Некоммерческое акционерное общество
АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра физики
МЕХАНИКА ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО. ДВИЖЕНИЯ.
Методические указания к выполнению
лабораторных работ
для студентов всех форм обучения всех специальностей
СОСТАВИТЕЛИ: Т.С. Байпакбаев, М.Ш.Карсыбаев, А.М.Саламатина. Механика поступательного и вращательного движения. Методические указания к выполнению лабораторных работ для студентов всех форм обучения всех специальностей.
Методические указания содержат описания девяти лабораторных работ, в которых изложена методика лабораторного эксперимента, описаны экспериментальные установки, указаны порядок проведения эксперимента и обработки результатов и контрольные вопросы.
Методические указания предназначены для студентов всех специальностей и всех форм обучения.
Введение
Физика непосредственно связана с экспериментом. Это значит, что все физические законы устанавливаются и проверяются путем накопления и сопоставления экспериментальных данных.
Физический практикум призван помочь студентам глубже осознать основные физические закономерности и приобрести элементарные навыки экспериментирования, научить анализировать результаты эксперимента и оценивать их точность. Практикум является введением в дальнейшую самостоятельную работу будущего инженера.
Приступая к выполнению лабораторной работы, следует ознакомиться с теорией данного вопроса, используя для этого указанные учебники по физике и физпрактикуму, внимательно прочесть методические указания к работе, ознакомиться с приборами, которые используются.
Успех эксперимента в значительной мере зависит от правильной записи результатов. С этой целью для работы в лаборатории необходимо иметь специальную тетрадь, в которой записывается название, цель и задачи работы, краткий конспект. Полезные советы для начинающих экспериментаторов вы найдете в литературе [2].
Выполнение работ в физической лаборатории, как известно, включает три этапа: подготовка к эксперименту, проведение эксперимента и оформление отчета. На подготовительном этапе необходимо:
а) ознакомиться с целями и задачами;
б) уяснить теоретическое обоснование тех явлений и процессов, взаимосвязей и закономерностей, которые лежат в основе эксперимента;
в) составить план действий;
г) подготовить таблицу для записи результатов эксперимента.
В результате подготовительной работы у студента должно сформироваться достаточно ясное представление о предстоящем эксперименте и ожидаемых результатах.
Проведение экспериментов начинают с установки приборов, затем производят наблюдение и отсчет измеряемых величин; полученные результаты записывают в таблицы. На заключительном этапе выполняют обработку результатов, вычисления искомых величин и оценку погрешностей. Приступая к вычислениям, необходимо руководствоваться правилами действий с приближенными числами. Наконец, по результатам выполненной работы необходимо сформулировать выводы.
В экспериментальной физике часто пользуются графиками для разных целей. Во-первых, для наглядности и сравнения с другими результатами или с теоретической кривой; во-вторых, для определения некоторой величины (напр., по наклону графика или по отрезку, отсекаемому, графиком от какой-либо из осей и т.д.); в-третьих, для градуировки прибора. Построение графиков должно удовлетворять ряду требований, которые подробно изложены в литературе [1,2].
1 Статистическая обработка результатов измерений
1.1 Основные понятия и определения
Проведение физического эксперимента, как правило, с измерением той или иной физической величины. Измерения принято различать прямые, когда измеряется сама исследуемая физическая величина, и косвенные, когда значение искомой величины находят на основании известной зависимости от величин, получаемых прямыми измерениями. Всякому измерению присущи всякие погрешности, поэтому в опытах мы вместо истинного значения измеряемой величины Х0, получаем некоторое приближенное значение X. Разность между результатом измерения и истинным значением называется абсолютной погрешностью измерения ∆Х = Х-Х0. Всевозможные ошибки измерений по характеру происхождения можно разделить на три типа.
Систематические погрешности обусловлены одной и той же причиной. Поэтому при повторении опыта они обычно имеют одно и то же значение и знак, т.е. систематически повторяются. Они являются следствием несовершенства приборов и недостатков методики измерения. Систематические погрешности можно учесть с помощью поверки приборов и уменьшить, усовершенствовав методику измерений.
Случайные погрешности являются следствием случайных неконтролируемых помех, влияние которых на процесс измерения учесть невозможно. Они связаны с ограниченной точностью приборов, ограниченной чувствительностью наших органов чувств, изменением внешних условий и т.д. Случайные погрешности устранить нельзя, но благодаря тому, что они подчиняются вероятностным закономерностям, при достаточно большом числе измерений, всегда можно указать пределы, внутри которых заключается истинное значение.
Промахи - это, очевидно, ошибочные измерения или наблюдения, возникающие в результате небрежности экспериментатора. При вычислениях такие данные следует отбрасывать и проводить повторные измерения.
Случайные ошибки при многократном повторении опыта служат причиной разброса результатов отдельных измерений. Предположим, что мы п раз измерили некоторую величину, истинное значение которой равно а.
Из-за случайных ошибок мы вместо а получим ряд значений Х1… Х2 ... Xi,...Xn. Какое из этих измерений ближе всего к истинному, мы не знаем. Самой лучшей оценкой по данным измерениям является среднее арифметическое <Х> из числа всех измерений
<X>=![]() .
(1)
.
(1)
Так как среднее значение
является приблизительной оценкой истинного значения,
то нужно уметь оценивать абсолютную величину возможного отклонения среднего
результата от истинного значения. Это отклонение ![]() Х называется абсолютной ошибкой
среднего
Х называется абсолютной ошибкой
среднего
ΔX=|<X> a|. (2)
Среднее значение <X> и абсолютная ошибка ΔХ среднего определяют, так называемый, доверительный интервал (< X > ± ΔХ), в пределах которого, по данным опыта, заключена измеряемая величина а.
Например, результат измерения скорости звука записав так:
V = (335 ±5) м/с.
Эта запись означает, что скорость звука, по данным опыта, лежит в пределах от 330 м/с по 340 м/с.
Однако и такое утверждение не может считаться абсолютно достоверным. Необходимо указать надежность получаемого результата. Надежность результата оценивается так называемой доверительной вероятностью Р.
Доверительная вероятность - это вероятность того, что истинное значение измеряемой величины попадает в найденный доверительный интервал.
Предположим, что в приведенном выше примере доверительный интервал найден с доверительной вероятностью Р, равной 0, 95. Это значит, что 95 измерений из 100 попадут в найденный интервал и лишь 5 окажутся за его пределами. Чем уже доверительный интервал (т.е. чем меньше абсолютная ошибка ΔХ) при заданном значении доверительной вероятности, тем точнее выполнены измерения. Точность измерений выявляется при сравнении абсолютной ошибки измерений со средним значением всех измерений путем вычисления так называемой относительной ошибки.
Относительная ошибка вычисляется по формуле
![]() %.
%.
В рассмотренном примере со скоростью звука она равна:
![]() .
.
Итак, измерения любой физической величины должны завершаться указанием доверительного интервала с заданной доверительной вероятностью и вычислением относительной ошибки измерений.
1.2 Определение доверительного интервала на основании нормального закона распределения случайной величины
Доверительный
интервал и доверительная вероятность обосновываются теорией погрешностей
измерений, в основе которой лежит нормальный закон распределения случайной величины. Эта теория учитывает лишь
случайные ошибки. На рисунке 1.1, где
представлен общий вид нормального распределения, видно, что основная масса результатов измерения
группируется около центра а. Отклонения
по обе стороны от центра распределения наблюдаются тем реже, чем больше абсолютная величина (х - а) таких
отклонений. Степень разброса отдельных
измерений относительно а определяет другой параметр функции распределения,
параметр σ. Анализ функции распределения показывает, что на расстоянии <σ от центра распределения
кривая имеет точки перегиба и при |х - а | > σ функция
быстро стремится к нулю. Величина <σ2>, называемая
дисперсией, совпадает со средним значением
квадратов отклонений результатов отдельных измерений от истинного значения, т.е. <σ2>
= <(х-а)2 >.
Поэтому параметр σ называют стандартом отклонения или средним квадратным отклонением;
σ определяет также максимальное значение функции распределения, которое
достигается при х=а и
равно σ=
На рисунке 1.1, где
представлен общий вид нормального распределения, видно, что основная масса результатов измерения
группируется около центра а. Отклонения
по обе стороны от центра распределения наблюдаются тем реже, чем больше абсолютная величина (х - а) таких
отклонений. Степень разброса отдельных
измерений относительно а определяет другой параметр функции распределения,
параметр σ. Анализ функции распределения показывает, что на расстоянии <σ от центра распределения
кривая имеет точки перегиба и при |х - а | > σ функция
быстро стремится к нулю. Величина <σ2>, называемая
дисперсией, совпадает со средним значением
квадратов отклонений результатов отдельных измерений от истинного значения, т.е. <σ2>
= <(х-а)2 >.
Поэтому параметр σ называют стандартом отклонения или средним квадратным отклонением;
σ определяет также максимальное значение функции распределения, которое
достигается при х=а и
равно σ=![]() .
