Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ
И СВЯЗИ
Кафедра
электрических станций, сетей и систем
УПРАВЛЕНИЕ ЭНЕРГООБЪЕДИНЕНИЯМИ
Конспект лекций
для магистрантов
профильного обучения
по специальности 6М071800 – Электроэнергетика
Алматы 2014
СОСТАВИТЕЛИ: К.К.Тохтибакиев. Управление энергообъединениями. Конспект лекций для магистрантов профильного обучения по специальности 6М071800 – Электроэнергетика. -Алматы: АУЭС, 2012. – 66 с.
В данном конспекте лекций представлены материалы по вопросам обеспечения устойчивости в энергосистемах, приведены принципы и структура противоаварийной автоматики для предотвращения нарушения устойчивости, рассматриваются современные средства и устройства управления нормальными и аварийными режимами энергосистем.
Конспект лекций предназначен для магистрантов профильного обучения по специальности 6М071800 – Электроэнергетика.
Ил. - 26, табл.- 2, библиогр. - 15 назв.
Рецензент: АУЭС, д-р техн. наук, проф. П.С.Сагитов
Каз НАУ, канд. техн. наук, доц. Е.К. Умбеткулов
Печатается по плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2012г.
©НАО Алматинский университет энергетики и связи, 2014 г.
Содержание
1. Аварийные ситуаций в энергосистемах и их последствия.
2. Нарушение статической и динамической устойчивости. Задачи и принципы обеспечения устойчивости
3. Методы анализа и управления режимами энергосистем с целью обеспечения устойчивости
4. Обеспечение устойчивости энергосистем различной структуры
5. Принципы, структура и средства управления режимами энергосистем для обеспечения устойчивости
6. Виды противоаварийнаой автоматики
7. Методы выбора дозировки противоаварийной автоматики
8. Управление мощностью генераторов для повышения синхронной динамической устойчивости
9. Автоматическое регулирование возбуждения и форсировка системы возбуждения для повышения устойчивости энергосистем
10. Использование современных технологий для повышения пропускной способности передачи электрической сети
11. Использование современных технологий для повышения пропускной способности передачи электрической сети (продолжение)
12. Интеллектуальные электрические сети
13. Современные средства активно-адаптивной сети и аппаратуры релейной защиты и автоматики (продолжение)
14. Современные средства активно-адаптивной сети и аппаратуры релейной защиты и автоматики (продолжение)
15. Нормативные документы по эксплуатации противоаварийной автоматики
Список литературы
1 лекция. Аварийные ситуации в энергосистемах и их последствия
Содержание лекции: основные виды аварийных ситуаций, причины нарушения устойчивости, последствия аварийных нарушений режимов.
Цель лекции: ознакомить с видами аварийных ситуаций, исследованиями нарушения устойчивости, классификацией нарушений, распределением нарушения устойчивости, причинами нарушения устойчивости.
Анализ повреждаемого электрического оборудования энергосистем и статистические данные по нарушениям устойчивости содержатся в ряде работ [6, 10].
Для энергосистем различной структуры характерны разные причины нарушений синхронизма. Для энергосистем простой типовой структуры это, в основном, превышение предела статической устойчивости при отключении одной из параллельных линий или понижении напряжения на одном из концов линии при потере возбуждения или ошибочном его понижении. Для слабых связей и более сложных структур частыми причинами нарушений синхронизма являются превышения предела статической устойчивости вследствие медленных изменений или нерегулярных колебаний мощности, вследствие превышения предела статической устойчивости в послеаварийном режиме, а также из-за возникновения внезапных небалансов мощности, вызванных отключением линий, генераторов или нагрузки внутри соединяемых энергосистем. Нарушения синхронной динамической устойчивости слабых связей практически не имеют места. В энергосистемах сложной структуры наблюдаются случаи нарушения устойчивости, вызванные асинхронным ходом по соседним электропередачам.
Наибольшее количество нарушений устойчивости приходится на дефицитные и сложные энергосистемы. Это является прямым следствием происходящего процесса объединения энергосистем на параллельную работу, создания крупных энергообъединений, в которых, с одной стороны, возрастает число энергорайонов и энергосистем, получающих значительную часть мощности из энергообъединений (дефицитные энергосистемы), и, с другой стороны, следствием того, что режимы и процессы, происходящие в энергосистемах сложного энергообъединения, как уже указывалось выше, взаимосвязаны и взаимообусловлены.
Характерной особенностью сложных энергообъединений является возможность развития цепочечных (каскадных) нарушений устойчивости. Возникнув в одном из районов энергообъединения, нарушение, если оно быстро не локализовано, может распространяться, охватывая новые энергосистемы и районы, вплоть до всего энергообъединения.
Наибольшее число нарушений приходится на сеть 110—220 кВ, в связи малой пропускной способности. Сравнительно небольшое число нарушений синхронизма в системообразующей сети 330—500 кВ определяется ее большей пропускной способностью и более высоким уровнем оснащения противоаварийной автоматикой.
Определенный интерес представляет также анализ первичных причин, вызвавших возникновение и развитие аварийной ситуации, сопровождавшейся нарушением устойчивости. Так, например, первопричинами нарушения синхронизма, явились следующие:
- отключение линий, автотрансформаторов, трансформаторов вследствие отключения линий из-за к.з. при грозе, дожде, пожаре, сильном ветре, в результате наброса постороннего предмета, перекрытия изоляции на посторонний предмет, из-за отключения трансформаторов и автотрансформаторов в результате действия их защит (газовой и др.);
- отказ или неправильные действия релейной защиты и противоаварийной автоматики;
- отключение или снижение мощности блока, котла, собственных нужд электростанции;
- повреждение или отказ оборудования — из-за повреждения (разрушения) опорных изоляторов, обрыва гирлянды изоляторов;
- медленное превышение предела передаваемой мощности из-за нарастания нагрузки и опоздания в ограничении потребителей.
Рассмотрим вопрос о том, какова вероятность возникновения различных видов к. з. и вероятность повреждения линий. Статистические данные по повреждаемости линий содержатся в ряде работ ([15] и др.). Подавляющее большинство при этом (90—95%) составляют однофазные замыкания. Двухфазное к. з. на землю является, как правило, расчетным и для сетей 500 кВ.
Последствия нарушений устойчивости.
Сохранение устойчивости (в том числе и результирующей) требуется, прежде всего, для обеспечения бесперебойного энергоснабжения потребителей, поэтому последствия нарушений устойчивости оцениваются именно с этих позиций.
Вопрос об оценке ущербов, вызванных нарушением энергоснабжения потребителей, особенно при кратковременных перерывах питания, в настоящее время практически еще не решен. В связи с этим последствия от нарушений устойчивости не оцениваются по ущербу, что было бы желательным, а лишь сопоставляются по длительности перерывов питания, отключаемой мощности и т. п.
В энергорайонах, потребляющих значительную часть мощности из энергообъединений, нарушения синхронизма наносят, как правило, значительный ущерб, связанный с необходимостью отключения части менее ответственных потребителей для сохранения в работе электрических станций дефицитного района и обеспечения питания более ответственных потребителей. На рисунке 1.1 в качестве примера показано изменение частоты в одном из дефицитных районов (Рген=0,47Рнагр) после нарушения устойчивости по связям 110 кВ этого района с энергообъединением вследствие отключения параллельных линий 220 кВ.
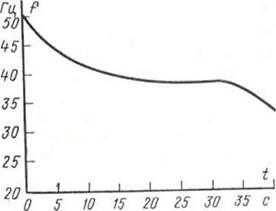
Рисунок 1.1 - Изменение частоты во времени при возникновении дефицита мощности
При нарушении синхронной устойчивости в течение секунд и десятков секунд за счет сохранения результирующей устойчивости ликвидировалось 20% нарушений синхронизма.

Рисунок 1.2 - Осциллограмма нарушения статической устойчивости слабой связи с последующей ресинхронизацией
Нарушения синхронной устойчивости между двумя энергосистемами, соединенными слабой связью, чаще всего не вызывают тяжелых последствий, поскольку возникающий при этом дефицит мощности в одной из систем обычно может быть покрыт без отключения потребителей за счет вращающегося резерва мощности. На рисунке 1.2 показана осциллограмма нарушения статической устойчивости по одной из слабых связей с последующей ресинхронизацией через 20 с за счет быстрого вмешательства персонала, снизившего мощность в передающей системе [10].
Следует отметить, что быстрая ликвидация аварий в энергосистемах сложной структуры может быть обеспечена только с помощью противоаварийной автоматики.
2 лекция. Нарушение статической и динамической устойчивости. Задачи и принципы обеспечения статической и динамической устойчивости
Содержание лекции: основные виды режимов, возмущения, понятия статической и динамической устойчивости, критерии устойчивости.
Цель лекции: ознакомить с понятиями устойчивости, причинами нарушения устойчивости, методами анализа статической и динамической устойчивости, использование практических методов оценки статической устойчивости.
Процесс нарушения статической устойчивости характеризуется постепенным нарастанием тока и реактивной мощности по линии, снижением напряжения на подстанциях с последующим лавинообразным протеканием процесса и периодическими колебаниями таких электрических параметров, как токи, мощность, напряжения.
Нарушения статической устойчивости в энергосистемах структуры I происходят, главным образом, в послеаварийном режиме вследствие отключения одной из сильно загруженных параллельных линий, т. е. увеличения x∑. Кроме того, имеют место нарушения устойчивости, обусловленные понижением напряжения в приемной или передающей частях энергосистемы. Причиной нарушения статической устойчивости было также возникновение дефицита реактивной мощности в приемной системе конечной мощности.
В качестве средств повышения статической устойчивости могут также применяться отключение или управление реакторами (если такая возможность имеется), принудительная кратковременная форсировка возбуждения генераторов (у современных крупных турбогенераторов по условиям нагрева ротора длительность форсировки ограничивается временем 15—20 с) и форсировка продольной компенсации, снижающей суммарное реактивное сопротивление (число таких устройств в настоящее время незначительно). Эффективным способом повышения статической устойчивости послеаварийного режима являются все виды АПВ.
С ростом мощности энергосистем и энергообъединений растут и единичные мощности генераторов, при этом их параметры с точки зрения устойчивости менее благоприятны. Более подробно эти вопросы рассмотрены в материалах, изложенных в [5,10].
Поскольку отключение одной из параллельных линий в большинстве случаев происходит в результате к. з., разгрузка электропередачи путем отключения генераторов, аварийного регулирования турбин с последующим ограничением их мощности, деления станции предназначается как для обеспечения статической, так и синхронной динамической устойчивости. Естественно, что в целом, это процесс динамический, но поскольку в подавляющем большинстве подобных нарушений определяющим является статическая устойчивость в послеаварийном режиме после отключения одной из параллельных линий, оценим эти мероприятия только с точки зрения обеспечения статической устойчивости.
Цель перечисленных мероприятий — снизить переток по оставшимся в работе линиям до значений, допустимых по условиям статической устойчивости. Однако их эффективность существенно зависит от соотношения мощностей передающей и приемной энергосистем.
В случае если передающая и приемная энергосистемы соизмеримы по мощности или приемная энергосистема меньше передающей, то снижение генерируемой мощности в передающей системе малоэффективно, поскольку для уменьшения перетока в послеаварийном режиме на определенную величину потребуется в ряде случаев снижение генерируемой мощности передающей энергосистемы на величину, в несколько раз большую. При таких соотношениях более целесообразным может быть разделение передающей станции (энергосистемы) на две части при отключении одной из параллельных линий с выделением на оставшиеся связи такого числа генераторов, чтобы обеспечивались условия устойчивости.
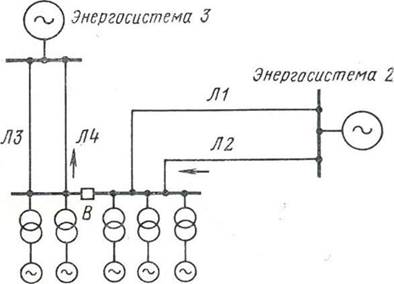
Такой способ наиболее часто применяется в случае, когда в предаварийном режиме передающая станция или энергосистема работает на два направления, т. е. по схеме, которая относится к сложным структурам V (см.рисунок 2.1).
Энергосистема (электростанция) 1
Рисунок 2.1 - Принципиальная схема электростанции, работающей на два направления
Однако, поскольку в послеаварийном режиме она фактически сводится к типовой структуре I, это мероприятие рассматривается в настоящем разделе.
Его существо сводится к следующему. При возникновении аварийной ситуации, например отключении одной из параллельных линий, передающая крупная станция или энергосистема 1 делится с помощью выключателя В на две части, одна из которых передает мощность в энергосистему 2, другая в энергосистему 3, причем число выделенных генераторов на каждую передачу выбирается таким, чтобы обеспечивались условия устойчивости при передаче мощности в каждой из двух разделившихся частей. Для выполнения этого условия разделение передающей станции обычно одновременно сопровождается отключением одного или нескольких генераторов, причем в этом случае отключение генераторов в отделившейся части оказывается более эффективным, чем аналогичное мероприятие в полной схеме, без разделения. Поскольку мощность каждой части разделившейся передающей энергосистемы меньше ее полной мощности. В качестве примера такой автоматики можно привести автоматику, установленную на Красноярской ГЭС, работающей на два направления — Братск и Кузбасс, которая производит деление станции с одновременным отключением части генераторов при отключении одной из линий 500 кВ.
К недостаткам данного способа следует отнести следующее. Деление станции или энергосистемы обычно приходится осуществлять на нескольких выключателях, что существенно усложняет выполнение этого мероприятия, снижает его надежность и при отказе одного из выключателей может привести к развитию тяжелой аварийной ситуации. В случае, когда мощность приемной энергосистемы соизмерима с мощностью передающей или в несколько раз меньше ее, т. е. в условиях, когда применение отключения генераторов или аварийного снижения мощности турбин передающей энергосистемы нецелесообразно, а деление передающей станции (энергосистемы) или неэффективно, или существенно снижает надежность передачи, целесообразно для обеспечения устойчивости ориентироваться на мероприятия в приемной энергосистеме, в частности на отключение в ней части нагрузки, или, по крайней мере, сочетать мероприятия в передающей и приемной энергосистемах.
В тех случаях, когда нарушение статической устойчивости может произойти или в результате отключения одной из параллельных линий без к.з., или при понижении напряжения на одном из концов электропередачи, или при увеличении передаваемой мощности (например, из-за отключения части местной нагрузки), пуск разгрузочной автоматики может осуществляться по различным факторам. В качестве выявительных органов возможно применение реле, реагирующих на ток, активную мощность, сопротивление или непосредственно на угол δ. Зависимости изменения электрических параметров при изменении угла δ показаны на рисунке 2.2.
Недостатком автоматики, реагирующей на активную мощность электропередачи, является то, что она может не действовать при нарушениях устойчивости, вызванных снижением напряжения на одном из концов электропередачи или отключением одной из параллельных линий, поскольку при этом предел передаваемой мощности снижается, а автоматика, настроенная на определенный переток мощности, который остается неизменным, не реагирует на это.
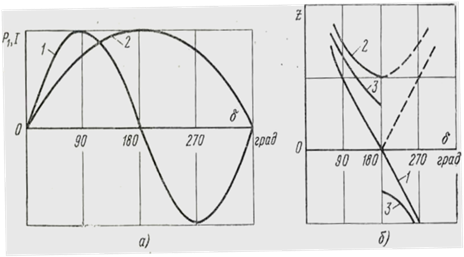
а — активная мощность (1) и ток линии (2);
б — сопротивление на зажимах реле полного сопротивления;
1 — в электрическом центре качаний,
2 — в точке приложения э.д.с.,
3 — в промежуточной точке.
