Коммерциялық емес акционерлік қоғам
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС ИНСТИТУТЫ
Өнеркәсіп қондырғыларының электржетегі және автоматтандырылуы кафедрасы
Электр механика және электр техникалық жабдықтар
5В0718 – Электр энергетикасы мамандығының барлық оқу түрлерінің студенттеріне арналған дәрістер жинағы
Алматы 2010
ҚҰРАСТЫРУШЫЛАР: М.А. Мустафин, Н.К. Алмуратова. Электр механика және электр техникалық жабдықтар. 5В0718 – Электр энергетикасы мамандығының барлық оқу түрлерінің студенттеріне арналған дәрістер жинағы. – Алматы: АЭжБИ, 2010. - 27 б.
«Электр механика және электр техникалық жабдықтар» курсының дәрістер жинағының оқу бағдарламасына сәйкес және 5В0718 - Электр энергетикасы мамандығы бакалаврларына жасалынған.
Тұрақты және айнымалы тоқ электр жетектерінің статикалық сипаттамаларының реттелу әдістері, қуатын таңдау, электр жетегінің өтпелі процесстері қарастырылған.
Кіріспе
Электржетегі деп элекр энергиясын механикалық энергияға түрлендіріп, түрлендірілген энергияны басқаратын электрмеханикалық қондырғыны атайды.
Өнеркәсіптегі техникалық прогресс технологиялық процестер, олардың тағайындалуы бойынша механизмдер мен әрекет ету принциптерінің көптүрлілігінің ұлғаюымен, өндірістік процестердің режимдік сипаттамаларының қаталдығымен, технологиялық циклдің қысқаруымен, өңдеу дәлдігін жоғарылатумен қатар жүреді. Бұл жағдайларда энергияны алып жүруші ретінде электр энергиясының артықшылығы, оның өзіне тән қасиеттері бойынша жоғары өндірістік еңбек құралдарын және осы техникалық прогресті қамтамасыз ететін жаңа технологиялар жасау мәселелеріне толық сәйкес келеді. Электр энергиясының бірден-бір негізгі тұтынушылары - электр жетегі – машинаның жұмысшы органдарын қозғалысқа келтіретін және оның технологиялық процесін басқаратын электр механикалық құрылғы. Қазіргі заманғы өнеркәсіптік және ауыл шаруашылығы өндірісіндегі технологиялық процестердің көпшілігі электр механикалық түрлендіру көмегімен алынатын механикалық энергияның көмегімен іске асады. Энергияны электр механикалық түрлендіру жүйесінің, электр жетегінің кемелдену нәтижесі қоғамдық өндірістің тиімділігімен байланысты. Кемелденген электр жетегін жасау электр механикалық құрылғыны және технологиялық процестің ерекшелігін есепке алып оның басқару жүйесін, машина жұмысының шарттары мен осы процесте әрекет ететін оның бөлек механизмдерін таңдау бойынша принциптік шешімдерді қабылдауға негізделген. Бұл технологиялық процестердің көптігімен, олардың өзара байланысуымен және олардың халық шаруашылығының әртүрлі салаларына жатуымен түсіндіріледі. Сонымен бірге, бір технологиялық процесте көптеген әртүрлі жұмысшы машиналары қатысуы мүмкін, сол сәтте бір машинаның өзі тіпті бөлек технологиялық процестерде жұмыс істеуі мүмкін. Келісілген жұмысшы бөліктері бар механикалық құрылғы ретінде анықталатын, энергияны, материалдар мен ақпаратты түрлендіру үшін белгілі бір мақсатқа бағытталған қозғалыстарды орындайтын машиналар атқаратын функцияларының түрі бойынша энергияны түрлендіру үшін алдын-ала тағайындалған энергетикалық (мысалы, электр қозғалтқыштары, электр генераторлары, турбиналар, және т.б.) және еңбек өнімінің пішінін, қасиетін, күйін өзгертуді немесе ақпаратты жинау, қайта өңдеу және қолдануды орындайтын жұмысшы болып екіге бөлінеді. Жұмысшы машиналарға технологиялық машиналар – құралдар (металл кесуші станок типтері, ауыл шаруашылық, тігін, құрылыс машиналары) жатады.
Берілген күштер әсерімен белгілі бір мақсаттағы қозғалыстарды жасайтын қозғалмалы - қосылған денелердің бір тұтастығы ретінде механизмдер басты (жұмысшы) немесе басты қозғалыспен бірге технологиялық немесе көтеру - транспорттық амалдарды іске асыратын көмекші қозғалыстарды орындайды. Атап өту керек, белгілі бір механизм әртүрлі технологиялық немесе жұмысшы машиналар құрамында болуы мүмкін.
Негізгі түсініктер
Электржетектерінің құрылымы және типтері
Автоматтандырылған электржетегі деп жұмысшы машинаның атқарушы органдарын қозғалысқа келтіру үшін алдын-ала тағайындалған электр қозғалтқыштық, түрлендіргіштік, берілістік және басқару құрылғыларынан тұратын электр механикалық жүйені атайды. Электр энергиясын механикалық энергияға тікелей түрлендіретін негізгі элемент – қозғалтқыш болып табылады. Қозғалтқыш түрлендіруші және басқарушы құрылғылардың көмегімен өндірістік механизмнің талаптарына жауап беретін сипаттамаларды пішіндеуге рұқсат береді.
Автоматтандырылған электржетегінің құрылымдық сипаттамасы 1- суретінде көрсетілген. Онда өзара байланысқан екі жүйені белгілеуге болады:
а) күштік ажыратқыштан КА, күштік түрлендіруші бөліктен Т, бұрыштық жылдамдық ω кезіндегі қозғалтқыштың иінкүші М әсер ететін ротор массасы бар РД энергияның электр механикалық түрлендіргішінен ЭМТ тұратын энергияның электр механикалық түрлендіруін іске асыратын ақпараттық-энергетикалық жүйе;
б) ақпаратты өңдеу жүйесі қорғау және бақылауды басқару функцияларын орындайды. Ақпаратты өңдеу жүйесінің функционалды кіріс шамалары – беруші айнымалылар W және кері байланыстардың r айнымалылары. 1. - суретінде жұмысшы машинаға ЖМ берілетін ток, кернеу, иінкүш, айналу жиілігі және күштеуі бойынша кері байланыстар көрсетілген. Ақпаратты өңдеу жүйесінің шығыс шамалары белгілі мақсатқа бағытталған әсерлер ретінде күштік бөліктің басқарылатын элементіне (күштік ажыратқыш, түрлендіргіш, редуктор және т. б.) беретін басқарушы айнымалылар J болады. Ақпараттық айнымалылар V қызмет көрсетуші адамдарға немесе басқарудың жоғарғы деңгейін бағдарлау үшін қызмет етеді. Басқарушы Б және ақпараттық V айнымалылар беруші шамалар W мен белгілі логика бойынша ақпаратты өңдеу құрылғысына енгізілген кері байланыстар r айнымалыларынан құралады.
Электржетегі жүйесі оның типіне тәуелсіз, белгілі бір сыртқы функцияны x = f(w,z) орындайды. Басқарылатын шама (мысалы, айналу иінкүші, жиілік немесе қозғалтқыш білігінің орны) берілетін сигналдың шамасына W, сонымен бірге бір немесе бірнеше әсер етуші әрекеттерге Z тәуелді.
Автоматтандырылған электржетегі жүйелері автономды құрылғы ретінде (көтергіштер, лифттер, транспортерлердің электржетегі) немесе кешенді автоматтандырылған жүйелердің негізгі элементтері ретінде де жұмыс істейді. Мұндай жүйелерде басқару мәселелері бірнеше деңгей бойынша орналасады.
