ҚАЗАҚСТАН РЕСПУБЛИКАСЫ БІЛІМ ЖӘНЕ ҒЫЛЫМ МИНИСТРЛІГІ
Алматы энергетика және байланыс институты
П.И. Сагитов.
ЭЛЕКТРЖЕТЕГІ
Оқу құралы
1 бөлім
(Электр энергетика бағыты бойынша даярланатын бакалавриат студенттеріне арналған.)
Алматы, 2006
УДК 620.9 (621.313)
ББК 31.291
С13 Электр жетегі:
Оқу құралы. П.И.Сагитов;
АЭжБИ. Алматы, 2007. - 105 б.
ISBN 9965- 850- 04- 6.б.
Оқу құралында «Электр жетегі» пәні бойынша тұрақты
және айнымалы ток электр жетегі басқару нысаны ретінде қарастырылған.
Әртүрлі іске қосу – тежеу режимдері кезінде тұрақты
ток машинасының якорь мен қоздыру және айнымалы ток
машинасының статор мен ротор (немесе индуктор) тізбегіне енгізілетін қосымша
элементтердің талдауы және синтезі жүргізілген. Есептеулер
мысалдары, бақылау сұрақтары келтірілген.
Оқу құралы электр энергетика бағыты бойынша
даярланатын бакалавриат студенттеріне арналған.
Без. 91, Кесте. 7. Библиогр - 11 атау.
Пікір беруші: ҚазҰТУ, ЭТКА кафедрасының меңг.,
техн. ғыл. д-р., проф.
Бекбаев А. Б.
ЭиАПУ каф., проф., техн. ғыл. канд.
Мустафин М.А.
Алматы энергетика және байланыс институтының
2006 жылдың жоспары бойынша басылады.
![]()
ISBN 9965- 850- 04- 6
© Алматы энергетика және байланыс институты, 2006ж.
Мазмұны
Кіріспе.....................................................................................................................4
1.Негізгі түсініктер...............................................................................................
..5
1.1 Электр жетектерінің құрылымы
және типтері.......................................... ....5
1.2 Электр жетектерінің жіктелуі....................................................................
....6
1.3 Өндірістік механизмдер мен электр қозғалтқыштарының
сипаттамалары.................7
1.4 Электр жетегі қозғалысының
теңдеуі.......................................................... ..9
1.5 Электр жетегінің жұмыс режимдерін
жіктеу.........................................
......10
1.6 Электр жетектерінің бұрыштық
жылдамдығын реттеу........................... ....15
2. Тұрақты ток электр
жетегі.............................................................................. ..16
2.1 Тәуелсіз қоздырылатын тұрақты
ток қозғалтқыштары
негізіндегі электр
жетегі...............................................................................................16
2.2 Генератор – қозғалтқыш жүйесі
негізіндегі электр жетегі......................
....25
2.3 Тізбектеле қоздырылатын ТТҚ – ның
электр жетегі...............................
....31
2.4 Тұрақты ток қозғалтқышы
- басқарылатын вентильді түрлендіргіш..... ...46
2.5 Есептеу
мысалдары.................................................................................. .......79
2.6 Тізбектеле қоздырылатын тұрақты
ток
қозғалтқышының іске қосу аппараттарының есептеулері............................................ 90
2.7 Бақылау сұрақтары.................................................................................... ....102
Әдебиеттер тізімі............................................................................. ....................107
Кіріспе
Өнеркәсіптегі техникалық прогресс
технологиялық процестер, олардың тағайындалуы бойынша
механизмдер мен әрекет ету принциптерінің көптүрлілігінің
ұлғаюымен, өндірістік процестердің режимдік
сипаттамаларының қаталдығымен, технологиялық циклдің
қысқаруымен, өңдеу дәлдігін жоғарылатумен қатар
жүреді. Бұл жағдайларда энергияны алып жүруші ретінде
электр энергиясының артықшылығы, оның өзіне тән
қасиеттері бойынша жоғары өндірістік еңбек құралдарын
және осы техникалық прогресті қамтамасыз ететін жаңа
технологиялар жасау мәселелеріне толық сәйкес келеді.
Электр энергиясының бірден-бір негізгі тұтынушылары
- электр жетегі – машинаның жұмысшы органдарын қозғалысқа
келтіретін және оның технологиялық процесін басқаратын
электр механикалық құрылғы.
Қазіргі заманғы өнеркәсіптік және
ауыл шаруашылығы өндірісіндегі технологиялық процестердің
көпшілігі электр механикалық түрлендіру көмегімен
алынатын механикалық энергияның көмегімен іске асады.
Энергияны электр механикалық түрлендіру жүйесінің,
электр жетегінің кемелдену нәтижесі қоғамдық өндірістің
тиімділігімен байланысты.
Кемелденген электр жетегін жасау электр механикалық
құрылғыны және технологиялық процестің
ерекшелігін есепке алып оны басқару жүйесін, машина жұмысының
шарттары мен осы процесте әрекет ететін оның бөлек
механизмдерін таңдау бойынша принциптік шешімдерді қабылдауға
негізделген. Бұл технологиялық процестердің көптігімен,
олардың өзара байланысуымен және олардың халық
шаруашылығының әртүрлі салаларына жатуымен түсіндіріледі.
Сонымен бірге, бір технологиялық процесте көптеген әртүрлі
жұмысшы машиналары қатысуы мұмкін, сол сәтте бір
машинаның өзі тіпті бөлек технологиялық процестерде жұмыс
істеуі мүмкін.
Келісілген жұмысшы бөліктері бар механикалық
құрылғы ретінде анықталатын, энергияны, материалдар мен
ақпаратты түрлендіру үшін белгілі бір мақсатқа бағытталған
қозғалыстарды орындайтын машиналар атқаратын функцияларының
түрі бойынша энергияны түрлендіру үшін алдын-ала тағайындалған
энергетикалық (мысалы, электр қозғалтқыштары, электр
генераторлары, турбиналар, және т.б.) және еңбек өнімінің
пішінін, қасиетін, күйін өзгертуді немесе ақпаратты
жинау, қайта өңдеу және қолдануды орындайтын жұмысшы
болып екіге бөлінеді. Жұмысшы машиналарға технологиялық
машиналар – құралдар (металл кесуші станок типтері, ауыл шаруашылығы,
тігін, құрылыс машиналары) жатады.
Берілген күштер әсерімен белгілі бір мақсаттағы
қозғалыстарды жасайтын қозғалмалы - қосылған
денелердің бір тұтастығы ретінде механизмдер басты (жұмысшы)
немесе басты қозғалыспен бірге технологиялық немесе көтеру
- транспорттық амалдарды іске асыратын көмекші қозғалыстарды
орындайды. Атап өту керек, белгілі бір механизм әртүрлі технологиялық
немесе жұмысшы машиналар құрамында болуы мүмкін.
1. Негізгі түсініктер
1.1 Электр жетектерінің құрылымы және
типтері
Автоматтандырылған электр жетегі деп жұмысшы
машинаның атқарушы органдарын қозғалысқа келтіру үшін
алдын-ала тағайындалған электр қозғалтқыштық,
түрлендіргіштік, берілістік және басқару құрылғыларынан
тұратын электр механикалық жүйені атайды. Электр энергиясын
механикалық энергияға тікелей түрлендіретін негізгі элемент –
қозғалтқыш болып табылады. Қозғалтқыш түрлендіруші
және басқарушы құрылғылардың көмегімен
өндірістік механизмнің талаптарына жауап беретін сипаттамаларды
пішіндеуге рұқсат береді.
Автоматтандырылған электр жетегінің құрылымдық
сипаттамасы 1.1.1 суретінде көрсетілген. Онда өзара байланысқан
екі жүйені белгілеуге болады:
а) күштік ажыратқыштан КА, күштік түрлендіруші
бөліктен Т, бұрыштық жылдамдық ω кезіндегі қозғалтқыштың
иінкүші М әсер ететін ротор массасы бар РД энергияның электр
механикалық түрлендіргішінен ЭМТ тұратын энергияны электр
механикалық түрлендіруін іске асыратын ақпараттық-энергетикалық
жүйе;
б) ақпаратты өңдеу жүйесі қорғау
және бақылауды басқару функцияларын орындайды. Ақпаратты
өңдеу жүйесінің функционалды кіріс шамалары – беруші
айнымалылар W және кері байланыстардың r айнымалылары. 1.1.1 - суретінде
жұмысшы машинаға ЖМ берілетін ток, кернеу, иінкүш, айналу
жиілігі және күштеуі бойынша кері байланыстар көрсетілген. Ақпаратты
өңдеу жүйесінің шығыс шамалары белгілі мақсатқа
бағытталған әсерлер ретінде күштік бөліктің
басқарылатын элементіне (күштік ажыратқыш, түрлендіргіш,
редуктор және т. б.) беретін басқарушы айнымалылар J болады. Ақпараттық
айнымалылар V қызмет көрсетуші адамдарға немесе басқарудың
жоғарғы деңгейіне бағдарлау үшін қызмет
етеді. Басқарушы Б және ақпараттық V айнымалылар беруші
шамалар W мен белгілі логика бойынша ақпаратты өңдеу құрылғысына
енгізілген кері байланыстар r айнымалыларынан құралады.
Электр жетегі жүйесі оның типіне тәуелсіз,
белгілі бір сыртқы функцияны x = f(w,z)
орындайды. Басқарылатын шама (мысалы, айналу иінкүші, жиілік немесе
қозғалтқыш білігінің орны) берілетін сигналдың
шамасына W, сонымен бірге бір немесе бірнеше әсер етуші әрекеттерге
Z тәуелді.
Автоматтандырылған электр жетегі жүйелері автономды құрылғы ретінде (көтергіштер, лифттер, транспортерлердің электр жетегі) немесе кешенді автоматтандырылған жүйелердің негізгі элементтері ретінде де жұмыс істейді. Мұндай жүйелерде басқару мәселелері бірнеше деңгей бойынша орналасады.
1.1.1 – сурет. Автоматтандырылған электр жетегінің құрылымдық сұлбасы: 1- электр энергиясының ағыны; 2 – механикалық энергияның ағыны; r – кері байланыстар айнымалылары; V – ақпараттық айнымалылар; W – беруші шамалар; Б – басқарушы айнымалылар; Z - әсер етуші факторлар;
Төменгі деңгейлерде бір-бірімен технологиялық
байланыс арқылы байланысқан және жоғарғы деңгей
басқаратын функционалды топтарды құрайтын автоматтандырылған
электр жетегі жүйесі орналасқан. Жоғарғы деңгей құрылғысын
адам немесе келесі одан жоғарғы деңгейдің ақпаратты
өңдеу құрылғысы басқарады. Осы текті құрылғылар,
мысалы метал өңдеуші және мұнай өңдеуші өнеркәсіптің,
станоктар мен басқа автоматты басқару жүйелерінің ЭЕМ –
нен басқарылатын технологиялық жүйелерде қолданылады.
1.2 Электр жетектерінің жіктелуі
Механикалық энергияны тарату тәсілдері
бойынша электр жетектерін үш негізгі типке бөлуге болады:
а) топталған электр жетегі жұмысшы
механизмдерді бірнеше жұмысшы машиналармен немесе бірнеше атқарушы
механизмдердің бір жұмысшы машинамен қозғалысын қамтамасыз
етеді. Жетектен атқарушы механизмдерге энергияны беру бір немесе бірнеше
беріліс көмегімен іске асады.
б) жеке орналасқан электр жетегі. Әрбір жұмысшы
орган жеке тұрған электр жетегімен қозғалысқа
келтіріледі. Машинаның жұмысшы органдары өзара байланыспайды,
бұл жұмысшы машинаның кинематикалық сұлбасын
біршама қысқартады;
в) өзара байланысқан электр жетегі екі немесе
бірнеше электрлік немесе технологиялық өзара байланысқан
электр қозғалтқыштары, құрылғыларынан тұрады.
Олардың жұмысы кезінде берілген арақатынас немесе жылдамдықтық
жүктеме немесе жұмысшы машинаның атқарушы органдары
орнының теңесуі ұсталып тұрады. Осындай электр жетегінің
қажеттілігі технологиялық процесс немесе конструктивті құрылғының
талабынан пайда болады. Өзара байланысқан электр жетегінің
бір түрі – көп қозғалтқышты электр жетегі болады,
оның қозғалтқыштық құрылғылары
ортақ білікке жұмыс істейді.
Қозғалыс түрі бойынша электр жетегі:
айналмалы бір бағытты, айналмалы реверсті және тура жүруші
реверсті болады.
Басқарылу дәрежесі
бойынша электр жетектері: реттелмейтін – бір жұмысшы жылдамдығы бар
машинаның атқарушы жұмысшы органдарын әрекетке қосу
үшін; реттелетін – электр жетегінің шамалары басқарушы құрылғының
әсерімен өзгереді; бағдарламалық – басқарылатын
– электр жетегін берілген бағдарлама бойынша басқару; ілеспелі –
автоматты, еркін өзгеретін беруші сигналға сәйкес атқарушы
органның жылжытуын жасау; адаптивті – машина жұмысының
шарттары өзгерген кезде басқарудың кұрылымы мен
шамаларын автоматты түрде таңдап алу.
Автоматтандыру деңгейі
бойынша электр жетектері: қолмен басқарылатын автоматтандырылмаған;
шамалары автоматты реттеумен басқарылатын автоматтандырылған; басқарушы
әрекет оператордың қатысуынсыз автоматты түрде өндірілетін
автоматты болып бөлінеді.
1.3 Өндірістік механизмдер
мен электр қозғалтқыштарының сипаттамалары
Электр жетегінің дұрыс
жобалануы және үнемді қолданылуы үшін қозғалтқыштың
механикалық сипаттамаларының өндірістік механизмдер
сипаттамаларымен сәйкестігін білу керек. Өндірістік механизмнің
механикалық сипаттамасы деп қозғалтқыш білігіне
келтірілген жылдамдық пен механизмнің кедергі иінкүші ω=f(М) арасындағы тәуелділікті атайды. Әртүрлі
өндірістік механизмдердің әртүрлі механикалық
сипаттамалары болады. Оларды жалпы түрде келесі формуламен жазуға
болады
![]() ,
(1.3.1)
,
(1.3.1)
мұнда Мс
– ω жылдамдығы кезіндегі механизмнің кедергі иінкүші;
Мо –
механизмнің қозғалмалы бөлігіндегі үйкеліс
кедергісінің иінкүші;
Mс.н –
ωн жылдамдығы кезіндегі кедергі иінкүші.
Келтірілген
формулаларға сәйкес өндірістік механизмдердің
механикалық сипаттамаларын келесі негізгі категорияларға жатқызуға
болады.

1.3.1 - сурет. Өндірістік
механизмдердің механикалық сипаттамалары
Жылдамдықтан тәуелсіз
механикалық сипаттама (Х=0 кезіндегі 1.3.1- суретіндегі 2 қисығы).
Бұл сипаттамалар көтеру крандары, металл кесуші станоктардың
беру механизмдері, поршенді сорғылар, конвейерлерде болады.
Сызықты өсетін механикалық сипаттама (Х=1 кезіндегі 1 қисығы). Мұндай сипаттама тәуелсіз қоздырылатын тұрақты ток генераторында болады.
Сызықты емес - өсетін
(парабола) механикалық сипаттама (3 қисығы Х=2 кезінде). Мұндай
сипаттамасы бар механизмдер желдеткіштік жүктемесі бар механизмдер деп
аталады – ортадан тепкіш сорғылар, есу қалақтары және
т. б.
Сызықты емес – құлдилайтын
механикалық сипаттама (Х=1 кезіндегі 4 қисығы). Бұл
сипаттамаға бірқатар токарлық, жонушы станоктар ие болады.
Электр қозғалтқышының
механикалық сипаттамасы деп оның бұрыштық сипаттамасының
айналдырушы иінкүшіне тәуелділігін ω=f(M) атайды.
Электр жетегі механикалық
сипаттамасының қатаңдығы деп электр қозғалтқышының
электр магниттік иінкүштерінің айырмасының электр жетегінің
бұрыштық жылдамдықтары айырмасына қатынасын атайды.
![]() .
.
Механикалық сипаттамалардың түрлері:
а) иінкүш өзгерген кезде жылдамдық өзгеріссіз қалатын абсолютті қатаң механикалық сипаттама, бұл сипаттама синхронды қозғалтқыштарда болады (1.3.2 - суреті, 1 қисығы);

1.3.2 - сурет. Электр қозғалтқышының механикалық сипаттамалары
б) иінкүш өзгерген кезде жылдамдықтың өзгеруі өте аз болатын қатаң механикалық сипаттама, бұл сипаттама тәуелсіз қоздырылатын тұрақты ток қозғалтқыштарында болады (2 қисығы);
в) иінкүш өзгерген кезде жылдамдық біршама өзгеретін жұмсақ механикалық сипаттама (3 қисығы);
г) жылдамдық өзгерген кезде иінкүш өзгеріссіз қалатын абсолютті жұмсақ сипаттама, бұл сипаттама «қозғалтқыш – ток көзі» жүйесінде орын алады (4 қисығы).
1.4 Электр жетегі қозғалысының теңдеуі
Электр жетегінің тұрақтанған
режим жұмысында қозғалтқыштың айналдырушы иінкүші
механизмнің кедергі иінкүшіне тең және жетектің
жылдамдығы тұрақты болады. Электр жетегінің бір тұрақтанған
жұмыс күйінен екінші күйіне өткен кезде анықталған
заңдар бойынша инерция күшінің пайда болуына байланысты жүйедегі
жылдамдық, иінкүш және ток өзгереді, бұл процесс өтпелі
процесс деп аталады. Олардың пайда болу себептері – қозғалтқыш
білігіндегі жүктеменің немесе электр жетегінің басқарушы
әрекетінің өзгеруі, яғни іске қосу, тежеу, айналу
бағытын өзгерту және т. б. режимдері орын алады. Бұл жағдайда
түзу қозғалыс күштерінің теңесу теңдеуін
мына түрде жазуға болады
![]() ,
(1.4.1)
,
(1.4.1)
Мұнда F –
механизмнің кедергі күшімен Fс теңесетін қозғаушы
күш;
![]() – жылдамдық өзгерген кездегі инерция күші;
– жылдамдық өзгерген кездегі инерция күші;
m – дене массасы.
Механизмге әсер
етуші күштің өлшем бірлігі кг м∙с-2.
Айналмалы қозғалыс
үшін иінкүштер теңесуінің теңдеуі немесе электр
жетегінің қозғалыс теңдеуі мына түрде жазылады
![]() .
(1.4.2)
.
(1.4.2)
Электр қозғалтқышының
айналдырушы иінкүші оның білігіндегі кедергі иінкүші Мс
мен динамикалық иінкүшімен ![]() теңеседі,
мұнда жетектің инерция иінкүші көптеген өндірістік
механизмдер үшін
теңеседі,
мұнда жетектің инерция иінкүші көптеген өндірістік
механизмдер үшін ![]() тұрақты:
тұрақты:
M> Мс кезінде; ![]() > 0 - жетек үдеу режимінде;
> 0 - жетек үдеу режимінде;
М < Мс кезінде; ![]() < 0 - жетек баяулау
режимінде;
< 0 - жетек баяулау
режимінде;
![]() = 0 кезінде жетек тұрақтанған
жұмыс режимінде болады.
= 0 кезінде жетек тұрақтанған
жұмыс режимінде болады.
Динамикалық
иінкүш электр жетегінің тек ғана өтпелі режимінде,
жылдамдық өзгергенде пайда болады. Бұл иінкүш қозғалысқа
қарсы бағытталған, тежеу кезінде ол қозғалысты ұстап
тұрады. Осыны есепке алып, жетектің қозғалыс теңдеуінің
жалпы жағдайдағы түрін аламыз
![]() .
(1.4.3)
.
(1.4.3)
1.5 Электр жетегінің жұмыс режимдерін жіктеу
Электр механикалық құрылғылар жүйесін
талдау және синтездеу негізінде бір бөлігі механизмдердің
сипаттамасына, екіншісі – тікелей электр жетегіне қойылатын талаптарға
қатысты болатын белгі бойынша механизмдердің жіктелуіне сүйенетін
принциптер қойылу керек.
Электр жетегі жүйесінің принциптік шешім таңдауын
анықтайтын механизмдер сипаттамаларының келесі белгілері бола
алады:
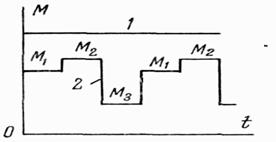
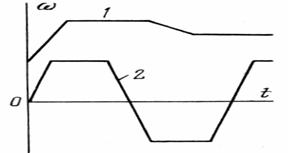
а) уақыт бойынша жұмыс режимі (1.5.1а -
суреті) – үздіксіз (1 қисығы) және циклдік (2 қисығы)
әрекет ету. Механизмнің үздіксіз режим жұмысы деп
технологиялық амал толық орындалып бітетін ұзақ режим жұмысы.
Механизмнің үздіксіз әрекет ету уақыты жетектік қозғалтқыштың
қызу тұрақтысынан Тқ аз болмауы керек.
Циклдік режим технологиялық амал циклі tц ағымында жұмыс
tж және үзіліс tү периодтарының
ауысуымен сипатталады;
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
1.5.1 - сурет
б) жылдамдық бойынша жұмыс режимі (1.5.1б -
сурет) – реверсті емес (1 қисығы) және ревесті (2 қисығы).
Берілген режим электр жетегі жүйесінің принциптік шешіміне әсер
етеді, бірақ үздіксіз әрекет ету механизмдерінде жетектік қозғалтқышты
қызуы бойынша талдауы кезінде оған аса мән берілмейді;
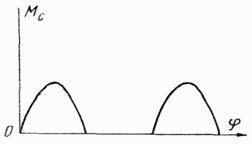
в) жүктеменің уақыт бойынша өзгеру
сипаты – тұрақты (1.4в - сурет,
1 қисығы), айнымалы (1.5.1в - сурет,
2 қисығы), соққылы (1.5.1г - сурет, 1 қисығы),
кездейсоқ (1.5.1г - сурет, 2 қисығы);
г) жүктеменің жылдамдық бойынша өзгеру
сипаты – тұрақты (активті жүктеме, 1.5.1д - сурет, 1 қисығы),
құрғақ үйкеліс типті (реактивті жүктеме) М
= sin(w) (1.5.1д - сурет, 2 қисығы), айнымалы M = bwn типті (1.5.1д - сурет, 3
қисығы).
 .
(1.5.1)
.
(1.5.1)
1.5.2 – сурет. Электр машиналарының нақты режимдері
Электр жетегінің бақару жүйесін таңдауды анықтайтын келесі белгілер болуы мүмкін:
а) координаттарды реттеу – талап етілмейді; жылдамдықты w, үдеуді e, иінкүшті М, жолды S және т.б. реттеу қажет;
б) реттеу дәлдігі – талап етілмейді, шектелген дәлдікпен реттеу талап етіледі, прецизионды, жоғарғы дәлділікпен реттеу қажеттілігі бар;
в) координаттарды жатықтық реттеу;
г) реттеу тәсілі – қолмен, жартылай автоматты, автоматты, бағдарламалық.
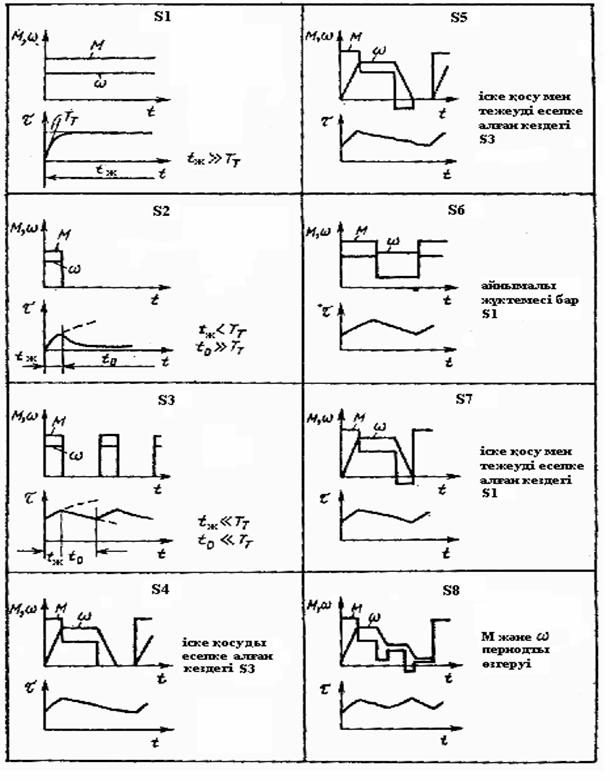
Өндірістік механизмдердің әртүрлі
жұмыс шарттары электр жетегінің әртүрлі режимдерін
шарттайды. Ол режимдер шартты белгілеулері S1-S8 бар сегіз режимге жіктеледі
(1.5.2 - сурет). Бұл жағдай қозғалтқышты қуаты
бойынша дәлірек есептеуге және таңдауға мүмкіндік
береді. Электр машинасының ұзақ нақты жұмыс
режимінде біліктегі жүктеме өзгермейді және оның барлық
бөлігіндегі температура тұрақтанған мәніне
жеткенше жалғасады.
1.5.3 - суретінде қозғалтқыш білігіндегі қуат Р, қуат шығындары және температураның q° уақытқа тәуелділігі қозғалтқыштың ұзақ нақты жұмыс режимінде келтірілген.
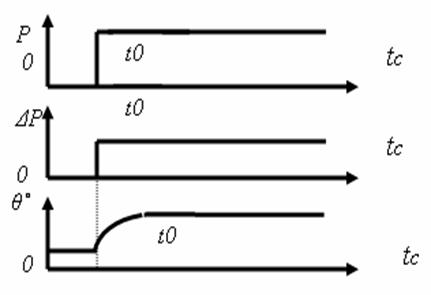
1.5.3 - сурет Қозғалтқыштың ұзақ жұмыс режимінің сипаттамалары
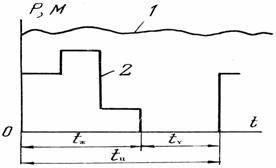
Қысқа уақыттық
нақты жұмыс режимі S2 деп өзгеріссіз нақты жүктеме
периоды машинаның ажыратылу периодымен алма кезек ауысу режимін атайды. Бұл
кезде жүктеме периоды машина температурасы тұрақты режимге
жететіндей ұзақ емес, ал тоқтап тұру периоды машина бөліктері
қоршаған орта температурасына дейін суып бітетіндей ұзақ
болады (1.5.4 - сурет).
Бұл режимдегі тағайындалған жұмысшы периодының ұзақтығы 10, 30, 60, 90 минут.
1.5.4 – сурет. Қозғалтқыштың қысқа уақыттық нақты жұмыс режимінің сипаттамалары
Қайталанбалы – қысқа уақыттық нақты жұмыс режимі S3 деп өзгеріссіз нақты жүктеменің қысқа уақыттық периодтары (жұмысшы периодтар) машинаның ажыратылу периодымен алма-кезек ауысу режимін атайды, бұл кезде жұмысшы периоды температураның жоғарылауы тұрақты мәніне жететіндей соншалықты ұзақ емес (1.5.5 - сурет).
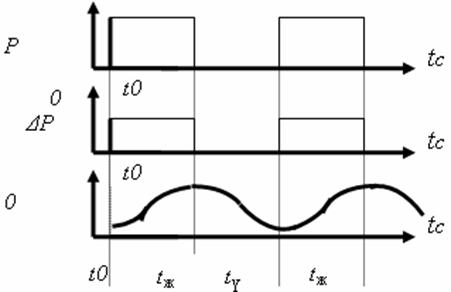
1.5.5 – сурет. Қозғалтқыштың қайталанбалы - қысқа уақыттық нақты жұмыс режимінің сипаттамасы
Қайталанбалы - қысқа уақыттық нақты режимі жиі іске қосуы бар S4 режимі.
Қайталанбалы - қысқа уақыттық нақты режимі жиі іске қосуы және электрлік тежеу S5 режимі.
Нақты жұмыс режимі жиі іске қосуы бар S6 режимі.
Нақты жұмыс режимі жиі кері айналдыруы бар S7 режимі.
Нақты жұмыс режимі екі және көп бұрыштық жылдамдықтармен аралас S8 режимі.
Әрбір өндірістік механизм жетектік электр қозғалтқышына әсер етудің ерекшелігіне ие және жоғарыда сипатталған нақты режимдердің біріне келтірілуі мүмкін.
1.6 Электр жетектерінің бұрыштық жылдамдығын реттеу
Қазіргі заманғы өнеркәсіпте
технологиялық процестердің талаптарына әртүрлі өзгеретін
жылдамдықпен жұмыс істейтін өндірістік механизмдердің көп
бөлігі қолданылады. Бұл өндірістік механизмдерде электр
жетегінің жылдамдығын күштеп өзгерту – жылдамдықты
реттеу талап етіледі. Жылдамдықты реттеу автоматты немесе қолмен
реттеу тәсілімен жетектік электр қозғалтқышына қосымша
әсер ету арқылы орындалады. Қазіргі уақытта әртүрлі
күштік электронды түрлендіргіштер көмегімен жылдамдықты
электрлік реттеу кең қолданыла бастады. Бұл түрлендіргіштер
аз инерциялы және тұрақты ток кернеуі мәні бойынша немесе
айнымалы ток кернеуі амплитудасы мен жиілігі бойынша реттелетін кернеуді өндіреді.
Түрлендіргіштер күштік транзисторлар немесе тиристорлар негізінде жиналуы мүмкін және олар дискретті режимде жұмыс істейді. 1.6.1 суретте электрлік түрлендіргіші бар автоматтандырылған электр жетегінің негізгі элементтерінің сұлбалық өзара әрекеттесуі келтірілген.
1.6.1 – сурет. Реттелетін электр жетегінің құрылымдық сұлбасы
Электр жетегі жылдамдығын реттеудің әртүрлі тәсілдерін сипаттайтын негізгі көрсеткіштер:
а) бұрыштық жылдамдықтың
реттеу ауқымы. Максималды тұрақтанған жылдамдықтың
минималды тұрақтанған жылдамдыққа қатынасымен
![]() анықталады;
анықталады;
б) реттеудің
жатықтығы. Берілген жылдамдықтан ωi жақын
мүмкін болатын жылдамдыққа ωi+1 өткен
кездегі жылдамдықтың секіруін сипаттайды
 ;
;
в) реттеудің үнемділігі.Технологиялық
процестің жоғары сапасы мен салыстырмалы түрде құнын
тез өтейтін механизмнің үлкен өндірушілігін қамтамасыз
ететін электр жетегін жасау және қолдану шығындарымен
сипатталады;
г) бұрыштық жылдамдықтың
тұрақтылығы. Жүктеме иінкүшінің берілген
ауытқуы кезіндегі бұрыштық жылдамдықтың өзгеруін
сипаттайды. Сипаттаманың қатаңдығы көп болған
сайын бұрыштық жылдамдықтың тұрақтылығы
жоғары;
д) реттеу жылдамдығының
бағыты, яғни негізгі жылдамдыққа қатысы бойынша
оның көбеюі немесе азаюы реттеу тәсілдеріне байланысты;
е) қозғалтқыштың
рұқсат етілген жүктемесі – реттеу сипаттамаларындағы жұмысы
кезіндегі қозғалтқыштың ұзақ уақыт жұмыс
істей алатын иінкүшінің ең үлкен мәні, ол қозғалтқыштың
қызуымен анықталады және реттеудің сан-алуан тәсілдері
үшін әртүрлі болады.
2. Тұрақты ток электр жетегі
2.1 Тәуелсіз қоздырылатын тұрақты
ток қозғалтқыштары негізіндегі электр жетегі.
Тәуелсіз қоздырылатын тұрақты ток қозғалтқышы (ТТҚ) электр энергиясын механикалық энергияға түрлендіру үшін қолданылатын автоматты басқару жүйесінің бір бөлігі болады. Машиналардың кері жұмыс істеу принципі бойынша тәуелсіз қоздырылатын тұрақты ток қозғалтқыштары қозғалтқыштық режиммен бірге тежеу режимдерінде де жұмыс істей алады. 2.1.1 - суретте машинаның якорь тізбегін қоректендіретін түрлендіргіштің шамалары ескерілген электр қозғалтқышының орын басу сұлбасы көрсетілген. 2.1.1 - суреттегі белгілеулер: Ет –түрлендіргіштің э.қ.к – сі; Rт, Lп – түрлендіргіштің активті және индуктивті кедергілері; Eқ, Iя – қозғалтқыштың э.қ.к – сі және тогы; Rқ, Lқ - қозғалтқыштың активті кедергісі және индуктивтілігі; Uқоз – Wқоз орам саны бар машинаның қоздыру орамасындағы кернеуі; F - машина ағыны; Rқоз – қоздыру орамасының кедергісі; Ls – сейілу индуктивтілігі; Iқоз – қоздыру тогы; Rк – құйынды токтар контурының балама кедергісі; Mқ және Mс – қозғалтқыш иінкүші және статикалық кедергілер иінкүші (2.1.2 - сурет); J – қозғалтқыштың инерция иінкүші. Машинаның якорь тізбегі және электр жетегінің механикалық бөлігі үшін төмендегідей арақатынасын аламыз
Eт(p)-Eқ(p)=Iя(p)×[Rт+Rқ+(Lт+Lқ)p], (2.1.1)
Mқ(p)-Mс(p)=J×p×w(p), (2.1.2)
Mқ(p)=k×F×Iя(p), (2.1.3)
Eқ(p)=k×F×w(p).
(2.1.4)
Kря коэффициенті бар якорь реакциясын, сонымен
қатар ағын F мен қоздыру тогы Iқоз шамалары
арасындағы пропорционалдық коэффициенті бар магниттелу
сипаттамасының қисық сызықтығын, I – ші түйін
және IK, 2K контурлары үшін Кирхгоф заңдары негізінде алынған
қоздыру тізбегінің теңдеулерін есепке ала отырып, келесі арақатынасты
табамыз
Iм(p)=Iқоз(p)-Iк(p)-Kря×Iя(p),
(2.1.5)
Uқоз(p)=Iқоз(p)×[Rs+Ls×p]+Iк(p)×Rк ,
(2.1.6)
Iк(p)×Rк-Wқоз×p×F(p)=0,
(2.1.7)
F(p)=KF×Iм(p). (2.1.8)
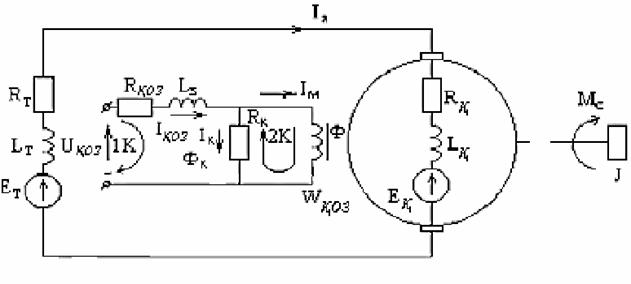
2.1.1 – сурет. Тәуелсіз қоздырылатын ТТҚ – ның балама сұлбасы |
(2.1.5)-(2.1.8) теңдеулеріне түрлендірулер жүргізе отырып, аралық айнымалыларды шығарып тастап, қоздыру тогы Iқоз(p) және ағын F(p) үшін келесі теңдеулерді аламыз
 ,
(2.1.9)
,
(2.1.9)
 ,
(2.1.10)
,
(2.1.10)
 мұнда Tқт
– құйынды токтардың уақыт тұрақтысы;
мұнда Tқт
– құйынды токтардың уақыт тұрақтысы;
Tқоз – қоздыру орамасының балама уақыт
тұрақтысы, Tқоз=Tқо+Ts;
![]() Ts – сейілу ағынының
уақыт тұрақтысы; ;
Ts – сейілу ағынының
уақыт тұрақтысы; ;
Tқо – қоздыру орамасының
уақыт тұрақтысы; ;
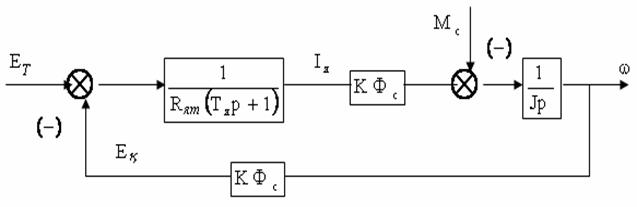
(2.1.1), (2.1.4), (2.1.9), (2.1.10) теңдеулері негізінде 2.1.2 -
суретте қозғалтқыштың құрылымдық сұлбасы
келтірілген.

