МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
Некоммерческое акционерное общество
Алматинский университет энергетики и связи»
А.М.Ауэзова
ЭЛЕМЕНТЫ И УСТРОЙСТВА АВТОМАТИКИ
Учебное пособие
Алматы 2013
УДК 681.5 (075.8)
ББК 312.965Я73
А93 Элементы и устройства автоматики:
Учебное пособие/А.М.Ауэзова;
АУЭС. Алматы,2013. - 115 с.
ISBN 978 – 601 – 7436 – 06 - 3
В учебном пособии излагаются основные понятия теории и практики применения элементов и устройств в системах автоматики и управления. Рассматриваются принципы использования элементов, их строение, принцип действия, основные конструкторские, эксплуатационные параметры, характеристики элементов и устройств, которые применяются в современных системах управления и автоматики, роль устройств, в составе систем управления и автоматики, вычислительной и информационно-измерительной техники; перспективы развития современных устройств и их элементов.
Учебное пособие предназначено для студентов, обучающихся по специальности 5В070200 - Автоматизация и управление.
Ил.57, табл.3, библиогр. – 19 назв.
ББК 312.965Я73
РЕЦЕНЗЕНТЫ: КазНТУ, д-р техн. наук, проф. М.Ш.Байбатшаев.
КазНТУ, канд. техн. наук, проф. А.М.Адамбаев.
АУЭС, канд. техн. наук, проф. А.К.Копесбаева.
Рекомендовано к изданию Ученым советом Алматинского университета энергетики и связи (Протокол № 1 от 24.09.2013г.)
ISBN 978 – 601 – 7436 – 06 - 3
© НАО «Алматинский университет энергетики и связи», 2013 г.
Содержание
Введение. Обзор развития, современное состояние и значение элементов и технических средств автоматики
1 Классификация элементов систем автоматики
1.1 Основные понятия и определения
1.2 Основные принципы управления и регулирования
2 Типовые структуры и средства АСУ ТП
2.1 Обобщенная блок-схема АСУ ТП. Комплекс типовых функций
2.2 Локальные системы контроля, регулирования и управления
2.3 Автоматизированные системы управления технологическими процессами
2.4 Принципы функциональной и топологической децентрализации
3 Типизация, унификация и агрегатирование средств АСУ ТП
3.2 Унифицированные сигналы устройств автоматизации
3.3 Последовательная передача данных
3.4 Параллельная передача данных
4 Функциональные схемы автоматизации
4.1 Общие сведения
4.2 Изображение технологического оборудования и коммуникаций
4.3 Примеры построения условных обозначений приборов и средств автоматизации на функциональных схемах
4.4 Позиционные обозначения приборов и средств автоматизации
4.5 Примеры выполнения функциональных схем автоматизации
4.6 Последовательность чтения функциональных схем автоматизации
5 Автоматические регуляторы систем автоматики
5.1 Общие сведения
5.2 Структурные схемы автоматических регуляторов
6 Электронные элементы систем автоматики
6.3 Полупроводниковые тиристоры
6.4 Программируемые логические контроллеры
6.5 Краткий обзор зарубежных ПЛК
7 Электромагнитные устройства автоматики
7.1 Электромагниты
7.4 Синтез и минимизация дискретных схем логического управления
8 Выбор элементов систем автоматики
8.1 Общие сведения
8.2 Выбор промышленных приборов и средств автоматизации
9 Трансформаторы
9.1 Принцип действия и конструкция
9.2 Основные режимы работы и соотношения в трансформаторе
10 Измерительные преобразователи
10.1 Общие сведения
10.2 Основные характеристики датчиков систем автоматики
11 Исполнительные механизмы и устройства систем автоматики
12 Электрические машины постоянного тока
12.1 Общие сведения. Конструкция
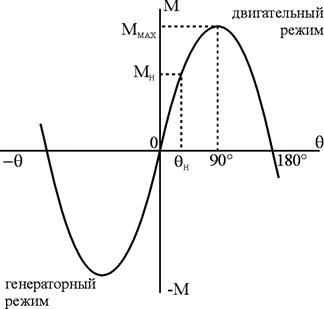
12.2 Машина постоянного тока независимого возбуждения. Режимы работы и механические характеристики
12.3 Машина постоянного тока последовательного возбуждения. Режимы работы и механические характеристики
13 Электрические машины переменного тока
|
|
Заключение
Список литературы
Введение. Обзор развития, современное состояние и значение элементов и технических средств автоматики
|
На начальном этапе развития средств автоматизации является создание простейших автоматов. Первые сведения об автоматах появились в начале нашей эры в работах Герона Александрийского, который создал пневмоавтомат для открывания дверей храма, автомат для продажи «священной» воды и др. В средние века развивалась «андроидная» автоматика, когда искусные механики создавали автоматы, подражающие отдельным действиям человека. Развитие также получили различные автоматы на основе часовых механизмов. На рубеже XVIII-XIX в.в., в эпоху промышленного переворота в Европе, начинается новый этап развития автоматики, связанный с ее внедрением в промышленность. К первым промышленным автоматическим устройствам относятся регулятор уровня воды парового котла И.И.Ползунова (1765 г.), регулятор скорости паровой машины Дж.Уатта (1784 г.), система программного управления от перфоленты ткацким станком Жаккара (1804-1808 гг.) и т.д. В этот период начинает развиваться и теория автоматических систем. Формируется ряд важнейших принципов автоматики: принцип регулирования — стабилизации по отклонению Ползунова-Уатта, принцип регулирования по возмущению Понселе-Чиколева. Впервые глубокое теоретическое исследования систем автоматического регулирования с учетом нелинейных факторов было выполнено английским физиком Максвеллом, который получил условия устойчивости из анализа линеаризованных уравнений и поставил перед математиками проблему определения устойчивости линейных систем произвольной размерности. Следующий этап в исследованиях автоматических систем связан с именами И.А.Вышнеградского, А.Стодолы, Э.Рауса, А.Гурвица, Н.Е.Жуковского, А.М.Ляпунова, П.Л.Чебышева, В.А.Стеклова, А.Н.Крылова. Бурное развитие науки и техники в XX веке обусловило и качественный скачок как в исследованиях автоматических систем (Х.Найквист, А.В.Михайлов, В.В.Солодовников, А.Пуанкаре, В.Оппельт, А.Н.Колмогоров, В.С.Пугачёв, Н.Винер, Р.Беллман, Р.Калман, И.А.Вознесенский, Н.Н.Лузин и др.), так и в развитии элементов и устройств автоматизации (полупроводниковые приборы, технологии интегральной микросхемотехники, ЭВМ, микропроцессорные и компьютерные средства автоматизации и т.д.). Современными тенденциями в автоматизации производства являются широкое применение ЭВМ (промышленных контроллеров, компьютеров) для управления, создание машин и оборудования со встроенными микропроцессорными средствами измерения, контроля и регулирования, переход на децентрализованные (распределенные) структуры автоматизированных систем управления технологическими процессами (АСУ ТП) с микроконтроллерами, внедрение человеко-машинных систем, автоматизированное проектирование систем управления и др. [1]. |
1 Классификация элементов систем автоматики
1.1 Основные понятия и определения
|
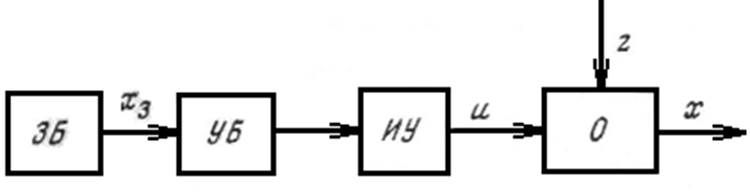
Автоматика как научная дисциплина рассматривает принципы и технические средства управления производственными процессами без непосредственного участия человека. В общем случае управление представляет собой такую организацию того или иного процесса, которая обеспечивает достижение определенных целей. Управление осуществляется с помощью специально организованных воздействий, прикладываемых к объекту управления и изменяющих его количественное и качественное состояние в соответствии с поставленной целью. Любой процесс управления можно разделить на четыре составляющих: 1) получение информации о цели управления или задание величины параметров состояния объекта; 2) получение информации о состоянии объекта; 3) переработка полученной информации и принятие решения, т.е. формирование сигнала управления; 4) исполнение решения — реализация управляющего воздействия, соответствующего выработанному сигналу управления. Соответственно для реализации автоматического управления необходимо иметь элементы — задающие, измерительные, управляющие (регулирующие) и исполнительные. Под элементом системы управления понимают составную, относительно самостоятельную ее часть, предназначенную для выполнения какой-либо определенной функции. Задающим элементом (задатчиком) называется элемент, вырабатывающий сигналы, соответствующие цели управления. В качестве задающего устройства могут использоваться простейшие реостатные задатчики, контактные командоаппараты, бесконтактные программные устройства и др. Измерительный элемент (измерительный преобразователь) служит для контроля состояния объекта, его выходных параметров, а также параметров внешней среды и передачи этой информации управляющему элементу системы. Управляющий (регулирующий) элемент в простейшем случае вырабатывает сигнал управления (регулирования), пропорциональный отклонению управляемой (регулируемой) величины от заданного значения. Обычно управляющий элемент (регулятор) имеет весьма сложное строение и может рассматриваться как система, состоящая из других элементов (усилителей, фильтров, суммирующих устройств и др.). Исполнительные элементы служат для непосредственного изменения состояния объекта управления. К исполнительным элементам относятся исполнительные механизмы и регулирующие органы, которые конструктивно могут быть объединены в едином изделии или собираются из индивидуально выпускаемых блоков. В некоторых случаях исполнительный элемент может состоять из одного блока, выполняющего функции исполнительного механизма. Под исполнительным механизмом в общем случае подразумевают блок, преобразующий входной управляющий сигнал от регулирующего устройства в сигнал, который через соответствующую связь осуществляет воздействие на регулирующий орган или непосредственно на объект регулирования. Как правило, это весьма мощные устройства, например, электродвигатели, гидравлические и пневматические исполнительные механизмы. Регулирующим органом называют блок исполнительного элемента, с помощью которого оказывается регулирующее воздействие на объект регулирования. Регулирующие органы по конструкции представляют собой устройства, монтируемые непосредственно в технологические объекты. Так, для трубопроводов используют различные клапаны, заслонки, шиберы и т.п. Управление регулирующими органами осуществляется исполнительными механизмами, выполняющими функции их приводов [1].
|
|
|
1.2 Основные принципы управления и регулирования
|
2 Типовые структуры и средства АСУ ТП
2.1 Обобщенная блок-схема АСУ ТП. Комплекс типовых функций
|
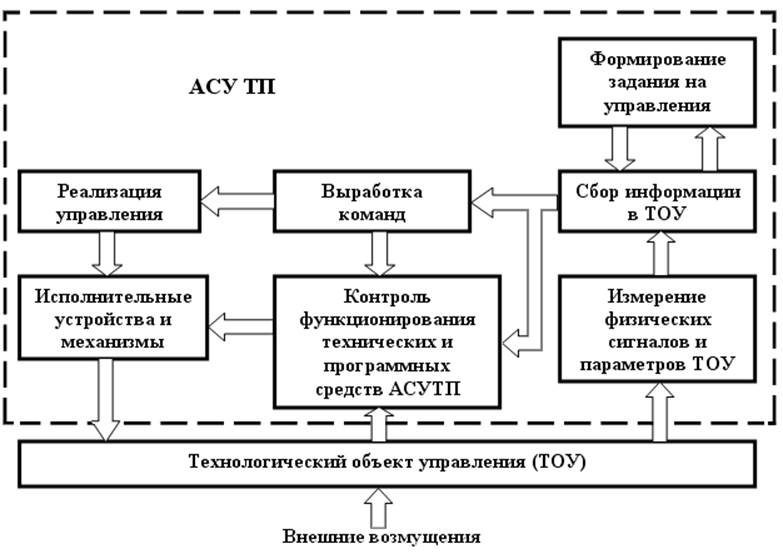
В соответствии с ГОСТ 20.003—84 автоматизированные системы управления технологическими процессами предназначены для выработки и реализации управляющих воздействий на технологический объект управления и представляют собой человекомашинные системы, обеспечивающие автоматизированный сбор и обработку информации, необходимой для оптимизации управления технологическим объектом в соответствии с принятым критерием. Технологический объект управления (ТОУ) — это совокупность технологического оборудования и реализованного на нем по соответствующим инструкциям или регламентам технологического процесса производства. В зависимости от уровня АСУ ТП в качестве ТОУ можно рассматривать: технологические агрегаты и установки, группы станков, отдельные производства (цехи, участки), реализующие самостоятельный технологический процесс; производственный процесс всего промышленного предприятия, если управление им заключается в рациональном выборе и согласовании режимов работы агрегатов, участков и производств. Совместно функционирующие ТОУ и управляющая им АСУ ТП образуют автоматизированный технологический комплекс (АТК). АСУ ТП являются частным видом систем управления, которые представляют, в свою очередь, особый класс систем, характеризующихся наличием самостоятельных функций и целей управления и необходимой для реализации этого специальной системной организацией. Степень достижения поставленных целей принято характеризовать с помощью критерия управления. Критерием может быть технико-экономический показатель, например, себестоимость выходного продукта при заданном качестве, производительность ТОУ при заданном качестве выходного продукта, технологические показатели — параметры процесса, характеристики выходного продукта и т. п. Отметим, что определение АСУ ТП как системы отличается от классического определения системы управления из теории автоматического управления, согласно которому система автоматического управления — это совокупность объекта управления и регулятора. В этом смысле понятие АТК подпадает под классическое определение системы управления, где в роли объекта выступает ТОУ, а в роли регулятора — АСУ ТП. Обобщенная блок-схема АСУ ТП изображена на рисунке 2.1. Сформулированное выше определение подчеркивает, во-первых, наличие в составе АСУ ТП современных автоматических средств сбора и переработки информации (в первую очередь средств вычислительной техники); во-вторых, роль человека в системе как субъекта труда, принимающего содержательное участие в выработке решений по управлению; в-третьих, что АСУ ТП — это система, осуществляющая переработку технологической и другой информации.
Рисунок 2.1 - Обобщенная блок-схема АСУ ТП
Еще один важный признак АСУ ТП — это осуществление управления в темпе протекания технологического процесса, т. е. в реальном масштабе времени. АСУ ТП как компонент общей системы управления промышленным предприятием (АСУП) предназначена для целенаправленного ведения технологических процессов и обеспечения смежных и вышестоящих систем управления оперативной и достоверной технико-экономической информацией. АСУ ТП, созданные для объектов основного и вспомогательного производства, представляют низовой уровень автоматизированных систем управления производством. Перечень, форма представления и режим обмена информацией между АСУ ТП и другими взаимосвязанными с ней системами управления определяется в каждом конкретном случае в зависимости от специфики производства, его организации и структуры управления им [3]. Реализация целей в конкретных АСУ ТП достигается выполнением в них определенной последовательности операций и вычислительных процедур, в значительной степени типовых по своему составу и потому объединяемых в комплекс типовых функций АСУ ТП. Функции АСУ ТП подразделяются на управляющие, информационные и вспомогательные. Управляющие функции АСУ ТП — это функции, результатами которых является выработка и реализация управляющих воздействий на объект управления. К управляющим функциям АСУ ТП относятся: регулирование (стабилизация) отдельных технологических переменных; однотактное логическое управление операциями или аппаратами; программное логическое управление группой оборудования; оптимальное управление установившимися или переходными режимами или отдельными стадиями процесса; адаптивное управление объектом в целом, например, управление участком станков с ЧПУ. Информационные функции АСУ ТП — это функции системы, содержанием которых является сбор, обработка и представление информации о состоянии АТК оперативному персоналу или передача этой информации для последующей обработки. К информационным функциям АСУ ТП относятся: централизованный контроль и измерение технологических параметров; косвенное измерение; вычисление параметров процесса (технико-экономических, внутренних переменных); формирование и выдача данных оперативному персоналу АСУ ТП или АТК; подготовка и передача информации в смежные системы управления; обобщенная оценка и проверка состояния АТК и его оборудования. Отличительная особенность управляющих и информационных функций АСУ ТП — их направленность на конкретного потребителя (объект управления, оперативный персонал, смежные системы управления). Вспомогательные функции АСУ ТП состоят в обеспечении контроля за состоянием функционирования технических и программных средств системы. |
2.2 Локальные системы контроля, регулирования и управления
|
Локальные системы контроля, регулирования и управления ЛСКРУ (см. рисунок 2.2) эффективны при автоматизации технологически независимых объектов с компактным расположением основного оборудования и несложными целями управления (стабилизация, программное управление) при хорошо отработанной технологии и стационарных условиях эксплуатации. Локальные регуляторы (ЛР) могут быть аналоговыми, цифровыми, одно- или многоканальными. Наличие человека-оператора в системе позволяет использовать эту структуру на объектах с невысоким уровнем механизации и надежности технологического оборудования, осуществлять общий контроль за выполнением технологического процесса и ручное управление (РУ) [4]. Структура ЛСКРУ соответствует классической структуре систем управления: содержит датчики измеряемых переменных (Д) на выходе ТОУ, автоматические регуляторы, исполнительные устройства (ИУ), передающие команды управления (в том числе, оператор в режиме ручного управления) на регулирующие органы ТОУ. Устройство связи с оператором состоит, как правило, из измерительных, сигнализирующих и регистрирующих приборов.
Рисунок 2.2 — Типовая структура ЛСКРУ |

2.3 Автоматизированные системы управления технологическими процессами
|
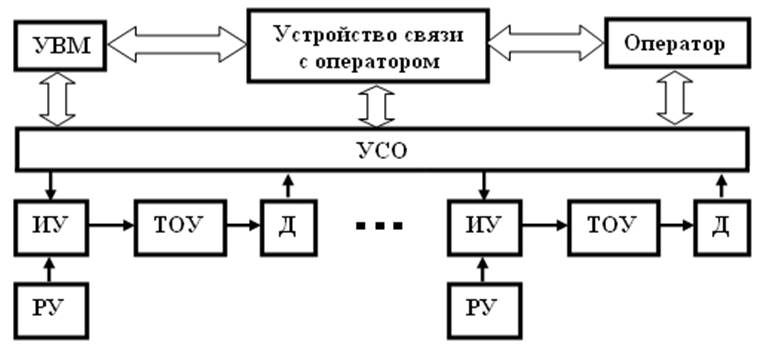
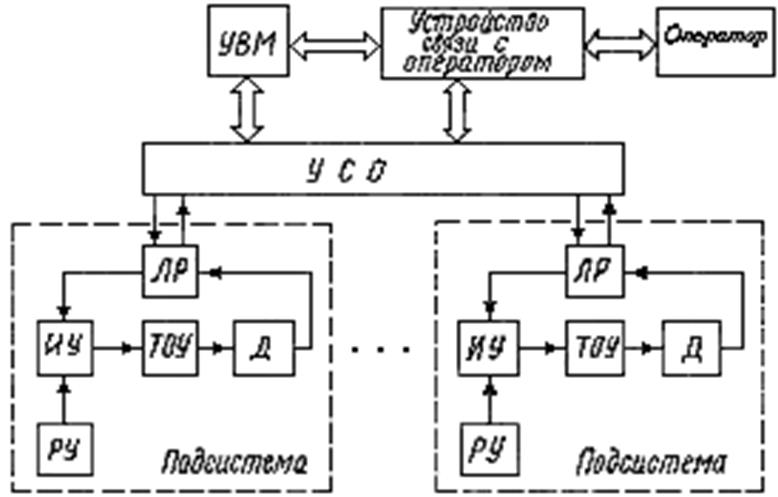
Развитие экономико-математических методов управления с широким использованием современной вычислительной техники позволило существенно облегчить работу оператора при управлении сложными технологическими объектами. В результате появились человеко-машинные системы управления технологическими процессами, в которых обработка информации и формирование оптимальных управлений осуществляются человеком с помощью управляющей вычислительной машины (УВМ). УВМ в этом случае является многоканальным информационно-управляющим устройством в системе автоматизированного управления технологическим процессом. В зависимости от распределения информационных и управляющих функций между человеком и УВМ, между УВМ и средствами контроля и регулирования возможны различные принципы построения АСУ ТП. Наибольшее распространение в промышленной практике нашли три принципа построения АСУ ТП: централизованные АСУ ТП, АСУ ТП с супервизорным управлением и децентрализованные распределенные АСУ ТП. Типовая структура централизованной АСУ ТП (см. рисунок 2.3) включает в себя устройство связи с объектом (УСО) и УВМ, осуществляющую централизованное управление одним или несколькими технологическими процессами. Надежность всего комплекса определяется в этом случае надежностью УСО и УВМ, и при выходе их из строя нормальное функционирование технологического оборудования невозможно.
Рисунок 2.3 — Типовая структура централизованной АСУ ТП
Характерным примером централизованной АСУ ТП является система, УВМ которой непосредственно вырабатывает оптимальные регулирующие воздействия и с помощью соответствующих преобразователей передает команды управления на исполнительные устройства (механизмы). Централизованные АСУ ТП, УВМ которых работают в таком режиме, называются системами с непосредственным или прямым цифровым управлением (ПЦУ). В АСУ ТП с ПЦУ оператор должен иметь возможность изменять уставки, контролировать избранные переменные, варьировать диапазоны допустимого изменения переменных, изменять параметры настройки и иметь доступ к управляющей программе. Для обеспечения этих функций необходимо иметь сопряжение (человек — машина) в виде пульта оператора и средств отображения информации [4]. Применение УВМ в режиме ПЦУ позволяет строить программным путем системы регулирования по возмущению, комбинированные системы каскадного и многосвязного регулирования, учитывающие связи между отдельными частями объекта управления. ПЦУ позволяет реализовать не только оптимизирующие функции, но и адаптацию к изменению внешней среды и переменным параметрам объекта. В системах с ПЦУ упрощается реализация режимов пуска и остановки процессов, переключение с ручного управления на автоматическое, операции переключения исполнительных механизмов. Главный недостаток систем с ПЦУ заключается в том, что при отказе в работе УВМ объект теряет управление. Несмотря на высокую надежность всех средств системы, отказы в УВМ возможны, и это обстоятельство необходимо особо учитывать при построении АСУ ТП с ПЦУ. Более широкими возможностями и лучшей надежностью обладают АСУ ТП, в которых непосредственное регулирование объектами ТП осуществляют ЛР, а УВМ выполняет функции «советчика» в так называемом супервизорном режиме. Типовая структура супервизорной АСУ ТП изображена на рисунке 2.4. По данным, поступающим от датчиков (Д) локальных подсистем через УСО, УВМ вырабатывает значение уставок в виде сигналов, поступающих непосредственно на входы систем автоматического регулирования.
