Некоммерческое акционерное общество
Алматинский институт энергетики и связи
СИСТЕМЫ ВИДЕОНАБЛЮДЕНИЯ И КОСМИЧЕСКИЕ СИСТЕМЫ СЛЕЖЕНИЯ
Конспект лекций
для студентов всех форм обучения специальности
5В0719 - Радиотехника, электроника и телекоммуникации
Алматы 2010
СОСТАВИТЕЛИ: Артюхин В.В., Кондратович А.П. Системы видеонаблюдения и космические системы слежения. Конспект лекций для студентов всех форм обучения, специальности 5В0719 – Радиотехника, электроника и телекоммуникации. – Алматы: АИЭС, 2009. – 55 с.
Конспект лекций предназначен для самостоятельного изучения курса «Системы видеонаблюдения и космические системы слежения». В конспекте приведен обзор основных элементов систем видеонаблюдений, спутниковой радионавигации и дистанционного зондирования Земли.
Конспект лекций предназначен для студентов всех форм обучения по специальности 5В0719 – Радиотехника, электроника и телекоммуникации.
Часть первая – Системы видеонаблюдения, написана Артюхиным В.В.;
Часть вторая – Космические системы слежения, написана Кондратовичем А.П.
Содержание
1 Системы видеонаблюдения
1.1 Лекция 1. Введение. История развития систем видеонаблюдения
1.2 Лекция 2. Цифровая регистрация. Передача видео на расстояние
1.3 Лекция 3. Основные компоненты систем видеонаблюдения
1.4 Лекция 4. Основные компоненты систем видеонаблюдения (продолжение)
1.5 Лекция 5. Классификация и выбор компонентов системы видеонаблюдения для оборудования объектов
1.6 Лекция 6. Требования к каналам передачи видеосигнал
2 Космические системы слежения
2.1 Лекция 7. Основные принципы определения координат в пространстве. Методы и точность радионавигационных измерений
2.2 Лекция 8. Факторы, искажающие результаты измерений и методы их учета. Структура радионавигационного сигнала
2.3 Лекция 9. Структура, особенности построения и оборудование некоторых глобальных радионавигационных систем
2.4 Лекция 10 Дистанционное зондирование Земли (ДЗЗ). Основные понятия, история возникновения отрасли
2.5 Лекция 11 Методы и способы обработки результатов ДЗ
2.6 Лекция 12 Некоторые виды оборудования и способы применения информации полученной со спутников ДЗЗ
Список сокращений
Список литературы
1 Системы видеонаблюдения
1.1 Лекция 1. Введение. История развития систем видеонаблюдения
Одним из наиболее распространенных технических средств защиты является система охранного телевидения (система видеоконтроля), которая активно используется в средствах защиты самого широкого круга государственных, коммерческих и частных объектов. Простота установки, настройки, надежность в эксплуатации сделали возможным применение охранного телевидения в небольших частных магазинах, пансионатах, особняках и даже жилых квартирах.
Важным качеством охранного телевидения является возможность не просто фиксировать нарушение режима охраны объекта, но и при этом контролировать обстановку вокруг объекта, определять причины срабатывания охранной сигнализации, вести скрытое наблюдение и производить видеозапись охраняемого места или предмета, фиксируя перемещение нарушителя. Перечисленные возможности охранного телевидения сделали этот вид технических средств защиты самым популярным в мире. Все банки используют в своих зданиях разветвленную телевизионную сеть охраны. В магазинах всех категорий также широко используется охранное телевидение, с помощью которого ведется наблюдение за торговыми залами и ценными предметами. Установлены камеры видеонаблюдения для контроля за автомобильным движением. Практически остается очень мало сфер деятельности, где бы не использовались данные системы.
В отечественной и зарубежной практике такую телесистему иногда называют по-другому: замкнутая (закрытая) видеоаппаратура (Closed Circuit Video Equipment - сокращенно CCVE), иногда ССТV. Термин "замкнутое - закрытое" показывает принципиальное отличие от обычного телевидения, с помощью которого можно принимать различные телепрограммы, настраиваясь на различные передающие каналы. В системе же охранного телевидения на экране монитора принимается изображение от одной или нескольких видеокамер, установленных в определенных местах. Кроме оператора (охранника), никто не может наблюдать это изображение, поэтому такую систему называют закрытой и замкнутой.
Повышенный интерес криминальных сообществ к объектам, характеризующимся наличием значительных денежных средств, материальных или культурных ценностей, вызвал необходимость комплексного подхода к решению проблемы обеспечения их безопасности. В частности, подразумевается применение интегрированных средств охраны (ИСО), которые включают в себя средства видеоконтроля, охранно-пожарной сигнализации, контроля доступа, инженерные средства защиты и т.п., объединенные общей системой управления и предназначенные для совместной работы.
Телевизионные системы видеоконтроля (ТСВ) можно назвать основным звеном ИСО. Однако ТСВ относятся к разряду довольно сложной и дорогостоящей техники, поэтому необходимо иметь четкое представление о принципах работы, тактико-технических и функциональных возможностях этой аппаратуры. Неоспоримые достоинства ТСВ определили быстро растущий спрос на них, что привело к появлению на рынке разнообразной специальной телевизионной техники. Однако зачастую поставщики и продавцы во имя прибыли предлагают заказчику аппаратуру низкого качества и неквалифицированные услуги. Нередко и покупатели не имеют достаточного опыта. В результате на важных объектах можно встретить непрофессионально спроектированные системы. Проектируя охранную телевизионную систему, обычно принимают в расчет заявленную в паспорте разрешающую способность телевизионной камеры. Исходя из этого, определяют зоны наблюдения и места установки телевизионных камер, вычисляют углы поля зрения и выбирают объективы. Затем закупают регистраторы, мультиплексоры, видеомагнитофоны и другие устройства. Монтажники прокладывают кабели, устанавливают телекамеры и аппаратуру, и, наконец, система включается. С первого взгляда, все работает нормально, на мониторах видны изображения помещений и территорий объекта. Но при первом же инциденте выясняется, что лицо нарушителя невозможно различить. Не виден номер въезжающего автомобиля, а иногда невозможно даже различить его марку. В темное время суток дела обстоят еще хуже: изображения деталей размыты, движущиеся объекты смазаны. В результате, телевизионная система, вместо полноценного наблюдения, предоставляет службе охраны функции, близкие к возможностям обычных охранных датчиков. Происходит это из-за того, что при проектировании системы не учитываются реальная разрешающая способность телевизионных камер и ее зависимость от освещенности, глубина резкости, а также потери разрешающей способности в кабельной сети и других устройствах.
С самого зарождения фотографии многие задавались вопросом, как запечатлеть "движущиеся картинки" вместо неподвижных изображений. В 1877 г. Эдвард Майбридж (Edward Muybridge) провел эксперимент: лошадь бежит по треку, а 24 неподвижных фотокамеры по очереди снимают ее. Когда все 24 изображения рассматривали в быстром темпе, казалось, что лошадь двигается.
Двадцатью годами позже, в 1889, был изобретен кинетоскоп. Этот прибор имел небольшое отверстие для того, чтобы смотреть внутрь ящика. Внутри ящика было колесо с изображениями, вмонтированными в него. Колесо приводилось во вращение при помощи рукоятки. При вращении рукоятки создавалась иллюзия движущегося изображения. Вместе с изобретением целлулоидной пленки Ганнибалом Гудвином в 1889 г. индустрия движущихся картинок стала развиваться еще быстрее. Много лет, дополнившись звуком и цветом, целлулоидная пленка была стандартом киноиндустрии. И только в 1956 г. компания под названием "Ампекс" (Ampex) выпустила на рынок первый коммерчески жизнеспособный ленточный видеорегистратор (Video Tape Recorder, VTR) модели VR-1000. VR-1000 имел четыре головки и записывал черно-белые изображения + две звуковые дорожки на широкой (2 дюйма) магнитной ленте. Конечно, эти машины использовались только для целей коммерческого телевидения, так как стоили очень дорого. Только в 70-х ленточные видеорегистраторы стали достаточно недорогими и прочными, чтобы использоваться буквально кем угодно.
С изобретением недорогих видеокамер и кассетных видеорегистраторов (Video Cassette Recorder - VCR) родилась и индустрия локального телевидения (CCTV - Industry) - в том виде, в котором она известна сейчас. Конечно, имелись противоречия, такие, как два разных видеостандарта, разработанных для ТВ - PAL, в основном, в Европе и Азии и NTSC для Северной Америки и Японии, а также различия в форматах между BETA и VHS. Применение стандартных кассетных видеорегистраторов породило две основные проблемы для CCTV - индустрии: на каждую видеокамеру требовался отдельный видеорегистратор и при стандартной скорости записи пленки хватало только на два часа. Таким образом, для записи четырех камер в течение 24 часов потребовалось бы четыре видеорегистратора и 48 кассет плюс человек, обязанностью которого было бы менять кассеты. Но решения были найдены быстро и по обеим проблемам.
Чтобы производить регистрацию в течение длительного периода времени, производители изобрели лентопротяжный механизм, который мог работать в старт-стопном режиме и записывать, таким образом, изображения по отдельности. Подбирая количество стартов и остановок, стандартная двухчасовая лента могла быть использована для записи 12 часов, если регистрировать со скоростью 5 кадров/с, вместо стандартных 30 (в NTSC формате). Кроме того, так как каждое изображение или видеокадр состоит из двух полей, то, если записывать только одно поле вместо обычных двух, ленты будет хватать на 24 часа, и ее надо будет менять только раз в сутки. Этот режим сегодня известен как стандартный 24-часовой режим с прерывистой записью сигнала (24 - Hour Time Lapse Mode). Варьируя команды "старт" и "стоп", может быть достигнута длительность записи 72, 480 и даже 960 часов.
Система с последовательным коммутатором была предназначена для наблюдения за обстановкой в маленьких магазинах, частных домах, квартирах, на автомобильных стоянках. Центральное устройство, коммутатор, используется для ручного или автоматического переключения изображения от многих камер на монитор. Однако, чем больше камер, тем больше временные пробелы между индивидуальными камерами. Поэтому пришли системы картинка в картинке и квадро. Эти системы электронным способом захватывают два или четыре изображения и создают единый видеопоток, который и регистрируется. По такой технологии все камеры регистрируются в одно и то же время, но так как каждая является только частью реального видеоизображения, качество оставляет желать лучшего. Такая система была предназначена для установки в больших домах, гаражных кооперативах, на автомобильных стоянках, офисах, магазинах и обеспечивала удобный просмотр изображений от четырех видеокамер. Квадратор можно было использовать для записи, подключив к нему видеомагнитофон. На видеомагнитофон в этом случае записываются изображения всех четырех видеокамер одновременно. Изображения от четырех камер через квадратор выводятся на один монитор в формате мультиэкрана 2х2 и позволяют полностью контролировать ситуацию. В отличие от коммутаторов, квадраторы могут разделяться по обработке цветного и черно-белого видео сигналов.
При выборе квадратора появились
дополнительные возможности: - возможность обработки изображения в реальном
времени ("живая" картинка); выполнение функций коммутатора (вывод
изображения от любой камеры в полноформатном режиме, автолистание); возможность
выдачи текстовой информации на экран; наличие тревожных входов; детекция
пропадания видеосигнала от любой видеокамеры с запоминанием последнего кадра,
со звуковым оповещением и выводом соответствующей текстовой информации на
экран. В дальнейшем развитии получили распространение более сложные системы
видеоохраны, которые обеспечивают не только видеонаблюдение и видеозапись
обстановки, а также автоматическое включение тревожного режима за счет
обнаружения движения в контролируемой зоне. В случае обнаружения движения
нарушителя в одном или нескольких маркерных окнах детектор движения выдает
сигнал тревоги, включающий видеомагнитофон в непрерывную запись тревожного
события, контрольный видеомонитор начинает показывать ситуацию в охраняемой
зоне в реальном масштабе времени. В приведенной системе видеоохраны
используется два видеомонитора. Один, видеомонитор оператора, подключается
непосредственно на квадратор и, по желанию оператора показывает распахнутое или
квадрированное изображение от всех четырех видеокамер с рамками маркерных окон
охраны. Второй видеомонитор, контрольный, подключается к видеомагнитофону и
показывает только квадрированное изображение, записываемое на видеомагнитофон.
Спецвидеомагнитофон либо постоянно записывает квадрированное изображение, либо
включается при возникновении тревожной ситуации. Аналоговые детекторы движения
обычно имеют небольшое число зон обнаружения (до 4 зон), поэтому такие
устройства ставились для охраны малопосещаемых внутренних помещений.
В середине 1980-го пришел самый последний прибор - мультиплексор. В
то время как последовательный переключатель не мог переключать быстрее, чем раз
в секунду, мультиплексор мог переключать до 20 раз в секунду, делая возможным
регистрацию 16 различных камер в пределах одной секунды. Требование к кассетным
видеорегистраторам записывать со скоростью 20 изобр./с привело к появлению 24 -
часового режима реального времени - но не за счет старт-стопного режима, а за
счет уменьшения скорости движения ленты по сравнению со стандартной. Установка
таких систем осуществлялась в супермаркетах, банках, казино, заводах,
больницах, многоэтажных автомобильных стоянках (рисунок 1.1).
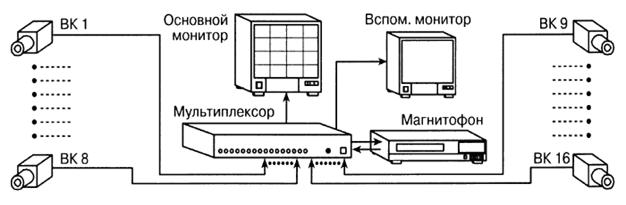
Рисунок 1.1 - Система видеорегистрации с мультиплексором
Мультиплексор позволяет записывать изображения от нескольких (обычно
до 16) видеокамер на один спецвидеомагнитофон. Изображения от видеокамер
пишутся на видеомагнитофон в полноэкранном режиме без ухудшения разрешения (в
отличие от записи квадрированного изображения с квадратора). Благодаря
последовательной записи кадров от всех каналов, мультиплексор незаменим при
записи большого количества видеокамер на один видеомагнитофон. Кроме того, в
подавляющем большинстве моделей мультиплексоров есть встроенный детектор
движения, который, как было отмечено выше, обнаруживает движение в
контролируемой зоне. При изменении изображения той или иной видеокамеры,
мультиплексор ведет более подробную запись на видеомагнитофон с «тревожной»
видеокамеры. В результате чаще пишутся кадры с той видеокамеры, где обнаружено
движение. Этим экономится и без того ограниченное место на видеокассете, а при
воспроизведении уменьшается дискретность изображения. Кроме детекторов движения,
мультиплексоры обычно имеют входы для подключения охранной сигнализации (их
влияние на режим записи аналогично детекторам движения) и детектор пропадания
видеосигнала. Мультиплексоры можно разделить на несколько классов по типу - на
симплексные, дуплексные и триплексные.
