Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ
ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра
электроснабжения промышленных предприятий
CИСТЕМЫ АВТОМАТИЗАЦИИ
ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Методические указания и задания к выполнению курсовой
работы
для студентов специальности 5В081200-Энергобеспечение сельского
хозяйства
Алматы 2013
СОСТАВИТЕЛИ: Дюсенбаев Т.С., Мустагулова Б.Ж. Системы автоматизации технологических процессов. Методические указания и задания к выполнению курсовой работы для студентов специальности 5В081200-Энергобеспечение сельского хозяйства.– Алматы: АУЭС, 2013. – 39 с.
Данная разработка включает в себя программу курса «Системы автоматизации технологических процессов» и задания с методическими указаниями по выполнению курсовой работы.
Ил. 8, табл. 4, библиогр. - 14 назв.
Рецензент: канд.техн.наук, профессор Цыба Ю.А.
Печатается по плану издания НАО «Алматинский университет энергетики и связи» на 2013 год.
© НАО «Алматинский университет энергетики и связи», 2013 г.
Содержание
|
|
Введение |
4 |
|
1 |
Цель и задания курсовой работы |
4 |
|
2 |
Методика выполнения курсовой работы |
7 |
|
2.1 |
Свойства объектов управления |
7 |
|
2.2 |
Выбор принципа управления |
13 |
|
2.3 |
Обоснования параметров регулирующего органа |
14 |
|
2.4 |
Выбор первичных измерительных преобразователей |
15 |
|
2.5 |
Обоснование закона регулирования и выбор регулятора |
16 |
|
2.6 |
Определение математической модели системы автоматического управления |
18 |
|
2.7 |
Анализ устойчивости системы |
19 |
|
2.8 |
Расчет параметров настройки регуляторов САУ |
23 |
|
|
Приложение А – Пример проектирования САУ |
26 |
|
|
Список литературы |
41 |
Автоматизация сельскохозяйственного производства - это этап комплексной механизации, характеризуемый освобождением человека от непосредственного выполнения функций управления технологическими процессами и передачей этих функций автоматическим устройством.
Специалисты сельского хозяйства должны быть готовыми к использованию новых технологий и техники, широкому внедрению средств автоматизации технологических процессов, к выявлению резервов производства и его интенсификации. При этом автоматизация способна коренным образом поднять производительность труда, снизить удельные энергетические затраты, повысить урожайность сельскохозяйственных культур и продуктивность животных.
Для этого им необходимо не только изучить теорию, но еще уметь проектировать систему автоматического управления с выбором и расчетом параметров отдельных устройств. Эта задача решается при выполнении курсового проекта по автоматизации. Однако специальной литературы по курсовому проектированию адресованной студентам сельскохозяйственных вузов недостаточно. Поэтому методические указания по курсу «Системы автоматизации технологических процессов» должно в какой-то мере восполнить этот пробел.
В предлагаемой курсовой работе студент показывает способность самостоятельно решать задачи автоматизации технологических процессов в сельском хозяйстве с использованием новых достижений науки и техники.
Перед выполнением проекта необходимо изучить технологический процесс, выявить его достоинства и недостатки, сформулировать требования к системе автоматического управления [1,2,3,6]. При выполнении курсовой работы следует руководствоваться действующими нормативными документами, использовать выпускаемое оборудование, опираться на результаты опубликованных научно-исследовательских работ.
1 Цель и задания по выполнению курсовой работы
Цель работы: разработать систему автоматизации технологических процессов в животноводстве и птицеводстве.
Задание: выбор темы курсовой работы должен быть обоснованным и экономически целесообразным. Рекомендуется следующая тематика проектов:
- автоматизация технологических процессов в животноводстве, птицеводстве и т.д.;
- автоматизация технологических процессов в растениеводстве, в тепличном хозяйстве;
- автоматизация технологических процессов, связанных с переработкой и хранением сельхозпродукции.
Курсовая работа состоит из пояснительной записки и графической части.
Объем пояснительной записки составляет 30-40 страниц рукописного текста.
Графическая часть проекта-2 листа формата А1.
Материал следует излагать от первого лица множественного числа («выбираем», «находим» и т.д.).
Рисунки и схемы выполняются в соответствии с ГОСТам и ЕСКД.
Каждому вычислению должна предшествовать расчетная формула, вынесенная в отдельную строку.
Графическая часть курсовой работы включает:
- функциональная и алгоритмическая схемы автоматической системы;
- график переходного процесса в системе;
- принципиальная схема системы автоматического управления.
По согласованию с преподавателем тема курсовой работы может быть выбрана в виде макета лабораторной работы или в соответствии с научно- исследовательской работой студента.
Таблица 1.1 – Технические данные для расчета автоматизации технологического процесса в животноводстве и птицеводстве
|
№ варианта |
Объект проектирования |
Количество животных (птиц) голов |
Удельный объем помещения Vуд., м3/гол |
Температура |
Тепловая характерис тика помещения, кДж/м3°С·ч. |
Отношение времени запаздывания к постоянной времени помещения (τ/Т) |
Ширина зоны неоднозначности регулятора |
Область проектирования |
|
|
Внутри помещения, tвн. |
Наружного воздуха, tн. |
||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
1 |
Коровник |
100 |
20 |
10 |
-5 |
2,0 |
0,15 |
4 |
Алматинская |
|
2 |
Птичник |
500 |
1,0 |
16 |
-10 |
3,2 |
0,12 |
4 |
Aктюбинская |
|
3 |
Свинарник |
40 |
6,0 |
16 |
-8 |
2,1 |
0,10 |
5 |
Кзылординская |
|
4 |
Телятник |
20 |
10 |
18 |
-15 |
2,5 |
0,13 |
4 |
Костанайская |
|
5 |
Свиноматочник |
12 |
15 |
18 |
-15 |
3,2 |
0,15 |
3 |
Павлодарская |
|
6 |
Овчарня |
800 |
3,6 |
5 |
-15 |
3,2 |
0,14 |
5 |
ВКО |
|
7 |
Овчарня |
750 |
3,5 |
6 |
-10 |
3,1 |
0,15 |
4 |
ЮКO |
|
8 |
Свиноматочник |
18 |
14 |
19 |
-15 |
3,1 |
0,16 |
3 |
СКО |
|
9 |
Телятник |
30 |
9 |
11 |
-10 |
2,6 |
0,14 |
5 |
Карагандинская |
|
10 |
Свинарник |
50 |
7 |
17 |
-10 |
3,2 |
0,12 |
4 |
Карагандинская |
|
11 |
Птичник |
750 |
0,9 |
17 |
-15 |
2,2 |
0,11 |
4 |
СКО |
|
12 |
Коровник |
90 |
18 |
11 |
-8 |
2,4 |
0,14 |
6 |
ЮКО |
|
13 |
Коровник |
80 |
16 |
12 |
-12 |
2,6 |
0,15 |
6 |
ВКО |
|
14 |
Птичник |
1000 |
0,8 |
18 |
-14 |
2,8 |
0,13 |
5 |
Павлодарская |
|
15 |
Свинарник |
60 |
8 |
18 |
-15 |
2,3 |
0,14 |
6 |
Акмолинская |
|
16 |
Телятник |
40 |
8 |
16 |
-10 |
2,7 |
0,12 |
4 |
Кзылординская |
|
17 |
Свиноматочник |
24 |
13 |
20 |
-12 |
3,0 |
0,13 |
5 |
ЗКО |
|
18 |
Овчарня |
650 |
3.8 |
7 |
-20 |
3,0 |
А 0,15 |
6 |
Атырауская |
|
19 |
Овчарня |
