МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
НЕКОММЕРЧЕСКОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО
«АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ»
С. В. Коньшин
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЗАПУСКА СПУТНИКОВ НА ОРБИТУ
Учебное пособие
Алматы 2013
УДК 629.783
ББК 32.88-01я73
К 65 Теоретические основы запуска спутников на орбиту:
Учебное пособие / C.В. Коньшин;
АУЭС. Алматы, 2013 - 78с.
978-601-7327-32-3
Учебное пособие посвящено теоретическим основам запуска спутников на орбиту и необходимо при изучении дисциплин аэрокосмического направления. В учебном пособии помимо общих положений теории движения космических аппаратов, описания и характеристик тяжелых и легких ракетоносителей; рассматриваются такие важные основы теории движения ракетоносителей, как динамика полета на участке выведения, при орбитальном маневрировании и сближении.
Учебное пособие предназначено для студентов всех форм обучения по специальностям аэрокосмического направления (дисциплины: «Баллистика» и «Космические технологии») и при изучении отдельных вопросов космической связи по специальности подготовки бакалавра («Спутниковые и радиорелейные системы передачи») и магистра («Исследование технологий оказания спутниковых и радиорелейных услуг в радиоэлектронике») специальности "Радиотехника, электроника и телекоммуникации" для всех форм обучения
Табл. 7. Ил. 138. Библиогр. – 14 назв.
ББК 32.88-01я73
: Каз.РПНТО РЭС, >канд. техн. наук, С.А. Петров
АУЭС, докт. физ.-мат. наук, профессор И.Д.Козин
Печатается по плану издания Министерства образования и науки Республики Казахстан на 2012 г.
ISBN 978-601-7327-32-3
© Алматинский университет энергетики и связи, 2013 г.
Содержание
1 Общие положения теории запуска спутников на орбиту 4
1.2 Системы координат, применяемые при изучении движения космических аппаратов 6
2 Движение ракеты-носителя на участке выведения 18
2.1 Основные характеристики ракет-носителей 18
2.2 Динамика полета на участке выведения 27
2.3 Движение РН на активном участке 42
3 Орбитальное маневрирование 52
3.1 Импульсные маневры коррекции элементов орбиты 52
3.2 Маневры орбитального перехода 55
4 Динамика полета космического аппарата при сближении 61
4.1 Принципы управления сближением 61
4.2 Этап дальнего наведения 63
4.3 Этап ближнего наведения 70
Введение
Теория запуска спутников на орбиту изучает механическое движение летательных аппаратов (космических ракетоносителей). Механическое движение есть изменение положения тел друг относительно друга с течением времени. Одно и то же тело может совершать одновременно различные механические движения относительно других тел. Поэтому при изучении механического движения рассматривается не менее двух тел.
Тело, относительно которого изучается движение других тел, называется телом отсчета. Другое тело, изменяющее свое положение относительно тела отсчета, называется движущимся телом. Отмечая особую важность того, что движение любого тела может быть определено только по отношению к какому-либо телу отсчета, говорят, что все механические движения относительны.
Положение материальных точек в пространстве в любой момент времени может быть определено, например, тремя координатами относительно различных систем координат, которые связаны с телом отсчета. В этих системах координат изучается движение материальных точек и тел, и они заменяют при изучении данного движения само тело отсчета.
Так как в классической механике предполагается, что время изменяется одинаково во всех системах координат, то можно отождествить понятие система отсчета и система координат.
1 Общие положения теории запуска спутников на орбиту
Небесной сферой называется вспомогательная сфера произвольного радиуса, на которую проектируются небесные светила. За центр небесной сферы, как правило, принимают глаз наблюдателя, хотя это может быть центр Земли или Солнца. Каждому светилу на небесной сфере соответствует точка ее пересечения с прямой, соединяющей центр сферы и светила.
Взаимное положение звезд на небесной сфере практически не изменяется из-за большой их удаленности от центра сферы. Зафиксируем основные линии и точки на небесной сфере. Точка пересечения отвесной линии над головой наблюдателя с небесной сферой называется зенитом (Z), а диаметрально противоположная точка - надиром (Z'). Плоскость, проходящая через центр небесной сферы перпендикулярно отвесной линии, пересекает сферу по большому кругу SWNE, называемому математическим (или истинным) горизонтом. Математический горизонт делит небесную сферу на видимую и невидимую полусферы (см. рисунок 1.1а).
Прямая, проходящая через центр небесной сферы параллельно оси вращения Земли, называется осью мира, а точка пересечения ее с небесной сферой - северным (P) и южным (P') полюсами мира.

Рисунок 1.1 - К определению небесной сферы
Плоскость, проходящая
через центр небесной сферы перпендикулярно оси мира, пересекает сферу по
большому кругу A![]() A'
A'![]() , называемому небесным
экватором (см. рисунок 1.1б).
, называемому небесным
экватором (см. рисунок 1.1б).
Угол между отвесной (вертикальной) линией и плоскостью небесного экватора равен географической широте наблюдателя. Плоскость небесного экватора делит небесную сферу на северное и южное полушария. Большой круг небесной сферы, проходящий через полюсы мира, зенит и надир, называется небесным меридианом. Небесный меридиан пересекает истинный горизонт в точках N и S (см. рисунок 1.1а), где N - точка Севера, а S - точка Юга. Линия NS называется полуденной линией. Точки истинного горизонта, отстоящие на 90º от Севера (N) и Юга (S), называются точками Востока E и Запада W. В точках E и W небесный экватор пересекается с истинным горизонтом. Плоскость небесного меридиана делит небесную сферу на два полушария - восточное с точкой востока E и западное - с точкой запада W.
Для изучения видимого движения светил небесной сфере придают вращение вокруг оси мира в направлении, противоположном вращению Земли. Такая кинематическая модель почти точно воспроизводит картину звездного неба, которая представляется наблюдателю. При суточном вращении каждое светило два раза пересекает небесный меридиан. Момент прохождения светила через полукруг меридиана, ограниченный точками Севера и Юга и содержащий зенит, называется верхней кульминацией светила. Момент прохождения светила через противоположный полукруг - нижней кульминацией светила.
Плоскость, параллельная
плоскости орбиты Земли и проходящая через центр небесной сферы, пересекает ее
по дуге большого круга, называемого эклиптикой Э'![]() Э
Э![]() (см. рисунок 1.1б). Другими словами, эклиптика
- большой круг небесной сферы, по которому происходит годичное движение центра
Солнца. Плоскость эклиптики образует с плоскостью небесного экватора угол
(см. рисунок 1.1б). Другими словами, эклиптика
- большой круг небесной сферы, по которому происходит годичное движение центра
Солнца. Плоскость эклиптики образует с плоскостью небесного экватора угол ![]() . Угол
. Угол ![]() непостоянный, он медленно изменяется. Для 1995
года
непостоянный, он медленно изменяется. Для 1995
года ![]() =23º26'34,53". Эклиптика пересекает небесный экватор в двух
точках: в точке весеннего равноденствия (ТВР)
=23º26'34,53". Эклиптика пересекает небесный экватор в двух
точках: в точке весеннего равноденствия (ТВР) ![]() , и в точке осеннего равноденствия (ТОР)
, и в точке осеннего равноденствия (ТОР) ![]() . В ТВР Солнце переходит из
южного полушария в северное, в ТОР - из северного в южное полушарие. Точки Э и Э', отстоящие от ТВР и
ТОР на 90º, называются
соответственно точками летнего и зимнего солнцестояния.
. В ТВР Солнце переходит из
южного полушария в северное, в ТОР - из северного в южное полушарие. Точки Э и Э', отстоящие от ТВР и
ТОР на 90º, называются
соответственно точками летнего и зимнего солнцестояния.
В точке Э Солнце будет летом в момент наибольшей продолжительности дня, в точке Э' Солнце находится зимой в момент наибольшей продолжительности ночи.
1.2 Системы координат, применяемые при изучении движения космических аппаратов
При изучении движения космических аппаратов (КА) и небесных тел применяются прямоугольные и криволинейные системы координат (СК). Криволинейными координатами являются цилиндрические, сферические, эллипсоидальные, параболоидальные координаты.
В зависимости от места положения начала координат системы делятся на:
- гелиоцентрические - с началом в центре масс Солнца;
- геоцентрические - с началом в центре масс Земли;
- топоцентрические - с началом координат в пункте наблюдения на поверхности Земли;
- барицентрические - с началом координат в центре масс КА;
- планетоцентрические - с началом координат в центре масс планет: Венеры, Марса, Юпитера и др.;
- селеноцентрические - с началом координат в центре масс Луны.
В зависимости от выбора основной плоскости СК делятся на экваториальные, эклиптические и др. В зависимости от выбора осей систем по отношению к пространственным ориентирам системы делятся на вращающиеся и невращающиеся (инерциальные). Для геоцентрических (эклиптических и экваториальных) и гелиоцентрических СК необходимо указать момент времени (эпоху), к которому отнесена принятая СК.
Эпоха - момент времени, для которого дается значение каких-либо величин, изменяющихся со временем и определяющих ориентацию координатной системы (или определяющих положение небесного светила). В настоящее время для баллистических расчетов за начало эпохи принято 12 часов 00 минут 0 января 2000 года.
Ниже приведены наиболее употребительные системы координат.
ИНЕРЦИАЛЬНАЯ (абсолютная
геоцентрическая экваториальная) СК XYZ (см. рисунок 1.2). Начало в центре масс
Земли ОЗ. Ось X направлена в точку весеннего равноденствия ![]() , ось Z совпадает с осью
вращения Земли, ось Y дополняет систему до правой.
, ось Z совпадает с осью
вращения Земли, ось Y дополняет систему до правой.
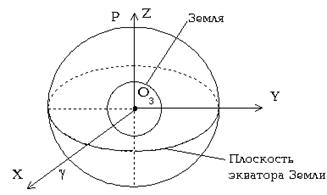
Рисунок 1.2 - Инерциальная СК
Положение светила на
небесной сфере в данной системе координат определяют двумя дугами ![]() k и k
k и k![]() (см. рисунок 1.3). Дуга
(см. рисунок 1.3). Дуга ![]() k , т.е. угловое расстояние от ТВР до часового
круга светила P
k , т.е. угловое расстояние от ТВР до часового
круга светила P![]() P' (большой
круг небесной сферы, проходящий через полюсы мира Р и Р' и изображение светила
P' (большой
круг небесной сферы, проходящий через полюсы мира Р и Р' и изображение светила ![]() ), называется прямым
восхождением и может измеряться как в градусной мере от 0° до 360°, так и в
часовой от 0 до 24 часов. Угловое расстояние по часовому кругу светила k
), называется прямым
восхождением и может измеряться как в градусной мере от 0° до 360°, так и в
часовой от 0 до 24 часов. Угловое расстояние по часовому кругу светила k![]() называется склонением
светила и обозначается буквой
называется склонением
светила и обозначается буквой ![]() . Склонение светила отсчитывается от 0° до 90° к
северному полюсу мира (Р) и от 0° до 90° - к южному полюсу мира.
. Склонение светила отсчитывается от 0° до 90° к
северному полюсу мира (Р) и от 0° до 90° - к южному полюсу мира.

Рисунок 1.3 - Положение светила на небесной сфере
ГРИНВИЧСКАЯ XYZ СК (см. рисунок 1.4). Начало в центре масс Земли ОЗ. Система связана с вращающейся Землей. Ось X направлена в точку пересечения гринвичского меридиана с экватором, ось Z совпадает с осью вращения Земли и направлена на Северный полюс, ось Y дополняет систему до правой.
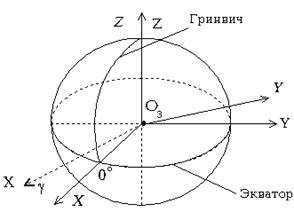
Рисунок 1.4 - Гринвичская СК
ТОПОЦЕНТРИЧЕСКАЯ
(пунктовая) СК XNYNZN (см. рисунок 1.5).
Начало в точке N расположения пункта наблюдения, определяемой геодезической
широтой ![]() и долготой
и долготой ![]() . Ось XN
направлена в сторону Северного полюса Земли Р по касательной к меридиану пункта
наблюдения, ось YN по внешней нормали к земному эллипсоиду, а ось ZN
дополняет систему до правой.
. Ось XN
направлена в сторону Северного полюса Земли Р по касательной к меридиану пункта
наблюдения, ось YN по внешней нормали к земному эллипсоиду, а ось ZN
дополняет систему до правой.
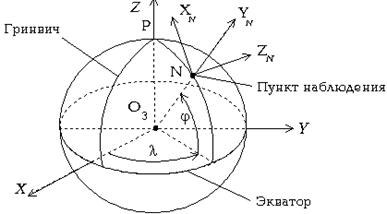
Рисунок 1.5 - Топоцентрическая СК
СТАРТОВАЯ СК XстYстZст
(см. рисунок 1.6). Начало на поверхности Земли в точке старта С, определяемой
географической широтой ![]() и
долготой
и
долготой ![]() , ось Xст
лежит в плоскости местного горизонта и задается азимутом запуска А,
отсчитываемого по часовой стрелке от направления на Северный полюс Земли до
плоскости траектории запуска КА, ось Yст направлена вверх прямо
противоположно направлению силы тяжести (линии отвеса), а ось Zст
дополняет систему до правой.
, ось Xст
лежит в плоскости местного горизонта и задается азимутом запуска А,
отсчитываемого по часовой стрелке от направления на Северный полюс Земли до
плоскости траектории запуска КА, ось Yст направлена вверх прямо
противоположно направлению силы тяжести (линии отвеса), а ось Zст
дополняет систему до правой.
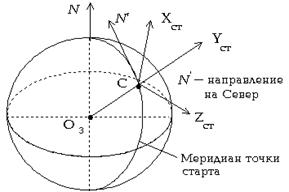
Рисунок 1.6 - Стартовая СК
СТАРТОВАЯ "ЗАМОРОЖЕННАЯ" СК X'стY'стZ'ст (см. рисунок 1.7). Начало системы совпадает с началом стартовой СК. Координатные оси в момент старта совпадают с осями стартовой СК и в дальнейшем не меняют своего положения относительно инерциальной СК XYZ.

Рисунок 1.7 - Стартовая "замороженная" СК
ОРБИТАЛЬНАЯ СК ![]() bn (см. рисунок 1.8). Начало
в центре масс КА. Ось b нормальна к плоскости орбиты КА и параллельна вектору С
- удвоенной секторной скорости движения КА, ось n направлена по радиусу-вектору
КА в сторону его возрастания, ось
bn (см. рисунок 1.8). Начало
в центре масс КА. Ось b нормальна к плоскости орбиты КА и параллельна вектору С
- удвоенной секторной скорости движения КА, ось n направлена по радиусу-вектору
КА в сторону его возрастания, ось ![]() дополняет систему до правой и направлена в
сторону противоположную орбитальному движению КА. Вариант данной СК -
американская СК LHLV (Local Horizontal Local Vertical), которая отличается тем,
что ось b у нее направлена по местной вертикали к центру Земли, ось
дополняет систему до правой и направлена в
сторону противоположную орбитальному движению КА. Вариант данной СК -
американская СК LHLV (Local Horizontal Local Vertical), которая отличается тем,
что ось b у нее направлена по местной вертикали к центру Земли, ось ![]() - в направлении против
орбитального движения, n - по вектору С.
- в направлении против
орбитального движения, n - по вектору С.

Рисунок 1.8 - Орбитальная СК
СВЯЗАННАЯ СК O1X1Y1Z1 (см. рисунок 1.9). Начало координат совпадает с центром масс КА. Основная плоскость совпадает с плоскостью симметрии КА. Ось X1 направлена вдоль продольной оси КА, ось Y1 расположена в плоскости симметрии или строительной плоскости КА, ось Z1 дополняет систему до правой.
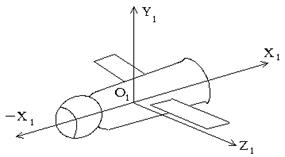
Рисунок 1.9 - Связанная СК
СКОРОСТНАЯ СК O1ZVYVZV
(см. рисунок 1.10). Начало координат в центре масс КА. Ось XV
направлена вдоль вектора V, ось YV направлена вверх, ось ZV
дополняет систему до правой. Положение скоростной СК относительно связанной с
КА СК, определяется тремя углами: углом атаки ![]() , углом скольжения
, углом скольжения ![]() и скоростным углом крена
и скоростным углом крена ![]() . Положительные углы
. Положительные углы ![]() ,
, ![]() ,
, ![]() определяются положительной угловой скоростью
поворота на данные углы. Положительные направления осей
определяются положительной угловой скоростью
поворота на данные углы. Положительные направления осей ![]() ,
, ![]() ,
, ![]() сонаправлены с осями связанной СК X1Y1Z1
соответственно (см. рисунок 1.10).
сонаправлены с осями связанной СК X1Y1Z1
соответственно (см. рисунок 1.10).
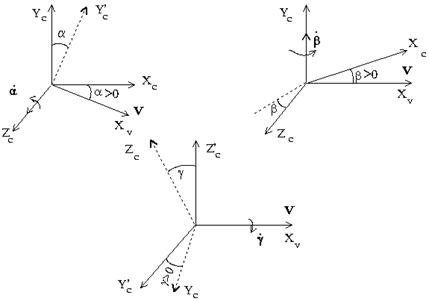
Рисунок 1.10 - Скоростная СК
ВИЗИРНАЯ (ЛУЧЕВАЯ) СК O1 XЛYЛZЛ (см. рисунок 1.11), ось XЛ которой направлена на второй КА (или наземный пункт), ось YЛ принадлежит плоскости, проходящей через радиусы-векторы обоих КА, ось ZЛ дополняет систему до правой.

Рисунок 1.11 - Визирная (лучевая) СК
Поверхность Земли с ее низменностями, возвышенностями и горными складками имеет сложную геометрическую форму. Считается, что Земля принимает форму тела, ограниченного поверхностью океанов при полном равновесии находящихся в них водных масс (в штиль), продолженных под материками на уровне мирового океана (см. рисунок 1.12). Такое тело называют геоидом. В геометрическом смысле фигура геоида является неправильной и достаточно сложной, что очень усложняет математическое решение задач на его поверхности. Поэтому действительную фигуру Земли приходится заменять телом, достаточно близким к геоиду, но более простым в геометрическом отношении. Первым приближением геоида может служить сфера с радиусом Rэ=6371.210 км. Теоретические и экспериментальные исследования показали, что в качестве более близкой по форме к геоиду фигуры может быть принят эллипсоид вращения с малым сжатием.