|
|
|
|
|
|
|
Оның электр магниттік уақыт тұрақтысы Tя келесі формула бойынша анықталады
 ,
,
 .
.
2.1.3 - суретте якорь реакциясы әсерін есептемеген
жағдайда алынған қозғалтқыштың құрылымдық
сұлбасы келтірілген. Машина ағынын F тұрақты деп
есептеп, 2.1.4 - суретте көрсетілген қозғалтқыштың
құрылымдық сұлбасын аламыз.
Әсер етуші әрекетті иінкүш Mс(p)
түрінде шығысына ауыстырып, қозғалтқыштың
электр механикалық уақыт тұрақтысы Tэм мен қозғалтқыштың
беріліс коэффициентін Kд есепке ала отырып, 2.1.5 - суретте
келтірілген қозғалтқыштың құрылымдық
сұлбасын аламыз.
Құрылымдық сұлбаны түрлендіре
отырып, басқару және әсер ету әрекеттері бойынша
машинаның беріліс функциясын аламыз.
 ,
(2.1.11)
,
(2.1.11)
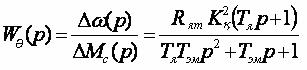 .
(2.1.12)
.
(2.1.12)

|
|
|
|
|
|
|
Динамикада қозғалтқыштың құрылымдық сұлбасы 2.1.4-суретте көрсетілген.
Статикада p=0, иінкүш Mқ пен қозғалтқыш
тогы IЯ арасындағы байланыс (2.1.3) бойынша, сонымен бірге түрлендіргіш
э.қ.к – сі Eт тұрақты ток желісі кернеуіне тең
деп есептеп, 2.1.6 - суретте келтірілген қозғалтқыштың
статикадағы құрылымдық сұлбасын аламыз. Қозғалтқыштың
электр механикалық және механикалық сипаттамаларының теңдеулері
мына түрге келеді
 ,
(2.1.13)
,
(2.1.13)
 .
(2.1.14)
.
(2.1.14)

|
|
|
|
|
|
|
|
|
|
|
|
|
|
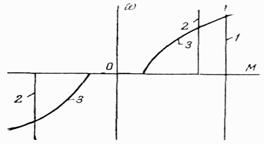
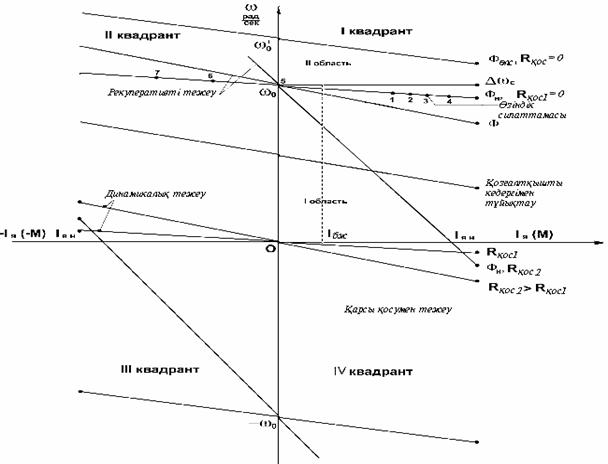
Графиктік түрде қозғалтқыштардың электр механикалық және механикалық сипаттамалары (2.1.8 - сурет) жазықтықта төртінші квадрантта келтіріледі. Электр механикалық және механикалық сипаттамалары w=f(Iя), w=f(M) арақатынасына сәйкес; бұл жерде w - қозғалтқыштың айналу жиілігі; Iя – қозғалтқыштың якорь тогы; М – қозғалтқыштың иінкүші.

|
|
|
|
|
|
|
Қозғалтқыштың өзіндік сипаттамасы оның нақты кернеумен қоректеніп, қалыпты сұлбасымен қосылғанда және қозғалтқыштың якорь тізбегінде қосымша кедергілер Rқос болмаған кезде алынады.
Тежеу режимдерінде тұрақты ток машинасы
генератор ретінде жұмыс істейді, ал әртүрлі тежеудің түрлері
бір-бірінен тек тұрақты ток желісі кернеуі мен якорь кернеуі бағытына
қатысты болады. Үш тежеу түрі бар: рекуперативті, динамикалық
және қарсы қосумен тежеу.
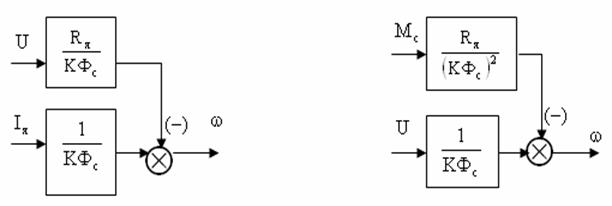
(2.1.13) және (2.1.14) теңдеулерінен анықталғандай,
қозғалтқыштың айналу жылдамдығын w басқару келесі тәсілдер
арқылы мүмкін болады:
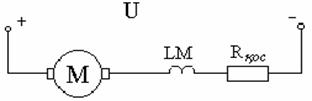
1) қозғалтқыштың якорь тізбегіне қосылған
кернеуді U өзгерту;
2) қозғалтқыштың якорь тізбегіне
кедергі Rқос енгізу;
3) қозғалтқыштың ағынын Fәл мәніне дейін азайту.
|
|
|
|
|
|
|
1 аймақта (2.1.8 - сурет) қозғалтқыштың
якорь тізбегіне қосылған кернеуді U өзгерту және
2 аймақта (2.1.8 - сурет) қозғалтқыш ағынын Fәл (ағынды әлсірету)
мәніне дейін азайту арқылы қозғалтқыштың
айналу жылдамдығын басқару екі аймақты реттеу деп аталады. Мұнда
қалыпты ағын Fн тұрақты кезінде
якорьдегі кернеуді басқару қозғалтқыштың иінкүші
тұрақты кезінде айналу жылдамдығын w реттеуге сәйкес
келеді. Қозғалтқыштың якоріндегі кернеу U тұрақты
кезінде қозғалтқыш ағынын F басқару қозғалтқыштың
қуаты тұрақты кезіндегі айналу жылдамдығын w реттеуге сәйкес
келеді.
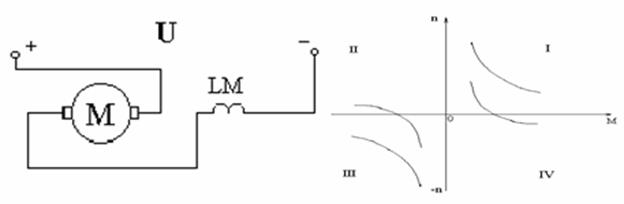
Якорге тұрақты кернеу U берілген тәуелсіз
қоздырылатын ТТҚ – ның М принциптік сұлбасы 2.1.9 -
суретте көрсетілген. Қоздыру орамасы LM арқылы машинаның
М ағыны Ф пайда болады. Машинаның якоріндегі кернеу U полюстерін өзгертумен
(айналу бағытын өзгерту) қозғалтқышты кері
айналдыру іс жүзінде қолданыс тапты. Кері айналдыру кезінде қозғалтқыштың
электр механикалық теңдеуі төмендегідей болады:
 .
.
 (2.1.15)
(2.1.15)
2.1.10 суретте қозғалтқышты кері
айналдыру сұлбасы көрсетілген. S1-S2 кілттері
ретінде түйіспелі, сонымен бірге түйіспесіз элементтерді қолдануға
болады. S1 кілті түйіскен кезде IЯ якорь тогы
+, S1, М, S1, - тізбегі бойынша ағады, сол
кезде якорге +, - таңбаларымен белгіленген кернеу U қосылады.
S2 кілті түйіскен кезде Iя якорь тогы +,
S2, M, S2, - тізбегі бойымен ағады, бұл кезде
якорге шеңбермен белгіленген + және – таңбалы кернеу U қосылады.
Рекуперативті тежеу режимінде қозғалтқыштың
қарсы э.қ.к – сі тұрақты ток желісі кернеуінен U үлкен
болады және рекуперативті тежеу режиміндегі электр механикалық сипаттамасының
теңдеуі төмендегідей болады
 .
(2.1.16)
.
(2.1.16)
 Қарсы қосу
режимінде қозғалтқыштың қарсы э.қ.к – сі
желі кернеуімен U бірге қозғалтқыштың якорь тізбегін қоректендіреді.
Тұрақты ток желісімен U тізбектеле қозғалтқыш
генератор ретінде жұмыс істейді және барлық энергия жылу түрінде
қозғалтқыштың якорь тізбегінде бөлінеді. Бұл
режимде қозғалтқыш өзінің иінкүшіне қарама-қарсы
бағытта айналады. Қарсы қосу режиміндегі қозғалтқыштың
электр механикалық сипаттамасының теңдеуін аламыз
Қарсы қосу
режимінде қозғалтқыштың қарсы э.қ.к – сі
желі кернеуімен U бірге қозғалтқыштың якорь тізбегін қоректендіреді.
Тұрақты ток желісімен U тізбектеле қозғалтқыш
генератор ретінде жұмыс істейді және барлық энергия жылу түрінде
қозғалтқыштың якорь тізбегінде бөлінеді. Бұл
режимде қозғалтқыш өзінің иінкүшіне қарама-қарсы
бағытта айналады. Қарсы қосу режиміндегі қозғалтқыштың
электр механикалық сипаттамасының теңдеуін аламыз
 (2.1.17)
(2.1.17)
Динамикалық режимде қозғалтқыш
якорі желіден ажыратылған (U=0) және тежеу кедергісіне тұйықталған.
Динамикалық тежеу режиміндегі электр механикалық сипаттаманың
теңдеуі
 . (2.1.18)
. (2.1.18)
 2.1.11 - суретте қозғалтқышты
динамикалық тежеу сұлбасы көрсетілген.
2.1.11 - суретте қозғалтқышты
динамикалық тежеу сұлбасы көрсетілген.
Қозғалтқыштың электр механикалық және механикалық сипаттамасының еңістігі қателік шамасымен бағаланады
 (2.1.19)
(2.1.19)
мұнда Dwс - (2.1.13) - (2.1.14) теңдеулерінен
анықталатын қозғалтқыш М жылдамдығының
статикалық төмендеуі
 (2.1.20)
(2.1.20)
Қозғалтқыштың іске қосу
тогының секіруін шектеу қозғалтқыштың якорь
тізбегіндегі шамасын якорь тогы, қозғалтқыш жылдамдығы
немесе уақыт функцияларының бірімен реттеп өзгерту жолымен
іске асырылады. Машинаны іске қосу диаграммасы дұрыс тұрғызылған
кезде кедергілерді қосу максималды және минималды мүмкін
якорь токтарының шамаларында орындалады. Максималды мүмкін якорь
тогы шамасы lI×Iн мәніне, ал
минималды мүмкін шама (1,05¸1,1)×Iн мәніне
сәйкес болады, мұнда: Iн – қозғалтқыш
якорь тогының нақты мәні; ![]() 1 – қозғалтқыштың
ток бойынша аса жүктеу коэффициенті.
1 – қозғалтқыштың
ток бойынша аса жүктеу коэффициенті.
Қозғалтқыштың басқару Wб(p)
және әсер ету әрекеті Wә(p) бойынша беріліс
функцияларын (2.1.11 - 2.1.12) теңдеулері арқылы талдау сипаттамалық
теңдеу түбірлерінің түріне байланысты қозғалтқыш
тербелмелі, екі апериодты, апериодты бөліктердің бірі болып берілуі
мүмкін. Бұл кезде басқару бойынша өтпелі процестер w=f(t) әртүрлі
сипат алады:
а) комплексті түбірлер кезінде – тербелмелі өтпелі процесс;
б) жай түбірлер кезінде – иілу нүктесі анық көрінген екі экспонента түріндегі өтпелі процесс;
в) қозғалтқыштардың уақыт тұрақтыларының арасындағы айырмашылығы Tэм>>Tя кезінде – экспонентті өтпелі процесс.
Тәуелсіз қоздырылатын ТТҚ – ның
жақсы реттеу қасиеттері бар. Соңғы уақытта пайда
болған микропроцессорлық басқаруы бар жиіліктік электр
жетектері көмегімен асинхронды қысқа тұйықталған
машинаны ТТҚ – ның орнына қолдануға мүмкіндік алды.
2.2 Генератор – қозғалтқыш жүйесі
негізіндегі электр жетегі
Генератор - қозғалтқыш (Г - Қ) жүйесі
тұйықталмаған, яғни кіріс және шығыс мәндері
бір-бірімен байланыспаған басқару жүйесінің классикалық
мысалы болып табылады. Басқарылатын қуат күшейткіші (ҚК)
ретінде шығысында ТТҚ (Қ) қосылған тұрақты
ток генераторы (Г) қолданылады.
Генератор - қозғалтқыш жүйесіндегі машинаның қосылу сұлбасы 2.2.1 - суретте көрсетілген.

2.2.1 – сурет. Генератор - қозғалтқыш жүйесінің блоктық сұлбасы
2.2.1 - суреттегі белгілеулер:
Xкір, Xшығ - кіріс және шығыс шамалары;
ULM – генератордың қоздыру орамасындағы кернеуі;
wқ – қозғалтқыштың айналу жылдамдығы.
Г - Қ жүйесі өнеркәсіпте оның жақсы реттеу қасиеттері арқасында – генератордың (қозғалтқыштың) якорь кернеуін және қозғалтқыштың қоздыру тогын басқарумен кең тарады. Жүйенің ықшамдалған принциптік сұлбасы 2.2.2 - суретте келтірілген.
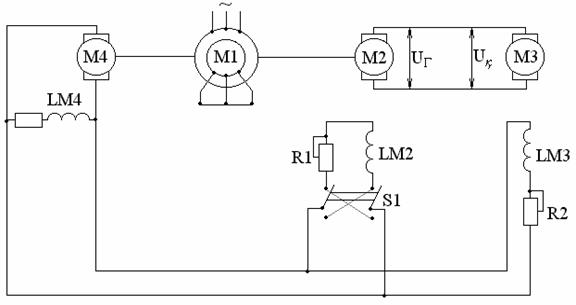
2.2.2 – сурет. Генератор - қозғалтқыш жүйесі
М1 – генератор - қозғалтқыш жүйесіндегі генераторды қозғалысқа келтіретін қозғалтқыш.
М2 – генератор.
М3 – тәуелсіз қоздырылатын қозғалтқыш.
LM2 – генератордың қоздыру орамасы.
М4 – қоздырушы (өзі қозатын машина).
LM3 – қозғалтқыштың қоздыру орамасы.
R1, R2 – реттелетін кедергілер.
S1 – кері ауыстырып-қосқыш (генератордың қоздыру орамасындағы тогын кері ағызу үшін).
Реттелетін қуат көзі ретінде М2 генераторы қолданылады.
М3 қозғалтқышындағы кернеуді реттеуге болады. Жылдамдықты
реттеу ауқымдары келесі факторлармен шектеледі:
а) генератордың аз қоздыру токтарында оның
якорь реакциясы әсер береді;
б) щеткалардағы кернеу төмендеуі 2 В шамасын құрайды;
в) реттеу ауқымының төменгі шегінде
жылдамдық төмендеуі өседі.
Сондықтан, якорь тізбегі бойынша жылдамдықты
реттеу ауқымы 15: 1 - 20: 1 шамасын құрайды. Қозғалтқыштың
өрісін 2: 1 ауқымында азайтуды есепке алсақ, жалпы реттеу ауқымы
30: 1 - 40: 1 шамаларын құрайды.
Бұл жүйенің кемшілігі – қозғалтқыштың
қуатынан үш есе көп қойылған жүйенің
жалпы қуаты. Асқан кемшілігі болатын генератор айналмалы түрлендіргіш
болып жұмыс істейді, бұл оның төмен сенімділігінің
және тұрып қалмай жұмыс істеу мүмкіндігінің
шектелуін анықтайды.
Іске қосқандағы қозғалтқыштың
якорь тогының секіруі оның аса жүктемелік икемділігін ![]() есепке алып рұқсат етілген мәнін lIн құрау
керек, мұнда Iн – қозғалтқыштың нақты
тогы. Іске қосқанда қозғалтқыштың якорь
тогын шектеу үшін R1 толық қосылған (R2 сырғымасы
жоғарғы қалыпта), ал R2 толық ажыратылған (R2 сырғымасы
төменгі қалыпта). R1 кедергісін ептеп азайтқанда (R1 сырғымасын
төменге жылжытқанда), генератор кернеуі UГ өсе
бастайды, яғни қозғалтқыштың кернеуі Uқ
өседі, ол қозғалтқыштың айналуына әкеледі.
есепке алып рұқсат етілген мәнін lIн құрау
керек, мұнда Iн – қозғалтқыштың нақты
тогы. Іске қосқанда қозғалтқыштың якорь
тогын шектеу үшін R1 толық қосылған (R2 сырғымасы
жоғарғы қалыпта), ал R2 толық ажыратылған (R2 сырғымасы
төменгі қалыпта). R1 кедергісін ептеп азайтқанда (R1 сырғымасын
төменге жылжытқанда), генератор кернеуі UГ өсе
бастайды, яғни қозғалтқыштың кернеуі Uқ
өседі, ол қозғалтқыштың айналуына әкеледі.
Генератордың қоздыру орамасының тогын өзгерту
арқылы генератор кернеуін UГ (UГ1, UГ2,
UГ3) басқарумен қозғалтқышты нақты
жылдамдығына wН дейін айналдыруды қарастырайық. Сипаттамалар
қозғалтқыш ағынының нақты мәні ФНҚ
үшін көрсетілген. I2 – IН бөлігі Г - Қ
жүйесінің динамикалық иінкүшін және қозғалтқыштың
келесі жүріп кетуіне икемділігін сипаттайды.
Қозғалтқыштың жылдамдығын
генератордың кернеуімен реттеу қозғалтқыштың иінкүші
тұрақты кезде реттеу болып табылады. Қозғалтқыштың
иінкүші
![]() ,
(2.2.1)
,
(2.2.1)
мұнда К – машинаның конструктивті тұрақтысы;
ФҚ – қозғалтқыш ағыны;
IЯ – қозғалтқыш тогы.
Реттеудің барлық ауқымында машина нақты
токпен IН жұмыс істей алатынын атап өту қажет.
Қозғалтқыштың жылдамдығын ағынды
ФҚ азайтумен реттеу қуат тұрақты кезінде
реттеу болып табылады, сонда иінкүш азаяды, ал қозғалтқыш
жылдамдығы ![]() ағынның ФҚ азаюына
кері пропорционал өседі. Қуат келесі формуламен анықталатын
болса
ағынның ФҚ азаюына
кері пропорционал өседі. Қуат келесі формуламен анықталатын
болса
![]() (2.2.2)
(2.2.2)
онда, жылдамдықты ағынын азайтумен реттеу қуат
тұрақты кезіндегі реттеу болады. Якорь кернеуі мен ағынын
азайту арқылы реттеу екі аймақтық реттеу деп аталады.
Генератор кернеуінің полюстері ауысқанда сипаттамалар абсцисса
осінен төмен орналасады. Кернеудің UГ полюстерін өзгертумен
қозғалтқышты кері айналдыруға болады, оның
сипаттамалары III–IV квадранттарда орналасады.
Қозғалтқыштың механикалық сипаттамалары 2.2.4 - суретте көрсетілген. UГН-ФҚ1; UГН – ФҚ2 сипаттамалары генератордың кернеуі тұрақты кезде қозғалтқыштың өрісін азайту режиміне сәйкес келеді. UГН – ФҚ.Н; UГ1 – ФҚ.Н; UГ2 – ФҚ.Н сипаттамалары қозғалтқыш ағыны тұрақты кезде генератордың кернеуін реттеуге сәйкес келеді.
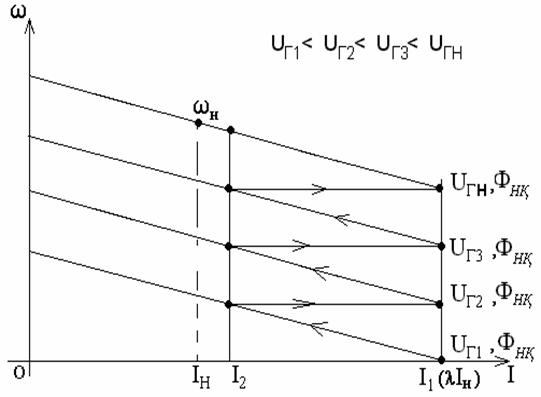
2.2.3 – сурет. Г - Қ жүйесінің іске қосу диаграммасы
UГ=0 деп белгіленген сипаттама генератордың якорь тізбегінің кедергісі түріндегі тежеу кедергісіне қозғалтқыштың якорь тізбегін тұйықтау динамикалық тежеу режиміне сәйкес келеді. 2.2.4 - суреттегі III–IV квадранттардағы сипаттамалар жоғарыдағы сипаттамаларға ұқсас және қозғалтқыш айналуының кері бағытына сәйкес. Рекуперативті тежеу – тежеудің негізгі түрі болады.
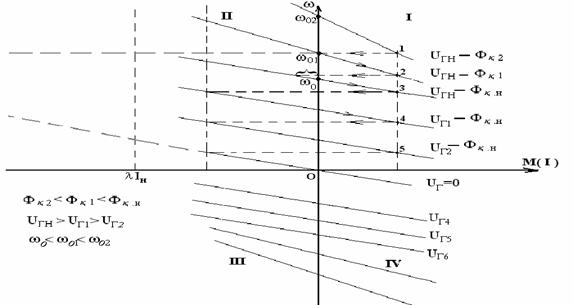
2.2.4 – сурет. Екі аймақтық басқару кезіндегі генератор-қозғалтқыш жүйесінің механикалық сипаттамалары
Рекуперативті энергияны желіге
асинхронды қозғалтқыш М1 ғана бере алады. Рекуперация
режимінде М3 машинасы генератор болып істейді. Генератор болып жұмыс
істейтін және энергияны желіге беретін М1 машинасын М2 қозғалтқышы
айналдырады. Егер жетек 1-ші нүктеде жұмыс істесе, (2.2.4 - сурет)
генератор кернеуін (UГ=0) нолге дейін түсіруге болмайды, өйткені
ток lIН мәнінен асып түседі. (тежеу траекториясы
II-квадрантта үзік сызықпен көрсетілген). Сондықтан
тежеудің бірінші қадамымен қозғалтқыштың ағынын
ФҚ2 мәнінен ФҚ1 мәніне дейін өсіруге
болады және жетек жылдамдығы 1-ші нүктеден 2-ші нүктеге
дейін төмендейді. 2-ші нүктеде қозғалтқыш ағынын
ФҚ1 мәнінен ФҚ.Н нақты мәніне
дейін өсіру керек.
Рекуперация режимінде жұмыс істеп тұрып, қозғалтқыш
айналу жылдамдығын 2-ші нүктеден 3-ші нүктеге дейін азайтады.
Келесі қадам якорь тогы lIН мәнінен асып
түспеу үшін генератор кернеуін UГ мәніне дейін
азайтады. Генератордың кернеуі UГН мәнінен UГ1 мәніне
дейін төмендеген кезде жетектің жылдамдығы 3-ші нүктеден
4-ші нүктеге дейін төмендейді. Жетек II квадрантта жұмыс
істеп тұрғанда рекуперативті тежеу режимі орын алады. Генератордың
кернеуі UГ1 мәнінен UГ2 мәніне дейін азайғанда
жетектің жылдамдығы 4-ші нүктеден 5-ші нүктеге дейін төмендейді.
Ары қарай тежеу жоғарыдағыға ұқсас
орындалады. Яғни, екі аймақтық басқаруда тежеу екі қадам
бойынша орындалады: қозғалтқыштың өрісі күшею
және генератордың UГ кернеуі төмендеу керек,
оның әрқайсысында тежеу тогының секіруі lIН мәнінен
аспауы қажет.
Шексіз үлкен қуатты желіден қоректенетін тәуелсіз қоздырылатын ТТҚ – ның электр механикалық және механикалық сипаттамаларының теңдеулеріне ұқсас, Г - Қ жүйесіндегі қозғалтқыштың электр механикалық және механикалық сипаттамаларының теңдеуі былай жазылады
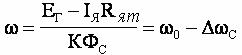 ,
(2.2.3)
,
(2.2.3)
 ,
(2.2.4)
,
(2.2.4)
мұнда ЕГ – генератордың э.қ.к – сі;
IЯ – якорь тогы;
RЯТ – генератор - қозғалтқыш жүйесі якорь тізбегінің кедергісі;
К – қозғалтқыштың конструктивті коэффициенті;
ФС – қозғалтқыш ағыны;
М – қозғалтқыш иінкүші;
w0 – бос жүріс жылдамдығы;
DwС – жүктеме бар кездегі жылдамдықтың статикалық төмендеуі.
Генератор э.қ.к – сі келесі формула бойынша анықталады
![]() ,
,
мұнда ФГ - генератор ағыны;
wГ – генератордың айналу жиілігі;
K – генератордың конструктивті тұрақтысы.
Г - Қ жүйесі якорь тізбегінің кедергісі RЯТ қозғалтқыштың якорь тізбегі кедергісі RЯТ.Қ мен генератордың якорь тізбегі кедергісімен RЯТ.Г анықталады
![]() .
(2.2.5)
.
(2.2.5)
Генератордың якорь тізбегі RЯТ.Г кедергісі генератордың якорь кедергісімен RЯ.Г, генератордың қосымша полюстері кедергісімен RГ.ҚП және генератордың якорінің компенсациялау орамасының кедергісімен RКО.Г анықталады.
RЯТ.Г=RЯ.Г+RГ.ҚП+RКО.Г
.
(2.2.6)
Жалпы жағдайда, генератор - қозғалтқыш
жүйесінің якорь тізбегіндегі сымдардың кедергісін есепке алу
керек. Генератор - қозғалтқыш жүйесінің
механикалық сипаттамасының қатаңдығын шексіз үлкен
қуатты қондырғыдан қорек алатын бөлек қозғалтқыштың
механикалық сипаттамасының қатаңдығымен салыстырғанда,
Г - Қ жүйесіндегі механикалық сипаттамаларында кедергілер RЯТ
> RЯТ.Қ болу есебінен неғұрлым жұмсақ
келеді.
М3 қозғалтқышының якорь тогы өскенде
М1 асинхронды қозғалтқышы механикалық сипаттаманың
теңдеуіне сәйкес өзінің жылдамдығын төмендетеді.
М2 генераторы wГ жиілігімен айналады (бір білікте), М2 генераторы wГ мәнінің өзгеруіне
сәйкес өзінің э.қ.к – сін ЕГ төмендетеді.
Егер айналдырушы қозғалтқыш ретінде
асинхронды машина М1 орнына синхронды қозғалтқыш қойсақ,
онда механикалық сипаттамалардың қатаңдығы өседі,
өйткені жүктемесі бар синхронды қозғалтқыш
синхронизмнен шықпаса, синхронды жылдамдықпен айналады.
Генератор мен қозғалтқыштың қоздыру
орамасы тізбегіндегі R1 және R2 реттеу кедергілерінің қуатын
анықтайық (2.2.2 - сурет). М2 генераторының қуаты
Р=1000 кВт – қа тең, қоздыру орамасының қуаты
орташа генератор қуатының 5% - ын құрайды, яғни
50 кВт болады. Қуатты Г - Қ жүйелерінде R1 және R2
кедергілері едәуір үлкен болғандықтан, оларды қолмен
басқару қиын болады. Бұл жағдайда машиналардың қоздыру
тізбектері де Г - Қ жүйесімен басқарылады. Жүйе мұндай
жағдайларда квадратты (кубты) Г - Қ жүйесі деп аталады.
Қоздырушы агрегаттарды басқару оның басқару қуатын 2,5 кВт – қа дейін азайту есебінен мүмкін болады (50 кВт – тың 5% - ы). Бұл жүйеде басқару қоздырушы агрегаттарға ауыстырылған: М5 – М2 генераторының қоздырушысы, М6 – М3 қозғалтқышының қоздырушысы. М7 – М5 және М6 қоздырушы агрегаттардың айналдырушы қозғалтқышы.
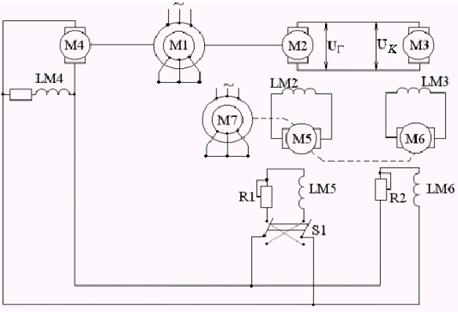
2.2.5 – сурет. Г - Қ квадраттық жүйесі
2.2.5 - суретте LM5 и LM6 қоздыру орамалары М5
генераторы мен М6 қозғалтқыш қоздырушысының қоздыру
орамалары болады. М5 және М6 қоздырушылары ортақ білікпен
байланысқан және М7 асинхронды машинасымен айналдырылады. М3 қозғалтқышының
кері айналуы S1 ауыстырып-қосқышымен орындалады. Г - Қ – ның
қарапайым жүйесімен салыстырғанда, квадраттық жүйеде
жоғары реттік дифференциалды теңдеулер бар, яғни олар үлкен
инерцияға ие болады.
2.3 Тізбектеле қоздырылатын ТТҚ – ның
электр жетегі
Жоғары аса жүктемелік икемділігі
есебінен тізбектеле қоздырылатын ТТҚ өндірісте қолданыс
тапты және трамвай мен троллейбуста, жүк көтергіш
механизмдерде және т.б. жерлерде кең қолданылады. Тізбектеле қоздырылатын
ТТҚ – ның негізгі ерекшелігі оның ағыны жүктеме
тогының ![]() мәніне тәуелді.
Жалпы жағдайда машинаның магниттелу қисығы
мәніне тәуелді.
Жалпы жағдайда машинаның магниттелу қисығы ![]() қисық сызықты функция болады.
қисық сызықты функция болады.

