Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ
ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра
электропривода и автоматизации промышленных установок
Моделирование электрических машин в среде MATLAB
Методические
указания к лабораторным работам
(для специальности 5В071800 – Электроэнергетика)
Алматы 2014
СОСТАВИТЕЛИ: П.И. Сагитов, Ю.И. Шадхин, Ж.Ж. Тойгожинова. Моделирование электрических машин в среде MATLAB. Методические указания к лабораторным работам (для специальности 5В071800 – Электроэнергетика). - Алматы: АУЭС, 2014.– 30 с.
Методические указания содержат необходимые сведения о виртуальных модели в среде MATLAB для исследование переходных процессов скорости и моментов двигателей постоянного и переменного тока, программу выполнения работ, методику подготовки параметров электрических машин, проведения экспериментов и анализа полученных результатов и контрольные вопросы.
Методические указания предназначены для студентов специальности 5В071800 – Электроэнергетика.
Ил. 19, табл. 10, библ. – 7 назв.
Рецензент: доцент М.А. Башкиров
Печатается по плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2014 г.
© НАО «Алматинский университет энергетики и связи», 2014г.
Содержание
Введение
Лабораторная работа. Исследование двигателя постоянного тока с независимым возбуждением
Лабораторная работа. Исследование трехфазной асинхронной машины с короткозамкнутым ротором
Лабораторная работа. Исследование асинхронного двигателя с фазным ротором
Лабораторная работа. Исследование синхронной машины в двигательном режиме
Список литературы
Введение
Целью лабораторных занятий является ознакомление студентов с вертуальными моделями электрически машин в среде MATLAB. Лабораторные занятия способствуют развитию навыков студентов по составлению моделей электрические машины на ЭВМ.
1 Лабораторная работа. Исследование двигателя постоянного тока с независимым возбуждением
Цель работы: исследование машины постоянного тока в двигательном режиме работы.
1.1 Содержание работы
1.1.1 Снятие механической и расчет рабочих характеристик машины в двигательном режиме работы.
1.1.2 Снятие механических характеристик при различных напряжениях питания в цепи якоря.
1.1.3 Снятие механических характеристик при различных сопротивлениях в цепи якоря.
1.1.4 Снятие механических характеристик при различных потоков возбуждения.
1.1.5 Снятие регулировочных характеристик при изменении напряжения якоря.
1.2 Описание виртуальной лабораторной установки
Виртуальная лабораторная установка в системе MATLAB представлена на рисунке 1.1.
Она включает:
- источники постоянного напряжения V1 и V2 для питания якоря машины и обмотки возбуждения из библиотеки SimPowerSystems - раздел Electrical Sources;
- блок Moment для задания момента нагрузки (блок Constant из библиотеки Simulink – раздел Sources);
- машину постоянного тока (блок DC Machine из библиотеки SimPowerSystems – раздел Machines);
- блок для измерения переменных состояния машины Display (цифровой дисплей) из библиотеки Simulink.

Рисунок 1.1 - Модель для исследования машины постоянного тока с независимым возбуждением
Показания Display в модели:
W – скорость вращения якоря в (119,8);
Ia – ток якоря (15,54);
If - ток возбуждения (2,346);
Te – электромагнитный момент (15,8).
Цепь якоря и цепь возбуждения видны из графического начертания блока, на вход TL подается момент нагрузки, выход m предназначен для измерения и наблюдения переменных состояния машины в следующей последовательности: угловая скорость (рад/с), ток якоря (А), ток возбуждения (А), электромагнитный момент (Нм).
В полях настройки машины (см. рисунок 1.2) задаются:
- параметры
обмотки якоря - ![]()
- параметры
обмотки возбуждения ![]() ;
;
- коэффициент ![]()
- коэффициент
вязкого трения - ![]() ;
;
- коэффициент
сухого трения - ![]() ;
;
- начальная скорость (рад/с).
Параметры машины, вводимые в окно настройки, определяются из
паспортных данных.
