіксіз бөлігінің ЖФ-сы WПНЧ. Ол үздіксіз бөлігінің ЖФ-сы мен АИМ ЖФ-сын көбейту арқылы алынады:

z-түрлендірім кестесіне сәйкесті, келтірілген үздіксіз бөлігінің ЖФ-сы

болады, бұндағы d = ехр(-Ти /Т1). z-түрлендірімі z = ехр(-рТ) арқылы алынған қалыптастырушы буынның ЖФ-сы:
![]()
Ажыратылған жүйенің дискретті ЖФ-сы:


Цифрлық тұйық жүйенің ЖФ-сы:
|
|
(8.1) |
Цифрлық тұйық жүйенің сипаттамалық теңдеуі:
|
|
(8.2) |
бұндағы ![]()
![]() қойылымы арқылы жаңа w-түрлендірімді сипаттамалық теңдеу аламыз:
қойылымы арқылы жаңа w-түрлендірімді сипаттамалық теңдеу аламыз:
![]()
Шур-Кон шартнамасы бойынша жүйенің тиянақтылығы үшін сипаттамалық теңдеудің коэффициенттері оң таңбалы болу керек:
|
|
(8.3) |

Бұл шартқа а1 мен а0 мәндерін қою арқылы тиянақтылық шартын аламыз:
![]()
![]()
![]()
Теориядан Ти/Т1 қатынасына тәуелді kпр1∙Ти мен kпр2∙Ти функцияларының 2 шамасында болатындығы белгілі. Онда
![]()
Бұл өрнек тиянақты жүйенің шекті күшейту коэффициентінің тездетуші буынның (модулятордың) Ти импульсінің ұзақтығына кері пропорционал болатындығын көрсетеді.
Сонымен, бақылау жүйенің тиянақтылығы үшін үздіксіз бөлігінің күшейту коэффициенті шегін табамыз:
|
|
(8.4) |
 .
.8.3 Жұмыс тапсырмасы
8.3.1 Т1 = 1с және Ти = 0,2с шамалары арқылы d = exp(-Ти/Т1) = 0,8187, kпр = 10 анықтап, (8.1) арқылы берілген бақылау жүйесінің ЖФ-сын табамыз:
|
|
(8.5) |
8.3.2 k = 1, 5, 10 мәндерін (8.5) өрнегіне қойып, ЖФ-сы мен үдіріс үдемесінің сызбаларын ал.
8.2 Сурет. Жүйенің үдіріс үдемесінің қисығы (К = 1)