Төменгі деңгейлерде бір-бірімен технологиялық байланыс арқылы байланысқан және жоғарғы деңгей басқаратын функционалды топтарды құрайтын автоматтандырылған электр жетегі жүйесі орналасқан.
1– сурет. Автоматтандырылған электржетегінің құрылымдық сұлбасы: 1- электр энергиясының ағыны; 2 – механикалық энергияның ағыны; r – кері байланыстар айнымалылары; V – ақпараттық айнымалылар; W – беруші шамалар; Б – басқарушы айнымалылар; Z - әсер етуші факторлар;
Жоғарғы деңгей құрылғысын адам немесе келесі одан жоғарғы деңгейдің ақпаратты өңдеу құрылғысы басқарады. Осы текті құрылғылар, мысалы метал өңдеуші және мұнай өңдеуші өнеркәсіптің, станоктар мен басқа автоматты басқару жүйелерінің ЭЕМ – нен басқарылатын технологиялық жүйелерде қолданылады.
Электржетектерінің жіктелуі
Механикалық энергияны тарату тәсілдері бойынша электр жетектерін үш негізгі типке бөлуге болады:
а) топталған электржетегі жұмысшы механизмдерді бірнеше жұмысшы машиналармен немесе бірнеше атқарушы механизмдердің бір жұмысшы машинамен қозғалысын қамтамасыз етеді. Жетектен атқарушы механизмдерге энергияны беру бір немесе бірнеше беріліс көмегімен іске асады.
б) жеке орналасқан электр жетегі. Әрбір жұмысшы орган жеке тұрған электр жетегімен қозғалысқа келтіріледі. Машинаның жұмысшы органдары өзара байланыспайды, бұл жұмысшы машинаның кинематикалық сұлбасын біршама қысқартады;
в) өзара байланысқан электржетегі екі немесе бірнеше электрлік немесе технологиялық өзара байланысқан электр қозғалтқыштары құрылғыларынан тұрады. Олардың жұмысы кезінде берілген арақатынас немесе жылдамдықтық жүктеме немесе жұмысшы машинаның атқарушы органдары орнының теңесуі ұсталып тұрады. Осындай электржетегінің қажеттілігі технологиялық процесс немесе конструктивті құрылғының талабынан пайда болады. Өзара байланысқан электр жетегінің бір түрі – көп қозғалтқышты электржетегі болады, оның қозғалтқыштық құрылғылары ортақ білікке жұмыс істейді.
Қозғалыс түрі бойынша электр жетегі: айналмалы бір бағытты, айналмалы реверсті және тура жүруші реверсті болады.
Басқарылу дәрежесі бойынша электр жетектері: реттелмейтін – бір жұмысшы жылдамдығы бар машинаның атқарушы жұмысшы органдарын әрекетке қосу үшін; реттелетін – электр жетегінің шамалары басқарушы құрылғының әсерімен өзгереді; бағдарламалық – басқарылатын – электржетегін берілген бағдарлама бойынша басқару; ілеспелі – автоматты, еркін өзгеретін беруші сигналға сәйкес атқарушы органның жылжытуын жасау; адаптивті – машина жұмысының шарттары өзгерген кезде басқарудың кұрылымы мен шамаларын автоматты түрде таңдап алу.
Автоматтандыру деңгейі бойынша электр жетектері: қолмен басқарылатын автоматтандырылмаған; шамалары автоматты реттеумен басқарылатын автоматтандырылған; басқарушы әрекет оператордың қатысуынсыз автоматты түрде өндірілетін автоматты болып бөлінеді.
1 Дәріс. Электржетектің типтік статикалық жүктемелері. Статикалық орнықтылық. Тәуелсіз қоздырудың тұрақты токтағы қозғалтқыштың электрмеханикалық және механикалық сипаттамалары
Мақсаты: Электржетекте қатысы бар күш пен моментті, ДПТ НВ қозғалтқыш сипаттамаларын оқып-білу.
Механизмде орындалатын механикалық сипаттама Мс=f(ω) тәуелділік.
Активті күш пен момент деп электржетек қозғалысынан тәуелсіз қозғалтқыштың механикалық энергияларына қатысы бар сыртын құрайтын күш пен моментті айтады. Мысал, жүкті жіберетін немесе көтеретін салмақпен құралған момент (1-сурет). Қозғалтқыш білігінің айналу бағытынан тәуелсіз және төмен қарай бағытталған кезде момент кедергісі тең болады
![]() ,
,
Сурет 1.1
МС шамасы жылдамдыққа тәуелді емес. Жүктің орын ауыстыруы 1.1-сурет.
Реактивті күш пен момент деп қозғалтқыш арқылы активті қозғалатын моментте реакция сияқты пайда болатын қозғалысқа кедергі болатын момент пен күшті айтады. Реактивті күш пен момент жылдамдыққа тәуелді және құрғақ үйкеліс күші мен моменті, үйкеліс тұтқырлығы және желдеткіш типтегі күш мен момент болып бөлінеді.
Құрғақ үйкеліс
күші мен моменті (1.2-сурет) модуль бойынша өзгермейді, бірақ
өзінің белгісін жылдамдық белгісі ![]() өзгергенде секіріп
отырады.
өзгергенде секіріп
отырады.
Олар станоктық жетектің
берілуілеріне, желдеткіштерге, дросселдерге және т.б. үшін
сипатталған. 1.3-суретте ![]() жылдамдық шамасынан
сызықтығын сипаттайтын тәуелділіктегі жүктемелі үйкеліс
тұтқырлығының моментті келтірілген.
жылдамдық шамасынан
сызықтығын сипаттайтын тәуелділіктегі жүктемелі үйкеліс
тұтқырлығының моментті келтірілген.
Желдеткіштің бұрыштық
жылдамдығы, ортадан тепкіш сорғыштың жүктемелі
моменттің тәуелділігі 1.4.-суреттігідей болады және желдеткішті
деп аталады және ![]() , мұндағы n = 1,5…2.5
өрнегімен жазылады.
, мұндағы n = 1,5…2.5
өрнегімен жазылады.
Электрқозғалтқыштың
механикалық сипаттамасы -
М=f(ω тәуелділігі. Электрлік машина курсынан білетініміздей,
ЭҚ механикалық  сипаттамасы
(5-сурет) абсолютті қатаң (1 – синхронды ЭҚ),
қатаң- (3- тәуелсіз қоздыру кезіндегі
тұрақты ток қозғалтқышы және 2- жұмыс
аймағындағы асинхронды қозғалтқыш) және
жұмсақ - (4-тізбектей қоздыру кезіндегі тұрақты ток
қозғалтқышы) болуы мүмкін.
сипаттамасы
(5-сурет) абсолютті қатаң (1 – синхронды ЭҚ),
қатаң- (3- тәуелсіз қоздыру кезіндегі
тұрақты ток қозғалтқышы және 2- жұмыс
аймағындағы асинхронды қозғалтқыш) және
жұмсақ - (4-тізбектей қоздыру кезіндегі тұрақты ток
қозғалтқышы) болуы мүмкін.
Абсолютті қатаң сипаттама деп момент өскендегі жылдамдық өсуіне қатынасын айтады.
![]() .
.
Орнықтылық режімде жетек қозғалысы орнықты немесе орнықсыз болуы мүмкін. ωУСТ-тан ω ауытқыған жағдайда бірінші жағдайда жетек орнықтылық режіміне қайта айналып келеді.
Кез келген орнықты емес қозғалыста, тіпті ωУСТ-тан ω кішкене ауытқығанда жағдайда жетек орнықтылық режіміне қайта айналып келмейтін өзгерістерге әкеліп соғады.
