МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
Некоммерческое акционерное общество
“Алматинский университет энергетики и связи”
П.И. Сагитов
К.К. Жумагулов
Ж.Ж. Тойгожинова
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ ПЕРЕМЕННОГО ТОКА
Учебное пособие
Алматы 2011
УДК 534.6(075.8)
ББК 31.261
С13 Электрические машины переменного тока:
Учебное пособие/П.И. Сагитов., К.К. Жумагулов., Ж.Ж. Тойгожинова;
АУЭС. Алматы, 2011. - 80с.
ISBN 978-601-7327-01-9
В учебном пособии по курсу “ Электрические машины переменного тока” рассмотрены общие вопросы теории электрических машин переменного тока, устройства, принцип действия, основные характеристики, векторные диаграммы, схемы замещения электрических машин переменного тока.
Учебное пособие предназначены для студентов всех форм обучения специальности 5В071800 – «Электроэнергетика».
Ил.58, библиогр. – 5 назв.
ББК 31.261
РЕЦЕНЗЕНТ: КазНТУ им. К. Сатпаева, к.т.н, доцент К.Т. Тергемес
АУЭС, д-р техн. наук, проф. М.А. Мустафин.
Печатается по дополнительному плану издания Министерства образования и науки Республики Казахстан на 2011 г.
ISBN 978-601-7327-01-9
Ó НАО «Алматинский университет энергетики и связи», 2011 г.
Содержание
Введение 4
1 Общие вопросы теории электрических машин 5
1.1 Основные типы машин переменного тока и их устройство 5
1.1.1 Устройство и принцип действия синхронных машин 6
1.1.2 Устройство и принцип действия асинхронных машин 7
1.2 Электродвижущие силы в обмотках машин переменного тока 8
1.3 Электродвижущая сила обмотки от высших гармоник магнитного поля 13
1.4 Обмотки двигателя переменного тока 14
2 Асинхронные машины 19
2.1 Холостой ход асинхронного двигателя при неподвижном роторе 19
2.2 Короткое замыкание асинхронного двигателя 21
2.3 Асинхронный двигатель при вращающемся роторе 23
2.4 Вращающие моменты и мощности асинхронного двигателя 28
2.5 Рабочие характеристики асинхронного двигателя 33
2.6 Пуск в ход асинхронных двигателей 35
2.7 Регулирование скорости вращения асинхронных двигателей 41
3 Синхронные машины 47
3.1 Магнитное поле и параметры обмотки якоря, продольная и поперечная
реакции якоря 49
3.2 Магнитные поля, ЭДС и параметры продольной и поперечной реакции якоря 52
3.3 Работа синхронного генератора при симметричной нагрузке 53
3.4 Характеристики синхронного генератора 55
3.5 Определение индуктивных сопротивлений синхронной машины 57
3.6 Потери и коэффициент полезного действия синхронной машины 61
3.7 Параллельная работа синхронных генераторов 62
3.8 Регулирование активной мощности 63
3.9 Мощность, электромагнитный момент и угловые характеристики
синхронного генератора 65
3.10 U-образные характеристики синхронного генератора 69
3.11 Переходные процессы в синхронных генераторах 70
3.12 Гашение магнитного поля 73
3.13 Синхронный двигатель 73
3.14 U-образные и рабочие характеристики синхронного двигателя 74
3.15 Пуск синхронных двигателей 76
3.16 Синхронный компенсатор 77
Список литературы 79
Введение
Электрическая энергия обладает большим преимуществом по сравнению с другими видами энергии: её можно передавать на большие расстояния, удобно распределять между потребителями, сравнительно просто и с высоким коэффициентом полезного действия преобразовывать в другие виды энергии. Процессом преобразования электрической энергии легко управлять и при этом автоматически получать необходимые характеристики преобразованной энергии.
Развитие энергетики требует применения и совершенразнообразного электротехнического оборудования. Одним из основных видов этого оборудования являются электрические машины.
В данном учебном пособии приведено исследование рабочих процессов и характеристик электрических машин переменного тока в соответствии с общими законами преобразования энергии.
Общие положения теории машин переменного тока выделены в самостоятельный раздел, в котором дана классификация этих машин, описаны схемы обмоток переменного тока, приведены методы определения их электродвижущих и намагничивающих сил.
В следующем разделе рассмотрены асинхронные машины - устройство их и образование электромагнитного момента. Подробно исследован основной для трехфазной асинхронной машины режим работы двигателя, описаны другие режимы работы.
Далее рассмотрены синхронные машины, наибольшее внимание уделено основному режиму работы синхронной машины, в режиме генератора, исследована также работа в режимах двигателя, генератора реактивной энергии.
Примерный порядок расположения материала соответствует основному методическому принципу учебного пособия от простого к сложному.
1 Общие вопросы теории электрических машин
1.1 Основные типы машин переменного тока и их устройство
Действие всех электрических машин переменного тока основано на принципе вращающегося магнитного поля, и поэтому их теория является общей. На практике применяются преимущественно трехфазные (т=3) машины переменного тока. Машины с другим числом фаз (т=2;6) используются для специальных целей.
Трехфазные машины переменного тока подразделяются на два основных типа: 1) синхронные и 2) асинхронные. В свою очередь асинхронные машины подразделяются на: а) бесколлекторные и б) коллекторные.
Синхронной называется бесколлекторная машина переменного тока, в которой частота вращения ротора п2 находится в строго постоянном отношении к частоте сети
|
|
(1) |
 [об/с],
[об/с],где р - число пар полюсов машины.
Другими словами, в синхронной машине ротор (подвижная часть) вращается с такой скоростью и в том же направлении, как и вращающееся магнитное поле статора.
Применение синхронных машин весьма широко и многообразно. Синхронная машина как и все электрические машины обратима и может работать как в режиме генератора, так и в режиме двигателя.
Синхронный генератор является основным типом генератора переменного тока, устанавливаемого на электростанции для производства электроэнергии.
Синхронные двигатели обладают рядом преимуществ, главными из которых являются постоянная частота вращения и возможность регулирования их коэффициента мощности. Поэтому они находят широкое применение в электроприводах большой мощности. Синхронные двигатели малой мощности применяются в системах автоматики.
Синхронные машины применяются в качестве синхронных компенсаторов, дающих возможность улучшать коэффициент мощности энергосистем.
Асинхронной называется такая машина, частота вращения которой зависит не только от частоты сети f1, но и от нагрузки на валу, т.е. ротор асинхронной машины вращается несинхронно по отношению к вращающемуся магнитному полю статора. На практике асинхронные машины используются, главным образом, в качестве двигателей. Выгодно отличаясь от других электродвигателей простотой конструкции и надежностью в работе, асинхронный двигатель в настоящее время является основным типом электродвигателя.
Общие вопросы теории многофазных машин переменного тока целесообразно рассмотреть совместно, предварительно приведя краткое описание принципов действия и устройства основных видов машин переменного тока.
1.1.1 Устройство и принцип действия синхронных машин
В конструктивном отношении различают два основных типа синхронных машин: а) неявнополюсные, т.е. машины с неявно выраженными полюсами и б) явнополюсные, т.е. машины с явно выраженными полюсами.
Полюса, возбуждаемые постоянным током, располагаются на вращающейся части машины, называемой ротором, а обмотка переменного тока укладывается в пазах неподвижной части машины, называемой статором.
При заданной частоте сети f1 наибольшую частоту вращения имеют машины с числами пар полюсов р = 1 и p = 2 (соответственно n = 3000 об/мин и n = 1500 об/мин). В таких машинах большой мощности скорость на окружности ротора настолько велика, что из соображений механической прочности и укрепления обмотки возбуждения ее, приходится распределять по поверхности ротора, т.е. выполнять обмотку как неявнополюсную.
Синхронные генераторы приводятся во вращение паровыми и гидравлическими турбинами. В первом случае, синхронный генератор называется турбогенератором, а во втором - гидрогенератором.
Паровые турбины принадлежат к числу быстроходных машин, и поэтому турбогенераторы имеют неявнополюсное исполнение. Гидрогенераторы имеют явнополюсное исполнение, так как гидравлические турбины принадлежат к тихоходным машинам.
На одном валу с гидрогенератором устанавливаются вспомогательные машины: возбудитель генератора (генератор постоянного тока) и регуляторный генератор.
При аварийном отключении гидрогенератора от сети его частота вращения сильно возрастает, т.к. быстрое прекращения доступа воды в турбину невозможно (из-за гидравлического удара), а подача энергии в сеть прекращается (исчезает тормозной электромагнитный момент). Достигаемая при этом максимальная (угонная) частота вращения может в два и более раз превышать номинальную, поэтому механическая прочность генератора рассчитывается на эту частоту вращения.
Гидрогенераторы обычно изготовляются в вертикальном исполнении для непосредственного соединения с гидравлической турбиной.
Неявнополюсные синхронные машины имеют цилиндрический ротор из массивной стальной поковки, в лазах которого уложена обмотка возбуждения.
Турбогенераторы предназначены для непосредственного соединения с работающими на тепловых станциях паровыми турбинами, и поэтому они имеют горизонтальное исполнение.
Предельный диаметр активной части ротора при п = 3000 об/мин по условиям механической прочности из-за больших центробежных сил не может превышать 1,2-1,3 м. В связи с этим ротор мощных машин приходится делать длинным. В то же время увеличение длины ротора ограничено пределом увеличения гибкости и прогиба ротора и связанного с этим увеличения вибрации. Наибольшая возможная активная длина ротора составляет l = 7,5÷8,5 см. Таким образом, предельные размеры турбогенераторов ограничены возможностями современной металлургии. Мощность выпускаемых турбогенераторов достигает 1200 МВт.
Увеличение предельных мощностей связано с увеличением электромагнитных нагрузок (линейной нагрузки и плотности тока обмоток) и интенсификацией способов охлаждения.
В настоящее время разработаны и внедряются в эксплуатацию криогенные турбогенераторы, использующие принцип сверхпроводимости обмоток при охлаждении их жидким гелием. В будущем это позволит довести предельную мощность генератора до 10 млн. кВт при существующих габаритах за счет увеличения линейной токовой нагрузки.
Принцип действия синхронного генератора основан на явлении электромагнитной индукции и заключается в преобразовании механической энергии, отдаваемой потребителю.
Намагничивающая сила, создаваемая током обмотки возбуждения, возбуждает постоянный магнитный поток. Этот поток, вращаясь вместе с ротором генератора, пересекает обмотки статора и наводит в них трехфазную систему электродвижущих сил (ЭДС). При замыкании обмотки статора через нагрузку под действием ЭДС начинает протекать ток.
1.1.2 Устройство и принцип действия асинхронной машины
Асинхронная машина состоит из двух основных частей неподвижной части - статора и подвижной части - ротора. Между статором и ротором имеется воздушный зазор. Увеличение воздушного зазора резко уменьшает коэффициент мощности (cosφ) и вращающий момент двигателя.
Сердечник статора собирают из листов электротехнической стали в виде колец, на внутренней окружности которых штампуют пазы для укладки обмотки статора. Обмотка выполняется из изолированных медных проводов. Стальные листы изолируют друг от друга лаком для уменьшения потерь от вихревых токов.
Сердечник статора с обмоткой помещают в станину, посредством которой машина крепится к фундаменту. Ротор собирают также из листов электротехнической стали и крепят на валу машины.
В зависимости от типа ротора асинхронные двигатели делятся на: а) двигатели с короткозамкнутым ротором; б) двигатели с контактными кольцами.
Работа асинхронного двигателя основана на принципе электромагнитной индукции.
При подаче в обмотку статора трехфазного переменного тока возникает вращающееся магнитное поле, которое перемещается в воздушном зазоре между статором и ротором с частотой вращения п1 и при своем вращении пересекает проводники обмотки ротора, индуктируя в этой обмотке ЭДС E2.
Если обмотка ротора замкнута, то под действием ЭДС в ней возникает ток, совпадающий по направлению с ЭДС.
В результате взаимодействия тока в проводнике обмотки ротора с вращающимся магнитным полем статора возникает сила f, которая перемещает проводник в направлении, определяемом правилом «левой руки». Если умножим силу F на расстояние от оси ротора до проводника, то получим вращающий момент M=FR, развиваемый током этого проводника. Так как на роторе помещено большое количество проводников, то произведения сил, действующих на каждый проводник, на расстояние этих проводников до оси ротора определяет вращающий момент двигателя. Под действием вращающего момента ротор двигателя вращается в направлении вращения магнитного поля.
1.2 Электродвижущие силы в обмотках машин переменного тока
Необходимо, чтобы индуктируемые в обмотках ЭДС были синусоидальными, т.е. не содержали высшие гармоники, вызывающие дополнительный нагрев и тормозные моменты. Так как ЭДС индуктируются вращающимися магнитными потоками, то для этого необходимо, чтобы распределение магнитной индукции вдоль воздушного зазора было синусоидальным. Для этого применяются различные конструктивные меры. Например, для улучшения кривой поля возбуждений явнополюсных синхронных генераторов, их полюсные наконечники выполняют с радиусом несколько меньшим, чем радиус воздушного зазора, т.е. делают зазор (δm) у краев полюсного наконечника больше зазора посередине (δ). Хорошие результаты дает полюсный наконечник с соотношением δm/δ=1,5÷2.
В неявнополюсных машинах синусоидальный характер распределения магнитной индукции создается подбором соответствующего отношения между частью окружности ротора без пазов и частью его окружности с пазами, в которые укладывается обмотка возбуждения. Обычно это отношение равно 2/3. Однако и в этих случаях кривая магнитной индукции лишь приближается к синусоиде, поэтому ЭДС обмотки статора остается несинусоидальной и наряду с основной гармоникой содержит высшие гармоники. В силу симметрии кривой ЭДС обмотки статора относительно оси абсцисс, в кривой ЭДС не будет четных гармоник.
Определим ЭДС, индуктируемую в обмотке статора основной пространственной гармоникой вращающегося поля (к = 1).
а) электродвижущая сила проводника
Вращающееся со скоростью υ=2τf синусоидальное магнитное поле индуктирует в каждом проводнике витка ЭДС
|
|
(2) |
амплитуда, которой
|
|
(3) |
|
|
|
и действующее значение
|
|
(4) |
где Вб=Вт1 - амплитуда индукции основной гармоники поля в зазоре;
l6 - расчетная активная длина машины;
τ - полюсное деление.
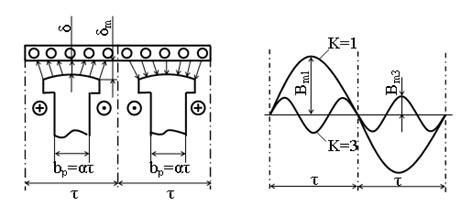
Рисунок 1 - Распределение магнитной индукции поля возбуждения явнополюсной синхронной машины вдоль поверхности статора
В ряде случае, для улучшения формы ЭДС обмотки статора осуществляется скос пазов относительно бегущего магнитного поля. При этом фаза ЭДС, индуктируемая в отдельных участках проводника синусоидально распределенным магнитным полем, беспрерывно изменяется вдоль проводника, и элементарные ЭДС ∆E, индуктируемые на обоих концах проводника, сдвинуты по фазе на угол
|
|
(5) |
|
|
|
где вс - величина скоса.
В этом
случае, для определения ЭДС проводника необходимо сложить векторы ЭДС отдельных
участков проводника ∆E. В пределе, если рассматривать
бесконечно малые участки, ∆![]() →0 и геометрическая
сумма векторов
∆¯E изобразится дугой и
будет равна хорде окружности, опирающейся на центральный угол γс.
→0 и геометрическая
сумма векторов
∆¯E изобразится дугой и
будет равна хорде окружности, опирающейся на центральный угол γс.
Отношение длины хорды к ее дуге
|
|
(6) |
определяет степень уменьшения ЭДС Епр при наличии скоса и называется коэффициентом пазов обмотки.
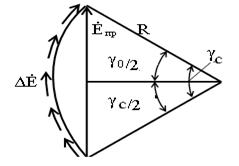
Рисунок 2 - Определение ЭДС проводника при скосе пазов
Подставив значение γс, получим
|
|
(7) |

так как скос невелик, то ![]() . Например,
при
. Например,
при ![]()
|
|
(8) |
т.е. ЭДС Епр уменьшается на 1,1 %. Окончательно ЭДС проводника
|
|
(9) |
б) электродвижущая сила витка и катушки
Шаг
витка и катушки обмоток переменного тока у чаще всего несколько укорачивают по
сравнению с полюсным делением τ, так что относительный шаг ![]() обычно меньше
единицы.
обычно меньше
единицы.
ЭДС проводников витка имеют одинаковую величину, но сдвинуты по фазе на угол βπ, так как активные проводники витка сдвинуты в магнитном поле на такой же угол.
ЭДС
витка равна ![]() и
согласно рисунку 3
и
согласно рисунку 3
|
|
(10) |
|
|
|
где ky=sinπβ/2 - коэффициент укорочения шага обмотки. Ев максимальна при полном шаге (у=π; β=1), тогда ky=1.
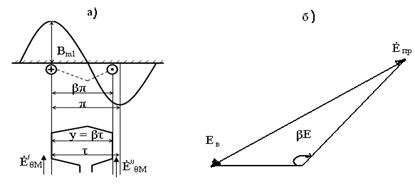
Рисунок 3 - ЭДС витка
Группа последовательно соединенных витков, вместе с общей пазовой изоляцией стенок паза, называется катушкой.
Если катушка содержит ωk витков, то ЭДС катушки
|
|
(11) |
Поток одного полюса при синусоидальном распределении индукции
|
|
(12) |
и после
постановки значения ![]() в (11) получим окончательно
в (11) получим окончательно
|
|
(13) |
в) электродвижущая сила катушечной группы
Для получения достаточного количества проводников и витков в фазе и сохранения в то же время приемлемых размеров пазов, количество пазов в машине делают больше единицы. При этом ряд (q) катушек, имеющих по одинаковому количеству витков ωк и лежащих в соседних пазах, соединяют последовательно. Такую группу катушек, принадлежащих одной фазе, называют катушечной группой.
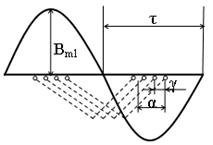
Рисунок 4 - Катушечная группа в магнитном поле (q =4)
ЭДС соседних катушек группы сдвинуты на угол
|
|
(14) |
Вся группа из q катушек занимает по окружности якоря угол (электрический)
|
|
(15) |
называемый углом
фазной зоны. ЭДС катушечной группы Еq равна геометрической сумме
ЭДС отдельных катушек группы и меньше арифметической
суммы ЭДС этих катушек qEk. Отношение ![]() называется коэффициентом распределения
обмотки.
называется коэффициентом распределения
обмотки.
Таким образом,
|
|
(16) |
Из рисунка 5 следует, что
|
|
(17) |
Подставив эти значения, получаем
|
|
(18) |

