МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
Некоммерческое акционерное общество
Алматинский университет энергетики и связи
С.Б. Бухина
Х.А. Нурходжаева
АНГЛИЙСКИЙ ЯЗЫК
(English for automation and control)
Учебное пособие
для магистрантов
Алматы 2012
УДК 802.0 (075.8)
ББК 81.2 Англ. яз. – 923
Английский язык:
Н90 Учебное пособие / С.Б.Бухина, Х.А.Нурходжаева;
АУЭС. Алматы, 2012. – 87 с.
ISBN 978-601-7327-08-8
Данное пособие предназначено для магистрантов, специализирующихся в области автоматизированных систем управления. Представленный материал позволяет углубить знания в английском языке по данной теме. Пособие содержит тексты из оригинальной литературы, учебные задания для усвоения и запоминания специальных терминов, а также задания для развития навыков чтения, свертывания и развертывания информации при составлении аннотаций и рефератов на русском и английском языках.
Рецензенты: КазУМОиМЯ им. Абылай хана, канд. филол. наук, профессор М.Р.Сабитова;
АУЭС, канд. тех. наук, доцент Н.В. Сябина.
ББК 81.2 Англ. яз. – 923
Печатается по плану издания 2012 г. Министерства образования и науки Республики Казахстан
ISBN 978-601-7327-08-8
© НАО «Алматинский университет энергетики и связи», 2012 г.
Предисловие
Предлагаемое учебное пособие предназначено для магистрантов высших учебных заведений, совершенствующихся в области автоматизации и управления. Целью данного пособия является обучение языковым средствам понимания специальных научно-технических текстов на английском языке, умениям перевода информации с русского на английский язык, а также навыкам написания и подготовки аннотаций и рефератов.
Структурно пособие состоит из основной части и приложений. Основная часть содержит 7 уроков, каждый из которых состоит из основного текста, лексико-грамматических упражнений, дополнительных текстов, предназначенных для развития навыков поискового чтения, двустороннего перевода, упражнений и текстов для составления аннотаций, планов, рефератов.
Пособие содержит:
- тексты из оригинальной литературы, относящиеся к области автоматизированных систем управления;
- учебные задания, способствующие усвоению и запоминанию специальных терминов;
- задания для развития навыков чтения, свертывания и развертывания информации, составления аннотаций и рефератов, как на русском, так и на английском языке;
- задания по совершенствованию навыков письменного перевода;
- упражнения по усвоению грамматических явлений, характерных для научно-технических текстов.
В качестве приложений предлагаются:
- краткий грамматический справочник;
- научно-технические тексты для дополнительного чтения.
Авторы выражают благодарность и признательность рецензентам: кандидату филологических наук, профессору КазУМОиМЯ им. Абылай хана М.Р. Сабитовой и кандидату технических наук, доценту кафедры ИК АУЭС Н.В.Сябиной за ценные рекомендации, которые были учтены при подготовке пособия к печати.
UNIT ONE
Texts: History and Development of Automatic Control; Introduction to Control Systems; From the History of automatic Control Theory
Grammar: The Passive Voice
1. Memorize the words
fly-ball governor – центробежный регулятор
prone to – склонный
to steer – управлять
to struggle – прилагать все усилия
prior to – раньше, прежде
automatic aircraft pilot – автопилот самолета
control engineering – техника регулирования
track – след; направляющее приспособление; следить
vast vistas – перспективы
advent – приход; наступление
to devise – изобретать, придумывать
to implement – выполнять
to tackle – заниматься (чем-л.); браться (за что-л.)
vigour (vigor) – сила, энергия
to deplete – истощать (запасы и т. п.)
2. Read the text and say how the automatic control theory was developed
History and Development of Automatic Control
by I. J. Nagrath
It is instructive to trace brief historical development of automatic control. Automatic control systems did not appear until the middle of eighteenth century. The first automatic control system, the fly-ball governor, to control the speed of steam engines, was invented by James Watt in 1770. This device was usually prone to hunting. It was about hundred years later that Maxwell analyzed the dynamics of fly-ball governor.
The importance of positioning heavy masses like ships and guns quickly and precisely was realized during World War I. In early 1920, Minorsky performed the classic work on the automatic steering of ships and positioning the guns on the shipboards.
A date of significance in automatic control systems is that of Hazen’s work in 1934. His work may possibly be considered as a first struggling attempt to develop some general theory to servomechanisms. The word “servo” was originated with him.
Prior to 1940 automatic control theory was not much developed and for most cases the design of control systems was indeed in art. During the decade of 1940’s, mathematical and analytical methods were developed and practiced and control engineering was established as an engineering discipline in its own rights. During the World War II it became necessary to design and construct automatic airplane pilots, gun positioning systems, radar tracking systems and other military equipment based on feedback control principle. This gave a great impetus to the automatic control theory.
The industrial use of automatic control has tremendously increased since World War II. Modern industrial processes such as manufacture and treatment of chemicals and metals are now automatically controlled.
Control engineering has enjoyed tremendous growth during the years since 1955. Particularly with advent of analog and digital computers and the perfection achieved in computer field, highly sophisticated control schemes have been devised and implemented. Furthermore, computers have opened up vast vistas for applying control concepts to non-engineering fields like business and management. On the technological front fully automated computer control schemes have been introduced for electric utilities and many complex industrial processes with several interacting variables particularly in chemical and metallurgical processes.
A glorious future lies ahead for automation wherein computer control can run our industries and produce our consumer goods provided we can tackle with equal vigour and success the socio-economic and resource depletion problems associated with such sophisticated degree of automation.
3. Look through the text and answer the questions:
1. What was the first automatic control system? 2. Where were they used? 3 Who devised the term “servo”? 4. What was designed in 1940s? 5 Why has control engineering increased since 1955? 6 What were automated computer control schemes introduced for? 7. What vistas lie ahead for automation?
4. Find out the English equivalents for the following word combinations:
Применять концепции управления; электрическое оборудование; с появлением аналоговых и цифровых компьютеров; очень сложные схемы управления; принцип обратной связи; восстановить в правах; автоматическое управление; настойчивая попытка; прежде, раньше, до; автопилот; центробежный регулятор; дать толчок; огромные перспективы.
5. Translate the groups of words:
To play a vital role; in addition to; space-vehicle systems; the design of cars; missile-guidance systems; to provide the means; manual operations; to relieve the drudgery; machine tools; fields like business and management; electric utilities; interacting variables.
6. Read the text and write the translation of it:
Introduction to Control Systems
by K. Ogata
Automatic control has played a vital role in the advance of engineering and science. In addition to its extreme importance $ space-vehicle systems, missile-guidance systems, robotic systems, and the like, automatic control has become an important and integral part of modern manufacturing and industrial processes. For example, automatic control is essential in the numerical control of machine tools in the manufacturing industries, in the design of autopilot systems in the aerospace industries, and in the design of cars and trucks in the automobile industries. It is also essential in such industrial operations as controlling pressure, temperature, humidity, viscosity, and flow in the process industries.
Since advances in the theory and practice of automatic control provide the means for attaining optimal performance of dynamic systems, improving productivity, relieving the drudgery of many routine repetitive manual operations, and more, most engineers and scientists must now have a good understanding of this field.
Ogata K. Modern Control Engineering. – 4th Ed. – New Jersey: Prentice Hall, 2002. – 964 p. (P. 1).
7. Translate the following sentences and state the tense form of the verbs in Passive:
1) Materials are selected in a special way. 2) All the dimensions necessary for manufacturing machines will be shown in the computer model. 3) The engine is being tuned 4) The principle of displacement was discovered by Archimedes. 5) The rate of speeding up is called acceleration. 6) The electromagnetic induction had been discovered by 1832 before the invention of electric motors. 7) The change in scale was measured by the number of transistors on a chip. 8) The brakes are being adjusted. 9) The object will soon be greatly deformed. 10) The tires were being checked. 11) The labor productivity has been increased this month. 12) Many scientific books will have been read by the end of the year to prepare the thesis.
8. Put down the tense forms of the verbs (in Active or Passive Voice):
Model: was being discharged – Past Continuous Passive
will be testing – Future Continuous Active
is given; analyzed; has increased; was established; have become; is trained; is set; is not known; are controlled; is held; is required; will have been measured; expressed; will have taken; was launched; have been studying; are applied; have been entered; is reduced; is being studied.
9. Translate into English in the written form and think about its title:
Первая искусственная автоматическая регулирующая система, водяные часы, была изобретена древнегреческим механиком Ктезибием. В его водяных часах вода вытекала из источника такого, как стабилизирующий бак, в бассейн, затем из бассейна— на механизмы часов. Устройство Ктезибия использовало конусовидный поток для контроля уровня воды в своём резервуаре и регулировки скорости потока воды соответственно, чтобы поддержать постоянный уровень воды в резервуаре так, чтобы он не был ни переполнен, ни осушен. Это было первым искусственным действительно автоматическим саморегулирующимся устройством, которое не требовало никакого внешнего вмешательства между обратной связью и управляющими механизмами. Хотя они, естественно, не ссылались на это понятие как на науку кибернетику (они считали это областью инженерного дела), Ктезибий и другие мастера древности такие, как Герон Александрийский или китайский учёный Су Сун, считаются одними из первых, изучавших кибернетические принципы. Исследование механизмов в машинах с корректирующей обратной связью датируется ещё концом XVIII века, когда паровой двигатель Джеймса Уатта был оборудован управляющим устройством, центробежным регулятором обратной связи для того, чтобы управлять скоростью двигателя. А. Уоллес описал обратную связь как «необходимую для принципа эволюции» в его известной работе 1858 года. В 1868 году великий физик Дж. Максвелл опубликовал теоретическую статью по управляющим устройствам, одним из первых рассмотрел и усовершенствовал принципы саморегулирующихся устройств.
10. Read the text. Compose the plan of it. Try to broaden the information containing in each part of the text:
From the History of Automatic Control Theory
The concept of control and the use of control devices were known long ago. Simple control systems with an input signal controlling an output element have been used by people for a long time. In recorded history it is found that the Romans invented a water-level control device 2000 years ago.
The mathematical foundations for control theory have been laid by J. Fourier and P. Laplace. Research work in analytical dynamics was carried out by A. Routh. A. Lyapunov was the first to develop the theory of stability of automatic control systems.
Real development of automatic control theory began in 1920s. World War I brought a tremendous impetus for the advancement of control. Such problems as the automatic bombing and control systems for anti-aircraft guns required fundamental theory and complex equipment. To meet these requirements investigations in the field of automation were accelerated.
Nowadays automatic control systems play an important role in the development of civilization. There has been an enormous growth in the application of controllers, in technologies and everyday life. Domestically, automatic controls in heating and air conditioning systems regulate the temperature and humidity. Industrially, they are employed in quality control of manufactured products, power stations, etc. In space technology and weapon systems they appear in the form of guidance systems, fire control systems, etc. It is automation that ensures speed, accuracy, reliability, high quality and economy of technological processes.
Automation control is irreplaceable where it is necessary to maintain various physical properties at a desired level. Among many physical properties that can be controlled there temperatures and pressures in chemical industry, moisture content in textile industry, thickness of insulation around wires in electrical engineering.
11. Write down the translation of these two texts and entitle them:
Text A
As it is known control systems are classified according to the degree of their automation. A control system is called automatic if the basic functions of control are performed without the participation of man, that is automatically. Completely automated control systems are defined as closed-loop systems. Partially automated control systems are termed open-loop ones.
A closed- loop control system or feedback system automatically controls and modifies its own operation by responding to data generated by the system itself. The example of a closed-loop control system is a switch of a high-speed printer, used in computer systems. The switch finds if there is paper in the printer. If the paper runs out, the switch signals the system to stop operation.
An open-loop system does not provide for its own control or modification. It must be controlled by people. The example is the operation of a printer having no switch. In this case a human operator must notice when the paper runs out and signal the system to stop printing.
The former system is automatically controlled by self-regulation, the latter one being controlled by man. This difference determines their application. Open systems are used for stabilization and program control. Closed systems replace man in hard and dangerous work.
Text B
Today forms and applications of electric relay are numerous and varied. Having improved relays scientists received a more reliable form of control. As it is known there is a large range of electric relays which are utilized to operate switchgear, totalisator, road traffic signals and certain types of automatic telephone equipment.
Sometimes it is necessary to operate a circuit by reversing a current in the actuating circuit. This is done by using a polarized relay. The special feature of this relay is the employment of a permanent magnet. Giving the armature a definite polarity, the permanent magnet makes it possible to control the direction of the armature movement when a current passes through the relay coils. This permanent magnet is necessary to maintain the same polarity at each end of the armature. When energized with the poles directed to the north and south, the relay attracts one end of the armature and repels the other one.
Using this type of relay engineers often employ it for the remote control of wireless sets and similar purposes, when needed, to economize energy of batteries.
When used in such applications as temperature control, coil winding machines, etc., another type of relay is very effective. It is a plug-in relay. These relays are medium speed devices. Requiring relatively low coil power they are preferable in many applications.
12. Translate into English:
Управление
В. П. Евменов
Управление материальными объектами – это не изобретение человеческого разума, а изобретение Природы. Задолго до осознания понятия «управление» процессы управления в организме человека происходили на многих уровнях.
Интуитивно понятие управления хорошо известно. Овладение живыми организмами процессами управления уходит вглубь веков, а осмысление этих процессов – научное достижение новой истории человечества. Любой вид деятельности человека – это процесс управления, имеющий целью разрешить какое-либо противоречие. Поддержание огня в костре, приготовление пищи, организация охоты на мамонта, управление упряжкой лошадей или морским судном, селекция растений и животных, выработка и распределение электроэнергии, обучение детей и студентов, удар футболиста по мячу, борьба со СПИДом и многое, многое другое – это все процессы управления. Во всех этих процессах центральную роль выполняет отрицательная обратная связь. Отрицательную обратную связь осуществляет человек, когда подбрасывает сучья в костер, заметив убывание огня. Футболист отрабатывает во время тренировок удары по мячу, пытаясь минимизировать отклонения мяча от нужной траектории.
Многие виды управления изучались специальными дисциплинами задолго до возрождения термина «кибернетика». Для многих систем управления техническими объектами разработаны математические теории различного уровня общности.
Евменов, В. П. Интеллектуальные системы управления: Учеб. пособие. – М.: Книжный дом «ЛИБРОКОМ», 2009. – 304 с. (С. 205-206).
UNIT TWO
Texts: Elements and structure of Automatic Control Systems; Automation; Business Systems; Comparing Feed forward and Feedback Controllers; Types of Feedback Control Systems
Grammar: The forms and functions of Infinitive.
1. Memorize the words:
process control systems – системы управления (производственным процессом)
physical variables – физические переменные величины
a controlled quantity – управляемая величина
to supply a feedback signal – поставлять сигнал обратной связи
feedback path elements – элементы обратной связи
transducers - преобразователи
servomotors - сервомоторы
a variable resistance – переменное сопротивление
reference input /driver – задающее устройство
2. Read the text and speak about elements of automatic control systems
Elements and Structure of Automatic Control Systems
Automatic control is the use of means which can maintain physical variables, such as temperature or pressure, at a desired level automatically. Systems which perform the control of physical variables are called automatic control systems (ACS).
Automatic control systems may be classified as servo-mechanisms, process control systems and regulators, but whatever the classification be, the same principles of operation are common to them all. Every ACS should contain five main components. They are: a driver or reference input, an error detector, control elements, a controlled quantity and feedback path elements. The basic control system operation may be described by the simple block diagram:
The reference input or driver sets the desired level or position of controlled quantity C in this system. The controlled quantity C is the resulting level or position of variable parameter, which is the position to be controlled by this ACS. The feedback path elements H supply a feedback signal B that indicates the level of the controlled quantity C. The error detector receives the feedback signal B and compares it with the input command signal R; any error (or difference between B and R) produces an output or resulting signal E. Control elements G receive, amplify and transform the output signal E to maintain the controlled quantity at the desires level.
To produce an automatic control system it is necessary to use a lot of various elements. These are logical elements, relays, potentiometers, magnetic amplifiers, transducers and other devices. The basic components of every ACS are logical elements which may be deducted to transducers and servomotors. Relays are usually sensitive devices that can control the action of large or remote apparatus in circuits. A potentiometer consists basically of a variable resistor. If connected to a circuit the variable resistance makes it possible to vary the amount of voltage supplied to a load. Magnetic amplifiers belong to a large group of magnetically controlled devices. The principle of their operation is based on the process of magnetizing a core by varying a magnetomotive force periodically. Transducer is known as a converting device. Many well-known devices act as transducers, for example, an electric motor acts as a transducer converting electrical energy into mechanical one.
The application of automatic control systems covers a lot of spheres, ranging from the use for the guidance of space vehicles to the control of industrial processes.
3. Look through the text and answer the questions:
1) What is automatic control? 2) What are automatic control systems? 3) How can they be classified? 4) What components does an ACS consist of? 5) What is the function of a driver? 6) Try to describe the ACS control system operation. 7) What are the basic elements of any automatic control system? 8) What is the function of relays? 9) What is the principle of amplifiers operation based on? 10) What do transducers serve for?
4. Memorize the words:
a self-feeding process – процесс автоматической подачи
self- initiating – автоматическое включение
a float-type controller – поплавковый регулятор
a weaving loom – ткацкий станок
to suggest an idea to smb – натолкнуть на мысль
continuous cycle production – непрерывный производственный цикл
to direct on the correct path – направлять по заданной траектории
transfer machining – механическая перестановка
5. Read the text and explain the advantages of automation:
Automation
by Meriam J.L.
It is well known that since ancient times people have tried to construct automatic toys. Those toys were put into motion by hidden mechanisms of automatic devices. The mechanical wonders of the past indicated the road for developing automatic systems later. Clocks and watches, being the first automatic systems, suggested to people an idea of producing automata in industrial manufacture. The Frenchman Vaucanson built a weaving loom replacing fifty weavers. The talented Russian mechanic Ivan Polzunov invented a float-type controller for his steam engine. Steam engine found universal application due to the invention of the centrifugal speed governor, designed by the English inventor James Watt. Soon automation spread to all technological spheres and became a moving force of technological advance.
So, automation deals with the theory and construction of control systems which can function without man’s participation. It should be noted that modern automatic industrial process involves four independent components, each component becoming more powerful in the presence of the other. They are: transfer machining, automatic assembly, communication engineering and control engineering. These four components are linked together into a single process called automation. When two or more automatic machines are connected together with automatic controls, which may be mechanical, electrical or a combination of them, an automated control is formed. This system creates a self-feeding, self-initiating and self-checking process.
It should be noted that electronics has greatly extended the range of automatic control and has made the processing of information rapid and automatic. Electronic devices are able to respond very quickly to signals and take measurements and detect faults very accurately. So, they can effectively control many processes and machines working at high speeds. Due to the above – mentioned advantages automatic control systems find wide application in many fields of technology. Automatic controls relieve man of many monotonous activities. Besides, they can perform functions which are beyond the physical abilities of man.
People make great use of automation in industry; it is especially effective in continuous cycle production. Various kinds of electronic devices are applied in automatic aircraft pilots, as radio aids to air and marine navigation. Owing to automation special devices make precise calculations for space vehicle movement, help to launch missiles and to direct them to the correct path. Automatic interplanetary stations and space rockets are equipped with orientation systems, photo-television apparatus, special soft landing radio systems and movement control systems of high precision. These systems ensure safe returning and safe landing.
Automation to be developed successfully has become one of the main factors of engineering progress today.
6. Answer the questions:
1) How were the first automatic toys put into motion? 2) What were the first automatic systems? 3) Who was the first to show the advantages of automatic devices? 4) Due to what did steam engines find wide application? 5) What is automation? 6) What components does an automatic process include? 7) What conditions can an automatic control system be formed under? 8) What process does such system create? 9) What extended the range of automatic control? 10) What fields of technology are automatic control systems used in?
7. Translate and memorize the following word combinations:
To invent a float-type controller; centrifugal speed governor; to put into motion; self-initiating and self-checking process; to extend the range of automatic control; a steam engine; control engineering; mechanical wonders; transfer machining; to create a self-feeding; to extend the range of automatic control; to respond to signals quickly; to take measurements; to detect faults accurately; continuous cycle production; automatic aircraft pilot; radio aids; air and marina navigation; owing to automation; to make precise calculations; space vehicle movement; to launch and direct missiles on the correct path; to be equipped with orientation systems; movement control systems of high precision; to ensure safe returning and safe landing.
8. Find out the English equivalents for the following word combinations:
1) Автоматическая сборка; автоматизированные системы управления; натолкнуть на мысль; механическая перестановка; диапазон автоматического управления; создавать процесс автоматической подачи; обнаруживать погрешности с высокой точностью; автоматическое включение; техника регулирования; быстро реагировать; непрерывный производственный цикл; выполнять вычисления; направлять ракеты по заданной траектории; системы управления полетом высокой точности; приводить в движение; благодаря изобретению регулятора скорости; промышленное производство; автопилоты; радиосредства; паровой двигатель; техника связи.
