Некоммерческое
акционерное
 общество
общество
 |
Кафедра электропривода
и автоматизации
ЭЛЕКТРОПРИВОД
Методические указания по выполнению расчетно-графических работ для студентов специальности 5В081200-Энергообеспечение сельского хозяйства
Алматы 2017
СОСТАВИТЕЛИ: С.Б. Алексеев, К.Ж. Калиева, Д.М. Чныбаева. Электропривод. Методические указания по выполнению расчетно-графических работ для студентов специальности 5В081200 - Энергообеспечение сельского хозяйства. – Алматы: АУЭС. 2017. – 20 с.
Методические указания предназначены для выполнения расчетно-графических работ по дисциплине «Электропривод» и содержат теоретические сведения, методика и пример расчета задач.
Ил.9, табл.6, библ.- 6назв.
Рецензент: старший преподователь ЭССиС Курпенов Б.К.
Печатается по плану издания Некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2017г.
©НАО «Алматинский университет энергетики и связи», 2017г.
Св.пл.2017 поз.16
Сергей Борисович Алексеев
Казима Жанбырбаевна Калиева
Данна Максуткановна Чныбаева
ЭЛЕКТРОПРИВОД
Методические указания по выполнению расчетно-графических работ для студентов специальности 5В081200-Энергообеспечение сельского хозяйства
Редактор Л.Т. Сластихина
Специалист по стандатизации Н.К. Молдабекова
|
Подписано в печать___ Тираж 20 экз. Объем 2,3уч. – изд.л. |
|
Формат 60х84 1/16 Бумага типоргафическая №1 Заказ_____ Цена 625 тг
|
Копировално-множительная бюро
некоммерческого акционерного общества
«Алматинский университет энергетики и связи»
050013 Алматы,
ул. Байтурсынова, 126
Введение
Методические указания предназначены для студентов для всех форм обучения подготовки специальности 5В081200 - «Энергообеспечение сельского хозяйства», выполняющих расчетно-графическую работу по дисциплине «Электропривод».
Цель расчетно-графической работы - закрепление студентами знаний, полученных на лекциях и лабораторных работах, более глубокое понимание положений теории, а также развитие у студентов навыков решения прикладных задач электропривода.
По дисциплине предусмотрено выполнение трех расчетно-графических работ (РГР), в которых рассматриваются принципы управления электродвигателями постоянного и переменного тока, а также выполняются расчеты и построение механических характеристик для заданных режимов.
Расчет и построение естественных и искусственных механических характеристик электродвигателей позволяют студентам овладеть навыками анализа режимов работы электропривода и наглядно оценить изменения регулируемых параметров на их вид.
В методических указаниях приведены краткие теоретические сведения, позволяющие студенту самостоятельно выполнить задание, требования к структуре, содержанию и оформлению пояснительной записки, рекомендуемые библиографические источники.
1 Основные требования к структуре, содержанию и оформлению пояснительной записки
Пояснительная записка (ПЗ) выполняется на листах формата А4 (297×210) мм. Текст пояснительной записки должен быть оформлен в соответствии с требованиями СТ НАО 56023-1910-04-2014 [6].
Расчетно-графическая работа должна включать следующие основные компоненты:
1) Титульный лист по форме СТ НАО 56023-1910-04-2014 (приложение С) [56].
2) Задание на выполнение расчетно-графической работы: является вторым листом ПЗ, выполненным на бланке (приложение A).
3) Содержание: по форме СТ НАО 56023-1910-04-2014 является третьим листом ПЗ
4) Введение, содержащее обоснование актуальности темы расчетно-графической работы; перечень задач, решаемых при выполнении работы; методы и средства, которые предполагается использовать для решения этих задач.
5) Краткие теоретические сведения по теме работы.
6) Расчетно-графическую часть, содержащую схему, расчеты, графики, результаты моделирования и выводы по каждой задаче.
7) Заключение должно содержать основные результаты и краткие выводы.
8) Список литературы включает перечень научно-технических источников, использованных при выполнении работы, составленный в алфавитном порядке фамилий авторов с учетом требований СТ НАО 56023-1910-04-2014 [6]. Текст пояснительной записки должен содержать ссылки на библиографические источники.
При защите расчетно-графической работы учитываются дата представления работы на защиту в срок, соответствующий утвержденному графику учебного процесса; соответствие содержания работы выданному заданию; соответствие оформления расчетно-графической работы требованиям [6] и ЕСКД; ответы на вопросы при защите расчетно-графической работы.
2 Расчетно-графическая работа №1.
