МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Б.С. Джумагалиев
Ю.В. Шевяков
ПРОЕКТИРОВАНИЕ АСУ ТП с использованием
программного комплекса
SCADA
Учебное пособие
Алматы 2013
УДК 681.51:004.42(075.8)
ББК 32.965 я73
Автоматизированное проектирование (САПР)
Ш37 Учебное пособие/ Б.С. Джумагалиев, Ю.В. Шевяков
АУЭС. Алматы. 2013. - 77 с.
ISBN 9978-601-7327-05-7
В учебном пособии «Проектирование АСУ ТП с использованием программного комплекса SCADA» приводятся краткое описание и основные понятия SCADA-системы TRACE MODE. Кроме того, рассматривается интегрированная среда разработки проекта и обмен данными в SCADA-системе TRACE MODE и изучения методов и моделей проектирования систем автоматизации (АС) в среде программных комплексов SCADA и DCS-систем на примере TRACE MODE.
Учебное пособие предназначено для студентов специальности 5В070200 – Автоматизация и управление.
Табл. 4 , Ил. 24 , Библиогр. – 22 назв.
ББК 32.965 я73
РЕЦЕНЗЕНТ: КазНТУ, д-р. тех. наук, профессор Г.З. Казиев АУЭС, канд. тех. наук, доцент Ш.И. Имангалиев
Печатается по плану Министерства образования и науки Республики Казахстан на 2012 г.
ãНАО «Алматинский университет энергетики и связи», 2013 г.
Содержание
|
Введение 1 Особенности проектирования АСУ ТП в SCADA-системе TRACE MODE 1.1 Архитектура TRACE MODE 1.2 Основные понятия SCADA-систем TRACE MODE 1.2.1 Определения 1.2.2 Каналы 1.2.3 Процедуры 1.2.4 Подтип канала 1.2.5 Атрибуты каналов 1.3 Обмен данными в SCADA-системе TRACE MODE 1.4 Типы интерфейсов и механизмы обмена 1.4.1 Последовательный интерфейс 1.4.2 Обмен по протоколу M-Link 1.4.3 Организация ввода-вывода данных 1.4.4 Настройка МРВ для обмена по M-Link 1.4.5 Обмен данными через механизмы ОРС 1.4.6 Обмен с базами данных через механизмы ODBC 1.5 Идеология распределенных комплексов 1.5.1 Уровень контроллеров 1.5.2 Оперативный уровень 1.5.3 Административный уровень Контрольные вопросы 2 Разработка проекта в SCADA-системе TRACE MODE 2.1 Системный анализ технологического объекта автоматизации 2.2 Структурно-алгебраическое описание процесса проектирования систем управления технологическими процессами при использовании SCADA-системы 2.3 Системный анализ технологического объекта управления (ТОУ) 2.4 Пример выполнения системного анализа для описания технологического объекта управления (ТОУ) для реализации в среде SCADA системы 2.5 Анализ макроструктуры процесса, осуществляемого теплофикационной установкой (подраздел составления макроструктуры ТП) 2.6 Декомпозиция ТОУ и анализ микроструктуры ТП выработки тепловой энергии (подраздел составления микроструктуры ТП) Контрольные вопросы 3 Функциональная схема автоматизации 3.1 Общие сведения 3.2 Требования к оформлению функциональных схем 3.3 Изображение технологического оборудования и коммуникаций 3.4 Буквенные условные обозначения приборов и средств 3.5. Примеры упрощенных функциональных схем автоматизации 3.6 Проектная документация Контрольные вопросы 4 Графический интерфейс в SCADA-системе TRACE MODE 4.1 Графический интерфейс 4.2 Пошаговое создание мнемосхемы проекта 4.3 Локальный СПАД 4.4 Локальный архив “Отчет тревог” 4.5 Архив «Глобальный регистратор» 4.6 Разработка документов по спроектированной системе 4.7 Работа TRACE MODE в реальном времени 4.7.1 Монитор реального времени 4.7.2 Система паролей и прав доступа 4.7.3 Связь с аппаратурой ввода-вывода Контрольные вопросы Список литературы
|
5 7 7 12 12 12 14 16 17 18 18 18 19 19 21 22 25 25 26 26 27 27 28 28
31 33
33
35
36 39 40 40 40 41 43 44 46 49 50 50 51 55 57 62 63 66 66 71 73 74 75 |
Введение
Создание современных систем управления базируется на разработке и применении технологий проектирования с использованием программных комплексов CAE, CAD и CASE систем, которые представляют системы автоматизации проектирования различных частей информационно-управляющих систем, функционирование которых невозможно без использования развитой вычислительной сети, включающей персональные компьютеры (ПК), микроконтроллеры и широкий набор модулей ввода/вывода.
Усложнение технологических процессов и производств ставит задачи создания распределенных иерархических систем (АСУ ТП) и их сквозного программирования, что объясняет появление новых компьютерных технологий для интегрированных систем, объединяющих все уровни производства.
В качестве примера может быть названа SCADA-система (Supervisory Control And Data Acquisition), предназначенная для проектирования и эксплуатации распределенных автоматизированных систем управления. Судя по названию, SCADA-система предназначена для диспетчерского управления и сбора данных. Однако в последних версиях её предназначение значительно расширилось. В частности, российская фирма-изготовитель AdAstra Research Group, LTD выпустила 6-ю версию SCADA-системы TRACE MODE (ТРЕЙС МОУД), которая имеет мощные средства для создания распределенных иерархических АСУ ТП, включающих в себя до трех уровней иерархии: уровень контроллеров – нижний уровень; уровень операторских станций – верхний уровень; административный уровень. На рынке программных продуктов существует много версий SCADA-систем в основном зарубежных производителей, например Genesis фирмы Iconics, Factory Link фирмы United States DATD Co. (США), WinCC фирмы Siemens (Германия) и др.
Инструментальные средства выше перечисленных систем, позволяют создавать высокоэффективные АС объединяя и интегрируя различные этапы проектирования. Однако такая технология оставляет необходимым проведение основных базовых этапов, связанных с исследованием и описанием технологического объекта автоматизации (ТОУ) в виде необходимом для последующего использования инструментальных средств САПР.
Настоящее учебное пособие посвящено изучению методов и моделей проектирования систем автоматизации (АС) в среде программных комплексов SCADA и DCS –систем на примере TRACE MODE. Выбор этого программного комплекса определён тем, что инструментальные средства обеспечивают наиболее полную реализацию последовательности этапов проектирования. Кроме этого разработчики постоянно совершенствуют свой продукт, расширяя режим автопостроения. Нужно отметить, что TRACE MODE 6 содержит рекордное количество библиотек ресурсов, готовых к использованию в прикладных проектах. Она имеет встроенные бесплатные драйверы к более чем 1600 контроллерам и платам ввода/вывода, свыше 600 анимационных объектов, более 150 алгоритмов обработки данных и управления, комплексные технологические объекты. Режим автопостроения, применяемый в TRACE MODE 6, мгновенно формирует базу тегов для операторских станций, контроллеров и ОРС-серверов, настраивает сетевые связи, строит систему документирования и графический интерфейс. Бесплатную базовую версию SCADA-системы TRACE MODE можно получить, обратившись на сайт фирмы-производителя www.adastra.ru или www. tracemode.ru или E-mail: adastra@adastra/ru.
В 1-ой части учебного пособия «Проектирование АСУ ТП в SCADA-системе» приводятся краткое описание и основные понятия SCADA-системы TRACE MODE. Кроме того, рассматривается интегрированная среда разработки проекта и обмен данными в SCADA-системе TRACE MODE, в результате чего даются рекомендации по использованию одного из самых перспективных стандартов обмена данными механизма OPC.
Во 2-й части учебного пособия рассматриваются особенности разработки распределенных АСУ ТП, методы системного анализа ТОУ и способы описания основных структур, а также даются рекомендации по оформлению документации на разработанную систему.
В 3-ей части учебного пособия рассматриваются особенности разработки функциональных схем автоматизации технологических процессов, приводятся рекомендации по оформлению проектной документации при разработке АСУ ТП.
В 4-ой части учебного пособия рассмотрены основные приемы разработки графического интерфейса операторских станций, а также организация архивирования данных в автоматизированной системе управления.
При подготовке пособия были использованы материалы компании AdAstra Reasearch Group, LTD, предоставленные для изучения базовой версии SCADA- системы TRACE MODE. Системный анализ макроблока производственного процесса получения электрической и тепловой энергии на конкретной Тепловой Электрической Станции взят в качестве примера для реализации SCADA- системы, подробно рассмотрен в [ 10].
1 Особенности проектирования АСУ ТП в SCADA-системе TRACE MODE
1.1 Архитектура TRACE MODE
АСУ ТП является комплексом технических и программных средств, предназначенным для автоматизации управления технологическим оборудованием. Автоматизация производства направлена на частичное или полное освобождение человека от участия в технологическом процессе, что обеспечивает исключение влияния человеческого фактора на особо важных и ответственных этапах эксплуатации технологического оборудования. АСУ ТП может состоять из отдельных систем автоматического управления и комплексных устройств, объединенных единым решением для автоматизации технологических процессов с целью обеспечения максимальной эффективности решения производственных задач. Обычно структура АСУ ТП представлена единой системой операторского управления технологическим процессом, куда входят один или несколько пультов управления; средства сбора, передачи, обработки и архивирования информации о ходе производственного процесса; типовое оборудование: датчики, контроллеры и другие средства автоматизации. Разработку проекта АСУ ТП также можно условно разделить на три уровня: нижний уровень связан с разработкой принципиальных и монтажных схем и компоновочных решений по подключению датчиков и исполнительных механизмов, верхний – с созданием структуры программно-технического комплекса и подключением сигналов к программно-техническому комплексу (ПТК). На самом верхнем уровне создается математическое, программное и информационное обеспечение АСУ ТП. В состав базового программного обеспечения ПТК обычно входят системы автоматизированного проектирования для создания самого верхнего уровня. Таким образом, разработка и внедрение АСУ ТП состоят из цепи взаимосвязанных процессов, включающих в себя проектирование АСУ ТП, программное обеспечение, программирование контроллеров, диагностирование АСУ ТП, диспетчеризацию.
Как отмечалось во введении, SCADA-система TRACE MODE разработана и продолжает совершенствоваться отечественной фирмой-изготовителем AdAstra Research Group, LTD. Последний на данный момент продукт – это 5-й релиз 6-й версии TRACE MODE, который содержит полный набор программных средств для создания АСУ ТП и АСУП. SCADA-система TRACE MODE содержит средства разработки операторского интерфейса (SCADA/HMI), программирования контроллеров (Softlogic), управления основными фондами (EAM), персоналом (HRM) и производственными процессами (MES).
Для изучения базовых понятий системы TRACE MODE, таких как проект, узел, база каналов, шаблоны экранов, FBD-программы, архивы и отчеты тревог удобнее воспользоваться более ранней версией, к примеру 5.15, а затем перейти к версии, у которой большинство процедур реализуется в режиме автопостроения. Все программы, входящие в TRACE MODE, подразделяются на две группы (см. рисунок 1.1) инструментальную систему разработки и исполнительные модули (runtime). Как видно из рисунка, инструментальная система разработки содержит три редактора [1]: редактор базы каналов, редактор представления данных, редактор шаблонов. В редакторе базы каналов создается математическая основа системы управления: описываются конфигурации всех рабочих станций, контроллеров и УСО, а также настраиваются информационные потоки между ними. Здесь же описываются входные и выходные сигналы и их связь с устройствами сбора данных и управления; задаются периоды опроса или формирования сигналов, настраиваются законы первичной обработки и управления, технологические границы, программы обработки данных и управления, осуществляется архивирование технологических параметров, сетевой обмен, а также решаются некоторые другие задачи.
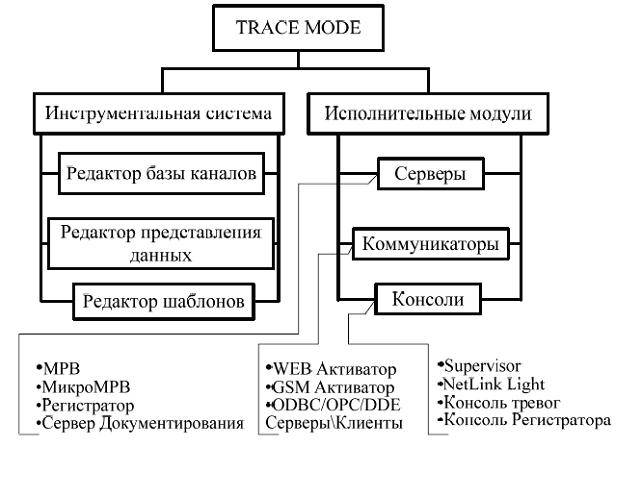
Рисунок 1.1 – Программы интегрированной среды TRACE MODE
Результатами работы в этом редакторе являются математическая и информационная структуры проекта АСУ ТП, которые включают в себя набор баз каналов и файлов конфигурации для всех контроллеров и операторских станций (узлов) проекта, а также файл конфигурации всего проекта c расширением cmt (для версии 6 расширение - prj). Все остальные файлы проекта хранятся в рабочей директории в каталоге, имя которого совпадает с именем файла конфигурации. В редакторе представления данных разрабатывается графическая часть проекта системы управления. Сначала создается статичный рисунок технологического объекта, а затем поверх него размещаются динамические формы отображения и управления. Среди этих форм присутствуют такие, как поля вывода числовых значений, графики, гистограммы, кнопки, области ввода значений и перехода к другим графическим фрагментам и т. д. Кроме стандартных форм отображения, TRACE MODE позволяет вставлять в проекты графические формы представления данных или управления, разработанные пользователями.
Все формы отображения информации, управления и анимационные эффекты связываются с информационной структурой, разработанной в редакторе базы каналов. Для разработки шаблонов документов в состав инструментальной системы включен редактор шаблонов. Исполнительная система TRACE MODE включает в себя исполнительные модули (мониторы, МРВ) – программные модули различного назначения, под управлением которых в реальном времени выполняются составные части проекта, размещаемые на отдельных компьютерах или в контроллерах, предназначенные для работы на всех уровнях систем управления, о которых говорилось выше. Существует ряд программных модулей, назначение которых четко не привязано к функциям одного из перечисленных уровней систем управления. К таким модулям относятся (см. рисунок 1.1):
- глобальный регистратор;
- сервер документирования;
- Web-активатор;
- GSM-активатор.
Они могут использоваться для создания как оперативного, так и административного уровней систем управления.
Глобальный регистратор служит для обеспечения надежного хранения архивов ТП. Он архивирует данные, посылаемые ему по сети мониторами реального времени (64 000 параметров с дискретностью 0,001 с), обеспечивает автоматическое восстановление данных после сбоя, а также может передавать архивные данные для просмотра мониторам SUPERVISOR. Глобальный регистратор может также выступать как ОРС-сервер и DDE-сервер и поддерживает обмен с базами данных через ODBC.
Для документирования технологической информации в TRACE MODE предусмотрен специальный модуль - сервер документирования. Документирование осуществляется по шаблонам, которые создаются в редакторе шаблонов. Время или условие генерирования документа, имя файла шаблона, а также направление вывода документа описываются в программах документирования - сценариях. Подготовка отчетов (документов) чаще всего привязывается к астрономическому времени. Например, они могут генерироваться один раз в час, один раз в сутки, один раз в месяц или один раз в десять минут. Кроме того, можно установить режим подготовки документа один раз в смену и затем описать разбивку суток на смены. Сервер документирования NetLink Light используется для решения задачи документирования технологической информации. Он по команде МРВ, собственному сценарию или по команде оператора интерпретирует созданные заранее шаблоны, запрашивает у МРВ необходимые данные и формирует по ним документы. Эти документы могут быть распечатаны на принтере, отправлены по E-mail или опубликованы на Web-сервере. Утилита консоль тревог позволяет просматривать отчет тревог разных МРВ одного проекта. Для каждого просматриваемого отчета тревог создается отдельное окно. В него можно выводить информацию из файла отчета тревог или сообщения, формируемые МРВ. Любая рабочая станция системы TRACE MODE может выступать в качестве Web-сервера, что позволяет управлять технологическим процессом через Интернет (Internet) [1]. На удаленном компьютере необходимо иметь только доступ к сети Интернет и Web-браузер. Для реализации данного режима предназначен модуль Web-активатор, который используется в качестве www-шлюза для локальных систем АСУ ТП на базе TRACE MODE или для придания функций Web-сервера мониторам реального времени. Использование Web-активатора позволяет быстро превратить существующие АСУТП и АСУП в Internet/Intranet-системы без переделки баз данных реального времени (баз каналов). Доступ к данным реального времени через Web-активатор осуществляется при помощи обыкновенного браузера, работающего под любой операционной системой, позволяющей запуск виртуальной Java-машины. Информация о технологическом процессе представляется пользователю в виде анимированных мнемосхем, трендов и таблиц.
Связь с серверами реального времени TRACE MODE может осуществляться практически любыми доступными средствами, например через сотовую сеть стандарта GSM, инфракрасный порт, сеть на основе интерфейса RS-232/485 или модем с использованием высоконадежного протокола TCP/IP. Можно осуществлять подключение и непосредственно через Internet. Для этого достаточно войти в Internet и набрать IP-адрес сервера TRACE MODE – подключение произойдет автоматически.
Для доступа к данным пользователю достаточно набрать Web-адрес активатора и ввести пароль, тогда весь проект загружается в удаленный компьютер в виде Java-аппрета. Использование стандартного языка Java при написании аппретов позволяет реализовать на удаленных компьютерах не только Windows, но и другие операционные системы, например Unix, Linux, Mac OS и т. д., а так же ОС, использующиеся в карманных PC. Проект TRACE MODE поступает к пользователю в виде Java-аппрета, объем которого не превышает 300 Кбайт, что дает возможность использовать Web-активатор в сетях с низким качеством связи. Достоинством технологии Java является также повышенная безопасность. При использовании Web-активатора не требуется установка Web-серверов других производителей (например, MS IE), что выгодно отличает эту программу от решений, примененных в других SCADA.
Для обеспечения мобильных пользователей АСУ оперативной информацией в режиме реального времени на базе TRACE MODE разработан программный продукт – GSM-активатор. Он предназначен для дистанционного мониторинга и управления технологическими процессами, а также для получения оперативной технико-экономической информации при помощи сверх портативных компьютеров handheld PC. В реальном времени GSM-активатор может принимать информацию от 64 000 датчиков, осуществлять супервизорное управление, получать технико-экономическую информацию из баз данных через сервер, использующий стандартные интерфейсы SQL/ODBC. ОРС, DDE и т. д. Вся входящая информация отображается графически в виде анимированных мнемосхем и трендов. GSM-активатор, относящийся к новому классу систем оперативного управления, отражающих мировую тенденцию к миниатюризации и автономизации компьютерных систем, может быть использован в качестве персональной информационной системы руководителя. К GSM-активатору проявляют интерес нефтяные компании, электрические и тепловые сети РАО ЕЭС и РАО ГАЗПРОМ, коммунальные и другие службы, управляющие пространственно распределенными объектами. GSM-активатор пригоден также к применению в охранных службах: получение в реальном времени информации о состоянии охраняемого объекта может стать основой успеха операции группы быстрого реагирования, вызванной по тревоге.
