Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра компьютерных технологий
СИСТЕМНЫЙ АНАЛИЗ
Конспект
лекций для студентов специальности
5В070400 - Вычислительная техника и программное обеспечение
Алматы 2013
СОСТАВИТЕЛИ: А.Р. Оразаева, Г.С. Ыбытаева. Системный анализ. Конспект лекций для студентов специальности 5В070400 - Вычислительная техника и программное обеспечение. – Алматы: АУЭС, 2013. - 68 с.
Конспект лекций разработан в соответствии с требованиями квалификационной характеристики специалиста, Государственных стандартов, типовой программы курса. Они составлены с учетом активизации процесса изучения основ курса и являются подготовкой к проведению лабораторных работ.
Конспект лекций предназначены для студентов специальности 5В070400 - Вычислительная техника и программное обеспечение.
Библиография – 4.
Рецензент: доцент Куликов А.А.
Печатается по дополнительному плану издания некоммерческого акционерного общества «Алматинский университет энергетики и связи» на 2013 г.
© НАО «Алматинский университет энергетики и связи», 2013 г.
Содержание
|
1 Лекция №1. Введение. Системный анализ как методология решения проблем. |
4 |
|
2 Лекция №2. Понятие системы. Модели систем. |
8 |
|
3 Лекция №3. Математическое описание систем. |
13 |
|
4 Лекция №4. Основные системно-теоретические задачи. |
20 |
|
5 Лекция №5. Основные положения теории систем. |
24 |
|
6 Лекция №6. Сигналы в системах. |
29 |
|
7 Лекция №7. Энтропия и количество информации. |
33 |
|
8 Лекция №8. Языки описания выбора. |
35 |
|
9 Лекция №9. Выбор в условиях статической неопределенности. |
39 |
|
10 Лекция №10. Групповой выбор. Декомпозиция систем. |
43 |
|
11 Лекция №11. Агрегирование, эмерджентность, внутренняя целостность системы. |
49 |
|
12 Лекция №12. Методология решения неструктуризованных проблем. |
54 |
|
13 Лекция №13. Методология решения слабо структуризованных проблем. |
58 |
|
14 Лекция №14. Основы принятия решений при многих критериях. |
63 |
|
15 Лекция №15. Современные тенденции в области системного анализа. |
68 |
|
Список литературы |
71 |
1 Лекция №1. Введение. Системный анализ как методология решения проблем
1.1 Системный анализ в структуре современных системных исследований
В настоящее время в развитии наук наблюдаются 2 противоположные тенденции:
1) Дифференциация, когда при увеличении знаний и появлении новых проблем из более общих наук выделяются частные науки.
2) Интеграция, когда более общие науки возникают в результате обобщения и развития тех или иных разделов смежных наук и их методов.
В основе процессов дифференциации и интеграции лежат 2 фундаментальных принципа материалистической диалектики:
1) принцип качественного своеобразия различных форм движения материи, необходимость изучать отдельные аспекты материального мира;
2) принцип материального единства мира, необходимость получать целостное представление о каких-либо объектах материального мира.
В результате проявления интегративной тенденции появилась новая область научной деятельности: системные исследования, которые направлены на решение комплексных крупномасштабных проблем большой сложности.
Системный анализ представляет собой новое научное направление интеграционного типа, которое разрабатывает системную методологию принятия решений и занимает определенное место в структуре современных системных исследований.
1) системные исследования;
2) системный подход;
3) конкретные системные концепции;
4) общая теория систем (метатеория по отношению к конкретным системам);
5) диалектический материализм (философские проблемы системных исследований);
6) научные системные теории и модели (учение о биосфере земли; теория вероятностей; кибернетика и др.);
7) технические системные теории и разработки — исследование операций; системотехника, системный анализ и др;
8) частные теории системы.
Рисунок 1.1 - Системный анализ
1.2 Классификация проблем по степени их структуризации
Согласно классификации, предложенной Саймоном и Ньюэллом, все множество проблем в зависимости от глубины их познания подразделяется на 3 класса:
1) хорошо структурированные или количественно выраженные проблемы, которые поддаются математической формализации и решаются с использованием формальных методов;
2) неструктуризованные или качественно выраженные проблемы, которые описываются лишь на содержательном уровне и решаются с использованием неформальных процедур;
3) слабоструктуризованные (смешанные проблемы), которые содержат количественные и качественные проблемы, причем качественные, малоизвестные и неопределенные стороны проблем имеют тенденцию доминирования.
Эти проблемы решаются на основе комплексного использования формальных методов и неформальных процедур. За основу классификации взята степень структуризации проблем, причем структура всей проблемы определяется 5-ю логическими элементами:
1) цель или ряд целей;
2) альтернативы достижения целей;
3) ресурсы, расходуемые на реализацию альтернатив;
4) модель или ряд моделей;
5) критерий выбора предпочтительной альтернативы.
Степень структуризации проблемы определяется тем, насколько хорошо выделены и осознаны указанные элементы проблем.
Характерно, что одна и та же проблема может занимать различное место в таблице классификации. В процессе все более глубокого изучения, осмысления и анализа проблема может превратиться из неструктуризованной в слабоструктуризованную, а затем из слабоструктуризованной в структуризованную. При этом выбор метода решения проблемы определяется ее местом в таблице классификаций.
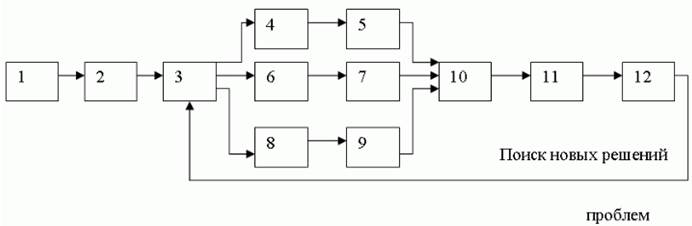
1) выявление проблемы;
2) постановка проблемы;
3) решение проблемы;
4) неструктуризованная проблема (может решаться с помощью эвристических методов);
5) методы экспертных оценок;
6) слабо структуризованная проблема;
7) методы системного анализа;
8) хорошо структуризованная проблема;
9) методы исследования операций;
10) принятие решения;
11) реализация решения;
12) оценка решения.
Рисунок 1.2 - Таблица классификаций
1.3 Основные этапы и методы системного анализа
Системный анализ предусматривает разработку системного метода решения проблемы, т.е. логически и процедурно организованную последовательность операций, направленных на выбор предпочтительной альтернативы решения. Системный анализ реализуется практически в несколько этапов, однако в отношении их числа и содержании пока еще нет единства.
Приведем таблицу, которая иллюстрирует основные закономерности системного анализ трех различных научных школ.
|
Основные этапы системного анализа |
||
|
По
Ф. Хансману |
По
Д. Джеферсу |
По
В. В. Дружинину |
|
1. Общая ориентация в проблеме (эскизная постановка проблемы) 2. Выбор соответствующих критериев 3. Формирование альтернативных |
1. Выбор проблемы 2. Постановка задачи и ограничение степени ее сложности 3. Установление иерархии, целей и задач 4. Выбор путей решения задачи |
1. Выделение проблемы 2. Описание 3. Установление критериев 4. Идеализация (предельное упрощение, попытка построения модели) |
|
решений 4. Выделение существенных факторов внешней среды 5. Построение модели и ее проверка 6. Оценка и прогноз параметров модели 7. Получение информации на основе модели 8. Подготовка к выбору решения 9. Реализация и контроль |
5. Моделирование 6. Оценка возможных стратегий 7. Внедрение результатов |
5. Декомпозиция (разбивка по частям, нахождения решений по частям) 6. Композиция («склеивание» частей вместе) 7. Принятие наилучшего решения |
В научный инструментарий системного анализа входят следующие методы:
- метод сценариев (пытаются дать описание системы);
- метод дерева целей (есть конечная цель, она разбивается на подцели, подцели на проблемы и т.д., т.е. декомпозиция до задач, которые мы можем решить);
- метод морфологического анализа (для изобретений);
- методы экспертных оценок;
- вероятностно-статистические методы (теория массового обслуживания, игр и т.д.);
- кибернетические методы (объект в виде черного ящика);
- методы исследования операции (скалярная opt);
- методы векторной оптимизации;
- методы имитационного моделирования (например, GPSS);
- сетевые методы;
- матричные методы;
- методы экономического анализа и др.
В процессе системного анализа на разных его уровнях применяются различные методы, в которых эвристика сочетается с формализмом. Системный анализ выполняет роль методологического каркаса, объединяющего все необходимые методы, исследовательские приемы, мероприятия и ресурсы для решения проблем.
Основная литература: [1] – 8-12, 18-23 с.
Контрольные вопросы.
1. Принципы решения хорошо структуризованных проблем.
2. Принципы решения слабоструктуризованных проблем.
3. Система предпочтений ЛПР и системный подход к процессу принятия решений.
2 Лекция №2. Понятие системы. Модели систем
2.1 Понятие системы
Первое определение системы
Начнем с рассмотрения искусственных, т.е. создаваемых человеком систем. Как уже отмечалось, любая деятельность человека носит целенаправленный характер. Наиболее четко это прослеживается на примере трудовой деятельности. Цели, которые ставит перед собой человек, редко достижимы только за счет его собственных возможностей или внешних средств, имеющихся у него в данный момент. Такое стечение обстоятельств называется «проблемной ситуацией». Проблемность существующего положения осознается в несколько «стадий»: от смутного ощущения что «что-то не так», к осознанию потребности, затем к выявлению проблемы и, наконец, к формулировке цели.
Приведем несколько упрощенных примеров систем, предназначенных для реализации определенных целей.
|
№ |
Цель |
Система |
|
1 |
В произвольный момент указать время |
Часы |
|
2 |
Обеспечить выпечку хлеба в заданном ассортименте для большого количества людей |
Пекарня |
|
3 |
Передать зрительную и звуковую информацию на большое расстояние практически мгновенно |
Телевидение |
|
4 |
Обеспечить перемещение людей в городе |
Городской транспорт |
Отметим, что далеко не просто сформулировать цели так, чтобы имелось действительно очевидное соответствие между целями и системами. Например, только слова «практически мгновенно» в примере 3 отличает цель телевидения от цели кино или пересылки видеокассет. В то же время между целью (абстрактной и конечной моделью) и реальной системой нет и не может быть однозначного соответствия: для достижения заданной цели могут быть избраны разные средства — системы. С другой стороны, заданную реальную систему можно использовать и для других целей, прямо не предусмотренных при ее создании.
В инженерной практике момент формулирования цели — один из важнейших этапов создания систем. Обычно цели уточняются итеративно, с многократными изменениями и дополнениями.
2.2 Модели систем
Модель состава системы
Части системы, состоящие более чем из одного элемента, называют подсистемами. При необходимости можно ввести обозначения или термины, указывающие на иерархию частей. В результате получается модель состава системы, описывающая из каких подсистем и элементов она состоит (см. рисунок 3.2).
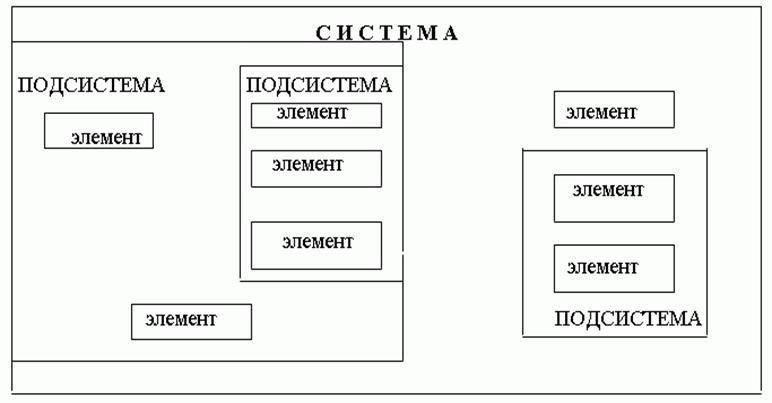
Рисунок 2.1 - Модель состава системы
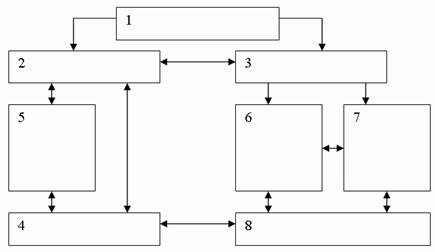
Второе определение системы. Структурная схема системы
Объединяя все изложенное в предыдущих параграфах, можно сформулировать второе определение системы: система есть совокупность взаимосвязанных элементов, обособленная от среды и взаимодействующая с ней как целое.
Рассмотрим систему «синхронизируемые часы». Считаем, что в состав такой системы входят три элемента: датчик, индикатор и эталон времени. Структура часов определяется следующими отношениями между парами элементов.
|
Пара элементов |
Связь между ними |
|
Датчик и индикатор |
Однозначное соответствие |
|
Эталон и датчик |
Приблизительное соответствие |
|
Индикатор и эталон |
Периодическое сравнение и устранение расхождения |
Описанные связи указаны стрелками 1-3 между элементами на рисунке 2.2. Вход 4 изображает поступление энергии извне, вход 5 соответствует регулировке индикатора, вход 6 — показанию часов.
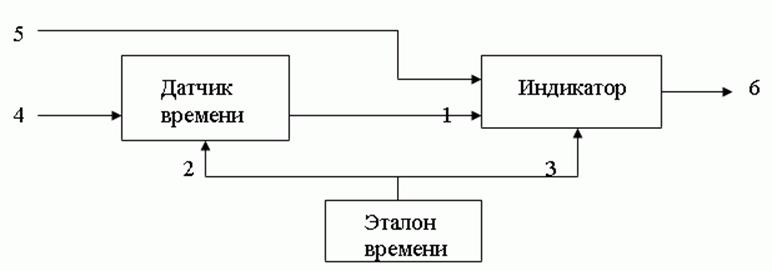
Рисунок 2.2 — Структурная схема системы синхронизируемые часы
Общие сведения о методологии IDEF0
Создание современных информационных систем представляет собой сложнейшую задачу, решение которой требует применения специальных методик и инструментов. Неудивительно, что в последнее время среди системных аналитиков и разработчиков значительно вырос интерес к CASE-технологиям и инструментальным CASE-средствам, позволяющим максимально систематизировать и автоматизировать все этапы разработки программного обеспечения: СASE-средство верхнего уровня Bpwin, поддерживающее методологии IDEFO. Erwin — case средство, позволяющее осуществить прямое и обратное проектирование базы данных, поддерживает методологию IDEF1X. Сase-средство BPwin значительно облегчают задачу создания информационной системы, позволяя осуществить декомпозицию сложной системы на более простые с тем, чтобы каждая из них могла проектироваться независимо, и для понимания любого уровня проектирования достаточно было оперировать с информацией о немногих ее частях.