Рисунок 1.12 - Геоид
Одной из задач высшей геодезии является определение параметров такого эллипсоида вращения, для которого выполняются следующие условия: центр эллипсоида совпадает с центром масс Земли, а плоскость его экватора - с плоскостью земного экватора (см. рисунок 1.13); объем эллипсоида равен объему геоида; сумма квадратов отклонений поверхности эллипсоида от поверхности геоида является минимальной.
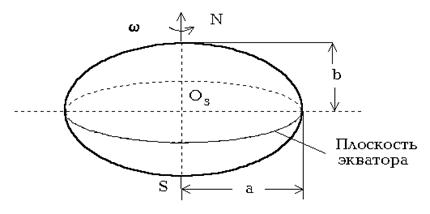
Рисунок 1.13 - Эллипсоид вращения (общеземной эллипсоид Красовского)
Удовлетворяющий этим условиям эллипсоид, наиболее близкий к геоиду, в целом называется общеземным эллипсоидом. Параметры общего земного эллипсоида, принятого в нашей стране (эллипсоид Красовского), следующие:
- большая полуось а=6378.245 км,
- малая полуось b=6356.863 км,
-
полярное сжатие ![]() =0.00335233.
=0.00335233.
Общий земной эллипсоид используется в теории полета КА в качестве более совершенной (по сравнению со сферической) моделью Земли.
Еще более совершенной моделью фигуры Земли является трехосный эллипсоид Красовского, размеры которого следующие (см. рисунок 1.14):
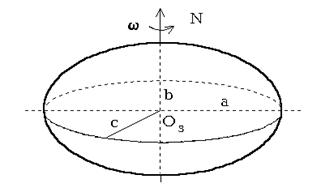
Рисунок 1.14 - Трехосный эллипсоид Красовского
- а=6379.351 км,
- b=6356.863 км,
- с=6378.139 км,
-
![]() .
.
Здесь ![]() характеризует экваториальное сжатие
эллипсоида. Из сравнения
характеризует экваториальное сжатие
эллипсоида. Из сравнения ![]() и
и
![]() видно, что полюсное
сжатие на два порядка больше экваториального. Трехосный эллипсоид Красовского
подобран из условия наилучшего приближения к геоиду. Зазор между ними не
превышает 100 м.
видно, что полюсное
сжатие на два порядка больше экваториального. Трехосный эллипсоид Красовского
подобран из условия наилучшего приближения к геоиду. Зазор между ними не
превышает 100 м.
При изучении движения КА на очень большом удалении от планет реальные притягивающие массы можно заменять материальными точками. Это допустимо, т.к. размеры притягивающих тел по сравнению с расстоянием до удаленного КА пренебрежимо малы. В этих случаях, когда полет КА длительное время происходит вблизи притягивающего тела (например ИСЗ) или когда некоторые этапы полета выполняются в непосредственной близости от притягивающего центра (вывод КА на орбиту или спуск), расстояние от притягивающих тел до КА имеет один порядок с размерами самих притягивающих тел. В этом случае при точном решении задачи о полете КА притягивающие тела нельзя рассматривать как материальные точки и необходимо учитывать силовое воздействие на КА, обусловленное фигурой и распределением масс притягивающего центра.
Земля, как и любая другая планета, создает вокруг себя поле притяжения (гравитационное поле), которое и обуславливает силу притяжения (гравитационную силу) G. В гравиметрии поле притяжения, соответствующее общему земному эллипсоиду, называется нормальным, а отклонение фактического поля земного притяжения от нормального - полем аномалий земного притяжения.
Каждая точка гравитационного поля характеризуется вектором гравитационного ускорения jгр. Согласно второму закону Ньютона, выражение для определения гравитационной силы имеет вид:
|
G = m · jгр, |
(1.1) |
где m - масса КА.
Свойство гравитационного поля создавать в каждой точке пространства определенное по величине и направлению ускорение математически описывается потенциальной функцией (потенциал силы притяжения).
Из теоретической механики известно, что сила притяжения является консервативной силой, а значит, проекции этой силы на оси прямоугольной СК (OзXYZ), жестко связанной с центром масс Земли, равны частным производным от потенциала сил притяжения по соответствующим координатам:
|
|
|
|
|
(1.2) |
|
|
|
где U - потенциал сил притяжения Земли;
GX, GY, GZ - проекции вектора на оси координат.
Поделив GX, GY, GZ на массу КА, получим соотношения для вычисления проекций вектора гравитационного ускорения jгр на оси координат X, Y, Z:
|
|
|
|
|
(1.3) |
|
|
|
Таким образом, задача определения силы притяжения Земли или гравитационного ускорения будет решена, если известно выражение для потенциала сил притяжения.
Если движение тела рассматривать в СК, связанной с вращающейся Землей, то вместо гравитационной силы (притяжения) берут вектор силы притяжения и переносной силы инерции, возникающей за счет суточного вращения Земли (центробежной силы). Если предположить, что скорость вращения Земли постоянна, то переносная сила инерции имеет только одну составляющую, направленную перпендикулярно оси вращения Земли и величина данной силы определяется выражением
|
Je=m·r·cos |
(1.11) |
где m - масса тела, находящегося на горизонтальной неподвижной площадке на поверхности Земли;
r - расстояние от центра Земли до данного тела;
j - геоцентрическая широта.
Потенциал силы для единичной массы
|
Ue = 1/2· |
(1.12) |
Из формулы (1.12) видно, что
значение Ue зависит от полярных координат r и ![]() , причем с увеличением r оно
возрастает, а с увеличением угла
, причем с увеличением r оно
возрастает, а с увеличением угла ![]() от 0 до
от 0 до ![]() /2 - уменьшается. С учетом (1.12) потенциал сил
тяжести будет равен
/2 - уменьшается. С учетом (1.12) потенциал сил
тяжести будет равен
U=U+Ue,
где U определяется выражением для выбранной модели гравитационного поля Земли.
В теории полета КА и на практике пользуется понятием ускорения силы тяжести. Ускорение силы тяжести gT - это ускорение, обусловленное силой GT, т.е.
gT=GT/m.
Величины ускорений (радиального и меридионального) силы тяжести (см. рисунок 1.15) определяются как


Рисунок 1.15 - Радиальное и меридиальное ускорения силы тяжести
Отождествлять понятия силы тяжести и силы притяжения можно только в предположении, что Земля не вращается или материальная точка (тело) находится на полюсах Земли.
Силы тяжести на поверхности Земли (r = RЗ) называют весом тела и определяют как
GT=m·g,
где g=gЭ·(1+0.005288·sin2![]() -0.000006·sin2
-0.000006·sin2![]() ) - ускорение силы
тяжести на поверхности Земли;
) - ускорение силы
тяжести на поверхности Земли;
gЭ - ускорение силы тяжести на экваторе;
![]() - геоцентрическая широта.
- геоцентрическая широта.
В действительности на КА при его движении по орбите воздействуют поля тяготения всех небесных тел, входящих в Солнечную систему. Величина ускорения, создаваемого полями тяготения планет, зависит от гравитационного параметра планеты и от расстояния. Чтобы выделить основные (главные) и малые (возмущающие) ускорения, вводится понятие сферы действия. Обычно рассматривается сфера действия малого тела по отношению к большому. Например, сфера действия Земли по отношению к Солнцу, сфера действия Луны по отношению к Земле. Сферой действия малого тела называется та область пространства, в которой выполняется условие
![]()
Здесь gvb - возмущающее ускорение большого тела;
gvm - возмущающее ускорение малого тела;
gm - ускорение, создаваемое малым телом;
gb - ускорение, создаваемое большим телом.
gvb = gb - gbm,
gvm = gm - gmb,
где gbm - ускорение, сообщаемое большим телом малому;
gmb - ускорение, сообщаемое малым телом большому.
На границе сферы действия имеет место равенство
![]()
Внутри сферы действия малое тело принимается за центральное, а большое оказывает возмущающее воздействие. Другими словами, считают, что полет КА происходит в центральном поле малого тела, а воздействие большого тела невелико. Вне сферы действия - наоборот.
Введение понятия сферы действия позволяет разделить траекторию КА на участки, на каждом из которых в первом приближении движение можно считать невозмущенным (см. рисунок 1.16).

Рисунок 1.16 - Разбиение орбиты КА на участки сфер действия
Радиус сферы действия зависит от отношения масс небесных тел и расстояния между ними
![]()
Радиус сферы действия Земли по отношению к Солнцу Rз-с=930000 км, Луны по отношению к Земле Rл-з=66000 км.
Существует понятие сферы притяжения. Она определяется как область, на границе которой гравитационные ускорения от большого и малого тела равны.
Радиус сферы притяжения Земли равен 260000 км. Орбита Луны лежит вне сферы притяжения Земли, но в ее сфере действия, поэтому мы считаем Луну спутником Земли.
Для иллюстрации вышеизложенного рассмотрим геоцентрическое движение КА в Солнечной системе (см. рисунок 1.17).
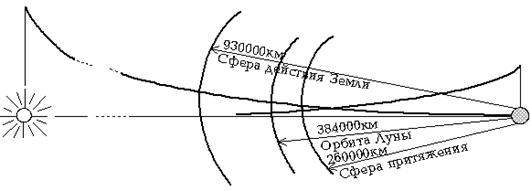
Рисунок 1.17 - Сфера действия и сфера притяжения Земли
На расстоянии 149 100 тыс. км от Солнца и 500 тыс. км от Земли на КА действуют ускорения
gb = gc = 5,97 ·10-6 км/с2 ;
gm = gз = 1,59 ·10-6 км/с2.
Солнце сообщает Земле ускорение
gbm = gсз = 5,93 ·10-6 км/с2.
Тогда возмущающее ускорение, действующее на КА от Солнца, будет равно
gvb=gvc=gc-gсз= 5,97 ·10-6- 5,93 ·10-6 =0,04 ·10-6 км/с2.
Это составляет примерно2,5% от ускорения, сообщаемого Землей, т.е. возмущение геоцентрического движения КА Солнцем незначительно.
Рассмотрим теперь картину гелиоцентрического движения.
Основным гравитационным ускорением является ускорение от Солнца
gс = 5,97 ·10-6 км/с2,
а возмущающим
gbm = gз - gз-с,
т.е. разность между ускорением, сообщаемым аппарату Землей gз, и ускорением, сообщаемым Землей Солнцу, gз-с.
Последнее пренебрежимо мало, и, следовательно,
gbm=1,59 ·10-6км/с2.
Это составляет 26,7% от основного ускорения gз , то есть возмущение гелиоцентрического движения КА Землей существенно. Отсюда следует, что в этой точке пространства нужно рассматривать движение как геоцентрическое, т.е. аппарат находится в сфере действия Земли.
Аналогичные рассуждения могут быть проведены для любой точки пространства, причем для точек, не лежащих на линии Земля - Солнце, необходимо оперировать с векторными величинами ускорений. При переходе из одной сферы действия в другую следует переходить к другому центральному телу.
2 Движение ракеты-носителя на участке выведения
2.1 Основные характеристики ракет-носителей
2.1.1 Одноступенчатая ракета-носитель (РН).
Первые исследования поступательного прямолинейного движения ракет были выполнены К.Э. Циолковским и опубликованы в 1903 году. Результатом этих исследований было выявление основных закономерностей ракетного движения.
Допустим, что ракета движется поступательно в бессиловом ("свободном" по терминологии Циолковского) пространстве. Пусть относительная скорость отбрасываемых ракетным двигателем частиц Vr постоянна и направлена противоположно скорости центра масс ракеты. Будем считать, что при выгорании топлива центр масс ракеты не смещается относительно ее корпуса.
Тогда движение ракеты описывается дифференциальным уравнением движения точки:
![]() ,
,
где m - масса ракеты;
V - вектор скорости центра масс;
P - сила тяги ракетного двигателя.
Величину реактивной силы можно представить в виде:
![]()
где ![]() - секундный расход массы;
- секундный расход массы;
Vr- скорость истечения продуктов сгорания из сопла ракетного двигателя.
Уравнение движения центра масс ракеты примет вид
![]()
Это уравнение движущейся точки переменной массы, полученное И.В.Мещерским. Спроецируем уравнение Мещерского на направление движения ракеты и проинтегрируем его при начальных условиях: при t=0, m=m0, V=V0.
В результате интегрирования получим соотношение, выражающее основной закон ракетодинамики
![]()
Если считать, что начальная скорость ракеты V0= 0 (наземный старт), а ее масса в процессе полета меняется от m0 до mk, тогда получаем
|
|
(2.1) |
Это соотношение называется формулой Циолковского. Отношение начальной (стартовой) массы ракеты к ее конечной массе называется числом Циолковского
![]()
Окончательно формула Циолковского приобретает вид
|
Vk = Vr · ln( Z ). |
(2.2) |
Из нее вытекают следующие основные закономерности движения ракеты в бессиловом пространстве:
- скорость ракеты в конце активного участка прямо пропорциональна скорости истечения продуктов сгорания из сопла ракетного двигателя;
- скорость ракеты в конце активного участка возрастает при увеличении отношения начальной массы ракеты к конечной по логарифмическому закону, т.е. скорость ракеты тем больше, чем больше число Циолковского;
- скорость ракеты в конце активного участка не зависит от закона изменения массы ракеты (режима работы двигателей).
Заданному числу Циолковского Z соответствует вполне определенная конечная скорость ракеты независимо от того, быстро или медленно происходило сжигание имеющегося запаса топлива.
Логарифмический закон был сформулирован Э.К. Циолковским в 1914 г.: "Когда масса ракеты плюс масса взрывчатых веществ, имеющихся в реактивном приборе, возрастает в геометрической прогрессии, скорость ракеты возрастает в прогрессии арифметической". Действительно, из формулы Циолковского следует, что если отношение mo/mk примет значения 2, 4, 8, 16..., то значение Vk/Vr будет равно ln2, 2ln2, 3ln2, 4ln2 и т.д. Итак, для увеличения скорости ракеты в конце активного участка выгоднее увеличивать скорость истечения продуктов сгорания (зависимость Vk от Vr линейная), чем отношение m0/mk. Формула Циолковского позволяет определить скорость ракеты при движении в бессиловом пространстве, т.е. так называемую идеальную или характеристическую скорость.
Характеристическая скорость - это скорость, которую приобрел бы КА с данной начальной и конечной массами m0 и mk под действием тяги РН, если бы РН двигалась в безвоздушном пространстве и в отсутствии сил тяготения. Реальная РН, движущаяся вблизи поверхности Земли, никогда не достигнет скорости, равной Vk, вследствие потерь скорости в основном на аэродинамическое сопротивление и гравитацию. Величина потерь зависит от геометрии траектории, начальной скорости и программы изменения реактивного ускорения.
Характеристическая скорость является важным параметром ракеты-носителя, так как она определяет возможности ракеты-носителя по выводу КА на орбиту.
Определим условия, необходимые для выхода КА на круговую околоземную орбиту. Будем считать, что полет спутника Земли в сфере ее действия происходит под действием единственной внешней силы - силы притяжения Земли. Поле тяготения Земли будем считать центральным. Центральное поле тяготения имеет потенциал
![]()
Поскольку ускорение центрального поля тяготения
![]()
потенциал поля тяготения можно отобразить зависимостью
U = -g · r .
Выражение g·r имеет размерность квадрата скорости и представляет энергию поля тяготения на расстоянии r от притягивающего центра. Скорость, соответствующую этой энергии, может иметь только материальное тело, которое не сходит с эквипотенциальной поверхности радиуса r. Движение этого тела должно происходить по большому кругу эквипотенциальной сферической поверхности диаметра 2r, причем плоскость большого круга проходит через центр притяжения.
Следовательно, для того чтобы искусственный спутник мог двигаться вокруг притягивающего центра по круговой орбите радиуса r, он должен иметь постоянную энергию, равную значению потенциала поля тяготения на этом расстоянии
![]()
Скорость, соответствующую этой энергии, называют круговой скоростью.
Получим выражение для круговой скорости. Движение КА по орбите происходит под действием двух сил - силы тяготения g и центростремительной силы инерции ацс, которая возникает во вращательном движении.
Из условия равновесия сил (см. рисунок 2.1)
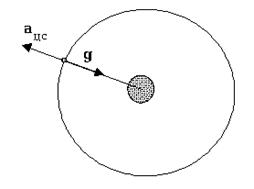
Рисунок 2.1 - Центростремительная сила и сила тяготения
![]()
Отсюда
|
|
(2.3) |
Круговая скорость также называется первой космической скоростью. Значение круговой скорости у поверхности Земли Vкр= 7,92 км/сек.
При увеличении радиуса орбиты круговая скорость уменьшается вследствие уменьшения потенциала поля тяготения.
Зависимость Vкр(H) приведена на рисунке 2.2 и в таблице 2.1. Значения круговых скоростей для нулевого спутника различных планет Солнечной системы приведены в таблице 2.2 (нулевой спутник – это гипотетический спутник, вращающийся вокруг планеты на нулевой высоте). Эти значения характеризуют интенсивность гравитационного поля планеты.

