АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра
электропривода и автоматизации промышленных установок
ЭЛЕКТРИЧЕСКИЕ
МАШИНЫ СИСТЕМ АВТОМАТИКИ
методические
указания к выполнению
лабораторных
работ
(для студентов всех форм
обучения специальности 050718 – Электроэнергетика)
Алматы 2006
СОСТАВИТЕЛИ: П.И. Сагитов, Ю.А. Цыба, М.А. Мустафин.
Электрические машины систем автоматики. Методические указания к выполнению лабораторных работ (для студентов всех форм
обучения специальности 050718 – Электроэнергетика). – Алматы: АИЭС, 2006. –
29с.
Методические
указания содержат необходимые технические сведения о стендах, программу
выполнения работ, методику подготовки, проведения экспериментов и анализа
полученных результатов.
Методические
указания предназначены для студентов, обучающихся по специальности
050718 – Электроэнергетика.
Ил.11, табл.14, Библиогр. – 7 назв.
Рецензент:
канд. техн. наук, проф. К.К. Жумагулов.
Печатается по плану издания
Алматинского института энергетики
и связи на 2006г.
Ó Алматинский
институт энергетики и связи, 2006г.
1 Лабораторная работа №1. Исследование режимов работы шагового
двигателя
1.1 Цель работы
Ознакомление
с устройством, принципом действия и режимами работы шагового двигателя и
исследование его характеристик.
1.2 Основные
сведения о стенде и установленном оборудовании
Монтажная
панель лабораторного стенда приведена на рисунке 1.1. При этом сборка
комплектующего оборудования выполнена таким образом, что для монтажа
исследуемой схемы требуется минимальное количество проводников.
На панели стенда смонтированы: шаговый двигатель (ШД)
с электромагнитным тормозом,
который создает тормозной момент на валу двигателя в пределах от 0,1 до 1,0 х 10-2 Нм и ЛАТР в качестве регулятора тормоза, элементы управления и
измерительные приборы.
На стенде также установлены:
блок управления шаговым двигателем с системой импульсного питания. Для контроля
величины управляющих импульсов, установлен вольтметр Vп, а для измерения тормозного момента на валу
двигателя датчик момента Мт. Скорость вращения и угол поворота ротора двигателя измеряется электронным тахометром. Переключателем П![]() подаётся напряжение на систему импульсного питания ШД, а включателем В
подаётся напряжение на систему импульсного питания ШД, а включателем В![]() напряжение питания тормоза. Включатель В2
осуществляет переключение обмоток ШД на напряжения
напряжение питания тормоза. Включатель В2
осуществляет переключение обмоток ШД на напряжения ![]() и
и ![]() .
.
1.3 Программа
работы
1.3.1
Ознакомиться с
назначением и техническими характеристиками элементов комплектующих
лабораторный стенд.
1.3.2
Собрать схему
исследований по рисунку 1.2.
1.3.3
Ознакомится с работой
двигателя в шаговом и непрерывном режимах, определить шаг ротора шагового
двигателя.
1.3.4 Снять предельную механическую характеристику шагового двигателя
f
= f(М)max.
1.3.5
Снять предельную
динамическую характеристику приемистости шагового двигателя fпр =f
(М)max.
1.4 Порядок и
методика выполнения работы
1.4.1
Проверить отсутствие
напряжения на стенде, состояние измерительных приборов, клемм и соединительных
проводников.
1.4.2
Собрать электрическую
схему представленную на рисунке 1.2 и проверить её работоспособность в шаговом и непрерывном режимах
работы двигателя. Для этого
включить переключатель П![]() , а включателем В2 подключить обмотки ШД на
напряжения при положении
, а включателем В2 подключить обмотки ШД на
напряжения при положении ![]() или при –
или при –![]() .
.
С помощью блока
управления ШД установить квазистатический (шаговый) или установившийся (непрерывный) режим
работы, выбрать направление вращения ШД. При шаговом режиме
количество шагов можно задать любым значением, но желательно от 9 до 999. При
выборе непрерывного режима работы частоту подачи импульсов управления, исходя
из возможности данного ШД, следует выбрать в пределах 700 – 1900Гц.
Шаг ротора двигателя может быть определен в шаговом или в непрерывном режиме
работе из выражения
![]() =
= ![]() ,
,
где ![]() – значение
угла поворота вала ротора ШД в шаговом режиме;
– значение
угла поворота вала ротора ШД в шаговом режиме;
![]() – количество заданных шагов;
– количество заданных шагов;
n – скорость вращения ротора ШД;
f – частота импульсов управления.
Значения ![]() и n записываются по показаниям электронного тахометра.
и n записываются по показаниям электронного тахометра.
1.4.3
Для снятия предельной
механической характеристики ШД в схеме (рисунок 1.2) включают включатель В1
с тем чтобы иметь возможность регулятором тормоза устанавливать значения
тормозного момента на валу ротора ШД в пределах от (75 до 120) х 10-3 Нм
контролируемые по показаниям датчика момента
МТ.
Предельная механическая характеристика представляет
собой зависимость частоты подачи управляющих импульсов от максимального момента
(М)max
на валу ротора, при котором происходит выпадение двигателя из синхронизма.
Поэтому для каждого заданного значения
частоты импульсов управления выбранного
в установившемся режиме,
путём вращения по часовой стрелке
ручкой регулятора тормоза, увеличивают тормозной момент на валу ротора до тех пор, пока
ШД не выйдет из синхронизма, т.е. пока ШД не остановиться. При этом значения
максимального тормозного момента (М)max снимают по показаниям
датчика момента МТ
для частот находящихся в пределах диапазона от 700 –
1900Гц через каждые 200Гц.
Результаты измерений МТ, значения f и n заносят в таблицу 1.1. При больших тормозных
моментах, т.е. при МТ > 100 х 10-3 Нм не
следует ШД долго испытывать, так как электромагнитный тормоз перегревается.
Таблица 1.1 – Данные для построения зависимости f =f
(М)max
|
Результаты
измерения |
|||
|
n |
f, Гц |
МТ , 10-3 Нм |
Vп, B |
|
|
от700 до 1900 Через 200 Гц |
|
При |
|
|
от700 до 1900 Через 200 Гц |
|
При |
Предельная механическая характеристика снимается при двух положениях
включателя В2 т. е. при
напряжении на обмотках ШД – ![]() и
и ![]() .
.
По данным
таблицы 1.1 построить характеристику ШД f = f(М)max.
1.4.4
Для снятия предельной
динамической характеристики приемистости блоком управления устанавливается
непрерывный режим работы ШД и
также как в пункте 1.4.3 на каждой из заданных частот импульсов
управления в пределах диапазона от 700 – 1900Гц
через каждые 200Гц, увеличивая тормозной
момент на валу ротора, выводят
двигатель из синхронизма. При этом после остановки двигателя на каждой из этих же частотах импульсов управления путём вращения против часовой
стрелки ручкой регулятора тормоза,
уменьшают тормозной момент на
валу ротора МТ до тех пор, пока ШД не войдет в синхронизм, т.е. пока вновь не
запустится. В этом случае частоты подачи импульсов управления
можно считать частотами приемистости fпр ШД
для каждой конкретной величины нагрузки на валу ротора, при которых двигатель запускается
без выпадения из синхронизма. Результаты
измерений МТ, для каждого значения fпр заносят в таблицу 1.2.