2.3.1 - сурет
Машинаның қанығуын есепке алмай, яғни
машинаның ағыны Ф қозғалтқыштың якорь
тогына пропорционал деп есептеп, машинаның механикалық
сипаттамасының теңдеуін аламыз. Тәуелсіз қоздырылатын
ТТҚ – ның механикалық сипаттамасының теңдеуін қолданамыз
 .
(2.3.1)
.
(2.3.1)
Жоғарыда жазылғандай, машина ағыны
якорь тогына ![]() припорционал болғанда,
машина иінкүші үшін келесі формуланы аламыз
припорционал болғанда,
машина иінкүші үшін келесі формуланы аламыз
![]() (2.3.2)
(2.3.2)
мұнда c - пропорционалдық
коэффициенті.
(2.3.2) формуладан анықталған
машина ағыны Ф келесі мәніне тең болады
![]() .
.
Ағынды Ф (2.3.1) теңдеуге
қойып, тізбектеле қоздырылатын ТТҚ – ның механикалық
сипаттамасының теңдеуін аламыз:
 .
(2.3.3)
.
(2.3.3)
(2.3.3) теңдеуді талдай келе, машина ағыны
Ф мен қозғалтқыштың якорь тогы Iя пропорционал
деп есептеп, қозғалтқыштың механикалық
сипаттамасы гипербола екенін анықтаймыз (2.3.2 - сурет). Аз жүктеме
токтары (иінкүштері) кезінде қозғалтқыштың айналу
жылдамдығы w тым өсіп кетеді. МСТ бойынша жылдамдықтың рұқсат
етілген шамасы ![]() мәндерін құрайды.
мәндерін құрайды.
Үзік сызықпен
белгіленген аймақ қозғалтқыштың тыйым салынған
жұмыс аймағы болады, сондықтан қозғалтқыш
тыйым салынған аймаққа кетіп қалмас үшін МСТ
бойынша қозғалтқыштың автоматтандыру нысанымен қатаң
механикалық жалғануын алдын-ала қарастырады, жетектің
механикалық бөлігінде белбеулік беріліс тыйым салынған.
Механикалық сипаттамасынан (2.3.2 - сурет) көрініп тұрғандай,
қалыпты қосылу сұлбасы кезінде (2.3.1 - сурет) қозғалтқыш
екінші квадранттағы жұмыс режиміне көше алмайды (рекуперация
режимі).
Машинаны рекуперация режиміне ауыстыру үшін арнайы қосылу
сұлбалары қолданылады. Машинаның механикалық
сипаттамасы қисық сызықты болғандықтан, іске қосуды
реттеу аппараттарын есептеудің негізгі әдістері графиктік және
графиктік-талдау әдістері болады.
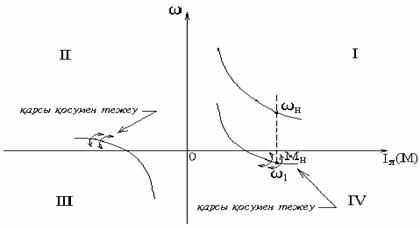
Жалпы жағдайда үш түрлі тежеу режимдері мүмкін болады: рекуперативті, қарсы қосумен және динамикалық тежеу.
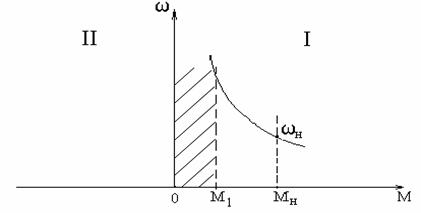
2.3.2 – сурет. Тізбектеле қоздырылатын ТТҚ – ның механикалық сипаттамасы
Қалыпты қосылу сұлбасы үшін
рекуперация режимі мүмкін емес, өйткені машина екінші квадранттағы
жұмыс режиміне көше алмайды. Бұл режимді іске асыру үшін
күрделі қосылу сұлбалары деп аталатын арнайы қосылу сұлбалары
қолданылады. Қарсы қосу режимінде қозғалтқыш
жылдамдығының бағыты өзінің иінкүшіне қарама-қарсы
болады. Қарсы қосу якорь тізбегіне едәуір кедергі қосу
арқылы орындалады.
Қарсы қосу режимінің аймақтары
2.3.3 - суретте екінші және төртінші квадранттарда көрсетілген.
Бұл режимнің кемшілігі – қозғалтқыш айналу бағытын
өзгертуі мүмкін және қозғалтқыштың
механикалық сипаттамасы жұмсақ болады.
Қозғалтқыштың нолдік
жылдамдықтар аймағында өз еркімен кері айналуын шектеу үшін
оның білігіне механикалық тежеу қойылады.
|
|
|
|
|
|
2.3.3 - сурет
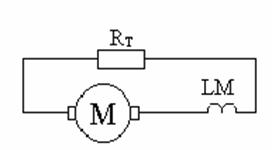 Динамикалық
тежеу қозғалтқыштың якорь тізбегін қорек көзінен
ажыратып, оны тежеу кедергісіне Rт қосу арқылы жүзеге
асырылады (2.3.4 - сурет). Тәуелсіз қоздырылатын ТТҚ
сияқты, тежеу кедергісі өскен кезде механикалық сипаттамасы төмен
орналасады (2.3.5 - сурет). Аз иінкүштермен жұмыс істеген кезінде
машина тұрақсыз болады, бұл 2.3.5 - суретте үзік сызықпен
көрсетілген.
Динамикалық
тежеу қозғалтқыштың якорь тізбегін қорек көзінен
ажыратып, оны тежеу кедергісіне Rт қосу арқылы жүзеге
асырылады (2.3.4 - сурет). Тәуелсіз қоздырылатын ТТҚ
сияқты, тежеу кедергісі өскен кезде механикалық сипаттамасы төмен
орналасады (2.3.5 - сурет). Аз иінкүштермен жұмыс істеген кезінде
машина тұрақсыз болады, бұл 2.3.5 - суретте үзік сызықпен
көрсетілген.
Кері айналдыру машинаның якорь орамасы немесе қоздыру
орамасы полюстерін ауыстыру арқылы орындалады. Кері айналдырудың ықшамдалған
принциптік сұлбасы 2.3.6 -суретте көрсетілген. Машинаны кері айналдырудың
механикалық сипаттамалары 2.3.7 - суретте екінші және төртінші
квадранттарда орналасқан. Машинаны іске қосқан уақытта қозғалтқыштың
қарсы э.қ.к – сі нолдік мәнге тең, сондықтан
якорь тогының секіруі қозғалтқыштың нақты
тогынан Iн бірнеше есе асып түседі. Бұл қауіпті жағдайды
болдырмау үшін, якорь тогының секіруі шекті рұқсат
етілген шамасына дейін машинаның якорь тізбегіне қосымша кедергі Rқос
енгізу арқылы азайтылады (2.3.8 - сурет).
-суретте көрсетілген. Машинаны кері айналдырудың
механикалық сипаттамалары 2.3.7 - суретте екінші және төртінші
квадранттарда орналасқан. Машинаны іске қосқан уақытта қозғалтқыштың
қарсы э.қ.к – сі нолдік мәнге тең, сондықтан
якорь тогының секіруі қозғалтқыштың нақты
тогынан Iн бірнеше есе асып түседі. Бұл қауіпті жағдайды
болдырмау үшін, якорь тогының секіруі шекті рұқсат
етілген шамасына дейін машинаның якорь тізбегіне қосымша кедергі Rқос
енгізу арқылы азайтылады (2.3.8 - сурет).
2.3.5 - сурет Тежеу сипаттамалары
Қозғалтқыштың жылдамдығы көбейе
бастағанда, қарсы э.қ.к – сі пайда болады, якорь тогы азаяды.
Якорь тізбегінен кедергісін бір-бірлеп шығара отырып, қозғалтқыштың
өзіндік сипаттамасында жұмыс істеуге болады (Rқос=0).
Тізбектеле қоздырылатын машинаның іске қосу диаграммасы
2.3.9 - суретте келтірілген. Якорь тізбегіне Rқос2 кедергісін енгізгенде, қозғалтқыш жасанды сипаттамада жылдамдығын өсіре бастайды.
2.3.6 - сурет 2.3.7 - сурет
Егер Rқос2 кедергісін тізбектен шығарып
тастау үшін шара қолданбаса, жетектің жылдамдық өсіруі
3-ші нүктеде аяқталады, өйткені динамикалық иінкүш
Мдин нолге тең және қозғалтқыш келесі
жылдамдығын өсіруге деген икемділігін жоғалтып алады. Сондықтан
2-ші нүктеде, яғни машинаның иінкүші М2=(1,05¸1,1)Мн мәніне
жеткенше Rқос кедергісінің бір бөлігі якорь
тізбегінен алынып тасталынады. Кедергіні шығарып тастау ток, жылдамдық
немесе уақыт функциясында басқару жүйесінің релелі-түйіспелі
бөлігімен орындалады. Қозғалтқыш келесі, алғашқыдан
қатаңдау механикалық сипаттамаға (Rқос1)
жұмыс істеуге көшеді және сипаттаманың 4-5 бөлігі
бойымен жылдамдығы өседі. 5-ші нүктеде барлық
кедергі Rқос тұйықталады, ал қозғалтқыш
өзіндік сипаттамаға жұмыс істеуге көшеді.
![]()
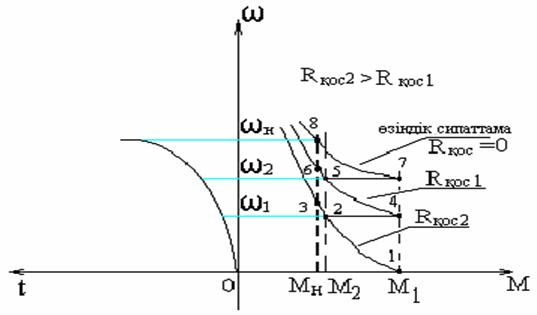
2.3.9 – сурет. Қозғалтқышты іске қосу диаграммасы
Жетектің жылдамдығын өсіруі 8-ші нүктеде
аяқталады. Кейбір жағдайларда кедергі сатыларының саны 2-ге
(2.3.9 - сурет) тең болмауы мүмкін. Кейбір бөліктерде қозғалтқыш
жылдамдығы w1, w2, wн мәндерін құрайды.
2.3.9 - суреттің сол жағында машинаның толық жүріп
кету сипаттамасы w=f(t) көрсетілген.
Механикалық сипаттамалар қисық сызықты
болғандықтан есептеудің негізгі әдістері графиктік және
графиктік талдау әдістері болады:
- механикалық сипаттамалардың топтары
бойынша;
- кедергілер әдісі (Андронов әдісі);
- өтпелі сипаттамалар әдісі;
- шектік сипаттамалар әдісі.
Жасанды механикалық сипаттамаларды есептеу кезінде
бірінші әдіс бойынша әртүрлі кедергілер r % үшін салыстырмалы
бірліктегі механикалық сипаттамасының ![]() топтамасын қолданамыз. Әдісті қолдану
үшін салыстырмалы бірліктегі сипаттамалар топтамасын жылдамдық wн пен иінкүштің
Мн нақты мәндерін қолдана отырып, абсолютті
бірлікке аударамыз. 2.3.10 - суретте r % мәні
топтамасын қолданамыз. Әдісті қолдану
үшін салыстырмалы бірліктегі сипаттамалар топтамасын жылдамдық wн пен иінкүштің
Мн нақты мәндерін қолдана отырып, абсолютті
бірлікке аударамыз. 2.3.10 - суретте r % мәні ![]() кедергісінің
салыстырмалы мәніне (пайызда) сәйкес келеді.
кедергісінің
салыстырмалы мәніне (пайызда) сәйкес келеді.

2.3.10 - сурет Тізбектеле қоздырылатын ТТҚ – ның сипаттамалары
Бұл әдіс бойынша синтез кезінде талап етілген
нүктесі белгіленеді. Интерполяциямен r % мәні, одан кейін
А нүктесінде берілген жылдамдық режимін іске асыру үшін якорь
тізбегіне қосылатын қосымша кедергісі анықталады.
 .
.
Кедергілер әдісі бойынша (Андронов әдісі)
тізбектеле қоздырылатын машинаның электр механикалық
сипаттамасы ![]() координатында көрсетіледі.
Қозғалтқыштың якорь кедергісін RЯ, қосымша
полюстердің кедергісін RҚП, тізбектеле жалғанған
қоздыру орамасының кедергісін RҚОЗ, якорь
тізбегіндегі қосымша кедергіні RҚОС арқылы
белгілеп, келесі формуланы аламыз
координатында көрсетіледі.
Қозғалтқыштың якорь кедергісін RЯ, қосымша
полюстердің кедергісін RҚП, тізбектеле жалғанған
қоздыру орамасының кедергісін RҚОЗ, якорь
тізбегіндегі қосымша кедергіні RҚОС арқылы
белгілеп, келесі формуланы аламыз
 .
(2.3.4)
.
(2.3.4)
Қозғалтқыштың
электр механикалық сипаттамасының теңдеуі ![]() координатында жүктеме тогы I тұрақты
кезде түзу сызық болады. (2.3.4) теңдеудегі белгілеулер
координатында жүктеме тогы I тұрақты
кезде түзу сызық болады. (2.3.4) теңдеудегі белгілеулер
![]() ,
,
 ,
,
 .
.
Әдісті қолдану үшін
бірінші квадрантта машинаның өзіндік электр механикалық
сипаттамасы сызылады. Сипаттама бойына есептік I1, I2, I3
токтары кезіндегі өзіндік сипаттамада жататын 1,2,3 нүктелері
белгіленеді. Токтардың мәндерінің саны жасанды сипаттамалардың
есептеу дәлдігін анықтайды. Екінші квадрантта ![]() координатында I1=const, I2=const,
I3=const токтарының тұрақты кезіндегі электр
механикалық сипаттамалары тұрғызылады. Rқ
кедергісінің мәні өз масштабында белгіленеді және ол арқылы
тік түзу сызық жүргізіледі. 1,2,3 нүктелері екінші
квадрантқа 4,5,6 нүктелері болып көшіріледі.
координатында I1=const, I2=const,
I3=const токтарының тұрақты кезіндегі электр
механикалық сипаттамалары тұрғызылады. Rқ
кедергісінің мәні өз масштабында белгіленеді және ол арқылы
тік түзу сызық жүргізіледі. 1,2,3 нүктелері екінші
квадрантқа 4,5,6 нүктелері болып көшіріледі.
Есептелінген ![]() ;
;![]() ;
;![]() кедергілерінің мәні масштабында белгіленеді және I1=const,
I2=const, I3=const якорь токтарына сәйкес 7,8,9 нүктелері
алынады. I1 ,I2 ,I3 токтары тұрақтанған
режимге сәйкес 4-7, 5-8, 6-9 нүктелері өзара түзу қосылады.
Машинаның якорь тізбегіне Rқос қосымша кедергісін
енгізген кезде жасанды электр механикалық сипаттаманы тұрғызу
үшін Rқос мәні Rқ кедергісі мәнінен
бастап тұрғызылады және алынған Rқос+Rқ
мәнінің нүктесі арқылы вертикаль тұрғызылады.
I1=const, I2=const, I3=const токтары тұрақты
кезінде түзу сызықтармен вертикаль қиылысқанда, оларға
сәйкес 10, 11, 12 нүктелерін аламыз. Ол нүктелерді бірінші
квадрантқа көшіргенде қосымша кедергісінің мәніне
сәйкес жасанды механикалық сипаттамада жататын 13, 14, 15 нүктелерін
аламыз. Жоғарыда жазылған графиктік тұрғызулар 2.3.11 -
суретте көрсетілген.
кедергілерінің мәні масштабында белгіленеді және I1=const,
I2=const, I3=const якорь токтарына сәйкес 7,8,9 нүктелері
алынады. I1 ,I2 ,I3 токтары тұрақтанған
режимге сәйкес 4-7, 5-8, 6-9 нүктелері өзара түзу қосылады.
Машинаның якорь тізбегіне Rқос қосымша кедергісін
енгізген кезде жасанды электр механикалық сипаттаманы тұрғызу
үшін Rқос мәні Rқ кедергісі мәнінен
бастап тұрғызылады және алынған Rқос+Rқ
мәнінің нүктесі арқылы вертикаль тұрғызылады.
I1=const, I2=const, I3=const токтары тұрақты
кезінде түзу сызықтармен вертикаль қиылысқанда, оларға
сәйкес 10, 11, 12 нүктелерін аламыз. Ол нүктелерді бірінші
квадрантқа көшіргенде қосымша кедергісінің мәніне
сәйкес жасанды механикалық сипаттамада жататын 13, 14, 15 нүктелерін
аламыз. Жоғарыда жазылған графиктік тұрғызулар 2.3.11 -
суретте көрсетілген.
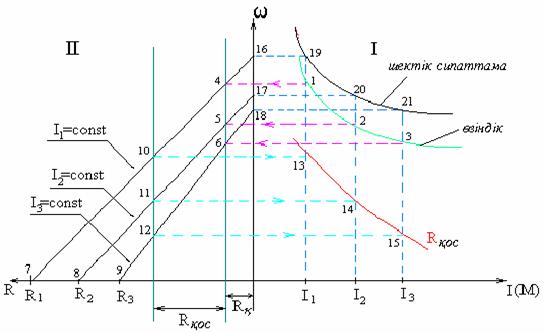
2.3.11 – сурет. Тізбектеле қоздырылатын ТТҚ – ның сипаттамасын тұрғызу
Шектік механикалық сипаттама деп якорь тізбегінің кедергісі болмаған кездегі Rқ=0 қозғалтқыштың сипаттамасын атайды.
I1=const,
I2=const, I3=const түзулері мен вертикаль осінің
қиылысын анықтай отырып, 16, 17, 18 нүктелерін аламыз. Бұл
алынған 16, 17, 18 нүктелерін бірінші квадрантқа көшіріп,
I1, I2, I3 токтары кезіндегі 19, 20, 21 нүктелерін
анықтаймыз. Бұл алынған 19, 20, 21 нүктелері шектік
сипаттаманы құрайды. Шектік сипаттама өзіндік сипаттамадан жоғары
орналасады.
Шектік сипаттама әдісі.
Rқ кедергісі мәнін есептемеген
кезде қозғалтқыш жылдамдығы ω үшін, шектік
сипаттамадағы жылдамдық үшін wшек, өзіндік wөз және жасанды wжас сипаттамадағы
жылдамдық үшін келесі арақатынасын аламыз.
 ,
(2.3.5)
,
(2.3.5)
 ,
(2.3.6)
,
(2.3.6)
 ,
(2.3.7)
,
(2.3.7)
 ,
(2.3.8)
,
(2.3.8)
 .
(2.3.9)
.
(2.3.9)
Шектік сипаттама (2.3.6) бойынша kФ мәні
есептелінеді. (2.3.8) және (2.3.9) формулалардағы теңдеулерде
қозғалтқыштың өзіндік Eөз және
жасанды Ежас сипаттамаларындағы қорек беруші э.қ.к
– сі. (2.3.8), (2.3.9) теңдеулер бойынша жасанды механикалық
сипаттаманың есептік теңдеуі (2.3.10) анықталады.
 ,
,
 ,
(2.3.10)
,
(2.3.10)
Жасанды механикалық сипаттаманы есептеу реті:
а) өзіндік механикалық сипаттамасына I1,
I2, I3 есептеу токтарын белгілейміз. Есептеу нүктелерінің
саны жасанды механикалық сипаттамалардың есептеу дәлдігін анықтайды.
Өзіндік сипаттама салыстырмалы бірліктен абсолютті бірлікке аударылады;
б) I1, I2, I3 токтарының
мәндері бойынша өзіндік сипаттама бойында ωөз1,
ωөз2, ωөз3 жылдамдықтарын
анықтаймыз;
в) өзіндік сипаттамадан қарсы э.қ.к –
сін Еөз1=U-I1RҚ, Еөз2=U-I2RҚ
арақатынастары бойынша анықтаймыз;
г) жасанды сипаттамадан қарсы э.қ.к – сі Ежас1=U-I1(RҚ+Rқос),
Ежас2=U-I2(RҚ+Rқос)
арақатынастары бойынша анықталады;
д) жасанды сипаттамадан ωжас1, ωжас2,
ωжас3 жылдамдықтары ωжас1=ωөз1·Ежас1/Еөз1,
ωжас2=ωөз2·Ежас2/Еөз2
арақатынастары бойынша анықталады;
е) бұл нүктелер w=f(Iя)
координаттарында белгіленеді, оларды өзара жалғап, жасанды
сипаттаманы аламыз.
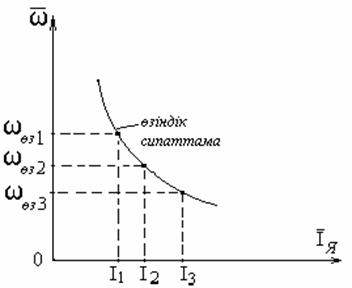
2.3.12 – сурет. Тізбектеле қоздырылатын ТТҚ – ның өзіндік сипаттамасы
Жылдамдық шамасын бөліндіге көшіріп, келесі арақатынасты аламыз
 .
(2.3.11)
.
(2.3.11)
Өтпелі сипаттама теңдеуі
![]() .
(2.3.12)
.
(2.3.12)
Әдісті қолдану үшін өтпелі
сипаттама машина үшін бір рет реттеледі. Өтпелі сипаттаманы
салыстырмалы бірліктерде берілген өзіндік сипаттама бойынша есептеу үшін
абсолютті шамаларда өзіндік сипаттама тұрғызылады. I1,
I2, I3 есептеу токтары белгіленеді және өзіндік
сипаттама бойындағы ωөз1, ωөз2,
ωөз3 жылдамдықтарына сәйкес жылдамдықтар
табылады. Әрбір есептеу нүктелері үшін қарсы э.қ.к
– сі анықталады Еөз1=U-I1RҚ ;
Еөз2=U-I2RҚ;
Еөз3=U-I3RҚ.
Әрбір есептеу нүктелері Еөз1/ωөз1,
Еөз2/ωөз2, Еөз3/ωөз3
үшін Е/ω қатынасы анықталады және магниттелу қисығына
ұқсас, өтпелі сипаттама (Е/ω)өз=f(IЯ)
тұрғызылады. Әдісті қолдану үшін келесі амалдарды
жасаймыз: сол есептеу токтары I1, I2, I3
шамалары үшін жасанды сипаттамада қарсы э.қ.к – сі Ежас1=U-I1(Rқ+Rқос),
Ежас3=U-I3(Rқ+Rқос) анықталады.
Сол есептеу токтары I1, I2,
I3 үшін өтпелі сипаттамада (Е/ω)жас1,
(Е/ω)жас2, (Е/ω)жас3 мәндері анықталады.
Жасанды сипаттамада I1, I2, I3 токтарының
мәндері үшін жылдамдық анықталады және жасанды
сипаттама тұрғызылады
 .
.

