Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электроснабжения промышленных предприятий
Несимметричные режимы электрических сетей.
Статические и динамические параметры электроэнергетических систем.
Конспект лекций
для магистрантов
специальности 6М071800 – Электроэнергетика
Алматы 2011
СОСТАВИТЕЛЬ: Арыстанов Н.Н. Несимметричные режимы электрических сетей. Статические и динамические параметры электроэнергетических систем. Конспект лекций для магистрантов специальности 6М071800 – Электроэнергетика. - Алматы: АУЭС, 2011. – 56 с.
Конспект лекций содержит сведения по вопросам расчетов коротких замыканий и неполнофазных режимов, устойчивости электроэнергетических систем и электрических нагрузок, а также поведения релейной защиты при сложных видах повреждений электрических сетей.
Ил. 60, табл. 2, библиогр.- 5 назв.
Рецензент: канд. техн. наук, доц. Бугубаев С.А.
Печатается по плану издания Некоммерческого акционерного общества “Алматинский университет энергетики и связи” на 2011 г.
©НАО “Алматинский университет энергетики и связи”, 2011 г.
Содержание
Лекция 1. Неполнофазные режимы работы при разрыве одной
или двух фаз (в одном месте) 4
Лекция 2. Короткие замыкания с одновременным разрывом
одной и двух фаз на линии с двухсторонним питанием
(вычисление с помощью расчетных выражений) 7
Лекция 3. Применение комплексных схем замещения для
вычислений коротких замыканий с одновременными
разрывами фаз 14
Лекция 4. Поведение релейной защиты при неполнофазных
режимах. 18
Лекция 5. Поведение релейной защиты при неполнофазных
режимах (продолжение) 21
Лекция 6. Устойчивость электрических систем. Основные понятия.
Характеристика мощности. Понятие о статической и
динамической устойчивости 25
Лекция 7. Устойчивость электрических систем. Основные понятия.
Характеристика мощности. Понятие о статической и
динамической устойчивости (продолжение) 29
Статическая устойчивость 31
Лекция 8. Статическая устойчивость (продолжение) 34
Лекция 9. Статическая устойчивость (продолжение) 39
Динамическая устойчивость 42
Лекция 10. Динамическая устойчивость (продолжение) 43
Лекция 11. Динамическая устойчивость (продолжение) 47
Лекция 12. Средства повышения устойчивости 51
Список литературы 55
Лекция 1. Неполнофазные режимы работы при разрыве одной или двух фаз (в одном месте)
Неполнофазные режимы, возникающие при отключении одной фазы линии выключателями с обоих концов, характеризуются двумя разрывами. При отключении фазы линии большой протяженности, а также линии с ответвлениями, в особенности, когда требуется вычислить не только токи, но и напряжения на линии, работающей неполным числом фаз, необходимо учитывать оба разрыва. Однако при отключении фазы линии, имеющей малую протяженность, можно ограничиться учетом одного разрыва в любой точке линии.
Трехфазная линия с разрывом одной и двух фаз показана на рисунке 1.1.
а) б)
а – разрыв фазы А; б - разрыв фаз В и С.
Рисунок 1 - Линия с разрывом
Разорванные фазы схемы по рисунку 1 можно замкнуть, если между точками М и N включить в эти фазы напряжение Uу, равное разности потенциалов между точками М и N, как показано на рисунке 2.
Рисунок 2 - Включение напряжения Uу в местах разрывов схемы
по рисунку 1
Нессиметричные системы токов и напряжений в месте разрыва на рисунке 2 характеризуются соотношениями
IуА = 0; UуВ = Uус = 0 (1)
(для схемы по рисунку 1,а);
Iув = Iус = 0; UуА = 0 (2)
(для схемы по рисунку 1,б).
Разложением на симметричные составляющие можно для схем по рисунку 2 получить схемы последовательностей рисунка 3, составленные для случая разрыва на линии, приключенной с двух сторон к генерирующим станциям.
В схемах отдельных последовательностей по рисунку 3 разрыв представляет собой продольную несимметрию - напряжения в месте разрыва Uу включены в эти схемы последовательно. Этим рассматриваемый вид несимметрии отличается от несимметричного короткого замыкания (к.з.), представляющего собой параллельную несимметрию.

а)
б) в)
а - прямая последовательность; б – обратная последовательность; в – нулевая последовательность.
Рисунок 3 - Схемы замещения при разрыве между точками M и N (ZΣ=Zм+ZN)
На рисунке 3 условные положительные направления для напряжений Uу и токов Iу в отдельных последовательностях приняты противоположными, аналогично тому, как это принимается обычно для места к.з.
В общем случае сложных сетей схемы замещения отдельных последовательностей, аналогично схемам по рисунку 3, при разрыве между точками М и N представляют собой по к последнему двухполюсники: пассивные - для схем обратной и нулевой последовательностей и активный (содержащий э.д.с. генераторов) для схемы прямой последовательности. Граничные условия при разрыве одной и двух фаз, представляющие собой соотношения между токами, а также напряжениями отдельных последовательностей в местах разрыва и вытекающие из (1) и (2), приведены в таблице 1; там же даны граничные условия для разных видов к.з..
Из таблицы 1.1 можно установить, что существует аналогия между разрывами одной фазы и замыканиями на землю двух фаз, а также между разрывами двух фаз и замыканием на землю одной фазы.
Для определения токов и напряжений при разрывах фаз (так же как и при к.з.) наиболее удобны комплексные схемы замещения, которые можно получить соединением схем отдельных последовательностей вида на рисунке 3 в соответствии с граничными условиями таблицы 1.
При разрыве одной фазы, например фазы А, схемы отдельных последовательностей по рисунку 3 при учете граничных условий пункта 1 таблицы 1 можно объединить в комплексную схему замещения по рисунку 4, в которой схемы отдельных последовательностей включаются параллельно по отношению к месту разрыва. При таком объединении схем отдельных последовательностей в месте разрыва удовлетворяется требование равенства нулю суммы токов отдельных последовательностей и равенства между собой напряжений отдельных последовательностей.
Рисунок 4 - Комплексная схема замещения для случая разрыва фазы А
Рисунок 5 - Комплексная схема замещения для случая разрыва фаз В и С
Комплексную схему замещения по рисунку 4 можно также рассматривать как схему прямой последовательности по рисунку 3,а, в которой напряжение U1у между точками М1 и N1 замещается эквивалентной схемой из параллельно включенных в точках М2 и N2, М0 и N0 схем обратной и нулевой последовательностей по рисунку 1-3,б и в соответствии с соотношениями:
|
I1у= – (I2у+Iоу)
При разрыве двух фаз (например, фаз В и С) комплексная схема замещения по рисунку 5 в соответствии с граничными условиями пункта 4 таблицы 1 может быть получена последовательным соединением схем последовательностей по рисунку 3. При этом в месте разрыва удовлетворяется требование равенства между собой токов отдельных последовательностей и равенства нулю суммы напряжений отдельных последовательностей в месте разрыва (см. рисунок 5).
Комплексную схему замещения по рисунку 5 можно также рассматривать как схему прямой последовательности по рисунку 3,а, в которой напряжение U1у между точками М1 и N1 замещается эквивалентной схемой из последовательно включенных схем обратной и нулевой последовательностей по рисунку 3,б,в и в соответствии с соотношениями:
U1у= – (U2у+Uоу) = Z2ΣI2у + ZоΣIоу ; I1у=I2у=Iоу. (3,а)
Комплексные схемы замещения по рисункам 4 и 5 действительны для фазы, находящейся в особых условиях (в рассматриваемом случае для фазы А).
Т а б л и ц а 1 Соотношения между токами и напряжениями симметричных последовательностей (граничные условия) при разрывах фаз и несимметричных коротких замыканиях (соотношения даны для случая, когда за основную принята фаза А)
|
№пп |
Разрыв или к.з. в фазах |
Соотношения в местах повреждений |
||||
|
Разрыв |
к.з. |
Для токов |
Для напряжений |
|||
|
1 |
Разрыв одной фазы |
А |
Замыкание на землю двух фаз |
В и С |
I1+I2+I0=0 |
U1=U2=U0 |
|
2 |
В |
С и А |
a2I1+aI2+I0=0 |
a2U1=aU2=U0 |
||
|
3 |
С |
А и В |
aI1+a2I2+I0=0 |
aU1=a2U2=U0 |
||
|
4 |
Разрыв двух фаз |
В и С |
Замыкание на землю одной фазы |
А |
I1=I2=I0 |
U1+U2+U0=0 |
|
5 |
С и А |
В |
a2I1=aI2=I0 |
a2U1+aU2+U0=0 |
||
|
6 |
А и В |
С |
aI1=a2I2=I0 |
aU1+a2U2+U0=0 |
||
Лекция 2. Короткие замыкания с одновременным разрывом одной и двух фаз на линии с двухсторонним питанием (вычисление с помощью расчетных выражений)
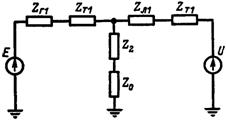
В данной лекции рассматривается метод вычислений с помощью расчетных выражений различных комбинаций к.з. с разрывами одной и двух фаз на одиночной линии с двусторонним питанием при неучете распределенной емкости (см. рисунок 6,а). Этот метод является универсальным в отличие от методов расчета с помощью комплексных схем замещения и расширенных схем прямой последовательности, которые могут быть использованы не для всех комбинаций к.з. с разрывами. Вместе с тем применительно к схеме по 6,а метод расчетных выражений достаточно прост для большинства случаев повреждений.
В схеме по рисунку 6,а принимается:
1) э.д.с. EF и EL представляют собой эквивалентные э.д.с. генераторов и нагрузок примыкающих систем или станций, в общем случае различные по величине и углу;
2) сопротивления ZF и ZL в прямой и обратной последовательностях включают в себя приведенные сопротивления генераторов и нагрузок примыкающих систем.
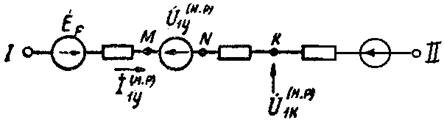
Ниже рассмотрены методы вычислений повреждений в схеме по рисунку 6,а как непосредственно по заданным э.д.с. генераторов и сопротивлениям схемы (см. рисунок 6,б), так и при применении принципа наложения составляющих токов и напряжений двух режимов: а) основного исходного режима и б) дополнительного режима (см. рисунки 7—9). Совместное действие обоих режимов обеспечивает соотношения, характеризующие рассматриваемые повреждения.
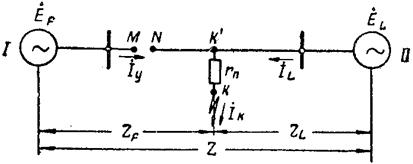
а)
б)
а - исходная схема; б - схема замещения прямой последовательности при расчете по заданным э.д.с. генераторов.
Рисунок 6 - Короткое замыкание с одновременным разрывом на линии с двусторонним питанием
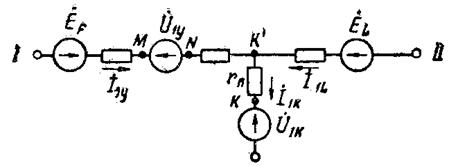
Здесь применяются следующие три формы принципа наложения токов и напряжений двух режимов:
1) исходного полнофазного нагрузочного режима и дополнительного режима к.з. с одновременным разрывом (см. рисунок 7);
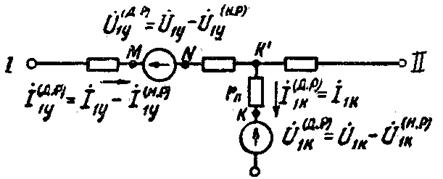
2) исходного неполнофазного нагрузочного режима и дополнительного режима к.з. в схеме с разрывом (см. рисунок 8);
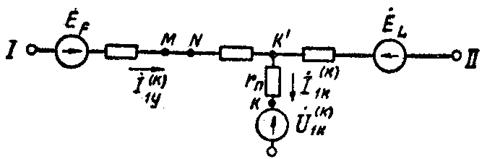
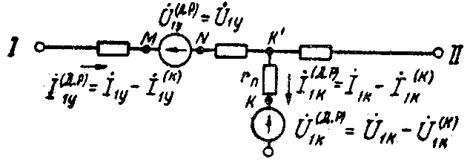
3) исходного режима к.з. (без разрыва) и дополнительного режима разрыва в схеме с к.з. (см. рисунок 9).
В схемах по рисункам 7—9 индексы (Н), (Н.Р), (Д.Р) и (К) сверху символа тока или напряжения означают соответственно полнофазный и неполнофазный нагрузочные режимы, дополнительный режим и короткое замыкание.
Схемы по рисункам 6,б—9 даны для прямой последовательности; схемы обратной и нулевой последовательностей составляются аналогично, но при исключении из рисунков 6,б , 8,а и 9,а э.д.с. EF и EL.
Рассматриваемые расчетные выражения выводятся из следующих положений. Схема по рисунку 6,а характеризуется 12 неизвестными токами и напряжениями, для определения которых требуется 12 уравнений.
а)
б)
а -нагрузочный режим; б - дополнительный режим повреждения. Результирующие величины токов и напряжений обратной и нулевой последовательностей равны таковым в дополнительном режиме.
Рисунок 7 - Схемы замещения прямой последовательности по рисунку 6,а при применении принципа наложения в 1-й форме
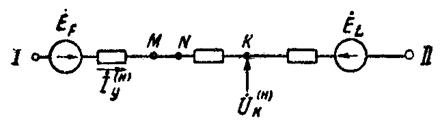
а)
б)
а - неполнофазный нагрузочный режим; б - дополнительный режим повреждения. Соотношения между напряжениями и токами прямой последовательности, указанные на рисунке б, верны и для обратной и нулевой последовательностей.