Предельная динамическая характеристика приемистости
также снимается при двух положениях включателя В2 т. е. при напряжении на обмотках ШД – ![]() и
и ![]() .
.
По данным таблицы 1.2 построить предельную
динамическую характеристику приемистости шагового двигателя fпр =f
(М)max.
Таблица 1. 2 – Данные для построения зависимости fпр =f
(М)max
|
Результаты измерения |
||
|
f, Гц |
МТпр , 10-3 Нм |
Vп, B |
|
от700 до 1900 Через 200 Гц |
|
При |
|
от700 до 1900 Через 200 Гц |
|
При |
1.5
Содержание отчета
1.5.1
Схема исследования ШД в
шаговом и непрерывном режимах работы.
1.5.2
Данные для определения
шага ротора.
1.5.3
Данные замеров
необходимые для построения предельной механической характеристики.
1.5.4
Данные замеров
необходимые для построения предельной динамической характеристики приемистости.
1.5.5
Полученные в результате выполнения работы
предельная механическая характеристика и предельная динамическая характеристика
приемистости шагового двигателя.
1.5.6
Выводы.нтрольные вопросы
1.6.1
Назначение шаговых
двигателей в системах автоматики.
1.6.2
Устройство и принцип
действия магнитоэлектрических шаговых двигателей.
1.6.3
Устройство и принцип
действия реактивных шаговых двигателей.
1.6.4
Режимы работы шаговых
двигателей и их характеристика.
1.6.5
Что характеризует
частота приемистости ШД и от чего она зависит?
1.6.6
Предельная механическая
характеристика ШД и что она характеризует?
1.6.7
Предельная динамическая
характеристика приемистости ШД и что она характеризует?
1.6.8
Статическая ошибка в
положении ротора и её зависимость от нагрузки и максимального момента.
1.6.9
Зависимость
электромагнитного момента от угла рассогласования.
1.6.10
Понятие о четырехтактной
и шеститактной разнополярной коммутации
ШД.
1.6.11
Понятие о несимметричной
трехтактной и шеститактной однополярной коммутации ШД.
1.6.12
Область применения
различных типов ШД в системах автоматики.
2
Лабораторная работа №2. Исследование сельсинов
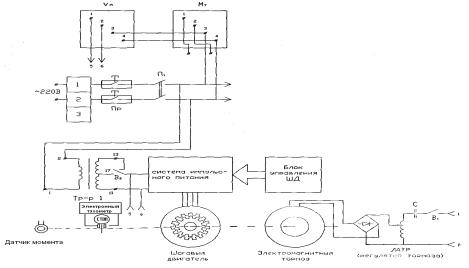
Рисунок 1.2 - Схема исследования шагового двигателя
2.1 Цель работы
Ознакомление
с устройством, принципом действия сельсинов и исследование их характеристик в
индикаторном и трансформаторном режимах работы.
2.2
Основные сведения о стенде и установленном оборудовании
На панели стенда смонтированы два сельсина. Для
создания тормозного момента на валу второго сельсина установлен
электромагнитный тормоз, роль которого играет двигатель.
На стенде также установлены:
электронный указатель углов поворота
валов сельсинов, ЛАТР для питания
обмоток возбуждения сельсинов и регулирования напряжения на них, магазин
сопротивлений, включаемых в линию связи между сельсинами и измерительные
приборы (цифровые вольтметры и амперметры).
Для контроля величины управляющих импульсов, установлен вольтметрVп, а для измерения тормозного момента на валу
двигателя датчик момента Мт. Скорость вращения и угол поворота ротора двигателя измеряется электронным тахометром. Переключателем П![]() подаётся напряжение на стенд, а включателем В3 напряжение питания тормоза. Монтаж исследуемой схемы осуществляется с помощью
изолированных гибких проводников.
подаётся напряжение на стенд, а включателем В3 напряжение питания тормоза. Монтаж исследуемой схемы осуществляется с помощью
изолированных гибких проводников.
Монтажная
панель лабораторного стенда ранее приводилась на рисунке 1.1.
2.3 Программа работы
2.3.1
Подробно ознакомиться с
устройством контактных и бесконтактных сельсинов.
2.3.2
Исследовать сельсины в индикаторном режиме работы.
2.3.2.1 Ознакомиться со схемами
исследования сельсинов в индикаторном режиме работы.
2.3.2.2 Снять характеристику холостого
хода сельсина: соs j, Рв, Iв = f (Uв).
2.3.2.3
Снять зависимость
величины линейного напряжения обмотки синхронизации от положения ротора: U 1-2; U2-3; U1-3 = f (![]() ).
).
2.3.2.4
Снять зависимость статического синхронизирующего момента от угла
рассогласования на валах датчика и приёмника – ![]() и определить
удельный статический синхронизирующий момент.
и определить
удельный статический синхронизирующий момент.
2.3.2.5 Определить угол рассогласования между сельсинами, cнять кривую ошибок Δ![]() = f (
= f (![]() ).
).
2.3.2.6
Определить время успокоения сельсинов.
2.3.3 Исследовать сельсины в
трансформаторном режиме работы.
2.3.3.1
Ознакомиться со схемой
исследования сельсинов в трансформаторном режиме работы.
2.3.3.2 Определить ошибку асимметрии
сельсина приёмника.
2.3.3.3
Определить точность работы сельсинов в трансформаторном режиме.
2.3.3.4
Снять зависимость выходного напряжения сельсина приёмника от угла
рассогласования при различных сопротивлениях линии связи - Uвых =f (![]() ).
).
2.4 Порядок выполнения работы
2.4.1 Исследование сельсинов в
индикаторном режиме работы.
2.4.1.1 Для снятия характеристик холостого
хода сельсина – соsj, Рв, Iв = f(Uв) собирается
схема, приведенная на рисунке 2.1.
Указанные
зависимости характеризуют магнитоэлектрические свойства сельсинов (насыщение,
коэффициент мощности и т.д.). Характеристики снимаются только для датчика или
только для приёмника, поскольку они однотипны.
При
снятии характеристик холостого хода, напряжение на обмотке возбуждения
сельсина повышается от Uв = 0 через 10В до Uв = 50В и
записываются показания тока Iв и Рв .
Коэффициент мощности подсчитывается по обычной формуле
соs j = Рв
/ UвIв.
Данные измерений заносятся в таблицу 2.1 и строятся
характеристики холостого хода сельсина.
Таблица 2.1 – Зависимость соsj, Рв,
Iв = f(Uв)
|
Uв, В |
0 |
10 |
20 |
30 |
40 |
50 |
|
Iв, А |
|
|
|
|
|
|
|
Рв, Вт |
|
|
|
|
|
|
|
Соs j |
|
|
|
|
|
|
Примечание. Для выполнения данного
пункта программы необходимо измерять величину мощности Рв. Однако лабораторный
стенд не укомплектован ваттметром, поэтому этот пункт выполняется по усмотрению
преподавателя и при наличии ваттметра.
2.4.1.2 Для снятия зависимости – U1-2; U2-3; U1-3 = f (![]() ) используется схема приведенная на рисунке 2.2.
) используется схема приведенная на рисунке 2.2.
