ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
“Алматы энергетика және байланыс институты”
Коммерциялық емес акционерлік қоғамы
П.И. Сагитов.
М.А. Мустафин
АЙНЫМАЛЫ ТОК ЭЛЕКТР ЖЕТЕГІ
(айнымалы токтарға)
Оқу құралы
Алматы 2008
Оқу құралысында «ЭЛЕКТРЖЕТЕГІ. (айнымалы токтарға)» пәні бойынша айнымалы ток электр жетегі басқару нысаны ретінде қарастырылған. Әртүрлі іске қосу – тежеу режимдері кезінде айнымалы ток машинасының статор мен ротор (немесе индуктор) тізбегіне енгізілетін қосымша элементтердің талдауы және синтезі жүргізілген. Есептеулер мысалдары, бақылау сұрақтары келтірілген.
Оқу құралы электр энергетика бағыты бойынша даярланатын бакалавриат студенттеріне арналған.
Без.63, кесте 7,әдеб. көрсеткіші: 11 атау.
Мазмұны
Мазмұны................................................................................................................3
Кіріспе........................................................... ........................................................4
1 Айнымалы ток электр жетегі ...........................................................................5
1.1 Синхронды қозғалтқыш негізіндегі электр жетегі......................................5
1.2 Асинхронды қозғалтқыш негізіндегі электр жетегі...................................11
1.3 Асинхронды қозғалтқыштың айналу жылдамдығын реттеу.....................20
1.4 Асинхронды қозғалтқышты кернеуін өзгертумен басқару...................... 25
1.5 Асинхронды қозғалтқыштарды импульсті басқару...................................28
2 Айнымалы ток қозғалтқыштарының жиіліктік басқару әдісі.................... 31
3 Есептеу мысалдары..........................................................................................47
4 Бақылау сұрақтары..........................................................................................54
А қосымшасы.......................................................................................................57
Әдебиеттер тізімі.................................................................................................58
Кіріспе
Өнеркәсіптегі техникалық прогресс технологиялық процестер, олардың тағайындалуы бойынша механизмдер мен әрекет ету қағидаларының көптүрлілігінің ұлғаюымен, өндірістік процестердің режимдік сипаттамаларының қаталдығымен, технологиялық циклдің қысқаруымен, өңдеу дәлдігін жоғарылатумен қатар жүреді. Бұл жағдайларда энергияны алып жүруші ретінде электр энергиясының артықшылығы, оның өзіне тән қасиеттері бойынша жоғары өндірістік еңбек құралдарын және осы техникалық прогресті қамтамасыз ететін жаңа технологиялар жасау мәселелеріне толық сәйкес келеді.
Электр энергиясының бірден-бір негізгі тұтынушылары - электр жетегі – машинаның жұмысшы органдарын қозғалысқа келтіретін және оның технологиялық процесін басқаратын электр механикалық құрылғы.
Қазіргі заманғы өнеркәсіптік және ауыл шаруашылығы өндірісіндегі технологиялық процестердің көпшілігі электр механикалық түрлендіру көмегімен алынатын механикалық энергияның көмегімен іске асады. Энергияны электр механикалық түрлендіру жүйесінің, электр жетегінің кемелдену нәтижесі қоғамдық өндірістің тиімділігімен байланысты.
Кемелденген электр жетегін жасау электр механикалық құрылғыны және технологиялық процестің ерекшелігін есепке алып оны басқару жүйесін, машина жұмысының шарттары мен осы процесте әрекет ететін оның бөлек механизмдерін таңдау бойынша принциптік шешімдерді қабылдауға негізделген. Бұл технологиялық процестердің көптігімен, олардың өзара байланысуымен және олардың халық шаруашылығының әртүрлі салаларына жатуымен түсіндіріледі. Сонымен бірге, бір технологиялық процесте көптеген әртүрлі жұмысшы машиналары қатысуы мұмкін, сол сәтте бір машинаның өзі тіпті бөлек технологиялық процестерде жұмыс істеуі мүмкін.
Келісілген жұмысшы бөліктері бар механикалық құрылғы ретінде анықталатын, энергияны, материалдар мен ақпаратты түрлендіру үшін белгілі бір мақсатқа бағытталған қозғалыстарды орындайтын машиналар атқаратын функцияларының түрі бойынша энергияны түрлендіру үшін алдын-ала тағайындалған энергетикалық (мысалы, электр қозғалтқыштары, электр генераторлары, турбиналар, және т.б.) және еңбек өнімінің пішінін, қасиетін, күйін өзгертуді немесе ақпаратты жинау, қайта өңдеу және қолдануды орындайтын жұмысшы болып екіге бөлінеді. Жұмысшы машиналарға технологиялық машиналар – құралдар (металл кесуші станок типтері, ауыл шаруашылығы, тігін, құрылыс машиналары) жатады.
Берілген күштер әсерімен белгілі бір мақсаттағы қозғалыстарды жасайтын қозғалмалы - қосылған денелердің бір тұтастығы ретінде механизмдер басты (жұмысшы) немесе басты қозғалыспен бірге технологиялық немесе көтеру - транспорттық амалдарды іске асыратын көмекші қозғалыстарды орындайды. Атап өту керек, белгілі бір механизм әртүрлі технологиялық немесе жұмысшы машиналар құрамында болуы мүмкін.
1 Айнымалы ток электр жетегі
1.1 Синхронды қозғалтқыш негізіндегі электр жетегі
Синхронды қозғалтқыштар осыдан біраз уақытқа дейін салыстырмалы түрде сирек – бастысы, жылдамдық реттеуді талап етпейтін қуатты қондырғыларда қолданылды. Соңғы жылдары жағдай күрт өзгерді: қазіргі заманғы материалдар (тұрақты магниттер), басқару құралдары (салыстырмалы үлкен токтар мен кернеулерге арналған кілттер) есебінен синхронды қозғалтқыштары бар электр жетегінің түрі өзгеріп, бірқатар техникалық салаларда – станок тұрғызу, робот техникасы, икемді өндірістік жүйелерде орын алды.
Машина элементтерінің бірі (статоры) қозғаушы магнит өрісін тудыру үшін қолданылады және бұл мағынада асинхронды машинаның сәйкес элементіне өте ұқсас; басқа элементі (роторы) тұрақты кернеу көзінен сақиналары мен щеткалары арқылы қоректенетін айқындалған немесе айқындалмаған полюсті электр магниті, немесе тұрақты магниттердің конструкциясы түрінде орындалған. Қозғалмалы элементі магнит өрісімен айналады, онымен синхронды қозғалады.
Айқындалмаған полюсті (рn=1) синхронды машинаның статорының фазасына, егер ораманың активті кедергісін ептемегенде, 1.1а суретіне сәйкес қарапайым орын басу сұлбасын құруға болады: қоректендіру көзінің э.қ.к – сі (синусоидалы кернеу U) айналып тұратын магнитпен – ротормен қозғалмайтын орамада пайда болатын э.қ.к – мен Е теңеледі және реактивті кедергімен Х бірге токты I анықтайды. Көрсетілген процестерді сипаттайтын векторлық диаграмма 1.1б суретінде көрсетілген.
Синхронды машина үшін U және Е, немесе сол сияқты статор мен ротор остері арасындағы q бұрышы өте маңызды. Бұл бұрыш «магниттік серіппенің» созылу дәрежесін сипаттайды. Электрлік және механикалық шамалар арасындағы негізгі арақатынастарды келесі формуламен:
![]() 1.1
1.1
және 1.1б суретіндегі векторлық диаграмманы қолдана отырып табамыз
![]()
Көмекші АВС үшбұрышынан анықтаймыз
![]()
яғни
![]()
және соңында табамыз
 1.2
1.2
1.1 суретте синхронды машинаның қарапайым орын басу сұлбасы, векторлық диаграммасы және сипаттамалары келтірілген.
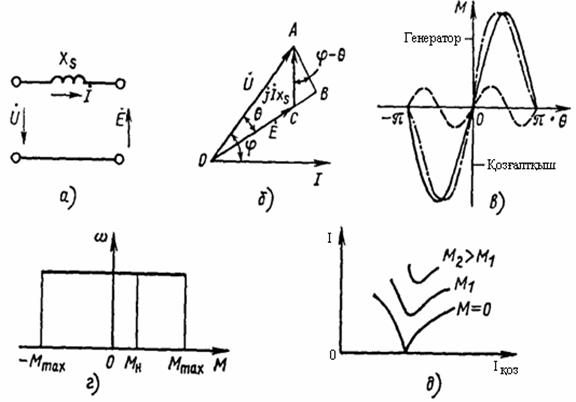
1.1 Сурет
Сонымен, синхронды машинаның электр магниттік иінкүші q бұрышына тәуелді, q бұрышының аз мәндері үшін
![]() 1.3
1.3
Кернеуі мен жиілігі тұрақты кезінде максималды иінкүші Мтах э.қ.к – ге Е пропорционал, яғни сызықтық шамамен машинаның қоздыру тогына пропорционал; қалыпты машиналар үшін Мтах /Мн=2¸2,5. Егер машинаның айқындалған полюсті роторы бар болса, онда 1.2 формуласы бойынша анықталған (1.1в суреті) иінкүшке тағы бірі - sin2q мәніне (.1.1в суретіндегі үзік сызық) пропорционал реактивті құраушысы қосылады. Синхронды машинасы иінкүшінің сипаттамасының жалпы түрі 1.1в суретінде (үзік нүктелі сызық), механикалық сипаттамасы 1.1г суретінде көрсетілген.
Синхронды машинаның V – түріндегі қисықтар (1.1д суреті) деп аталатын статор тогының I қоздыру тогына Iқоз тәуелділігі бар. Олардың табиғаты қоздыру тогы өзгерген кезде статор тогының реактивті құраушысының және оның таңбасының өзгеруімен түсіндіріледі.
Синхронды машинаның реактивті қуатын және оның таңбасын өзгерту қасиеті энергетикалық түрде өте қызықты болады: ол Mc = 0 кезінде жақсы басқарылатын арнайы реактивті қуаттың конденсаторы болып және таңдау кезінде, механизмнің қозғалуының басты функциясынан басқа тағы бір функциясын – қоректендіру желісінің режимін рационалды пайдаланатын электр жетегінің элементі болып қолданыла алады. (1.3) формуладан анықталғандай, аз q бұрышы кезінде динамикада синхронды машина икемді элементке тура сәйкес келеді. Шынында да, q бұрышы ω0, жылдамдығымен айналатын өріс осі мен ω жылдамдығы бар ротор осі арасындағы бұрыш болғандықтан, (1.3) формуласының дифференциалын анықтаймыз
![]() (1.4)
(1.4)
мұнда: сэм коэффициенті – «магниттік серіппенің» қатаңдығы, екі массалы механикалық жүйеде орын алатын механикалық байланыстың қатаңдығына ұқсас.
Алынған нәтижелерге сүйене отырып, синхронды машинаның тербелуге өте жақын екенін байқаймыз және оның мұндай қасиеті жақсы емес екенін білеміз. Сондықтан үлкен синхронды машиналар асинхронды қозғалтқыштың торлы орамасына ұқсас арнайы демпферлі құрылғылармен жабдықталады және олар иінкүштің асинхронды құраушысын қамтамасыз етеді
![]() .
(1.5)
.
(1.5)
![]()
![]()
 Дәл осы құрылғылар қарапайым емес және жағымсыз амалды –
синхронды қозғалтқышты желіден қоректендіріп тұрған кезде асинхронды режимде
іске қосу үшін қолданылады. Қуаты аз қозғалтқыштарда тербелістерге шамадан тыс
икемділігінен арылу үшін басқа құралдар қолданылады. Жазылғандарды есепке
алғанда, синхронды қозғалтқыш 1.2а суретінде көрсетілген динамикалық бөлік болып
ұсыныла алады. Синхронды қозғалтқышы бар қарапайым электр жетегіне (1.2б суреті)
1.2в суретіндегі құрылымдық сұлбасы сәйкес келеді, ал оны, әрине қатал және дәл
анықталған мақсаттар үшін қолдану техниканың ісі. Синхронды электр қозғалтқышын
іске қосудың екі әдісі таралған: асинхронды және жиіліктік іске қосу. Көптеген
жағдайларда синхронды қозғалтқыштарды тікелей асинхронды іске қосу қолданылады.
Егер синхронды қозғалтқыш роторында қоздыру орамасы болса, онда ол қосымша
кедергіге тұйықталады. Іске қосу орамасы болмаған кезде орташа айналу иінкүші
қисығында оның аса төмен түсіп кетуі s
=
0,5 аймағында (бірості қосылу құбылысы) байқалады
(1.3 сурет).
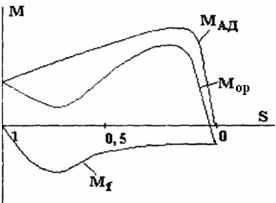
Іске қосу орамасы және қосымша
кедергіге тұйықталған қоздыру орамасы бар кезде синхронды қозғалтқыштың іске
қосу иінкүш қисығының пішіні бойынша асинхронды қозғалтқыштың іске қосу иінкүш
М1 қисығына ұқсас. Қоздырылған синхронды қозғалтқышты іске қосу жағдайында
тежеуші иінкүш Мf пайда болады және орташа электр магниттік
иінкүш қисығында аса төмен түсіп кету байқалады, аз сырғу мәндері кезінде орташа
электр магниттік иінкүші теріс мәнді болады (1.4 сурет).
Роторында тұрақты магниттері бар синхронды қозғалтқышты іске қосу ерекшелігі –
іске қосу ротордың қоздыру ағыны бар кезде орындалады. Бұл ағын ротордың айналуы
кезінде статор орамасында жиілігі желі кернеуінің жиілігіне тең емес э.қ.к – сін
пайда етеді. Бұл э.қ.к – нің әсерімен статор орамасы фазалары бойымен токтар
ағады, олар ротордың іске қосу орамасы тудыратын иінкүшке қарсы бағытталған
тежеуші иінкүшін пайда етеді. Орташа электр магниттік иінкүші қисығындағы аса
төмен түсіп кету аймағы іске қосу шарттарын нашарлатады.
Дәл осы құрылғылар қарапайым емес және жағымсыз амалды –
синхронды қозғалтқышты желіден қоректендіріп тұрған кезде асинхронды режимде
іске қосу үшін қолданылады. Қуаты аз қозғалтқыштарда тербелістерге шамадан тыс
икемділігінен арылу үшін басқа құралдар қолданылады. Жазылғандарды есепке
алғанда, синхронды қозғалтқыш 1.2а суретінде көрсетілген динамикалық бөлік болып
ұсыныла алады. Синхронды қозғалтқышы бар қарапайым электр жетегіне (1.2б суреті)
1.2в суретіндегі құрылымдық сұлбасы сәйкес келеді, ал оны, әрине қатал және дәл
анықталған мақсаттар үшін қолдану техниканың ісі. Синхронды электр қозғалтқышын
іске қосудың екі әдісі таралған: асинхронды және жиіліктік іске қосу. Көптеген
жағдайларда синхронды қозғалтқыштарды тікелей асинхронды іске қосу қолданылады.
Егер синхронды қозғалтқыш роторында қоздыру орамасы болса, онда ол қосымша
кедергіге тұйықталады. Іске қосу орамасы болмаған кезде орташа айналу иінкүші
қисығында оның аса төмен түсіп кетуі s
=
0,5 аймағында (бірості қосылу құбылысы) байқалады
(1.3 сурет).
Іске қосу орамасы және қосымша
кедергіге тұйықталған қоздыру орамасы бар кезде синхронды қозғалтқыштың іске
қосу иінкүш қисығының пішіні бойынша асинхронды қозғалтқыштың іске қосу иінкүш
М1 қисығына ұқсас. Қоздырылған синхронды қозғалтқышты іске қосу жағдайында
тежеуші иінкүш Мf пайда болады және орташа электр магниттік
иінкүш қисығында аса төмен түсіп кету байқалады, аз сырғу мәндері кезінде орташа
электр магниттік иінкүші теріс мәнді болады (1.4 сурет).
Роторында тұрақты магниттері бар синхронды қозғалтқышты іске қосу ерекшелігі –
іске қосу ротордың қоздыру ағыны бар кезде орындалады. Бұл ағын ротордың айналуы
кезінде статор орамасында жиілігі желі кернеуінің жиілігіне тең емес э.қ.к – сін
пайда етеді. Бұл э.қ.к – нің әсерімен статор орамасы фазалары бойымен токтар
ағады, олар ротордың іске қосу орамасы тудыратын иінкүшке қарсы бағытталған
тежеуші иінкүшін пайда етеді. Орташа электр магниттік иінкүші қисығындағы аса
төмен түсіп кету аймағы іске қосу шарттарын нашарлатады.
Электр магниттік қоздыруы бар синхронды қозғалтқышты асинхронды іске қосу кезінде қозғалтқыш синхронды жылдамдыққа жақын жылдамдыққа дейін жүргізіледі, одан кейін қоздыру орамасына тұрақты кернеу беріледі және қоздырылған электр қозғалтқышы синхронды жылдамдыққа тартылады.
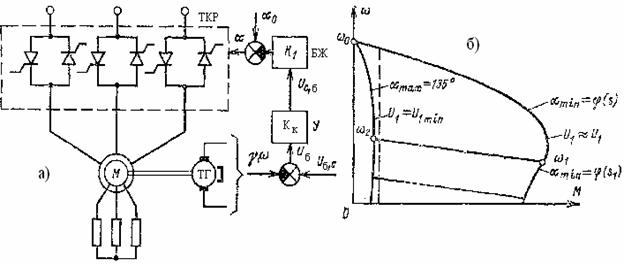
Жиіліктік іске қосу кезінде синхронды қозғалтқыш синхронды айналуға бірден, аз айналу жиілігі кезінде келтіріледі. Тиристорлық қоздыруы бар синхронды электр жетегінің күштік бөлігінің сұлбасы 1.5 суретте келтірілген. Жылдамдықты жиіліктік реттеу кезінде айналу иінкүші, жиілігі және қоректендіретін кернеудің амплитудасы араларындағы тиімді арақатынастары белгілі теңдеулермен жазылады
U2/U1=(f2/f1) (Ф1М2/Ф2М1) (1.6)
мұнда Ф1, Ф2 - f1 және f2 жиіліктері кезінде машинаның ауа саңылауындағы магниттік ағындары;
М1, М2 - f1 және f2 жиіліктеріне сәйкес синхронды қозғалтқыш роторының айналу жиілігі кезіндегі жүктеме иінкүштері.
1.5 Сурет -Синхронды электр жетегінің күштік бөлігінің сұлбасы
Тұрақты статикалық иінкүші және тұрақты магнит ағыны кезінде академик Костенко М.П шығарған реттеу заңын аламыз
U/f=соnst.
Электр магниттік қоздыруы бар синхронды қозғалтқыш үшін ауа саңылауында тұрақты магнит ағынын қамтамасыз ететін заң бойынша жиілігі мен кернеуін өзгерту ұсынылады. Жоғарыда аталғандай, синхронды машиналары бар электр жетегі соңғы 20-30 жылда қарқынды дамыды.
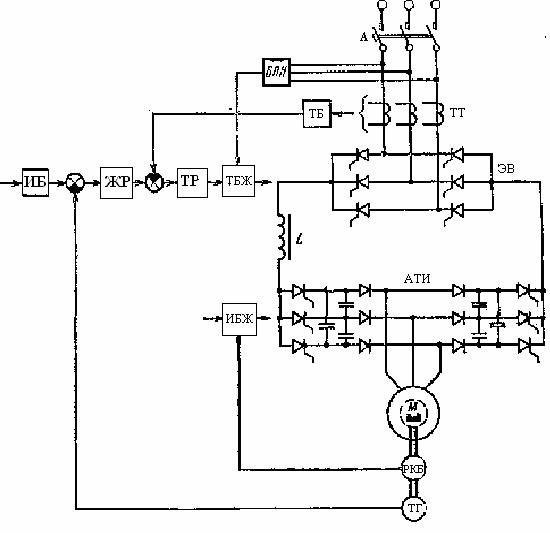
1.6 Сурет- Тұрақты магниттері бар вентильді қозғалтқышты автоматты басқарудың құрылымдық сұлбасы және жетектің күштік бөлігінің қағидалық сұлбасы
Кернеу векторын басқаруда түскен бұйрықтың санына тәуелді дозаланған бұрыштарға жылжыту идеясы соңғы он жылда кең даму алған жаңа ғылыми бағытқа – адымдық қозғалтқыштары бар дискретті электр жетегін жасауға әкеліп соқты. Планарлық, сызықтық, бұрылыстық, аралас қозғалтқыштар - модульдердің, берілген пішінді токтарды пішіндейтін түрлендіргіштердің көптеген түрлері пайда болды, күрделі және дәл қозғалысты қамтамасыз ететін басқару алгоритмдері жасалынды. Қолдану салалары да анықталды - әртүрлі технологиялық салалардағы икемді өндірістік жүйелерде микроэлектроникадан бастап бөлшектерді лазерлік өңдеу желілері, күрделі өнімдерді адамның кірісуінсіз автоматтандырып жинау үшін қолданылады.
Бұл идеяның басқа түрі – электронды коммутаторлары мен ротор күйінің бергіштерінің (датчик) синхронды қозғалтқыштармен араласуы – бұл вентильді қозғалтқыштар.
1.6 суретте жетектің күштік бөлігінің қағидалық сұлбасы және тұрақты магниттері бар вентильді қозғалтқышты автоматты басқарудың құрылымдық сұлбасы көрсетілген.
Жиілік түрлендіргіші жиіліктік - токтық басқару сұлбасы бойынша орындалған. Автономды ток инверторын (АТИ) басқару қозғалтқыштың М білігіне орнатылған ротор күйінің бергішімен (РКБ) синхрондалатын импульстік басқару жүйесімен ИБЖ жүзеге асырылады. Жетекті басқару жүйесі тізбектелген түзетуі бар бағынышты реттеу қағидасы бойынша тұрғызылған және ток бергішінен ТБ алынатын ток бойынша кері байланысы және ток реттеуіші ТР бар ток контурынан және жылдамдық реттеуіші ЖР бар жылдамдық контурынан тұрады.
Вентильді қозғалтқыштар электр машиналарының жіктелуі туралы үйреншікті көзқарасты шатыстырды: қоректенуі бойынша олар тұрақты ток машиналары, әрекет ету қағидасы бойынша – синхронды және т.б. Шатыстырулар, әрине егер жүйелі көзқарасты қолданса пайда болмас еді. Әзірге вентильді қозғалтқыштарда электр механикалық және электрондық бөліктер (коммутатор - электронды коллектор) байланысқан. Бұл байланыс электр механотроникасы деп аталатын электр механикасының жаңа бөлімі болып құрылуына себепкер болды. Вентильді қозғалтқыштар конструкциясы дамып және функциясы ұлғайып станоктар, роботтар, манипуляторлардың электр жетегіндегі басқа техникалық шешулерге күшті бәсеке құрды.
1.2 Асинхронды қозғалтқыш негізіндегі электр жетегі
Асинхронды машина негізіндегі электр жетегі электр энергиясын механикалық энергияға түрлендіруді қамтамасыз ететін өндірістік механизмдерде көп таралған. Осыған байланысты оқулықта басқару нысаны ретінде асинхронды қозғалтқыштың сипаттамаларының электр механикалық есептеулері қарастырылады, сипаттама есептеулерінің бір түрі келтірілген.
Қысқа тұйықталған (1.7 сурет) және фазалы роторы бар (1.8 сурет) асинхронды электр қозғалтқыштары автоматты басқару жүйесінің бөліктері болып табылады. Асинхронды қозғалтқыш қозғалтқыштық және тежеу режимдерінде жұмыс істей алады. Қысқа тұйықталған және фазалы роторы бар асинхронды қозғалтқыштар электр жетегінде тұрып қалмай жұмыс істеу ресурсының көптігіне, жұмысындағы жоғары көрсеткіштеріне, жақсы реттеу қасиеттеріне байланысты кең таралған.
1.9 суретте активті rm және индуктивті xm кедергілері бар магниттеуші контур шамаларын есепке алғандағы электр қозғалтқышының бір фазасының орын басу сұлбасы көрсетілген.