2) Прибор по обнаружению ошибки; управляемая величина; задающее устройство; поддерживать физические переменные величины; подавать сигнал обратной связи; чувствительные приборы; периодическое намагничивание сердечника; усиливать; менять величину напряжения; подаваемого к нагрузке; любая погрешность; желаемый уровень; управление производственными процессами; принцип действия; переменное сопротивление.
9. Translate the verbs and their derivatives:
To feed – feedback; feed forward; feeder; feeding.
To indicate – indicated; indication; indicative; indicator; indicatory.
To transfer – transferable; untransferable; transferability; transferring; transference; transferor.
To govern – governor; governable; ungovernable; government; governmental.
To vary – variable; variability; invariability; variant; variation; variety; various
To detect – detectable; undetectable; detectability; detection; detector.
To control – controllable; incontrollable; controller; controlling.
10. Find out the synonyms from the texts for the followings:
- To mean; to connect; to provide; to build; to widen; to react; to connect; to install; to include; to manage; to show; to find out; to provide; to get; to fabricate; to use; to intensify; to convert; to operate; to change.
- Up-to-date; broad; on-going; main; different; quick; particular; distant; feasible; accurate.
- Motor; branch; airplane; progress; road; concept; convertor; regulator; production; movement; use; instruction; number; rate; type; mistake; value; element; standard; failure; work.
11. Translate the word combinations paying attention to the words in bold type
Error (ошибка, погрешность): access error; accidental error; admissible error; application error; calculation error; entry error; conversion error; common error; start-up error; connection error; operating error; error-prone; undetectable error; unexpected error.
Control (управление, регулирование): automatic control; distance/remote control; digital control; feedback control; error control; process control; keyboard control; manual control; on-line control; off-line control; power control; security control; precision control.
Level (уровень; степень; мера): level of sensitivity; desirable level; difficulty level; error level; output level; performance level; protection level; significance level; transmission level; software level.
Quantity (величина; значение; количество): absolute quantity; alternating /variable quantity; digital quantity; average quantity; random quantity; unknown quantity; directed quantity; constant quantity; derived quantity; digital quantity; switching quantity.
Variable (переменная величина; переменный, изменяющийся): complex variable; controlled variable; physical variable; dependent variable; independent variable; input variable; random variable; irregulated variable; reference variable; switching variable; replaceable variable.
12. Translate the following word combinations using the exercise 11:
Комплексная переменная; подверженный ошибкам; средства управления системой защиты; неизвестная величина; уровень чувствительности; изменяющаяся величина; переменная – переключатель; физическая переменная; ошибка доступа; сетевое управление; дистанционное управление; неизвестная величина; комплексная переменная; независимая переменная; уровень выходного сигнала; случайная переменная; незакономерно изменяющаяся величина; векторная величина; подверженный ошибкам; уровень сложности; степень быстродействия; непредусмотренная ошибка; программный уровень; управление производственным процессом; регулирование потребляемой мощности; входная переменная; допустимая ошибка; случайная погрешность; клавишное управление; степень значимости; производная величина; вспомогательная переменная; ошибка в прикладной программе; числовое значение; контроль за ошибками; заменяемая переменная; уровень передаваемого сигнала; распространенная ошибка; неправильное соединение; управление с использованием обратной связи; уровень защиты; ошибка из-за нарушений правил эксплуатации; управление точностью (вычисления); уровень ошибки; не обнаруживаемая ошибка; автономное управление.
13. Translate the text paying attention to the forms of the Infinitive:
Michael Faraday, one of the greatest men of science, had little chance to get an education. In his early youth Faraday had to save money to buy the apparatus necessary for his experiments. We know Faraday to have taken interest in many scientific and technical problems of his time. He took part in the creation of a safety lamp to be used in mines. To turn gases into liquids was one of numerous problems he worked at. For several years Faraday is known to have been working at the problem of a perfect optical glass that greatly improved the telescope. After a while Faraday set to work on another important problem, the problem of magnetism. These were many questions to be answered in the field of science. The main task of his work was to find out the nature of electricity and magnetism.
14. State the functions of the Infinitive and translate the following:
1) A. The instrument to be used; the problem to be solved; the new device to be introduced; the theory to be considered; the experiment to be carried out.
B. Kepler was the first to discover the exact laws governing the movements of the planets. The fly-ball governor was a device to control the speed of steam engines.
2) The primary task is to maintain the output value in the presence of disturbances. We may consider the emergency control as an integrated system.
The function of the transmitter is to encode the messages.
3) To obtain the necessary data was difficult. To measure information means to define the logarithm of the number of available choices.
4) To meet the requirements the circuit must be assembled on the basis of current technology. Switches are used to open the circuit. To learn more about the space people launch spaceships.
5) It was decided to use “a bit” as a unit of information. To measure information means to define the logarithm of the number of available choices.
15. Translate the text paying attention to the functions of the Infinitive and its forms:
Business Systems
by K. Ogata
A business system may consist of many groups. Each task assigned to a group will represent a dynamic element of the system. Feedback methods of reporting the accomplishments of each group must be established in such a system for proper operation. The cross-coupling between functional groups must be made a minimum in order to reduce undesirable delay times in the system. The smaller this cross-coupling, the smoother the flow of work signals and materials will be.
A business system is a closed-loop system. A good design will reduce the managerial control required. Note that disturbances in this system are the lack of personnel or materials, interruption of communication, human errors, and the like.
The establishment of a well-founded estimating system based on statistics is mandatory to proper management. Note that it is a well-known fact that the performance of such a system can be improved by the use of lead time, or anticipation.
To apply control theory to improve the performance of such a system, we must represent the dynamic characteristic of the component groups of the system by a relatively simple set of equations.
Although it is certainly a difficult problem to derive mathematical representations of the component groups, the application of optimization techniques to business systems significantly improves the performance of the business system.
Ogata K. Modern Control Engineering. – 4th Ed. – New Jersey: Prentice Hall, 2002. – 964 p. (P. 5).
16. Translate the text and speak about feed forward and feedback controllers:
Comparing Feed forward and Feedback Controllers
by David M. Koenig
The feed forward controller can act on a measured event (such as the drain value position) before it shows up as a disturbance in the process output (such as the tank level). Unfortunately, the feed forward controller has no idea how well it did. Furthermore, it is often rather difficult to measure the disturbance-causing event. Sometimes there will be many disturbance-causing events, some of which cannot be measured. Also, it is not always clear how the algorithm should react to the measured disturbance-causing event. Often, each feed forward control algorithm is a special custom application. Finally, if perchance, the feed forward control algorithm acts mistakenly on a perceived disturbance-causing event it can actually generate a more severe disturbance.
The feedback controller cannot anticipate the disturbance. It can only react “after the damage has been done.” If the disturbance is relatively constant there may be a good chance that the feedback controller can slowly compensate for it and perhaps even remove it. As we will show in the next couple of pages, there are some disturbances that simply should be left alone. The feedback controller can tell how well it has been done and it can often react appropriately. Unlike the case with feed forward control algorithms, there are a few well-known, easily applied feedback control algorithms that, under appropriate conditions can deal quite effectively with disturbances.
Koenig D. Practical Control Engineering: Guide for Engineers, Managers, and Practitioners. – McGraw-Hill, 2009. – 538 p. (P. 7-8).
17. Translate the text in the written form:
Types of Feedback Control Systems
by B. Kuo & F. Golnaraghi
Feedback control systems may be classified in a number of ways, depending upon the purpose of the classification. For instance, according to the method of analysis and design, control systems are classified as linear or nonlinear, and time-varying or time-invariant. According to the types of signal found in the system, reference is often made to continuous-data or discrete-data systems, and modulated or unmodulated systems. Control systems are often classified according to the main purpose of the system. For instance, a position-control system and a velocity-control system control the output variables just as the names imply. In a particular case, the type of control system is defined according to the form of the open-loop transfer function. In general, there are many other ways of identifying control systems according to some special features of the system. It is important to know some of the more common ways of classifying control systems before embarking on the analysis and design of these systems.
Kuo, B., Golnaraghi, F. Automatic Control Systems. – 9th Ed. – Wiley, 2010. – 944 p. (P. 11).
18. Make a sentence out of the two parts:
1) Feedback -
2) Driver -
3) Transducer -
a) a defect in a circuit, which prevents the current from following the intended course.
b) an electromagnetic device controlling a larger current or activating other devices in the same or another electric circuit.
c) an instrument for measuring, comparing or controlling electric voltage.
4) Potentiometer
5) Relay –
6) Detector -
7) Amplifier -
8) Regulator –
9) Fault -
10) Assembly -
d) a device used to increase the strength of an electric signal.
e) any machine part that communicates motion to another part.
f) any device that transmits energy from one system to another or converts the energy in form.
g) a mechanism for controlling the movement of machinery, the flow of liquids, gases, electricity, steam, etc.
h) an apparatus for indicating the presence of smth., as electric waves.
i) a fitting together of parts to make the whole.
j) a transfer of [part of the output of an active circuit or device back to the input.
UNIT THREE
Texts: History of the word “cybernetics”; The History of Cybernetics; Cybernetics; The Heritage and Revival of Cybernetics; Сфера кибернетики; Обратная связь
Grammar: The Complex Subject and the Complex Object; the Construction for + infinitive
1. Memorize the words:
Rudder – руль
to assure – убеждать; уверять; обеспечивать; гарантировать
root – корень
to denote – обозначать, означать
to manage – управлять
2. Translate the text and tell what the word “cybernetics” stands for:
History of the word "cybernetics"
Cybernetics is the discipline that studies communication and control in living beings and the machines built by man. A more philosophical definition, suggested by Louis Couffignal in 1958, considers cybernetics as "the art of assuring efficiency of action". The word cybernetics was reinvented by Norbert Wiener in 1948 from the Greek kubernetes, pilot, or rudder. The word was first used by Plato in the sense of "the art of steering" or "the art of government ". Ampère used the word cybernetics to denote "the study of ways of governing." One of the very first cybernetics mechanisms to control the speed of the steam engine, invented by James Watt and Matthew Boulton in 1788, was called a governor, or a ball regulator. Cybernetics has in fact the same root as government: the art of managing and directing highly complex systems.
3. Memorize the words:
a cone shaped float – конусообразный поплавок
to run dry – работать всухую
self-regulatory device – саморегулирующееся устройство
knowledge management – управление знаниями
to keep great minds busy – занимать умы великий людей
a holding tank – бак-сборник
4. Translate the text and speak about the history of cybernetics:
The History of Cybernetics
As it is known, the first artificial automatic regulatory system, a water clock, was invented by the mechanic Ktesibios (2-1 century BC) from ancient Greece. In his water clocks water flowed from a source such as a holding tank into a reservoir, then from the reservoir to the mechanisms of the clock. The device used a cone shaped float to monitor the level of the water in its reservoir and adjust the rate of flow of the water accordingly to maintain a constant level of water in the reservoir, so that it neither overflowed nor was allowed to run dry. This was the first artificial truly automatic self-regulatory device that required no outside intervention between the feedback and the control of the mechanism.
The word cybernetics was first used in the context of self-governance by Plato (428-348 BC) in the Laws to signify the governance of people. In 1834 Andre Marie Ampere, the French physicist and mathematician, systematized the human knowledge of that time under different numbers. Under number 83 he listed a science that was to deal with the methods of regulating society. Ampere termed this science “cybernetics” from the Greek word “kubernetes” meaning “steersman” or “pilot”. This literal translation embodies much of the modern relevance of the cybernetics principles.
After Ampere, however, the term “cybernetic” was forgotten until it appeared again in 1948 in a book of the well-known American mathematician Norbert Wiener (1894-1964). His book was entitled “Cybernetics or Control and Communication in the Animal and the Machine” The name ‘cybernetics’ was coined by N. Wiener to denote the study of “teleological mechanisms”, that is machines with corrective feedback. Wiener was part of a group of very brainy people of various specialties – psychology, mathematics, sociology, philosophy, knowledge management. So, the modern study of cybernetics began at the intersection of neurology, electronic network theory and logic modeling. Wiener popularized the social implications of cybernetics, drawing analogies between automatic systems such as a regulated steam engine and human institutions. The laws described by N. Wiener as the basis if cybernetics greatly interested scientists of many specialties.
The foundations of cybernetics were laid and its basic principles were formulated in the works of mathematicians, physicists, physicians and engineers. The works of American scientists Claude Shannon and John von Neumann were of outstanding importance.
Thus, the study of control and response to complex systems has been keeping great minds busy for thousands of years, and Wiener seems to be regarded as the chief modern architect.
5. Answer the questions using the information from these texts:
1) When did the first automatic regulatory system appear? 2) How did Ktesibios’s system operate? 3) When was the word ‘cybernetics’ first used? 4) Who used it and how? 5) What kind of classification did Ampere do? 6) What does the word ‘cybernetics’ mean? 7) Who is considered to be the founder of cybernetics? 8) What did Wiener denote by the word ‘cybernetics’? 9) What sciences contributed to its development?
6. Translate and memorize the following word combinations:
The first artificial automatic regulatory system; a water clock; ancient Greece; a holding tank; to use a cone shaped float; to monitor the level of the water; to overflow; to run dry; self-regulatory device; to adjust the rate of flow of the water; accordingly; to maintain a constant level of water; to require no outside intervention; feedback; self-governance; to systemize the human knowledge; the methods of regulating society; to term the science; steersman; literal translation; to embody relevance of the cybernetics principles; very brainy people; knowledge management; intersection of sciences; electronic network theory; the social implications of cybernetics; to draw analogies; a regulated steam engine; to lay the foundation; to formulate the basic principles; to be of outstanding importance; control and response to complex systems; to keep great minds busy.
7. Translate the following sentences paying attention to the Complex Object:
1) We want the information to be measured in bits. 2) They supposed the system to be out of order. 3) They believe the data to be reliable. 4) I should like this reaction to be repeated. 5) In this case we may suppose the chain of symbols to be endless. 6) The computing equipment enabled investigators to process the received data much quicker. 7) I have never heard anyone give so much interesting information in one report. 8) The students observed the liquid change. 9) Scientists make new electronic machines store information, handle calculations and even control production process.
8. Translate into English using the Complex Object:
1) М. Фарадей предполагал, что луч света меняет свою полярность, проходя через намагниченный кристалл. 2) Мы наблюдали, как работает этот прибор. 3) Ампер полагал, что ток течет от положительного полюса к отрицательному. 4) Теперь мы знаем, что тепло это форма энергии. 5) Я чувствую, что эта проблема – трудная. 6) Никто не ожидал, что он станет физиком. 7) Мы бы хотели, чтобы вы рассказали нам об автономном управлении. 8) Мы знаем, что Белл был учителем. 9) Никто не заметил, как двигатель остановился из-за того, что выключили ток.
9. Translate the following sentences paying attention to the Complex Subject:
1) The water seems to be boiling. 2) The new power plant is expected to have been put onto operation and it proved to be of great practical importance. 3) Coal is considered to be a valuable fuel. 4) The electrolytes appear to change greatly when the current passes through them. 5) Light and radio waves are said to be of similar nature. 6) The application of this device is unlikely to give better results. 7) This new approach to the problem discussed appears to be the most satisfactory.
10. Translate into English using the Complex Subject:
1) Они, наверняка, уже проанализировали результаты эксперимента. 2) Чувствительность прибора оказалась слабой. (poor). 3) Сообщили, что оптический эквивалент транзистора уже изобрели. 4) Известно, что тела расширяются при нагревании. 5) Кажется, что это легкая задача. 6) Оказалось, что изменения температуры были вызваны (affect) работой компьютера. 7) Говорят, что пластик используется вместо металлов. 8) Мы, конечно, решим эти задачи. 9) Было обнаружено, что сопротивление ртутного провода исчезает при охлаждении до - 269°С. 10) Он, наверное, не понимает это правило. 11) Вряд ли мы проведем этот эксперимент. 12) По-видимому, этот компьютер вышел из строя. 13) Они, вероятно, примут участие в конференции. 14) Он, кажется, изучил вопрос очень хорошо. 15) Несомненно, новый метод будет очень эффективным. 16) Оказывается, свойства этих металлов гораздо лучше.
11.Translate the following sentences:
1) It is very good for this engine to have been repaired before the experiment began. 2) This is a good possibility for us to utilize the electronic equipment for speeding up the process of calculation. 3) It required some more experiments for the engineers to prove the precision of the results obtained. 4) It was for our engineer to decide what kind of computer to utilize for such calculations. 5) Much more heat is required for the water to boil than for the needle to become white-hot. 6) Electromotive force is necessary for the current to flow along the circuit.
12. Translate into English:
1) Мы ожидали, пока установят новое оборудование. 2) Необходимо огромное количество энергии для того, чтобы эта реакция произошла. 3) Для того, чтобы этот процесс произошел, температура должна быть очень высокой. 4) Нам очень трудно получить эту информацию.
13. Memorize the words:
behavioral responses – поведенческий отклик (реакция)
self-determination – самоопределение
principles of regulating and responding – принцип регулирования и реакции
the way we relate to our world – то, как мы соотносимся с нашим миром
tolerance and variety of responses – допуск и разнообразие откликов
the subject matter – предмет (кибернетики)
the controlled object – объект управления
feed-forward and feedback – прямая и обратная связь
the applied cybernetics – прикладная кибернетика
power supply – источник питания
14. Read the text and say what the science cybernetics studies:
Cybernetics
I. As we know, contemporary cybernetics began as an interdisciplinary study connecting the fields of control systems, electrical network theory, mechanical engineering, logic modeling, evolutionary biology and neuroscience in the 1940s. It was N. Wienner who has combined the main cybernetics perspectives which have been developed by many and various people over the past two thousand years. He defined the principles of regulating and responding to mechanical and electrical systems, social and governmental systems, human and animal nervous systems, and human and animal social systems. The cybernetics concept is relevant to the modern development of management and one’s own role and potential within systems of all kinds. The organization in which we work, the world in which we live, the people around us – these are all systems. Cybernetics is central to our understanding of life, organizations and the way we relate to our world.
The first law of cybernetics is considered to be the following: “The unit within the system with the most behavioral responses available to it, controls the system”. This law has great significance especially in understanding and developing greater individual self-determination; and greater understanding, tolerance and variety of responses to situations and people around us. And this all is essential for our ability to interact and respond effectively within work and beyond. The first law of cybernetics is one of the most powerful maxims for living a happy productive and successful life. And while ‘successful’ is of course a matter of individual interpretation, cybernetics provides the key to achieving it, whatever your interpretation might be. It’s a very powerful concept – in a way cybernetics is the source of thoughtful choice over unquestioning instinct.
II. Thus, as we see, cybernetics is the science of general principles of control, means of control and human society. The subject matter of cybernetics is a cybernetic system, including a variety of interconnected elements which are able to store, process and exchange information. The examples of cybernetic systems may serve an automatic regulator, a computer, a human brain and the human society.
Any control process, to be used on a cybernetic system, implies continuous information exchange between the controlled object (a machine or a human muscle) and the control unit (an automatic regulator or the brain of a living organism. The control process represented on the scheme below involves the transmission, accumulation, storage and processing of information about the controlled object. The laws governing control processes are based on such fundamental concepts as feed-forward and feedback. The controlled object receives information from the control unit through the feed-forward and modifies its behavior. The information transmitting process about the effects or results of the control operations is achieved through the feedback.
Feed-forward

Feedback
Cybernetics can be subdivided into theoretical cybernetics and technical one. The cornerstones of theoretical cybernetics are information theory, the theory of algorithms and the theory of automatic systems which investigates the methods of building data-processing systems. Technological cybernetics is concerned with design and operation of technical control systems and computer hardware. The applied cybernetics is associated with the use of theoretical and technological cybernetics for solving specific control tasks to be found in industry, power supply, transport, communication, etc.
Cybernetics studies human thinking to create algorithms for computer programming. It also studies the automata design principles and investigates the possibilities of using them to mechanize human mental processes. The main goal of cybernetics is to achieve maximum automation of control processes in various spheres of human activity.
15. Look through the text and answer the questions using the information from the text:
1) Why can cybernetics be called an interdisciplinary science? 2) What fields does contemporary cybernetics connect? 3) Who is considered the founder of cybernetics? 4) What did he do to develop the science? 5) What kind of science is cybernetics? 6) What is the main law of cybernetics? 7) What is the subject matter of cybernetics? 8) What does any control process used in a cybernetic system imply? 9) What fundamental concepts govern control processes in cybernetics? 10) What do theoretical and technological cybernetic deal with?
16. Find in the previous texts the English equivalents for:
Саморегулирующееся устройство; следить за уровнем воды; искусственная система автоматического регулирования; бак-сборник; водяные часы; регулировать скорость потока воды; соответственно; поддерживать постоянный уровень воды; работать всухую; обратная связь; самоуправление; рулевой; буквальный перевод; социальная причастность; регулируемый паровой двигатель; заложить основу; иметь значение; занимать умы великих умов; нельзя не упомянуть.
