Коммерциялық емес акционерлік қоғам
АЛМАТЫ ЭНЕРГЕТИКА ЖӘНЕ БАЙЛАНЫС УНИВЕРСИТЕТІ
Өнеркәсіп қондырғыларының электржетегі және автоматтандырылуы кафедрасы
АВТОМАТТЫ БАСҚАРУДЫҢ САНДЫҚ ЖӘНЕ БЕЙСЫЗЫҚТЫҚ ЖҮЙЕЛЕРІ
6М071800 – Электр энергетикасы мамандығының магистранттары
үшiн зертханалық жұмысты орындауға арналған әдістемелік нұсқау
Алматы 2013
ҚҰРАСТЫРУШЫЛАР: Сагитов П.И., Цыба Ю.А., Шадхин Ю.И., Алмуратова Н.К. Автоматты басқарудың сандық және бейсызықтық жүйелері: 6М071800 - Электр энергетикасы мамандығының магистранттары үшін зертханалық жұмысты орындауға арналған әдістемелік нұсқау. – Алматы: АЭжБУ, 2013. - 21 б.
«Автоматты басқарудың сандық және бейсызықтық жүйелері» курсы бойынша жасалған зертханалық жұмысты орындауға арналған әдістемелік нұсқау 6М071800 - Электр энергетикасы мамандығында оқитын магистранттарға арналған, әдістемелік нұсқауда жұмыстың теориялық сұрақтары және құрылысы әртүрлі автоматты жүйелеріндегі кеңінен қолданылатын сапалы элементтер қарастырылған.
Без.-5, әдеб. көрсеткіші – 3 атау.
Пікір беруші: техн.ғыл.д-ры, проф. Жумагулов К.К.
“Алматы энергетика және байланыс университеті” коммерциялық емес акционерлік қоғамының 2011 ж. баспа жоспары бойынша басылады.
© “Алматы энергетика және байланыс университеті” КЕАҚ, 2013 ж.
1 Зертханалық жұмыс № 1. Автоматты басқарудың бейсызықты тұйықталған және тұйықталмаған жүйелерінің тұрақтылығын зерттеу
Жұмыстың мақсаты: құрылысы әртүрлі автоматты жүйелердің тұрақтылығын зерттеу.
1.1 Жалпы мағлұматтар
Әсер етілмеген қозғалыстың математикалық тұрақтылығын әсер ету тоқталғанда бағаланады. Бастапқы шарты нөлдік емес біртектес дифференциалды теңдеуді шешу, біртектес емес теңдеуді шешуге қарағанда оңтайлы болғандықтан, әсер етілген қозғалысты жүйенің бос қозғалысы ретінде қарастырады.
Егер әсерсіз қозғалыс мына
функциялармен сипатталатын болса ![]() әсер етілген қозғалыс
әсер етілген қозғалыс ![]() , онда әсер етілген қозғалысты тыныштық
күйінен ауытқыған жағдайда қарастыруға
болады:
, онда әсер етілген қозғалысты тыныштық
күйінен ауытқыған жағдайда қарастыруға
болады:
![]() (1.1)
(1.1)
Ауытқудағы ![]() мәндері бос
қозғалыстың бастапқы шарттары болып есептеледі. Олар
кейіннен жоғалған әсер етулердің арқасында пайда
болады. Сондықтан
мәндері бос
қозғалыстың бастапқы шарттары болып есептеледі. Олар
кейіннен жоғалған әсер етулердің арқасында пайда
болады. Сондықтан ![]() функциясы жүйедегі бос
қозғалыстардың үрдісін сипаттайды. Бұл
жағдайда тұрақтылықты қалай түсінуге
болады? Егер әр
функциясы жүйедегі бос
қозғалыстардың үрдісін сипаттайды. Бұл
жағдайда тұрақтылықты қалай түсінуге
болады? Егер әр ![]() оң сандары үшін,
оң сандары үшін, ![]() -ға тәуелді қандай да бір
-ға тәуелді қандай да бір ![]() санын анықтап, әсерлі қозғалыстың
бастапқы моменті,
санын анықтап, әсерлі қозғалыстың
бастапқы моменті,
![]() (1.2)
(1.2)
болса, әсерсіз қозғалыс тұрақты болғаны.
Барлық ![]() жағдайында
жағдайында
![]() (1.3)
(1.3)
(1.3) теңдеуінен байқалғандай,
тұрақтылықты есептеу барысында ауытқулар ![]() аз мәнінен аспауы, ал (1.2) байқағандай
бастапқы мәндері нөлден жоғары,
аз мәнінен аспауы, ал (1.2) байқағандай
бастапқы мәндері нөлден жоғары, ![]() мәніне тәуелді
мәніне тәуелді ![]() мәнінен аспауы қажет.
