Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электропривода и автоматизации промышленных установок
МЕТОДЫ МОДЕЛИРОВАНИЯ КОМПОНЕНТОВ
ЭЛЕКТРОТЕХНИЧЕСКИХ КОМПЛЕКСОВ И СИСТЕМ
методические указания к выполнению лабораторных работ
для магистрантов специальности 6М071800 – Электроэнергетика
Алматы 2013
СОСТАВИТЕЛИ: П.И. Сагитов, Ю.А. Цыба, Ю.И. Шадхин. Методы моделирования компонентов электротехнических комплексов и систем. Методические указания к выполнению лабораторных работ для магистрантов специальности 6М071800 – Энергетика. – Алматы: АУЭС, 2013. – 23 с.
Методические указания содержат необходимые теоретические и технические сведения, программу выполнения работ, методику подготовки, проведения экспериментов и анализа полученных результатов.
Методические указания предназначены для магистрантов, обучающихся по специальности 6М071800 – Электроэнергетика.
Ил. 10, табл. 5, библиогр. – 8 назв.
Рецензент: канд. тех. наук, проф. А.С. Байкенов.
Печатается по плану издания некоммерческого акционерного общества ,,Алматинский университет энергетики и связи” на 2012г.
Ó НАО ,,Алматинский университет энергетики и связи”, 2013г.
Введение
Лабораторные работы направлены на закрепление, систематизацию и расширение полученных знаний по дисциплинам: «Системы автоматического управления электроприводами», «Электропривод промышленных механизмов», «Математические задачи и компьютерное моделирование в электроэнергетике», а также на овладение практическими навыками при решении конкретных технических задач.
Лабораторные работы, описанные в данном лабораторном практикуме, ориентированы на применении вычислительных машин и программного обеспечения MATLAB, которое в настоящее время является наиболее эффективным средством проектирования и моделирования сложных электротехнических устройств и систем.
Прикладные пакеты MATLAB, используемые для исследования и проектирования электротехнических устройств и систем, позволяют качественно изменить и существенно расширить возможности инженера. При этом разработка моделей многодвигательного асинхронного электропривода, особенно по системам преобразователь частоты – асинхронный двигатель (ПЧ-АД), является одной из основных задач при проектировании этих электроприводов. Поэтому вопросам моделирования электротехнических устройств и систем уделяется большое внимание.
Среда MATLAB представляет магистрантам самые различные варианты моделирования электротехнических устройств и систем в Simulink и Sim Power Systems.
Каждая лабораторная работа включает выполнение магистрантом
следующих основных этапов:
- проработка теоретических положений соответствующего раздела курса и разработки схемы моделирования;
- моделирование задачи с использованием MATLAB;
- объяснения результатов эксперимента с привлечением аналитических методов.
Каждую выполненную лабораторную работу студент должен оформить в виде отчета (согласно правилам оформления лабораторных работ), который должен содержать:
- цель работы;
- задание;
- полученные результаты по всем пунктам практикума в виде расчетов, схем, таблиц и графиков;
- анализ результатов в соответствии с приведенными теоретическими сведениями;
- выводы по всем пунктам работы.
В процессе сдачи отчета магистрант должен ответить на предлагаемые контрольные вопросы.
1 Лабораторная работа №1. Структурный метод моделирования двигателя постоянного тока с независимым возбуждением в программе MATLAB
Цель работы: Исследование на компьютерной модели переходные процессы двигателя постоянного тока с обратной связью по скорости в среде программируемого комплекса MATLAB.
1.1 Общие сведения
В современных промышленных установках широкое применение нашли двигатели постоянного тока с независимым возбуждением (ДПТ НВ). Управление этими двигателями осуществляется по цепи якоря. Для создания определенной жесткости механической характеристики двигателя, как правило, вводится обратная связь по скорости. Математическая модель ДПТ НВ при постоянном статическом моменте двигателя и неизменном токе возбуждения может быть описана следующими дифференциальными уравнениями [1,2,3]:
![]() ; (1.1)
; (1.1)
![]() ;
(1.2)
;
(1.2)
где ω - угловая частота вращения двигателя;
МД - момент двигателя;
МС - статический момент нагрузки двигателя;
U – напряжение питания;
Е - э.д.с., индуктированная в якоре двигателя;
I – ток якоря;
L – индуктивность обмотки якоря.
При
Ф = ![]() э.д.с.
двигателя пропорциональна скорости
э.д.с.
двигателя пропорциональна скорости ![]()
а момент – току якоря (![]() ).
).