Показания
снимаются только для датчика или только для приёмника, поскольку сельсины
однотипны. При этом ось приёмника или датчика устанавливается в положение 0о
и фиксируется. После этого вольтметрами производятся замеры указанных
напряжений. Затем ось сельсина ставится в положение 20о. Снова
производятся замеры U1-2, U2-3, U1-3. Аналогичным образом производятся замеры
напряжений через 20о до 360о.
Данные измерений заносятся в таблицу
2.2.
Таблица 2.2 –
Зависимость U1-2; U2-3; U1-3 = f (![]() )
)
|
Угол поворота |
Результаты измерения |
|||||||||||
|
|
0
о |
20о |
40о |
60о |
80о |
90о |
110о |
130о |
150о |
170о |
180о |
и т.д. от180о до360о |
|
V1, В |
|
|
|
|
|
|
|
|
|
|
|
|
|
V2, В |
|
|
|
|
|
|
|
|
|
|
|
|
|
V3, В |
|
|
|
|
|
|
|
|
|
|
|
|
По
данным таблицы 2.2 строится вышеприведенная зависимость.
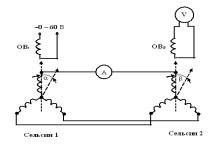
2.4.1.3
Для снятия зависимости ![]() статического
синхронизирующего момента от угла
статического
синхронизирующего момента от угла ![]() поворота вала
сельсина собирается схема, приведенная на рисунке 2.3.
поворота вала
сельсина собирается схема, приведенная на рисунке 2.3.
Сельсин
2 затормаживают и, поворачивая вал сельсина 1,
отсчитывая угол поворота в
градусах записать показание амперметра в таблицу 2.3. Указанная зависимость
снимется в первую очередь при выключенных добавочных сопротивлениях Rл. Затем опыт повторяется при включенных добавочных
сопротивлениях Rл. По показанию амперметра определить статический синхронизирующий момент следующим образом ![]() , где I показание амперметра, Км =16 Н см/А.
, где I показание амперметра, Км =16 Н см/А.
Данные опыта заносят в таблицу 2.3
Таблица 2.3 – Зависимость ![]()
|
Сопротивление линии |
Угол поворота |
Результаты измерения |
|||
|
Rл, Ом |
|
Мст, Н см |
Iв, А |
I, А |
Мс уд., Н см |
|
0 |
0о |
|
|
|
|
|
10о |
|
|
|
|
|
|
20о и.т.д. до 90о |
|
|
|
|
|
|
20 |
0о |
|
|
|
|
|
10о |
|
|
|
|
|
|
20о и т.д. до 90о |
|
|
|
|
|
|
|
Величину
удельного статического синхронизирующего момента Мс уд. трудно определить
для угла рассогласования ![]() = 1о, поэтому
его практически определяют по формуле
= 1о, поэтому
его практически определяют по формуле
|
Мс уд. = Мст10о |
Нсм/град,
10о
где Мст10о –
статический синхронизирующий момент при
наличии угла рассогласования ![]() = 10о, выраженный в Нсм.
= 10о, выраженный в Нсм.
Чем больше Мс уд, тем точнее работает система в индикаторном режиме.
По данным таблицы 2.3 строится вышеприведенная
зависимость.
2.4.1.4
Определение угла
рассогласования между сельсинами и cнятие
кривой ошибок Δ![]() = f (
= f (![]() ) также производится
по схеме приведенной на рисунке 2.3.
) также производится
по схеме приведенной на рисунке 2.3.
Устанавливают сельсин - датчик в положение 0о.
Сельсин – приёмник также должен устанавливаться в положение 0о.
Сопротивление Rл = 0. Напряжение на обмотках
возбуждения должно быть Uв = 50В.
Затем поворачивают ось сельсина – датчика по часовой стрелке на угол, равный ![]() д = 30о. Отмечают показания сельсина – приёмника
д = 30о. Отмечают показания сельсина – приёмника ![]() п. Затем опыт повторяют через каждые 30о, т.е.
устанавливают
п. Затем опыт повторяют через каждые 30о, т.е.
устанавливают![]() д = 0о, 30о, 60о и.т.д. при этом отмечают показания
д = 0о, 30о, 60о и.т.д. при этом отмечают показания ![]() п. Измерения производятся в пределах от
п. Измерения производятся в пределах от ![]() д = 0о до
360 о
д = 0о до
360 о
как по часовой стрелке, так и
против неё. Данные опыта заносят в таблицу 2.4.
Таблица 2.4 – Зависимость Δ![]() = f (
= f (![]() )
)
|
По часовой
стрелке |
Против часовой стрелки |
||||
|
|
|
Δ |
|
|
Δ |
|
0о |
|
|
|
|
|
|
30о |
|
|
|
|
|
|
60о |
|
|
|
|
|
|
90о |
|
|
|
|
|
|
и т.д. до 360о |
|
|
|
|
|
|
|
|
|
|
|
|
По данным таблицы 2.4 строится зависимость Δ![]() = f (
= f (![]() ).
).
Точность работы сельсина определяется как среднее
арифметическое значение максимальной положительной и максимальной отрицательной
погрешности. Определить к какому классу точности относятся исследуемые
сельсины.
Сельсины подразделяют на 3 класса точности.
I класс имеет погрешность от 0 до 0,75о;
II -------------------------------- от 0,75 до 1,5о;
III ------------------------------- от 1,5 до 2,5о.
2.4.1.5
Определим время
успокоения сельсинов.
Схема эксперимента та же, что и в
предыдущем пункте (см. рисунок 2.3). Устанавливают Uв = 50В. Устанавливают сельсин – приёмник в положение
0о и закрепляют стопором
(тормозом). Сельсин – датчик также устанавливается на 0о. Затем
включателем В3 отключают питание.
Стрелка датчика отводится в ту или другую сторону на угол ![]() = 17о.
Резким движением включателем В3 система включается в сеть и одновременно
запускается секундомер.
= 17о.
Резким движением включателем В3 система включается в сеть и одновременно
запускается секундомер.
Время в течение, которого ротор сельсина – датчика
колеблется, приходя в согласованное положение, называется временем успокоения сельсина.
Для точного определения времени
успокоения опыт необходимо проделать 2 – 3 раза.
2.4.2 Исследование сельсинов в трансформаторном режиме
работы.
Работа
сельсинов в трансформаторном режиме определяется несколькими показателями. Из
них большое значение имеют такие показатели работы как степень асимметрии,
точность, удельное выходное напряжение, зависимость выходного напряжения от
угла рассогласования и ряд других показателей.
Для определения вышеназванных зависимостей собирается
схема сельсинов в трансформаторном режиме работы, т. е. обмотка возбуждения
сельсина – приёмника отключается от источника переменного тока и подключается к
вольтметру, измеряющему выходное напряжение сельсина – приёмника. Схема
представлена на рисунке 2.4. Опыты проводятся при сопротивлении линии Rл = 0.
Однако при желании и с указания преподавателя опыты
могут дополнительно проводится и при включенных сопротивлениях Rл.
2.4.2.1 Наличие асимметрии определяется следующим
образом. Закрепляют сельсин – датчик в
положении 0о (рисунок 2.4). Напряжение Uв = 60В.
Рукой вращают вправо ось сельсина – приемника до тех
пор, пока напряжение Uвых не будет
иметь минимальное значение (это напряжение обычно называют остаточным
напряжением).