.![]() Отсюда
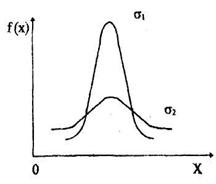
видно, чем меньше σ, тем выше максимум. На одном и том же графике площади
под кривыми распределения, соответствующие различным значениям σ, должны
быть одинаковы (равными 1), поэтому на графике кривые с меньшим значением σ выглядят более узкими и высокими, чем кривые с
большим σ.
Отсюда
видно, чем меньше σ, тем выше максимум. На одном и том же графике площади
под кривыми распределения, соответствующие различным значениям σ, должны
быть одинаковы (равными 1), поэтому на графике кривые с меньшим значением σ выглядят более узкими и высокими, чем кривые с
большим σ.
На рисунке 1.2 приведены две нормальные кривые, где σ2>σ1. При измерениях величина зависит от точности избранного метода, чем точнее метод, тем меньше σ. Доверительный интервал всегда выбирается симметричным относительно а, тогда доверительная вероятность определяется интегрированием (смотри выражение 4) нормального закона распределения (1.5) в пределах от (а - ΔХ ) до (а + ΔХ).
Если полуширину интервала ![]() Х брать кратной σ, то, как показывают соответствующие расчеты, для ΔХ=σ доверительная
вероятность равна Р=0,683, для ΔХ=2σ Р=0,954, а
для ΔХ=3σ Р=0,997. При производстве измерений а и σ неизвестны. Поэтому при математической обработке
результатов измерений необходимо
получить по этим результатам наилучшую
оценку а и σ. Лучшей оценкой а является среднее арифметическое
<X> из всех измерений (1). Можно показать, что при
большом числе измерений (n→∞) <X> = а, т.е.
Х брать кратной σ, то, как показывают соответствующие расчеты, для ΔХ=σ доверительная
вероятность равна Р=0,683, для ΔХ=2σ Р=0,954, а
для ΔХ=3σ Р=0,997. При производстве измерений а и σ неизвестны. Поэтому при математической обработке
результатов измерений необходимо
получить по этим результатам наилучшую
оценку а и σ. Лучшей оценкой а является среднее арифметическое
<X> из всех измерений (1). Можно показать, что при
большом числе измерений (n→∞) <X> = а, т.е. ![]()
![]() .
.
|
|
Лучшей
оценкой σ является выборочное
среднее квадратичное отклонение Sn, равное  . (3)
. (3)
При n→∞ Sn и σ совпадают, т.е. ![]() .
.
Рисунок 1.2
При большом числе измерений (n>20) результат обрабатывают, пользуясь правилом "трех сигм". По формуле (1) находят <X>, по формуле (3) вычисляют выборочное среднеквадратичное отклонение Sn и принимая его равным 3σ, записывают доверительный интервал в виде
Х = <Х>±Зσ,
доверительная вероятность в этом случае равна 0,997.
В лабораторном практикуме, когда производится небольшое число измерений (n<10), широко пользуются методом, разработанным Стьюдентом. Этот метод называется методом малых выборок. В этом случае в качестве стандарта отклонения средней величины от истинного значения принимается величина S, называемая средним квадратичным отклонением среднего и равная
 . (4)
. (4)
Следует заметить, что величину S часто обозначают через
![]() и
также называют среднеквадратичным
отклонением (среднеквадратичной погрешностью среднего). Доверительный интервал
записывается в виде
и
также называют среднеквадратичным
отклонением (среднеквадратичной погрешностью среднего). Доверительный интервал
записывается в виде
Х= <Х>±![]() Х,
Х,
причем ![]() Х = t·S (5)
Х = t·S (5)
где ț - коэффициент Стьюдента.
Коэффициенты Стьюдента зависят от выбранного значения доверительной вероятности Р и числа произведенных измерений п. Эти коэффициенты рассчитываются в теории вероятностей и приводятся в справочных таблицах.
Таблица 1.1- Таблица коэффициентов Стьюдента
|
n |
0,6 |
0,7 |
0,95 |
0,99 |
|
2 |
1,38. |
2,0 |
12,71 |
63,66 |
|
3 |
1,06 |
1,3 |
4,30 |
9,92 |
|
4 |
0,98 |
1,3 |
3,18 |
5,84 |
|
5 |
0,94 |
1,2 |
2,78 |
4,60 |
|
6 |
0,92 |
1,2 |
2,57 |
4,03 |
|
7 |
0,90 |
1,1 |
2,45 |
3,71 |
|
8 |
0,90 |
1,1 |
2,36 |
3,50 |
|
9 |
0,90 |
1,1 |
2,31 |
3,36 |
|
10 |
0,88 |
1,1 |
2,26 |
3,25 |
Следует заметить, что при большом числе измерений метод Стьюдента дает тот же результат, что и при использовании нормального закона. Однако для малого числа измерений доверительный интервал по методу Стьюдента вычисляется более надежно.
1.3 Порядок обработки результатов измерений по методу малых выборок
Обработку результатов измерений по методу малых выборок следует производить в таком порядке:
а) произвести п измерений (X1, X2,..., Xi,... Xn);
б) найти среднее арифметическое по формуле

в) определить отклонение каждого измерения от среднего ∆Xi=|Xi–<X>| (прямые скобки указывают на то, что нас интересуют лишь абсолютные значения указанных разностей);
г) определить стандарт отклонения
 ;
;
д) по таблице коэффициентов Стьюдента найти t;
е) определить абсолютное значение случайной ошибки среднего арифметического
∆X = t·S;
ж) определить относительную ошибку
Е = ![]() ∙100%;
∙100%;
и) записать
окончательный результат в виде: для Р = 0,95 Х = <Х>±![]() Х, Е = А%.
Х, Е = А%.
При записи
окончательного результата нужно иметь ввиду следующее. Так как абсолютная
ошибка ΔХ сама определяется с ошибкой, то ее следует округлять до
первой значащей цифры. Лишь в том случае, когда первая значащая цифра ошибки
меньше 4, в результате можно оставлять 2 значащие цифры. Например, в результате
вычислений было получено ![]() Х=0,524. Следует оставить
Х=0,524. Следует оставить ![]() Х=0,5. Ошибку
Х=0,5. Ошибку ![]() Х=0,167 можно
округлить так:
Х=0,167 можно
округлить так: ![]() Х=0,20
или
Х=0,20
или ![]() Х=0,17.
Х=0,17.
Абсолютная ошибка показывает,
в каком разряде полученного результата содержится неточность, поэтому результат
нужно округлять до того разряда, в котором находится значащая цифра ошибки.
Например, мы получили < X > = 26,731
и ![]() Х=0,8.
Значит, ответ нужно записать так:
Х=0,8.
Значит, ответ нужно записать так:
X = 26,7 ± 0,8;
или получив < X> = 0,8568 и ![]() Х=0,014, записываем:
Х=0,014, записываем:
Х = 0,857± 0,014.
1.4 Классы точности приборов
Для характеристики измерительных приборов часто используют понятие класса точности.
Классом точности прибора γ называется наибольшая допустимая относительная приведенная погрешность, определяемая по формуле
γ =![]() ·100% (6)
·100% (6)
где ΔA – наибольшая допустимая абсолютная погрешность прибора;
Aпред – предельное (номинальное) значение измеряемой величины по шкале прибора.
Класс точности приборов в соответствии со стандартом может принимать следующие значения: 0,02; 0,05; 0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 4.
Класс точности прибора указывается на его шкале. Если на шкале такого обозначения нет, это означает, что прибор внеклассный, то есть его приведенная погрешность превышает 4%.
Зная класс точности можно
вычислить наибольшую допустимую абсолютную погрешность прибора (которую
принимают одинаковой на всей шкале прибора) по формуле ![]()
ΔA=![]()
![]() . (7)
. (7)
2 Лабораторная работа ММФ-1. Измерительный практикум
Цель работы: овладение методикой измерения физических величин и методами обработки результатов измерений на примере удельного сопротивления провода.
Задачи: - измерить сопротивление провода и изучить зависимость сопротивления
R провода от его длины ℓ;
- определить удельное сопротивление ρ материала провода;
- провести обработку результатов измерений методом малых выборок.
2.1 Методика эксперимента
Сопротивление
проводников зависит от их формы, размеров и материала, из которого они
изготовлены, т.е. R =![]() . Если проводник
имеет форму круглого цилиндра постоянного поперечного сечения S=
. Если проводник
имеет форму круглого цилиндра постоянного поперечного сечения S=![]() , тогда его сопротивление
равно R=
, тогда его сопротивление
равно R=![]() (1) где
ℓ - длина проводника; d
- его диаметр; ρ-
удельное сопротивление. Из
(1) легко получить
формулу
(1) где
ℓ - длина проводника; d
- его диаметр; ρ-
удельное сопротивление. Из
(1) легко получить
формулу
ρ= (2)
(2)
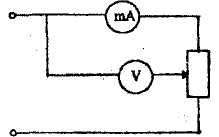
которая является расчетной в данной работе. Значение сопротивления R рассчитывается по показаниям амперметра и вольтметра (расчетные формулы представлены ниже).