Через всю историю CCTV проходит требование регистрации все большего и большего количества изображений, чтобы сохранить столько доказательств, сколько возможно. Но, в конце концов, с введением в практику работы мультиплексора, оказалось, что проблема не в том, чтобы зарегистрировать как можно больше изображений, а в том, чтобы найти требуемое изображение.
1.2 Лекция 2. Цифровая регистрация. Передача видео на расстояние
С начала 90-х годов компании воспользовались преимуществами, которые давали выросшая производительность чипсетов и общее движение к цифровой записи изображений. В то время как аналоговое изображение непосредственно записывалось на кассетный видеорегистратор, для записи изображения в цифровом виде его вначале необходимо конвертировать из аналогового в цифровое (рисунок 1.2).
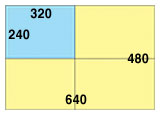
Рисунок 1.2 – Форматы цифрового изображения
Как можно видеть, изображение размером 640х480 содержит в четыре раза больше информации (или пикселей), чем 320x240. Это означает, что цифровой размер изображения 640х480 в четыре раза больше, чем цифровой размер изображения 320х240. Если изображение 320х240 имело размер 7 Мб, то 480х240 будет иметь 28 Мб. В зависимости от используемого чипсета, цифровое изображение имеет различное число пикселей, которые взяты из аналогового видеосигнала. Наиболее распространенные размеры изображения - 640х480 или 320х240. Важно помнить, что аналоговое изображение состоит из двух полей. Так как каждое поле в среднем аналоговом изображении состоит из примерно 262-1/2 линий, легко видеть, как можно поле конвертировать в 320х240: просто путем выборки каждого второго пикселя по горизонтали и каждой линии по вертикали для каждого поля. Так как второе поле передается на 1/60 с позже, два цифровых изображения должны быть «расплетены» (de-interlaced), чтобы избежать артефактов в конечном изображении. В то время как 30-дневная емкость архива при применении Time-Laps VCR легко достигается использованием 30 лент и 24-часового режима, регистрирующие средства для цифровых видеорегистраторов, во-первых, значительно более дорогие, а во-вторых, использовать их как сменные более затруднительно. По этой причине цифровые видеорегистраторы требуют сжатия (компрессии) изображений для их хранения, но чтобы при этом визуальные потери были бы минимальные. Хотя методы сжатия могут быть разными, одна черта является общей для всех алгоритмов видеокомпрессии: с определенного уровня компрессии видеоизображение начинает быстро деградировать (рисунок 1.3).
Рисунок 1.3 – Зависимость ухудшения качества изображения от степени сжатия
Степень сжатия и размер изображения (в пикселях) следует варьировать в зависимости от количества изображений, которые необходимо сохранить на жестком диске. Кроме того, большинство цифровых видеорегистраторов на сегодняшний момент регистрируют только единичное поле для того чтобы избежать проблем с чересстрочной разверткой и чтобы, вдвое обрезать количество информации, которую необходимо сжать - с изображения размером 640х480 до 640х240. В то время как изображение 320х240 может воспроизводиться с качеством VHS, для получения изображения с SVHS-качеством требуется разрешение 640х240 или 640х480. Обычная ошибка заключается в предположении, что изображение в формате 640х480 всегда имеет лучшее качество, чем в формате 320х240. Предположим, что изображение 320х240 сжато с соотношением 1000:1, при этом размер результирующего изображения уменьшится с 7 Мб до 7 кб. Для достижения того же размера в 7 кб изображение в 640х480 пикселей должно быть сжато с фактором 4000:1. При таких крайне высоких степенях компрессии потери качества из-за сжатия могут в действительности привести к худшему изображению при 640х480 пикселей, чем при 320х240. Реальные алгоритмы компрессии могут меняться в широких пределах от индустриальных стандартов (JPEG, MPEG) до "самоделок", но могут быть разделены на две основные группы: полнокадровые (Full Frame) и обновляемые по условию (Conditional Refresh). Новое свойство, которое было введено вместе с мультиплексором - это детектор активности. Детектор активности позволяет мультиплексору менять частоту изображений, посылаемых на кассетный видеорегистратор. В результате, изображения "с движением" будут регистрироваться с более высокой скоростью, чем "без движения". Некоторые из ранних моделей мультиплексоров даже включали режим, при котором изображения посылались на видеорегистратор только в том случае, когда обнаруживалось движение в этих изображениях. Так как кассетный видеорегистратор двигал магнитную ленту с установленной скоростью, это приводило к пропускам на ленте. Хотя теоретически этот режим должен был облегчить просмотр ленты с записью изображений от 16 камер, так как показывались только изображения с наличием активности, этот режим распространения не получил. Для цифровых видеорегистраторов этот режим обеспечивает значительно большую выгоду, так как он сохраняет пространство на жестком диске и может значительно расширить емкость памяти. Однако цифровые регистраторы - не более чем продвинутая версия комбинации из мультиплексора и кассетного видеорегистратора. Имеется третье свойство, предлагаемое в большинстве цифровых видеорегистраторов, которое в аналоговый век требовало приобретения дополнительного оборудования: дистанционного видеотрансмиттера. Как только модемы стали быстрее, чем 9600 бод, потребители стали выражать желание рассматривать натуру прямо со своего рабочего места. Передача видео на расстояние не только экономит время на доставке лент, но также позволяет пользователям переключаться с одного объекта наблюдения на другой, и даже позволяет наблюдать несколько объектов одновременно. В то время как объединение кассетного видеорегистратора, мультиплексора и видеотрансмиттера представляет серьезную задачу (особенно применительно к воспроизведению), большинство цифровых видеорегистраторов предлагает это как часть интегрированного, легкого в использовании пакета. Рынок требует разных цифровых видеорегистраторов. Малые системы цифровой видеорегистрации могут использоваться в стандартной охранной схеме вместо системы с мультиплексором, если число камер ограничивается четырьмя или менее и если стоимость является основным фактором. Основная масса цифровых видеорегистраторов обычно предлагает все три основные преимущества, а также одновременные запись и воспроизведение, интеллектуальные алгоритмы поиска и другие продвинутые свойства. Большие системы цифровой видеорегистрации используют технологии, которые позволяют производить регистрацию по каждой камере в полнокадровом режиме и с полной скоростью, предлагают избыточную емкость для хранения информации, такую, как RAID - подсистемы, и сетевую архитектуру, которая делает легким развертывание регистраторов в больших приложениях, таких, как аэропорты, супермаркеты, казино и др. В дополнение к более традиционным цифровым видеорегистраторам, имеется также расширенное предложение DVR, которые являются интерфейсом в таких приложениях, как банкоматы и системы контроля доступа. При регистрации данных от этих и других приборов вместе с видео, сортировка видео и поиск в нем может производиться более умным и быстрым способом. При преимуществах, которыми обладают цифровые видеорегистраторы, нет ничего удивительного в том, что они являются самым быстрорастущим сегментом на рынке CCTV. Многие специалисты, связанные с управлением предприятий, широко пользуются системами передачи компьютерной информации - специализированными компьютерными сетями. Они решают задачи передачи компьютерных данных, телефонных переговоров, видеоконференций и многого другого. Данные технологии могут быть использованы при организации управляемого видеонаблюдения. Известны различные системы охранного наблюдения на основе видеокамер. Основной недостаток таких систем заключается в очень ограниченной области их работы: расстояние передачи аналогового видеосигнала по физическим кабелям составляет всего несколько сот метров. Дальнейшее увеличение расстояния приводит к значительному ухудшению качества изображения, затрудняется распознавание объекта наблюдения, т.е. система перестает выполнять свои основные функции. Также представляется весьма затруднительным создание крупных систем наблюдения на аналоговом принципе. Современные цифровые технологии не только делают систему значительно более надежной и универсальной, но и более доступной по стоимости. Видеонаблюдение, основанное на цифровых технологиях, объединяет возможности передачи высококачественного видеосигнала с управлением на любом расстоянии вращающимися видеокамерами. Видеосигнал и дополнительная информация с видеокамеры поступают в реальном времени без задержек по сети связи в оцифрованном виде на пульт управления, который может находиться как в том же здании, так и в любом другом месте. Рабочим местом оператора могут быть персональный компьютер, видеомонитор или телевизор. При использовании персонального компьютера программное обеспечение оператора устанавливается непосредственно на компьютер. Очень простой и удобный для использования графический интерфейс обеспечивает прямой доступ ко всем функциям управления и отображению видеоизображения на экране монитора компьютера. Для управления поворотными устройствами могут использовать джойстик, графический интерфейс или стандартная клавиатура. При этом возможен любой тип соединения к видеосерверу, включая локальную сеть, арендованную линию или Internet. Если в системе присутствуют два или более поста наблюдения, будут выполняться необходимые уровни доступа и приоритеты. К одному видеосерверу может быть подключено одновременно несколько видеопотоков и телеметрических приемников. Приемники команд дистанционного управления разных изготовителей имеют различные и, как правило, несовместимые системы управления и протоколы. Однако оборудование обеспечивает легкую адаптируемость к различным системам и позволяет объединять оборудование различных производителей в единую систему. Представляемые системы могут быть использованы для наблюдения за технологическими процессами, за движением автотранспорта, в медицине, обучении, системах охранного видеонаблюдения, в игорном бизнесе. Они отличаются простотой использования, универсальностью и высокой защищенностью от несанкционированного доступа.
1.3 Лекция 3. Основные компоненты систем видеонаблюдения
1.3.1 Телевизионная камера (видеокамера) - это устройство, которое преобразует оптическое изображение наблюдаемого объекта в электрический видеосигнал. Телевизионная камера является важнейшим элементом системы, так как именно с нее в систему поступает первичная информация об объекте и именно ее характеристиками определяется качество изображения в целом. Видеокамера является наиболее важным элементом охранного телевидения, поэтому в настоящее время разработано и выпускается большое количество их типов и моделей. В качестве светочувствительного элемента используется специальный малогабаритный полупроводниковый сенсор (английское название CCD - Charge Coupled Device – прибор с зарядовой связью (ПЗС - матрица). Это относительно новый вид камер, которые имеют меньшие, чем видиконовые камеры, габариты, более высокую разрешающую способность и долговечность. Кроме того, CCD камеры могут работать при освещенности до 0,1 люкс и ниже. Однако стоимость таких камер в настоящее время еще достаточно высока, но имеет тенденцию к снижению.
Качество телевизионной камеры определяется целым рядом показателей, однако, в большинстве случаев при выборе камеры для конкретной системы достаточно ориентироваться на следующие характеристики. ГОСТ Р 51558-2000 предусматривает обязательную проверку трёх технических характеристик телекамер: разрешение; рабочий диапазон освещённостей и отношение сигнал/шум. В то же время в спецификациях на передающее телевизионное оборудование приводится гораздо большее число параметров.
1.3.2 Разрешающая способность (разрешение) - максимальное количество телевизионных линий (ТВЛ), различаемых в выходном сигнале камеры при минимально допустимой глубине модуляции 10%. Разрешение по горизонтали определяет максимальное количество градаций от черного к белому или обратно, которые могут быть получены от камеры в центральной области экрана. На краях экрана допускается некоторое ухудшение качества изображения. Чем выше разрешение камеры, тем более мелкие детали можно различить на изображении. Обычным разрешением считается 380…420 линий для черно-белых и 300…320 линий для цветных камер. В системах высокого класса используются камеры с повышенным разрешением (500…600 линий для черно-белых и 375…450 линий для цветных камер). Матрицу ПЗС можно характеризовать либо полным, либо эффективным количеством пикселей. В полное число входят и те пиксели на концах строк, на которые не попадает свет или которые используются для стабилизации цифрового изображения, а эффективное учитывает только те, что действительно участвуют в формировании изображения. При прочих равных условиях, чем выше разрешение, тем лучше. Число пикселей в строке развертки определяет верхний предел разрешения; матрица, имеющая в строке развертки 700 пикселей по высоте кадра, обеспечивает разрешение не более 700 ТВ-линий/h.
1.3.3 Пороговая чувствительность (чувствительность) - минимальная освещенность на ПЗС-матрице, при которой камера сохраняет работоспособность. Обычной чувствительностью считается 0,1…0,5 лк для черно-белых и 1…3 лк для цветных камер. В системах, предназначенных для наблюдения слабо освещенных объектов, имеющих малую отражательную способность, используются камеры высокой чувствительности (порядка 0,01 лк). ПЗС-матрицы обладают очень важным свойством - они позволяют получать четкое изображение (особенно "теплых" объектов, например, человека) в условиях полной темноты при подсветке инфракрасными лучами. С этой целью некоторые камеры оснащаются встроенной ИК-подсветкой. ПЗС сенсор, преимущественно используемый в качестве фотоэлектрического преобразователя телевизионных камер (ТК) систем телевизионного наблюдения, имеет линейную световую характеристику чувствительности до освещенности насыщения. Значение величины освещенности насыщения, при стандартном времени накопления, зависит от размера светочувствительного элемента и потенциала подложки, то есть фактически от размеров ПЗС сенсора. Типичное значение для сенсоров 1/3", 1/4" составляет 0,7…1,0 люкс. Рабочую точку на световой характеристике выбирают таким образом, чтобы максимальная освещенность в кадре была бы на 20…30 % ниже освещенности насыщения для конкретного экземпляра ПЗС сенсора, а усиление в видеотракте ТК при этом обеспечивало получение полного видеосигнала 1 В (0,7 В собственно видеосигнал) на нагрузке 75 Ом. На рисунке 3.1 представлена типичная сквозная характеристика чувствительности ТВ камеры без работы средств адаптации видеокамеры к изменениям освещенности.
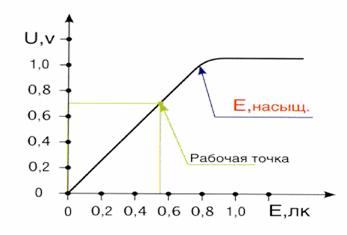
Рисунок 1.4 - Световая характеристика чувствительности ПЗС сенсора
1.3.4 Отношение «сигнал/шум» учитывают, когда требуется высокое качество телевизионного сигнала. Чем оно выше, тем выше качество изображения. Обычным считается отношение "сигнал/шум" 40 дБ. У камер высокого класса это отношение достигает 58 дБ, что позволяет доводить АРУ до 45 дБ и выше.
1.3.5 Важным атрибутом камеры является объектив. Объектив - это устройство, формирующее изображение объекта в плоскости ПЗС-матрицы. Очевидно, что без объектива телевизионная камера работать не может. Объектив, как отмечалось выше, может быть встроенным в камеру или сменным. Для камер с присоединительным узлом «С» подходят только объективы типа «С». Если камера имеет узел «CS», то к ней подходят объективы «CS» и «С» со специальным переходным кольцом.