Отмечают точно положение стрелки сельсина – приёмника.
Затем поворачивают ось сельсина – приемника на 180о. Если у сельсина
асимметрии нет, то вольтметр покажет прежнее значение Umin. При наличии асимметрии приходится поворачивать
сельсин в ту или другую сторону, чтобы снова получить Umin. Величина этого угла и даёт ошибку асимметрии,
выраженную в градусах.
2.4.2.2
Точность работы сельсинов в трансформаторном режиме с некоторым
приближением может быть определена следующим образом. Закрепляют или фиксируют
вручную сельсин – датчик в положении 0о
(рисунок 2.4). Напряжение на обмотке возбуждения устанавливают Uв = 60В. Затем ось сельсина – приемника вращают по
часовой стрелке до тех пор, пока напряжение на выходе не будет равно
минимальному значению Umin. Эту точку
шкалы сельсина – приемника и Umin. необходимо
определить по возможности точнее. Найденное положение оси сельсина – приемника
принимается за условный нуль. После этого поворачивают ось сельсина – датчика на ![]() д = 30о по часовой стрелке и снова закрепляют стопором или фиксируют вручную.
Ось сельсина – приемника поворачивают от условного нуля также на
д = 30о по часовой стрелке и снова закрепляют стопором или фиксируют вручную.
Ось сельсина – приемника поворачивают от условного нуля также на ![]() п = 30о. В этом положении напряжение на выходе
должно иметь прежнее минимальное значение Umin. Если его нет, то оно достигается путем поворота оси
сельсина – приемника в ту или другую сторону. Отклонение стрелки от 30о дает
величину погрешности сельсина в данном положении в градусах. Данные
эксперимента заносятся в таблицу 2.5.
п = 30о. В этом положении напряжение на выходе
должно иметь прежнее минимальное значение Umin. Если его нет, то оно достигается путем поворота оси
сельсина – приемника в ту или другую сторону. Отклонение стрелки от 30о дает
величину погрешности сельсина в данном положении в градусах. Данные
эксперимента заносятся в таблицу 2.5.
Таблица 2.5 – Погрешность
сельсинов
|
По часовой стрелке |
||
|
|
|
Δ = |
|
0о |
|
|
|
30о |
|
|
|
и т.д. до 360о |
|
|
Замеры погрешности производятся через 30о
поворота сельсина – датчика до 360о только в одну сторону. Знак погрешности определяется исходя из того положения, что показание шкал
приемника дополнительно плюс погрешность.
По данным таблицы 2.5 строится вышеприведенная
зависимость.
2.4.2.3 Зависимость выходного напряжения от угла
рассогласования снимается следующим образом (рисунок 2.4). Ось сельсина –
датчика закрепляется на нуле шкалы. Напряжение на обмотке возбуждения сельсина
– датчика Uв = 60В. Поворотом оси сельсина –
приемника по часовой стрелке добиваются минимального напряжения на выходе Umin. Эту точку шкалы принимают за условный нуль. Затем
ось сельсина – приемника поворачивается по часовой стрелке на угол 10о
– 12о. Записывается значение Uвых. Запись выходного напряжения производится через 10о
– 12о до 180о.
Данные эксперимента заносятся в таблицу 2.6.
Таблица 2.6 – Зависимость ![]()
|
Угол поворота |
Результаты
измерения |
|||||||||||||
|
|
0о |
10о |
20о |
30о |
40о |
50о |
60о |
70о |
80о |
90
о |
и
т. д. до 180 о |
|||
|
V, В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По
данным таблицы 2.6 строится зависимость![]() .
.
Удельным
выходным напряжением называется напряжение на выходе сельсина – приемника при
наличии угла рассогласования в 1о.
Как
и в индикаторной схеме, оно обычно определяется по формуле
|
Uвых 10о 10о |
Uвых = В/град,
где Uвых 10о – напряжение
на выходе сельсина – приемника при наличии угла рассогласования ![]() = 10о (
берется непосредственно из таблицы 2.6).
= 10о (
берется непосредственно из таблицы 2.6).
2.5 Содержание отчета
2.5.1
Схема исследования
сельсинов в индикаторном режиме работы.
2.5.2
Данные измерений
необходимые для построения характеристик холостого хода сельсина. Характеристики холостого хода сельсина.
Схема исследований холостого хода сельсина.
2.5.3
Данные замеров необходимые для построения зависимости величины линейного
напряжения обмотки синхронизации от положения ротора. Характеристики
зависимости – U 1-2; U2-3; U1-3 = f (![]() ). Схема исследований по определению данной зависимости.
). Схема исследований по определению данной зависимости.
2.5.4
Данные замеров
необходимые для построения зависимости статического синхронизирующего момента
от угла рассогласования на валах датчика и приёмника. Характеристика
зависимости – ![]() . Расчет удельного
статического синхронизирующего
момента. Схема исследований по определению данной зависимости.
. Расчет удельного
статического синхронизирующего
момента. Схема исследований по определению данной зависимости.
2.5.5
Данные замеров необходимые для определения угла рассогласования между
сельсинами. Характеристика зависимости
Δ![]() = f (
= f (![]() ) (кривая ошибок). Схема исследований по определению данной
зависимости. Указать класс точности исследуемых сельсинов, определенный опытным
путем.
) (кривая ошибок). Схема исследований по определению данной
зависимости. Указать класс точности исследуемых сельсинов, определенный опытным
путем.
2.5.6
Экспериментальные данные
по определению времени успокоения сельсинов и расчет времени успокоения
сельсинов.
2.5.7
Схема исследований сельсинов в трансформаторном режиме работы.
2.5.8 Экспериментальные данные по
определению и расчету асимметрии сельсина.
2.5.9
Данные замеров по
определению погрешности и зависимость погрешности от угла поворота ротора
сельсина.
2.5.10 Экспериментальные данные по определению зависимости ![]() и характеристика
этой зависимости.
и характеристика
этой зависимости.
2.6
Контрольные вопросы
2.6.1
Устройство и принцип
действия контактных сельсинов.
2.6.2
Устройство и принцип
действия бесконтактных сельсинов.
2.6.3
Назначение сельсинов в
системах автоматики. Привести примеры применения сельсинов при их работе в
индикаторном и трансформаторном режиме.
2.6.4
Что называется
статическим синхронизирующим моментом сельсина?
2.6.5
Какой характер имеет
зависимость ![]() ?
?
2.6.6
Как влияет сопротивление
линии связи на Мст?
2.6.7
Какие свойства сельсинов
характеризуют зависимости холостого хода?
2.6.8
Удельный статический
синхронизирующий момент Мс уд., что он характеризует?
2.6.9
Удельное выходное
напряжение, что оно характеризует?
2.6.10 От чего
зависит точность работы сельсинов?
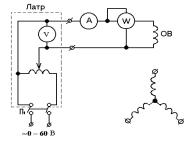
Рисунок
2.1 – Схема исследования характеристик холостого хода сельсина
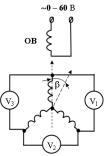
Рисунок
2.2 - Схема исследования зависимости – U 1-2; U2-3; U1-3 = f (![]() )
)
Рисунок
2.3 – Схема исследования сельсинов в
индикаторном режиме
Рисунок
2.4 - Схема исследования сельсинов в трансформаторном режиме
3 Лабораторная работа №3. Исследование однофазного
асинхронного двигателя
3.1 Цель работы
Ознакомление с устройством, принципом действия
однофазного асинхронного двигателя и исследование его характеристик.