Стандарт IDEF0 базируется на трех основных принципах:
1) принцип функциональной декомпозиции — любая функция может быть разбита на более простые функции;
2) принцип ограничения сложности — количество блоков от 2 до 8 (в BPwin) условие удобочитаемости;
3) принцип контекста — моделирование делового процесса начинается с построения контекстной диаграммы, на которой отображается только один блок — главная функция моделирующей системы.
Иерархия диаграмм
Построение SADT-модели начинается с представления всей системы в виде простейшей компоненты — одного блока и дуг, изображающих интерфейсы с функциями вне системы. Поскольку единственный блок представляет всю систему как единое целое, имя, указанное в блоке, является общим. Это верно и для интерфейсных дуг — они также представляют полный набор внешних интерфейсов системы в целом. Затем блок, который представляет систему в качестве единого модуля, детализируется на другой диаграмме с помощью нескольких блоков, соединенных интерфейсными дугами. Эти блоки представляют основные подфункции исходной функции. Данная декомпозиция выявляет полный набор подфункций, каждая из которых представлена как блок, границы которого определены интерфейсными дугами. Каждая из этих подфункций может быть декомпозирована подобным образом для более детального представления.
Как уже отметили, главный процесс — это создать курсовой проект. На входе этого процесса — исходные данные по заданию. В качестве управляющего воздействия выступает методическое пособие, ГОСТы, необходимые требования.
Механизм осуществления создания курсового проекта — программное обеспечение, с помощью которого представлен материал и разработан проект и исполнитель проекта (студент).
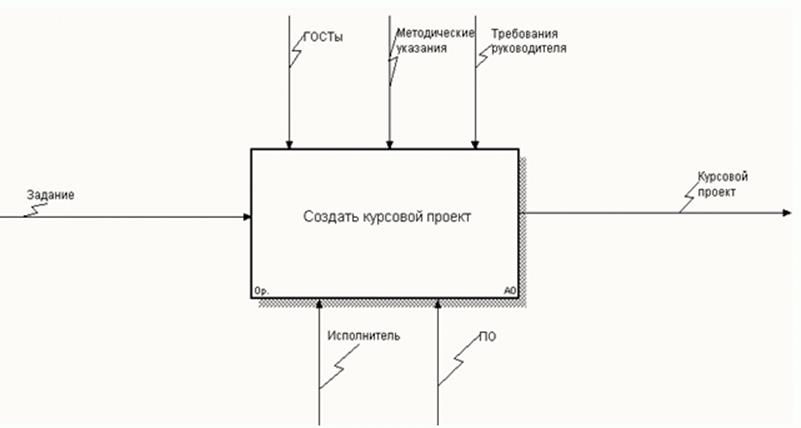
Рисунок 2.3 - Блок «Создать курсовой проект»
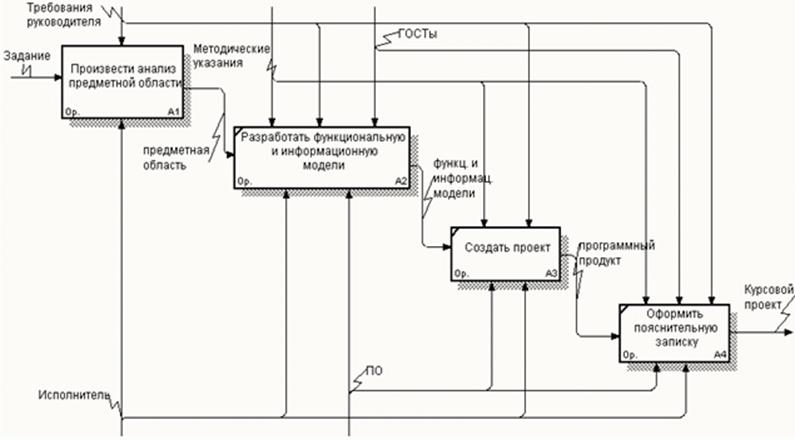
Рисунок 2.4 - Блок «Создать курсовой проект»
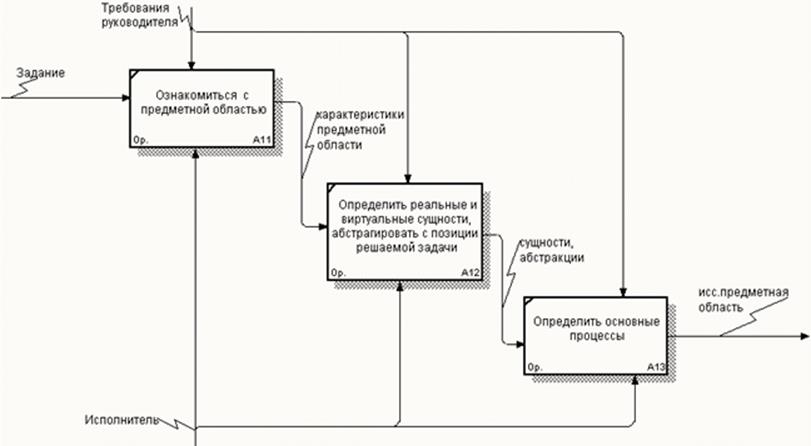
Рисунок 2.5 - Декомпозиция блока «Произвести анализ предметной области»
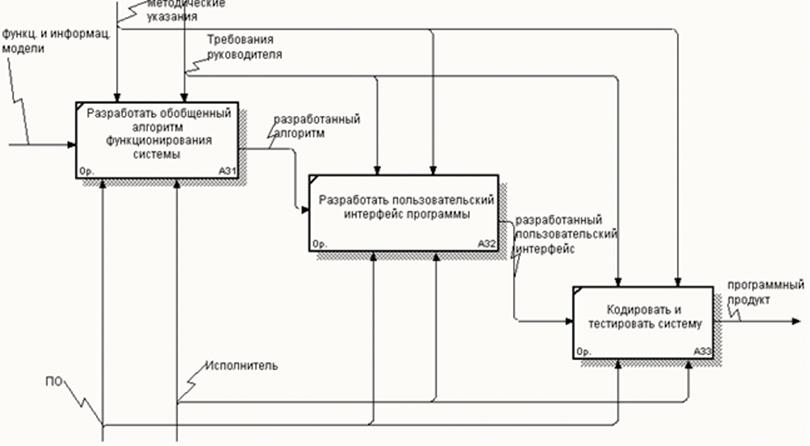
Рисунок 2.6 - Декомпозиция блока «Создать проект»
Основная литература: [1] – 101-111 с.
Контрольные вопросы.
1. Понятие модели системы.
2. Способы описания систем.
3. Модель «черного ящика».
4. Динамические модели систем.
5. Стационарные системы.
3 Лекция №3. Математическое описание систем
3.1 Внутреннее описание
Со времен Ньютона динамические процессы описывали на языке дифференциальных (или разностных) уравнений, т.е. в терминах некоторых естественно выбранных переменных таких, как положение, температура, скорость и т.д. В общем виде такое описание может быть представлено как:
dz/dt = f[z(t), x(t), t], z(0) = z0, y(t) = h[z(t), x(t), t],
где z(t) — n-мерный вектор, компоненты которого описывают состояние системы в момент времени t;
y(t) — p-мерный вектор наблюдаемых выходов системы;
x(t) — m-мерный вектор входов системы;
z0 — начальное состояние системы.
В дискретном времени динамика системы может быть описана с помощью разностных соотношений; z(k+1) = F[z(k), x(k), k], z(0) = z0, y(k) = H[z(k), x(k), k].
Наиболее важным свойством такого описания является то, что оно дает нам представление о поведении системы в некоторой локальной окрестности текущего состояния. При этом неявно предполагается, что локальная информация может быть каким-то образом «собрана воедино», что позволит понять глобальное (во времени или пространстве) поведение системы. Такой подход оказался достаточно обоснованным для анализа многих физических и технических задач. Простые примеры локального описания можно найти в элементарной физике. Известно, например, что колебательное движение груза (маятника) единичной массы, подвешенного на нерастяжимой и невесомой нити единичной длины, описывается уравнением (3.1):
d2z/dt2 + a*dz/dt + sin(z) = x(t), (3.1)
где а — коэффициент трения;
x(t) — внешняя сила, действующая на груз;
z(t) — отклонение груза от положения равновесия.
Таким образом, уравнение (3.1) описывает мгновенное изменение положения и скорости маятника как функцию его текущего состояния (положения) и скорости, т.е. мы имеем локальное описание в координатах «положение-скорость», что характерно для всех описаний динамических процессов на языке дифференциальных или разностных уравнений.
Интересно отметить, что математические описания такого типа начали использовать только со времен Ньютона. До этого при описания физических процессов придерживались точки зрения, высказанной Аристотелем, согласно которой важность целого превыше важности его составляющих. Другими словами, значимость элементов, составляющих некоторое множество, трактовалась через значимость самого множества как целого. Однако возможность использования такого подхода в случае менее изученных объектов, в особенности систем социально-экономической природы, вовсе не очевидна.
3.2 Внешнее описание
Тип математического описания, с которым чаще всего приходится иметь дело ученому-экспериментатору, — это связь «вход-выход». Во многих отношениях такое описание диаметрально противоположно частному, локальному описанию, поскольку оно не содержит деталей и единственным доступным источником информации является закономерность (отображение), связывающая выходы системы с ее входами. При этом ничего не известно о внутреннем механизме преобразования входов в выходы. По этой причине связь «вход-выход» часто называют «внешним описанием» системы, в отличие от «внутреннего» (или локального) описания (см. рисунок 3.1).
Внутреннее и внешнее описания позволяют рассматривать систему как устройство, образующее входы и выходы в соответствии с правилами, определенными внутренним описанием. Иными словами, система является информационным процессом в некотором обобщенном смысле.

Рисунок 3.1 — Внешнее и внутреннее описание системы
Очевидно, что внутреннее описание говорит нам гораздо больше о способе действия системы, поскольку каждое такое описание порождает внешнее описание. Тем не менее построение модели системы часто связано с решением диаметрально противоположного вопроса: может ли внутренняя модель «объяснить» каждое внешнее описание? Ответом на этот вопрос, по существу, является решение так называемой «задачи реализации», которая представляет собой один из важнейших аспектов теории систем.
Наиболее «сырая» возможная ситуация, при которой возникает необходимость в описании типа «вход-выход», имеет место, когда мы располагаем всего лишь таблицей элементов (часто чисел), характеризующих реакцию (выходы) системы на различные внешние воздействия (входы). В этом случае внешнее описание системы эквивалентно отображению:
f: X → Y,
где через X обозначено множество возможных входов, а через Y множество возможных выходов системы.
Как отмечалось во многих задачах (в частности, психологии, экономики и общественных наук), множества X и Y представляют собой конечный набор элементов, связь между которыми описывается с помощью функции f.
Пример.
Предположим, что эксперт, изучающий «черный» ящик, не имеет ни малейшего представления ни о его природе, ни о его содержимом. Вместе с тем, эксперт может производить над ним некоторые действия (входы) и наблюдать их результаты (выходы). Предположим для определенности, что элементами множества X и множества Y являются показания различных измерительных приборов. Тогда описание эксперимента типа «вход-выход» могло бы быть таким.
|
Время |
Вход |
Выход |
|
10:05 |
Эксперт не производит никаких действий |
Прибор издает звуковой сигнал частотой 240 Гц |
|
10:06 |
Эксперт нажал на кнопку «A» |
Частота сигнала возросла до 480 Гц |
|
10:07 |
Эксперт случайно нажал на кнопку «B» |
Ящик нагрелся на 20°C и начал вибрировать |
Этот довольно тривиальный пример показывает, что входы и выходы системы являются функциями времени, т.е. нельзя один и тот же эксперимент провести дважды! Единственное, что можно сделать, — это провести следующий эксперимент, который хотя и незначительно, но будет отличаться от предыдущего.
3.3 Описание систем с конечным числом состояний
В тех случаях, когда предположение конечномерности пространства состояний заменяется предположением о конечности числа его элементов, мы имеем дело с классом систем, анализ которых возможен с помощью чисто алгебраических методов. Важность такой замены трудно переоценить, поскольку совокупность систем с конечным числом состояний включает все последовательные цифровые вычислительные машины.
Математическое описание системы с конечным числом состояний включает:
- множество допустимых входов — X;
- множество допустимых выходов — Y;
- множество состояний — Z;
- функцию перехода — : Z X Z;
- функцию выхода — : Z X Y;
Пример.
Пусть система состоит из симметрий вращения правильного треугольника. Тогда некоторые возможные конечные пространства состояний могут иметь вид:

Рисунок 3.2 — Конечные пространства
Для описания системы достаточно любого из этих пространств состояний, однако только некоторые из них удобнее использовать для вычислений результата воздействия на состояние системы. Следовательно, пространство состояний вовсе не обязательно должно быть непосредственно привязано к реальному физическому процессу. Это чисто математическая условность, введенная для упрощения проблемы определения реакции системы на заданные внешние воздействия.
Пусть имеются два возможных отображения σ1 и σ2, переводящие одно состояние системы в другое и соответствующие повороту треугольника вокруг центра тяжести на 120 и 240 градусов соответственно. Результаты применения этих отображений к различным пространствам состояний можно представить в виде таблицы.
|
|
zi |
σ1(zi) |
σ2(zi) |
|
z1 → |
[a, b, c] |
[c, a, b] |
[b, c, a] |
|
z2 → |
0 |
2π/3 |
4π/3 |
|
z3 → |
0 |
1 |
2 |
Пространство z1, на первый взгляд, излишне сложное, оказывается вполне пригодным для более сложных систем, например, в случае симметрий более общего вида, где могут присутствовать отображения типа σ. В то же время пространства z2 и z3 не допускают очевидных обобщений на более сложные случаи с сохранением простоты вычислений.
