АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра радиотехники
Радиотехнические цепи и радиоприемные устройства
Конспект лекций
(для бакалавров всех форм обучения
специальности 5В0719 – Радиотехника, электроника и телекоммуникации)
Алматы 2010
СОСТАВИТЕЛИ: Достиярова А.М. Радиотехнические цепи и радиоприемные устройства. Конспект лекций(для студентов всех форм обучения специальности 05В719 – Радиотехника, электроника и телекоммуникации) – Алматы: АИЭС, 2009. – 80 с.
Конспект лекций предназначен для помощи при самостоятельном изучении курса «Радиотехнические цепи и радиоприемные устройства». В конспекте приведен обзор характеристик различных радиотехнических цепей и принципы построения функциональных узлов радиоприемных устройств Необходимость самого конспекта лекций обусловлена потребностью более глубокого понимания процессов, происходящих в радиоприемных устройствах, и направлена на то, чтобы студенты могли ориентироваться, на какие вопросы, темы или аспекты они должны уделить наибольшее внимание при изучении данного курса. В конспекте лекций приведены основные структурные и принципиальные схемы, необходимые для понимания процессов, происходящих в радиоприемных устройствах.
Конспект лекций предназначен для студентов радиотехнических специальностей, обучающихся в бакалавриате, по специальности 050719 – Радиотехника, электроника и телекоммуникации.
1 Лекция № 1. Преобразование сигналов в радиотехнических цепях и системах
Содержание лекции: методы преобразования сигналов в радиотехнических цепях.
Цели лекции:
- краткий очерк развития радиотехники;
- изучить характеристики радиосигналов;
- изучить методы передачи радиосигналов через радиотехнические цепи.
Впервые в мире радиосвязь была осуществлена 24 марта 1896 г. А. С. Поповым на расстояние около 250 м. В передатчике Попова (cм. рисунок 1.1) источник постоянного тока питал преобразователь, на выходе которого создавалось высокое напряжение. Оно подводилось к двум относительно длинным проводам, разделенными разрядным промежутком, которые выполняли роль антенны.

Рисунок 1.1 – Аппаратура линии радиосвязи А. С. Попова
Когда напряжение на проводах антенны превышало напряжение пробоя воздушного промежутка, возникал искровой разряд; из антенной цепи возбуждались затухающие электрические колебания, создававшие в окружающем пространстве электромагнитное излучение.
Управление этим излучением осуществлялось с помощью телеграфного ключа, через который замыкалась цепь питания преобразователя. Нажимая и размыкая ключ, можно было создавать электромагнитные сигналы, пользуясь телеграфной азбукой Морзе. Радиоприемное устройство А. С. Попова состояло из приемной антенны, в цепь которой включался когерер — стеклянная трубочка, заполненная металлическими опилками. При появлении переменных токов в цепи приемной антенны происходило спекание отдельных частиц металлического порошка, вследствие чего сопротивление когерера резко падало. Через когерер замыкалась также цепь звонка или обмотка реле пишущего механизма телеграфного аппарата. При уменьшении сопротивления когерера в цепи возникал ток, молоточек ударял по звонку и телеграфный сигнал мог быть принят на слух или записан аппаратом. При обратном ходе молоточек звонка встряхивал когерер, восстанавливая его первоначальное состояние. Здесь когерер играл роль детектора, а звонок — оконечного устройства. Приемное устройство такого типа впервые было продемонстрировано А. С. Поповым 7 мая 1895 г« на заседании химического общества в Петербурге. Этот день и и принято считать днем изобретения радио. Попов неустанно совершенствовал разработанную аппаратуру и, если первая радиопередача производилась на расстояние всего в 250 м, то уже через полтора года он мог передавать радиограммы на расстояние в несколько километров, а в 1899 г. при операции по спасению «Адмирал Апраксин» Попов осуществлял радиосвязь на расстоянии в 40 км. В 1901 г. с помощью радиостанции Попова удается установить связь на расстоянии в 150 км. Изобретение Попова получило широкое признание во всем мире. Всюду стали появляться искровые радиотелестанции, только в России косность и полное равнодушие царского правительства, не желавшего видеть огромного значения замечательного изобретения, тормозило развитие радио. В 1906 г. американский изобретатель Ли де Форест создал первую трехэлектродную электронную лампу, которая открыла новые возможности для радиотехники. В 1913 г. немецкий инженер Мейснер создал первый ламповый генератор. Появившиеся ламповые генераторы и усилители незатухающих колебаний разрешили проблему создания компактнных, стабильных, перестраиваемых передатчиков и приемников, с помощью которых стали возможными передача и прием не только телеграфных сигналов, но и человеческой речи, музыки, изображения.
По указанию В. И. Ленина в Нижнем Новгороде была создана радиолаборатория, где были сосредоточены важнейшие разработки радиотехнической аппаратуры. В условиях голода, блокады, экономической разрухи коллектив работников лаборатории во главе с М. А. Бонч-Бруевичем создали первые образцы отечественных электронных ламп, и уже в 1920 г. на Ходынском поле под Москвой была построена весьма мощная по тому времени радиотелефонная радиостанция.
А еще через 2 года в Москве была построена самая мощная в мире радиовещательная радиостанция. С этого времени Советский Союз неизменно занимает первое место в мире по мощности радиовещательных станций.
В начале двадцатых годов под руководством М. А. Бонч-Бруевича были разработаны мощные и сверхмощные генераторные лампы мощностью до 100 квт. В 1933 г. под Москвой была построена радиостанция имени Коминтерна мощностью 500 кВт в антенне, разработанная коллективом инженеров под руководством А. Л. Минца. А в годы Великой Отечественной войны была создана самая мощная в мире радиостанция, мощность которой значительно превышает мощность радиостанции имени Коминтерна.
В конце тридцатых годов и особенно после второй мировой войны стали быстро развиваться и другие отрасли радиотехники: передача изображений по радио - телевидение, управление различными объектами по радио - телеуправление, обнаружение самолетов и судов с помощью отраженных радиоволн - радиолокация, вождение самолетов и судов с помощью радиосредств - радионавигация.
Радиотехнические методы проникают в самые различные отрасли науки и техники: в физику, химию, геологию, медицину, астрономию, математику и т.д. Сейчас невозможно указать ни одной отрасли естественных наук, где бы не использовались те или иные радиотехнические устройства.
Радиосигналы можно разделить на два класса: детерминированные сигналы, которые не несут в себе информации, но могут быть использованы для переноса информации, поступающей от различных источников сообщений; управляющие сигналы, которые изменяются по случайной закону и несут в себе информацию. Как правило, управляющие сигналы в сравнении с сигналами-переносчиками сообщений являются относительно низкочастотными (звуковой сигнал, музыка, телеграфный код). Передать подобные сигналы на большие расстояния в различных линиях связи (радиоканал, волоконно-оптическая или проводная линии связи) практически невозможно. Это связано, как с особенностями распространения электромагнитных волн в линии связи, так и с тем, что в одной линии приходится передавать сигналы, несущие различную информацию. Выполнить это в узком частотном диапазоне невозможно.
В целях преодоления этих ограничений в радиотехнических устройствах используют операцию преобразования сигналов, называемую модуляцией.
Под модуляцией понимают изменение какого-либо параметра вполне определенного (детерминированного) сигнала в соответствии с изменениями управляющего сигнала, несущего сообщение. Детерминированный сигнал, параметры которого изменяются в ходе модуляции, называется модулируемым или несущим колебанием. Управляющий сигнал, в котором присутствует информация, называется модулирующим сигналом. Сигнал, полученный в ходе модуляции, называется модулированным колебанием.
На рисунке 1.2 показаны следующие виды несущих колебаний, используемых при модуляции сигналов:
а) гармонические колебания (см. рисунок 1.2, а), изменяющиеся по закону синуса u(t) = Umsin(ωt);
б) последовательность прямоугольных импульсов (см. рисунок 1.2, б)
в) постоянный ток (см. рисунок 1.2, в);
г) шумоподобные сигналы (см. рисунок 1.2, г), представляющие; собой последовательность единичных интервалов длительностью τ, которым поставлены в соответствие случайным образом расположенные простейшие по форме сигналы: прямоугольные импульсы, sinx, cosх и т.д.
В каждом из несущих колебаний имеются несколько параметров, изменяя которые можно получить модулированный сигнал.
Соответственно число возможных видов модуляции для данного несущего колебания ограничено. Так, при использовании в качестве несущего колебания сигнала, изменяющегося по закону косинуса (см. рисунок 1.2, а), можно получить сигналы с амплитудной (AM), частотной (ЧМ) и фазовой (ФМ) модуляциями. В первом случае амплитуда Um несущего колебания модулируется в соответствии с изменениями мгновенного значения модулирующего сигнала. Во втором случае модулируется частота, а в третьем — фаза в соответствии с изменениями мгновенного значения модулирующего сигнала. Используя в качестве несущего колебания последовательность прямоугольных импульсов (см. рисунок 1.2, б), можно получить следующие виды модуляции сигналов:
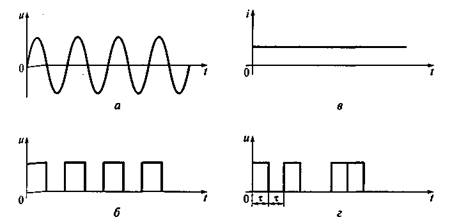
Рисунок 1.2 – Виды несущих колебаний: а — гармоническое колебание; б — последовательность прямоугольных импульсов; в — постоянный ток; г — шумоподобный сигнал
а) амплитудно-импульсная модуляция (АИМ), при которой модулируется амплитуда импульсов;
б) широтно-импульсная модуляция (ШИМ), при которой модулируется длительность импульсов;
в) частотно-импульсная модуляция (ЧИМ), при которой модулируется частота следования импульсов;
г) фазоимпульсная модуляция (ФИМ), при которой модулируется фаза появления следующего импульса в последовательности.
Используя постоянный ток в качестве несущего, можно получить модуляцию по форме (изменяется величина тока в каждый момент времени) или направлению (в определенные моменты времени меняется направление тока, протекающего в цепи).
Использование в качестве несущего колебания шумоподобных сигналов позволяет получить модуляцию по фазе или амплитуде. Модуляция постоянного тока, шумоподобного сигнала и поледовательности прямоугольных импульсов имеет следующую специфику: во-первых, используется только в определенных случаях; во-вторых, менее применима к понятиям радиотехники о модуляции; в-третьих, как и модуляция гармонического несущего колебания, приводит к изменению спектра этого сигнала. Со спектральной точки зрения понятие модуляции заключается в переносе спектра модулирующего сигнала в область высоких частот (в область частоты несущего колебания). Сформированное в ходе модуляции высокочастотное колебание должно однозначно отражать информацию, заключенную в модулирующем сигнале, несмотря на то, что процесс модуляции происходит с изменением спектра сигнала, поскольку получить модулированный сигнал можно только при использовании нелинейных и параметрических элементов в электрических цепях. Использование этих элементов приводит к появлению в отклике спектральных составляющих с комбинационными частотами. Качество модуляторов определяется малой долей комбинационных спектральных составляющих в AM колебании.
2 Лекция № 2. Нелинейные радиотехнические цепи
Содержание лекции: виды нелинейных радиотехнических цепей.
Цели лекции:
- изучить нелинейные преобразования в РТЦ;
- изучить виды аппроксимации и ВАХ нелинейных элементов.
Простейшая нелинейная цепь содержит, кроме источника эдс, нелинейное сопротивление, т.е. элемент, сопротивление которого не является постоянной величиной, а зависит от тока. Предполагается, что реактивных элементов, т.е. емкостей и индуктивностей, в цепи нет. Поэтому уравнение такой нелинейной цепи будет уравнением алгебраическим (а не дифференциальным).
Свойства нелинейного сопротивления выражаются непосредственно зависимостью тока i, протекающего через сопротивление, от напряжения и на его концах. Эта зависимость носит название вольтамперной характеристики и может быть записана как i = f(u).
Задавшись напряжением в функции времени, можем найти ток также, как функцию времени. Это делается или графически, или аналитически. Графическое построение показано на рисунке 2.1. В левой части рисунка изображены, сверху – характеристика нелинейного сопротивления i=f(u), снизу – и=f(t) (выбрано синусоидальное напряжение). График i=f(t) получается построением, аналогичным построению третьей проекции по двум данным (см. рисунок 2.1, справа). Заметим, что форма кривой тока отличается от формы кривой напряжения. Это типично для нелинейной цепи и имеет очень большое значение. Формы кривых напряжения и тока были бы подобны только в случае линейной цепи, когда вольтамперная характеристика представляется прямой линией.
На рисунке 2.1 на синусоидальное напряжение наложено еще постоянное напряжение U0. Оно определяет постоянную составляющую тока I0 в отсутствие колебаний. Точка на характеристике с координатами (U0,I0) называется рабочей точкой. Изменяя U0, можно переместить рабочую точку по ВАХ. Постоянная составляющая тока при колебаниях I, отличается от тока покоя I0. Это также типично для нелинейной цепи.
Рассмотрим вопрос о распределении напряжений в цепи, в которой последовательно включены обычное (линейное, т.е. постоянное) сопротивление R и нелинейное сопротивление, определяемое своей ВАХ. Соответствующее построение показано на рисунке 2.2.
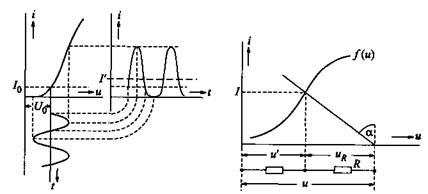
Рисунок 2.1 – ВАХ НЭ Рисунок 2.2 – ВАХ нелинейного
сопротивления
Вольтамперная характеристика нелинейного сопротивления построена, как обычно, в координатах (i, и). Из точки на оси абсцисс, соответствующей приложенному к цепи напряжению, проведена прямая под углом α к вертикальной оси. Эта прямая изображает вольтамперную характеристику линейного сопротивления R; ее наклон tg α непосредственно выражает величину сопротивления и численно равен R.
Координаты точек пересечения прямой с вольтамперной характеристикой определяют, во-первых, ток в цепи, а во-вторых, распределение напряжений на элементах цепи, как показано на рисунке 2.2 (uR означает падение напряжения на линейном сопротивлении, а и' — на нелинейном).
Аналогично решается задача о распределении напряжений в случае соединения двух нелинейных сопротивлений.
Если число нелинейных сопротивлений, включенных в цепь, больше двух, то построение целесообразно изменить. На рисунке 2.3 показаны три вольтамперные характеристики.
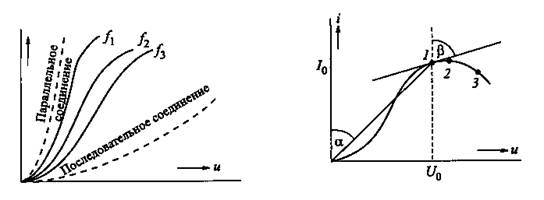
Рисунок 2.3 – ВАХ НЭ Рисунок 2.4 – ВАХ нелинейного
сопротивления
Если нелинейные сопротивления включены параллельно, то вольтамперная характеристика результирующего сопротивления получается поординатным сложением характеристик. Если же сопротивления включены последовательно, то результирующая характеристика получается поабсциссным сложением всех характеристик.
Определим нелинейные сопротивления. Простое линейное сопротивление определятся как отношение падения напряжения на нем к протекающему через него току, т. е. R = U/I. Это – постоянная величина. Но нелинейное сопротивление – величина переменная, и ее можно определить по-разному. На рисунке 2.4 изображена вольтамперная характеристика нелинейного сопротивления. Если подать на сопротивление постоянное напряжение U0, то получим постоянный ток I0; отношение этих величин можно назвать сопротивлением постоянному току: R= = U0/I0 =tgα.
Графически R= определяется наклоном секущей; ясно, что эта величина зависит от приложенного напряжения U0. Положим теперь, что на постоянное напряжение наложено небольшое переменное напряжение Δu, вызывающее приращение тока Δi. Вводят определение сопротивления переменному току, как предел R~ = lim Δu/Δi = du/di =1/f’(u) = tg β/
Определенную таким образом величину называют также дифференциальным сопротивлением. Графически сопротивление переменному току выражается наклоном касательной к вольтамперной характеристике, как показано на рисунке 2.4.
Различают реактивные и резистивные нелинейные элементы. К реактивным нелинейным элементам относятся нелинейные накопители энергии — катушка с ферритовым сердечником, нелинейная емкость (варикап, вариконд, варактор). Нелинейная емкость нашла широкое применение в параметрических усилителях, генераторах, частотных модуляторах и т.д.
Резистивные нелинейные элементы, которыми являются электронные и ионные приборы, в зависимости от наличия управляющего фактора могут быть управляемые и неуправляемые. Управляемые резисторы (четырехполюсники) — транзисторы, тринисторы, электронные лампы. Неуправляемые резисторы (двухполюсники) — диоды, газоразрядные приборы, варисторы, терморезисторы. Характеристика неуправляемого резистора представляет собой одну кривую, а управляемого — семейство кривых, параметром которого является управляющий фактор.
Нелинейные элементы могут быть инерционными и безынерционными. Инерционным в электрическом смысле является такой нелинейный элемент, в котором фаза первой гармоники отклика отстает от фазы гармонического воздействия. В транзисторах, диодах, электронных лампах инерционность проявляется на СВЧ. Реактивные нелинейные элементы являются инерционными, так как способны накапливать электрическую энергию. Инерционным в тепловом смысле является такой нелинейный элемент, сопротивление которого зависит от температуры и тока, протекающего через него, например, терморезистор.
Экспериментально полученные типовые статические характеристики нелинейного элемента позволяют проводить графический расчет его параметров. Этот расчет громоздок и неточен. Для аналитических расчетов необходимо получить математическое выражение статических характеристик нелинейного элемента Аппроксимация – замена характеристики простой аналитической функцией, отражающей особенности экспериментальной характеристики. Подбор аппроксимирующей функции состоит из следующих этапов: 1) выбор аппроксимирующей функции; 2) определение ее коэффициентов; 3) проверка точности подбора функции.
Обычно аппроксимируют не всю характеристику, а ее рабочий участок. В радиотехнике и электросвязи чаще используется кусочно-линейная и полиномиальная аппроксимация.
Кусочно-линейная аппроксимация представляет собой замену характеристики отрезками прямых линий с различным наклоном. Такая замена позволяет вести расчет аналитически с помощью линейных функций, значения которых в конце одного и в начале другого участка приравниваются. Результаты расчета этим способом имеют значительную погрешность, но при большой амплитуде входного сигнала их можно считать приемлемыми, например, при расчете умножителей частоты, выпрямителей, усилителей. Этот способ не может быть применен, если изучаются процессы, связанные с изменением крутизны характеристики (при генерировании колебаний, квадратичном детектировании).
Способ аппроксимации зависит от величины входного сигнала: при подаче на вход нелинейного элемента сигнала большой амплитуды используется кусочно-линейная аппроксимация, а при входном сигнале малой амплитуды — полиномиальная.
Полиномиальная аппроксимация предполагает использование степенного полинома. Кривую любого вида представляют в виде степенного полинома относительно рабочей точки с координатами (u0, i0). На рабочем участке характеристики отмечают точки, число которых зависит от требуемой точности расчетов и равно числу коэффициентов п. Координаты этих точек определяют из графика и подставляют в аппроксимирующий полином. Решение полученной системы из п уравнений с п неизвестными, позволяет найти коэффициенты аппроксимации.
Рассмотрим методы анализа нелинейных цепей при воздействии на них гармонических колебаний. Задачей анализа электрических цепей является определение токов и напряжений в цепи при известных параметрах. Для определения формы тока в цепи (реакции) i(t) при известной форме воздействующего на цепь напряжения u(t) широко используют графический и аналитический методы.
Метод проекций (графический способ) заключается в построении третьей проекции (реакции нелинейного элемента) по известному воздействию и(t) и характеристике нелинейного элемента (см. рисунок 2.5). Из рисунка видно, что реакция отличается от гармонического воздействия. Причина искажений в нелинейности характеристики элемента. Проявляются искажения в том, что одинаковым приращениям воздействия соответствуют неодинаковые приращения реакции. Величина искажений зависит от вида характеристики нелинейного элемента, от положения рабочей точки на характеристике, от амплитуды воздействия. Чем больше амплитуда входного сигнала, тем больше искажения. Реакцию можно разложить в ряд Фурье, при этом она будет содержать основную гармонику, имеющую наибольшую амплитуду колебаний и основную частоту ω, а также ряд гармоник с меньшей амплитудой и частотами, кратными основной 2ω, 3ω, 4ω и т.д.
Метод угла отсечки включает кусочно-линейную аппроксимацию характеристики, после которой определяют форму реакции с помощью метода проекций (см. рисунок 2.6).
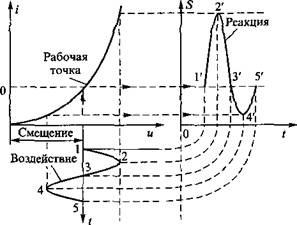
Рисунок 2.5 –Графическое определение формы реакции безынерционного нелинейного элемента с помощью метода проекций
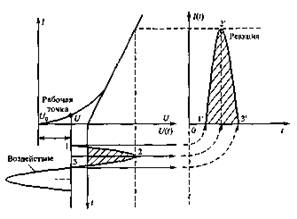
Рисунок 2.6 – Графическое определение формы реакции безынерционного нелинейного элемента с помощью угла отсечки
На выходе нелинейного элемента получили реакцию в виде импульса тока с амплитудой Imax, соответствующей максимальному значению воздействия, и шириной 2θ, т.е. нелинейный элемент работает с отсечкой выходного тока. θ — угол отсечки, соответствующий половине времени существования импульса тока в выходной цепи. Угол отсечки определяется из равенства U0+ Umcosθ = Un; откуда cosω = (Un – U0)Uт, высота импульса imax = SUmax = SUm(1 – cosθ). Спектральный состав периодических косинусоидальных импульсов определяется по формулам ряда Фурье и подробно изучен академиком А.И. Бергом.
Метод п ординат позволяет определить n первых составляющих спектра реакции, полагая, что остальные достаточно малы (на практике применяют методы трех п=3 или пяти ординат п=5). Применяя метод пяти ординат, задают значения аргумента ωt = 0, π/3; π/2; 2π/3; π. Если использовать метод трех ординат (см. рисунок 2.7), то реакция содержит три составляющие I(t) = I0 + I1 cosωt + 12cos2 ωt. Задавая значения аргумента ωt, получают систему уравнений для imax, i0, imin, решая которую, получают амплитуды гармоник.
3 Лекция №3. Преобразование сигналов в нелинейных цепях
Содержание лекции: АМ-колебания, детектирование сигналов.
Цели лекции:
- изучить возможности получения АМ-колебаний и их детектирования.
Амплитудная модуляция гармонического несущего колебания считается наиболее простой и распространенной в радиотехнических устройствах. При этой модуляции управляющий сигнал в действует на амплитуду Um несущего колебания, вызывая ее изменение в соответствии с передаваемым сообщением. Частота ω0 и начальная фаза φ0 несущего колебания при AM остаются неизменными.
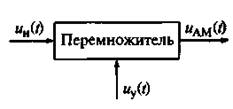
Рисунок 3.1 – Структурная схема амплитудного модулятора
Модулятор представляет собой перемножитель двух сигналов. Структурная схема амплитудного модулятора приведена на рисунке 3.1, на рисунке 3.2 показано формирование АМ-сигнала. На один вход модулятора поступает сигнал несущего колебания (см. рисунок 3.2, а) ин(t) = Umcos(ω0t + φ0), а на второй вход подается управляющий (модулирующий) сигнал uy(t) произвольной формы (см. рисунок 3.2, б). Для понятия процесса модуляции принимаем, что управляющий сигнал является тональным, т.е. иу(t) = Uуcos(Ωt + ψ).
На выходе амплитудного модулятора появляется сигнал uАМ(t), частота которого соответствует частоте несущего колебания. Амплитуда колебания в каждом периоде изменения АМ-колебания пропорциональна изменению управляющего сигнала uy(t) (см. рисунок 3.2, б). При этом следует помнить, что при равенстве нулю значения управляющего сигнала иу(/) амплитуда колебания модулированного сигнала равна амплитуде несущего колебания Um. При неравенстве нулю uy(t) АМ-колебание изменяется относительно уровней +Um и –Um, повторяя изменения управляющего сигнала. АМ-колебание можно описать формулой
uАМ(t) = Um[1 + mАМ cos(Ωt + ψ)]cos (ω0t + φ0), (3.1)
где u(t) = Um[1 + mАМ cos(Ωt + ψ)] – огибающая модулированного сигнала.
Для получения неискаженного AM-сигнала необходимо, чтобы коэффициент амплитудной модуляции mАМ отвечал условию mАМ ≤ 1(см. рисунок 3.2, в). При mАМ > 1 возникает процесс перемодуляции. В результате этого процесса форма огибающей v{t) модулированного сигнала искажается (см. рисунок 3.2, г ), что приводит к потере информации или ее некачественной передаче.