Нужно отметить, что в последней версии TRACE MODE 6 все редакторы системы вызываются из одной программы - Интегрированной среды разработки (ИС). ИС – единая программная оболочка, содержащая все необходимые средства для разработки проекта. Все переменные проекта, к чему бы они ни относились - к контроллеру, к операторской станции, к управлению техобслуживанием или производством хранятся в единой базе данных проекта. Единая база проекта устраняет лишнюю работу проектировщика по созданию, поддержке и взаимной увязке во многом одинаковых баз переменных контроллеров и ПК, характерную для систем предыдущего поколения. Логическая структура проекта полностью отделена от аппаратной части. Благодаря единому пространству распределенных переменных, переменные из разных узлов могут связываться между собой также легко, как и в пределах одного узла, любые изменения, вносимые в объект, автоматически применяются везде, где он был задействован. И всё же в целях пояснения особенностей и принципов работы SCADA-системы воспользуемся некоторыми справочными материалами предыдущих версий.
1.2 Основные понятия SCADA-систем TRACE MODE
1.2.1 Определения
ПРОЕКТ системы управления – это совокупность всех математических и графических элементов системы, функционирующих на различных операторских станциях и контроллерах одной АСУ ТП, объединенных информационными связями и единой системой архивирования. Проект может быть масштабным (сотни узлов), а может включать в себя только один контроллер или одну операторскую станцию. Под проектом в TRACE MODE 6 понимается вся совокупность данных и алгоритмов функционирования распределенной АСУ (АСУ ТП и/или T-FACTORY), заданных средствами TRACE MODE. Итогом разработки проекта является создание файлов, содержащих необходимую информацию об алгоритмах работы АСУ. Эти файлы затем размещаются на аппаратных средствах (компьютерах и контроллерах) и выполняются под управлением исполнительных модулей TRACE MODE. Составная часть проекта, размещаемая на отдельном компьютере или в контроллере и выполняемая под управлением одного или нескольких исполнительных модулей TRACE MODE, называется узлом проекта.
УЗЕЛ – любое устройство в рамках проекта, в котором запущено программное обеспечение TRACE MODE, реализующее серверные функции. Это может быть контроллер, операторская станция или архивная станция. В проекте не может быть более 128 узлов. В общем случае размещение узла на том же аппаратном средстве, на котором он должен исполняться под управлением монитора, не является обязательным – мониторы могут загружать узлы с удаленных аппаратных средств.
БАЗА КАНАЛОВ – совокупность всех каналов, математических объектов, FBD-программ и IL-программ, созданных для каждого конкретного узла.
ОБЪЕКТ БАЗЫ КАНАЛОВ – совокупность любых каналов, которой приписан определенный набор свойств и атрибутов. Среди последних можно назвать имя, графический идентификатор, флаг подчинения: родитель, потомок. Оформленные группы каналов могут быть подчинены друг другу и создавать таким образом иерархические структуры.
ДРАЙВЕРЫ обмена – драйверы, используемые мониторами TRACE MODE для взаимодействия с устройствами, протоколы обмена с которыми не встроены в мониторы.
1.2.2. Каналы. КАНАЛ (базовое понятие системы) – это структура, состоящая из набора переменных и процедур, имеющая настройки на внешние данные, идентификаторы и период.
пересчета ее переменных. Идентификаторами канала являются: имя, комментарий и кодировка. Например, имя канала, связанного с пятым каналом платы аналогового ввода, расположенной в первом посадочном месте контроллера, будет AI_-pе01-0005. Кроме того, каждый канал имеет числовой идентификатор, используемый внутри системы для ссылок на этот канал. Среди переменных канала выделяются четыре основных значения: входное (In), аппаратное (A), реальное (R) и выходное (Q). С помощью настроек входное значение канала связывается с источником данных, а выходное – с приемником. В зависимости от направления движения информации, т.е. от внешних источников (данные с контроллеров, УСО или системные переменные) в канал или наоборот, каналы подразделяются на входные (тип INPUT) (см. рисунок 1.2) и выходные (тип OUTPUT) (см. рисунок 1.3).
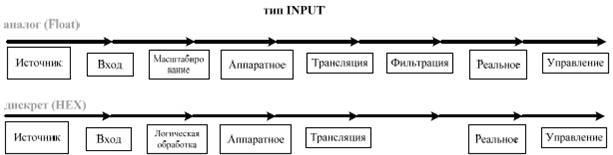
Рисунок 1.2 – Структура входного канала
Входной канал (см. рисунок 1.2) запрашивает данные у внешнего источника (контроллер, другой МРВ и пр.) или значение системных переменных (счетчик ошибок, длина архива и пр.). Полученное значение поступает на вход канала и далее пересчитывается в аппаратное и реальное значения. Аппаратное значение у каналов типа INPUT формируется масштабированием (логической обработкой для дискретных каналов) входных значений. Используемые процедуры обеспечивают первичную обработку данных (исправление ошибок датчиков, масштабирование, коррекция температуры холодных спаев термопар и т. д.). Выходные значения в каналах типа INPUT не используются.
Выходной канал (см. рисунок 1.3) передает данные приемнику. Приемник может быть внешним (значение переменной в контроллере,

Рисунок 1.3 – Структура выходного канала
в другом МРВ и пр.) или внутренним – одна из системных переменных (номер проигрываемого звукового файла, номер экрана, выводимого на монитор, и пр.). И внешние и внутренние приемники данных связываются с выходными значениями каналов. У каналов типа OUTPUT их входное значение формируется одним из следующих способов:
- процедурой управление данного канала;
- процедурами управление или трансляция других каналов;
- метапрограммой на языке Техно IL;
- каналом удаленного узла (на пример, по сети);
- оператором с помощью управляющих графических форм.
У каналов типа OUTPUT аппаратное значение получается из реального процедурой трансляция. Аппаратные значения каналов имеют такое название, поскольку в них удобно получать величины унифицированных сигналов, с которыми работает аппаратура ввода/вывода (4-20 мА, 0-10 В и пр.). Реальные значения предназначены для хранения значений контролируемых параметров или сигналов управления в реальных единицах (например, кг/час, оС, % и пр.). Выходное значение определено только для каналов типа OUTPUT. Оно пересчитывается из аппаратного значения. Данные из внешних устройств записываются в каналы, данные из каналов посылаются на внешние устройства. В каналы оператор заносит управляющие сигналы. Значения из каналов записываются в архивы, операторские отчеты и т.п. В каналах осуществляется преобразование данных. Меняя значения на системных каналах, можно управлять выводимой на экран информацией, звуковыми сигналами и т.д., т.е. всей системой.
1.2.3. Процедуры. Входное значение канала преобразуется в аппаратное, реальное и выходное с помощью процедур. Процедурами канала являются:
- масштабирование (умножение и смещение);
- фильтрация (подавление пиков, апертура и сглаживание);
- логическая обработка (предустановка, инверсия, контроль сочетаемости);
- трансляция (вызов внешней программы);
- управление (вызов внешней программы).
Порядок следования и содержание процедур может меняться в зависимости от типа канала (входной или выходной, аналоговый или дискретный). Процедура масштабирование используется только в каналах, работающих с аналоговыми переменными. Она включает в себя две операции: умножение и смещение. Последовательность этих операций меняется в зависимости от типа канала:
- у каналов типа INPUT входное значение умножается на заданный множитель и к полученному результату добавляется величина смещения. Результат присваивается аппаратному значению канала.
- у каналов типа OUTPUT к аппаратному значению добавляется величина смещения, затем эта сумма умножается на заданный множитель, а результат присваивается выходному значению канала.
Процедура трансляция определена для всех каналов независимо от их типа и вида представления. У входных каналов процедура трансляции преобразует аппаратное значение в реальное, а для выходных – наоборот. Для этого вызывается FBD-программа. Вызываемая программа выбирается при настройке процедуры. При настройке процедуры входные и выходные аргументы выбранной программы связываются с атрибутами текущего канала, а также любых других каналов из текущей базы. Поэтому процедура трансляции одного канала может также использоваться для формирования значений других каналов.
Пример использования процедуры трансляция [1].
Необходимо измерять расход вещества, транспортируемого по трубопроводу, и интегрировать его по времени для расчета технико-экономических показателей производства. На трубопроводе установлен датчик скорости потока.
Решение. Для решения этой задачи потребуется один канал типа INPUT. Его аппаратное значение необходимо связать с данными, поступающими от датчика скорости потока (адресация каналов будет описана в следующем разделе), настроить коэффициенты масштабирования и дрейфа нуля исходя из геометрических характеристик трубопровода и физических свойств потока для перевода измеренной скорости в величину расхода. Далее следует создать FBD-программу, в которой будет выполняться интегрирование входной величины и результат записываться в выходную переменную. Затем эту программу надо установить для процедуры трансляции данного канала (написание программ для процедур канала будет рассмотрено ниже). При такой конфигурации во входном значении канала будет находиться информация о скорости потока, в аппаратном – величина расхода вещества, а в реальном – количество прошедшего по трубе вещества. Набор процедур в канале зависит от формата данных. Каналы, работающие с аналоговыми переменными, используют следующие процедуры масштабирование, трансляцию, фильтрацию и управление. В каналах, обрабатывающих дискретные параметры, используются логическая обработка, трансляция и управление.
Фильтрация – процедура, которая присутствует только у аналоговых каналов. Набор выполняемых ею операций отличается для входных и выходных каналов. У каналов типа INPUT фильтрация выполняется после процедуры трансляции до формирования реального значения. Фильтрация включает в себя следующие операции: подавление случайных всплесков в тракте измерения; подавление малых колебаний значения канала; экспоненциальное сглаживание; контроль шкалы – отслеживание выхода реального значения канала за установленные границы шкалы. У каналов типа OUTPUT данная процедура формирует реальное значение по входному значению. При этом выполняются следующие операции:
- ограничение скорости изменения реального значения; подавление малых колебаний значения канала;
- экспоненциальное сглаживание; контроль шкалы – обрезание величины управляющего воздействия до границ шкалы канала.
Управление – процедура, которая определена для всех каналов. Она реализует функцию управления. С ее помощью можно вызвать FBD-программу, в которой можно запрограммировать требуемые алгоритмы управления. В качестве аргументов программе могут передаваться значения и атрибуты любых каналов из текущей базы. Эти аргументы могут быть как входными, так и формируемыми. Формально процедура управления связана с каналом только циклом пересчета. Она может вообще никак не участвовать в формировании его значений, а управлять другими каналами. Такая ситуация часто наблюдается при использовании процедуры «Управление» на каналах типа INPUT. Кроме основных значений, канал имеет дополнительные переменные: шесть границ; гистерезис; настройки процедур обработки; начальные параметры, флаги архивирования и др. (см . рисунок 1.4)
Рисунок 1.4 – Процедуры канала
Часть из них задается в редакторе базы каналов и не может быть изменена в реальном времени. Другие могут иметь начальные значения и доступны для изменения.
1.2.4 Подтип канала. Подтип канала указывает класс источников или приемников данных, с которыми будет связываться канал. Для каналов типа INPUT подтип характеризует получаемую ими информацию (АНАЛОГ – значение АЦП, считанное с платы УСО, СИСТЕМНЫЙ – состояние системы, СВЯЗЬ – данные с удаленных узлов проекта и пр.). Каналы OUTPUT имеют тот же набор подтипов, что и каналы INPUT. Однако для них подтип определяет класс приемников, а не источников данных (АНАЛОГ – значение ЦАП, СИСТЕМНЫЙ – состояние системы, СВЯЗЬ значения управляемых каналов на удаленных узлах проекта и пр.). Всего существует шестнадцать подтипов каналов. Все они могут задаваться как для входных, так и для выходных каналов. Подтип канала задает класс источников или приемников данных. Кроме того, подтип канала определяет также количество его дополнительных настроек. Уточнение источника или приемника в рамках заданного подтипом класса осуществляется с помощью дополнения к подтипу. Последний уровень адресации источника или приемника данных осуществляется с помощью настроек канала.
Пример.
Пусть надо настроить канал для запроса данных от удаленного МРВ по протоколу M_LINK.
Тип канала в этом случае следует установить INPUT, поскольку данные запрашиваются. Для обмена данными с удаленными мониторами ТРЕЙС МОУД по любой линии связи используется подтип каналов СВЯЗЬ. Дополнение к подтипу должно быть задано In M_Link. Такой канал будет иметь пять настроек. В них будет указываться номер последовательного порта, имя удаленного монитора, название объекта базы каналов, имя канала и его атрибут.
1.2.5. Атрибуты каналов. Границы шкалы указывают возможный диапазон изменения контролируемого параметра. Например, если датчик позволяет измерять давление в диапазоне от 0 до 10 кгс/см2 , то его показания, лежащие вне данного диапазона, являются заведомо недостоверными. Если задать для канала границы шкалы, то при выходе за них его реального значения может автоматически формироваться признак недостоверности данных. Эта информация может быть доведена до оператора и зафиксирована в архивах.
Пример [1]
- Обработка аварийной ситуации.
- Использование аварийных границ и интервала.
Рассмотрим решение следующей задачи: при понижении давления в котле ниже предаварийной границы (НГ_0) надо записать в отчет тревог сообщение "КОТЕЛ_1 предаварийное состояние" и проиграть предупреждающий звуковой файл. Для решения этой задачи потребуются два канала. Настроим один из них на прием данных (INPUT) от датчика давления и зададим ему имя ДАВЛЕНИЕ. Для этого канала в диалоге Реквизиты установим флаг сохранения в отчете тревог и, исходя из технологических требований, зададим значение границы НГ_0 и в бланке Сообщения в отчет тревог введем требуемое сообщение для записи в отчет тревог. Второй канал должен иметь тип OUTPUT, подтип СИСТЕМНЫЙ и дополнение к подтипу звуковой файл. Имя этому каналу дадим ЗВУК. Далее создадим программу, содержащую два аргумента. Эта программа должна при отличии первого аргумента от 0 формировать значение второго аргумента, равным 1 (номер звукового файла, содержащего вой сирены), а в противном случае - 0. Установим ссылку на эту программу из процедуры УПРАВЛЕНИЕ канала ЗВУК. В качестве первого аргумента будем использовать значение интервала канала ДАВЛЕНИЕ, а в качестве второго - реальное значение канала ЗВУК. Теперь при переходе реального значения канала, измеряющего давление, через границу НГ_0 аппаратное значение канала, управляющего звуковой платой, будет равно 1. Файл с записанным звуковым предупреждением должен находиться в директории проекта и иметь имя 1.wav.
1.3 Обмен данными в SCADA-системе TRACE MODE
Если речь идет о связи между компонентами одного узла, то вопрос об аппаратно-программном интерфейсе, который должен быть задействован для обеспечения связи, не возникает. В этом случае достаточно выполнить конфигурирование свойств связь/вызов компонентов. Если взаимодействующие компоненты относятся к разным узлам, интерфейс связи, как правило, должен быть указан и сконфигурирован.
Мониторы реального времени ТРЕЙС МОУД могут обмениваться данными по следующим линиям:
- локальная сеть;
- последовательный интерфейс RS-232, RS-485, RS-422;
- радиоканал;
- выделенная телефонная линия;
- коммутируемые телефонные линии;
- сети GSM.
По этим носителям необходимо организовать информационные потоки всех уровней системы управления. При этом могут реализоваться как вертикальные связи (между уровнями), так и горизонтальные (между узлами одного уровня). Например, при задании связи двух каналов разных узлов по RS необходимо создать в узлах компоненты COM-порт, задать для них необходимые
параметры и указать для канала-приемника используемый интерфейс связи.
1.4 Типы интерфейсов и механизмы обмена
1.4.1. Последовательный интерфейс. Обмен по всем линиям, кроме локальной сети, реализуется через последовательный порт по протоколу M-Link. Узлы в сети M-Link неравноправны: один имеет статус Master, а остальные – Slave. Такие сети следует использовать для связи между операторскими станциями и контроллерами. Монитор со статусом Master является активным. Он посылает команды управления и запросы на передачу информации. Монитор со статусом Slave принимает посланные ему команды и передает запрошенные данные. Команды управления содержат указания на изменение значений атрибутов каналов удаленного узла. Таким образом, запросы, посылаемые монитором со статусом Master, могут быть двух типов:
1) запрос данных (используется для получения значений каналов или другой информации от монитора со статусом Slave);
2) запрос на изменение (используется для изменения значений атрибутов каналов на удаленном мониторе).
В запросах на изменение передаются новые значения корректируемых атрибутов удаленной базы. Следует отметить, что в одной сети M-Link не может быть двух мониторов, для которых установлен статус Master. Чтобы один монитор выступал и как Master, и как Slave, надо создать параллельные сети, используя при этом по два последовательных порта на каждом узле. Тогда два монитора смогут работать в режиме Master.
1.4.2. Обмен по протоколу M-Link.
Для обмена данными между мониторами ТРЕЙС МОУД по последовательному интерфейсу используется протокол M-Link. Он применяется для обмена по интерфейсам RS-232, RS-485, RS-422, радиоканалу, коммутируемым телефонным линиям и GSM сети. Используя протокол M-Link, в рамках ТРЕЙС МОУД можно создавать сетевые комплексы на базе последовательного интерфейса RS-485. Такие комплексы могут включать в себя до 128 узлов (контроллеров и операторских станций). При этом связь может осуществляться по нескольким последовательным портам.
Для связи двух мониторов можно использовать интерфейс RS-232. Чтобы связаться с несколькими удаленными узлами по этому интерфейсу, нужно иметь соответствующее количество последовательных портов. Это позволяет организовать связь типа "звезда". Такая конфигурация может потребовать дополнительных затрат на многоканальные платы. Однако она позволяет быстрее передавать данные за счет распараллеливания обмена с разными удаленными узлами. ТРЕЙС МОУД поддерживает обмен одновременно по 32 последовательным портам. Для связи сильно разнесенных в пространстве мониторов можно использовать радиоканал, выделенные или коммутируемые телефонные линии. В этих случаях нужны дополнительные устройства – модемы. Они согласуют электрические характеристики последовательных портов и используемой среды передачи.
1.4.3 Организация ввода/вывода данных.