Рисунок 2.2 - График зависимости круговой скорости от высоты орбиты
Таблица 2.1
|
H (км) |
Vкр (км/сек) |
|
250 |
7.76 |
|
500 |
7,62 |
|
750 |
7,48 |
|
1 000 |
7,35 |
|
2 000 |
6,90 |
|
5 000 |
5,92 |
|
10 000 |
4,93 |
|
36 000 |
3,07 |
Таблица 2.2
|
Планета |
Vкр (км/сек) |
V2кс (км/сек) |
|
Луна |
1,67 |
2,36 |
|
Марс |
3,56 |
5,09 |
|
Земля |
7,92 |
11,19 |
|
Венера |
7,25 |
10,25 |
Для вывода искусственного спутника Земли на круговую орбиту радиуса r необходимо, чтобы на высоте орбиты он имел энергию, равную потенциалу поля в этой точке. При этом потребная характеристическая скорость будет равна:
Vn =Vкр + Vп -Vн,
где Vкр - скорость КА на орбите (7,9 км/сек);
Vп - потери скорости на преодоление сил тяготения и аэродинамического сопротивления, Vп составляет примерно 2 км/сек;
Vн - начальная скорость КА в точке старта, обусловленная вращением Земли.
На экваторе она составляет 0,465 км/сек, на широте точки старта:
Vн=0,465·cos(![]() ст)·sin(
ст)·sin(![]() 0)
(км/сек),
0)
(км/сек),
где ![]() ст - широта точки
старта;
ст - широта точки
старта;
![]() 0 - путевой угол в конце
участка выведения.
0 - путевой угол в конце
участка выведения.
В случае воздушного старта:
Vн = W +
0,465·cos(![]() ст)·sin(
ст)·sin(![]() 0)
(км/сек),
0)
(км/сек),
где W - скорость самолета-носителя относительно земной поверхности.
Таким образом, потребная характеристическая скорость для вывода спутника на околоземную круговую орбиту составляет примерно 9,5 - 10 км/сек. Зная потребную характеристическую, можно найти потребное число Циолковского
|
|
(2.4) |
Зависимость потребных чисел Циолковского от характеристической скорости и от скорости истечения продуктов сгорания представлена на рисунок 2.3.
Запуск космического аппарата на орбиту возможен, если Zп< Zр.
Итак, число Циолковского является безразмерным параметром, характеризующим возможности РН по выводу КА на орбиту.
Чем больше число Циолковского Zр, тем большей конечной скорости может достичь РН. Увеличение числа Z возможно посредством всемерного уменьшения массы конструкции ракеты при заданном весе полезной нагрузки. Однако получить сколь угодно большие значения не представляется возможным.
Рисунок 2.3 - Зависимость числа
Циолковского от потребной характеристической скорости при различной скорости
истечения продуктов сгорания ![]() 3
3
Для определения летно-технических характеристик РН вводятся еще два безразмерных параметра: коэффициент полезной нагрузки K и структурная характеристика ракеты S.
Коэффициент полезной нагрузки представляет собой отношение полезной нагрузки к стартовой массе РН
![]()
Полезной нагрузкой одноступенчатой РН является масса выводимого на орбиту космического аппарата. В стартовую массу m0 входят масса топлива mт, масса конструкции РН m и масса полезной нагрузки mп (см. рисунок 2.4).

Рисунок 2.4 - Компоненты стартовой массы одноступенчатой РН mо = mт + mр + mп
Коэффициент полезной нагрузки характеризует эффективность РН. Если сравнить две РН с одинаковым весом полезной нагрузки, то более эффективной окажется та, у которой коэффициент полезной нагрузки больше.
Пусть имеются две ракеты с характеристиками: mn1, Vk1, K1 и mn2, Vk2, K2, соответственно, причем mn1 = mn2, Vk1=Vk2, K1>K2.
Тогда
![]()
Таким образом, каждый килограмм стартового веса в первом случае используется более эффективно. Поэтому желательно иметь коэффициент полезной нагрузки как можно больше.
Структурная характеристика РН - это отношение стартовой массы РН без полезной нагрузки к массе конструкции РН
![]()
Этот коэффициент характеризует конструктивное совершенство РН (или степень заполнения РН топливом).
Для любой РН число S всегда больше Z. Если все возможности увеличения числа Z путем совершенствования конструкции РН исчерпаны, остается уменьшать вес полезной нагрузки. В предельном случае m=0, тогда Z достигает максимальной величины и становится равным числу S. Значения структурных характеристик для одноступенчатых РН на современном этапе развития техники составляет 15-20 (для ступеней РН "Сатурн-5" S = 16).
Часто вместо структурной характеристики РН S используют коэффициент конструкции E - отношение веса конструкции РН к ее стартовому весу
![]()
В настоящее время величина коэффициента конструкции E составляет 0,05 - 0,1.
Указанные три параметра связаны соотношением:
![]()
или
![]()
Набор параметров (Z, K, S,) или (Z, K, E) используется при проектировании РН.
Потребная величина Z при достигнутых в настоящее время скоростях истечения V=4 км/сек будет составлять, как следует из (2.4)
Zpotr = e9.5/4 = e2.575 ![]() 13 .
13 .
Получение таких значений структурной характеристики (S > Zпотр) требует очень высокого уровня развития техники и технологии и находится на пределе достигнутого сейчас, а во времена Циолковского считалось принципиально недостижимым. Другими словами, К.Э. Циолковский пришел к заключению, что вывод КА на орбиту искусственного спутника Земли с помощью одноступенчатой РН невозможен и в качестве решения задачи предложил идею создания многоступенчатых РН.
2.1.2 Общие сведения о многоступенчатой РН.
Многоступенчатая РН состоит из нескольких ракетных ступеней, действующих одна за другой. При работе очередной ступени последующие ступени являются для нее полезной нагрузкой. После выработки топлива j-ой ступени она отбрасывается, вес оставшейся части РН уменьшается, и при сжигании оставшегося топлива ей может быть сообщена большая скорость.
Известны два типа компоновочных схем многоступенчатых ракет:последовательное соединение ступеней (с поперечным делением) и параллельное соединение (пакетные схемы с продольным делением). Циолковский называл первую схему соединения ступеней ракетным поездом, а вторую - эскадрильей ракет.
Компоновочная схема многоступенчатой РН с поперечным делением приведена на рисунке 2.5.
Двигатели ступеней трехступенчатой ракеты с последовательным соединением ступеней работают последовательно, один за другим. Последняя ступень РН сообщает полезному грузу скорость, необходимую для достижения цели полета.

Рисунок 2.5 - Схема многоступенчатой РН с поперечным делением
При пакетной схеме соединения двигательные установки последующих ступеней могут работать одновременно с двигательными установками предыдущих. Часто в одной РН применяют оба способа соединения ступеней. Такая компоновочная схема трех-ступенчатого РН изображена на рисунок 2.6. Первая и вторая ступень РН соединены параллельно, третья ступень присоединена к ним последовательно.
Рисунок 2.6 - Схема многоступенчатой РН с комбинированным делением
Рассмотрим закономерности движения многоступенчатой ракеты на примере ракеты с последовательным соединением ступеней. Введем следующие обозначения:
n - число ступеней ракеты;
mn - масса полезной нагрузки;
m0 - начальная (стартовая)масса ракеты;
mi - масса ракеты с отброшенными 1,2,...,i-ой ступенями, так что mn-1 - масса последней ступени комплекса;
mpi - масса конструкции i-ой ступени;
Vri - скорость истечения продуктов сгорания из сопла i-ой ступени.
В соответствии с формулой (2.1) скорость ракеты-носителя в результате работы двигателя первой ступени V1 будет равна
![]() ;
;
в результате работы второй ступени -
![]()
в результате работы третьей ступени (см. рисунок 2.7) –
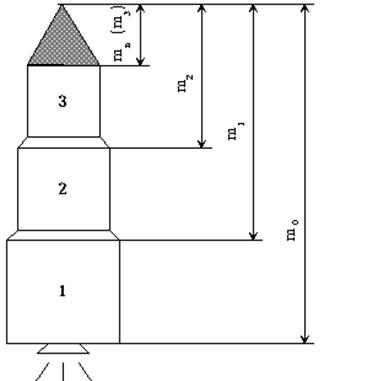
Рисунок 2.7 - Схема многоступенчатой ракеты
V3 = V2+ V r3 · ln(m3/(m3+mp3))
и так далее.
После работы n-ой ступени скорость Vn, сообщенная КА ракетой-носителем, будет равна
![]() или
или ![]()
Во всех этих выражениях под знаком логарифма стоит число Циолковского для одно -, двух -,... и n - ступенчатых ракет. Поэтому скорость, сообщенная полезному грузу (космическому кораблю) n - ступенчатой ракетой-носителем в предположении равенства скоростей истечения для всех ступеней, будет равна
![]()
Учитывая, что
![]()
получим:
Vn = Vr · lnZ0 ,
где
Z0 = Z1· Z2· Z3· ... ·Zn ,
т.е. число Циолковского для многоступенчатой ракеты-носителя равно произведению чисел Циолковского для отдельных ступеней. Если числа Циолковского для всех ступеней одинаковы, то Zn = Zn.
Поскольку Z больше единицы, число Циолковского для многоступенчатой ракеты-носителя будет больше, чем для отдельной ступени, рассматриваемой как одноступенчатая ракета, т.е. при одинаковых скоростях истечения и одном и том же стартовом весе многоступенчатая ракета способна развить значительно большую характеристическую скорость, чем одноступенчатая.
Коэффициент полезной нагрузки К для многоступенчатой ракеты - это отношение полезной нагрузки к ее стартовой массе. Он выражается произведением K0=K1·K2·...·Kn.
Поскольку коэффициенты полезной нагрузки ступеней меньше единицы, коэффициент полезной нагрузки многоступенчатой ракеты будет меньше, чем для ступени, т.е. соединяя одноступенчатые ракеты в многоступенчатую, мы ухудшаем этот параметр, выигрывая, однако, в характеристической скорости за счет увеличения числа Z. Этим объясняется тот факт, что число ступеней нецелесообразно увеличивать до бесконечности, существует некоторое оптимальное число ступеней.
2.2 Динамика полета на участке выведения
2.2.1 Аэродинамические силы.
Аэродинамические силы - это результат воздействия воздушной среды на РН при ее движении в атмосфере. Полная аэродинамическая сила представляет собой равнодействующую всех элементарных сил давления воздуха, направленных по нормали к поверхности ракеты, и сил трения воздуха об эту поверхность, направленных по касательным к ней. Т.к. РН является осесимметричным телом, то линия действия полной аэродинамической силы пересекает ее продольную ось. Эту точку пересечения силы с продольной осью ракеты принято называть центром давления (ЦД) и рассматривать как точку приложения полной аэродинамической силы. В общем случае ЦД не совпадает с ЦМ ракеты.
Проекции полной аэродинамической силы на оси скоростной СК (O1XVYVZV) обозначаются
RXC = x, RYC = y, RYZ = z .
Т.к. величина x всегда
отрицательна, то вводят в рассмотрение силу Q=-x, которую называют силой
лобового сопротивления. Проекции y и z соответственно называют подъемной и
боковой силами. Плоскость, проходящую через вектор скорости ЦМ РН и его
продольную ось, назовем плоскостью полного угла атаки, а сам угол между
вектором скорости и продольной осью – полным (истинным) углом атаки ![]() (см. рисунок 2.8).
Положение связанных осей X1Y1Z1 РН
относительно скоростной СК определяется углами
(см. рисунок 2.8).
Положение связанных осей X1Y1Z1 РН
относительно скоростной СК определяется углами ![]() и
и ![]() .
.
Рисунок 2.8 - Полный угол атаки
Угол атаки ![]() - это угол между
проекцией вектора скорости на основную плоскость симметрии и продольной осью
ракеты. Угол скольжения
- это угол между
проекцией вектора скорости на основную плоскость симметрии и продольной осью
ракеты. Угол скольжения ![]() - угол между вектором скорости и вертикальной
плоскостью симметрии РН (см. рисунок 2.9).
- угол между вектором скорости и вертикальной
плоскостью симметрии РН (см. рисунок 2.9).
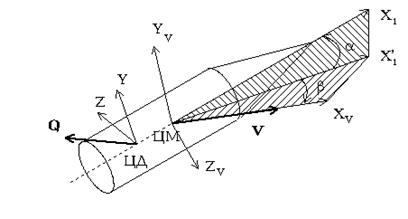
Рисунок 2.9 - Аэродинамические силы
Аэродинамические силы зависят от многих факторов: формы тела, размеров и состояния поверхности, углов, вязкости и сжимаемости среды, от ее плотности, скорости потока и др.
Представить зависимость аэродинамических сил от указанных факторов в аналитическом виде практически невозможно. Поэтому при выводе формул аэродинамических сил принимают, что полная аэродинамическая сила и ее составляющие зависят только от плотности среды, скорости потока и характерной площади тела, а влияние всех остальных факторов на величину аэродинамических сил учитывается через коэффициенты этих сил.
При этих условиях выражения для аэродинамических сил могут быть записаны в следующем виде:
R=CR·q·S,
x=Cx·q·S,
y=Cy·q·S,
z=Cz·q·S,
где CR, Cx,
Cx, Cz - соответственно коэффициенты полной
аэродинамической силы, силы лобового сопротивления, подъемной и боковой сил.
Эти коэффициенты - безразмерные величины ![]() - принято называть скоростным напором.
- принято называть скоростным напором.
Для осесимметричных тел (ракет, их головных частей и КА) за характерную площадь принимают площадь проекции тела на плоскость, перпендикулярную оси симметрии (площадь МИДЕЛЯ Sm). В качестве характерной площади для несущих поверхностей (крыло, оперение и др.) принимают площадь несущей поверхности в плане.
Рассмотрим проекции полной аэродинамической силы на оси скоростной СК.
Сила лобового сопротивления:
Q=Cx·q·S.
Для конкретной формы носителя коэффициент зависит Cx от чисел Маха (М) и Рейнольдса (Re) и полного угла атаки, т.е.
Cx=Cx(M, Re, ![]() ).
).
Число Маха равно отношению скорости полета V к скорости звука aS на данной высоте М=V/aS и характеризует влияние сжимаемости воздуха на аэродинамические силы. Число Рейнольдса характеризует влияние вязкости воздуха на аэродинамические силы и вычисляется по формуле:
Re=VL/n,
где V - скорость полета (скорость ЦМ РН относительно воздуха);
L - длина носителя;
n - коэффициент кинематической вязкости воздуха.
Скорость звука в воздухе aS зависит от его абсолютной температуры T, которая изменяется с высотой и вычисляется по формуле:
aS=20,06![]()
Коэффициент кинематической вязкости воздуха n зависит от давления и температуры. Поэтому можно считать, что числа Маха и Рейнольдса являются функцией скорости и высоты полета Н, т.е.
M=M(H,V), Re=Re(H,V).
Т.к. зависимость коэффициента
Cx от величин М, Н, ![]() имеет очень сложный характер, то для удобства
ее представляют в виде следующей суммы:
имеет очень сложный характер, то для удобства
ее представляют в виде следующей суммы:
|
|
(2.3) |
где ![]() - значение коэффициента Cx
у поверхности Земли при
- значение коэффициента Cx
у поверхности Земли при ![]() =0 и данном числе Маха;
=0 и данном числе Маха;
![]() - поправка к коэффициенту Cx,
учитывающая влияние угла атаки
- поправка к коэффициенту Cx,
учитывающая влияние угла атаки ![]() , при Н=0 и данном значении числа М;
, при Н=0 и данном значении числа М;
![]() - слагаемое, учитывающее приращение
коэффициента лобового сопротивления за счет изменения числа с высотой.
- слагаемое, учитывающее приращение
коэффициента лобового сопротивления за счет изменения числа с высотой.
Эта поправка приводится в виде таблиц с двумя входами Н и М.
Основным членом в формуле (2.3) является первый член. Значение его, как и других в формуле (2.3), дается для каждого конкретного носителя в виде таблиц или графиков.
Формулы для вычисления подъемной и боковой сил имеют вид:
Y=Cy·q·S, Z=Cz·q·S.
Коэффициенты подъемной Cx
и Cy боковой сил для заданной формы носителя, завися от величин M, Re,
![]() и
и ![]() . При этом с
достаточной для практики точностью можно пренебречь влиянием числа Re
на коэффициенты Cx и Cy. Кроме того, т.к. при полете
носителя углы
. При этом с
достаточной для практики точностью можно пренебречь влиянием числа Re
на коэффициенты Cx и Cy. Кроме того, т.к. при полете
носителя углы ![]() и
и
![]() являются
малыми, то можно пренебречь влиянием угла скольжения
являются
малыми, то можно пренебречь влиянием угла скольжения ![]() на коэффициент подъемной силы Cy
и угла атаки
на коэффициент подъемной силы Cy
и угла атаки ![]() на
коэффициент боковой силы Сz. Тогда
на
коэффициент боковой силы Сz. Тогда
|
|
(2.4) |
Разлагая функции (2.4) в ряд по степеням и соответственно в окрестности их нулевого значения с точностью до величин второго порядка малости, получим

Обозначив производные ![]() и
и ![]() через коэффициенты Cay и Cbz,
можно записать
через коэффициенты Cay и Cbz,
можно записать
![]()
Cy=Cay(M)![]() ,
,
Cz=Cbz(M)![]() .
.
Для РН с аэродинамической осевой симметрией справедливо равенство
|
|Cay|=|Cbz| . |
(2.5) |
Значение частных производных Cay и Cbz для конкретных носителей выдаются в виде графиков или таблиц.
2.2.2 Сила тяги реактивного двигателя.
РН с работающим двигателем представляет собой тело переменной массы с отделяющимися частицами. Отделение частиц обусловлено истечением газов из сопла двигателя.
В соответствии с законом сохранения количества движения, замкнутая система механических тел (РН + отделяющиеся со скоростью W частицы рабочего тела (топлива)), должна иметь постоянный импульс. Т.к. импульс рабочего тела постоянно возрастает за счет увеличения массы отработанных газов, должен увеличиваться импульс носителя за счет увеличения скорости носителя V, противоположный скорости W. Приращение скорости в соответствии со вторым законом Ньютона определяется реактивной силой, равной изменению количества движения отработанных газов за единицу времени. Реактивная сила F равна:
|
|
(2.6) |
где ![]() - секундный расход массы
(топлива);
- секундный расход массы
(топлива);
W-вектор относительной скорости истечения газов из сопла двигателя (см. рисунок 2.10).
Эта формула верна в предположении, что отделившаяся масса не оказывает силового воздействия на тело переменной массы. В действительности в газовой среде на срезе сопла (а-а) устанавливается давление Рa, не равное нулю. Кроме того, на внешнюю поверхность двигателя действует атмосферное давление РН.
Из рисунка 2.11 видно, что результирующая сила, действующая на двигатель, обусловленная давлениями Рa и РН будет равна
|
(Рa -PН)·Sa, |
(2.7) |
где Sa - площадь выходного сечения сопла.
Рисунок 2.10 - Реактивная сила тела переменной массы