3.2 Основные сведения о стенде и установленном
оборудовании
Стенд содержит трехфазный асинхронный двигатель с
короткозамкнутым ротором, на валу которого установлен электромагнитный тормоз.
В качестве регулятора тормозного
момента используется ЛАТР. Величина тормозного момента
контролируется прибором М![]() . Переключателем П
. Переключателем П![]() на схему подаётся трехфазное напряжение, а
включателем В
на схему подаётся трехфазное напряжение, а
включателем В![]() напряжение питания тормоза.
напряжение питания тормоза.
Для измерения скорости вращения на валу ротора двигателя установлен
тахогенератор частота выходного напряжения, с которого замеряется частотомером. Кроме того, на стенде
установлены цифровые вольтметры и амперметр, а также прибор для
измерения коэффициента мощности ![]() .
.
При переключении трехфазного асинхронного двигателя в
однофазный режим работы используются конденсаторы, которые подключаются к
статорной обмотке переключателем на три положения (С![]() , С
, С![]() , С
, С![]() ).
).
Монтажная панель лабораторного стенда приведена на
рисунке 3.1. при этом сборка комплектующего оборудования выполнена таким
образом, что для монтажа исследуемой схемы требуется минимальное количество
проводников.
3.3 Программа работы
3.3.1
Ознакомиться с
устройством и принципом действия трёхфазного и однофазного асинхронного
двигателя с короткозамкнутым ротором, рассмотреть возможность использования
трехфазного двигателя в качестве однофазного.
3.3.2
Ознакомиться с
лабораторным стендом и схемами
исследования.
3.3.3
Собрать схему согласно
рисунку 3.2 и снять механическую характеристику трехфазного асинхронного двигателя,
а также зависимость коэффициента мощности от нагрузки.
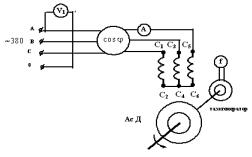
3.3.4
Собрать схему согласно
рисунку 3.3 и снять механическую характеристику однофазного асинхронного двигателя,
а также зависимость коэффициента мощности от нагрузки при трех значениях
рабочего конденсатора включенного в цепь статора.
3.3.5
Проанализировать и
сравнить полученные результаты при работе асинхронного двигателя в качестве
трехфазного и в качестве однофазного двигателя.
3.4 Указания к выполнению работы
3.4.1
Проверить отсутствие
напряжения на стенде, состояние измерительных приборов, клемм и соединительных
проводников. Ознакомиться с лабораторным стендом и схемами исследования.
3.4.2
Собрать электрическую
схему представленную на рисунке 3.2 и включив переключатель
П![]() подать на двигатель трехфазное напряжение, все остальные переключатели должны быть отключены.
подать на двигатель трехфазное напряжение, все остальные переключатели должны быть отключены.
Затем включить
переключатель В1 в верхнее положение и с помощью
регулятора тормоза путем вращения ручкой по часовой стрелке осуществить
увеличение нагрузки на валу двигателя. При этом снимают показания всех приборов
и заносят в таблицу 3.1. Показания
прибора измеряющего тормозной момент
необходимо умножить на 0,1 Н м.
По данным таблицы 3.1 выбрав масштаб построить
механическую характеристику асинхронного двигателя и
зависимости: ![]() = f (М
= f (М![]() ); I= f (М
); I= f (М![]() ).
).
Завершив выполнение данного
пункта необходимо отключить переключатели П![]() и В1.
и В1.
Таблица 3.1 – Зависимости: n = f (М![]() );
); ![]() = f (М
= f (М![]() ); I= f (М
); I= f (М![]() )
)
|
Результаты измерений |
||||||
|
№ п\п |
V1, B |
А, А |
n, об/мин |
о. е. |
f, Гц |
Мт, Н м |
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
до 5 |
|
|
|
|
|
|
3.4.3
Далее для исследования
однофазного асинхронного двигателя необходимо перевести трехфазный двигатель, в
однофазный режим работы, собрав схему согласно рисунку 3.3. Собранный по данной
схеме трехфазный асинхронный двигатель
представляет собой однофазный конденсаторный двигатель со вспомогательной
обмоткой на статоре. Схема позволяет снимать механическую характеристику ![]() = f (М
= f (М![]() ) однофазного
асинхронного двигателя, зависимость
) однофазного
асинхронного двигателя, зависимость ![]() = f (М
= f (М![]() ) и зависимость I= f (М
) и зависимость I= f (М![]() ).
).
Установив переключатель рабочих
конденсаторов в положение С![]() переключателем П
переключателем П![]() подать на двигатель однофазное напряжение (рисунок
3.3).
подать на двигатель однофазное напряжение (рисунок
3.3).
Затем включив
переключатель В1 в верхнее положение, регулятором тормоза
вращая ручкой по часовой стрелке осуществляют увеличение нагрузки на валу
двигателя. При этом снимают показания всех приборов и заносят в таблицу 3.2.
Эксперимент
повторяют устанавливая переключатель рабочих конденсаторов поочерёдно в
положение С![]() , и С
, и С![]() . По данным таблицы 3.2 построить в ранее выбранном масштабе механические характеристики
однофазного асинхронного двигателя, а также зависимости:
. По данным таблицы 3.2 построить в ранее выбранном масштабе механические характеристики
однофазного асинхронного двигателя, а также зависимости:
![]() = f (М
= f (М![]() ) и I= f (М
) и I= f (М![]() ) полученные
при разных значениях рабочих конденсаторов.
) полученные
при разных значениях рабочих конденсаторов.
Таблица 3.2 – Зависимости n = f (М![]() );
); ![]() = f (М
= f (М![]() ); I= f (М
); I= f (М![]() )
)
|
Результаты измерений |
|||||||
|
Положение выключателя С |
№ п\п |
V1, B |
А, А |
n, об/мин |
о. е. |
f, Гц |
Мт, Н м |
|
С |
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
С |
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
С |
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
3.4.4
Определить и сравнить
жесткость механической характеристики двигателя при его работе в трёхфазном и
однофазном режимах
![]()
,
где
![]() - жесткость характеристики;
- жесткость характеристики;
Δ М![]() - приращение момента торможения;
- приращение момента торможения;
Δ ![]() - приращение
скорости.
- приращение
скорости.
Определить влияние
величины рабочего конденсатора на жесткость механической характеристики и на величину ![]() однофазного
асинхронного двигателя. Сравнить коэффициенты мощности асинхронного двигателя в
трехфазном и однофазном режимах работы.
однофазного
асинхронного двигателя. Сравнить коэффициенты мощности асинхронного двигателя в
трехфазном и однофазном режимах работы.
3.5 Содержание
отчета
3.5.1
Схема исследования
асинхронного двигателя в трехфазном режиме работы, экспериментальные данные
зависимостей ![]() = f (М
= f (М![]() ) и
) и ![]() = f (М
= f (М![]() ) и характеристики этих зависимостей.
) и характеристики этих зависимостей.
