Коммерциялық емес акционерлік қоғам
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ
Өнеркәсіп қондырғыларының электржетегі және автоматтандыру кафедрасы
ЭЛЕКТР ЖЕТЕГІН БАСҚАРУ ЖҮЙЕЛЕРІ
5В071800 – Электр энергетикасы мамандығының студенттеріне
арналған дәрістер жинағы
Алматы 2013
ҚҰРАСТЫРҒАНДАР: Ю.А. Цыба, Ж.Ж. Тойгожинова. Электр жетегін басқару жүйелері. 5В071800 – Электр энергетикасы мамандығының студенттеріне арналған дәрістер жинағы. - Алматы: АЭжБУ, 2013. – 33 бет.
«Электр жетегін басқару жүйелері» курсы бойынша дәрістер жинағы оқу жұмыс бағдарламасына сәйкес өңделген және 5В071800 – Электр энергетикасы мамандығының бакалаврлары үшін 15 сағатқа есептелген. Дәрістер жинағында бейімдеумен (адаптивпен) және бағдарламамен басқарудың жұмыстарын бақылауды, моменттің және жылдамдықтың функциясын тұрақтандыруды орындайтын электр жетегін автоматты басқарудың санды және санды аналогты жүйелерінің жұмысы мен құрылыстары, құру принциптері қарастырылған.
Дәрістер жинағы 5В071800 – Электр энергетикасы мамандығының студенттеріне арналған.
Суреттер 22, әдеб. – 17 атау.
Пікір беруші: техн. ғыл. канд, профессор А.С. Байкенов «Алматы энергетика және байланыс университетінің» коммерциялық емес акционерлік қоғамының 2013 ж. баспа жоспары бойынша басылады.
© «Алматы энергетика және байланыс университетінің» КЕАҚ, 2013 ж.
Мазмұны
|
|
Кіріспе |
4 |
|
1 дәріс. |
Электр жетегін автоматты басқару жүйесінің сандық және санды аналогты жүйесін құру принципі |
5 |
|
2 дәріс. |
Жылдамдықты тұрақтандыратын санды аналогты және сандық жүйелер |
9 |
|
3 дәріс. |
Электр жетегінің жағдайын аналогты және санды аналогты жүйелермен басқару |
13 |
|
4 дәріс. |
ЭЕМ басқарылатын жағдайды санды жүйемен басқару |
16 |
|
5 дәріс. |
Бақылау электр жетегінің басқару жүйелері және оларды құрудың негізгі принциптері |
18 |
|
6 дәріс. |
Бақылау электр жетегінің аналогты және санды жүйелері |
20 |
|
7 дәріс. |
Электр жетегін бағдарламалық басқару жүйесі, құру принциптері және жіктелімі |
24 |
|
8 дәріс. |
Электр жетегімен бағдарламалық басқарудың циклдік жүйелері |
28 |
|
|
Әдебиеттер тізімі |
33 |
Автоматиканың құралдары кез келген технологикалық процестерді жаңа, өте жоғарғы деңгейде жетілдіреді және технологиялық процестерді енгізу тиімділігін жоғарлатады. Сонымен қатар автоматтандырылған электр жетегі жұмыс машиналарын және өндірістік процестерді автоматтандырудың негізгі құралдары болып саналады [1,2,3,4].
Автоматтандырылған электр жетегі қазіргі кезде автоматты басқару жүйесінен тұрады. Автоматты басқару жүйесі процесті басқарудың өте күрделі автоматты жүйесінен тұрады. Мұндай күрделі жүйе өндірістік процестердің өту жағдайы туралы ақпараттарды жинап, оны берілген «алгоритммен» өңдеп және өндірістік процестердің орынды жүргізілуін қамтамасыз ететін электр машиналарымен немесе басқа элементтермен басқару әсерін береді. Мұнда алгоритм дегеніміз берілген процестегі өзгерістерге бағынатын логикалық және математикалық ережелер. Қарапайым жағдайларда алгоритм автоматты іске қосу немесе электр қозғалтқыштарын тоқтату міндетін атқарады. Өте күрделі электр жетегін басқару жүйелерінде әртүрлі ұйтқу кезінде жоғарғы пайдалы әсерлі коэффицентті қамтамасыз ететін басқару объектісінің және автоматты басқарудың п.ә.к. есептеу қажет болады.
Машиналарды сандық басқару кең дамығандықтан қазіргі кезде электр жетегін басқару жүйелері аппаратты құрылғылармен емес, ал электр жетегінің қажетті алгоритмдік басқаруы бағдарламалық болатын машиналар қолданылады. Бұл мұндай жүйелерді жобалап және орындауға көмектеседі. Сонымен қатар, бірдей ақпаратты басқару кешенінен бірдей технологиялық процеспен байланысқан, икемді басқарылатын өндірісті құру үшін қажетті үлкен өндірістік құрылғылардың электр жететерін басқаруға мүмкіндік береді. Электр жетегі жүйелерінде машиналарды сандық басқарудың қолданылуына байланысты, дисплейде электр жетегінің жұмысын бақылау және диагностикалық жүйені құру сияқты олардың жұмыстарына жаңа мүмкіндіктер туады. Берілген дәріс жинағында сандық басқару жүйесі ғана емес, сонымен қатар сандық жүйені құратын аналогты жүйе де қарастырылған. Электр жетегінің қазіргі кездегі күрделі басқару жүйесінің даму кезеңдері және олардың талдау мен синтез әдістері мазмұнында көрсетілген.
1 дәріс. Электр жетегін автоматты басқару жүйесінің сандық және санды аналогты жүйесін құру принципі
Дәрістің мазмұны:
- автоматты электр жетегін басқару жүйесіндегі (АЭЖБЖ) сандық және санды аналогты жүйенің негізгі анықтамалары;
- аналогты сигналдардың дискреттік сигналға түрленуі және дискреттік сигналдардың аналогты сигналдарға түрленуі;
- ЭЖБЖ негізгі функционалдық элементтері.
Жұмыстың мақсаттары:
- аналогты сигналдардың дискреттік сигналдарға және керісінше түрлену әдістерін игеру;
- ЭЖАБЖ негізгі функционалдық элементтерінің анықтамасын оқу;
- ЭЖАБЖ құрылымдық сұлбаларын тұрғызу принциптерін меңгеру.
Электр жетегін аналогты жүйемен басқару арқылы орындалатын жылдамдықты 1 - 0,5 % нақты тұрақтандыруы кейбір өндірістік механизмдеріне қажетті 0,1 – 0,01 % нақты тұрақтылықты қамтамасыздандыра алмайды. Бұл аналогты датчиктармен, жылдамдық датчиктарының координатты тұрақтандыру мәндерін нақты өлшей алмағандығынан және салыстыру (күшейткіштер) аналогты құрылғылардың дреф нөлі болғандықтан кері байланысты және берілген аз сигналдарды нақты салыстыру қаблетсіздігінен болады. Мұндай кемшіліктер, координатты 0,01 % және одан да жоғарғы пайызда нақты реттейтін сандық басқару жүйесін құратын сандық құрылғыларда болмайды.
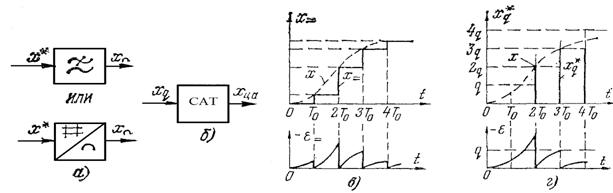
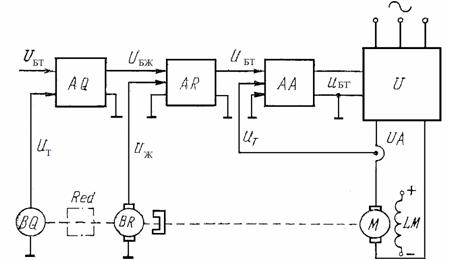
Әдетте, электр жетегін жүйемен басқару электр жетегінің координатын бақылаумен жүзеге асады. Мысалы, жылдамдықты және басқару объектісінің жағдайын (жұмыс машинасының атқарушы органдары ЖМАО) бақылау, оның жағдайы ЭЖЖД мен КБЖД датчиктердің көмегімен орындалады (1.1 суретке қараңыз). Мұндай жүйелерде (санды сигналды аналогты сигналға түрлендіретін) санды аналогты түрлендіргішпен (САТ) сандық беріліс құрылғысының қолданылуы (БҚ) берілетін әсерлердің дәлдігін жоғарылатады және оның нақты индикациясын орындайды (1.1, а суретін қараңыз). Беру сандық құрылғысы (БС), КБЖД кері байланысы және санды аналогты түрлендіргішпен (САТ) салыстыру құрылғысының (СҚ) (1.1, б суретке қараңыз) қолданылуы толық дәл реттеуді жоғарылатады. Сонымен қатар сандық жүйеде электр жетегін аналогты жүйемен (1.1, в суретке қараңыз), толық сандық немесе аналогты (1.1, г суретін қараңыз) реттеумен (АР) басқарудың нақты сандық реттеуі (СР) қолданылады.
Құрылғылардың сандық және аналогты болып бөлінуі, осы құрылғылармен өңделген ақпараттың көрсетілу түріне және осы құрылғыларды құру үшін қажетті аппараттарға байланысты. Айнымалы аналогты түрі әртүрлі физикалық шамаларға (кернеу, ток, жылдамдық, жиілік, біліктің айналу бұрышы және т.б.) тура пропорционалдығымен сипатталады. Сандық түрі тек ғана 0 және 1 сандарды қолданып, шаманы сандық кодпен сипаттайды. Санды жазған кезде біртұтас код арқылы санды білдіретін және санды тізбектей ілестіретін қажетті импульстар санымен қамтамасыздандырылады.

а – санды беру; б – санды беру және жағдайды бақылау; в – жағдайды санмен басқару; г – жағдайды және жылдамдықты санмен басқару.
1.1 сурет - Электр жетегін санды аналогты басқару жүйесі
Сигналды сан ретінде қарастырсақ, аналогты сигналдың деңгейі анықталған дискреттік уақыт немесе сигнал деңгейінің аралығында пайда болады. Онда аналогты сигналдың үздіксіз функциясы сатылы функцияға айналады. Бұл операция сигналдың квантталуы деп аталады [6]. Егер дискреттелу Т0 әртүрлі уақыт аралығында орындалса, онда мұндай квантталу уақыт бойынша квантталу деп аталады (1.2, а суретіне қараңыз), ал егер дискреттелу q мәні әртүрлі болғанда, шығыс сигналы бойынша квантталу болса, онда деңгей бойынша квантталу деп аталады (1.3, а суретін қараңыз). Т0 және q аралығы квантталу қадамы деп аталады.
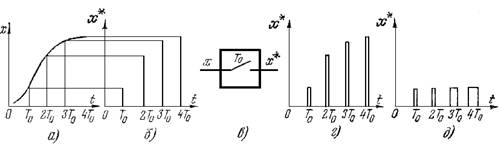
а – үздіксіз функция; б –торлы функция; в – импульсті элементтің шартты белгісі; г – амплитуда-импульсті модуляция; д – ендiк-импульстi модуляция. 1.2 сурет – Уақытпен шамаларды дискретизациялау
Уақыт бойынша кванттаған кезде үздіксіз сигнал (1.2, а суретін қараңыз) торлы түрге өзгереді (1.2, б суретін қараңыз)
|
|
(1.1) |
мұндағы Т0 – дискреттік аралық.
Бұл операция импульстік элементпен (дискретизатормен) орындалады. Оның шартты белгіленуі 1.2, в суретінде көрсетілген. Әдетте, дискретизатор ретінде модулятор қолданылады. Импульстардың амплетудасы (1.2, г суретін қараңыз, амплитуда-импульсті модуляция – АИМ), импульстардың ұзақтығы, көлемі және т.б. бойынша үздіксіз кіріс сигналымен дискреттік аралықта Т0 импульлстардың тізбектігін модульдейді (1.2, д суретін қараңыз, көлем-импульсті модуляция – КИМ). Сонымен қатар импульсті ілестіру жиілігі бойынша модуляция (ЖИМ-жиіллікті импульсті модуляция) қолданылады, ал фаза импульстері бойынша фаза импульсті модуляция (ФИМ) қолданылады.