Рисунок 5 - Определение ЭДС катушечной группы
При q=1, имеем kp = 1, а при q>1, kp< 1.
На основании выражений (13) и (16) получим:
|
|
(19) |
где koб = ky kp - коэффициент обмотки.
г) электродвижущая сила фазы обмотки.
В многополюсной машине каждая фаза обмотки содержит ряд катушечных групп, лежащих под разными полюсами. Если группы содержат одинаковое число катушек q, то они занимают одинаковые углы α и сдвинуты относительно друг друга на целое число полюсных делений. В этом случае ЭДС катушечных групп равны по величине и сдвинуты по фазе на 360° (при сдвиге группы на четное число τ) или на 180° (при сдвиге на нечетное число τ). Такие катушечные группы можно соединить последовательно таким образом, что ЭДС групп будут складываться арифметически. Возможно также их параллельное соединение так, что ЭДС всех параллельных ветвей будут одинаковы по величине и совпадут по фазе.
Если в каждой ветви соединено последовательно n катушечных групп, то действующее значение ЭДС каждой ветви и фазы обмотки в целом будет:
|
|
|
или
|
|
(20) |
где ![]() , (
, (![]() - число последовательно соединенных
витков каждой параллельной ветви и называется числом витков фазы).
- число последовательно соединенных
витков каждой параллельной ветви и называется числом витков фазы).
Если m - фазная обмотка имеет Z пазoв и α параллельных ветвей, то:
|
|
(21) |
где Sn - число эффективных проводников в пазу.
Трехфазную обмотку конструируют таким образом, чтобы ЭДС всех фаз были равны по величине и сдвинуты по фазе на 120°. Такую обмотку называют симметричной. Пространство машины используется в наибольшей степени, когда все Z пазов машины заняты обмоткой. В симметричной обмотке Z/m - целое число.
1.3 Электродвижущая сила обмотки от высших гармоник магнитного поля
Полюсное деление k-гармоники τк в k раз меньше τ и поэтому, если сдвиг фаз двух проводников витка относительно основной гармоники (k = 1) составляет угол βπ, то относительно k-гармоники этот сдвиг равен βkπ.
При определении коэффициента укорочения для К-гармоники пользуются формулой:
|
|
(22) |
Сдвиг фаз ЭДС соседних катушек группы также будет в К раз больше, и поэтому коэффициент распределения следует вычислять по формуле:
|
|
(23) |
Угол скоса паза относительно поля K - гармоники также будет в К раз больше и поэтому для коэффициента скоса:
|
|
(24) |
Обмоточный
коэффициент для ![]() -гармоники:
-гармоники:
|
|
(25) |
ЭДС фазы от высшей гармоники поля:
|
|
(26) |
Поток ![]() - гармоники
определяется выражением:
- гармоники
определяется выражением:
|
|
(27) |
Действующее значение полной ЭДС
|
|
(28) |
1.4 Обмотки двигателя переменного тока
а) трехфазные двухслойные обмотки
Обмотка переменного тока представляет собой систему проводов, определенным образом уложенных в пазах сердечника статора.
Элементом обмотки статора является катушка, которая состоит из активных сторон и лобовой части. Расстояние между активными сторонами называется шагом обмотки у.
Шаг называется полным, если равен полюсному делению у=τ и укороченным, если он меньше полюсного деления у ≤ τ.
Применяемые в настоящее время обмотки переменного тока классифицируются следующим образом:
а) по числу фаз - однофазные и трехфазные;
б) в зависимости от размеров катушек обмотки с полным и обмотки с укороченным шагом;
в) по способу укладки катушек в пазы - однослойные и двухслойные.
В современных машинах переменного тока применяются преимущественно двухслойные обмотки.
В двухслойных обмотках стороны катушек лежат в пазах в два слоя, и каждая катушка лежит одной стороной в верхнем, а другой стороной - в нижнем слое. При этом все катушки имеют одинаковые размеры и форму. Преимущества двухслойных обмоток:
1) возможность укорочения шага обмотки на любое целое число зубцовых делений, что выгодно с точки зрения подавления высших гармоник ЭДС обмоток и уменьшения расхода обмоточного провода;
2) одинаковые размеры и форма катушек, что облегчает изготовление обмоток;
3) относительно простой формой лобовых частей катушек, что также упрощает изготовление обмоток.
Обмотки переменного тока делятся на петлевые и волновые, которые в электромагнитном отношении равноценны.
Простейшая трехфазная обмотка выполняется тремя катушками, оси которых сдвинуты по окружности статора на 1/3 двойного полюсного деления 2т. Каждая катушка в этом случае представляет собой фазную обмотку. Обычно фазная обмотка состоит не из одной, а из нескольких катушек, занимающих q пазов в пределах каждого полюсного деления. Таким образом, для образования трехфазной обмотки зубцовый слой сердечника статора в пределах каждого полюсного деления необходимо разделить на три зоны по q пазов в каждой. Порядок чередования таких зон под каждым полюсом должен быть одинаковым. Катушки, уложенные в пазы одинаковых зон, образуют фазные обмотки.
Для определения величины q - числа пазов на полюс и фазу следует пользоваться формулой
|
|
(29) |
где m - число пазов.
Угол между соседними пазами
|
|
(30) |
Сдвиг между соседними фазами, выраженный в пазах
|
|
(31) |
Пример.
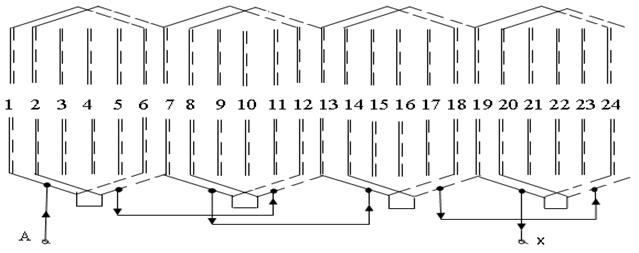
Выполнить развернутую схему трехфазной двухслойной обмотки с укороченным шагом,
если Z=24, 2р=4, ![]() =5.
=5.
По заданным т, 2р и z определяем:
а) число пазов на полюс и фазу q = z/2pm = 6;
б) полюсное деление τ= z/2p = 6;
в) угол сдвига между
соседними пазами ![]() = 360p/z – 30 эл. град;
= 360p/z – 30 эл. град;
г) сдвиг между соседними
фазами ![]() =
120/а = 4.
=
120/а = 4.
На
развернутой поверхности статора размечаем пазы (z=24) и полюсные деления ![]() пазов, а
затем наносим верхние (сплошные) и нижние (пунктирные) стороны катушек (см. рисунок 6,а).
Размечаем зоны по q = 2 паза для всех фаз (см.рисунок 6,б); при этом расстояние между зоной
какой-либо фазы в одном полюсном делении и
зоной этой же фазы в другом полюсном делении должно быть равно полюсному
делению
пазов, а
затем наносим верхние (сплошные) и нижние (пунктирные) стороны катушек (см. рисунок 6,а).
Размечаем зоны по q = 2 паза для всех фаз (см.рисунок 6,б); при этом расстояние между зоной
какой-либо фазы в одном полюсном делении и
зоной этой же фазы в другом полюсном делении должно быть равно полюсному
делению ![]() . Далее отмечаем
расстояние между началами фазных обмоток
. Далее отмечаем
расстояние между началами фазных обмоток ![]() паза.
паза.
Соединяем верхние стороны катушек 1 и 2 с их нижними сторонами (пазы 6 и 7) и получаем первую катушечную группу первой фазы; соединяем верхние стороны катушек 7 и 8 с их нижними сторонами (пазы 12 и 13) и получаем вторую катушечную группу; соединяем верхние стороны 13 и 14 с их нижними сторонами 9 пазы 18 и 19) и получаем третью катушечную группу и, наконец, соединяем верхние стороны катушек 19 и 20 с нижними сторонами (пазы 24 и 1) и получаем четвертую группу катушек.
Катушки в группах, а также катушечные группы между собой соединяем последовательно (см. рисунок 6,в) и получаем фазную обмотку первой фазы. Начало первой катушечной группы присоединяем к выводу А, а начало четвертой катушечной группы к выводу X. Проделав то же самое с катушками второй и третьей фаз и соединив катушечные группы так же, как это сделано в первой фазе, получаем фазные обмотки второй (B-Y) и третьей (C=Z) фаз (см. рисунок 6,в).
б) волновые обмотки с целым числом пазов на полюс и фазу
В мощных машинах переменного тока, в частности и в крупных турбогенераторах, вследствие большого магнитного потока и большого числа катушек необходимое напряжение обмотки статора достигается при числе витков в катушке q = 1. В этом случае двухслойная обмотка имеет в каждом пазу только два стержня большого сечения, из которых образованы витки путем пайки в лобовых частях.
Стержневые обмотки можно выполнять как петлевыми, так и волновыми. Однако в большинстве случаев их делают волновыми, так как при этом за счет уменьшения между катушечными группами достигается экономия меди и уменьшается трудоемкость изготовления обмотки.
Схема
трехфазной двухслойной стержневой волновой обмотки с теми же данными, что на
рисунке 6, изображена на рисунке 7. Для удобства обозрения схемы счет пазов
начат с отступлением от левого края. Начало фазы А взято из верхнего слоя паза 2. При обходе этой фазы
от ее начала А обойдем виток 2, лежащий
своей верхней стороной в пазу 2, из конца витка 2 (нижний слой паза 19) завершим полный обход вокруг статора. При этом
будет обойдено (в данном случае р=2)
витков. Второй обход вокруг статора начинается с соединения конца витка 14 с началом витка 1. При
втором обходе пройдем еще q=2 катушки (1 и 13) и закончим обход
выходом из нижней стороны паза 18 (см. рисунок 7). В данном случае, при q=2, этим заканчивается
первый цикл обходов. При ![]() и 4 этот цикл включает 3 и 4 обходов,
причем будет использовано pq витков (катушек) обмотки (в данном случае 2·2=4
витка), т.е. половина всех 2pq витков (катушек)
фазы.
и 4 этот цикл включает 3 и 4 обходов,
причем будет использовано pq витков (катушек) обмотки (в данном случае 2·2=4
витка), т.е. половина всех 2pq витков (катушек)
фазы.
Второй цикл обходов фазы А начат (начало 2) из нижней стороны катушки 19 (нижняя сторона паза 24), при этом все витки фазы соединены последовательно перемычкой 1K-2H. Второй цикл обходов совершается в противоположном направлении, причем q=2 охватывает катушки 20, 8, 19,7 и заканчивается концом фазы X.
Аналогично выполняются соединения в фазах В и С, независимо от числа полюсов обмотка будет иметь три перемычки, соединяющие циклы обходов в каждой фазе.
Таким образом, каждая фаза волновой обмотки состоит из двух половинок по pq катушек в каждой. Эти половинки можно соединить и параллельно, и получить обмотку с а=1 параллельных ветвей.
На рисунке 8 показано последовательное соединение четырех катушечных групп. Вторая и третья катушечные группы соединены верхними концами. Третья и четвертая катушечные группы - нижними концами, а к выводам фазной обмотки присоединены верхние концы первой и четвертой катушечных групп. При последовательном соединении катушечных групп каждая фазная обмотка, независимо от числа полюсов, содержит одну параллельную ветвь.
а)

б)
в)
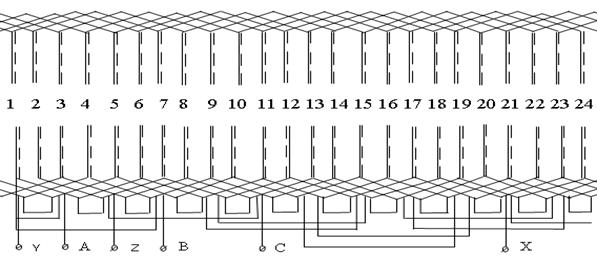
Рисунок 6 - Порядок построения трехфазной двухслойной петлевой обмотки с
укороченным шагом
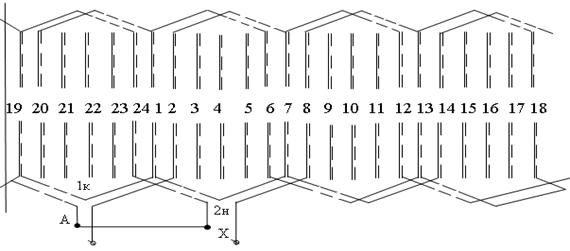
Рисунок 7 – Порядок построения двухслойной волновой обмотки с укороченным шагом обмотки (фаза А)

Рисунок 8 – Последовательный способ соединения катушечных групп
Двухслойная обмотка в каждой фазе имеет 2р катушечных групп, поэтому соединив все катушечные группы параллельно, получим обмотку, состоящую из 2р параллельных ветвей.
На рисунке 8 показано параллельное соединение четырех катушечных групп. Чтобы соединить все катушечные группы параллельно, следует к одному выводу обмотки А подключить верхние концы нечетных катушечных групп (I и III) и нижние концы четных катушечных групп (II и IV). Оставшиеся концы катушечных групп присоединяют к другому выводу фазной обмотки X. Такой порядок присоединения группы объясняется следующим: ЭДС рядом лежащих катушечных групп сдвинуты по фазе друг относительно друга на 180°, так как они расположены под разными полюсами. Поэтому, чтобы ЭДС рядом лежащих катушечных групп фазной обмотки совпадали по фазе, приходится их присоединять, меняя концы.
Если половину катушечных групп каждой фазной обмотки соединить последовательно в одну ветвь, а затем полученные ветви соединить параллельно, то получим обмотку с двумя параллельными ветвями (2а=2). Для того, чтобы ЭДС параллельных ветвей были одинаковы, в каждую параллельную ветвь включают катушечные группы через одну. Таким образом, в одной параллельной ветви оказываются все четные катушечные группы, в другой все нечетные. Катушечные группы каждой фазы статорной обмотки могут быть соединены последовательно или параллельно, что влияет на число параллельных ветвей в обмотке.
в)способы соединения катушечных групп обмоток статора Катушечной группой называется ряд последовательно соединенных между собой катушек, которые лежат в соседних пазах и принадлежат одной фазной обмотке. Каждая катушечная группа имеет q последовательно соединенных катушек. Количество катушечных групп в фазной обмотке равно числу полюсов и, следовательно, общее число катушечных групп в двухслойной обмотке А=2рт.
2 Асинхронные машины. Трехфазный асинхронный двигатель при неподвижном роторе
2.1 Холостой ход асинхронного двигателя при неподвижном роторе
Предположим, что ротор асинхронного двигателя (АД) разомкнут и неподвижен, а статор включен в электрическую сеть с напряжением U1 и частотой f1. Все величины, относящиеся к статору, называются первичными и обозначаются индексом «1», а все величины, относящиеся к ротору вторичными и обозначаются индексом «2».
Под действием напряжения U1 по обмотке статора будет протекать ток холостого хода I0. Образуемая этим током магнитодвижущая сила (МДС) создает магнитный поток, одна часть которого Фт сцеплена с обмотками обеих частей машины, а другая часть Фs1 - только с обмоткой статора. Первый поток является основным, второй - потоком рассеяния. Если р - число пар полюсов АД, то частота вращения n1 МДС f1 и соответственно магнитного потока составляет
|
|
(32) |
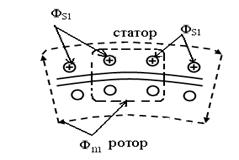
Рисунок 9 – Потоки статора при разомкнутом роторе
|
Рисунок 10 - Эквивалентная схема (а) и векторная диаграмма (б) асинхронного двигателя в режиме холостого хода |
Основной поток создает в обмотках статора и ротора ЭДС Е1 и Е2, определяемые формулами:
|
|
|
|
|
(33) |
где ω1, ω2 – число витков обмоток статора и ротора;
ko61, kо62 – обмоточные коэффициенты обмоток.
|
Отношение |
(34) |
|
|
|
называется коэффициентом трансформации ЭДС асинхронного двигателя, который определяется опытным путем отношений фазных значений ЭДС обмоток статора и ротора при холостом ходе.
Поток
рассеяния Фs1 индуктирует в каждой
фазе обмотки статора ЭДС рассеяния ![]() , где X1 - индуктивное
сопротивление рассеяния обмотки статора. Кроме того, каждая фаза обмотки статора
обладает активным сопротивлением r1, вызывающим падение
напряжение r1I0.
, где X1 - индуктивное
сопротивление рассеяния обмотки статора. Кроме того, каждая фаза обмотки статора
обладает активным сопротивлением r1, вызывающим падение
напряжение r1I0.
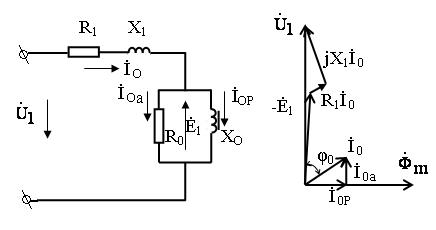
Следовательно, для одной фазы статора уравнение равновесия ЭДС будет
|
|
(35) |
|
|
|
Соответствующая этому уравнению эквивалентная схема и векторная диаграмма АД изображена на рисунке 10. Ток I0 имеет реактивную составляющую Iор, потребляемую для возбуждения магнитного поля, и активную составляющую Iоа, необходимую для покрытия потерь в стали сердечников статора и ротора.
Для построения схемы замещения, т.е. перехода от магнитной связи между обмотками статора и ротора к электрической, обмотку ротора приводят к обмотке статора, заменяя действительную обмотку ротора другой, имеющей такое же число витков, шаг обмотки и количество пазов на полюс и фазу, такое же как в обмотке статора.
При этом параметры вторичной обмотки должны быть пересчитаны так, чтобы сохранить энергетические соотношения в машине.
ЭДС приведенной вторичной обмотки равна
|
|
(36) |
|
|
|
При разомкнутом роторе в асинхронном двигателе имеются потери в обмотке статора ![]() , и потери в
сердечниках статора и ротора pcl и рс2.
На покрытие
этих потерь идет мощность р10, потребляемая двигателем из
сети
, и потери в
сердечниках статора и ротора pcl и рс2.
На покрытие
этих потерь идет мощность р10, потребляемая двигателем из
сети
|
|
(37) |
2.2 Короткое замыкание асинхронного двигатели
Режим короткого замыкания АД возникает при заторможенном роторе. Для того, чтобы токи в обмотках статора и ротора при коротком замыкании были ограничены, их номинальные значения напряжения, подводимые к двигателю, надо понизить до значения Uк, то есть на 10-20% от номинального напряжения U1ном.
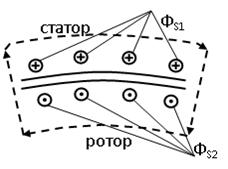
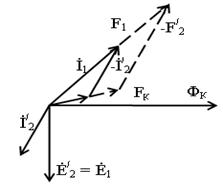
Рисунок 12 - Векторная диаграмма АД при коротком замыкании
Рисунок 11- Потоки АД при коротком замыкании
Токи I1 и I2 создают МДС F1 и F2, которые вращаются
относительно неподвижных статора и ротора в одинаковом направлении с одинаковой скоростью ![]() , они
неподвижны относительно друг друга и образуют результирующую, вращающуюся со
скоростью n1 МДС FK, которая создает
основной вращающий поток Фs1, сцепленный с
обмотками статора и ротора. Кроме того МДС F1 создает первичный
поток рассеяния Фs1 сцепленный только с первичной
обмоткой, а МДС F2 - вторичный поток
рассеяния Фs2, сцепленный только со вторичной
обмоткой (см. рисунок 11).
, они
неподвижны относительно друг друга и образуют результирующую, вращающуюся со
скоростью n1 МДС FK, которая создает
основной вращающий поток Фs1, сцепленный с
обмотками статора и ротора. Кроме того МДС F1 создает первичный
поток рассеяния Фs1 сцепленный только с первичной
обмоткой, а МДС F2 - вторичный поток
рассеяния Фs2, сцепленный только со вторичной
обмоткой (см. рисунок 11).
МДС и F1 при коротком замыкании действуют навстречу друг другу. Поэтому, несмотря на значительную величину токов I1 и I2 и создаваемых ими F1 и F2 результирующая МДС относительно мала, вследствие чего и поток Фк мал и, следовательно, магнитная цепь в этом случае ненасыщена.
Первичный ток I1 можно представить как сумму двух составляющих, из которых одна (IК) создает МДС FK, а вторая (-I2) создает МДС - F2, компенсирующую МДС F2 вторичного тока I2. Таким образом, имеем:
|
|
(38) |
соответственно
|
|
(39) |
 .
.Из условия равновесия ЭДС статора и ротора получим:
|
|
(40) |
где m1 и т2 - число фаз статора и ротора.
Коэффициент трансформации токов будет:
|
|
(41) |
Следовательно, приведенный ток ротора
|
|
(42) |
Пользуясь коэффициентами трансформации ЭДС и токов, определяем приведенные значения активного и индуктивного сопротивления ротора r2’ и x2’.
При приведении r2’ исходим из того, что потери в обмотке ротора должны оставаться неизменными, т.е
|
|
|
Откуда
|
|
(43) |
 ,
,
где ![]() - коэффициент
приведения сопротивления, при приведении индуктивного сопротивления рассеяния исходим
из того, что угол ψ2 между ЭДС Е2 и
током I2 должен остаться неизменным.
Следовательно,
- коэффициент
приведения сопротивления, при приведении индуктивного сопротивления рассеяния исходим
из того, что угол ψ2 между ЭДС Е2 и
током I2 должен остаться неизменным.
Следовательно,
|
|
|
откуда
|
|
(44) |
Уравнения первичных и вторичных ЭДС при коротком замыкании
|
|
(45) |
|
|
|
 ,
,где ![]() и
и ![]() - полные сопротивления
обмоток статора и ротора.
- полные сопротивления
обмоток статора и ротора.
Принимая
во внимание что ![]() и
и
![]() и решая
совместно уравнения
(45) относительно тока, получаем:
и решая
совместно уравнения
(45) относительно тока, получаем:
|
|
(46) |
 .
.Соответственно, этому имеем схему замещения АД в режиме короткого замыкания (рисунок 13).
Параметры схемы замещения короткого замыкания:
|
|
(47) |
|
|
|
|
|
|
 ,
,  .
.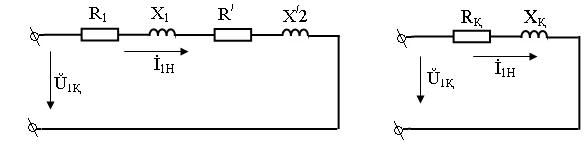
Рисунок 13 - Схема замещения АД в режиме короткого замыкания
2.3 Асинхронный двигатель при вращающемся роторе
а) скольжение, частота ЭДС и сопротивления обмотки ротора
Из принципа действия асинхронного двигателя знаем, что частота вращения ротора п2 меньше частоты вращения поля статора п1. Если бы п2 стало равно п1, то не было бы пересечения вращающимся полем статора витков обмоток ротора, а, следовательно, в обмотке ротора не индуктировалось бы ЭДС. Поэтому в обмотке ротора не возникал бы ток I2, и отсутствовал бы вращающий момент.
Степень отставания ротора от вращающегося магнитного поля статора характеризуется скольжением S, представляет собой разность между п1 и n2, выраженной в относительных, единицах, относительно частоты поля статора
|
|
(48) |
|
откуда
|
|
|
|
|
Частота ЭДС Е2, индуктируемой в обмотке ротора, равна:
|
|
(49) |
т.е. при заданной частоте сети f1 ЭДС ротора изменяется пропорционально скольжению S (f2 называется частотой скольжения). Согласно общему выражению (33) для ЭДС ротора имеем:
|
|
(50) |
|
|
|
или, если обмотка ротора приведена к обмотке статора,
|
|
(51) |
Таким образом, при заданном основном потоке Фт ЭДС, индуктируемая в обмотке ротора при его вращении, равна ЭДС E2n при неподвижном роторе, умноженной на скольжение.
Если не принимать во внимание явления вытеснения тока на поверхность проводника обмотки ротора и изменения активного сопротивления обмотки в связи с изменением ее температуры, то можно считать постоянным индуктивное сопротивление рассеяния неподвижного ротора
x2H=2nf1L2 ,
где L2 - индуктивность, определяемая потоком рассеяния.
Так как потоки рассеяния проходят в основном по воздуху, то L2 постоянна.
Следовательно, индуктивное сопротивление ротора при его вращении равно:
|
|
(52) |
или, при приведении к обмотке статора:
|
|
(53) |
т.е. индуктивное сопротивление обмотки ротора при его вращении равно индуктивному сопротивлению неподвижного ротора Х2H, умноженному на скольжение S.
б) уравнения электродвижущей силы и тока ротора
Если цепь ротора замкнута, то в ней течет ток I2, создающий поток рассеяния Фs2 и встречающий сопротивление r2. Соответственно этому в обмотке ротора существуют ЭДС Е2, создаваемые основным потоком Фт и ЭДС рассеяния Es2= -jx2I2. Тогда по второму закону Кирхгофа имеем:
|
|
(54) |
где ![]() - полное
сопротивление ротора.
- полное
сопротивление ротора.
Следовательно
|
|
(55) |
Если обмотка ротора приведена к обмотке статора, то:
|
|
(56) |