Рисунок 2.4 — Типовая структура АСУ ТП с супервизорным режимом работы УВМ
Основная задача супервизорного управления — автоматическое поддержание процесса вблизи оптимальной рабочей точки. Кроме того, супервизорное управление позволяет оператору-технологу использовать плохо формализуемую информацию о ходе технологического процесса, вводя через УВМ коррекцию уставок, параметров алгоритмов регулирования в локальные контуры. Например, оператор вводит необходимые изменения в управление процессом при изменении сырья и состава вырабатываемой продукции. Это требует определения новых значений коэффициентов уравнений математической модели объекта управления, что может выполняться любой другой внешней ЭВМ или самой УВМ, если она не загружена. Работа информационно-измерительной части системы супервизорного управления практически не отличается от рассмотренной выше системы. Функции оператора в этом случае сводятся лишь к наблюдению, а его вмешательство необходимо только в аварийных ситуациях. Достоинство системы супервизорного управления состоит в том, что УВМ в ней не только автоматически контролирует процесс, но и автоматически управляет им вблизи оптимальной рабочей точки [5]. Рассматриваемая система управления технологическим процессом является многоканальной как в информационной части, так и на уровне оптимизации.
|
|||||||
Развитие АСУ ТП на современном этапе связано с широким использованием для управления микропроцессоров и микро ЭВМ, стоимость которых с каждым годом становится все более низкой по сравнению с общими затратами на создание систем управления. До появления микропроцессоров эволюция систем управления технологическими процессами сопровождалась увеличением степени централизации. Однако возможности централизованных систем теперь уже оказываются ограниченными и не отвечают современным требованиям по надежности, гибкости, стоимости систем связи и программного обеспечения. Переход от централизованных систем управления к децентрализованным вызван также возрастанием мощности отдельных технологических агрегатов, их усложнением, повышением требований по быстродействию и точности к их работе. Централизация систем управления экономически оправдана при сравнительно небольшой информационной мощности (число каналов контроля и регулирования) ТОУ и его территориальной сосредоточенности. При большом числе каналов контроля, регулирования и управления, большой длине линий связи в АСУ ТП децентрализация структуры системы управления становится принципиальным методом повышения живучести АСУ ТП, снижения стоимости и эксплуатационных расходов. Наиболее перспективным направлением децентрализации АСУ ТП следует признать автоматизированное управление процессами с распределенной архитектурой, базирующееся на функционально-целевой и топологической децентрализации объекта управления. Функционально-целевая децентрализация — это разделение сложного процесса или системы на меньшие части — подпроцессы или подсистемы по функциональному признаку (например, переделы технологического процесса, режимы работы агрегатов и т. д.), имеющие самостоятельные цели функционирования. Топологическая децентрализация означает возможность территориального (пространственного) разделения процесса на функционально-целевые подпроцессы. При оптимальной топологической децентрализации число подсистем распределенной АСУ ТП выбирается так, чтобы минимизировать суммарную длину линий связи, образующих вместе с локальными подсистемами управления сетевую структуру. Технической основой современных распределенных систем управления, обусловившей возможность реализации таких систем, являются микропроцессоры и микропроцессорные системы. Микропроцессорная система выполняет функции сбора данных, регулирования и управления, визуализации всей информации базы данных, изменения уставок, параметров алгоритмов и самих алгоритмов, оптимизации и т.д. Использование микропроцессоров (в том числе микро ЭВМ) для решения перечисленных задач дает возможность достичь следующих целей: а) заменить аналоговые технические средства на цифровые там, где переход к цифровым средствам повышает точность, расширяет функциональные возможности и увеличивает гибкость систем управления; б) заменить технические средства с жесткой логикой на программируемые (с возможностью изменения программы) устройства, или микроконтроллеры; в) заменить одну мини-ЭВМ системой из нескольких микроЭВМ, когда необходимо обеспечить децентрализованное управление производством или технологическим процессом с повышенной надежностью и живучестью или когда возможности мини-ЭВМ полностью не используются. Микропроцессорные системы могут выполнять в подсистемах распределенной АСУ ТП все типовые функции контроля, измерения, регулирования, управления, представления информации оператору. В распределенных АСУ ТП приняты в основном три топологические структуры взаимодействия подсистем: звездообразная (радиальная); кольцевая (петлевая); шинная (магистральная) или их комбинации. Организация связи с датчиками и исполнительными устройствами носит индивидуальный и преимущественно радиальный характер. На рисунке 2.5 изображены варианты топологий распределенных АСУ ТП. Радиальная структура взаимодействия подсистем (см. рисунок 2.5,а) отражает традиционно применявшийся способ соединения устройств с выделенными линиями связи и характеризуется следующими особенностями: а) существуют отдельные, не связанные между собой линии, объединяющие центральную подсистему (ЦП) с локальными системами автоматики ЛАi ; б) технически просто реализуются устройства сопряжения УС1—УСm локальной автоматики. Центральное устройство связи УСЦ представляет собой набор модулей типа УСi по числу линий либо достаточно сложное устройство мультиплексирования каналов передачи информации; в) обеспечиваются максимальные скорости обмена по отдельным линиям при достаточно высокой производительности вычислительных устройств на уровне ЦП; г) надежность подсистемы связи в значительной степени зависит от надежности и живучести технических средств ЦП. Выход из строя ЦП практически разрушает подсистему обмена, так как все потоки информации замыкаются через верхний уровень. Распределенная система с радиальной структурой является двухуровневой системой, где на нижнем уровне в подсистемах реализуются необходимые функции контроля, регулирования, управления, а на втором — в ЦП координирующая микроЭВМ (или мини-ЭВМ), кроме координации работы микроЭВМ-сателлитов, осуществляет оптимизацию задач управления ТОУ, распределение энергии, управляет технологическим процессом в целом, вычисляет технико-экономические показатели и т.п. Вся база данных в распределенной системе с радиальной структурой должна быть доступной координирующей микроЭВМ для прикладных программ управления на верхнем уровне. Вследствие этого координирующая микроЭВМ работает в режиме реального времени и должна управляться с помощью языков высокого уровня. На рисунке 2.5 (б, в) изображены кольцевая и шинная топологии взаимодействия уровней. Эти структуры имеют ряд достоинств по сравнению с радиальной: а) работоспособность подсистемы связи, включающей в себя канал и устройства связи, не зависит от исправности технических средств на уровнях автоматизации; б) имеются возможности подключения дополнительных устройств и контроля всей подсистемы с помощью специальных средств; в) необходимы значительно меньшие затраты кабельной продукции. За счет обмена информацией между ЛАi через канал связи и УС («каждый с каждым») появляется дополнительная возможность динамического перераспределения функций координации совместной работы подсистем ЛА по нижним уровням в случае выхода из строя ЦП. Шинная (в меньшей степени кольцевая) структура обеспечивает широковещательный режим обмена между подсистемами, что является важным преимуществом при реализации групповых команд управления. Вместе с тем, шинная и кольцевая архитектура предъявляет уже значительно более высокие требования к «интеллекту» устройств сопряжения, а следовательно, повышенные единовременные затраты на реализацию базовой сети.
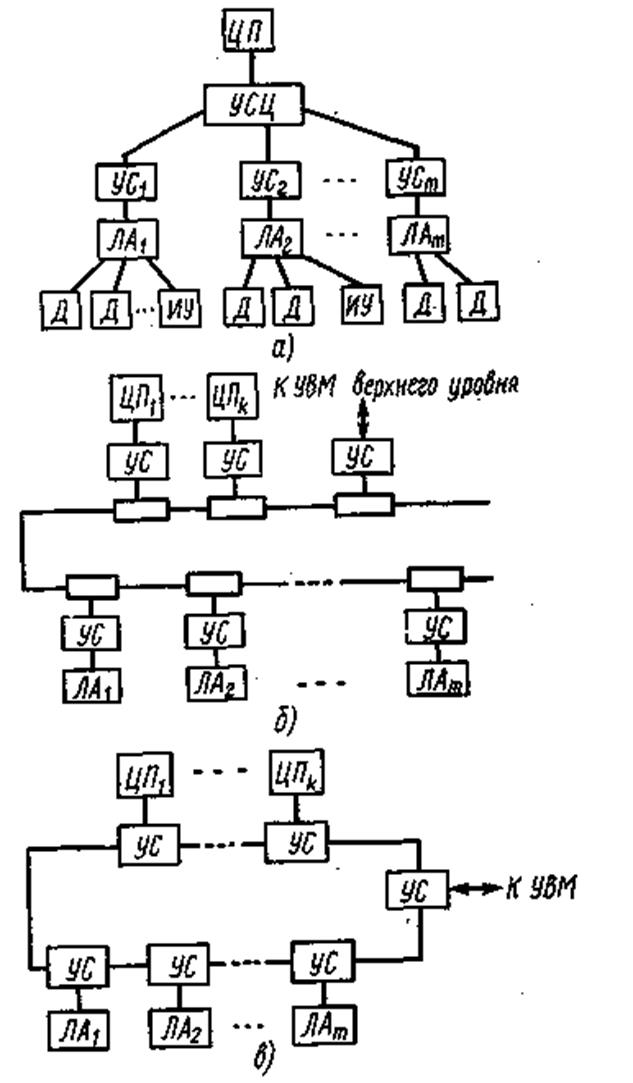
а — радиальная, б — магистральная, в — кольцевая. Рисунок 2.5 — Типовые структуры распределенных АСУ ТП Сравнивая кольцевую и шинную топологии подсистемы связи, следует отметить, что организация кольцевой структуры менее дорогостоящая, чем шинная. Однако надежность всей подсистемы с кольцевой системой связи определяется надежностью каждого устройства сопряжения и каждого отрезка линий связи. Для повышения живучести необходимо применение двойных колец или дополнительных линий связи с обходными путями. Работоспособность физического канала передачи для шинной архитектуры с трансформаторной развязкой не зависит от исправности устройств сопряжения, однако, как и для кольца, выход из строя любого устройства сопряжения в наихудшем случае приводит к полностью автономной работе отказавшего узла подсистемы, т. е. к потере функции управления от уровня ЦП автоматикой отказавшего узла. Явным методом повышения живучести всей системы автоматики в случае отказа устройств согласования в подсистеме связи является дублирование устройств согласования в узлах подсистемы. В кольцевой структуре такой подход уже подразумевается при организации двойных колец и обходных путей. Если надежность непрерывного физического канала для нижней топологии не вызывает сомнений, то возможно дублирование только устройств сопряжения без применения резервного магистрального кабеля. Более дешевым способом повышения надежности подсистемы связи является использование комбинированных структур, сочетающих в себе достоинства радиальных и кольцевых (магистральных) топологий. Для кольца число радиальных связей может быть ограничено двумя-тремя линиями, реализация которых дает простое и недорогое решение. Оценка таких показателей распределенных АСУ ТП, как экономические (затраты на кабельную продукцию, трассировку кабеля, на разработку или приобретение сетевых средств, в том числе устройства связи и т. п.), функциональные (использование групповых операций передачи, интенсивность обмена, возможность обмена «каждый с каждым»), а также показатели унификации и возможности эволюции сети (возможность простого включения дополнительных узлов-абонентов, тенденции к применению в АСУ ТП) и показатели надежности сети (отказ канала связи и устройств связи или сопряжения), позволяет сделать следующие выводы: а) наиболее перспективной в смысле развития и использования является магистральная организация подсистемы связи; б) функциональные возможности магистральной топологии не уступают возможностям кольцевой и радиальной; в) надежностные показатели магистральной структуры достаточно удовлетворительные; г) магистральная топология распределенной АСУ ТП требует больших единовременных затрат на создание и внедрение канала связи и устройств сопряжения. Во многом благодаря этим особенностям магистральной структуры и модульной организации аппаратных и программных средств в современных АСУ ТП магистрально-модульный принцип построения технического обеспечения нашел преимущественное распространение. Применение микропроцессоров и микроЭВМ позволяет эффективно и экономно реализовать принцип функциональной и топологической децентрализации АСУ ТП. Тем самым можно значительно повысить надежность и живучесть системы, сократить дорогостоящие линии связи, обеспечить гибкость функционирования и расширить область применения в народном хозяйстве комплексов технических средств, основным элементом которых является микроЭВМ или микропроцессор [6]. В таких распределенных системах управления большое значение приобретает стандартизация интерфейсов, т.е. установление и применение единых норм, требований и правил, гарантирующих информационное объединение технических средств в типовых структурах АСУ ТП.
|
3 Типизация, унификация и агрегатирование средств АСУ ТП
|
Прежде чем определить принципы построения комплекса технических средств (КТС) для автоматизации технологических процессов на основе системного подхода, остановимся на содержании используемых в технической литературе терминов «типизация», «унификация», «параметризация» и других понятий, которые будут использоваться ниже. Типизацию определим как обоснованное сведение многообразия избранных типов конструкций машин, оборудования, приборов и устройств автоматизации к небольшому числу наилучших с какой-либо точки зрения образцов, обладающих существенными качественными признаками. Например, типизация технологических процессов заключается в выборе для внедрения из всей массы действующих технологий только наиболее производительных и рентабельных. В процессе типизации разрабатываются и устанавливаются типовые конструкции, содержащие общие для ряда изделий (или их составных частей) базовые элементы и конструктивные параметры, в том числе перспективные, учитывающие последние достижения науки и техники. Процесс типизации эквивалентен группированию, классификации некоторого исходного, заданного множества элементов в ограниченный ряд типов с учетом реально действующих ограничений, целей типизации; другими словами, типизация является оптимизационной задачей с ограничениями. Типизация предшествует унификации — приведению различных видов продукции и средств ее производства к рациональному минимуму типоразмеров, марок, форм, свойств и т.п. Унификация вносит единообразие в основные параметры типовых решений технических средств, необходимое для их совместного использования в АСУ ТП, и устраняет неоправданное многообразие средств одинакового назначения и разнотипность их частей. Одинаковые или разные по своему функциональному назначению устройства, их блоки, модули, но являющиеся производными от одной базовой конструкции, образуют унифицированный ряд. Унификация позволяет за счет применения общих и типовых конструктивных решений использовать принцип агрегатирования, создавать на одной основе различные модификации изделий, выпускать технические средства одинакового назначения, но с различными техническими характеристиками, удовлетворяющими потребностям того или иного производства, технологии. Такие изделия одного типа, но с различными техническими параметрами образуют параметрический ряд. Агрегатирование предусматривает разработку и использование ограниченной номенклатуры типовых унифицированных модулей, блоков, устройств и унифицированных типовых конструкций (УТК) для построения множества проблемно-ориентированных установок и комплексов, технические параметры которых в значительной степени удовлетворяют потребительским целям. Типизация, унификация и агрегатирование являются основополагающими принципами построения агрегатных комплексов для комплексной автоматизации производства и, в частности, при проектировании и внедрении АСУ технологическими объектами и агрегатами. Принципы типизации, унификации и агрегатирования получили в свое время развитие в Государственной системе промышленных приборов и средств автоматизации (ГСП), созданной в СССР и предназначенной для создания автоматических и автоматизированных информационно-управляющих систем. Изделия ГСП компоновались в агрегатные комплексы технических средств, ориентированные на решение типового состава функциональных задач, и вместе с типовыми проектными решениями значительно упрощали проектирование АСУ ТП, создавали основу для «индустриализации» проектирования, что весьма важно для ускорения темпов внедрения АСУ ТП. Являясь частью такой сложной системы, как АСУ ТП, комплекс технических средств также представляет собой сложную систему аппаратных и аппаратно-программных средств. Понятие «сложная система» здесь понимается как множество взаимосвязанных и взаимодействующих подсистем, выполняющих самостоятельные и общесистемные функции и имеющих собственные и общие цели. Поэтому представляется необходимым решать проблемы проектирования комплекса технических средств для АСУ ТП с единой методологической позиции — позиции системного подхода, что в данном случае означает: — использование концепций теории систем управления (общесистемные функции и цели, распределенность, многоуровневость и иерархичность структуры АСУ ТП); — исследование технологических объектов управления и учет особенностей их эксплуатации с целью выбора ограничений при формировании типового состава функциональных задач КТС и состава индивидуальных задач данного объекта автоматизации; — организацию внутренней структуры КТС (с учетом распределенности, иерархичности и многоуровневости АСУ ТП) на основе принципов типизации, унификации и агрегатирования; — оптимизацию системотехнических, схемных, конструктивных и программных решений для упорядочения номенклатуры КТС (в том числе оптимизацию распределения функциональных задач, решаемых аппаратными и программными средствами); — прогнозирование развития функционально-алгоритмической структуры АСУ ТП в процессе эксплуатации и эволюции технического обеспечения. Анализ задач автоматизации в различных отраслях промышленности показывают, что в настоящее время только в группе датчиков имеется потенциальный спрос на преобразователи для измерения более 2000 физических величин. С учетом известных методов измерений, диапазонов значений измеряемых величин и условий эксплуатации это может привести к необходимости изготовления нескольких десятков тысяч модификаций датчиков. Поскольку даже простейшая локальная система регулирования, кроме датчика, включает в себя ряд других устройств, то индивидуальный подход к разработке средств для АСУ ТП, приводящий к неоправданному многообразию этих средств, нецелесообразен. Следовательно, одна из главнейших задач, решаемых агрегатными комплексами, состоит в создании ограниченной номенклатуры унифицированных устройств, способных максимально удовлетворять потребностям производства. Сокращение номенклатуры средств автоматизации достигается объединением их в отдельные функциональные группы путем сведения функций этих устройств к ограниченному числу типовых функций. Оптимизация состава каждой группы обеспечивается разработкой параметрических рядов изделий. В основу ряда заложены более узкая специализация выполняемых функций (типизация инструментальных методик измерения или метода преобразования информации), ограничения по видам и параметрам сигналов, несущих информацию о контролируемой величине или команде управления, ограничения по техническим параметрам изделий, пределам измерений, классам точности, параметрам питания и т. д., наконец, унификация конструктивного исполнения изделий. Существенное сокращение числа различных функциональных устройств достигается обеспечением их совместимости в АСУ ТП. Концепция совместимости, включающая в себя требования информационного, энергетического, конструктивного, метрологического и эксплуатационного сопряжений между различными изделиями, основана на последовательной унификации и стандартизации свойств и характеристик изделий [7]. |
Применительно к информационным связям термин «унификация» означает введение ограничений, налагаемых на сигналы, несущие сведения о контролируемой величине или команде. Унифицируются виды носителей нормированной информации (электрические — сигналы, коды и согласование входов и выходов; вещественные — с механическим носителем на перфокартах, перфолентах, бланках для записи и печати, с магнитными носителями). Определяется также способ представления информации в устройствах автоматизации — аналоговый и дискретный.
Конструктивная совместимость изделий предусматривает прежде всего унификацию присоединительных размеров отдельных узлов, деталей, модулей, введение типовых конструкций, создание единой элементной базы, разработку общих принципов конструирования приборов. При конструировании устройств автоматизации рекомендуется блочно-модульный принцип построения изделий. Применение этого принципа делает приборы более универсальными, позволяет использовать при их создании рациональный минимум конструктивных элементов (сокращается количество наименований деталей). Вместе с тем возможность простой и легкой замены отдельных узлов позволяет модернизировать эти приборы в процессе эксплуатации, повышает их ремонтопригодность и расширяет круг решаемых ими задач (путем различных сочетаний функциональных звеньев и введением специализированных деталей). Блочно-модульное построение приборов позволяет широко применять при их изготовлении современную технологию и максимально использовать кооперацию и специализацию предприятий.
Стандартизируются также общие технические требования к устройствам автоматизации и условиям их работы в АСУ ТП. Ввиду многообразия производств и технологических процессов, важное место отводится разделению приборов и устройств по группам условий эксплуатации. По защищенности от воздействия окружающей среды устройства автоматизации подразделяются на следующие исполнения: обыкновенное, пылезащищенное, взрывозащищенное, герметическое, водозащищенное, защищенное от агрессивной среды. В зависимости от предполагаемых механических воздействий также предусматриваются обыкновенное и виброустойчивое исполнение.
Нормируются метрологические характеристики изделий (виды погрешностей, методы нормирования погрешностей отдельных устройств, погрешностей совокупности звеньев и систем, классы точности и методы аттестации). Этим достигается метрологическая совместимость различных технических средств АСУ ТП [3].
|
Устройства автоматизации по роду используемой вспомогательной энергии носителя сигналов в канале связи, применяемой для приема и передачи информации и команд управления, делятся на электрические, пневматические и гидравлические. В отдельных видах изделий могут быть использованы и другие виды энергии носителей сигналов (акустическая, оптическая, механическая и др.). Различают также устройства, работающие без использования вспомогательной энергии (приборы и регуляторы прямого действия). Устройства, питающиеся при эксплуатации энергией одного рода, образуют единую структурную группу или «ветвь». АСУ ТП, комплектуемые из приборов электрической ветви, имеют преимущества по чувствительности, точности, быстродействию, дальности связей, обеспечивают высокую схемную и конструктивную унификацию приборов. Применение интегральных микросхем способствует уменьшению габаритов и веса приборов, сокращению количества потребляемой ими энергии, повышению их надежности, расширению их функциональных возможностей (создание многофункциональных приборов), позволяет применять при их изготовлении современную прогрессивную технологию. Применение в АСУ ТП аналоговых и цифровых микросхем и микропроцессоров особенно важно в группе контрольно-измерительных приборов, так как обеспечивает возможность их непосредственной связи с управляющим контроллером. Приборы пневматической ветви характеризуются безопасностью применения в легковоспламеняемых и взрывоопасных средах, высокой надежностью в тяжелых условиях работы, особенно при использовании в агрессивной атмосфере. Они легко комбинируются друг с другом. Однако пневматические приборы уступают электронным в тех случаях, когда технологический процесс требует большого быстродействия или передачи сигналов на значительные расстояния. Гидравлические приборы позволяют получать точные перемещения исполнительных механизмов при больших усилиях. Унифицированный сигнал (УС) — это сигнал дистанционной передачи информации с унифицированными параметрами, обеспечивающий информационное сопряжение (интерфейс) между блоками, приборами и устройствами автоматизации. Под унифицированным параметром УС понимается тот его параметр, который является носителем информации: значение постоянного или переменного тока или напряжения, или частоты, код, давление воздуха пневматического сигнала. В зависимости от вида унифицированных параметров применяются унифицированные сигналы четырех групп: 1) тока и напряжения электрические непрерывные; 2) частотные электрические непрерывные; 3) электрические кодированные; 4) пневматические. Каждая группа УС определяется соответствующим государственным стандартом (ГОСТ). В качестве примера в таблице 3.1 приведены основные виды унифицированных аналоговых сигналов.
Т а б л и ц а 3.1 — Основные виды унифицированных аналоговых сигналов систем автоматики
В функциональных приборах и системах значения величин в цифровой форме представляются числом двоичных разрядов, кратным восьми (байтами). Байты могут передаваться и обрабатываться последовательно или полями, составленными из нескольких байтов; форматы, используемые для представления чисел, имеют фиксированную длину, равную 1 или 2 байт. Сообщения большей длины могут передаваться последовательно форматами принятой длины начиная со старших разрядов. В последние годы в связи с развитием микро- и мультипроцессорных информационных измерительных систем (ИИС), отдельные микропроцессоры или устройства ввода-вывода которых могут отстоять друг от друга территориально на сотни метров (например, заводская или цеховая ИИС), все более широко применяются системные интерфейсы или интерфейсы локальных сетей. Системный интерфейс, как правило, имеет многоуровневую архитектуру (совокупность) аппаратных и программных средств. Широкое распространение получил цифровой протокол HART. Этот открытый стандартный гибридный протокол двунаправленной связи предусматривает передачу цифровой информации поверх стандартного аналогового сигнала 4...20 мА. Бурно развивается системная интеграция первичных преобразователей с использованием различных разновидностей промышленных сетей Foundation Fieldbus, ModBus, Profibus и др. При этом используется полностью цифровой коммуникационный протокол для передачи информации в обоих направлениях между датчиками и системами управления, существенно облегчая взаимозаменяемость приборов разных мировых производителей. В отечественных и зарубежных микропроцессорных измерительно-управляющих вычислительных системах распространены асинхронные мультиплексные интерфейсы с параллельным способом передачи информации 8-разрядные интерфейсы Microbus, 16-разрядные интерфейсы общая шина (Unibus, Microbus). При реализации информационно-измерительных сетей в настоящее время преобладают цифровые интерфейсы последовательной передачи данных RS-232С и RS-485, а также интерфейс параллельной передачи IEEE-488. До сих пор используются выходящие из применения ДДПК (двоично-десятичный параллельный код) и ИРПС (интерфейс радиальный последовательный), разработанные в 1980-е годы [8]. |
||||||||||||||||||||
|
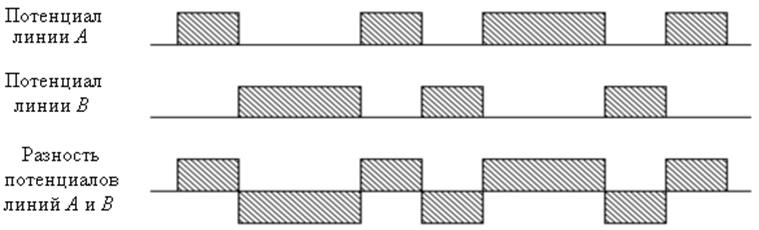
Для последовательной передачи цифровых данных существует три формы связи: а) симплексная связь предполагает наличие одного передатчика и одного приемника; информация передается в одном направлении, связь осуществляется через отдельную пару проводов; б) полудуплексная связь допускает двунаправленную передачу данных, но не одновременно; связь осуществляется по кабелю, состоящему из двух или четырех проводов; в) дуплексная связь обеспечивает одновременную двунаправленную передачу данных, а связь осуществляется также по кабелю, состоящему из двух или четырех проводов. Для каждой из указанных выше форм связи необходимо, чтобы приемное устройство было готово принять и идентифицировать каждый набор данных, переданный передатчиком. Существуют два способа решения этой задачи. При асинхронной передаче каждому пакету данных предшествует старт-бит, а по окончании передачи этого пакета данных следует стоп-бит. Таким образом, приемник четко определяет начало и конец сообщения. Однако из-за необходимости постоянной проверки старт- и стоп-битов скорость передачи при данном виде связи ограничена и, как правило, не превышает 1200 бит/с. Асинхронная передача используется в условиях неуверенного приема и высокого уровня помех. Синхронная передача не требует старт- и стоп-битов, передатчик и приемник синхронизированы. Начало приема-передачи данных предварительно синхронизируется синхроимпульсом, а затем каждое слово пакета данных распознается как блок из семи или восьми бит. Синхронная передача данных может обеспечивать скорость более 1200 бит/с и наиболее часто применяется для передачи таких потоков данных, как программные файлы. Современные интеллектуальные датчики и элементы управления, наряду с традиционным интерфейсом RS-232C, могут иметь также в своем составе подсистему последовательного ввода-вывода на базе интерфейса RS-485. Программируемые логические контроллеры большинства производителей в качестве средств организации территориально-распределенных систем сбора данных и управления содержат ту или иную реализацию интерфейсов RS-422А/RS-485. RS-232C — широко распространенный стандартный последовательный интерфейс. Он может быть использован для синхронной передачи данных со скоростью до 20 000 бит/с на расстояние до 15 метров; на более длинные дистанции скорость передачи уменьшается. Интерфейс RS-449 — это более поздний стандарт, он обладает улучшенными по сравнению с RS-232 характеристиками по скорости и расстоянию передачи; здесь достижима скорость до 10 000 бит/с на расстояние до 1 км. Уровни напряжения, соответствующие стандарту RS-232, составляют +12 В для логического “0“ и —12 В для логической “1“. Интерфейс RS-232 является в настоящее время стандартным для СОМ-портов персональных компьютеров. Поскольку подавляющее большинство микропроцессоров построено на ТТЛ-структуре (транзисторно-транзисторная логика), где уровень логического нуля составляет 0 В, а логической единицы +5 В, то, очевидно, что уровни сигналов необходимо преобразовывать для согласования. Последнее достигается использованием интегральных микросхем — преобразователей уровня таких, как МС1488 для преобразования ТТЛ-уровней в уровни RS-232 и МС1489 для преобразования уровней RS-232 в ТТЛ-уровни. Интерфейс RS-485 (EIA—485) — один из наиболее распространенных стандартов физического уровня связи (канал связи + способ передачи сигнала). Сеть, построенная на интерфейсе RS-485, представляет собой приемопередатчики, соединенные при помощи витой пары — двух скрученных проводов. В основе интерфейса RS-485 лежит принцип дифференциальной (балансной) передачи данных. Суть его заключается в передаче одного сигнала по двум проводам. Причем по одному проводу (условно A) идет оригинальный сигнал, а по другому (условно B) — его инверсная копия. Другими словами, если на одном проводе логическая "1", то на другом "0" и наоборот. Таким образом, между двумя проводами витой пары всегда есть разность потенциалов (см. рисунок 3.1).