Жиілікті кванттау дискретизациясының
нәтижесінде![]() о=2
о=2![]() /То=2
/То=2![]() fо дискретті функция
мына формуламен анықталады
fо дискретті функция
мына формуламен анықталады
|
|
(1.2) |
х(0)=0 болғанда жазылған дискретті функция
п=0 кезде (1.2) теңдеу арқылы алынған![]() о
жиілігінің пайдалы сигналын құрады. Дискреттік моменттер
арасындағы аралықта ақпараттың жоғалуынан пТ0
–ден жиілікпен солға және оңға
ығысқан көлденең жоғарғы жиілікті
гармоникалар пайда болады.
о
жиілігінің пайдалы сигналын құрады. Дискреттік моменттер
арасындағы аралықта ақпараттың жоғалуынан пТ0
–ден жиілікпен солға және оңға
ығысқан көлденең жоғарғы жиілікті
гармоникалар пайда болады.
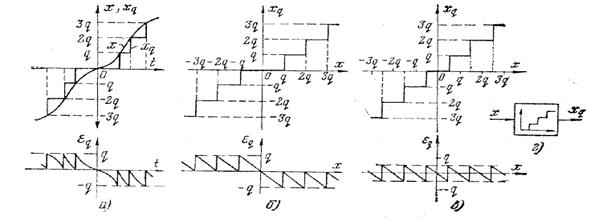
а – деңгей бойынша үздіксіз функцияның дискреттік функцияға өзгертілуі; б, в – квантталудың статискикалық сипаттамалары және оған сәйкес келетін квантталудың қателіктері; г – квантталудың шартты белгіленуі.
1.3 сурет – Шаманы деңгей бойынша кванттау
Сандық құрылғыларда деңгей бойынша кванттау кең қолданылады. Онда квант аралығы уақытпен анықталатын үздіксіз функция дискреттік функцияға өзгертіледі (1.3, а суретін қараңыз). Бұл жағдайда үздіксіз сигнал сандық мәнде көрсетіледі. Оны мына формуламен анықтайды
|
|
(1.3) |

мұндағы k – k = 1 тең кванттау сипаттамасының тіктілігі (1.3 суретін қараңыз); ent - бұртін бөлігі; n = 0, ±1, ±2,… - кванттау шкаласының арасындағы номер.
Деңгей бойынша кванттау хq шығыс х кіріс сигналдарының арасындағы айырымдарға тең қателіктермен анықталады (1.3, а cуретіне қараңыз).
|
|
(1.4) |
Қателік модулі кванттау
сипаттамасының түріне тәуелді және 1.3, б мен 1.3,
в суреттерінде көрсетілген сипаттамаларға
сәйкес ![]() q
және
q
және ![]() q/2 тең. Кванттаудың
санды аналогты (АСТ) түрде шартты белгіленуі 1.3, г суретінде көрсетілген.
q/2 тең. Кванттаудың
санды аналогты (АСТ) түрде шартты белгіленуі 1.3, г суретінде көрсетілген.
Уақыт бойынша квантталу кезінде дискреттелген
сигналдардың аналогты сигналдарға түрленуі демодуляция деп, ал
қисық торлы функциялардың орнықты қалпына келуі –
интерполяция деп аталады. Мұндай түрленулерді демодулятор
немесе интерполятор деп аталатын құрылғылармен
орындайды. Олар төменгі жиіліктің фильтрлары болып саналады.
Олардың шартты белгіленулері 1.4, а суретінде көсетілген. Котельников анықтамасы [6,7] бойынша
дискретизация ![]() 0 жиілігі
арқылы орындалады. Егер х(t) функциясы 0,5 Тс -дан
жоғары жиілікті болмаса, Тс уақыттың тізбекті
аралығы үшін уақытпен берілген аймақта х(t) үздіксіз
функция толық өзінің ординаттарымен анықталады. Осыған
байланысты дискретизация жиілігі
0 жиілігі
арқылы орындалады. Егер х(t) функциясы 0,5 Тс -дан
жоғары жиілікті болмаса, Тс уақыттың тізбекті
аралығы үшін уақытпен берілген аймақта х(t) үздіксіз
функция толық өзінің ординаттарымен анықталады. Осыған
байланысты дискретизация жиілігі
|
|
(1.5) |
мұндағы –![]() =2
=2![]() / Тс
=2
/ Тс
=2![]() f0 х(t) функция спекторының ең
жоғарғы жиілігі.
f0 х(t) функция спекторының ең
жоғарғы жиілігі.
а – төменгі жиілік сүзгісінің шартты белгіленуі – интерполятор; б – санды аналогты түрлендіргіштің шартты белгіленуі; в – қисық торлы функцияларды және оның қателігін қалпына келтіру; г – торлы функция деңгейімен кванттау және оның интерполяторын қалпына келтіру қателігі.
1.4 сурет – Шамалардың интерполяциясы
Электр жетегін басқару жүйелерінде
қарапайым нөлдік қатардың интерполяторы кең
қолданылады. Ол толық дискреттеу кезінде дискреттік сигналдың
мәнін анықтайды және торлы функцияны тұрақты
бөлікке түрлендіреді (1.4, в суретін қараңыз). Бұл
түрлендіру ![]() = = х= – х ең жоғарғы деңгейдегі
күрделі интерполяторларды қолдану кезінде төмендетілуі
мүмкін интерполяция қателігімен орындалады.
= = х= – х ең жоғарғы деңгейдегі
күрделі интерполяторларды қолдану кезінде төмендетілуі
мүмкін интерполяция қателігімен орындалады.
Деңгей бойынша сигналдарды кванттау кезінде санды ақпараттың аналогты ақпаратқа түрленуі санды аналогты түрлендіргішпен орындалады (САТ), оның шартты белгіленуі 1.4, б суретінде көрсетілген. САТ хq санды сигналды xс,а санды аналогты шамаға сызықты сандық аналог түрінде түрлендіреді. Нақты xс,а шамасы аналогты болып саналмайды, ал статистикалық режимде бастапқы тұрақты бөлікті квантталған хq функциясының түрінде болады (1.3, а суретін қараңыз).
Санды аналогты құрылғыларда және электр жетегін басқару жүйелерінде х*(t) дискреттік шамалар аналогты түрде көрсетіледі (1.2, б суретін қараңыз), ал х*q(t) сандық шамалар e =хq - х қателік деңгейінде квантталған торлы функциялар түрінде көрсетіледі (1.4, г суретін қараңыз). Бірінші жағдайда құрылғылар импульсті деп, ал екінші жағдайда импульс-кодты деп аталады.
2 дәріс. Жылдамдықты тұрақтандыратын санды аналогты және сандық жүйелер
Дәрістің мазмұны:
- электр жетегінің санды аналогты жүйелермен жылдамдықты тұрақтандыру, оның құрамы, құрылысы және әсер ету принципі;
- электр жетегінің сандық жүйелермен жылдамдықты тұрақтандыру, оның құрамы, құрылысы және әсер ету принципі.
Жұмыстың мақсаттары:
- жылдамдықты тұрақтандырудың сандық және санды аналогты жүйелерінің негізгі принциптерін оқу;
- қарастырылатын жүйелердің анықтамасын, әсер ету принциптерін және негізгі функционалдық элементтерін оқу.
Қозғалтқыш моментін және жылдамдықты санды аналогты жүйемен тұрақтандыру аналогты жүйеге ұқсас реттеуге тәуелді координат құрылысы бойынша орындалады. Олар аналогты және сандық бөліктен тұрады, сондықтан санды аналогты деп аталады. Мұндай жүйелердің аналогты элементтеріне түрлендіргіштер мен қозғалтқыштар жатады. Сондықтан ток датчиктері қозғалтқыш тоғын өлшейді. Жүйедегі ток контуры аналогты түрде орындалады. Электр жетегі жүйесінің сандық бөлігіне жылдамдықты реттеу контуры жатады. Ол датчик пен жылдамдықты реттеу түріндегі жылдамдықтың ақпаратты өлшеу және жылдамдықты берудің сандық құрылғыларынан тұрады.
Жылдамдықты реттеудің дәлдігі төмен жүйелерде жылдамдық контуры аралас және санды аналогты етіп жасалады. Жылдамдықты реттеудің пропорционалды бөлігі аналогты, ал интегралдаушы бөлігі санды болады. Мұндай жүйеде жылдамдықты беру санды түрде болады. Бұл жүйенің функционалдық сұлбасы 2.1 суретінде көрсетілген. Электр жетегінің жылдамдығын беру SZ тапсырманы енгізу құрылғысының көмегімен NЖБ сандық түрде енгізіледі. Берілген жылдамдықтың және кернеудің жоғарлауы SJZ күшейткіш санды датчикпен орындалады. UZV санды аналогты түрлендіргішпен (САТ) N’ЖБ санды сигналды беру UЖБ жылдамдықты берудің аналогты сигналына түрленеді және жылдамдықты аналогты реттеуге беріледі АR. Басқарылатын А1 жиілікті бөлгіште бір уақытта пайда болған N’ЖБ сан жоғары тұрақты Gf кварцтық генератормен берілген, fЭ эталонды жиілік импульстарымен орындалатын fБ жылдамдықты берудің импульстерін бақылау жиілігін анықтайды.
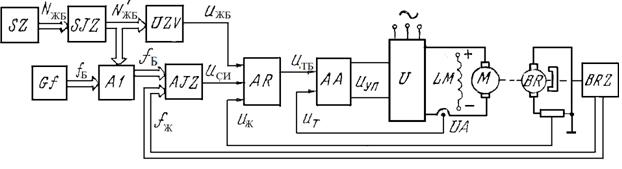
2.1 сурет – Электр жетегінің жылдамдығын санды аналогты тұрақтандыру жүйесінің функционалдық сұлбасы
fБ жиілігімен берілетін импульстар АJZ (СИ) сандық интеграторға беріледі. Сандық интегратор жылдамдықты реттеудің интегралдаушы бөлігі болып саналады және оған да жылдамдық бойынша кері байланыс арқылы қозғалтқыштың жылдамдығына пропорционалды fЖ жиілікпен, ВRZ жылдамдық импульс датчигімен бақыланатын импульстар беріледі. СИ негізгі үш түйіннен тұрады: уақыт бойынша кері байланыс және берілген импульстардың бөліну түйіні (ИБТ), реверсивті санағыш РС және САТ (2.2, а суретін қараңыз). ИБТ fБ және fЖ жиіліктермен уақыт бойынша импульстерді РС тізбектей беру үшін (fЖ үзілісі кезінде fБ беруге және керсінше fБ үзілісі кезінде fЖ беруге) таратады. Реверсивті санағыш екі кірістен тұрады: күрделі және есептегіш. Оларға fБ және fЖ импульстары тізбектей беріледі. РС fБ және fЖ импульстардың мөлшерін санайды. Сонымен қатар, егер fБ = fЖ болса, онда қозғалтқыш жылдамдығы берілген мәнге тең, санағыш кірістегі санды өзгертпейді; егер fЖ < fБ (қозғалтқыш жылдамдығы берілген мәннен аз), онда санағыш + f = fБ - fЖ мәнін есептейді, САТ сандық интегратор кірісіндегі UСИ кернеуді жоғарлатады. Ол қозғалтқыш жылдамдығы мен UБТ кернеуінің және жылдамдық реттегішінің интегралды құрайтын келiспеушіліктері болып саналады (2.1 суретін қараңыз). Егер fЖ >fБ болса, қозғалтқыш жылдамдығы берілген мәннен жоғары, онда кірістегі UСИ мәнін, UБТ мәнін және қозғалтқыш жылдамдығын төмендету үшін санағыш – f = fЖ – fБ мәнін есептейді. Сонымен санағыш кері байланыс пен импульсті беру арасындағы UСИ интегралды құрайтын, САТ пен СИ аналогты сигналға түрлендіретін, шамасы санағышта жазылған санға пропорционалды fБ және fЖ жиіліктермен ілесетін интегралдауды қамтамассыздандырады. UСИ сигналы UБС-мен АR-ға арифметикалық қалыптасып, қозғалтқыш жылдамдығын жоғарылатады немесе төмендетеді.