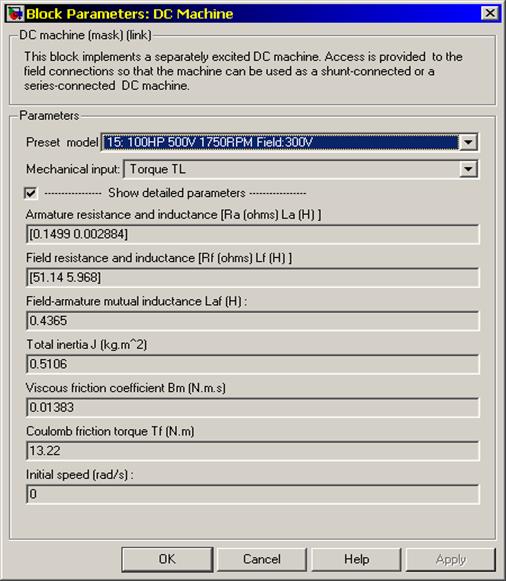
Рисунок 1.2 - Окно настройки параметров машины постоянного тока
Паспортные параметры машин постоянного тока приведены в таблице 1.1.
Таблица 1.1
|
Тип двигателя |
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
2ПН-0.17 2ПН-0.25 2ПН-0.37 2ПН-0.71 2ПН-1.0 |
0,17 0,25 0,37 0,71 1,0 |
220 220 220 220 220 |
750 1120 1500 2360 3000 |
48,5 57 61,5 70 72,5 |
27,2 15,47 10,61 3,99 2,52 |
162 612 612 123 92 |
514 297 190 70 48 |
Кроме перечисленных параметров машины постоянного тока (см. таблицу 1.1), необходимо определить взаимную индуктивность между обмотками возбуждения и якоря. Для машины с независимым возбуждением ее величина определяется последовательным расчетом, используя следующие выражения:
|
|
(1.1) |
1.3 Порядок проведения лабораторной работы
1.3.1 Исследование машины постоянного тока осуществляется по заданному варианту преподавателем. Параметры заданного варианта модели (Preset model) устанавливаются в окне настройки параметров машины постоянного тока (см. рисунок 1.2).
1.3.2 При снятии
характеристик в окне настройки блока Moment последовательно
задаются значения момента от 0 до 1.2 ![]() с шагом 0,2. Для каждого
значения момента осуществляется моделирование и заполняется таблица 1.2 измеренных и
рассчитанных значений.
с шагом 0,2. Для каждого
значения момента осуществляется моделирование и заполняется таблица 1.2 измеренных и
рассчитанных значений.
Таблица 1.2
|
Задание |
Измерения |
Расчет |
||||
|
|
|
|
|
|
|
|
Вычисления Р1, Р2, и η осуществляются по выражениям:
|
|
(1.2) |
1.3.3 Снятие
механических характеристик при различных напряжениях питания в цепи
якоря следует провести для двух значений напряжения на якоре 0,6 ![]() и 0,8
и 0,8 ![]() . При этом момент нагрузки следует
изменять от - 1,2
. При этом момент нагрузки следует
изменять от - 1,2 ![]() до
1,2
до
1,2 ![]() с
шагом 0,2
с
шагом 0,2 ![]() .
Для каждого значения напряжения на якоре и момента проводится моделирование и
заполняется таблица 1.3.
.
Для каждого значения напряжения на якоре и момента проводится моделирование и
заполняется таблица 1.3.
Таблица 1.3
|
|
|
1.3.4 Снятие
механических характеристик при различных сопротивлениях в цепи якоря следует
провести для двух значений сопротивления якоря 2![]() и 4
и 4![]() , где
, где ![]() первоначальное значение сопротивления.
Изменение сопротивления якоря осуществляется в поле настройки параметров
машины. При этом момент нагрузки следует изменять от - 1,2
первоначальное значение сопротивления.
Изменение сопротивления якоря осуществляется в поле настройки параметров
машины. При этом момент нагрузки следует изменять от - 1,2 ![]() до 1,
до 1,![]() с шагом 0,2
с шагом 0,2 ![]() . Для каждого значения
сопротивления якоря и момента проводится моделирование и заполняется таблица 1.3.
. Для каждого значения
сопротивления якоря и момента проводится моделирование и заполняется таблица 1.3.
1.3.5 Снятие
механических характеристик при различных потоках возбуждения следует провести
для двух значений потока 0,6![]() до 0,8
до 0,8 ![]() . Для этого в поле Field – armature mutual inductance (окно настройки
параметров машины, см. рисунок 2) необходимо установить значение
. Для этого в поле Field – armature mutual inductance (окно настройки
параметров машины, см. рисунок 2) необходимо установить значение ![]() вначале 0,6, а
затем 0,8 от первоначальной величины. При этом момент нагрузки следует изменять
от - 1,2
вначале 0,6, а
затем 0,8 от первоначальной величины. При этом момент нагрузки следует изменять
от - 1,2 ![]() до
1,2
до
1,2 ![]() с
шагом 0,2
с
шагом 0,2 ![]() .