Настройка каналов. Для обмена данными по последовательному интерфейсу между мониторами Trace Mode применяются каналы подтипа СВЯЗЬ. В зависимости от направления передачи информации используются разные дополнения к подтипу этих каналов. Для запроса данных по протоколу M-Link предназначены каналы подтипа СВЯЗЬ с дополнением In M_Link и дополнением In M_Link(T). Для второго из них вместе со значением канала передается время его последнего изменения. При этом отображаемое время изменения значения канала соответствует времени того МРВ, из которого считывается канал. Оно копируется в соответствующий атрибут запрашивающего канала, а также заносится в архивы. Для передачи данных следует использовать каналы с дополнением OUT M_Link и дополнением OUT M_Link(T) . В последнем случае так же, как и при запросе, со значением канала передается время его формирования. При считывании значения канала по M-Link(T) из МикроМРВ в МРВ отображаемое время изменения канала соответствует времени МРВ. Указанные каналы имеют следующие настройки:
1) NN – номер последовательного порта;
2) NODE – имя удаленного узла;
3) CH – имя канала на удаленном узле;
4) ATR – копируемый атрибут удаленного канала;
5) OBJ – имя объекта в базе каналов удаленного узла.
Номер последовательного порта задается вводом с клавиатуры в соответствующем поле диалога Каналы объекта. Значение этой настройки должно быть на 1 меньше номера соответствующего порта (0 – COM1, 1 – COM2, …). Остальные настройки указываются в диалоге выбора канала. Он выводится на экран при нажатии ЛК в области задания значения любой из них.
Пример.
Настроить канал для передачи значения верхнего предела показаний аналогового датчика из операторской станции АРМ в 1-й аналоговый канал 1-го посадочного места платы УСО контроллера MFC_1 по последовательному интерфейсу от порта COM1.
Решение.
Канал объекта _БАЗА с именем AI_-peHL_out будет иметь следующие настройки:
- Тип – OUT;
- подтип – СВЯЗЬ;
- дополнение к подтипу – In M_Link; NN - 0;
- NODE - MFC_1;
- CH – AI_-pe01-0001;
- ATR -ВПредел;
- OBJ - _БАЗА.
Следует отметить, описанные каналы создаются только в базе монитора со статусом Master. Каналы выдачи команды (OUT) по последовательному интерфейсу не работают, если на тот же COM-порт не настроен хотя бы 1 канал INPUT (даже выключенный). При ответе на запрос узел со статусом Slave анализирует аппаратную недостоверность запрашиваемого канала. Если значение недостоверно, то вместо него отсылается значение FFFF. Узел со статусом Master, получив такое значение, не изменяет значение запрашивающего канала, но выставляет ему флаг недостоверности.
1.4.4 Настройка МРВ для обмена по M-Link.
Для обмена данными по протоколу M_Link необходимо настроить соответствующие параметры запуска узла. К ним относятся статус узла, а также физические параметры связи. Параметры обмена по протоколу M_Link настраиваются в бланках Основные и Параметры последовательных портов диалога Параметры узла. Для входа в этот диалог необходимо нажать ПК на изображении настраиваемого узла в редакторе базы каналов. Статус узла при обмене по протоколу M_Link задается в бланке Основные диалога Параметры узла. Чтобы узел поддерживал статус Master, необходимо установить флаг M_Link в разделе Host Mode данного бланка, а для поддержки режима SLAVE – тот же флаг в разделе Slave Mode. Кроме статуса, при обмене по M_Link необходимо настроить физические параметры порта, через который будут передаваться данные. Для обмена данными с контроллерами по последовательным интерфейсам надо настроить используемые порты. Это реализуется в бланке Параметры последовательных портов диалога, Параметры узла редактора базы каналов. Для входа в него надо выделить настраиваемый узел и нажать ПК. Этот бланк содержит список последовательных портов (COM1– порт 0, COM32 – порт 31) и семь полей настройки параметров выбранного в списке порта. Такими параметрами являются:
- назначение порта;
- базовый адрес порта;
- скорость обмена;
- параметры связи;
- таймаут на ожидание ответа;
- номер используемого прерывания;
- режим управления передатчиком.
Значение параметра «Назначение порта» формируется из списка, содержащего четыре следующих пункта:
- Связь с контроллерами;
- Slave M_Link;
- Modem;
- GSM_SMS.
По умолчанию устанавливается значение Связь с контроллерами. Это означает, что порт используется для обмена с контроллерами через внешний драйвер или по встроенным протоколам со статусом Master. Для обмена по протоколу M_Link со статусом Slave, в данном поле следует установить назначение – Slave M_Link. Режим связи Modem нужно установить для порта при его использовании для обмена по коммутируемым линиям, а GSM_SMS – при обмене по GSM сети. Два поля бланка Параметры портов такие, как «Базовый адрес порта» и «Номер используемого прерывания» предназначены для задания базового адреса и номера прерывания порта. Они имеют смысл при настройке узла, запускаемого под управлением МикроМРВ. В остальных случаях эти параметры портов настраиваются средствами WINDOWS из Панели управления (см. Справочную систему ТРЕЙС МОУД). В любом случае их нельзя оставлять нулевыми, желательно задать их реальные значения. Например, Базовый адрес порта – 3f8, Номер используемого прерывания– 4. Следующее поле «Скорость обмена» заполняется из списка:
110, 150, 300, 600, 1200, 2400, 4800, 9600, 19.2k, 38.4k, 57.6k, 115.2k, 144k, 192k, 288k, 576k. Причем скорость обмена по протоколу M-LINK не должна быть ниже 600 бит/с. Её величина при обмене по последовательным портам ограничивается расстоянием и наличием помех в линии. Чем ниже скорость обмена, тем меньше вероятность сбоя. Например, она может быть назначена равной 4800 бит/с. В поле «Параметры связи» задаются такие параметры обмена, как: количество информационных бит в посылке; количество стоповых бит; наличие проверки на четность. Значение всех этих параметров задается выбором из списка. Каждая строка этого списка содержит одно из доступных сочетаний этих трех параметров. Эти строки имеют следующий формат: k-m-x, где k – количество информационных бит; m – количество стоповых бит; x – наличие проверки на четность (n – отсутствие проверки, e – проверка на четность, o – проверка на нечетность). Значение поля «Таймаут на ожидание ответа» вводится непосредственно с клавиатуры. Оно задает время ожидания ответа от устройства, которому был послан запрос по данному порту. Величина времени ожидания задается в миллисекундах. Если величина таймаута не задана, то она принимается равной 100 мс. Если в течение времени таймаута ответ на запрос от устройства или МРВ не пришел, то каналу, запрашивающему эти данные, взводится флаг аппаратной недостоверности. Кроме того, для задания времени задержки на включение передатчика после завершения приема в каналах на базе RS-485 и RS-232 используется таймаут «RS-передача». Его значение в миллисекундах задается в бланке Таймауты того же диалога. В поле «Режим управления передатчиком» вносится «Нет», если не требуется управлять передатчиком. Остальные пункты, кроме первого, задают различные режимы управления. Можно заметить, что МикроМРВ поддерживает до 4 связей со статусом Master по M-Link или по другому встроенному протоколу (по 4-м COM-портам, имеющим один и тот же вектор прерывания), а со статусом Slave – только одну связь (на любом прерывании). В рамках задач управления обменом по последовательным портам ТРЕЙС МОУД позволяет осуществлять следующие операции:
- отключение обмена по указанному порту;
- переключение обмена на резервный порт;
- отключение группы каналов от обмена.
Подробнее см. в справочной системе ТРЕЙС МОУД.
1.4.5 Обмен данными через механизмы OPC.
Одним из самых перспективных стандартов обмена данными между приложениями WINDOWS при создании систем управления является механизм OPC. OPC (OLE for Process Control) – стандартизованные интерфейсы для Microsoft технологии COM, предназначенные для применения в области автоматизации управления технологическими процессами. Стандарт ОРС разработан международным фондом OPC Foundation, который был создан фирмами Fisher Rosemount, Intellution, Intuitive Technology, Opto22, Rockwell и Siemens в 1995 г. В 1996 г. появилась первая версия спецификации ОРС. ОРС в настоящее время является стандартом, который признан разработчиками, системными интеграторами и пользователями АСУ ТП. Сегодня практически все производители программного и аппаратного обеспечения АСУ ТП разрабатывают продукты, соответствующие этому стандарту. За последние несколько лет ОРС серверы полностью вытеснили DDE (Dynamic Data Exchange) серверы и специализированные драйверы для аппаратных средств автоматизации. DDE – самый старый (время появления - 1989-1991 гг.) и очень медленный способ динамического обмена данными между Windows приложениями, был со временем заменен (преобразован) в OLE (Object Linking and Embedding). OLE первоначально и до середины 90-х годов использовался исключительно Microsoft для обмена данными между ее офисными приложениями. Во время разработки Windows NT появилась технология DCOM (Distributed Componet Object Model) как продолжение технологии COM. DCOM была разработана для распределенных клиент-серверных приложений. Один клиент мог одновременно использовать несколько серверов, установленных на разных компьютерах в сети и каждый сервер одновременно мог обслуживать несколько клиентов. В настоящее время ОРС базируется практически исключительно на DCOM технологии фирмы Microsoft для распределенных систем. Главным понятием DCOM является понятие интерфейса, посредством которого DCOM-объекты обслуживают клиентов. OPC-сервер NLopc является программной системой, позволяющей подключить аппаратуру к программному обеспечению сторонних производителей, если оно удовлетворяет стандарту ОРС. Сервер NLopc имеет следующие отличительные особенности:
- возможность задания различных прав доступа к тегам для различных клиентов сервера;
- возможность добавления новых устройств в расширяемую библиотеку драйверов;
- содержит встроенный редактор скриптов VBScript для описания пользовательских конверторов входных переменных;
- поддерживает пользовательские DLL-библиотеки для описания сложных конверторов входных переменных;
- кроме стандартного ОРС-интерфейса, имеет дополнительный упрощенный COM интерфейс Easy Access для управления устройствами;
- cодержит объект, служащий для интеграции сервера NLopc и OPC-серверов сторонних производителей с программами, не поддерживающими OPC, но поддерживающими OLE, например MS Excel, Matlab. Сервер NLopc работает под Windows2000, XP или NT, позднее Windows NT 4.x.
Требования к аппаратным показателям компьютера (объем RAM, объем HDD, и т.д.) полностью соответствуют требованиям к операционной системе. Оптимально подходят для работы сервера NLopc Windows NT 4.x, Windows NT 2000, Windows XP. Требуемый объем свободного места на жестком диске составляет пять мегабайт. ОРС-сервер работает только с СОМ портами или их эмуляторами. МРВ может выступать в качестве OPC-сервера и OPC-клиента.
В качестве OPC-клиента он поддерживает следующие режимы:
SYNC/CACHE – синхронное чтение из CACHE;
SYNC/DEVICE – синхронный обмен данными с устройством;
ASYNC/DEVICE – асинхронный обмен данными с устройством;
ADVISE – асинхронное чтение данных при изменении их значений.
В режиме ADVISE МРВ принимает значения, присылаемые по каналу подписки. Они обычно присылаются сервером только при изменении значения параметра. В режиме ASYNC МРВ опрашивает OPC-сервер и принимает данные, присылаемые по каналу подписки в случае изменения значения параметра. При этом поддерживаются следующие типы данных:
- VT_R4 (FLOAT, 4 байта) – для каналов типа Float;
- VT_I4 (INT, 4 байта) – для каналов типа Hex.
Для обмена данными по OPC между мониторами ТРЕЙС МОУД используются каналы подтипа СВЯЗЬ с дополнениями In OPC – прием данных от МРВ по OPC , Out OPC – передача данных МРВ по OPC. При настройке связи по OPC для каждого узла необходимо указать имя компьютера, на котором он будет запущен. Для этого в диалоге Параметры узла на бланке Основные предусмотрено поле Имя компьютера. Для доступа к удаленному компьютеру может потребоваться запуск утилиты DCOMCNFG.EXE и установка соответствующих разрешений пользователям.
Каналы для связи с ОРС-сервером создаются процедурой автопостроения. Чтобы запустить её, следует, находясь в окне объектов настраиваемого узла, выполнить команду “Связать с OPC-сервером” из меню “Узел” или нажать сочетание клавиш “Alt”+”L”. При этом появится экран “Выбор сервера OPC”, на котором имеется тир кнопки: ”Добавить”, ”Удалить”, ”Изменить”. Нажатие кнопки ”Добавить” выводит на экран “Выбор сервера OPC” перечень серверов, зарегистрированных на локальной машине или на любом компьютере, присутствующем в сети. Указанный сервер добавляется в список предыдущего диалога. По нажатию кнопки ”Удалить” выделенный в списке сервер удаляется из окна. Кнопка ”Изменить” используется для замены выделенного сервера. Она выводит на экран тот же диалог, что и кнопка ”Добавить”. Выбранный в нем сервер заменяет текущий. Чтобы создать каналы ТРЕЙС МОУД для обмена с выделенным в списке сервером, надо нажать ЛК на кнопке “Выбрать”. В левом окне появившегося экрана следует выбрать каналы OPC-сервера, которые надо контролировать в МРВ, и перенести их в правое окно нажатием ЛК на кнопке “>>”. После выхода из этого диалога в базе каналов появится новый объект, имя которого образовано из идентификатора OPC-сервера. В нем создаются каналы для обмена с указанными каналами сервера.
1.4.6 Обмен с базами данных через механизмы ODBC.
Для связи с базами данных и бизнес-приложениями в МРВ встроена поддержка интерфейса ODBC [1]. МРВ может запрашивать данные из зарегистрированных источников данных ODBC и записывать в них значения каналов. При этом передача значений каналов может осуществляться как в режиме формирования новых записей в базе (INSERT), так и в режиме обновления существующих (UPDATE). Чтобы связаться с базами данных (БД) по ODBC в директории проекта, надо создать конфигурационный файл odbc.cfg. Этот файл имеет текстовый формат. В нем описывается база данных, имя пользователя, имеющего доступ к ней, а также элементы запросов на языке SQL для управления обменом данными. При этом с целью обеспечения обмена с любыми ODBC-серверами фрагменты SQL-запросов следует записывать прописными буквами. Перед тем как создать источник данных, необходимо убедиться в наличии TRACE MODE драйвера ODBC driver, установка которого обычно производится автоматически при инсталляции системы. Если по каким-то причинам он не установлен, необходимо выполнить его установку вручную [1]. Для взаимодействия с любой базой данных ее надо зарегистрировать как источник с помощью панели управления WINDOWS.
Это могут быть популярные программы Microsoft Access или Excel. Так, если проектная документация составлена в виде таблиц программы Microsoft Access и сконфигурирована в файл “Проектная документация.mdb”, то чтобы переписать её в БД необходимо:
1) Создать источник данных ODBC, для чего на диске C следует открыть Панель управления MS Windows. Если это – Win9x или WinNT, то дважды нажать ЛК мыши на иконке “ Источники данных ODBC ” (для Win200 эта иконка расположена в пункте Администрирование). В появившемся диалоговом окне Администратор источников данных ODBC следует выбрать бланк Пользовательский DSN и нажать кнопку ”Добавить”. Затем в окне Создание нового источника данных выбрать из списка пункт Driver do Microsoft Access (*.mdb) и нажать кнопку ”Готово”.
2) В поле Имя источника данных записать имя проекта, например, YPN и нажать кнопку “Выбрать”. Теперь в качестве БД нужно выбрать с диска С файл “Проектная документация.mdb”, нажать “Ок” и закрыть Администратор источников данных ODBC.
1.5 Идеология распределенных комплексов
TRACE MODE имеет мощные средства для создания распределенных АСУ ТП, включающих в себя до трех уровней иерархии:
- уровень контроллеров – нижний уровень;
- уровень операторских станций – верхний уровень;
- административный уровень.
Деление на уровни иногда может быть весьма условным. В малых системах функции всех уровней часто реализуются на одной операторской станции. В крупных же на каждом уровне может быть выделена своя иерархия. Тем не менее, в большинстве случаев такое деление правомерно. Необходимо заметить, что при разработке крупных сетевых систем, включающих в себя десятки узлов, лимитирующим элементом становятся не характеристики пакета по количеству одновременно работающих в сети узлов, а пропускная способность линий связи. Исполнительная система TRACE MODE включает в себя мониторы, предназначенные для работы на всех уровнях систем управления.
1.5.1 Уровень контроллеров.
На этом уровне реализуется сбор данных от датчиков и НЦУ. Для создания этого уровня предусмотрены мониторы: Микро МРВ, Микро МРВ Модем+, Микро МРВ GSM+. Первый из них предназначен для запуска в контроллерах, связанных с верхним уровнем по локальной сети или последовательному интерфейсу, второй -при связи по коммутируемым линиям, а третий – по GSM-сети. При использовании выделенных телефонных линий или радиоканалов следует применять первый монитор. Эти мониторы не имеют графического интерфейса. Однако по математическим функциям они идентичны мониторам верхнего уровня, а также имеют ряд функций, необходимых для работы в контроллерах (например, поддержка сторожевого таймера).
1.5.2 Оперативный уровень.
Для верхнего уровня АСУ ТП предусмотрены такие мониторы, как МРВ, NetLink МРВ, NetLink Light. Они позволяют создавать рабочие станции оперативного управляющего персонала. МРВ может обмениваться данными с другими мониторами ТРЕЙС МОУД, а также с любыми контроллерами через встроенные протоколы или драйвер. Он запрашивает данные у нижнего уровня и передает ему команды управления. Полученные данные могут отображаться, архивироваться и передаваться другим приложениям WINDOWS по протоколам ODBC, OPC и DDE. NetLink МРВ – это сетевая рабочая станция. Этот монитор может обмениваться данными с операторскими станциями (по последовательному интерфейсу или локальной сети), а также с Микро МРВ, работающими в PC-based контроллерах. По функциям визуализации, архивирования, связи с базами данных и документирования NetLink МРВ аналогичен МРВ. В отличие от МРВ, в нем блокированы поддержка плат УСО, обмен с драйвером, обмен по встроенным протоколам MODBUS и DCS, а также клиентские функции OPC и DDE. NetLink Light – это сетевой графический терминал. Он не имеет своего сервера матобработки, а связывается с сервером МРВ или NetLink МРВ, запущенным на другом компьютере. NetLink Light позволяет создавать дополнительные рабочие места оператора.
1.5.3 Административный уровень.
Задачей данного уровня управления является контроль текущего состояния производственных процессов и анализ функционирования производства по архивным данным. Для решения задач данного уровня предусмотрен монитор SUPERVISOR. Он является специализированной графической консолью, которая может подключаться к серверу мат.обработки
МРВ, NetLink МРВ или ГР. В первых двух случаях просматривается локальный СПАД архив, а в последнем – глобальный архив. Кроме того, SUPЕRVISOR можно переключить в режим реального времени. В этом случае он работает как консоль NetLink Light, и может использоваться для управления процессом.