Протекая по обмотке ротора, ток I2 создает МДС F2, вращающуюся относительно ротора со скоростью п, соответствующей частоте тока в роторе.
Сам ротор вращается со скоростью п2. Следовательно, МДС F2 ротора вращается относительно статора со скоростью n1+n2
|
|
(57) |
Таким
образом ![]() ,
т.е. намагничивающая сила ротора F вращается в пространстве всегда (независимо
от режима работы) с той частотой вращения и в том же направлении, что в
намагничивающая сила статора F1.
,
т.е. намагничивающая сила ротора F вращается в пространстве всегда (независимо
от режима работы) с той частотой вращения и в том же направлении, что в
намагничивающая сила статора F1.
в) схема замещения и векторная диаграмма асинхронного двигателя
Выражение для тока ротора (55) может быть преобразовано путем деления числителя и знаменателя на скольжение к виду:
|
|
(58) |
 .
.Новое выражение имеет новый физический смысл. Во вторичной цепи теперь вместо ЭДС вращающегося ротора Е2 с частотой f2 будет существовать ЭДС подвижного ротора с частотой f1. Вместо индуктивного сопротивления при вращении ротора Х2 действует индуктивное сопротивление при неподвижном роторе Х2н. Для того, чтобы через вторичную цепь протекал тот же по величине и по фазе относительно Е2, ток I2, необходимо вместо сопротивления r2 ввести новое сопротивление, равное
|
|
(59) |
В обоих случаях сдвиг по фазе тока от производящей его ЭДС будет один и тот же. Действительно в первом случае
|
|
(60) |
В дальнейшем будем обозначать постоянное по величине индуктивное сопротивление х2н через Х2 и постоянную по величине ЭДС Е2н через Е2. Очевидно, что и ток статора I1 остается прежним по величине и по фазе, а следовательно, не изменится потребляемая из сети мощность. Так как электрические потери в обмотках останутся прежними, то мощность, развиваемая на валу двигателя при его вращении, будет равна мощности, потребляемой в добавочном сопротивлении r2(l-S)/S. Указанное положение дает право анализировать вместо вращающегося двигателя неподвижный, с указанным добавочным активным сопротивлением. Физическая схема замещения приведена на рисунке 14.
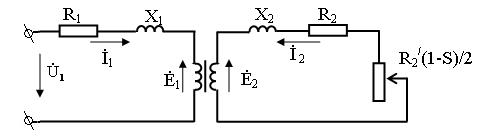
Рисунок 14 - Физическая схема замещения асинхронного двигателя, приведённая к неподвижному ротору
Оперируя для вторичной цепи приведенными величинами, напишем для первичной и вторичной цепей:
|
|
|
|
|
(61) |
 .
.Учитывая,
что ![]() ; и
падение напряжения в намагничивающем контуре равно ЭДС с обратным знаком, то есть
; и
падение напряжения в намагничивающем контуре равно ЭДС с обратным знаком, то есть ![]() , решим
совместно уравнения
(61) и получим:
, решим
совместно уравнения
(61) и получим:
|
|
(62) |
 .
.
Решая совместно уравнения (62), получим
|
|
(63) |

На основании уравнений (61) и (62) строим эквивалентную схему замещения и векторную диаграмму асинхронного двигателя при нагрузке (см. рисунки 15 и 16). При уменьшении нагрузки напряжение на зажимах обычно остается неизменным, а поток взаимоиндукции и соответствующая ему ЭДС F = Е2 на зажимах намагничивающего контура схемы (см. рисунок 15) при изменении нагрузки под влиянием падения напряжения Z1I1 в первичной цепи изменяется.
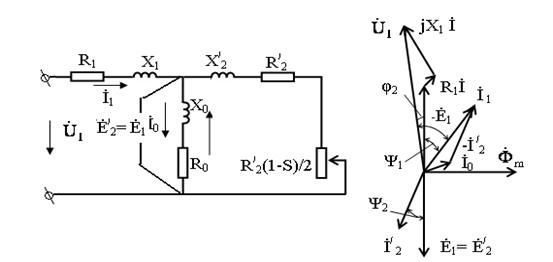
Рисунок 15 - Эквивалентная схема Рисунок 16 - Векторная замещения асинхронного двигателя диаграмма асинхронного
при нагрузке двигателя при нагрузке
Поэтому для изучения
процессов работы асинхронного двигателя, более удобной является схема
замещения, в которой намагничивающий контур выносится
на первичные зажимы, и ток в нем при всех изменениях нагрузки и соответственно
при изменении скольжения S остается
постоянным и равным току идеального
синхронного холостого хода. Поправочный коэффициент ![]() изменяет основные параметры главной намагничивающей
цепи и токи по величине и фазе, но он не зависит от скольжения.
изменяет основные параметры главной намагничивающей
цепи и токи по величине и фазе, но он не зависит от скольжения.
Так как
обычно отношение r1/хт весьма не велико, то
можно пренебречь мнимой частью σ1, учитывая лишь его вещественную
часть ![]() . В
реальных
машинах σ1= 1 ,04 - 1 ,08.
. В
реальных
машинах σ1= 1 ,04 - 1 ,08.
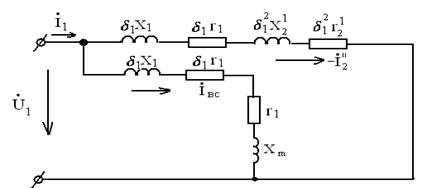
Рисунок 17 - Точная схема замещения с вынесенным на первичные зажимы намагничивающим контуром
2.4 Вращающие моменты и мощности асинхронного двигателя
а) энергетическая диаграмма асинхронного двигателя
Активная мощность, потребляемая двигателем из сети, равна
|
|
(64) |
Из векторной диаграммы (рисунок 16) имеем:
|
|
(65) |
Окончательное выражение для подводимой к статору активной мощности
|
|
(66) |
где pM1 - электрические потери в обмотке статора;
рс1 - магнитные потери в сердечнике статора;
рэм - электромагнитная мощность, передаваемая вращающимся магнитным полем в цепь ротора.
Для реактивной мощности, потребляемой двигателем, имеем:
|
|
(67) |
После аналитических преобразований получим:
|
|
(68) |
т.е. реактивная мощность, потребляемая двигателем из сети, расходуется на создание магнитного поля рассеяния обмотки статора, намагничивания сердечников статора и ротора и передачу реактивной мощности ротору, для создания полей рассеяния обмотки ротора.
Преобразование энергии и потери в асинхронном двигателе иллюстрируются энергетической диаграммой.
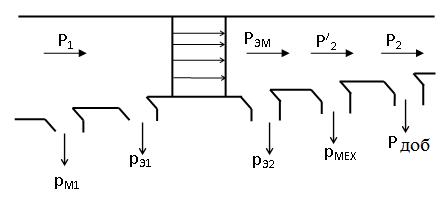
рмех - механические потери в роторе;
рм2 - электрические потери в обмотке ротора;
рдоб -прочие добавочные потери.
Рисунок 18-Энергетическая диаграмма асинхроного
двигателя
Потери в стали сердечника ротора при обычной частоте (1 - 2 Гц) ничтожны, и их учитывают только при глубоком регулировании скорости двигателя.
Электромагнитная мощность вращающегося магнитного поля
|
|
(69) |
Мощность, передаваемая со статора на вал ротора.
|
|
(70) |
Полезная механическая мощность на валу двигателя
|
|
(71) |
Обозначив угловую скорость поля статора через Ω1, а ротора через Ω2 имеем:
|
|
(72) |
Следовательно,
![]() , но так как
скольжение
, но так как
скольжение
|
|
|
|
то |
(73) |
Таким образом, потери в обмотках роторной цепи равны мощности вращающегося поля, умноженной на скольжение, т.е. чем больше скольжение (меньше частота вращения), тем больше потери в цепи ротора.
Из зависимости (72) получается общее выражение для момента асинхронного двигателя.
Полный вращающий момент равен:
|
|
(74) |
 .
.б) вращающий момент асинхронного двигателя из (73) получается
|
|
(75) |
 .
.Из схемы замещения (см. рисунок 17) имеем:
|
|
(76) |
|
следовательно, |
(77) |
 ,
, .
.Подставив значение в уравнение (75), получим общее выражение для вращающегося момента асинхронного двигателя:
|
|
(78) |
 ,
,где ![]() - индуктивное
сопротивление короткого замыкания.
- индуктивное
сопротивление короткого замыкания.
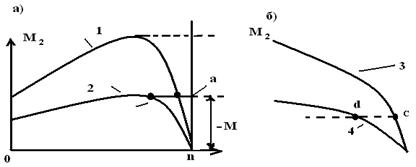
Из (78) вытекает, что момент М пропорционален квадрату напряжения сети U12, т.е. асинхронный двигатель уменьшает перегрузочную способность при понижении напряжения. Напряжение сети будем считать постоянным, поэтому момент является функцией скольжения S.
Имея параметры двигателя r1, х1,![]() и х2 и задаваясь различными значениями
скольжения от S = 1 до S=0, можем построить
механическую характеристику двигателя M=f(S), показанную на рисунке
19.
и х2 и задаваясь различными значениями
скольжения от S = 1 до S=0, можем построить
механическую характеристику двигателя M=f(S), показанную на рисунке
19.
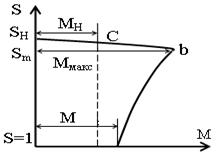
Рисунок 19 - Механическая характеристика асинхронного двигателя
При пуске двигателя развивается пусковой момент (точка а) при S=1, проходит через максимальный момент (точка в) при S=SM.
Равновесие между вращающим моментом двигателя и моментом сопротивления на валу со стороны приводного механизма наступает тогда, когда момент двигателя становится равным моменту сопротивления М=МС (точка с).
в) пусковой, максимальный и номинальный моменты асинхронного
двигателя
1) пусковой момент. Мпуск составляет одну из его важнейших эксплутационных характеристик. Значение пускового момента получается из общего выражения момента (78) при S =1
|
|
|
|
|
|
|
|
(79) |
 .
.
Из формулы (79) видно, что пусковой момент:
- при заданной частоте f1 и параметрах двигателя прямо пропорционален квадрату напряжения статора U21;
- достигает максимума при условии, что активное сопротивление ротора равно индуктивному сопротивлению рассеяния
|
|
(80) |
Пусковой
момент обычно выражается отношением: ![]() , называемым кратностью пускового момента.
, называемым кратностью пускового момента.
2) максимальный
или опрокидывающий момент Ммакс, находим, взяв производную dM/dS и приравняв её к нулю.
Из полученного равенства  определим скольжение Sm, при котором момент будет
максимальным. Таким образом, скольжение соответствующее максимальному моменту
определим скольжение Sm, при котором момент будет
максимальным. Таким образом, скольжение соответствующее максимальному моменту
|
|
(81) |
Подставив (81) в общее выражение вращающего момента (78), получим
|
|
(82) |
В нормальном асинхронном двигателе r1 значительно меньше хк, и поэтому можно считать r1=0. Тогда выражение для максимального момента приобретает вид:
|
|
(83) |

Из формулы (80) следует, что максимальный момент:
- при
заданной частоте и заданных параметрах двигателя пропорционален квадрату
напряжения статора ![]() ;
;
- не зависит от активного сопротивления цепи ротора;
- получается при тем большем скольжении (меньшей частоте вращении), чем больше активное сопротивление цепи ротора;
г) получается тем меньше, чем больше индуктивное сопротивление рассеяния первичной и вторичной цепи.
Таким образом, при увеличении активного сопротивления цепи ротора максимальный момент, не меняясь по величине, перемещается в область больших скольжений (см. рисунок 20). Кривые М=( S) при разных значениях rдо6.

Рисунок 20 - Кривые M=(S) при значениях rдо6
Показанные на рисунке 20 четыре кривые момента соответствуют четырем различным значениям добавочного активного сопротивления в rдо6 в цепи ротора. Кривая 1 получается при rдо6 = 0 (естественная характеристика).
Подбор величины rдо6 диктуется необходимой величиной пускового момента в зависимости от требований электропривода. Предельная величина пускового момента равна максимальному моменту
(кривая 4). При этом![]() ,
откуда может быть определена величина
,
откуда может быть определена величина ![]() для условия Мпуск = Ммакс.
Введением реостата в цепь ротора одновременно уменьшают и величину пускового тока.
для условия Мпуск = Ммакс.
Введением реостата в цепь ротора одновременно уменьшают и величину пускового тока.
Работа асинхронного двигателя становится неустойчивой при скольжениях s>sm. Если момент двигателя равен максимальному, а скольжение s~sm, то увеличение нагрузочного момента Мс вызовет увеличение s, a следовательно, уменьшение вращающего момента. Это приведет к дальнейшему увеличению скольжения до тех пор, пока скольжение s станет равным единице, т.е. пока ротор двигателя не остановится (опрокидывание двигателя).
Таким образом, при достижении вращающим моментом максимального значения наступает предел устойчивого режима работы асинхронного двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы вращающий момент был меньше максимального. В этом случае двигатель будет работать устойчиво не только при номинальной нагрузке, но будет выдерживать и перегрузки, что необходимо для надежной работы двигателя в электроприводе. Другими словами двигатель должен обладать перегрузочной способностью, которая определяется отношением максимального момента к номинальному (коэффициент перегрузки):
|
|
(84) |
3)Номинальный момент асинхронного двигателя имеет место при номинальном скольжении SН, когда нагрузка на валу двигателя равна номинальной, на которую рассчитан двигатель. Номинальный момент двигателя определяется по формуле:
|
|
(85) |
где Рн - номинальная мощность двигателя, Вт,
п2к - номинальная частота вращения ротора
|
|
(86) |
2.5 Рабочие характеристики асинхронного двигателя
Под
рабочими характеристиками асинхронного двигателя понимается зависимость частоты
вращения n2, развиваемого вращающего момента М,
коэффициента
мощности cosφ1, коэффициента полезного действия ![]() от полезной активной мощности на валу двигателя Р2.
от полезной активной мощности на валу двигателя Р2.
а) частота
вращения ротора ![]()
Из
формулы для скольжения следует, что ![]() . С другой стороны
. С другой стороны ![]() ,
т.е. скольжение численно равно отношению потерь в обмотке ротора РМ2
развиваемой двигателем электромагнитной мощности Рэм.
,
т.е. скольжение численно равно отношению потерь в обмотке ротора РМ2
развиваемой двигателем электромагнитной мощности Рэм.
В режиме
холостого хода Рм2 очень малы по сравнению с Рэм ,
и поэтому здесь S= 0 и ![]() . По мере увеличения нагрузки отношение
. По мере увеличения нагрузки отношение ![]() растет, но для поддержания высокого КПД оно ограничено и при номинальной нагрузке
составляет 1,5-3%.
растет, но для поддержания высокого КПД оно ограничено и при номинальной нагрузке
составляет 1,5-3%.
Зависимость представляет кривую, слабо наклоненную к оси абсцисс (рисунок 21), т.е. асинхронный двигатель имеет скоростную характеристику двигателя постоянного тока параллельного возбуждения.
б) момент
вращения ![]()
При установившемся режиме работы М=М2 + М0 ,
где М2 - полезный тормозной момент двигателя;
М0 - момент холостого хода.
Так как при изменении
нагрузки Р2 от
холости о хода до n частота вращения ротора изменяется
незначительно, то зависимость ![]() почти прямолинейна.
почти прямолинейна.
в) коэффициент
полезного действия ![]()
В асинхронном двигателе имеют место следующие виды потерь: механические потери, потери в обмотках статора и ротора, потери в сердечнике статора и добавочные потери.
Добавочные потери вызываются высшими гармониками намагничивающих сил и учитываются приближенно. Согласно ГОСТ 183-55 добавочные потери Рдоб при номинальной нагрузке составляют 0,5% от подводимой мощности.

