Некоммерческое акционерное общество
АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ и СВЯЗИ
Кафедра электропривода и автоматизации промышленных установок
ЭЛЕКТРОПРИВОД
Методические указания к виртуальным лабораторным работам
для студентов всех форм обучения специальности 050718 –
Электроэнергетика
Алматы 2009
СОСТАВИТЕЛЬ: С.Б. Алексеев. Регулируемый электропривод. Методические указания к выполнению виртуальных лабораторных работ для студентов всех форм обучения специальности 050718 – Электроэнергетика. – Алматы: АИЭС, 2009. – 27 с.
Методические указания содержат необходимые теоретические положения, принципы работы в среде MATLAB Simulink при исследовании статических и динамических характеристик программу выполнения работ, методику подготовки, проведения экспериментов и анализа полученных результатов.
Методические указания предназначены для студентов всех форм обучения специальности 050718 – Электроэнергетика.
ВВЕДЕНИЕ
Основными показателями, характеризующими различные способы регулирования скорости электроприводов, являются:
- диапазон регулирования угловой скорости, определяющийся отношением максимальной и минимальной установившихся скоростей
D= ωmax : ωmin,
при заданной точности регулирования;
- плавность регулирования, характеризующая скачок скорости при переходе от данной скорости к ближайшей возможной. Коэффициент плавности находится как отношение двух соседних значений угловых скоростей
φпл = ωi /ωi-1
и при плавном регулировании φпл→ 1;
- стабильность угловой скорости, характеризующая изменение угловой скорости при заданном отклонении момента нагрузки;
- экономичность регулирования, определяющаяся затратами на электропривод и потерями при регулировании. Потери мощности ΔΡ, возникающие при регулировании скорости, определяют КПД привода
η = Р2 / (Р2 + ΔΡ),
где Р2 – мощность на валу двигателя;
- направление регулирования скорости- показывает каким образом, в сторону увеличения или уменьшения от скорости при номинальных параметрах, действует данный способ регулирования;
- допустимая нагрузка двигателя- наибольшее значение момента, который может развивать двигатель, длительно работая на регулировочных характеристиках.
Изучение способов регулирования удобно проводить с использованием электромеханических ω = f(I) и механических характеристик ω = f(M) электродвигателя при данном способе регулирования. Поэтому в лабораторных работах студенту необходимо с помощью программного обеспечения Matlab набрать схему модели электропривода, для получения механических характеристик исследуемых способов регулирования, снять характеристики и произвести их анализ.
1 Лабораторная работа № 1. Способы регулирования скорости электродвигателей постоянного тока с независимым возбуждением.
1.1 Цель работы
Изучить способы регулирования скорости электродвигателей постоянного тока с независимым возбуждением на модели электропривода в программной среде Matlab.
1.2 Основные положения к выполнению работы
Из уравнений электромеханической и механической характеристик электродвигателя постоянного тока с независимым возбуждением:
![]() ;
; ![]() ,
,
где
С = кФ , ![]() следует,
что возможны три основных способа регулирования угловой скорости (см. рисунок
1.1):
следует,
что возможны три основных способа регулирования угловой скорости (см. рисунок
1.1):
а) изменением напряжения UЯ, подводимого к якорю;
б) изменением сопротивления цепи якоря двигателя переменным добавочным резистором RД;
в) изменением тока возбуждения IВ (воздействие на величину магнитного потока, коэффициент - С).

Рисунок 1.1-Схемы включения электродвигателя для основных способов регулирования.
Вид типичных электромеханических и механических характеристик, полученных в этих схемах регулирования, представлен на рисунке 1.2.
Рисунок 1.2- Механические и электромеханические характеристики для трех способов регулирования: а) регулирование напряжением на якоре двигателя; б) регулирование добавочным резистором в цепи якоря; в) и г) регулирование током возбуждения.
Аналогичные по виду характеристики должны быть получены в процессе выполнения лабораторной работы на исследуемой модели.
1.3 Программа выполнения работы
1.3.1 Применяя блоки и элементы программного обеспечения Matlab Simulink, набрать модель (см. рисунок 1.3). Установить параметры блоков и элементов модели в соответствии с вариантом задания.
1.3.2 Снять и построить естественную электромеханическую характеристику ω= f(IЯ) для электродвигателя постоянного тока независимого возбуждения (параметры электродвигателя задаются преподавателем из таблицы 1 (Приложение А).
1.3.3 Снять и построить две искусственные электромеханические характеристики электродвигателя при введении в цепь якоря дополнительного сопротивления, проходящие через точки: 1) ω = 0,8ωн, I = Iн и 2) ω = 0,6ωн, I = Iн.
1.3.4 Снять и построить электромеханические характеристики, проходящие через те же точки (п. 1.3.2) , при регулировании скорости электродвигателя напряжением UЯ на якоре.
