Некоммерческое акционерное общество
АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ и СВЯЗИ
Кафедра электропривода и автоматизации промышленных установок
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к лабораторным работам
для студентов всех форм обучения специальности 050718 –Электроэнергетика
Алматы 2009 г.
СОСТАВИТЕЛИ: С.Б. Алексеев, П.И. Сагитов. Системы автоматического управления. Методические указания к выполнению лабораторных работ для студентов всех форм обучения специальности 050718 – Электроэнергетика. – Алматы: АИЭС, 2009. – 33с.
Методические указания содержат необходимые теоретические положения, принципы работы в среде MATLAB Simulink программу выполнения работ, методику подготовки и проведения экспериментов, анализа полученных результатов.
Методические указания предназначены для студентов всех форм обучения специальности 050718 – Электроэнергетика.
1 Лабораторная работа №1 Исследование типовых динамических звеньев систем автоматического регулирования
1.1 Цель работы
Используя методы моделирования элементов систем автоматического регулирования (САР) в среде программного обеспечения Matlab Simulink изучить работу типовых динамических звеньев САР.
1.2 Основные положения к выполнению работы
САР представляют собой совокупность элементов, выполняющих определенные функции (измерительные, усилительные, исполнительные и другие) и различающихся по принципу действия, конструктивным формам и физической природе (электрические, тепловые, гидравлические и т.д.). Эти элементы могут иметь одинаковое математическое описание - передаточные функции - W(P). В общем случае, уравнения динамики являются нелинейными. Однако, динамические свойства большого числа элементов САР с достаточным приближением описываются линейными (или линеаризованными) дифференциальными уравнениями. Элементы, имеющие одинаковое математическое описание, рассматриваются как динамические звенья определенного типа.
1.2.1 Колебательное звено
 (1.1)
(1.1)
где ![]() ;
;  .
.
1.2.2 Апериодическое звено первого порядка (инерционное звено)

![]() . (1.2)
. (1.2)
1.2.3 Пропорциональное звено (усилительное или безынерционное эвено)
 .
(1.3)
.
(1.3)
1.2.4 Интегрирующее звено (астатическое)
 .
.
![]() (1.4)
(1.4)
1.2.5 Дифференцирующее звено
а)
идеальное -  ,
(1.5)
,
(1.5)
б)
реальное -  .
(1.6)
.
(1.6)
Переходная характеристика звена h(t) представляет собой реакцию на выходе звена, вызванной подачей на его вход единичного ступенчатого воздействия I(t). Характеристика h(t) может быть определена аналитически с помощью обратного преобразования Лапласа, получена экспериментально на реальной установке или на модели звена.
На рисунке 1.1 показан вид переходной характеристики h(t) инерционного звена и его основные параметры.
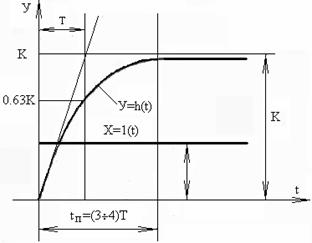 |
Рисунок 1.1 - Переходная характеристика
1.3 Программа работы
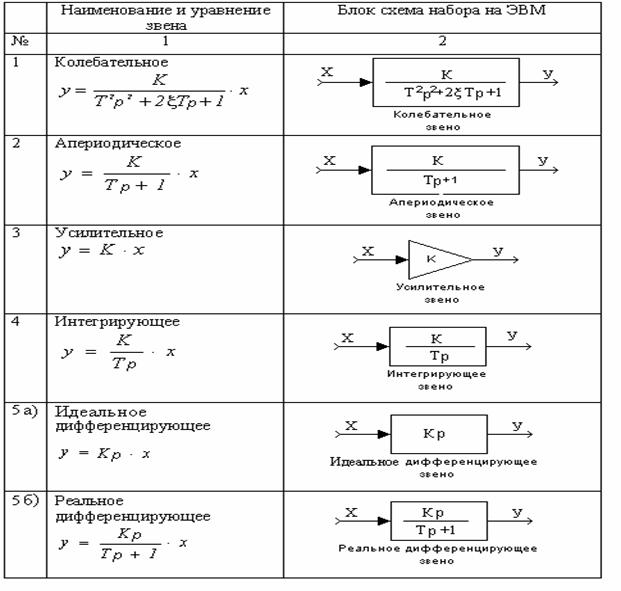
1.3.1 Для каждого из типовых звеньев САР, представленных в таблице 1.1, произвести набор модели из элементов Matlab Simulink. К выходу модели звена подключить виртуальный осциллограф, на вход подать единичный сигнал 1(t). Ввести в модель необходимые коэффициенты из таблицы 1.2, настроить осциллограф под ожидаемые параметры выходного сигнала. Произвести пуск модели и сохранить полученные осциллограммы. Вариант работы задается преподавателем.