Понятие «кибернетика»; теория электрических сетей; междисциплинарная наука; машиностроение; правительственные системы; определять принципы регулирования и отклика; в пределах возможных систем; понимание жизни; самоопределение; процесс передачи информации; разнообразие реакций; взаимодействовать; эффективно реагировать; мощные (сильнодействующие) правила; плодотворная и успешная жизнь; средства управления; предмет «кибернетика»; запоминать и обрабатывать информацию; человеческий мозг; человеческое общество; непрерывный обмен информацией; объект управления; управляющее устройство; прямая связь; обратная связь; модифицировать поведение.
17. Translate the text and think of its title:
There are many definitions of cybernetics and many individuals who have influenced the definition and direction of cybernetics. Norbert Wiener, a mathematician, engineer and social philosopher, coined the word "cybernetics" from the Greek word meaning "steersman." He defined it as the science of control and communication in the animal and the machine. Ampere, before him, wanted cybernetics to be the science of government. For philosopher Warren McCulloch, cybernetics was an experimental epistemology concerned with the communication within an observer and between the observer and his environment. Stafford Beer, a management consultant, defined cybernetics as the science of effective organization. Anthropologist Gregory Bateson noted that whereas previous sciences dealt with matter and energy, the new science of cybernetics focuses on form and pattern. For educational theorist Gordon Pask, cybernetics is the art of manipulating defensible metaphors, showing how they may be constructed and what can be inferred as a result of their existence.
Cybernetics takes as its domain the design or discovery and application of principles of regulation and communication. Cybernetics treats not things but ways of behaving. It does not ask "what is this thing?" but "what does it do?" and "what can it do?" Because numerous systems in the living, social and technological world may be understood in this way, cybernetics cuts across many traditional disciplinary boundaries. The concepts which cyberneticians develop thus form a metadisciplinary language by which we may better understand and modify our world.
Several traditions in cybernetics have existed side by side since its beginning. One is concerned with circular causality, manifest in technological developments--notably in the design of computers and automata--and finds its intellectual expression in theories of computation, regulation and control. Another tradition, which emerged from human and social concerns, emphasizes epistemology--how we come to know-- and explores theories of self-reference to understand such phenomena as autonomy, identity, and purpose. Some cyberneticians seek to create a more humane world, while others seek merely to understand how people and their environment have co-evolved. Some are interested in systems as we observe them, others in systems that do the observing. Some seek to develop methods for modeling the relationships among measurable variables. Others aim to understand the dialogue that occurs between models or theories and social systems. Early work sought to define and apply principles by which systems may be controlled. More recent work has attempted to understand how systems describe themselves, control themselves, and organize themselves. Despite its short history, cybernetics has developed a concern with a wide range of processes involving people as active organizers, as sharing communicators, and as autonomous, responsible individuals.
18. Translate the text into English in the written form:
Сфера кибернетики
from Wikipedia
Объектом кибернетики являются все управляемые системы. Системы, не поддающиеся управлению, в принципе, не являются объектами изучения кибернетики. Кибернетика вводит такие понятия, как кибернетический подход, кибернетическая система. Кибернетические системы рассматриваются абстрактно, вне зависимости от их материальной природы. Примеры кибернетических систем—автоматические регуляторы в технике, ЭВМ, человеческий мозг, биологические популяции, человеческое общество. Каждая такая система представляет собой множество взаимосвязанных объектов (элементов системы), способных воспринимать, запоминать и перерабатывать информацию, а также обмениваться ею. Кибернетика разрабатывает общие принципы создания систем управления и систем для автоматизации умственного труда. Основные технические средства для решения задач кибернетики— ЭВМ. Поэтому возникновение кибернетики как самостоятельной науки (Н. Винер, 1948) связано с созданием в 40-х гг. XX века этих машин, а развитие кибернетики в теоретических и практических аспектах— с прогрессом электронной вычислительной техники.
Кибернетика является междисциплинарной наукой. Она возникла на стыке математики, логики, семиотики, физиологии, биологии, социологии. Ей присущ анализ и выявление общих принципов и подходов в процессе научного познания. Наиболее весомыми теориями, объединяемыми кибернетикой, можно назвать следующие:
- теория передачи сигналов;
- теория управления;
- теория автоматов;
- теория принятия решений;
- синергетика;
- теория алгоритмов;
- распознавание образов;
- теория оптимального управления.
19. Translate the text and define the main problems touched upon in it:
The heritage and revival of cybernetics
The members of the next generation of cyberneticians shifted the emphasis from the structural approach to the functional one. The pioneers of the artificial intelligence (AI) research substituted McCulloch and Pitts' binary strings of zeros and ones by more general symbols. Procedures on physical symbol systems were viewed as the necessary and sufficient means for general (i.e. natural and artificial) intelligent action. While the symbolistic paradigm became predominant, the perspectives of the cyberneticians and AI researchers did not separate immediately, but the debate became very sharply related to the Perception battle. The Perceptron is a mathematical construction of an adaptive neural network being able to learn and classify inputs. It was defined by Rosenblatt (Rosenblatt 1962) by extending the MCP rule by modifying synaptic weights. Minsky and Papert proved in 1969 (Minsky and Papert 1969) that a single layer Perceptron cannot solve the exclusive OR problem. Perceptrons were assumed to be able to classify only linearly separable patterns. The implication of the critique was the serious restriction on funding neural network research. However, the critique is not valid for multilayer neural networks.
Many concepts of cybernetics revived. Brain theory, cognitive science systems biology, and implemented ideas emerged by cybernetics.
The brain is a physical structure which is controlled and also controls, learns and teaches, processes and creates information, recognizes and generates patterns, organizes its environment and is organized by it. Furthermore, closed causal loops and self-referential systems implement the iterative nature of learning and interpretation.
Many concepts of cybernetics returned in a somewhat different context to cognitive science without being credited. McCulloch's embodied mind notion, von Foerster's critiques on the controversial computational paradigm of AI and cognitive science, and the concept of circular causality all returned related to the embodied cognition (see e.g. Ziemke 2005).
Systems biology is an emergent movement to combine system-level description with microscopic details. It might be interpreted as the renaissance of cybernetics and of system theory. The systems biological approach emphasizes the integration of components (mostly proteins and genes) by dynamical models. Internal control mechanisms exist which maintain the function of the system.
The analysis of dynamics and stability of large networks of elements interconnected by positive and negative feedback connections also grew up from ideas inherent in cybernetics. The strategy is applied in many disciplines, from chemical reaction networks via biochemical, cellular, ecological and epidemic networks, to many socioeconomic situations, such as international relations, economic trades etc.
Cybernetics has a great potential for future research (Umpleby 2007) by offering a common way of thinking and language to develop theories for machines, organisms, groups and societies.
20. Translate into English:
Обратная связь является фундаментальным понятием кибернетики, особенно теории управления и теории информации. Обратная связь позволяет контролировать и учитывать действительное состояние управляемой системы (т. е., в конечном счёте, результаты работы управляющей системы) и вносить соответствующие корректировки в её алгоритм управления. В технических системах контрольная информация о работе управляемого объекта поступает по цепи Обратная связь к оператору или автоматическому управляющему устройству
UNIT FOUR
Texts: Distributed Control Systems; Servomechanism, Regulator and Process Control
Grammar: Participle I, Participle II, Perfect Participle; Absolute Participle Construction
1.Memorize the words:
distributed control system (DSC) – распределительная система управления
domain – область, сфера; владения; имение
peer – ровня; всматриваться; вглядываться
availability – наличие
proliferation – распространение; быстрое увеличение
rough – приблизительный; грубый; резкий
refinery – нефтеочистительный завод
batch – партия; группа; пачка
duly – должным образом; вовремя
inclusion – включение
implement – выполнять
cluster – группа; скопление
emulate – соревноваться
crude – грубый; необработанный
embody – воплощать; заключать в себе, содержать; осуществлять
redundancy – излишек; избыточность
2. Translate the text
Distributed Control System (DCS) History
from Wikipedia
Early minicomputers were used in the control of industrial processes since the beginning of the 1960s. The IBM 1800, for example, was an early computer that had input/output hardware to gather process signals in a plant for conversion from field contact levels (for digital points) and analog signals to the digital domain.
The first industrial control computer system was built 1959 at the Texaco Port Arthur, Texas, refinery with an RW-300 of the Ramo-Wooldridge Company.
The DCS was introduced in 1975. Both Honeywell and Japanese electrical engineering firm Yokogawa introduced their own independently produced DCSs at roughly the same time, with the TDC 2000 and CENTUM systems, respectively. US-based Bristol also introduced their UCS 3000 universal controller in 1975. In 1978 Metso (known as Valmet in 1978) introduced their own DCS system called Damatic (latest generation named Metso DNA). In 1980, Bailey (now part of ABB) introduced the NETWORK 90 system. Also in 1980, Fischer & Porter Company (now also part of ABB) introduced DCI-4000 (DCI stands for Distributed Control Instrumentation).
The DCS largely came about due to the increased availability of microcomputers and the proliferation of microprocessors in the world of process control. Computers had already been applied to process automation for some time in the form of both Direct Digital Control (DDC) and Set Point Control. In the early 1970s Taylor Instrument Company, (now part of ABB) developed the 1010 system, Foxboro the FOX1 system and Bailey Controls the 1055 systems. All of these were DDC applications implemented within minicomputers (DEC PDP-11, Varian Data Machines, MODCOMP etc.) and connected to proprietary Input/Output hardware. Sophisticated (for the time) continuous as well as batch control was implemented in this way. A more conservative approach was Set Point Control, where process computers supervised clusters of analog process controllers. A CRT-based workstation provided visibility into the process using text and crude character graphics. Availability of a fully functional graphical user interface was a way away.
Central to the DCS model was the inclusion of control function blocks. Function blocks evolved from early, more primitive DDC concepts of "Table Driven" software. One of the first embodiments of object-oriented software, function blocks were self-contained "blocks" of code that emulated analog hardware control components and performed tasks that were essential to process control, such as execution of PID algorithms. Function blocks continue to endure as the predominant method of control for DCS suppliers, and are supported by key technologies such as Foundation Fieldbus today.
Midac Systems of Sydney Australia developed an objected-oriented distributed direct digital control system in 1982. The central system ran 11 microprocessors sharing tasks and common memory and connected to a serial communication network of distributed controllers each running two Z80s. The system was installed at the University of Melbourne.
Digital communication between distributed controllers, workstations and other computing elements (peer to peer access) was one of the primary advantages of the DCS. Attention was duly focused on the networks, which provided the all-important lines of communication that, for process applications, had to incorporate specific functions such as determinism and redundancy. As a result, many suppliers embraced the IEEE 802.4 networking standard. This decision set the stage for the wave of migrations necessary when information technology moved into process automation and IEEE 802.3 rather than IEEE 802.4 prevailed as the control LAN.
URL: http://en.wikipedia.org/wiki/Distributed_Control_System
3. Find out the English equivalents for the following word combinations:
Ввести особые функции; соответственно; благодаря; распределительные регуляторы; а также и; компьютерные системы управления.
4. Translate the following word combinations:
Object-oriented software; a serial communication network; distributed controllers; input/output hardware; at roughly the same time; DCI stands for; the proliferation of microprocessors; direct digital control; for some time; attention duly focused on, the system runs microprocessors.
5. Find the English equivalents given in (b) for the word combinations in (a):
a) 1. вместо; 2. несмотря на; 3. в результате; 4. более или менее; 5. на самом деле; 6. благодаря; 7. а также и; 8.по крайней мере; 9. между прочим; 10. рассматриваемый; 11. в свою очередь; 12. то есть; 13. до сих пор; 14. скорее чем.
b) 1. by the way; 2. in question; 3. at least; 5. so far; 6. that is to say; 7. as a result; 8. due to; 9. more or less; 10. in one’s turn; 11. in spite of; 12. as a matter of fact; 13.rather than; 14. as well as.
6. Form nouns from the following verbs:
To communicate, to apply, to achieve, to require, to develop, to move, to implement, to introduce, to discover, to know, to observe, to protect, to embody, to experience, to begin, to introduce, to perform, to evolve, to convert, to control.
7. Translate the text and write down the terms
Servomechanism, Regulator and Process Control
by S. K. Bhattacharya
Servomechanism is an automatic control system in which the controlled variable value is forced to follow the variations of reference value, instead of regulating a variable value to “set point”. Take, for example, an industrial robot arm. It is also called tracking control system.
Regulator is a feedback control system in which controlled variable is maintained at a constant value in spite of external load on the plant. The reference input or command signal although adjustable, is held constant for long period of time. The primary task is then to maintain the output and the desired value in the presence of disturbances. Examples are regulation of steam supply in steam engine by fly-balls governor, thermostat control of home-heating systems, regulation of the voltage of an alternator, frequency controller and speed controller and so on.
Process control refers to control of such parameters as level, flow, pressure, temperature and acidity of process variables. A particular parameter has only one desired value. The control system is required to ensure that the process output is maintained at the desired level in spite of external disturbances which affect the process.
Bhattacharya, S. K. Control Systems Engineering. – Pearson Education India, 2009. – 550 p. (P. 6).
8. Translate the word combinations with Participles:
a) Participle I Active and Passive
The receiving station; the following problem; the leading branch of industry; a growing interest; the age of “thinking machines”; the increasing pressure; interacting variables
The engineers discussing the design; the equipment being installed in…; scientists contributing to the development of this theory; magnetic field forming electromagnetic waves; inventors improving the device; the experiment being carried out; the engineer operating with high frequency modulator; the systems improving productivity
When discussing the design…; when using the controllers…; demonstrating the possibility of…; speaking about the law…
Being founded (=when founded) in 2010…; being examined (=while examined)…; being heated (=when heated)…; being supplied (=though supplied)
with the necessary equipment…; the experiment being carried out…
b) Participle II Passive
The received messages; the transmitted news; the used device; the invented machine; the improved design; the controlled variable; the transmitted binary signal; the desired value
The polymer found during the experiment…; signals transmitted over very long cables…; the design discussed yesterday…; the model developed the speed; techniques based on…; the effect caused by
When transported gasses are compressed…; when discussed the design was…; if heated to 100 °C water…; though discovered the mistake had no…
c) Perfect Participle Active and Passive
Having created the theory of…; having made improvements in the device; having transmitted the message they were…; having summed up the information the computer…; having achieved the success
Having been used for a long time the device…; having been repaired the machine operated …; having been tested the motor…
9. Translate into English paying attention to the forms of Participle:
a) Силы, действующие на тело…; компьютеры, выполняющие миллионы операций в секунду…; методы, улучшающие исследовательскую работу…; эксперимент, который проводится в …; рабочие, устанавливающие новое оборудование…; инженеры, использующие новые достижения…; поверхность, отражающая свет…; увеличивающееся напряжение; метод, который применяется в настоящее время…
Работая над проблемой…/при работе над проблемой…; сравнивая системы…/при сравнении систем…; производя новые конструкции; применяя новые методы; увеличивая скорость; устанавливая новое оборудование /когда они устанавливали новое оборудование…; проводя эксперимент /при проведении эксперимента…/когда они проводили эксперимент…
Так как этот вопрос рассматривается на…; хотя мотор был проверен…; когда новую модель завершат, она будет…; так как это устройство используется в этом эксперименте, оно будет…; проблемы, которые обсуждаются в настоящее время,…
b) Усовершенствованные механизмы…; полученные результаты…; переданные (передаваемые) сигналы…; хорошо оснащенная лаборатория…
Результаты, полученные в этом эксперименте…; проблема, решенная успешно…; метод, разработанный этим ученым…; лаборатория, оборудованная новейшей аппаратурой…; материалы, рекомендованные для…
Если воду нагреть до…; как упомянуто выше…; как видно из статьи…; хотя машину и починили…; если мотор не проверен…
c) Получив новую информацию…/после того, как они получили новую информацию…; решив важную проблему…/после того, как он решил важную проблему…; сравнив силы, инженер определит…/когда/после того, как инженер сравнит силы, он определит…
После того, как двигатель отремонтировали, он…; после того, как необходимая информация была получена…
10. Translate the following sentences paying attention to the forms and functions of Participles:
a) 1. While flowing along a conductor the current heats it. 2. Being widely used in industry electrical motors are also used in our everyday life. 3. Cybernetics has developed a concern with a wide range of processes involving people as active organizers, as sharing communicators. 4. The powerful ventilators are being turned on, the air is being purified. 5. The installation being used is very efficient. 6. The best results were achieved with electro-ionizing laser devices operating on carbon dioxide. 7. Following instructions computing equipment will perform different calculations. 8. These devices working by electronic impulses perform at fantastic speed and with great precision. 9. Electronic systems are spreading widely all over the world.
b) 1. Each new generation of computers opens up new possibilities for basic and applied research. 2. The experiment carried out resulted in the improvement of all parts of the system. 3. It required some more experiments to prove the precision of the results obtained. 4. The change in scale was measured by a number of transistors on a chip. 5. Though first developed for military purposes radar can be used in modern cars. 6. The transducer attached to each wheel changes the tire pressure accordingly. 7. It is well-known that technological progress is impossible without electronics, computers, robots, and new materials. 8. Electricity has provided mankind with the most efficient source of energy. 9. When required the data will be applied in the practical work.
c) 1. Having designed a car radar the engineers started complex tests. 2. Having been tested the computer system was installed at a plant. 3. Having been tested under unfavorable conditions the machine was successfully put into operation. 4. Having done a given number of operations the machine stopped automatically. 5. Having been heated the substance changed its properties. 6. Having obtained the necessary data he stopped his work. 6. Having lost some of its electrons the atom becomes positively charged.
11. Translate the sentences paying attention to the Absolute Participle Construction:
1) The conductor having the form of a coil, the inductance increased. 2) The rocket houses automatic and radio-controlled instruments, these instruments receiving any order the Earth may send. 3) Reduced weight and size are particularly important, miniaturization becoming the necessity in order to reach the high speed. 4) A simple component having failed, the whole system was repaired. 5) The true size of the Earth and the true distance to the moon having been calculated, Newton solved the problem of universal gravitation. He discovered the laws of motion, these laws having become the basis of practical mechanics. 6) The reflected signal having been received, the distance to the object was counted. 7) The temperature being increased, the resistivity of the semiconductor decreases.
12. Form one sentence of each pair using the Absolute Participle Construction:
1) Man-made satellites move round the Earth. They will help to solve many problems connected with space travel.
2) Radio is the fastest way to detect an artificial satellite. It is largely used for that purpose.
3) Those new devices have already been tested. They received recognition.
4) The energy sources of the world decrease. The scientists must look for new sources of energy.
5) There are many different sources of energy. Coal is the most important of them.
6) Great progress has been achieved in rocket technique. It was possible to construct a rocket overcoming the Earth’s gravitation.
13. Translate into English:
Программи́руемый логи́ческий контро́ллер (ПЛК) (англ.Programmable Logic Controller, PLC) или программируемый контроллер— электронная составляющая промышленного контроллера, специализированного (компьютеризированного) устройства, используемого для автоматизации технологических процессов. В качестве основного режима длительной работы ПЛК, зачастую в неблагоприятных условиях окружающей среды, выступает его автономное использование, без серьёзного обслуживания и практически без вмешательства человека.
Иногда на ПЛК строятся системы числового программного управления станком (ЧПУ, англ. Computer numerical control, CNC).
ПЛК являются устройствами реального времени.
В отличие от:
- микроконтроллера (однокристального компьютера), микросхемы предназначенной для управления электронными устройствами, областью применения ПЛК обычно являются автоматизированные процессы промышленного производства, в контексте производственного предприятия;
- компьютеров, ПЛК ориентированы на работу с машинами и имеют развитый 'машинный' ввод-вывод сигналов датчиков и исполнительных механизмов в противовес возможностям компьютера, ориентированного на человека (клавиатура, мышь, монитор и т. п.);
- встраиваемых систем— ПЛК изготавливается как самостоятельное изделие, отдельно от управляемого при его помощи оборудования.
Первые логические контроллеры появились в виде шкафов с набором соединённых между собой реле и контактов. Эта схема задавалась жёстко на этапе проектирования и не могла быть изменена далее.
Первый в мире ПЛК— MOdular DIgital CONtroller (Modicon) 084, имеющий память 4 кБ, произведен в 1968 году.
В первых ПЛК, пришедших на замену обычным логическим контроллерам, логика соединений программировалась схемой соединений LD (Ladder logic Diagram). Устройство имело тот же принцип работы, но реле и контакты (кроме входных и выходных) были виртуальными, то есть существовали в виде программы, выполняемой микроконтроллером ПЛК. Современные ПЛК являются «свободно программируемыми».