2.3.13 – сурет. Э.Қ.К – нің сипаттамасы
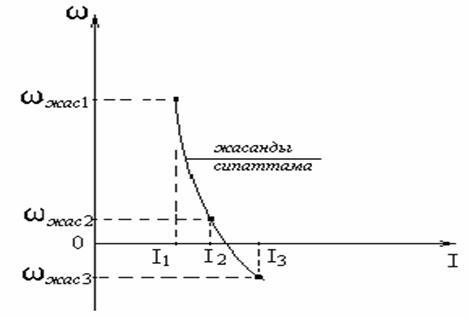
2.3.14 – сурет. Жасанды сипаттама
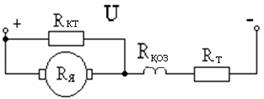
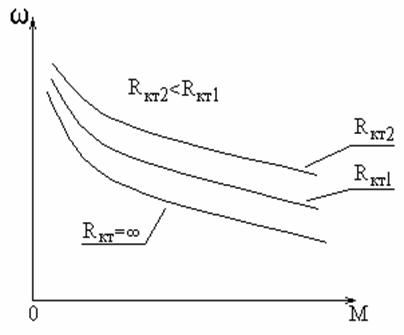
Қозғалтқыштың жылдамдығын реттеу кезінде күрделі қосылу сұлбалары қолданылады:
а) қозғалтқышты кедергімен тұйықтау
(шунттау). Бұл жағдайда кедергімен тұйықталған қозғалтқыш
желіге жалпы тізбектеліп қосылған кедергі Rт арқылы
қосылған. 2.3.15 - суретте қозғалтқыштың қосылу
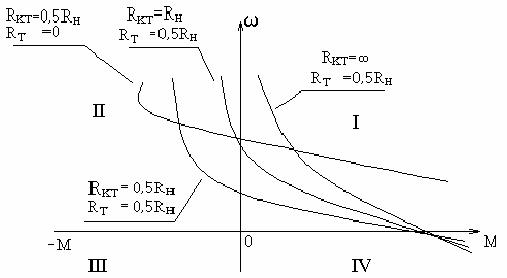
сұлбасы және 2.3.16 суретте әртүрлі Rт, Rкт
кедергілері кезіндегі механикалық сипаттамалары келтірілген. Кедергілер Rкт=¥, Rт=0÷¥ мәндері кезіндегі
механикалық  сипаттамалар тізбектеле қоздырылатын
қозғалтқыштың қалыпты қосу сұлбасы
кезіндегі кәдімгі сипаттамалары болады. Бұл сипаттамалардың түрі
мен тізбектеле қосылған кедергінің әсері жоғарыда
қарастырылған. Қозғалтқышты кедергімен
сипаттамалар тізбектеле қоздырылатын
қозғалтқыштың қалыпты қосу сұлбасы
кезіндегі кәдімгі сипаттамалары болады. Бұл сипаттамалардың түрі
мен тізбектеле қосылған кедергінің әсері жоғарыда
қарастырылған. Қозғалтқышты кедергімен ![]() тұйықтау кезіндегі механикалық
сипаттамаларды қарастыру келесі қорытындыларды жасауға мүмкіндік
береді:
тұйықтау кезіндегі механикалық
сипаттамаларды қарастыру келесі қорытындыларды жасауға мүмкіндік
береді:
а) әртүлі тұйықтала және
тізбектеле қосылған кедергілердің мәндері кезіндегі
механикалық сипаттамалар өзіндік сипаттаманың түрін сақтап
қалады және аз иінкүш мәндері кезінде өте жоғары
жылдамдықтарға ұмтылады;
б) тізбектеле қосылған кедергі шамасының
көбеюі қозғалтқышқа қосылған кернеудің
азаюына әкеледі және иінкүштің берілген мәндері
кезінде айналу жылдамдығын төмендетеді;
с) тізбектеле қосылған кедергі шамасының
көбеюі сипаттаманың еңістігінің өсуіне, иінкүш
өсуі кезінде жылдамдықтың жоғары қарай өсуіне
әкеледі;
г) үлкен жүктемелер кезінде тұйықтау
кедергісі сипаттаманың еңістігін төмендетеді, бірақ аз
иінкүштер кезінде тиімсіз болады;
д) теріс қосумен тежеу біріншіден төртінші
немесе үшіншіден екінші квадрантқа сипаттамалардың өтуін
қамтамасыз ететін тек қана біршама тізбектеле қосылған
кедергісі бар кезде ғана потенциалды, сонымен бірге реактивті иіккүш
үшін мүмкін болады.
Rт = ¥ және Rкт¹¥ кезіндегі сипаттамалар өзін-өзі
қоздырумен электр динамикалық тежеу режиміне сәйкес келеді.
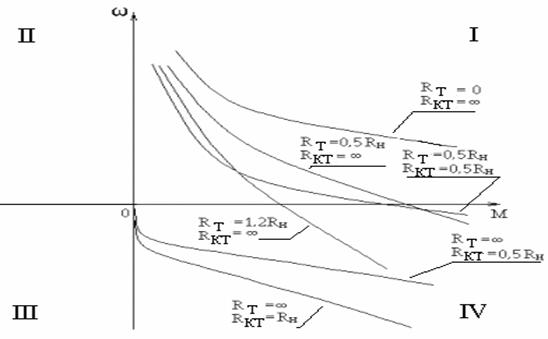
2.3.16 - сурет Тізбектеле қоздырылатын ТТҚ – ның сипаттамалары
![]()
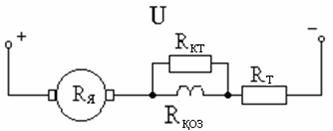
 б) қозғалтқыштың
якорін кедергімен тұйықтау. Ықшамдалған принциптік сұлба
2.3.17 - суретте келтірілген. Тек қана якорь орамасын тұйықтайтын
кедергінің болуы якорь тізбегінде ток болмаған кезде қоздыру
орамасымен ток ағатын мүмкіндікті туғызады. Бұл жағдайда
бос жүріс кезіндегі жұмыс істеу мүмкіндігін қамтамасыз
етіп, сонымен бірге белгілі шектерде генераторлық тежеу режимін алуға
мүмкін болады. Кедергімен тұйықтау контурының тогы әсері
есебінен, сондай-ақ тізбектеле қосылған кедергідегі осы
токтан қосымша кернеу төмендеуі жылдамдықтың біршама төмендеуіне
апарады (2.3.18 - сурет). Тұйықтау кедергісі мәнінің
азаюы сипаттаманы төмен және солға, екінші квадрантқа
жылжытады. “Идеалды бос жүріс жылдамдығы” тұйықтау
кедергісі, қоздыру орамасы және тізбектеле қосылған
кедергісі бойымен ағатын токтың әсерінен пайда болатын
якорьдің э.қ.к - сі тұйықтау кедергісіндегі RКТ
кернеу төмендеуіне тең болғанда орын алады.
б) қозғалтқыштың
якорін кедергімен тұйықтау. Ықшамдалған принциптік сұлба
2.3.17 - суретте келтірілген. Тек қана якорь орамасын тұйықтайтын
кедергінің болуы якорь тізбегінде ток болмаған кезде қоздыру
орамасымен ток ағатын мүмкіндікті туғызады. Бұл жағдайда
бос жүріс кезіндегі жұмыс істеу мүмкіндігін қамтамасыз
етіп, сонымен бірге белгілі шектерде генераторлық тежеу режимін алуға
мүмкін болады. Кедергімен тұйықтау контурының тогы әсері
есебінен, сондай-ақ тізбектеле қосылған кедергідегі осы
токтан қосымша кернеу төмендеуі жылдамдықтың біршама төмендеуіне
апарады (2.3.18 - сурет). Тұйықтау кедергісі мәнінің
азаюы сипаттаманы төмен және солға, екінші квадрантқа
жылжытады. “Идеалды бос жүріс жылдамдығы” тұйықтау
кедергісі, қоздыру орамасы және тізбектеле қосылған
кедергісі бойымен ағатын токтың әсерінен пайда болатын
якорьдің э.қ.к - сі тұйықтау кедергісіндегі RКТ
кернеу төмендеуіне тең болғанда орын алады.
Жылдамдықтың одан ары жоғарылауы
кезінде якорь желімен бірге тұйықталған кедергі контурын қоректендіреді,
сондықтан онда ток көбейеді. Нәтижесінде, түйықталу
кедергісінің RКТ қысқыштарында кернеу төмендеуі
жоғарылайды, соның салдарынан магнит ағыны азаяды.
Сондықтан, қайсыбір жылдамдық кезінде
тежеу иінкүші максимумға жетеді, содан кейін жылдамдық көбейгенде,
иінкүш азая бастайды.
2.3.18 – сурет. Rкт -var кезіндегі сипаттамалар
2.3.18 - суретте келтірілген сипаттамалар қозғатқыш
режимінде түйықтау кедергісінің азаюы іске қосу иінкүші
мен сипаттаманың еңістігін төмендетеді. Бұл жағдайда
теріс қосумен тежеуді қолдануға болмайды, өйткені ол
тежеу иінкүшінің тым үлкен мәнін береді. Динамикалық
тежеу аймағында сипаттамаларда біршама еңістіктер бар;
в) қоздыру орамасын кедергімен түйықтау.
![]()
 Жоғарыда қарастырылған
сұлбалардың негізгі мақсаты айналу жылдамдығын төмендету
және механикалық сипаттаманың керек түрін алу болды. Тәжірибеде
кейбір кезде нақты жылдамдығынан асып түсетін айналу жылдамдығын
алу қажеттілігі кездеседі. Желінің тұрақты кернеуі
кезінде бұл магнит ағынының азаюы есебінен алынады.
Тізбектеле қоздырылатын ТТҚ - да магнит ағынының азаюы
Rкт кедергісімен қоздыру орамасын тұйықтау арқылы орындалады.
Жоғарыда қарастырылған
сұлбалардың негізгі мақсаты айналу жылдамдығын төмендету
және механикалық сипаттаманың керек түрін алу болды. Тәжірибеде
кейбір кезде нақты жылдамдығынан асып түсетін айналу жылдамдығын
алу қажеттілігі кездеседі. Желінің тұрақты кернеуі
кезінде бұл магнит ағынының азаюы есебінен алынады.
Тізбектеле қоздырылатын ТТҚ - да магнит ағынының азаюы
Rкт кедергісімен қоздыру орамасын тұйықтау арқылы орындалады.
Қозғалтқыштың қосылу сұлбасы
2.3.19 - суретте келтірілген. Бұл жағдайда алынатын
механикалық сипаттамалар 2.3.20 суретте келтірілген. Rкт=¥ жағдайында қозғалтқыштың
қалыпты қосылу сұлбасын аламыз, яғни бұл кезде Iя
=Iқоз.
Rкт<¥ кезінде қоздыру орамасындағы
токтың мәні
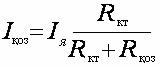 .
.
Сондықтан, қоздыру орамасын кедергімен тұйықтау
кезінде магнит ағыны қозғалтқыштың қалыпты қосылу
сұлбасы бойынша жұмыс кезінен аз болады, яғни жылдамдық
жоғары көтеріледі.
2.3.20 - сурет Механикалық сипаттамалар
Механикалық сипаттаманың жалпы түрі сақталады, бірақ ол жоғары жылдамдықтар жағына көшеді;
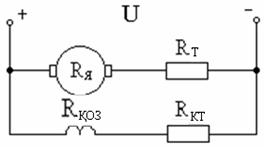 г) якорь мен қоздыру
орамасын қатар қосу. Кейбір жағдайларда тізбектеле қоздырылатын
қозғалтқыш қоздыру және якорь орамасы қатар
қосылғанда, әрине қосымша кедергілер бар кезде жұмыс
істей алады. Бұл кезде қоздыру орамасы тогының шамасы бойынша
нақты мәніне жақын болу керек, осы себептен, қоздыру
орамасымен тізбектеле қосылған кедергі біршама энергияны тұтынады.
г) якорь мен қоздыру
орамасын қатар қосу. Кейбір жағдайларда тізбектеле қоздырылатын
қозғалтқыш қоздыру және якорь орамасы қатар
қосылғанда, әрине қосымша кедергілер бар кезде жұмыс
істей алады. Бұл кезде қоздыру орамасы тогының шамасы бойынша
нақты мәніне жақын болу керек, осы себептен, қоздыру
орамасымен тізбектеле қосылған кедергі біршама энергияны тұтынады.
![]() 2.3.21 - суретте қозғалтқыштың
орамаларын қатар қосу сұлбасы келтірілген. Қосымша
кедергілердің әртүрлі мәндері кезіндегі механикалық
сипаттамалар 2.3.22 - суретте көрсетілген. Тізбектеле қосылған
кедергі болмаған кезде, яғни Rт=0 кезінде, қоздыру
орамасы тізбегіндегі кедергі Rкт тек қоздыру тогын шектеу үшін
қызмет етеді. Бұл жағдайда қозғалтқыш тәуелсіз
қоздыру арқылы жұмыс істейді. Осыған сәйкес
сипаттамалары түзу сызықты болып келеді. Rкт кедергісінің
азаюы айналу жылдамдығының және сипаттама еңістігінің
азаюына апарады. Rт ≠ 0 жағдайда қозғалтқыш
якорі Rкт және Rт кедергілері құраған
кернеу бөлгішінің бір бөлігіне қосылған.
2.3.21 - суретте қозғалтқыштың
орамаларын қатар қосу сұлбасы келтірілген. Қосымша
кедергілердің әртүрлі мәндері кезіндегі механикалық
сипаттамалар 2.3.22 - суретте көрсетілген. Тізбектеле қосылған
кедергі болмаған кезде, яғни Rт=0 кезінде, қоздыру
орамасы тізбегіндегі кедергі Rкт тек қоздыру тогын шектеу үшін
қызмет етеді. Бұл жағдайда қозғалтқыш тәуелсіз
қоздыру арқылы жұмыс істейді. Осыған сәйкес
сипаттамалары түзу сызықты болып келеді. Rкт кедергісінің
азаюы айналу жылдамдығының және сипаттама еңістігінің
азаюына апарады. Rт ≠ 0 жағдайда қозғалтқыш
якорі Rкт және Rт кедергілері құраған
кернеу бөлгішінің бір бөлігіне қосылған.
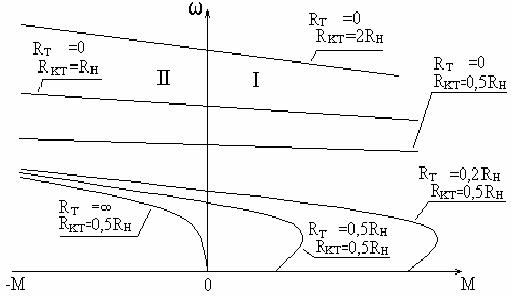
2.3.22 – сурет. R – var кезіндегі механикалық сипаттамалар
Қоздырудың қатар контуры якорь тогы
нолге тең болған кезде магнит ағынының болуын қамтамасыз
етеді. Осыған байланысты идеалды бос жүріс жылдамдығы мен тұйықтаушы
тізбекке энергияны беретін генератор режиміне қозғалтқыш
режимінен көшу мүмкіндігі бар.
Идеалды бос жүріс жылдамдығы қоздыру
орамасы тізбегіндегі Rкт кедергісінің мәнімен анықталады.
Бұл кедергінің аз мәнінде қоздыру тогы жоғары, ал
якорьдегі кернеу төмен болады. Сондықтан идеалды бос жүріс
жылдамдығы аз болады. Rкт кедергісінің жоғарылауы
магнит ағынын әлсіретеді және бір уақытта бос жүріс
жылдамдығын өсіреді.
Rкт мәні өзгеріссіз кезде
тізбектеле қосылған кедергінің Rт көбеюі қоздыру
орамасындағы токты төмендетеді және бір уақытта қозғалтқыш
якоріне қосылған кернеуді төмендетеді. Бұл кезде екінші
фактордың әрекеті басым болады және магнит ағынының
әлсіреуіне қарамастан, идеалды бос жүріс жылдамдығы төмендейді.
Бұл сұлбада якорь тогы тым көбейген кезде, соның
салдарынан қозғалтқыштың білігіндегі иінкүш көбейгенде,
Rт кедергісіндегі кернеу төмендеуі көбейгендіктен,
автоматты түрде қоздыру тогы азаяды.
Белгілі бір нүктеде якорь тогы мен магнит ағынының
көбейтіндісі максимумға жетеді, одан кейін реттеу мүмкін
болмайтын құбылыс болады. Осымен анық көрсетілген иінкүш
максимумы түсіндіріледі. Тізбектеле қосылған кедергі шексіз үлкен
мәніне Rт=¥ дейін өскен кезде, қозғалтқыш
өзін-өзі қоздыратын генераторға айналады.
2.4 Тұрақты ток қозғалтқышы
- басқарылатын вентильді түрлендіргіш
Қатты дене физикасының жетістіктері айнымалы
ток энергиясын тұрақты ток энергиясына түрлендіру және
кері түрлендіру басқарылатын вентильді түрлендіргіштердің
(БВТ) көмегімен іске асуы олардың қазіргі заман
техникасында кең қолданылуына септігін тигізді. БВТ - ның
негізгі жетістіктері жоғары энергетикалық көрсеткіштерге, жоғары
статикалық және динамикалық қасиеттері, шығыс
кернеуін кең реттеу мүмкіндігі, шығыс кернеуін реверстеуді қамтамасыз
ету, тәуелсіз қоздырылатын тұрақты ток қозғатқыштарын
қолданып басқару жүйесін тұрғызу кезінде
реттеуіштердің шамаларын ретке келтіруді стандарттау бұзылмай жұмыс
істеудің үлкен ресурсына әкеліп тіреледі. Тарихи статикалық
элемент ретінде тиристорлық түрлендіргіштер бұзылмай жұмыс
істеу ресурсы шектелген айналмалы машиналық түрлендіргіштердің
орнына қолданылды. Тиристорлық түрлендіргіштер бір
фазалық және үш фазалық сұлбалар бойынша тұрғызылады.
Түрлендіргіштің әрекет ету принципі вентильдер периодтың
өткізгіштік бөлігіне кернеу төмендеуі аз кезінде электрлік
кілттер ролінде ток өткізуімен және периодтың өткізгіштік
емес бөлігінде тізбекті жабуымен түсіндіріледі. Кернеуді реттеу
периодтың өткізгіштік бөлігінде вентильдің жұмыс
істеу ұзақтығын өзгерту жолымен орындалады. Іс жүзінде
вентильдік түрлендіргіштерде басқаруы шектеулі вентильдер қолданылады,
яғни оларда периодтың өткізгіштік бөлігінде токты
жіберу бастамасын тоқтата тұру мүмкін, бірақ оның
ноль арқылы өзіндік өтуіне дейін токты жіберуді тоқтатуға
болмайды. Осыған байланысты вентильді түрлендіргіштің
кернеуін реттеу периодтың өткізгіштік бөлігінде вентильдерді
ашу кезеңін тоқтата тұру жолымен орындалады.
Басқарылатын түзеткіштерде қолданылатын
негізгі элементтер – шала өткізгіштік вентильдер – диодтар мен
тиристорлар болады.
Бұл элементтердің ортақ қасиеті,
олар екі күйде – ашық және жабық күйде тұра
алады. Ашық күйде вентильдегі тікелей кернеу төмендеуі сұлбаның
басқа элементтерінде бөлінетін кернеуден 102-103
есе аз болады (мысалы, тиристорда тікелей кернеу төмендеуінің
орташа мәні 1В-тан аз). Жабық күйде вентиль арқылы ағатын
ток ашық күйдегі токтан 103-104 есе аз. Осының
бәрі электр магниттік процестерді талдау кезінде шала өткізгіш
вентильдерді идеалды кілт ретінде есептеуге рұқсат береді және
олардың тікелей кернеу төмендеуі мен кері токтарын есепке алмаса да
болады. Шала өткізгіш диод оның анодында оң кернеу кезінде
ашық күйде (катодқа қатысты оң) және теріс
кезінде жабық күйде болады.
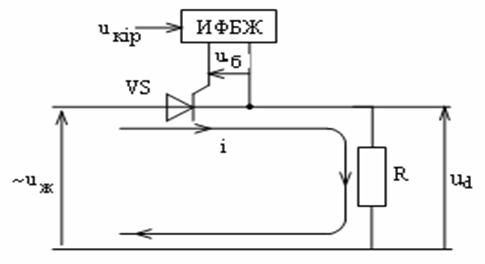
Тиристорды ашық күйге қосу үшін оның басқарушы электродына (катодқа қатысты) анодта оң кернеу болған кезде (катодқа қатысты оң) оң басқарушы импульс беру қажет. Басқарушы импульстің ұзақтығы оның әрекет ету уақытында тиристордың анодының тогы ағыту тогынан үлкен болу керек. Тиристорды жабу үшін анодтың тогын ағыту тогы мәніне дейін азайту қажет немесе оның анодына кері кернеу қосу керек (катодқа қатысты теріс). Тиристорды жабу тогы оның тура ағатын тогынан 103-104 есе аз, сондықтан сұлбаның жұмысын талдау кезінде тиристор анод тогының нолдік мәнінде жабылады деп есептеуге болады. Тиристорлардың шығыс кернеуін басқару үшін фазалық реттеу тәсілі кең қолданыс тапты. Фазалық реттеу тәсілі айнымалы кернеу мен жүктеме арасында тізбектеле қосылған тиристорларды ашу кезеңін басқаруға негізделген. Фазалық тәсілді сипаттау үшін қарапайым басқарылатын түзеткіштің жұмысын қарастырайық.
|
|
|
|
|
|
|
2.4.1 - суретте бір фазалы бір жарты периодты басқарылатын
түзеткіштің сұлбасы көрсетілген. Бұл сұлбада
VS тиристор, ИФБЖ - импульсті фазалық басқару жүйесі,
R - жүктеме кедергісі. Тиристор жүктемедегі түзетілген
кернеуді түзету және реттеу үшін қызмет етеді. ИФБЖ
тиристорлардың ашу кезеңін басқару үшін қолданылады.
Сұлбаның күштік бөлігіне желінің
айнымалы кернеуі uж беріледі. Тиристордың басқарушы
электродына желінің кернеуіне қатысты фазасы ИФБЖ - ның кіріс
сигналының uкір мәнімен анықталады, ал жиілігі қоректендіретін
желінің жиілігіне тең.
Жүктеменің кедергісі R ретінде тұрақты
ток машинасының якорь тізбегі, сондай-ақ оның қоздыру
орамасы да қолданылады. 2.4.2 - суретте машинаның қоздыру
орамасына LМ жұмыс істеу кезіндегі бір фазалы басқарылатын түзеткіштер
сұлбаларының нұсқалары көрсетілген. Суреттегі
белгілеулер: Т - трансфарматорға, VS - тиристорларға, VD - диодтарға
сәйкес.
2.4.2а - суретте нолдік диоды бар бір фазалы бір жарты периодты басқарылатын түзеткіш келтірілген. 2.4.2б суретте орта нүктесі бар бір фазалы түзеткіш көрсетілген.
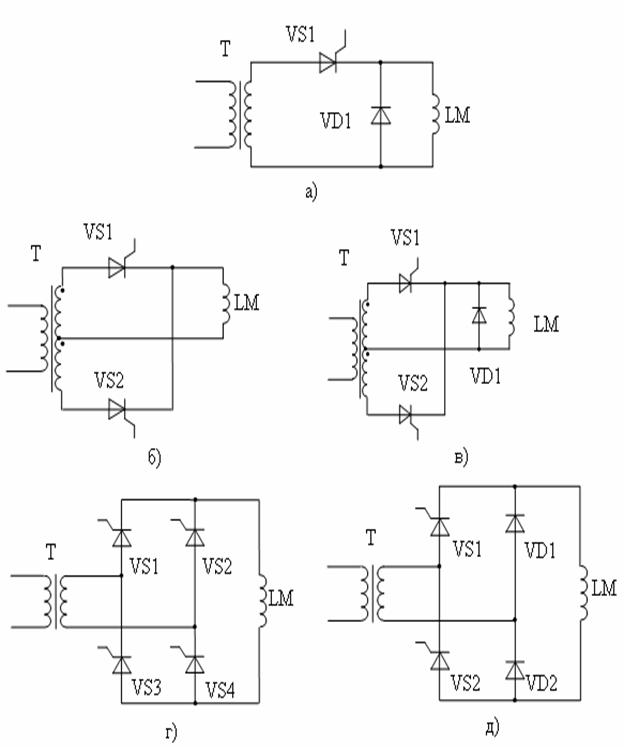
2.4.2 – сурет. Бір фазалы түзеткіштердің сұлбалары
2.4.2в - суретте орта нүктесі және нолдік
диоды бар бір фазалы басқарылатын түзеткіш көрсетілген.
2.4.2г - суретте көпірлі бір фазалы басқарылатын түзеткіш көрсетілген.
2.4.2д - суретте бір фазалы симметриялы емес көпірлі басқарылатын түзеткіш
келтірілген.
Басқарылатын түзеткіштердің шамаларын
есептеу үшін келтірілген формулалар 2.4.1 - кестеде көрсетілген,
кестедегі әрбір бағана 2.4.2 - суреттегі сұлбаның нұсқаларына
сәйкес.
2.4.1 - кесте
|
Шамалар |
Басқарылатын түзеткіш сұлбаларының нұсқалары |
||||
|
Сұлбалар |
Сурет 2.4.2а |
Сурет 2.4.2б |
Сурет 2.4.2в |
Сурет 2.4.2г |
Сурет 2.4.2д |
|
Реттеу бұрыш максим. мүмкін ауқымы |
0 £ a £ p |
0 £ a £ p/2 |
0 £ a £ p |
0 £ a £ p/2 |
0 £ a £ p |
|
Түзетілген кернеудің орташа мәні |
|
|
|
|
|
|
Түзетілген токтың орташа мәні |
|
|
|
|
|
|
Тиристор тогының орташа мәні |
|
|
|
|
|
|
Диод тогының орташа мәні |
|
_____ |
|
______ |
|
|
Тиристор. максимал кері кернеуі |
|
|
|
|
|
|
Диодтағы кері кернеудің максимал мәні |
|
______ |
|
______ |
|

Кестеде келесі белгілеулер қолданылған:
a - реттеу бұрышы;
Uор- түзетілген кернеудің орташа мәні;
Uор0 – реттеу бұрышы a=0 кезіндегі түзетілген кернеудің орташа мәні; U2 – трансформатордың екінші реттік орамасы кернеуінің әрекет ету мәні;
UVS кері m – тиристордағы кері кернеудің максимал мәні;
UVD кері m – диодтағы кері кернеудің максимал мәні;
Iор – жүктеме тогының орташа мәні;
IVS ор – тиристор тогының орташа мәні;
IVD ор – диод тогының орташа мәні;
RLM – қоздыру орамасының кедергісі.
2.4.1 - суреттегі сұлбаның жұмысын түсіндіретін
диаграммалар 2.4.2а -суретінде келтірілген. Бірінші диаграммада желі кернеуінің
uж бұрышқа u (мұнда және
бұдан кейін u= ωt [рад], w=2pfж - бұрыштық
жиілік [рад/сек], fж - желі кернеуінің жиілігі
[Гц], t - уақыт) тәуелділігі келтірілген. Кернеу uж
периоды 2π болатын синусондалы заң
бойынша өзгереді
Uж = Um
sin u,
(2.4.1)
мұнда Um - желі кернеуінің
амплитудалық мәні (![]() ;
;
Uж – желі кернеуінің әсер
етуші мәні).
Екінші диаграммада тікбұрышты пішінді басқарушы
импульсі uб келтірілген. Импульстің амплитудасы мен ұзақтығы
тиристордың сенімді ашылу шартынан таңдалады. Импульстер ИФБЖ - мен
тиристордың анодында оң кернеу болған кезде пішінделеді және
желінің кернеуіне қатысты реттеу бұрышына a (кештету бұрышына)
ысырылған. Реттеу бұрышының мәні ИФБЖ - ның кіріс
сигналына uкір тәуелді. Үшінші, төртінші және
бесінші диаграммаларда жүктемедегі кернеудің бірсәттік мәндері
– ud(u), жүктеме тогы – i(u) және тиристордың
анодындағы катодқа қатысты кернеудің uVS(u) тәуелділіктері
келтірілген.
Сұлбаның жұмысын бөлек уақыт
аралықтарында қарастырайық.
0£u<a уақыт аралығы. Бұл
аралықта тиристор жабық, тиристор тогы i(u) мен жүктемедегі
кернеу ud(u) нолге тең, ал тиристор анодындағы кернеу
желі кернеуіне тең uVS(u)=uс(u).
u=a кезінде тиристордың
басқарушы электродына басқарушы импульс uб беріледі және
тиристор ашылады. Бұл кезде тиристор анодының тогы і бірден өседі
және ажырату тогынан үлкен болып шығады, сондықтан басқарушы
импульс біткеннен кейін де тиристор ашық күйде қалады.
a£u<p уақыт аралығы.
Бұл уақыт аралығында тиристор ашық, тиристор анодындағы
кернеу uVS(u) нолге тең, жүктемедегі кернеу желі
кернеуіне тең, яғни ud(u)»uж(u), ал жүктеме тогы
i(u)=ud/Rн.
u»p кезінде тиристор анодының
тогы ажырату тогынан аз болады, тиристор жабылады.
p£u£2p+a. уақыт аралығы.
Бұл уақыт аралығында тиристор жабық, ал сұлбаның
күйі 0£u<a уақыт аралығындағы
күймен бірдей болады.
2p£u£4p, 4p£u£6p, ..., 2ip£u£2(i+1)p, мұнда
i=0,1,2,..., уақыт аралықтарында сұлбаның жұмысы
0£u£2p уақыт аралығындағы жұмысына ұқсас.
2.4.3б - суретте реттеу бұрышы α 2.4.3а суретпен салыстырғанда үлкен мәнге
ие болған жағдай үшін диаграммалар келтірілген.
2.4.3 - суретте келтірілген диаграммаларда көрсетілгендей,
жүктемедегі кернеуде жиілігі желі кернеуінің жиілігіне тең оң
импульстердің сипаты бар.
Жүктемедегі кернеудің бірсәттік мәні
ud(a) тиристор ашық уақыт аралықтарында желі кернеуіне uж(a) тең және
тиристор жабық уақыт аралықтарында нолге тең. Түзетілген
кернеудің орташа (периодта) мәнін (түзетілген кернеудің
тұрақты құраушысы) геометриялық түрде
келесі жолмен анықтауға болады. Ені 2π болатын тікбұрыш тұрғызамыз, оның ауданы жүктемедегі
бір сәттік кернеу ud қисығының ауданымен
шектелген. Алынған тікбұрыштың биіктігі жүктемедегі
кернеудің орташа мәніне тең болады. Осыған орай,
кернеудің орташа мәні жүктемедегі бірсәттік кернеу қисығымен
шектелген ауданға пропорционал, яғни ол реттеу бұрышына
α тәуелді.

