Коммерциялық емес акционерлік қоғам
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС ИНСТИТУТЫ
Инженерлік графика және қолданбалы механика кафедрасы
ҚОЛДАНБАЛЫ МЕХАНИКА
050717 – Жылуэнергетикасы мамандығы бойынша барлық оқу түрлерінде оқитын студенттерге арналған дәрістер жинағы
Алматы 2009
ҚҰРАСТЫРҒАНДАР: А.Д. Дінасылов, Р.Қ.Қойлыбаева. Қолданбалы механика. 050717 – Жылуэнергетикасы мамандығы бойынша барлық оқу түрлерінде оқитын студенттерге арналған дәрістер жинағы. – Алматы: АЭжБИ, 2009. – 84 б.
Дәрістер жинағында «Қолданбалы механика» пәні бойынша 050717 – Жылуэнергетикасы мамандығының студенттері үшін оқылатын дәрістерінің негізгі теориялық материалы келтірілген. 1 - 7-дәрістерде статика, кинематика және механикалық жүйелердің динамикасының негіздері беріледі. 8, 9- дәрістерде механизмдер мен машиналар теориясының кейбір мәселелері қарастырылады. 10 - 16-дәрістерде конструкциялардың элементтерін беріктікке және қатаңдыққа есептеудің негіздері қарастырылады.
Жинақтың көлемі шектелген сон кейбір жағдайлардың дәлелдеуі берілмеген және келтірілген мысалдардың саны материалды толық игеру үшін жеткіліксіз, сондықтан студенттер пәнді оқу кезінде конспектінің соңында көрсетілген тізімдегі қосымша әдебиеттерді пайдаланғаны жөн.
Дәрістер жинағы «Қолданбалы механика» және «Механика» пәндерін оқитын басқа мамандықтардың студентеріне де пайдалы болады деген ойдамыз.
Мазмұны
|
1 дәріс. Кіріспе ұғымдар. Статиканың аксиомалары. Тоғысатын күштер. |
6 |
|
1.1 Статиканың негізгі ұғымдары. |
6 |
|
1.2 Статика аксиомалары. Үш күш туралы теорема |
7 |
|
1.3 Тоғысатын күштер жүйесі |
9 |
|
2 дәріс. Күштің нүктеге және өске қатысты моменті. Күштер жұбы. Күштер жүйесін берілген центрге келтіру |
10 |
|
2.1 Күштің нүктеге және өске қатысты моменті |
11 |
|
2.2 Параллель күштерді қосу |
12 |
|
2.3 Күштер жұбы. Күштер жұбының моменті |
12 |
|
2.4 Күшті параллель көшіру туралы теорема |
13 |
|
2.5 Күштер жүйесін берілген центрге келтіру |
14 |
|
3 дәріс. Күштер жүйелерінің тепе-теңдік шарттары. Үйкеліс. Ауырлық центрі |
14 |
|
3.1 Күштер жүйесінің тепе-теңдік шарттары |
14 |
|
3.2 Денелер жүйесінің тепе-теңдігі |
15 |
|
3.3 Статикалық түрде анықталатын және статикалық түрде анықталмайтын жүйелер |
16 |
|
3.4 Сырғанау үйкелісі. Тегіс емес беттің реакциясы |
16 |
|
3.5 Домалау кезіндегі байланыстың реакциясы |
17 |
|
3.6 Қатты дененің ауырлық центрі |
18 |
|
4 дәріс. Нүктенің және дененің қарапайым қозғалыстарының кинематикасы |
19 |
|
4.1 Кинематикаға кіріспе |
19 |
|
4.2 Нүкте қозғалысының берілу тәсілдері |
19 |
|
4.3 Қозғалыс векторлық тәсілімен берілген жағдайда нүктенің жылдамдығы мен үдеуі |
20 |
|
4.4 Қозғалыс координаттық тәсілімен берілген жағдайда нүктенің жылдамдығы мен үдеуі |
21 |
|
4.5 Қозғалыс табиғи тәсілімен берілген жағдайдағы нүктенің жылдамдығы мен үдеуі |
21 |
|
4.6 Қатты дененің ілгерілемелі қозғалысы |
22 |
|
4.7 Қатты дененің тұрақты өс төңірегіндегі айналмалы қозғалысы |
22 |
|
5 дәріс. Қатты дененің жазық параллель қозғалысы. Нүктенің күрделі қозғалысы |
24 |
|
5.1 Жазық параллель қозғалыстың теңдеулері |
24 |
|
5.2 Жазық фигура нүктелерінің жылдамдықтарын анықтау |
25 |
|
5.3 Жазық фигура нүктелерінің жылдамдықтарын жылдамдықтардың лездік центрі қолдануымен анықтау |
25 |
|
5.4 Жазық фигура нүктелерінің үдеулерін анықтау |
26 |
|
5.5 Нүктенің күрделі қозғалысы. Салыстырмалы, тасымал және абсолют қозғалыстар |
26 |
|
5.6 Жылдамдықтарды қосу теоремасы |
27 |
|
5.7 Үдеулерді қосу туралы Кориолис теоремасы |
27 |
|
6 дәріс. Нүкте динамикасы |
29 |
|
6.1 Динамиканың аксиомалары |
29 |
|
6.2 Материялық нүкте қозғалысының дифференциалдық теңдеулері |
30 |
|
6.3 Материялық нүктенің салыстырмалы қозғалысы |
30 |
|
6.4. Нүктенің қозғалыс мөлшерінің өзгеруі туралы теорема |
31 |
|
6.5 Нүктенің қозғалыс мөлшері моментінің өзгеруі туралы теорема |
32 |
|
6.6 Күштің жұмысы. Күштің қуаты. Нүктенің кинетикалық энергиясының өзгеруі туралы теорема |
32 |
|
6.7 Нүкте үшін Даламбер принципі |
33 |
|
7 дәріс. Жүйе және қатты дене динамикасының негіздері |
33 |
|
7.1 Механикалық жүйе. Масса, массалар центрі және инерция моменттері |
34 |
|
7.2 Жүйе қозғалысының дифференциалдық теңдеулері |
35 |
|
7.3 Жүйенің қозғалыс мөлшерінің өзгеруі туралы теорема |
36 |
|
7.4 Жүйе қозғалыс мөлшерлерінің бас моментінің өзгеруі туралы теорема |
36 |
|
7.5 Жүйенің кинетикалық энергиясының өзгеруі туралы теорема |
37 |
|
7.6 Жүйе үшін Даламбер принципі |
38 |
|
8 дәріс. Машина мен механизмдер теориясының негізгі ұғымдары. Механизмдердің құрылымдық талдауы |
38 |
|
8.1 Негізгі ұғымдар. Механизмдердің құрылымдық элементтері |
38 |
|
8.2 Механизмдердің негізгі түрлері |
41 |
|
8.3 Кинематикалық тізбектер мен механизмдердің құрылымдық формулалары |
43 |
|
8.4 Механизмдердің құрылымдық талдауы мен синтезі туралы түсініктер |
43 |
|
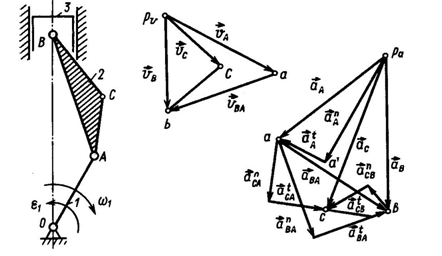
9 дәріс. Жазық рычагты механизмдердің кинематикалық және кинетостатикалық талдауы |
45 |
|
9.1 Жалпы мәліметтер және жазық рычагты механизмдердің түрлері |
45 |
|
9.2 Механизмдердің кинематикалық талдауы |
45 |
|
9.3 Механизмдердің кинетостатикалық талдауы |
47 |
|
10 дәріс. Материалдар кедергісіне кіріспе. Материалдар кедергісінің мәселелері мен әдістері |
51 |
|
10.1 Материалдар кедергісінің мәселелері. Есептеу сұлбасы |
51 |
|
10.2 Қималар әдісі. Сырықтың көлденең қимасындағы ішкі күштер факторлары |
53 |
|
10.3 Кернеулер, орын ауыстырулар және деформациялар жөнінде түсініктемелер |
54 |
|
10.4 Гук заңы. Күштер әсерінің тәуелсіздігі туралы және Сен-Венан принциптері. |
55 |
|
10.5 Құрылыс элементтерін есептеудің жалпы принциптері |
56 |
|
11 дәріс. Сырықтардың созылуы мен сығылуы |
56 |
|
11.1 Бойлық күш және тік кернеулер |
56 |
|
11.2 Сырықтың ұзаруы және Гук заңы |
57 |
|
11.3 Созылу-сығылу кезіндегі статикалық түрде анықталмайтын жүйелер |
59 |
|
11.4 Созылу кезіндегі кернеулі және деформациялық күйлер |
60 |
|
12 дәріс. Созылу және сығылу кезіндегі материалдардың механикалық қасиеттері |
|
|
12.1 . Созылу диаграммалары |
61 |
|
12. 2 Сығылуға сынаудың ерекшеліктері |
64 |
|
12.3 Температура мен уақыттың материалдардың қасиеттеріне әсері |
64 |
|
13 дәріс. Созылу-сығылу кезінде беріктікке есептеу. Кернеулер шоғырлануы |
65 |
|
13.1 Созылу-сығылу кезінде беріктік шарты. Есептеудің үш түрі |
65 |
|
13.2 Кернеулердің шоғырлануы |
67 |
|
14. Таза ығысу. Көлденең қимасы дөңгелек сырықтың бұралуы |
68 |
|
14.1 Таза ығысу кезіндегі кернеулер мен деформациялар |
68 |
|
14.2 Көлденең қимасы дөңгелек сырықтың бұралуы |
69 |
|
15 дәріс. Көлденең қималардың геометриялық сипаттамалары. Иілу кезіндегі ішкі күштер факторлары |
72 |
|
15.1 Жазық фигураның статикалық моменттері мен ауырлық центрі |
72 |
|
15.2 Қиманың инерция моменттері |
73 |
|
15.3 Бас инерция өстері мен бас инерция моменттері |
74 |
|
15.4 Иілу. Иілу кезіндегі ішкі күштер факторлары |
75 |
|
15.5 Июші момент пен көлденең күш арасындағы дифференциалдық тәуелділіктер |
76 |
|
16 дәріс. Иілу кезіндегі кернеулер және беріктікке есептеу. Күрделі қарсыласу |
77 |
|
16.1 Таза иілу кезіндегі кернеулер |
77 |
|
16.2 Көлденең иілу кезіндегі кернеулер және беріктікке есептеу |
79 |
|
16.3 Қиғаш иілу және центрден тыс созылу-сығылу |
80 |
|
16.4 Иілу мен бұралудың біріккен әсері |
81 |
|
Әдебиеттер тізімі |
83 |
1 дәріс. Кіріспе ұғымдар. Статиканың аксиомалары. Тоғысатын күштер
Дәрістің мазмұны: қолданбалы механика техниканың теориялық базасы ретінде; кіріспе ұғымдар және статиканың аксиомалары; тоғысқан күштер жүйелері және олардың тепе-теңдігінің шарттары.
Дәрістің мақсаты: бакалаврлар дайындығы кезіндегі қолданбалы механиканың рөлін анықтау, статиканың негізгі ұғымдарын және аксиомаларын тұжырымдау, тоғысатын күштер жүйесінің қарапайым түрге келтірілуін және оның тепе-теңдік шарттарын қарастыру.
«Қолданбалы механика» - энергетика саласы үшін бакалаврларды жалпы техникалық дайындау негізіндегі пән. Қолданбалы механика машина жасау саласының теориялық негізі болып келеді, ол машиналар, механизмдер, приборлардың сенімділігін, жобалау сапасын және дұрыс қолдануын арттыруда үлкен рөлді атқарады. Пән теориялық механиканың, механизмдер мен машиналар теориясының, машина бөлшектерінің және материалдар кедергісінің өзара байланысқан бөлімдерінен тұрады.
Теориялық механика (ТМ) – материялық денелердің механикалық қозғалысы мен тепе-теңдігінің жалпы заңдары туралы ғылым. Механикалық қозғалыс ретінде материялық денелердің кеңістіктегі салыстырмалы орналасуының уақыт өтуімен өзгеруі түсінеді. Материялық денелердің механикалық қозғалысы басқа денелермен байланысқан, санақ жүйесі деп аталатын координаттық остерге қатысты қарастырылады. Механикалық қозғалыстың дербес жағдайы – материялық денелердің тепе-теңдігі, бұл олардың тек қана тыныштық қалпы емес, бірқалыпты түзу сызықты қозғалыс қалпы деп де түсіну керек. Механикада денелердің өзара механикалық әрекеттесуі қарастырылады, яғни нәтижесінде денелердің қозғалысының өзгеруі немесе олардың өлшемдері мен формасының өзгеруі (деформациясы) болатын өзара әрекеттесуі.
ТМ статика, кинематика және динамика бөлімдерінен тұрады. Статика деп күштер жүйелерінің түрлендіру әдістерін зерттейтін және олардың тепе-теңдігінің шарттарын анықтайтын ТМ бөлімін айтамыз. Кинематикада денелердің қозғалысы, оларға түсетін күштер есепке алынбай қарастырылады. Динамикада материялық денелердің қозғалысы, оларға түсетін күштер есепке алынып зерттеледі.
1.1 Статиканың негізгі ұғымдары
ТМ зерттеу объектілері ретінде материялық денелердің модельдері алынады, олар материялық нүкте (МН), МН жүейсі және абсолют қатты дене (АҚД).
МН деп қарастырылатын жағдайда өлшемдерін ескермеуге болатын материялық денені айтамыз, оның массасы нуктеде жинақталыды деп есептеледі. МН жүйесі деп орындары мен қозғалыстары өзара байланысқан МН жиынтығын айтамыз (мысалы, механизм). АҚД - кез келген нүктелері арасындағы қашықтықтары өзгермейтін дене. Шынында барлық денелер күштер әсерінің нәтижесінде өз өлшемдерін және формасын өзгертеді (дефомацияланады). Көбінесе сол деформациялар аз болғандықтан, денені абсолют қатты дене деп деформацияларды есепке алмауға болады.
Дененің тепе-теңдік немесе
қозғалыс қалпы оның басқа денелермен өзара
механикалық әрекеттенуіне тәуелді, өзара
әрекеттенудің өлшемі ретінде күш келеді. Күш – вектор,
ол сан шамасымен (модулімен), бағытымен және түсу
нүктесімен сипатталады. Графикалық түрде күш
бағытталған түзу кесіндісімен көрсетіледі. Күш
бағыты бойындағы түзу күштің әсер ету
сызығы деп аталады. Күшті үстіне сызық қойып,
латын әліппесінің үлкен әрпімен белгілейміз, мысалы, ![]() , сонда F=
, сонда F= ![]() -
күштің модулі болады. Қатты денеге немесе нүктеге
түсетін күштер жиынтығы күштер жүйесі (КЖ) деп
аталады. Оны
-
күштің модулі болады. Қатты денеге немесе нүктеге
түсетін күштер жиынтығы күштер жүйесі (КЖ) деп
аталады. Оны ![]() арқылы белгілейміз.
арқылы белгілейміз.
Егер қатты денеге әсер ететін КЖ-н
дененің тыныштық немесе қозғалыс қалпын
өзгертпей, басқа КЖ-не ауыстыруға болса, олар баламалы күштер
жүйелері деп аталады ![]() ~
~![]() .
.
Егер берілген КЖ бір ғана күшке баламалы
болса, сол күш қарастырылып отырған КЖ-нің тең
әсерлі күші (тең әсерлісі) деп аталады. Оны ![]() * деп белгілесек, сонда
* деп белгілесек, сонда ![]() *~
*~![]() . Кез келген
КЖ-нің тең әсерлі күші бола бермейді.
. Кез келген
КЖ-нің тең әсерлі күші бола бермейді.
КЖ денеге түскенде, ол дененің
тыныштық немесе қозғалыс қалпын өзгертпейтін
болса, КЖ теңгерілген деп аталады. Теңгерілген КЖ-нің
әсері нөлге баламалы, яғни ![]() ~0. Егер күшті КЖ-не қосқанда,
ол сонымен бірге нөлге баламалы жаңа КЖ-н құрса, оны КЖ-н
теңгеретін күш деп атайды.
~0. Егер күшті КЖ-не қосқанда,
ол сонымен бірге нөлге баламалы жаңа КЖ-н құрса, оны КЖ-н
теңгеретін күш деп атайды.
Дененің бір нүктесіне түсетін күш қадалған күш деп аталады. Дене көлемінің немесе бетінің бір бөлігінің барлық нүктелеріне түсетін күштер таралған күштер деп аталады.
1.2 Статика аксиомалары
Статика бірнеше аксиомаға негізделеді.
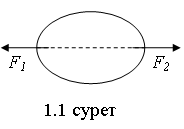
1. Екі күш жүйесінің
тепе-теңдігі туралы аксиома. Денеге түсетін екі күш
тепе-теңдікте болу үшін олардың шамалары тең болуы
және түсу нүктелері арқылы өтетін түзу
бойымен қарама-қарсы бағытталуы қажетті де, жеткілікті де: F1
= F2, бірақ ![]() (1.1 сурет).
(1.1 сурет).
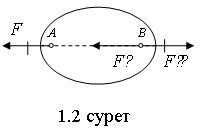
2. Теңгерілген КЖ-н қосу және алып тастау аксиомасы. Күштер жүйесінің қатты денеге әсерін өзгертпей, соған теңгерілген КЖ-н қосуға немесе алып тастауға болады. Салдары: АҚД-ге түсетін күштің әсерін өзгертпей, оны әсер ету сызығы бойымен дененің кез келген басқа нүктесіне көшіруге болады (1.2 сурет), яғни күш - жылжымалы вектор.
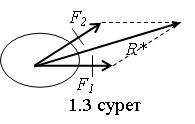
3. Күштер параллелограмы аксиомасы. Өзара бұрыш құрып,
бір нүктеге түсетін екі күштің тең әсерлісі
сол күштер қабырғалары болып табылатын
параллелограмның диагоналі ретінде анықталады (1.3 сурет), яғни
![]() .
.
4. Өзара әрекеттену аксиомасы. Екі
дене бір-біріне шамалары тең және бір түзу бойымен
қарама-қарсы бағытталған күштермен әсер
етеді: F21 = F12, ![]() .
.
5-аксиоманың алдында бірнеше ұғымды енгіземіз.
Егер дененің кеңістікте кез келген орын ауыстыру алуға мүмкіншілігі болса, ол еркін дене деп аталады. Егер кейбір орын ауыстырулар мүмкін емес болса, дене еркін емес деп аталады. Дене қозғалысының еркіндігін шектейтін шарттар байланыстар деп аталады. Байланыстар қатты немесе икемді материялық денелер арқылы орындалады. Дене түскен күштер әсерінен байланыс кедергілік жасап тұрған орын ауыстыруды орындауға тырысып, оған күш түсіреді. Біржолы байланыс та денеге модулі тап сондай, бірақ қарама-қарсы бағытталған байланыстың реакциясы деп аталатын күшті түсіреді. Реакциялардан басқа күштерді актив (пәрменді) күштер деп атаймыз. Байланыс реакциясының актив күштерден айырмашылығы – оның шамасы актив күштерге тәуелді және алдын ала белгісіз. Реакцияның бағыты - байланыс дененің қозғалысына кедергілік жасайтын бағытқа қарама-қарсы. Кейбір байланыстардың (тіректердің) реакциялары қалай бағытталатынын қарастырайық:
а) абсолют тегіс бет (үйкелісті ескермеуге болады) дененің бет үстінде жылжуына кедергілік жасамайды, ол тек қана бетке тік бағытпен қозғалуға кедергілік жасайды. Сондықтан оның реакциясы жанасып тұрған денелердің беттеріне ортақ нормаль бойымен бағытталады және жанасу нүктесіне түседі;
б) икемді жіп немесе шынжыр. Мұнда реакция жіп немесе шынжыр бойымен бағытталады;
в) цилиндрлік топса (подшипник) немесе жылжымайтын топсалы тұғыр. Тесіктерінен өтетін білікпен қосылған екі дене топсалы (шарнирлі) қосылысты құрайды. Біліктің өстік сызығы топсаның өсі деп аталады. Дене топса өсіне перпендикуляр бағытта орын ауыстыра алмайды, бірақ ол өске қатысты айнала алады. Сондықтан реакция топса өсіне перпендикуляр жазықтықта кез келген бағытталуы мүмкін. Әдетте оны екі құраушы күшке жіктейді;
г) каток түріндегі тірек, яғни жылжымалы топсалы тұғыр. Үйкеліс күші ескерілмесе, реакция домалау бетінің нормалі бойымен бағытталады;
д) сфералық топса және өкшелік. Мұндай байланыс дененің бір нүктесі ешқандай орын ауыстыру ала алмайтындай қылып бекітеді, ал сол нүктеге қатысты дене кеңістікте кез келген бағытта айналуы мүмкін. Реакция бекітілген нүкте арқылы өтеді; оның бағыты алдын ала белгісіз болғандықтан, оны үш құраушы күшке жіктейді;
е) екі шетінде топсалармен бекітілген, салмағы ескерілмейтін сырық. Сырыққа топсалардың центрлерінде түсетін тек екі күш ғана әсер етеді. Сырық тепе-теңдікте болғандықтан, сол күштер (реакциялар) топсалардың центрлерінен өтетін түзу бойымен бағытталу керек.
Еркін емес дене үшін келесі аксиома орын алады.
5. Байланыстар аксиомасы. Еркін емес денені, байланыстарды алып тастап және олардың әсерін реакциялармен ауыстырып, еркін дене ретінде қарастыруға болады.
6. Қатаю аксиомасы. Деформацияланатын дененің КЖ-нің әсерінен болған тепе-теңдік қалпы, оған қосымша байланыстарды орнатса, тіпті денені қатайған (абсолют қатты) дене ретінде қарастырса да, өзгермейді.
Үш күш туралы теорема: егер дене бір жазықтықта орналасқан үш параллель емес күш әсерінен тепе-теңдік қалпында болса, онда сол күштердің әсер ету сызықтары бір нүктеде қиылысады.
Дәлелдеу: Дене үш ![]() күштері
әсерінен тепе-теңдікте дейік. Олар параллель емес және бір
жазықтықта болғандықтан, екі
күштері
әсерінен тепе-теңдікте дейік. Олар параллель емес және бір
жазықтықта болғандықтан, екі ![]() күштерінің
әсер ету сызықтары қиылысады, сонда күштерді сол
нүктеге көшіріп, тең әсерлі
күштерінің
әсер ету сызықтары қиылысады, сонда күштерді сол
нүктеге көшіріп, тең әсерлі ![]() күшіне
ауыстыруға болады. Енді
күшіне
ауыстыруға болады. Енді ![]() күші
күші ![]() күшін
теңгереді, сондықтан олардың әсер ету сызықтары
түйіседі, яғни барлық үш күштердің
әсер ету сызықтары бір нүктеде қиылысады.
күшін
теңгереді, сондықтан олардың әсер ету сызықтары
түйіседі, яғни барлық үш күштердің
әсер ету сызықтары бір нүктеде қиылысады.
1.3 Тоғысатын күштер жүйесі
Күштер жүйелері (КЖ) келесі түрлерге бөлінеді: тоғысатын КЖ, параллель күштер жүйесі, кез келген КЖ. Тоғысатын деп күштердің әсер ету сызықтары (ӘС) бір нүктеде қиылысатын КЖ-ні атайды. Параллель деп, ӘС өзара параллель КЖ-ні атайды. Кез келген деп ӘС қиылыспайтын және параллель емес КЖ-сі аталады. Аталған КЖ жазық және кеңістік болуы мүмкін. Егер барлық күштердің ӘС бір жазықтықта жатса, КЖ жазық деп, керісінше жағдайда кеңістік деп аталады.
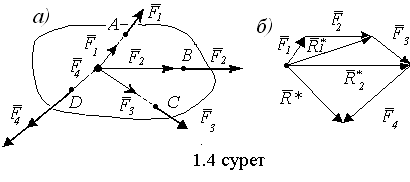 Дененің А, В, С, D нүктелерінде әсер
ету сызықтары О нүктеде
қиылысатын
Дененің А, В, С, D нүктелерінде әсер
ету сызықтары О нүктеде
қиылысатын ![]() күштері түседі
дейік (1.4,а сурет). Күштерді олардың ӘС бойымен О
нүктеге көшіріп, оларды тізбектеп күштер үшбұрышы
ережесімен қосамыз (1.4 б сурет). Алдымен
күштері түседі
дейік (1.4,а сурет). Күштерді олардың ӘС бойымен О
нүктеге көшіріп, оларды тізбектеп күштер үшбұрышы
ережесімен қосамыз (1.4 б сурет). Алдымен ![]() ,
, ![]() күштерінің
тең әсерлі
күштерінің
тең әсерлі ![]() күшін, сонан соң
күшін, сонан соң
![]() ,
, ![]() күштерінің
тең әсерлі
күштерінің
тең әсерлі ![]() күшін, сөйтіп
т.б. табамыз. Сонда:
күшін, сөйтіп
т.б. табамыз. Сонда: ![]() ,
, ![]() ,
, ![]() =
=![]() . Күштер
саны n болса, онда
. Күштер
саны n болса, онда
 (1.1)
(1.1)
![]() күшін былай да табуға болады: алдымен
күшін былай да табуға болады: алдымен ![]() векторын тұрғызып,
оның ұшынан
векторын тұрғызып,
оның ұшынан ![]() векторын, содан
кейін
векторын, содан
кейін ![]() векторының ұшынан
векторының ұшынан ![]() векторын және сөйтіп т.б.
тұрғызамыз. Сонда тең әсерлі
векторын және сөйтіп т.б.
тұрғызамыз. Сонда тең әсерлі ![]() күші
бірінші вектордың басын соңғы вектордың ұшымен
қосады. Сонымен, тоғысатын КЖ-нің тең әсерлі
күші жүйедегі күштердің векторлық
қосындысына тең. Оның ӘС күштердің ӘС
қиылысу нүктесінен өтеді. Тең әсерлі күшін
геометриялық тәсілімен табу үшін күштердің
қиылысу нүктесінде күш көпбұрышын
тұрғызу керек; оның тұйықтаушысы тең
әсерлі күші болып келеді.
күші
бірінші вектордың басын соңғы вектордың ұшымен
қосады. Сонымен, тоғысатын КЖ-нің тең әсерлі
күші жүйедегі күштердің векторлық
қосындысына тең. Оның ӘС күштердің ӘС
қиылысу нүктесінен өтеді. Тең әсерлі күшін
геометриялық тәсілімен табу үшін күштердің
қиылысу нүктесінде күш көпбұрышын
тұрғызу керек; оның тұйықтаушысы тең
әсерлі күші болып келеді.
Тоғысатын КЖ-нің тең әсерлі күшін аналитикалық тәсілмен анықталуын қарастырайық. Ол үшін (1.1) векторлық теңдеуінің декарт координат жүйесінің өстеріне проекцияларын жазып, тең әсерлі күшінің проекцияларын анықтаймыз
![]() ,
, ![]() ,
, ![]() . (1.2)
. (1.2)
Тең әсерлі күшінің модулі келесі формуламен табылады
 (1.3)
(1.3)
ал оның бағыты – үш бағыттаушы косинустар арқылы табылады
 ,
,  ,
,  . (1.4)
. (1.4)
Тоғысатын КЖ тепе-теңдік қалпында болуы
үшін оның тең әсерлі күші нөлге тең
болуы қажетті де, жеткілікті де, яғни ![]() немесе
немесе
![]() (тепе-теңдік шартының
векторлық түрінде жазылуы). Тепе-теңдіктің
геометриялық шарты – күш көпбұрышы
тұйықталу керек, яғни соңғы күш
векторының ұшы бірінші вектордың басымен түйісу керек. Тепе-теңдіктің
аналитикалық шарттары - жүйедегі барлық күштердің
үш координаттық өстеріне проекцияларының
қосындылары нөлге тең болуы
(тепе-теңдік шартының
векторлық түрінде жазылуы). Тепе-теңдіктің
геометриялық шарты – күш көпбұрышы
тұйықталу керек, яғни соңғы күш
векторының ұшы бірінші вектордың басымен түйісу керек. Тепе-теңдіктің
аналитикалық шарттары - жүйедегі барлық күштердің
үш координаттық өстеріне проекцияларының
қосындылары нөлге тең болуы
![]() ,
, ![]() ,
, ![]() . (1.5)
. (1.5)
Тоғысатын жазық КЖ-нің тепе-теңдік шарттары мына түрде жазылады
![]() ,
, ![]() . (1.6)
. (1.6)
2 дәріс. Күштің нүктеге және өске қатысты моменті. Күштер жұбы. Күштер жүйесін берілген центрге келтіру
Дәрістің мазмұны: күштің нүктеге және өске қатысты моменті; күштер жұбы, күштер жұбының қасиеттері, күштер жүйесін центрге келтіру.
Дәрістің мақсаты: күштің нүктеге және өске қатысты моментінің қасиеттерін, күштер жұбының қасиеттерін, күштер жұптары жүйесін қарапайым түрге келтіруін және тепе-теңдік шарттарын, кез келген күштер жүйесін қарапайым түрге келтіруін зерттеу.
2.1 Күштің нүктеге қатысты және өске қатысты моменті
![]() күшінің
О нүктесіне қатысты моменті деп О нүктесінде ОАВ
үшбұрышының жазықтығына перпендикуляр түсетін
және төмендегі формуламен анықталатын
күшінің
О нүктесіне қатысты моменті деп О нүктесінде ОАВ
үшбұрышының жазықтығына перпендикуляр түсетін
және төмендегі формуламен анықталатын ![]() векторы
аталады (2.1 сурет)
векторы
аталады (2.1 сурет)

![]() (2.1)
(2.1)
мұндағы ![]() - О нүктсінен
- О нүктсінен ![]() күші
түсетін А нүктесіне жүргізілген радиус-вектор.
күші
түсетін А нүктесіне жүргізілген радиус-вектор.
![]() векторының
модулі күштің F модулі мен О нүктесінен
күштің әсер ету сызығына дейін ең
қысқа қашықтығының, яғни
күштің О нүктеге қатысты иінінің
көбейтіндісіне тең
векторының
модулі күштің F модулі мен О нүктесінен
күштің әсер ету сызығына дейін ең
қысқа қашықтығының, яғни
күштің О нүктеге қатысты иінінің
көбейтіндісіне тең
![]() =F∙h.
(2.2)
=F∙h.
(2.2)
![]() моменті
моменті
![]() күшінің О нүктесіне
қатысты айналдыру әсерін сипаттайды.
күшінің О нүктесіне
қатысты айналдыру әсерін сипаттайды. ![]() радиус-векторы
О нүктесінен тек қана А нүктесіне емес,
радиус-векторы
О нүктесінен тек қана А нүктесіне емес, ![]() күшінің
әсер ету сызығында жатқан кез келген басқа нүктесіне
де жүргізілуі мүмкін. Егер нүкте күштің
әсер ету сызығында жатса, онда күштің нүктеге
қатысты моменті нөлге тең болады (иіні нөлге
тең).
күшінің
әсер ету сызығында жатқан кез келген басқа нүктесіне
де жүргізілуі мүмкін. Егер нүкте күштің
әсер ету сызығында жатса, онда күштің нүктеге
қатысты моменті нөлге тең болады (иіні нөлге
тең).
![]() күштер
жүйесі үшін барлық күштердің О
нүктесіне қатысты векторлық моменттерінің
қосындысына тең вектор
күштер
жүйесі үшін барлық күштердің О
нүктесіне қатысты векторлық моменттерінің
қосындысына тең вектор
 (2.3)
(2.3)
күштер жүйесінің О нүктесіне қатысты бас моменті деп аталады.
Жазық күштер жүйесі үшін күштің нүктеге қатысты векторлық моментінің орнына күштің нүктеге қатысты алгебралық моментін қолданған ыңғайлы, өйткені бұл жағдайда барлық күштердің векторлық моменттері бір- біріне параллель болады. Күштің нүктеге қатысты алгебралық моменті деп күш модулінің күш иініне көбейтіндісі аталады
![]() .
(2.4)
.
(2.4)
Күш денені сағат тілінің қозғалысына қарсы бағытта айналдыруға тырысса алгебралық момент оң таңбамен, ал сағат тілінің қозғалысымен бағыттас айналдыруға тырысса теріс таңбамен алынады.
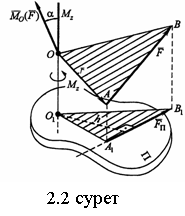
![]() күшінің
өске қатысты моменті деп оның өсте жатқан кез
келген нүктеге қатысты векторлық моментінің сол
өске проекциясы аталады, яғни
күшінің
өске қатысты моменті деп оның өсте жатқан кез
келген нүктеге қатысты векторлық моментінің сол
өске проекциясы аталады, яғни
![]() .
(2.5)
.
(2.5)
![]() күшінің
Oz өсінің О нүктесіне қатысты моментінің
өске проекциясы нүктенің өс үстіндегі орнына
тәуелсіз.
күшінің
Oz өсінің О нүктесіне қатысты моментінің
өске проекциясы нүктенің өс үстіндегі орнына
тәуелсіз.
Басқаша: ![]() күшінің өске қатысты
моменті деп күштің өске перпендикуляр
жазықтыққа түсірілген проекциясының
жазықтық пен өстің қиылысу нүктесіне
қатысты алгебралық моменті аталады (2.2 сурет)
күшінің өске қатысты
моменті деп күштің өске перпендикуляр
жазықтыққа түсірілген проекциясының
жазықтық пен өстің қиылысу нүктесіне
қатысты алгебралық моменті аталады (2.2 сурет)
![]() .
(2.6)
.
(2.6)
Күштің өске қатысты моменті,
күш пен өс бір жазықтықта орналасса, нөлге
тең. Күштің координат жүйесінің басына
қатысты ![]() моменті (2.1) формуласына сай
мына формуламен анықталады
моменті (2.1) формуласына сай
мына формуламен анықталады
 .
.
Осыдан күштің координат өстеріне қатысты моменттерін табамыз
![]() ,
, ![]() ,
, ![]() .
(2.7)
.
(2.7)
2.2 Параллель күштерді қосу
АҚД-ге түскен екі параллель және бір жаққа бағытталған күштердің тең әсерлі күші болады, оның модулі күштердің модульдерінің қосындысына тең, бағыты күштерге параллель және бағыттас. Тең әсерлі күштің ӘС-ғы берілген күштердің ӘС арасындағы түзу сызықты кесіндіні күштер модульдеріне кері пропорционал бөліктерге іш жағынан бөліп өтеді. Керісінше, кез келген күшті параллель және сол күшке бағыттас екі күшке жіктеуге болады.