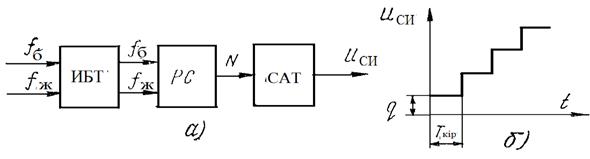
а – функционалды сұлбасы; б – сипаттамасы.
2.2 сурет – Сандық интегратор
СИ жұмысы fкір кіріс сигнал жиілігінің тұрақты кезіндегі UСИ (t )өтпелі функциясымен 2.2, б суретінде көрсетілген. СИ кірісіндегі сигнал q=UСИмах /N дискретімен дискретті түрде жоғарылайды, мұндағы N - Ткір=1/fкір ілесу аралығымен әрбір кіретін импульстің түсуі кезіндегі СИ санағышының санды сыйымдылығы. Кіріс импульстерінің мәні мен жиілігі үлкен болғанда СИ өтпелі функциясы түзу сызықтан жоғары болады.
СИ шығыс кернеуі және оның полярлығы кіріс жиілігінің интеграл айырымдарымен анықталады (берілген және кері байланыспен)
|
|
(2.1) |
немесе
|
|
(2.2) |
мұндағы ![]() - кіріс жиілігінің импульстер тізбектілігінің
фаза айырмашылығы.
- кіріс жиілігінің импульстер тізбектілігінің
фаза айырмашылығы.
Дискретті түрдегі СИ өтпелі функциясы мына теңдеумен анықталады
|
|
(2.3) |
Егер ![]() дәрежелi қатарға жiктеп
және жiктеудiң екi бiрiншi мүшелерiмен шектесе, онда
дәрежелi қатарға жiктеп
және жiктеудiң екi бiрiншi мүшелерiмен шектесе, онда
|
|
(2.4) |
Онда
|
|
(2.5) |
мұндағы ТСИ =Ткір/q – интегратордың тұрақты уақыты.
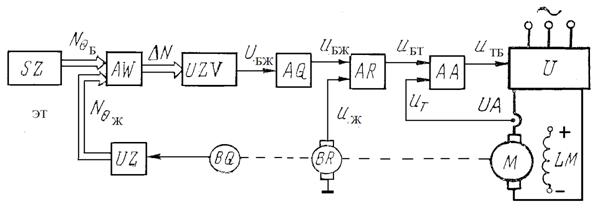
Жылдамдықты реттеу жүйесінің дәлдігі жылдамдықтың сандық контуры болғанда орындалады. Жүйенің функционалдық сұлбасы 2.3 суретінде көрсетілген. Электр жетегінің мұндай жүйесінде жылдамдықты беру қозғалтқыш жылдамдығына сәйкес N’ЖБ(nT0) жылдамдықты беру сигналының қажетті деңгейге дейін өсуін қамтамасыз ететін SJZ датчик қарқындылығын қолдана отырып, секірме және уақыт функциясы түрінде орындалады.
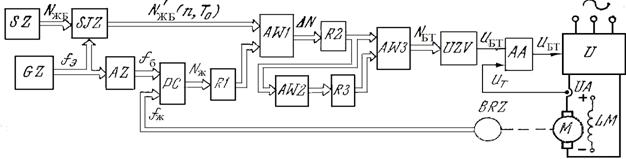
2.3 сурет – Электр жетегінің жылдамдығын тұрақтандырудың санды жүйесінің функционалдық сұлбасы
Жылдамдық бойынша кері байланыс сигналы ВRZ жылдамдық импульсті датчигімен орындалады. Жылдамдық датчигінің импульсі санды жүйенің f0 дискреттік жиілігімен (Т0=1/f0) анықталатын, бекiтiлген дискреттi Т0 уақыт аралығында санағышпен есептелінеді. Дискреттеу жиілігі АZ жиілік бөлгіш арқылы жоғары тұрақтылықты кварцтық генератордың Gf эталонды жиілігімен беріледі (f0=fЭ/kд). t=пТ0 уақыт аралығындағы электр қозғалтқышының ағымдағы жылдамдығы есептелген импульстар санына пропорционалды
|
|
(2.6) |
мұндағы m – уақыт аралығындағы жылдамдық датчигінің импульстер саны [(п-1)Т0 – пТ0]; z – біліктің бір айналымы кезіндегі импульстер саны.
РС санағышының шығысында уақыт аралығының өтуі кезінде жылдамдық бойынша кері байланыстың санды сигналы тәрізді Nc[пТ0] сан пайда болады. Бұл сан R1 регистрда келесі [пТ0 - (n +1)Т0] аралық басталғанша сақталады және NЖБ жылдамдық беру санымен АW1 қосындылауда салыстырылады. АW1 шығысында санды басқару сигнал түріндегі айырмашылық пайда болады
|
|
(2.7) |
Ол R2 регистрінде сақталып, UZV САТ беріледі. Егер жүйеде алгоритм бойынша жұмыс жасайтын жылдамдықты пропорционалды реттеу қолданса, онда
|
|
(2.8) |
мұндағы k1 - көлемдік коэффициент.
Егер алгоритм бойынша жұмыс жасайтын жылдамдықтың ПИ реттегіші қолданса
|
|
(2.9) |
|
|
|
онда санды бөлікте қосымша AW2 сумматор және
R3 регистр қолданылады. Нәтижелері R3 регистрде сақталып және AW2 қосындылауда
жинақталған ![]() [пТ0] жылдамдықтың ауытқыған ағымдағы
мәндерінің тізбектей алгебралық қосындысы интегралды
құрады.
[пТ0] жылдамдықтың ауытқыған ағымдағы
мәндерінің тізбектей алгебралық қосындысы интегралды
құрады.
Жылдамдықты санды реттеу және басқа санды құрылғылар өндірісте шығарылатын стандарттық блокпен орындалады [6]. Егер электр жетегін басқару сәйкес келетін бағдарлама арқылы ЭЕМ орындалса, онда бұл құрылғылардың құрылуы оңай болады.
Соңғы уақытта импульсті фазалық басқару жүйесін (ИФБЖ) қолданбай, ЭЕМ арқылы тиристорлы түрлендіргішпен жылдамдықты реттеу жүйесі өңделуде, ол тура басқару деп аталады. Мұндай жүйеде жүйенің аналогты бөлігі ретінде түзеткіш – қозғалтқыш күштік бөлігі, ал ток және жылдамдық контурлары санды бөлігі болып саналады. Қажетті уақыт аралығында басқару импульстерін түзеткіш тиристорларына беріп және ИФБЖ функцияларын орындайтын «Тура» басқару ЭЕМ орындалады. Жылдамдықты және токты санды реттеу бағдарламалық әдіспен ЭЕМ орындалады.
3 дәріс. Электр жетегінің жағдайын аналогты және санды аналогты жүйелермен басқару
Дәрістің мазмұны:
- жағдайды аналогты басқару жүйелерінің функционалды және принципиалды сұлбалары, құрылысы және әсер ету принципі;
- жағдайды санды аналогты басқару жүйелерінің функционалды және принципиалды сұлбалары, құрылысы және әсер ету принципі.
Жұмыстың мақсаттары:
- электр жетегі жағдайымен аналогты және санды басқару жүйелерінің негізгі принциптерін игеру;
- қарастырылатын жүйелердің анықтамасын және әсер ету принципін, оның негізгі функционалдық элементтерін оқу.
Механизмдерді автоматтандыру кезінде негізгі жұмыс қозғалысы орындаушы органның сызықты немесе бұрышты орналасуы болып саналады. Оны қажетті жағдайда тоқтату үшін жағдайды басқару жүйесімен электр жетегі кең қолданылады. Жағдайды автоматты басқарудың екі түрі болады:
a) жолдық датчиктердiң дискреттік сигналдарымен, жолдың берілген нүктелерінде электр жетегінің дискретті орындалуы;
b) берілген бағдарламамен немесе мөлшерленген орын ауыстыруды орындау үшін ауытқу бойынша жағдайды үздіксіз автоматты басқару.
Басқару әдісіне тәуелсіз электр жетегі дискретті немесе үздіксіз жағдайды беруді, берілген жағдайда жылдамдықтың орын ауыстыруына тәуелді жұмыс машинасының өнімділігі мен орындау органының дәл тоқтатуын талап етуімен анықталатын жағдайдың орын ауыстыруын бақылауды, берілген жағдайда дәл тоқтатуды қамтамасыз етеді.
Дискретті орналастыру кезінде орындау органының анықталған шекті жағдайы беріледі. Бұл жағдайды бақылау түйiскен және түйіспесіз немесе іске қосылу қателігі 1– 0,01 мм жол ажыратқыштармен дискретті датчик жағдайымен орындалады. Бұл жағдайда механикалық тоқтатуды қолданып, берілген жағдайда электр жетегін тоқтатуды қамтамасыз ететін электр жетегін басқарудың ажыратылған жүйесі қолданылады. Мұндай басқару түрі орын ауыстыруларды сирек қайта өңдеушi циклімен дәлдігі жоғары емес орналастыру кезінде қолданылады.
Жағдайды үздіксіз басқару кезінде орындау органының жағдайын бақылау берілген жағдайда, тоқтағанға дейін үздіксіз орын ауыстырудың орындалуы кезінде жүзеге асады. Осы мақсатпен жоғарғы дәлдікпен (0,001 мм дейінгі) сипатталатын үздіксіз аналогты немесе санды орын ауыстыру датчиктері қолданылады. Мұндай басқару түрі жиі орын ауыстыруларды қайта өңдеушi циклімен, жоғары дәлдікпен орындалатын жүйелерде қолданылады. Орындау дәлдік жүйелері тұрақты токты қозғалтқышпен реттеуге бағынатын принциппен және жылдамдық пен токтың ішкі контурына жағдайдың аналогты немесе санды контуры енгізілуі бойынша құрылады.
3.1 сурет – Жағдайды басқаратын аналогты жүйенің функционалды сұлбасы
Жағдаймен басқарылатын аналогты
жүйенің функционалды сұлбасы 3.1 суретінде көрсетілген. Бұл
функционалдық сұлба ток, жылдамдық және жағдай
контурларымен, ток және жылдамдықтың реттеуге бағынатын
принципі бойынша тұрғызылған үш деңгейлі жүйемен
басқарылатын тұрақты токты тиристорлы электр жетегі
қолданылады. Жағдайды
беру сигналы UЖБ жағдайды реттеуге АQ беріледі, оған жағдай датчигі арқылы BQ UЖ жағдай
бойынша кері байланыс сигналы беріледі. Ток және жылдамдықтың
ішкі контурлары жылдамдықты тұрақтандыру жүйесіне
ұқсас орындалған
[4,5]. Мұндай электр жетегінің басқару жүйелерінде орын
ауыстыру датчигі ретінде айналдыру трансформатор түріндегі немесе сельсиндер
түріндегі бұрыштық орын ауыстыру датчигі қолданылады. Олардың
білігі қозғалтқыш білігіне, тікелей ЖМАО білігіне
ұқсас немесе редукторлар арқылы жалғанады (3.2 суретіне
қараңыз). Сельсинмен немесе айналдыру трансформаторымен ілескен
анықталған фазаның айнымалы токты басқару сигналын
түрлендіруге және анықталған полярмен
тұрақты токты сигналды басқару үшін сұлбада фаза
сезгіш түзеткіш қолданылады (ФСТ) UВ. Жағдайды беру қажетті qБ
берілген бұрышқа айналатын және ЖМАО орын ауыстыруын талап
етуін анықтайтын датчикпен (сельсинді-датчик ВС) орындалады. ЖМАО ағымдағы
жағдайы ВЕ сельсин-қабылдағыш деп аталатын
жағдай датчигімен бақыланады. Қарастырылған
басқару жүйелерінің мақсаты берілген жағдайларда
ЖМАО мен қозғалтқышты дәл тоқтату. Бұл мақсат
қозғалтқыш немесе ЖМАО qБ берілген бұрышта жұмыс жасап
өтегенсон және ВЕ сельсин қабылдағыштың
бұрышы берілген бұрышқа тең болғанда (qҚ =qБ), ал кліспеушіліктері нөлге тең
болғанда (qБ -qҚ =![]() =0) орындалады.
=0) орындалады.