Рисунок 8 - Схемы замещения прямой последовательности по рисунку 6,а при применении принципа наложения во 2-й форме
Шесть из них составляются обходом контуров схем отдельных последовательностей по рисункам 6,б—9,б (по схеме каждой последовательности два уравнения) и дают связь между токами и напряжениями одноименных последовательностей. Остальные шесть уравнений определяются граничными условиями для мест короткого замыкания и разрыва (см. таблицу 1), дающими связь между токами и напряжениями разных последовательностей в этих местах. Следует отметить, что при применении принципа наложения граничные условия таблицы 1 для токов и напряжений верны в месте разрыва (см. рисунок 8) и к.з. (см. рисунок 9) для каждого из двух режимов - как исходного, так и дополнительного.
Указанные 12 уравнений используются ниже для решения различных сочетаний к.з. с разрывами в схеме по рисунку 6.
Знание токов и напряжений отдельных последовательностей в местах короткого замыкания и разрыва, для которых ниже выводятся расчетные выражения, позволяет найти токи и напряжения и в других точках исходной схемы.
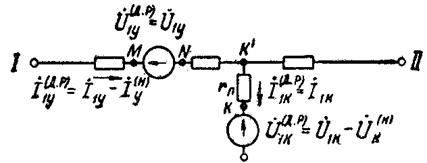
а)
б)
а - режим короткого замыкания; б - дополнительный режим повреждения. Соотношения между напряжениями и токами прямой последовательности, указанные на рисунке б, верны и для обратной в нулевой последовательностей.
Рисунок 9 - Схемы замещения прямой последовательности по рисунку 6,а при применении принципа наложения в 3-й форме
Обходом контуров схем отдельных последовательностей любого из рисунков 6,б, 7,б – 9,б можно для отдельных последовательностей составить связь между напряжениями и токами в форме Z (при учете принятых в этих схемах положительных направлений для напряжений и токов):
|
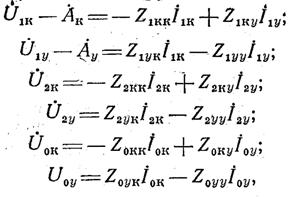
где при расчете с помощью принципа наложения (схемы по рисункам 7,б—9,б) величины токов и напряжений относятся к дополнительному режиму и должны быть отмечены индексом (Д. Р) сверху соответствующих символов.
Все величины токов и напряжений в (4)—(9) предполагаются отнесенными к фазе А, принятой в качестве основной.
В (4) – (9) при расчетах по заданным э.д.с. генераторов (см. рисунок 6,б) следует принять:
Ак = ЕLA; Ay = EFA-ELA = ∆E, (10)
а при расчетах с помощью принципа наложения (см. рисунки 7,б—9,б):
Ак = Ау = 0 . (10а)
Коэффициенты уравнений (4)—(9) с одинаковыми индексами представляют собой собственные сопротивления, а с разными индексами - взаимные сопротивления. Указанные коэффициенты в отдельных последовательностях выражаются через сопротивления схемы по рисунку 6,а следующим образом:
Zαкк = ZαL + rП; Zαку = Zαук = ZαL; Zαуу = Zα, (11)
где α - индекс последовательности (α=1; 2; 0).
Исходя из (4)—(9), учитывая (10), (10а) и (11), покажем решение для случая замыкания на землю фазы В при использовании заданных э.д.с. генераторов, а также принципа наложения.
Из (4)—(9) с учетом граничных условий (см. таблицу 1) и (10), (11) можно получить три уравнения с неизвестными I1к , I1у и I2у. Для этого сложим сначала левые и правые части уравнений (4), (6) и (8), умножая (6) на а2 и (8) на а, в результате указанного сложения, учитывая граничные условия для данного случая (см. таблицу 1) и (10) и (11), получим:
- ELA = - (Z1L+Z2L+Z0L+3rП)I1K+(Z1L-aZ0L)I1У +(a2Z2L-aZ0L)I2У . (12)
Из уравнений (2.4) и (2.6), учитывая, что левые их части равны, получим:
0=(a2Z0L-aZ2L)I1K+Z0I1У+(Z2+Z0)I2У . (13)
Аналогично из (5) и (7)
∆E=(aZ2L-Z1L)I1K+Z1I1У-Z2I2У . (14)
Решая совместно (12)—(14) при подстановке в них численных значений э.д.с. и сопротивлений схемы по рисунку 6,а, нетрудно вычислить токи I1K, I1У, I2У.
Расчетные выражения для этих токов в общем виде можно составить решением уравнений (12) – (14). В таблице 2, пункт 1, для рассматриваемого случая повреждения при расчете по заданным э.д.с. генераторов приведены расчетные выражения для токов I1К и I1У . По известным токам I1К и I1У ток I2У проще вычислить, исходя из любого из выражений (12)—(14); приведенное в таблице 2 расчетное выражение составлено, исходя из (13):
|
Граничные условия, данные в общем виде в таблице 1, с помощью соотношений, указанных на рисунках 7—9, могут быть выражены через величины токов и напряжений дополнительного режима для отдельных форм наложения.
В соответствии с этим для случая замыкания на землю фазы В с одновременным разрывом фазы А получим:
I(Н)уА+I(ДР)1у+I(К)2у+I(ДР)0у=0 ; U(Н)кА+U(ДР)1к+a2U(ДР)2к+aU(ДР)0к=0 (16)
(для схемы по рисунку 7);
U(НР)1к+U(ДР)1к+a2U(НР)2к+a2U(ДР)2к+aU(НР)0к+aU(ДР)0к=0 (17)
(для схемы по рисунку 8);
I(К)1у+I(ДР)1у+I(К)2у+I(ДР)2у+I(К)0у+I(ДР)0у=0 (18)
(для схемы по рисунку 9).
Решением уравнений (4)—(9) для дополнительного режима по схемам на рисунках 7,б—9,б с учетом соответствующих граничных условий и (10а) и (11) могут быть получены по аналогии с (12) – (14) следующие три уравнения, содержащие неизвестные токи I(ДР)1к, I(ДР)1у и I(ДР)2у для случая замыкания на землю фазы В:
|
|
|
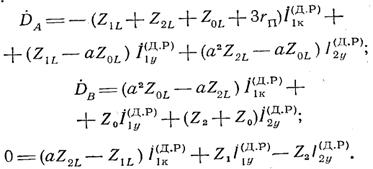
В (19)—(21) величины и с учетом соотношений (16)—(18) равны:
DA=-(U(Н)кА-aZ0LI(Н)уА); DВ=-Z0I(Н)уА (22)
(для схемы по рисунку 7,б);
DA=-U(НР)кА=-(U(НР)1к+a2U(НР)2к+aU(НР)0к); DВ=0 (23)
(для схемы по рисунку 8,б);
DA=aZ0LI(К)уА; DВ=-Z0I(К)уА; I(К)уА=I(К)1у+I(К)2у+I(К)0у (24)
(для схемы по рисунку 9,б).
В (22)—(24) отдельные величины означают:
U(Н)кА и I(Н)уА - напряжение и ток фазы А в полнофазном нагрузочном режиме в месте предполагаемого разрыва;
U(НР)кА - напряжение фазы А в неполнофазном нагрузочном режиме в месте предполагаемого к.з.;
I(К)уА - ток фазы А в режиме к.з. в месте предполагаемого разрыва.
Т а б л и ц а 2 Расчетные выражения для случая замыкания на землю одной фазы с одновременным разрывом фазы А на линии с двухсторонним питанием по рисунку 6,а
|
№пп |
Способ расчета |
Замкнута на землю фаза |
Расчетные выражения |
|
1 |
Расчет по заданным э.д.с. (см. рисунок 6,б) |
В |
|
|
|
Расчет с помощью принципа наложения (см. рисунок 7,б – 9,б) |
В |
|





P = (Z2L-Z0L)2 (для замыкания на землю фазы А).
P = Z22L+Z2LZ0L+Z20L (для замыкания на землю фазы В или С).
DA = - (U(Н)КA - aZ0LI(Н)УА); DB= - Z0I(Н)УА (для рисунка 7,б).
DA = - (U(НР)1К - a2U(НР)2К + aU(НР)0К); DB = 0 (для рисунка 8,б).
![]() DA = aZ0LI(К)УА; DВ = - Z0I(К)У; I(К)УА = I(К)1У +I(К)2У +I(К)0У; (для рисунка 9,б).
DA = aZ0LI(К)УА; DВ = - Z0I(К)У; I(К)УА = I(К)1У +I(К)2У +I(К)0У; (для рисунка 9,б).
Продолжение таблицы 2
 .
.

(для замыкания на землю фазы А).

(для замыкания на землю фазы В или С).
П р и м е ч а н и я:
 1) Расчетные выражения для токов обратной
последовательности при замыкании на землю фазы В):
1) Расчетные выражения для токов обратной
последовательности при замыкании на землю фазы В):
(для рисунка 6,б);
 |
(для рисунков 7,б—9,б).
2) В приведенных выражениях при замыкании на землю фазы С следует вместо а и а2 принять соответственно а2 и а, а при замыкании на землю фазы А следует вместо а и а2 принять единицу.
Совместным решением уравнений (19)—(21) получены расчетные выражения для токов дополнительного режима I(ДР)1к и I(ДР)1у для случаев расчета с применением разных форм принципа наложения в соответствии с рисунками 7 – 9, приведенные в таблице 2, пункт 2.
При известных токах I(ДР)1к и I(ДР)1у и ток I(ДР)1к и I(ДР)2у определяется из следующего выражения, вытекающего из уравнения (21):
|
Выражение (25) приведено в таблице 2.
Лекция 3. Применение комплексных схем замещения для
вычислений коротких замыканий с одновременными разрывами фаз
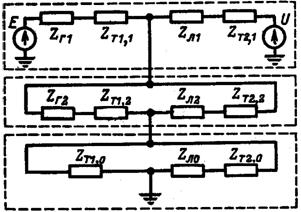
В общем же случае могут быть составлены комплексные схемы замещения с электрическими связями между схемами отдельных последовательностей в соответствии с граничными условиями в одном месте несимметрии; при этом в другом месте несимметрии используются промежуточные идеальные трансформаторы.
Для примера на рисунке 10 приведены комплексные схемы замещения, составленные с применением таких идеальных промежуточных трансформаторов для случая к.з. с одновременным разрывом в фазе А. В этих схемах показаны э.д.с. Е/Т и Е//Т индуктируемые в обмотках трансформаторов общим потоком.
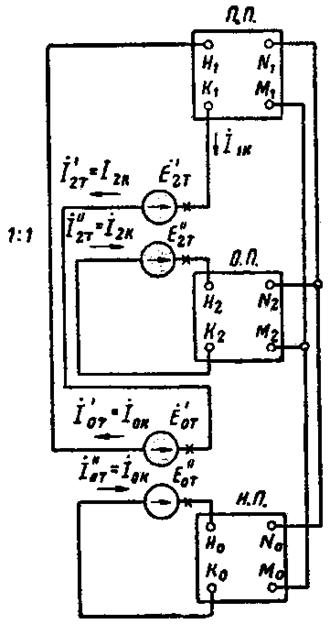
а) б)
а - трансформаторы в месте короткого замыкания; б - трансформаторы в месте разрыва. Однополярные зажимы трансформаторов обозначены крестиками.
Рисунок 10 - Комплексные схемы замещения при замыкании на землю с одновременным разрывом фазы А, составленные с помощью промежуточных трансформаторов
В схеме по рисунку 10,а использованы два промежуточных идеальных трансформатора для соединения отдельных последовательностей в месте к.з. между точками К и Н. В этой схеме промежуточные трансформаторы включены таким образом, что обеспечиваются требуемые граничные условия для замыкания на землю фазы А:
I1К=I2К=I0К ; U1К=E/2T+ E/0T= E//2T + E//0T = (0-U2К)+(0-U0К) = - (U2К+U0К). (26)
В схеме по рисунку 10,б два промежуточных идеальных трансформатора использованы для соединения отдельных последовательностей в месте разрыва между точками М и N таким образом, что обеспечиваются требуемые граничные условия для места разрыва:
I1У = I/2Т + I/0Т = I//2Т + I//0Т = - (I2У + I0У); U1У = U2У = U0У . (27)

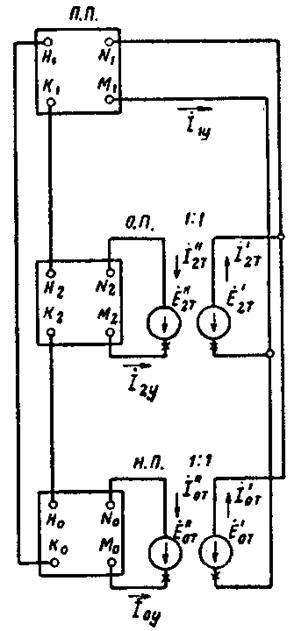
а)
б)
Рисунок 11 - Исходная схема (а) и комплексная схема замещения (б) при двух разрывах с одновременным замыканием на землю фазы А, составленная с помощью промежуточных трансформаторов
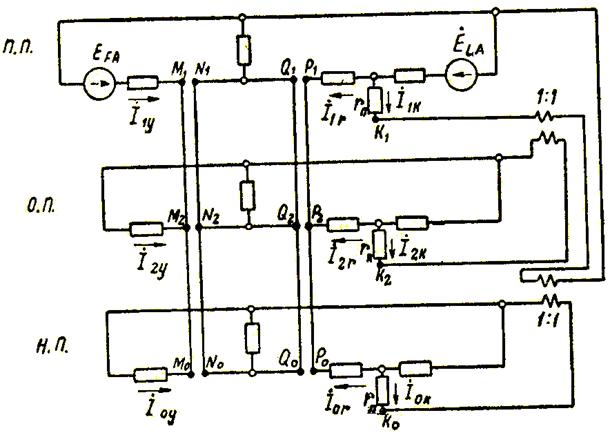
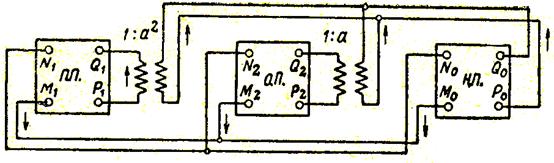
При двух разрывах одной фазы линии большой протяженности с распределенной емкостью и к.з. вне этой линии или вблизи шин, когда практически можно считать, что повреждение находится на шинах (см. рисунок 11,а), можно составить комплексную схему последовательностей, используя принцип электрического объединения схем отдельных последовательностей по местам разрыва путем переноса действительных мест разрыва и осуществляя соединение между местами к.з. отдельных последовательностей с помощью промежуточных трансформаторов с коэффициентом трансформации 1:1 и устройств для сдвига по фазе на угол 1200 в соответствии с граничными условиями для места к.з. На рисунке 11,б приведена комплексная схема последовательностей с применением таких трансформаторов для случая замыкания на землю и разрывов в фазе А; схема дана для случая двух генерирующих источников с э.д.с.EFA и ELA.