При работе с архивами SUPЕRVISOR реализует следующие функции:
- отображение последних изменений значений каналов;
- просмотр архивов в режиме PLAYBACK;
- просмотр на заданное архивное время с пошаговым переходом по времени.
До тех пор, пока речь идет о связи между компонентами одного узла, не возникает вопрос об аппаратно/программном интерфейсе, который должен быть задействован для обеспечения связи, в этом случае достаточно выполнить конфигурирование свойств связь/вызов компонентов. Если взаимодействующие компоненты относятся к разным узлам, интерфейс связи, как правило, должен быть указан и сконфигурирован. Мониторы реального времени ТРЕЙС МОУД могут обмениваться данными по следующим линиям:
- локальная сеть; последовательный интерфейс RS-232, RS-485, RS-422;
- радиоканал;
- выделенная телефонная линия;
- коммутируемые телефонные линии;
- сети GSM.
По этим носителям необходимо организовать информационные потоки всех уровней системы управления. При этом могут реализоваться как вертикальные связи (между уровнями), так и горизонтальные (между узлами одного уровня). Например, при задании связи двух каналов разных узлов по RS необходимо создать в узлах компоненты COM-порт, задать для них необходимые параметры и указать для канала-приемника используемый интерфейс связи.
Контрольные вопросы
1. Каковы основные задачи, решаемые АСУ ТП? Дайте определение АСУ ТП.
2. Каков состав технического обеспечения АСУ ТП?
3. В чем заключается информационная структура проекта АСУ ТП в TRACE MODE?
4. В чем заключается программное обеспечение АСУ ТП?
5. Для чего предназначен редактор базы каналов?
6. Для чего служит редактор представления данных?
7. Как осуществляется обмен данными в SCADA-системе TRACE MODE?
8. В чем особенности организации ввода-вывода данных?
9. В чем состоит иерархический принцип управления?
10. Опишите типичную иерархическую структуру АСУ ТП.
2 Разработка проекта в SCADA-системе TRACE MODE
2.1 Системный анализ технологического объекта автоматизации
Системный подход является основополагающей методологией при проектировании и построении информационно-управляющих систем. Сущность системного подхода состоит в том, что объект проектирования или управления рассматривается как единство взаимосвязанных элементов, которые образуют единое целое и действуют в интересах реализации единой цели. Системный подход требует рассматривать каждый элемент системы во взаимосвязи и взаимозависимости с другими элементами, вскрывать закономерности, присущие данной конкретной системе, выявлять оптимальный режим ее функционирования.
Методическим средством реализации системного подхода к исследованию, проектированию или управлению сложным процессом служит системный анализ, под которым понимается совокупность приемов и методов исследования объектов (процессов) посредством представления их в виде систем и их последующего анализа.
Всякая система общается
с внешней средой, имеет входы ![]() и выходы
и выходы ![]() из нее (см. рисунок 2.1).
из нее (см. рисунок 2.1).
 |
Рисунок 2.1- Простейшая структура ТОУ
Входами могут быть: состав комплектующих элементов с их параметрами; параметры пленки при производстве транзисторов и т. д.; выходами могут быть показатели качества готовой продукции (надежность РЭС, процент выхода годных приборов и т. п.).
Система обычно
подвержена возмущениям ![]() ; для их
компенсации, для того чтобы система работала в нужном режиме, используют управляющие воздействия
; для их
компенсации, для того чтобы система работала в нужном режиме, используют управляющие воздействия ![]() (электрические непрерывные и
дискретные сигналы, различные механические воздействия и т. д.). Следовательно,
системными объектами
являются параметры изучаемой системы: вход, процесс, выход, цель, обратная
связь и ограничения. Под действием системных объектов
понимается качество параметров объектов. Свойства позволяют количественно
описывать объекты, выражая их в присущих им единицах, обладающих определенной
размерностью.
(электрические непрерывные и
дискретные сигналы, различные механические воздействия и т. д.). Следовательно,
системными объектами
являются параметры изучаемой системы: вход, процесс, выход, цель, обратная
связь и ограничения. Под действием системных объектов
понимается качество параметров объектов. Свойства позволяют количественно
описывать объекты, выражая их в присущих им единицах, обладающих определенной
размерностью.
Центральный этап методологии системного анализа — определение целей. Для проектировщиков важно четко представлять себе, что требуется от будущей системы управления, какие результаты желательны. Следовательно, необходимо иметь определенный набор требований к системе, т. е. четко сформулированную цель проектирования. Уже на самых первых фазах уяснения задачи необходимо иметь представление о тех целях, которые предполагается достичь в результате проектирования технологического процесса, в результате управления им.
Формулирование целей создает возможность выбора связанных с ними критериев. В системном анализе под критерием понимается правило, по которому проводится отбор тех или иных средств достижения цели. Критерий в общем случае дополняет понятие цели и помогает определить эффективный способ ее достижения. В том случае, когда между целью и средствами ее достижения имеется четкая однозначная связь, критерий может быть задан в виде аналитического выражения. Эта ситуация типична, например, для "простых" систем проектирования или управления, когда критерий, заданный в виде функционала, позволяет найти управляющие воздействия, обеспечивающие заданную цель. Поэтому в таких ситуациях понятия цели и критерия не различают. В сложных системах с высокой степенью неопределенности, когда цели носят качественный характер и получить аналитическое выражение не представляется возможным, следует отличать цели от критериев, характеризуя средства достижения цели. Критерий должен отвечать ряду требований. Во-первых, он должен отражать основную, а не второстепенную цель функционирования управляемой системы. Во-вторых, отражать вcе существенные стороны деятельности системы, т. е. быть достаточно представительным. В-третьих, критерий должен быть чувствительным к существенным изменениям, возникающим в процессе функционирования управляемой системы. Для проектирования и управления всегда желательно иметь единственный критерий оптимальности, что облегчает принятие решений и позволяет решить задачу оптимизации математически.
Системный подход требует прослеживания как можно большего числа связей не только внутренних, но и внешних, чтобы не упустить действительно существенные связи и факторы и оценить их влияние на систему.
При разработке систем управления производственными процессами в связи с применением ЭВМ неизбежно приходится рассматривать прежде всего такие вопросы, как совершенствование структуры управления, методы подготовки и принятия решений и, соответственно, формирование целей и критериев, используемых в процессе проектирования.
Существенное место в понятии системы занимает принцип целостности, согласно которому взаимосвязь и взаимодействие объектов порождает новые, системные свойства объекта, не присущие отдельным его элементам.
С точки зрения системного подхода к автоматизации проектирования, процесс проектирования представляет собой многослойную иерархическую процедуру с оптимизацией решений в каждом слое.
Принцип иерархичности в проектировании и управлении, а также принцип целостности обусловливают необходимость построения системы критериев, когда частные критерии, предназначенные для решения задач низшего звена управления (подсистемы), логически совпадают с критериями, применяемыми на более высоком иерархическом уровне.
В процессе проектирования и управления сопоставляются выходные величины, т. е. результат функционирования системы, с критерием. Следовательно, критерий в управляемой системе — это признак, по которому выбирается наиболее эффективный способ достижения цели. Он является той величиной, которую нужно максимизировать или минимизировать при управлении системой в соответствии с целью ее деятельности.
Таким образом, система — это достаточно сложный объект, который можно расчленить на составляющие элементы или подсистемы. Элементы информационно связаны друг с другом и с окружающей объект средой. Совокупность связей образует структуру системы. Система имеет алгоритм функционирования, направленный на достижение определенной цели.
Например, при проектировании автоматизированной системы управления технологическим процессом (АСУ ТП) его рассматривают как взаимосвязанную совокупность отдельных типовых технологических процессов и аппаратов, при взаимодействии которых возникают статистически распределенные по времени возмущения, т.е. существуют стохастические взаимосвязи между входными и выходными переменными подсистем.
Глобальную цель проектирования или управления обычно не удается связать непосредственно со средствами ее достижения. Поэтому ее обычно разбивают (декомпозиция) на более частные локальные цели, позволяющие выявить средства их достижения. Такой метод системного анализа называют методом построения дерева целей.
2.2 Структурно-алгебраическое описание процесса проектирования систем управления технологическими процессами при использовании SCADA
Использование современных программных комплексов SCADA и DCS предполагает осуществление параметризации и привязки в структуре практически готовой программной системы. Это обстоятельство накладывает специфические требования на описание результатов проектных процедур разработки АСУ ТП.
Предлагается структурно-функциональный подход, состоящий из трёх этапов процедур анализа и последующих этапов синтеза основных функциональных структур, представленных на схеме (см. рисунок 2.2).
 |
1 Этап – Формализация описания комплексной задачи управления (КЗУ)
Для технологичности описания используем алгебраическую форму записи, содержащую множество задач и отношений их связывающих:
{З1}- соответственно семейство отношений
![]()
{З1}= <{![]() },
},![]() }
}
Отношения на множестве задач:
1) Унарные отношения или свойства подзадач. Согласно этой записи множество задач {З1} делим на подклассы по свойствам (обработка данных, формирование базы реального времени, контроль, регулирование, управление, визуализация).
2)
Бинарные отношения –
отношения вида![]() носят название связи, т.е.
носят название связи, т.е. ![]() .
.
Используем два вида бинарных отношений связи :
a) информационные связи - ,
,
![]() - решение - задачи, или исходные данные
i ой – задачи используются как исходные данные
j–ой задачи. Во многих случаях
i -ая и
j -ая задачи могут быть не связаны
информационно, но связаны по временному признаку;
- решение - задачи, или исходные данные
i ой – задачи используются как исходные данные
j–ой задачи. Во многих случаях
i -ая и
j -ая задачи могут быть не связаны
информационно, но связаны по временному признаку;
б) временные связи –
![]() , решение Зi
предшествует решению Зj.
, решение Зi
предшествует решению Зj.
![]() , Зi и Зj.
решаются одновременно.
, Зi и Зj.
решаются одновременно.
2 Этап – Декомпозиция КЗУ
Декомпозиция описания осуществляется с использованием методологии функционального моделирования с помощью графического языка IDEF0 система представляется в виде набора взаимосвязанных функций (функциональных блоков — в терминах IDEF0). Функциональные блоки являются исходными для формирования Информационной Базы Данных (блок 3), а также основой для проведения системного анализа ТОУ.
3 Этап – Синтез основных структур.
Выбор базы комплекса технических средств (КТС) – семейства МП – контроллеров, однозначно определяет набор и структуру Алгоритмов и программ (блоки 4,5).
Дальнейшие процедуры являются стандартными для конкретного программного комплекса SCADA и DCS.
2.3 Системный анализ технологического объекта управления (ТОУ)
Системный анализ объекта управления позволяет на основании принципиальной технологической схемы и ее описания подойти к процедуре его автоматизации на принципах системного подхода.
Системотехнический анализ проводится в четыре этапа :
- составляется макроструктура производственного процесса (ПП) (в состав которого входит заданный объект управления) и проводится ее анализ с позиций установления главных задач управления (автоматизации) производственного процесса;
- составляется микроструктура ПП с выполнением ее анализа с позиций оценки места и роли заданного объекта управления, как составного ТП или макроблока в структуре ПП и установления его общих задач автоматизации для достижения главных задач ПП;
- составляется микроструктура технологического процесса (ТП) (выполняемого заданным объектом управления) и проводится ее анализ с позиций установления детального состава задач его автоматизации;
- составляется организационная структура ПП для установления иерархических уровней, входящих в него объектов управления и их задач автоматизации.
2.4 Пример выполнения системного анализа для описания технологического объекта управления (ТОУ) для реализации в среде SCADA системы
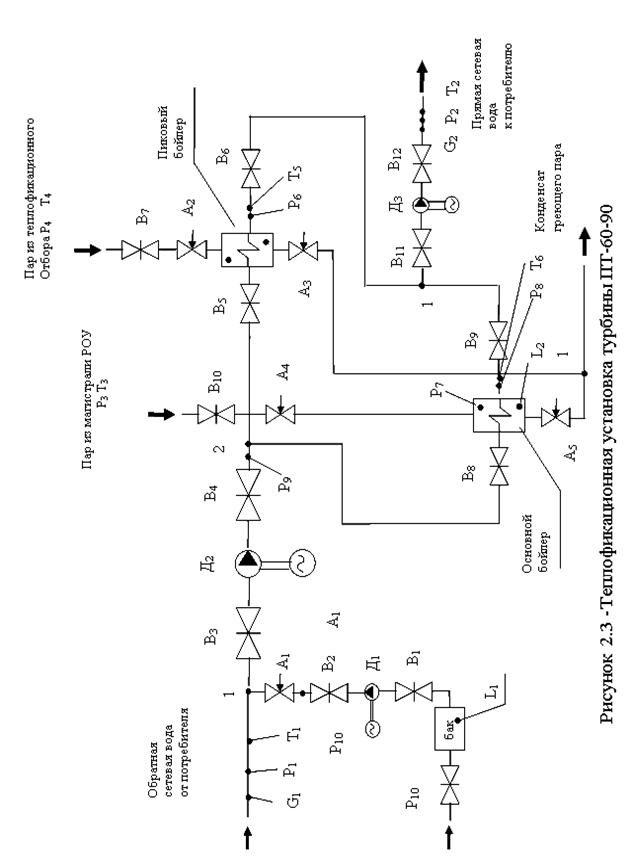
Необходимо разработать систему автоматизации теплофикационной установки турбоагрегата ПТ-60-90 Алматинской ТЭЦ-1.
Исходные данные:
- принципиальная технологическая схема (ПТС) установки;
- параметры рабочих сред.
Принципиальная технологическая схема представлена на рисунке 4.1. Параметры рабочих сред:
1) Обратная сетевая вода – G1=1600 т/ч, Р1,=0,25 МПа, Т1=70 °С;
2) Прямая сетевая вода - G2=2000 т/ч, Р2=0,63 МПа, Т2=120 °С;
3) Нагретая сетевая вода за пиковым бойлером - Р6=0,4 МПа, Т5=Т20 °С;
4) Нагретая сетевая вода за основным бойлером - P8=0,4 МПа, Т6=120 °С;
5) Пар из теплофикационного отбора: Р4=0,25 МПа, Т4=350 °С;
6) Пар из магистрали РОУ: Р3=1,3 МПа, Т3=350 °С;
7) Уровень конденсата греющего пара в пиковом и основном бойлерах -Lj= 1,2=500 мм в ст.;
8) Уровень подпиточной воды в баке: L3=T-4 м в ст.
При разработке проекта системы автоматизации данной установкой обеспечить реализацию централизованного автоматизированного управления с рабочего места оператора-технолога турбины ПТ-60-90.
2.5 Анализ макроструктуры процесса, осуществляемого теплофикационной установкой (подраздел составления макроструктуры ТП)
В соответствии с описанием физических основ процесса (раздел 1) на рассматриваемой установке осуществляется технологический процесс (ТП) выработки тепловой энергии (в виде нагретой прямой сетевой воды), входящего в структуру производственных процессов (ПП) Алматинской ТЭЦ-1, в соответствии с которой (в виду ограничений не приводится) к его внешним технологическим связям (ТС) относятся:
- трубопровод обратной сетевой воды от потребителя (участок от места входа на границу предприятия, измерения параметров G1, Р1 и Т1 до точки 1 суммирования ее потока с потоком подпиточной воды), поэтому классифицируем данный трубопровод как входную системную ТС и обозначим ее ТСС-1;
- трубопровод прямой сетевой воды к потребителю (участок от места измерения параметров G2, Р2 и Т2 до выхода на границе предприятия), классифицируем его как выходную системную ТС и обозначим ее ТСС-2;
- трубопроводы пара из магистрали РОУ, пара из теплофикационного отбора турбины, подпиточной воды от установки химической водоочистки (ХВО) - классифицируем соответственно как входные промежуточные ТС ПП и обозначим соответственно Пр ТС ПП-3 (с параметрами Р и Т3), Пр ТС ПП-4 (с параметрами Р4, и Т4..), Пр ТС ПП-5 (без измерения параметров) и Пр ТС ПП-6 (без измерения параметров).
В результате макроструктура ТП выработки тепловой энергии имеет вид (см. рисунок 2.4).
 |
Рисунок 2.4 - Макроструктура ТП выработки тепловой энергии
Рассмотренная макроструктура позволяет:
- проанализировать достаточность объема информационного обеспечения для управления автоматизируемым процессом на уровне его макроструктуры;
- определять текущие значения отпускаемой тепловой энергии Q - главного показателя процесса по формуле
Q = C*G2(T,-T2),
где С - теплоемкость прямой сетевой воды;
- определять текущее значение расхода подпиточной воды по формуле
G6 = G2-G2;
- классифицировать процесс как непрерывный по характеру изменения потоков во входных и выходных внешних ТС (в системных и промежуточных ПП);
- сформулировать состав отображаемых параметров на главном видеокадре ТП в объеме, представленном на макроструктуре, и главную задачу управления -поддержание материального баланса G1 + G6= G2 при постоянстве заданных значений давления Р1, и температуры Т2.
2.6 Декомпозиция ТОУ и анализ микроструктуры ТП выработки тепловой энергии (подраздел составления микроструктуры ТП)
В соответствии с исходной ПТС проводим декомпозицию по следующему принципу:
- аппараты или машины, выполняющие ТО совместно с измеряемыми в них промежуточными параметрами ТП;
- промежуточные ТС ТП между аппаратами совместно с измеряемыми в них промежуточными параметрами ТП и СВП, выполняющих операции управления подачей - отводом рабочих сред для осуществления ТО.
При наличии на ТС нескольких СВП выделить их простейшие системы, технологические узлы или магистрали [3].
На ПТС выделяем следующие технологические аппараты:
- бак подпиточной воды объемом 100 м3, выполняющий ТО промежуточного аккумулирования (обозначим ТО-1), протекание ТО-1 характеризуется ее главным параметром - уровень L3;
- соединительный узел 1 трубопроводов обратной сетевой и подпиточной воды, выполняющий ТО смешивания (обозначим ТО-2), ход ТО-2 характеризуется ее главным параметром - заданным значением системного параметра Рь
- пиковый бойлер (ПБ), выполняющий ТО нагрева обратной сетевой воды (обозначим ТО-3), протекание ТО характеризуется ее главным параметром -заданным значением Т5 на выходе его трубной системы;
- основной бойлер (ОБ), выполняющий ТО нагрева обратной сетевой воды (обозначим ТО-4), протекание ТО характеризуется ее главным параметром -заданным значением Т6 на выходе его трубной системы;
- нижняя часть корпуса ПБ, выполняющая ТО аккумулирования конденсата греющего пара (обозначим ТО-5), протекание ТО характеризуется ее главным параметром - уровнем Т3;
- нижняя часть корпуса ОБ, выполняющая ТО аккумулирования конденсата греющего пара (обозначим ТО-6), протекание ТО характеризуется ее главным параметром - уровнем L2.