3.2 сурет - Жағдайды басқаратын аналогты жүйенің қысқартылған принципиалдық сұлбасы
Орындауға жоғары талаптар
қойылғанда жағдайды санды аналогты жүйемен
басқару қолданылады. Орындау жүйесі электр жетегі тоғын
және жылдамдығын дәл реттеуге жоғарғы талап
қоймайтындықтан, жүйе ток пен жылдамдықтың
аналогты контурларымен, жағдайдың санды контурымен орындалады. Мұндай
жүйенің функционалдық сұлбасы 3.3
суретінде көрсетілген. Сұлба қозғалтқыш пен
түрлендіргіштің күштік және аналогты бөлігінен,
ток пен жылдамдық контурларымен басқарылатын жүйеден, АА және
АR аналогты реттегіштерден және UА, ВR ток пен
жылдамдық датчиктерінен тұрады. Реттеу жағдайы АQ
аналогты бөліммен санды аналогты түрде орындалған.
Контурдың санды бөлігіне арифметикалық
құрылғылар (АҚ) АW, санды
аналогты түрлендіргіштер (САТ)
UZV жатады. Арифметикалық
құрылғы кірісінде берілген SZ мәнді
енгізудің сандық құрылғысымен NӨБ
жағдайды берудің санды сигналын және нақты
жағдайға сәйкес NӨТ санды сигналды қабылдайды.
Бұл сигнал BQ жағдай датчигіне беріледі және UZ
кодты түрлендіргішпен санды сигналға түрленеді. NӨБ
және NӨТ сандары автоматты басқаруда (АБ) екі-параллельдік кодпен беріледі. АБ NӨБ мен
NӨТ сандарын салыстырып және кірісінде ![]() N = N
N = N![]() = NӨБ
- NӨТ айырымдарға тең санды басқару
сигналын өңдейді. Бұл сан UZV санды аналогты
түрлендіргіш арқылы ЖБ аналогты бөлікке берілетін UТБ
жағдайды берудің аналогты сигналына түрленеді. Жүйенің
қалған бөлігі аналогты түрде жұмыс жасайды.
= NӨБ
- NӨТ айырымдарға тең санды басқару
сигналын өңдейді. Бұл сан UZV санды аналогты
түрлендіргіш арқылы ЖБ аналогты бөлікке берілетін UТБ
жағдайды берудің аналогты сигналына түрленеді. Жүйенің
қалған бөлігі аналогты түрде жұмыс жасайды.
3.3 сурет – Жағдаймен санды аналогты басқару жүйесінің функционалдық сұлбасы
4 дәріс. ЭЕМ басқарылатын жағдайды санды жүйемен басқару
Дәрістің мазмұны:
- микро-ЭЕМ-мен жағдайды санды жүйемен басқарудың функционалдық сұлбасы, негізгі құрамдары және әсер ету принципі;
- жағдайды реттеу, жағдай контурының алгоритмді жұмысы.
Жұмыстың мақсаттары:
- микро-ЭЕМ-мен жағдайды санды басқару жүйесінің құрылуының негізгі принципімен танысу;
- қарастырылатын жүйелердің анықтамасын, әсер ету принципін және оның негізгі функционалдық элементтерін оқу.
Қазіргі уақытта жағдайды санды басқаратын ЭЕМ-мен электр жетегінің жүйесі өңделуде. Мұндай жүйенің функционалдық сұлбасы 4.1 суретінде көрсетілген. Электр жетегінің ток және жылдамдық графиктерінің құрылуы ток пен жылдамдықтың аналогты контурларымен орындалады. Берілген сызықты S орын ауыстырумен өңделетін жағдайдың контуры микро-ЭЕМ-мен бағдарламалық түрде орындалады. Микро-ЭЕМ микропроцессор МП, оперативті ОЕСҚ және тұрақты ТЕСҚ еске сақтау құрылғыларынан, Инт- кіріс және шығыс интерфейстерінен, БШ-берілген шыналардан, ША- адресінен және ШБ-басқару шынасынан тұрады. Микро-ЭВМ-ның электр жетегінің аналогты бөлігімен байланысы САТ арқылы орындалады.
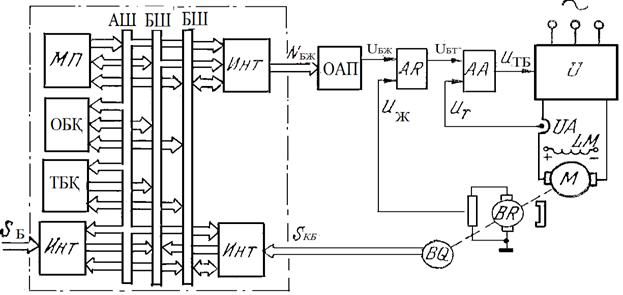
4.1 сурет - Микро-ЭЕМ жағдайымен сандық басқару жүйесінің функционалдық сұлбасы
Микро-ЭВМ бағдарлама
әдісінің көмегімен параболалық П, ПИ кез келген
түрімен жағдайды реттеуді (ЖР) құруға болады. ЖР
сызықты параболалық сипаттамасы ең күрделі түрі
болып саналады (4.2 суретін қараңыз). Бұл
сипаттама санды кодпен кодталады, NЖБ жылдамдықты санды кесте
түрде беруге сәйкес ОБҚ жазылады және орын ауыстыруы![]() S=SБ-SКБ түрленеді. Мысалдағы жүйенің әсер ету
принципі NЖБ кодтау мен
S=SБ-SКБ түрленеді. Мысалдағы жүйенің әсер ету
принципі NЖБ кодтау мен ![]() S екілік кодтың төртінші разряды бойынша орындалған.
Сонымен қатар талап етілген NЖБ қарағанда,
NЖБ* жазғандағы қателігі жоғары
болады. Микро-ЭВМ NЖБ=f(
S екілік кодтың төртінші разряды бойынша орындалған.
Сонымен қатар талап етілген NЖБ қарағанда,
NЖБ* жазғандағы қателігі жоғары
болады. Микро-ЭВМ NЖБ=f(![]() S) тәуелділіктің жеткілікті дәлдігін қамтамасыз
ететін екілік кодтың сегіз разряды қолданылады және 28 =
256 нүктеге кодталады. Контур жағдайының жұмысы 4.3
суретте көрсетілген алгоритм бойынша құрылады. SБ
қозғалысты беру ҚБТ жазылады, микро-ЭВМ SБ және SКБ мәндерін салыстырады және ОБҚ
жазылған ЖБ сипаттамасы бойынша NЖБ анықталатын
S) тәуелділіктің жеткілікті дәлдігін қамтамасыз
ететін екілік кодтың сегіз разряды қолданылады және 28 =
256 нүктеге кодталады. Контур жағдайының жұмысы 4.3
суретте көрсетілген алгоритм бойынша құрылады. SБ
қозғалысты беру ҚБТ жазылады, микро-ЭВМ SБ және SКБ мәндерін салыстырады және ОБҚ
жазылған ЖБ сипаттамасы бойынша NЖБ анықталатын ![]() S өңдейді.
Қозғалыстың басында РПрп
SКБ мәні аз болғанда,
S өңдейді.
Қозғалыстың басында РПрп
SКБ мәні аз болғанда, ![]() S жоғарғы
мәнде болады және
микро-ЭВМ UЖБмах сәйкес келетін NЖБмах
мәнін береді, электр жетегі максималды жылдамдықта болады.
S жоғарғы
мәнде болады және
микро-ЭВМ UЖБмах сәйкес келетін NЖБмах
мәнін береді, электр жетегі максималды жылдамдықта болады. ![]() S
мәні 1111 мәнінен төмен болса, микро-ЭВМ NЖБ және UЖБ мәндерін төмендетеді және
жылдамдықты беру төмендейді. Орын ауыстыру соңында SКБ = SБ және
S
мәні 1111 мәнінен төмен болса, микро-ЭВМ NЖБ және UЖБ мәндерін төмендетеді және
жылдамдықты беру төмендейді. Орын ауыстыру соңында SКБ = SБ және ![]() S=0 болғанда, онда NБЖ
= 0 және UБЖ =0, берілген орын ауыстыруды орындап болып
қозғалтқыш тоқтайды.
Егер қайта реттеу керек
болса, онда
S=0 болғанда, онда NБЖ
= 0 және UБЖ =0, берілген орын ауыстыруды орындап болып
қозғалтқыш тоқтайды.
Егер қайта реттеу керек
болса, онда ![]() S
кері мәнде болады,
яғни - NЖБ және -UЖБ, қозғалтқыш реверстеледі
және ЖМАО бастапқы жағдайға келеді.
S
кері мәнде болады,
яғни - NЖБ және -UЖБ, қозғалтқыш реверстеледі
және ЖМАО бастапқы жағдайға келеді.
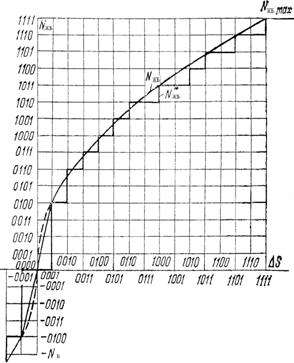
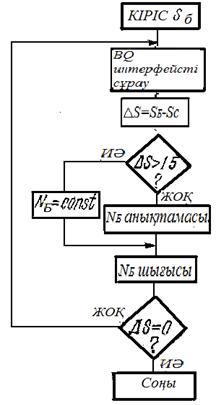
4.2 сурет – Жағдайды реттеу 4.3 сурет – Жағдай контурының
сипаттамасы жұмыс алгоритмі
5 дәріс. Бақылау электр жетегінің басқару жүйелері және оларды құрудың негізгі принциптері
Дәрістің мазмұны:
- бақылау электр жетегінің басқару жүйелерін құрудың негізгі принциптері және анықтамасы, БЭЖ БЖ анықтамасы;
- БЭЖ БЖ құрылымдық сұлбалары, оның негізгі құрамдары және әсер ету принципі.
Жұмыстың мақсаттары:
- БЭЖ БЖ құрудың негізгі принциптерін игеру және олардың анықтамасымен танысу;
- БЭЖ БЖ әсер ету принциптерін және мысалда көрсетілген құрылымдық сұлбалардағы функционалдық элементтерді оқу.
Бақылау электр жетегінің басқару жүйелері (БЭЖ БЖ) – кірісте уақыт бойынша өзгеретін айнымалы сигналды қабылдайтын және шығыста оны бақылау қателігі берілген мәннен жоғарлап кетпес үшін өңдейтін тұйық динамикалық жүйе. Өндірістік механизмнің бақылау электр жетегі тағайындалуы бойынша бұрышпен бақылау электр жетегі немесе ЖМАО сызықты орын ауыстыруы болып бөлінеді. Қолданылуы бойынша электрлі тұрақты токты және айнымалы токты қозғалтқыштар, басқару жүйесі бойынша қосындылау күшейткіштерінен тұратын жүйе және координатты бағыныңқы реттеу жүйесі, әсер ету принципі бойынша аналогты, дискретті (релелік және импульсті) және санды жүйелер болып бөлінеді [8,9,10].
Жалпы БЭЖ БЖ құрылымдық сұлбасы 5.1 суретінде көрсетілген. Бұл жүйе АW өлшеу құрылғыларынан, UВ түрлендіргіш құрылғысынан, А аралық қосындылау күшейткішінен, ЭЖ электр жетегі U түрлендіргіш және М электр қозғалтқышынан тұрады. Электр қозғалтқышы Rеd редуктор арқылы өндірістік механизмнің орындау органына (БО басқару органына) әсер етеді. Шығыс координаты qшығ бұрыш түрінде, кері байланыстар: ішкі немесе (НКБ) негізгі және (СКБ) сыртқы байланыстар ретінде көрсетілген.
