Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электропривода и автоматизации промышленных установок
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД В АСУТП
Методические указания к лабораторным работам для магистрантов специальности 6М071800 – «Электроэнергетика»
Алматы 2012 г.
СОСТАВИТЕЛЬ: С.Б. Алексеев. Частотно-регулируемый электропривод в АСУТП. Методические указания к выполнению лабораторных работ для магистрантов специальности 6М071800 – Электроэнергетика.– Алматы: АУЭС, 2012. – 20 с.
Методические указания содержат необходимые теоретические положения, программу выполнения работ, методику подготовки и проведения экспериментов, анализа полученных результатов.
Методические указания предназначены для магистрантов специальности 6М071800 – Электроэнергетика.
Ил.12, библиогр.- 5 назв.
Рецензент: канд. техн. наук, проф. Ю.А Цыба
Печатается по плану издания некоммерческого акционерного общества “Алматинский университет энергетики связи” на 2012 г.
ã НАО “Алматинский университет энергетики и связи”, 2012 г.
Сводный план 2012 г., поз. 26
1 Лабораторная работа. Частотно-регулируемый электропривод в системе стабилизации мощности фрезерования
Цель работы: получить навыки расчета и моделирования системы автоматического управления фрезерным станком с технологической обратной связью по мощности фрезерования.
1.1 Основные положения к выполнению работы
1.1.1 Работа преобразователя частоты в режиме стабилизации параметра технологического процесса.
Система стабилизации внешнего параметра в современных преобразователях частоты строится на основе ПИД-регулятора, на входы которого подаются сигналы задания параметра (уставки) и сигнал с датчика регулируемого параметра. ПИД- регулятор формирует сигнал для преобразователя частоты (ПЧ), который за счет изменения скорости электродвигателя (М) поддерживает управляемую величину равную заданной рисунок 1.1 В качестве внешнего параметра может использоваться давление, температура, мощность и др.
Рисунок 1.1
1.1.2 Структурная схема технологического процесса.
В процессе фрезерования может изменяться глубина и ширина обработки, твердость обрабатываемого металла, происходит износ режущего инструмента. В результате изменяется мощность, затрачиваемая на обработку, и происходит занижение параметров фрезерования, что приводит к снижению производительности и повышению себестоимости металлообработки. В рассматриваемой системе с технологической обратной связью по мощности, воздействуя на привод подачи, стабилизируют мощность при изменяющихся условиях процесса фрезерования [1]. На рисунке 1.2 представлена структурная схема стабилизации мощности фрезерования, которая содержит электропривод подачи по схеме преобразователь частоты – асинхронный двигатель (ПЧ-АД).
Wэп(р) – передаточная функция электропривода (ПЧ-АД);
Wр(р) – передаточная функция процесса обработки;
Wдм(р) – передаточная функция датчика мощности;
Wк(р) – передаточная функция корректирующего звена;
WH (p)- нелинейное звено;
Кпм – коэффициент передачи редуктора;
V-скорость резания;
tp- глубина фрезерования;
В – ширина фрезерования.
Рисунок 1.2
1.1.3 Математическое описание системы ПЧ-АД.
Поскольку система ТПЧ АД является нелинейной, а динамика такой системы описывается сложными уравнениями, так как при изменении частоты меняются все параметры электродвигателя, то с целью упрощения расчетов воспользуемся структурной схемой линеаризованной системы ПЧ-АД, представленной на рисунке 1.3 [2].
В этом случае
при постоянстве потокосцепления ![]() = const в пределах значения абсолютного
скольжения
= const в пределах значения абсолютного
скольжения ![]() уравнение
механической характеристики двигателя имеет вид:
уравнение
механической характеристики двигателя имеет вид:
![]() .
.
 |
Рисунок 1.3
В структурной схеме:
 - электромагнитная
постоянная двигателя,
- электромагнитная
постоянная двигателя,
где ωo – синхронная скорость, соответствующая заданной частоте;
Sk – критическое скольжение.
 - модуль жесткости
линеаризованной механической характеристики,
- модуль жесткости
линеаризованной механической характеристики,
где Мк – критический момент для заданной частоты.
 - электромеханическая
постоянная времени,
- электромеханическая
постоянная времени,
где ![]() - суммарный момент
инерции на валу;
- суммарный момент
инерции на валу;
ЈД – момент инерции двигателя.
