Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электропривода и автоматизации промышленных установок
ЭЛЕКТРОМЕХАНИКА И ЭЛЕКТРОТЕХНИЧЕСКОЕ ОБОРУДОВАНИЕ
Методические указания к расчетно-графической работе
для студентов всех форм обучения специальности
5В071800 – «Электроэнергетика»
Алматы 2011
СОСТАВИТЕЛЬ: Мустафин М.А., Шидерова Р.М., Алексеев С.Б., Алмуратова Н.К. Электромеханика и электротехническое оборудование. Методические указания к расчетно-графической работе.
Разделы «Электромеханика», «Электропривод». Для студентов всех форм обучения специальности 5В071800 – «Электроэнергетика» - Алматы: АУЭС, 2011. – 16 с..
Методические указания включает задания по расчетно-графической работе и методические указания по их выполнению для студентов специальности 5В071800 -Электроэнергетика по разделам «Электромеханика» и «Электропривод», а также список необходимой литературы.
Ил. 7, табл.7, библиогр. – 5 назв.
Рецензент: канд.техн.наук, проф. Ю.А. Цыба
Печатается по плану издания некоммерческого акционерного общества «Алматинский институт энергетики и связи» на 2010 г.
© НАО «Алматинский университет энергетики и связи», 2011 г.
Содержание
1 Электромеханика 4
1.1 Задание 4
1.2 Методические указания к выполнению расчетно-графической работы 5
2 Электропривод 7
2.1 Расчет механических характеристик ПЧ-АД 8
2.1.1 Естественная механическая характеристика АД 8
2.1.2 Искусственная механическая характеристика 10
2.2 Пуск асинхронного двигателя с короткозамкнутым ротором 13
2.3 Список литературы 16
1 Электромеханика
Электромеханические преобразователи нашли самое широкое применение в промышленности, сельском хозяйстве, авиации, транспорте, военном деле, в быту и в современных системах автоматического управления и системах синхронной связи. Из этого вытекает важность знаний теории основ электромеханики для студентов электроэнергетических специальностей.
Перед началом изучения основных разделов курса следует подробно разобраться в конструкции и видах электрических машин и уметь объяснить принцип действия, а также повторить основные законы электротехники, на которых основаны процессы электрического и электромеханического преобразования энергии.
В заданиях для расчетно-графической работы отражены вопросы, являющиеся наиболее общими для различных типов электромеханических преобразователей. К ним относятся конструкция и принцип действия электрических машин, сфера применения и общие вопросы теории машин переменного тока.
1.1 Задание
Расчетно-графическая работа включает в себя два раздела:
а) конструкция и принцип действия электрической машины в соответствии с заданием, сфера применения;
б) схема-развертка обмотки.
Выбор варианта
Варианты задания выбираются из таблиц 1.1, 1.2 и 1.3 по номеру зачетной книжки и начальной букве фамилии студента
Вариант задания а) выбирается по таблице 1.1
Т а б л и ц а 1.1
|
Первая буква фамилии |
Варианты |
|
А,Б,В,Г |
Трансформаторы |
|
Д,Е,Ж,З |
Машина постоянного тока |
|
И,К,Л,М |
Асинхронные машины |
|
О,П,Р,С |
Турбогенераторы |
|
Т,У,Ф,Х,Ц,Ч,Ш,Щ,Э,Ю,Я |
Гидрогенераторы |
Вариант задания б) выбирается по таблицам 1.2 и 1.3
Т а б л и ц а 1.2
|
Предпоследняя цифра шифра |
Варианты |
|
0,1,2,3,4, |
Двухслойная обмотка |
|
5,6,7,8,9 |
Однослойная обмотка |
Т а б л и ц а 1.3
|
Последняя цифра шифра |
Число пар полюсов р |
Число пазов на полюс и фазу q |
|