В системах управления технологическими объектами логические команды преобладают над числовыми операциями, что позволяет при сравнительной простоте микроконтроллера (шины шириной 8 или 16 бит), получить мощные системы действующие в режиме реального времени. В современных ПЛК числовые операции реализуются наравне с логическими. В то же время, в отличие от большинства процессоров компьютеров, в ПЛК обеспечивается доступ к отдельным битам памяти.
14. Play “dominoes”:
Device / steam; cybernetics / management / coneshaped; detector / feedback; engine / outstanding; scientist / important; study / electrical network theory / mechanical; engineering / behavioral; response / powerful; maxim / human; regulator / control; process / computer; hardware / controlled; landing / technical; object / centrifugal; float / self-regulatory; speed governor / moving; vehicles / soft and safe; force the subject; matter / the theory of ; algorithms / transfer; machining / continuous; cycle production / prices; society / automatic; calculation / space; progress / physical; tank / knowledge; variables / reference; input / an error; contribution / interdisciplinary; path elements / magnetic; amplifiers / applied.
UNIT FIVE
Texts: Sensors and Transducers, Source, Signals, DAQ hardware, DAQ software, Алгоритмы функционирования технологических объектов, управляемых АСУТП
Grammar: The Gerund
1. Memorize the words:
To convert – преобразовывать
transducer – преобразователь; датчик
strain – напряжение; деформация
gauge – измерительный прибор
voltage – напряжение
DC- direct current – постоянный ток
resistance – сопротивление
capacitance – емкость; емкостное сопротивление
inductance – индуктивность; (само)индукция
thermocouple – термоэлемент, термопара
pressure – давление
in response to – в ответ на
stimulus – стимул; раздражитель
to respond – отвечать; реагировать
unlike- - непохожий на, не такой как
to stand alone – быть выдающимся, непревзойденным
discrete – раздельный, состоящий из разрозненных частей; дискретный
2. Translate the text into Russian:
Sensors and Transducers
Simple stand-alone electronic circuits can be made to repeatedly flash a light or play a musical note, but in order for an electronic circuit or system to perform any useful task or function it needs to be able to communicate with the "real world" whether this is by reading an input signal from an "ON/OFF" switch or by activating some form of output device to illuminate a single light and to do this we use Transducers.
Transducers can be used to sense a wide range of different energy forms such as movement, electrical signals, radiant energy, thermal or magnetic energy etc., and there are many different types of both analogue and digital input and output devices available to choose from. The type of input or output transducer being used, really depends upon the type of signal or process being "Sensed" or "Controlled" but we can define a transducer as a device that converts one physical quantity into another.
Devices which perform an input function are commonly called Sensors because they "sense" a physical change in some characteristic that changes in response to some excitation, for example heat or force and covert that into an electrical signal. Devices which perform an output function are generally called Actuators and are used to control some external device, for example movement. Both sensors and actuators are collectively known as Transducers because they are used to convert energy of one kind into energy of another kind, for example, a microphone (input Sensors and Transducers and a loudspeaker (output device) converts the electrical signals back into sound waves and an example of this is given below.
Simple Input/ Output System using Sound Transducers
|
|
There are many different types of transducers available in the marketplace, and the choice of which one to use really depends upon the quantity being measured or controlled.
Input type transducers or sensors, produce a proportional output voltage or signal in response to changes in the quantity that they are measuring (the stimulus) and the type or amount of the output signal depends upon the type of sensor being used. Generally, all types of sensors can be classed as two kinds, passive and active.
Active sensors require some form of external power to operate, called an excitation signal which is used by the sensor to produce the output signal. Active sensors are self-generating devices because their own properties change in response to an external effect and produce an output voltage, for example, 1 to 10v DC or an output current such as 4 to 20mA DC. For example, a strain gauge is a pressure-sensitive resistor. It does not generate any electrical signal, but by passing a current through it (excitation signal), its resistance can be measured by detecting variations in the current and/or voltage across it relating these changes to the amount of strain or force.
Unlike the active sensor, a passive sensor does not need any additional energy source and directly generates an electric signal in response to an external stimulus. For example, a thermocouple or photodiode. Passive sensors are direct sensors which change their physical properties, such as resistance, capacitance or inductance etc. As well as analogue sensors, Digital Sensors produce a discrete output representing a binary number or digit such as a logic level "0" or a logic level "1".
Analogue Sensors produce a continuous output signal or voltage which is generally proportional to the quantity being measured. Physical quantities such as Temperature, Speed, Pressure, Displacement, Strain etc. are all analogue quantities as they tend to be continuous in nature. For example, the temperature of a liquid can be measured using a thermometer or thermocouple which continuously responds to temperature changes as the liquid is heated up or cooled down.
3. Translate the word combinations:
To convert energy of one kind into energy of another kind; unlike the active sensor; a pressure-sensitive resistor; physical properties; the amount of strain; an external stimulus; excitation signal; an output function; a wide range of different energy forms; a single light.
4. Arrange the following words in pairs of antonyms:
a number of on the other hand
out-of-date regarding
result in some
regardless up-to-date
on the one hand result from
5. Define the parts of speech of the following words; translate them into Russian:
To differ – different – indifferent – difference; long – length – to lengthen; to apply – application – applicable – appliance; efficient – inefficient – efficiency; to divide – division – divisible – indivisible; to vary – variety – various – variable – invariable; to transform – transformer – transformation; to convert – converter – conversion – convertible; machine – to machine – machinery – machinable
6. Form the gerund choosing the following verbs:
To convert; to create; to utilize; to move; to run
1) The idea of (использования) the energy of oceans is not new, but tidal stations are still few. 2) Recently scientists have succeeded in (создать) a few kinds of generators for (превращения) heat directly into light. 3) This machine tool is capable of (работать) at very high speeds. 4) In fact, (превращение) conventional kinds of fuels into electricity is not economic enough. 5) Upon being heated the molecules begin (двигаться) very rapidly.
7. Translate into Russian paying attention to the function and the form of gerund:
1) These pieces of metal can’t be used in the process without being hammered into thin sheets. 2) The investigator mentioned his having tested this material for strength. 3) Strengthening metals means reinforcing them with artificial fibers. 4) Their being reinforced with artificial fibers makes them more corrosion resistant. 5) Without having improved the properties of this alloy we couldn’t use it in the production process. 6) Using atomic fuel for the production of electricity is one of the most promising sources of energy. 7) Atomic fuel has great possibilities. Its being used for the direct production of electricity is one of the most promising. 8) Much effort is being given to find the most efficient means of generating electricity. 9) After the young scientist’s report having been discussed at the conference it was published in a scientific journal. 10) Sometimes we speak of applying a still broader definition of communication including the influence of one mechanism upon another mechanism. 11) Our having mastered a foreign language helps us in our work.
8. Define the group of subject:
1) Testing engines should be carried out on a special stand.
2) The increasing pressure was measured precisely.
3) The metals to be strengthened are subjected to special operations.
4) The pressure increased was measured precisely.
5) To operate new flexible line became possible thanks to computers.
9. Define the group of the predicate:
1) Scientists are doing their best to find more efficient ways of utilizing solar energy.
2) The task of the computer is to operate the whole line properly.
3) When transported gases are compressed into strong cylinders.
4) While discussing the design the engineers suggested a few improvements.
10. Translate the texts into Russian without a dictionary and write down the main idea of each following texts:
Data acquisition
Data acquisition is the process of sampling signals that measure real world physical conditions and converting the resulting samples into digital numeric values that can be manipulated by a computer. Data acquisition systems (abbreviated with the acronym DAS or DAQ) typically convert analog waveforms into digital values for processing. The components of data acquisition systems include:
- Sensors that convert physical parameters to electrical signals.
- Signal conditioning circuitry to convert sensor signals into a form that can be converted to digital values.
- Analog-to-digital converters, which convert conditioned sensor signals to digital values.
Data acquisition applications are controlled by software programs developed using various general purpose programming languages such as BASIC, C, Fortran, Java, Lisp, Pascal.
Specialized software tools used for building large-scale data acquisition systems include EPICS. Graphical programming environments include ladder logic, Visual C++, Visual Basic, and Lab VIEW.
Methodology
Source
Data acquisition begins with the physical phenomenon or physical property to be measured. Examples of this include temperature, light intensity, gas pressure, fluid flow, and force. Regardless of the type of physical property to be measured, the physical state that is to be measured must first be transformed into a unified form that can be sampled by a data acquisition system. The task of performing such transformations falls on devices called sensors.
A sensor, which is a type of transducer, is a device that converts a physical property into a corresponding electrical signal (e.g., a voltage or current) or, in many cases, into a corresponding electrical characteristic (e.g., resistance or capacitance) that can easily be converted to an electrical signal.
The ability of a data acquisition system to measure differing properties depends on having sensors that are suited to detect the various properties to be measured. There are specific sensors for many different applications. DAQ systems also employ various signal conditioning techniques to adequately modify various electrical signals into voltage that can then be digitized using an Analog-to-digital converter (ADC).
Signals
Signals may be digital (also called logic signals sometimes) or analog depending on the transducer used.
Signal conditioning may be necessary if the signal from the transducer is not suitable for the DAQ hardware being used. The signal may need to be amplified, filtered or demodulated. Various other examples of signal conditioning might be bridge completion, providing current or voltage excitation to the sensor, isolation, and linearization. For transmission purposes, single ended analog signals, which are more susceptible to noise, can be converted to differential signals. Once digitized, the signal can be encoded to reduce and correct transmission errors.
DAQ hardware
DAQ hardware is what usually interfaces between the signal and a PC. It could be in the form of modules that can be connected to the computer's ports (parallel, serial, USB, etc.) or cards connected to slots (S-100 bus, Apple Bus, ISA, MCA, PCI, PCI-E, etc.) in the motherboard. Usually the space on the back of a PCI card is too small for all the connections needed, so an external breakout box is required. The cable between this box and the PC can be expensive due to the many wires, and the required shielding.
DAQ cards often contain multiple components (multiplexer, ADC, DAC, TTL-IO, high speed timers, RAM). These are accessible via a bus by a microcontroller, which can run small programs. A controller is more flexible than a hard wired logic, yet cheaper than a CPU so that it is permissible to block it with simple polling loops. For example: Waiting for a trigger, starting the ADC, looking up the time, waiting for the ADC to finish, move value to RAM, switch multiplexer, get TTL input, let DAC proceed with voltage ramp. Many times reconfigurable logic is used to achieve high speed for specific tasks and digital signal processors are used after the data has been acquired to obtain some results. The fixed connection with the PC allows for comfortable compilation and debugging. Using an external housing a modular design with slots in a bus can grow with the needs of the user.
Not all DAQ hardware has to run permanently connected to a PC, for example intelligent stand-alone loggers and oscilloscopes, which can be operated from a PC, yet they can operate completely independent of the PC.
DAQ software
DAQ software is needed in order for the DAQ hardware to work with a PC. The device driver performs low-level register writes and reads on the hardware, while exposing a standard API for developing user applications. A standard API such as COMEDI allows the same user applications to run on different operating systems, e.g. a user application that runs on Windows will also run on Linux.
11. Translate into English, write down the main idea of the text first in Russian, then in English:
Алгоритмы функционирования технологических объектов, управляемых АСУТП
О. М. Соснин
Чтобы решать задачи управления технологическим объектом (ТО), необходимо достаточно точно и полно знать его свойства и характеристики, обеспечивающие нормальное течение технологического процесса. Характеристики объекта, обеспечивающие управление им, называются управляющими (входными) параметрами, а интересующие нас параметры техпроцесса называются управляемыми (выходными) параметрами. Основной задачей управления является изменение управляющих параметров по закону, обеспечивающему работу технологического объекта в соответствии с заданным критерием оптимальности. Для решения этой задачи необходимо знать зависимость между управляющими и выходными параметрами техпроцесса в условиях действия различных возмущений.
Достаточно точное и математически обоснованное описание зависимости между управляющими (входными) и управляемыми (выходными) параметрами ТО называется алгоритмом функционирования. Если алгоритм функционирования реализован в виде компьютерной программы или на моделирующей установке иного типа, то его называют моделью технологического объекта. Алгоритм функционирования, оформленный в виде совокупности математических выражений, называется математической моделью. При построении модели ТО алгоритм функционирования исследуемого ТО обычно расчленяют на отдельные математически однородные элементы, называемые типовыми звеньями. Этот процесс называется декомпозицией алгоритма.
После этого модель ТО строится в виде
совокупности типовых звеньев, объединенных характерными для данного ТО связями.
Затем проводится исследование функционирования ТО путем подачи на модель
типовых для данного ТО возмущений. Пригодность полученной модели для описания
исследуемого ТО может быть оценена путем вычисления величины ![]() суммарного квадратичного отклонения данных
расчета на модели
суммарного квадратичного отклонения данных
расчета на модели ![]() от результатов экспериментального исследования
ТО
от результатов экспериментального исследования
ТО ![]() :
:
Чем меньше ![]() , тем удачнее модель.
, тем удачнее модель.
Соснин, О. М. Основы автоматизации технологических процессов и производств: Учеб. пособие для студентов ВУЗов. – М.: Академия, 2007. – 240 с. (С. 61).
UNIT SIX
Texts: What is artificial intelligence? HART-коммуникация; Беспроводные интерфейсы; Artificial Intelligence
1. Memorize the words:
Embodiment – воплощение; изображение; осуществление
To confine – ограничивать; придерживаться
perception – восприятие, ощущение; осознание, понимание
to reason – рассуждать; обсуждать; убеждать; аргументировать
to pursue – неотступно следовать за ; преследовать ( цель)
cognition – познавательная способность; знание; познание
to coin – фабриковать, измышлять; создавать (новые слова, выражения)
challenge – вызов (на состязание); сложная задача, проблема
landmark – веха; знак; ориентир; поворотный пункт
to defeat – наносить поражение
assertion – утверждение; суждение
inference – вывод, заключение; предположение
to impede – препятствовать, мешать, задерживать; затруднять
array – множество
to reveal – открывать; показывать, обнаруживать
reasoning – рассуждение; аргументация; доказательство
intelligence – ум, интеллект, рассудок
2. Translate the text
What is Artificial Intelligence?
by John McCarthy, Computer Science Department, Stanford University, November 12, 2007
Artificial Intelligence is “the scientific understanding of the mechanisms underlying thought and intelligent behavior and their embodiment in machines.” It is the science and engineering of making intelligent machines, especially intelligent computer programs. It is the science and engineering of making intelligent machines, especially intelligent computer programs. It is related to the similar task of using computers to understand human intelligence, but AI does not have to confine itself to methods that are biologically observable. Intelligence is the computational part of the ability to achieve goals in the world. Varying kinds and degrees of intelligence occur in people, many animals and some machines.
Artificial intelligence (AI) is a branch of computer science that studies the computational requirements for tasks such as perception, reasoning, and learning, and develops systems to perform those tasks. AI is a diverse field whose researchers address a wide range of problems, use a variety of methods, and pursue a spectrum of scientific goals. For example, some researchers study the requirements for expert performance at specialized tasks, while others model commonsense processes; some researchers explain behaviors in terms of low-level processes, using models inspired by the computation of the brain, while others explain them in terms of higher-level psychological constructs such as plans and goals. Some researchers aim to advance understanding of human cognition, some to understand the requirements for intelligence in general (whether in humans or machines), and some to develop artifacts such as intelligent devices, autonomous agents, and systems that cooperate with people to amplify human abilities.
AI is a young field–even its name, “artificial intelligence,” was only coined in 1956. One of the challenges for AI has been to determine which tasks to study–what constitutes an “AI question”–and how to evaluate progress. Much early AI research focused on tasks commonly thought to require high intelligence in people, such as playing high-quality chess. Skeptics viewed this as an impossible assignment, but AI made rapid progress. By the 1960’s, programs were capable of tournament play. In 1997, in a landmark match, the chess system Deep Blue defeated Gary Kasparov, the world’s human chess champion for the previous twelve years. At the same time, however, AI research was illuminating the enormous difficulty of commonsense tasks that people take for granted, such as understanding stories or conversations. Developing programs that can deal at a human level with rich everyday reasoning remains a fundamental research challenge.
In the logicist approach to knowledge representation and reasoning, information is encoded as assertions in a logic, and the system draws conclusions by deduction from those assertions . Other research studies non-deductive forms of reasoning, such as reasoning by analogy and abductive inference–the process of inferring the best explanation for a set of facts. Abductive inference does not guarantee sound conclusions, but is enormously useful for tasks such as medical diagnosis, in which a reasoner must hypothesize causes for a set of symptoms.
Capturing the knowledge needed by AI systems has proven to be a challenging task. The knowledge in rule-based expert systems, for example, is represented in the form of rules listing conditions to check for, and conclusions to be drawn if those conditions are satisfied. For example, a rule might state that IF certain conditions hold (e.g., the patient has certain symptoms), THEN certain conclusions should be drawn (e.g., that the patient has a particular condition or disease). A natural way to generate these rules is to interview experts. Unfortunately, the experts may not be able to adequately explain their decisions in a rule-based way, resulting in a “knowledge-acquisition bottleneck” impeding system development.
In its short existence, AI has increased understanding of the nature of intelligence and provided an impressive array of applications in a wide range of areas. It has sharpened understanding of human reasoning, and of the nature of intelligence in general. At the same time, it has revealed the complexity of modeling human reasoning, providing new areas and rich challenges for the future.
3. Look through the text and translate the following word combinations:
A rule-based way; a fundamental research challenge; a landmark match; abductive inference; to confine itself to methods; computational requirements; higher-level psychological constructs; to pursue a spectrum of scientific goals; human cognition; commonsense processes; to develop artifacts; unfortunately; human reasoning.
4. Arrange the following words in pairs of synonyms:
in question with regard to
in effect to take steps
despite under consideration
with reference to more over
to take measures yet
furthermore in spite of
due to to meet requirements
so far the latter
to take into consideration in fact
as to to bring about
to meet demands to take into account
the former owing to
to cause as for
5. Try to explain what artificial intelligence is.
6. Compose questions which answers could be the plan to the previous text.
7. Study the following:
Составление реферата
Реферирование или составление реферата (лат. refere – докладывать, сообщать) - это краткое изложение оригинала – первоисточника.
Реферирование представляет собой интеллектуальный творческий процесс, включающий осмысление исходного текста, аналитико-синтетическое преобразование информации: описание текста, целевое извлечение наиболее важной информации, ее перераспределение и создание нового текста.
Объем реферата определяется степенью важности реферируемого материала (средний объем реферата не превышает 2000 печатных знаков).
Реферат составляется по определенной схеме:
1) Вводная часть (выходные данные, перевод названия, формулировка темы).
2) Содержание работы (собственно реферативная часть), включающая изложение основных положений текса – первоисточника. Нельзя вносить какие-либо изменения или дополнения по существу реферируемой работы; нельзя также излагать собственную точку зрения или критические замечания, вступать в полемику с автором.
3) Заключительная часть (краткий комментарий, отношение к проблемам, затронутым в первоисточнике и к позиции автора по этим вопросам).
Начало реферата не должно повторять заглавие работы. Не следует прибегать к неясным формулировкам, а также различного рода повторениям. Текст реферата следует делить на абзацы.
При составлении реферата используется академический стиль письма. В реферируемой части могут быть фразы типа: «Автор считает…; автор полагает…, автор утверждает…»; «По мнению автора…»; «С точки зрения автора…»; «Как утверждает автор…»; «Целью данной статьи является…» и др. Для обобщения информации и конденсации текста рекомендуется использовать безличные конструкции типа: «дается определение…; привлекается внимание к…; описывается…; указывается…; подчеркивается…; подробно излагается…и т. п.».
8. Study the example of a resume in Russian:
Р е ф е р а т
New Energy from Old Sources
(Новые ресурсы энергии из старых источников)
Automobile Engineer, vol. 82, № 5, 1990, New York
Статья посвящена важной проблеме поиска путей получения энергии. Вследствие того, что залежи полезных ископаемых, являющихся в настоящее время основным источником энергии, истощаются, необходимо разрабатывать способы получения энергии из других источников. В качестве таковых автор предлагает использовать тепловую энергию солнца, ветер, приливные течения и подземные запасы пара.
В статье приводятся данные о возможности отопления жилых домов за счет солнечного тепла и снабжения электроэнергией небольших поселков от ветряных мельниц.
Упомянутые в статье источники смогут дать в будущем неограниченные возможности получения энергии.
9. Condense the information in each paragraph of the texts and write down the resume into Russian using the academic style:
HART-коммуникация
Рон Хельсон
Большинство полевых интеллектуальных устройств, установленных на заводах пользователей, поддерживают протокол обмена данными HART. Во всем мире установлено более 20 миллионов HART-совместимых устройств – больше, чем с каким-либо иным протоколом обмена данными. Ни одна другая технология полевой коммуникации не может заявить о таких результатах в предлагаемой номенклатуре доступных изделий или глобальной поддержке.
При надлежащем использовании, интеллектуальные возможности HART-устройств представляют собой ценный ресурс, с помощью которого можно заставить производство работать с максимальной отдачей. Возможности удаленной коммуникации и улучшенные характеристики этих устройств неоценимы при интеграции в системы управления производством, обеспечения безопасности и управления активами, предназначенными для «Интеллектуальной полевой коммуникации».