Последующее смешивание выходных потоков обоих бойлеров осуществляется в соединительном узле 1 и характеризуется величиной системного параметра - температурой Т2.
Промежуточные ТС ТП:
- Пр ТС ТП-1 - трубопровод от узла 1 смешивания обратной сетевой и подпиточной воды до узла 2 разделения потоков к бойлерам содержит систему S- Д 2, состоящую из трех, последовательно соединенных СВП (задвижка В3, насос Да, задвижка В4) - насосный агрегат, выполняющего в комплексе операцию дискретного управления подачей сетевой воды к узлу 2 разделения потоков по промежуточному параметру Р9;
- ПрТС ТП-2 - трубопровод от бака подпиточной воды до узла смешивания 1. Содержит технологический узел СВП, состоящий из последовательно соединенной системы Б-Д1 и регулирующего клапана А1 выполняющего в комплексе операцию непрерывно-дискретного управления подачей подпиточной воды для обеспечения ТО-2 по ее главному параметру P1 с использованием промежуточного параметра Р10на выходе S-Д1;
- Пр ТС ТП-3 - трубопровод от узла 2 разделения потоков до входа в трубную систему пикового бойлера. Содержит задвижку В5, выполняющую операцию дискретного управления подачей сетевой воды в трубную систему ПБ;
- Пр ТС ТП-4 - трубопровод от узла 2 разделения потоков до входа в трубную систему основного бойлера. Содержит задвижку В8, выполняющую операцию дискретного управления подачей сетевой воды в трубную систему ОБ;
- Пр ТС ТП-5 - трубопровод с выхода в трубную систему ПБ до узла 1 смешивания потоков нагретой сетевой воды. Содержит задвижку В6, выполняющую операцию дискретного управления выходом воды из трубной системы ПБ по параметру Р6;
- Пр ТС ТП-6 - трубопровод с выхода в трубную систему ОБ до узла 1 смешивания потоков нагретой сетевой воды. Содержит задвижку В9, выполняющую операцию дискретного управления выходом воды из трубной системы ПО по параметру Р8;
- Пр ТС ТП-7 - трубопровод от нижней части корпуса ПБ до узла 1 смешивания потоков конденсата. Содержит регулирующий клапан А3, выполняющий операцию непрерывного регулирования сливом основного конденсата из корпуса ПБ по параметру L3;
- Пр ТС ТП -8 - трубопровод от нижней части корпуса ОБ до узла 1 смешивания потоков конденсата. Содержит регулирующий клапан А5, выполняющий операцию непрерывного регулирования сливом основного конденсата из корпуса ОБ по параметру L2.
Проведем анализ состава операций управления потоками рабочих сред через внешние ТС данного процесса:
- Пр ТС ПП-6 содержит задвижку В13, выполняющую операцию двухпозиционного регулирования подачей подпиточной воды в бак по параметру L1;
- Пр ТС ПП-3 содержит систему S-A4 (задвижка В10, регулирующий клапан А4), выполняющую операцию непрерывного регулирования подачей греющего пара к корпусу ОБ по параметру Т6;
- Пр ТС ПП-4 содержит систему S-A2 (задвижка В7, регулирующий клапан А2), выполняющую операцию непрерывного регулирования подачей греющего пара к корпусу ПБ по параметру Т5;
- ТСС-2 содержит систему S-ДЗ (задвижка Вц, насос Дз, задвижка В12), выполняющую в комплексе операцию дискретного управления подачей прямой сетевой воды к потребителю по параметру Р2.
Составим микроструктуру ТП выработки тепловой энергии (см. рисунок 4.3) путем замены элементов ПТС: технологических аппаратов - на условные графические обозначения выполняемых ТО, СВП - на условные обозначения выполняемых ими операций управления, с указанием мест измеряемых параметров на ТС (системных, промежуточных ПП, промежуточных ТП).
Используя полученные данные анализа о составе ТО и составе операций управления на ТС, согласно [3] представим рассмотренные ТО как объекты управления 1 -го иерархического уровня, обозначив стрелками на рисунке 4.3 их управляющие U„ и внешние f„„ возмущающие воздействия на их главные параметры:
- объект 1 - двухпозиционного управления уровня L1 в баке (ТО-1) с управляющим воздействием Uв13 и внешним возмущающим воздействием fвн L1 со стороны системы S-Д1;
- объект 2 - непрерывного регулирования давления P1 перед узлом смешивания 1 (ТО-2) с управляющим воздействием UA1 и внешним возмущающим fвн P1 воздействием стороны ТСС-1;
- объект 3 - непрерывного регулирования температуры Т5 на выходе ПБ (ТО-3) с управляющим воздействием UA2 и внешним возмущающим воздействием fвн T5 со стороны ПР ТС ТП-3;
- объект 4 - непрерывного регулирования температуры Т6 на выходе ОБ (ТО-4) с управляющим воздействием UA4 и внешним возмущающим воздействием fвн T6 со стороны ПР ТС ТП-4;
- объект 5 - непрерывного регулирования уровня L3 конденсата греющего пара в ПБ (ТО-5) с управляющим воздействием UA3 и внешними возмущениями fвн L3 со стороны ПР ТС ТП-3;
- объект 6 - непрерывного регулирования уровня L2 конденсата греющего пара в ОБ (ТО-6) с управляющим воздействием Ua5 и внешними возмущениями fвн L2 со стороны ПР ТС ТП-4.
Используя микроструктуру (см. рисунок 4.3), выполним анализ общего состава операций управления потоками рабочих сред данного процесса (выполняемых отдельных СВП):
- всего операций управления - 21, в том числе:
- операций непрерывного регулирования - 5 (A1 - А5), реализуемых с помощью ручных воздействий UA1 - UA5 по месту (двухканальные команды "прибавить -убавить" - всего команд -10);
- операций дискретного управления -13 (B1 - B13), реализуемых с помощью ручных воздействий UВ1 - UB13 по месту (двухканальные команды "открыть -закрыть" - всего команд -26);
- операций дискретного управления - 3 (Д1 - Дз), реализуемых с помощью воздействий UД1 - UД3 на нереверсивный электропривод от пусковых устройств дистанционного управления (одноканальные команды "включить - отключить" -всего команд -3, т.к. данная команда формируется одним пусковым устройством).
Отсюда общее число команд на СВП для реализации перечисленных операций управления составит - 39.
В соответствии с микроструктурой ТП (см. рисунок 4.3) следует отнести данный процесс к типовой сходящейся последовательно-параллельной структуре с непрерывным характером протекания во времени рабочих операций (ТО).
Параллельное протекание основных ТО-5 и ТО-6 предопределяет независимое поддержание заданных значений их главных параметров Т5 и Т6.
Ввиду непрерывного характера процесса, все перечисленные при анализе его макро и микроструктур параметры (кроме уровня L1 в баке подпиточной воды) следует измерять с использованием технических средств с аналоговым выходным сигналом. Для параметра L1 достаточно измерять его дискретные значения L1Max и L1Mин для обеспечения двухпозиционного регулирования.
Контрольные вопросы
1. В чем сущность системного подхода к автоматизированному проектированию технологического процесса?
2. Что является ТОУ?
3. В чем заключается сущность структурно-функционального подхода к проектируемому комплексу автоматизации?
4. В чем состоит декомпозиция комплексной задачи управления?
5. В чем заключается макро- и микроструктура технологического процесса?
6. Каковы основные принципы системного подхода к проектированию АСУ ТП?
7. Каковы основные этапы разработки АСУ ТП?
8. В чем заключается принцип «черного ящика»?
3 Функциональная схема автоматизации
3.1 Общие сведения
Задачи автоматизации решаются наиболее эффективно тогда, когда они прорабатываются в процессе изучения технологического процесса. В этот период нередко выявляется необходимость изменения технологических схем в целях приспособления их к требованиям автоматизации, установленным на основании системного анализа ТОУ [2].
Основным техническим документом, определяющим блочно - функциональную структуру систем контроля и управления, а также показывающим расположение приборов на технологическом оборудовании, щитах управления и в операторских помещениях является функциональная схема.
При разработке функциональных схем автоматизации технологических процессов решаются следующие задачи:
- получение первичной информации о состоянии технологического
процесса и оборудования;
- непосредственное воздействие на технологический процесс для
управления им;
- стабилизация технологических параметров процесса;
- контроль и регистрация технологических параметров процессов и
состояния технологического оборудования.
Для решения перечисленных задач привлекаются такие специалисты, как технологи, инженеры контрольно-измерительных приборов и автоматики (КИПиА), разработчики АСУ ТП. Каждый из перечисленных специалистов заполняет таблицы, материал которых позволяет составлять подробные функциональные схемы автоматизации и в дальнейшем использовать SCADA-системы для проектирования и управления ТП.
3.2 Требования к оформлению функциональных схем
Функциональная схема (ФС) выполняется в виде чертежа, на котором схематически условными изображениями показывают [3] технологическое оборудование, коммуникации, органы управления, средства автоматизации с указанием связей с технологическим оборудованием. Для ТП с большим объемом автоматизации выполняют отдельно схемы автоматического контроля, управления, сигнализации и т.д. Обычно в нижней части чертежа изображаются в виде прямоугольников щиты и пульты управления, в которых показываются устанавливаемые средства автоматизации. Если используется микропроцессорная и вычислительная техника, то вместо поля "Приборы на щите управления", или дополнительно к нему, дается полоса "Комплекс технических средств операторских помещений" ("КТС ОП").
На свободном поле чертежа допускается давать краткую технологическую характеристику автоматизируемого объекта, поясняющие таблицы, диаграммы и т.п. На линиях связи от датчиков указывают предельные рабочие (максимальные или минимальные) значения измеряемых или регулируемых технологических параметров при установившихся режимах работы. Если приборы для измерения или регулирования встроены в технологическое оборудование, то предельные значения технологических параметров указывают под или вблизи позиционного обозначения прибора. Контуры технологического оборудования, трубопроводные коммуникации, прямоугольники, изображающие щиты, пульты, КТС ОП выполняют линиями толщиной 0.6-1.5 мм, линии связи -толщиной 0.2-0.3 мм, приборы и средства автоматизации - линиями толщиной 0.5-0.6 мм. При необходимости указания точного места точки измерения (внутри контура технологического аппарата) в конце тонкой линии изображается окружность диаметром 2 мм.
3.3 Изображение технологического оборудования и коммуникаций
Технологическое оборудование (ТО) и коммуникации на функциональных схемах изображаются упрощенно, но так, чтобы дать ясное представление о принципах работы и взаимодействии со средствами автоматизации. Технологические коммуникации и трубопроводы жидкостей и газов имеют условные цифровые обозначения, иногда к цифре добавляют буквы, условные обозначения проставляются на расстоянии не менее 50мм (ГОСТ 2.784-70), например [2], для
- воды -1-1 (-1ч-чистая вода) (см. рисунок 3.1),
- пара -2-2 (-2п-перегретый пар, -2н-насыщенный пар),
- воздуха -3-3,
- горючего:
жидкого -15-15, газообразного такого, как
- ацетилен -17-17,
- пропан -22-22.
Если используются дополнительные цифры, не предусмотренные ГОСТом, то на ФС должны быть нанесены пояснения принятых условных обозначений. На элементах ТО и трубопроводов даются необходимые поясняющие надписи, стрелками отмечается направление потоков.
На функциональных схемах условными изображениями показывают:
1) технологическое оборудование (в упрощенном виде, не нарушая принципа работы) с указаниями взаимодействий со средствами автоматизации;

Рисунок 3.1 - Барабан
2) коммуникации совместно с регулирующими органами и запорной аппаратурой;
3) средства автоматизации с указанием связи с технологическим оборудованием.
Изображения некоторых средств измерения и автоматизации в соответствии с ГОСТ представлены в табл. 3.1
Таблица 3.1
|
3.4 Буквенные условные обозначения приборов и средств
В автоматизации (ГОСТ 21.404-85). На первой позиции обозначения приборов располагают заглавные буквы наименования измеряемого или регулируемого параметра, а именно:
D – плотность, разность или перепад;
Е – любая электрическая величина;
F – расход, соотношение, доля, дробь;
G – размер, положение, перемещение;
Н – указатель верхнего предела;
L – уровень или нижний предел измеряемой величины;
М – влажность;
W – масса;
Q – концентрация, качество, состав;
P – давление, вакуум;
Т – температура;
V – вязкость.
На второй и последующих позициях – либо уточнение первого наименования, как например перепад давления, либо заглавную букву процедуры контроля или регулирования. На ФС используются следующие обозначения указанных процедур:
А – сигнализация при отображении информации;
С – регулирование или управление;
I – показания при отображении информации; R – регистрация,
S – включение/отключение или сигнализация при формировании выходного сигнала;
К – станция управления – переключатель режимов: ручное/автоматическое управление;
Н – ручное управление.
В верхней части окружности или овала наносятся буквенные обозначения измеряемой величины и функциональное назначение прибора. В нижней части окружности или овала наносятся позиционные обозначения, в которых указывается номер функциональной группы, строчными буквами русского алфавита либо через дефис арабскими цифрами порядковый номер прибора в функциональной группе по направлению следования сигнала от датчиков к регулирующему органу.
Примеры обозначений приборов:
1. Если на ФС встречается следующее
обозначение прибора 
то оно должно быть прочитано так: “Прибор, относящийся к 22-й функциональной группе, стоящий 5-м в этой группе, расположен на щите управления и предназначен для регистрации R и автоматического регулирования C перепада давления PD с одновременной визуализацией (показаниями) I”
2. Обозначение характеризует прибор,
относящийся к 1-й функциональной группе,
занимающий 4-е место по направлению следования сигнала, расположенный на щите
управления и предназначенный для регулирования C уровня L с сигнализацией S и
блокировкой по верхнему пределу H.
характеризует прибор,
относящийся к 1-й функциональной группе,
занимающий 4-е место по направлению следования сигнала, расположенный на щите
управления и предназначенный для регулирования C уровня L с сигнализацией S и
блокировкой по верхнему пределу H.
3. Обозначение указывает на то,
что прибор установлен на технологическом
объекте (нет разделяющей черты) и предназначен для показания I содержания Q
кислорода O2 в отходящих газах. Кроме того, прибор относится ко второй
функциональной группе и является в ней первым.
указывает на то,
что прибор установлен на технологическом
объекте (нет разделяющей черты) и предназначен для показания I содержания Q
кислорода O2 в отходящих газах. Кроме того, прибор относится ко второй
функциональной группе и является в ней первым.
Иногда для условных обозначений применяют дополнительные буквы в соответствии со следующим порядком: 1 - измеряемая величина, 2 – одна из дополнительных букв E, T, Y, соответственно обозначающих:
E – преобразование в электрическую величину;
T – дистанционная передача;
Y – преобразование.
Следовательно, РТ есть бесшкальный
манометр с дистанционной передачей. А обозначение показывает прибор для преобразования
давления в электрический сигнал.
показывает прибор для преобразования
давления в электрический сигнал.
3.5 Примеры упрощенных функциональных схем автоматизации
Система измерения расхода пара в парогенераторе. Проследим по рисунку 3.2 каналы 1 и 2 от датчиков к выходу на регистрирующий прибор.
Рисунок 3.2 – Система измерения расхода пара в парогенераторе
Функциональная группа по каналу 1 имеет позиционный номер 33, а приборы, в этой группе от датчика и далее должны иметь индексы "1", "2", "3" и т. д.
Датчик FE с позицией 33-1 – первичный бесшкальный измерительный преобразователь для измерения расхода.
Устройство 33-2 – устройство с нестандартным обозначением Z (конденсационный сосуд). Это означает, что датчик FE обладает диафрагмой, врезанной в паропровод Т71. Перепад давления на диафрагме, эквивалентный расходу пара, поступает в прибор с позицией 33-3, установленный на стативе (статическом основании). На этот же прибор воздействует сигнал по каналу 2.
Прибор 33-3 имеет функциональное обозначение UR, т.е. он является прибором, регистрирующим (R) величину U, которая является функцией расхода пара F и давления Р: U=f(F,P). Следовательно, этот прибор регистрирует расход пара F с коррекцией по его давлению Р. Корректирующий сигнал по давлению Р поступает по каналу 2. Для каждого канала указаны номинальные значения параметров сигналов: расход пара - 25 т/ч, давление - 1.3 МПа.
Контур регулирования температуры воды в котле (см. рисунок 3.3)
На функциональной схеме автоматизации котла термосопротивление 2-1 служит для измерения температуры горячей воды, выходящей из котла, термосопротивление 2-2 – для измерения температуры наружного воздуха, преобразователи 2-3 и 2-4 для преобразования сигналов от соответствующих термосопротивлений в унифицированные токовые сигналы 0 – 5 мА.
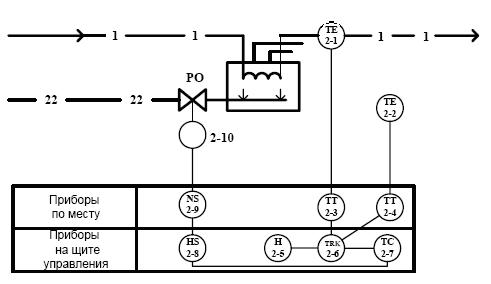
Рисунок 3.3 – Контур регулирования температуры воды в котле
В регуляторе температуры присутствуют задатчик 2-5 (Н в его обозначении означает ручную операцию), измерительный блок 2-6, регулирующий блок 2-6, блок управления 2-7, магнитный пускатель 2-9 и электрический исполнительный механизм 2-10. Изменение подачи топлива осуществляется регулирующей заслонкой РО. Как только температура воды из котла достигает заданного значения, регулирующий блок 2-7 дает команду на прекращения подачи газа, тем самым предохраняя котел от перегрева.
3.6 Проектная документация
Как было отмечено перед
разработкой проекта в SCADA-системе, необходимо изучить объект управления и
составить проектную документацию по его автоматизации. Для пояснения принципов
составления проектной документацией воспользуемся информацией, предоставленной
фирмой AdAstra Reseach Grou, LTD на курсах обучения базовой версии TRACE MODE.