700 |
3,9 |
8 |
-20 |
2,9 |
0,16 |
6 |
Карагандинская |
|
20 |
Свиноматочник |
30 |
12 |
20 |
-12 |
2,9 |
0,14 |
6 |
ЮКО |
|
21 |
Телятник |
50 |
8 |
15 |
-15 |
2,8 |
0,15 |
5 |
СКО |
|
22 |
Свинарник |
70 |
8 |
18 |
-15 |
2,4 |
0,14 |
6 |
Павлодарская |
|
23 |
Птичник |
1250 |
0,7 |
18 |
-10 |
2,6 |
0,12 |
6 |
ВКО |
|
24 |
Коровник |
70 |
15 |
10 |
-12 |
2,8 |
0,15 |
6 |
Кзылординская |
|
25 |
Коровник |
60 |
17 |
12 |
-15 |
3,0 |
0,14 |
6 |
Костанайская |
|
26 |
Птичник |
1500 |
0,6 |
17 |
-10 |
2,4 |
0,12 |
5 |
Жамбульская |
|
27 |
Свинарник |
80 |
7 |
17 |
-14 |
2,5 |
0,13 |
6 |
Актюбинская |
|
28 |
Телятник |
55 |
9 |
14 |
-10 |
2,9 |
0,14 |
5 |
Алматинская |
|
29 |
Свиноматочник |
36 |
12 |
20 |
-12 |
2,8 |
0,12 |
4 |
Кызылординская |
|
30 |
Овчарня |
600 |
4,0 |
8 |
-16 |
2,8 |
0,14 |
6 |
ЗКО |
|
31 |
Овчарня |
550 |
3,9 |
7 |
-20 |
2,7 |
0,14 |
6 |
Павлодарская |
|
32 |
Свиноматочник |
42 |
13 |
20 |
-14 |
2,7 |
0,11 |
5 |
Акмолинская |
|
33 |
Телятник |
60 |
10 |
15 |
-10 |
3,0 |
0,12 |
6 |
ЮКО |
|
34 |
Свинарник |
90 |
6 |
16 |
-15 |
2,6 |
0,14 |
6 |
ВКО |
|
35 |
Птичник |
1750 |
0,5 |
16 |
-14 |
2,2 |
0,13 |
5 |
Карагандинская |
|
36 |
Коровник |
50 |
19 |
13 |
-15 |
3,2 |
0,15 |
6 |
СКО |
|
37 |
Коровник |
40 |
20 |
10 |
-15 |
3,4 |
0,14 |
6 |
Карагандинская |
|
38 |
Птичник |
2000 |
0,4 |
17 |
-10 |
2,0 |
0,16 |
5 |
ЮКО |
|
39 |
Свинарник |
100 |
6 |
16 |
-15 |
2,7 |
0,15 |
6 |
СКО |
|
40 |
Телятник |
65 |
10 |
16 |
-14 |
3,1 |
0,14 |
6 |
Павлодарская |
|
41 |
Свиноматочник |
48 |
14 |
19 |
-15 |
2,6 |
0,15 |
6 |
ВКО |
|
42 |
Овчарня |
500 |
3,8 |
6 |
-15 |
2,6 |
0,12 |
6 |
Кызылординская |
|
43 |
Овчарня |
450 |
3,7 |
5 |
-20 |
2,5 |
0,14 |
6 |
Костанайская |
|
44 |
Свиноматочник |
50 |
15 |
18 |
-10 |
2,7 |
0,16 |
6 |
Алматинская |
|
45 |
Телятник |
70 |
9 |
17 |
-12 |
3,2 |
0,15 |
6 |
Актюбинская |
|
46 |
Свинарник |
110 |
7 |
17 |
-8 |
2,8 |
0,12 |
5 |
Атырауская |
|
47 |
Птичник |
2250 |
0,3 |
18 |
-10 |
2,1 |
0,13 |
4 |
Кызылординская |
|
48 |
Коровник |
30 |
18 |
12 |
-13 |
3,3 |
0,14 |
6 |
ЗКО |
|
49 |
Коровник |
44 |
17 |
11 |
-15 |
3,1 |
0,15 |
6 |
Павлодарская |
|
50 |
Птичник |
2500 |
0,4 |
17 |
-12 |
2,3 |
0,12 |
4 |
Костанайская |
|
51 |
Свинарник |
120 |
8 |
18 |
-8 |
2,9 |
0,15 |
6 |
ЮКО |
|
52 |
Телятник |
75 |
8 |
18 |
-14 |
3,2 |
0,14 |
6 |
ВКО |
|
53 |
Свиноматочник |
60 |
13 |
20 |
-10 |
2,9 |
0,13 |
6 |
Карагандинская |
|
54 |
Овчарня |
400 |
3,6 |
5 |
-15 |
2,6 |
0,14 |
6 |
СКО |
|
55 |
Овчарня |
350 |
3,5 |
6 |
-12 |
2,7 |
0,13 |
6 |
Алматинская |
|
56 |
Свиноматочник |
60 |
13 |
20 |
-10 |
2,9 |
0,14 |
6 |
Жамбульская |
|
57 |
Телятник |
80 |
9 |
17 |
-14 |
3,1 |
0,15 |
6 |
Атырауская |
|
58 |
Свинарник |
130 |
7 |
17 |
-12 |
3,0 |
0,16 |
6 |
Алматинская |
|
59 |
Птичник |
2750 |
0,5 |
18 |
-10 |
2,5 |
0,12 |
5 |
Аытрауская |
|
60 |
Коровник |
54 |
16 |
11 |
-8 |
2,9 |
0,13 |
6 |
Жамбульская |
|
61 |
Коровник |
64 |
15 |
10 |
-12 |
2,7 |
0,14 |
6 |
ВКО |
|
62 |
Птичник |
3000 |
0,6 |
17 |
-13 |
2,7 |
0,11 |
4 |
ВКО |
|
63 |
Свинарник |
140 |
6 |
16 |
-14 |
3,1 |
0,15 |
6 |
ВКО |
|
64 |
Телятник |
85 |
10 |
16 |
-15 |
3,0 |
0,14 |
6 |
ВКО |
|
65 |
Свиноматочник |
52 |
12 |
19 |
-15 |
3.0 |
0,15 |
6 |
ВКО |
|
66 |
Овчарня |
300 |
3,8 |
7 |
-15 |
2,8 |
0,12 |
6 |
ВКО |
|
67 |
Овчарня |
370 |
3,7 |
8 |
-10 |
2,9 |
0,13 |
6 |
Алматинская |
|
68 |
Свиноматочник |
40 |
10 |
18 |
-10 |
2,8 |
0,13 |
6 |
Алматинская |
|
69 |
Телятник |
90 |
10 |
15 |
-12 |
3,1 |
0,15 |
6 |
Алматинская |
|
70 |
Свинарник |
150 |
7 |
17 |
-12 |
2,9 |
0,16 |
6 |
Алматинская |
|
71 |
Птичник |
3200 |
0,7 |
16 |
-10 |
3,1 |
0,14 |
4 |
Алматинская |
|
72 |
Коровник |
74 |
17 |
11 |
-11 |
2,5 |
0,15 |
6 |
Алматинская |
|
73 |
Коровник |
84 |
18 |
12 |
-14 |
2,3 |
0,16 |
6 |
Карагандинская |
|
74 |
Птичник |
3400 |
0,8 |
17 |
-15 |
3,1 |
0,15 |
5 |
Карагандинская |
|
75 |
Свинарник |
160 |
8 |
18 |
-14 |
3,1 |
0,16 |
6 |
Карагандинская |
|
76 |
Телятник |
95 |
9 |
14 |
-15 |
2,8 |
0,15 |
6 |
Карагандинская |
|
77 |
Свиноматочник |
40 |
14 |
18 |
-15 |
3,2 |
0,13 |
6 |
Карагандинская |
|
78 |
Овчарня |
570 |
4,0 |
5 |
-15 |
3,0 |
0,12 |
6 |
Карагандинская |
|
79 |
Овчарня |
470 |
3,9 |
6 |
-10 |
3,1 |
0,12 |
6 |
Алматинская |
|
80 |
Свиноматочник |
34 |
15 |
18 |
-10 |
3,1 |
0,12 |
6 |
Алматинская |
|
81 |
Телятник |
100 |
8 |
15 |
-12 |
2,7 |
0,15 |
6 |
Алматинская |
|
82 |
Свинарник |
170 |
7 |
17 |
-10 |
3,0 |
0,16 |
6 |
Алматинская |
|
83 |
Птичник |
3600 |
0,8 |
16 |
-12 |
3,2 |
0,14 |
5 |
Алматинская |
|
84 |
Коровник |
94 |
19 |
11 |
-13 |
2,2 |
0,15 |
6 |
Алматинская |
|
85 |
Коровник |
88 |
20 |
10 |
-10 |
2,4 |
0,14 |
6 |
Жамбульская |
|
86 |
Птичник |
3800 |
1,0 |
17 |
-12 |
3,0 |
0,12 |
4 |
ЗКО |
|
87 |
Свинарник |
180 |
6 |
16 |
-10 |
2,9 |
0,16 |
5 |
Кызылординская |
|
88 |
Телятник |
45 |
9 |
16 |
-15 |
2,6 |
0,13 |
6 |
Акмолинская |
|
89 |
Свиноматочник |
28 |
14 |
20 |
-14 |
3,0 |
0,14 |
6 |
Павлодарская |
|
90 |
Овчарня |
670 |
3,8 |
8 |
-15 |
3,2 |
0,12 |
6 |
ВКО |
|
91 |
Овчарня |
770 |
3,7 |
7 |
-10 |
3,1 |
0,12 |
6 |
ЮКО |
|
92 |
Свиноматочник |
22 |
13 |
20 |
-15 |
2,9 |
0,13 |
6 |
СКО |
|
93 |
Телятник |
35 |
10 |
17 |
-12 |
2,5 |
0,11 |
6 |
Карагандинская |
|
94 |
Свинарник |
19 |
6 |
17 |
-13 |
2,8 |
0,16 |
6 |
Карагандинская |
|
95 |
Птичник |
4000 |
0,9 |
16 |
-14 |
2,6 |
0,14 |
6 |
СКО |
|
96 |
Коровник |
78 |
18 |
12 |
-10 |
2,6 |
0,15 |
6 |
ЮКО |
|
97 |
Коровник |
68 |
17 |
11 |
-15 |
2,8 |
0,14 |
6 |
ВКО |
|
98 |
Птичник |
1200 |
0,8 |
17 |
-12 |
2,5 |
0,13 |
5 |
Павлодарская |
|
99 |
Свинарник |
200 |
7 |
18 |
-15 |
2,7 |
0,14 |
6 |
Костанайская |
|
100 |
Телятник |
25 |
10 |
18 |
-10 |
2,5 |
0,12 |
6 |
Кызылординская |
2 Методика выполнения курсовой работы
2.1 Свойства объектов управления
Управляемый объект - основной элемент системы автоматического управления, в котором при помощи технических средств автоматизации осуществляется заданный алгоритм функционирования.
В состав объекта может входить набор машин для выполнения технологического процесса, а также внешняя среда, если она влияет на процесс управления. На объект действуют управляющие и возмущающие воздействия. Управляющие воздействия возникают в результате операций управления, которые стремятся приблизить процесс к заданному режиму работы.
Возмущающие воздействия, наоборот, удаляет процесс от заданного режима, стремятся вывести из установившегося состояния.
Чтобы обосновать выбор регулятора или управляющего устройства, необходимо знать статические и динамические характеристики объекта. Математическая модель может быть получена аналитическим или экспериментальным методом [1,2,3,12].