Для каждого значения сопротивления якоря и момента проводится моделирование и
заполняется таблица 1.3.
.
Для каждого значения сопротивления якоря и момента проводится моделирование и
заполняется таблица 1.3.
1.3.6 Снятие регулировочных характеристик при изменении напряжения якоря проводится для постоянного момента нагрузки, равного номинальному, и изменению напряжения в цепи якоря от 0,4 до 1,2 исходного значения с шагом 0,2 исходного значения напряжения. Для каждого значения напряжения проводится моделирование и заполняется таблица 1.4.
Таблица 1.4
|
|
|
1.4 Содержание отчета
1.4.1 Схема модели для проведения лабораторной работы.
1.4.2 Расчетные формулы для мощностей P1, P2 и КПД.
1.4.3 Заполненные таблицы.
1.4.4 Графики механической характеристики машины при различных напряжениях на якоре.
1.4.5 Графики механической характеристики машины при различных сопротивлениях якоря.
1.4.6 Графики механической характеристики машины при различных потоках.
1.4.7 Регулировочная характеристика двигателя.
1.5 Контрольные вопросы
1.5.1 Устройство и принцип действия двигателя постоянного тока независимого возбуждения.
1.5.2 Способы пуска двигателя постоянного тока независимого возбуждения. Какой способ пуска применяли в лабораторной работе?
1.5.3 Напишите уравнение напряжения на якоре двигателя постоянного тока независимого возбуждения.
1.5.4 Из уравнения напряжения выведите уравнения тока якоря и скорости вращения двигателя постоянного тока независимого возбуждения.
1.5.5 Почему пусковой ток значительно превышает номинальный ток якоря двигателя постоянного тока независимого возбуждения?
1.5.6 Почему с увеличением нагрузки частота вращения двигателя постоянного тока независимого возбуждения уменьшается?
1.5.7 Напишите формулу электромагнитного момента двигателя постоянного тока независимого возбуждения. Объясните величины, определяющие электромагнитный момент.
1.5.8 Напишите зависимость электромагнитного момента двигателя постоянного тока независимого возбуждения от его мощности и угловой скорости вращения якоря.
1.5.9 Перечислите потери мощности в двигателя постоянного тока независимого возбуждения. Какие из них относятся к постоянным, а какие - к переменным и почему?
1.5.10 Напишите уравнение КПД двигателя постоянного тока независимого возбуждения. Нарисуйте график зависимости КПД от величины нагрузки.
1.5.11 При каком условии КПД двигателя постоянного тока независимого возбуждения достигает максимума?
1.5.12 Как изменить направление вращения якоря двигателя постоянного тока независимого возбуждения?
1.5.13 Двигатель постоянного тока независимого возбуждения работает с номинальной нагрузкой. Что будет с ним, если произойдёт обрыв цепи возбуждения?
2 Лабораторная работа. Исследование трехфазной асинхронной машины с короткозамкнутым ротором
Цель работы: исследование трехфазной асинхронной машины с короткозамкнутым ротором при питании от сети.
2.1 Содержание работы
2.1.1 Снятие механической характеристики машины в двигательном режиме.
2.1.2 Снятие рабочих характеристик машины в двигательном режиме.
2.2 Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рисунке 2.1.
Она содержит:
- источники переменного однофазного напряжения;
- измеритель
напряжения и тока в источнике питания ![]()
- исследуемую трехфазную асинхронную машину Asynchronous;
- измеритель
активной и реактивной мощности ![]() в источнике питания;
в источнике питания;
- блок Display 1 для количественного представления измеренных мощностей;
- блок Moment для задания механического момента на валу двигателя из главной библиотеки Simulink/Sinnks;
- блок Machines Measurement;
- блок ![]() для измерения
действующего тока в источнике;
для измерения
действующего тока в источнике;
- блок Display 2 для количественного представления действующего тока в источнике (А) и скорости (рад/с);
- блок Mux, объединяющий два сигнала в один векторный;
- блок Skope для наблюдения токов статора, а также скорости и момента асинхронной машины.

Рисунок 2.1 - Модель для исследования асинхронной машины
Окно настройки параметров асинхронной машины представлено на рисунке 2.2.

Рисунок 2.2 - Окно настройки параметров асинхронной машины
Окно настройки параметров универсального блока измерения переменных состояния машины показано на рисунке 2.3.
В выпадающем меню поля Machine type задается тип машины. Флажками выбираются переменные для измерения.