Основой создания проектной документации при разработке АСУ ТП является
функциональная схема автоматизации объекта. На рисунке 3.4 представлена
функциональная схема устройства подготовки нефти (УПН) для транспортировки. Как
видно из рисунка, перед разработчиками АСУ поставлена задача: из добытой нефти
убрать пластовую воду и выжечь газ. Внизу слева от штампа на чертеже ФС
представлены приборы местные, расположенные на ОУ, и приборы на щите
операторской, названные в [3] комплексом технических средств операторских
помещений. Предварительно сложный объект автоматизации разбивается на
подобъекты (см. таблицу 3.2), и приборы комплектуются по контурам, каждому из
которых присваивается свой номер (см. таблицу 3.3). Приведем некоторые из них,
выделенные в таблицу 3.2. Приборы 1-го контура и
и служат для измерения температуры нефти на входе
в УПН с показанием (I) аварийных значений (A) при выходе за пределы допустимого
диапазона изменения температуры (5-60оС).
служат для измерения температуры нефти на входе
в УПН с показанием (I) аварийных значений (A) при выходе за пределы допустимого
диапазона изменения температуры (5-60оС).
Рисунок 3.4 – Функциональная схема устройства подготовки нефти (УПН) для транспортировки
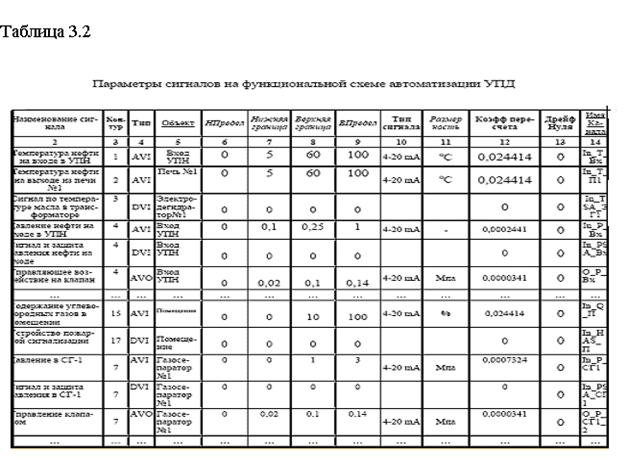
![]()
При этом датчик 1-1 установлен на объекте, а прибор 1-2 – на щите управления, на что указывает разделительная черта.
Приборы контура 4 и
и  предназначены для измерения давления (Р)
нефти на входе в УПН с сигнализацией (S) по превышению верхнего предела (H)
величиной 0,1 МПа и подачей через устройство усилия
предназначены для измерения давления (Р)
нефти на входе в УПН с сигнализацией (S) по превышению верхнего предела (H)
величиной 0,1 МПа и подачей через устройство усилия
 на пневматический клапан ИМ. Вторая буква (Т) в обозначении
прибора 4-1 указывает на то, что показания передаются на расстояние. Y в
обозначении прибора 4-3 указывает на преобразование измеряемой величины, в
частности, из электрической (Е) в механическую – давление (Р).
на пневматический клапан ИМ. Вторая буква (Т) в обозначении
прибора 4-1 указывает на то, что показания передаются на расстояние. Y в
обозначении прибора 4-3 указывает на преобразование измеряемой величины, в
частности, из электрической (Е) в механическую – давление (Р).
|
|
В системе предусмотрена
пожарная и
аварийная сигнализации по превышению в помещении процентного содержания
углеводородных газов
и
аварийная сигнализации по превышению в помещении процентного содержания
углеводородных газов ,
,  и
и  . Остальные комплекты приборов также
определяются, если воспользоваться материалом предыдущего подраздела. В
разработке проектной документации участвуют технолог-инженер КИПиА и
разработчик АСУ ТП на базе SCADA-системы. Каждый из них изучает объект
автоматизации – ТП и заполняет таблицы.
. Остальные комплекты приборов также
определяются, если воспользоваться материалом предыдущего подраздела. В
разработке проектной документации участвуют технолог-инженер КИПиА и
разработчик АСУ ТП на базе SCADA-системы. Каждый из них изучает объект
автоматизации – ТП и заполняет таблицы.
Технолог в таблицу 3.3 вносит следующую информацию по технологическим параметрам объекта (в шапке таблицы она обозначена курсивом):
- наименование технологического параметра;
- нижняя граница технологического параметра;
- верхняя граница технологического параметра;
- нижний предел измерений;
- верхний предел измерений;
- размерность технологического параметра.
Инженер КИПиА, продолжая заполнять таблицу 3.2, начатую технологом, вносит информацию по таким данным, как (см. в шапке таблицы – жирный шрифт):
- вид сигнала (входной или выходной, аналоговый или дискретный);
- тип сигнала (с позиции SCADA-системы);
- коэффициент умножения, названный ранее коэффициентом пересчета;
- дрейф нуля.
Разработчик АСУ ТП дополняет таблицу 3.3 следующей информацией (подчеркнутый шрифт в шапке таблицы):
- имя объекта (основано на структурном делении объекта автоматизации на участки);
- имя канала;
- число бит (для дискретных сигналов).
Представленная в таблице 3.3 информация используется при разработке систем измерения, контроля и управления на базе SCADA-системы.
Следует отметить, что в SCADA-системе TRACE MODE процесс создания проекта исходит из структуры системы управления. Вначале описываются задействованные в ней ПК и ПЛК, а также их коммуникации. Затем для используемых в структуре системы управления устройств указываются исполнительные модули SCADA-системы, которые на этих устройствах будут работать. После этого разрабатываются фрагменты программного обеспечения проекта для запуска на соответствующих исполнительных модулях.
Контрольные вопросы
1. Что является основой создания проектной документации при разработке АСУ ТП?
2. Какие задачи решаются при разработке функциональной схемы автоматизации?
3. Перечислите требования к оформлению функциональных схем?
4. Каким образом производится выбор технических средств АСУ ТП?
5. Каков порядок создания проекта в SCADA системе TRACE MODE?
4 Графический интерфейс в SCADA-системе TRACE MODE. Пошаговое создание мнемосхемы проекта
4.1 Графический интерфейс
Для разработки средств визуализации состояния технологического процесса и управления им (создания человеко-машинного интерфейса для операторских станций – графических баз для узлов проекта) в SCADA-системе TRACE MODE имеется редактор преставления данных. В него загружается структура проекта, созданная в редакторе базы каналов. Выбрав требуемый узел проекта, можно редактировать его графическую базу. Эта база включает в себя все графические фрагменты, которые выводятся на монитор данной операторской станции. Совокупность всех экранов для представления данных и супервизорного управления, входящих в графические базы узлов проекта составляют его графическую часть. Экраны в графических базах узлов проекта подразделяются на группы. Каждая группа имеет свое название. Группировку экранов удобно использовать исходя из их функционального назначения. Например, в одну группу можно собрать мнемосхемы, в другую – экраны настройки регуляторов, в третью – обзорные экраны и т.п. Одновременно на монитор может выводиться только один экран, каждый из них –это графическое пространство фиксированного размера, на котором размещаются статический рисунок и формы отображения. Он имеет свое имя и набор атрибутов (настроек). К таким атрибутам относятся:
- Размер.
- Цвет фона.
- Обои.
- Права доступа.
- Спецификация окна просмотра отчета тревог.
Разработка графических экранов осуществляется путем размещения на них графических элементов. Различают статические и динамические элементы. Статические элементы не зависят от значений контролируемых параметров, а также к ним не привязываются никакие действия по управлению выводимой на экран информацией. Эти элементы используются для разработки статической части графических экранов, например для изображения наполняемых емкостей, котлов, моторов и т.п. Поэтому их называют элементами рисования. Динамические элементы называются формами отображения. Эти элементы связываются с атрибутами каналов для вывода их значений на экран. Кроме того, часть форм отображения используется для управления значениями атрибутов каналов или выводимой на экран информацией. Некоторые формы могут также совмещать в себе обе функции. На экранах можно размещать комплексы статических и динамических элементов, оформленных как графические объекты, используемые для тиражирования готовых решений в области создания интерфейса оператора.
Графическим объектом называется совокупность форм отображения и элементов рисования, которая оформлена как единый графический элемент. Оформленные в виде объектов типовые графические фрагменты могут вставляться в экраны графических баз любых проектов. Существует два типа графических объектов: «Объект» и «Блок». Первый из них может ссылаться на 256 каналов, а второй– только на один. Для создания и редактирования объектов используются такие же окна, как и при работе с экранами. Разработка объектов идентична процессу разработки экрана. Различие заключается лишь в настройке форм отображения на каналы. В объекте формы отображения связываются с его внутренними каналами. Эти каналы при размещении объекта на экране настраиваются на реальные каналы редактируемого узла. TRACE MODE позволяет осуществлять ряд операций с графическими объектами: копирование, сохранение и вставка в другие проекты или графические базы того же проекта, вывод в отдельные окна на других экранах и т. д. Для хранения графических объектов используются графические библиотеки. Каждая библиотека имеет имя и список включенных в нее объектов. Чтобы в дальнейшем использовать созданную библиотеку, ее надо сохранить в файле. Для получения доступа к сохраненной ранее библиотеке надо ее загрузить в редактор представления данных.
4.2 Пошаговое создание мнемосхемы проекта
Поясним использование графического интерфейса для создания мнемосхемы проекта на базе учебного тренажерного комплекса. Как отмечалось ранее, тренажерный комплекс служит для проектирования упрощенного варианта АСУ технологического процесса регулирования температуры с одновременным контролем влажности. необходимо, чтобы эти процессы отображались на дисплее оператора. Кроме того, необходимо обеспечить возможность оператору изменять параметры регулятора, наблюдать состояние оборудования, например, нагревателя: включен или выключен. Решение поставленной задачи осуществляется следующими шагами:
1) В разделе проекта «Шаблоны_экранов» необходимо создать компонент «Экран», переименовав его в «АРМ диспетчера» и разместив дату и время, вызвав ГЭ «Календарь» с типом привязки: Текущие дата и время (см. рисунок 4.1).
Рисунок 4.1- Окно «Шаблоны экранов»
2) Открыв шаблон экрана на
редактирование, размещаем на рабочем поле графический элемент: «тренд» ![]() (см. рисунок 4.2). В
окне свойств тренда задаем параметры отображаемых кривых такие, как диапазон
изменения переменных, предельные и аварийные значения, масштаб по оси времени.
Затем осуществляем привязку к аргументам экрана.
(см. рисунок 4.2). В
окне свойств тренда задаем параметры отображаемых кривых такие, как диапазон
изменения переменных, предельные и аварийные значения, масштаб по оси времени.
Затем осуществляем привязку к аргументам экрана.
3) На рабочем поле шаблона
экрана разместим ещё один графический элемент «Кнопка» ![]() для организации ввода значений
для организации ввода значений

Рисунок 4.2 – Окно графического элемента «Тренд»
параметров регулятора. На рисунке 4.3 показана кнопка для ввода значений параметра регулятора Кп. При этом также создаем аргумент экрана с соответствующим названием и выполняем привязку.

Рисунок 4.3 – Кнопка для ввода значений параметра регулятора Кп
Для высвечивания заданных из АРМ значений параметра Кп вызываем ГЭ динамический текст и выполняем основную привязку к соответствующему аргументу (см. рисунок 4.4). Подобным образом создаем кнопки для остальных параметров регулятора.
Рисунок 4.4 – Окно привязки аргументов
4) Для формирования задания регулятору
разместим ГЭ Ползунок![]() На нем будем задавать величину задания, и он же
будет отображать ее.
На нем будем задавать величину задания, и он же
будет отображать ее.
5) Осуществляем привязку компонентов перетаскиванием с нажатой левой клавишей мыши элементов «Тег Температура» на «Канал Температура» и «Канал Выход_плюс» на «Тег Нагреватель» (см. рисунок 4.5).
Рисунок 4.5 – Окно привязки компонентов
6) Создаем гистограмму, отображающую температуру и влажность, а также графический элемент, отображающий работу ШИМ (Выход_плюс) и, следовательно, нагревателя (см. рисунок 4.6). В свойствах гистограммы создаем 2 столбца и привязываем их к температуре и к влажности.
Рисунок 4.6 – Гистограмма, отображающая работу ШИМ
7) Для индикатора выхода ШИМ создаем канал типа HEX16 в АРМ_диспетчера и переименовываем его в Выход. К графическому элементу (сфера), отображающему работу ШИМ и нагревателя добавляем динамизацию и привязываем к аргументу Выход_плюс, который создаем в аргументах экрана. Канал Выход привязываем к Реальному значению Выход_плюс в ШИМ. В аргументах экрана созданный аргумент Выход_плюс привязываем к каналу Выход, созданному в АРМ_диспетчера.
8) Сохраняем проект и запускаем профайлер. В результате получаем мнемосхему с трендом и гистограммой (см. рисунок 4.7).
Рисунок 4.7 – Мнемосхема с трендом и гистограммой
Архивирование и документирование в SCADA-системе TRACE MODEВ поддерживаются три типа архивов: локальный СПАД (система промышленного архивирования данных); отчет тревог; глобальный регистратор [1, 2]. Разница между архивами заключается в алгоритме сохранения данных и в формате файлов.
4.3 Локальный СПАД
Этот вид локального архива предусмотрен для сохранения на диске и последующего анализа значений каналов текущего узла. В нем фиксируются изменения реальных значений и не вычисляемых атрибутов каналов. В этот архив значения каналов записываются в бинарном формате. Условием записи является изменение значения канала. При этом в архив добавляется одна запись, фиксирующая новое значение и время. Точность фиксации времени составляет 1 мс. СПАД имеет фиксированную длину. При этом глубина архивирования определяется заданным размером и интенсивностью потока данных. При настройке СПАД задается имя файла архива, путь к нему и размер в мегабайтах. Время записи равно базовому времени цикла пересчета базы каналов. Это означает, что при многократном изменении какого-либо архивируемого атрибута в пределах одного цикла пересчета базы в архив попадет значение последнего изменения. Поскольку размер архива ограничен, то увеличение времени хранения достигается сокращением интенсивности потока данных. Для этого вводится апертура по каналам, чтобы не фиксировать малые изменения, а для инерционных параметров увеличивается период опроса. Данные в СПАД обновляются циклически. Перед добавлением новой записи контролируется ее положение в файле. Если места для записи больше нет, то информация записывается в начало архива. Далее все новые записи записываются поверх записей, самых ранних по времени. Сохранение данных в СПАД реализовано в виде потока, работающего параллельно с пересчетом базы каналов, но имеющего более низкий приоритет. МРВ формирует внутреннюю очередь сообщений для записи в СПАД. Поток архивирования берет данные из нее и записывает их в архив. Если размер очереди превышен, то самые ранние по времени сообщения теряются. По умолчанию максимальный размер очереди принимается равным 64 000 сообщений. Контроль состояния очереди сообщений в СПАД и управление ею осуществляется с помощью канала подтипа «ДИАГНОСТИКА» с дополнением очереди в СПАД. МРВ, сохраняющий данные в СПАД, инициализирует этот архив при первом запуске. МРВ проверяет наличие свободного места на диске. Если место на диске есть, то создается файл архива. Число записей в архиве определяется его размером, длиной записи и размером заголовка. Величина одной записи составляет 16 байт, а размер заголовка, в котором формируются структуры для индексации данных в архиве, приблизительно 1 Мбайт. Если указанная длина архива меньше размера заголовка и на диске есть свободное место, то файл архива создается. Его размер будет 1,4 Мбайт. Это позволяет хранить 22 770 записей. Если при запуске МРВ уже существует файл архива с тем же именем, то проверяется идентичность его структуры требуемой. При этом сравниваются установленный размер и имя узла.
Для контроля и управления архивированием данных в СПАД предусмотрены следующие каналы:
- подтип «ДИАГНОСТИКА» с дополнениями «СПАД»;
- «Потеря СПАД» и «Очередь СПАД»;
- подтип «Системный» с дополнениями «Архивация» и «СПАД копировать».
Канал «Системный» с дополнением «Архивация» управляет сохранением во всех архивах. Значение его нулевого бита управляет разрешением записи в локальный архив, а восьмого - разрешением открытия файла архива:
- 0 - разрешить;
- 1 - запретить.
Запрет открытия файла используется при записи архива на сменный носитель во время его замены. При этом файл закрывается, а новые данные накапливаются в буфере. После замены носителя значение восьмого бита следует снова установить равным нулю. В результате на новом носителе создается файл архива. В него запишутся данные из буфера, и процесс архивирования продолжится. Принудительное сохранение данных в СПАД реализуется с помощью канала типа OUTPUT подтипа «ДИАГНОСТИКА» с дополнением «Потеря СПАД». МРВ может экспортировать данные из локального архива в файлы текстового формата. Существует возможность экспортировать архивные значения одного канала или всей базы целиком. Для управления экспортом значений из одного архивируемого канала используется канал типа OUTPUT подтипа «КАНАЛ» с дополнением «SetGetCПАД». Он имеет настройки для выбора канала и его атрибута и настройку, задающую диапазон выборки. Значение канала OUTPUT задает смещение базового времени в секундах относительно начала текущих суток. Диапазон выборки отсчитывается назад от полученного базового времени. Положительное значение канала задает смещение назад, а отрицательное - вперед. Экспортируемые данные сохраняются в текстовом файле, имя которого образуется из имени указанного канала. При каждой операции экспорта новые данные дописываются в конец данного файла. Экспорт всех архивируемых каналов осуществляется в текстовый файл с именем data.txt. Он располагается в директории проекта. При каждой операции экспорта новые данные дописываются в конец файла. Данные в него заносятся в следующем формате:
<имя канала 1>
<дата время> <значение>
…………………………..
<дата время> <значение>
…………………………..
<имя канала n>
<дата время> <значение>
………………………….
<дата время> <значение>
Для управления экспортом данных из СПАД используется канал типа OUTPUT подтипа «Системный» с дополнением. «Данные из СПАД». Значение канала определяет временной диапазон выборки и вид представления экспортируемых каналов:
1 - за предыдущие сутки по каналам F;
2 - за предыдущие сутки по каналам Н;
3 - за предыдущий час по каналам F;
4 - за предыдущий час по каналам Н;
5 - за текущий час до текущей минуты по каналам F;
6 - за текущий час до текущей минуты по каналам Н;
7 - за последние 24 часа по каналам F;
8 - за последние 24 часа по каналам Н;
9 - за текущие сутки до текущего часа по каналам F;
10 - за текущие сутки до текущего часа по каналам Н.
Канал типа INPUT контролирует чтение данных из СПАД.
Для управления копированием СПАД используется канал подтипа «Системный» с дополнением «СПАД копировать». Посылаемое в этот канал значение определяет путь к копии:
1 - в директорию проекта;
2 - в корневую директорию диска С, где записан проект;
3 - в корневую директорию диска А;
65... 95 - в корневые директории дисков (65 - А; 66 - В и т. д.).