В основе аналитического исследования объектов управления лежит энергетический или материальный баланс. Для большинства объектов управления достаточно определения двух обобщенных координат, из которых одна характеризует поток вещества или энергию (входная), а другая (выходная) - параметр, определяющий результаты процесса. Такие объекты называют простыми одноемкостными объектами. Они могут быть описаны линейными дифференциальными уравнениями первого порядка, в которых третьей переменной является время. Виды дифференциальных уравнений, описывающих процессы, наиболее часто встречающиеся в сельскохозяйственном производстве в простых объектах управления приведены [1].
Процессы, протекающие в простых объектах управления, могут описаны в общем виде следующим выражением:
![]() ,
,
где L - часть объекта, неизменная во времени;
Y - управляемая величина;
X - входное воздействие.
На основании закона сохранения энергии можно записать, что
![]() ,
,
где Qп, Qр - входящие и выходящие потоки энергии или вещества.
Для установившегося режима ![]() .
.
Если объект вывести из состояния покоя, появляется возмущение ΔQ:
![]() .
.
В общем случае входящий и выходящий потоки являются нелинейными функциями управляемой величины. Применив для их линеаризации разложение в ряд Тейлора, получаем:

где ![]() .
.
Обозначив ![]() и
и
![]() ,
получим уравнения в относительных (безразмерных) единицах:
,
получим уравнения в относительных (безразмерных) единицах:
 .
.
Разделив это уравнение по ![]() и
перегруппировав составляющие, получим:
и
перегруппировав составляющие, получим:
 .
.
Обозначив  - время разгона, время, необходимое для
заполнения емкости объекта поступающим веществом или энергией.
- время разгона, время, необходимое для
заполнения емкости объекта поступающим веществом или энергией.
 -
коэффициент самовыравнивания (безразмерная величина).
-
коэффициент самовыравнивания (безразмерная величина).
С учетом обозначения получим:
 .
.
Это уравнение было получено А. Стодолой.
Если разделить уравнение Стодолы на (![]() ),
то получим стандартную форму дифференциального уравнения объекта:
),
то получим стандартную форму дифференциального уравнения объекта:
 ,
,
где  -
постоянное времени объекта;
-
постоянное времени объекта;
 -
коэффициент передачи объекта.
-
коэффициент передачи объекта.
Передаточная функция объекта в операторской форме:
Проанализируем свойства одноемкостного объекта в зависимости от коэффициента самовыравнивания.
1) ![]() .
Объект называют статическим, устойчивым, обладает свойством самовыравнивания;
.
Объект называют статическим, устойчивым, обладает свойством самовыравнивания;
2) ![]() .
Объект не обладает свойством самовыравнивания, и его принято называть
статическим неустойчивым объектом, т.е. при отсутствии вмешательства извне
объект теряет управление;
.
Объект не обладает свойством самовыравнивания, и его принято называть
статическим неустойчивым объектом, т.е. при отсутствии вмешательства извне
объект теряет управление;
3) ![]() .
Объект лишен свойств самовыравнивания и называется астатическим объектом.
Выходной параметр объекта управления растет безгранично по линейному закону.
.
Объект лишен свойств самовыравнивания и называется астатическим объектом.
Выходной параметр объекта управления растет безгранично по линейному закону.
Теплотехнические объекты сельскохозяйственного назначения относится к статистическим объектам с самовыравниванием, имеющий S-образную характеристику.
Для практических расчетов систем
управления такими объектами S-образную
кривую переходного процесса (см.рисунок 2.1) достаточно охарактеризовать следующими параметрами,
определенными непосредственно по графику: передаточным коэффициентом ![]() ,
постоянной времени
,
постоянной времени ![]() и
полным запаздыванием
и
полным запаздыванием ![]() .
.
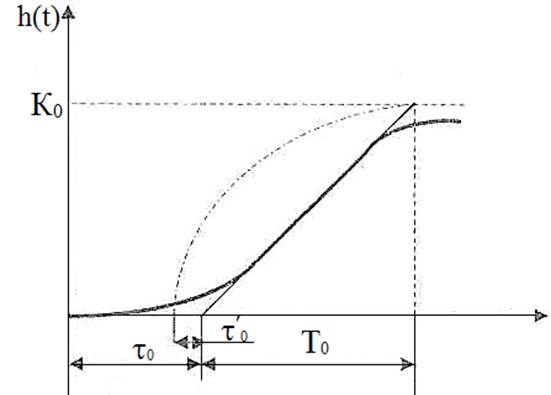
Рисунок 2.1 - Переходная характеристика объекта
S-образную характеристику можно заменить экспонентой с запаздыванием.
Передаточная функция объекта:
 .
.
Постоянную времени объекта и запаздывания объекта определяются из следующих выражений [6]:
![]() о;
о;
![]() .
.
При выполнении курсового проекта не
ставится задача строгого определения параметров объекта управления. Поэтому
принимаем упрощенную методику расчета характеристик животноводческого
помещения. Обобщенным показателем является тепловая характеристика помещения ![]() ,
которая определяется по формуле [1,13]:
,
которая определяется по формуле [1,13]:
 ,
(кДж/м3 °С ч),
,
(кДж/м3 °С ч),
где ![]() -
суммарное количество теплоты кДж/ч;
-
суммарное количество теплоты кДж/ч;
![]() -
объем помещения, м3;
-
объем помещения, м3;
![]() -
температура внутри помещения, °С;
-
температура внутри помещения, °С;
![]() -
температура наружного воздуха, ºС.
-
температура наружного воздуха, ºС.
Суммарное количество теплоты для отопления помещения можно вычислить из выражения:
![]()
Объем помещения вычисляется по формуле:
![]() ,
,
где ![]() - удельный объем помещения, м3/гол.
- удельный объем помещения, м3/гол.
Численные значения, соответствующие ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
берутся из задания по курсовому проектированию.
,
берутся из задания по курсовому проектированию.
Коэффициент теплопотерь определяется по формуле:
![]() ,
(кДж/ч °С) или
,
(кДж/ч °С) или ![]() .
.
Теплоемкость животноводческого помещения определяем из формулы:
![]() ,
,
где ![]() -
удельная теплоемкость воздуха (
-
удельная теплоемкость воздуха (![]() ,
кДж/кг °С);
,
кДж/кг °С);
![]() -
плотность воздуха (
-
плотность воздуха (![]() кг/м3)
при температуре 20°С;
кг/м3)
при температуре 20°С;
![]() -
объем помещения, м3.
-
объем помещения, м3.
Постоянное времени животноводческого помещения определяется по формуле [12]:
 ,
час, или
,
час, или  ,
мин.
,
мин.
Запаздывание в объекте можно вычислить
![]()
Конкретное значение ![]() приведено
в задании.
приведено
в задании.
Для принятой модели объекта как последовательное соединение апериодического звена первого порядка и звена с чистым запаздыванием определяем передаточное
где ![]() -
коэффициент передачи объекта в относительных единицах равен единице;
-
коэффициент передачи объекта в относительных единицах равен единице;
![]() -
постоянное времени;
-
постоянное времени;
![]() –
запаздывание.
–
запаздывание.
Если в выражение для определения Тоб подставить выражение для определение А и С, то получим:
![]() час.
час.
Постоянное времени для модели объекта
(животноводческого помещения) можно определить из значения удельной тепловой
характеристики помещения в часах или ![]() в
секундах.
в
секундах.
Постоянное времени животноводческого помещения Т0 будет равно:
![]() или
или
![]() .
.
2.2 Выбор принципа управления
В соответствии с алгоритмом функционирования, проектируемая система должна автоматически стабилизировать температуру воздуха в помещении на соответствующих зоотехническим требованиям пределах.
Управляемая или регулируемая величина
- температура воздуха в животноводческом помещении ![]() .
.
Регулирующий орган (РО) - электрокалориферная установка, осуществляет управляющее воздействие на объект путем подачи (или прекращения) нагретого теплоносителя в помещения при недостаточной (избыточной) температуре воздуха. Возмущающее воздействие - отток теплоты из помещения через вентиляцию, ограждения и строительные конструкции. Точность поддержания регулируемой величины в объекте (±10%).
Структурная схема системы представлена на рисунке 2.2.
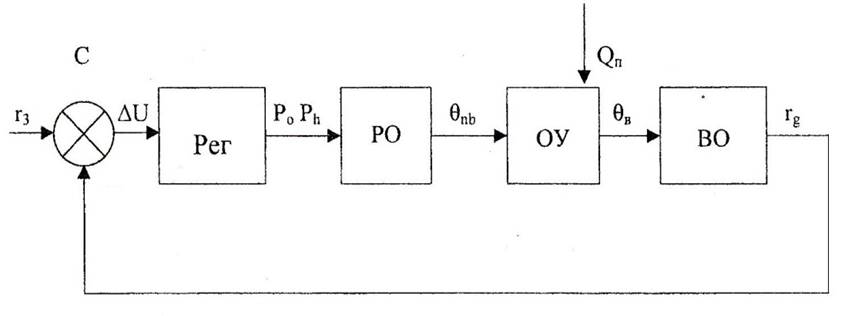
Рисунок 2.2 - Структурная схема САУ
Система автоматического управления работает на основе принципа управления по отклонению.
Управляемый параметр - температура
внутри помещения (![]() )
с помощью воспринимающего органа (ВО) преобразовывается в сопротивление и
сравнивается с заданным значением сопротивлениям, которое соответствует
заданному значению температуры. При отклонении действительного значения
температуры (соответственно и
)
с помощью воспринимающего органа (ВО) преобразовывается в сопротивление и
сравнивается с заданным значением сопротивлениям, которое соответствует
заданному значению температуры. При отклонении действительного значения
температуры (соответственно и ![]() )
от заданного (
)
от заданного (![]() )
на выходе сравнивающего элемента (
)
на выходе сравнивающего элемента (![]() )
появляется сигнал
)
появляется сигнал ![]() , который
поступает на вход управляющего устройства (Peг), регулирующий орган (РО) воздействует на объект управления
таким образом, чтобы привести в соответствие действительное значение
управляемой величины (
, который
поступает на вход управляющего устройства (Peг), регулирующий орган (РО) воздействует на объект управления
таким образом, чтобы привести в соответствие действительное значение
управляемой величины (![]() )
с заданным значением.