Орын басу сұлбасы келесі қойылған шарттарда дұрыс:
а) ротордың келтірілген кедергісі r2’ жиілікке тәуелді емес;
ә) машинаның магнит жүйесінің қанығуы ротордың келтірілген индуктивті кедергісіне x2’ әсер етпейді;
б) магниттеуші контур тогы Im жүктемеге тәуелді емес, ол тек қоректендіретін кернеу U шамасымен анықталады;
в) жоғары гармоникалық құраушылардың әсері есепке алынбайды;
г) ротор тогының сығылысу эффектісі есепке алынбайды.
Машинаның ротор тогының мәні
 (1.7)
(1.7)
мұнда r1 және x1 –статор тізбегінің активті және индуктивті кедергілері.
Машинаның кез келген сырғу мәні S кезінде машинаның тұтынатын тогы I комплексті пішінде анықталады:
 (1.8)
(1.8)
(1.7) арақатынасынан шыққандай, ротор тогы I2’ оның сырғуына S тәуелді, яғни машинаның айналу жиілігіне тәуелді, өйткені
![]() .
(1.9)
.
(1.9)
Іске қосу кезінде сырғу S = 1 (ағындағы айналу жиілігінің мәні w = 0), ал айналу жиілігі w=w0 идеалды жүріс жиілігіне тең кезде сырғу S =0. (1.2.4) арақатынасынан анықталғандай, іске қосу кезінде ротор тогы максимал мәніне I2қ’@ (8¸10) × Iн жетеді және оны шектеу қажет.
 .
(1.10)
.
(1.10)
Ротор тогының жиілігі fР желі кернеуінің жиілігі мәні fж кезінде келесі арақатынас бойынша анықталады
fР = fж×·S . (1.11)
Іске қосу кезінде S=1 және асинхронды машина кернеу трансформаторы ретінде қарастырылады, өйткені fp= fж = 50Гц. Қозғалтқыштың айналуы өскен сайын және сырғуы Sн @ 0,1 мәнінен аспайтын нақты сырғумен Sн жұмыс істеп тұрғанда ротор тогының жиілігі де fp = 5Гц –ке төмендейді.
Қысқа тұйықталу кезіндегі индуктивті кедергіні xқ=x1+x2’ деп белгілеп алып, машинаның шамалары арқылы критикалық сырғу мәнін аламыз
 .
(1.12.6)
.
(1.12.6)
Оң таңба қозғалтқыш режиміне, теріс таңба генераторлық режимге сәйкес екенін атап өтейік. Машина статоры орамасының фаза саны m кезінде қозғалтқыштық режимдегі жұмыс кезінде қозғалтқыштың критикалық иінкүшінің мәні Mкр.қ келесі формула бойынша анықталады
 .
(1.13)
.
(1.13)
Генераторлық режим жұмысы кезіндегі қозғалтқыштың критикалық иінкүшінің Mкр.г мәні
 .
(1.14)
.
(1.14)
Бұл иінкүштер арасындағы қатынасы
![]() .
(1.15)
.
(1.15)
Иінкүштер арақатынасы мұндай: ½Mкр.г½> Mкр.қ. Коэффициентті x келесі формула бойынша анықтаймыз
 .
(1.16)
.
(1.16)
Ірі машиналарда r1 @ r2’ және x @ Sk.
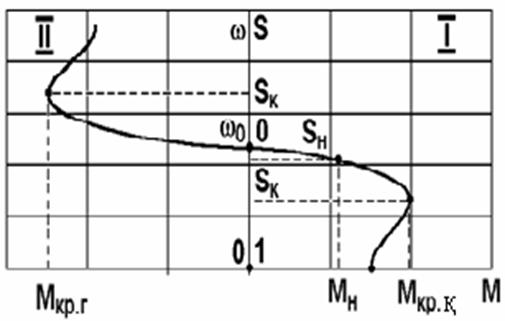
Жоғарыда көрсетілген шарттарды есепке ала отырып, қозғалтқыштың механикалық сипаттамасының теңдеуін аламыз
 .
(1.17)
.
(1.17)
|
Коэффициенттің x мәнін есепке алмай, яғни статордың активті кедергісін r1=0 нолге тең деп, қозғалтқыштың механикалық сипаттамасының қысқартылған теңдеуін аламыз. Асинхронды қозғалтқыштың сипаттамалары 1.10 суретте көрсетілген.
 .
(1.8)
.
(1.8)
Жалпы өнеркәсіп үшін орындалған үш фазалы қысқа тұйықталған электр қозғалтқыштары үшін максималды айналу иінкүшінің дүркін мәні
![]() .
.
Электр қозғалтқышының механикалық сипаттамасына желі кернеуінің U әсерін талдай отырып, (1.12)-(1.13)арақатынастары негізінде критикалық сырғу Sк кернеу төмендеген кезде тұрақты болып қалатынын, ал критикалық иінкүші Mкр.қ қоректендіру кернеуінің квадратына пропорционал кемитінін анықтаймыз (1.11 сурет).