 Өзара тең емес, параллель және
қарсы бағытталған екі күштің тең
әсерлі күші күштердің модульдерінің
айырмашылығына тең және үлкен күштің
бағытымен бірдей болады. Тең әсерлі күшінің
ӘС-ғы үлкен күштің ӘС сыртынан,
күштердің ӘС арасындағы түзу сызықты
кесіндіні күштер модульдеріне кері пропорционал бөліктерге
сыртқы жағынан бөліп өтеді.
Өзара тең емес, параллель және
қарсы бағытталған екі күштің тең
әсерлі күші күштердің модульдерінің
айырмашылығына тең және үлкен күштің
бағытымен бірдей болады. Тең әсерлі күшінің
ӘС-ғы үлкен күштің ӘС сыртынан,
күштердің ӘС арасындағы түзу сызықты
кесіндіні күштер модульдеріне кері пропорционал бөліктерге
сыртқы жағынан бөліп өтеді.
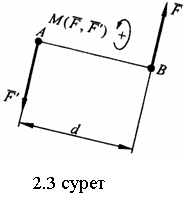
2.3 Күштер жұбы. Күштер жұбының моменті
АҚД түсетін күштер жұбы деп
модульдері өзара тең, параллель, бір біріне қарсы
бағытталған және бір түзуде жатпайтын екі
күштің жүйесін атаймыз (2.3 сурет). Жұп
құрайтын күштердің векторлық қосындысы
нөлге тең, бірақ күштер жұбы теңгерілмейді.
Күштердің ӘС арасындағы ең қысқа
қашықтық жұптың иіні d деп, ал
күштер орналасқан жазықтық жұптың
әсер ету жазықтығы деп аталады. Денеге түсетін бірнеше
жұптардың жиынтығы күштер жұптарының
жүйесі деп аталады. Жұп тең әсерлі күшке
келтірілмейді. Жұптың денеге әсері, шамасы ±F∙d тең
болатын M![]() моментімен, жұптың әсер ету
жазықтығының кеңістікте орналасуымен және
жұптың денені айналдыруға тырысатын бағытымен сипатталады,
сонда күштер жұбының моменті вектор болып табылады.
моментімен, жұптың әсер ету
жазықтығының кеңістікте орналасуымен және
жұптың денені айналдыруға тырысатын бағытымен сипатталады,
сонда күштер жұбының моменті вектор болып табылады.
Күштер жұбының векторлық
моменті ![]() – модулі жұп күшінің модулі мен
жұп иінінің көбейтіндісіне тең вектор, оның
бағыты жұптың әсер ету жазықтығына
перпендикуляр және вектордың ұшынан қарағанда,
жұп денені сағат тілінің қозғалысына қарсы
айналдыруға тырысатын болып көрінеді. Күштер жұбын оның әсер
ету жазықтығында және параллель жазықтыққа,
күш модулі мен жұп иінін өзгертіп, бірақ жұп
модулі мен оның денені айналдыруға тырысатын бағытын
сақтап, көшіруге болады, яғни күштер
жұбының векторлық моменті – еркін вектор.
– модулі жұп күшінің модулі мен
жұп иінінің көбейтіндісіне тең вектор, оның
бағыты жұптың әсер ету жазықтығына
перпендикуляр және вектордың ұшынан қарағанда,
жұп денені сағат тілінің қозғалысына қарсы
айналдыруға тырысатын болып көрінеді. Күштер жұбын оның әсер
ету жазықтығында және параллель жазықтыққа,
күш модулі мен жұп иінін өзгертіп, бірақ жұп
модулі мен оның денені айналдыруға тырысатын бағытын
сақтап, көшіруге болады, яғни күштер
жұбының векторлық моменті – еркін вектор.
Векторлық моменттері тең, бір жазықтықта немесе параллель жазықтықтарда орналасқан екі күштер жұбы, күш модульдері мен жұп иіндерінің шамаларына тәуелсіз, баламалы болады
Егер күштер жұптары бір жазықтықта орналасса, олардың векторлық моменттері сол жазықтыққа перпендикуляр, денені айналдыруға тырысатын бағытына сәйкес бір немесе екінші жаққа бағытталады. Бұл жағдайда жұптардың моменттерін алгебралық шамалар ретінде қарастырып, моменттің модулі мен таңбасы арқылы айыруға болады. Жұп денені сағат тілінің қозғалысына қарсы айналдыруға тырысса, оның моменті оң, керісінше жағдайда теріс болып саналады. Сонда күштер жұптарының жазық жүйесі үшін
![]() (2.8)
(2.8)
және 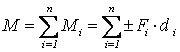 . (2.9)
. (2.9)
Жұптарды қосу туралы теорема: күштер
жұптарының жүйесі векторлық моменті барлық
жұптардың векторлық моменттерінің қосындысына
тең бір ғана жұпқа баламалы, яғни  .
Сонда қатты денеге әсер ететін күштер жұптары
жүйесінің тепе-теңдік шарты келесідей жазылады
.
Сонда қатты денеге әсер ететін күштер жұптары
жүйесінің тепе-теңдік шарты келесідей жазылады
 .
(2.10)
.
(2.10)
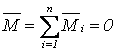
2.4 Күштерді параллель көшіру туралы теорема
Қатты денеге түсетін күшті оның денеге әсерін өзгертпей, дененің кез келген басқа нүктесіне, күштер жұбын қосып, өзіне параллель көшіруге болады (2.4 сурет); жұптың моменті күштің сол нүктеге қатысты моментіне тең болуы тиіс.
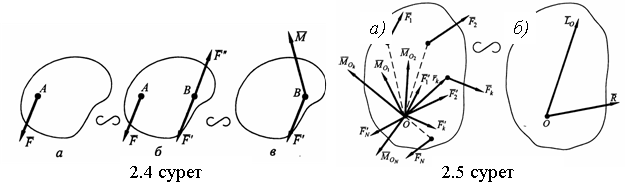 2.5 Күштер жүйесін берілген центрге
келтіру
2.5 Күштер жүйесін берілген центрге
келтіру
АҚД-ге әсер ететін кез келген күштер жүйесін бір центрге келтіруге болады, сонда барлық күштер келтіру центріне түсетін жүйенің бас векторына тең бір күш пен моменті жүйенің сол центрге қатысты бас моментіне тең бір жұпқа ауыстырылады (2.5 сурет)
 (2.11)
(2.11)
 .
(2.12)
.
(2.12)
Мұнда ![]() келтіру
центрінің таңдалуына тәуелсіз, ал
келтіру
центрінің таңдалуына тәуелсіз, ал ![]() – тәуелді.
– тәуелді.
АҚД-ге әсер ететін екі күштер жүйесі, олардың бас векторлары бірдей және кез келген нүктеге қатысты бас моменттері бірдей болғанда баламалы.
Вариньон теоремасы: егер күштер жүйесінің тең әсерлі күші болса, оның кез келген нүктеге немесе өске қатысты моменті жүйенің барлық күштерінің сол нүктеге немесе өске қатысты моменттерінің қосындысына тең.
3 дәріс. Күштер жүйелерінің тепе-теңдік шарттары. Үйкеліс. Ауырлық центрі.
Дәрістің мазмұны: күштер жүйелерінің тепе-теңдік шарттары, сырғанау үйкелісі мен домалау үйкелісі, қатты денелердің ауырлық центрлері.
Дәрістің мақсаты: кеңістік және жазық күштер жүйелерінің тепе-теңдік шарттарын анықтау, үйкеліс болғанда есептерді шешудің ерешеліктерін қарастыру, денелердің ауырлық центрлерін анықтауды үйрену.
3.1 Күштер жүйесінің тепе-теңдік шарттары
Денеге әсер ететін кез келген күштер
жүйесі оның ![]() бас векторына
тең бір күшке және моменті жүйенің кез келген О
центріне қатысты
бас векторына
тең бір күшке және моменті жүйенің кез келген О
центріне қатысты ![]() бас моментіне тең күштер
жұбына баламалы. Олай болса күштер жүйесі тепе-теңдікте болу үшін
бас моментіне тең күштер
жұбына баламалы. Олай болса күштер жүйесі тепе-теңдікте болу үшін ![]() және
және ![]() нөлге
тең болуы қажетті де жеткілікті. Сондықтан
тепе-теңдіктің шарттары векторлық түрде осылай жазылады
нөлге
тең болуы қажетті де жеткілікті. Сондықтан
тепе-теңдіктің шарттары векторлық түрде осылай жазылады
 ,
(3.1)
,
(3.1)
 .
(3.2)
.
(3.2)
Бұл шарттар келесі тепе-теңдіктің аналитикалық шарттарына баламалы
![]()
 ,
,  ,
,
 ,
,
 ,
,  ,
,
 , (3.3)
, (3.3)
яғни АҚД-ге әсер ететін кез келген күштер жүйесінің тепе-теңдігі үшін барлық күштердің декарт координат жүйесінің үш өсіне проекцияларының қосындылары және сол өстерге қатысты барлық күштердің моменттерінің қосындылары нөлге тең болуы қажетті де жеткілікті.
Кеңістік параллель күштер жүйесі үшін (Oz өсі күштерге бағыттас) келесідей жазылады
, , . (3.4)
Кез келген жазық күштер жүйесінің тепе-теңдік шарттарының бірінші түрі: күштердің екі координат өсіне проекцияларының қосындылары және кез келген центрге қатысты күштердің алгебралық моменттерінің қосындысы нөлге тең болуы қажетті де жеткілікті
, ,  .
(3.5)
.
(3.5)
Екінші түрі
 ,
,  ,
,  , (3.6)
, (3.6)
мұнда ![]() түзуі
түзуі ![]() өсіне перпендикуляр емес болу
керек.
өсіне перпендикуляр емес болу
керек.
Үшінші түрі
 , , (3.7)
, , (3.7)
мұнда А, В, С бір түзудің бойында жатпау керек.
Жазық параллель күштер жүйесі үшін тепе-теңдік шарттары келесідей
, (3.8)
(мұнда Ox өсі күштерге перпендикуляр болмау керек) немесе
,  , (3.9)
, (3.9)
мұнда А мен В нүктелерінен өтетін түзу күштерге параллель болмау керек.
3.2 Денелер жүйесінің тепе-теңдігі
Денелер жүйесінің бөліктерін қосатын байланыстар ішкі байланыстар деп аталады. Егер сыртқы байланыстарды күштерге ауыстырса, тепе-теңдік шарттары оларды анықтау үшін жеткіліксіз болады. Есептерді шешу әдістері:
 а) ішкі байланыстардың қасиеттерін
қолданып, қосымша тепе-теңдік шарттарын құрады.
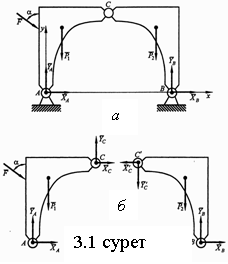
Мысалы, 3.1,а суреттегі жүйе үшін төртінші
теңдеу ретінде оның кез келген бір жартысына түсетін
барлық күштердің С топсасына қатысты
моменттерінің қосындысының нөлге тең болу
теңдеуін алуға болады;
а) ішкі байланыстардың қасиеттерін
қолданып, қосымша тепе-теңдік шарттарын құрады.
Мысалы, 3.1,а суреттегі жүйе үшін төртінші
теңдеу ретінде оның кез келген бір жартысына түсетін
барлық күштердің С топсасына қатысты
моменттерінің қосындысының нөлге тең болу
теңдеуін алуға болады;
б) конструкцияны, оның ішкі байланыстарын күштерге ауыстырып, бөліктерге ойша жіктейді (3.1,б сурет). Әр бөлігі үшін үш тәуелсіз тепе-теңдік теңдеулерін құрып, олардан алты белгісізді табуға болады.
3.3 Статикалық түрде анықталатын және статикалық түрде анықталмайтын жүйелер
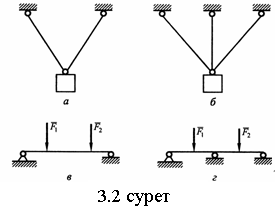 Егер байланыстар реакцияларының белгісіз
құраушыларының саны тәуелсіз тепе-теңдік
теңдеулерінің санына тең болса (3.2 а, в
сурет), қарастырылатын жүйе статикалық түрде
анықталатын, одан артық болса статикалық түрде
анықталмайтын жүйе деп аталады (3.2,б,г сурет). Статикалық
түрде анықталмайтын жүйелердегі реакцияларды теориялық
механикада АҚД үшін берілген әдістермен табу мүмкін
емес. Мұндай есептерді шешу үшін денелердің деформациялануын
есепке алып, қосымша деформациялардың теңдеулерін
құру керек.
Егер байланыстар реакцияларының белгісіз
құраушыларының саны тәуелсіз тепе-теңдік
теңдеулерінің санына тең болса (3.2 а, в
сурет), қарастырылатын жүйе статикалық түрде
анықталатын, одан артық болса статикалық түрде
анықталмайтын жүйе деп аталады (3.2,б,г сурет). Статикалық
түрде анықталмайтын жүйелердегі реакцияларды теориялық
механикада АҚД үшін берілген әдістермен табу мүмкін
емес. Мұндай есептерді шешу үшін денелердің деформациялануын
есепке алып, қосымша деформациялардың теңдеулерін
құру керек.
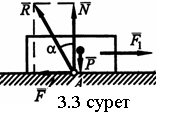
3.4 Сырғанау үйкелісі. Тегіс емес беттің реакциясы
 Сырғанау үйкелісінің Кулон – Амонтон
заңдары:
Сырғанау үйкелісінің Кулон – Амонтон
заңдары:
1. Бір денені басқа дене үстінде
ығыстыруға тырысқан жағдайда олардың жанасу
жазықтығында ![]() үйкеліс күші пайда болады,
оның модулі 0≤F≤ Fmax
аралығында кез келген мәнге ие болуы мүмкін. Үйкеліс
күші денеге түседі және күш түскен
нүктенің мүмкін жылдамдығына қарама-қарсы
болады.
үйкеліс күші пайда болады,
оның модулі 0≤F≤ Fmax
аралығында кез келген мәнге ие болуы мүмкін. Үйкеліс
күші денеге түседі және күш түскен
нүктенің мүмкін жылдамдығына қарама-қарсы
болады.
2. Максималды үйкеліс күші f үйкеліс коэффициенті мен N нормаль қысым күшінің көбейтіндісіне тең
Fmax=f∙N. (3.10)
Үйкеліс коэффициенті жанасатын денелердің материалдары мен беттерінің қалпына (кедір-бұдырлығына, температурасына, ылғалдылығына және т.б.) тәуелді өлшем бірліксіз шама, ол тәжірибе арқылы анықталады. f мәндері: ағаш пен ағаш арасында 0,4-0,7; металл мен металл - 0,15-0,25; болат пен мұз - 0,027.
Тыныштық үйкелісі мен сырғанау үйкелісі айыра танылады. Тыныштық үйкелісінің коэффициенті тепе-теңдіктің шеткі қалпына, яғни сыртқы күштер кішкене ғана өскенде қозғалыс басталып кететін қалпына сәйкес келетін максималды Fmax үйкеліс күші арқылы анықталады. Әдетте ол сырғанау үйкелісінің коэффициентінен артық. Сырғанау жылдамдығының өсуімен сырғанау үйкелісінің коэффициенті басында шамалы азаяды, содан кейін айтарлықтай өзгермейді.
3. Максималды үйкеліс күші едәуір кең шектерде жанасатын беттердің ауданына тәуелсіз.
Тегіс емес беттің реакциясы екі
құраушы күштер арқылы есепке алынады: ![]() нормаль реакциясы (оның модулі нормаль
қысым күшіне тең) және оған перпендикуляр
нормаль реакциясы (оның модулі нормаль
қысым күшіне тең) және оған перпендикуляр ![]() үйкеліс күші (3.3
сурет). Толық реакция
үйкеліс күші (3.3
сурет). Толық реакция ![]() нормаль
бағыттан α бұрышына ауытқиды (tg α = F/N).
нормаль
бағыттан α бұрышына ауытқиды (tg α = F/N).
Егер дене горизонталь тегіс емес беттің
үстінде болып, оған ауырлық күштен басқа
ешқандай сыртқы күш түспесе, онда F = 0, ал
толық реакция R = N және тіреуіш бетіне перпендикуляр
болады. Денеге шамасы аз ![]() күшін
түсіріп, біз оны қозғалтуға тырыссақ,
қозғалыс бола қалмайды, өйткені
күшін
түсіріп, біз оны қозғалтуға тырыссақ,
қозғалыс бола қалмайды, өйткені ![]() үйкеліс
күші пайда болады, және F≤ Fmax.
үйкеліс
күші пайда болады, және F≤ Fmax. ![]() күші артқан сайын
күші артқан сайын ![]() үйкеліс күші де артады. F1
= Fmax болғанда тепе-теңдіктің шеткі
қалпы орын алады, сонда толық реакция
үйкеліс күші де артады. F1
= Fmax болғанда тепе-теңдіктің шеткі
қалпы орын алады, сонда толық реакция ![]() вертикальдан
үйкеліс бұрышы деп аталатын αmax бұрышына
ауытқиды. Оны φ арқылы белгілеп, үйкеліс
бұрышының тангенсі үйкеліс коэффициентіне тең екенін
анықтаймыз
вертикальдан
үйкеліс бұрышы деп аталатын αmax бұрышына
ауытқиды. Оны φ арқылы белгілеп, үйкеліс
бұрышының тангенсі үйкеліс коэффициентіне тең екенін
анықтаймыз
tg φ= Fmax/N=f . (3.11)
Идеалды емес байланыстың толық реакциясының бағыты үйкеліс бұрышымен шеттеледі. Әдетте денелердің сырғанау үйкеліс күші ескерілуімен тепе-теңдіктің шеткі қалпы үшін үйкеліс күші максималды шамасына ие болғанда қарастырылады. Идеалды емес байланыстың реакциясы екі құраушымен көрсетіледі: N нормаль реакциясымен және Fmax максималды үйкеліс күшімен.
3.5 Домалау кезіндегі байланыстың реакциясы
3.4,а суретте домалау кезінде цилиндр тіреуші бетке жаншылып, онымен домалау бағыты жағына ығысқан СD доғасымен кескінделетін бетпен өзара әрекеттескені көрсетілген.
Тіреуші беттің цилиндрге ![]() толық реакциясы беттің
деформациясынан туындаған таралған күштердің
қосындысы ретінде цилиндр домалауына кедергі жасайды. Бір дененің
басқа дененің бетінде домалау кезінде пайда болатын кедергі домалау
үйкелісі деп аталады. Инженерлік есептеулер жүргізуде керегі - домалауға
кедергі моменті (3.4,б сурет). Құбылыстың
толық реакциясы беттің
деформациясынан туындаған таралған күштердің
қосындысы ретінде цилиндр домалауына кедергі жасайды. Бір дененің
басқа дененің бетінде домалау кезінде пайда болатын кедергі домалау
үйкелісі деп аталады. Инженерлік есептеулер жүргізуде керегі - домалауға
кедергі моменті (3.4,б сурет). Құбылыстың 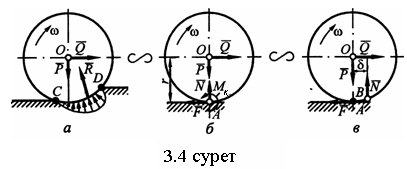 сұлбасын жасағанда, домалау
деформацияланбайтын бетінде қарастырылады, ал
сұлбасын жасағанда, домалау
деформацияланбайтын бетінде қарастырылады, ал ![]() толық
реакциясы А нүктеден δ шамасына ығысқан В
нүктесіне түсетін екі құраушы күш арқылы
көрсетіледі (3.4,в сурет.
толық
реакциясы А нүктеден δ шамасына ығысқан В
нүктесіне түсетін екі құраушы күш арқылы
көрсетіледі (3.4,в сурет. ![]() күші
– сырғанау үйкеліс күші, ал
күші
– сырғанау үйкеліс күші, ал ![]() - нормаль
реакциясы. Тепе-теңдік теңдеулерінен келесі анықталады
- нормаль
реакциясы. Тепе-теңдік теңдеулерінен келесі анықталады
N = P, F = Q, Qmax∙r = δ∙N. (3.12)
Келесі көбейтінді δ∙N = (Мкед)max домалауға кедергі моменті, яғни домалау үйкелісі деп аталады. Егер Q күші аз болса, N күшінің вертикаль диаметрінен ауытқуы да аз болады; Q өсуімен бұл ауытқу артады. Qmax болғанда цилиндр тепе-теңдіктің шеткі қалпына жетеді, сонда N нормаль реакциясы вертикаль диаметрінен домалау үйкелісінің коэффициенті деп аталатын, δ шеткі қашықтығында өтеді. δ коэффициенті жанасатын денелер материалдардың қасиеттеріне және беттерінің қалпына тәуелді, ол тәжірибелік түрде анықталады. Мысалы, рельс үстімен дөңгелек домалаған кезде δ = 0,005 см, шарик подшипнигінде δ = 0,001 см.
3.6 Қатты дененің ауырлық центрі
Дененің А1, A2
нүктелерінде
түсетін екі параллель ![]() және
және ![]() күштерін
қарастырайық (3.5 сурет).
күштерін
қарастырайық (3.5 сурет). ![]() тең
әсерлі күшінің әсер ету сызығы қосылатын
күштерге параллель және A1A2 түзуінде
жатқан С нүктесінен өтеді. С
нүктесінің орнын Вариньон теоремасын қолданып
анықтай аламыз:
тең
әсерлі күшінің әсер ету сызығы қосылатын
күштерге параллель және A1A2 түзуінде
жатқан С нүктесінен өтеді. С
нүктесінің орнын Вариньон теоремасын қолданып
анықтай аламыз: ![]() , осыдан
, осыдан
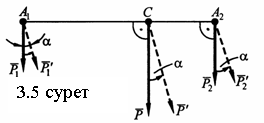
![]() . (3.13)
. (3.13)
![]() ,
, ![]() күштерін
А1, А2
нүктелерінің айналасында бірдей α бұрышына бұрғанда,
тең әсерлі күші де сол бағытта α бұрышына бұрылады және
дәл сол С нүктесіне түседі. С
нүктесі параллель күштердің центрі деп аталады. Кез келген
күштер саны үшін де осылай болады.
күштерін
А1, А2
нүктелерінің айналасында бірдей α бұрышына бұрғанда,
тең әсерлі күші де сол бағытта α бұрышына бұрылады және
дәл сол С нүктесіне түседі. С
нүктесі параллель күштердің центрі деп аталады. Кез келген
күштер саны үшін де осылай болады.
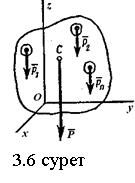
Дене бөлшектеріне түсетін ![]() ,
, ![]() ,…,
,…, ![]() ауырлық күштерінің
тең әсерлісін
ауырлық күштерінің
тең әсерлісін ![]() деп белгілейік (3.6 сурет). Осы күштің
модулі дененің салмағы деп аталады және келесі
теңдікпен анықталады
деп белгілейік (3.6 сурет). Осы күштің
модулі дененің салмағы деп аталады және келесі
теңдікпен анықталады
![]() .
(3.14)
.
(3.14)
С нүктесі ![]() параллель
ауырлық күштерінің центрі болып келеді, ол дененің
ауырлық центрі деп аталады. Сонымен, АҚД-нің ауырлық
центрі – денемен өзгеріссіз байланысқан дененің
кеңістікте кез келген орналасуында дене бөлшектеріне түсетін
ауырлық күштерінің тең әсерлі күшінің
әсер ету сызығы өтетін нүкте. Ауырлық
центрінің координаттары келесі формулалармен анықталады
параллель
ауырлық күштерінің центрі болып келеді, ол дененің
ауырлық центрі деп аталады. Сонымен, АҚД-нің ауырлық
центрі – денемен өзгеріссіз байланысқан дененің
кеңістікте кез келген орналасуында дене бөлшектеріне түсетін
ауырлық күштерінің тең әсерлі күшінің
әсер ету сызығы өтетін нүкте. Ауырлық
центрінің координаттары келесі формулалармен анықталады
![]() ,
, ![]() ,
, ![]() (3.15)
(3.15)
мұндағы ![]() ,
, ![]() ,
, ![]() – ауырлық
– ауырлық
![]() күштері түсетін
нүктелердің координаттары.
күштері түсетін
нүктелердің координаттары.
4 дәріс. Нүктенің және дененің қарапайым қозғалыстарының кинематикасы
Дәрістің мазмұны: кинематиканың кіріспе ұғымдары, нүкте кинематикасы, траектория, нүктенің жылдамдығы мен үдеуі; қатты дененің ілгерілемелі және айналмалы қозғалыстары.
Дәрістің мақсаты: нүкте қозғалысының және қатты дененің қарапайым қозғалыстарының кинематикалық сипаттамаларын қарастыру.
4.1 Кинематикаға кіріспе
Кинематика – денелер қозғалыстарының геометриялық қасиеттерін, денелердің инерттілігі мен оларға әсер ететін күштерді ескермей зерттейтін механика бөлімі. Қозғалыс ретінде дененің координат жүйесімен бірігіп, санақ жүйесін (СЖ) құрайтын басқа денелерге қатысты кеңістікте орналасуының уақыт өтуімен өзгеруін түсінеді. СЖ кинематикада еркінше таңдап алынады.
Денелердің қозғалысы кеңістікте уақыт өтуімен орындалады. Кеңістік үш өлшемді Евклид кеңістігі ретінде қарастырылады. Уақыт барлық СЖ бірдей өтеді деп есептеледі. Кинематика есептерінде t уақыты тәуелсіз айнымалы (аргумент) ретінде алынады. Басқа айнымалылардың барлығы (арақашықтар, жылдамдықтар және т.б.) t аргументінің функциялары ретінде қарастырылады. Уақыт бір бастапқы уақыт мезгілінен есептеледі.
Кинематика есептерін шешу үшін дененің (нүктенің) қарастырылатын қозғалысы кинематикалық түрде берілу керек, яғни дененің (нүктенің) кез келген уақыт мезгілінде берілген СЖ-не қатысты орналасуы берілу керек. Қозғалысты зерттеу оның берілу тәсілдерін анықтаудан басталады. Кинематиканың негізгі мақсаты – нүктенің (дененің) қозғалыс заңын біліп, қозғалысты сипаттайтын барлық кинематикалық шамаларды табу әдістерін анықтау.
Қозғалатын нүктенің берілген СЖ-не қатысты кескіндейтін үздіксіз сызығы нүктенің траекториясы деп аталады. Траектория түзу болса, нүкте қозғалысы түзу сызықты, қисық болса қисық сызықты деп аталады.
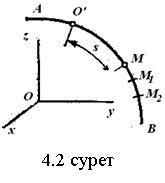
4.2 Нүкте қозғалысының берілу тәсілдері
Нүктенің қозғалысы үш тәсілдердің біреуімен берілуі мүмкін.
1.
Векторлық тәсіл. М нүктесі Oxyz санақ
жүйесіне қатысты қозғалатын болсын.
Нүктенің кез келген уақыт мезетіндегі орнын, оның ![]() радиус-векторының (4.1 сурет) t
уақытына тәуелдігін беріп, анықтауға болады.
радиус-векторының (4.1 сурет) t
уақытына тәуелдігін беріп, анықтауға болады.
![]() . (4.1)
. (4.1)
Бұл векторлық түрде жазылған нүктенің қозғалыс заңы.
2. Координаттық тәсіл. Нүктенің орнын оның уақыт өтуімен өзгеретін координаттарымен тікелей анықтауға болады
![]() . (4.2)
. (4.2)
Бұл - тік бұрышты декарт координаттарындағы нүктенің қозғалыс заңы.
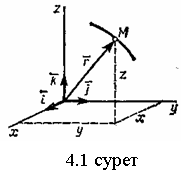
3. Табиғи тәсіл. Нүкте қозғалысын табиғи тәсілмен беру – бұл оның траекториясын (4.2 сурет), траекториясындағы санақ басы мен санақ бағытын және қозғалыс заңын келесі түрде беру
![]() .
(4.3)
.
(4.3)
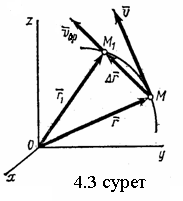
4.3 Қозғалыс векторлық тәсілімен берілген жағдайда нүктенің жылдамдығы мен үдеуі
Нүкте
қозғалысының негізгі кинематикалық
сипаттамаларының біреуі жылдамдық болып келеді. t уақыт
мезетінде ![]() радиус-векторымен анықталатын М
орнында, ал t1 уақыт мезетінде
радиус-векторымен анықталатын М
орнында, ал t1 уақыт мезетінде ![]() радиус-векторымен
анықталатын М1 орнында болсын дейік (4.3 сурет). Сонда
радиус-векторымен
анықталатын М1 орнында болсын дейік (4.3 сурет). Сонда
![]() уақыт аралығында
нүктенің орын ауыстыруы
уақыт аралығында
нүктенің орын ауыстыруы ![]() орын ауыстыру векторымен
анықталады. ОММ1 үшбұрышынан
орын ауыстыру векторымен
анықталады. ОММ1 үшбұрышынан ![]() болатыны көрінеді, яғни
болатыны көрінеді, яғни ![]() . Орын ауыстыру векторының
сәйкес уақыт аралығына қатынасы, нүктенің Dt уақыт аралығындағы модулі
мен бағыты бойынша ортақ жылдамдығы деп аталатын
векторлық шамасын береді,
. Орын ауыстыру векторының
сәйкес уақыт аралығына қатынасы, нүктенің Dt уақыт аралығындағы модулі
мен бағыты бойынша ортақ жылдамдығы деп аталатын
векторлық шамасын береді, ![]() .
.
![]() векторлық
шамасы нүктенің t уақыт мезетіндегі жылдамдығы деп аталады,
сонда нүктенің жылдамдығы
векторлық
шамасы нүктенің t уақыт мезетіндегі жылдамдығы деп аталады,
сонда нүктенің жылдамдығы ![]() векторының
t аргументі бойынша бірінші ретті туындысы болып келеді
векторының
t аргументі бойынша бірінші ретті туындысы болып келеді
![]() .
(4.4)
.
(4.4)
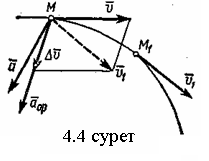
Нүктенің
үдеуі - оның жылдамдығының модулі мен
бағытының уақыт өтуімен өзгеруін сипаттайтын
векторлық шама. Әлдебір t уақыт мезетінде
нүктенің орны М және жылдамдығы ![]() болсын, ал t1 мезетінде нүкте M1 орнына
келіп,
болсын, ал t1 мезетінде нүкте M1 орнына
келіп, ![]() жылдамдығына ие болады дейік (4.4
сурет). Сонда
жылдамдығына ие болады дейік (4.4
сурет). Сонда ![]() уақыт аралығында
нүктенің жылдамдығы
уақыт аралығында
нүктенің жылдамдығы ![]() өсімін
алады, ол әрқашан траекториясының ойыс жағына
бағытталады.
өсімін
алады, ол әрқашан траекториясының ойыс жағына
бағытталады. ![]() векторының Dt аралығына қатынасы
нүктенің сол ауқыт аралығындағы орташа
үдеуін анықтайды. Dt
нөлге ұмтылған кезде
векторының Dt аралығына қатынасы
нүктенің сол ауқыт аралығындағы орташа
үдеуін анықтайды. Dt
нөлге ұмтылған кезде ![]() ұмтылатын векторлық шама
ұмтылатын векторлық шама
 (4.5)
(4.5)
нүктенің берілген t уақыт мезетіндегі үдеуі деп аталады. Сонымен, нүктенің берілген уақыт мезетіндегі үдеу векторы жылдамдық векторының уақыт бойынша бірінші ретті туындысына, яғни нүктенің радиус-векторының екінші ретті туындысына тең.
4.4 Қозғалыс координаттық тәсілімен берілген жағдайда нүктенің жылдамдығы мен үдеуі
Келесі теореманы қолданамыз: вектордың туындысының қарастырылатын СЖ-нің қозғалмайтын өсіне проекциясы вектордың сол өске проекциясының туындысына тең.
Сонда жылдамдықтың проекциялы үшін келесі орын алады
![]() (4.6)
(4.6)
немесе ![]() . (4.7)
. (4.7)
Сонымен, жылдамдықтың координаттық өстерге проекциялары сәйкес координаттардың уақыт бойынша бірінші ретті туындыларына тең.
Үдеудің проекциялары үшін келесі болады
 ,
,  ,
,  (4.8)
(4.8)
немесе ![]() ,
(4.9)
,
(4.9)
яғни үдеудің координаттық өстерге проекциялары жылдамдықтың сәйкес проекцияларының уақыт бойынша бірінші ретті туындыларына немесе кординаттардың екі ретті туындыларына тең.
4.5 Қозғалыс табиғи тәсілімен берілген жағдайда нүктенің жылдамдығы мен үдеуі
Мұнда
![]() мен
мен ![]() векторларын
олардың Мtnb табиғи
үшжақтықтың М нүктесінен басталып,
сонымен бірге қозғалатын өстеріне проекциялары арқылы
табылады. Өстердің бағыттары: Мt - s санағының оң бағытына
сәйкес траекторияға жанама бойынша; Мn бас нормалі – траекториямен
жанасу жазықтығында траекторияның ойыс жағына
жүргізілген нормалі бойынша; Mb бинормалі – алдынғы екі
өске перпендикуляр бойынша олармен оң өстер жүйесін
құрайтын болып бағытталады.
векторларын
олардың Мtnb табиғи
үшжақтықтың М нүктесінен басталып,
сонымен бірге қозғалатын өстеріне проекциялары арқылы
табылады. Өстердің бағыттары: Мt - s санағының оң бағытына
сәйкес траекторияға жанама бойынша; Мn бас нормалі – траекториямен
жанасу жазықтығында траекторияның ойыс жағына
жүргізілген нормалі бойынша; Mb бинормалі – алдынғы екі
өске перпендикуляр бойынша олармен оң өстер жүйесін
құрайтын болып бағытталады.
Нүктенің жылдамдығын анықтаймыз
 .
(4.10)
.
(4.10)
Нүкте жылдамдығының траекториясына жанама өсіне проекциясы
![]() .
(4.11)
.
(4.11)
Осыдан
шығар ![]() және жылдамдықтың модулі
және жылдамдықтың модулі ![]() .
.
Нүктенің үдеуі үшін
 .
(4.12)
.
(4.12)
Мұнда
 (ρ – қарастырылатын орнында
нүктенің траекториясының қисықтық радиусы),
сонда
(ρ – қарастырылатын орнында
нүктенің траекториясының қисықтық радиусы),
сонда
 ,
(4.13)
,
(4.13)
яғни үдеу векторы жанама және нормаль құраушыларының қосындысына тең
![]() .
(4.14)
.
(4.14)
![]() векторы жанасу
жазықтығында жатады, яғни Mtn жазықтығында.