1.3.5 Снять и построить электромеханические характеристики при ослаблении магнитного потока ( IВ = 0,9IВН , IВ= 0,75IВН).
1.3.6 По полученным данным, для трех способов регулирования рассчитать и построить механические характеристики ω= f(М).
1.3.7 Произвести анализ характеристик, применяя основные показатели способов регулирования, сделать выводы.
1.4 Порядок выполнения работы
1.4.1 В набранной схеме модели (см. рисунок 1.3) установить параметры блоков и элементов согласно заданного преподавателем варианта из таблицы 1, в том числе рассчитанных при выполнении домашней подготовки. Первой снимается естественная характеристика (при номинальных параметрах электродвигателя без добавочных резисторов), затем все остальные согласно программе.
1.4.2 В меню Simulation установить параметры процесса моделирования (шаг и метод интегрирования, время окончания процесса моделирования).
1.4.3 Произвести настройку осциллографа ( Ymax- максимальное и Ymin- минимальное ожидаемое значение тока якоря при пуске согласно проведенных расчетов. Установить ожидаемое время развертки. Осциллограф необходим для визуального контроля окончания переходного процесса при пуске и набросе нагрузки.
1.4.4 Для ограничения пускового тока в схему введен дополнительный резистор, который автоматически шунтируется через заданное время. Установить время подачи импульса на выключатель 1,5 – 3с.
1.4.5 В блоке constant (задается требуемое значение нагрузки) установить значение равное нулю.
1.4.6 По завершении всех настроек произвести пуск модели и после наступления установившегося режима записать показания приборов (ток и скорость).
1.4.7 Не останавливая работу модели, произвести наброс нагрузки, изменив значение constant, исходя из параметров электродвигателя. Дождавшись установившегося режима, записать показания приборов. Получить четыре точки в пределах от I=0 до I=1,2IН .
1.4.8 На основании полученных данных построить электромеханическую характеристику.
1.4.9 Подготовить модель к снятию следующей характеристики согласно программы работы.
1.5 Задание для домашней подготовки
1.5.1 Исходя из параметров электродвигателя, произвести расчет пускового резистора для ограничения пускового тока на уровне 2IН.
1.5.2 Рассчитать добавочные резисторы RД1 и RД2 для получения двух искусственных характеристик, проходящих через заданные точки п. 1.3.2.
1.5.3 Рассчитать напряжения на якоре электродвигателя UЯ1 и UЯ2 , позволяющие получить электромеханические характеристики, проходящие через те же точки п.1.3.3.
1.6 Содержание отчета
1.6.1 Цель и программа работы
1.6.2 Расчеты, проведенные при домашней подготовке.
1.6.3 Схемы моделей для получения характеристик.
1.6.4 Таблицы с данными проведенных экспериментов, графики.
1.6.5 Анализ полученных результатов, выводы.
2 Лабораторная работа № 2 Регулирования угловой скорости электродвигателей постоянного тока с помощью полупроводниковых преобразователей в цепи якоря.
2.1 Цель работы
Изучить особенности регулирования угловой скорости и электромеханических характеристик электродвигателей постоянного тока, питаемых от управляемых выпрямителей и широтно-импульсных регуляторов в цепи якоря на модели электропривода. Произвести оценку исследуемых схем по основным показателям регулирования.
2.2 Основные положения к выполнению работы
Способ регулирования угловой скорости напряжением в цепи якоря в серийных электроприводах постоянного тока осуществляется обычно с помощью однофазных и трехфазных тиристорных выпрямителей (см.-рисунок 2.1) и широтно-импульсных регуляторов (см. рисунок 2.2).
Уравнения электромеханической и механической характеристики электродвигателя постоянного тока, питаемого от управляемого выпрямителя в системе регулирования без обратных связей:
ω = (Ud0 cosα-IRЭ)/ kф; ω = Ud0 cosα/ kф- MRЭ/ (kф)2, (2.1)
где Ud0 – среднее значение выпрямленного напряжения для данного типа выпрямителя ( для трехфазной мостовой схемы Ud0 = 2,34 U2Ф);
RЭ – эквивалентное сопротивление цепи якоря;
α - угол управления тиристорами выпрямителя, формируемый схемой управления СУ.
Для широтно-импульсного преобразователя уравнения этих характеристик имеют следующий вид:
ω = (εU –IRЯ) / kф, ω = εU / kф - MRЯ / (kф)2, (2.2)
где ε = tи / T – коэффициент регулирования (tи- длительность импульса, T- период).
 +
+
VS1 VS3 VS5
Uc Т
ОВ
![]()
Рисунок 2.1 – Электропривод на основе трехфазного мостового выпрямителя
 VS
VS
VD
ОВ
= U
Рисунок 2.2– Электропривод с импульсным регулятором
Силовые схемы, представленные на рисунках 2.1 и 2.2, положены в основу моделей исследования электромеханических характеристик данных электроприводов. Типичный вид механических характеристик для этих схем представлен на рисунке 2.3.