Рисунок 3.2 – Формирование АМ-сигнала: а — несущее колебание; б — управляющий сигнал; в, г — модулированные сигналы соответственно с тАМ < 1 и тАМ > 1
Рассмотрим спектр АМ-колебания, используя выражение (3.1). В этом выражении имеются две гармонические составляющие. Одна из них с частотой ω0 характеризует несущее колебание uн(t), имеющее амплитуду Um и начальную фазу φ0, а другая с частотой Ω — управляющий сигнал uy(t), имеющий амплитуду Uy и начальную фазу ψ. В данном случае управляющий сигнал uy(t) является тональным, изменяющимся только в соответствии с одной частотой Ω. Как правило, в устройствах модуляции выполняется условие ω0>>Ω. С учетом этого на рисунке 3.3 показаны амплитуды и начальные фазы несущего колебания и управляющего сигнала.
В целях анализа спектра АМ-колебания к выражению (3.1) применим ряд математических преобразований: во-первых, раскроем квадратные скобки; во-вторых, разложим произведение косинусов и получим
uАМ(t)=Umcos(ω0t+φ0)+![]() mАМUmcos[(ω0+Ω)t+φ0+ψ]+
mАМUmcos[(ω0+Ω)t+φ0+ψ]+
+ ![]() mАМUmcos[(ω0–Ω)t+φ0–ψ].
(3.2)
mАМUmcos[(ω0–Ω)t+φ0–ψ].
(3.2)
Из этого выражения видно, что АМ-колебание при тональной модуляции представляет собой сумму трех спектральных составляющих. На рисунке 3.4 показаны спектры амплитуд и фаз АМ-колебания. Ширина спектра АМ-колебания, модулированного тональным сигналом, F=ωв–ωн=2Ω. Таким образом, ширина спектра АМ-колебания равна удвоенной частоте управляющего сигнала, а спектр симметричен относительно частоты ω0 несущего колебания.
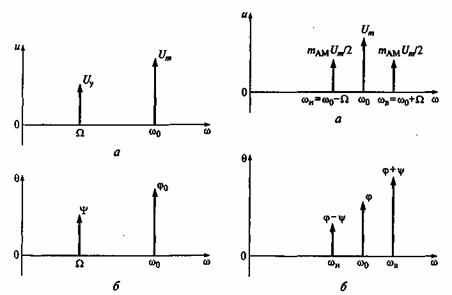
Рисунок 3.3 – Амплитуды (а) Рисунок 3.4 – Спектр амплитуд
и начальные фазы (б) несущего (а) и спектр фаз (б) АМ - колебания
колебания и управляющего сигнала при тональной модуляции
Детектирование – процесс преобразования модулированного колебания в целях выделения модулирующего сигнала. Модулирующие сигналы могут быть как непрерывными, так и дискретными. При использовании несущего колебания, изменяющегося по гармоническому закону, в качестве модулируемых параметров могут выступать амплитуда, частота и фаза сигнала. Если несущее колебание – последовательность прямоугольных импульсов, то модулируемыми параметрами могут быть амплитуда, длительность, время начала и период следования импульсов.
Модулированные колебания могут быть как с полным набором спектральных составляющих, так и с одной боковой полосой или с подавленной спектральной составляющей несущего колебания. Каждый вид модуляции требует своего подхода к организации процесса детектирования и построения детекторов, которые делят на амплитудные, частотные и фазовые.
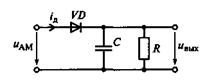
Рисунок 3.5 – Схема амплитудного детектора на диоде
В процесс детектирования АМ-колебания необходимо выделить спектральные составляющие модулирующего сигнала, частоты которых лежат в диапазоне от Ωmin до Ωmax. Выполнить это можно, используя резисторы нелинейной ВАХ. В качестве этих резисторов могут выступать полупроводниковые диоды, транзисторы, электровакуумные приборы. На рисунке 3.5 приведена схема амплитудного детектора, который состоит из полупроводникового диода VD, конденсатора С и резистора R. Принцип его работы основан на формировании окрестности частот ω = 0, ω0, 2ω0, ... множества групп спектральных составляющих сигнала uАМ(t) на выходе диода.
В последующем спектральные составляющие, расположенные в окрестности нулевой частоты ω=0, выделяются фильтром нижних частот, выполненном на конденсаторе С и резисторе R. Выбор параметров элементов ФНЧ должен одновременно удовлетворять двум условиям: 1/(ΩmaxС)>>R; 1/(ω0С)<<R. Первое условие говорит о том, что при детектировании АМ-колебания не будут потеряны спектральные составляющие модулирующего сигнала, вплоть до максимальной частоты спектра Ωmax сигнала. Второе условие обеспечивает подавление всех спектральных составляющих сигнала, кроме модулирующего. Учитывая эти условия, можно наложить ограничение на величину постоянной времени τ = RC фильтра Ωmax << 1/τ << ω0.
На рисунке 3.6 показаны диаграммы аппроксимированной ВАХ диода, входного гармонического колебания, импульса тока и напряжения на выходе детектора. Прямая ветвь ВАХ полупроводникового диода на начальном участке носит явно выраженный нелинейный характер. Далее ее вид становится близким к линейному. Интенсивность спектральных составляющих АМ-колебания может быть как малой, так и большой. В первом случае преобразование спектра АМ-колебания происходит на начальном (нелинейном) участке ВАХ диода, а во втором — на линейном участке.
При детектировании выделяется спектральная составляющая тока диода I0(t). Основным недостатком АМ-детектирования является высокий уровень нелинейных искажений при малых интенсивностях спектральных составляющих АМ-колебаний, когда диод работает на нелинейном участке ВАХ. Вторым недостатком АМ-детекторов является квадратичная зависимость низкочастотной составляющей тока диода от интенсивности сигнала на входе детектора.

Рисунок 3.6 – Диаграммы аппроксимированной ВАХ диода (а), входного гармонического колебания (б), импульса тока (в) и напряжения на выходе детектора (г)
Это сильно ощущается при детектировании непрерывных сигналов и выражается в непрерывном воспроизведении формы напряжения иаых(t) на выходе детектора. При детектировании импульсных АМ-колебаний, представляющих поток радиоимпульсов, квадратичная зависимость напряжения на выходе детектора несущественна. При детектировании импульсных АМ-колебаний на выходе детектора появляются видеоимпульсы, наличие которых говорит о том, что передаваемый сигнал соответствует логической единице, а его отсутствие – логическому нулю.
В этом случае амплитуда видеоимпульса может быть пpoпорциональна как интенсивности модулирующего сигнала, так и квадрату интенсивности, однако, это никак не скажется на правильности восприятия передаваемого сообщения.
4 Лекция № 4. Автоколебательные системы
Содержание лекции: автогенераторы гармонических сигналов.
Цели лекции:
- изучить свойства автогенераторов гармонических сигналов;
- изучить режимы работы АГ.
Автоколебательными называют активные электрические цепи, в которых происходит преобразование энергии источников питания в электрические колебания, возникающие без какого-либо внешнего воздействия. Устройства на основе таких электрически цепей называют автогенераторами (генераторами). По организации и принципу работы автогенераторы делят на генераторы с внешней и внутренней обратными связями, a по типу элементов, определяющих частоту колебаний, генераторы делят на автогенераторы LC- и RС-типов.
В автогенераторах в роли активных элементов могут быть использованы электровакуумные приборы, биполярные и полевые транзисторы, ИМС и т.д.
Из-за наличия сопротивления потерь R в контуре колебательный процесс носит затухающий характер. При коэффициенте затухания δ, стремящемся к нулю, т.е. при условии, что сопротивление потерь R стремится к нулю, колебательный процесс в контуре будет незатухающим. Для получения незатухающих колебаний в реальном контуре, в котором присутствует сопротивление потерь R, необходимо каким-либо образом внести в этот контур отрицательное сопротивление» Rвн величиной больше сопротивления потерь R или равное ему. В этом случае суммарное сопротивление потерь в контуре (R + Rвн) < 0. Этого можно достичь внесением извне в контур энергии, компенсирующей энергию, рассеиваемую на сопротивлении потерь R. Подобную энергию можно получить, используя собственные колебания контура, усиливая их и возвращая вновь в контур.
На рисунке 4.1 приведена обобщенная структурная схема автогенератора. В автогенераторе усилительный элемент и колебательный контур образуют нелинейный резонансный усилитель, в котором максимальный коэффициент усиления напряжения достигается на резонансной частоте ω0 колебательного контура. На резонансной частоте контура коэффициент усиления нелинейного резонансного усилителя будет зависеть только от входного напряжения Ку (U1).
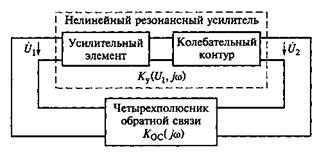
Рисунок 4.1 – Обобщенная структурная схема автогенератора
В стационарном состоянии коэффициент усиления нелинейного резонансного усилителя Ky(U1,jωA) и коэффициент передачи четырехполюсника обратной связи Koc(jωA) являются комплексными величинами и имеют взаимообратные значения. Отсюда следует важное соотношение, характеризующее автогенератор:
Ky(U1,jωA)Koc( jωA) = 1 (4.1)
где ωA — частота колебаний в автогенераторе.
Комплексные коэффициенты определяются модулем коэффициента усиления резонансного усилителя Ky(U1,ωA), модулем коэффициента передачи четырехполюсника обратной связи Koc(ωA), а также фазовыми сдвигами (аргументами), вносимыми резонансным усилителем φу(ωа) и четырехполюсником обратной связи φОС(ωа).
С учетом вводимых параметров формула (4.1) преобразуется к виду
Ky(U1, ωA )Koc(ωA) exp{j [φу(ωа) +φОС(ωа)]} = 1.
Выражение можно разбить на две части. Первая часть характеризует условие баланса амплитуд, а вторая часть — условие баланса фаз в автогенераторе. Только при выполнении условий баланса амплитуд и баланса фаз в автогенераторе могут возникнуть незатухающие колебания.
Четырехполюсник обратной связи, как правило, состоит из пассивных элементов. В связи с этим его комплексный коэффициент передачи не зависит от приложенного напряжения, а определяется только параметрами элементов и частотой сигнала в цепи, поэтому на частоте ωА работы автогенератора модуль коэффициента передачи К0С(ωА) четырехполюсника обратной связи можно считать величиной постоянной. На рисунке 4.2 показано графическое определение стационарного режима работы автогенератора. Модуль коэффициента усиления резонансного усилителя в зависимости от амплитуды входного напряжения U1 носит нелинейный характер. В результате этого в точке, в которой выполняется условие баланса амплитуд, достигается стационарная амплитуда выходного напряжения Uст автогенератора. Левее от этой точки произведение Ky(U1, ωA)Koc(ωA) превышает единицу, а правее становится меньше единицы. При выполнении равенства Ky(U1, ωA ) = 1/Koc(ωA) достигается устойчивое равновесие в автогенераторе и в нем наблюдается незатухающий колебательный процесс.

