Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электропривода и автоматизации промышленных
установок
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
СИНХРОННЫЕ И АСИНХРОННЫЕ
МАШИНЫ
Методические указания к выполнению лабораторных работ
для студентов специальности
5В071800 –Электроэнергетика
Алматы 2013
Составители: П.И. Сагитов, Р.М. Шидерова, Н.К. Алмуратова. Электрические машины. Синхронные и асинхронные машины. Методические указания к выполнению лабораторных работ для студентов специальности 5В071800 - Электроэнергетика. – Алматы: АУЭС, 2014. –52с.
Методические указания содержат необходимые технические сведения о стендах, программу выполнения работ, методику подготовки, проведения экспериментов и анализа полученных результатов, контрольные вопросы. Исследуются схемы построения, статические и динамические характеристики, способы регулирования скорости и тормозные режимы электрических машин постоянного и переменного тока.
Методические указания предназначены для студентов специальности 5В071800 – Электроэнергетика.
Ил.27, табл.21, библиогр. – 3 назв.
Рецензент: доцент кафедры ЭПП Башкиров М.В.
Печатается по плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2013 г.
Ó НАО «Алматинский университет энергетики и связи», 2014 г.
Содержание
|
1. Описание лабораторного стенда |
4 |
|
2. Методические указания к проведению лабораторных работ |
5 |
|
2.1 Описание сборки схемы |
5 |
|
Работа №1. Исследование асинхронного электродвигателя с короткозамкнутым ротором |
7 |
|
Работа №2. Исследование асинхронного электродвигателя с фазным ротором |
9 |
|
Работа №3. Исследование асинхронной машины в режиме асинхронного генератора |
15 |
|
Работа №4. Исследование трехфазного синхронного генератора |
23 |
|
Работа №5. Исследование синхронного электродвигателя |
31 |
|
Приложение А Краткое описание модулей стенда |
|
|
Приложение Б. Паспортные и расчетные данные электрических машин |
|
|
Приложение В. Тарировочные кривые |
|
|
Приложение Г. Паспортные и расчетные данные трансформатора |
|
|
Приложение Д. Преобразователь частоты |
|
|
|
|
1 Описание лабораторного стенда
Лабораторный стенд (см.рисунок 1) предназначен для использования в качестве учебного оборудования для проведения лабораторно-практических занятий при исследовании трансформаторов, асинхронных и синхронных машин, а также машин постоянного тока.
В состав стенда входят: модуль питания стенда; модуль питания; модуль измерителя мощности; модуль добавочных сопротивлений №1; модуль добавочных сопротивлений №2; модуль силовой; модуль преобразователя частоты; модуль автотрансформатора; модуль однофазного трансформатора; модуль измерительный; каркас 2x5; электромашинный агрегат; методическое описание; техническое описание.
Краткое описание модулей стенда представлено в Приложении А.
2 Лабораторная работа №1. Исследование асинхронного электродвигателя с короткозамкнутым ротором
Цель работы: исследование рабочих свойств трехфазного асинхронного электродвигателя путем снятия соответствующих опытных характеристик.
Рисунок 1 - Общий вид лабораторного стенда
Программа выполнения работы.
1. Изучить схемы для исследования асинхронного электродвигателя с короткозамкнутым ротором (в дальнейшем изложении АД).
2. Исследовать двигатель в режиме короткого замыкания.
3. Исследовать двигатель в режиме холостого хода.
4. Снять рабочие характеристики двигателя по методу непосредственной нагрузки.
5. По опытам холостого хода и короткого замыкания рассчитать параметры двигателя, построить схему замещения.
6. Провести обработку экспериментальных данных, составить отчет и сделать заключение по работе.
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– модуль измерителя мощности (МИМ);
– модуль добавочных сопротивлений №1 (МДС1);
– модуль добавочных сопротивлений №2 (МДС2);
– силовой модуль (СМ);
– модуль преобразователя частоты (ПЧ);
– модуль измерительный (МИ).
Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
– переключатель SA1 МДС№1 установить в положение «¥»;
– переключатель SA1 МДС№2 установить в положение «¥».
Исследуемый асинхронный двигатель входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель М1, нагрузочный генератор – машину постоянного тока – М2, импульсный датчик скорости М3.
2.1 Опыт короткого замыкания асинхронного двигателя
Опыт короткого замыкания проводится при неподвижном (заторможенном роторе) и пониженном напряжении, при котором ток статора примерно равен номинальному току статора I1К ≈ I1Н.
Схема для проведения опыта короткого замыкания представлена на рисунке 1.

Рисунок 2.1 - Схема для проведения опытов короткого замыкания
и холостого хода
Торможение двигателя осуществляется путем установки металлического стержня в отверстие полумуфты.
Понижение напряжения достигается включением добавочного сопротивления в цепь статора.
Опыт проводится в следующей последовательности:
– включить автоматические выключатели QF1 и QF2 соответственно МПС и МП;
– переключателем SA1 МДС1 вводить сопротивление в цепь статора до тех пор, пока ток статора примерно не будет равен номинальному току статора.
Данные занести в таблицу 1.
Опыт необходимо производить максимально быстро.
Т а б л и ц а 1
|
Данные опыта |
Расчетные данные |
||||||||||
|
U1ФК |
I1ФК |
Р1ФК |
сosφ1К |
Р1К |
ΔРэл.1 |
ΔРСТ |
РЭМ.К |
МЭМ.К |
zК |
rК |
хК |
|
В |
А |
Вт |
Вт |
Вт |
Вт |
Вт |
Н∙м |
Ом |
Ом |
Ом |
|
После проведения опыта отключить автоматические выключатели QF1, QF2, установить модули в исходное состояние, удалить металлический стержень из электромашинного агрегата.
По данным опыта короткого замыкания определить пусковой ток, пусковой момент при s=1.
Расчетные данные.
Трехфазная активная мощность при опыте короткого замыкания, Вт:
Р1К=m1К∙P1ФК.
Электрические потери в цепи статора, Вт:
![]() ,
,
где m1 – число фаз обмотки статора;
r1 – сопротивление фазы статора (Приложение Б), Ом.
Потери в стали при напряжении U1К, Вт:
 ,
,
где ΔРСТ1 – потери в стали при номинальном напряжении, Вт.
Электромагнитная мощность при опыте короткого замыкания, Вт:
РЭМ.К=Р1К –ΔРЭЛ.1–ΔРСТ.
Электромагнитный момент при опыте короткого замыкания, Н·м
 ,
,
где ω1 – синхронная частота вращения электродвигателя, рад/с.
Электромагнитный момент при номинальном напряжении, Н·м:
 .
.
Кратность пускового момента:
Номинальный момент электродвигателя, Н∙м:
 ,
,
где Р2Н – номинальная мощность на валу, Вт;
ωН – угловая номинальная частота вращения (Приложение Б), рад/с.
Кратность пускового тока:
 .
.
2.2 Опыт холостого хода асинхронного двигателя
Исследование двигателя в режиме холостого хода проводится для одного значения напряжения, равного номинальному, и позволяет оценить величину тока холостого хода, а также потери в стали при номинальном напряжении.
Схема для проведения опыта холостого хода представлена на рисунке 1.
Опыт проводится в следующей последовательности:
– включить автоматические выключатели QF1 и QF2 соответственное МПС и МП;
– переключатель SA1 МДС1 установить из положения «¥» в положение «0», напряжение принимает значение, равное номинальному, запускается асинхронный двигатель.
Данные опыта занести в таблицу 2.
Т а б л и ц а 2
|
Данные опыта |
Расчетные данные |
|||||||
|
U1ФН |
I10 |
Р1Ф |
ω |
Р10 |
сosφ10 |
ΔРЭЛ.1 |
ΔРСТ |
I10* |
|
В |
А |
Вт |
рад/с |
Вт |
Вт |
Вт |
||
После проведения опыта отключить автоматические выключатели QF1, QF2, установить модули в исходное состояние.
Расчетные данные:
коэффициент мощности:
 ;
;
активная мощность трех фаз, Вт:
Р10 = m1Р1Ф.
Потери в стали сердечника статора при номинальном напряжении, Вт
![]() ,
,
где r1 – активное сопротивление фазы статора при температуре окружающей среды (Приложение Б), Ом;
ΔРМЕХ.АД. – механические потери асинхронного двигателя (Приложение Б), Вт;
ΔРМЕХ.ДПТ – механические потери машины постоянного тока (Приложение Б), Вт.
Потери в стали сердечника статора при любом другом напряжении могут быть пересчитаны через квадрат напряжения:
 .
.