Рисунок 3.1 — Разность потенциалов
Такой способ передачи обеспечивает высокую устойчивость к синфазной помехе, действующей на оба провода линии одинаково. Если сигнал передается потенциалом в одном проводе относительно общего, как в RS-232, то наводки на этот провод могут исказить сигнал относительно хорошо поглощающего наводки общего («земли»). Кроме того, на сопротивлении длинного общего провода будет падать разность потенциалов общих точек как дополнительный источник искажений. При дифференциальной передаче таких искажений не происходит, поскольку в витой паре наводка на оба провода одинакова. Таким образом, потенциал в одинаково нагруженных проводах изменяется одинаково, при этом информативная разность потенциалов остается без изменений. Аппаратная реализация интерфейса — микросхемы приемопередатчиков с дифференциальными входами/выходами (к линии) и цифровыми портами (к портам UART-контроллера). Существуют два варианта такого интерфейса: RS-422 и RS-485. RS-422 — дуплексный интерфейс. Прием и передача обеспечиваются по двум отдельным парам проводов. На каждой паре проводов может быть только по одному передатчику. RS-485 — полудуплексный магистральный аналог интерфейса RS-422. Прием и передача выполняются по одной паре проводов с разделением во времени. В сети может быть много передатчиков, так как они могут отключаться в режиме приема. Все устройства подключаются к одной витой паре одинаково: прямые выходы (A) к одному проводу, инверсные (B) - к другому. Входное сопротивление приемника со стороны линии обычно составляет 12 кОм. Поскольку мощность передатчика не беспредельна, это создает ограничение на количество приемников, подключенных к линии. Согласно стандарту RS-485, c учетом согласующих резисторов, передатчик может вести до 32 приемников. Однако, применяя микросхемы с повышенным входным сопротивлением, можно подключать к линии значительно большее количество устройств (более 100 приборов). При этом приборы подключаются к линии параллельно, а контроллер (компьютер) должен быть снабжен дополнительным устройством — преобразователем последовательного порта RS-485/ RS-232 . Максимальная скорость связи в RS-485 может достигать 10 Мбит/сек, а максимальная длина линии связи — 1200 м. Если необходимо организовать связь на расстоянии, превышающем 1200 м, или подключить большее число устройств, нежели допускает нагрузочная способность передатчика, то применяют специальные повторители (репитеры). Диапазон напряжений логических “1“ и “0“ в передатчика RS-485 составляют, соответственно, +1,5...+6 В и —1,5...-6 В, а диапазон синфазного напряжения передатчика — (—1...+3 В). Значения параметров определены таким образом, что любое устройство, входящее в состав измерительной информационной системы, сохраняет работоспособность при наличии на его клеммах, подключенных к линии связи, помехи общего вида, напряжение которой находится в диапазоне от —7 до +7 В. Ниже приведены ограничения на длину линии (L) и максимальную скорость передачи данных (V) для стандартов RS-422 и RS-485 (см. таблицу 3.2).
Т а б л и ц а 3.2 — ограничения на длину линии и скорость передачи данных для стандартов RS-422 и RS-485
3.4 Параллельная передача данных
Для параллельной передачи данных в измерительных информационных системах часто используется стандартный интерфейс IEEE-488 (Institute of Electrical and Electronics Engineers), называемый также HP-IB (Hewlett-Packard Interface Bus) или GPIB (General Purpose Interface Bus — интерфейсная шина общего применения). Международная электротехническая комиссия (МЭК) рекомендовала данный стандарт в качестве международного, по этой причине на постсоветском пространстве он носит название цифрового интерфейса МЭК. Интерфейс IEEE-488 был разработан для программируемых и непрограммируемых электронных измерительных приборов и преобразователей. Он рассчитан на асинхронный обмен информацией, ориентирован на сопряжение устройств, располагаемых относительно друг друга на расстоянии до 20 м, и обеспечивает работу в ИИС приборов различной сложности, допускает прямой обмен информацией между ними, дистанционное и местное управление приборами. Описываемый интерфейс имеет магистральную структуру (см. рисунок 3.2). Магистраль интерфейса состоит из 24 сигнальных линий, восемь из которых — линии заземления, а остальные линии разбиты на три группы. Первая группа, состоящая из восьми двунаправленных сигнальных линий, является шиной данных. Она предназначена для передачи данных и команд между различными приборами, присоединенными к интерфейсу. Другая группа из пяти сигнальных линий — шина общего управления, по ней передаются сигналы управления и состояния. Последняя группа из трех линий используется для управления передачей данных (шина квитирования). Приборы, подсоединенные к интерфейсу, могут работать как приемники либо источники сообщений. В каждый момент времени только одно устройство может быть источником информации, тогда как приемниками сообщений могут работать одновременно несколько устройств. Одно из устройств на магистрали является контроллером интерфейса [8]. Общее количество приемников и источников информации в IEEE-488 не должно превышать 31 при однобайтовой адресации, а число параллельно подключаемых приборов — 15 (включая управляющий контроллер).
В стандарте IEEE-488 высокому уровню сигнала в линии соответствует значение напряжения, равное или больше 2 В, а низкому уровню—значение, равное или меньше 0,8 В. |
|
|||||||||||||||||||
3.5 Агрегатные комплексы
|
В настоящее время в СНГ и в странах дальнего зарубежья продолжаются работы по созданию агрегатных комплексов (АК) технических средств многопланового применения, являющихся развитием системотехнического подхода в приборостроении. АК представляют собой группы устройств с высоким уровнем унификации. Агрегатный комплекс есть совокупность изделий, взаимосвязанных между собой по функциональному назначению или области применения, конструкции, основным параметрам и техническим данным. АК содержит технически и экономически обоснованную номенклатуру изделий, созданных на единой конструктивной, элементной и технологической базе, с использованием блочного принципа построения на основе базовых моделей и обеспечивает решение всех функциональных задач, соответствующих назначению комплекса. Агрегатирование средств автоматизации в проблемно-ориентированные комплексы являлось, как отмечалось выше, одним из важнейших принципов построения ГСП. Агрегатирование означает построение функционально более сложных устройств из ограниченного наборa более простых изделий (модулей) методом «наращивания и стыковки» простых изделий на основе функциональной, информационной и конструктивной совместимости. Существуют два структурно различных пути агрегатирования: — за счет агрегатного соединения унифицированных модулей и блоков на основе общей унифицированной базовой конструкции или нескольких конструкций; — за счет использования унифицированных типовых конструкций. Под унифицированным модулем (УМ) понимается конструктивно целостная ячейка, выполняющая одну типовую функцию, например: источник питания, модуль усилителя постоянного тока, коммутатор сигналов и т.п. Как правило, УМ не является товарной продукцией. Унифицированные блоки представляют собой объединение унифицированных модулей для реализации типовой автономной функции, имеющей самостоятельное и многоплановое применение, например блок регистрации и контроля, блок многоканального регулирования и т.п. Унифицированные блоки являются автономными изделиями, изготовляемыми на основе унифицированной базовой конструкции. В качестве примера рассмотрим агрегатный комплекс средств электроизмерительной техники (АСЭТ), который представляет собой совокупность технических средств, обеспечивающих автоматизацию измерений и предназначенных для построения на их основе измерительных систем, для применения в составе других комплексов и использования в виде автономных приборов и устройств. Устройства АСЭТ используются для измерения физических величин электрическими методами и представления получаемой измерительной информации при контроле и управлении технологическими процессами в энергетике, металлургии, химии и других отраслях промышленности, в научных исследованиях, разведочных, испытательных и поверочных работах, в том числе совместно с машинными средствами обработки информации в АСУ ТП. В АСЭТ входят группы устройств для сбора и преобразования информации, для обработки и хранения информации; для управления и формирования управляющих воздействий, а также некоторые вспомогательные устройства. Дальнейшим развитием АСЭТ является расширение ее до уровня параметрического ряда каждой из номенклатурных групп устройств. Параметрические ряды основных номенклатурных групп устройств АСЭТ были составлены с учетом перспективной потребности в средствах электроизмерительной техники и тенденции развития этих средств в СНГ и за рубежом [9]. Принятое в структуре АСЭТ распределение средств по основным группам в некотором смысле условное, так как некоторые средства по своим функциональным признакам могут входить как в одну, так и в другую группу. Например, цифро-аналоговые преобразователи, выполняющие функции преобразования цифровой информации в аналоговую форму, могут быть отнесены не только к устройствам сбора и преобразования информации, но и к устройствам управления и т.д. |
4 Функциональные схемы автоматизации
4.1 Общие сведения
Функциональная схема автоматизации является основным техническим документом, определяющим функциональную структуру и объем автоматизации технологических установок, отдельных машин, механизмов и агрегатов, выполняющих технологический процесс.
Функциональная схема автоматизации представляет собой чертеж, на котором схематически, условными обозначениями изображены: технологическое оборудование, коммуникации, органы управления и средства автоматизации (приборы, регуляторы, вычислительные устройства, элементы телемеханики) с указанием связей между технологическим оборудованием и элементами автоматики, а также связей между отдельными элементами автоматизации. Вспомогательные устройства такие, как редукторы и фильтры для воздуха, источники питания, автоматические выключатели и предохранители в цепях питания, соединительные коробки и другие устройства и монтажные элементы на функциональных схемах автоматизации не показываются.
Функциональную схему автоматизации технологической установки выполняют, как правило, на одном чертеже, на котором изображают аппаратуру всех систем, контроля, регулирования, управления и сигнализации, относящуюся к данной технологической установке.
Для сложных технологических процессов с большим объемом автоматизации схемы могут быть выполнены раздельно по видам технологического контроля и управления, т.е. отдельно выполняют схемы автоматического управления, контроля и сигнализации.
Прочитать функциональную схему автоматизации означает определить из нее:
а) параметры технологического процесса, которые подлежат автоматическому контролю и регулированию;
б) наличие защиты и аварийной сигнализации;
в) принятую блокировку механизмов;
г) организацию пунктов контроля и управления;
д) функциональную структуру каждого узла контроля, сигнализации, автоматического регулирования и управления;
е) технические средства, с помощью которых решается тот или иной функциональный узел контроля, сигнализации, автоматического регулирования и управления.
4.2 Изображение технологического оборудования и коммуникаций
Технологическое оборудование и коммуникации на функциональных схемах автоматизации изображают, как правило, упрощенно и в сокращенном виде, без указания отдельных технологических аппаратов и трубопроводов вспомогательного назначения. Изображенная таким образом технологическая схема дает ясное представление о принципе ее работы и взаимодействии со средствами автоматизации.
На технологических трубопроводах обычно показывают ту регулирующую и запорную арматуру, которая непосредственно участвует в контроле и управлении процессом, а также запорные и регулирующие органы, необходимые для определения относительного расположения мест отбора импульсов или поясняющие необходимость измерений.
В отдельных случаях некоторые элементы технологического оборудования изображают на функциональных схемах в виде прямоугольников с указанием наименования этих элементов или не показывают вообще. При этом около датчиков, отборных, приемных и других подобных по назначению устройств указывают наименование того технологического оборудования, к которому они относятся.
4.3 Примеры построения условных обозначений приборов и средств автоматизации на функциональных схемах
|
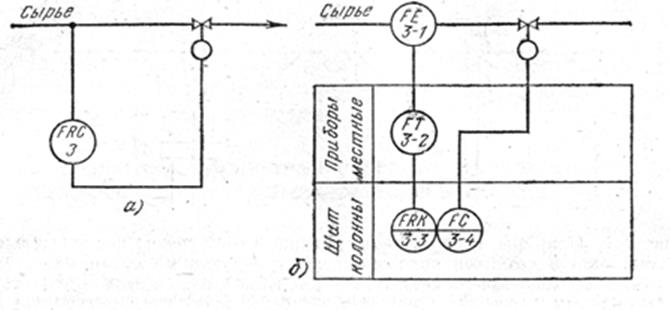
Приборы, средства автоматизации, электрические устройства и элементы вычислительной техники на функциональных схемах автоматизации показывают в соответствии с действующим ГОСТ 21.404-85. В отдельных случаях при отсутствии в стандартах необходимых изображений могут быть использованы нестандартные изображения, которые выполняют на основе характерных признаков изображаемых устройств. В ГОСТ 21.404-85 принята система обозначений по функциональному признаку, выполняемому данным прибором или средством автоматизации. Регулирующие органы такие, как горелки, форсунки, направляющие аппараты, гидромуфты, вариаторы и реостаты, показывают непосредственно на местах их установки в виде условных изображений, принятых для технологического оборудования. Для датчиков и приборов, указывающих положение регулирующих органов, исполнительных механизмов и т. п., показывают существующую механическую связь [10]. Изображение приборов и средств автоматизации на функциональных схемах может быть выполнено упрощенным или развернутым способом (см. рисунок 4.1).
Рисунок 4.1 — Примеры изображения условных обозначений приборов и средств автоматизации упрощенным (а) и развернутым (б) способами
Пример. На рисунке 4.1,а изображен участок технологического трубопровода, на котором упрощенным способом показан функциональный узел автоматического регулирования расхода технологического сырья. Первичный измерительный преобразователь (диафрагма или сопло) в данном случае не показан. Место установки первичного преобразователя обозначено пересечением линий технологического трубопровода с линией, связывающей этот преобразователь с условным обозначением прибора, осуществляющего сложные функции. На рисунке 4.1,б тот же узел изображен развернутым способом.
|
4.4 Позиционные обозначения приборов и средств автоматизации
Всем приборам и средствам автоматизации, изображенным на функциональных схемах автоматизации, присваивают позиционные обозначения (позиции), сохраняющиеся во всех материалах проекта. На стадии проекта позиционные обозначения выполняют арабскими цифрами в соответствии с нумерацией в заявочной ведомости приборов, средств автоматизации и электроаппаратуры. На стадии рабочей документации и при одностадийном проектировании позиционные обозначения приборов и средств автоматизации образуются из двух частей: арабских цифр — номера функциональной группы и строчных букв русского алфавита — номера прибора и средств автоматизации в данной функциональной группе.
Буквенные обозначения присваивают каждому элементу функциональной группы в порядке алфавита в зависимости от последовательности прохождения сигнала — от устройств получения информации к устройствам воздействия на управляемый процесс (например, приемное устройство-датчик, вторичный преобразователь, задатчик, регулятор, указатель положения, исполнительный механизм, регулирующий орган).
Позиционные обозначения в функциональных схемах автоматизации проставляют, как правило, в нижней части окружности, обозначающей прибор, или рядом с условными графическими обозначениями приборов и средств автоматизации с правой стороны или над ним.
4.5 Примеры выполнения функциональных схем автоматизации
Функциональные схемы автоматизации разрабатывают с большей или меньшей степенью детализации.
Функциональные схемы автоматизации могут быть выполнены двумя способами:
а) с изображением щитов и пультов управления при помощи условных прямоугольников (как правило, в нижней части чертежа), в пределах которых указывают устанавливаемые на них средства автоматизации;
б) с изображением средств автоматизации на технологических схемах вблизи отборных и приемных устройств без построения прямоугольников, условно изображающих щиты, пульты, пункты контроля и управления.
При выполнении схемы по первому способу на ней показывают все приборы и средства автоматизации, входящие в состав функционального блока или группы, а также место их установки. Преимуществом этого способа является большая наглядность, в значительной степени облегчающая чтение схемы и работу с проектными материалами.
Прямоугольники щитов и пультов располагают в такой последовательности, чтобы при размещении в их пределах обозначений приборов и средств автоматизации обеспечивалась наибольшая простота и ясность схемы и минимум пересечений линий связи. В прямоугольниках могут быть даны номера чертежей общих видов щитов и пультов. В каждом прямоугольнике с левой стороны указывают его наименование.
Приборы и средства автоматизации, которые расположены вне щитов и не связаны непосредственно с технологическим оборудованием и трубопроводами, условно показывают в прямоугольнике «Приборы местные».
Для облегчения понимания существа автоматизируемого объекта и возможности выбора диапазона измерения и шкал приборов, а также уставок регуляторов на участках линий связи над верхним прямоугольником («Приборы местные») указывают предельные рабочие (максимальные и минимальные) значения измеряемых или регулируемых технологических параметров при установившихся режимах работы. Эти значения дают в единицах шкалы выбираемого прибора или в международной системе единиц без буквенных обозначений.
При построении схем по второму способу, хотя он и дает только общее представление о принятых решениях по автоматизации объекта, достигается сокращение объема документации. Чтение схем автоматизации, выполненных таким образом, затруднено, так как они не отображают организацию пунктов контроля и управления объектом. При втором способе позиционные обозначения элементов схемы в каждом контуре регулирования выполняют арабскими цифрами, а исполнительные механизмы обозначения не имеют.
4.6 Последовательность чтения функциональных схем автоматизации
|
Для работы по схемам автоматизации необходимо иметь пояснительную записку к проекту, опись чертежей и спецификацию на приборы, средства автоматизации и электроаппаратуру. При чтении схем автоматизации рекомендуется соблюдать следующую последовательность: а) прочитать все надписи — основную надпись (штамп), примечания, ссылки на относящиеся чертежи и другие дополнительные пояснения, имеющиеся на чертеже; б) изучить технологический процесс и взаимодействие всех участвующих в нем аппаратов, агрегатов и установок, начиная с ознакомления с пояснительными записками к проекту автоматизации и технологической части; в) определить организацию пунктов контроля и управления данным технологическим процессом; г) установить перечень узлов контроля, сигнализации и автоматического регулирования и управления электроприводами, предусмотренных данной схемой [11].
|
5 Автоматические регуляторы систем автоматики
5.1 Общие сведения
|
Автоматический регулятор — это средство автоматизации, получающее, усиливающее и преобразующее сигнал отклонения регулируемой величины и целенаправленно воздействующее на объект регулирования; он обеспечивает поддержание заданного значения регулируемой величины или изменения её значения регулируемой величины или изменения её значения по заданному закону (алгоритму). Автоматические регуляторы с типовыми алгоритмами регулирования — релейными, пропорциональным (П), пропорционально-интегральным (ПИ), пропорционально-дифференциальным (ПД) и пропорционально-интегрально-дифференциальным (ПИД) — составляют основную группу регуляторов, используемых в самых различных отраслях промышленности и сельского хозяйства. Несмотря на широкое использование управляющих вычислительных машин, микропроцессорных средств контроля и управления, автоматические регуляторы являются широко распространенными средствами автоматизации в составе локальных систем контроля и регулирования с числом контуров регулирования от 1 до 8—16, подсистем нижнего уровня иерархии управления в распределенных АСУ ТП и систем с супервизорным управлением. Главная функция регулятора — формирование сигнала рассогласования между регулируемой величиной и ее заданным значением (уставкой) и динамическое преобразование сигнала рассогласования по типовым алгоритмам (законам) регулирования. Управляющий сигнал с выхода регулятора поступает непосредственно на вход исполнительного устройства автоматической системы. Однако к современным автоматическим регуляторам предъявляется ряд дополнительных эксплуатационных требований, основными из которых являются: - безударный переход (т. е. без дополнительных переходных процессоров в цепях) с режима ручного управления на автоматический и обратно; - в режиме автоматического управления безударный переход с внешнего источника сигнала задания на внутренний (необходимый, например, в супервизорном управлении); - ограничение выходного аналогового сигнала по верхнему и нижнему уровням и сигнализации предельных значений этих уровней; - гальваническое разделение входных и выходных цепей; - связь с УВМ верхнего уровня иерархии управления; - аналоговая и дискретная автоподстройка динамических параметров регулятора, необходимая для построения адаптивных систем управления. Автоматические регуляторы классифицируются в зависимости от назначения, принципа действия, конструктивных особенностей, вида используемой энергии и др. По конструктивным признакам автоматические регуляторы подразделяются на аппаратные, приборные, агрегатные и модульные. Регуляторы аппаратного типа конструктивно представляют собой техническое устройство, работающее в комплексе с первичным измерительным преобразователем. Такие регуляторы работают независимо (параллельно) от средств измерения данного технологического параметра. Регуляторы приборного типа работают только в комплексе со вторичным измерительным прибором. Приборные регуляторы не имеют непосредственной связи с первичным измерительным преобразователем. Автоматические регуляторы, построенные по агрегатному (блочному) принципу, состоят из отдельных унифицированных блоков, выполняющих определённые функции. Входные и выходные сигналы этих блоков унифицированы. Это позволяет из блоков проектировать автоматические регуляторы различного функционального назначения. Автоматические регуляторы, построенные по модульному (элементному) принципу, состоят из отдельных модулей (элементов), выполняющих простейшие операции. Входные и выходные сигналы модулей унифицированы. Это позволяет, как и в случае использования агрегатных регуляторов, собирать автоматические регуляторы различного функционального назначения. В зависимости от вида используемой энергии регуляторы подразделяются на электрические (электромеханические, электронные), пневматические, гидравлические и комбинированные (электро-пневматические, электрогидравлические и т.д.). Выбор регулятора по виду используемой энергии определяются характером объекта регулирования и особенностями автоматической системы. Так, пневматические автоматические регуляторы применяются во взрыво— и пожароопасных зонах при небольших расстояниях (до 400 м) от пункта управления до объекта регулирования. Следует отметить, что гидравлические регуляторы надёжны в работе, а их исполнительные механизмы при относительно небольших размерах развивают большие усилия. Однако и пневматические, и гидравлические регуляторы имеют ряд недостатков: - необходимость в специальных источниках питания; - ограниченность радиуса действия; - требования полной герметизации всех элементов регулятора и линии связи; - большая инерционность элементов и линий связи по сравнению с инерционностью электрических регуляторов и т. д. Автоматические регуляторы электрической ветви в зависимости от вида электрического сигнала разделяются на аналоговые, дискретные и гибридные (аналого-дискретные). В свою очередь, дискретные регуляторы могут быть импульсными и цифровыми. В аналоговых регуляторах информационный сигнал непрерывен на всем тракте формирования сигнала регулирования. В дискретных регуляторах в одной или нескольких точках тракта формирования регулирующего сигнала происходит импульсная модуляция сигнала либо по амплитуде (АИМ), либо по длительности (ширине) импульсов (ШИМ), либо по частоте импульсов (ЧИМ); модуляция по уровню в релейных регуляторах и модуляция по уровню и амплитуде в цифровых регуляторах. В гибридных регуляторах информационные сигналы имеют как аналоговую, так и дискретную природу в различных точках тракта формирования регулирующего сигнала.
|
5.2 Структурные схемы автоматических регуляторов
|
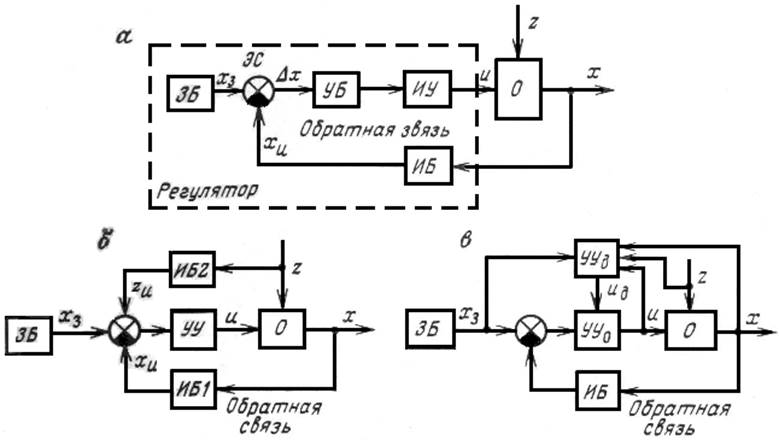
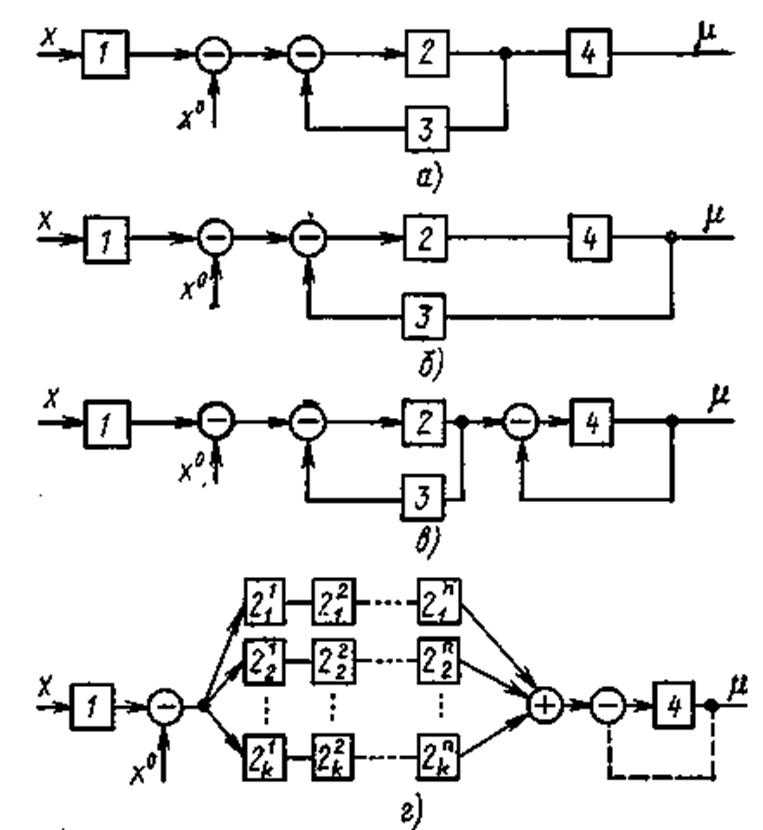
Структурные схемы автоматических регуляторов — аналоговых и дискретных — с типовыми алгоритмами регулирования могут быть получены на основе известных в теории автоматического регулирования методов коррекции, когда желаемые динамические характеристики (алгоритмы) достигаются с помощью последовательных и параллельных корректирующих цепей (активных и пассивных) и обратных связей. В ряде случаев исполнительные механизмы также участвуют в формировании необходимого алгоритма. На рисунке 5.1 изображены основные структуры, в соответствии с которыми построено большинство промышленных регуляторов с типовыми алгоритмами. На структурных схемах приняты следующие обозначения: 1) преобразователь входной величины х; 2) усилительное устройство; 3) функциональная обратная связь; 4) исполнительное устройство (механизм), сигнал, с выхода которого управляет объектом. Преобразователь 1 может осуществлять демпфирование входных сигналов, пропорциональных регулируемым параметрам, преобразование токовых сигналов в сигналы напряжения, суммирование нескольких входных сигналов, масштабирование, активную фильтрацию помех и т. д. В структурах (см. рисунок 5.1, а—в) формирование алгоритма осуществляется корректирующей обратной связью 3, охватывающей усилитель 2, и исполнительным устройством 4. В структурной схеме на рисунке 5.1, а функциональная обратная связь 3 не охватывает исполнительное устройство 4, поэтому будем называть эту структуру структурой без обратной связи по положению исполнительного устройства. В регулирующих устройствах этого типа устройство 4 выполняется чаще всего в виде интегрирующего двигателя с преобразователем угла поворота (датчик положения), а его передаточная функция входит в передаточную функцию закона регулирования.В отличие от этих регуляторов структуры на рисунке 5.1, б соответствуют так называемым регуляторам с обратной связью по положению исполнительного устройства. По правилам структурного преобразования схемы на рисунке 5.1, а, б могут быть сведены к одной из них, однако техническая реализация и свойства структур различны, что и делает необходимым их разделение. В структурной схеме на рисунке 5.1,в исполнительное устройство охватывается жесткой обратной связью и носит название позиционера, так как его выходная величина — регулирующее воздействие µ— пропорциональна входному. Закон регулирования определяется блоками 2 и 3. В ряде промышленных регуляторов закон регулирования формируется суммированием отдельных составляющих, реализуемых блоками 2i(1), 2i(2), ..., 2i(n)) (см. рисунок 5.1, г), каждый из которых может быть образован контуром из усилительного устройства 2 и функциональной обратной связью 3. Часто исполнительное устройство 4 в этих структурах является позиционером. В наиболее простых промышленных регуляторах (например, релейных) структурная схема на рисунке 5.1, г содержит лишь единственное усилительное звено 2, где отсутствует обратная связь 3 [12].