Характеристики объективов во многом совпадают с фотографическими:
- длиннофокусные объективы используются для наблюдения за удаленными объектами или небольшого размера предметами;
- широкоугольные объективы устанавливаются там, где необходимо панорамное наблюдение за объектом;
- объективы с изменяемым фокусным расстоянием (имеющие ZOOM) используются для приближения объекта наблюдения. Изменение фокусного расстояния осуществляется с помощью дистанционного управления.
1.3.6 Фокусное расстояние f (мм) характеризует величину угла зрения при определенном оптическом формате камеры. Чем меньше фокусное расстояние, тем больший угол зрения наблюдаемого пространства можно получить и наоборот. Однако при очень больших углах зрения (порядка 90… 120° и более) довольно сложно, а порой и невозможно, рассмотреть требуемый масштаб и детали картины.
Расчет фокусного расстояния объектива находится по формуле:
f = h·L/V, (1.1)
где: f - необходимое фокусное расстояние (мм);
h - размер ПЗС-матрицы по вертикали (мм);
L - максимальная дальность наблюдения (м);
V - размер поля зрения по высоте на максимальной дальности наблюдения (м).
1.3.7 Видеомониторы - это устройства, преобразующие видеосигналы в двухмерное изображение. Видеомониторы являются изделиями, специально предназначенными для использования в системах видеонаблюдения (высокая надежность при круглосуточной работе, частом переключении кадров и т.п.), поэтому замена их обычными приемниками телевизионного изображения или компьютерными мониторами нежелательна, а иногда недопустима. Кроме этого, многие видеомониторы снабжены встроенными устройствами для приема сигналов от нескольких камер – видеокоммутаторами. Мониторы делятся на два класса - мониторы черно-белого и мониторы цветного изображения. Основными характеристиками мониторов являются размер экрана по диагонали и разрешающая способность по горизонтали. Наиболее часто применяются мониторы с размером экрана 9" и 12". При использовании устройств совмещения изображения (квадраторов) применяются мониторы с большим размером экрана: 15", 17" или 20".
1.3.8 Видеокоммутаторы последовательного действия - это устройства, обеспечивающие последовательное переключение видеосигналов от нескольких телекамер на один или несколько выходов (мониторов). Видеокоммутаторы последовательного действия имеют автоматический («листающий») и ручной режимы переключения камер, позволяющие просматривать сигналы от всех камер либо выборочно от некоторых из них. Число входных видеоканалов может быть от 4 до 16, а при использовании нескольких блоков коммутации - до 64. Видеокоммутаторы последовательного действия являются сравнительно простыми устройствами и применяются, как правило, в небольших и недорогих системах.
1.3.9 Видеоквадраторы - это цифровые устройства, обеспечивающие размещение изображений от 4-х видеоисточников на одном экране, который в этом случае делится на 4 части (квадранты), и позволяющие уменьшить количество мониторов в системе. Квадраторы высокого разрешения позволяют работать на одном мониторе с 8 камерами: они формируют две группы по 4 камеры и дают возможность по очереди выводить их на экран. В некоторых видеоквадраторах могут быть встроены видеодетекторы движения.
1.3.10 Видеодетектор движения представляет собой электронный блок, встроенный или автономный, который хранит в памяти текущее изображение с телекамеры и подает сигнал тревоги при возникновении изменений в охраняемой зоне. Видеодетекторы движения применяются, главным образом, в системах охраны крупных объектов, где оператору приходится контролировать большое количество камер. Цифровые видеодетекторы движения применяются в сложных системах высокого класса.
1.3.11 Видеомультиплексоры представляют собой высокотехно-логичные системы видеозаписи и управления, обладающие широкими функциональными возможностями, и предназначены для записи видеосигналов от нескольких (до 16) камер на одну видеокассету с использованием кодирования, воспроизведение кодированных кассет и обработку сигналов тревоги. Мультиплексоры позволяют осуществлять переключение между различными методами записи, что дает возможность либо записывать то, что появляется на экране, либо просматривать на экране изображения от одних камер, записывая в это же время изображения от других камер. Благодаря наличию нескольких режимов вывода изображений на экран, записанные изображения могут просматриваться на одном мониторе в полноэкранном режиме, режимах квадрированного экрана и «картинка в картинке» либо в мультиэкранном режиме (8+2, 9, 4+3, 12+1 или 16 сегментов на одном экране
1.3.12 Матричные коммутаторы имеют встроенный процессор и обеспечивают независимую коммутацию видеосигналов с большого количества входов на любой из мониторов. При наличии детектора движения коммутатор самостоятельно отслеживает ситуацию и в случае тревоги выводит изображение именно того помещения, где сработала сигнализация, а также выдает звуковой сигнал для привлечения внимания оператора. Матричные коммутаторы позволяют формировать несколько последовательностей изображений от камер в любом порядке с управлением их поворотными устройствами и вариообъективами, а также выводить номера камер и названия помещений, в которых они установлены, сообщения о сигналах тревоги, текущее время, дату, инструкции оператору и т.п.
1.3.13 Компьютерные устройства управления, так называемые видеоменеджеры, включающие в себя компьютерные карты с аппаратным или программным сжатием, позволяют удовлетворить практически любые требования заказчика. Перечислить все возможные функции видеоменеджеров достаточно трудно, поэтому в качестве примера приводятся лишь некоторые из них.
Система обеспечивает несколько режимов работы. В режиме «подготовка» оператор заносит в память машины необходимую служебную информацию: номера телефонов, по которым производится автоматическое дозванивание в случае тревоги и передача информации на удаленный пост через модем, шифры кодовых замков, данные об операторе, заступившем на дежурство, временные окна нахождения объекта под охраной либо свободного доступа на него, номера охраняемых автомобилей и т.п. В режиме «тестирование» проверяется работоспособность средств охранной сигнализации. В режиме «охрана» при срабатывании охранного извещателя на экран монитора выводится план контролируемой зоны и сработавший извещатель, изображение от установленной в этой зоне телекамеры с необходимым увеличением.
Система может выполнять функции цифрового видеодетектора движения с программированием данных нарушителя (направление движения, скорость, размеры и т.п.), управлять режимами записи, воспроизведения и вывода изображения на экран, программировать алгоритмы наблюдения, охраны и видеорегистрации в ежедневном и еженедельном циклах, производить обработку видеоинформации цифровыми методами, автоматически фиксировать повреждения камер, коммуникаций и другого периферийного оборудования, реализовать смешанный режим охраны-наблюдения, вести диалог с оператором речевым способом и т.п. Функциональные возможности и эффективность компьютерных систем наилучшим образом проявляются при организации с их помощью интегрированных систем охраны.
1.4 Лекция 4. Основные компоненты систем видеонаблюдения (продолжение)
1.4.1 Специализированные видеомагнитофоны (VCR - Video Cassette Recorder) предназначены для регистрации и документирования в течение длительного времени событий, происходящих в охраняемых зонах. Видеомагнитофоны могут работать в двух режимах: непрерывном (время записи на стандартную видеокассету (180 минут…3 часа) и прерывистом (время записи 24, 480 или 960 часов). В прерывистом режиме записываются не все кадры, а только определенные (таблица 4.1).
Наиболее популярным режимом записи является 24-х часовой режим с использованием 3-х часовой кассеты. При этом соответствующая скорость записи - 6,25 полей/сек и промежуток между соседними изображениями - 0,16 сек. Если в системе более одной камеры, то используются устройства обработки - видеоквадраторы и мультиплексоры.
Т а б л и ц а 1.1 – Режимы записи видеомагнитофонов
|
Режимы записи на одну кассету |
||
|
Часы |
Кадры |
Кол-во кадров /за N секунд |
|
3 |
все кадры |
25/1 |
|
24 |
каждый 8-й кадр |
3/1 |
|
480 |
каждый 160-й кадр |
1/7 |
|
960 |
каждый 320-й кадр |
l/14 |
При использовании видеоквадратора на пленку видеомагнитофона посылаются одновременно изображения со всех 4-х или 8-ми камер (в зависимости от модели квадратора), в том же представлении, что наблюдается на экране монитора, то есть экран, «разрезанный» на 4 или 9 частей. При этом скорость записи не теряется: каждое из 4-х или 8-ми изображений обновляется со скоростью 6,25 полей/сек, но сильно теряется качество изображения. Разрешение записи обычного Time Lapse VCR – 330…350 ТВ - линий по горизонтали для черно-белого изображения, но так как на это качество накладывается сразу 4 или 9 изображений, то разрешение записи по горизонтали делится соответственно на 2 или на 3 и составляет для каждой камеры, записанной с использованием 4-х канального квадратора, - 165…175 ТВ-линий; а с использованием 9-ти канального – 110…117 ТВЛ. В результате получается достаточно подробная, но плохая по качеству запись.
1.4.2 Цифровые видеорегистраторы (DVR). Цифровые системы конвертируют аналоговый видеосигнал в последовательность отдельных изображений или снимков. Каждый снимок содержит полное неподвижное видеоизображение в отдельный момент времени. Изображение определяется как регулярная матрица точек на изображении, содержание каждой точки может быть описано числом. Разрешение изображения определяется числом пикселей: чем выше цифровое разрешение, тем больше чисел требуется для описания изображения. Цифровой видеоснимок представляется в той же форме, что компьютерные данные, поэтому возможно использовать компьютерные технологии для хранения и обработки этих данных. Один из недостатков заключается в том, что каждое изображение состоит из относительно большого количества данных, что имеет значение при хранении и обработке. В настоящий момент существует два основных подхода к построению систем цифровой видеозаписи:
- использования плат видеоввода, встраиваемых в универсальный персональный компьютер;
- разработка комплексной системы на основе специализированных промышленных компьютеров.
Несмотря на кажущуюся экономическую привлекательность первого подхода создания цифровой системы видеонаблюдения, он имеет существенные недостатки, по сравнению с «промышленной» системой цифровой видеозаписи: использование «экономичных» карт видеоввода требует максимального использования ресурсов компьютера, то есть на качество видеозаписи напрямую влияют следующие параметры:
- частота процессора;
- частота системной шины;
- объем оперативной памяти и т д.
Это не позволяет применять подобного рода карты видеозахвата на недорогих компьютерах. Для максимальной разгрузки системных ресурсов компьютера необходимо применять мощные карты видеоввода с аппаратной обработкой, что приводит к значительному увеличению стоимости.
Второй (промышленный) подход к построению системы характеризуется разработкой оптимально сбалансированного комплекса аппаратно-программных средств. В последнее время на рынке технических средств и систем безопасности все более широкое применение получают системы охранного телевидения (СОТ), использующие цифровую обработку, передачу и хранение видеоинформации. Соответственно, у оцифрованного сигнала открывается весь спектр возможностей для всякого рода его обработки, анализа и моделирования мощными арсеналами программно-математических средств. Одно из неоспоримых преимуществ цифровых технологий - возможность применения к оцифрованному сигналу мощного математического аппарата упаковки и сжатия информации. На рисунке 1.5 показана блок-схема типового DVR.
Рисунок 1.5 - Блок-схема цифрового регистратора (DVR)
Другим направлением использования цифровых технологий в ЦСОТ является перевод традиционных аппаратных устройств на работу с цифровыми сигналами.
Прежде всего, это телекамеры и цифровые видеомагнитофоны или многофункциональные видеорегистраторы (Digital Video Recorder - DVR). На их базе строятся ЦСОТ без использования ПК. Прежде всего их отличает простота управления за счет меньшей гибкости в конфигурировании системы. Но в то же время за счет использования более стабильных операционных систем типа Linux цифровые видеорегистраторы по надежности намного выше систем на базе ПК с операционными системами общего пользования.
На рисунке 1.6 показана типовая схема системы охранного телевидения на базе управляемых камер и цифрового регистратора (DVR).
Рисунок 1.6 - Типовая ЦСОТ на базе DVR
В целом ЦСОТ имеют следующие отличительные особенности от аналоговых систем:
- неограниченные возможности конфигурирования и модернизации;
- высокую функциональность и настраиваемость под конкретный объект;
- высокие характеристики скорости ввода видеоинформации и качества ее записи;
- неограниченное время хранения записи и глубина архива;
- быстрый доступ к архиву по различным критериям и приоритетам;
- возможность удаленного доступа к видеоизображениям и архивам;
- интеллектуальный детектор движения.
Другим фактором, влияющим на качество отображения и записи видеоинформации, является используемый в системе алгоритм компрессии или сжатия оцифрованного изображения. На рынке цифровых технологий, в основном, представлены системы, использующие следующие типы компрессии: JPEG, MIPEG, MPEG-2, MPEG-4 (или Н-264 как развитие MPEG-4), Wavelet.
Основные принципы сжатия видеоинформации сводятся к следующему:
- сжатие данных внутри отдельного кадра;
- оптимизация в передаче изменений между кадрами.
1.4.3 Каналы передачи телевизионного сигнала. Для передачи телевизионного сигнала могут использоваться как проводные каналы связи (коаксиальные кабели, телефонные линии (витая пара), волоконно-оптические линии), так и беспроводные каналы - радиоканал или ИК-канал. Стабильная и качественная работа системы возможна при использовании коаксиальных кабелей. Одним из основных параметров высокочастотного кабеля является волновое сопротивление. Волновое сопротивление линии с малыми потерями определяется по формуле:
 (1.2)
(1.2)
где Z — волновое сопротивление (Ом);
Lк — индуктивность закороченной линии (Гн);
Ск — емкость разомкнутой линии (Ф).
1.4.4 При необходимости передачи сигнала на большие расстояния применяют видеоусилители и модемы (передатчики-модуляторы и приемники-демодуляторы). Установка видеоусилителя сигнала около монитора приведет в усилению как полезного сигнала, так и шумов, которые "насасывает" длинный кабель связи. В этом случае эффект зашумления видеосигнала на мониторе будет очевиден, и данный усилитель не восстановит "потерянные" в кабеле связи строки в видеосигнале. Видеоизображение будет стабильным, т.к. уровень входного сигнала на входе монитора будет стандартным, но сам сигнал будет иметь меньшее количество строк и меньшее отношение уровня сигнала к уровню шума. Поэтому усилитель видеосигнала должен устанавливаться около видеокамеры перед длинной линией связи. Такой усилитель должен иметь высокую линейность и, в зависимости от длины линии связи и расчетного затухания в ней, иметь определенный коэффициент усиления сигнала. Видеораспределители используются при необходимости трансляции видеосигнала нескольким потребителям. Основными характеристиками видеораспределителей являются входное и выходное сопротивления, а также количество выходов (количество возможных потребителей).