Для более точного определения сопротивления необходимо учитывать
|
|
|
|

внутреннее сопротивление электроизмерительных приборов – амперметра RA и вольтметра Rv.
а) б)
Рисунок 2.1
На рисунке 2.1 показаны две возможные схемы: а) и б) - включения приборов, которые выбираются произвольно с помощью переключателя.
При включении схемы а) сопротивление следует находить по формуле
R=![]() (3)
(3)
где RA = 0,15 Ом - внутреннее сопротивление амперметра; U и I - показания вольтметра и амперметра соответственно.
Если включена схема б), то в этом случае сопротивление находится по формуле
R= (4)
(4)
где R![]() = 2500 Ом – внутреннее сопротивление
вольтметра. Обе формулы можно получить из закона Ома.
= 2500 Ом – внутреннее сопротивление
вольтметра. Обе формулы можно получить из закона Ома.
2.2 Экспериментальная установка
Установка РРМ-01 предназначена для определения удельного сопротивления провода (рисунок 2.2).
|
|
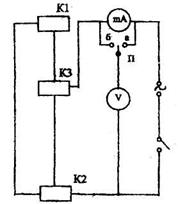
Между двумя неподвижными контактами К1 и К2 закреплен исследуемый провод. С помощью подвижного контакта К3 устанавливается необходимая длина провода, на которой измеряется падение напряжения и ток. Схема включения (а) или (б) выбирается переключателем П.
Рисунок 2.2
2.3 Порядок выполнения работы
2.3.1
Зафиксировать положение верхнего контакта и записать в таблицу 1
длину ![]() провода (не менее
половины всей длины), заключенного между нижним и средним контактами.
2.3.2 С
помощью микрометра измерить диаметр провода Д.
провода (не менее
половины всей длины), заключенного между нижним и средним контактами.
2.3.2 С
помощью микрометра измерить диаметр провода Д.
2.3.3 Включить установку, переключателем П выбрать схему включения приборов.
2.3.4
Для различных (не менее 5) значений длины провода ![]() провести десять измерений напряжения U
и силы I тока.
провести десять измерений напряжения U
и силы I тока.
Таблица 2.1
|
d, м |
|
U, B |
I, А |
R, Ом |
|
< |
|
2.4 Обработка результатов
2.4.1 В зависимости от выбранной схемы по формуле (3) или (4) вычислить активное сопротивление провода.
2.4.2 Построить график зависимости сопротивления провода R от его длины ℓ.
2.4.3 По формуле (2) вычислить
значение удельного сопротивления ![]() .
.
2.4.4 Для всех измерений
по формуле [(2), см. Введение] найти среднеквадратичную погрешность S и величину доверительного интервала ![]() =2 S
=2 S![]() (для вероятности Р=0,95).
(для вероятности Р=0,95).
2.4.5 Выбрать любые три
измерения, найти значение интервала ![]()
методом малых выборок.
2.4.6 Для n=10 и n=3 найти относительную погрешность соответствующего среднего арифметического.
2.4.7 Вычислить относительную приборную погрешность любого единичного измерения по формуле
 .
.
2.4.8 Сравнить абсолютные и относительные погрешности, проанализировать полученные результаты и сформулировать выводы.
2.5 Контрольные вопросы 2.5.1 Прямые и косвенные измерения, систематические и случайные погрешности.
2.5.2 Абсолютная и относительная погрешности. Класс точности приборов.
2.5.3 Доверительный интервал и доверительная вероятность.
2.5.4 Обработка результатов прямых и косвенных измерений.
2.5.5 Методика проведения работы.
3 Лабораторная работа ММФ - 2. Изучение законов кинематики и
динамики на машине Атвуда
Цель работы: изучение законов равномерного и равноускоренного движение, а также второго закона Ньютона
Задачи:
- проверить формулы равномерного и равноускоренного движения;
- проверить второй закон Ньютона.
3.1 Методика эксперимента
Движение системы, состоящей из двух грузов с массами т и т +
т![]() связанных нерастяжимой нитью, и блока
радиуса r с моментом инерции описывается законами динамики. Ведь грузы одинаковы, то потенциальная энергия системы не зависит от высоты поднятия
грузов, т.к. убыль потенциальной
энергии одного из них приводит к возрастанию энергии другого. Когда же грузы различны, изменение потенциальной
энергии системы определяется
изменением положения
связанных нерастяжимой нитью, и блока
радиуса r с моментом инерции описывается законами динамики. Ведь грузы одинаковы, то потенциальная энергия системы не зависит от высоты поднятия
грузов, т.к. убыль потенциальной
энергии одного из них приводит к возрастанию энергии другого. Когда же грузы различны, изменение потенциальной
энергии системы определяется
изменением положения ![]() перегрузка т
перегрузка т![]()
![]() (1)
(1)
где ![]() h - изменение положениия
перегрузка.
h - изменение положениия
перегрузка.
Потенциальная энергия системы превращается в кинетическую энергию поступательного и вращательного движения (работой по преодолению сил трения можно пренебречь).
![]() (2)
(2)
где ![]() - кинетическая
энергия груза без перегрузка;
- кинетическая
энергия груза без перегрузка;
![]() - кинетическая энергия груза
с перегрузком и
- кинетическая энергия груза
с перегрузком и ![]() -
кинетическая энергия вращательного движения блока.
-
кинетическая энергия вращательного движения блока.
Учитывая, что ![]() h=
h= ![]() вращения диска
вращения диска ![]() и линейная скорость V = at, можно получить
выражение для определения ускорения системы
и линейная скорость V = at, можно получить
выражение для определения ускорения системы
а=![]() . (4)
. (4)
Если пренебречь моментами инерции блока 1, формула примет вид
a=![]() (5)
(5)
где М = 2m + m![]() - полная масса
системы; m
- полная масса
системы; m![]() - масса перегрузка.
После снятия перегрузка грузы будут двигаться равномерно со скоростью V, которая при неизменном расстоянии
S
останется постоянной, тогда
- масса перегрузка.
После снятия перегрузка грузы будут двигаться равномерно со скоростью V, которая при неизменном расстоянии
S
останется постоянной, тогда
V=![]() . (6)
. (6)
При равноускоренном движении без начальной скорости ускорение
a=![]() (7)
(7)
где V - конечная скорость, которая равна скорости равномерного движения и, следовательно, может быть найдена по формуле V = h /t. Тогда окончательное выражение для определения ускорения запишется в виде
a=![]()
![]()
![]() . (8)
. (8)
Одним из способов проверки второго закона Ньютона является проверка соотношения (5), для этого полная масса системы М должна оставаться постоянной, а величина действующей силы – изменяться
![]()
![]() =
=![]() (9)
(9)
где
m1, m2 …,m![]() -
массы перегрузков.
-
массы перегрузков.
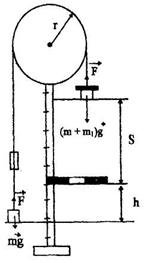
3.2 Описание экспериментальной установки
Машина Атвуда РРМ-2 состоит из вертикальной колонны с масштабной линейкой, на которой закреплены три кронштейна (рисунок 3.1). На колонне установлен легкий блок, способный вращаться с незначительным трением, и электромагнит. Через блок перекинута легкая нить с прикрепленными на концах грузами одинаковых масс. Электромагнит удерживает блок с грузами в состоянии покоя. Средний кронштейн снабжен кольцом для снятия перегрузка. В момент прохождения груза через кольцо включается секундомер, измеряющий время равномерного движения грузов t. Измеряя расстояние, пройденное грузом соответственно при равноускоренном S и равномерном движении h , а также время t, можно проверить основные законы кинематики и динамики поступательного движения, а также вычислить ускорение свободного падения.
|
|
3.3 Порядок выполнения работы
Упражнение 1. Проверка формулы равномерного
движения.
3.3.1 Включить прибор, установить высоту равно-
мерного движения груза h и записать расстояние между
средним и нижним кронштейнами в таблицу 3.1.
3.3.2 Используя предложенный преподавателем
перегрузок, измерить время t равномерного движения
грузов для пяти различных расстояний h, оставляя не-
изменным расстояние S между верхним и нижним
кронштейнами. Полученные данные занести в таблицу 3.1.
Рисунок 3.1
Таблица 3.1
|
h, м |
t, c |
V, m/c |
Упражнение 2. Проверка формулы равноускоренного движения.
3.3.3 Перемещая подвижные кронштейны, установить выбранные расстояния равноускоренного S и равномерного h движения груза и записать их в таблицу 2.2
Таблица 3.2
|
S, м |
h, м |
t, c |
a, м/с2 |
Упражнение 3. Проверка второго закона Ньютона.