Значение тока холостого хода в относительных единицах:
 .
.
2.3 Снятие рабочих характеристик
Схема для снятия рабочих характеристик, представлена на рисунке 2.
Рисунок 2 - Схема для снятия рабочих характеристик асинхронного двигателя
Асинхронный двигатель подключается непосредственно к преобразователю частоты.
Питание обмотки возбуждения двигателя постоянного тока (ДПТ) осуществляется от клемм «=220 В» модуля питания.
Якорная цепь машины постоянного тока подключается на сопротивление RP1 МДС2.
Для измерения тока, частоты выходного напряжения статора, мощности двигателя и момента асинхронного двигателя используется преобразователь частоты.
Измерение тока якоря и напряжения на якоре осуществляется с помощью приборов МИ.
Текущее значение частоты вращения n агрегата наблюдать на индикаторе СМ.
Опыт проводится в следующей последовательности:
– включить автоматы QF1 и QF2 модулей МПС и МП;
– настроить преобразователь частоты (Приложение Г);
– установкой SA1 модуля ПЧ в крайнее положение запустить асинхронный двигатель. Установить выходную частоту напряжения 50 Гц (RP1);
– переключателем SA1 МДС2, уменьшая сопротивление, увеличивать нагрузку ГПТ пока ток якоря ГПТ не достигнет номинального значения (1,3А). Выше этого значения двигатель не нагружать! (SA1 в «0» не выводить!).
Опытные данные со стороны, как асинхронного двигателя, так и со стороны генератора, занести в таблицу 3. и 4.
Т а б л и ц а 3
|
Со стороны асинхронного двигателя |
||||||||||||||
|
Данные опыта |
Расчетные данные |
|||||||||||||
|
I1Ф |
P1 |
n |
сosφ1 |
U1 |
ΔРЭЛ.1 |
ΔРСТ |
РЭМ |
s |
ΔРЭЛ.2 |
РМЕХ |
∑ΔP |
Р2 |
МЭМ |
η |
|
А |
Вт |
об/мин |
В |
Вт |
Вт |
Вт |
Вт |
Вт |
Вт |
Вт |
Н∙м |
% |
||
Т а б л и ц а 4
|
Со стороны ГПТ |
||||||||
|
Данные опыта |
Расчетные данные |
|||||||
|
IЯ |
UЯ |
СМ |
МЭМ |
IЯО |
М0 |
М2 |
Р2 |
η |
|
А |
В |
Н∙м |
А |
Н∙м |
Н∙м |
Вт |
% |
|
После проведения опыта отключить автоматические выключатели QF1, QF2, установить модули в исходное состояние.
Расчетные данные со стороны асинхронного двигателя.
Линейное напряжение на статоре, В:
![]() .
.
Электрические потери в обмотке статора асинхронного двигателя, Вт;
![]() ,
,
где r1 – активное сопротивление фазы статора (Приложение Б);
Потери в стали при напряжении U1Ф, Вт:
 .
.
Электромагнитная мощность, Вт:
РЭМ = Р1 –ΔРЭЛ.1– ΔРСТ.
Скольжение:
 .
.
Электрические потери в обмотке ротора, Вт:
ΔРЭЛ.2 = РЭМ·s.
Суммарные потери в двигателе, Вт:
∑ΔР=ΔРЭЛ.1+ΔРСТ+ΔРЭЛ.2+ΔРМЕХ.АД.
Электромагнитный момент асинхронного двигателя, Н·м:
 .
.
где ω1 – синхронная угловая частота вращения, рад/с.
Полезный момент на валу двигателя, Н∙м:
М2=МЭМ–М0.
Полезная мощность на валу двигателя, Вт:
Р2=Р1–∑ΔР.
Коэффициент полезного действия, %:
 .
.
Коэффициент мощности (расчетный):
 .
.
Расчетные данные со стороны машины постоянного тока.
Электромагнитный момент ГПТ, Н·м:
МЭМ.ГПТ=СМ∙IЯ,
где СМ – принимается из тарировочной кривой (Приложение В).
Момент холостого хода ГПТ, Н∙м:
М0 = СМ∙IЯ0,
где IЯ0 – ток холостого хода принимается из тарировочной кривой машины постоянного тока (Приложение В), А.
Полный момент на валу ГПТ, Н∙м:
М2ГПТ = МЭМ.ГПТ + М0.
Полезная мощность на валу ГПТ, Вт:
Р2 = М2ГПТ∙ω.
Рабочие характеристики представляют собой графически изображенные зависимости тока статора, потребляемой из сети активной мощности, частоты вращения, скольжения, электромагнитного момента, КПД и коэффициента мощности от полезной мощности на валу двигателя:
I1, Р1, n, s, МЭМ, η, сosφ1 = f(P2) при f1 = const и U1 = const.
2.4 Расчет параметров асинхронного двигателя. Построение схемы замещения
Опыты холостого хода и короткого замыкания позволяют рассчитать параметры асинхронного двигателя и построить схему замещения.
Из опыта холостого хода.
Активное сопротивление намагничивающей цепи, Ом:
 .
.
Полное сопротивление намагничивающей цепи, Ом:
 .
.
Индуктивное сопротивление намагничивающей цепи ![]() .
.
Из опыта короткого замыкания.
Полное сопротивление:  .
.
Активное сопротивление:  ,
,
r2’=rк–r1.
Индуктивное сопротивление:
![]() ,
,
 .
.
«Т» – образная схема замещения асинхронного двигателя представлена на рисунке 3.
Рисунок 3 - «Т»-образная схема замещения
Контрольные вопросы
1. Как изменить направление вращения асинхронного двигателя?
2. Как изменится момент асинхронного двигателя при понижении напряжения питающей сети?
3. Может ли асинхронный двигатель создавать момент при синхронной частоте вращения, т.е. может ли он вращаться с синхронной частотой вращения?
4. Как изменяется ток статора двигателя при повышении напряжения и неизменной нагрузке на валу двигателя?
5. Объяснить физический смысл зависимости сosφ1 = f(Р2).
3 Лабораторная работа №3. Исследование асинхронного электродвигателя с фазным ротором
Цель работы: исследование рабочих свойств электродвигателя путем снятия соответствующих опытных характеристик.
Программа выполнения работы.
1. Изучить схемы для исследования асинхронного электродвигателя с фазным ротором (в дальнейшем изложении АДФР).
2. Исследовать двигатель в режиме короткого замыкания.
3. Исследовать двигатель в режиме холостого хода.
4. По опытам холостого хода и короткого замыкания рассчитать параметры двигателя, построить схему замещения.
5. Снять рабочие характеристики двигателя по методу непосредственной нагрузки при введении сопротивлений в цепь ротора.
6. Провести обработку экспериментальных данных, составить отчет и сделать заключение по работе.
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– силовой модуль (СМ);
– модуль измерителя мощности (МИМ);
– модуль добавочных сопротивлений №1 (МДС1);
– модуль добавочных сопротивлений №2 (МДС2);
– модуль измерительный.
Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
– переключатель SA1 МДС№1 установить в положение «¥»;
– переключатель SA1 МДС№2 установить в положение «¥».
Исследуемый асинхронный двигатель входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель М1, нагрузочный генератор – машину постоянного тока – М2, импульсный датчик скорости M3.
3.1 Опыт короткого замыкания
Опыт короткого замыкания проводится при неподвижном (заторможенном) роторе s = 1 и пониженном напряжении, при котором ток статора примерно равен номинальному току статора I1к ≈ I1н.
Схема для проведения опыта короткого замыкания представлена на рисунке 3.1.
Рисунок 3.1 - Схема для проведения опыта короткого замыкания
Асинхронный электродвигатель подключается через измеритель мощности модуля МДС1 непосредственно к модулю МП.
Торможение двигателя осуществляется путем установки металлического стержня в отверстие полумуфты.
Понижение напряжения достигается включением добавочного сопротивления в цепь статора.
Ток статора, напряжение статора, мощность и коэффициент мощности электродвигателя измеряется модулем МИМ.
Опыт проводится в следующей последовательности:
– включить автоматические выключатели QF1 и QF2 соответственное МПС и МП;
– переключателем SA1 МДС№1 вводить сопротивление в цепь статора до тех пор, пока ток статора примерно будет равен номинальному.
Данные занести в таблицу 1.
Т а б л и ц а 1
|
Данные опыта |
Расчетные данные |
||||||||||
|
U1фк |
I1фк |
Р1фк |
сosφ1к |
Р1к |
DPЭЛ.СТ |
DPСТ |
РЭМ.К |
МЭМ.К |
zК |
rК |
хК |
|
В |
А |
Вт |
Вт |
Вт |
Вт |
Вт |
Н∙м |
Ом |
Ом |
Ом |
|
После проведения опыта отключить автоматические выключатели QF1, QF2, установить модули в исходное состояние.