мәнінен аспауы қажет. ![]() шарты орындалатын болса, жүйе шексіз тұрақты,
яғни кез келген бастапқы шарттар мәнінде тұрақты
болады. Егер жүйе
шарты орындалатын болса, жүйе шексіз тұрақты,
яғни кез келген бастапқы шарттар мәнінде тұрақты
болады. Егер жүйе ![]() шартында тұрақты,
шартында тұрақты, ![]() шартында тұрақсыз болса, жүйе
шартында тұрақсыз болса, жүйе ![]() шартына жауап берсе, онда ол жүйе асимтоталық
тұрақты болып есептеледі.
шартына жауап берсе, онда ол жүйе асимтоталық
тұрақты болып есептеледі.
Бейсызықты жүйенің математикалық тұрақтылығын қарастырмас бұрын, сызықты автоматты жүйенің тұрақтылығын қарастырайық. Мысалы, сызықты жүйенің бос қозғалысы сызықты, бір тектес дифференциалды теңдеу түрінде көрсетілсе:
![]() . (1.4)
. (1.4)
Бастапқы шарттары ![]() онда
онда ![]() туындылар қатары.
туындылар қатары.
(1.4) теңдеуінің шешуі мүшелерінің қосындысына тең
![]() (1.5)
(1.5)
мұнда ![]() - теңдеуді сипаттайтын түбір
- теңдеуді сипаттайтын түбір
![]() (1.6)
(1.6)
![]() - бастапқы шарттардан тәуелді интегралдау
тұрақтысы
- бастапқы шарттардан тәуелді интегралдау
тұрақтысы ![]()
Бұл шарттарға сызықтандырылған жүйелердің тұрақтылығының теоремасын енгізген А.М. Ляпунов жауап берді.
Бірінші теорема.
Егер сызықтандырылған жүйе тұрақты болса, онда бастапқы бейсызықты жүйе де тұрақты.
Екінші теорема.
Егер сызықтандырылған жүйе тұрақсыз болса, онда бастапқы бейсызықты жүйе де тұрақсыз.
Үшінші теорема.
Егер сызықтандырылған жүйе тұрақтылық шегінде жатса, онда бейсызықты жүйенің теңдеулері бойынша қосымша тұрақтылықты анықтауға есептеулер жүргізу.
Ляпунов теоремасы сызықты теңдеулер арқылы бейсызықты жүйелердің тұрақтылығын анықтауға мүмкіндік береді.
Автоматты басқарудың бейсызықты жүйелері беріліс функциясы бар, сызықтандырылған буын жүйелерінің құрылымдық сұлбасы ретінде де берілуі мүмкін.
1.2 Жұмыс бағдарламасы
1.2.1 Сұлбаны және берілген нұсқа бойынша тұйықталмаған жүйенің беріліс функциясын тұрғызу (нұсқаны оқытушы береді).
1.2.2 Сипатталу теңдеуінің түбірін табу арқылы тұйықталмаған теңдеудің тұрақтылығын анықтау.
1.2.3 Теріс байланысы бар тұйықталмаған жүйені тұйықтау, тұйықталған жүйенің беріліс функциясын алу және жүйенің өтпелі үрдіс сипаттамасын тұрғызу. Егер тұйықталған жүйе тұрақсыз болса немесе тұрақтылық шегінде жатса, оның динамикасын, өтпелі үрдіс сипаттамаларын жақсарту.
1.2.4 ![]() коэффициентінің жүйеге әсері
және
коэффициентінің жүйеге әсері
және ![]() уақыт тұрақтысының
тұйықталған және тұйықталмаған
жүйеге әсері.
уақыт тұрақтысының
тұйықталған және тұйықталмаған
жүйеге әсері.
Тапсырма нұсқалары:
1 - нұсқа
![]()
![]()
2 - нұсқа
![]()
![]()
3 - нұсқа
![]()
![]()
4 - нұсқа
![]()
![]()
5 - нұсқа
![]()
![]()
6 - нұсқа
![]()
![]()
7 - нұсқа
![]()
![]()
8 - нұсқа
![]()
![]()
9 - нұсқа
![]()
![]()
10 - нұсқа
![]()
![]()
11 - нұсқа
![]()
![]()
12 - нұсқа
![]()
![]()
1.3 Жұмысты орындау әдісі және реті
Мысалы, тұйықталмаған жүйе, тізбектей жалғанған буындардан тұрады деп есептесек:
![]()
мұндағы ![]()
Тұйықталмаған жүйенің беріліс функциясын тұрғызамыз.