(4.13) теңдігінің екі жағын Мt, Мn және
Mb өстеріне проекциялап, келесіге келеміз
векторы жанасу
жазықтығында жатады, яғни Mtn жазықтығында.
(4.13) теңдігінің екі жағын Мt, Мn және
Mb өстеріне проекциялап, келесіге келеміз
 .
(4.15)
.
(4.15)
4.6 Қатты дененің ілгерілемелі қозғалысы
АҚД-нің ілгерілемелі қозғалысы деп денеде жүргізілген кез келген түзу өзіне параллель болып қала беретін қозғалысты айтады, сонда дене нүктелерінің траекториялары қисық болулары мүмкін. Келесі теорема орын алады: ілгерілемелі қозғалыста дене нүктелері бірдей траекторияларды кескіндейді және әр уақыт мезгілінде модульдері мен бағыттары бірдей жылдамдықтар мен үдеулерге ие болады. Бұл жағдайда АҚД-нің кинематикасы нүктенің кинематикасына келтіріледі.
 4.7 Қатты
дененің тұрақты өс төңірегіндегі айналмалы
қозғалысы
4.7 Қатты
дененің тұрақты өс төңірегіндегі айналмалы
қозғалысы
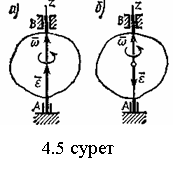
АҚД-нің тұрақты (қозғалмайтын) өс төңірегінде айналғанда, оның өсте жатқан нүктелері қозғалмайды (4.5 суретіндегі АВ). Өс арқылы екі жазықтық жүргізейік – қозғалмайтын және денемен байланысып қозғалатын жазықтықты. Олардың арасындағы екі жақтық j бұрышы дененің бұрылу бұрышы деп аталады, ол айналу өсінің оң бағыты жағынан қарағанда сағат тілінің қозғалысына қарсы болып көрінгенде, оң болып есептеледі. АҚД-нің тұрақты өс төңірегіндегі айналу заңы – келесі тәуелділік
 j = j (t). (4.16)
j = j (t). (4.16)
Бұрыштық жылдамдық j бұрышының уақыт өтуімен өзгеруін сипаттайды
w = dj/dt, яғни ![]() .
(4.17)
.
(4.17)
Дененің
бұрыштық жылдамдығын модулі |w| тең
және айналу өсінің бойымен, ұшынан
қарағанда дене сағат тілінің қозғалысына
қарсы айналатын болып, бағытталған ![]() векторымен
кескіндеуге болады.
векторымен
кескіндеуге болады.
Бұрыштық үдеу бұрыштық жылдамдығының уақыт өтуімен өзгеруін сипаттайды
e = dw/dt = d2 j/dt2, яғни
![]() . (4.18)
. (4.18)
Егер қозғалыс кезінде w=const болса, айналу бірқалыпты деп аталады. (4.17) формуласын интегралдап, айналу заңын анықтаймыз
![]() . (4.19)
. (4.19)
Бірқалыпты
айналу кезінде ![]() болса, онда
болса, онда
![]() . (4.20)
. (4.20)
Егер қозғалыс кезінде бұрыштық үдеу тұрақты болса (e=const), айналу бірқалыпты айнымалы деп аталады, оның заңы келесі түрде жазылады
![]() . (4.21)
. (4.21)
Егер w мен e таңбалары бірдей болса, айналу – бірқалыпты үдемелі, әртүрлі болса, бірқалыпты кемімелі болады.
Айналатын дене нүктелерінің жылдамдықтары мен үдеулерін анықтаймыз (4.6 сурет).
Айналу кезінде М нүктесі радиусы h тең, жазықтығы айналу өсіне перпендикуляр және P центрі өсте жататын шеңберді кескіндейді. dt уақыт ішінде дене dφ бұрышына бұрылады, М нүктесі ds = h∙ dφ орын ауыстыру жасайды. Сонда
![]() . (4.21)
. (4.21)
Нүктенің үдеулерін анықтаймыз
 . (4.22)
. (4.22)
![]() үдеуі траекторияға жанама
бағытталады (үдемелі айналу кезінде айналу бағытына
сәйкес және кемімелі айналу кезінде айналу бағытына
қарсы),
үдеуі траекторияға жанама
бағытталады (үдемелі айналу кезінде айналу бағытына
сәйкес және кемімелі айналу кезінде айналу бағытына
қарсы), ![]() үдеуі
әрқашан МP радиусы бойымен өске қарай
бағытталады. Нүктенің толық үдеуі
үдеуі
әрқашан МP радиусы бойымен өске қарай
бағытталады. Нүктенің толық үдеуі
![]() ,
(4.23)
,
(4.23)
m бұрышы (4.6 сурет) келесі тәуелдік арқылы анықталады
![]() .
(4.24)
.
(4.24)
![]() және
және ![]() векторлары
үшін келесі формулуларды шығаруға болады
векторлары
үшін келесі формулуларды шығаруға болады
![]() ,
(4.25)
,
(4.25)
![]() .
(4.26)
.
(4.26)
5 дәріс. Қатты дененің жазық параллель қозғалысы. Нүктенің күрделі қозғалысы
Дәрістің мазмұны: дененің жазық параллель қозғалысының кинематикасы; нүктенің күрделі қозғалысы.
Дәрістің мақсаты: жазық параллель қозғалысының және нүктенің күрделі қозғалысының кинематикалық сипаттамаларын оқып үйрену.
5.1 Жазық параллель қозғалыстың теңдеулері
 АҚД-нің
жазық параллель немесе жазық қозғалысы деп
дененің барлық нүктелері бір қозғалмайтын
жазықтыққа параллель жазықтарда орын ауыстыратын
қозғалысты атайды (5.1 сурет).
АҚД-нің
жазық параллель немесе жазық қозғалысы деп
дененің барлық нүктелері бір қозғалмайтын
жазықтыққа параллель жазықтарда орын ауыстыратын
қозғалысты атайды (5.1 сурет).
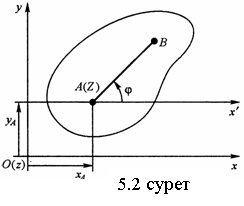
Дене қозғалысын зерттеу үшін оның S қимасының Оху жазықтығында қозғалысын зерттеуге жеткілікті. S фигурасының Оху жазықтықта орны АВ кесіндінің орналасуымен анықталады (5.2 сурет). А нүктенің (полюсінің) хА, уА координаттарын және j бұрышын біліп, АВ кесіндінің орналасуын анықтауға болады. Қозғалыс заңын білу үшін, яғни кез келген уақыт мезетінде фигураның Оху жазықтығында орналасуын білу үшін, келесі тәуелдіктерді білу қажет
![]() . (5.1)
. (5.1)
(5.1) теңдеулері АҚД-нің жазық қозғалысының теңдеулері деп аталады. Алдыңғы екі теңдеу j=соnst жағдайда фигураның орын алатын қозғалысын анықтайды; бұл ілгерілемелі қозғалыс, ол болғанда фигураның барлық нүктелері А полюсы мен бірдей қозғалады. Үшінші теңдеу хА =const, уА =const жағдайда, яғни А полюсы қозғалмайтын жағдайда фигураның орын алатын қозғалысын анықтайды; бұл фигураның А полюс төңірегіндегі айналуы. Сонымен, жазық қозғалысты полюспен бірдей ілгерілемелі қозғалысы мен полюс төңірегіндегі айналмалы қозғалысының қосындысы ретінде қарастыруға болады.
5.2 Жазық фигура нүктелерінің жылдамдықтарын анықтау
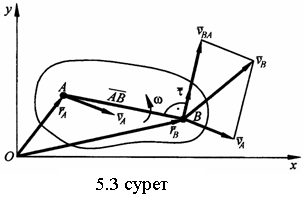 Қозғалыстың
ілгерілемелі құраушысы
Қозғалыстың
ілгерілемелі құраушысы ![]() жылдамдығымен
сипатталады дейік. Оху өстеріне қатысты фигураның кез
келген B нүктесінің орны
жылдамдығымен
сипатталады дейік. Оху өстеріне қатысты фигураның кез
келген B нүктесінің орны ![]() радиус-векторымен
анықталады (5.3 сурет) . Сонда
радиус-векторымен
анықталады (5.3 сурет) . Сонда
 . (5.2)
. (5.2)
Сонда
фигураның А полюсын айналуында B нүктесі алатын ![]() жылдамдығы келесіге тең
жылдамдығы келесіге тең
![]() (5.3)
(5.3)
мұндағы w - фигураның бұрыштық жылдамдығы.
АҚД нүктелерінің жылдамдықтарын анықтағанда келесі теореманы қолдануға болады (кез келген қозғалыс үшін орындалады): дененің екі нүктелерінің жылдамдықтарының оларды қосатын түзуге проекциялары тең.
5.3 Жазық фигура нүктелерінің жылдамдықтарын жылдамдықтардың лездік центрі қолдануымен анықтау
Жазық фигура нүктелерінің жылдамдықтарын басқа әдіспен, жылдамдықтардың лездік центрі (ЖЛЦ) қолдануымен анықтауға болады. ЖЛЦ деп жылдамдығы қарастырылатын уақыт мезетінде нөлге тең жазық фигураның нүктесі аталады.
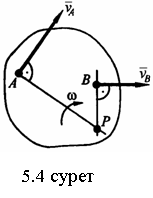 t уақыт
мезгілінде жазық фигураның А және В нүктелері
бір-біріне параллель емес
t уақыт
мезгілінде жазық фигураның А және В нүктелері
бір-біріне параллель емес ![]() және
және ![]() жылдамдықтарына ие болсын (5.4
сурет). Сонда
жылдамдықтарына ие болсын (5.4
сурет). Сонда ![]() векторына жүргізілген Аа
және
векторына жүргізілген Аа
және ![]() векторына жүргізілген Вb
перпендикулярларының қиылысу Р нүктесі жылдамдықтардың
лездік центрі болады, өйткені
векторына жүргізілген Вb
перпендикулярларының қиылысу Р нүктесі жылдамдықтардың
лездік центрі болады, өйткені ![]() = 0.
= 0.
Егер t уақыт мезгілінде Р нүктені полюс ретінде алса, онда (5.2) формуласы бойынша А нүктенің жылдамдығы келесі болады
![]() .
.
Сонымен, қарастырылатын уақыт мезгілінде фигура нүктелерінің жылдамдықтары фигура қозғалысы ЖЛЦ төңірегіндегі айналмалы қозғалыс болғандай анықталады. Сонда
![]() ,
, ![]() .
(5.4)
.
(5.4)
(5.4) теңдігінен келесі шығады
![]()
![]() ,
(5.5)
,
(5.5)
яғни жазық фигура нүктелерінің жылдамдықтары олардың ЖЛЦ-не дейінгі қашықтықтарына пропорционал.
Алынған нәтижелерден келесі қорытындыларға келеміз:
а)
ЖЛЦ-нің орнын анықтау үшін жазық фигураның кез
келген екі А, В нүктелерінің ![]() ,
,
![]() жылдамдықтарының
бағыттарын білген жеткілікті; ЖЛЦ А және В
нүктелерінен олардың жылдамдықтарына
тұрғызылған перпендикулярлардың қиылысу
нүктесінде орналасады;
жылдамдықтарының
бағыттарын білген жеткілікті; ЖЛЦ А және В
нүктелерінен олардың жылдамдықтарына
тұрғызылған перпендикулярлардың қиылысу
нүктесінде орналасады;
б)
жазық фигураның кез келген нүктесінің жылдамдығын
анықтау үшін фигураның бір А нүктесінің
жылдамдығының модулі мен бағытын және оның
басқа В нүктесінің жылдамдығының
бағытын білген жеткілікті. Сонда А және В нүктелерінен
![]() мен
мен ![]() бағыттарына
перпендикулярлар тұрғызып, ЖЛЦ-н табамыз және
бағыттарына
перпендикулярлар тұрғызып, ЖЛЦ-н табамыз және ![]() бағытымен фигураның айналу
бағытын анықтаймыз. Содан кейін
бағытымен фигураның айналу
бағытын анықтаймыз. Содан кейін ![]() белгілі
болғандықтан, (5.5) бойынша жазық фигураның кез келген М
нүктесінің
белгілі
болғандықтан, (5.5) бойынша жазық фигураның кез келген М
нүктесінің ![]() жылдамдығын таба
аламыз. Сонда
жылдамдығын таба
аламыз. Сонда ![]() векторы РМ-ға
перпендикуляр фигураның айналу бағытына сәйкес
бағытталады;
векторы РМ-ға
перпендикуляр фигураның айналу бағытына сәйкес
бағытталады;
в) жазық фигураның w бұрыштық жылдамдығы кез келген уақыт мезетінде фигура нүктесінің жылдамдығы мен оның ЖЛЦ-не дейінгі қашықтығының қатынасына тең
![]() .
(5.6)
.
(5.6)
5.4 Жазық фигура нүктелерінің үдеулерін анықтау
Жазық
фигураның кез келген М нүктесінің үдеуі сол
фигураның ілгерілемелі және айналмалы қозғалыстарында
нүкте алатын үдеулерінің қосындысы болады. М нүктесінің
Оху өстеріне қатысты орны ![]() радиус-векторымен
анықталады, мұнда
радиус-векторымен
анықталады, мұнда ![]() = AM. Сонда
= AM. Сонда
 . (5.7)
. (5.7)
Сонымен
жазық фигураның кез келген М нүктесінің
үдеуі полюс ретінде қабылданған А
нүктесінің үдеуі мен фигура сол полюсты айналғандағы
М нүктесі алатын үдеуінің қосындысына тең.
Есетерді шешу кезінде ![]() векторын оның жанама (
векторын оның жанама (![]() ) және нормаль (
) және нормаль (![]() ) құраушыларына ауыстырып, (5.7)
теңдікті келесі түрде жазған ыңғайлы
) құраушыларына ауыстырып, (5.7)
теңдікті келесі түрде жазған ыңғайлы
![]() .
(5.8)
.
(5.8)
5.5 Нүктенің күрделі қозғалысы. Салыстырмалы, тасымал және абсолют қозғалыстар
Есептерді шешу кезінде нүктенің қозғалысын екі санақ жүйелеріне қатысты қарастырған тиімді болады, олардың біреуі негізгі болып саналады (шартты қозғалмайтын), екіншісі – біріншісіне қатысты қозғалады. Нүктенің қозғалысы бұл жағдайда күрделі деп аталады. М нүктесінің қозғалатын Oxyz СЖ-не қатысты қозғалысын қарастырайық және осы Oxyz СЖ-сі қозғалмайтын О1х1у1z1 СЖ-не қатысты қозғалыста болсын (5.5 сурет). Келесі анықтамаларды енгіземіз:
а) М нүктесінің қозғалатын СЖ-не қатысты (Oxyz өстеріне қатысты) қозғалысы салыстырмалы қозғалыс деп аталады;
б)
қозғалмайтын О1х1у1z1
СЖ-не қатысты Oxyz СЖ-нің қозғалысы М нүктесі
үшін тасымал қозғалыс болады. Охуz өстерімен
өзгеріссіз байланысқан, қарастырылатын уақыт мезетінде
қозғалатын М нүктесімен түйісетін m
нүктесінің жылдамдығы М нүктесінің сол
уақыт мезгіліндегі тасымал жылдамдығы (![]() ), ал
m нүктенің үдеуі - М нүктесінің
), ал
m нүктенің үдеуі - М нүктесінің ![]() тасымал үдеуі деп аталады. Сонда
тасымал үдеуі деп аталады. Сонда
![]() ,
, ![]() ;
(5.9)
;
(5.9)
в) М нүктесінің қозғалмайтын О1х1у1z1 СЖ-не қатысты қозғалысы абсолют немесе күрделі қозғалыс деп аталады.
5.6 Жылдамдықтарды қосу теоремасы
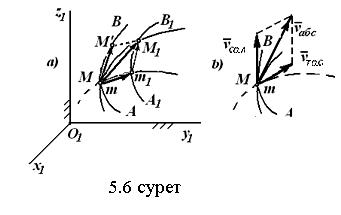 М нүктесінің күрделі
қозғалысын қарастырайық. Нүкте Dt=t1-t уақыт
аралығында АВ траекториясы бойымен
М нүктесінің күрделі
қозғалысын қарастырайық. Нүкте Dt=t1-t уақыт
аралығында АВ траекториясы бойымен ![]() векторымен
анықталатын салыстырмалы
қозғалысын жасайтын болсын (5.6,а сурет). АВ
қисығы қозғалатын Oxyz өстерімен бірге
қозғалып, сол уақыт аралығында жаңа A1B1
орнына келеді. Біржолы АВ қисығының t
уақыт мезгілінде М нүктесімен түйісетін m нүктесі
векторымен
анықталатын салыстырмалы
қозғалысын жасайтын болсын (5.6,а сурет). АВ
қисығы қозғалатын Oxyz өстерімен бірге
қозғалып, сол уақыт аралығында жаңа A1B1
орнына келеді. Біржолы АВ қисығының t
уақыт мезгілінде М нүктесімен түйісетін m нүктесі
![]() тасымал орын ауыстыруын жасайды.
Нәтижесінде М нүктесі М1 орнына келіп, Dt уақыт ішінде абсолют
тасымал орын ауыстыруын жасайды.
Нәтижесінде М нүктесі М1 орнына келіп, Dt уақыт ішінде абсолют ![]() орын ауыстыруын жасайды. Векторлық
Мm1М1 үшбұрышынан келесі шығады
орын ауыстыруын жасайды. Векторлық
Мm1М1 үшбұрышынан келесі шығады
![]() .
.
Осы
теңдіктің екі жағын Dt-ға
бөліп, оны нөлге ұмтылдырып, шектерді
қарастырғанда, келесіге келеміз ![]() .
Нәтижесінде келесі шығады
.
Нәтижесінде келесі шығады
![]() .
(5.10)
.
(5.10)
![]() векторлары сәйкес траекторияларына
жанама бағытталады (5.6,б сурет). Сонымен, жылдамдықтарды
қосу теоремасын дәлелдедік: күрделі қозғалыста
нүктенің абсолют жылдамдығы оның салыстырмалы
және тасымал жылдамдықтарының векторлық
қосындысына тең. Егер
векторлары сәйкес траекторияларына
жанама бағытталады (5.6,б сурет). Сонымен, жылдамдықтарды
қосу теоремасын дәлелдедік: күрделі қозғалыста
нүктенің абсолют жылдамдығы оның салыстырмалы
және тасымал жылдамдықтарының векторлық
қосындысына тең. Егер ![]() мен
мен ![]() арасындағы бұрышы a болса, онда
абсолют жылдамдығының модулі
арасындағы бұрышы a болса, онда
абсолют жылдамдығының модулі
![]() . (5.11)
. (5.11)
5.7 Үдеулерді қосу туралы Кориолис теоремасы
Салыстырмалы, тасымал және абсолют үдеулердің арасындағы тәуелдікті табайық. (5.10) теңдігінен келесі шығады
![]() . (5.12)
. (5.12)
Мұнда
![]() мен
мен ![]() векторларының
салыстырмалы қозғалыстағы өзгерістері 1 индексімен
белгіленген, тасымал қозғалыстағы өзгерістері – 2
индексімен.
векторларының
салыстырмалы қозғалыстағы өзгерістері 1 индексімен
белгіленген, тасымал қозғалыстағы өзгерістері – 2
индексімен.
Анықтама бойынша салыстырмалы үдеу салыстырмалы жылдамдықтың тек қана салыстырмалы қозғалыста болатын өзгерісін сипаттайды, сонда Охуz өстерінің қозғалысы, яғни тасымал қозғалысы, есепке алынбайды. Сондықтан
![]() .
(5.13)
.
(5.13)
Тасымал
үдеу тасымал жылдамдықтың тек қана тасымал
қозғалыстағы өзгерісін сипаттайды, өйткені ![]() , мұндағы m - Охуz
өстерімен өзгеріссіз байланысқан нүкте, ол тек қана
сол өстермен қозғалғанда, яғни тасымал
қозғалыста үдеуге ие болады. Сондықтан
, мұндағы m - Охуz
өстерімен өзгеріссіз байланысқан нүкте, ол тек қана
сол өстермен қозғалғанда, яғни тасымал
қозғалыста үдеуге ие болады. Сондықтан
![]() .
(5.14)
.
(5.14)
Нәтижесінде (5.12) теңдігінен келесі шығады
![]() . (5.15)
. (5.15)
Келесі белгіні енгізейік
![]() .
(5.16)
.
(5.16)
Салыстырмалы
жылдамдықтың тасымал қозғалыстағы өзгерісін
және тасымал жылдамдықтың салыстырмалы қозғалыстағы
өзгерісін сипаттайтын ![]() шамасы нүктенің
бұрынды немесе Кориолис үдеуі деп аталады. Нәтижесінде (5.15)
теңдік келесі түрде жазылады
шамасы нүктенің
бұрынды немесе Кориолис үдеуі деп аталады. Нәтижесінде (5.15)
теңдік келесі түрде жазылады
![]() .
(5.17)
.
(5.17)
(5.17) формуласы үдеулерді қосу Кориолис теоремасын өрнектейді: нүктенің күрделі қозғалысында оның абсолют үдеуі үш үдеулерінің, яғни салыстырмалы, тасымал және кориолис үдеулерінің векторлық қосындысына тең.
Кориолис үдеуінің векторы келесі фомуламен анықталатыны дәлелденеді
![]() .
(5.18)
.
(5.18)
![]() мен
мен
![]() тапқан кезде олар да бірнеше
құраушылардың, мысалы, жанама және нормаль
үдеулерінің қосындысы болуы мүмкін екенін есепке алу
керек.
тапқан кезде олар да бірнеше
құраушылардың, мысалы, жанама және нормаль
үдеулерінің қосындысы болуы мүмкін екенін есепке алу
керек.
Тасымал қозғалыс ілгерілемелі болатын
дербес жағдайында ![]() =0, сонда
үдеулерді қосу теоремасы қарапайымдалады
=0, сонда
үдеулерді қосу теоремасы қарапайымдалады
![]() .
(5.19)
.
(5.19)
6 дәріс. Нүкте динамикасы
Дәрістің мазмұны: нүкте динамикасының кіріспе ұғымдары мен аксиомалары; қозғалыстың дифференциалдық теңдеулері; нүкте динамикасының жалпы теоремалары.
Дәрістің мазмұны: динамиканың ұғымдары мен нүкте қозғалысының дифференциалдық теңдеулерін қарастыру, нүкте динамикасының жалпы теоремаларын қолданып нүкте қозғалысының сипаттамаларын анықтауды үйрену.
6.1 Динамика аксиомалары
Динамика деп материялық денелердің, олардың инерциясын есепке алуымен күштер әсерінен пайда болатын қозғалысын қарастыратын теориялық механиканың бөлімін атайды. Инерция деп материялық дененің өзінің қозғалыс немесе тыныштық қалпын күштер түспеген кезде сақтап қалу қасиетін айтады. Ілгерілемелі қозғалыстағы дененің инерциясының өлшемі болып табылатын зат мөлшеріне тәуелді физикалық шама дененің массасы m деп аталады.
Нүкте динамикасы 4 аксиомаға негізделеді.
1-аксиома (инерция заңы): күштер түспейтін материялық нүкте (МН), оған күштер түсіп, қалпын өзгерткенге дейін тыныштықта немесе бірқалыпты түзу сызықты қозғалыста болады. Күштер болмағандағы нүктенің қозғалысы инерциялық қозғалыс деп аталады. Инерция заңы орындалатын санақ жүйесі (СЖ) инерциялық СЖ деп аталады. Көптеген есептерде Жермен байланысқан СЖ инерциялық деп алынады.
2-аксиома (динамиканың негізгі заңы): МН-нің үдеуі оған түсетін күшке пропорционал және сол күшпен бағыттас. Динамиканың негізгі теңдеуі
![]() .
(6.1)
.
(6.1)
3-аксиома (әсер мен кері әсер заңы): екі МН бір-біріне модульдері тең және нүктелерді қосатын түзу бойымен қарама-қарсы бағытталған күштермен әсер етеді.
4-аксиома (күштер әсерінің тәуелсіздік заңы): әр күш бөлек түскенде МН алатын үдеулердің векторлық қосындысы барлық күштер біржолы түскенде алатын үдеуіне тең
![]() (6.2)
(6.2)
(6.2) теңдеуінің орнына (6.1)
теңдеуін, ![]() күші ретінде тең
әсерлі күшті алып, қолдануға болады.
күші ретінде тең
әсерлі күшті алып, қолдануға болады.
Ауырлық күш әсерінен денелер
бірдей ![]() үдеуіне ие болады, ол
ауырлық күш үдеуі немесе еркін түсу үдеуі деп
аталады. Егер МН-ге тек қана
үдеуіне ие болады, ол
ауырлық күш үдеуі немесе еркін түсу үдеуі деп
аталады. Егер МН-ге тек қана ![]() ауырлық
күші түсетін болса, онда (6.1) бойынша
ауырлық
күші түсетін болса, онда (6.1) бойынша
![]() .
(6.2)
.
(6.2)
Дененің массасы оның орналасуына және оған түсетін күштерге тәуелсіз, ал дененің салмағы дене орнының географикалық еніне және оның Жер орталығына дейінгі қашықтығына тәуелді еркін түсу үдеуінің өзгеруімен өзгеріп тұрады.
6.2 Материялық нүкте қозғалысының дифференциалдық теңдеулері
МН {![]() }
күштер жүйесінің әсерінен инерциалдық Оxyz
санақ жүйесіне қатысты қозғалатын болсын, және
күштер арасына байланыстардың реакциялары да кіреді деп есептейміз.
}
күштер жүйесінің әсерінен инерциалдық Оxyz
санақ жүйесіне қатысты қозғалатын болсын, және
күштер арасына байланыстардың реакциялары да кіреді деп есептейміз.
(6.2) теңдеуін декарт координат өстеріне проекциялап, декарт координаттарындағы қозғалысының дифференциалдық теңдеулерін (ҚДТ) аламыз
![]() (6.3)
(6.3)
табиғи өстерге проекциялап, нүкте қозғалысының табиғи дифференциалдық теңдеулерін аламыз
 ; (6.4)
; (6.4)
ҚДТ нүкте динамикасының екі негізгі есебін шешу үшін қолданылады:
1-негізгі есеп: нүкте қозғалысы бойынша оған түсетін күшті анықтау. Мұнда МН қозғалысының теңдеулерін дифференциалдап, нәтижелерін (6.3) немесе (6.4) теңдеулеріне қою керек, содан нүктеге түсетін күш анықталады;
2-негізгі есеп: нүктеге түсетін күштер бойынша оның қозғалысын анықтау. Мұнда жалпы жағдайда (6.3) немесе (6.4) дифференциалдық теңдеулерінің екінші интегралдарын табу керек. Дербес жағдайларда ҚДТ айнамалыларды бөлу әдісінің көмегімен интегралдалуы мүмкін.
6.3 Материялық нүктенің салыстырмалы қозғалысы
Динамика заңдары тек қана инерциалдық
СЖ-нде орындалады. Материялық нүктенің кейбір СЖ-не
қатысты қозғалысын қарастырайық және осы СЖ
инерциалдық СЖ-не қатысты еркінше қозғалатын болсын. P
нүктесі {![]() } күштер
әсерінен қозғалатын болсын. Инерциалдық СЖ-нде динамиканың
негізгі (6.2) теңдеуі орындалады. Нүктенің абсолют
үдеуі (5.17) формуласымен табылады
} күштер
әсерінен қозғалатын болсын. Инерциалдық СЖ-нде динамиканың
негізгі (6.2) теңдеуі орындалады. Нүктенің абсолют
үдеуі (5.17) формуласымен табылады
![]() (6.5)
(6.5)
(6.5) теңдігін (6.4) теңдігіне қойып, түрлендіреміз
![]() (6.6)
(6.6)
Келесі белгілерді қабылдаймыз
![]() (6.7)
(6.7)
және ![]() (6.8)
(6.8)
![]() және
және ![]() векторлары
сәйкес тасымал және кориолис инерция күштері деп аталады.
векторлары
сәйкес тасымал және кориолис инерция күштері деп аталады.
(6.6) теңдігін келесі түрде жазуға болады
![]() (6.9)
(6.9)
(6.9) теңдеуі МН-нің салыстырмалы қозғалысы динамикасының негізгі теңдеуі деп аталады. МН-нің салыстырмалы қозғалысының теңдеулері абсолют қозғалысының теңдеулері секілді, түсетін күштерге тасымал және кориолис инерция күштерін қосып, құрастырылады. Қозғалатын инерциалдық емес СЖ-нің бақылаушы тасымал және кориолис инерция күштерін шынайы әсер ететін күштер секілді қабылдайды. Бірақ ол дұрыс емес, өйткені инерциалдық емес СЖ үшін механиканың Ньютон заңдары орындалмайды, сондықтан құбылыстарды алдыңғы аксиомалар қолдануымен қарастыруға болмайды.
МН-нің салыстырмалы қозғалысы негізгі теңдеуінің дербес жағдайлары:
а) ілгерілемелі тасымал қозғалыс кезінде
![]()
![]() (6.10)
(6.10)
б) түзу сызықты бірқалыпты тасымал қозғалыс кезінде
![]() (6.11)
(6.11)
Мұнда (6.11) мен (6.2) бірдей болады, өйткені
![]() . Сондықтан, бұл
санақ жүйесі инерциалдық болады. Механикалық
тәжірибелер арқылы санақ жүйесі тыныштықта екенін
немесе ілгерілемелі бірқалыпты және түзу сызықты
қозғалыста екенін анықтау мүмкін емес (Галилейдің
салыстырмалылық принципі);
. Сондықтан, бұл
санақ жүйесі инерциалдық болады. Механикалық
тәжірибелер арқылы санақ жүйесі тыныштықта екенін
немесе ілгерілемелі бірқалыпты және түзу сызықты
қозғалыста екенін анықтау мүмкін емес (Галилейдің
салыстырмалылық принципі);
в) салыстырмалы тыныштық қалпында
![]() (6.12)
(6.12)
Бұл МН-нің салыстырмалы тепе-теңдігінің теңдеуі.
6.4. Нүктенің қозғалыс мөлшерінің өзгеруі туралы теорема
Динамиканың көптеген есептерін шешу кезінде ҚДТ-н интегралдаудың орнына динамиканың жалпы теоремаларын қолданған тиімділеу болады.
Нүктенің
қозғалыс мөлшерінің өзгеруі туралы теоремасын
қарастырайық. МН-нің қозғалыс мөлшері деп
нүктенің массасы мен оның жылдамдығының ![]() көбейтіндісіне тең шаманы
айтады.
көбейтіндісіне тең шаманы
айтады. ![]() векторы нүктенің
траекториясына жанама бағытталады.
векторы нүктенің
траекториясына жанама бағытталады.
Күштің элементар импульсі деп күштің элементар уақыт аралығына көбейтіндісін атайды
![]() (6.13)
(6.13)
Импульс
күштің әсер ету сызығы бойымен бағытталады. ![]() күшінің шекті t1 уақыт
ішіндегі
күшінің шекті t1 уақыт
ішіндегі ![]() импульсі
импульсі
 . (6.14)
. (6.14)
Импульстің модулі мен бағытын оның проекциялары арқылы табуға болады
 . (6.15)
. (6.15)
Динамиканың негізгі теңдеуін келесі түрде жазуға болады
![]() .
(6.16)
.
(6.16)
Бұл дифференциалдық түрдегі нүктенің қозғалыс мөлшерінің өзгеруі туралы теоремасы: нүктенің қозғалыс мөлшерінің уақыт бойынша туындысы нүктеге түсетін күштердің векторлық қосындысына тең. Шекті түрде сол теорема осылай болады: нүктенің қозғалыс мөлшерінің кейбір уақыт аралығында өзгеруі оған түсетін күштердің сол уақыт аралықтағы импульстерінің векторлық қосындысына тең
![]() .
(6.17)
.
(6.17)
Есептерді шешу кезінде әдетте теңдеулердің проекциялары қолданылады.
6.5 Нүктенің қозғалыс мөлшері моментінің өзгеруі туралы теорема
Нүктенің
қозғалыс мөлшерінің кейбір О центріне
қатысты моменті деп келесі теңдікпен анықталатын ![]() векторлық шамасын айтады
векторлық шамасын айтады
![]() (6.18)
(6.18)
мұндағы
![]() - қозғалыстағы нүктенің
О центрінен жүргізілген радиус-векторы.
- қозғалыстағы нүктенің
О центрінен жүргізілген радиус-векторы.
Сонда
![]() векторы
векторы ![]() және
О центрі арқылы өтетін жазықтыққа
перпендикуляр бағытталады, aл модулі
және
О центрі арқылы өтетін жазықтыққа
перпендикуляр бағытталады, aл модулі ![]() .
.
Нүктенің
қозғалыс мөлшерінің О центрінен өтетін Оz
өсіне қатысты моменті ![]() векторының
сол өске проекциясына
тең
векторының
сол өске проекциясына
тең
![]() (6.19)
(6.19)
мұндағы
g -![]() векторы мен Оz
өсі арасындағы бұрыш.
векторы мен Оz
өсі арасындағы бұрыш.
Теорема: нүктенің қозғалыс мөлшерінің кейбір қозғалмайтын центрге қатысты алынған моментінің уақыт бойынша туындысы әсер ететін күштің сол центрге қатысты моментіне тең
![]() .
(6.20)
.
(6.20)
Өске қатысты моменттер теоремасы
![]() .
(6.21)
.
(6.21)
(6.20)
теңдеуінен ![]() болса,
болса, ![]() болатыны шығады.
болатыны шығады.
6.6 Күштің жұмысы. Күштің қуаты. Нүктенің кинетикалық энергиясының өзгеруі туралы теорема
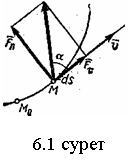 М
нүктесіне түсетін
М
нүктесіне түсетін ![]() күшінің
(6.1 сурет) элементар жұмысы деп, келесі скаляр шаманы айтады
күшінің
(6.1 сурет) элементар жұмысы деп, келесі скаляр шаманы айтады
dW = Ft ∙ds (6.22)
мұндағы
Ft -![]() күшінің М
нүктесінің траекториясына нүктенің орын ауыстыру
бағытымен жүргізілген Мt жанамасына
проекциясы;
күшінің М
нүктесінің траекториясына нүктенің орын ауыстыру
бағытымен жүргізілген Мt жанамасына
проекциясы;
ds - М нүктенің элементар орын ауыстыруының модулі.
ds=|d![]() | болғандықтан
(мұндағы d
| болғандықтан
(мұндағы d![]() - нүктенің
элементар орын ауыстыру векторы), (6.22) теңдігін келесі түрде
жазуға болады
- нүктенің
элементар орын ауыстыру векторы), (6.22) теңдігін келесі түрде
жазуға болады
dW= ![]() .
(6.23)
.