Рисунок 2.3 - Окно настройки блока измерения
Окно настройки параметров источника питания показано на рисунке 2.4.
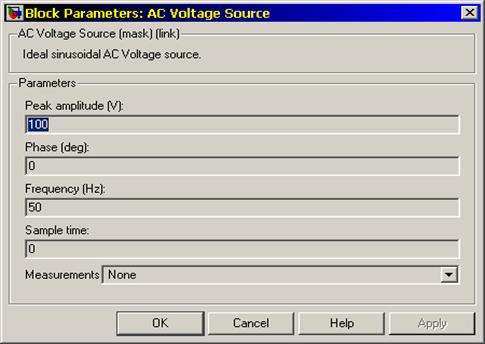
Рисунок 2.4 - Окно настройки источника питания
В полях окна задаются:
- амплитуда напряжения источника (В);
- начальная фаза в градусах;
- частота (Гц).
Напряжение и частота должны соответствовать параметрам асинхронной машины.
2.3 Порядок выполнения работы
Параметры асинхронной машины для выполнения работы задаются преподавателем.
Снятие механической характеристики машины в двигательном режиме производится на модели (см. рисунок 2.1) при изменении нагрузочного момента от нуля до номинального. При этом для каждого значения момента нагрузки осуществляется моделирование.
Наброс момента нагрузки осуществляется с задержкой по отношению к началу моделирования с тем, чтобы переходные процессы при пуске закончились.
Окно настройки блока Moment показано на рисунке 2.5.

Рисунок 2.5 - Окно настройки момента
При проведении исследований заполняется таблица 2.1.
Таблица 2.1
|
|
|
Снятие рабочих характеристик асинхронного двигателя в соответствии с п. 2.2 содержания работы проводится на модели (см. рисунок 2.1) при изменении нагрузочного момента от нуля до номинального. При этом для каждого значения момента нагрузки осуществляется моделирование. При проведении исследований заполняется таблица 2.2.
Таблица 2.2
|
Измерения |
Вычисления |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Вычисления производятся по выражениям:
|
|
(2.1) |
По данным таблиц строится механическая характеристика машины и на отдельном графике – рабочие характеристики.
Временные зависимости переменных состояния машины (скорость, электромагнитный момент) можно наблюдать на экране осциллографа (см. рисунок 2.6). На рисунке 2.6 виден и переходной процесс при пуске машины, и переходной процесс при набросе момента нагрузки, и установившиеся процессы.

Рисунок 2.6 - Переходные процессы скорости и момента
двигателя переменного тока
2.4 Содержание отчета
2.4.1 Схема модели и описание виртуальных блоков.
2.4.2 Механическая характеристика машины.
2.4.3 Рабочие характеристики машины.
2.5 Контрольные вопросы
2.5.1 Устройство трехфазного асинхронного двигателя с короткозамкнутым ротором.
2.5.2 Принцип действия асинхронного двигателя с короткозамкнутым ротором.
2.5.3 Что такое скольжение и каким оно обычно бывает у асинхронного двигателя общего применения?
2.5.4 С какой целью у асинхронного двигателя обычно делают шесть выводов обмотки статора?
2.5.5 Как определить начало и конец обмотки статора?
2.5.6 Что такое реверс и как его осуществить в трехфазном асинхронном двигателе?
2.5.7 Какие характеристики асинхронного двигателя называются рабочими?
2.5.8 Почему относительная величина тока холостого хода у асинхронного двигателя больше, чем у трансформатора такой же мощности?
2.5.9 Как изменится электромагнитный момент асинхронного двигателя, если питающее напряжение уменьшить в 3 раза?
2.5.10 Что такое перегрузочная способность асинхронного двигателя, и как ее определить по круговой диаграмме?
2.5.11 Почему без нагрузки асинхронный двигатель работает с малыми значениями КПД и коэффициента мощности?
2.5.12 Какие виды потерь имеют место в асинхронном двигателе?
2.5.13 Почему магнитные потери в сердечнике ротора не учитывают?
2.5.14 На какие виды потерь влияют величина воздушного зазора и толщина пластин сердечника статора?
2.5.15 Почему график I1 = f(P2) не выходит из начала координат?
2.5.16 При каких условиях высшие гармоники поля создают в асинхронном двигателе двигательный, генераторный и тормозной режимы?
2.5.17 Какими причинами вызван «провал» в механической характеристике?
2.5.18 При каких условиях может происходить «прилипание» ротора к статору?