В связи с этим уравнения (1.1) и (1.2) можно представить в следующем виде:
![]() ; (1.3)
; (1.3)
![]() (1.4)
(1.4)
или
 (1.5)
(1.5)
По полученным дифференциальным уравнениям (1.5) составляется структурная модель двигателя постоянного тока [2,3,4].
1.2 Программа работы
1.2.1 Создание структурной схемы модели двигателя постоянного тока в среде MATLAB.
1.2.2 Создание структурной схемы модели двигателя постоянного тока
с обратной связью по скорости в среде MATLAB.
1.2.3 Расчет и набор параметров звеньев структурной схемы модели
двигателя постоянного тока с обратной связью по скорости.
1.2.4 Анализ переходных процессов скорости и момента двигателя постоянного тока с обратной связью по скорости, полученных на модели.
1.3 Порядок и методика выполнения работы
Структурная схема модели двигателя постоянного тока составляется в среде MATLAB после выполнения следующих команд: File – New – Model. В окне моделирования структурная схема модели имеет вид (см. рисунок 1.1):
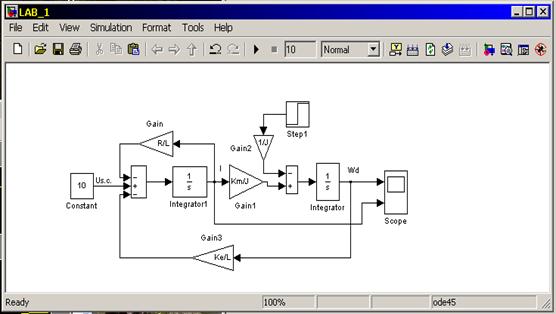
Рисунок 1.1 - Структурная схема модели ДПТ НВ в среде
MATLAB
Структурная схема модели двигателя постоянного тока с обратной связью по скорости представлена на рисунке 1.2, где PI Controller – ПИ регулятор.
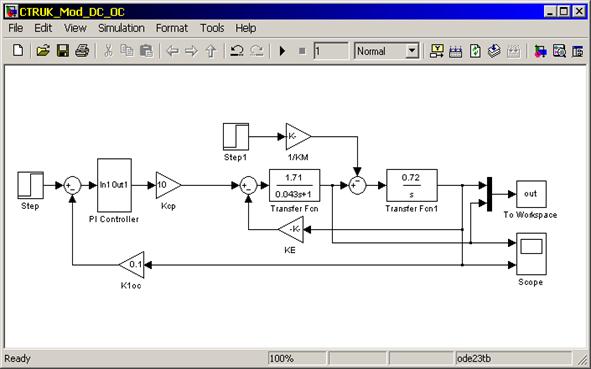
Рисунок 1.2 - Структурная схема модели ДПТ НВ с обратной связью
по скорости в среде MATLAB
Для численного моделирования динамики ДПТ НВ на ЭВМ в среде MATLAB необходимо открыть M-File командой File – New – M-File. Появляется окно, вид которого представлен на рисунке 1.3.

Рисунок 1.3 - Окно MATLAB M-File
В M-File, который представлен на рисунке 1.3, осуществляется набор уравнений модели, а также команды на запуск программы счета и вывода результатов решения. Согласно правилу набора дифференциальных уравнений в M-File, систему уравнений (1.5) приводим к следующему виду:
 (1.6)
(1.6)
где
![]()
При численных значениях ![]() окно M-File
приобретает вид (см. рисунок 1.4). Запуск программы на счет осуществляется
командой Debug – Save end Run.
окно M-File
приобретает вид (см. рисунок 1.4). Запуск программы на счет осуществляется
командой Debug – Save end Run.
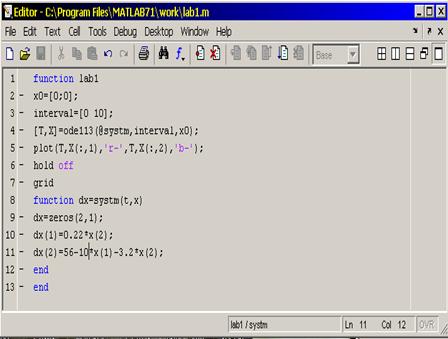
Рисунок 1.4 - Окно M-File с программой решения уравнений
Варианты задания для выполнения работы приведены в таблице 1.1.