Хельсон, Р. HART-коммуникация. Повышайте производительность // Журнал интеллектуальных технологий Itech. – ООО «Проект», 2006. – №5. – C. 17-21. (С. 17).
Беспроводные интерфейсы
Ю. И. Иванов, В. Я. Югай
Иногда в средствах передачи данных применение традиционных проводных каналов связи по каким-либо причинам невозможно. В этих случаях необходима передача данных с применением беспроводных интерфейсов. Наряду с известными в этой области средствами, в настоящее время разрабатываются и предлагаются новые средства. Наиболее отработаны и стандартизованы беспроводные интерфейсы на основе оптических каналов связи и радиоканалов дециметрового и сантиметрового диапазонов.
Например, беспроводные Wi-Fi сети с использованием радиоканалов становятся все более популярными, число компьютерных периферийных устройств, поддерживающих эти интерфейсы, постоянно растет. Примерами реализации являются уже широко применяемый интерфейс «Bluetooth» и разрабатываемый в настоящее время UWB.
Иванов, Ю. И., Югай, В. Я. Интерфейсы средств автоматизации: Учеб. пособие. – Таганрог: Изд-во ТРТУ, 2005. – 252 c. (С. 45).
10. Study the following expressions to write a resume in English:
1) The author of the article is…
The article is written by…
2) The main idea of the article is…
The article is devoted to…
The article deals with…
The article touches upon…
The article presents some results which illustrate…
3) The purpose of the article is to give the reader some information to…
The purpose of the article is to determine / to compare…
The aim of the article is to provide the reader some data / material on…
4) The author starts by telling the readers about / that…
The author writes / stresses / thinks / points out that…
The article describes…
It is described (in short) – (кратко) описывается
…is / are introduced - вводится
…is / are given – дается / предлагается
…is / are provided for - обеспечивается
…is / are examined / investigated - исследуется
…is / are analyzed - анализируется
…is formulated - формулируется
Attention is drawn to… - обращается внимание на…
The data are given about… - приводятся данные о…
Attempts are made to analyze / to formulate… - делаются попытки…
According to the article…
Further the author reports / says that…
The article goes on to say that…
The need is stressed to employ – подчеркивается необходимость…
5) The first part deals with…
The second part is about…
The third part of the article includes the fact on…
6) In conclusion the article reads…
The author comes to the conclusion that…
Conclusions are made
Recommendations are given
7) I found the article interesting / important / of value for…
etc.
11. Study the text and the resume to it:
The End of a Monopoly Era
The GSM community is fond of talking about the benefits of competition. Competition between operators is said to be good. Competition between handset suppliers is said to be good. And competition between infrastructure suppliers is said to be good.
The irony of this is that throughout the first half of the 1990sGSM was itself a virtual wireless technology monopoly. Japan got a good Second Generation digital system up and running in the form of PDC. But it then found that a combination of the frequency band it operates in, and inflexible commercial acumen on the part of Japanese suppliers, meant that it could not succeed outside Japan. For its part, North America floundered between fledgling TDMA and IS-95 CDMA systems. Neither of them looked like succeeding in the United States, let alone anywhere further afield.
During the first five years of commercial deployment, GSM has enjoyed startling success. But it has only done so by virtue of being the only credible Second Generation technology on the market. That comfortable position has changed during 1996 with the position of the first serious challenges by alternative technologies. IS-95 CDMA has got off the ground and is alive and commercially kicking at last in the Far East and in the United States. IS-136 TDMA now looks like a far more serious option than IS-54. And Japan’s cordless PHS has clearly stolen the wireless limelight from GSM with its extraordinary take-up rates. All of a sudden, the world looks like a different place. GSM can no longer assume continued success on the same scale as before. It is no longer the only credible digital wireless solution.
This new reality necessitates a change of strategy on the part of the GSM community. The first thing which has to go is the negative mindset which some Europeans have had towards other digital technologies. True, some of the marketing of IS-95 has been highly derogatory about GS. But now that that seems to have peaked, there is no point pretending that the alternatives to GSM are not a lot more credible than they were a couple of years ago.
In any case it is childish to deny the hugely positive impact which the rise of these rivals has had on the GSM standard. But for the threat posed by IS-95, it is doubtful whether PCS-1900 operators in the US would have pushed so hard for an enhanced 3 kbits/s vocoder – an enhancement which other GSM operators world-wide are now able to benefit from. It is also doubtful whether the migration towards Phase 2+ would now be moving as fast as it is were it not for the GSM camp’s need to stay ahead of the game in the value added service, data and information stakes.
Faced with a new competitive landscape, the GSM community also needs to be more thorough in its marketing. The IS-95 camp has been pushing themselves as much – if it not more – as wireless local loop suppliers. The GSM community, by contrast, has done very little to position itself for wireless local loop.
The evolution of regulatory and standardization policy for GSM has become a little less Euro-centric but it is still too wrapped up in the blue and yellow of the European Union. The American Way has definitely been a positive influence in the last couple of years. The doors should be opened still wider. Asia’s GSM operators are also the key to GSM future. Regrettably, the only Asian countries with sufficiently powerful and outward looking telecoms policy bodies are Japan and Korea, both of which are outside the GSM camp.
1997 opens a new chapter – a Phase Two so to speak –in GSM’s development. Europe’s technology has done fantastically well without any real rivals. Now it must do just as well in the face of real competition.
Patrick Donegan GSM World Focus 1997, p.7
Resume
Donegan P. The End of a Monopoly Era. GSM World Focus, 1997, p.7.
The End of a Monopoly Era
The aim of the article is to show the reader that real competition in the GSM field is now a reality and should be faced both by reducers and operators.
The research method used in the article is description.
Recognizing that in the first half of the 1990’s GSM was a virtual wireless technology monopoly the author admits that nowadays that situation has changed dramatically due to the appearance of alternative technologies such as IS-95 CDMA, IS-136 TDMA, PHS.
This new reality leads to change of strategy in the GSM community. Measures should be taken to let some Europeans’ negative mindset towards other digital technologies go and to become more thorough in marketing; the doors should be opened for America’s and Asia’s GSM operators.
The article describes the period of GSM’s development beginning with the first half of the 1990’s and ending with 1997 which was mainly a Europe-centric one.
The author’s conclusion is that GSM’s development has entered a new chapter, i.e. the phase of competition. And it’s up to GSM’s technology to do as well in the face of real competition as it did without any real rivals.
12. Condense the information in each paragraph of the text and try to write down the resume into English:
Artificial Intelligence
One of the main problems of cybernetics is known to be creation of artificial intelligence. It is a scientific trend including mathematics, linguistics, psychology, engineering, etc. An artificial intelligence is considered to be a machine intelligence, dealing with the application of a computer which, in operation, is like a human intelligence.
To make an artificial intelligence fully similar to human intelligence is impossible because the human brain is a very complex system, to say nothing of the fact that a machine cannot have human emotions. Being often called a thinking machine, in reality a computer can’t think either logically, or figuratively. Therefore even the most complex machine cannot be compared to the human brain.
When speaking of the origin of the term ‘artificial intelligence’, it should be noted that it is the model of creative process in computers that gave birth to this term. But that doesn’t mean that computers possess it. The ‘intelligence’ is put into the computer by an expert who develops the program for solving some practical creative problems.
But nevertheless, scientists continue the research into the field of an artificial intelligence. Production becoming automated, management must become automated as well. That is why the question of an artificial intelligence acquires special importance for economic planning and management.
13. Translate the text. Entitle it. Condense the information in each paragraph of the text and try to write down the resume in English:
Text
Process control is extensively used in industry and enables mass production of continuous processes such as oil refining, paper manufacturing, chemicals, power plants and many other industries. Process control enables automation, with which a small staff of operating personnel can operate a complex process from a central control's room.
For example, heating up the temperature in a room is a process that has the specific, desired outcome to reach and maintain a defined temperature (e.g. 20°C), kept constant over time. Here, the temperature is the controlled variable. At the same time, it is the input variable since it is measured by a thermometer and used to decide whether to heat or not to heat. The desired temperature (20°C) is the set point. The state of the heater (e.g. the setting of the valve allowing hot water to flow through it) is called the manipulated variable since it is subject to control actions.
A commonly used control device called a programmable logic controller, or a PLC, is used to read a set of digital and analog inputs, apply a set of logic statements, and generate a set of analog and digital outputs. Using the example in the previous paragraph, the room temperature would be an input to the PLC. The logical statements would compare the set point to the input temperature and determine whether more or less heating was necessary to keep the temperature constant. A PLC output would then either open or close the hot water valve, an incremental amount, depending on whether more or less hot water was needed. Larger more complex systems can be controlled by a Distributed Control System (DCS) or SCADA system.
UNIT SEVEN
Texts: Robot programming and interfaces; Industrial Robot; Defining Parameters; End of Arm Tooling; Controlling Movement; Robotics; Функции АСУ ТП.
1. Memorize the words:
feeder – фидер; подающий механизм
mold – (литейная) форма; шаблон; делать по шаблону; формировать по образцу
cell – отсек, камера; элемент
entity – существо; вещь, объект
screw – винт, болт, гайка
hole – дыра, отверстие
host – множество; хозяин; содержатель
2. Read and translate the text:
Robot programming and interfaces
The setup or programming of motions and sequences for an industrial robot is typically taught by linking the robot controller to a laptop, desktop computer or (internal or Internet) network.
A robot and a collection of machines or peripherals are referred to as a work cell, or cell. A typical cell might contain a parts feeder, a molding machine and a robot. The various machines are 'integrated' and controlled by a single computer or PLC. How the robot interacts with other machines in the cell must be programmed, both with regard to their positions in the cell and synchronizing with them.
Software: The computer is installed with corresponding interface software. The use of a computer greatly simplifies the programming process. Specialized robot software is run either in the robot controller or in the computer or both depending on the system design.
There are two basic entities that need to be taught (or programmed): positional data and procedure. For example in a task to move a screw from a feeder to a hole the positions of the feeder and the hole must first be taught or programmed. Secondly the procedure to get the screw from the feeder to the hole must be programmed along with any I/O involved, for example a signal to indicate when the screw is in the feeder ready to be picked up. The purpose of the robot software is to facilitate both these programming tasks.
Teaching the robot positions may be achieved a number of ways:
Positional commands: The robot can be directed to the required position using a GUI or text based commands in which the required X-Y-Z position may be specified and edited.
Teach pendant: Robot positions can be taught via a teach pendant. This is a handheld control and programming unit. The common features of such units are the ability to manually send the robot to a desired position, or "inch" or "jog" to adjust a position. They also have a means to change the speed since a low speed is usually required for careful positioning, or while test-running through a new or modified routine. A large emergency stop button is usually included as well. Typically once the robot has been programmed there is no more use for the teach pendant.
Lead-by-the-nose is a technique offered by many robot manufacturers. In this method, one user holds the robot's manipulator, while another person enters a command which de-energizes the robot causing it to go limp. The user then moves the robot by hand to the required positions and/or along a required path while the software logs these positions into memory. The program can later run the robot to these positions or along the taught path. This technique is popular for tasks such as paint spraying.
Offline programming is where the entire cell, the robot and all the machines or instruments in the workspace are mapped graphically. The robot can then be moved on screen and the process simulated. The technique has limited value because it relies on accurate measurement of the positions of the associated equipment and also relies on the positional accuracy the robot which may or may not conform to what is programmed (see accuracy and repeatability, above).
Others In addition, machine operators often use user interface devices, typically touchscreen units, which serve as the operator control panel. The operator can switch from program to program, make adjustments within a program and also operate a host of peripheral devices that may be integrated within the same robotic system. These include end effectors, feeders that supply components to the robot, conveyor belts, emergency stop controls, machine vision systems, safety interlock systems, bar code printers and an almost infinite array of other industrial devices which are accessed and controlled via the operator control panel.
The teach pendant or PC is usually disconnected after programming and the robot then runs on the program that has been installed in its controller. However a computer is often used to 'supervise' the robot and any peripherals, or to provide additional storage for access to numerous complex paths and routines.
3. Look through the text and translate the following word combinations:
The procedure to get the screw from the feeder; via the operator control panel; additional storage; used to 'supervise'; make adjustments; , emergency stop controls; a handheld control; a large emergency stop button; log the positions into memory; a host of peripheral devices.
4. Make a sentence out of the two parts:
1) Mathematics a) any mechanical device operated automatically by remote control;
2) Sociology b) the science dealing with quantities, magnitudes and forms, and their relationships by the use of numbers and symbols;
3) Philosophy c) the power of regulating and directing the action of devices;
4) Physiology d) the branch of medicine dealing with the nervous system, its structure and its disease;
5) Neurology e) the transfer of part of the output of an active circuit or device back to the initial point;
6) Psychology f) the science of human society and of social relations, organization and change;
7) Feedback g) theory or logical analysis of the principles underlying conduct, thought, knowledge and nature of the universe;
8) Robot h) the branch of biology dealing with the functions and vital processes of living organisms, their parts and organs;
9) Algorithm i) the science dealing with the mind and with mental and emotional processes;
10) Control j) predetermined set of instructions for solving a problem in a limited number of steps.
5. Find nonfinite forms of verbs in the following sentences and define their forms and functions. Translate into Russian:
1) Cybernetics is considered to be the science of general laws of control. 2) I suppose the control process to involve the transmission, accumulation, storage and processing of information. 3) Automatic temperature regulators using the principle of feedback can maintain the required temperature. 4) The methods applied improved the quality of production. 5) The computer can perform various mathematical operations involved in solving scientific and engineering problems. 6) Electronic computers having appeared, automatic control of complex industrial processes became possible. 7) To exchange information a cybernetic system must operate with continuous or discrete signals. 8) A. Lyapunov proves to have given the exact definition of the subject matter of cybernetics. 9) The transformer is a device having no moving parts and used for changing the electric current from one voltage to another.
6. Translate the words into English:
Сильный – сила – усиливать; длинный – длина – удлинять; достигать – достижение – достижимый; реагировать - реакция – реактор – реактивный; творить – творение – творец – творческий – творчески; проводить – проводимость – проводник – полупроводник – проводимый; машина – обрабатывать – обрабатываемый; исследовать – исследователь – исследование
7. Study how to write a summary or an abstract:
Writing a Summary
A summary is condensed version of a larger reading. A summary is not a rewrite of the original piece and does not have to be long nor should it be long. To write a summary, use your own words to express briefly the main idea and relevant details of the piece you have read. Your purpose in writing the summary is to give the basic ideas of the original reading. What was it about and what did the author want to communicate?
While reading the original work, take note of what or who is the focus and ask the usual questions that reporters use: Who? What? When? Where? Why? How? Using these questions to examine what you are reading can help you to write the summary.
Sometimes, the central idea of the piece is stated in the introduction or first paragraph, and the supporting ideas of this central idea are presented one by one in the following paragraphs. Always read the introductory paragraph thoughtfully and look for a thesis statement. Finding the thesis statement is like finding a key to a locked door. Frequently, however, the thesis, or central idea, is implied or suggested. Thus, you will have to work harder to figure out what the author wants readers to understand. Use any hints that may shed light on the meaning of the piece: pay attention to the title and any headings and to the opening and closing lines of paragraphs.
Аннотация к статье составляется по такой же схеме, что и реферат, только объем аннотации обычно не превышает 600 печатных знаков. В конце аннотации даются ключевые слова.
8. Study the example of the summary (abstract) in English:
Experimental modeling and adaptive power control of a 750MW once-through boiler
H. Unbehauen and I. Kocaarslan
Ruhr-University Bochum, Department of Electrical Engineering,
P.O. Box 102 148. D-4630 Bochum 1, Germany
Abstract. This paper presents the reduced mathematical model for the power generation of a steam power plant. Plant measurements have been made for four different operating points. The dynamic model for these operating conditions of the multivariable plant has been developed by application of parameter estimation methods. Based on these multivariable models, three different types of adaptive control schemes as well as a conventional PID-control structure have been tested by extended simulation studies. Due to the very promising results, preparations for the practical application results in the plant are now under work.
Keywords. Power plant, once-through boiler, identification, modeling, multivariable model reference adaptive control, decentralized adaptive control.
9. Condense the information of the texts and write down the summaries to them in English:
I. Industrial robot
from Wikipedia, the free encyclopedia
An industrial robot is defined as an automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes. The field of robotics may be more practically defined as the study, design and use of robot systems for manufacturing (a top-level definition relying on the prior definition of robot).
Typical applications of robots include welding, painting, assembly, pick and place (such as packaging, palletizing and SMT), product inspection, and testing; all accomplished with high endurance, speed, and precision.
|
|
II. Robot types, features
The most commonly used robot configurations are articulated robots, SCARA robots and Cartesian coordinate robots, (aka gantry robots or x-y-z robots). In the context of general robotics, most types of robots would fall into the category of robotic arms (inherent in the use of the word manipulator in the above-mentioned ISO standard). Robots exhibit varying degrees of autonomy:
- Some robots are programmed to faithfully carry out specific actions over and over again (repetitive actions) without variation and with a high degree of accuracy. These actions are determined by programmed routines that specify the direction, acceleration, velocity, deceleration, and distance of a series of coordinated motions.
- Other robots are much more flexible as to the orientation of the object on which they are operating or even the task that has to be performed on the object itself, which the robot may even need to identify. For example, for more precise guidance, robots often contain machine vision sub-systems acting as their "eyes", linked to powerful computers or controllers. Artificial intelligence, or what passes for it, is becoming an increasingly important factor in the modern industrial robot.
III. Defining parameters
- Number of axes – two axes are required to reach any point in a plane; three axes are required to reach any point in space. To fully control the orientation of the end of the arm (i.e. the wrist) three more axes (yaw, pitch, and roll) are required. Some designs (e.g. the SCARA robot) trade limitations in motion possibilities for cost, speed, and accuracy.
- Degrees of freedom which is usually the same as the number of axes.
- Working envelope – the region of space a robot can reach.
- Kinematics – the actual arrangement of rigid members and joints in the robot, which determines the robot's possible motions. Classes of robot kinematics include articulated, Cartesian, parallel and SCARA.
- Carrying capacity or payload – how much weight a robot can lift.
- Speed – how fast the robot can position the end of its arm. This may be defined in terms of the angular or linear speed of each axis or as a compound speed i.e. the speed of the end of the arm when all axes are moving.
- Acceleration - how quickly an axis can accelerate. Since this is a limiting factor a robot may not be able to reach its specified maximum speed for movements over a short distance or a complex path requiring frequent changes of direction.
- Accuracy – how closely a robot can reach a commanded position. When the absolute position of the robot is measured and compared to the commanded position the error is a measure of accuracy. Accuracy can be improved with external sensing for example a vision system or Infra-Red (see robot calibration). Accuracy can vary with speed and position within the working envelope and with payload (see compliance).
- Repeatability - how well the robot will return to a programmed position. This is not the same as accuracy. It may be that when told to go to a certain X-Y-Z position that it gets only to within 1 mm of that position. This would be its accuracy which may be improved by calibration. But if that position is taught into controller memory and each time it is sent there it returns to within 0.1mm of the taught position then the repeatability will be within 0.1mm.
Accuracy and repeatability are different measures. Repeatability is usually the most important criterion for a robot. ISO 9283 sets out a method whereby both accuracy and repeatability can be measured. Typically a robot is sent to a taught position a number of times and the error is measured at each return to the position after visiting 4 other positions. Repeatability is then quantified using the standard deviation of those samples in all three dimensions. A typical robot can, of course make a positional error exceeding that and that could be a problem for the process. Moreover the repeatability is different in different parts of the working envelope and also changes with speed and payload. ISO 9283 specifies that accuracy and repeatability should be measured at maximum speed and at maximum payload. But this results in pessimistic values whereas the robot could be much more accurate and repeatable at light loads and speeds. Repeatability in an industrial process is also subject to the accuracy of the end effector, for example a gripper, and even to the design of the 'fingers' that match the gripper to the object being grasped. For example if a robot picks a screw by its head the screw could be at a random angle. A subsequent attempt to insert the screw into a hole could easily fail. These and similar scenarios can be improved with 'lead-ins' e.g. by making the entrance to the hole tapered.
- Motion control – for some applications, such as simple pick-and-place assembly, the robot need merely return repeatably to a limited number of pre-taught positions. For more sophisticated applications, such as welding and finishing (spray painting), motion must be continuously controlled to follow a path in space, with controlled orientation and velocity.
- Power source – some robots use electric motors, others use hydraulic actuators. The former are faster, the latter are stronger and advantageous in applications such as spray painting, where a spark could set off an explosion; however, low internal air-pressurization of the arm can prevent ingress of flammable vapors as well as other contaminants.