3.3.4 Установить некоторое расстояние h между средним и нижним кронштейнами.
3.3.5 Положить на правый груз три перегрузка (используя грузы малого диаметра, которые кольцом не снимаются) и записать их общую массу в таблицу 3.3.
3.3.6 Поднять правый груз до положения среднего кронштейна и измерить время t движения груза на расстоянии h.
3.3.7 Перекладывая перегрузки так, чтобы масса правого груза всегда была больше, повторить измерения еще два раза.
Таблица 3.3
|
m, кг |
h, м |
t,c |
а, м/с2 |
3.4 Обработка результатов
3.4.1 По результатам таблицы 3.1 проверить соотношение (6).
3.4.2 По данным таблицы 3.2 проверить соотношение (8).
3.4.3 По результатам таблицы 3.3 проверить соотношение (9).
3.4.4 Для одного из упражнений оценить точность полученных результатов.
3.4.5 Проанализировать полученные результаты и сделать выводы.
3.5 Контрольные вопросы
3.5.1 Укажите участки равномерного и равноускоренного движения фаз на машине Атвуда.
3.5.2 Что такое мгновенная скорость?
3.5.3 Чему равна сила натяжения нити при равномерном и равноускоренном движении?
3.5.4 Почему в первом упражнении расстояние между верхним и средним кронштейнами должно оставаться постоянным ?
3.5.5 Почему при выполнении третьего упражнения общая масса всех грузов должна оставаться постоянной?
4 Лабораторная работа ММФ -3. Определение коэффициента трения качения методом наклонного маятника
Цель работы: экспериментальное изучение явления трения качения.
Задача: определить коэффициент трения качения для металлов при различных углах наклона маятника.
4.1 Методика работы
При перемещении одного тела относительно другого по его поверхности или слоев одного и
того же тела относительно друг друга возникает сопротивление, которое
описывается силой трения F![]() . Сила трения направлена тангенциально относительно перемещения соприкасающихся
тел. Она равна произведению коэффициента
трения µ на силу нормального давления N
. Сила трения направлена тангенциально относительно перемещения соприкасающихся
тел. Она равна произведению коэффициента
трения µ на силу нормального давления N
Fтp =µN.
Экспериментальные данные показывают, что величина коэффициента трения не является константой, а зависит от материала поверхностей, микрогеометрического профиля, смазки, среды и других факторов.
Различают силы трения покоя, скольжения и качения. Трение качения возникает при перекатывании одного тела (шара) по поверхности другого. При этом возникают как упругие так и пластические деформации. Из-за деформации поверхностей линия действия силы реакции соприкасающихся тел Q, направленная перпендикулярно поверхности соприкосновения, не совпадает c линией действия силы нормального давления N, равной весу шара (рисунок 4.1).
Нормальная составляющая силы реакции Qn уравновешивается силонормального давления N, а горизонтальная - представляет собой силу трения качения Qτ.
|
|

При равномерном движении шара должно выполняться правило равенства моментов: момент силы трения качения относительно точки О равен произведению нормальной составляющей силы реакции опоры Qn на расстояние смещения из-за контактных деформаций K.
![]()
где R - радиус шара.
Рисунок 4.1
Учитывая, что Qn = N, для определения силы трения качения получим выражение
![]() . (1)
. (1)
Величину К, представляющую собой плечо силы Qn и имеющую размерность длины, называют коэффициентом трения качения.
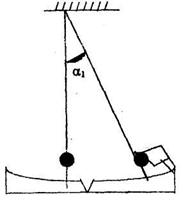
Для исследования процесса трения в данной работе используется метод наклонного маятника.
Шарик, подвешенный на нити, опирается на
наклонную плоскость, угол наклона которой ![]() можно изменять.
можно изменять.
|
|

Если вывести шарик из положения равновесия, он начнет перекатываться по плоскости. Причем, движение его имеет характер колебаний, затухающих, главным образом, под действием внешнего трения.
Измерение силы трения с помощью наклонного маятника основано на измерении уменьшения амплитуды колебаний за определенное число циклов.
Энергия,
рассеянная за цикл колебаний маятника ![]() равна работе силы трения на пройденном
пути
равна работе силы трения на пройденном
пути ![]() = F
= F![]() S.
S.
Рисунок 4.2
Работой по преодолению
сопротивления среды и трения в подвесе можно пренебречь. За n колебаний
маятник теряет энергию ![]() =
= ![]() . С учетом (1) можно записать
. С учетом (1) можно записать ![]() =K
=K![]() (2)
(2)
где т -масса маятника, ![]() h - потеря
высоты центром тяжести маятника, которая как видно из рисунка 4.2, может быть
выражена формулой
h - потеря
высоты центром тяжести маятника, которая как видно из рисунка 4.2, может быть
выражена формулой
h=![]()
где ![]() l= ОС - OB = L(cos
l= ОС - OB = L(cos ![]() n - cos
n - cos![]() );
); ![]() - амплитудное значение угла
отклонения маятников в
начальный момент;
- амплитудное значение угла
отклонения маятников в
начальный момент; ![]() n - амплитуда отклонения
через n
колебаний; l - длина маятника.
n - амплитуда отклонения
через n
колебаний; l - длина маятника.
Путь, пройденный центром тяжести маятника за n колебаний равен
S = 4L n (a![]() - а
- а![]() )/2.
)/2.
Подставляя
эти выражения в (2) и учитывая, что нормальная составляющая силы тяжести N = m g cos ![]() , получим
, получим
![]() (3)
(3)
здесь ![]() и
и ![]() - значения углов, выраженные в радианах.
- значения углов, выраженные в радианах.
4.2 Описание экспериментальной установки
Прибор
"Наклонный маятник РРМ-07" предназначен для определения коэффициента
трения качения. Принцип работы наклонного маятника представлен на рисунках 4.1
и 4.2. Угол наклона маятника ![]() = 90 -φ, где φ - угол между
наклонной плоскости и вертикалью. Фотоэлектрический датчик соединен с
секундомером, который отсчитывает число колебаний и время, затраченное на них.
На кронштейн подвешен шар с водилкой, совершающий колебания по пластинке
(рисунок 4.2). В комплекте имеются набор шариков и пластинок, изготовленных из
разных металлов.
= 90 -φ, где φ - угол между
наклонной плоскости и вертикалью. Фотоэлектрический датчик соединен с
секундомером, который отсчитывает число колебаний и время, затраченное на них.
На кронштейн подвешен шар с водилкой, совершающий колебания по пластинке
(рисунок 4.2). В комплекте имеются набор шариков и пластинок, изготовленных из
разных металлов.
4.3 Порядок выполнения эксперимента
4.3.1 Установить предложенные преподавателем образец и шарик.
4.3.2 При помощи опорных винтов установить маятник так, чтобы его нить оказалась против нулевого деления шкалы.
4.3.3 Наклонить плечо маятника на угол
β = 30°. Отклонить шар от положения равновесия на угол ![]() > 6° - 7° и считать число колебаний.
> 6° - 7° и считать число колебаний.
4.3.4 При уменьшении угла отклонения маятника до некоторого значе-
ния ![]() , записать в таблицу значения углов отклонения шарика в начальный
и конечный моменты времени и число n полных
колебаний.
, записать в таблицу значения углов отклонения шарика в начальный
и конечный моменты времени и число n полных
колебаний.
4.4.5 Пункты 3 и 4 повторить не менее пяти раз.
4.4.6 Повторить измерения для углов ![]() = 45° и 60°.
= 45° и 60°.
Записать данные в таблицу 4.1.
Таблица 4.1
|
|
|
|
|
|
|
|
|
4.4 Обработка результатов
4.4.1 Пользуясь формулой (12 ), вычислить коэффициент трения качения.
4.4.2 Произвести оценку погрешностей методом малых выборок.
4.4.3 Проанализировать полученный результат и предложенную методику эксперимента, сделать выводы.
4.5 Контрольные вопросы
4.5.1 Силы трения. Трения покоя, скольжения, качения.
4.5.2 Как
изменится сила трения при изменении угла наклона плоскости![]() от 0° до α ? Как при этом изменится
коэффициент трения?
от 0° до α ? Как при этом изменится
коэффициент трения?
4.5.3 Что является основным источником погрешностей в данной работе?
44.5.4 Методика проведения работы.
5 Лабораторная работа ММФ – 4. Изучение законов сохранения импульса и энергии при ударе
Цель работы: изучить законы сохранения в механике на примере соударения шаров.
Задачи:
- проверить закон сохранения импульса для абсолютного удара;
- проверить закон сохранения импульса для абсолютно неупругого удара;
- определить коэффициенты восстановления скорости и энергии.
5.1 Методика работы
Удар - кратковременное взаимодействие соприкасающихся тел, приводящее к значительному изменению состояния их движения. Явление удара широко используется в технике. В лабораторном практикуме с его помощью изучают законы сохранения, определяют скорость полёта снаряда.