3 Лабораторная работа. Исследование асинхронного двигателя
с фазным ротором
Цель работы: исследование асинхронной машины с фазным ротором.
3.1 Содержание работы
3.1.1 Снятие механической характеристики асинхронного двигателя с фазным ротором.
3.1.2 Снятие рабочих характеристик асинхронного двигателя с фазным ротором.
3.2 Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рисунке 3.1.
Она содержит:
- идеальные
источники переменного напряжения (![]() - AC Voltage Source);
- AC Voltage Source);
- измеритель
линейного напряжения на статоре машины ![]() и цифровой дисплей
и цифровой дисплей  ;
;
- исследуемый асинхронный двигатель с фазным ротором
 ;
;
- блок Moment для задания механического момента на валу двигателя из главной библиотеки Simulink/Sinnks
 ;
;
- блок Machines Measurement
 ;
;
- блок Display для количественного представления скорости (рад/с) и электромагнитного момента
 ;
;
- блок Mux, объединяющий два сигнала в один векторный;
- блок Skope для наблюдения токов статора, а также скорости и момента асинхронной машины.
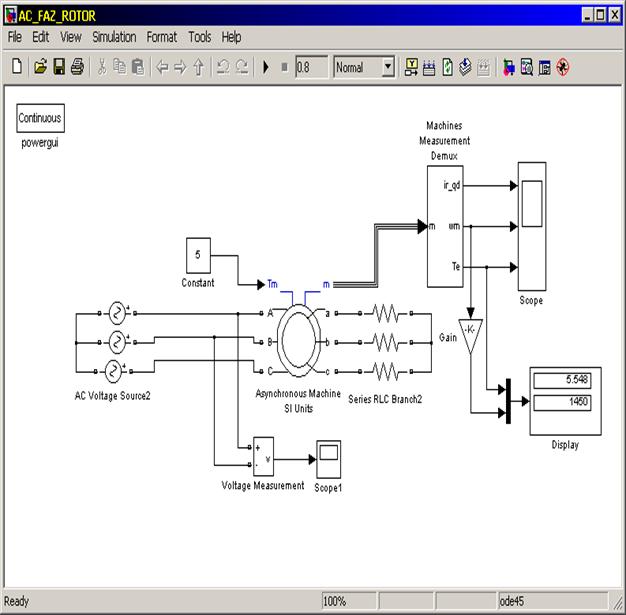
Рисунок 3.1 - Модель для исследования асинхронной машины с фазным ротором
Окно настройки параметров асинхронной машины с фазным ротором представлено на рисунке 3.2.
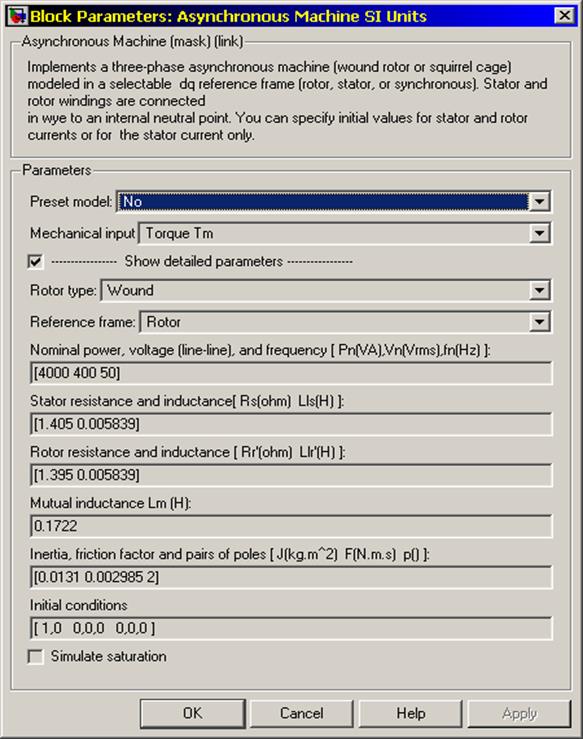
Рисунок 3.2 - Окно настройки параметров асинхронной машины с фазным ротором
Окно настройки параметров универсального блока измерения переменных состояния машины показано на рисунке 3.3.
В выпадающем меню поля Machine type задается тип машины. Флажками выбираются переменные для измерения.