1.4.5 Кабель "Twisted Pair" - витая паpа состоит из паp пpоводов, закpученных вокpуг дpуг дpуга и одновpеменно закpученных вокpуг дpугих паp, в пpеделах одной оболочки. Каждая паpа состоит из пpовода, именуемого "Ring" и пpовода "Tip". Данные названия пpоизошли из телефонии. Каждая паpа в оболочке имеет свой номеp, таким образом, каждый провод можно идентифициpовать как Ring1, Tip1, Ring2, Tip2, ... . Дополнительно к нумеpации пpоводов каждая паpа имеет свою уникальную цветовую схему. Например, синий/белый для 1-ой паpы, оpанжевый/белый - для 2-й, зеленый/белый - для 3-й, коpичневый/белый - для 4-й и так далее. Когда количество пар невелико (4 пары), часто не применяется окраска основного провода полосками цвета дополнительного. В этом случае провода имеют цвет в парах - синий и белый с синими полосками, оранжевый и белый с оранжевыми полосками, зеленый и белый с зелеными полосками, коричневый и белый с коричневыми полосками. Для обозначения диаметра провода часто применяется американская мера - AWG (American Wire Gauge) (Gauge - калибр, диаметр). Согласно стандартам, провод делится на несколько категорий по своей пропускной способности. Обычно на проводе написано, к какой категории он относится. Например, "CATEGORY 5 UTP".
Кабели «витая паpа» обладают целым рядом преимуществ по сравнению с коаксиальными кабелями такого же сечения – высокая помехоустойчивость за счет симметрирования видеосигнала, большая дальность передачи, более низкая стоимость. Передатчик, предназначенный для передачи цветных и черно-белых видеосигналов по кабелю типа «витая пара», представляет собой очень компактное устройство с встроенным BNC-разъемом для непосредственного подключения к камере. Благодаря низкой потребляемой мощности, питание передатчика может осуществляться прямо от камеры.
1.4.6 В специальных системах видеонаблюдения, когда требуется повышенная помехозащищенность, конфиденциальность информации и высокая разрешающая способность, применяются волоконно-оптические линии связи. Дальность действия таких систем (как и при передаче по телефонным линиям) практически неограниченна. Относительная дороговизна систем с волоконно-оптическими линиями связи обусловлена тем, что видеокамеры не имеют выхода для подключения оптоволоконного кабеля, поэтому требуется вводить в систему преобразователи электрического сигнала в оптический и обратно.
1.4.7 При создании мобильных и переносных систем, а также, если прокладка кабельных линий невозможна или нецелесообразна, используется радио - или инфракрасный каналы связи. Дальность передачи при этом составляет от нескольких сотен метров до нескольких километров. В простейшем случае камера подключается к радиопередатчику дециметрового диапазона, а сигнал принимается на обычный телевизор. Однако такие системы имеют существенные недостатки - могут создавать помехи бытовому телевещанию, а сигнал в зоне действия передатчика может принимать преступник. Этих недостатков лишены радиосистемы, работающие в сантиметровом диапазоне, а также инфракрасные системы. Последние не требуют разрешения на применение, однако, они работают только в зоне прямой видимости, а их дальность действия в значительной мере зависит от оптической плотности среды (снег, дождь, туман, пыль и т. п.).
1.4.7 Системы питания. Основными напряжениями питания компонентов систем телевизионного видеоконтроля являются 220В переменного тока частотой 50 Гц и 12 В постоянного тока. От сети переменного тока напряжением 220 В питаются практически все мониторы, коммутаторы, квадраторы, мультиплексоры, видеомагнитофоны, видеопринтеры, поворотные устройства, гермокожухи, а также некоторые камеры. Напряжением 12 В постоянного тока питаются практически все камеры, а также некоторые устройства обработки видеосигнала (квадраторы, коммутаторы и т.п.) и поворотные устройства. В редких случаях питание компонентов систем видеонаблюдения осуществляется напряжением 24 В постоянного и переменного тока, а также 9 В постоянного тока. Нормативным документом, в котором сконцентрированы технические требования к системам CCTV, в том числе и к электропитанию, является ГОСТ Р 51558 - 2000 «Системы охранные телевизионные. Общие технические требования и методы испытаний», впервые введенный в действие с 1.01.2001г. Буферные ЭПУ (рисунок 1.7) получили широкое распространение для питания аппаратуры видеонаблюдения. Достоинством буферной системы электропитания является: обеспечение аппаратуры бесперебойным питанием; обеспечение АБ роли динамического фильтра; возможность повышения мощности системы за счет параллельного включения преобразовательных устройств.
Рисунок 1.7 - Буферная система электропитания
1.5 Лекция 5. Классификация и выбор компонентов системы видеонаблюдения для оборудования объектов
1.5.1 По показателям значимости системы подразделяются на классы в соответствии с категориями значимости охраняемых объектов: высший, средний и общего применения.
По условиям эксплуатации различают системы (части систем) для работы:
- в закрытых отапливаемых помещениях;
- в закрытых неотапливаемых помещениях;
- под навесом на улице в условиях умеренно-холодного климата;
- на улице в условиях умеренно-холодного климата;
- в особых условиях (повышенная влажность, запыленность, вибрации и т.п.).
В зависимости от назначения, характера решаемых задач и выполняемых функций различают следующие режимы работы системы (части системы):
- режим 1 - видеонаблюдение;
- режим 2 - видеонаблюдение с видеозаписью;
- режим 3 - одновременное видеонаблюдение и видеоохрана;
- режим 4 - видеонаблюдение и видеоохрана с видеозаписью и приоритетным выбором (выделением) для видеонаблюдения и видеозаписи камеры (камер), с которых приходит сигнал тревоги;
- режим 5 - видеозащита, т.е. видеонаблюдение и видеоохрана, с видеозаписью и приоритетным выбором (выделением) для видеонаблюдения и видеозаписи камер из зон наблюдения, с которых приходит сигнал тревоги от средств охранно-пожарной сигнализации, устройств контроля доступа или других систем, входящих вместе с системой видеоконтроля в комплекс ИСО.
С помощью системы (части системы) видеоконтроля на объекте могут создаваться:
- зоны видеонаблюдения - зоны объекта, в которых осуществляется наблюдение телевизионными камерами;
- зоны видеоохраны - зоны объекта, в которых осуществляется наблюдение телевизионными камерами и при изменении ситуации выдается сигнал тревоги с помощью сигналов, генерируемых средствами видеоохраны;
- зоны защиты - зоны объекта, которые оборудованы интегрированными системами охраны (включая средства сигнализации, устройства контроля доступа и т.п.) и в которых видеонаблюдение может производиться по сигналам тревоги от средств сигнализации, устройств контроля доступа и т.п.
Телевизионные системы видеоконтроля формируются по модульному принципу. Модулем называется совокупность технических средств, приборов и устройств, объединенных линиями связи, решающая конкретную функциональную задачу.
В зависимости от параметров функционирования используемых технических средств, приборов, устройств и линий связи, различают:
- модули общего применения;
- модули среднего класса;
- модули высшего класса.
1.5.2 Модули общего применения содержат простейшие технические средства (телевизионные камеры и средства их оснащения, коммутаторы, мониторы и т.п.). Рекомендуется применять для систем обычного применения, не входящих в состав ИСО, на объектах категорий значимости Б и В.
1.5.3 Модули среднего класса содержат технические средства с обычными и улучшенными характеристиками, имеющие входы и выходы тревоги (телевизионные камеры и средства их оснащения, коммутаторы, квадраторы, мониторы, видеомультиплексоры с ограниченными возможностями, простейшие видеодетекторы движения, видеомагнитофоны, цифровые видеорегистраторы и т. п.). Рекомендуется применять для систем среднего класса на объектах категории значимости Б.
1.5.4 Модули высшего класса содержат технические средства с наилучшими характеристиками, имеющие входы и выходы тревоги (телевизионные камеры и средства их оснащения, профессиональные видеодетекторы движения, мониторы и охранные видеомагнитофоны повышенного разрешения (S-VHS класса), многофункциональные мультиплексоры, матричные коммутаторы, цифровые видеорегистраторы и т.п.) Рекомендуется применять в составе систем высшего и среднего класса (в том числе входящих в ИСО) на объектах, категорий значимости А и Б.
По выполняемым функциям модули подразделяются на:
- модули видеонаблюдения;
- модули видеозаписи;
- модули видеоохраны;
- модули видеопередачи.
1.5.5 Класс системы. Трудно найти объект, все или почти все зоны которого имели бы одинаковую категорию значимости. Даже на объектах категории А всегда можно выделить зоны категорий Б и В. Как правило, зоны низших категорий удалены от «ответственных» зон и проникновение на них не связано с ущербом, который может быть нанесен при проникновении на зоны более высокой категории значимости. Заказчик определяет категорию значимости объекта, и в соответствии с ней может выбрать класс системы в целом. Однако более рациональным и экономичным является выбор для каждой зоны (группы зон) объекта модулей такого класса, который соответствует их категориям значимости.
1.5.6 Режим работы системы. На основании полученных характеристик значимости объекта (зон, групп зон) выбираются показатели их защиты. Одни из этих зон определяют как зоны видеонаблюдения, другие - как зоны видеоохраны, третьи - как зоны видеозащиты. В соответствии с этим устанавливается режим работы системы. В таблице 1.2 приведены рекомендуемые режимы работы системы и типы защиты объекта (зоны), в зависимости от категории значимости объекта (зоны).
Т а б л и ц а 1.2 – Рекомендуемые режимы работы
|
0 |
Тип защиты объекта (зоны) |
Режим работы системы |
|
А |
Видеозащита |
4,5 |
|
Б |
Видеозащита, видеоохрана |
4,5 |
|
В |
Видеоохрана, видеонаблюдение |
1…4 |
От режима работы системы зависит состав и стоимость оборудования, нагрузка на оператора, сложность программного обеспечения. Наиболее сложным и дорогостоящим является аппаратно-программное обеспечение режимов 4 и 5.
1.5.7 Первичная оценка состава системы. Перед тем, как приступить к закупке аппаратуры и оборудованию объекта, желательно хотя бы ориентировочно оценить сложность будущей системы. Для этого вначале определяют необходимое количество камер, а затем систему условно относят к соответствующей группе:
- 1 группа - системы, содержащие до 8 камер;
- 2 группа - системы, содержащие от 9 до 16 камер;
- 3 группа - системы, содержащие более 16 камер.
1.5.8 Правильный выбор телевизионных камер является принципиально самым важным моментом в проектировании системы, так как именно характеристиками камер определяются, в конечном счете, характеристики других компонентов системы и в целом ее стоимость.
При выборе телекамеры и места ее установки учитываются:
- категория значимости зоны;
- геометрические размеры зоны;
- необходимость идентификации наблюдаемого предмета;
- ориентация зоны на местности;
- освещенность объекта наблюдения;
- расположение уязвимых мест (окон, дверей, люков и т.п.);
- условия эксплуатации;
- вид наблюдения - скрытое или открытое.
Для того, чтобы определить основные параметры камер, целесообразно сгруппировать зоны объекта таким образом, чтобы требования к камерам oт группы к группе были различными.
1.5.9 Размещение камеры в наблюдаемой зоне. Важную роль в обеспечении нормальной работы камеры играет выбор места установки камеры на объекте. При этом нужно обратить внимание на два момента. Во-первых, следует, по возможности, исключить засветки объектива прямым или отраженным солнечным светом, либо мощными источниками искусственного освещения, например, прожекторами. И, во-вторых, нужно ориентировать камеру таким образом, чтобы в поле зрения попадали все уязвимые места (окна, двери, люки и т.п.), а размеры непросматриваемой зоны не позволяли нарушителю проникнуть через нее. Для того чтобы избежать засветок рекомендуется не ориентировать камеру в южную сторону, устанавливать камеру на потолке либо на стене или в углу с наклоном её вниз, использовать корпус или кожух с защитными козырьком и фильтром, не направлять камеру на блестящие, хорошо отражающие свет предметы (зеркала, лужи и т.п.), окна и наружные двери. Весьма важным вопросом при проектировании системы охранного телевидения является учет мертвой зоны под видеокамерой. Чтобы определить длину мертвой зоны m следует рассмотреть треугольник ADG, в котором необходимо опустить перпендикуляр PQ на основание AG (рисунок 1.8). Перпендикуляр PQ длиной n может служить в качестве примера высоты человека (естественно, если мы оцениваем длину мертвой зоны AQ на предмет обнаружения человека). Иначе говоря, если окажется человек высотой n правее точки Q, он попадет на экран видеомонитора.
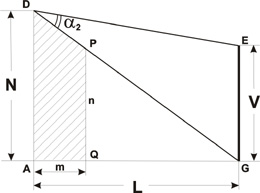
Рисунок 1.8 – Определение мертвой зоны под видеокамерой
Формула для определения длины мертвой зоны
m = L*(N – n) / N. (1.3)
1.5.10 По аналогии с мертвой зоной под видеокамерой можно ввести термин условно мертвая зона, понимая под этим ту часть сектора обзора по горизонтали, которая оказывается "невидимой" видеосистемой для некоторых движущихся объектов (рисунок 1.9).
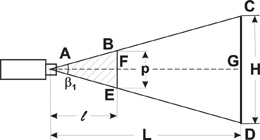
Рисунок 1.9 - Определение условно мертвой зоны по горизонтали
Длина пути p пересечения сектора наблюдения объектом равна произведению скорости движения этого объекта v на время пересечения t
p = v*t. (1.4)
1.5.11 Дальняя зона. Чем дальше от видеокамеры находятся объекты, тем мельче они отображаются на экране видеомонитора, тем сложнее задача их обнаруживать, а тем более идентифицировать. Зона сектора наблюдения, за границей которой указанные задачи при данном комплекте видеооборудовании не могут быть реализованы, называется дальней зоной. Прежде, чем говорить об обнаружении объекта, следует договориться, что в конкретной задаче понимается под объектом, который требуется обнаруживать. Например, размеры автомобилей могут быть взяты из каталогов; намного сложнее обстоит дело с обнаружением человека в охраняемой зоне. ГОСТ Р 51558 - 2000 «Системы охранные телевизионные» в качестве стандартной цели называет человека весом (50-70) кг, ростом (165-180) см, одетого в белый хлопчатобумажный халат. Поскольку системы охранного телевидения пока не в силах обнаруживать цель по их весу, а размер человека по вертикали при желании можно уменьшить (присев или начав ползти), то для оценки видеосистем более практичным параметром человека, как цели, представляется использование его размера по горизонтали, который может быть принят равным 0,5 м.