)
с заданным значением.
2.3 Обоснование параметров регулирующего органа
В качестве регулирующего органа используется электрокалориферная установка. Основными узлами электрокалориферной установки являются электрический калорифер, вентилятор, электродвигатель, система воздуховодов и система управления.
Мощность калорифера определяется по формуле [9,13]:
![]() ,
кВт,
,
кВт,
где ![]() –
теплопроизводительность (кДж/ч) и к.п.д. калорифера.
–
теплопроизводительность (кДж/ч) и к.п.д. калорифера.
Для установок, установленных в
помещении, ![]() , а в
подсобных -
, а в
подсобных - ![]() .
.
Схема управления обеспечивает защиту калориферов от токов короткого замыкания и от перегрева нагревательных элементов, а также защиту электродвигателя. Обязательным условием являются блокировка, обеспечивающая невозможность включения калорифера при отключенном электродвигателе вентилятора. Для поддержания температурно-влажностного режима воздуха в помещении в пределах допустимых зоотехническими требованиями необходимо осуществлять автоматическое регулирование одновременно по температуре и производительности вентилятора.
Теплопроизводительность регулируется переключением нагревательных элементов, а производительность вентилятора изменением скорости электродвигателя или перекрытием заслонки вентилятора.
Для ступенчатого регулирования скорости вентилятора используется автотрансформатор, а для плавного регулирования - тиристорное управление.
Динамическую модель электрокалорифера определим из экспериментальной разгонной характеристики, приведенной на рисунке 2.3.

Рисунок 2.3 - Разгонная характеристика электрокалориферной установки
Выпускаются электрокалориферные установки шипа СФОА-Х/1,5 ТЦ-МГ2/1 и СФОЦ-Х/0,5-И1 мощностью от 5 до 160 кВт.
Основные технические данные электрокалориферных установок типа СФОЦ-Х/0,5-И1 приведены в приложении (см.таблицу П.1).
Устройство с такой характеристикой можно представить двумя последовательно соединенными звеньями, инерционным и запаздывающим. Передаточная функция электрокалориферной установки по каналу мощность нагревателей - температура теплоносителя (воздуха) - будет иметь вид:
![]() .
.
За время переходного процесса
температура воздуха возрастает на ![]() .
.
Принимая мощность нагревателей
калорифера при включении на номинальную мощность ![]() ,
находим передаточный коэффициент калорифера
,
находим передаточный коэффициент калорифера ![]() .
.
Значение ![]() . выбираем из таблицы П.1. Номинальная мощность калорифера определяется
из условия:
. выбираем из таблицы П.1. Номинальная мощность калорифера определяется
из условия:
![]() .
.
Из таблицы П.1 выбираем серийно
выпускаемую электрокалориферную установку соответствующую номинальной мощности.
Значение постоянной времени ![]() и
запаздывание
и
запаздывание ![]() принимаем
для всех электрокалориферных установок одинаковыми:
принимаем
для всех электрокалориферных установок одинаковыми: ![]()
2.4 Выбор первичных измерительных преобразователей (датчиков)
Воспринимающий орган или датчик выбирается в два этапа.
На первом этапе по роду контролируемого параметра и условием работы определяет разновидность датчика, а на втором этапе, после выбора всех элементов системы, по каталогу находят его тип. Воспринимающий орган (датчик) выбирается таким образом, чтобы диапазон изменения измеряемой величины находился в пределах 0,3 ÷ 0,75 диапазона измерения датчика. Особое внимание необходимо обращать на инерционность датчика.
Постоянное времени датчика
определяется из условия ![]() .
.
Передаточная функция воспринимающего органа можно представить в виде инерционного звена первого порядка:
![]() .
.
Коэффициент передачи воспринимающего
органа (датчика) определяется как отношение изменения сопротивления ![]() к
соответствующему диапазону изменения температуры
к
соответствующему диапазону изменения температуры ![]() :
:
 ,
,  .
.
Технические параметры датчиков приведены в литературе [1,7,10], параметры термометров сопротивления приведены в таблицах П.2, П.3.
На практике используется медные термометры сопротивления (ТСМ) на номинальное сопротивление 53 Ом (гр22) и 100 Ом (гр24) для измерения температуры от -50 до +180 ºС, а также платиновые термометры сопротивления на номинальные сопротивления 46 Ом (гр 21) и 100 Ом (гр22) для измерения температуры от -200 до +650 ºС.
Чувствительность (коэффициент передачи) медного термометра сопротивления определяется по формуле:
 ,
,
где ![]() -
сопротивление датчика при 0°С, значение которого соответствует
градуировке (гр 23 или гр 24);
-
сопротивление датчика при 0°С, значение которого соответствует
градуировке (гр 23 или гр 24);
![]() -
температурный коэффициент, сопротивление, соответствующий для меди 3,8 10-3
1/град.
-
температурный коэффициент, сопротивление, соответствующий для меди 3,8 10-3
1/град.
Полупроводниковые терморегуляторы обладают большей чувствительностью, выпускаются две группы терморезисторов: с отрицательным температурным коэффициентом сопротивления термисторы и положительным - позисторы. Зависимость сопротивления терморезисторов от температуры нелинейна Чувствительность терморезисторов определяется экспериментально. Номинальное сопротивление и постоянный коэффициент указываются на корпусе терморезистора.
2.5 Обоснование закона регулирования и выбор регулятора
Система автоматического управления
состоит из регулятора и объекта управления. Критерием правильного выбора закона
регулирования служит отношение времени чистого запаздывания объекта ![]() к
его постоянной времени,
к
его постоянной времени, ![]() .
Если
.
Если ![]() ,
выбирают регулятор позиционного действия, при
,
выбирают регулятор позиционного действия, при ![]() -
регулятор импульсного типа; если
-
регулятор импульсного типа; если ![]() -
непрерывный закон регулирования.
-
непрерывный закон регулирования.
При обосновании закона регулирования и выборе соответствующего ему регулятора нужно знать не только свойства объекта, но и некоторые конструктивные особенности самих регуляторов.
Промышленные регуляторы реализуют законы регулирования с определенной погрешностью. Свойства регулятора и других технических устройств, входящих в состав системы автоматического управления, должны быть учтены. В сельскохозяйственном производстве широко используются регуляторы, реализующие позиционные и непрерывные законы.
Позиционные (релейные) регуляторы работают по принципу: включено- выключено, они выдают сигнал, обеспечивающий перемещение регулирующего органа в одно из фиксированных положений - позиций. По количеству позиций различают двух-, трех- и многопозиционные регуляторы. Процесс позиционного регулирования - автоколебательный.
Двухпозиционные регуляторы имеют статические характеристики без зоны неоднозначности и с зоной неоднозначности.
В качестве примера приведем
статическую характеристику двухпозиционного регулятора с зоной неоднозначности.
Границы зоны неоднозначности обозначены ![]() и
и
![]() ,
ширина зоны неоднозначности
,
ширина зоны неоднозначности ![]() ;
;
![]() и
и
![]() -
выходные воздействия регулятора. В
общем случае регулятор может оказывать в одну сторону воздействия
-
выходные воздействия регулятора. В
общем случае регулятор может оказывать в одну сторону воздействия ![]() а
в другую сторону воздействия
а
в другую сторону воздействия ![]() ,
при этом
,
при этом ![]() .
.
На рисунке 2.4 представлена статическая характеристика регулятора.
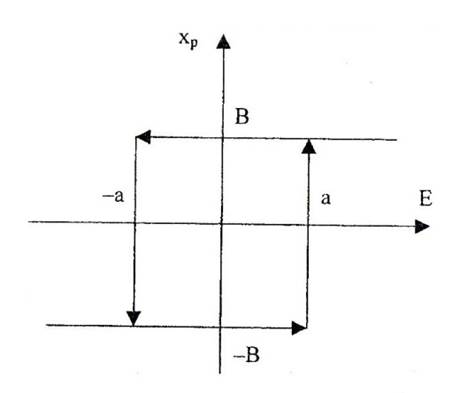
Рисунок 2.4 - Статическая характеристика регулятора
Ширина зоны неоднозначности должна
быть меньше допустимых отклонений температуры в помещении ![]() .
.
Регуляторы непрерывного действия - это регуляторы, у которых сигналы на входе и на выходе непрерывны во времени. Регуляторы непрерывного действия подразделяются на интегральные (И), или астатические; пропорциональные (П), или статические; пропорционально-интегральные (ПИ), или изодромные. Пропорционально-дифференциальные (ПД), или статические с предварением и пропорционально-интегрально-дифференциальные (ПИД), или изодромные с предварением. Дифференциальные уравнения, передаточные функции, частотные и временные характеристики, а также математические модели реальных регуляторов приведены в литературе [1,2,6,13].
Технические характеристики регуляторов температуры приведены в таблице П.3.
2.6 Составление математической модели системы автоматического управления
В инженерной практике для оценки статических и динамических свойств системы используются математические модели, устанавливающие взаимосвязь входных и выходных величин в установившихся (статических) и переходных (динамических) режимах, получаемые аналитически или экспериментально.
Математическую модель системы автоматического управления удобно представить в виде алгоритмической структурной схемы. Алгоритмическая структурная схема САУ температурой животноводческого помещения представлена на рисунке 2.5.