Рисунок 21- Рабочие характеристики асинхронного двигателя
Полные потери в двигателе равны:
|
|
(87) |
где РМ1 + Рм2 - переменные потери, пропорциональные квадрату тока нагрузки;
Рс+Рмех + Рдоб - постоянные потери.
Максимум КПД достигается при равенстве постоянных и переменных потерь. На рисунке 21 показана типичная кривая КПД асинхронного двигателя, достигающая максимума примерно при 75% номинальной нагрузки.
г) коэффициент
мощности ![]() .
.
Асинхронный двигатель потребляет из сети, как и трансформатор, отстающий ток, почти не зависящий от нагрузки. Поэтому, его коэффициент мощности всегда меньше единицы. При холостом ходе он не превышает 0,2, а затем, с увеличением нагрузки, он довольно быстро растет и достигает максимума при нагрузке, близкой к номинальной. При дальнейшем росте
нагрузки
частота вращения ротора падает, соответственно чему увеличивается угол ![]() , и указываются
, и указываются ![]() и
и ![]() .
.
2.6 Пуск в ход асинхронных двигателей
Пусковые характеристики асинхронных двигателей тесно связаны с их конструкцией. Двигатели с фазной обмоткой ротора имеют, по сравнению с двигателями с короткозамкнутой обмоткой ротора, лучшие пусковые характеристики, так как включением в цепь ротора пускового реостата можно уменьшить пусковой ток Iп и одновременно увеличить пусковой момент Мп. Но двигатели с короткозамкнутой обмоткой ротора дешевле, надежнее в работе и имеют лучшие рабочие характеристики. Многочисленные попытки сочетать в одной конструктивной форме преимущества обоих типов двигателей, избежав их недостатков или сведя их до минимума, показали, что эту задачу пока нельзя считать решенной. Наилучших результатов добились, применяя двигатели с короткозамкнутой обмоткой ротора специального исполнения. В связи с ростом пропускной способности распределительных сетей такие двигатели в настоящее время выполняются на мощности порядка тысяч киловатт.
Главными способами пуска асинхронных двигателей являются: а) пуск в ход с помощью реостата, вводимого в цепь ротора двигателя с фазной обмоткой ротора; б) включение в сеть двигателей с короткозамкнутой обмоткой ротора при Un = UM (прямое включение); в) то же при Un < UH.
а) пуск двигателей с фазной обмоткой ротора.
Сопротивление rд пускового реостата (см. рисунок 22) выбирается из соображений ограничения пускового тока. Обычно величина пускового тока получается допустимой при таком сопротивлении rд, когда начальное значение пускового момента Мп равно максимальному моменту Мт. Тогда SM = 1 и по формуле
|
|
(88) |
|
|
(89) |
 ,
,
Плавность пуска двигателя достигается устройством в реостате нескольких ступеней сопротивления. На рисунке 23 а приведены механические характеристики двигателя для пяти значений сопротивления rд, а на рисунке 23 б - соответствующие зависимости тока от скорости вращения ротора.
Для уменьшения времени пуска выключение отдельных ступеней сопротивления следует производить при скорости вращения, соответствующей наибольшему вращающему моменту Мт двигателя, для остающегося сопротивления цепи ротора, как это показано на рисунке 23.
Одновременное
уменьшение пускового тока Iп и увеличение момента
Мп объясняется тем, что при включении в цепь ротора
добавочного сопротивления r'д < хк - r'2 уменьшается угол ![]() между э.д.с.
между э.д.с. ![]()
![]() и током
и током ![]() а (увеличивается активная составляющая тока ротора
а (увеличивается активная составляющая тока ротора ![]() ) и увеличивается
вращающий момент Мn. При сопротивлении цепи
ротора r'л
+ r'2
> хк активная составляющая тока уменьшается, а это снижает вращающий
момент.
) и увеличивается
вращающий момент Мn. При сопротивлении цепи
ротора r'л
+ r'2
> хк активная составляющая тока уменьшается, а это снижает вращающий
момент.
Включение в сеть двигателя с разомкнутой обмоткой ротора может вызвать значительные всплески тока, как это имеет место при включении ненагруженного трансформатора. Поэтому, начала первых ступеней сопротивления трех фаз реостата соединяются в общую точку. Наличие замкнутой вторичной цепи предохраняет также от перенапряжений в обмотках статора и ротора при выключении двигателя.
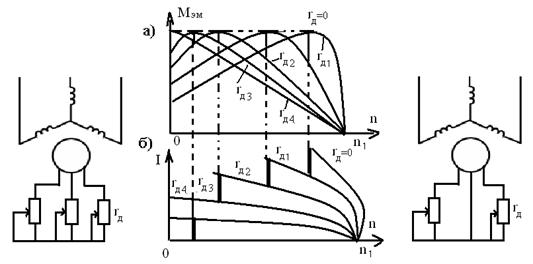
|
Рисунок 22- Включение симметричного пускового реостата |
|
Рисунок 24 - Включение несимметричного реостата |
Рисунок 23 - Пуск двигателя
с реостатом цепи ротора:
а - изменение момента;
б - изменение тока реостата
Для пуска двигателей малой и средней мощности применяются металлические реостаты, чаще всего с масляным охлаждением, для двигателей большой мощности - водяные реостаты с подвижными электродами.
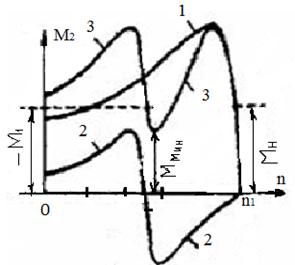
Для уменьшения числа контактов и удешевления пускового реостата иногда добавочные сопротивления вводят только в две фазы обмотки ротора (см. рисунок 24), что вызывает асимметрию тока ротора, асимметрию систему токов в общем случае можно разложить на три симметричные системы с различным порядком следования фаз. Но система нулевой последовательности токов в данном случае отсутствует, так как средние точки реостата и обмотки ротора не соединяются. Система прямого следования фаз и система обратного следования фаз вращаются относительно ротора с одинаковой скоростью
|
|
(90) |
но в противоположные стороны.
Ротор
вращается со скоростью ![]() . Следовательно, скорость вращения прямого
поля относительно статора
. Следовательно, скорость вращения прямого
поля относительно статора
|
|
(91) |
скорость вращения обратного поля
|
|
(92) |
Таким образом, прямое поле вращается синхронно с полем статора, их взаимодействие создает на валу машины вращающий момент (линия 1 на рисунке 26).
Обратное поле ротора вращается в пространстве с переменной скоростью, причем при изменении скольжения от s = 1 до s = 0,5. Обратное поле вращается против вращения ротора; при S = 0,5 скорость обратного поля n1(l-2s)=0, а при изменении скольжения от s = 0,5 до нуля направление вращения обратного поля совпадает с направлением вращения ротора.
а) б)
|
|

|
|

|
|
а - последовательно с rд ; Рисунок 26 - Механическая
б - параллельно с rд . характеристика при
Рисунок 25 - Включение несимметрии токов ротора
в цепь ротора
индуктивного сопротивления
Для обратно вращающегося поля ротора можно считать обмотку статора замкнутой накоротко, так как сопротивление сети очень мало. Поэтому взаимодействие обратного поля ротора с короткозамкнутой обмоткой статора при скорости вращения ротора n<n1/2 приводит к увеличению вращающего момента двигателя, а при n>n1/2 момент, создаваемый обратным полем, является тормозящим, как показано на рисунке 26 (линия 2). Результирующий момент представлен линией 3. Резкое снижение вращающего момента наблюдается при п ≈ 0,5n1 и, если нагрузочный момент Мт окажется больше вращающего момента Ммин, то двигатель не достигнет нормальной для него скорости вращения, а будет устойчиво работать в точке а механической характеристики.
Такое же явление наблюдается вследствие асимметрии токов обмотки ротора при нарушении контактов в цепи ротора.
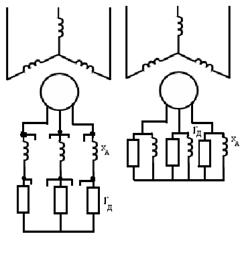
Для автоматизации процесса пуска в некоторых случаях в цепь ротора включают активное сопротивление rд и последовательно или параллельно с ним индуктивное сопротивление хд.
По схеме (см. рисунок 25, а) в первый момент пуска, когда s = 1 и f2=f, индуктивное сопротивление велико и в основном ограничивает пусковой ток. По мере увеличения скорости вращения ротора частота f2 = fs уменьшается, соответственно чему уменьшаются э.д.с. ротора E2s и индуктивное сопротивление XdS =Xd. В результате ток в цепи ротора спадает медленнее, чем при наличии только сопротивления rд, т. е. пусковая операция идет более плавно.
По схеме (см. рисунок 25, б) в начале пуска, когда частота f2 еще велика, велико и индуктивное сопротивление хд, поэтому основная часть тока ротора идет через активное сопротивление, которое таким образом определяет пусковой ток и вращающий момент. По мере увеличения скорости вращения ротора индуктивное сопротивление уменьшается пропорционально частоте f2=fs и к концу пуска почти весь ток ротора потечет по индуктивному сопротивлению. Такое перераспределение тока в цепи ротора позволяет иметь во время пуска почти постоянные значения вращающего момента и тока.
б) прямое включение асинхронного двигателя в сеть
При этом способе включения двигателя с короткозамкнутой обмоткой ротора явления, имеющие место в первый момент включения, те же, что и в короткозамкнутом трансформаторе. Сверхток короткого замыкания имеет две составляющие - периодическую, соответствующую установившемуся току короткого замыкания, и апериодическую, налагающуюся на первую составляющую и затухающую во времени. В асинхронных двигателях затухание второй составляющей тока короткого замыкания происходит очень быстро. Поэтому под пусковым током двигателя IП обычно понимают только установившийся ток короткого замыкания.
Величина начального значения пускового тока обычно выражается отношением его к номинальному току и называется кратностью пускового тока. Для современных двигателей кратность пускового тока находится в пределах IП/IH = 4÷7, поэтому предохранители и тепловое реле должны выдерживать кратковременно значительные токи.
Возможность прямого включения электродвигателя в сеть определяется падением напряжения, зависящим от пускового тока и полного сопротивления линии и трансформатора. В настоящее время в связи с ростом мощностей распределительных систем допускается прямое включение в сеть двигателей мощностью в несколько сот и даже тысяч киловатт.
в) Включение двигателя в сеть при Un < UH
Понижение напряжения включением индуктивного сопротивления
На рисунке 27, а показана схема включения двигателя 1 и индуктивного сопротивления 2. При пуске сначала замыкают рубильник 3, а затем при вращении ротора рубильник 4. Величина индуктивного сопротивления подбирается таким образом, чтобы кратность пускового тока IП /IH = 2 ÷2,5; для этого нужно понизить напряжение на двигателе в 2-3 раза. Включение регулируемого индуктивного сопротивления позволяет осуществить плавный пуск двигателя. Начальное значение пускового момента уменьшается пропорционально (Un / UH )2, т. е. в 4-9 раз.
Понижение напряжения автотрансформатором
Вместо индуктивного сопротивления можно применить автотрансформатор (см. рисунок 27, б). Применение автотрансформатора позволяет получить большую величину пускового момента, чем в случае индуктивного сопротивления при одинаковых токах в линии. Если сохранить прежнее значение IП/IH = 2÷2,5, то требуется понижение напряжения автотрансформатором только в 1,5-2 раза, а это приводит к уменьшению пускового момента в 2-4 раза.

|
Рисунок 28 - Пуск двигателя переключением с треугольника на звезду |
а - индуктивным сопротивлением;
б – автотрансформатором.
Рисунок 27 - Понижение напряжения
при пуске
Недостатком обоих способов пуска является значительная стоимость пусковой аппаратуры.
Переключение треугольник - звезда
В этом случае пуск осуществляется следующим образом (см. рисунок 28). Переключатель ставится в положение «пуск» и обмотка статора включается в сеть. При скорости вращения, близкой к номинальной, перебрасывают переключатель в положение «работа», чем и заканчивается пусковая операция.
При пусковом положении переключателя обмотки статора соединены звездой, при рабочем положении - треугольником.
Пусть Uл - напряжение в линии; UY и UΔ- напряжения на фазу при соединении обмоток статора звездой и треугольником; In.л.Y; Iп.фу Iп.лΔ; I п.фΔ -пусковые токи в линии и в фазах обмотки статора при ее соединении звездой и треугольником. При соединении обмотки звездой
|
|
(93)
|

Если включить двигатель в сеть при соединении обмотки статора треугольником, то
|
|
(94) |
|
|
(95) |

Из сопоставления этих формул следует, что  .
.
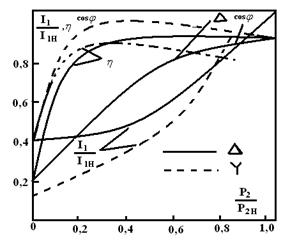
Рисунок 29 - Рабочие характеристики асинхронного двигателя при соединении обмотки статора треугольником и звездой
Таким
образом, пусковой ток в линии при соединении статора звездой в три раза меньше,
чем при соединении треугольником. Это весьма ценное преимущество
рассматриваемого способа пуска. Но так как при соединении обмоток статора звездой
фазное напряжение в ![]() раз меньше, чем при соединении
треугольником, то пусковой момент Мп тоже уменьшается в три
раза
раз меньше, чем при соединении
треугольником, то пусковой момент Мп тоже уменьшается в три
раза
|
|
(96) |
 .
.
Поэтому рассматриваемый способ пуска в ход применяется только там, где нагрузочный момент при пуске значительно меньше номинального.
К недостаткам данного способа относится неплавность пусковой операции, имеющей всего только две пусковые ступени, и увеличение продолжительности пуска.
Способ переключения
треугольник - звезда применяется не только для пуска двигателей в ход, но также для улучшения cosφ и к.п.д. двигателей
при малых нагрузках (не превышающих 0,4 номинальной). Переключив обмотки статора с
треугольника на звезду, уменьшают фазное напряжение в ![]() раза при том же линейном напряжении. Следовательно, э.д.с. Ег и поток
раза при том же линейном напряжении. Следовательно, э.д.с. Ег и поток ![]() уменьшаются, так как
уменьшаются, так как ![]() и n1, и
и n1, и ![]() . Это
приводит к уменьшению намагничивающего
тока I0 несколько больше, чем в
. Это
приводит к уменьшению намагничивающего
тока I0 несколько больше, чем в ![]() раз, так как магнитная цепь двигателя
обычно насыщена, а также к уменьшению потерь в стали приблизительно в 3
раза, так как они зависят от магнитного потока во второй степени.
раз, так как магнитная цепь двигателя
обычно насыщена, а также к уменьшению потерь в стали приблизительно в 3
раза, так как они зависят от магнитного потока во второй степени.
Но, согласно формуле
|
|
(97) |
Если
момент Мт задан (Мт = const), то уменьшение
потока ![]() вызывает соответствующее
увеличение тока в роторе
вызывает соответствующее
увеличение тока в роторе ![]() 2 за счет большего скольжения
s:
2 за счет большего скольжения
s:
|
|
(98) |
 .
.
Это приводит к увеличению потерь в обмотке ротора примерно в 3 раза.
В обмотке статора ток равен геометрической сумме намагничивающего и приведенного вторичного токов. При соединении звездой первый уменьшается, а второй увеличивается.
Поэтому при малых нагрузках,
где главную роль играет намагничивающий ток I0, ток в статоре I1 уменьшается; но при
относительно больших нагрузках, где большее значение имеет приведенный вторичный ток ![]() 2, ток
2, ток ![]() 1 при соединении
звездой может оказаться больше, чем при соединении треугольником (см. рисунок
29).
1 при соединении
звездой может оказаться больше, чем при соединении треугольником (см. рисунок
29).
Из сказанного следует, что к.п.д. двигателя при соединении звездой немногим отличается от к.п.д. при соединении треугольником; при малых нагрузках, не превышающих 40% номинальной, он несколько выше, но затем быстро уменьшается.
При малых нагрузка переключение с треугольника на звезду оказывает большое влияние на cosφ двигателя (см. рисунок 29).
2.7 Регулирование скорости вращения асинхронных двигателей
Асинхронный двигатель, как правило, используется в электроприводе с постоянной скоростью вращения, однако в ряде случаев требуется эту скорость регулировать.
Из
формулы ![]() следует, что
скорость вращения ротора асинхронного двигателя
следует, что
скорость вращения ротора асинхронного двигателя
|
|
(99) |
|
|
|
Таким образом, чтобы изменить скорость вращения ротора, необходимо изменить либо скольжение s, либо скорость вращения поля статора n1. Последнее достигается изменением числа пар полюсов обмотки статора или же частоты тока в обмотке статора.
Перечисленные способы имеют существенные недостатки, и поэтому было предложено большое число соединений (каскадов) асинхронного двигателя с другими электрическими машинами для получения необходимых характеристик скорости:
а) изменение скольжения
Проще всего регулирование скольжения осуществляется в двигателе с фазной обмоткой ротора, введением добавочного активного сопротивления (см. рисунок 22). Процесс регулирования скорости вращения ротора этим способом рассматривается при постоянстве подведенного к двигателю напряжения U1, и частоты f . Момент М2 считается также постоянным.
При
отсутствии добавочного сопротивления в цепи ротора скольжение двигателя в
установившемся режиме определяется точкой А пересечения линии нагрузочного момента
(Мт) и характеристики скорости 1 (см. рисунок 30), соответствующей
скорости вращения n'. Если ввести сопротивление в цепь ротора, то U1 останется постоянным согласно условию,
следовательно, останутся постоянными э.д.с. Е1 и поток ![]() . Так как ротор обладает инерцией, то в ближайший
момент времени после введения
реостата, скорость вращения ротора останется прежней и, соответственно этому, сохраняется величина э.д.с.
ротора
. Так как ротор обладает инерцией, то в ближайший
момент времени после введения
реостата, скорость вращения ротора останется прежней и, соответственно этому, сохраняется величина э.д.с.
ротора ![]() .
Ток ротора
.
Ток ротора
|
|
(100) |
уменьшается вследствие
увеличения сопротивления цепи ротора до значения ![]() , а это приводит к уменьшению вращающего
момента
, а это приводит к уменьшению вращающего
момента
|
|
(101) |