 Мысал ретінде, жетектің асинхронды жұмысында
МС кедергілі моменттің механизмін қарастырамыз.
Жұмыс кезінде «а» нүктесінде қандай да мақсатта
ω<ωУСТ болсын. Онда механикалық
сипаттамаға М>МС сәйкес дұрыс динамикалық
сипаттама МДИН=М–МС >0 пайда болады, осыған
сәйкес дұрыс үдеу dω/dt>0 және
жүйе орнықтылық режім нүктесіне қайта айналып
келеді, қозғалыс орнықты болады.
Мысал ретінде, жетектің асинхронды жұмысында
МС кедергілі моменттің механизмін қарастырамыз.
Жұмыс кезінде «а» нүктесінде қандай да мақсатта
ω<ωУСТ болсын. Онда механикалық
сипаттамаға М>МС сәйкес дұрыс динамикалық
сипаттама МДИН=М–МС >0 пайда болады, осыған
сәйкес дұрыс үдеу dω/dt>0 және
жүйе орнықтылық режім нүктесіне қайта айналып
келеді, қозғалыс орнықты болады.
Егер жұмыс кезінде «а» нүктесінде ω < ωУСТ, М < МС, МДИН = М – МС < 0, үдеу dω/dt < 0 және жүйе орнықтылық режім нүктесіне қайта айналып келсе, қозғалыс орнықты. Егер жұмыс кезінде «b» нүктесінде ω > ωУСТ, М > МС, МДИН = М – МС > 0, үдеу dω/dt > 0 және жылдамдық төмендей береді. Осындай кезде «b» нүктесінде статикалық орнықсыз болады.
2 Дәріс. Өндірістік механизмдер мен электрқозғалтқыштарының сипаттамалары
Мақсаты: Өндірістік механизмдер мен электрқозғалтқыштарының сипаттамаларын оқып-білу.
Электржетегінің дұрыс жобалануы және үнемді қолданылуы үшін қозғалтқыштың механикалық сипаттамаларының өндірістік механизмдер сипаттамаларымен сәйкестігін білу керек. Өндірістік механизмнің механикалық сипаттамасы деп қозғалтқыш білігіне келтірілген жылдамдық пен механизмнің кедергі иінкүші ω=f(М) арасындағы тәуелділікті атайды. Әртүрлі өндірістік механизмдердің әртүрлі механикалық сипаттамалары болады. Оларды жалпы түрде келесі формуламен жазуға болады
![]() , (2.1)
, (2.1)
мұнда Мс – ω жылдамдығы кезіндегі механизмнің кедергі иінкүші;
Мо – механизмнің қозғалмалы бөлігіндегі үйкеліс кедергісінің иінкүші;
Mс.н – ωн жылдамдығы кезіндегі кедергі иінкүші.
Келтірілген формулаларға сәйкес өндірістік механизмдердің механикалық сипаттамаларын келесі негізгі категорияларға жатқызуға болады.
Жылдамдықтан тәуелсіз механикалық сипаттама (Х=0 кезіндегі 3.1- суретіндегі 2 қисығы). Бұл сипаттамалар көтеру крандары, металл кесуші станоктардың беру механизмдері, поршенді сорғылар, конвейерлерде болады.
2.1 - сурет. Өндірістік механизмдердің механикалық сипаттамалары
Сызықты өсетін механикалық сипаттама (Х=1 кезіндегі 1 қисығы). Мұндай сипаттама тәуелсіз қоздырылатын тұрақты ток генераторында болады.
Сызықты емес - өсетін (парабола) механикалық сипаттама (3 қисығы Х=2 кезінде). Мұндай сипаттамасы бар механизмдер желдеткіштік жүктемесі бар механизмдер деп аталады – ортадан тепкіш сорғылар, есу қалақтары және т. б.
Сызықты емес – құлдилайтын механикалық сипаттама (Х=1 кезіндегі 4 қисығы). Бұл сипаттамаға бірқатар токарлық, жонушы станоктар ие болады.
Электрқозғалтқышының механикалық сипаттамасы деп оның бұрыштық сипаттамасының айналдырушы иінкүшіне тәуелділігін ω=f(M) атайды.
Электржетегінің механикалық сипаттамасының қатаңдығы деп электр қозғалтқышының электрмагниттік иінкүштерінің айырмасының электр жетегінің бұрыштық жылдамдықтары айырмасына қатынасын атайды.
![]() .
.
Механикалық сипаттамалардың түрлері:
а) иінкүш өзгерген кезде жылдамдық өзгеріссіз қалатын абсолютті қатаң механикалық сипаттама, бұл сипаттама синхронды қозғалтқыштарда болады (3.2 - суреті, 1 қисығы);
б) иінкүш өзгерген кезде жылдамдықтың өзгеруі өте аз болатын қатаң механикалық сипаттама, бұл сипаттама тәуелсіз қоздырылатын тұрақты ток қозғалтқыштарында болады (2 қисығы);
в) иінкүш өзгерген кезде жылдамдық біршама өзгеретін жұмсақ механикалық сипаттама (3 қисығы);
2.2 - сурет. Электр қозғалтқышының механикалық сипаттамалары
г) жылдамдық өзгерген кезде иінкүш өзгеріссіз қалатын абсолютті жұмсақ сипаттама, бұл сипаттама «қозғалтқыш – ток көзі» жүйесінде орын алады (4 қисығы).
2.4 Электр жетегі қозғалысының теңдеуі
Электр жетегінің тұрақтанған режім жұмысында қозғалтқыштың айналдырушы иінкүші механизмнің кедергі иінкүшіне тең және жетектің жылдамдығы тұрақты болады. Электр жетегінің бір тұрақтанған жұмыс күйінен екінші күйіне өткен кезде анықталған заңдар бойынша инерция күшінің пайда болуына байланысты жүйедегі жылдамдық, иінкүш және ток өзгереді, бұл процесс өтпелі процесс деп аталады. Олардың пайда болу себептері – қозғалтқыш білігіндегі жүктеменің немесе электр жетегінің басқарушы әрекетінің өзгеруі, яғни іске қосу, тежеу, айналу бағытын өзгерту және т. б. режімдері орын алады. Бұл жағдайда түзу қозғалыс күштерінің теңесу теңдеуін мына түрде жазуға болады
![]() ,
(2.4.1)
,
(2.4.1)
мұнда F – механизмнің кедергі күшімен Fс теңесетін қозғаушы күш;
![]() – жылдамдық өзгерген кездегі инерция күші;
– жылдамдық өзгерген кездегі инерция күші;
m – дене массасы.
Механизмге әсер етуші күштің өлшем бірлігі кг м∙с-2.
Айналмалы қозғалыс үшін иінкүштер теңесуінің теңдеуі немесе электр жетегінің қозғалыс теңдеуі мына түрде жазылады
![]() .
(2.4.2)
.
(2.4.2)
Электр
қозғалтқышының айналдырушы иінкүші оның
білігіндегі кедергі иінкүші Мс мен динамикалық
иінкүшімен ![]() теңеседі, мұнда
жетектің инерция иінкүші көптеген өндірістік
механизмдер үшін
теңеседі, мұнда
жетектің инерция иінкүші көптеген өндірістік
механизмдер үшін
![]() тұрақты:
тұрақты:
M> Мс кезінде;
![]() > 0 - жетек үдеу режімінде;
> 0 - жетек үдеу режімінде;
М
< Мс кезінде;
![]() < 0 - жетек баяулау режімінде;
< 0 - жетек баяулау режімінде;
![]() = 0 кезінде жетек тұрақтанған жұмыс
режімінде болады.