Рисунок 2.2 - Зависимости изменения электрических параметров при изменении угла δ
Наиболее универсальной автоматикой, предотвращающей нарушение статической устойчивости независимо от причин этого нарушения, является автоматика, реагирующая на угол [14]. Эти устройства автоматики измеряют угол между векторами напряжения по концам электропередачи и, если этот угол превышает заданное значение, производят разгрузку или отключение генераторов. Вектор э.д.с. или напряжения (точнее их фаза) получается или с помощью телеизмерения, или с помощью, так называемой фантомной схемы.
Автоматику, используемую в энергосистемах для обеспечения устойчивости, по назначению можно разделить на следующие виды: автоматика повышения статической устойчивости, автоматика повышения синхронной динамической устойчивости, автоматика ресинхронизации, автоматика локализации аварий, автоматика восстановления нормальной схемы и режима.
Такая классификация удобна, поскольку в настоящей книге рассматриваются только режимные принципы автоматики. В ряде других работ, посвященных в основном вопросам технической реализации автоматики и опыту ее применения [3], приняты иные системы классификации, в большей степени отвечающие задачам этих работ.
По принципам выполнения автоматика может быть разделена на следующие группы: автоматика программного действия, осуществляющая заранее выбранное воздействие без контроля за протеканием процесса; режимная автоматика, осуществляющая воздействие после анализа аварийной ситуации и режима системы; устройство автоматического регулирования или ограничения; самонастраивающаяся автоматика.
Чем меньше доля человека в управлении режимом и чем больше управление автоматизировано, тем выше уровень устойчивости. Это положение справедливо лишь при условии, что быстрота, надежность и «разумность» действий автоматики не ниже, чем у хорошего опытного диспетчера.
Создание такой автоматики является весьма сложным и дорогим делом, не всегда себя окупающим, в разделах 11-15 представлены современные средства и системы управления энергосистемой, обеспечивающего ее устойчивость.
Автоматика различного назначения и различного выполнения воздействует на одни и те же элементы энергосистемы. Поэтому в ряде случаев (как это будет показано ниже) одна и та же автоматика может выполнять несколько функций.
К автоматике повышения статической устойчивости относятся устройства: автоматического регулирования возбуждения (АРВ); автоматического повторного включения, повышающего предел устойчивости в послеаварийном режиме (трехфазное, быстродействующее, однофазное - ТДПВ, БАПВ, ОАПВ); автоматической частотной разгрузки (ЛЧР), предотвращающей «лавину частоты»; автоматического регулирования или ограничения перетоков мощности (АРПМ), изменяющие мощности турбин и позволяющие работать с меньшим запасом устойчивости; автоматического отключения генераторов в передающей системе при приближении к пределу статической устойчивости; автоматического отключения нагрузки в приемной системе при приближении к пределу статической устойчивости (по мощности или напряжению); автоматического управления конденсаторами продольной компенсации; автоматического разделения энергосистемы или станции при приближении к пределу статической устойчивости.
Для повышения синхронной динамической устойчивости применяются: АРВ, БАПВ, ОАПВ, аварийное регулирование паровых турбин и отключение генераторов в передающей части системы, разделение станции, работающей на два направления.
К автоматике ресинхронизации относятся: АПВ линий, устройства воздействия на систему регулирования турбин, устройства отключения синхронных компенсаторов (СК) в приемной части системы, отключения части нагрузки (чаще всего АЧР), устройства частотного пуска гидрогенераторов и перевода агрегатов из режима СК в режим выдачи активной мощности.
Для локализации аварий используются: аварийное регулирование турбин (для разгрузки электропередач), отключение генераторов, делительная автоматика (действующая до появления асинхронного хода или прекращающая асинхронный ход).
Для восстановления нормальной схемы и режима применяются: самозапуск двигателей, самосинхронизация генераторов, АПВ с самосинхронизацией (АПВС), несинхронное АПВ (НАПВ), АПВ с улавливанием синхронизма (АПВУС), АПВ по частоте (ЧАПВ), пуск гидрогенераторов при понижении частоты, перевод агрегатов из режима СК в режим выдачи активной мощности.
Принципы выполнения автоматики определяют такие ее характеристики, как приспособляемость к режиму и схеме, эффективность использования возможностей управления и селективность. В разных случаях важны те или иные из этих характеристик, и это во многом определяет выбор автоматики. Так, при регулировании возбуждения селективность практически не играет роли, а при отключении нагрузки или генераторов это очень важная характеристика; аварийное управление турбиной должно иметь хорошую приспособляемость к режиму и схеме и т. д.
Наиболее простым видом автоматики является автоматика программного действия, т. е. такая автоматика, которая работает по заранее заданной программе при возникновении какого-либо события (например, АПВ линий, отключение генераторов при появлении тока нулевой последовательности, релейная форсировка возбуждения).
Более сложным (зато более селективным) видом автоматики является режимная автоматика, действие которой происходит только в том случае, если этого требует режим системы (например, отключение генераторов при понижении напряжения прямой последовательности с контролем мощности предшествующего режима, разгрузка генераторов по набросу мощности с контролем мощности предшествующего режима и т. п.).
3 лекция. Методы анализа и управления режимами энергосистем с целью обеспечения устойчивости
Содержание лекции: математическая модель установившихся и переходных режимов ЭЭС, комплекс программ РАСТР по расчету стационарных режимов, «Мустанг» по расчетам переходных режимов. Основные виды режимов, возмущения, понятия статической и динамической устойчивости, критерии устойчивости.
Цель лекции: изучить математические модели по расчету установившихся и переходных режимов, ознакомить с комплексом программ РАСТР и Мустанг.
Для расчетов установившихся режимов наиболее распространенной является промышленная программа «РАСТР».
Ниже описываются модели элементов электроэнергетической системы, используемые в данной версии программы. Каждый узел i характеризуется при расчете стационарного режима следующими данными:
а) активной и реактивной нагрузкой (Pнi, Qнi);
б) напряжением (модулем и фазой- Ui,6i) в узле;
в) активной и реактивной генерируемой мощностью (Pri, Qri);
г) активной и реактивной проводимостью на землю, включенной в узле (Via, Yir).
Активная и реактивная нагрузки в узле могут быть заданы с учетом статических характеристик по напряжению следующего вида:
 I
I
Ui, oi
Pгi+jQгi
![]()
Yia+jYirPHi+jQm
Рисунок 3.1 – Схема замещения узла
 (3.1)
(3.1)
 (3.2)
(3.2)
где Рн0 и Qн 0 - активная и реактивная составляющие мощности нагрузки при U = Uном,
а0, а1, а2 - коэффициенты полиномов статических характеристик активной нагрузки по напряжению,
b0, b1,b2 - коэффициенты полиномов статических характеристик реактивной нагрузки по напряжению.
Реактивная мощность генератора может быть задана фиксированной величиной либо свободной величиной (с учетом ограничений Qrmax и Qrmin).
Каждая связь i-j представляется П-образной схемой замещения:
 iZijKjij
iZijKjij
Yiij = 0.5∙Yij0 Yijj = 0.5∙Yji0
Рисунок 3.2 – Схема замещения связи i-j
Обозначения на рисунке 3.2
Zij = Rij + jXij - сопротивление связи.
0.5Yijo - проводимость на землю.
Yijo=Gij+jBijo.
Kjia+jKjir - комплексный коэффициент трансформации (продольная и поперечная составляющие).
Основная информационная база программы RASTR состоит из:
- информации об узлах, содержащих сведения об активной и реактивной мощности узла, номинальном напряжении и наличии шунтирующих реакторов или СК;
- информации о ветвях, содержащих сведения об активном и реактивном сопротивлении, емкостной и активной проводимости линии, коэффициенте транёсформации трансформаторов. Ниже в таблицах в качестве приведены информация для одной из региональных компаний РК (АО «АЖК»).
Моделирование электромеханических переходных процессов. Синхронные машины.
Уравнения синхронных машин (СМ) соответствуют двум модификациям модели:
- без учета электромагнитных переходных процессов, т.е. с допущением о постоянстве э.д.с. за некоторым реактивным сопротивлением;
- с учетом электромагнитных переходных процессов в контурах ротора.
а) генератор моделируется постоянством модуля э.д.с. Ег за реактивным сопротивлением Хг.
Данная модель генератора описывается уравнениями движения
ротора:
![]() (3.3)
(3.3)
![]() (3.4)
(3.4)
где S – скольжение ротора СМ относительно синхронно вращающихся осей [о.е.];
б – угол ротора СМ, т.е. угол между направлением вектора Ег и синхронно вращающимися осями [рад.];
Wном – синхронная скорость сращения (при частоте равной номинальной Wном=1);
Рт – мощность турбины [МВТ];
Мэ – электромагнитный момент СМ [МВа];
Рном – номинальная активная мощность СМ [МВТ];
Мj – момент инерции СМ вместе с турбиной [МВТс];
D – коэффициент демпфирования [о.е.];
Su – скольжение вектора напряжения U относительно синхронно вращающихся осей [о.е.];
 (3.5)
(3.5)
б) генератор моделируется с учетом электромагнитных переходных процессов в роторе.
При следующих принятых основных допущениях: - не учитываются апериодические составляющие переходных процессов, несимметричные режимы воспроизводятся только токами и напряжениями прямой, последовательности, не учитываются изменения в насыщении главной магнитной цепи и зубцового слоя, в продольной и поперечной осях СМ имеется по одному демпферному контуру, сверхпереходные сопротивления по продольной и поперечной осям равны, при этом значение сверхпереходного сопротивления Х” вычисляется как
 (3.6)
(3.6)
здесь допустимо полагать ![]() зависимость Х”” от Wu не учитывается.
зависимость Х”” от Wu не учитывается.
Уравнения СМ записаны в «форме э.д.с.» в осях, жестко связанных с ротором СМ.
Системы возбуждения и АРВ (автоматическое регулирование возбуждения).
Уравнения системы возбуждения (СВ) и уравнения АРВ образуют единый блок и основаны на следующих допущениях:
1) малые постоянные времени в СВ и АРВ не учитываются или учитываются упрощенно;
2) не учитывается ряд второстепенных эффектов: нелинейность передаточных функций (эти функции заменяются на линейные с ограничениями), кратковременное снижение Еqe при близком к.з. в высокочастотной СВ (соответственно увеличивается постоянная времени СВ) и другие;
3) упрощенно записываются уравнения высокочастотной СВ и блок сильной стабилизации (БСС);
4) упрощенно учитывается действие ограничителя минимального возбуждения (ОМВ);
5) при описании СВ и АРВ вместо тока If в обмотке возбуждения используется э.д.с. Еq.
Уравнения составлены таким образом, что они пригодны для описания всех существующих СВ и АРМ (при условии соответствующего задания параметров). Предусмотрена возможность моделирования следующих типов СВ:
Тип 1 – независимое тиристорное возбуждение, или тиристорная система возбуждения с сериесными трансформаторами, или бесщеточная СВ с вращающимися тиристорами; АРВ сильного действия (АРВСД);
Тип 2 – тиристорное самовозбуждение без сериесных трансформаторов; АРВСД;
Тип 3 – бесщёточная СВ с вращающимися диодами; АРВСД;
Тип 4 – высокочастотная СВ без блока сильной стабилизации (БСС); АРВ типа корректора напряжения;
Тип 5 – то же, но с БСС;
Тип 6 – электромашинное возбуждение с возбудителями постоянного тока;
компаундирование и корректор напряжения; релейная форсировка напряжения;
Тип 0 – отсутствие АРВ, Еqe=const.
Предусмотрена возможность управления действием АРВ от автоматики и моделирование ряда отказов АРВ и СВ.
Уравнение СВ и АРВ:
 (3.11)
(3.11)
Uрвmin-Eqe(0)<DUрв<Upвmax-Eqe(0),
где DUрв – входной сигнал на АРВ;
КOU, К1U, К1if, КOf, К1f - коэффициенты регулирования;
U0 – установка АРВ по напряжению, равная напряжению генератора в исходном режиме;
аlfa – коэффициент, позволяющий учесть изменение уставки по напряжению в корректорах напряжения от частоты;
Sut – скольжение вектора напряжения U, используемое для формирования сигнала по отклонению частоты от предшествующего значения:
 (3.12)
(3.12)
где Tf – постоянная времени в канале отклонения частоты;
UДОП.1 – дополнительный сигнал, позволяющий обеспечить специфическое воздействие на работу АРВ (от противоаварийной автоматики, или при моделировании неправильной работы АРВ); управление величиной UДОП.1.
Осуществляется дискретно: значение UДОП.1 введенное по правилам моделирования противоаварийной автоматики сохраняется до нового управления;
Еqe(0)=E”q+Id•(X’dp-X”),
Upвmin, Upвmax – ограничения сигнала DUpв на АРВ.
Регулирование мощности турбины.
Модель регулятора скорости, принятая в комплексе программ «MUSTANG-90» описывается максимально двумя дифференциальными уравнениями:
а) простейшая модель регулятора скорости (не учитывается влияние паровых объемов, включает в себя одно дифференциальное уравнение, которое описывает поведение самого регулятора скорости). Признаком наличия регулятора скорости у турбины является задание величины статизма. Кроме этого, необходимы следующие параметры: постоянные времени на открытие и закрытие направляющего аппарата Т0 и ТЗ. Необязательными параметрами являются зона нечувствительности Зн и ограничения мощности турбины Ртmin и Ртmax.
Причем, если Ртmin=Pтmax=0, то ограничения не учитываются.
 (3.13)
(3.13)
![]() при
при
![]() , (3.14)
, (3.14)
![]() при
при ![]() ,
,
 , (3.15)
, (3.15)
где Трс=Т0 при открытии направляющего аппарата турбины;
Трс=Тз при закрытии направляющего аппарата турбины;
Мт=Ртmax при Мт>Pтmax;
Mт=Рт min при Мт<Pтmin;
А - сигнал на входе системы РС;
Ф – перемещение муфты центробежного маятника;
Мт – перемещение штока сервопривода системы РС;
4 лекция. Обеспечение устойчивости энергосистем различной структуры
Содержание лекции: классификация энергосистем по их структуре, типовые структуры, критерии отнесения структуры к выделенными типовым структурам, эквивалентные параметры энергосистемы.
Цель лекции: ознакомить с понятиями структуры энергосистем, типовыми структурами простых и сложных энергосистем, способами обеспечения устойчивости в простых и сложных структурах энергосистем.
Структура электрических систем и ее влияние на устойчивость параллельной работы.
Современные электрические системы имеют, как правило, достаточно сложную структуру, которую лишь весьма приближенно можно охарактеризовать и классифицировать. Тем не менее, такая классификация электрических систем полезна, поскольку существуют особенности обеспечения устойчивости систем, присущие той или иной структуре. Эти общие для каждой структуры особенности касаются причин нарушения устойчивости, и их последствий, целесообразного уровня устойчивости, методов анализа, задач и принципов управления. Классификация энергосистем по их структуре при решении задач устойчивости приведена в [1,9]. Эта классификация постепенно расширяется и уточняется. Анализ опыта использования предложенной ранее классификации, опыта эксплуатации, экспериментальные исследования и расчеты электромеханических переходных процессов, проведенные для многих энергосистем и энергообъединений, дают основания предложить следующую классификацию. Прежде всего, энергосистемы могут быть подразделены на энергосистемы простой и сложной структуры. К энергосистемам простой структуры могут быть отнесены такие, которые при анализе электромеханических переходных процессов можно свести к эквивалентной двухмашинной системе. Если же при анализе переходных процессов энергосистема не может быть сведена к двухмашинной, а должна быть представлена тремя или более эквивалентными генераторами, она относится к энергосистемам сложной структуры.
В свою очередь энергосистемы простой структуры целесообразно разделить на следующие типы:
- энергосистема (энергорайон) с избытком мощности, связанная с энергообъедииением большой мощности;
- дефицитная энергосистема (энергорайон), получающая мощность из энергообъединения большой мощности;
- две энергосистемы соизмеримой мощности, соединяемые жесткой связью;
- две энергосистемы, соединяемые слабой связью.