Рисунок 30 - Скорость вращения при различных сопротивлениях цепи ротора
Так как
нагрузочный момент Мт
остается постоянным, то он будет превышать вращающий момент, на валу
двигателя появится отрицательный динамический момент Mj =
М2 + Мт и скорость вращения ротора начнет уменьшаться. Соответственно возрастающему
скольжению s будет также увеличиваться э.д.с. ![]() и ток
и ток ![]() . Процесс уменьшения скорости вращения и увеличения тока
. Процесс уменьшения скорости вращения и увеличения тока ![]() будет происходить до
тех пор, пока активная составляющая этого тока
будет происходить до
тех пор, пока активная составляющая этого тока ![]() не достигнет прежнего значения. Вращающий момент
М2 станет равным нагрузочному моменту (- Мт),
и ротор будет вращаться с установившейся скоростью n" меньшей, чем до
введения реостата (точка В характеристики).
не достигнет прежнего значения. Вращающий момент
М2 станет равным нагрузочному моменту (- Мт),
и ротор будет вращаться с установившейся скоростью n" меньшей, чем до
введения реостата (точка В характеристики).
Так как
ток ротора и магнитный поток при уменьшении скорости вращения не претерпевают
изменений, то ток статора ![]() и
и ![]() также остаются без изменений, поэтому
потребляемая двигателем мощность
также остаются без изменений, поэтому
потребляемая двигателем мощность ![]() не изменяется. Полезная мощность уменьшается
вследствие уменьшения скорости вращения и при постоянном моменте М2.
Следовательно, кпд двигателя
не изменяется. Полезная мощность уменьшается
вследствие уменьшения скорости вращения и при постоянном моменте М2.
Следовательно, кпд двигателя
|
|
(102) |
|
|
|
уменьшается пропорционально уменьшению скорости вращения.
С уменьшением скорости вращения происходит ухудшение вентиляции двигателя, поэтому одновременно необходимо также понижать нагрузочный момент Мm.
Наклон характеристик скорости с увеличением сопротивления цепи ротора увеличивается, это понижает устойчивость работы двигателя, т. е. малые изменения нагрузочного момента вызывают большие колебания скорости вращения.
В случае
резко нарастающих нагрузок «смягчение», т.е. увеличение наклона характеристики
скорости желательно для использования кинетической энергии ![]() , запасенной во
вращающихся частях привода с общим моментом инерции
, запасенной во
вращающихся частях привода с общим моментом инерции ![]() . При повышении нагрузки скорость
вращения двигателя понижается, и динамический момент
. При повышении нагрузки скорость
вращения двигателя понижается, и динамический момент ![]() способствует преодолению нагрузочного
момента МТ, уменьшая таким образом вращающий момент М2
двигателя. Это позволяет выбрать двигатель меньшей мощности и понизить
наибольший ток статора.
способствует преодолению нагрузочного
момента МТ, уменьшая таким образом вращающий момент М2
двигателя. Это позволяет выбрать двигатель меньшей мощности и понизить
наибольший ток статора.
а - при малом активном сопротивлении ротора; б - при большом сопротивлении.
Рисунок 31 - Регулирование скорости асинхронного двигателя изменением напряжения
Изменение скольжения может быть получено также за счет изменения подведенного к двигателю напряжения Ul; однако при малом сопротивлении цепи ротора скольжение изменяется в узких пределах вследствие большого угла наклона механической характеристики (см. рисунок 31,а). Механическая характеристика 1 построена для номинального напряжения U1H , критическое скольжение SM=0,2 (в двигателях средней и большой мощности Sм значительно меньше). При уменьшении напряжения ординаты механической характеристики уменьшаются пропорционально (U1/UIH)2 . Характеристика 2 соответствует уменьшению напряжения на 0,3 UIH. При заданном нагрузочном моменте скольжение будет изменяться в пределах между точками а и в, т. е. скорость вращения изменится не более чем на 15%. Но при этом пусковой момент Мn становится меньше момента (Мт), вследствие чего резко снижается перегрузочная способность двигателя. При увеличении сопротивления цепи ротора пределы регулирования скорости вращения значительно расширяются, особенно если SM становится равным единице, однако при этом понижается устойчивость работы двигателя.
На рисунке 31, б приведены механические характеристики двигателя при SM=1 для номинального напряжения (линия 3) и для пониженного на 30% напряжения (линия 4). Регулирование скорости вращения при заданном значении Мт находится в пределах c-d.
Пределы регулирования скольжения зависят также от характера изменения нагрузочного момента, от скорости вращения; эти пределы уменьшаются, если момент Мт возрастает с увеличением скорости вращения.
Регулирование напряжения может производиться автотрансформатором, переменным индуктивным сопротивлением или другими способами.
б) изменение числа пар полюсов
При изменении числа пар полюсов обмотки статора изменяется скорость вращения поля статора, а следовательно, и скорость вращения ротора. Число полюсов может быть только целым, поэтому изменение скорости вращения будет ступенчатым. Особенно большие ступени получаются при малом числе полюсов.
Изменение числа полюсов может быть достигнуто двумя способами: на статоре можно уложить две обмотки, каждая из которых имеет требуемое число полюсов, или же использовать одну обмотку, допускающую переключение на разное число полюсов.
В двигателе с переключением числа полюсов ротор обычно выполняется с короткозамкнутой обмоткой, так как применение фазной обмотки с переключением числа полюсов значительно усложняет изготовление ротора.
Наиболее простая схема переключения числа полюсов обмотки получается при отношении скоростей вращения 1:2.
Двухслойные обмотки предпочтительнее, так как они обеспечивают лучшую форму магнитного поля в зазоре. Шаг обмотки выбирается таким образом, чтобы он был близким к полюсному делению при большем числе полюсов. На рисунке 32 представлена схема обмотки, фаза которой состоит из двух катушек АВ и CD. Показанное на рисунке 32, а направление тока при соединении конца катушки В с началом катушки С создает четыре полюса. При изменении направления тока в катушке CD получается два полюса (см. рисунок 32, б) Изменение направления тока в катушке CD может быть получено и при параллельном соединении катушек (см. рисунок 32, в). При этом требуется только три выведенных конца вместо четырех по схеме (см. рисунок 32, б), а при внутреннем соединении трехфазной обмотки звездой или треугольником только шесть концов. При изменении числа полюсов может изменяться также индукция в зазоре и приблизительно пропорционально ей - вращающий момент двигателя.
Индукция в зазоре зависит от величины вращающегося магнитного потока и полюсного деления. Магнитный поток определяется приложенным к обмотке напряжением, числом последовательно соединенных витков и обмоточным коэффициентом.
При одинаковом фазном напряжении магнитный поток при параллельном соединении будет в 2,5 раза больше, чем при последовательном (в два раза за счет половинного числа последовательно соединенных витков и в 1,25 раза за счет меньшего обмоточного коэффициента). При переходе от удвоенного числа полюсов к меньшему полюсное деление увеличивается в два раза. Таким образом, индукция в зазоре Вб и, следовательно, вращающий момент при переходе к большей скорости вращения возрастает в 1,25 раза. Соединение фазных обмоток при высшей скорости вращения в этом случае выполняется звездой с двумя параллельными ветвями (YY), а при низшей - звездой (Y).

Рисунок 32 - Регулирование скорости вращения изменением числа пар полюсов двигателя
Эта схема переключения обмоток пригодна для двигателей привода вентиляторов.
Для получения
приблизительно одинакового вращающего момента при обеих скоростях
вращения, например, у двигателя для привода компрессора; применяется схема
соединения обмоток YY/А. В этом случае фазное напряжение при переходе к
высшей скорости вращения уменьшается в-![]() ,
следовательно, магнитный поток увеличивается только в 1,45 раза.
Вследствие увеличения полюсного
деления в два раза индукция в зазоре и вращающий момент при высшей скорости вращения составляют 0,7 индукции
и момента при низшей скорости.
Увеличение вращающего момента может быть достигнуто за счет соответствующего выбора шага обмотки и повышения
плотности тока при высшей скорости
вращения.
,
следовательно, магнитный поток увеличивается только в 1,45 раза.
Вследствие увеличения полюсного
деления в два раза индукция в зазоре и вращающий момент при высшей скорости вращения составляют 0,7 индукции
и момента при низшей скорости.
Увеличение вращающего момента может быть достигнуто за счет соответствующего выбора шага обмотки и повышения
плотности тока при высшей скорости
вращения.
При необходимости сохранения одинаковой мощности на обеих ступенях скорости вращения (для привода металлорежущих станков) применяется схема переключения обмотки ∆/YY.
в) Изменение частоты питающей сети
Этот способ применяется в тех случаях, когда требуется регулировать скорость вращения одного или нескольких двигателей одновременно или получить скорость вращения более 3000 об/мин.
В качестве примера можно привести привод 1 ребных винтов на судах, привод двигателей в деревообделочной промышленности со скоростью вращения 12000 об/мин, привод электрошпинделей для шлифовки со скоростью вращения до 150 000 об/мин.
При питании двигателей от синхронного генератора изменение частоты достигается изменением скорости приводного двигателя. Это возможно только в сравнительно узких пределах. Существуют специальные схемы, которые позволяют регулировать частоту тока без изменения скорости приводного двигателя.
С изменением частоты тока будут изменяться в общем случае все величины, характеризующие работу двигателя: напряжение на зажимах, поток, ток холостого хода, вращающий момент, мощность, перегрузочная способность, скорость вращения. Анализ этого способа регулирования скорости отличается значительной сложностью. Поэтому приводятся только конечные результаты без вывода их.
Пусть поставлено условие, чтобы двигатель работал при переменной частоте, но с практически постоянными значениями кпд, cos<р, перегрузочной способности Мт и постоянным абсолютным скольжением s. Если двигатель не насыщен, то поставленные условия соблюдаются при следующем соотношении между напряжением, частотой и вращающим моментом
|
|
(103) |
где ![]() и
и ![]() - напряжение и
вращающий момент при частоте
- напряжение и
вращающий момент при частоте ![]() ;
;
![]() и
и ![]() - те же величины при частоте
- те же величины при частоте ![]() .
.
Если ![]() ,
, ![]() , т. е. напряжение, подводимое к
двигателю,
должно
изменяться пропорционально частоте.
, т. е. напряжение, подводимое к
двигателю,
должно
изменяться пропорционально частоте.
При использовании в качестве источника электроэнергии синхронного генератора изменение частоты и напряжения получается при постоянном возбуждении и изменяющейся скорости вращения.
Если
двигатель работает на центробежный вентилятор или на гребной винт, то ![]() . В этом случае
. В этом случае  , т. е. напряжение на
зажимах должно
изменяться пропорционально частоте во второй степени. Этот режим соответствует работе
синхронного генератора с током возбуждения, изменяющимся пропорционально скорости
вращения.
, т. е. напряжение на
зажимах должно
изменяться пропорционально частоте во второй степени. Этот режим соответствует работе
синхронного генератора с током возбуждения, изменяющимся пропорционально скорости
вращения.
Иногда подобное регулирование частоты применяется для пуска крупных асинхронных двигателей.
3 Синхронные машины
Обмотка возбуждения создает магнитный поток возбуждения синхронной машины, который сцепляется с обмоткой якоря (статора) и индуктирует в ней ЭДС.

Рисунок 33 - Магнитное поле обмотки возбуждения
явнополюсной машины
На рисунке 33 кривая I представляет собой распределение магнитной индукции поля возбуждения Вδ на поверхности якоря. Кривую - Вδ разлагают на основную и высшие гармоники, которые индуктирует в обмотке якоря основную и высшие гармоники ЭДС. Высшие гармоники ЭДС малы, так как малы высшие гармоники поля и, кроме того, выбором шага и распределением обмотки якоря достигается уменьшение высших гармоник ЭДС. Поэтому учитывается только основная гармоника ЭДС якоря, и соответственно потоком взаимной индукции между индуктором (ротором) и якорем считается основная гармоника поля возбуждения. Коэффициент формы кривой поля
|
|
(104) |
Магнитодвижущая сила (МДС) обмотки возбуждения на один полюс
|
|
(105) |
где ωв - число витков обмотки возбуждения;
IB - ток возбуждения.
Амплитуда основной гармоники поля возбуждения
|
|
(106) |
где ![]() - коэффициент зазора;
- коэффициент зазора;
![]() - коэффициент насыщения по
продольной оси (оси полюсов).
- коэффициент насыщения по
продольной оси (оси полюсов).
Так как зазор ![]() переменен, то
величину
переменен, то
величину ![]() принято
рассчитывать для среднего расчетного зазора
принято
рассчитывать для среднего расчетного зазора
|
|
(107) |
Поток основной гармоники поля возбуждения
|
|
(108) |
Потокосцепление с фазной обмоткой якоря, когда ось этой фазы совпадает с осью полюсов синхронной машины
|
|
(109) |
При повороте ротора потокосцепление основной гармоники поля возбуждения изменяется по закону
|
|
(110) |
где взаимоиндуктивность равна
|
|
(111) |
При этом в якоре индуктируется ЭДС
|
|
(112) |
Амплитуда и действующее значение этой ЭДС
|
|
(113) |
где ![]() - сопротивление взаимной индукции обмотки
возбуждения с обмоткой якоря.
- сопротивление взаимной индукции обмотки
возбуждения с обмоткой якоря.
С
обмоткой возбуждения сцепляется весь поток воздушного зазора ![]() , определяемый
площадью, ограниченной кривой I (рисунок 33,б) и осью абсцисс. Величина этого потока
, определяемый
площадью, ограниченной кривой I (рисунок 33,б) и осью абсцисс. Величина этого потока
|
|
(114) |
где  - коэффициент потока
возбуждения.
- коэффициент потока
возбуждения.
Собственная индуктивность обмотки возбуждения от
|
|
(115) |
 .
.Кроме поля в воздушном зазоре обмотка возбуждения создает поток рассеяния междуполюсного пространства Фвп. и поток рассеяния лобовых частей.
Полная индуктивность обмотки возбуждения
|
|
(116) |
В
установившемся режиме работы Iв=const и поэтому ЭДС
самоиндукции обмотки возбуждения ![]() . В переходном режиме
. В переходном режиме ![]() . Активное сопротивление обмотки возбуждения
вычисляется по известным обмоточным данным (число витков, их сечение и длина).
. Активное сопротивление обмотки возбуждения
вычисляется по известным обмоточным данным (число витков, их сечение и длина).
3.1 Магнитное поле параметры обмотки якоря. Продольная и поперечная реакции якоря
При нагрузке генератора, когда по обмотке якоря протекает ток, обмотка создает собственное магнитное поле, называемое полем реакции якоря. Реакция якоря синхронной машины оказывает существенное влияние на характеристики и поведение машины как при установившихся, так и при переходных режимах работы.
Ввиду несимметричного устройства ротора явнополюсной синхронной машины возникает необходимость рассматривать действие реакции якоря по продольной и поперечной осям в отдельности. Метод такого рассмотрения называется методом наложения или теорией двух реакций. Метод двух реакций основан на принципе наложения, при котором предполагается, что магнитные потоки, действующие по поперечной оси, не влияют на величину потоков, действующих по продольной оси, и наоборот.
Векторные диаграммы МДС обмотки якоря
Активная нагрузка (![]() ). На рисунке 34, а
представлены статор и ротор двухполюсного генератора. Ротор вращается против
часовой стрелки с угловой частотой
). На рисунке 34, а
представлены статор и ротор двухполюсного генератора. Ротор вращается против
часовой стрелки с угловой частотой ![]() и при указанном положении ротора ЭДС
фазы А максимальна. Так как ток при активной нагрузке совпадает по фазе с ЭДС, то и
он максимален
iA =Im,
и при указанном положении ротора ЭДС
фазы А максимальна. Так как ток при активной нагрузке совпадает по фазе с ЭДС, то и
он максимален
iA =Im, ![]() .
.
По построенным линиям магнитной индукции поля обмотки возбуждения и магнитной индукции поля обмотки якоря видно, что МДС обмотки якоря fa направлена перпендикулярно МДС обмотки возбуждения Fв. Этот вывод подтверждается векторной диаграммой, построенной для этого случая (см. рисунок 34). Вектор ЭДС, наведенный полем возбуждения в обмотке якоря, отстает на 90° от МДС Fe при подключении активной нагрузки ток в обмотке якоря I1 совпадает по фазе с ЭДС Е, а поэтому вектор МДС Fа, создаваемый этим током, сдвинут в пространстве на 90° относительно вектора Fв.
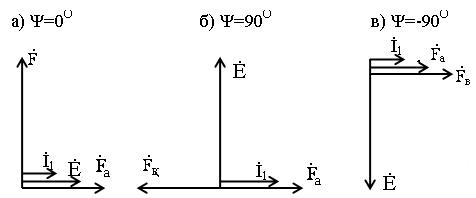
Рисунок 34 - Векторные диаграммы при активной (а), индуктивной (б) и емкостной (в) нагрузках синхронного генератора
Такой
характер поля реакции якоря (при ![]() ) сохранятся при любом положении
ротора, так как ротор и поле реакции якоря вращаются синхронно.
) сохранятся при любом положении
ротора, так как ротор и поле реакции якоря вращаются синхронно.
Поперечная реакция якоря вызывает искажение кривой поля в воздушном зазоре, и вращающее поле реакции якоря индуктирует ЭДС в обмотке якоря.
Индуктивная нагрузка ( ![]() ). При индуктивной нагрузке ток статора
). При индуктивной нагрузке ток статора ![]() отстает по фазе от ЭДС Е1 на
90°. Поэтому он достигает максимума после поворота ротора вперед на 90° относительно его положения,
соответствующего максимуму ЭДС (см. рисунок 34,б). При этом МДС реакции якоря Fa действует по оси полюсов ротора
встречно МДС обмотки возбуждения Fe (см. рисунок 34,б).
отстает по фазе от ЭДС Е1 на
90°. Поэтому он достигает максимума после поворота ротора вперед на 90° относительно его положения,
соответствующего максимуму ЭДС (см. рисунок 34,б). При этом МДС реакции якоря Fa действует по оси полюсов ротора
встречно МДС обмотки возбуждения Fe (см. рисунок 34,б).
Такое действие МДС реакции якоря ослабляет магнитное поле машины. Следовательно, реакция якоря в синхронном генераторе при чисто индуктивной нагрузке оказывает продольно-размагничивающее действие.
Емкостная нагрузка (![]() ). Так как ток I1 при емкостной
нагрузке опережает
по фазе ЭДС на 90°, то он достигает максимума раньше, чем ЭДС (в положении, указанном на рисунке 34, в).
МДС реакции якоря Fa действует,
как и в предыдущих случаях по оси полюсов,
но теперь уже согласно с МДС обмотки
возбуждения Fв, следовательно,
реакция якоря в синхронном генераторе при чисто емкостной нагрузке оказывает
продольно-намагничивающее действие.
). Так как ток I1 при емкостной
нагрузке опережает
по фазе ЭДС на 90°, то он достигает максимума раньше, чем ЭДС (в положении, указанном на рисунке 34, в).
МДС реакции якоря Fa действует,
как и в предыдущих случаях по оси полюсов,
но теперь уже согласно с МДС обмотки
возбуждения Fв, следовательно,
реакция якоря в синхронном генераторе при чисто емкостной нагрузке оказывает
продольно-намагничивающее действие.
Смешанная
нагрузка. При смешанной нагрузке синхронного генератора ток статора ![]() сдвинут по фазе
относительно ЭДС на угол
сдвинут по фазе
относительно ЭДС на угол ![]() , значения которого лежат в пределах 0<
, значения которого лежат в пределах 0<![]() <90 °.
<90 °.
При
активно-индуктивной нагрузке вектор Fa отстает от вектора ЭДС
на
угол 0 <![]() <
90°. Раскладываем вектор Fa на составляющие:
продольную составляющую МДС реакции якоря
<
90°. Раскладываем вектор Fa на составляющие:
продольную составляющую МДС реакции якоря ![]() и поперечную составляющую
и поперечную составляющую ![]() (см. рисунок 35,а).
Такое же разложение на составляющие сделано и для случая активно-емкостной
нагрузки (см. рисунок 35,б). Поперечная составляющая МДС Faq пропорциональна активной
составляющей тока
(см. рисунок 35,а).
Такое же разложение на составляющие сделано и для случая активно-емкостной
нагрузки (см. рисунок 35,б). Поперечная составляющая МДС Faq пропорциональна активной
составляющей тока ![]() , продольная
составляющая МДС пропорциональна реактивной составляющей
, продольная
составляющая МДС пропорциональна реактивной составляющей ![]() . Если реактивная
составляющая тока отстает от ЭДС (
. Если реактивная
составляющая тока отстает от ЭДС (![]() ), то МДС размагничивает генератор, если же
реактивная составляющая тока
), то МДС размагничивает генератор, если же
реактивная составляющая тока ![]() опережает ЭДС (ψ< 0) ,
то МДС Fad подмагничивает
генератор.
опережает ЭДС (ψ< 0) ,
то МДС Fad подмагничивает
генератор.
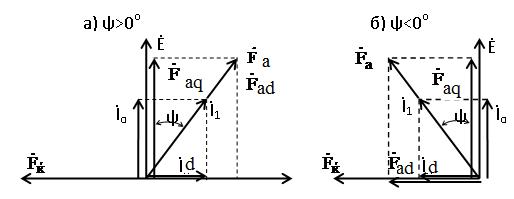
а) активно- индуктивная нагрузка;
б) активно-емкостная нагрузка.
Рисунок 35 - Векторные диаграммы при смешанной нагрузке
В явнополюсной машине магнитное сопротивление между полюсами значительно больше, чем под полюсами. Объясняется это значительным воздушным зазором междуполюсного пространства. Поэтому, составляющая магнитного потока реакции якоря по продольной оси значительно меньше, чем в неявнополюсной. При определении поперечной составляющей МДС реакции якоря для явнополюсной машины это уменьшение потока учитывается коэффициентом kq:
|
|
(117) |
где kq - коэффициент формы поперечной реакции якоря, представляющий отношение магнитного потока реакции якоря по поперечной оси в явнополюсной машине к составляющей магнитного потока реакции якоря по той же оси в неявнополюсной машине (обычно kq =0.3-0.5)
Продольная составляющая МДС реакции якоря в явнополюсной машине
|
|
|
где kd - коэффициент формы
продольной реакции якоря, учитывающий ослабление составляющей магнитного потока
реакции якоря по продольной оси из-за неравномерности воздушного зазора по
поверхности полюсного наконечника (обычно ![]() ).
).
3.2 Магнитные поля, ЭДС и параметры продольной и поперечной реакции якоря
Продольная составляющая МДС реакции якоря
|
|
(118) |
 .
.Поперечная составляющая МДС реакции якоря
|
|
(119) |
 .
.Основные гармоники полей продольной и поперечной реакции якоря создают потоки реакции якоря
|
|
(120) |
На основании (115) и (116) получим
|
|
|
|
|
(121) |
 ,
, .
.
Потоки Фad и Фaq вращаются синхронно с ротором и индуктируют в обмотке якоря ЭДС самоиндукции которые называются ЭДС продольной и
|
|
|
|
|
(122) |
поперечной реакции
якоря. ЭДС ![]() можно представить в виде
можно представить в виде
|
|
(123) |
где ![]() и
и ![]() - индуктивные сопротивления продольно
и
поперечной реакции якоря. На основании выражений (П8),(Н9) и (120) получим
- индуктивные сопротивления продольно
и
поперечной реакции якоря. На основании выражений (П8),(Н9) и (120) получим
|
|
|
|
|
(124) |
 ,
, .
.Поток оцепление
рассеяния обмотки якоря ![]() . Можно разложить на составляющие по осям d и q:
. Можно разложить на составляющие по осям d и q:
|
|
|
|
|
|
|
|
(125) |
ЭДС Ead и Eoad_Eaq и Еда совпадают по фазе
|
|
|
|
|
(126) |
или
|
|
(127) |
где ![]() - продольные
и поперечные синхронные индуктивные сопротивления обмоток якоря.
- продольные
и поперечные синхронные индуктивные сопротивления обмоток якоря.
Активное сопротивление обмотки якоря Ra, вычисляется по известным обмоточным данным (число витков, их сечение и длина).
3.3 Работа синхронного генератора при симметричной нагрузке
Векторные диаграммы напряжений синхронного генератора
а) явнополюсная машина
Напряжение фазы обмотки генератора равно сумме индуктированных в обмотке ЭДС и минус падение напряжения в активном сопротивлении фазы обмотки якоря
|
|
(128) |
ЭДС реакции якоря рассеяния можно выразить через соответствующие токи и индуктивные сопротивления. Тогда вместо (128) получим:
|
|
(129) |
Поскольку ![]() и Ra относительно малы, то при
и Ra относительно малы, то при ![]() величины ЭДС
величины ЭДС ![]() и потока
и потока ![]() при изменении характера и
величины нагрузки изменяются незначительно. Угол
при изменении характера и
величины нагрузки изменяются незначительно. Угол ![]() между векторами U1 и Е называется углом
нагрузки, так как величина угла
между векторами U1 и Е называется углом
нагрузки, так как величина угла ![]() зависит от нагрузки генератора. Векторная диаграмма на рисунке 36
называется диаграммой Блонделя.
зависит от нагрузки генератора. Векторная диаграмма на рисунке 36
называется диаграммой Блонделя.
а) активно-индуктивная нагрузка; б) активно-емкостная нагрузка.
Рисунок 36 - Векторная диаграмма напряжений янополюсного синхронного генератора
б) неявнополюсная машина
При
неявнополюсном исполнении синхронной машины индуктивные сопротивления
реакции якоря по продольной и поперечной осям равны ![]() , а следовательно,
равны и синхронные индуктивные сопротивления Xd=Xq.
, а следовательно,
равны и синхронные индуктивные сопротивления Xd=Xq.
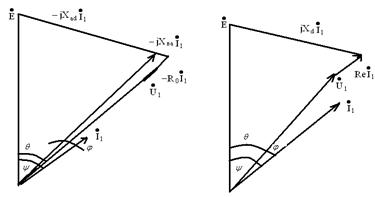
Рисунок 37 - Векторные диаграммы напряжении неявнополюсного синхронного генератора
В связи
с этим нет необходимости разлагать ток I1 на составляющие Id и Iq, a на векторных
диаграммах можно откладывать падения напряжения![]() и
и ![]() .
.
3.4 Характеристики синхронного генератора
Среди
разнообразных характеристик синхронного генератора отдельную группу составляют
характеристики, которые определяют зависимость между напряжением на
зажимах якоря ![]() током
якоря
током
якоря ![]() , и током возбуждения Iв при частоте вращения
, и током возбуждения Iв при частоте вращения ![]() и
коэффициента мощности
и
коэффициента мощности ![]() в установившемся режиме работы. Эти характеристики
дают наглядное представление о ряде основных
свойств синхронных генераторов.
в установившемся режиме работы. Эти характеристики
дают наглядное представление о ряде основных
свойств синхронных генераторов.
Они могут быть построены по расчетным данным, по векторным диаграммам и по экспериментальным данным.
Обмотка якоря нагружается с помощью симметричных регулируемых сопротивлений ZH.
Активная мощность генератора регулируется путем изменения момента двигателя, вращающего генератор. Обмотка возбуждения OB питается от источника постоянного тока и регулирование тока возбуждения Iв производится с помощью реостата R.
Все
характеристики для наглядности целесообразно строить в относительных единицах.
Внешние и регулировочные характеристики генератора. Зависимость напряжения ![]() от
тока нагрузки
от
тока нагрузки ![]() при неизменных токе
возбуждения
Iв, угле
при неизменных токе
возбуждения
Iв, угле ![]() и частоте
и частоте ![]() называют внешними характеристиками
генератора.
называют внешними характеристиками
генератора.
Форма
внешней характеристики зависит от характера нагрузки, т.е. от угла сдвига фазы ![]() между
между![]() и
и ![]() так как в зависимости от этого изменяется вектор
так как в зависимости от этого изменяется вектор ![]() (при заданном значении U1=UlHОМ ). При активной и
активно-индуктивной
нагрузках ЭДС >U1, при активно-емкостной
нагрузке E<U1, т.е. в первых двух
случаях с ростом нагрузки напряжение на зажимах генератора уменьшается, а в
третьем - увеличивается. Это объясняется тем, что при активно-емкостной
нагрузке имеется продольно-намагничивающая составляющая реакция якоря, а при
активно-индуктивной нагрузке продольно-размагничивающая составляющая (при чисто
активной нагрузке имеет место падение напряжения на индуктивном сопротивлении
рассеяния
(при заданном значении U1=UlHОМ ). При активной и
активно-индуктивной
нагрузках ЭДС >U1, при активно-емкостной
нагрузке E<U1, т.е. в первых двух
случаях с ростом нагрузки напряжение на зажимах генератора уменьшается, а в
третьем - увеличивается. Это объясняется тем, что при активно-емкостной
нагрузке имеется продольно-намагничивающая составляющая реакция якоря, а при
активно-индуктивной нагрузке продольно-размагничивающая составляющая (при чисто
активной нагрузке имеет место падение напряжения на индуктивном сопротивлении
рассеяния ![]() ).
).
На рисунке 38 изображены внешние характеристики генератора при различных видах нагрузки, полученные при одинаковом для всех характеристик значении UlHOM .
При переходе от режима холостого хода к режиму номинальной нагрузки изменение напряжения характеризуется величиной в %
|
|
(130) |
Обычно
генераторы работают с ![]() при опережающем токе. В этом случае
∆U=20-30%.
при опережающем токе. В этом случае
∆U=20-30%.
Чтобы
подключенные к генератору потребители работали с напряжением, близким к
номинальному, применяют специальные устройства, стабилизирующие выходное
напряжение U1 (быстродействующие регуляторы
возбуждения). Зависимости тока возбуждения I1 от тока нагрузки при
неизменных напряжении U1 , угле ![]() и частоте
и частоте ![]() называются регулировочными
характеристиками генератора. Они показывают, как надо изменять ток возбуждения
генератора, чтобы поддерживать напряжение неизменным при изменении тока
нагрузки.
называются регулировочными
характеристиками генератора. Они показывают, как надо изменять ток возбуждения
генератора, чтобы поддерживать напряжение неизменным при изменении тока
нагрузки.