1.3.2 Экспериментально исследовать колебательное звено при заданных параметрах К, Т, ξ и их вариации (а, б, в) по таблице 1.2. Снять переходную характеристику. Оценить влияние К и ξ на показатели переходного процесса (перерегулирование, число колебаний, время).
1.3.3 Экспериментально определить переходную характеристику апериодического звена при заданных К и Т. Оценить значения К и Т по снятой переходной характеристике.
1.3.4 Получить переходные характеристики для типовых звеньев 3, 4, 5а, 5б. Результаты сохранить.
1.3.5 По результатам проведенных исследований сделать выводы.
1.4 Порядок выполнения работы
Запустить программу Matlab и в появившемся окне нажать на панель "Simulink". Откроется библиотека элементов Simulink, необходимых для реализации моделей САУ. Создать новую модель и в открывшееся окно перетащить элементы для построения лабораторной модели. Соединить элементы между собой согласно структурной схеме. В эти звенья следует ввести коэффициенты и постоянные времени двойным щелчком левой кнопки мышки на нужное звено. Произвести настройку осциллографа под ожидаемые параметры выходного сигнала.
Для получения кривой переходного процесса следует нажать на кнопку "старт"(►). Сохранить полученные осциллограммы.
Для изменения параметров звеньев необходимо два раза щелкнуть левой кнопкой мыши на блок, появится окно параметров этого блока, в котором можно производить изменения. После введения числовых данных необходимо подтвердить их, нажав на «Арр1у» в текущем окне задания параметров, а затем закрыть это окно нажатием на панель «Close». Надо учесть, что, введя новые значения в блоке и не подтвердив их нажатием на «Арр1у», а просто закрыв окно, вы не сохраните новые параметры блока.
1.5 Содержание отчета
1.5.1 Цель и программа работы.
1.5.2 Схемы типовых звеньев и их моделей.
1.5.3 Результаты экспериментов в виде осциллограмм.
1.5.4 Анализ результатов экспериментов, выводы.
Т а б л и ц а – 1.1
Т а б л и ц а – 1.2
|
№ звена |
Пара- метры |
Варианты |
||||||||
|
I |
II |
III |
||||||||
|
а |
б |
в |
а |
б |
в |
а |
б |
в |
||
|
1 |
К Т ξ |
1 2 0.25 |
1 2 0.5 |
2 2 1 |
2 4 0.4 |
2 4 0.8 |
1 4 1 |
1.5 3 0.2 |
1.5 3 0.3 |
3 3 0.75 |
|
2 |
К Т |
1 4 |
1 2 |
2 2 |
1 3 |
2 3 |
2 2 |
0.5 2 |
0.5 1 |
1 1 |
|
3 |
К |
1 |
2 |
3 |
3 |
2 |
1 |
1 |
3 |
2 |
|
4 |
К Т=1 |
0.25 |
0.5 |
1 |
0.5 |
0.7 |
1 |
0.3 |
0.8 |
1.5 |
|
5а |
К |
1 |
1 |
2 |
2 |
2 |
1 |
1 |
2 |
1 |
|
5б |
К Т |
1 2 |
1 4 |
2 4 |
2 2 |
2 4 |
1 4 |
1 3 |
2 3 |
1 1 |
2 Лабораторная работа №2 Исследование устойчивости замкнутой САР
2.1 Цель работы
Исследование устойчивости САР на примере системы тиристорный преобразователь – двигатель (ТП-Д).