Энергосистемы сложной структуры можно классифицировать по следующим типам:
- лучевая трехмашинная система;
- цепная система;
- радиальная система;
- кольцевая система;
- многоконтурная система.
Энергосистемы простой структуры, соответствующие этой классификации, показаны на рисунке 1.1, сложные — на рисунке 4.1. Некоторые типовые структуры (I, III, IV и V) стали общепринятыми и включены в директивную [9] и учебную [10] литературу. Классификация по остальным типовым структурам распространена в меньшей степени. Предложенная классификация является условной, и не существует жестких критериев, определяющих принадлежность какой-либо конкретной системы к той или иной структуре. Во многих случаях достаточно сложные системы могут рассматриваться в первом приближении как простые или в иных могут выделяться участки, которые целесообразно рассматривать как простые схемы.
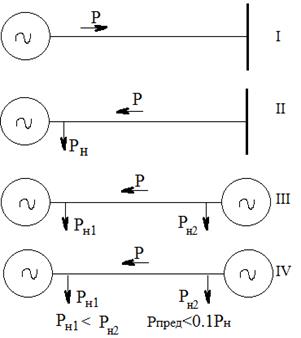
Рисунок 4.1 - Энергосистемы простой структуры
При определении того, к какому типу целесообразно относить конкретные системы, важную роль играют режим энергосистемы, а также соотношения между мощностями генерации и потребления в ее частях и между пропускной способностью электропередач и мощностями соединяемых систем. Так, одна и та же система в зависимости от направления потока мощности по линии связи с энергообъединением в различных режимах может быть отнесена к I или II структуре; две энергосистемы, отнесенные в нормальном режиме ко II структуре, при отключении одной из параллельных линий могут быть представлены IV структурой.
Предложенные девять типовых структур не единственно возможные, могут быть иные варианты классификации.
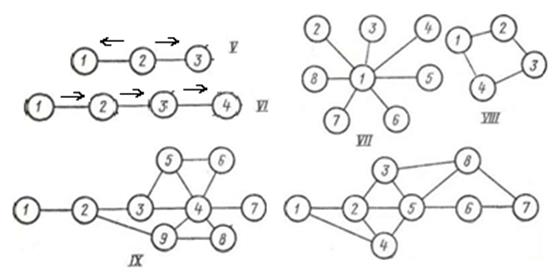
Рисунок 4.2 - Энергосистемы сложной структуры
Рассмотрим основные характерные черты типовых структур, определяющие задачи и принципы управления. Первые четыре типовых структуры — простые, для их анализа достаточно схемы эквивалентный генератор — шины или схемы с двумя эквивалентными генераторами. Типовая структура I характеризуется тем, что значительная часть мощности генераторов передающей энергосистемы отдается в приемную систему, мощность которой (по сравнению с передающей) настолько велика, что можно не считаться с понижениями частоты в приемной системе при нарушении режима работы передачи. Нарушения устойчивости в энергосистемах этой типовой структуры связаны с возмущениями или отклонениями режима от нормального на электропередаче или в передающей энергосистеме (короткими замыканиями, которые вызывают отключение линий, превышением предела статической устойчивости и т. п.). Последствия нарушений устойчивости в таких энергосистемах, как правило, не слишком тяжелы, если только нет ответственных потребителей, расположенных вблизи электрического центра качаний. Для обеспечения устойчивости таких энергосистем эффективным является воздействие на возбуждение генераторов и синхронных компенсаторов, отключение в передающей системе при возникновении аварийных ситуаций части агрегатов или аварийное автоматическое снижение мощности паровых турбин. Примерами такой структуры являются часть блоков Волжской ГЭС имени В. И. Ленина, работающих на ОЭС Урала (на этапе раздельной работы ОЭС Центра и Урала), Чиркейская ГЭС, отдающая мощность в ОЭС Северного Кавказа, и др.
Типовая структура II характеризуется тем, что в энергосистеме малой мощности значительная часть нагрузки покрывается за счет приема из системы, мощность которой в несколько раз больше. Нарушение синхронной работы в таких системах происходит, главным образом, вследствие возмущений на линии или в приемной системе. Разрыв связи с энергообъединением для энергосистем этой структурной группы является одним из наиболее тяжелых возмущений. Последствия нарушений устойчивости в таких системах, как правило, весьма тяжелые, так как они сопровождаются понижением частоты и отключением значительной части нагрузки. Поэтому необходимо принимать меры для обеспечения синхронной устойчивости даже на случай маловероятных аварий. Такими мерами могут являться различные виды АПВ на линиях, автоматическое увеличение (специальными средствами) мощности первичных двигателей на электростанциях приемной системы (если на них имеется свободный резерв мощности), быстрое отключение части потребителей при аварийных ситуациях. В тех случаях, когда синхронная динамическая устойчивость не обеспечивается, принимаются меры для быстрой ресинхронизации и восстановления нормальной работы потребителей электроэнергии. Примерами этой типовой структуры группы являются Омскэнерго, Тамбовэнерго, Крымэнерго.
Типовая структура III весьма сходна со второй и отличается лишь тем, что передающая энергосистема соизмерима по мощности с приемной. Количество энергосистем такой структуры сокращается по мере объединения энергосистем. Причинами нарушений устойчивости в этом случае (помимо перечисленных для второй группы) могут быть внезапные возмущения в передающей системе, в частности отключение значительной нагрузки. Для повышения устойчивости энергосистем этой типовой структуры могут применяться те же мероприятия, что были указаны для структур I и II типов. Примеры таких структур: две части Иркутскэнерго (при ее раздельной работе с ОЭС Сибири) [34, 139] и др.
Типовая структура IV — две энергосистемы, соединяемые слабыми связями, т. е. такими электропередачами, для которых предельная передаваемая мощность не превосходит 10—15% мощности наименьшей из систем. Основными причинами нарушений устойчивости таких электропередач являются превышение пределов статической устойчивости вследствие отключения одной из параллельных линий, нерегулярных колебаний мощности в связываемых энергосистемах или внезапного возникновения в них небаланса мощности (отключение генератора или нагрузки). Последствия нарушений синхронной устойчивости слабых связей, как правило (если нет потребителей вблизи центра качаний), не являются тяжелыми для энергосистем, поэтому для слабых связей во многих случаях можно ориентироваться на обеспечение результирующей устойчивости. В то же время при наличии вблизи центра качаний потребителей или возможности нарушения синхронизма других энергосистем при асинхронном режиме по слабой связи ориентация на ресинхронизацию по этим связям нецелесообразна. В последние годы с ростом мощностей энергообъединений, усложнением их структуры и увеличением взаимного влияния режимов энергосистем число слабых связей, на которых применяется ресинхронизация, сокращается. Мероприятиями по обеспечению устойчивости слабых связей являются ручное или автоматическое регулирование межсистемного перетока, применение различных видов АПВ (в том числе и несинхронного). Примеры таких структур: объединение ОЭС Закавказья с ЕЭС, объединение ОЭС Северо-Запада с ЕЭС и др.
Типовая структур, а V — энергосистема (энергорайон) с избытком мощности, отдаваемым в два энергообъединения (трехмашинная схема). Это первая из сложных структур, под которыми подразумеваются такие, которые не могут быть сведены к системе генератор — шины. Сложные структуру часто могут рассматриваться по аналогии, с описанными выше простыми случаями, однако есть ряд особенностей, которые можно объяснить и исследовать, только прибегая к сложной схеме. Эти особенности, присущие всем сложным структурам, связаны, прежде всего, с взаимным влиянием соседних электропередач, которое может проявляться в большей или меньшей степени в зависимости от соотношения между генерируемой мощностью и мощностью нагрузок в узлах, от отношения мощности генераторов к предельной мощности электропередач и направления передачи мощности.
В типовой структуре V наиболее ярко проявляются особенности, связанные с взаимным влиянием электропередач, а именно: новые причины и последствия нарушения устойчивости (нарушение устойчивости одной электропередачи часто приводит к асинхронному режиму другой), зависимость предела устойчивости одной электропередачи от мощности, которая передается по другой, и, наконец, сложный комплекс разгрузочной и делительной автоматики, локализующий распространение аварийной ситуации с одной электропередачи на другую. Примеры такой структуры: Братская ГЭС, отдающая мощность в Иркутскэнерго и Красноярскэнерго; Волжская ГЭС имени В. И. Ленина, соединенная с ОЭС Центра и Урала и др.
Рассмотрим типовую структуру VI — цепную систему. Если по всем участкам такой системы мощность передается в одном направлении, то при отключении одной из линий между энергосистемами взаимное влияние электропередач на устойчивость параллельной работы минимально, так как при нарушении устойчивости на любом из участков остальные линии разгружаются. Если же к какому-либо узлу схемы мощность притекает с двух сторон (или передается от этого узла в двух направлениях, так же как в структуре V), то взаимное влияние при такой же аварии проявляется в максимальной степени. В этих условиях нарушение устойчивости одной электропередачи часто сопровождается нарушением устойчивости другой электропередачи. Путем отключения части агрегатов (если в узле, где сходятся электропередачи, имеется избыток мощности) или путем отключения части нагрузки (для узла с дефицитом мощности) это влияние может быть в значительной степени ослаблено. В случае цепной схемы за счет взаимного влияния возможно также нарушение устойчивости электропередачи, работающей с малым запасом устойчивости, при возмущениях на других электропередачах, даже существенно удаленных от первой. Примеры цепных систем: ОЭС Сибири, ОЭС Северного Кавказа ОЭС Северо-Запада (до ввода электропередачи Витебск — Смоленск).
Радиальная система — типовая структура VII. Как правило, центральное звено такой системы является самым мощным, и устойчивость всей системы в целом определяется балансом мощности этого звена. Наиболее тяжело обеспечивается устойчивость в том случае, когда в центре такой системы существует дефицит мощности и по всем связям перетоки направлены к центру. В этих условиях отключение одной из связей может вызвать каскадное нарушение устойчивости остальных связей. Повышение устойчивости таких систем в основном достигается автоматической разгрузкой основных электропередач с тем, чтобы не допустить развала системы в целом. Примерами такой системы могут быть: ЕЭС, в которой энергообъединения Центра и Средней Волги имеют радиальные связи с Уралом, Северо-Западом и Волгоградэнерго; ОЭС Урала с центром Свердловэнерго [157].
Кольцевые системы — типовая структура VIII— характеризуются, прежде всего, тем, что в них нарушение устойчивости возникает не менее чем по двум связям. Эти связи могут быть географически удалены одна от другой, поэтому автоматика, разгружающая электропередачи для обеспечения устойчивости такой системы, часто не может приводиться в действие непосредственно от возмущающих факторов, и требуется применение телепередачи.
Последняя типовая структура IX — многоконтурные системы, т. е. системы более сложные, чем все предшествующие. Такие системы, как правило, приходится рассматривать при анализе устойчивости современныхэнергообъединений в целом.
Характерным для многоконтурных систем является то, что они состоят из более простых структур, сложным образом влияющих одна на другую. Именно для анализа такого влияния требуется учет многоконтурности.
5 лекция. Принципы, структура и средства управления режимами энергосистем для обеспечения устойчивости.
Содержание лекции: структура управления режимами энергосистем, противоаврийное управление для обеспечения устойчивости, принципы выбора противоаврийной автоматики уставки противоаврийной автоматики.
Цель лекции: ознакомить с задачами управления режимами энергосистем, со структурой и принципами противоаварийной автоматики для обеспечения устойчивости.
Управление режимами энергосистем для обеспечения их устойчивости состоит из ручного управления, автоматического регулирования и действия противоаварийной автоматики. В [3,10] изложены требования к устойчивости энергосистем.
Обеспечение устойчивости параллельной работы энергосистем является одной из наиболее важных задач, входящих в более общую задачу обеспечения живучести энергообъединений. Понятие живучести в энергетике появилось сравнительно недавно. Под термином «живучесть» понимают способность автоматически управляемой энергосистемы противостоять цепочечному развитию аварийных событий, т. е. развитию системной аварии большого масштаба. Такие аварии сопровождаются отключением значительной части потребителей и электростанций, разделением энергосистемы на несинхронно работающие отдельные районы с полным погашением части этих районов. Поскольку системные аварии наносят большой ущерб народному хозяйству, обеспечение живучести энергосистем является важной задачей проектирования и эксплуатации энергосистем. Помимо устойчивости параллельной работы для обеспечения живучести необходимы рациональное размещение резервов, надежная работа теплосилового оборудования электростанций в аварийных условиях и т. п.
Рассмотрим различные степени распространения нарушений и роль противоаварийной автоматики в обеспечении устойчивости параллельной работы энергосистем.
Повреждение одного или нескольких элементов и локализация поврежденного участка основными устройствами релейной защиты и автоматики без отключения существенной части потребителей и деления энергосистемы. Таких событий происходит более 100 000 ежегодно.
Отказ релейной защиты или выключателя и локализация аварии резервной защитой, автоматикой и устройством резервирования отказов выключателей (примерно 0,5% всех повреждений).
Нарушение синхронизма по одному сечению с ресинхронизацией или делением без существенного отключения нагрузки (несколько сотен ежегодно).
Каскадное нарушение синхронизма, которое ликвидируется устройствами делительной автоматики и не сопровождается существенным отключением нагрузки (несколько событий в год).
Отключение части нагрузки автоматикой при понижении частоты или напряжения (несколько десятков событий в год).
Дополнительная потеря значительной мощности тепловых электростанций (несколько событий ежегодно).
Длительный асинхронный ход вследствие того, что не произошла ресинхронизация и отказала делительная автоматика или выключатель (единичные события).
Длительное понижение (лавина) напряжения в основной сети вследствие того, что не отключилось к. з., нарушилась устойчивость части нагрузки и т. п. (единичные события).
Разделение энергосистемы или энергообъединения на отдельные части с погашением ряда электростанций и отключением значительной части (более 10%) потребителей (редкие события).
Разделение Единой энергетической системы (ЕЭС) на отдельные части с отключением более 10% потребителей.
Из приведенных данных видно, что, несмотря на очень большую эффективность существующей противоаварийной автоматики, ежегодно достаточно часто наблюдаются случаи, когда аварийные события охватывают значительную часть энергообъединений.
Возникновение подобных явлений, как показывает проведенный анализ значительного числа аварийных событий, обусловлено в основном следующими причинами:
- в условиях эксплуатации возникает такое сочетание схем, режимов и возмущений, на которое не рассчитана существующая противоаварийная автоматика;
- при вводе новых объектов ввод противоаварийной автоматики значительно отстает от ввода основного оборудования;
- при изменении схем и режимов энергосистемы персонал не выполняет необходимых изменений в противоаварийной автоматике, выполняет их неправильно или допускает существование таких режимов, при которых автоматика заведомо не может обеспечить живучесть энергосистемы.
Этот анализ показывает, что если ориентироваться лишь на локальные устройства противоаварийной автоматики, то при дальнейшем развитии энергосистем можно ожидать существенного понижения их живучести, так как увеличение протяженности и многосвязности энергосистем значительно понижает адаптивность локальных устройств и повышает вероятность ошибки персонала при операциях с автоматикой: при большом количестве устройств противоаварийной автоматики действия отдельных ее устройств могут быть противоречивыми; быстрый рост энергосистем вызывает необходимость постоянного перепроектирования, демонтажа старых и монтажа новых устройств с естественным отставанием возможностей автоматики от потребителей энергообъединений. Таким образом, ориентация лишь на локальные устройства автоматики может привести к тому, что энергообъединения в аварийных условиях могут стать неуправляемыми и их живучесть не будет обеспечена.
Наилучшим вариантом при решении задачи управления энергосистемами было бы определение оптимального уровня устойчивости по условиям минимизации расчетных затрат (на повышение устойчивости и покрытие ущербов от ее нарушения). Однако для такого решения в настоящее время нет достаточных данных ни по вероятностным характеристикам повреждаемости оборудования, ни по ущербам. Поэтому излагаемые ниже требования основаны лишь на инженерной оценке анализа опыта эксплуатации.