Способ выбора конкретного пространства состояний системы называется ее координатизацией. При этом важно установить, всегда ли существует координатизация, которую можно считать «хорошей» с точки зрения описания поведения системы. Ключевым моментом проблемы координатизации является алгебраическая структура модели системы в пространстве состояний.
Аксиома 1. Система является частью некоторой вселенной и развивается только постольку, поскольку она преследует некоторую цель.
Аксиома 2. Для достижения цели система воспринимает информацию I из окружающей среды и использует эту информацию для перестройки собственной организации (внутренней структуры) A, в результате которой увеличилась бы негэнтропия n, и для оказания воздействия L на окружающую среду.
Аксиома 3. (Принцип эволюции). Структурная энтропия Е системы определяется соотношением dE = dI/n и является неубывающей функцией эволюции.
Аксиома 4. Вселенная не может наблюдать собственную эволюцию. В силу этих аксиом уравнение состояния системы имеет вид:
f(He, Hi, ν) = 0,
где
1) He — внешняя энтропия системы по отношению к фиксированному наблюдателю R;
2) Hi — внутренняя энтропия системы по отношению к наблюдателю R;
3) ν — цель системы с точки зрения наблюдателя R.
При таком подходе к описанию системы наблюдатель (или лицо, принимающее решение) играет особую роль, причем особый упор делается на кинематический подход, основанный на аналогах преобразования Лоренца для двух наблюдателей R и R*.
Анализируя уравнение состояния, можно заметить, что знание функции f позволяет вычислить структурную энтропию Е c помощью соотношения, описывающего обмен информацией:
dI = α*dHe + β*dHi.
Пример 1. Одномерная динамика
Рассмотрим простую динамическую систему x(t) = u(t),
где x(t) и u(t) — скалярные функции.
Поскольку внешняя энтропия He обладает теми же свойствами, что и время t, произведем замену: t He. Более того, имеет смысл отождествить внутреннее состояние x с внутренней энтропией Hi. Тогда динамика системы эквивалентным образом описывается уравнением:
dHi - u(He)*dHe = 0.
Попытаемся теперь построить функцию состояния f в соответствии с приведенным выше ее определением. Из равнения состояния следует, что
df/dHe*dHe + df/dHi*dHi + df/dν*dν = 0.
Не имея дополнительной информации о системе, можно предположить, что ее цель не меняется.Интегрируя уравнение динамики, получаем
f(Hi, He, ν) = H - ∫u(s)ds = 0,
где He0 — внешняя энтропия в начальный момент времени t0.
Проведенный анализ показывает, что система x = u не определена с точки зрения обмена информацией с окружающей средой. Более того, такой обмен вообще не имеет места.
Пример 2. Стационарная динамика
Рассмотрим систему, описываемую уравнением
x(t) = Ψ[X(t)],
которое способом, аналогичным рассмотренному в примере А, можно привести к виду:
dHi - Ψ(Hi)dHe = 0.
Чтобы получить уравнение состояния, следует записать
df/dHi = 1 * f = Hi + k(He),
df/dHe = Ψ(Hi) * Ψ(Hi) = f(He).
Однако эти уравнения противоречивы, и уравнение динамики следует, рассматривать не как уравнение состояния, а как уравнение обмена информацией:
dI = dHi - Ψ(Hi)dHe = 0.
Следовательно, система не обменивается информацией с окружающей средой и развивается с постоянной структурной энтропией, что находится в соответствии с автономным характером системы.
В целом, можно сказать, что «энтропийный» подход к анализу систем основан на трактовке системы, как некоторого единого целого. Отсюда следует, что понять сущность системы можно, лишь изучая ее взаимодействие с окружающей средой, т.е. с некой «вселенной». Взгляд на систему как на единое целое можно развить, введя понятие «связь». Весь комплекс связей и их характеристик приводит к понятию «структура» и «сложность» системы.
Основная литература: [1] – 125-140 с.
Контрольные вопросы.
1. Сущность имитационного моделирования.
2. Композиция дискретных систем.
3. Содержательное описание сложной системы.
4 Лекция №4. Основные системно-теоретические задачи
4.1 Управляемы и неуправляемые динамические системы
Первые шаги, положившие начало развитию системного анализа, были сделаны античными астрономами. Не обладая средствами, с помощью которых можно было бы влиять на динамику изучаемых систем, они были вынуждены ограничить свой анализ лишь наблюдением, классификацией и возможно синтезом. Другими словами, их роль была пассивной: наблюдать. В аналогичном положении находятся современные исследователи, работающие, например, в области астрофизики. Они пока еще также вынуждены ограничиться только наблюдениями каких-то процессов, не имея возможности ими управлять.
В то же время современный исследователь призван играть активную роль в развитии наблюдаемого процесса, поскольку именно он генерирует соответствующие внешние воздействия, гарантирующие удовлетворительное поведение системы. Разумеется, при таком подходе активного вмешательства возникает множество проблем психологического и морального характера. Подобное разделение на активную и пассивную или управляемую и неуправляемую динамику позволяет наиболее наглядно выявить отличие классического и современного взглядов на системный анализ.
«Кибернетический» или управленческий подход неизбежно приводит к изменению входов системы в зависимости от наблюдаемых ее выходов. При этом преследуется цель - превратить некоторую первоначально независимую переменную в частично зависимую так, чтобы поведение системы в определенном смысле приближалось к некоторой стандартной (или желаемой) траектории. Такой процесс может оказаться более сложным, если имеется еще и обратное преобразование. Подобная ситуация типична для имитационного моделирования развивающихся систем. Обратное преобразование заключается в изменении и перестройке поведения системы по измеряемому выходу и является основой кибернетического регулирования и управления.
Идентификация
Начальный этап построения математической модели данной системы состоит в идентификации существенных переменных и их взаимосвязей. В зависимости от конкретного типа выбранного математического описания идентификация может включать: определение размерности пространства состояний, описание внутренней динамики системы и содержательных связей между множествами объектов, распределение вероятностей для случайных воздействий. Поскольку идентификация зависит от типа математического описания, которое в свою очередь зависит от того, насколько удачно проведена идентификация, то процесс построения модели является итерационным: сначала выбирают математическое описание, которое затем модифицируют в зависимости от результатов идентификации, что приводит к новому описанию, и процесс повторяют.
Наиболее глубоко разработанной проблемой идентификации систем является задача построения внутреннего описания линейного отображения «вход-выход» с постоянными коэффициентами. Для простоты изложения предположим, что данная система развивается в дискретном времени с начальным состоянием x0=0, соответствующим начальному моменту времени t0=0. Можно показать, что вход u(t) и выход y(t) системы связаны следующим соотношением:
y(t) = ∑A1-τ*u(τ),
где все матрицы {Ai} имеют размер p×m.
Тогда описание типа «вход-выход» системы определяется последовательностью матриц {A1,A2, ...}. Если внутреннее описание системы, заданное соотношениями
x(t+1) = F[x(t)] + G[u(t)],
y(t) = H[x(t)],согласуется с приведенным выше внешним описанием, то связь между матрицами F, G, H и {Aj} имеет вид:
At = H*Ft-1*G, t = 0, 1, 2, ... (4.1)
Задача реализации для линейных динамических систем состоит в отыскании n×n, n×m, p×m матриц F, G и H соответственно, удовлетворяющих соотношению {4.1}, и таких, что размерность внутреннего пространства состояний n минимальна. Иными словами, задача состоит в построении, по возможности, более компактной модели, согласующейся с наблюдаемыми данными.
Существуют «хорошие» алгоритмы решения задачи реализации, если справедливо следующие предложение: последовательность {Ai} обладает конечномерной реализацией. Для нелинейных отображений «вход-выход» общего вида подобных отработанных алгоритмов не существует, несмотря на попытки решения отдельных классов задач с некоторой линейной или алгебраической структурой.
В отличие от наиболее общих задач идентификации (типа от внешнего описания к внутреннему), так называемые задачи идентификации параметров исследовались более интенсивно. Эти задачи обычно возникают, когда имеется твердая уверенность в правильности определения основной внутренней структуры системы и невыясненными остаются только численные значения некоторых параметров.
Предположим, что динамика системы описывается дифференциальным (или разностным) уравнением:
dx/dt = f(x, u, a),
y(t) = h(x, a),
где а — вектор неизвестных параметров, которые следует определить, основываясь на значении наблюдаемого выхода системы y(t). В некоторых случаях входная функция u(t) выбирается таким образом, чтобы усилить влияние неизвестных параметров. Подчеркнем, что в данной ситуации существенным является предположение, что функции f и h, описывающие структуру системы, известны, хотя относительно их линейности никаких предположений не делается.
Ограничения
Системный анализ, как и политика, — это прежде всего искусство действовать в пределах «возможного». Рассматривая математическую формулировку той или иной задачи, исследователь (или лицо, принимающее решение) должен полностью представлять себе те внутренние и внешние факторы, которые могут ограничить его выбор стратегий управления. Различные обстоятельства, связанные с объемом имеющихся ресурсов, способом, который необходимо удовлетворить имеющейся технологией, наличием и возможностями ЭВМ, людскими ресурсами, бюджетом времени и т.д., резко сужают круг возможностей, доступных исследователю.
Выделим два принципиально различных типа ограничений:
1) внутренние — ограничения, налагаемые структурой самой системы;
2) внешние — ограничения, налагаемые на поведение системы внешними факторами.
Оптимизация
Одна из наиболее злободневных проблем анализа систем, рассматриваемых в социально-экономических задачах, — это проблема выбора критерия, т.е. вопрос о том, каким образом следует сравнивать между собой различные реализации поведения систем. К счастью, динамические процессы, наблюдаемые в физических и биологических системах, часто протекают по вполне определенным законам, которые, как правило, являются следствием различных принципов минимума или законами сохранения. Однако перенос этих законов на объекты социальной природы в лучшем случае носит искусственных характер и, более того, часто просто невозможен. Поскольку цель нашего курса состоит в изучении структуры систем независимо от вопросов оптимизации, можно позволить себе роскошь оставить в стороне проблему выбора критерия. Тем не менее, для того чтобы продемонстрировать значимость этой проблемы, рассмотрим простой пример, иллюстрирующий ситуацию, когда выбор различных критериев приводит к качественно различным стратегиям управления.
Предположим, что динамика системы описывается одномерным линейным дифференциальным уравнением dx/dt = u(t), x(0) = c, где u(t) — вход, или функция управления. Предположим далее, что доступные резервы управления ограничены следующим образом:
|u(t)| ≤ 1 для всех 1 t ≥ 0.
(Подобная ситуация возникает, например, при управлении автомобилем, и тогда функция u(t) есть скорость движения).
Одним из критериев для данного процесса может быть перевод системы из начального состояния с в некоторое заданное состояние, например, x = 0 за минимальное время. Хорошо известно, что решение этой задачи имеет вид:
u(t) = +1, c < 0,
u(t) = -1, c > 0,
т.е. релейное управление является оптимальным. Предположим теперь, что мы стремимся минимизировать квадратичный функционал этого вида. Можно показать, что в этом случае оптимальный закон управления имеет вид u(t) = th(T-t)*x(t), и он может быть реализован в виде обратной связи или синтеза.
Полученные результаты показывают, что изменение критерия качественно меняет характер решения. В первом случае мы имеем экстремальные управления, переключающиеся с одной границы на другую в зависимости от начального состояния. Во втором случае оптимальный закон управления строится по ходу развития самого процесса и не имеет никаких точек разрыва. Важно отметить, что, хотя динамика системы остается неизменной, выбор иного критерия приводит к качественному изменению оптимального управления.
4.2 Стохастические системы
Несмотря на то что основная направленность данного курса лекций такова, что не возникает необходимости в подробном обсуждении вопросов, связанных с неопределенностью, тем не менее следует иметь в виду, что при анализе большинства реальных системных задач практически ничего не известно достоверно. Независимо от выбранного математического описания, неопределенности будут присутствовать в динамике, целях, ограничениях и т.п. При удачном стечении обстоятельств для неопределенных переменных будут известны с определенной достоверностью распределения вероятностей. Однако довольно часто даже распределение вероятностей заранее неизвестны, поэтому возникает адаптивная ситуация. В любом случае нельзя считать анализ законченным без тщательного исследования неопределенностей, присущих выбранной модели.
В дальнейшем будем придерживаться довольно смелого предположения, что всеми неопределенными эффектами можно пренебречь, т.е. будем считать, что передаточные функции, динамика состояний и т.д. известны достоверно. Такое допущение, естественно, должно быть оправдано полученными результатами, что мы и попытаемся продемонстрировать в каждом отдельном случае.
Основная литература: [1] – 140-151 с.
Контрольные вопросы.
1. Модели и виды подобия.
2. Основные понятия физического подобия.
3. Формирование критериев физического подобия.
5 Лекция №5. Основные положения теории систем
5.1 Глобальные свойства системы
В настоящее время существенно увеличилось число проблем, решение которых не может быть получено редукционистскими методами, что, в свою очередь, возродило интерес к изучению и развитию холистских (или глобальных) подходов. В этой связи наша цель состоит в том, чтобы каталогизировать некоторые наиболее перспективные направления, включая вопросы связности, сложности и устойчивости. Для иллюстрации фундаментального различия между локальным и глобальным описанием системы рассмотрим простой пример — математический маятник.
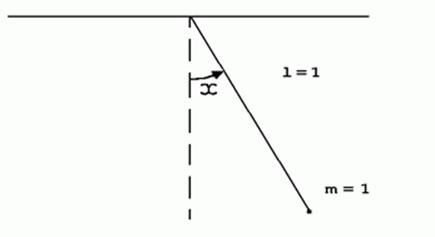
Рисунок 5.1 - Математический маятник
Если отклонение маятника от вертикали обозначим через x(t), то в локальной окрестности любого такого положения можно записать динамические уравнения движения:
d2x/dt2 + sin(x) = 0, x(0) = x0, x(0) = 0,
в безразмерных единицах.