Математикалық жүйе MATLAB көмегімен тұрғызылған тұйықталмаған жүйенің беріліс функциясы төмендегідей болады:
>> k1=5;k2=70;k3=12;
>> T1=0.5;T2=2;T3=1.5;
>> n1=[T1 1]; m1=[T2 1];
>> W1=tf(n1,m1)
Transfer function:
0.5 s + 1
---------
2 s + 1
>> W1=k1*W1;
>> n2=[k2]; m2=[1.5 1 0];
>> W2=tf(n2,m2)
Transfer function:
70
-----------
1.5 s^2 + s
>> n3=[k3]; m3=[1];
>> W3=tf(n3,m3)
Transfer function:
12
>> G1=W1*W2*W3
Transfer function:
2100 s + 4200
-------------------
3 s^3 + 3.5 s^2 + s
G1 беріліс функциясы, тұйықталмаған
жүйенің беріліс функциясы болып есептеледі. Жүйенің
тұрақтылығы сипаттамалық теңдеу
түбірінің сандық мәнінен анықталады. Ол
үшін G1 беріліс функциясының сипаттамалық
теңдеулерінің коэффициенттерінен Р массивін жасап, ![]() функциясы арқылы сипаттамалық теңдеудің
түбірін аламыз.
функциясы арқылы сипаттамалық теңдеудің
түбірін аламыз.
>> P=[3 3.5 1 0];
>> r = roots(P)
r =
0
-0.6667
-0.5000
мұнда ![]() сипаттамалық теңдеудің түбірі.
сипаттамалық теңдеудің түбірі.
![]() тұйықталмаған жүйенің беріліс функциясы
арқылы теріс кері байланысы бар тұйықталған
жүйенің беріліс функциясы
тұйықталмаған жүйенің беріліс функциясы
арқылы теріс кері байланысы бар тұйықталған
жүйенің беріліс функциясы ![]() функциясы арқылы анықталады:
функциясы арқылы анықталады:
>> GOS=feedback(G1, [1])
Transfer function:
2100 s + 4200
-------------------------------
3 s^3 + 3.5 s^2 + 2101 s + 4200,
мұндағы GOS - тұйықталған жүйенің беріліс функциясы.
![]() функциясын реттеу арқылы теріс кері байланысы бар
тұйықталған жүйенің өтпелі үрдісін
алуға болады:
функциясын реттеу арқылы теріс кері байланысы бар
тұйықталған жүйенің өтпелі үрдісін
алуға болады:
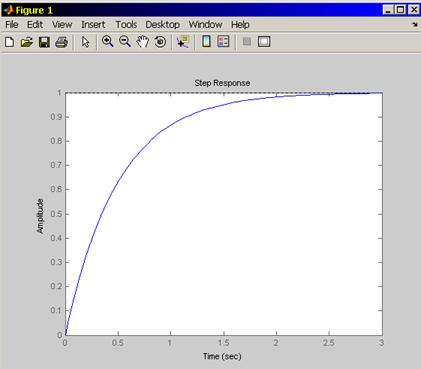
>> step(GOS)
Тұйықталған жүйенің өтпелі үрдісі 1.1 суретте көрсетілген.

1.1 сурет - Тұйықталған жүйенің өтпелі үрдісі сипаттамасы
1.1 суретте көрсетілгендей, өтпелі үрдіс сипаттамасы тұрақсыз.
Тұйықталмаған жүйенің тұрақтылығын арттыру үшін (мысал ретінде), жүйенің жұмсақ кері байланысын туынды арқылы тұйықтауға болады. Кері байланыс ретінде беріліс функциясы блогын қабылдаймыз.
![]()
мұнда ![]() .
.
![]() кезіндегі беріліс функциясы
кезіндегі беріліс функциясы ![]() .
.
Негізгі бағдарламаға келесіні енгіземіз:
>> n4=[0.5 1];
>> m4=[1];
>> W4=tf(n4,m4);
>> GOS=feedback(G1, [W4])
Transfer function:
2100 s + 4200
--------------------------------
3 s^3 + 1054 s^2 + 4201 s + 4200
![]() функциясын реттеу арқылы теріс кері байланысы бар
тұйықталған жүйенің өтпелі үрдісін
аламыз.
функциясын реттеу арқылы теріс кері байланысы бар
тұйықталған жүйенің өтпелі үрдісін
аламыз.
>> step(GOS).
1.2 сурет - ![]() кезіндегі жұмсақ кері байланысы
бар тұйықталған жүйенің өтпелі
үрдісі
кезіндегі жұмсақ кері байланысы
бар тұйықталған жүйенің өтпелі
үрдісі
Қорытынды: өтепелі үрдіс ![]() мәніне таяу, яғни жүйе тұрақты.
мәніне таяу, яғни жүйе тұрақты.
1.4 Есеп беру бағдарламасы
1.4.1 Негізгі теориялық мағлұматтарға түсініктеме беру.