Рисунок 2.11 - Распределение атмосферного давления
Выражение для силы тяги Р запишем в виде:
|
Р=mc·W +(Рa -PН)·Sa, |
(2.8) |
где ![]() - секундный расход топлива.
- секундный расход топлива.
Т.к. на реактивных двигателях РН площадь выходного сечения сопла не регулируется, т.е. Sa=const, а давление Pa пропорциональна секундному расходу топлива mc, то
P=P(mc, PН).
В случае, если массовый секундный расход постоянен mc = const, то сила тяги будет зависеть только от высоты полета Н , т.е.
P=P(H).
Обозначим через Р0 и РН=0 соответственно силу тяги и атмосферное давление у Земли (Н=0). Тогда выражение (2.8) для тяги запишем
P0=mc·W+(Pa-PН=0)·Sa,
Р=mc·W+(Pa-PН=0)·Sa+(PН=0 -РН)·Sa
или
|
P=P0+(PН=0-PН)·Sа. |
(2.9) |
Из формулы (2.9) следует, что по
мере увеличения высоты тяга двигателя будет увеличиваться, т.к. РН с
высотой уменьшается. При РН![]() 0 тяга двигателя стремится к максимальному
значению, которое обозначим Рvac.
0 тяга двигателя стремится к максимальному
значению, которое обозначим Рvac.
Тогда из (2.9) получим
|
Рvac =Р0 +РН=0·Sa. |
(2.10) |
График изменения тяги с высотой Н имеет вид, представленный на рисунке 2.12.
Рисунок 2.12 - График изменения тяги двигателя с высотой Н
Подставляя значение Р0, получим следующее выражение для определения тяги двигателя в пустоте:
Рvac=mc·W+Pa·Sa.
Часто при определении величины тяги Р пользуются формулой, в которую входят эффективные скорости истечения газов у поверхности Земли и в пустоте. Эффективной скоростью истечения газов из сопла реактивного двигателя называется такая фиктивная скорость истечения, которая, будучи умноженной на секундный расход топлива, численно равна тяге двигателя Р:
|
Р =Рef ·mc. |
(2.11) |
Тогда из выражений (2.8) и (2.11) получим
Wef=![]()
В пустоте (РH=0) эффективная скорость истечения равна:
Wef vac ![]()
Опуская промежуточные преобразования, запишем формулу для вычисления величины тяги двигателя
|
|
(2.12) |
где ![]() - относительное атмосферное
давление.
- относительное атмосферное
давление.
Величину тяги реактивного двигателя можно определить, пользуясь понятием удельной тяги. Удельной тягой Рud реактивного двигателя называется тяга двигателя, приходящаяся на единицу весового секундного расхода топлива Gс
Рud = ![]()
или
![]()
где g0- ускорение силы тяжести на поверхности Земли.
Тяга в этом случае запишется
P=Pud · mc·g0
или
|
Pud =Wef · mс. |
(2.13) |
Pud =Wef · mс.
Удельная тяга топлива зависит от качества топлива и конструктивного совершенства двигателя. Вводя понятие удельной тяги у Земли Рud 0 и удельной тяги в пустоте Рud vac, формулу для вычисления тяги двигателя можно записать в следующем виде:
![]() .
.
2.2.3 Управляющие воздействия на РН.
Для обеспечения программного движения РН при выводе КА на орбиту необходимо, чтобы скорость ЦМ носителя была близка к расчетной и чтобы продольная ось аппарата в каждый момент времени занимала определенное (расчетное) положение. В качестве органов управления на РН используются рулевые двигатели (РД), поворотные реактивные сопла, газовые и аэродинамические рули. Эти органы управления предназначены для осуществления программного движения ракеты относительно ЦМ.
Обычно на ракете устанавливаются четыре управляющих двигателя, расположенные в двух взаимно перпендикулярных плоскостях, и нумеруются они по порядку от одного до четырех в направлении движения часовой стрелки, если смотреть со стороны хвостовой части ракеты (см. рисунок 2.13). За положительное направление отсчета углов отклонения РД считают те, которые создают отрицательные моменты относительно связанных осей.
Обозначим через Р(1), Р(2),Р(3), Р(4) силы тяги рулевых двигателей. Найдем проекции сил тяги всех четырех управляющих двигателей на оси связанной системы координат: X1pd, Y1pd, Z1pd.
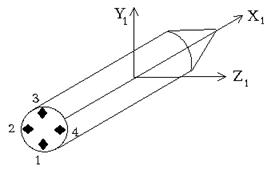
Рисунок 2.13 - Схема расположения рулей
При отклонении
двигателей на некоторые положительные углы ![]() 1,
1, ![]() 2,
2, ![]() 3,
3, ![]() 4 ( см. рисунок 2.14)
выражения для алгебраической суммы проекций сил тяги рулевых двигателей на
связанные оси будут иметь вид:
4 ( см. рисунок 2.14)
выражения для алгебраической суммы проекций сил тяги рулевых двигателей на
связанные оси будут иметь вид:
|
X1 pd=P(1)pd·cos
Y1
pd=P(2)pd·sin Z1
pd=-P(1)pd·sin |
(2.14) |
Если тяги всех рулевых двигателей одинаковы, то (2.14) можно записать:
|
X1 pd=Ppd(cos Y1
pd=Ppd (sin Z1
pd=-Ppd (sin |
(2.15) |
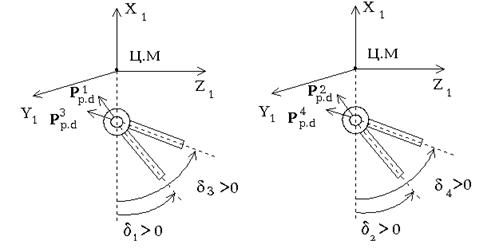
Рисунок 2.14 - Направление сил тяги рулевых двигателей
Из первой строки (2.15) видно, что при углах отклонения рулей меньше 90°, независимо от их знака, проекция больше нуля, т.е. она направлена по продольной оси, по которой направлена тяга двигателя.
2.2.4 Перегрузка и связанные с ней явления.
Рассмотренные в предыдущих пунктах силы удобно разделить на две группы: поверхностные и массовые. К поверхностным силам относятся аэродинамическая сила R, сила тяги Р, а если РН стоит на стартовом столе, то и сила реакции опоры N. Массовые силы - это элементарные силы притяжения, которые приложены к каждой элементарной массе РН. Сумма этих сил составляет силу притяжения. При изучении движения ЦМ РН в неинерциальной СК к массовым силам относят переносную и кориолисову силы инерции. Сравним величину поверхностных сил с весом РН у поверхности Земли, введем понятие перегрузки.
Перегрузкой РН (или перегрузкой ЦМ РН) называется вектор, равный отношению главного вектора всех поверхностных сил, действующих на РН к его весу в данный момент времени у поверхности Земли:
|
|
(2.16) |
где в общем случае
|
Rs =Q +Y +Z +N, |
(2.17) |
m - масса РН в данный момент времени;
g0 - ускорение силы тяжести у поверхности Земли.
Если РН находится на стартовом столе, то при безветрии и выключенном двигателе на него действует только сила реакции опоры N и перегрузка в этом случае равна единице.
При включенном двигателе до момента отрыва РН от стартового стола на него действуют сила тяги Р и сила реакции опоры N, которые уравновешиваются весом тела, перегрузка здесь n = 1.
После отрыва РН от стартового стола при полете в атмосфере действующими поверхностными силами будут аэродинамические силы и сила тяги двигателя. В этом случае перегрузка будет возрастать.
Особое внимание уделяется воздействию перегрузки при пилотируемом полете КА, т.к. изменения в организме человека под ее влиянием зависят не только от ее величины, но и направления, длительности, частоты воздействия и интервала между действием. Для смягчения действия перегрузок космонавты в КА располагаются таким образом, что перегрузка действует на них в поперечном направлении (относительно продольной оси тела).
Под действием поверхностных сил ЦМ КА получает ускорение, которое называется кажущимся, т.е.
|
|
(2.18) |
где Rs - главный вектор всех поверхностных сил;
m - масса КА в данный момент времени.
Как следует из (2.16) и (2.18), вектор перегрузки и вектор кажущегося ускорения КА направлены по вектору.
Согласно второму закона Ньютона можно записать
|
mJc=Rs+G, |
(2.19) |
где Jc - вектор ускорения ЦМ КА относительно инерциальной СК;
G - сила притяжения КА Землей.
Поделив обе части уравнения (2.19) на массу КА m, получим
|
|
(2.20) |
или
|
Jc=Jc is+Jgr . |
(2.21) |
Из соотношения (2.21) следует, что ускорение ЦМ КА относительно инерциальной СК равно сумме кажущегося и гравитационного ускорений.
Аналогичные понятия можно ввести и для точек КА, не совпадающих с ЦМ.
Кажущимся ускорение называется потому, что оно "кажется" наблюдателю, находящемуся на борту КА. Наблюдатель может это ускорение замерить, т.к. он испытывает действие только поверхностных сил, под воздействием которых и приобретает кажущееся ускорение.
С кажущимся ускорением связано понятие кажущейся скорости
|
|
. (2.22) |
С перегрузкой связана еще одна характеристика - кажущийся вес тела (груза). Кажущийся вес груза, который находится в КА и неподвижно закреплен относительно него, равен по величине силе реакции опоры груза и противоположен ей по направлению. Следовательно, кажущийся вес груза в этом случае - это сила, с которой груз давит на опору.
Если груз находится в состоянии относительного покоя (т.е. не передвигается относительно КА) и его относительная скорость Vr=0, то кориолисово ускорение груза
|
Jr kor =2·(ω ·Vr). |
(2.23) |
В случае вращения КА на груз, закрепленный не в ЦМ КА, действует центростремительное ускорение и ускорение, обусловленное угловым ускорением КА - ε. Если Rs= 0, то со стороны опоры на груз действует ускорение от поверхностных сил или кажущееся ускорение Jc is. На груз действует ускорение со стороны сил притяжения, но т.к. по своей природе эта сила является массовой, то точно такое же ускорение испытывает и сама опора, и КА, т.е. в создании кажущегося веса в летящем КА гравитационное притяжение "не принимает участия".
Кажущийся вес груза, по определению, противоположен силе реакции опоры. Поскольку реакция опоры равна
|
N =(Jc+Joc+J |
(2.24) |
где Jc - кажущееся ускорение ЦМ КА (передается через опору);
Joc - центростремительное ускорение груза со стороны опоры;
Je - ускорение, возникающее при наличии углового ускорения ε,
|
Je = ε · r, |
(2.25) |
тогда
|
Gr is= -N, |
(2.26) |
где Gr is - кажущийся вес груза (см. рисунок 2.15) или
|
Gr is=-mr·(Jc+Joc+J |
(2.27) |
Человек, находящийся в КА, величину перегрузки оценивает как отношение силы, с которой он давит на опору к своему весу в данный момент времени у поверхности Земли.
В соответствии с этим связь кажущегося веса с перегрузкой будет следующей
|
|
(2.28) |
где Gr=mr · g0 .
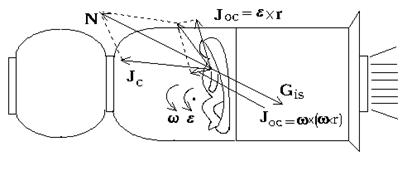
Рисунок 2.15 - Перегрузка
Из анализа (2.28) следует, что в случае поступательного движения КА и при отсутствии поверхностных сил кажущийся вес груза будет равен нулю, т.е. груз не испытывает реакции опоры. Такое безопорное состояние внутри КА называется невесомостью. Для создания искусственного веса необходимо КА придать вращение относительно центра масс.
2.2.5 Моменты сил, действующие на ракету-носитель.
2.2.5.1. Аэродинамические моменты.
Моменты от аэродинамических сил обусловлены влиянием воздушной среды, в которой происходит полет РН. Для удобства изучения их подразделяют на статические и динамические.
Статические аэродинамические моменты, действующие на ракету, изучают при продувках ракеты в аэродинамических трубах при постоянных параметрах воздушной среды (температуры, плотности и атмосферного давления) и нейтральном положении органов управления.
Если бы в полете ракета двигалась поступательно и равномерно при неизменных параметрах воздушной среды, нейтральном положении органов управления и установившемся режиме работы двигательной установки, то на нее действовали бы только статические аэродинамические моменты. Но в реальном полете ракета движется непоступательно и неравномерно, параметры воздушной среды изменяются с течением времени, органы управления, в общем случае, не находятся в нейтральном положении и режим работы двигательной установки не является установившимся. Поэтому действительные моменты от аэродинамических сил отличаются от статических аэродинамических моментов.
Разность между действительными и статическими моментами, соответствующими значениям параметров движения в рассматриваемый момент времени, принято называть динамическими моментами. Основную роль в возникновении динамических моментов играет вращение ракеты вокруг ЦМ. Влияние других факторов в создании динамических моментов незначительно.
Под действием
аэродинамических сил Q
и Y появляется
статический аэродинамический момент ![]() . Проекции этого момента на оси связанной СК X1
Y1 Z1 составляют:
. Проекции этого момента на оси связанной СК X1
Y1 Z1 составляют:
Mx=0,
My=f ·Z1,
Mz=-f ·Y1.
Обозначив через lg и lc расстояние от центра давления (ЦД) и ЦМ до вершины ракеты, соответственно (см. рисунок 2.16 a, 2.16 б), вычисляем плечо аэродинамического момента f = (lg-lc).
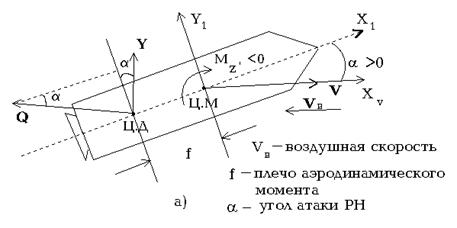
Рисунок 2.16, а - Аэродинамические моменты, действующие на РН от ЦД

Рисунок 2.16, б - Аэродинамические моменты, действующие на РН от ЦМ
Проекции X1Y1Z1 определим по проекциям -Q,Y,Z силы R на оси скоростной СК
Y1=Q sin![]() ·cos
·cos![]() +Y·cos
+Y·cos![]() +Zsin
+Zsin![]() ·sin
·sin![]() , Z1=-Q·sin
, Z1=-Q·sin![]() +Z·cos
+Z·cos![]() .
.
Т.к. углы ![]() и
и ![]() при движении РН малы, то sin
при движении РН малы, то sin![]() =
= ![]() , sin
, sin![]() =
= ![]() , cos
, cos![]() = 1, cos
= 1, cos![]() = 1 и с точностью до величины второго порядка малости,
момент зависит только от угла скольжения
= 1 и с точностью до величины второго порядка малости,
момент зависит только от угла скольжения ![]() , а момент - от угла атаки
, а момент - от угла атаки ![]() . Тогда
. Тогда
Y=Q · ![]() +Y, Z= -Q ·
+Y, Z= -Q · ![]() +Z .
+Z .
Выражения для Q, Y, Z
при малых углах ![]() и
и
![]() могут записаны
могут записаны
Q=(Cx0 +![]() Cx) · q · S,
Cx) · q · S,
![]()
![]()
где
![]() ;
;
![]()
и
|
|
(2.29) |
Из формулы (2.29) видно, что
момент ![]() зависит
от угла
зависит
от угла ![]() , а
момент
, а
момент ![]() - от
угла
- от
угла ![]() , причем
зависимости эти линейные.
, причем
зависимости эти линейные.
Возьмем частные
производные от (2.29) соответственно
по ![]() и
и ![]() :
:
|
|
(2.30) |

|
|
(2.31) |

Эти производные называют коэффициентами статических аэродинамических моментов.
Учитывая соотношения (2.31) для осесимметричных РН, можно записать
Y![]() = Z
= Z![]() ,
,
тогда
![]() .
.
Часто в расчетах
используют безразмерный коэффициент статического аэродинамического момента ![]() и
и ![]() , который вычисляется
следующим образом:
, который вычисляется
следующим образом:
![]() .
.
Все статические коэффициенты определяются при продувках моделей в аэродинамических трубах и для каждого конкретного носителя выдаются в виде таблиц или графиков.
2.2.5.2 Понятие о статической устойчивости РН.
Допустим, что РН
движется в плотных слоях атмосферы и имеет углы ![]() и
и ![]() , равные нулю. В этом случае, согласно (2.31) статические
аэродинамические моменты будут равны нулю.
, равные нулю. В этом случае, согласно (2.31) статические
аэродинамические моменты будут равны нулю.
Пусть в какой-то момент
времени мгновенно возник угол атаки ![]() , тогда сразу же появится и статический
аэродинамический момент относительно оси Z1, равный
, тогда сразу же появится и статический
аэродинамический момент относительно оси Z1, равный
![]()
Из (2.31) следует, что направление действия момента при заданной величине угла a будет определяться его знаком.
Рассмотрим случай, когда
ЦД будет находиться позади ЦМ, т.е. lg>lc (см. рисунок 2.26 б), тогда
согласно (2.30) при движении РН
в плотных слоях атмосферы (q ![]() 0) коэффициент статического момента
0) коэффициент статического момента ![]() всегда будет меньше
нуля
всегда будет меньше
нуля
![]() <0.
<0.
Следовательно, если
возник угол атаки ![]() >0, то возникает статический аэродинамический
момент
>0, то возникает статический аэродинамический
момент ![]() ,
который будет стремиться вращать РН по часовой стрелке, т.е. возвращать его к
нулевому (исходному) углу атаки.
,
который будет стремиться вращать РН по часовой стрелке, т.е. возвращать его к
нулевому (исходному) углу атаки.
Если же ![]() > 0, то
> 0, то ![]() > 0, т.е. этот момент
будет стремиться вращать РН против часовой стрелки, стремясь вернуть РН также к
нулевому (исходному) углу атаки.
> 0, т.е. этот момент
будет стремиться вращать РН против часовой стрелки, стремясь вернуть РН также к
нулевому (исходному) углу атаки.
Ракета, которая стремится возвратиться к исходному углу атаки a под действием статического аэродинамического момента, называется статически устойчивой.
Аналитическим признаком
статической устойчивости ракеты является ![]() < 0, а физическим (конструктивным) -
расположение ЦД позади ЦМ (передняя центровка, т.е. lg>lc).
< 0, а физическим (конструктивным) -
расположение ЦД позади ЦМ (передняя центровка, т.е. lg>lc).
Аналитическим признаком
статической неустойчивости ракеты является условие ![]() > 0.
> 0.
Для статически
нейтральной ракеты ![]() = 0 физическими признаками статической неустойчивости
и статической нейтральности является соответственно расположение ЦД впереди ЦМ
и совпадение УД с ЦМ.
= 0 физическими признаками статической неустойчивости
и статической нейтральности является соответственно расположение ЦД впереди ЦМ
и совпадение УД с ЦМ.
Все, что сказано в
отношении действия статического аэродинамического момента ![]() =
=![]() ·
·![]() , обусловленного возникновением угла атаки
, обусловленного возникновением угла атаки ![]() , в равной степени
относится и к статическому аэродинамическому моменту, обусловленному
возникновением угла скольжения
, в равной степени
относится и к статическому аэродинамическому моменту, обусловленному
возникновением угла скольжения ![]() . Статически устойчивая ракета всегда стремится
возвратиться к нулевым (исходным) углам
. Статически устойчивая ракета всегда стремится
возвратиться к нулевым (исходным) углам ![]() и
и ![]() .
.
2.2.5.3 Демпфирующий момент.
Если РН движется в
воздушной среде и вращается вокруг ЦМ, то на нее будут действовать силы
сопротивления воздушной среды, препятствующие вращению. Эти силы создают момент
относительно ЦМ ракеты, всегда направленный в сторону, противоположную вращению
ракеты, стремящийся уменьшить угловую скорость вращения, которая и порождает
этот момент. Данный момент называется демпфирующим моментом и обозначается M(![]() ).
).
2.3 Движение РН на активном участке
Активный участок (АУ),
или участок выведения орбитального КА, предназначен для вывода аппарата на
орбиту. Параметры движения в конце АУ являются начальными условиями для
орбитального полета КА. Орбита КА может быть определена полностью шестью
параметрами (![]() ,
i, P, e,
,
i, P, e, ![]() ,
, ![]() п) или
только общими требованиями к ней. В качестве общих требований могут быть: время
существования КА, максимальное время нахождения КА над заданными регионами
земной поверхности, максимальное время пребывания в зонах повышенной радиации,
ограничения на освещенность и др. Чтобы получить орбиту КА с расчетными
параметрами, необходимо вывести аппарат в расчетную точку пространства с
заданной величиной и направлением скорости.
п) или
только общими требованиями к ней. В качестве общих требований могут быть: время
существования КА, максимальное время нахождения КА над заданными регионами
земной поверхности, максимальное время пребывания в зонах повышенной радиации,
ограничения на освещенность и др. Чтобы получить орбиту КА с расчетными
параметрами, необходимо вывести аппарат в расчетную точку пространства с
заданной величиной и направлением скорости.
Для изучения такого сложного процесса, как полет КА, необходимо правильно описать его математически, т.е. при помощи системы дифференциальных уравнений с оговоренными расчетными условиями, характеризующими физическую модель движения, которая с определенной степенью точности соответствует реальному процессу. Это движение называют невозмущенным.
Рассмотрим невозмущенное движение РН при следующих расчетных условиях:
- гравитационное поле Земли - центральное, Земля имеет форму шара с R= 6371 км;
- тяговые, массовые и аэродинамические характеристики РН соответствуют номинальным (расчетным);
-
параметры атмосферы P, ![]() , T соответствуют
параметрам стандартной атмосферы, ветер отсутствует;
, T соответствуют
параметрам стандартной атмосферы, ветер отсутствует;
- гравитационные поля Луны, Солнца и др. планет отсутствуют;
- пренебрегаем: вращением Земли, неравномерным и непрямолинейным движением ее центра масс в инерциальном пространстве.
2.3.1 Анализ изменения скорости РН на АУ.
Изменение вектора скорости ЦМ РН полностью определяется силами, действующими на него на АУ. Для удобства анализа будем рассматривать движение ЦМ РН в плоскости. Основными силами, действующими на РН, являются: тяга двигателя Р, сила лобового сопротивления Q, подъемная сила Y и сила притяжения Земли G (см. рисунок 2.19).