Рисунок 4.2 – Определение стационарного режима работы автогенератора
Условие баланса фаз говорит о том, что в стационарном режиме сдвиг фазы сигнала в кольце обратной связи автогенератора должен быть кратен 2π. В этом случае рост амплитуды выходного сигнала приводит к росту амплитуды входного сигнала резонансного усилителя (положительная обратная связь). При малом всплеске сигнала на входе усилительного элемента, например, вследствие подключения напряжения питания к автогенератору, происходит выделение колебательным контуром спектральной составляющей на частоте ωА и ее усиление до достижения амплитуды Uст.
На рисунке 4.3 приведена схема автогенератора с трансформаторной ОС. Используя эту схему, рассмотрим физические процессы, приводящие к возникновению колебаний в автогенераторе. Для узла, в котором соединены между собой индуктивная катушка LK, конденсатор Ск, сопротивление потерь R контура и коллектор транзистора VT, в соответствии с первым законом Кирхгофа можно записать уравнение баланса токов iL+ iС+ ir= iК.
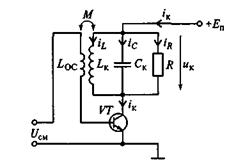
Рисунок 4.3 – Схема автогенератора с трансформаторной ОС
При напряжении на контуре uK(t) через элементы контура протекают токи iL,iС, ir, iК. Ток коллектора iк транзистора зависит от напряжения и6э- UCM, приложенного между базой и эмиттером этого транзистора. За счет тока, протекающего через индуктивную катушку контура LK, и наличия взаимной индуктивности М между индуктивными катушками контура LK и цепи ОС Loc в индуктивной катушке Loc возникает ЭДС обратной связи uoc(t).Эта ЭДС является сигнальной составляющей напряжения, управляющего работой транзистора, так как uос= ибэ–Ucм. В результате этого ток коллектора iк транзистора становится зависимым от напряжения обратной связи uос.
Колебательный контур, включенный в коллектор транзистора VT, и индуктивная катушка обратной связи Loc образуют систему связанных контуров, в которой коэффициент связи определяется взаимной индуктивностью М. В связи с этим напряжение обратной связи можно представить в виде иОС(t) = -(M/LK)uK(t).
Коэффициент затухания при соответствующем выборе параметров элементов контура и индуктивной катушки обратной связи может быть больше, равен или меньше нуля. При δА> 0 колебания в контуре носят затухающий характер, и, соответственно, процесс генерации в автогенераторе не возникнет. При δА= 0 колебательный процесс в контуре в момент запуска автогенератора может как возникнуть в пределах той амплитуды сигнала, которая сформировалась в момент запуска автогенератора, так и не возникнуть. Подключение напряжения питания к автогенератору при δА < 0 приводит к появлению всплеска тока iк коллектора транзистора. Этот ток лавинообразно увеличивается за счет роста напряжения обратной связи иос.
Основным параметром, который обеспечит выполнение условия δА < 0 и приведет к возникновению колебаний в автогенераторе, будет крутизна транзистора S. На рисунке 4.4 показаны зависимости тока коллектора и крутизны транзистора от напряжения база—эмиттер. Так как зависимость тока коллектора от напряжения база—эмиттер транзистора носит нелинейный характер (см. рисунок 4.4, а), то крутизна S=diк/duбэ, как функция напряжения uбэ будет иметь колоколообразный вид (см. рисунок 4.4, б).
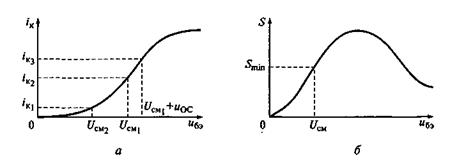
Рисунок 4.4 – Зависимости тока коллектора (а) и крутизны (б) транзистора от напряжения база—эмиттер
Между базой и эмиттером транзистора автогенератора (см. рисунок 4.3) задается напряжение Ucм, которое определяет начальную крутизну транзистора Smin (см. рисунок 4.4, б). При подобном смещении для возникновения колебательного процесса в автогенераторе значение взаимной индуктивности М, при котором возникают колебания в автогенераторе, должно выбираться из условия М>Lк/RSmin. Это условие называется условием самовозбуждения автогенераторов LC-типа. Величина Мкр=Lк/RSmin называется критической взаимной индуктивностью. Заметим, что при М=Мкр в контур вносится отрицательное сопротивление величиной, которое компенсирует сопротивление потерь R, обеспечивая δА=0 и незатухающий колебательный процесс в контуре.
Спектр переходного
процесса, возникающего при подаче напряжения питания Еп на
автогенератор, весьма широк. Передаточная характеристика колебательного
контура достигает максимального значения, равного добротности контура
Q,
на резонансной частоте ω0=1/![]() В этом случае
сопротивление контура ZK является только действительным. Оно достигает
максимального значения, равного сопротивлению контура
R0,
на резонансной частоте среди всех спектральных
составляющих, выделяемой контуром, спектральная составляющая сигнала с
частотой ω0 будет иметь наибольшую амплитуду. Рост
амплитуды спектральной составляющей с частотой ω0 приведет
к росту напряжения обратной связи, возникающего за счет наличия взаимной
индуктивности М между катушками индуктивности
LK
колебательного
контура и Loc
цепи
обратной связи. Напряжение обратной связи, приложенное между базой и эмиттером
транзистора, за счет действия ПОС вызовет дальнейшее увеличение напряжения
между базой и эмиттером транзистора, увеличивая тем самым ток коллектора и
крутизну транзистора (см. рисунок 4.4). Рост крутизны транзистора приводит к
тому, что коэффициент затухания в контуре становится отрицательным. Это
исключает затухание колебаний в контуре, приводя к усилению напряжения обратной
связи и росту амплитуды незатухающих колебаний в нем.
В этом случае
сопротивление контура ZK является только действительным. Оно достигает
максимального значения, равного сопротивлению контура
R0,
на резонансной частоте среди всех спектральных
составляющих, выделяемой контуром, спектральная составляющая сигнала с
частотой ω0 будет иметь наибольшую амплитуду. Рост
амплитуды спектральной составляющей с частотой ω0 приведет
к росту напряжения обратной связи, возникающего за счет наличия взаимной
индуктивности М между катушками индуктивности
LK
колебательного
контура и Loc
цепи
обратной связи. Напряжение обратной связи, приложенное между базой и эмиттером
транзистора, за счет действия ПОС вызовет дальнейшее увеличение напряжения
между базой и эмиттером транзистора, увеличивая тем самым ток коллектора и
крутизну транзистора (см. рисунок 4.4). Рост крутизны транзистора приводит к
тому, что коэффициент затухания в контуре становится отрицательным. Это
исключает затухание колебаний в контуре, приводя к усилению напряжения обратной
связи и росту амплитуды незатухающих колебаний в нем.
При выборе рабочей крутизны транзистора S* значение коэффициента затухания в контуре становится отрицательным, что обеспечивает возникновение колебательного процесса в автогенераторе. В данном случае рабочая крутизна S* транзистора зависит как от параметров контура LK и R, так и от взаимной индуктивности М, определяющей величину коэффициента обратной связи Кос(ωА). Для обеспечения устойчивой работы автогенератора относительно рабочей крутизны транзистора должно выполняться условие dS*/duоc<0. Этому условию соответствует участок кривой правее точки А, представленной на рисунке 4.5. На этом участке каждому значению взаимной индуктивности М соответствует свое значение рабочей крутизны транзистора S*. При малых величинах взаимной индуктивности М=M1 величина S* больше возможной крутизны транзистора.
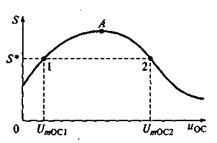
Рисунок 4.5 – Определение устойчивости автогенератора
В этом случае коэффициент затухания в контуре больше нуля и самовозбуждение в автогенераторе возникнуть не может. При дальнейшем увеличении взаимной индуктивности М возникает ситуация, когда значение рабочей крутизны транзистора S* накладывается на кривую крутизны транзистора, например, М=М2. В этом случае коэффициент затухания в контуре принимает значение больше или равное нулю. При М>Мг значение рабочей крутизны транзистора понижается и возникает ситуация, когда коэффициент затухания становится меньше или равен нулю, что приводит к возникновению колебательного процесса в автогенераторе.
Рост взаимной индуктивности М приводит и к росту напряжения обратной связи, которое суммируется с напряжением смещения и вызывает увеличение амплитуды первой гармоники 1т1 тока коллектора. Напряжение смещения транзистора Ucм (см. рисунок 4.4, а) можно выбирать в достаточно широком диапазоне от Uсм = 0 до напряжения смещения, обеспечивающего большой ток коллектора. Случай, когда выбор величины напряжения смещения UCM приводит к большему току коллектора, а выбор величины взаимной индуктивности М — к плавному росту напряжения обратной связи, называется мягким режимом самовозбуждения автогенератора. При настройке на этот режим автоколебания в автогенераторе возникают непосредственно после подачи на него напряжения питания.
Режим, при котором колебания в автогенераторе возникают при сильной взаимной индуктивности М=М' и пропадают при снижении взаимной индуктивности меньше величины, определяемой условием М=М", называется жестким режимом самовозбуждения автогенератора.
Достоинством автогенераторов с мягким режимом самовозбуждения является то, что они начинают генерировать колебания непосредственно при подаче на них напряжения питания, однако, они имеют низкий КПД. Достоинством автогенераторов с жестким режимом самовозбуждения является высокий КПД за счет того, что транзистор работает с отсечкой коллекторного тока, однако, для запуска этих автогенераторов требуется помимо подключения напряжения питания дополнительное внешнее воздействие по цепи ОС, приводящее к возникновению колебаний в АГ.
5 Лекция № 5. Автогенераторы RC-типа
Содержание лекции: автогенераторы RC-типа.
Цели лекции:
- изучить назначение и свойства автогенераторов RC-типа;
- изучить варианты построение автогенераторов RC-типа.
Автогенераторы RC-типа предназначены для генерации колебаний высокой частоты. В области низких частот, например, звуковых, применение этих автогенераторов затруднено, что вызвано следующими двумя факторами. Во-первых, в колебательном контуре необходимо использовать катушки большой индуктивности и конденсаторы большой емкости, что делает контуры низкодобротными. Во-вторых, из-за больших величин индуктивности катушки и емкости конденсатора сложно создать автогенераторы с перестраиваемой частотой генерации.
Для устранения отмеченных недостатков используют автогенераторы RC-типа. Структурная схема автогенератора RC-типа приведена на рисунке 5.1 Автогенератор состоит из усилителя, охваченного петлей частотно-зависимой положительной обратной связи.

Рисунок 5.1 – Структурная схема автогенератора RC-типа
Фазосдвигающий четырехполюсник обеспечивает требуемый сдвиг фазы сигнала на выходе усилителя относительно сигнала на его входе. В автогенераторе должен сохраняться баланс амплитуд, т.е. произведение коэффициента усиления усилителя и модуля коэффициента передачи цепи обратной связи должно быть равно единице. В автогенераторе должно выполняться условие баланса фаз, говорящее о том, что фазовый сдвиг по кольцу «усилитель-цепь обратной связи» должен быть кратен 2π.
Учитывая эти условия, можно говорить о двух подходах к построению автогенераторов RC-типа. Это автогенераторы, в которых используется неинвертирующий усилитель (выходное и входное напряжения совпадают по фазе), а цепь обратной связи обеспечивает фазовый сдвиг величиной нуль градусов либо 2π; используется инвертирующий усилитель (выходное напряжение сдвинуто по фазе на угол л относительно входного напряжения), а цепь обратной связи обеспечивает фазовый сдвиг величиной π. В любом из отмеченных подходов к построению автогенераторов RC-типа сдвиг фазы в кольце «усилитель — цепь обратной связи» равен 2π.
В RC-автогенераторах для обеспечения требуемого фазового сдвига величиной π используют RC-звенья. Каждое из этих звеньев включает резистор и конденсатор. Подобное RC-звено обеспечивает фазовый сдвиг φ<90°. Для автогенератора, в котором используется инвертирующий усилитель, получение фазового сдвига по цепи обратной связи величиной π возможно при использовании не менее трех RC-звеньев. На рисунке 5.2 показаны первый и второй варианты RC-звеньев автогенераторов.
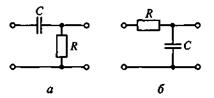
Рисунок 5.2 – Варианты RC -звеньев автогенераторов
На рисунке 5.3
приведена электрическая схема автогенератора
RC-типа.
В
таком автогенераторе ток базы Iб
транзистора существенно меньше тока I3. На частоте генерации автогенератора ωА=![]() модуль коэффициента
передачи по цепи обратной связи КОС(ωА)=0, 034. Учитывая условие баланса
амплитуд, коэффициент усиления усилителя Ку(ωА)=29.
Соответственно, рабочая крутизна транзистора
S* автогенератора должна отвечать условию
S*=Ky(ωА)/Rн=29/Rн.
модуль коэффициента
передачи по цепи обратной связи КОС(ωА)=0, 034. Учитывая условие баланса
амплитуд, коэффициент усиления усилителя Ку(ωА)=29.
Соответственно, рабочая крутизна транзистора
S* автогенератора должна отвечать условию
S*=Ky(ωА)/Rн=29/Rн.
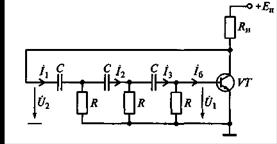
Рисунок 5.3 – Электрическая схема автогенератора RC –типа
Второй вариант построения автогенераторов RC-типа основан на использовании неинвертирующих усилителей, в которых обеспечивается фазовый сдвиг сигнала на 2π. Соответственно, фазовый сдвиг по цепи обратной связи должен быть равен нулю на частоте генерации автогенератора. На рисунке 5.4 приведен один из подобных автогенераторов, в цепи обратной связи которого включен мост Вина. Генерация колебаний автогенератором с мостом Вина также осуществляется при выполнении условий баланса амплитуд и баланса фаз. Генерация возможна, когда фазовый сдвиг в цепи обратной связи будет равен нулю. Это условие выполняется при частоте ωА=1/RlR2ClC2. На практике при построении таких автогенераторов часто стремятся к равенству сопротивлений резисторов RI и R2 и к равенству емкостей конденсаторов С1 и С2 в цепи ОС. В случае R1=R2=R и С1=С2=С частота генерации автогенератора рассчитывается по формуле ωА=1/RC.
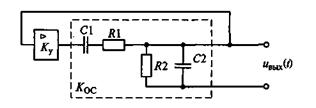
Рисунок 5.4 –Автогенератор RC-типа с мостом Вина
Преимущества автогенератора RC-типа с мостом Вина в сравнении с другим автогенератором RC-типа (см. рисунок 5.3) заключаются в следующем: для его построения требуется меньшее число резисторов и конденсаторов; модуль коэффициента передачи цепи обратной связи не зависит от частоты; малое число резисторов и конденсаторов в автогенераторе позволяет использовать сдвоенные переменные резисторы или конденсаторы для построения автогенераторов с перестраиваемой частотой.
Несмотря на простоту построения автогенераторов RC-типа, им свойственен и ряд недостатков, которые необходимо учитывать при разработке подобных устройств. К числу этих недостатков относят следующие:
1. Емкости конденсаторов и сопротивления резисторов должны иметь слабую зависимость от дестабилизирующих факторов, например, от температуры, так как в противном случае и частота генерации автогенератора RC-типа будет зависеть от температуры.
2. Токи утечки в конденсаторах должны быть весьма малыми. Действительно, на низких частотах сопротивление утечки конденсаторов будет оказывать шунтирующее действие, что может привести к изменению фазовых соотношений в четырехполюснике обратной связи и, соответственно, к срыву генерации.
3. Транзисторы, используемые в автогенераторах RC-типа, имеют нелинейные ВАХ. Это вызывает нелинейную зависимость тока коллектора транзистора и выходного напряжения автогенератора от напряжения, возникающего между базой и эмиттером транзистора. Подобная нелинейная зависимость приводит к тому, что форма выходного напряжения отличается от формы гармонического колебания. Для устранения этого недостатка необходимо выбирать положение исходной рабочей точки транзистора таким образом, чтобы при работе автогенератора рабочая точка не выходила за пределы близкого к линейному участка ВАХ.
6 Лекция № 6. Линейные параметрические цепи
Содержание лекции: анализ линейных параметрических цепей.
Цели лекции:
- рассмотреть характеристики параметрических цепей;
- рассмотреть прохождение сигналов через линейные параметрические цепи.
Понятие и характеристики параметрической цепи. Под параметрическими цепями понимают цепи, состоящие из множества радиоэлементов (элементов), при этом параметры одного или нескольких из них изменяются во времени при приложении к цепи электрических колебаний. Элемент, хотя бы один параметр которого изменяется во времени, называется параметрическим.
В цепях в качестве параметрических элементов могут выступать параметрические сопротивления R(t), емкости C(t) или индуктивности L(t). «Параметричность» этих элементов заключается в том, что основные (сопротивление, емкость или индуктивность) или производные (крутизна, величина заряда) их параметры изменяются во времени.
Для рассмотрения вопроса по формированию параметрических элементов на рисунке 6.1 приведена диаграмма проходной ВАХ iк=f(uбэ) биполярного транзистора. Вольт-амперная характеристика этого резистивного элемента носит явно выраженный нелинейный характер, а его сопротивления (статическое и дифференциальное) зависят от напряжения, приложенного к нему. Статическое сопротивление определяется при медленно меняющихся сигналах, поэтому оно от времени не зависит, а дифференциальное сопротивление Rдиф=du/di определяется при быстро изменяющихся сигналах и, соответственно, зависит от приращений напряжения на этом нелинейном резисторе и тока, протекающего через него.
На практике при рассмотрении параметрических цепей чаще пользуются не понятием «дифференциальное сопротивление», а понятием «дифференциальная крутизна». Этот параметр является обратной величиной сопротивлению. В нашем случае дифференциальная крутизна определяется выражением S = di/du.
Дифференциальная крутизна характеризует изменение тока, протекающего через нелинейный резистор при приложении к нему переменного напряжения.
Допустим, для нелинейного резистора, ВАХ которого приведена на рисунке 6.1, определено положение исходной рабочей точки (U0,I0). Относительно напряжения смещения U0 приложено управляющее напряжение, которое изменяется по гармоническому закону uy(t) = Uycos(ωyt). В пределах изменения управляющего напряжения uy(t) ВАХ нелинейного резистора можно аппроксимировать полиномом второй степени
i=a0(U0)+ а1(uу–Uo)+а2(иу - U0)2 (6.1)
где а0(U0) = I0 — ток нелинейного резистора в рабочей точке.
Осуществив дифференцирование, найдем выражение для описания поведения дифференциальной крутизны нелинейного резистора в окрестности рабочей точки: S[Uy(t)] = а1 + 2a2uy(t), где a1 = S0 — крутизна нелинейного резистора в исходной рабочей точке. Из этого выражения видно, что если ВАХ нелинейного резистора в окрестности исходной рабочей точки может быть аппроксимирован полиномом второй степени, то дифференциальная крутизна в окрестности этой точки будет изменяться по линейному закону (см. рисунок 6.1). При этом, так как управляющее напряжение uy(t) = Uycos(ωyt) зависит от времени, то и дифференциальную крутизну можно рассматривать зависимой от времени. Таким образом, относительно дифференциальной крутизны S(t), зависящей от времени, нелинейный резистор может рассматриваться как параметрический элемент.
Дифференциальная крутизна S{t) может быть как положительной, так и отрицательной. Если с ростом управляющего напряжения uу относительно исходной рабочей точки растет и ток (точка 1 на рисунке 6.1), то дифференциальная крутизна S(t) будет положительной. Если с ростом управляющего напряжения uy относительно исходной рабочей точки происходит снижение тока (точка 4 на рисунке 6.1), то в этом случае дифференциальная крутизна S(t) будет отрицательной.
Рассмотрим зависимость заряда, накапливаемого в нелинейной емкости, от напряжения. На рисунке 6.2 показана диаграмма зависимости барьерной емкости р-n-перехода БТ от напряжения, приложенного к нему.
В окрестности исходной рабочей точки изменение заряда q нелинейной емкости можно аппроксимировать полиномом второй степени q=q0+ b1(и–U0) + b2(u–U0)2, где q0 — заряд емкости в исходной рабочей точке нелинейной емкости.
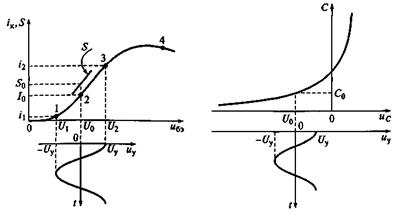
Рисунок 6.1–Диаграмма проходной Рисунок 6.2–Диаграмма зависимости
ВАХ iк=f(uбэ) биполярного тран- барьерной емкости р-n-перехода БТ
зистора от приложенного напряжения
При приложении к нелинейной емкости переменного напряжения ее дифференциальная емкость будет зависеть от изменения этого напряжения и, соответственно, может рассматриваться как емкость, зависящая от времени, так как управляющее напряжение зависит от времени. С учетом этого нелинейная емкость может быть использована в качестве параметрического элемента, дифференциальная емкость C(t) которого зависит от времени.
Обобщая результаты, полученные при анализе дифференциальной крутизны S(t) нелинейного резистора и дифференциальной емкости C(t) р-n-перехода, отметим следующее. Параметрический элемент — это совокупность одного из нелинейных элементов (сопротивление, емкость или индуктивность) и источника управляющего напряжения, напряжение которого изменяется, например, по гармоническому закону относительно исходной рабочей точки нелинейного элемента. На рисунке 6.3 показана структурная схема представления параметрического элемента.
Используя параметрические элементы, можно строить различные радиотехнические устройства, в частности, малошумящие параметрические усилители, модуляторы и преобразователи частоты, генераторы и детекторы.
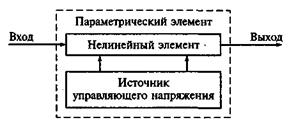
Рисунок 6.3 – Структурная схема представления параметрического элемента
Прохождение сигналов через линейные параметрические цепи. При рассмотрении линейных радиотехнических цепей с постоянными параметрами отмечалось, что отклик цепи при известном входном воздействии можно определить различными способами. Наиболее часто при анализе цепей в частотной области используют передаточную характеристику цепи K(jω). Если задана спектральная плотность сигнала на входе цепи Sвх(jω), то спектральная плотность сигнала на выходе цепи может быть рассчитана по формуле Sвых(jω)= = Sвх(jω) K(jω). При анализе цепи во временной области пользуются интегралом Дюамеля и импульсной характеристикой h(τ) цепи. Тогда
Sвых(
t)=![]() (6.2)
(6.2)
где Sвх( t)и Sвых( t)— сигналы на входе и выходе цепи соответственно.
Однако в параметрических цепях передаточная характеристика зависит как от частоты ω, так и от времени t, в соответствии с которым изменяются параметры нелинейного элемента и цепи в целом. В этом случае передаточная характеристика цепи принимает вид K(jω, t). Импульсная характеристика параметрической цепи также зависит от нескольких параметров: с одной стороны - от интервала времени t–τ, определяющего момент приложения единичного импульса и момент времени наблюдения отклика сигнала, а с другой стороны - от расположения момента времени t–τ на временной оси. В этом случае импульсная характеристика параметрической цепи принимает вид h(t, τ).
Зависимость передаточной K(jω, t) и импульсной h(t, τ) характеристик параметрической цепи от двух параметров усложняет вычислительный процесс при анализе радиотехнических устройств, поэтому решение таких задач возможно при учете определенных допущений, например, в электрической цепи какой-либо параметр изменяется по периодическому закону.
При изменении передаточной характеристики цепи по сложному, но периодическому закону с частотой Ω на выходе цепи образуется спектр сигнала, содержащий составляющие с частотами ω ± Ω; ω + 2 Ω и т.д., где ω - частота входного сигнала.
В линейной параметрической цепи никакого взаимодействия между спектральными составляющими не происходит, т. е. выходной сигнал не содержит спектральных составляющих с комбинационными частотами.
7 Лекция № 7. Реактивные параметрические цепи
Содержание лекции: параметрическое усиление.
Цели лекции:
- изучить принципы параметрического усиления;
- рассмотреть принципы параметрических преобразования и детектирования.
Для построения параметрических усилителей используют нелинейные энергоемкие элементы (емкости и индуктивности). Усиление сигналов основано на том, что амплитуда сигнального напряжения Uc существенно меньше амплитуды управляющего Uy. В этом случае сигнальное напряжение ис не оказывает влияния на изменение, например, дифференциальной емкости нелинейного конденсатора. При этом, изменение величины дифференциальной емкости (уменьшение) под действием управляющего напряжения иу в параметрическом элементе не приводит к изменению заряда, накопленного в емкости. В то же время это способствует увеличению сигнального напряжения на емкости.
На рисунке 7.1 показаны диаграммы скачкообразного изменения емкости нелинейного конденсатора и изменения напряжения на нем. Изменение напряжения на емкости показано при условии, что входное напряжение изменяется по гармоническому закону.
Заряд, накопленный в конденсаторе (q=CU), может мгновенно измениться. Если каким-либо способом уменьшить емкость конденсатора, сохраняя накопленный заряд, то, соответственно, увеличится напряжение на конденсаторе. Однако, для получения этого эффекта необходимо, чтобы уменьшение емкости совпадало с амплитудным значением напряжения на емкости, а рост емкости происходил тогда, когда напряжение на ней будет равно нулю. Этого можно достичь при условии, что частота сигнального напряжения будет в 2 раза меньше частоты управляющего напряжения.
Изменять емкость конденсатора скачком весьма сложно, поэтому при построении параметрических усилителей в качестве управляющего напряжения, как правило, используют сигнал, изменяющийся по гармоническому закону. Однако, как при скачкообразном изменении емкости конденсатора, так и при гармоническом, должно соблюдаться условие по уменьшению емкости при максимальном амплитудном напряжении и увеличении емкости при минимальном напряжении на ней.