Рисунок 2.3 – а) механические характеристики при питании электродвигателя от управляемого выпрямителя; б) от импульсного регулятора.
Характерной особенностью этих характеристик является резкий подъем характеристик в области малых нагрузок, что обусловлено явлением прерывистых токов.
2.3 Программа выполнения работы
2.3.1 Применяя блоки и элементы программного обеспечения Matlab Simulink, набрать модель регулируемого электропривода постоянного тока на основе трехфазного мостового управляемого выпрямителя (см. рисунок 2.4). Установить параметры блоков и элементов модели в соответствии с вариантом задания.
2.3.2 Снять электромеханические характеристики ω= f(IЯ) для двух значений напряжения на якоре электродвигателя U1= UH и U2= 0,5 UH, установив соответствующую величину угла α в блоке задания системы управления выпрямителем.
2.3.4 Набрать модель электропривода постоянного тока с широтно-импульсным регулятором в цепи якоря электродвигателя (см. рисунок 2.5).
2.3.5 Снять электромеханические характеристики для двух напряжений U1= UH и U2= 0,5 UH.
2.3.6 Для каждой из схем построить электромеханические характеристики. Произвести анализ полученных результатов, сделать выводы.
2.4 Порядок выполнения работы
2.4.1 В набранной схеме модели установить параметры трансформатора, электродвигателя, угол управления α, начальный момент на валу двигателя равный нулю. Параметры электродвигателя из таблицы 1 (Приложение А).
2.4.2 В меню Simulation установить параметры процесса моделирования (шаг и метод интегрирования, время окончания процесса моделирования).
2.4.4 Произвести настройку осциллографа ( Ymax- максимальное и Ymin- минимальное ожидаемое значение тока якоря при пуске согласно проведенных расчетов. Установить ожидаемое время развертки. Осциллограф необходим для визуального контроля окончания переходного процесса при пуске и набросе нагрузки.
2.4.5 В блоке constant (задается требуемое значение нагрузки) установить значение равное нулю, а в блоке constant 1 значение угла α , соответствующее заданному напряжению на двигателе.
2.4.6 По завершении всех настроек произвести пуск модели и после наступления установившегося режима (окончание переходного процесса наблюдаем по осциллографу, контролирующему процесс изменения скорсти) записать показания приборов (ток и скорость).
2.4.7 Не останавливая работу модели произвести наброс нагрузки, изменив значение constant, исходя из параметров электродвигателя. Дождавшись установившегося режима, записать показания приборов. Получить пять точек в пределах от I=0 до I=1,5 IН .
2.4.8 Рассчитать значение угла α для напряжения на двигателе равном 0,5 UH , ввести это значение в схему модели, повторить эксперимент при тех же параметрах нагрузки п. 2.4.7.
2.4.9 Аналогично снимаются электромеханические характеристики для схемы электропривода с широтно-импульсным регулятором (см. рисунок 2.5).
2.5 Задание для домашней подготовки
2.5.1 Изучить особенности работы регулируемого электропривода и его характеристики при питании от управляемого выпрямителя и широтно-импульсного преобразователя /1/.
2.5.2 Рассчитать значение вторичного линейного напряжения трансформатора, которое обеспечит после выпрямления номинальное напряжение электродвигателя при угле α = 0 формула (2.1).
2.6 Содержание отчета
2.6.1 Цель и программа работы
2.6.2 Расчеты необходимых параметров.
2.6.3 Схемы моделей для получения характеристик.
2.6.4 Таблицы с данными проведенных экспериментов, графики.
2.6.5 Анализ полученных результатов, выводы.
3 Лабораторная работа № 3 Импульсное регулирование угловой скорости асинхронного электродвигателя с фазным ротором.
3.1 Цель работы
Изучить принцип импульсного регулирования в цепи выпрямленного тока асинхронного электродвигателя с фазным ротором и регулировочные возможности схемы на модели электропривода.
3.2 Силовая схема электропривода
Схема (см. рисунок 3.1,а) содержит неуправляемый трехфазный мостовой выпрямитель (В) в цепи ротора электродвигателя, нагруженный на добавочный резистор RД. Параллельно резистору подключен запираемый тиристор VS, позволяющий осуществлять широтно-импульсное регулирование в цепи выпрямленного тока. Статор электродвигателя подключается непосредственно к сети.
В приведенной схеме дополнительные потери мощности, обусловленные регулированием угловой скорости, в основном выделяются в добавочном резисторе вне машины. Когда тиристор открыт, двигатель работает на естественной характеристике, при замкнутом роторе. Если тиристор закрыт, то двигатель работает на реостатной характеристике. Рабочая зона при импульсном регулировании располагается между двумя этими характеристиками (рисунок 3.1, б).