Число параллельных ветвей а однсл/двухсл |
||
|
Однослойная обмотка |
Двухслойная обмотка |
|||||
|
0 |
3 |
2 |
1 |
0,5 |
2 |
2 |
|
1 |
1 |
3 |
1 |
0,6 |
1 |
3 |
|
2 |
2 |
2 |
1 |
0,7 |
2 |
1 |
|
3 |
1 |
3 |
1 |
0,8 |
1 |
2 |
|
4 |
3 |
2 |
1 |
0,9 |
2 |
2 |
|
5 |
2 |
3 |
1 |
1,1 |
2 |
2 |
|
6 |
3 |
2 |
1 |
1,2 |
2 |
2 |
|
7 |
1 |
3 |
1 |
1,3 |
1 |
2 |
|
8 |
2 |
2 |
1 |
0,8 |
2 |
2 |
|
9 |
2 |
3 |
1 |
0,7 |
2 |
2 |
1.2 Методические указания к выполнению расчетно-графической работы
Хотя рабочие процессы машин переменного тока различны, однако имеется ряд положений, общих для машин обоих типов. Поэтому прежде, чем приступить к изучению асинхронной машины и синхронной машины, необходимо изучить следующие вопросы:
- принцип образования вращающегося магнитного поля;
- устройство обмотки статора;
- наведение в обмотке статора необходимой ЭДС;
- определение МДС обмотки статора;
- вычисление индуктивных сопротивлений;
- нагрев и охлаждение.
Создание ЭДС и МДС тесно связано с устройством обмотки, поэтому эти вопросы рассматриваются совместно. Следовательно, в этом разделе необходимо изучить: построение звезды пазовых ЭДС; принцип выполнения однослойных, двухслойных обмоток и наведение в них ЭДС; влияние укорочения шага и распределения обмоток по пазам на величину ЭДС. От конструкции обмоток зависит форма кривой МДС. Обычно стремятся к тому, чтобы эта кривая была, по возможности, близка к синусоиде. При этом ЭДС, индуктированные в катушке обмотки статора, будут иметь приблизительно синусоидальную форму, т.е. высшие гармоники в кривой будут малы. Необходимо также знать вывод формулы ЭДС основной и высших гармоник.
Контроль уровня усвоения студентом теоретического материала в процессе подготовки к выполнению расчетно-графической работы осуществляется по полноте ответов на следующие вопросы:
- что называется коэффициентом распределения и укорочения обмотки?
- в чем заключаются преимущества двухслойных обмоток?
- в каких случаях коэффициенты распределения, укорочения и скоса пазов соответственно равны единице?
- как влияет открытие паза на коэффициент воздушного зазора?
- от чего зависят величина, форма кривой и частота ЭДС обмотки?
- как зависит скорость вращения МДС обмотки от числа полюсов и частоты сети?
- как возникает вращающееся магнитное поле?
- какие существуют системы вентиляции электрических машин?
1.3 Список литературы
1. Копылов И.П. Электрические машины: Учебник для вузов. – 3-е изд. испр. – М.: Высшая школа, 2002. – 608 с.
2. Вольдек А.И. Электрические машины переменного тока. Учебник для вузов. -СПб.: Питер, 2007. – 352 с.
3. Вольдек А.И. Введение в электромеханику. МПТ и трансформаторы. Учебник.:– СПб.: Питер, 2007. – 320 с.
4. Иванов-Смоленский А.В. Электрические машины. - М.: Энергия, 1980.- 986 с.
5. Копылов И.П. Электрические машины. – М.: Высшая школа, Логос, 2000. – 607 с.
6. Вольдек А.И. Электрические машины. - Л.: Энергия, 1978.- 832 с.
7. Копылов И.П. Проектирование электрических машин. М.: Высшая школа, 2002.
9. Абрамов А.И., Иванов-Смоленский А.В. Проектирование гидро- генераторов и синхронных компенсаторов. Учебник для вузов. – М.: Высшая школа. 1978. – 312 с.
10. Абрамов А.И. и др. Проектирование турбогенераторов. Учебное пособие для вузов. – М.: Высшая школа. 1990. Костенко М.П., Пиотровский Л.М. Электрические машины. Ч.I.- Л.: Энергия, 1972.- 544 с.