(6.23)
Сонымен, күштің элементар жұмысы күштің оның түсу нүктесінің орын ауыстыру векторына скаляр көбейтіндісіне тең.
Күштің шекті M0M1 орын ауыстыруында (6.1 сурет) жұмысы төмендегідей анықталады
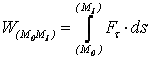 ,
(6.24)
,
(6.24)
 . ( 6.25)
. ( 6.25)
Күштің қуаты деп күштің уақыт бірлігінде жасайтын жұмысына тең шаманы айтады. Егер жұмыс бірқалыпты жасалатын болса, онда қуат P = W/t1 (мұнда t1 – W жұмысы жасалатын уақыт аралығы). Жалпы жағдайда
![]() , (6.26)
, (6.26)
яғни қуат күштің жанама құраушысының жылдамдыққа көбейтіндісіне тең.
Нүктенің
кинетикалық энергиясы (КЭ) деп ![]() тең
скаляр шаманы айтады. Теорема: нүктенің КЭ оның кейбір орын
ауыстыру кезіндегі өзгерісі нүктеге түсетін барлық
күштердің сол орын ауыстырудағы жұмыстарының
алгебралық қосындысына тең
тең
скаляр шаманы айтады. Теорема: нүктенің КЭ оның кейбір орын
ауыстыру кезіндегі өзгерісі нүктеге түсетін барлық
күштердің сол орын ауыстырудағы жұмыстарының
алгебралық қосындысына тең
![]() . (6.26)
. (6.26)
6.7 Нүкте үшін Даламбер принципі
Массасы
m материялық нүктеге тең әсерлі күші ![]() деп белгіленген актив күштер
және байланыстың
деп белгіленген актив күштер
және байланыстың ![]() реакциясы түсетін болсын. Осы
күштер әсерінен нүкте инерциалдық СЖ-не қатысты
кейбір
реакциясы түсетін болсын. Осы
күштер әсерінен нүкте инерциалдық СЖ-не қатысты
кейбір ![]() үдеуімен қозғалады.
үдеуімен қозғалады.
Келесі шаманы енгіземіз
![]() ,
(6.27)
,
(6.27)
ол күштің өлшем бірлігіне ие болады. Модулі нүкте массасы мен оның үдеуінің көбейтіндісіне тең және сол үдеуге қарама-қарсы бағытталатын векторлық шама нүктенің инерция күші деп аталады. Сонда, егер кез келген уақыт мезгілінде нүктеге түсетін актив және реакция күштеріне инерция күшін қосса, алынған күштер жүйесі теңгеріледі, яғни
![]() . (6.28)
. (6.28)
Бұл МН үшін Даламбер принципін өрнектейді.
7 дәріс. Жүйе және қатты дене динамикасының негіздері
Дәрістің мазмұны: механикалық жүйе, оның массасы, массалар центрі және инерция моменттері; жүйе қозғалысының дифференциалдық теңдеулері; жүйе динамикасының жалпы теоремалары және жүйе үшін Даламбер принципі.
Дәрістің мазмұны: жүйенің динамикалық сипаттамаларын, қозғалыстың дифференциалдық теңдеулерін, жүйе үшін негізгі динамика теоремаларын оқып үйрену.
7.1 Механикалық жүйе. Масса, массалар центрі және инерция моменттері
Механикалық жүйе (МЖ) деп өзара
әрекеттесетін МН-лердің немесе денелердің жиынтығы
аталады. Материалық дене оны құрайтын
бөлшектердің МЖ-сі болып келеді. Нүктелерінің
қозғалысы байланыстармен шектелмейтін МЖ еркін материялық
нүктелердің жүйесі деп аталады. Жүйенің
нүктелеріне қарастырылып отырған жүйеге кірмейтін
денелерден түсетін ![]() , k= 1,2 …,n
күштері сыртқы күштер деп аталады. Ішкі күштер деп
жүйе нүктелері бір- біріне түсіретін
, k= 1,2 …,n
күштері сыртқы күштер деп аталады. Ішкі күштер деп
жүйе нүктелері бір- біріне түсіретін ![]() ,
k= 1,2 …,m күштері аталады. Ішкі күштер
жүйесінің бас векторы мен бас моменті нөлге тең
болатынын көрсетуге болады. Бұдан ішкі күштер жалпы
жағдайда теңгерілетіні шықпайды, өйткені олардың
әсерінен жүйе нүктелерінің орын ауыстырулары болуы
мүмкін (АҚД үшін теңгеріледі).
,
k= 1,2 …,m күштері аталады. Ішкі күштер
жүйесінің бас векторы мен бас моменті нөлге тең
болатынын көрсетуге болады. Бұдан ішкі күштер жалпы
жағдайда теңгерілетіні шықпайды, өйткені олардың
әсерінен жүйе нүктелерінің орын ауыстырулары болуы
мүмкін (АҚД үшін теңгеріледі).
Жүйе массасы деп жүйе нүктелері массаларының қосындысын атайды
M=Σmk. (7.1)
Жүйенің массалар центрінің орны (С нүктесі) келесі формулалармен анықталады
![]() ,
(7.2)
,
(7.2)
![]() . (7.3)
. (7.3)
Дене үшін келесі болады  , (7.4)
, (7.4)
 . (7.5)
. (7.5)
Ауырлық күштердің біртекті өрісінде массалар мен ауырлық центрлері түйіседі.
МЖ-нің өске және нүктеге қатысты инерция моменттері деп келесі шамалар аталады
Jl=Σmk∙hk2. (7.6)
JO=Σmk∙rk2 (7.7)
мұндағы hk мен rk – дененің массасы mk нүктесінің l өсіне дейінгі және O нүктесіне дейінгі қашықтытары.
Қатты дене үшін өске және нүктеге қатысты инерция моменттері
![]() ,
(7.8)
,
(7.8)
![]() . (7.9)
. (7.9)
Декарт өстеріне және координаттар басына қатысты инерция моменттері
Jx=Σmk∙(yk2+zk2), Jy=Σmk∙(xk2+zk2), Jz=Σmk∙( xk2+yk2), (7.10)
JO=Σmk∙rk2= Σmk∙( xk2+yk2+zk2). (7.11)
Координаттық жазықтықтарға қатысты инерция моменттері келесіге тең
Jxy=Σmk∙ zk2, Jyz=Σmk∙xk2, Jxz=Σmk∙yk2. (7.12)
Келесі тәуелдіктер орын алатынын дәлелдеуге болады
2JO= Jx+ Jy+ Jz, (7.13)
JO= Jxy+ Jyz+ Jxz. (7.14)
Дене үшін инерция моменттері массалар бойынша интегралдармен анықталады
![]() ,
, ![]() ,
, ![]() . (7.15)
. (7.15)
Гюйгенс-Штейнер теоремасы: жүйенің кейбір z өсіне қатысты Jz инерция моменті сол өске параллель, массалар центрінен өтетін zC өсіне қатысты жүйенің JzC инерция моментінің және жүйенің M массасының өстердің d арақашықтығына көбейтіндісінің қосындысына тең
![]() .
(7.16)
.
(7.16)
Параллель өстер жиынтығы арасында массалар центрінен өтетін өске қатысты инерция моменті ең кіші болады.
7.2 Жүйе қозғалысының дифференциалдық теңдеулері. Жүйенің массалар центрі қозғалысы туралы теорема
МЖ-ге кіретін нүктелер үшін қозғалыстарының дифференциалдық теңдеулерін (ҚДТ) векторлық түрде жазуға болады
 (7.17)
(7.17)
(7.17) өстерге проекциялап, өске проекциялары түріндегі ҚДТ-н аламыз. Жүйе үшін динамиканың негізгі есебін толық шешуі ҚДТ-н интегралдап, жүйенің әр нүктесінің қозғалыс теңдеулерін және байланыстардың реакцияларын анықтаудан тұрады. Бұны аналитикалық түрде тек қана дербес жағдайда, нүктелер саны аз болғанда орындауға болады, керісінше теңдеулерді сандық интергралдау керек. Бірақ көптеген есептерді шешкенде жүйе қозғалысын жалпы анықтайтын кейбір сипаттамаларын табу жеткілікті болады. (7.17) теңдеулерін қосып, келесіні аламыз
![]() . (7.18)
. (7.18)
(7.2) формуласын есепке алып, келесіге келеміз
![]() . (7.19)
. (7.19)
(7.19) жүйенің массалар центрінің қозғалысы туралы теорема: жүйенің массалар центрі массасы жүйенің массасына тең және оған жүйенің барлық сыртқы күштері түсетін материялық нүкте секілді қозғалады. (7.19) теңдігін координаттық өстерге проекциялап, массалар центрі қозғалысының декарт координат жүйесі өстеріне проекцияларындағы дифференциалдық теңдеулерін табуға болады.
(7.19) теңдігінен ілгерілемелі қозғалыстағы денені массасы дененің массасына тең МН секілді қарастыруға болатыны шығады. Қалған жағдайларда денені МН секілді тек дене қозғалысының айналмалы бөлігін ескермеуге болса ғана қарастыруға болады. МЖ-нің массалар центрі қозғалысының заңын анықтаған кезде белгісіз ішкі күштерді қарастырмауға болады.
Теореманың салдары (жүйенің массалар центрі қозғалысының сақталу заңы): ішкі күштер жүйенің массалар центрінің қозғалысын өзгертпейді.
7.3 Жүйенің қозғалыс мөлшерінің өзгеруі туралы теорема
Жүйенің қозғалыс мөлшері (ЖҚМ) деп келесі шаманы атайды
![]() . (7.20)
. (7.20)
Мынаны көрсетуге болады
![]() ,
(7.21)
,
(7.21)
яғни
ЖҚМ жүйе массасының оның массалар центрінің
жылдамдығына көбейтіндісіне тең. Егер жүйе
қозғалысында оның массалар центрі қозғалмай
тұрса, онда ЖҚМ нөлге тең (мысалы, дененің
массалар центрінен өтетін тұрақты өсті айналатын дене
жағдайында). Егер дене қозғалысы күрделі болса,
ЖҚМ-ң шамасы дененің массалар центрі төңірегіндегі
айналмалы қозғалысына тәуелсіз (домалайтын
дөңгелек үшін айналуына тәуелсіз ![]() ).
).
Дифференциалдық түрдегі ЖҚМ-нің өзгеруі туралы теоремасы: ЖҚМ-нің уақыт бойынша туындысы жүйенің барлық сыртқы күштерінің векторлық қосындысына тең
![]() . (7.22)
. (7.22)
Интегралдық түрдегі теорема: ЖҚМ-нің кейбір уақыт аралығында өзгерісі жүйеге түсетін сыртқы күштерінің сол уақыт аралығындағы импульстерінің векторлық қосындысына тең
![]() .
(7.23)
.
(7.23)
Салдары (ЖҚМ-нің сақталу заңы): ішкі күштер ЖҚМ-н өзгертпейді, сондықтан есептерді шешу кезінде ішкі күштерді қарастырмауға болады.
7.4 Қозғалыс мөлшерлерінің бас моментінің өзгеруі туралы теорема
Берілген
О
центріне қатысты жүйенің қозғалыс
мөлшерлерінің бас моменті (ЖҚМБМ) немесе кинетикалық
моменті деп жүйенің барлық нүктелерінің қозғалыс
мөлшерлерінің сол центрге қатысты моменттерінің
векторлық қосындысына тең ![]() шамасы
аталады
шамасы
аталады
![]() .
(7.24)
.
(7.24)
Дәл солай координаттық өстерге қатысты қарастырамыз
![]() ,
, ![]() ,
, ![]() .
(7.25)
.
(7.25)
ЖҚМБМ-нің өзгеруі туралы теорема (моменттер теоремасы): кейбір қозғалмайтын центрге қатысты ЖҚМБМ-нің уақыт бойынша туындысы жүйенің барлық күштерінің сол центрге қатысты моменттерінің қосындысына тең
![]() . (7.26)
. (7.26)
Қозғалмайтын Охyz өстеріне проекциялап, проекциялардағы теореманы аламыз.
Теорема дененің айналмалы қозғалысын және жүйенің жалпы жағдайда қозғалысын зерттеу үшін қолданылады, өйткені жалпы жағдайдағы қозғалыс ілгерілемелі және айналмалы қозғалыстардан тұрады. Егер полюс ретінде массалар центрі алынса, онда қозғалыстың ілгерілемелі бөлігін массалар центрі қозғалысы туралы теоремасын, ал айналмалы бөлігін моменттер теоремасы қолдануымен зерттеуге болады. Сонда алдын ала белгісіз ішкі күштер қарастырылмайды.
Денемен бірге ілгерілемелі қозғалатын координаттар жүйесі үшін оның центріне қатысты моменттер теоремасы орын алады. Сонда теореманың түрі қозғалмайтын центрге қатысты теоремасымен бірдей болады. Сондай жүйенің өстеріне де қатысты моменттері үшін осыған ұқсас теңдеулер шығады.
Теореманың салдары (ЖҚМБМ-нің сақталу заңы): ішкі күштер ЖҚМБМ-н өзгертпейді. Сонда жүйе өзгермейтін жүйе болса, ол тұрақты бұрыштық жылдамдықпен айналады, ал өзгеретін болса, онда ішкі (немесе сыртқы) күштер әсерінен жүйе нүктелерінің өстен қашықтығы өзгеруі мүмкін, ал одан жүйенің бұрыштық жылдамдығының өзгерісі болады.
7.5 Жүйенің кинетикалық энергиясының өзгеруі туралы теорема
Жүйенің кинетикалық энергиясы (КЭ) деп келесі скаляр шаманы атайды
![]() . (7.27)
. (7.27)
КЭ жүйенің ілгерілемелі де,
айналмалы да қозғалыстарын сипаттайды. Т шамасының
![]() мен
мен ![]() шамаларынан
айырмашылығы КЭ әрқашан
оң скаляр шама болып келеді, ол жүйе бөліктері
қозғалыстырының бағыттарына тәуелсіз және
олардың өзгерісін сипаттамайды. Ішкі күштер жүйе бөліктеріне
қарама-қарсы бағыттармен әсер етеді, сондықтан
олар
шамаларынан
айырмашылығы КЭ әрқашан
оң скаляр шама болып келеді, ол жүйе бөліктері
қозғалыстырының бағыттарына тәуелсіз және
олардың өзгерісін сипаттамайды. Ішкі күштер жүйе бөліктеріне
қарама-қарсы бағыттармен әсер етеді, сондықтан
олар ![]() мен
мен ![]() векторлық
шамаларын өзгерпейді, бірақ егер ішкі күштер әсерінен
жүйе нүктелерінің жылдамдықтарының модульдері өзгеретін
болса, онда Т шамасы да өзгереді. Сонымен, T шамасының
векторлық
шамаларын өзгерпейді, бірақ егер ішкі күштер әсерінен
жүйе нүктелерінің жылдамдықтарының модульдері өзгеретін
болса, онда Т шамасы да өзгереді. Сонымен, T шамасының ![]() мен
мен
![]() шамаларынан тағы бір айырмашылығы
-оның өзгеруіне сыртқы күштер де, ішкі күштер де
әсерін тигізеді. Дененің КЭ-сы қозғалыстың дербес
жағдайларында төмендегідей анықталады:
шамаларынан тағы бір айырмашылығы
-оның өзгеруіне сыртқы күштер де, ішкі күштер де
әсерін тигізеді. Дененің КЭ-сы қозғалыстың дербес
жағдайларында төмендегідей анықталады:
а) ілгерілемелі қозғалыста
![]() , (7.28)
, (7.28)
б) айналмалы қозғалыста
![]() , (7.29)
, (7.29)
в) жазық параллель қозғалыста
![]() . (7.30)
. (7.30)
Дифференциалдық түрдегі жүйенің КЭ-сы өзгеруі туралы теорема
![]() .
(7.31)
.
(7.31)
Интегралдық түрдегі теорема: жүйенің КЭ-сы кейбір орын ауыстыру кезіндегі өзгерісі жүйеге түсірілген барлық сыртқы және ішкі күштердің сол орын ауыстырудағы жұмыстарының қосындысына тең
![]() .
(7.32)
.
(7.32)
7.6 Жүйе үшін Даламбер принципі
МЖ-нің нүктелеріне түсетін инерция
күштерін ![]() бас векторы мен
бас векторы мен ![]() бас моментіне келтіруге болады (O
нүктесі – қозғалмайтын келтіру центрі). МЖ үшін Даламбер принципі:
қозғалыстағы жүйені оған әсер ететін
күштерге
бас моментіне келтіруге болады (O
нүктесі – қозғалмайтын келтіру центрі). МЖ үшін Даламбер принципі:
қозғалыстағы жүйені оған әсер ететін
күштерге ![]() мен
мен ![]() қосып,
тыныштықтағы жүйе ретінде қарастыруға болады.
Жүйенің кез келген қозғалысында
қосып,
тыныштықтағы жүйе ретінде қарастыруға болады.
Жүйенің кез келген қозғалысында ![]() векторы
теріс таңбамен алынған жүйе массасының массалар
центрінің үдеуіне көбейтіндісіне тең екенін
дәлелдеуге болады, яғни
векторы
теріс таңбамен алынған жүйе массасының массалар
центрінің үдеуіне көбейтіндісіне тең екенін
дәлелдеуге болады, яғни ![]() . Егер АҚД
оның Oxy материялық симметриялығы
жазықтығында жазық параллель қозғалысын жасайтын
болса, онда оның инерция күштерін С қозғалатын
массалар центріне келтіруге болады. Сонда Cz өсі – дененің
бас инерция өсі болады. Сол өске қатысты инерция моментін
. Егер АҚД
оның Oxy материялық симметриялығы
жазықтығында жазық параллель қозғалысын жасайтын
болса, онда оның инерция күштерін С қозғалатын
массалар центріне келтіруге болады. Сонда Cz өсі – дененің
бас инерция өсі болады. Сол өске қатысты инерция моментін ![]() арқылы және
бұрыштық үдеуін ε арқылы белгілеп,
арқылы және
бұрыштық үдеуін ε арқылы белгілеп, ![]() болатынын дәлелдеуге болады.
болатынын дәлелдеуге болады.
8 дәріс. Машина мен механизмдер теориясының негізгі ұғымдары. Механизмдерді құрылымдық талдау
Дәрістің мазмұны: машина мен механизмдер теориясының есептері, негізгі ұғымдар, механизмдердің құрылымдық талдауы.
Дәрістің мақсаты: машина мен механизмдер теориясының әлістерімен шешілетін есептер жиынын анықтау, ММТ негізгі ұғымдарын игеру.
8.1 Негізгі ұғымдар. Механизмдердің құрылымдық эелементтері
Техникада әртүрлі машиналар қолданылады – энергияны түрлендіретін және пайдалы жұмыс атқаратын арнаулы жабдықтар. Олар қозғалтқыш машиналарға (электр қозғалтқыштар, гидравликалық қозғалтқыштар, іштен жанатын қозғалтқыштар және т.б.) және машина-құралдарға (технологиялық немесе көлік операцияларын орындайтын) бөлінеді. Механизм деп, бір немесе бірнеше денелердің қозғалысын басқа денелердің кеекті қозғалыстарына түрлендіруге арналған, өзара байланысқан денелерден тұратын машина бөлігін атайды. Механизм энергия немесе қозғалыстың қозғалтқыштан машинаның жұмыс органдарына берілуін атқарады (әдетте күштер мен қозғалыс заңы сипаттамаларын түрлендіру арқылы) және механикалық қозғалыстын түрлендіруі мен реттеуін атқарады. Егер түрлендіруге қатты денелермен қатар сұйықтар және газдар қатысса, онда механизм сәйкес гидравликалық және пневматикалық деп аталады. Механизмдердің қозғалысын және жұмысын зерттеумен айналысатын ғылым - машина мен механизмдер теориясы (ММТ).
Кез келген механизм буындардан және кинематикалық жұптардан (КЖ) тұрады. Буын деп механизмнің біртұтас қозғалатын бөлігін атайды. Буын қарапайым (бір бөлшектен тұратын) немесе күрделі (құрастырылған) болуы мүмкін. Буындар құрылымдық белгілері (білік, поршень және т.б.), деформациялану қабілеті (қатты немесе икемді буын) және қозғалыс түрі бойынша жіктеледі. Қозғалмайтын өсті толық айналып қозғалатын буын кривошип деп аталады; толық айналмайтын буын - күйенте; ілгерілемелі-қайтымды қозғалатын буын сырғақ деп аталады. КЖ деп екі буынның, бір- біріне салыстырмалы қозғалысына мүмкіншілік беретін қосылысын атайды. Механизмнің құрылуы КЖ арқылы орындалады (8.1 кесте).
Кез келген КЖ конструкциясы буындардың қосылатын бөліктерінің қозғалмалы беттесуі болып келеді, онда «күш ағымы» бір буыннан екінші буынға геометриялық тұйықталу немесе күш тұйықталуы арқылы беріледі.
КЖ жүктеме мен қозғалысты береді және олар жиі механизм мен тұтас машинаның қызмет ету қабілетін және сенімділігін анықтайды. КЖ элементтерінің жанасу түріне байланысты олар төменгі жұптарға (беттерімен жанасатын) және жоғарғы жұптарға (нүкте арқылы немесе сызық арқылы жанасатын) бөлінеді. Жүктеліп тұрғанда жоғарғы жұптар да беттерімен жанасады, бірақ олардың жанасу беттері буынның қосылатын бетімен салыстырғанда ескермеуге болатындай өте аз екенін айтып өтейік. Сондықтан жоғарғы жұптарда үйкеліске энергия жоғалуы аз және олардың өлшемдері де кіші, бірақ төмеңгі жұптардың жүк көтеру қабілеті артық.
Түсірілген байланыс шарттарының S саны немесе буындардың салыстырмалы қозғалысының Н еркіндік дәрежесі бойынша КЖ кластарға бөлінеді (И.И.Артоболевский). Еркін дене кеңістікте 6 еркіндік дәрежеге ие бола алады, және Н=6-S. S=6 болғанда КЖ қатты қосылысқа (буынға)
|
8.1 К е с т е |
|||
|
Жұп кла-сы |
Байла- ныстың шарттарсаны |
Жұп аталуы, сурет |
Шартты кескіні |
|
І
|
1 |
|
|
|
ІІ
|
2 |
|
|
|
ІІІ
|
3 |
|
|
|
ІІІ
|
3 |
|
|
|
IV
|
4 |
|
|
|
IV
|
4 |
|
|
|
V
|
5 |
|
|
|
V
|
5 |
|
|
|
V
|
5 |
|
|













айналады, ал S=0 болса КЖ болмайды, яғни екі дене өзара тәуелсіз қозғалады. S=1 болғанда КЖ-тың еркіндік дәрежесі 5 болады (бес козғалмалы), S=2
болғанда - 4 (төрт қозғалмалы) және т.б.
8.1 кестеде КЖ мысалдары және олардың шартты кескіндері келтіріл-ген. Ең кең таралған - 5- класты жұптар (бір қозғалмалы) – ілгерілемелі, айналмалы және винттік; винттік жұпта l ілгерілемелі орын ауыстыру мен φ бұрылу бұрышы арасында келесі тәуелдік орын алады l=p∙φ/(2π), мұндағы p – бұранданың қадамы.
Кинематикалық жұп-тардың басқаша да жіктелуі орын алады (мысалы, қозға-лыс түрі бойынша, кеңістік-те орналасуы бойынша және т.б.).
КЖ арқылы қосылған буындар жүйесі (8.1 сурет) кинематикалық тізбек деп аталады (КТ). Тұйықталған және тұйықталмаған тізбек-терді айырады. Тұйықталған КТ әр буыны кемінде екі КЖ кіреді, тұйықталмаған (ашық) КТ-те тек қана бір КЖ кіретін буындар болады. Сонымен, механизм - бір немесе бірнеше буындары-ның берілген қозғалысы ке-зінде барлық буындар кез келген буынға қатысты белгілі бір қозғалыста болатын КТ. Тіреу деп соған қатысты қозғалыс сипат-тамалары (орын ауыстыру-лар, жылдамдықтар және т.б.) бағаланатын, буын аталады. Жиі тіреу ретінде қозғалмайтын буынды алады (көлік машиналарда тіреу ретінде рамасын есептейді). КТ-те кіріс және шығыс буындар болады (бірнешеуі болуы мүмкін). Кіріс (жетекші) буын – қоз-ғалысты қозғалтқыштан алатын буын, ал шығыс (жетектегі) буын – меха-низмнің арналған қозға-лысын орындайтын буын. КТ осымен қатар жазық және кеңістік, қарапайым және күрделі тізбектерге бөлінеді. Егер тізбектің әр буыны басқа буынмен бір немесе екі КЖ арқылы қосылса, онда КТ қарапайым деп аталады. Керісінше жағдайда ол күрделі деп аталады.

Механизмнің құрылымы оның негізгі сипаттамаларын анықтайды (қозғалыс түрлерін, еркіндік қозғалу дәрежесін және т.б.). Осыдан механизмдердің құрылымдық т алдауының есептері шығады: а) буындар қосылуының геометриялық формасына және олардың санына тәуелді механизмдердің еркіндік дәрежесін анықтау;
б) механизмдерді құрылымдық топтарға жіктеу; в) буындар нүктелерінің берілген траекторияларын қамтамасыздандыру. Құрылымдық талдау үшін құрылымдық сұлба қолданылады, ол механизм жұмысының принципін сипаттайтын қарапайым есептеу моделі. Сұлбада механизм буындарының шартты кескіндері (цифралармен белгіленеді, өлшемдері көрсетілмейді) және КЖ-дың шартты кескіндері (әріптермен белгіленеді) арқылы көрсетіледі. Қозғалмайтын буын штрихтермен (шабақтармен) белгіленеді.
8.2 Механизмдердің негізгі түрлері
Кинематикалық, құрылымдық және функционалдық қасиеттеріне сәйкес механизмдер бірнеше түрге бөлінеді.
Мысалдар – 8.2–8.8 суреттерде механизмдердің негізгі түрлерінің мысалдары келтірілген.
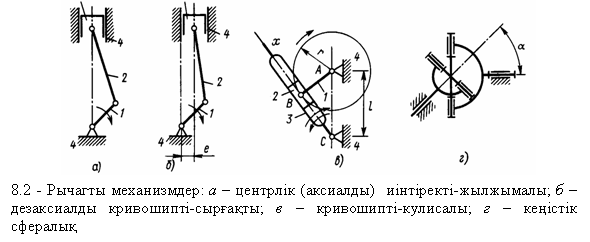
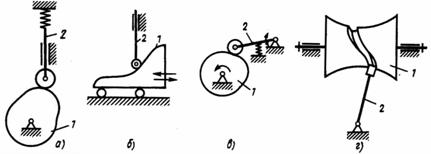
|
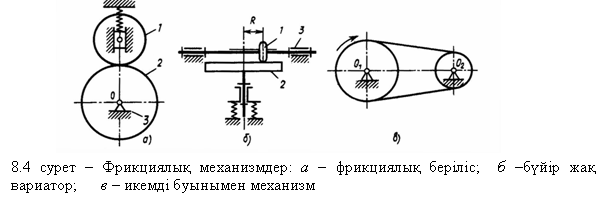

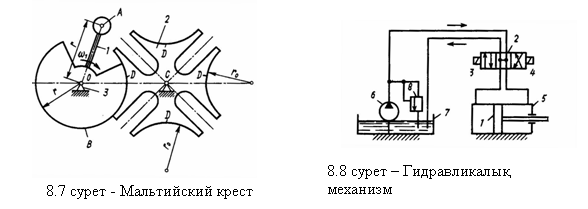 |
8.3 Кинематикалық тізбектер мен механизмдердің құрылымдық формулалары
Құрылымдық формулалар КТ-тің еркіндік H дәрежесін және буындар санын, КЖ саны мен олардың түрлерін байланыстырады.
Егер механизмнің H еркіндік дәрежесі жалпыланған координаттар санымен бірдей болса, онда механизмнің барлық буындарының орнын анықтайтын координаттардың жалпы саны мен сол координаттарды байланыстыратын тәуелсіз теңдеулердің санының айырмашылығы H-ты береді.
Әр бөлек алынған буынның кеңістікте 6 еркіндік дәрежесі бар, k буыны үшін жалпы еркіндік дәреже саны 6k болады. Буындардың КЖ арқылы қосылуы олардың салыстырмалы қозғалысына байланыс түсіреді. Сол шектеулер КЖ класына, яғни байланыс шарттарының санына тәуелді. Егер әр класс үшін КЖ саны рn деп белгілесек (мұндағы n индексі класс нөмірін кескіндейді), онда жалпы жағдайда КТ р1 - 1-і класс жұптар саны, р2 - 2-і класс жұптар саны және т.б. болады. Сондықтан еркін буындардың жалпы 6k еркіндік дәрежесінен КЖ арқылы тыйым салынатын еркіндік дәрежелерді алып тастау керек. Сонда кеңістік КТ-тің еркін дәрежесі келесіге тең болады
H = 6k - 5р5 - 4р4 - 3р3 - 2р2 - р1. (8.1)
Егер КТ-тің бір буыны қозғалмайтын болса (тіреу), онда қозғалмайтын буынға қатысты КТ-тің еркіндік дәрежесі
W = 6n - 5р5 - 4р4 - 3р3 - 2р2 - р1. (8.2)
Егер механизмнің буындары бір жазықтықта қозғалатын болса (немесе параллель жазықтықтарда), механизм жазық болып келеді, ол үшін (8.2) құрылымдық формуласы келесі түрге келтіріледі
W = 3n - 2р5 - р4. (8.3)
(8.2) мен (8.3) құрылымдық формулалары, барлық байланыс теңдеулері тәуелсіз деп алынды. Кейбір механизмдерде түсірілген байланыстар ішіне q артық (қайталымды) байланыстар кіруі мүмкін. Сонда (8.2) мен (8.3) келесі түрде жазылады
W = 6n - 5р5 - 4р4 - 3р3 - 2р2 – р1+q, (8.4)
W = 3n - 2р5 - р4 +q. (8.5)
Егер q=0 болса, онда механизм статикалық түрде анықталатын жүйе болып келеді, оның құрылуы буындардың деформациясы болмай орындалады (өз бетінше қалыптасатын механизм), ал q>0 болса – статикалық түрде аықталмайтын жүйе болады. Мұндай механизмнің құрылуы және қозғалысы оның буындары деформацияланып орындалады, өйткені буындардың өлшемдері абсолют дәлдікпен жасалуы мүмкін емес.
8.4 Механизмнің құрылымдық талдауы мен синтезі жөнінде түсініктеме
Механизмнің құрылымдық талдауы деп оның буындар мен КЖ санын анықтау, КЖ классификациясын жүргізу, механизмнің еркіндік дәрежесін, класы мен реттілігін анықтауды атайды. Құрылымдық синтез деп қозғалмайтын және қозғалатын буындар мен КЖ-тардан тұратын механизмнің құрылымдық сұлбасын жобалауды атайды.

Рисунок 8.9 - Пример образования плоскостного 6-тизвенного механизма
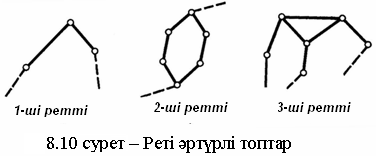 Құрылымдық сұлбасын
анықтау үшін жетекші буынға немесе негізгі механизмге
Ассурдың құрылымдық топтарын қосу әдісі
қолданылады.
Құрылымдық сұлбасын
анықтау үшін жетекші буынға немесе негізгі механизмге
Ассурдың құрылымдық топтарын қосу әдісі
қолданылады.
Ассур тобы деп оны тіреуге
сыртқы КЖ-тар элементтерімен қосқанда еркіндік дәрежесі
нөлге тең болатын КТ-ті атайды. Ассур топтарының
құрылымдық формулалары (8.3) формуласынан шығады: W=3n—2p5,
осыдан p5 = 3n/2, мұндағы n –
қозғалатын буындар саны. Осыдан топтағы 5-і класс КЖ саны
міндетті түрде жұп саны болатыны анық. 8.9 суретте екі
2-буынды топтардың жетекші буынға қосылудың мысалы
көрсетілген.
Механизм класы мен реттілігі оған кіретін ең жоғарғы класты топ бойынша анықталады. Топ реттілігі оның негізгі механизмге қосылатын элементтер санына тең (8.10 сурет).
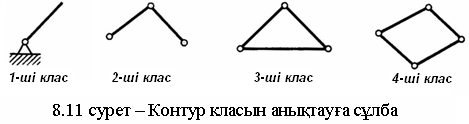
Топ класы оған кіретін ең жоғарғы класты контурының класы арқылы анықталады. Контур класы оның буындары кіретін КЖ санымен анықталады (8.11 сурет). Топ класының нөмері ішкі КЖ арқылы жасалған тұйық контурге кіретін КЖ санына тең, бұдан өзге 2-буынды топты шартты түрде екінші класқа жатқызады.
Механизмнің класы мен реттілігі оның жетекші буынына тәуелді. Топтардың қабатталып қосылуы буындары қатты дене болып табылатын механизмдер үшін қолданылады.
9 дәріс. Жазық рычагты механизмдердің кинематикалық және кинетостатикалық талдауы
Дәрістің мазмұны: жазық рычагты механизмдердің графаналитикалық әдісімен кинематикалық және кинетостатикалық талдауы.
Дәрістің мақсаты: Жазық рычагты механизмдердің кинематикасын және кинематикалық жұптардағы реакцияларды графаналитикалық әдісімен талдау тәсілдерін игеру.
9.1 Жалпы мәліметтер және жазық рычагты механизмдердің түрлері
Рычагты механизмдер арасында ең кеңінен қолданылатын жазық төрт буынды механизмдер. Оларда төрт топса (топсалы төртбуын), үш топса мен бір ілгерілемелі жұп немесе екі топса мен екі ілгерілемелі жұп болуы мүмкін.
Буындар ұзындықтарының қатынасына байланысты (Грасгоф ережесі) 9.1,а,б,в суреттерінде көрсетілген топсалы төртбуындар иінтіректі-күйентелі, екі иінтіректі немесе екі күйентелі механизм деп аталады. 9.1,г,д,е,ж суреттерінде көрсетілген механизмдер сәйкес центрлік емес, теңселетін цилиндрмен, центрлік, теңселетін кулисамен иінтіректі-жылжымалы механизм, ал 9.1 и суретте – синустік механизм деп аталады.