3.5.2
Схема исследования
асинхронного двигателя в однофазном режиме работы, экспериментальные данные
зависимостей ![]() = f (М
= f (М![]() ) и
) и ![]() = f (М
= f (М![]() ) и характеристики этих зависимостей.
) и характеристики этих зависимостей.
3.5.3
Анализ полученных
результатов исследований, выполненный в соответствии с пунктами 3.3.5 и 3.4.4
настоящей методики.
3.6 Контрольные
вопросы
3.6.1
Устройство и принцип
действия однофазного асинхронного двигателя.
3.6.2
Типы однофазных асинхронных двигателей со
вспомогательной обмоткой на
статоре.
3.6.3
Устройство и принцип
действия однофазного асинхронного двигателя с полым ротором.
3.6.4
Из каких условий
выбирается величина рабочего
конденсатора С![]() ?
?
3.6.5
Рабочие характеристики
однофазного асинхронного двигателя.
3.6.6
Регулирование скорости
однофазного асинхронного двигателя.
3.6.7
Достоинства и недостатки
однофазного асинхронного двигателя.
3.6.8
Область применения однофазных асинхронных двигателей в
системах автоматики.
C
Рисунок 3.2 - Схема
исследования трехфазного асинхронного двигателя
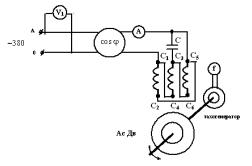
Рисунок 3.3 -
Схема исследования однофазного
асинхронного двигателя
4
Лабораторная работа №4. Исследование тахогенераторов
4.1
Цель работы
Ознакомление с устройством, принципом действия
синхронного тахогенератора и тахогенератора постоянного тока, расчет их
параметров и исследование характеристик.
4.2 Основные сведения о стенде и установленном оборудовании
Монтажная
панель лабораторного стенда ранее приводилась на рисунке 3.1, при этом
сборка комплектующего оборудования данной лабораторной работы выполнена таким
образом, что для монтажа исследуемых схем требуется минимальное количество изолированных гибких проводников.
Стенд содержит приводной электродвигатель постоянного
тока, синхронный тахогенератор и тахогенератор постоянного тока, связанные между
собой жестким валом на котором установлен
цифровой электронный тахометр для измерения скорости вращения. Переключатель П![]() подключает к питанию цифровые вольтметр, амперметр и
частотомер, а переключатель
П
подключает к питанию цифровые вольтметр, амперметр и
частотомер, а переключатель
П![]() регулятор напряжения,
обмотку возбуждения приводного электродвигателя и обмотку возбуждения
тахогенератора постоянного тока. Якорная обмотка приводного электродвигателя
подключена к регулятору напряжения, что позволяет изменять скорость его
вращения. Частота выходного напряжения
синхронного тахогенератора
замеряется частотомером, а
амплитуда цифровым вольтметром U
регулятор напряжения,
обмотку возбуждения приводного электродвигателя и обмотку возбуждения
тахогенератора постоянного тока. Якорная обмотка приводного электродвигателя
подключена к регулятору напряжения, что позволяет изменять скорость его
вращения. Частота выходного напряжения
синхронного тахогенератора
замеряется частотомером, а
амплитуда цифровым вольтметром U![]() , величина напряжения на выходе тахогенератора постоянного
тока измеряется вольтметром U
, величина напряжения на выходе тахогенератора постоянного
тока измеряется вольтметром U![]() .
.
Монтаж исследуемой схемы осуществляется с помощью
изолированных гибких проводников.
4.3 Программа
работы
4.3.1
Ознакомится с
устройством, принципом действия синхронного тахогенератора и тахогенератора
постоянного тока, а также с их основными параметрами.
4.3.2
Ознакомиться с
лабораторным стендом и схемами
исследования синхронного тахогенератора и тахогенератора постоянного тока.
4.3.3
Исследование синхронного
тахогенератора.
4.3.3.1
Собрать схему исследования синхронного
тахогенератора в соответствии с рисунком 4.1, определить зону его нечувствительности, снять и
построить выходные характеристики U = f(n):
a) в режиме холостого хода Z![]() =
=![]() ;
;
b) в режиме активной
нагрузки R = 1,0 кОм;
c) в режиме емкостной
нагрузки С = 0,5 мкФ.
4.3.3.2 Определить крутизну и
линейность синхронного тахогенератора
как основных параметров определяющих качество работы тахогенератора.
4.3.3.3 Снять и построить зависимость выходного напряжения тахогенератора от
величины нагрузки U = f(z) при n = 600об\мин.
a) для активной нагрузки U = f(R);
b) для емкостной нагрузки U = f(Х![]() ).
).
4.3.4 Исследование
тахогенератора постоянного тока.
4.3.4.1
Собрать схему
исследования тахогенератора постоянного тока по рисунку 4.2, определить зону его
нечувствительности, снять и построить выходные характеристики U = f(n):
a) в режиме холостого хода Z![]() =
=![]() ;
;
b) в режиме активной
нагрузки R = 1,0 кОм.
4.3.4.2
Определить крутизну и линейность тахогенератора постоянного тока.
4.3.4.3
Снять и построить зависимость
выходного напряжения тахогенератора от величины нагрузки U = f(R) при n = 600об\мин.
4.3.4.4
Определить асимметрию выходного сигнала
тахогенератора постоянного тока.
4.3.5
Проанализировать и
сравнить результаты, полученные при исследовании данных тахогенераторов.
Определить какой из тахогенераторов имеет лучшие качественные показатели.
4.4 Указания к выполнению работы
4.4.4
Проверить отсутствие
напряжения на стенде, состояние измерительных приборов, клемм и соединительных
проводников. Ознакомиться с лабораторным стендом и схемами исследования.
4.4.5
Исследование синхронного
тахогенератора.
4.4.5.1
Собрать электрическую схему представленную на
рисунке 4.1
при этом выключатель П2 должен быть в
отключенном состоянии.
4.4.5.2
Определение зоны нечувствительности
синхронного тахогенератора выполняется
следующим образом: включив переключатель П![]() подать питание на цифровые вольтметр, амперметр и
частотомер, включить
переключатель П
подать питание на цифровые вольтметр, амперметр и
частотомер, включить
переключатель П![]() , который подключает к питанию регулятор напряжения (от 0 – 110В), обмотку возбуждения приводного
электродвигателя и обмотку возбуждения тахогенератора постоянного тока.
, который подключает к питанию регулятор напряжения (от 0 – 110В), обмотку возбуждения приводного
электродвигателя и обмотку возбуждения тахогенератора постоянного тока.
Затем, медленно поворачивая регулятор напряжения по часовой
стрелке установить минимально возможные обороты приводного электродвигателя, и
плавно увеличивая скорость, зафиксировать момент появления сигнала на выходе
тахогенератора (напряжение и частота). При этом необходимо записать интервал
скоростей вращения от 0 до скорости, при которой появляется сигнал на выходе(U![]() и f). Данный интервал определяет зону нечувствительности
тахогенератора.
и f). Данный интервал определяет зону нечувствительности
тахогенератора.
4.4.5.3 Чтобы снять выходные
характеристики тахогенератора необходимо,
медленно поворачивая
регулятор напряжения по часовой стрелке записать и занести в таблицу 4.1
показания вольтметра U![]() , частотомера f и электронного тахометра через каждые 150об/мин в режиме холостого хода
тахогенератора, т.е. при R
, частотомера f и электронного тахометра через каждые 150об/мин в режиме холостого хода
тахогенератора, т.е. при R![]() =
=![]() .