1.6 Лекция 6. Требования к каналам передачи видеосигнала
1.6.1 Спектральное и временное представление сигналов. При разверткe, которая применяется в системах замкнутого телевидения, частота следования кадров fкадр = 25 Гц. Максимальная частота видеосигнала при этом будет равна: fмакс = 4х6252х25/3х2 = 6 510 416 Гц, т.е. примерно 6,5 МГц. Применение чересстрочной развертки позволяет взять частоту полукадров (частоту кадровой развертки Fкадр), определяющую мерцание экрана, равной частоте электросети 50 Гц, и этим самым ликвидировать мерцание и ослабить помехи от сети переменного тока, частота кадров fкадр при этом оказывается равной 25 Гц, что определяет высшую частоту сигнала изображения – 6,5 МГц. При построчной развертке с Fкадр = 50 Гц высшая частота сигнала изображения будет 13 МГц. Минимальная частота сигнала изображения fс.мин остается равной частоте кадровой развертки Fкадр = 50 Гц, т.е., частоте полукадров – полей). Полоса частот видеосигнала простирается от 50 Гц до 6,5 МГц и вся она занята сигналом. При чересстрочной развертке существует значительная взаимная зависимость между видеосигналами в соседних полях и кадрах. Это позволяет считать видеосигнал периодичным с частотой кадровой развертки при передаче изображений неподвижных объектов. Видеосигналу присуща также определенная периодичность с частотой строк в результате высокой степени связи сигналов в соседних строках. С учетом высокой взаимной связи между строками и кадрами можно представить напряжение сигнала как временную функцию с периодом повторения строчной Тс.р. и кадровой Тк.р. разверток. Периодичность видеосигнала при передаче изображений неподвижных объектов является его главной особенностью. Периодическое колебание состоит из суммы постоянной составляющей (частота которой равна нулю) и ряда гармонических (синусоидальных) колебаний. Амплитуда частотных составляющих телевизионного сигнала падает с ростом частоты (номера гармоники). Первая гармоническая составляющая с частотой fк1 = Fкадр = 50 Гц. Далее низкочастотный участок спектра занят гармониками частоты кадровой развертки. Вторая гармоника имеет частоту fк2 = 2Fкадр = 100 Гц. Частота строк (625-я гармоника частоты кадров) и все ее гармоники являются гармониками частоты кадров
fстр = Zfкадр.= 625х25 = 15625 Гц.
При передаче неподвижных изображений около составляющих спектра гармоник частоты строк fстр группируются боковые спектры, имеющие также вид дискретных линий, кратных частоте кадровой развертки Fкадр (± 50 Гц). В случае однокадровой передачи, когда частота кадров стремится к нулю и спектральные линии сольются, спектр преобразуется в непрерывный. Наличие в полном телевизионном сигнале строчных гасящих и синхронизирующих импульсов увеличивает интенсивность гармоник спектра сигнала, кратных строчной частоте, по их числу и амплитуде. При изменении динамики изображения меняется и положение линий спектра. Спектр как бы «дышит» относительно гармоник частоты строк. Участки полос сигнала будут тем больше, а пустые промежутки тем меньше, чем выше скорость движения деталей передаваемого объекта. Но даже при сравнительно высоких скоростях, пустые промежутки в спектре сигнала оказываются настолько значительными, что в них можно поместить дополнительную информацию о цветности передаваемых объектов. Речь идет о поднесущей цветности, которая представляет собой радиоимпульс с длительностью 2,25 мкс и несущей частотой 4,4336 МГц. «Импульсный характер» цветового синхроимпульса определяет то, что его спектр имеет достаточно большую ширину и по форме также является дискретным. Чем больше гармонических составляющих принимает участие в формировании выходного сигнала, тем более точно он соответствует входному, исходному сигналу. Не имеет значения, что более высокочастотные гармоники спектра видеосигнала имеют малые амплитуды. Они и должны быть такими, и их значением нельзя пренебрегать. Нельзя запросто ограничить спектр полосой частот в 3 МГц и ждать от системы хорошего распознавания деталей. Скорее всего, такая система позволит очень хорошо отличать только день от ночи. Спектр радиоимпульса, которым является «вспышка поднесущей» цветовой синхронизации, достаточно широкий. Он занимает полосу частот от 3,10 МГц до 5,77 МГц с центральной частотой 4,43 МГц (рисунок 1.10).
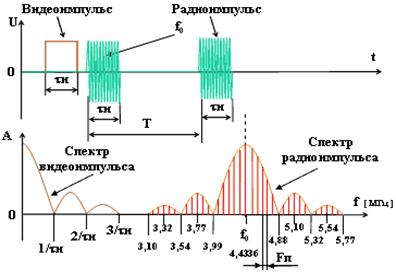
Рисунок 1.10 - Спектр радиоимпульса
Поэтому, для качественной передачи цветного видеосигнала необходима полоса пропускания системы не ниже 5,77 МГц. Это практически те же 6,5 МГц, которые мы определили при нахождении максимальной граничной частоты видеосигнала.
Теперь должно стать понятным, почему на осциллограмме (рисунок 1.10) радиоимпульс отображается с небольшой амплитудой – усилитель осциллографа с полосой 5 МГц его просто «зарезал». Чтобы при прохождении через усилительные цепи осциллографа не было ограничения спектра радиоимпульса, ширина полосы пропускания осциллографа должна быть не менее 6 МГц, а лучше – 10 МГц. Те же самые ограничения спектра происходят и в усилителях устройств и в линиях передачи видеосигналов. Если полоса пропускания устройств передачи видеосигнала ограничивает его спектр, то на приемной стороне мы будем наблюдать искаженный сигнал, а на мониторе – искаженное изображение.
1.6.2Разрешающая способность видеосистемы. Принимая во внимание формат телевизионного кадра 4:3 (отношение ширины к высоте), и то, что вертикальное разрешение на практике равно 400 ТВЛ, а максимальное – 430 ТВЛ, максимальное число вертикальных линий – горизонтальное разрешение в телевизионных линиях будет
430х4/3 = 573 ТВЛ.
Горизонтальное разрешение видеосистемы, имеющей в своем составе видеокамеру высокого разрешения 570 ТВЛ, может быть ухудшено за счет потерь высокочастотных составляющих спектра видеосигнала, внесенных несовершенной системой передачи. Практически, чтобы увидеть 570 ТВЛ на испытательной таблице, необходима полоса пропускания устройства передачи не менее 7 МГц. Другое дело, что такое разрешение не всегда требуется. Данные для требуемой полосы частот в зависимости от заданного разрешения приведены в таблице 1.3.
Т а б л и ц а 1.3 – Значения требуемой полосы частот в зависимости от заданного разрешения
|
№ |
Разрешение |
Требуемая полоса частот |
|
1 |
240 ТВЛ |
3 МГц |
|
2 |
320 ТВЛ |
4 МГц |
|
3 |
400 ТВЛ |
5 МГц |
|
4 |
480 ТВЛ |
6 МГц |
|
5 |
570 ТВЛ |
7 МГц |
Основные выводы:
- независимо от выбора способа передачи аналогового видеосигнала необходимо использовать такие устройства передачи, которые обеспечивают необходимую коррекцию частотных искажений, вносимых линией, в полосе видеосигнала, по меньшей мере, от 50 Гц до 6 МГц;
- при использовании для передачи видеосигнала на расстояния 300 – 400 метров коаксиального кабеля надо учитывать его характеристику затухания. Если коаксиальный кабель имеет на частотах видеосигнала затухание в 3,6 дБ/100 м., то на трассе в 200 метров видеосигнал на высоких частотах получит затухание 7,2 дБ, что приведет к снижению амплитуд наиболее высокочастотных гармоник видеосигнала, к потере информации о мелких деталях изображения и снижению разрешающей способности. Изображение на экране монитора будет казаться размытым, и при просмотре обстановки создастся впечатление, что это следствие плохой фокусировки объектива видеокамеры;
- скомпенсировать в какой-то мере частотные искажения в коаксиальном кабеле можно, используя на приемной стороне видеоусилитель-корректор (ВУК);
- при длине кабельной трассы свыше 300-400 метров более целесообразно использовать аппаратуру передачи видеосигнала по витой паре. Это позволит одновременно решить вопрос как повышения помехозащищенности канала передачи видеосигнала, так и улучшения качества передаваемого изображения. При этом, под «витой парой» не обязательно понимается компьютерный кабель для локальных вычислительных сетей;
- наилучшими характеристиками для передачи видеосигнала «по витой паре» на расстояния до 2000 метров обладает экранированный кабель телефонной городской связи. По своим частотным характеристикам, при длине от 1000 метров и выше, он значительно превосходит кабели AWG 24 (5-й категории) и П-274М (полевой). Последние два кабеля допускаются к использованию для качественной передачи видеосигнала только до 1000 метров и требуют введения дополнительной частотной коррекции;
- оценить качество системы передачи видеосигнала на этапе проектирования можно по сквозной амплитудно-частотной характеристике устройства передачи. Сквозная АЧХ с «нулевыми» частотными искажениями (± 0 дБ) является идеальной. Поэтому та система совершенней, которая ближе к идеалу;
- «нулевая» сквозная АЧХ свидетельствует о
том, что «какой видеосигнал пришел на вход системы передачи, таким он и будет
на выходе системы передачи». При этом имеет место точная передача всех
частотных составляющих спектра видеосигнала. Идеальное изделие при передаче
видеосигнала производит коррекцию искажений на всех частотах ровно настолько,
насколько на каждой из этих частот вносит затухание кабель.
В зависимости от дальности допустимой является неравномерность
АЧХ: ± 1,5…2,0 дБ;
- чем больший запас по затуханию имеет устройство передачи, тем большее число раз можно организовать ретрансляцию видеосигнала с целью увеличения общей дальности передачи.
2 Космические системы слежения
2.1 Лекция 7 Основные принципы определения координат в пространстве. Методы и точность радионавигационных измерений
2.1.1 Основные идеи и принципы, на которых основано действие, весьма просты: это - определение местоположения объекта путем измерения его удаления от навигационных точек, координаты которых известны. Сложность же реализации этих идей обусловлена стремлением сделать систему круглосуточной и глобальной. Для этого в качестве навигационных точек выбраны искусственные спутники Земли, излучающие специальные радиосигналы, которые пользователь принимает на специальный приемник. Но спутники движутся по своим орбитам, значит, система должна предоставлять пользователю информацию о координатах НКА на любой момент выполнения измерений.
В основе применяемого в СРНС (Спутниковые РадиоНавигационные Системы) метода определения местоположения лежит так называемая линейная геодезическая засечка. Ее суть сводится к известной геометрической задаче: найти положение точки R , находящейся на земной поверхности (hR=0), если известны положения двух других точек S1 и S2 и расстояния до них d 1 и d 2 (рисунок 2.1). Искомая точка R , очевидно, принадлежит одновременно двум окружностям с радиусами d 1 и d 2, описанным из центров S1 и S2, т.е. является одной из двух точек пересечения этих окружностей. В аналитическом представлении эта задача выражается в виде системы двух уравнений:
![]()
![]() , (2.1)
, (2.1)
где X, Y - прямоугольные координаты точек на плоскости.
Искомые координаты ХR, YR точки R получаются из решения системы (2.1) двух уравнений с двумя неизвестными.
 |
Рисунок 2.1 - Геометрическая засечка
При обобщении этой задачи для пространственного построения вводится третья координата Z. Для определения теперь уже трех искомых координат ХR , YR , ZR точки R понадобится решать систему из трех уравнений:
![]() ,i=1, 2,
3. (2.2)
,i=1, 2,
3. (2.2)
Следовательно, при решении пространственной линейной засечки должно быть 3 навигационные точки, не лежащие на одной прямой, иначе система не будет иметь определенного решения. При решении систем уравнений (2.1 и 2.2) следует значения координат и расстояния выражать в одной размерности – пространственной или угловой. Количество исходных точек, до которых измерены расстояния, может быть и больше трех. Привлечение избыточных измерений, помимо повышения точности определения координат, дает еще возможность включения в систему уравнений дополнительных неизвестных параметров, определение которых необходимо для поправки часов в приемнике. Полагая, что бортовые часы точны, разность бортовых и наземных часов для каждого приемника постоянна. Она рассчитывается методом итерации или аналитически.
С помощью описанного метода геодезической засечки в ГНСС (Глобальная Навигационная Спутниковая Система) решаются две главные задачи:
- определение координат спутника по измеренным удалениям его от наземных пунктов с известными координатами (прямая геодезическая засечка);
- определение координат наземного (или надземного) объекта по измеренным удалениям его от нескольких спутников, координаты которых известны (обратная геодезическая засечка).
Первую задачу решает служба управления (наземный сегмент) орбитальной системой, вторую - потребитель (пользовательский сегмент).
Для достижения наибольшей точности хорошие приемники снабжают вычислительными процедурами, которые анализируют относительные положения всех доступных для наблюдения спутников и выбирают из них четырех кандидатов, т.е. наилучшим образом расположенные четыре спутника.
2.1.2 Фактически измеряется время распространения волн τ между спутником и приемником, а искомое расстояние d вычисляется по формуле:
d=cτ. (2.3)
Радиодальномерный метод, применяемый в СРНС, - однонаправленный: сигнал излучается передатчиком спутника и регистрируется приемником пользователя. Значит, в формуле (2.3) следует полагать τ = t1 – t0. Но это последнее соотношение справедливо только при условии, что оба момента t1 , t0 выражены в одной и той же шкале времени. Реально же излучение сигнала фиксируется по часам, установленным на спутнике, а прием - по часам приемника.
d¢i=di-cD τ i=[(XS,i-XR)2 +(YS,i-YR)2 +(ZS,i-ZR)2 ]1/2 – c(Dt R-Dt S) (2.4)
Это и есть основное уравнение для решения навигационной задачи с помощью СНРС. В нем - четыре неизвестных: координаты пункта XR, YR, ZR и поправка часов приемника DtR. Значит, для их определения необходимо составить и решить систему из четырех таких уравнений (i = 1, 2, 3, 4), то есть использовать наблюдения минимум четырех спутников.
2.1.3 При оценке точности навигационных измерений различают погрешности измерения навигационного параметра радионавигационного сигнала и погрешности определения соответствующих навигационных элементов, среди которых важнейшим является местоположение объекта. Погрешности РНС зависят, прежде всего, от метода, положенного в основу построения радионавигационного средства, от особенностей технической реализации РНС, от условий их эксплуатации.
Количество причин, влияющих на погрешности измерения навигационных параметров, велико и степень воздействия их обычно примерно одинакова, поэтому во многих случаях считают, что погрешности радионавигационных измерений в соответствии с центральной предельной теоремой имеют гауссовский закон распределения. При этом, основной мерой точности является среднеквадратическое значение s погрешности измерения навигационного параметра. На практике точность навигационных средств часто характеризуют максимальной погрешностью, равной 2s, а в ряде случаев, например, применительно к системам посадки, - предельной погрешностью, которая равна s.