Это уравнение описывает локальное поведение маятника в (бесконечно малой) окрестности положения 2 0x(t). Редукционист попытался бы «склеить» подобные локальные описания для последовательных точек в надежде достичь понимания глобального поведения. Хотя иногда такой подход оказывается успешным, непредвиденные проблемы, возникающие при его использовании, существенно снижают его эффективность.
В случае движения маятника эти глобальные ограничения определяются принципом Гамильтона-Якоби, согласно которому глобальное движение системы соответствует минимуму полной энергии системы. Вводя гамильтониан
Н = Кинетическая энергия + Потенциальная энергия
видим, что движение системы должно быть таким, что гамильтониан
H(x, dx/dt) = (0,5) * (dx/dt)2 + 1 - cos(x)
достигает минимума.
Это уравнение, очевидно, может быть сведено к уравнению движения, приведенному выше, т.е. локальные уравнения движения могут быть получены как следствие глобального принципа, а не выведены на основе рассуждений локального характера и использования второго закона Ньютона. С концептуальной точки зрения такое различие является фундаментальным.
Для систем, рассматриваемых в социально-экономических приложениях, не существует подобных общих законов (по крайней мере, сейчас), и мы вынуждены ограничиться рассмотрением ряда глобальных свойств и методов работы с ними, рассчитывая на то, что освещение различных аспектов задачи поможет понять ее структуру в целом.
В качестве примера использования глобального подхода для решения системных задач рассмотрим ситуацию с заторами на транспортной магистрали. Учитывая наличие множества факторов, влияющих на дорожную ситуацию, можно попытаться склеить локальные ситуации, полученные методом Монте-Карло или методами теории очередей и т.д. Такой подход позволяет выявить множество деталей, однако в большинстве случаев остается неясным, как можно использовать полученные результаты для анализа других дорожных ситуаций. Холист в этом случае прибегнул бы к помощи статистической физики и попытался бы описать подобную ситуацию одним уравнением, пренебрегая дистанцией между машинами, причинами заторов и т.д. Главным для него было бы значение параметра q — плотности потока машин (число машин в час на километр пути). Время TA (минуты), необходимые для преодоления 1 км дороги, можно представить как сумму двух слагаемых:
TA = TA0 + k * nA,
где TA0 — время, необходимое для преодоления участка дороги длиной А = 0 без учета помех со стороны других машин (q = 0) (TA0 = 0,5 мин/км соответствует скорости свободного движения 120 км/час); k * nA — дополнительное время, необходимое для преодоления участка А = 1 км, пропорциональное числу машин nA, находящихся на участке А в течение времени TA (т.е. задержка в условиях заторов является линейной функцией числа торможений и ускорений, или числа nA машин, участвующих в движении). Число nA является произведением плотности потока машин (транспорта) q и длительности периода времени TA:
nA = q * TA / 60.
Учитывая предыдущие соотношения, получаем
TA = TA0 / (1 - k * q / 60).
Функция TA = f(q) является выпуклой: каждая дополнительная машина, приводящая к росту q, не только задерживается на участке А, но и является причиной задержки других машин. При значениях TA = 0,5 и k = 0,0266 имеется хорошее согласие между кривой и экспериментальными данными (см. рисунок 2.4).
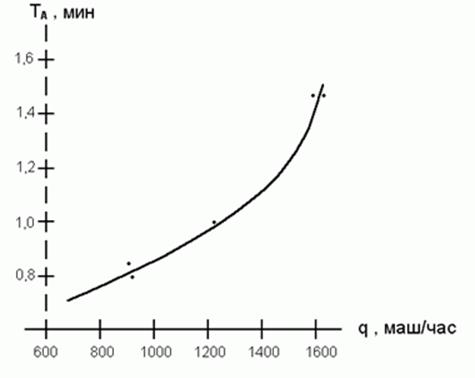
Рисунок 5.2 - Задержки, вызванные транспортными заторами
Полученное уравнение дает значение для q, лежащие гораздо ниже теоретического значения плотности q = 2,255 маш/час, соответствующей «параличу дороги». Таким образом, глобальный (а не локальный) подход позволяет построить содержательную модель временных задержек в транспортной магистрали с заторами.
5.2 Связность и графы
Структурная связность системы является, по-видимому, наиболее существенной ее качественной характеристикой. Кажется очевидным, что с исчезновением структурной связности исчезнет и сама система, поскольку само понятие системы подразумевает наличие «чего-то», находящегося в некотором отношении (или как-то связанного) с «чем-то».
Анализ задачи построения математического описания связности может быть осуществлен с помощью различных подходов, причем наиболее удачные из них построены на использовании теории графов и алгебраической (комбинаторной) топологии. Это является вполне закономерным, поскольку вопрос о характере связности «простейших элементов» единого целого интересует алгебру в гораздо большей степени, чем любую другую математическую дисциплину.
Сущность исследования связности состоит в том, чтобы осознать и уяснить себе те математические конструкции, которые описывают характер связи между отдельными компонентами системы. Если вообразить некоторую систему, в которой можно выделить n различных компонент (подсистем), то можно попытаться изобразить структуру (связную) графом (см.рисунок 2.5): n вершин изображают n подсистем системы, а дуга, соединяющая подсистемы i и j, показывает, что эти две подсистемы находятся в некотором отношении или как-то связаны между собой. Например, j-я подсистема может генерировать входы для i-й подсистемы, а i-я управлять j-й и т.д. Эту схему, естественно, можно развить. Так, например, можно ввести ориентацию на дугах и образовать ориентированный граф (орграф). Такое представление системы позволит изучать ситуации, когда i-я система влияет на j-ю, но не наоборот. Кроме того, можно учесть силу связности, сопоставив каждой направленной дуге некоторое число и т.д. Все это, в конечном счете, позволяет определить, какие компоненты системы влияют на другие компоненты и в какой степени. По существу, теоретико-графовые модели позволяют несколько лучше понять, как можно было бы осуществить декомпозицию системы на меньшие составляющие без потери тех основных свойств, в силу которых она и является системой.
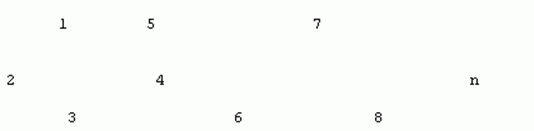
Рисунок 5.3- Теоретико-графовое описание
5.3 Связность и симплициальные комплексы
Приближенно симплициальный комплекс состоит из множества вершин X и множества симплексов Y, образованных из этих вершин в соответствии с заданным бинарным отношением. Симплициальный комплекс образован множеством симплексов Y, связанных через общие грани, т.е. через общие вершины. Например, можно положить Y = X = {птицы, лисы, насекомые, травы, антилопы}. При этом отношение таково: симплекс состоит из всех вершин таких, что Xj является жертвой Yi. Таким образом, Yi = «птицы» — 1-симплекс, состоящий из вершин «насекомые» и «травы», y2 = «лисы» — 1-симплекс, состоящий из вершин «птицы» и «насекомые» и т.д. Отметим, что n-симплекс состоит из n+1 вершин и его размер на единицу меньше числа вершин.
Вообще говоря, p — симплекс представляется выпуклым многогранником с вершинами в эвклидовом пространстве, а комплекс Ky(X,L) совокупностью таких многогранников в эвклидовом пространстве E. Хотя размерность, наверняка, не превышает суммы размерностей всех симплексов из Ky(X,L), однако поскольку многие симплексы имеют общие грани, то размерность на самом деле окажется меньше. В действительности, можно показать, что если dim[Ky(X,L)] = n, то 7 a 1 = 2*n + 1. Так, если dim[Ky(X,L)] = 1, то наибольший порядок есть p = 1, поэтому можно ожидать, что трехмерного пространства E3 будет достаточно, чтобы геометрически представить произвольный комплекс размерности 1. Это можно проиллюстрировать следующим образом: на плоскости (E2) надо соединить непересекающимися линиями три дома H1, H2 и H3 с источником газа, воды и электроэнергии. Неразрешимость поставленной задачи иллюстрирует наше утверждение. Задача графически изображена на рисунке 5.4, а ее решение в E3 показано на рисунке 5.5.
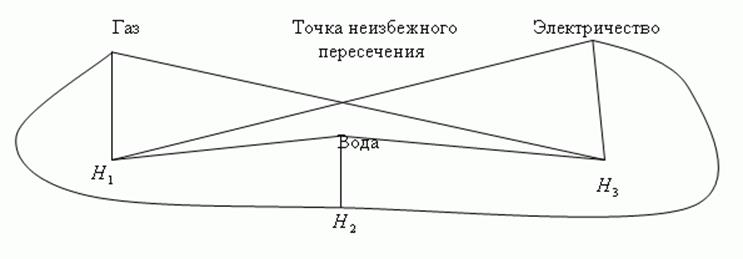
Рисунок 5.4 - Проблема пересечений в E2
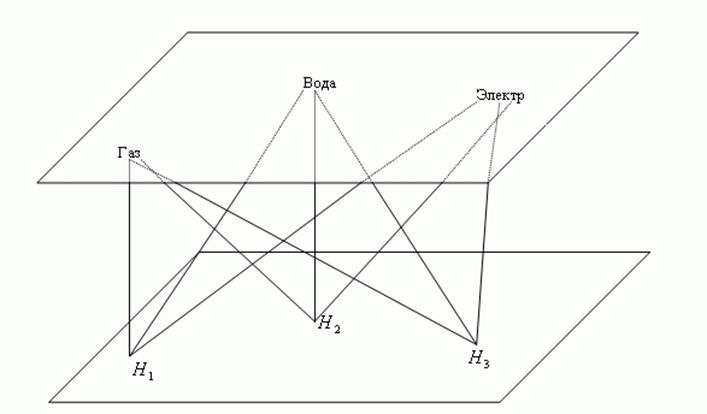
Рисунок 5.6 - Решение проблемы пересечений в E2
Основываясь на геометрической интуиции, можно изучать многомерную связную структуру комплекса Ky(X,L) различными способами с привлечением алгебраических методов. В связи с этим рассмотрим некоторые важные понятия.
q — связность
Это понятие связано с изучением цепочек связи таких, что каждый симплекс в цепи имеет общую вершину с соседними симплексами, q = 0, 1, 2, ..., dim[К-1]. Геометрически эти цепи содержат достаточно много локальной информации относительно того, каким образом симплексы, составляющие комплекс, связаны друг с другом. Если представить себе,что мы можем «видеть» только в пространстве размерности 7. 0 q (скажем с помощью специальных очков), то, рассматривая комплекс Ky(X,L), мы увидим, что он распадается на несколько несвязанных элементов. Подобное геометрическое представление порождает алгебраическую теорию q-связности, позволяющую гораздо лучше понять процессы обмена информацией внутри комплекса.
Эксцентриситет
Для того чтобы понять, каким образом отдельные симплексы «вложены» в комплекс, вводится понятие эксцентриситета. Это понятие отражает как относительную важность данного симплекса для комплекса в целом (через его размерность), так и его значимость как связующего звена (через максимальное число его вершин, принадлежащих также любому другому симплексу). Другими словами, эксцентриситет позволяет увидеть и оценить, насколько «плотно» каждый симплекс вложен в комплекс.
Основная литература: [4] – 163-181 с.
Контрольные вопросы.
1. Анализ структуры системы.
2. Сбор данных о функционировании системы.
3. Катастрофы и адаптируемость.
6 Лекция №6. Сигналы в системах
6.1 Случайный процесс — математическая модель сигналов
Для того чтобы два объекта содержали информацию друг о друге необходимо, чтобы между их состояниями существовало соответствие. Только при этом условии по состоянию одного объекта можно судить о состоянии другого. Такое соответствие может установиться только в результате физического взаимодействия между этими объектами. Соответствие между состоянием двух объектов может устанавливаться и с помощью взаимодействия с промежуточными объектами, например, сигналами. Сигнал есть материальный носитель информации, средство перенесения информации в пространстве и времени.
Сигналы играют в системах особую, очень важную роль. Если энергетические и вещественные потоки, образно говоря, питают систему, то потоки информации, переносимые сигналами, организуют все ее функционирование, управляют ею. Н.Винер, например, подчеркивал, что общество простирается до тех пределов, до каких распространяется информация. Пожалуй, это следует отнести к любой системе.
Для рассмотрения конкретных свойств систем бывает необходимо учесть особенности сигналов, циркулирующих по каналам связи этих систем. Такие особенности можно описать по-разному: просто перечислить возможные реализации (если число их конечно) либо задать в той или иной форме общие свойства реализаций, входящих в ансамбль. Рассмотрим в качестве примеров некоторые модели реализаций непрерывных сигналов.
6.2 Моделирование конкретных реализаций
Гармонические сигналы
Обозначим через Ac множество всех синусоидальных сигналов:
Ac = {x(t) = Ac * cos(w*t + y)}, (6.1)
здесь R — множество всех положительных действительных чисел;
А — амплитуда;
w — круговая частота;
y — фаза гармонического колебания.
Модулированные сигналы
В технических системах полезная информация может переноситься каким-нибудь одним параметром «гармонического» колебания. Конечно, при изменении этого параметра во времени колебание перестает быть гармоническим. Процесс изменения параметра колебания называется модуляцией, а выделение этого изменения в «чистом виде» — демодуляцией. Само колебание называется несущим. Различают амплитудную, частотную и фазовую модуляции в зависимости от того, на какой из параметров несущего колебания «накладывают» полезную информацию:
Aам
= {x(t) = A(t) * cos[w0*t + y0]};
Aчм = {x(t) = A0 * cos[w(t)*t+ y0]};
Aфм = {x(t) = A0 * cos[w0*t + y(t)]}.
(6.2)
Необходимо отметить, что физический смысл модуляции сохраняется лишь в том случае, когда модулирующий сигнал является «медленно меняющимся» по сравнению с несущим колебанием. Только при этом условии можно говорить о гармоническом сигнале с переменной амплитудой, частотой либо фазой.