Рисунок 7.1 – Диаграммы скачкообразного изменения емкости параметрического конденсатора и изменения напряжения на нем
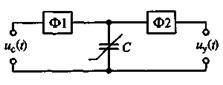
Рисунок 7.2 – Функциональная схема параметрического усилителя
На рисунке 7.2 приведена функциональная схема параметрического усилителя. Рассмотрим его работу. Усилитель включает параметрический конденсатор С, емкость которого изменяется по нелинейному закону. Фильтр Ф1 препятствует прохождению тока от источника управляющего напряжения uy(t) = Uycos(ωyt + φ) с частотой ωу к источнику сигнального напряжения, а фильтр Ф2 исключает протекание тока от источника сигнального напряжения ис(t) = Uccos(ωct) с частотой ωс и частотами, близкими к ней, к источнику управляющего напряжения. Учитывая принцип параметрического усиления, отметим, что частоты источников управляющего uy(t) и сигнального ис(t) напряжений должны отвечать условию ωу = 2ωс; кроме того, амплитуда Uy управляющего напряжения uy(t) должна быть существенно больше амплитуды Uc сигнального напряжения ис(/).
В соответствии с принципом параметрического усиления на рисунке 7.3 приведена электрическая схема одноконтурного параметрического усилителя. Усилитель включает конденсатор с нелинейной емкостью Снел, конденсатор Ск и индуктивную катушку LK,, образующих колебательный контур. Проводимость нагрузочного элемента GH=1/RH. Разделительные конденсаторы Ср1 и Ср2 препятствуют прохождению тока от источника постоянного напряжения U0 к источникам сигнального ис(t) и управляющего uy(t) напряжений. Источник постоянного напряжения U0 используется для установления рабочей точки нелинейного конденсатора Снел. Индуктивная катушка L препятствует прохождению переменных токов от источников сигнального ис(t) и управляющего uy(t) напряжений к источнику постоянного напряжения U0.