Кпч – передаточный коэффициент преобразователя частоты;
Тпч = 0,001с – постоянная времени преобразователя частоты.
Кос= Uз.ном / ωном .
Параметры ПИ-регулятора рассчитываются исходя из настройки привода на модульный оптимум.
1.1.4 Математическая модель процесса фрезерования.
Если рассматривать процесс как безынерционный и стационарный, то он может быть описан эмпирической зависимостью выходной координаты – усилия резания Fz от входных координат – глубины фрезерования tр, подачи на один зуб фрезы Sz, ширины фрезерования В и скорости резания V:
![]() ,
,
где СFz, XFz, YFz – по справочнику [3];
Dф – диаметр фрезы, мм;
В – ширина фрезерования;
Zф – число зубьев.
Мощность резания
![]() .
.
Скорость резания при фрезеровании
![]() .
.
 |
Рисунок 1.4 Схема модели процесса резания представлена на рисунке 1.4.
Передаточная функция процесса фрезерования при условии равномерности может быть представлена следующим образом
 .
.
Кр – рассчитывается для заданного типа фрезы и обрабатываемого материала .
Тр – для заданной частоты вращения шпинделя выбирается по справочнику.
![]()
Cр', Ср' ', - коэффициенты; n, i, Xp, Yp, q - показатели степени для заданного процесса металлообработки определяются по справочнику и заданию преподавателя. (СР´´= 2,2; tР = 0 – 10мм; XP = 0,95; YP = 0,8).
Датчик мощности
![]() ,
,
где Тдм=0,02с, Кдм=10 В/кВт.
Узел технологической обратной связи
![]() при
при ![]() ,
,
![]() при
при ![]() ,
,
где Uк, Uср - напряжения коррекции и сравнения.
Устройство упреждающей коррекции
![]() .
.
Кпм - коэффициент передачи механизма подачи ;
Кдм – коэффициент усиления датчика мощности (10 В/ кВТ).
1.2 Задание для домашней подготовки
1.3.1 Построить модель фрезерования с технологической обратной связью по мощности, согласно методическим указаниям и блок- схемы (см. рисунок 1.5).
1.3.2 Произвести расчет параметров САУ электроприводом подачи станка в режиме стабилизации мощности фрезерования для заданных преподавателем параметров процесса фрезерования.
1.3.3 Составить структурную схему модели с применением программного обеспечения Matlab Simulink.
 |
Рисунок 1.5
1.4 Программа работы
1.4.1 Открыть программу Matlab, в открывшемся окне создать новый проект и присвоить имя исследуемой модели. Из элементов и блоков Matlab Simulink набрать модель на основании разработанной структурной схемы.
1.4.2 Выделить из структурной схемы модель электропривода, скопировать ее в отдельный проект и присвоить имя модели электропривода. Добавить в модель элементы измерения тока и скорости, установить параметры модели.
1.4.3 Исследовать модель электропривода по управляющему и возмущающему воздействиям, подавая на вход системы единичный ступенчатый сигнал. Графики переходных процессов w=f(t), I=f(t) сохранить, определить величину перерегулирования и время переходного процесса. В случае неудовлетворительных показателей качества САУ проверить расчеты и произвести настройку системы. Отлаженную модель сохранить.
1.4.4 Параметры настроенной модели электропривода установить в основную модель.
1.4.5 Исследовать работу модели по управляющему и возмущающему воздействиям. Полученные графики I=f(t), w=f(t), Pz=f(t) зарисовать и оценить работу системы. В случае возникновения колебательного режима ввести в схему устройство упреждающей коррекции, согласно методических указаний. Отредактировать модель и повторить исследования. Графики сохранить.
1.4.8 По заданию преподавателя изменить параметры процесса резания и повторить эксперимент.
1.4.9 Сделать выводы о проделанной работе.
5 Содержание отчета
1 Результаты расчета параметров системы регулирования.
2 Структурная схема системы регулирования.
3 Схема исследования системы в Matlab Simulink.
4 Результаты исследования системы в виде графиков w=f(t), I=f(t), Pz=f(t).
5 Анализ результатов, выводы.
2 Лабораторная работа. Изучение основ микроконтроллерного управления частотно-регулируемым электроприводом MICROMASTER 420
Цель работы: изучение принципов взаимодействия частотно-регулируемого электропривода MICROMASTER 420 c контроллером SIMATIC S7-200 по USS протоколу.