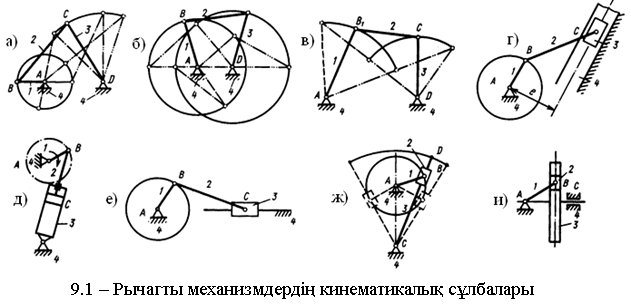
9.2 Механизмдердің кинематикалық талдауы
Механизмнің кинематикалық талдауының мақсаты кіріс (жетекші) буын қозғалысының берілген заңы бойынша механизм буындары қозғалыстарының сипаттамаларын (орын ауыстырулар, жылдамдықтар мен үдеулерді) анықтау болып келеді. Буындар орналасуы мен олардың нүктелерінің траекторияларын талдауынан механизм жұмысының дұрыстығын, жұмыс органы нүктелері траекторияларының технологиялық процестеріне сәйкестігін және механизмді қондыруға қажетті кеңістікті анықтауға болады. Буындар жылдамдықтары (бұрыштық және сызықтық) динамика есептерін шешу кезінде механизмнің кинетикалық энергиясын анықтау үшін және машинадағы жұмыс процесінің шарттарын бағалау үшін қолданылады. Буындардың үдеулері арқылы (бұрыштық және сызықтық) оларға түсірілген инерция жүктемелері табылады, ал олар буындар беріктігін бағалау үшін қолданылады.
Кинематикалық талдау буындардың өлшемдері көрсетілген механизмнің кинематикалық сұлбасы бойынша орындалады. Кинематикалық талдау аналитикалық, графикалық және тәжірибелік әдістермен орындалады. Төменде тек графикалық әдісі қарастырылады, оның нақтылығы төмен болғаны мен, ол көрнекі болып келеді. Графикалық әдісте сәйкес масштабтар қолдануымен орналасулар планы, жылдамдықтар планы және үдеулер планы тұрғызылады.
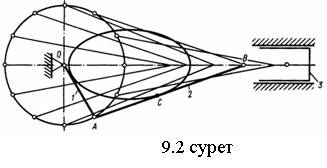 Механизмнің
орналасулар планы деп таңдалған уақыт мезгілдеріне
сәйкес буындардың өзара орналасуының графикалық
бейнесін атайды. Орналасулар планы қолдануымен механизмнің буын-дары
мен нүктелерінің қозғалысын көрнекі байқап
отыруға болады. Мысал ретінде иінтіректі-жылжымалы механизмнің
(9.2 сурет) орналасулар планы көрсетілген, мұндағы 1 — криво-шип,
2 - бұлғақ, 3 - сырғақ.
Бұлғақта С нүктесінің орны АС және
СВ кесінділерімен анықталады. А,
В және С нүктелерінің
траекторияларын анықтау үшін механизмнің тізбектелген орналасулар
қатарын тұрғызу керек. Бір атаулы нүкте орындарынан өткізілген
сазды сызық нүктенің траекториясы болып келеді.
Механизмнің
орналасулар планы деп таңдалған уақыт мезгілдеріне
сәйкес буындардың өзара орналасуының графикалық
бейнесін атайды. Орналасулар планы қолдануымен механизмнің буын-дары
мен нүктелерінің қозғалысын көрнекі байқап
отыруға болады. Мысал ретінде иінтіректі-жылжымалы механизмнің
(9.2 сурет) орналасулар планы көрсетілген, мұндағы 1 — криво-шип,
2 - бұлғақ, 3 - сырғақ.
Бұлғақта С нүктесінің орны АС және
СВ кесінділерімен анықталады. А,
В және С нүктелерінің
траекторияларын анықтау үшін механизмнің тізбектелген орналасулар
қатарын тұрғызу керек. Бір атаулы нүкте орындарынан өткізілген
сазды сызық нүктенің траекториясы болып келеді.
Буын қозғалысының бір бағытта саналуы басталған орны бастапқы немесе шеткі деп аталады. Кривошип пен бұлғақ бір түзуде орналасқан жағдайда орналасуы өлі деп аталады.
Жылдамдықтар мен үдеулер пландарын тұрғызу қозғалыстың векторлық теңдеулерін графикалық шешуіне негізделеді. Оларды тұрғызу үшін механизмнің кинематикалық сұлбасы және жетекші буын қозғалысының заңы берілу керек.
 9.1 мысал – Иінтіректі-жылжымалы
механизмнің берілген орнында (9.3,а
сурет) оның А, В, С нүктелерінің
сызықты жылдамдықтары мен үдеулерін және 3 буынның бұрыштық
жылдамдығы мен бұрыштық үдеуін анықтау керек.
Берілгені: жетекші буынның w1 бұрыштық
жылдамдығы және e1 бұрыштық
үдеуі.
9.1 мысал – Иінтіректі-жылжымалы
механизмнің берілген орнында (9.3,а
сурет) оның А, В, С нүктелерінің
сызықты жылдамдықтары мен үдеулерін және 3 буынның бұрыштық
жылдамдығы мен бұрыштық үдеуін анықтау керек.
Берілгені: жетекші буынның w1 бұрыштық
жылдамдығы және e1 бұрыштық
үдеуі.
![]() Жылдамдықтар планын тұрғызуы кривошиптің
А нүктесінің
жылдамдығын анықталуынан басталады
Жылдамдықтар планын тұрғызуы кривошиптің
А нүктесінің
жылдамдығын анықталуынан басталады ![]() . Жылдамдық векторы
. Жылдамдық векторы ![]() ОА кривошипіне
перпендикуляр
ОА кривошипіне
перпендикуляр ![]() бағытымен
бірдей бағытталады.
бағытымен
бірдей бағытталады.
2 буынның В нүктесінің А нүктесіне
қатысты салыстырмалы қозғалысын қарастырып, оның
жылдамдығын салыстырмалы және тасымал жылдамдықтарының
векторлық қосындысы ретінде таба аламыз ![]() . Мұнда
. Мұнда ![]() векторының шамасы да, бағыты да белгілі, ал
оң жақтағы векторлардың тек бағыттары белгілі:
векторының шамасы да, бағыты да белгілі, ал
оң жақтағы векторлардың тек бағыттары белгілі: ![]() ⃦
⃦![]() және
және ![]() . Бұл
векторлардың белгісіз шамаларын анықтау үшін таңдалған
. Бұл
векторлардың белгісіз шамаларын анықтау үшін таңдалған
![]() масштабы қолдануымен жылдамдықтар
планын тұрғызамыз. Кез
келген
масштабы қолдануымен жылдамдықтар
планын тұрғызамыз. Кез
келген ![]() полюсынан (9.3,б сурет) жылдамдықтар
планында
полюсынан (9.3,б сурет) жылдамдықтар
планында ![]() абсолют жылдамдығына сәйкес келетін
абсолют жылдамдығына сәйкес келетін ![]() векторын ОА кривошипке перпендикуляр
жүргіземіз.
векторын ОА кривошипке перпендикуляр
жүргіземіз. ![]() векторының ұшынан (а нүктесі)
векторының ұшынан (а нүктесі) ![]() салыстырмалы
жылдамдығы бағытымен АВ-ға перпендикуляр сызық,
салыстырмалы
жылдамдығы бағытымен АВ-ға перпендикуляр сызық, ![]() полюсынан —
полюсынан — ![]() жылдамдығы бағытымен ОВ-ға
параллель сызық жүргіземіз. Сызықтардың қиылысуында
b нүктесін табамыз.
жылдамдығы бағытымен ОВ-ға
параллель сызық жүргіземіз. Сызықтардың қиылысуында
b нүктесін табамыз. ![]() векторы В нүктесінің
векторы В нүктесінің ![]() жылдамдығын,
жылдамдығын, ![]() векторы -
векторы -![]() жылдамдығын бейнелейді.
Жылдамдықтардың мәндерін
жылдамдығын бейнелейді.
Жылдамдықтардың мәндерін ![]() және
және ![]() формулаларымен анықтаймыз.
формулаларымен анықтаймыз.
Бұлғақтың С нүктесінің жылдамдығын жылдамдықтар үшін ұқсастық теоремасы қолдануымен табуға болады. Теорема бойынша механизм буынының сұлбасында оның нүктелерін қосатын түзу кесінділер және жылдамдықтар планында сол нүктелердің салыстырмалы жылдамдық векторларының ұштарын қосатын түзу кесінділер ұқсас және бірдей орналасатын фигураларды құрады. Жылдамдықтар планындағы фигура буын сұлбасындағы фигураға қарағанда 90° бұрышына бұрылып тұрады.
С
нүктесінің жылдамдығының ![]() векторын ab кесіндісінде ABC үшбұрышына
ұқсас және оған қарағанда 90°
бұрылған abc үшбұрышын
тұрғызып, табамыз. Ол
үшін жылдамдықтар планында а нүктесінен АС-ға перпендикуляр сызығын, ал b
нүктесінен —ВС- ға перпендикуляр сызығын
жүргіземіз. Сызықтардың қиылысуында с нүктесі
болады. Нүктенің жылдамдығының мәні
векторын ab кесіндісінде ABC үшбұрышына
ұқсас және оған қарағанда 90°
бұрылған abc үшбұрышын
тұрғызып, табамыз. Ол
үшін жылдамдықтар планында а нүктесінен АС-ға перпендикуляр сызығын, ал b
нүктесінен —ВС- ға перпендикуляр сызығын
жүргіземіз. Сызықтардың қиылысуында с нүктесі
болады. Нүктенің жылдамдығының мәні ![]() . Бұлғақтың бұрыштық
жылдамдығы
. Бұлғақтың бұрыштық
жылдамдығы ![]() формуласымен есептеледі, оның бағыты
формуласымен есептеледі, оның бағыты ![]() жылдамдық векторымен анықталады .
жылдамдық векторымен анықталады .
Үдеулер
планының тұрғызылуы кривошиптің А
нүктесінің абсолют үдеуінен басталады, ол нормаль ![]() және тангенциал
және тангенциал ![]() құраушы үдеулерінің
қосындысына тең
құраушы үдеулерінің
қосындысына тең ![]() .
. ![]() үдеулер
масштабын таңдап, кез келген
үдеулер
масштабын таңдап, кез келген ![]() полюсынан (9.3,в
сурет)
полюсынан (9.3,в
сурет) ![]() үдеуін
үдеуін ![]() векторы
түрінде көрсетеміз, а' нүктесінен
векторы
түрінде көрсетеміз, а' нүктесінен ![]() үдеуін тұрғызамыз (
үдеуін тұрғызамыз (![]() векторы), оның бағыты e1 бұрыштық
үдеуінің бағытымен анықталады.
векторы), оның бағыты e1 бұрыштық
үдеуінің бағытымен анықталады. ![]() полюсін а нүктесімен қосып, А нүктесінің толық үдеуін
анықтаймыз (
полюсін а нүктесімен қосып, А нүктесінің толық үдеуін
анықтаймыз (![]() кесіндісі)
кесіндісі) ![]() . В нүктесінің үдеуін мына
теңдеуден таба аламыз
. В нүктесінің үдеуін мына
теңдеуден таба аламыз ![]() . Салыстырмалы үдеудің нормаль
құраушысының шамасы келесі формуламен анықталады
. Салыстырмалы үдеудің нормаль
құраушысының шамасы келесі формуламен анықталады ![]() . Оның
. Оның ![]() векторын үдеулер планында а нүктесінен
АВ бойымен айналу центріне (А нүктесіне) қарай бағыттап,
көрсетеміз. Салыстырмалы үдеудің тангенциал
құраушысының
векторын үдеулер планында а нүктесінен
АВ бойымен айналу центріне (А нүктесіне) қарай бағыттап,
көрсетеміз. Салыстырмалы үдеудің тангенциал
құраушысының ![]() векторын
векторын ![]() векторы ұшынан оған перпендикуляр
бағыттаймыз. В нүктесінің
абсолют үдеуінің бағыты белгілі (
векторы ұшынан оған перпендикуляр
бағыттаймыз. В нүктесінің
абсолют үдеуінің бағыты белгілі (![]() ⃦
⃦![]() ) және сәйкес
сызық
) және сәйкес
сызық ![]() полюсынан өтеді. Осы сызықтардың
қиылысуы b нүктесінің пландағы орнын
анықтайды, үдеу шамасы
полюсынан өтеді. Осы сызықтардың
қиылысуы b нүктесінің пландағы орнын
анықтайды, үдеу шамасы ![]() формуласымен табылады.
формуласымен табылады. ![]() векторы толық салыстырмалы үдеу
векторы толық салыстырмалы үдеу ![]() векторын бейнелейді
. Бұлғақтың
бұрыштық үдеуі
векторын бейнелейді
. Бұлғақтың
бұрыштық үдеуі ![]() формуласымен табылады.
формуласымен табылады. ![]() векторын В нүктесіне орын ауыстырып және В нүктесінің
қозғалысын А нүктесіне қатысты қарастырып,
векторын В нүктесіне орын ауыстырып және В нүктесінің
қозғалысын А нүктесіне қатысты қарастырып,
![]() бағытын анықтаймыз.
бағытын анықтаймыз.
С нүктесінің ![]() үдеуі
үдеуі ![]() және
және ![]() векторлық
теңдеулерінен табылады. Мұндағы
векторлық
теңдеулерінен табылады. Мұндағы
![]() және
және ![]() ,
, ![]() және
және ![]() . Осыдан үдеулер
планында c нүктесінің орнын анықтап, соңында
. Осыдан үдеулер
планында c нүктесінің орнын анықтап, соңында ![]() үдеудің
шамасын табамыз.
үдеудің
шамасын табамыз.
9.3 Механизмдердің кинетостатикалық талдауы
Кинетостатикалық талдаудың (КСТ) негізгі мақсаты – буындардың берілген массалары мен инерция моменттері, буындарға түсірілген сыртқы күштер мен моменттері және олардың қозғалыс заңдары бойынша байланыстардың реакцияларын (КЖ реакцияларын) анықтау. Реакциялардың цикл ішіндегі өзгеру заңын анықтау үшін КСТ механизмнің бірқатар орналасуы үшін жүргізіледі. Есептеу нәтижелері бойынша механизмді берілген орналасуында ұстап тұру үшін жетекші буындарға түсіруге қажетті теңгеруші күштер (моменттер) немесе буындардың керекті қозғалысын қамтамасыздандыратын қозғалтушы күштер (моменттер), КЖ-тардағы үйкеліс күштері мен олардың моменттері, механизмнің пайдалы әсер коэффициенті (пәк) табылады. Механизмнің КСТ жобалау кезінде буындарды беріктікке, қатаңдыққа, вибрацияға және тозуға төзімділікке есептеу арқылы олардың оптималды құрылымдығын анықтауға, тіректер мен бағыттаушыларын есептеуін орындауға, қондырғының қуатын таңдауға және механизмді реттеу, қозғалатын массаларды теңгеру, машиналар фундаментін есептеу мәселелерін шешуге мүмкіншілік береді.
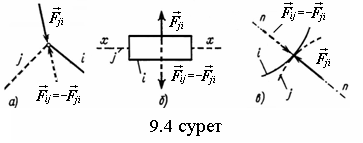 ММТ-нда күштер
қозғалтушы және кедергі күштерге немесе моменттерге
бөлінеді. Қозғалтушы Fқ күштері
немесе Мқ моменттері деп механизмнің
қозғалысын қамсыздандыратын күштер немесе моменттерді
атайды. Қозғалтушы күштер вектор-ларының
бағыттары олардың түсірілу нүктелерінің жылдам-дықтарымен
бірдей болады немесе олармен сүйір бұрыш жасайды.
Қозғалтушы күштер-дің жұмысы оң шама, Wқ>0.
Кедергі Fкед күштері немесе олардың Мкед
моменттері пайдалы, яғни технологиялық кедергі күштеріне Fп.кед
және зиянды (пассив) Fз.кед күштеріне
бөлінеді. Fп.кед векторлары олардың түсірілу
нүктелерінің жылдамдықтарына қарсы бағытталады
немесе олармен доғалы бұрыш жасайды, олардың жұмысы Wп.кед<0.
Fз.кед күштеріне КЖ-тардағы үйкеліс
күштері, аэродинамикалық кедергі күштері және т.б.
жатады. Оларды жеңуге қосымша жұмыс орындалады, сонда
қосынды кедергі күштердің жұмысы Wкед
= Wп.кедс + Wз.кед. Күштердің
қозғалтушы және кедергі күштерге бөлінуі шартты
екенін айтып өтейік (ауырлық күштер көтерілу және
төмен түсу кезінде; шкив пен белдік арасындағы үйкеліс
күштері).
ММТ-нда күштер
қозғалтушы және кедергі күштерге немесе моменттерге
бөлінеді. Қозғалтушы Fқ күштері
немесе Мқ моменттері деп механизмнің
қозғалысын қамсыздандыратын күштер немесе моменттерді
атайды. Қозғалтушы күштер вектор-ларының
бағыттары олардың түсірілу нүктелерінің жылдам-дықтарымен
бірдей болады немесе олармен сүйір бұрыш жасайды.
Қозғалтушы күштер-дің жұмысы оң шама, Wқ>0.
Кедергі Fкед күштері немесе олардың Мкед
моменттері пайдалы, яғни технологиялық кедергі күштеріне Fп.кед
және зиянды (пассив) Fз.кед күштеріне
бөлінеді. Fп.кед векторлары олардың түсірілу
нүктелерінің жылдамдықтарына қарсы бағытталады
немесе олармен доғалы бұрыш жасайды, олардың жұмысы Wп.кед<0.
Fз.кед күштеріне КЖ-тардағы үйкеліс
күштері, аэродинамикалық кедергі күштері және т.б.
жатады. Оларды жеңуге қосымша жұмыс орындалады, сонда
қосынды кедергі күштердің жұмысы Wкед
= Wп.кедс + Wз.кед. Күштердің
қозғалтушы және кедергі күштерге бөлінуі шартты
екенін айтып өтейік (ауырлық күштер көтерілу және
төмен түсу кезінде; шкив пен белдік арасындағы үйкеліс
күштері).
![]()
Буындардың үдеумен
қозғалу кезінде инерция күштері пайда болады, олар ![]() бас векторы мен
бас векторы мен ![]() бас моментіне келтіріле-ді..Мұнда
m – буынның массасы,
бас моментіне келтіріле-ді..Мұнда
m – буынның массасы, ![]() - буынның массалар центрінің үдеуі (үдеулер
планынан алынады),
- буынның массалар центрінің үдеуі (үдеулер
планынан алынады), ![]() - буынның бұрыштық үдеуі,
- буынның бұрыштық үдеуі, ![]() - буын массаларының буын қозғалысының
жазықтығына перпендикуляр массалар центрі арқылы өтетін
өске қатысты инерция моменті. Осы күштер мен
моменттердің бағыттары сәйкес үдеулердің
бағыттарына қарама-қарсы болады, ал олардың цикл ішінде
жасайтын жұмысы нөлге тең.
- буын массаларының буын қозғалысының
жазықтығына перпендикуляр массалар центрі арқылы өтетін
өске қатысты инерция моменті. Осы күштер мен
моменттердің бағыттары сәйкес үдеулердің
бағыттарына қарама-қарсы болады, ал олардың цикл ішінде
жасайтын жұмысы нөлге тең.
Кинематикалық
жұптағы ![]() реакциясы деп j буынының i буынына олардың
жанасу нүктесінде түсірілген күшті атайды (
реакциясы деп j буынының i буынына олардың
жанасу нүктесінде түсірілген күшті атайды (![]() ). Егер механизмді толығымен қарастырса, КЖ реакциялары
өзара теңгеріледі (ішкі күштер). Әр буынды жеке
қарастырғанда, алып тасталған байланыстардың
реакциялары сыртқы күштерге айналады. Айналмалы КЖ реакциясының
түсірілген нүктесі белгілі (9.4,а сурет), ал оның
бағыты мен шамасы белгісіз. Ілгерілемелі КЖ реакциясының
бағыты белгілі (
). Егер механизмді толығымен қарастырса, КЖ реакциялары
өзара теңгеріледі (ішкі күштер). Әр буынды жеке
қарастырғанда, алып тасталған байланыстардың
реакциялары сыртқы күштерге айналады. Айналмалы КЖ реакциясының
түсірілген нүктесі белгілі (9.4,а сурет), ал оның
бағыты мен шамасы белгісіз. Ілгерілемелі КЖ реакциясының
бағыты белгілі (![]() ), ал оның түсірілу нүктесі мен шамасы белгісіз
(9.4,б сурет). Жазық механизмнің жоғарғы КЖ реакциясының
түсірілген нүктесі мен бағыты белгілі (9.4,в сурет)
және шамасы белгісіз.
), ал оның түсірілу нүктесі мен шамасы белгісіз
(9.4,б сурет). Жазық механизмнің жоғарғы КЖ реакциясының
түсірілген нүктесі мен бағыты белгілі (9.4,в сурет)
және шамасы белгісіз.
Механизмді жобалау кезінде КСТ екі кезеңде орындалады. Бірінші кезеңде жетекші буынның қозғалыс заңын және буындардың массалары мен инерция моменттерін қабылдап, үйкеліс күштерін ескермей КЖ реакцияларын анықтайды. Содан кейін алынған нәтижелерді қолданып, үйкеліс күштерін анықтайды және екінші кезеңде осыларды ескеріп КЖ шынайы реакцияларын табады.
КСТ Даламбер принципіне
негізделеді. Кинетостатика теңдеулерін Ассур топтары үшін
жазған ыңғайлы, өйткені олар статикалық
анықталатын жүйелер болып келеді (артық байланыстар
болмаған жағдайда). КСТ жүргізу-інде механизмді, жетекші
буыннан бастап, Ассур топтарына шартты түрде жіктейді. Декомпозиция
негізінде келесі принцип жатады: жүйенің қозғалысын
немесе тыныштығын бұзбай, оның кейбір байланыстарын алып
тастап, жүйеге сәйкес реакция күштерін түсіруге болады.
Сонда буындар тобының тепе-теңдік теңдеулері бір  векторлық теңдеуіне және
векторлық теңдеуіне және  бір скаляр теңдеуіне келтіріледі. Мұнда
қосынды топқа кіретін барлық буындар бойынша және
барлық күштер бойынша (соның ішінде алынып тасталған байланыстардың
реакциялары ескерілуімен) жүргізіледі.
бір скаляр теңдеуіне келтіріледі. Мұнда
қосынды топқа кіретін барлық буындар бойынша және
барлық күштер бойынша (соның ішінде алынып тасталған байланыстардың
реакциялары ескерілуімен) жүргізіледі.
Күштерді есептеуі соңғы, яғни жетекші буыннан ең алыста орналасқан буыннан басталады және жетекші буынды есептеуімен аяқталады.
Механизм буындарының қайсысы жетекші буын ретінде алынғанына байланысты механизмнің құрылымы әртүрлі болуы мүмкін.
Жалпы жағдайда күштерді есептеуі белгісіздер күштер арасында тек қана реакциялар болатын топтан басталады. Әдетте ол қозғалтушы күш немесе пайдалы кедергі күші түсірілген құрылымдық топ болып келеді. Содан кейін келесі топ қарастырылады. Есептеудің ең соңына қалатын топ - теңгеруші күш немесе теңгеруші момент түсірілген құрылымдық топ. Соңғы топ есептеуінде теңгеруші күш пен қалған реакция анықталады. Әдетте бұл топ құрамында қозғалмайтын буын болады; онда реакциялар мен теңгеруші күшті (немесе моментті) тапқанда, шеткі буын деп аталатын, топтың қозғалатын буынының тепе-теңдігі қарастырылады.
9.2 мысал – Сұлбасы 9.5,а суретте көрсетілген
екінші класты екібуынды топ үшін КСТ қалай орындалатынын
қарастырайық. 2 және 3 буындарға белгілі
күштер мен моменттер әсер етеді. В мен D нүктелерінде
алып тасталған 1 және 4 буындардың
қалған 2 және 3 буындарға
түсірілген белгісіз ![]() мен
мен ![]() реакцияларын, оларды шартты түрде жоғары
бағыттап, көрсетеміз. Топтың тепе-теңдік теңдеуі
келесі түрде жазылады
реакцияларын, оларды шартты түрде жоғары
бағыттап, көрсетеміз. Топтың тепе-теңдік теңдеуі
келесі түрде жазылады ![]() . Реакциялардың векторларын буындар бойымен (нормаль) және
оларға перпендикуляр (тангенциалды) құраушыларына жіктейміз. Сонда
тепе-теңдік теңдеуі осылай жазылады
. Реакциялардың векторларын буындар бойымен (нормаль) және
оларға перпендикуляр (тангенциалды) құраушыларына жіктейміз. Сонда
тепе-теңдік теңдеуі осылай жазылады ![]() .
. ![]() мен
мен ![]() құраушыларын 2 және 3
буындардың тепе-теңдік теңдеулерін С нүктеге
қатысты моменттерінің теңдеуі ретінде жеке жазып, табуға
болады. 2 буын үшін
құраушыларын 2 және 3
буындардың тепе-теңдік теңдеулерін С нүктеге
қатысты моменттерінің теңдеуі ретінде жеке жазып, табуға
болады. 2 буын үшін ![]() осыдан
осыдан ![]() 3 буын үшін
3 буын үшін ![]() бұдан
бұдан ![]()
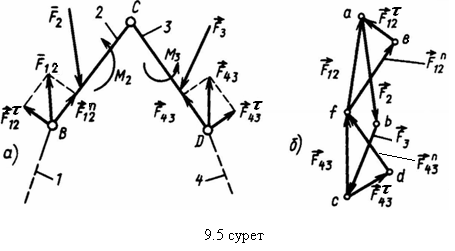 Реакциялардың
Реакциялардың ![]() мен
мен ![]() құрау-шыларын және толық
құрау-шыларын және толық ![]() мен
мен ![]() реакция-ларын
күштер планы-нан анықтаймыз (9.5,б сурет), ол
күштердің векторлық қосындысы түрінде
жазылған тепе-теңдік теңдеуі негізінде
тұрғызылады. Күштер планының басынан (а
нүктесі) қабылданған mF масштабы
қолда-нуымен
реакция-ларын
күштер планы-нан анықтаймыз (9.5,б сурет), ол
күштердің векторлық қосындысы түрінде
жазылған тепе-теңдік теңдеуі негізінде
тұрғызылады. Күштер планының басынан (а
нүктесі) қабылданған mF масштабы
қолда-нуымен ![]() векторын тұрғызамыз, оның ұшынан -
векторын тұрғызамыз, оның ұшынан - ![]() векторын.
Содан кейін
векторын.
Содан кейін ![]() век-торының басынан және
век-торының басынан және ![]() векторының
ұшынан жоғарыда табылған күштерді келесідей тұрғызамыз:
векторының
ұшынан жоғарыда табылған күштерді келесідей тұрғызамыз:
![]() және
және ![]() . d
және е нүктелерінен келесі күштердің бағы-тымен
сызықтар жүргіземіз:
. d
және е нүктелерінен келесі күштердің бағы-тымен
сызықтар жүргіземіз: ![]() және
және ![]() . Осы сызықтардың
қиылысу f нүктесі
. Осы сызықтардың
қиылысу f нүктесі ![]() ,
, ![]() ,
, ![]() және
және ![]() күштерінің
шамалары мен бағыттарын анықтайды. Екібуынды топтын ішкі С
топсасындағы толық реакция 2 немесе 3 буынға
түсірілген күштердің келесі түрде жазылған тепе-теңдік
шарттарынан табылады:
күштерінің
шамалары мен бағыттарын анықтайды. Екібуынды топтын ішкі С
топсасындағы толық реакция 2 немесе 3 буынға
түсірілген күштердің келесі түрде жазылған тепе-теңдік
шарттарынан табылады: ![]() немесе
немесе ![]() Енді b мен f
нүктелерін қосып,
Енді b мен f
нүктелерін қосып, ![]() реакциясын
табуға болады (суретте көрсетілмеген).
реакциясын
табуға болады (суретте көрсетілмеген).
Механизмнің жетекші
буынының есептелуін қарастырайық. Бұл буын тіреумен
айналмалы немесе ілгерілемелі бесінші класты жұп арқылы қосылады.
Жетекші буын тепе-теңдікте болу үшін оған түсірілген
барлық күштер мен моменттерді теңгеретін қосымша
теңгеруші Fт күшін немесе
теңгеруші Мт моментін енгізу керек. Fт мен
Мт бағыттары жетекші буынның айналуына
қарама-қарсы алынады. Егер есептеу нәтижесінде табылған
Fт мен Мт шамалары теріс болып шықса,
онда шынында теңгеруші күштің (моменттің) бағыты
айналу бағытымен бірдей болады, яғни ол қозғалтушы  күш (момент) болып келеді.
күш (момент) болып келеді.
9.3
мысал – 9.6,а суретте көрсе-тілген жетекші буын
үшін теңгеруші күшті анықтау керек. Жетекші буын
тіреумен айналмалы жұп арқылы қосылады. Жетекші буынға
оның теңгеруші күші түсірілсін, оның әсер
ету сызығын өзіміз қабылдаймыз. Fт табу
үшін буын үшін А нүктесіне қатысты
моменттердің теңдеуін құрамыз ![]() осыдан
осыдан
![]() ,
яғни
,
яғни
![]()
![]() реакциясы
реакциясы
![]() теңдеуі негізінде тұрғызылған
күштер планы-нан анықталады (9.6,б сурет).
теңдеуі негізінде тұрғызылған
күштер планы-нан анықталады (9.6,б сурет).
![]() күшін, КСТ жүргізбей де анықтауға болады,
ол үшін Н.Е.Жуковскийдің келесі теоремасы қолданылады: егер
жылдамдықтар планының фигурасын қатты рычаг ретінде 90°
бұрып және буындардың әртүрлі нүктелеріне
түсірілген механизмде теңгерілетін күштердің
векторларын қарастырып отырған планындағы бірдей белгіленген
нүктелеріне өздеріне параллель көшірсе, онда планның
полюсіне қатысты сол күштердің моменттерінің
қосындысы нөлге тең болады.
күшін, КСТ жүргізбей де анықтауға болады,
ол үшін Н.Е.Жуковскийдің келесі теоремасы қолданылады: егер
жылдамдықтар планының фигурасын қатты рычаг ретінде 90°
бұрып және буындардың әртүрлі нүктелеріне
түсірілген механизмде теңгерілетін күштердің
векторларын қарастырып отырған планындағы бірдей белгіленген
нүктелеріне өздеріне параллель көшірсе, онда планның
полюсіне қатысты сол күштердің моменттерінің
қосындысы нөлге тең болады.
10 дәріс. Материалдар кедергісіне кіріспе. Материалдар кедергісінің есептері мен әдістері
Дәрістің мазмұны: материалдар кедергісінің есептері, есептеу сұлбасы, болжамдар; ішкі күштер факторлары, қималар әдісі; кернеулер, орын ауыстырулар, деформациялар мен есептеу әдістері жөнінде түсініктеме.
Дәрістің мақсаты: материалдар кедергісінің әдістерімен шешілетін есептер жиынын анықтау, негізгі үғымдарды игеру.
10.1 Материалдар кедергісінің мәселелері. Есептеу сұлбасы
Әртүрлі құрылыстар, машиналар, жабдықтар, аппараттар мен приборлардың басқа сапаларымен қатар беріктігі және қатаңдығы болу керек. Беріктік деп қатты денелердің күштер әсерін қирамай қабылдау қабілетін атайды. Қатаңдық деп қатты денелердің күштер әсерін өз өлшемдері мен формасын айтарлықтай өзгертпей, яғни үлкен деформацияларға ие болмай қабылдау қабілетін атайды. Конструкция элементтерінің (бөлшектерінің) беріктігі мен қатаңдығын қамсыздандыру үшін олар лайықты материалдан жасалу керек және оның керекті өлшемдері болу керек. Материалдар кедергісі (МК) – конструкция элементтерінің беріктігі мен қатаңдығы туралы ғылым. МК-нің негізгі қорытындылары статиканың заңдары мен теоремаларына тіреледі, бірақ МК-сінде денелердің деформациялану қасиетінің үлесі ең маңызды болады. МК мақсаты – конструкцияның типтік элементтерін есептеуінің қарапайым әдістерін беру. МК-нде жарамды болжамдарға негізделген жуық әдістер қолданылады.
Есептер шешуі есептеу моделін, яғни есептеу сұлбасын (ЕС) тандауынан басталады, ЕС – бұл объектінің айтарлықтай емес факторларынан босатылған сипаттамасы. Бір объект үшін талап қойылған нақтылыққа және құбылыстың қарастырылатын жағына тәуелді бірнеше ЕС-ны қолдануға болады. Екінші жақтан, бір ЕС-ға бірнеше объектілер келтірілуі мүмкін.
 ЕС-ны тандау материалдар қасиеттерін модельдеуден
басталады. Барлық материалдар олардың микроструктурасына
тәуелсіз біртекті тұтас орта ретінде қарастырылады,
бұл шексіз аз шамалар талдауының аппаратын қолдануға
мүмкіншілік береді. Тұтас ортаны шынайы материалдың
қасиеттеріне ие болғызады. Мысалы, барлық қатты
денелердің анықталған дәрежедегі серпімділік
қасиеті бар, яғни денелердің өлшемдері мен формасын
өзгерткен сыртқы күштерді алып тастаса, олардың
бастапқы өлшемдері мен формасына қайта келу қабілеті
бар. Көптеген есептерде орта абсолют серпімді болып алынады. Егер абсолют
серпімділіктен ауытқуы айтарлықтай көп болса, ортаны
басқа қасиеттерге ие болғызады. Әдетте МК-нде орта
изотропты болып қарастырылады.
ЕС-ны тандау материалдар қасиеттерін модельдеуден
басталады. Барлық материалдар олардың микроструктурасына
тәуелсіз біртекті тұтас орта ретінде қарастырылады,
бұл шексіз аз шамалар талдауының аппаратын қолдануға
мүмкіншілік береді. Тұтас ортаны шынайы материалдың
қасиеттеріне ие болғызады. Мысалы, барлық қатты
денелердің анықталған дәрежедегі серпімділік
қасиеті бар, яғни денелердің өлшемдері мен формасын
өзгерткен сыртқы күштерді алып тастаса, олардың
бастапқы өлшемдері мен формасына қайта келу қабілеті
бар. Көптеген есептерде орта абсолют серпімді болып алынады. Егер абсолют
серпімділіктен ауытқуы айтарлықтай көп болса, ортаны
басқа қасиеттерге ие болғызады. Әдетте МК-нде орта
изотропты болып қарастырылады.
Объектінің геометриясы да қарапайымдалады, МК-нде ол сырық немесе қабық сұлбасына келтіріледі. Сырық деп бір өлшемі (ұзындығы) басқа екі өлшемінен әлдеқайда үлкен денені атайды. Қабық деп бір өлшемі (қалындығы) басқа екі өлшемінен әлдеқайда кіші денені атайды. Сырықты геометриялық түрде жазық фигураны (10.1 сурет) кейбір қисықтың, яғни сырық өсінің бойымен орын ауыстырып жасауға болады. Ауырлық центрі сырық өсінде жатқан және оған тік орналасқан жазық фигура сырықтың көлденең қимасы деп аталады. Сырық түзу сызықты немесе қисық сызықты, оның қимасы өс бойымен тұрақты немесе айнымалы болулары мүмкін. Төменде тек қана сырықтар мен сырық жүйелерінің есептелуі қарастырылады.