Сигналы с ограниченной энергией
О сигналах из множества Aэ = {x: ∫x(t)dt ≤ K < ∞} говорят, что их энергия ограничена величиной К. Происхождение этого названия связано с тем, что если x(t) есть напряжение, то интеграл представляет собой энергию, выделяемую сигналом x(t) на единичном сопротивлении.
Сигналы с ограниченной полосой частот
Фурье-преобразование X(f) сигнала x(t) называют его спектром:
X(f) = ∫x(t)*exp[j2πft]dt.
Физический смысл спектра состоит в том, что колебание x(t) представляется в виде суммы (в общем случае в виде интеграла) составляющих его гармонических колебаний с определенными амплитудами |X(f)|, частотами и соответствующими фазами. Между x(t) и X(f) имеется взаимно однозначное соответствие, так как
x(t) = ∫X(f)*xp[-j2πft]df.
Условием существования и обратимости Фурье-преобразования является ограниченность энергии сигнала (интегрируемость в квадрате функций x(t) и X(f)).
Если функция X(f) на оси f имеет ограниченный носитель F, то говорят, что сигнал x(t) имеет ограниченную полосу частот шириной F:
AF = {X(f) = ∫x(t)⋅exp[j2πft]dt = 0 для всех f ≥ |F|}.
Частотно-временное представление сигналов
Мы излагаем только элементы теории сигналов, преследуя при этом ознакомительные цели. В то же время представляется интересным рассмотреть два основных ее аспекта, относящихся к свойствам непрерывных сигналов. Первый — это частотно-временная неопределенность сигналов.
Как мы уже отметили, сигнал x(t) и его спектр X(f) однозначно выражаются друг через друга. Следовательно, сигнал можно рассматривать в любом из этих эквивалентных представлений — временном или частотном. При этом масштабные параметры этих представлений связаны обратно пропорциональной зависимостью. Допустим, что изменили масштаб по оси времени в k раз (например, воспроизведем запись x(t) с другой скоростью) и найдем спектр функции x(k*):
Xk(f) = ∫x(k*)*xp[j2πft]dt = (1/k)*(F/k).
Как видим, масштаб по частотной оси изменился в 1/k раз. Более того, из свойств преобразования Фурье следует, что сигналы с ограниченной длительностью имеют спектры неограниченной ширины, а сигналы с ограниченной полосой частот длятся бесконечно долго. Этот математический результат находится в противоречии с практикой: в реальности все сигналы конечны по длительности и ограничены по спектру. Тот факт, что аналитическая функция времени не может быть одновременно ограниченной и по длительности и по ширине спектра является, как видим, не свойством реальных сигналов, а свойством данной модели сигналов.
Говорить об одновременной ограниченности сигналов по времени и по спектру оказывается возможным при использовании энергетического критерия точности: сигнал считается имеющим конечную длительность Т, если в этом интервале времени сосредоточена основная часть всей энергии функции x(t). В то же время и ширина спектра F сигнала определяется как область частот, содержащая эту же часть всей энергии спектра X(f):
∫x2(t)dt = ∫|X(f)|df = μ∫x2(t)dt = μ∫|X(f)|df.
Здесь величина M меньше единицы, хотя достаточно близка к ней, а величина 1-M характеризует косвенным образом точность, о которой шла речь.
Теперь можно говорить о том, какую «площадь» на плоскости «частота-время» занимает тот или иной сигнал. Если строго следовать теории Фурье-преобразований, то получим, что эта площадь для всех сигналов бесконечна. Но для большинства из них энергетический критерий позволит ограничить ее естественным образом.
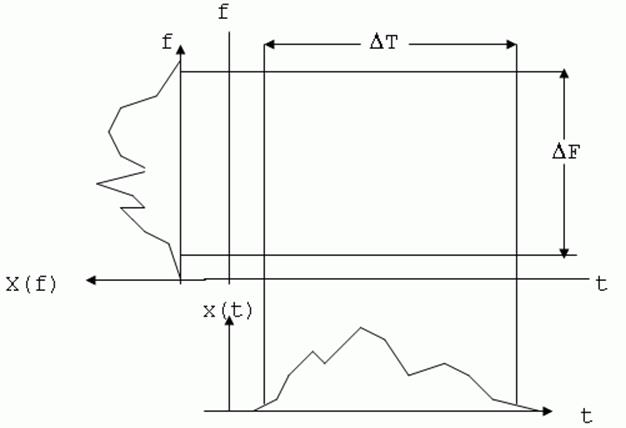
Рисунок 6.1 - Иллюстрация частотно-временной неопределенности сигнала
Меняя форму сигнала, можно изменить и площадь на плоскости «время-частота», которую он занимает. Оказывается, что уменьшать эту площадь можно лишь до некоторого предела. Этот предел достигается на кривой, являющейся гармоническим колебанием, которое модулировано по амплитуде гауссовым импульсом. Существование предела, ниже которого нельзя сжать площадь сигнала, занимаемую им на плоскости «частота-время», и называется (по аналогии с принципом неопределенности в квантовой механике) принципом частотно-временной неопределенности сигналов:
ΔF *ΔT = const ≥ 0.
Из многочисленных результатов теории сигналов мы выделяем два, как существенно проясняющих природу непрерывных сигналов.
Первый состоит в том, что сигналы обнаруживают своеобразную «упругость» занимаемой ими площади на плоскости «время-частота». Это явление называется частотно-временной неопределенностью сигналов.
Второй результат заключается в том, что определенный класс непрерывных сигналов допускает взаимно однозначное соответствие между любой реализацией из этого класса и дискретным набором отсчетов данной реализации.
Основная литература: [4] – 245-266 с.
Контрольные вопросы
1. Моделирование конкретных реализаций.
2. Гармонические сигналы.
3. Модулированные сигналы.
4. Сигналы с ограниченной энергией.
5. Дискретное представление сигналов.
7 Лекция №7. Энтропия и количество информации
7.1 Понятие неопределенности
Первым специфическим понятием теории информации является понятие неопределенности случайного объекта, для которого удалось ввести количественную меру, названную энтропией. Начнем с простейшего примера — со случайного события. Пусть, например, некоторое событие может произойти с вероятностью 0,99 и не произойти с вероятностью 0,01, а другое событие имеет вероятности соответственно 0,5 и 0,5. Очевидно, что в первом случае результатом опыта, «почти наверняка», является наступление события, во втором же случае неопределенность исхода так велика, что от прогноза разумнее воздержаться.
Для характеристики размытости распределения широко используется второй центральный момент (дисперсия) или доверительный интервал. Однако эти величины имеют смысл лишь для случайных числовых величин и не могут применяться к случайным объектам, состояния которых различаются качественно. Следовательно, мера неопределенности, связанной с распределением, должна быть некоторой его числовой характеристикой, функционалом от распределения, никак не связанным с тем, в какой шкале измеряются реализации случайного объекта.
7.2 Энтропия и ее свойства
Примем (пока без обоснования) в качестве меры неопределенности случайного объекта А с конечным множеством возможных состояний А1,...,Аn с соответствующими вероятностями P1,P2...Pn величину
H(A) = H({pi}) = -∑ pi*log(pi),
которую и называют энтропией случайного объекта А. Убедимся, что этот функционал обладает свойствами, которые вполне естественны для меры неопределенности.
1. Н(p1...pn)=0 в том и только в том случае, когда какое-нибудь одно из {pi } равно единице (а остальные — нули). Это соответствует случаю, когда исход опыта может быть предсказан с полной достоверностью, т.е. когда отсутствует всякая неопределенность. Во всех других случаях энтропия положительна. Это свойство проверяется непосредственно.
2. Н(p1...pn) достигает наибольшего значения при p1=...pn=1/n, т.е. в случае максимальной неопределенности. Действительно, вариация Н по pi при условии ∑pi = 1 дает pi = const = 1/n.
3. Если А и В — независимые случайные объекты, то H(A∩B) = H({piqk}) = H({pi}) + H({qk}) = H(A) + H(B). Это свойство проверяется непосредственно.
4. Если А и В — зависимые случайные объекты, то H(A∩B) = H(A) + H(B/A) = H(B) + H(A/B), где условная энтропия H(А/В) определяется как математическое ожидание энтропии условного распределения. Это свойство проверяется непосредственно.
5. Имеет место неравенство Н(А) > Н(А/В), что согласуется с интуитивным предположением о том, что знание состояния объекта В может только уменьшить неопределенность объекта А, а если они независимы, то оставит ее неизменной.
Как видим, свойства функционала Н позволяют использовать его в качестве меры неопределенности.
7.3 Дифференциальная энтропия
Обобщение столь полезной меры неопределенности на непрерывные случайные величины наталкивается на ряд сложностей, которые, однако, преодолимы. Прямая аналогия:
-∑pk*log(pk) → ∫p(x)*log(p(x))dx
не приводит к нужному результату: плотность p(x) является размерной величиной (размерность плотности p(x) обратно пропорциональна x а логарифм размерной величины не имеет смысла. Однако положение можно исправить, умножив p(x) под знаком логарифма на величину К, имеющую ту же размерность, что и величина х:
-∑pk*log(pk) → ∫p(x)*log(K*p(x))dx.
Теперь величину К можно принять равной единице измерения х, что приводит к функционалу
h(X) = -∫p(x)*log(p(x))dx,
который получил название «дифференциальной энтропии». Это аналог энтропии дискретной величины, но аналог условный, относительный: ведь единица измерения произвольна. Запись (3) означает, что мы как бы сравниваем неопределенность случайной величины, имеющей плотность p(x), с неопределенностью случайной величины, равномерно распределенной в единичном интервале. Поэтому величина h(X) в отличие от Н(Х) может быть не только положительной. Кроме того, h(X) изменяется при нелинейных преобразованиях шкалы х, что в дискретном случае не играет роли. Остальные свойства h(X) аналогичны свойствам Н(Х), что делает дифференциальную энтропию очень полезной мерой.
Пусть, например, задача состоит в том, чтобы, зная лишь некоторые ограничения на случайную величину (типа моментов, пределов области возможных значений и т.п.), задать для дальнейшего (каких-то расчетов или моделирования) конкретное распределение. Один из подходов к решению этой задачи дает «принцип максимума энтропии»: из всех распределений, отвечающих данным ограничениям, следует выбирать то, которое обладает максимальной дифференциальной энтропией. Смысл этого критерия состоит в том, что, выбирая максимальное по энтропии распределение, мы гарантируем наибольшую неопределенность, связанную с ним, т.е. имеем дело с наихудшим случаем при данных условиях.
Основная литература: [1] – 183-201 с.
Контрольные вопросы.
1. b-арная энтропия.
2. Тринарная энтропия.
3. Тетрарная энтропия.
4. Условная энтропия.
8 Лекция №8. Языки описания выбора
8.1 Выбор как реализация цели
Выбор является действием, придающим всей деятельности целенаправленность. Именно выбор реализует подчиненность всей деятельности определенной цели или совокупности целей. Рано или поздно наступает момент, когда дальнейшие действия могут быть различными, приводящие к разным результатам, а реализовать можно только одно действие, причем вернуться к ситуации, имевшей место в этот момент времени уже, как правило, нельзя.
Способность сделать правильный выбор в таких условиях — очень ценное качество, которое присуще людям в разной степени. Великие полководцы, выдающиеся политики, гениальные инженеры и ученые, талантливые администраторы отличались и отличаются от своих коллег или конкурентов прежде всего умением принимать лучшие решения, делать лучший выбор.
Естественно стремление понять, что такое «хороший выбор», как приблизиться к наилучшему решению, возможно ли предложить алгоритм получения такого решения. Работа многих исследователей в этом направлении выявила характерную ситуацию: полная формализация нахождения наилучшего решения возможна, но лишь для хорошо изученных (хорошо структурированных) задач. Для решения слабо структурированных задач полностью формальных алгоритмов не существует. Современная тенденция практики выбора в естественных ситуациях состоит в сочетании способности человека решать неформализованные задачи с возможностями формальных методов и компьютерного моделирования (например, диалоговые методы поддержки решений, экспертные системы, информационно-поисковые системы, системы управления базами данных, автоматизированные системы управления и т.д.).
Задачи выбора чрезвычайно многообразны, различны и методы их решения. Прежде всего введем понятия общие для всех задач выбора.
Будем представлять принятие решения как действие над множеством альтернатив, в результате которого получается подмножество выбранных альтернатив. Сужение множества альтернатив возможно, если имеется способ сравнения альтернатив и определение наиболее предпочтительных. Каждый такой способ называют «критерием предпочтения». Обратим внимание на то, что при таком описании выбора считают сами собой разумеющимися, уже пройденными, два чрезвычайно важных этапа системного анализа:
1) порождение множества альтернатив, на котором предстоит осуществлять выбор;
2) определение целей, ради достижения которых производится выбор.
Будем считать, что исходное множество альтернатив уже задано и преследуемые нами цели определены настолько детально, что уже имеются критерии оценки и сравнения любых альтернатив.
8.2 Множественность задач выбора
Отметим сразу, что проблема выбора далеко нетривиальна и допускает существенно различающиеся математические постановки задач. Дело в том, что каждая компонента ситуации выбора может реализовываться в качественно различных вариантах. Отметим основные ситуации из этих вариантов:
- множество альтернатив может быть конечным, счетным или континуальным;
- оценка альтернативы может осуществляться по одному или по нескольким критериям, которые в свою очередь могут иметь как количественный, так и качественный характер;
- режим выбора может быть однократным (разовым) или повторяющимся, допускающим обучение на опыте;
- последствия выбора могут быть точно известны (выбор в условиях определенности), иметь вероятностный характер, когда известны вероятности возможных исходов после сделанного выбора (выбор в условиях риска), или иметь неоднозначный исход, не допускающий введение вероятностей (выбор в условиях неопределенности);
- ответственность за выбор может быть односторонней (индивидуальной) или многосторонней. Собственно различают индивидуальный и групповой выбор;
- степень согласованности целей при многостороннем выборе может варьироваться от полного совпадения интересов сторон (кооперативный выбор) до их противоположности (выбор в конфликтной ситуации). Возможны также промежуточные случаи, например, компромиссный выбор, коалиционный выбор, выбор в условиях нарастающего конфликта и т.д.