- Drive – some robots connect electric motors to the joints via gears; others connect the motor to the joint directly (direct drive). Using gears results in measurable 'backlash' which is free movement in an axis. Smaller robot arms frequently employ high speed, low torque DC motors, which generally require high gearing ratios; this has the disadvantage of backlash. In such cases the harmonic drive is often used.
- Compliance - this is a measure of the amount in angle or distance that a robot axis will move when a force is applied to it. Because of compliance when a robot goes to a position carrying its maximum payload it will be at a position slightly lower than when it is carrying no payload. Compliance can also be responsible for overshoot when carrying high payloads in which case acceleration would need to be reduced.
IV. End –of-arm Tooling
The most essential robot peripheral is the end effector, or end-of-arm-tooling (EOT). Common examples of end effectors include welding devices (such as MIG-welding guns, spot-welders, etc.), spray guns and also grinding and deburring devices (such as pneumatic disk or belt grinders, burrs, etc.), and grippers (devices that can grasp an object, usually electromechanical or pneumatic). Another common means of picking up an object is by vacuum. End effectors are frequently highly complex, made to match the handled product and often capable of picking up an array of products at one time. They may utilize various sensors to aid the robot system in locating, handling, and positioning products.
V. Controlling Movement
For a given robot the only parameters necessary to completely locate the end effector (gripper, welding torch, etc.) of the robot are the angles of each of the joints or displacements of the linear axes (or combinations of the two for robot formats such as SCARA). However there are many different ways to define the points. The most common and most convenient way of defining a point is to specify a Cartesian coordinate for it, i.e. the position of the 'end effector' in mm in the X, Y and Z directions relative to the robot's origin. In addition, depending on the types of joints a particular robot may have, the orientation of the end effector in yaw, pitch, and roll and the location of the tool point relative to the robot's faceplate must also be specified. For a jointed arm these coordinates must be converted to joint angles by the robot controller and such conversions are known as Cartesian Transformations which may need to be performed iteratively or recursively for a multiple axis robot. The mathematics of the relationship between joint angles and actual spatial coordinates is called kinematics. (See robot control).
Positioning by Cartesian coordinates may be done by entering the coordinates into the system or by using a teach pendant which moves the robot in X-Y-Z directions. It is much easier for a human operator to visualize motions up/down, left/right, etc. than to move each joint one at a time. When the desired position is reached it is then defined in some way particular to the robot software in use.
VI. Robotics
Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots. Robotics is related to the sciences of electronics, engineering, mechanics, mechatronics, and software.
The concept and creation of machines that could operate autonomously dates back to classical times, but research into the functionality and potential uses of robots did not grow substantially until the 20th century. Today, robotics is a rapidly growing field, as we continue to research, design, and build new robots that serve various practical purposes, whether domestically, commercially, or militarily.
10. Translate the text into English. Condense the information of the text and write down the summary to it in English:
Функции АСУ ТП
Функции АСУ ТП подразделяются на:
1) Информационные, содержанием которых является сбор, обработка и представление информации о состоянии автоматизированного технологического комплекса (АТК) оперативному персоналу или передача этой информации для последующей обработки. Например, централизованный контроль и измерение технологических параметров, косвенное измерение параметров процесса, формирование и выдача данных оперативному персоналу АТК, подготовка и передача информации в смежные системы управления, обобщенная оценка и прогноз состояния АТК и его оборудования.
2) Управляющие, результатом которых являются выработка и реализация управляющих воздействий на ТОУ. Например, регулирование (стабилизация) отдельных технологических переменных, однотактное логическое управление операциями или аппаратами, программное логическое управление группой оборудования, оптимальное управление установившимися или переходными технологическими режимами, адаптивное управление объектом в целом. Отличительная особенность управляющих и информационных функций АСУ ТП – их направленность на конкретного потребителя (ТОУ, оперативный персонал, смежные системы управления).
3) Вспомогательные, функции обеспечивающие решение внутри системных задач. Они имеют потребителя вне системы. Например, контроль за функционированием и состоянием технических средств, контроль за хранением информации и т.п.
11. Control questions “What do you know about automatic control systems and cybernetics?”:
1. What is automation?
2. What does automation deal with?
3. What components does an automatic industrial process include?
4. How did ancient automatic toys contribute to the development of automation?
5. What inventors of the past centuries helped in developing automation?
6. Under what conditions can an ACS be formed?
7. How did electronics contribute to the development of automation?
8. What are the advantages of ACSs?
9. In what fields of technology are ACSs used?
10. What control systems can be called automatic?
11. How can ACSs be classified?
12. What five components can every ACS contain?
13. Can you draw the scheme of the basic control system operation?
14. What is the function of a driver?
15. What is the function of the error detector?
16. What do transducers serve for?
17. What do relays serve for?
18. What is the principle of amplifiers operation based on?
19. What was the first automatic regulatory system?
20. What does the “cybernetics” mean?
21. Who is considered to be the founder of cybernetics?
22. What did N. Wienner do for the development of cybernetics?
23. Why can cybernetics be called an interdisciplinary science?
24. What fields does contemporary cybernetics connect?
25. What is the first law of cybernetics?
26. What is the role of the first law of cybernetics in understanding this science?
27. What is cybernetics?
28. What does cybernetics study?
29. What is the subject matter of cybernetics?
30. What can serve examples of cybernetic systems?
31. What does any control process imply?
32. What operations does any control process involve?
33. Can you draw the scheme of the control process?
34. What are the cornerstones of cybernetics?
Grammar Reference
Passive Voice
|
|
Present |
Past |
Future |
|
Simple |
am/is/are linked |
was/were linked |
will be linked |
|
Continuous |
am/is/are being linked |
was/were being linked |
__ |
|
Perfect |
have/has been linked |
had been linked |
will have been linked |
На русский язык глаголы в Passive Voice переводятся:
1) Сочетанием глагола быть (в прошедшем и будущем времени) с краткой формой причастия II смыслового глагола:
The equipment was tested in different conditions. – Это оборудование было проверено в различных условиях.
2) Глаголом с окончанием на –ся, -сь:
The problem is solved easily. – Проблема решается легко.
3) Неопределенно-личным предложением (без подлежащего):
The fax will be sent tomorrow. – Факс отправят завтра.
Если в английском предложении за сказуемым в Passive следует предлог, относящийся к подлежащему, то при переводе предложение начинается с этого предлога:
This system is much spoken about. – Об этой системе много говорят.
Сопоставление русских и английских времен в Passive
I. Настоящее время – Эти системы управления внедряются.
1) Эти системы управления внедряются повсюду. (Обычное действие).
2) Эти системы управления внедряются сейчас. (Длительное действие в момент речи).
3) The control systems have been introduced for a month. (Present Perfect Passive).
1) The control systems are introduced everywhere. (Present Simple Passive).
2) The control systems are being introduced now. (Present Continuous Passive).
3) Эти системы управления внедряются уже целый месяц.
II. Прошедшее время – Эти системы управления внедрили. /Эти системы управления были внедрены.
1) Эти системы управления внедрили в прошлом месяце. (Действие, совершившееся в истекшем отрезке времени).
1) The control systems were introduced last month. (Past Simple Passive).
2) Эти системы внедряли с декабря по март. (Действие, совершавшееся в определенный момент в прошлом).
2) The control systems were being introduced from December till March. (Past Continuous Passive).
3) Эти системы уже внедрили. (Совершившееся действие, результат которого налицо).
4) Эти системы внедрили до того, как появились новые. (Действие, совершившееся до указанного момента в прошлом).
3) The control systems have already been introduced. (Present Perfect Passive).
4) The control systems had been introduced before the new ones appeared. (Past Perfect Passive).
III. Будущее время – Эти системы управления внедрят. / Эти системы управления будут внедряться.
1) Эти системы внедрят в следующем году. (Действие, которое будет совершаться в будущем).
2) Эти системы внедрят к концу года. (Действие, которое совершится к определенному моменту в будущем).
1) The control systems will be introduced next year. (Future Simple Passive).
2) The control systems will have been introduced by the end of the year. (Future Perfect Passive).
The Infinitive
Инфинитив является неличной (неизменяемой) формой глагола.
Перевод инфинитива на русский язык зависит от его функции в предложении и от его формы.
Forms of the Infinitive
|
Simple Infinitive
|
Active |
Passive |
Выражают действие, одновременное с действием глагола-сказуемого
|
|
to help |
to be helped |
||
|
Continuous |
to be helping |
- |
|
|
Perfect Infinitive |
to have helped |
to have been helped |
Выражают действия, предшествующие действию глагола-сказуемого и переводятся глаголом в прошедшем времени |
|
Perfect Continuous Infinitive |
to have been helping |
-
|
На русский язык инфинитив переводится:
1) неопределенной формой глагола;
2) существительным;
3) придаточным предложением.
Simple Infinitive (Active and Passive) –простая форма инфинитива, которая обозначает действие, одновременное действию глагола-сказуемого.
I am glad to help them. – Я рад помочь им. (Active) (Я рад, что помогаю им). (вообще)
I am glad to be helped. – Я рад, что мне помогают. (Passive) (вообще)
I am glad to be helping him. – Я рад, что помогаю ему. (сейчас)
Perfect Infinitive (Active and Passive) обозначает действие, которое предшествовало действию глагола-сказуемого.
I am glad to have helped them. – Я рад, что помог им. (Active)
I remember to have been helped then. – Я помню, что мне тогда помогли. (Passive)
I am glad to have been helping him. – Я рад, что помогаю ему. (до сих пор).
Functions of the Infinitive
В предложении инфинитив может быть:
1) подлежащим (стоит перед сказуемым, переводится существительным или неопределенной формой глагола).
To operate the complex device is rather difficult. Управлять (Управление) этим сложным механизмом довольно трудно.
2) частью сказуемого.
а) составного глагольного (переводится неопределенной формой глагола)
You must (had to) improve your methods of work. – Вы должны (должны были) улучшить методы работы.
This engineer is to design a new high speed device. – Этот инженер должен спроектировать новый скоростной механизм.
б) именной частью сказуемого после подлежащего, выраженного словами aim,purpose, duty, task, method, function, problem и др., и глагола-связки to be, который либо не переводится совсем, либо переводится словами заключаться в том, что(бы); состоять в том, чтобы:
Our task was to install the new equipment in time. – Наша задача заключалась в том, чтобы установить новое оборудование вовремя.
(Ср.: He was to install the new equipment. – Он должен был установить новое оборудование.)
3) дополнением (стоит после прилагательных, после любого глагола, кроме to be, to have и модальных; переводится неопределенной формой глагола).
We hope to get new data in a week or two. – Мы надеемся получить новые данные через неделю или две.
It is necessary to master this specialty. – Необходимо овладеть этой специальностью.
4) определением (стоит всегда после существительного и переводится):
- определительным придаточным предложением, сказуемое которого выражает долженствование, возможность или будущее время
The metal to be used in our experiment is to be hard. – Металл, который будет (может, должен) использоваться в нашем эксперименте, должен быть твердым.;
- неопределенной формой глагола
M.Faraday had little chance to get an education. – У Майкла Фарадея была очень маленькая возможность получить образование.
- существительным (с предлогом)
The device to measure the temperature is out of order. – Прибор для измерения температуры не работает.
Инфинитив после слов the first (the second…) the last тоже является определением и переводится глаголом в личной форме в том времени, в котором стоит глагол-сказуемое.
Kepler was the first to discover the exact laws governing the movement of the planets. Кеплер первый открыл точные законы движения планет.
5) обстоятельство (цели) (стоит в начале предложения перед подлежащим или в конце; иногда вводится союзом in order to –для того, чтобы, переводится неопределенной формой глагола с союзом чтобы, для того, чтобы или существительным с предлогом для):
To reinforce the metal engineers use artificial fibers. Чтобы усилить металл (для усиления…), инженеры используют искусственные волокна.
A number of devices were developed in order to detect cosmic rays. – Было разработано несколько приборов для обнаружения (чтобы обнаружить…) космических лучей.
The Complex Object
Конструкция ‘the Complex Object’ – сложное дополнение – состоит из :
|
или местоимения (в объектном падеже: + инфинитив смыслового глагола me, him, her, us, you, them, it) |
На русский язык эта конструкция переводится дополнительным придаточным предложением.
They supposed this system to be out of order. Они полагали, что система вышла из строя.
Эта конструкция употребляется после ряда глаголов, выражающих:
a) желание: to want; to desire; should (would) like; to like; to hate.
Specialists want the new methods (them) to be used in the production process. Ученые хотят, чтобы новые методы (они) использовались в этом производственном процессе.
b) предположение, суждение, мнение: to expect; to think; to believe; to suppose; to consider; to find; to know.
We know this scientist (him) to have been working at this problem for some years. - Мы знаем, что этот ученый (он) работает над этой проблемой уже в течение нескольких лет.
c) приказание: to order; to command; to ask; to allow.
d) восприятие: to see; to hear; to watch; to observe; to feel; to notice (после этой группы глаголов частица “to” перед инфинитивом опускается , а также после глагола to make в значении “заставлять”).
We saw the solution boil. – Мы видели, что (как) раствор кипит.
The Complex Subject
Конструкция ‘the Complex Subject’ – сложное подлежащее – состоит из:
|
Существительного или местоимения (в именительном падеже – I, you, he, she, we, they, it) |
+ инфинитив, стоящий после сказуемого, выраженного: |
a) следующими глаголами в страдательном залоге: is/are known - известно; is/are considered (thought, believed, found) – считают, полагают; is/are said – говорят; is/are reported– сообщают, сообщается; is/are supposed (assumed) – предполагают; is/are stated – утверждают; is/are expected – ожидают, ожидается, что
The receiver is known to decode the message. – Известно, что приемное устройство расшифровывает сообщение.
Nanotechnologies are expected to have a great future. – Полагают, что нанотехнологии имеют большое будущее.
b) глаголами в действительном залоге: to seem – кажется, как оказывается; to appear – оказывается, по-видимому, кажется; to prove, to turn out, to happen – оказывается.
This new method of data processing proved to be very effective. – Оказалось, что этот новый метод обработки данных является очень эффективным.
c) выражениями: to be likely - вероятно; to be unlikely – маловероятно, вряд ли; to be sure, to be certain – несомненно, наверняка, конечно.
The application of this device is certain to give better results. Применение этого прибора несомненно даст лучшие результаты.
Конструкция for +существительное (местоимение) +инфинитив
переводится придаточным предложением с союзами что, чтобы, для того чтобы, подлежащим которого становится существительное или местоимение этой конструкции, а сказуемым –инфинитив:
Everybody waited for the new data of the experiment to be published. – Все ожидали, что новые данные эксперимента будут опубликованы.
Возможен перевод этого оборота существительным или инфинитивом:
It was important for us to solve this problem as soon as possible. – Нам было важно решить эту проблему как можно скорее.
The Participle
Причастие - неличная форма глагола, имеющая признаки прилагательного, глагола и наречия.
Forms of the Participles
|
participle |
active |
passive |
|
|
present (Part.I) |
building |
being built
|
Выражает действие, одновременное с действием глагола-сказуемого |
|
past (Part.II) |
-
|
built |
Выражает действие, одновременное с действием глагола-сказуемого или предшествующее ему |
|
perfect |
having built |
having been built |
Выражает действие, предшествующее действию глагола-сказуемого |
В предложении простые формы причастия могут быть:
1) определением, (стоящим перед или после определяемого существительного):
We need devices improving the accuracy of measurements. – Нам нужны устройства, улучшающие точность измерений.
The results of the experiment carried out in the laboratory were good. – Результаты эксперимента, проведенного в этой лаборатории, были хорошими.
2) обстоятельством (с союзами when, while, if, unless, as, though):
(When) heated (=Being heated) to a sufficient temperature semiconductors begin to conduct electricity. Являясь обстоятельством, причастия переводятся:
а) деепричастием
Нагревшись до определенной температуры, полупроводники начинают проводить электричество.
б) придаточным предложением
Когда полупроводники нагреваются до определенной температуры, они начинают проводить электричество.
в) при + существительное
При нагревании до определенной температуры полупроводники начинают проводить электричество.
3) частью сказуемого (переводятся глаголами в личной форме):
Be + Participle I = Continuous Tenses.
Microcontrollers must provide real time response in the system they are controlling. – Микрорегуляторы должны обеспечивать время реакции в системе, которой они управляют.
Be + Participle II = Passive Voice.
The word “cybernetic” was forgotten until 1948. – Слово «кибернетика» было забыто до 1948 года.
Have + Participle II = Perfect tenses.
They have considerably developed the engine. – Они значительно усовершенствовали двигатель.
Participle I Passive (being built) в предложении может быть:
1) определением (переводится причастием страдательного залога или определительным придаточным предложением).
The installation being used (now) is very efficient. – Установка, используемая (которая используется) в настоящее время, очень эффективна.
2) обстоятельством (переводится придаточным предложением времени или причины, реже оборотом со словом «будучи»):
Being subjected (=When subjected) to high pressure metals become highly conductive. – Когда металлы подвергаются высокому давлению, они становятся хорошими проводниками.
Perfect Participle Active (having built) и Perfect Participle Passive (having been built) в предложении могут быть только обстоятельством и переводятся деепричастиями или придаточными предложениями с союзами так как, когда, после того как:
Having made a number of tests, the researcher got some useful results. – Выполнив ряд испытаний, исследователь получил полезные результаты. /или: После того как исследователь выполнил ряд испытаний, он получил полезные результаты.
The Absolute Participle Construction
Самостоятельный причастный оборот не зависит от подлежащего всего предложения.
Признаки оборота:
а) перед причастием стоит существительное или местоимение в именительном падеже;
б) оборот всегда отделен запятой.
Переводится оборот на русский язык:
1) придаточным предложением времени или причины с союзами когда, после того как, поскольку, так как и др., когда оборот стоит в начале предложения:
Some new devices having been obtained, the researchers could make more complex experiments. – После того как были получены новые приборы, исследователи смогли проводить более сложные опыты.
2) самостоятельным бессоюзным предложением или с союзами причем, а, и, но, если оборот стоит в конце предложения:
The installation was automized last year, its capacity rising by 25 per cent. – Эта установка была автоматизирована в прошлом году, и ее производительность увеличилась на 25 %.
The Gerund
Герундий – это неличная форма глагола, имеющая признаки существительного и глагола. Перевод герундия зависит от его формы и от функции в предложении.
Forms of the Gerund
|
Gerund |
active |
passive |
|
|
Simple |
heating |
being heated |
Выражает одновременное или будущее действие относительно сказуемого |
|
Perfect |
having heated |
having been heated |
Выражает предшествующее действие относительно сказуемого |
Functions of the Gerund
1) Подлежащим (переводится существительным или неопределенной формой глагола):
Heating the substance up to 85°C was absolutely necessary. – Нагреть это вещество до 85°C было совершенно необходимо.
2) частью сказуемого (переводится существительным или неопределенной формой глагола):
Their aim was finding new ways of utilizing this polymer. – Их целью было использовать этот полимер.
3) дополнением (переводится существительным, неопределенной формой глагола или дополнительным придаточным предложением):
The experimentalist suggested purifying the solution by a new method. – Экспериментатор предложил очистить раствор новым методом.
We know of silver and copper being very good conductors. – Мы знаем о том, что серебро и медь являются хорошими проводниками.
4) определением (переводится прилагательным или существительным):
At present scientists take interest in the methods of turning the light and heat of the Sun into electricity. – В настоящее время ученые интересуются методами превращения солнечного света и тепла в электричество.
5) обстоятельством (всегда с предлогами after, before, in, on, upon, for, at, by, without), переводится деепричастием, существительным с предлогом или придаточным предложением:
By subjecting air to very great pressure and cooling it is possible to transform it to the liquid state. – Подвергая воздух высокому давлению и охлаждению, возможно трансформировать его в жидкое состояние.
Supplementary Texts
Types of control systems
In practice, process control systems can be characterized as one or more of the following forms:
- Discrete – Found in many manufacturing, motion and packaging applications. Robotic assembly, such as that found in automotive production, can be characterized as discrete process control. Most discrete manufacturing involves the production of discrete pieces of product, such as metal stamping.
- Batch – Some applications require that specific quantities of raw materials be combined in specific ways for particular durations to produce an intermediate or end result. One example is the production of adhesives and glues, which normally require the mixing of raw materials in a heated vessel for a period of time to form a quantity of end product. Other important examples are the production of food, beverages and medicine. Batch processes are generally used to produce a relatively low to intermediate quantity of product per year (a few pounds to millions of pounds).
- Continuous – Often, a physical system is represented through variables that are smooth and uninterrupted in time. The control of the water temperature in a heating jacket, for example, is an example of continuous process control. Some important continuous processes are the production of fuels, chemicals and plastics. Continuous processes in manufacturing are used to produce very large quantities of product per year (millions to billions of pounds).
Applications having elements of discrete, batch and continuous process control are often called hybrid applications.
Do the following tasks:
- Translate the text and describe the forms of control systems.
- Find some additional information.
- Write down a summary of the text.