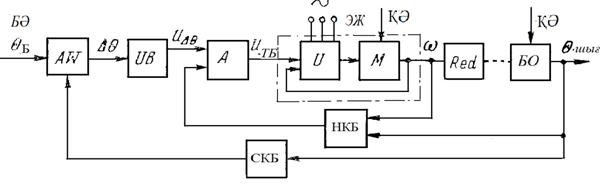
5.1 сурет – ЭЖЖ БЖ құрылымдық сұлбасы
БЭЖ БЖ кірісінде уақыт бойынша
өзгеретін ![]() бұрыш түріндегі және объектіні талап
етілген заңмен басқаруды қамтамасыз ететін беру әсері (БӘ)
берілген. Электр жетегі мен басқару объектісіне беру әсерінен
басқа берілген басқару заңынан реттеу шамасының
ауытқуы болатын әртүрлі сыртқы қоздырушы әсерлер
ҚӘ әсер
етеді. Сыртқы қоздыруға электр қозғалқыш
білігінің жүктемесінің өзгеруі, ал ішкі
қоздырғышқа БЭЖ БЖ құрылғыларына әсер
ететін әртүрлі кездейсоқ кедергілер және
өзгерістер жатады.
бұрыш түріндегі және объектіні талап
етілген заңмен басқаруды қамтамасыз ететін беру әсері (БӘ)
берілген. Электр жетегі мен басқару объектісіне беру әсерінен
басқа берілген басқару заңынан реттеу шамасының
ауытқуы болатын әртүрлі сыртқы қоздырушы әсерлер
ҚӘ әсер
етеді. Сыртқы қоздыруға электр қозғалқыш
білігінің жүктемесінің өзгеруі, ал ішкі
қоздырғышқа БЭЖ БЖ құрылғыларына әсер
ететін әртүрлі кездейсоқ кедергілер және
өзгерістер жатады.
БЭЖ БЖ әсер етуі бойынша қоздыру әсерлерімен және жүйенің параметрлерімен анықталатын қателігі төмен басқару әсерін толық өңдейтін астатикалық болып саналады. Басқарулар кезінде БЭЖ БЖ жұмысының дәлдігін зерттеулерде тұрақты үдеумен немесе гармоникалық заңмен, тұрақты жылдамдықпен өзгертілген берілген сигналды қайта қалпына келтірудің дәлдігімен бағалайды.
БЭЖ БЖ өлшеу құрылғыларына потенциометрлер, сельсиндар және синус-косинусты айналу трансформаторлары (СКАТ) жатады. Олардың зерттеулерде болатын қателiктері: потенциометрларде 0,2– 0,6%, сельсиндерде 0,25 – 1o және айналу трансформаторларында – бұрыштық минуты бірге тең.
Түрлендіргіш құрылғысы
(ТҚ)
UВ![]() қателікке пропорционалды U
қателікке пропорционалды U![]() үйлесімсіздік кернеуін алу үшін
қолданылады. Мұны шығыс
сигналы үйлесімсізді кернеу болатын өлшеу құрылғылары
орындайды. Сельсиндарды және СКАТ қолданған кезде ТҚ-на
айнымалы токты сигналды тұрақты токты сигналға
түрлендіретін фаза сезгіш түзеткіші (ФСТ) қолданылады.
үйлесімсіздік кернеуін алу үшін
қолданылады. Мұны шығыс
сигналы үйлесімсізді кернеу болатын өлшеу құрылғылары
орындайды. Сельсиндарды және СКАТ қолданған кезде ТҚ-на
айнымалы токты сигналды тұрақты токты сигналға
түрлендіретін фаза сезгіш түзеткіші (ФСТ) қолданылады.
БЭЖ БЖ аралық күшейткіштері ретінде түзеткіш кері байланыстың берілген сигналдарын қосындылайтын тұрақты токты операторлық күшейткіштер қолданылады. БЭЖ БЖ тұрақты токты күшейткіштің нөлге ығысуы кезінде айнымалы токтың күшейткіштері қолданылады. Ол тұрақты токты сигналды айнымалы токты сигналға түрлендіретін (модулятор) және күшейтілген айнымалы токты сигналды (күшейткіш) тұрақты токтың сигналына түрлендіретін (демодулятор), модулятор – күшейткіш – демодулятор ретінде жұмыс жасайды.
БЭЖ БЖ орындау құрылғылары ретінде тұрақты, айнымалы токты тиристорлы және транзисторлы электр жетектері қолданылады. Тұрақты токты электр жетектерінде ТМҚ және ПБВ [17] сериялық жоғарғы моментті қозғалтқыштар кең қолданылады. Олар білік моментінің инерциялары мен орамдардың индуктивтілігінің аздығына байланысты тез әсерді қамтамасыз етеді, сонымен қатар номиналды мәнді сегіз есе жоғарылататын жоғарғы іске қосу моменттермен қамтамасыз етеді.
Бақылау электр жетектерін қоректендіру өндірістік тізбекте 50Гц жиілікті айнымалы токпен және тұрақты токтың өзіндік қоректендіру көздерімен жүзеге асады. Аз қуатты электр жетектері 400 Гц жиілікті қоректендіру көзімен қоректенеді. Өлшеу, түрлендіргіш құрылғылары және аралық күшейткіштер 400 Гц жиілікті айнымалы токпен қоректенеді. Сондықтан бұл құрылғылардың көлемі мен инерциялығы төмендетеді.
Шығыс координатындағы негізгі кері байланыстың жүйесі қарапайым түзетілмеген БЭЖ БЖ болып саналады. Оны пропорционалды реттеу жүйесі деп те атайды. БЭЖ БЖ синтездеу мен талдау кезінде шығыс координаты ретінде өлшеу құрылғысында қабылдағышпен өлшенетін координатты айтады. Егер қабылдағыш ЖМАО тәуелсіз орналасқан болса, онда біліктің орын ауыстыруы немесе айналу бұрышы шығыс координаты болып саналады. Көп жағдайда бақылау электр жетегінде өлшеу құрылғысындағы қабылдағыш қозғалтқыш білігіне орналасады, ал жоғарғы моментті қозғалтқыштарда қабылдағыш қозғалтқышқа орналасады. Бұл жағдайда шығыс координаты ретінде айналу бұрышына немесе ЖМАО орын ауыстыруына сәйкес келетін қозғалтқыштың айналу бұрышы қолданылады.
6 дәріс. Бақылау электр жетегінің аналогты және санды жүйелері
Дәрістің мазмұны:
- бақылау электр жетегін санды және аналогты басқару жүйелерін құрудың негізгі принциптері;
- аналогты және санды БЭЖ БЖ функционалды және құрылымдық сұлбалары, олардың негізгі құрылымдары және әсер ету принциптері.
Жұмыстың мақсаттары:
- аналогты және санды БЭЖ БЖ әсер ету принциптерін және құрылысын оқу;
- БЭЖ БЖ жұмыс дәлдігінің әдістерін оқу.
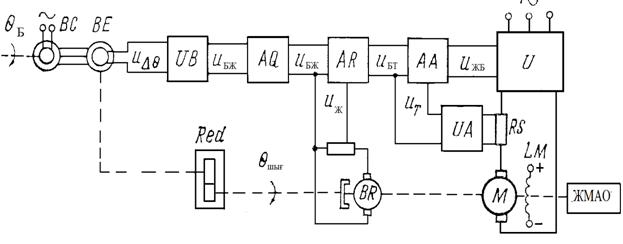
Тұрақты токты қозғалтқышпен, шығыс бұрышы бойынша негізгі кері байланыспен бақыланатын электр жетегінің түзетілмеген қарапайым аналогты басқару жүйесінің функционалдық жүйесі, яғни пропорционалды реттеу жүйесі 6.1 суретінде көрсетілен. Сұлбада сельсинды өлшеу құрылғылары (ВС және ВЕ) қолданылады. Түрлендіргіш құрылғысында UВ ФСТ, кернеуді күшейткіш ретінде тұрақты токты А инерционды емес күшейткіш және U-М тиристорлы электр жетегімен басқарылатын инерционды емес қуат күшейткіші қолданылады.
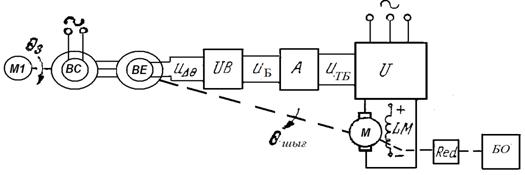
6.1 сурет - Күштік
қосындылармен аналогты БЭЖ БЖ функционалдық сұлбасы
ЭЖЖ БЖ кірісіндегі![]() бұрышпен қозғалтқыш білігі және ЖМАО (жұмысты орындау осі) білігі
ілесіп, беру сигналын өңдейтін және бақылау электр
жетегінің жүйесін басқаратын
бұрышпен қозғалтқыш білігі және ЖМАО (жұмысты орындау осі) білігі
ілесіп, беру сигналын өңдейтін және бақылау электр
жетегінің жүйесін басқаратын ![]() қателігінен тұрады.
қателігінен тұрады.
ЭЖЖ БЖ жұмысының дәлдігін
жоғарлату үшін қатаң (ҚЕ)
және дәл (ДЕ) есептеулермен, екі есептеу нәтижесінен
тұратын өлшеу элементтері қолданылады (6.2 суретіне
қараңыз). Қатаң есептеудің ВС1 және ВЕI
сельсин-датчигі мен сельсин-қабылдағышы берілген және
шығыс остерімен жалғанады, ал дәл есептеудің ВС2 және
ВЕ2 сельсиндері Rеd1 және Rеd2 редукторлары
арқылы жалғанады. Онда ДЕ сельсиндерінің қателігі редуктордың
беріліс қатынасына тең төмендейді. Мұндай жүйеде
қатаң есептеу сельсиндары бастапқы келіспеушілігі бар
үлкен бұрыштарды өңдегеннен кейін жұмыс жасайды,
ал дәл есептеу сельсиндары аз бұрышта бақылау режимінде
жұмыс жасайды. ҚЕ және ДЕ сельсиндары арнайы S селектор арқылы таңдалады. Селектор ҚЕ сельсиндар
сигналын ![]() айырмашылығы үлкен мәнде болғанда қолдануды,
ал ДЕ сельсиндар сигналын
айырмашылығы үлкен мәнде болғанда қолдануды,
ал ДЕ сельсиндар сигналын ![]() айырмашылығы аз болғанда қолдануды
қамтамасыз етеді. Селекторлардың әртүрлі
сұлбалары қолданылады. Ең көп қолданылатын
түрі 6.2 [9] суретінде көрсетілген. Бұл сұлбада сигналдардың
келіспеушіліктері жоғары болғанда ҚЕ
сельсин-қабылдағыш сигналы U0 тірек кернеуінен жоғарлап,
V1 және V2 диодтарды ашып, сұлбаның шығысына
беріледі (қатаң есептеу нәтижесі). Сонымен қатар R2>>R1
болатындықтан, ВЕ2 сигналы әсер етпейді.
Сигналдардың келіспеушіліктері аз болғанда диодтар жабық
болады және сұлбаның шығысына тек ғана ДЕ
сельсин-қабылдағыштың сигналы өтеді ДЕ (дәл
есептеу нәтижесі).
айырмашылығы аз болғанда қолдануды
қамтамасыз етеді. Селекторлардың әртүрлі
сұлбалары қолданылады. Ең көп қолданылатын
түрі 6.2 [9] суретінде көрсетілген. Бұл сұлбада сигналдардың
келіспеушіліктері жоғары болғанда ҚЕ
сельсин-қабылдағыш сигналы U0 тірек кернеуінен жоғарлап,
V1 және V2 диодтарды ашып, сұлбаның шығысына
беріледі (қатаң есептеу нәтижесі). Сонымен қатар R2>>R1
болатындықтан, ВЕ2 сигналы әсер етпейді.
Сигналдардың келіспеушіліктері аз болғанда диодтар жабық
болады және сұлбаның шығысына тек ғана ДЕ
сельсин-қабылдағыштың сигналы өтеді ДЕ (дәл
есептеу нәтижесі).