а)
б)
в)
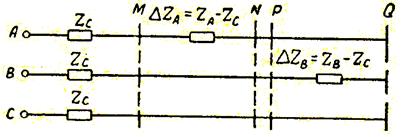
а - комплексная схема замещения при разрывах фазы А между точками М и N и фазы В между точками Р и Q; б - приведение схемы с тремя несимметричными сопротивлениями к двум неполным разрывам фазы А между точками М и N и фазы В между точками Р и Q; в - комплексная схема замещения при неполных разрывах фазы А между точками М и N и фазы В между точками Р и Q в схеме с несимметричными сопротивлениями.
Рисунок 12 - Составление комплексных схем замещения при разрывах разных фаз с помощью фазосдвигающих трансформаторов
Для общего случая несимметрии с неодинаковыми сопротивлениями ZА, ZВ, ZС в отдельных фазах также может быть составлена комплексная схема замещения при использовании промежуточных трансформаторов.
Этому соответствует схема по рисунку 12,б, в которой сопротивление Zс во всех фазах учитывается как симметричный элемент основной части системы, а сопротивления ∆ZА и ∆ZВ рассматриваются как два неполных разрыва одной фазы соответственно между точками М и N, Р и Q.
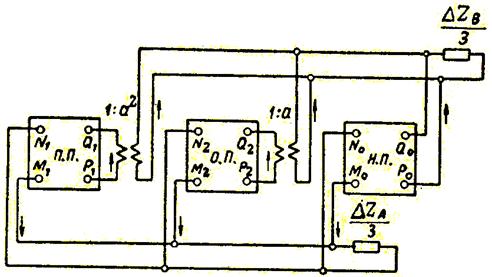
Комплексная схема замещения для этого случая (см. рисунок 12,в) составляется объединением схем отдельных последовательностей электрически по месту неполного разрыва фазы А между точками М и N и включением параллельно сопротивления ∆ZА /3, а также объединением этих схем с помощью промежуточных фазосдвигающих трансформаторов для сдвига на угол 1200 по месту неполного разрыва фазы В между точками Р и Q и включением параллельно сопротивления ∆ZА /3.
Взамен комплексной схемы замещения (см. рисунок 12,в) для общего случая несимметрии могут быть использованы расчетные выражения. В соответствии с рисунком 12,б падения напряжения между точками М и Q в отдельных фазах равны:
∆UA=∆ZA(I1+I2+I0) ; ∆UВ=∆ZВ(a2I1+aI2+I0) ; ∆UС=0. (28)
Лекция 4. Поведение релейной защиты при неполнофазных режимах
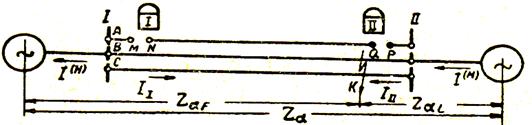
Анализ дан применительно к направленной высокочастотной защите, выполненной на принципе сравнения направлений мощности обратной и нулевой последовательностей на обоих концах линии и предназначенной для действия при несимметричных к.з. Принимается, что реле направления мощности, использующиеся в защите на каждом конце линии, имеют максимальный момент в сторону отключения линии при опережении током напряжения на 900.
Действие защиты при неполнофазных нагрузочных режимах.
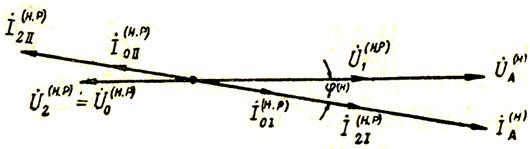
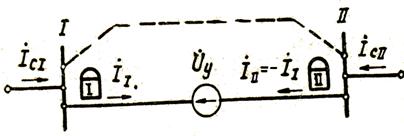
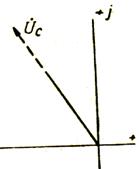
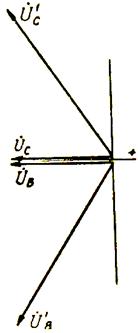
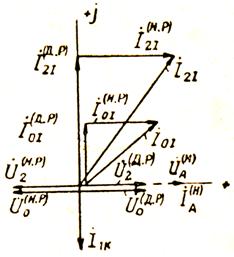
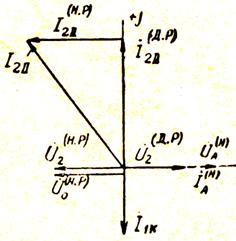
Трансформаторы напряжения установлены на линии. Особенности защиты в этом случае проявляются на линии, работающей двумя фазами. Для оценки действия реле направления мощности на линии, работающей с фазой, отключенной с двух концов (см. рисунок 13,а), используются принципиальные векторные диаграммы токов и напряжений (см. рисунок 13,6), построенные для случая, когда в предшествующем нагрузочном режиме ток I(Н)А сдвинут на угол φ(Н) по отношению к фазному напряжению U(Н)А. Токи обратной и нулевой последовательностей I(НР)β на обоих концах линии в неполнофазном режиме ориентированы противоположно току I(Н)А предшествующего полнофазного режима. Векторы напряжений отдельных последовательностей U(НР) построены приближенно, исходя из допущения, что напряжением по отношению к земле фазы с двумя разрывами (см. рисунок 13,а) можно пренебречь и что напряжения неповрежденных фаз не изменяются по сравнению с нормальным нагрузочным режимом. На рисунке 13,б условно принимается, что напряжения U(НР)2 и U(НР)2 примерно одинаковы для обоих концов линии (в точках N и Q на рисунке 13, а).
Из рассмотрения векторной диаграммы по рисунку 13,б следует, что реле направления мощности имеют на одном конце линии положительное значение момента, а на другом конце линии - отрицательное значение момента. Это может быть пояснено и тем, что рассматриваемая защита действует, когда источник мощности обратной и нулевой последовательностей находится на линии (как, например, при к.з. на линии), а в данном случае источники напряжений обратной и нулевой последовательностей расположены в местах разрывов вне зоны, охватываемой защитой (поскольку трансформаторы напряжения на рисунке 13,а предполагаются установленными на линии).
Таким образом, направленная высокочастотная защита на линии, работающей двумя фазами, при присоединении ее к трансформаторам напряжения, установленным непосредственно на линии, принципиально селективна (как при внешних к.з.). Однако следует отметить, что при передаче по линии в основном активной мощности угол φ(Н) (см. рисунок 13,а) между током и напряжением мал и может находиться в пределах ошибок реле и измерительных трансформаторов. Указанное может привести к снижению надежности действия защиты в этом режиме.

а)
б)
Рисунок 13 - Исходная схема (а) и векторная диаграмма токов и напряжений обратной и нулевой последовательностей (б) для линии, работающей в неполнофазном режиме (трансформаторы напряжения установлены на линии)
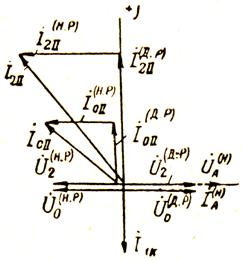
Действие реле направления мощности на линии, работающей двумя фазами, как при несимметричном к.з. в защищаемой зоне, может быть объяснено также и тем, что в обоих случаях источник несимметрии находится на самой линии.

а) б)
Рисунок 14 - Исходная схема (а) и векторные диаграммы токов и напряжений обратной и нулевой последовательностей (б) для линии, работающей в неполнофазном режиме (трансформаторы напряжения установлены на шинах)

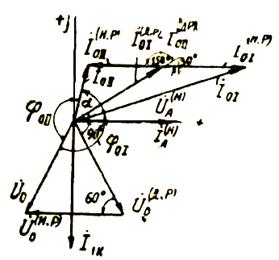
а)
б)
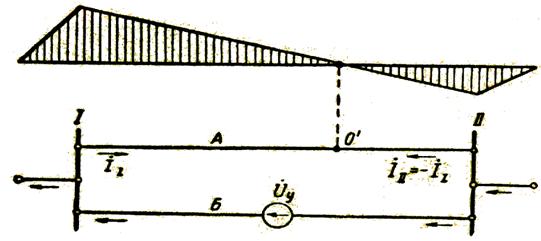
а - по линии, работающей двумя фазами (см. рисунок 14,а); б - по линии, параллельной линии, работающей двумя фазами.
Рисунок 15 - Распределение напряжений обратной и нулевой последовательностей в нагрузочном режиме работы двумя фазами
Поведение реле направления мощности в данном случае поясняется также диаграммой распределения напряжения вдоль линии по рисунку 14,а, показанной на рисунке 15,а. Диаграмма на рисунке 15,а соответствует условию физического протекания тока в схеме по рисунку 14,а на одном конце от шин, а на другом конце к шинам; поскольку напряжение при переходе через место разрыва меняет фазу, в связи с чем напряжения на обоих концах линии имеют противоположные знаки, то моменты реле на обоих концах линии имеют одинаковые знаки. Следует отметить, что место разрыва на рисунке 15,а показано условно; при его перемещении диаграмма изменяется, как, например, показано пунктиром, однако поведение релейной защиты на обоих концах линии при этом не изменяется.
Из приведенного рассмотрения следует, что направленная высокочастотная защита линии, работающей двумя фазами, при питании защиты от трансформаторов напряжения, устанавливаемых на шинах, может неселективно сработать.
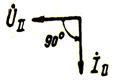
Рассмотрим особо действие защиты при наличии линии, параллельной линии, работающей двумя фазами (пятифазный режим по рисунку 15,б). В этом случае на реле направления мощности защит обоих концов линии, работающей тремя фазами (линия А на рисунке 15,б), всегда имеются отрицательные значения моментов, что объясняется следующим: поскольку во внешней сети, шунтирующей параллельные линии по рисунку 15,б, имеются точки с нулевым потенциалом, то на линии А (см. рисунок 15,б) также имеется точка О/ такого потенциала. В связи с этим в схемах обратной и нулевой последовательностей напряжения и по концам линии А (см. рисунок 15,б) могут быть определены как падения напряжения в линии до точки О/, которые опережают соответственно токи II и III на угол, близкий к 900, что обеспечивает селективность рассматриваемой защиты.
Лекция 5. Поведение релейной защиты при неполнофазных режимах (продолжение)
Короткое замыкание на линии, работающей двумя фазами (трансформаторы напряжения установлены на линии). Для оценки действия защиты в рассматриваемом случае могут быть использованы принципиальные векторные диаграммы, которые позволяют в общем виде получить представление о примерном характере электрических величин, определяющих поведение защиты при к.з. в неполнофазном режиме.
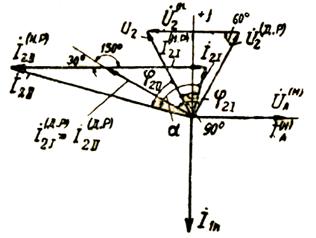
При построении векторных диаграмм напряжений в месте включения защиты при отключении одной фазы и к.з. на других фазах используются ориентировочные диаграммы напряжений в месте к.з. по рисунку 16, построенные в предположении, что напряжение на отключенной фазе равно нулю.
Векторные диаграммы в месте включения защиты построены на рисунке 17 для режима разрывов одной фазы как наиболее часто применяемого, причем на рисунке 17 рассматриваются к.з., не охватывающие разорванную фазу, которая предполагается отключенной с двух концов.
При построении векторных диаграмм по рисунку 17 в целях упрощения приняты следующие допущения:
1) Векторы напряжений и токов на рассматриваемой линии при работе ее в полнофазном режиме (U(Н)А и I(Н)А) принимаются приближенно совпадающими в предположении передачи по линии в основном активной мощности. На диаграммах по рисунку 17 вектор U(Н)А принимается совпадающим с осью действительных величин.

а) б)
в)
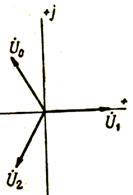
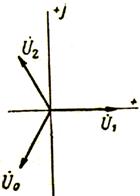
а - замыкание на землю фазы В; б - замыкание на землю фазы С; в - замыкание между фазами В и С. Штриховой линией показаны векторы, построенные не в масштабе. На диаграмме в векторы U/B, U/C, U/2 относятся к отдаленному от места короткого замыкании концу линии.
Рисунок 16 - Векторные диаграммы напряжений в месте короткого замыкания на линии, работающей с отключенной фазой А
2) При построении на диаграммах по рисунку 17 векторов напряжений обратной и нулевой последовательностей (U(НР)2 и U(НР)0) предполагалось, что напряжение отключенной фазы А равно нулю, а напряжения фаз В и С равны соответствующим фазным напряжениям нормального нагрузочного режима.
3) Векторы токов обратной и нулевой последовательностей I(НР)2 и I(НР)0 режима с разрывами ориентированы против нагрузочного тока I(Н)A. В соответствии с этим, учитывая принятые условные положительные направления на рисунке 17,а, векторы указанных токов на конце I линии показаны совпадающими с положительным направлением оси действительных величин, а на конце II - с отрицательным направлением этой оси.
а)
б) в)
г) д)
а - исходная схема; б—ж - принципиальные векторные диаграммы токов и напряжений для защит I и II: б - обратной последовательности при замыкании на землю фазы В; в - нулевой последовательности при замыкании на землю фазы B; г - обратной последовательности при замыкании на землю фазы C; д - нулевой последовательности при замыкании на землю фазы С; е - обратной и нулевой последовательностей при замыкании на землю фаз В и С; ж - обратной и нулевой последовательностей при замыкании между фазами В и С.