2.2 Функциональная схема САР скорости двигателя постоянного тока
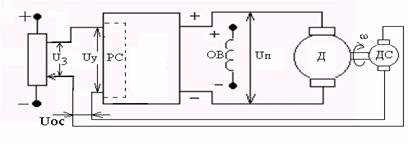 |
Рассмотрим вопросы исследования устойчивости САР на примере системы стабилизации скорости двигателя, представленной на рисунке 2.1.
Рисунок 2.1- САР двигателя постоянного тока с обратной связью по скорости
Схема содержит: электродвигатель постоянного тока Д с обмоткой возбуждения ОВ; датчик скорости ДС; преобразователь П (тиристорный выпрямитель) с регулятором скорости РС; источник задающего напряжения UЗ. Задающий сигнал UЗ суммируется с отрицательным сигналом обратной связи по скорости UОС , образуя управляющий сигнал UУ, который поступает на вход регулятора скорости преобразователя П и далее на систему управления тиристорами выпрямителя. Так как UЗ остается постоянным, то сигнал на выходе РС при снижении скорости с увеличением нагрузки возрастает, приводя к возрастанию выходного напряжения преобразователя UП, что автоматически приводит к компенсации падения угловой скорости двигателя.
На практике устойчивость САР может быть определена с помощью критериев устойчивости (алгебраические -Гурвица и Рауса, частотные - Михайлова и Найквиста) или посредством моделирования САР на ЭВМ по кривой переходного процесса (перерегулирование, время переходного процесса, число колебаний). Запас устойчивости считается достаточным, если перерегулирование ≤ 10 – 30%.
2.3 Структурная схема САР ТП-Д
Процесс моделирования САР базируется на структурной схеме исследуемой системы, которая представлена на рисунке 2.2.
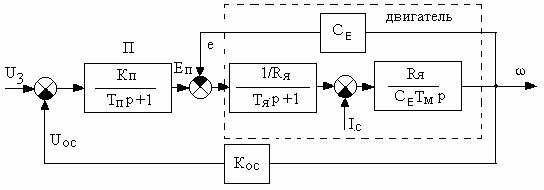 |
Рисунок 2.2 – Структурная схема САР
Передаточная функция двигателя по управляющему воздействию:
 (2.1)
(2.1)
где ![]() ;
;
![]() ;
; ![]() ;
;
![]() 2.2)
2.2)
С учетом этого структурная схема может быть приведена к виду на рисунке 2.3.
Здесь КП - общий коэффициент усиления РС и П.
Устойчивость линейной САР зависит от параметров и их соотношения, поэтому исследуя переходные процессы в данной схеме проследим за изменением показателей качества САР по кривой переходного процесса в зависимости от КП и КОС.
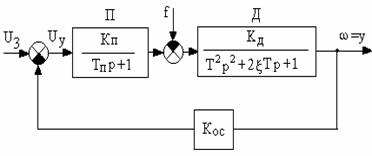 |
Принимаем: КД=1; Т=1с; ξ=0,5; ТП=0,1с.
Рисунок 2.3 – Преобразованная структурная схема САР
2.4 Программа работы
2.4.1 При Кос=1; Iс=0
получить переходные процессы ![]() в схеме (рисунок 2.3) относительно
задающего (управляющего) воздействия U3=10в, Кп=2; 5; 8 .
в схеме (рисунок 2.3) относительно
задающего (управляющего) воздействия U3=10в, Кп=2; 5; 8 .