Различные сочетания перечисленных вариантов и приводят к многообразным задачам выбора, которые изучены не в одинаковой степени.
На примере описания выбора видно, как об одном и том же явлении можно говорить на языках различной общности. К настоящему моменту сложились три основных языка описания выбора. Самым простым и наиболее развитым (и, быть может, поэтому чаще употребляемым) является критериальный язык.
8.3 Критериальный язык описания выбора
Такое название языка связано с основным предположением, состоящим в том, что каждую отдельно взятую альтернативу можно оценить конкретным числом (значением критерия), и сравнение альтернатив сводится к сравнению соответствующих им чисел.
Пусть x — некоторая альтернатива из множества X. Считается, что для всех x может быть задана функция q(x), которая называется критерием (критерием качества, целевой функцией, функцией предпочтения, функцией полезности) и обладает тем свойством, что если альтернатива x1 предпочтительнее x2 (будем обозначать это x1>x2 ), то q(x1)>q(x2) и обратно. Если теперь сделать еще одно важное предположение, что выбор любой альтернативы приводит к однозначно известным последствиям (т.е. считать, что выбор осуществляется в условиях определенности) и заданный критерий q(x) численно выражает оценку этих последствий, то наилучшей альтернативой x* является, естественно, та, которая обладает наибольшим значением критерия:
x*=argmax{q(x)}. (8.1)
Задача отыскания x*, простая по постановке, часто оказывается сложной для решения, поскольку метод ее решения определяется как характером множества X, так и характером критерия q(x).
Чаще всего на практике оценивание любого варианта единственным числом оказывается неприемлемым упрощением. Более полное рассмотрение альтернатив приводит к необходимости оценивать их не по одному, а по нескольким критериям, качественно различающимся между собой. Например, при выборе конструкции самолета проектировщикам следует учитывать множество критериев: технических, технологических, экономических, социальных, эргономических и пр. Даже в обычной жизни при выборе мы почти никогда не используем единственный критерий: вспомним хотя бы затруднения при выборе подарка ко дню рождения или при выборе места стоянки в турпоходе.
Сведение многокритериальной задачи к однокритериальной
Итак, пусть для оценивания альтернатив используется несколько критериев qi(x); i = 1...p. Как же тогда осуществлять выбор? Рассмотрим наиболее употребительные способы решения многокритериальных задач. Первый способ состоит в том, чтобы многокритериальную задачу свести к однокритериальной. Это означает введение суперкритерия, т.е. скалярной функции векторного аргумента:
q0(x)= q0[q1(x), q2(x), ..., qp(x)]. (8.2)
Суперкритерий позволяет упорядочить альтернативы по величине q0, выделив тем самым наилучшую (в смысле этого критерия). Вид функции q0 определяется тем, как мы представляем себе вклад каждого критерия в суперкритерий. Обычно используют аддитивные или мультипликативные функции:
q0 = ∑{αi*qi/Si}, (8.3)
1 - q0 = ∏{1 - [βi*qi/Si]}. (8.4)
Коэффициенты Si обеспечивают, во-первых, безразмерность числа Qi/Si (частные критерии могут иметь разную размерность) и, во-вторых, в необходимых случаях (как в формуле 4) выполнения условия Bi*Qi/Si < 1. Коэффициенты Ai и Bi отражают относительный вклад частных критериев в суперкритерий.
Итак, при данном способе задача сводится к максимизации суперкритерия:
x* = argmax{q0[q1(x), ..., qp(x)]}. (8.5)
Очевидные достоинства объединения нескольких критериев в один суперкритерий сопровождаются рядом трудностей и недостатков, которые необходимо учитывать при использовании этого метода. Оставив в стороне трудности построения самой функции и вычислительные трудности ее максимизации, обратим внимание на следующий очень важный момент. Упорядочение точек в многомерном пространстве в принципе не может быть однозначным и полностью определяется видом упорядочивающей функции. Суперкритерий играет роль этой упорядочивающей функции, и его даже «небольшое» изменение может привести к тому, что оптимальная в новом смысле альтернатива окажется очень сильно отличающейся от старой.
Условная максимизация
Недостатки свертывания нескольких критериев заставляют искать другие подходы к решению задач многокритериального выбора. Рассмотрим второй способ решения таких задач. Он заключается в использовании того факта, что частные критерии обычно неравнозначны между собой. Наиболее явное выражение этой идеи состоит в выделении основного, главного критерия и рассмотрении остальных как дополнительных, сопутствующих. Такое различие критериев позволяет сформулировать задачу выбора как 1 задачу нахождения условного экстремума основного критерия:
x* = arg{ max q1(x)|qi(x) = Ci, i=2,3,...p} (8.6)
при условии, что дополнительные критерии остаются на заданных им уровнях.
В некоторых задачах оказывается возможным или даже необходимым задавать ограничения на сопутствующие критерии не столь жестко, как в задаче (6). Например, если сопутствующий критерий характеризует стоимость затрат, то вместо фиксации затрат разумнее задавать их верхний уровень, т.е. формулировать задачу с ограничениями типа неравенств:
x*=arg{ max q1(x)|qi(x) ≤ Ci, i=2,3...,p}. (8.7)
Отметим, что такое, казалось бы, незначительное изменение постановки задачи требует принципиально иных методов ее решения.
Мы обсудили наиболее употребительные способы описания выбора в терминах критериального языка. Возможны и другие постановки задач на этом языке; наша цель состояла в том, чтобы дать лишь общее представление об их многообразии. Математические аспекты решения задач оптимизации рассматриваются в специализированных монографиях и учебниках.
Основная литература: [1] – 220-232 с.
Контрольные вопросы.
1. Классификация задач выбора.
2. Человеко-машинные системы и выборы.
3. Пакеты прикладных программ для выбора.
4. Базы знаний и экспертные системы.
9 Лекция №9. Выбор в условиях статической неопределенности
9.1 Статистические решения как выбор
Пусть, например, требуется знать высокоточное значение веса некоторого предмета. Неоднократное его взвешивание на аналитических весах дает хотя и близкие, но разные значения. На показания весов оказывают внимание не только вес самого предмета, но и трение, не идеальность геометрической формы опорной призмы, воздушная турбулентность, тепловой режим и пр. При радиолокационном зондировании Луны мы будем так же за каждым разом получать различные расстояния до нее, чему имеется множество причин.
Аналогичная ситуация — выбор в условиях статистической неопределенности — имеет место не только при оценке некоторой величины, но и при классификации объектов, при необходимости подобрать математическую модель явления или обнаружить некую закономерность.
Во всех таких задачах есть общее — необходимость выбора на основании косвенных или прямых, но обязательно «зашумленных» данных. Основным, центральным, самым важным предположением для формализации решения таких задач является предположение о статистичности экспериментальных данных. Оно состоит в том, что связь между истинной, но неизвестной искомой альтернативой w и наблюдаемыми данными x1,x2,...,xN адекватно описывается распределением вероятностей F(x1,x2,...,xN) или плотностью вероятностей f(x1,x2,...,xN). Считается, что любая закономерность w, отыскиваемая в протоколе наблюдений, принадлежит множеству W возможных закономерностей, на котором и надо сделать выбор. Другими словами, считается, что:
1) во-первых, выборка наблюдений принадлежит статистическому ансамблю всевозможных выборок, на котором задано распределение вероятностей;
2) во-вторых, это распределение различно для разных w, что и обеспечивает наличие информации о w в выборке x1,x2,...xN.
Вопрос состоит в том, как извлечь эту информацию, т.е. как сделать выбор на множестве W, или как принять статистическое решение.
9.2 Общая схема принятия статистических решений
Рассмотрим общие черты для задач выбора в условиях статистической неопределенности. Обстоятельства принятия статистических решений иллюстрирует схема, приведенная на рисунке:
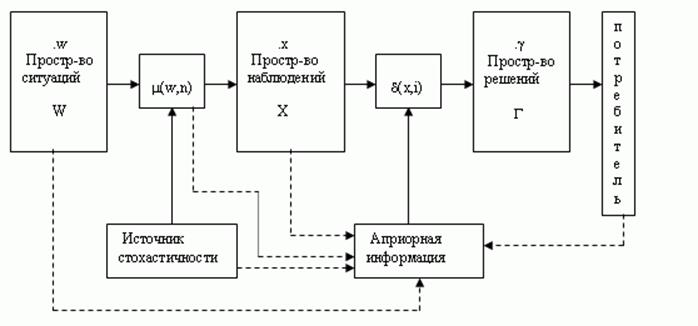
Рисунок 9.1 - Общая схема принятия статистических решений
На этой схеме точкой w W изображено то, нам не известно, но необходимо определить; W — множество всех предполагаемых возможностей относительно w. Точкой х Х изображена выборка (протокол наблюдений).
x = (x1,...,xN); Х — множество всех возможных выборок. Тот факт, что на реализовавшееся значение выборки оказывает влияние не только искомая закономерность w, но и совокупность случайных факторов, изображен на схеме как результат совместного отображения w и некоторого случайного воздействия n в пространство Х с помощью некоторого оператора m: х = m(w,n). Зная х, мы должны сделать выбор относительно w, принять решение, какую из множества альтернатив W мы примем за истинную. Чтобы не путать принимаемое решение и «истинное» состояние w, обозначим пространство, на котором производится выбор, через Г. Очевидно, что в Г входят все элементы множества W, но могут быть и дополнительные решения (типа отказа от выбора, увеличить число наблюдений и др.). Процедура выбора изображена как действие некоторого оператораd над выборкой х: каждой выборке х этот оператор, называемый решающей функцией, ставит в соответствие решение g = d(x,i). Здесь аргумент i введен:
- во-первых, для того чтобы подчеркнуть, что одну и ту же выборку можно обрабатывать по-разному, получая решения различного качества;
- во-вторых, чтобы сделать акцент на том, что качество решения зависит не только от того, какой протокол обрабатывается, но и от того, какие априорные предположения вошли в структуру алгоритма.
Итак, и проблема синтеза статистических процедур (построения решающих функций), и проблема анализа их качества (оценивание степени близости между g и w) тесно связаны с ролью априорной информации.
Определим конкретнее, что именно в статистике понимается под априорной информацией. В нее включают любые сведения, имеющиеся до того, как мы приступили к синтезу новой процедуры d, в том числе и любую информацию о природе наблюдений (но не саму выборку х, считающуюся информацией апостериорной). Конкретнее априорные сведения характеризуют:
1) пространство ситуаций W;
2) природу случайных факторов n;
3) оператор m, определяющий характер взаимодействия w и n ;
4) пространство наблюдений Х ;
5) требования потребителя к качеству решений. Нумерация та же, что и на рисунке.
9.3 Понятие об основных направлениях математической статистики
Априорная информация может быть более или менее полной; в зависимости от этого по-разному ставятся и решаются статистические задачи выбора. Можно даже утверждать, что разным уровням априорной информации соответствуют различные специфические ветви математической статистики.
Самое полное описание случайного объекта состоит в задании распределения вероятностей на множестве возможных состояний этого объекта. Поэтому наиболее подробное и полное задание априорной информации состоит в том, что считаются известными:
1) распределение P(w), w W;
2) условное распределение выборочных значений F(x), x X, w W;
3) функция потерь l(g,w), выражающая отношение потребителя решений к расхождению между g, т.е. тем, что он должен использовать вместо истинного w, и действительным состоянием w.
Такой уровень априорной информации соответствует байесову направлению статистики (Т.Байес — известный английский статистик). Среднее значение потерь, связанное с конкретным алгоритмом g обработки наблюдений х, называемое байесовым риском R, принимается за меру качества этого алгоритма. Оптимальная в этом случае процедура g 5* (также называемая байесовой) и считается наилучшим решением задачи:
?,
?.
Наибольшее количество споров относительно байесовых задач вызывала необходимость задавать априорное распределение P(W). В конце концов было признано, что могут существовать и другие уровни априорной информации, для которых требуется создание своих методов синтеза процедур.
Следующим уровнем стал отказ от необходимости знать P(W). На этом уровне в синтезе алгоритмов участвует только информация о семействе функций F(x2W). Оказалось, что если подставить в функцию плотности f(x) выборочные значения x1, ..., xN, и рассматривать ее зависимость от w, то такая зависимость L(w2x1,...,xN) = f(x1,...,xN) обладает замечательными свойствами, из-за которых ее и назвали функцией правдоподобия. Например, если w — неизвестный числовой параметр распределения, то:
wмп = arg max L(w2x1, ..., xN)
является очень хорошей оценкой рассматриваемого параметра. Этот метод оценивания называется методом максимального правдоподобия. В том случае, когда по выборке x1,...,xN следует принять решение в пользу одной из конкурирующих гипотез Ho и H1, т.е. решить — это выборка из распределения с плотностью f(x2Ho) или f(x2H1), лучшей процедурой является вычисление отношения правдоподобия f(x1,..,xN2H1)/ f(x1,...,xN2Ho) выбор гипотезы H1, если это отношение превышает заданный порог, и гипотезы Ho, если ниже его.
Априорное знание функции F(x) не всегда достижимо, и возникает вопрос, как осуществить выбор, если F(x) неизвестно. Если оставаться в рамках параметрических моделей, то можно снова рассмотреть класс распределений и воспользоваться минимаксной методикой. Подобные алгоритмы также используются в статистике и дают хорошие результаты в рамках принятых предположений.
Надо отметить, что, переходя с одного уровня априорной информации на другой, отказываясь от учета недоступной информации, получают в общем случае решения все более «низкого» качества. Байесовы процедуры лучше процедур правдоподобия, которые, в свою очередь, обычно лучше непараметрических.
Основная литература: [1] – 232-240 с.
Контрольные вопросы.
1. Основные понятия математической статистики.
2. Генеральная совокупность и выборка.
3. Вариационный ряд, статистический ряд.
4. Группированная выборка.
5. Группированный статистический ряд.