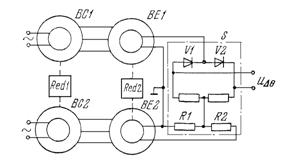
6.2 сурет – ЭЖЖ БЖ екі есептеу нәтижесінен тұратын өлшеу құрылғысының электрлік сұлбасы
Бақылау жүйелерінің жеке түйіндерінің жұмысын оқып болғаннан кейін, үздіксіз әсерлі бақылау жүйесінің жалпы құрастырылуын қарастырамыз. Оның функционалдық сұлбасы 6.3 суретінде көрсетілген. Сұлбадағы белгіленулері: АW1 – бұрышты (немесе сызықты) орын ауыстырулардың қатаң (ВС1, ВЕ1) және дәл (ВС2, ВЕ2) есептеу нәтижелерінің ВС дачиктері мен ВЕ қабылдағыштарынан тұратын келіспеушіліктерді өлшеуіші; S – қатаң және дәл есептеулердің селекторы; АW2 – АW5 – қосындылаулар; UВ1, UВ 2 – фаза сезгіш түзеткіштер (ФСТ); АD1 – АDЗ және ВR1, ВR2 – тізбектей және параллельді түзеткіш құрылғылар; UR – модулятор; А – күшейткіш; U – кернеудің күштік тиристорлы түрлендіргіш; М – қозуға тәуелсіз тұрақты токты қозғалтқыш.
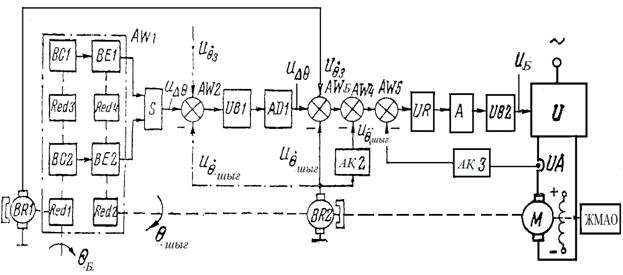
6.3 сурет – Аналогты ЭЖЖ БЖ функционалды сұлбасы
Келіспеушіліктерді өлшеу ретінде басқару дәлдігіне байланысты потенциометрлер, сельсиндер немесе синус-косинусті бұрылатын трансформаторлары қолданылады. Егер АW1 сельсиндар немесе бұрылатын трансформаторлар қолданса, онда ФСТ қолданылады.
ЭЖЖ БЖ ![]() беру сигналы ВС датчик
арқылы берілетін болса, онда
беру сигналы ВС датчик
арқылы берілетін болса, онда ![]() кері байланыс сигналы ВЕ датчигі арқылы беріледі. АW1 бұрыштың орын
ауыстыруының келіспеуін өлшеу бұрыш келіспеуіне
пропорционалды U
кері байланыс сигналы ВЕ датчигі арқылы беріледі. АW1 бұрыштың орын
ауыстыруының келіспеуін өлшеу бұрыш келіспеуіне
пропорционалды U![]() келіспеу сигналын қамтамасыз етеді. Селектор қатаң есептеу
нәтижелерінің (үлкен келіспеушіліктер болғанда) немесе
дәл есептеу (аз келіспеушіліктер болғанда)
нәтижелерінің сұлбасын құрады.
келіспеу сигналын қамтамасыз етеді. Селектор қатаң есептеу
нәтижелерінің (үлкен келіспеушіліктер болғанда) немесе
дәл есептеу (аз келіспеушіліктер болғанда)
нәтижелерінің сұлбасын құрады.
Селектордың шығысында
түзетілген сигналмен U![]() күрделі
сигналдардың келіспеушіліктері өңделеді. Мұнда егер ВR1
және ВR2 айнымалы токты тахогенераторлар қолданылатын
болса, онда U1
күрделі
сигналдардың келіспеушіліктері өңделеді. Мұнда егер ВR1
және ВR2 айнымалы токты тахогенераторлар қолданылатын
болса, онда U1![]() берілген әсердің бірінші туындысы ВR1 беру тахогенераторы арқылы алынады, ал U1
берілген әсердің бірінші туындысы ВR1 беру тахогенераторы арқылы алынады, ал U1![]() шығыс бұрышының бірінші туындысы ВR2
шығыстағы тахогенератор арқылы алынады (үзік
сызықпен берілген сызықты қараймыз). Айнымалы токты
сигналдардың қосындысы ФСТ (UВ1) түрленеді. ФСТ кейін
дифференциатор түріндегі тізбектелген АD1 түзеткіш құрылғысы
қосылады. Ол келіспеу сигналдарын қосымша оның U1
шығыс бұрышының бірінші туындысы ВR2
шығыстағы тахогенератор арқылы алынады (үзік
сызықпен берілген сызықты қараймыз). Айнымалы токты
сигналдардың қосындысы ФСТ (UВ1) түрленеді. ФСТ кейін
дифференциатор түріндегі тізбектелген АD1 түзеткіш құрылғысы
қосылады. Ол келіспеу сигналдарын қосымша оның U1![]() бірінші туындысымен қамтамасыз етеді. Дифференциатор ФСТ бірге жұмыс жасайды. Келіспеу сигналына және оның
туындысына АD2 параллелді реттелетін құрылғының
сигналы қосылады. Онда U11
бірінші туындысымен қамтамасыз етеді. Дифференциатор ФСТ бірге жұмыс жасайды. Келіспеу сигналына және оның
туындысына АD2 параллелді реттелетін құрылғының
сигналы қосылады. Онда U11![]() шығыс бұрышындағы екінші туынды
жылдамдық бойынша сигналдың туындысы ретінде алынады немесе UА
ток датчигімен АDЗ қозғалтқыш тоғының
сигналы бойынша алынады (үдеу бойынша теріс кері байланыс). Бұған
U1
шығыс бұрышындағы екінші туынды
жылдамдық бойынша сигналдың туындысы ретінде алынады немесе UА
ток датчигімен АDЗ қозғалтқыш тоғының
сигналы бойынша алынады (үдеу бойынша теріс кері байланыс). Бұған
U1![]() және U1
және U1![]() сигналдарын беруге болады (егер ВR1 және ВR2
тахогенераторлары тұрақты токты болса). Сигналдардың
қосындысы тұрақты токты күшейткішпен
түзетілгеннен кейін күшейеді. Бақылау электр жетегінде тура
күшейту үшін тұрақты токты күшейткіштің
дрейф нөлі ретінде айнымалы токты модулятор – күшейткіш демодулятор UR – А – UB2 принципі бойынша
жұмыс жасайтын күшейткіштер кең қолданылады. Демодулятор ретінде айнымалы токты
тұрақты тоқа түрлендіретін екінші ФСТ UВ2
қолданылады. Сигнал тұрақты токты транзисторлы немесе
тиристорлы электр жетегіне беріледі. Оның құрамы
күшейткіштен, СИФҚ, токты шектеу жүйесінен, U
түрлендіргіштен және берілген орын ауыстыруды орындайтын М
тұрақты токты қозғалтқыштан тұрады.
сигналдарын беруге болады (егер ВR1 және ВR2
тахогенераторлары тұрақты токты болса). Сигналдардың
қосындысы тұрақты токты күшейткішпен
түзетілгеннен кейін күшейеді. Бақылау электр жетегінде тура
күшейту үшін тұрақты токты күшейткіштің
дрейф нөлі ретінде айнымалы токты модулятор – күшейткіш демодулятор UR – А – UB2 принципі бойынша
жұмыс жасайтын күшейткіштер кең қолданылады. Демодулятор ретінде айнымалы токты
тұрақты тоқа түрлендіретін екінші ФСТ UВ2
қолданылады. Сигнал тұрақты токты транзисторлы немесе
тиристорлы электр жетегіне беріледі. Оның құрамы
күшейткіштен, СИФҚ, токты шектеу жүйесінен, U
түрлендіргіштен және берілген орын ауыстыруды орындайтын М
тұрақты токты қозғалтқыштан тұрады.
Санды ЭЖЖ БЖ ретінде санды құрылғылар немесе ЭЕМ қолданылады. Мұндай жүйелер басқару сигналын санды кодпен өңдейді, оны электр жетегін басқару үшін үздіксіз сигналға түрлендіреді және орын ауыстыруды өңдеуді бақылауды, беруді қамтамасыз етеді.
ЭЖЖ БЖ санды аналогты және санды болады. Мұндай жүйелер жоғарыда қарастырылған жағдайды реттеу жүйелерімен орындалады (3.3 және 4.1 суреттерін қараңыз), онда NӨБ беру сандық сигналдары талап етілген басқару алгоритмімен өзгереді, ал жағдайды басқару жүйелерінде қолданылатын толқын түрінде өзеруі ЭЖЖБЖ жұмысының меншікті жағдайы болып саналады.
Жалпы түрдегі санды ЭЖЖ БЖ 6.4 суретінде құрылымдық сұлба арқылы көрсетілген.

6.4 сурет – Сандық ЭЖЖ БЖ құрылымдық сұлбасы
Жағдайды басқару ЭЕМ арқылы
орындалады. Ол басқару алгоритмін береді және оның
өңделуін бақылайды. Беру NӨБ санды кодпен орындалады. Жағдай бойынша
кері байланыс сигналы АСТ UVZ көмегімен алынған NӨшығ санды кодпен орындалады. АСТ уақыт
және деңгей бойынша үздіксіз шамаларды кванттауды, аналогты
сигналдарды санды сигналдарға түрлендіреді, кодтауды орындайды. ЭЕМ
салыстыру құрылғылары кері байланыс, беру санды сигналдарын
салыстырады және ![]() басқарудың санды сигналын өңдейді.
Бұл санды сигнал САТ кодталады және басқару электр
жетегінің жылдамдығын берудің UТБ аналогты
сигналына айналады; егер ЭЕМ жылдамдық пен токты санды түрде
реттеуді қамтамасыз етсе, онда электр жетегін тура басқару
орындалады.
басқарудың санды сигналын өңдейді.
Бұл санды сигнал САТ кодталады және басқару электр
жетегінің жылдамдығын берудің UТБ аналогты
сигналына айналады; егер ЭЕМ жылдамдық пен токты санды түрде
реттеуді қамтамасыз етсе, онда электр жетегін тура басқару
орындалады.
Санды техникалардың қолданылу мүмкіндігі санды ЭЖЖ БЖ негізгі артықшылығы болып саналады: жоғары дәлдік, кедергілерден қорғануы, ЭЕМ көмегімен күрделі алгоритмді басқаруды құру және электр жетегі жұмысының санды индикацияларын құру.
Санды аналогты ЭЖЖ БЖ санды құрылғылармен реттеудің жоғары статистикалық дәлдігін алуды (қателік 0,01 — 0,001%), аналогты жүйелермен орындалатын өтпелі процестердің жоғарғы сапасымен тез әсер етуін орындайды. Санды жүйелердің статистикалық дәлдігі уақыт бойынша квантталу қадамымен анықталады, оның минималды мәні реттеу параметрін өлшеу дәлдігімен және оның мәнінің санды түрге түрлену дәлдігімен шектеледі.
ЭЕМ, микро-ЭЕМ және микропроцессорладың дамуының салдарынан санды жүйелерді қолдану тез өсуде.
7 дәріс. Электр жетегін бағдарламалық басқару жүйесі, құру принциптері және жіктелімі
Дәрістің мазмұны:
- электр жетегін бағдарламалық басқару жүйесін құрудың негізгі принциптері және тағайындалуы;
- электр жетегін бағдарламалық басқару жүйесінің жіктелімі.
Жұмыстың мақсаттары:
- электр жетегін бағдарламалық басқару жүйесін құрудың негізгі принциптерін оқу;
- электр жетегін бағдарламалық басқару жүйесінің жіктелімін оқу.
Бағдарламалық басқару жүйесі (ББЖ) жұмыс машинасын автоматты басқару жүйесі немесе берілген басқару бағарламасына сәйкес басқаруды орындайтын жеке орындау органы (БО – басқару объектісі) болып саналады [11-14].
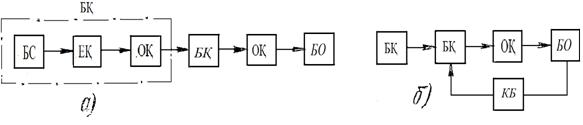
а – ажыратылған; б – тұйықталған.