В энергосистемах простой структуры управление режимами должно, в основном, обеспечивать:
- статическую устойчивость в нормальных схемах и режимах, в том числе, если это требуется по условиям передачи мощности в систему, до возможности работы с минимальным запасом устойчивости 5—10%;
- статическую устойчивость в послеаварийных условиях для нормальных и ремонтных схем и режимов работы;
- синхронную динамическую устойчивость при двухфазных и более тяжелых видах к.з., отключаемых основными защитами, при отказе основных защит или работе УРОВ при однофазных к.з.;
- результирующую устойчивость при тяжелых видах к.з., отключаемых резервными защитами или УРОВ (а в случае единственной линии при любых к.з.), если по условиям работы потребителей ресинхронизация выгоднее, чем быстрое деление;
- деление энергосистем, если ресинхронизация невыгодна или не произошла в течение заданного времени;
- уровень частоты в избыточном районе не выше, чем это допустимо для турбоагрегатов;
- восстановление частоты в дефицитном районе до уровня, позволяющего произвести ресинхронизацию или синхронизацию;
- автоматическую синхронизацию после действия делительной автоматики (или деления по другим причинам);
- уровень напряжения в избыточном районе не выше, чем это допустимо для оборудования;
- восстановление уровня напряжения в дефицитной части системы до минимально допустимого по условиям работы потребителей;
- быстрый ввод резервной активной и реактивной мощности;
- подключение к системе отключенных потребителей, если это допустимо по условиям работы системы.
В энергосистемах сложной структуры в дополнение к перечисленным требованиям возникает ряд новых требований, обусловленных необходимостью локализации аварий. Для этого следует обеспечивать:
- разгрузку электропередач, работающих с небольшим запасом устойчивости, при различных возмущениях в соседних частях системы, не слишком сильно влияющих на данную, если, однако, эти возмущения могут вызвать нарушение устойчивости данной электропередачи; глубокую разгрузку электропередач при возмущениях в соседних частях систем, вызывающих значительный наброс мощности на данную электропередачу;
- деление энергосистемы в отдельных точках (чаще всего на электростанциях, работающих на два направления) при приближении к пределу статической устойчивости по одной из электропередач;
- деление электростанций, работающих на два направления, при тяжелых видах возмущений для сохранения синхронной динамической устойчивости обеих или хотя бы одной электропередачи;
- разгрузку отдельных электропередач для предотвращения нарушения их устойчивости при кратковременном асинхронном ходе и ресинхронизации соседних электропередач;
- деление энергосистем на части после возникновения асинхронного хода в одной из частей для предотвращения возникновения новых нарушений устойчивости между синхронно работающими электростанциями.
Помимо этих основных требований возникают иногда и дополнительные, например, обеспечение разгрузки отдельных линий электропередач при их недопустимой перегрузке по нагреву и т. п.
В энергосистемах РК все время происходит рост нагрузки (в среднем около 3—5% в год) и в связи с этим вводятся дополнительные генерирующие мощности, строятся новые электростанции, линии и подстанции. При этом электрическими сетями охватывается все большая территория и энергосистемы объединяются на параллельную работу. Этот процесс происходит при увеличении уровня напряжения и единичной мощности генераторов и трансформаторов. В то же время сети низшего напряжения, которые были ранее системообразующими, становятся в основном распределительными.
6 лекция. Виды противоавариной автоматики
Содержание лекции: виды противоаврийной автоматики на примере НЭС РК, размещение ПА по зонам НЭС.
Цель лекции: ознакомить с различными видами ПА на примере НЭС РК.
Противоаварийное управление НЭС РК предназначено для автоматической локализации аварийных режимов при отключении элементов сети и генерации, приводящих к протеканию быстротечных (до 10 секунд) электромеханических переходных процессов, которые могут привести к системным авариям и повреждению оборудования.
Противоаварийное управление предназначено для решения следующих задач:
- предотвращения каскадного развития аварии при аварийных отключениях элементов сети;
- предотвращения нарушения устойчивости энергосистем при нормативных аварийных возмущениях в соответствии с методическими указаниями по устойчивости энергосистем;
- ликвидации асинхронных режимов;
- предотвращения недопустимого снижения или повышения частоты;
- предотвращения недопустимого снижения или повышения напряжения;
- предотвращения недопустимых токовых нагрузок на электротехническое оборудование.
Ниже приведено описание принципов построения и функционирования систем противоаварийной автоматики установленных в НЭС РК.
Система автоматического предотвращения нарушения устойчивости
Система АПНУ представляет собой совокупность устройств ПА, обеспечивающих сохранение параллельной работы ЕЭС Казахстана с ОЭС Урала и с ОЭС Сибири, либо их отдельных регионов с одним из Объединений при возникновении различных аварийных возмущений в сети 500- 220 кВ.
Система АПНУ осуществляет контроль режима района управления, фиксацию аварийных возмущений, выбор и реализацию необходимых управляющих воздействий.
Фиксацию аварийных возмущений осуществляют пусковые устройства.
Пусковыми устройствами для АПНУ являются устройства фиксации отключения линии (ФОЛ). Пускодозирующими устройствами для АПНУ являются устройства фиксации перегрузки ВЛ по активной мощности (УФПМ), имеющие также второе название: автоматика наброса мощности (АНМ).
В качестве управляющих воздействий АПНУ в Северной зоне ЕЭС Казахстана могут применяться:
- отключение генераторов (ОГ-1, ОГ-2);
- отключение нагрузки в дефицитных районах РК.
Для централизованного воздействия на отключение нагрузки в Северной зоне ЕЭС Казахстана выполнены укрупненные ступени САОН: «ОН-200» и «ОН-350».
Устройства АНМ
Устройства АНМ являются выявительными для комплекса автоматики предотвращения нарушения устойчивости. Они срабатывают при превышении мощностью защищаемой линии заданного значения с учетом направления перетока мощности.
Автоматика деления сети
АДС предназначена для недопущения параллельной работы различных энергосистем по связям 220 кВ при разрыве трех транзитов 500 кВ.
Автоматика ограничения снижения частоты (АОСЧ)
Подсистема АОСЧ состоит из следующих автоматик и устройств:
- автоматическая частотная разгрузка (АЧР);
- частотно-делительная автоматика тепловых электростанций (ЧДА);
- автоматический частотный пуск резервных гидрогенераторов (АЧПР);
- межсистемная ЧДА (МЧДА).
АЧР действует на отключение части потребителей для предотвращения глубокого снижения частоты при возникновении значительного дефицита мощности.
После восстановления частоты происходит обратное включение потребителей действием устройств ЧАПВ.
ЧДА действует на выделение турбогенераторов электростанций со сбалансированной нагрузкой и предназначена для сохранения собственных нужд станции при глубоком снижении частоты в энергосистеме.
Автоматика ограничения повышения частоты (АОПЧ)
Подсистема АОПЧ представляет собой совокупность устройств, действующих на отключение генераторов станций при повышении частоты на шинах.
Автоматика разгрузки оборудования (АРО)
Подсистема АРО представляет собой совокупность устройств, предназначенных для выявления и ликвидации опасной перегрузки оборудования.
Автоматика ограничения снижения напряжения (АОСН)
Подсистема АОСН представляет собой совокупность устройств, предназначенных для выявления и ликвидации опасного снижения напряжения в энергосистеме или её части в целях предотвращения лавины напряжения, перегрузки и отключения генерирующего оборудования электростанций и питающих линий электропередачи, распространения аварии на смежные энергосистемы.
Автоматика ограничения повышения напряжения (АОПН)
Подсистема АОПН представляет собой совокупность устройств, предназначенных для ограничения длительности воздействия опасного повышения напряжения на оборудование защищаемых линий.
В Северной зоне ЕЭС Казахстана подсистема АОПН представлена совокупностью устройств АОПН, установленных на линиях 500 кВ и действующих на отключение защищаемой линии и на включение реактора, если он установлен на защищаемой линии.
Автоматика ликвидации асинхронных режимов (АЛАР)
Подсистема АЛАР представляет собой совокупность устройств, предназначенных для выявления и ликвидации асинхронного режима в системе при условии попадания электрического центра качаний на защищаемый элемент. Подсистема АЛАР предназначена для выявления и прекращения асинхронного хода в энергосистеме, возникающего в результате нарушения устойчивости.
Система противоаварийной автоматики НЭС РК выполнена на базе локальных устройств, т.е. без образования централизованной системы противоаварийной автоматики (ЦС ПА).
На рисунке 6.1 представлена схема размещения устройств противоаварийной автоматики ЕЭС Казахстана.
Объединенная энергосистема Казахстана территориально разделена на 3 зоны: Северная, Южная и Западная. В каждой из перечисленных зон реализуется собственная система противоаварийной автоматики, выполняющий определенный круг задач.
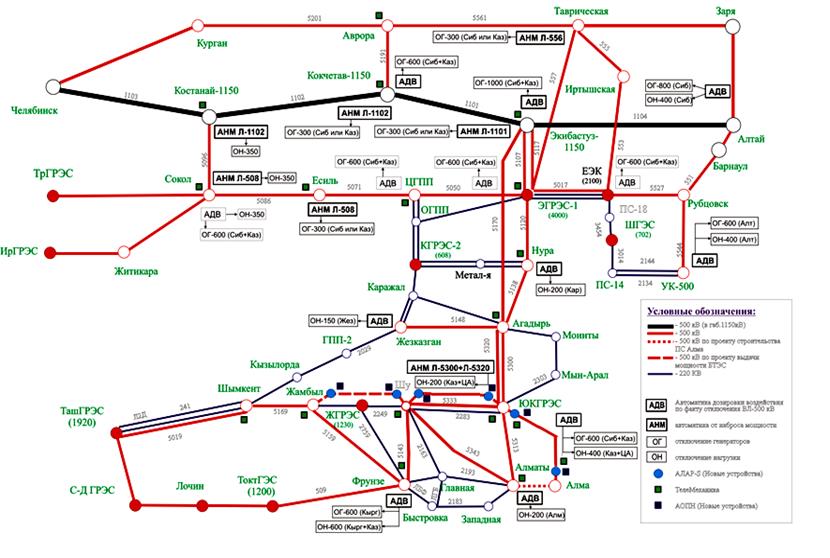
Рисунок 6.1 -Структура размещения устройств противоаварийной автоматики
7 лекция. Методы выбора дозировки ПА для сохранения устойчивости
Содержание лекции: противоаварийное управление для обеспечения устойчивости, максимально допустимые перетоки мощности.
Цель лекции: ознакомить с методикой расчета предельных перетоков, определение нормативных запасов устойчивости.
Для обеспечения устойчивости параллельно работающих энергосистем необходимо прежде всего правильно выбрать допустимые перетоки в контролируемых диспетчером сечениях сети на основе «Методических указаний по устойчивости энергосистем», утвержденных Минэнерго России 30.06.2003 года. Допустимые перетоки контролируются по активной мощности (МВт) или току (А) и разделяются на максимальные и аварийные.
1)Максимально-допустимые перетоки допускаются длительно и определяются исходя из следующих условий:
- нормативный запас устойчивости в нормальном или в ремонтных режимах с коэффициентом запаса не менее 20% определяемом по формуле:
Рдоп = Рпр/1,2 – Рнерег,
где: Рдоп – допустимый переток в сечении;
Рпр – предельный переток по устойчивости в сечении;
Рнерег – нерегулярные колебания равные корень квадратный из мощности меньшей из параллельно работающих энергосистем, умноженные на коэффициент регулирования 1,5 при ручном и 0,75 при автоматическом регулировании.
- нормативный запас в послеаварийном режиме, при аварийном отключении согласно Методических указаний, с коэффициентом запаса не менее 8% с учетом противоаварийного управления (ПАУ):
Рдоп = Рпр. пар /1,08 – Рнерег + Рпау,
где: Рдоп – допустимый переток в сечении;
Рпр. пар – предельный переток по статической устойчивости в сечении в послеаварийном режиме;
Рпау – величина противоаварийного управления на отключение потребления или генерации при аварийном возмущении.
Меньший из выбранных перетоков, определенных согласно пунктам 1 и 2, проверяются по динамической устойчивости при аварийных возмущениях с учетом короткого замыкания и работы ПА. Если переходный режим неустойчивый, то либо увеличивается объем ПАУ, либо снижается допустимый переток до величины, при которой переходный режим устойчивый и этот переток принимается за максимально-допустимый.
Из вышеуказанных пунктов 1,2,3 следует, что необходимый объем ПАУ определяется, как разность допустимого перетока определенного с нормативным запасом устойчивости 20% и допустимого перетока определенного из условия аварийного отключения элемента сети или генерации (N-1) без ПА.
Выбранные допустимые перетоки проверяются на отсутствие недопустимых токовых нагрузок на оборудование в нормальном и послеаварийных режимах. Если имеется недопустимая токовая перегрузка, то допустимые перетоки снижаются до величины при которых отсутствует недопустимая токовая нагрузка на оборудование.
В случаях, когда в силу конфигурации сети (развитая или распределительная сеть) допустимые перетоки выбранные по условию устойчивости значительно превышают допустимые токовые нагрузки на оборудование, то контролируется только токовая загрузка сети в нормальной и послеаварийном режиме.
Для дефицитных энергоузлов максимально-допустимые перетоки в соответствии с СДМ должны не превышать величин более 45% от потребления с учетом работы САОН в энергоузле:
Рдоп=0,45 · (Рпотр-САОН)+САОН,
где: САОН – специальная автоматика отключения нагрузки.
Допустимым уровнем напряжения в нормальном и ремонтном режиме с коэффициентом запаса по напряжению не менее 15%, определяемом по формуле:
Кu = (Uтек-Uкр) /Uтек> 0,15,
где: Кu – коэффициент запаса по напряжению;
Uтек – текущее напряжение;
Uкр – критическое напряжение в узле нагрузки равное 0,75 Uном.
2) Аварийно-допустимые перетоки допускаются кратковременно не более часа и определяются исходя из следующих условий:
Нормативный запас устойчивости в нормальном или в ремонтном режиме с коэффициентом запаса не менее 8% определяемом по формуле:
Рдоп= Рпр/1,08 – Рнерег,
где: Рдоп – допустимый переток в сечении;
Рпр – предельный переток по устойчивости в сечении;
Рнерег – нерегулярные колебания равные корень квадратный из мощности меньшей из параллельно работающих энергосистем, умноженные на коэффициент регулирования 1,5 при ручном и 0,75 при автоматическом регулировании.
Допустимым уровнем напряжения в нормальном и ремонтном режиме с коэффициентом запаса не менее 10%, определяемом по формуле:
Кu = (Uтек-Uкр) /Uтек> 0,1,
где: Кu – коэффициент запаса по напряжению;
Uтек – текущее напряжение;
Uкр – критическое напряжение в узле нагрузки равное 0,75 Uном.
3) Контрактно-допустимые перетоки при планировании.
Допустимый переток по контролируемым сечениям и ВЛ при планировании определяется в зависимости от наличия резервов мощности для регулирования перетоков мощности.
При наличии резервов мощности в достаточном объеме контрактно-допустимый переток назначается равным максимально-допустимому.
При отсутствии достаточных резервов мощности контрактно-допустимый переток назначается равным максимально-допустимому перетоку минус суммарно допустимое отклонение субъектов оптового рынка той зоны, которой определяется переток.