History of Cybernetics and Systems Science
Perhaps one of the best ways of seeing the strength and the impact of the systemic approach is to follow its birth and development in the lives of men and institutions.
The Search for New Tools
We need new tools with which to approach organized complexity, interdependence, and regulation. These tools emerged in the United States in the 1940s from the cross-fertilization of ideas that is common in the melting pot of the large universities.
In illustrating a new current of thought, it is often useful to follow a thread. Our thread will be the Massachusetts Institute of Technology (MIT). In three steps, each of about ten years, MIT was to go from the birth of cybernetics to the most critical issue, the debate on limits to growth. Each of these advances was marked by many travels back and forth--typical of the systemic approach--between machine, man, and society. In the course of this circulation of ideas there occurred transfers of method and terminology that later fertilized unexplored territory.
In the forties the first step forward led from the machine to the living organism, transferring from one to the other the ideas of feedback and finality and opening the way for automation and computers. In the fifties it was the return from the living organism to the machine with the emergence of the important concepts of memory and pattern recognition, of adaptive phenomena and learning, and new advances in bionics (Bionics attempts to build electronic machines that imitate the functions of certain organs of living beings.): artificial intelligence and industrial robots. There was also a return from the machine to the living organism, which accelerated progress in neurology, perception, the mechanisms of vision. In the sixties MIT saw the extension of cybernetics and system theory to industry, society, and ecology.
Three men can be regarded as the pioneers of these great breakthroughs: the mathematician Norbert Wiener, who died in 1964, the neurophysiologist Warren McCulloch, who died in 1969; and Jay Forrester, professor at the Sloan School of Management at MIT. There are of course other men, other research teams, other universities--in the United States as well as in the rest of the world--that have contributed to the advance of cybernetics and system theory. I will mention them whenever their course of research blends with that of the MIT teams.
Do the following tasks:
- Make up a detailed plan of each part of the text.
- Retell each part of the text separately.
Industrial Robots
A robot is defined as a mechanical device which can be programmed to perform some task. An automatic machine, stationary or mobile, containing a manipulator and a reprogrammable device of program control, is called an industrial robot.
Industrial robots are made up of some basic components: the manipulator, the control and the power supply. Being hydraulically, pneumatically or electrically drive, the manipulator performs the useful functions of the robot. Engineers consider robots to have same manipulators with up to seven degrees of coordinated motions. Feedback devices on the manipulator provide information on its motions and positions to the robot control, the control storing the necessary motions of the robot in its memory. The control directs the manipulator operations by means of a program upon a command. A power supply is certain to provide energy for driving the manipulator.
Industrial robots perform production processes better and faster than men. The job changing, robots may be reprogrammed. They can imitate the manual actions of people, being able to substitute manual actions of man. Thus, the industrial robot is the most important form of automated means.
Do the following tasks:
- Translate into Russian.
- Write a summary to it.
“Intelligent” Machines
Norbert Wiener had been teaching mathematics at MIT since 1919. Soon after his arrival there he had become acquainted with the neurophysiologist Arturo Rosenblueth, onetime collaborator of Walter B. Cannon (who gave homeostasis its name) and now at Harvard Medical School. Out of this new friendship would be born, twenty years later, cybernetics. With Wiener's help Rosenblueth set up small interdisciplinary teams to explore the no man's land between the established sciences.
In 1940 Wiener worked with a young engineer, Julian H. Bigelow, to develop automatic range finders for antiaircraft guns. Such servomechanisms are able to predict the trajectory of an airplane by taking into account the elements of past trajectories. During the course of their work Wiener and Bigelow were struck by two astonishing facts: the seemingly "intelligent" behavior of these machines and the "diseases" that could affect them. Theirs appeared to be "intelligent" behavior because they dealt with "experience" (the recording of past events) and predictions of the future. There was also a strange defect in performance: if one tried to reduce the friction, the system entered into a series of uncontrollable oscillations.
Impressed by this disease of the machine, Wiener asked Rosenblueth whether such behavior was found in man. The response was affirmative: in the event of certain injuries to the cerebellum, the patient cannot lift a glass of water to his mouth; the movements are amplified until the contents of the glass spill on the ground. From this Wiener inferred that in order to control a finalized action (an action with a purpose) the circulation of information needed for control must form "a closed loop allowing the evaluation of the effects of one's actions and the adaptation of future conduct based on past performances." This is typical of the guidance system of the antiaircraft gun, and it is equally characteristic of the nervous system when it orders the muscles to make a movement whose effects are then detected by the senses and fed back to the brain.
Thus Wiener and Bigelow discovered the closed loop of information necessary to correct any action--the negative feedback loop--and they generalized this discovery in terms of the human organism.
During this period the multidisciplinary teams of Rosenblueth were being formed and organized. Their purpose was to approach the study of living organisms from the viewpoint of a servomechanisms engineer and, conversely, to consider servomechanisms with the experience of the physiologist. An early seminar at the Institute for Advanced Study at Princeton in 1942 brought together mathematicians, physiologists, and mechanical and electrical engineers. In light of its success, a series of ten seminars was arranged by the Josiah Macy Foundation. One man working with Rosenblueth in getting these seminars under way was the neurophysiologist Warren McCulloch, who was to play a considerable role in the new field of cybernetics. In 1948 two basic publications marked an epoch already fertile with new ideas: Norbert Wiener's Cybernetics, or Control and Communication in the Animal and the Machine, and The Mathematical Theory of Communication by Claude Shannon and Warren Weaver. The latter work founded information theory.
Do the following tasks:
- Define the main facts mentioned in the text.
- Ask 10 questions to the text.
- Write down a resume of it.
An Introduction to Artificial Intelligence
Artificial Intelligence, or AI for short, is a combination of computer science, physiology, and philosophy. AI is a broad topic, consisting of different fields, from machine vision to expert systems. The element that the fields of AI have in common is the creation of machines that can "think".
In order to classify machines as "thinking", it is necessary to define intelligence. To what degree does intelligence consist of, for example, solving complex
|
|

problems, or making generalizations and relationships? And what about perception and comprehension? Research into the areas of learning, of language, and of sensory perception has aided scientists in building intelligent machines. One of the most challenging approaches facing experts is building systems that mimic the behavior of the human brain, made up of billions of neurons, and arguably the most complex matter in the universe. Perhaps the best way to gauge the intelligence of a machine is British computer scientist Alan Turing’s test. He stated that a computer would deserve to be called intelligent if it could deceive a human into believing that it was human.
Artificial Intelligence has come a long way from its early roots, driven by dedicated researchers. The beginnings of AI reach back before electronics,
|
|
to philosophers and mathematicians such as Boole and others theorizing on principles that were used as the foundation of AI Logic. AI really began to intrigue researchers with the invention of the computer in 1943. The technology was finally available, or so it seemed, to simulate intelligent behavior. Over the next four decades, despite many stumbling blocks, AI has grown from a dozen researchers, to thousands of engineers and specialists; and from programs capable of playing checkers, to systems designed to diagnose disease.
AI has always been on the pioneering end of computer science. Advanced-level computer languages, as well as computer interfaces and word-processors owe their existence to the research into artificial intelligence. The theory and insights brought about by AI research will set the trend in the future of computing. The products available today are only bits and pieces of what are soon to follow, but they are a movement towards the future of artificial intelligence. The advancements in the quest for artificial intelligence have, and will continue to affect our jobs, our education, and our lives.
Do the following tasks:
- Make up a plan of the text.
- Retell it using your plan.
Applications of AI
Here are some applications of AI:
game playing
You can buy machines that can play master level chess for a few hundred dollars. There is some AI in them, but they play well against people mainly through brute force computation--looking at hundreds of thousands of positions. To beat a world champion by brute force and known reliable heuristics requires being able to look at 200 million positions per second.
speech recognition
In the 1990s, computer speech recognition reached a practical level for limited purposes. Thus United Airlines has replaced its keyboard tree for flight information by a system using speech recognition of flight numbers and city names. It is quite convenient. On the other hand, while it is possible to instruct some computers using speech, most users have gone back to the keyboard and the mouse as still more convenient.
understanding natural language
Just getting a sequence of words into a computer is not enough. Parsing sentences is not enough either. The computer has to be provided with an understanding of the domain the text is about, and this is presently possible only for very limited domains.
computer vision
The world is composed of three-dimensional objects, but the inputs to the human eye and computers' TV cameras are two dimensional. Some useful programs can work solely in two dimensions, but full computer vision requires partial three-dimensional information that is not just a set of two-dimensional views. At present there are only limited ways of representing three-dimensional information directly, and they are not as good as what humans evidently use.
expert systems
A ``knowledge engineer'' interviews experts in a certain domain and tries to embody their knowledge in a computer program for carrying out some task. How well this works depends on whether the intellectual mechanisms required for the task are within the present state of AI. When this turned out not to be so, there were many disappointing results. One of the first expert systems was MYCIN in 1974, which diagnosed bacterial infections of the blood and suggested treatments. It did better than medical students or practicing doctors, provided its limitations were observed. Namely, its ontology included bacteria, symptoms, and treatments and did not include patients, doctors, hospitals, death, recovery, and events occurring in time. Its interactions depended on a single patient being considered. Since the experts consulted by the knowledge engineers knew about patients, doctors, death, recovery, etc., it is clear that the knowledge engineers forced what the experts told them into a predetermined framework. In the present state of AI, this has to be true. The usefulness of current expert systems depends on their users having common sense.
heuristic classification
One of the most feasible kinds of expert system given the present knowledge of AI is to put some information in one of a fixed set of categories using several sources of information. An example is advising whether to accept a proposed credit card purchase. Information is available about the owner of the credit card, his record of payment and also about the item he is buying and about the establishment from which he is buying it (e.g., about whether there have been previous credit card frauds at this establishment).
Do the following tasks:
- Translate into Russian
- Write a summary
Artificial intelligence
Artificial intelligence (AI) is the intelligence of machines and the branch of computer science that aims to create it. AI textbooks define the field as "the study and design of intelligent agents" where an intelligent agent is a system that perceives its environment and takes actions that maximize its chances of success. John McCarthy, who coined the term in 1956, defines it as "the science and engineering of making intelligent machines."
The field was founded on the claim that a central property of humans, intelligence—the sapienсe of Homo sapiens—can be so precisely described that it can be simulated by a machine. This raises philosophical issues about the nature of the mind and the ethics of creating artificial beings, issues which have been addressed by myth, fiction and philosophy since antiquity. Artificial intelligence has been the subject of optimism, but has also suffered setbacks and, today, has become an essential part of the technology industry, providing the heavy lifting for many of the most difficult problems in computer science.
AI research is highly technical and specialized, deeply divided into subfields that often fail in the task of communicating with each other. Subfields have grown up around particular institutions, the work of individual researchers, the solution of specific problems, longstanding differences of opinion about how AI should be done and the application of widely differing tools. The central problems of AI include such traits as reasoning, knowledge, planning, learning, communication, perception and the ability to move and manipulate objects. General intelligence (or "strong AI") is still among the field's long term goals.
Do the following tasks
- Read and translate the text.
- Condense the information in each paragraph.
- Write the plan of the text
- Retell the text using the plan.
Open and closed – loop systems
Open Loop
The open and closed loop
system describes the two primary types of CNC control systems. Open and closed
loop describes the control process of a system. Open loop refers to a system
where the communication between the controller system and the motor is one way.
Check the image to the right.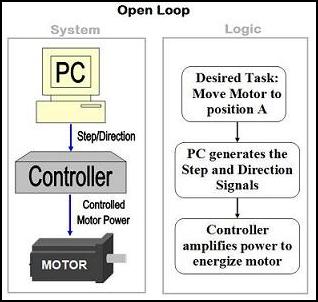
As you can see the process for an open loop system is simple. After the user decides what he/she wants to do and generates the g-code or some sort of work file, the NC software then create the necessary step and direction signals to perform the desired task. The computer relays this information to the controller which then energizes the motor/s. After the motor moves to the desired position, there is no feedback to the controller system to verify the action.
In the CNC industry, open loop systems use stepper motors. However, just because a system uses stepper motors does not mean the system is an open loop system. Stepper motors may be outfitted with encoders to provide position feedback just like servo motors.
Stepper motors are able to operate in an open loop system while servo motors are not, for CNC applications at least. Because stepper motors do not require feedback hardware, the price for an open loop CNC system is much cheaper and simpler than a closed loop system. This makes it more affordable for hobbyists to build their own CNC machine.
There are drawbacks to the open loop system. Because there is no feedback to the controller, if the motor does not operate as instructed there is no way for the system to know. The controller system will continue performing the next task as if there is no problem until a limit switch is tripped or the operator resets the machine.
Many do it yourselfers run into trouble by overloading their machine and losing steps with the open loop system. This can ruin the piece or be harmful to the machine or user. However, if the system is constructed properly and not overloaded, there is no reason an open loop system should not function properly.
Closed Loop
The closed loop system has a feedback system to
monitor the output of the motors. Closed systems are also able to correct
errors in position, velocity, and acceleration, and also fault the system if
the error is too large. Refer to the image below. 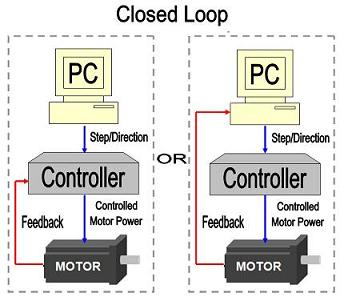
As you can see from the image to the left, there are two closed loop system shown. The first system returns the feedback to the CNC controller. The second system returns the feedback into the computer. Regardless what some say, both systems are true closed loop systems. The system where the feedback is fed into the signal generator or computer is usually found on high end machines.
The image on the left represents the most common type of closed loop controller system. In this type of system, an encoder, glass scale, or some other type of analog device is responsible for the feedback signal.
Most of these closed loop controllers are PID or proportional–integral–derivative controllers. The encoder output is fed into the motor driver. A PID controller attempts to correct the error between a measured variable and a desired set point by calculating and then outputting a corrective action that can adjust the process accordingly and rapidly, to keep the error minimal. See the image below for a basic concept flow chart.
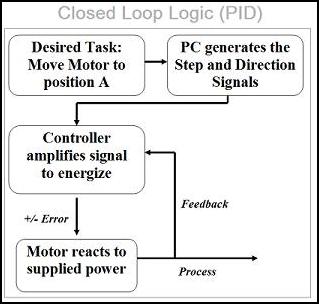 This type of control
loop is set to fault at a preset value. This should
This type of control
loop is set to fault at a preset value. This should
stop the machine in case of excess error. Some people believe that this type
of system can be inaccurate. This
is untrue if setup properly. The
resolution of this type of servo system should be designed to be one order
of magnitude more precise than
the machine. With this setup, even if
the machine were to fault, the error is
still less than the machine tolerance.
If a controller faults when it is 124 steps out of position, the resolution of the
system should be designed so that 124 steps is less than the machine tolerance.
The disadvantages of closed loop systems are cost and complexity. Closed loop controllers can be harder to tune and have more parts that could fail.
Text
The automation of many electromechanical processes, such as the movement of machinery on an assembly line, is done through the use of small computers called programmable logic controllers (PLCs). A PLC contains a programmable microprocessor that is programmed using a specialized computer language. Typically, the program for the automated process is written on a computer and then is downloaded onto the programmable logic controller directly through a cable connection. The program is stored in the programmable logic controller in non-volatile memory.
Inputs and Outputs
Programmable logic controllers typically contain a variable number of input/output (I/O) ports and usually employ reduced instruction set computing (RISC), which consists of simplified instructions that are intended to allow for faster execution. PLCs are designed for real-time use and often must withstand harsh factory environments, such as excessive vibration and high noise levels. The programmable logic controller circuitry monitors the status of multiple sensor inputs, which control output actuators such as motor starters, solenoids, lights, displays and valves.
Advantages
This type of controller has made a significant contribution to factory automation. Earlier automation systems had to use thousands of individual relays, timers and sequencers, which had to be replaced or rewired whenever the automated process needed to change. In many cases, a programmable logic controller allows all of the relays and timers within a factory system to be replaced by a single controller. Modern PLCs deliver a wide range of functionality, including basic relay control, motion control, process control and complex networking. They also can be used in a distributed control system (DCS).
Interface
There are several types of interfaces that are used when people need to interact with programmable logic controllers to configure them or work with them. The interface might be configured with simple lights or switches, or it might include a text display. A more complex system might use an Internet-based interface on a computer running a supervisory control and data acquisition (SCADA) system.
History
PLCs were first created to serve the automobile industry. The first programmable logic controller project was developed in 1968 for General Motors to replace hard-wired relay systems with electronic controllers. PLCs have remained widely used in the early 21st century within manufacturing sectors such as the automobile industry.
Do the following tasks:
- Read the text and entitle it.
- Write down a resume of the text
Technological revolution in Russia
As it is known Computer Science and cybernetics appeared as late as in the middle of the century and had quite exceptional achievements. It is the real basis of what is now called “New Technological revolution”. Up to the recent time, the history of Computing in Eastern Europe and the former Soviet Union was practically unknown to the computer community in the West. This situation is now changing. In 1996, on the 50th Anniversary of Computing, the Computer Society has honored prominent Russian computer scientists Victor Glushkov, Sergey Lebedev and Alexey Lyapunov as computer Pioneers among other Eastern European scientists. V. Glushkov was awarded for founding the first USSR Institute of Cybernetics in the Ukraine, and for establishing the theory of digital automation, computer architecture, and a high-level recursive, macro pipeline processor. S. Lebedev is known to have designed and constructed the first computer in the Soviet Union and founded the Soviet computer industry. A. Lyapunov developed the first theory of operator methods for abstract programming and founded Soviet cybernetics and programming. Indeed, the awarded scientists, together with A. Berg, A. Ershov, A. Kolmogorov, L. Kantorovoch and others, made a decisive contribution to the formation of Soviet cybernetics and Computer Science. These talented and noble people assured the front-rank position of Russian Computer Science.
Alexey Lyapunov was a typical representative of progressive Russian intelligentsia. Over forty years of his life he devoted to disinterested service to his science and his country. The area of his scientific interests was so widespread that he can be truly called an encyclopedic scientist. Despite the broad spectrum of his scientific interests, Lyapunov’s activities in science were always distinguished by professional skill. The biologists considered him a biologist, the geophysicists a geophysicist, the philosophers a philosopher. His large erudition and encyclopedic knowledge, combined with his integrating, non-dividing approach in natural science, in the whole complex of scientific knowledge became the rich soil which provided the sprout of cybernetic ideas. In this respect, there is some similarity of A. Lyapunov with Norbert Wienner, who was also a scientist of deep and broad mind working in different areas.
The name of Leonid Kantorovoch, his life, his role in the science, and his struggle for his ideas occupy a special position in the history of science of the 20th century. Kantorovich’s importance to science and society has not as yet found an adequate expression in the scientific literature. The early blossoming of his talent, the discovery (at the age of 27) of new methods of planning and management, the extraordinary breadth of interests, the uncompromising nature of a fighter, and, at the same time, his modesty and nobility- all these features form the unique phenomenon of Kantorovich.
The mathematical investigations of Kantorovich served as a basis of the formation of new important directions in mathematics. At the same time, he is rightfully considered one of the founders of modern mathematical economics, the kernel of which is the linear programming he created. It is the most important concept of the economical cybernetics allowing to transform the economics into objective science, thus ensuring most efficient results of the economic activity. Kantorovich is an outstanding economist, a scientist who changed essentially the understanding of economic events, the economic thinking, and became a founder of an original economic school.
Do the following tasks:
- Translate into Russian.
- Write a summary to it.
АСУ ТП сегодня
(АСУ ТП - Автоматизированные системы управления технологических процессов).
В настоящее время такие системы представляют собой объект активных теоретических исследований. Исследователи, используя новый технологический уровень, вернулись к созданию моделей комплексной автоматизации процессов, производств и производственных структур. Единые открытые вычислительные системы позволяют управлять распределенными децентрализованными эволюционирующими структурами с ограниченным взаимодействием, способными поддерживать по мере потребностей механизм налаживания новых связей или углублять их взаимодействие. Все необходимые аппаратные средства для таких систем уже созданы или легко могут быть созданы. Активно разрабатывается для этих целей системо-независимое программное обеспечение. Главная проблема состоит в создании системы протоколов функционирования сети. Если решение задач бухгалтерских, маркетинговых и прочих офисных приложений успешно решается при помощи локальных компьютерных сетей, то привнесение в эту сеть задач АСУ ТП предъявляет новые требования к ее функционированию: возможность работы в режиме реального времени, максимальный приоритет при работе с объектом управления, надежность протоколов связи с объектами и самотестирование системы на предмет утери связи с контролируемым процессом. Что касается ПО непосредственно для АСУ ТП, то для создания автоматизированных технологических процессов существуют и успешно применяются пакеты, называемые в технической литературе SCADA-программами (Supervisory Control and Data Acquisition - диспетчерское управление и сбор данных). Эти программы позволяют обеспечить двустороннюю связь в реальном времени с объектом управления и контроля, визуализацию информации на экране монитора в любом удобном для оператора виде, контроль нештатных ситуаций, организацию удаленного доступа, хранение и обработку информации. SCADA-пакеты обеспечивают гибкость системы, поддерживают распределенную архитектуру, возможность разработки драйверов, масштабируемость, резервируемость, поддержку специализированных языков программирования. Микропроцессорные промышленные управляющие контроллеры также имеют собственные языки программирования, позволяющие описать конкретный процесс: это так называемые языки релейных схем со встроенными булевыми операциями. Контроллеры можно программировать и при помощи Ассемблера или языка высокого уровня, чаще всего C, с последующим компилированием и загрузкой управляющих программ в память контроллера. В настоящее время создание АСУ ТП, особенно небольших, не является чем-то исключительным. Наработаны типовые схемы, схемные и программные решения, используя которые, разработчики даже не акцентируют внимание на том, что они создают АСУ ТП, - просто решаются текущие задачи управления оборудованием или процессом. Это свидетельствует о том, что автоматизация уже достигла той степени обыденности, что и, например, электрификация. Тем не менее, новые применения или новые решения в этой области всегда привлекают внимание - вспомним хотя бы управление автоматической стиральной машиной через Интернет.