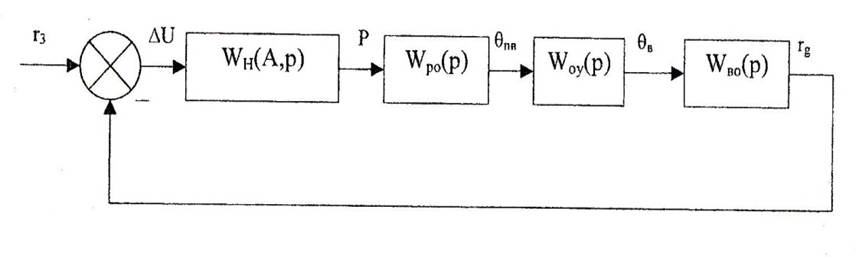
![]() -
передаточная функция регулятора;
-
передаточная функция регулятора;
![]() -
передаточная функция электрокалориферной установки РО;
-
передаточная функция электрокалориферной установки РО; ![]() -
передаточная функция объекта;
-
передаточная функция объекта; ![]() -
передаточная функция датчика - воспринимающего органа.
-
передаточная функция датчика - воспринимающего органа.
Рисунок 2.5 - Алгоритмическая структурная схема САУ
В рассматриваемой системе в качестве регулятора используется двухпозиционный регулятор с зоной нечувствительностью. Ширина зоны нечувствительности выбирается из задания на проектирование (ΔР < Δп).
Учитывая, что регулятор имеет нелинейную статическую характеристику система в целом является нелинейной.
Регулирующий орган - электрокалориферная установка имеет передаточную функцию:
![]() .
.
Передаточная функция объекта управления имеет вид:
![]() .
.
И передаточная функция воспринимающего органа
![]() .
.
Специфической особенностью нелинейной системы является режим автоколебаний.
Автоколебания в нелинейных системах являются устойчивым режимом работы. Например, в системе автоматической стабилизации температуры с нелинейным управляющим устройством. При анализе нелинейных систем решают следующие задачи:
- отыскание возможных состояний равновесия системы и оценка их устойчивости.
- определение параметров автоколебаний и их связь с параметрами системы.
Обычно в нелинейной системе содержится один существенно нелинейный элемент.
Линейная часть включает в себе все элементы с линейными или линеаризованными характеристиками и может иметь структуру любой сложности.
В рассматриваемой системе нелинейным элементов является двухпозиционный регулятор температуры, а линейная часть включает регулирующий орган (РО), объект управления (ОУ) и воспринимающий орган (ВО).
2.7 Анализ устойчивости системы
Одной из важнейших характеристик системы автоматического управления является устойчивость. Неустойчивая система неработоспособна, т.е. она не способна выполнить функции управления и может привести управляемый объект в аварийное состояние. Любая практическая система должна быть устойчивой.
Условия устойчивости реальных систем автоматического управления сформулировал А.М Ляпунов:
1) Если линейная САУ устойчива, то устойчива и реальная САУ, при этом никакие отброшенные при линеаризации члены не могут изменить её устойчивость.
2) Если линейная САУ неустойчива, то неустойчива и реальная САУ, при этом никакие отброшенные при линеаризации члены не могут изменить её устойчивость.
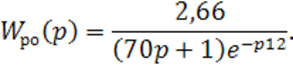
В связи с этим необходимо убедиться в устойчивости линейной части системы с передаточной функцией.
 .
.
Объединив два звена с чистым запаздыванием, получим
 .
.
Когда в контуре системы управления присутствует звено запаздывания, то характеристическое уравнение системы будет трансцендентным, решение которого связано с большими трудностями. Поэтому в практических расчетах трансцендентную передаточную функцию раскладывает в ряд Пада. Учитывая только два или три члена ряда, приближенно заменяют её дробной рациональной функцией [6]:
![]() .
.
Такая замена дает удовлетворительное приближение, если частота входного сигнала:
![]() ,
(рад/с).
,
(рад/с).
Другим способом приближенной аппроксимации звена запаздывания является представление его в виде последовательного соединения нескольких инерционных звеньев первого порядка с одинаковыми постоянными времени
Ti = τ/n:
![]() .
.
Учитывая, что для рассматриваемом в курсовом проекте системе не требуется высокая точность аппроксимации, звено с запаздыванием заменим одним инерционным звеном с передаточной функцией:
![]() .
.
Соответственно, передаточная функция линейной части системы соответствует следующему выражению:
 .
.
Обозначим сумму ![]() .
.
Запишем передаточную функцию линейной части в стандартной форме:

,
где ![]()
![]()
![]()
![]()
![]() .
.
Используя критерии Гурвица или Рауса, определим устойчивость линейной части системы. Расчет рассмотрим при определении устойчивости на примере конкретной системы. При условии устойчивости линейной части системы можно переходить к определению устойчивости системы в целом.
Для определения устойчивости нелинейных систем применяется метод гармонической линеаризации (наряду с другими методами).
Метод гармонической линеаризации является приближенным методом, который позволяет определить условия возникновения и параметры автоколебаний.
При высоком порядке характеристического полинома системы этот метод требует значительных вычислений. Расчет упростится, если линейную часть системы, которая является по отношению к регулятору обобщенным статическим объектом с самовыравниванием, представим последовательно соединенными апериодическим звеном первого порядка и звеном с чистым запаздыванием [1, 3, 11]:
 ,
,
где ![]()
![]()
Численные значения ![]() ,
,
![]() ,
,
![]() определим
при рассмотрении примера конкретного объекта:
определим
при рассмотрении примера конкретного объекта:
- В результате такого обобщения получаем нелинейную систему с двухпозиционным регулятором и объектом управления, для исследования которой применим метод гармонической линеаризации.
- Сущность метода заключается в замене существенного нелинейного элемента, эквивалентным линейным звеном.
- Условием эквивалентности служит равенство амплитуд и фаз выходного сигнала эквивалентного звена и первой гармоники выходного сигнала реального нелинейного элемента.
- Гармоническая линеаризация принципиально отличается от обычной линеаризации, так как коэффициенты линеаризованного элемента непостоянны и зависят от амплитуды входного сигнала. Коэффициенты гармонической линеаризации зависят от вида нелинейности и приведены в литературе [1.14].
Например, передаточную функцию двухпозиционного регулятора с зоной нечувствительности можно определить из выражения:
![]()
где ![]() и
и
![]() - коэффициенты линеаризации при А > а.
- коэффициенты линеаризации при А > а.
 ;
;
![]() ,
,
где ![]() и
и
![]() -
параметры статической характеристики регулятора (нелинейного элемента).
-
параметры статической характеристики регулятора (нелинейного элемента).
Заменяя ![]() на
на
![]() получаем
выражение для АФЧХ нелинейного элемента
получаем
выражение для АФЧХ нелинейного элемента
![]() .
.
Когда линейная часть системы описывается уравнением высокого порядка или содержит запаздывание для определения параметров автоколебаний, используется критерий Найквиста. Условием существования автоколебаний является равенство:
![]()
или ![]() ,
,
где ![]() -
АФЧХ всех линейных звеньев системы, а правая часть - обратная характеристика нелинейного элемента с
противоположным знаком.
-
АФЧХ всех линейных звеньев системы, а правая часть - обратная характеристика нелинейного элемента с
противоположным знаком.
Данное уравнение удобно решать графически. Для этого необходимо построить АФЧХ линейной части и обратную характеристику нелинейного элемента в одной системе координат.
В точках пересечения кривых
определяют параметры автоколебаний. На кривой ![]() определяет
частоту автоколебаний
определяет
частоту автоколебаний ![]() ,
на кривой
,
на кривой ![]() –
амплитуду автоколебания
–
амплитуду автоколебания ![]()
Факт устойчивости или неустойчивости
режима автоколебаний устанавливают при помощи следующего правила: если точка на кривой ![]() ,
близкая к точке пересечения, но сдвинутая в направлении возрастания параметра
,
близкая к точке пересечения, но сдвинутая в направлении возрастания параметра ![]() ,
не охватывается характеристикой
,
не охватывается характеристикой ![]() , то
автоколебания устойчивы, если же охватывается,
то автоколебания неустойчивы.
, то
автоколебания устойчивы, если же охватывается,
то автоколебания неустойчивы.
2.8 Расчет параметров настройки регуляторов
После выбора закона регулирования и анализа устойчивости системы необходимо обосновать параметры настройки регулятора. Существует несколько методик, по которым проводится этот расчет. Расчет оптимальных параметров регуляторов зависит от типа регулятора и переходного процесса в системе. Характер переходного процесса в нелинейных автоматических системах с релейными (позиционными) регуляторами определяется статической характеристикой релейного элемента и видом объекта (статический, астатический, с запаздыванием, без запаздывания).
Подробно методика расчета параметров
настройки непрерывных и позиционных регуляторов приведена в литературе [1,14].
Рассматриваемый в курсовом проекте объект представляется апериодическим звеном
с запаздыванием, а в качестве регулятора двухпозиционный регулятор с зоной
нечувствительности. В этом случае диапазон колебаний регулируемой величины
(температуры) будет больше зоны неоднозначности регулятора, так как регулятор
будет реагировать на фактическое изменение регулируемой величины с
запаздыванием ![]() .
.
Формулы для расчета длительности
положительной ![]() и
отрицательной
и
отрицательной ![]() амплитуд
автоколебаний, их периода
амплитуд
автоколебаний, их периода ![]() ,
частоты переключения п регулятора, положительной
,
частоты переключения п регулятора, положительной ![]() и
отрицательной
и
отрицательной ![]() амплитуды
отклонения регулируемой величины от заданного значения и диапазона
амплитуды
отклонения регулируемой величины от заданного значения и диапазона ![]() колебаний
регулируемой величины можно определить по следующим выражениям [1, 14].
колебаний
регулируемой величины можно определить по следующим выражениям [1, 14].