7.1 сурет – Бағдарламалық басқару жүйесінің құрылымдық сұлбасы
Бағдарламалық басқару жүйесінің кең қолданылатын құрылымдық сұлбасы 7.1 суретінде көрсетілген. Жүйе бағдарламалық (БҚ), басқару (БҚ) және орындау құрылғыларынан (ОҚ), басқару объектісі (БО) мен кері байланыстан (КБ) тұрады. БҚ бағдарламаны сақтаушыдан (БС), енгізу (ЕҚ) мен оқитын (ОҚ) құрылғылардан тұрады. Бағдарламаны сақтаушы ретінде магнитті ленталар, дискеталар және дисктер, штекерлі және басқа түрдегі матрицалар немесе ЭЕМ, бағдарламашы немесе ЭЕМ енгізген бағдарламаны басқару сызбасын немесе ақпартатты беруді сақтау жатады. ЕҚ енгізу құрылғысы БС бағдарламаны сақтаушыға немесе ЭЕМ тікелей жазылған бағдарламаны басқаратын ақпаратты ОҚ көмегімен басқару құрылғысына енгізеді. БҚ басқару құрылғысы кері байланыс ақпаратына немесе басқа ақпарат көздеріне сәйкес басқару бағдарламасының ақпарат ағымдарын түзетеді. Мысалы интерполяторлар қажетті математикалық операцияларды өңдейді және орындау элементтеріне (электржетегіне) басқару әсерін өңдеп шығарады. ББЖ тұрақты және айнымалы токты тез әсерететін, реттелетін және бақыланатын электр жетегі қолданылады. Ол басқарылатын ақпаратқа сәйкес басқару объектісін қозғалсықа келтіреді. Кері байланыс ЖМАО нақты жағдайы туралы ақпарат ағымын өңдейтін кері байланыстың датчигімен орындалады. Ол датчикті орындау органына немесе электр жетегінің электр қозғалтқышының білігіне жанама орналастыруымен анықталады.
Бағдарламалық басқару өнеркәсіптің барлық салаларында қолданылады. Күрделі пішінді бұйымды жоғарғы дәлдікпен орындайтын және тікелей адамның қатысуынсыз өндірілетін металды өңдеу өнеркәсібінде кең қолданылады.
ББЖ жіктеу бойынша келесі түрге бөлінеді: бағдарламаны беру принципі; басқару принципі; әсер ету принципі; тағайындалуы.
Басқару бағдарламасын беру принципі бойынша ББЖ аналогты және санды болып бөлінеді. Аналогты ББЖ басқару бағдарламасын беру тұрақты токты кернеу деңгейін немесе айнымалы токты кернеу фазасын беру түрінде аналогты сигналмен орындалады.
Санды ББЖ станокты құруда кең қолданылады. Сондықтан олар үшін терминдер мен анықтамалар «Метал өңдеу жабдықтарын санды бағдарламамен басқару құрылысы» деген 20523-81 МТ сәйкес келеді. Осы МТ сәйкес бағдарламаны санды кодпен жазудан тұратын басқару бағдарламасы санды бағдарламамен басқару (СББ) деп аталады және берілгендері санды түрде жазылған, басқару бағдарламасымен станокта өңделетін бұйымды басқарумен анықтайды. Бағдарламаны басқаратын санды ақпаратты кодтайтын әртүрлі санды кодтар болады. ББЖ-де бірлік, екілік және екілік-ондық кодтар кең қолданылады.
СББ-да басқару құрылғысы СББ құрылғысы деп аталады (СББҚ), ал СББ қамтамасыз ететін технологиялық және бағдарламалық құралдарына функционалды өзара әсер ететін, өзара байланысқан жиынтығын анықтауды СББ (СББЖ) жүйесі деп аталады.
Халық аралық классификацияға сәйкес СББҚ техникалық деңгейінің мүмкінділігіне қарай төмендегі класстарға бөлінеді:
NC (Numerical Control) – әрбір бұйымды дайындауды өңдеу кезінде бағдарламаны кадрлық есептеу СББҚ;
SNC (Stored Numerical Control) – бірдей бұйымды дайындауды өңдеудің алдында бағдарламаны бір рет есептеу СББҚ;
СNC (Computer Numerical Control) – мини-ЭЕМ (микропроцессормен) тұратын СББҚ;
DNC (Direct Numerical Control) – бір ЭЕМ-мен станоктар топтарынан тұратын СББҚ;
HNC (Handled Numerical Control) – пультпен басқару арқылы бағдарламаны қолмен терудің оперативті СББҚ.
ББЖ басқару принципі бойынша ажыратылған және тұйықталған болып келеді. Ажыратылған ББЖ (7.1, а суретін қараңыз) басқару бағдарламасында (ББ) ақпаратты берудің бір ағымынан тұрады. Олар машинаны қажетті технологиялық жұмыспен және бағдарламаны дәл өңдеуді қамтамасыз етеді. Тұйықталған ББЖ (7.1, б суретін қараңыз) басқару бағдарламасы ББ және кері байланыс КБ бойынша екі ақпараттық ағымнан тұрады. Олар ЖМАО жағдайы туралы ақпараттың болуынан және үздіксіз бақылаудың салдарынан ақпаратты өңдеудің жоғарғы дәлдігін қамтамасыз етеді.
ББЖ әсер ету принципі бойынша аналогты, импульсті, аралас (аналог-импульсті және импульс-аналогты) және кодты болып бөлінеді [6,7]. Қазіргі кезде СББ ЭЕМ дамуының салдарынан аппараттық құралдармен орындалатын ББЖ ескірді. Сондықтан үздіксіз әсер ететін тұрақты және айнымалы токты электр жетегімен және импульсті қадамдық электр жетегімен орындалатын санды СББҚ ғана шығарылады.
Тағайындалуы бойынша технологиялық белгісіне сәйкес ББЖ циклді, позициялық және контурлы болып бөлінеді.
Циклді бағдарламалық басқару жүйесі (ЦББ), ЖМАО жұмыс машинасының бір немесе бірнеше орындау органдарымен басқаруды орындайды. Ол әдетте жеке ЖМАО немесе топты машиналардың тізбектілігін қайталаумен анықталатын, қажетті технологикалық циклді қамтамасыз етеді. Әсер ету тізбектілігі ЖМАО қозғалысқа келтіретін, электр жетегін қосу мен өшіру үшін қарапайым дискреттік бұйрықпен берілетін басқару бағдарламасымен орындалады. ЦББ жүйесі негізі ажыратылған күйде орындалады, ал ЖМАО жағдайын белгілейтін және электр жетегін қосу мен өшіру бұйрығын беретін жағдай датчигі кері байланыс ретінде қарастырылады.
Металды кесу станоктарымен СББ-да ББЖ позициялық және контурлық ретінде екіге бөлінеді. 20523-81 МТ сәйкес позициялық СББ станокты санды бағдарламамен басқарумен анықталады. Станоктың жұмыс органдарының орын ауыстыруы берілген нүктеде орындалады, бірақ орын ауыстыру траекториялары берілмейді. Позициялық СББ металды кесетін станогтың қозғалысын бақылау үшін ғана қолданылады, сонымен қатар кез келген жұмыс машиналарында орындау органдарының орнынын анықтап, орнын ауыстыруға қолданылады. Мұндай жүйеде берілген соңғы жағдайда дәл орналастыру маңызды, ал оның орналастыру траекторияларының дәлдігі маңызды емес.
Позициялық жүйелер жазықтықта, бірнеше координатта дәл орны анықталатын орындау органының жағдайын басқаруды жүзеге асырады. Бұл жағдайда ЖМАО бір координаттан екінші координатқа қозғалуы кез келген траекторияларда орындалады, бірақ өнімділігі жоғары болу үшін орын ауыстыру уақыты аз болады. Позициялық ББЖ позициялық басқару жүйелерінің базасы арқылы тұрғызылады, онда берілген сигналдар берілген бағдарламамен өзгереді.
Позициялық СББ негізі тұрақты токты тез әсер ететін электр жетектері қолданылады, олар позициялық электр жетектерінің талаптарын қанағаттандырады.
Контурлы СББ дегеніміз станокпен (кез келген жұмыс машинасымен) санды бағдарламалық басқару, оның орындау органдарының орын ауыстыруы қажетті өңдеу контурын (контур бойынша қозғалыс) алу үшін берілген траекториялармен және берілген жылдамдықпен орныдалады.
Контурлы СББҚ сигналы уақыт функциясы, жылдамдық, жолдар немесе кез-келген басқа параметрлер болатын, басқару ақпаратының үздіксіз өзгеруінен тұратын ЖМАО (басқару объектісі) орын ауыстыруын басқару үшін арналған. Мұндай ББЖ берілген контур бойынша жазықтықта және кеңістікте объектінің қисық сызықты қозғалысын құрады. Сонымен қатар ББЖ сипаттамалық ерекшелігі жылдамдық пен жол бойынша әрбір уақыт моментінде орындау органының үздіксіз үйлесімді қозғалысы.
Басқару алгоритмі мен электр жетегінің талабы бойынша контурлы жүйе позициялы жүйеге қарағанда өте күрделі болып келеді. Контурлы ББЖ басқару құрылғыларының негізгі блоктары ретінде сызықты және шеңберлі интерполяторлар қолданылады. Олар басқару бағдарламасында тірек нүктесімен ЖМАО қозғалыс траекториясын бағдарламалауды жүзеге асырады және электр жетегімен сигналдарды басқаруды қамтамасыз ететін бағдарламаның санды кодтық ақпаратын бірыңғай код ақпаратына түрлендіреді.
Өздiгiнен бейiмделетiн адаптивтік жүйені өңдеу ақпараттың ағымдарының саны бойынша СББ классификациялауын кеңейтті. Санды бағдарламалық басқару ретінде анықталатын адаптивті СББ (АСББ) құрылды. Онда анықталған критериялар бойынша өңдеу шартымен өзгеретін бұйымды дайындауды өңдеу процессі автоматты бейімделеді. Сондықтан қазіргі кездегі СББ ақпараттың негізгі ағымдармен бірге кері байланыспен және басқару бағдарламасымен ғана анықталатын қосымша ағымдар пайда болды.
8 дәріс. Электр жетегімен бағдарламалық басқарудың циклдік жүйелері
Дәрістің мазмұны:
- қатаң өзгермейтін бағдарламадан тұратын электржетегімен бағдарламалық басқарудың циклдік жүйелерінің тағайындалуы, құрылысы және әсер ету принциптері;
- контроллермен бағдарланатын электржетегімен бағдарламалық басқарудың циклдік жүйелерінің құрылысы және әсер ету принциптері.
Жұмыстың мақсаттары:
- электржетегімен бағдарламалық басқарудың циклдік жүйелерінің негізгі құру принциптерін игеру;
- электржетегімен бағдарламалық басқарудың циклдік жүйелерінің құрылысын және әсер ету принциптерін оқу.
Циклді ББЖ бір немесе бірнеше басқару объектісінің жұмысын қамтамасыз етеді, онда ЖМАО бірдей циклмен қайталанатын әртүрлі қозғалысты орындайды. Бұл қозғалыстардың тізбектілігі басқару бағдарламасымен беріледі [11].
СББ жүйесінде басқару бағдарламасы қатаң өзгермейтін және өзгеретін бағдарламамен орындалады. Қатаң өзгермейтін басқару бағдарламасы электр автоматтандырудың анықталған сұлбасы түрінде беріледі, мұнда басқару элементтерін қосу мен ажырату уақыт бойынша немесе ЖМАО техникалық дайын болуы кезінде қосылады.
Циклдік ББЖ-де қатаң басқару бағдарламасының өзгеруі штепсельді коммутаторларды, бұйрық аппараттарын, ауыстырып қосқыштарды жинақтау түріндегі бағдарламаны беруден тұратын матрица түріндегі сұлба бойынша және реле сұлбасының логикалық функцияларын құратын, электронды есептеу құрылғысы ретінде көрсетілген бағдарламалау контроллердің көмегімен құрастырылады.
Күрделі циклдік ББЖ-де басқару бағдарламалары ЭЕМ және санды (СББ) түрде беріледі. Бірақ мұндай бағдарламалар циклді және технологиялық режимдер туралы ғана ақпараттан тұрады, ал орын ауыстыруы жолдағы ауыстырып қосқыштарға әсер ететін тіреу құрылғысымен беріледі.
Циклдік ББЖ тұрақты токты және жиі айнымалы токты электр жетектері қолданылады.