Рисунок 2.19 - Силы, действующие на РН на АУ
Запишем уравнения движения ЦМ РН в проекциях на касательную и главную нормаль:
![]() ,
, ![]() ,
,
где F ![]() -
алгебраическая сумма проекций всех действующих сил на касательную к траектории,
-
алгебраическая сумма проекций всех действующих сил на касательную к траектории,
Fn - алгебраическая сумма проекций всех сил на направление главной нормали.
Найдем выражение для F
![]() и Fn
(см. рисунок 2.19).
и Fn
(см. рисунок 2.19).
|
|
(2.33) |
|
|
. (2.34) |
Из рисунка 2.19 следует,
что при ![]() будет
увеличение скорости, при F
будет
увеличение скорости, при F ![]() < 0 - уменьшение, а при F
< 0 - уменьшение, а при F ![]() =0 - ЦМ РН
будет двигаться с постоянной по величине скоростью.
=0 - ЦМ РН
будет двигаться с постоянной по величине скоростью.
Одной из задач участка выведения является доведение скорости до орбитальной.
Используя формулу (2.33), получим формулу приращения величины скорости при работе ступени РН. Для этого в правой части уравнения (2.33) добавим и вычтем тягу Р, далее разделим правую и левую части на массу m и перегруппируем. В результате получаем:
|
|
(2.35) |
Разделив переменные в (2.35) и проинтегрировав его от момента начала работы ступени до момента окончания ее работы, получим приращение скорости
![]() V=V1-V0
V=V1-V0
в виде
![]()
или запишем
|
|
(2.36) |
|
|
(2.37) |
|
|
(2.38) |
|
|
. (2.39) |
Рассмотрим составляющие приращения скорости, входящие в формулу (2.36).
1) Составляющая
приращения скорости ![]() VP,Q обусловлена разностью сил тяги и
лобового сопротивления и на АУ РН всегда положительна. Преобразуем ее,
используя формулы (2.13) и (2.37):
VP,Q обусловлена разностью сил тяги и
лобового сопротивления и на АУ РН всегда положительна. Преобразуем ее,
используя формулы (2.13) и (2.37):
![]()
или с учетом (2.8)
![]() .
.
Применим теорему о среднем интегрального исчисления:
|
|
(2.40) |
Обозначив начальную массу РН в момент начала работы ступени через m0, а через m1- массу РН в конце работы ступени, заменим в (2.40) пределы интегрирования и, введя поправочные коэффициенты, получим
![]() ,
,
где ![]() ,
,
m1 - масса РН в конце работы ступени (когда топливо выработано, но она еще не отделилась от РН). Проинтегрировав, получим
|
|
(2.41) |
Отношение ![]() - есть число Циолковского
ступени. Введя понятие относительного запаса топлива ступени
- есть число Циолковского
ступени. Введя понятие относительного запаса топлива ступени ![]() t ,
t ,
|
|
(2.42) |
где m0 - начальная масса РН в начале работы ступени, формулу (2.41) можно записать в виде:
![]()
или
|
|
(2.43) |
Из формулы (2.43) видно, что
приращение скорости ![]() VP,Q при работе ступени определяется
двумя факторами: относительным запасом топлива ступени (или числом
Циолковского) и эффективной скоростью истечения газов из сопла реактивного
двигателя ступени.
VP,Q при работе ступени определяется
двумя факторами: относительным запасом топлива ступени (или числом
Циолковского) и эффективной скоростью истечения газов из сопла реактивного
двигателя ступени.
Статистика показывает, что при работе первой ступени Кp=1.1, КQ=0.96-0.98, а для второй ступени и последующих эти коэффициенты практически равны единице.
Т.к. для современных
химических топлив Wef0=2200-3200 км/с, а ![]() T<0.92, то
приращение скорости при работе ступени РН не превышает 6.0-6.5 км/с. Если
принять КP=КQ=1, то формула (2.43) превращается в
известную формулу Циолковского
T<0.92, то
приращение скорости при работе ступени РН не превышает 6.0-6.5 км/с. Если
принять КP=КQ=1, то формула (2.43) превращается в
известную формулу Циолковского
![]() V=Wef vac·lnZ=-Wef vac·(1-
V=Wef vac·lnZ=-Wef vac·(1-![]() T).
T).
Эта формула дает приращение величины скорости ракеты при работе ступени в пустоте и отсутствии гравитационного поля.
2) Составляющая ![]() V
V ![]() , перед
которой в формуле (2.36) стоит минус, обусловлена
уменьшением тяги в направлении скорости V
на величину
, перед
которой в формуле (2.36) стоит минус, обусловлена
уменьшением тяги в направлении скорости V
на величину ![]() из-за
наличия угла атаки
из-за
наличия угла атаки ![]() (см. рисунок 2.19). Из формулы (2.38)
видно, что при малых по величине углах атаки
(см. рисунок 2.19). Из формулы (2.38)
видно, что при малых по величине углах атаки ![]() , не превышающих 5°-7° потери
скорости, будут незначительны, но при больших (порядка 15°-20°)
, не превышающих 5°-7° потери
скорости, будут незначительны, но при больших (порядка 15°-20°) ![]() V
V ![]() достигает существенных
значений. Поэтому с точки зрения экономии топлива угол атаки
достигает существенных
значений. Поэтому с точки зрения экономии топлива угол атаки ![]() при движении
РН на АУ должен быть мал по абсолютной величине.
при движении
РН на АУ должен быть мал по абсолютной величине.
3) Составляющая ![]() VG
обусловлена проекцией силы притяжения G, направленной против вектора скорости
при движении РН на АУ (см. рисунок 2.19).
VG
обусловлена проекцией силы притяжения G, направленной против вектора скорости
при движении РН на АУ (см. рисунок 2.19).
Поэтому ![]() VG называют
гравитационными потерями скорости при работе ступени и в формуле (2.36) перед ней стоит
знак минус. Применяя теорему о среднем интегрального исчисления к (2.39), получаем:
VG называют
гравитационными потерями скорости при работе ступени и в формуле (2.36) перед ней стоит
знак минус. Применяя теорему о среднем интегрального исчисления к (2.39), получаем:
|
|
(2.44) |
где ![]() tCT =t1-t0.
tCT =t1-t0.
Из формулы (2.44) следует, что с
увеличением продолжительности работы ступени ![]() tCT гравитационные потери скорости
увеличиваются. С другой стороны, уменьшение
tCT гравитационные потери скорости
увеличиваются. С другой стороны, уменьшение ![]() tCT (при сокращении запасов топлива mT
ступени) приводит к росту перегрузки n из-за увеличения секундного расхода
топлива mc. С увеличением
tCT (при сокращении запасов топлива mT
ступени) приводит к росту перегрузки n из-за увеличения секундного расхода
топлива mc. С увеличением ![]() tCT растет относительная масса
двигательной установки, и, следовательно, уменьшается относительный запас
топлива ступени
tCT растет относительная масса
двигательной установки, и, следовательно, уменьшается относительный запас
топлива ступени ![]() T.
T.
Поэтому при выборе надо
учитывать эти противоречивые факторы. Кроме того, выбор величины ![]() tCT определяется
также номером ступени, предназначением РН и т.д. Для современных РН время
работы ступени составляет 100-500 с.
tCT определяется
также номером ступени, предназначением РН и т.д. Для современных РН время
работы ступени составляет 100-500 с.
С увеличением номера
ступени РН гравитационные потери скорости при ![]() tCT=const уменьшаются, т.к., в первую
очередь, зависимость
tCT=const уменьшаются, т.к., в первую
очередь, зависимость ![]() (t) на АУ РН является монотонно-убывающей
функцией времени, да и гравитационное ускорение gT уменьшается с
ростом высоты полета РН.
(t) на АУ РН является монотонно-убывающей
функцией времени, да и гравитационное ускорение gT уменьшается с
ростом высоты полета РН.
В качестве примера приведем ориентировочные
данные значений ![]() VGi
трехступенчатой РН в долях
VGi
трехступенчатой РН в долях ![]() VP,Qi:
VP,Qi:
![]() V=(0.17
V=(0.17 ![]() 0.25)
0.25) ![]() VP,Q1 ,
VP,Q1 ,
![]() V=(0.10
V=(0.10 ![]() 0.17)
0.17) ![]() VP,Q2 ,
VP,Q2 ,
![]() V=(0.03
V=(0.03 ![]() 0.10)
0.10) ![]() VP,Q3 .
VP,Q3 .
Из приведенных данных можно сделать следующие выводы:
1) На современном уровне
развития ракетной техники с помощью одноступенчатого носителя КА вывести на
орбиту нельзя, т.к. приращение скорости при работе одной ступени ![]() V в настоящее время не
превышает 5.6-5.8 км/с, а круговая скорость на высоте Н=200 км примерно равна
7,6 км/с. Значит, РН должен быть не менее чем двух ступенчатой.
V в настоящее время не
превышает 5.6-5.8 км/с, а круговая скорость на высоте Н=200 км примерно равна
7,6 км/с. Значит, РН должен быть не менее чем двух ступенчатой.
2) Для выведения на орбиту обитаемых КА желательно использовать трехступенчатые РН, чтобы перегрузка не превышала допустимых значений, обеспечивающих комфортность условий для людей. Заметим, что если mc=const при работе ступени (т.к. не предусматривается дросселирование тяги двигательной установки), то максимум перегрузки nx будет наступать в конце работы каждой ступени вследствие уменьшения массы ступени (из-за выработки топлива) (см. рисунок 2.20).
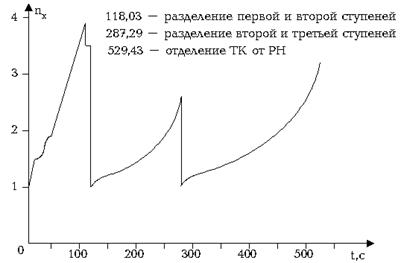
Рисунок 2.20 - Профиль изменения перегрузки при выведении КА
3) Если рассчитаны
приращения скорости при работе каждой ступени ![]() Vi, то скорость РН в конце АУ VK
определяется по формуле
Vi, то скорость РН в конце АУ VK
определяется по формуле
![]() ,
,
где n- число ступеней РН.
Характер изменения
величины скорости РН на АУ показан на рисунке 2.21,
зависимость V(t) является монотонно-возрастающей функцией времени, причем
производная ![]() из-за
выработки топлива возрастает и к концу работы ступени становится максимальной
(если m=const).
из-за
выработки топлива возрастает и к концу работы ступени становится максимальной
(если m=const).
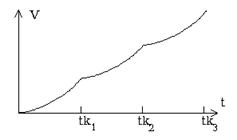
Рисунок 2.21 - Характер изменения скорости РН на АУ
С энергетической точки
зрения выгоднее производить запуск РН в восточном направлении, т.к., находясь
на стартовом столе, РН уже обладает некоторой линейной скоростью в инерциальной
СК. Это окружная скорость космодрома, т.е. скорость его движения вокруг оси
Земли за счет суточного вращения. На широте ![]() она равна
она равна
![]() Vвр =
Vвр =![]() з·Rз·cos
з·Rз·cos ![]() = 465·cos(
= 465·cos(![]() ) м/c.
) м/c.
На экваторе Vвр=465 м/с, на полюсе - нулю, для Байконура - 320 м/с, Плисецка - 213 м/с .
Составляющая вектора скорости от вращения Земли
![]() Vвр
=
Vвр
=![]() з·(Rз+Н)·cos
з·(Rз+Н)·cos
![]() ·sinA,
·sinA,
где ![]() - широта точки старта;
- широта точки старта;
H - высота точки старта;
А - азимут пуска.
Т.о., ![]() Vвр векторно добавляется
к скорости РН в конце АУ, поэтому запуск КА с обратным наклонением с
энергетической точки зрения невыгоден.
Vвр векторно добавляется
к скорости РН в конце АУ, поэтому запуск КА с обратным наклонением с
энергетической точки зрения невыгоден.
2.3.2 Требования, предъявляемые к программе движения РН на участке выведения КА на орбиту.
Каким бы образом ни была
определена орбита КА - полностью или общими требованиями к ней - существует
множество траекторий выведения, отличающихся программой движения РН на АУ.
Определим в связи с этим требования к программе продольного движения (при программе
угла рыскания ![]() (t)
(t)
![]() 0 и программе
угла крена
0 и программе
угла крена ![]() (t)
(t) ![]() 0):
0):
1) Начальной точкой
траектории выведения КА на орбиту является точка старта РН. Технически наиболее
простым является вертикальный старт РН. Поэтому первым участком траектории
является вертикальный участок. На вертикальном участке наиболее простая
программа движения ![]() . (
. (![]() СТ-стартовый угол тангажа), и это
способствует устойчивой работе автономной системы управления непосредственно
после старта. На этом участке угол атаки
СТ-стартовый угол тангажа), и это
способствует устойчивой работе автономной системы управления непосредственно
после старта. На этом участке угол атаки ![]() =0, и тяга двигателя полностью реализуется на
увеличение скорости. При одной и той же скорости полета лобовое сопротивление Q
при
=0, и тяга двигателя полностью реализуется на
увеличение скорости. При одной и той же скорости полета лобовое сопротивление Q
при ![]() = 0 имеет
минимальное значение и отсутствуют поперечные силы.
= 0 имеет
минимальное значение и отсутствуют поперечные силы.
Продолжительность вертикального участка составляет 4-12 с. При этом носитель достигает высоты 40-50 м, имея скорость 20-40 м/с. Существенно уменьшать продолжительность этого участка нельзя, т.к. необходимо обеспечить выход всех систем управления на устойчивый режим работы, при котором управление движением РН будет достаточно эффективным.
Таким образом, вертикальный участок удовлетворяет первому требованию к программе движения РН: осуществление технически наиболее благоприятного старта и обеспечение устойчивой работы автономной системы управления.
Увеличение продолжительности вертикального участка нежелательно, т.к. оно приводит к росту гравитационных потерь скорости. Кроме того, при больших скоростях увеличивается программное значение нормального ускорения, необходимого для искривления траектории при заданном радиусе кривизны r:
![]()
что приведет к возникновению больших нормальных перегрузок, опасных для работы конструкции ракеты. Следовательно, для уменьшения нормальных перегрузок необходимо искривление траектории начинать при возможно меньшей скорости, т.е. по возможности раньше. Таким образом, вторым требованием к программе движения РН является ограничение нормальных перегрузок на участке начального разворота.
Поскольку начальной
искривляющей силой является составляющая силы тяги по главной нормали P·sin![]() , то для искривления
траектории требуется обеспечение программного значения
, то для искривления
траектории требуется обеспечение программного значения ![]() <0. Но при скорости РН,
соответствующей 0.7М, возникают скачки уплотнения набегающего потока воздуха
(так называемый волновой кризис). При
<0. Но при скорости РН,
соответствующей 0.7М, возникают скачки уплотнения набегающего потока воздуха
(так называемый волновой кризис). При ![]()
![]() 0 они вызывают нежелательные аэродинамические
моменты, действующие на корпус РН.
0 они вызывают нежелательные аэродинамические
моменты, действующие на корпус РН.
2) К моменту начала
протекания волнового кризиса угол атаки должен быть равен нулю, т.к. при ![]() =0 обеспечивается
наиболее благоприятное протекание волнового кризиса.
=0 обеспечивается
наиболее благоприятное протекание волнового кризиса.
3) Ввиду того, что
разделение ступеней РН производится при скоростях полета 2 км/с и более, и,
несмотря на разреженность атмосферы, скоростной напор ![]() достигает значительных величин.
Поэтому в момент отделения первой ступени РН скоростной напор не должен
превышать допустимого значения для данного типа носителя, т.е.
достигает значительных величин.
Поэтому в момент отделения первой ступени РН скоростной напор не должен
превышать допустимого значения для данного типа носителя, т.е.
qРАЗД ![]() qДОП ,
qДОП ,
что обеспечит нормальные условия отделения ступени.
4) Непосредственно перед разделением и на небольшом интервале времени после разделения программный разворот РН должен отсутствовать.
5) Программа движения должна быть определена таким образом, чтобы отделяющиеся части РН падали в отведенные районы.
6) Угловая скорость
вращения РН не должна превышать некоторой величины, обусловленной особенностями
работы программного устройства ![]() .
.
7) Абсолютные величины
отклонения органов управления ![]() , а также их производных по времени
, а также их производных по времени ![]() , не должны
превосходить допустимых значений
, не должны
превосходить допустимых значений ![]() , диктуемых соответственно конструкцией и
мощностью рулевых машинок системы управления
, диктуемых соответственно конструкцией и
мощностью рулевых машинок системы управления
![]() .
.
8) В реальном полете отклонения параметров движения РН в конце АУ от их расчетных значений не должны превосходить допустимых, при которых обеспечивается требуемая точность выведения КА на заданную орбиту.
9) Если РН обеспечивает выведение на орбиту обитаемого КА, то перегрузки на АУ nx не должны превышать допустимых nx доп, т.е.
nx![]() nx доп.
nx доп.
10) Программа должна обеспечить наиболее экономичный вывод КА на орбиту, т.е. при минимально возможных энергетических затратах. Это требование является одним из критериев при выборе программы выведения КА.
2.3.3 Программа движения РН при работе двигателей первой ступени.
Программа движения
первой ступени должна обеспечить полет РН от момента старта до момента
отделения ступени при удовлетворении по всей траектории движения требований,
перечисленных в предыдущем параграфе. Т.к. на участке начального разворота
первой и основной силой, искривляющей траекторию движения ЦМ, является
составляющая силы тяги по главной нормали P·sin![]() , то в качестве программируемого
параметра для первой cтупени выберем угол атаки
, то в качестве программируемого
параметра для первой cтупени выберем угол атаки ![]() и программу определим как
и программу определим как
![]() =
=![]() (t).
(t).
Область определения ![]() (t) слева определена
продолжительностью вертикального участка (моментом времени t1), а
справа - временем выключения двигателей первой ступени tк1. В
результате многолетнего опыта был найден следующий вид программы:
(t) слева определена
продолжительностью вертикального участка (моментом времени t1), а
справа - временем выключения двигателей первой ступени tк1. В
результате многолетнего опыта был найден следующий вид программы:
|
|
(2.45) |
где ![]() max-предельное
значение угла атаки на участке начального разворота, выбираемое из условия
допустимой поперечной нагрузки.
max-предельное
значение угла атаки на участке начального разворота, выбираемое из условия
допустимой поперечной нагрузки.
Рассмотрим физическую
картину движения РН. Т.к. РН стартует вертикально, то предусматривается
небольшой по продолжительности вертикальный участок, на котором силы по нормали
к траектории отсутствуют. Для искривления траектории движения РН, начиная с
момента t1, необходимо иметь силы по нормали к траектории. С этой
целью с помощью второго и четвертого рулевых двигателей (см. рисунок 2.17)
создается отрицательный момент ![]() , под действием которого РН изменяет угол
тангажа, равный 90°, на отрицательную величину
, под действием которого РН изменяет угол
тангажа, равный 90°, на отрицательную величину ![]()
![]() , причем с появлением
, причем с появлением ![]()
![]() появится одновременно и угол атаки
появится одновременно и угол атаки ![]() =
=![]()
![]() . Если считать, что поворот произошел
мгновенно, то уже в момент t1 будут действовать силы Pyv=P·sin
. Если считать, что поворот произошел
мгновенно, то уже в момент t1 будут действовать силы Pyv=P·sin![]() и Y. Как только под
действием этих сил траектория начнет искривляться (вектор V повернется на угол
и Y. Как только под
действием этих сил траектория начнет искривляться (вектор V повернется на угол ![]() и станет меньше
90°), по нормали к траектории появится проекция силы притяжения Gyv=-G·cos
и станет меньше
90°), по нормали к траектории появится проекция силы притяжения Gyv=-G·cos![]() , которая по мере
искривления траектории будет возрастать и все больше будет брать на себя
функции по развороту вектора скорости (см. рисунок 2.19). К началу протекания
волнового кризиса (М=0.7-0.8) необходимо, чтобы угол атаки
, которая по мере
искривления траектории будет возрастать и все больше будет брать на себя
функции по развороту вектора скорости (см. рисунок 2.19). К началу протекания
волнового кризиса (М=0.7-0.8) необходимо, чтобы угол атаки ![]() был близок к нулю. Для этого
с помощью момента
был близок к нулю. Для этого
с помощью момента ![]() замедляем вращение корпуса РН и таким образом
уменьшаем угол атаки до требуемого.
замедляем вращение корпуса РН и таким образом
уменьшаем угол атаки до требуемого.
Далее управляющий момент
поддерживает угловую скорость РН ![]() z1, практически равную угловой
скорости поворота вектора скорости в продольной плоскости
z1, практически равную угловой
скорости поворота вектора скорости в продольной плоскости ![]() v. Из физической
картины видно, что без участка первоначального разворота, на котором должен
быть
v. Из физической
картины видно, что без участка первоначального разворота, на котором должен
быть ![]() > 0, не
обойтись.
> 0, не
обойтись.
Траектория движения
наиболее чувствительна к величине, которая рассматривается как параметр
семейства программ. Зависимость (2.45) задает угол
атаки в виде кривой, которая довольно быстро достигает своего максимального (по
абсолютной величине) значения, а затем убывает сначала быстро, но по мере
увеличения времени все медленнее, стремясь к нулю при t![]()
![]() . Коэффициент подбирается так, чтобы при числе
М=0.7-0.8 угол атаки практически равнялся нулю. Коэффициенты a и время начала
разворота для данного носителя являются величинами постоянными. Поэтому
программа движения
. Коэффициент подбирается так, чтобы при числе
М=0.7-0.8 угол атаки практически равнялся нулю. Коэффициенты a и время начала
разворота для данного носителя являются величинами постоянными. Поэтому
программа движения ![]() (t), определяемая зависимостью (2.45), имеет один
параметр
(t), определяемая зависимостью (2.45), имеет один
параметр ![]() max.
Изменяя его значение от своего значения в сторону уменьшения, получаем
семейство однопараметрических программ (см. рисунок 2.22).
max.
Изменяя его значение от своего значения в сторону уменьшения, получаем
семейство однопараметрических программ (см. рисунок 2.22).
Рисунок 2.22 - Программа движения РН при работе ДУ первой ступени
Следует отметить, что ![]() max
достигается при одном и том же времени tэкстр. Варьируя параметр при
работе двигательной установки (ДУ) первой ступени, получим семейство траекторий
с различными значениями Vk1,
max
достигается при одном и том же времени tэкстр. Варьируя параметр при
работе двигательной установки (ДУ) первой ступени, получим семейство траекторий
с различными значениями Vk1, ![]() k1, Hk1. Чем больше
k1, Hk1. Чем больше ![]() max, тем
сильнее будет искривлена траектория и тем меньше будет
max, тем
сильнее будет искривлена траектория и тем меньше будет ![]() k1 и Hk1.
k1 и Hk1.
2.3.4 Программа движения второй ступени.
В качестве программы
движения при работе второй ступени РН принимают зависимость угла тангажа от
времени ![]() =
=![]() (t). Программа
движения второй ступени должна обеспечить перевод РН из состояния,
определяемого параметрами движения на момент tk1 в заданное
состояние орбитального полета.
(t). Программа
движения второй ступени должна обеспечить перевод РН из состояния,
определяемого параметрами движения на момент tk1 в заданное
состояние орбитального полета.
3 Орбитальное маневрирование
Управляемое движение КА, в результате которого происходит изменение орбиты, называется маневром.
По назначению маневра принято различать:
- корректирующие маневры;
- маневры орбитального перехода;
- маневры при выполнении операции встречи;
- маневр для схода КА с орбиты.
Любой из перечисленных видов маневров изменяет элементы орбиты, то есть, по существу, является маневром орбитального перехода. Однако каждый вид маневра имеет свои особенности.
3.1 Импульсные маневры коррекции элементов орбиты
Целью корректирующего маневра является, как это следует из названия, исправление или уточнение орбиты. Корректирующие маневры могут применяться для коррекции ошибок выведения; для коррекции элементов орбиты, изменяющихся под действием различных возмущающих факторов; для коррекции межпланетных траекторий и т.д.
Как правило, изменение элементов орбиты при проведении корректирующих маневров невелико. Маневры, изменяющие форму и размеры орбиты и ориентацию орбиты в плоскости, называются продольными; маневры, изменяющие положение плоскости орбиты в пространстве, - боковыми.
Если целью корректирующего маневра является изменение одного параметра орбиты, то коррекция называется однопараметрической, если двух или более - двух- или многопараметрической.
Обычно при расчете параметров корректирующего маневра стремятся найти управление, требующее минимальных энергетических затрат (оптимальное по критерию расхода топлива). Это можно сделать, пользуясь выражениями для изменения элементов орбиты под действием импульсной возмущающей силы (см. таблицу 3.1). Данные выражения позволяют определить положение точек приложения импульсов, их величин и направлений в интересах коррекции тех или иных элементов.
Таблица 3.1
|
Элементы орбиты |
Составляющие возмущающего воздействия |
||
|
|
Тангенциальная |
Нормальная |
Боковая |
|
a |
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
Так, большая полуось орбиты изменяется лишь под действием тангенциального импульса. Следовательно, для ее коррекции нужно ориентировать вектор тяги по касательной к орбите.
Наибольшая экономичность коррекции большой полуоси, как видно из выражения:
JT =(![]() /2
/2![]() a2 V)
a2 V)![]()
![]() a,
a,
где JT - величина корректирующего импульса, достигается при тангенциальном импульсе, прикладываемом в перигее орбиты (скорость КА максимальна).
В этом случае для
заданного значения ![]() a потребуется минимальный импульс.
a потребуется минимальный импульс.
Коррекция
эксцентриситета может осуществляться с помощью как тангенциального, так и
нормального импульса. Тангенциальный импульс для коррекции эксцентриситета
целесообразно прикладывать в точках апсид в зависимости от знака требуемого
изменения ![]() е.
Как следует из выражения
е.
Как следует из выражения
JT={V/[2·(e+cos(![]() ))]}·
))]}·![]() e
e
величина импульса в этом случае будет минимальна.
Положение линии апсид при такой коррекции не изменится, т.к. второй фокус смещается по линии апсид.
Оптимальные точки приложения тангенциального импульса для коррекции аргумента перигея - точки Р и Р' (точки пересечения эллипса с хордой, проведенной через второй фокус (см. рисунок 3.1), т. к. в этом случае второй фокус смещается по перпендикуляру к первоначальной линии апсид, что обеспечивает максимальный угол ее поворота.
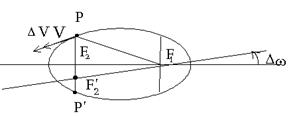
Рисунок 3.1 - Оптимальные точки приложения тангенциального импульса для коррекции аргумента перигея
Наряду с тангенциальным импульсом для коррекции эксцентриситета и аргумента перигея может использоваться нормальный импульс. Из анализа выражений, приведенных в таблице 3.1, можно получить точки приложения оптимальных импульсов, при этом коррекция эксцентриситета и аргумента перигея не будет сопровождаться изменением большой оси орбиты.
Из выражения следует, что нормальный импульс, приложенный в апогее или перигее орбиты, обеспечивает оптимальную коррекцию аргумента перигея. Действительно, такой импульс смещает второй фокус по дуге окружности с радиусом ПF2 или AF2 (см. рисунок 3.2). При малых импульсах дугу можно заменить касательной и считать, что смещение происходит по перпендикуляру к первоначальной линии апсид.
В результате эксцентриситет практически не изменится, а угол поворота линии апсид будет максимальным.
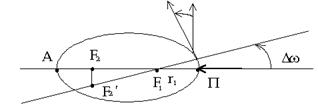
Рисунок 3.2 - Смещение линии апсид под действием нормального импульса
Необходимо отметить,
что, как это следует из выражений, приведенных в таблице 3.1, при заданном ![]()
![]() потребный нормальный импульс
для орбит с малыми эксцентриситетами вдвое больше тангенциального. С
увеличением эксцентриситета е эта разница уменьшается.
потребный нормальный импульс
для орбит с малыми эксцентриситетами вдвое больше тангенциального. С
увеличением эксцентриситета е эта разница уменьшается.
Для изменения эксцентриситета потребуется минимальный нормальный импульс, если он прикладывается в точках Р и Р', т.к. в этом случае второй фокус смещается в направлении (для малых импульсов) первоначальной линии апсид. В результате все смещение переходит в изменение межфокусного расстояния, что приводит к наибольшему изменению эксцентриситета е.
Для коррекции наклонения и долготы восходящего узла необходимо прикладывать к КА бинормальный импульс таким образом, чтобы он не вызывал нежелательных изменений другого элемента. Кроме того, важно, чтобы коррекция того или иного элемента производилась при минимальной потребной величине импульса, так как при этом обеспечивается минимум расхода топлива.
3.2 Маневры орбитального перехода
3.2.1 Компланарные орбитальные переходы.
Эти маневры характерны значительным изменением элементов орбиты.
Если при выполнении маневра положение плоскости орбиты в пространстве не изменяется, маневр называется компланарным, если изменяется - некомпланарным.
Рассмотрим компланарные переходы. Они могут быть одноимпульсные и многоимпульсные (два, три и более).
Одноимпульсный переход возможен в том случае, если исходная и конечная орбиты имеют общую точку. Он осуществляется путем приложения управляющего импульса в этой общей точке (точнее, в ее окрестности). Такой маневр может потребоваться при переводе аппарата с круговой орбиты на высокую эллиптическую (например, для полета к Луне) или на межпланетную траекторию (см. рисунок 3.3).