10 Лекция №10. Групповой выбор. Декомпозиция систем
10.1 Описание группового выбора
Итак, пусть на множестве альтернатив Х задано n в общем случае различных индивидуальных предпочтений. Для определенности будем говорить о бинарных отношениях R 41 0,R 42 0,...,R 4n 0.
Ставится задача о выработке такого нового отношения R , которое согласует индивидуальные выборы, выражает в каком-то смысле «общее мнение» и принимается за групповой выбор. Очевидно, что это соотношение должно быть какой-то функцией индивидуальных выборов: R = F(R 41 0,R 42 0,...R 4n 0).
Различным функциям согласования будут отвечать разные функции F. В принципе, т.е. теоретически, функции F могут быть совершенно произвольными, но главный вопрос состоит в том, чтобы правильно отобразить в функции F особенности конкретного варианта реального группового выбора.
Различные правила голосования. Одним из наиболее распространенных принципов согласования — правило большинства: принятой всеми считается альтернатива, получившая наибольшее число голосов. Правило большинства привлекательно своей простотой и демократичностью, но имеет особенности, требующие осторожного обращения с ним.
Прежде всего оно лишь обобщает индивидуальные предпочтения, и его результат не является критерием истины. Только дальнейшая практика показывает, правильным или ошибочным было решение, принятое большинством голосов. Само голосование — лишь форма согласования дальнейших действий. (Этот вопрос, однако, формально находится вне нашего рассмотрения: ведь мы обсуждаем выбор в условиях определенности, а здесь речь зашла о выборе определенной альтернативы с неопределенными последствиями).
Во-вторых, даже в простейшем случае выбора одной из двух альтернатив легко представить себе ситуацию, когда правило большинства не срабатывает, например, разделение голосов поровну при четном числе голосующих. Это порождает варианты: «председатель имеет два голоса», «большинство простое (51%)», «подавляющее большинство (около 3/4)», «абсолютное большинство (близкое к 100%)», наконец, «принцип единогласия (консенсус, право вето)».
Подчеркнем, что при любом из этих вариантов подразумевается отказ от принятия решения, если ни одна из альтернатив не получила необходимого процента голосов. Поскольку в реальной жизни отказ от дальнейших действий, следующих за решением, бывает недопустим, то разрабатываются различные приемы, сокращающие число ситуаций, приводящих к отказу.
10.2 Модели систем как основание декомпозиции
Основной операцией анализа является разделение целого на части. Задача распадается на подзадачи, система — на подсистемы, цели — на подцели и т.д. При необходимости этот процесс повторяется, что приводит к иерархическим древовидным структурам. Обычно (если задача не носит чисто учебного характера) объект анализа сложен, слабо структурирован, плохо формализован, поэтому операцию декомпозиции выполняет эксперт. Если поручить анализ одного и того же объекта разным экспертам, то полученные древовидные списки будут различаться. Качество построенных экспертами деревьев зависит как от их компетентности, так и от применяемой методики декомпозиции.
При разделении целого на части появляются затруднения, когда требуется доказательство полноты и безизбыточности предлагаемого набора частей. Стремясь перейти от эвристического, интуитивного подхода к более осознанному, алгоритмическому выполнению декомпозиции, мы должны объяснить, почему именно так, а не иначе, именно на такое, а не на большее или меньшее количество частей мы разделяем целое. Объяснение состоит в том, что основанием всякой декомпозиции является модель рассматриваемой системы.
10.3 Содержательная модель как основание декомпозиции
Остановимся на этом важном соображении подробнее. Операция декомпозиции представляется теперь как сопоставление объекта анализа с некоторой моделью, как выделение в нем того, что соответствует элементам взятой модели. Поэтому на вопрос, сколько частей должно получиться в результате декомпозиции, можно дать следующий ответ: столько, сколько элементов содержит модель, взятая в качестве основания. Вопрос о полноте декомпозиции — это вопрос о завершенности модели.
Пример 1.
В начале 70-х годов проводились работы по системному анализу целей развития морского флота. Первый уровень дерева целей выглядел в виде схемы.
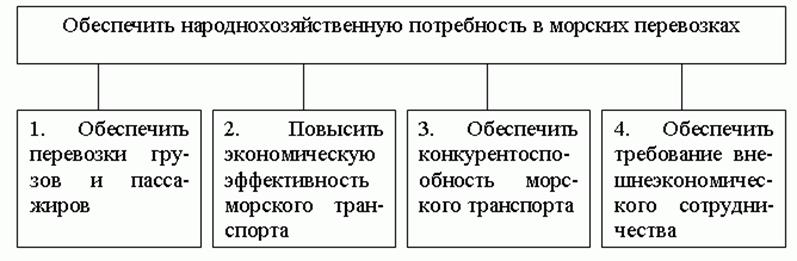
Рисунок 10.1 - Первый уровень дерева целей из примера 1
Декомпозиция проведена по модели входов организационной системы.

Рисунок 10.2 - Схема входов организационной системы
Модель организационной системы включает входы:
- от «нижестоящих» систем (здесь клиентуры — подцель 1);
- от «вышестоящих» систем (народного хозяйства в целом - подцель 2);
- от «существенной среды» (в данном случае от флотов капиталистических государств — подцель 3, и социалистических государств — подцель 4).
Очевидно, что такая декомпозиция неполна, поскольку отсутствует подцель, связанная с собственными интересами морского флота. Это, по-видимому, не столько ошибка экспертов-аналитиков, сколько стиль тогдашнего руководства. Через 15 лет пришлось говорить о том, что «остаточный» подход создал серьезные проблемы в работе флота в целом.
Итак, объект декомпозиции должен сопоставляться с каждым элементом модели-основания. Однако и сама модель-основание может с разной степенью детализации отображать исследуемый объект. Например, в системном анализе часто приходится использовать модель типа «жизненный цикл», позволяющую декомпозировать анализируемый период времени на последовательные этапы от его возникновения до окончания. Разбиение на этапы дает представление о последовательности действий, начиная с обнаружения проблемы и кончая ее ликвидацией. При этом такое разбиение может быть различно.
Перейдем теперь к рассмотрению вопроса о том, какие модели брать за основание декомпозиции. Напомним, что при всем практически необозримом многообразии моделей формальных типов моделей немного: это модели «черного ящика», состава, структуры, конструкции (структурной схемы) — каждая в статическом или динамическом варианте.
Алгоритмизация процесса декомпозиции
Рассмотрим рекомендации по осуществлению всего многоступенчатого процесса декомпозиции.
Компромиссы между полнотой и простотой
Начнем с обсуждения требований к древовидной структуре, которая получится как итог работы по всему алгоритму. С количественной стороны эти требования сводятся к двум противоречивым принципам:
- полноты (проблема должна быть рассмотрена максимально всесторонне и подробно);
- простоты (все дерево должно быть максимально компактным — «вширь» и «вглубь»).
Эти принципы относятся к количественным характеристикам (размерам) дерева. Компромиссы между ними вытекают из качественного требования — главной цели: свести сложный объект анализа к конечной совокупности простых подобъектов либо (если это не удается) выяснить конкретную причину неустранимой сложности.
Принцип простоты требует сокращать размеры дерева. Мы уже знаем, что размеры «вширь» определяются числом элементов модели, служащей основанием декомпозиции. Поэтому принцип простоты вынуждает брать как можно более компактные модели-основания. Наоборот, принцип простоты заставляет брать как можно более развитые, подробные модели. Компромисс достигается с помощью понятия «существенности»: в модель-основание включаются только компоненты, существенные по отношению к цели анализа. Как видим, это понятие неформальное, поэтому решение вопроса о том, что же является в данной модели существенным, а что — нет, возлагается на эксперта.
Перейдем теперь к вопросу о размерах дерева «вглубь», т.е. о числе «этажей» дерева, числе уровней декомпозиции. Принцип полноты требует, чтобы в случае необходимости можно было продолжать декомпозицию до тех пор, когда она приведет к получению результата (подцели, подфункции, подзадачи и т.д.), не требующего дальнейшего разложения, т.е. результата простого, понятного, реализуемого, называемого элементарным.
Неэлементарный фрагмент подлежит дальнейшей декомпозиции по другой модели-основанию. На этом этапе рекомендуется введение новых элементов в модель-основание и продолжении декомпозиции по ним. Поскольку новые существенные элементы могут быть получены только расщеплением уже имеющихся, в алгоритме декомпозиции должна быть заложена и возможность возврата к использованным ранее основаниям. Указанная итеративность алгоритма декомпозиции придает ему вариабельность, возможность пользоваться моделями различной детальности на разных ветвях, углублять детализацию.
Алгоритм декомпозиции
Алгоритм декомпозиции представлен на рисунке 4 в виде блок-схемы. К тому, что было уже сказано об изображаемых блоками операциях алгоритма, добавим следующее.
Блок 1. Объектом анализа может быть что угодно — любое высказывание, раскрытие смысла которого требует его структурирования. На определение объекта анализа затрачиваются весьма значительные усилия. Формулировка глобальной цели системы, как правило, требует неоднократного уточнения и согласования. От правильного выбора объекта анализа зависит, действительно ли мы будем делать то, что нужно.
Блок 2. Этот блок определяет, зачем нужно то, что мы будем делать. В качестве целевой системы выступает система, в интересах которой осуществляется весь анализ. Более формального определения целевой системы дать нельзя — многое зависит от конкретных условий.
Блок 3. Этот блок содержит набор фреймовых моделей и рекомендуемые правила их перебора либо обращение к эксперту с просьбой самому определить очередной фрейм.
Блок 4. Содержательная модель, по которой будет произведена декомпозиция, строится экспертом на основании изучения целевой системы. Хорошим подспорьем ему могут служить различные классификаторы, построенные в различных областях знаний.
Блоки 5-10 были достаточно пояснены ранее.
Блок 11. Окончательный результат анализа оформляется в виде дерева, конечными фрагментами ветвей которого являются либо элементарные фрагменты, либо фрагменты, признанные экспертом сложными, но не поддающиеся дальнейшему разложению. Причины такой сложности могут состоять либо в ограниченности знаний данного эксперта (сложность из-за неинформированности), либо в том, что нужные знания существуют, но еще не объединены в объясняющие модели (сложность из-за непонимания), либо в принципиальном отсутствии нужных знаний (сложность из-за незнания).
Блок-схема, изображенная на рисунке 10.3, является, конечно, слишком укрупненной. Она предназначена для разъяснения лишь основных идей алгоритма декомпозиции.
Основание для декомпозиции является содержательная модель системы. Это означает, что в разделяемом целом мы должны найти часть, соответствующую каждому из элементов модели-основания. Ориентиром для построения содержательной модели (т.е. основания декомпозиции) служат формальные модели известных типов. Предметом особого внимания является полнота модели.
Один из способов упрощения сложного — метод декомпозиции — состоит в разложении сложного целого на все более мелкие и простые части. Компромиссы между требованием не упустить важного (принцип полноты) и требованием не включать в модель лишнего (принцип простоты) достигаются с помощью понятий существенного (необходимого), элементарного (достаточного), а также постепенной нарастающей детализации базовых моделей и итеративности алгоритма декомпозиции.
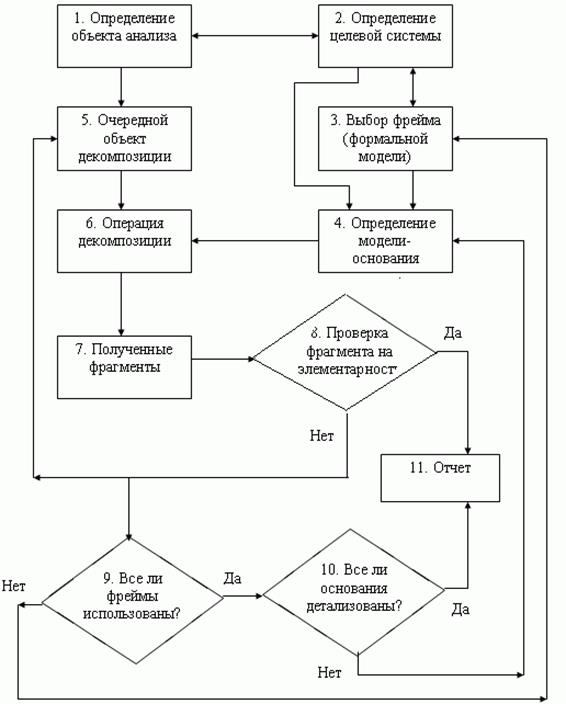
Рисунок 10.3 - Укрупненная схема алгоритма декомпозиции
Основная литература: [1] – 240-249 с.
Контрольные вопросы.
1. Групповой выбор: экспертиза, голосование и подходы к их осуществлению.
2. Определение и основные (фундаментальные) свойства системы.
3. Выбор в условиях неопределенности: постановка и решение игровых задач, задача выбора в условиях статической неопределенности.
11 Лекция №11. Агрегирование, эмерджентность, внутренняя целостность системы
Операцией, противоположной декомпозиции, является операция агрегирования, т.е. объединение нескольких элементов в единое целое. Необходимость агрегирования может вызываться различными целями и сопровождаться разными обстоятельствами, что приводит к различным способам агрегирования. Результат агрегирования называют агрегатом. У всех агрегатов есть одно общее свойство, получившее название эмерджентность. Это свойство присуще всем системам, и ввиду его важности остановимся на нем подробнее.
Будучи объединенными, взаимодействующие элементы образуют систему, которая обладает не только внешней целостностью, обособленностью от окружающей среды, но и внутренней целостностью, природным единством. Если внешняя целостность отображается моделью «черного ящика», то внутренняя целостность связана со структурой системы. Наиболее яркое проявление целостности системы состоит в том, что свойства системы не являются только суммой свойств ее составных частей. Система есть нечто большее, система в целом обладает такими свойствами, которых нет ни у одной из ее частей, взятой в отдельности. Модель структуры подчеркивает главным образом связанность элементов, их взаимодействие. Мы же стремимся сейчас сделать акцент на том, что при объединении частей в целое возникает нечто качественно новое, такое, чего не было и не могло быть без этого объединения.