1.4.2 Тұйықталған және тұйықталмаған АБЖ құрылымдық сұлбасы.
1.4.3 Тұйықталған АБЖ өтпелі үрдіс сипаттамасы.
1.4.4 Тұйықталған АБЖ өтпелі үрдіс сапасына баға беру.
1.5 Бақылау сұрақтары
1.5.1 Тұрақтылық шарттары (Ляпунов теоремасы).
1.5.2 Жүйенің өтпелі үрдісін, оның тұрақтылығын анықтайтын, беріліс функцияларын орындайтын MATLAB-тың негізгі функциялары.
1.5.3 Жүйенің динамикасын жақсартатын әдістер.
2 Зертханалық жұмыс №2. Екіканалды бейсызықты түзеткіш құрылғыларды зерттеу
Жұмыстың мақсаты: екіканалды бейсызықты түзеткіш құрылғыларымен және оның функцияларымен танысу.
2.1 Жалпы мағлұматтар
Басқару объектісінің күйi туралы мәлiметтер толық болмаған жағдайда минималды - сызықты фазалық түзеткіш құрылғылары (СТҚ) АБЖ керектi сапа көрсеткiштерін қамтамасыз ете алмайды.
СТҚ мүмкiндiктерiнің
шектелуi (АЧХ) амплитудалық және (ФЧХ) фазалық жиiлiктiк
сипаттамаларының арасындағы қатаң бiрмәндi
байланыспен ұғындырылады. Мұндай байланыс кейбiр жиiлiк
аумағында тiзгiнүздi ФЧХ-ны апериодтық буындара жасауға
мүмкiндiк бермейдi. СТҚ-ға қарағанда
жалғансызықты түзеткіш құрылғыларында
оң және терiс таңбалары бар комбинациялы дабыл түрiнде
басқаруларын қалыптастыратын релелі жұмыс режімдері
қолданылады. Жалғансызықты екiканалды бейсызықты
түзеткіш АЧХ-дан тәуелсіз ФЧХ-ны синтездеуге және
жоғарғы жиiлiктегі сүзгiштік қасиеті бар
тұрақты жүйелер алудың мүмкiншiлiгiн береді. 2.1
суретте ![]() беріліс функциялы басқару объектісі
(БО) және екі контурлы бейсызықты түзеткіш
құрылғысының (ЕБТҚ) құрылымдық
сұлбасы көрсетілген. Оның жоғарғы каналы
амплитудалы,
беріліс функциялы басқару объектісі
(БО) және екі контурлы бейсызықты түзеткіш
құрылғысының (ЕБТҚ) құрылымдық
сұлбасы көрсетілген. Оның жоғарғы каналы
амплитудалы, ![]() сызықты сүзгішті, модульді басқару
блогымен көрсетілген.
сызықты сүзгішті, модульді басқару
блогымен көрсетілген.
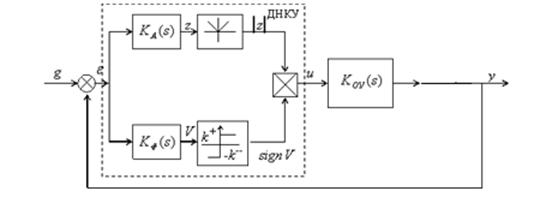
2.1 сурет - ЕБТҚ құрылымдық сұлбасы
![]() фазалық сүзгi және
фазалық сүзгi және ![]() ,
, ![]() күшейту коэффициенттерi бар реле (реверс)
фазаның каналдарын құрайды. Екi каналдың шығыс
дабылдары көбейту блоктарында көбейтілу нәтижесінде,
бағдарлаушы әсер пайда болады.
күшейту коэффициенттерi бар реле (реверс)
фазаның каналдарын құрайды. Екi каналдың шығыс
дабылдары көбейту блоктарында көбейтілу нәтижесінде,
бағдарлаушы әсер пайда болады.
![]() (2.1)
(2.1)
мұнда ![]() -
- ![]() сүзгі шығысындағы
сүзгі шығысындағы ![]() дабыл модулі;
дабыл модулі;
![]()
![]() сүзгі шығысындағы дабыл.
сүзгі шығысындағы дабыл.
Егер ![]() қатесі
қатесі
![]() гармоникасы болып табылса, онда ЕБТҚ шығысы
келесі заң бойынша өзгередi:
гармоникасы болып табылса, онда ЕБТҚ шығысы
келесі заң бойынша өзгередi:
 (2.2)
(2.2)
мұнда ![]()
![]() амплитудалы сүзгінің амплитудалы жиілікті сипаттамасы;
амплитудалы сүзгінің амплитудалы жиілікті сипаттамасы;
![]()
![]() гармоникасында қаралатын жиiлiгiндегі фазалық
сүзгiнiң фазалы жиілікті сипаттамасы.