Рисунок 3.3 - Одноимпульсный переход
В этом случае высота исходной круговой орбиты равна высоте перигея конечной орбиты.
Для определения необходимого приращения скорости запишем соответствующие выражения для скорости в общей точке этих орбит. Скорость на исходной круговой орбите
![]()
Скорость в перигее конечной эллиптической орбиты
![]()
Потребный импульс будет представлять собой разность между ними
![]()
Здесь ![]() V представляет собой значение
характеристической скорости для одноимпульсного маневра. С помощью
характеристической скорости удобно оценивать энергоемкость маневра, так как она
определяется исходя из энергетики исходной и конечной орбит, и не связана с
характеристиками конкретного КА. С другой стороны, зная потребное значение
характеристической скорости, можно определить как параметры маневра, так и
тактико-технические характеристики КА.
V представляет собой значение
характеристической скорости для одноимпульсного маневра. С помощью
характеристической скорости удобно оценивать энергоемкость маневра, так как она
определяется исходя из энергетики исходной и конечной орбит, и не связана с
характеристиками конкретного КА. С другой стороны, зная потребное значение
характеристической скорости, можно определить как параметры маневра, так и
тактико-технические характеристики КА.
Переходы между непересекающимися орбитами могут быть осуществлены путем приложения двух или более импульсов. В этом случае КА в течение определенного времени движется по переходной орбите. Схемы таких переходов весьма многочисленны и разнообразны, так как они определяются назначением маневра и параметрами исходной и конечной орбит.
Рассмотрим некоторые типы орбитальных переходов:
а) переходная орбита касается исходной и конечной орбит.
Маневр осуществляется
следующим образом. В некоторой точке исходной круговой орбиты прикладывается
касательный импульс ![]() V1, который переводит КА на
переходную эллиптическую орбиту с апогеем, лежащим на высоте конечной круговой
орбиты. Затем в апогее переходной орбиты прикладывается касательный импульс
V1, который переводит КА на
переходную эллиптическую орбиту с апогеем, лежащим на высоте конечной круговой
орбиты. Затем в апогее переходной орбиты прикладывается касательный импульс ![]() V2,
который переводит аппарат на конечную круговую орбиту (см. рисунок 3.4).
V2,
который переводит аппарат на конечную круговую орбиту (см. рисунок 3.4).
Рисунок 3.4 - Двухимпульсный переход
Величины потребных импульсов определяются как разность между имеющейся и потребной скоростями на этих орбитах:
![]() V1 =Vппер -Vкрисх
;
V1 =Vппер -Vкрисх
; ![]() V2=Vкркон-Vапер
;
V2=Vкркон-Vапер
;
суммарный импульс перехода:
![]()
или, подставляя в эти соотношения соответствующие значения скоростей и выражения для эксцентриситета,
е=(rа -rп)/(rа +rп),
получим:
![]()
![]() ;
;
![]() .
.
Этот переход называется Хомановским.
Угловая дальность полета по переходной орбите (угловая дальность перехода) составляет 180°, энергетические затраты на таком переходе минимальны для значения отношения rn/ra=15.6. При больших значениях rn/ra Хомановский переход становится неоптимальным;
б) переходная орбита касается исходной орбиты и пересекает конечную (см. рисунок 3.5).
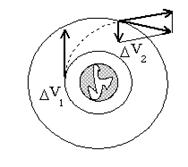
Рисунок 3.5 - Случай неоптимального двухимпульсного перехода, когда переходная орбита пересекает конечную
В этом случае импульсы ![]() V1 и
V1 и ![]() V2 будут
больше, чем при касательном переходе, однако время перехода будет меньше;
V2 будут
больше, чем при касательном переходе, однако время перехода будет меньше;
в) переходная орбита не является касательной ни к исходной, ни к конечной орбитам (см. рисунок 3.6).
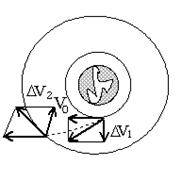
Рисунок 3.6 - Случай неоптимального двухимпульсного перехода, когда переходная орбита пересекает начальную и конечную
Такой переход будет еще более быстрым, но потребует большей энергетики. Предельным случаем такого перехода будет приложение радиального импульса. Поскольку энергетика существующих КА ограничена, на практике стараются применять оптимальные в энергетическом отношении переходы.
В качестве исходной и конечной орбит могут выступать и эллиптические. На рисунке 3.7 изображена схема перехода между компланарными круговой и эллиптической орбитами, причем наименьших энергетических затрат потребует переход в апогей конечной орбиты.
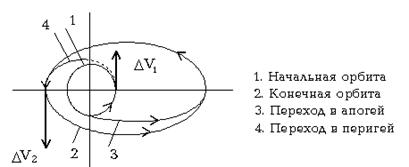
Рисунок 3.7- Двухимпульсный переход между круговой и эллиптической орбитами
На рисунок 3.8 изображена схема перехода между соосными компланарными эллиптическими орбитами. Такой переход называется апсидальным (переход между апсидальными точками исходной и конечной орбит), импульс направлен перпендикулярно к линии апсид.
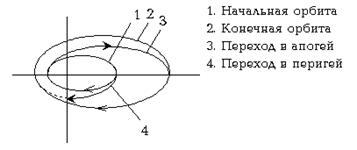
Рисунок 3.8 - Двухимпульсный переход между эллиптическими орбитами
Переход между соосными эллиптическими орбитами по пересекающей переходной орбите (быстрый переход) изображен на рисунке 3.9.