Рисунок 38 - Внешние характеристики синхронного
генератора при различных видах нагрузки
При активной нагрузке увеличения тока нагрузки I1 сопровождается уменьшением напряжения U1 и для поддержания неизменным напряжения следует повышать ток возбуждения (см.рисунок 39, кривая 2).

Рисунок 39 - Регулировочные характеристики синхронного генератора при различных видах нагрузки
При активно-индуктивной нагрузке происходит более резкое падение напряжения U1 и для поддержания U1= UlHOМ ток возбуждения Iв следует повышать в большей степени (см рисунок 39, кривая 1).
При активно-емкостной нагрузке увеличение нагрузки сопровождается ростом напряжения U1 и поэтому для поддержания U1= UlHОМ ток возбуждения Iв следует уменьшать (см. рисунок 39, кривая 3).
3.5 Определение индуктивных сопротивлений синхронной машины
Опыты холостого хода и короткого замыкания
Схема
включения синхронного генератора для снятия характеристики холостого хода
приведена на рисунке 40,а. Характеристика холостого хода представляет зависимости
напряжения на выходе генератора в режиме х.х. ![]() от тока возбуждения Iв при
от тока возбуждения Iв при ![]() .
.

Рисунок 40 - Схема опыта и характеристика холостого хода
Если
характеристики х.х. различных синхронных генераторов изобразить в относительных
единицах ![]() ,
то эти характеристики мало отличаются друг от друга и схожи с нормальной характеристикой
х.х. (см. рисунок 40,б), которую используют при расчетах синхронных машин.
,
то эти характеристики мало отличаются друг от друга и схожи с нормальной характеристикой
х.х. (см. рисунок 40,б), которую используют при расчетах синхронных машин.
При снятии
характеристики короткого замыкания выводы обмотки статора замыкают накоротко (см.
рисунок 41, а), и при вращении ротора с частотой вращения n1ном постоянно
увеличивают ток возбуждения Iв до значения, при котором ток к.з. не
превышает номинальный ток статора более чем на 25%. Так как ЭДС обмотки статора
при этом имеет значение в несколько раз меньшее, чем в рабочем режиме
генератора, и следовательно, основной магнитный поток мал, то магнитная цепь
машины не насыщена. Вследствие этого характеристика к.з., т.е. зависимость тока
статора от тока возбуждения ![]() представляет прямую линию (см. рисунок
41, б).
представляет прямую линию (см. рисунок
41, б).
Активное сопротивление обмотки статора невелико по сравнению с индуктивным и можно принять Ra=0, т.е. нагрузка синхронного генератора является чисто индуктивной, и при опыте к.з. реакция якоря является продольно-размагничивающей.
Из векторной диаграммы (см. рисунок 41,в) видно, что ЭДС Ек индуцируемая в обмотке статора, полностью уравновешивается ЭДС продольной реакции якоря ЭДС рассеяния
|
|
(131) |
Характеристики х.х. и к.з. дают возможность определить значения токов возбуждения, соответствующие указанным составляющим МДС возбуждения. С этой целью характеристики х.х. и к.з. строят в одних осях (см. рисунок 43) в относительных единицах.
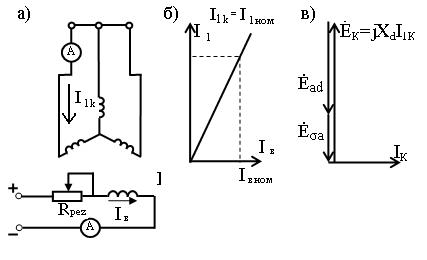
Рисунок 41- Схема опыта, характеристика и векторная диаграмма короткого замыкания
На оси
ординат откладываем отрезок ОВ, выражающий в масштабе напряжения значение ЭДС рассеяния ![]() , Затем точку
В сносят на характеристику х.х. (точка С) и
опускают перпендикуляр СД на ось абсцисс. Полученная точка Д разделит ток возбуждения Iвном на две части: Iвx ток возбуждения, необходимый для
компенсации падения напряжения
, Затем точку
В сносят на характеристику х.х. (точка С) и
опускают перпендикуляр СД на ось абсцисс. Полученная точка Д разделит ток возбуждения Iвном на две части: Iвx ток возбуждения, необходимый для
компенсации падения напряжения ![]() и
и ![]() ; ток возбуждения,
компенсирующий продольно размагничивающую реакцию якоря.
; ток возбуждения,
компенсирующий продольно размагничивающую реакцию якоря.
Из
формулы (128) можно определять синхронное индуктивное сопротивление по продольной
оси ![]() , где
ЭДС Ек и 1К должны быть взяты при одном и том же значении
тока возбуждения (рисунок 42). При учете насыщения сопротивление Xd уменьшается.
Практически употребляется значение Xd для насыщенной
машины. Если известны коэффициенты реакции якоря kd и kq, по полученному
значению Xd, можно определить синхронное индуктивное сопротивление по поперечной оси
, где
ЭДС Ек и 1К должны быть взяты при одном и том же значении
тока возбуждения (рисунок 42). При учете насыщения сопротивление Xd уменьшается.
Практически употребляется значение Xd для насыщенной
машины. Если известны коэффициенты реакции якоря kd и kq, по полученному
значению Xd, можно определить синхронное индуктивное сопротивление по поперечной оси ![]() в неявнополюсных машинах
в неявнополюсных машинах![]() .
.
В относительных единицах индуктивные сопротивления равны
|
\х A |
|
у , -Л d - |
|
|
(132) |
В современных
явнополюсных синхронных машинах ![]() и
и
![]() ; неявнополюсных синхронных машинах
; неявнополюсных синхронных машинах ![]() .
.
Один из важных параметров синхронной машины - отношение короткого замыкания (ОКЗ)
|
|

|
|
|
|
|
|
|
|
|
|
(133) |
Это отношение характеризует значение установившегося тока к.з. IК=ОКЗ I1ном, которое возникает при номинальном токе возбуждения.
При указанных выше значениях Хд и Хq для неявнополюсных машин ОКЗ = 0,4-1,1, а для явнополюсных 0,6-1,6. Следовательно, установившийся ток короткого замыкания синхронной машины сравнительно невелик (в некоторых машинах он меньше номинального), так как поле реакции якоря сильно размагничивает машину. Синхронные машины с малым ОКЗ менее устойчивы при параллельной работе и имеют значительные колебания напряжения при изменениях нагрузки, но у таких машин меньшие габариты и, следовательно, они дешевле, чем машины с большим ОКЗ.
Для
определения индуктивного сопротивления рассеяния ![]() принимают индукционную нагрузочную
характеристику генератора, т.е. зависимость его напряжения U1 от тока возбуждения Iв, при неизменном токе
нагрузки
принимают индукционную нагрузочную
характеристику генератора, т.е. зависимость его напряжения U1 от тока возбуждения Iв, при неизменном токе
нагрузки ![]() ,
частоте
,
частоте ![]() и
и ![]() (чисто индуктивная
нагрузка) (см. рисунок 44,а). Так как, при снятии индукционной нагрузочной
характеристики в машине имеется только продольная составляющая МДС Fad реакция якоря, то,
как следует из векторной диаграммы (см. рисунок 44,б), результирующая
МДС Fpe3=Fe-Fad напряжение машины
(чисто индуктивная
нагрузка) (см. рисунок 44,а). Так как, при снятии индукционной нагрузочной
характеристики в машине имеется только продольная составляющая МДС Fad реакция якоря, то,
как следует из векторной диаграммы (см. рисунок 44,б), результирующая
МДС Fpe3=Fe-Fad напряжение машины ![]() . Точка А кривой
2 (рисунок 44, а) соответствует режиму короткого замыкания, т.е. значению U1=0 при Ik=Ihom. Треугольник ABC называется реактивным
треугольником.
. Точка А кривой
2 (рисунок 44, а) соответствует режиму короткого замыкания, т.е. значению U1=0 при Ik=Ihom. Треугольник ABC называется реактивным
треугольником.
Горизонтальный катет СА соответствует току возбуждения Iек, компенсирующему размагничивающее действие реакции якоря Fact, а вертикальный катет ВС - ЭДС, он необходим для компенсации падения напряжения.
Нагрузочную характеристику можно получить как след вершины А реактивного треугольника при перемещении его так, чтобы вершина В скользила по характеристике холостого хода (I1=0), а стороны треугольника оставались бы параллельными соответствующим сторонам первоначального треугольника АВС, На кривой 2 находят точку А´, соответствующую напряжению u1hom, и откладывают влево от этой точки отрезок О´А' = О А (его определяют по характеристике короткого замыкания на рисунке 34,б для тока IК = I1ном).