Рисунок 17 - Короткие замыкания, не охватывающие разорванную фазу
4) При построении на диаграммах по рисунку 17 векторов напряжений дополнительного режима к.з. учитывались диаграммы напряжений в месте к.з. по рисунку 16. Напряжения по концам линии ориентировочно принимались совпадающими с напряжениями в месте к.з.. В соответствии с этим диаграммы в большей степени верны для коротких линий и для конца линии, ближе расположенного к месту к.з..
е)

ж)
Рисунок 17 (продолжение)
5) Вектор тока прямой последовательности в месте к.з. I1к принимался отстающим по отношению к оси действительных величин на 90° в предположении, что схемы замещения отдельных последовательностей содержат только индуктивные сопротивления. Токи обратной и нулевой последовательностей для обоих концов линий ориентировались по отношению к току I1к.
Ниже даны указания по построению векторных диаграмм и анализ действия защиты для отдельных случаев повреждений.
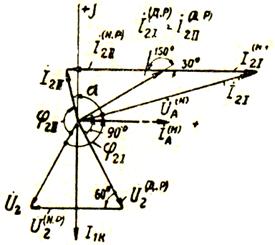
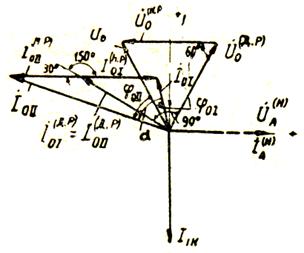
Для токов при замыкании на землю фазы В (см. рисунок 17,а) получим:
|

![]()
|

![]()
Из рассмотрения диаграмм рисунка 17,б можно установить, что токи обратной последовательности двух режимов I(ДР)2 и I(НР)2 для замыкания на землю фазы В или С сдвинуты соответственно на угол примерно 30° и 1500 на одном конце линии и 150° и 30° - на другом конце линии; для аналогичных токов нулевой последовательности I(ДР)0 и I(НР)0 имеются обратные соотношения. При наложении составляющих двух режимов фаза результирующего тока обратной или нулевой последовательности на концах линии может значительно измениться по сравнению с фазой тока дополнительного режима к.з..
Напряжения обратной последовательности, а также нулевой последовательности двух режимов сдвинуты примерно на угол 60°. Таким образом, фаза результирующего напряжения также может значительно измениться в сравнении с фазой напряжения дополнительного режима к.з. В соответствии с этим искажение угла между током и напряжением (φI или φII на рисунке 17) может быть столь значительным, что ток на одном конце будет отставать от напряжения (при к.з. в полнофазном режиме ток опережает напряжение на 900), в результате чего защита откажет в действии. Вероятность отказа защиты тем больше, чем больше токи неполнофазного нагрузочного режима в сравнении с токами дополнительного режима к.з..
Лекция 6. Устойчивость электрических систем. Основные понятия. Характеристика мощности. Понятие о статической и динамической устойчивости
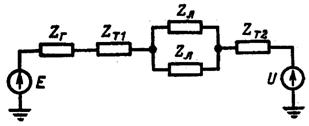
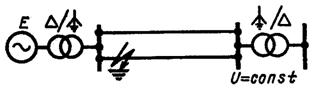
Рассмотрим схему электропередачи (см. рисунок 18), в которой генератор работает через трансформатор и линию электропередачи на шины приемной системы, мощность которой настолько велика по сравнению с мощностью рассматриваемой электропередачи, что напряжение приемника U можно считать неизменным по абсолютному значению и фазе при любых условиях работы электропередачи. На рисунке 19 дана схема замещения электропередачи, в которой активные сопротивления и емкости опущены и элементы схемы представлены только их индуктивными сопротивлениями. Сумма индуктивных сопротивлений генераторов, трансформаторов и линий дает результирующее индуктивное сопротивление системы:
ХС = ХГ + ХТ1 + 0,5ХЛ + ХТ2 .
На рисунке 20 показана векторная диаграмма нормального режима работы электропередачи, из которой ввиду равенства отрезков ОА = Е sinδ и ВС = Iа Хс вытекает соотношение
Iа Хс = Е sinδ,
где Iа - активный ток;
δ - угол сдвига вектора э.д.с. Е относительно вектора напряжения приемной системы U.
Умножая обе части равенства на U/Хс, нетрудно получить:
 |
 |
||
или (31)
где Р - активная мощность, выдаваемая генератором.
При ускорении генератора вектор э.д.с. Е на рисунке 21 перемещается относительно вращающегося с неизменной угловой скоростью вектора напряжения приемной системы U. Связанное с этим увеличение угла и обусловливает согласно (31) соответствующее изменение мощности генератора Р, возрастающей до тех пор, пока она вновь не уравновесит увеличивающуюся мощность турбины. Таким образом, величиной, непосредственно определяющей значение активной мощности, отдаваемой генератором приемнику, является угол δ.
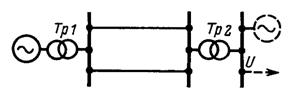
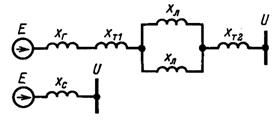
Рисунок 18 - Принципиальная схема электропередачи
Рисунок 19 - Схема замещения электропередачи
Как вытекает из уравнения (31), зависимость мощности от угла δ имеет синусоидальный характер (см. рисунок 22) и, следовательно, с увеличением угла δ мощность Р сначала возрастает, но затем, достигнув максимального значения, начинает падать.
При данном значении э.д.с. генератора Е и напряжения приемника U существует определенный максимум передаваемой мощности
Рm = ЕU/Хс, (32)
который может быть назван идеальным пределом мощности рассматриваемой простейшей электрической системы. Равновесие между мощностью турбины и генератора достигается лишь при значениях мощности, меньших Рm, причем данному значению мощности турбины Ро соответствуют, вообще говоря, две возможные точки равновесия на характеристике мощности генератора и, следовательно, два значения угла δа и δb (см. рисунок 22). Однако в действительности устойчивый установившийся режим работы электропередачи возможен только при угле δа. Режим, которому на рисунке 22 отвечает точка b на падающей части характеристики, неустойчив и длительно существовать не может.
В режиме работы в точке а (см. рисунок 23), мощности генератора и турбины уравновешивают друг друга. Если допустить, что угол δа получает небольшое приращение Δδ, то мощность генератора, следуя синусоидальной зависимости от угла, также изменится на некоторую величину ΔР, причем, как вытекает из рисунка 23 в точке а положительному приращению угла Δδ соответствует также положительное изменение мощности генератора ΔР. Что же касается мощности турбины, то она не зависит от угла δ и при любых изменениях последнего остается постоянной и равной Ро. В результате тормозящий момент генератора в силу положительного изменения мощности ΔР преобладает над вращающим моментом турбины.
Под влиянием тормозящего момента ротор генератора начинает замедляться, что обусловливает перемещение связанного с ротором вектора э. д. с, генератора Е в сторону уменьшения угла δ.
В результате восстанавливается исходный режим работы в точке а и, следовательно, этот режим должен быть признан устойчивым.
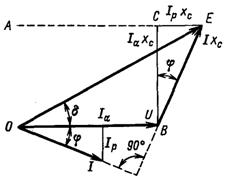
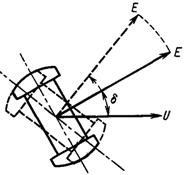
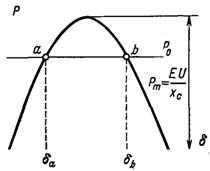
Рисунок 20 - Векторная диаграмма нормального режима работы электропередачи
Рисунок 21 - Движение вектора э.д.с. генератора при ускорении генератора
Рисунок 22 - Зависимость активной мощности от угла δ
Совершенно иной получается картина в точке b. Здесь положительное приращение угла Δδ сопровождается не положительным, а отрицательным изменением мощности генератора ΔР. Изменение мощности генератора вызывает появление избыточного момента ускоряющего характера, под влиянием которого угол δ не уменьшается, а возрастает. С ростом угла мощность генератора продолжает падать, что обусловливает дальнейшее увеличение угла и т. д. Процесс сопровождается непрерывным перемещением вектора э.д.с. Е относительно вектора напряжения приемной системы U (см. рисунок 24) и станция выпадает из синхронизма. Таким образом, режим работы в точке b статически неустойчив и практически неосуществим.
Итак, точка а и любая другая точка на возрастающей части синусоидальной характеристики мощности отвечают статически устойчивым режимам и, наоборот, все точки падающей части характеристики - статически неустойчивым. Из приведенных выше соображений, характеризующих условия работы системы, непосредственно вытекает следующий формальный признак статической устойчивости рассмотренной простейшей системы: приращения угла δ и мощности генератора Р должны иметь один и тот же знак, т.е. ΔР/Δδ>0 или, переходя к пределу,
dР/dδ>0 . (33)
Производная dР/dδ, как известно, носит название синхронизирующей мощности, и, следовательно, критерием статической устойчивости системы в рассмотренных условиях является положительный знак синхронизирующей мощности. Производная мощности по углу согласно (31) равна, очевидно,
 |
(34)
она положительна при δ <900 (см. рисунок 25). В этой области и возможны устойчивые установившиеся режимы работы системы.
![]()
![]()
![]()
![]()
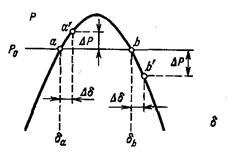
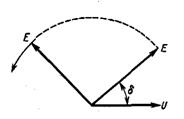
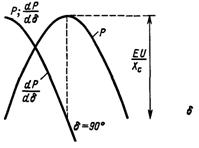
Рисунок 23 - Изменение мощности при приращениях угла
Рисунок 24 - Выпадение из синхронизма
Рисунок 25 - Зависимость синхронизирующей мощности от угла
Для выяснения принципиальных положений динамической устойчивости мы рассмотрим явления, возникающие при внезапном отключении одной из двух параллельных цепей линии электропередачи (см. рисунок 26), связывающей удаленную станцию с шинами неизменного напряжения. Схема замещения электропередачи в нормальном режиме (до отключения цепи) представлена на рисунке 27,а. Индуктивное сопротивление системы, равное Хс=Хг+ХТ1+0,5Хл+ХТ2, определяет амплитуду характеристики мощности в этих условиях:
![]() .
.
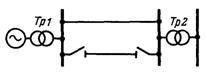
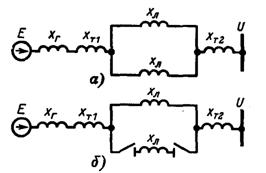
Рисунок 26 - Принципиальная схема электропередачи при отключении цепи
Рисунок 27 - Схема замещения электропередачи при нормальном режиме (а) и при отключении цепи (б)
Опуская пока влияние переходных электромагнитных процессов в генераторах, можно установить, что при отключении одной из цепей линии электропередачи индуктивное сопротивление системы получает новое значение (см. рисунок 27,б): Хс=Хг+ХТ1+Хл+ХТ2, - большее, чем в нормальном режиме, поскольку индуктивное сопротивление линии при отключении цепи возрастает с 0,5Х до Х. Амплитуда характеристики мощности при отключенной цепи соответственно уменьшается до ЕU/ХС1. Характеристики мощности в условиях нормального режима и при отключенной цепи показаны на рисунке 28. Если режим работы, предшествовавший отключению цепи, определялся точкой а на характеристике мощности (I) нормального режима при передаваемой мощности Ро и угле δо, то после отключения этому режиму должна соответствовать новая характеристика мощности (II), причем нетрудно установить, какая именно точка этой характеристики будет определять режим в момент отключения цепи. Этой точкой является точка b при том же значении угла δ=δо, что и в нормальном режиме. Угол δ сохраняет свое значение δ=δо в момент отключения, поскольку вектор э.д.с. генератора Е может перемещаться относительно вектора напряжения приемной системы U только при изменениях частоты вращения ротора генератора. Последняя же не может претерпевать скачкообразных изменений в силу существования механической инерции у ротора генератора.
Лекция 7. Устойчивость электрических систем. Основные понятия. Характеристика мощности. Понятие о статической и динамической устойчивости (продолжение)
Неравенство мощностей, а следовательно, и моментов на валу турбины и генератора вызывает появление избыточного момента, под влиянием которого агрегат турбина-генератор начинает ускоряться. Связанный с ротором генератора вектор э.д.с. Е начинает вращаться быстрее, чем вращающийся с неизменной синхронной угловой скоростью w0 вектор напряжения шин приемной системы U. Изменения скорости v перемещения вектора э. д. с. генератора Е относительно напряжения шин приемной системы U, представляющей разность угловых скоростей вращения векторов Е и U, показаны на рисунке 28.
Возникновение относительной скорости вращения v приводит к увеличению угла d, и на характеристике мощности генератора при отключенной цепи рабочая точка перемещается из точки b по направлению к точке с. При этом мощность генератора начинает возрастать. Однако вплоть до точки с мощность турбины все еще превышает мощность генератора и избыточный момент, хотя и уменьшается, но сохраняет свой знак, благодаря чему относительная скорость вращения непрерывно возрастает. В точке с мощности турбины и генератора вновь уравновешивают друг друга и избыточный момент равен нулю. Однако процесс не останавливается в этой точке, так как относительная скорость вращения ротора достигает здесь наибольшего значения и ротор проходит точку с по инерции.
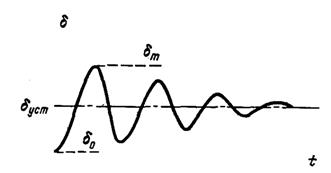
При дальнейшем росте угла d мощность генератора уже превышает мощность турбины и избыточный момент изменяет свой знак. Он начинает тормозить агрегат. Относительная скорость вращения v теперь уменьшается и в некоторой точке d становится равной нулю. Это означает, что в точке d вектор э.д.с. Е вращается с той же угловой скоростью, что и вектор напряжения U, и, следовательно, угол между ними больше не возрастает. Угол d в этой точке достигает своего максимального значения dm. Однако и теперь процесс не останавливается, так как вследствие неравенства мощностей турбины и генератора на валу агрегата существует избыточный момент тормозящего характера, под влиянием которого частота вращения продолжает уменьшаться и относительная скорость v становится отрицательной. Угол d начинает уменьшаться, и рабочая точка, характеризующая процесс на характеристике мощности, перемещается в обратном направлении к точке с. Эту точку ротор вновь проходит по инерции, и около точки b угол достигает своего нового минимального значения, после чего вновь начинает возрастать. После ряда постепенно затухающих колебаний в точке с устанавливается новый установившийся режим с прежним значением передаваемой мощности Ро и новым значением угла d. Картина колебаний угла d во времени показана на рисунке 29. Постепенное уменьшение амплитуды обусловливается потерями энергии при колебаниях частоты вращения генератора.