Применяя к взаимодействующим шарам закон сохранения импульса (для случая, когда первый шар движется с некоторой скоростью, а второй неподвижен), можно записать:
для упругого удара
![]() =
=![]()
![]() , (1)
, (1)
для абсолютно неупругого удара
![]() =
= ![]() (2)
(2)
где m1, m2- массы шаров,
v1 - скорость первого шара до удара;
![]()
![]() -
скорости шаров после удара.
-
скорости шаров после удара.
Рассеяние механической энергии при ударе определяется коэффициентами восстановления скорости Кс и энергии Кэ. Коэффициент восстановления скорости представляет собой отношение модуля скорости взаимного удаления шаров к модулю скорости их взаимного сближения
 . (3)
. (3)
Коэффициент восстановления энергии - отношение суммарных кинетических энергий после и до удара
![]() . (4)
. (4)
Величина коэффициентов, восстановления зависит от физических свойств материалов
соударяющихся тел, их формы и масс. Для абсолютно упругого удар Кэ = 1,
для абсолютно неупругого Кэ = 0, в реальном случае 0 < Кэ < 1.
Скорости шаров
до и после удара можно найти из закона сохранения механической энергии для каждого шара,
без учёта её диссипации. Так, для первого шара, отклонённого на некоторый угол
![]()
m![]() gh = m v2 / 2
gh = m v2 / 2
где h - высота, на которую поднимается центр масс шара (рисунок 5.1).
Откуда v![]() =
= ![]() . Учитывая, что
. Учитывая, что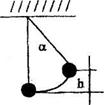 cos
cos![]() =(
=(![]() )/
)/![]() и 1-
и 1-![]() =2sin2
=2sin2![]() /2, получим
/2, получим
V![]() =2
=2![]() (5)
(5)
Измеряя углы, на которые отклоняются шары после удара
(![]() и
и ![]() ), аналогично
можно определить
), аналогично
можно определить
![]()
![]()
Рисунок 5.1
5.2 Описание экспериментальной установки
|
|
Основная часть прибора РРМ - 08, предназначенная для исследования взаимодействий, состоит из двух шаров, подвешенных на нитях, и угольников со шкалами, которые позволяют определить положение шаров в градусной мере. Прибор (рисунок 5.2) оснащён приспособлениями, с помощью которых можно произвести его выравнивание, установить длину подвески шаров. Для удержания шара в исходном положении служит электромагнит.
Рисунок 5.2
5.3 Порядок выполнения работы
5.3.1 Навинтить на подвесы стальные шары, установить электромагнит в определённом положении, включить установку.
5.3.2 Зафиксировать
правый шар с помощью электромагнита (![]() - угол его отклонения). Левый шар остаётся в положении
равновесия.
- угол его отклонения). Левый шар остаётся в положении
равновесия.
5.3.3 Разомкнуть электромагнита
и произвести отсчёт отклонения обоих шаров после удара (![]() и α2) .
и α2) .
5.3.4 Измерения повторить пять раз. Все данные занести в таблицу 5.I.
Таблица 5.1
|
|
|
|
|
|
|
|
|
|
|
5.3.5 Заменить стальные шары пластилиновыми, повторить пункты 2 - 4, записать результаты в таблицу 5.2.
Таблица 5.2
|
|
|
|
|
|
|
|
5.4 Обработка результатов
5.4.1 По формулам (5) и (6) вычислить значения скоростей шаров до и после столкновения.
5.4.2 По результатам таблицы 4.1 проверить закон сохранения импульса для абсолютно упругого удара (1), по результатам таблицы 2 - для абсолютно неупругого (2).
5.4.3 По формулам (3) и (4) вычислить коэффициенты восстановления скорости и энергии для упругого и неупругого ударов.
5.4.4 Проанализировать полученные результаты и сделать выводы
5.5 Контрольные вопросы
5.5.1 Дать определение изолированной системы.
5.5.2 Что такое импульс тела?
5.5.3 Что такое упругое и неупругое взаимодействие тел?
5.5.4 Сформулируйте законы сохранения для абсолютно упругого и неупругого ударов.
5.5.5 Сформулируйте закон сохранения механической энергии.
5.5.6 Методика проведения работы.
6 Лабораторная работа ММФ-5. Определение момента инерции маятника Максвелла
Цель работы: изучение законов механики твердого тела на примере его плоского движения.
Задачи:
- определить значение момента инерции маятника Максвелла;
- вычислить значение момента инерции маятника Максвелла с помощью теоретической формулы;
- сравнить полученные значения.
6.1 Методика эксперимента Маятник Максвелла представляет собой диск, насаженный на легкую трубку и подвешенный на двух нитях (рисунок 6.1). Если, намотав нити симметрично на трубку, поднять диск на высоту h, а затем отпустить без толчка, то он начнет опускаться, одновременно вращаясь вокруг горизонтальной оси. При этом траектории всех точек диска лежат в параллельных плоскостях. Такое движение твердого тела называется плоским. Его можно рассматривать как поступательное движение тела, происходящее со скоростью центра масс, и одновременное вращение вокруг горизонтальной оси, проходящей через этот центр.
Уравнения движения центра масс и вращения маятника относительно указанной оси в этом случае имеют вид
|
|
ma = mg – 2T, I·e = 2T·r |
(1) (2) |
где
m – масса маятника;
I – его момент инерции;
а – ускорение центра масс;
e – угловое ускорение маятника;
Т – натяжение нити;
r – радиус трубки (плечо силы натяжения).
Учитывая, что ускорения в данном случае связаны соотношением а = e· r,
получим из (1) и (2)
|
|
|
(3) |
Из последнего выражения следует, что центр масс маятника движется с постоянным ускорением, которое зависит от момента инерции. Это обстоятельство и лежит в основе рассматриваемой методики. Из соотношения (3) с учетом формулы пути равноускоренного движения h = at2/2, получим расчетную формулу
|
|
|
(4) |
где D = D0 + d. Таким образом, для определения момента инерции маятника Максвелла необходимо измерить время t его падения с заданной высоты h, определить его массу m, диаметр трубки D0 и толщину d нити.
6.2 Экспериментальная установка Прибор "Маятник Максвелла FPM-03" состоит из собственно маятника (описанного выше), электромагнита, двух фотоэлектрических датчиков и соединенного с ними электронного миллисекундомера. На диск маятника накладывается одно из имеющихся в комплекте сменных колец, что позволяет изменять момент инерции маятника и его массу. Электромагнит при протекании электрического тока по его обмотке удерживает маятник в верхнем положении. Длину подвески маятника (высоту h) изменяют по миллиметровой шкале, нанесенной на вертикальной колонне. На лицевой панели миллисекундомера расположены клавишные выключатели СЕТЬ, ПУСК, СБРОС и цифровые индикаторы, которые высвечивают показания миллисекундомера.
Рисунок 6.1
6.3.3 Равномерно
в один слой наматывая нити на трубку, поднять маятник в верхнее положение и
зафиксировать с помощью электромагнита. Клавиша ПУСК при этом должна быть
отжата.
6.3.4 Нажать
последовательно клавиши СБРОС и ПУСК, что вызовет освобождение маятника и
запуск миллисекундомера.
6.3.5 Считать показания
миллисекундомера. Повторить опыт не менее 5 раз. Результаты измерений занести в
таблицу 6.1.
6.3.6 Измерить
штангенциркулем внешние диаметры трубки D0, диска DД
и кольца DК; определить толщину нити d.
Таблица 6.1
|
№ |
h, м |
m, кг |
t, c |
I, кг· м2 |
<I>, кг· м2 |
D0, м |
DД, м |
DК, м |
Iтеор, кг· м2 |
6.4 Обработка результатов 6.4.1
Выписать значения масс трубки m0, диска mд,
и кольца mк, выгравированные на соответствующих
деталях, и вычислить массу m маятника.
6.4.2 Вычислить по
формуле (4) значения момента инерции I для каждого из полученных
в опыте значений времени t.
6.4.3 Вычислить среднее
арифметическое значение <I> и оценить его случайную
погрешность DI для
доверительной вероятности r = 0,95.
6.4.4 Вычислить
теоретическое значение момента инерции маятника по формуле
|
|
Iтеор=[m0D02 + mд(Dд2 + D02) + mк(Dк2 + Dд2)]/8, |
(5) |
и сравнить его со значением <I>.
6.5
Контрольные вопросы 6.5.1
От чего зависит время падения маятника Максвелла с данной высоты h?
6.5.2 Как движется центр
масс маятника? От чего зависит его ускорение?
6.5.3 Чему равна механическая
энергия маятника в верхнем положении? При прохождении нижнего положения?
Каково отношение этих значений?
6.5.4 Укажите источники
погрешностей в опыте.
7 Лабораторная работа ММФ – 6. Определение момента инерции твердых тел с помощью крутильных колебаний
Цель работы: овладение методом определения момента инерции тела, который основан на применении закона динамики вращательного движения тела. Задачи:
- определить периоды крутильных колебаний маятника с закрепленными на нем телами; - вычислить момент инерции тела с использованием полученных в опыте значений периодов колебаний.