8.3 Сурет. Жүйенің үрдіс үдемесінің қисығы (К = 5)
8.3.3 (8.5) түрлендіру арқылы жүйенің жүйе ЖФ-ның басқа түрін аламыз:
|
|
(8.6) |
8.3.3.1. Осы ЖФ арқылы және импульс уақыты Ти = 0,2с z^-1 аталымды күрделі блок пайдаланып сұлба құр.
z^-1 блогын құру үшін Blocks-Time-unitDelay мәзірінен 1/z блогын алып, оның b кірісіне аспаптар тақтасындағы pulse train блогын жалғаймыз және оның time between Pulses жолына Ти = 0,2с қоямыз. Сосын блоктарды анықтап, Edit-Creat Compound Block мәзірінде ашылатын қасиеттер терезесінде z^-1 аталымы қойылады.
![]()
8.3.3.2. slider блогы арқылы k коэффициентін өзгерте отырып, реттелім көрсеткіштері ең жоғарғы жағдайында болатын үрдіс үдемесінің қисығын ал
8.4 Сурет. Жүйенің үрдіс үдемесінің қисығы (К = 3,3)
8.4 Есептесім мазмұны
- жұмыс мақсаты;
- теориядан қысқаша мәліметтер;
- сұлбалар мен сызбалар;
- қорытындылар.
8.5 Тексерім сұрақтары
1. Импульстік тұйық жүйенің ЖФ-сы қандай болады?
2. Айырмалы теңдеумен сипатталған импульстік тұйық жүйенің шығыс сигналы қандай болады?
3. Найквист шартнамасы импульстік жүйелерге жарай ма?
4. w-түрлендірім деген не және ол қалай пайдаланылады?
5. Абсолютті және салыстырмалы псевдожиілік деген не?
6. Шур-Кон шартнамасының негізгі артықшылығы қандай?
9 зертханалық жұмыс. Қисықты жүйелердің ерекшеліктерін зерттеу
9.1 Жұмыс мақсаты:
- қисықты жүйенің уақыттық сипаттамаларын зерттеу.
9.2 Жұмыс тапсырмасы
9.2.1 Жүйенің сызықты бөлігінің берілген ЖФ-сы бойынша оң кері байланысты (ОКБ) қисықты тұйық жүйенің сұлбасын жина.
Қисықты элементке (ҚЭ) Dx = ±10 шекті шектеу блогы жатады.
9.1 Сурет. ОКБ-ты сызықты тұйық жүйенің үрдіс үдемесінің қисығы
9.2 Сурет. Шектеу блогы қамтылған қисықты тұйық жүйенің үрдіс үдемесінің қисығы (Dx = ±10)
Диаграммада көрсетілгендей 10-шы секунд шамасында тиянақты автотербелістер туады. Демек, шектеу блогын пайдаланып, генератор жұмысын елестетуге болады.
9.2.2 Жүйенің сызықты бөлігінің ЖФ-сын өзгертпей, ТКБ-ты сызықты тұйық жүйенің сұлбасын жинап, оның үрдіс үдемесінің шығар.
9.3 Сурет. ТКБ-ты сызықты тұйық жүйенің үрдіс үдемесінің қисығы
9.2.3 Ажыратылған жүйенің ЖФ-сын өзгертпей, оған relay блогын енгізіп, оның үрдіс үдемесінің шығар.