Удалить металлический стержень из электромашинного агрегата.
По данным опыта короткого замыкания определить пусковой ток и пусковой момент при s=1.
Трехфазная активная мощность при опыте короткого замыкания, Вт:
Р1к = m1КP1ФК.
Электрические потери в цепи статора, Вт:
![]() .
.
Потери в стали при напряжении U1к, Вт:
DРСТ ≈ DРСТ1 ,
,
где DРСТ1 – потери в стали при номинальном напряжении, Вт.
Электромагнитная мощность при опыте короткого замыкания, Вт:
РЭМ.К = Р1К – DРЭЛ.СТ– DРСТ.
Электромагнитный момент при опыте короткого замыкания, Н·м:
МЭМ.К =  , или МЭМ.К =
, или МЭМ.К =  .
.
где n1 – синхронная частота вращения, об/мин;
w1 синхронная угловая частота вращения, рад/сек:
 ,
,
где р – число пар полюсов (Приложение Б).
Электромагнитный момент при номинальном напряжении, Н·м:
МЭМ.Н = МЭМ.К .
.
Кратность пускового момента:
Мп* =  ;
;
МН = ![]() ,
,
где Р2Н и ωН – номинальная мощность на валу и угловая номинальная частота вращения (Приложение Б).
Кратность пускового тока:
IП* =  .
.
3.2 Опыт холостого хода
Исследование двигателя в режиме холостого хода проводится для одного значения напряжения, равного номинальному и позволяет оценить величину тока холостого хода, а также потери в стали при номинальном напряжении.
Схема для проведения опыта холостого хода представлена на рисунке 3.2.

Рисунок 3.2 - Схема для проведения опыта холостого хода
Ток статора, напряжение статора, мощность и коэффициент мощности электродвигателя измеряется модулем МИМ.
Опыт проводится в следующей последовательности:
– включить автоматические выключатели QF1 и QF2 соответственное МПС и МП;
– переключатель SA1 МДС№1 установить из положения «¥» в положение «0», напряжение принимает значение, равное номинальному, запускается асинхронный двигатель.
Данные опыта занести в таблицу 2.
Т а б л и ц а 2
|
Данные опыта |
Расчетные данные |
||||||||||
|
U1фн |
I10 |
Р1ф |
n |
ω |
Р10 |
сosφ10 |
DРЭЛ.СТ |
Р0m |
DРСТ |
DРСТ1 |
I10* |
|
В |
А |
Вт |
об/мин |
рад/с |
Вт |
Вт |
Вт |
Вт |
Вт |
||
После проведения опыта отключить автоматические выключатели QF2, QF1, установить модули в исходное состояние.
Расчетные данные.
Коэффициент мощности сosφ10:
сosφ10=  ,
,
где Р10 – активная мощность трех фаз, Вт:
Р10 = m1Р1Ф.
Электрические потери в цепи статора, Вт:
DРЭЛ.СТ = m1![]() r1.
r1. ![]() .
.
Потери в стали сердечника статора при номинальном напряжении, Вт:
DРСТ.1 = Р10 –DРЭЛ.СТ – DРМЕХ.АД. – DРМЕХ.МПТ,
где r1 – активное сопротивление фазы статора при температуре окружающей среды, Ом (Приложение Б);
DРМЕХ.АД. – механические потери асинхронного двигателя, Вт (Приложение Б);
DРМЕХ.МПТ – механические потери машины постоянного тока, Вт (Приложение Б).
Потери в стали сердечника статора при любом другом напряжении могут быть пересчитаны через квадрат напряжения:
DРСТ = DРСТ.1 ,
,
где DРСТ – потери в стали при любом значении напряжения U1, Вт.
Значение тока холостого хода в относительных единицах:
I10* = ![]() .
.
3.3 Расчет параметров асинхронного двигателя
Опыт холостого хода и короткого замыкания позволяет рассчитать параметры асинхронного двигателя и построить схему замещения.
Из опыта холостого хода:
– активное сопротивление намагничивающей цепи rm≈ ;
;
– полное сопротивление намагничивающей цепи zm≈ ;
;
– индуктивное сопротивление намагничивающей цепи xm≈![]() .
.
Из опыта короткого замыкания:
– полное сопротивление zк = ![]() ;
;
– активное сопротивление rк =  ; r2’ = rк
– r1;
; r2’ = rк
– r1;
– индуктивное сопротивление хк = ![]() ; х1 ≈ х`2
=
; х1 ≈ х`2
= ![]() .
.
Т – образная схема замещения асинхронного двигателя представлена на рисунке 3.
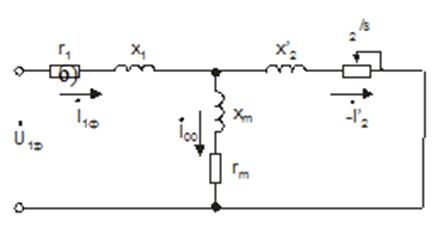
Рисунок 3 - Т-образная схема замещения
4 Снятие рабочих характеристик
Схема для снятия рабочих характеристик, представлена на рисунке 9.4.

Рисунок 4.1 - Схема для снятия рабочих характеристик
Асинхронный двигатель подключается непосредственно к преобразователю частоты.
Ротор электродвигателя включается по схеме «звезда» через сопротивления МДС№1.
Питание обмотки возбуждения двигателя постоянного тока через сопротивление RP2 модуля МДС2 осуществляется от клемм «=220В» модуля МП.
Якорная цепь машины постоянного тока подключается на сопротивление RP1 модуля МДС2.
Для измерения тока, частоты выходного напряжения статора, мощности двигателя и коэффициента мощности асинхронного электродвигателя используется модуль МИМ.
Значения тока якоря IЯ, напряжения якоря UЯ контролируются с помощью измерительных приборов.
Измерение тока ротора осуществляется с помощью прибора модуля МИ.
Текущее значение частоты вращения n агрегата также можно наблюдать на индикаторе СМ.
Рабочие характеристики снимаются при нескольких значениях сопротивления в цепи ротора (рекомендуемое значение сопротивления RДОБ =50…200 Ом).
Опыт проводится в следующей последовательности:
– переключателем SA1 модуля МДС1 ввести сопротивление (задается преподавателем);
– включить автоматы QF1 и QF2 модулей МПС и МП, запустится асинхронный двигатель.
Нагрузкой ГПТ служат сопротивления RP1 модуля МДС2;
– переключателем SA1 МДС2, уменьшая сопротивление, увеличивать нагрузку ГПТ, пока ток якоря ГПТ не достигнет номинального значения IНАГР = IЯ ≈ IЯН (IЯН = 1,3А). Выше этого значения двигатель не нагружать! SA1 в «0» не выводить!
– изменить сопротивление в цепи ротора и повторить опыт.
Опытные данные со стороны, как асинхронного двигателя, так и генератора, занести в таблицу 3.
Т а б л и ц а 3
|
U1Ф, В |
||||||||
|
I1Ф, А |
||||||||
|
P1, Вт |
||||||||
|
n, об/мин |
||||||||
|
сosφ1 |
||||||||
|
DРЭЛ.СТ, Вт |
||||||||
|
DРСТ, Вт |
||||||||
|
РЭМ, Вт |
||||||||
|
s |
||||||||
|
DРЭЛ.Р, Вт |
||||||||
|
DРМЕХ.АД, Вт |
||||||||
|
DРЭЛ.ДОБ, Вт |
||||||||
|
∑DР, Вт |
||||||||
|
Р2, Вт |
||||||||
|
МЭМ, Н×м |
||||||||
|
η, % |
||||||||
|
IЯ, А |
||||||||
|
UОВ, В |
||||||||
|
СМ |
||||||||
|
МЭМ, Н×м |
||||||||
|
IЯО, А |
||||||||
|
М0, Н×м |
||||||||
|
М2ГПТ, Н×м |
||||||||
|
Р2ГПТ, Вт |
После проведения опыта установить все переключатели модулей в исходное состояние, отключить автоматические выключатели QF2, QF1.
Частота вращения электродвигателя, рад/с:
 .
.
Электрические потери в обмотке статора асинхронного двигателя, Вт:
DРЭЛ.СТ = m1![]() r1,
r1,
где r1 – активное сопротивление фазы статора, приводится в паспортных данных двигателя (Приложение Б), Ом.