2.1 Размещение оборудования, схема соединений и порядок работы
Преобразователь частоты MICROMASTER 420 (UZ) размещен на стенде слева от контроллера и силовым кабелем соединен с электродвигателем и схемой пуска ( пускатель КМ; кнопки SB1,SB2; автомат QF см. рисунок 2.1). Кабелем связи контроллер подключен к преобразователю и персональному компьютеру (см. рисунок 2.2).
Работа с оборудованием производится в следующем порядке:
а) включается автомат QF и кнопкой SB1 подается напряжение на преобразователь;
б) производится параметрирование преобразователя для работы по USS протоколу с помощью программы SIMOVIS на персональном компьютере;
в) запускается программа MICRO/Win 3.2 для работы с контроллером;
г) в открывшемся окне создается новый проект и с помощью редактора LAD формируется программа управления электроприводом, согласно заданному алгоритму, в которую добавляются команды USS протокола;
д) разработанная программа загружается в контроллер;
г) производится старт программы и проверка работы привода на соответствие требуемому алгоритму.
2.2 Команды протокола USS для взаимодействия с электроприводами
. Команды протокола USS являются характерной особенностью STEP 7-Micro/WIN 32 Toolbox. STEP 7-Micro/WIN 32 Toolbox упрощает управление приводами MicroMaster за счет включения предварительно скомпонованных
подпрограмм и программ обработки прерываний, специально разработанных для обмена данными по протоколу USS. Эти программы появляются в качестве команд в папке библиотек дерева команд STEP 7-Micro/WIN. При помощи этих новых команд мы можем управлять физическим приводом и параметрами чтения/записи для привода. Рассмотрим назначение основных команд протокола USS.
Команда USS_INIT (Приложение А) используется для того, чтобы деблокировать и инициализировать или блокировать обмен данными с приводом MICROMASTER. Команда USS_INIT должна быть выполнена без
возврата кода ошибки, прежде чем можно будет использовать любую другую команду протокола USS. Эта команда завершается, и сразу устанавливается бит Done (флаг готовности) перед переходом к следующей команде. Команда выполняется в каждом цикле обработки программы, когда включен вход EN. КомандаUSS_INIT должна выполняться ровно один раз для каждого изменения состояния обмена данными.Поэтому вход EN должен включаться импульсом через элемент обнаружения фронта сигнала. Если протокол USS был запущен, то он должен блокироваться путем выполнения новой команды USS_INIT прежде, чем может быть сделано изменение в параметрах инициализации. Значение входа USS выбирает протокол обмена данными. Значение 1назначает порт 0 протоколу USS и деблокирует этот протокол. Значение 0 назначает порт 0 протоколу PPI и блокирует протокол USS. BAUD устанавливает скорость 1200, 2400, 4800, 9600 или 19200 Бод. ACTIVE указывает, какие приводы являются активными. Некоторые приводы поддерживают только адреса с 0 по 30. Любой привод, отмеченный как ACTIVE, автоматически опрашивается в фоновом режиме работы для того, чтобы управлять приводом, собирать данные о состоянии и предотвращать простои последовательного канала связи в приводе. Время простоя между опросами состояния вычисляется согласно инструкции.
Команда DRV_CTRL используется для управления активным приводом MICROMASTER. Команда DRV_CTRL размещает выбранные команды в коммуникационном буфере. Команды из буфера передаются адресованному приводу (параметр DRIVE), если этот привод был выбран в параметре действие - привод, нужно выполнить следующее:
- DRIVE должен быть выбран как ACTIVE в USS_INIT;
- OFF1 и OFF2 должны быть установлены в 0;
- FAULT и INHIBIT должны быть равны 0.