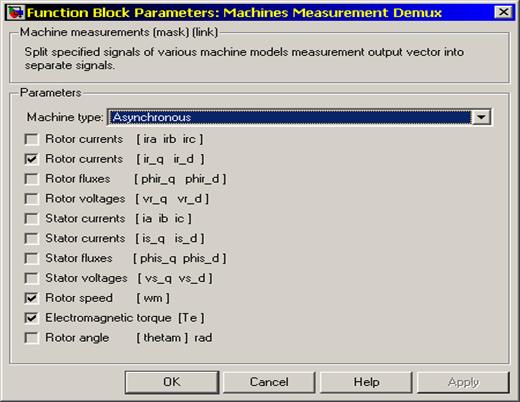
Рисунок 3.3 - Окно настройки блока измерения
Окно настройки параметров источника питания показано на рисунке 3.4.
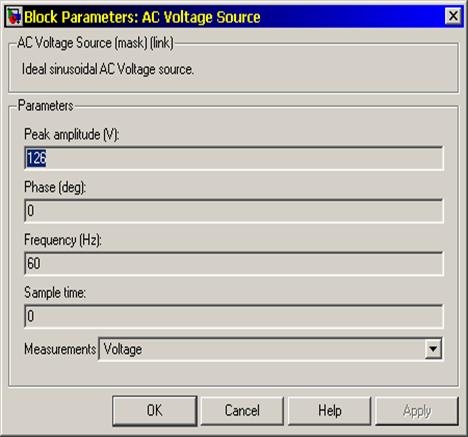
Рисунок 3.4 - Окно настройки источника питания
В полях окна задаются:
- амплитуда напряжения источника (В);
- начальная фаза в градусах;
- частота (Гц).
Напряжение и частота должны соответствовать параметрам асинхронной машины с фазным ротором.
3.3 Порядок выполнения работы
Параметры асинхронной машины с фазным ротором, для выполнения работы, задаются преподавателем.
Снятие механической характеристики асинхронной машины с фазным ротором производится на модели (см. рисунок 3.1) при изменении нагрузочного момента от нуля до номинального. При этом для каждого значения момента нагрузки осуществляется моделирование.
Наброс момента нагрузки осуществляется с задержкой по отношению к началу моделирования с тем, чтобы переходные процессы при пуске закончились.
Окно настройки блока Moment показано на рисунке 3.5.

Рисунок 3.5 - Окно настройки момента
При проведении исследований заполняется таблица 3.1.
Таблица 3.1
|
|
|
Снятие рабочих характеристик асинхронного двигателя с фазным ротором, в соответствии с п. 2.2 содержания работы, проводится на модели (см. рисунок 3.1) при изменении нагрузочного момента от нуля до номинального. При этом для каждого значения момента нагрузки осуществляется моделирование. При проведении исследований заполняется таблица 3.2.
Таблица 3.2
|
Измерения |
Вычисления |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Вычисления производятся по выражениям:
|
|
(3.1) |
По данным таблиц строится механическая характеристика машины с фазным ротором и на отдельном графике – рабочие характеристики.
Временные зависимости переменных состояния машины (скорость, электромагнитный момент) можно наблюдать на экране осциллографа (см. рисунок 3.6). На рисунке 3.6 виден и переходной процесс при пуске машины, и переходной процесс при набросе момента нагрузки, и установившиеся процессы.

Рисунок 3.6 - Переходные процессы токов ротора, скорости и момента двигателя с фазным ротором
3.4 Содержание отчета
3.4.1 Схема модели и описание виртуальных блоков.
3.4.2 Механическая характеристика машины.
3.4.3 Рабочие характеристики машины.
3.5 Контрольные вопросы
3.5.1 Устройство трехфазного АД с фазным ротором.
3.5.2 Принцип действия АД с фазным ротором.
3.5.3 В чем особенность устройства АД с фазным ротором?
3.5.4 Каков порядок действий при пуске АД с фазным ротором?
3.5.5 Как провести опыт холостого хода АД с фазным ротором?
3.5.6 Как провести опыт короткого замыкания АД с фазным ротором?
3.5.7 Как провести опыт, чтобы снять рабочие характеристики АД с фазным ротором?
3.5.8 Что такое перегрузочная способность АД с фазным ротором?
3.5.9 Почему с увеличением нагрузки на валу АД с фазным ротором возрастает потребляемая из сети мощность?
3.5.10 Как определить величину механических и магнитных потерь АД с фазным ротором по характеристикам холостого хода?
4 Лабораторная работа. Исследование синхронной машины в двигательном режиме
Цель работы: исследование синхронной машины Synchronous Machine в среде MATLAB.