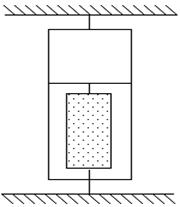
7.1 Методика эксперимента Крутильный маятник представляет собой тело, закрепленное на вертикально натянутой стальной проволоке. При повороте маятника вокруг оси, совпадающей с осью проволоки, в ней возникают упругие силы, момент которых пропорционален углу поворота
|
|
M = -kj |
(1) |
где k – коэффициент, зависящий от радиуса и длины проволоки, а также – от упругих свойств материала, из которого она изготовлена.
Уравнение динамики вращательного движения в данном случае имеет вид
|
|
Ie = -kj . |
(2) |
С учетом определения углового ускорения и после небольших преобразований запишем
|
|
|
(3) |

Последнее уравнение представляет собой дифференциальное уравнение свободных крутильных колебаний, период которых равен
|
|
|
(4) |
Именно
зависимость периода крутильных колебаний от момента инерции тела, подвешенного
на проволоке, и лежит в основе предлагаемой методики. Обычно на проволоке
подвешивают рамку, конструкция которой позволяет закреплять в ней образцы,
значительно отличающиеся по своим размерам. Эта рамка обладает моментом
инерции Iр. Если в ней закрепить исследуемый
образец с моментом инерции I0, то период такого маятника равен![]()
![]()
|
|
To=2π |
(5) |
Чтобы исключить из расчетной формулы неизвестные нам величины Iр и k, необходимо измерить периоды колебаний Тр пустой рамки и Тэ рамки с закрепленным в ней эталонным образцом, момент инерции Iэ которого известен. При этом
|
|
Tp=2π
|
(6) |
|
|
Tэ=2π |
(7) |
Из последних соотношений вытекает расчетная формула для момента инерции исследуемого образца
|
|
|
(8) |
7.2 Экспериментальная установка Установка (рисунок 7.1) состоит из натянутой между
двумя кронштейнами стальной проволоки, на которой подвешена легкая рамка,
электромагнита и собранных в одном корпусе универсального электронного
миллисекундомера и счетчика колебаний. Последние соединены с ф/э датчиком. В комплекте
имеются три образца, один из которых мы условно принимаем за эталонный.
По обеим сторонам рамки
расположены два флажка из магнитного материала.
На лицевой панели
секундомера размещены клавишные выключатели СЕТЬ, ПУСК, СБРОС и СТОП, а также
цифровые индикаторы, которые высвечивают время t и число n полных колебаний
маятника.
7.3.1 Выравнить прибор и включить его в сеть.
7.3.2Закрепить исследуемый образец в рамке.
7.3.3 Поворачивая рамку, приблизить ее флажок к электромагниту. Последний притягивает к себе флажок, фиксируя тем самым маятник в начальном положении.
7.3.4 Нажать последовательно клавиши СБРОС и ПУСК. Цепь электромагнита при этом размыкается и маятник начинает совершать свободные колебания.
Рисунок 7.1
7.3.5 Определить t0 – время 20-30 полных колебаний. Для этого надо нажать клавишу СТОП при появлении на счетчике колебаний числа, на единицу меньшего, т.е. равного (n – 1). После остановки счетчика, считать показания секундомера и занести в таблицу. 7.3.6 Заменить исследуемый образец на эталонный и определить tэ – время n полных колебаний (см. п.п. 3-5). 7.3.7 Убрать образец и произвести измерение времени tр полных n колебаний пустой рамки. Каждый опыт повторить не менее трех раз.
Таблица 7.1
|
№ |
n |
t0, c |
tэ, c |
tp, c |
T0, c |
Tэ, c |
Тр, с |
I0, кг× м2 |
7.4 Обработка результатов
7.4.1 Вычислить периоды T0,
Tэ и Тр по формуле Т= t/n, и их
средние значения <T0>,< Tэ> и <Тр>;
7.4.2 Вычислить момент
инерции I0 исследуемого образца по формуле (8),
подставляя в нее средние значения соответствующих периодов. Примечание:
значение момента инерции эталонного образца приведено на справочном стенде в
лаборатории "Механика и молекулярная физика".
7.5 Контрольные вопросы 7.5.1Что лежит в основе используемой в данной работе методики экспериментального определения момента инерции тел? 7.5.2 Каковы основные источники погрешностей в данном эксперименте?
8 Лабораторная работа ММФ -7. Определение скорости полета снаряда на баллистическом крутильном маятнике
Цель работы: овладение методом определения скорости тела, основанном на применении законов сохранения. Задачи:
- изучить возможности применения законов сохранения момента импульса и энергии;
- определить скорость полета снаряда.
8.1 Методика эксперимента Баллистический крутильный маятник представляет собой стержень, подвешенный на вертикально натянутой стальной проволоке и способный совершать колебательное движение в горизонтальной плоскости. На концах стержня закреплены две мишени, заполненные пластилином. Также на стержне расположены два одинаковых цилиндрических груза, которые можно перемещать и закреплять в выбранном положении (рисунок 8.1). При попадании в мишень горизонтально летящего со скоростью v снаряда маятник отклоняется от положения равновесия, поворачиваясь вокруг своей оси с начальной угловой скоростью w0. Согласно закону сохранения момента импульса
|
|
m0vr = (I + m0r2) w0 |
(1) |
здесь m0 – масса снаряда;
r – плечо его импульса, равное расстоянию от оси до того места на мишени, где застрял снаряд (при условии, что его скорость перпендикулярна оси стержня);
I – момент инерции маятника. При повороте маятника проволока, на которой он подвешен, закручивается. В ней возникают упругие силы, момент которых пропорционален углу j поворота маятника,
|
|
M = - kj |
(2) |
где k – коэффициент, зависящий от длины, радиуса и материала проволоки. Под действием момента упругих сил маятник совершает свободные крутильные колебания с периодом, равным
|
|
|
(3) |
Кинетическая энергия, полученная маятником при ударе, переходит в потенциальную энергию упругой деформации проволоки. Если пренебречь потерей энергии при движении маятника (вследствие сопротивления воздуха), то можно записать закон сохранения механической энергии в следующем виде
|
|
|
(4) |
где
jm –
максимальный угол, на который повернется маятник после удара.
Из соотношений (1) и (3)
получим
|
|
|
(5) |

В
(5) учтено, что m0r2<< I,
т.е. моментом инерции снаряда можно пренебречь.
Для того, чтобы
исключить из расчетной формулы неизвестные нам величины k и I,
необходимо произвести измерения периодов Т и Т1
колебаний маятника при двух различных положениях грузов на расстояниях соответственно
R и R1 от оси вращения. Тогда расчетная формула
приобретает следующий вид
|
|
|
(6) |
где m – масса груза. Таким образом, методика определения скорости полета снаряда с помощью баллистического крутильного маятника основана на применении законов сохранения момента импульса и механической энергии. Суть ее заключается в проведении двух опытов, в одном из которых определяют угол jm отклонения маятника после удара и период Т его свободных колебаний, грузы при этом расположены симметрично, на расстояние R от оси. Во втором опыте грузы располагают на другом расстоянии, которое мы обозначили R1, и вновь определяют период колебаний маятника – Т1 в нашем обозначении.
8.2 Экспериментальная установка Прибор "баллистический крутильный маятник FRM-09" состоит из описанного выше маятника, стреляющего устройства, фотоэлектрического датчика и соединенных с ним электронного миллисекундомера и счетчика колебаний. Также имеется прозрачный экран с нанесенной на него угловой шкалой. На лицевой панели секундомера расположены клавишные выключатели СЕТЬ, СБРОС, СТОП и цифровые индикаторы, высвечивающие показания миллисекундомера и счетчика колебаний.
Рисунок 8.1
8.3 Проведение эксперимента 8.3.1 Выравнить прибор. 8.3.2
Максимально приблизить грузы друг к другу, т.е. сдвинуть их к оси, и измерить
расстояние R до центра каждого груза. 8.3.3
Установить маятник в нулевом положении, когда черта на торце мишени
располагается напротив нулевого деления угловой шкалы. Включить прибор в сеть. 8.3.4
Заложить снаряд в стреляющее устройство и произвести выстрел. 8.3.5
Определить по шкале угол jm
максимального поворота маятника после удара снаряда о мишень и выразить его в
радианах. 8.3.6 Определить t –
время n = 7¸10 полных колебаний маятника. 8.3.7
Измерить r – расстояние от оси до того места на мишени, где застрял
снаряд. 8.3.8
Максимально раздвинуть грузы и определить их расстояние R1 до
оси.
8.3.9 Повернуть маятник
на угол, равный jm, нажать
клавишу СБРОС, затем отпустить маятник и определить t1 –
время полных n1 колебаний маятника.