Циклді ББЖ қатаң өзгермейтін бағдарламамен реле түйіспелі және түйіспесіз аппараттармен орындалады. Қазіргі кезге дейін реле түйіспелі сұлбалар кең қолданылған. Мысал ретінде 8.1 суретінде екі ЖМАО қарапайым циклдік ББЖ көрсетілген, онда агрегаттық станокта орындау органы (ОО1) айналдыру қозғалысын, ал ОО2 келіп түскен қозғалысты келтіреді. Мысалы қарапайым автоматты қайталанатын циклді орындау қажет болсын: ОО1 а жағдайдан б жағдайға қарай айналсын; ОО2 в жағдайдан г жағдайға қарай орын ауыстырсын; ОО2 бастапқы в жағдайына орын ауыстыруы, ОО1 бастапқы а жағдайына орын ауыстыруы.
ОО1 және ОО2 орын ауыстыруын басқару SQ1 – SQ4 соңғы қосқыштарымен, а – г жағдайын бақылау арқылы орындалады. ОО1 және ОО2 бастапқы жағдайлары SQ1 және SQ3 басылған, а және в жағдайына сәйкес орналасқан. S ажыратқышымен басқару сұлбасына кернеу бергеннен соң K түйістіргіші қосылады, M1 қозғалтқышы ОО1 б жағдайына орналастырады, SQ2 ажыратқышы қосылған кезде K1 ажыратылады K3 қосылады да, қозғалтқыштың қозғалысы тоқтайды. M2 қозғалтқышы қосылады және ОО2 г жағдайына орналастырады, SQ4 ажыратқышы қосылады K3 ажыратылады және K4 қосылады. M2 қозғалтқышы реверстеледі және ОО2 бастапқы в жағдайына орналастырады, SQ3 ажыратқышы K4 ажыратады және K2 қосады. M2 қозғалтқышы ажыратылады, ал M1 қосылады, ол ОО1 бастапқы а жағдайынна айналдырады. Бұл цикл S ажырағанша автоматтты түрде қайталанады.
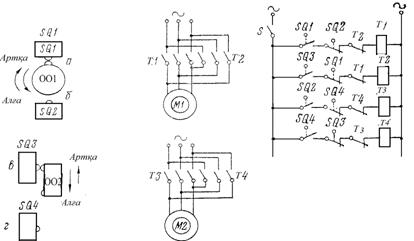
8.1 сурет – Реле-түйіспеден тұратын бағдарламаны басқарудың циклдік сұлбасының қарапайым принципиалды сұлбасы
Мұндай түйіспелі циклді ББЖ-ң жұмыс дәлдігі жоғары емес, көлемі үлкен және түйіспенің іске қосылуы үлкен санмен жұмыс жасайтын, үлкен сұлбаларда жиі сынатын реленің механикалық құрылысына байланысты жұмыс жасау сенімділігі мен ұзақ уақытқа жарамдығы төмен болады.
Сұлбасы микросұлбаларды қолданып, түйіспесіз логикалық элементтерде жиналған циклдік ББЖ жұмыс жасау сенімділігі жоғары болады. Бірақ қатаң өзгермейтін бағдарламамен түйіспесіз логикалық элементтерде және түйіспелі аппараттарда циклдік ББЖ сұлбасын құру үлкен еңбек шығынын, монтаждау мен жөндеуді қажет етеді.
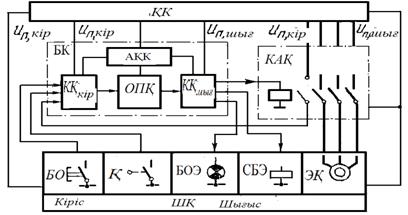
Циклдік ББЖ үлкен сұлбасын құру үшін кіріс және шығыс құрылғыларымен басқарылатын мини-ЭЕМ түріндегі бағдарламалық контроллерлер (бағдарламалық бұйрық аппараттары) – БК қолданылады, ол ЭЕМ еске сақтауына еңгізілген бағдарламаға жазылған кез келген басқару сұлбасының логикалық функцияларын орындайды. БК басқару объектісіне байланыс каналы бойынша қосылады және онымен нақты уақыт масштабымен тізбектей әсерлесіп жұмыс жасайды. Мұндай ББЖ (8.2 суретке қараңыз) БК бағдарламалық контроллерден, КҚ кіріс және шығыс құрылғыларынан, КАҚ күштік автоматты құрылғыдан және ҚК қоректендіру көзінен тұрады. БК басқару бағдарламасын құру мен сақтауды қамтамасыз ететін орталық процессорлық құрылғыдан, ББЖ электрлік ішкі, сыртқы тізбектерінің параметрлерін тізбектілігін орындайтын ТҚкір кіріс және ТҚшығ шығыстың түйіндестер құрылғысынан және АҚК автономды қоректендіру көзінен тұрады. Кіріс құрылғылары БО бұйрық органдары мен басқару объектісінің жағдайын индикациялау Д датчиктерінен, шығыс – БОЭ басқаруды орындау және СБЭ сигнал беру элементтерінен, ЭҚ электр қозғалтқышынан тұрады.
Мұндай БК бағдарламаны енгізу мен ретке келтіру үшін аз еңбек сыйымдылығынан тұрады, дисплей және жарықпен сигнал берудің көмегімен жұмыс сұлбасын индикациялауды орындайды, сонымен қатар оның жұмысына диагностика жасайды. БК екі қоректендіру көзі (ҚК және АҚК) энергияға тәуелді және энергияға тәуелсіз еске сақтауды қамтамасыз етеді. Сонымен қатар біріншісі ішкі энергия көзінен ажыратылған кезде өзінің берілгендерін сақтамайды (БК нөлдік сақтандыру ретінде қолданылады), ал екіншісі энергиядан ажыраған кезде жұмыс бағдарламасын құру үшін процессордың жұмыс алгоритмін, бұйрықтың құрамын және өзінің берілгендерін сақтайды.
8.2 сурет – бағдарламаланған контроллермен бағдарламалық басқарудың циклдік жүйесінің функционалдық сұлбасы
Автоматтандырылған объектінің сипаттамасына сәйкес модульдің нақты жиынтығын алу үшін БК блок-модульдік принцип бойынша құрылады. Сонымен қатар техникалық диагностиканың, жөнделмейтіндігін және т.б. жағдайларды шешетін құрылғылармен кешенді басқарудың күрделі жүйелерін және қарапайым циклді басқару сұлбаларын құруға болады.
БК әсер ету принципі функционалдық сұлбамен түсіндіріледі (8.3 суретін қараңыз). Бастапқыда БК бағдарламалық панельде (бағдарламаны жүктеуде) терілетін және тұрақты еске сақтау құрылғысына (ТЕҚ) жазылатын (жүктеледі) бағдарламаны жазу режимінде жұмыс жасайды. БК сканнер (токты импульстар генераторы) ТЕҚ сұрайтын жұмыс режиміне қосылады және құрылғылардың регисторларының кірісі мен шығысы жүйенің кіріс, шығысына түйіндес болады. Бағдарламаның адресі бойынша (операндасы) енгізу және шығару регисторларының ұяшықтары таңдалып, процессорға қосылады. Процессор ТЕҚ арқылы келіп түскен бағдарламаның бұйрығына (қадаммен) сәйкес кіріс, шығыс сигналдарына логикалық операциялар жасайды және кіріс жағдайын шығыс жағдайына түрлендіреді. Егер кіріс жағдайы бастапқы циклді сұраумен салыстырғанда өзгермесе, онда процессор шығыстың ағымдағы жағдайын қайталайды; егер өзгерсе, онда процессор ТЕҚ жазылған бағдарламамен шығыс жағдайын өзгертеді.
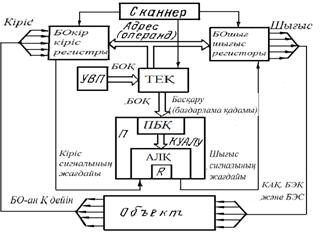
8.3 сурет – Бағдарламаланған контроллердің функционалдық сұлбасы
БК орталық бөлігі П процессор, оның құрылысы БК параметрлерін анықтайды: тез әсер ететін, бұйрық жүйесі, кіріс және шығыс сандары, таймерлер мен есептегіштердің саны, бағдарламаны сақтау үшін еске сақтау көлемі. Процессормен бұйрықты өңдеу мен есептеу операциялары, еске сақтаудан операндтарды алуды және шығыс құрылғыларына басқару бұйрығын беруді орындайды. Процессор арифметика-логикалық құрылғылардан АЛҚ тұрады, ол бағдарламаның логикалық операцияларын орындайды; бағдарламаның кодын АЛҚ басқару кодына түрлендіретін процессорды басқару құрылғысы ПБҚ; есептелген R нәтижесін еске сақтауға еңгізуден; бағдарламаның қадамының адрестерін санағыштан (БҚАС) және еске сақтау құрылғысының адрестерінен ЕСҚА, операндтардың (кіріс адресі) және бағдарламалардың қадамдарын санағыштан, бағдарлама қадамдарының адрестерін беру шиналарынан және операндтарды беру үшін берілгендер шинасынан тұрады.
Процессордың кіріс, шығыс модульдерімен байланысы модуль процессоры арқылы орындалады, ол адаптер деп аталады. Оның көмегімен кіріс сигналының ағымдағы мәні ТЕҚ беріледі және адресі операндпен берілген басқару әсерін шығыс модуліне береді. Егер шығыс модулінде басқару дискретті емес аналогты орындау сигналдарымен орындалса, онда САТ және АСТ құрылғылары қолданылады.
БК жұмыс циклі үш этапқа бөлінеді. Бірінші этап кіріс сигналдарын сканерлеу деп аталады, онда кіріс модульінің ТЕҚ жүктеледі. Екінші этапта бағдарлама өңделеді, ал үшінші этап соңғы – шығыс модуліне басқару сигналдары беріледі. Бұл этаптардың орындалуы бір уақытта болуы мүмкін. Цикл уақыты бағдарламаның ұзақтығына байланысты анықталады. БК-да бағдарламаның бітуі және басқа циклге ауысуы екі әдіспен орындалады: бағдарламаның бұйрықпен соңы және ТЕҚ барлық көлемін өңдеу.
Јдебиеттер тізімі
1. Ключев В.И. Теория электропривода. – М.: Энергоатомиздат, 1985. – 560 с.
2. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. – Л.: Энергоиздат, 1982. – 392 с.
3. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. – М.: Высш. Школа, 1979. – 318 с.
4. Сиротин А.А. Автоматическое управление электроприводами. – М.: Энергия, 1969, – 560 с.
5. Елисеев В.А. Непрерывное управление движением электроприводов – М.: МЭИ, 1982. – 100 с.
6. Елисеев В.А. Цифровые системы управления электроприводами. – М.: МЭИ, 1985. – 104 с.
7. Перельмутер В.М., Соловьев А.К. Цифровые системы управления тиристорным электроприводом. – Киев: Техника, 1983. – 104 с.
8. Ахиетжанов А.А., Кочемасов А.В. Следящие системы и регуляторы. – М.: Энергоатомиздат. 1986. – 288 с.
9. Следящие электроприводы. / Под ред. Б.К. Чемоданова. – М.: Энергия, 1976. – 480 с.
10. Гумен В.Ф., Калининская Т.В. Следящий шаговый электропривод. – Л.: Энергия Ленингр. отд – ние, 1980. – 168 с.
11. Срибнер Л.А. Цикловое программное управление оборудованием – М.: Машиносроение, 1980. – 152 с.
12. Управление автоматическими линиями с помощью ЭВМ / Крыленко В.В. и др. – М.: Машиностроение, 1983. – 152 с.
13. Программное управление станками / Сосонкин В.Л. Михайлов О.П. и др.: Под. ред. В.Л. Сосонкина. – М.: Машиностроение, 1981. – 398 с.
14. Станки с числовым программным управлением / Под ред. В.А. Лещенко. – М.: Машиностроение, 1987. – 592 с.
15. Ивоботенко Б.А. Козаченко В.Ф. Шаговый электропривод в робототехнике. – М.: МЭИ, 1985. – 104 с.
16. Цыба Ю.А., Сагитов П.И. «Элементы теории автоматического управления»: Учебное пособие для ВУЗов. – Алматы: КАУ, 2006. – 144 с.
17. Сагитов П.И., Цыба Ю.А. «Электрические машины систем автоматики»: Учебное пособие для ВУЗов. – Алматы: АИЭС, 2004. – 90 с.
2013 ж. жосп., реті 241