Таблица 1.1 – Варианты задания
|
Варианты |
РН, кВт |
UЯ, В |
nН, об/мин |
IЯ, А |
RЯ, Ом |
J, кГм2 |
|
1 |
0,12 |
110 |
3000 |
1,53 |
1,48 |
0,06 |
|
2 |
0,2 |
110 |
3000 |
2,46 |
0,762 |
0,08 |
|
3 |
0.25 |
110 |
3000 |
3,05 |
0,945 |
0,14 |
|
4 |
0,37 |
110 |
4000 |
4,4 |
0,546 |
0,16 |
|
5 |
0,45 |
110 |
3000 |
5,6 |
0,585 |
0,36 |
|
6 |
1,0 |
110 |
3000 |
9,96 |
0,561 |
0,8 |
Номинальный момент двигателя в (Нм), конструктивные постоянные и индуктивность якоря рассчитываются из уравнений:
где
![]() = 0,3 – 0,4
– эмпирический коэффициент.
= 0,3 – 0,4
– эмпирический коэффициент.
1.4 Содержание отчета
1.4.1 Краткое описание математической модели двигателя постоянного тока.
1.4.2 Структурная модель ДПТ НВ.
1.4.3 Графики переходных процессов скорости и тока ДПТ НВ при наброске и сбросе нагрузки.
1.4.4. Анализ переходных процессов скорости и тока ДПТ НВ.
1.5 Контрольные вопросы
1.5.1 Для чего предназначен регулятор скорости ДПТ НВ?
1.5.2 Как влияет на переходные процессы скорости и тока изменение нагрузки?
1.5.3 Как изменяются переходные процессы скорости двигателя на изменение параметров регулятора скорости?
1.5.4 Как влияет на переходные процессы скорости и тока изменение численного значения коэффициента обратной связи по скорости?
2 Лабораторная работа № 2. Моделирование обобщенной асинхронной машины в системе MATLAB
Цель работы: исследовать модель асинхронного двигателя с короткозамкнутым ротором в неподвижной и во вращающейся системе координат
2.1 Общие сведения
Обобщенная асинхронная машина содержит трехфазную обмотку на статоре и трехфазную обмотку на роторе. Обмотки статора и ротора, как правило, симметричны по отношению друг к другу и также подключены к симметричным трехфазным источникам напряжения [1,2,3].
Математическое описание такой машины базируется на трех известных законах, которые описываются следующими уравнениями [1,2,3]:
1) Уравнения равновесия ЭДС на обмотках статора и ротора в соответствии со вторым законом Кирхгофа.
2) Уравнения потокосцепления обмоток статора и ротора, которые находятся на основе закона Ампера.
3) Уравнение равновесия моментов на валу машины, которые определяется на основе второго закона Ньютона.
Однако следует подчеркнуть, что, несмотря на полное и строгое математическое описание, использование уравнений для исследования машины встречает серьезные трудности. В связи с этим рассмотрим упрощенное математическое описание обобщенной асинхронной машины, т.е. не учитывается насыщение, которое наступает при больших токах в обмотках, пространственное распределение магнитного поля в зазоре считается синусоидальным, параметры машины считаются постоянными, не зависящими от тока в обмотках.
Таким образом, при данных допущениях можно получить математическое описание асинхронной машины с короткозамкнутым ротором. Обмотки ротора асинхронной машины замыкаются накоротко.
Математическое описание асинхронной машины с короткозамкнутым ротором (АКЗ) может быть представлено в неподвижной системе координат, системой уравнений в операторной форме в виде [2,3]:
![]()
 ;
;
![]() ;
;
 ; (2.1)
; (2.1)
 ;
;
![]() ;
;
![]() ;
;
где ![]() .
.
Структурная схема модели АКЗ в среде MATLAB [5,6,7,8], построенная по уравнениям (2.1), показана на рисунке 2.1.
Для моделирования в среде MATLAB выберем
двигатель АКЗ 20HP (15kW) из библиотеки Sim Power System со следующими
паспортными данными: ![]() Гц,
Гц, ![]() Ом,
Ом, ![]() Ом,
Ом, ![]() Гн,
Гн, ![]() Гн, J
= 0.102 кГм
Гн, J
= 0.102 кГм![]() , p
= 2. Коэффициенты, необходимые для
моделирования уравнений (2.1), помещены в таблицу 2.1.
, p
= 2. Коэффициенты, необходимые для
моделирования уравнений (2.1), помещены в таблицу 2.1.