 |
Рисунок 2.1
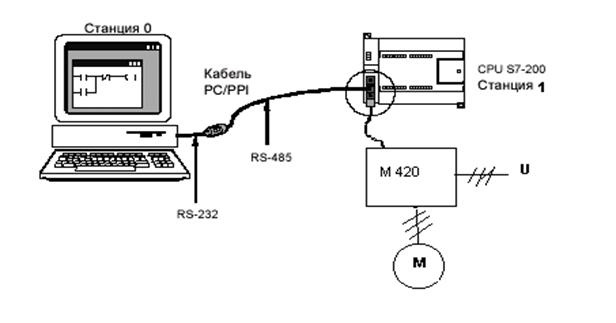
Рисунок 2.2
Когда бит RUN выключается, приводу MICROMASTER передается команда линейно понижать скорость до останова двигателя. Бит OFF2 используется для того, чтобы разрешить приводу MICROMASTER вращаться по инерции до останова. Бит OFF3 используется, чтобы подать приводу MICROMASTER команду остановиться быстро. Вход DRIVE (адрес привода) является адресом привода MICROMASTER,которому должна передаваться команда DRV_CTRL. Действительными являются адреса с 0 по 31. SPD_SP (уставка скорости) – это скорость привода, заданная как процент от полной скорости (от –200,0% до 200,0%). Отрицательные значения SPD_SP заставляют привод изменить направление его вращения на противоположное.
Бит RSP_R (Response Received [ответ принят]) подтверждает ответ привода. Все АКТИВНЫЕ приводы опрашиваются с целью получения информации о самом последнем состоянии привода. Каждый раз, когда CPU получает ответ привода, RSP_R бит включается на один цикл обработки программы, и обновляются все следующие значения. ERR – это байт ошибки, содержащий результат самого последнего коммуникационного запроса к приводу. SPEED - это скорость привода, выраженная в процентах от полной скорости (от –200,0% до 200,0%). RUN_EN (RUN Enable [деблокировка RUN]) показывает, работает ли привод (1) или остановлен (0). DIR_CW показывает направление вращения привода (0 - против часовой стрелки, 1 - по часовой стрелке). INHIBIT показывает состояние бита запрета в приводе (0 - не запрещен, 1- запрещен). Для того, чтобы сбросить бит запрета, нужно выключить бит FAULT, а также выключить входы RUN, OFF2 и OFF3. FAULT [неисправность] показывает состояние бита неисправности (0 – нет неисправности, 1 - неисправность).
Команда READ_PM считывает параметр привода.Транзакция READ_PM завершается, когда привод MicroMaster подтверждает получение команды или когда регистрируется ошибочное состояние. Пока этот процесс ожидает ответа, продолжает выполняться логическое сканирование программы. Бит EN, чтобы деблокировать передачу запроса, должен быть включен и оставаться включенным до тех пор, пока не установится бит DONE, сообщая о завершении процесса. Запрос READ_PM передается приводу MicroMaster в каждом цикле обработки программы, когда вход XMT_REQ включен. Поэтому вход XMT_REQ должен включаться импульсно через элемент обнаружения фронта сигнала, вызывающий передачу одного запроса для каждого положительного фронта на входе EN. Вход DRIVE – это адрес привода MICROMASTER, которому должна передаваться команда READ_PM.
Команда WRITE_PM записывает параметр привода в заданную ячейку. Транзакция WRITE_PM завершается, когда привод MICROMASTER подтверждает получение команды или когда регистрируется ошибочное состояние. Пока этот процесс ожидает ответа, продолжает выполняться логическое сканирование программы. Бит EN, чтобы деблокировать передачу запроса, должен быть включен и оставаться включенным до тех пор, пока не установится бит DONE, сообщая о завершении процесса. Запрос WRITE_PM передается приводу MICROMASTER в каждом цикле обработки программы, когда вход XMT_REQ включен. Поэтому вход XMT_REQ должен включаться импульсно через элемент обнаружения фронта сигнала, вызывающий передачу одного запроса для каждого положительного фронта на входе EN. Вход DRIVE – это адрес привода MicroMaster, которому должна передаваться команда WRITE_PM. Действительными адресами отдельных приводов являются адреса с 0 по 31. PARM является номером параметра. VAL – это значение параметра, подлежащее записи. На вход DB_PTR должен подаваться адрес 16-байтового буфера. Этот буфер используется командой WRITE_PM, чтобы сохранять результаты команды, поданной на привод MICROMASTER. Когда команда WRITE_PM завершается, выход DONE включается и выходной байт ERR содержит результат выполнения команды.
В каждый конкретный момент времени может быть активна только одна команда READ_PM или WRITE_PM.
На рисунке 6.3 показан пример записи программы с применением рассмотренных команд.
2.3 Особенности работы протокола USS и последовательность программирования
Универсальный протокол последовательного интерфейса (USS) обеспечивает информационный доступ к оборудованию по принципу мастер -подчиненный (master-slave). К сети могут подключаться только 1 мастер и до 31 подчиненного устройства . К каждому устройству мастер обращается через параметры адреса , указываемые в сообщении . Подчиненное устройство никогда не может самостоятельно (без запроса ) формировать сообщение или обращаться к другим подчиненным устройствам в сети .