гармоникасында қаралатын жиiлiгiндегі фазалық
сүзгiнiң фазалы жиілікті сипаттамасы.
Демек, (2.2) заңға
сәйкес, ![]() дабылы таңбасының өзгерiсi немесе күшейу
режімінен тежеу режіміне өту кезеңі
дабылы таңбасының өзгерiсi немесе күшейу
режімінен тежеу режіміне өту кезеңі ![]() фазалық
ығысудың шамаларынан тәуелдi болады
фазалық
ығысудың шамаларынан тәуелдi болады
2.2 суретiнде екi мән ![]() үшiн,
үшiн, ![]() түріндегі ЕБТҚ
жұмысының алгоритмінің геометриялық интерпретациясы
келтiрiлген. Мұнда
түріндегі ЕБТҚ
жұмысының алгоритмінің геометриялық интерпретациясы
келтiрiлген. Мұнда ![]()
![]() қажетті коэффициенттері
қажетті коэффициенттері ![]() үшін реттеледі.
үшін реттеледі.
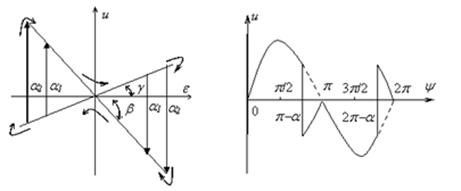
а б
2.2 сурет - ЕБТҚ жұмысының алгоритмінің геометриялық интерпретациясы
2.2 а суреттен байқалғандай,
ЕБТҚ сағат тiлi бойынша реттелетiн тұзақ, гистерезис
секілді әсер құрайды. Бұндай тұзақ сипаттамалары
![]() -ға тәуелді айнымалы
фазалық озулар енгізіп, нақтылы жиiлiк ауқымында фаза бойынша
АБЖ алуға мүмкiндiк береді. 2.2 б бейнелелген суреттегі
-ға тәуелді айнымалы
фазалық озулар енгізіп, нақтылы жиiлiк ауқымында фаза бойынша
АБЖ алуға мүмкiндiк береді. 2.2 б бейнелелген суреттегі ![]() дабылының пішінінен, ЕБТҚ-ның кешiгетiн
әрбiр жартылай периодтардағы гармоникасының фазалық
озуын инвертрлеу арқылы құрайтыны көрінеді.
дабылының пішінінен, ЕБТҚ-ның кешiгетiн
әрбiр жартылай периодтардағы гармоникасының фазалық
озуын инвертрлеу арқылы құрайтыны көрінеді. ![]() ,
, ![]() беріліс функцияларын және
беріліс функцияларын және ![]() коэффициенттерін таңдау барысында, бiр-бiрiнен тәуелсiз АЧХ және ФЧХ-ны түзетiлетiн
сапа көрсеткiштерi бойынша керектi мәндерге жуыта өзгертуге
мүмкіндік бар.
коэффициенттерін таңдау барысында, бiр-бiрiнен тәуелсiз АЧХ және ФЧХ-ны түзетiлетiн
сапа көрсеткiштерi бойынша керектi мәндерге жуыта өзгертуге
мүмкіндік бар.
![]() (2.3)
(2.3)
және ![]() кесіп өту жиілігінде фаза каналы
кесіп өту жиілігінде фаза каналы![]() озып кетуді камтамасыз етеді.
озып кетуді камтамасыз етеді.
![]() (2.4)
(2.4)
ал амплитуданың каналы жиілік
жоғарлаған сайын, басқарылатын объектінің (БО) ![]() қателiктiң мәнiнен
басқа, күй туралы қосымша мәлiметiне қарамастан жүйенi
синтездейді. Мысалы, жүйенің БО-нің беріліс функциясы
келесідей түрде болса:
қателiктiң мәнiнен
басқа, күй туралы қосымша мәлiметiне қарамастан жүйенi
синтездейді. Мысалы, жүйенің БО-нің беріліс функциясы
келесідей түрде болса:
![]() (2.5)
(2.5)
ал коэффициенттер ![]()
2.3 суретте 2.5 теңдеуіне сәйкес ЛАЧХ ![]() және ФЧХ
және ФЧХ ![]() көрсетілген. Жиілік сипаттамаларынан,
тұйықталған реттелмеген жүйе тұрақтылық
ширегінде жатқанын бақылауға болады. Фаза бойынша
көрсетілген. Жиілік сипаттамаларынан,
тұйықталған реттелмеген жүйе тұрақтылық
ширегінде жатқанын бақылауға болады. Фаза бойынша ![]() кесіп өту
жиілігінде қормен қамтамасыз ететін және жоғары
жиіліктерде
кесіп өту
жиілігінде қормен қамтамасыз ететін және жоғары
жиіліктерде ![]() жиілігі
жиілігі ![]() жақсы сүзу қасиетін
көрсететін
жақсы сүзу қасиетін
көрсететін ![]() және
және ![]() сүзгілері бар ЕБТҚ-ны табамыз. (2.3)
бойынша
сүзгілері бар ЕБТҚ-ны табамыз. (2.3)
бойынша ![]()
![]() мәндері бар сүзгілерді қабылдаймыз. Сонда фазаның каналы, (2.4 ) теңдеуге
сәйкес,
мәндері бар сүзгілерді қабылдаймыз. Сонда фазаның каналы, (2.4 ) теңдеуге
сәйкес, ![]() фазалық озуды
фазалық озуды ![]() жиiлiгiнде фаза бойынша тиiстi қорға
кепiлдiк береді.