2 Электропривод
Современный электропривод включает в себя электрический двигатель, полупроводниковый преобразователь электрической энергии (например, преобразователь частоты для асинхронных двигателей) и систему управления. Асинхронные двигатели широко распространены, надежны, имеют относительно невысокую стоимость, хорошие эксплуатационные качества. Благодаря бурному развитию электроники и появлению недорогих преобразователей частоты, стало возможным регулирование скорости вращения асинхронных двигателей в широком диапазоне. Быстрый рост рынка преобразователей частоты для асинхронных двигателей стал возможен в связи с появлением новой элементной базы – силовых полупроводниковых модулей на базе 1GBT транзисторов (Insulated Gate Bipolar Transistor - биполярный транзистор с изолированным затвором), рассчитанных на токи до нескольких килоампер, напряжение до нескольких киловольт и имеющих частоту коммутации 30 кГц и выше.
Асинхронный электродвигатель является самым массовым и повсеместно применяемым типом электропривода. Суммарный объем электроэнергии, используемой для приведения в движение всех приводов с асинхронными двигателями, составляет более 50% всей потребляемой электроэнергии.
Скорость ротора асинхронного электродвигателя можно регулировать изменением частоты питающего напряжения, амплитуды питающего напряжения, числа пар полюсов статора.
Для регулирования скорости вращения асинхронного электродвигателя наиболее широко используются устройства, позволяющие изменять частоту и амплитуду подводимого напряжения - полупроводниковые преобразователи частоты. В простейшем случае частотного регулирования управление скоростью вращения осуществляется путем изменения частоты и амплитуды напряжения трехфазного источника питания. Как известно, регулирование скорости асинхронного двигателя изменением частоты подводимого к статору напряжения возможно как в сторону снижения скорости, так и в сторону увеличения скорости выше номинальной. При регулировании частоты вниз от номинальной можно выбрать такой закон частотного управления (соотношение между частотой и амплитудой питающего напряжения, подводимого к статору асинхронного двигателя), что магнитный поток машины будет поддерживаться неизменным (самом простом случае U/f=const). Тогда максимальный момент двигателя сохраняется неизменным, и таким образом обеспечивается постоянство перегрузочной способности во всем диапазоне регулирования при неизменном моменте нагрузки. При регулировании частоты вверх от номинальной, что возможно у преобразователей частоты с промежуточным контуром постоянного тока, имеет место режим снижения магнитного потока двигателя, поскольку амплитуда напряжения остается неизменной на уровне ее номинального значения.
Существует два основных типа преобразователей частоты: с непосредственной связью и с промежуточным контуром постоянного тока. В первом случае выходное напряжение синусоидальной формы формируется из участков синусоид преобразуемого входного напряжения. При этом максимальное значение выходной частоты принципиально не может быть равным частоте питающей сети. Частота на выходе преобразователя этого типа обычно лежит в диапазоне от 0 до 25-33 Гц. Но наибольшее распространение получили преобразователи частоты с промежуточным контуром постоянного тока, выполненные на базе инверторов напряжения. Структурная схема такого преобразователя приведена на рисунке 1. Переменное напряжение сети преобразуется с помощью диодного выпрямителя, а затем сглаживается в промежуточной цепи индуктивно-емкостным фильтром. И, наконец, инвертор, выходной каскад которого обычно выполняется на основе IGBT-модулей, осуществляет обратное преобразование из постоянного тока в переменный, обеспечивая формирование выходного сигнала с необходимыми значениями напряжения и частоты. Наиболее часто в инверторах применяется метод высокочастотной широтно-импульсной модуляции (ШИМ). В этом случае выходной сигнал преобразователя представляет собой последовательность импульсов напряжения постоянной амплитуды и изменяющейся длительности, которая на индуктивной нагрузке, каковой является обмотка статора, формирует токи синусоидальной формы (см.рисунок 2).