9.4 Сурет. Релелік блокты және нолді сезімсіздік аймақты (deadBand = 0) қисықты жүйенің үрдіс үдемесінің қисығы
Диаграммада үрдістің периодсыздан теріс толқынды периодтыға айналғаны көрініп тұр.
9.2.4 Гармоникалық кіріс сигналының шамасының релелік элементті қисықты жүйеге әсерін зертте.
9.5 Сурет. Гармоникалық сигналдың (Um = 1, f = 1рад/с) релелік элементті қисықты жүйеге әрекеті
Синусоидального сигналдың амплитудасын өзгерте отырып (Um = 0.1, 10, 100), жүйенің жіберім коэффициентінің өзгерісін анықта.
9.2.5 Соңғыны хвх = 1 кезінде және f = 0,1; 1; 10 жиілігінде қайтала.
Жұмыс есептесімінде К = f(хвх) және А(ω) тәуелділіктерін келтір.
9.3 Есептесім мазмұны
- жұмыс мақсаты;
- сұлбалар мен сызбалар;
- қорытындылар.
9.4 Тексерім сұрақтары
1. Қандай жүйе қисықты деп аталады?
2. Қисықты элемент сипаттамасының кіріс сигналының өзгеріс бағытына тәуелділігі деген не?
3. Қисықты элемент сипаттамасының қанығым бөлігі деген не?
4. Қисықты элементтің сезімсіздік аймағы неге байланысты?
5. Қандай объектілердің сипаттамасы гистерезисті болады?
6. Релелік сипаттаманың түрі қандай?
10 зертханалық жұмыс. Қисықты жүйелердің тиянақтылығын зерттеу
10.1 Жұмыс мақсаты:
- қисықты жүйелердің тиянақтылығын фаза суреттемесі бойынша зерттеу.
10.2 Жұмыс тапсырмасы
10.2.1 Қозғалтқышты басқарушы сызықты Тм = 0.1с бақылау жүйесін моделде.
10.1 Сурет. Сызықты жүйенің берілген бұрышынан, қозғалтқыш жылдамдығынан және жағдай бұрышынан ауытқулардың сызбалары
10.2.2 Қозғалтқышты басқарушы, екіжағдайлы релелік элементті, қисықты бақылау жүйесін моделде.
10.2 Сурет. Қисықты жүйенің берілген бұрышынан, қозғалтқыш жылдамдығынан және жағдай бұрышынан ауытқулардың сызбалары
Сызбаларда шамалы Х ауытқуында (солғы plot) жылдамдық (көк түс) пен бұрыштың (оңғы plot, қызыл түс) тиянақты автотербелістері туады.
10.2.3 Синусоидалы Um = 1В, f = 0.1 рад/с кіріс сигналы кезінде plot қасиеттерінің терезесінде ХУ опциясын сәйкесті шектермен белгілеп, қисықты жүйенің фазалық суреттемесін шығар.
10.3 Сурет. Қисықты жүйенің фазалық суреттемесі
(f = 0.1рад/с, А = 1, deadBand = 0)
10.4 Сурет. Қисықты жүйенің фазалық суреттемесі
(f = 0.1рад/с, А = 1 и deadBand = 0.1)
10.3 Есептесім мазмұны
- жұмыс мақсаты;
- сұлбалар мен сызбалар;
- қорытындылар.
10.4 Тексерім сұрақтары
1. Қисықты жүйелердің кіші, үлкен түрінің және түгелдей тиянақтылығы не білдіреді?
2. Ерекше нүкте қандай режімді анықтайды?
3. Фазалық суреттеме деген не?
4. Жүйе тиянақтылығы фазалық суреттеме арқылы қалай анықталады?
5. Тиянақты шектік цикл не білдіреді?
6. Фаза траекториясының сыным нүктесі не білдіреді?
Әдебиеттер тізімі
1. Анхимюк В.Л. Теория автоматического управления. – Мн.: Дизайн ПРО, 2002. – 352 с.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1975. – 767 с.
3. Бесекерский В.А. Сборник задач по теории автоматического регулирования и управления. – М.: Наука, 1978. – 524 с.
4. Душин С.Е. Теория автоматического управления: Учебник /Под ред. В.Б. Яковлева. – М.: Высшая школа, 2003. – 576 с.
5. Дьяконов В. П. VisSim + Mathcad + MATLAB. Визуальное математическое моделирование. – М.: СОЛОН-Пресс, 2004. – 384 с.
6. Методы классической и современной теории автоматического управления: Учебник: В 5 т.- Т.1: Математические модели, динамические характеристики и анализ систем автоматического управления / Под ред. Н.Е. Егупова. – М.: Изд-во МГТУ им. Н.Э.Баумана, 2004. – 656 с.
7. Справочник по теории автоматического управления / Под ред. А.А.Красовского.- М.: Наука, 1987. – 712 с.
8. Теория автоматического управления. В 2 ч. /Под ред. А.А.Воронова. - М.: Высшая школа, 1986. - Ч.1. - 367 с.; Ч.2. – 504 с.
9. Теория автоматического управления. В 2 ч. /Под ред. А.В.Нетушила. - М.: Высшая школа, 1976. - Ч.1. - 401 с.; 1983. - Ч.2. – 432 с.
Мазмұны
1 зертханалық жұмыс. Күрделі жалғанымды буынды жүйелерді моделдеу
2 зертханалық жұмыс. Қалыпты буындардың динамикалық сипаттамаларын зерттеу
3 зертханалық жұмыс. Сызықты жүйелердің тиянақтылығын Михайлов шартнамасы бойынша зерттеу
4 зертханалық жұмыс. Жүйелердің тиянақтылығын Найквист шартнамасы бойынша зерттеу
5 зертханалық жұмыс. Жүйелердің реттелу дәрежесін зерттеу
6 зертханалық жұмыс. Қалыпты реттеу заңдарын моделдеу
7 зертханалық жұмыс. Цифрлық жүйелердің динамикалық сипаттамаларын зерттеу
8 зертханалық жұмыс. Цифрлық жүйелердің тиянақтылығын зерттеу
9 зертханалық жұмыс. Қисықты жүйелердің ерекшеліктерін зерттеу
10 зертханалық жұмыс. Қисықты жүйелердің тиянақтылығын зерттеу