жиiлiгiнде фаза бойынша тиiстi қорға
кепiлдiк береді.
2.3 суретіндегі ![]() және
және ![]() жиіліктік сипаттамалары ЕБТҚ бойынша реттелген жүйеде бар
талаптарға сай екеніне көз жеткіземіз. АБЖ қосымша
қасиеттері
жиіліктік сипаттамалары ЕБТҚ бойынша реттелген жүйеде бар
талаптарға сай екеніне көз жеткіземіз. АБЖ қосымша
қасиеттері ![]() коэффициенттерін өзгерту арқылы алынады.
коэффициенттерін өзгерту арқылы алынады.
2.2 Жұмыс бағдарламасы
2.2.1 MATLAB жүйесінде ЕБТҚ моделінің құрылымдық сұлбасын жинау.
2.2.2 АБЖ буындарының мәндерін енгізу.
2.2.3 Құрылған модель бойынша өтпелі үрдіске талдау жасау.
2.3 Жұмыстың орындалу реті және әдісі
2.3 суретінде жүйенің ![]() коэффициентінің
коэффициентінің ![]() кезінде,
кезінде, ![]() коэффициентінің
коэффициентінің ![]() кезінде қосылуының құрылымдық
сұлбасы келтірілген. Басқару объектісі
берiлiс функциясының сызықтық бөлiгінен тыс, редуктордың
люфт түрiндегi
кезінде қосылуының құрылымдық
сұлбасы келтірілген. Басқару объектісі
берiлiс функциясының сызықтық бөлiгінен тыс, редуктордың
люфт түрiндегi ![]() бейсызықты бөлiктi
де бола алады.
бейсызықты бөлiктi
де бола алады.

2.3 сурет– Тұйықталған жүйенің жиіліктік сипаттамасы
Matlab аумағында жүйені бағдарламаға
енгізу сұлбасы 2.4 көрсетілген. БО кірісіне ![]() қателік дабылын беру арқылы реттелмейтін жүйеге
сараптау жүргізіледі. Өтпелі үрдісті
қателік дабылын беру арқылы реттелмейтін жүйеге
сараптау жүргізіледі. Өтпелі үрдісті ![]() жеке сатылы функцияға тiркеуден кейiн
әртүрлі сүзгілердің канал амплитудаларындағы
және фазаларындағы ЕБТҚ-лы тұйықталған
жүйе пiшiнделеді.
жеке сатылы функцияға тiркеуден кейiн
әртүрлі сүзгілердің канал амплитудаларындағы
және фазаларындағы ЕБТҚ-лы тұйықталған
жүйе пiшiнделеді.
Сызықты бөлімнің
және бейсызықты люфт үлгісі 2.1 кестеде көрсетілген.
Фазалы және амплитудалы сүзгілердің беріліс
функцияларының түрлері 2.2 кестеде берілген. Сондай-ақ 2.2
кестеде ![]() коэффициенттерінің өзгеру аймағы көрсетілген.
Сүзгі және БО мәндерін оқытушы береді.
коэффициенттерінің өзгеру аймағы көрсетілген.
Сүзгі және БО мәндерін оқытушы береді.