Статические характеристики двухпозиционного регулятора для статического объекта с передаточной функцией:
 ,
,
можно рассчитать по следующим формулам:
1-случай ![]() .
.
![]() ;
;
![]() .
.
2-случай ![]() .
.
![]() ;
;
![]() ;
;
 ;
;
![]()
![]()
![]()
Равенства амплитуд колебаний управляемой величины относительно заданного значения при практической настройке регулятора добиваются корректировкой заданного значения регулируемой величины.
Задание регулятора следует скорректировать на величину:
![]() .
.
Из приведенных формул следует, что
уменьшение зоны неоднозначности ![]() приводит
к уменьшению периода колебаний
приводит
к уменьшению периода колебаний ![]() и
увеличению числа переключений п регулятора. Уменьшение числа переключений
возможно за счет уменьшения количества энергии, коммутируемой регулятором
(мощности электрокалориферной установки). При этом следует иметь в виду, что
регулирующие воздействие регулятора должно полностью компенсировать возможные
возмущающие воздействия на объект.
и
увеличению числа переключений п регулятора. Уменьшение числа переключений
возможно за счет уменьшения количества энергии, коммутируемой регулятором
(мощности электрокалориферной установки). При этом следует иметь в виду, что
регулирующие воздействие регулятора должно полностью компенсировать возможные
возмущающие воздействия на объект.
Увеличение постоянной времени объекта при прочих равных условиях увеличивает период колебаний и уменьшает частоту переключений регулятора.
По полученным данным необходимо построить переходные процессы с указанием параметров автоколебаний.
Приложение А
Пример проектирования САУ
В качестве примера рассмотрим курсовой проект на тему: «Разработать систему автоматического управления температурой воздуха в коровнике для переходного периода времени года».
Исходные данные для проектирования:
1) количество животных — 50 голов;
2) удельный объем помещения — 16 м3/гол;
3) температура внутри помещения — +12ºС;
4) температура наружного воздуха — -10ºС;
5) тепловая характеристика помещения, q — 2,5 кДж/м3 ч;
6)
отношение времени
запаздывания ![]() к
постоянной времени,
к
постоянной времени, ![]() —
0,12;
—
0,12;
7) допустимое отклонение температуры от заданного значения — ±3°С;
8) теплоноситель системы – воздух.
Для нагревания теплоносителя
используется электрокалориферная установка с двумя ступенями нагревательных
элементов ![]() и
и
![]()
В установившемся состоянии
поддержание заданной температуры в объекте обеспечивается нагревателями
мощностью ![]() .
.
В рассматриваемом примере управляемая
величина - температура воздуха в помещении ![]() .
Система должна обеспечить автоматическую стабилизацию, значение
.
Система должна обеспечить автоматическую стабилизацию, значение ![]() в
управляемом объекте - животноводческом помещении, являющемся статическим
объектом с самовыравниваем. Возмущающие воздействия - отток теплоты из
помещения через вентиляцию, ворота, ограждение и т.п.
в
управляемом объекте - животноводческом помещении, являющемся статическим
объектом с самовыравниваем. Возмущающие воздействия - отток теплоты из
помещения через вентиляцию, ворота, ограждение и т.п.
Учитывая, что резкие перепады внешних температур для переходного периода не характерны, будем считать примерно равными время переходного процесса в объекте и интервал времени между двумя последовательными возмущениями.
Регулирующий орган РО - электрокалориферная установка осуществляет подачу нагретого теплоносителя в помещение, т.е. осуществляет управляющее воздействие. Предполагается, что животноводческое помещение оборудовано системой вентиляции, обеспечивающей необходимую кратность воздухообмена. Точность поддержания температуры в помещении - ±10% от указанных в задании значений.
Структурная схема САУ представлена на рисунке 2.2.
При проектировании системы целесообразно использовать серийно выпускаемые недорогие средства автоматизации.
В качестве регулятора целесообразно выбрать двухпозиционный регулятор с выходным элементом реле (регулятор типа РТ, ПТР, МЭТРС, ТЭ, ТМ2).
Воспринимающий орган - малоинерционный, металлический терморезистор (типа ТСМ или ТСП). Регулирующий орган - электрокалориферная установка типа СФОЦ.
Оценить правильность предварительного выбора принципа регулирования и основных элементов системы можно лишь после изучения свойств и характеристик отдельных элементов и всей системы в целом.
На основании выбранного принципа управления и технических средств можно составить функциональную схему системы.
Функциональная схема - основной документ, поясняющий принцип действия системы и взаимодействия отдельных функциональных устройств. Перед составлением функциональной схемы следует досконально изучить принцип действия используемых устройств и технических средств автоматизации.
Для составления
математических моделей элементов системы автоматического управления примем для коровника упрощенную модель (модель объекта управления), когда плотность воздуха не зависит
от температуры и давления внутри помещения, тепловыделения животных постоянны,
обобщенным показателем является удельная тепловая характеристика ![]() кДж/м3·ºС·ч.
кДж/м3·ºС·ч.
Суммарное количество теплоты, необходимое для отопления помещения, можно вычислить по формуле [5]:
![]() ,
кДж/ч.
,
кДж/ч.
Объем помещения ![]() ,
(заданное количество коров
,
(заданное количество коров ![]() ,
удельный объем помещения
,
удельный объем помещения ![]() м3/гол):
м3/гол):
![]() (кДж/ч).
(кДж/ч).
Постоянную времени коровника можно определить по упрощенной формуле:
![]() .
.
Запаздывание в объекте ![]()
Примем ![]()
Упрощенно, животноводческое помещение можно представить в виде последовательно соединенных апериодического звена и звена чистого запаздывания.
![]() ,
,
где ![]() -
коэффициент передачи объекта (
-
коэффициент передачи объекта (![]() ).
).
![]() .
.
Рассмотрим модель регулирующего органа. В качестве регулирующего органа используется электрокалориферная установка. Мощность электрокапориферной установки определим по формуле:
![]() ,
кВт,
,
кВт,
где ![]() (к.п.д
электрокалориферной установки);
(к.п.д
электрокалориферной установки);
![]() кВт.
кВт.
Из таблицы П.2 выбираем ближайшую по
мощности электрокалориферную установку. Это электрокалорифер марки СФОЦ-16/05, ![]() Установленная
мощность
Установленная
мощность ![]() кВт. Мощность нагревателей
кВт. Мощность нагревателей ![]() кВт.
кВт.
Перепад температуры нагреваемого
воздуха ![]() .
.
Динамическая модель электрокалориферной установки будет соответствовать
![]() ;
;
 ;
;
![]() ;
;
Рассмотрим два возможных варианта формирования управляющего воздействия.
1-вариант
Мощность первой ступени электрокалорифера
![]() кВт.
кВт.
В этом случае управляющие воздействия ![]() .
.
2-вариант
Мощность первой ступени электрокалорифера
![]() кВт.
кВт.
При этом ![]() .
.
Примечание: электрокалориферы комплектуются унифицированными ТЭН-ами номинальной мощностью 2,5 кВт, 1,6 кВт.
В рассматриваемой системе воспринимающий орган (датчик) преобразовывает температуру воздуха в коровнике в сигнал, удобный для дальнейшей обработки в системе. Предварительно выбранные регуляторы температуры комплектуются термометрами сопротивления типа ТСМ с градуировкой ГР.22 или ГР.23
Диапазон изменения регулируемой
величины - температуры - должен находиться в
пределах 0,3÷0,75 диапазона измерения датчика. По этому показателю
выбираем термометр сопротивления ТСМ 5071 с пределами измерения 0°С -50°С~...
150°С с градуировкой ГР24 номинальным сопротивлением 100 Ом при ОС. Постоянная
времени ![]() (данные
взяты из таблицы П.2).
(данные
взяты из таблицы П.2).
Коэффициент передачи датчика определим из выражения:
![]() Ом/°С.
Ом/°С.
Передаточная функция воспринимающего органа (датчик):

Учитывая, что в задании на проектировании
отношении ![]() задано
равным 0,12, что меньше, чем 0,2, выбираем
позиционный закон регулирования.
задано
равным 0,12, что меньше, чем 0,2, выбираем
позиционный закон регулирования.
В качестве регулятора выберем серийно выпускаемый регулятор на микроэлектронных элементах ТМ2 с диапазоном регулирования температуры от 0 до 40°С с зоной возврата 0...10°С.
Выбранный регулятор температуры имеет статическую характеристику (см.рисунок 2.4).
Зона неоднозначности регулятора ![]() , изменение
регулирующего воздействия в относительных
единицах при включении регулятора
, изменение
регулирующего воздействия в относительных
единицах при включении регулятора  В2 -
при отключении
В2 -
при отключении ![]() т.е.
т.е. ![]() Второй
вариант
Второй
вариант ![]()
Принимаем ![]() в
поименных единицах. В относительных единицах
в
поименных единицах. В относительных единицах 
Математическую модель системы составим на основе алгоритмической структурной схемы. Система состоит из регулятора с нелинейной статической характеристикой и линейной части. Линейная часть включает последовательно соединенные звенья с передаточной функцией (см.рисунок П.1):

;
Объединив два звена с чистым запаздыванием и подставив, численные значения известных величин, получим:
 ;
;
 ;
;
 .
.
Устойчивость основной показатель, определяющий работоспособность системы. Неустойчивая система неработоспособна. Прежде чем определить устойчивость системы в целом, необходимо убедиться в устойчивости линейной части системы. В контуре системы управления имеется звено с запаздыванием, поэтому для определения устойчивости необходимо применить графический метод на базе критерия Найквиста или звено с запаздыванием заменить апериодическим звеном первого или второго порядка.
Для определения устойчивости проектируемой системы достаточно убедиться в устойчивости линейной части, поэтому остановимся на применении упрощенной методики определения устойчивости по критерию Гурвица.