Для активизации протокола необходимо выполнить следующие действия:
а) поместите команду USS_INIT в программу пользователя. Это автоматически добавит в программу несколько скрытых подпрограмм и программ обработки прерываний . Команда USS_INIT должна вызываться только на один цикл обработки программы, чтобы инициализировать или изменить параметры обмена данными по USS;
б) назначьте первой ячейке в таблице глобальных символов USS адрес
V-памяти (для переменных USS резервируется блок V-памяти размером 400 байтов). Все другие адреса назначаются автоматически;
в) поместите в свою программу только по одной команде DRV_CTRL на активный привод. Команд READ_PM и WRITE_PM может быть несколько, но только одна из них может быть активной в каждый конкретный момент времени.
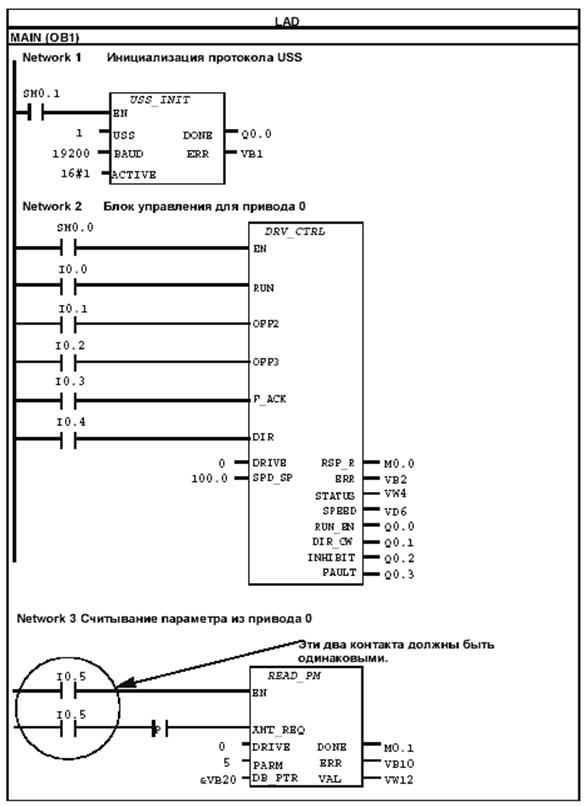
Рисунок 2.3
2.4 Программа работы
2.4.1 Провести параметрирование и конфигурирование привода для работы по USS протоколу.
2.4.2 Разработать и набрать программу работы двигателя в соответствии с алгоритмом, заданным преподавателем.
2.4.3 Загрузить программу в контроллер и проверить работу двигателя на соответствие заданному алгоритму.
2.5 Содержание отчета
1 Электрическая схема стенда
2 Алгоритм и программа
3 Выводы
3 Лабораторная работа. Исследование частотно-регулируемого электропривода центробежного вентилятора
Цель работы: исследовать технико-экономическую эффективность применения частотно-регулируемого электропривода в механизмах с вентиляторной нагрузкой.
3.1 Основные положения к выполнению работы
Эксплуатационные
свойства механизмов центробежного типа определяются Q–H характеристикой и зависимостью КПД от подачи при w=const.
Теоретический расчет указанных характеристик представляет большие трудности,
поэтому на практике пользуются экспериментальными зависимостями H=f(Q) и h=j(Q), которые приводятся в каталогах насосов для неизменной
номинальной скорости wном.
Чтобы получить Q–H-
характеристики для скорости, отличной от номинальной, пользуются законами
пропорциональности. Для этого задается ряд значений Qe,
которым соответствуют значения He на
исходной естественной Q–H-
характеристике с wном=const (см. рисунок 3.1). В соответствии с законами
пропорциональности рассчитываются параболы ![]() ,проходящие через выбранные точки на
исходной характеристике. Каждой точке параболы, согласно этим законам
соответствует определенная скорость механизма w=wномQ/Qe. Соединяя точки парабол с одинаковым значением w, определяют Q–H-характеристику для w=const. Так как законы пропорциональности получены в
предположении постоянства гидравлического КПД насоса- hг и объемного- h0,
то пересчетные параболы оказываются линиями постоянного КПД механизма [5].