Рисунок 7.3 – Электрическая схема одноконтурного параметрического усилителя
Достоинством одноконтурного параметрического усилителя является его относительная простота, однако, эта простота приводит к ряду недостатков этого усилителя, к числу которых относятся следующие.
Во-первых, фаза реально усиливаемого сигнала неизвестна. Кроме того, частота входного сигнала изменяется в некотором частотном диапазоне. Это приводит к неравенству частоты источника сигнала и деленной пополам частоты источника управляющего напряжения (ωс ≠ ωу/2) и, как следствие, к биениям выходного сигнала и к снижению коэффициента усиления. Во-вторых, коэффициент усиления одноконтурного параметрического усилителя имеет малую величину.
От недостатков, присущих одноконтурному параметрическому усилителю, свободен двухконтурный усилитель, эквивалентная схема которого приведена на рисунке 7.4. В этом усилителе конденсатор с нелинейной емкостью, источник управляющего напряжения и источник постоянного напряжения, определяющего рабочую точку нелинейного конденсатора, заменены линейным конденсатором C(t), емкость которого изменяется во времени по линейному закону. Кроме того, в нем имеется два колебательных контура: первый контур состоит из индуктивной катушки LKl, конденсатора Ск1 и нагрузочной проводимости GHl, а второй образован индуктивной катушкой LК2, конденсатором Ск2 и проводимостью нагрузки Gh2. Источник сигнала представлен источником тока jc(t) с внутренней проводимостью Gi.
Для нормальной работы двухконтурного параметрического усилителя резонансные частоты первого ω01 и второго ω02 контуров и частота управляющего напряжения ωу должны удовлетворять условиям ω01=ωс, ω02>> ω01 и ωу = ω01 + ω02. В этом случае комбинационные частоты ωк= ωу–ωс будут находиться вне полосы пропускания первого контура. Сигналы с частотами ωс не будут попадать в полосу прозрачности второго контура, а будут выделяться первым контуром.
Достоинством параметрических усилителей в сравнении, например, с транзисторными усилителями является низкий уровень шума. Действительно, в нелинейной емкости, в качестве которой может использоваться обратносмещенный p-n-переход, поток носителей заряда существенно меньше, чем в транзисторе. Соответственно, в нелинейной емкости существенно меньше и шум, вызванный носителями заряда. Кроме того, нелинейную емкость, но не транзистор, можно использовать при температурах, близких к абсолютному нулю. Это еще больше позволяет снизить уровень шума.
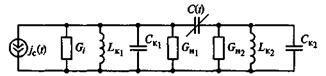
Рисунок 7.4 –Эквивалентная схема двухконтурного параметрического усилителя
Как правило, параметрические усилители находят применение в области высоких и сверхвысоких частот. Качественная работа электронных устройств в этом диапазоне частот тесно связана с высокими требованиями, которые предъявляются к их конструкции. Учитывая диапазон частот, параметрические усилители, как правило, выполняют на базе полосковых линий. Основная сложность при проектировании параметрических усилителей состоит в разработке цепей развязки между нелинейной емкостью и цепями подачи сигналов.
Параметрическое преобразование частоты. При рассмотрении преобразования частоты электронными устройствами, построенными на базе нелинейных резисторов, отметим, что на одну пару входов преобразователя поступает входной сигнал uc(t) частотой ωс, а на вторую пару входов — колебания гетеродина uг(t) частотой ωг. На выходе преобразователя формируется сигнал с комбинационными частотами ωг+ωс или ωг–ωс. Аналогичный преобразователь частоты (ПЧ) можно рассматривать как цепь, построенную на базе параметрического резистора. В таком ПЧ в качестве управляющего напряжения выступает сигнал гетеродина uг(t). При выполнении условия Uг>>Uc в преобразователе дифференциальная крутизна транзистора S(t) имеет линейную зависимость в окрестности рабочей точки транзистора (см. рисунок 6.1).
Приложение малого входного напряжения uc(t) к параметрическому резистору, в качестве которого можно использовать биполярный транзистор, приведет к линейному изменению крутизны транзистора. В этом случае ток параметрического резистора будет содержать слагаемые, изменяющиеся с частотами ωг+ωс и |ωг–ωс|. Настроив колебательный контур на выходе параметрического преобразователя частоты на одну из этих комбинационных частот, можно выделить спектральную составляющую сигнала в окрестности частоты, полученной в ходе преобразования частоты.
Параметрическое детектирование. Структурная схема синхронного детектора содержит перемножитель двух сигналов и фильтр нижних частот. Это устройство также можно рассматривать в качестве параметрического детектора. В общем случае в параметрическом детекторе амплитуда Uoп опорного напряжения uon(t) = Uoncos(ωont + φоп) существенно выше амплитуды Uвх модулированного напряжения uвх(t), т.е. Uon>>Uвх, что позволяет рассматривать перемножитель как параметрическое устройство, в котором нелинейное сопротивление управляется опорным напряжением. Тогда дифференциальная крутизна нелинейного резистора изменяется по линейному закону.
Пусть входное напряжение uвx(t) изменяется по гармоническому закону uвх(t)=Uвxcos(ωвхt+φвх) без модуляции, а частоты несущего колебания входного сигнала и опорного напряжения равны между собой ωоп = ωвх. При этом ток, проходящий через параметрический резистор, включает три слагаемых: первое слагаемое изменяется с частотой ωвх, второе — с частотой 2ωвх, а третье слагаемое представляет собой постоянный ток. На выходе перемножителя включен ФНЧ, который подавляет составляющие тока с частотами ωвх и 2ωвх. На выходе синхронного детектора будет присутствовать только постоянное напряжение (ток).
Пусть входной сигнал является модулированным сигналом uвх(t)=Uвxcos[(ωвх+Ω)t+φвх], где Ω — частота изменения низкочастотной составляющей входного сигнала (Ω<<ωвх). Тогда выходной сигнал параметрического детектора будет содержать спектральные составляющие только модулирующего сигнала, изменяющегося с частотой Ω<<ωвх.
Формирование модулированных колебаний. Устройства формирования модулированных колебаний можно рассматривать как параметрические цепи преобразования сигналов. При формировании АМ-колебаний используется параметрическое сопротивление, а при формировании ЧМ-колебаний — параметрическая емкость. В качестве примера рассмотрим амплитудный модулятор, в котором транзистор можно рассматривать в качестве нелинейного резистора, который в окрестности рабочей точки управляется модулирующим сигналом uy(t) = Uycos(Ω t) (управляющий сигнал).
На рисунке 7.5 приведена принципиальная схема модулятора ЧМ-колебаний. В этом модуляторе в качестве нелинейной емкости используется варикап VDI, емкость которого зависит от управляющего напряжения uупp(t), являющегося модулирующим сигналом. Этот сигнал изменяет емкость варикапа в окрестности рабочей точки.
Таким образом, использование параметрических элементов (сопротивление, емкость, индуктивность) позволяет проектировать различные радиотехнические устройства, работающие в широкое частотном диапазоне и имеющие относительно простые схемные решения.
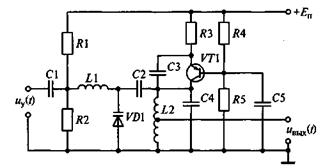
Рисунок 7.5 – Схема модулятора ЧМ-колебаний
8 Лекция № 8. Цифровые фильтры
Содержание лекции: особенности цифровых фильтров.
Цели лекции:
- изучить принцип цифровой обработки сигналов;
- изучить алгоритм линейной цифровой фильтрации.
Устройства, осуществляющие линейную фильтрацию сигналов цифровыми методами (т.е. с использованием средств цифровой вычислительной техники), получили название цифровых фильтров.
Цифровую обработку сигналов проводят в целях оценки их параметров или преобразования в другую форму средствами вычислительной техники.
Цифровую фильтрацию сигналов осуществляют на основе выполнения операций только трех типов: задержки, сложения и умножения. Поэтому алгоритм цифровой обработки может быть реализован двумя способами:
1) программным: универсальная ЭВМ выполняет цифровую обработку сигнала по специальной программе;
2) аппаратурным: специализированное вычислительное устройство выполняет только три указанные операции.
Программный способ реализации эффективен при моделировании различных систем цифровой обработки сигналов, так как позволяет легко изменять алгоритм фильтрации.
Цифровые фильтры, предназначенные для работы в системах автоматики, телемеханики и связи, должны обрабатывать сигналы в реальном масштабе времени, т.е. за время, не большее периода дискретизации входных сигналов, что является их особенностью. Использование универсальных ЭВМ для этих целей практически невозможно из-за их сравнительно низкого быстродействия и значительной стоимости.
Аппаратурная реализация цифровых фильтров основана на использовании цифровых интегральных схем, представляющих собой регистры сдвига, сумматоры, умножители и т.п. Она стала возможной в связи с появлением больших интегральных схем, имеющих большие функциональные возможности, высокое быстродействие, стабильность характеристик, надежность, компактность.
По сравнению с аналоговыми фильтрами, цифровые имеют ряд достоинств, к которым относят высокую стабильность параметров, простоту изменения характеристик, хорошую их повторяемость в процессе производства. При использовании цифровых фильтров не возникает задачи согласования нагрузок, они могут работать в диапазоне от сверхнизких частот до частот, измеряемых мегагерцами. Вместе с тем цифровым фильтрам присущи и некоторые специфические особенности, обусловленные цифровым характером обработки сигналов. Цифровые фильтры используют в системах управления различными объектами и процессами, где алгоритмы обработки настолько сложны, что не могут быть реализованы аналоговыми устройствами.
Другая важная область применения цифровых фильтров — это обработка низко- и инфранизкочастотных сигналов, когда использование аналоговых устройств затруднено из-за больших габаритных размеров катушек индуктивностей и конденсаторов. Области применения цифровых фильтров будут непрерывно расширяться в связи с появлением и широким распространением микропроцессоров, специализированных БИС и т.п., уменьшением их стоимости и повышением быстродействия.
В настоящее время широко используются методы обработки радиотехнических сигналов с помощью микроэлектронных вычислительных устройств и систем. Выполняя, подобно аналоговым цепям, операцию частотной фильтрации, цифровые фильтры (ЦФ) обладают рядом существенных преимуществ. Сюда относятся, например, высокая стабильность параметров, возможность получать самые разнообразные формы АЧХ и ФЧХ. Цифровые фильтры не требуют настройки и легко реализуются на ЭВМ программными методами.
Принцип цифровой обработки сигналов. На рисунке 8.1 приведена основная структурная схема цифровой обработки сигналов. Непрерывный входной сигнал x(t) поступает в аналого-цифровой преобразователь (АЦП), управляемый синхронизирующими импульсами от генератора, задающего частоту дискретизации. В момент подачи синхронизирующего импульса на выходе АЦП возникает сигнал, отображающий результат измерения мгновенного значения входного колебания в виде двоичного числа с фиксированным количеством разрядов.
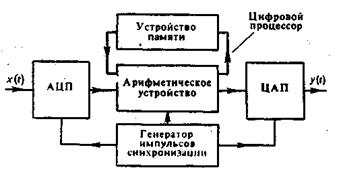
Рисунок 8.1 – Структурная схема цифровой обработки непрерывных сигналов
В зависимости от особенности построения устройства этому числу соответствует либо последовательность коротких импульсов (передача в последовательном коде), либо совокупность уровней напряжений на сигнальных шинах отдельных разрядов (передача в параллельном коде).
Преобразованный таким образом сигнал поступает в основной блок устройства, так называемый цифровой процессор, состоящий из арифметического устройства и устройства памяти. Арифметическое устройство выполняет над цифрами ряд операций, таких, как умножение, сложение и сдвиг во времени на заданное число интервалов дискретизации. В устройстве памяти может храниться некоторое число предшествующих отсчетов входного и выходного сигналов, которые необходимы для выполнения операций обработки.
Цифровой процессор преобразует поступающие в него числа в соответствии с заданным алгоритмом фильтрации и создает на выходе последовательность двоичных чисел, представляющих выходной сигнал. Если в дальнейшем необходимо иметь информацию в аналоговой форме, то используется цифро-аналоговый преобразователь (ЦАП). Однако это устройство может и отсутствовать, если сигналы подвергаются только цифровым преобразованиям.
Основной технический показатель ЦФ — быстродействие — зависит как от скорости протекания переходных процессов в микроэлектронных компонентах, так и от сложности алгоритма фильтрации.
Если в начале 70-х годов предельные частоты сигналов, обрабатываемых с помощью ЦФ, составляли несколько килогерц, то достижения современной микроэлектроники непрерывно расширяют этот диапазон. Цифровая фильтрация сигналов получила новый стимул развития с появлением относительно недорогих и надежных микропроцессоров, а также устройств памяти, выполненных по технологии больших интегральных схем (БИС).
Квантование сигналов а ЦФ. Специфика любого цифрового устройства — представление сигналов в виде последовательности чисел с ограниченной разрядностью. Поэтому мгновенное значение сигнала дискретизируется по уровню таким образом, что интервалом дискретизации (минимальной разностью между двумя соседними уровнями) служит единица младшего двоичного разряда.
В радиотехнике дискретные сигналы, уровни которых могут принимать лишь счетное множество значений, называют квантованными сигналами. Квантование сигналов приводит к специфической погрешности при обработке, которая получила название шума квантования. Прямой путь снижения той погрешности — использование двоичных чисел с большим количеством разрядов. Однако при этом неизбежно снижается быстродействие ЦФ из-за увеличения времени выполнения операций над многоразрядными числами. Поэтому на практике в микропроцессорных системах для цифровой обработки сигналов и дискретного управления обычно применяют двоичные числа с количеством разрядов от 4 до 16.
Алгоритм линейной цифровой фильтрации. Математическая теория цифровых фильтров переносит на случай дискретных сигналов все основные положения теории линейных систем, преобразующих непрерывные сигналы.
Как известно, линейная стационарная система преобразует непрерывный входной сигнал х(t) таким образом, что на ее выходе возникает колебание y{t), равное свертке функции x(t) и импульсной характеристики h(t)
y(t) =
![]() .
(8.1)
.
(8.1)
Линейный цифровой фильтр, по определению, есть дискретная система (физическое устройство или программа для компьютера), которая преобразует последовательность {хк} числовых отсчетов входного сигнала в последовательность {ук} отсчетов выходного сигнала: (х0, х1, х2, ...)=>{у0, у1, у2, ...), или сокращенно {xk}=>{yk}.
Линейный цифровой фильтр обладает тем свойством, что сумма любого числа входных сигналов, умноженных на произвольные коэффициенты, преобразуется в сумму его откликов на отдельные слагаемые.
Для того чтобы обобщить формулу (8.1) на случай дискретных сигналов, вводят понятие импульсной характеристики ЦФ. По определению, она представляет собой дискретным сигнал {hk}, который является реакцией ЦФ на «единичный импульс» (1, 0, 0, 0, ...).
Линейный ЦФ стационарен, если при смещении входного единичного импульса на любое число интервалов дискретизации импульсная характеристика смещается таким же образом, не изменяясь по форме. Например (0, 1, 0, 0, ...) =>(0, h0, hl,h2, ...),
(0, 0, 1, 0, ..)=>(0, 0, h0, h1 ...).
Рассмотрим, каким образом из свойств линейности и стационарности вытекает наиболее общий алгоритм линейной цифровой фильтрации. Пусть {хk}=(х0, х1, х2, ...) - некоторый сигнал на входе ЦФ с известной импульсной характеристикой. Запишем т-й отсчет выходного сигнала {ук}:
ут = x0hm
+
x1hm-1 +
...+ xmh0 =
![]() .
(8.2)
.
(8.2)
Формула (8.2), играющая ведущую роль в теории линейной цифровой фильтрации, показывает, что выходная последовательность есть дискретная свертка входного сигнала и импульсной характеристики фильтра. Смысл этой формулы прост и нагляден: в момент каждого отсчета ЦФ проводит операцию взвешенного суммирования всех предыдущих значений входного сигнала, причем роль последовательности весовых коэффициентов играют отсчеты импульсной характеристики. Иными словами, ЦФ обладает некоторой «памятью» по отношению к прошлым входным воздействиям.
Практический интерес представляют лишь физически реализуемые ЦФ, импульсная характеристика которых не может стать отличной от нуля в отсчетных точках, предшествующих моменту подачи входного импульса. Поэтому для физически реализуемых фильтров коэффициенты h-1, h-2, ... обращаются в нуль и суммирование в (8.2) можно распространить на все положительные значения индекса к.
9 Лекция № 9. Реализация алгоритмов цифровой фильтрации
Содержание лекции: дискретный и рекурсивный фильтры.
Цели лекции:
- изучить линейную модель цифрового фильтра;
- рассмотреть синтез цифровых фильтров
Линейная модель цифрового фильтра. Понятие «фильтр» будем использовать в широком смысле как устройство для обработки сигнала заданным способом. Как отмечалось, частотные фильтры, пропускающие определенные полосы частотных составляющих, являются одной из разновидностей фильтров.
Поскольку цифровой фильтр обрабатывает сигналы на основе использования вычислительной техники, то сигнал, поступающий на вход вычислительного устройства, должен быть цифровым, т.е. дискретным и квантованным. Как правило, исходный, подлежащий обработке сигнал является аналоговым; поэтому на первом этапе цифровой обработки его преобразуют в цифровой путем дискретизации и квантования. Это преобразование осуществляет устройство, называемое аналого-цифровым преобразователем (АЦП).
Дискретизация представляет собой замену непрерывного во времени сигнала последовательностью отсчетов (выборок), взятых через определенные интервалы времени Т. Дискретизация должна осуществляться с частотой, достаточной для сохранения точности представления непрерывного сигнала. Квантование — это замена выборок напряжения дискретного сигнала, каждая из которых может принимать бесчисленное множество значений, выборками напряжения, принимающими одно из конечного числа значений.
Квантование эквивалентно округлению числа при вычислениях и должно осуществляться с необходимой для решения задачи точностью. В результате выполнения операций дискретизации и квантования сигнал на выходе АЦП представляет собой последовательность выборок сигнала, представленных в виде, пригодном для обработки вычислительным устройством.
Квантование отсчета (выборки) можно рассматривать как появление в тракте обработки сигнала некоторой помехи (ошибки квантования), максимальное значение которой не превышает половины шага квантования. Если погрешность квантования пренебрежимо мала, то можно считать, что фильтр осуществляет преобразования точных значений выборок дискретизированного сигнала. Если требуется учет погрешности, вызванной квантованием выборок дискретизированного аналогового сигнала, то возникновение и преобразование этой погрешности цифровым фильтром следует рассматривать совместно с преобразованием квантованных отсчетов.
Таким образом, в обоих случаях можно рассматривать прохождение через фильтр последовательности отсчетов дискретного сигнала. Реакцию цепи на единичный импульс называют импульсной характеристикой цепи. Для аналоговых цепей она представляет собой непрерывную функцию G(t). Если единичный импульс подать на вход цифрового фильтра, то сигнал на его выходе будет представлять собой дискретную последовательность значений, следующих с интервалом Т, называемым интервалом (периодом) дискретизации. Этот сигнал является импульсной характеристикой цифрового фильтра.
При воздействии на цепь с импульсной характеристикой G{kT) сигналом, представляющим собой последовательность значений х(кТ), выходной сигнал у(кТ) определяется дискретной сверткой
у{кТ) =  . (9.1)
. (9.1)
Эта формула определяет значение к-й выборки. Для нахождения выходного сигнала ее следует применить многократно для последовательного вычисления у(0); у(Т); у(2Т). Реакция на единичный импульс
у(кТ) = G(kT) =
 .
(9.2)
.
(9.2)
Если реакция фильтра на единичный импульс представлена конечным числом отсчетов, то G(kT) состоит из конечного числа членов, например при к = 3
у(кТ)=G(kT)=δ(kT)g(0)+δ[(k–2)T]g(2T)+δ[(k–З)T]g(ЗT). (9.3)
Этому выражению соответствует линейная модель нерекурсивного цифрового фильтра (не имеет цепи обратной связи) (см. рисунок 9.1).
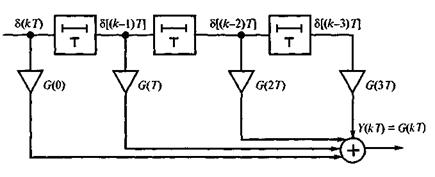
Рисунок 9.1 – Линейная модель нерекурсивного цифрового фильтра
Для практической реализации нерекурсивного фильтра импульсная характеристика G(kT) должна представлять собой последовательность с конечным числом членов.
Если импульсная характеристика содержит бесконечное число отсчетов, быстро убывающих по значению, то можно, отбросив отсчеты с малыми значениями, ограничиться конечным их числом Если же отсчеты импульсной характеристики не убывают по значению, то нерекурсивный фильтр реализовать невозможно.
Фильтр, эквивалентный нерекурсивному фильтру, имеющий цепь обратной связи, называют рекурсивным (см. рисунок 9.2). Схема и соответственно алгоритм рекурсивного фильтра проще, чем нерекурсивного. Так, для определения одного значения выходного сигнала для нерекурсивного фильтра требуется выполнить 2к операций, а для рекурсивного — только две операции. Поэтому, если импульсная характеристика цифрового (дискретного) фильтра должна иметь большое число отсчетов, то целесообразно использовать рекурсивные схемы.
Нерекурсивную схему следует применять при реализации фильтров с импульсной характеристикой, содержащей небольшое число отсчетов. В технической литературе, посвященной цифровым дискретным фильтрам, использована и другая терминология: фильтры с конечной импульсной характеристикой (КИХ-фильтры) и с бесконечной импульсной характеристикой (БИХ-фильтры). Любой реальный нерекурсивный фильтр является и КИХ-фильтром. Рекурсивные фильтры, как правило, есть БИХ-фильтры, однако, возможно построение рекурсивных фильтров, представляющих co6oй КИХ-фильтры.
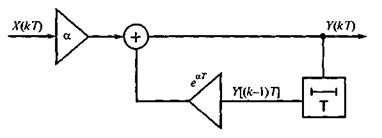
Рисунок 9.2 – Модель рекурсивного цифрового фильтра
Синтез цифровых фильтров. Большое практическое значение имеют методы синтеза ЦФ с требуемым видом импульсной или частотной характеристик ЦФ. Рассмотрим некоторые приемы синтеза ЦФ по заданным характеристикам их аналоговых прототипов.
Синтез по заданной импульсной характеристики аналогового прототипа g(t). ЦФ строится с импульсной характеристикой, которая является результатом дискретизации g(t), т.е. ее k-й отсчет g(k)=g(kΔ). Если в импульсной характеристике Цф ограничится конечным числом слагаемых, получаем реализацию в виде трансверсального фильтра. При неограниченном числе компонент g(k) следует реализация в виде рекурсивного фильтра.
Синтез ЦФ по заданной частотной характеристике ќ(ω) (или операторного коэффициента передачи K(p)). Принципиально нельзя создать ЦФ, частотная характеристика которого ќцф(ω) повторяла бы частотную характеристику аналогового прототипа ќ(ωа), т.к. ќцф(ω) является периодической функцией частоты дискретизации ωg. Однако можно потребовать, чтобы весь интервал частот ωа, характеризующий аналоговую цепь, был преобразован в отрезок частот ωц ЦФ, на котором сохраняется форма характеристики ќ(ωа), причем
![]() (9.1)
(9.1)
Если для перехода от р-плоскости (отображающей аналоговый прототип) к z-плоскости (отображающей цифровой фильтр) воспользоваться соотношением
то
формально мы от частотной характеристики аналогового эквивалента переходим к
системной функции ЦФ. Однако, если ![]() подставить
в выражения для передаточной функции аналогового прототипа ќ(р), которая
для цепей с сосредоточенными параметрами представляет собой отношение двух
полиномов от Р (дробно-рациональную функцию), получим физически нереализуемую
системную функцию ЦФ, т.к. она не выражается отношение двух полиномов от
z.
подставить
в выражения для передаточной функции аналогового прототипа ќ(р), которая
для цепей с сосредоточенными параметрами представляет собой отношение двух
полиномов от Р (дробно-рациональную функцию), получим физически нереализуемую
системную функцию ЦФ, т.к. она не выражается отношение двух полиномов от
z.
Надо найти такое преобразование Р в Z, которое привело бы к реализуемому фильтру, но вместе с тем сохраняло бы основное свойство преобразование (9.1), т.е. переводило бы точки мнимой оси на плоскости Р (точки jω) в точки единичной окружности в z-плоскости. Для синтеза ЦФ получило широкое распространение билинейное преобразование.
10 Лекция № 10. Фильтры НЧ с характеристиками Баттерворта и Чебышева
Содержание лекции: фильтры НЧ с заданными характеристиками.
Цели лекции:
- изучить фильтры НЧ с заданными характеристиками.
Фильтр Баттерво́рта — один из типов электронных фильтров. Фильтры этого класса отличаются от других методом проектирования. Фильтр Баттерворта проектируется так, чтобы его амплитудная частотная характеристика была максимально гладкой на частотах полосы пропускания.
АЧХ фильтра Баттерворта максимально гладкая на частотах полосы пропускания и снижается практически до нуля на частотах полосы подавления. При отображении частотного отклика фильтра Баттерворта на логарифмической АФЧХ, амплитуда снижается к минус бесконечности на частотах полосы подавления.
В случае фильтра первого порядка АЧХ затухает со скоростью −6 децибел на октаву (-20 децибел на декаду) (на самом деле все фильтры первого порядка независимо от типа идентичны и имеют одинаковый частотный отклик).
Для фильтра Баттерворта второго порядка АЧХ затухает на −12 дБ на октаву, для фильтра третьего порядка — на −18 дБ и так далее. АЧХ фильтра Баттерворта — монотонно убывающая функция частоты.
Фильтр Баттерворта — единственный из фильтров, сохраняющий форму АЧХ для более высоких порядков (за исключением более крутого спада характеристики на полосе подавления), тогда как многие другие разновидности фильтров (фильтр Бесселя, фильтр Чебышева, эллиптический фильтр) имеют различные формы АЧХ при различных порядках.
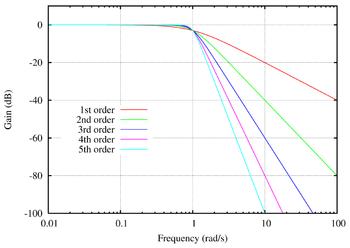
Рисунок 10.1 – АЧХ для фильтров Баттерворта нижних частот порядка от 1 до 5. Наклон характерстики — 20n дБ/декаду, где n — порядок фильтра
Амплитудно-частотная характеристика фильтра Баттерворта n-го порядка может быть получена из передаточной функции H(S)
 (10.1)
(10.1)
где n - порядок фильтра; ωc - частота среза (частота на которой амплитуда равна −3dB); G0 - коэффициент усиления по постоянной составляющей (усиление на нулевой частоте).
Легко заметить, что для бесконечных значений ![]() АЧХ становится прямоугольной
функцией, и частоты ниже частоты среза будут пропускаться с коэффициентом
усиления G0, а
частоты выше частоты среза будут полностью подавляться. Для конечных значений
АЧХ становится прямоугольной
функцией, и частоты ниже частоты среза будут пропускаться с коэффициентом
усиления G0, а
частоты выше частоты среза будут полностью подавляться. Для конечных значений ![]() спад характеристики будет
пологим.
спад характеристики будет
пологим.
Полюсы передаточной функции расположены на круге
радиуса ωc равноудалённо
друг от друга в левой полуплоскости. То есть передаточную функцию фильтра
Баттерворта можно определить лишь определением полюсов его передаточной функции
в левой полуплоскости s-плоскости. ![]() -й полюс определяется из следующего выражения:
-й полюс определяется из следующего выражения:
 , (10.2)
, (10.2)
Откуда
 .
(10.3)
.
(10.3)
Передаточную функцию можно записать в виде:
![]() . (10.4)
. (10.4)
Аналогичные рассуждения применимы и к цифровым фильтрам Баттерворта, с той лишь разницей, что соотношения записываются не для s-плоскости, а для z-плоскости.
Знаменатель этой передаточной функции называется полиномом Баттерворта.
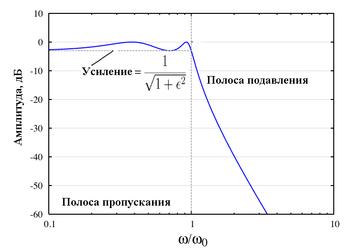
Рисунок 10.2 – АЧХ фильтра Чебышева I рода четвёртого
порядка с ω0 = 1 и ![]()
Фильтр Чебышева — один из типов линейных аналоговых или цифровых фильтров, отличительной особенностью которого является более крутой спад амплитудно-частотной характеристики (АЧХ) и существенные пульсации амплитудно-частотной характеристики на частотах полос пропускания (фильтр Чебышева I рода) и подавления (фильтр Чебышева II рода), чем у фильтров других типов. Фильтр получил название в честь известного русского математика XIX века Пафнутия Львовича Чебышева, так как характеристики этого фильтра основываются на многочленах Чебышева.
Фильтры Чебышева обычно используются там, где требуется с помощью фильтра небольшого порядка обеспечить требуемые характеристики АЧХ, в частности, хорошее подавление частот из полосы подавления, и при этом гладкость АЧХ на частотах полос пропускания и подавления не столь важна.
Различают фильтры Чебышева I и II родов.
Это более часто встречающаяся модификация фильтров Чебышева. Амплитудно-частотная характеристика такого фильтра n-го порядка задаётся следующим выражением:
 , (10.5)
, (10.5)
где ![]() — показатель пульсаций, ω0 — частота среза,
а Tn(x) — многочлен Чебышева
— показатель пульсаций, ω0 — частота среза,
а Tn(x) — многочлен Чебышева ![]() -го порядка.
-го порядка.
В полосе пропускания такого фильтра видны пульсации,
амплитуда которых определяется показателем пульсации (англ. ripple factor) . В
полосе пропускания многочлены Чебышева принимают значения от 0 до 1, поэтому
коэффициент усиления фильтра принимает значения от максимального ![]() до минимального
до минимального ![]() . На частоте среза ω0
коэффициент усиления имеет значение
. На частоте среза ω0
коэффициент усиления имеет значение ![]() , а на частотах выше неё продолжает уменьшаться с
увеличением частоты. (Примечание: обычное определение частоты среза как
частоты, когда ЛАЧХ имеет значение −3 дБ в случае фильтра Чебышева не
работает).
, а на частотах выше неё продолжает уменьшаться с
увеличением частоты. (Примечание: обычное определение частоты среза как
частоты, когда ЛАЧХ имеет значение −3 дБ в случае фильтра Чебышева не
работает).
Рисунок 10.3 – Типовая ФЧХ и фазовая задержка фильтра Чебышева I рода 10-го порядка
В случае аналогового электронного фильтра Чебышева его порядок равен числу реактивных компонентов (например, индуктивностей), использованных при его реализации.
Фильтры Чебышева часто реализуются в цифровой форме. Для того, чтобы от аналогового фильтра перейти к цифровому, необходимо над каждым каскадом фильтра осуществить билинейное преобразование. Весь фильтр получается путём последовательного соединения каскадов.
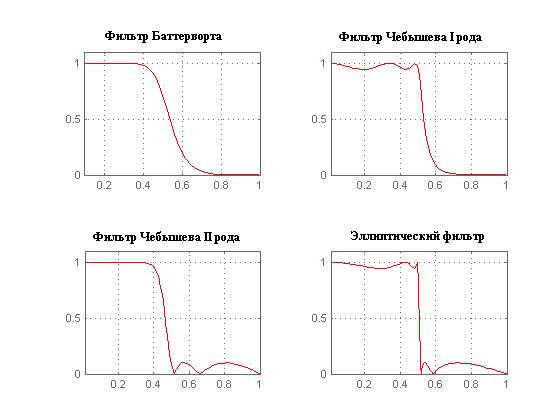
Рисунок 10.4 – По графикам видно, что амплитудная характеристики фильтров Чебышева имеет более крутой спад, чем у фильтров Баттерворта, но не такой крутой, как у эллиптического фильтра.
11 Лекция № 11. Реализация ФВЧ и ППФ
Содержание лекции: реализация полосно-пропускающих фильтров и фильтров верхних частот.
Цели лекции:
- изучить фильтры верхних частот и их реализацию;
- изучить полосно-пропускающие фильтры и их реализацию.
Фильтр верхних частот представляет собой устройство, пропускающее сигналы высоких частот и подавляющее сигналы низких частот. Передаточную функцию ФВЧ можно получить из передаточной функции ФНЧ. ФВЧ Баттерворта имеет монотонную характеристику, подобную характеристике на рисунке 11.1, тогда как характеристика фильтра Чебышева характеризуется пульсациями в полосе пропускания (см. рисунок 11.2).
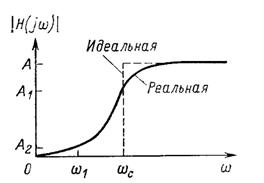
Рисунок 11.1 – Идеальная и реальная АЧХ ФВЧ
Рисунок 11.2 –АЧХ ФВЧ с характеристикой Чебышева
Полосно-пропускающий фильтр представляет собой устройство, которое пропускает сигналы в диапазоне частот с полосой пропускания BW, расположенной приблизительно вокруг центральной частоты ω0.
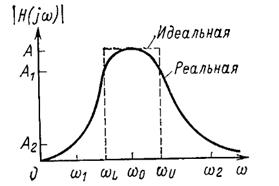
Рисунок 11.3 – Идеальная и реальная АЧХ ППФ
На рисунке 11.3 представлены идеальная и реальная АЧХ полосно-пропускающего фильтра. ωL и ωU соответственно нижняя и верхняя частоты среза фильтра. В полосе пропускания частная характеристика никогда не превышает некоторого определенного значения.
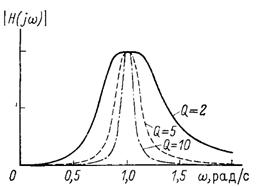
Рисунок 11.4 – АЧХ ППФ Баттерворта при различных значениях добротности
Отношение Q=ω0/BW есть характеристика качества самого фильтра и является мерой его избирательности. Высокому значению Q соответствует сравнительно узкая полоса пропускания и наоборот для низкого значения Q – широкая полоса пропускания.
Рисунок 11.5 – АЧХ реального фильтра Баттерворта 4-го порядка
12 Лекция № 12. Структура и общие сведения о радиоприемных устройствах
Содержание лекции: основные сведения о радиоприемных устройствах.
Цели лекции:
- изучить назначение и принцип действия приемника;
- изучить классификацию и структурные схемы приемников;
- изучить основные функциональные узлы приемников.
Радиоприемным называется устройство, предназначенное для приема сообщений, передаваемых с помощью электромагнитных волн (ЭМВ) в радиочастотном и оптическом диапазонах.
Место радиоприемного устройства в любой системе передачи информации отражает рисунок 12.1.
Рисунок 12.1 – Место радиоприемного устройства в любой системе передачи информации
Основными функциями РПрУ являются:
1. Улавливание радиоволн и преобразование энергии электромагнитного поля в энергию электрических колебаний. Эту функцию выполняет антенна РПрУ.
2. Преобразование принятого радиочастотного колебания в напряжение (или ток), изменяющиеся в соответствии с переданным сообщением. Для этого требуется осуществить фильтрацию сигнала от помех, его усиление и детектирование. Эти функции выполняет собственно радиоприемник.
3. Воспроизведение переданного сообщения в виде звука, изображения на экране, записи текста и т.п. Укрупненная структурная схема РПрУ, определяемая его основными функциями показана на рисунке 12.2.
Рисунок 12.2 – Структурная схема радиоприемного устройства
Основным показателем качества радиотракта приемника является чувствительность. Чувствительностью называется способность приемника принимать слабые радиосигналы. Избирательность (селективность) приемника – это способность приемника отделять полезный сигнал от мешающих. Важным показателем приемника, определяемым по его АЧХ, является полоса пропускания, оцениваемая полосой частот вблизи резонансной частоты, где уровень амплитудно-частотных искажений не превышает допустимый, задаваемый неравномерностью АЧХ в полосе пропускания. Радиотракт предназначен для усиления сигнала до уровня, необходимого для нормальной работы детектора (без искажений), и подавления мешающих сигналов. Детектор преобразует высокочастотное колебание, модулированное передаваемым сообщением, в низкочастотное, соответствующее модулирующему сигналу.
Структурные схемы приемников различаются прежде всего построением радиотракта. Наиболее простым является приемник прямого детектирования (детекторный), структура которого представлена на рисунке 12.3.
Рисунок12.3 – Структурная схема приемника прямого детектирования
Схема приемника прямого усиления представлена на рисунке 12.4. Этот приемник отличается наличием усилителей радиочастоты, настроенных на частоту принимаемого сигнала и перестраиваемых вместе с ВЦ.