4.1 Содержание работы
4.1.1 Снятие механической характеристики синхронной машины в двигательном режиме.
4.1.2 Снятие рабочих характеристик синхронной машины в двигательном режиме.
4.2. Описание виртуальной лабораторной установки
Виртуальная лабораторная установка представлена на рисунке 4.1.
Виртуальная лабораторная установка содержит:
- идеальные источники переменного напряжения AC Voltage Sourse пиктограмма имеет вид:
 ;
;
- измеритель тока Current Measurement в статорной цепи синхронной машины, пиктограмма имеет вид:
 ;
;
- исследуемую синхронную машину Synchronous Machine, пиктограмма:
 ;
;
Vf – напряжение обмотки возбуждения (В),
Pm – механическая мощность на валу машины,
А, В и С – выводы статорной обмотки машины.
- блок Machines Measurement Demux
 ;
;
- блок умножения Product.

Рисунок 4.1 - Модель для исследования синхронной машины
Окно настройки параметров синхронной машины в двигательном режиме представлено на рисунке 4.2.
Окно настройки параметров универсального блока измерения переменных состояния синхронной машины в двигательном режиме показано на рисунке 4.3.
В выпадающем меню поля Machine type задается тип машины. Флажками выбираются переменные для измерения.
Окно настройки идеального источника питания статорной обмотки синхронной машины показано на рисунке 4.4.
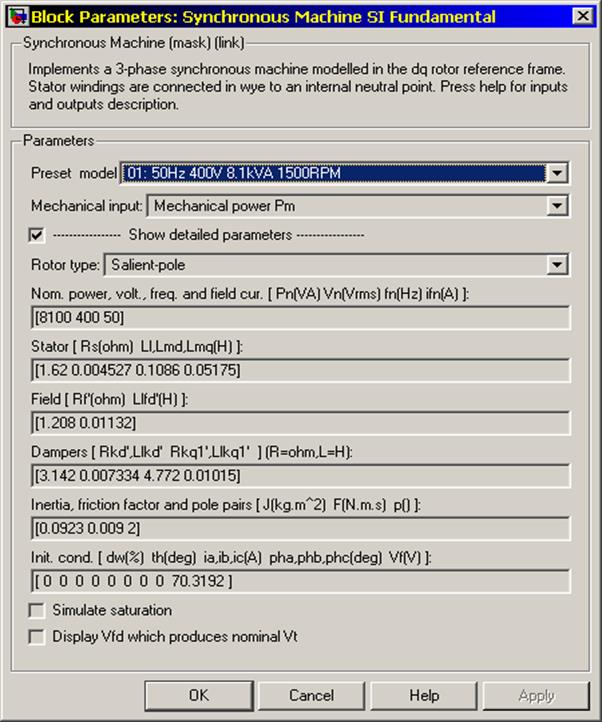
Рисунок 4.2 - Окно настройки параметров синхронной машины в двигательном режиме
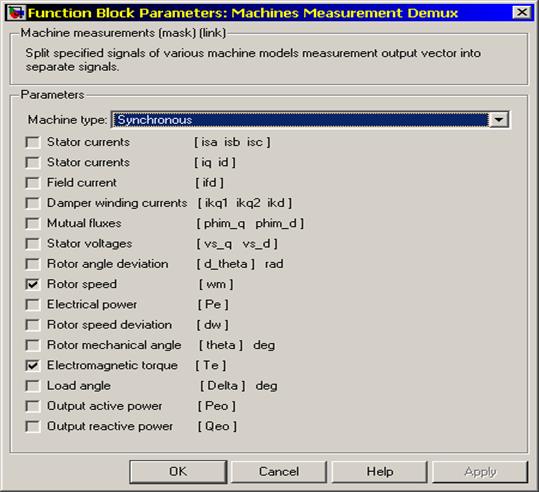
Рисунок 4.3 - Окно настройки универсального блока измерений переменных синхронной машины
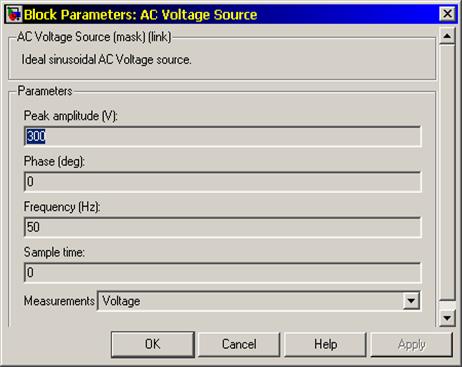
Рисунок 4.4 - Окно настройки идеального источника питания
Следует отметить, что на рисунке 4.4 в поле Phase (deg) начальная фаза напряжения равна нулю (для первого идеального источника). Для второго идеального источника в поле Phase (deg) начальную фазу напряжения следует задать фазу, равную минус 120, т.е. (-120), а для третьего источника начальную фазу напряжения следует задать плюс 120, т.е. 120. На рисунке 4.1 счет идеальных источников питания следует вести и верхнего источника питания.