2.2 Лекция 8 Факторы, искажающие результаты измерений и методы их учета. Структура радионавигационного сигнала.
2.2.1 Источники погрешностей, воздействующих на результаты измерений псевдодальностей, могут быть условно разделены на три группы, связанные, соответственно, со спутником, приемником, а также со средой распространения сигнала.
Как бы точны ни были атомные часы на спутниках, все же и у них имеются источники небольших погрешностей. Специальные станции следят за этими часами и могут выверить их, если выявится хотя бы незначительный уход.
Наши приемники на Земле также иногда ошибаются. Компьютер приемника может округлить математическую операцию, или электрические помехи могут привести к ошибочной обработке навигационных сигналов.
При прохождении через атмосферу скорость распространения радиоволн отличается от скорости света в вакууме, поэтому в вычисленные значения псевдодальностей необходимо ввести поправку.
Принято значение этой поправки разбивать на три части, одна из которых относится к свободному пространству между спутником и ионосферой, вторая – к ионосфере, содержащей электрически заряженные частицы и третья – к нижней (до 10 км) части атмосферы - тропосфере.
Эффекты многолучевости. Они возникают, когда сигналы, передаваемые со спутника, многократно переотражаются от окружающих предметов и поверхностей до того, как попадают в приемник.
Релятивистские эффекты. Их влияние сказывается на орбитах спутников, на распространении сигналов и на ходе часов спутника.
Все источники погрешностей суммируются и придают каждому измерению навигационных параметров некоторую неопределенность.
2.2.2 Среда влияет на поглощение, траекторию (отражение, дифракция, преломление) и скорость распространения радиоволн. Магнитное поле Земли в ионизированной плазме приводит к расщеплению радиосигнала на обыкновенную и необыкновенную составляющие, которые имеют специфические дисперсионные характеристики взаимодействия со средой.
Даже от одного излучателя в пункт приема приходит несколько волн, распространяющихся различными траекториями (модами). Векторное сложение этих волн приводит к таким эффектам как интерференция, вращение плоскости поляризации, сопровождаемые нежелательными федингами амплитуды суммарного сигнала.
Каждый из частотных диапазонов характеризуется специфическими условиями распространения радиосигнала.
2.2.3 При использовании двухчастотных приемников, способных измерять псевдодальности по кодовым сигналам или по фазе несущей на двух частотах f1, f2, можно так скомбинировать измерения, что влияние ионосферы исключится.
Однако такой метод применим только при работе с фазовыми двухчастотными приемниками, большинство же широко распространенных типов менее дорогих приемников работают только на одной несущей частоте. В таких приемниках учет влияния ионосферы производится с помощью математической модели, текущие параметры которой содержатся в навигационном сообщении. Они вычисляются службой управления на основе собираемой метеорологической информации. Для вычисления ионосферной задержки Dtjon используется формула, основанная на модели Дж. А. Клобушара.
2.2.4 Дифференциальным методом введения ионосферных поправок можно назвать метод определения вектора состояния (координаты, составляющие скорости, время) потребителя по результатам приема и обработки сигналов СРНС, по крайней мере, в двух разнесенных точках ее рабочей зоны. Одна из этих двух точек – место расположения аппаратуры пользователя, вектор состояния которой уточняется, вторая (контрольная станция) – место расположения аппаратуры приема и обработки сигналов, обеспечивающей формирование корректирующей информации для уточнения вектора состояния потребителя.
Вторая точка эталонируется в результате ее привязки на местности с геодезической точностью и размещения там наиболее точной аппаратуры пользователя. Считается, что в этой точке можно выявить систематическую погрешность вектора состояния и такую же систематическую погрешность приписать вектору состояния для пункта размещения аппаратуры пользователя.
Очевидно, что эффект от применения дифференциального метода будет зависеть от того, насколько одинаковыми окажутся погрешности на контрольной станции и в точке нахождения потребителя, то есть от степени пространственной и временной корреляции погрешностей.
2.2.5 Для учета тропосферных поправок рассматривают различные модели тропосферных задержек, отличающиеся гипотезами о характере изменения метеопараметров с высотой
Отметим одно важное обстоятельство: величина тропосферной задержки зависит от угла наклона направления на спутник. Действительно: ведь чем сильнее наклон, тем длиннее путь через тропосферный слой, а вертикальный луч «прошивает» тропосферу по самому короткому пути. Указанное обстоятельство позволяет реализовать метод определения тропосферных поправок, без измерения метеопараметров. Для этого достаточно найти лишь поправку в зените Ddtr (0), полагая для других зенитных расстояний
 .
.
При установлении этих зависимостей принято рассматривать тропосферу как смесь сухого воздуха и водяных паров и рассчитывать задержки для каждого из этих компонентов по своим формулам. «Сухая» часть задержки составляет около 90% от полной, и она достаточно точно определяется по метеоданным, измеренным вблизи приемника. «Влажная» часть зависит от давления водяных паров, которое очень неустойчиво во времени и пространстве.
В среднем тропосферная поправка в зените составляет 2,3 м, а при угле наклона над горизонтом 15° - около 10 м.
2.2.6 Релятивистские эффекты, искажающие результаты измерений являются следствием движения спутника в гравитационном поле Земли Спутник создает дополнительное возмущающее ускорение, которое учитывается при численном интегрировании орбит спутников.
Гравитационное поле вызывает также дополнительное пространственно-временное искривление пути распространения сигнала. Увеличение дальности при этом может быть выражено формулой:
где rS и rR- расстояния от центра Земли до спутника и приемника,
m = G×MÅ = 3986005 ×108 м3/с2 - гравитационная постоянная Земли.
Вычисленное по этой формуле значение D drel составляет около 19 мм.
Согласно теории относительности, ход времени в собственной координатной системе спутника отличается от хода в земной системе из-за разницы гравитационных потенциалов и из-за движения спутника. Для спутников GPS это приводит к смещению частоты его базового генератора, которое можно рассчитать по формуле:
 ,
,
где V- скорость спутника;
fS- частота, сформированная на спутнике,
fR– частота, принятая на Земле.
Подставив в эту формулы численные значения входящих в нее величин, получим D drel = 4,464×10-10. Для частоты базового генератора fR = 10.23 МГц абсолютное смещение составит 4,55×10-3 Гц. Чтобы все излучаемые спутником сигналы воспринимались в масштабе земного времени, частота базовых генераторов спутников при настройке на Земле умышленно смещается до величины 10,22999999545 МГц.
2.3 Лекция 9 Структура, особенности построения и оборудование некоторых глобальных радионавигационных систем.
2.3.1 Глобальные Навигационные Спутниковые Системы (ГНСС): американская NAVSTAR - GPS и российская ГЛОНАСС. Глобальность систем ГНСС обеспечивается функционированием на орбитах набора видимых из любой точки Земли спутников, непрерывно передающих высокоточные измерительные сигналы. Тем самым вокруг нашей планеты создано как бы информационное координатно-временное поле, находясь в котором пользователь с помощью специального приемника может черпать из него данные о своем положении в пространстве и времени.
Спутниковой радионавигационной системой (СРНС) принято называть систему, в которой группировка ИСЗ выполняет роль опорных радионавигационных точек.
2.3.2 Глобальная система определения местоположения NAVSTAR (NAVigation System using Timing And Ranging), чаще называемая GPS (Global Positioning System), является спутниковой РНС, предназначенной для обеспечения точной навигационной информацией всех соответствующим образом оборудованных потребителей. Система обеспечивает непрерывную навигацию почти в глобальном масштабе независимо от погодных условий. Система NAVSTAR состоит из следующих взаимосвязанных подсистем: космических аппаратов, контроля и управления, аппаратуры потребителей.
В системе NAVSTAR используется дальномерный метод определения пространственных координат (широты, долготы и высоты). Для этой цели требуются измерения дальностей до четырех спутников: три измерения для определения пространственных координат и четвертое измерение – для синхронизации опорной временной шкалы часов приемоиндикатора. Приемоиндикатор системы NAVSTAR определяет дальность до спутника посредством измерения времени прихода сигнала. Сигнал, передаваемый спутниками, модулируется (кодируется) некоторой двоичной последовательностью, различной для каждого спутника. Приемоиндикатор генерирует опорные сигналы, соответствующие кодам спутников, сигналы которых принимаются. Синхронизация опорного кода по принимаемому коду осуществляется изменением тактовой частоты опорного кода, до тех пор, пока не будет зафиксирована максимальная корреляция между ними. Временной сдвиг между синхронизированным и несинхронизированным опорными кодами соответствует времени прохождения сигнала от спутника до потребителя без учета поправки часов приемоиндикатора. Для определения местоположения приемника необходимо знать местоположение спутника, которое можно точно вычислить на основании информации об эфемеридах, передаваемой спутниками. Точность информации об эфемеридах контролируется наземной подсистемой контроля и управления.
2.3.3 Глобальная навигационная спутниковая система NAVSTAR-GPS предоставляется в стандартном режиме для гражданского, коммерческого и научного использования бесплатно. Существует «Интерфейсный контрольный документ GPS» (ICD-200-C-002, 25.9.97), в котором зафиксированы важные для пользователей технические подробности об устройстве и функционировании системы и о взаимодействии с ней.
Принято рассматривать систему GPS, состоящую из трех составных частей: космического сегмента, сегмента управления и сегмента пользователей.
2.3.4 Космический сегмент, иначе называемый «орбитальная группировка», образуют действующие на орбитах спутники. Они распределены пространственно с таким расчетом, чтобы в любой точке Земли выше 15° над горизонтом находилось бы всегда от 4 до 8 спутников. Для этого запущено 24 основных и несколько резервных спутников (в 2001 г. их было всего 28), распределенных по 6 круговым орбитам на высоте около 20200 км над поверхностью Земли. Плоскости орбит наклонены к плоскости экватора под углом 55° и равномерно развернуты друг относительно друга так, что их узлы (точки пересечения орбит с экватором) отстоят по долготе на 60°. Период обращения спутников составляет 11 час. 58 мин., т.е. ровно половину звездных суток, и значит видимая с земли конфигурация созвездия спутников повторяется каждый день на 4 минуты раньше, чем в предыдущий.
2.3.5 Сегмент управления GPS решает две группы задач:
- непрерывный контроль за работоспособностью аппаратуры спутников, выявление и дистанционное устранение сбоев, выдача команд по корректировке орбит;
- эфемеридно-временное обеспечение системы (уточнение текущих орбитальных параметров и показаний бортовых часов, загрузка этих данных на спутники для передачи в составе навигационного сообщения).
Сегмент управления состоит из сети наземных станций слежения, равномерно распределенных по Земле вблизи экваториальных широт. Они работают в автоматическом режиме и управляются ведущей станцией.
Станции слежения принимают сигналы спутников GPS при помощи прецизионных приемников, и результаты измерения дальностей передают на ведущую станцию. Там по ним осуществляются точные расчеты и прогноз параметров орбит, ионосферной модели и корректирующих поправок для бортовых часов. Кроме того, на основе обработки метеорологической информации вычисляются текущие параметры модели тропосферных задержек. Все эти данные через радиостанции загрузки передаются на борт каждого спутника.
Сегмент управления устанавливает шкалу времени GPS, которая привязана к шкале времени UTC и поддерживается Военно-морской обсерваторией США. Начало отсчета этой шкалы времени установлено в полночь с 5 на 6 января 1980 г. Самой крупной единицей времени GPS является одна неделя (604800 с).
2.3.6 Сегмент пользователей образует комплекс приемно-вычислительной аппаратуры - пользовательских навигационных приемников, способных выполнять измерения по сигналам спутников GPS. Может показаться не вполне логичным, что рассредоточенные по всему миру и никак не связанные между собой приемники разного типа и назначения считаются частью системы GPS, но это столь же верно, как, например, считать ваш личный телефонный аппарат частью телефонной сети, ее оконечным устройством.
2.3.7 Полная орбитальная структура системы ГЛОНАСС должна состоять из 24 спутников, равномерно размещенных в трех орбитальных плоскостях. В настоящее время на орбитах присутствует 18 НКА, к 2010году их будет 24 – минимальная группировка для обеспечения глобального применения.
Орбитальные плоскости разнесены относительно друг друга на 120о по абсолютной долготе восходящего узла. Плоскостям присвоены номера 1, 2, 3 с возрастанием в направлении вращения Земли. Номинальные значения абсолютных долгот восходящих узлов идеальных плоскостей, зафиксированных на 00 часов Московского времени 1 января 1983 года, равны: 215о 15¢ 00¢¢ + 120о×(i - 1), где i - номер плоскости (i = 1, 2, 3).
2.3.8 Спутники системы ГЛОНАСС непрерывно излучают навигационные сигналы двух типов: навигационный сигнал стандартной точности (СТ) в диапазоне L1 (1,6 ГГц) и навигационный сигнал высокой точности (ВТ) в диапазонах L1 и L2 (1,2 ГГц). Информация, предоставляемая навигационным сигналом СТ, доступна всем потребителям на постоянной и глобальной основе и обеспечивает при использовании приемников ГЛОНАСС возможность определения:
- горизонтальных координат с точностью 50-70 м (вероятность 99,7%);
- вертикальных координат с точностью 70 м (вероятность 99,7%);
- составляющих вектора скорости с точностью 15 см/с (вероятность 99,7%)
- точного времени с точностью 0,7 мкс (вероятность 99,7 %).
Эти точности можно значительно улучшить, если использовать дифференциальный метод навигации и/или дополнительные специальные методы измерений.
Сигнал ВТ предназначен, в основном, для потребителей МО РФ, и его несанкционированное использование не рекомендуется. Вопрос о предоставлении сигнала ВТ гражданским потребителям только рассматривается.
Для определения пространственных координат и точного времени требуется принять и обработать навигационные сигналы не менее чем от 4-х спутников ГЛОНАСС. При приеме навигационных радиосигналов ГЛОНАСС приемник, используя известные радиотехнические методы, измеряет дальности до видимых спутников и измеряет скорости их движения.
2.3.9 Одновременно с проведением измерений в приемнике выполняется автоматическая обработка содержащихся в каждом навигационном радиосигнале меток времени и цифровой информации. Цифровая информация описывает положение данного спутника в пространстве и времени (эфемериды) относительно единой для системы шкалы времени и в геоцентрической связанной декартовой системе координат. Кроме того, цифровая информация описывает положение других спутников системы (альманах) в виде кеплеровских элементов их орбит и содержит некоторые другие параметры. Результаты измерений и принятая цифровая информация являются исходными данными для решения навигационной задачи по определению координат и параметров движения. Навигационная задача решается автоматически в вычислительном устройстве приемника, при этом используется известный метод наименьших квадратов. В результате решения определяются три координаты местоположения потребителя, скорость его движения и осуществляется привязка шкалы времени потребителя к высокоточной шкале Координированного всемирного времени (UTC).