Рисунок 3.9 - Переход между соосными эллиптическими орбитами по пересекающей переходной орбите
На рисунке 3.10 показана одна из возможных схем перехода между несоосными эллиптическими орбитами. Переход между эллиптическими орбитами является наиболее общим случаем орбитальных переходов.

Рисунок 3.10 - Схема перехода между несоосными эллиптическими орбитами
3.2.2 Некомпланарные орбитальные переходы.
Если положения плоскостей исходной и конечной орбит не совпадают, необходим маневр поворота плоскости орбиты. Наиболее простой способ поворота плоскости орбиты заключается в приложении бинормального импульса скорости в узле начальной и конечной орбит (см. рисунок 3.11).
Значение импульса скорости в предположении, что бинормальный импульс не меняет величину скорости, а изменяет только направление, получается из треугольника скоростей:
V=2Vкр ![]() sin(
sin(![]()
![]() /2),
/2),
где Vкр - местная круговая скорость;
![]()
![]() - угол поворота плоскости орбиты.
- угол поворота плоскости орбиты.
Из выражения для ![]() V можно получить,
что для поворота плоскости орбиты на 1° требуется
V можно получить,
что для поворота плоскости орбиты на 1° требуется ![]() V=144 м/с, а при
V=144 м/с, а при ![]()
![]() =60° потребуется приращение скорости,
равное значению местной круговой скорости, т.е. маневр поворота плоскости
орбиты является чрезвычайно энергоемким. Причем, чем больше скорость КА, т.е.
чем ниже его орбита, тем больше будет потребный импульс для поворота плоскости
орбиты на заданный угол.
=60° потребуется приращение скорости,
равное значению местной круговой скорости, т.е. маневр поворота плоскости
орбиты является чрезвычайно энергоемким. Причем, чем больше скорость КА, т.е.
чем ниже его орбита, тем больше будет потребный импульс для поворота плоскости
орбиты на заданный угол.
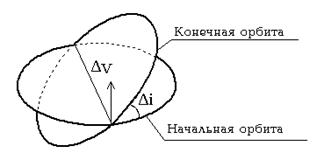
Рисунок 3.11 - Некомпланарный орбитальный переход
В определенных условиях
может оказаться выгодно использовать переходную эллиптическую орбиту с высоким
апогеем. В этом случае маневр осуществляется следующим образом (см. рисунок
3.12). Первый импульс ![]() V1 прикладывается в одном из узлов
начальной и конечной орбит по касательной к исходной орбите (точка П). Этот
импульс переводит КА на переходную орбиту, лежащую в той же плоскости. В апогее
переходной орбиты (который совпадает со вторым узлом) прикладывается
ортогональный импульс
V1 прикладывается в одном из узлов
начальной и конечной орбит по касательной к исходной орбите (точка П). Этот
импульс переводит КА на переходную орбиту, лежащую в той же плоскости. В апогее
переходной орбиты (который совпадает со вторым узлом) прикладывается
ортогональный импульс ![]() V2 для поворота плоскости орбиты.
Поскольку скорость КА в этой точке значительно меньше, чем на исходной орбите,
то затраты характеристической скорости на поворот плоскости орбиты будут
меньше. Третий касательный импульс
V2 для поворота плоскости орбиты.
Поскольку скорость КА в этой точке значительно меньше, чем на исходной орбите,
то затраты характеристической скорости на поворот плоскости орбиты будут
меньше. Третий касательный импульс ![]() V3, приложенный в точке П, возвращает
КА на исходную орбиту в новой плоскости.
V3, приложенный в точке П, возвращает
КА на исходную орбиту в новой плоскости.
Такой маневр называется трехимпульсным маневром поворота плоскости орбиты. Суммарный импульс характеристической скорости запишется в виде
![]() VS=
VS=![]() V1+
V1+![]() V2+
V2+![]() V3.
V3.
Трехимпульсный маневр
выгоден тогда, когда ![]() VS<
VS<![]() V0, где
V0, где ![]() V0 - затраты
характеристической скорости на поворот плоскости орбиты с помощью
одноимпульсного маневра.
V0 - затраты
характеристической скорости на поворот плоскости орбиты с помощью
одноимпульсного маневра.
Исследования показали,
что область параметров орбит и углов поворота, где применение трехимпульсного
маневра является энергетически выгодным, определяется заданным углом поворота ![]()
![]() и отношением rn/ra,
где ra - апогей переходной орбиты. Зависимость
и отношением rn/ra,
где ra - апогей переходной орбиты. Зависимость ![]() VS от этих
параметров показана на рисунок 3.13.
VS от этих
параметров показана на рисунок 3.13.
Как видно, для больших углов поворота энергетические затраты остаются чрезвычайно высокими.
Трехимпульсный маневр применяется для вывода КА на стационарную орбиту (r=36000 км, i=0°).

Рисунок 3.12 - Трехимпульсный орбитальный переход

Рисунок 3.13 - Зависимость затрат характеристической скорости от величины изменения угла наклона орбиты
Несколько менее энергоемкий способ поворота плоскости орбиты состоит в разделении угла поворота на несколько частей и выполнении соответствующей последовательности трехимпульсных маневров. Однако реализация такого маневра сложна и требует больших затрат времени.
Еще один способ уменьшения энергетических затрат на поворот плоскости орбиты - применение так называемого аэродинамического (или синергического) маневра. Этот маневр заключается в использовании для поворота в плоскости аэродинамических сил, возникающих при движении летательного аппарата, обладающего аэродинамическим качеством, в атмосфере. В общих чертах маневр включает четыре этапа (см. рисунок 3.14):
1) Сход КА с орбиты посредством приложения тормозного импульса, движение по Кеплеровой орбите до входа в плотные слои атмосферы.
2) Полет в атмосфере со снижением, при этом скорость полета уменьшается. За счет управления по крену осуществляется маневр в боковой плоскости.
3) Подъем до первоначальной высоты за счет управления по углу атаки.
4) Разгон до орбитальной скорости на заданной высоте.
4 Динамика полета космического аппарата при сближении
4.1 Принципы управления сближением
Встреча космических объектов на орбите представляет собой одну из важнейших операций в космосе, позволяющую решить целый ряд задач:
- сборку крупногабаритных конструкций и орбитальных станций различного назначения;
- доставку на КА и орбитальные станции грузов;
- проведение ремонта и профилактических работ на КА;
- периодическую смену экипажей орбитальных пилотируемых станций;
- спасение членов экипажа в аварийных ситуациях;
- инспекцию с целью оценки состояния КА.
Под операцией встречи в самом общем случае понимается выведение двух или более объектов в некоторую относительно малую область космического пространства, сближение объектов и осуществление между ними стыковки.
Как можно видеть из определения, в операции встречи принимают участие, по меньшей мере, два объекта. Один из них обычно не маневрирует (пассивный). Роль пассивного объекта может выполнять орбитальная станция (ОС). Активный объект (маневрирующий космический аппарат) будем называть транспортным кораблем (ТК).
Введем следующие обозначения:
Rц(t), Vц(t) - соответственно радиус-вектор и вектор скорости орбитальной станции;
Rп(t), Vп(t) - радиус-вектор и вектор скорости ТК;
R(t)=Rц(t)-Rп(t) - вектор положения ТК относительно ОС;
V(t)=Vц(t)-Vп(t) - вектор относительной скорости.
Вектор q(t)={![]() R(t),
R(t),
![]() V(t)}, определяемый тремя
компонентами вектора относительного положения
V(t)}, определяемый тремя
компонентами вектора относительного положения ![]() R(t)
и тремя компонентами вектора относительной скорости
R(t)
и тремя компонентами вектора относительной скорости ![]() V(t),
полностью описывает в любой момент времени относительное положение и
относительные скорости центров масс аппаратов, участвующих в операции
сближения.
V(t),
полностью описывает в любой момент времени относительное положение и
относительные скорости центров масс аппаратов, участвующих в операции
сближения.
Основное назначение маневра встречи состоит в том, чтобы в момент его окончания вектор q(t) относительного состояния двух КА, участвующих в операции встречи, принял заданное значение.
В зависимости от того, какие конечные условия требуются в момент окончания маневра tk, различают несколько видов этого маневра.
1. Все компоненты вектора относительного состояния должны обратиться в момент встречи в нуль, т.е.
q(tk)=0; R(tk)=0, V(tk)=0 .
Такой маневр обычно используется при решении задач стыковки и носит название мягкого контакта.
2. В конце маневра должны обратиться в нуль компоненты вектора относительной скорости, компоненты же вектора относительного положения должны принять заданные (обычно достаточно малые) значения, т.е.
V(tk) = 0, R(tk) = Rk .
Такой маневр позволяет осуществить в дальнейшем выполнение стыковки, зависания, облета цели.
3. В момент встречи должны обратиться в нуль только компоненты вектора относительного положения, компоненты вектора относительной скорости могут быть произвольной величины (жесткий контакт):
R(tk) = 0; V(tk) = Vk .
Такой маневр необходим при решении задачи уничтожения КА.
Процесс осуществления маневра встречи можно разделить на два этапа: вывод ТК в некоторую окрестность ОС и сближение аппаратов. Первый этап называется этапом дальнего наведения, второй - этапом ближнего наведения.
Участок дальнего наведения может начинаться с промежуточной орбиты или непосредственно с участка выведения. Ближнее наведение начинается с момента обнаружения и захвата ОС бортовыми радиолокационными средствами ТК, таким образом граница между участками дальнего и ближнего наведения определяется возможностями бортовых средств.
Траектории сближения на этапе дальнего наведения можно подразделить на два основных класса:
1) Траектории прямого выведения в зону встречи, т.е. сближение с участка выведения.
2) Траектории встречи с использованием промежуточных (фазирующих) орбит.
4.2.1 Сближение с участка выведения.
В этом случае ТК выводится непосредственно в зону встречи. Момент запуска выбирается с таким расчетом, чтобы точка выхода ТК на орбиту попала в окрестность расчетной точки встречи. Этап дальнего наведения совмещается с выведением (см. рисунок 4.1).

Рисунок 4.1 - Траектория прямого выведения
Прямое выведение ТК в зону встречи может быть компланарным и некомпланарным. Компланарный запуск может быть обеспечен только в том случае, если орбита ОС проходит через точку старта, причем наиболее просто это можно осуществить при запуске ТК и ОС из одной и той же точки.
В этом случае вывод ТК осуществляется по той же траектории. При этом обеспечивается одновременный выход ТК и ОС в окрестность расчетной точки встречи, которая совпадает с точкой вывода ОС на орбиту. Ближнее наведение начинается сразу после окончания активного участка.
Выполнение условий компланарности запуска наступает спустя n витков, определяемых формулой:
|
nk
=(Tз /Tос) |
(4.1) |
где nк - номер витка ОС, соответствующий условию компланарности;
mк - количество суток, прошедших от момента запуска ОС до момента выполнения условий компланарности;
Tз - период вращения Земли вокруг своей оси;
Тос - период обращения ОС.
Если отношение Тз/Тос представляет собой целое число, то орбита ОС пройдет через точку старта (т.е. условие компланарности запуска выполняется) через сутки, в течение которых ТК сделает nк витков. Если отношение Тз/Тос - рациональная дробь, то условие компланарности выполняется через число суток mк, равное знаменателю дроби. В дальнейшем условия компланарности будут выполняться через число суток, кратное знаменателю, т.е. положение плоскости орбиты относительно Земли периодически повторяется с периодом Тк-nкТос. Такие орбиты называются геопериодическими (период обращения Земли кратен периоду обращения ОС). Наименьшее значение Тк соответствует mк=1 и равно 24 часам. Эти орбиты называются минимальными геопериодическими орбитами.
Если отношение Тз/Тос - иррациональное число, орбита ОС никогда не пройдет через точку старта, т.е. условие компланарности запуска выполнено быть не может.
Таким образом, для
обеспечения компланарности запуска при старте ТК из той же точки необходимо
обеспечить условия геопериодичности орбит. Если условие геопериодичности орбиты
ОС не выполнено или оно нарушилось вследствие возмущений при длительном
нахождении ОС на орбите, период обращения ОС необходимо корректировать. Кроме
того, для выполнения условий компланарности необходимо производить запуск TK в
определенный момент времени. Любое отклонение момента запуска от номинального
так же, как и отклонение периода обращения ОС от геопериодического, приводит к
нарушению условий компланарности (см. рисунок 4.1). Кроме того, при
осуществлении запуска имеют место и другие ошибки и ограничения, связанные, в
частности, с характеристиками ракет-носителей, поэтому практически компланарный
запуск осуществить не удается. Возникающий угол некомпланарности необходимо
устранить либо на траектории выведения ТК, либо на участке ближнего выведения,
что требует расхода характеристической скорости ![]() Vхар.
Vхар.

Рисунок 4.2 - Нарушения условий компланарности
Понятно, что чем больше
ошибка во времени старта ТК, тем больше угол некомпланарности ![]()
![]() и тем больше потребный расход
характеристической скорости
и тем больше потребный расход
характеристической скорости ![]() Vхар. Поэтому на отклонение момента
старта ТК от минимального накладывается ограничение:
Vхар. Поэтому на отклонение момента
старта ТК от минимального накладывается ограничение:
|
t1 = t0 - |
(4.2) |
Этот интервал времени (t2-t1)
называется интервалом или окном запуска. Величина этого интервала определяется
располагаемым запасом ![]() Vхар на устранение угла
некомпланарности.
Vхар на устранение угла
некомпланарности.
Маневрирование моментом старта в пределах окна запуска позволяет частично компенсировать отдельные ошибки и ограничения.
Если в течение интервала
запуска старт ТК не был осуществлен, располагаемый запас ![]() Vхар не позволяет
устранить возникший угол некомпланарности, и сближение будет невозможно. В
следующий раз условие компланарности выполняется через Тк=nк·Тос.
Vхар не позволяет
устранить возникший угол некомпланарности, и сближение будет невозможно. В
следующий раз условие компланарности выполняется через Тк=nк·Тос.
В общем случае старт ТК может производиться и из другой точки по другой траектории. Если наклонение орбиты ОС больше широты точки старта, условия компланарности могут быть обеспечены. При этом станция в момент старта ТК может находиться в произвольной точке орбиты, поэтому траектория выведения в зону встречи должна будет включать пассивный участок. При этом время запуска ТК можно определить из выражения:
|
tс=N |
(4.3) |
где N - количество полных оборотов, сделанных ОС с момента первого прохождения через перигей;
T - период обращения ОС;
![]() t - интервал времени, который
соответствует времени движения ОС от последнего прохождения перигея до точки
встречи;
t - интервал времени, который
соответствует времени движения ОС от последнего прохождения перигея до точки
встречи;
![]() tа- продолжительность
активного участка;
tа- продолжительность
активного участка;
![]() tп- продолжительность
пассивного участка траектории выведения КА.
tп- продолжительность
пассивного участка траектории выведения КА.
Очевидно, что для
обеспечения встречи с ОС время запуска ТК, определяемое приведенной выше
формулой (4.3), должно быть равно времени запуска, определенному по формуле
(4.2). Достижение такого равенства может быть выполнено только варьированием интервала
времени ![]() tп,
стоящего в правой части выражения (4.3).
tп,
стоящего в правой части выражения (4.3).
Траектория пассивного
участка, а следовательно, и время движения ![]() tп на этом участке до момента начала
этапа ближнего наведения будут определяться параметрами движения КА в конце
активного участка. Следовательно, меняя, например, скорость КА в конце
активного участка, можно подобрать такое значение
tп на этом участке до момента начала
этапа ближнего наведения будут определяться параметрами движения КА в конце
активного участка. Следовательно, меняя, например, скорость КА в конце
активного участка, можно подобрать такое значение ![]() t, при котором время запуска,
определяемое по формуле (4.2), будет равно требуемому времени запуска,
определенному из выражения (4.1).
t, при котором время запуска,
определяемое по формуле (4.2), будет равно требуемому времени запуска,
определенному из выражения (4.1).
При идеальном соблюдении условий компланарности наиболее экономичной траекторией на пассивном участке выведения ТК будет эллипс Хомана, перигеем траектории выведения является точка конца стартового участка. Траектория выведения по эллипсу Хомана представлена на рисунке 4.3 кривой 1.
Траектория 2 соответствует полному использованию энергетических возможностей РН (полному выгоранию топлива).

Рисунок 4.3 - Траектория выведения на орбиту
Таким образом, возможные точки встречи ТК и ОС находятся в пределах дуги В1В2 орбиты станции. Эта область носит название области встречи. Окно запуска определяется дугой С1С2 (соответствующей дуге В1В2), характеризующей положение ОС на орбите в момент старта ТК. Этот вариант запуска наиболее экономичен (встреча происходит при минимальном расходе топлива). Однако время ожидания момента старта может быть велико.
Рассмотрим схему выведения с активного участка с поворотом плоскости орбиты на значительный угол (см. рисунок 4.4).