2.4.3 – сурет. 2.4.1 - суреттегі сұлбаның диаграммалары
Талдау бойынша жүктемедегі кернеудің орташа мәні мына түрде анықталады
 (2.4.2)
(2.4.2)
мұнда  - реттеу бұрышы
α=0 кезіндегі түзетілген
кернеудің орташа мәні.
- реттеу бұрышы
α=0 кезіндегі түзетілген
кернеудің орташа мәні.
Алынған формула жүктеме кернеуі орташа мәнінің
Uор(a) реттеу бұрышына a тәуелділігін сипаттайды және
оны реттеу сипаттамасы деп атайды. Формуладан көрініп тұрғандай,
a бұрышы
0£a£p шектерінде өзгерген кезде жүктемедегі кернеудің орташа мәні
Uор(a), ![]() шектерінде өзгереді және
реттеу бұрышы көбейген сайын ол азая түседі. Соңғы
жазылғандар 2.4.3а және 2.4.3б - суреттерінде Uор мәндерімен
суреттеледі.
шектерінде өзгереді және
реттеу бұрышы көбейген сайын ол азая түседі. Соңғы
жазылғандар 2.4.3а және 2.4.3б - суреттерінде Uор мәндерімен
суреттеледі.
Активті жүктеме кезінде u(u)=R·i(u) пішінімен орындалады.
Сондықтан токтың және кернеудің орташа мәндері
келесі арақатынаспен байланысты
 (2.4.3)
(2.4.3)
Осыған орай, кернеу мен жүктеме тогының
орташа мәнін реттеу әдісі реттеу бұрышын α өзгерту жолымен ИФБЖ – ның
көмегімен тиристордың ашу кезеңін өзгерту арқылы
жүзеге асырылады.
Қазіргі уақытта өнеркәсіпте тәуелсіз
қоздырылатын тұрақты ток электр қозғалтқыштары
кең колданылады. Мұндай қозғалтқыштардың
якорге қосылған кернеуді және қоздыру тогын (ағынын)
өзгерту жолымен айналу жылдамдығын өзгертуге болады. Айналу
жылдамдығын реттеу үшін бір аймақтық (бірінші тәсіл
бойынша) және екі аймақтық (бірінші және екінші тәсіл
бойынша) басқаруы бар тиристорлық түрлендіргіштер қолданылады.
Тұрақты ток қозғалтқыштарындағы қоздыру
орамасының ерекшелігі оның үлкен (якорьге қатысты)
индуктивтілігі, аз тұтыну қуаты және қоздыру тогының
рұқсат етілген ауқымы болады. Тұтыну қуаты электр
қозғалтқышының нақты қуатының бір
пайызын құрайды, ал қоздыру тогын реттеу ауқымы 10 -
нан аспайды. Осыған байланысты қоздыру тогын реттеу үшін бәрінен
де жиі реверсті емес бір фазалы басқарылатын түзеткіштер қолданылады.
Қоздыру орамасының үлкен уақыт тұрақтысы және
қоздыру тогының аз реттеу ауқымы басқарылатын түзеткіштердің
үздіксіз токтар ауданында жұмыс істеуіне әкеліп соғады.
Сипатталған сұлба тұрақты ток қозғалтқыштарының
қоздыру тогын реттеу үшін және соған орай оның
айналу жылдамдығын нақты жылдамдығынан жоғары қарай
реттеу үшін арналған.
2.4.4 - суретте нолдік диоды бар бір фазалы бір жарты
периодты реферсті емес басқарылатын түзеткіштің ықшамдылған
принциптік электрлік сұлбасы келтірілген. Сұлба күштік
трасформаторды Т, тиристорды VS, импульсті – фазалы басқару жүйесін
ИФБЖ, нолдік диодты VD және қоздыру орамасын LM құрайды.
Трансформатордың Т қоздыру орамасындағы LM кернеудің
максимал мәнін анықтайтын екінші реттік орамасындағы айнымалы
кернеудің талап етілген әсер ету мәнін алу үшін,
сонымен бірге желі мен сұлбаның қалған бөлігі
арасындағы гальваникалық байланыс үшін қызмет етеді.
|

Тиристор VS қоздыру орамасындағы LM түзетілген
кернеудің орташа мәнін түзету және реттеу үшін қызмет
етеді. ИФБЖ тиристордың VS жұмысын басқарады. Нолдік диод VD қоздыру
орамасындағы кернеудің кері мәндерін болдырмау үшін және
осыған орай, түзетілген кернеу мен токтың орташа мәнін
көбейту үшін арналған.
Трансформатордың бірінші реттік орамасына
синусоидты заң бойынша өзгеретін желінің айнымалы кернеуі
беріледі. Трансформатордың екінші реттік орамасынан U2 кернеуі
алынады
u2=kтрu1,
(2.4.4)
мұнда kтр=v2/v1 = u2 /u1
– трансформатордың беріліс коэффициенті;
v1 және v2 – бірінші және
екінші реттік кернеу орамасындағы орам саны;
u2 кернеуі u1 кернеуі секілді
синусты заң бойынша өзгереді
u2= Um sin u,
(2.4.5)
мұнда u2 - екінші
реттік орамасындағы кернеудің бір сәттік мәні.
Um=![]() - екінші реттік орамасындағы
кернеудің амплитудалық (максимал) мәні;
- екінші реттік орамасындағы
кернеудің амплитудалық (максимал) мәні;
(U2 – сол орамадағы кернеудің әсер
ету мәні);
u=wt [рад] (w=2pf; f - қорек
желісінің жиілігі, t – уақыт).
Тиристор VS кілт режимінде жұмыс істейді. Ол ИФБЖ
пішіндеген басқарушы импульсін uб беру кезеңінде анодтағы
оң кернеу кезінде (катодқа қатысты оң) ашылады. Басқарушы
импульс тікбұрышты пішінде болады және ИФБЖ – ның кіріс
сигналы Uкір анықтайтын кернеудің u2 оң
жарты толқыны бастамасынан реттеу бұрышына α жылжыған. Басқарушы
импульстің амплитудасы және ұзақтығы тиристорды
сенімді ашу шарттарынан таңдалады.
Ары қарай, сұлбаның жұмысын қарапайым
сипаттау үшін, тиристор мен диодтың анодындағы оң
кернеу төмендеуін, тиристордың ажырату тогын және жабық
тиристор анодының тогын нолге тең деп есептейміз, өйткені көрсетілген
шамалар өте аз мәндерді құрайды.
Тұрақтанған режимдегі сұлбаның
жұмысы бөлек уақыт аралықтарында 2.4.5 - суретте
келтірілген уақыт диаграммаларымен түсіндіріледі. Бұл суретте
келесі кернеулердің бірсәттік мәндерінің бұрышқа
u тәуелділігі
келтірілген: u2(u) - трансформатордың екінші
реттік орамасындағы; uб(u) - тиристордың басқарушы
электродындағы; uLM(u) - қоздыру орамасындағы;
uVS(u) -тиристордың анодындағы (катодқа қатысты) және
uVD(u) - диодтың анодындағы (катодқа қатысты) кернеулер.
Сол жерде келесі токтардың бірсәттік мәндерінің тәуелділігі
келтірілген: iVS(u) - тиристор тогы; iVD(u) -диодтың тогы және
iLM(u) - қоздыру орамасының тогы.
Берілген сұлбада жүктеме (қоздыру
орамасы) активті – индуктивті сипат алады (RL – жүктемесі).
Индуктивтілік L энергия аккумуляторы болады. Индуктивтілікке оң импульс
берген кезде онда энергия қоры пайда болады, ал ол арқылы ағатын
ток өсе бастайды. Импульс біткен кезде индуктивтілікте жиналған
энерия беріле бастайды, ал ток өзінің бағытын өзгертпеген
күйде азая бастайды. Соңында, бұл токтың соғуын төмендетеді.
Сұлбаның жұмысы бөлек уақыт
аралықтарында сипатталады.
0£u<a уақыт аралығы.
Бастапқы күйде (u=0) тиристор жабық. 0£u<a уақыт аралығында
тиристор жабық күйде қалады, тиристор анодының тогы iVS(u) нолге тең, ал қоздыру
орамасы трасформатордың екінші реттік орамасынан ажыратылып қалады.
Бірақ, қоздыру орамасы арқылы ағатын ток нолге тең
емес. Алдындағы уақыт аралығында (u<0) қоздыру
орамасында LM жиналған индуктивтіліктегі энергия есебінен қоздыру
орамасының тогы iLM(u) сұлбада көрсетілген
бағытта диод VD арқылы ағады. Токқа байланысты диод ашық
күйде тұрады. Осы кезде қоздыру орамасындағы LM кернеуі
uLM(u) диодтағы VD нолге тең кернеудің оң төмендеуіне
uVD(u) тең, ал қоздыру орамасының тогы iLM(u) уақыт бойынша
экспонентті тәуелділікпен төмендейді. Жабық VS тиристордағы
кернеу трансформатордың екінші реттік кернеуіне тең болады: uVS(u)=u2(u) - uLM(u)= u2(u).
a£u<p уақыт аралығы. u=a кезінде тиристордың
басқарушы электродына ИФБЖ - дан басқарушы импульс беріледі,
тиристор ашылады, ал қоздыру орамасындағы кернеу ud нолден
u2(a) мәніне дейін тез өседі. Басқарушы импульсті алып тастаған
соң тиристор ашық күйде тұрады, өйткені анод тогы
ажырату тогынан үлкен болып қалады. Кернеудің u2 әсерімен
диод VD жабылады және ол сұлбаның жұмысына әсер
етпейді.
a£u£p уақыт аралығында
тиристор ашық күйде болады, трансформатордың екінші реттік
орамасындағы кернеу u2(u) қоздыру орамасындағы
кернеуге uLM(u) тең, диодқа
VD кері кернеу қосылған және ол жабық (диод тогы iVD(u) нолге тең), қоздыру
орамасының LM тогы iLM(u) уақыт бойына өседі
және трансформатордың екінші реттік орамасы – VS тиристоры –
трансформатордың екінші реттік орамасы бойымен ағады. Бұл уақыт
аралығында қоздыру орамасындағы индуктивтілікте энергия
жиналады. p£u кезінде қоздыру орамасы LM мен диодқа
VD қосылған кернеу u2 өз таңбасын
кері өзгертеді және теріс болып шығады. Нәтижесінде
диод VD ашылады, ал тиристор VS анодына теріс кернеу қосылады және
ол тиристор жабылады.
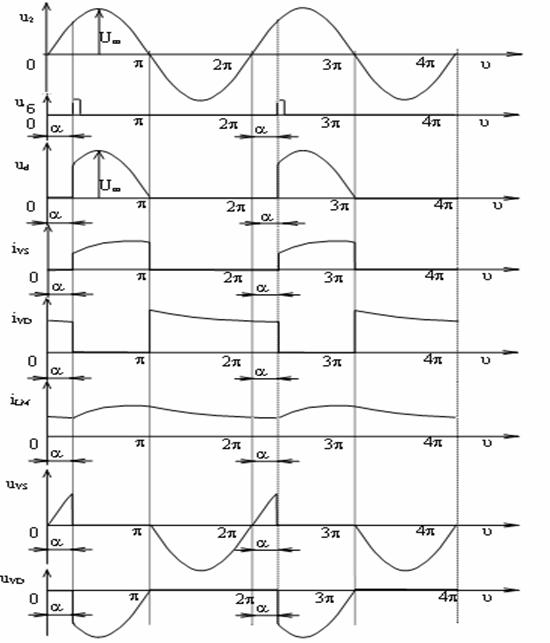
|
![]() уақыт аралығы.
Берілген уақыт аралығында тиристор VS жабық, ал диод VD ашық
күйде ұсталып тұрады. Қоздыру орамасындағы
LM кернеу ud(u) диодтағы оң кернеу
төмендеуіне UVD тең, яғни нолге тең.
Тиристор анодындағы кернеу UVS (
уақыт аралығы.
Берілген уақыт аралығында тиристор VS жабық, ал диод VD ашық
күйде ұсталып тұрады. Қоздыру орамасындағы
LM кернеу ud(u) диодтағы оң кернеу
төмендеуіне UVD тең, яғни нолге тең.
Тиристор анодындағы кернеу UVS (![]() ) трансформатордың Т екінші реттік орамасының
кернеуіне u2(u) тең. Жабық тиристор
VS арқылы ағатын ток iVS (
) трансформатордың Т екінші реттік орамасының
кернеуіне u2(u) тең. Жабық тиристор
VS арқылы ағатын ток iVS (![]() ) нолге тең,
) нолге тең, ![]() уақыт аралығында
қоздыру орамасының LM индуктивтілігінде жиналған
энергияның әсерімен iLM (
уақыт аралығында
қоздыру орамасының LM индуктивтілігінде жиналған
энергияның әсерімен iLM (![]() ) тогы диод арқылы ағады және
экспоненттік тәуелділік бойынша азаяды. Келесі
) тогы диод арқылы ағады және
экспоненттік тәуелділік бойынша азаяды. Келесі ![]() ,
, ![]() және тағы
басқа уақыт аралықтарында басқарылатын түзеткіштің
жұмысы
және тағы
басқа уақыт аралықтарында басқарылатын түзеткіштің
жұмысы ![]() уақыты аралығындағы
жұмыс сипатымен, ал
уақыты аралығындағы
жұмыс сипатымен, ал ![]() ,
, ![]() және сол сияқты уақыт аралықтарындағы
жұмысы
және сол сияқты уақыт аралықтарындағы
жұмысы ![]() уақыт аралығындағы
жұмысымен сәйкес келеді.
уақыт аралығындағы
жұмысымен сәйкес келеді.
2.4.5 суретте көрсетіп тұрғандай, қоздыру
орамасындағы LM кернеу ud(u) бір полюсті тікбұрышты
болатын импульстер түрінде болады, олардың жиілігі қоректендіру
желісінің жиілігіне тең. Тиристор VS ашық кездегі кернеудің
ud(u) мәні трансформатордың екінші реттік орамасының
кернеуіне u2(u) тең және тиристор
жабық кезде нолге тең. Қоздыру орамасындағы LM бір
периодтағы (![]() ) кернеудің орташа мәні Ud (кернеудің тұрақты
құраушысы) қоздыру орамасындағы кернеу қисығының
ауданына пропорционал және ол реттеу бұрышына a тәуелді. Мысалы,
ол a=0 кезінде
максимал мәніне және a=p кезінде нолге тең
болады. Осыған орай, импульсті фазалы басқару жүйесінің
кірісіндегі кернеудің Uкір өзгеруі реттеу бұрышының
a өзгеруіне
әкеледі және қоздыру орамасындағы LM бір периодтағы
кернеудің орташа мәнінің Uор өзгеруіне әкеліп
соғады. Диаграммаларда көрсетілгендей, тиристор анодындағы
кері кернеудің максимал мәні желі кернеуінің Um
амплитудалық мәніне тең.
) кернеудің орташа мәні Ud (кернеудің тұрақты
құраушысы) қоздыру орамасындағы кернеу қисығының
ауданына пропорционал және ол реттеу бұрышына a тәуелді. Мысалы,
ол a=0 кезінде
максимал мәніне және a=p кезінде нолге тең
болады. Осыған орай, импульсті фазалы басқару жүйесінің
кірісіндегі кернеудің Uкір өзгеруі реттеу бұрышының
a өзгеруіне
әкеледі және қоздыру орамасындағы LM бір периодтағы
кернеудің орташа мәнінің Uор өзгеруіне әкеліп
соғады. Диаграммаларда көрсетілгендей, тиристор анодындағы
кері кернеудің максимал мәні желі кернеуінің Um
амплитудалық мәніне тең.
Үш фазалы нолдік және үш фазалы көпірлік
түзету сұлбаларына талдау жүргізейік. Бұл түрлендіргіштер
тәуелсіз қоздырылатын ТТҚ – ларының якоріне жұмыс
істеп тұрған жағдайды қарастырайық. Периодтың
өткізуші бөлігінде вентильдердің ашық күйінің
ұзақтығын басқару өзіндік ашылу нүктелерінен
(1-ші, 2 – ші нүктелер, 2.4.5 – 2.4.6 - суреттерде) бастап есептелетін
кідіру бұрышымен a сипатталады.
Түзеткіштің кернеуі мен тогының уақыт
бойынша өзгеру графигі тұрақты және айнымалы құраушыларынан
тұратын күрделі қисық түрінде болады. Электр
машинасында қызу және коммутация процесіне жайсыз әсер ететін
токтың айнымалы құраушысын азайту мақсатында, түрлендіргіштің
жүктемесі болатын якорь тізбегіне белгілі бір индуктивтілігі бар
тегістеуші реактор (Р) орнатады.
Вентильді түрлендіргіштен қорек алатын тұрақты
ток қозғалтқышының жұмысын талдау үшін, қорек
ететін айнымалы ток желісіндегі кернеудің өзгеру периодында кернеу
мен токтың орташа мәні болып анықталатын түрлендіргіштің
кернеуі мен тогының тұрақты құраушысын табу
керек. Көрсетілген кернеу мен токтың тұрақты құраушысы
түзетілген кернеу мен түзетілген ток деп аталады. Вентильді түрлендіргіштің
кернеуі мен тогының орташа мәні оның шамалары және қосылу
сұлбасымен анықталады.
Тәжірибеде вентильді түрлендіргіштің әртүрлі
сұлбалары қолданылады. Бірақ әсер ету және тұрғызуы
бойынша барлық әртүрлі сұлбалар екі топқа бөлінеді:
айнымалы ток жүйесінің тек бір ғана жарты толқыны қолданылатын
нолдік сұлбалар (2.4.6 - сурет) және айнымалы ток жүйесінің
екі жарты толқыны қолданылатын көпірлік сұлбалар (2.4.7
- сурет). 2.4.6 б-д және 2.4.7б-д - суреттерінде екі топтардағы
вентильді түрлендіргіштердің балама сұлбалары және э.қ.к
– лері, токтар мен кернеулердің өзгеру диаграммалары көрсетілген.

2.4.6 – сурет. Нолдік нүктесі бар үш фазалы вентильді түрлендіргіштің принциптік (а) және балама (б) сұлбалары, фазалық э.қ.к – сінің (в), вентильдегі токтардың (г), түрлендіргіштің э.қ.к – сі мен кернеуінің (д) өзгеру диаграммалары
Суретте келесі белгілеулер алынған:
е2а, е2b, е2c – трансформатордың әр фазасының екінші реттік орамаларындағы э.қ.к – нің бір сәттік мәндері;
ij – j вентильіндегі токтың бір сәттік мәні;
Ud және id – түрлендіргіш шығысындағы кернеу мен токтың бір сәттік мәндері;
RTР – трансформатор фазасының активті кедергісі;
XTР – сейілу өрісі тудыратын трансформатор фазасының индуктивті кедергісі.
Өз кезегінде
 ,
,
 ,
(2.4.6)
,
(2.4.6)
мұнда R1, R2 – трансформатор фазасының бірінші және екінші реттік орамаларының активті кедергілері;
X1, X2 - трансформатор фазасының бірінші және екінші реттік орамаларының индуктивті кедергілері;
ω1, ω2 - трансформатор фазасының бірінші және екінші реттік орамаларының орам саны.
2.4.6б - суреттегі балама сұлбада трансформатордың әр фазасы э.қ.к көзі мен RTР және XTР кедергілері түрінде ұсынылған, бұл барлық вентильді түрлендіргішті балама кедергілері бар э.қ.к көзі еd етіп көрсетуге рұқсат береді (2.4.6д - суреттегі диаграммаларды көріңіз).
Үздіксіз токтар режиміндегі түзетілген э.қ.к – нің орташа мәні келесі формуламен анықталады
![]() ,
(2.4.7)
,
(2.4.7)
мұнда Edm – вентильдерді ашуда кідірудің болмауына сәйкес болатын түзетілген э.қ.к – нің максимал мәні.
 ,
(2.4.8)
,
(2.4.8)
мұнда m – түрлендіргіш фазасының саны;
E2Ф.М, E2Ф – трансформатордың екінші реттік орамасындағы фазалық э.қ.к – нің амплитудалық әсер ету мәні.
Бір жарты периодты сұлбалардың
ерекшелігі вентиьдер коммутациясы периодын g, яғни бір
вентильдің жұмысы біткенде және жұмысқа келесі
вентиль қосылған периодын есептемеген кезде жүктеме тогы id
жұмыс істеп тұрған вентильдің тогына тең. Жүктеме
тізбегіндегі ток трансформатордың жұмыс істеп тұрған
фазасындағы э.қ.к – мен, ал түрлендіргіштегі кернеу төмендеуі
осы фазадағы кернеу төмендеуімен анықталады. Осы шарттар
кезінде үш фазалы бір жарты периодты сұлба (т = 3) үшін
 .
(2.4.9)
.
(2.4.9)
Түрлендіргіштегі кернеу төмендеуі өткізуші
периодта вентильдің өзіндегі (DUВ), активті
кедергідегі кернеу төмендеуімен (DUR), сонымен бірге,
вентильдер коммутациясы процесінен туындайтын кернеу төмендеуімен (DUХ) анықталады.
Вентильдегі кернеу төмендеуі өткізуші периодта токқа тәуелді
емес және сынапты вентильдер үшін ол DUВ=15-20 В,
шала өткізгіштік вентильдер (тиристорлар) үшін DUВ= 0,5-1 В.
Атап өтетін болсақ, вентильді түрлендіргіштердің
топтарына тиристорлардан басқа әртүрлі сынаптық
вентильдер кіреді, олар тиристорлық түрлендіргіштер әлі қолданысқа
шықпай тұрған кезде қолданылған болатын. Активті
кедергідегі кернеу төмендеуі токқа пропорционал
 ,
(2.4.10)
,
(2.4.10)
мұнда Id – түрлендіргіштің жүктеме
тогының орташа мәні.
Коммутация бұрышы g түзетілген ток Id
пен a бұрышының
берілген мәні кезінде анықталады
 .
(2.4.11)
.
(2.4.11)
Іс жүзінде g<< 4p/m, осыған байланысты
кернеу төмендеуі
![]()
Вентильдердің коммутация процесі анықтайтын түрлендіргіш шығысындағы кернеу төмендеуі келесі функциямен анықталады
 (2.4.12)
(2.4.12)
Жоғарыда айтылғандарды есепке ала отырып, бір жарты периодты түрлендіргіштегі кернеудің орташа мәні мына түрде көрсетіледі
![]() .
(2.4.13)
.
(2.4.13)
Жақша ішіндегі кедергі вентильді түрлендіргіштің балама кедергісі деп аталады.
![]() .
(2.4.14)
.
(2.4.14)
Сонда
![]() (2.4.15)
(2.4.15)
Көпірлік сұлбаларда коммутация
периодын есептемегенде, бір уақытта екі вентиль жұмыс істейді. Бұл
кезде жүктеме тогы тізбектеле екі вентиль және фазалық э.қ.к
– лер айырмасы, яғни сызықтық э.қ.к әсерімен
трансформатордың екі фазасы арқылы өтеді.
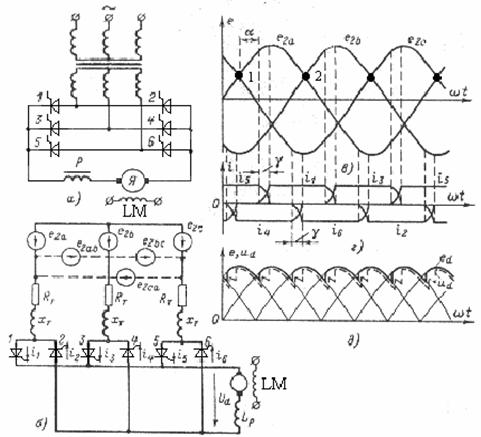
2.4.7 – сурет. Көпірлік сұлба бойынша орындалған үш фазалы вентильді түрлендіргіштің принциптік (а) және балама (б) сұлбалары, фазалық э.қ.к – нің (в), вентильдегі токтардың (г), түрлендіргіштің э.қ.к – сі мен кернеуінің (д) өзгеру диаграммалары
2.4.7б - суретте сызықтық э.қ.к көздері үзік сызықпен көрсетілген. Айнымалы кернеудің толық өзгеру периодында түрлендіргіштің барлық алты вентилі жұмыс істейді (2.4.7г - суреті). Бұл шарттарда үш фазалы көпірлік сұлба (m=6) үшін