Рисунок 5.1 — Типовые структурные схемы промышленных регуляторов
|
6 Электронные элементы систем автоматики
Полупроводниковый диод — это полупроводниковый прибор, содержащий один р-n переход. Как правило, области прибора с р- и n-проводимостями имеют неодинаковые концентрации основных носителей. Область с более высокой концентрацией называется эмиттером, с более низкой — базой. В настоящее время используются два основных типа диодов: точечный (см. рисунок 6.1) и плоскостной (см. рисунок 6.2).
1,3 — металлические торцы; 2 — керамическая трубка; 4 — проволочный вывод; 5 — кристаллодержатель; 6 — кристалл германия; 7 — вольфрамовая проволока. Рисунок 6.1 — Конструкция точечного полупроводникового диода
В точечном диоде к кристаллическому полупроводнику 6 с одним типом проводимости вплавляется конец вольфрамовой проволоки 7, на которую нанесен слой акцептора (если кристалл имеет n-проводимость) или донора (в случае р-проводимости). В процессе приплавки атомы примеси с поверхности проволоки диффундируют в кристалл, и в нем образуется р—n переход. В плоскостных диодах р—n переход образуется путем наплавки кусочка индия 8 на германиевый или кремниевый кристалл 9 с n-проводимостью. Детали конструкций ясны из рисунков. Из рисунка видно, что при малых значениях напряжения (как обратного, так и прямого) сопротивление диода R = ΔU/ΔI велико (ток нарастает полого). Когда значение прямого напряжения больше потенциального барьера, ток нарастает круто и почти по прямой; сопротивление диода резко падает и, достигнув некоторого значения Ro, остается неизменным. Точечные диоды благодаря малой площади р—n перехода имеют очень малую емкость и поэтому широко применяются в высокочастотных схемах детектирования и преобразования сигналов, а также в различных измерительных и логических схемах. Основными параметрами, характеризующими точечные диоды, являются: а) прямой ток, соответствующий указанному напряжению (обычно 1—2 В); б) допустимая амплитуда обратного напряжения; в) минимальное пробивное напряжение; г) обратный ток, соответствующий указанному обратному напряжению; д) проходная емкость. Обратные ток и напряжение указываются при различных температурах. Плоскостные диоды используются главным образом в выпрямителях, а также в различных схемах, работающих в диапазоне низких частот. Основными параметрами этих диодов являются: а) максимально допустимое значение обратного напряжения; б) обратный ток при максимально допустимом обратном напряжении; в) среднее значение выпрямленного тока; г) падение напряжения при прохождении прямого тока. Все указанные величины приводятся для различных рабочих температур.
1,6 — проволочные выводы; 2 — кристаллодержатель; 3 — корпус; 4 — токосниматель; 5 — проходной изолятор; 7 — втулка; 8 — кристалл индия; 9 — кристалл германия; 10 — подложка. Рисунок 6.2 — Конструкция плоскостного полупроводникового диода
Выше было сказано о том, что при пробое р—n перехода обратным напряжением лавинообразное нарастание тока обусловлено ударной ионизацией и массовым переходом электронов из валентной зоны в зону проводимости.
|
6.2 Биполярные транзисторы
Полупроводниковый транзистор представляет собой прибор с двумя последовательно включенными р-n переходами. Он состоит из трех областей с чередующимися типами проводимостей.
Одна из крайних областей транзистора называется эмиттером, средняя область — базой и вторая крайняя область — коллектором, р-n переход со стороны эмиттера называется эмиттерным, а со стороны коллектора — коллекторным. Эмиттер, база и коллектор отличаются не только характером проводимости, но и концентрацией носителей. В базе она на несколько порядков меньше, чем в эмиттере, а в коллекторе — почти такая же, как в эмиттере.
В настоящее время подобные приборы принято называть биполярными транзисторами, поскольку в них используются носители обоих типов — электроны и дырки. Введение этого термина связано с появлением новых типов трехэлектродных полупроводниковых приборов — униполярных (полевых) транзисторов. В зависимости от типа проводимости различают транзисторы р-n-р и n-р-n структур.
В практических схемах транзистор используется как четырехполюсник — прибор с двумя входными и двумя выходными зажимами, поэтому один из выводов транзистора является общим для входной и выходной цепей. Различают схемы включения транзистора: с общим эмиттером (ОЭ), общей базой (ОБ) и общим коллектором (ОК).
Усилительные свойства транзистора основаны на резком изменении сопротивления участка «эмиттер — коллектор» под действием поступающего на базу управляющего сигнала.
Важной особенностью транзисторов является взаимосвязь токов базы, эмиттера и коллектора. Поэтому характер зависимостей между токами и напряжениями в транзисторе зависит от того, как включены относительно друг друга источники питания эмиттерного и коллекторного переходов транзистора. Графики зависимостей между токами и напряжениями в транзисторе называются вольт-амперными характеристиками или просто характеристиками транзистора.
При включении транзистора по схеме с ОЭ входной статической характеристикой называют зависимость тока базы от напряжения на эмиттерном переходе при постоянном напряжении на коллекторе.
Выходной статической характеристикой транзистора, включенного по схеме с ОЭ, называют зависимость коллекторного тока от напряжения на коллекторе при неизменном токе базы (см. рисунок 6.3).
На примере включения транзистора по схеме с ОЭ рассмотрим четыре характерных рабочих режима транзистора.
Режим насыщения (1) имеет место при напряжении UK = 0, а также при |Uк| < |UБ|. В этом режиме оба перехода включены в прямом направлении и обе крайние области транзистора служат одновременно эмиттерами и коллекторами (инжектируют и собирают носители). При данном режиме база насыщена носителями, инжектируемыми через оба перехода. Поэтому сопротивление между двумя любыми выводами транзистора очень мало. При UK=0 результирующий ток коллектора равен нулю. По мере увеличения напряжения UК коллекторный переход, хотя по-прежнему и смещен в прямом направлении, но прямое напряжение на участке «база — коллектор» транзистора уменьшается. Инжекция носителей из коллектора в базу значительно слабее, чем из эмиттера, что приводит к резкому росту коллекторного тока с увеличением UК. Начиная с |UК|=|UБ|, коллектор уже не инжектирует дырки в базу, транзистор переходит в активный режим (2), который характеризуется плавным ростом коллекторного тока с увеличением UK, что обусловлено главным образом сужением базы. При больших напряжениях на коллекторе возникает пробой коллекторного перехода (режим лавинного пробоя 4). Режим отсечки (3) имеет место при UЭБ < 0. В этом режиме ток эмиттера отсутствует, а коллекторный ток равен току базы и представляет собой обратный ток коллекторного перехода IКо.
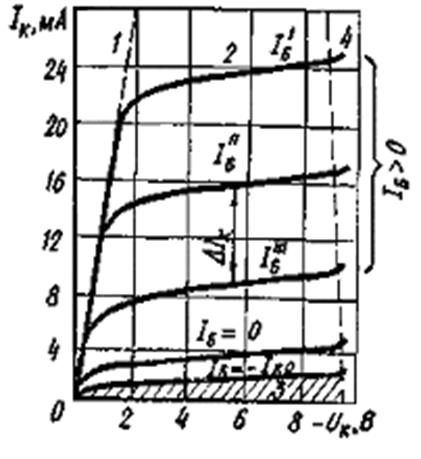
Рисунок 6.3 — Выходные статические характеристики транзистора, включенного по схеме с ОЭ
При расчете усилительных схем на транзисторах (при условии, что напряжение сигнала намного меньше напряжения питания) транзистор представляют в виде четырехполюсника; соотношения между токами и напряжениями на входе и выходе его (IВХ, UВX, IВЫХ, UВЫХ) при этом могут выражаться тремя различными системами уравнений. Коэффициенты, входящие в состав этих уравнений, называются первичными параметрами транзистора, поскольку они характеризуют основные электрические свойства транзистора как линейного четырехполюсника.
Наибольшее распространение получила система уравнений с так называемыми гибридными параметрами (их называют еще h-napaметрами), которая имеет вид:
![]() UВХ = h11IВХ+ h12UВЫХ
UВХ = h11IВХ+ h12UВЫХ
IВХ = h21IВХ+ h22UВЫХ
Здесь под IВХ, UВX, IВЫХ, UВЫХ понимаются переменные напряжения и токи на входе и выходе транзистора. По физическому смыслу h-параметры представляют собой следующие величины:
h11 — входное сопротивление при короткозамкнутом по переменному току выходе, т. е. при UВЫХ = 0. Так, например, для схемы с ОБ h11 = UЭ/IЭ при UК = 0.
h12 — отношение напряжения на входе к напряжению на выходе (коэффициент обратной связи) при разомкнутом по переменному току входе, т. е. при IВХ = 0. Так, например, для схемы с ОБ h12 = UЭ/UK при IЭ = 0;
h21 — отношение тока на выходе к току на входе (коэффициент передачи тока) при UВЫХ = 0. Так, например, для схемы с ОБ h21 = IК/IЭ при UK = 0;
h22 — выходная проводимость, т. е. отношение IВЫX/UВЫХ при IВХ = 0.
Помимо рассмотренных, транзисторы характеризует еще ряд параметров:
1) Предельно допустимая мощность, рассеиваемая на коллекторе,
PKmax.
Определяется она предельно допустимой температурой нагрева полупроводникового
прибора (около 100 °С для германиевых и 150 °С
для кремниевых транзисторов). Для улучшения теплоотдачи в мощных транзисторах
корпус их закрепляют на ребристом радиаторе. Допустимая мощность, рассеиваемая
на коллекторе различных типов транзисторов, находится в пределах от единиц
милливатт до десятков ватт.
2) Предельно допустимое обратное напряжение коллекторного перехода UKmax, т. е. напряжение, при котором еще не наступает пробой коллекторного перехода. Практически UKmax = 10…50 В.
3) Обратный ток коллекторного перехода (подобен обратному току диода) IKo. В обычных условиях IKо не превышает единиц микроампер.
4) Предельно допустимая частота. Принято считать, что транзистор работоспособен, если коэффициент усиления по току уменьшается не более чем в 2 раза по сравнению с рассчитанным для низкой частоты. В зависимости от типа транзистора предельная частота его может изменяться в широких пределах (от сотен килогерц до единиц гигагерц).
5) Диапазон рабочих температур. Транзисторы, как и все полупроводниковые приборы, в большой степени подвержены влияниям температуры. С повышением температуры резко увеличивается количество основных и неосновных носителей в полупроводнике, что приводит к увеличению токов транзистора. Особенно сильно влияет на работу транзистора температурное изменение обратного тока коллекторного перехода, которое происходит по экспоненциальному закону. Можно приближенно считать, что при повышении температуры на 10°С обратный ток коллектора возрастает вдвое.
Из сказанного следует, что при эксплуатации транзисторов нужно, по возможности, добиваться того, чтобы они работали в относительно узком диапазоне температур, или принимать специальные меры для компенсации влияния изменений температуры.
Только при этих условиях схемы на транзисторах работают стабильно. Диапазон допустимых температур окружающей среды для различных образцов транзисторов неодинаков, однако максимально допустимая температура в лучшем случае не превышает +125 °С, а минимальная — не ниже -30 °С.
6.3 Полупроводниковые тиристоры
Со второй половины прошлого века используются полупроводниковые приборы с четырехслойной структурой. В зависимости от характера вольтамперной характеристики и способа управления их подразделяют на:
а) динисторы — имеют два вывода и переключаются в открытое состояние импульсами напряжения заданной амплитуды;
б) тиристоры (однооперационные) — не проводящие в обратном направлении, включаются импульсами тока управления, а выключаются либо подачей обратного напряжения, либо прерыванием тока в открытом состоянии. Тиристоры в зависимости от коммутационных параметров подразделяют на низкочастотные, высокочастотные, быстродействующие, импульсные (специальные тиристоры для импульсных режимов работы);
в) запираемые тиристоры (двухоперационые) — выключаются с помощью импульсов тока управления (отличаются малыми значениями времени выключения при равной энергетике с однооперационными тиристорами);
г) комбинированно-выключаемые тиристоры — выключаются с помощью импульса тока управления при одновременном воздействии обратного анодного напряжения. У этих тиристоров время выключения несколько превышает время выключения запираемых;
д) симметричные тиристоры (симисторы) — являются эквивалентом встречно-параллельного соединения двух тиристоров и способны пропускать ток в открытом состоянии как в прямом, так и в обратном направлениях. Включается симистор однополярными и разнополярными импульсами тока управления;
е) лавинные тиристоры — имеют лавинную вольт-амперную характеристику и обладают повышенной устойчивостью к перенапряжениям;
ж) оптронные тиристоры (оптотиристоры) — управляются с помощью светового сигнала от светодиода, расположенного внутри корпуса прибора. Оптотиристоры обладают повышенной помехоустойчивостью, так как их цепь управления гальванически развязана с сильноточной анодной цепью.
Чтобы перевести тиристор в открытое состояние, необходимо накопить избыточный отрицательный заряд в базе n1 и положительный в базе р2 (см. рисунок 6.4). Это осуществляется путем увеличения уровня инжекции через эмиттерные переходы П1 и П3 при увеличении напряжения на тиристоре до UПЕРЕКЛ .
На управляющий электрод подается напряжение такой полярности, чтобы прилегающий к этой базе эмиттерный переход был включен в прямом направлении. Это приводит к росту тока через эмиттерный переход и снижению U ПЕРЕКЛ . На рисунке 6.5 приведено семейство ВАХ тиристора при различных значениях управляющего тока.
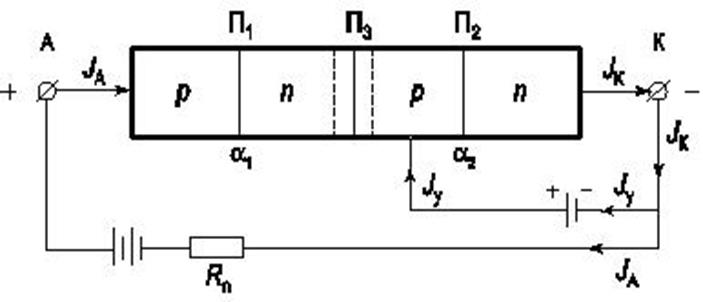
Рисунок 6.4 — Схема включения тиристора
При достаточно больших значениях тока IУПР ВАХ тиристора вырождается в прямую ветвь ВАХ диода. Критическое значение тока IУПР, при котором на ВАХ тиристора исчезает участок с отрицательным диффиренциальным сопротивлением и тринистор включается, минуя запертое состояние, называется током спрямления.
Таким образом, наличие IУПР принципиально не меняет существа процессов, определяющих вид ВАХ тиристора, но меняет значения параметров: напряжение переключения и ток переключения.
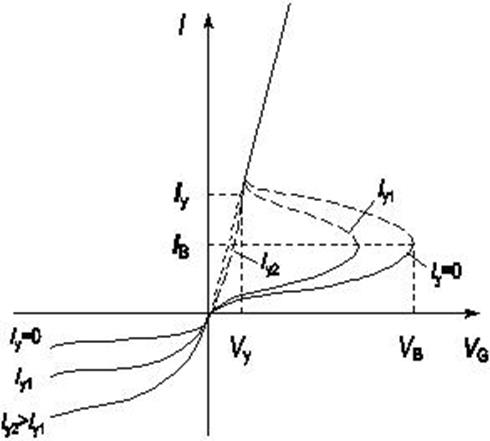
Рисунок 6.5 — ВАХ тиристора при различных значениях управляющего тока базы IУПР
К наиболее важным параметрам тиристоров относят: максимально допустимый средний прямой ток (в современных мощных тиристорах может достигать 1000…2000 А), импульсное прямое напряжение, максимальный обратный ток, ток удержания (определяется при Iу=0), время выключения (у быстродействующих тиристоров составляет 5…100 мкс), управляющий ток отпирания и управляющее напряжение отпирания (при таких значениях тока и напряжения в управляющей цепи обеспечивается надежное отпирание тиристора даже при малых значениях напряжения — 5…10 В).
Четырехслойные приборы используются в качестве выпрямителей, а также переключающих устройств. Основная область применения тиристоров — энергетическая (силовая) электроника [6].
Ввиду несложной технологии изготовления, большого срока службы, четырехслойные полупроводниковые приборы очень перспективны. Разработаны конструкции тиристоров на рабочие напряжения до 2000 В и токи 1000 А и более.
6.4 Программируемые логические контроллеры
|
В настоящее время широкое распространение на производстве получают промышленные контроллеры и ПЛК (программируемые логические контроллеры, на Западе называемые «программируемыми реле»), предназначенные для применения в системах автоматизации там, где использование других средств автоматики не удовлетворяет современным требованиям. Фирма Siemens была пионером в области разработки промышленных контроллеров и ПЛК, начав их массовое производство в 1996 году. Логический модуль LOGO! изначально задумывался как промежуточное звено между традиционными релейными элементами автоматики (контакторы, реле времени и т.п.) и программируемыми контроллерами. В нем вместо соединения проводов должно было использоваться логическое соединение функций, обычно реализуемых аппаратно с помощью отдельных устройств. Но в отличие от программируемых контроллеров сложность устройств должна была позволять работать с ними персоналу без специальных знаний в области программирования. С этой же целью ввод программы в LOGO! осуществляется непосредственно со встроенных индикатора и клавиатуры. Для подключения к источникам сигналов и исполнительным устройствам модули LOGO! первых поколений имели 6 или 12 дискретных входов и 4 или 8 дискретных выходов (варианты Basic и Long соответственно). Затем к дискретным входам добавилось два аналоговых. В 2001 году фирма Siemens выпустила модульный LOGO!, в котором увеличение числа обслуживаемых входов и выходов обеспечивается с помощью дополнительных модулей расширения. Подключение разных модулей расширения к базовой модели LOGO! позволяет расширить возможности контроллера. Модуль закрепляется на стандартной профильной шине и подключается к LOGO! В распоряжении разработчика имеются следующие типы модулей: - дискретный модуль LOGO!DM8; - аналоговый модуль LOGO!AM2; - коммуникационный модуль LOGO!CM AS-i. В модульном варианте ПЛК LOGO! (см. рисунок 6.6) можно реализовать максимум с 24 дискретными и 8 аналоговыми входами, а также 16 дискретными выходами. Напряжение питания входных цепей в LOGO! соответствует напряжению питания модуля, которое может быть 12/24 В постоянного тока, 24 и 230 В переменного тока. Выходы могут быть транзисторными или релейными. Нагрузочная способность последних (до 10 А) обеспечивает непосредственное подключение достаточно мощных исполнительных устройств. Новые модули расширения делают LOGO! способным быстро реагировать на изменения и занимают в два раза меньше места, чем сам LOGO! Кроме того, к такому микроконтроллеру можно подключить коммуникационные модули для работы в сетях AS-interface, EIB Instabus или LON. Существуют и логические модули без дисплея и клавиатуры, благодаря чему они почти на 20 процентов дешевле.
Рисунок 6.6 — Модульный LOGO! фирмы Siemens
Главной особенностью ПЛК LOGO! является то, что схема релейной автоматики собирается из программно реализованных функциональных блоков. В распоряжении пользователя имеется восемь логических функций типа И, ИЛИ и т.п., большое число типов реле, в том числе, реле с задержкой включения и выключения, импульсное реле, реле с самоблокировкой, выключатель с часовым механизмом, тактовый генератор, календарь, часы реального времени с возможностью автоматического перехода на летнее/зимнее время и др. Программирование модулей LOGO! может выполняться с помощью встроенных клавиатуры и дисплея. Оно сводится к выбору необходимых функциональных блоков, соединению их между собой и заданию параметров настройки блоков (задержек включения/выключения, значений счётчиков и т.д.). Для хранения управляющей программы в модуле имеется встроенное энергонезависимое запоминающее устройство. Создание резервной копии программы, а также перенос ее в другие LOGO! может быть осуществлено с помощью специальных модулей памяти, устанавливаемых в интерфейсное гнездо. Модули памяти так и называются по цвету корпуса — «желтый» и «красный». При использовании жёлтого модуля программа может быть свободно перенесена из него в LOGO! и обратно. Если же программа переносится из красного модуля, то она может исполняться только в том случае, если модуль памяти остается вставленным в LOGO! Копирование её на другой модуль памяти невозможно. Таким способом обеспечивается защита управляющей программы от несанкционированного размножения. Однако ввод программы с панели управления может быть оправдан только для небольших по объему программ или в случае острой необходимости внесения корректив в уже работающую программу непосредственно на объекте. Для относительно сложных схем очевидна необходимость использования программного пакета LOGO! SoftComfort. Этот пакет позволяет разрабатывать в графической форме и документировать программы для LOGO! на компьютере и отлаживать их в режиме эмуляции логического модуля. Принцип работы аналогичен используемому при ручном вводе, но эффективность во много раз выше. Выбранные функциональные блоки мышью перетаскиваются на рабочее поле, затем соединяются и параметрируются. Для каждого функционального блока может быть написан комментарий, который существенно облегчит понимание принципа работы программы другому пользователю или поможет самому разработчику через некоторое время вспомнить собственные замыслы. Если по результатам эмулирования корректировка программы не требуется, то ее можно загрузить в память LOGO! с помощью специального кабеля, подключаемого к тому же интерфейсному гнезду, что и модули памяти. На рисунке 6.7 приведен пример блок-схемы логического устройства, выполненного в программе LOGO! SoftComfort.
Рисунок 6.7 — Пример блок-схемы логического устройства, выполненного в программе LOGO! SoftComfort Зачастую при решении задачи автоматизации возникает потребность в контроле температуры. С появлением специализированного аналогового модуля LOGO! АМ2 Pt100, предназначенного для непосредственного подключения двух термометров сопротивления Pt100, процесс контроля температуры в диапазоне от —50 до +200°С заметно упрощается. С помощью LOGO! можно обеспечить и регулирование температуры. Такая задача решается с помощью обычного двухпозиционного регулятора, реализуемого с помощью платинового термометра сопротивления, аналогового модуля АМ2 Pt100 и функционального блока «Аналоговый триггер». Сигнал с выхода этого блока будет являться управляющим для электрического нагревателя. Конечно, качество регулирования будет далеко не идеальным, но для многих применений оно может оказаться вполне приемлемым. |
|
|
Классические ПЛК компании Mitsubishi Electric, предлагающей широкую гамму ПЛК, представлены несколькими линейками производства, от компактных серии ALPHA до мощных многофункциональных серии Q. Важной особенностью ПЛК фирмы Mitsubishi Electric является: -наличие процессоров RISC-архитектуры и специализированной операционной системы; -возможность одновременно обрабатывать несколько алгоритмов или событий со строго детерминированным временем реакции; - масштабируемость системы; - возможность аппаратного резервирования; -исключительно высокая надежность; -поддержка практически всех существующих полевых шин и коммуникационных интерфейсов. ПЛК Mitsubishi серии ALPHA (см. рисунок 6.8) представляют собой компактные, универсальные, недорогие логические модули. Они предназначены для применения в задачах автоматизации, где использование релейной автоматики не удовлетворяет современным требованиям, а использование мощных ПЛК является избыточным. Программирование ПЛК серии ALPHA осуществляется с помощью наглядного программного обеспечения, использующего готовые библиотеки функциональных блоков. Контроллеры серии ALPHA могут обрабатывать до 28 каналов ввода-вывода.
Рисунок 6.8 — ПЛК Mitsubishi серии ALPHA ПЛК Mitsubishi серии MELSEC FX (см. рисунок 6.9) включают в себя целое семейство контроллеров и отличаются высокой производительностью, гибкостью, функциональностью и масштабируемостью. Это идеальный выбор вне зависимости от того, необходима ли простая система, требующая до 34 каналов ввода-вывода (FX1S), или более сложная, требующая до 256 каналов ввода-вывода (FX2N/FX2NC). Все контроллеры MELSEC FX совместимы друг с другом, а также с унифицированными функциональными модулями и модулями расширения (кроме FX1S). ПЛК серии MELSEC FX поддерживают сетевую интеграцию.