![]()
![]()
![]()
![]()
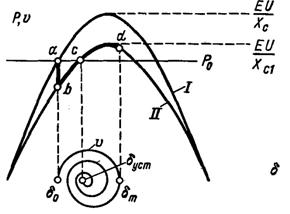
I - характеристика мощности при нормальном режиме; II - характеристика мощности при отключении цени.
Рисунок 28 - Колебания мощности и относительной угловой скорости генератора при отключении цепи
Рисунок 29 - Колебания угла при отключении одной параллельной цепи электропередачи
Возможен и другой исход процесса (см. рисунок 30). Торможение ротора, начиная с точки с, уменьшает относительную скорость вращения с. Однако угол в этой фазе процесса все еще возрастает, и если он успеет достигнуть критической величины dКР в точке с на пересечении падающей ветви синусоиды мощности генератора с горизонталью мощности турбины Ро прежде, чем относительная скорость v упадет до нуля, в дальнейшем избыточный момент на валу машины становится вновь ускоряющим, скорость v начнет быстро возрастать, и генератор выпадает из синхронизма (см. рисунок 31).
Таким образом, если в процессе качаний будет пройдена точка с/, то возврат к установившемуся режиму уже невозможен.
Основной причиной нарушений динамической устойчивости электрических систем являются обычно короткие замыкания, резко уменьшающие амплитуду характеристики мощности.
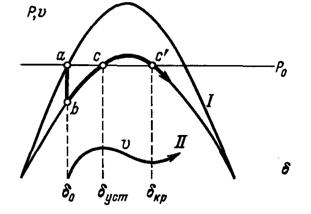
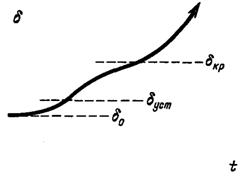
Рисунок 30 - Нарушение динамической устойчивости при отключении одной параллельной цепи электропередачи
Рисунок 31 - Нарастание угла при нарушении устойчивости
Статическая устойчивость
При данном значении передаваемой мощности Р, например, отвечающей точке а на рисунке 32, отношение амплитуды синусоидальной характеристики мощности Рm = ЕU/Xc к Рo характеризует степень устойчивости данного режима и носит название запаса статической устойчивости.
Часто запасом называют также отношение
(35)
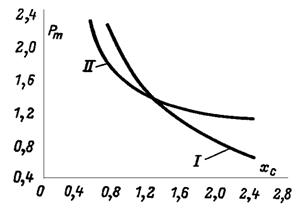
Амплитуда мощности обратно пропорциональна индуктивному сопротивлению системы Хс, и, следовательно, запас устойчивости с увеличением Хс быстро уменьшается.
Индуктивное сопротивление системы является одним из важнейших факторов, определяющих степень статической устойчивости системы. Оно в целом складывается из индуктивных сопротивлений генераторов, трансформаторов и линий электропередачи. На рисунке 32 показано соотношение между индуктивными сопротивлениями отдельных элементов типичной электропередачи 220 кВ длиной 200 км, связывающей гидроэлектростанцию с приемной системой (в случае, если генераторы станции не снабжены современной системой АРВ, в этих условиях в Хс в качестве индуктивного сопротивления генераторов входит их синхронное сопротивление, имеющее большое относительное значение).
Как вытекает из диаграммы, в рассматриваемых условиях удельное индуктивное сопротивление генераторов достигает 2/3 общего индуктивного сопротивления системы. Гиперболический характер зависимости идеального предела мощности Рm от индуктивного сопротивления системы справедлив лишь при условии постоянства э.д.с. Е. В действительности же увеличение сопротивления Хс при неизменных значениях передаваемой в систему активной и реактивной мощности сопровождается обычно некоторым ростом и э.д.с. Е, как это вытекает из векторной диаграммы (см. рисунок 33), построенной для условий передачи одной и той же мощности при двух различных значениях индуктивного сопротивления системы.
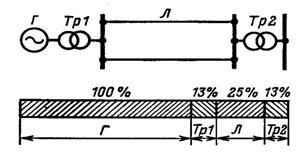
Рисунок 32 - Диаграмма относительных значений индуктивных
сопротивлений
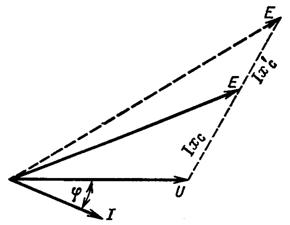
Рисунок 33 - Изменение э.д.с. генераторов при увеличении индуктивного сопротивлении
системы
I - без учета изменения э.д.с. генератора, II - с учетом изменения э.д.с. генератора
Рисунок 34 - Зависимости идеального предела мощности от индуктивного сопротивления системы
Поэтому кривая зависимости идеального предела мощности от Хс при учете влияния изменения э.д.с. отклоняется от гиперболы и становится несколько более пологой (см. рисунок 34). Однако и в этих условиях индуктивное сопротивление системы сохраняет свое значение основного фактора, определяющего запас статической устойчивости.
Зависимости активной мощности от угла сдвига вектора э.д.с. δ имеют при Е = соnst синусоидальный характер, однако синусоиды смещены как относительно оси абсцисс, так и относительно оси ординат. Смещение характеристики мощности обусловливается потерями активной мощности в элементах схемы. Оно возникает при значениях углов α, отличных от нуля, что имеет место только при наличии в схеме активных сопротивлений. Если активные сопротивления в схеме отсутствуют, то вещественные составляющие собственных и взаимных сопротивлений и проводимостей ветвей равны нулю, углы ψ получаются равными 90° и, следовательно, α = 90° – ψ = 0. При этом мощности генератора и приемника
.
 Характеристика мощности имеет тот же вид, что и при
схеме замещения электропередачи с последовательным соединением реактивных
сопротивлений, с той только разницей, что вместо суммарного индуктивного
сопротивления Хс в знаменатель входит взаимное сопротивление Х12.
для Т-образной схемы с индуктивными сопротивлениями ветвей Х1, Х2
и Х3 (см. рисунок 35) взаимное сопротивление Х12 = Х1
+ Х2 + Х1Х2/Х3 и характеристика
мощности имеет амплитуду
Характеристика мощности имеет тот же вид, что и при
схеме замещения электропередачи с последовательным соединением реактивных
сопротивлений, с той только разницей, что вместо суммарного индуктивного
сопротивления Хс в знаменатель входит взаимное сопротивление Х12.
для Т-образной схемы с индуктивными сопротивлениями ветвей Х1, Х2
и Х3 (см. рисунок 35) взаимное сопротивление Х12 = Х1
+ Х2 + Х1Х2/Х3 и характеристика
мощности имеет амплитуду
. (36)
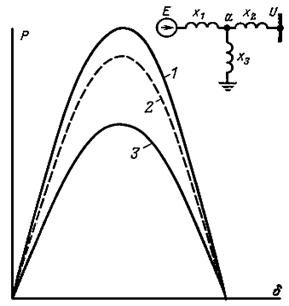
1 - характеристика мощности при увеличенной э.д.с., 2 - при отсутствии Х3, 3 - при неизменной э.д.с..
Рисунок 35 - Влияние шунтирующего индуктивного сопротивления на амплитуду характеристики мощности
![]() Если бы шунтирующее индуктивное сопротивление Х3
в схеме отсутствовало, то амплитуда характеристики мощности была бы равной:
Если бы шунтирующее индуктивное сопротивление Х3
в схеме отсутствовало, то амплитуда характеристики мощности была бы равной:
. (37)
Поскольку знаменатель в выражении (36) больше, чем в (37), очевидно, амплитуда мощности в первом случае меньше (кривая 3 на рисунке 35), чем во втором (кривая 2 на рисунке 35), и разница между ними тем больше, чем меньше шунтирующее индуктивное сопротивление Х3.
Таким образом, можно констатировать, что шунтирующие индуктивные сопротивления в схеме электропередачи снижают амплитуду характеристики мощности.
Такой характер изменения амплитуды мощности справедлив, однако, только при условии, что э.д.с. генератора Е сохраняет одно и то же значение как при наличии шунтирующего индуктивного сопротивления, так и без него. В установившемся режиме работы системы при подключении индуктивного шунтирующего сопротивления (например, сопротивления Х3 в схеме на рисунке 35) для того, чтобы восстановить напряжение в точке подключения сопротивления, приходится увеличивать э.д.с. генератора Е с тем, чтобы компенсировать потерю напряжения от реактивного тока, потребляемого индуктивным сопротивлением Х3. Это увеличение э.д.с. приводит к прямо противоположным результатам, обусловливающим повышение характеристики мощности (кривая 1 на рисунке 35).
Лекция 8. Статическая устойчивость (продолжение)
До сих пор предполагалось, что э.д.с. генераторов при изменении их мощности остается постоянной. Как можно будет видеть из дальнейшего, связанное с ростом передаваемой мощности увеличение угла обусловливает снижение напряжения генератора. Если возрастание нагрузки происходит достаточно медленно, то э.д.с. генераторов путем регулирования тока возбуждения может быть изменена для поддержания постоянства напряжения на шинах генераторного напряжения. Предел передаваемой мощности при этом резко возрастает.
Мы обратимся снова к схеме электропередачи (см. рисунок 36) с индуктивным сопротивлением системы Хс = Хг+ХТ1+Хл+ХТ2 . Значение напряжения на шинах генераторов Uг, в этой схеме нетрудно получить на векторной диаграмме (см. рисунок 37), прибавляя к вектору напряжения приемника U падение напряжения в суммарном индуктивном сопротивлении трансформаторов и линии, равном: Хтл = ХТ1+Хл+Хт. Прибавляя далее к вектору Uг падение напряжения в синхронном индуктивном сопротивлении генератора Хг, находим э.д.с. генератора в данном режиме Е. Вектор напряжения на шинах генератора Uг делит вектор полного падения напряжения IХс на два отрезка: IХтл и IХг, - в отношении значений индуктивных сопротивлений Хтл и Хг. При увеличении угла δ на ∆δ вектор э.д.с. генератора Е займет новое положение, показанное на диаграмме рисунка 37 штриховой линией. Положение вектора напряжения генератора Uг в новом режиме можно найти, разделив в том же отношении значений индуктивных сопротивлений Хтл и Хг вектор полного падения напряжения, соединяющий концы векторов Е и U.
Как вытекает из диаграммы, вектор напряжения Uг при увеличении угла δ поворачивается, следуя за вектором Е, и, что особенно важно, Uг при этом уменьшается. Этот вывод, очевидно, справедлив для напряжения любой другой промежуточной точки схемы электропередачи: на шинах подстанции, на линии и т. д.
При наличии у генераторов автоматических регуляторов возбуждения контролирующих напряжение Uг, регуляторы, реагируя на понижение напряжения при возрастании угла δ, будут увеличивать ток возбуждения генераторов, а с ними э.д.с. Е до тех пор, пока не восстановят прежнего значения напряжения.
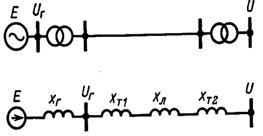
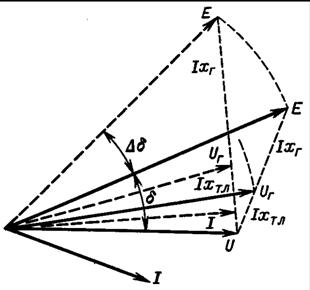
Рисунок 36 - Принципиальная схема и схема замещения электропередачи
Рисунок 37 - Изменение напряжения при увеличении угла
Таким образом, исследуя установившиеся режимы работы генераторов, имеющих автоматические регуляторы напряжения, при различных значениях угла δ следует исходить из постоянства напряжения на шинах генераторного напряжения Uг. Значение же э.д.с. генераторов Е в этих условиях будет изменяться, возрастая с увеличением угла δ (см. рисунок 38). Если при неизменной э.д.с. характеристика мощности генераторов в зависимости от угла δ представляет собой синусоиду
,
то при наличии регуляторов напряжения эта характеристика будет иметь более сложный характер, отражая непрерывное изменение э.д.с. генераторов в зависимости от угла δ. Построив для различных значений э.д.с. Е семейство синусоид, амплитуды которых пропорциональны Е (см. рисунок 39), характеристику мощности с учетом изменения э.д.с. (которую мы назовем внешней характеристикой) можно получить, переходя с одной синусоиды на другую в соответствии с ростом э.д.с., вытекающим из векторной диаграммы, приведенной на рисунке 38. Если увеличение мощности и угла происходит достаточно медленно, то такая же характеристика может быть получена и при ручном регулировании напряжения. Внешняя характеристика имеет возрастающий характер даже в области углов δ > 90°, что нетрудно объяснить увеличением э.д.с. Е, которое преобладает над уменьшением sinδ в выражении мощности при углах, несколько больших 90°.
Максимум внешней характеристики достигается не при δ = 90°, а при δГ = 90°, где δГ, - угол вектора напряжения на шинах генераторов Uг. Угол δ при этом уже значительно превышает 90°. Однако неустойчивость системы возникает ранее, и при регуляторах напряжения с зоной нечувствительности, а тем более при ручном регулировании, критическим с точки зрения устойчивости следует признать режим не при δГ. = 900, а при δ = 90°. В области углов δ < 90° несовершенство регулирования не приводит непосредственно к неустойчивости системы, так как даже синусоидальные характеристики при постоянстве э.д.с. имеют в этой области значений углов возрастающий характер. При углах же δ > 90° режим переходит на падающие ветви синусоидальных характеристик мощности; система становится внутренне неустойчивой, и удержать машины в синхронизме здесь можно лишь при исключительно точном регулировании. При изменении напряжения в пределах этой зоны регуляторы не работают и э.д.с. генераторов остается постоянной. Критерием статической устойчивости является знак синхронизирующей мощности dР/dδ, т.е. предела отношения приращения мощности к приращению угла при бесконечно малом отклонении от исходного установившегося режима работы системы.