Do the following tasks:
- Translate into English.
- Write out all the terms.
Microprocessor
A silicon chip that contains a CPU. In the world of personal computers, the terms microprocessor and CPU are used interchangeably. At the heart of all personal computers and most workstations sits a microprocessor. Microprocessors also control the logic of almost all digital devices, from clock radios to fuel-injection systems for automobiles.
Three basic characteristics differentiate microprocessors:
- Instruction set: The set of instructions that the microprocessor can execute.
- bandwidth: The number of bits processed in a single instruction.
- clock speed : Given in megahertz (MHz), the clock speed determines how many instructions per second the processor can execute.
In both cases, the higher the value, the more powerful the CPU. For example, a 32-bit microprocessor that runs at 50MHz is more powerful than a 16-bit microprocessor that runs at 25MHz.
In addition to bandwidth and clock speed, microprocessors are classified as being either RISC (reduced instruction set computer) or CISC (complex instruction set computer).
External Processor Interfaces and Operation
The way that the processor "talks" to other parts of the system is in many ways as important a factor in indicating system power as how it works internally. The processor controls the entire PC, and uses dedicated control pathways called "buses" to send information between itself and the system cache, memory and other devices. These are the processor's external interfaces, which can be different even for otherwise similar CPUs.
There are several different types of buses on a modern PC. The section on System Bus Function and Features provides the basic details on the various bus types, the hierarchy of buses, and general explanations of bus size and bandwidth. You can also find there descriptions of the I/O system buses such as PCI and ISA. At the processor level, the important buses are the processor bus and memory bus, which we discuss in more detail here.
Do the following tasks:
- Read the text.
- Broad the information in each paragraph.
- Speak of microprocessor charachteristics.
Trigonometry. Units of Measurement
by Bob Connell
Trigonometry is a branch of mathematics concerned with functions that describe angles. Although knowledge of trigonometry is valuable in surveying and navigation, in control systems engineering its virtue lies in the fact that trigonometric functions can be used to describe the status of objects that exhibit repeatable behavior. This includes the motion of the planets, pendulums, a mass suspended on a spring, and perhaps most relevant here, the oscillation of process variables under control.
The most common unit of measurement for angles is the degree, which is 1/360 of a whole circle.
A lesser used unit is the radian. Although the radian is not ordinarily used in angular measurement, it should be understood because when differential equations, which occur in control systems engineering, are solved, the angles emerge in radians.
On the circumference of a circle, if an arc equal in length to the radius of the circle is marked off, then the arc will subtend, at the center of the circle, an angle of 1 radian. The angle θ (or POB) in Figure 1, illustrates this.
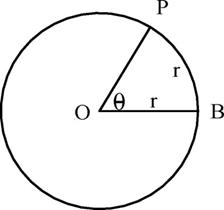
Figure 1 - A radian defined
In line with this definition of a radian, the relationship between radians and degrees can be worked out. The full circumference of the circle (length 2π r) subtends an angle of 360° at the center of the circle. An arc of length r will subtend an angle of
![]()
Therefore 1 radian = 180/π deg, or π radians = 180°.
The actual value of a radian is 57°17'45", although this value is hardly ever required in control systems analysis.
If the base line OB in Figure remains fixed and the radius OP is allowed to rotate counterclockwise around the center O, then the angle 6 (or POB) increases. If the starting point for OP is coincident with OB, and OP rotates one complete rotation (or cycle) until it is again coincident with OB, then the angle 6 will be 360°. From this it is evident that 1 cycle = 360° = 2n radians.
Do the following tasks:
- Translate the text in the written form.
- Write down a summary to it.
Text
A microcontroller (sometimes abbreviated µC, uC or MCU) is a small computer on a single integrated circuit containing a processor core, memory, and programmable input/output peripherals. Program memory in the form of NOR flash or OTP ROM is also often included on chip, as well as a typically small amount of RAM. Microcontrollers are designed for embedded applications, in contrast to the microprocessors used in personal computers or other general purpose applications.
Microcontrollers are used in automatically controlled products and devices, such as automobile engine control systems, implantable medical devices, remote controls, office machines, appliances, power tools, toys and other embedded systems. By reducing the size and cost compared to a design that uses a separate microprocessor, memory, and input/output devices, microcontrollers make it economical to digitally control even more devices and processes. Mixed signal microcontrollers are common, integrating analog components needed to control non-digital electronic systems.
Some microcontrollers may use four-bit words and operate at clock rate frequencies as low as 4kHz, for low power consumption (milliwatts or microwatts). They will generally have the ability to retain functionality while waiting for an event such as a button press or other interrupt; power consumption while sleeping (CPU clock and most peripherals off) may be just nanowatts, making many of them well suited for long lasting battery applications. Other microcontrollers may serve performance-critical roles, where they may need to act more like a digital signal processor (DSP), with higher clock speeds and power consumption.
Embedded design
A microcontroller can be considered a self-contained system with a processor, memory and peripherals and can be used as an embedded system. The majority of microcontrollers in use today are embedded in other machinery, such as automobiles, telephones, appliances, and peripherals for computer systems. While some embedded systems are very sophisticated, many have minimal requirements for memory and program length, with no operating system, and low software complexity. Typical input and output devices include switches, relays, solenoids, LEDs, small or custom LCD displays, radio frequency devices, and sensors for data such as temperature, humidity, light level etc. Embedded systems usually have no keyboard, screen, disks, printers, or other recognizable I/O devices of a personal computer, and may lack human interaction devices of any kind.
Interrupts
Microcontrollers must provide real time (predictable, though not necessarily fast) response to events in the embedded system they are controlling. When certain events occur, an interrupt system can signal the processor to suspend processing the current instruction sequence and to begin an interrupt service routine (ISR, or "interrupt handler"). The ISR will perform any processing required based on the source of the interrupt before returning to the original instruction sequence. Possible interrupt sources are device dependent, and often include events such as an internal timer overflow, completing an analog to digital conversion, a logic level change on an input such as from a button being pressed, and data received on a communication link. Where power consumption is important as in battery operated devices, interrupts may also wake a microcontroller from a low power sleep state where the processor is halted until required to do something by a peripheral event.
Do the following tasks:
- Read the text.
- Entitle it.
- Write down a resume to it.
Programs
Microcontroller programs must fit in the available on-chip program memory, since it would be costly to provide a system with external, expandable, memory. Compilers and assemblers are used to convert high-level language and assembler language codes into a compact machine code for storage in the microcontroller's memory. Depending on the device, the program memory may be permanent, read-only memory that can only be programmed at the factory, or program memory may be field-alterable flash or erasable read-only memory.
Other microcontroller features
Microcontrollers usually contain from several to dozens of general purpose input/output pins (GPIO). GPIO pins are software configurable to either an input or an output state. When GPIO pins are configured to an input state, they are often used to read sensors or external signals. Configured to the output state, GPIO pins can drive external devices such as LEDs or motors.
Many embedded systems need to read sensors that produce analog signals. This is the purpose of the analog-to-digital converter (ADC). Since processors are built to interpret and process digital data, i.e. 1s and 0s, they are not able to do anything with the analog signals that may be sent to it by a device. So the analog to digital converter is used to convert the incoming data into a form that the processor can recognize. A less common feature on some microcontrollers is a digital-to-analog converter (DAC) that allows the processor to output analog signals or voltage levels.
In addition to the converters, many embedded microprocessors include a variety of timers as well. One of the most common types of timers is the Programmable Interval Timer (PIT). A PIT may either count down from some value to zero, or up to the capacity of the count register, overflowing to zero. Once it reaches zero, it sends an interrupt to the processor indicating that it has finished counting. This is useful for devices such as thermostats, which periodically test the temperature around them to see if they need to turn the air conditioner on, the heater on, etc.
A dedicated Pulse Width Modulation (PWM) block makes it possible for the CPU to control power converters, resistive loads, motors, etc., without using lots of CPU resources in tight timer loops.
Universal Asynchronous Receiver/Transmitter (UART) block makes it possible to receive and transmit data over a serial line with very little load on the CPU. Dedicated on-chip hardware also often includes capabilities to communicate with other devices (chips) in digital formats such as I²C and Serial Peripheral Interface (SPI).
Higher integration
Micro-controllers may not implement an external address or data bus as they integrate RAM and non-volatile memory on the same chip as the CPU. Using fewer pins, the chip can be placed in a much smaller, cheaper package.
Integrating the memory and other peripherals on a single chip and testing them as a unit increases the cost of that chip, but often results in decreased net cost of the embedded system as a whole. Even if the cost of a CPU that has integrated peripherals is slightly more than the cost of a CPU and external peripherals, having fewer chips typically allows a smaller and cheaper circuit board, and reduces the labor required to assemble and test the circuit board.
Do the following tasks:
- Find all the abbreviations in the text, write them down.
- Give their meanings.
What Is a Control Engineer?
by David M. Koenig
So far we have implied that a control engineer designs control algorithms. In fact, the title of control engineer can mean many things. The following list, in no particular order, covers many of these "things":
1) Installer of control! instrumentation equipment (sometimes called an "instrumentation engineer"): In my experience this is the most prevalent description of a control engineer's activities. In this case, the actual design of the control algorithm is usually quite straightforward. The engineer usually purchases an off-the-shelf controller, installs it in an instrumentation panel, probably of her design, and then proceeds to make the controller work and get the process under control. This often is not trivial. There may be control input sensor problems. For example, the input signal may come from a thermocouple in an electrically heated bath of some kind and there may be serious common and normal mode voltages riding on the millivolt signal representing the thermocouple value. There may be control output actuator problems. There may be challenging process dynamics problems, which require careful controller tuning. In many ways, instrumentation engineering can be the most challenging aspect of control engineering.
2) Control algorithm designer: When off-the-shelf controllers will not do the job, the scene is often set for the control algorithm designer. The vehicle may be a microprocessor with a higher-level language like BASIC or a lower-level language like assembly language. It may even require firmware. Many control/instrumentation engineers fantasize about opportunities like this. They have to be careful to avoid exotic custom undocumented algorithms and keep it simple.
3) Process improvement team member: Although this person is trained in control engineering, success may result from solving process problems rather than installing new control algorithms.
4) Process problem solver: This is just a different name for the previous category although it may be used when the team members have developed a track record of successes.
Do the following task:
- Write down the translation of the text into Russian.
Специальность «Автоматизация и управление»
Алматинский университет энергетики и связи
Образовательные программы (специализации) в рамках специальности:
- автоматизация и информатизация в системах управления (по отраслям и областям применения);
- автоматизация технологических процессов и производств.
Выпускник обладает знаниями и навыками, необходимыми для работы, связанной с:
- монтажом, наладкой, эксплуатацией автоматических, автоматизированных и информационных систем, средств передачи данных и информационных потоков, диагностирования, контроля и управления, а также их техническим, информационным, математическим и программным обеспечением;
- внедрением новейших компьютерных технологий в сфере производства;
- разработкой и внедрением оптимальных технологий изготовления и эксплуатации технических средств автоматизации и информатизации;
- организацией и эффективным проведением производственного контроля технологических процессов и качества готовой продукции;
- эффективным использованием материалов, оборудования, алгоритмов и программ выбора и расчетов параметров технологических процессов;
- осуществлением метрологической поверки основных средств измерения показателей качества выпускаемой продукции;
- стандартизацией и сертификацией технических средств автоматизации и оборудования при их изготовлении и ремонте.
Do the following task:
- Translate into English in the written form.
Linear versus Nonlinear Control Systems
by B. Kuo & F. Golnaraghi
This classification is made according to the methods of analysis and design. Strictly speaking, linear systems do not exist in practice, because all physical systems are nonlinear to some extent. Linear feedback control systems are idealized models fabricated by the analyst purely for the simplicity of analysis and design. When the magnitudes of signals in a control system are limited to ranges in which system components exhibit linear characteristics (i.e., the principle of superposition applies), the system is essentially linear. But when the magnitudes of signals are extended beyond the range of the linear operation, depending on the severity of the nonlinearity, the system should no longer be considered linear. For instance, amplifiers used in control systems often exhibit a saturation effect when their input signals become large; the magnetic field of a motor usually has saturation properties. Other common nonlinear effects found in control systems are the backlash or dead play between coupled gear members, nonlinear spring characteristics, nonlinear friction force or torque between moving members, and so on. Quite often, nonlinear characteristics are intentionally introduced in a control system to improve its performance or provide more effective control. For instance, to achieve minimum-time control, an on-off (bang-bang or relay) type controller is used in many missile or spacecraft control systems. Typically in these systems, jets are mounted on the sides of the vehicle to provide reaction torque for attitude control. These jets are often controlled in a full-on or full-off fashion, so a fixed amount of air is applied from a given jet for a certain time period to control the attitude of the space vehicle.
For linear systems, a wealth of analytical and graphical techniques is available for design and analysis purposes. Nonlinear systems, on the other hand, are usually difficult to treat mathematically, and there are no general methods available for solving a wide class of nonlinear systems. It is practical to first design the controller based on the linear-system model by neglecting the nonlinearities of the system. The designed controller is then applied to the nonlinear system model for evaluation or redesign by computer simulation.
Kuo, B., Golnaraghi, F. Automatic Control Systems. – 9th Ed. – Wiley, 2010. – 944 p. (P. 11-12).
Do the following tasks:
- Read and translate the text.
- Write down the summary to the text.
Principles of Automatic Emergency Control
by V. A. Venikov
The emergency control consists of individual (self-contained) devices. It should be remembered, however, that all those devices respond to the parameters of a single electro-mechanical transient process evolving in the system and control it. The devices, therefore, become interrelated through the controlled process. We may therefore consider the emergency control as an integrated system, though certain of its apparatus perform individually. In its progress, the emergency control technology tends to overcome this disintegration of apparatus and become integrated in all respects.
With the emergency control schemes considered as an integrated system, we may say that its main purpose during disturbances of the normal operating conditions is to keep those conditions within the permissible range or get them back into the range. Comparing it with other control systems; we may draw a parallel with the modern systems of optimal control which control the motion along certain paths subject to the movement speed and energy change. The processes in power systems are rapid, and to obtain the desired results the control has to use all of its utmost means.
Attempts to optimally control electromechanical transients in power systems have revealed a specific feature of a power system. In most cases the effect caused on it by the emergency control can be of one sign only. Thus, power plant generators, for instance, can be rapidly switched off only, whereas their reconnection takes far more time, measured in minutes and sometimes in tens of minutes. The same case is with the steam turbines which are quick only in stopping steam admittance, while its readmittance takes much longer time. Such installations make a majority in electrical utilities, whereas the abilities of control actions in either direction (forcing and deforcing generators, for instance) at equal or close speeds are scarce exceptions, though fairly useful.
At the same time all methods of optimal control theory use, as a rule, alternating actions of both signs. Hence, the application of optimal control theory to the emergency control produces as yet fairly modest results. Basic concepts and techniques in this field most often employ conventional methods of analyzing electromechanical transients in power systems, i.e. stability studies and the investigation of measures to improve the stability.
The study of emergency control automatic equipment falls into several closely interrelated problems which involve the analysis of contingencies in power systems of diverse configurations, study of methods to control electromechanical transients that can be utilized at power stations and networks of different types, and also familiarization with the methods of detecting emergency situations and aids for the containment for emergencies under such circumstances. In parallel with optimal control theory the latter operation is known as search for control strategy, the control being any action of the emergency control on a power system.
Problems of the emergency control theory are concerned with the study of stability or form part of it. However, the emergency control equipment is called upon not only to assess the stability level of a given real operating condition or conditions taken as a whole, but also to reveal measures providing the required value of this level (or a maximally possible level, if the required value cannot be achieved).
Lately many stability studies have been done with reference to, the design of emergency control (structure and settings) with a view of providing control over the process.
Generally calculations of steady-state, and transient stability are carried out for substantially simplified models in which system parts are substituted by their electric, magnetic, and mechanic equivalents. This simplification is used because the process flow can be clearly traced, a method of a process control can be chosen, and emergency control automatic facilities can be properly arranged only in a model of simple configuration.
Venikov, V. A. Electric Power Systems: Automatic Power Systems Control /translated from Russian by Y. M. Matskovsky. – Moscow: MIR Publishers, 1982. – 445 p. (Pp. 362-364).
Do the following task:
- Write a resume to the text.
Сети следующего поколения
К. А. Тубекбаева
Сети следующего поколения (NGN – Next Generation Network) представляют собой новую концепцию сети, комбинирующую в себе голосовые функции, качество обслуживания (QoS) и коммутируемые сети с преимуществами и эффективностью пакетной коммутации.
В структуре NGN присутствует несколько элементов, представляющих собой отдельные устройства или произвольные комбинации в интегрированном устройстве. Наиболее важными элементами сети NGN являются:
1) Медиа-шлюз (MG) терминирует голосовые вызовы из телефонной сети, сжимает и пакетирует голос, передает сжатые голосовые пакеты в сеть IP, а также проводит обратную операцию для голосовых вызовов из сети IP. В случае вызовов ISDN/POTS передает данные сигнализации контроллеру меди-шлюза или же преобразование сигнализации в сообщения H.323 производится в самом шлюзе.
2) Наряду с вышеописанным медиа-шлюз может также включать функциональность для удаленного доступа, маршрутизации, виртуальных частных сетей, фильтрования трафика TCP/IP и т.п.
3) Шлюз сигнализации (SG) служит для преобразования сигнализации и обеспечивает ее прозрачную передачу между коммутируемой и пакетной сетью. Он терминирует сигнализацию и передает сообщения через сеть IP контроллеру медиа-шлюза или другим шлюзам сигнализации.
4) Контроллер меда-шлюза (MGC) выполняет регистрацию и управляет пропускной способностью медиа-шлюза. Через медиа-шлюз обменивается сообщениями с телефонной станцией.
Тубекбаева, К. А. Сети следующего поколения // Энергетика, телекоммуникации и высшее образование в современных условиях: Труды 5-ой Международной научно-технической конференции (г. Алматы, 21-22 сентября 2006 г.). – Алматы, 2006. – С. 379-382. (С. 379).
Do the following task:
- Translate into English in the written form.
Список литературы
1. Automatic Control Systems. – 9th Ed. – Wiley, 2010. -944 p.
2. Modern Control Engineering. -4th Ed. – New Jersey: Prentice Hall, 2002. – 964 p.
3. Koenig D. Practical Control Engineering: Guide for Engineers, Managers and Practitioners. McGraw- Hill, 2009. – 538 p.
4. West M. Learning to Read a Foreign Language and Other Essays on Language Teaching. – London, 1990.
5. The Oxford Russian Dictionary, 2010.
6. Фоломкина С.К. Обучение чтению на иностранном языке в неязыковом вузе. – М.: «Высшая школа». 1987.
7. Бастриков А.В./Бастрикова Е.М. Реферирование научного текста. Казанский Государственный Университет, Казань, 2005.
8. Новицкая Т.М., Кучин Н.Д. Практическая грамматика английского языка. – М.: Высшая школа, 1979.
9. Евменов В.П. Интеллектуальные системы управления: Учебное пособие. – М.: Книжный дом «ЛИБРОКОМ», 2009. – 309 с.
10. Соснин О.М. Основы автоматизации технологических процессов и производств: Учебное пособие для студентов ВУЗов. - : Академия, 2007. – 240 с.
11. Иванов Ю.И., Югай В.Я. Интерфейсы средств автоматизации: Учебное пособие. – Таганрог: Изд-во ТРТУ, 2005. -252 с.
12. www.google.
Содержание
Предисловие 3
Unit one 4
Unit two 10
Unit three 18
Unit four 27
Unit five 34
Unit six 41
Unit seven 49
Grammar reference 58
Supplementary texts 66
Список литературы 87