= 0 кезінде жетек тұрақтанған жұмыс
режімінде болады.
Динамикалық иінкүш электр жетегінің тек ғана өтпелі режимінде, жылдамдық өзгергенде пайда болады. Бұл иінкүш қозғалысқа қарсы бағытталған, тежеу кезінде ол қозғалысты ұстап тұрады. Осыны есепке алып, жетектің қозғалыс теңдеуінің жалпы жағдайдағы түрін аламыз
![]() . (2.4.3)
. (2.4.3)
3 Дәріс. Электржетегінің жұмыс режимдерін жіктеу
Мақсаты: Электржетегі жүйесінің принциптік шешімін таңдауын анықтайтын механизмдер сипаттамаларын оқып-білу.
Электр механикалық құрылғылар жүйесін талдау және синтездеу негізінде бір бөлігі механизмдердің сипаттамасына, екіншісі – тікелей электр жетегіне қойылатын талаптарға қатысты болатын белгі бойынша механизмдердің жіктелуіне сүйенетін принциптер қойылу керек.
Электржетегі жүйесінің принциптік шешім таңдауын анықтайтын механизмдер сипаттамаларының келесі белгілері бола алады:
а) уақыт бойынша жұмыс режімі (3.1а - суреті) – үздіксіз (1 қисығы) және циклдік (2 қисығы) әрекет ету. Механизмнің үздіксіз режім жұмысы деп технологиялық амал толық орындалып бітетін ұзақ режім жұмысы. Механизмнің үздіксіз әрекет ету уақыты жетектік қозғалтқыштың қызу тұрақтысынан Тқ аз болмауы керек. Циклдік режим технологиялық амал циклі tц ағымында жұмыс tж және үзіліс tү периодтарының ауысуымен сипатталады;
б) жылдамдық бойынша жұмыс режимі (3.1б - сурет) – реверсті емес (1 қисығы) және ревесті (2 қисығы). Берілген режим электр жетегі жүйесінің принциптік шешіміне әсер етеді, бірақ үздіксіз әрекет ету механизмдерінде жетектік қозғалтқышты қызуы бойынша талдауы кезінде оған аса мән берілмейді;
 |
3.1 - сурет
в) жүктеменің уақыт бойынша өзгеру сипаты – тұрақты (3.1в - сурет, 1 қисығы), айнымалы (3.1в - сурет, 2 қисығы), соққылы (3.1г - сурет, 1 қисығы), кездейсоқ (3.1г - сурет, 2 қисығы);
г) жүктеменің жылдамдық бойынша өзгеру сипаты – тұрақты (активті жүктеме, 3.1д - сурет, 1 қисығы), құрғақ үйкеліс типті (реактивті жүктеме) М = sin(w) (3.1д - сурет, 2 қисығы), айнымалы M = bwn типті (3.1д - сурет, 3 қисығы).
 . (3.1)
. (3.1)
Электр жетегінің бақару жүйесін таңдауды анықтайтын келесі белгілер болуы мүмкін:
а) координаттарды реттеу – талап етілмейді; жылдамдықты w, үдеуді e, иінкүшті М, жолды S және т.б. реттеу қажет;
б) реттеу дәлдігі – талап етілмейді, шектелген дәлдікпен реттеу талап етіледі, прецизионды, жоғарғы дәлділікпен реттеу қажеттілігі бар;
в) координаттарды жатықтық реттеу;
г) реттеу тәсілі – қолмен, жартылай автоматты, автоматты, бағдарламалық.
Өндірістік механизмдердің әртүрлі жұмыс шарттары электр жетегінің әртүрлі режімдерін шарттайды. Ол режимдер шартты белгілеулері S1-S8 бар сегіз режімге жіктеледі (3.2 - сурет). Бұл жағдай қозғалтқышты қуаты бойынша дәлірек есептеуге және таңдауға мүмкіндік береді. Электр машинасының ұзақ нақты жұмыс режімінде біліктегі жүктеме өзгермейді және оның барлық бөлігіндегі температура тұрақтанған мәніне жеткенше жалғасады.
3.2 - суретінде қозғалтқыш білігіндегі қуат Р, қуат шығындары және температураның q° уақытқа тәуелділігі қозғалтқыштың ұзақ нақты жұмыс режімінде келтірілген.
3.2 - сурет Қозғалтқыштың ұзақ жұмыс режімінің сипаттамалары
Қысқа уақыттық нақты жұмыс режімі S2 деп өзгеріссіз нақты жүктеме периоды машинаның ажыратылу периодымен алма кезек ауысу режимін атайды. Бұл кезде жүктеме периоды машина температурасы тұрақты режимге жететіндей ұзақ емес, ал тоқтап тұру периоды машина бөліктері қоршаған орта температурасына дейін суып бітетіндей ұзақ болады (3.4 - сурет).
Бұл режимдегі тағайындалған жұмысшы периодының ұзақтығы 10, 30, 60, 90 минут.
3.3 – сурет. Қозғалтқыштың қысқа уақыттық нақты жұмыс режімінің сипаттамалары
Қайталанбалы – қысқа уақыттық нақты жұмыс режимі S3 деп өзгеріссіз нақты жүктеменің қысқа уақыттық периодтары (жұмысшы периодтар) машинаның ажыратылу периодымен алма-кезек ауысу режимін атайды, бұл кезде жұмысшы периоды температураның жоғарылауы тұрақты мәніне жететіндей соншалықты ұзақ емес (3.3 - сурет).

3.4 – сурет. Қозғалтқыштың қайталанбалы - қысқа уақыттық нақты жұмыс режімінің сипаттамасы
Қайталанбалы - қысқа уақыттық нақты режімі жиі іске қосуы бар S4 режімі.
Қайталанбалы - қысқа уақыттық нақты режімі жиі іске қосуы және электрлік тежеу S5 режимі.
Нақты жұмыс режімі жиі іске қосуы бар S6 режімі.
Нақты жұмыс режімі жиі кері айналдыруы бар S7 режімі.
Нақты жұмыс режімі екі және көп бұрыштық жылдамдықтармен аралас S8 режимі.
Әрбір өндірістік механизм жетектік электр қозғалтқышына әсер етудің ерекшелігіне ие және жоғарыда сипатталған нақты режімдердің біріне келтірілуі мүмкін.
4 Дәріс. Автоматтандырылған электржетек жүйесінің қозғалысының теңдеуі
Мақсаты: Механикалық сұлба құрылуын, денелердің қозғалуы мен байланыс қаттылығы және жүктеменің есеп жылдамдығын келтіру.
Электр энергиясын механикалық энергияға түрлендіру үшін және түрлендірілген электр энергиясымен басқарудағы электрмеханикалық құрылғы электржетек деп аталады.
4.1-суретте өндірістік механизмдегі автоматтандырылған электржетектің толық функционалды сұлбасы көрсетілген. Жетектің басқару ЖБ жүйесі, күштік КЖБ және ақпараттық құраушыларымен бірге, қоректі Uc,Ic,fc параметрлерімен және оларды ЭД қозғалтқыштың қоректенуі үшін соңғы жұмыс режіміне сәйкес түрлендіреді. Беру механизмі БМ, ЭД білігіндегі механикалық параметрлер мен моменттің МВ және айналу жиілігінің ωВ түрлендірілуі үшін және олардың орындаушы механизмге ОМ жіберу қызметін атқарады.
Тұйық жүйелерде АЭЖ сигнал басқаруының қою құрылғысының (ҚҚ) және кері байланыс датчигі КБД сигналдарымен салыстыру кезінде болады. Нақты агрегаттарда сүлбенің бөлек элементтері болмауы мүмкін.