Күштер жүйесі де қарапайымдалады. Мысалы, қадалған күш ұғымы енгізіледі. МК-нде күштер сыртқы және ішкі болып ажыратылады. Егер конструкция басқа денелерден тыс қарастырылатын болса, соңғылардың конструкцияға әсері сыртқы күштерге жататын күштермен ауыстырылады. Бұл күштер келесі күштерге бөлінеді: көлемдік (ауырлық, инерция, магниттік тарту күштері және т.б.) және беттік (айналасындағы денелермен түйісіп әрекеттесу күштері). Сыртқы күштер арасына тек берілген (актив) күштер ғана емес, оларға қосылып, теңгерілетін күштер жүйесін құрайтын байланыстардың реакциялары да кіреді. Теңгерілетін (актив және реактив күштерден тұратын) күштер жүйесін жүктеме деп атайды. Сыртқы күштердің шамасы және олардың таралу түрі объект пен айналасындағы денелердің шекарасы қайда өтетіне тәуелді. Күштер келесіге айрылады: статикалық (уақыт өтуімен өте жай өзгеретін, айтарлықтай инерция күштерін болдырмайтын күштер), динамикалық (уақыт өтуімен жылдам өзгеретін, есептеуде ескерілетін инерция күштеріне себепші болатын күштер; олар соққы, аяқ астынан түсірілетін және вибрациялық күштер болуы мүмкін), қайталымды-айналымды (әсері периодпен көп қайталанатын күштер). Объект бөліктерінің өзара әрекеттесуін сипаттайтын күштер ішкі күштерге жатады. Ішкі күштер тек қана объект бөліктерінің арасында емес, оның барлық көрші бөлшектерінің арасында да объектінің жүктелуі кезінде пайда болады. Әдетте объект сыртқы күштермен жүктелмесе, оның ішінде ішкі күштер жоқ деп есептеледі.
10.2 Қималар әдісі. Сырықтың көлденең қималарындағы ішкі күштер факторлары
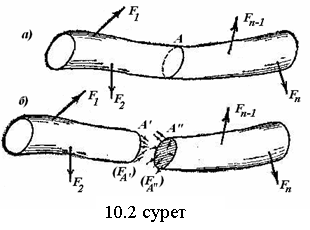 Сырыққа (10.2,а сурет) {F1, F2,
…, Fn} жүктемесі түсетін болсын. Сырық-та
пайда болатын ішкі күштерді, оны екі бөлікке, мысалы А
қимасымен кесіп, анықтауға болады (қималар әдісі). Сырықтың
бөліктері арасындағы байланыстарды алып тастағандықтан,
оның бір бөлігінің екінші бөлігіне әсерін
қимадағы {FА}
ішкі күштер жүйесімен ауыстыру керек (10.2,б су-рет). Жалпы жағдайда
әртүрлі қима-ларда әр түрлі ішкі күштер
орын алады. А' жазықтығындағы
күштер жүйесінің таңбасы А" жазықты-ғындағы
күштер жүйесінің таңбасы-на қарсы болады. Ішкі
күштер қима бойымен кейбір күрделі түрде тарала-ды. Сонда
оң жақ және сол жақ бөліктері үшін
тепе-теңдік шарттары бөлек орындалу керек. А қимасындағы ішкі күштердің бас
векторы мен бас моментін кез келген бөліктің тепе-теңдік шарттарынан
анықтауға болады.
Сырыққа (10.2,а сурет) {F1, F2,
…, Fn} жүктемесі түсетін болсын. Сырық-та
пайда болатын ішкі күштерді, оны екі бөлікке, мысалы А
қимасымен кесіп, анықтауға болады (қималар әдісі). Сырықтың
бөліктері арасындағы байланыстарды алып тастағандықтан,
оның бір бөлігінің екінші бөлігіне әсерін
қимадағы {FА}
ішкі күштер жүйесімен ауыстыру керек (10.2,б су-рет). Жалпы жағдайда
әртүрлі қима-ларда әр түрлі ішкі күштер
орын алады. А' жазықтығындағы
күштер жүйесінің таңбасы А" жазықты-ғындағы
күштер жүйесінің таңбасы-на қарсы болады. Ішкі
күштер қима бойымен кейбір күрделі түрде тарала-ды. Сонда
оң жақ және сол жақ бөліктері үшін
тепе-теңдік шарттары бөлек орындалу керек. А қимасындағы ішкі күштердің бас
векторы мен бас моментін кез келген бөліктің тепе-теңдік шарттарынан
анықтауға болады.
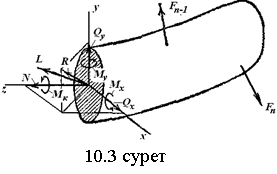 Тепе-теңдік теңдеулерінен
ішкі күштердің қима бойымен таралу заңын емес, тек
қана олардың стати-калық эквиваленттерін
анықтауға бо-лады (сыртқы күштер белгілі
жағдайда). Ішкі
күштер жүйесін қима-ның ауырлық центріне
келтірейік. Нә-тижесінде
Тепе-теңдік теңдеулерінен
ішкі күштердің қима бойымен таралу заңын емес, тек
қана олардың стати-калық эквиваленттерін
анықтауға бо-лады (сыртқы күштер белгілі
жағдайда). Ішкі
күштер жүйесін қима-ның ауырлық центріне
келтірейік. Нә-тижесінде ![]() бас векторы мен
бас векторы мен ![]() бас моментін аламыз (10.3
сурет). z өсін қиманың сыртқы
нормалімен бағыттап және х пен у өстерін қима жазық-тығында
орналастырып, координат жүйесін қабылдаймыз.
бас моментін аламыз (10.3
сурет). z өсін қиманың сыртқы
нормалімен бағыттап және х пен у өстерін қима жазық-тығында
орналастырып, координат жүйесін қабылдаймыз. ![]() және
және ![]() вектор-ларын
өстерге проекциялап, 6
құраушыны аламыз: үш күш пен үш момент, олар
сырық қимасындағы ішкі күштер факторлары (ІКФ) деп
аталады. N құраушысы
бойлық немесе нормаль күш, Qx пен Qy – көлденең
күштер, Мк моменті – бұраушы момент, ал Мх
пен Му моменттері – х пен у өстеріне қатысты июші моменттер деп
аталады. Сыртқы күштер белгілі болғанда, барлық ІКФ
кесілген бөлік үшін құрылған 6 тепе-теңдік
теңдеулерінен табылады.
вектор-ларын
өстерге проекциялап, 6
құраушыны аламыз: үш күш пен үш момент, олар
сырық қимасындағы ішкі күштер факторлары (ІКФ) деп
аталады. N құраушысы
бойлық немесе нормаль күш, Qx пен Qy – көлденең
күштер, Мк моменті – бұраушы момент, ал Мх
пен Му моменттері – х пен у өстеріне қатысты июші моменттер деп
аталады. Сыртқы күштер белгілі болғанда, барлық ІКФ
кесілген бөлік үшін құрылған 6 тепе-теңдік
теңдеулерінен табылады.
ІКФ-на сәйкес сырықтың жүктелуі түрлерге жіктеледі (созылу, сығылу, бұралу, иілу және т.б.). Жүктелудің түрін анықтау үшін қима әдісін қолданып, қималарда қандай ІКФ болатынын анықтау керек. Нәтижелер эпюрлер деп аталатын графиктермен көрсетіледі.
10.3 Кернеулер, орын ауыстырулар және деформациялар туралы түсініктер
Ішкі күштердің қимада таралуын сипаттау үшін кернеу ұғымы енгізіледі. S қимасының К нүктесіндегі толық кернеу векторы деп, келесі шама аталады
![]() (10.1)
(10.1)
мұндағы
![]() - K нүктесі
аймағындағы элементар аудан;
- K нүктесі
аймағындағы элементар аудан;
![]() - элементар
ауданға түсетін ішкі күштердің тең әсерлі
күші.
- элементар
ауданға түсетін ішкі күштердің тең әсерлі
күші.
Сонымен, кернеу ауданның бірлігіне түсетін ішкі күш болып табылады (паскальмен өлшенеді). р кернеуін 3 құраушыға жіктеуге болады: қиманың нормалі бойымен (тік s кернеуі) және қима жазықтығындағы екі өс бойымен (жанама t кернеулері). Егер К нүктесі арқылы басқа қию ауданды жүргізсе, жалпы жағдайда кернеудің шамасы басқа болады. Нүктеден жүргізілген барлық аудандардағы кернеулердің жиынтығы нүктенің кернеулі күйін құрайды (ол 6 шамамен толық анықталады).
Сыртқы күштер әсерінен барлық денелер өздерінің өлшемдері мен формасын өзгертеді (деформацияланады). Осы өзгерістер әдетте аз болса да ішкі күштердің дене бойымен таралуына айтарлықтай әсерін тигізеді. Деформациялану кезінде дене нүктелері кеңістікте өзінің орнын ауыстырады. Деформацияланбаған дене нүктесінен басталып, деформацияланған дененің дәл сол нүктесіне жүргізілген вектор нүктенің сызықты орын ауыстыру векторы деп аталады. Бұрыштық орын ауыстыру ұғымы келесідей енгізіледі: деформацияға дейін екі жақын нүктелердің арасындағы түзу кесінді де-формация болғаннан кейін кеңістікте кейбір бұрышқа бұрылады, ол да вектормен сипатталады.
 Егер жүйеге, оның
кеңістікте қатаң бүтін ретінде орын ауыстыруына
ешқандай мүмкіншілік бермеуге жеткілікті байланыстар енгізілген
болса, онда жүйе кинематикалық өзгермейтін жүйе деп
аталады. МК-нде әдетте тек сондай жүйелер қарастырылады. Керісінше
жағдайда орын ауыстырулардың тек қана деформациялар себебінен
бола-тын бөлігі қарастырылады. Сонда көптеген жүйелер
үшін кез келген нүктенің орын ауыстыруы дене
өлшемдерімен салыстырғанда өте аз шама болады.
Сондықтан, статика теңдеулерін құрған кезде
бастапқы өлшемдер принципі бойынша өлшемдердің
өзгеруі есепке алынбайды (бұдан өзгешеліктер бар).
Егер жүйеге, оның
кеңістікте қатаң бүтін ретінде орын ауыстыруына
ешқандай мүмкіншілік бермеуге жеткілікті байланыстар енгізілген
болса, онда жүйе кинематикалық өзгермейтін жүйе деп
аталады. МК-нде әдетте тек сондай жүйелер қарастырылады. Керісінше
жағдайда орын ауыстырулардың тек қана деформациялар себебінен
бола-тын бөлігі қарастырылады. Сонда көптеген жүйелер
үшін кез келген нүктенің орын ауыстыруы дене
өлшемдерімен салыстырғанда өте аз шама болады.
Сондықтан, статика теңдеулерін құрған кезде
бастапқы өлшемдер принципі бойынша өлшемдердің
өзгеруі есепке алынбайды (бұдан өзгешеліктер бар).
Дене өлшемдері мен формасының өзгеру қарқындылығын сипаттау үшін денені деформацияға дейін және деформация болғаннан кейін қарастырайық (10.4 сурет). Келесі шама
![]() (10.2)
(10.2)
А нүктесінің АВ бағыты бойымен сызықтық деформациясы немесе деформациясы деп аталады (оның реті 10-3). Дәл сол нүктедегі басқа бағыты бойымен алынған деформация, жалпы айтқанда, басқа болады. х, у және z өстері бойымен деформацияларды eх, eу және ez деп белгілейді.
Дене ішінде OD және ОС кесінділерімен жасалған тік бұрышты қарастырайық (10.4 сурет). Дене сыртқы күштермен жүктелген сон, бұл бұрыш өзгеріп, C'O'D' мәніне ие болады. Келесі шама
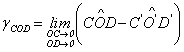 (10.3)
(10.3)
О нүктесіндегі COD жазықтығындағы бұрыштық деформация немесе ығысу бұрышы деп аталады. Координаттық жазықтықтарда ығысу бұрыштар gуz, gzx және gху арқылы белгіленеді.
10.4 Гук заңы. Күштер әсерінің тәуелсіздігі мен Сен-Венан принциптері
Көптеген жағдайда орын ауыстырулар кейбір шектерде әсер ететін күштерге пропорционал (Гук, 1660 ж.). Мұнда пропорционалдық коэффициенті материалдың физикалық қасиеттеріне және жүйенің геометриясына тәуелді. Қазіргі қарастыру бойынша Гук заңы кернеу мен деформация арасындағы сызықтық тәуелдігін анықтайды. Сонда пропорционалдық коэффициенттер материалдың тұрақтылары болып келеді. Ал орын ауыстырулар мен күштер арасындағы сызықтық тәуелдік соның салдары ретінде шығады. Тәуелдік күштер артқанда да, азайғанда да сақталады, демек, ол жүйенің серпімділік қасиеттерін сипаттайды.
Гук заңына бағынатын жүйелер үшін суперпозиция принципі (күштер әсерінің тәуелсіздігі принципі) орын алатынын дәлелдеуге болады, осыған сәйкес серпімді денедегі орын ауыстырулар мен ішкі күштер сыртқы күштердің түсу кезегіне тәуелсіз болады. Егер жүйеге бірнеше күш түсірілсе, алдымен әр күш бөлек түскен кезде орын алатын ішкі күштер, кернеулер, орын ауыстырулар мен деформацияларды анықтап, содан кейін барлық күштер әсерінің нәтижесін әр күш әсері нәтижелерінің қосындысы ретінде табуға болады.
МК есептерін шешу кезінде Сен-Венан принципі қолданылады. Егер денеге теңгерілетін күштер жүйесі әсер ететін болса, онда жүктеме түсірілетін орнынан алыстаған сайын кернеулер мен деформациялар шапшаң азаяды деп алынады. Бұл принципке сәйкес жүктеменің түсірілу тәсілі дененің деформациясына тек қана жүктеме түсірілген орнына жақын кіші көлемінде әсерін тигізеді, ал жүктеме түсірілген орнынан алыс жерде жүктеменің түсірілу тәсілі дененің деформациясына әсерін тигізбейді.
10.5 Конструкция элементтерін есептеудің жалпы принциптері
Конструкция оның беріктігіне, қатаңдығына, сенімділігіне қойылған талаптарды қанағаттандыра ма деген сұраққа жауап беру үшін алдымен есептеу әдісін таңдап алу керек. Беріктікке есептеудің ең кеңінен таралғал әдісі кернеулер бойынша есептеу болып табылады: мұнда конструкция сенімділігінің критерийі ретінде кернеу (кернеулі күй) болады деп есептеледі. Сонда конструкция талдауының негізінде ең жоғары (есептеу) кернеулер анықталады. Сол кернеулер берілген материал үшін,алдын ала зертханалық сынау негізінде табылған шекті мәнімен салыстырылады. Салыстыру нәтижесінде конструк-цияның беріктігі жөнінде қорытынды жасалынады.
Егер конструкция өлшемдерінің және формасының өзгеруі аз болу керек болса, қауіпсіз орын ауыстырулар бойынша есептеу жүргізіледі (қатаңдыққа есептеу). Бір жолы жүйені кернеулер бойынша беріктікке тексеру керек. Сапалық түрде айырылатын құбылыстармен, яғни орнықтылықпен, қайталмалы жүктемелердің әсерімен, динамикалық әсермен және т.б. байланысқан өзгеше әдістер қолданылады. Конструкцияның нақты жағдайларындағы сенімділігі-нің дәрежесі туралы мәселесі, машина бөлшектері курсында, турбома-шиналар динамикасы жіне беріктігі, химикалық өндірістегі аппараттар мен процестер және т.б. пәндерде қарастырылады.
11 дәріс. Сырықтардың созылуы мен сығылуы
Дәрістің мазмұны: бойлық күш, кернеулер мен деформациялар, орын ауыстырулар, деформацияның потенциалдық энергиясы, созылу (сығылу) кезіндегі кернеулі және деформациялық күйлер.
Дәрістің мақсаты: созылған (сығылған) сырықтардың механикасын игеру.
11.1 Бойлық күш және тік кернеулер
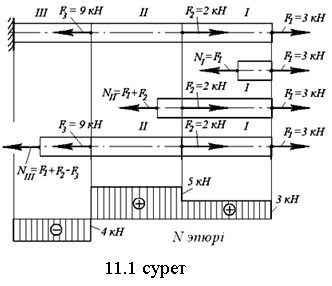
![]() Созылу деп,
сырықтың көлденең қималарында тек қана N
бойлық күші орын алып, басқа ІКФ нөлге тең
болатын сырықтың жүктелу түрін атайды. Созылу кезінде
N күшінің бағыты қарастырылатын
қиманың сыртқы нормалімен бірдей болады. Сығылу
созылудан формалды түрде тек қана N күшінің
бағытымен айырылғанмен, онда айтарлықтай айырмашылықтар
бо-луы мүмкін (ұзын сырықтар сығылған кезде олар
иілуі мүмкін, созылу және сығылу кезіндегі қирау
міңезі әртүрлі болады). Әдетте созылу немесе
сығылу сырық өсі бойымен бағытталған сыртқы
күштер әсерінен пайда болады. N эпюрі қима әдісі
қолдануымен тұрғызылады, сонда N күші
қарастырылатын қиманың бір жағындағы сырық
бөлігіне түсетін сыртқы күштердің бойлық
өсіне проекцияларының қосындысына тең
Созылу деп,
сырықтың көлденең қималарында тек қана N
бойлық күші орын алып, басқа ІКФ нөлге тең
болатын сырықтың жүктелу түрін атайды. Созылу кезінде
N күшінің бағыты қарастырылатын
қиманың сыртқы нормалімен бірдей болады. Сығылу
созылудан формалды түрде тек қана N күшінің
бағытымен айырылғанмен, онда айтарлықтай айырмашылықтар
бо-луы мүмкін (ұзын сырықтар сығылған кезде олар
иілуі мүмкін, созылу және сығылу кезіндегі қирау
міңезі әртүрлі болады). Әдетте созылу немесе
сығылу сырық өсі бойымен бағытталған сыртқы
күштер әсерінен пайда болады. N эпюрі қима әдісі
қолдануымен тұрғызылады, сонда N күші
қарастырылатын қиманың бір жағындағы сырық
бөлігіне түсетін сыртқы күштердің бойлық
өсіне проекцияларының қосындысына тең
N = ∑Fiz. (11.1)
Созатын N күші - оң, сығатын - теріс болып алынады. Сондықтан (11.1) формуласында сыртқы күш қимадан тыс бағытталса, оның проекциясы «+» таңбасымен, қимаға қарай бағытталса – «-» таңбасымен алынады. 11.1 сурет-те N эпюрінің тұрғызу мысалы көрсетілген.
N күші көлденең қимадағы ішкі тік күштердің тең әсерлісі болып келеді, ол қимадағы тік кернеулерімен келесі тәуелдікпен байланысады
![]() (11.2)
(11.2)
 мұндағы σ –
қиманың кез келген нүктесінің dA элементар
ауданындағы тік кернеуі;
мұндағы σ –
қиманың кез келген нүктесінің dA элементар
ауданындағы тік кернеуі;
A – көлденең қиманың ауданы.
Қиманың әр нүктесіндегі σ кернеуін табу үшін оның қима бойымен таралу заңын білу керек. Көлденең қимасы тұрақты, біртекті материалдан жасалған және шеттерінде түсірілген созу F күштерімен жүктелген сырықты қарастырайық (11.2 сурет). Жүктелу алдында оның бетінде өске перпен-дикуляр түзу сызықтарды жүргізейік. Тәжірибе көрсеткендей, жүктелу кезінде сол сызықтар түзу және өске перпендикуляр болып қала береді. Бұдан сырықтың жүктелу алдындағы жазық көлденең қималары жүктелу кезінде жазық болып қала береді деп есептеуге болады (жазық қималар гипотезасы). Бірдей ұзаруларға сәйкес бірдей кернеулер болғандықтан, көлденең қимасының барлық нүктелерінде кернеулер бірдей болады, сонда
![]() бұдан
бұдан
![]() (11.3)
(11.3)
Тік кернеу созылу кезінде оң, ал сығылу кезінде теріс болып есептеледі. Қарастырылатын мысалда біртекті кернеулі күй орын алады, яғни сырықтың барлық нүктелеріндегі кернеулі күй бірдей. Егер сырықтың қимасы айнымалы болса (11.3 сурет), онда ол дәл солай жүктелген кезде нүктелердегі кернеулі күйлер әр түрлі болады.
11.2 Сырықтың ұзаруы және Гук заңы
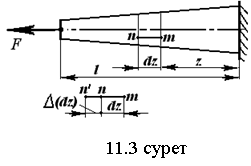 Созылған сырықтың өлшемдері
түсірілген күштерге тәуелді өзгереді. Мысалы, 11.2
суретте көрсетілген сырық сырықтың абсолют
(толық) ұзаруы деп ата-латын ∆l шамасына ұзарады. Мұнда біртекті
кернеулі күй болғандықтан, сызықты деформация
(яғни салыстырмалы ұзаруы) барлық нүктелерде бірдей
және келесіге тең
Созылған сырықтың өлшемдері
түсірілген күштерге тәуелді өзгереді. Мысалы, 11.2
суретте көрсетілген сырық сырықтың абсолют
(толық) ұзаруы деп ата-латын ∆l шамасына ұзарады. Мұнда біртекті
кернеулі күй болғандықтан, сызықты деформация
(яғни салыстырмалы ұзаруы) барлық нүктелерде бірдей
және келесіге тең
![]() .
(11.4)
.
(11.4)
Біртекті емес кернеулі күй жағдайында (11.3 сурет)
![]() .
(11.5)
.
(11.5)
Аз ε шектерінде көптеген материалдар үшін Гук заңы орындалады (σ мен ε арасындағы сызықты тәуелдік)
σ=Е∙ε (11.6)
мұндағы E –Юнг модулі (I ретті серпімділік модулі).
Юнг модулі тәжірибе арқылы анықталады; 11.1 кестеде кейбір материалдар үшін E мәндері келтірілген.
11.1 К е с т е
|
Материал |
болат |
мыс |
латунь |
алюминий және алю-миний-магний қорыт-палары |
ағаш (талшық бойымен) |
|
Е∙105, МПа |
1,9-2,0 |
1,2 |
1,0-1,2 |
0,7-0,8 |
0,08-0,12 |
(11.5) формуласын (11.3) және (11.4) ескеруімен интегралдаудан кейін келесіге келеміз
 .
(11.7)
.
(11.7)
Көлденең қимасы тұрақты және шеттерінде F күштерімен жүктелген сырық үшін N=F=const болады және абсолют ұзаруы келесіге тең
![]() .
(11.8)
.
(11.8)
Мұнда E∙А – сырықтың созылу-сығылу кезіндегі қатаңдығы.
Егер серпімді деформациялармен қатар температуралық деформация-ларды есепке алу керек болса, онда қосынды деформация осылай анықталады
![]() (11.9)
(11.9)
мұндағы α – материалдың температуралық ұлғаю коэффициенті;
∆t – температураның өсімі.
Сырықтың жәй (статикалық) жүктелу кезінде сыртқы күштердің жұмысы толығымен деформацияның U потенциялық энергиясына айналады, ол Гук заңы орындалғанда келесі түрде жазылады
![]() .
(11.10)
.
(11.10)
Көлденең қимасы тұрақты, біртекті материалдан жасалған және шеттерінде күштермен жүктелген сырық жағдайында келесі орын алады
![]() . (11.11)
. (11.11)
11.3 Созылу-сығылу кезіндегі статикалық түрде анықталмайтын жүйелер
11.5,а суретте екі сырықтан құрылған кронштейн көрсетілген. Сырықтардағы бойлық күштерді түйіндерді қиып алу әдісі қолдануымен анықтауға болады, сонда тепе-теңдік теңдеулері 2 координаттық өске күштер проекцияларының қосындылары түрінде жазылады, одан N1 мен N2 күштерін табу қиын емес. Егер конструкцияға тағы бір сырықты қосса (11.5,б сурет), онда оның беріктігі мен қатаңдығы артады, бірақ N1, N2 және N3 күштері тек қана статика теңдеулерінен табылмайды: белгісіздер са-ны 3, ал статика теңдеуле-рінің саны алдынғыдай 2 (1 рет статикалық түрде анық-талмайтын жүйе болады). 11.5 суретте көрсетілген жүйе 2 рет статикалық анықталмайды. Статикалық анықталмау дәрежесі (САД) деп байла-ныстар саны мен тәуелсіз тепе-теңдік теңдеулерінің саны арасындағы айырмашылықты атайды. Барлық белгісіз күштерді анықтауы (статикалық түрде анықталмауын шешуі) қосымша теңдеулерді (орын ауыстырулар теңдеулерін) қолдануымен орындалады.
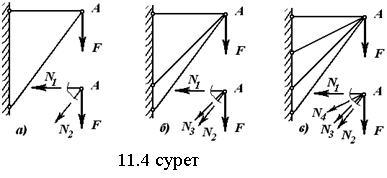 11.1
мысал - 11.5,а суретте екі шеті бекітілген және F күшімен
жүктелген сырық көрсетілген; RA мен RB
реакцияларын табу керек.
11.1
мысал - 11.5,а суретте екі шеті бекітілген және F күшімен
жүктелген сырық көрсетілген; RA мен RB
реакцияларын табу керек.
Шешуі. Мұнда тек қана бір тепе-теңдік теңдеуін құруға болады
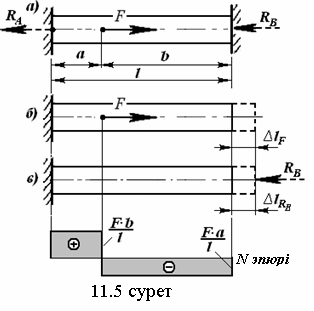
![]() . (11.12)
. (11.12)
RA мен RB реакцияларын табу үшін тағы бір теңдеу қолдану керек (САД=1). Ол үшін оң жақтағы қатты бекітпені алып тастап, оның сырыққа әсерін RB реак-циясына ауыстырамыз. Енді тек F күші түседі, ал RB күші жоқ деп алайық. Онда F күшінің әсерінен сырықтың тек қана а ұзындығымен сол жақ аралығы деформацияланады, соның нәтижесінде күш түсірілген қима ∆lF=F∙a/(E∙A) шамасына оқ жаққа орын ауыстырады. Сонда b ұзындығымен оң жақ аралығы деформацияланбайды, ол тек қана қатты дене секілді дәл сол ∆lF шамасына оң жаққа орын ауыстырады. Енді тек қана RB күші түседі, ал F күші жоқ дейік. RB күші әсерінен сырық толығымен деформацияланады, оның нәтижесінде сырықтың оң жақ шеті ∆lRB= RB∙l/(E∙A) шамасына сол жаққа орын ауыстырады. Шындығында, сырықтың оң жақ шеті бекітілген соң, ол орын ауыстырмайды. Сонымен, оның F күші әсерінен болған оң жаққа орын ауыстыруы RB күші әсерінен болған сол жаққа орын ауыстыруына тең болу керек
∆lF - ∆lRB = 0, (11.13)
яғни ![]() .
(11.14)
.
(11.14)
(11.14) пен (11.12) теңдеулер жүйесінен RA және RB табылады. Содан кейін N эпюрін тұрғызу, кернеулерді, деформацияларды және орын ауыстыруларды анықтауы статикалық түрде анықталатын есепте секілді орындалады.
Статикалық түрде анықталатын жүйелер элементтерінде ІКФ мен кернеулер тек қана сыртқы күштер әсерінен пайда болады, ал статикалық түрде анықталмайтын жүйелер элементтерінде олар сыртқы күштер болмаса да, мысалы, температураның өзгерісі, тіректер орнынан ауытқуы және конструкцияның кейбір элементтері нақты жасалмауы себебінен орын алуы мүмкін.
11.4 Созылу кезіндегі кернеулі және деформациялық күйлер
Сырықтың көлденең қимасымен α бұрышын жасайтын көлбеу қимала-рындағы кернеулерді қарастырайық (11.6,а сурет). Егер көлденең қимасының ауданы A болса, онда көлбеу қимасының ауданы A/cosα болады.
11.6,б суреттен p∙Aα = F және F=σ∙A болатыны көрінеді, сондықтан
р = F/ Aα = σ∙cosα. (11.15)

р кернеуін σα және τα құраушыларына жіктеп (11.6,в сурет), келесіні аламыз
σα= р∙cosα = σ∙cos2α, (11.16)
τα= р∙sinα = ![]() σ∙cos2α. (11.17)
σ∙cos2α. (11.17)
Осыдан келесі орын алады:
а) α=0 болғанда (көлденең қималарында) σα= σ, τα=0;
б) α=90ْ (бойлық қималарында) σα= 0, τα=0, яғни бойлық қабаттар өзара әрекеттеспейді;
в) α=45ْ болғанда τ кернеуі ең жоғары мәніне ие болады τmax= σ/2;
г) α және (α+90ْ) бұрыштарымен орналасқан қималарда τ шамасының абсолют мәні бірдей; бұл жанама кернеулердің жұптылық заңы, ол әрқашанда орындалады.
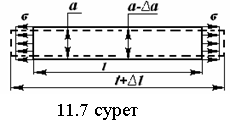 Созылу кезіндегі деформацияларды қарас-тырайық.
Тәжірибе көрсеткендей, кейбір шек-терде сырықтың
бойлық ұзаруымен қатар бір-жолы оған пропорционал көлденең
жіңішкеру болады (11.7
сурет). Көлденең деформациясы ε´=∆а/а
және
Созылу кезіндегі деформацияларды қарас-тырайық.
Тәжірибе көрсеткендей, кейбір шек-терде сырықтың
бойлық ұзаруымен қатар бір-жолы оған пропорционал көлденең
жіңішкеру болады (11.7
сурет). Көлденең деформациясы ε´=∆а/а
және
ε´=- µ∙ε (11.18)
мұндағы µ - көлденең деформациясының коэффициенті (Пуассон коэф-фициенті); оның мәні металлдар үшін 0,25… 0,35 шектерінде жатады.
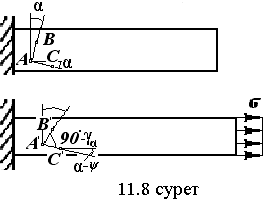 Сырықта осымен қатар γα бұрыштық деформациялар орын алады (11.8 сурет). Сонда γα ығысу бұрышы сәйкес аудандағы τα
жанама кернеуіне пропор-ционал болатынын дәлелдеуге болады. Бұл –
ығысу кезіндегі Гук заңы
Сырықта осымен қатар γα бұрыштық деформациялар орын алады (11.8 сурет). Сонда γα ығысу бұрышы сәйкес аудандағы τα
жанама кернеуіне пропор-ционал болатынын дәлелдеуге болады. Бұл –
ығысу кезіндегі Гук заңы
τ=G∙γ (11.18)
мұнда G – ығысу модулі немесе II ретті серпімділік модулі.
Материал серпімділігінің Е, G және µ параметрлері арасында келесі өзара тәуелдігі орын алады
 .
.
12 дәріс. Созылу және сығылу кезіндегі материалдардың механикалық қасиеттері
Дәрістің мазмұны: сынаулардың мақсаты, созылу және сығылу диаг-раммалары, материалдар беріктігі мен пластикалық қасиетінің сипаттамалары, мығымдау, температура мен уақыттың қасиеттерге әсері, жылыстау.
Дәрістің мақсаты: материалдарды созылуға және сығылуға сынауларын жүргізу әдістемесімен танысу, материалдардың негізгі механикалық сипаттамаларын игеру.
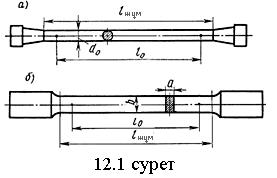 Материалдар қасиеттерін зерттеу
үшін және шекті кернеулердің мәндерін анықтау
үшін материал үлгілерінің сынауларын оларды сындыруға
дейін жүргізеді. Сынаулар статикалық, соққы және
циклдік жүктемелер әсерінен созылуға, сығылуға,
бұралуға және иіюлуге жүргізіледі (кейбірде
күрделі қарсыласуға). Сынаудың нәтижелері
үлгінің формасына, деформациялану жылдамдығына, сынау
кезіндегі температураға және т.б. тәуелді
болғандықтан, оларды арнаулы машиналарда стандартталған
шарттар сақтауымен жүргізеді.
Материалдар қасиеттерін зерттеу
үшін және шекті кернеулердің мәндерін анықтау
үшін материал үлгілерінің сынауларын оларды сындыруға
дейін жүргізеді. Сынаулар статикалық, соққы және
циклдік жүктемелер әсерінен созылуға, сығылуға,
бұралуға және иіюлуге жүргізіледі (кейбірде
күрделі қарсыласуға). Сынаудың нәтижелері
үлгінің формасына, деформациялану жылдамдығына, сынау
кезіндегі температураға және т.б. тәуелді
болғандықтан, оларды арнаулы машиналарда стандартталған
шарттар сақтауымен жүргізеді.
12.1 Созылу диаграммалары
Ең кеңінен таралған сынаулар – ста-тикалық жүктеме әсерінен созылуға сы-наулар, өйткені олар ең қарапайым болып келеді және материал деформацияның басқа түрлерін қалай қабылдайтыны туралы айтуға мүмкіншілік береді.
Сынаулар үшін цилиндрлік және жазық үлгілер қолданылады (12.1 сурет). Әдетте цилиндрлік үлгілердің өлшемдері d0=20 мм және l0=10d0 немесе l0=5d0 болып алынады.
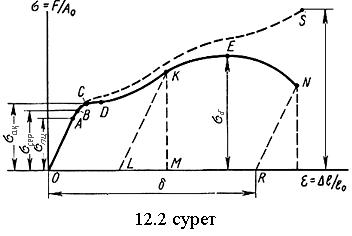 Сынау кезінде созатын F күші мен
үлгінің Δl ұзаруы арасындағы
тәуелдіктің диаграм-масы жазылып отырады. Әртүрлі
өлшемдерімен алынған үлгілер бойынша сынау нәтижелерін
салыстыруға мүмкіншілік болу үшін F-Δl
диаграммасының σ-ε диаграммасы ретінде қарасты-рады.
Бұл нақты емес, өйткені σ=F/A0 және
ε=∆l/l0 алынады (A0, l0
– үлгінің көлденең қимасының бастапқы
ауданы мен оның бастапқы ұзындығы). Нақты σ
мен ε A және l шамаларының
ағымды мәндері арқылы анықталу керек
болғандықтан, бұл σ-ε диаграммасын шартты
созылу диаграммасы деп атайды.