Рисунок 1 - Структурная схема преобразователя частоты с промежуточным контуром постоянного тока
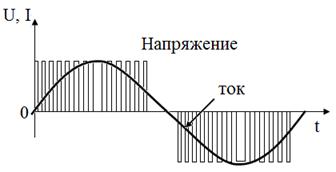
Рисунок 2 - Выходной сигнал преобразователя частоты
2.1 Расчет механических характеристик ПЧ-АД
Для асинхронного электродвигателя с короткозамкнутым ротором, питающегося от преобразователя частоты, рассчитать и построить механические характеристики:
- естественную при f = 50Гц;
- искусственные при заданных частотах и законе частотного регулирования.
Тип электродвигателя, его мощность, синхронная скорость и закон частотного управления задаются преподавателем. Остальные параметры выписываются студентом из справочника «Асинхронные двигатели серии 4А».
2.1.1 Естественная механическая характеристика АД, при, f= 50Гц.
Вращающий момент двигателя может быть определен из выражения
 (1.1)
(1.1)
где: UФ – фазное напряжение питания;
R1, R 2‘, X1, X2 – параметры двигателя согласно схемы замещения /1/.
Приравнивая dM/ds=0, можно найти значение
критического скольжения ![]() , при котором двигатель развивает
максимальный (критический) момент:
, при котором двигатель развивает
максимальный (критический) момент:
 . (1.2)
. (1.2)
Знак «+» относится к двигательному режиму. Подставим
значение ![]() в
выражение момента асинхронного двигателя и найдем значение максимального
(критического) момента:
в
выражение момента асинхронного двигателя и найдем значение максимального
(критического) момента:
 (1.3)
(1.3)
где ![]() - угловая синхронная скорость;
- угловая синхронная скорость;
![]() ;
;
n0 - синхронная скорость вращения в об/мин.
Из полученных выражений получим уравнение для нахождения момента асинхронного двигателя в двигательном режиме и построения естественной механической характеристики:
 (1.4)
(1.4)
где ![]() - максимальный (критический) момент
двигателя;
- максимальный (критический) момент
двигателя;
![]() - критическое скольжение;
- критическое скольжение;

Задавая величину скольжения от 0 до 1 и подставляя в (1.3), рассчитываем естественную механическую характеристику M = f(S). Зная зависимость между угловой скоростью и скольжением S= (ω0 – ω )/ω0, рассчитываем механическую характеристику двигателя в координатах ω=f (M). На основании расчетных данных строим графики.
2.1.2 Искусственная механическая характеристика АД при заданной выходной частоте преобразователя и законе частотного регулирования.
Для идеализированного электродвигателя, у которого можно пренебречь активным сопротивлением статора, основной закон изменения напряжения при частотном регулировании выражается формулой:
 (1.5)
(1.5)
где МС1 и МС2 – моменты статической нагрузки, соответствующие работе двигателя при частотах f1 и f2;
U11 U12- напряжение на двигателе при тех же частотах.
При постоянстве момента статической нагрузки напряжение источника питания должно изменяться пропорционально его частоте.
В этом случае для идеализированного двигателя сохраняется перегрузочная способность (Мк=const), и закон изменения напряжения примет вид:
U1/ f1 = const, (1.6)
Механические характеристики асинхронного двигателя для этого случая приведены на рисунке 3.
При постоянстве мощности на валу двигателя в процессе регулирования скорости закон изменения напряжения:
 (1.7)
(1.7)
Соответствующие характеристики приведены на рисунке 4.
При вентиляторной нагрузке напряжение на статоре должно изменяться по закону:
 (1.8)
(1.8)
Для расчета механической характеристики при заданной частоте fn необходимо рассчитать напряжение на двигателе с учетом закона регулирования и пересчитать индуктивные сопротивления двигателя для новой выходной частоты преобразователя:
X = ωL= 2πfL; Xf1 = ω1 L= 2πf1 L.
С учетом изменившихся параметров двигателя проводится расчет механических характеристик для новой частоты - формулы: 1.2; 1.3; 1.4.