|
Желі кернеуі 0,9×Uн мәніне дейін төмендеген кезде, яғни Uн мәнінің 10% - ы, критикалық иінкүші Mкр.қ 19% - ға төмендейді. Қоректендіру кернеуі төмендеген кезде, иінкүштің бастапқы мәніне жету үшін қозғалтқыш үлкен ротор токтарымен жұмыс істеу керек.
Электр қозғалтқышын жобалау кезінде іске қосу (S=1) және критикалық иінкүштер (S=Sк) мәні минималды мүмкін кернеу кезінде жұмысшы машинаның талаптарын қанағаттандыруына көз жеткізу қажет.
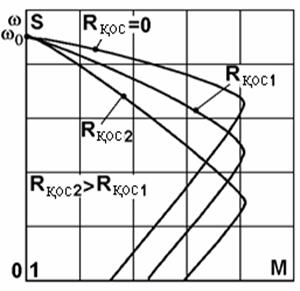
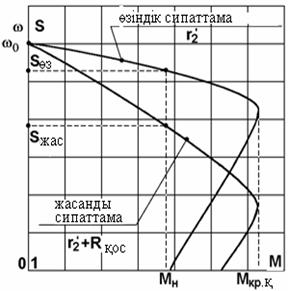
Ротор тізбегіне енгізілетін активті кедергінің әсерін талдай отырып, (1.12)-(1.13) арақатынастары негізінде алатынымыз, ротор кедергісі (r2’ + Rқос) көбейгенде критикалық сырғу мәні өседі, бірақ қозғалтқыштың критикалық иінкүшінің мәні Mкр.қ өзгеріссіз қалады. Механикалық сипаттамалары 1.12суретте көрсетілген. Ротор тізбегіне қосымша кедергілерді енгізу әдісі машинаны жүргізіп жіберу үшін қолданылады, іске қосу уақытында ротор тізбегіне мәні үлкен кедергі Rқос қосылады. Машина жүрісінің шамасы бойынша Rқос мәні автоматты түрде айналу жиілігі, ток және уақыт функциясында азайып өзіндік сипаттамада ол толық ротор тізбегінен алынып тасталынады. Жүргізіп жіберу диаграммасы тәуелсіз қоздырылатын тұрақты ток қозғалтқышын жүргізіп жіберу диаграммасына ұқсас. Ротор тізбегіне кедергіні Rқос енгізу кезінде жасанды механикалық сипаттамаларды есептеу үшін келесі арақатынас қолданылады
 (1.9)
(1.9)
мұнда Sжас және Sөз – жасанды және өзіндік сипаттамалардағы сырғу мәндері.
![]()
![]()
Арақатынасты қолдану үшін машинаның өзіндік сипаттамасын білу қажет (Sөз нүктелері және r2 мәні’). (1.19) арақатынасы бойынша сол нүктелер үшін ротор тізбегіне енгізілетін Rқос мәнін біле отырып, жасанды сипаттамадағы сырғудың Sжас есептеулері жүргізіледі.
Машинаның белгілі жасанды сипаттамасынан (Rқос1) басқа жасанды сипаттамасы (Rқос2) есептелінеді. Бұл кезде есептеу арақатынасы мына түрде жазылады
 .
(1.20)
.
(1.20)
 | |||
 | |||
|
Бұл арақатынаста Sжас1 сырғуы жасанды сипаттамадағы қосымша кедергі Rқос1 мәніне сәйкес.
Активті - индуктивті кедергіні машинаның ротор тізбегіне енгізу (1.15 сурет) машинаның өзіндік сипаттамасымен салыстырғанда іске қосу иінкүшін тұрақты ұстап тұру үшін қолданылады, сырғудың 1<S<Sк аралықтарында машинаның механикалық сипаттамасы жұмсақ қисықпен ұсынылады. Машинаның критикалық иінкүші Mкр.қ мен критикалық сырғу мәні Sк (1.13)-(1.14) арақатынастарына сәйкес өзгереді.
Активті және индуктивті кедергілерді машинаның статор тізбегіне енгізу (1.2.9 сурет) машинаның іске қосу тогының секіруін азайту үшін қолданылады, өйткені тікелей статордағы кернеу ток функциясында болады және іске қосу тогы азайған сайын кернеу өсе бастайды және U мәніне жақын мәнге дейін көтеріліп, қалпына келеді. Активті және индуктивті кедергілерді машинаның статор тізбегінен шығару релелі - түйіспелі және түйіспесіз сұлбалармен жүзеге асырылады.
Іске қосу тогының секіруін төмендету үшін статор орамасын жұлдызшадан үшбұрышқа ауыстыру ұсынылады. Бұл жағдайда іске қосу тогының секіруі төмендегенде машинаның іске қосу иінкүші үш есе азаяды.
![]() .
(1.21)
.
(1.21)
Қысқа тұйықталған және фазалы роторы бар қозғалтқыштың рекуперативті, қарсы қосу, динамикалық тежеу режимдері бар. Рекуперация режиміне өткен кезде –1<S<0 (II квадрант) ротор w0 жылдамдығынан үлкен жылдамдықпен айналады және қозғалтқыштық режиммен салыстырғанда электр магниттік қуат өз таңбасын өзгертеді (сырғу мәні теріс), яғни қозғалтқыш энергиясын желіге береді.
Рекуперация режимінде реактивті қуат өз таңбасын сақтайды, бұл машинаның айналдырушы магнит өрісін туғызуға жұмсалатын реактивті энергияны желіден рекуперация және қозғалтқыштық режимдерінде тұтынатынын көрсетеді.
 (1.22)
(1.22)
Мұндай режим жүкті төмен түсіргенде, сонымен бірге машинаның полюстерінің санын аздан көпке ауыстыру кеінде орын алады. Механикалық сипаттамалары 1.17 суретте келтірілген. Сипаттама екінші және төртінші квадранттарда орналасқан.
![]()

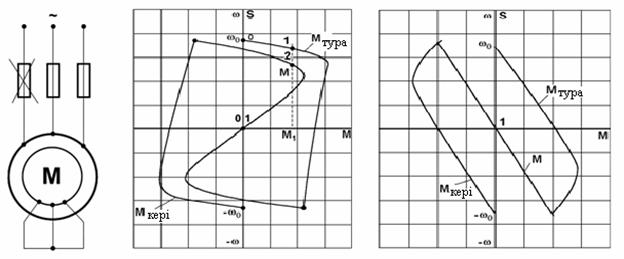
ҚҚарсы қосумен тежеу кезінде қозғалтқыш оның иінкүшіне қарама-қарсы жаққа айналады, яғни машина роторы магнит өрісінің айналу бағытына қарсы бағытта айналады. Аталған режим ротор тізбегіне кедергі енгізумен жүзеге асырылады. Қарсы қосумен тежеу режимінің сипаттамасы IV квадрантта, ал қарама-қарсы бағыттағы айналуда II квадрантта орналасқан (1.18 сурет).
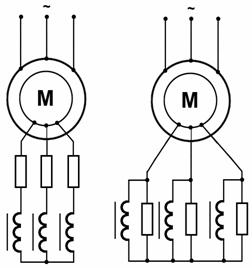
Динамикалық тежеу режимінде статор орамасы айнымалы ток желісінен ағытылады және орамаға әртүрлі қосылу сұлбасымен (тежеу тиімділігіне байланысты) машинаның қозғалмайтын ағынын тудыратын тұрақты ток беріледі.
Машина роторы инерциямен айналғандықтан, онда ток тудыратын ротор тізбегінде э.қ.к – сі индукцияланады. Статор мен ротор ағынының өзара әрекеттесуі тежеу иінкүшін тудырады. Статор орамасының мүмкін болатын қосылу түрлері 1.19 суретте келтірілген.

1.19 Сурет
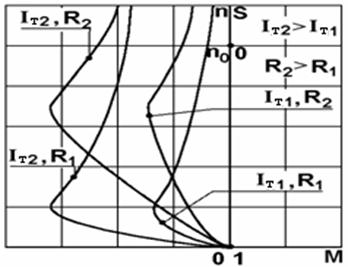
![]()
Қозғалтқыштың ротор тізбегіне енгізілетін әртүрлі кедергілер (R2>R1) кезінде машинаның статор тізбегіне беретін екі тұрақты ток Iт1 және Iт2 мәні үшін механикалық сипаттамасы 1.20 суретте келтірілген. Магниттеуші ток (Iт2>Iт1) көбейген сайын тежеу тиімділігі өсе бастайды.
1.3 Асинхронды қозғалтқыштың айналу жылдамдығын реттеу
Қысқа тұйықталған роторы бар машинаның айналу жиілігін реттеу дискретті (2:1, 3:2, 3:1 және т.б.) түрде полюстер жұбының санын ауыстыру арқылы келесі арақатынас негізінде орындалады
![]() (1.23)
(1.23)
мұнда n – машинаның айналу жылдамдығы;
f –желі кернеуінің жиілігі;
р –полюстер жұбының саны.
Қысқа тұйықталған роторы бар машинаның статор орамасы секция болып бөлінген, шығыстары (басы және соңы) қысқыштар қорабшасында орналасқан және басқару жүйесінің релелі - түйіспелі бөлігімен коммутацияланады.
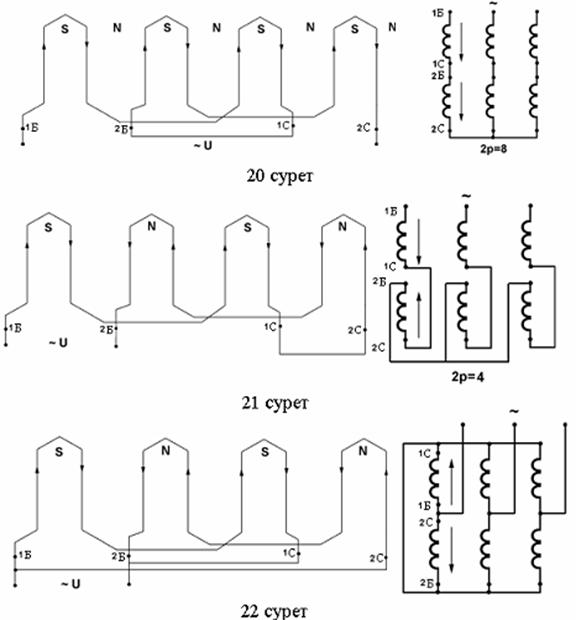
Жылдамдықты реттеу принципін түсіндіру үшін статордың сегіз ойығында орналасқан статор орамасы бір фазасының бөлек бөліктерінің ауыстырып қосу түрлерін қарастырайық (1.1-3.3 сурет).
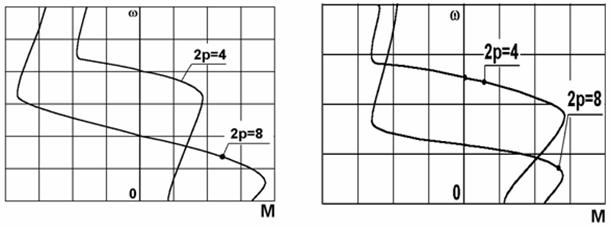
3.1, 3.2, 3.3 суреттерде үш фазалы статор орамасының принциптік қосылу сұлбалары келтірілген. Полюстер саны және түрі (S, N) статордың басқа көрші ойықтарына қолданылған бұрауыш ережесі бойынша анықталады. Жылдамдықты реттеу түрінің критерийі фазалық кернеу мәнінің осы кернеуге қосылған статор орамасының орам санына қатынасы болады. Бұл критерийді қолдана отырып, ауыстырып қосу кезінде қуат тұрақты P= const кезінде жылдамдықты реттеу орын алады. Механикалық сипаттамалары 3.4 суретте көрсетілген. Иінкүші M = const тұрақты кезінде жылдамдықты реттеу ауыстырып қосу кезінде орын алады (3.5 сурет). Механикалық сипаттамалары 3.4 суретте көрсетілген. Полюстер жұбының аз санынан көбіне ауыстырған кезде қозғалтқыш рекуперативті тежеу режимінде тежелетінін атап өту керек.
Полюстер жұбының санын ауыстырудың көптеген әртүрлі сұлбалары бар. Орамадағы кернеуді өзгерту қажеттілігі кезінде орамаларды үшбұрыш, екі үшбұрыш, жұлдызша-үшбұрыш етіп қосуды қолданады. Реттеудің бұл түрі станок жасауда, жүк көтеру техникасында (лифт) және басқа салаларда кең қолданылады.
Көпжылдамдықты электр қозғалтқышын дайындаудағы еңбек сыйымдылығы кәдімгі машинамен салыстырғанда секцияланған ораманы орындау есебінен өседі.
|
|
|
|
Машинаның симметриялы емес жұмыс режимі арасында іс жүзінде кездесетін симметриялы емес қоректендіру кернеуі (статор тізбегі) және симметриялы емес ротор тізбегі (кедергілерді қосу) талдауға жатады.
Симметриялы емес үш фазалы кернеу жүйесі екі симметриялы үш фазалы жүйеге - тура және керіге бөлінеді.
Тура кернеу жүйесінде векторлардың ілесу реті негізгі жүйемен бірдей, кері кернеу жүйесінде – фазалардың кері ілесу реті болады. Машинада екі магнит қозғаушы күші және сәйкес бағытта айналатын иінкүштері пайда болады деп есептелінеді. Қозғалтқыш білігіндегі нәтижелік иінкүш екі иінкүштің алгебралық қосындысына тең болады. Кернеудің тура және кері құраушылары келесі арақатынастармен анықталады
 (1.24)
(1.24)