Сынау кезінде созатын F күші мен
үлгінің Δl ұзаруы арасындағы
тәуелдіктің диаграм-масы жазылып отырады. Әртүрлі
өлшемдерімен алынған үлгілер бойынша сынау нәтижелерін
салыстыруға мүмкіншілік болу үшін F-Δl
диаграммасының σ-ε диаграммасы ретінде қарасты-рады.
Бұл нақты емес, өйткені σ=F/A0 және
ε=∆l/l0 алынады (A0, l0
– үлгінің көлденең қимасының бастапқы
ауданы мен оның бастапқы ұзындығы). Нақты σ
мен ε A және l шамаларының
ағымды мәндері арқылы анықталу керек
болғандықтан, бұл σ-ε диаграммасын шартты
созылу диаграммасы деп атайды.
12.2 суретте үздіксіз сызықпен аз көміртекті болаттың шартты созылу диаграммасы көрсетілген. ОА аралығында кейбір пропорционалдық шегі деп аталатын σпц шамасына дейін ε деформациясы σ кернеуіне пропорционал өседі, яғни Гук заңы орындалады (Ст3 болат үшін σпц≈ 200 МПа). Содан кейін диаграмма қисық сызықтыға айналады, сонда серпімділік шегі деп аталатын, σсер шамасына дейін материал өзінің серпімділік қасиетін сақтайды. σпц және σсер арасындағы айырмашылығы аз болғандықтан (Ст3 үшін σсер≈ 210 МПа), оларды қолдану кезінде айырмайды.
Жүктемені әрі қарай өсіріп тұрғанда, бір мезгілде (С нүктесі) деформациялар, жүктеме өспесе де өсе береді. Горизонталь СD аралығы аққыштық ауданы деп, ал сәйкес кернеу – σақ аққыштық (немесе жұмсару) шегі деп аталады (Ст3 үшін 240…400 МПа).
Содан кейін диаграмма жоғары кетеді, материал созуға қарсыласу қабілетіне қайта ие болады. Е нүктесінде ең жоғары шартты кернеуге жетеміз, ол σб беріктік шегі деп немесе уақытша қарсыласуы деп аталады (Ст3 үшін σб=400…500 МПа). Сонда үлгіде мойнақ деп аталатын жергілікті жіңішкеру орын алады (12.3,б сурет). Үлгі мойнағындағы қимасының ауданы тез азаяды, соның себебінен күш пен σ шамалары төмен түседі. Үлгінің үзілуі ең кіші қимасы бойымен болады. Беріктік шегі үлгі үзілетін кездегі кернеуге тең емес. Егер созатын күштің A0 ауданына емес, мойын ауданына қатынасын тапсақ, онда үзілу алдын-дағы (S нүктесінде) мойындағы σшын кернеуі σб кернеуінен айтарлықтай жоғары болады.
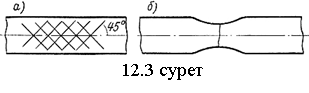 Материал беріктігінің қарастырылған
сипаттамаларымен қатар сынау арқылы үлгі үзілгендегі δ
салыстырмалы қалдық ұзаруын анықтайды, ол
материалдың пластикалық қасиетінің сипаттамасы болып
келеді
Материал беріктігінің қарастырылған
сипаттамаларымен қатар сынау арқылы үлгі үзілгендегі δ
салыстырмалы қалдық ұзаруын анықтайды, ол
материалдың пластикалық қасиетінің сипаттамасы болып
келеді
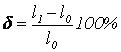 (12.1)
(12.1)
мұндағы l0 – үлгінің бастапқы есептеу ұзындығы;
l1– үлгі үзілгеннен кейін, оның есептеу ұзындығы.
Ст3 үшін δ ≥24%, жоғары берікті болаттар үшін δ=(7…10)%. Бұл ұзаруы орташа алынады, шынайы ұзаруы үзілген жерде орын алады.
Айтарлықтай үлкен пластикалық деформацияларды зерттеу үшін шынайы созу диаграммасын білу қажет (12.2 суреттегі OCS қисығы).
Қарастырылған созылу диаграммасы пластикалық материалдарды, яғни қирамай тұрғанда айтарлықтай қалдық деформацияларға ие бола алатын мате-риалдарды сипаттайды. Пластикалық қасиеті жоғары материалдарға мыс, алюминий, латунь, аз көміртекті болат және т.б. жатады, пластикалық қасиеті аз материалдарға – легирленген болаттардың көпшілігі. Кейбір пластикалық материалдардың созылу диаграммаларында аққыштық ауданы болмайды; олар үшін шартты аққыштық шегі қолданылады - ол қалдық деформация-сының кейбір шамасына сәйкес келетін кернеу. σ0,2 шартты аққыштық шегі 0,2% тең қалдық деформациясына сәйкес болады.
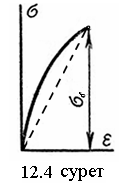 Пластикалық қасиетіне керісінше
морт қасиеті бар. Морт материалдар үшін δ шамасы 2-5%-дан
аспайды. Морт материалдарға шойын, инструменттік болат, тас, бетон, шыны
және т.б. жатады. Пластикалық және морт мате-риалдарға
бөлу шартты екенін айта кету керек, өйткені сынау шарттарына
(жүктелу жылдамдығына, темпе-ратураға) және кернеулі
күйіне тәуелді морт материал-дардың биімділігі
пластикалық материалдар секілді, ал пластикалық
материалдардың биімділігі морт материалдар секілді болуы мүмкін.
Мысалы, шойыннан жасалған үлгі жан-жақты сығу кезінде
пластикалық қасиетіне ие болады. Ал болаттан жасалған
қырнауы бар үлгі, оның δ қалдық
деформациясы салыстырмалы кішкене болғанда сынады.
Пластикалық қасиетіне керісінше
морт қасиеті бар. Морт материалдар үшін δ шамасы 2-5%-дан
аспайды. Морт материалдарға шойын, инструменттік болат, тас, бетон, шыны
және т.б. жатады. Пластикалық және морт мате-риалдарға
бөлу шартты екенін айта кету керек, өйткені сынау шарттарына
(жүктелу жылдамдығына, темпе-ратураға) және кернеулі
күйіне тәуелді морт материал-дардың биімділігі
пластикалық материалдар секілді, ал пластикалық
материалдардың биімділігі морт материалдар секілді болуы мүмкін.
Мысалы, шойыннан жасалған үлгі жан-жақты сығу кезінде
пластикалық қасиетіне ие болады. Ал болаттан жасалған
қырнауы бар үлгі, оның δ қалдық
деформациясы салыстырмалы кішкене болғанда сынады.
Морт материалдардан жасалған үлгілердің созылу диаграммаларының бір қатар ерешеліктері болады (12.4 сурет). Мұнда Гук заңынан ауытқуы өте ерте басталады. Үзілу өте аз деформациялар кезінде мойыны болмай аяқ астынан келіп қалады. Сынау кезінде тек қана σб беріктік шегін анықтайды. Есептеу жүргізгенде қисық сызықты диаграммасын түзу сызықты диаграммасына ауыстырып, Гука заңынан ауытқуы ескерілмейді. σб шамасына үлгінің өлшемдері байқалатын әсерін тигізеді, ол масштаб коэффициенті арқылы бағаланады.
12.2 суреттегі диаграммасын қайта қарастырайық. Егер үлгі жүктел-генде σсер кернеуі асырылмаса, жүктемені алғаннан кейін деформациялар толығымен жойылады. Содан кейін үлгі қайта жүктелсе, үлгі алдыңғы жағдайдағыдай болады. Егер үлгі жүктелуінде кернеу σсер кернеуінен артық болып кетсе, мысалы үлгі К нүктесіне дейін жүктелсе, онда жүктемеден босатылу ОА-ға параллель КL түзуімен орындалады. Деформацияның сер-пімді бөлігі (LM кесіндісі) жойылады, ал пластикалық бөлігі (OL кесіндісі) қалады. Енді үлгі қайта жүктелсе, созу диаграммасы LK түзу бойымен K нүктесіне дейін жетіп, әрі қарай KEN сызығы бойымен үлгі үзілгенге дейін жүргізіледі. Үзілу кезіндегі LR ұзаруы ОR шамасынан кіші болады. Сонымен, алдын ала σсер кернеуінен асатын кернеулерге дейін созылған үлгіге қайта жүктемені түсірсе, оның пропорционалдық шегі алдыңғы жүктелу кезіндегі кернеулер деңгейіне дейін өседі. Бұны - жүктемені алып қайта түсіру заңы, ал құбылысты мығымдау деп атайды.
12. 2 Сығылуға сынаулардың ерешеліктері
Мұнда үлгілер текше немесе биік емес цилиндрлер (h≤ 3d) түрінде алынады, керісінше иілу пайда болуы мүмкін. Өте қысқа үлгілерді де пайдалануға болмайды, өйткені шеткі беттеріндегі үйкеліс күштері бірталай әсерін тигізеді.
 Морт материалдар үшін сығылу
диаграммасының түрі созу диаграммасымен бірдей болады. Диаграмма
бойынша σб мен δ анықталады, сонда
сығу кезіндегі беріктік шегі созылу кезіндегі беріктік шегінен әдетте
артық болады.
Морт материалдар үшін сығылу
диаграммасының түрі созу диаграммасымен бірдей болады. Диаграмма
бойынша σб мен δ анықталады, сонда
сығу кезіндегі беріктік шегі созылу кезіндегі беріктік шегінен әдетте
артық болады.
12.5 суретте пластикалық материалдың типтік сығылу диаграммасы көрсетілген. Басында ол созу диаграммасымен бірдей болады, кейін тікшіл көтеріледі, үлгі жалпаяды және қирамайды. Пластикалық материалдар үшін соылзу және сығылу кезіндегі аққыштық шектері бірдей болады.
12.3 Температура мен уақыттың материалдар қасиеттеріне әсері
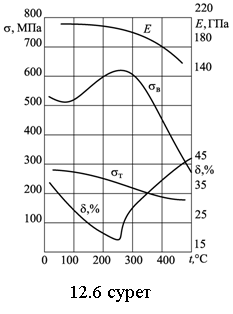 tº температурасы мен t уақыт факто-рының
материалдардың қасиеттеріне әсерін зерттеу өте
күрделі есеп болып келеді, сондықтан дербес жағдайлар
қарастырылады.
tº температурасы мен t уақыт факто-рының
материалдардың қасиеттеріне әсерін зерттеу өте
күрделі есеп болып келеді, сондықтан дербес жағдайлар
қарастырылады.
12.6 суретте аз көміртекті болат үшін Е серпімділік модулі, σақ аққыштық шегі, σб беріктік шегі мен үзілгендегі δ ұзаруының tº-дан тәуелдіктері көрсетілген. tº темпе-ратурасының 0…300ºС аралығында серпімділік модулі шамалы ғана кемиды. Одан айтар-лықтай көбірек σб мен δ өзгереді, сонда морт қасиеттеріне ие болу орын алады – үзілу кезін-дегі ұзаруы кемиді. tº әрі қарай өскенде, болаттың пластикалық қасиеттері кайта ора-лады, ал беріктігі бірталай төмендейді. Жоғары tº кезіндегі морт қасиеттеріне ие болу аз көміртекті болаттар үшін орын алады. Легирленген болаттар және түсті қорытпалар δ шамасының бір сарынды өсуін және σб мен σақ азаюын көрсетеді.
Жоғары tº болған кезде (органикалық материалдар үшін төмен tº кезінде де) жүктелген бөлшекте кернеулер мен деформациялар уақыт өтуімен өзгереді, бұл құбылыс жылыстау деп аталады.
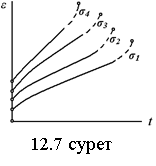 Жылыстаудың дербес білінуі – зардап, яғни
тұ-рақты кернеу кезіндегі жойылмайтын деформация-лардың
өсуі. Мысалы: центрден тепкіш күштер және жоғары tº
әсерінен бу және газ турбиналарының дискі-лері мен
қалақшалары өлшемдерінің өсуі. Жылыстау
қасиетінің тағы бір дербес білінуі – релаксация, ол
тұрақты деформациялар кезіндегі уақыт өтуімен
кернеулердің өзінен-өзі өзгеруі, мысалы, жоғары tº
кезінде қосылыстардағы болттардың тартпасының босауы.
Жылыстаудың дербес білінуі – зардап, яғни
тұ-рақты кернеу кезіндегі жойылмайтын деформация-лардың
өсуі. Мысалы: центрден тепкіш күштер және жоғары tº
әсерінен бу және газ турбиналарының дискі-лері мен
қалақшалары өлшемдерінің өсуі. Жылыстау
қасиетінің тағы бір дербес білінуі – релаксация, ол
тұрақты деформациялар кезіндегі уақыт өтуімен
кернеулердің өзінен-өзі өзгеруі, мысалы, жоғары tº
кезінде қосылыстардағы болттардың тартпасының босауы.
Жылыстау кезіндегі материалдың негізгі сипаттамалары келесі:
а) ұзақ беріктіктің шегі – бұл созылған үлгінің берілген уақыт өткеннен кейін қирау болатын жүктеменің қиманың бастапқы ауданына қатынасы;
б) жылыстау шегі – берілген уақыт аралығында пластикалық дефор-мацияны берілген шамаға жеткізетін кернеу.
13 дәріс. Созылу-сығылу кезіндегі беріктікке есептеу. Кернеулер шоғырлануы
Дәрістің мазмұны: қауіпсіз кернеулер, беріктік кепілдігі, созылу-сығылу кезіндегі беріктік шарты, кернеулер шоғырлануы.
Дәрістің мақсаты: созылу-сығылу кезіндегі беріктікке есептеудің әдістемесін игеру.
13.1 Созылу-сығылу кезіндегі беріктік шарты. Есептердің үш түрі
Созылуға және сығылуға сынаулары нәтижесінде алынған мате-риалдардың механикалық қасиеттерін конструкция элементтерін есептеу кезінде қалай қолдануға болатынын қарастырайық.
Ең кең таралған әдіс – кернеулер бойынша беріктікке есептеу әдісі. Осы әдісте есептеу конструкцияда орын алатын кернеулердің ең үлкен кернеуі бойынша жүргізіледі, максималды кернеу материал үшін шекті шамасынан аспау керек σmax<σшек, сонда беріктіктің кейбір кепілдігі ескерілу керек, сондықтан беріктік шарты келесі түрде орындалу керек
σmax≤[σ]. (13.1)
Мұнда [σ] – қауіпсіз кернеу, ол шекті кернеудің кейбір бөлігі ретінде анықталады
 (13.2)
(13.2)
мұндағы [n] – беріктік кепілдігінің нормативтік мәні, ол конструкция жауапкершілігінің дәрежесіне, есептеу сұлбасының нақтылығына, жобалау тәжірибесіне, конструкция жұмысының шарттарына тәуелді беріледі. Сонда әрқашан [n] >1,0 , оның мәндері конструкцияның әртүрлі элементтері үшін нормативтік құжаттарда беріледі.
Конструкцияда білінетін қалдық
деформациялар болмауы үшін пластикалық материалдардан
жасалған конструкция элементтеріне σшек мәні
созылған жағдайда ![]() ,
сығылған жағдайда
,
сығылған жағдайда ![]() тең деп
алынады. Морт материалдарға және кейбір жағдайда бірыңғай
пластикалық материалдарға σшек ретінде
созылу немесе сығылу кезіндегі сәйкес
тең деп
алынады. Морт материалдарға және кейбір жағдайда бірыңғай
пластикалық материалдарға σшек ретінде
созылу немесе сығылу кезіндегі сәйкес ![]() немесе
немесе
![]() беріктік шегі алынады.
беріктік шегі алынады.
Осы әдіс бойынша беріктік шартының басқа түрі
n≥[n] (13.3)
мұндағы n – шынайы (есептеу) беріктік кепілдігі, ол n=σшек/σmax формуласымен анықталады.
Сонымен, созылу-сығылу кезіндегі (13.1) беріктік шарты келесі түрге келтіріледі
![]() .
(13.4)
.
(13.4)
Беріктік шартын қолданып, келесі есептерді шешуге болады:
а) тексеру есептері. Мұнда берілген жүктеме мен сырықтың көлденең қимасының өлшемдері бойынша шынайы кернеулерді анықтап, оларды қауіпсіз кернеулермен салыстырады, сонда тікелей (13.4) шартының орындалуы тексеріледі. Кернеулер асып кетсе, беріктік қамсыздандырыл-майды, сондықтан мұндай жағдайға тыйым салынады, ал кернеулер аз болуы материалдың артық шығынына алып келеді;
б) жобалау есептері. Берілген жүктеме мен қаупсіз кернеу бойынша беріктік шартын қанағаттандыратын сырықтардың көлденең қималарының өлшемдерін анықтайды
![]() ;
(13.5)
;
(13.5)
в) жүк көтеру шегін (жүк көтеру қабілетін) анықтау есептері. Мұнда сы-рық көлденең қимасының берілген өлшемдері мен берілген қауіпсіз кернеу бойынша қауіпсіз бойлық күшті анықтайды
![]() , (13.5)
, (13.5)
содан кейін бойлық күш пен жүктеме арасындағы байланысты анықтап (статиканың тепе-теңдік теңдеулерінің қолдануымен), қауіпсіз жүктемені табуға болады.
Сығылған сырықтар беріктікке есептелуімен қатар орнықтылыққа да есептелу керек екенін айтқан жөн, өйткені сығушы күштің кейбір мәнінде сырық иіліп кетуі мүмкін (орнықтылықтан айырылу).
Қауіпсіз кернеу әдісіндегі қабылданған критерий (нүктедегі кернеу) конструкция қирауының шарттарын кейбір жағдайларда сипаттамайтынын айтып кету керек. Сол жағдайларда критерий ретінде жүйе қирамай және формасын айтарлықтай өзгертпей, көтере алатын шекті жүктемені алған дұрыс.
13.1 мысал – Қимасының ауданы А=4 см2 шойын сырық үшін (10.1 сурет), созылу кезіндегі қауіпсіз кернеуді [σсоз] = 30 МПа және сығылу кезіндегі қауіпсіз кернеуді [σсығ] = 100 МПа қабылдап, беріктік шартының орындалуын тексеру керек..
Шешуі. Сырықтың сол жақ аралығында сығылу, басқа екі аралығында – созылу орын алады. Сырық қимасы тұрақты, орташа аралығында N бойлық күші басқа екі аралықтағы бойлық күштен артық және мұнда созылу орын алып тұр. [σсоз] кернеуі [σсығ]-дан аз болғандықтан, беріктік шартын тек қана орташа аралық үшін тексерген жеткілікті болады. Сонда σ=N/A=5∙103/4∙102=12,5 МПа<[σсоз]=30 МПа, сондықтан сырық үшін беріктік шарты орындалып тұр.
13.2 Кернеулердің шоғырлынуы
Көлденең қимасы айнымалы сырықтардың есептелуі қимасы тұрақты сырықтардың есептелуімен бірдей жүргізіледі. Көлденең қималарында тек қана бірқалыпты таралған тік кернеулер орын алады, ал бойлық қималар кернеуден бос деп есептеледі.
Сырықтың қимасы кенет өзгеретін жағдайда (ойық, қуыс, тесік және т.б. қасында), кернеулердің таралуы қарапайым созылуға сәйкес болмайды (13.1 сурет). Қарапайым созылу кезінде орын алатын кернеулердің бірқалыпты таралу заңынан қөлденең қиманың кенет өзгеретін орнының қасында ауытқуы кернеулердің шоғырлануы деп аталады. Кернеулердің шоғырлануы келесі арқылы білінеді:
а) көлденең қималарда σ таралуы бірқалыпты емес, олар қима өзгеретін орнының қасында ең үлкен мәндеріне ие болады;
б) көлденең және бойлық қималарында σ да, τ да болады.
Шоғырландырғыштардағы кернеулердің таралу заңын анықтау үшін серпімділік теориясының әдістері мен тәжірибелік әдістер қолданылады. Әдетте теориялық шоғырлану коэффициентін анықтайды α=σmax/σ0, ол қимадағы ең үлкен кернеу номинал σ0=F/Aнетто кернеуден неше есе артық екенін көрсетеді. α мәндері анықтамаларда беріледі (ол тек қана шоғырландырғыштың геометриясына тәуелді).
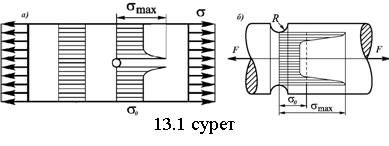 α коэффициентін білу бөлшекті
беріктікке есептеу үшін жеткіліксіз болады. Егер материал Гук
заңына қирауға дейін бағынып тұратын болса, онда
берік-тігі α есе төмеңдейтін бола-тын еді; бірақ
практикада – α -дан аз есе төмендейді. Сондықтан
тәжірибелік түрде тиімді шоғырлану коэффициенті
анықталады, ол шоғырландырғышы бар үлгінің
беріктік шегі шоғырландырғышсыз үлгінің беріктік
шегінен неше есе аз болатынын көрсе-теді kσ = σб/σбш.
Пластикалық материалдан жасалған сырықтың
статикалық жүктеме жағдайында беріктігін есептеу кезінде
кернеулер шоғырлануы ескерілмейді, яғни kσ =1
алынады және беріктік шарты осылай жазылады
α коэффициентін білу бөлшекті
беріктікке есептеу үшін жеткіліксіз болады. Егер материал Гук
заңына қирауға дейін бағынып тұратын болса, онда
берік-тігі α есе төмеңдейтін бола-тын еді; бірақ
практикада – α -дан аз есе төмендейді. Сондықтан
тәжірибелік түрде тиімді шоғырлану коэффициенті
анықталады, ол шоғырландырғышы бар үлгінің
беріктік шегі шоғырландырғышсыз үлгінің беріктік
шегінен неше есе аз болатынын көрсе-теді kσ = σб/σбш.
Пластикалық материалдан жасалған сырықтың
статикалық жүктеме жағдайында беріктігін есептеу кезінде
кернеулер шоғырлануы ескерілмейді, яғни kσ =1
алынады және беріктік шарты осылай жазылады ![]() . Бұл
пластикалық материалдың жүк көтеру
қабілетінің тек қиманың барлық
нүктелеріндегі кернеу σақ мәніне
жеткенде ғана жойыла-тынына байланысты. F күші
жәймендеп өскенде максималды кернеу σақ
мәніне жеткеннен кейін, тесіктің қасындағы кернеулер,
аққыштық шегінің ауданы өтілмей өсе
алмайды, ал бойлық талшықтар еркін жағдайда секілді
ұзара алмайды, өйткені олар қысылыңқы болады.
Жүктеме өсуімен бойлық күш те өсу керек – ол σ
< σт болатын талшықтардағы
кернеулердің өсуі арқылы орындалады, сонда
аққыштық аймағы, барлық нүктелерде σ=σт
болғанға дейін артады, сонда жалпы аққыштық орын
алады. Сонымен, шекті қалпының шынайы жағдайы кернеулер
шоғырлануыны болмаған жағдайдағы қалпымен бірдей
болады.
. Бұл
пластикалық материалдың жүк көтеру
қабілетінің тек қиманың барлық
нүктелеріндегі кернеу σақ мәніне
жеткенде ғана жойыла-тынына байланысты. F күші
жәймендеп өскенде максималды кернеу σақ
мәніне жеткеннен кейін, тесіктің қасындағы кернеулер,
аққыштық шегінің ауданы өтілмей өсе
алмайды, ал бойлық талшықтар еркін жағдайда секілді
ұзара алмайды, өйткені олар қысылыңқы болады.
Жүктеме өсуімен бойлық күш те өсу керек – ол σ
< σт болатын талшықтардағы
кернеулердің өсуі арқылы орындалады, сонда
аққыштық аймағы, барлық нүктелерде σ=σт
болғанға дейін артады, сонда жалпы аққыштық орын
алады. Сонымен, шекті қалпының шынайы жағдайы кернеулер
шоғырлануыны болмаған жағдайдағы қалпымен бірдей
болады.
Морт материалдар үшін кернеулердің шоғырлануы бөлшектердің беріктігін біраз төмендетеді (мысалы, шыны кесу кезінде шыны кескіштің қалдырған сызығы шоғырландырғыш болып келеді).
14 дәріс. Таза ығысу. Көлденең қимасы дөңгелек сырықтың бұралуы
Дәрістің мазмұны: таза ығысу, бұраушы момент, бұралу кезіндегі кернеулер мен деформациялар, беріктікке және қатаңдыққа есептеу.
Дәрістің мақсаты: таза ығысудың ерекшеліктерін, көлденең қимасы дөңгелек және сақина тәрізді сырықтардың бұралу механикасын игеру, беріктікке және қатаңдыққа есептеу формулаларын алу.
14.1 Таза ығысу кезіндегі кернеулер мен деформациялар
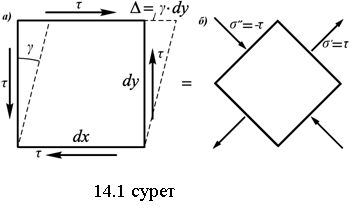 Таза ығысу – денеден бөліп алынған
элементтің беттерінде тек қана t жанама
кернеулері болатын кернеулі күй (14.1,а сурет). Біртекті
таза ығысу жұқа қабырғалы цилиндрдің
бұралу кезінде орын алады (14.2 сурет).
Таза ығысу – денеден бөліп алынған
элементтің беттерінде тек қана t жанама
кернеулері болатын кернеулі күй (14.1,а сурет). Біртекті
таза ығысу жұқа қабырғалы цилиндрдің
бұралу кезінде орын алады (14.2 сурет).
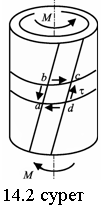 Егер таза ығысудағы эле-менттен оның бет-терімен
45º жасайтын беттері бар элементті қиып алсақ, оның беттерінде
жанама кернеулер жоқ болып, тек қана тік кернеулер орын алатынын
дәлелдеуге болады (14.1,б сурет). Сонда қарама-қарсы
беттерінің бір жұбында кернеулер созушы (σ’=t), екінші жұбында сығушы (σ”=-t) болады.
Егер таза ығысудағы эле-менттен оның бет-терімен
45º жасайтын беттері бар элементті қиып алсақ, оның беттерінде
жанама кернеулер жоқ болып, тек қана тік кернеулер орын алатынын
дәлелдеуге болады (14.1,б сурет). Сонда қарама-қарсы
беттерінің бір жұбында кернеулер созушы (σ’=t), екінші жұбында сығушы (σ”=-t) болады.
Алдында айтылғандай, t жанама кернеуі мен γ бұрыштық деформациясы Гук заңы бойынша байланысады
t=G∙γ. (14.1)
Таза ығысу кезінде элементтердің қабырғаларының ұзындықтары өзгермейтінін және элемент қөлемінің өзгерісі де нөлге тең екенін дәлелдеуге болады.
Материалдарды созылу мен сығылуға сынаулары секілді таза ығысуға да сынау жүргізіледі. Ол үшін моменттермен бұралатын жұқа қабырғалы құбыр тәрізді үлгілер қолданылады. Нәтижесінде t мен γ координаттарындағы шартты ығысу диаграммасын алады, ол созу диаграммасына ұқсас болып келеді, сонда пластикалық металдар үшін аққыштық шегі tақ=(0,5…0,55)σақ.
Таза ығысуға жақын кернеулі күй шегендерде, саңылаусыз қойылатын болттарда, шпонкаларда, шлицаларда, пісірілмелі біріктірмелерде орын алады.
14.2 Көлденең қимасы дөңгелек сырықтың бұралуы
Бұралу - сырықтың көлденең қималарында тек қана Мбұр бұраушы моменты орын алып, басқа ІКФ нөлге тең болатын сырықтың жүктелу түрі. Бұралу әдетте сырық, әсер ету жазықтықтары сырықтың өсіне перпендикуляр күштер жұптарымен (бұрайтын моменттермен) жүктелген кезде орын алады. Бұраушы моменттердің эпюрін қималар әдісі қолдануымен тұрғызады, сонда Мбұр қарастырлатын қиманың бір жағындағы бөлікке түсірілген күштер жұптарының сырықтың бойлық өсіне қатысты моменттерінің қосындысына тең болады
 Мбұр = ∑Mi. (14.2)
Мбұр = ∑Mi. (14.2)
Таңбалар ережесі: егер қиманың сырт-қы нормалі жағынан қарағанда Мбұр сағат тілінің қозғалысына қарсы бағытталса, ол оң, керісінше жағдайда теріс болып есептеледі. Сонда (14.2) формуласының оң жағындағы сыртқы моменттер қарсы ережемен алыну керек. 14.3 суретте Мбұр эпюрін тұрғызу мысалы көрсетілген.
|
 Көлденең қима-сы
дөңгелек сырық жағдайында оның әр
көлденең қимасы өзі-нің жазықтығында
қатты диск секілді кейбір бұрышқа бұры-лады деп
есептейміз (жазық қималар гипо-тезасы).
Көлденең қима-сы
дөңгелек сырық жағдайында оның әр
көлденең қимасы өзі-нің жазықтығында
қатты диск секілді кейбір бұрышқа бұры-лады деп
есептейміз (жазық қималар гипо-тезасы).
Шеттеріне M моменттері түсірілген, көлденең қимасы дөңгелек сырық-ты қарастырайық (14.4,а сурет). Оның көлденең қималарында тұрақты Мбұр=M бұраушы момент орын алады. Екі көлденең қима арқылы сырықтан ұзындығы dz элементті қиып аламыз, ал одан r және (r + dr) радиустерімен екі цилиндрлік беттер арқылы, элементар сақинаны қиып аламыз (14.4,в сурет). Бұралу нәтижесінде сақинаның оң жақ қимасы dφ бұрышына бұры-лады. Сонда цилиндрдің АВ жасаушысы g бұрышына бұрылып, АВ ¢ орнын алады. BВ ¢ доғасы бірінші жақтан r ∙dj тең, екінші жақтан - g ∙dz тең. Сондықтан,
![]() .
(14.3)
.
(14.3)
g бұрышы t жанама кернеулері әсерінен цилиндрлік беттің ығысу бұры-шы болып келеді. Келесі шама
![]() (14.4)
(14.4)
салыстырмалы бұралу бұрышы деп аталады. Бұл екі қиманың өзара бұрылу бұрышының олардың арақашықтығына қатынасы.
(14.3) және (14.4) формулаларынан келесі алынады
g = r∙θ. (14.5)
Ығысу кезіндегі Гук заңы бойынша
τ=G ∙r∙θ (14.6)
мұндағы t - сырықтың көлденең қимасындағы жанама кернеулер. Олар-ға жұпталатын кернеулер бойлық жазықтарда орын алады (14.4,г сурет).
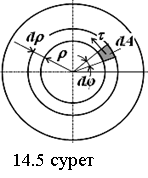 Келесі тәуелдік болатыны анық
(14.5 сурет)
Келесі тәуелдік болатыны анық
(14.5 сурет) ![]() . (14.6) ескерумен
. (14.6) ескерумен ![]() аламыз. Мұндағы
интеграл қиманың тек геометриялық сипаттамасы болып келеді,
ол қиманың полюстік инерция моменті деп аталады
аламыз. Мұндағы
интеграл қиманың тек геометриялық сипаттамасы болып келеді,
ол қиманың полюстік инерция моменті деп аталады
![]() . (14.7)
. (14.7)
Сонымен, ![]() немесе
немесе
 .
(14.8)
.
(14.8)
![]() шамасы
сырықтың бұралу кезіндегі қатаңдығы деп
аталады.
шамасы
сырықтың бұралу кезіндегі қатаңдығы деп
аталады.
(14.8) формуласынан (14.4) ескеруімен мынаны аламыз
 .
(14.9)
.
(14.9)
Егер Мбұр мен ![]() сырық бойымен
тұрақты болса, онда (14.9) формуласынан келесіге келеміз
сырық бойымен
тұрақты болса, онда (14.9) формуласынан келесіге келеміз
 .
(14.10)
.
(14.10)
(14.8) формуласын (14.6)- ға қойып, кернеулердің өрнегін аламыз
 .
(14.11)
.
(14.11)
Сонымен, жанама кернеулер радиус бойымен сызықты заңмен таралады, олардың максималды мәндері центрден ең алыста жатқан нүктелерінде болады. Сонда
 немесе
немесе  .
(14.12)
.
(14.12)
Келесі шама
![]() (14.13)
(14.13)
сырықтың көлденең қимасының полюстік қарсыласу моменті деп аталады. (14.10), (14.12) формулалары дөңгелек және сақина тәрізді қималар үшін орын алады.
Дөңгелек қиманың полюстік инерция моментін (14.7) қолдануымен, элементар ауданы dA=2π∙ρ∙dρ тең деп алып, таба аламыз (14.4 сурет). Сонда
 немесе
немесе  . (14.14)
. (14.14)
Дөңгелек қиманың полюстік қарсыласу моментін табамыз
 .
(14.15)
.
(14.15)
Сақина тәрізді қима үшін (сыртқы диаметрі D және ішкі диаметрі d болса) келесіні аламыз
 .
(14.16)
.
(14.16)
 . (14.17)
. (14.17)
Бұралу кезіндегі беріктік және қатаңдық шарттары келесі түрде жазылады
 ,
(14.18)
,
(14.18)
 немесе
немесе  (14.19)
(14.19)
мұндағы [τ], [φ], [θ] – сәйкес қауіпсіз жанама кернеу, қауіпсіз толық және қауіпсіз салыстырмалы бұралу бұрыштары.
14.1 мысал – Болаттан жасалған қимасы дөңгелек сырық үшін (14.3 сурет) беріктік шартынан, [τ] = 100 МПа, M1=2 кН∙м, M2=3 кН∙м, M3=9 кН∙м, M4=4 кН∙м алып, сырық диаметрін тандап алу керек. Қабылданған диаметрдің мәні бойынша, [θ]=3 град/м, болат үшін ығысу модулін G=8∙104 МПа алып, қатаңдық шартын тексеру керек
Шешуі. Сырықтың көлденең қимасы тұрақты болғандықтан, қауіпті қималар, сол жақтан санағанда екінші аралықта болады, өйткені сол аралықта бұраушы момент ең үлкен мәніне ие болып тұр: Mбұр2 = 5 кН∙м.
(14.18) беріктік шартынан ![]() м табамыз. Артығымен
жуық-тап, келесі шаманы қабылдаймыз D = 65 мм.
м табамыз. Артығымен
жуық-тап, келесі шаманы қабылдаймыз D = 65 мм.
Көлденең
қиманың полюстік инерция моментін анықтаймыз Jp=π∙D4/32=1,785∙10-5 м3. Қатаң-дық шартын
тексереміз ![]() =2,01 град/м < [θ]=3 град/м,
яғни қатаңдық шарты орындалады.
=2,01 град/м < [θ]=3 град/м,
яғни қатаңдық шарты орындалады.