2.1 Задание 1
Для электродвигателя постоянного тока с независимым возбуждением определить:
- величину пускового резистора (RП), ограничивающего пусковой ток двигателя на уровне 2IН;
- определить величину добавочного резистора (RД), который, оставаясь в цепи якоря электродвигателя, обеспечит его работу с номинальным током и скоростью, равной Кωн (коэффициент К задается преподавателем);
- определить скорость электродвигателя, с которой он будет работать, если в цепи якоря останутся включенными пусковой и добавочный резисторы;
- построить на одном графике
естественную электромеханическую характеристику, пусковую электромеханическую характеристику,
проходящую через точку (![]() , I=IH), и
характеристику, соответствующую двум последовательно включенным резисторам (RД +RП).
, I=IH), и
характеристику, соответствующую двум последовательно включенным резисторам (RД +RП).
Тип и параметры электродвигателя задаются в приложениии А преподавателем и записывается в таблицу 2.1.
Таблица 2.1 – Параметры двигателя постоянного тока независимого возбуждения
|
№ п/п |
Наименование |
Обозначение |
Единица измерения |
Значение |
|
1 |
Номинальная мощность электродвигателя |
РН |
кВт |
|
|
2 |
Ток якоря |
IЯ |
А |
|
|
3 |
Номинальное напряжение |
U |
В |
|
|
4 |
Активное сопротивление |
RЯ |
Ом |
|
|
5 |
Индуктивное сопротивление |
LЯ |
Гн |
|
|
6 |
Частота вращения |
ωН |
рад/с |
|
|
7 |
Номинальный момент |
МН |
Н·м |
|
|
8 |
Момент инерции |
Jя |
кг·м2 |
|
|
9 |
Коэффициент |
К |
|
|
Для решения поставленной задачи следует воспользоваться формулой, описывающей электромеханическую характеристику электродвигателя постоянного тока с независимым возбуждением [1]:
![]() (2.1)
(2.1)
где UH – номинальное напряжение, В;
IЯ – ток якоря, А;
RЯ – активное сопротивление якоря, Ом;
k – конструктивный коэффициент;
Ф – магнитный поток, Вб.
Коэффициент С определяется по формуле:
![]() .
(2.2)
.
(2.2)
Величину пускового резистора RП, ограничивающего пусковой ток двигателя равна 2IН в момент включения электродвигателя, определим по формуле (2.3).
В момент включения электродвигателя его скорость ω=0. Подставив все известные параметры в уравнение электромеханической характеристики, найдем величину пускового резистора RП:
![]() . (2.3)
. (2.3)
Величину добавочного резистора RД, который, оставаясь в цепи якоря электродвигателя, обеспечивает работу при скорости, равной ω=КωН с номинальным током I=IН находим по формуле (2.4):
![]() , (2.4)
, (2.4)
где К-коэффициент, согласно заданию.
Для построения электрмеханических характеристик определим скорость идеального холостого хода:
![]() .
(2.5)
.
(2.5)
Естественная электромеханическая характеристика строится по точкам: (ω=ω0, I=0), (ω=ωН, I=IH); пусковая характеристика по точкам: (ω=ω0, I=0), (ω=0, I=2IH). Аналогичным образом строятся искусственные характеристики при дополнительных сопротивлениях в цепи якоря [2].
Ниже показан пример построения электромеханических характеристик.
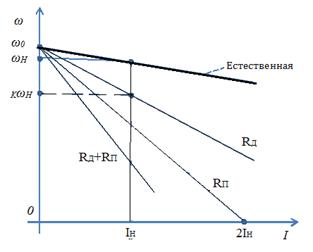
Рисунок
2.1- Электромеханические характеристики электродвигателя постоянного тока с
независимым возбуждением
2.2 Задание 2
Для двух схем регулирования скорости электродвигателя постоянного тока с независимым возбуждением рисунки 2.2 и 2.3 рассчитать и построить электромеханические характеристики ω=f(I). Для первой схемы при номинальном выходном напряжении, электродвигателя и при напряжении, равном 0,5UН, для второй схемы при номинальном выходном напряжении при 0,2UН, частота коммутации 1000 Гц. Характеристики построить на одном графике. Тип и параметры двигателя соответствуют заданию 2.1.

Рисунок 2.2 – Электропривод на основе трехфазного мостового выпрямителя
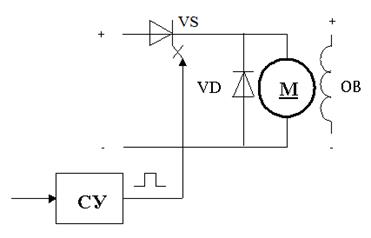
Рисунок 2.3 – Электропривод с импульсным регулятором
Способ регулирования угловой скорости напряжением в цепи якоря в серийных электроприводах постоянного тока осуществляется обычно с помощью однофазных и трехфазных тиристорных выпрямителей и широтно-импульсных регуляторов, которые обеспечивают экономическое регулирование частоты вращения двигателя в широком диапазоне [3].