Потери в стали сердечника статора при номинальном напряжении, Вт:
DРСТ.1 = Р10 –DРЭЛ.1 – DРМЕХ.АД. – DРМЕХ.МПТ,
DРМЕХ.АД. – механические потери асинхронного двигателя, Вт (Приложение Б);
DРМЕХ.МПТ – механические потери машины постоянного тока, Вт (Приложение Б).
Потери в стали при напряжении U1ф, Вт:
DРСТ = DРСТ1 .
.
Электромагнитная мощность, Вт:
РЭМ = Р1 – DРЭЛ.1– DРСТ.
Скольжение:
s =  или
s =
или
s =  .
.
Электрические потери в обмотке ротора, Вт:
DPЭЛ.Р = РЭМ·s.
Электрические потери в добавочных сопротивлениях ротора, Вт:
DРЭЛ.ДОБ=3∙I22∙RДОБ.
Суммарные потери в двигателе, Вт:
∑DР = DРЭЛ.СТ+ DРСТ+ DРЭЛ.Р+ DРЭЛ.ДОБ.
Полезная мощность на валу двигателя, Вт:
P2=P1-∑DР.
Полезный момент на валу двигателя, Н∙м:
 .
.
Электромагнитный момент двигателя, Н∙м:
 ,
,
где
![]() - синхронная угловая частота вращения
электродвигателя, 1/с.
- синхронная угловая частота вращения
электродвигателя, 1/с.
Коэффициент полезного действия, %:
η = ![]() 100%.
100%.
Коэффициент мощности (расчетный) :
сosφ1 =  .
.
Электромагнитный момент ГПТ, Н·м:
МЭМ.ГПТ = СМIЯ,
где См – принимается из тарировочной кривой (Приложение В).
Момент холостого хода ГПТ, Н∙м:
М0 = СмIя0
где IЯ0 – ток холостого хода, принимается из тарировочной кривой машины постоянного тока (Приложение В) и пропорционален механическим потерям и потерям в стали ГПТ, А.
Полный момент на валу ГПТ, Н∙м:
М2ГПТ = МЭМ.ГПТ + М0.
Полезная мощность на валу ГПТ, Вт:
Р2ГПТ = М2ГПТω.
Рабочие характеристики представляют собой графически изображенные зависимости тока статора, потребляемой из сети активной мощности, частоты вращения, скольжения, электромагнитного момента, КПД и коэффициента мощности от полезной мощности на валу двигателя:
I1, Р1, n, s, Мэм, η, сosφ1 = f(P2) при f1 = const и U1 = const.
По данным опыта построить механическую w = f(M2) и электромеханическую w = f(I1) характеристики.
Контрольные вопросы
1. Как изменить направление вращения асинхронного двигателя?
2. Как изменится момент асинхронного двигателя при понижении напряжения питающей сети?
3. Может ли асинхронный двигатель создавать момент при синхронной частоте вращения, т.е. может ли он вращаться с синхронной частотой вращения?
4. Как изменяется ток статора двигателя при повышении напряжения и неизменной нагрузке на валу двигателя?
5. Объяснить физический смысл зависимости сosφ1 = f(Р2).
6. Как влияет величина добавочного сопротивления в цепи ротора на величину момента?
7. Как влияет величина добавочного сопротивления в цепи ротора на жесткость механической характеристики?
4 Лабораторная работа № 4. Исследование асинхронной машины в режиме асинхронного генератора
Цель работы: изучение способа включения асинхронной машины для работы в режиме генератора. Исследование рабочих свойств асинхронного генератора.
Программа выполнения работы.
1. Изучить схему для экспериментального исследования асинхронного генератора.
2. Произвести пробный пуск асинхронного двигателя и двигателя постоянного тока.
3. Исследовать асинхронный двигатель в режиме асинхронного генератора.
4. Провести обработку экспериментальных данных, составить отчет и сделать заключение по работе.
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– модуль автотрансформатора (ЛАТР);
– силовой модуль (СМ);
– модуль добавочных сопротивлений №2 (МДС2);
– модуль измерителя мощности (МИМ);
– модуль измерительный (МИ).
Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
– переключатель SA1 модуля ЛАТР установить в нижнее положение, ручку автотрансформатора установить в крайнее положение против часовой стрелки;
– переключатель SA2 МДС2 установить в положение «1100».
Исследуемая асинхронная машина входит в состав электромашинного агрегата, включающего в себя собственно исследуемый генератор М1, приводной двигатель – машину постоянного тока – М2 и импульсный датчик скорости М3.
4.1 Снятие рабочих характеристик
Рабочие характеристики представляют собой зависимость мощности, подводимой к асинхронном генератору Р1, фазного тока IФ, КПД hА.ГЕН, скольжения s от полной активной мощности, отдаваемой асинхронным генератором в сеть Р2.
Для подключения асинхронной машины к сети переменного тока путем непосредственного включения асинхронного генератора на сеть собирается схема, представленная на рисунке 4.1.
Рисунок 4.1 - Схема для исследования асинхронного генератора
Питание обмотки возбуждения двигателя постоянного тока (ДПТ) осуществляется от клемм «=220В» модуля питания. Последовательно с обмоткой возбуждения вводится добавочное сопротивление RP2 МДС2.
Для питания якорной цепи ДПТ используется модуль автотрансформатора.
Значение скорости наблюдать на индикаторе силового модуля.
Значения тока якоря IЯ, напряжения якоря UЯ можно определить с помощью приборов модуля измерительного. Для контроля параметров цепи статора последовательно с асинхронным электродвигателем включается измеритель мощности (МИМ).
4.2 Пробный пуск
Последовательным включением автоматов QF1 и QF2 произвести пробный пуск асинхронного двигателя. Одновременно наблюдать за током якоря ДПТ. Если ток якоря превышает значение 1А, следует выключить автоматы QF2 и QF1 и поменять полярность обмотки возбуждения ГПТ. Переключатель SA2 МДС2 перевести в положение «0».
4.3 Снятие рабочих характеристик
Рабочие характеристики представляют собой зависимости тока статора, мощности на валу, КПД и cosφ от активной мощности, отдаваемой в сеть.
Опыт проводится в следующей последовательности:
– включить автоматы QF1 и QF2 – запустится асинхронный двигатель;
– переключить SA1 автотрансформатора в верхнее положение;
– увеличивать скорость ДПТ, изменяя напряжение на якоре до достижения асинхронной машиной синхронного холостого хода. Если этого достигнуть не удалось, то следует с помощью переключателя SA2 МДС2 ослаблять обмотку возбуждения регулированием сопротивления RP2;
– дальнейшее увеличение напряжения на якоре или ослабление обмотки возбуждения приводит к переходу асинхронной машины в режим асинхронного генератора и отдаче в сеть активной мощности. Асинхронный генератор нагружать до тех пор, пока ток якоря ДПТ не будет равен номинальному току (1,3А).
Данные опыта заносят в таблицу 1.
Т а б л и ц а 1
|
Со стороны асинхронного генератора |
||||||
|
Данные опыта |
Расчетные данные |
|||||
|
UФ |
IФ |
n |
Р2 |
сosφ |
s |
hА.Ген |
|
В |
А |
об/мин |
Вт |
% |
||
|
Со стороны ДПТ |
||||||
|
Опытные данные |
Расчетные данные |
|||||
|
UЯ |
IЯ |
MЭМ |
IЯ0 |
M0 |
M1 |
P1 |
|
В |
А |
Н∙м |
А |
Н∙м |
Н∙м |
Вт |
После окончания опыта перевести модули в исходное состояние.
Расчетные данные со стороны асинхронного генератора.
Полная активная мощность, отдаваемая асинхронным генератором в сеть переменного тока, Вт:
Р2 = P1 – PХХ –DРЭМ,
где PХХ – потери холостого хода асинхронной машины (Приложение Б), Вт.
Потери в обмотке статора, Вт:
![]() ,
,
где rС – сопротивление обмотки статора (Приложение Б).
Коэффициент мощности асинхронного генератора:
 .
.
Скольжение асинхронного генератора:
 .
.
КПД асинхронного генератора:
hа.ген =  .
.
Мощность, подводимая к асинхронному генератору от двигателя постоянного тока (определяется по расчетным данным этого двигателя), Вт:
 .
.
Полезный момент на валу двигателя постоянного тока, Н∙м:
М1=МЭМ–М0.
Электромагнитный момент, создаваемый двигателем постоянного тока, Н∙м:
МЭМ = СМ×IЯ.
Момент холостого хода двигателя постоянного тока, Н∙м:
М0 = СМ×IЯ0.