![]()
![]()

Рисунок 3.1
3.3 Программа выполнения работы
3.3.1 Применяя блоки и элементы программного обеспечения Matlab Simulink, набрать модель регулируемого электропривода с импульсным управлением на основе асинхронного двигателя с фазным ротором ( рисунок 3.2). Установить параметры блоков и элементов модели в соответствии с вариантом задания.
3.3.2 Снять механические характеристики ω= f(М) при заданной тактовой частоте задающего генератора для двух значений ε =1 и ε =0, установив соответствующие параметры в блоке генератора.
3.3.3 Снять механические характеристики ω= f(М) для значений ε = 0,5 и ε =0,75.
3.3.4 Построить характеристики на одном графике, оценить регулировочные возможности схемы, сделать выводы.
3.4 Порядок выполнения работы
3.4.1 В набранной схеме модели установить параметры источника питания, электродвигателя, начальный момент на валу двигателя равный нулю, тактовую частоту задающего генератора. Параметры электродвигателя из таблицы 2 (Приложение А).
3.4.2 В меню Simulation установить параметры процесса моделирования (шаг и метод интегрирования, время окончания процесса моделирования).
3.4.3 Произвести настройку осциллографов (Ymax- максимальное ожидаемое значение момента при пуске и максимальное значение угловой скорости). Установить ожидаемое время развертки.
3.4.4 В блоке constant (задается требуемое значение момента нагрузки) установить значение равное нулю.
3.4.5 По завершении всех настроек произвести пуск модели и после наступления установившегося режима (окончание переходного процесса наблюдаем по осциллографу, контролирующему процесс изменения скорсти) записать показания установившейся угловой скорости и момента.
3.4.6 Не останавливая работу модели произвести наброс нагрузки, изменив значение constant, исходя из параметров электродвигателя. Дождавшись установившегося режима, записать показания приборов. Получить пять - семь точек в пределах от М=0 до М=1.8МН .
3.5 Задание для домашней подготовки
3.5.1 Изучить особенности работы схемы импульсного регулирования угловой скорости асинхронного двигателя с фазным ротором, ее области применения и возможности /1/.
3.5.2 Исходя из заданных параметров электродвигателя, рассчитать значения номинального и максимального моментов.
3.6 Содержание отчета
3.6.1 Цель и программа работы
3.6.2 Расчеты необходимых параметров.
3.6.3 Схемы моделей для получения характеристик.
3.6.4 Таблицы с данными проведенных экспериментов, графики.
3.6.5 Анализ полученных результатов, выводы.
4 Лабораторная работа №4 Механические характеристики асинхронного электродвигателя при частотном управлении
4.1 Цель работы
Изучить принцип частотного управления асинхронным электродвигателем на основе инвертора с широтно-импульсной модуляцией (ШИМ). Получить механические характеристики электродвигателя при заданном законе частотного управления на модели электропривода.
4.2 Основные положения к выполнению работы
Структура частотно-управляемого электропривода с ШИМ представлена на рисунке 4.1, где:
 |
Рисунок 4.1
В – неуправляемый мостовой выпрямитель, С – конденсатор;
И - инвертор напряжения; СУ- система управления; АД- асинхронный электродвигатель, EП – напряжение на входе инвертора.
В инверторе напряжения реализуется заданный закон частотного управления. Для идеализированного электродвигателя, в котором можно пренебречь активным сопротивлением статора, основной закон изменения напряжения при частотном регулировании выражается формулой / 1/
 , (4.1)
, (4.1)
где МС1 и МС2 – моменты статической нагрузки, соответствующие работе двигателя при частотах f1 и f2;
U11 U12- напряжение на двигателе при тех же частотах.
При постоянстве момента статической нагрузки напряжение источника питания должно изменяться пропорционально его частоте.
В этом случае для идеализированного двигателя сохраняется перегрузочная способность (Мк=const) и закон изменения напряжения примет вид:
U1/ f1 = const. (4.2)
При постоянстве мощности на валу двигателя в процессе регулирования скорости закон изменения напряжения
U1/![]() = const.. (4.3)
= const.. (4.3)
При вентиляторной нагрузке напряжение на статоре должно измениться по закону
U1/f12= const. (4.4)
Механические характеристики для этих трех случаев представлены на рисунке 4.2.
Рисунок 4.2
Модуляция выходного напряжения инвертора с ШИМ осуществляется по синусоидальному закону
Uн,f = EП m sinwst, (4.5)
где m - коэффициент глубины модуляции; ws – круговая частота модуляции.
Напряжение источника питания инвертора напряжения с ШИМ
 ,
(4.6)
,
(4.6)
где UL- номинальное значение линейного напряжения на статоре двигателя.
По формулам 4.5,4.6 при заданном законе частотного управления и выходной частоте, определяется коэффициент глубины модуляции m (индекс модуляции), необходимый при настройке модели.
4.3 Программа выполнения работы
4.3.1 Применяя блоки и элементы программного обеспечения Matlab Simulink, набрать модель частотно-управляемого электропривода (см. рисунок 4.3). Установить параметры блоков и элементов модели в соответствии с вариантом задания. Закон частотного управления задается преподавателем.