Структурную схему системы можно упростить и представить в виде нелинейного элемента и линейной части (см.рисунки П.1, П.2).
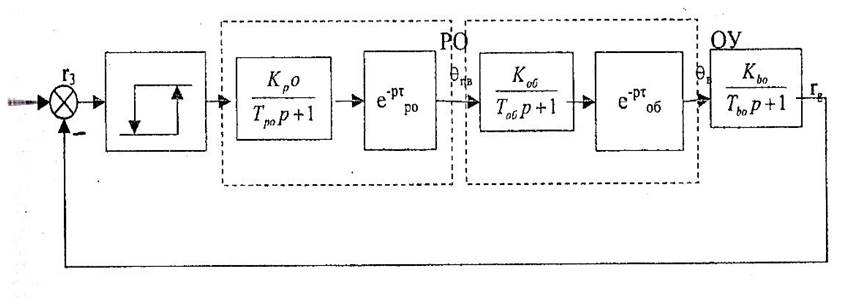
Рисунок П.1 - Алгоритмическая структурная схема системы
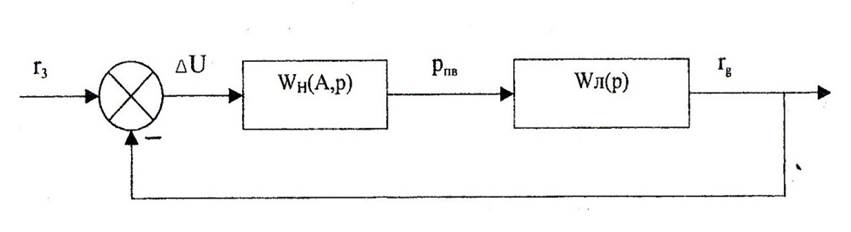
Рисунок П.2 - Упрощенная алгоритмическая структурная схема
Для определения устойчивости проектируемой системы достаточно убедиться в устойчивости линейной части, поэтому остановимся на применении упрощенной методики определения устойчивости по критерию Гурвица.
Передаточную функцию звена с запаздыванием аппроксимируем апериодическим звеном первого порядка:
![]() .
.
Подставляя это значение в выражение ![]() ,
получим:
,
получим:
 .
.
Характеристическое уравнение линейной части системы приведем к стандартному виду:
![]()
![]() ;
;

![]() с;
с;
![]()
![]() с;
с;
![]()
![]() .
.
Характеристическое уравнение линейное части системы:
![]() .
.
Все коэффициенты характеристического уравнения больше нуля, поэтому необходимое условия устойчивости выполняется.
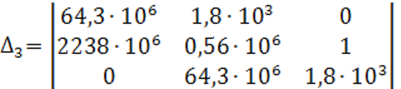
Из коэффициентов характеристического уравнения составим определитель Гурвица:
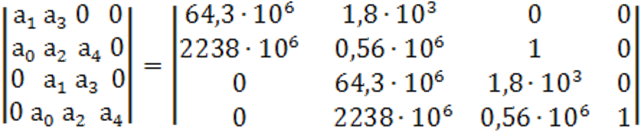 .
.
Для устойчивости линейной части системы достаточно, чтобы все диагональные миноры определителя также были больше нуля:
![]() ;
;

˃ 0;
˃ 0;
![]() .
.
Линейная часть системы устойчива.
Переходим к определению устойчивости системы в целом методом гармонической линеаризации. Для упрощения расчета линейную часть системы, которая является обобщенным статическим объектом с самовыравниванием по отношению к регулятору преобразуем к виду:
 ,
,
где ![]()
![]() ;
; ![]() примем
примем
![]()
Звено с запаздыванием заменим апериодическим звеном первого порядка:
 .
.
Передаточную функцию двухпозициопного регулятора методом гармонической линеаризации представим в виде:
![]() .
.
Коэффициенты линеаризации b(A) и c(A) определим по формулам [1,13]:
![]() ;
;
![]() .
.
Заменяя р на jω по аналогии с линейными системами, получаем выражение для АФЧХ нелинейного элемента:
![]() .
.
Условия возникновения автоколебаний в нелинейной системе определим по критерию устойчивости Найквиста.
Условием возникновения автоколебаний является:
![]()
Передаточная функция типичных нелинейных элементов зависит только от амплитуды входных сигналов. В этом случае условия возникновения автоколебаний можно записать:
![]() ,
,
где ![]() -
частота автоколебаний;
-
частота автоколебаний;
![]() -
амплитуда автоколебаний.
-
амплитуда автоколебаний.
Для инженерных расчетов применяется графическое решение данного уравнения, для чего в одних координатах строят АФЧХ линейной и нелинейной частей системы.
Графическое построение АФЧХ линейной части системы и нелинейного элемента связано с большим объемом вычислений и графических построений и дает приблизительные значения частоты и амплитуды автоколебаний.
В курсовом проекте ограничимся определением этих параметров из переходной характеристики процесса регулирования, которую можно построить после расчета параметров регулятора.
Статическая характеристика для расчетов параметров настройки и переходного процесса двухпозиционного регулятора с зоной нечувствительностью имеет следующие параметры:
Вариант 1: ![]() .
.
Вариант 2: ![]() .
.
Обобщенный объект управления с передаточной функцией:
 ,
,
имеет следующие параметры (одинаковые для обоих вариантов)
![]()
![]()
![]()
![]() .
.
Вариант 1. Расчет параметров настройки регулятора.
Продолжительность положительной ![]() и
отрицательной
и
отрицательной ![]() амплитуд
автоколебаний
амплитуд
автоколебаний
![]()
= 949,2 c.
Период автоколебаний ![]() .
.
Частота переключения регулятора ![]() .
.
Амплитуда положительного ![]() и
отрицательного
и
отрицательного ![]() отклонения
регулируемой величины от заданного значения:
отклонения
регулируемой величины от заданного значения:
![]() .
.
В абсолютных единицах:
![]() .
.
Диапазон колебаний регулируемой величины (амплитуда автоколебаний):
![]() .
.
Действительное значение диапазона
изменения регулируемой величины
![]() на 0,96°С
больше допустимого по заданию значению (6°С), это составляет
на 0,96°С
больше допустимого по заданию значению (6°С), это составляет ![]() от
заданного значения температуры в коровнике (12°С), что допустимо по зоотехническим
требованиям.
от
заданного значения температуры в коровнике (12°С), что допустимо по зоотехническим
требованиям.
Амплитуда автоколебаний соответствует ширине диапазона колебаний:
![]() .
.
Частота автоколебаний:
 рад/с.
рад/с.
Вариант 2. (![]() ).
).
Продолжительность положительной амплитуды:
![]() - 0,83) / 0,33 = 1636,4 с.
- 0,83) / 0,33 = 1636,4 с.
Продолжительность отрицательной амплитуды:
![]() + 0560 ln (1,5 – 0,33) /.0,83
= 856 с.
+ 0560 ln (1,5 – 0,33) /.0,83
= 856 с.
Период автоколебаний:
![]() .
.
Частота переключения регулятора:
![]() .
.
Амплитуда положительного отклонения:
![]()
.
Амплитуда отрицательного отклонения:
![]() .
.
В абсолютных единицах:
![]()
![]()
Диапазон колебаний регулируемой величины:
![]()
Так как значение ![]() и
и
![]() не
равны, для обеспечения равенства амплитуд колебаний температуры относительно принятого
значения температуры, задание регулятору при его настройке следует
скорректировать на величину [1]:
не
равны, для обеспечения равенства амплитуд колебаний температуры относительно принятого
значения температуры, задание регулятору при его настройке следует
скорректировать на величину [1]:

или в абсолютных единицах:
![]() .
.
Диапазон колебаний регулируемой величины:
![]()
Диапазон изменения температуры в
проектируемой системе по варианту 2 получился больше требуемого (6°С) на
0,16°С, что составляет 1,3% от заданного значения, что вполне достаточно для
практики. Второй вариант обеспечивает более точнее стабилизацию температуры в
коровнике, однако имеет более продолжительный период автоколебаний. По
полученным данным построим графики переходного процесса для первого варианта (см.рисунок П.3). Амплитуда автоколебаний ![]() .
.
Частота автоколебаний ![]() рад/с.
рад/с.
Для экономического обоснования системы автоматического управления температурным режимом в животноводческом помещении в проекте рассмотрены два возможных варианта системы управления. В обоих вариантах используются одинаковые типы оборудования и решают одну и ту же задачу. Из двух вариантов необходимо выбрать тот вариант, который требует меньший расход электрической энергии на отопление.
Исходные данные для определения затрат электроэнергии.
Вариант 1.
Мощность электрокалориферной
установки ![]() кВт,
первой ступени
кВт,
первой ступени ![]() кВт.
кВт.
Продолжительность работы электрокалориферной
установки на полную мощность ![]()
![]() с
или 0,264 часа.
с
или 0,264 часа.
Продолжительность работы
электрокалориферной установки на первой ступени мощности ![]()
![]() с
или 0,264 часа.
с
или 0,264 часа.
Количество циклов работы электрокалориферной установки в сутки:
![]() .
.
Затраты электроэнергии в сутки, кВт·ч:
![]() кВт·ч.
кВт·ч.
Вариант 2.
Мощность электрокалориферной
установки ![]() кВт,
первой ступени
кВт,
первой ступени ![]() кВт.
Продолжительность работы электрокалориферной установки на полную мощность
кВт.
Продолжительность работы электрокалориферной установки на полную мощность ![]() с
или 0,43 часа.
с
или 0,43 часа.
Продолжительность работы
электрокалориферной установки на первой ступени ![]() с
или 0,24 часа.
с
или 0,24 часа.
Количество циклов работы за сутки:
![]() .
.