![]()
![]()
 (2.4.16)
(2.4.16)
мұнда E2С – трансформатордың
екінші реттік орамасындағы сызықтық э.қ.к – нің әсер
ету мәні. ![]()
DUВ – көпірдің бір жағындағы вентильдегі өткізуші периодтың кернеу төмендеуі.
Жоғарыда айтылғандарды есепке алып, екі жарты периодты түрлендіргіш үшін келесі теңдеуді аламыз
![]() (2.4.17)
(2.4.17)
Осыған ұқсас, келесі арақатынастарды аламыз
![]() ,
,
![]() (2.4.18)
(2.4.18)
Ud1 және Ud2 кернеулерін
бір-бірінің орнына қою, олардың толық ұқсас
екенін көрсетеді. Бұл келесі қорытынды жасауға мүмкіндік
береді; үздіксіз токтар режимінде жұмыс істейтін кез-келген
вентильді түрлендіргіш түзетілген ток тізбектерін есептеген кезде
2.4.8 суретте келтірілген және негізгі э.қ.к көзінен Ed=Edmcosa, балама активті
кедергіден Rб.к, э.қ.к көзінен DUВ=const және
кедергісі өткізетін бағытта нолге, ал кері бағытта
шексіздікке тең идеалды вентильден ИВ тұратын балама сұлбамен
көрсетуге болады.
Балама сұлбада идеалды вентильді ИВ қосу
электр тізбегінің бір бағыттағы өткізгіштігін көрсетеді.
2.4.8 суретте вентильді түрлендіргіштің жүктеме тізбегінен тұрақты
ток қозғалтқышының якорі қорек алып тұрған
жағдай үшін балама сұлбасы көрсетілген.
Кирхгофтың екінші заңына сәйкес
келтірілген балама сұлба үшін келесі теңдеуді жазуға
болады
![]() .
(2.4.19)
.
(2.4.19)
Бұдан электр жетегінің электр механикалық теңдеуін
аламыз
 (2.4.20)
(2.4.20)
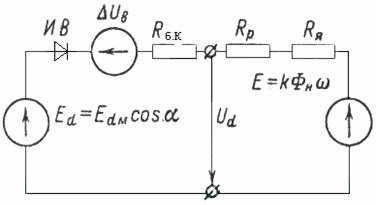
2.4.8 – сурет. Вентильді түрлендіргіштердің түзетілген ток тізбегінің балама сұлбасы
Ал механикалық теңдеуі
 ,
(2.4.21)
,
(2.4.21)
мұнда RЯS=RБ.К.+RP+RЯ;
RP – тегістеуші реактор орамасының кедергісі.
Edm, RБ.К., DUВ мәндері
жоғарыда келтірілген формулалар бойынша түрлендіргіштің сұлбасымен
анықталады. Алынған теңдеулер бойынша түрлендіргіштің
үздіксіз токтар режимінде жұмыс істеу кезінде БВТ - Қ жүйесіндегі
электр жетегінің электр механикалық және механикалық
сипаттамалары түзу сызық болады, олардың еңістігі RЯS кедергісінің мәнімен
анықталады. Атап өту керек, вентильдік түрлендіргіші бар
электр жетегі механикалық сипаттамаларының қатаңдық
модулі қозғалтқыштың сол қуаты кезінде де Г - Қ
жүйесі механикалық сипаттамаларының қатаңдық
модулінен кем. Бұл ең алдымен, түрлендіргіштің үлкен
кедергісімен, коммутация процесіндегі RБ.КОММ = ХTР m/2p кернеу төмендеуімен
түсіндіріледі, қысқа тұйықталу токтарын шектеу мақсатында
жоғарыланған қысқа тұйықталу кернеуі бар DUҚ » 8¸10% трансформатор таңдалынып
алынады. Бұл кезде
ХTР» U1н UҚ% / kТР2 I1H
100 =E2Ф uҚ% / I2H100 =
(0,08 ¸ 0,010)E2Ф/I2H .
Кейбір жағдайларда, түрлендіргіш айнымалы ток
желісінен трансформаторсыз қоректенгенде, мысалы нақты кернеуі 440
В болатын қозғалтқыштар үшін Uж = 380 В
болатын желіден және көпірлік үшфазалы түзеткіштен қоректенген
кезде, айнымалы ток тізбегіне түрлендіргішпен тізбектеле токты шектейтін
xP және RР кедергілері бар мәні трансформатор
кедергісі мәніне жақын реактор қосылады.
Қарастырылған электр жетегі жүйесінде
жылдамдықты реттеу вентилді ашудың кідіру бұрышын a өзгерту жолымен, яғни
түрлендіргіштің э.қ.к – сін Еd орындалады. Кідіру
бұрышы a нолден p/2 мәніне дейін өзгерген кезде, Еd мәні Edm
мәнінен нолге дейін өзгереді. Анық көрініп тұрғандай,
электр жетегінің механикалық және электр механикалық
сипаттамалары бұл жағдайда бір-біріне қатар орналасқан
түзулер топтамасын құрайды. Бұл түзулер ордината
осімен қиылысады, қиылысу мәндері бос жүріс жылдамдығына
сәйкес
 (2.4.22)
(2.4.22)
Бірақ, шын мәнінде реттеу бұрышының
a
берілген мәні кезіндегі электр жетегінің идеалды бос жүріс
жылдамдығы w0’ (2.4.22) формуласына сәйкес алынған мәнінен
айырмасы болады. Бұл 2.4.8 - суретте көрсетілген түрлендіргіштің
балама сұлбасы мен қозғалтқыштың электр
механикалық және механикалық сипаттамаларының теңдеулері
түрлендіргіштің үздіксіз токтар режимінде жұмыс
істеуімен түсіндіріледі. Жүктеме тогы аз мәніне дейін түскен
кезде, яғни Id®0 режимінде үзікті токтар
режимі басталады, 2.4.9а суретте көрсетілгендей, вентильдегі ток ағымының
бұрыштық ұзақтық l мәні 2p / т мәнінен аз
болып қалады. Бұл жағдайда жүктеме тогының қисығы
нолдік токтар уақыт аралықтарынан тұрады. Бұл режим үшін
жоғарыда алынған ара қатынастар жарамсыз болады.
Үздіксіз токтар режимінен үзікті
токтар режиміне өтуге аталған екі режим арасындағы шегі
бастапқы - үздіксіз ток режиміне сәйкес. Бұл режимде
вентильдерді жабу коммутация процесінде жоқ, бірақ 2.4.9б суретте көрсетілгендей,
нолдік токтар уақыт аралықтары жоқ. Шектік токтың мәні
реттеу бұрышы мен сұлбаның шамаларына тәуелді. Ол
келесі формула бойынша анықталады
 ,
(2.4.23)
,
(2.4.23)
мұнда fж – айнымалы ток желісі кернеуінің жиілігі;
Ld = LP+LЯ – түрлендіргіштің
жүктеме тізбегінің индуктивтілігі, тегістеуші реактор LР
мен қозғалтқыштың якорь тізбегі LЯ
индуктивтіліктерімен анықталады.
Бұдан бұрын келтірілген теңдеулер IЯ
³ Idшек кезінде дұрыс болатын. Механикалық
және электр механикалық сипаттамалардың шектік нүктелері
эллипстің доғасында жатады. Олар ордината осі бойына DUB/kФН
мәніне жылжыған. Түрлендіргіштің үзікті токтар
режиміндегі жұмысы кезінде электр жетегінің механикалық және
электр механикалық сипаттамаларын талдау түрінде келтіру мүмкін
емес.
Бұл жағдайда токтың өтуінің
бұрыштық ұзақтығын l<2p/m деп алып, келесі
формула бойынша анықтайды
 (2.4.24)
(2.4.24)
Соңғы теңдеуден анықталғандай, l = 2p/т кезінде IЯ ³ Idшек және l®0 кезінде Id®0. l= 0 кезінде қозғалтқыштың э.қ.к – сі, яғни оның жылдамдық мәндері түрлендіргіштің берілген реттеу бұрышы a үшін үлкен мәнге тең. Бұл арақатынастан (2.4.24) l= 0 кезінде
 (2.4.25)
(2.4.25)
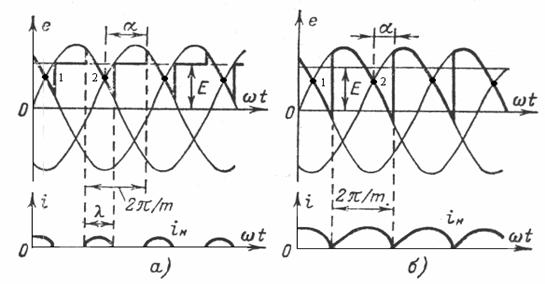
2.4.9 – сурет. Үзікті (а) және бастапқы - үздіксіз (б) ток режимінде жұмыс істеп тұрған вентильді түрлендіргіштің э.қ.к – сі мен токтарының диаграммалары.
Бұл жағдайда a бұрышы нолден p/m мәніне дейін өзгеруі EM мәнінің өзгеруіне
әкеліп соқпайды. EM мәні түрлендіргіштің
қорек көзі болатын фазалық э.қ.к – нің
амплитудасымен анықталады
![]() (2.4.26)
(2.4.26)
Бұдан
 .
(2.4.27)
.
(2.4.27)
2.4.10 - суретте w0(a) тәуелділігі көрсетілген.
Мұнда w’0(a) тәуелділігі w’0 ара қатынасына
сәйкес тұрғызылған.
Вентильді түрлендіргіштер үздіксіз ток
режиміндегі жұмысы кезінде вентильдерді ашудың кідіру бұрышын
өзгерту бос жүрістің есептік жылдамдығы w’0 үшін
теңдеулерге сәйкес оның үлкен шектерде өзгеруіне әкеледі.
Жекелеп айтқанда, a=a0=![]() кезінде, яғни қозғалтқыштың
динамикалық тежеу режимі орын алған кезде, жылдамдық
кезінде, яғни қозғалтқыштың
динамикалық тежеу режимі орын алған кезде, жылдамдық ![]() = 0 нолге тең. a > p/2 кезінде w’0 < 0, яғни электр жетегі жүйесі
рекуперативті тежеу режимінде жұмыс істейді. Бұл кезде электр
машинасы өндіретін тұрақты ток энергиясы вентильді түрлендіргіш
көмегімен айнымалы ток энергиясына түрленеді және қоректендіретін
желіге беріледі. Бұл кезде вентильді түрлендіргіш инвертор
режимінде жұмыс істейді.
= 0 нолге тең. a > p/2 кезінде w’0 < 0, яғни электр жетегі жүйесі
рекуперативті тежеу режимінде жұмыс істейді. Бұл кезде электр
машинасы өндіретін тұрақты ток энергиясы вентильді түрлендіргіш
көмегімен айнымалы ток энергиясына түрленеді және қоректендіретін
желіге беріледі. Бұл кезде вентильді түрлендіргіш инвертор
режимінде жұмыс істейді.

2.4.10 - сурет БВТ-Қ жүйесіндегі идеалды бос жүріс жылдамдығының тәуелділігі.
Инвертор режимінде трансформатор орамаларындағы ток (анығында, айнымалы кернеу көзі тізбегінде) вентильдердің өткізгіштік периодының үлкен бөлігінде бұл орамалардағы э.қ.к – ге қарсы бағытталған, 2.4.11 -суретте көрсетілгендей, электр машинасының э.қ.к – сі Е, яғни түзетілген ток тізбегінде әрекет ететін э.қ.к – нің әсерімен ағады.
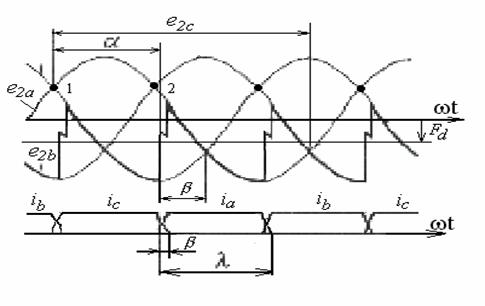
2.4.11 – сурет. Инвертор режимінде жұмыс істейтін вентильді түрлендіргіштің э.қ.к - сі және токтарының диаграммалары.
Электр машинасының э.қ.к – сі Е вентильді
ашудың кідіру бұрышының жоғарғы өзгеру
шегін анықтайды. Шынымен, егер q1 бұрышымен сипатталатын
вентильді ашудың өзіндік нүктесінен p+2p/m мәніне дейінгі
уақыт кезінде, жұмыс істеп жатқан кезекті вентильде ток нолге
дейін кемімейді және вентиль сенімді жабылмайды, келесі уақыт
кезінде (wt >q1 ) осы вентильдегі кернеу электр машинасының э.қ.к
– сі Е мен айнымалы ток көзінің сәйкес э.қ.к – сінің
арифметикалық қосындысымен анықталады. Бұл кезде
«инвертордың істен шығуы», яғни вентильдер тізбегіндегі
токтар мәні жұмыс режиміндегі токтар мәнінен бірнеше рет асып
түседі, өйткені жұмыс режимінде вентильдегі кернеу көрсетілген
э.қ.к – лердің арифметикалық айырмасымен анықталады.
Токтардың секіруі вентильді түрлендіргіштің және
бірінші кезекте вентильдің өзінің істен шығуына әкеліп
соғады, осыған байланысты инвертордың істен шығуы
апаттық режим болып саналады. Осындай режимнің пайда болу мүмкіндігін
алып тастау мақсатында, ең алдымен вентильді ашудың кідіру бұрышын
шектеу қажет.
Токтың ағу ұзақтығы l = 2 ![]() /m+g кезінде оның мәні
/m+g кезінде оның мәні ![]() t<
t<![]() 1 кезінде нолге дейін төмендеуі үшін, келесі
шарт қажет
1 кезінде нолге дейін төмендеуі үшін, келесі
шарт қажет
aМАКС< q1- l = p - g .
(2.4.28)
Келтірілген арақатынас сенімді инверттеуді қамтамасыз
ету үшін жеткілікті болмайды, өйткені вентильдегі ток біткеннен
кейін ![]() бұрышымен
сипатталатын оның жабу қасиетін қалпына келтіру үшін уақыт
қажет. Сондықтан:
бұрышымен
сипатталатын оның жабу қасиетін қалпына келтіру үшін уақыт
қажет. Сондықтан:
aМАКС£ p - (g+d)
.
(2.4.29)
Желінің жиілігі 50 Гц кезінде ионды вентильдердің
жабу қасиетін қалпына келтіру бұрышы орта есеппен 120
- ты құрайды. Тиристорлар үшін жабу қасиетін қалпына
келтіру уақыты 150 мкс - тен аспайды, яғни ![]()
![]() 30 - қа сәйкес.
Инвертор режимінде жиі жұмыс істейтін түрлендіргішті талдау кезінде
вентильді ашудың озу бұрышы b түсінігін қолданады
30 - қа сәйкес.
Инвертор режимінде жиі жұмыс істейтін түрлендіргішті талдау кезінде
вентильді ашудың озу бұрышы b түсінігін қолданады
b=p-a.
(2.4.30)
Жоғарыда қаралған реттеу бұрышын
шектеу ашудың озу бұрышына қатысы бойынша мына түрде
жазылады
bмин ³ g + d.
(2.4.31)
Вентильді түрлендіргіштің басқару бұрышын
шектеу генератор режимінде жұмыс істейтін электр машинасының шекті
э.қ.к - сін және идеалды бос жүріс режиміндегі оның бұрыштық
жылдамдығын шектеуге әкеліп соғады. Үздіксіз токтар үшін
түзетілген э.қ.к арақатынастарына сәйкес
Емакс= (kФн)w0 г.макс= Еd и. макс=
Еd м cos aмакс,
(2.4.32)
мұнда Еd и. макс - инвертор режиміндегі
вентильді түрлендіргіш э.қ.к -сінің ең үлкен рұқсат
етілген мәні.
Жоғарыда көрсетілгендей, коммутация бұрышы
g токқа
тәуелді және ол көбейген сайын ток өсе бастайды. aмакс арақатынасы үшін
cos (aмакс+g) = -cos d
(2.4.33)
ал ![]() бұрышын анықтайтын ара қатынастан
келесі формуланы аламыз
бұрышын анықтайтын ара қатынастан
келесі формуланы аламыз
 ,
,
![]() Еd и.макс= Еd м· cosaмакс= - Еd м· cosd +(m·xTP· Id)/π
.
(2.4.34)
Еd и.макс= Еd м· cosaмакс= - Еd м· cosd +(m·xTP· Id)/π
.
(2.4.34)
Осыдан сенімді инверттеу
процесіне сәйкес келетін жетектің жылдамдығының ең
үлкен мәні:
 .
(2.4.35)
.
(2.4.35)
Вентильді электр жетегі жүйелерін есептеу кезінде
коммутация бұрышын gмакс= 15¸18° деп алады, бұл
якорь тогы мен трансформатордың шынайы шамаларының шектік рұқсат
етілген мәндеріне сәйкес. Онда жоғарыда көрсетілген ![]() - ның максималды мәндері
ионды вентильдерді бар түрлендіргіштер үшін aмакс1» 150° немесе
- ның максималды мәндері
ионды вентильдерді бар түрлендіргіштер үшін aмакс1» 150° немесе ![]() мин1
мин1 ![]() 300, яғни
Еd.макс1
300, яғни
Еd.макс1![]() 0,866ЕdМ, тиристорлы түрлендіргіштер
үшін
0,866ЕdМ, тиристорлы түрлендіргіштер
үшін ![]() макс2
макс2![]() 1600 (
1600 (![]() мин2
мин2 ![]() 200 ), яғни
Еd.макс2
200 ), яғни
Еd.макс2![]() (0,94-0,92)ЕdМ. Жоғарыда
келтірілген талдаулардан шыққандай, тәуелсіз қоздырылатын
тұрақты ток қозғалтқыштары вентильді түрлендіргіштен
қорек алатын электр жетегі жүйесінде қозғалтқыш
тек қана қозғалтқыш режимінде ғана емес, сонымен
бірге кері қосу, рекуперативті және динамикалық тежеу (a = a0 = p/2 мәніне сәйкес
сипаттама) режимдерінде жұмыс істей алады.
(0,94-0,92)ЕdМ. Жоғарыда
келтірілген талдаулардан шыққандай, тәуелсіз қоздырылатын
тұрақты ток қозғалтқыштары вентильді түрлендіргіштен
қорек алатын электр жетегі жүйесінде қозғалтқыш
тек қана қозғалтқыш режимінде ғана емес, сонымен
бірге кері қосу, рекуперативті және динамикалық тежеу (a = a0 = p/2 мәніне сәйкес
сипаттама) режимдерінде жұмыс істей алады.
Вентильді түрлендіргіштің бір жақты өткізгіштігі
бұл жүйелерде кері айналдыруын іске асыруды қиындатады. Іс жүзінде
иінкүшінің бағытын өзгертудің үш тәсілі
қолданылады:
а) якорь тогының бағытын өзгертпей қозғалтқыштың
ағынын өзгерту (2.4.12а суреті);
б) якорь қысқыштарындағы полюстерді
ауыстырып қосқыштардың көмегімен өзгерту (2.4.12б
- суреті);
в) вентильді түрлендіргіштің екі тобының
көмегімен якорь қысқыштарындағы полюстерді өзгерту
(2.4.12в - суреті).
|
|
|
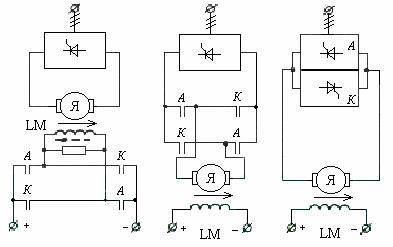
2.4.12 - сурет. Басқарылатын вентильді түрлендіргіштен қорек алатын электр қозғалтқышын кері айналдыру принципі.
Бірінші екі тәсілді жүзеге асыру кезінде қозғалтқыш
бір топты вентильді түрлендіргіштен қорек алады. Бірақ, бұл
жағдайда бір айналу бағыты кезінде қозғалтқыштық
режимнен тежеу режиміне өту қиындайды. Бірінші сұлба ең
арзан, әрі қарапайым болып келеді. Оның кемшілігі қозғалтқыштың
қоздыру орамасының үлкен уақыт тұрақтысы
анықтайтын кері айналдырудың біршама ұзақтығы
0,5-0,25 с болады. Якорь тізбегінде ажыратып-қосқыштары бар сұлбамен
кері айналдыру процессін тез орындауға мүмкін болады. Бірақ бұл
жағдайда да кері айналдыру уақыты 0,1с - тан үлкен. Бұл
түрлендіргіштің басқару бұрышын көбейтумен
басталатын жетекті басқару жүйесіндегі кері айналдыру процесінде
белгілі бір реттілікті сақтау қажеттілігімен анықталады. Бұрыш
![]() көбейген кезде түрлендіргіштің
э.қ.к -сі төмендейді, бірақ ол кезде кинетикалық
энергияның қоры болғандықтан қозғалтқыштың
бұрыштық жылдамдығы бірден өзгермейді. Бұл
шарттар кезінде ЕҚ>Еd, және вентильді түрлендіргіштің
бір жақты өзткізгіштігі нәтижесінде Іd®0. Якорь тізбегіндегі ток
нолге жақын болған кезде ажыратып-қосқыштың бұрын
жұмыс істеп тұрған түйіспелері ажыратылады, мысалы А түйіспелері.
Одан кейін a > p/2 кезінде ашудың кідіру бұрышын одан әрі көбейту
жолымен вентильді түрлендіргіш инвертор режиміндегі жұмысқа
дайындалады. Бастапқы басқару бұрышы Еd.и
көбейген кезде түрлендіргіштің
э.қ.к -сі төмендейді, бірақ ол кезде кинетикалық
энергияның қоры болғандықтан қозғалтқыштың
бұрыштық жылдамдығы бірден өзгермейді. Бұл
шарттар кезінде ЕҚ>Еd, және вентильді түрлендіргіштің
бір жақты өзткізгіштігі нәтижесінде Іd®0. Якорь тізбегіндегі ток
нолге жақын болған кезде ажыратып-қосқыштың бұрын
жұмыс істеп тұрған түйіспелері ажыратылады, мысалы А түйіспелері.
Одан кейін a > p/2 кезінде ашудың кідіру бұрышын одан әрі көбейту
жолымен вентильді түрлендіргіш инвертор режиміндегі жұмысқа
дайындалады. Бастапқы басқару бұрышы Еd.и![]() ЕҚ шарты кезінде
қойылады. Бұл шарт кезінде бұрын жұмыс істемей тұрған
түйіспенің К тұйықталуы якорь тізбегінде токтың үлкен
секіруіне әкеліп соқпайды. Бұрыштың
ЕҚ шарты кезінде
қойылады. Бұл шарт кезінде бұрын жұмыс істемей тұрған
түйіспенің К тұйықталуы якорь тізбегінде токтың үлкен
секіруіне әкеліп соқпайды. Бұрыштың ![]() одан әрі азаюымен қозғалтқышты
тежеп және оның қарама-қарсы бағытта талап ететін
жылдымдыққа дейін айналуын іске асыруға болады.
одан әрі азаюымен қозғалтқышты
тежеп және оның қарама-қарсы бағытта талап ететін
жылдымдыққа дейін айналуын іске асыруға болады.
Кері айналдыру кезінде жетектер үшін максималды тез
әрекет ету талап етілсе, сонымен бірге, айналу бағыты бір болатын қозғалтқыштық
және тежеу режимдері де қажет болса, екі вентильді топтары бар сұлбалар
қолданылады, олардың әрқайсысы өз бағыттарында
ток өткізеді, соған байланысты тұтас түрлендіргіште екі
жақты өткізгіштік әсері пайда болады. Реверсті вентильді түрлендіргіштерді
барлық көп түрлі сұлбалары екі түрге келтіру мүмкін:
қиылыспалы немесе "сегіздік" сұлбалар, олар 2.4.13 -
суретте көрсетілген, және қарсы-қатарлы немесе кері-қатарлы
сұлбалар, олар 2.4.14 - суретте келтірілген. Қиылыспалы сұлбаларда
вентильдердің әрбір топтары бір-бірінен оқшауланған
трансформатордың екінші реттік орамаларының топтарынан, ал қарсы-қатарлы
сұлбаларда вентильдердің екі тобы да трансформатордың екінші
реттік орамаларының бір тобынан ғана қорек алады.
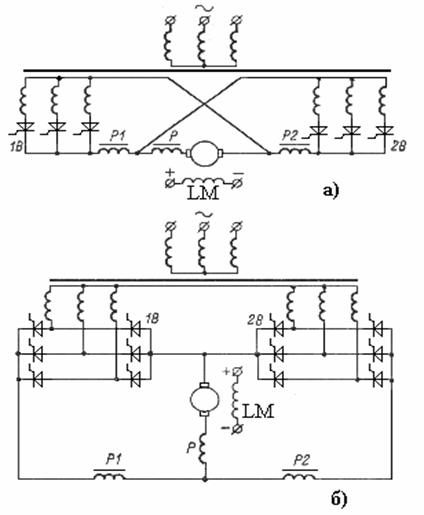
2.4.13 – сурет. Үш фазалы вентильді түрлендіргіштері бар реверсті электр жетегінің қиылыспалы сұлбасы: а) нольдік нүктесі бар; б) көпірлі.
Реверсті емес түрлендіргіштер сияқты,
реверсті түрлендіргіштің барлық сұлбаларын 2.4.15 -
суретте көрсетілгендей, бір балама есептік сұлбаға келтіруге
болады, оның элементтері 2.4.1 - суретте көрсетілген сұлбаның
элементтерімен бірдей. Электр жетегінің қозғалтқыштық
режимі кезінде реверсті вентильді түрлендіргіштің бір вентильдер
тобы, мысалы 1В, түзету режимінде жұмыс істейді, ал екіншісі - 2В
жабық немесе инверттеу режимі жұмысы үшін дайындалған.
Соңғы жағдайда 1В тобында түрлендірілген энергияны
желіге 2В тобы арқылы беруді болдырмау мақсатында Ed2³ Ed1, шарты
орындалуы қажет. Егер де 2В тобы түзету режимінде жұмыс істеп
тұрса, онда 1В тобы жабық немесе инверттеу режимі жұмысына
дайындалған. Бұл кезде, жоғарыда айтылғандарға сәйкес,
Ed1³ Ed2.. Ортақ жағдайда
Ed И³ EdТ,
(2.4.36)
мұнда EdИ, EdТ -инверттеу және түзету
режиміндерінде жұмыс істейтін вентильді түрлендіргіштің
топтарының э.қ.к,-лері.
Электр жетегінің рекуперативті тежеу режиміндегі жұмысы
кезінде вентильдердің бір тобы инверттеу режимінде жұмыс істейді,
ал екінші тобы жабық немесе түзету режимі жұмысына дайындалған.
Бұл жағдайда да жоғарыдағыдай, EdИ³EdТ ара қатынасы
сақталуы қажет. Бұл жағдайда вентильдердің екі
топтарының арасындағы олардың э.қ.к - лерінің бір
сәттік мәндерінің айрмасы есебінен ағатын теңестірулік
токтарын шектеу мәселесі пайда болады. Бұл мақсатта, 2.4.13 және
2.4.14 - суреттегі сұлбаларда көрсетілгендей түрлендіргіш
тізбегіне теңестірулік Р1 - Р4 реакторлары қосылады.
Электр жетегінің механикалық және
электр механикалық сипаттамаларының түрі екі вентиль
топтарының басқару бұрыштарын келістіру тәсіліне тәуелді.
Сызықтық келістіру кезінде теңестірулік кернеудің
орташа мәні нолге тең деп алынады. Бұл жағдайда келесі
ара қатынас сақталуы қажет
Еd1+Ed2-DUB1-DUB2=0
(2.4.37)
Немесе
![]() .
(2.4.38)
.
(2.4.38)
Басқарылатын вентильдер ретінде тиристорларды қолданған
жағдайда UВ/Ed.M![]() 0,сондықтан
0,сондықтан
a1 + a2 = p
.
(2.4.39)
Осыған сәйкес реттеу және жылдамдықтық
сипаттамалары 2.4.16 - суретте көрсетілген. Механикалық
сипаттамалардың қатаңдығы бұл жағдайда бір
топты түрлендіргіш үшін анықталады. Вентильді топтардың
басқару бұрыштарын a1+a2=p етіп келістіген кезде,
реверсті вентильді электр жетегінің сипаттамалары генератор-қозғалтқыш
жүйесінің сипаттамаларына ұқсас болады. Сызықтық
келістіруі бар сұлбаның кемшілігі онда теңестірулік токтарының
болуы, олар вентильдер мен трансформаторларды қосымша жүктейді.
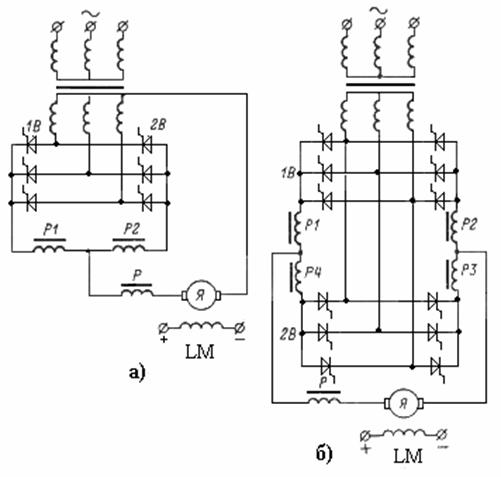
2.4.14 - сурет. Үш фазалы вентильді түрлендіргіштері бар реверсті электр жетегінің қарсы-қатарлы сұлбасы.
Осыған байланысты теңестірулік реакторларын қосу электр жетегі жүйесінің тез әрекет етуін төмендетеді, сонымен бірге трансформаторлар толығымен қолданылмайды, яғни бұл жағдайда (bмин ³ g + d) және (a1 + a2 = p) арақатынастарына сәйкес, aмин= bмин.

2.4.15 - сурет. Екі вентильді топтары бар реверсті вентильді электр жетегінің балама сұлбасы.
Реверсті вентильді түрлендіргіштің максималды э.қ.к – сі.
Еd р.макс= Еd м cosbмин .
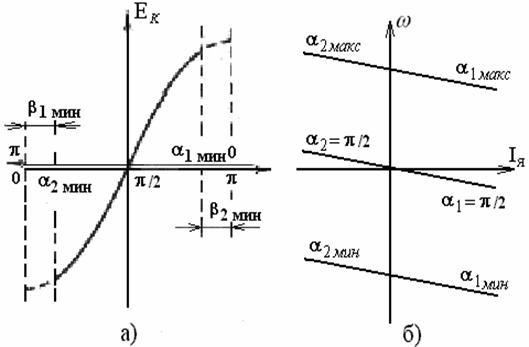
2.4.16 - сурет. Сызықтық келістіруімен вентильдер топтарын бірге басқару кезінде вентильді түрлендіргіштері бар реверсті электр жетегінің реттеу (а) және жылдамдықтық (б) сипаттамалары.
Теңестірулік токтарын төмендету мақсатында кейбір жағдайларда сызықтық емес немесе толық емес деп аталатын келістіру қолданылады, яғни мына кезде
a1 + a2 = p + x .
(2.4.40)
Бұл кезде электр механикалық және
механикалық сипаттамалардың сызықтығы бұзылады
(2.4.16,а - сурет). Бұл жағдайда қозғалтқыш
режимінен тежеу режиміне көшу жылдамдықтың біраз өсуіне
сәйкес келеді. Бұдан басқа, бұл жағдайда
трансформаторларды қолдану біршама нашарлайды және басқару бұрыштарын
өзгерту шектеледі. Сондықтан, мұндай келістіру тәсілі қарапайым
түрде кең қолдануын таппайды. Іс жүзінде x мәні автоматты түрде
қайсы бір шаманың функциясында өзгеретін жүйелер қолданылады.
Жеке айтқанда, электр жетегінің қанағаттанарлық
сипаттамалары кезінде реакторлардың индуктивтілігін төмендететін теңестірулік
токтардың берілген деңгейін автоматты түрде ұстап тұру
мүмкін.
Теңестірулік токтарды толық алып тастау үшін
вентильді түрлендіргіштердің топтарын бөлек басқару қолданылады.
Бөлек басқару кезінде басқарушы сигналдар (импульстер) тек қана
сол кезде жұмыс істеуі керек топқа ғана беріледі. Жұмыс
істемейтін топтың вентильдеріне импульстер берілмейді және ол жабық
болады. Түрлендіргіштің жұмыс режимін өзгерту үшін
арнайы ажыратып-осқыш құрылғы қолданылады,
олар түрлендіргіш тогы ноль кезде алдымен жұмыс істеп тұрған
топтан басқарушы импульстерді алады, содан аз ғана үзілістен
кейін (5 - 10 мс) басқа топқа басқарушы импульстерді береді.
Көрсетілген реттілік кезінде электр жетегінің қозғалтқыштық
режимнен тежеу режиміне және кері процеске өтуге түрлендіргіштің
үзікті токтар режимі сәйкес болады.