Таблица 2.1 – Коэффициенты, используемые при моделировании
|
ффициенты |
r |
|
|
|
|
|
Един. измерения |
Ом |
c |
c |
|
Гн |
|
Значение |
0.4285 |
0.0046 |
0.2956 |
0.9848 |
0.00196 |

Рисунок 2.1 - Модель АКЗ в неподвижной системе координат
![]() Математическое
описание асинхронной машины с короткозамкнутым ротором (АКЗ) во вращающейся
системе координат, с вещественной осью “x” и мнимой осью
“y” по уравнениям
(2.1), в операторной форме
запишется в виде:
Математическое
описание асинхронной машины с короткозамкнутым ротором (АКЗ) во вращающейся
системе координат, с вещественной осью “x” и мнимой осью
“y” по уравнениям
(2.1), в операторной форме
запишется в виде:
 ;
;
![]() ;
;
 ; (2.2)
; (2.2)
 ;
;
![]() ;
;
![]() .
.
![]() Структурная схема АКЗ и модель зависят от выбора
базового вектора, который определяет скорость вращения координат. За базовый
вектор принимается тот, который при анализе совмещается с одной из осей
системы координат. Так если за базовый вектор принять вектор
Структурная схема АКЗ и модель зависят от выбора
базового вектора, который определяет скорость вращения координат. За базовый
вектор принимается тот, который при анализе совмещается с одной из осей
системы координат. Так если за базовый вектор принять вектор ![]() , то система
координат будет вращаться со скоростью ω1, равной
угловой частоте напряжения питания. Кроме того, если совместить вектор
, то система
координат будет вращаться со скоростью ω1, равной
угловой частоте напряжения питания. Кроме того, если совместить вектор ![]() с осью x
вращающейся системы координат, то в уравнениях (2.2) следует принять
с осью x
вращающейся системы координат, то в уравнениях (2.2) следует принять ![]() , тогда уравнения
(2.2) будут иметь вид:
, тогда уравнения
(2.2) будут иметь вид:
 ;
;
![]() ;
;
 ; (2.3)
; (2.3)
 ;
;
![]() ;
;
![]() .
.
Модель, построенная по уравнениям (2.3), представлена на рисунке 2.2. В этой модели напряжение питания и частота, являясь переменными режима, могут изменяться независимо друг от друга.
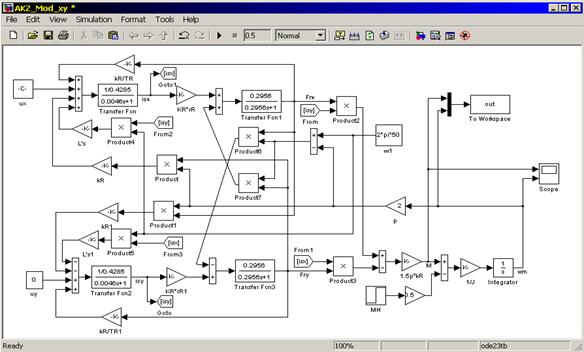
Рисунок 2.2 - Модель АКЗ во вращающейся системе координат
2.2 Программа работы
2.2.1 Создание структурной схемы модели АКЗ в неподвижной системе координат в среде MATLAB.
2.2.2 Расчет параметров модели АКЗ в неподвижной и во вращающейся системе координат.
2.2.3 Исследование переходных процессов скорости и момента в АКЗ в неподвижной системе координат при пуске и наброске нагрузки.
2.2.4 Создание структурной схемы модели АКЗ во вращающейся системе координат в среде MATLAB.
2.2.5 Исследование переходных процессов скорости и момента в АКЗ во вращающейся системе координат при пуске и наброске нагрузки
2.3 Порядок и методика выполнения работы
В соответствии с вариантом задания численных значений момента нагрузки получить переходные процессы скорости и момента АКЗ в неподвижной системе координат и определить качественные характеристики переходных процессов. При создании структурной схемы модели АКЗ в неподвижной системе координат в среде MATLAB необходимо с помощью команды «File – New - Model» создать окно «моделирования», т.е. окно для набора элементов структурной схемы модели АКЗ согласно рисунку 2.1.
Порядок и методика выполнения данной лабораторной работы для АКЗ во вращающейся системе координат аналогичен порядку и методике выполнения работы для АКЗ в неподвижной системе координат.
Варианты задания численных значений нагрузки представлены в таблице 2.2.
Таблица 2.2 – Варианты задания численных значений нагрузки
|
Варианты |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Весовой коэфф. нагрузки |
0,1 |
0,2 |
0,3 |
0,15 |
0,45 |
0,35 |
0,5 |
0,25 |
0,4 |
0,17 |
Отметим, что момент нагрузки определяется по уравнениям:
![]() и т. д.
и т. д.
2.4 Содержание отчета
2.4.1 Структурные схемы моделей АКЗ в неподвижной и во вращающейся системе координат.