На рисунке 7.1 показаны предельные перетоки для Национальной электрической сети Республики Казахстан на 2013 год
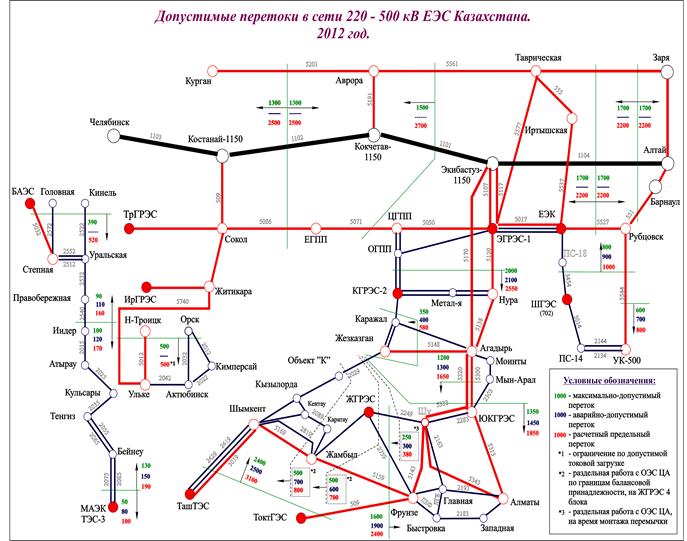
Рисунок 7.1 - Допустимые перетоки по сечениям в НЭС РК
8 лекция. Управление мощностью генераторов для повышения синхронной динамической устойчивости
Содержание лекции: отключение генераторов в передающей части системы с целью сохранения устойчивости, разгрузка турбин, области устойчивости, дозировка управляющих воздействий.
Цель лекции: изучить методы расчета дозировки управления мощностью для сохранения статической и динамической устойчивости.
Нарушения синхронной динамической устойчивости происходят в энергосистемах относительно редко, что (как указывалось в гл.1) обусловлено малой вероятностью тяжелых к.з., оснащением энергосистем быстродействующими релейными защитами, современными АРВ и другой противоаварийной автоматикой.
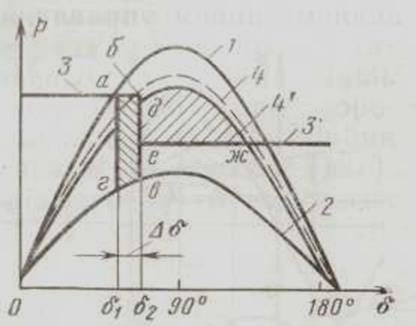
1-электрическая мощность в предаварийном режиме; 2-то же при к.з.; 3-мощность турбин до отключения части агрегатов; 3/-то же после отключения части агрегатов; 4- электрическая мощность в аварийном режиме без отключения части агрегатов; 4/- то же после отключения части генераторов; SАБВГ – площадка ускорения; SБДЕЖ – площадка торможения; Δδ- приращение угла δ до момента отключения к.з. и части генераторов.
Рисунок 8.1 - Угловая характеристика электропередачи
при к.з. с отключением одной из параллельных линий
Наибольшее распространение до настоящего времени получил способ обеспечения устойчивости энергосистем типовой структуры I путем отключения части генераторов передающей энергосистемы (см.рисунок 8.1). Этот способ наиболее часто применяется на гидростанциях, где отключение и последующее повторное включение генератора в сеть не представляют больших трудностей, могут быть выполнены быстро и легко могут быть автоматизированы. Отключение современных турбогенераторов для повышения устойчивости нежелательно по ряду причин и в первую очередь из-за долгого пуска блока после его отключения. Однако за неимением других средств отключение агрегатов на тепловых электростанцияхдля повышения устойчивости применялось также весьма широко.
В последние годы серьезное внимание было уделено другому эффективному способу повышения синхронной динамической устойчивости энергосистем — аварийному управлению мощностью турбин тепловых электростанций.
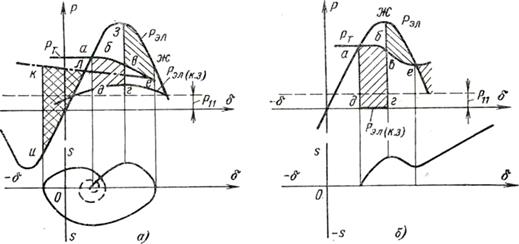
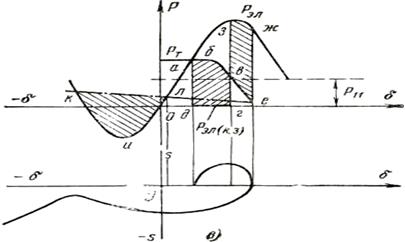
а — устойчивость обеспечивается; б — нарушение устойчивости с положительным скольжением (недоторможение); в — нарушение устойчивости с отрицательным скольжением (переторможение); (изменение мощности турбины во втором цикле качаний показано штрихпунктирной линией); Sабвгд — площадка ускорения при к. з.; Sвежз — площадка торможения в первом цикле качаний при аварийном управлении мощностью турбины; Sежл— площадка торможения во втором цикле качаний;Sлки — площадка ускорения во втором цикле качаний.
Рисунок 8.2 - Аварийное управление мощностью турбины при к.з.
Для обеспечения синхронной динамической устойчивости энергосистемы требуется быстрое изменение мощности агрегата, что не позволяет использовать для этой цели механизм управления турбиной, обычно применяемый в нормальном режиме.
Поэтому если не отключать агрегат от сети, то для его быстрого управления возникает необходимость в более быстродействующем электрическом входе в систему регулирования турбины — так называемом электрогидравлическом преобразователе (ЭГП). Через этот преобразователь электрического сигнала в гидравлический в систему регулирования турбины подается форсированный сигнал, обеспечивающий кратковременную глубокую разгрузку турбины для гашения избыточной кинетической энергии ротора с последующим набором нагрузки и, если в этом есть необходимость, ограничением мощности агрегата (см.рисунок 8.2). Первые опыты по аварийному регулированию турбоагрегатов, проведенные еще в предвоенные годы [67], показали эффективность кратковременного глубокого снижения мощности турбины.
Воздействие на регулирование первичного двигателя (турбины), как видно из рисунок 8.2, практически не изменяет площадки ускорения, но существенно расширяет возможную площадку торможения.
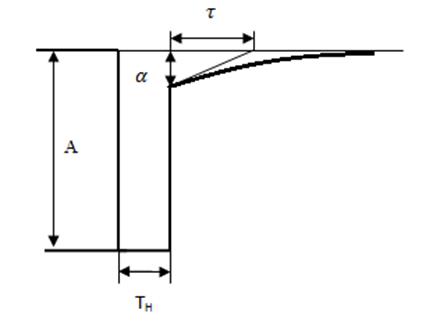
Рисунок 8.3 - Форма импульса приразомкнутом
программном управлении
Вместе с тем, этот способ весьма чувствителен к параметрам управляющего импульса: при его малой величине не удается скомпенсировать площадку ускорения, что приводит к нарушению устойчивости в первом цикле качаний с положительным скольжением (ускорением), при избыточном импульсе может произойти резкое увеличение площадки торможения и выпадение из синхронизмавовтором цикле с отрицательным скольжением (торможение). Возникновение явления переторможения при аварийном управлении турбиной возможно только при наличии на шинах станции достаточно большой местной нагрузки (большого значения Р11). При незначительной местной нагрузке опасность переторможения отсутствует (см.рисунок 8.2.) Возможны различные законы регулирования мощности турбины в переходном режиме. В одном из первых регуляторов, созданных ВТИ, управляющий сигнал определялся по разности между мощностью генератора и турбины [127, 128] (см.рисунок 8.3).
В настоящее время применяется такой способ управления мощностью турбины, при котором значение управляющего воздействия определяется в начальный момент переходного процесса на основании анализа возникшей ситуации, а самоуправление осуществляется как разомкнутое программное, т. е. без контроля за дальнейшим протеканием процесса.
К-200-130 ЛМЗ, результаты испытаний на агрегате Змиевской ГРЭС.
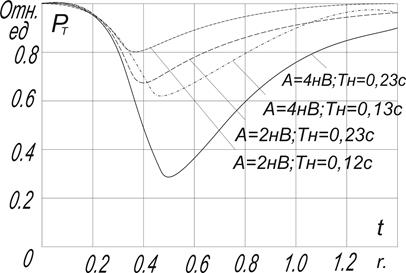
Рисунок 8.4 - Импульсные характеристики турбины
Применяемые в настоящее время программы представляют собой сигнал специальной формы (см.рисунок 8.4), состоящий из прямоугольного импульса, обеспечивающего быстрое снижение мощности турбины, и остаточного сигнала, предотвращающего нарушение во втором или последующих циклах качаний из-за быстрого набора нагрузки турбиной. Изменяя максимальное значение и длительность прямоугольной части импульса, можно менять глубину и скорость разгрузки агрегата и, следовательно, интенсивность воздействия в переходном процессе. Для существенно нелинейного объекта, каким является турбина, для выбора управляющего воздействия необходим набор характеристик изменения момента (мощности) турбины в зависимости от длительности и амплитуды прямоугольного импульса — так называемые импульсные характеристики. На рисунке 8.5 приведена серия импульсных характеристик для турбин К-300-240 и К-200-130, выпускаемых ЛМЗ, а на рисунке 8.6 — осциллограммы опытов, выполненных при испытаниях на Конаковской ГРЭС в 1969 г.
На рисунке 8.5 в качестве примера построены полученные на математической модели области синхронной динамической устойчивости простейшей энергосистемы типовой структуры I в координатах тяжесть аварии — интенсивность воздействия. Тяжесть аварии характеризуется сбросом мощности ΔPг при к.з. (tкз =пост.), а интенсивность воздействия — длительностью прямоугольного импульса Ти (максимальное значение импульса постоянно). Область ограничена двумя линиями, одна из которых (I) может быть названа границей недоторможения, за пределами которой происходит нарушение устойчивости с положительным скольжением (ускорение), а вторая (II) — границей переторможения, за пределами которой происходит нарушение устойчивости с отрицательным скольжением (торможение).
Рт = 1,0; Рнагр = 0,7; Рпред=0;5;τJ=8 c; tкз=0,2 с.
Рисунок 8.5 - Области устойчивости простой энергосистемы
Конфигурация диаграммы рисунка 8.5 зависит от исходного перетока мощности, но электропередаче, от параметров энергосистемы, а также от параметров турбины. Таким образом, даже для энергосистем простейшей структуры возникает необходимость в автоматической дозировке воздействия (АДВ).
9 лекция. Автоматическое регулирование возбуждения и форсировка системы возбуждения для повышения устойчивости энергосистем
Содержание лекции: автоматическое регулирование возбуждения, электромашинные системы возбуждения, АРВ сильного действия, форсировка системы с целью сохранения устойчивости, области устойчивости.
Цель лекции: изучить методы выбора закона регулирования АРВ для сохранения статической и динамической устойчивости.
Причинами нарушения статической устойчивости станции, передающей мощность в энергосистему, могут быть: снижение эквивалентной э.д.с. Е1 передающей станции или напряжения Uс на приемном конце электропередачи.
Процесс нарушения статической устойчивости характеризуется постепенным нарастанием тока и реактивной мощности по линии, снижением напряжения на подстанциях с последующим лавинообразным протеканием процесса и периодическими колебаниями таких электрических параметров, как токи, мощность, напряжения. Типичная осциллограмма нарушения статической устойчивости приведена на рисунке 2.1.
Нарушения статической устойчивости в энергосистемах структуры I происходят главным образом в послеаварийном режиме вследствие отключения одной из сильно загруженных параллельных линий, т.е. увеличения x∑. Кроме того, имеют место нарушения устойчивости, обусловленные понижением напряжения в приемной или передающей частях энергосистемы. В частности, наблюдались случаи нарушения устойчивости гидростанций в период их ввода в эксплуатацию при работе с временными схемами возбуждения в результате потери возбуждения генераторов (т.е. снижение эквивалентной э.д.с. станции Е1 и как следствие нарушение статической устойчивости). Причиной нарушения статической устойчивости было также возникновение дефицита реактивной мощности в приемной системе конечной мощности.
Основной широко используемый способ повышения статической устойчивости – автоматическое регулированияя возбуждения генераторов [2, 11].
Все системы возбуждения современных турбоагрегатов можно разделить на две группы: электромашинные системы возбуждения, постоянная времени которых составляет 0,3—0,5 с из-за наличия электромагнитной инерции возбудителя; системы возбуждения с управляемыми выпрямителями, постоянная времени которых составляет 0,04—0,05 с и не зависит от источника питания выпрямителя.
До последнего времени для возбуждения турбо- и гидрогенераторов в основном применялись возбудители постоянного тока, сочлененные непосредственно с валом основного генератора.
Для работающих турбоагрегатов 200—800 МВт и проектируемых агрегатов мощностью свыше 1000 МВт выполнение обычных электромашинных возбудителей, соединенных с валом генератора, из-за большой требуемой мощности возбудителя оказывается технически очень сложным. Для них создаются новые системы возбуждения в основном с применением ионных и полупроводниковых управляемых выпрямителей.
С электромашинными системами возбуждения, как правило, используются АРВ пропорционального типа, которые регулируют возбуждение по отклонению одного-двух параметров. С системами возбуждения с управляемыми выпрямителями применяются АРВ сильного действия, которые производят регулирование, как по отклонению режимных параметров, так и по их производным.
С точки зрения обеспечения устойчивости (как статической, так и динамической) энергосистем целесообразно сопоставить различные системы возбуждения крупных турбогенераторов и АРВ по их быстродействию, кратности форсировки, повышению пределов устойчивости, демпфированию колебаний в переходных процессах. С этих позиций любую систему возбуждения и АРВ можно охарактеризовать постоянной времени возбудителя τе, постоянной времени регулятора тр, кратностью потолочного возбуждения ke, скоростью нарастания возбуждения υe, законом регулирования и коэффициентами усиления АРВ. В ГОСТ на синхронные машины по системам возбуждения и АРВ регламентированы только две величины ke и υe:
Таблица 9.1
|
Наименование генератора |
ke, ед. ном.возб. |
vе, ед.возб/с |
|
Турбогенераторы, Гидрогенераторы |
2 |
2 |
|
Р<50 МВт |
1,8 |
2 |
|
Р*>50 МВт |
— |
— |
*Оговариваются особо заказчиком.
К электромашинным системам возбуждения с АРВ пропорционального типа относятся высокочастотная система возбуждения, электромашинная с возбудителем постоянного тока с компаундированием, корректором и релейной форсировкой, электромашинная с редукторным приводом, бесщеточная. В АРВ, работающих с этими системами возбуждения, обычно применяется регулирование по отклонению напряжения ΔU при наличии компаундирования по ΔI. Практически при расчетах синхронной динамической устойчивости (§ 2-2) можно учитывать только регулирование по ΔU, а для электромашинной системы с компаундированием, корректором и релейной форсировкой — только действие релейной форсировки, поскольку постоянная времени корректора примерно равна τкорр≈2 с и его действие не оказывает влияние на первые периоды переходного процесса, а компаундирование очень незначительно увеличивает нарастание возбуждения только в процессе к.з.
В высокочастотной системе возбуждения (см. исунок 9.1) выпрямление переменного тока осуществляется неуправляемыми кремниевыми выпрямителями. В качестве возбудителя ВГТ используется индукторный генератор 500 Гц, имеющий три обмотки: одну, включенную последовательно с обмоткой возбуждения генератора и две независимые. Две последние обмотки питаются либо от под возбудителя (как показано на схеме), либо от выводов ВГТ .
Регулирование возбуждения выполняется по отклонению напряжения ΔU, причем kΔU=20÷50 ед. возб./ед. напр., т.е. при минимальном значении kΔU и при снижении напряжения на 5% система возбуждения обеспечивает дополнительно 1 ед. возб.