8.3.10 Каждый опыт повторить не менее трех раз. Результаты измерений занести в таблицу 8.1
Таблица 8.1
|
№ |
j m, рад. |
R, м |
t, c |
n |
<T>, c |
t1, c |
n1 |
<T1>, c |
R1, м |
r, м |
v, м/ с |
<v>, м/ с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8.4 Обработка результатов 8.4.1 Вычислить для каждого опыта периоды колебаний по
формулам: Т = t/n и T1=t1/n1;
затем вычислить их средние значения <T> и <T1>.
8.4.2 Для каждого из
полученных в опыте значений jm вычислить скорость v, подставляя в
расчетную формулу (5) средние значения периодов <T> и <T1>.
8.4.3 Вычислить среднее значение скорости <v>. Примечание. Массы грузов m и снаряда m0 указаны на справочном стенде в лаборатории "Механика и молекулярная физика".
8.5 Контрольные вопросы 8.5.1 При каких условиях сохраняется момент импульса системы относительно некоторой оси Z? 8.5.2 При каких условиях сохраняется механическая энергия системы? 8.5.3 Сохраняется ли механическая энергия системы: баллистический крутильный маятник – снаряд, при условии попадания снаряда в мишень? 8.5.4 При каких условиях расстояние от места попадания снаряда в мишень до оси можно считать равным плечу импульса летящего снаряда относительно оси маятника? 8.5.5 Какие обстоятельства и факты определяют точность эксперимента на данной установке?
9 Лабораторная работа ММФ – 8. Изучение динамики вращательного движения на маятнике Обербека
Цель работы: проверка закона (уравнения) динамики вращательного движения твердого тела относительно неподвижной оси. Задачи:
- определить значения момента М внешней силы, углового ускорения ε вращающегося тела и его момента инерции I;
- проверить соотношения, вытекающие из закона динамики вращательного движения в двух случаях: а) I = const, б) M = const.
9.1 Методика эксперимента Уравнение динамики вращательного движения твердого тела относительно неподвижной оси имеет вид
|
|
I·e z = Mz |
(1) |
здесь I – момент инерции тела относительно оси вращения Z;
ez = dw/dt – проекция углового ускорения на ось Z;
Mz – суммарный момент внешних сил относительно оси Z.
Из уравнения (1) следует, что, если под действием момента силы М1 тело вращается относительно неподвижной оси с ускорением e1, а под действием момента силы М2 – с ускорением e2, то, при неизменной величине момента инерции тела (I = const) относительно данной оси, справедливо равенство отношений
|
|
e 1/e 2 = М1 / М2. |
(2) |
Еще одно следствие из уравнения (1) заключается в том, что отношение ускорений e 1 и e 2, приобретаемых телами с моментами инерции I1 и I2 под действием одного и того же момента силы (М = const), обратно отношению их моментов инерции
|
|
e 1/e 2 = I2 / I1. |
(3) |
Проверка соотношений (2) и(3) осуществляется на маятнике Обербека. Маятник Обербека представляет собой маховик в виде крестовины (четырех взаимноперпендикулярных стержней, скрепленных со шкивом), способный вращаться вокруг горизонтальной оси (рисунок 9.1). На этой оси имеется двухступенчатый диск, на котором закреплена нить. К другому концу нити подвешен груз. При наматывании нити на диск груз поднимается на некоторую высоту h. При опускании груза нить, разматываясь с диска, приводит во вращение маховик. На груз действуют сила тяжести и сила натяжения нити, направленные в противоположные стороны. Под действием результирующей этих сил груз движется, согласно второму закону Ньютона, с постоянным ускорением
|
|
ma = mg – T . |
(4) |
При этом ускорение, пройденный путь и время движения связаны формулой
|
|
a = 2h/t2 . |
(5) |
Из уравнения (4) с учетом (5) получим для натяжения нити:
|
|
|
(6) |
Натяжение нити создает вращающий момент
|
|
|
(7) |
который сообщает маховику угловое ускорение. Последнее связано с тангенциальным ускорением точек обода диска и его радиусом соотношением
|
|
e = aτ / r. |
|
Поскольку нить нерастяжима и не проскальзывает, то тангенциальное ускорение указанных точек диска равно ускорению груза:
|
|
aτ = а. |
|
Следовательно
|
|
|
(8) |
При выводе расчетной формулы для момента инерции маятника Обербека воспользуемся законом сохранения энергии
|
|
|
(9) |
Учтем, что при равноускоренном движении без начальной скорости
|
|
v = at = 2h/t , w = e t = 2h/rt, |
(10) (11) |
и получим искомую формулу
|
|
|
(12) |
 .
.Таким образом, для проверки соотношений (2) и (3) необходимо измерить время падения груза с заданной высоты, радиус диска и массу груза, затем вычислить по формулам (7), (8) и (12) соответствующие величины.
9.2 Экспериментальная установка Установка состоит из крестовины (рисунок 9.1), двухступенчатого диска, тормозного электромагнита и универсального электронного миллисекундомера, соединенного с двумя фотоэлектрическими датчиками. Имеется также малоинерционный блок, через который перекинута нить. Один конец нити закреплен на диске, на другом ее конце подвешен груз (имеется набор грузов различной массы). В комплект входят четыре одинаковых цилиндрических груза, которые можно надеть на стержни и перемещать вдоль них, изменяя таким образом момент инерции маятника.
 Тормозной электромагнит при подключении к нему
напряжения питания способен удерживать маховик вместе с грузами в состояние
покоя. При прерывании светового луча падающим грузом верхний ф/ э датчик вырабатывает электроимпульс начала отсчета времени, а второй
ф/ э датчик – конца измерения времени и включения тормозного
электромагнита. На лицевой панели секундомера расположены клавишные выключатели
СЕТЬ, ПУСК, СБРОС и цифровые индикаторы, высвечивающие показания секундомера.
Тормозной электромагнит при подключении к нему
напряжения питания способен удерживать маховик вместе с грузами в состояние
покоя. При прерывании светового луча падающим грузом верхний ф/ э датчик вырабатывает электроимпульс начала отсчета времени, а второй
ф/ э датчик – конца измерения времени и включения тормозного
электромагнита. На лицевой панели секундомера расположены клавишные выключатели
СЕТЬ, ПУСК, СБРОС и цифровые индикаторы, высвечивающие показания секундомера.
Рисунок 9.1
9.3 Выполнение
эксперимента Задание 1: проверка соотношения (2).
9.3.1 Выравнить прибор и
включить его в сеть.
9.3.2 Подвесить к нити
груз массой m1.
9.3.3 Вращением
крестовины наматывая нить на одну из ступеней диска, поднять груз на высоту h.
При этом нижний край груза установить на уровне черты, которая нанесена на
корпусе верхнего ф/ э датчика.
9.3.4 Отжать клавишу
ПУСК, блокируя электромагнит.
9.3.5 Нажать клавишу
СБРОС, затем клавишу ПУСК, что вызовет движение маятника и включение
секундомера.
9.3.6 После остановки
маятника считать показания секундомера и занести в таблицу 9.1.
9.3.7 По миллиметровой
шкале, нанесенной на колонне, определить высоту h – длину пройденного грузом
пути и занести в таблицу 9.1.
Таблица 9.1
|
№ |
h, м |
r, м |
m, кг |
t, c |
<t>, c |
М, Н·м |
e , с-2 |
e 1/ e 2 |
М1/М2 |
9.3.8 Нажать клавишу СБРОС и повторить опыт (п.п.3-6)
не менее трех раз.
9.3.9 Добавить еще один
или два груза и выполнить измерения времени (п.п.3-8) с грузом массы m2.
9.3.10 С помощью штангенциркуля измерить диаметр используемой ступени диска и найти его радиус r.
Задание 2: проверка соотношения (3).
9.3.11 Подвесить к нити не менее двух грузов общей массой m, значение которой занести в таблицу 9.2.
9.3.12 Надеть
цилиндрические грузы на стержни и расположить их на некотором расстоянии
(2-5см) от концов стержней. При этом необходимо добиться безразличного равновесия
маховика (когда нить не натянута).
9.3.13 Измерить не менее трех раз время t падения груза с высоты h (п.п.3-8). 9.3.14 Сдвинуть грузы на стержнях ближе к шкиву. При новом расположении грузов маховик
должен находиться в состоянии равновесия (см. п.12).
9.3.15 Измерить не менее трех раз время падения груза с высоты h.
Все полученные данные
занести в таблицу 9.2.
Таблица 9.2
|
№ |
h, м |
r, м |
m, кг |
Положение грузов на стержнях |
t, c |
<t>, c |
e , с-2 |
I, кг·м2 |
e 1/e 2 |
I2/ I1 |
9.4 Обработка
результатов 9.4.1
Используя результаты измерений, занесенные в таблицу 9.1, вычислить:
а) среднее значение
<t1> и <t2> времен движения грузов m1
и m2 соответственно;
б) значения e 1и e2, М1
и М2 подставляя в формулы (7) и (8) средние значения <t1>
и <t2> соответственно;
в) отношения e1/e2 и М1 / М2.