мұнда ![]() - симметриялы
емес жүйенің фазалық кернеуі;
- симметриялы
емес жүйенің фазалық кернеуі;
a – бірліктік вектор, 0,5+j×0,866 мәніне тең.
Табылған фазалық кернеулердің симметриялық құраушылар мәндері бойынша сәйкес критикалық иінкүштер мәнін анықтауға болады.
 ,
(1.25)
,
(1.25)
 .
.
Тура Mтура және кері Mкері тізбектілік иінкүштері үшін:
 ,
(1.26)
,
(1.26)
 .
(1.27)
.
(1.27)
Қозғалтқыш иінкүші Mтура және Mкері иінкүштерінің қосындысымен анықталады. 1.26 суретте симметриялы емес қоректендіру кернеуі кезіндегі қозғалтқыштың механикалық сипаттамалары көрсетілген – жүктеме кезінде қозғалтқыштың жылдамдығымен бірге машинаның іске қосу иінкүші де азаяды. Ротор тізбегіне біршама активті кедергіні енгізумен төмен жылдамдығы бар сенімді тежемелі іске қосуды қамтамасыз ететін сипаттамаларды алуға болады (1.27 сурет).

|
Қозғалтқыштың бір фазалы режимі - фазалардың бірінің сақтандырғышы күйіп кеткен кезде орын алады, бұл кезде қоректендіру кернеуінің үшбұрышы түзу сызыққа айналуы симметриялы емес статор кернеуінің шектік режимі болады, сонымен бірге өз еркімен кері айналу және сипаттаманың үлкен еңістігінің мүмкіндігі - қарсы қосумен тежеу кемшіліктерін шеттету үшін қолданылады.
Бір фазалы екпінді магнитік өріс қарама-қарсы бағытта синхронды жылдамдықпен айналатын екі симметриялы өріске бөлінеді. Машинада бір білікке жұмыс істейтін екі үш фазалы асинхронды қозғалтқыш бар деп көрсетуге болады және олардың нәтижелік иінкүші екі қозғалтқыштың иінкүштерінің алгебралық қосындысына тең болады. Роторда қосымша кедергісі жоқ бір фазалы қосылу кезіндегі асинхронды қозғалтқыштың механикалық сипаттамалары 1.28 суретте келтірілген. Механикалық сипаттамалардың талдауы көрсеткендей, бір фазалы қосылу кезінде (S=1) іске қосу иінкүші нолге тең және қозғалтқыш жүріп кете алмай, қысқа тұйықталу режимінде қалады, осының салдарынан қозғалтқыш қызады. Егер машина М1 иінкүші бар жұмысы кезінде сақтандырғыш күйіп кетсе, онда қозғалтқыш өз жылдамдығын 1-2 нүктелеріне сәйкес төмендетеді.
Ротор тізбегінде біршама қосымша кедергі болғанда, бір фазалы қосылу кезінде асинхронды қозғалтқыштың механикалық сипаттамалары 1.28 суретте көрсетілген.
Бір фазалы қосылу кезінде алынған тежеу сипаттамасы тұрақты ток қозғалтқыштарының сипаттамаларына орын береді, бірақ көтеру машиналарының жетектері толығымен қанағаттандырылады және бұл тежеу түрі кең қолданыс табады.
Машинаның бір фазалы қосылуы жарықтандыру желісі бар тұрмыста да қолданылады, бірақ асинхронды қозғалтқышты қосу оның 20% қуатын кемітеді. Бұл кезде іске қосу иінкүшін тудыру үшін, статордың бір фазасына машина жүріп кеткеннен кейін тұйықтайтын коденсатор қосады.
|
Машинаның ротор тізбегіне симметриялы емес кедергілерді қосу (1.10 сурет) кедергілердің шектелген саны кезінде жасанды сипаттамалардың санын көбейту үшін қолданылады.
Ротор тізбегінің бөлек фазаларының кедергілері өзара тең болмауы салдарынан оның фазаларындағы токтар бірдей болмайды. Ротор тогының симметриялы емес жүйесін тура және кері реттілікті симметриялық құраушыларына бөлуге болады. Нолдік реттілікті токтар ротор тізбегінде болмайды.

|
Бұл шарттар бойынша қозғалтқышта екі айналушы магнит өрісі пайда болады. Біріншісі статор тогынның магнит қозғаушы күшімен (м.қ.к) және ротордың тура реттілікті токтарымен, екіншісі - кері реттілікті ротор тогының м.қ.к - мен және ротордың кері реттілікті ағынымен статор орамасында индукцияланатын жиілігі f болатын статор токтарымен пайда болады. Механикалық сипаттамалары 1.11 суретте көрсетілген. Механикалық сипаттамаларының ерекшелігі ротор тізбегінің балама кедергісінің мәнімен анықталатын жарты синхронды жылдамдықта иінкүшінің төмен түсіп кетуі болады. Бұдан басқа, ағындар мен токтардың кері реттілігінің болуы болат пен мыстағы шығындарды көбейтеді және машинаның қызуын өсіреді.
1.4 Асинхронды қозғалтқышты кернеуін өзгертумен басқару
Статор кернеуінің өзгеруі асинхронды қозғалтқыштың критикалық иінкүшінің Мкр өзгеруіне әкеледі, оның мәнін орын басу сұлбасы негізінде анықтауға болады
Мк = 3k2sU2s/2Wsxs, (1.28)
мұнда Ws - өрістің бұрыштық айналу жылдамдығы.
Бұл жағдайды қозғалтқыштың айналу жиілігін басқару үшін қолдануға болады, егер де критикалық сырғу мәні
Sk = R1/xs (1.29)
салыстырмалы түрде үлкен немесе фазалы роторы бар қозғалтқышты қолданған жағдайда ротор тізбегіндегі қосымша кедергілердің көмегімен жеткілікті үлкен болып жасалынған. 1.4 суретте осы басқарудың принциптік сұлбасы және Sк=1 кезінде ωS/ω0=f(M/MH) сипаттамасы көрсетілген. Айналу жиілігін басқару өрісті әлсіретуге негізделгендіктен, қозғалтқыш тек азайтылған иінкүшімен төменгі айналу жиілігінде ғана жұмыс істейді.
Айналу жиілігін реттеу кезінде ротор тізбегінде, басым бөлігі қосымша кедергілерде шығындар орын алады, мұның өзі электр жетегінің көптеген қолданылуы үшін жайсыз болады. Осыдан қорытқанда, статор кернеуін басқару бірқатар жағдайларда жүк көтеруші электр жетегі үшін қолданылады, мұнда үзікті ток режимі жұмысы салдарынан шығындар салыстырмалы түрде көп емес, немесе желдеткіш жетектері үшін, мұнда кедергі иінкүші төменгі айналу жиіліктері кезінде тіпті аз болады. Қарастырылған басқаруды қолдану саласы осы уақытта аз ғана қуаттармен (P<50 кВт) шектеледі. Күштік түрлендіргіштер ретінде айнымалы токтың толық және жартылай басқарылатын вентильді коммутаторлары қолданылады.
Статор кернеуі тиристорлар көмегімен желі кернеуінің бір бөлігін „кесіп тастау” жолымен басқарылады. Осының салдарынан жоғарыланған жылу және магниттік шығындарды тудыратын статор кернеуі мен тогының жоғары гармоникасы, сонымен бірге иінкүш гармоникалары пайда болады. Мұндай басқарудың орнына статорды желіге периодты қосу жолымен айналу жиілігін реттеуді қамтамасыз ететін релелі ажыратып-қосқыш ретінде қызмет ететін тиристорлы құрылғыны қолдану мүмкін (екі позициялық реттеу). Соңғы тәсілді жүзеге асырудың келесі қиндықтары бар:
- қозғалтқышты периодты ажыратып-қосу машина мен редукторда үлкен әрі жиі рұқсат етілмейтін механикалық жүктемелерді пайда қылады;
- есептеулер көрсеткендей, критикалық иінкүшінің үш - төрт есе мәні орын алады;
- қозғалтқышты келесі қосу уақытында рұқсат етілмеген электрлік жүктемелер болмас үшін, алдындағы ажыратудан пайда болған өтпелі процестер толығымен бітуі керек;
- қосу және ажырату арасындағы үзіліс үш ротордың электр магниттік уақыт тұрақтысына жуық мәні, кәдімгі механикалық инерциялығы мен жүктемесі бар қозғалтқыштың айналу жиілігін шектен тыс үлкен тербелістерге әкеледі.
1.32 Сурет
Аталған қиындықтарға байланысты асинхронды қозғалтқыштың айналу жиілігін релелік реттеу қолданылмайды. Бірақ, ротордың кедергісі үлкен қозғалтқыштар үшін, мысалы қозғалтқыштың электр магниттік және механикалық инерциялылығының арасындағы арақатынасты жақсартуға мүмкін болатын түйіспелі сақиналары мен қосымша кедергілері бар қозғалтқыштар үшін аталған басқару қағидасын жүзеге асыру мүмкін болады. Релелік басқару сызықтық қозғалтқыштар үшін қолданылады, өйткені олар механизммен қатаң, редукторсыз жалғанған және электр магниттік және механикалық уақыт тұрақтылары арасындағы арақатынасты шарттайтын жұмсақ сипаттамасы болады. Қозғалтқышты таңдау кезінде ажыратып қосу кезінде пайда болатын күштер есепке алыну керек.
Қозғалтқыш пен түрлендіргіштің шамаларын таңдау. Статор кернеуін басқару кезінде қозғалтқыштың қызуын есептеу көптеген әсер етуші факторларға байланысты біршама қиындықтар тудырады. Есепке келесі факторлар алынады
а) өзін желдететін қозғалтқыштардың жылу берілісі айналу жиілігіне (сырғуға) тәуелді. Сырғу өскен сайын рұқсат етілген шығын қуаты төмендейді. Қуаты P<50 кВт асинхронды қозғалтқыштар үшін шамалап жазуға болады
PVz /PVн = 0,6(1+Sн – S) +0,4 (1.30)
мұнда: PVн –Sн сырғуы кезіндегі нақты шығын қуаты ;
PVz - S сырғуы кезіндегі рұқсат етілген шығын қуаты ;
б) кедергі иінкүшінің айналу жиілігіне тәуелділігі көптеген іс жүзіндегі жағдайларды қамтиды.
Mw = CW n, n = 0; 1;2; (1.31)
в) статор кернеуінің синусоидалығын қамтамасыз ететін реттегіш трансформатордың көмегімен кернеуді басқару кезінде қозғалтқыштағы жылулық және магниттік шығындар сырғуға және жүктемеге тәуелді. Сырғу функциясындағы максималды рұқсат етілген иінкүшін анықтауға ыңғайлы қалыпты шектік М-S сипаттамасын есептеуге болады (0 сипаттамасы, 1.4.1 б суреті);
г) тиристорлы коммутатормен басқару кезінде жоғарылаған қызу шығындарына әкелетін кернеу мен токтың біршама гармоникалары байқалады. Бұл шығындарды есептеу қиын. Тәжірибелік есептеулер кезінде қозғалтқыштың қуатын алдын-ала анықтау априорлы берілгендері негізінде жүзеге асырылады, яғни максималды қуат шығынын шамалап бағалау жолымен орындалады. Бұдан кейін қалыпты жүктемелік сипаттама тұрғызылады. Егер тұрғызылған сипаттама шектік сипаттаманың сол жағында жатса, қозғалтқыш қызуы бойынша дұрыс таңдап алынады. Кейбір механизмдердің жылдамдығын реттеу қажеттілігі кезінде электр жетегінің түрі реттеудің жұмсақтығы мен ауқымына қойылатын талабымен анықталады. Салыстырмалы аз қуатты электр жетектері үшін (40-60 кВт), жылдамдықты сатылап реттеуді талап ететін, мысалы, пластиналы қоректендіргіштер үшін, жылдамдығын статор орамасының полюстер жұбының санын өзгертумен реттейтін асинхронды қысқа тұйықталған көп жылдамдықты қозғалтқыштарды қолдануға болады. Жылдамдықты жұмсақ реттеу үшін каскадты реттеуі бар асинхронды электр жетегін қолдануға болады.
Асинхронды қысқа тұйықталған қозғалтқыштары мен аралық муфталары бар электр жетектерінде жүктемелерді теңестіру муфтаның сырғуын өзгертумен, гидравликалық муфтада - муфтаның көлемін толтырумен өзгерту, электр магниттік сырғу муфтасында индуктордың қоздыру тогын өзгертумен мүмкін болады.
1.5 Асинхронды қозғалтқыштарды импульсті басқару
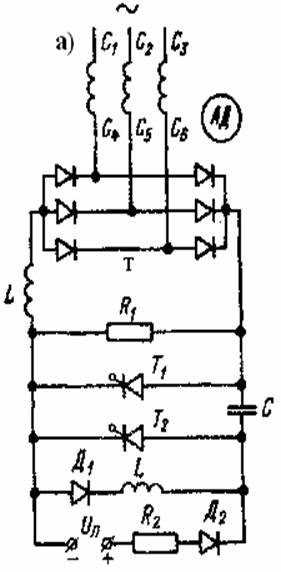
Асинхронды қозғалтқыштардың жылдамдығын реттеу статорлық немесе роторлық тізбекті импульсті басқару сұлбасында қол жеткізуге болады (1.33а суреті). Токты түзету үшін қозғалтқыштың ротор тізбегіне түзетуші көпір Т қосылған. Ротордың түзетілген тогының шамасы тиристорлық кілттің көмегімен реттеледі. Кілт келесі жолмен жұмыс істейді. Егер Т1 және Т2 тиристорлары жабық болса, онда қозғалтқыш көпірдің Т шығысына қосылған қосымша кедергіге R2 жұмыс істейді. Бұл кезде ротор тогы R2 кедергісі анықтайтын мәніне дейін өсе бастайды. Сол уақытта конденсатор С оның төменгі электродында оң потенциял болғанға дейін сыртқы кернеу көзінен Uп зарядталады.