,проходящие через выбранные точки на
исходной характеристике. Каждой точке параболы, согласно этим законам
соответствует определенная скорость механизма w=wномQ/Qe. Соединяя точки парабол с одинаковым значением w, определяют Q–H-характеристику для w=const. Так как законы пропорциональности получены в
предположении постоянства гидравлического КПД насоса- hг и объемного- h0,
то пересчетные параболы оказываются линиями постоянного КПД механизма [5].
Для вентилятора напор H измеряется в единицах давления и его можно
трактовать как энергию, сообщаемую единице объема газа. Тогда полезная
мощность вентилятора определяется произведением
![]()
а мощность на валу
![]()
где hвен–КПД вентилятора.
При отсутствии статического напора в магистрали Hcт = 0
Hмаг= He![]() =He
=He .
.

Рисунок 3.1
3.2 Задание для домашней подготовки
3.2.1 По данной, для номинальной скорости, Q-H – характеристике лабораторного центробежного вентилятора произвести расчет новых характеристик для заданных преподавателем скоростей.
3.2.2 Определить потери мощности на дросселирование при снижении расхода до заданной величины Qз, при дроссельном способе регулирования подачи.
3.3 Программа работы
3.3.1 Ознакомиться со схемой лабораторного стенда, элементами управления и инструкцией по эксплуатации преобразователя MICROMASTER-Eco и стенда.
3.3.2 С помощью переключателя - Q1 подключить электродвигатель к сети, минуя преобразователь UZ (см. рисунок 3.2).
3.3.3 Произвести запуск электродвигателя кнопкой SB1, установленной на стенде, и для полностью открытой заслонки, регулирующей производительность вентилятора, записать значение тока, потребляемого двигателем, а также напряжение на нем и показания датчика расхода. Подобные измерения произвести еще для трех промежуточных положений заслонки.
3.3.4 Переключателем Q1, при выключенном пускателе КМ, подключить электродвигатель к преобразователю. С помощью пульта управления преобразователем ОРе запустить двигатель и регулируя частоту вращения, при полностью открытой заслонке, установить расход, соответствующий первому промежуточному положению заслонки , записать показания приборов. Аналогичные опыты проделать для двух других положений заслонки.
3.3.5 По результатам измерений произвести расчет мощности, потребляемой электроприводом, для двух способов регулирования. Определить величину сэкономленной мощности. По известной мощности, угловой скорости и КПД вентилятора определить положение рабочей точки на рассчитанных характеристиках. Сделать выводы.
3.4 Содержание отчета
1 Электрическая схема стенда.
2 Результаты расчета характеристик, графики.
3 Результаты измерений и расчеты сэкономленной мощности.
4 Выводы.
 |
Рисунок 3.2
Рисунок 3.3 Функциональная схема преобразователя частоты (UZ) Micromaster Eco
Приложение
Команды USS протокола
Команда DRV_CRL
Команда USS_INIT
Команда READ_PM
Список литературы
1.Белов М.П., Новиков В.А., Рассудов Л.Н. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов. – М.: Издательский центр « Академия », 2004.- 576с.
2. Шапарев Н.К. Автоматизация типовых технологических процессов металлообработки.-Киев: Высшая школа, 1984.-312с.
3. Общемашиностроительные нормативы режимов резания и времени для технического нормирования работ на металлорежущих станках. – М,: Машгиз, 1982- 200 с.
4. Алексеев С.Б. , Сагитов П.И., Системы автоматического управления. Методические указания к выполнению лабораторных работ для студентов всех форм обучения специальности 050718 – Электроэнергетика.- Алматы: АИЭС, 2009.- 33с.
5. Справочник по автоматизированному электроприводу / Под ред. В.А. Елисеева, А.В. Шинянского.-М.: Энергоатомиздат, 1983.-615с.
6. Ключев В. И., Терехов В.М. Электропривод и автоматизация общепромышленных механизмов.-М.: Энергия, 1980.-360 с.
7. Вешеневский С.Н. Характеристики двигателей в электроприводе.-М.: Энергия, 1977.- 432 с.
Содержание
1 Лабораторная работа. Исследование системы стабилизации мощности фрезерования
2 Лабораторная работа. Изучение основ микроконтроллерного управления частотно-регулируемым электроприводом MICROMASTER 420
3 Лабораторная работа. Исследование автоматизированной системы управления центробежным вентилятором