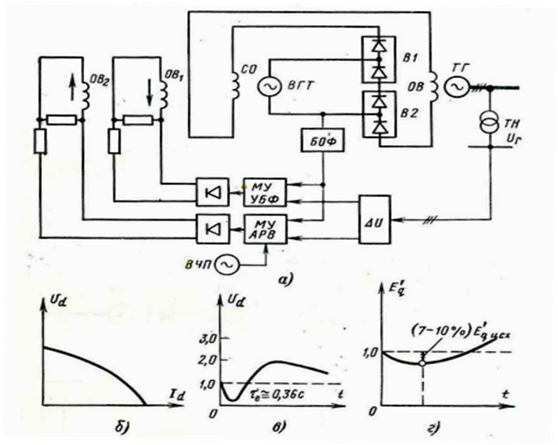
а – принципиальная схема высокочастотная система возбуждения; б – нагрузочная характеристика возбудителя; в – изменение напряжения возбуждения в переходном режиме; г — изменение э.д.с. Е'q в переходном режиме; ТГ — турбогенератор; БОФ — блок ограничения форсировки; АРБ — автоматический регулятор возбуждения; УБФ — устройство бесконтактной форсировки; ОВ1 — обмотка независимого возбуждения, питающаяся от УБФ; ОВ2— обмотка независимого возбуждения, питающаяся от АРБ; СО — последовательная обмотка возбудителя; ВГТ—высокочастотный возбудитель; БЧП — высокочастотный под возбудитель; ОБ — обмотка возбуждения основного турбогенератора; В1, В2 — выпрямители.
Рисунок 9.1 - Высокочастотная система возбуждения
С точки зрения статической устойчивости высокочастотная система возбуждения с АРВ пропорционального типа аналогична другим электромашинным системам возбуждения и обеспечивает выполнение практического критерия устойчивости
![]() (9.1)
(9.1)
где E'q — переходная э.д.с. в предельном режиме.
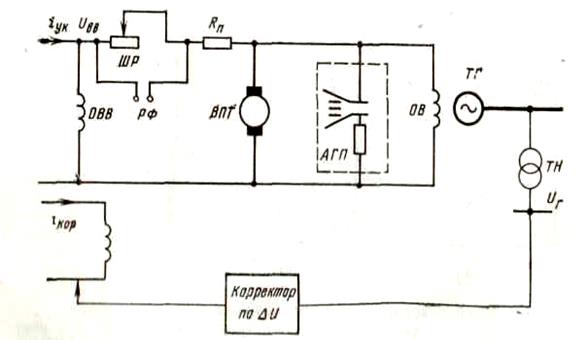
ТГ — турбогенератор; iyK—ток компаундирования; iкор — ток корректора напряжения; РФ-релейная форсировка; Rп -постоянно включенное активное сопротивление; АГП — автомат гашения поля; ВПТ — возбудитель постоянного тока;
ШР — шунтовой реостат; ОВ – обмотка возбуждения основного генератора;
ОВВ — обмотка возбуждения возбудителя.
Рисунок 9.2 - Принципиальная схема электромашинной системы возбуждения с компаундированием, корректором и релейной форсировкой
10 лекция. Использование современных технологий для повышения пропускной способности передачи электрической сети
Содержание лекции: оценка состояния, система мониторинга переходных режимов, измерение комплексных электрических величин (PMU), современные технологии управления на основе системы WAMS (Wide – Area Measurement Systems), декомпозиция и методы решения задачи оценивания.
Цель лекции: ознакомить с методами управления режимами на основе измерения параметров режима в реальном времени, изучить методы идентификации и оценки состояния системы.
Оценивание состояния (ОС) – важнейшая процедура, обеспечивающая управление электроэнергетической системой (ЭЭС) надежной и качественной информацией [1]. Результатом ОС является расчет установившегося режима (текущего состояния) ЭЭС на основе измерений параметров режима и данных о состоянии топологии схемы. При ОС до недавнего времени в качестве измерений использовались в основном телеизмерения (ТИ) и телесигналы (ТС), получаемые от системы SCADА.
Процедура ОС включает в себя решение следующих основных задач [10]:
- формирование текущей расчетной схемы поданным ТС;
- анализ наблюдаемости;
- выявление грубых ошибок в ТИ или обнаружение плохих данных (ОПД);
- фильтрация случайных погрешностей ТИ, т.е. получение их оценок;
- дорасчёт неизмеренных параметров режима.
Основные проблемы, возникающие при ОС, связаны с недостаточным объемом и низким качеством информации, поступающей от системы SCADA. Кроме того, из-за последовательного сканирования измерений в SCADA - системах невозможна абсолютная синхронизация данных. Это приводит к ошибкам при формировании расчетной схемы, появлению ненаблюдаемых районов, критических измерений и критических групп [2], в которых невозможно обнаружить плохие данные, и, как следствие, к искажению результатов ОС и низкой точности получаемых оценок.
Уровень наблюдаемости и управляемости в ЭЭС существенно повышается внедрением технологии WAMS (Wide - Area, Measurement Systems). Ее создание стало возможно с появлением системы GPS (Global Positioning System) в 80-х годах прошлого века.
Основным измерительным оборудованием систем WAMS, позволяющим контролировать состояние ЭЭС синхронно с высокой точностью, являются приборы для измерения комплексных электрических величин – PMU (Phasor Measurements Units) [15]. По сравнению со стандартным набором ТИ, получаемым от системы SCADA, PMU, установленные в узлах, могут обеспечить точное (погрешность 0,2–0,5%) измерение модуля и фазы напряжения в этом узле, а также модулей и фаз токов в смежных с этим узлом ветвях.
С 2005 г. в России создается Система мониторинга переходных режимов (СМПР) (российский аналог WAMS), основное измерительное оборудование – регистраторы комплексных электрических величин (SMART-WAMS). Задача ОС включена в основной состав задач СМПР [4].
Совместное использование ТИ SCADA и PMU-измерений ведет к необходимости развития существующих методов ОС на основе интеграции данных SCADA и PMU. Второе направление исследований связано с тем, что в современных условиях функционирования ЭЭС и управлениями требуется решение задачи ОС для схем большой размерности (порядка нескольких тысяч узлов), состоящих из параллельно работающих подсистем. В настоящее время в СО-ЦДУ ЕЭС России для решения комплекса задач оперативно-диспетчерского управления создана единая расчетная модель, наиболее полно отражающая топологию и режим ЕЭС, которая в включает в себя около 7 тыс. узлов и 10 тыс. ветвей. При ОС схем такой размерности возникают проблемы, связанные с неоднородностью и большим объемом обрабатываемой информации.
Распределенная обработка информации при декомпозиции задачи ОС и ее реализация на основе мультиагентных технологий является эффективным методом решения этих проблем. Использование синхронизированных измерений комплексных величин высокой точности (измерений от PMU) не только существенно улучшает результаты решения задачи ОС, но и повышает эффективность алгоритмов ее де - композиции.
а) Оценка состояния ЭЭС.
Задача оценивания состояния ЭЭС состоит в расчете таких значений (оценок) измеренных переменных, при которых их вычисленные значения максимально приближены к измерениям. При этом в качестве критерия чаще всего используется критерий взвешенных наименьших квадратов.
Вектор SCADA - измерений, используемых при традиционной постановке ОС ЭЭС, имеет вид:
![]() , (10.1)
, (10.1)
где: Pi,Qi–активная и реактивная узловые мощности;
Рij,Qij–активный и реактивный переток и мощности в линиях;
Ui–модуль напряжения в узле;
Ij,Iij–модули токов в узле и линии.
При решении задачи оценивания состояния вводится понятие вектора состояния Х=(δ,U) размерностью 2n–1 (где n–число узлов расчетной схемы), включающего модули U и фазовые углы δ напряжений, кроме фиксированной фазы базисного узла. Этот вектор однозначно определяет как измеренные у, так и неизмеренные z параметры режима.
В такой постановке задача оценивания состояния сводится к минимизации критерия:
![]() , (10.2)
, (10.2)
т.е. к поиску оценок вектора состояния х. Этот метод подробно представлен в [15].
б) Развитие методов ОС на основе интеграции данных SCADA и PMU.
Система WAMS (в России – СМПР) представляет собой комплекс устройств PMU, распределенных по объектам энергосистемы (подстанции, крупные узлы) и связанных Internet – каналами передачи данных с пунктами сбора информации – Phasor Data Concentrator (PDC) (уровень «СО-РДУ» или «СО-ОДУ»), - в свою очередь, передающих ее в центр управления данными («СО-ЦДУ»). Самым важным из приложений WAMS – платформы является мониторинг ЭЭС, открывающий новые возможности управления ЭЭС, в частности в тех областях, которые функционируют под разными SCADA/EMS- системами внутри взаимодействующих ЭЭС. С помощью SMART-WAMS (российский аналог PMU) производится точная синхронная регистрация фаз и амплитуд токов и напряжений в ЭЭС с периодом 20 мс, присвоение каждому измерению метки времени с дискретность 1 мс. В таблице 10.1 представлено сравнение точностей измерений, получаемых от PMU разных производителей.
Таблица 10.1-Точности измерений устройств PMU
|
Измеряемая величина |
SMART-WAMS (Россия) |
BEN6000 (Бельгия) |
SEL421 (США) |
RES521 (Швеция) |
Arbiter (США) |
|
U,kB |
±(0,3–0,5)% |
±0,1% |
±0,1% |
±0,1% |
±0,02% |
|
Фазовый угол δ |
±0,1° |
±0,1° |
±0,2° |
±0,1° |
±0,3° |
|
Iij,А |
±(0,3–0,5)% |
±0,2% |
±0,2% |
±0,1% |
±0,03% |
|
Угол ϕij между Iij и Ui |
±0,1° |
±0,1° |
±0,2° |
±0,1° |
±0,1° |
|
Частота, Гц |
±0,001 |
±0,002 |
±0,01 |
±0,002 |
±0,005 |
|
Погрешность t CИHX от GPS |
20 мкс |
50 мкс |
5 мкс |
5 мкс |
1 мкс |
Были проанализированы существующие в настоящее время подходы к решению задачи ОС с использованием PMU-измерений. Представляется очень привлекательной идея ОС на основе данных, полученных только от PMU [14].
Это становится возможным, если количество PMU достаточно для обеспечения наблюдаемости. Как показывают исследования, нет необходимости устанавливать PMU во всех узлах схемы, достаточно установить их примерно в 1/3 узлов. Вектор измерений выглядит следующим образом:
![]() .
(10.4)
.
(10.4)
где: Iij–модуль тока в ветви, смежной узлу i;
ϕij–угол между током в этой ветви и напряжением.
В этом случае часть компонент вектора состояния оказывается измеренной, а оставшиеся компоненты можно вычислить через измеренные токи.
Возможны различные способы использования данных, полученных от PMU:
1) непосредственное использование в качестве измерений модулей и фаз напряжений в узлах установки PMU и комплексов токов по отходящим ветвям;
2) использование модулей и фаз напряжений в узлах установки PMU, а так же вычисленных по измерениям комплексов токов псевдо измерений δ и в смежных узлах, так называемые «расчетные» PMU. Исследования показали [14], что точность измерений «расчетного» PMU практически равна точность измерений физического PMU;
3) в виде псевдо измерений перетоков мощностей, вычисленных на основе векторных измерений из выражений:
 (10.5)
(10.5)
Измерения PMU имеют высокую точность, но при сбоях в приеме/передаче возможны ошибки в измерениях фаз напряжений δ, связанные со сдвигом синусоиды напряжения относительно синусоиды 50 Гц (точки отсчета). При этом угол сдвига фазы между током и напряжением ϕij не искажается, следовательно, по сравнению с δ такие измерения можно считать более надежными;
г) расстановка PMU в граничных узлах подсистем.
При декомпозиции задачи ОС в граничных узлах подсистем необходимо выдерживать точные измерения модулей и фаз напряжений для безоперационного решения координационной задачи при формировании оценок полной расчетной схемы. Для этого в граничных узлах устанавливаются PMU.
11 лекция. Использование современных технологий для повышения пропускной способности передачи электрической сети (продолжение)
Содержание лекции: современные технологии создания гибких линий электропередач.
Цель лекции: ознакомить с новыми технологиями повышения пропускной способности ЛЭП.
Накопители электроэнергии.
Накопители электрической энергии являются важнейшим элементом будущих ААС. Накопители энергии выполняют ряд функций: выравнивание графиков нагрузки в сети (накопление электрической энергии в периоды наличия избыточной (дешевой) энергии и выдачу в сеть в периоды дефицита); обеспечение в сочетании с устройствами FACTS повышения пределов устойчивости; обеспечение бесперебойного питания особо важных объектов, собственных нужд электростанций и подстанций; демпфирование колебаний мощности; стабилизацию работы малоинерционных децентрализованных источников электрической энергии.
Накопители энергии делятся на электростатические и электромеханические.
К электростатическим накопителям энергии относятся:
- аккумуляторные батареи большой энергоемкости (АББЭ);
- накопители энергии на основе молекулярных конденсаторов;
- накопители энергии на основе низкотемпературных (охлаждение жидким гелием) сверхпроводников.
Все типы электростатических накопителей связываются с сетью через устройства силовой электроники – преобразователи тока или напряжения.
К электромашинным накопителям энергии относятся два вида комплексов:
- синхронные машины с преобразователями частоты в первичной цепи маховиками на валу;
- асинхронизированные машины с маховиками на валу.
Асинхронизированные турбогенераторы.
Асинхронизированные турбогенераторы предназначены для работы в режимах не только выдачи, но и глубокого потребления реактивной мощности.
Классический АС-турбогенератор имеет на роторе, в отличие от синхронного, две одинаковые обмотки возбуждения, расположенные под углом 90 эл.град. относительно друг друга. Однако опыт создания АС-турбогенераторов различной мощности показал, что по ряду причин, прежде всего конструктивного характера, не всегда удается создать такую классическую структуру. Преимущественно это касается невозможности размещения ортогональных обмоток возбуждения на роторе без некоторого увеличения типовых габаритных размеров турбогенератора (прежде всего диаметра ротора и внешнего диаметра сердечника статора). При этом габариты могут быть ограничены требованиями обеспечения взаимозаменяемости статора АС-турбогенератора и его синхронного аналога либо необходимостью его установки на тот же фундамент, что и заменяемый им синхронный турбогенератор. Предельные диаметры роторов, как известно, также ограничены допустимыми окружными скоростями, что затрудняет создание классических АС-турбогенераторов больших мощностей (например, 800 МВт и более). Особенно это относится к конструкциям турбогенераторов с полностью воздушным охлаждением, где для уменьшения потерь мощности (тепловыделения) приходится снижать удельные электрические нагрузки машины.
Регулирование напряжения может осуществляться эффективно во всех режимах генератора по активной нагрузке и реактивной мощности (включая режим компенсатора при полном потреблении реактивной мощности) и не влияет на общую устойчивость генератора. Основным условием обеспечения статической устойчивости является правильный выбор настройки коэффициентов обратных связей регулятора в канале регулирования электромагнитного момента. Практически это относится к АС-турбогенераторам с любой степенью не симметрии, включая вариант со «слабой» управляющей обмоткой возбуждения по поперечной оси и с регулятором, реализующим «асинхронизированный» принцип управления.
Структура двух ОВ с несовпадающими осями и наличие реверсивных возбудителей у каждой ОВ дает возможность в переходных режимах оптимально ориентировать мдс генератора с целью создания максимального тормозящего электромагнитного момента. При сильных возмущениях, когда возможности управления ограничены «потолочным» напряжением возбуждения, оптимальная ориентация мдс возбуждения достигается автоматически по командам АРВ сочетанием форсировок и расфорсировок напряжений на ОВ. Поскольку управление каналом напряжения может осуществляться независимо от электромеханического процесса качаний ротора, то в условиях, когда напряжение возбуждения не достигает потолочных значений, можно повысить качество регулирования напряжения на шинах станции. Это, в частности, способствует повышению динамической устойчивости параллельно работающих синхронных турбогенераторов и ускоряет восстановление нормального энергоснабжения потребителей.