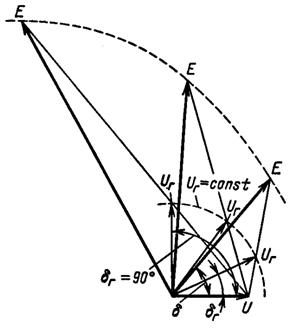
Рисунок 38 - Изменение э.д.с. с увеличением угла
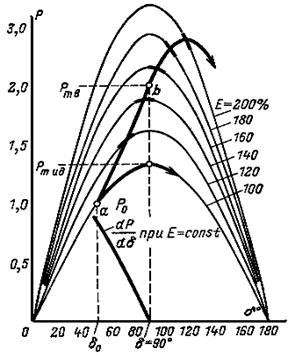
Рисунок 39 - Определение внутреннего предела мощности
Для каждой точки внешней характеристики мощности существует свой запас устойчивости, определяемый по внутренней характеристике, проходящей через данную точку (см. рисунок 40). По мере увеличения Ро запас уменьшается и становится равным нулю при достижении внутреннего предела мощности. Ввиду того, что необходимо иметь определенное значение запаса устойчивости наибольшее допустимое значение передаваемой мощности Ро при ручном регулировании напряжения далеко не достигает внутреннего предела.
При автоматических регуляторах напряжения (имеющих зону нечувствительности) могут быть допущены меньшие запасы по внутренней характеристике, а следовательно, и большие значения передаваемой мощности Ро, поскольку при более или менее значительных изменениях режима можно не считаться с зоной нечувствительности регуляторов. Регуляторы обеспечивают дополнительный запас устойчивости вплоть до внутреннего предела мощности. Это обстоятельство позволяет рассматривать автоматические регуляторы напряжения как одно из наиболее эффективных средств увеличения статической устойчивости.
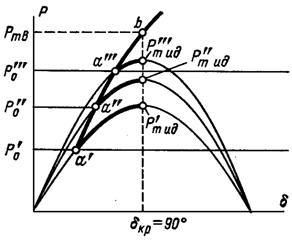
Рисунок 40 - Изменение запаса устойчивости, определяемого по внутренней характеристике
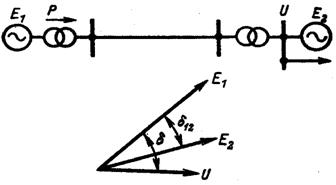
Рисунок 41 - Схема электропередачи и приемной системы
Если мощность приемной системы соизмерима с мощностью электропередачи, то напряжение нагрузки не остается постоянным при изменениях режима работы электропередачи. Для электропередачи с бесконечно мощной нагрузкой выше было установлено, что при постоянстве э.д.с. генератора и напряжения нагрузки увеличение угла сдвига этих векторов влечет за собой уменьшение напряжения во всех промежуточных точках схемы электропередачи.
Если приемная система представлена некоторой нагрузкой и местной электростанцией (см. рисунок 41), то при оценке статической устойчивости системы передачи следует исходить из постоянства э.д.с. обеих станций Е1 и Е2 (отвлекаясь пока от влияния регуляторов напряжения). Увеличение угла δ12 между векторами э.д.с., а следовательно, и угла δ между Е1 и U по-прежнему сопровождается уменьшением промежуточных напряжений, но на этот раз будет уменьшаться и напряжение U на шинах нагрузки, являющихся в рассматриваемых условиях некоторой промежуточной точкой в схеме замещения системы. Если при построении характеристики передаваемой мощности исходить из знакомой нам зависимости
![]()
,
где Хс представляет собой индуктивное сопротивление электропередачи между э.д.с. Е1 и напряжением нагрузки U, то напряжение следует считать переменным. Построив семейство синусоид для различных значений напряжения U (см. рисунок 42), действительную характеристику мощности, учитывающую снижение напряжения нагрузки, можно получить, переходя при увеличении δ с одной синусоиды на другую в соответствии с уменьшением напряжения U. Если касательные к синусоидальным характеристикам мощности, построенным для неизменных значений напряжения U, при δ = 900 горизонтальны, то действительная характеристика мощности при этом значении угла в силу непрерывного уменьшения напряжения должна иметь уже падающий характер и, следовательно, максимум этой характеристики - так называемый действительный предел мощности - достигается при угле, меньшем 90°. Значение действительного предела мощности также получается меньше идеального предела мощности, т.е. амплитуды синусоиды, построенной при постоянстве напряжения исходного режима U = 100%.
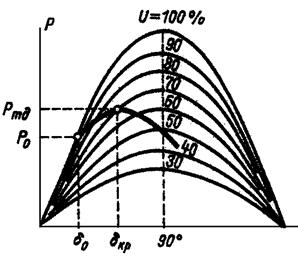
Рисунок 42 - Действительная характеристика мощности
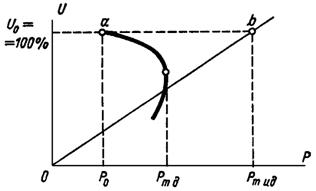
Рисунок 43 - Зависимость напряжения от мощности
Таким образом, снижение напряжения нагрузки является фактором, ухудшающим статическую устойчивость системы передачи. Обращая внимание на значение этого фактора, в практических расчетах устойчивости характеристику передаваемой мощности часто строят в зависимости от напряжения нагрузки U (см. рисунок 43), а не от угла δ. Каждой точке действительной характеристики мощности Р = f(δ), представленной на рисунке 42, соответствует свое значение напряжения нагрузки U. Откладывая по оси ординат эти значения U, а по оси абсцисс - соответствующие значения передаваемой мощности Р, мы и получаем характеристику U = f(Р), показанную на рисунке 43. Максимальное значение мощности на этой характеристике, разумеется, совпадает с максимумом характеристики мощности Р = f(δ) и является тем же действительным пределом мощности Рmд. Идеальный предел мощности на рисунке 43 для данного исходного режима работы системы, характеризуемого точкой а, определяется точкой b на пересечении горизонтали U = соnst с прямой оb, дающей значения Pmд = ЕU/Xc в зависимости от напряжения U.
Лекция 9. Статическая устойчивость (продолжение)
Обычно более 50% нагрузки составляют асинхронные двигатели, к характеристикам которых мы и обратимся. На рисунке 44 показаны графики зависимости потребляемой мощности или вращающего момента асинхронного двигателя от скольжения для номинального и пониженных значений напряжения на его выводах. Характеристики момента асинхронного двигателя, вообще говоря, изменяются пропорционально квадрату напряжения на выводах двигателя. Предполагая тормозной момент (момент сопротивления, преодолеваемый двигателем) постоянным (Рт = Рмех = соnst), можно установить, что уменьшение напряжения на выводах двигателя должно сопровождаться увеличением скольжения двигателя до такого значения, чтобы вращающий момент вновь уравновесил бы тормозной момент. Увеличение скольжения двигателя влечет за собой изменение его эквивалентного сопротивления. Как вытекает из известной схемы замещения двигателя, с увеличением скольжения падает эквивалентное активное сопротивление цепи ротора r/s. Поэтому ток в цепи Xℓ2 снижается в меньшей степени, чем в случае неизменности сопротивления в этой цепи, а в определенных условиях (при постоянном Р) даже возрастает. Те же соображения справедливы и в отношении реактивной мощности I2Xℓ2, теряемой в индуктивном сопротивлении рассеяния ротора Xℓ2. С этой точки зрения регулирующий эффект по реактивной мощности асинхронного двигателя должен быть ниже, чем в случае нагрузки в виде постоянного сопротивления, и может оказаться даже отрицательным (если ток I2, а с ним и реактивная мощность I22Xℓ2 не снижаются с уменьшением напряжения двигателя, а возрастают). Однако имеется другой фактор, значительно повышающий регулирующий эффект нагрузки при достаточно высоком напряжении на выводах двигателя, - это изменение намагничивающего тока двигателя Iμ.
При напряжении, близком к номинальному, двигатель работает с насыщенной магнитной цепью (точка а на рисунке 45) и небольшое снижение напряжения приводит к настолько резкому уменьшению Iμ, что суммарный регулирующий эффект двигателя может получиться даже более высоким, чем у нагрузки в виде неизменного сопротивления. При низких напряжениях преобладает отрицательное влияние изменения эквивалентного активного сопротивления ротора, рассмотренного выше. Результирующая характеристика реактивной мощности двигателя показана на рисунке 46. Регулирующий эффект, определяемый по касательной к этой характеристике, при низких напряжениях изменяет свой знак.
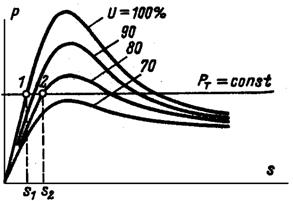
Рисунок 44 - Характеристики мощности асинхронного двигателя при различных напряжениях
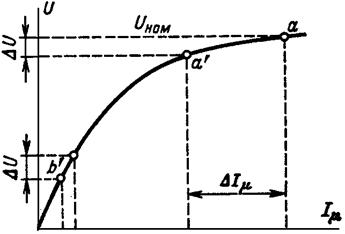
Рисунок 45 - Зависимость намагничивающего тока от напряжения
Регулирующий эффект по реактивной мощности у синхронных двигателей, а также и у синхронных компенсаторов очень невелик:
![]()
и, зависит от э.д.с. Eq , т.е. от возбуждения машин.
Когда компенсатор вырабатывает реактивную мощность, близкую к номинальной, он должен иметь значительный ток возбуждения. При этом обычно Еq > 2U, что приводит к отрицательному значению регулирующего эффекта. При Еq = 2U регулирующий эффект равен нулю, и только при Еq < 2U он становится положительным. Однако и здесь регулирующий эффект численно невелик ввиду пологого наклона характеристики синхронного компенсатора в зависимости от напряжения при неизменном токе возбуждения машины (см. рисунок 47). Небезынтересно сопоставить с этой точки зрения синхронные компенсаторы с другим типом компенсирующего устройства - конденсаторами. Реактивная мощность конденсаторов, как и всякого постоянного сопротивления, пропорциональна квадрату напряжения. Конденсаторы отдают («генерируют») реактивную мощность в сеть. Следовательно, получаемая ими реактивная мощность так же, как и у перевозбужденного синхронного компенсатора, отрицательна:
Qст.к = -U2 / Xc , где Хс = 1/ωС,
эта зависимость показана на рисунке 47.
Регулирующий эффект конденсаторов, очевидно, определяется следующим образом:
.
При отрицательной мощности Qст.к регулирующий эффект также отрицателен и в относительных единицах равен - 2.
Таким образом, характеристики конденсаторов с точки зрения поддерживания напряжения при изменении режимов работы электрических систем еще более неблагоприятны, чем у синхронных компенсаторов, причем разница в пользу последних очень значительна.
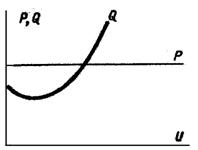
Рисунок 46 - Характеристики активной и реактивной мощности асинхронного двигателя
При симметричных схемах и режимах оценку устойчивости нагрузки производят путем построения зависимости Е = f(U), что равносильно использованию критерия dPм/ds > 0, приводящего в симметричных условиях к результатам, весьма близким или даже совпадающим с результатами оценки устойчивости станций.
Помимо исключительной простоты и экономичности расчетов устойчивости путем построения зависимости Е = f(U) целесообразность использования этого метода связывается с тем обстоятельством, что наиболее вероятной причиной нарушения статической устойчивости симметричных схем при достаточно тесной связи между электростанциями является именно снижение напряжения в системе в силу каких-либо обстоятельств.
Такого рода аварии, известные под названием «лавины напряжения», имели место в крупных системах, когда ввиду дефицита реактивной мощности приходилось допускать чрезмерно низкий уровень напряжения в системе. Допустимые пределы изменения напряжения и устанавливаются непосредственно из графика Е = f(U).
Статическая устойчивость системы должна проверяться не только в нормальных, но и в послеаварийных режимах работы, возникающих в результате отключения линий, трансформаторов или целых участков системы. Для удаленных электростанций наибольшую опасность, с точки зрения устойчивости, обычно представляют отключения линий. Запас устойчивости в послеаварийном режиме может быть допущен меньшим, чем в нормальном режиме.
При расчетах устойчивости и определении запаса как нормальных, так и послеаварийных режимов существенное значение имеет учет типа автоматических регуляторов возбуждения, установленных на генераторах электрических станций. Характеристика мощности регулируемых генераторов может быть построена как внешняя характеристика при постоянстве напряжения генераторов Uг. При этом регуляторы сильного действия обеспечивают устойчивость при передаче мощностей в диапазоне, ограниченном максимумом внешней характеристики. Соответственно запас устойчивости должен определяться как Кз = (Рm(Uг = const) - Рo)/Рo.
Действующие нормы устанавливают необходимый запас устойчивости для нормальных режимов равным 20%, для послеаварийных режимов 8% .
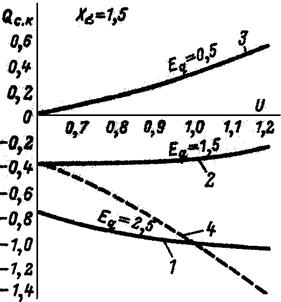
1, 2, 3 - синхронный компенсатор; 4 – конденсатор.
Рисунок 47 - Характеристики реактивной мощности синхронного компенсатора и конденсатора
Динамическая устойчивость
Всякое внезапное нарушение рабочего режима электрической системы, состоящей из электростанций, линий электропередачи и нагрузок, вызывает качания синхронных машин (генераторов, синхронных двигателей и компенсаторов). При неблагоприятных условиях размах колебаний может получиться настолько большим, что отдельные машины или целые электростанции выпадут из синхронизма.