2.4.2 Графики переходных процессов скорости и момента АКЗ в неподвижной и во вращающейся системе координат при различных входных воздействиях.
2.4.3 Анализ переходных процессов скорости и момента АКЗ в неподвижной и во вращающейся системе координат.
2.5 Контрольные вопросы
2.5.1 Какие законы электричества используются для создания обобщенной математической модели асинхронной машины?
2.5.2 Какие динамические звенья используются в моделях АКЗ в неподвижной и во вращающейся системе координат?
2.5.3 Какие переменные модели АКЗ в неподвижной и во вращающейся системе координат могут быть измерены?
3 Лабораторная работа № 3. Моделирование системы ПЧ - АД с обратной связью по скорости
Цель работы: Исследовать динамику переходных процессов системы
ПЧ – АД с обратной связью по скорости в среде MATLAB.
3.1 Общие сведения
Характерной тенденцией электропривода переменного тока является всё более широкое применение асинхронных двигателей (АД) в различных областях промышленности. Эти двигатели технически более просты и надежны в эксплуатации, могут работать при повышенных скоростях и температурах, имеют меньшие массу, габариты и стоимость. Расширяются возможности и систем управления асинхронных электроприводов за счет создания управляемых преобразователей напряжения и частоты. Изменение напряжения на статоре АД вызывает изменение его электромагнитного момента и, в итоге, угловой скорости двигателя. Частота напряжения на статоре двигателя при этом остается неизменной и равна стандартной частоте сети 50 Гц [2].
Для регулирования напряжения на статоре АД в настоящее время наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием и высоким КПД. Однако система ТРН – АД ограничена весьма малым диапазоном устойчивых режимов работы двигателя. В связи с этим наиболее целесообразным является частотное управление АД при использовании, в зависимости от технических требований, различных видов обратных связей, например, по скорости, напряжению и току статора АД. При этом увеличение диапазона регулирования по скорости АД можно получить за счет введения отрицательной обратной связи по скорости [2,3].
Структурная схема линеаризированной системы ПЧ – АД с обратной связью по скорости представлена в рисунке 3.1 [8].
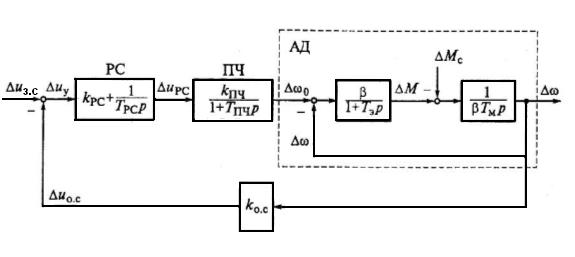
Рисунок 3.1 - Структурная схема системы ПЧ – АД с обратной
связью по скорости
На схеме (см. рисунок 3.1) приняты следующие обозначения:
![]() –модуль жесткости линеаризированной
механической характеристики АД
–модуль жесткости линеаризированной
механической характеристики АД ![]() ;
;
ТЭ –
эквивалентная электромагнитная постоянная времени цепей статора и ротора АД, определяемая по формуле ![]() ;
;
ω0ном – угловая скорость электромагнитного поля АД при его
номинальной частоте питания f1ном
= 50 Гц ![]() ;
;
ТМ – электромеханическая постоянная времени;
КПЧ – передаточный коэффициент;
ТПЧ – постоянная времени цепи управления ПЧ (преобразователя частоты);
РС – регулятор скорости, параметрами которого являются постоянная времени ТРС и коэффициент передачи КРС.
Передаточная функция ПИ- регулятора скорости запишется:
![]() .
(3.1)
.
(3.1)
Передаточная функция цепи обратной связи по скорости двигателя равна:
![]() . (3.2)
. (3.2)
При номинальном сигнале управления электроприводом,
равном ![]() и
соответствующей ему номинальной скорости АД
и
соответствующей ему номинальной скорости АД ![]() , равен:
, равен:
![]() (3.3)
(3.3)
В соответствии со структурной схемой АД его результирующая передаточная функция по отношению к отклонению Δω0 будет равна:
![]() (3.4)
(3.4)
Структурная схема модели системы ПЧ – АД с обратной связью по скорости в среде MATLAB представлена на рисунке 3.2.