Рисунок12.4 – Структурная схема приемника прямого усиления
Недостатками этого приемника являются:
1. Сложность системы настройки.
2. Трудность обеспечения усиления на высокой частоте, а, следовательно, сравнительно низкая чувствительность приемника. Возникает опасность самовозбуждения.
3. Непостоянство параметров радиотракта при перестройке.
Перечисленных недостатков лишена схема супергетеродинного приемника.
Рисунок12.5 – Структурная схема супергетеродинного приемника
В радиотракте помимо усиления сигнала происходит преобразование частоты принятого колебания. В таком приемнике сигналы частоты c fс преобразуются в преобразователе частоты (ПрЧ), состоящем из смесителя (См), генератора вспомогательных колебаний – гетеродина (Г) и фильтра (например, фильтра сосредоточенной селекции ФСС) в колебания фиксированной, так называемой промежуточной частоты fпр, на которой и осуществляются основное усиление и частотная избирательность.
В качестве промежуточной используется разносная частота fпр = fг - fс .
Структурная схема приемника прямого преобразования приведена на рисунке 12.6.
Рисунок12.6 – Структурная схема приемника прямого преобразования
Такой приемник отличается от супергетеродинного тем, что выбирается fг=fc и при разностном преобразовании fпр = 0 . Гетеродин синхронизирован относительно сигнала с точностью до фазы цепью синхронизации ЦС. К его достоинствам относятся простота и отсутствие ЗК. Недостатки – низкая помехоустойчивость цепи синхронизации, содержащей систему ФАПЧ, и повышенные требования к линейности тракта.
13 Лекция № 13. Помехи радиоприему
Содержание лекции: побочные каналы приема в супергетеродинном приемнике.
Цели лекции:
- изучить виды внешних помех и их источники;
- изучить внутренние шумы в приемниках;
- изучить статистические характеристики шума.
Основным источником помех в супергетеродинном приемнике является наличие побочных (комбинационных) каналов приема. Предположим, что приемник принимает сигнал от радиостанции на частоте fг = fс (см. рисунок 13.1). Для этого в приемнике устанавливается частота гетеродина fг , при которой fпр = fг - fс. При этом, если на вход ПрЧ поступает сигнал, который при взаимодействии с частотой гетеродина или ее гармониками также преобразуется в промежуточную частоту, то такой сигнал проходит на выход ПрЧ так же, как и полезный сигнал.
Рисунок13.1 – Спектральная диаграмма супергетеродинного приемника
Частоты нескольких побочных каналов приема показаны на рисунке 13.1 и соответствуют частотам f1, f2, f3, f4. При этом предполагается, что в ПрЧ не образуются гармоники сигнала (n=1), то есть преобразователь линеен относительно сигнала. В противном случае сигнал при переносе на промежуточную частоту будет искажен. Частота f1 = fпр соответствует каналу прямого прохождения. Сигнал этой частоты проходит через ПрЧ без преобразования как через усилитель (если ПрЧ транзисторный) или как через пассивную цепь (ПрЧ диодный). Частота fз = fзк соответствует зеркальному каналу, отстоит от полезного сигнала на 2fпр и взаимодействует с гетеродином так же, как полезный сигнал fзк - fг = fпр.
Наиболее опасным из побочных каналов приема является зеркальный канал, поэтому одним из основных показателей РПрУ является избирательность по зеркальному каналу Seзк. Ввиду того, что ВЦ и УРЧ в РПрУ выполняют функцию предварительной фильтрации, их обычно называют преселектором.
Очевидно, выбор промежуточной частоты влияет на основные показатели РПрУ. Чем выше fпр, тем легче обеспечить избирательность по зеркальному каналу, но тем труднее обеспечить большое устойчивое усиление и фильтрацию в тракте промежуточной частоты. С другой стороны, понижение fпр приводит к ухудшению избирательности преселектора и увеличению вероятности излучения колебаний гетеродина через приемную антенну (ввиду близости частоты гетеродина к частоте настройки преселектора). Таким образом, выбор частоты fпр ограничен противоречивыми требованиями. Поэтому в ряде приемников используется многократное (чаще двукратное) преобразование частоты. При первом преобразовании частота f пр выбирается достаточно высокой, чтобы проще отфильтровать помехи по ЗК, при втором преобразовании – достаточно низкой, что облегчает фильтрацию соседних станций и обеспечение большого усиления.
Особое значение имеют шумовые показатели РПрУ, определяющие его предельную чувствительность. Для оценки уровня собственных шумов приемника (или любого четырехполюсника) вводится понятие коэффициента шума Ш, оценивающего уровень собственных шумов РПрУ в общем шуме на выходе устройства.
Для любого четырехполюсника коэффициент шума представляет собой
 .
(13.1)
.
(13.1)
Здесь Pшвых ид - мощность шума на выходе идеального нешумящего четырехполюсника; Pшсоб – собственные шумы четырехполюсника.
Интерпретацией коэффициента шума может служить отношение
 ,
(13.2)
,
(13.2)
оценивающем ухудшение Pc/Pш на выходе четырехполюсника за счет добавления собственных шумов.
Иногда, особенно для малошумящих устройств, удобно пользоваться понятием шумовой температуры. Шумовая температура Тш показывает, на сколько надо изменить температуру сопротивления источника сигнала Rи , чтобы, считая его не шумящим, получить на выходе такую же мощность шума, какую дает реальный усилитель. При этом Тш=(Ш-1)*Т0.
Коэффициент шума многокаскадного устройства
 (13.3)
(13.3)
Отсюда следует, что влияние каждого последующего каскада на общий коэффициент шума меньше предыдущего, и это уменьшение тем заметнее, чем выше коэффициент передачи предыдущих каскадов. Поэтому в РПрУ для обеспечения высокой предельной чувствительности, т.е. низкого коэффициента шума, стремятся первые каскады (УРЧ) выполнять малошумящими и с возможно большим коэффициентом усиления по мощности.
14 Лекция № 14. Входные цепи радиоприемных устройств
Содержание лекции: основные сведения о входных цепях радиоприемных устройств.
Цели лекции:
- изучить назначение и характеристики входных цепей;
- изучить ВЦ различных диапазонов и их особенности.
Входной цепью (ВЦ) называется цепь, соединяющая антенну с первым усилительным или преобразовательным каскадом приемника. Основное назначение ВЦ – передача полезного сигнала от антенны ко входу первого активного элемента (АЭ) приемника и предварительная фильтрация помех.
Отсюда основные требования к показателям качества:
1. Возможно больший коэффициент передачи по мощности КрВЦ . При этом уменьшается и коэффициент шума ШВЦ=1/КрВЦ , а следовательно, уменьшается коэффициент шума всего приемника.
2. Обеспечение предварительной фильтрации накладывает требования к селективности по зеркальному каналу Seзк , а следовательно, и к допустимой неравномерности АЧХ в полосе пропускания приемника.
3. Обеспечение перестройки ВЦ в заданном диапазоне от f0min до f0max.
4. Допустимые изменения резонансного коэффициента передачи K0 по диапазону.
5. Допустимая расстройка контуров ВЦ за счет вносимых реактивных проводимостей (в первую очередь со стороны антенны).
Обычно ВЦ представляет собой пассивный четырехполюсник, содержащий один или несколько колебательных контуров (резонаторов),
настроенных на частоту принимаемого сигнала. Наибольшее распространение получили одноконтурные ВЦ, особенно в приемниках с переменной настройкой, как наиболее простые, обладающие наименьшими потерями, следовательно наибольшим Кр. В радиовещательных приемниках ДВ и СВ применяются двухконтурные ПФ.
ВЦ классифицируются по виду фильтров и способам связи входного контура с антенной и входом следующего каскада. На рисунке 14.1. приведена схема с трансформаторной связью с антенной и автотрансформаторной со входом следующего каскада. В схеме рисунка 14.2. использованы емкостная связь с антенной и полное подключение входного контура ко входу АЭ. В схеме рисунка 14.3. входной контур связан с антенным фидером через автотрансформатор. Кроме того, существуют непосредственная связь входного контура с антенной (ВЦ с ферритовой магнитной антенной) и комбинированная.
Рисунок14.1 Рисунок14.2
Рисунок 14.3 – Автотрансформаторная связь контура с антенной
Плавно настраивать контуры в заданном диапазоне частот можно, изменяя индуктивность или емкость (либо то и другое). Однако целесообразнее настройку осуществлять изменением емкости, так как только в этом случае добротность контура, определяющая его резонансный коэффициент передачи, не зависит от частоты настройки. Следовательно, настройка емкостью сопровождается менее резким изменением параметров контура (полоса пропускания и эквивалентное сопротивление пропорциональны частоте). При настройке емкостью коэффициент перекрытия диапазона
 (14.1)
(14.1)
Если приемник должен работать в широком диапазоне частот (Кд>3), то диапазон разбивают на поддиапазоны. Переход от одного поддиапазона на другой осуществляют переключением индуктивностей. Основными способами разбиения диапазона на поддиапазоны являются разбиения с постоянным частотным интервалом (f0imax-f0imin=Δfпд=Const) и с постоянным коэффициентом перекрытия Кпд=f0imax/f0imin=Const. При втором способе обычно требуется меньшее число поддиапазонов, поэтому он более экономичен. В то же время с увеличением частоты в этом случае возрастает плотность настройки.
Вместо громоздких механических конденсаторов переменной емкости (КПЕ) в настоящее время обычно применяют варикапы, главное преимущество которых – малые размеры, механическая надежность, простота автоматического и дистанционного управлений настройкой.

Рисунок 14.4 – Схема ВЦ на базе варикапа
Недостатком варикапов является существенная нелинейность их характеристик. Ослабить нелинейные эффекты можно, используя встречно-последовательное включение двух варикапов.
Коэффициент передачи K0 ВЦ максимален при одинаковом шунтировании контура как со стороны антенны, так и со стороны входа следующего каскада, т.е. когда
![]() (14.2)
(14.2)
Очевидно, значение K0max зависит от коэффициента шунтирования Ψ. При Ψ = 1 (m1=m2=0) K0max=0 (нет передачи энергии из антенны на вход АЭ). При Ψ>>1 (контур с малыми потерями) имеем наибольшее возможное значение
 (14.3)
(14.3)
В случае идеального контура без потерь равенство вносимых проводимостей соответствует одновременному согласованию входного контура как с антенной, так и со входом следующего каскада, что и обеспечивает получение наибольшего теоретически возможного коэффициента усиления. На самом деле условие не соответствует согласованию ни с одной стороны, поэтому иногда называется условием оптимального рассогласования. При работе с настроенными антеннами обычно стараются согласовать цепь антенны с ВЦ. Условие согласования предполагает равенство вносимой из антенной цепи в контур активной проводимости и собственной резонансной проводимости контура с учетом внесенной входной проводимости АЭ:
![]() (14.4)
(14.4)
Необходимый для согласования коэффициент включения
![]() (14.5)
(14.5)
15 Лекция № 15. ВЦ различных диапазонов
Содержание лекции: ВЦ при работе с настроенными и ненастроенными антеннами.
Цели лекции:
- изучить элементы входных цепей и защиты приемника;
- изучить основы расчета входных цепей различных диапазонов частот.
При работе на частотах ниже 100 МГц контур входной цепи реализуется на сосредоточенных LC - элементах.
На частотах выше 300 МГц катушка индуктивности контура вырождается в один неполный виток, а требуемая емкость становится соизмеримой с входной емкостью транзистора совместно с емкостью монтажа; контур превращается в отрезок линии.
Таким образом, в диапазоне длин волн короче 1м в качестве колебательного контура используются цепи с распределенными параметрами.
Колебательные контуры с сосредоточенными параметрами применяются до частот порядка 200 – 220 МГц, т.е. в метровом и более длинноволновых диапазонах.
В дециметровом диапазоне волн во входных цепях применяют коаксиальные резонаторы. Они представляют собой четвертьволновые отрезки коаксиальных линий, короткозамкнутых на одном конце.
Достоинством таких резонаторов является высокая добротность (десятки тысяч), стабильность, механическая прочность, жесткость конструкции, совершенное самоэкранирование, что устраняет нежелательные связи с другими элементами и потери на излучение.
Коаксиальные резонаторы хорошо сопрягаются с металлокерамическими лампами, с дисковыми выводами. В большинстве случаев потери, вносимые в резонансную линию, намного превосходят ее собственные, поэтому можно считать ее идеальной, без потерь. Связь резонансной линии с антенным фидером может быть автотрансформаторная (с помощью отвода от внутреннего провода, см. рисунок15.1а), трансформаторная (витком связи, см. рисунок15.1б), емкостная (см. рисунок15.1в).
Настройку резонансных линий можно производить изменением емкости или действующей длины lk.
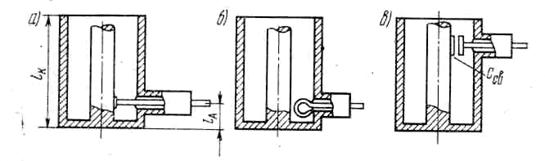
Рисунок 15.1 – Связь коаксиального резонатора с антенной при помощи
отвода (а), витка связи (б), емкости (в)
В сантиметровом и миллиметровом диапазонах волн входная цепь приемника состоит из волноводного тракта, отдельные участки которого представляют собой одиночные или связанные объемные резонаторы. Они образуются замкнутой металлической оболочкой, во внутренней полости которой возбуждается электромагнитное поле с помощью отверстия в стенке резонатора, петли или штыря (см. рисунок15.2).
Достоинства объемных резонаторов: высокая добротность, стабильность, удобные размеры, почти идеальная экранировка.
Объемный резонатор может служить трансформирующим элементом.
В последнее время вместо отрезков коаксиальных линий и волноводов используют отрезки микрополосковых линий.

Рисунок 15.2 – Виды связи объемного резонатора:
а – при помощи диафрагмы; б – петли; в – зонда
Входные устройства приемников СВЧ в конструктивном отношении нераздельно связаны с высокочастотным блоком, содержащим лампу бегущей волны, параметрический усилитель, усилитель на туннельном диоде или кристаллический преобразователь. Поэтому их удобнее рассматривать вместе.
16 Лекция №16. Высокочастотные усилители
Содержание лекции: основные сведения об УРЧ.
Цели лекции:
- изучить транзисторные усилители и обратные связи в УРЧ;
- изучить устойчивость избирательных усилителей и способы её повышения.
Усиление принимаемых радиосигналов в приемном устройстве осуществляется в его преселекторе, т.е. на радиочастоте, и после преобразователя частоты - на промежуточной частоте. Соответственно различают усилители радиочастоты (УРЧ) и усилители промежуточной частоты (УПЧ). В этих усилителях, вместе с усилением должна обеспечиваться частотная избирательность приемника. Для этого усилители содержат резонансные цепи: одиночные колебательные контуры, фильтры на связанных контурах, различные типы фильтров сосредоточенной избирательности. Усилители радиочастоты с переменной настройкой обычно выполняют с избирательной системой, аналогичной примененной во входной цепи приемника, чаще всего это одноконтурные избирательные цепи.
В усилителях промежуточной частоты находят применение сложные типы избирательных систем, обладающие АЧХ, близкими к прямоугольным. В большинстве современных приемников используют однокаскадные УРЧ. Реже, при высоких требованиях к избирательности и коэффициенту шума, УРЧ могут содержать до трех каскадов.
К числу основных электрических характеристик усилителей относятся:
1.
Резонансный
коэффициент усиления напряжения ![]() .
.
На сверхвысоких частотах
(СВЧ) чаще применяют понятие коэффициента усиления по мощности ![]() , где
, где ![]() - активная
составляющая входной проводимости усилителя;
- активная
составляющая входной проводимости усилителя;
![]() - активная составляющая проводимость нагрузки.
- активная составляющая проводимость нагрузки.
2. Частотная
избирательность усилителя
показывает относительное уменьшение усиления при заданной расстройке ![]() . Иногда
избирательность характеризуют коэффициентом прямоугольности, например,
. Иногда
избирательность характеризуют коэффициентом прямоугольности, например, ![]() .
.
3. Коэффициент шума определяет шумовые свойства усилителя.
4. Искажения сигнала в усилителе: амплитудно-частотные, фазовые, нелинейные.
5. Устойчивость работы усилителя определяется его способностью сохранять в процессе эксплуатации основные характеристики (обычно Ко и АЧХ), а также отсутствие склонности к самовозбуждению.
На рисунках 16.1-16.3 приведены основные схемы УРЧ, а на рисунке 16.4 схема УПЧ с фильтром сосредоточенной избирательности (ФСИ) в виде электромеханического фильтра. В усилителях радиочастоты и промежуточной частоты, в основном применяют два варианта включения усилительного прибора: с общим эмиттером (общим истоком) и каскодную схему включения транзисторов.
Рисунок 16.1 – УРЧ на полевом транзисторе
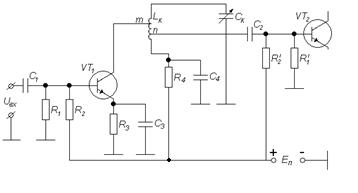
Рисунок 16.2 – УРЧ на биполярном транзисторе
Рисунок 16.3 – УРЧ с индуктивной связью с избирательной системой
На рисунке 16.1 приведена схема усилителя на полевом транзисторе с общим истоком. В цепь стока включен колебательный контур LКСК. Контур настраивается конденсатором СК (может применяться для настройки контура варикап или варикапная матрица).
В усилителе применено
последовательное питание стока через фильтр
R3C3 .
Напряжение смещения на затворе
VT1
определяется падением напряжения от тока
истока на резисторе
R2 ![]() . Резистор
R1
является
сопротивлением утечки транзистора
VT1
и служит для передачи
напряжения смещения на затвор транзистора.
. Резистор
R1
является
сопротивлением утечки транзистора
VT1
и служит для передачи
напряжения смещения на затвор транзистора.
Рисунок 16.4 – УПЧ с фильтром сосредоточенной избирательности
На рисунке 16.2 приведена аналогичная схема УРЧ на биполярном транзисторе. Здесь применено двойное неполное включение контура с транзисторами VT1, VT2, что позволяет обеспечить необходимое шунтирование контура со стороны выхода транзистора VT1 и со стороны входа транзистора VT2. Напряжение питания на коллектор транзистора подано через фильтр R4C4 и часть витков катушки контура LК. Режим по постоянному току и температурная стабилизация обеспечивается с помощью резисторов R1, R2 и R3. Емкость С2 устраняет отрицательную обратную связь по переменному току.
На рисунке 16.3 показана схема с трансформаторной связью контура с коллектором транзистора и автотрансформаторной связью со входом следующего каскада. Обычно, в этом случае, применяют "удлиненную" настройку контура.
На рисунке 16.4 представлена схема каскада УПЧ с ФСИ, выполненного на микросхеме 265 УВЗ. Микросхема представляет собой каскодный усилитель ОЭ - ОБ.
Усилители промежуточной
частоты обеспечивают основное усиление и селективность приемника по соседнему
каналу. Их важной особенностью является то, что они работают на фиксированной
промежуточной частоте и имеют большое усиление, порядка ![]() .
.
При использовании различных типов ФСИ, требуемое усиление УПЧ достигается применением широкополосных каскадов.
Приведенные соотношения
позволяют получить уравнение резонансной кривой усилителя. Так, при малых
расстройках,![]() .
Откуда, полоса пропускания УРЧ по уровню 0,707 (- 3дБ) равна
.
Откуда, полоса пропускания УРЧ по уровню 0,707 (- 3дБ) равна
![]() . (16.1)
. (16.1)
Резонансный коэффициент усиления одноконтурного каскада УПЧ такой же, как и у одноконтурного УРЧ
![]() (16.2)
(16.2)
Для УПЧ с двухконтурным полосовым фильтром резонансный коэффициент усиления каскада определяется выражением
![]()
(16.3)
где ![]() - фактор связи между
контурами, а
- фактор связи между
контурами, а ![]() - коэффициент связи между контурами.
- коэффициент связи между контурами.
Коэффициент усиления (по напряжению) УПЧ с любым ФСИ при согласовании фильтра на входе и выходе может быть рассчитан по формуле
![]() (16.4)
(16.4)
Здесь ![]() ,
,![]() - характеристические (волновые)
сопротивления ФСИ по входу и выходу соответственно;
- характеристические (волновые)
сопротивления ФСИ по входу и выходу соответственно; ![]() - коэффициент передачи фильтра в
полосе прозрачности (пропускания).
- коэффициент передачи фильтра в
полосе прозрачности (пропускания).
Коэффициент усиления
избирательного усилителя не должен превышать величины коэффициента устойчивого
усиления ![]() . В
общем случае,
. В
общем случае, ![]() можно
оценить из выражения
можно
оценить из выражения
 (16.5)
(16.5)
Если в качестве усилительного элемента используется каскодная схема, то необходимо подставить соответствующие значения проводимостей для каскодной схемы, например, для схемы ОЭ – ОБ
![]() (16.6)
(16.6)
В случае использования
полевых транзисторов активной составляющей проводимости
![]() можно пренебречь и
можно пренебречь и
![]() .
(16.7)
.
(16.7)
Рисунок 16.5 – Различные способы подключения четырехполюсника
обратной части схемы к усилителю
1 – Последовательная ООС – устраняется при холостом ходе на входе усилителя.
2 – Параллельная ООС – устраняется при коротком замыкании входных клемм усилителя.
3 – ООС по напряжению – четырехполюсник ООС управляется выходным напряжением. Устраняется при коротком замыкании выходных клемм усилителя.
4 – ООС по току – четырехполюсник ООС управляется выходным током. Устраняется при размыкании выходных клемм.
ООС влияет на входное и выходное сопротивление усилителя и используется для согласования каскадов (см. таблицу 16.1).
Таблица - 16.1