4.3.2 Снять механическую характеристику ω= f(М) при выходной частоте инвертора равной 50Гц, установив соответствующие параметры частоты и индекса модуляции в блоках модели.
4.3.3 Снять механические характеристики ω= f(М) для значений выходных частот инвертора равных 25Гц и 10Гц.
4.3.4 Построить характеристики на одном графике, оценить регулировочные возможности схемы, сделать выводы.
4.4 Порядок выполнения работы
4.4.1 В набранной схеме модели установить параметры источника питания, электродвигателя, начальный момент на валу двигателя равный нулю, в блоке управления инвертором индекс модуляции и выходную частоту. Параметры электродвигателя из таблицы 2 (Приложение А).
4.4.2 В меню Simulation установить параметры процесса моделирования (шаг и метод интегрирования, время окончания процесса моделирования).
4.4.3 Произвести настройку каналов осциллографа (Ymax- максимальное и Ymin- минимальное ожидаемое значение момента при пуске и максимальное значение угловой скорости). Установить необходимое время развертки.
4.4.4 В блоке constant (задается требуемое значение момента нагрузки) установить значение равное нулю.
4.4.5 По завершении всех настроек произвести пуск модели и после наступления установившегося режима (окончание переходного процесса наблюдаем по осциллографу, контролирующему процесс изменения скорсти) записать показания установившейся угловой скорости и момента.
4.4.6 Не останавливая работу модели, произвести наброс нагрузки, изменив значение constant, исходя из параметров электродвигателя. Дождавшись установившегося режима записать показания приборов. Получить пять - семь точек в пределах от М=0 до М=Мmax .
4.5 Задание для домашней подготовки
4.5.1 Изучить принципы частотного управления асинхронным двигателем, области применения и возможности /1/.
4.5.2 Исходя из заданных параметров электродвигателя и закона частотного управления, рассчитать необходимое напряжение на входе инвертора и значение коэффициента глубины модуляции для заданных в программе значений выходных частот (принять максимальное значение коэффициента для частоты 50Гц , m= 0.98).
4.5.3 Для каждой из заданных в работе частот рассчитать максимальное значение момента электродвигателя с учетом изменившейся частоты /1/.
4.6 Содержание отчета
4.6.1 Цель и программа работы
4.6.2 Расчеты необходимых параметров.
4.6.3 Схемы моделей для получения характеристик.
4.6.4 Таблицы с данными проведенных экспериментов, графики.
4.6.5 Анализ полученных результатов, выводы.
5 Лабораторная работа №5. Пуск электродвигателя постоянного тока в три ступени
5.1 Цель работы
Изучение переходных режимов при пуске электродвигателя постоянного тока с независимым возбуждением на модели электропривода в программной среде Matlab.
5.2 Основные положения к выполнению работы
Изучение переходных режимов электропривода необходимо для правильного определения мощности применяемого электродвигателя, выбора аппаратуры управления и оценки влияния его работы на производственный механизм.
При многоступенчатом пуске двигателя (см.рисунок 5.1) и постоянном напряжении сети задаются обычно определенными границами колебаний пускового тока или пускового момента. При этом значение максимального пускового момента двигателя с номинальным потоком обычно принимается по условиям коммутации 2÷ 2,5 Мн. Значение момента переключения выбирают на 10÷20% больше момента сопротивления механизма.
При исследовании переходных процессов определяются зависимости
i = f1(t) , M = f2(t) и ω = f3(t).
 + К М К1 К2 К3
-
+ К М К1 К2 К3
-
R1 R2 R3
Рисунок 5.1- Пуск электродвигателя постоянного тока в три ступени
Схема на рисунке 5.1 положена в основу модели исследования переходных процессов. Процесс пуска осуществляется в функции времени последовательным шунтированием ступеней пускового реостата.
5.3 Программа выполнения работы
5.3.1 По заданным параметрам электродвигателя (таблица 1) рассчитать графическим методом резисторы (R1,R2,R3) пускового реостата и время пуска на каждой ступени / 1/, ( Приложение Б).
5.3.2 Применяя блоки и элементы программного обеспечения Matlab Simulink, набрать модель электропривода (см. рисунок 5.2). Установить параметры блоков и элементов модели в соответствии с вариантом задания и данными, полученными при расчетах (R1,R2,R3, время пуска на каждой ступени). Модель схемы пуска в три ступени ( Приложение Б).
5.3.3 Получить переходные характеристики пуска электродвигателя
i = f1(t) , M = f2(t) и ω = f3(t), сравнить с расчетными параметрами.
5.3.4 Произвести анализ полученных результатов, сделать выводы.
5.4 Порядок выполнения работы
5.4.1 В набранной модели установить параметры моделирования - меню «Simulaition».