Коэффициенты СМ и IЯ0 принимаются по тарировочным кривым (Приложение В) в зависимости от угловой частоты вращения с учетом тока возбуждения.
По расчетным данным построить рабочие характеристики асинхронного генератора:
Р1; IФ; сosφ; hА.ГЕН; S = f (Р2) при UФ = const и f= const.
Контрольные вопросы
1. В чем состоят достоинства и преимущества асинхронного генератора по отношению к синхронному генератору?
2. Указать недостатки асинхронного генератора.
3. Может ли асинхронный генератор работать без сети переменного тока?
4. Каким образом создается магнитное поле в асинхронном генераторе?
5. Области применения асинхронных генераторов.
5 Лабораторная работа № 5. Исследование трехфазного синхронного генератора
Цель работы: Исследование рабочих свойств трехфазного синхронного генератора путем снятия и построения опытных характеристик.
Программа выполнения работы.
1. Изучить схему для снятия характеристик синхронного генератора.
2. Снять характеристику холостого хода генератора.
3. Снять характеристику трехфазного короткого замыкания генератора.
4. Снять внешнюю характеристику генератора.
5. Снять регулировочную характеристику генератора.
6. Определить синхронное индуктивное сопротивление СГ.
В данной лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– модуль автотрансформатора (ЛАТР);
– модуль добавочных сопротивлений №1 (МДС №1);
– модуль добавочных сопротивлений №2 (МДС №2);
– модуль измерительный (МИ);
– силовой модуль (СМ).
Исследуемый синхронный генератор (М1) входит в состав электромашинного агрегата, состоящего также из машины постоянного тока независимого возбуждения (М2) и импульсного датчика частоты вращения (М3), закрепленных на едином основании.
Перед проведением работы установить модули в исходное состояние:
– ручку модуля ЛАТР установить на минимум снимаемого напряжения (крайнее положение против часовой стрелки);
– переключатель SA1 модуля ЛАТР перевести в нижнее положение;
– установить переключатели SA1 МДС №1 и МДС №2 в положение «∞»;
– установить переключатель SA2 МДС №2 в положение «1100».
5.1 Характеристика холостого хода синхронного генератора
Характеристика холостого хода СГ представляет собой зависимость ЭДС обмотки статора от тока возбуждения при постоянной частоте вращения ротора и отсутствии нагрузки:
Е = f (Iов), Iс = 0, w0 = const.
Схема для проведения опыта приведена на рисунке 5.1.
Рисунок 5.1 - Схема для проведения опыта холостого хода
Якорная цепь машины постоянного тока, выступающей в качестве приводного двигателя, подключается к модулю ЛАТР, а обмотка возбуждения – к нерегулируемому источнику постоянного напряжения =220В.
Для регулирования тока возбуждения синхронного генератора в цепь обмотки возбуждения включаются регулируемые сопротивления МДС №1.
В качестве измерителей тока возбуждения и напряжения генератора выступают амперметр PA1 и цифровой мультиметр модуля измерительного.
Опыт проводится в следующей последовательности:
– установить начальное положение переключателей всех модулей;
– включением автоматических выключателей QF1 и QF2 модулей питания стенда и питания подать напряжение на ЛАТР;
– перевести SA1 модуля ЛАТР в верхнее положение и вращением рукоятки этого модуля выставить такое напряжение, при котором частота вращения электродвигателя будет равна ~1500 об/мин;
– изменяя положение переключателя SA1 МДС №1, увеличивать ток возбуждения синхронного генератора, контролируя выходное напряжение генератора Uлг. Увеличивать ток возбуждения до тех пор, пока напряжение статора не станет равным 380 В. Результаты опытов заносить в таблицу 1.
Т а б л и ц а 1
|
Iов, А |
||||||
|
Uлг, В |
После проведения опыта перевести SA1 МДС №1 в положение «∞», остановить двигатель постоянного тока, выключить автоматы QF2, QF1.
5.2 Опыт трехфазного короткого замыкания
Этот опыт проводится для получения характеристики установившегося трехфазного короткого замыкания, которая представляет зависимость тока Iк в обмотке статора от тока возбуждения СГ при постоянной частоте вращения:
Iк = f (Iов), U = 0, w = w0 = const.
Схема для проведения опыта представлена на рисунке 2.
Рисунок 5.2 - Схема для проведения опыта
трехфазного короткого замыкания
Порядок проведения опыта:
– установить начальное положение переключателей всех модулей, затем установить переключателем SA1 МДС №1 сопротивление 0 Ом;
– включением автоматических выключателей QF1 и QF2 модулей питания стенда и питания подать напряжение на ЛАТР;
– перевести SA1 модуля ЛАТР в верхнее положение и вращением рукоятки этого модуля выставить такое напряжение, при котором частота вращения электродвигателя будет равна ~1500 об/мин;
– изменяя ток возбуждения генератора с помощью резисторов RP1 и RP2 МДС №2 контролировать ток статорной обмотки генератора, занося результаты в таблицу 2. Ток статора не должен превышать номинального тока генератора. Для более плавной регулировки тока возбуждения рекомендуется при определенном положении RP2 МДС №2 изменять сопротивление RP1.
– после проведения опыта остановить электродвигатель постоянного тока, выключить автоматы QF2, QF1.
Т а б л и ц а 2
|
Iов, А |
||||||
|
Iк, А |
5.3 Внешняя характеристика СГ
Внешняя характеристика генератора представляет собой зависимость напряжения на зажимах генератора от тока нагрузки при постоянном токе возбуждения СГ, коэффициенте мощности и частоте вращения:
Uг = f (Iс), Iов = const, сosφ = const, w = w0 = const.
Внешняя характеристика снимается для чисто активной нагрузки на понижение напряжения, то есть на холостом ходу устанавливается напряжение и ток возбуждения СГ, который при этом будет поддерживаться неизменным.
Схема для проведения опыта приведена на рисунке 5.2.
Порядок проведения опыта:
– установить начальное положение переключателей всех модулей, затем перевести RP1 МДС №2 в положение 160 Ом;
– включением автоматических выключателей QF1 и QF2 модулей питания стенда и питания подать напряжение на ЛАТР;
– перевести SA1 модуля ЛАТР в верхнее положение и вращением рукоятки этого модуля выставить такое напряжение, при котором частота вращения электродвигателя будет равна ~1500 об/мин;
– переключением SA1 и SA2 МДС №2 установить ток возбуждения генератора, при котором выходное напряжение генератора будет равно 380В. Если ток возбуждения Iов>0,3 А, необходимо вывести сопротивление RP2 МДС №2 в положение «0» и регулировать ток возбуждения сопротивлением RP1 МДС №2. Ток возбуждения не должен превышать 1А;
– изменяя сопротивление RP1 МДС №1, задавать нагрузку генератору, контролируя ток Iс и напряжение Uг. Ток статора не должен превышать 1А. Результаты заносить в таблицу 3;
– после проведения опыта установить SA1 МДС №1 в положение «∞», остановить двигатель постоянного тока, выключить автоматы QF2, QF1.
Т а б л и ц а 3
|
Iв, А |
||||||
|
Iс, А |
||||||
|
Uг, А |
5.4 Регулировочная характеристика СГ
Эта характеристика генератора представляет собой зависимость тока возбуждения СГ от тока нагрузки при постоянных напряжении на зажимах обмотки статора, коэффициенте мощности и частоте вращения:
Iов = f (Iс) при U = const, сosφ = const, w = w0 = const.
Схема проведения опыта представлена на рисунке 2.
Опыт проводится в следующей последовательности:
– установить начальное положение переключателей всех модулей, затем перевести RP1 МДС №2 в положение 160 Ом;
– включением автоматических выключателей QF1 и QF2 модулей питания стенда и питания подать напряжение на ЛАТР;
– перевести SA1 модуля ЛАТР в верхнее положение и вращением рукоятки этого модуля выставить такое напряжение, при котором частота вращения электродвигателя будет равна ~1500 об/мин;
– изменением RP1 и RP2 МДС №2 установить такой ток возбуждения генератора, при котором напряжение на выходе генератора будет равно 200…220В;
– переключением SA1 МДС №1 задавать ток нагрузки генератора, а изменением тока возбуждения генератора добиться постоянства напряжения на выходе генератора. Результаты занести в таблицу 4. Внимание! Ток статора не должен превышать 1А. Переключатель SA1 МДС №1 не переводить в положение «0».
– после проведения опыта установить SA1 МДС №1 в положение «∞», остановить двигатель постоянного тока, выключить автоматы QF2, QF1.