17 Лекция №17. Преобразователи частоты
Содержание лекции: основные сведения о преобразователях частоты.
Цели лекции:
- изучить назначение и характеристики преобразователей частоты;
- изучить общую теорию преобразования;
- изучить основные схемы транзисторных ПЧ;
- изучить гетеродины преобразователей частоты и их основные характеристики.
Преобразователем частоты называют устройство, осуществляющее перенос спектра радиосигнала из одной области частот в другую без изменения характера модуляции.
 fc
fпр
fc
fпр
fг
Рисунок 17.1 – Гетеродинный преобразователь частоты
В таком преобразователе частоты сигнал и колебания маломощного вспомогательного генератора, называемого гетеродином (Г), одновременно воздействуют на нелинейный элемент (НЭ) (или на элемент с переменным параметром).
В результате на выходе нелинейного элемента (часто называемого смесителем (См)) появляется множество комбинационных составляющих токов/напряжений с частотами fк = | ± n fг ± m fc | , где n = m = 0, 1, 2, … .
Одна из этих комбинационных частот используется в качестве новой несущей частоты выходного сигнала. Эта частота называется промежуточной частотой (fпр). Для её выделения в качестве нагрузки смесителя используют различные типы избирательных систем (ИС).
Преобразователь частоты характеризуется рядом качественных показателей, основные из которых следующие:
- коэффициент преобразования (Кп),
являющийся отношением комплексных амплитуд напряжения промежуточной частоты ![]() и частоты сигнала
и частоты сигнала ![]() :
:
![]()
- входное сопротивление
![]()
- выходное сопротивление
![]()
- крутизной преобразователя
![]()
- внутренней проводимостью
![]()
- крутизной обратного
преобразования ![]()
- входной проводимостью
преобразователя ![]()
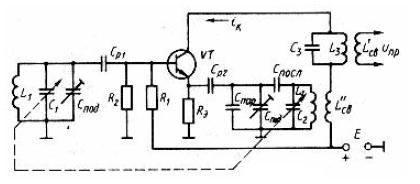
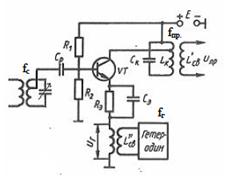
Рисунок 17.2 Рисунок 17.3

Рисунок 17.4
Применение балансных схем преобразователей частоты также позволяет уменьшить число паразитных каналов приема. Преобразователь частоты можно сделать балансным как для входного, так и для гетеродинного сигналов. Такие схемы называют двойными балансными и обычно выполняют с использованием дифференциальных усилителей или диодов. На рисунках 17.2-17.4 приведены примеры схем преобразователей частоты.
Возможны различные варианты схем подачи напряжения сигнала и гетеродина на ПЭ.
На рисунке 17.2 приведена схема ПрЧ с отдельным гетеродином на биполярном транзисторе. Напряжение сигнала подаётся в цепь базы, напряжение гетеродина – в цепь эммитера. Этим достигается хорошая развязка цепей сигнала и гетеродина.
Лучшая развязка между сигнальной и гетеродинной цепью достигается в схеме на двухзатворном полевом транзисторе, так как напряжения сигнала и гетеродина подаются на разные затворы.
Схема ПрЧ с совмещенным гетеродином представлена на рисунке 17.3 Коллекторный ток транзистора содержит помимо составляющих с частотами kf г ± fc составляющую с частотой fг, которая используется для генерирования колебаний с частотой fг. Для этого предусмотрена индуктивная связь через катушку Lсв с контуром L2C2.
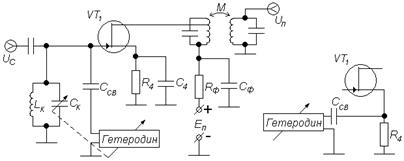
Рисунок 17.5 – Преобразователь частоты на полевом транзисторе
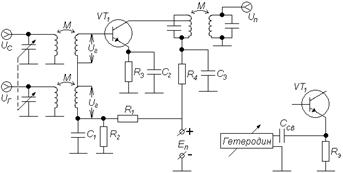
Рисунок 17.6 – Преобразователь частоты на биполярном транзисторе
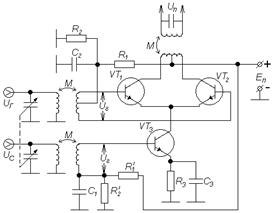
Рисунок 17.7 – Преобразователь частоты на дифференциальном каскаде
В большинстве приёмников СВЧ диапазона в качестве ПЭ используются кристаллические диоды, обладающие малой инерционностью и сравнительно малыми шумами. Недостатком их является отсутствие усилительных свойств.
Рисунок 17.8 – Диодный преобразователь частоты.
Балансный ПрЧ – соединение двух небалансных ПрЧ. Из двух подводимых к ПЭ напряжений uc и uг одно действует на оба ПЭ синфазно, а другое – противофазно. Напряжение на выходе балансного ПрЧ определяется разностью выходных токов ПЭ.

Рисунок 17.9 – Балансный преобразователь частоты
18 Лекция №18. Усилители промежуточной частоты с сосредоточенной и распределительной избирательностью
Содержание лекции: основные сведения об УПЧ.
Цели лекции:
- изучить усилители промежуточной частоты с сосредоточенной избирательностью;
- изучить усилители промежуточной частоты с распределительной избирательностью;
- изучить ФСИ на элементах, спиральные, пьезофильтры, кварцевые, ПАВ.
УПЧ по своей структуре и режиму работы, в принципе, не отличаются от УРЧ, работающих в том же диапазоне частот. Только последние каскады УПЧ работают при сравнительно больших амплитудах усиливаемого сигнала.
УПЧ классифицируют по ряду следующих признаков:
- по типу усилительного прибора (транзисторные, ламповые и т.п.);
- по числу каскадов (однокаскадные и многокаскадные);
- по применяемым избирательным цепям (одноконтурные, с полосовым фильтром, с ФСИ и т.п.);
- по ширине полосы пропускания (узкополосные и широкополосные).
Фильтры сосредоточенной избирательности (ФСИ) используются для того, чтобы получить высокую избирательность и одновременно хорошую равномерность усиления в заданной полосе пропускания, т.е. чтобы обеспечить хорошую прямоугольность формы частотной характеристики.
В настоящее время находят применение электрические LC фильтры различной сложности, электромеханические, пьезоэлектрические, пьезокерамические и пьезомеханические фильтры. Такие фильтры обычно включают на входе УПЧ, ими в основном и определяется форма частотной характеристики тракта. Остальные каскады УПЧ выполняют функцию усиления, поэтому их полосу пропускания делают более широкой, чем ФСИ, чтобы не ухудшить результирующую частотную характеристику.
Сосредоточение избирательности в одном каскаде обеспечивает большую устойчивость формы резонансной кривой тракта при изменении температуры и режима питания.
На рисунках 18.1–18.4 приведены некоторые варианты схем ФСИ.
Многозвенный LC фильтр (см. рисунок 18.1) строится на основе методов общей теории электрических фильтров. Электрические LC фильтры используются как в широкополосных, так и в узкополосных УПЧ приемников.
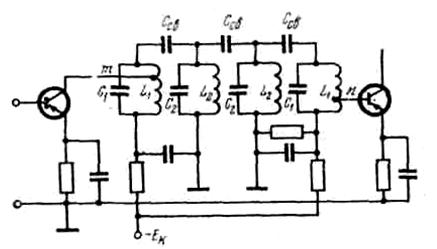
Рисунок 18.1 – Усилитель с ![]() фильтром
сосредоточенной избирательности
фильтром
сосредоточенной избирательности
Электромеханический фильтр (см. рисунок 18.2) состоит из входного преобразователя электрических колебаний в механические, механического фильтра и выходного преобразователя механических колебаний в электрические.
В настоящее время наибольшее распространение получили магнитострикционные преобразователи. Эффект магнитострикции заключается в способности некоторых металлов (никель, пермаллой) изменять свои размеры в магнитном поле.
Механический фильтр представляет собой систему механических резонаторов, которые могут иметь форму прямоугольных пластин, цилиндрических стержней или дисков, связанных между собой механическим связками.
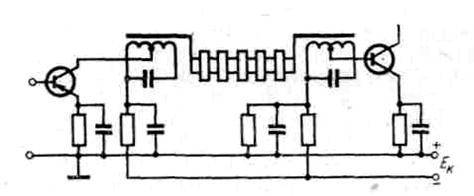
Рисунок 18.2 – Усилитель с электромеханическим фильтром
Механические колебания входного преобразователя возбуждают колебания в системе связанных механических резонаторов, каждый из которых резонирует подобно колебательному контуру с очень высокой добротностью (порядка десятков тысяч). Последний резонатор возбуждает колебания в выходном преобразователе, который преобразует механические колебания в электрические, за счет обратного эффекта магнитострикции. Такие фильтры имеют очень хорошую прямоугольность формы резонансной кривой, малые габариты и высокую температурную стабильность.
Для получения очень узких полос пропускания порядка несколько сотен или десятков герц используются пьезоэлектрические (кварцевые) фильтры (см. рисунок 18.3 а).
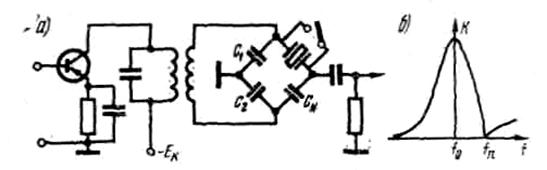
Рисунок 18.3 – Кварцевый фильтр (а) и его резонансная кривая (б)
Фильтрующее действие кварцевого резонатора, который эквивалентен последовательному колебательному контуру, основано на резком уменьшении сопротивления его в узкой полосе в окрестности резонансной частоты.
Для нейтрализации емкости кварцедержателя фильтр выполняется по мостовой схеме. Плечи моста образованы конденсаторами С1, С2, СN и емкостью кварцедержателя. На частоте fn (см. рисунок 18.3 б), где сопротивление кварца имеет емкостный характер, мост сбалансирован и напряжение на выходе отсутствует. При изменении частоты баланс моста нарушается и на выходе схемы возникает напряжение. Оно максимально на частоте последовательного резонанса f0 кварцевой пластины. Полосовые пьезоэлектрические фильтры могут быть многокварцевые мостового типа.
Пьезоэлектрический эффект может наблюдаться не только в кристаллах, но и поликристаллических веществах, после их поляризации. К таким веществам относятся так называемые пьезокерамические материалы.
Пьезокерамические материалы позволяют изготовлять методами керамической технологии резонаторы заданной формы и размеров, пригодные для построения миниатюрных фильтров. Вследствие малой стоимости и размеров можно строить довольно сложные по структуре фильтры, добиваясь хорошей прямоугольности формы частотной характеристики. Для примера на рисунке 18.4 показана схема пьезокерамического фильтра лестничного типа.
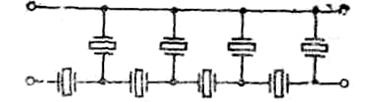
Рисунок 18.4 – Пьезокерамический фильтр лестничного типа
Пьезокерамические материалы имеют более низкую по сравнению с кварцем температурную и временную стабильность и более высокие потери. Позволяют получить относительные полосы пропускания порядка 0,1%.
Пьезомеханические фильтры – это фильтры, изготовляемые путем нанесения нескольких пар металлических пластинок на одну кварцевую пластинку. Участок кварца между двумя металлическими пластинками работает как резонатор, связь между резонаторами – механическая по кварцу. Частотные характеристики таких фильтров почти как у многокварцевых мостового типа, но габариты меньше.
19 Лекция №19. Детектирование сигналов
Содержание лекции: основные сведения о детекторах АМ-сигналов.
Цели лекции:
- изучить основные характеристики детекторов;
- изучить детектирование сильного АМ сигнала на примере диодного детектора;
- изучить воздействие помех на детектор АМ – сигналов
Детектором называют устройство, служащее для создания напряжения, изменяющегося в соответствии с законом модуляции одного из параметров входного сигнала.
Детекторы классифицируют по характеру входного сигнала и виду параметра, который подвергается модуляции, по способу выполнения и т.д.
В состав любого детектора входит нелинейный элемент для образования спектральных компонент, соответствующих модулирующей частоте, и линейный фильтр, для выделения компонент, соответствующих спектру модулирующих частот, и устранения компонент, соответствующих спектру несущего колебания и его гармоник.
Свойства детекторов принято характеризовать следующими показателями:
1. Коэффициент передачи для
немодулированного сигнала 
и для модулированного сигнала  , где
, где ![]() - прирост постоянного напряжения на
нагрузке
- прирост постоянного напряжения на
нагрузке ![]() по
сравнению с напряжением покоя
по
сравнению с напряжением покоя ![]() , вызванного приложением к входу
детектора немодулированного колебания с амплитудой
, вызванного приложением к входу
детектора немодулированного колебания с амплитудой ![]() ;
; ![]() - амплитуда выходного напряжения
модуляционной частоты
- амплитуда выходного напряжения
модуляционной частоты ![]() ;
;
![]() - амплитуда
изменения огибающей входного модулированного сигнала.
- амплитуда
изменения огибающей входного модулированного сигнала.
2. Входное сопротивление
![]() .
(19.1)
.
(19.1)
Реактивная составляющая входного сопротивления обычно является емкостной, она легко находится из схем детектора и компенсируется настройкой входного контура. Поэтому аналитически обычно рассчитывается активное входное сопротивление детектора
![]() (19.2)
(19.2)
Здесь ![]() - амплитуда первой гармоники входного
тока детектора.
- амплитуда первой гармоники входного
тока детектора.
3. Выходное сопротивление детектора, обычно также рассчитывается активная составляющая сопротивления
![]() . (19.3)
. (19.3)
4. Частотные и фазовые искажения
огибающей характеризуются, как и для усилителей, значениями нижней и
верхней граничных частот и отклонениями фазовой характеристики от касательной
к ней в точке ![]() =
=![]() на граничных
частотах.
на граничных
частотах.
5. Нелинейные искажения оцениваются по величине коэффициента нелинейных искажений
![]() (19.4)
(19.4)
где ![]() - мощности гармонических
составляющих частот модуляции;
- мощности гармонических
составляющих частот модуляции; ![]() - мощность выходного сигнала на частоте
модуляции.
- мощность выходного сигнала на частоте
модуляции.
6. Коэффициент подавления несущего колебания
 (19.5)
(19.5)
где ![]() - амплитуда несущего
колебания на выходе детектора.
- амплитуда несущего
колебания на выходе детектора.
На рисунке 19.1 показана схема последовательного амплитудного детектора, а на рисунке 19.2 - параллельного детектора.
Рисунок 19.1 – АД последовательного Рисунок 19.2 – АД параллельного
типа типа
В режиме линейного детектирования (сильный
сигнал) коэффициент передачи детектора практически не зависит от амплитуды
входного сигнала, а определяется углом отсечки тока, текущего через диод ![]() .
.
Работа детектора описывается трансцендентным уравнением
![]() ,
(19.6)
,
(19.6)
которое решается графически или подбором.
При увеличении
SR угол отсечки
![]() . При
SR
. При
SR![]() 30
30 ![]() .
.
В случае, если есть необходимость учета обратного сопротивления диода, то
 .
(19.7)
.
(19.7)
Угол отсечки увеличивается, а коэффициент передачи детектора уменьшается. Входное сопротивление последовательного линейного амплитудного детектора определяется выражением
 ,
(19.8)
,
(19.8)
а при малых углах отсечки ![]() , для параллельного детектора
, для параллельного детектора ![]() .
.
Элементы нагрузки детектора рассчитываются, исходя из условий его безынерционной работы и отсутствия искажений, обусловленных разностью величины нагрузки по постоянному току и токам модулирующей частоты.
20 Лекция №20. Частотный и фазовый детекторы
Содержание лекции: основные сведения частотных и фазовых детекторах.
Цели лекции:
- изучить принципы частотного детектирования;
- изучить виды частотных и фазовых детекторов;
- изучить воздействие помех на частотный и фазовый детектор.
Для частотного детектирования ЧМ колебание преобразуется в колебание, модулированное на амплитуде, фазе или в импульсно-модулированное колебание, с последующим применением амплитудного, фазового или пикового детекторов.
На рисунке 20.1 представлена схема балансного частотного детектора с фазовым преобразованием модуляции, выполненного на основе двухконтурного полосового фильтра L1C2 и L2C6 и двух амплитудных детекторов VD1,R,C и VD2,R,C.
Рисунок 20.1 – Балансный ЧД со связными контурами.
Транзистор VT1 обычно работает в режиме амплитудного ограничителя. Его рабочая точка и температурная стабилизация обеспечиваются резисторами R1,R2 и R3.
Таким образом, действие данного вида ЧД происходит с расстроенными относительно частоты сигнала контурами.
При использовании наклонного участка АЧХ контура возникает сопутствующая модуляция (см. рисунок 20.2), при которой закон изменения амплитуды Uк напряжения на контуре соответствует закону изменения частоты входного сигнала.
К каждому из диодов ЧД со связанными контурами приложено напряжение, складывающееся из половины напряжения на втором контуре и напряжения на первом контуре. Напряжение на диоде VD1: UД1 = U1 – 0,5U2 , напряжение на диоде VD1: UД2 = U1 – 0,5U2.