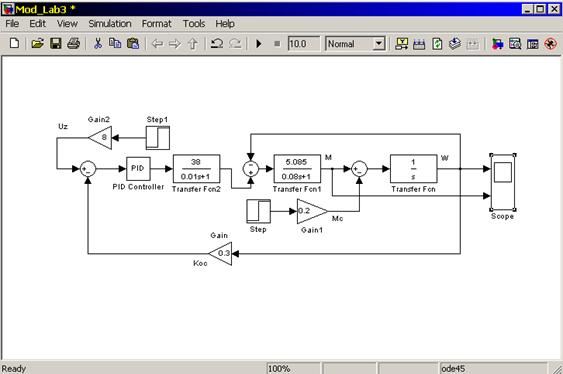
Рисунок 3.2 - Структурная схема модели системы ПЧ – АД
3.2 Программа работы
3.2.1 Создание структурной схемы модели системы ПЧ – АД с обратной связью по скорости.
3.2.1 Расчет параметров регулятора скорости системы ПЧ – АД с обратной связью по скорости.
3.2.3 Исследование переходных процессов скорости и момента АД.
3.3 Порядок и методика выполнения работы
С использованием прикладных программ MATLAB в окне моделирования осуществляется набор элементов структурной схемы модели системы ПЧ – АД с обратной связью по скорости с ПИ регулятором скорости (см. рисунок 3.2). Параметры регулятора скорости и преобразователя частоты (ПЧ), выбираются в соответствии с вариантом задания (см. таблицу 3.1). Параметры АД остаются неизменными.
Таблица 3.1 – Варианты задания
|
Варианты |
Коэффициент передачи ПЧ |
Крс |
Трс |
Кос |
|
1 |
5,0 |
4,0 |
0,11 |
0,14 |
|
2 |
10 |
1,5 |
0,13 |
0,18 |
|
3 |
15 |
2,0 |
0,16 |
0,22 |
|
4 |
20 |
1,3 |
0,20 |
0,26 |
|
5 |
25 |
1,0 |
0,22 |
0,28 |
|
6 |
30 |
0,5 |
0,25 |
0,30 |
|
7 |
34 |
1,0 |
0,27 |
0,33 |
|
8 |
36 |
0,8 |
0,30 |
0,35 |
|
9 |
38 |
0,6 |
0,34 |
0,40 |
3.4 Содержание отчета
3.4.1 Структурная схема модели системы ПЧ – АД с обратной связью по скорости и ПИ регулятором скорости.
3.4.2 Графики переходных процессов скорости и момента АД.
3.4.3 Анализ переходных процессов скорости и момента АД.
3.5 Контрольные вопросы
3.5.1 Какими динамическими звеньями моделируется АД?
3.5.2 Какие функции выполняет ПИ - регулятор в системе ПЧ - АД?
3.5.3 Каким динамическим звеном моделируется ПЧ?
3.5.4 Какую роль выполняет обратная связь по скорости в системе ПЧ – АД?
4 Лабораторная работа № 4. Моделирование динамики движения двухдвигательного асинхронного электропривода с системой ПЧ – АД
Цель работы: исследовать согласование скоростей двигателей и чувствительность двухдвигательного электропривода к наброске и сбросу нагрузки.
4.1 Общие положения
Плавный пуск и торможение асинхронного электропривода переменного тока являются одним из необходимых и основных режимов работы, в особенности для осуществления технологического процесса многих производственных машин и установок в режиме циклического действия [1,2]. При проектировании управляющего устройства возникает задача выбора его параметров, обеспечивающих плавный пуск движением электропривода с системой преобразователь частоты – асинхронный двигатель (ПЧ – АД). Поэтому разработка моделей многодвигательного асинхронного электропривода, с системами ПЧ – АД, является одной из основных задач при проектировании этих электроприводов [8].
Структурная схема двухдвигательного асинхронного электропривода основывается на структурной схеме однодвигательного электропривода с системой ПЧ – АД, которая ранее была приведена на рисунке 3.1. При этом каждая система ПЧ – АД имеет отрицательную обратную связь по скорости.
Структурная схема модели двухдвигательного асинхронного электропривода с системами ПЧ – АД в среде MATLAB показана на рисунке 4.1.

Рисунок 4.1 - Структурная схема модели двухдвигательного
асинхронного электропривода в среде MATLAB
В структурной схеме модели двухдвигательного асинхронного электропривода (см. рисунок 4.1) приняты следующие обозначения:
J – момент инерции;
В – модуль жесткости механической характеристики АД;
Т1 – эквивалентная электромагнитная постоянная времени цепей статора и ротора АД;
![]() – передаточный коэффициент
преобразователя частоты;
– передаточный коэффициент
преобразователя частоты;
![]() – постоянная времени преобразователя
частоты;
– постоянная времени преобразователя
частоты;
![]() коэффициент
синхронизации;
коэффициент
синхронизации;
РС – регулятор скорости.