Испытания и опыт эксплуатации АС-турбогенераторов позволили подтвердить основные отличительные свойства таких генераторов, обусловливающие целесообразность их применения:
- обеспечение высокого уровня статической устойчивости во всем допустимом по условиям нагрева генератора диапазоне рабочих режимов, включая режимы глубокого потребления РМ;
- повышенное быстродействие регулирования напряжения (РМ);
- обеспечение равновысоких пределов динамической устойчивости в режимах выдачи и глубокого потребления РМ;
- поддержание высокого качества вырабатываемой электроэнергии при возмущениях в энергосистеме и в энергоблоке;
- возможность неограниченно длительных асинхронных режимов без возбуждения при обеспечении близкой к номинальной нагрузки и высокого качества электроэнергии;
- высокий уровень живучести при частичных отказах в системе возбуждения и при полной потере возбуждения (не требуется система резервного возбуждения);
- повышенный коэффициент готовности;
- повышенная ремонтопригодность системы возбуждения;
- облегченное техническое обслуживание систем возбуждения и управления;
- улучшение условий работы оперативного персонала электростанции.
Высоковольтная передача постоянного тока (High – Voltage Direct - Current Transmission – HVDC)
Еще одним способом управления потокораспределением мощности является использование высоковольтной передачи постоянного тока (HVDC). В HVDC устройствах происходит преобразование переменного тока в постоянный, передача его по линии постоянного тока и обратное преобразование в переменный ток. Данный способ передачи обладает преимуществами перед АС передачей при решении следующих задач.
Соединение АС систем. Для соединения двух АС систем, имеющих различные частоты, мощность одной системы может быть преобразована в DC мощность, передана по DC линии, а затем передана в другую АС систему уже с другой частотой. Таким же способом можно соединить и несинхронизированные сети.
Передача мощности по ВЛ на большие расстояния. При
большой протяженности линии передачи (как правило ![]() км)
экономия на капитальных вложениях и потерях в DC линиях может скомпенсировать
инвестиционные затраты на два преобразователя, что делает использование HVDC
более привлекательным.
км)
экономия на капитальных вложениях и потерях в DC линиях может скомпенсировать
инвестиционные затраты на два преобразователя, что делает использование HVDC
более привлекательным.
Существует три типа HVDC вставок (вставок постоянного тока):
- однополярная (однополюсная) вставка (monopolarlink) (см.рисунок 11.1);
- двухполярная (двухполюсная) вставка (bipolarlink) (см.рисунок 11.2);
- униполярная вставка (homopolarlink) (см.рисунок 11.3).
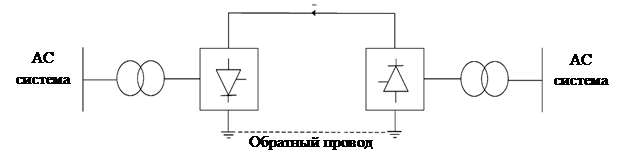
Рисунок 11.1– Однополярная HVDC вставка
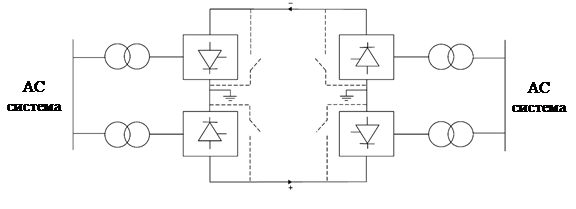
Рисунок 11.2 – Двухполярная HVDC вставка
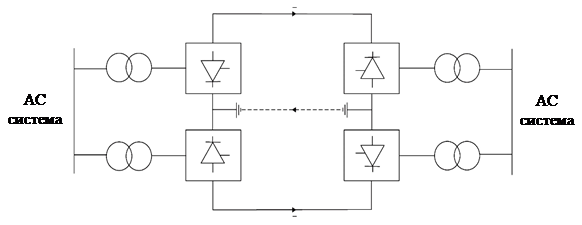
Рисунок 11.3 – Униполярная HVDC вставка
Однополярная вставка состоит из одного проводника, имеющего, как правило, отрицательную полярность.
Двухполярная вставка состоит из двух проводников разной полярности, с, как правило, одинаковыми токами, но с независимым управлением. Зачастую для шунтирования преобразователей при их отказах в нее включают коммутаторы (пунктирная линия на рисунке 11.2).
12 лекция. Интеллектуальные электрические сети
Содержание лекции: интеллектуальные и гибкие системы электропередачи переменного тока (FACTS). Системный эффект от применения устройств FACTS для электроэнергетической системы.
Цель лекции: ознакомить с современными технологиями повышения устойчивости и устройствами продольного и поперечного регулирования реактивной мощности.
Проблема недостаточной пропускной способности традиционно решается путём строительства дополнительных электрических сетей и применения более высоких классов напряжения, что требует больших капитальных затрат. Однако данные мероприятия, как правило, не решают, а порой даже усугубляют проблемы связанные с управляемостью сетей и стабилизации режимных параметров.
Для решения описанных проблем в мировой практике на протяжении длительного времени разрабатывается концепция так называемых «интеллектуальных электрических сетей» [14] (перевод с англ. –Smart Grids).
Термин управляемые (гибкие) системы электропередачи переменного тока – Flexible Alternative Current Transmission System (FACTS) введен в обращение Институтом электроэнергетики EPRI (США).
Технологии управляемых систем электропередачи переменного тока – Flexible Alternative Current Transmission System (FACTS) являются одной из наиболее перспективных электросетевых технологий, суть, которой состоит в том, что электрическая сеть из пассивного устройства транспорта электроэнергии превращается в устройство, активно участвующее в управлении режимами работы электрических сетей.
К устройствам FACTS первого поколения (FACTS-1) относят устройства, обеспечивающие регулирование напряжения (реактивной мощности) и обеспечивающие требуемую степень компенсации реактивной мощности в электрических сетях (статический компенсатор реактивной мощности (СТК), реактор с тиристорным управлением, стационарный последовательный конденсатор с тиристорным управлением, фазосдвигающий трансформатор и др.).
К новейшим FACTS второго поколения (FACTS-2) относят устройства, обеспечивающие регулирование режимных параметров на базе полностью управляемых приборов силовой электроники (IGBT транзисторы, IGCT - тиристоры и др.). FACTS-2 обладают новым качеством регулирования - векторным, когда регулируется не только величина, но и фаза вектора напряжения электрической сети (синхронный статический компенсатор (СТАТКОМ), синхронный статический продольный компенсатор реактивной мощности на базе преобразователя напряжения (ССПК), объединённый регулятор потоков мощности (ОРПМ), ВПТН, ФПУ, а синхронизированный синхронный компенсатор, в том числе с маховиком (АСК), а синхронизированный синхронный электромеханический преобразователь частоты (АС ЭМПЧ), фазовращающий трансформатор (ВФТ).
Виды устройств FACTS.
Все устройства FACTS делятся на статические и электромашинные системы.
1) К статическим относятся:
- управляемые шунтирующие реакторы (УШР), реализованные по принципу магнитного усилителя (УШРП) или трансформаторного типа (УШРТ или реактор-трансформатор) с тиристорным управлением;
- реакторы, коммутируемые вакуумными выключателями (ВРГ);
- статические тиристорные компенсаторы реактивной мощности (СТК), состоящие из одной или нескольких тиристорно-реакторной групп и набора фильто - компенсирующих цепей;
- синхронные статические компенсаторы реактивной мощности типа СТАТКОМ на базе преобразователя напряжения с параллельным подключением к сети;
- синхронные статические продольные компенсаторы реактивной мощности на базе преобразователя напряжения (ССПК);
- объединенный регулятор перетока мощности на основе преобразователей напряжения параллельного и последовательного включения, объединённых по цепям постоянного тока (ОРПМ);
- управляемые тиристорами устройства продольной емкостной компенсации (УУПК);
- управляемые фазоповоротные устройства (ФПУ) на базе фазосдвигающих трансформаторов с тиристорным управлением или РПН;
- вставки постоянного тока на базе преобразователей напряжения (ВПТН);
- токоограничивающие устройства на основе технологии FACTS (для ограничения токов короткого замыкания);
- фазовращающийся трансформатор-вращающаяся машина с питанием статора и ротора от сетей с различной частотой с дополнительным двигателем на валу (ВФТ).
Факторы технико-экономического эффекта применения устройств FACTS в электроэнергетических системах.
1) Повышение управляемости режимов работы ЭЭС.
2) Повышение пропускной способности линий электропередач.
3) Повышение статической и динамической устойчивости ЭЭС.
4) Повышение качества электроэнергии.
5) Нормализация параметров режимов работы ЭЭС.
13 лекция. Современные средства активно-адаптивной сети и аппаратуры релейной защиты и автоматики
Содержание лекции: основные элементы активно-адаптивной сети. Интеллектуальные электрические сети, принципы работы СТК, статком, накопители электроэнергии для электроэнергетической системы. Асинхронизированные турбогенераторы.
Цель лекции: ознакомить с современными устройствами регулирования реактивной мощности.
Анализ основных элементов активно-адаптивной сети.
Элементы ААС являются определяющими в реализации технологии ААС на практике. Элементы ААС можно условно разделить на следующие группы:
1) Устройства регулирования (компенсации) реактивной мощности и напряжения, подключаемые к сетям параллельно, – поперечные компенсаторы.
2) Устройства регулирования параметров сети (сопротивление сети), подключаемые в сети последовательно, – продольные компенсаторы.
3) Устройства, сочетающие функции первых двух групп, – устройства продольно-поперечного включения или комбинированные компенсаторы.
4) Устройства ограничения токов КЗ.
5) Накопители электрической энергии.
6) Преобразователи рода тока.
Технология использования ААС открывает новые возможности по управлению мощностью и повышению пропускной способности как существующих, так и новых или усовершенствованных линий передач. Это обусловлено возможностями регуляторов гибких линий по управлению взаимосвязанными параметрами, влияющими на работу систем – последовательное и параллельное сопротивления, токи, напряжения, углы сдвига фаз.
Принцип действия и устройство статических поперечных
компенсаторов
Поперечная компенсация используется для увеличения пропускной способности и управления напряжением линий передачи.
К статическим синхронным компенсаторам относятся статические компенсаторы реактивной мощности (SVC) и статические синхронные компенсаторы (STATCOM).
Статический компенсатор реактивной мощности (СКРМ, Static Var Compensator – SVC): параллельно включенный статический генератор или поглотитель реактивной мощности, предназначенный для управления определенными параметрами энергосистемы (как правило, напряжением на шине) посредством изменения значений емкостного или индуктивного тока на его выходе.
SVC является обобщающим термином для таких устройств, как:
1) TCR (Thyristor-Controlled Reactor – реактор с тиристорным управлением);
2) SR (Thyristor-Switched Reactor – реактор с тиристорным переключением);
3) TSC (Thyristor-Switched Capacitor – конденсатор с тиристорным управлением).
Размещение шунтирующего элемента в средней точке линии позволяет регулировать напряжение в этой точке, обеспечивая его равенство с напряжениями на концах линий, что в свою очередь приводит к повышению уровня передаваемой мощности.
Подключение поперечного компенсатора к концу линии параллельно нагрузке позволяет регулировать напряжение на этом конце с целью предотвращения нестабильности напряжения, вызванной колебаниями нагрузки или отключениями линий.
С помощью поперечной компенсации можно повысить пределы динамической устойчивости и улучшить демпфирование колебаний мощности путем управления потокораспределением мощности во время или после действия динамических возмущений.
Реактор с тиристорным управлением (TCR): параллельно включенная индуктивность с тиристорным управлением, эффективное реактивное сопротивление которой плавно изменяется с помощью управления частичной проводимостью тиристорного вентиля.
Простейший однофазный TCR показан на рисуноке 15.1. Ток реактора
может быть изменен от максимального значения до нуля методом управления углом
регулирования. То есть продолжительность интервала проводимости регулируется
задержкой закрытия тиристорного вентиля в зависимости от максимального значения
напряжения в каждом полупериоде (см.рисунок 13.1). При ![]() амплитуда
максимальна, а при
амплитуда
максимальна, а при ![]() – равна нулю, и во время этого
полупериода ток не протекает. Подобный эффект может быть достигнут
непосредственным изменением значения индуктивности.
– равна нулю, и во время этого
полупериода ток не протекает. Подобный эффект может быть достигнут
непосредственным изменением значения индуктивности.
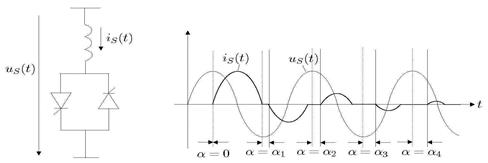
Рисунок 13.1 – Реактор с тиристорным управлением
Реактор с тиристорным переключением (TSR) состоит из тех же элементов, но используется только при фиксированных значениях углов 90° и 180° т.е. обеспечивает либо полную проводимость, либо ее отсутствие.
TSR: параллельно включенная индуктивность с тиристорным управлением, эффективное реактивное сопротивление которой изменяется ступенчато с помощью полного открытия или полного закрытия тиристорного вентиля.
Максимальное значение передаваемой мощности может быть увеличено в два раза путем включения TSR или TCR в среднюю точку линии и обеспечения равенства напряжений на ее концах, как показано на рисунке 13.2.

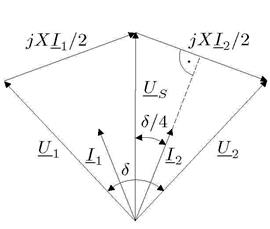
Рисунок 13.2 – Линия с SVC в средней точке
Передаваемая мощность равна
 (13.1)
(13.1)
Так как передаваемая мощность без SVC равна  , то
максимальная передаваемая мощность увеличивается в два раза.
, то
максимальная передаваемая мощность увеличивается в два раза.
14 лекция. Современные средства активно-адаптивной сети и аппаратуры релейной защиты и автоматики (продолжение)
Содержание лекции: основные элементы активно-адаптивные сети. Интеллектуальные электрические сети, принципа работы СТК, статком. Накопители электроэнергии для электроэнергетической системы. Асинхронизированные турбогенераторы.
Цель лекции: ознакомить с современными устройствами регулирования реактивной мощности.
Конденсатор с тиристорным переключением (TSC): параллельно включенный конденсатор, эффективное реактивное сопротивление которого изменяется ступенчато с помощью полного открытия или полного закрытия тиристорного вентиля.
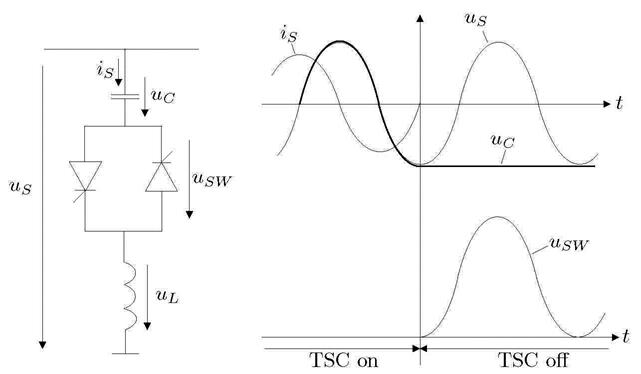
Схема однофазного TSC приведена на рисунке 14.1. Цепь TSC отключается при нулевом значении тока. В
этот момент времени заряд конденсатора достигает своего максимального значения,
которое в идеальном случае остается неизменным, а напряжение на закрытом
тиристоре изменяется синфазно прилагаемому АС напряжению.
Рисунок 14.1 – Конденсатор с тиристорным переключением
Однако, как правило, вследствие
постепенного разряда конденсатора при закрытии тиристора напряжение на его
зажимах не остается постоянным. В целях минимизации динамических возмущений при
подключении TSC необходимо осуществлять повторное его
включение в момент равенства АС напряжения и напряжения на конденсаторе, т.е.
когда напряжение на тиристоре равно нулю. Однако и в этом случае остаются
переходные процессы, вызванные ненулевым значением ![]() в
момент включения, которые при отсутствии реактора приведут к возникновению
мгновенного тока в конденсаторе (
в
момент включения, которые при отсутствии реактора приведут к возникновению
мгновенного тока в конденсаторе (![]() ). Взаимовлияние
между конденсатором и токоограничивающим (и
). Взаимовлияние
между конденсатором и токоограничивающим (и ![]() ) реактором
вызывает колебания тока и напряжения.