Как правило, аварии в системах передачи сопровождаются внезапным изменением мощности, отдаваемой в сеть электростанциями. Регуляторы первичных двигателей обладают значительной инерцией и могут реагировать на изменение мощности или, вернее, на изменение частоты вращения машины с определенным запаздыванием. В результате равновесие между отдаваемой генераторами мощностью и мощностью, развиваемой первичными двигателями, нарушается и на валу машин возникают избыточные моменты, вызывающие изменение скорости и относительное перемещение роторов. Значения отдаваемой машинами мощности и избыточных моментов, ускоряющих или замедляющих роторы машин, в каждый момент времени определяются абсолютным значением и фазой э.д.с. всех машин системы, которые с течением времени изменяются, причем изменение фаз связано с относительным перемещением роторов и зависит, таким образом, от инерции вращающихся масс, т. е. от механических свойств системы, тогда как изменение абсолютных значений э. д. с. определяется преимущественно переходными электромагнитными процессами в машинах и зависит от действий АРВ и ряда других факторов.
Качания синхронных машин могут возникнуть также в следующих случаях: при внезапном скачке нагрузки, при отключении линии или трансформатора, при отключении генератора и при коротком замыкании к.з.
Из этих видов аварии наиболее опасным является к.з., с которым и необходимо считаться в первую очередь. При заземленной нейтрали могут быть следующие виды к.з.: однофазное замыкание на землю; непосредственное замыкание между двумя фазами; двухфазное замыкание на землю; трехфазное к.з.
Наибольшие затруднения в отношении устойчивости возникают при трехфазном к.з. Вследствие резкого снижения напряжения при трехфазном к.з. связь между генераторными станциями настолько ослабляется, что устойчивость системы часто нарушается.
При однофазном и двухфазном к.з. (особенно в первом случае) снижение напряжения получается меньше и генераторы находятся в более благоприятных условиях, чем в случае трехфазного к.з..
Однако поскольку вероятность однофазного к.з. достаточно велика, опасности выпадения машин из синхронизма в этих условиях необходимо взбегать.
Лекция 10. Динамическая устойчивость (продолжение)
Если отвлечься от вопроса о параметрах генераторов, трансформаторов и линий электропередачи при различных условиях их работы, то схема замещения системы передачи при трехфазном к.з. (см. рисунок 48,б) отличается от схемы нормального режима (см. рисунок 48,а) лишь тем, что точка к.з. (в однолинейной схеме замещения) замыкается непосредственно на обратный провод.
Напряжение в точке к.з. при этом падает до нуля, и передача мощности приемнику через нее оказывается невозможной. Если к.з. произошло в начале или конце двухцепной линии электропередачи, то генератор сбрасывает активную мощность почти до нуля, покрывая только потери мощности в активных сопротивлениях электропередачи. Избыток мощности, развиваемой турбиной, а следовательно, и избыточный момент на валу агрегата турбина-генератор получаются очень значительными, чем и объясняется большая вероятность нарушения устойчивости при трехфазном к.з..
Несколько иначе обстоит дело при несимметричных к.з.. Прежде всего необходимо установить некоторые принципиальные положения, которыми следует руководствоваться при исследованиях устойчивости при несимметричных к.з. Надо помнить, что качания роторов машин вызываются изменениями активной мощности генераторов и в проблеме несимметричных к.з. нас будут интересовать только те стороны вопроса, которые непосредственно влияют на значение активной мощности и моментов на валах машин.
Современная практика при исследовании несимметричных режимов и, в частности, к.з. в электрических системах неизменно обращается к методу симметричных составляющих, который и в данном случае позволяет наметить наиболее простые решения задачи. Разлагая токи и напряжения при несимметричном к.з. на составляющие прямой, обратной и нулевой последовательности, можно сразу же констатировать, что при к.з. в сети высокого напряжения токи нулевой последовательности в цепи генератора вообще не циркулируют, поскольку при обычном соединении обмоток трансформаторов по схеме треугольник-звезда они замыкаются на землю через заземленную нейтраль трансформатора.
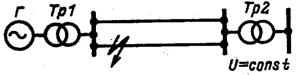
а) б)
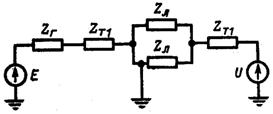
в)
Рисунок 48 - Принципиальная схема (а) и схемы замещения электропередачи при нормальном режиме (б) и при трехфазном к.з. (в)
Иначе обстоит дело с токами обратной последовательности, которые трансформируются вне зависимости от схемы соединения обмоток трансформаторов так же, как и токи прямой последовательности, и протекают, следовательно, в обмотке генератора при несимметричном к.з. в любой точке сети. Токи обратной последовательности создают в воздушном зазоре машины магнитный поток реакции якоря, вращающийся в направлении, обратном направлению вращения ротора, и имеющий, следовательно, двойную частоту вращения относительно последнего. Возникающий при этом вращающий момент изменяется периодически с двойной частотой. Механическая инерция ротора машины настолько велика, что ротор не успевает следовать за периодическими колебаниями момента столь высокой частоты (100 Гц). Среднее же значение момента близко к нулю. На основной синхронный поток в воздушном зазоре, а, следовательно, и на основную гармонику э.д.с. прямой последовательности токи обратной последовательности влияния почти не оказывают.
Таким образом, при несимметричных к.з. оказывается возможным не считаться с возникновением моментов, связанных с токами обратной и нулевой последовательности, и ограничиться рассмотрением системы токов и напряжений только прямой последовательности. Это очень важный вывод, значительно упрощающий анализ динамической устойчивости при несимметричных к.з., так как от несимметричного режима работы системы оказывается возможным перейти к симметричному.
Полученные результаты не следует понимать таким образом, что параметры схем обратной и нулевой последовательности вообще не влияют на устойчивость систем при несимметричных к.з. Схемы прямой, обратной и нулевой последовательности, как известно, связываются между собой и образуют комплексные схемы замещения несимметричных к.з. Следовательно, токи и напряжения прямой последовательности зависят от сопротивлений и конфигурации схем не только прямой, но также обратной и нулевой последовательности.
а) б)
в)
а - схема системы; б - схема замещения для токов прямой последовательности; в - преобразованная схема замещения.
Рисунок 49 - Принципиальная схема и схема замещения электропередачи при однофазном к.з.
Пример построения комплексной схемы при однофазном к.з. в простой схеме электропередачи показан на рисунке 49, где схемы прямой, обратной и нулевой последовательности, ориентированные относительно точки к.з., соединены последовательно. Поскольку значение токов, протекающих в отдельных элементах схем обратной и нулевой последовательности, для нашей задачи несущественны, схемы обратной и нулевой последовательности могут быть преобразованы к виду результирующих сопротивлений систем обратной и нулевой последовательности Z2 и Z0, как это показано на рисунке 49,в. Эта схема отличается от схемы замещения нормального режима работы системы лишь тем, что в точке к.з. оказывается включенным шунтирующее сопротивление, равное сумме результирующих сопротивлений схем обратной и нулевой последовательности.
Напряжения и токи генератора и приемника в схеме на рисунке 49,в являются составляющими прямой последовательности. Они и определяют изменения мощности при к.з., приводящие к качаниям машин.
Таким образом, если рассматривать составляющие только прямой последовательности, то однофазное к.з. сводится к включению в точке к.з. трехфазного симметричного шунтирующего сопротивления, составленного из последовательно соединенных сопротивлений обратной и нулевой последовательности. Используя комплексные схемы замещения, можно установить, что это положение справедливо и для других видов несимметричного к.з. с той только разницей, что шунтирующее сопротивление при двухфазном к.з. (без замыкания на землю) равно результирующему сопротивлению обратной последовательности, а при двухфазном замыкании на землю - сопротивлениям обратной и нулевой последовательности, сложенным параллельно. Для симметричного трехфазного к.з. шунтирующее сопротивление равно нулю.
Рассмотрим простейший случай работы электростанции через двухцепную линию электропередачи на шины бесконечной мощности (см. рисунок 50). Предпосылка постоянства напряжения на шинах системы по абсолютному значению и фазе исключает возможность качаний приемной системы и значительно упрощает анализ явлений. На рисунке 51 приведена упрощенная схема замещения рассматриваемой системы при нормальном режиме, представляющая собой последовательное соединение индуктивных сопротивлений отдельных элементов системы, дающее в сумме Хс:
Хс = Хг + Хт1 +0,5Хл +Хт2 ;
здесь под индуктивным сопротивлением генератора следует понимать его переходное индуктивное сопротивление Х/d.
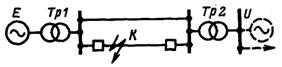
Рисунок 50 – Принципиальная
схема электропередачи

Рисунок 51 - Схема замещения электропередачи для нормального режима
Выше было установлено, что при быстром изменении угла в нормальном или аварийном режиме характеристику мощности генератора можно считать синусоидальной, отбросив вторую гармонику мощности и полагая
,
где Е = Е/ - переходная э.д.с. генератора, приложенная в его схеме замещения за переходным индуктивным сопротивлением, одинаковым для продольной и поперечной осей.
Эта зависимость для нормального режима представлена на рисунке 52 (кривая I). Теперь предположим, что в начале одной из цепей линии электропередачи в точке К (см. рисунок 50) произошло несимметричное к.з. Схема замещения системы для этого режима принимает вид, изображенный на рисунке 53,а, где в точке К включено эквивалентное шунтирующее сопротивление к.з. Хк, состоящее из сопротивлений обратной и нулевой последовательностей.
В связи с изменением конфигурации схемы вследствие к.з. при неизменной э.д.с. генератора (за переходным индуктивным сопротивлением) значение передаваемой системе мощности изменяется. Выражение для передаваемой мощности при к.з. можно найти с помощью следующих простых преобразований схемы замещения системы для аварийного режима. Эта схема представляет собой звезду с лучами Хк, Ха = Хг + Хт1 и Хb = 0,5Хл + Хт2, причем для однофазного к.з. Хк = Х2 + Х0, для двухфазного к.з. Хк = Х2, а для
![]() двухфазного замыкания на землю .
двухфазного замыкания на землю .
Как известно, звезда может быть преобразована в эквивалентный треугольник (см. рисунок 51,б), стороны которого будут представлены следующими индуктивными сопротивлениями:
![]()
![]()
|
![]()
Индуктивные сопротивления ХЕ и ХU, подключенные непосредственно к э.д.с. Е и напряжению U, не влияют на значение активной мощности генератора в аварийном режиме и могут быть отброшены.
Лекция 11. Динамическая устойчивость (продолжение)
Весь поток активной мощности генератора направляется через индуктивное сопротивление Х/с, связывающее э.д.с. генератора с напряжением приемника U, которое при этом можно рассматривать как эквивалентное индуктивное сопротивление системы в аварийном режиме. В этих условиях характеристика мощности генератора, очевидно, будет иметь вид:
,
![]() где
где
. (39)
Зависимость мощности от угла имеет синусоидальный характер, но амплитуда ее меньше, чем при нормальном режиме, так как знаменатель в выражении (39) больше, чем в (38). Обе синусоиды приведены на рисунке 52.
Отдаваемая генератором мощность и угол между э.д.с. Е и напряжением U при нормальном режиме обозначены соответственно через Ро и δ0. В момент к.з. в связи с изменением параметров схемы происходит переход с одной характеристики мощности на другую, и так как вследствие инерции ротора угол δ мгновенно измениться не может, то отдаваемая генераторами мощность уменьшается до значения Р(0), определяемого углом δ0 на кривой II (см. рисунок 52). Мощность первичных двигателей электростанции вследствие запаздывания регуляторов турбин остается при этом неизменной и равной Ро.
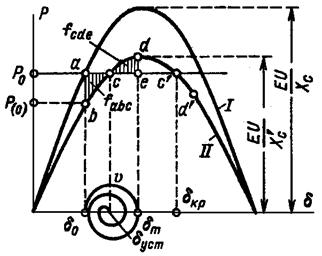
Рисунок 52 - Анализ колебаний по правилу площадей
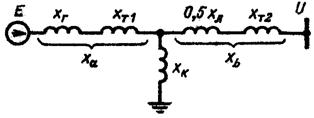
а)
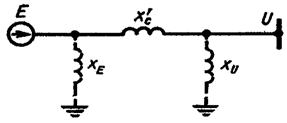
б)
Рисунок 53 - Схема замещения электропередачи при коротком замыкании (а) и ее преобразование (б)
В результате на валу машины возникает некоторый избыточный момент, обусловленный избытком мощности ΔР(О) = Ро - Р(О) . Под влиянием этого момента ротор машины начинает ускоряться, увеличивая угол δ. В дальнейшем процесс протекает качественно так же, как и при внезапном отключении нагруженной цени.
С изменением угла δ отдаваемая генераторами мощность начинает увеличиваться и избыточный ускоряющий момент падает. В точке с (см. рисунок 52) избыток мощности равен нулю, относительная же скорость ротора v достигает здесь максимума, и ротор по инерции проходит дальше. Теперь отдаваемая мощность становится уже больше мощности первичных двигателей, избыточный момент меняет свой знак, и ротор начинает тормозиться.
В период торможения генератор покрывает избыток отдаваемой мощности за счет избыточной кинетической энергии, запасенной им в период ускорения. В некоторой точке d, отвечающей углу, при котором запас избыточной кинетической энергии ротора иссякнет, относительное перемещение ротора прекратится, и так как в этой точке имеется избыточный тормозящий момент, начинается относительное движение ротора в обратном направлении. Пройдя по инерции точку с и достигнув минимального угла отклонения, ротор останавливается в своем относительном движении и затем снова начинает ускоряться. После нескольких колебаний с постепенно затухающей амплитудой относительное движение ротора прекратится и его положение будет определяться точкой с, являющейся точкой установившегося режима на новой характеристике мощности. Если бы ротор при первом отклонении прошел угол δкр, соответствующий мощности Р0 на падающей ветви характеристики II, то избыточный момент вновь изменил бы свой знак и сделался бы снова ускоряющим. С дальнейшим увеличением угла ускоряющий момент стал бы нарастать и генератор выпал бы из синхронизма.