Т а б л и ц а 4
|
Iв, А |
||||||
|
Iс, А |
||||||
|
Uг, А |
5.5 Определение синхронного индуктивного сопротивления СГ
По опытным характеристикам холостого хода и трехфазного короткого замыкания определить ненасыщенное значение синхронных индуктивных сопротивлений хd¥»хq¥, т.к. ротор неявнополюсный. Определение хd¥ показано на рисунке 4.3.
По опытным характеристикам холостого хода и трехфазного короткого замыкания определить ненасыщенное значение синхронных индуктивных сопротивлений хd¥»хq¥, т.к. ротор неявнополюсный. Определение хd¥ показано на рисунке 4.3.
 |
Рисунок 3 - Определение синхронного индуктивного сопротивления
Прямая 0А – спрямленная ненасыщенная характеристика холостого хода. Для одного и того же тока возбуждения определяем ток Iк по характеристике трехфазного короткого замыкания и значение Е’ по спрямленной ненасыщенной характеристике холостого хода:
хd¥ » хq¥ =  .
.
Выразить это сопротивление в относительных единицах:
хd¥* = .
.
Контрольные вопросы
1. Чем объясняется нелинейность характеристики холостого хода СГ?
2. Чем объяснить падение напряжения СГ при нагрузке?
3. Почему синхронные индуктивные сопротивления хd¥ » хq¥, в данном СГ?
6 Лабораторная работа №6. Исследование трехфазного синхронного двигателя
Цель работы: ознакомление с асинхронным пуском трехфазного синхронного двигателя (СД) и исследование его рабочих свойств путем снятия опытных характеристик.
Программа выполнения работы.
1. Изучить схему для экспериментального исследования синхронного двигателя (в дальнейшем изложении СД), состав и назначение модулей, используемых в работе.
2. Осуществить асинхронный пуск.
3. Снять рабочие характеристики СД.
4. Снять U-образные характеристики СД.
5. Провести обработку экспериментальных данных, составить отчет и сделать заключение по работе.
В лабораторной работе используются следующие модули:
– модуль питания стенда (МПС);
– модуль питания (МП);
– модуль автотрансформатора (ЛАТР);
– силовой модуль (СМ);
– модуль добавочных сопротивлений №2 (МДС№2);
– модуль измерителя мощности (МИМ);
– модуль измерительный (МИ).
Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
– переключатель SA1 модуля ЛАТР установить в нижнее положение, ручку автотрансформатора установить в крайнее левое положение;
– переключатель SA1 МДС№2 установить в положение «¥»;
Исследуемый синхронный двигатель входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель М1, нагрузочный генератор – машину постоянного тока – М2, импульсный датчик скорости M3.
6.1 Асинхронный пуск синхронного двигателя
Схема для проведения асинхронного пуска синхронного двигателя представлена на рисунке 1.
Особенность пуска СД заключается в том, что при асинхронном пуске нужно ротор СД разогнать до скорости, близкой к синхронной w0 и обмотку возбуждения (ротора) подключить к источнику напряжения постоянного тока для создания тока возбуждения Iвс.
Рисунок 6.1 - Схема асинхронного пуска СД и снятия рабочих характеристик
В данной работе роль синхронного двигателя выполняет асинхронный электродвигатель с фазным ротором М1, роторная цепь которого подключена к регулируемому источнику постоянного тока автотрансформатора. Постоянный ток в роторной цепи Iвс. измеряется амперметром РА модуля ЛАТР. Подключение роторной цепи осуществляется через переключатель SA1 модуля автотрансформатора.
Статорная обмотка АД через модуль измерителя мощности подключается непосредственно на сеть.
Нагрузка СД создается двигателем постоянного тока (ДПТ) М2, работающим в режиме нагрузочной машины. Якорная цепь машины постоянного тока подключается на сопротивление МДС№2.
Питание обмотки возбуждения двигателя постоянного тока (ДПТ) осуществляется от клемм «=220 В» модуля питания.
Измерение тока якоря осуществляется с помощью прибора PA1 модуля измерительного.
Текущее значение частоты вращения n агрегата наблюдать на индикаторе СМ.
Асинхронный пуск проводится в следующей последовательности:
– включить автоматы QF1 и QF2 модулей МПС и МП соответственно, синхронная машина разгонится до подсинхронной скорости;
– переключатель SA1 модуля ЛАТР перевести в верхнее положение, изменяя положение ручки автотрансформатора, наблюдать изменение тока ротора Iв сд по прибору РА и вход в синхронизм СД.
После того, как СД втянется в синхронизм, можно снимать его рабочие характеристики.
6.2 Рабочие характеристики синхронного двигателя
Схема для снятия рабочих характеристик представлена на рисунке 8.1.
Рабочие характеристики представляют собой зависимости Ic, Р1, М2, h и cosj = f(Р2) при Uc = и Iв.сд = const.
Снятие рабочих характеристик проводится в следующей последовательности:
– установить ток возбуждения СД Iв.сд = 1А, необходимо учесть, что напряжение после диодного выпрямителя отличается от входного напряжения на Kф=1,11:

– переключателем SA1 модуля МДС №2 увеличивать нагрузку ГПТ пока синхронный двигатель не выпадет из синхронизма или ток якоря ГПТ не достигнет номинального значения Iнагр = Iя ≈ Iян. (Iян. = 1,3 А). Выше этого значения двигатель не нагружать! (SA1 в «0» не выводить!).
Данные опыта занести в таблицу 1 и табл. 2.
Т а б л и ц а 1
Со стороны СД |
|||||||||||||
|
Данные опыта |
Расчетные данные |
||||||||||||
|
Uф |
Iф= Iс |
Рф |
Iв.сд |
сosφ |
Р1 |
рэл1 |
Рст |
Рэм |
Мэм.сд |
М0 |
М2 |
Р2 |
h |
|
В |
А |
Вт |
А |
Вт |
Вт |
Вт |
Вт |
Н×м |
Н×м |
Н×м |
Вт |
% |
|
Т а б л и ц а 2
Со стороны ГПТ |
|||||||||
|
Данные опыта |
Расчетные данные |
||||||||
|
Uя |
Iя |
iв |
n |
См |
Мэм.гпт |
Iяо |
М0 |
М2 |
Р2 |
|
В |
А |
А |
рад/с |
Н×м |
А |
Н×м |
Н×м |
Вт |
|
После проведения опыта установить модули в исходное состояние, отключить автоматы QF1 и QF2.
Расчетные данные.
Р1 – полная активная мощность, подводимая к СД, Вт:
Р1 = mРф;
сosφ – коэффициент мощности СД:
сosφ =  ;
;
рэл.1 – электрические потери в обмотке статора:
рэл.1 = Iс m1Iс2r1;
рст – потери в стали при напряжении Uф = Uс;
r1– принимается из приложения Б, а потери в стали из данных, которые получены при исследовании асинхронного двигателя;
Рэм – электромагнитная мощность СД:
Рэм = Р1 - рэл.1 - рст;
w0 – синхронная угловая частота вращения электродвигателя, рад/с:
 ;
;
Мэм – электромагнитный (полный) момент, развиваемый СД, Н×м:
Мэм =  ;
;
М0 – момент холостого хода СД, Н×м:
М0 =  ;
;
Рмех.сд – принимаются из приложения Б и равны механическим потерям асинхронного двигателя рмех.ад;
М2 – полезный момент на СД, Н×м:
М2 = Мэм – М0;
Р2 – полезная мощность на валу СД, Вт:
Р2 = М2w0;
h – КПД синхронного двигателя:
h = ![]() 100%.
100%.
Полезную мощность на валу СД можно определить также со стороны ГПТ:
Мэм.гпт – электромагнитный момент ГПТ, Н×м:
Мэм.гпт = См×Iя;
М0.гпт –момент холостого хода ГПТ, Н×м:
М0.гпт = См×Iя0;
См, Iя0 – принимаются из Приложения Б для соответствующей частоты вращения и тока возбуждения ГПТ;
М2 – полезный момент на СД, Н×м:
М2 = Мэм.гпт – М0.гпт;
Р2 – полезная мощность на валу СД, Вт:
Р2 = М2w0.
По опытным и расчетным данным построить зависимости рабочих характеристик СД: Iс, Р1, М2, h и сosφ= f(Р2).
6.3 U-образные характеристики СД
U-образные характеристики представляют собой зависимости тока статора Iс и cosj от тока возбуждения Iв.сд при моменте нагрузки М = const: Iс, cosj = f(Iв.сд).
Схема для снятия U-образные характеристик СД представлена на рисунке 6.3.
 |
Внешний вид U-образные характеристик СД представлен на рисунке 2.