Рисунок 42 - Совмещенные характеристики холостого хода и короткого замыкания
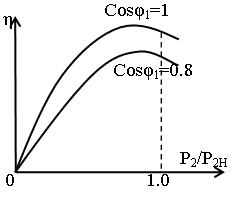
Рисунок 43 – Зависимость ![]() синхронной машины
синхронной машины
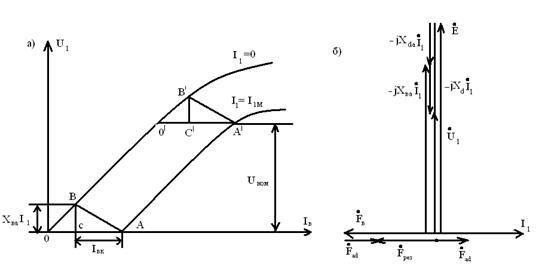
Рисунок 44 - Индукционная нагрузочная характеристика синхронного генератора (а) и его векторная диаграмма при индуктивной нагрузке (б)
Затем
через точку 0´ проводят прямую, параллельную начальной части характеристики I, до пересечений с этой характеристикой в точке В'. Опустив
из точки В' перпендикуляр на линию О'А1,
получают отрезок ![]() . следовательно
. следовательно
![]() .
.
3.6 Потери и коэффициент полезного действия синхронной машины
Преобразование энергии в синхронной машине связано с потерями энергии. Все виды потерь в синхронной машине связаны и разделяются на основные и добавочные.
Основные потери слагаются из электрических потерь в обмотке статора, потерь на возбуждение, магнитных потерь и механических потерь.
Электрические потери в обмотке статора (Вт):
|
|
(134) |
Потери на возбуждение (Вт):
|
|
(135) |
где ![]() - КПД возбудителя.
- КПД возбудителя.
Магнитные потери в сердечнике статора (Вт):
|
|
(136) |
При частоте тока 50 Гц магнитные потери в спинке статора
|
|
(137) |
где Р 1,0/so - удельные магнитные потери в стали сердечника статора, Вт/кг;
GZ1 - расчетная масса спинки статора, кг. При частоте тока 50 Гц магнитные потери в зубцах сердечника статора
|
|
(138) |
где ВС1 и BZ - значения магнитной индукции в спинке и зубцах сердечника статора, Тл.
Механические потери, равные сумме потерь на трение в подшипниках, в контактных кольцах, и потери на вентиляцию.
|
|
(139) |
 ,
,где ![]() - окружная
скорость на поверхности, полюсного наконечника ротора, м/с;
- окружная
скорость на поверхности, полюсного наконечника ротора, м/с;
ιI - длина сердечника статора, мм.
Добавочные потери в синхронных машинах подразделяются на пульсационные потери в полюсных наконечниках ротора и потери при нагрузке. Обычно добавочные потери принимаются равными 0,5% от подведенной мощности, потери в синхронной машине (кВт)
|
|
(140) |
Коэффициент полезного действия: для синхронного генератора
|
|
(141) |
где ![]() , для
синхронного двигателя
, для
синхронного двигателя
|
|
(142) |
КПД синхронной машины
зависит как от нагрузки (I1), так и от ее характера ![]() . На рисунке 44
представлены графики зависимости
. На рисунке 44
представлены графики зависимости ![]() ,
Рн, соsφ1 синхронной машины от нагрузки. При уменьшении
коэффициента мощности
,
Рн, соsφ1 синхронной машины от нагрузки. При уменьшении
коэффициента мощности ![]()
![]() при прочих неизменных параметрах машины КПД
уменьшается. У синхронных машин средней и большой мощности
при прочих неизменных параметрах машины КПД
уменьшается. У синхронных машин средней и большой мощности ![]() .
.
3.7 Параллельная работа синхронных генераторов
Включение генератора на параллельную работу
На электрических
станциях обычно устанавливают несколько синхронных генераторов, включаемых
параллельно на общую электрическую сеть. Это повышает надежность
энергоснабжения потребителей и позволяет лучше организовать обслуживание
электрооборудования. Электрические станции, в свою очередь, объединяют
для параллельной работы в мощные энергосистемы. Таким образом, синхронный
генератор работает на сеть большой мощности, по сравнению с которой собственная
мощность генератора является очень малой. В этом случае можно принять, что
генератор работает параллельно с сетью бесконечно большой мощности, т.е. напряжение
сети Uc и ее частота ![]() являются постоянными, не зависящими от
нагрузки данного генератора.
являются постоянными, не зависящими от
нагрузки данного генератора.
При включении генератора на параллельную работу необходимо обеспечить возможно меньший бросок тока, так как в противном случае срабатывает релейная защита и возможна поломка генератора или первичного двигателя.
Ток в момент подключения генератора к сети будет равен нулю, если удастся обеспечить равенство мгновенных значений напряжений сети и генератора:
|
|
(143) |
Для
выполнения условия (140) необходимо выполнить следующие условия: напряжение
генератора в момент включения в сеть должно быть равно напряжению сети (Uг = Uс); частота генератора
![]() - должна
быть равна частоте сети
- должна
быть равна частоте сети![]() ; порядок следования фаз на выводах генератора
должен быть таким же, что и на зажимах генератора.
; порядок следования фаз на выводах генератора
должен быть таким же, что и на зажимах генератора.
Совокупность
операций, проводимых при подключении генератора к сети, называют
синхронизацией. При синхронизации сначала останавливают номинальную частоту вращения
ротора, т.е. обеспечивают равенство ![]() затем, регулируя ток
возбуждения, добиваются равенства Ur = Uc. Совпадение по фазе векторов
напряжений сети и генератора (
затем, регулируя ток
возбуждения, добиваются равенства Ur = Uc. Совпадение по фазе векторов
напряжений сети и генератора (![]() ) контролируется специальными приборами - ламповыми
и стрелочными синхроноскопами.
) контролируется специальными приборами - ламповыми
и стрелочными синхроноскопами.
Генераторы
большой мощности синхронизируют с помощью стрелочных синхроноскопов,
работающих по принципу вращающегося магнитного поля. При ![]() стрелка
устанавливается на нуль. В этот момент и следует подключать генератор. На электрических станциях используются автоматические
системы синхронизации генераторов
без участия обслуживающего персонала.
стрелка
устанавливается на нуль. В этот момент и следует подключать генератор. На электрических станциях используются автоматические
системы синхронизации генераторов
без участия обслуживающего персонала.
Довольно часто применяют метод самосинхронизации (грубой синхронизации), при котором генератор подключают к сети при отсутствии возбуждения на роторе (обмотка возбуждения для избежание перенапряжения, замыкается на активное сопротивление). Ротор приводят во вращение с помощью первичного двигателя до частоты вращения, отличающейся от синхронной не более, чем на 2-3%, и затем подключают статорную обмотку к сети.
После
подключения в обмотку возбуждения подают постоянный ток, что приводит к втягиванию
ротора в синхронизм. Так как в момент подключения генератора к сети ЭДС равна
нулю (генератор невозбужден), то под действием напряжения сети в обмотке статора
наблюдается резкий бросок тока и на валу ротора появляются механические усилия.
Бросок тока не должен превышать 3,5 ![]() , что практически всегда имеет
место.
, что практически всегда имеет
место.
Метод самосинхронизации очень удобен при частых включениях, так как требует малого времени и легко автоматизируется.
3.8 Регулирование активной мощности
После
подключения генератора в сеть при соблюдении всех условий синхронизации его
напряжение ![]() равно
напряжению сети Uс совпадает по фазе, по отношению к
внешней нагрузки и находится в противофазе, т.е. Ur= - Uс до контуру
"генератор - сеть". Ток генератора при этом равняется нулю, т.е. генератор
работает без нагрузки
равно
напряжению сети Uс совпадает по фазе, по отношению к
внешней нагрузки и находится в противофазе, т.е. Ur= - Uс до контуру
"генератор - сеть". Ток генератора при этом равняется нулю, т.е. генератор
работает без нагрузки
|
|
(144) |
 .
.Механическая
мощность приводного двигателя ![]() (турбины дизельного двигателя и т.д.) в этом
случае затрачивается на покрытие потерь холостого хода:
(турбины дизельного двигателя и т.д.) в этом
случае затрачивается на покрытие потерь холостого хода:
|
|
(145) |
При
увеличении вращающего момента приводного двигателя ротор приобретает ускорение и
сместится относительно первоначального положения на угол ![]() в направлении
вращения. На такой же угол
в направлении
вращения. На такой же угол ![]() сдвинется вектор ЭДС генератора
сдвинется вектор ЭДС генератора ![]() относительно
своего положения, соответствующего режиму холостого хода (см. рисунок 45,а).
В результате в цепи ротора появится результирующая ЭДС (см. рисунок 45,б)
которая создаст в цепи обмотки статора ток
относительно
своего положения, соответствующего режиму холостого хода (см. рисунок 45,а).
В результате в цепи ротора появится результирующая ЭДС (см. рисунок 45,б)
которая создаст в цепи обмотки статора ток
|
|
(146) |
Между намагниченными полюсами ротора и неявно выраженными полюсами вращающегося поля статора возникают силы магнитного притяжения FM , имеющие нормальные Fn и тангенциальные F1 составляющие. Совокупность тангенциальных составляющих на всех полюсах ротора создает электромагнитный момент, направленный встречно момент приводного двигателя
|
|
(147) |
где D - диаметр ротора.
При
работе в рассматриваемом режиме генератор отдает в сеть активную мощность ![]() .Чем больше внешний момент, приложенный к валу генератора, тем больше
угол
.Чем больше внешний момент, приложенный к валу генератора, тем больше
угол ![]() , а
следовательно, ток и мощность, отдаваемая
генератором в сеть.
, а
следовательно, ток и мощность, отдаваемая
генератором в сеть.
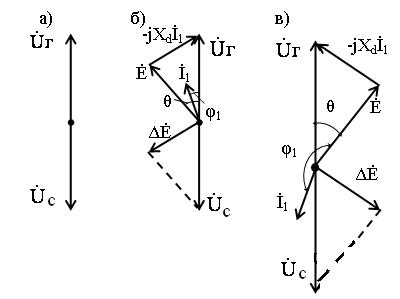
а) при работе без нагрузки;
б) при работе в режиме генератора;
в) при работе в режиме двигателя.
Рисунок 45 - Векторные диаграммы синхронной машины
Если к валу
ротора приложить внешний тормозной момент, то вектор ![]() будет отставать от
вектора напряжения
будет отставать от
вектора напряжения ![]() на угол
на угол ![]() (см. рисунок 45). При этом возникнут
результирующая ЭДС
(см. рисунок 45). При этом возникнут
результирующая ЭДС ![]() и
ток
и
ток ![]() , вектор которого
отстает от вектора
, вектор которого
отстает от вектора ![]() на
90°.
на
90°.
Так как
теперь угол ![]() >0,
то активная составляющая
>0,
то активная составляющая ![]() находится в противофазе с
напряжением генератора и, следовательно, в рассматриваемом режиме активная
мощность
находится в противофазе с
напряжением генератора и, следовательно, в рассматриваемом режиме активная
мощность ![]() забирается из сети, и
машина работает двигателем, создавая электромагнитный вращающий момент, который
уравновешивает
внешний тормозной момент; частота вращения ротора при этом снова остается
неизменной.
забирается из сети, и
машина работает двигателем, создавая электромагнитный вращающий момент, который
уравновешивает
внешний тормозной момент; частота вращения ротора при этом снова остается
неизменной.
3.9 Мощность, электромагнитный момент и угловые характеристики синхронного генератора
Зависимость
активной мощности синхронного генератора от угла нагрузки в получим из рассмотрения
упрощенной векторной диаграммы, построенной при ![]() . Из диаграммы, приведенной на рисунке 46,
а для неявнополюсной машины, устанавливаем,
что сторона
. Из диаграммы, приведенной на рисунке 46,
а для неявнополюсной машины, устанавливаем,
что сторона ![]() или с учетом модулей соответствующих векторов
или с учетом модулей соответствующих векторов ![]() .
.
Следовательно, активная мощность синхронной машины
|
|
(148) |
Для
явнополюсной машины с учетом того, что ![]() получаем:
получаем:
|
|
(149) |
Для
определения токов ld и 1q возьмем проекции
модулей векторов напряжения ![]() ,
падения напряжений
,
падения напряжений ![]() и
и
![]() на
координатные оси (см. рисунок 46, б).
на
координатные оси (см. рисунок 46, б).
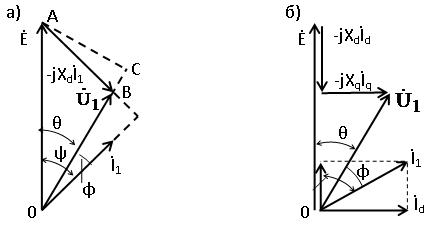
Рисунок 46 - Упрощенные векторные диаграммы неявнополюсной (а) и явнополюсной (б) синхронной машин
Тогда ![]()
|
откуда |
(150) |
Подставив
значения ![]() и
и ![]() в (146), получим:
в (146), получим:
|
|
(151) |
Или, использую формулу
|
|
(152) |

Если пренебречь потерями в обмотке статора, то можно считать, что электромагнитная мощность машины Рзм равна активной мощности Р.
Поэтому электромагнитный момент для неявнополюсной и явнополюсной машин соответственно
|
|
(153) |
|||
|
(154) |
|
||

Электромагнитный момент неявнополюсной машины имеет две вставляющие; одна представляет основную составляющую момента
|
|
(155) |

другая - реактивную составляющую момента
|
|
(156) |
 .
.Основная
составляющая электромагнитного момента Мосн зависит не только
от напряжения сети U1, но и от ЭДС, т.е. от
магнитного потока ротора, а также от угла ![]() (см. рисунок 47, кривая 1). Отсюда следует, что в
машине с невозбужденным ротором (Ф = 0) основная составляющая момента Мсн
=0.
(см. рисунок 47, кривая 1). Отсюда следует, что в
машине с невозбужденным ротором (Ф = 0) основная составляющая момента Мсн
=0.
Реактивная
составляющая электромагнитного момента Мреак от магнитного потока
ротора не зависит, т.е. возникает даже при отсутствии тока возбуждения; он
пропорционален sin 2![]() (см. рисунок 47, кривая 2). Для
возникновения этой составляющей достаточно двух условий: ротор должен иметь явно
выраженные полюса (xd ≠ хд) и чтобы к обмотке
статора было подведено напряжение сети U1.
(см. рисунок 47, кривая 2). Для
возникновения этой составляющей достаточно двух условий: ротор должен иметь явно
выраженные полюса (xd ≠ хд) и чтобы к обмотке
статора было подведено напряжение сети U1.
При
увеличении нагрузки синхронной машины растет угол ![]() , что ведет к изменению электромагнитной мощности и
его электромагнитного момента. Зависимость Рэм
и Мэм, от угла
, что ведет к изменению электромагнитной мощности и
его электромагнитного момента. Зависимость Рэм
и Мэм, от угла ![]() называются угловыми характеристиками синхронной машины.
называются угловыми характеристиками синхронной машины.
Угловые характеристики синхронного генератора (см. рисунок 47) построены при постоянстве напряжения сети (Uc=const) и магнитного потока возбуждения (Е = const).
Зависимость
результирующего момента (кривая 3) Мр = Мосн +Мреак
и электромагнитной мощности Рэм от угла ![]() получается сложением
значений моментов
Мосн и Мреак и соответствующих им
мощности по ординатам.
получается сложением
значений моментов
Мосн и Мреак и соответствующих им
мощности по ординатам.
Максимальное значение
электромагнитного момента Ммакс соответствует критическому
значению угла ![]() кр.
кр.

Рисунок 47 - Области устойчивости и угловые характеристики при разных значениях тока возбуждения
Для явнополюсных
синхронных машин ![]() эл.град.
эл.град.
Для
неявнополюсных машин Мреак=0, а поэтому угловая характеристика представляет
синусоиды и угол ![]() .
.
Характеристика имеет важное значение для оценки статической устойчивости и перегрузочной способности. Под статической устойчивостью синхронной машины, работающей параллельно с сетью, понимается ее способность сохранять синхронную частоту вращения при изменении внешнего вращающего или тормозного момента, приложенного к ее валу.
Статическая
устойчивость обеспечивается только при углах ![]() соответствующих М < Ммакс.
соответствующих М < Ммакс.
Синхронный
генератор работает с внешним моментом Мвн, передаваемым
его ротору от первичного двигателя. При этом ось полюсов сдвинута на угол ![]() относительно оси
суммарного магнитного потока Ф, и генератор развивает электромагнитный
момент M, который можно считать равным Мвн (точки
А и С на рисунке 47,а).
относительно оси
суммарного магнитного потока Ф, и генератор развивает электромагнитный
момент M, который можно считать равным Мвн (точки
А и С на рисунке 47,а).
Если
момент Мвн возрастает, то ротор генератора ускоряется, и угол
![]() увеличивается
до значения
увеличивается
до значения ![]() .
При работе машины в точке А возрастание угла в вызывает
увеличение момента до значения М+∆M (точка В) в результате равновесие моментов, действующих на
вал ротора, восстанавливается, и
машина, после некоторого колебательного процесса, продолжит работу с синхронной частотой вращения.
.
При работе машины в точке А возрастание угла в вызывает
увеличение момента до значения М+∆M (точка В) в результате равновесие моментов, действующих на
вал ротора, восстанавливается, и
машина, после некоторого колебательного процесса, продолжит работу с синхронной частотой вращения.
Однако, если машина работает
при угле ![]() (точка С), то
увеличение угла
(точка С), то
увеличение угла ![]() вызывает уменьшение момента
до значения М = ∆М (точка Д). В результате
равновесие моментов нарушается, ротор продолжает ускоряться, а угол
вызывает уменьшение момента
до значения М = ∆М (точка Д). В результате
равновесие моментов нарушается, ротор продолжает ускоряться, а угол ![]() возрастать. При этом под действием избыточного момента увеличивается частота вращения ротора и происходит
выпадение из синхронизма. Выпадение из синхронизма является аварийным режимом,
так как оно сопровождается резким возрастанием тока в обмотке статора.
возрастать. При этом под действием избыточного момента увеличивается частота вращения ротора и происходит
выпадение из синхронизма. Выпадение из синхронизма является аварийным режимом,
так как оно сопровождается резким возрастанием тока в обмотке статора.
Из
сказанного выше следует, что синхронная машина работает устойчиво, если ![]() , и неустойчиво, если
, и неустойчиво, если ![]() , чем меньше угол
, чем меньше угол ![]() , тем больший
запас по устойчивости имеет машина.
, тем больший
запас по устойчивости имеет машина.
Если
машина работает в установившемся режиме с углом, то малое отклонение ![]() от этого угла сопровождается
возникновением момента
от этого угла сопровождается
возникновением момента ![]() , который стремится восстановить исходный угол
, который стремится восстановить исходный угол ![]() . Этот момент
называют
синхронизирующим. Ему соответствует синхронизирующая мощность
. Этот момент
называют
синхронизирующим. Ему соответствует синхронизирующая мощность![]() .
.
Производные
![]() и
и ![]() называют
соответственно удельным синхронизирующим моментом и удельной синхронизирующей
мощностью. При неявнополюсной машине
называют
соответственно удельным синхронизирующим моментом и удельной синхронизирующей
мощностью. При неявнополюсной машине
|
|
(157) |
Удельный
синхронизирующий момент имеет максимальное значение при,![]() , а с возрастанием
, а с возрастанием ![]() он уменьшается,
и при
он уменьшается,
и при ![]() он
равен нулю. Поэтому синхронные машины работают с углом
он
равен нулю. Поэтому синхронные машины работают с углом ![]() , что соответствует
двукратному
или несколько большему запасу по моменту.
, что соответствует
двукратному
или несколько большему запасу по моменту.
Статическая перегружаемость синхронной машины оценивается коэффициентом статической перегружаемое
|
|
(158) |
По
ГОСТу этот коэффициент для мощных генераторов должен быть не менее ![]() , а для синхронных
двигателей - не менее 1,65.
, а для синхронных
двигателей - не менее 1,65.
Устойчивость синхронной машины при заданном значении активной мощности зависит от тока возбуждения. При увеличении тока возбуждения возрастает ЭДС, а следовательно, и момент Ммакс, при этом увеличивается устойчивость машины.
На
рисунке 47,б
изображены угловые характеристики при различных токах возбуждения (при
различных ЭДС). Откуда следует, что чем больше ток возбуждения, тем меньше угол
![]() при
заданной нагрузке, а следовательно, тем больше отношение
при
заданной нагрузке, а следовательно, тем больше отношение ![]() .
.
Обычно электрическая сеть, на которую работает синхронный генератор, является для него активно-индуктивной нагрузкой (генераторы отдают в сеть как активную Р так и реактивную мощности). При этом синхронный генератор должен работать с некоторым перевозбуждением, обеспечивающим повышение перегрузочной способности.
По ГОСТу
в синхронных генераторах при номинальном режиме ток ![]() должен опережать напряжения сети
должен опережать напряжения сети ![]() (т.е. отставать от
напряжения
(т.е. отставать от
напряжения ![]() )
и иметь
)
и иметь
![]() .
.
3.10 U - образные характеристики синхронного генератора
Генератор
после подключения к сети работает без нагрузки, и его ЭДС ![]() уравновешивает напряжение
сети
уравновешивает напряжение
сети ![]() . Если теперь увеличить
ток возбуждения, т.е. перевозбудить генератор, то ЭДС
. Если теперь увеличить
ток возбуждения, т.е. перевозбудить генератор, то ЭДС ![]() увеличится до
значения
увеличится до
значения ![]() , и в цепи генератора появится
избыточная ЭДС
, и в цепи генератора появится
избыточная ЭДС ![]() (см. рисунок 48,а),
вектор которой
совпадает по фазе с вектором ЭДС
(см. рисунок 48,а),
вектор которой
совпадает по фазе с вектором ЭДС ![]() . Ток Id, вызванный ЭДС
. Ток Id, вызванный ЭДС ![]() , будет отставать от
нее по фазе на 90° (т.к. Ra = 0). По отношению к ЭДС
, будет отставать от
нее по фазе на 90° (т.к. Ra = 0). По отношению к ЭДС ![]() этот
ток также будет отстающим (индуктивным).
этот
ток также будет отстающим (индуктивным).
а) б)