2.4.2 Снять переходные процессы относительно возмущающего воздействия (нагрузки) при U3=0; Iс=10 , Кп=2; 5; 8.
2.4.3 Пункты 2.3.1, 2.3.2 повторить положив Кп=1 и варьируя Кос (например Кос=2;5).
2.4.4 Произвести оценку качества САУ по виду кривой переходного процесса.
2.5 Порядок выполнения работы
2.5.1 Используя программное обеспечение Matlab Simulink набрать модель САР скорости двигателя (см. рисунок 2.3 ).
2.5.2 На вход схемы модели подать управляющий сигнал U3. На выход схемы для контроля скорости подключить виртуальный осциллограф и произвести его настройку под ожидаемые параметры сигнала.
2.5.3 Установить необходимые параметры элементов модели и задающего сигнала согласно программы работы. Произвести пуск модели.
2.5.4 Сохранить полученные осциллограммы и произвести их анализ.
2.6 Содержание отчета
2.6.1 Цель и программа работы
2.6.2 Функциональная и структурная схемы САР. Схема модели.
2.6.3 Результаты экспериментов в виде осциллограмм.
2.6.3 Анализ результатов экспериментов. Выводы.
3 Лабораторная работа №3 Синтез и исследование САР с последовательной коррекцией
3.1 Цель работы
Целью настоящей работы является изучение необходимости коррекции САР, порядка синтеза корректирующего устройства (КУ) и экспериментальная проверка на модели теоретических результатов и эффективности коррекции.
3.2 Основные положения к выполнению работы
 ,
(3.5)
,
(3.5)

 |
3.4 Программа работы
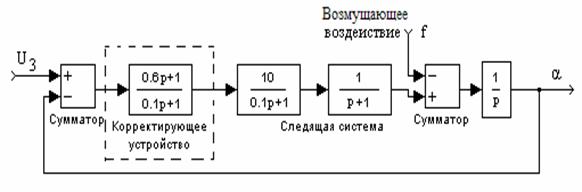
3.4.1 Для структурной схемы следящей системы (рисунок 3.1) набрать схему модели из элементов и блоков Matlab Simulink. Получить переходный процесс при UЗ=10В, результаты сохранить.
3.4.2 Набрать схему модели скорректированной системы. Снять переходный процесс при UЗ=10В, результаты сохранить.
3.4.3 Сопоставить качественные показатели. Сделать выводы.
3.5 Содержание отчета
3.5.1 Цель и программа работы
3.5.2 Структурные схемы САР. Схемы моделей.
3.5.3 Результаты экспериментов в виде осциллограмм.
3.5.4 Анализ результатов экспериментов. Выводы.
3.6 Контрольные вопросы
3.6.1 Назначение коррекции.
3.6.2 Методы синтеза КУ.
3.6.3 Расскажите порядок синтеза с помощью ЛАЧХ.
3.6.4 Порядок построения желаемой ЛАЧХ.
3.6.5 Определение передаточной функции КУ по ЛАЧХ.
3.6.6 Виды КУ. Порядок расчета параметров.
4 Лабораторная работа№4 Исследование автоколебаний в нелинейных системах автоматического управления
4.1 Цель работы
Теоретическое и экспериментальное определение параметров автоколебаний нелинейных САУ.
4.2 Основные положения к выполнению работы
В состав автоматических систем часто входят существенно нелинейные элементы, которые существенно изменяют характер системы и придает ей такие свойства, которые никогда не могут быть исследованы в рамках линейной теории. Среди нелинейных элементов автоматических систем особую роль играют так называемые безынерционные нелинейности, не обладающих заметным запаздыванием. Элементарным безынерционным звеном будем называть любую систему, выходная переменная которой в каждый данный момент времени зависит только от значения входной переменной в тот же момент времени и не зависит от того, как изменяется входная переменная до данного момента. Таким образом, оператором элементарного безынерционного звена является обычная функциональная зависимость между входной и выходной переменными. Эта функциональная зависимость называется характеристикой элементарного безынерционного звена. Характеристики элементарных нелинейных звеньев можно разделить на слабые и существенные нелинейности. К первой группе относятся такие нелинейные характеристики, которые при малом диапазоне изменения входного сигнала или при малом его отклонении от изменяющегося среднего значения могут быть заменены линейными. Ко второй группе относятся нелинейные характеристики, которые являются существенно нелинейными функциями, например, разрывными или близкими к разрывным. Зависимость между входной и выходной переменными для таких элементов чаще всего может быть приближенно представлена в виде кусочно-линейных функций.