БМ мысалына, жіберу санына i = ωВЫХ/ωВХ сәйкес айналудың бұрыштық жиілігін (4.2,а - Сурет) түрлендіру үшін қолданылатын редукторды айтса болады. Сонымен қатар БМ – ω жиілікті қозғалтқыш білігінің айналу және де керісінше - сызықты жылдамдықты V (4.2,б, с - Сурет) түзетін қозғалысын түрлендіру үшін қолданылады.
 Электржетек қозғаласының
теңдеуі.
Механикалық жүйенің қозғалтқыштың
айналатын бөлігінен (ротор немесе статор РД) және механизмнің
айналып қозғалатын жұмысшы бөлігін,
қозғалтқыштың білігіне жалғастырылған жай
түрін қарастырайық. Жүйеде екі момент іс-әрекет
жасайды – қозғалтқыш дамытқан МД және
оған механизмнің жұмысшы бөлігімен жасалған және
үйкеліс моменті арқылы жасалған статикалық
жүктеме моменті МС. Бұл моменттер іс-әрекет
бағыты мен өлшеміне байланысты сипатталады. Егер МД
және МС қозғалыс бағытымен іс-әрекет
жасаса, оларды қозғалатын, егер де олардың белгілері
жылдамдық белгісіне қарама-қарсы болса, моменттерді тежелгіш
деп атайды. Деламбер принципіне сәйкес МД және МС
арасындағы іс-әрекет, жүйе үдеуін анықтайтын
динамикалық моменттің
Электржетек қозғаласының
теңдеуі.
Механикалық жүйенің қозғалтқыштың
айналатын бөлігінен (ротор немесе статор РД) және механизмнің
айналып қозғалатын жұмысшы бөлігін,
қозғалтқыштың білігіне жалғастырылған жай
түрін қарастырайық. Жүйеде екі момент іс-әрекет
жасайды – қозғалтқыш дамытқан МД және
оған механизмнің жұмысшы бөлігімен жасалған және
үйкеліс моменті арқылы жасалған статикалық
жүктеме моменті МС. Бұл моменттер іс-әрекет
бағыты мен өлшеміне байланысты сипатталады. Егер МД
және МС қозғалыс бағытымен іс-әрекет
жасаса, оларды қозғалатын, егер де олардың белгілері
жылдамдық белгісіне қарама-қарсы болса, моменттерді тежелгіш
деп атайды. Деламбер принципіне сәйкес МД және МС
арасындағы іс-әрекет, жүйе үдеуін анықтайтын
динамикалық моменттің ![]() белгісін және өлшемін анықтайды.
Сонымен, жүйе қозғалысының теңдеуі жалпы
жағдайда мына түрде болады
белгісін және өлшемін анықтайды.
Сонымен, жүйе қозғалысының теңдеуі жалпы
жағдайда мына түрде болады
 . (4.1)
. (4.1)
ЭЖ жұмысының қозғалтқыштық режімі үшін (1) теңдеуге жай талдау келтіреміз, онда
 . (4.2)
. (4.2)
МД > МС dω/dt > 0 болғанда жетектің үдеу режімі орын алады, МД < МС dω/dt < 0 болғанда жетектің баяулау режімі орын алады, ал МД = МС болғанда динамикалық момент пен үдеу нөлге тең болады. Алғашқы екі режімдер өтпелі, ал соңғысын орнықты (стационар) деп атайды.
Статикалық жүктеме моменті мен инерция моменттерін келтіру. ЭҚ және РО арасында, әдетте, бір немесе бірнеше беру құрылғысы (БҚ) болады. 4.4-суретте көтергіш механизм электржетегінің кинематикалық сұлбасы көрсетілген, онда жалпы жағдайда айналу қозғалысын қайтадан түсу қозғалысына түрлендіретін барабан мен айналу жылдамдығын төмендету үшін редукторлардың і (ПУ1 – ПУi) қолданылады, Бұл құрылғылардың біліктері байланыстыратын муфталардың БМ көмегімен байланысқан.
Сұлбаның барлық элементтері әртүрлі жылдамдықпен және үдеумен қозғалады және өздерінің инерция моменттері болады, бұл бүкіл жүйенің қозғалыс теңдеуін талдауды және оны құруды қиындатады. Сондықтан тәжірибеде статикалық жүктеменің барлық моменттері және инерцияның моменттері бір ғана білікке келтіріледі, әдетте, қозғалтқыш білігіне келтіріледі және осы білікке байланысты қозғалыс теңдеуін шешеді. Сонымен қатар, берілген сұлбадан 1-суреттегі сұлбаға көшу керек, мұндағы МС және J – ЭҚ білігіне келтірілген өлшемдер қосындысы.
Статикалық жүктеменің моменттерін келтіргеннен кейін қуат теңдігінен шығып реалды және келтірілген сұлбаларға қараймыз:
![]() ,
,
бұдан
 .
(4.3)
.
(4.3)
Қайта-түсу қозғалысы кезінде
![]() ,
,
және
 .
(4.4)
.
(4.4)
Қозғалтқыш білігіне келтірілген кедергі моментінің қосындысы
Инерция моменттерін келтіргеннен кейін кинетикалық энергия артық теңдігінен шығып, реалды және келтірілген сұлбаларға қараймыз. Айналу қозғалысы кезінде
 (4.5)
(4.5)
Қайта-түсу қозғалысы кезінде
 (4.6)
(4.6)
(1), (2) - ден
 ;
;
![]() ,
,
мұндағы
 ;
;
 .
.
Қозғалтқыш білігіне келтірілген инерция моментінің қосындысы
 (4.7)
(4.7)
5 Дәріс. Электржетектерінің бұрыштық жылдамдығын реттеу
Мақсаты: Электржетегі жылдамдығын реттеудің әртүрлі тәсілдерін сипаттайтын негізгі көрсеткіштермен танысу.
Қазіргі заманғы өнеркәсіпте технологиялық процестердің талаптарына әртүрлі өзгеретін жылдамдықпен жұмыс істейтін өндірістік механизмдердің көп бөлігі қолданылады. Бұл өндірістік механизмдерде электржетегінің жылдамдығын күштеп өзгерту – жылдамдықты реттеу талап етіледі. Жылдамдықты реттеу автоматты немесе қолмен реттеу тәсілімен жетектік электрқозғалтқышына қосымша әсер ету арқылы орындалады. Қазіргі уақытта әртүрлі күштік электронды түрлендіргіштер көмегімен жылдамдықты электрлік реттеу кең қолданыла бастады. Бұл түрлендіргіштер аз инерциялы және тұрақты ток кернеуі мәні бойынша немесе айнымалы ток кернеуі амплитудасы мен жиілігі бойынша реттелетін кернеуді өндіреді.
Түрлендіргіштер күштік транзисторлар немесе тиристорлар негізінде жиналуы мүмкін және олар дискретті режимде жұмыс істейді. 1.6.1 суретте электрлік түрлендіргіші бар автоматтандырылған электр жетегінің негізгі элементтерінің сұлбалық өзара әрекеттесуі келтірілген.