.
Эксперимент повторяют в режиме активной нагрузки R![]() = 2,0 кОм и в режиме емкостной нагрузки С = 0,5 мкФ,
которые подключаются к выходной обмотке тахогенератора.
= 2,0 кОм и в режиме емкостной нагрузки С = 0,5 мкФ,
которые подключаются к выходной обмотке тахогенератора.
Таблица 4.1 – Зависимости U![]() = f(n) и f= f(n).
= f(n) и f= f(n).
|
Z |
U |
|
|
|
|
|
|
|
f Гц. |
|
|
|
|
|
|
|
|
n, об\мин. |
150 |
300 |
450 |
600 |
750 |
900 |
|
|
Z R |
U |
|
|
|
|
|
|
|
f Гц. |
|
|
|
|
|
|
|
|
n, об\мин. |
150 |
300 |
450 |
600 |
750 |
900 |
|
|
Z С |
U |
|
|
|
|
|
|
|
f Гц. |
|
|
|
|
|
|
|
|
n, об\мин. |
150 |
300 |
450 |
600 |
750 |
900 |
4.4.5.4
По данным таблицы 4.1 в
выбранном масштабе на одном графике построить
3 выходные характеристики синхронного тахогенератора U![]() = f(n) и 3
зависимости частоты ЭДС генератора от скорости вращения f= f(n).
= f(n) и 3
зависимости частоты ЭДС генератора от скорости вращения f= f(n).
4.4.5.5 Для характеристики снятой в режиме холостого хода
определить крутизну, которая представляет
собой отношение приращения
напряжения к приращению частоты вращения:
c = ΔU/Δn мВ/об/мин.
Разбив выходную характеристику тахогенератора на 5- 6
участков через 150 об/мин скорости
(по оси ординат) и определив для каждого из них приращение напряжения рассчитать крутизну
отдельных участков.
Определить средне
арифметическое значение крутизны c![]() выходной
характеристики, просуммировав крутизну отдельных ее участков, деленную на их
число.
выходной
характеристики, просуммировав крутизну отдельных ее участков, деленную на их
число.
 Найти
максимальное значение в расхождении
крутизны Δc
Найти
максимальное значение в расхождении
крутизны Δc![]() отдельных участков,
которое и будет характеризовать линейность выходной характеристики
отдельных участков,
которое и будет характеризовать линейность выходной характеристики
.
4.4.5.6 При определении зависимости выходного напряжения
тахогенератора от величины нагрузки U = f(Z) установить
скорость n = 600об\мин. Постепенно
увеличивая активную нагрузку от R![]() =
=![]() до R
до R![]() = 1,0 кОм, записывают 5 показаний вольтметра U
= 1,0 кОм, записывают 5 показаний вольтметра U![]() .
.
Аналогично проводят
опыт для чисто емкостной нагрузки, и результаты заносят в таблицу 4.2.
Таблица 4.2 – Зависимости
U![]() = f(R
= f(R![]() ) и
U
) и
U![]() = f(Х
= f(Х![]() )
)
|
R |
|
2,5 |
2,2 |
1,8 |
1,4 |
1,0 |
|
U |
|
|
|
|
|
|
|
С |
0 |
0,1 |
0,2 |
0,35 |
0,6 |
1,0 |
|
Х |
|
31 |
15,5 |
9 |
5,3 |
3,18 |
|
U |
|
|
|
|
|
|
|
n, об\мин. |
150 |
300 |
450 |
600 |
750 |
900 |
4.4.5.7
По данным таблицы 4.2 на одном графике в выбранном масштабе построить 2
внешние характеристики синхронного тахогенератора U![]() = f(R
= f(R![]() ) и
U
) и
U![]() = f(Х
= f(Х![]() ).
).
Завершив выполнение данного пункта методики
необходимо отключить переключатели П![]() и П2.
и П2.
4.4.6
Исследование тахогенератора постоянного тока.
4.4.6.1
Собрать электрическую
схему представленную на рисунке 4.2 при этом
переключатели П![]() и П2 должны быть в отключенном состоянии.
и П2 должны быть в отключенном состоянии.
4.4.6.2 Зона нечувствительности
тахогенератора постоянного тока определяется при включенных переключателях П![]() и П2 по той же методике, что и для синхронного
тахогенератора, которая рассмотрена ранее в пункте 4.4.5.2 настоящих указаний.
При этом необходимо зафиксировать момент появления на выходе тахогенератора
напряжения по вольтметру U
и П2 по той же методике, что и для синхронного
тахогенератора, которая рассмотрена ранее в пункте 4.4.5.2 настоящих указаний.
При этом необходимо зафиксировать момент появления на выходе тахогенератора
напряжения по вольтметру U![]() .
.
4.4.6.3 Чтобы снять выходные
характеристики тахогенератора, необходимо
медленно поворачивая регулятор напряжения по часовой стрелке записать и занести
в таблицу 4.3 показания вольтметра U![]() , частотомера f и электронного тахометра через каждые 100об/мин в
режиме холостого хода тахогенератора, т.е. при Z
, частотомера f и электронного тахометра через каждые 100об/мин в
режиме холостого хода тахогенератора, т.е. при Z![]() =
=![]() .
.
Эксперимент повторяют в режиме
активной нагрузки R = 1,0 кОм, которая
подключаются к выходной обмотке тахогенератора.
Таблица 4.3 – Зависимость U![]() = f(n)
= f(n)
|
R |
U |
|
|
|
|
|
|
|
n, об\мин. |
|
|
|
|
|
|
|
|
R |
U |
|
|
|
|
|
|
|
n, об\мин. |
150 |
300 |
450 |
600 |
750 |
900 |
4.4.6.4
По данным таблицы 4.3 в
выбранном ранее в пункте 4.4.5.4 масштабе на одном графике построить 2 выходные
характеристики тахогенератора постоянного тока U = f(n).
4.4.6.5
Крутизну и линейность
выходной характеристики тахогенератора постоянного тока определяют по той
же методике, что и для синхронного
тахогенератора, которая рассмотрена ранее в пункте 4.4.5.5 настоящих указаний.
4.4.6.6 Для определения зависимости выходного напряжения
тахогенератора от величины нагрузки U = f(R![]() ) установить скорость
приводного электродвигателя n = 600об\мин.
Постепенно увеличивая активную нагрузку от R
) установить скорость
приводного электродвигателя n = 600об\мин.
Постепенно увеличивая активную нагрузку от R![]() =
=![]() до R
до R![]() = 1,0 кОм, записывают 5 показаний вольтметра U
= 1,0 кОм, записывают 5 показаний вольтметра U![]() и заносят их в таблицу 4.4.
и заносят их в таблицу 4.4.
Таблица 4.4 – Зависимость U![]() = f(R
= f(R![]() )
)
|
R |
|
2,5 |
2,2 |
1,7 |
1,0 |
|
U |
|
|
|
|
|
|
n, об\мин. |
150 |
300 |
450 |
750 |
900 |
4.4.6.7
По данным таблицы 4.4 построить
внешние характеристики тахогенератора
постоянного тока U = f(R![]() ).