а) қағидалық сұлба; б) механикалық сипаттамалары
1.33 Сурет Фазалық роторы бар АҚ - ны импульсті басқару
Тиристорды Т2 ашқан кезде кедергі R2 тұйықталады және асинхронды қозғалтқыштың ротор тізбегіндегі тогы тек ротор орамасының кедергісімен анықталатын шамаға дейін өсе бастайды. Т2 тиристоры ашылған кезде конденсатордың С кернеуі Т1 тиристорына қойылады да, оның жабылуын қамтамасыз етеді. Бұл кезде асинхронды қозғалтқыштың ротор тізбегіне кедергі қайта енгізіледі, мұның салдарынан ротор тізбегінің тогы азая бастайды. Сол уақытта С, коденсаторы Т1 тиристоры арқылы түзеткіштің Т кернеуімен қайта зарядталады, бұл кезде оң потенциал оның жоғары электродында болады.
 |
Тиристордың Т1 жаңа ашылуы кезінде кедергі қайта тұйықталады және ротор тізбегіндегі ток қайта өсе бастайды. Сол уақытта конденсатор С қайта зарядталады, бірақ тек қана сыртқы көзден ғана емес, сонымен бірге, Т1 тиристоры – Д диоды - L индуктивтілігі тізбегі арқылы да зарядталады. Тиристордың Т2 жаңа ашылуы кезінде конденсатор кернеуі Т1 тиристорын күштеп жабады және т.с.с.
Ротор тізбегіндегі кедергі мәнін импульсті реттей отырып, бұл тізбектегі токтың қажетті мәнін қамтамасыз етуге болады және қозғалтқыштың иінкүшін де реттеуге болады. Токтың мәнін Т1 тиристорының ашық және жабық кезіндегі жұмыс уақытын өзгертумен реттеуге болады. Егер Т1 тиристоры жабық болса, қозғалтқыш 1 сипаттамасына жұмыс істейтін болады, Т1 тиристоры ашық кезде - 2 сипаттамада жұмыс істейді (1.33 суреті). Тиристорлардың қосылу уақытын өзгертумен қозғалтқыштың иінкүшін кейбір шектерде реттеуге болады (1.33б суретте үзік сызықтармен көрсетілген). Бұл кезде Т1 тиристоры ашық немесе жабық уақыт ішінде ток тұрақтанған мәніне жетпеу қажет, яғни токтың өзгеруі көп болмауы керек. Бұл шарт тиристорды ашу мен жабудың жиілігінің жоғары болуын талап етеді.
Аталған қозғалқыштарды реттеу тәсілдері асинхронды қозғалтқыштың өз сырғуын немесе реттегіш муфтаның сырғуын көбейтумен байланысты. Мұндай реттеу сырғу шығынының көбеюіне және п.ә.к - тің төмендеуіне әкеліп соғады.
Тек роторлық қана емес, сонымен бірге статорлық тізбектің тогын импульстік реттеу мүмкін (1.34а суреті). Сұлбаның әрекет ету қағидасы 1.33а суретінде келтірілген сұлбаның әрекет ету қағидасына ұқсас. Кедергіні тиристормен Т1 тұйықтап және қайта қосып, статор орамасындағы орташа ток пен кернеуді реттеуге болады. Бұл жағдайдағы шектік сипаттамалары мен реттеу ауқымдары 1.34б суретінде көрсетілген.
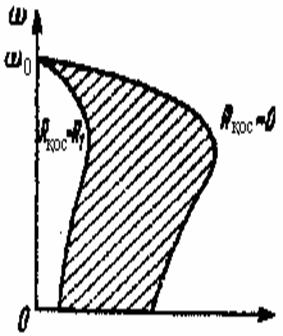
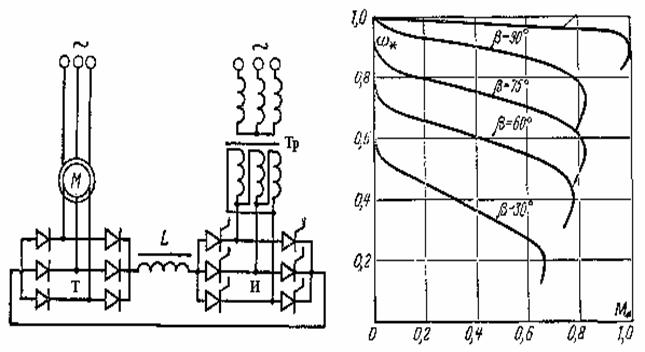
П.ә.к-ті түсірмейтін электр жетегін қолдану үшін асинхрондық вентильдік каскад сұлбасы бойынша қозғалтқыштарды басқаруды қолдануға болады (1.5.3а суреті).
Асинхрондық вентильдік каскад (АВК) жүйесінде ротордың түзетілген э.қ.к - сіне инверторлық режимде жұмыс істейтін басқарылатын тиристорлық түрлендіргішінің э.қ.к - сі қарсы қосылады. Ротордың э.қ.к - сін түзету үшін сұлбаға түзеткіш Т енгізілген.
Инвертордағы қарсы э.қ.к - нің мәнін өзгерте отырып, асинхронды қозғалтқыштың ротор тізбегіндегі токты, оның иінкүшін және электр жетегінің жылдамдығын реттеуге болады.
АВК - ның механикалық сипатамалары 1.35б суретінде көрсетілген, олардан көрініп тұрғандай, қайсыбір β бұрышы кезінде жүйенің шектеп тыс жүктемелік икемділігі төмендейді және АВК - ның жұмысы минималды бұрышпен β және инвертеу тогымен шектелген.
Каскадты реттеу сұлбасы үнемді, өйткені қозғалтқыштың төмендетілген жылдамдықта жұмыс істеуі кезінде, түзеткіш пен инвертордағы шығындарды алып тастағанда, сырғу қуаты қоректендіруші желіге қайтарылатын болады.
|
 |
2 Айнымалы ток қозғалтқыштарын жиіліктік басқарудың әдісі
Айнымалы ток қозғалтқыштарының айналу жиілігін реттеудің ең үнемді тәсілі желінің қоректендіру жиілігін басқарумен жүзеге асырылады, өйткені айналу жиілігі ω қоректендіретін желінің жиілігіне және полюстер жұбының санына р тәуелді
![]() .
(2.1)
.
(2.1)
Айналу жиілігін ω реттеу үшін реттелетін жиілік көзі керек. Қолдану салалары металлургия (мысалы, рольгангтер жетегі), тігін өнеркәсібі, станок жасау (мысалы, электр шпинделдері мен металл кесуші станоктар), желдеткіштер мен сорғылардың электр жетегі және т. б.
Шетелдік фирмалар, жекелеп айтқанда Sіemens, Fanyk, АВВ желдеткіштер, сорғылар, роботтар, транспортерлер үшін жиліктік басқаруды кең қолданады.
Америка және ағылшын фирмалары мұнай және газ өнеркәсібінде жетектерді жиіліктік басқару жолын кең қолданады. Орталықтандырылған, сонымен бірге жеке түрлендіргіштері бар жетектер қолданылады.
АҚ - ны реттеудің негізгі ерекшелігі оның статорындағы кернеуін U статикалық кедергілердің иінкүші Mс функциясында өзгерту қажет, сонымен бірге жиілігін өзгертуге сәйкес болу керек
Статор тізбегінің активті кедергісін r1 есептемегенде, қозғалтқыштың критикалық иінкүшінің мәнін аламыз.
 (2.2)
(2.2)
мұнда: xқ - қысқа тұйықталудың индуктивті кедергісі.
Асинхронды қозғалтқыштың статор орамасының э.қ.к - сі қоректендіру желісінің жиілігіне f және машинаның ағына Ф пропорционал
E=c·F·f (2.3)
Статор орамасындағы кернеуінің төмендеуін есепке алмағанда
![]()
келесі арақатынастарды аламыз
U1 » E1 және U1 » kFf1. (2.4)
Статор тізбегінің индуктивті кедергісі x1 деп белгіленген. Кернеудің қорек көзі мен қозғалтқыштың жиілігін реттеу өзгермейтін кезде машинаның магнит ағыны өзгереді.
Жиілік f1 азайған кезде ағын Ф өседі, қанығу байқалады, магниттелу тогы көбейеді, қозғалтқыштың энергетикалық көрсеткіштері төмендейді және қозғалтқыштың қызуына әкеледі.
Жиілік f1 көбейген кезде M=кФІ2cosφ формуласына сәйкес кернеу U мен жүктеме иінкүші тұрақты кезде ағын Ф азаяды, бұл ротор тогының өсуіне І2, яғни оның орама жүктемесінің көбеюіне, максималды иінкүшінің және аса жүктемелік қабілеттілігінің төмедеуіне әкеледі. Сондықтан Ф=const шартын қамтамассыз ету үшін статор кернеуін жүктеме мен жиілік функциясында өзгерту қажет. Бұл кезде кернеуді жиілік функциясында реттеу тұйықталмаған жүйелерде мүмкін болады.
Жиілік және қызу функциясында реттеу тұйықталған жүйелерде мүмкін болады.
Жылдамдықты реттеу негізгі жылдамдықтан жоғары 2:1 ауқымында мүмкін және ротор орамасының бекітілу беріктігімен шектеледі.
Негізгі жылдамдықтан төмен реттеу 15:1 ауқымымен шектелген, өйткені төменгі жиілігі бар қоректендіру көзін жүзеге асыру қиындық тудырады. Жиіліктік басқару 30:1 ауқымына дейін іске асырыла алады. Арнайы құрылысы бар қозғалтқыштарды қолданумен жылдамдықтың жоғары шегін көбейтуі есебінен ауқымын көбейтеді.
Жылдамдықты жиіліктік реттеу кезіндегі кернеудің өзгеру заңын қарастырамыз. Бұл кезде асинхронды қозғалтқыштың жүктемелік қабілеттілігін сақтау шартынан, яғни критиклық иінкүшінің Мк статикалық жүктеме иінкүшіне дүркіндігінен бастайды. Осы аталғандарды есепке алып, табамыз
 ,
(2.5)
,
(2.5)
 ,
(2.6)
,
(2.6)
 (2.7)
(2.7)
мұнда: Mk1, Mc1 - қорекендіруші желінің жиілігі f1 бар сипаттамада жұмыс істеп тұрған кездегі критикалық және статикалық иінкүштері;
Mk2, Mc2 - қоректендіруші желінің жиілігі f2 бар сипаттамада жұмыс істеп тұрған кездегі критикалық және статикалық иінкүштері.
Егер басқару нысаны иінкүш тұрақты кезде реттелетін болса, онда
![]()
![]() .
(2.8)
.
(2.8)
(2.7) арақатынастан аламыз: Mk1 = Mc2 = Const.
Егер басқару нысаны қуат тұрақты кезде реттелетін болса, онда
Pc1 = Mc1w1 Pc2 = Mc2w2 Pc1 = Pc2 .
Бөлек ω1 және ω2 айналу жылдамдықтарына Рс, және Рс (Мс1,Мс2) қуаттары сәйкес. (2.7) арақатынасын түрлендіре отырып, аламыз
 ,
,
![]() .
(2.9)
.
(2.9)
Желдеткіштік иінкүш кезінде кернеуді реттеу заңы (2.6) арақатынас бойынша анықталады.
Mc1 » kw12 » cf12 Mc2 » kw22 » cf22,
![]()
 . (2.10)
. (2.10)
Иінкүші жылдамдыққа пропорционал кезінде келесі арақатынас бойынша кернеу реттеуін аламыз
Mc1 » kw1 » cf1 Mc2 » kw2 » cf2,
 ,
(2.11)
,
(2.11)
 .
.
Жылдамдықты жиіліктік реттеу кезінде әртүрлі басқару нысандары үшін асинхронды қозғалтқыштың механикалық сипаттамаларының түрі 2.1 -2.3 суреттерде көрсетілген.
Сонымен, статикалық жүктеменің тұрақты иінкүші
Mc = Const бар басқару нысандары кезінде, қоректендіру көзінің
кернеуі оның жиілігіне пропорционал өзгеруі қажет U/f = const; қуат
тұрақты кезінде Pc=Const жылдамдықты реттеуді талап ететін
басқару нысандары кезіндегі басқару заңы: U/![]() = const; желдеткіштік
сипаттама кезіндегі басқару заңы: U/f 2= const
шартына сәйкес болады. Осы жазылғандар бойынша Mс=Const
механизмдері үшін реттеу әдісі көп тарады, бірақ функционалды түрлендіргіштерді
қолдану арқылы осы заңдардың кез келгенін жүзеге асыруға болады. (2.7)
арақатынасын шығару статор орамасының активті кедергісіндегі кернеу төмендеуін
есептемеген кезде ғана дұрыс болады.
= const; желдеткіштік
сипаттама кезіндегі басқару заңы: U/f 2= const
шартына сәйкес болады. Осы жазылғандар бойынша Mс=Const
механизмдері үшін реттеу әдісі көп тарады, бірақ функционалды түрлендіргіштерді
қолдану арқылы осы заңдардың кез келгенін жүзеге асыруға болады. (2.7)
арақатынасын шығару статор орамасының активті кедергісіндегі кернеу төмендеуін
есептемеген кезде ғана дұрыс болады.
 (2.7)-(2.10) арақатынастары ірі машиналар
үшін жиіліктері 2:1 өзгеру ауқымында дұрыс. Орташа және аз қуатты машиналар
үшін, сонымен бірге реттеудің кең ауқымы кезінде арақатынастарды түзеу
қажет.
(2.7)-(2.10) арақатынастары ірі машиналар
үшін жиіліктері 2:1 өзгеру ауқымында дұрыс. Орташа және аз қуатты машиналар
үшін, сонымен бірге реттеудің кең ауқымы кезінде арақатынастарды түзеу
қажет.
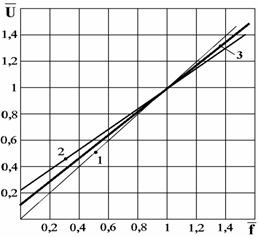
Mс = const заңымен реттеу үшін жиілік өзгеруіне байланысты статордың индуктивті кедергісінің өзгеруін есепке аламыз. Бұл кезде U/f=const сызықтық заңын түзеу қажет болады (2.4 сурет).
Белгілеулер:
 U=U/Uн – машина статорындағы кернеудің салыстырмалы
мәні;
U=U/Uн – машина статорындағы кернеудің салыстырмалы
мәні;
f/fн= f - машина статорындағы жиіліктің салыстырмалы мәні.
Жиіліктің өзгеруінен статордың индуктивті кедергісінің өзгеруін есепке алғанда МС=const нысандары үшін басқару заңдары:
1 - статордың индуктивті кедергісін есептемеген кезде МС=const үшін жиіліктік басқару кезіндегі статор кернеуінің U өзгеру заңы;
2 - қуаты аз қозғалтқыштардың статорының индуктивті кедергісін есептеген кезде МС=const үшін жиіліктің басқару кезінде статор кернеуінің U өзгеру заңы;
3 - қуаты көп қозғалтқыштардың статорының индуктивті кедергісін есептеген кезде МС=const үшін жиіліктік басқару кезінде статор кернеуінің U өзгеру заңы.
Қозғалтқыштың қуаты азайған сайын 1 түзуінен айырмашылық көбейе береді.
Енді критикалық иінкүштің өзгеруін МС=const нысандары үшін реттеу кезінде қоректендіруші кернеуінің U жиіліктен өзгерудің түзетілген (статордың индуктивті кедергісін еспке алғанда) және түзетілмеген U/f = const заңдары үшін қарастырайық (индуктивті кедергіні есептемегенде).
 | |||
 | |||
Криктикалық иінкүштің өзгеруі 2.5 суретте көрсетілген. Бұл суреттегі белгілер:
![]() - статорды қоректендіретін кернеудің өзгеруінен болатын
критикалық иінкүші;
- статорды қоректендіретін кернеудің өзгеруінен болатын
критикалық иінкүші;
Mк н- статордағы кернеу кезіндегі критикалық иінкүші.
Үзік сызықпен критикалық иінкүштің ![]() өзгеруі көрсетілген.
өзгеруі көрсетілген.
Статордағы түзетілген кернеуді өзгерту заңы кезінде (индуктивті кедергіні есепке алғанда, яғни 2.4 суреттегі 2 және 3 сипаттамалары жарамды кезде) сипаттамадан анықталғандай, жүктемелік қабілеттілігі бұл кезде тұрақты болып қалады.
1 тәуелділігі Mс=const және U/f = const (яғни, 2.4 суреттегі 1 заңы жарамды, статор индуктивтілігін есептегенде) кезінде қуаты аз қозғалтқыш үшін критикалық иінкүштің өзгеруін сипаттайды.
2 тәуелділігі МС=const және U/f = const (яғни, 2.4 суреттегі 1 заңы жарамды, статор индуктивтілігін еспетемегенде) кезінде қуатты қозғалтқыш үшін критикалық иінкүштің өзгеруін сипаттайды. Жиілік (0,6¸0,5)fн мәніне дейін азайғанда критикалық иінкүштің мәні нақты жиілік кезінде (15-25)% -ға дейін төмендейді.
Жиілік f төмендеген кезде жүктемелік қабілеттілігі l=const тұрақты шартына сәйкес кернеуді реттеу рекуперативті тежеу режимінде критикалық иінкүшінің біршама өсуіне әкеліп соғуы мүмкін. Критикалық иінкүшті сәйкес деңгейінде шектеуге талпыну жиілік f функциясынан статор кернеуі U өзгеруінің әртүрлі заңдарына әкеліп соғады (2.6 сурет).
Суреттегі белгілеулер:
1 қисығы статордың индуктивті кедергісін есептегенде МС=const нысандары үшін кернеудің U жиілік f функциясынан өзгеруін сипаттайды;
2 қисығы генераторлық режимдегі критикалық иінкүші генераторлық режимдегі нақты жиілік кезіндегі критикалық иінкүшіне тең болғанда, МС=const нысандары үшін кернеудің U жиілік f функциясынан өзгеруін сипаттайды.
Жиілік f төмендеген сайын, критикалық сырғу Sк өседі, өйткені индуктивті кедергінің xқ мәні азаяды.
 .
(2.12)
.
(2.12)
Қозғалтқыштық режимде жиілік f төмендеген кезде критикалық иінкүш Mк.қ аз болып қалады, өйткені статордағы кернеуді U де төмендету керек. Генераторлық режимде критикалық иінкүші Mк.г өседі, жиілік төмендеген кезде іске қосу иінкүші біраз көбейеді, максимумға жетеді және одан кейін азаяды. Иінкүштің төмендеуі төмен жиіліктерде байқалады және активті кедергінің салыстырмалы түрде өсуімен, сонымен бірге статордағы кернеу төмендеуді шақыратын магнит ағынының төмендеуімен түсіндіріледі. Соңғысы төменгі жиіліктерде кернеудің өсуімен толықтырылады.
Жиілік түрлендіргіштері екі топқа бөлінеді: электр машиналық түрлендігіштер, вентилдік түрлендіргіштер. Бірінші топқа асинхронды генераторы және асинхрондық жиілік түрлендіргіштері бар түрлендіргіштер кіреді. Синхронды генераторлары бар жүйенің артықшылықтары шығысындағы жиілік пен кернеуді бөлек реттеуден тұрады. Жүйенің кемшіліктері - үлкен қуаты мен шығындары және төмен п.ә.к - і. 2.7 суретте синхронды генератор кезіндегі электр машиналық түрлендіргіші бар жүйе көрсетілген.
Мұнда синхронды генератордың М4 айналу жиілігі генератор (М2) - қозғалтқыш (М3) жүйесі бойынша басқарылады. Айнымалы жиілік түрлендіргішінің М4 кернеуі бұл машинаның қоздыруымен реттеледі. Машинаның М2 шығыс кернеуі оның қоздыру орамасындағы LM2 қосымша кедергімен R1 реттеледі. Синхронды генератордың М4 айналу жылдамдығы оның қоздыру орамасындағы LM3 қосымша кедергімен R2 реттеледі. Бұл кезде синхронды генератордың М4 кернеуі де U, жиілігі де f өзгереді.
Асинхронды жиіліктік түрлендіргіші бар жүйе 2.8 суретте келтірілген. Жоғарыда қарастырған сұлбадан айырмашылығы машинаның М4 шығыс кернеуі жиілікпен қатаң байланысқан. Аз ауқымда реттеу үшін М4 статор тізбегіне автотрансформатор қосады, - бұл кезде ротор кернеуін аз ауқымда реттеуге болады. Қозғалтқыштың М3 айналу жылдамдығы Г - Қ жүйесі бойынша реттеледі.