2.4.17 - сурет. Вентильді түрлендіргіштері бар реверсті электр жетегінің электр механикалық сипаттамалары
а) вентильді топтарды бірге басқару және сызықтық емес келістіру кезінде; б) вентильді топтарды бөлек басқару және сызықтық емес келістіру кезінде.
Топтардың бөлек басқаруы бар реверсті
вентильді электр жетегінің механикалық және электр механикалық
сипаттамалары басқару бұрыштарын келістіру тәсіліне тәуелді.
Жеке айтқанда, сызықты келістіру кезінде олар 2.4.17 - суретте көрсетілгендей
сипат алады.
Бөлек басқару кезінде бөлек
топтардың тізбектеріне реакторларды қосу қажеттілігі жоқ,
трансформаторды толық қолдану мумкіндігі болады (Еdр.макс=
Еdм), инверторлық режимде вентильді түрлендіргіштің
жұмыс уақытының азаюы салдарынан инвертордың істен шығып
қалу ықтималдығы төмендейді, теңестірулік
токтардың болмауынан электр жетегінің п.ә.к. өседі. Бұдан
басқа, вентильді түрлендіргішті түзету режимінен инверттеу
режиміне ауыстыру үзіліспен ілеседі, бұл өтпелі процестің
ұзақтығын көбейтеді. Бөлек басқару идеалды
бос жүріс немесе оған жақын режимде жұмыс істей алатын
электр жетектері үшін қолданыла алмайтынын атап өту керек,
мысалы қозғалтқыштың аз жүктемесіне вентильді түрлендіргіштің
үзікті токтар режимі сәйкес келетін лифттердің жетегі.
Сызықтық келістіру кезіндегі бірге басқаруда
өте жақсы динамикалық көрсеткіштер мен бір таңбалы
статикалық сипаттамаларды алуға болады. Бұл жағдайда
бір режимнен екіншісіне қарапайым көшу қамтамасыз етіледі.
Реверсті вентильді түрлендіргіштің мұндай басқару тәсілінің
артықшылықтары оның кемшіліктерінен біраз асып түседі.
Сондықтан бұл басқару тәсілі іс жүзінде кең
қолданылады. Бұдан бұрын көрсетілгендей, вентильді түрлендіргіші
бар электр жетегінің механикалық сипаттамаларының қатаңдық
модулі салыстырмалы түрде өте аз. Осыған байланысты, тұрақты
ток вентильді электр жетегі жүйелерінде жылдамдықты реттеу ауқымын
кеңейту мақсатында Г - Қ жүйесіндегідей, атап айтқанда
якорь тогы бойынша оң, немесе жылдамдық және кернеу бойынша
кері байланыстар қолданылуы мүмкін. Вентильдік түрлендіргіш
пен қозғалтқыш якоріндегі токты шектеу мақсатында ток
бойынша кідірілген теріс кері байланыс (токты кесу) қолдануы мүмкін.
Вентильді түрлендіргіш үлкен күшейту коэффициентіне ие, осыған
байланысты көрсетілген кері байланыстар кейбір жағдайларда аралық
күшейткіштерсіз іске асуы мүмкін.
Үлкен қуатты түрлендіргіштер үшін
жақсартылған энергетикалық көрсеткіштері бар реверсті
электр жетектерін қолдану іс жүзінде орындалады, мұнда жұмыс
істемей тұрған вентильдер тобы реактивті энергияны желіге беру
режиміне аударылады. Мұндай кезде өнеркәсіптік қондырғы
мен тұтас мекеменің қуат коэффициенті cosj жоғарылайды.
Түрлендіргішті тұрғызудың
осы тәсілін металлургия кең қолданады. Динамикалық
процестерде орташа түзетілген кернеудің Uор бұрыштан
a тәуелділігі,
яғни Uор=f(a) инженерлік көзқарас
бойынша іс жүзінде рационалды түрге ие емес күрделі
трансцендентті тәуелділікті сипаттайды.
Электр жетегін сипаттау сызықтық
дифференцалдық теңдеулер және соған сәйкес
беріліс функциясы деңгейінде орындалғандықтан, вентильді түрлендіргіштер
де сондай-ақ қарапайым динамикалық бөлік түрінде
сипатталады, атап айтқанда:
а) инерциясыз бөлік түрінде
 (2.4.41)
(2.4.41)
б) кідіріс бар бөлік түрінде
![]() (2.4.42)
(2.4.42)
в) инерциялы бөлік түрінде
![]() (2.4.43)
(2.4.43)
Бұл ара қатынастардағы белгілеулер:
ЕВТ - вентильді түрлендіргіштің
э.қ.к -сі
UКІР - вентильді түрлендіргіштің
кірісіндегі (ИФБЖ) кернеу
КВТ - вентильді түрлендіргіштің күшейту
коэффициенті
ТВТ - вентильді түрлендіргіштің уақыт
тұрақтысы
![]() -
пульс жартысының уақыты
-
пульс жартысының уақыты
р - Лаплас операторы
Пульс әртүрлі сұлбаларда келесі жолмен анықталатынын атап өтейік: бір жарты периодты сұлбаларда - қоректендіретін кернеудің жарты периоды; екі жарты периодты сұлбаларда - қоректендіретін кернеудің төрттен бір бөлігі; үш фазалы бір жарты периодты сұлбаларда - қоректендіретін кернеудің үштен бір бөлігі; үш фазалы екі жарты периодты сұлбаларда - қоректендіретін кернеудің алтыдан бір бөлігі.
Көрсетілген үш бөлік, әрине шынайы процестің нақты математикалық сипатын бермейді. Көптеген авторлар инженерлік дәлдік шектерінде жүйені синтездеу есебін қысқартатын үш түрдің біреуін таңдау кажет екенін айтып, сол шешімге келеді. Мысалы, бағынышты реттеу жүйелерін жобалау кезінде вентильді түрлендіргіш барлық авторларда инерциялық бөлік түрінде ұсынылады. Рационалды тұрғызу жүйелерін жобалау кезінде вентильді түрлендіргіш инерциясыз немесе кідіріс бар бөлік түрінде ұсынады. Бірақ, вентильді түрлендіргіш кідіріс бар бөлік болып есептелетін электр жетегі жүйелерін ретке келтіру тәжірибиесі дұрыс нәтиже бермейді және қазіргі уақытта іс жүзінде қолданылмайды. Вентильді түрлендіргіштің динамикалық режимдегі көрсетілген түрлері қарапайымдылығына қарамастан, тәжірибе бойынша алынған нәтижелер берілген шамаларға тура сәйкес келеді. Бірқатар авторлар вентильді түрлендіргішті оның жұмыс режиміне байланысты (үздіксіз немесе үздікті токтар) түрі бойынша әртүлі динамикалық бөліктермен есептейді және электр жетегі жүйесін тұрғызу кезінде түрлендіргіштің жұмыс режимін анықтайтын вентильдер өткізгіштігінің бергішімен реттеуішті түйіспесіз ажыратып-қосып отырады.
Вентильді түрлендіргіші бар тұрақты токтың реттелетін электр жетегінің энергетикалық көрсеткіштерін бағалау үшін қондырғының п.ә.к - і мен қуат коэффициентінің cosj жылдамдыққа тәуелділігін қарастырамыз. Басқарылатын вентильді түрлендіргіш - қозғалтқыш (БВТ - Қ) жүйесінің пайдалы әсер коэффициентін қозғалтқыштың электр магниттік қуатының РҚ = ЕҚІЯ = wM түрлендіргіштің желіден тұтынатын қуатқа РЖ қатынасымен анықтауға болады. Үздіксіз ток режиміндегі түрлендіргіштің жұмысы кезінде
PЖ = (Ed -DUB - RяS IЯ) IЯ
. (2.4.44)
Түрлендіргіштің желіден тұтынатын қуаттын
мына түрде жазуға болады
![]() . (2.4.45)
. (2.4.45)
Сонда
 . (2.4.46)
. (2.4.46)
Алынған ара қатынастың
алымы қозғалтқыштың бұрыштық
жылдамдығына пропорционал екенін есепке алып, жазамыз
 .
(2.4.47)
.
(2.4.47)
Салыстырмалы бірлікке көшкенде
![]() , (2.4.48)
, (2.4.48)
мұнда ![]() - жылдамдық төмендеуінің
салыстырмалы мәні, вентильдегі кернеудің төмендеуімен DUB анықталады.
- жылдамдық төмендеуінің
салыстырмалы мәні, вентильдегі кернеудің төмендеуімен DUB анықталады.
R’Я= RЯ +RTР + RP.
Алынған ара қатынастарды талдау көрсеткендей,
БВТ - Қ жүйесінің п.ә.к мәні қозғалтқыш
білігіндегі жүктемеге және реттеу кезінде жылдамдыққа тәуелді.
Біліктегі иінкүш тұрақты болған жағдайда жылдамдық
төмендеген сайын п.ә.к мәнінің де төмендеуі орын
алады. Қондырғының п.ә.к мәніне басқарылатын
вентильдердегі қуат шығыны DPB=DUBІЯ әсер
етуі мүмкін екенін атап өту қажет. Тиристорлы түрлендіргіштерді
қолданған жағдайда вентильдегі салыстырмалы кернеу төмендеуі
бір пайыздың үлесін ғана құрайды. 2.4.18 суретте
БВТ - Қ жүйесі п.ә.к. қозғалтқыш
білігіндегі нақты жүктеме кезінде жылдамдыққа тәуелділігі,
түрлендіргіш тиристорлар негізінде (hТ) және ионды
вентильдер негізінде (hИ.В) орындалған жағдайлар үшін
келтірілген.
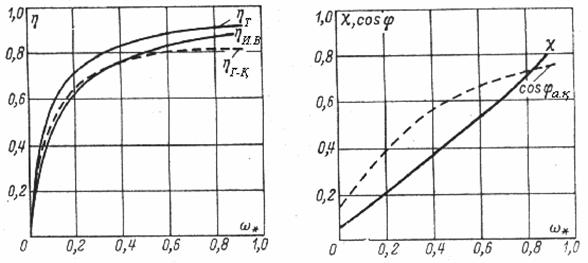
|
|
|
|
|
||
|
|
|
|
|
Сол суретте салыстыру үшін hЭ.Г-Қ тәуелділігі Г - Қ
жүйесі үшін көрсетілген. 2.4.18 - суреттегі қисықтарды
салыстыру БВТ - Қ жүйесі бойынша орындалған электр жетегінің
п.ә.к – і Г - Қ жүйесінің п.ә.к – інен жоғары
екенін көрсетеді.
БВТ - Қ жүйесінің
қуат коэффициенті c екі фактормен - вентильді түрлендіргіштің
желіден тұтынатын токтың бірінші гармоникалық құраушысының
желі кернеуіне қатысты жылжу бұрышымен j1 және сол токтың
айну коэффициентімен n анықталады.
c = n cos j1,
(2.4.49)
cos j1 » cos (a+g/2),
 ,
,
мұнда І – түрлендіргіштің желіден тұтынатын
тогының әсер ету мәні;
І1
– сол токтың І бірінші гармоникалық құраушысының әсер
ету мәні.
БВТ - Қ жүйесі бойынша орындалған
электр жетегінің қуат коэффициенті реттеу кезінде жылдамдыққа
және біліктегі жүктемеге тәуелді. Жылдамдықтың төмендеуі
және соған сәйкес реттеу бұрышының a, сонымен бірге
коммутация бұрышының g өсуіне байланысты жүктеме
тогының өсуі қондырғының қуат
коэффициентінің төмендеуіне әкеледі.
2.4.19 суретте БВТ - Қ жүйесінің қозғалтқыш
білігіндегі нақты жүктеме кезінде жылдамдыққа тәуелділігі
көрсетілген. Сол суретте үзік сызықпен Г - Қ жүйесіндегі
қуат коэффициентінің (cos jа.қ.) жылдамдыққа
тәуелділігі келтірілген. Көрсетілген тәуелділікті салыстыру қуат
коэффициенті бойынша БВТ - Қ электр жетегі жүйесі Г - Қ жүйесіне
орын береді. Қуат коэффициенті c мәнін көтеру мақсатында
вентильдердің жасанды коммутациясының тәсілдері және
cos j1, n мәндерін көтеретін
жоғары гармоникалық құраушысының арнайы сүзгілерін
қолданады.
Өнеркәсіпте сандық бағдарламалық
басқаруы бар металл кесетін станоктардың беру механизмдері және
өндірістік роботтар да кіретін әртүрлі өндірістік
механизмдердің кең реттеліп, тез әрекет ететін жетектер
ретінде қолдану үшін ЭПУ 1М, ЭПУ 1И, ЭП, ЭПБ 2, ЭПБ 3, ЭПБ 3-Б, ЭПА
1, ЭТА 1, ЭПУ 3, ЭПБ 4, МЕЗОМАТИК, КЕМТОК, КЕМТОР, КЕМЕК, КЕМРОН және тағы
басқа электр жетегінің түрлері табылады.
2.5 Есептеу мысалдары
Тәуелсіз қоздырылатын тұрақты ток
қозғалтқышының іске қосуын реттейтін аппараттарын
есептеу.
Есептеулер келесі тұрақты
ток қозғалтқышының ДП-32 төлқұжат
бойынша берілгендері үшін жүргізіледі:
Нақты қуаты Рн=32 кВт
Нақты айналу жылдамдығы nн= 760
айн/мин
Нақты кернеуі Uн=220В
Қозғалтқыш якорінің нақты
тогы Iн=164A
Қозғалтқыштың якорь тізбегінің
кедергісі Rят=0,054Ом (қозғалтқыш якорі
кедергісі Rя қосымша полюстер кедергісімен Rқп
бірге қосқанда)
Қоздыру орамасының кедергісі Rқат=62,4
Ом
Якорь орамының саны N= 278
Қоздыру орамасы орамдарының саны Wқоз
= 1420
Якорьдың қатар орамдарының саны 2а=2
Полюстер жұбының саны 2р=4
Машинаның нақты ағыны F=2,95×106 мкс
Нақты қоздыру тогы Iқоз=2,45A
Қозғалтқыштың сермеу иінкүші GД2=7,5кгм2
1 мысал. Абсолютті және салыстырмалы бірліктерде қозғалтқыштың электр механикалық n=f(I) және механикалық n=f(М) сипаттамаларын есептеу және тұрғызу қажет.
Қозғалтқыштың идеалды бос жүріс жылдамдығы
 .
.
Абсолютті бірліктерде қозғалтқыштың өзіндік электр механикалық сипаттамасы n=f(Iя) келесі шамаларға ие:
бос жүрісте Ія=0 → n= nо=790 айн/мин,
нақты жүктемеде Ін=164А→ n= nн=760 айн/мин.
Қозғалтқыштың өзіндік электр механикалық сипаттамасын салыстырмалы бірлікте тұрғызу үшін базалық шамаларды таңдаймыз:
якорь тогы Іб= Ін= 164 А. Айналу жылдамдығы nб= nо= 790 айн/мин.
Өзіндік электр механикалық сипаттаманың салыстырмалы бірліктегі шамалары:
бос жүрісте
![]() ,
,
нақты режимде
 ,
,
қозғалтқыштың нақты иінкүші
 .
.
Қозғалтқыштың механикалық сипаттамасының n=f(M) абсолютті бірліктерде келесі шамалары бар:
бос жүрісте M0=0 ® n=n0=790 айн/мин,
нақты режимде Mн=41,1кгм
® n=nн=760 айн/мин.
|
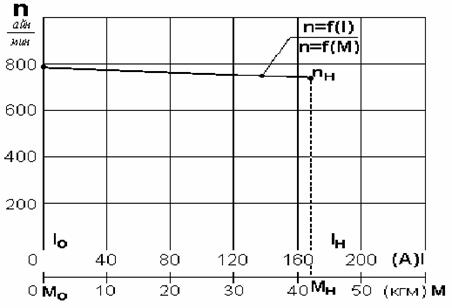
Қозғалтқыштың базалық иінкүші ретінде Mб=Mн мәнін таңдап алып, салыстырмалы бірліктердегі қозғалтқыштың өзіндік сипаттамасының шамаларын аламыз:
бос жүрісте  ,
,
нақты режимде  .
.
Қозғалтқыштың механикалық
сипаттамасы абсолютті бірліктерде 2.5.1 суретте және салыстырмалы
бірліктерде 2.5.2 суретте келтірілген.
|
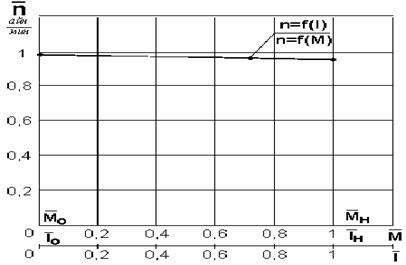
2 мысал. Іске қосу кедергілерінің берілген саны m=4 кезінде қозғалтқыштың іске қосу кедергілерін есептеу қажет.
Қозғалтқыштың нақты кедергісі:

Қозғалтқыштың максималды іске қосу иінкүші:
M1=2×Mн=82,2 кгм.
Ауысып қосылудың минималды иінкүші M2=1,06Mн болып белгіленеді. (нақты иінкүштен 5-10% үлкен)
Максималды іске қосу иінкүшінің M1 ауысып қосылуының минималды иінкүшіне M2 қатынасы:
Машинаны М іске қосу үшін якорь тізбегінің принциптік сұлбасы 2.5.3 суретте көрсетілген.
Қозғалтқышты М іске қосудың салыстырмалы бірліктердегі диаграммасы 2.5.3 - суретте келтірілген.
Іске қосудың әрбір сатысындағы якорь тізбегінің кедергілері
R4=l×Rят=1,88×0,054=0,102 Ом,
R3=l2×Rят=(1,88)2×0,054=0,19 Ом,
R2=l3×Rят=(1,88)3×0,054=0,36 Ом,
R1=l4×Rят=(1,88)4×0,054=0,672 Ом.

2.5.3 - сурет
Іске қосу реостаты секцияларындағы кедергілердің мәндері
Z1=R1-R2=0,672-0,36=0,312 Ом,
Z2=R2-R3=0,36-0,19=0,17 Ом,
Z3=R3-R4=0,19-0,102=0,09
Ом,
Z4=R4-Rят=0,102-0,054=0,048
Ом.
Осы іске қосу
реостаты секцияларындағы кедергілерінің мәндері басқаша
да анықталуы мүмкін
Z4=Rят×(l-1)=0,054×0,08=0,0475 Ом,
Z3=Rят×l×(l-1)=0,0892 Ом,
Z2=Rят×l2×(l-1)=0,168 Ом,
Z1=Rят×l3×(l-1)=0,312 Ом.
Іске қосу
реостатының толық кедергісі
Rт.р=Z1+Z2+Z3+Z4=0,62Ом.
Іске қосу
кедергісінің есептеулерін графиктік әдіспен жүргіземіз (2.5.4
-сурет).
|
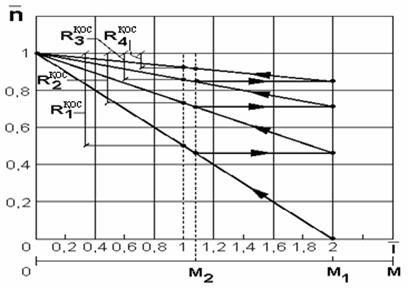
3 мысал. Қозғалтқыштың
нақты иінкүші Мн кезінде жұмысшы айналу жылдамдығын
n=0,5×nн алу үшін қозғалтқыштың
якорь тізбегіне қосылатын қосымша кедергінің Rқос
мәнін есептеу қажет. Қозғалтқыштың жасанды
механикалық сипаттамасын n=f(M) тұрғызу керек.
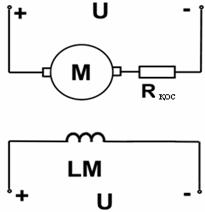 Машинаның жұмысшы
жылдамдығының мәні
Машинаның жұмысшы
жылдамдығының мәні
n=0,5×nн=0,5×760=380 айн/мин.
Нақты иінкүші
Мн бар қозғалтқыштың М жұмысы кезінде
оның якорь тізбегі бойымен I=Iн=164A тогы ағады. Қосылу
сұлбасы 2.5.5 суретте келтірілген. Жасанды электр механикалық
сипаттаманың теңдеуі
![]() .
.
![]() Қозғалтқыштың конструктивті тұрақтысының
мәні
Қозғалтқыштың конструктивті тұрақтысының
мәні
![]() .
.
Қосымша кедергінің Rқос есептік мәні

![]() .
.
Қозғалтқыштың жасанды механикалық сипаттамасы 2.5.6 - суретте көрсетілген.
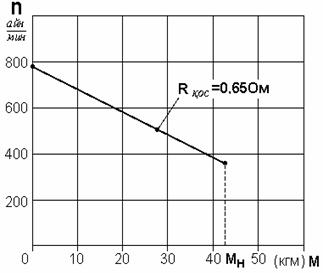
|
|
|
|
|
|
|
4 мысал. Қозғалтқыштың динамикалық тежеу режимінде нақты иінкүші Мн кезінде жүкті n=0,75×nн жылдамдығымен түсіргенде якорь тізбегіне қосылатын тежеу кедергісінің мәнін Rт есептеу қажет. Қозғалтқыштың жасанды механикалық сипаттамасын n=f(М) тұрғызу керек.
Машинаның жұмысшы жылдамдығының
мәні n=0,7·nн=0,75·760=-570 айн/мин. Қозғалтқыш
М нақты иінкүшімен Мн жұмыс істеп тұрған
кезде якорь тізбегі бойымен І =Ін =164А тогы ағады. Қосылу
сұлбасы 2.5.7 суретте көрсетілген. Жасанды электр механикалық
сипаттамасының теңдеуі
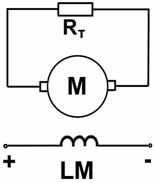
![]() .
.
Тежеу кедергісінің Rт есептік мәні
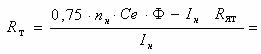
|
 .
.
Қозғалтқыштың жасанды механикалық сипаттамасы 2.5.8 суретте көрсетілген.

|
|
|
|
|
|
|
5 мысал. Динамикалық тежеу режимінде иінкүші М = 0,54·Мн кезінде жүкті n=0,75·nн жылдамдығымен түсіргенде қозғалтқыштың якорь тізбегіне қосылатын тежеу кедергісінің мәнін есептеу қажет. Қозғалтқыштың жасанды механикалық сипаттамасын n=f(М) тұрғызу керек.
Машинаның жұмысшы жылдамдығының мәні n=0,75×nн=0,75×760= -570 айн/мин. Берілген иінкүші M=0,54×Mн бар қозғалтқыштың М жұмысы кезінде қозғалтқыш якорь тогы I=0,54×Iн=0,54×164=88,5A мәнімен жұмыс істейді. Қосылу сұлбасы 2.5.7 - суретте келтірілген сұлбамен бірдей болады.
Жасанды электр механикалық сипаттамасының теңдеуі
![]() .
.
Тежеу кедергісінің есептік мәні

![]() .
.
Қозғалтқыштың жасанды
механикалық сипаттамасы 2.5.9 - суретте көрсетілген.
|
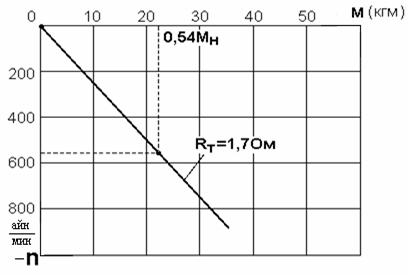
6 мысал. Кері қосу режимінде иінкүші M=0,54×Mн мәні кезінде жүкті n=0,75×nн жылдамдығымен түсіргенде қозғалтқыштың якорь тізбегіне қосылатын тежеу кедергісінің Rт мәнін есептеу қажет. Қозғалтқыштың жасанды механикалық сипаттамасын n=f(М) тұрғызу керек.
Машинаның жұмысшы жылдамдығының мәні n=0,75×nн=0,75×760=-570 айн/мин. Берілген иінкүші M=0,54×Mн бар қозғалтқыштың М жұмысы кезінде қозғалтқыш якорь тогы I=0,54×Iн=0,54×164=88,5A мәнімен жұмыс істейді. Қосылу сұлбасы 2.5.5 - суретте келтірілген сұлбамен бірдей болады.
Жасанды электр механикалық сипаттамасының теңдеуі
 .
.
Қосымша кедергінің Rқос есептік мәні
 .
.
Қозғалтқыштың жасанды механикалық сипаттамасы 2.5.10 - суретте көрсетілген.
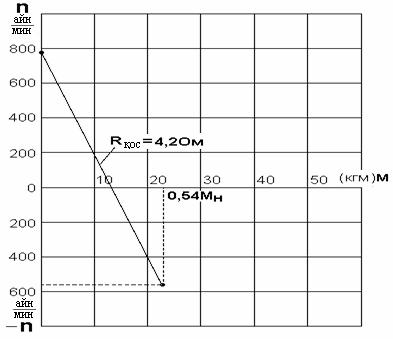
2.5.10 - сурет
7 мысал. Қозғалтқыштың нақты иінкүші
Мн кезінде жүкті n=1,5×nн жылдамдығымен
көтеру үшін қоздыру орамасының LM тізбегіне қосылатын
қосымша кедергінің Rқос мәнін есептеу қажет.
Қозғалтқыштың жасанды механикалық сипаттамасын
n=f(М) тұрғызу керек.
 Қосылу сұлбасы
2.5.11 - суретте көрсетілген. Қозғалтқыштың жұмысшы
жылдамдығының мәні n=1,5nн=1,5×760=1140 айн/мин. Бұл
жылдамдыққа жеткізуге болатын машинаның ағынын Ф
механикалық сипаттаманың теңдеуінен анықтаймыз.Машинаның
конструктивті тұрақтылары Се және См
келесі мәндеріне тең:
Қосылу сұлбасы
2.5.11 - суретте көрсетілген. Қозғалтқыштың жұмысшы
жылдамдығының мәні n=1,5nн=1,5×760=1140 айн/мин. Бұл
жылдамдыққа жеткізуге болатын машинаның ағынын Ф
механикалық сипаттаманың теңдеуінен анықтаймыз.Машинаның
конструктивті тұрақтылары Се және См
келесі мәндеріне тең: ![]()
![]() Машинаның ағынына Ф қатысты квадрат теңдеуді
шешіп, n×Ce×Cм×F2-U×Cм×F+Rят×Mн=0
Машинаның ағынына Ф қатысты квадрат теңдеуді
шешіп, n×Ce×Cм×F2-U×Cм×F+Rят×Mн=0
жылдамдықтың теңдеуін табамыз
 .
.
Бұл теңдеуге
белгілі мәндерді қоя отырып, көрсетілген режим үшін қозғалтқыш
ағынының мәнін аламыз
 ;
;
 .
.
Ағынның
формуласындағы түбір алдындағы теріс таңба іске
аспайтын режимге сәйкес екенін атап өтейік.
Қозғалтқыш
ағынының салыстырмалы мәні
 .
.
2.5.12 - суретте көрсетілген
әмбебап магниттелу қисығын қолдана отырып, көрсетілген
режим үшін қоздыру тізбегіндегі LM қоздыру тогының
салыстырмалы мәнін табамыз
I*
қоз=0.43.
Машинаның М нақты қоздыру тогы Іқоз.н=2,45А
кезінде қоздыру тізбегіндегі LM қоздыру тогы: Iқоз=0,43×Iқоз.н=0,43×2,45=1A.

2.5.12 - сурет
Қоздыру тізбегіндегі LM қосымша кедергінің мәні
![]() .
.
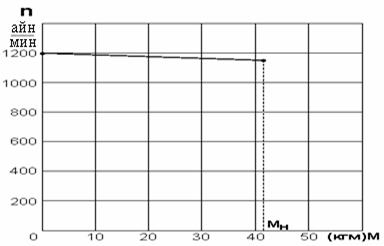
2.5.13 - сурет
Бұл режимдегі қозғалтқыштың идеалды бос жүріс жылдамдығы n0
![]() .
.
Өрісті әлсірету режиміндегі қозғалтқыштың механикалық сипаттамасы 2.5.13 - суретте көрсетілген.
 8 мысал. Қозғалтқыштың иінкүші
М=Мн мәнімен өзіндік механикалық сипаттамада
n=f(М) жұмыс істеп тұрғанда рекуперативті тежеу режимінде жүкті
түсіру жылдамдығын анықтау қажет және механикалық
сипаттамасын тұрғызу керек. Қозғалтқыштың қосылу
сұлбасы 2.5.14 суретте көрсетілген. 1 мысал бойынша қозғалтқыштың
М өзіндік сипаттамасының есептік шамаларын қолданамыз.
8 мысал. Қозғалтқыштың иінкүші
М=Мн мәнімен өзіндік механикалық сипаттамада
n=f(М) жұмыс істеп тұрғанда рекуперативті тежеу режимінде жүкті
түсіру жылдамдығын анықтау қажет және механикалық
сипаттамасын тұрғызу керек. Қозғалтқыштың қосылу
сұлбасы 2.5.14 суретте көрсетілген. 1 мысал бойынша қозғалтқыштың
М өзіндік сипаттамасының есептік шамаларын қолданамыз.
Пропорциялар әдісін немесе графиктік жолын қолданып, тұрғызылған механикалық сипаттама бойынша иінкүш М = Мн мәніне тең рекуперативті тежеу режимінде жүкті түсіру жылдамдығын n=820 айн/мин табамыз.
Жылдамдықтардың есептік шамалары бар
механикалық сипаттамасы ![]() 2.5.15 суретте көрсетілген.
2.5.15 суретте көрсетілген.
Рекуперативті тежеу режиміндегі жылдамдықтың есептік мәні
![]() .
.

|
|
|
|
|
|
|
Рекуперативті тежеу режимінде жылдамдықтың есептік шамаларының бірдей болмауы төлқұжаттық берілгендері бойынша машинаның ағынының Ф берілу дәлдігімен түсіндіріледі.
9 мысал. Қозғалтқыш нақты
иінкүші Мн мәніне тең
кезінде қозғалтқыштық режимде
жасанды механикалық сипаттамада n=0,5×nн жылдамдығымен
жұмыс істеп тұрған кезде қозғалтқышты
М рекуперативті тежеу режимінде нақты иінкүшімен
Мн жүкті төмен түсіру
жылдамдығын анықтау қажет және
механикалық сипаттамасын ![]() тұрғызу
керек.
тұрғызу
керек.![]()
 Якорь
тізбегіндегі есептік кедергі Rқос 3
мысалға сәйкес, яғни Rқос=0.65
Ом. Қосылу сұлбасы 2.5.16 - суретте келтірілген.
2.5.4 - суретте келтірілген жасанды механикалық
сипаттаманы
Якорь
тізбегіндегі есептік кедергі Rқос 3
мысалға сәйкес, яғни Rқос=0.65
Ом. Қосылу сұлбасы 2.5.16 - суретте келтірілген.
2.5.4 - суретте келтірілген жасанды механикалық
сипаттаманы ![]() ала
отырып, пропорция әдісін қолданып
немесе графиктік жолмен М=Мн иінкүші
бар рекуперативті тежеу режиміндегі жүкті түсіру
жылдамдығы n=1200 айн/мин мәніне сәйкес
екенін табамыз. Жылдамдықтардың есептік
шамалары бар механикалық сипаттама
ала
отырып, пропорция әдісін қолданып
немесе графиктік жолмен М=Мн иінкүші
бар рекуперативті тежеу режиміндегі жүкті түсіру
жылдамдығы n=1200 айн/мин мәніне сәйкес
екенін табамыз. Жылдамдықтардың есептік
шамалары бар механикалық сипаттама ![]() 2.5.17 - суретте келтірілген.
2.5.17 - суретте келтірілген.
Рекуперативті тежеу режиміндегі қозғалтқыш
жылдамдығының есептік мәні
 .
.