).
Завершив
выполнение данного пункта методики необходимо отключить переключатели П![]() и П2.
и П2.
4.4.7
Поменять полярность напряжения на якоре приводного двигателя и вновь
включив переключатели П![]() и П2, снять значение выходной ЭДС
тахогенератора при обратном вращении на
скорости 600об\мин в режиме холостого хода. Рассчитать
асимметрию выходного сигнала ΔU = U
и П2, снять значение выходной ЭДС
тахогенератора при обратном вращении на
скорости 600об\мин в режиме холостого хода. Рассчитать
асимметрию выходного сигнала ΔU = U![]() – U
– U![]() , которая представляет
собой разность значений выходной ЭДС тахогенератора при его вращении в прямом и
обратном направлении на одной и той же
скорости, в данном случае (600об\мин)
, которая представляет
собой разность значений выходной ЭДС тахогенератора при его вращении в прямом и
обратном направлении на одной и той же
скорости, в данном случае (600об\мин)
![]()
.
4.4.8
Проанализировать и
сравнить по линейности, крутизне и зоне нечувствительности полученные характеристики синхронного
тахогенератора и тахогенератора постоянного тока. Определить какой из
тахогенераторов имеет лучшие качественные показатели.
4.5 Содержание
отчета
4.5.1
Исследование синхронного
тахогенератора.
4.5.1.1
Схема исследования синхронного
тахогенератора.
4.5.1.2
Результаты эксперимента по определению зоны
нечувствительности синхронного тахогенератора в соответствии с пунктом 4.4.5.2
настоящей методики.
4.5.1.3
Данные измерений
необходимые для построения
выходных характеристик синхронного тахогенератора и зависимости f= f(n) при
его работе в режиме холостого хода R![]() =
=![]() ; активной нагрузки R
; активной нагрузки R![]() = 2,0 кОм и
емкостной нагрузки С = 0,5 мкФ.
= 2,0 кОм и
емкостной нагрузки С = 0,5 мкФ.
Три выходные характеристики синхронного тахогенератора
U = f(n) и три
зависимости f= f(n) построенные в
выбранном масштабе на одном графике.
4.5.1.4 Расчет крутизны и
линейности выходной характеристики в соответствии с пунктом 4.4.5.5 настоящей
методики.
4.5.1.5
Данные замеров необходимые для построения
зависимости выходного напряжения тахогенератора от величины активной и
емкостной нагрузки.
Построенные в выбранном масштабе на одном графике внешние характеристики синхронного тахогенератора
U = f(R![]() ) и
U = f(Х
) и
U = f(Х![]() ).
).
4.5.2
Исследование тахогенератора постоянного тока.
4.5.2.1
Схема исследования тахогенератора постоянного тока.
4.5.2.2
Результаты эксперимента по определению зоны
нечувствительности тахогенератора
постоянного тока в соответствии с пунктом 4.4.5.2 настоящей методики.
4.5.2.3
Данные измерений необходимые для построения выходных характеристик тахогенератора
и зависимости f= f(n) при его работе в режиме
холостого хода R![]() =
=![]() и активной нагрузки R
и активной нагрузки R![]() = 1,0 кОм.
= 1,0 кОм.
Две выходные характеристики тахогенератора постоянного
тока U = f(n) построенные на одном графике в масштабе выбранном
ранее п. 4.5.1.3.
4.5.2.4 Расчет крутизны и
линейности выходной характеристики в соответствии с пунктом 4.4.5.5 настоящей
методики.
4.5.2.5
Данные замеров
необходимые для построения зависимости выходного напряжения тахогенератора от
величины активной нагрузки.
Внешняя характеристика тахогенератора
постоянного тока U = f(R![]() ) построенная в
масштабе выбранном ранее п. 4.5.1.5.
) построенная в
масштабе выбранном ранее п. 4.5.1.5.
4.5.3
Результаты анализа
качественных показателей синхронного тахогенератора и тахогенератора
постоянного тока.
4.6 Контрольные
вопросы
4.6.1
В каком качестве применяются
тахогенераторы в системах автоматики?
4.6.2
Устройство и принцип
действия синхронного и асинхронного
тахогенераторов.
4.6.3
Устройство и принцип
действия тахогенератора постоянного тока.
4.6.4
Достоинства и недостатки
синхронного тахогенератора.
4.6.5
Достоинства и недостатки
асинхронного тахогенератора.
4.6.6
Достоинства и недостатки
тахогенератора постоянного тока.
4.6.7
Требования,
предъявляемые к тахогенераторам и какие из них основные?
4.6.8
Основные параметры,
определяющие качество работы тахогенератора.
4.6.9
Нулевой сигнал и, в
каком типе тахогенератора он присутствует?
4.6.10
Чем вызвана асимметрия
выходного напряжения и, в каком тахогенераторе она наблюдается?
4.6.11
Что такое зона
нечувствительности, асимметрия и температурная погрешность тахогенератора?
4.6.12
Почему уменьшается
крутизна выходной характеристики тахогенератора с уменьшением нагрузки?
4.6.13
Какое влияние оказывает
реактивная составляющая сопротивления выходной обмотки тахогенератора на его
выходную характеристику?
Рисунок
4. 1 - Схема исследования синхронного тахогенератора
Рисунок
4.2 - Схема исследования тахогенератора
постоянного тока
Список
литературы
1.
Бертинов А.И. Специальные электрические
машины. – М.: Энергоиздат, 1982 – 552 с.
2. Сагитов П.И., Цыба Ю.А. Электрические машины систем
автоматики. – Алматы: АИЭС, 2004.
- 90 с.
- Копылов И.П.
Электрические машины. – М.: Логос, 2000. – 606с.
- Копылов И.П.
Электромеханика планеты земля. – М.: МАИ, 1998. - 260с.
- Пиотровский Л.М.
Электрические машины. – Л-д.: Энергия, 1972. – 497с.
6.
Брускин Д.Е., Зорохович А.Е., Хвостов
В.С. Электрические машины и
микромашины. – М.: Высшая школа, 1972. – 430с.
7.
Гинзбург С.А., Лехтман И.Я., Малов В.С.
Основы автоматики и телемеханики. – М.: Энергия, 1968. – 512с.
Содержание
|
1 Лабораторная работа № 1 Исследование шагового двигателя…. |
3 |
|
2 Лабораторная работа № 2 Исследование сельсинов…………….. |
8 |
|
3
Лабораторная работа № 3 Исследование
однофазного АД…….. |
16 |
|
4 Лабораторная работа № 4 Исследование тахогенераторов……… |
21 |
|
Список литературы……………... ………………………………………….. |
28 |
Св. пл. 2006 поз. 50
Пулат Исмаилович Сагитов
Юрий Александрович Цыба
Марат
Аскарович Мустафин
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ СИСТЕМ АВТОМАТИКИ
Методические указания к выполнению лабораторных работ
(для студентов всех форм обучения специальности 330140
– Электромеханика)
Редактор Т.С. Курманбаева
Подписано
в печать ______ Формат 60x84 1/16
Тираж 50 экз. Бумага
типографская № 1
Объем
1,8 уч. – изд. л. Заказ____ Цена_____
Копировально – множительное бюро
Алматинского института энергетики и связи
050013, Алматы, ул. Байтурсынова, 126