Имя файла копии архива образуется из 8-разрядного шестнадцатеричного числа, кодирующего дату и время (число секунд с 00:00:00 01/01/1970). Данные, записанные в архив во время его копирования, в копии отсутствуют. Для контроля сохранения данных в локальном СПАД и чтения из него предназначен канал типа INPUT подтипа «ДИАГНОСТИКА» с дополнением «СПАД». Если этот канал имеет тип OUTPUT, то любая его отработка обнуляет признак текущего состояния операций с локальным архивом.
4.4 Локальный архив “Отчет тревог”
Отчет тревог служит для записи в ASCII-файл информации об изменении значений атрибутов каналов, а также для записи сообщений, содержащих тексты из словаря событий, и интерактивных сообщений оператора. Он предназначен для фиксации событий. Сохранение сообщений в отчете тревог реализовано в виде отдельного потока с более низким приоритетом, чем пересчет базы каналов. МРВ формирует очередь сообщений для записи. Поток архивирования берет данные из этой очереди и записывает их на диск. Если интенсивность потока сообщений превышает скорость их записи на диск, то очередь растет. По умолчанию предельный размер очереди равен 64 000 сообщений. При достижении этого размера новые сообщения затирают самые старые. Если очередь сообщений пуста, то файл отчета тревог закрывается без записи сообщений. При этом только обновляется FAT. При наличии сообщений в очереди файл снова открывается. Отчет тревог может иметь размер до 4 Гбайт. По умолчанию его максимальный размер принимается равным 140 Мбайт. При достижении этого размера новые сообщения начинают записываться со второй строки. Для управления размером файла и длиной очереди используются системные каналы. Формируемые сообщения могут передаваться на ряд направлений:
- направление AR - в файл отчета тревог;
- направление G - в графические консоли;
- направление PRN - программируется;
- направление М - программируется.
Сообщения, заносимые в отчет тревог, оформляются в виде строк фиксированной длины - 136 символов. Каждая строка состоит из набора полей, разделенных пробелами:
- Дата Время ИД Имя Код Сообщение Икв Ткв Номер, где Дата – дата формирования строки [ДД-ММ-ГГ];
- здесь ДД – день месяца; ММ – месяц;
- ГГГГ – год;
- Время – время формирования строки [чч:мм:сс.х];
- здесь чч– часы; мм – минуты;
- сс – секунды;
- х – доли секунды;
- ИД – символ идентификатора типа сообщения;
- здесь А - аварийное сообщение;
- W -предупредительное сообщение (и т. д.);
- Имя – имя канала (13 символов);
- Код – кодировка канала или комментарий (21 символ);
- Сообщение – текст сообщения (48 символов);
- Икв – числовой идентификатор пользователя, квитировавшего сообщение (4 символа);
- Ткв – при квитировании сообщения в это поле заносится время в следующем формате [дд_чч:мм:сс]:
- дд – день месяца;
- чч – часы;
- мм – минуты;
- сс –секунды;
- Номер – индивидуальный номер строки в шестнадцатеричном виде (8 символов).
Формат первой строки отличается от остальных. В ней присутствуют дата и время создания отчета тревог, сообщение START и три числа, содержащих служебную информацию. Поля: Икв и Ткв строки отчета тревог предназначены для квитирования – подтверждения того, что оператор видел данное сообщение. В них заносится числовой идентификатор пользователя,
квитировавшего сообщение, дата и время квитирования. Сообщения могут квитироваться в МРВ с помощью форм отображения, имеющих функции управления, с помощью формы просмотра отчета тревог, из специального окна просмотра отчета тревог, а также из консоли тревог. При квитировании заполняются соответствующие поля строки отчета тревог. Все сообщения, поступившие в отчет тревог, имеют тип, который определяет степень ответственности сообщения и задается при вводе текста сообщения. При просмотре отчета тревог сообщения можно фильтровать по типу:
<пробел> – без класса;
М – сообщение;
W – предупредительное сообщение;
E – ошибка;
I – информация;
A – аварийное сообщение;
R – изменение атрибутов канала;
S – пользовательское;
Y – пользовательское;
0,…,9 – пользовательское;
_ – невидимое (не передается в графику);
- – неквитируемое;
! – командное;
? – резерв;
* – системное невидимое Сообщения по реальным значениям.
У архивируемых в отчете тревог каналов контролируются изменения их реального значения. По результатам формируются сообщения для записи в отчет тревог. В зависимости от вида представления канала режимы формирования сообщений различаются. Аналоговые параметры обрабатываются каналами с видом представления F. Для них сообщения заносятся в отчет тревог при пересечении реальным значением аварийных границ и шкалы. Для канала можно ввести величину гистерезиса на отслеживание границ. Если, например, значение канала пересекает верхнюю внутреннюю границу, то номер интервала меняется с 0 на 1 и формируется сообщение. При обратном изменении значения канала сообщение формируется после того, как реальное значение станет меньше границы на величину гистерезиса. Величины аварийных границ и гистерезиса задаются в бланке «Границы и обработка» диалога «Реквизиты». Дискретные параметры контролируются каналами с видом представления Н. Здесь на каждое изменение значения любого его бита формируется свое сообщение. Число формируемых сообщений определяется числом битов, изменивших свое значение. Для каждого бита реального значения каналов с видом представления Н определены два сообщения. Одно из них заносится в отчет тревог при изменении значения бита с 0 на 1, а второе - с 1 на 0. Число контролируемых битов задается в бланке «Маски и эмуляция» диалога «Реквизиты». Число контролируемых битов задается в бланке Маски и эмуляция диалога Реквизиты, как показано на рисунке 4.8.
Рисунок 4.8- Окно диалога «Реквизиты»
Внимание! Сообщение, которое начинается со знака @, не выводится в отчет тревог. Это особенно существенно для битовых сообщений. В отчет тревог, кроме сообщений, связанных с реальным значением канала, могут заноситься сообщения, характеризующие изменение других атрибутов канала. Такими сообщениями являются информация о недостоверности канала и сообщения об изменении границ, периода, состояния и настроек первичной обработки. Чтобы контролировать изменения этих атрибутов канала, для него в бланке «Основные» диалога «Реквизиты» необходимо установить флаг «Атрибуты».
При наличии у канала флага аппаратной недостоверности в отчет тревог заносится строка, поле «Сообщение» которой содержит символы «???». Пока не будет снят этот флаг, в отчет тревог не будут заноситься сообщения по реальному значению недостоверного канала. При изменении любых других атрибутов канала в отчет тревог будут заноситься строки, содержащие в поле «Сообщение» обозначение атрибута и его новое значение. Формирование текстов сообщений по каналам. Текстовая строка поля «Сообщение» содержит описание возникшей ситуации. Эти строки задаются в бланке «Сообщения в отчет тревог» диалога «Реквизиты». Тексты сообщений выбираются из системного словаря. Он содержит 40 стандартных сообщений: первые 8 – для каналов с видом представления F, остальные – для Н. Сообщения в списке бланка их настройки располагаются в строго определенном порядке. Вместо стандартных для каждого канала можно ввести собственные сообщения. Они сохранятся в системном словаре. Для каналов с видом представления F порядок сообщений определяется номером интервала, в который должен осуществляться переход (таблица 4. 1).
|
![]()
Для каналов с видом представления Н положение строки в списке определяет номер бита, к которому это положение относится. Для каждого бита в списке отводится две расположенных подряд строки. Первая из них содержит сообщение об изменении значения бита с единицы на нуль, а вторая – об изменении значения с нуля на единицу. Таким образом, список сообщений для канала с видом представления Н содержит 2b строк, где b – число контролируемых битов. По умолчанию в эти строки заносятся следующие сообщения: «nM_Off» «nМ_Оn», где n – номер бита (начиная с нуля). Запись в отчет тревог сообщений оператора. Дополнительными источниками формирования сообщений в отчете тревог могут являться интерактивные сообщения оператора, например сообщения о приеме или (и) сдаче смены, сообщения о начале или завершении профилактических работ и т. д. Вводимый оператором текст записывается в поле «Сообщение» формируемой строки отчета тревог. Длина строки, доступной для ввода произвольного сообщения, ограничена 48 символами. Введенный текст дополняется числовым идентификатором оператора. Для ввода сообщения надо разместить на одном из экранов (в редакторе представления данных) форму отображения «Кнопка» и использовать ее функцию «Ввод комментария». Подробную информацию по отчету тревог можно найти в Справочной системе Трейс Моуд [1].
4.5 Архив «Глобальный регистратор»
Этот архив является общим для всего проекта. В него могут по сети посылать данные все узлы. Сохранение данных в регистраторе обеспечивает монитор глобального регистратора. Значения архивируемых в регистраторе каналов посылаются ему по сети при их изменении. Сохранение информации в архивах настраивается при конфигурировании системы. Однако многие настройки могут меняться в реальном времени с помощью специальных каналов. Кроме того, используя ODBC, можно сохранять информацию в любых базах данных, поддерживающих этот протокол. Глобальный регистратор предназначен для сохранения в бинарном виде информации об изменениях значений каналов. В нем фиксируются изменения реального значения и всех не вычисляемых атрибутов: период, границы, маски и настройки первичной обработки, а также флаги достоверности, состояния и подключения. Точность фиксации времени составляет 0,001 с.
Глобальный регистратор имеет фиксированный групповой номер 200. Он принимает данные, посылаемые по сети на этот номер, и сохраняет их. Поэтому в рамках проекта может существовать только один регистратор. Однако он может быть дублированным. Число его дублей не ограничено. Все присутствующие в сети мониторы глобальных регистраторов будут одновременно принимать данные, посылаемые для сохранения. Естественно, каждый из них будет вести свой файл архива, но все эти файлы будут идентичны. Глобальный регистратор не может осуществлять автопосылки в сеть. Поддержка глобального архива включается установкой регистратора в состояние «Активен». В этом случае в базе каналов глобального регистратора для данного узла создается объект с соответствующим именем. В нем формируются каналы, принимающие архивируемые данные. Имена этих каналов воспроизводят имена архивируемых каналов в МРВ. Чтобы при запуске МРВ отключить сохранение данных в регистраторе, следует поставить признак начального состояния «Выключен». Глобальный архив для глобального регистратора является локальным архивом. Поэтому параметры архивирования, каналы для сохранения, а также функции управления и контроля настраиваются для него так же, как в МРВ для локального архива СПАД. Глобальный архив фиксирует изменения реальных значений и всех не вычисляемых атрибутов каналов со всех узлов проекта. Локальный архив глобального регистратора является глобальным архивом для остальных узлов проекта. Глобальный регистратор принимает по сети данные, посланные для сохранения в его архиве. Архивированием в глобальном регистраторе управляет канал «СИСТЕМНЫЙ» с дополнением «Архивация». Подробнее см. Справочную систему Трейс Моуд [1].
4.6 Разработка документов по спроектированной системе
Документирование технологической информации – это одна из основных функций систем управления. Документы должны соответствовать требованиям к технологическим отчетам и журналам, принятым на производстве. Они могут существенно различаться на разных предприятиях. Поэтому чтобы решить задачу документирования, необходимо иметь инструмент для создания произвольных форм документов. Для документирования технологической информации используется сервер документирования. Этот модуль по команде от МРВ, собственному сценарию или по команде от оператора интерпретирует созданные заранее шаблоны, запрашивает у МРВ необходимые данные и формирует по ним документы. Для создания шаблонов документов в инструментальную систему включен редактор шаблонов. Шаблон документа разрабатывается в виде файла HTML-формата. В него могут быть вставлены любые элементы, поддерживаемые в HTML, а также дополнительные функции и команды, предназначенные для запроса данных от узлов проекта и обработки полученных значений. Команды, доступные для использования в шаблонах, позволяют выводить значения атрибутов каналов в нужные области генерируемого документа, вставлять в него растровые изображения, данные из архивов в виде графиков, интегральных и усредненных значений каналов.
Редактор шаблонов. Экран редактора шаблонов представлен на рисунке 4.9. Редактор имеет главное меню, панели инструментов, строку состояния и рабочее поле. В меню включены команды работы с файлами шаблонов, печати документа, а также команда выхода из редактора.
При выполнении команды «Пробный отчет» на экране появляется окно, в которое выводится изображение сгенерированного по шаблону документа. Этот документ может быть выведен на принтер как образец. Данные, которые вставлены в него, генерируются редактором шаблонов, а не запрашиваются у МРВ. Редактор имеет три инструментальные панели: основную панель, панель форматирования и панель объектов.
Рисунок 4.9 –Экран редактора шаблонов
Основная инструментальная панель позволяет выполнять следующие операции:
- создать новый шаблон; загрузить шаблон из файла;
- сохранить шаблон; вставить фрагмент в шаблон;
- удалить выделенный фрагмент и поместить его в буфер обмена;
- копировать выделенный фрагмент в буфер обмена; вставить содержимое буфера обмена в текст шаблона;
- отменить предыдущее действие;
- восстановить отмененные действия;
- объединить выделенные линейные элементы;
- объединить выделенные блочные элементы;
- выделить элементы, находящиеся в иерархии на ступень выше;
- перейти в диалог редактирования свойств элемента;
- просмотреть пробный отчет; получить информацию о программе.
С помощью инструментальной панели для форматирования текста можно выбрать тип и размер шрифта, один из стандартных стилей текста и т. п. В инструментальную панель объектов вынесены команды создания наиболее часто используемых элементов.
Среди них такие:
- вставить произвольное выражение; вставить поле вывода имени канала;
- вставить поле вывода значения канала;
- вставить поле вывода даты или времени; вставить поле вывода обработанного значения канала; вставить график;
- вставить разделительную линию;
- вставить таблицу; вставить растровое изображение;
- поставить метку;
- создать гиперссылку.
Строка состояния располагается в нижней части экрана редактора и используется для вывода контекстной подсказки по функциям инструментальных панелей. В нее также выводится вспомогательная информация о состоянии клавиатуры. Для создания нового шаблона надо выполнить команду «Создать» из меню «Файл» или нажать ЛК на соответствующую иконку основной инструментальной панели. При этом рабочее поле редактора очищается и становится доступным для создания нового шаблона. Создаваемому шаблону присваивается имя «Безымянный». При его первом сохранении на экран выводится диалог выбора файла. В нем можно изменить имя шаблона и указать каталог сохранения. Формируемые сервером документирования отчеты содержат данные, характеризующие состояние управляемого процесса:
- текущие или архивные значения технологических параметров;
- характеристики состояния технологического оборудования и пр.
Эти данные запрашиваются у МРВ. Чтобы вставить в документ команды запроса этой информации, надо связать шаблон с проектом. Для подключения шаблона к проекту надо выполнить команду «Выбрать проект» из меню «Файл». В появившемся диалоге следует указать файл конфигурации требуемого проекта. Файл шаблона представляет собой HTML-документ. Однако помимо стандартных функций, заложенных в HTML, шаблон может содержать команды форматирования и запроса данных у МРВ. Существует три типа таких команд:
- команды, задающие общие параметры шаблона (путь к проекту; интервал обновления);
- команды, определяющие пользовательские функции (общие для всего документа);
- команды, управляющие форматированием отдельных HTML- элементов шаблона.
Команды первых двух типов размещаются в заголовке документа HTML внутри тега <HEAD> (пример записи этих команд см в [1, 2]). Команды управления форматированием отдельных HTML- элементов шаблона находятся в теле документа (внутри тега <BODY>). Они располагаются сразу за стартовым тегом элемента [1, 2]. Свойства элементов HTML в редакторе шаблонов могут быть разделены на три класса:
- атрибуты элементов HTML, определяющие функциональные характеристики элементов,
- например, COLSPAN задает число столбцов, занимаемых элементом таблицы, а атрибут ID - идентификатор элемента;
- стили элементов HTML для задания внешнего вида документа;
- специальные свойства, используемые сервером документирования.
Разные атрибуты и стили имеют различный синтаксис записи значений и могут применяться к разным элементам. Например, стиль TEXT-ALIGN имеет допустимые значения left, right, center, justify и действует на блочные элементы. Специальные свойства служат для задания характеристик элемента, которые не могут быть выражены стандартными атрибутами и стилями. Специальным является, например, свойство VALUE. Оно задает текстовое содержимое элемента HTML. Свойство REPEAT определяет число повторений элемента и т. п. Для изменения свойств элементов в редакторе шаблонов предусмотрен специальный диалог, вход в который осуществляется по команде «Свойства элемента» из меню «Элемент». Кроме того, этот диалог можно открыть нажатием ЛК на специальную иконку основной инструментальной панели. Все свойства элементов (значения стиля, атрибута или специального свойства) могут вычисляться во время генерации документа. Для этого надо задать выражение для их вычисления. Список атрибутов и стилей, а также их значения определены стандартом языка HTML и таблицами стилей CSS (http://www.w3.org).
Для более сложных задач представления информации можно использовать произвольные выражения. Они разрабатываются на языке TexнoLIST и предназначены для управления свойствами элементов HTML в процессе формирования документа. Чтобы вставить произвольное выражение на языке ТехноLIST в текст шаблона, надо нажать ЛК на специальную иконку панели объектов редактора шаблонов (см. рисунок 2.13). При этом на экране появляется диалог, в окне «Выражение» которого можно написать фрагмент программы, реализующий требуемые операции. Текст выражения набирается с помощью клавиатуры. Чтобы вставить в программу стандартные или пользовательские функции, нужно нажать ЛК на кнопку «fn()». При этом на экране появляется меню, содержащее перечень элементов, которые могут быть использованы в выражениях.
4.7 Работа TRACE MODE в реальном времени
Работа Трейс Моуд в режиме реального времени осуществляется через исполнительные модули, под управлением которых запускается АСУ, cозданная в инструментальной системе.
4.7.1 Монитор реального времени.
Мониторы исполнительной системы циклически выполняют следующие операции: обмен данными с контроллерами и УСО, сохранение данных в СПАД и отчет тревог, пересчет базы каналов, обмен по сети, взаимодействие с графическими клиентами, обмен данными с другими приложениями и др. Набор операций зависит от типа монитора. Структура монитора реального времени (МРВ). МРВ состоит из сервера математической обработки и графической консоли. Сервер математической обработки реализует функции пересчета базы каналов, обработки данных и управления, связи с контроллерами и удаленными мониторами по сети, последовательному интерфейсу и через модемы. Здесь же реализуются функции обмена с базами данных и другими приложениями Windows, а также функции архивирования и считывания данных из архивов.