М1 -жетектік қозғалтқыш; М2, М3 -тұрақты тоқ қозғалтқыштары; М4 -синхронды генератор; М5,М6 - жиіліктік басқаратын асинхрондық қозғалтқыштар.
![]()
Электр машиналық түрлендіргіштердің кемшіліктері олардың қолдану саласын шектейді және вентильді жиілік түрлендіргіштерін қолдану қажеттілігіне әкеледі, жекелей, электр жетектерінің п.ә.к - ін, тез әсер етуін жоғарылататын, өлшемдері азаятын тиристорлық түрлендіргіштерді қолдануға әкеліп соғады.
Вентильді түрлендіргіштерді жиіліктік басқарудың тиімді режиміне қол жеткізу мақсатында жиілік пен кернеуді бөлек реттеу үшін қолдануға болады.
Статикалық вентильді жиіліктік түрлендіргіштер екі түрге бөлінеді: 1) бір құрылғыда түзету және инверттеу функциясы бірге орналасқан тікелей байланысы бар түрлендіргіштер (желі мен жүктеменің байланысы); 2) аралық тұрақты ток бөлігі бар түрлендіргіштер. Бірінші түрлендіргіштер желі жиілігі 50 Гц кезінде шамамен 10 Гц және одан төмен жиіліктер үшін қолданылады. Осыған байланысты бұл жиілік түрлендіргіштері электр жетегінде кең қолданыс таба алмады. Екіншісі арқылы шығысындағы жиілікті кең шектерде реттеуге болады және олар өнеркәсіпте көп тараған.
2.9 суретте аралық тұрақты ток бөлігі бар түрлендіргіш сұлбасы берілген, ондағы белгілеулер: Т – fж = сonst, Uж =сonst желілік кернеуін U=var реттелетін тұрақты кернеуге түрлендіретін түзеткіш; И - f=var реттелетін жиілігі және түрлендіргіш шығысындағы U=var реттелетін кернеу деңгейі бар инвертор; ТББ – түзеткішті басқару блогы; ИББ –инверторды басқару блогы.
Тұтасымен түрлендіргіш кернеу мен жиілікті бөлек реттеу үшін екі арнаны құрайды.

М1 - жетектік қозғалтқыш; М2, М3 - тұрақты ток генераторы және қозғалтқышы; М4 – асинхронды жиілік түрлендіргіші.
|
Электр жетегі жүйелерінде түрлендіргіш қуаты мен кернеуді реттеу тереңдігіне байланысты әр түрлі түзеткіштерді қолданады: бір фазалы, үш фазалы, көпірлік және нолдік нүктесі бар, симметриялы емес және т.б.
Коммутация тәсілі бойынша автономды инверторлар келесі топтарға бөлінеді:
-жеке коммутациясы бар инверторлар;
-фаза бойынша коммутациясы бар инверторлар;
-топтық коммутациясы бар инверторлар;
-жалпы коммутациясы бар инверторлар;
-фаза аралық коммутациясы бар инверторлар;
Күштеу коммутациясы дегеніміз өткізуші тиристор арқылы кері токты өткізгенде оның тура тогы нолге дейін азаяды, дәлірек айтсақ - ұстап қалу тогы мәніне дейін, одан кейін тиристорға кері анодтық кернеу оның жабылу қасиеттері орнына келу үшін қажет уақытқа қосылады.

![]()
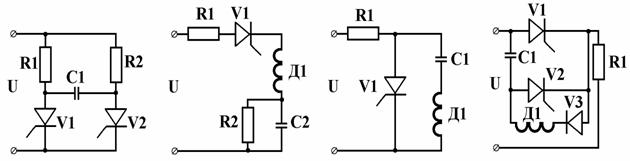
Тиристорларды коммутациялау тәсілдерін келесі топтарға бөлуге болады:
-басқа күштік тиристорға қосылатын конденсатордың көмегімен коммутациялау (2.10 сурет);
-тиристормен тізбектеле қосылған тізбектелген тербелмелі LC - контуры көмегімен коммутациялау (2.11 сурет);
-тиристормен қатар қосылған тізбектелген тербелмелі LC - контуры көмегімен коммутациялау (2.12 сурет);
-көмекші тиристордың көмегімен негізгі тиристорға қосылған конденсатор немесе LC - контур көмегімен коммутациялау (2.13 сурет).
|
Басқару тәсілі бойынша өзінің қоздыруы бар және тәуелсіз қоздыруы бар инверторлар болып бөлінеді. Бөлек жағдайларда аралас қоздыруды қолданады.
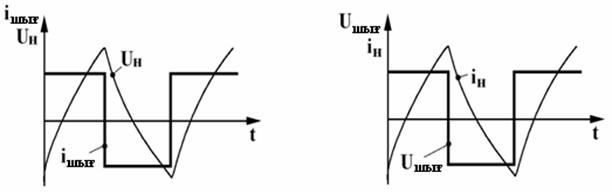
Электр магниттік процестердің өту ерекшеліктеріне байланысты автономды инверторлар ток инверторы (2.14 сурет) және кернеу инверторы болып бөлінеді (2.15 сурет).
2.14,15 суреттегі белгілеулер: Uшығ – шығыс кернеуі; ішығ - шығыс тогы.
|