Рисунок 4.4 - Схема прямого выведения с поворотом плоскости орбиты
Запуск осуществляется в
произвольный момент времени. При этом необходимо предусмотреть дополнительный
запас ![]() Vхар
для устранения угла некомпланарности
Vхар
для устранения угла некомпланарности ![]()
![]() , причем, чем больше
, причем, чем больше ![]()
![]() , тем больше требуется запас топлива. Время
ожидания момента запуска при использовании этой схемы может быть значительно
сокращено. Эта схема вывода может применяться, когда требуются экстренные
действия (например, спасение экипажа).
, тем больше требуется запас топлива. Время
ожидания момента запуска при использовании этой схемы может быть значительно
сокращено. Эта схема вывода может применяться, когда требуются экстренные
действия (например, спасение экипажа).
4.2.2 Траектория выведения в зону встречи с использованием промежуточной орбиты.
Для реализации схемы сближения с участка выведения орбита ОС и траектория выведения ТК должны удовлетворять целому ряду ограничений. Кроме того, выведение по такой схеме требует достаточно больших энергетических затрат. Чтобы снять указанные ограничения и уменьшить энергетические затраты, применяют схему сближения с промежуточной орбиты. В этом случае, как и в предыдущем, запуск может быть компланарным и некомпланарным. Схема компланарного выведения с использованием промежуточной орбиты изображена на рисунок 4.5.

Рисунок 4.5 - Схема выведения с промежуточной орбиты
Угловое расстояние между
объектами ![]() называется
фазовым углом (см. рисунок 4.6). Задача процесса фазирования состоит в
уменьшении фазового угла до заданной величины.
называется
фазовым углом (см. рисунок 4.6). Задача процесса фазирования состоит в
уменьшении фазового угла до заданной величины.
Транспортный корабль выводится на промежуточную орбиту - фазирующую, или орбиту ожидания, и в течение некоторого времени находится на этой орбите. Это может быть несколько витков, сутки, несколько суток, в зависимости от принятой схемы управления.
Уменьшение фазового угла происходит за счет разницы периодов обращения ТК и ОС. Здесь могут быть выделены следующие два варианта:
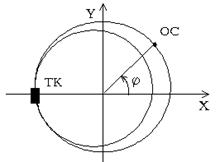
Рисунок 4.6 - Фазирование с использованием эллиптической орбиты
1) Начальная орбита эллиптическая, в апогее она касается конечной орбиты. Тогда после соответствующего числа оборотов ТК попадает в зону встречи, т.е. начальная орбита играет роль фазирующей (см. рисунок 4.6).
2) Начальная (промежуточная или фазирующая) орбита не касается орбиты ОС (см. рисунок 4.7).
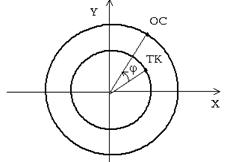
Рисунок 4.7 - Фазирование с использованием круговой орбиты
Рассмотрим первый вариант (см. рисунок 4.6). Период обращения ТК по эллиптической орбите выражается уравнением
![]()
Если Ra=Rn, то отношение периодов обращения ТК и ОС запишется в виде
T /T = [0.5(1+Rn/R0)]3.
В этом случае за каждый оборот ОС фазовый угол между ТК и ОС уменьшится на величину
![]()
Если начальное значение
фазового угла ![]() 0
известно, то можно определить число полных оборотов, которые должен будет
совершить ТК, прежде чем он попадет в заданный район ОС, после чего сразу
начинается ближнее наведение
0
известно, то можно определить число полных оборотов, которые должен будет
совершить ТК, прежде чем он попадет в заданный район ОС, после чего сразу
начинается ближнее наведение
![]()
Во втором варианте при
фазировании на круговой орбите (см. рисунок 4.7) число витков ![]() , необходимых для уменьшения
фазового угла до заданной величины, определяется формулой:
, необходимых для уменьшения
фазового угла до заданной величины, определяется формулой:
![]() =ROC
=ROC ![]()
![]() 0/ (3
0/ (3![]() (ROC-RTK)-1/4,
(ROC-RTK)-1/4,
где ROC, RTK - радиусы орбит ОС и ТК соответственно;
![]()
![]() 0 - начальный фазовый угол между ТК и
ОС.
0 - начальный фазовый угол между ТК и
ОС.
На рисунке 4.8
представлен график зависимости числа фазирующих витков от начального угла ![]()
![]() 0 для круговой
фазирующей орбиты.
0 для круговой
фазирующей орбиты.
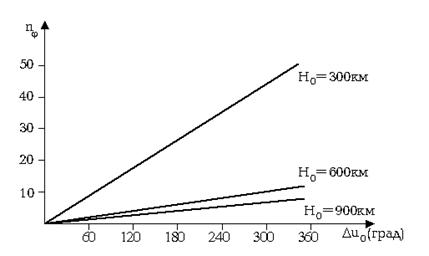
Рисунок 4.8 - Зависимость числа витков фазирования от разности высот круговых орбит
Чем больше разница высот
конечной и фазирующей орбит, тем меньше число витков требуется для выполнения
фазирования. Так при высоте фазирующей орбиты ![]() =200 км и высотах ОС Н1=300 км и
p=900 км потребное число витков
=200 км и высотах ОС Н1=300 км и
p=900 км потребное число витков ![]() составляет 44,2 и 6,7 соответственно. В этом
случае после выполнения фазирования необходимо провести маневр орбитального
перехода. Как правило, этот маневр совмещается с фазированием.
составляет 44,2 и 6,7 соответственно. В этом
случае после выполнения фазирования необходимо провести маневр орбитального
перехода. Как правило, этот маневр совмещается с фазированием.
На рисунке 4.9 представлен график зависимости числа фазирующих витков для эллиптической фазирующей орбиты, апогей которой лежит на орбите ОС, Н1- высота перигея фазирующей орбиты. Очевидно, что время фазирования в этом случае возрастает почти вдвое. В настоящее время используют в процессе маневрирования несколько фазирующих орбит.
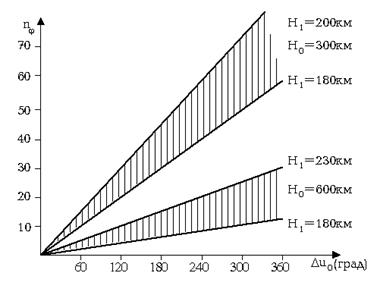
Рисунок 4.9 - Зависимость числа витков фазирования от разности высот эллиптических орбит
После этапа дальнего наведения, как правило, следует этап ближнего наведения.
Задача этапа ближнего наведения состоит в том, чтобы вывести ТК из любой точки эллипсоида рассеивания, определяемого ошибками дальнего наведения, в ограниченную область фазового пространства для решения целевой задачи (стыковка, облет и т.д.).
Методы управления сближением на этапе ближнего наведения принято разделять на две группы:
- методы, основанные на использовании законов орбитального движения;
- методы, в которых законы орбитального движения не учитываются.
Дальность, на которой начинается этап ближнего наведения, зависит от имеющихся на борту ТК средств измерения параметров относительного движения и от применяемых методов сближения.
4.3.1 Относительные системы координат на этапе ближнего наведения.
Для исследования относительного движения на этапе сближения применяются различные системы координат, начала которых удобно помещать в центре масс цели, поскольку цель, как правило, совершает пассивное движение по известной орбите. Наиболее часто употребляются следующие системы координат.
Орбитальная система координат (ОСК).
Ось ОY все время направлена вдоль радиуса-вектора цели, ось ОХ нормальна к ней, лежит в плоскости орбиты и направлена против движения. Ось ОZ дополняет систему до правой (см. рисунок 4.10).

Рисунок 4.10 - Орбитальная система координат
Лучевая (визирная) система
координат (ВСК) связана
с "лучом" или линией визирования. Ось ОХ направлена вдоль вектора
дальности от цели до перехватчика (вдоль линии визирования), ось OZ совпадает с
вектором угловой скорости линии визирования ![]() лв, ось ОY дополняет систему
координат до правой. Оси ОХ и ОY определяют плоскость наведения (см. рисунок 4.11).
лв, ось ОY дополняет систему
координат до правой. Оси ОХ и ОY определяют плоскость наведения (см. рисунок 4.11).
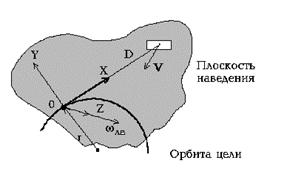
Рисунок 4.11 - Визирная система координат
Орбитально-лучевая (орбитально-визирная) система координат (ОВСК).
Эта система координат связана с линией визирования и плоскостью орбиты цели. Ось ОХ направлена по вектору дальности, ось ОY лежит в плоскости орбиты цели и нормальна к оси ОХ. Ось OZ дополняет систему до правой (см. рисунок 4.12).
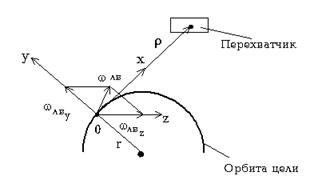
Рисунок 4.12 - Орбитально-визирная система координат
Использование ВСК и ОВСК
позволяет записывать уравнения относительного движения непосредственно в
измеряемых параметрах ![]() ,
, ![]() ,
, ![]() лв, (дальность, скорость сближения,
угловая скорость линии визирования), что согласуется с визуальной картиной,
воспринимаемой космонавтом. Однако уравнения движения при этом получаются
достаточно громоздкими.
лв, (дальность, скорость сближения,
угловая скорость линии визирования), что согласуется с визуальной картиной,
воспринимаемой космонавтом. Однако уравнения движения при этом получаются
достаточно громоздкими.
4.3.2 Уравнение движения в относительных системах координат.
При исследовании относительного движения ТК и ОС на этапе сближения приняты следующие предположения:
- цель рассматривается как материальная точка, движущаяся пассивно;
- взаимосвязь угловых и поступательных движений ТК отсутствует;
- возмущения от несферичности Земли, атмосферное сопротивление отсутствуют;
- притяжение других небесных тел не учитывается.
Векторные уравнения движения для участвующих во встрече аппаратов записываются в виде:
![]()
![]()
где RTK, ROC - геоцентрические радиусы-векторы ТК и ОС;
a - вектор ускорения от тяги двигателей ТК;
![]() -гравитационная постоянная Земли.
-гравитационная постоянная Земли.
Для получения уравнения относительного движения вычтем из второго уравнения первое:
|
|
(4.4) |
Определим вектор дальности от OC до TK равенством D=RTK-ROC (см. рисунок 4.13).

Рисунок 4.13 - Определение вектора относительной дальности
Исключая RТК при помощи выражения для D, из уравнения (4.4), получим:
![]()
Полагая на участке сближения D<<ROC, преобразуем выражение в квадратных скобках, пренебрегая членами второго порядка малости. Опуская промежуточные выкладки, запишем следующее векторное уравнение относительного движения TK и OC:
|
|
(4.5) |
Это уравнение удовлетворительно описывает относительное движение на сравнительно небольших дальностях до OC при продолжительности сближения до половины периода обращения OC. Погрешность для орбит средней высоты составляет около 5% при дальности порядка 100 км.
В уравнении (4.5) второе слагаемое есть не что иное, как относительное гравитационное ускорение, действующее на TK:
gотн=- ![]() /R3ОС
/R3ОС![]() [D-3ROC
[D-3ROC ![]() (ROC
(ROC![]() D)/R2OC].
D)/R2OC].
На рисунок 4.14 gотн - это относительное гравитационное ускорение. Оно зависит от угла между вектором дальности и радиусом-вектором цели.

Рисунок 4.14 - Определение разностного гравитационного ускорения
Учитывая все вышесказанное, запишем векторное уравнение относительного движения:
D = gотн+a.
Проецируя это уравнение на оси выбранных систем координат, получим системы дифференциальных уравнений, описывающих движение одного КА относительно другого.
1. В ОСК уравнения движения ТК относительно ОС записываются в виде:
|
|
(4.6) |
|
|
(4.7) |
|
|
(4.8) |
где p - фокальный параметр орбиты цели;
![]() OC - угловая скорость
обращения цели по орбите;
OC - угловая скорость
обращения цели по орбите;
ax, ay, az - проекции управляющего ускорения ТК на оси ОСК.
Из уравнений (4.6, 4.7, 4.8) видно, что движение ТК в плоскости орбиты цели (т.е. в плоскости XOY) можно рассматривать независимо от движения вне ее, т.к. уравнение (4.8) не зависит от координат x и y.
Для круговой орбиты цели
справедливо следующее: ROC
= p, а ![]() OC
= const. 2. В ВСК для круговой орбиты цели, если предположить, что
относительное гравитационное ускорение мало, поскольку |D|<<R, получим
следующую систему дифференциальных уравнений относительного движения:
OC
= const. 2. В ВСК для круговой орбиты цели, если предположить, что
относительное гравитационное ускорение мало, поскольку |D|<<R, получим
следующую систему дифференциальных уравнений относительного движения:
|
|
(4.10) |
|
|
(4.11) |
|
|
(4.12) |
где axb, ayb ,azb - проекции вектора управляющего ускорения ТК на оси визирной системы координат;
![]() ls - угловая скорость линии
визирования.
ls - угловая скорость линии
визирования.
3. В ОВСК уравнения движения примут вид:
![]()
![]()
![]()
Управление сближением осуществляется путем задания закона изменения управляющего ускорения a(t) или ax(t), ay(t), az(t). Решение систем уравнений при известных правых частях дает траекторию относительного движения. При отсутствии управляющего ускорения (a(t)=0) движение будет пассивным (неуправляемым).
4.3.3 Траектории пассивного относительного движения в различных системах координат.
Рассмотрим траектории пассивного (т.е. ax=ay=az=0) относительного движения ТК в орбитальной системе координат. В этом случае система дифференциальных уравнений (4.9) имеет следующее решение:
|
x=2 |
(4.13) |
|
y=A·cos( |
(4.14) |
|
z=z0 cos( |
(4.15) |
где A=(2 (![]() )-3y0);
)-3y0);
B=![]() ;
;
F=2y0
-![]() ;
;
Е=x0
+2![]() ;
;
G=2F;
x0, y0,
z0 , ![]() 0,
0,
![]() 0,
0, ![]() 0 -
векторы начального положения ТК и его скорости в ОСК.
0 -
векторы начального положения ТК и его скорости в ОСК.
Из уравнений (4.13, 4.14, 4.15) следует:
1) Движение вдоль оси ОZ можно рассматривать независимо от движения по другим осям.
2) Гармонические колебания при пассивном движении происходят с частотой, равной угловой частоте движения цели по орбите.
3) Уравнение (4.13) содержит линейный член, который говорит о том, что координата X TK во времени не только совершает колебания, но и постоянно растет или убывает в зависимости от знака F.
Рассмотрим движение ТК в плоскости орбиты цели (XOY). Для получения уравнения траектории возведем в квадрат и сложим уравнения (4.13) и (4.14). После ряда преобразований получим:
|
|
. (4.16) |
Это уравнение эллипса, причем большая ось его a=2C, а малая в=C, таким образом, пассивное движение ТК в ОСК происходит по эллипсу, причем соотношение осей эллипса всегда равно 0.5, а большая полуось расположена параллельно оси ОХ.
Центр эллипса имеет
координаты: по x - (3F ![]() OC
OC![]() t+F), т.е. по оси х центр эллипса движется со
скоростью пропорциональной
t+F), т.е. по оси х центр эллипса движется со
скоростью пропорциональной ![]() OC, а по оси y центр смещен на
постоянную величину G. Если G=0, т.е. большая полуось лежит на оси OX, то центр
эллипса неподвижен.
OC, а по оси y центр смещен на
постоянную величину G. Если G=0, т.е. большая полуось лежит на оси OX, то центр
эллипса неподвижен.
После этапа дальнего наведения предусматривается этап ближнего наведения и причаливания, задача которых обеспечить выполнение требуемых конечных условий в зависимости от типа задачи. Ближнее наведение реализуется бортовой системой транспортного корабля, при этом для выполнения маневрирования транспортный корабль должен иметь двигательную установку, обеспечивающую необходимые управляющие воздействия.
Обычно все методы наведения в ближней зоне делят на две категории:
- методы, учитывающие законы орбитального движения;
- методы, не учитывающие законов орбитального движения.
И в том, и в другом случае траектория сближения КА представляет собой совокупность активных и пассивных участков, а управление сближением сводится к последовательной коррекции орбитального движения, обеспечивающей выполнение заданных условий.
В связи с тем что время движения на активных участках траектории существенно меньше времени движения на пассивных, при изучении закономерностей движения на этапе ближнего наведения можно воспользоваться импульсной аппроксимацией, т.е. считается, что изменение скорости в результате маневра происходит практически мгновенно.
В зависимости от количества и расположения на транспортном корабле двигателей, создающих управляющие ускорения, различают два вида управления - полярное и декартовое или координатное.
Полярное управление реализуется, если транспортный корабль имеет один двигатель по продольной оси (см. рисунок 4.27), а необходимое направление корректирующего импульса обеспечивается соответствующей ориентацией транспортного корабля. При декартовом управлении на транспортном корабле устанавливается шесть координатных двигателей по каждой из трех осей транспортного корабля в положительном и отрицательном направлениях (см. рисунок 4.28).

Рисунок 4.27 - Космический корабль с полярным управлением

Рисунок 4.28 - Космический аппарат с координатным управлением
Полярная схема управления более экономична и имеет меньшую массу.
К числу недостатков полярной схемы относится в первую очередь необходимость разворота транспортного корабля для совмещения вектора тяги двигательной установки с направлением управляющего импульса, что делает неприменимой эту схему управления на этапе причаливания, поэтому обычно на ТК применяют комбинацию полярной и декартовой схем.
Список литературы
1. Алексеев К. Б., Бебенин Г. Г., Ярошевский В. А. Маневрирование космических аппаратов. - М.: Машиностроение, 1990. – 416 с.
2. Балахонцев В. Г., Иванов В. А., Шабанов В. И. Сближение в космосе. М.: Воениздат, 1998. – 240 с.
3. Алёшин А.В., Половников О.В. Основы теории полета космического аппарата. - М.: Наука, 1991. – 212 с.
4. Кубасов В.Н., Данков Г.Ю. , Яблонько Ю.П. Методы сближения на орбите.-М.: Машиностроение, 1985. – 184 с.
5. Лебедев А. А., Соколов В. Б. Встреча на орбите. - М.: Машиностроение, 1989. – 366 с.
6. Левантовский В. И. Механика космического полета в элементарном изложении. - М.: Наука, 1980. – 512 с.
8. Одинцов В. А., Анучин В. М. Маневрирование в космосе. - М.: Воениздат, 1984. – 152 с.
9. Основы теории полета космических аппаратов/Под. ред. Г.С. Нариманова и М. К. Тихонравова. - М.: Машиностроение, 1992. – 607 с.
10. http://www.satellite.srd.mtuci.ru
11. http://www.space.org.ru
12. http://www.space.com
13. http://www.intersputnik.ru
14. http://www.nasa.com