Схема содержит два идентичных однодвигательных асинхронных электропривода, где напряжения с датчиков скорости каждого двигателя суммируются (kw1ω1 + kw2ω2). Далее сигнал, соответствующий данной сумме, через звено с коэффициентом связи Кс поступает на вход следующего суммирующего звена системы, где сравнивается с сигналом управления U(t).
Управляющее устройство, на структурной схеме, представлено двумя интегрирующими звеньями с коэффициентами обратных связей: а1 и а2. Значения параметров асинхронных двигателей и преобразователей частоты являются известными величинами. Поэтому определению подлежат параметры управляющего устройства а1 и а2, коэффициент связи Кс и постоянные времени регулятора скорости (РС) Трс1 и Трс2. Указанные параметры должны быть рассчитаны таким образом, чтобы переходные процессы скоростей асинхронных двигателей с системой ПЧ – АД получались без перерегулирования и без колебаний, т.е. близкие к оптимальному процессу.
Математическое описание динамики двухдвигательного асинхронного электропривода рассматривается на основе системы ПЧ – АД с обратной связью по скорости по передаточным функциям динамических звеньев (см. рисунок 4.1). В этом случае динамика каждой системы ПЧ – АД с обратной связью по скорости может быть описана следующей системой дифференциальных уравнений:
![]()
 (4.1)
(4.1)


Учитывая разность скоростей (коэффициент синхронизации
равный ![]() ), уравнения
переходных процессов двухдвигательного электропривода будут иметь следующий
вид:
), уравнения
переходных процессов двухдвигательного электропривода будут иметь следующий
вид:
![]()
![]()
![]()
![]()
![]() (4.2)
(4.2)
![]()
![]()
Система дифференциальных уравнений (4.2) может быть успешно решена в системе MATLAB. Для этого её преобразуем в систему уравнений:
![]()
![]()
![]()
![]()
(4.3)
![]()
![]()
![]()
![]()
где ![]()

![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Программа решения системы уравнений (4.3) показана на рисунке 4.2.
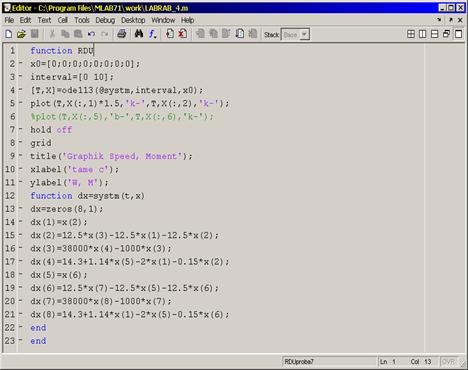
Рисунок 4.2 - Программа решения системы уравнений (4.3)
4.2 Программа работы
4.2.1 Создание структурной схемы модели двухдвигательного асинхронного электропривода с системой ПЧ – АД в MATLAB.
4.2.2 Расчет параметров модели двухдвигательного асинхронного электропривода.
4.2.3 Исследование на модели переходных процессов скоростей и моментов асинхронных двигателей при различных значениях момента нагрузки.
4.2.5 Набор программы решения дифференциальных уравнений, в MATLAB, динамики движения двухдвигательного асинхронного электропривода.
4.2.6 Исследование на модели переходных процессов скоростей и моментов асинхронных двигателей при различных значениях момента нагрузки.
4.2.7 Анализ переходных процессов скоростей и моментов асинхронных двигателей.
4.3 Порядок и методика выполнения работы
Сначала в окне моделирования MATLAB набирается структурная схема модели двухдвигательного асинхронного электропривода (см. рисунок 4.1) с рассчитанными параметрами звеньев модели согласно выбранному варианту задания (см. таблицу 4.1). Затем исследуются переходные процессы скоростей и моментов двигателей с различными значениями нагрузки двигателей. После этого в окне М файл набирается программа решения дифференциальных уравнений (см. рисунок 4.2) динамики двухдвигательного асинхронного электропривода с ранее рассчитанными параметрами звеньев модели. Качественные характеристики переходных процессов определяются по кривым переходных процессов скоростей и моментов двигателей по осциллографу.