Рисунок 6.9 — ПЛК Mitsubishi серии MELSEC FX
ПЛК Mitsubishi серии Q (см. рисунок 6.10) представляет многопроцессорную концепцию, сочетающую в себе традиционный контроллер, контроллер управления движением и персональный компьютер. В одной системе может одновременно функционировать до 4-х процессоров, реализующих различные задачи управления. Высочайшая надежность, встроенная самодиагностика ЦПУ с регистрацией истории сбоев и удаленная диагностика системы позволяют использовать ПЛК Mitsubishi серии Q для решения самых ответственных задач. Расширяемая конфигурация с количеством входов-выходов от 16 до 4096, а также быстродействие до 34 наносекунд за логическую операцию, позволяют использовать эти контроллеры для управления процессами любого уровня сложности. Компактность исполнения дает возможность максимально использовать пространство в шкафах управления. В ПЛК серии Q реализована полная функциональность ПК с ОС Windows. Контроллеры класса SoftPLC представлены несколькими линейками, в числе которых I-7188, I-8000, WinCon-8000 и Adam. РС-совместимые контроллеры отличаются от классических ПЛК тем, что в них большинство функций, которые у ПЛК решаются на аппаратном уровне, могут выполняться с помощью программного обеспечения.
Рисунок 6.10 — ПЛК Mitsubishi серии Q
Возможность применения более дешевых, отработанных и быстрее развивающихся открытых архитектур на базе РС-совместимой платформы позволяет широко использовать такие решения для задач, где раньше применялись только обычные PLC. Неоспоримыми достоинствами данных контроллеров являются: - невысокая цена аппаратных средств; - использование открытых протоколов, которое позволяет интегрировать в одну систему устройства широкого спектра производителей [8].
|
|

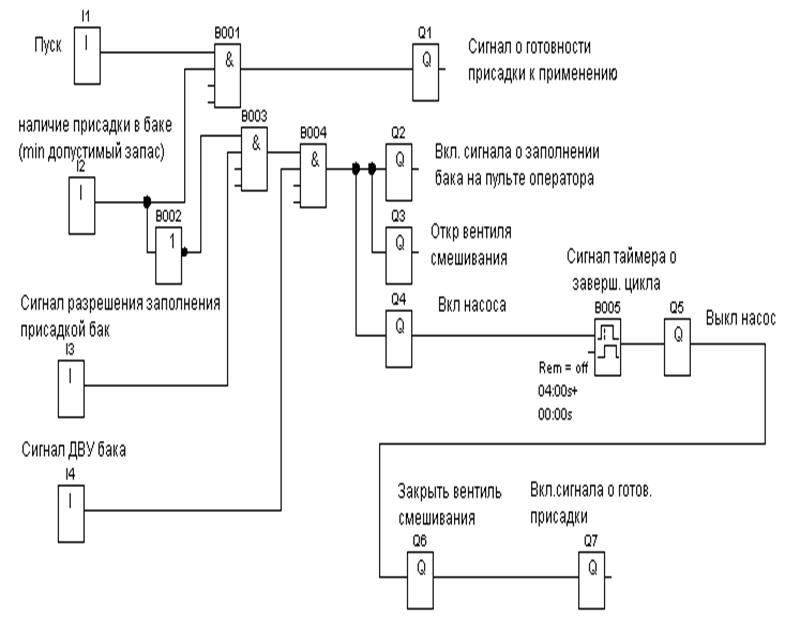



7 Электромагнитные устройства автоматики
7.1 Электромагниты
|
Электромагнит (ЭМ) является наиболее распространенным преобразователем электрического сигнала в механическое движение. ЭМ получили применение в системах автоматики в качестве приводных и управляющих устройств. Например, в подъемных и тормозных устройствах, приводах для включения и выключения коммутационных аппаратов, электромагнитных контакторах, автоматических регуляторах, приводах для включения и отключения механических, пневматических, гидравлических цепей, а также для сцепления и расцепления вращающихся валов, открывания и закрывания клапанов, вентилей, заслонок, золотников на небольшое расстояние с усилием в несколько десятков ньютонов. По назначению различают электромагниты: - удерживающие, которые служат для фиксации положения ферромагнитных тел (например, предназначенные для подъема предметов из ферромагнитного материала, электромагнитные плиты для фиксации деталей на металлообрабатывающих станках, электромагнитные станки); - приводные, которые служат для перемещений исполнительных устройств (например, клапанов, золотников, заслонок, железнодорожных стрелок), а также используются в контакторах, электромагнитных муфтах и др.; - специальные, которые используются в ускорителях элементарных частиц, медицинской аппаратуре и др. По роду тока в обмотке различают ЭМ постоянного и переменного токов. ЭМ постоянного тока делят на нейтральные, не реагирующие на полярность управляющего сигнала, и поляризованные, реагирующие на полярность сигнала (когда на якорь действуют два независящих друг от друга потока). По конструктивному исполнению различают следующие типы ЭМ. Клапанные — с внешним притягивающим якорем (см. рисунок 7.1, а-г), при этом магнитные системы могут иметь различную форму: а) П-образный магнитопровод и сердечник круглого сечения; б) П-образный магнитопровод и плоский якорь-ярмо; в) Ш-образный магнитопровод и сердечник круглого сечения; г) цилиндрический магнитопровод. В клапанных ЭМ происходит небольшое перемещение якоря (несколько миллиметров), благодаря чему они развивают большие усилия и имеют высокую чувствительность. Прямоходовые - с поступательным движением якоря. Используются, как правило, в виде соленоидов и поэтому часто называются соленоидными ЭМ (см. рисунок 7.1, д, е). Прямоходовые ЭМ имеют большой ход якоря, меньшие, чем клапанные, размеры и большее быстродействие, однако чувствительность у них меньше. По своему назначению прямоходовые ЭМ выполняются в двух вариантах: а) с неподвижным сердечником-«стопом» (см. рисунок 7.1, д, е) и без сердечника со сквозным отверстием по оси катушки — так называемые длинноходовые электромагниты (см. рисунок 7.1, е); б) ЭМ с неподвижным сердечником создает большое усилие, значение которого возрастает по мере приближения якоря к сердечнику. Длинноходовые системы позволяют получить относительно большой ход якоря (до 200 мм) за счет удлинения катушки. Эти ЭМ применяются в установках, работающих в режиме кратковременной нагрузки, т.е. когда ток, проходящий через катушку, имеет большое значение, но не вызывает ее перегрева. С поперечным движением — якорь движется в поперечном направлении к средней линии между полюсами. Практическое использование получили следующие формы магнитных систем: а) с выступающим якорем (см. рисунок 7.1, ж) — применяется при углах поворота якоря 25...40°; б) с вытягивающимся якорем (см. рисунок 7.1, з) — применяют при углах поворота якоря 10... 15°. Позволяют получить тяговую характеристику любой формы (возрастающую, спадающую с любым углом наклона), что обеспечивается соответствующим выбора профиля якоря. В этих системах якорь подвешивается на пружине, а рабочий угол поворота якоря выбирается таким, чтобы он не занимал крайних положений против полюсов. Рассмотренные системы с движущимся в поперечном направлении якорем применяются в автоматических регуляторах, когда требуется получить большое значение коэффициента возврата. Кроме того, их удобно использовать в устройствах, работающих на постоянном токе (при переменном токе могут возникнуть вибрации якоря, в то время как зазор между полюсами и якорем должен быть постоянным).
а ... г — клапанные; д, е — прямоходовые; ж, з — с поперечным движением якоря; 1 — сердечник; 2 — якорь; 3 — полюсный наконечник; 4 — катушка; 5 — ярмо; 6 — направляющая трубка; 7 — пружина; δн — начальный воздушный зазор. Рисунок 7.1 — Нейтральные электромагниты различных конструкций
ЭМ состоит из магнитопровода и собственно катушки. Поведение якоря электромагнита после прекращения тока в обмотке во многом зависит от магнитных свойств магнитопровода, а именно: от величины его остаточной индукции BТ и коэрцитивной силы HC. При перемагничивании ферромагнетика полем обратного знака остаточная индукция BТ уменьшается и при значении поля HС индукция падает до нуля. Напряженность магнитного поля, равная HС, называется коэрцитивной силой. Доводя внешнее поле до —HS, можно получить нижнюю ветвь кривой намагничивания, а, изменяя поле от —HS до +HS, получить замкнутую петлю гистерезиса. Площадь, ограниченная петлей, пропорциональна работе, которая затрачивается на нагревание ферромагнетика, и определяет потери энергии на перемагничивание [13]. Низкокоэрцитивные магнетики (HC = 0,8…150 А/м) обладают узкой петлей гистерезиса и называются магнитомягкими материалами, которые в свою очередь подразделяются на две группы: - электротехнические стали, используемые для работы в средних и сильных магнитных полях (Н = 2…200 А/см) и обладающие большой величиной индукции насыщения BS (более 2 Тл) и сравнительно высокой магнитной проницаемостью µ (4…6 x 103) при средней индукции 0,5…1,2 Тл; - железо-никелевые сплавы, обладающие в слабых полях (Н << 1 А/см) высокой и сверхвысокой магнитной проницаемостью (µ = 104…105), что и используется для усиления таких полей. Магнитомягкие ферромагнетики имеют малое магнитное сопротивление и поэтому используются в качестве магнитопроводов. Высококоэрцитивные (НС = 400…1200 А/см) магнитожесткие (магнито-твердые) материалы обладают широкой петлей гистерезиса, имеют значительное магнитное сопротивление и требуют больших затрат энергии на намагничивание и перемагничивание. Из магнитожестких материалов путем их предварительного намагничивания получают постоянные магниты, которые используются в ЭМР как источники дополнительной намагничивающей силы. В ЭМ постоянного тока магнитопровод выполняется сплошным из полосового или круглого материала - технически чистого железа марок Э, ЭА и ЭАА. Высокочувствительные электромагниты имеют магнитопровод из железоникелевых и железоникелькобальтовых сплавов, это пермаллои марок 79НМ, 79НМА и гайперники марок 50НП, 45Н, 45НП. Широкое применение в магнитопроводах быстродействующих ЭМ нашли легированные кремнием стали марок Э11, Э21 и т.д. Легирование электротехнических сталей кремнием обусловливает значительное повышение электросопротивления. При этом уменьшаются потери энергии на вихревые токи, что позволяет применять сталь в более мощных устройствах, работающих на переменном токе. Магнитопроводы ЭМ переменного тока выполняют шихтованными, т.е. собирают из пластин, штампуемых из листового материала толщиной 0,3...0,5 мм. Материалами могут быть: горяче- и холоднокатаная электротехническая сталь марок Э11... Э43, Э1100, Э310 и др. В некоторых случаях магнитопроводы ЭМ постоянного тока также делают шихтованными для устранения вихревых токов, возникающих в процессе включения и выключения. Иногда в целях экономии небольшие ЭМ переменного тока изготовляют из сплошного материала толщиной 2... 3 мм. По своей конструкции катушки бывают каркасными и бескаркасными, а по форме — круглого и прямоугольного сечения. Каркасная катушка состоит из каркаса и обмотки. На одном каркасе может быть несколько обмоток, уложенных рядами. Бескаркасная катушка проще каркасной. Отсутствие каркаса позволяет полностью использовать намоточное окно.
|
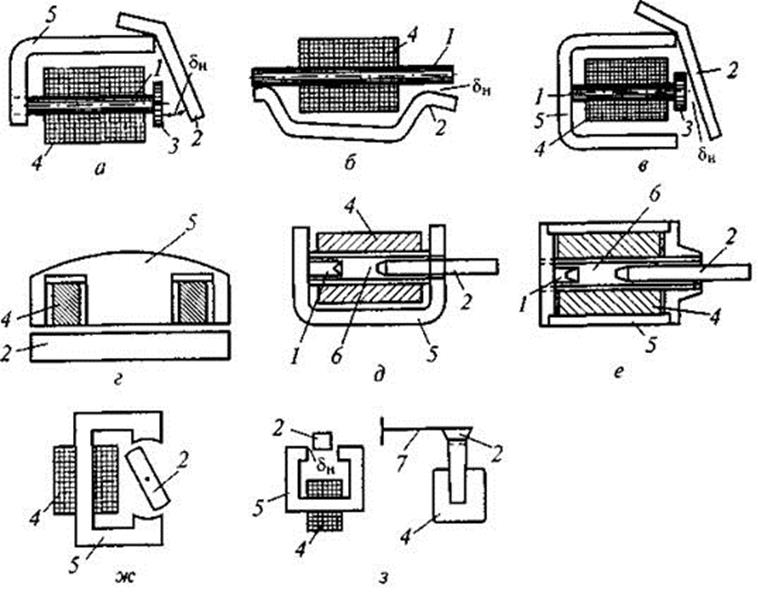
7.2 Электромагнитные реле
|
Электромагнитные реле (ЭМР) представляют собой электромеханические контактные устройства, преобразующие управляющий электрический ток в магнитное поле, которое оказывает силовое скачкообразное воздействие на подвижное намагниченное тело, механически связанное с электрическим контактом реле или являющееся подвижной частью этого контакта. При возникновении управляющего тока в ЭМР происходит скачкообразное срабатывание контакта, который из разомкнутого (замкнутого) состояния через замыкание (размыкание) переходит в замкнутое (разомкнутое) состояние. В разомкнутом состоянии контакт имеет видимый разрыв с высокой электрической прочностью и контактным сопротивлением на уровне поверхностного сопротивления элементов конструкции реле. В замкнутом состоянии переходное сопротивление механического контакта, выполненного из соответствующих материалов, составляет единицы — десятки мОм, а падение напряжения на контакте даже при протекании тока силой в десятки ампер не превышает 100 ...200 мВ. На работу контактов ЭМР, помимо управляющей электромагнитной силы, существенное влияние оказывают также силы упругой деформации контактных элементов и/или специальной (возвратной) пружины, которые в процессе срабатывания реле препятствуют действию электромагнитной силы, а в ее отсутствие способствуют возвращению контактов в исходное состояние. Конструкции ЭМР в зависимости от принципа силового воздействия магнитного поля на подвижный элемент контакта подразделяются на два основных вида: - реле с магнитоуправляемым якорем или якорные реле, в которых подвижное магнитоуправляемое тело — якорь, который либо несет на себе подвижный контактный элемент, либо механически воздействует на него посредством толкателя, поводка и т.п. передающего органа; - реле с магнитоуправляемым контактом (МУК), в которых магнитоуправляемым телом является сам подвижный элемент контакта — геркон. Дальнейшим шагом по совершенствованию ЭМР с МУК было заключение рабочей части контакта в герметичный магнитопроницаемый баллон. Такой контакт называют герметизированным контактом или герконом, а ЭМР на их основе — герконовым реле. Для повышения чувствительности и уменьшения габаритов реле геркон помещают вблизи или внутри обмотки ЭМ, получая, таким образом, разомкнутую магнитную цепь со стороны выводов. Помимо обычных «сухих» контактов, геркон может содержать контакты, смоченные жидким металлом, например, ртутью, что позволяет повысить скорость размыкания жидкометаллических герконов. По общетехническим признакам реле подразделяются: - по выполняемым функциям (логические (или коммутирующие) и измерительные). Для логических реле входная воздействующая величина не нормируется в отношении точности и должна находиться в неком рабочем диапазоне. Измерительные реле должны срабатывать только при определенном значении входного сигнала, который, как правило, подается непрерывно; - по количеству коммутационных позиций (двухпозиционные, трех-позиционные); - по количеству обмоток управления и их номинальному сопротивлению; - по количеству контактов; - по виду контактов (с замыкающими, размыкающими, переключающими, перекрывающими, неперекрывающими контактами и с их сочетанием); - по роду тока в цепи управления (постоянного тока, переменного тока); - по чувствительности к управляющему току (сверхчувствительные (например, измерительные реле, регистрирующие сверхмалые токи менее 1 мкА), высокочувствительные и нормально чувствительные (до 10-5 Вт)); - по характеру и величине управляющего сигнала (реле тока, реле напряжения); - по количеству начальных состояний (одностабильные (с самовозвратом), двустабильные (с самоблокировкой)); - по принципу действия (нейтральные, действие которых не зависит от направления тока в обмотке и поляризованные — со вспомогательным поляризующим магнитным полем); - по времени действия (нормальнодействующие, с замедлением, быстродействующие, сверхбыстродействующие); - по частоте коммутируемого тока (низкочастотные, высокочастотные); - по величине коммутируемого тока (слаботочные и сильноточные, низковольтные и высоковольтные). Разделение ЭМР по величине коммутируемого сигнала носит условный характер. В электротехнике сильноточными (силовыми) реле или контакторами принято считать устройства, коммутирующие ток свыше 50…60 А, а высоковольтными — ЭМР, коммутирующие напряжение от 500 до 1200 В и более. Некоторые зарубежные производители считают силовыми индустриальные реле, коммутирующие номинальный ток более 5 А и др. Слаботочные электромагнитные реле (СЭМР) составляют наиболее многочисленную по номенклатуре и исполнениям группу малогабаритных, миниатюрных и сверхминиатюрных ЭМР, предназначенных для работы в устройствах связи, сигнализации, автоматики, телемеханики и т.п. Электромагнитные реле в последние годы вытесняются бесконтактными элементами и устройствами автоматики (полупроводниковыми диодами, транзисторами, интегральными микросхемами и др.). Однако реле еще длительное время будут оставаться одними из самых распространенных элементов аппаратуры автоматики и телемеханики в различных отраслях промышленности. Это связано как с традиционными преимуществами реле (высокая нагрузочная способность, значительные перегрузочная способность и помехозащищенность и др.), так и с появлением современных реле пятого поколения, в том числе, твердотельных, сверхбыстродействующих и др.
Поведение якоря ЭМР после прекращения тока в обмотке во многом зависит от магнитных свойств магнитопровода, а именно от величины его остаточной индукции Br и коэрцитивной силы HC. При перемагничивании ферромагнетика полем обратного знака остаточная индукция Br уменьшается и при значении поля HС индукция падает до нуля. Напряженность магнитного поля, равная HС, называется коэрцитивной силой. Доводя внешнее поле до —HS, можно получить нижнюю ветвь кривой намагничивания, а, изменяя поле от —HS до +HS, получить замкнутую петлю гистерезиса. Площадь, ограниченная петлей, пропорциональна работе, которая затрачивается на нагревание ферромагнетика, и определяет потери энергии на перемагничивание. Низкокоэрцитивные магнетики (HC = 0,8…150 А/м) обладают узкой петлей гистерезиса и называются магнитомягкими материалами, которые в свою очередь подразделяются на две группы: — электротехнические стали, используемые для работы в средних и сильных магнитных полях (Н = 2…200 А/см) и обладающие большой величиной индукции насыщения BS (более 2 Тл или 2 •104 Гс) и сравнительно высокой магнитной проницаемостью µ (4…6 • 103) при средней индукции 0,5…1,2 Тл; — железо-никелевые сплавы, обладающие в слабых полях (Н << 1 А/см) высокой и сверхвысокой магнитной проницаемостью (µ = 104…105), что и используется для усиления таких полей. Магнитомягкие ферромагнетики имеют малое магнитное сопротивление и поэтому используются в качестве магнитопроводов. Высококоэрцитивные (НС = 400…1200 А/см) магнитожесткие (магнитотвердые) материалы обладают широкой петлей гистерезиса, имеют значительное магнитное сопротивление и требуют больших затрат энергии на намагничивание и перемагничивание. Из магнитожестких материалов путем их предварительного намагничивания получают постоянные магниты, которые используются в ЭМР как источники дополнительной намагничивающей силы. Существуют также реманентные среднекоэрцитивные материалы на основе ферритов, ремендюров и т.п. сплавов, имеющие достаточно большую коэрцитивность (Нс = 20…100 А/см), что позволяет использовать эти материалы в качестве постоянных магнитов, намагничиваемых и перемагничиваемых при помощи маломощных электрообмоток. Устройство реле с магнитоуправляемым контактом описывается всего одним динамическим СЭ, состоящим из электромагнитного механизма, подвижным телом которого является подвижный элемент контакта. Ферромагнитные контактные элементы намагничиваются искусственным магнитным полем, создаваемым управляющим током, в результате чего близко расположенные нормально разомкнутые контактные элементы притягиваются, преодолевая упругие силы противодействия. Прототипом первого ЭМР с МУК, показанного на рисунке 7.4, является реле В.И. Коваленкова, предложенное в 1925 г. с целью упрощения конструкции и повышения быстродействия классического якорного реле. В исходном состоянии (управляющий ток в обмотке отсутствует) перекрывающиеся концы ПКЭ разомкнуты и отстоят друг от друга на расстоянии воздушного зазора δ.
О — обмотка; С — сердечник; Яр — ярмо; Из — изолятор; ПКЭ — подвижный контактный элемент; ГМПБ — герметичный магнитопроницаемый баллон. Рисунок 7.4 — Схема ЭМР с МУК и замкнутой магнитной цепью
При подаче сигнала управления в обмотку О в магнитной системе протекает магнитный поток, замыкающийся через рабочий зазор δ и создающий в нем электромагнитную силу FЭ, замыкающую ПКЭ. Максимального значения FЭ достигает при δ >0 и сохраняет это значение до тех пор, пока действует НС (I > 0). После прекращения тока в обмотке поведение ПКЭ, как и якоря у классических ЭМР, во многом зависит от магнитных свойств магнитопровода. Дальнейшим шагом по совершенствованию ЭМР с МУК было заключение рабочей части контакта (выделено пунктиром на рисунке 3) в герметичный магнитопроницаемый баллон. Такой контакт называют герметизированным контактом или герконом, а ЭМР на их основе — герконовым реле. Для повышения чувствительности и уменьшения габаритов реле геркон помещают вблизи или внутри обмотки ЭМ, получая, таким образом, разомкнутую магнитную цепь со стороны выводов ПКЭ (см. рисунок 7.5).
Рисунок 7.5 — Схема герконового ЭМР с разомкнутой магнитной цепью
Простейшим герконом и ЭМР на его основе является нормально разомкнутый или замыкающийся контакт, срабатывающий при любой поляризации постоянного тока. Простейший размыкающийся контакт образуется, если параллельно нормально разомкнутому контакту установлен постоянный магнит, поляризующее поле которого постоянно держит контакт в замкнутом состоянии. Такой контакт разомкнется только после подачи в обмотку реле тока определенной полярности. Помимо обычных «сухих» контактов, геркон может содержать контакты, смоченные жидким металлом, например, ртутью, что позволяет повысить скорость размыкания жидкометаллических герконов. По общетехническим признакам реле подразделяются: — по выполняемым функциям: на логические (коммутирующие) и измерительные. Для логических реле входная воздействующая величина не нормируется в отношении точности и должна находиться в неком рабочем диапазоне. Измерительные реле должны срабатывать только при определенном значении входного сигнала, который, как правило, подается непрерывно; — по количеству коммутационных позиций: двухпозиционные, трехпозиционные; — по количеству обмоток управления и их номинальному сопротивлению; — по количеству контактов; — по виду контактов: с замыкающими, размыкающими, переключающими, перекрывающими, неперекрывающими контактами и с их сочетанием; — по роду тока в цепи управления: постоянного тока, переменного тока; — по чувствительности к управляющему току: сверхчувствительные (например, измерительные реле, регистрирующие сверхмалые токи менее 1 мкА), высокочувствительные и нормально чувствительные (до 10-5 Вт); — по характеру и величине управляющего сигнала: реле тока, реле напряжения; — по количеству начальных состояний: одностабильные (с самовозвратом), двустабильные (с самоблокировкой); — по принципу действия: неполяризованные (нейтральные), поляризованные. — по частоте коммутируемого тока: низкочастотные, высокочастотные; — по величине коммутируемого тока: слаботочные и сильноточные, низковольтные и высоковольтные. Разделение ЭМР по величине коммутируемого сигнала носит условный характер. В электротехнике сильноточными (силовыми) реле или контакторами принято считать устройства, коммутирующие ток свыше 50…60 А, а высоковольтными — ЭМР, коммутирующие напряжение от 500 до 1200 В и более. Некоторые зарубежные производители считают силовыми индустриальные реле, коммутирующие номинальный ток более 5 А; — по виду и величине коммутируемой нагрузки, которая может быть активной, емкостной и индуктивной. Слаботочные электромагнитные реле (СЭМР) составляют наиболее многочисленную по номенклатуре и исполнениям группу малогабаритных, миниатюрных и сверхминиатюрных ЭМР, предназначенных для работы в устройствах связи, сигнализации, автоматики, телемеханики, радиоэлектронной аппаратуре (РЭА) и т.п. Конструктивно-технологическая разновидность отечественных СЭМР появилась в 50-х годах прошлого века в связи с совершенствованием РЭА, ракетно-космической и военной техники, что существенно повышало эксплуатационно-технические требования к ЭМР. Они должны были иметь не только малый вес и высокую герметичность, но и длительно безотказно работать в широких диапазонах температур, ударов, вибраций, ускорений и т.п. воздействий. Для реализации этих требований в СЭМР были применены новые конструктивно-технологические решения, новые контактные и конструкционные материалы, микропровода. В производстве реле использовалась микросварка, термовакуумная очистка и др. специальные технологии [14]. В связи с широкой номенклатурой СЭМР и их массовым применением в 1974 г. в СССР была образована слаботочная релейная отрасль, состоящая из десятка предприятий-производителей реле во главе с НИИ коммутационной техники, вошедшим в ленинградское НПО «Северная заря». Электромагнитные реле в последние годы вытесняются бесконтактными элементами и устройствами автоматики (полупроводниковыми диодами, транзисторами, интегральными микросхемами и др.). Однако реле еще длительное время будут оставаться одними из самых распространенных элементов аппаратуры автоматики и телемеханики в различных отраслях промышленности. Это связано как с традиционными преимуществами реле (высокая нагрузочная способность, значительные перегрузочная способность и помехозащищенность и др.), так и с появлением современных реле пятого поколения, в том числе, твердотельных, сверхбыстродействующих и др [1].
|
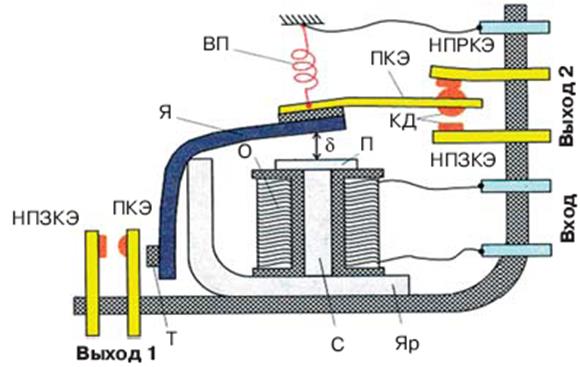
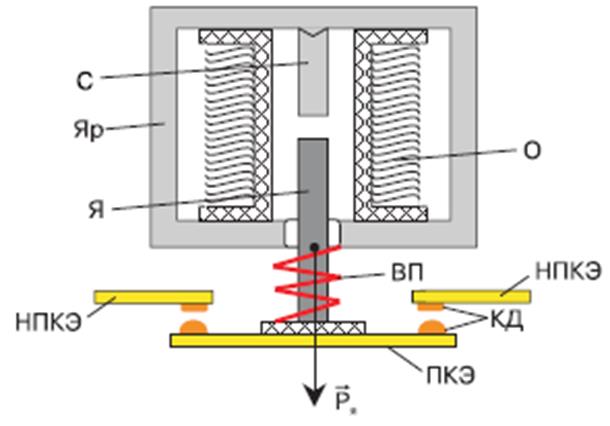
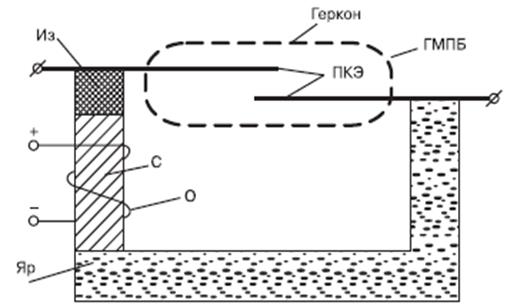
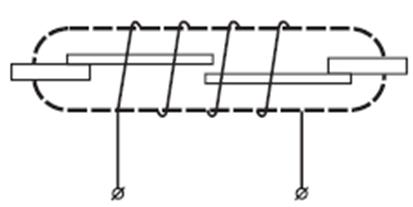
7.3 Типовые релейные схемы
|
Наиболее широкое применение получили следующие типовые релейные схемы: - самоблокировки; - взаимной блокировки; - экономичного включения; - искробезопасного включения; - замедления (реле времени). В схеме самоблокировки реле при кратковременном замыкании кнопки SB1 Пуск реле срабатывает (см. рисунок 7.6) и своим замыкающим контактом блокирует цепь питания этой кнопки, благодаря чему последующее отпускание кнопки SB1 не приведет к отключению реле. Для отключения реле необходимо разорвать общую цепь питания нажатием кнопки SB2.