Бір фазалы автономды көпірлік инвертордың элементтерінің тағайындалуын қарастырайық (2.16 сурет). Бұл сұлбада V1-V4 тиристорлары кілт болып жұмыс істейді, олардың арасында жүктеме кедергісі Rж әртүрлі полярлықпен тұрақты кернеу Е0 көзіне қосылады. Титисторлар басқару сұлбасымен талап етілген жиілікпен жұптасып (V1-V4 және V2-V3) қосылады. Бұл кезде жүктемеде кернеу инверторындағы Е0 амплитудасына тең тік бұрышты пішіндегі айнымалы кернеу пайда болады. Тиристорларды жабу C1, C2 конденсаторларының коммутациясы арқылы іске асады. V1 және V4 тиристорлары қосылғанда C1 және C2 көрсетілген полярлықпен қоректендіру көзінің кернеуіне дейін зарядталады. V2 және V3 тиристорлары қосылған кезде C1 және C2 конденсаторлары V1, V2 және V3, V4 тиристорлары арқылы зарядталады. V1 және V4 тиристорларындағы ток нолге дейін кемігенде олар жабылады.
V5-V8 диодтары коммутациялайтын конденсаторларды жүктемеден бөледі, бұл олардың сыйымдылығын азайтуға және жүктеме кернеуіне әсерін шеттетуге мүмкін болады.
V9-V12 диодтары "кері көпірді" немесе "реактивті токтың көпірін" құрайды. Олардың тағайындалуы ток пен кернеу таңбалары сай келмеген уақыт кезеңдерінде реактивті қалыс жүктеме тогын өткізуден тұрады. Бұл кезде өз индукциясы немесе статор орамының э.қ.к – сі есебінен "кері көпірдің" сәйкес диодтары ашылады және құлап бара жатқан жүктеме тогымен С0 конденсаторы толығымен зарядталады. Мысалы, егер V1 және V4 тиристолары ашық болса және V2,V3 тиристорлары ашылғанда жүктеме тогы өз бағытын сақтап, V10, СО, V11 тізбегі бойымен оның ноль арқылы өту кезеңіне дейін ағатын болады.
Д1 және Д2 дроссельдері кері көпір тізбегі бойымен С1 және С2 конденсаторларының разряд тогын шектеу үшін қызмет етеді. Мысалы, жоғарыда жазылған тәсілмен V1 және V4 тиристорларын қосу кезінде С1 конденсаторы V5-V9-Д1-V2 тізбегі бойымен қосымша разрядталады. Егер сұлбадан Д1 және Д2 дроссельдерін алып тастаса, бұл инвертордағы тиристорлар коммутациясының болуы мүмкін емес.
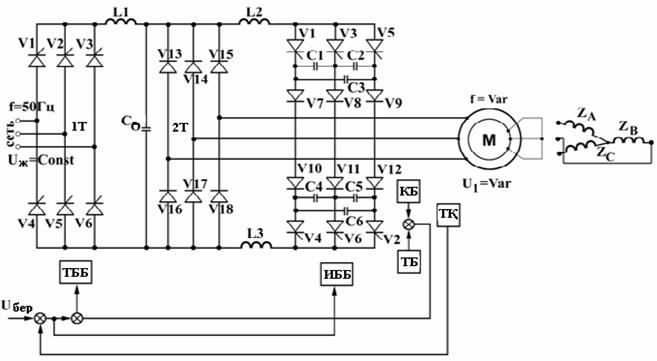
2.17 суретте үш фазалы көпірлік басқарылатын түзеткіш 1Т, сүзгіш дросселі Д1, реактивті энергияның конденсаторы СО және коммутациялайтын сыйымдылықтары бар автономды үш фазалы көпірлік кернеу инверторын құрайтын аралық тұрақты тоқ бөлігі бар үш фазалы жиілік түрлендіргішінің сұлбасы берілген.
Бұл түрлендіргіштен қоректенетін қозғалтқыш желімен қатар генераторлық режимде жұмыс істей алмайды, өйткені 1Т түзеткішінің энергиясының біржақты өткізгіштігі бар. Генераторлық режимнің мүмкіндігін құру үшін 1Т түзеткішіне қарсы-қатар тәуелді, желімен жүретін инвертор қосу қажет. 1Т түзеткіші V1-V6 тиристорларында, V7-V12 диодтарында, С1-С6 сыйымдылықтары негізінде жиналған. Блок-сұлбадағы белгілеулер: ТББ - түзеткішті басқару блогы, ИББ - инверторды басқару блогы, ТҚ - түзеу құрылғысы, КБ - кернеу бергіші, ТБ - ток бергіші.
|
Бұл инвертордағы электр магниттік процестерді қарастырайық. Статор
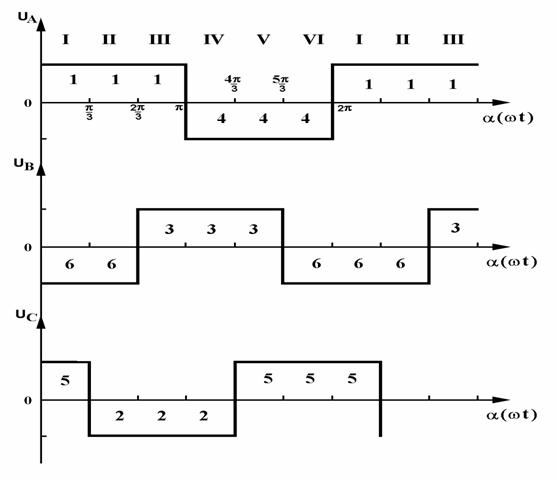
тізбегіне қосылатын үш фазалы кернеудің жалпы түрін алсақ, инвертор тиристорларының келесі жұмыс алгоритімдері қажет (2.18 сурет).
0-2p уақыт аралығын қарастырайық. Алгоритмді тұрғызу үшін UA, UB,UC кернеулері арасындағы фаза жылжуы 2p/3 мәнін құрайды деп есептеледі. Суретте V1-V6 тиристорларының коммутациясы (1-6) белгіленген. 0-2p уақыт аралығында p/3 бұрышы арқылы І-VІ бөлек периодтары қарастырылатын болады.
![]()
Бөлек периодтары І-VІ үшін уақыт бойынша балама сұлбалар тұрғызылған (2.19 сурет). SV1–SV6 -V1-V6 тиристорларындағы кілттер. Мысалы, (0-p/3) уақыт аралығында І периоды үшін оң бағыттағы ток бірінші (1) және сол жақтағы (5) тиристор (SV1–SV5 кілттері) арқылы ағады, ал токтың қайтуы алтыншы (6) тиристор (SV6 кілті) арқылы жүзеге асырылады. 2.19 суретте ZA ZB ZC жүктемесі белгіленген. 2.19 суретте көрсетілгендей, кез келген уақыт аралығы І-VІ үшін екі жүктемелік резистор қатар қосылған, ал қатар қосылуға тізбектеле кедергінің тағы бір жұбы қосылған.
|
|


2.20 Сурет -Типтік айнымалы ток жетектерінің блоктік сұлбалары

ИБ - интенсивтілікті беруші
ФТ - функционалды түрлендіргіш
КР - кернеу реттеуіші
Т - түзеткіш
КБ - кернеу бергіші
АТИ - автономды ток инверторы
М - асинхронды қозғалтқыш
G - тахогенератор
МББ - модульды бөлу блогы
|
 ИБ - интенсивтілікті беруші
ИБ - интенсивтілікті беруші
ЭР - э.қ.к реттеуіші
ЭБ - э.қ.к бергіші
АТИ - автономды ток инверторы
М - қозғалтқыш
Сипаттамалардың қатаңдығы енгізілген кері байланыстардың түрімен анықталады. Тиристордың жиілік түрлендіргіші негізіндегі жетек осы блоктық сұлба бойынша орындалған.
|

ИБ - интенсивтілікті беруші
ЖР – жылдамдық реттеуіші
ФТ - функционалды түрлендіргіш
ТР – ток реттеуіші
ТБ - ток бергіші
Т – түзеткіш
АТИ - автономды ток инверторы
М - қозғалтқыш
G – тахогенератор
|
Кез-келген уақыт аралығы І-VІ үшін балама кедергі
 (2.13)
(2.13)
болады деп есептегенде, тізбектеле қосылған кедергіде 2/3U мәніне тең, ал қатар қосылған кедергіде 1/3U мәніне тең кернеу төмендеуі болады.
Одан кейін резисторлардағы кернеу төмендеуін есептеген кезде бөлек уақыт аралықтары І-VІ бойынша ZA ZB ZC жүктемелері бойынша токтардың тура және кері ағуы есепке алынып, асинхронды машинаның қоректендіру кернеуінің шынайы пішіні тұрғызылады.
Кернеудің алынған пішіні (2.20 сурет) қоректендіру кернеуі синусоидтан біршама айырмашылығы болатынын көрсетеді. Инвертордың әртүрлі түрлері бір-бірінен синусоидтық шығыс кернеуінің аппроксимациялау дәлдігімен айырмашылығы болады.
Жиіліктік басқаруы бар электр жетегі 2.21-2.23 суреттерде көрсетілген. Типтік сұлбаның (2.21 сурет) тахогенератор G көмегімен іске асатын жылдамдық бойынша басты кері байланысы және кернеу бойынша (КБ, КР) кері байланысы болады. Э.қ.к.-нің реттеуіші бар электр жетегінің жүйесі 2.22 суретте көрсетілген. Жылдамдықтық контуры (жылдамдық реттеуші ЖР) және оған бағынышты токтық контуры (ток реттеуіші ТР) бар блоктық сұлба 2.23 суретте көрсетілген.
Машинаның статор тізбегінің шектік қоректендіру жиілігі 2,5 кГц болатын асинхронды және синхронды машиналарды басқару үшін жиіліктік түрлендіргіштер шығарылады. Асинхрондық қозғалтқыштың мұндай қоректендіру жиіліктерінде бірқатар құрылыстық ерекшеліктері бар: статор мен ротордағы электр техникалық болаттың қалыңдығы 0,1 мм - дан аспайды; асинхронды машина сумен суытылады және басқа ерекшеліктер.
Шет елдік электр жетектері микропроцессорлық басқарумен, транзисторлар мен тиристорлар негізінде орындалған инвертордағы күштік элементтермен тұрғызылады. Электр жетегінің жүруі мен тежелу қарқыны, жоғарыланған және төмендетілген жиіліктердегі жұмысы бағдарламаланады. Күштік трансформаторды алып тастап, сонымен бірге жоғарыланған жиіліктегі қоректендіру блогын тұрғызып, салмақ-өлшем көрсеткіштерін азайтуға болады.
Айнымалы ток машинасын жиіліктік басқаруды қолдану, түрлендіргіштердің салмақ-өлшем көрсеткіштерін азайту, реттеу ауқымын кеңейту, микропроцессорлық басқаруды қолдану, реттеудің дәлдігін көтеру жиіліктік айнымалы ток электр жетегін тұрақты ток электр жетегімен бәсекеге қабілетті етеді.
3 Есептеу мысалдары
Есептеулер келесі төлқұжаттық берілгендері бар фазалы
роторы бар МТ-52-8 асинхронды қозғалтқышы үшін жүргізіледі: нақты қуаты
Pн = 30кВт; нақты айналу жылдамдығы nн
= 725 айн/мин, нақты қоректендіру кернеуі Uн=380 B;
нақты ротор тогы Ір.н = 74,3 А; нақты ротор э.қ.к.-сі
Eр.н=257 В: қозғалтқыштың жүктемелік қабілеттігі  э.қ.к - нің
трансформация коэффициенті Kе = 1,41;
э.қ.к - нің
трансформация коэффициенті Kе = 1,41;
статордың активті кедергісі r1 = 0,136Ом; статордың индуктивті кедергісі x1 = 0,225Ом; ротордың активті кедергісі r2 = 0,0593Ом; ротордың индуктивті кедергісі x2= 0,174Ом.
1-мысал. Қозғалтқыштың өзіндік механикалық сипаттамасын n=f(M) есептеу және тұрғызу қажет.
Статор mс мен ротор mр тізбегінің фазалар саны кезінде кедергілердің трансформациялау коэффициенті Kr:
![]() .
.
Ротор тізбегінің келтірілген активті r2’ және x2’ кедергілерін анықтаймыз
r2’ = r2×kr = 0,0593×2 = 0,1186 Ом,
x2’ = x2×kr = 0,174×2 = 0,348 Ом.
Қозғалтқыштық режим жұмысы кезінде машинаның критикалық сырғуын анықтаймыз

![]() x коэффициентін анықтаймыз
x коэффициентін анықтаймыз

Механикалық сипаттаманың n=f(М)
теңдеуін салыстырмалы бірлікте
қойып (сол және оң жағын нақты иінкүшке Мн бөліп) және
иінкүштің салыстырмалы мәнін ![]() белгілеп, машинаның
өзіндік механикалық сипаттамасы үшін есептік
белгілеп, машинаның
өзіндік механикалық сипаттамасы үшін есептік ![]() арақатынасты
аламыз
арақатынасты
аламыз
 Есептеулерді кестеге толтырамыз, мұнда бөлінді
å таңбасымен белгіленген. Машинаның есептік
бірқатар сырғу мәндері үшін иінкүштің салыстырмалы мәнін
Есептеулерді кестеге толтырамыз, мұнда бөлінді
å таңбасымен белгіленген. Машинаның есептік
бірқатар сырғу мәндері үшін иінкүштің салыстырмалы мәнін ![]() анықтаймыз.
анықтаймыз.
3.1 Кесте
|
S |
|
|
S |
| ||||||||||||||
|
1,4 |
7 |
0,143 |
7,6 |
0,975 | ||||||||||||||
|
1,2 |
6 |
0,167 |
6,63 |
| ||||||||||||||
|
1 |
5 |
0,201 |
5,66 |
1,31 | ||||||||||||||
|
0,8 |
4 |
0,25 |
4,7 |
1,57 | ||||||||||||||
|
0,6 |
3 |
0,334 |
3,8 |
1,95 | ||||||||||||||
|
0,4 |
2 |
0,5 |
2,96 |
2,5 | ||||||||||||||
|
0,3 |
1,5 |
0,667 |
2,627 |
2,8 | ||||||||||||||
|
0,25 |
1,25 |
0,8 |
2,51 |
2,95 | ||||||||||||||
|
0,201 |
1 |
1 |
2,46 |
3 | ||||||||||||||
|
0,15 |
0,75 |
1,33 |
2,54 |
2,92 | ||||||||||||||
|
0,1 |
0,5 |
2 |
2,96 |
2,5 | ||||||||||||||
|
0,05 |
0,25 |
4 |
4,7 |
1,57 | ||||||||||||||
|
0,04 |
0,2 |
5 |
5,66 |
1,31 | ||||||||||||||
|
0,02 |
0,1 |
10 |
10,56 |
0,7 | ||||||||||||||
|
|
0,05 |
20,1 |
20,6 |
0,36 | ||||||||||||||
|
0 |
0 |
¥ |
¥ |
0 |
Салыстырмалы бірліктегі машинаның есептік өзіндік сипаттамасы n=f(M) 3.1М суретінде көрсетілген. Атап өтсек, сырғу S мәні бойынша машинаның айналу жылдамдығы п (айн/мин) анықталады. Кәдімгі асинхронды машина үшін критикалық сырғу мәні Sk»(0,2¸0,3) аралықтарында болады.
2 мысал. Машинаның ротор тізбегіне қосымша кедергі Rқос=0,237Oм енгізген кездегі жасанды механикалық сипаттаманы n=f(M) тұрғызу қажет.
Жасанды механикалық сипаттаманы тұрғызу үшін келесі арақатынасты қолданамыз:
![]()
мұнда Sжас - жасанды сипаттамадағы сырғу: Sөз - өзіндік сипаттамадағы сырғу. Жасанды сипаттамадағы критикалық сырғу мәні:

Ротор тізбегіндегі берілген мәні Rқос=0,237 үшін сырғулар қатынасы тең болады:
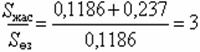 .
.
Механикалық сипаттаманың теңдеуіндегі x коэффициенті:
 .
.
Жасанды механикалық сипаттаманың есептік теңдеуі
 .
.
Есептеулер 3.2 кестеге толтырылған, мұнда бөлінді å белгісімен белгіленген. Машинаның бірқатар есептік сырғу S мәндері үшін иінкүштің М салыстырмалы мәнін анықтаймыз.
Салыстырмалы бірліктегі машинаның есептік жасанды сипаттамасы n=f(M) 3.2 суретінде көрсетілген.
3.2 Кесте
|
|
|
|
S |
|
|
1 |
|
0,5 |
2,96 |
2,5 |
|
0,9 |
1,5 |
0,667 |
2,627 |
2,8 |
|
0,75 |
1,25 |
0,8 |
2,51 |
2,95 |
|
0,603 |
1 |
1 |
2,46 |
3 |
|
0,45 |
0,75 |
1,33 |
2,54 |
2,92 |
|
0,3 |
0,5 |
2 |
2,96 |
2,5 |
|
0,15 |
0,25 |
4 |
4,71 |
1,57 |
|
0,09 |
0,15 |
6,7 |
7,31 |
1,01 |
|
0,06 |
0,1 |
10 |
10,56 |
0.7 |
|
0,03 |
0,05 |
20,1 |
20,61 |
0,36 |
|
0 |
0 |
¥ |
¥ |
0 |
3 мысал. Ротор тізбегіне қосымша кедергі Rқос=0,593 Ом енгізілген кездегі машинаның жасанды механикалық сипаттамасын n=f(M) тұрғызу қажет.
![]()
![]() .
.
 .
.
3.3
 Кесте
Кесте
|
S |
|
|
å |
| |||||||||||||
|
1,2 |
1 |
1 |
2,46 |
3 | |||||||||||||
|
0,9 |
0,75 |
1,33 |
2,54 |
2,92 | |||||||||||||
|
0,6 |
0,5 |
2 |
2,96 |
2,5 | |||||||||||||
|
0,45 |
0,375 |
2,67 |
3,505 |
2,1 | |||||||||||||
|
0,3 |
0,25 |
4 |
4,71 |
1,57 | |||||||||||||
|
0,18 |
0,15 |
6,7 |
7,31 |
1,01 | |||||||||||||
|
0,06 |
0,05 |
20,1 |
20,61 |
0,36 | |||||||||||||
|
0 |
0 |
¥ |
¥ |
0 |
|
Жасанды механикалық сипаттаманың есептік теңдеуі
 .
.
Есептеулер 3.3 кестеге толтырылған, мұндағы бөлінді å белгісімен белгіленген. Машинаның бірқатар есептік сырғу S мәндері үшін иінкүштің салыстырмалы мәнін анықтаймыз.
Салыстырмалы бірліктегі есептік жасанды механикалық сипаттамасы n=f(M) 3.3 суретінде көрсетілген.
4 мысал. Іске
қосу кезінде (S=1) машина иіккүшінің салыстырмалы мәні ![]() болатын,
машинаның ротор тізбегіне қосылатын Rқос кедергі мәнін анықтау қажет. Машинаның жасалуы
механикалық сипаттамасын n =
f(M) есептеу және тұрғызу
қажет.
болатын,
машинаның ротор тізбегіне қосылатын Rқос кедергі мәнін анықтау қажет. Машинаның жасалуы
механикалық сипаттамасын n =
f(M) есептеу және тұрғызу
қажет.
Келесі арақатынасқа сәйкес есептік теңдеуді табамыз
 .
.
Критикалық сырғуға Sк.жас қатысты квадрат теңдеуді шешеміз.
 ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() .
.
Теңдеудің түбірін талдап, түбір астындағы мәні теріс кезінде теңдеудің түбірі физикалық мәнінен айырылған деген қорытындыға келеміз. Түбір астындағы мәні оң кезінде теңдеудің екінші түбірі Skжас=1,54 мәніне тең. Кейінгі есептеулер жоғарыда қарастырылған мысалдардағы есептеулерге ұқсас.
![]() ,
,
![]() .
.
Салыстырмалы бірліктегі есептік жасанды механикалық сипаттама n=f(M) 3.4 суретінде көрсетілген.
![]() .
.
3.4 Кесте
 | |||||||
|
S |
|
|
S |
|
|
1,54 |
1 |
1 |
2,64 |
3 |
|
1,15 |
0,75 |
1,33 |
2,54 |
2,92 |
|
0,77 |
0,5 |
2 |
2,96 |
2,5 |
|
0,38 |
0,25 |
4 |
4,71 |
1,57 |
|
0,58 |
0,375 |
2,67 |
3,505 |
2,1 |
|
0,31 |
0,2 |
5 |
5,66 |
1,31 |
|
0,23 |
0,15 |
6,7 |
7,31 |
1,01 |
|
0,16 |
0,1 |
10 |
10,56 |
0,7 |
|
0,08 |
0,05 |
20,1 |
20,61 |
0,36 |
|
0 |
0 |
¥ |
¥ |
0 |
|
5 мысал. Сырғу S=0,3 мәні кезінде иінкүштің салыстырмалы
мәні ![]() құрайтын, машинаның ротор тізбегіне қосылатын
Rқос кедергі мәнін анықтау қажет. Машинаның жасанды
механикалық сипаттамасын n=f(M) есептеу және тұрғызу керек.
құрайтын, машинаның ротор тізбегіне қосылатын
Rқос кедергі мәнін анықтау қажет. Машинаның жасанды
механикалық сипаттамасын n=f(M) есептеу және тұрғызу керек.
Жоғарыда келтірілген арақатынасқа сәйкес есептік теңдеуді аламыз
 .
.
Критикалық сырғуға Skжас қатысты квадрат теңдеуді шеше отырып, табамыз:
![]() ,
,
![]() ,
, ![]() ,
,
![]() .
.
Теңдеудің түбірін талдап, түбір астындағы мән теріс S@0,2 кезінде теңдеудің түбірі физикалық мәнінен айырылған деген қорытындыға келеміз. Түбір астындағы мәні оң кезде, теңдеудің екінші түбірі SKH=0,457. Ары қарай есептеулер 4 мысалда келтірілген есептеулерге ұқсас.
Салыстырмалы бірліктегі есептік жасанды механикалық сипатама n=f(M) 3.5 суретінде келтірілген.
3.5 Кесте
|
S |
|
|
S |
| |||||||||||||
|
1,4 |
3 |
0,33 |
3,89 |
1,9 | |||||||||||||
|
1,15 |
2,5 |
0,4 |
3,36 |
2,2 | |||||||||||||
|
0,91 |
2 |
0,5 |
2,96 |
2,5 | |||||||||||||
|
0,8 |
1,75 |
0,57 |
2,78 |
2,66 | |||||||||||||
|
0,685 |
1,5 |
0,667 |
2,627 |
2,8 | |||||||||||||
|
0,57 |
1,25 |
0,8 |
2,51 |
2,95 | |||||||||||||
|
0,46 |
1 |
1 |
2,46 |
3 | |||||||||||||
|
0,342 |
0,75 |
1,33 |
2,54 |
2,92 | |||||||||||||
|
0,228 |
0,5 |
2 |
2,96 |
2,5 | |||||||||||||
|
0,115 |
0,25 |
4 |
4,71 |
1,57 | |||||||||||||
|
0,09 |
0,2 |
5 |
5,66 |
1,31 | |||||||||||||
|
0,07 |
0,15 |
6,7 |
7,31 |
1,01 | |||||||||||||
|
0 |
0 |
¥ |
¥ |
0 |
|
4 Бақылау сұрақтары
1. Үш фазалы асинхронды қозғалтқыштың әрекет ету қағидасы.
2. Асинхронды машинаны кері айналдыру қалай іске асады?
3. Асинхронды электр қозғалтқышының қандай тежеу режимдері бар?
4. Асинхронды машинаның критикалық сырғу мәні дегеніміз не және ол қандай арақатынаспен анықталады?
5. Асинхронды машинаның нақты сырғу мәні дегеніміз не және ол қандай арақатынаспен анықталады?
6. Ротор тогының жиілігі қандай арақатынас бойынша анықталады?
7. Асинхронды машинаның орын басу сұлбасы қандай?
8. Асинхронды электр қозғалтқышының механикалық сипаттамасының теңдеуі қандай?
9. Іске қосу және идеалды бос жүріс жылдамдығы кезінде машинаның сырғу мәндері неге тең?
10. Асинхронды машинаның жылдамдығын ретттеудің қандай әдістері бар?
11. Қоректендіру кернеуі төмендеген кездегі асинхронды машинаның механикалық сипаттамалары қандай?
12. Асинхронды машинаның критикалық иінкүшінің мәні қандай?
13. Ротор тізбегіне қосымша кедергілерді енгізген кезде асинхронды машинаның механикалық сипаттамалары қалай өзгереді?
14. Асинхронды машинаның динамикалық тежеуін қалай жүзеге асырады және бұл кездегі механикалық сипаттамалары қандай?
15. Асинхронды машинаның кері қосумен тежеуін қалай жүзеге асырады және бұл кездегі механикалық сипаттамаларының түрі қандай?
16. Қозғалтқыштық режим жұмысы кезіндегі қозғалтқыш иінкүшінің критикалық мәнін анықтайтын арақатынас қандай?
17. Генераторлық режим жұмысы кезіндегі қозғалтқыштың иінкүшінің критикалық мәнін анықтайтын арақатынас қандай?
18. Машинаның ротор тізбегіне активті-индуктивті кедергілерді енгізу не үшін қолданылады?
19. Машинаның статор тізбегіне активті-индуктивті кедергілерді енгізу не үшін қолданылады?
20. Қуатты тұрақты етіп реттеу кезінде полюстер жұбы санын ауыстырған кезде қозғалтқыштың механикалық сипаттамасының түрі қандай болады?
21. Иінкүшті тұрақты етіп реттеу кезінде полюстер жұбы санын ауыстырған кезде қозғалтқыштың механикалық сипаттамасының түрі қандай болады?
22. Mc=const басқару нысандары үшін машинаның жылдамдығын жиіліктік реттеу кезінде қандай басқару заңы қолданылады?
23. P=const басқару нысандары үшін машинаның жылдамдығын жиіліктік реттеу кезінде қандай басқару заңы қолданылады?
24. Асинхронды машинаны жиіліктік басқару кезіндегі фазаның шығыс кернеуінің пішіні қандай?
25. Жиіліктік басқару кезіндегі асинхронды машинаның жылдамдығын реттеу ауқымы қандай?
26. Ротор тізбегінде қосымша кедергі болмаған кезде симметриялы емес қоректендіру кернеуі кезінде машинаның механикалық сипаттамасының n=f(M) түрі қандай?
27. Ротор тізбегінде біршама қосымша кедергі болған кезде симметриялы емес қоректендіру кернеуі кезінде машинаның механикалық сипаттамасының n=f(M) түрі қандай?
28. Асинхронды машинаның механикалық сипаттамасының n=f(M) теңдеуі қандай?
29. Симметриялы емес ротор тізбегі кезінде машинаның механикалық сипаттамасы n=f(M) қандай болады?
30. Бір фазалы қоректендіру желісі бар кезде үш фазалы асинхронды машинаны қалай іске қосады?
31. Асихронды машинаның айналу жиілігінің қоректендіру кернеуінің жиілігіне тәуелділігі қандай?
32. Қандай басқару нысандары үшін жылдамдықты реттеудің жиіліктік тәсілі қолданылады.
33. Асинхронды машинаның жиіліктік басқару құрылғыларындағы реактивті ток көпірінің тағайындалуы.
34. Не үшін инверторда тиристорлар мен жүктеме арасында шала өткізгіш диодтар орналасқан?
35. Машинаның статор тізбегіндегі кернеу төмендеуін есептегенде, жиіліктік басқару кезінде қуаты аз асинхронды қозғалтқыштар үшін қандай басқару заңы қолданылады?
36. Машинаның статор тізбегіндегі кернеу төмендеуін есептегенде, жиіліктік басқару кезінде қуатты қозғалтқыштар үшін қандай басқару заңы қолданылады?
37. Бір фазалы инвертордың сұлбасын салыңыз және сұлбаның негізгі элементтерінің тағайындалуын түсіндіріңіз.
38. Үш фазалы инвертордың сұлбасын салыңыз және оның негізгі элементтерінің тағайындалуын түсіндіріңіз.
39. Инвертор тиристорларының қандай жабу қағидалары бар?
40. Инвертордың кернеуі мен тогының шығыс пішінін салыңыз.
41. Кернеу инверторының кернеуі мен тогының шығыс пішінін салыңыз.
42. Асинхронды қозғалтқыштың критикалық иінкүшін анықтайтын арақатынас қандай?
43. Жылдамдықтық және бағынышты токтық контурлары бар жиіліктік басқарылатын жетектің сұлбасын салыңыз.
44. Жоғары жиілікте жұмыс істейтін асинхронды қозғалтқыш құрылысының негізгі ерекшеліктері қандай?