2.5.17 - сурет.
Рекуперативті тежеу режиміндегі қозғалтқыш жылдамдығының есептік шамаларының әртүрлі әдіспен анықтағанда тең болмауы төлқұжаттық белгілеулері бойынша машина ағынын Ф беру дәлдігімен түсіндіріледі.
2.6 Тізбектеле қоздырылатын тұрақты ток қозғалтқышының іске қосу аппараттарының есептеулері.
Есептеулер келесі төлқжаттық берілгендері бар МП-72 тізбектеле қоздырылатын тұрақты ток қозғалтқышы үшін жүргізіледі:
нақты қуаты: Рн = 80 кВт
нақты кернеуі: Uн = 220 В
нақты айналу жылдамдығы: n н=480 айн/мин
нақты п.ә.к. - і: ![]()
қозғалтқыштың нақты якорь тогы: Ія = 405 А
Іске қосу аппараттарын
есептеу үшін машинаның салыстырмалы
бірліктердегі өзіндік сипаттамасын ![]() қолданатын
боламыз (6.18 -сурет).
қолданатын
боламыз (6.18 -сурет).
Есептеулер үшін якорь орамасының кедергісін Rя және тізбектеле қосылған (якорьмен) қоздыру орамасының кедергісін Rқоз анықтаймыз.
Қозғалтқыштың нақты кедергісі
 .
.
Қуат шығыны келесі мәнді құрайтыны белгілі:
![]() .
.

2.6.1 - сурет
Бұл ара қатынастан якорь тізбегінің кедергісі анықталады
 .
.
Якорь орамасының кедергісін RЯ = 0,7(RЯ + Rқоз) деп есептейміз
![]() .
.
Тізбектеле қосылған ораманың кедергісі Rқоз = 0,3(RЯ + Rқоз) мына мәнді құрайды
Rқоз =0,3·0,0368=0,011 Ом.
1 - мысал. Өтпелі және шектік сипаттамаларды есептеу және тұрғызу қажет.
Есептеулер үшін бірқатар
токтарды ![]() алып,
салыстырмалы бірліктерден абсолютті бірліктерге Ія
аударамыз. Әрбір есептік нүкте үшін
қарсы э.қ.к -сін табамыз
алып,
салыстырмалы бірліктерден абсолютті бірліктерге Ія
аударамыз. Әрбір есептік нүкте үшін
қарсы э.қ.к -сін табамыз
![]() .
.
Келесі формулалар бойынша машинаның
конструктивті тұрақтыларын анықтаймыз
![]()
Берілген есептік токтар үшін өзіндік сипаттама (2.6.1 - сурет) бойынша қоғалтқыш жылдамдығының салыстырмалы мәні, ол бойынша жылдамдықтың абсолютті мәні анықталады.
Әрбір есептік нүкте үшін қарсы (Е/n)өз ара қатынасын анықтаймыз. Есептеп шығару нәтижелерін 2.6.1 - кестеге толтырамыз.
2.6.1- кесте
|
|
ІЯ |
E=Uн -Ія(Rя+Rқоз) |
|
nөз, айн/мин |
(Е/n)өз |
nшек |
СеФ |
СмФ |
U/E |
|
0,3 |
121 |
215,54 |
2,2 |
1010 |
0,21 |
1032 |
0,213 |
0,207 |
1,02 |
|
0,4 |
162 |
214,03 |
1,75 |
805 |
0,27 |
828 |
0,266 |
0,258 |
1,03 |
|
0,8 |
324 |
208 |
1,1 |
505 |
0,41 |
536,3 |
0,41 |
0,399 |
1,06 |
|
1 |
405 |
205 |
1 |
460 |
0,44 |
493,6 |
0,45 |
0,431 |
1,073 |
|
1,2 |
485 |
202 |
0,9 |
415 |
0,48 |
452,3 |
0,27 |
0,473 |
1,09 |
|
1,6 |
720 |
193 |
0,75 |
345 |
0,57 |
387 |
0,589 |
0,552 |
1,14 |
|
2 |
810 |
190,2 |
0,62 |
285 |
0,67 |
327,1 |
0,67 |
0,648 |
1,16 |
Есептеулер нәтижелері бойынша өтпелі (Е/п)өз = f(Ія) және шектік nшек=f(Ія) сипаттамалары тұрғызылады.
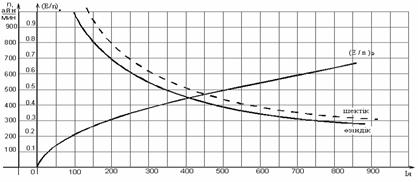
2.6.2 сурет
2 - мысал. Қозғалтқыштың
якорь тізбегіндегі кедергісін және якорь
тогы ![]() мәнінде
қозғалтқыш жылдамдығы нолге тең
жасанды сипаттаманы есептеу қажет.
мәнінде
қозғалтқыш жылдамдығы нолге тең
жасанды сипаттаманы есептеу қажет.

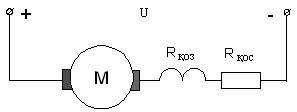 Қозғалтқыштың
М якорь тізбегінің сұлбасы 2.6.3 -
суретте келтірілген. Қосымша кедергі Rқос көрсетілген
жұмыс режимі үшін қарсы э.қ.к.
теңдеуінен анықталады
Қозғалтқыштың
М якорь тізбегінің сұлбасы 2.6.3 -
суретте келтірілген. Қосымша кедергі Rқос көрсетілген
жұмыс режимі үшін қарсы э.қ.к.
теңдеуінен анықталады
![]()
Алдында анықталған Rя+ Rқоз= 0,037 Ом мәнін қарсы э.қ.к. теңдеуіне қойып, келесі теңдеуді аламыз
Жасанды электр механикалық сипаттама келесі ара қатынас бойынша бөлек есептік нүктелер үшін тұрғызылады
![]() .
.
(E/n)өз қатынасы токтың әрбір мәні үшін 1 - мысалдан алынады. Есептеулер нәтижелерін 2.6.2 - кестеге толтырамыз.
2.6.2 - кесте
|
|
Ія(Rя+Rқоз+Rқос) |
Ежас |
|
|
0,3 |
27,50 |
192,5 |
905,9 |
|
0,4 |
36,80 |
183,2 |
690,0 |
|
0,8 |
73,68 |
146,5 |
356,0 |
|
1,0 |
91,80 |
128,0 |
288,0 |
|
1,2 |
110,20 |
110,0 |
225,0 |
|
1,6 |
147,20 |
72,60 |
127,8 |
|
2,0 |
184,00 |
36,60 |
54,90 |
|
2,4 |
220,80 |
0,00 |
0,00 |
Есептеулер нәтижелері бойынша жасанды механикалық
сипаттамасын тұрғызамыз (2.6.4 - сурет). Токтың
салыстырмалы бірліктері ![]() кезінде нөлдік
жылдамдық орын алады, яғни есептің
шарты орындалады.
кезінде нөлдік
жылдамдық орын алады, яғни есептің
шарты орындалады.
3 - мысал. Қозғалтқыштың
якорь тізбегіндегі кедергісін және якорь
тогы ![]() мәнінде
қозғалтқыш жылдамдығы нолге тең
жасанды сипаттаманы есептеу қажет.
мәнінде
қозғалтқыш жылдамдығы нолге тең
жасанды сипаттаманы есептеу қажет.
Есептеулер жоғарыда қарастырылған
2 - мысалға ұқсас. Қосымша кедергі Rқос
келесі ара қатынас бойынша анықталады:
![]() ,
,
![]() .
.
Қосымша кедергі келесі мәнге тең
![]() .
.
Жасанды электр механикалық
сипаттама бөлек есептік нүктелер бойынша тұрғызылады,
(E/n)өз қатынасы токтың әрбір
мәні үшін 1 мысалдан алынады.
Есептеулер нәтижелерін 2.6.3 - кестесіне толтырамыз.
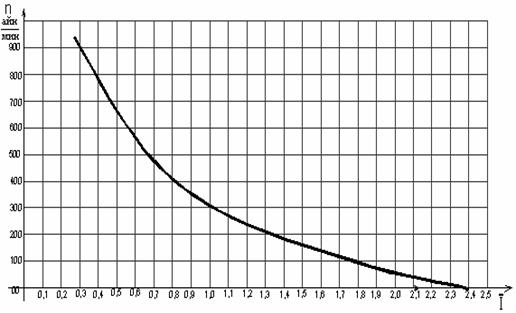
2.6.4 - сурет
Якорь тогының салыстырмалы мәні
![]() - ге тең болғанда
нолдік жылдамдық орын алады, яғни есептің
шарты орындалады.
- ге тең болғанда
нолдік жылдамдық орын алады, яғни есептің
шарты орындалады.
2.6.3 – кесте
|
|
Ія(Rя+Rқоз+Rқос) |
Ежас |
nжас=(Ежас)/(Е/n)өз |
(E/n)өз |
|
0,3 |
68 |
154 |
725 |
0,213 |
|
0,4 |
88 |
132 |
495 |
0,266 |
|
0,6 |
132 |
88 |
250 |
0,352 |
|
0,8 |
176 |
44 |
107 |
0,411 |
|
1,0 |
220 |
0,0 |
0,0 |
0,445 |
|
1,2 |
263 |
-43 |
-88 |
0,488 |
|
1,4 |
307 |
-87 |
-101 |
0,542 |
|
1,6 |
352 |
-132 |
-232 |
0,568 |
|
1,8 |
396 |
-176 |
-293 |
0,600 |
|
2,0 |
494 |
-274 |
-330 |
0,667 |
|
2,4 |
528 |
-308 |
-402 |
0,767 |
Есептеулер нәтижелері бойынша жасанды механикалық сипаттаманы тұрғызамыз (2.6.5 - сурет).

2.6.5 - сурет
4 мысал. Қозғалтқыш тогы Іян= 405 А мәніне тең болған кезде қозғалтқыштың жылдамдығы nн мәніне тең кері қосу сатыларын есептеу қажет және жасанды сипаттамасын тұрғызу керек.
Берілген жұмыс режимі үшін теңдеуін жазамыз
![]() .
.
Берілген теңдеуден машинаның якорь тізбегінің қосымша кедергісінің мәнін табамыз
![]() .
.
Алдын-ала есептеулер нәтижелерін
кестеге толтырып, берілген жұмыс режимі үшін
жасанды сипаттамасын тұрғызамыз. (Е/п)өз мәндерін
есептік токтар ![]() үшін өтпелі
сипаттамадан 2.6.1 - кестеден алынады.
үшін өтпелі
сипаттамадан 2.6.1 - кестеден алынады.
2.6.4 - кесте
|
|
Ія(Rя+Rқоз+Rқос) |
Ежас |
nжас=Ежас/(E/nжас) |
|
0,3 |
127 |
93 |
438 |
|
0,4 |
170 |
50 |
188 |
|
0,6 |
254 |
-37 |
-97 |
|
0,8 |
340 |
-120 |
-292 |
|
1,0 |
424 |
-204 |
-460 |
|
1,2 |
507 |
-284 |
-580 |
|
1,0 |
590 |
-370 |
-688 |
|
1,6 |
680 |
-460 |
-710 |
|
1,8 |
765 |
-545 |
-907 |
|
2,0 |
847 |
-627 |
-940 |
|
2,2 |
930 |
-720 |
-1010 |
|
2,4 |
1020 |
-800 |
-1040 |
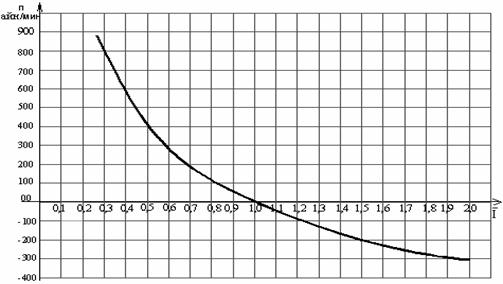
2.6.6 - сурет
Графиктегі 1 нүктесі шешілген есептің шартына сәйкес келеді.
5 мысал. Якорь тогы Ія=0,8Іян
мәніне тең кезде оның жылдамдығы
n=0.9nн болуы керек кері қосу
сатыларын есептеу керек. Есептің шешуі 4 мысалға
ұқсас.
Берілген жұмыс режимі үшін
жасанды сипаттамадағы қорек э.қ.к.
келесі теңдеу бойынша анықталады
![]() .
.
Берілген режимдегі электр қозғалтқышының
жұмысын сипаттайтын теңдеу
 .
.
Теңдеуден қосымша кедергінің
Rқос мәнін табамыз
 .
.
6 - мысал. Қозғалтқыштың
динамикалық тежеу режиміндегі жұмысы
кезінде тізбектеле қосылатын қоздыру
орамасы якорді тұйықтай (қатар) қосқанда
тежеу кедергісінің RТ мәнін есептеу қажет
және токтың секіруі 2Іян мәнінен
асып түспеу үшін қоздыру орамасының
тізбегіне қосылатын кедергі rтіз мәнін
анықтау керек. 2.6.7 - суретте электр қозғалтқышының
М қосылу сұлбасы келтірілген. Күштік
түйіспе Л ажыратылған кезде Т және
ТП түйіспелері қосылады (релелі-түйіспелі бөлік
көрсетілмеген).
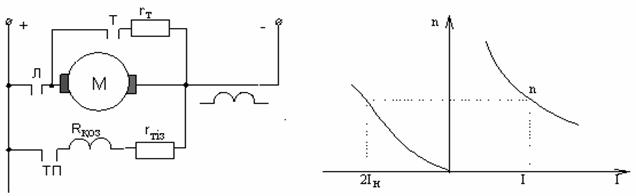
![]() Қоздыру орамасының
тізбегіне қосылған кедергінің rтіз мәнін
Ом заңы бойынша сол тізбек үшін табамыз, Rқоз
= 0.011 Ом.
Қоздыру орамасының
тізбегіне қосылған кедергінің rтіз мәнін
Ом заңы бойынша сол тізбек үшін табамыз, Rқоз
= 0.011 Ом.
 .
.
Тұтынылатын қуат
![]() .
.
Жылдамдық nн мәнімен өзіндік сипаттамада жұмыс істеген қозғалтқыштың э.қ.к. максимал мәні
![]() .
.
Рұқсат етілген токтың мәні
![]() .
.
Тежеу кедергісінің rт мәні
 .
.
7 - мысал. Тежеу кедергісі rт = 0.1142 Ом мәніне тең кезінде өзіндік қоздыруы бар динамикалық тежеу сипаттамасын есептеу қажет.
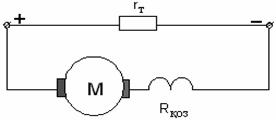 Машинаның
якорь тізбегінің кедергісі
Машинаның
якорь тізбегінің кедергісі
![]() .
.
![]() Берілген жұмыс режимі үшін
келесі теңдеулерді жазамыз
Берілген жұмыс режимі үшін
келесі теңдеулерді жазамыз
![]() .
.
Қозғалтқыштың
токтарының ![]() бөлек мәндері
үшін (Е/п)өз мәндері 1 мысалдан
алынады.
бөлек мәндері
үшін (Е/п)өз мәндері 1 мысалдан
алынады.
2.6.5 - кесте
|
|
Eжас |
(E/n)өз |
nжас |
|
0,3 |
18,3 |
0,21 |
86 |
|
0,4 |
24,5 |
0,27 |
92 |
|
0,6 |
36,6 |
0,35 |
104 |
|
0,8 |
49,0 |
0,41 |
119 |
|
1,0 |
61,2 |
0,44 |
138 |
|
1,2 |
73,5 |
0,48 |
151 |
|
1,4 |
85,5 |
0,54 |
158 |
|
1,6 |
98,5 |
0,57 |
173 |
|
1,8 |
110,5 |
0,60 |
183 |
|
2,0 |
122,5 |
0,67 |
184 |
|
2,4 |
147,0 |
0,77 |
192 |

2.6.10 - сурет
8 - мысал. Қосымша Rқос = 0.19 Ом және якорді тұйықтаушы Rк.т=0.1 Ом кедергілерінің мәндері кезінде күрделі қосылу сұлбасы үшін жасанды сипаттамасын есептеу керек.
Берілген жұмыс режимі үшін теңдеу жазамыз
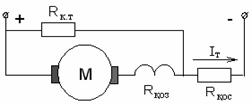
![]() .
.
Тізбектеле қосылған (якормен) кедергідегі токтың мәнін жазамыз
![]()
![]() .
.
Тұйықтала қосылған (якормен) кедергідегі токтың мәнін жазайық
![]() .
.
Токтардың ![]() бірқатар
мәндерін бере отырып, 1 мысалдағы
(Е/п)өз мәндері үшін
берілгендерді қолданамыз. Алынған мәндерді
кестеге толтырамыз (2.6.6 кесте).
бірқатар
мәндерін бере отырып, 1 мысалдағы
(Е/п)өз мәндері үшін
берілгендерді қолданамыз. Алынған мәндерді
кестеге толтырамыз (2.6.6 кесте).
2.6.6 кесте
|
Өзіндік сипаттама |
Жасанды сипаттама |
|||||||||
|
І |
nөз |
(E/n)өз |
Ія |
Іт |
Ік.т |
Ік.т*Rк.т=B |
Ія(Rя+Rқоз)=A |
Eжас=В-А |
nжас=(Ежас)/(Е/n)өз |
|
|
0,3 |
1010 |
0,213 |
121 |
800 |
679 |
67,9 |
4,46 |
63,4 |
298 |
|
|
0,4 |
805 |
0,266 |
162 |
815 |
653 |
65,3 |
5,97 |
59,33 |
223 |
|
|
0,6 |
600 |
0,352 |
245 |
841 |
598 |
59,8 |
8,95 |
50,85 |
144 |
|
|
0,8 |
506 |
0,411 |
324 |
872 |
547 |
54,7 |
12,1 |
42,6 |
104 |
|
|
1,0 |
460 |
0,445 |
405 |
899 |
494 |
49,4 |
14,9 |
34,5 |
77,5 |
|
|
1,2 |
415 |
0,488 |
485 |
925 |
440 |
44,0 |
17,9 |
26,1 |
53,5 |
|
|
1,4 |
368 |
0,542 |
585 |
954 |
368 |
38,6 |
20,8 |
18,1 |
33,3 |
|
|
1,6 |
345 |
0,568 |
650 |
982 |
332 |
33,2 |
20,4 |
9,20 |
16,2 |
|
|
1,8 |
322 |
0,600 |
730 |
1010 |
280 |
28,0 |
26,9 |
1,10 |
1,80 |
|
|
2,0 |
285 |
0,667 |
810 |
1035 |
225 |
22,5 |
32,8 |
-7,30 |
-11,0 |
|
|
2,2 |
267 |
0,702 |
890 |
1065 |
175 |
17,5 |
32,8 |
-15,3 |
-21,8 |
|
|
2,4 |
240 |
0,767 |
972 |
1090 |
118 |
11,8 |
35,7 |
-24,0 |
-31,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2.7 Бақылау сұрақтары
1. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының әрекет ету принципі.
2. Тәуелсіз қоздырылатын
тұрақты ток генераторының әрекет ету принципі.![]()
3. Неге қозғалтқыштың айналу жылдамдығы жүктеме кезінде төмендейді?
4. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышын кері айналдыру қалай жүзеге асырылады?
5. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының қандай тежеу түрлері бар?
6. Тәжірибеде қозғалтқыштың беріліс коэффициентін қалай анықтайды?
7. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының айналу жылдамдығының қандай басқару әдістері бар?
8. Қоздыру орамасының тізбегі үзілген кезде тәуелсіз қоздырылатын тұрақты ток қозғалтқышының айналу жылдамдығы қалай өзгереді?
9. Иінкүш тұрақты кезде тұрақты ток қозғалтқышының айналу жылдамдығын реттеудің қуат тұрақты кезде айналу жылдамдығын реттеуден қандай айырмашылығы бар?
10. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының жылдамдығын екі аймақтық реттеу туралы түсінік.
11. Басқару әрекеті бойынша қозғалтқыштың беріліс функциясы қандай?
12. Әсер ету әрекеті бойынша қозғалтқыштың беріліс функциясы қандай?
13. Қозғалтқыштың электр магниттік және электр механикалық уақыт тұрақтыларын қалай анықтайды?
14. Құйынды токтардың уақыт тұрақтысының мәні?
15. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының балама сұлбасы қандай?
16. Неге қозғалтқышты кері айналдыруды қоздыру орамасының тізбегінде іске асыруға болмайды.
17. Сейілу ағыны уақыт тұрақтысының мәні қандай?
18. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының электр механикалық және механикалық сипаттамаларының теңдеуі.
19. Қозғалтқыштың электр механикалық сипаттамасы тура және кері айналу бағыттары үшін қандай түрге ие болады?
20. Тәуелсіз қоздырылатын тұрақты ток қозғалтқышының жылдамдығын басқарудың қандай әдістері бар?
21. Иінкүші тұрақты кезінде тұрақты ток қозғалтқышының айналу жылдамдығын басқару қуаты тұрақты кезде басқарудан қандай айырмашылығы бар?
22. Рекуперативті тежеу режимінде қоғалтқыштың электр механикалық сипаттамасы қандай болады?
23. Кері қосумен тежеу режимінде қозғалтқыштың электр механикалық сипаттамасы қандай болады?
24. Динамикалық тежеу режимінде қозғалтқыштың электр механикалық сипаттамасы қандай болады?
25. Кері қосу режиміндегі қозғалтқыштың механикалық сипаттамасының теңдеуін жазыңыз.
26. Динамикалық тежеу режиміндегі қозғалтқыштың механикалық сипаттамасының теңдеуін жазыңыз.
27. Неге қозғалтқышты іске қосқанда алғашқы кезеңде іске қосу тогы үлкен болады?
28. Қоздыру орамасының тізбегі үзілген кезде қозғалтқыштың айналу жылдамдығы қалай өзгереді?
29. Қозғалтқыштың максимал іске қосу тогы немен шектеледі?
30. Сипаттамадан сипаттамаға ажыратып-қосу кезіндегі минимал токтың мәні қандай?
31. Іске қосу кедергісінің сатысындағы қозғалтқыштың айналу жылдамдығының өзгеру заңы.
32. Қозғалтқыштың іске қосу кедергісін басқару әдістері.
33. Неге тұрақты ток қозғалтқышын (тәуелсіз қоздырылатын) нақты қоздыру ағынымен іске қосу қажет.
34. Жетекті қозғаудың негізгі теңдеуі қандай?
35. Тұрақты ток қозғалтқышының иінкүші үшін арақатынас қандай?
36. Тұрақты ток қозғалтқышының қарсы э.қ.к - сі үшін арақатынас қандай?
37. Тізбектеле қоздырылатын тұрақты ток қозғалтқышының әрекет ету принципі?
38. Тізбектеле қоздырылатын тұрақты ток қозғалтқышының магнит ағыны немен анықталады?
39. Неге тізбектеле қоздырылатын тұрақты ток қозғалтқышына аз жүктеме кезінде жұмыс істеуге болмайды және бұл кезде қандай процестер пайда болады?
40. Тізбектеле қоздырылатын қозғалтқышты кері айналдыру қалай жүзеге асады?
41. Тізбектеле қоздырылатын қозғалтқышты іске қосу қалай жүзеге асады?
42. Тізбектеле қоздырылатын қозғалтқыш үшін кері қосумен тежеу режимі қалай орындалады?
43. Тізбектеле қоздырылатын қозғалтқыш үшін динамикалық тежеу қалай орындалады?
44. Тізбектеле қоздырылатын машинаның жасанды механикалық сипаттамасын есептеудің қандай әдістері бар?
45. Тізбектеле қоздырылатын тұрақты ток қозғалтқышының қандай күрделі қосылу сұлбалары бар?
46. Тізбектеле қоздырылатын машинаның механикалық сипаттамасының теңдеуін келтіріңіз.
47. Неге машинаның ағыны якорь тогына сызықты тәуелді деп алғанда тізбектеле қоздырылатын қозғалтқыш үшін қалыпты қосылу сұпбасы кезінде рекуперативті режим мүмкін емес?
48. Механикалық сипаттамалардың топтастыруы бойынша жасанды сипаттамаларды қалай есептеуге болады?
49. Аронов әдісі бойынша жасанды сипаттамаларды қалай есептеуге болады?
50. Шектік сипаттама бойынша жасанды сипаттамаларды қалай есептеуге болады?
51. Өтпелі сипаттама бойынша жасанды сипаттамаларды қалай есептеуге болады?
52. Тізбектеле қоздырылатын қозғалтқыштардың өнеркәсіптегі қолдану салалары.
53. Тізбектеле қоздырылатын қозғалтқыштардың шектік сипаттамасы дегеніміз не?
54. Тізбектеле қоздырылатын қозғалтқыштардың өтпелі сипаттамасы дегеніміз не?
55. Тұрақты ток генераторының жұмыс істеу принципі?
56. Тұрақты ток генераторының берілістік функциясы қандай?
57. Генератордың электр магниттік уақыт тұрақтысы қалай анықталады?
58. Генератор - қозғалтқыш жүйесі қандай кемшіліктерге ие?
59. Генератор – қозғалтқыш жүйесінің электр механикалық сипаттамасының қатандығын қалай көтеруге болады?
60. Генератор - қозғалтқыш жүйесіндегі МЗ қозғалтқышының қоздыру орамасы үзілген кезде қозғалтқыштың айналу жылдамдығына не болады?
61. Қозғалтқышты кері айналдыру қалай орындалады?
62. Генератор - қозғалтқыш жүйесіндегі жылдамдықты реттеу ауқымы немен шектелген?
63. Қозғалтқыштың өрісін әлсіреткен кезде жылдамдықты реттеу иінкүш тұрақты кезде орын алады ма, немесе қуат тұрақты кезде орын алады ма?
64. Генератордың кернеуін реттеу кезінде жылдамдықты реттеу иінкүш тұрақты кезде орын алады ма, немесе қуат тұрақтығы кезде орын алады ма?
65. Неге генератор кернеуін нақты мәнінен нолге дейін бірден төмен түсіруге болмайды?
66. Генератор – қозғалтқыш жүйесінде қандай тежеу режимі негізгі болып табылады?
67. Рекуперацияланған энергияны желіге қандай машина береді?
68. Генератор - қозғалтқыш квадратты жүйесін қай кезде қолданған тиімді?
69. Генератор - қозғалтқыш жүйесінің қолдану салалары қандай?
70. Басқарылатын түзеткіштердің айнымалы кернеуді тұрақтыға түрлендіретін басқа түрлендіргіштерден айырмашылығы?
71. Басқарылатын түзеткіштердің қолдану салалары?
72. Көпірлі бір фазалы басқарылатын түзеткіштердің сұлбасын сызыңыз.
73. Ортақ нүктесі және нолдік диоды бар бір жарты периоды бір фазалы басқарылатын түзеткіштің сұлбасын сызыңыз.
74. Үш фазалы сұлбаларда тиристорларды ашудың кідіру бұрышын қай нүктеден бастап есептейді?
75. Үш фазалы кернеулер жүйесінде вентильдерді ашудың өзіндік нүктесін көрсетіңіз.
76. Вентильді түрлендіргіштің үш фазалы нолдік сұлбасын салыңыз.
77. Үздіксіз токтар режимінде түзетілген э.қ.к - нің орташа мәні үшін арақатынасын жазыңыз.
78. Вентильдердің коммутация периоды деп нені атайды?
79. Үш фазалы бір жарты периодты сұлба үшін түзетілген э.қ.к - нің максималды мәні неге тең?
80. Вентильді түрлендіргіштің үш фазалы көпірлі сұлбасын салыңыз.
81. Үш фазалы нолдік вентильді түрлендіргіштің балама кедергісі неге тең?
82. Үш фазалы көпірлі вентильді түрлендіргіштің балама кедергісі неге тең?
83. Вентильді түрлендіргіштің түзетілген ток тізбегінің балама сұлбасын салыңыз.
84. Электр қозғалтқышының вентильді түрлендіргіштен қорек алған кезіндегі электр жетегінің жылдамдықтық сипаттамасының теңдеуі қандай?
85. Үзікті токтар режимінде жұмыс істеп тұрған вентильді түрлендіргіштің токтар диаграммасын салыңыз.
86. Бастапқы-үздіксіз токтар режимінде жұмыс істеп тұрған вентильді түрлендіргіштің токтар диаграммасын салыңыз.
87. Вентильдердің екі тобы бар реверсті вентильді электр жетегінің балама сұлбасын салыңыз.
88. Вентильді түрлендіргіштердің топтарын бөлек басқарудың артықшылықтары мен кемшіліктері қандай?
89. Бұрыштарын сызықты келістіруі бар бірігіп басқару кезіндегі реверсті үш фазалы сұлбалардың кемшіліктерін атаңыз?
90. Бөлек басқару принципі бойынша тұрғызылған вентильді түрлендіргіші бар реверсті электр жетегіндегі электр механикалық сипаттамалары қандай болады?
Әдебиеттер тізімі
1.Ковчин С.А., Сабинин Ю.А. Теория электропривода. – С.П.: Энергоатомиздат, 1994. – 491с.
2.Ключев В.И. Теория электропривода. – М.: Энергоатомиздат, 1985. – 560б.
3.Шенфельд Р. Хабигер Э. Автоматизированный электропривод. – М. Энергоатомиздат, 1985.
4.Ильинский Н.Ф. Козаченко В.Ф. Общий курс электропривода. – М. Энергоиздат, 1992.
5.Эпштейн И.И. Автоматизированный электропривод переменного тока. – М. : Энергоиздат, 1982.
6.Справочник по электрическим машинам. Под ред. П.П. Копылова и Б.К. Клюкова. – М.: Энергоатомиздат, 1989. – 688с.
7.Вешеневский С.Н. Характеристики двигателей в электроприводе.- М.: Энергия, 1997.-431б.
8.Калашников Б.Е. и др. Системы управления автономным инвертором. – М. : Энергия, 1984.
9.Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. – Л.: Энергоиздат, 1982.
10.Андреев В.П., Сабинин Ю.А. Основы электропривода. – Л.: Госэнергоиздат, 1963.-722с.
11.Сагитов П.И., Электропривод переменного тока: Учебное пособие. Алматы, 2004.