Рисунок 7.6 — Релейная схема самоблокировки
Схема взаимной блокировки, показанная на рисунке 7.7, не допускает одновременного включения реле, так как в цепь обмотки каждого реле введен размыкающий контакт другого реле. Необходимость взаимной блокировки встречается в схемах, предохраняющих от возможной аварии. Например, одно реле служит для включения двигателя в прямом направлении вращения, а другое — на реверс.
Рисунок 7.7 — Релейная схема взаимной блокировки
На рисунке 7.8 показаны схема и график экономичного включения реле. Если в обычных схемах реле срабатывает при напряжении срабатывания UСР и остается в этом состоянии при таком напряжении за счет цепи самоблокировки, то в рассматриваемой схеме реле, срабатывающее также при напряжении UСР, при отпускании кнопки SB1 остается в рабочем состоянии через цепь резистора R при напряжении UР. На графике видно, что UСР> UР, поэтому и потребление энергии в рабочем состоянии реле намного меньше, чем в ранее рассмотренных схемах. Необходимым условием работы схемы является UР> UОТ, в противном случае при отпускании кнопки SB1 реле будет отключаться. Отличительная особенность схемы искробезопасного включения реле, широко применяющейся в различной рудничной и шахтной аппаратуре автоматизации (см. рисунок 7.9), заключается в том, что цепь питания реле осуществляется искробезопасным напряжением UИСК. Искробезопасные параметры цепи питания достигаются выполнением обмотки II проводом высокого удельного сопротивления или включением в цепь питания ограничительного резистора R2. В исходном положении при поданном питании реле К не работает, так как UСР> UР. При нажатии кнопки SB1 реле срабатывает и остается во включенном состоянии. При этом выполняется соотношение UСР> UР > UОТ. Через обмотку реле протекает однополупериодный постоянный ток, второй полупериод закорачивается в цепи искробезопасного напряжения через диод VD1. Сопротивление обмотки реле однополупериодному току мало, и реле работает устойчиво.
Рисунок 7.8 — Схема и график экономичного включения реле
Рисунок 7.9 — Схема искробезопасного включения реле
При нажатии кнопки SB2 сопротивление обмотки реле для переменного тока возрастает, реле отключается и схема возвращается в исходное положение. Следует отметить, что, когда работает реле К, диод VD1 переводит его в режим замедления — реле времени (за счет ЭДС самоиндукции, которая действует от однополупериодного тока в обмотке), что предотвращает вибрацию якоря реле. На рисунке 7.10 показана схема замедления срабатывания реле с помощью шунтирования его обмотки конденсатором. В этом случае при замыкании ключа заряд конденсатора происходит за определенный промежуток времени.
Рисунок 7.10 — Схема замедления срабатывания реле
В схеме на рисунке 7.11 время отпускания реле увеличивается за счет того, что при размыкании ключа в цепи, состоящей из параллельного соединения обмотки реле, конденсатора и резистора, некоторое время сохраняется ток разряда конденсатора.
Рисунок 7.11 — Схема увеличения времени отпускания реле
Чтобы переходный процесс в этой цепи имел апериодический характер, применяют достаточно большую емкость конденсатора и большое значение сопротивления резистора [15].
7.4 Синтез и минимизация дискретных схем логического управления
|
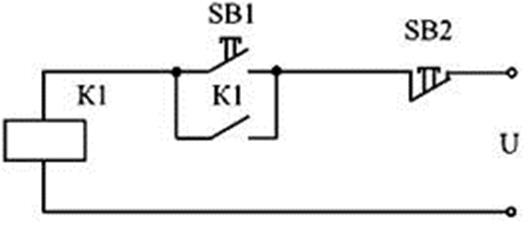
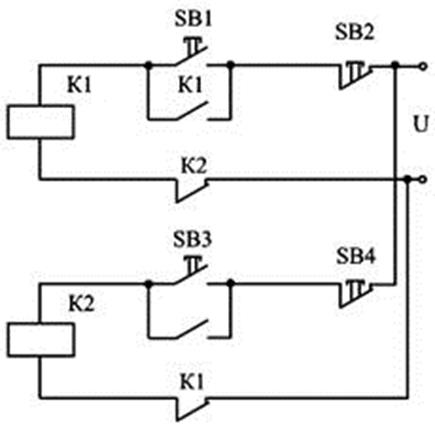
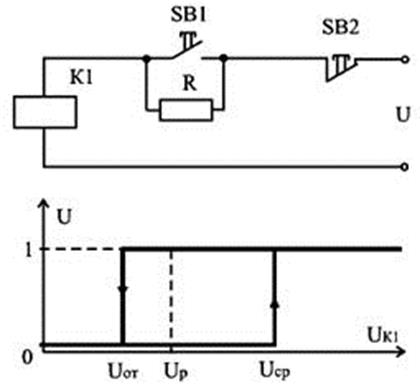
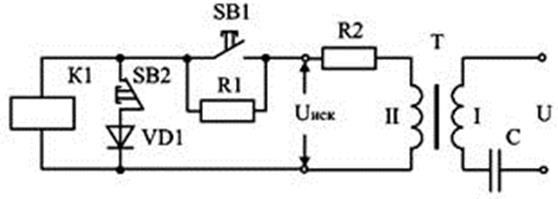
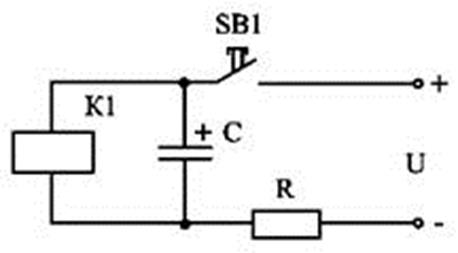
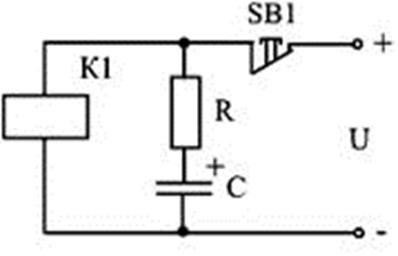
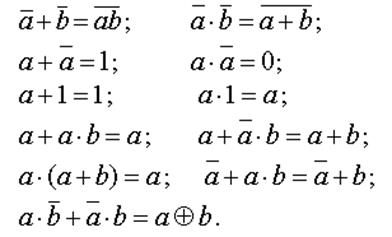
8 Выбор элементов систем автоматики
8.1 Общие сведения
|
На основе анализа технологической схемы, существующих приборов и средств автоматизации, применяемых в заданном технологическом процессе, формулируются основные требования к приборам и средствам автоматизации, которые можно подразделить на следующие основные: а) функциональные требования, включая технические характеристики; б) требования, выдвигаемые физическими условиями работы (искро- и взрывобезопасность, вибростойкость, влагонепроницаемость, защищенность от агрессивной среды и т.п.); в) требования по надёжности и ремонтопригодности; г) весовые и габаритные требования на всю систему автоматизации в целом и на отдельные её элементы (приборы и средства автоматизации); д) требования инженерной психологии, связанные с недопустимостью ошибок при эксплуатации системы автоматизации человеком, организация рабочего места оператора и т. п. Следует иметь в виду, что условия окружающей среды в местах установки средств автоматизации определяют возможность их применения, особенность работы службы эксплуатации, а в отдельных случаях и работоспособность агрегатов, линий и производств. Условия пожаро-, взрывоопасности объекта и агрессивности окружающей среды, а также требования к быстродействию, дальности передачи сигналов информации и управления являются определяющими при выборе средств автоматизации по виду энергии носителя сигналов (электрической, пневматической, гидравлической и др.) в канале связи. Так, для пожаро- и взрывоопасных технологических процессов (установок) в большинстве случаев применяют пневматические средства автоматизации; при высоких требованиях к быстродействию и значительных расстояниях между источниками и приемниками сигналов информации применяют, как правило, электрические и комбинированные средств автоматизации. Также необходимо ориентироваться на использование серийно выпускаемых средств; при этом следует учитывать, что средства автоматизации общепромышленного применения предназначены для усреднённых промышленных условий эксплуатации, и не все они могут удовлетворять работе отдельных предприятий. Следует стремиться к применению однотипных приборов и ТСА, предпочтительно унифицированных комплексов, характеризующихся простотой сочетания, взаимозаменяемостью и удобством компоновки на щитах автоматики. Использование однотипных (унифицированных) средств даёт значительные эксплуатационные преимущества как с точки зрения их настройки, так и при техническом обслуживании и ремонте. В проектируемые системы автоматизации необходимо закладывать средства автоматизации с тем классом точности, который определяется действительными требованиями объекта автоматизации. Как известно, чем выше класс средства измерения, тем более сложной является конструкция прибора, тем выше его стоимость, сложнее эксплуатация. Количество приборов и средств автоматизации на оперативных щитах и пультах должно быть ограниченным. Излишек аппаратуры является не менее вредным, чем её недостаток: усложняет эксплуатацию, отвлекает внимание обслуживающего персонала от наблюдений за основными приборами, определяющими ход технологического процесса, удлиняет сроки монтажных работ, увеличивает стоимость автоматизируемого объекта.
|
8.2 Выбор промышленных приборов и средств автоматизации
|
Выбору промышленных приборов и средств автоматизации предшествует определение необходимого состава и составление функциональной схемы автоматизации технологического процесса (объекта), исходя из принятого принципа регулирования (управления), функциональных задач, которые должна выполнять система, и конструктивных особенностей серийных приборов. При составлении функциональной схемы автоматизации приборы, средства автоматизации, электрические устройства и элементы вычислительной техники необходимо показывать в соответствии с ГОСТ 21.404-85 и отраслевыми нормативными документами. При определении состава функциональной схемы необходимо руководствоваться следующим порядком действий: а) определяются возможные варианты использования сигнала датчика. Информация от датчика (чувствительного элемента) может использоваться несколькими системами контроля и регулирования. В современных системах сигнал датчика часто вводится непосредственно в управляющую вычислительную машину. Это вызывает необходимость выбирать датчики с несколькими выходными преобразователями и комплектовать их первичными приборами с высокоомным усилителем; б) анализируется возможность использования в системе автоматизации единого сигнала связи (например, сигнала постоянного тока 4…20 мА). Если современные технические средства контроля и регулирования не дают возможности использовать единый сигнал связи по выбранному каналу управления, то необходимо ввести в состав системы автоматизации нормирующий преобразователь (например, преобразователь напряжения переменного тока 0…1 В в сигнал постоянного тока 4…20 мА); в) определяется состав информационной аппаратуры (вторичных
приборов, сигнальных устройств и др.), устанавливаемой по месту измерения и
регулирования, на операторском пульте, на местном щите управления и г) исходя из функций системы автоматизации и иерархического структурного построения системы, определяется наличие ключей, кнопок управления, источников питания, блоков или пультов управления и т.д. д) в зависимости от количества регулирующих органов, на которые будет воздействовать система регулирования, определяется соответствующее количество аппаратуры для реализации команд управления (магнитных пускателей, исполнительных механизмов и т.д.); е) на основе характеристики условий работы проектируемой системы автоматизации выбирается соответствующая ветвь средств автоматизации (электрическая, пневматическая, гидравлическая). Кроме того, необходимо учитывать эксплуатационную надежность элементов системы в данной среде, возможность реализации системы с минимальными затратами, необходимое быстродействие, протяженность каналов связи от датчика и до исполнительного механизма, используемого на данном предприятии или принятый в проекте автоматизации род энергии и т.д [16]. После определения состава функциональной схемы автоматизации следует приступить к выбору отдельных элементов (комплектованию системы). Рассмотрим подробнее выбор средств автоматизации на примере датчика. Пример. Выбор датчика технологического параметра определяется физической природой этого параметра. При этом анализируются технические характеристики и возможности всего ряда датчиков, пригодных для измерения регулируемой (контролируемой) величины. В процессе выбора датчика в первую очередь необходимо учитывать характеристики контролируемой и окружающей сред (температуру, влажность, давление и т.д.), в которых придется работать датчику. Также учитываются условия, в которых находится контролируемый параметр (в трубопроводах, в открытых емкостях под атмосферным давлением, в закрытых емкостях под избыточным давлением и т.д.). В зависимости от условий окружающей среды выбирают исполнение датчика (уровень искробезопасности, степень взрывобезопасности, климатическое исполнение и т.д.). Диапазон действия датчика выбирается с учетом минимальных и максимальных длительных значений регулируемой величины. Здесь необходимо учитывать, что необоснованно завышенный диапазон действия датчика снижает точность контроля (измерения). Погрешность датчика не должна превышать допустимой погрешности контроля (измерения) регулируемой величины, которая определяется технологией производства и погрешностью регулирования по выбранному каналу управления. Датчик должен выбираться с учетом передачи сигнала в последующие элементы системы автоматизации. Это значит, что выходной сигнал датчика должен соответствовать сигналу связи, принятому в проектируемой системе. Число выходных сигналов датчика (количество выходных преобразователей) определяется принятым составом функциональной схемы автоматизации. При выборе датчика необходимо установить возможность обеспечения условий для нормальной работы выбранного датчика, обеспечивающих паспортные параметры датчика в предлагаемом месте его установки. Так, например, для обеспечения нормальной работы диафрагменного расходомера объемного расхода необходимо иметь длину прямолинейного участка трубопровода 10 D до и 20 D после расходомера, где D — диаметр трубопровода. Для нормальной работы щелевого расходомера объемного расхода необходимо обеспечить перепад высот (уровней) трубопровода и т.д. В ряде случаев следует учитывать электромагнитную (магнитную) совместимость датчика с другими элементами системы автоматизации и технологического оборудования. Немаловажное значение имеет стоимость датчика, зависящая от сложности его изготовления, стоимости чувствительного элемента, протяженности необходимых линий связи и масштабов производства (крупносерийные изделия предпочтительнее). Наконец, необходимо учитывать также фактор морального устаревания технических средств за промежуток времени между созданием проекта системы автоматизации и его воплощением, что вынуждает предъявлять более жесткие требования в отношении новизны и перспективности применяемых датчиков и других технических средств автоматизации.
|
9 Трансформаторы
9.1 Принцип действия и конструкция
Трансформатор — это электромагнитный статический преобразователь с двумя или более неподвижными обмотками, который преобразует параметры переменного тока: напряжение, ток, частоту.
Преимущественное применение в электрических установках получили силовые трансформаторы, преобразующие напряжение переменного тока при неизменной частоте. Трансформаторы для преобразования не только напряжения переменного тока, но и его частоты, числа фаз и т. д. называют трансформаторными устройствами специального назначения.
Трансформаторы разделяются, в зависимости от:
- числа фаз преобразуемого напряжения на однофазные и многофазные;
- числа обмоток, приходящихся на одну фазу трансформируемого напряжения на двухобмоточные и многообмоточные;
- способа охлаждения, на сухие (с воздушным охлаждением) и масляные (погруженные в металлический бак, заполненный трансформаторным маслом).
Рассмотрим однофазный двухобмоточный трансформатор. Его принцип действия основан на явлении электромагнитной индукции. Однофазный двухобмоточный трансформатор состоит из замкнутого магнитопровода и двух обмоток. Одна из обмоток, первичная, подключается к источнику переменного тока с напряжением U1 и частотой f (см. рисунок 9.1). Переменный ток, проходящий по виткам этой обмотки, создает МДС, которая наводит в магнитопроводе трансформатора переменный магнитный поток Ф. Замыкаясь в магнитопроводе, этот поток сцепляется с витками обмоток трансформатора и индуцирует, соответственно, в первичной w1 и вторичной w2 обмотках ЭДС.

Рисунок 9.1 — Электромагнитная схема двухобмоточного трансформатора
е1 =-w1dФ/dt, (9.1)
e2=-w2dФ/dt. (9.2)
Если магнитный поток трансформатора — синусоидальная функция времени Ф=Фmaxsinwt, изменяющаяся с угловой частотой w = 2pf, то после подстановки его в (3.1) и (3.2), дифференцирования и преобразования, получим действующие значения ЭДС первичной и вторичной обмоток:
E1=4,44fw1 Фmах, (9.3)
E2=4,44fw2 Фmах. (9.4)
В режиме холостого хода трансформатора, когда ток во вторичной обмотке отсутствует (обмотка разомкнута), напряжение на выводах вторичной обмотки равно ЭДС вторичной обмотки E2 = U20, а ЭДС первичной обмотки столь незначительно отличается от первичного напряжения, что этой разницей можно пренебречь: E1 >> U1.
Отношение ЭДС обмотки высшего напряжения (ВН) к ЭДС обмотки низшего напряжения (НН) называют коэффициентом трансформации k. Для режима холостого хода трансформатора отношение указанных ЭДС практически равно отношению напряжений:
k = E1/E2=w1/w2>>U1/U20. (9.5)
Если w2<w1 и U2<U1, то трансформатор называется понижающим. Если w2 > w1, и U2>U1, то трансформатор называется повышающим. Один и тот же трансформатор в зависимости от того, к какой из обмоток подводится напряжение, может быть понижающим или повышающим.
Если на выводы вторичной обмотки трансформатора подключить
нагрузку сопротивлением ZH, то в обмотке появится ток
нагрузки I2. При этом мощность на выходе трансформатора
определяется произведением вторичного напряжения U2 на ток
нагрузки I2. С некоторым приближением можно принять
мощности на входе и выходе трансформатора одинаковыми, т. е. U1I1
![]() U2I2.
Из этого следует, что отношение токов в обмотках трансформатора обратно
пропорционально отношению напряжений:
U2I2.
Из этого следует, что отношение токов в обмотках трансформатора обратно
пропорционально отношению напряжений:
I1
/I2.![]() U2
/U1
U2
/U1 ![]() 1/k.
(9.6)
1/k.
(9.6)
Если на выводы вторичной обмотки трансформатора подключить нагрузку сопротивлением rн, то, так как мощности на входе P1=I12r’H и выходе P2=I22rH трансформатора приблизительно равны, из уравнения:
I12r’H =I22rH , (9.7)
определим сопротивление нагрузки, измеренное на выводах первичной обмотки:
r’H ≈ rH I22/I12rHk2 , (9.8)
т. е. оно изменится в k2 раз по сравнению с сопротивлением rН.
Это свойство трансформаторов используется в межкаскадных трансформаторах для согласования входного сопротивления какого-либо каскада (блока) с выходным сопротивлением предыдущего каскада (блока).
Трансформатор является аппаратом переменного тока. Если первичную обмотку трансформатора включить в сеть постоянного тока, то магнитный поток в магнитопроводе этого трансформатора окажется постоянным как по величине, так и по направлению, т. е. dФ/dt = 0. Такой поток не будет индуцировать ЭДС в обмотках трансформатора, что исключит передачу электроэнергии из первичной цепи во вторичную. Кроме того, отсутствие ЭДС в первичной обмотке трансформатора приведет к возникновению в ней тока недопустимо большой величины, следствием чего будет выход из строя этого трансформатора.
Основные части трансформаторов — обмотки и магнитопровод. Магнитопровод состоит из стержней и ярм. На стержнях располагают обмотки, а ярма служат для соединения магнитопровода в замкнутую систему. Для изготовления магнитопроводов трансформаторов применяют тонколистовую электротехническую сталь. При частоте переменного тока 50 Гц применяют листы (полосы) толщиной 0,5 или 0,35 мм. При частотах 400 Гц и более применяют листы (полосы) толщиной 0,2-0,08 мм. При частотах 1000 Гц и выше магнитопроводы изготавливают из железоникелевых сплавов типа пермаллой, характеризующихся улучшенными по сравнению с электротехническими сталями свойствами: более высокой магнитной проницаемостью и меньшей коэрцитивной силой.
В зависимости от способа изготовления магнитопроводы трансформаторов бывают пластинчатые и ленточные. Магнитопроводы однофазных трансформаторов бывают трех основных видов: стержневые, броневые и тороидальные.
Пластинчатые магнитопроводы (см. рисунок 9.2, а-в) собирают из отдельных пластин, полученных путем штамповки или резки листовой электротехнической стали. Для уменьшения вихревых токов пластины изолируют друг от друга слоем изоляционного лака или оксидной пленкой. Стержневые пластинчатые магнитопроводы (см. рисунок 9.2, а) собирают из пластин (полос) прямоугольной формы. Пластины магнитопровода скрепляют в пакет либо посредством шпилек, электрически изолированных от пластин специальными втулками и шайбами, либо посредством бандажа из стеклянной нетканой ленты или ниток. Броневые пластинчатые магнитопроводы (см. рисунок 9.2, б) собирают из пластин Ш-образной формы. Они имеют лишь один стержень, на котором располагают все обмотки трансформатора. Тороидальные пластинчатые магнитопроводы (см. рисунок 9.2, в) собирают из отдельных штампованных колец.
Ленточные разрезные магнитопроводы стержневого (см. рисунок 9.2, г) и броневого (см. рисунок 9.2, д) типов состоят из отдельных частей подковообразной формы. После установки заранее изготовленных обмоток эти подковообразные части соединяют встык и скрепляют стяжками. Тороидальные ленточные магнитопроводы (см. рисунок 9.2, е) изготавливают путем навивки ленты. Преимущества таких магнитопроводов — отсутствие стыков, т.е. мест с повышенным магнитным сопротивлением.
Магнитопроводы броневого типа обеспечивают трансформаторам следующие достоинства: лучшее заполнение окна магнитопровода обмоточным проводом; частичную защиту обмотки ярмами от механических повреждений. Однако при броневом магнитопроводе ухудшаются условия охлаждения обмоток [17].
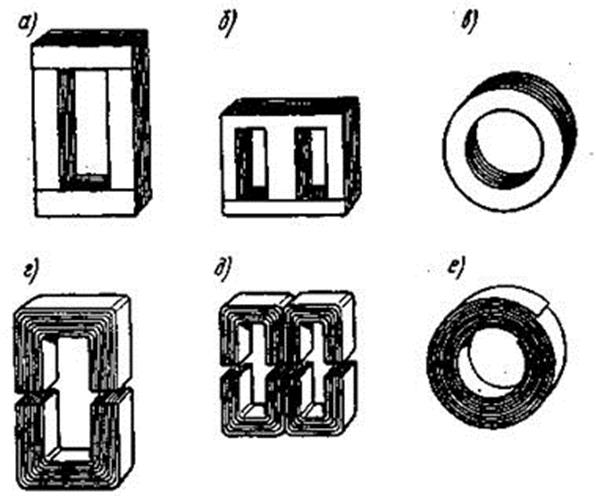
Рисунок 9.2 — Магнитопроводы трансформаторов
Кроме обмоток и магнитопровода, трансформаторы низкого напряжения имеют кожух, клеммную колодку и крепежные элементы. Металлический кожух соединяют с магнитопроводом и заземляют — мера, необходимая по условиям техники безопасности. Высоковольтные трансформаторы делают масляными — магнитопровод с обмотками помещают в металлический бак, заполненный трансформаторным маслом, которое увеличивает электрическую прочность изоляции обмоток и способствует лучшему охлаждению трансформатора.
|
9.2 Основные режимы работы и соотношения в трансформаторе
|
При работе трансформатора с подключенной к зажимам вторичной обмотки нагрузкой Z, (рисунок 9.3, а) в его первичной обмотке проходит ток İ1, а во вторичной обмотке — ток İ2. Проходя по обмоткам, эти токи создают соответственно МДС первичной F1= İ1w1 и вторичной F2= İ2w2 обмоток. Действуя совместно, МДС наводят в трансформаторе основной магнитный поток Ф, замыкающийся в магнитопроводе, и магнитные потоки рассеяния ФΔ1 и ФΔ2, каждый из которых частично проходит через магнитопровод, а частично через воздушные промежутки и кожух трансформатора. Если основной поток Ф сцеплен с обеими обмотками трансформатора, то каждый из потоков рассеяния ФΔ1 и ФΔ2 сцеплен соответственно лишь с одной из обмоток w1, w2.