2.4 сурет - Matlab жүйесіндегі басқару объектісінің
ЕБТҚ моделінің құрылымдық сұлбасы
2.1 к е с т е– БО беріліс функциялары және бейсызықтану сипаттамалары
|
Нұсқа нөмірі |
КОУ(s) объектінің сызықты бөлімінің беріліс функциясы |
ОБ бейсызықты бөлімі |
||||||||
|
|
|
|
Гистерезис тұзағының еніндей люфт |
|||||||
|
|
|
Т |
|
|
|
|
|
Т |
||
|
1 |
1.5 |
0,25 |
0,05 |
0,7 |
1.2 |
0.2 |
0.05 |
2 |
0.4 |
+ |
|
2 |
1.7 |
0,2 |
0,03 |
0,5 |
1.1 |
0.4 |
0.05 |
4 |
0.2 |
+ |
|
3 |
1.8 |
0,15 |
0,025 |
0,4 |
1.5 |
0.3 |
0.02 |
3 |
0.1 |
+ |
|
4 |
1.0 |
0,1 |
0,02 |
0,45 |
1.6 |
0.15 |
0.04 |
1.5 |
0.35 |
+ |
|
5 |
1.1 |
0,08 |
0,015 |
0,6 |
1.3 |
0.25 |
0.04 |
5 |
0.25 |
+ |
|
6 |
1.3 |
0.04 |
0.02 |
0.3 |
1.6 |
0,05 |
0,05 |
2.5 |
0.15 |
+ |
|
7 |
1.2 |
0.02 |
0.01 |
0.2 |
1.22 |
0,04 |
0,015 |
3.5 |
0.24 |
+ |
|
8 |
1.4 |
0.01 |
0.04 |
0.35 |
1.07 |
0,02 |
0,04 |
4.5 |
0.33 |
+ |
|
9 |
1.35 |
0.03 |
0.022 |
0.55 |
1.4 |
0,03 |
0,02 |
3.1 |
0.11 |
+ |
|
10 |
1.45 |
0.02 |
0.05 |
0.6 |
1.2 |
0,01 |
0,1 |
4.1 |
0.17 |
+ |
|
11 |
1.33 |
0.01 |
0.02 |
0.5 |
1.44 |
0.02 |
0.4 |
5 |
0,25 |
- |
|
12 |
1.41 |
0.02 |
0.04 |
0.4 |
1.34 |
0.01 |
0.5 |
6 |
0,2 |
- |
|
13 |
1.52 |
0.03 |
0.05 |
0.3 |
1.25 |
0.03 |
0.44 |
7 |
0,15 |
- |
|
14 |
1.66 |
0.04 |
0.02 |
0.25 |
1.11 |
0.04 |
0.52 |
8 |
0,1 |
- |
|
15 |
1.30 |
0.05 |
0.04 |
0.15 |
1.37 |
0.015 |
0.33 |
9 |
0,08 |
- |

2.2 к е с т е – фазалы және амплитудалы сүзгілердің беріліс функцияларының түрлері
|
Фаза каналдарындағы сүзгі түрлері |
Амплитуда каналындағы сүзгі
түрлері |
Өзгеріс шегі k+ және k - |
|
|
|
|
|
|
|
|
|
|
|





2.4 Есеп беру бағдарламасы
2.4.1 ЕБТҚ-ның қысқаша сипаттамасы.
2.4.2 ЕБТҚ-лы БО моделінің MATLAB-тағы құрылымдық сипаттамасы.
2.4.3 Реттелетін және реттелмейтін АБЖ-ны модельдеу барысындағы өтпелі үрдістер сипаттамасы.
2.4.4 ![]() коэффициенттерімен және әртүрлі
сүзгілермен ЕБТҚ-ның жұмысына қорытынды.
коэффициенттерімен және әртүрлі
сүзгілермен ЕБТҚ-ның жұмысына қорытынды.
2.5 Бақылау сұрақтары
2.5.1 ЕБТҚ-ның СТҚ-дан айырмашылығы қандай?
2.5.2 ![]() коэффициенттері АБЖ-ға қалай әсер етеді?
коэффициенттері АБЖ-ға қалай әсер етеді?
2.5.3 ЕБТҚ-ның амплитудалы және фазалы сүзгілері не үшін қажет?
2.5.4 ![]() коэффициенттерімен ЕБТҚ-ның жұмысына қорытынды
жасаңыз?
коэффициенттерімен ЕБТҚ-ның жұмысына қорытынды
жасаңыз?
3 Зертханалық жұмыс № 3. Бейсызықты нұсқаны басқарудың тиімді реттегішін құрастыру
Жұмыстың мақсаты: бейсызықты нұсқаны басқарудың тиімді реттегішін құрастыру және оның сапалық көрсеткіштерін тексеру
3.1 Жалпы мағлұматтар
Көптеген өндірістік механизмдерді бейсызықты дифференциалды нұсқалар ретінде қарастыруға болады. Мысалы, көптеген БО әсерленген нұсқа ретінде мына түрде жезылады:
 (3.1)
(3.1)
мұнда ![]() нұсқаның координаттары;
нұсқаның координаттары;
![]() басқарушы әсер;
басқарушы әсер;
![]() - коэффициенттер;
- коэффициенттер;
![]() - аргументтері бойынша дифференциалданушы
бейсызықты функция,
- аргументтері бойынша дифференциалданушы
бейсызықты функция, ![]()
Теріс кері байланысты заңдылық
![]() (3.2)
(3.2)
Қозғалыс аймағы бойынша минималдандырылған жалпы түрі
 (3.3)
(3.3)
мұнда ![]() қандайда бір еркін туынды;
қандайда бір еркін туынды;
![]() оң коэффициенттер.