Уравнения электромеханической характеристики электродвигателя постоянного тока, питаемого от управляемого выпрямителя в системе регулирования без обратных связей (рисунок 2.2), можно представить в следующем виде:
![]() ,
(2.6)
,
(2.6)
α - угол управления тиристорами выпрямителя, формируемый схемой управления СУ (α= 0 ÷ 900).
Для широтно-импульсного преобразователя (рисунок 2.2) уравнение этой характеристики имеет следующий вид:
![]() ,
(2.7)
,
(2.7)
где ε=tи /T – коэффициент регулирования (tи- длительность импульса; T- период).
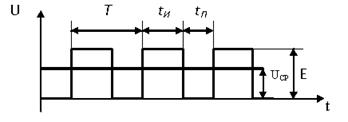
Рисунок 2.4 - Выходное напряжение на нагрузке при использовании метода ШИР
Координаты для построения электромеханических характеристик определяются по приведенным формулам, а сами характеристики строятся на отдельном графике для каждой схемы.

Рисунок 2.5 – Электромеханические характеристики электродвигателя постоянного тока с независимым возбуждением при различных значениях напряжения
3 Расчетно-графическая работа №2.
3.1 Задание
Для асинхронного электродвигателя заданной мощности, питающегося от преобразователя частоты, рассчитать и построить естественную механическую характеристику (f=50 Гц) и механические характеристики при законе частотного регулирования U/f=const, для заданных частот (f1=f2=f3). Характеристики ω=f(M) для всех частот построить на одном графике.
Тип и параметры электродвигателя задаются преподавателем по приложении Б преподавателем и записывается в таблицу 3.1.
Таблица 3.1 – Параметры асинхронного двигателя
|
№ п/п |
Наименование |
Обозначение |
Единица измерения |
Значение |
|
1 |
Тип двигателя |
4А100L6У3 |
|
|
|
2 |
Номинальная мощность электродвигателя |
РН |
кВт |
|
|
3 |
Номинальный ток |
IH |
А |
|
|
4 |
Номинальное напряжение |
Uн |
В |
|
|
5 |
Синхронная скорость вращения |
nн |
об/мин |
|
|
6 |
Номинальное скольжение |
sном |
о.е. |
|
|
7 |
Индуктивное сопротивление основного магнитного потока |
|
о.е. |
|
|
8 |
Активное сопротивление обмотки статора |
R1 |
о.е. |
|
|
9 |
Индуктивное сопротивление обмотки статора |
Х1 |
о.е. |
|
|
10 |
Активное сопротивление обмотки ротора, приведенное к обмотке статора |
R2' |
о.е. |
|
|
11 |
Индуктивное сопротивление обмотки ротора, приведенное к обмотке статора |
X2' |
о.е. |
|
|
12 |
Коэффициент мощности |
cosφ |
о.е. |
|
Расчет механических характеристик асинхронного двигателя проводится в абсолютных единицах. Для этого параметры электродвигателя приводится к абсолютным единицам путем умножения на базовое сопротивление, выписанных из каталога, сопротивлений двигателя в относительных единицах [4].
Базовое сопротивление определяется по известным номинальным значениям напряжения и тока:
![]() .
(3.1)
.
(3.1)
Вращающий момент асинхронного электродвигателя, согласно схеме замещения, определяется следующим выражением [1]:
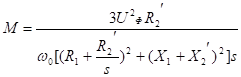 . (3.2)
. (3.2)
Для расчета механической характеристики М=f(s) применяется формула Клосса:
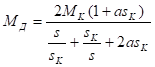 , (3.3)
, (3.3)
где ![]() - максимальный
(критический) момент двигателя, Н∙м.
- максимальный
(критический) момент двигателя, Н∙м.
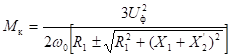 , (3.4)
, (3.4)
где ![]() -
критическое скольжение.
-
критическое скольжение.
 , (3.5)
, (3.5)
где ![]() - угловая
синхронная скорость, рад/с.
- угловая
синхронная скорость, рад/с.
![]() ,
(3.6)
,
(3.6)
 . (3.7)
. (3.7)
Подставив рассчитанные параметры МК, SК и α в формулу (3.3) и задаваясь величиной скольжения S от 0 до 1, можно получить выражение механической характеристики М=f(s) электродвигателя ( таблица 3.2).
Задаваясь величиной скольжения S от 0 до 1, определяется соответствующие моменты электродвигателя (таблица 3.2).
Для построения механической характеристики ω=f(M) рассчитывается значения угловой скорости для заданных величин скольжения:
![]() .
(3.8)
.