Основной магнитный поток Ф индуцирует в обмотке w1 ЭДС Е1 (9.3), в обмотке w2 ЭДС Е2 (9.4). Каждый из магнитных потоков рассеяния индуцирует ЭДС рассеяния только в одной из обмоток: поток ФΔ1 в обмотке w1 ЭДС рассеяния EΔ1, поток ФΔ2 в обмотке w2 ЭДС рассеяния EΔ2. Магнитные, потоки рассеяния пропорциональны токам соответствующих обмоток, а ЭДС рассеяния эквивалентны падениям напряжения на индуктивных сопротивлениях рассеяния первичной и вторичной обмоток соответственно:
x1= EΔ1/I1; (9.9)
x2= EΔ2/I2. (9.10)
)
Учитывая, что каждая из обмоток трансформатора обладает активным сопротивлением r1, или r2, запишем уравнения напряжений по второму закону Кирхгофа в комплексном виде:
- для первичной цепи
Ú1+Ė1 = İ1(r1+jx1), (9.11)
или
Ú1= (-Ė1)+ jx1İ1 + İ1 r1, (9.12)
- для вторичной цепи
Ė2 = Ú2+İ2(r2+jx2), (9.13)
или
Ú2= Ė2- jx2İ2 – İ2 r2. (9.14)
Полученные выражения (9.12) и (9.14) представляют собой уравнения напряжений первичной и вторичной цепей трансформатора.
Рассмотрим работу трансформатора без нагрузки, т. е. в режиме холостого хода (см. рисунок 9.3, б), когда ток во вторичной цепи I2 = 0, а ток в первичной цепи представляет собой ток холостого хода I0. В этом режиме основной магнитный поток трансформатора Ф создается лишь МДС первичной обмотки, а амплитудное значение этого потока:
ФВЫХ =√2I0w1/RM, (9.15)
где RM — магнитное сопротивление магнитопровода потоку ФMAX.
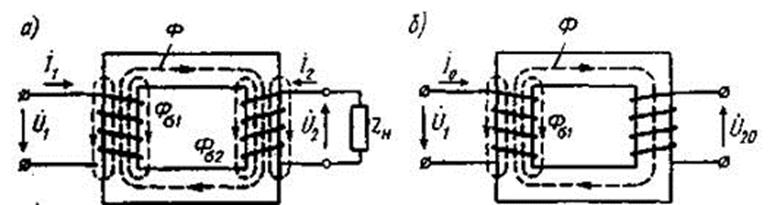
Рисунок 9.3 — Схемы однофазного трансформатора в режимах нагрузки (а)
и холостого хода (б)
Если же трансформатор работает с подключенной нагрузкой ZH (см. рисунок 9.3, а) и основной магнитный поток создается совместным действием МДС первичной F1= İ1w1 и вторичной F2= İ2w2 обмоток, то амплитудное значение основного магнитного потока запишем в виде:
ФВЫХ =√2(İ1w1 + İ2w2)/RM, (9.16)
Преобразовав (9.16), получим еще одну формулу для основного магнитного потока:
Фmax=E1/(4,44fw1). (9.17)
Пренебрегая значением падения напряжения в первичной обмотке I1(r1+jx1), которое обычно не превышает нескольких процентов от первичного напряжения, т. е. приняв E1ΔU1, получим:
ФmaxΔU1/(4,44fw1). (9.18)
Из (9.18) следует, что основной магнитный поток не зависит от нагрузки трансформатора, это позволяет приравнять выражения (9.15), (9.16) и получить уравнение МДС трансформатора:
İ0w1 = İ1w1 + İ2w2. (9.19)
Из уравнения (9.19) следует, что сумма МДС первичной İ1w1 и вторичной İ2w2 обмоток в режиме работы трансформатора под нагрузкой равна МДС холостого хода İ0w1, необходимой для наведения в магнитопроводе трансформатора основного магнитного потока ФMAX.
Такое взаимодействие МДС İ1w1 и İ2w2 объясняется их встречным направлением, т. е. если МДС İ1w1 оказывает на магнитопровод намагничивающее действие, то МДС İ2w2 стремится размагнитить этот магнитопровод. Несмотря на такое взаимодействие указанных МДС, магнитный поток в магнитопроводе ФMAX в процессе работы трансформатора остается практически неизменным, так как во всем диапазоне изменений тока нагрузки I2 (в пределах номинального значения) МДС первичной обмотки İ1w1 оказывается больше, чем МДС вторичной обмотки İ2w2, на величину МДС холостого хода İ0w1.
В процессе работы трансформатора под нагрузкой часть активной мощности Р1, поступающей в первичную обмотку из сети, рассеивается в трансформаторе на покрытие потерь. В итоге активная мощность Р2, поступающая в нагрузку, оказывается меньше мощности Р1 на величину суммарных потерь в трансформаторе ΔP:
Р1=Р2+ΔР. (9.20)
В трансформаторе есть два вида потерь — магнитные и электрические. Магнитные потери РM в стальном магнитопроводе, по которому замыкается переменный магнитный поток ФMAX, складываются из потерь на гистерезис РГ и вихревые токи РВХ:
РM=РГ+РВX. (9.21)
Магнитные потери прямо пропорциональны массе магнитопровода и квадрату магнитной индукции в нем. Они также зависят от свойств стали, из которой изготовлен магнитопровод. Уменьшению потерь на гистерезис способствует изготовление магнитопровода из ферромагнитных материалов (электротехнической стали или сплава типа пермаллой), обладающих небольшой коэрцитивной силой (узкой петлей гистерезиса). Для уменьшения потерь на вихревые токи магнитопровод изготавливают шихтованным (из тонких пластин текстурованной электротехнической стали, изолированных друг от друга тонким слоем лака или оксидной пленкой) или витым из стальной ленты. Магнитные потери зависят также и от частоты переменного тока: с увеличением частоты f магнитные потери возрастают за счет потерь на гистерезис РГ и вихревые токи РВХ.
Ранее было установлено, что основной магнитный поток в магнитопроводе не зависит от нагрузки трансформатора (9.17), поэтому при изменениях нагрузки магнитные потери остаются практически неизменными.
10 Измерительные преобразователи
10.1 Общие сведения
|
Измерительные преобразователи — элементы систем автоматики, предназначенные для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не всегда поддающейся восприятию наблюдателем. Измерительный преобразователь с высокой точностью реализует однозначную функциональную зависимость между двумя физическими величинами y = f (x), где x = f (t) и y = f (t) — сигналы на входе и выходе измерительного преобразователя. Измерительные преобразователи подразделяют на первичные, нормирующие преобразователи и вторичные приборы. Первичные измерительные преобразователи часто называют также датчиками либо чувствительными элементами. В зависимости от рода измеряемой величины на входе преобразователя различают преобразователи электрических и неэлектрических величин. К первым относятся усилители напряжения, делители напряжения, электроизмерительные шунты и т.д. К преобразователям неэлектрических величин — терморезисторы, тензопреобразователи, тахогенераторы и др. К первичным преобразователям также относят отборные и приемные устройства. Под отборными и приемными устройствами понимают устройства, встраиваемые в технологические аппараты и трубопроводы для отбора контролируемой среды и измерения ее параметров. Основное назначение нормирующего преобразователя — преобразование выходного сигнала первичного измерительного преобразователя с естественным выходом сигнала в унифицированный электрический или пневматический сигналы для связи с устройствами регулирования, индикации, регистрации и с системами централизованного сбора данных. Примером нормирующего преобразователя может служить преобразователь сигнала постоянного тока в цифровой сигнал интерфейса RS-485. Вторичным преобразователем (измерительным прибором) называют средство измерения, предназначенное для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия наблюдателем. Измерительные приборы могут быть показывающими, регистрирующими, интегрирующими и т.д. Кроме того, в них могут быть встроены регулирующие, преобразующие и сигнализирующие устройства.
|
10.2 Основные характеристики датчиков систем автоматики
|
К основным характеристикам первичных измерительных преобразователей относятся: входная величина, воспринимаемая и преобразуемая датчиком; выходная величина, используемая для передачи информации; статическая характеристика датчика; динамическая характеристика датчика; порог чувствительности; основная и дополнительные погрешности. Входные величины датчиков подразделяют на два класса: а) величины, характеризующие протекание процессов (ток, напряжение, расход, давление и др.); б) величины, характеризующие свойства и состав веществ (концентрация, pH-уровень, влажность и др.). Выходная величина, используемая для передачи информации, обычно модулируется по амплитуде, по временному признаку (частота, фаза и др.),по кодовому признаку, а также по пространственному признаку (чередование сигналов в каналах связи). Статическая характеристика — зависимость выходной величины от входной в статическом режиме (равновесном состоянии), когда каждому значению входной величины соответствует определенное значение выходной. Наиболее приемлемой статической характеристикой для большинства датчиков является линейная характеристика. Для линеаризации характеристик датчиков, которые могут быть представлены аналитическими (гладкими) нелинейностями, используются усилители-линеаризаторы. Наряду с линейными, широкое распространение нашли датчики с различными видами нелинейных характеристик (релейных, с зоной нечувствительности, с ограничением по амплитуде и др.). Динамическая характеристика описывает во времени поведение датчика при изменениях входной величины в переходных режимах и определяется внутренней структурой датчика и его элементов. Динамические свойства датчиков могут быть определены передаточными функциями, переходными, импульсно-переходными (весовыми), амплитудно-частотными, амплитудно-фазовыми и др. Порог чувствительности датчика — это минимальное изменение входной величины, вызывающее заметно различимое изменение выходного сигнала. Основная погрешность датчика — максимальная разность между получаемой в нормальных эксплуатационных условиях величиной выходного сигнала и его номинальным значением, определяемым по статической характеристике для данной входной величины. Основная погрешность выражается как в абсолютных, так и в относительных единицах. Для наиболее распространенных типов датчиков статические характеристики стандартизируются с указанием допустимых отклонений статических характеристик от номинальных значений. Так, номинальные статические характеристики (НСХ) для стандартных типов термоэлектрических преобразователей — термопар установлены ГОСТ 3044-84, согласованным со стандартом Международной электротехнической комиссии МЭК 584-1.1977 [18]. Дополнительные погрешности датчика — погрешности, вызываемые изменениями внешних условий по сравнению с нормальными эксплуатационными условиями. Выражаются обычно в процентах, отнесенных к изменению вызвавшего их фактора (например, 1,5 % на 10 0С).
|
11 Исполнительные механизмы и устройства систем автоматики
|
Исполнительные механизмы и устройства (ИМ, ИУ) промышленных систем автоматики входят в четвертую функциональную группу изделий ГСП в соответствии с ГОСТ 12997-84 — группу устройств использования командной информации в целях воздействия на процесс и для связи с оператором (сюда же входят рассматриваемые в следующей главе устройства сбора, регистрации, передачи и отображения информации). Термины «исполнительное устройство» и «исполнительный механизм» иногда употребляются как синонимы. В дальнейшем будем преимущественно использовать термин «исполнительное устройство», понимая под этим силовое устройство, назначение которого состоит в изменении регулирующего воздействия на объект управления в соответствии с сигналом (командной информацией), подаваемым на его вход от командного устройства (регулятора, ручного дистанционного задатчика, УВМ). К основным блокам ИУ относятся исполнительные механизмы (ИМ) и регулирующие органы (РО), которые конструктивно могут быть объединены в едином изделии или собираются из индивидуально выпускаемых блоков. В некоторых случаях ИУ может состоять из одного блока, выполняющего функции исполнительного механизма. Под исполнительным механизмом в общем случае подразумевают блок ИУ, преобразующий входной управляющий сигнал от регулирующего устройства в сигнал, который через соответствующую связь осуществляет воздействие на регулирующий орган или непосредствен но на объект регулирования. Регулирующим органом называют блок ИУ, с помощью которого производится регулирующее воздействие на объект регулирования. Классификация исполнительных механизмов приведена на рисунке 11.1. Одной из основных характеристик ИУ является величина перестановочного усилия (момента), передаваемого выходным органом исполнительного механизма на регулирующий орган. Эта величина обычно указывается в паспорте и является основной при энергетическом расчете и выборе ИУ. По виду энергии, создающей перестановочное усилие, ИМ подразделяются на пневматические, гидравлические и электрические. Существуют ИМ, в которых используются одновременно два вида энергии: электропневматические, электрогидравлические и пневмогидравлические. Наиболее распространенными из них являются электрогидравлические ИМ. Вид энергии управляющего сигнала может отличаться от вида энергии, создающей перестановочное усилие.
Рисунок 11.1 – Классификация исполнительных механизмов
В пневматических ИМ перестановочное усилие создается за счет действия давления сжатого воздуха на мембрану, поршень или сильфон. В соответствии с этим пневматические подразделяются на мембранные, поршневые и сильфонные. Давление сжатого воздуха в пневматических ИУ обычно не превышает 103 кПа. В гидравлических ИМ перестановочное усилие создается за счет действия давления жидкости на мембрану, поршень или лопасть. В соответствии с этим различают мембранные, поршневые и лопастные гидравлические ИМ. Давление жидкости в них обычно находится в пределах (2,5-20) 103 кПа. Отдельный подкласс гидравлических ИУ составляют ИУ с гидромуфтами. Пневматические и гидравлические мембранные и поршневые ИМ подразделяются на пружинные и беспружинные. В пружинных ИМ перестановочное усилие в одном направлении создается давлением в рабочей полости ИМ, а в обратном направлении —силой упругости сжатой пружины. В беспружинных ИМ перестановочное усилие в обоих направлениях создается перепадом давления на рабочем органе механизма. Электрические ИМ по принципу действия подразделяются на электродвигательные и электромагнитные; по характеру движения выходного элемента — на прямоходные с поступательным движением выходного элемента, поворотные с вращательным движением до 360° (однооборотные) и с вращательным движением на угол более 360° (многооборотные). Как было отмечено ранее, вторым основным блоком исполнительного устройства является регулирующий орган (РО). Различные РО по виду воздействия на объект подразделяются на два основных типа: дросселирующие и дозирующие. Ниже приводится классификация исполнительных органов (см. таблицу 11.1). Дросселирующие регулирующие органы изменяют гидравлическое сопротивление в системе, воздействующее на расход вещества путем изменения своего проходного сечения. В дозирующих регулирующих органах осуществляется заданное дозирование поступающего вещества или энергии или изменение расхода вещества путем изменения производительности агрегатов. В настоящее время широкое распространение в АСУ ТП получили дросселирующие РО, хотя применение дозирующих РО экономически более оправдано.
Т а б л и ц а 11.1 — Классификация исполнительных органов
|
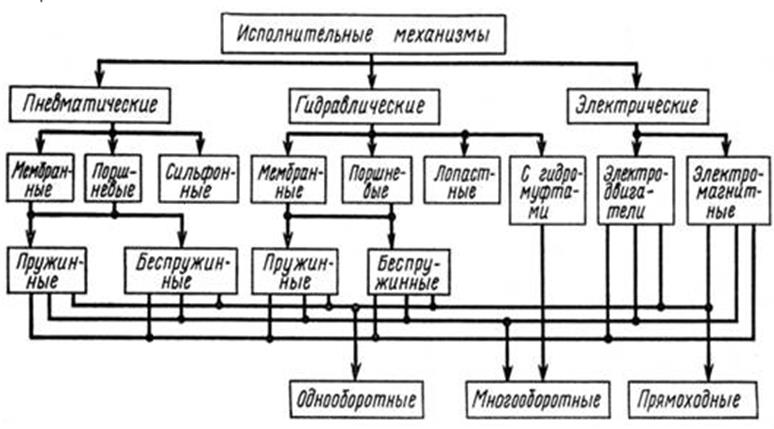
К вспомогательным блокам исполнительных устройств относят блоки, расширяющие область применения ИУ и обеспечивающие выполнение ряда дополнительных функций. К вспомогательным блокам относятся блок ручного управления для механического (ручного) управления регулирующим органом, блок сигнализации конечных положений для выдачи информации о положении выходного элемента исполнительного механизма или затвора регулирующего органа, фиксаторы положения для фиксации положения выходного элемента исполнительного механизма или затвора регулирующего органа, блок дистанционного управления, блок обратной связи для улучшения статических и динамических характеристик ИУ или всей замкнутой системы регулирования.
12 Электрические машины постоянного тока
12.1 Общие сведения. Конструкция
|
Двигатели постоянного тока в зависимости от способа возбуждения в них подразделяются на три типа: а) двигатели с независимым возбуждением (параллельным возбуждением); б) двигатели с последовательным возбуждением; в) двигатели со смешанным возбуждением. Машина постоянного тока (см. рисунок 12.1) состоит из статора, который обычно является индуктором, и ротора (якоря). Статор содержит: - стальной корпус; - полюсные наконечники вместе с полюсными сердечниками; - обмотку возбуждения; - траверсу со щеткодержателями для крепления щеток; - подшипниковые щиты с подшипниками.
Рисунок 12.1 — Электрическая машина постоянного тока |
|
|
Условное изображение машины постоянного тока независимого возбуждения на электрических схемах приведено на рисунке 12.2, 12.3.
Рисунок 12.2 — Условное изображение машины постоянного тока независимого возбуждения
При вращении якоря его обмотка пересекает ФОСТ и в ней индуцируется небольшая по величине остаточная ЭДС ЕОСТ. Под действием этой ЭДС по обмотке возбуждения потечет ток возбуждения, который создаст небольшой магнитный поток. Если обмотка возбуждения включена правильно, то этот магнитный поток совпадет с остаточным магнитным потоком.
Рисунок 12.3 — Условное изображение машины постоянного тока независимого возбуждения
В результате общий магнитный поток возрастает, увеличится и ЭДС, наводимая этим потоком в обмотке якоря. Поскольку возросла ЭДС якоря, возрастает и ток возбуждения, что в свою очередь ведет к новому увеличению магнитного потока и ЭДС якоря. Процесс продолжается до тех пор, пока ЭДС якоря не станет равной падению напряжения в цепи возбуждения. Запишем уравнение согласно второму закону Кирхгофа для контура, включающего в себя цепь якоря и цепь возбуждения:
Ея=Iв Rов+IвRя+IвRв=IвRцв.
Здесь: Rов— сопротивление обмотки возбуждения; Rя — сопротивление обмотки якоря; Rв — сопротивление реостата; Rцв= Rов + Rя+ Iя Rя — сопротивление цепи возбуждения. Если Ея> IвRцв, то процесс самовозбуждения проходит. Если Ея= IвRцв, то процесс самовозбуждения останавливается. Если Ея< IвRцв, то процесса самовозбуждения нет и машина не возбуждается. Таким образом, для обеспечения процесса самовозбуждения генератора постоянного тока необходимо три условия: а) наличие остаточного магнитного потока в магнитной системе машины; б) правильное включение обмотки возбуждения; в) сопротивление цепи возбуждения должно быть меньше критического. Аналогично процесс возбуждения происходит у генераторов с последовательным возбуждением, но для этого к ним необходимо подключить нагрузку. Рассмотрим работу машины постоянного тока независимого возбуждения в режиме двигателя (см. рисунок 12.4).
Рисунок 12.4 - Машины постоянного тока независимого возбуждения в режиме двигателя
Обмотка возбуждения подключена к источнику постоянного тока, под действием которого в ней будет протекать ток возбуждения и создаваться магнитный поток машины. Если к источнику постоянного тока подключить обмотку якоря, то по ней потечет ток якоря. Тогда на проводники с током якоря, находящиеся в магнитном поле возбуждения, будут действовать электромагнитные силы, совокупность которых образует вращающий момент, приложенный к якорю. Направление этого момента можно найти по правилу левой руки, а величину его по выражению:
M=kФIя.
Под действием этого момента якорь придет во вращение, а его проводники — пересекать магнитный поток возбуждения, и в них будет индуцироваться ЭДС Ея, величину которой можно найти согласно:
Ея=kФω.
Направление ЭДС определяется по правилу правой руки. В двигательном режиме ЭДС якоря в двигателе будет направлена против тока якоря. По величине Ея близка напряжению сети, но всегда его меньше. Значение Ея зависит от частоты вращения якоря (ω). Если под действием постороннего вращающего момента увеличивать скорость вращения якоря, то можно достичь такой скорости (ν0), при которой Ея =U. В этом случае ток через якорь протекать не будет (Iя=0) несмотря на то, что обмотка якоря подключена к сети постоянного тока. Такой режим работы называют режимом идеального холостого хода. Запишем уравнение для цепи якоря двигателя согласно второму закону Кирхгофа:
U - Ея = Iя(R+Rp).
Учитывая, что Ея=kФω, после подстановки получим:
ω= (U - Iя(R+Rp))/kФ. Полученное уравнение называют уравнением электромеханической характеристики. Если принять, что U=Uн, Ф=Фн, Rр=0, то получим уравнение естественной электромеханической характеристики:
ω = (Uн-IяRя)/kФн=(Uн/kФн)- (IяRя/kФн).
Чтобы получить выражение для механической характеристики, нужно учесть, что M=kФIя., выразить отсюда ток якоря Iя=M/(kФ) и подставить его в уравнение электромеханической характеристики:
ω = (Uн/kФ)-(М (Rя-Rр)/k2Ф2).
Полученное уравнение называется уравнением механической характеристики. Если в это уравнение подставить U=Uн, Ф=Фн, Rp=0, то получим уравнение естественной механической характеристики:
ω = (Uн/kФн)-(М Rя/k2Фн2).
В режиме идеального холостого хода, когда Ея=U, Iя=0, М=0, якорь должен вращаться со скоростью ν0, тогда из выражений для механической и электромеханической характеристик следует, что скорость идеального холостого хода можно найти согласно выражению:
ν0 = U/(kФ).
Механическая характеристика двигателя — это зависимость угловой скорости двигателя от вращающего момента: ω =f(M), полученная при неизменных других параметрах (при U=const, Ф=const, Rp=const). Механическая характеристика, снятая при нормальных рабочих условиях (Uн,Iвн,Rр=0) называется естественной характеристикой. Все прочие характеристики называют искусственными. На рисунке 12.5 приведено семейство искусственных характеристик, соответствующих различным значениям сопротивления реостата Rp, включенного последовательно с якорем.
Рисунок 12.5 - Искусственные характеристики, соответствующие различным значениям сопротивления реостата Rp, включенного последовательно с якорем
Все характеристики пересекаются в точке идеального холостого хода ω0, поскольку скорость идеального холостого хода не зависит от сопротивления якорной цепи двигателя:
(ν0=U/kФ).
Разность значений установившихся скоростей до и после приложения заданной статической нагрузки называется статическим падением скорости электропривода (Δω0). Для данного двигателя из уравнения естественной механической характеристики следует, что:
∆ω0 = М Rя/k2Ф2.
Для искусственных характеристик статическое падение скорости определится из выражения [17]:
∆ω0 = М (Rя+Rp)/k2Ф2. |
|
|
Обмотка возбуждения у двигателя постоянного тока последовательного возбуждения включена последовательно с якорем (см. рисунок 12.6).
Рисунок 12.6 — Схема включения двигателя постоянного тока последовательного возбуждения
Уравнение электромеханической характеристики будет иметь такой же вид, что и у двигателя независимого возбуждения:
ω = U-I(Rд- Rр)/kФ.
Здесь RД - суммарное сопротивление цепи двигателя, состоящее из сопротивления якоря и обмотки возбуждения. Поскольку ток якоря и ток возбуждения один и тот же, то при изменении нагрузки изменяется и магнитный поток возбуждения, следовательно, магнитный поток Ф является функцией тока якоря. Зависимость магнитного потока возбуждения от тока Ф=f(I) называется кривой намагничивания (см. рисунок 12.7).
Рисунок 12.7 — Зависимость магнитного потока возбуждения от тока
Ф=f(I)
Зависимость Ф=f(I) нелинейна из-за насыщения магнитной цепи. Из-за нелинейности нельзя получить точного аналитического выражения зависимости Ф=f(I). Для упрощения анализа можно пренебречь магнитным насыщением и считать, что магнитный поток пропорционален току якоря (линейная зависимость показана на графике пунктиром), то есть Ф=lI. При этом момент двигателя можно записать в виде:
M = k · Ф · I = k · l ·I2.
Уравнение электромеханической характеристики тогда будет иметь вид:
ω = (U-I(Rд- Rр))/kФ = ω = (U-I(Rд- Rр))/kαI = U)/kαI - (Rд- Rр)/kα. . Учитывая, что I = √(M/kα) получим выражение для механической характеристики:
ω = U/kα√(M/kα) - (Rд+Rр)/kα.