Приведенные на рисунке 52 характеристики дают возможность определить максимальное отклонение угла ротора и установить, сохраняет ли система устойчивость. Действительно, ординаты заштрихованных площадок (см. рисунок 52) представляют собой избыток мощности ΔР = Р0 - Р, создающий избыточный момент того или иного знака. Значение избыточного момента
ΔМ = ΔР/Ω, (40)
где Ω - угловая скорость вращения ротора.
При качании генератора Ω непрерывно изменяется, однако это изменение весьма невелико сравнительно с синхронной угловой скоростью Ωо. С достаточной точностью значение Ω можно считать постоянным и равным Ωо. Ошибка в значении момента лежит при этом в пределах 1-1,5%. Подставляя вместо Ω синхронную скорость Ωо, получаем:
ΔМ = ΔР/Ωо = ΔР,
так как в системе относительных единиц Ωо = 1.
Таким образом, избыточный момент в относительных единицах может быть принят численно равным избытку мощности ΔР.
Рассматривая лишь относительное движение ротора и работу, совершаемую в этом относительном движении, можно принять, что при перемещении ротора на бесконечно малый угол dδ избыточный момент совершает элементарную работу, равную ΔМ dδ. При отсутствии потерь вся эта работа идет на изменение кинетической энергии ротора (в его относительном движении).
 В рассматриваемом случае избыточный момент сначала
ускоряет вращение ротора, и работа, совершаемая в период ускорения при
перемещении ротора от δо до δуст, равна:
В рассматриваемом случае избыточный момент сначала
ускоряет вращение ротора, и работа, совершаемая в период ускорения при
перемещении ротора от δо до δуст, равна:
,
где fabc представляет собой заштрихованную на рисунке (52) площадку аbс. Таким образом, кинетическая энергия, запасенная ротором в период его ускорения, равна площадке fabc. Эту площадку мы назовем площадью ускорения.
После того как ротор пройдет точку своего установившегося положения на новой характеристике мощности, избыточный момент меняет свой знак и начинает тормозить вращение ротора. Изменение кинетической энергии в период торможения при перемещении ротора от с до е равно:

.
Площадка fcde может быть названа площадью торможения.
В период торможения ротор возвращает запасенную им ранее избыточную кинетическую энергию. Когда вся запасенная ротором избыточная энергия будет израсходована, т.е. когда работа торможения уравновесит работу ускорения относительная скорость становится равной нулю, поскольку кинетическая энергия пропорциональна квадрату скорости. В этот момент ротор останавливается в своем относительном движении и достигнутый им при этом угол δm является максимальным углом отклонения ротора машины. Таким образом, для определения угла δm, оказывается достаточным равенство Ауск + Аторм = 0, или что то же самое,
fabc+fcde=0 (41)
Уравнение (41) показывает, что при максимальном угле отклонения площадь торможения должна быть равна площади ускорения и, следовательно, задача сводится к тому, чтобы найти положение точки d, удовлетворяющее этому условию (см. рисунок 52), что может быть сделано графически.
Максимально возможная площадь торможения на рисунке 52 равна, очевидно, площадке fcdc/. Если бы эта площадь оказалась меньше площади ускорения fabc, то система выпала бы из синхронизма. Отношение возможной площади торможения к площади ускорения Кд = fcdc//fabc является мерой запаса динамической устойчивости системы и может быть названо коэффициентом запаса устойчивости.
Когда возможная площадь торможения получается меньше площади ускорения, нередко все же оказывается возможным добиться устойчивой работы, достаточно быстро отключив поврежденную цепь. Мощность, которую можно передать по второй, оставшейся в работе цепи (см. рисунок 50), обычно больше, чем та, которую можно передавать по двум цепям при к.з. Уравнение мощности при отключении поврежденной цепи получает следующий вид:
,
где Хс//=Хг+Хт1+Хл+Хт2 .
Эта зависимость дана на рисунке 54 в виде кривой III. Кривые I и II представляют собой характеристики при нормальном режиме и при к.з..
Как указывалось выше, в момент к.з. передаваемая мощность падает и ротор начинает ускоряться. Пусть в некоторой точке d происходит отключение поврежденной цепи. В момент выключения работа переходит в точку е на кривой III, и в результате отдаваемая генераторами мощность значительно повышается. Благодаря этому максимально возможная площадь торможения (ограниченная кривой cdefc/) получается значительно больше, чем при длительном неотключенном к.з., и это увеличение тем больше, чем раньше происходит отключение, т.е. чем меньше угол δотк. Таким образом, быстрая ликвидация аварий может весьма значительно повысить устойчивость системы. Благодаря своей простоте и большому эффекту это средство находит широкое применение и является, по существу, основным мероприятием, служащим для повышения динамической устойчивости.
С помощью рисунка 54, пользуясь правилом площадей, можно графически найти предельное значение угла δотк, при котором нужно произвести отключение поврежденной линии для того, чтобы добиться устойчивой работы. Значение этого угла определяется равенством площади ускорения и возможной площади торможения.
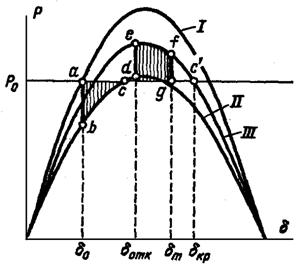
Рисунок 54 - Определение предельного угла отключения по правилу
площадей
 Предельный угол отключения δотк легко может быть
найден и аналитически. Действительно, приравнивая нулю сумму площади ускорения
и максимальной возможной площади торможения, получаем:
Предельный угол отключения δотк легко может быть
найден и аналитически. Действительно, приравнивая нулю сумму площади ускорения
и максимальной возможной площади торможения, получаем:
, (42)
где РmII и РmII - амплитуды характеристик мощности при к.з. и отключении цепи.
Уравнение (42) дает
Ро(δотк-δо)+РmII (cosδотк-cosδo)+(Po(δкр-δотк)+PmIII (cosδкр-cosδотк)=0,
 Откуда
Откуда
, (43)
![]() где все углы выражены в радианах.
где все углы выражены в радианах.
Подставляя в (43) δо и δкр= π – arcsin , нетрудно найти соsδотк, а следовательно, и угол δотк.
Лекция 12. Средства повышения устойчивости
Для повышения статической устойчивости электроэнергетических систем используются средства, с помощью которых уменьшаются взаимные проводимости между электростанциями и увеличиваются э.д.с. этих станций при росте передаваемой мощности. Средства, разработанные для повышения динамической устойчивости систем, предусматривают уменьшение небаланса вращающего и тормозящего моментов, возникающего на валах агрегатов при нарушениях установившихся режимов работы, а также уменьшение длительности периода, в течение которого действует такой небаланс.
Весьма быстрое отключение к.з. явилось средством решительного улучшения динамической устойчивости электрических систем. Эффективность этого средства легко объясняется уменьшением длительности периода ускорения генераторов. Формально это выражается в уменьшении площади ускорения, которое обычно сопровождается соответствующим увеличением площади возможного торможения. В большинстве случаев для данного значения передаваемой мощности Ро (см. рисунок 55) оказывается возможным подобрать угол δотк таким образом, чтобы площадь ускорения fabc получалась равной площади возможного торможения fde. Этому углу соответствует определенное время отключения, которое является предельно допустимым для данного Ро (и данного вида к.з.). Если передаваемую мощность несколько увеличить (Р/о на рисунке 55), то площадь ускорения возрастет, а площадь возможного торможения уменьшится, и для того, чтобы вновь достигнуть равенства этих площадей, угол δотк, а вместе с ним и время отключения к.з. приходится уменьшать.
На рисунке 56 показаны графики зависимости предельно допустимой передаваемой мощности от времени отключения к.з. для гидроэлектростанции, работающей через двухцепную линию электропередачи на шины бесконечной мощности. Одна из цепей при к.з. отключается, другая остается в работе.
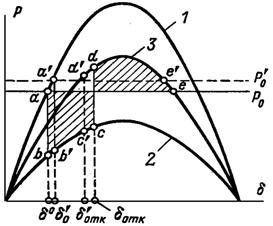
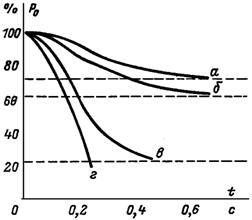
1 - характеристика мощности в нормальном режиме; 2 2 при к.з.; 3 - после отключения к.з..
Рисунок 55 - Анализ изменения предельного угла отключения к.з. в зависимости от передаваемой мощности по правилу площадей
а - однофазное к.з.; б - двухфазное к.з.; в двухфазное к.з. на землю; г - трехфазное к.з..
Рисунок 56 - Зависимости предельной передаваемой мощности от времени отключения к.з.
При времени отключения, равном нулю, длительность к.з. также равна нулю, и этот случай сводится, по существу, к внезапному отключению одной из цепей. Соответствующее этому случаю предельное значение передаваемой мощности принято на рисунке 56 за 100%.
Как видно на рисунке 56, уменьшение времени отключения резко повышает допустимое значение передаваемой мощности, особенно при наиболее тяжелых видах к.з.: трехфазном и двухфазном замыкании на землю. Следует отметить, что степень тяжести к.з. зависит не только от вида его, но и от схемы электрических соединений передачи. На рисунке 57 показаны зависимости предельных значений передаваемой мощности при двухфазном замыкании на землю для одной и той же электропередачи, которая работает в одном случае (А) по схеме блоков трансформатор - линия, а в случае (В) имеет шины высокого напряжения на обоих концах линии. Быстрое отключение оказывается более эффективным в случае В, когда ток к точке к.з. подтекает через параллельно работающие трансформаторы и, следовательно, к.з. является более тяжелым, чем в случае А. Ток к.з. в схеме А ограничивается реактивным сопротивлением трансформатора поврежденной цепи, что ослабляет толчок при к.з., но режим при отключении повреждения здесь менее благоприятен, поскольку вместе с поврежденной цепью отключаются и ее трансформаторы. Характеристики мощности при к.з. при отключенной цепи в этих условиях довольно близки друг к другу, и результат отключения к.з. в схеме А малозначителен.
Большинство коротких замыканий на воздушных линиях электропередачи обусловливается грозовыми разрядами. Во многих случаях эти замыкания имеют преходящий характер, и после отключения линии, спустя небольшой промежуток времени, необходимый для деионизации перекрытого дугой промежутка, на линию вновь может быть подано напряжение и восстановлены нормальные условия работы электропередачи. Время деионизации при этом невелико.
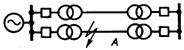
![]()
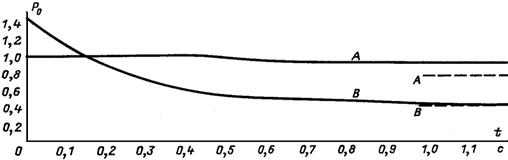
Рисунок 57 - Предельное значение передаваемой мощности при различных схемах коммутации
Автоматическое повторное включение, дающее до 80-90% удачных включений, во многих случаях предотвращает длительное отключение линий и увеличивает тем самым, надежность работы одноцепных линий в несколько раз. Однако во избежание нарушения устойчивости скорость БАПВ одноцепных магистральных линий должна быть очень велика, не выходя при этом за пределы минимальной длительности периода деионизации перекрытого дугой воздушного промежутка. Необходимость весьма быстрого повторного включения одноцепных магистральных линий обусловливается тем обстоятельством, что сброс мощности, имеющий место при к.з. (например, в точке а на рисунке 58), усугубляется при отключении линии (точка b), когда передаваемая мощность падает до нуля.
Быстродействующее АПВ используется не только для одноцепных, но и для двухцепных линий передачи, способствуя увеличению устойчивости последних. При своевременном АПВ отключенной цепи (точка с на рисунке 59) достигается некоторое увеличение площади торможения в результате перехода с характеристики мощности передачи при одной цепи на более высокую характеристику мощности при двух цепях.
Рисунок 58 - Площадки ускорения и торможения в случае повторного включения одноцепной линии при двухфазном к.з. на землю
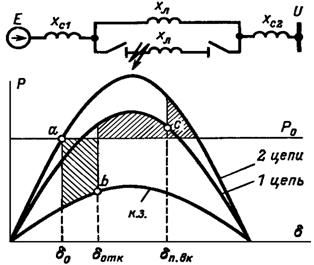
Рисунок 59 - Площадки ускорения и торможения при повторном включении двухцепной линии
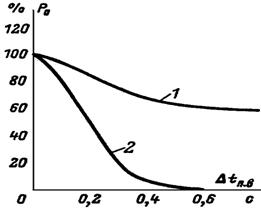
1 - при пофазном повторном включении; 2 - при трехфазном повторном
включении.
Рисунок 60 - Зависимости предельной передаваемой мощности от длительности повторного включения
Автоматическое однофазное повторное включение отключившихся фаз (ОАПВ) в некоторой степени увеличивает и устойчивость в связи с повышением амплитуды характеристики мощности. При однофазном к.з. и однофазном отключении могут быть допущены небольшие скорости ОАПВ даже в наиболее трудных условиях передачи мощности от удаленных станций. На рисунке 60 показаны зависимости допустимой длительности повторного включения ∆tп.в при однофазном (1) и трехфазном (2) отключении однофазного к.з. в подобных условиях в зависимости от передаваемой мощности Ро.
Преимущества пофазного отключения здесь очевидны. Допустимая по условиям динамической устойчивости длительность повторного включения при пофазном отключении настолько значительна, что позволяет не считаться в большинстве случаев с некоторым увеличением времени деионизации дугового промежутка, неизбежным при однофазном отключении ввиду подпитки дуги через емкостные связи от неповрежденных фаз.
Список литературы
1. Жданов П.С. Вопросы устойчивости электрических систем. – М.: Энергия, 1979.
2. Веников В.А. Переходные электромеханические процессы в электрических системах. – М.: Высш. шк., 1985.
3. Чернин А.Б. Вычисление электрических величин и поведение релейной защиты при неполнофазных режимах в элетрических системах. – М-Л.: ГЭИ, 1963.
4. Авербух А.М. Примеры расчетов неполнофазных режимов и коротких замыканий. – Л.: Энергия. Ленингр. отд-ние, 1979.
5. Ульянов С.А. Электромагнитные переходные процессы в электрических системах. – М.: «Энергия», 1970.
Сводный план 2011 г., поз. 323