На рисунке 4.1 представлены характеристики нелинейных элементов, применяемых в работе.
 |
Рисунок 4.1- Характеристики НЭ
![]()
Для исследования режима автоколебаний составляют и набирают схему модели, соответствующую структурной схеме системы (рисунок 4.2). Амплитуда и частота автоколебаний на входе нелинейного элемента, т.е. на выходе САУ, определяются по осциллографу. Параметры блоков приведены в таблице 4.1.
 Uз
Uвых
Uз
Uвых
Рисунок 4.2- Структурная схема
4.3.1 По заданным параметрам рассчитать и построить зависимость амплитуды и частоты автоколебаний на выходе САУ от коэффициента усиления линейной части системы.
4.3.2 Проверить выполнение условий применимости гармонической линеаризации для заданных нелинейностей.
4.3.3 Подготовить схемы для моделирования в Matlab Simulink для трех представленных на рисунке 4.2 нелинейностей.
4.4 Программа работы
. 4.4.1 Набрать схемы подготовленные при домашней подготовке.
4.4.2 Снять зависимость амплитуды и частоты автоколебаний на выходе САУ от коэффициента усиления линейной части системы. Убедиться в том, что линейная часть является фильтром низких частот.
4.3.3 Сравнить экспериментальные зависимости с расчетными, оценить их совпадение и проанализировать причины их расхождения.
Т а б л и ц а 4.1
|
№ варианта |
Т1, с |
Т2, с |
Т3, с |
Вид нелинейности |
U1 U2 |
t1 t2 |
|
1 |
1 |
0.1 |
0.1 |
Блок 2,а |
50 |
- |
|
2 |
1 |
1 |
0.1 |
Блок 2,а |
70 |
- |
|
3 |
0.2 |
0.1 |
0.1 |
Блок 2,а |
60 |
- |
|
4 |
1 |
0.1 |
0.1 |
Блок 2,б |
50 |
10 |
|
5 |
1 |
1 |
0.1 |
Блок 2,б |
60 |
5 |
|
6 |
1 |
0.5 |
0.1 |
Блок 2,в |
80 |
- |
4.5 Содержание отчета
4.5.1 Цель и программа работы
4.5.2 Структурные схемы САР. Схема модели.
4.5.3 Результаты экспериментов в виде осциллограмм.
4.5.3 Анализ результатов экспериментов. Выводы.
Приложение А
В настоящее время разработано большое число в основном приближенных методов синтеза корректирующих устройств. Наибольшее распространение в инженерной практике получили графо-аналитические методы синтеза, основанные на построении инверсных и логарифмических частотных характеристик разомкнутой системы. При этом широко используются косвенные оценки качества переходного процесса не требующие решения системы дифференциальных уравнений, такие как запас по фазе, запас по модулю, колебательность, частота среза, которые можно непосредственно определить по частотным характеристикам.
К другой группе относятся аналитические методы синтеза. Для них находятся выражения, аналитически связывающие показатели качества системы с параметрами корректирующего устройства, и определяются значения параметров, соответствующих экстремальному значению функции.
К этим методам относится синтез системы по интегральным критериям качества переходного процесса и критерию среднеквадратичной ошибки.