 Механические характеристики для всех
заданных частот M=f(S)
строятся
на одном графике. На отдельном графике строятся характеристики
ω=f
(M).
Механические характеристики для всех
заданных частот M=f(S)
строятся
на одном графике. На отдельном графике строятся характеристики
ω=f
(M).
 |
2.2 Пуск асинхронного двигателя с короткозамкнутым ротором
Для случая прямого пуска асинхронного двигателя с короткозамкнутым ротором рассчитать и построить:
а) статическую механическую характеристику;
б) динамическую механическую характеристику;
в) кривые переходных процессов ω = f(t), М = φ(t).
Определить время пуска АД. Расчеты провести для значений напряжения U1=UН = 380 В и U2 = 0,8UН.
Т а б л и ц а 1 – Варианты задания
|
Исходные данные |
Р(н), кВт |
n(o)об/мин |
SH |
Jp/кг*м(2) |
|
Начальная буква фамилии |
||||
|
А |
1,5 |
3000 |
0,011 |
0,042 |
|
Б |
2,2 |
3000 |
0,012 |
0,052 |
|
В |
3,2 |
3000 |
0,014 |
0,09 |
|
Г |
4,5 |
3000 |
0,016 |
0,116 |
|
Д |
6 |
3000 |
0,018 |
0,15 |
|
Е |
11 |
3000 |
0,011 |
0,008 |
|
Ж |
19 |
3000 |
0,012 |
0,14 |
|
З |
32 |
3000 |
0,014 |
0,25 |
|
И |
2,2 |
1500 |
0,018 |
0,116 |
|
К |
3,2 |
1500 |
0,018 |
0,15 |
|
Л |
4,5 |
1500 |
0,011 |
0,18 |
|
М |
6 |
1500 |
0,012 |
0,35 |
|
Н |
8 |
1500 |
0,014 |
0,4 |
|
О |
11 |
1500 |
0,016 |
0,56 |
|
П |
14 |
1500 |
0,018 |
0,65 |
|
Р |
19 |
1500 |
0,011 |
1,4 |
|
С |
25 |
1500 |
0,012 |
1,6 |
|
Т |
32 |
1500 |
0,014 |
2,7 |
|
У |
42 |
1500 |
0,016 |
3,1 |
|
Ф |
55 |
1500 |
0,018 |
5,9 |
|
Х |
3,2 |
1000 |
0,011 |
0,35 |
|
Ц |
4,5 |
1000 |
0,012 |
0,4 |
|
Ч |
6 |
1000 |
0,014 |
0,56 |
|
Ш |
8 |
1000 |
0,016 |
0,65 |
|
Щ |
10 |
1000 |
0,018 |
1,4 |
|
Э |
12,5 |
1000 |
0,011 |
1,6 |
|
Ю |
19 |
1000 |
0,012 |
2,7 |
|
Я |
25 |
1000 |
0,014 |
3,1 |
Т а б л и ц а 1.1
|
Исходные данные |
Мк* |
Исходные данные |
Мс* |
|
Последняя цифра зачетки |
Предпоследняя цифра зачетки |
||
|
0 |
2 |
0 |
0,5 |
|
1 |
2,1 |
1 |
0,6 |
|
2 |
2,2 |
2 |
0,7 |
|
3 |
2,3 |
3 |
0,8 |
|
4 |
2,4 |
4 |
0,9 |
|
5 |
2,5 |
5 |
1 |
|
6 |
2,6 |
6 |
0,5 |
|
7 |
2,7 |
7 |
0,9 |
|
8 |
2,8 |
8 |
0,7 |
|
9 |
2,9 |
9 |
0,8 |
2.1 Для правильного проектирования и экономичной эксплуатации электропривода необходимо знать соответствие механических характеристик двигателя характеристикам производственного механизма. Механической характеристикой производственного механизма называется зависимость между приведенными к валу двигателя скоростью и моментом сопротивления механизма MС=f(ω). Различные производственные механизмы имеют различные механические характеристики, которые в общем случае южно выразить следующей эмпирической формулой
Mc=Mo+( Mc.ном – Мо)(ω/ω ном)α (1)
где Mc - момент сопротивления механизма при скорости ω;
Mo - момент сопротивления трения в движущих частях механизма;
Mc.ном - момент сопротивления при номинальной скорости ωном .