Из анализа этих выражений следует, что уравнение электромеханической и механической характеристик представляют собой гиперболические зависимости. В каталогах обычно приводятся естественные механические и электромеханические характеристики. Уравнение механической характеристики имеет вид:
ω = U/kФ - M(Rд+Rр)/ k2Ф2
Рисунок 12.8 — Механическая характеристика двигателя последовательного возбуждения
При уменьшении момента скорость якоря возрастает, при M>0, то есть такой двигатель не имеет скорости идеального холостого хода. При возрастании скорости машина не переходит в генераторный режим. Механические характеристики не имеют продолжения во втором квадрате. При снижении момента сопротивления скорость якоря растет и может достигнуть выше допустимой по условиям механической прочности коллектора и бандажей обмотки якоря. При нагрузках ниже (15-20)% номинальных, работа двигателя практически недопустима из-за чрезмерного увеличения скорости якоря (двигатель идёт в разнос). Это ограничивает область применения этих двигателей. Их нельзя использовать для привода механизмов, которые в режиме холостого хода создают малый момент сопротивления на валу. В каталогах приводятся зависимости ω*=f(I*) и M*=ω(I*) угловой скорости и момента от тока якоря, в относительных единицах, общий вид которых представлен на рисунке 12.9.
Рисунок 12.9 - Зависимости ω*=f(I*) и M*=ω(I*) угловой скорости и момента от тока якоря
На рисунке 12.10 представлены искусственные реостатные механические характеристики двигателя постоянного тока последовательного возбуждения.
|
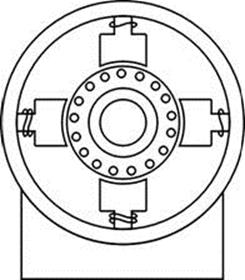
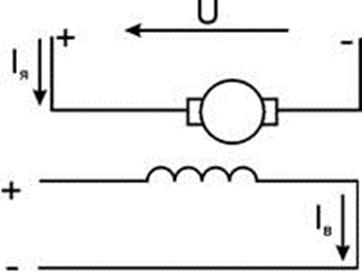
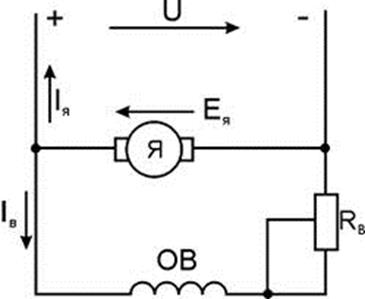
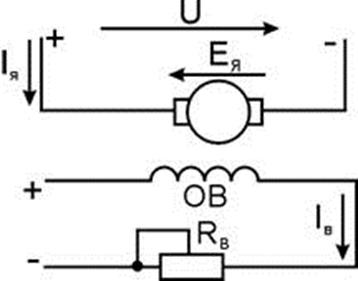
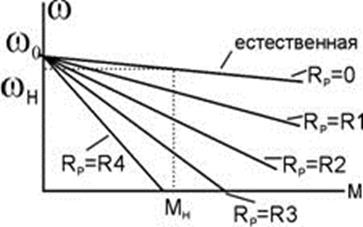
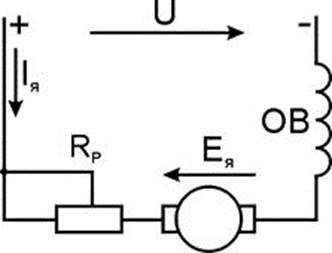
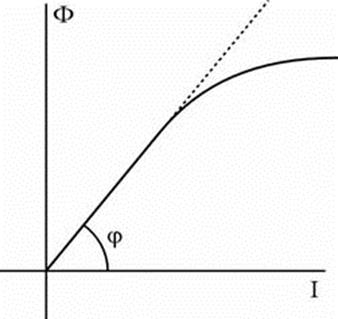
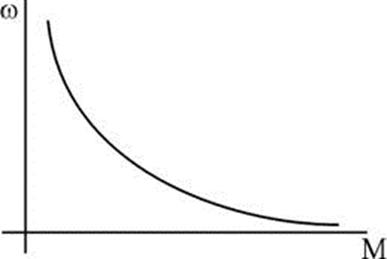
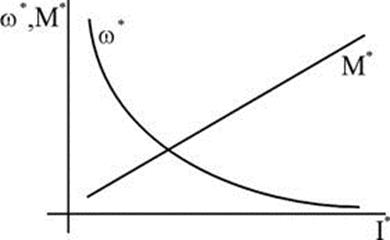
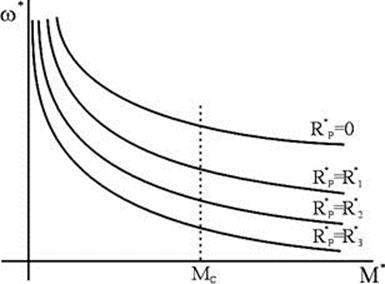
Рисунок 12.10 - Искусственные реостатные механические характеристики двигателя постоянного тока последовательного возбуждения
С увеличением сопротивления реостата скорость двигателя уменьшается при одном и том же моменте сопротивления Мс, уменьшается и жесткость механических характеристик.
13 Электрические машины переменного тока
Асинхронный двигатель состоит (см. рисунок 13.1) из двух основных частей — неподвижной, называемой статором, и вращающейся части, называемой ротором.
Рисунок 13.1- Асинхронный двигатель
Статор содержит: а) корпус, выполненный из стали или алюминиевых сплавов; б) сердечник, представляющий из себя полый цилиндр, набранный из листов электротехнической стали, на внутренней поверхности которого имеются пазы, в которые укладывается и закрепляется обмотка статора; в) обмотку, состоящую из трех одинаковых фазных обмоток (катушек), расположенных в пазах сердечника статора и сдвинутых в пространстве под углом в 120 градусов друг относительно друга. Выводы обмотки статора соединяются по схемам «звезда» или «треугольник». Ротор содержит: а) вал, изготовленный из стали; б) сердечник ротора, закреплённый на валу, который представляет собой цилиндр, набранный из листов электротехнической стали. На внешней поверхности сердечника имеются пазы, в которые укладывается обмотка ротора; в) обмотку ротора. В зависимости от типа обмотки различают две конструкции ротора: ротор с короткозамкнутой обмоткой и ротор с фазной обмоткой. Обмотка короткозамкнутого ротора состоит из алюминиевых или медных стержней, уложенных по одному стержню в каждый паз сердечника ротора. Выступающие торцы стержней соединяют между собой (закорачиваются) кольцами, которые изготавливаются из того же материала, что и стержни. Таким образом, при помощи колец стержни обмотки замыкаются накоротко. Обмотка фазного ротора имеет такую же конструкцию, что и обмотка статора, т.е. состоит из трех (катушек) совершенно одинаковых фазных обмоток, которые располагаются в пазах сердечника ротора под углом 120 градусов друг к другу в пространстве. Выводы обмотки ротора соединяются «звездой». Оставшиеся выводы подсоединяются к трем медным кольцам, которые закреплены на валу ротора. Кольца изолируются друг от друга и от вала ротора. При помощи щеток, которые скользят по кольцам, обмотка ротора может быть соединена с внешней цепью, обычно с трехфазным реостатом. Щетки закрепляются в щеткодержателях на траверсе, которая крепится на подшипниковом щите. Если к обмотке статора приложить переменное трехфазное напряжение, то по обмоткам будут протекать переменные трехфазные токи, которые возбуждают в фазных обмотках три магнитных потока. Эти магнитные потоки, складываясь вместе, образуют результирующее магнитное поле статора, которое по величине неизменно, а по направлению вращается с угловой скоростью n0 или w0. Скорость вращения магнитного поля статора (n0 или w0) зависит от числа пар магнитных полюсов Р и частоты f тока статора.
n0 = 60f1/P, ω0 = 2πn0/60 = 2πf/P.
Магнитное поле статора, вращаясь, пересекает проводники обмотки ротора и наводит в них ЭДС. Поскольку обмотка ротора замкнута накоротко, то под действием ЭДС по обмотке ротора будут протекать токи. Тогда на проводники с током обмотки ротора, находящиеся в магнитном поле статора, будут действовать электромагнитные силы. Совокупность этих сил образует вращающий момент, приложенный к ротору, под действием которого ротор придет во вращение. Изменяя сопротивление цепи ротора, можно изменять ток ротора и, соответственно, будут изменяться вращающий момент и частота вращения ротора. Так же, как и изменяя скорость магнитного поля статора, можно изменять и угловую скорость ротора. Угловую скорость ротора обозначим через n или w. Угловая скорость асинхронных двигателей близка к скорости вращения поля статора, n<n0 или w<w0, но всегда несколько меньше ее. Разность скоростей магнитного поля статора и ротора (n0-n) или (w0-w) принято оценивать в относительных единицах по отношению к скорости вращения поля статора и называть скольжением S: S = (n0-n) n0, S = (w0-w)/w0.
Поскольку скорость ротора не совпадает со скоростью вращения поля статора, то двигатель называют асинхронным. Если же скорость вращения ротора станет равной скорости вращения поля статора, то магнитное поле статора не будет пересекать проводники обмотки ротора, следовательно, в них не будет ЭДС и тока, а, значит, исчезнет вращающий момент, приложенный к ротору. Поскольку в двигателе всегда присутствует тормозной момент (хотя бы за счет сил трения), то ротор двигателя будет всегда вращаться со скоростью несколько меньшей, чем поле статора. Если же под действием сторонних сил (момента) ротор заставить вращаться со скоростью w0, то такой режим работы называется режимом идеального холостого хода двигателя. Для вывода уравнения механической характеристики асинхронного двигателя обычно пользуются упрощенной Г-образной схемой замещения, представленной на рисунке 13.2. Схема соответствует одной фазе трёхфазного асинхронного двигателя. Полная схема замещения асинхронного двигателя будет содержать три таких Г-образных схем, соединённых между собой по схеме «звезда». Из анализа этой схемы можно записать выражение (по закону Ома) для определения действующего значения вторичного тока (приведенного тока ротора).
Рисунок 13.2- Упрощенная Г-образная схема замещения
I2’ = UФ/√((R1+R2’/S)2+(X1+X2’)2).
Электромагнитная мощность ротора (передаваемая от статора через магнитное поле ротору) численно равна энергии, которая выделяется в переменном резисторе R2’/S схемы замещения. Поскольку двигатель трехфазный, то её необходимо утроить, тогда электромагнитную мощность ротора можно записать следующим образом:
Pэм = 3(I2’)2 R2’/S. . Для того, чтобы найти выражение для электромагнитного момента, необходимо электромагнитную мощность поделить на угловую скорость вращающегося магнитного поля w0, поскольку электромагнитный момент образуется при взаимодействии тока ротора и магнитного поля статора, вращающегося со скоростью w0:
M = Pэм/ω0=3(I2’)2 R2’/ω0S. Подставляя сюда выражение для тока I2, окончательно получим:
M = 3Uф2 R2’/(ω0S (R1+R2’/S)2+(X1+X2’)2).
В этом выражении переменной величиной является скольжение. Зависимость М=f(S) имеет два максимума. В этом легко убедится, если по общему правилу исследования функций взять производную dM/dS и приравнять ее к нулю. При этом получим квадратное уравнение, решив его относительно скольжения, получим значение скольжения Sk, соответствующее максимальному (критическому) моменту:
Значение скольжения, соответствующего максимуму функции М=f(S), называют критическим. Подставляя полученное выражение SК в выражение для момента, найдем выражение для максимального момента, его еще называют критическим моментом:
Знак (+) в этих выражениях соответствует двигательному режиму работы асинхронной машины, а знак (-) — генераторному режиму. Из полученных выражений следует: а) значение критического скольжения одинаково как для двигательного режима, так и генераторного; б) значения максимального момента отличаются друг от друга, в генераторном режиме значение максимального момента несколько больше, нежели в двигательном. Следует подчеркнуть весьма важное для практики обстоятельство, что момент двигателя пропорционален квадрату напряжения сети, следовательно, двигатель очень чувствителен к колебаниям напряжения. При снижении напряжения момент двигателя резко падает. На рисунке 13.3 представлена механическая характеристика, на которой указаны области и точки, соответствующие характерным режимам работы асинхронной машины.
Рисунок 13.3 - Механическая характеристика асинхронной машины
На механической характеристике можно выделить три участка, каждый из которых соответствует одному из трех режимов работы асинхронной машины: а) двигательный режим работы, ему соответствует изменение скольжения от S=0 до S=1; б) режим торможения противовключением, ему соответствует изменение скольжения от S=1 до S= a; в) режим рекуперативного торможения или генераторный режим с возвратом энергии в сеть, ему соответствуют отрицательные значения скольжения S<0. Отметим характерные точки механической характеристики, к ним относятся: а) S=0, M=0, при этом скорость ротора равна синхронной, так называемый режим идеального холостого хода двигателя; б) S=Sн, М=Мн — номинальный режим двигателя; в) S=Sк, М=Мк — критический режим, при котором двигатель развивает максимальный момент; г) S=1,0, М=Мп — пуск двигателя, при котором при неподвижном роторе, двигатель развивает пусковой момент Мп; д) S= - Sк, М= - Мк — при котором двигатель развивает максимальный момент в генераторном режиме, когда он работает параллельно с сетью. Эта же механическая характеристика может быть построена в других координатах М=f(S), она приведена ниже (см. рисунок 13.4).
Рисунок 13.4 - Механическая характеристика асинхронной машины, построенная в других координатах
Рассмотрим естественную механическую характеристику асинхронного электродвигателя, представленную на рисунке 13.5.
Рисунок 13.5 - Механическая характеристика асинхронного электродвигателя
Участок характеристики между w=w0 и w=wкр то есть 0<S<Sкр называют устойчивым участком, так как на этом участке увеличению тормозного момента соответствует снижение скорости и увеличение вращающегося момента и наоборот. Участок механической характеристики между w=w0 и w=wк называют неустойчивым, так как на этом участке уменьшению угловой скорости ротора соответствует уменьшение вращающего момента двигателя. |
|
|
Синхронная машина состоит из двух частей: индуктора и якоря. Индуктором называют часть машины, в которой создается первичное магнитное поле. Якорем называют часть машины, в которой индуцируется ЭДС. Наибольшее распространение получили синхронные машины, в которых якорь неподвижен, а индуктор вращается. Рассмотрим устройство (см. рисунок 13.6) синхронной трехфазной машины, в которой якорь является статором, а индуктор является вращающимся ротором.
Рисунок 13.6 - Устройство синхронной трехфазной машины
Статор такой машины по конструкции аналогичен статору асинхронной машины и состоит из трех основных частей: корпуса (станины), сердечника и обмоток. Сердечник представляет собой полый цилиндр, набранный из электротехнической стали толщиной 0,5 мм. На внутренней поверхности сердечника имеются пазы, в которые укладывается обмотка статора. Пазы, как правило, имеют прямоугольное сечение. Обмотка статора состоит из трех одинаковых фазных обмоток, сдвинутых в пространстве друг относительно друга на 1200 и соединенных звездой. В синхронных машинах применяют роторы двух конструкций: явнополюсные и неявнополюсные. Неявнополюсные роторы используются в синхронных генераторах, рассчитанных на скорость вращения ротора 1500 и 3000 оборотов в минуту. В синхронных двигателях используют только явнополюсные роторы. Явнополюсный ротор содержит вал, на котором закреплен обод, а к нему крепятся полюса. Сердечники полюсов набираются из пластин, из электротехнической стали толщиной 0,5 мм, на полюсах крепится обмотка возбуждения, по которой пропускают постоянный ток, подводимый через щетки и контактные кольца, закрепленные на роторе. Кроме этого, в сердечниках полюсов делают пазы, в которые укладывают медные стержни: по одному стержню в каждый паз. С торцов стержни между собой закорачиваются сегментами или кольцами, образуя короткозамкнутую обмотку такого же типа, как обмотка у короткозамкнутого ротора асинхронного двигателя, которая является пусковой обмоткой. На электрических схемах синхронная машина изображается в виде двух концентрических окружностей (внешняя окружность изображает обмотку ротора). К обмотке статора подключается трёхфазная сеть, а к обмотке ротора сеть постоянного тока. Условное изображение синхронной машины приведено ниже:
Рисунок 13.7 - Условное изображение синхронной машины
При пуске обмотка статора подключается к трехфазной сети. Ротор приводится в движении благодаря наличию короткозамкнутой пусковой обмотки. Трехфазные токи, проходя по обмоткам статора создают вращающееся магнитное поле, которое вращается со скоростью ω0 Поле статора, вращаясь, пересекает стержни пусковой обмотки, индуцируя в них ЭДС, под действием которой по ним будут протекать токи. При взаимодействии этих токов с вращающимся полем статора создается электромагнитный момент, приложенный к ротору, ротор придет во вращение. Обмотка возбуждения на период пуска замыкается на резистор с целью уменьшения возникающих в ней напряжений. В конце пуска, когда скорость ротора становится достаточно близкой к скорости вращения магнитного поля статора (0,95-0,98) ω0, обмотку возбуждения отключают от резистора, и на нее подается постоянный ток. Постоянное магнитное поле вращающегося ротора сцепляется с вращающим полем статора, и ротор втягивается в синхронизм. После этого ротор продолжает вращаться со скоростью ω0, развивая вращающий момент. Пусковая обмотка при этом перестает работать, так как поле статора уже не пересекает стержни пусковой обмотки, и ток в ней становится равным нулю. Механическая характеристика при пуске синхронного двигателя соответствует характеристике асинхронного двигателя, а в рабочем режиме представляет собой прямую. Обе характеристики приведены на рисунке 13.8. Электромагнитный момент, приложенный к ротору синхронной машины, создается за счет взаимодействия между магнитными полюсами магнитного поля ротора и вращающимся магнитным полем статора. Изменение нагрузки на валу двигателя сопровождается изменением взаимного положения магнитных полюсов ротора и вращающегося магнитного поля статора.
Рисунок 13.8 - Механическая характеристика при пуске синхронного двигателя
При идеальном холостом ходе оси полюсов магнитного поля ротора и магнитного поля статора совпадают. Ротор не создает электромагнитного момента. При увеличении нагрузки на вал ротора ротор несколько отстает в пространстве от магнитного поля статора. Ось магнитных полюсов ротора будет сдвинута от оси магнитных полюсов статора на некоторый угол θ. За счет взаимодействия между полюсами ротора и статора появится электромагнитный момент. Чем больше угол θ, тем больше будет электромагнитный вращающий момент ротора. При определенном значении угла θ вращающий момент достигает максимума. Ниже на рисунке 13.9 показано расположение полюсов магнитного поля статора и ротора при нагрузке в двигательном режиме.
Рисунок 13.9 - Расположение полюсов магнитного поля статора и ротора при нагрузке в двигательном режиме
Если статический момент нагрузки превысит значение максимального момента, то двигатель выпадает из синхронизма. При приеме и сбросе нагрузки ротор совершает колебания прежде, чем займет определенное положение. Если при работе машины в режиме идеального холостого хода к ротору будет приложен вращающий момент, направленный в сторону вращения, то ось магнитных полюсов ротора сдвинется в сторону вращения на угол θ. Возникнет электромагнитный момент, направленный против вращения ротора (за счет взаимодействия между полюсами магнитных полей ротора и статора) и машина перейдет в генераторный режим работы. Мощность, потребляемая синхронным электродвигателем из сети, можно найти из выражения: P=3·U·I.
В этом выражении U — фазное напряжение статора; I — фазный ток. Если не учитывать потери, тогда выражение для электромагнитного момента развиваемого ротором можно записать так:
При q=90° электромагнитный момент, развиваемый ротором, принимает максимальное значение:
Тогда электромагнитный момент синхронной машины:
M=Mmaxsinθ.
Необходимо отметить, что угол q сдвига по фазе между ЭДС и напряжением статора в двухполюсной машине равен углу сдвига между магнитными полюсами статора и ротора. В многополюсной машине угол q сдвига по фазе между ЭДС и напряжением статора будет больше угла qреальный между полюсами на число пар полюсов магнитного поля ротора:
q=qреальноеP.
Зависимость электромагнитного момента синхронной машины от угла θ называется угловой характеристикой, она представлена на рисунке 13.10. Устойчивый режим работы синхронного двигателя обеспечивается на участке 00<θ<900 (устойчивый участок). Обычно номинальный момент двигателя лежит в пределах θ = 200 … 300 для обеспечения запаса по моменту. Вращающий момент двигателя пропорционален напряжению сети в первой степени, что определяет его меньшую чувствительность к колебаниям напряжения, чем у асинхронного двигателя.
Рисунок 13.10 - Угловая характеристика синхронной машины
Для торможения обычно применяется режим динамического торможения, при котором обмотки статора отключаются от сети и замыкаются на резисторы. Механические характеристики в этом случае подобны характеристикам асинхронного двигателя при динамическом торможении. Принципиальная схема включения синхронного двигателя при динамическом торможении приведена на рисунке 13.11. Торможение синхронных двигателей противовключением практически не применяется, так как оно сопровождается большими бросками тока и ведет к усложнению управления ввиду необходимости отключения двигателя при подходе к нулевой скорости. Синхронный двигатель может работать и в режиме генератора параллельно с сетью (рекуперативное торможение), в этом случае электромагнитный момент будет иметь отрицательное значение. Этому режиму отвечает левая ветвь угловой характеристики, угловая скорость вращения при этом не изменяется (равна синхронной). Отличительной особенностью синхронного двигателя является его способность регулирования потребления реактивной мощности. Объясняется это тем, что, при некоторых допущениях, можно считать, что ЭДС, индуцируемая в обмотках статора (Е=4,44w1f1k1Ф) и равная напряжению сети, определяется результирующим магнитным потоком двигателя, который в свою очередь возбуждается намагничивающим током статора и ротора. Следовательно, значение магнитного потока машины (вращающегося магнитного поля) и напряжение сети связаны пропорциональной зависимостью. При неизменном напряжении сети неизменен магнитный поток машины.
Рисунок 13.11 - Принципиальная схема включения синхронного двигателя при динамическом торможении
В случае, когда ток возбуждения отсутствует (тока в роторе нет), то весь магнитный поток создается током статора, следовательно, синхронный двигатель потребляет из сети реактивную энергию и двигатель представляет собой активно-индуктивную нагрузку. Если же машину возбудить, то результирующий магнитный поток будет создаваться как током статора, так и током ротора, следовательно, потребление реактивной энергии статором из сети уменьшится. Дальнейшее увеличение тока возбуждения приведет к дальнейшему уменьшению потребления реактивной энергии. При номинальном токе ротора статор вообще не будет потреблять реактивную энергию из сети, т.е. магнитный поток машины весь создается током ротора, наступает режим идеального холостого хода [17]. При дальнейшем увеличении тока возбуждения ток обмотки статора станет размагничивающим, т.е. статор будет работать и представлять собой по отношению к сети активно-емкостную нагрузку, а машина станет генератором реактивной энергии. Изменяя значение тока возбуждения машины (ток ротора), можно регулировать реактивную мощность синхронного двигателя. При токе ротора больше номинального (перевозбуждение двигателя) двигатель представляет собой активно-емкостную нагрузку, и его можно использовать для повышения cos j промышленных предприятий.
|
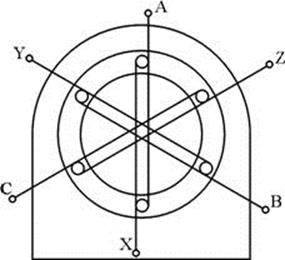
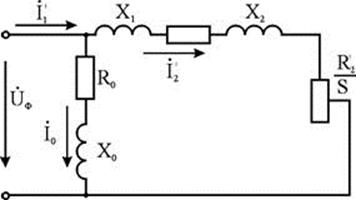
 .
. .
.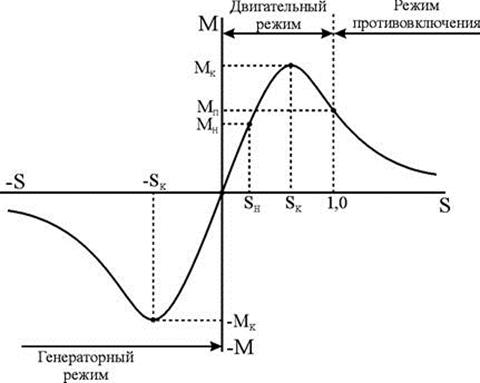
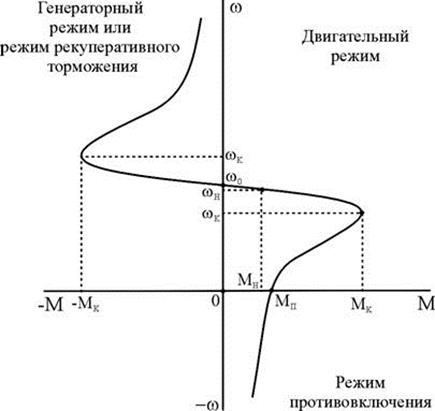
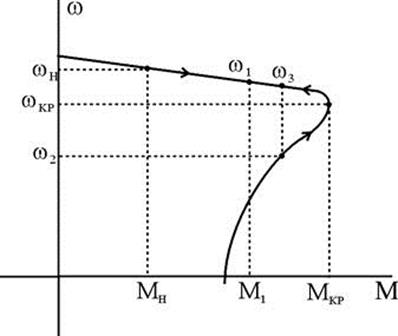
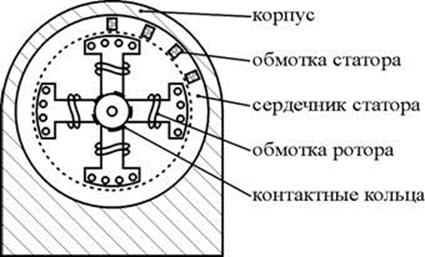

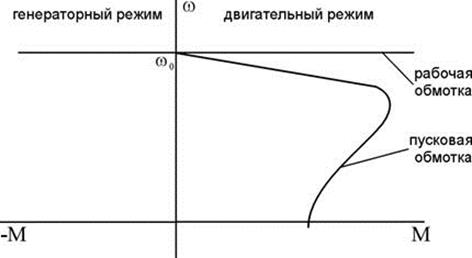
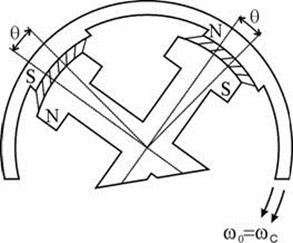
 .
. .
.