Применение современных средств вычислительной техники снимает трудности, связанные с непосредственным решением дифференциальных уравнений и построением переходных процессов. В связи с этим наблюдается тенденция решать задачу не приближенными методами, а путем направленного перебора решений исходной системы дифференциальных уравнений при вариации интересующих исследователя параметров корректирующего устройства.
Рассмотрим подробнее удобный из графо-аналитических методов синтеза -метод логарифмических амплитудных характеристик. Он применяется для синтеза минимально-фазовых САР, у которых имеется однозначная связь между амплитудной и фазовой частотной характеристиками.
Процесс синтеза включает в себя следующие этапы:
- строится ЛАЧХ исходной нескорректированной системы LНС(ω) с учетом требуемого коэффициента усиления системы КР в разомкнутом состоянии, который выбирается исходя из условия обеспечения заданной точности системы в установившемся режиме;
-по заданным показателям качества -перерегулированию σmax, времени регулирования строится желаемая ЛАЧХ системы LЖ(ω);
-вычитанием ординат желаемой ЛАЧХ ординат ЛАЧХ исходной нескорректированной системы определяют ЛАЧХ корректирующего устойства LК(ω);
- по полученной LК(ω) находится WK(p) и подбирается наиболее простой способ технической реализации.
Пусть передаточная функция нескорректированной следящей системы в разомкнутом состоянии
где Т1=1с; Т2=0,1с; КР=10.
Соответствующая ей структурная схема
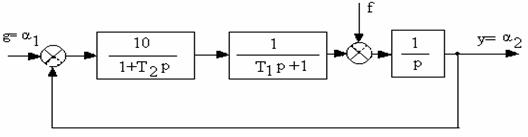
Рисунок 1-Структурная схема
Требуется
обеспечить следующие показатели качества: перерегулирование ![]() ;
; ![]() .
.
Проведем синтез последовательного корректирующего устройства.
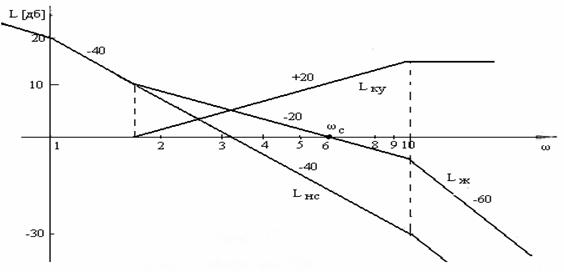
Построим ЛАЧХ разомкнутой
нескорректированной системы. Для этого находим ![]() и сопрягающие частоты (см.рисунок
4):
и сопрягающие частоты (см.рисунок
4):  .
.
Для построения
желаемой ЛАЧХ, LЖ, находим
частоту среза ![]() .
.
Находим ЛАЧХ корректирующего
устройства, как ![]() .
.
Определим передаточную функцию и блок схему реализации КУ
 |
 .
.
Рисунок 2- Логарифмические частотные характеристики
Список литературы
1. Бесекерский В.А., Попов Е.П. Теория автоматического регулирования.-М.: Наука, 1977.
2.Теория автоматического управления. Под ред. А.А.Воронова. - М.: Высшая школа, 1977.
3. Теория автоматического управления: учебник для вузов / под ред. Ю.М.Соломенцева. - М.: Высшая школа, 1999.
4. Топчеев Ю.И., Цыпляков А.П. Задачник по теории автоматического регулирования. -М.: Машиностроение, 1977.
5. Сборник задач по теории автоматического регулирования и управления. Под ред. Бесекерского В.А. -М.: Машиностроение, 1972.
6. Теория автоматического управления. Учебник для ВУЗов/Под ред. Нетушила А.В. М.: "Высшая школа", 1976.
Содержание
1 Лабораторная работа № 1……………………………………………… 3
2 Лабораторная работа № 2……………………………………………… 7
3 Лабораторная работа № 3……………………………………………….9
4 Лабораторная работа № 4……………………………………………… 11
Приложение А……………………………………………………………..14
Список литературы………………………………………………………..16