В соответствии с приведенной формулой можно классифицировать механические характеристики производственных механизмов на следующие основные категории (см.рисунок 1):
Рисунок 6- Механические характеристики производственных механизмов
- независимая от скорости механическая характеристика (прямая 1 на рисунке при α= 0), характерная для подъемных кранов, лебедок, механизмов подачи металлорежущих станков, поршневых насосов, конвейеров и т.д.;
- линейно-возрастающая механическая характеристика (прямая 1 при α = 1) генератора постоянного тока с независимым возбуждением;
- нелинейно-возрастающая механическая «вентиляторная» характеристика (кривая 3 при α≈2) механизмов центробежного действия (вентиляторы, центробежные насосы, гребные винты и т.п.);
- нелинейно-спадающая механическая характеристика (кривая 4 при α =-1), которая характерна для некоторых токарных, расточных и фрезерных станков, моталок металлургической промышленности и т.д.
В задании предусмотрен подъемно-транспортный механизм с независимой от скорости механической характеристикой (α=0).
Механической характеристикой электродвигателей называется зависимость его угловой скорости от вращающего момента ω =f(Mэ).
Асинхронный двигатель (АД) наиболее прост и надежен в эксплуатации, имеет широкое применение в промышленности во всех отраслях народного хозяйства. Механическая характеристика АД может быть построена по упрощенному выражению
 (2)
(2)
где
![]() -
максимальный момент, развиваемый двигателем;
-
максимальный момент, развиваемый двигателем;
![]() -
критическое скольжение, соответствующее максимальному моменту.
-
критическое скольжение, соответствующее максимальному моменту.
Угловая частота поля статора
![]() (3)
(3)
Номинальная угловая частота ротора
![]() .
(4)
.
(4)
Номинальный момент через Рн и wН
![]() (5)
(5)
Критический момент АД и момент сопротивления механизма заданы в относительных единицах
![]() (6)
(6)
![]()
Определяем критическое скольжение. Величина критического скольжения определяется из уравнения Клосса для номинальных значении параметров
 ,
,
отсюда выразим SK
![]() , квадратное
уравнение, т.е. два корня
, квадратное
уравнение, т.е. два корня
![]() ,
,
![]()
или
![]() .
.
Статическая механическая характеристика АД М(s) строится по формуле в диапазоне скольжений от 1 до 0 (двигательный режим).
 ;
;
![]()
Динамический момент
![]() ,
(7)
,
(7)
которая разбивается на n участков. На каждом участке динамический момент равен Мдинi. Переходя от бесконечно малых приращений к конечным приращениям, записываем для i – го участка, как
 ,
(8)
,
(8)
время пуска на каждом участке
 .
(9)
.
(9)
Для случая пуска при пониженном напряжении расчет проводится аналогично, с учетом снижения МК пропорционально квадрату напряжения статора.
Расчет можно проводить на ЭВМ с применением математических приложений (Mathcad, Maple и аналогичных), электронных таблиц Excel.
 |
Рисунок 7 - Построение динамической характеристики
2.3 Список литературы
1. Москаленко В.В. Автоматизированный электропривод. – М.: Энерго-атомиздат, 1986. - 416 с.
2. Ковчин С.А., Сабинин Ю.А. Теория электропривода.- СПб.: Энерго-атомиздат. Санкт – Петербургское отд – ние, 2000.- 496 с.
3. Ключев В.И. Теория электропривода.- М.: Энергоатомиздат, 1985. –560 с.
4. И.Ф Ильинский. Учебное пособие для ВУЗов - М.: «Изд.дом МЭИ» 2007.
5. М.Г. Чиликин, А.С. Сандлер. Общий курс электропривода. Учебник для вузов - М.: Энергоатомиздат, 1986.
Сводный план 2010г., поз. 112