5.1 – сурет. Реттелетін электржетегінің құрылымдық сұлбасы
Электржетегі жылдамдығын реттеудің әртүрлі тәсілдерін сипаттайтын негізгі көрсеткіштер:
а) бұрыштық
жылдамдықтың реттеу ауқымы. Максималды
тұрақтанған жылдамдықтың минималды
тұрақтанған жылдамдыққа қатынасымен
![]() анықталады;
анықталады;
б) реттеудің жатықтығы. Берілген жылдамдықтан ωi жақын мүмкін болатын жылдамдыққа ωi+1 өткен кездегі жылдамдықтың секіруін сипаттайды
 ;
;
в) реттеудің үнемділігі.Технологиялық процестің жоғары сапасы мен салыстырмалы түрде құнын тез өтейтін механизмнің үлкен өндірушілігін қамтамасыз ететін электржетегін жасау және қолдану шығындарымен сипатталады;
г) бұрыштық жылдамдықтың тұрақтылығы. Жүктеме иінкүшінің берілген ауытқуы кезіндегі бұрыштық жылдамдықтың өзгеруін сипаттайды. Сипаттаманың қатаңдығы көп болған сайын бұрыштық жылдамдықтың тұрақтылығы жоғары;
д) реттеу жылдамдығының бағыты, яғни негізгі жылдамдыққа қатысы бойынша оның көбеюі немесе азаюы реттеу тәсілдеріне байланысты;
е) қозғалтқыштың рұқсат етілген жүктемесі – реттеу сипаттамаларындағы жұмысы кезіндегі қозғалтқыштың ұзақ уақыт жұмыс істей алатын иінкүшінің ең үлкен мәні, ол қозғалтқыштың қызуымен анықталады және реттеудің сан-алуан тәсілдері үшін әртүрлі болады.
6 Дәріс. АҚ-ты реттелетін электржетектер
Мақсаты: АҚ негізінде реттелуі мүмкін болатын ЭЖ түрлерімен таныстыру. Айнымалы токтағы электрқозғалтқыштың айналу роторының жиілігін былай анықтауға болады.
![]() , (6.1)
, (6.1)
мұндағы f - қоректенетін кернеу жиілігі;
pп – полюс жұптарының саны;
s – тайғанау.
(6.1) өрнегіне кіретін бір немесе бірнеше параметрлерді өзгерте отырып, АҚ-ң моментін және айналу жиілігін реттеуге болады. Қысқа тұйықталған машинаның айналу жиілігінің реттелуі (6.1) қатынасы негізінде полюс жұптарының санының қосылуымен үздікті (2:1, 3:2, 3:1 және т.б.) жүзеге асырылады. Қысқа тұйықталған машинаның статорының орамы секционирленген, қорытындысы (басталуы-аяқталуы) электр сымның ұстатқышы бар қорапта орналасқан және басқару жүйесінің релейлі-контакторлы бөлігімен коммутацияланады.
Полюстер жұптарының санының қосылу сұлбасының түрлері көп. Орамда кернеуді өзгерту қажеттігі кезінде орамдар байланысының үшбұрышты, екі үшбұрышты, жұлдызша - үшбұрыш және т.б. түрлері қолданылады. Реттеудің бұл түрі станок құруда, жүккөтергіш техникада (лифттар) және басқа салаларда кең таралған. Көпжылдамдықты электрқозғалтқыштың дайындалуының жұмыс сыйымдылығы жай машинамен салыстырғанда секционирленген орам орындалуымен өседі.
Электрқозғалтқыш айналу жиілігінің реттелуі, оның тайғанауының өзгеруі. ЭҚК немесе қосымша кедергінің АҚ роторы шынжырының кірісіне және электрқозғалтқыш статорының кернеуінің өзгеруіне де негізделген.
Қозғалтқыштың фазалық ротор шынжырындағы қосымша кернеудің өзгеруі электрқозғалтқыштың механикалық сипаттамасының түрін және сорғыштық агрегаттың айналу жиілігін де өзгертуге мүмкіндік береді. Реттеу тереңдігіне пропорционал тайғанау қуаты реттелетін реостаттарда жылу түрінде таралады.
Құрылғының аз құндылығы және шартсыз жайлылығы кезіндегі реттеудің бұл амалы жылдамдық реттеуінің тереңдігіне пропорционалды және тайғанау шығынының көбюіне байланысты үнемді емес. Әдетте олар аз қуатты қозғалтқыштар және АҚ жіберу режімдерінің жасалуы үшін қолданылады.
Электрқозғалтқыштың айналу жиілігінің реттелуі, оның статорындағы кернеудің өзгеруінен «кернеудің тиристорлы реттелуі - асинхронды қозғалтқыш» (КТР-АҚ, 6.1,в-сурет) жүйесі арқылы жүзеге асырылады.
Асинхронды электрқозғалтқыштың айналу моменті электрқозғалтқышқа жүргізілген кернеу квадратына пропорционал. Кернеуді өзгерту кезінде критикалық тайғанау мәні өзгермейді, сондықтан максималды момент кернеудің кез келген өзгерулері кезінде критикалық тайғанаудың шамамен 0,1-0,2-ге тең болып келетін бір мәнінде ғана сәйкес келеді. Бұдан реттеудің салыстырмалы жіңішке аумағын осы реттеу амалын қамтамасыз ете алатын айналу жиілігі бойынша анықтауға болады. Жоғары тайғанаулы АҚ-ны немесе фазалық ротор шынжырына қосымша кедергі қосылуымен, сонымен қатар жылдамдық бойынша тұйықталған басқару жүйесін қолдану арқылы реттеу аралықтарын үлкейтуге болады.
Қызмет көрсетудің салыстырмалы арзандық және жайлық кезінде берілген нұсқаның негізгі жеткіліксіздігі болып тайғанау энергиясының қозғалтқышта таралуы, ал жүйенің қуат коэффициентінің – қозғалтқыш тайғанауының көбеюімен азаюы болып табылады.
Электржетекте асинхронды вентильді каскад сұлбасы бойынша (АВК - 6.1,д-сурет) - электр қозғалтқыштың айналу жиілігінің реттелуі ЭҚК инверторға қарсы, фазалық роторлы асинхронды электр қозғалтқыштың роторының шынжырына түзетілген ток енгізілген. Ротордың тайғанау энергиясы, қоректендіретін электрлік торға, басқарылмайтын түзеткіш және тәуелді инвертордан тұратын АВК түрлендіргіші арқылы беріледі. Қорек көзінің номиналды кернеуінің АВК түрлендіргішіндегі номиналды кернеуден айырмашылығы болған жағдайда келісілген трансформатор қажет болады.
Берілген жүйенің негізгі құндылығы ПЧ-АД нұсқасымен салыстырғанда, жылдамдық реттеудің тереңдігіне сәйкес келетін түрлендіргіштің аз орнатылған қуаты және басқарудың жайлылығы болып табылады. Дұрыс сапа ретінде түрлендіргіште апат кезінде реттелмейтін режімге (роторды қысқартып) немесе резисторды ротор шынжырына енгізу кезінде төмендетілген айналу жиілікті режімге өту мүмкіндігі болып табылады.
Вентилді қозғалтқыш - жиілік түрлендіргішінен, синхронды электр қозғалтқыштан және оның роторының кеңістікте қалай орналасқанын көрсететін құрылғыдан (6.1,г-сурет) тұратын электр механикалық жүйе. Түрлендіргіш тұрақты токтың анық көрсетілген түйіндерінде және басқару түзеткіштерінде және инверторда орындалады. Аз жиілікті аймақта инвертордың тиристорлы вентилдерінің коммутациясы ротор орналасуының берілуінің көмегімен жүзеге асады, ал 3-5 Гц жиілікті аймақта коммутацияланатын ЭҚК-ң көрсетілген түйіндерінің көмегімен электр қозғалтқыш өрістеріндегі кернеуден алынған коммутацияланатын жоғарғы өткізгішті ЭҚК бойынша жүзеге асырылады. Қозғалыс принципі бойынша бұл жүйе, коллектор және щеткалық аппарат функциясын тиристорлы инвертор және ротордың жағдайының датчигі атқаратын тұрақты токтың электрқозғалтқышына ұқсас.