Функции человеко-машинного интерфейса реализуются в графической консоли. Этот модуль запрашивает данные у сервера математической обработки для их отображения и передает серверу команды управления, сформированные оператором. Для связи сервера математической обработки и графической консоли используется механизм DCOM. Отладочный монитор «ПРОФАЙЛЕР». Вместе с инструментальной системой поставляется специальный отладочный МРВ - профайлер. Этот монитор по своим функциям полностью воспроизводит обычный МРВ. Однако в отличие от него профайлер сохраняет в файле протокол работы, который содержит информацию о запуске, работе в реальном времени и завершении работы. Этот файл имеет текстовый формат и имя <name>.txt (где <name> - имя файла базы каналов) и всегда создается в директории проекта. При каждом новом запуске профайлера старый файл профайлера стирается и вместо него создается новый. Информация, заносимая в этот файл, зависит от используемых функций МРВ. Кроме профиля работы МРВ профайлер может сохранять в файле <name>.tnt (где <name> - имя файла базы каналов) дополнительную отладочную информацию.
Запуск графической консоли. Графическая консоль запускается командной строкой:
PicRT.exe [<prg>.ctm/N:<node>] [/S:<PC>] [/F] [/R],
где <prg> - имя файла конфигурации проекта;
<node> - имя узла;
<РС> - имя компьютера, на котором должен работать сервер
математической обработки; отсутствие этого параметра означает, что это локальный компьютер;
/F - выход при старте в полноэкранный режим;
/R - автоматический запуск сервера математической обработки при наличии пользователя с именем default; если его нет, то на экран выводится диалог запроса имени и пароля. Все параметры запуска являются необязательными. Их можно указать после запуска.
Запуск сервера математической обработки. Графическая консоль может запустить сервер математической обработки только на локальном компьютере. При подключении к удаленному компьютеру сервер математической обработки должен быть на нем уже запущен. Сервер математической обработки может быть запущен командной строкой:
DrawServ.exe/P:<path>/F:<node> [/RUN] [/CONSOLE]
[/AUTORS] [/IREC=n] [/REC=m] [/DEBUG-h] [/DISABLEJO]
[/I:NNNN], где <path> - полный путь к базе каналов;
<node> - имя базы каналов без расширения;
/RUN - запуск пересчета при старте;
/CONSOLE - вывод на экран окна с таблицей каналов;
/AUTORS - этот ключ определен для каналов DCS;
MODBUS, M-Lmk(In,Out);
/LREC=n - число NCB для индивидуального приема п=0,1,2 (по умолчанию 1);
/REC=m - число NCB для приема, включая IREC;
/DEBUG-h - вывод отладочной информации в файл <name>.tnt, где <name> - имя файла базы каналов. Этот ключ реализуется только для профайлера. Параметр h - это число в шестнадцатеричном формате, каждый бит которого указывает на сохранение определенного вида информации;
/DISABLEJO - замена каналов обмена с платами УСО на внутренние каналы;
NNNN - число в шестнадцатеричном формате, значение отдельных битов которого задает различные параметры: ограничение числа NCB на прием и на отсылку, запрет считывания границ каналов из файла сохранения состояния и т. д. Настройка DCOM. Механизм DCOM позволяет запускать графический и математический компоненты МРВ на разных компьютерах, объединенных в локальную сеть. Для этого необходимо выполнить дополнительную настройку DCOM. Сначала надо зарегистрировать сервер математической обработки на обоих компьютерах. При инсталляции МРВ эта регистрация осуществляется автоматически. Однако при переносе сервера математической обработки с одного компьютера на другой его регистрацию можно выполнять вручную с помощью программы tmreg.exe. Если используется одноранговая сеть, то для работы DCOM учетные записи пользователей на всех машинах должны быть одинаковыми. После регистрации сервера математической обработки следует запустить программу Dcomcnfg.exe из поддиректории SYSTEM32 директории установки Windows NT. При этом на экран будет выведен диалог «Свойства: Настройка DCOM». В этом диалоге надо войти в бланк «Свойства по умолчанию» и настроить свойства DCOM, как показано на рисунке 4.10. Используя бланк «Безопасность по умолчанию» диалога настройки DCOM, нужно задать соответствующие разрешения на доступ к серверу для удаленных пользователей. Для подключения нескольких графических консолей к одному серверу математической обработки эту настройку надо выполнить на всех компьютерах, где будут запускаться графические консоли. При этом регистрация сервера математической обработки обязательна на всех этих компьютерах. Пересчет базы каналов. Мониторы реального времени Трейс Моуд работают как интерпретаторы базы каналов. Интерпретация базы каналов осуществляется один раз за цикл системы. Условием очередного пересчета базы каналов является начало нового цикла системы. Время цикла настраивается индивидуально для каждого узла с помощью двух параметров, задаваемых в соответствующих областях бланка «Основные» диалога «Параметры узла» (см. рисунок 4.11). Это - период пересчета в tick и разрешение таймера (величина tick).

Рисунок 4.10 – Окно настройки свойств DCOM
Рисунок 4.11 – Окно диалога «Параметры узла»

Рисунок 4.12 – Циклограмма таймера и индекс пересчета
Переход к новому циклу контролирует канал «Системный» с дополнением «Индекс пересчета». Величина цикла определяет минимальное время реакции системы.
Один пересчет базы каналов включает в себя четыре такта:
- первый - пересчет всех каналов типа INPUT, кроме каналов подтипов «КАНАЛ» и «ОБЪЕКТ». При этом для каждого пересчитываемого канала последовательно выполняется трансляция входных значений в аппаратные и реальные и процедура «Управление»;
- второй - пересчет каналов типа INPUT подтипов «КАНАЛ» и «ОБЪЕКТ». Для каждого пересчитываемого канала последовательно выполняется трансляция входных значений в аппаратные и реальные и процедура «Управление». Процедура «Управление» осуществляется для всех каналов, пересчитываемых на этом цикле;
- третий - вычисление метапрограмм, написанных на ТехноIL;
- четвертый - пересчет каналов типа OUTPUT (трансляция входных значений в реальные и аппаратные). Один цикл пересчета включает в себя три прохода по базе каналов, начиная с канала, имеющего младший индекс. Эти проходы реализуются на первом, втором и четвертом тактах пересчета.
Модификация проектов в реальном времени.
Чтобы подключить в реальном времени к базе каналов новый объект, его надо сохранить в файле и разместить в директории проекта. Кроме того, в базе надо предусмотреть специальные каналы управления загрузкой. Для них надо установить тип OUTPUT, подтип «СИСТЕМНЫЙ» с дополнением «Загрузить». Значение, посылаемое в такой канал, определяет выбор объекта для загрузки. Если оно равно двум, то загружается объект из файла с таким же именем, как у канала. Если значение больше 100, то имя файла определяется следующим образом:
<имя_каналаNN>.соb, где NN = <значение_канала>-100.
Если у загружаемого объекта стоит флаг загрузки и в базе имеется загружаемый объект с таким же именем, то он заменяется. При загрузке объекта анализируется наличие в базе каналов с идентичными именами. Такие каналы заменяются, а остальные просто добавляются в базу. Если для заменяемого канала были настроены вызовы FBD- программ, то эти ссылки сохраняются без изменения. Если добавляемые в базу каналы вызывали FBD-программы и в качестве аргументов использовали каналы, не входящие в загружаемый объект, то такие ссылки блокируются. Также блокируются ссылки на существующие в базе FBD-программы, если они не совпадают по структуре со ссылками из загружаемых каналов. Периоды загружаемых каналов желательно задавать в циклах. Если они заданы в секундах, то их величина должна быть меньше 30, если в минутах - меньше 30, если в часах - меньше 12. Динамическая перезагрузка графической базы позволяет обновить выводимую на экран информацию прямо во время работы в реальном времени.
Для всех неизмененных при загрузке новой графической базы графических элементов восстанавливается их состояние на момент подачи команды на перезагрузку. Кроме того, для всех, не модифицированных при перезагрузке трендов восстанавливается содержимое их буферов.
4.7.2 Система паролей и прав доступа.
Трейс Моуд контролирует права до 4096 пользователей с индивидуальными паролями в рамках одного проекта. Пользователи, имеющие доступ к системе, могут быть разбиты на восемь групп. Максимальное число пользователей – 32 000. Ввод имен пользователей и их паролей, а также настройка соответствующих прав осуществляется в диалоге «Пользователи и права доступа» редактора базы каналов. Для входа в этот диалог надо выполнить команду «Пароли» из меню «Проект». При запуске графической консоли МРВ, SUPERVISOR или NetLink Light на экран выводится диалог регистрации пользователя. В этом диалоге надо указать имя и ввести пароль. При этом осуществляется вход в систему с правами, определенными для указанного пользователя.
Если список пользователей пуст, то при нажатии ЛК на кнопку «Вход» без ввода имени и пароля консоль подключается к серверу математической обработки с наивысшими правами. Такой запуск МРВ удобно использовать на стадии разработки проекта. Если в проекте описан хотя бы один пользователь, то для входа в систему без ввода пароля и имени надо создать пользователя
с именем default и любым паролем. В этом случае пользователь, вошедший в систему без регистрации, получает права, определенные для пользователя default. Диалог «Пользователи и права доступа» содержит список пользователей и кнопки его редактирования «Добавить», «Удалить». Чтобы добавить нового пользователя, надо в списке выбрать группу и нажать ЛК на кнопку «Добавить». При этом в список выделенной группы добавляется новый пользователь, имя которого образуется следующим образом: U<число>. После того как пользователь добавлен в список, следует ввести его реальное имя, задать пароль и настроить его права. Пароль не может быть короче четырех символов. Для ввода имени и текста пароля предназначены специальные поля в диалоге «Пользователи и права доступа». Для удаления любого пользователя из списка надо выделить его имя и нажать ЛК на кнопку «Удалить». Права пользователя задаются установкой соответствующих флагов. Существует три раздела для установки прав доступа:
- «Права (запрет действий)»; «Права (графика)»;
- «Запрет на изменение».
В первом из них задаются общие права пользователя, во втором - доступ к экранам и функциям управления, а в третьем - доступ к функциям управления из клиентских модулей.
Установка флагов в разделе «Права (запрет действий)» соответствует следующим ограничениям прав:
- одновременный вход - запрет на одновременный вход с разных компьютеров под данным именем;
- отключение в 24 часа - отключение пользователя при смене суток;
- квитирование - запрет на квитирование сообщений отчета тревог;
- квитирование (синх) - запрет на квитирование тех сообщений отчета тревог, время которых отличается от текущего на величину, превышающую 10 минут;
- будни - запрет на вход в систему по будням; выходные - запрет на вход в систему по выходным дням;
- бит 1, бит 2 – запрет на вход в систему, если установленные флаги не полностью соответствуют установленным битам канала подтипа «СИСТЕМНЫЙ» с дополнением «Права».
Первые восемь флагов второго раздела задают права доступа к графическим экранам. Доступ к экрану разрешен при совпадении хотя бы одного из этих флагов с соответствующими флагами экрана. Последние восемь флагов второго раздела определяют доступ к функциям управления. Для всех форм отображения, имеющих функции управления, можно установить те же восемь флагов. Управление доступно при совпадении хотя бы одного из флагов доступа пользователя с соответствующим флагом формы отображения. При наличии любого флага в разделе «Запрет на изменение» пользователь, подключающийся с соответствующего клиентского модуля, лишается прав на управление значениями каналов. Для регистрации пользователей в реальном времени надо войти в диалог «Регистрация оператора». Для этого надо нажать клавиши «CTRL»+«ALT»+«SHIFT»+«P». Далее регистрация выполняется так же, как и при запуске МРВ: надо ввести имя и пароль. Если введен неверный пароль или имя пользователя, то смены прав не происходит и пользователь не регистрируется. Если МРВ ведет отчет тревог, то при каждой регистрации пользователя в этот архив заносится строка, в поле «Сообщение» которой будет записан следующий текст:
LOGIN <имя><номер>,
где <имя> - имя пользователя;
<номер> - числовой идентификатор пользователя.
Далее во все строки отчета тревог, запись которых инициирована действиями этого пользователя, в поле «Икв» будет заноситься числовой идентификатор пользователя. Такими действиями могут быть коррекция значений атрибутов каналов и запись интерактивных сообщений в отчет тревог.
При выходе из работы с монитором любого пользователя в отчет тревог записывается следующее сообщение:
LOGOUT <имя><номер>, где
<имя> - имя пользователя;
<номер> - числовой идентификатор пользователя.
4.7.3 Связь с аппаратурой ввода-вывода.
Трейс Моуд поддерживает обмен данными с разными контроллерами. Для PC- контролеров обмен реализуется по собственным протоколам Трейс Моуд при использовании в них микроМРВ, а для остальных - по их протоколам. Часть этих протоколов встроена в исполнительные модули Трейс Моуд, а часть поставляется опционально в виде динамически загружаемых библиотек. Для обмена по встроенным протоколам предусмотрены следующие подтипы каналов:
- СВЯЗЬ;
- DCS;
- MODBUS.
Канал подтипа «СВЯЗЬ» используется мониторами Трейс Моуд для обмена между собой. Связь с модулями распределенного УСО типа LAGOON, ROBO, ADAM-4000 и ADAM-5000/485, NuDAM-6000, I-7000, RIO-2000 и подобными осуществляется каналами подтипа DCS. Дополнение к подтипу этого канала определяет запрашиваемые или передаваемые данные. Обмен данными с контроллерами, поддерживающими протокол MODBUS, реализуется с помощью каналов подтипа MODBUS. При этом код команды в запросе определяется дополнением к подтипу этого канала. Для обмена данными по внешним протоколам служат каналы подтипов «КОНТР_1» и «КОНТР_2». Дополнение к подтипу этих каналов используется для выбора типа контроллера. Разные контроллеры имеют различную адресацию данных. Поэтому настройки каналов будут иметь разное назначение для любого из контроллеров. Список значений модифицируется по мере добавления в систему новых драйверов. Каналы подтипа «КОНТР_1» предназначены для обмена данными с контроллерами по последовательному интерфейсу, а «КОНТР_2» используются, когда носитель протокола явно не определен и требуется описать его внешними средствами. Поэтому в первом случае, для обмена с контроллером необходим один драйвер, описывающий протокол, а во втором - два. Первый драйвер используется для описания протокола, а второй - для носителя. Для создания драйвера обмена данными по стандартным последовательным интерфейсам (RS-232, RS-485) в Трейс Моуд реализована поддержка работы с последовательными портами. В этом случае драйвер только формирует сообщения для посылки по последовательным портам и расшифровывает ответ. Обмен данными с драйверами, использующими встроенную поддержку обмена по последовательным портам, осуществляется с помощью каналов подтипа «КОНТР_1». Настройку последовательных портов (см. в подразделе 1.3). Если Трейс Моуд не поддерживает устройства, с которыми необходим обмен данными, то необходимо разработать драйвер. Принципы его разработки смотрите в справочной системе Трейс Моуд [1].
Контрольные вопросы
1. Как осуществляется разработка графического интерфейса в TRACE MODE?
2. Как осуществляется архивирование данных в TRACE MODE?
3. Для чего предусмотрен архив Локальный СПАД?
4. Для чего предусмотрен архив Отчет тревог?
5. Для чего предусмотрен архив Глобальный регистратор?
6. Для чего предназначен редактор шаблонов?
7. Какие операции выполняют мониторы исполнительной системы?
8. Как осуществляется обмен данными с контроллерами в TRACE MODE?
Список литературы
1. Руководство пользователя Трейс Моуд. Версия 5.0. - М.: AdAstra Research Group, Ltd. 2000. - 814 c.
2. Емельянов А.И., Капник А.Б. Проектирование систем автоматизации технологических процессов. Справочное пособие – М.: Энергоатомиздат. 1983. -400 с., ил.
3. Чистяков С.Ф. Проектирование, монтаж и эксплуатация систем управления технологическими объектами. Учебник для ВУЗов – М.: Энергия, 1984. –280 с., ил.
4. Наладка средств автоматизации и автоматических систем регулирования. Справочное пособие. Под. Ред. А.С. Клюева. – М.: Энергоатомиздат. 1989.
5. Клюев А.С., Глазов Б.В., Миндин М.Б. Техника чтения схем автоматического управления и технологического контроля. – М.: Энергоатомиздат, 1983.
6. Клюев А.С., Глазов В.В., Дубровский А.Х. Проектирование систем автоматизации технологических процессов. Справочное пособие. – М.: Энергия, 1980. -512 с., ил.0
7. Проектирование систем контроля и автоматического регулирования металлургических процессов. Учебное пособие для вузов/Глинков Г.М., Моковский В.А., Шапировский М.Р. и др. /2-ое изд. Доп. И перераб. –М.: Металлургия, 1986 – 352 с., ил.
8. СПДС. Автоматизация технологических процессов. Обозначения условные приборов и средств автоматизации в схемах. ГОСТ 21.404-85-М.: Издательство стандартов, 1985.
9. ЕСКД. Правила выполнения электрических схем. ГОСТ 2.702-75-М.: Издательство стандартов, 1985.
10. ЕСКД. Обозначения буквенно-цифровые в электрических схемах. ГОСТ 2.710-81-М.: Издательство стандартов, 1981.
11. Аристанова Н.И., Корнеева А.И. Промышленные программно-аппаратные средства на отечественном рынке АСУ ТП. - М.:ООО Издательство «Научтехлитиздат», 2001. – 402 с.
12. Контроллер для распределенных открытых систем КРОСС: Руководство по эксплуатации ЯЛБИ. 421457.018 РЭ.ОАО «ЗЭиМ».
13. РАМ 4.6-91 ч 1,2,3.
14. Прангишвили И.В. Микропроцессоры и локальные сети микроЭВМ в распределительных системах управления. - М.: Энергоатомиздат, 1985.
15. Проектирование систем автоматизации технологических процессов: справочное пособие/Под. Ред. А.С. Клюева. М.: Энергоатомиздат, 1989.
16. Хакимов А.З. Основные требования стандартов СПДС при проектировании систем автоматизации технологических процессов// Монтажные и специальные строительные работы. Сер. Монтаж и наладка средств автоматизации и связи. Экспресс-информация (ЦБНТИ Минмонтажспецстроя СССР), 1986. Вып. 2. С. 16-19.
17. Липаев В.В., Филинов Е.Н. Мобильность программ и данных в открытых информационных системах. –М.: Научная книга, 1997.
18. Норенков И.П., Трудоношин В.А. Телекоммуникационные технологии и сети. –М.: Изд-во МГТУ им. Н.Э. Бакмана, 1998.
19. Острейковский В.А. Теория систем. –М.: Высш. Шк., 1997.
20. Системы автоматизированного проектирования: Учеб. пособие для вузов: в 9 кн. /Под ред. И.П. Норенкова. –М.: Высш. шк., 1986.
21. Фоли Дж., вэн Дэм А. Основы интерактивной машинной графики: Пер. с англ. В 2-х кН. – М.: Мир, 1985.
22. Черненький В.М. Имитационное моделирование. – М.: Высш. шк., 1990.