4.3 Порядок выполнения работы
Параметры синхронной машины для выполнения пунктов 2.1 и 2.2 задаются преподавателем.
Снятие механической характеристики синхронной машины в двигательном режиме производится на модели (см. рисунок 4.1) при изменении нагрузочного момента от нуля до номинального. При этом для каждого значения момента нагрузки осуществляется моделирование.
Окно настройки блока Moment показано на рисунке 4.5.
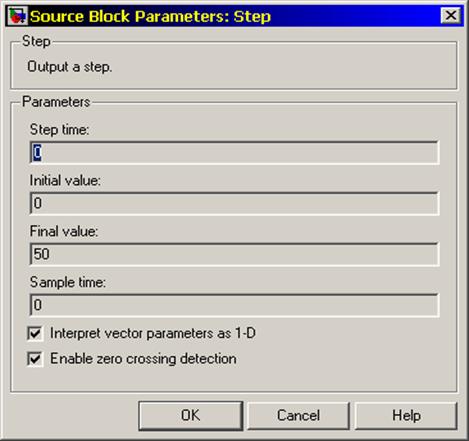
Рисунок 4.5 - Окно настройки блока Moment
Изменение численного значения момента от нуля до номинального задаются в окне Final value.
При проведении исследований заполняется таблица 4.1.
Таблица 4.1
|
|
|
Снятие рабочих характеристик синхронного двигателя в соответствии с п. 2.2 содержания работы проводится на модели (см. рисунок 4.1) при изменении нагрузочного момента от нуля до номинального. При этом для каждого значения момента нагрузки осуществляется моделирование. При проведении исследований заполняется таблица 4.2.
Таблица 4.2
|
Измерения |
Вычисления |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Вычисления производятся по выражениям:
|
|
(4.1) |
По данным таблиц строится механическая характеристика машины и на отдельном графике – рабочие характеристики.
4.4 Содержание отчета
4.4.1 Схема модели и описание виртуальных блоков.
4.4.2 Механическая характеристика машины.
4.4.3 Рабочие характеристики машины.
4.5 Контрольные вопросы
4.5.1 Какие существуют способы возбуждения синхронных машин?
4.5.2 Объясните устройство явнополюсных и неявнополюсных роторов.
4.5.3 Какие применяются способы крепления полюсов в явнополюсных синхронных машинах?
4.5.4 Чем обеспечивается неравномерный воздушный зазор в синхронных машинах?
4.5.5 Из каких участков состоит магнитная цепь явнополюсной синхронной машины?
4.5.6 В чем состоит явление реакции статора?
4.5.7 Почему характеристика короткого замыкания синхронной машины имеет вид прямой линии?
4.5.8 Какие виды потерь имеют место в синхронной машине?
Список литературы
1. Герман – Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0. – СПб.: КОРОНА принт, 2007.
2. Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. – М.: ДМК Пресс; СПб.: Питер, 2008.
3. Иванов-Смоленский А.В. Электрические машины. В двух томах. 3-е издание. - М.: Издательский дом МЭИ, 2006. - 652(656) с.
4. Беспалов В.Я., Котеленец Н.Ф. Электрические машины. - М.: Издательский дом МЭИ, 2006. - 320 с.
Сводный план 2014г., поз 23
Пулат Исмайлович Сагитов
Юрий Исаевич Шадхин
Жанар Жумакановна Тойгожинова
Моделирование электрических машин в среде MATLAB
Методические указания к лабораторным работам
(для специальности 5В071800 – Электроэнергетика)
Редактор Л.Т. Сластихина
Специалист по стандартизации Н.К. Молдабекова
Подписано в печать ________
Формат 60x84 1/16
Тираж 150 экз.
Бумага типографская № 1
Объем 1,9 уч.–изд. л.
Заказ____. Цена 950 тг.
Копировально– множительное бюро
Некоммерческого акционерного общества
«Алматинский университет энергетики и связи»
050013, Алматы, ул. Байтурсынова, 126