Рисунок 6.3 - Внешний вид U-образных характеристик СД
Снятие U-образных характеристик СД проводится в следующей последовательности:
– осуществить асинхронный пуск СД;
– установить ток возбуждения СД равным Iв.сд = 0,5А;
– переключателем SA1 модуля МДС №2 установить ток нагрузки Iн = 0,5А, что соответствует M = const.
– ручкой автотрансформатора увеличивать ток возбуждения.
Данные опыта занести в таблицу 3.
Т а б л и ц а 3
|
Iн = |
||||||||
|
Uс, В |
||||||||
|
Iс, А |
||||||||
|
Рф, Вт |
||||||||
|
Iв.сд, А |
||||||||
|
cosj |
||||||||
Увеличить ток нагрузки до Iн = 1А и повторить опыт.
Данные опыта занести в таблицу 3.
После проведения опыта установить модули в исходное состояние и отключить автоматы QF1 и QF2.
По данным таблицы 3 построить семейство U-образных характеристик.
Контрольные вопросы
1. По каким признакам можно определить, что двигатель втянулся в синхронизм?
2. По каким признакам следует переключателем SA3 тиристорного регулятора напряжения включать ток возбуждения СД?
3. По каким приборам можно определить, что СД работает в режиме идеального холостого хода?
4. Почему при регулировании тока возбуждения меняется величина тока статора СД?
5. Как изменяется характер зависимости Ic и cosj от Iв.сн с изменением нагрузки?
6. Что такое выпадение СД из синхронизма, при каких условиях и каковы внешние признаки выпадения из синхронизма?
7. При каких условиях СД работает с отстающим током статора, а при каких с опережающим?
8. Как зависят ток статора и cosj от тока возбуждения?
Приложение а
Описание модулей стенда
Модуль питания стенда.
Модуль питания стенда предназначен для ввода трехфазного напряжения 380 В из сети в лабораторный комплекс, защиты комплекса от токов короткого замыкания, подачи силовых и низковольтных напряжений питания на модули стенда.
Внешний вид модуля приведен на рисунке 1.
Рисунок 1 - Модуль питания стенда
Модуль содержит автоматический выключатель QF1, вторичный источник питания ±15В, +5В. Подключение стенда к источнику питания, подача силового и низковольтного напряжений на модули выполняется с помощью соединительных кабелей, подключаемых с тыльной стороны модуля.
На лицевой части имеется индикация подачи силового напряжения по фазам A, B и С, а также низковольтных напряжений питания +5В, +15В и –15 В. Кроме этого возможен контроль и низковольтных напряжений с лицевой панели (выведены соответствующие клеммы напряжений и общего провода).
Модуль питания.
Модуль питания предназначен для подачи трехфазного напряжения 380В на модули при наборе схемы, защиты подключенных модулей от токов короткого замыкания.
На лицевой панели модуля расположен автоматический выключатель QF2, клеммы трехфазного напряжения А, В, С, N (клеммы продублированы), индикация наличия фазных напряжений, клеммы фазного напряжения ~220В и выпрямленного напряжения =220В.
Внешний вид модуля приведен на рисунке 2.
Рисунок 2 - Модуль питания
Модуль измерителя мощности.
Модуль измерителя мощности (ИМ) предназначен для измерения электрических параметров трехфазной сети переменного тока.
Внешний вид модуля приведен на рисунке 3.
Рисунок 3 - Модуль измерителя мощности
На лицевой панели размещаются:
– входные А, В, С и N (генератор) и выходные А1, В1, С1 и N (нагрузка) клеммы подключения модуля;
– кнопка «Сеть» для подачи питания на измеритель мощности;
– разъем подключения модуля к персональному компьютеру по последовательному порту RS-232;
– кнопка фиксации показаний прибора.
Измеритель мощности содержит трехстрочный дисплей.
В таблице 1 приведены измеряемые параметры.
Т а б л и ц а 1
|
Верхняя строка |
V1 – фазное значение напряжения; V12 – линейное значение напряжения; А1 – фазное значение тока; А – среднее значение тока трех фаз; W – значение активной мощности; Var – значение реактивной мощности. |
|
Средняя строка |
V2 – фазное значение напряжения; V23 – линейное значение напряжения; А2 – фазное значение тока; V – среднее значение напряжения; WH – количество потребляемой активной мощности в час; VarH – количество потребляемой реактивной мощности в час. |
|
Нижняя строка |
V3 – фазное значение напряжения; V13 – линейное значение напряжения; А3 – фазное значение тока; PF – коэффициент мощности; HZ – частота сети. |
Под трехстрочным дисплеем находятся кнопки управления:
DISPLAY – переключение показаний измеряемых величин;
CHANNEL – переключение показаний между фазами (только для значений W, WH, Var, VarH);
MAX – переключение между максимальным, минимальным и действующим значением.
RESET – сброс показаний;
HOLD – фиксирование показаний.
Модуль добавочных сопротивлений № 1.
Модуль добавочных сопротивлений №1 применяется для создания регулируемой трехфазной активной нагрузки.
Действующие значения фазных токов не должны превышать 1А в длительном режиме и кратковременно допустима нагрузка до 1,5А.
Внешний вид модуля приведен на рисунке 4.
Рисунок 4 - Модуль добавочных сопротивлений №1
Модуль добавочных сопротивлений №2.
Модуль добавочных сопротивлений №2 используется в стенде для ввода добавочных сопротивлений в якорную цепь и цепь обмотки возбуждения машины постоянного тока.
Внешний вид модуля приведен на рисунке 5.
Рисунок 5 - Модуль добавочных сопротивлений №2
Шкала переключателя SA1, предназначенного для подключения к якорной цепи, имеет следующие деления 0, 20, 40, …, 160, ∞ Ом. Значения токов через эти сопротивления не должны превышать 1,0А в длительном режиме и кратковременно допустима перегрузка до 1,5А.
Предусмотрена защита по току резисторов RP1, срабатывание защиты сигнализируется светодиодом. В случае срабатывания защиты вывести переключатель SA1 в положение «∞».
Шкала переключателя SA2, предназначенного для подключения к цепи возбуждения, имеет следующие деления 0, 220, 440, 660, 880, 1100 Ом. Значения токов через эти сопротивления не должны превышать 0,25А в длительном режиме и кратковременно допустима перегрузка до 0,3А..
Силовой модуль.
Модуль силовой предназначен для упрощения набора силовых схем с электрическими машинами, а именно, для соединения силовых преобразователей с клеммами, расположенными на лицевой панели модуля с соответствующей мнемосхемой изображений электрических машин. Реальное подключение к электромашинному агрегату выполняется с тыльной стороны.
На силовом модуле асинхронный электродвигатель имеет выводы как статорной, так и роторной цепи, однако лабораторные стенды комплектуются машинами как с фазным, так и с короткозамкнутым ротором (комплектность зависит от варианта стенда). Если в лабораторном комплексе используется асинхронный электродвигатель с короткозамкнутым ротором, то выходы роторной цепи не используются.
На лицевой панели модуля имеется индикатор для отображения частоты вращения электродвигателей. Модуль содержит датчик напряжения (ДН) и датчик тока (ДТ). Датчики обеспечивают потенциальное разделение силовых цепей и цепей управления и позволяют получить напряжения, пропорциональные значениям входных силовых токов и напряжений.
Датчик тока включается в цепь последовательно, датчик напряжения – параллельно. При неправильном включении датчика тока возможен выход его из строя или срабатывание предохранителя на плате внутри модуля.
Внешний вид модуля приведен на рисунке 6.
Рисунок 6 - Силовой модуль
Преобразователь частоты.
Преобразователь частоты (ПЧ) обеспечивает преобразование переменного напряжения 3x380 В в трехфазное напряжение с регулируемыми значениями напряжения и частоты.
Модуль преобразователя частоты содержит:
– преобразователь частоты Altivar 31;
– силовые клеммы A, B, C подачи трехфазного напряжения на преобразователь;
– силовые клеммы A1, B1, C1 для снятия выходного напряжения преобразователя;
– выходы звена постоянного тока преобразователя «+», «–» ;
– клеммы маломощных аналоговых сигналов управления преобразователя (XS1 – вход 1, XS3 – вход 2);
– клеммы аналоговых выходов XS5;
– универсальный цифровой вход LI6 (клемма XS9);
– клеммы XS7, XS8 цифрового выхода 1;
– потенциометр RP1 задания частоты/момента;
– кнопку SB1 сброса внешней ошибки;
– переключатель со средним положением SA1 для задания направления вращения;
– тумблер SA2 для подачи сигнала на универсальный цифровой вход;
– разъем XR1 в данном модуле не используется.