6.1-сурет – АҚ-ты реттелетін электржетек жүйесінің нұсқалары.
Жиіліктік-реттелетін электржетек
қозғалтқышының қорегі қоректендіретін
тордың ![]() тұрақты
жиілігі айнымалыға
тұрақты
жиілігі айнымалыға ![]() түрленетін
жиіліктің вентилді түрлендіргіші арқылы іске асырылады (ЖТ-6.1-сурет).
Түрлендіргіш шығысына қосылған
электрқозғалтқыштың айналу жиілігі
түрленетін
жиіліктің вентилді түрлендіргіші арқылы іске асырылады (ЖТ-6.1-сурет).
Түрлендіргіш шығысына қосылған
электрқозғалтқыштың айналу жиілігі ![]() жиілігіне пропорционал өзгереді. Қазіргі уақытта
айнымалы токтың жиіліктік басқару машиналарын жасау үшін
қозғалыс принциптері, сұлбалық шешімдері, басқару
алгоритмдері және т.б. ажыратылатын жиілік
түрлендіргіштерінің әртүрлі нұсқалары
қолданылуда.
жиілігіне пропорционал өзгереді. Қазіргі уақытта
айнымалы токтың жиіліктік басқару машиналарын жасау үшін
қозғалыс принциптері, сұлбалық шешімдері, басқару
алгоритмдері және т.б. ажыратылатын жиілік
түрлендіргіштерінің әртүрлі нұсқалары
қолданылуда.
Элементтік негіздердің және басқару техникаларының дамуы, жаңа датчиктердің пайда болуы, микропроцессорлық және компьютерлік басқарулар жиіліктік асинхронды электржетек жүйесінің үздіксіз толық жетілуі жеткілікті қарастырылған.
ЖТ-АҚ жүйелерінің құндылығына келесілер жатады:
- АҚ жылдамдық реттеуінің кең ауқымындағы жоғары ПӘК, алдыңғысы барлық реттеу аумағында ротордың аз өлшемді тайғанауымен жұмыс істегендіктен (тайғанаудың аз шығынымен);
Сурет 6.1 – АҚ-ты реттелетін электржетек жүйелерінің нұсқаулары
- жылдамдық реттеудің бірқалыптылығының мүмкіндігін және талап етілген сипаттамаларды жасайтын және реттеу заңдарын қамтамасыз ететін реттеудің жақсы қасиеттері;
- қысқатұйықталған роторлы АҚ жүйесінде қолданылатын сенімділік.
Тәуелсіз қоздырудың тұрақты тоқтағы қозғалтқыштың электрмеханикалық және механикалық сипаттамалары.
 ДПТ НВ-да электрмеханикалық және
электрмагнитті процестер (6.2-сурет) якорь шынжыры мен орам
қоздыруындағы электр теңсіздіктері (Кирхгоф)
теңдеуімен, сонымен бірге электрмагнитті момент теңдеуімен
жазылады:
ДПТ НВ-да электрмеханикалық және
электрмагнитті процестер (6.2-сурет) якорь шынжыры мен орам
қоздыруындағы электр теңсіздіктері (Кирхгоф)
теңдеуімен, сонымен бірге электрмагнитті момент теңдеуімен
жазылады:
 (6.1)
(6.1)
(6.1) жүйе теңдеулерінің ортақ шешімімен ω = f(I) электрмеханикалық сипаттама теңдеуін аламыз.
![]() (6.2)
(6.2)
және ω = f(M) механикалық сипаттама теңдеуі
![]() .
(6.3)
.
(6.3)
Жетектің орнықтылық режіміндегі жұмысы
![]() ,
,
және (2.3) теңдеуі мына түр береді
![]() (6.4)
(6.4)
![]() (6.5)
(6.5)
Rдоб = 0 және номиналды мәндерде тұрғызылған кернеу сипаттамалары UЯ ≠ UН кезінде табиғи, Ф ≠ ФН немесе Rдоб ≠ 0 – жасанды электрмеханикалық немесе механикалық сипаттамалар деп аталады. Электрмеханикалық сипаттамалардың сипаттама нүктелері (6.2-сурет) (I = 0, ω = ω0 = UН/kФН) бос жүрісте , (I = IК = UН/RЯΣ, ω = 0) қысқа тұйықталуда, IЯ = IН, ω = ωН) номиналды режімде идеальды нүкте болып табылады. Осы координаттың кез келген жұбы бойынша сипаттама тұрғызуға болады.
 Енгізілген мәндерді сипаттама
қатаңдығына қойғанда:
Енгізілген мәндерді сипаттама
қатаңдығына қойғанда:
![]() ;
;
 . (6.6)
. (6.6)
Электрмеханикалық және механикалық сипаттамалар үшін келесі өрнекті жазуға болады.
![]() ;
;
![]() ;
;
![]() (6.7)
(6.7)
Жетектің жұмыс режімі 2-суретте келтірілген және төмендегідей анықталады.
 |
Қозғалтқышты жұмыс режімінде (3-сурет) ЭҚ энергияны электрлік тордан (жүйе) пайдалынады және механикалық энергия білігіне береді. Керіқосылу (қарсы) (4-сурет) режімінде ЭҚ энергияны механизмнен жиналғанын пайдаланады және қосымша кедергілерді ыдыратады. Рекуперативті (генеаторлық) тежелуде (5-сурет) ЭҚ энергияны ЭҚ механизмінен жиналғанын пайдаланады және қосымша кедергілерді ыдыратады.
8 Дәріс. Механизмнің және қозғалтқыштың жүктемелік диаграммалары. ЭҚ-ты қыздыру және салқындату.
Мақсаты: әртүрлі жұмыс режімінде қозғалтқышты қыздыру және салқындату процестерін оқып-білу.
МС(t) және ω(t) тәуелділіктеріндегі механизмнің жүктемелік диаграммалары – қозғалтқышты таңдаудағы бастапқы берілгендер болып табылады. Жүктемелік диаграммалар әрқашан да кез келген түрде бола алады, бірақ та циклды бөлуге болады, яғни диаграмма қайталанатын уақыт аралығы tЦ бірнеше. Егер сипаттама жұмысы осылай болса, яғни режімдер (лифт, көтергіш кран) нашар өндірілсе, аса күрделі циклдар үшін диаграмма тұрғызады. 8.1-суретте механизм мен қозғалтқыштың талап етілген жүктемелік диаграммасы мен тахограммасы ω(t) көрсетілген. Механизмнің жүктемелік диаграммасы бойынша қозғалтқышты алдын ала таңдауы үшін статикалық жүктеменің орташа моментін тауып алуға болады
 (8.1)
(8.1)
мұндағы МСi – статикалық жүктеменің i-ші аралықтағы моменті;
ti – i-ші аралықтың жалғасы;
n – бұл МС = const болғандағы аралықтар саны.
Ізделініп отырған қозғалт- қыштың номиналды моментін былай табуға болады:
МН = kДМС.ср, (8.2)
Мұндағы kД = 1.1…1.3 – динамикалық режімді есептейтін коэффициент.
Егер негізгі жылдамдықтан біраумақты төмен ωМАКС реттеу немесе негізгі жылдамдықтан біраумақты жоғары ωМИН реттеу болса, номиналды жылдамдық ретінде алуға болады.
Осылай табылған МН және ωН мәндеріне қозғалтқышты тізім бойынша таңдауға, оның инерция моментін анықтау, механикалық сипаттамаларын тұрғызуға, қисық өтпелі процестерге және М(t) қозғалтқыштың жүктемелік диаграммасын тұрғызуға болады. Соңғы негізінде таңдалынған қозғалтқыштың қатты қыздыру және артық жүктеу амалы бойынша тексеру жүргізіледі. Артық жүктеу амалы бойынша тексеру орындау шарттын тексеруге алып келеді.