(3.8)
Таблица 3.2 – Значения координат для механической характеристики двигателя при f1=50 Гц
|
S |
|
|
|
|
|
|
|
M, Н∙м |
|
|
|
|
|
|
|
ω, рад/с |
|
|
|
|
|
|
Искусственные механические характеристики для заданных частот, при законе частотного регулирования U/f=const, рассчитываются аналогично естественной с учетом того, что индуктивные сопротивления двигателя должны быть пересчитаны для заданной частоты:
![]()
![]() .
(3.9)
.
(3.9)
где L- индуктивность, Гн;
f – частота, Гц.
Примерный вид механических характеристик представлен на рисунке 3.1.

Рисунок 3.1-Механическая характеристика асинхронного двигателя при трех частотах
4 Расчетно-графическая работа №3
4.1 Задание
Для системы «преобразователь частоты - асинхронный двигатель», при законе регулирования U/f=const, построить модель в программной среде Matlab, рассчитать параметры и получить механические характеристики для трех заданных частот. Произвести осциллографирование процесса нагрузки двигателя при снятии механической характеристики.
Тип и параметры электродвигателя задаются преподавателем по приложении Б преподавателем и записывается в таблицу 4.1.
Таблица 4.1 – Параметры асинхронного двигателя
|
№ п/п |
Наименование |
Обозначение |
Единица измерения |
Значение |
|
1 |
Тип двигателя |
4А100L6У3 |
|
|
|
2 |
Номинальная мощность электродвигателя |
РН |
кВт |
|
|
3 |
Номинальный ток |
IH |
А |
|
|
4 |
Номинальное напряжение |
UН |
В |
|
|
5 |
Синхронная скорость вращения |
nн |
об/мин |
|
|
6 |
Номинальное скольжение |
sном |
о.е. |
|
|
7 |
Индуктивное сопротивление основного магнитного потока |
|
о.е. |
|
|
8 |
Активное сопротивление обмотки статора |
R1 |
о.е. |
|
|
9 |
Индуктивное сопротивление обмотки статора |
Х1 |
о.е. |
|
|
10 |
Активное сопротивление обмотки ротора, приведенное к обмотке статора |
R2' |
о.е. |
|
|
11 |
Индуктивное сопротивление обмотки ротора, приведенное к обмотке статора |
X2' |
о.е. |
|
|
12 |
Коэффициент мощности |
cosφ |
о.е. |
|
Структура частотно-управляемого электропривода с ШИМ представлена на рисунке 4.1.
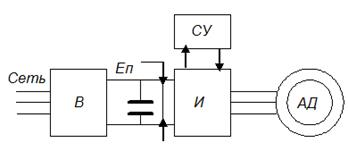
Рисунок 4.1 - Структура частотно-управляемого электропривода с ШИМ
Модель ПЧ-АД, составленная из функциональных блоков Matlab Simulink, представлена на рисунке 4.2.
Для работы с моделью электропривода необходимо пересчитать параметры электродвигателя в абсолютные единицы, аналогично предыдущему заданию и внести их в элементы модели.
Силовая схема преобразователя частоты (рисунок 4.1) состоит из неуправляемого выпрямителя на диодах, конденсатора С и инвертора на транзисторных ключах (IGBT). Модуляция выходного напряжения осуществляется методом ШИМ по синусоидальному закону. Зависимость напряжения на выходе инвертора от коэффициента модуляции выражается формулой:
![]() (4.1)
(4.1)
где μ – коэффициент глубины модуляции;
ωs –круговая частота модуляции.
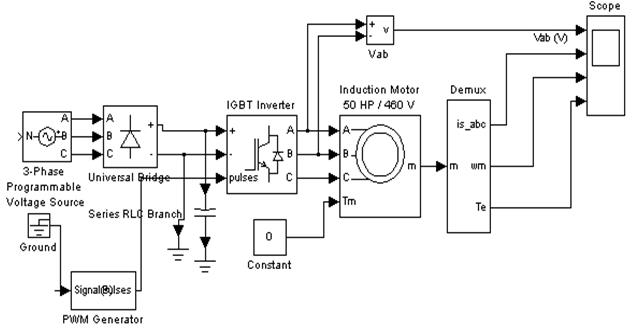
Рисунок 4.2 - Модель ПЧ-АД, составленная из функциональных блоков Matlab Simulink
Для выполнения заданного закона частотного регулирования в блок PWM вносится заданная выходная частота и рассчитанный для этой частоты коэффициент модуляции μ. Несущая частота установливается равной 2000 Гц. Методика получения механических характеристик дается в [5]. Ниже на рисунке 4.3 представлен примерный вид механических характеристик, полученных в процессе моделирования.

Рисунок 4.3 - Механическая характеристика асинхронного двигателя, полученная на модели при различных значениях частоты питающего напряжения