15 дәріс. Көлденең қималардың геометриялық сипаттамалары. Иілу кезіндегі ішкі күштер факторлары
Дәрістің мазмұны: жазық фигуралардың статикалық моменттері, ауырлық центрі, инерция моменттері, бас инерция өстері мен бас инерция моменттері; иілу кезіндегі ішкі күштер факторлары.
Дәрістің мақсаты: сырық көлденең қималарының иілу теориясында қолданылатын геометриялық сипаттамаларын игеру; июші моменттер мен көлденең күштердің эпюрлерін тұрғызу ерекшеліктерін игеру.
15.1 Жазық фигуралардың статикалық моменттері мен оның ауырлық центрі
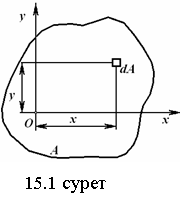 Кейбір жазық фигураны x, y
координат жүйесінде қарастырайық (15.1 сурет). Келесі интег-ралдар
Кейбір жазық фигураны x, y
координат жүйесінде қарастырайық (15.1 сурет). Келесі интег-ралдар
![]() ,
, ![]() ( 15.1)
( 15.1)
фигураның сәйкес x және y өстеріне қатысты ста-тикалық моменттері деп аталады.
Координаттық өстерді параллель орын ауыс-тырса, қиманың статикалық моменттері қалай өзге-ретінін анықтайық (15.2 сурет). x2 = x1 - a; y2 = y1 – b болатыны анық.
Сонда
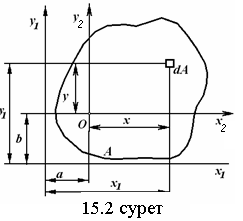
![]() ,
,
![]() .
.
а мен b шамаларын, ![]() мен
мен ![]() стати-калық моменттері
нөлге тең болатындай, таңдап алуға болады (тек бір
ғана ретімен). Центрлік өс деп оған қатысты
статикалық момент нөлге тең болатын өсті атайды.
Центрлік өстерінің қиылысу нүктесі қиманың
ауырлық центрі деп аталады.
стати-калық моменттері
нөлге тең болатындай, таңдап алуға болады (тек бір
ғана ретімен). Центрлік өс деп оған қатысты
статикалық момент нөлге тең болатын өсті атайды.
Центрлік өстерінің қиылысу нүктесі қиманың
ауырлық центрі деп аталады.
(x1, y1) координат жүйесінде ауырлық центрінің координаттары осыған тең
![]() ,
,
![]() .
(15.2)
.
(15.2)
Құрама қиманың статикалық моменті оны құраушы аймақтарының статикалық моменттерінің қосындысына тең екенін айтып өтейік.
15.2 Қиманың инерция моменттері
15.1 суретке қайта оралып, келесі үш интегралды қарастырайық
![]() ,
(15.3)
,
(15.3)
![]() , (15.4)
, (15.4)
![]() . (15.5)
. (15.5)
Алдыңғы екі интеграл қиманың сәйкес x және y өстеріне қатысты өстік инерция моменттері, ал үшіншісі - центрден тепкіш (немесе өрістік) инерция моменті деп аталады. Өстік инерция моменттері әрқашан оң шама, ал центр-ден тепкіш момент оң да, теріс та болуы мүмкін.
Координаттық өстерді параллель орын ауыстырса (15.2 сурет), инерция моменттері келесі формулаларға сәйкес өзгереді
![]() , (15.6)
, (15.6)
![]() , (15.7)
, (15.7)
![]() . (15.8)
. (15.8)
Егер x1 мен y1 -
центрлік өстер болса, онда ![]() және
және
![]() , (15.9)
, (15.9)
![]() , (15.10)
, (15.10)
![]() .
(15.11)
.
(15.11)
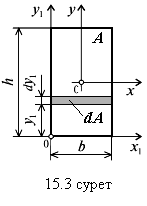 Сонымен, өсті параллель орын ауыстырғанда,
олардың біреуі центрлік өс болса, өстік инерция моменті
ауданның өстер арақашықтығының квадратына
көбейтінсіне тең шамаға өзгереді. Сонда параллель
өстер жиыны үшін центрлік өске қатысты инерция моменті
минималды мәніне ие болады.
Сонымен, өсті параллель орын ауыстырғанда,
олардың біреуі центрлік өс болса, өстік инерция моменті
ауданның өстер арақашықтығының квадратына
көбейтінсіне тең шамаға өзгереді. Сонда параллель
өстер жиыны үшін центрлік өске қатысты инерция моменті
минималды мәніне ие болады.
15.1 мысал – Тік төртбұрыштың x1, y1 және x, y өстеріне қатысты өстік инерция моменттерін анықтау керек (15.3 сурет).
Шешуі. Элементар dA ауданы ретінде b енімен және dy биікті-гімен тік төртбұрышты алайық. Сонда
![]()
![]() .
.
(15.9) формуласы бойынша
![]() . (15.12)
. (15.12)
Дәл солай келесіні анықтаймыз ![]() ,
, ![]() . Мұнда x пен y
симмет-риялық өстері болғандықтан, сәйкес
центрден тепкіш инерция моменті нөлге тең
. Мұнда x пен y
симмет-риялық өстері болғандықтан, сәйкес
центрден тепкіш инерция моменті нөлге тең ![]() ,
ал x1 мен y1 өстеріне қатысты
,
ал x1 мен y1 өстеріне қатысты ![]() .
.
Құрама қиманың инерция моменті оны құраушы аймақтарының инерция моменттерінің қосындысына тең екенін айтып өтейік.
15.3 Бас инерция өстері мен бас инерция моменттері
x пен y координаттық өстерін u мен v орнына келтіріп бұрғанда, жазық қиманың инерция моменттері қалай өзгертінін қарастырайық. 15.4 суреттен келесіні анықтай аламыз
u = y∙ sin a + x ∙ cos a; v = y∙ cos a - x∙ sin a . (15.13)
Осы өрнектерді
![]() ,
,
![]() ,
, ![]()
ескерілуімен түрлендіріп, келесіге келеміз
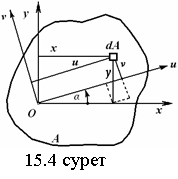
![]() ,
(15.14)
,
(15.14)
![]() ,
(15.15)
,
(15.15)
![]() .
(15.16)
.
(15.16)
Алдыңғы екі теңдеуді қосып, келесіні аламыз
![]() (15.17)
(15.17)
Сонымен, өзара перпендикуляр өстерге қатысты өстік инерция моменттерінің қосындысы өстер бұрылғанда тұрақты болып қалады және жазық фигураның полюстік инерция моментіне тең.
(15.17) қолдануымен дөңгелек
қиманың диаметріне қатысты өстік инерция моментін
анықтауға болады. Симметрия себебінен ![]() ,
сонда
,
сонда
![]() (15.18)
(15.18)
a бұрышы өзгеруімен ![]() және
және ![]() өзгереді,
ал олардың қосындысы тұрақты болады, сондықтан
олардың біреуін
өзгереді,
ал олардың қосындысы тұрақты болады, сондықтан
олардың біреуін ![]() немесе
немесе ![]() , өзінің
максимал-ды мәніне, екіншісін минималды мәніне ие болдыратын бұрыштың a=a0
мәнін
табуға болады. a0 табу үшін
, өзінің
максимал-ды мәніне, екіншісін минималды мәніне ие болдыратын бұрыштың a=a0
мәнін
табуға болады. a0 табу үшін ![]() немесе
немесе ![]() экстремумге
зерттейміз. Сонда келесі табылады
экстремумге
зерттейміз. Сонда келесі табылады
 . (15.19)
. (15.19)
a=a0 болғанда
біржолы центрден тепкіш инерция моменті ![]() нөлге
тең болатынын көрсетуге болады. Егер өстерге қатысты
центрден тепкіш инерция моменті нөлге тең, ал өстік инерция
моменттері экстремалды мәндерін алатын болса, онда сол өстер бас
инерция өстері деп аталады. Бас инерция өстеріне қатысты
өстік инерция моменттері бас инерция моменттері деп аталады. Олар
(15.14), (15.15) және (15.19) қолдануымен келесідей табылады
нөлге
тең болатынын көрсетуге болады. Егер өстерге қатысты
центрден тепкіш инерция моменті нөлге тең, ал өстік инерция
моменттері экстремалды мәндерін алатын болса, онда сол өстер бас
инерция өстері деп аталады. Бас инерция өстеріне қатысты
өстік инерция моменттері бас инерция моменттері деп аталады. Олар
(15.14), (15.15) және (15.19) қолдануымен келесідей табылады
 .
(15.20)
.
(15.20)
Жазық фигураның кез келген l өсіне қатысты инерция радиусы деп келесі формуламен анықталатын шаманы атайды
![]() .
(15.21)
.
(15.21)
15.4 Иілу. Иілу кезіндегі ішкі күштер факторлары
Иілу деп көлденең қималарында июші момент M пайда болатын сырықтың жүктелу түрін атайды. Егер сонда барлық ІКФ нөлге тең болса, онда таза иілу орын алады дейміз. Жиі M июші моментімен қатар Q көлденең күші болады, сонда көлденең иілу орын алады.
Иілу есептерін шешуінде ішкі күштер факторларының эпюрлерін тұрғызуды білу керек. Ол үшін қималар әдісі қолданылады. Деформацияға дейін өсі горизонталь орналасқан сырықтың оған түсірілген актив күштер вертикаль (yz) жазықтығында жататын жағдайдағы иілуін қарастырайық.
Арқалықтың кез келген қимасындағы көлденең күш қиманың бір жағындағы (арқалықтың қарастырылатын қимамен кесіліп алынған бір бөлігіне түсірілген) сыртқы күштердің вертикаль өсіне проекцияларының қосындысына тең болады
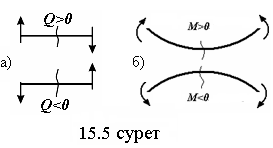
![]() . (15.22)
. (15.22)
Көлденең күш үшін таңбалар ережесі: егер қиманың сол жағындағы сыртқы күштердің тең әсерлі күші төменнен жоғары қарай бағытталса (15.5,а сурет), онда Q оң шама, керісінше жағдайда теріс шама болады. Оң жақтағы бөлік үшін ереже қарсы болады.
Июші момент қиманың бір жағындағы (арқалықтың қарастырылатын қимамен кесіліп алынған бір бөлігіне түсірілген) сыртқы күштердің сол қиманың көлденең өсіне қатысты моменттерінің қосындысына тең болады
![]() . (15.23)
. (15.23)
Июші момент үшін таңбалар ережесі: M эпюрін сығылған талшық үстінде тұрғызады, яғни M ординатасын сырықтың серпімді сызығының ойыс жағына қарай көрсетеді (15.5,б сурет). Егер сыртқы күш (немесе күштер жұбы) сырықты дөңес жағымен төмен қарай майыстыруға тырысса, онда оның моментін (15.23) формуласында оң таңбасымен алу керек, керісінше жағдайда – теріс таңбасымен.
 15.2 мысал - 15.6,а суретте көрсетілген сырық үшін
эпюрлерді тұрғызуын қарастырайық. Есеп шешуін
сыртқы күштердің толық жүйесін анықтаудан
бастаймыз. Ол үшін тіректерді алып тастап, оларды сәйкес реакцияларына
ауыстырамыз ( 15.5,б сурет).
15.2 мысал - 15.6,а суретте көрсетілген сырық үшін
эпюрлерді тұрғызуын қарастырайық. Есеп шешуін
сыртқы күштердің толық жүйесін анықтаудан
бастаймыз. Ол үшін тіректерді алып тастап, оларды сәйкес реакцияларына
ауыстырамыз ( 15.5,б сурет).
Тепе-теңдік
шарттарынан тіректердегі реакцияларды анықтаймыз ![]() ,
,
![]() .
.
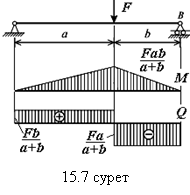 Сол
жақ тірегінен z қашықтығында С
қимасын жүргізіп, ойша сырықты екі бөлікке айрамыз да,
сол жақ бөлігін қарасты-рамыз. Сонда алып тастаған
бөліктің әсерін Q күші мен M моментіне
ауыстырамыз. (15.22) мен (15.23) бойынша келесіні табамыз
Сол
жақ тірегінен z қашықтығында С
қимасын жүргізіп, ойша сырықты екі бөлікке айрамыз да,
сол жақ бөлігін қарасты-рамыз. Сонда алып тастаған
бөліктің әсерін Q күші мен M моментіне
ауыстырамыз. (15.22) мен (15.23) бойынша келесіні табамыз
![]() ,
, ![]() .
.
Оң жақ аралығы үшін келесі шығады
![]() ,
, ![]() .
.
15.7 суретте бірінші аралық үшін (0 £ z £ a) және екінші аралық үшін (a £ z £ a + b) табылған өрнектері бойынша тұрғызылған эппюрлер көрсетіледі.
15.5 Июші момент пен көлденең күш арасындағы дифференциалдық тіуелдіктер
q(z)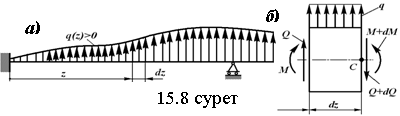 қарқындылығымен таралған күшпен
жүктелген (15.8,а сурет) сырықты қарастырайық.
Көрсетілген q бағытын оң деп есептейміз.
Сырықтан қиып алған dz элементі үшін (15.8,б
сурет) тепе-теңдік теңдеулерін құрып және одан
екінші ретті шексіз аз шамаларын алып тастап, таралған күш
қарқындылығы, көлденең күш пен июші момент
арасындағы Журавскийдің дифференциалдық тәуелдіктерін
аламыз
қарқындылығымен таралған күшпен
жүктелген (15.8,а сурет) сырықты қарастырайық.
Көрсетілген q бағытын оң деп есептейміз.
Сырықтан қиып алған dz элементі үшін (15.8,б
сурет) тепе-теңдік теңдеулерін құрып және одан
екінші ретті шексіз аз шамаларын алып тастап, таралған күш
қарқындылығы, көлденең күш пен июші момент
арасындағы Журавскийдің дифференциалдық тәуелдіктерін
аламыз
![]() ,
, ![]() ,
,  . (15.24)
. (15.24)
(15.24) өрнектерінен келесі қорытындылар шығады. Дербес жағдайда, егер q = const болса, онда Q z аргументінің сызықты функциясы, ал M - екінші дәрежелі функциясы болады. Егер сырықтың кейбір аралығында таралған күш болмаса (q = 0), онда Q = const, ал M - z аргументінің сызықты функциясы болады.
Қадалған күш түсірілген қимада Q эпюрінде сыртқы күштің шамасына тең үзік орын алады. Егер аралықта Q таңбасы өзгеретін болса, онда Q нөлге тең болатын қимада M функциясы экстремалды мәніне ие болады. Сыртқы момент түсірілген қимада M эпюрінде сыртқы моменттің шамасына тең үзік орын алады.
16 дәріс. Иілу кезіндегі кернеулер және беріктікке есептеу. Күрделі қарсыласу
Дәрістің мазмұны: таза және көлденең иілу кезіндегі кернеулер және беріктікке есептеу; қиғаш иілу, центрден тыс созылу (сығылу), иілу мен бұралудың біріккен әсері.
Дәрістің мақсаты: иілу кезіндегі беріктік шартын анықтау; күрделі қарсыласу кезіндегі беріктікке есептеуін қарастыру.
16.1 Таза иілу кезіндегі кернеулер
Таза иілу кезінде Q=0, M=const. M
әсерінен сырық майысады. Біртекті сырық жағдайында
барлық аралықтардың қисықтығының
өзгеруі бірдей болады. Сонда жазық қималар гипотезасы орындалады:
сырық жүктелу алдында жазық және сырықтың
деформациялан-баған өсіне перпендикуляр 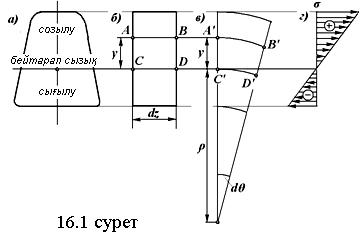 болған көлденең қималар
сырық жүктелгеннен кейін жазық және
сырықтың дефор-мацияланған өсіне перпенди-куляр болып
қала береді. Сонда таза иілу кезіндегі деформация-ларды
көлденең қималардың бір біріне
қарағандағы бұрылудың нәтижесі ретінде
қарастыруға болады (16.1 сурет). Бір-бірінен dz қашықтығында
орналасқан екі қиманы қарастырайық. Оң
жақтағы көлденең қимасының сол жақ
қимасына карағандағы dθ бұрышына
бұрылу нәтижесінде үстіңгі қабаттар
ұзарады, астыңғы қабаттар қысқарады. Сонда
ұзаруы да, қысқаруы да болмайтын бейтарап CD қабаты
табылады. Сонда ρ бейтарап қабаттың
қисықтық радиусы, dθ бұрышы мен dz
ұзындығы арасында келесі тәуелдік орын алады dz= ρ∙dθ.
dz ұзындығымен алынған кез келген AB
кесіндісінің деформациясы осыған тең
болған көлденең қималар
сырық жүктелгеннен кейін жазық және
сырықтың дефор-мацияланған өсіне перпенди-куляр болып
қала береді. Сонда таза иілу кезіндегі деформация-ларды
көлденең қималардың бір біріне
қарағандағы бұрылудың нәтижесі ретінде
қарастыруға болады (16.1 сурет). Бір-бірінен dz қашықтығында
орналасқан екі қиманы қарастырайық. Оң
жақтағы көлденең қимасының сол жақ
қимасына карағандағы dθ бұрышына
бұрылу нәтижесінде үстіңгі қабаттар
ұзарады, астыңғы қабаттар қысқарады. Сонда
ұзаруы да, қысқаруы да болмайтын бейтарап CD қабаты
табылады. Сонда ρ бейтарап қабаттың
қисықтық радиусы, dθ бұрышы мен dz
ұзындығы арасында келесі тәуелдік орын алады dz= ρ∙dθ.
dz ұзындығымен алынған кез келген AB
кесіндісінің деформациясы осыған тең
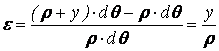 .
(16.1)
.
(16.1)
Гук заңы бойынша
 .
(16.2)
.
(16.2)
Сонымен, таза иілу кезінде кернеулер көлденең қима бойымен сызықтық заң бойынша таралады. Бейтарап сызық (БС) дегеніміз σ=0 болатын нүктелердің геомериялық орны; ол майысқан сырық қисықтығының жазықты-ғына перепендикуляр болатыны айқын.
Таза иілу кезінде  болғандықтан,
болғандықтан,
![]() болады, яғни БС
көлденең қиманың ауырлық центрінен өтеді.
Біз иілудің дербес жағдайын, сырықтың майысқан
өсі M моментінің әсер ету жазықты-ғында
жатқан жағдайын қарастырып отырмыз. Сонда
болады, яғни БС
көлденең қиманың ауырлық центрінен өтеді.
Біз иілудің дербес жағдайын, сырықтың майысқан
өсі M моментінің әсер ету жазықты-ғында
жатқан жағдайын қарастырып отырмыз. Сонда
 ,
(16.3)
,
(16.3)
 .
(16.4)
.
(16.4)
(16.4) теңдігінен ![]() болады,
яғни сырық қисықтығының M
жазық-тығында өзгеруі M жазықтығы
қиманың бас инерция өстерінің біреуінен өтсе орын
алады. Мұндай иілу тік иілу деп аталады, ал қиғаш иілу
кезінде M жазықтығы мен сырық
қисықтығының жазықтығы бір-бірімен
түйіспейді.
болады,
яғни сырық қисықтығының M
жазық-тығында өзгеруі M жазықтығы
қиманың бас инерция өстерінің біреуінен өтсе орын
алады. Мұндай иілу тік иілу деп аталады, ал қиғаш иілу
кезінде M жазықтығы мен сырық
қисықтығының жазықтығы бір-бірімен
түйіспейді.
(16.3) теңдігінен сырық қисықтығы үшін келесі формуланы аламыз
 .
(16.5)
.
(16.5)
Мұнда ![]() - июші момент
жазықтығына перпендикуляр, центрлік бас инерция өсіне
қатысты қиманың инерция моменті.
- июші момент
жазықтығына перпендикуляр, центрлік бас инерция өсіне
қатысты қиманың инерция моменті. ![]() шамасы
сырықтың иілу кезіндегі қатаңдығы деп аталады.
шамасы
сырықтың иілу кезіндегі қатаңдығы деп аталады.
(16.5) теңдігін (16.2) теңдігіне қойып, σ кернеудің өрнегіне келеміз
 .
(16.6)
.
(16.6)
Максималды кернеулер бейтарап сызықтан ең үлкен қашықтықта орналасқан нүктелерінде орын алады, олар келесіге тең
 (16.7)
(16.7)
мұндағы  -
қиманың иілуге қарсыласу моменті деп аталады.
-
қиманың иілуге қарсыласу моменті деп аталады.
Таза иілу кезіндегі беріктік шарты келесі түрде жазылады
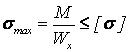 (16.8)
(16.8)
мұндағы ![]() - қауіпсіз
кернеу.
- қауіпсіз
кернеу.
Сырықтың материалы созылу мен сығылуға бірдей қарсыласатын
болмаса, беріктікке есептеуін максималды созылу және максималды
сығылу кернеулері бойынша жүргізу керек екенін айтып өтейік.
Көлденең қималарының ең тиімді формалары ретінде,
аудандары бірдей жағдайда ![]() қарсыласу моментінің
мәндері ең үлкен болатын формалары болады - бұл,
мысалы, қоставр, швеллер түріндегі прокатты стандарт профильдері
(16.2 сурет).
қарсыласу моментінің
мәндері ең үлкен болатын формалары болады - бұл,
мысалы, қоставр, швеллер түріндегі прокатты стандарт профильдері
(16.2 сурет).
16.2 Көлденең иілу кезіндегі кернеулер
Көлденең иілу кезінде Q≠0, M=vary, сонда көлденең қималарында тек қана σ тік кернеулері емес, τ жанама кернеулері де пайда болады. τ болған кезде γ бұрыштық деформациясы да болады, сонда τ мен γ қима бойымен бірқалыпты таралмаған соң, сырықтың көлденең қималары жазық болып қала бермейді. Бірақ бұл σ мәндеріне айтарлықтай әсерін тигізбейді, сонда (16.5) пен (16.6) жеткілікті нақтылықпен орындалады деп есептеуге болады.
Көлденең қимада b ені бойынша τ бірқалыпты таралады деп алып, оларды бейтарап сызықтан y қашықтығында орналасқан бойлық қимадағы жұптық кернеулері арқылы табуға ыңғайлы болады (16.3 сурет). Ұзындығы dz элементінен бойлық қимасымен кесіп алған бөлігі үшін тепе-теңдік теңдеулерін жазып, жанама кернеулер үшін Журавскийдің формуласын аламыз
 (16.9)
(16.9)
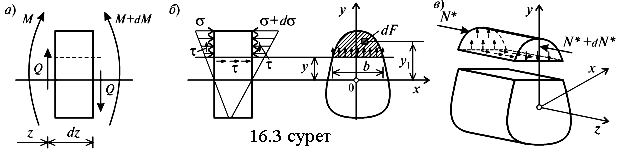 мұндағы
мұндағы ![]() -
бойлық қимасынан жоғары алынған
қөлденең қимасы бөлігінің x
өсіне қатысты статикалық моменті.
-
бойлық қимасынан жоғары алынған
қөлденең қимасы бөлігінің x
өсіне қатысты статикалық моменті.
Көптеген жағдайда τ сырықтардың беріктігіне әсерін тигізбейді (жұқа қабырғалы және қысқа сырықтардан басқасы үшін). Сонда көлденең қимасы тұрақты, созылу мен сығылуға бірдей қарсылысатын материалдан жасалған сырық үшін көлденең иілу кезіндегі беріктік шарты келесі түрде жазылады
 (16.10)
(16.10)
16.1 мысал – Қимасы тік төртбұрышты арқалықтың (16.10) бойынша беріктігін тексеру және жанама кернеулердің арқалық беріктігіне әсерінің талдауын жүргізу керек (16.4 сурет). Берілгені: F= 4 кН, l=1.2 м, b= 40 мм, h= 60 мм, [σ]= 160 МПа.
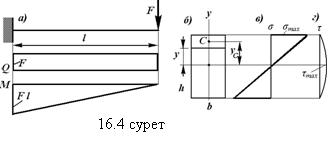 Шешуі.
Көлденең күш пен июші моменттерінің эпюрлерін
тұрғызамыз. Көлденең күш арқалық
бойымен тұрақты болады, ал июші моменттің ең
үлкен мәні қатаң бекітпеде болады (қауіпті
қима)
Шешуі.
Көлденең күш пен июші моменттерінің эпюрлерін
тұрғызамыз. Көлденең күш арқалық
бойымен тұрақты болады, ал июші моменттің ең
үлкен мәні қатаң бекітпеде болады (қауіпті
қима) ![]() =F∙l=4.8 кН∙м.
Қиманың иілуге қарсыласу моменті Wx=b∙h2/6=2.4∙104мм3.
Беріктік шартын тексереміз
=F∙l=4.8 кН∙м.
Қиманың иілуге қарсыласу моменті Wx=b∙h2/6=2.4∙104мм3.
Беріктік шартын тексереміз
![]() МПа>[σ]= 160 МПа
– беріктік шарты орындалмайды.
МПа>[σ]= 160 МПа
– беріктік шарты орындалмайды.
σ
тік кернеуінің көлденең қима бойымен таралу эпюрі 16.4,в
суретінде көрсетілген, қауіпті қимада ![]() .
Енді τ жанама кернеуінің арқалық беріктігіне әсерін
бағалайық, ол үшін алдымен
.
Енді τ жанама кернеуінің арқалық беріктігіне әсерін
бағалайық, ол үшін алдымен ![]() табамыз.
Жанама кернеуді (16.9) бойынша табамыз
табамыз.
Жанама кернеуді (16.9) бойынша табамыз ![]() ,
τ эпюрі 16.4,г суретінде көрсетілген. Жанама
кернеудің ең үлкен мәні БС-та болады, БС
нүктелерінде
,
τ эпюрі 16.4,г суретінде көрсетілген. Жанама
кернеудің ең үлкен мәні БС-та болады, БС
нүктелерінде ![]() , ал σ
нөлге тең. БС-тан ең үлкен қашықтықта
орналасқан нүктелерде σ максималды, ал τ
нөлге тең. Сонда келесі қатынасты анықтауға
болады
, ал σ
нөлге тең. БС-тан ең үлкен қашықтықта
орналасқан нүктелерде σ максималды, ал τ
нөлге тең. Сонда келесі қатынасты анықтауға
болады ![]()
![]() =4l/h, яғни ұзын
арқалық үшін жанама кернеулер тік кернеулерден өте аз
болады, сондықтан беріктікке есептеу кезінде оларды ескермеуге болады.
=4l/h, яғни ұзын
арқалық үшін жанама кернеулер тік кернеулерден өте аз
болады, сондықтан беріктікке есептеу кезінде оларды ескермеуге болады.
16.3 Қиғаш иілу және центрден тыс созылу-сығылу
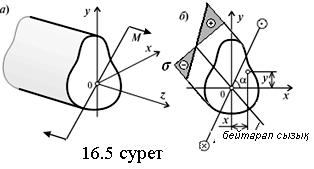 Қиғаш иілу
кезінде июші моменттің жазықтығы көлденең
қиманың бас инерция өстерінің біреуінен де
өтпейді (16.5 сурет). Қиғаш иілуді біржолы екі, x
және y бас инерция өстеріне қатысты иілу ретінде
қарастырған ыңғайлы. Ол үшін жалпы М июші
моментінің векторын Mx = M×sina және My = M×cosa құраушы
моменттеріне жіктеу керек. Координаттары x пен y
нүктедегі тік кернеу келесі формуламен табылады
Қиғаш иілу
кезінде июші моменттің жазықтығы көлденең
қиманың бас инерция өстерінің біреуінен де
өтпейді (16.5 сурет). Қиғаш иілуді біржолы екі, x
және y бас инерция өстеріне қатысты иілу ретінде
қарастырған ыңғайлы. Ол үшін жалпы М июші
моментінің векторын Mx = M×sina және My = M×cosa құраушы
моменттеріне жіктеу керек. Координаттары x пен y
нүктедегі тік кернеу келесі формуламен табылады
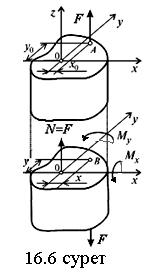
 .
(16.11)
.
(16.11)
Кернеулер нүктелердің БС дейін қашықтықтарына пропорционал болады, БС теңдеуі осылай жазылады
 .
(16.12)
.
(16.12)
Jx≠Jy болғандықтан, қиғаш иілу кезінде БС июші моменттің жазықтығына перпендикуляр емес, яғни сырық июші моменттің жазықтығында иілмейді, ол басқа, иілуге қатаңдығы аз жазықтықта иіледі.
Центрден тыс созылу (сығылу) кезінде сыртқы күштердің тең әсерлі F күші сырық өсінің бойында, қарапайым созылу кезіндегідей, жатпайды, ол z өсіне параллель және оның өстен ауытқуы бар (16.6 сурет). Сонда сырық көлденең қималарында N= F бойлық күш және Mx = F×y0 мен My = F×x0 июші моменттер орын алады (мұндағы x0 , y0 – F күші түсірілген А нүктесінің координаттары). Кез келген, x, y координаттарымен анықталатын В нүктесінде тік кернеу осыған тең болады
 . (16.13)
. (16.13)
Кернеулер нүктелердің БС дейін қашықтықтарына пропорционал болады, БС-ның теңдеуі осылай жазылады
 немесе
немесе  . (16.14)
. (16.14)
Координат басынан БС дейін қашықтығы (16.7 сурет) осыған тең
 .
(16.15)
.
(16.15)
Иілу мен созылудың (сығылудың) біріккен әсері жағдайында жоғарыда көрсетілгендей, күштер әсерінің тәуелсіздігі принципін қолданып, сырықтың көлденең қималарында қосынды тік кернеулерді анықтайды. Осында қарастырылған барлық жағдайларда беріктікке есептеуді қосынды кернеу бойынша жүргізеді.
16.4 Иілу мен бұралудың біріккен әсері
Көлденең қимасы дөңгелек, иілу мен бұралудың біріккен әсері жағдайындағы сырықты қарастырайық. Сырықтың көлденең қималарында июші моментпен байланысқан тік кернеулер және бұраушы моментпен байланысқан жанама кернеулер орын алады (көлденең күштен пайда болатын жанама кернеулерді ескермейміз).
 Ең үлкен
кернеулер A және B нүктелерінде пайда болады (16.8,а
сурет)
Ең үлкен
кернеулер A және B нүктелерінде пайда болады (16.8,а
сурет)
![]() ,
, ![]() , (16.16)
, (16.16)
Сонда күрделі кернеулі күйдің дербес жағдайы болады – ол қарапайымдалған жазық кернеулі күй (16.8,б сурет).
Күрделі кернеулі күй жағдайында материалдың беріктігі жөнінде қорытын-ды жасауға мүмкіншілік болу үшін эквивалент кернеу ұғымы енгізіледі, ол бағаланатын кернеулік күймен бірдей қауіпті (беріктік кепілдігі бірдей) созылған үлгіде пайда болатын кернеу.
Қарастырылатын жағдайда 3 және 4 беріктік теориялары бойынша эквивалент кернеу келесі формулалармен анықталады
![]() ,
,
![]() . (16.17)
. (16.17)
Осыған (16.17) қойып және дөңгелек қима үшін Wp=2Wx болатынын ескеріп, көлденең қимасы дөңгелек сырық үшін иілу мен бұралудың біріккен әсері кезіндегі беріктік шартын келесі түрде жазады
 ,
,
 . (16.18)
. (16.18)
Әдебиеттер тізімі
1. Курс теоретической механики: Учебник для вузов / В. И. Дронг, B. В. Дубинин, М. М. Ильин и др.; Под общ. ред. К. С. Колесникова. - М.: Изд-во МГТУ им. Н. Э. Баумана, 2005. - 736 с.
2. Никитин Н.Н. Курс теоретической механики: Учебник для машиностр. и приборостроит. спец. вузов - М.: Высш. шк., 1990. - 607 с.
3. Тарг С.М. Краткий курс теоретической механики: Учебник для студентов технических вузов - М.: Высш. шк., 2007. – 416 с.
4. Аркуша А.И. Техническая механика. Теоретическая механика и сопротивление материалов. - М.: Высш. шк., 2003. – 352 с.
5. Феодосьев В.И. Сопротивление материалов: Учебник для вузов. – М.: Изд-во МГТУ им. Н.Э.Баумана, 2000. – 592 с.
6. Степин П.А. Сопротивление материалов: Учебник для немашиностроит. спец. вузов. – М.: Высш. шк., 1989. – 367 с.
7. Зозуля В.В., Мартыненко А.В., Лукин А.Н. Механика материалов. – Харьков: Изд-во Нац. ун-та внутр. дел, 2001, 404 с.
8. Горшков А. Г., Трошин В. Н., Шалашилин В. И. Сопротивление материалов: Учеб. пособие. - М.: ФИЗМАТЛИТ, 2005. - 544 с.
9. Агамиров Л.В. Сопротивление материалов: Краткий курс. Для студентов вузов. – М.: ООО «Издательство Астрель», 2003. – 256 с.
10. Олофинская В.П. Техническая механика. Курс лекций с вариантами практических и тестовых заданий. – М.: Форум: Инфра-М, 2007. - 349 с.
11. Иосилевич Г.Б., Строганов Г.Б., Маслов Г.М. Прикладная механика. - М.: Высш.шк.,1989. – 352 с.
12. Қолданбалы механика. Есептеу–графикалық жұмыстарды орындауға әдістемелік нұсқаулар және тапсырмалар. (050702 – Автоматтандыру және басқару, 050717 – Жылуэнергетика, 050718 - Электрэнергетика мамандықтарының студенттеріне арналған)- Алматы: АЭжБИ, 2006.
13. М.Ф.Үркімбаев, С.Жүнісбеков. Материалдар кедергісі теория-ларының негіздері – Алматы: Мектеп, 1986.
14. М.Шыныбаев. Теориялық механика. – Алматы: РБК, 1994.
15. С.Д.Тәжібаев. Қолданбалы механика. - Алматы: Білім, 1974.
16. А.Д.Дінасылов, Ә.Жолшараев Созылу, сығылу, бұралу және ығысу кезіндегі беріктік пен қатаңдыққа есептеу мысалдары. – Алматы: АЭИ, 1990.
17. А.Д.Дінасылов, Ә.Жолшараев. Иілу кезіндегі беріктік пен қатаңдыққа есептеуге мысалдар. – Алматы: АЭИ, 1991.
18. А.Д.Дінасылов, Ә.Жолшараев. Материалдар механикасы атауларының орысша-қазақша түсіндірме сөздігі. - Алматы: РБК, 1994.