5.4.2 Перед пуском модели произвести настройку осциллографов под ожидаемые выходные параметры (I, М, ω).
5.4.3 Произвести пуск и отладку модели.
5.4.4 Сохранить полученные осциллограммы.
5.5 Содержание отчета
5.6.1 Цель и программа работы
5.6.2 Расчеты необходимых параметров.
5.6.3 Схема модели для получения переходных характеристик.
5.6.4 Осциллограммы.
5.6.5 Анализ полученных результатов, выводы.
Приложение А
Таблица 1- Электродвигатели постоянного тока
|
№ варианта |
Мощность Р,кВт |
Ном. напряж.Uн,В |
Ток якоря, Iн,А |
Актив. сопр. Rя,Ом |
Инд. сопр. Lя,Гн |
Частота вращ. ωнрад/с |
Ном. момент Мн,Н·м |
Момент инерции Jя,кг·м2 |
|
1 |
1,5 |
220 |
9 |
1,99 |
0,446 |
314 |
4,6 |
0,042 |
|
2 |
2,2 |
220 |
12,5 |
1,03 |
0,321 |
314 |
6,8 |
0,052 |
|
3 |
3,2 |
220 |
17,5 |
0,642 |
0,229 |
314 |
10 |
0,09 |
|
4 |
4,5 |
220 |
24,3 |
0,352 |
0,165 |
314 |
14 |
0,116 |
|
5 |
6 |
220 |
33 |
0,36 |
0,122 |
314 |
18,6 |
0,15 |
|
6 |
11 |
220 |
59 |
0,121 |
0,068 |
314 |
34 |
0,008 |
|
7 |
19 |
220 |
98,6 |
0,054 |
0,041 |
314 |
59 |
0,14 |
|
8 |
2,2 |
220 |
12 |
1,205 |
0,335 |
157 |
13,6 |
0,116 |
|
9 |
3,2 |
220 |
18,4 |
1,032 |
0,218 |
157 |
20 |
0,15 |
|
10 |
4,5 |
220 |
25,4 |
0,78 |
0,158 |
157 |
28 |
0,18 |
|
11 |
6 |
220 |
33,2 |
0,472 |
0,121 |
157 |
37,2 |
0,35 |
|
12 |
8 |
220 |
43,5 |
0,269 |
0,092 |
157 |
49,7 |
0,4 |
|
13 |
11 |
220 |
59,5 |
0,187 |
0,067 |
157 |
68,3 |
0,56 |
|
14 |
14 |
220 |
73,5 |
0,128 |
0,055 |
157 |
87 |
0,65 |
|
15 |
19 |
220 |
103 |
0,124 |
0,039 |
157 |
118 |
1,4 |
Таблица 2 - Асинхронные двигатели
|
№ вар. |
Электродвигатель |
Р кВт |
U1Л В |
R′´1 о.е. |
R´″′´2 о.е. |
X′´1 о.е. |
X″″´´2 о.е. |
Xµ о.е. |
JДВ кгм2 |
|
1 |
4АНК160S4У3 |
14 |
380 |
0,047 |
0,061 |
0,081 |
0,1 |
3,1 |
0,009 |
|
2 |
4АНК160М4У3 |
17 |
380 |
0,035 |
0,047 |
0,067 |
0,087 |
2,7 |
0,012 |
|
3 |
4АНК180S4У3 |
22 |
380 |
0,033 |
0,054 |
0,061 |
0,089 |
2,4 |
0,011 |
|
4 |
4АНК180М4У3 |
30 |
380 |
0,028 |
0,044 |
0,055 |
0,083 |
2,4 |
0,011 |
|
5 |
4АНК200М4У3 |
37 |
380 |
0,029 |
0,035 |
0,065 |
0,10 |
3,2 |
0,014 |
|
6 |
4АНК200L4У3 |
45 |
380 |
0,029 |
0,036 |
0,084 |
0,10 |
3,4 |
0,014 |
|
7 |
4АНК225М4У3 |
55 |
380 |
0,031 |
0,035 |
0,084 |
0,11 |
4,2 |
0,015 |
|
8 |
4АНК180S6У3 |
13 |
380 |
0,048 |
0,079 |
0,087 |
0,11 |
2,2 |
0,019 |
|
9 |
4АНК160М6У3 |
18,5 |
380 |
0,044 |
0,077 |
0,071 |
0,11 |
2,6 |
0,024 |
|
10 |
4АНК200М6У3 |
22 |
380 |
0,032 |
0,043 |
0,073 |
0,12 |
2,8 |
0,038 |
|
11 |
4АНК200L6У3 |
30 |
380 |
0,035 |
0,042 |
0,079 |
0,10 |
2,9 |
0,043 |
|
12 |
4АНК225М6У3 |
37 |
380 |
0,035 |
0,038 |
0,069 |
0,092 |
2,8 |
0,07 |
|
13 |
4АНК250S6У3 |
45 |
380 |
0,028 |
0,032 |
0,057 |
0,092 |
2,7 |
0,11 |
|
14 |
4АНК250М6У3 |
75 |
380 |
0,022 |
0,025 |
0,059 |
0,087 |
2,7 |
0,14 |
|
15 |
4АНК280S6У3 |
90 |
380 |
0,028 |
0,038 |
0,052 |
0,14 |
3,0 |
0,25 |
Приложение Б
Расчет ступеней пускового реостата
Для двигателя постоянного тока независимого возбуждения с известными параметрами ( Рн , Uн , Iян, nн, RЯ) необходимо выбрать пусковой реостат.