9.4.2 Проверить
справедливость соотношения (2).
9.4.3 Используя
результаты измерений, занесенные в таблицу 9.2, вычислить:
а) среднее значение
<t1> и <t2> времен для двух положений грузов
на стержнях;
б) значения e1 и e2, I1
и I2 по формулам (8) и (10), подставляя в них средние
значения <t1> и <t2> соответственно;
в) отношения e1/e2 и I2/I1. 9.4.4
Проверить справедливость соотношения (3).
9.5 Контрольные
вопросы 9.5.1 Увеличивается или уменьшается угловое ускорение
маховика, если к грузу, подвешенному на нити, добавить второй груз?
9.5.2 При каком
расположении грузов на стержнях момент инерции маховика наибольший? наименьший?
9.5.3 Как от
расположения грузов на стержнях зависит угловое ускорение маховика?
9.5.4 Зависит ли от
расположения грузов на стержнях ускорение подвешенного к нити груза?
9.5.5 Какие факторы не
учтены при выводе расчетных формул в описании методики эксперимента?
9.5.6 Каковы основные
источники погрешностей в данном эксперименте?
10 Лабораторная работа ММФ – 9. Изучение гироскопического эффекта
Цель работы: изучение законов динамики вращательного движения твердых тел вокруг их свободных осей на примере вынужденной прецессии гироскопа. Задачи:
- определить значение момента импульса гироскопа;
- определить значение главного момента инерции гироскопа.
10.1 Методика эксперимента Гироскопом называется массивное аксиально симметричное твердое тело, быстро вращающееся вокруг своей оси симметрии. Благодаря специальному карданному подвесу ось гироскопа может свободно поворачиваться в любом направлении. Все явления, обусловленные быстрым вращением гироскопа, называются гироскопическими. Одно из них заключается в том, что приведенный в быстрое вращение вокруг своей оси гироскоп сохраняет это направление оси устойчивого вращения. Это обстоятельство делает гироскоп важнейшим навигационным инструментом при полете ракет и главным элементом автопилота. Наиболее интересным видом движения гироскопа является вынужденная прецессия. Гироскоп обычно закреплен в точке "О" центра масс и при этом может свободно вращаться не только вокруг своей оси фигуры OZ, но также и вокруг вертикальной и горизонтальной осей OY и OX (рисунок 10.1). Приложим в какой – либо точке А оси фигуры гироскопа постоянную силу F, например, закрепим небольшой груз массы m. В этом случае F = mg. Когда маховик гироскопа не вращается, то наблюдается привычное явление – под действием груза ось гироскопа наклоняется. Однако, если предварительно маховик был приведен в быстрое вращение, то в этом случае ось фигуры гироскопа не опускается, а начинает медленно вращаться с постоянной скоростью вокруг оси OY. Такое вращение называется вынужденной прецессией. К гироскопу применимо уравнение моментов
|
|
dL/dt = M |
(1) |
где L = Iw - момент импульса - направлен вдоль главной оси гироскопа (ось OZ на рисунке 10.1);
М – момент внешней силы относительно точки "О", который в данном случае перпендикулярен вектору L и поэтому изменяет не величину момента импульса, а его направление. В итоге, ось гироскопа будет поворачиваться вокруг вертикальной оси. Угловая скорость W прецессии при этом определяется моментом М приложенной силы и моментом L импульса гироскопа
|
|
|
(2) |
|
или |
|
|
|
|
|
(2') |
здесь I - момент инерции гироскопа относительно его фигуры (главный момент инерции). Момент приложенной силы равен по модулю
|
|
M = lF = lmg |
(3) |
где l -плечо силы относительно т. "0". Гироскоп прибора FPM - 10 устроен так, что при некотором положении груза центр масс системы совпадает с точкой "О" подвеса и гироскоп находится в равновесии. Прецессия возникает, если груз сместить на некоторое расстояние r от положения равновесия.
Момент силы в этом случае равен
|
|
M = rmg. |
(4) |
Из соотношений (2), (2') и (4) получим расчетные формулы
|
|
|
(5) |
|
|
|
(6) |

Рисунок 10.1
Таким образом, чтобы определить момент импульса гироскопа необходимо измерить частоту W его прецессии, когда груз массой m смещен на расстояние r от положения равновесия. Определив в эксперименте частоту T быстрого вращения гироскопа, можно затем по формуле (6) вычислить его главный момент инерции I.
10.2 Экспериментальная установка Гироскоп в установке FPM- 10 представляет собой электродвигатель, к корпусу которого прикреплен рычаг с перемещаемым вдоль него грузом. Ротор двигателя, на валу которого закреплен инерционный диск, при подаче напряжения питания вращается вокруг собственной оси. Скоростью вращения управляют с помощью ручки потенциометра РЕГ.СКОРОСТИ, расположенной на лицевой панели блока управления и измерений. Встроенный стрелочный прибор показывает число оборотов n ротора в минуту. На лицевой панели размещены также клавишные выключатели СЕТЬ, СБРОС, СТОП и цифровые индикаторы, которые высвечивают длительность Dt промежутка времени (в мс) между двумя последовательными нажатиями клавиши СБРОС и СТОП, и величину угла Da прецессии (поворота) гироскопа за это время. 10.3 Проведение эксперимента 10.3.1 Выравнять прибор и включить его в сеть. 10.3.2 Перемещением груза вдоль рычага добиться равновесия гироскопа, рычаг при этом устанавливается горизонтально. 10.3.3 Ручкой РЕГ. СКОРОСТИ включить питание электродвигателя и установить скорость его оборотов в пределах 5000-7000 об/ мин. 10.3.4 Переместить груз из равновесного положения на расстояние r = ± (1,5¸2,5)см вправо (знак "+") или влево (знак "- "), что вызовет прецессию гироскопа в одну, либо другую сторону. Нажать клавишу СБРОС. 10.3.5 После поворота оси гироскопа на угол не менее 500, нажать клавишу СТОП, считать показания прибора и записать их в таблицу 10.1.
Таблица 10.1
|
№ |
n, |
D a, град |
Dt, |
W, |
r, |
w, |
L, |
<L>, |
I, |
<I>, |
10.3.6 Не меняя скорости оборотов электродвигателя, повторить не менее трех раз измерения (п. 4 и 5) при другом значении r.
10.4 Обработка результатов 10.4.1 Выразить угол поворота Da в радианах и вычислить затем угловую скорость прецессии W по формуле
|
|
W = Da /Dt. |
(7) |
10.4.2 Выразить n числом оборотов в секунду и затем вычислить угловую скорость быстрого вращения по формуле
|
|
w = 2p·n. |
(8) |
10.4.3 Вычислить момент импульса гироскопа по формуле
(5).
10.4.4 Вычислить момент
инерции ротора с диском по формуле (6).
10.4.5 Вычислить среднее
значение <L> и <I> и оценить их случайные погрешности
DL и DI для доверительной
вероятности P=0,95.
10.5 Контрольные вопросы
10.5.1 Какими свойствами обладает гироскоп?
10.5.2 При каких
условиях наблюдается вынужденная прецессия гироскопа?
10.5.3 От чего зависит
величина W угловой скорости прецессии?
10.5.4 От чего зависит
величина момента импульса L гироскопа?
Список литературы
1.Зайдель А.Л. Ошибки измерений физических величин. - Л.: Наука, 1974.
2. Кассандрова О.Н., Лебедев В.В.Обработка результатов наблюдений. - М.: Наука, 1970.
3. Савельев И.В. Курс физики.- М.: Наука, 1989. - т. 1.
4. Детлаф А.А., Яворский Б.М. Курс физики. - М.: Высш. шк., 2002.
5. Трофимова Т.И. Курс физики. - М. : Высш. шк., 2002.
6. Иродов И.Е. Основные законы механики. - М.: Физматлит., 2000.
Содержание
Введение
1 Статистическая обработка результатов измерений
2 Лабораторная работа ММФ – 1. Измерительный практикум
3 Лабораторная работа ММФ – 2. Изучение законов кинематики и динамики на машине Атвуда
4 Лабораторная работа ММФ – 3. Определение коэффициента трения качения методом наклонного маятника
5 Лабораторная работа ММФ – 4. Изучение законов сохранения импульса и энергии при ударе
6 Лабораторная работа ММФ – 5. Определение момента инерции маятника Максвелла
7 Лабораторная работа ММФ – 6. Определение момента инерции твердых тел с помощью крутильных колебаний
8 Лабораторная работа ММФ – 7. Определение скорости полета снаряда на баллистическом крутильном маятнике
9 Лабораторная работа ММФ – 8. Определение скорости полета снаряда на баллистическом крутильном маятнике
10 Лабораторная работа ММФ – 9. Изучение гироскопического эффекта
Список литературы