Рисунок 48 - Векторные диаграммы ЭДС синхронного генератора при параллельной работе
Если же после
подключения генератора к сети уменьшить ток возбуждения, т.е. недовозбудить машину, то ЭДС  уменьшится до значения
уменьшится до значения  и в цепи генератора будет
действовать избыточная ЭДС
и в цепи генератора будет
действовать избыточная ЭДС  . Теперь
вектор этой ЭДС будет совпадать по фазе с
вектором напряжения
сети
. Теперь
вектор этой ЭДС будет совпадать по фазе с
вектором напряжения
сети  (см. рисунок 48,
б), а поэтому ток
(см. рисунок 48,
б), а поэтому ток  , вызванный этой ЭДС
и отстающий от нее по фазе на 90°, будет опережающим (емкостным) по отношению ЭДС
генератора. Если при всех изменениях тока возбуждения вращающий момент
приводного двигателя остается неизменным, то неизменной остается и активная
мощность генератора:
, вызванный этой ЭДС
и отстающий от нее по фазе на 90°, будет опережающим (емкостным) по отношению ЭДС
генератора. Если при всех изменениях тока возбуждения вращающий момент
приводного двигателя остается неизменным, то неизменной остается и активная
мощность генератора:
|
|
(159) |
Из этого выражения
следует, что при ![]() активная составляющая тока статора
активная составляющая тока статора ![]() . Таким образом,
изменение тока возбуждения влияет только на реактивную составляющую тока
статора. Зависимость
тока статора
. Таким образом,
изменение тока возбуждения влияет только на реактивную составляющую тока
статора. Зависимость
тока статора ![]() от тока возбуждения
от тока возбуждения ![]() при неизменной активной нагрузке генератора
называется U-образной характеристикой. На рисунке 49 приведены U - образные
характеристики для значений активной нагрузки: Р2 =0; Р2
=0,5 Рюм и Р2 =РНОМ. U-образные
характеристики показывают, что любой нагрузке генератора соответствует такое
значение тока возбуждения
при неизменной активной нагрузке генератора
называется U-образной характеристикой. На рисунке 49 приведены U - образные
характеристики для значений активной нагрузки: Р2 =0; Р2
=0,5 Рюм и Р2 =РНОМ. U-образные
характеристики показывают, что любой нагрузке генератора соответствует такое
значение тока возбуждения ![]() , при котором ток статора I1, становится
минимальным и равным активной составляющей:
, при котором ток статора I1, становится
минимальным и равным активной составляющей: ![]() . В этом случае
генератор работает при коэффициенте мощности
. В этом случае
генератор работает при коэффициенте мощности ![]() .
.
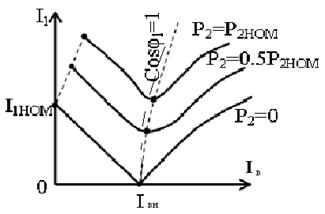
Рисунок 49 - U -образные характеристики синхронного генератора
Значения
тока возбуждения, соответствующие ![]() при фазной нагрузке генератора,
показаны пунктирной линией. С точки зрения уменьшения потерь генератора,
наиболее выгодным является возбуждение, соответствующее минимальному току
статора, т.е. когда
при фазной нагрузке генератора,
показаны пунктирной линией. С точки зрения уменьшения потерь генератора,
наиболее выгодным является возбуждение, соответствующее минимальному току
статора, т.е. когда ![]() . Но так как в большинстве случаев нагрузка
генератора имеет активно-индуктивный характер, то для компенсации реакции
якоря приходится несколько перевозбуждать генератор, для создания реактивной
составляющей тока статора I1, опережающей но
фазе напряжение
сети Uс.
. Но так как в большинстве случаев нагрузка
генератора имеет активно-индуктивный характер, то для компенсации реакции
якоря приходится несколько перевозбуждать генератор, для создания реактивной
составляющей тока статора I1, опережающей но
фазе напряжение
сети Uс.
3.11 Переходные процессы в синхронных генераторах
Внезапное короткое замыкание генератора
Поведение синхронной машины при переходных режимах имеет большое практическое значение, так как переходные процессы могут вызвать повреждение машины из-за больших значений токов. Поэтому необходимо иметь общее представление о физических процессах, возникающих при переходных режимах, и установить хотя бы приближенное значение аварийных токов, возникающих при внезапных трехфазных коротких замыканиях на зажимах генератора.
Считаем,
что предварительно генератор работал в режиме холостого хода, т.е. в нем
действовал единственный поток возбуждения Фв, созданный током возбуждения Iв. При коротком
замыкании под действием токов короткого замыкания в обмотке статора возникает
вращающийся синхронно с ротором магнитный поток статора по продольной оси Фаd, направленный
против потока Фв (см. рисунок 50, а), т.е. результирующее ![]() в результате изменения
во времени результирующего
поля в обмотке возбуждения и в успокоительной обмотке индуктируются. ЭДС
в результате изменения
во времени результирующего
поля в обмотке возбуждения и в успокоительной обмотке индуктируются. ЭДС ![]() и
и ![]() , которые создают в этих
обмотках дополнительный ток возбуждения ied и ток успокоительной обмотки
iy. Эти токи создают свои потоки Фд.в и Фд.у, которые противодействуют
проникновению потока
, которые создают в этих
обмотках дополнительный ток возбуждения ied и ток успокоительной обмотки
iy. Эти токи создают свои потоки Фд.в и Фд.у, которые противодействуют
проникновению потока ![]() в
сердечник ротора, т.е. вытесняют его
в воздушный зазор междуполюсного пространства. В результате поток статора
значительно уменьшается до значения
в
сердечник ротора, т.е. вытесняют его
в воздушный зазор междуполюсного пространства. В результате поток статора
значительно уменьшается до значения ![]() . Соответственно уменьшается и индуктивное сопротивление
обмотки статора по продольной оси
. Соответственно уменьшается и индуктивное сопротивление
обмотки статора по продольной оси ![]() . Поэтому
в начальный период переходного процесса, называемого сверхпереходным,
действующее значение тока внезапного к.з. имеет величину
. Поэтому
в начальный период переходного процесса, называемого сверхпереходным,
действующее значение тока внезапного к.з. имеет величину
|
|
(160) |
где ![]() -
сверхпереходное индуктивное сопротивление.
-
сверхпереходное индуктивное сопротивление.
а) б)
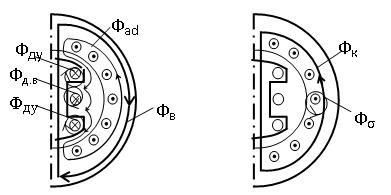
Рисунок 50 - Картинка магнитного поля при внезапном к.з.
Так как
обмотки возбуждения и успокоительная обладают некоторым активным
сопротивлением, то возникшие в них дополнительные токи будут постепенно затухать.
Однако, этот процесс затухания протекает неодинаково. Число витков обмотки
возбуждения значительно больше числа витков успокоительной обмотки, а, следовательно,
и постоянная времени Тв>ТУ. Вследствие этого, когда ток iy в успокоительной
обмотке станет равным нулю, дополнительный ток Iвд еще имеет некоторое
значение. При этом магнитный поток реакции якоря частично будет проходить через
ротор, и его значение возрастет ![]() .
Соответственно возрастет индуктивное
сопротивление статора по продольной
оси, достигнув значения Xd´>Xd", называемого
переходным индуктивным сопротивлением. При этом ток внезапного к.з. несколько уменьшится
до значения
.
Соответственно возрастет индуктивное
сопротивление статора по продольной
оси, достигнув значения Xd´>Xd", называемого
переходным индуктивным сопротивлением. При этом ток внезапного к.з. несколько уменьшится
до значения
|
|
(161) |

Через
некоторое время добавочный ток в обмотке возбуждения Iв.д. тоже станет равным нулю, и
поток статора будет полностью замыкаться через ротор; его значение станет
Фad>Фad´. Соответственно, индуктивное сопротивление статора возрастет до значения ![]() , ток к.з.
уменьшится до значения
, ток к.з.
уменьшится до значения
|
|
(162) |
В
генераторе устанавливается неизменный результирующий поток ![]() (см. рисунок 50,б).
(см. рисунок 50,б).
С уменьшением магнитного потока, сцепленного с обмоткой статора, ЭДС статора уменьшится до значения Ek<Ет, что приведет к уменьшению тока к.з. до установившегося значения
|
|
(163) |
Наибольшее значение тока к.з. (пик тока) называется ударным током. По ГОСТу значение ударного тока равно
|
|
(164) |
 ,
,где коэффициентами 1,05 и 1,8 учитывается соответственно возможность работы при повышенном напряжении и затухании.
Таким образом, при внезапном трехфазном к.з. происходит постепенное затухание тока короткого замыкания. Если ударный ток достигает 15 кратного значения, то установившийся ток к.з. достигает 1,5 кратного (для турбогенераторов) или 2,5 кратного (для гидрогенераторов) от номинального. В некоторых случаях установившийся ток к.з. может оказаться даже меньше номинального, причиной чего является размагничивающее действие реакции якоря.
Ударный ток к.з. создает значительные электромагнитные силы, действующие на обмотку статора. Особую опасность эти силы представляют для лобовых частей обмотки, что требует специальных мер по их креплению.
При коротком замыкании синхронного генератора возникает такой знакопеременный момент на валу ротора, который в неблагоприятных случаях может достигать 10-кратного значения по сравнению с номинальным, что необходимо учитывать при механических расчетах деталей машины и надежности ее крепления к фундаменту.
3.12 Гашение магнитного поля
При
коротких замыканиях во внешней цепи срабатывает релейная защита, которая отключает
генератор от сети. Однако, отключение генератора от внешней цепи не
ликвидирует режим короткого замыкания, так как в обмотке статора продолжает
индуктироваться ЭДС, и по ней продолжает проходить большой ток. Чтобы
устранить режим короткого замыкания, необходимо резко уменьшить поток
возбуждения, для чего следует прекратить прохождение тока по обмотке
возбуждения. Операции, необходимые для прекращения прохождения тока по обмотке
возбуждения при аварийных режимах, называют гашением поля. При быстром
размыкании цепи возбуждения в обмотке возбуждения индуцируется ЭДС самоиндукции
![]() , которая
из-за большой индуктивности Le создает большие
перенапряжения, опасные для изоляции обмотки. Поэтому применяют способы гашения
магнитного поля, обеспечивающие уменьшение тока возбуждения.
, которая
из-за большой индуктивности Le создает большие
перенапряжения, опасные для изоляции обмотки. Поэтому применяют способы гашения
магнитного поля, обеспечивающие уменьшение тока возбуждения.
Обмотка возбуждения отключается от возбуждения автоматом и замыкается на гасящем резисторе, сопротивление которого в 4-5 раз больше сопротивления обмотки в возбуждении. При таком значении сопротивления резистора ток к.з. не создает в генераторе значительных внутренних повреждений, а возникающие перенапряжения лежат в допустимых пределах.
Гашение поля мало
влияет на характер переходного процесса нарастания тока к.з., так как
ток достигает максимального значения ![]() примерно через полпериода (при
частоте 50 Гц через 0,01с), а за это время защита не успевает сработать. Оно
лишь уменьшает время, в течение которого по обмотке статора проходит ток к.з.
и, следовательно, снижает вероятность повреждения машины этим током.
примерно через полпериода (при
частоте 50 Гц через 0,01с), а за это время защита не успевает сработать. Оно
лишь уменьшает время, в течение которого по обмотке статора проходит ток к.з.
и, следовательно, снижает вероятность повреждения машины этим током.
3.13 Синхронный двигатель
Синхронная
машина может работать как в режиме генератора, так и в режиме двигателя, т.е.
потреблять из сети электрическую энергию и преобразовывать ее в механическую.
Если после подключения синхронной машины к электрической сети приложить к его
валу тормозной момент, т.е. момент нагрузки, направленный против вращения ротора,
то вектор ЭДС сместится на угол ![]() относительно его положения в
режиме холостого хода в сторону отставания. При этом в цепи статора появится
результирующая ЭДС
относительно его положения в
режиме холостого хода в сторону отставания. При этом в цепи статора появится
результирующая ЭДС ![]() , создающая в обмотке статора ток
, создающая в обмотке статора ток ![]() , опережающий по фазе
ЭДС
, опережающий по фазе
ЭДС ![]() на угол 900.
Ток I1, создает вращающееся синхронно с
ротором магнитное поле, ось которого d' - d' смещена относительно
продольной оси полюсов ротора d - d на угол - θ.
на угол 900.
Ток I1, создает вращающееся синхронно с
ротором магнитное поле, ось которого d' - d' смещена относительно
продольной оси полюсов ротора d - d на угол - θ.
Возникшие
при этом тангенциальные составляющие сил магнитного взаимодействия Ft= Fm Sinθ создадут на роторе
двигателя вращающий электромагнитный момент М, направленный согласно с
вращающим магнитным полем статора и приводящий во вращение ротор с синхронной
частотой ![]() .
При этом
синхронная машина потребляет из сети электрическую энергию и преобразует ее в
механическую энергию вращения. Вращающий электромагнитный момент преодолевает момент холостого хода,
и создает полезный момент Мc под действием, которого приводится во
вращение производственный механизм:
.
При этом
синхронная машина потребляет из сети электрическую энергию и преобразует ее в
механическую энергию вращения. Вращающий электромагнитный момент преодолевает момент холостого хода,
и создает полезный момент Мc под действием, которого приводится во
вращение производственный механизм:
|
|
(165) |
Электромагнитный
момент синхронного двигателя определяется выражением (137) для неявнополюсного и (138)
для явнополюсного двигателя. Угловые характеристики синхронного двигателя отличаются
лишь тем, что они располагаются в третьем квадранте осей координат, т.е, определяются
отрицательными значениями
углов ![]() и
моментов М.
и
моментов М.
Отношение максимального момента к номинальному определяет перегрузочную способность синхронного двигателя
|
|
(166) |
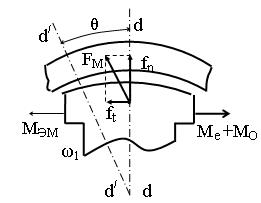
Рисунок 51 - Работа синхронной машины в двигательном режиме
Обычно
перегрузочная способность ![]() , что при номинальной нагрузке двигателя
соответствует
, что при номинальной нагрузке двигателя
соответствует ![]() эл.град.
эл.град.
3.14 U-образные и рабочие характеристики синхронного двигателя
При
неизменном напряжении сети ![]() результирующее
магнитное поле синхронного двигателя постоянно. Поэтому при изменении МДС
возбуждения Fв (изменении тока
возбуждения Iв) МДС статора Fa изменяется таким
образом, чтобы их совместное действие оставалось неизменным, т.е. чтобы оставалось
неизменным результирующее магнитное поле синхронного двигателя. Это
изменение МДС Fa может происходить за
счет изменения значения и фазы тока статора
результирующее
магнитное поле синхронного двигателя постоянно. Поэтому при изменении МДС
возбуждения Fв (изменении тока
возбуждения Iв) МДС статора Fa изменяется таким
образом, чтобы их совместное действие оставалось неизменным, т.е. чтобы оставалось
неизменным результирующее магнитное поле синхронного двигателя. Это
изменение МДС Fa может происходить за
счет изменения значения и фазы тока статора ![]() , т.е. за счет изменения реактивной
составляющей тока статора Id.
, т.е. за счет изменения реактивной
составляющей тока статора Id.
Например, при увеличении тока возбуждения от Iв=0, возрастает МДС ротора и уменьшается МДС статора, за счет уменьшения индуктивной (по отношению к напряжению сети) составляющей тока статора Id, которая оказывает на магнитную систему подмагничевающсе воздействие.
При
этом полный ток статора I1 =Iа +Id уменьшается, а коэффициент
мощности двигателя ![]() увеличивается.
При некотором значении тока возбуждения Iв индуктивная
составляющая тока статора уменьшается до нуля. Ток статора станет чисто
активным, а коэффициент мощности
увеличивается.
При некотором значении тока возбуждения Iв индуктивная
составляющая тока статора уменьшается до нуля. Ток статора станет чисто
активным, а коэффициент мощности ![]() .
.
При увеличении тока возбуждения сверх значения Iвн, т.е. перевозбуждение вызывает увеличение тока Id, но теперь увеличивается емкостная составляющая тока I1. Таким образом, при недовозбуждении (Iв< Iв/) синхронный двигатель работает с отстающим, а при перевозбуждении (Iв> Iв/) с опережающим током. Зависимость тока статора от тока возбуждения для синхронного двигателя представлена U - образными характеристиками (см. рисунок 52). Синхронный двигатель является генератором реактивного тока: индуктивного по отношению сети при недовозбуждении и емкостного при перевозбуждения. Указанная способность синхронных двигателей является их ценным качеством, которое используется для повышения коэффициента мощности электрических установок.
Рабочие
характеристики синхронного двигателя представляют собой зависимости частоты
вращения п2, потребляемой мощности P1, полезного момента М2,
коэффициента мощности ![]() и
тока статора I1 от полезной мощност1и
двигателя
Р2 (рисунок 53).
и
тока статора I1 от полезной мощност1и
двигателя
Р2 (рисунок 53).
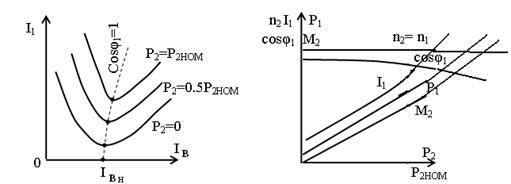
|
Рисунок 52 - U-образные характеристики синхронного двигателя |
Рисунок 53 - Рабочие
характеристики
синхронного двигателя
Частота
вращения ротора п2 = const, и поэтому
характеристика ![]() прямая параллельная
оси абсцисс. Полезный момент на валу синхронного двигателя
прямая параллельная
оси абсцисс. Полезный момент на валу синхронного двигателя ![]() . Так как рабочие характеристики снимают при
условии f1 = const, то график
. Так как рабочие характеристики снимают при
условии f1 = const, то график ![]() имеет вид
прямой, выходящей из начала координат.
имеет вид
прямой, выходящей из начала координат.
Мощность, потребляемая из сети, Р1= Р2+∆Р, а так как с ростом нагрузки на валу растут и потери мощности ∆Р, то характеристика P1=f(P2) имеет несколько криволинейный характер.
Характеристика
![]() зависит от характера возбуждения двигателя при холостом ходе. Если
зависит от характера возбуждения двигателя при холостом ходе. Если ![]() =1, то
при увеличении нагрузки он уменьшается.
=1, то
при увеличении нагрузки он уменьшается.
Ток в
обмотке статора ![]() - с
увеличением нагрузки на валу двигателя
растет быстрее, чем потребляемая мощность Р1, вследствие
уменьшения cosφ1.
- с
увеличением нагрузки на валу двигателя
растет быстрее, чем потребляемая мощность Р1, вследствие
уменьшения cosφ1.
3.15 Пуск синхронных двигателей
Для пуска синхронного двигателя приходится применять специальные способы, сущность которых состоит в предварительном приведении ротора во вращение до близкой к синхронной частоте вращения, при которой между статором и ротором устанавливается устойчивая магнитная связь.
В настоящее время для этой цели применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают как асинхронный, для чего снабжают пусковой короткозамкнутой обмоткой, выполненной по типу "беличьей клетки", для увеличения сопротивления стержней клетку изготовляют из латуни. Схема асинхронного пуска приведена на рисунке 54. При включении трехфазной обмотки статора в сеть образуется вращающее магнитное поле, наводящее в стержнях пусковой обмотки I э.д.с., которые создают токи Iп. Взаимодействие этих токов с вращающим полем создают электромагнитные силы, под действием которых ротор приводится во вращение. После разгона ротора до частоты вращения, близкой к синхронной (п2=0.95n1), обмотку возбуждения 2 подключают к источнику постоянного тока. Образующийся при этом синхронный момент втягивает ротор двигателя в синхронизм.
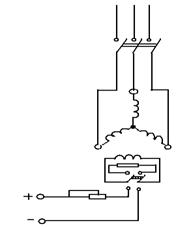
Рисунок 54 - Схема асинхронного пуска
В процессе асинхронного пуска обмотку возбуждения нельзя оставлять разомкнутой, так как во время разгона ротора в ней вращающимся магнитным полем индуцируется ЭДС Ев.
|
|
(167) |
В начальный момент пуска при s=1 из-за большого числа витков обмотки возбуждения Ев может достигнуть большого значения и вызвать пробой изоляции обмотки возбуждения. Для предотвращения этого обмотку возбуждения на период разгона замыкают на гасящий резистор 3, сопротивление которого в 5-10 раз больше, чем активное сопротивление обмотки возбуждения.
3.16 Синхронный компенсатор
Синхронный компенсатор - синхронный двигатель, работающий без нагрузки на валу и предназначенный для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности или стабилизации напряжения. К числу потребителей переменного тока, требующих для своей работы реактивной мощности в первую очередь относятся асинхронные двигателя. На рисунке 55 показана схема системы, состоящая из синхронного генератора СГ, повышающего ТрI и понижающего ТрII и трансформаторов, линии электропередачи ЛЭП, потребителя П и синхронного компенсатора СК, включенного на входе потребителя.
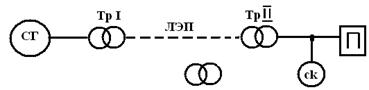
Рисунок 55- Схема включения синхронного компенсатора
Для
пояснения явлений, связанных с подключением СК к электрической системе,
рассмотрим рисунок 58. При подключении к сети потребителя II (группа асинхронных двигателей)
в сети возникает ток ![]() , отстающий от напряжения
, отстающий от напряжения ![]() на угол
на угол ![]() (рисунок 56,а).
(рисунок 56,а).
При подключении СК параллельно потребителю П и создание в ней режима перевозбуждения (см. рисунок 56,б) в сети появится ток IСК. Результирующий ток в сети:
|
|
(168) |
Фазовый
сдвиг тока ![]() относительно напряжения Uc уменьшается и одновременно
уменьшается ток
относительно напряжения Uc уменьшается и одновременно
уменьшается ток ![]() .
.
Синхронные компенсаторы применяют и для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших нагрузках напряжение в конце линии (у потребителя) оказывается меньше, чем в начале; при малых нагрузках, наоборот - под влиянием емкостей линии электропередачи в ее конце может стать больше, чем в начале. Если же в конце линии включить синхронный компенсатор, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически постоянным.
a)


б)
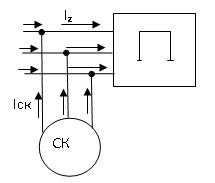

Рисунок 56 - Векторные диаграммы без асинхронного компенсатора (а) и с синхронным компенсатором (б)
Список литературы
1. Копылов И.П. Электрические машины. – М.: Высшая школа, Логос, 2000.
2. Проектирование электрических машин./Под общей редакцией И.П. Копылова. – М.: Энергия, 2002.
3. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины. – М., 1987.
4. Вольдек А.И. «Электрические машины»: Учебник для студентов выс. техн. учебн. заведений. Изд. 2-е. – М.: «Энергия», 1974.
5. Кацман М.М. Электрические машины. – М.: Высшая школа., 1990. – 463с.