Рисунок 20.2 – Графики напряжений на выходе ЧД
С изменением частоты
![]() относительно
относительно
![]() меняется фазовый сдвиг между ЭДС
меняется фазовый сдвиг между ЭДС
![]() , наводимой во втором контуре, и током
, наводимой во втором контуре, и током
![]() во
втором контуре, что приводит к изменению напряжений
во
втором контуре, что приводит к изменению напряжений ![]() и
и
![]() на диодах, а следовательно, напряжения
на диодах, а следовательно, напряжения
![]() .
.
Фазовым детектором (ФД) называют устройство, служащее для создания напряжения, изменяющегося в соответствии с законом изменения фазы входного напряжения.
Если на входе ФД действует напряжение
![]() ,
(20.1)
,
(20.1)
то
продетектированное напряжение ![]() .
.
Положим, на входе ФД действует напряжение
![]() (см. рисунок 20.3, а), тогда напряжение на выходе ФД должно
иметь вид (см. рисунок 20.3, б.).
(см. рисунок 20.3, а), тогда напряжение на выходе ФД должно
иметь вид (см. рисунок 20.3, б.).
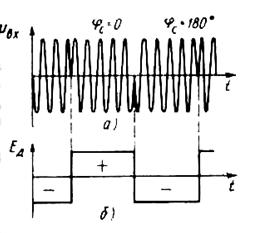
Рисунок 20.3 – Графики напряжений на входе и выходе ФД
Однотактный диодный ФД. Детектор выполнен по однотактной схеме (см. рисунок 20.4).
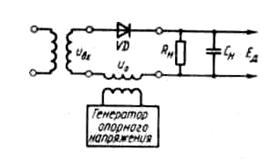
Рисунок 20.4 – Однотактный диодный ФД
Принцип действия ФД по схеме рисунка 20.4 можно пояснить, рассматривая его не как
параметрическую цепь, а как систему с амплитудным детектированием суммы двух
гармонических колебаний (![]() ).
).
На входе такого АД действует суммарное напряжение
![]() .
(20.2)
.
(20.2)
Эти два колебания имеют одинаковую частоту, но разные фазы.
В результате векторного сложения двух напряжений получают напряжение той же частоты, но другой фазы.
Амплитуда суммарного колебания
![]() .
(20.3)
.
(20.3)
Напряжение на выходе АД с коэффициентом передачи
![]()
![]() .
(20.4)
.
(20.4)
Согласно последней формуле, напряжение
![]() на выходе ФД зависит от
на выходе ФД зависит от
![]() входного
сигнала; вид зависимости
входного
сигнала; вид зависимости ![]() от
от
![]() определяется отношением
определяется отношением
![]() .
.
В общем случае характеристика детектирования существенно отличается от косинусоиды (см. рисунок 20.5, а).
Если
![]() , то
, то
 . (20.5)
. (20.5)
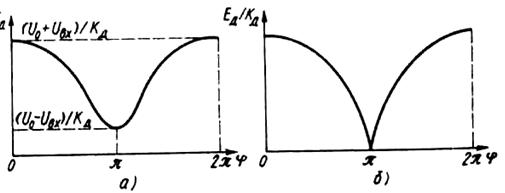
Рисунок 20.5 – Характеристики детектирования ФД
Таким образом, при малых амплитудах входного сигнала характеристика детектирования однотактного диодного ФД имеет косинусоидальную форму.
Если
![]() , то
, то
![]() , (20.6)
, (20.6)
в этом случае характеристика детектирования представляет собой циклоиду (см. рисунок 20.5, б), сильно отличающуюся от косинусоиды.
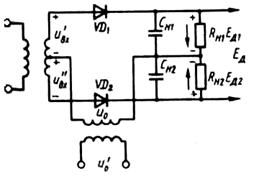
Рисунок 20.6 – Балансный фазовый детектор.
Балансный ФД – это сочетание двух однотактных ФД, каждый из которых работает на свою нагрузку и создает на них взаимно противоположные напряжения; разность этих напряжений определяет продетектированное напряжение на выходе балансного ФД. Полярность сигналов на диодах обратна, опорного напряжения – одинакова.
21 Лекция №21. Виды регулировок в приемнике
Содержание лекции: основные виды регулировок полосы пропускания и усиления.
Цели лекции:
- изучить виды регулировок в линейной части тракта;
- изучить сопряжение контуров преселектора и гетеродина;
- изучить автоматическую регулировку усиления (АРУ).
Основное назначение регулировок – обеспечение наилучших условий приема радиосигналов нужной радиостанции при непрерывно меняющихся в процессе эксплуатации радиоприемника условиях радиосвязи, а в некоторых случаях полностью автоматизированного процесса обмена информацией.
Регулировка усиления осуществляется в трактах радиочастоты, промежуточной частоты и в последетекторной части. Регулировка бывает ручной и автоматической. Рассмотрим основные способы регулировки усиления.
![]()
 Регулировка изменением
крутизны
носит название режимной регулировки,
так
как осуществляется за счёт изменения точки покоя, путём изменения
напряжения смещения на
управляющем электроде электронного прибора, то
есть режима работы. Заметим, что при
изменении напряжения смещения
UЗИО
в
полевом транзисторе меняется
практически
только
крутизна S, тогда как в биполярном
транзисторе
при изменении UБЭО
изменяются
входные и выходные параметры
транзистора
(gвх, gвых, Свх, Свых), что влияет
на показатели
усилителя.
Регулирующее напряжение Ерег может
подаваться в цепь эмиттера или
цепь базы
(биполярного)
транзистора. Однако при подаче
Ерег в цепь базы (см.
рисунок 21.1) ток
регулировки Iрег=Iдел=(5…10)Iбо во много раз
меньше тока регулировки в цепи
эмиттера.
Согласно
рисунку
21.1 UБЭ0= U0Ерег.
По мере увеличения Ерег напряжение
смещения UБЭО уменьшается,
что влечёт за собой уменьшение крутизны, а
следовательно,
и Ко. Недостатком
этой схемы является её низкая
стабильность
из-за
отсутствия резистора в цепи
эмиттера Rэ, включение
которого препятствовало бы
изменению рабочей точки, а следовательно,
приводило
бы к уменьшению эффективности регулировки.
Регулировка изменением
крутизны
носит название режимной регулировки,
так
как осуществляется за счёт изменения точки покоя, путём изменения
напряжения смещения на
управляющем электроде электронного прибора, то
есть режима работы. Заметим, что при
изменении напряжения смещения
UЗИО
в
полевом транзисторе меняется
практически
только
крутизна S, тогда как в биполярном
транзисторе
при изменении UБЭО
изменяются
входные и выходные параметры
транзистора
(gвх, gвых, Свх, Свых), что влияет
на показатели
усилителя.
Регулирующее напряжение Ерег может
подаваться в цепь эмиттера или
цепь базы
(биполярного)
транзистора. Однако при подаче
Ерег в цепь базы (см.
рисунок 21.1) ток
регулировки Iрег=Iдел=(5…10)Iбо во много раз
меньше тока регулировки в цепи
эмиттера.
Согласно
рисунку
21.1 UБЭ0= U0Ерег.
По мере увеличения Ерег напряжение
смещения UБЭО уменьшается,
что влечёт за собой уменьшение крутизны, а
следовательно,
и Ко. Недостатком
этой схемы является её низкая
стабильность
из-за
отсутствия резистора в цепи
эмиттера Rэ, включение
которого препятствовало бы
изменению рабочей точки, а следовательно,
приводило
бы к уменьшению эффективности регулировки.
Регулировка
изменением Rэкв может
осуществляться различными
способами,
например,
путём подключения
шунтирующего диода (см.
рисунок 21.2). При
Ерег<Uk диод закрыт и
не шунтирует контур,
при
![]() Ерег>Uk
диод открывается и его входное
сопротивление шунтирует
контур, его
эквивалентное
сопротивление Rэкв
уменьшается,
а следовательно, уменьшается К0.
Ерег>Uk
диод открывается и его входное
сопротивление шунтирует
контур, его
эквивалентное
сопротивление Rэкв
уменьшается,
а следовательно, уменьшается К0.
Аттенюаторная регулировка, когда между каскадами включают аттенюатор с переменным коэффициентом передачи. Используются регулируемые делители, ёмкостные делители на варикапах, мостовые схемы. Например, на рисунке 21.3 приведена схема регулируемого аттенюатора на диодах Д1Д3. При |Eрег|<|Uo| диоды Д1 и Д2 открыты, а диод Д3 закрыт; при этом коэффициент передачи максимален.

![]()
Рисунок 21.2 Рисунок 21.3
По мере увеличения |Eрег| динамические сопротивления диода Д3 уменьшается, а следовательно, уменьшается коэффициент передачи аттенюатора.

Автоматическая регулировка усиления (АРУ). АРУ предназначена для поддержания постоянного уровня сигнала на выходе УПЧ, необходимого для нормальной работы выходных устройств РПрУ. Задачей АРУ является изменение усиления радиотракта Ко в зависимости от уровня входного сигнала.
|
|
Для АРУ в приёмнике создаётся цепь АРУ, состоящая из детектора АРУ и фильтра АРУ (простая АРУ). При наличии усилителя в цепи АРУ, она называется усиленной. Фильтр АРУ отфильтровывает составляющие частот модуляции и пропускает более низкочастотные изменения Ерег, связанные с медленно меняющимся уровнем несущей (см. рисунок 21.4), т.е. постоянная времени фильтра АРУ больше постоянной времени цепи нагрузки детектора основного тракта.
Структурная схема обратной АРУ представлена на рисунке 21.5 регулируемого усилителя, т.е. Ерег=Кдет ару Uвых. Характеристика АРУ описывает работу регулируемого усилителя совместно с цепью АРУ: Uвых=F(Uвх) (см. рисунок 21.6).
Структурная схема прямой АРУ показана на рисунке 21.7. Здесь напряжение регулировки Ерег получается в результате детектирования входного напряжения. Выходное напряжение Uвых=КоUвх. При увеличении Uвх Ерег возрастает, что вызывает уменьшение Ко и выходное напряжение может оставаться постоянным, т.е. прямая АРУ позволяет получить идеальную характеристику регулировки (см. рисунок 21.8).
Рисунок 21.8 Рисунок 21.7
 В
комбинированной АРУ (см. рисунок 21.9) рационально
используются преимущества
обеих схем АРУ: стабильность обратной АРУ и
возможность
получения идеальной характеристики в прямой. Основная
регулировка проходит в первом
усилителе, он обычно содержит несколько
регулируемых
каскадов. Второй регулируемый усилитель – однокаскадный,
его основная
задача – несколько
ском -пенсировать
возрастание напряжения на выходе
первого усилителя.
В
комбинированной АРУ (см. рисунок 21.9) рационально
используются преимущества
обеих схем АРУ: стабильность обратной АРУ и
возможность
получения идеальной характеристики в прямой. Основная
регулировка проходит в первом
усилителе, он обычно содержит несколько
регулируемых
каскадов. Второй регулируемый усилитель – однокаскадный,
его основная
задача – несколько
ском -пенсировать
возрастание напряжения на выходе
первого усилителя.
![]()
22 Лекция №22. Автоматическая подстройка частоты
Содержание лекции: особенности АПЧ.
Цели лекции:
- изучить особенности АПЧ – основные виды и характеристики;
- изучить ЧАПЧ и ФАПЧ.
Автоматическая подстройка частоты (АПЧ) должна обеспечить требуемую точность настройки приёмника при воздействии дестабилизирующих факторов. Следует заметить, что АПЧ осуществляется только в супергетеродинных приёмниках. Для точной настройки таких приёмников нужно выполнение двух условий:
1) частота принимаемого сигнала соответствует частоте настройки преселектора;
2) промежуточная частота fпр = fг–fc совпадает с частотой настройки фильтров тракта промежуточной частоты.
Рисунок 22.1 – Структурная схема АПЧ
Очевидно, из-за широкополосности преселектора определяющим является второе условие. Поэтому задача АПЧ сводится к подстройке частоты гетеродина.
Для
АПЧ вводится специальная цепь АПЧ (см. рисунок 22.1),
состоящая из
измерительного
элемента (ИЭ), фильтра
и
регулятора частоты (РЧ).
![]()
 При этом в
качестве ИЭ используются соответственно частотные или фазовые детекторы и
происходит частотная или фазовая автоподстройка частоты (ЧАПЧ или ФАПЧ).
Очевидно, ФАПЧ более чувствительна и обеспечивает более точную настройку.
Фильтр в цепи АПЧ не пропускает быстрых изменений Ерег,
соответствующих модуляции соответствующего параметра, а пропускает медленные
изменения Ерег, связанные с уходом частоты. Регулятор (управитель)
частоты обеспечивает подстройку частоты гетеродина. В зависимости от вида
регулятора частоты различают электронные (РЧ – варикап) и электромеханические
(РЧ – КПЕ), причём последние в настоящее время почти не используются.
При этом в
качестве ИЭ используются соответственно частотные или фазовые детекторы и
происходит частотная или фазовая автоподстройка частоты (ЧАПЧ или ФАПЧ).
Очевидно, ФАПЧ более чувствительна и обеспечивает более точную настройку.
Фильтр в цепи АПЧ не пропускает быстрых изменений Ерег,
соответствующих модуляции соответствующего параметра, а пропускает медленные
изменения Ерег, связанные с уходом частоты. Регулятор (управитель)
частоты обеспечивает подстройку частоты гетеродина. В зависимости от вида
регулятора частоты различают электронные (РЧ – варикап) и электромеханические
(РЧ – КПЕ), причём последние в настоящее время почти не используются.
Рисунок 22.2 – Разностная АПЧ
В зависимости от точки подключения АПЧ в приёмнике различают два основных вида устройств АПЧ. Устройство АПЧ, поддерживающее постоянной fпр , показано на рисунке 22.2. Такие устройства АПЧ называют разностными, т.к. fпр=fг –fc. При несовпадении промежуточной частоты fпр частоте настройки фильтров тракта промежуточной частоты fопр, вырабатывается напряжение Ерег, вызывающее подстройку гетеродина.
Рисунок 22.3 – Система АПЧ, поддерживающая постоянной частоту гетеродина
Система АПЧ, поддерживающая постоянной частоту гетеродина, показана на рисунке 22.3. Такие устройства работоспособны при отсутствии сигнала, однако ими не компенсируется уход fпр из-за изменения частоты сигнала.
Рисунок 22.4 – Структурная схема электронной ЧАПЧ приёмников непрерывных сигналов
![]()
![]() Основные
показатели АПЧ определим на примере электронной ЧАПЧ
приёмников непрерывных
сигналов. Структурная схема соответствующей
части
приёмника представлена на рисунке 22.4. В качестве ИЭ используется ЧД, эталонной является
частота fo
нулевой
точки характеристики
детектирования
Основные
показатели АПЧ определим на примере электронной ЧАПЧ
приёмников непрерывных
сигналов. Структурная схема соответствующей
части
приёмника представлена на рисунке 22.4. В качестве ИЭ используется ЧД, эталонной является
частота fo
нулевой
точки характеристики
детектирования
![]() (22.1)
(22.1)
Высокие требования к стабильности нулевой точки выполнить просто, т.к. ЧД работает на низкой частоте. В качестве РЧ применяется варикап. Предположим, что из-за действия дестабилизирующих факторов частота гетеродина fг изменилась на Δfнач. После срабатывания системы ЧАПЧ происходит подстройка гетеродина, в результате чего его расстройка уменьшается на Δfпод. В установившемся режиме
Δfост=Δfнач-Δfпод, (22.2)
где Δfост – остаточная расстройка частоты гетеродина.
Эта расстройка вызывает на выходе ЧД появление напряжения
Ерег = Sчд Δfocт , (22.3)
где Sчд – крутизна характеристики детектирования.
После фильтра с коэффициентом передачи Кф напряжение
Ерег=КфSчдΔfост. (22.4)
Напряжение Ерег производит подстройку частоты гетеродина на величину
Δfпод= Ерег Sрег= Sрег SчдКфΔfост, (22.5)
где Sрег – крутизна характеристики РЧ.
Учитывая, что Δfост=ΔfначΔfпод, получаем
 (22.6)
(22.6)
ЛИТЕРАТУРА
1. Радиоприемные устройства. Под ред. А.П. Жуковского. - М.: Высшая школа, 1989.
2. Радиоприемные устройства. Под ред. Н.Н. Фомина. - М.: Радио и связь, 2003.
3. Буга Н.Н. и др. Радиоприемные устройства: Учебник для вузов/ Н.Н.Буга, А.И. Фалько, Н.И. Чистяков; Под ред. Н.И. Чистякова. - М.: Радио и связь, 1986. 320с.: ил.
4. Радиоприемные устройства. Под ред. Л.Г. Барулина. - М.: Радио и связь.
5. Тихонов В.И. Оптимальный прием сигнала. М.: Радио и связь,1986.
6. Радиоприемные устройства. Под ред. А.Г. Зюко. - М.: Радио и связь, 1975.
7. Проектирование радиолокационных приемных устройств. Под ред. Соколова. - М.: Высшая школа, 1984.
8. Сборник задач и упражнений по курсу радиоприемных устройств. Под ред. Сифорова В.И. - М.: Радио и связь, 1984.
9. Справочник по учебному проектированию приемно-усилительных устройств. Под ред. М.К. Белкина. - Киев, Высшая школа, 1982.
10. Кузнецов М.А., Сенина Р.С. Радиоприёмники АМ, ОМ, ЧМ сигналов. Пособие по проектированию. Изд. 4-е. СПбГУТ, СПб, 2000.
11. Алексеев Ю.П. Бытовая радиоприёмная и звуковоспроизводящая аппаратура. Справочник. – М.: Радио и связь, 1991.
12. Калихман С.Г., Левин Я.М. Радиоприёмники на полупроводниковых приборах. Теория и расчёт. – М.: Связь, 1979.
13. Полупроводниковые приборы. Диоды высокочастотные, диоды импульсные, оптоэлектронные приборы. Справочник / под ред. А.В.Голомедова. – М.: Радио и связь, 1988.
14. Шапиро Д.Н. Расчёт каскадов транзисторных радиоприёмников. – Л.: Энергия,1968.
15. Проектирование радиоприемных устройств. Под ред. А.П.Сиверса – М.: Советское радио, 1976.
16. Баскаков С.И. Радиотехнические цепи и сигналы. – М.: Высшая школа, 2003.