Решение задачи производим в относительных единицах. При этом уравнения электромеханической и механической характеристик / 1/ примут вид
ν = 1 - ir
ν = 1 – μr,
где: ν = ω / ω0 ; i = I / Iн ; μ = М / Мн – соответственно скорость , ток, момент двигателя в относительных единицах. В этих формулах второй член представляет собой перепад угловой скорости в относительных единицах
Δν = ir = μr .
При номинальном моменте i = 1 и μ = 1, а Δν = r , т.е. перепад угловой скорости соответствует сопротивлению якоря.
Естественная характеристика в относительных единицах легко может быть построена, если принять
ν = ν0 = 1 и Δν = r при μ = 1(i = 1).
Координаты одной токи характеристики будут:
ν = 1, μ = 0 (i = 0) ;
другой
νн = 1 – Δνн , μ = 1(i = 1).
Выполняем построение характеристики (см. рисунок 1)
 ν
ν
a
1 b
νн c
d
e
Рисунок 1
Максимальный пусковой момент принимаем μ = 2 (i =.2) Строим характеристику, соответствующую полностью включенному реостату, соединив прямой точки ν0, 0 и 0, i = 2.
Величина минимального пускового момента подбирается таким образом, чтобы выполнив графическое построение пуска в три ступени, мы вышли на естественную характеристику. Обычно минимальный пусковой момент принимается на 10- 20% выше момента сопротивления механизма.