Затраты электроэнергии в сутки:
![]() кВт·ч.
кВт·ч.
Из проведенных расчетов следует, что затраты электроэнергии во втором варианте за сутки на 50,6 кВт и больше, что составляет 19% от первого варианта.
Отсюда следует, хотя второй вариант реализации системы обеспечивает точное регулирование температурного режима в коровнике, но требует затрат электроэнергии на 19% больше. Поэтому из двух вариантов следует остановиться на первом, который обеспечивает приемлемый режим при меньших затратах.
Для технической реализации выбранного варианта системы автоматического управления температурным режимом в животноводческом помещении необходимо разработать принципиальную схему с указанием всех элементов, входящих в неё элементов, и связи между ними.
Базовая принципиальная электрическая
схема станции управления электрокалориферной установкой приведена в литературе
[2,3,8,9]. Базовую схему необходимо привести в соответствие с полученным в
проектируемой системе количеством нагревательных элементов и мощностью каждой
позиции (![]() ,
, ![]() ).
).
Дополнить регулятором и датчиком (воспринимающим органом).
Перечень элементов с указанием их марок и параметров сводится в таблицу.
Возможны несколько вариантов выполнения и технической реализации принципиальных схем в зависимости от используемых в схеме элементной базы. Поэтому принципиальная схема разрабатывается студентом, самостоятельно использующим знания, полученные при изучении родственных дисциплин и литературных источников.
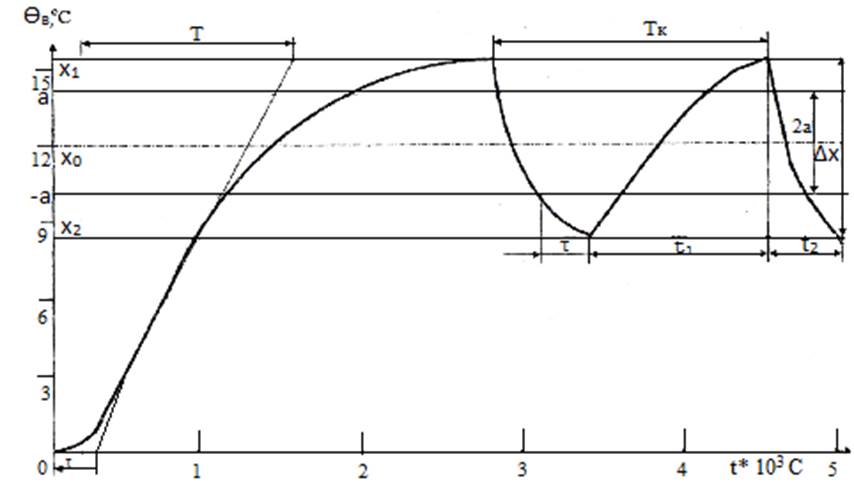
Рисунок П.1 - 1 вариант
Основные технические данные электрокалориферных установок типа СФОЦ-X/05-И1, термометров сопротивления и технические характеристики регуляторов температуры приведены в таблицах П.1, П.2, П.3.
Таблица П.1 - Основные технические данные электрокалориферных установок типа СФОЦ-X/05 -И1
|
Показатель |
СФОЦ -5 |
СФОЦ -10 |
СФОЦ -16 |
СФОЦ-25 |
СФОЦ -40 |
СФОЦ -60 |
СФОЦ -100 |
СФОЦ -160
|
|||||
|
Установленная мощность, кВт: |
4,92 |
10,0 |
16,1 |
23,6 |
47,2 |
69,7 |
97,5 |
170,5 |
|||||
|
в том числе: нагревателей, кВт |
4,8 |
9,6 |
15,0 |
22,5 |
45,0 |
67,5 |
90,0 |
163 |
|||||
|
электродвигателя, кВт |
0,12 |
0,4 |
1,1 |
1,1 |
2,2 |
2,2 |
7,5 |
7,5 |
|||||
|
минимальная |
500 |
700 |
1500 |
1500 |
1500 |
4000 |
6000 |
10000 |
|||||
|
максимальная |
1000 |
1400 |
3000 |
3000 |
5000 |
8000 |
12000 |
20000 |
|||||
|
перепад температуры нагреваемого воздуха при мин. производ, м3/°С |
40 |
40 |
40 |
60 |
60 |
60 |
60 |
60 |
|||||
|
при максимальной производит., м3/°С |
20 |
20 |
20 |
30 |
30 |
30 |
30 |
30 |
|||||
|
тип вентилятора |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
|||||
|
номер вентилятора |
2,5 |
3,2 |
4 |
4 |
5 |
5 |
6,3 |
8 |
|||||
Таблица П.2 - Термометры сопротивления
|
Вид, тип |
Градуировка |
Номинальное сопротивление при 0°С, Ом
|
Пределы измерения, °С |
Показатель тепловой инерции |
|
Медные:
|
||||
|
ТСМ-Х |
23 |
53 |
-50... + 100 |
4 мин |
|
ТСМ-6097 |
23 и 24 |
53 и 100 |
-50...+150 |
4 мин |
|
ТСМ-5071 |
23 и 24 |
53 и 100 |
-50…+150 |
120 с |
|
ТСМ-010 |
23 |
53 |
-50... + 100 |
2,5 мин |
|
ТСМ-5114 |
23 |
53 |
-50...+100 |
25 с |
|
ТСМ-148 |
23 |
53 |
0...+120 |
80 с |
|
ТСМ-8034 |
23 |
53 |
-50...+85 |
30 с |
|
Платиновые:
|
||||
|
ТСП-8012 |
22 |
100 |
0...+50 |
20 мин |
|
ТСП-6104 |
22 |
100 |
-50...+60 |
20 с |
|
ТСП-154 |
21 |
46 |
-5... + 140 |
20 с |
|
ТСП-6105 |
22 |
100 |
-260...+200 |
9 с |
|
ТСП-955М |
22 |
100 |
0... + 100 |
9 с |
Таблица П.3 - Технические характеристики регуляторов температуры
|
Тип |
Закон регулирования пределы настройки, ºС
|
Диапазон регулирования, ºС |
Зона возврата, С |
Тип датчика |
|
РТ-049 |
Двухпозиционный 100...+400 |
40:100:150:300 |
1...10 |
Термометр Гр 22: Гр 23 |
|
ПТР, ПО |
Двух- трехпозиционый Пропорциональный -40... + 100 |
20:25:30:50 |
0,5...5 |
Терморезистор погруженный камерный |
|
МЭТРС |
Двух- трехнозиционный -10...+300 |
40:100:150 |
0,5…10 |
Термометр Гр 21: Гр 22: Гр 23: Гр 24 |
|
ТЭ, ТМ 2, ТМ 8 |
Двух-трехпозиционный -40...+120 |
40 |
0,5…10 |
Термометр Гр 22: Гр 23 |
Список литературы
1. Мартыненко И.И., Лысенко В.Ф. Проектирование систем автоматики. — Агропромиздат, 1990. - 243 с.
2. Бородин И. Ф., Судник Ю. А. Автоматизация технологических процессов. - М.: КолосС, 2003. - 344 с.
3. Бородин И.Ф., Недилько Н.М. Автоматизация технологических процессов. – М.: Агропромиздат, 1986. – 368 с.
4. Курсовое и дипломное проектирование по автоматизации технологических процессов Ф.Д. Изаков, В.Р. Казедаев и др. – М.: Агропромиздат, 1988. - 183 с.
5. Захаров А.А. Практикум по применению теплоты в сельском хозяйстве. – М.: Агропромиздат, 1985. - 175 с
6. Лукас В.А. Теория автоматического управления. – М.: Недра 1990 – 416 с.
7. Средства автоматики и телемеханики Н.И. Бохан, И.Ф.Бородин, Ю.В. Дробышев и д.р. – М.: Агропромиздат, 1992. - 351 с.
8. Утешев У. Электротермические установки в животноводстве. - Алма-Ата КазСХИ. 1988. – 102 с.
9. Кудрявцев И.Ф., Карасенко В.А. Электрический нагрев и электротехнология. - М.: Колос, 1975. – 384 с.
10. Исследование и выбор элементов систем автоматизации технологических процессов. Методические указания к курсовой работе для студентов спец 311400. - Саратов, 1997. - 50 с .
11. Детальная разработка автоматизации технологического процесса в дипломном проекте на электрификации сельскохозяйственного объекта. Методические указания по дипломному проектированию. - Саратов, 1998.- 48 с.
12. Кирилин Н.И. Методическая разработка по расчету оптимальных систем автоматического управления сельскохозяйственными производственными процессами в курсовых и дипломных проектах. - М.: МИИСП им. Горячкина, 1992. – 70 с.
13. Наладка автоматических систем и устройств управления технологическими процессами. Справочное пособие под редакцией А.С. Клюева. - М.: Энергия, 1977. – 400 с.
14. Зайцев А.М., Жильцов В.И, Шавров А.В. Микроклимат животноводческих комплексов. - М.: Агропромиздат, 1986. - 192 с.
Сводный план 2013 г., поз. 13
Дюсенбаев
Торемурат Самуратович
Мустагулова Бопа Жанабаевна
CИСТЕМЫ АВТОМАТИЗАЦИИ
ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Методические указания и задания к выполнению курсовой работы
для студентов специальности 5В081200-Энергобеспечение сельского хозяйства
Редактор Л.Т.Сластихина
Специалист по стандартизации Н.К. Молдабекова
Подписано в печать ________
Формат 60х84 1/16
Тираж 50 экз.
Бумага типографская №1
Объем 2,0 уч.-изд.л.
Заказ ________. Цена ___ тг.
Копировально-множительное бюро
Некоммерческое акционерное общество
«Алматинский университет энергетики и связи»
050013, Алматы, ул. Байтурсынова, 126