2.3.10 В системе ГЛОНАСС каждый штатный НКА в ОГ постоянно излучает шумоподобные непрерывные навигационные радиосигналы в двух диапазонах частот 1600 МГц и 1250 МГц. В НАП навигационные измерения в двух диапазонах частот позволяют исключить ионосферные погрешности измерений.
Каждый НКА имеет цезиевый АСЧ, используемый для формирования бортовой шкалы (БШВ) и навигационных радиосигналов 1600 МГц и 1250 МГц.
Шумоподобные навигационные радиосигналы в ОГ НКА различаются несущими частотами. Поскольку для взаимноантиподных НКА в орбитальных плоскостях можно применять одинаковые несущие частоты, то для 24 штатных НКА минимально необходимое число несущих частот в каждом диапазоне частот равно 12
2.4 Лекция 10 Дистанционное зондирование Земли (ДЗЗ). Основные понятия, история возникновения отрасли.
2.4.1 Дистанционное зондирование Земли (ДЗЗ) означает получение информации о состоянии земной поверхности по измеренным на расстоянии, без непосредственного контакта датчиков с поверхностью, характеристикам электромагнитного излучения.
Датчики могут быть установлены на космических аппаратах, самолетах и других носителях. Диапазон измеряемых электромагнитных волн - от долей микрометра (видимое оптическое излучение) до метров (радиоволны). Методы ДЗЗ могут быть пассивные, т.е. использовать естественное отраженное или вторичное тепловое излучение объектов на поверхности Земли, обусловленное солнечной радиацией, и активные - использующие вынужденное излучение объектов, инициированное искусственным источником направленного действия. Сама возможность идентификации и классификации объектов по информации ДЗЗ основывается на том, что объекты разных типов - горные породы, почвы, вода, растительность и т.д. - по разному отражают и поглощают электромагнитное излучение в том или ином диапазоне длин волн.
Широкий диапазон сочетаний параметров предлагаемых типов данных (пространственного разрешения, полосы обзора, спектральной области), частая повторяемость съемки, а также возможность проведения радиолокационной съемки при любых погодных условиях и в любое время суток позволяют использовать их в самых разных областях хозяйственной деятельности:
- обновление топографических карт (вплоть до масштаба 1:10 000);
- оперативное обнаружение и мониторинг нефтяных загрязнений на суше и на шельфе в районах добычи и транспортировки нефти и нефтепродуктов;
- контроль за соблюдением лицензионных соглашений при освоении месторождений природных ресурсов;
- оперативная оценка состояния ледового и снежного покрова;
- оперативная оценка состояния и степени деградации сельскохозяй-ственных и пастбищных земель;
- ведение земельного кадастра;
- актуализация карт лесопользования;
- раннее обнаружение и наблюдение за развитием лесных и степных пожаров;
- объективная и оперативная оценка ущерба от стихийных бедствий;
- мониторинг состояния гидротехнических сооружений;
- создание современных тематических карт состояния природных объектов (растительности, состояния почвенного покрова, аварийноопасности территорий и др.);
- создание цифровых моделей рельефа;
- оценка экологических последствий освоения территорий;
- постоянный мониторинг состояния ледников в горных районах;
- контроль за нелегальным рыболовством в акваториях.
Наиболее популярная форма ДЗЗ это космические снимки.
2.4.2 Космические снимки — собирательное название данных, получаемых посредством космических аппаратов (КА) в различных диапазонах электромагнитного спектра, визуализируемых затем по определённому алгоритму.
Как правило, под понятием космические снимки в широких массах понимают обработанные данные дистанционного зондирования Земли, представленные в виде визуальных изображений.
Исходная информация космических снимков представляет собой зарегистрированное определённым видом сенсоров электромагнитное излучение (ЭМИ). Такое излучение может иметь как естественный природный характер, так и отклик от искусственного (антропогенного или иного) происхождения. Например, снимки Земли, т. н. оптического диапазона, представляют собой по сути обычную «фотографию» (способы получения, которой, тем не менее, могут быть весьма сложны). Такие снимки характеризуются тем, что регистрируют отражение естественного излучения Солнца от поверхности Земли (как в любой фотографии ясным днём). Снимки, использующие отклик от искусственного излучения похожи на фотографию ночью при фотовспышке, когда естественной подсветки нет и используется свет, отражённый от яркой вспышки лампы. В отличие от любительской съёмки, КА могут использовать переизлучение (отражение) в диапазонах электромагнитного спектра, выходящего за пределы оптического диапазона, видимого глазом человека и чувствительного для сенсоров бытовых камер. Например, таковы радарные снимки, для которых облачность атмосферы является прозрачной. Такие снимки дают изображение поверхности Земли или других космических тел «через облачность».
В самом начале для получения космических снимков использовался либо классический «фотографический» способ — съёмка специальной фотокамерой на светочувствительную плёнку, с последующим возвращением капсулы с плёнкой из космоса на Землю, либо съёмка телевизионной камерой с передачей телесигнала на наземную принимающую станцию.
На начало 2008г. преобладает сканерный способ, когда поперечную развёртку (перпендикулярно маршруту движения КА) обеспечивает сканирующий (качающийся механически или обеспечивающий электронную развёртку) механизм, передающий ЭМИ на сенсор (приёмное устройство) КА, а продольную развёртку (вдоль маршрута движения КА) обеспечивает само перемещение КА.
2.4.3 Первое телевизионное изображение Земли из космоса было получено с погодного спутника TIROS-1 (апрель 1960 года).
Первая спутниковая фотография Земли была сделана 14 августа 1959 года американским спутником «Explorer 6», а первые фотографии Луны — советским спутником «Луна-3» 6 октября того же года (во время выполнения фотографирования обратной стороны Луны). Знаменитое фото Blue Marble было снято в декабре 1972 году. В том же году США начало «Landsat» — крупнейшую программу по получению космических снимков поверхности Земли (последний спутник этой программы, «Landsat 7», был запущен в 1999 году). В 1977 году в рамках разведывательной программы KH-11 был сделан первый снимок, полученный в «реальном времени».
Все спутниковые изображения, сделанные и опубликованные НАСА, распространяются как общественное достояние и совершенно свободны. Другие страны также проводят программы по спутниковой фотосъёмке (в частности, европейские страны совместно работают над проектами ERS (European Remote-Sensing Satellite) и Envisat). Также существует ряд частных компаний, выполняющих коммерческие проекты спутниковой фотосъёмки.
В России для фотосъёмки использовались спутники серии Дон.
К началу XXI века результаты спутниковой фотосъёмки получили широкое распространение благодаря общедоступности и простоте работы с ними (например, многие сайты предоставляют бесплатный доступ к базам данных таких фотографий — «Google Maps», «NASA World Wind», «TerraServer-US», «Yahoo! Maps», «Космоснимки» и др.).
2.4.4 Спутниковые изображения находят применение во многих отраслях деятельности — сельском хозяйстве, геологических и гидрологических исследованиях, лесоводстве, охране окружающей среды, планировке территорий, образовательных, разведывательных и военных целях. Такие изображения могут быть выполнены как в видимой части спектра, так и в ультрафиолетовой, инфракрасной и других частях диапазона. Также существуют различные карты рельефа, выполненные с помощью радарной съёмки.
2.4.5 Разрешение спутниковых фотографий различно в зависимости от инструмента фотографирования и высоты орбиты спутника. Например, в ходе проекта «Landsat» была выполнена съёмка поверхности Земли с разрешением в 30 м, однако большинство из этих изображений до сих пор не обработаны.
Коммерческие спутники серии «QuickBird» фирмы «DigitalGlobe» имеют самую высокую на сегодняшний день разрешающую способность — 60 см, то есть позволяют опознавать объекты на поверхности Земли размером менее полуметра.
2.4.6 Поскольку площадь поверхности Земли весьма велика, и разрешение аппаратуры спутниковой фотосъёмки также достаточно значительно, то базы данных спутниковых фотографий получаются крайне объёмными (десятки и сотни ТБ), а обработка изображений (в целях создания пригодных для использования изображений из «сырой» графической информации) — отнимает слишком много времени.
Кроме того, фотокамеры, установленные на спутниках, весьма чувствительны к погодным условиям, которые существенно влияют на качество снимков. Обычно крайне сложно получить изображения районов с высокой облачностью, например, вершин горных пиков.
Компании, запускающие коммерческие спутники, не переводят свои изображения в статус общественного состояния, а предлагают каждому лицензировать полученные от них изображения, поэтому возможность легального создания на их основе других продуктов сведена к минимуму.
Последняя проблема — это сохранение государственной тайны, а также тайны личной жизни тех, кто не хотел бы быть «увиденным сверху». Компания «Google» в FAQ сервиса «Google Maps» указывает: «Мы понимаем эти опасения, однако изображения, предоставляемые нашим сервисом, не отличаются от тех, что может увидеть каждый, кто пролетает и проезжает через ту же географическую точку». И хотя нет возможности окончательно знать про все намерения «Google», вторая часть этого утверждения вполне поддаётся проверке.
2.4.7 В 2005 году австралийская компания «Astrovision» обнародовала планы вывести на геостационарную орбиту первый коммерческий спутник, который бы мог в реальном времени передавать на Землю картинку в естественных цветах с разрешением до 250 м. Заявленная область покрытия — Азиатско-Тихоокеанский регион (от Индии до Гавайев и от Японии до Австралии). Получаемые данные предполагается передавать пользователям мобильных телефонов третьего поколения, новостному погодному каналу системы «Pay TV», а также корпоративным и правительственным пользователям.
2.5 Лекция 11 Методы и способы обработки результатов ДЗЗ
2.5.1 Данные ДЗЗ, полученные с датчиков космического базирования, характеризуются большой степенью зависимости от прозрачности атмосферы. Поэтому на космических аппаратах устанавливаются многоканальные датчики пассивного и активного типов, регистрирующие электромагнитное излучение в спектральных диапазонах, расположенных в "окнах прозрачности" земной атмосферы.
Методика тематического анализа данных ДЗЗ заключается в определении спектральных диапазонов, чувствительных к изменениям спектральных свойств целевых объектов и выборе зависимостей, связывающих значения дистанционно измеренных яркостей с искомыми параметрами среды (состав, влажность, структура почв при мониторинге почв, типы растительности, уровни вегетации, проективное покрытие при мониторинге фитоценозов, содержание фитопланктона, минеральных взвешенных веществ, органического вещества при мониторинге водной среды и т.п.).
Достоверность количественных результатов анализа определяется тем, известны или нет на момент измерений точные значения коэффициентов зависимостей между параметрами среды и спектральными характеристиками целевых объектов. Наиболее часто встречающийся способ повышения достоверности - проведение одновременно с космической съемкой тестовых измерений на репрезентативных участках.
Дешифрование и анализ спутниковых снимков в настоящее время все больше выполняется с помощью автоматизированных программных комплексов, таких как «ERDAS Imagine» или «ENVI». В начале развития этой отрасли некоторые из видов улучшений изображений по заказу правительства США выполнялись фирмами-подрядчиками. Например, фирма «ESL Incorporated» разработала один из первых вариантов двухмерного преобразования Фурье для цифровой обработки изображений.
2.5.2 Одна из самых популярных программ по обработке и анализу космических снимков на территории СНГ – прграмма ScanMagic.
Приложение ScanMagic предназначено для просмотра, анализа и обработки изображений Земли из космоса. В большинстве случаев ScanMagic позволяет выполнить полный цикл работ по подготовке выходных продуктов дистанционного зондирования Земли без привлечения дополнительных программных средств.
Приложение ScanMagic предназначено для работы в среде Microsoft Windows 2000/XP, имеет интуитивно понятный графический интерфейс пользователя и позволяет производить следующие основные операции с изображениями:
- просмотр изображений с произвольным цветосинтезом, контрастированием и масштабированием;
- углубленный анализ изображения - построение профиля среза отсчетов яркости изображения; анализ отсчетов яркости изображения;
- вырезание из изображения фрагмента с исходным набором спектральных каналов в новое окно программы, с возможностью последующей его обработки в качестве нового изображения;
- конвертацию различных величин из одного представления в другое (единиц измерений), в том числе пересчет координат из одной картографической системы координат в другую;
- конвертацию векторных файлов из одного представления в другое с широким выбором параметров преобразования;
- географическую привязку изображений, в том числе по орбитальным элементам спутника;
- картографическую привязку изображений;
- коррекцию геопривязки методом подбора поправок к положению спутника на орбите и углам ориентации;
- коррекцию с использованием опорных точек местности;
- автоматическую привязку по технологиям “изображение к карте” и “изображение к изображению”;
- импорт и наложение на изображение векторных карт; создание и редактирование векторных слоев; добавление сетки широт и долгот; сохранение набора слоев векторных контуров для произвольного количества снимков;
- трансформирование изображений в картографические проекции; создание мозаичных изображений; улучшение пространственного разрешения;
- построение диаграмм; 3D визуализация диаграмм;
- экспорт исходных и трансформированных изображений в стандартные графические и ГИС форматы;
- занесение информации об изображении в базу данных и последующим извлечением записи из базы данных с помощью широкого набора фильтров;
- вывод изображений на печать, в том числе снимков с нанесенными слоями векторных карт.
Программа ScanMagic создана с использованием новейших эффективных технологий обработки изображений, что позволяет работать с изображениями больших размеров. «Подкачка на лету» (on-the-fly spooling) позволяет моментально открывать изображения, просматривать и анализировать большие объемы данных в оперативном режиме. «Обработка на лету» (on-the-fly processing) позволяет, например, при геометрических преобразованиях неоднократно менять те или иные параметры обработки и визуально оценивать качество снимков без существенных затрат времени с выполнением фактической обработки данных только на заключительной стадии.
2.5.3 Приложение ScanMagic состоит из базового модуля (ScanMagic.exe), файла конфигурации (ScanMagic.ini), который содержит текущие настройки и не является обязательным, набора динамических библиотек (файлы с расширениями .dll), набора ActiveX компонент (файлы с расширением .ocx) и других программных компонент. Кроме того, приложение может включать некоторые дополнительные элементы, такие как набор векторных карт, калибровочные файлы, палитры и т.д.
Приложение ScanMagic позволяет импортировать и обрабатывать изображения ряда стандартных графических, ГИС и ДЗЗ форматов: BMP, TIFF/GeoTIFF, GIF, JPEG, PNG, PGM/PPM, ERDAS IMG, ESRI BIL/BIP/BSQ, ENVI BIL/BIP/BSQ, CEOS SAR, USGS DEM и др.. Также приложение поддерживает импорт изображений в формате Google KML. Чтение любого формата происходит напрямую, без преобразования данных.