Отрезок af соответствует номинальному сопротивлению двигателя
RН = UН / IH
Сопротивления ступеней пускового реостата:
R1 = (ed / af)RН ; R2 = (dc/ af ) RН ; R3 = (cb/ af ) RН.
Субблок модели схемы пуска в три ступени представлен на рисунке 2
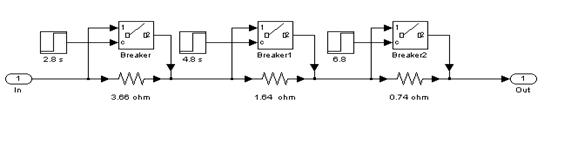
Рисунок 2 - Модель схемы пуска в три ступени
Список литературы
1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. Учебник для вузов,- М.: Энергоатомиздат,1981- 576с.
2. Москаленко В.В. Автоматизированный электропривод:- М.: Энергоатомиздат, 1985- 416с.
Содержание
Введение……………………………………………………………………..3
1 Лабораторная работа № 1…………………………………………………4
2 Лабораторная работа № 2…………………………………………………8
3 Лабораторная работа № 3…………………………………………………14
4 Лабораторная работа № 4…………………………………………………17
5 Лабораторная работа № 5…………………………………………………21
Приложение А……………………………………………………………….24
Приложение Б……………………………………………………………….25
Список литературы………………………………………………………….27
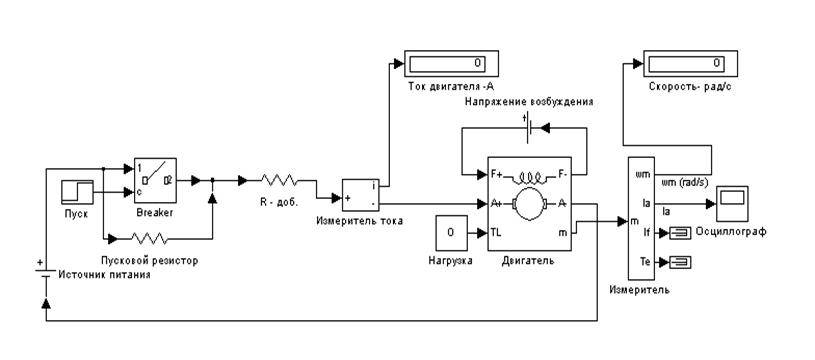
Рисунок 1.3
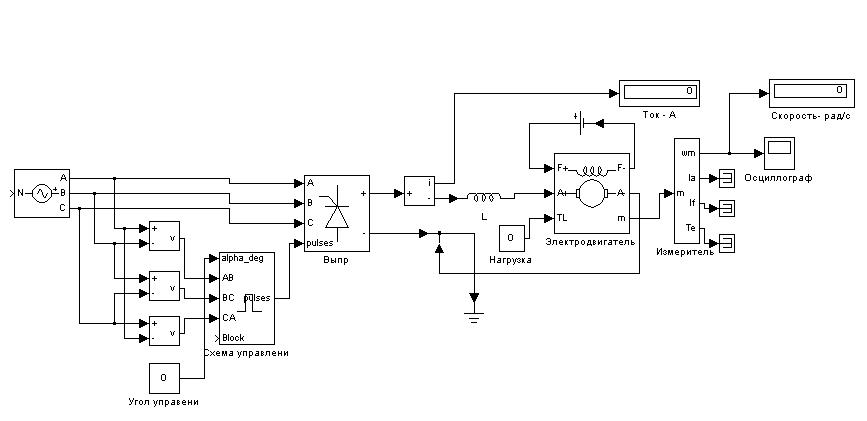
Рисунок 2.4
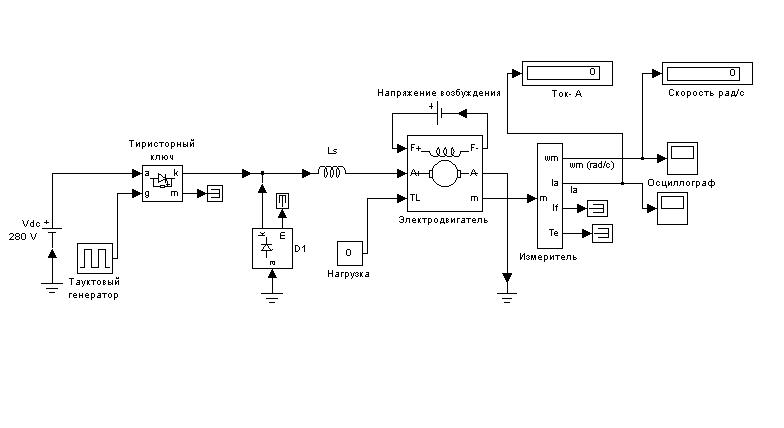
Рисунок 2.5
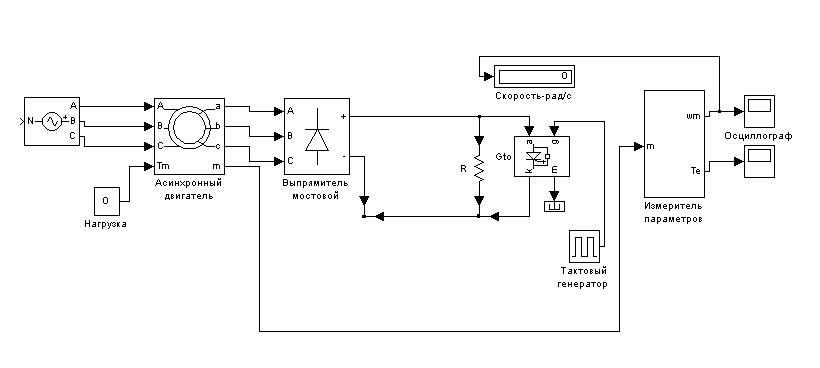
Рисунок 3.2
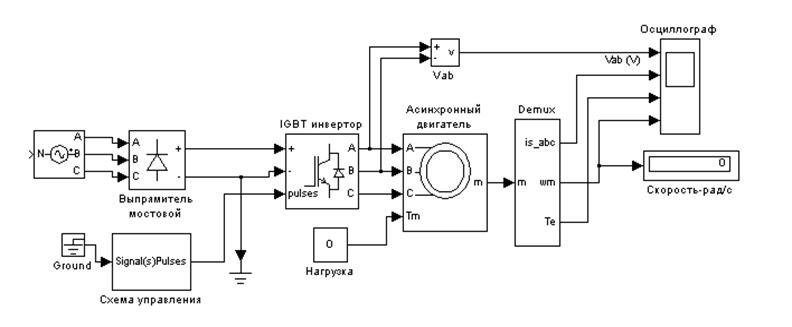
Рисунок 4.3
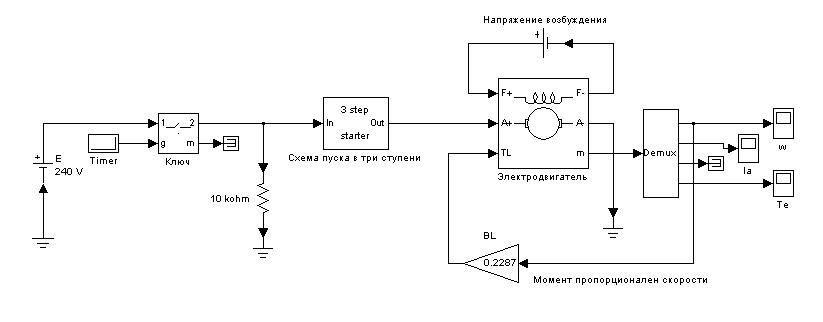
Рисунок 5.3