![]() ,
(8.3)
,
(8.3)
мұндағы ММАКС – қозғалтқыштың жүктемелік диаграммасындағы максималды момент;
МДОП – қозғалтқыш моментін артық жүктеу бойынша жіберу.
Нормалдық орындаудағы ДПТ және синхронды қозғалтқыштар үшін МДОП = (2 - 2.5) МН, қоректену кернеуін 10% -ке төмендету мүмкіндігін есептегендегі асинхронды қозғалтқыш үшін МДОП=0.8МК. Асинхронды қозғалтқыштар қосымша жіберу моменті бойынша да тексеріледі; нормалды жіберу үшін төмендегі шарт орындалуы керек.
![]() ,
(8.4)
,
(8.4)
мұндағы МС.МАКС – жетекті жіберуді іске асыру кезіндегі статикалық жүктемелердің максималды моменті;
МП – қозғалтқыштың жіберу моменті.
Қозғалтқыштарды қыздыру және салқындату
Рұқсат берілген (Допуск):
1. Қозғалтқыш барлық нүктелерде шексіз үлкен жылуөткізгіштік және бірдей температурада болатын біртекті дене ретінде қарастырылады.
2. Сыртқы ортаға жылуберу қоршаған орта және қозғалтқыш
температурасының бірінші дәрежелі айырмашылығына пропорционал;
3. Қозғалтқышты қыздыру процесінде қоршаған орта температурасы өзгермейді;
4.Қозғалтқыш жылусыйымдылығы және оның жылуберу коэффициенті қозғалтқыш температурасына тәуелді емес.
Жылулық баланс теңдеуі
![]() ,
(8.5)
,
(8.5)
яғни қозғалтқыштағы қуат шығыны қозғалтқышта артық алып қалынған жылуға және қоршаған ортаға алынған жылуға таралады. Әйтпесе:
![]() ,
(8.6)
,
(8.6)
мұндағы
А – қозғалтқыштың жылуберуі, Дж/с·˚С;
С – қозғалтқыштың жылусыйымдылығы, Дж/˚С;
![]() - қозғалтқыш
температурасын қоршаған орта температурасынан арттыру, ˚С.
- қозғалтқыш
температурасын қоршаған орта температурасынан арттыру, ˚С.
(2) теңдеудің шешімі:
![]() , (8.7)
, (8.7)
мұндағы
τуст – қозғалтқыш температурасының орныққан арттырылуы, ˚С;
Тн – қозғалтқыш қыздыруының уақыт тұрақтысы, с.
![]() .
(8.8)
.
(8.8)
8.2-суреттегі қозғалтқыш қыздырылуының 1, 2 қисығы әртүрлі жүктемелі қозғалтқыш қыздырылу процесінің жіберілуін, 3 қисық машина білігіндегі жүктемені үлкейту процесін сипаттайды. ТН сәйкес қисықтарға жүргізілген жанамалар бойынша анықталады.
 |
8.3-суретте жүктеме төмендеу жағдайлары (1 қисық) үшін қозғалтқыштың салқындату қисықтары және әртүрлі жүктемелер (2, 3 қисықтар) кезіндегі қозғалтқыштың тордан өшірілуі келтірілген.
Табылған заңдылықтар қыздыру бойынша қозғалтқыштың типтік жұмыс режімдерін бөлуге мүмкіндік береді.
Қозғалтқыштың (S1) жалғастыру жұмыс режімі – қозғалтқыш температурасы орныққан мәнге ие болғанға дейінгі уақытта өзгермейтін жүктеме кезіндегі қозғалтқыштың жұмыс режімі. Бұл режімге tР >3TН (14.4-сурет) шарт сәйкес келеді.
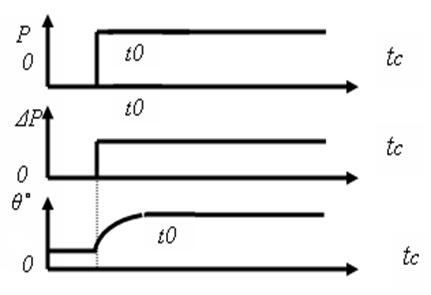
Қысқа уақытты жұмыс режімі (S2) кезінде tР жұмыс уақытында қозғалтқыштың қатты қыздырылуы орныққан өлшемге жетуге үлгермейді, ал үзіліс уақыты t0 кезінде қозғалтқыш қоршаған орта температурасына (8.5-сурет) дейін салқындайды. Сонымен қатар tР < 3TН, а t0 >3TН.
Қайталама-қысқа уақытты режім (S3) tР < 3TН, t0 <3TН шарттарына сәйкес келеді, яғни жұмыс уақытында қатты қыздыру τУСТ жетпейді, ал үзіліс уақыты кезінде нөлге тең болмайды (8.6-сурет).
 |
Циклдардың жеткілікті ұзақ қайталануы кезінде процесс орнығады, яғни қатты қызу температурасы циклдың басы және соңында бірдей және оның тербелуі орташа деңгей τСР маңайында болады. Қайталама-қысқа уақытты режім ПВ немесе ε қосудың салыстырмалы жалғастырылуымен сипатталады:
 ;
; ![]() . (8.9)
. (8.9)
Қайталама-қысқа уақытты режім кезінде ε (ε ≤ 0.6) шектелгендей, цикл уақыты (tЦ ≤10 мин.) да шектеледі.
Мазмұны
Кіріспе
Негізгі түсініктер
Дәріс. Электржетектерінің құрылымы және типтері. Электржетектерінің жіктелуі
Дәріс. Электржетектің типтік статикалық жүктемелері. Статикалық орнықтылық. Тәуелсіз қоздырудың тұрақты токтағы қозғалтқыштың электрмеханикалық және механикалық сипаттамалары
Дәріс. Өндірістік механизмдер мен электрқозғалтқыштарының сипаттамалары
Дәріс. Электржетегінің жұмыс режимдерін жіктеу
Дәріс. Автоматтандырылған электржетек жүйесінің қозғалысының теңдеуі
Дәріс. Электржетектерінің бұрыштық жылдамдығын реттеу
Дәріс. АҚ-ты реттелетін электржетектер
Дәріс. Механизмнің және қозғалтқыштың жүктемелік диаграммалары. ЭҚ-ты қыздыру және салқындату.
Қолданылған әдебиеттер
1. И.Ф Ильинский. Учебное пособие для ВУЗов М.: «Изд.дом МЭИ» 2007г.
2. С.А.Ковчин, Ю.А.Сабинин. Теория электропривода. Учебник для вузов. Санкт-Петербург: Энергоатомиздат, 2000г.
3. М.Г. Чиликин, А.С. Сандлер. Общий курс электропривода. Учебник для вузов М.: Энергоатомиздат, 1986г.
4. В.В. Москаленко. Автоматизированный электропривод. Учебник для вузов М.: Энергоатомиздат, 1986г.
Қосымша
1. М.Г. Чиликин, А.С. Сандлер. Общий курс электропривода. Учебник для вузов М.: Энергоатомиздат, 1986г.
2. Балагуров В.А. Проектирование специальных электрических машин. - М. Высшая школа, 1982. –272с.
3. Азбукин Ю.И., Аврух В.Ю. Модернизация турбогенераторов. - М.: Энергия, 1980.-232 с.
5. И.Ф Ильинский, В.В. Москаленко. Электропривод. Энерго и ресурсосбережение. М.: Изд.центр «Академия» 2008г.