оң коэффициенттер.
(4.3) үшін тиімділік теңдеуі
![]()
экстремалдар теңдеуіне әкеледі
![]()
оны келесідей түрде көрсетуге болады
![]() (3.4)мұнда
(3.4)мұнда ![]()
Тиімді реттеудің құрылымдық сұлбасы 3.1 суретте көрсетілген. Бейсызықты АБЖ функционалды сұлбасы тізбектей қосылған БО және тиімді реттегіштен тұрады.
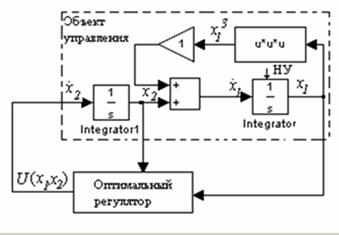
3.1 сурет - Тиімді реттеудің құрылымдық сұлбасы
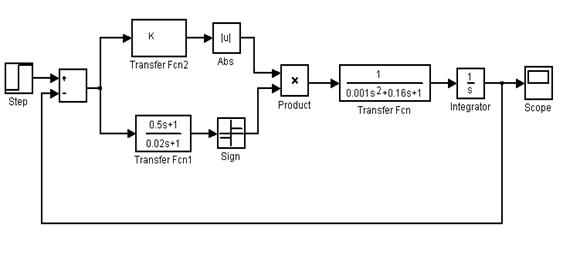
Matlab аумағында бағдарламалар
арқылы тұрғызылған жүйе 3.2 суретте
көрсетілген. Оның негізгі көрсеткіштері: ![]()
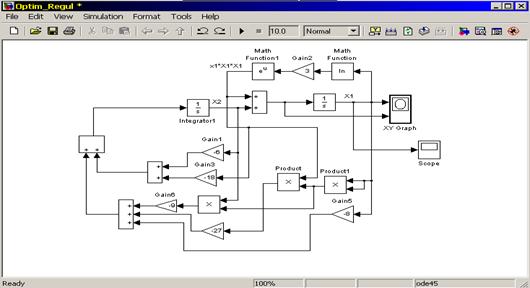
3.2 сурет - Matlab аумағында бағдарламалар арқылы тұрғызылған жүйе
3.2 Жұмыс бағдарламасы
3.2.1 Matlab аумағында бағдарламалар арқылы жүйе тұрғызу.
3.2.2 Реттегіштің мәндерін теру және есептеу.
3.2.3 Тиімді реттегіш сұлбасының өтпелі үрдісіне талдау жасау.
3.3 Жұмыстың орындалу әдісі және реті
Тапсырма нұсқалары
Нұсқа дифференциалды теңдеулер
жүйесімен келесідей түрде жазылады: ![]()
1)  2)
2)
![]()
3) 4)
4)
5)  6)
6) 
7)  8)
8) 
9)  10)
10) 
11) 12)
12) 
13) 
3.4 Бақылау сұрақтары
3.4.1 Жүйенің тиімділігі неліктен есептеледі?
3.4.2 Бейсызықты нұсқаның басқаруын қандай функциямен және мәндермен сипаттауға болады?
3.4.3 ![]() функциясына қойылатын негізгі талапттер?
функциясына қойылатын негізгі талапттер?
Әдебиеттер тізімі
1. Бесекерский В.А., Попов Е.П. «Теория систем автоматического регулирования». – СПб.: Профессия, 2004. – 752 с.
2. Лурье Б.Я., Энрайт П.Ж. Классические методы автоматического управления. – СПб.: БХВ – Петербург, 2004. – 640 с.
3. Попов Е.П. «Теория нелинейных систем автоматического регулирования и управления»: Учебное пособие. – М.: Наука, 1988. – 256 с.
4. Лазарев Ю. Моделирование процессов и систем в MATLAB. Учебный курс. – СПб.: БХВ – Петербург, 2005. – 512 с.
5. Половко А.М., Бутусов П.Н. MATLAB для студента. – СПб.: БХВ – Петербург, 2005. – 320 с.
Мазмұны
|
Зертханалық жұмыс № 1. Автоматты басқарудың бейсызықты тұйықталған және тұйықталмаған жүйелерінің тұрақтылығын зерттеу 1 |
3 |
|
Зертханалық жұмыс №2. Екіканалды бейсызықты түзеткіш құрылғыларды зерттеу |
11 |
|
Зертханалық жұмыс № 3. Бейсызықты нұсқаны басқарудың тиімді реттегішін құрастыру Әдебиеттер тізімі |
16 20 |
2011ж. жиынтық жоспары, реті 84