Внешний вид модуля представлен на рисунке 7.
Рисунок 7 - Модуль частотного преобразователя
Подробное описание модуля Преобразователя частоты представлено в Приложении Д.
Модуль однофазного трансформатора.
Модуль предназначен для исследования однофазного трансформатора.
Внешний вид модуля приведен на рисунке 8.
Рисунок 8 - Модуль однофазного трансформатора
Сопротивление RP1 предназначено для введения добавочного сопротивления в первичную обмотку трансформатора, максимальный допустимый ток 1,2А.
Сопротивление RP2 предназначено для введения добавочного сопротивления во вторичную обмотку трансформатора, максимально допустимый ток 3,6 А.
На лицевую панель выведены клеммы первичной и вторичной обмоток трансформатора.
Модуль однофазного трансформатора.
Модуль предназначен для исследования однофазного трансформатора.
Внешний вид модуля приведен на рисунке 9.
Рисунок 9 - Модуль однофазного трансформатора
Сопротивление RP1 предназначено для введения добавочного сопротивления в первичную обмотку трансформатора, максимальный допустимый ток 1,2А.
Сопротивление RP2 предназначено для введения добавочного сопротивления во вторичную обмотку трансформатора, максимально допустимый ток 3,6 А.
На лицевую панель выведены клеммы первичной и вторичной обмоток трансформатора.
Модуль измерительный.
Модуль измерительный служит для измерения сигналов постоянного и переменного тока и имеет в своем составе:
– универсальный цифровой мультиметр;
– вольтметр постоянного тока -250…0…250В;
– амперметр постоянного тока -2…0…2А;
– вольтметр переменного тока 0…250В;
– амперметр переменного тока 0…2А.
Внешний вид модуля приведен на рисунке 10.

Рисунок 10 - Модуль измерительный
Приложение б
Паспортные и расчетные данные электрических машин
Т а б л и ц а 1 – Паспортные данные машины постоянного тока
|
Наименование параметра |
Значение |
|
Тип |
ПЛ-072 |
|
Мощность, Вт |
180 |
|
Номинальное напряжение питания обмотки якоря, В |
220 |
|
Номинальное напряжение питания обмотки возбуждения, В |
200 |
|
Номинальная частота вращения, об/мин |
1500 |
|
Номинальный ток якоря, А |
1,3 |
|
к.п.д. |
0,63 |
|
Масса, кг |
7,65 |
|
Сопротивление обмотки якоря RЯ,20°C (расчетное значение), Ом |
17,5 |
|
Сопротивление обмотки возбуждения RОВ,20°C (расчет. значение), Ом |
820 |
|
Механические потери, Рмех ДПТ, Вт |
15 |
Т а б л и ц а 2 – Паспортные и расчетные данные асинхронного двигателя с фазным/короткозамкнутым ротором
|
Наименование параметра |
Значение |
|
Тип |
AIS71ВУ3/АИР63В4УЗ |
|
Мощность, Вт |
370 |
|
Номинальное напряжение питания обмотки статора, В, D Y |
380 |
|
Номинальная частота вращения, об/мин |
1320/1370 |
|
Номинальный ток фазы статора, А |
1,18/1,37 |
|
cos j |
0,7 |
|
Номинальный момент, Н×м |
1,4 |
|
Активное сопротивление статора r1,27°C , Ом |
19 |
|
Механические потри, Рмех АД, Вт |
11 |
|
Момент холостого хода, М0, Н·м |
0,07 |
|
Потери в стали сердечника статора при номинальном напряжении, DРСТ.1 ,Вт |
4,75 |
Примечание: механические характеристики, как естественные, так и искусственные, желательно снимать при пониженном напряжении, а затем момент пересчитывать по формуле:
UПОНИЖ, Л=220 В, М=МОПЫТ×(380/220)2» МОПЫТ×3.
Т а б л и ц а 3 – Паспортные данные импульсного датчика скорости
|
Наименование параметра |
Значение |
|
Тип |
TRD-S500VD |
|
Напряжение питания, В |
5 |
|
Разрешающая способность, имп/об |
500 |
Приложение в
Тарировочные кривые
|
|
|

|

|
||||
|
||||
|
 |
Приложение г
Паспортные и расчетные данные трансформатора
Т а б л и ц а 1
|
Наименование параметра |
Значение |
|
Тип |
ОСМ1-0,16.УЗ |
|
Мощность, В×А |
160 |
|
Номинальное напряжение первичной обмотки трансформатора, В |
220 |
|
Номинальное напряжение вторичной обмотки трансформатора, В |
42 |
|
Активное сопротивление первичной обмотки трансформатора r1 при t° = 20° C, Ом |
5,7 |
|
Активное сопротивление вторичной обмотки трансформатора r2 при t° = 20° C, Ом |
1,2 |
Приложение д
Преобразователь частоты
Преобразователь частоты (ПЧ) обеспечивает получение трехфазного напряжения с регулируемой частотой из трехфазного напряжения сети.
Преобразователь частоты служит для управления асинхронным трехфазным двигателем с короткозамкнутым ротором;
Внешний вид модуля ПЧ приведен на рисунке 1.
Рисунок 1 - Внешний вид модуля
На лицевую панель модуля вынесены:
– преобразователь частоты Altivar 31;
– силовые клеммы A, B, C подачи трехфазного напряжения на преобразователь;
– силовые клеммы A1, B1, C1 для снятия выходного напряжения преобразователя;
– выходы звена постоянного тока преобразователя «+», «–» ;
– клеммы маломощных аналоговых сигналов управления преобразователя (XS1 – вход 1, XS3 – вход 2);
– клеммы аналоговых выходов XS5;
– универсальный цифровой вход LI6 (клемма XS9);
– клеммы XS7, XS8 цифрового выхода 1;
– потенциометр RP1 задания частоты/момента;
– кнопка SB1 сброса внешней ошибки;
– переключатель со средним положением SA1 для задания направления вращения;
– тумблер SA2 для подачи сигнала на универсальный цифровой вход;
– разъем XR1 в данном модуле не используется.
Исследование преобразователя частоты.
Программирование преобразователя частоты.
Программирование производится с кнопочной панели преобразователя (см.рисунок 2).
Панель управления оснащена экраном, на котором отображаются текущие значения вызываемых параметров, значения вызываемых пользователем величин, сообщения преобразователя о текущем состоянии (коды неисправностей).
На кнопочной панели (см.рисунок Е2) расположены элементы управления и индикации, назначение которых пояснено ниже.

Рисунок 2 - Вид панели преобразователя
Нажатие на или не сохраняет выбора.
Длительное нажатие (>2с) на или убыстряет просмотр.
Сохранение, регистрация отображаемого выбора:
Список литературы
1. Копылов И.П. Электрические машины.-М.: Высшая школа. –Логос. -2000. -607 с.
2. Иванов-Смоленский А.В. Электрические машины. В двух томах. 3-е издание. - М.: Издательский дом МЭИ. 2006. -652(656) с.
3. Кацман М.М. Электрические машины. 5-е издание, переработанное и дополненное. – М.: Издательский центр «Академия». -2003.-496 с.
4. Беспалов В.Я., Котеленец Н.Ф. Электрические машины. - М.: Издательский дом МЭИ. 2006. -320 с.
5. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины. - ч. 1,2. -М.: Высшая школа. 1987.
6. Костенко М.П., Пиотровский Л.М. Электрические машины. - ч.2 Машины переменного тока.- Л.: Энергия, 1973. - 412 с.
7. Пиотровский Л.М., Васютинский С.Б., Несговоров Е.Д. Испытания электрических машин. -ч.1.- М., Л.: Госэнергоиздат, 1960.-181 с.
8. Кацман М.М. Руководство к лабораторным работам по электрическим машинам и электроприводу.- М.: Высшая школа. 1983.- 215с.
Сводный план 2013г., поз 19
Сагитов Пулат Исмаилович
Раушан Манаповна Шидерова
Алмуратова Нургуль Канаевна
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
СИНХРОННЫЕ И АСИНХРОННЫЕ МАШИНЫ
Методические указания к выполнению лабораторных работ
для студентов специальности 5В071800 –
Электроэнергетика
Редактор Н.М. Голева
Специалист по стандартизации Н.К.
Молдабекова
Подписано в печать __.__.__
Формат 60x84 1/16
Тираж
100 экз.
Бумага
типографская № 1
Объем
уч. – изд. л.
Заказ____.
Цена тг.
Копировально-множительное бюро
Некоммерческого акционерного общества
«Алматинский университет энергетики и связи»
050013, Алматы, Байтурсынова, 126