Приложение позволяет:
- получать общие сведения об изображении (формат файла, название спутника, название сенсора, номер витка, время начала и окончания съемки изображения, размер изображения, число каналов и т.д.);
- контролировать параметры выделяемого фрагмента (размер и объем);
- измерять в темпе перемещения курсора плоскостные, географические и картографические координаты изображения;
- измерять в темпе перемещения курсора яркостные характеристики пикселей изображения;
- измерять в темпе перемещения курсора азимут и возвышение солнца на момент съемки;
- измерять расстояния на изображении в метрах и пикселях;
- конвертировать время начала съемки изображения в различные представления.
2.5.4 Примеры обработки космических снимков с помощью программы
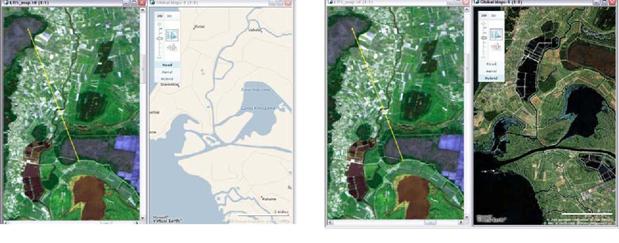
Рисунок 2.2 - Снимки выполненные в различных частях спектра

Рисунок 2.3 - Снимок, обработанный в 3D приложении программы
2.6 Лекция 12 Некоторые виды оборудования и способы применения информации полученной со спутников ДЗЗ
2.6.1 Спутниковая фотосъёмка часто дополняется аэрофотосъёмкой, которая позволяет получить более высокое разрешение, но имеет большую удельную стоимость (выражаемую в затратах денежных единиц на м²). Также спутниковая фотосъёмка может быть скомбинирована с уже готовыми векторными или растровыми изображениями в ГИС-системах (при условии что на снимках устранены искажения перспективы и они соответствующим образом выровнены и смасштабированы).
Т а б л и ц а 2.1 – Состав Космических группировок гражданских спутников ДЗЗ
Т а б л и ц а 2.2 - Международные сети станций прямого приема спутниковой информации ДЗЗ
2.6.2 Используемые в дистанционном зондировании приборы подразделяются на две обширные группы, которые будем называть системами спектральных данных и формирующими изображения системами. Обычно системы спектральных данных не формируют изображения, а дают детальную спектральную информацию об объекте. Системы, формирующие изображение, дают информацию относительно пространственной структуры объекта и обычно некоторую спектральную информацию.
2.6.3 Системы спектральных данных получают данные путем спектрального сканирования (в отличии от пространственного сканирования в формирующих изображения системах). В дистанционном зондирование системы спектральных данных обычно используют при полевых исследованиях. Применяются три различных типа полевых спектральных приборов. Все они спектрорадиометры, поскольку для них источником излучения является солнце, а не внутренние источники излучения. Три основных типа приборов такие: интерферометр, спектрорадиометр с диспергирующей призмой или дифракционной решеткой и спектрорадиометр с вращающимися сменными фильтрами. В основном эти приборы отличаются тем, как они диспергируют входное излучение на его спектральные компоненты. Различные способы диспергирования определяют пути установления внутренних опорных излучателей в приборе.
В интерферометрах диспергирующее зеркало быстро приводится в движение с помощью системы электродинамических катушек, что дает несколько спектральных сканов в 1с. Прибор не дает изображение сцены в его поле зрения, а просто наблюдает интерференционную картину, возникающую вследствие излучения энергии сценой.
Второй тип - приборы, в которых в качестве основных диспергирующих элементов применяются призмы и дифракционные решетки. Обычно для преобразования оптического сигнала в переменный сигнал, более подходящий для обработки в электронной части прибора, в этих приборах используется система оптического прерывания.
Еще один тип полевых приборов – это те в которых в качестве основных диспергирующих элементов используются интерференционные фильтры. Интерференционный фильтр – это многослойная диэлектрическая структура, позволяющая излучению проходить через нее. В результате многократных отражений и пропусканий возникает явление интерференции. Только одна спектральная полоса, соотвествующая определенной длине волны, интерферирует с усилением и поэтому проходит эту многослойную структуру без существенного ослабления.
2.6.4 Системы, формирующие изображение, делят на два типа: кадровые системы и сканирующие. В кадровых системах элементы изображения, или пикселы, получаются одновременно в основной единице изображения –кадре.
Фотографическая система – кадровая система: все данные об изображении получаются одновременно. Пленка, используемая в фотографической системе как детектор, по сравнению с многоспектральной
сканерной системой имеет дополнительное ограничение: относительно ограниченный спектральный диапазон. Однако по сравнению с многоспектральными сканерными системами фотографические системы характеризуются очень высоким пространственным разрешением.
Телевизионные системы формирующие изображение, имеют сходство с фотографическими системами в том, что изображение они образуют на фотоэлектрической поверхности, подобно тому, как в фотографических системах оно образуется на фотохимической поверхности.
Обычно эти системы включают затвор, оптическую систему и, возможно, систему компенсации смаза изображения, подобные тем, что входят в стандартную фотокамеру. Поскольку телевизионная система – по-кадровый прибор, собирающий данные, заполняющие кадр практически мгновенно, нет необходимости в столь точном контроле положения датчика, как это требуется для построчно – прямолинейного сканера.
2.6.5 В сканирующих системах элементы изображения получаются последовательно, но после получения могут быть приведены в формат кадра. Оба типа таких систем дают спектральную информацию, обычно образуя многоспектральные элементы изображения, состоящие из набора измерений в выбранных диапазонах длин волн спектра.
Многоспектральные построчно – прямолинейные сканеры дают изображения последовательно. Объект сканируется растровым способом, обычно оптико – механической системой. Излучение проходит через собирающую оптическую систему, создающую мгновенное поле зрение. Общее поле зрение создается сканирующим движением оптической системы. Затем с помощью диспергирующих призм, дифракционных решеток, дихроичных зеркал или фильтров излучения разлагается на спектральные составляющие. Набор детекторов улавливает диспергированое излучение.
Сигналы, идущие с каждого детектора, усиливаются и обрабатываются и далее записываются или передается информация, касающаяся источников калибровки, они как и сцена, также сканируются оптико-механической системой.
2.6.6 В качестве примеров применяемой аппаратуры рассмотрим комплекс многозональной спутниковой съемки (КМСС), созданной для съемок земной и водной поверхности с метеорологических и природно-ресурсных КА.
Он включает несколько цифровых многозональных съемочных устройств (МСУ) с линейными ПЗС, оснащаемых разными светофильтрами. Каждое МСУ позволяет получать изображения в трех спектральных зонах.



Рисунок 2.4 – Внешний вид некоторых МСУ

Рисунок 2.5 - Антенная система комплекса Алиса-СК™ предназначена для приема информации со спутников ДЗЗ.
В состав комплекса Алиса-СК™ входят следующие системы:
- антенная система;
- приемный блок c универсальным демодулятором;
- интерфейс связи с компьютером;
- персональный компьютер на базе процессора Intel Pentium IV;
- комплект соединительных кабелей;
- программное обеспечение;
- комплект документации.
Список сокращений
К разделу 1 Системы видеонаблюдения
CCVE - Closed Circuit Video Equipment (Сетевое закрытое (замкнутое) видеооборудование);
CCТV - Closed Circuit Tele Video (Сетевое замкнутое телевидение);
ИСО - интегрированные средства охраны;
ТСВ – телевизионные системы видеоконтроля;
ПЗС – приборы с зарядовой связью;
VTP - Video Tape Recorder (Пленочный видеорегистратор);
VCR - Video Cassette Recorder (Кассетный видеорегистратор);
PAL - Phase-alternating line (поэтапно-переменная линия);
NTSC – National Television Standards Committee (Национальный комитет по телевизионным стандартам);
VHS - Video Home System (Видео Домашняя Система);
SVHS - Super VHS;
JPEG – Joint Photographic Experts Group (объединённая группа экспертов в области фотографии);
MPEG – Motion Picture Experts Group (Экспертная группа по вопросам движущегося изображения);
RAID - Redundant Array of Independent/inexpensive Disks (избыточный массив независимых жёстких дисков);
CCD - Charge Coupled Device (прибор с зарядовой связью);
ТВЛ – ТелеВизионные Линии;
ТК – Телевизионный Канал;
DVR - Digital Video Recorder (цифровой видеорегистратор);
ЦСОТ – Цифровая Система Охранного Телевидения.
К разделу 2 Космические системы слежения
ДЗЗ – Дистанционное Зондирование Земли;
СРНС – Спутниковая Радионавигационная Система;
НКА – Навигационный Космический Аппарат;
ГНСС – Глобальная Навигационная Спутниковая Система;
NAVSTAR - NAVigation System providing Timing And Ranging (система навигации, обеспечивающая измерение времени (синхронизацию) и расстояние);
GPS - Global Positioning System (глобальная система позиционирования);
ГЛОНАСС –ГЛОбальная Навигационная Спутниковая Система;
ИСЗ – Искусственный Спутник Земли;
ICD – Interface checking document (Интерфейсный контрольный документ);
UTC – Coordinated Universal Time (всемирное координированное время);
ОГ – Орбитальная Группировка;
СТ – Стандартная Точность;
ВТ – Высокая Точность;
БШВ – Бортовая Шкала Времени;
НАП – Навигационная Аппаратура Потребителя;
АСЧ – Атомный Стандарт Частоты;
КА – Космический Аппарат;
ЭМИ – Электромагнитное Излучение;
НАСА - Национальное управление США по аэронавтике и исследованию космического пространства;
ERS - European Remote-Sensing Satellite (Европейская спутниковая система зондирования);
FAQ - Frequently Asked Question(s) (часто задаваемые вопросы);
ГИС - географическая информационная система;
КМСС - Комплекс Многозональной Спутниковой Съемки;
МСУ - Многозональные Съемочные Устройства.
Список литературы
К разделу 1 Системы видеонаблюдения
1 ГОСТ Р 51558 – 2000. «Системы охранные телевизионные. Общие технические требования и методы испытаний», 2001г.
2 Р 78.36.002 – 99. Выбор и применение телевизионных систем видеоконтроля. Рекомендации. – М.: ГУВО МВД РФ, 2000.
3 Постановление правительства РК № 407 от 05.04.2002г. «О мерах по реализации Закона Республики Казахстан «Об охранной деятельности».
4 ANSI/TIA/EIA-568-В.1 «Стандарт телекоммуникационных кабельных систем коммерческих зданий. Часть 1. Общие требования». Опубл. 1 апреля 2001 года.
5 ГОСТ Р 50009-2000. «Технические средства охранной сигнализации. Требования и методы испытаний», 2001 г.
6 РД 34.21.122-87 «Инструкция по устройству молниезащиты зданий и сооружений», 1988 г.
7 С.И. Неизвестный, О.Ю. Никулин. Приборы с зарядовой связью - основа современной телевизионной техники. Основные характеристики ПЗС // Специальная техника, №5, 1999.
8 А.Б.Семенов, С. К. Стрижаков, И.Р. Сунчелей. Структурированные кабельные системы. - Москва, 2001.
9 Н.Уваров. Зоны обзора видеокамер. http://www.security-bridge.com/articles.php?action=view&cid=10&id=286
10 В. Синилов. Охранное телевидение в системе безопасности объекта // Скрытая камера, № 3, 2003.
11 Д. Филлипов. Особенности применения широкоугольных и длиннофокусных объективов // Все о вашей безопасности, № 3, 2003.
12 Уваров Н.Е. Визуальная обстановка в системах телевизионного наблюдения. http://www.sec.ru/articles.cfm?aid=200
13 Лобанов В.Д., Е.В. Соловьёв, Н.Е. Уваров, Н.Г. Хитрово. Управление чувствительностью камер на ФПЗС // Техника кино и телевидения, № 9, 1988.
14 О. Крутц. Цифровые видеорегистраторы и кассетные видеорегистраторы с прерывистой записью сигнала: история и текущее состояние вопроса // Скрытая камера, № 6, 2003.
15 Н.Уваров. Настройка системы диафрагмирования ТВ камер // Скрытая камера, № 8-9(16), 2003.
16 В.Денисенко, А. Халявко. Защита от помех датчиков и соединительных проводов систем промышленной автоматизации // Современные технологии автоматизации, № 1, 2001.
17 А. Уилт. Чем определяется резкость // Цифровое видео, № 6, 2000.
18 А.Кисельков, Е.Кочетков. Основные причины выхода из строя оборудования видеонаблюдения // Защита информации, № 7, 2004.
19 ГОСТ 13109 – 97. «Нормы качества электрической энергии в системах электроснабжения общего назначения».
К разделу 2 Космические системы слежения
20 Н.М. Волков, Н.Е. Иванов, В.А. Салищев, В.В. Тюбалин. Глобальная навигационная спутниковая система "ГЛОНАСС"//Успехи современной радиоэлектроники. 1997. №1.
21 Гарбук С.В., Гершензон В.Е. Космические системы дистанционного зондирования Земли. – М.: Издательство А и Б, 1997
22 Генике А.А., Побединский Г.Г. Глобальные спутниковые системы определения местоположения и их применение в геодезии. Изд. 2-е, перераб. и доп. — М.: Картгеоцентр, 2004
23 Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. Харисова В.Н., Перова А.И., Болдина В.А. — М.: ИПРЖР, 1998.
24 ГОСТ Р 52928-2008 Система спутниковая навигационная глобальная. Термины и определения
25 Громаков Ю.А., Северин А.В., Шевцов В.А. Технологии определения местоположения в GSM и UMTS: Учеб. пособие. — М.: Эко-Трендз, 2005.
26 Дейвис Ш.М., Ландгребе Д.А., Филлипс Т.Л. и др. Дистанционное зондирование: количественный подход / Под ред. Ф. Свейна и Ш. Дейвис. Пер. с англ. — М.: Недра, 1983,
27 Кашкин В.Б., Сухинин А.И. Дистанционное зондирование Земли из космоса. Цифровая обработка изображений: Учебное пособие. — М.: Логос, 2001
28 Козин И.Д. Спутниковые радионавигационные системы, АИЭС 2006
29 Медведев Е.М., Данилин И.М., Мельников С.Р. Лазерная локация земли и леса: Учебное пособие. — 2-е изд., перераб. и доп. — М.: Геолидар, Геоскосмос; Красноярск: Институт леса им. В.Н. Сукачева СО РАН, 2007.
30 Р. Е. Пасечник, А. Н. Чеботарева, А. А. Абдураимов, П. Ю. Дмитрюк
Дистанционное зондирование Земли из космоса. – Вершина, 2006.-166с.
31 Соловьев Ю.А. Системы спутниковой навигации.- ЭКО - Трендз, 2000
32 http://www.gisa.ru/56481.html Космические технологии в науке образовании и бизнесе.