) реактором
вызывает колебания тока и напряжения.
Из этих рассуждений следует, что метод управления углом регулирования не применим к конденсаторам. Переключение конденсаторов необходимо осуществлять в конкретный момент времени каждого периода при выполнении условий, обеспечивающих минимальные переходные процессы. Поэтому схема TSC способна обеспечивать только ступенчатое изменение реактивного тока (максимальное или нулевое значение). Таким образом, TSC может рассматриваться как единичная емкостная проводимость, которая либо подключена к системе, либо полностью отключена.
STATCOM является управляемым источником реактивной мощности. Он обеспечивает поддержание заданного значения напряжения посредством поглощения или возвращения реактивной мощности в точке включения без использования внешних реакторов или конденсаторных батарей большой мощности. На рисунке 14.2 приведена стандартная схема преобразователя напряжения.
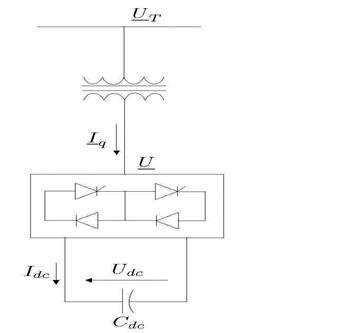
Рисунок 14.2 – Статический синхронный компенсатор
DC напряжение от конденсатора Cdc подается на преобразователь, на выходе которого формируются управляемые трехфазные напряжения с системной частотой. Управление перетоком реактивной мощности между преобразователем и АС системой осуществляется путем изменения амплитуды выходного напряжения U. При превышении значения выходного напряжения U системного UТ формируется опережающий ток, т.е. STATCOM работает в емкостном режиме, и происходит генерация реактивной мощности. При уменьшении значения выходного напряжения ниже системного, формируется запаздывающий ток, и STATCOM работает в индуктивном режиме. В этом случае происходит поглощение реактивной мощности. При равенстве напряжений перетока мощности не происходит.
На практике в преобразователе происходят потери энергии. За счет внутренних потерь в преобразователе DC конденсатор расходует накапливаемую энергию. При отставании намалый угол выходных напряжений преобразователя от системных, происходит поглощение небольшого количества активной мощности из АС системы для компенсации внутренних потерь в преобразователе.
Вместо конденсатора может быть использован накопитель DC энергии. В этом случае с помощью преобразователя можно управлять перетоком как реактивной, так и активной мощности, что может быть использовано для эффективного демпфирования колебаний мощности, поддержания максимального значения требуемой мощности, а также обеспечения надежности передачи при критических нагрузках.
Вывод формулы для передаваемой активной мощности достаточно сложен. Используя переменные, определенные на рисунке 14.3 и законы Кирхгоффа, могут быть записаны следующие уравнения:
 , (14.1)
, (14.1)
![]() . (14.2)
. (14.2)
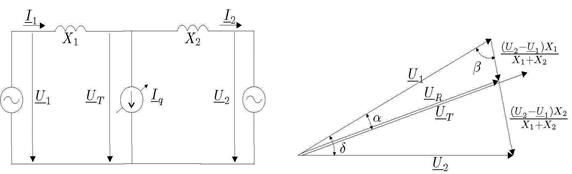
a) б)
Рисунок 14.3 – Двухмашинная система с STATCOM
Приравнивая правые части (14.1) и (14.2),
получим формулу для тока ![]() :
:
 . (14.3)
. (14.3)
Напряжение ![]() определяется
в виде:
определяется
в виде:
 , (14.4)
, (14.4)
где ![]() –
напряжение на зажимах STATCOM при его
отключении, т.е. при
–
напряжение на зажимах STATCOM при его
отключении, т.е. при![]() . Сдвиг
. Сдвиг ![]() на
90° относительно
на
90° относительно ![]() может быть использован для выражения
может быть использован для выражения ![]() в виде:
в виде:
 . (14.5)
. (14.5)
Выражение (14.4) может быть переписано следующим образом:
 . (14.6)
. (14.6)
Применяя закон синусов к диаграмме, показанной на рисунке 14.3,б, получим следующие два уравнения:
 ; (14.7)
; (14.7)
 ,
(14.8)
,
(14.8)
откуда вытекает формула для ![]() :
:
 . (14.9)
. (14.9)
Выражение для передаваемой активной мощности соответствует выражению
 . (14.10)
. (14.10)
Для исключения ![]() применим
закон косинусов:
применим
закон косинусов:
 . (14.11)
. (14.11)
Подстановка (14.11) и (14.6) в (14.10) с выполнением некоторых алгебраических операций приводит к окончательной формуле определения передаваемой активной мощности:
 . (14.12)
. (14.12)
Зависимость передаваемой мощности от транспортного угла показана на рисунке 14.4.
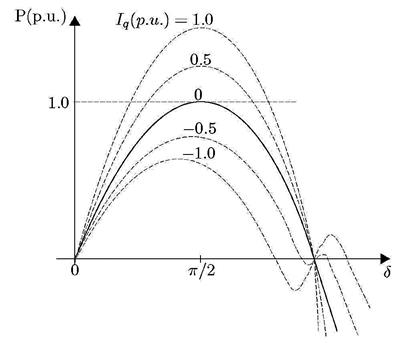
Рисунок 14.4 – Зависимость передаваемой мощности STATCOM от транспортного угла
Электромашинным аналогом STATCOM является асинхронизированный компенсатор (АСК). АСК содержит на роторе две обмотки и специальную (векторную) систему регулирования возбуждения. АСК можно также отнести к базовым устройствам электромашинных элементов FACTS. АСК обеспечивает возможность регулирования реактивной мощности в пределах ± 100 %. Обладает способностью регулирования не только величины, но и фазы вектора напряжения.
15 лекция. Нормативные документы по эксплуатации противоаварийной автоматики
Содержание лекции: оперативно-диспетчерское управление в энергосистемах, термины и определения, схемы, режимы, области устойчивости, расчетные возмущения, противоаварийная автоматика, управляющие воздействия, дозировка управляющих воздействий.
Цель лекции: ознакомить с нормативными документами по эксплуатации противоаварийной автоматики.
Общие положения.
Настоящий документ «Общие положения по системе противоаварийной автоматики энергообъединения ЕЭС/ОЭС» (далее – Положения) устанавливает общие принципы построения, эксплуатации и развития системы противоаварийной автоматики энергообъединения ЕЭС/ОЭС.
Положения предназначены для организаций, осуществляющих оперативно-диспетчерское управление в энергосистемах стран СНГ и Балтии, проектных, научно-исследовательских и других организаций стран СНГ и Балтии, осуществляющих исследование, разработку и проектирование систем и устройств противоаварийной автоматики электроэнергетических систем.
Участие субъектов параллельной работы в организации разработки и эксплуатации системы ПА энергообъединения ЕЭС/ОЭС определяется взаимосогласованными договорами и данными Положениями.
Основные термины, определения и сокращения.
Энергообъединение ЕЭС/ОЭС (inter connected power system) – объединение энергосистем стран СНГ и Балтии, работающих параллельно.
Субъекты параллельной работы (subject so parallel operation) – энергосистемы стран СНГ и Балтии, работающие параллельно в энергообъединении ЕЭС/ОЭС на основании межгосударственных договоров и соглашений.
Противоаварийная автоматика (Emergency control) – автоматические устройства, предназначенные для ограничения развития и ликвидации аварийных режимов в энергосистеме.
Противоаварийная автоматика энергообъединения ЕЭС/ОЭС-комплекс ПА межсистемного назначения, входящий в состав ПА субъектов параллельной работы и обеспечивающий необходимый уровень живучести и согласованные субъектами параллельной работы величины максимально допустимых перетоков по межсистемным связям.
Автоматическое противоаварийное управление (Emergency control) – управление режимом энергосистемы посредством специальных автоматических устройств, цель которого заключается в предотвращении развития нарушений нормального режима, сопровождающихся высокой скоростью изменения его параметров, при которой неэффективны системы автоматического и оперативного управления нормальными режимами.
Автоматическая частотная разгрузка энергосистем (Under frequency load shedding) – вид противоаварийной автоматики предотвращения снижения частоты с воздействиями на отключение заранее сформированных групп энергопринимающих установок потребителей электроэнергии от питающей электрической сети при понижении частоты в энергосистеме в целях недопущения развития частотной аварии и восстановления частоты в энергосистеме до допустимого уровня.
Автоматика ограничения снижения напряжения (Automatic under voltage protection) – комплекс устройств ПА, обеспечивающий отключение заранее сформированных групп потребителей электроэнергии, отключение шунтирующих реакторов, управление РПН трансформаторов, УПК, БСК при аварийном снижении напряжения в энергосистеме или её части в целях предотвращения лавины напряжения, перегрузки и отключения генерирующего оборудования электростанций и питающих линий электропередачи, распространения аварии на смежные энергосистемы.
Автоматическое отключение генератора/Отключение генератора (Generator automaticis connection) – вид управляющих воздействий ПА на отключение генератора (или нескольких генераторов) от электрической сети в результате действия автоматических устройств в целях:
- обеспечения устойчивости;
- ликвидации перегрузки оборудования энергосистемы и ввода режима в допустимую область;
- ограничения повышения частоты.
Автоматическое отключение нагрузки/Отключение нагрузки (Load automatic is connection) – вид управляющих воздействий ПА, на отключение заранее сформированных групп энергопринимающих установок потребителей от питающей электрической сети в результате действия автоматики в целях:
- сохранения устойчивости параллельной работы энергосистемы или отдельных ее частей;
- предотвращения возникновения лавины напряжения;
- ликвидации перегрузки оборудования энергосистемы и ввода режима в допустимую область;
-предотвращения аварийного снижения частоты;
- восстановления частоты после ее аварийного снижения.
Автоматическое разделение энергосистемы/Деление энергосистемы (Automatic sub-division of power system) – вид управляющих воздействий ПА на разделение энергосистемы на части в результате действия автоматических устройств в целях:
- предотвращения нарушения устойчивости параллельной работы электростанций и энергосистем в послеаварийном режиме;
- предотвращения нарушения динамической устойчивости параллельной работы электростанций;
- предотвращения и ликвидации асинхронного режима; предотвращения потери собственных нужд и останова генераторов электростанций при аварийном снижении частоты и/или напряжения в энергосистеме.
Автоматика предотвращения нарушения устойчивости (АПНУ) энергосистемы (района управления) (Automatic so instability prevention in power system) – энергосистемы (района управления) – автоматика, предназначенная для предотвращения нарушения устойчивости параллельной работы электростанций, энергосистем, устойчивости узлов двигательной нагрузки при аварийных возмущениях (АВ) и обеспечения в послеаварийных режимах нормативного запаса статической устойчивости, осуществляющая контроль режима района управления, фиксацию АВ, выбор и реализацию необходимых управляющих воздействий.
Возмущение (Disturbance):
Аварийное − внезапное изменение режима энергосистемы в результате короткого замыкания, непредвиденного отключения ЛЭП или силового оборудования ПС и электростанций из-за к.з., повреждения, ошибочных действий защиты, автоматики или персонала.
Нормативное/расчетное – возмущение из перечня нормативных возмущений, учитываемое при проектировании и настройке ПА.
Дозировка управляющих воздействий – процесс решения в устройстве АДВ задачи определения УВ для каждого пускового органа ПА или рассчитанная интенсивность управляющих воздействий.
Длительная разгрузка / ограничение мощности турбины (ДРТ или ОМ)- -продолжительное (на время послеаварийного режима) уменьшение мощности турбины за счет прикрытия:
- регулирующих клапанов и соответствующего уменьшения пар производительности котла, осуществляемого через ЭГП и (или) МУТ паровой турбины с соответствующим воздействием на системы регулирования котлов;
- направляющих аппаратов гидравлических турбин, осуществляемого через ГРАМ электростанции или МИЧО гидротурбин.
Кратковременная (импульсная) разгрузка паровой турбины (ИРТ) (Short-time (pulsed) turbine off-loading)−быстрое (за доли секунды) уменьшение мощности турбины за счет прикрытия регулирующих клапанов на период до нескольких секунд, осуществляемое путем подачи управляющего импульса на ЭГП.
Комплекс противоаварийной автоматики (Complex of emergency automation) – совокупность устройств противоаварийной автоматики, объединенных функциональной целостностью или районом управления.
Список литературы
1. Автоматизированные системы управления в энергетике. Под ред. В.А.Веникова,- М.: Наука, 1981.
2. АСУ и оптимизация режимов энергосистем. Д.А. Арзамасцев, П.И. Барталомей, A.M. Холян,- М.: Высшая школа, 1983.
3. О построении
алгоритмов П в энергосистемах при использовании ЭВМ в контуре управления. Ст.
науч. трудов ВНИИЭ.
Устойчивость
энергосистем и противоаварийное управление ими. В.А. Веников, В.А.
Строев, А.П. Унгер, А.А. Окин, М.Г. Портной.- М.:
«Энергоиздат»,
1987.
4. Окин А.А. Определение управляющих воздействий противоаварийной автоматики для повышения устойчивости энергосистем. Автореф. дисс. на соискание уч. ст. к.т.н. - М.: ВНИИЭ, 1978.
5. Оптимизация режимов электростанций и энергосистем. В.А.Веников, В.Г. Журавлев.- М.: Энергоатомиздат, 1990 .
6. Оперативно производственная информация в энергетике. Под ред. Семенова.- М.: «Энергия», 1987.
7. Пособие к курсовому
и дипломному проектированию для электроэнергетических специальностей ВУЗов.
Под ред. В.М. Блока, - М.:
«Высшая
школа», 1990.
8. Система ВТИ для регулирования мощности
турбогенераторов в аварийных режимах. Доклад
ВТИ на II ВНТС по устойчивости и
надежности
энергосистем СССР. Б.П. Мурганов, И.З. Черномзив. - М.,1969.
9. Справочник по
проектированию электроэнергетических систем. Под ред. Н.Ш. Шапиро, С.С. Рокотяна.
- М.: Энергоатомиздат,
1985.
10. Управление мощными энергообъединениями. Под ред. С.А. Совалова. - М.: «Энергоиздат», 1984.
11. Модели оптимизации развития энергосистем. Д.А. Арзамасцев, А.В. Липес, А.Л. Мызин. - М.: «Высшая школа», 1987.
12. Кочкин В.И. Управляемые статические устройства компенсации реактивной мощности для линии электропередач // Электричество. 2000 г. №9.
13. Рыжов Ю.П., Мотибирджанди А.А. Возложение ограничения при использовании управляемой продольной компенсации в линиях электропередачи 220-500 кВ // Вестник МЭИ 2004 г. №5.
14. Casazza J.A., Lekang D.J. New FACTS Technology: Its Potential impact on Transmission System Utilization // EPRI Conference on Flexible AC Transmission System, Cincinnati, OH, November 1990.
15. Zhang XP, Rehtanz, Palb. Flexible AC Transmission Systems: Modeling and Control, Springler, 2006.
Сводный план 2012 г., поз. 269
Кармель Камилович Тохтибакиев
УПРАВЛЕНИЕ ЭНЕРГООБЪЕДИНЕНИЯМИ
Конспект лекций
для магистрантов
профильного обучения
по специальности 6М071800 – Электроэнергетика
Редактор Н.М.
Голева
Специалист по
стандартизации Н.К. Молдабекова
Подписано в
печать «___»______201 г.
Формат 60х84 1/16
Тираж _10_
экз
Бумага
типографская
Объем 4,1
уч.-изд.л
Заказ __ Цена 2050
тенге
Копировально-множительное бюро
некоммерческого акционерного общества
«Алматинский университета энергетики и
связи»
050013, Алматы, Байтурсынова, 126