Таблица 4.1 – Варианты задания
|
Варианты |
|
|
|
|
|
|
|
|
|
|
1 |
10 |
0,10 |
0,22 |
0,22 |
2,0 |
2,0 |
0,02 |
0,001 |
0,20 |
|
2 |
14 |
0,12 |
0,24 |
0,24 |
2,5 |
2,5 |
0,02 |
0,001 |
0,22 |
|
3 |
16 |
0,14 |
0,26 |
0,26 |
2,5 |
2,5 |
0,02 |
0,001 |
0,24 |
|
4 |
18 |
0,16 |
0,28 |
0,28 |
1,5 |
1,5 |
0,02 |
0,001 |
0,26 |
|
5 |
20 |
0,18 |
0,30 |
0,30 |
2,0 |
2,0 |
0,02 |
0,001 |
0,28 |
|
6 |
24 |
0,20 |
0,34 |
0,34 |
1,5 |
1,5 |
0,02 |
0,001 |
0,30 |
|
7 |
28 |
0,22 |
0,35 |
0,35 |
1,5 |
1,5 |
0,02 |
0,001 |
0,33 |
|
8 |
30 |
0,24 |
0,36 |
0,36 |
1,20 |
1,20 |
0,02 |
0,001 |
0,34 |
|
9 |
34 |
0,26 |
0,38 |
0,38 |
1,10 |
1,10 |
0,02 |
0,001 |
0,35 |
|
10 |
36 |
0,3 |
0,42 |
0,42 |
1,05 |
1,05 |
0,02 |
0,001 |
0,36 |
|
11 |
40 |
0,34 |
0,44 |
0,44 |
1,00 |
1,00 |
0,02 |
0,001 |
0,38 |
|
12 |
44 |
0,38 |
0,45 |
0,45 |
0,80 |
0,80 |
0,02 |
0,001 |
0,40 |
|
13 |
46 |
0,40 |
0,48 |
0,48 |
0,60 |
0,60 |
0,02 |
0,001 |
0,42 |
4.4 Содержание отчета
4.4.1 Краткое описание структурной схемы модели двухдвигательного асинхронного электропривода с системами ПЧ – АД.
4.4.2 Таблица параметров варианта с указанием номера варианта.
4.4.3 Графики переходных процессов скоростей и моментов двигателей двухдвигательного асинхронного электропривода с системами ПЧ – АД.
4.4.4 Анализ переходных процессов скоростей и моментов двигателей.
4.5 Контрольные вопросы
4.5.1 Какие функции выполняет регулятор скорости каждого асинхронного электропривода двухдвигательного привода?
4.5.2 Какое влияние оказывает обратная отрицательная связь системы ПЧ – АД на динамику двухдвигательного привода?
4.5.3 Какое влияние оказывает коэффициент связи ![]() на динамику
двухдвигательного привода?
на динамику
двухдвигательного привода?
4.5.4 Какова точность согласования скоростей двигателей?
4.5.5 Каким динамическим звеном моделируется преобразователь частоты?
Список литературы
1. Башарин А.В., Новиков В.А., Соколовский Г.Г. «Управление электроприводами». Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отделение, 1982. - 392 с.
2. Терехов В. М. , Осипов О.И. «Системы управления электроприводов»: учебник для студ. высш. учеб. заведений. – М.: Издательский центр «Академия», 2008. – 304 с.
3. Бесекерский В.А., Попов Е.П. «Теория систем автоматического регулирования». – СПб.: Профессия, 2004. – 752 с.
4. Лазарев Ю. Моделирование процессов и систем в MATLAB. Учебный курс. – СПб.: БХВ – Петербург, 2005. – 521 с.
5. Половко А.М., Бутусов П.Н. MATLAB для студентов. – СПб.: БХВ – Петербург, 2005. – 320 с.
6. Алексеев Е.Р., Чеснокова О.В. MATLAB 7. – М.: НТ Пресс, 2006. – 464 с.
7. Герман – Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2007. – 320 с.
8. Терёхин В.Б. Моделирование систем электропривода в Simulink (Matlab 7.0.1): учебное пособие / В.Б. Терёхин. – Томск: Изд-во Томского политехнического университета, 2008. – 320 с.
Содержание
|
|
|
|
1 Лабораторная работа № 1 Структурный метод моделирования двигателя постоянного тока с независимым возбуждением в программе MATLAB |
4 |
|
2 Лабораторная работа № 2 Моделирование обобщенной асинхронной машины в системе MATLAB |
8 |
|
3 Лабораторная работа № 3 Моделирование системы ПЧ - АД с обратной связью по скорости |
13 |
|
4 Лабораторная работа № 4 Моделирование динамики движения двухдвигательного асинхронного электропривода с системой ПЧ – АД |
16 |
|
Список литературы |
22 |
Св. пл. 2012 поз.