11.1 Эмерджентность как результат агрегирования
Такое «внезапное» появление новых качеств у системы и дало основание присвоить этому их свойству название эмерджентности. Английский термин «emergence» означает возникновение из ничего, внезапное появление, неожиданную случайность. Однако сам термин имеет обманчивый смысл. Какие бы удивительные свойства ни возникали при объединении элементов в систему, ничего мистического, взявшегося «ниоткуда», здесь нет: новые свойства возникают благодаря конкретным связям между конкретными элементами. Другие связи дадут другие свойства, не обязательно столь же очевидные. Например, параллельное соединение тех же автоматов ничего не изменяет в арифметическом отношении, но увеличивает надежность вычислений.
Свойство эмерджентности признано и официально: при государственной экспертизе изобретений патентноспособным признается и новое, ранее неизвестное соединение хорошо известных элементов, если при этом возникают новые полезные свойства.
Надо отметить, что чем больше отличаются свойства совокупности от суммы свойств элементов, тем выше организованность системы. Кибернетик У.Эшби показал, что «у системы тем больше возможностей в выборе поведения, чем сильнее степень согласованности поведения ее частей». Это утверждение легко доказывается на примере системы, состоящей из р частей, каждая из которых может находиться в любом из s состояний (р и s конечны).
Будем исходить из того, что система полностью согласована, если возможен неслучайный переход между любыми двумя ее состояниями. Считая, что каждая из р частей полностью согласована, получим, что число возможных переходов (т.е. число возможностей в выборе поведения) для каждой из частей равно ss. Объединение р частей в одну систему приводит к тому, что число k возможных состояний становится равным sp. Однако теперь возможность перейти от одного произвольного состояния к другому неслучайным образом зависит от того, насколько согласованы между собой части системы. Рассмотрим два крайних случая. При полном согласовании частей число возможных переходов равно kk. Если же система состоит из р несвязанных частей, то число возможных переходов есть (Ss)p = (Sp)s=ks.
Так как s <k, то ks <kk, что и доказывает приведённое утверждение.
Итак, агрегирование частей в единое целое приводит к появлению новых качеств, не сводящихся к качествам частей в отдельности. Это свойство и является проявлением внутренней целостности систем, или, как еще говорят, системообразующим фактором. Новые качества систем определяются в очень сильной степени характером связей между частями и могут варьироваться в весьма широком диапазоне — от полного согласования до полной независимости частей.
11.2 Виды агрегирования
Как и в случае декомпозиции, техника агрегирования основана на использовании определенных моделей исследуемой или проектируемой системы. Именно избранные нами модели жестко определяют, какие части должны войти в состав системы (модель состава) и как они должны быть связаны между собой (модель структуры). Разные условия и цели агрегирования приводят к необходимости использовать разные модели, что в свою очередь определяет как тип окончательного агрегата, так и технику его построения.
В самом общем виде агрегирование можно определить как установление отношений на заданном множестве элементов. Благодаря значительной свободе выбора в том, что именно рассматривается в качестве элемента, как образуется множество элементов и какие отношения устанавливаются на этом множестве, получается весьма обширное количество и качественно разнообразное множество задач агрегирования. Мы рассмотрим лишь основные агрегаты, типичные для системного анализа: конфигуратор, агрегаты-операторы и агрегаты-структуры.
Конфигуратор
Всякое действительно сложное явление требует разностороннего, многопланового описания, рассмотрения с различных точек зрения. Только совместное (агрегированное) описание в терминах нескольких качественно различающихся языков позволяет охарактеризовать явление с достаточной полнотой. Например, автомобильная катастрофа должна рассматриваться не только как физическое явление, вызванное механическими причинами, но и как явление медицинского, социального, юридического характера. В реальной жизни не бывает проблем чисто физических, химических, экономических, общественных или даже системных: эти термины обозначают не саму проблему, а выбранную точку зрения на нее.
Эта многоплановость реальной жизни имеет важные последствия для системного анализа. С одной стороны, системный анализ имеет междисциплинарный характер. Системный аналитик готов вовлечь в исследование системы данные из любой отрасли знаний, привлечь эксперта любой специальности, если этого потребуют интересы дела. С другой стороны, перед ним встает неизбежный вопрос о допустимой минимизации описания явления. Если при декомпозиции этот вопрос решался компромиссно с помощью понятия существенности, то при агрегировании этот вопрос обостряется: риск неполноты становится недопустимым, поскольку при неполноте речь может идти вообще не о том, что мы имеем в виду. Напротив, риск переопределения связан с большими излишними затратами.
Приведенные соображения приводят к понятию агрегата, состоящего из качественно различных языков описания системы и обладающего тем свойством, что число этих языков минимально, но необходимо для заданной цели. Такой агрегат часто называют конфигуратором. Продемонстрируем смысл этого понятия на примерах.
Пример 1.
Конфигуратором для задания любой точки n-мерного пространства является совокупность ее координат. Обратим внимание на эквивалентность разных систем координат (разных конфигураторов) и на предпочтительность ортогональных систем, дающих независимое описание на каждом «языке» конфигуратора.
Пример 2.
Конфигуратором для описания поверхности любого трехмерного тела на «плоскостных» языках является совокупность трех ортогональных проекций, принятая в техническом черчении и начертательной геометрии. Обратим внимание на невозможность уменьшения числа проекций и на избыточность большего числа «точек зрения».
Пример 3.
В радиотехнике для одного и того же прибора используется конфигуратор: блок-схема, принципиальная схема, монтажная схема.
Подчеркнем, что главное в конфигураторе не то, что анализ объекта должен производиться на каждом языке конфигуратора отдельно (это разумеется само собой), а то, что синтез, проектирование, производство и эксплуатация прибора возможны при наличии всех трех его описаний. Этот пример дает возможность подчеркнуть еще и зависимость конфигуратора от поставленных целей. Например, если, кроме целей производства, мы будем преследовать и цели сбыта, то в конфигуратор радиоаппаратуры придется включить и язык рекламы, позволяющий описать потребительские качества прибора.
Пример 4.
Опыт проектирования организационных систем показывает, что для синтеза организационной системы конфигуратор состоит из описания распределения власти (структуры подчиненности), распределения ответственности (структура функционирования) и распределения информации (организация связи и памяти систем, накопления опыта, обучения, истории). Все три структуры не обязаны совпадать топологически, хотя связывают одни и те же части системы.
Заметим, что конфигуратор является содержательной моделью высшего возможного уровня. Перечислив языки, на которых мы будем говорить о системе, мы тем самым определяем, синтезируем тип системы, фиксируем наше понимание природы системы. Как всякая модель, конфигуратор имеет целевой характер и при смене цели может утратить свойства конфигуратора. Как каждая модель, конфигуратор в простых случаях очевидно адекватен, в то время как адекватность в других случаях подтверждает практика.
Агрегаты-операторы
Одна из наиболее частых ситуаций, требующих агрегирования, состоит в том, что совокупность данных, с которыми приходится иметь дело, слишком многочисленны, плохо обозрима, с этими данными трудно «работать». Именно интересы работы с многочисленной совокупностью данных приводят к необходимости агрегирования. В данном случае на первый план выступает такая особенность агрегирования, как уменьшение размерности: агрегат объединяет части в нечто целое, единое, отдельное.
Простейший способ агрегирования состоит в установлении отношения эквивалентности между агрегируемыми элементами, т.е. образования классов. Отметим, что классификация является очень важным и многофункциональным, многосторонним явлением в человеческой практике вообще и в системном анализе, в частности. С практической точки зрения одной из важнейших является проблема определения, к какому классу относится данный конкретный элемент. Все свидетельствует о том, что агрегирование в классы является эффективной, но далеко не тривиальной процедурой. Если представить класс как результат действия агрегата-оператора, то такой оператор имеет вид «ЕСЛИ <условия на агрегируемые признаки>, ТО <имя класса>».
Другой тип агрегата-оператора возникает, если агрегируемые признаки фиксируются в числовых шкалах. Тогда появляется возможность задать отношение на множестве признаков в виде числовой функции многих переменных, которая и является агрегатом. Свобода выбора в задании функции, агрегирующей переменные, является кажущейся, если этой функции придается какой-то реальный смысл. Редкий пример однозначности агрегата-функции дает стоимостный анализ экономических систем. Если все участвующие факторы удается выразить в терминах денежных расходов и доходов, то агрегат оказывается их алгебраической суммой. Вопрос состоит лишь в том, в каких случаях можно использовать этот агрегат, не обращаясь к другим системам ценностей, а когда следует вернуться к конфигуратору, включающему не только финансовые критерии, но и политические, моральные, экологические и т.д.
Важный пример агрегирования данных дает статистический анализ. Среди различных агрегатов, называемых в этом случае статистиками, т.е. функциями выборочных значений, особое место занимают достаточные статистики. Достаточные статистики — это такие агрегаты, которые извлекают всю полезную информацию об интересующем нас параметре из совокупности наблюдений. Однако при агрегировании обычно потери информации неизбежны, и достаточные статистики являются в этом отношении исключением. В таких случаях становятся важными оптимальные статистики, т.е. позволяющие свести неизбежные в этих условиях потери к минимуму в некотором заданном смысле. Наглядный пример статистического агрегирования представляет собой факторный анализ, в котором несколько переменных сводятся в один фактор. Именно потому, что при рассмотрении реальных данных самым важным является построение модели-агрегата при отсутствии информации, необходимой для теоретического анализа статистики, некто Тьюки предложил назвать эту область «анализом данных», оставляя за математической статистикой задачи алгоритмического синтеза и теоретического анализа статистик.
Агрегаты-структуры
Важной (а на этапе синтеза — важнейшей) формой агрегирования является образование структур. К тому, что о моделях структур уже было сказано, необходимо добавить следующее. Как и любой вид агрегата, структура является моделью системы и, следовательно, определяется тройственной совокупностью: объекта, цели и средств моделирования. Это и объясняет многообразие типов структур (сети, матрицы, деревья и т.п.), возникающих при выявлении, описании структур (познавательные модели).
При синтезе мы создаем, определяем, навязываем структуру будущей, проектируемой системе. Если это не абстрактная, а реальная система, то в ней вполне реально возникнут, установятся и начнут «работать» не только те связи, которые мы спроектировали, но и множество других, не предусмотренных нами, вытекающих из самой природы сведенных в одну систему элементов. Поэтому при проектировании системы важно задать ее структуру во всех существенных отношениях, так как в остальных отношениях структуры сложатся сами, стихийным образом. Совокупность всех существенных отношений определяется конфигуратором системы, и отсюда вытекает, что «проект любой системы должен содержать разработку стольких структур, сколько языков включено в ее конфигуратор». Например, проект организационной системы должен содержать структуры распределения власти, распределения ответственности и распределения информации. Подчеркнем, что хотя эти структуры могут сильно отличаться топологически, они лишь с разных сторон описывают одну и ту же систему и, следовательно, не могут быть не связаны между собой.
Основная литература: [1] – 250-262 с.
Контрольные вопросы.
1. Эмерджентность как проявление внутренней целостности системы.
2. Эмерджентность как результат агрегирования.
12 Лекция №12. Методология решения неструктуризованных проблем
12.1 Классификация и общая характеристика методов экспертных оценок
Все методы экспертных оценок целесообразно разбить на 2 класса:
1) Методы формирования индивидуальных экспертных оценок, причем отдельный эксперт может использоваться: для получения информации типа интервью; свободная беседа, беседа по принципу «вопрос-ответ»; перекрестный допрос и др. Для сбора исходных данных в методе парных сравнений и других. Для консультаций ЛПР и системных аналитиков.
2) Методы формирования коллективных экспертных оценок, причем группа экспертов может использоваться:
- для коллективной работы за круглым столом (метод комиссий — совещание для решения некоего вопроса; метод мозговой атаки; метод суда и др.);
- для сбора исходных данных в методе Delfi и др.;
- для проведения деловой игры;
- для разработки сценария;
- для построения дерева целей.
К числу перспективных методов экспертных оценок относится метод Delfi. Он основан на тщательно разработанной процедуре последовательных индивидуальных спросов экспертов с помощью анкет. Опросы сопровождаются постоянным информированием экспертов о результатах обработки ранее полученных ответов. Экспертиза проводится в несколько туров до тех пор, пока не получают приемлимую сходимость в суждении экспертов. В качестве коллективной экспертной оценки принимается медиана окончательных ответов экспертов.
Метод Delfi непрерывно совершенствуется благодаря применению ЭВМ и использованию его в сочетании с другими методами. Новые модификации метода обеспечивают повышенную универсальность, быстроту и точность получения коллективных экспертных оценок (метод Delfi — конференция и др.).
12. 2 Принципы формализации эвристической информации
Полученную от экспертов эвристическую информацию необходимо представить в качественной форме, которая удобна для обработки и анализа. При этом для формализации эвристической информации служат следующие типы шкал:
1) шкала классификаций, позволяющая изучать исследуемые объекты с помощью тех или иных чисел;
2) шкала порядка, позволяющая упорядочить исследуемые объекты по какому-либо признаку;
3) шкала интервалов, позволяющая приписать исследуемым объектам относительные числовые значения;
4) шкала отношений, позволяющая приписать исследуемым объектам абсолютные числовые значения.
Приведем пример шкал для формализации эвристической информации:
|
Лингвистические оценки |
Бальные оценки |
Шкала Е.Харрингтона |
|
Отлично |
5 |
0,8-1 |
|
Хорошо |
4 |
0,63-0,8 |
|
Удовлитворительно |
3 |
0,37-0,63 |
|
Плохо |
2 |
0,2-0,37 |
|
Очень плохо |
1 |
0-0,2 |
Шкала Харрингтона имеет аналитическое описание в виде функции полезности:
y = exp[-exp(-x)], 0≤y≤1,
где х — исследуемая величина в диапазоне [-6;6].
С помощью шкалы Харрингтона можно привести векторные оценки с различной размерностью к безразмерному виду.
Mетод парных сравнений
Метод предусматривает использование эксперта, который проводит оценку целей. Z1, Z2, Zn.
Согласно методу осуществляются парные сравнения целей во всех возможных сочетаниях. В каждой паре выделяется наиболее предпочтительная цель. И это предпочтение выражается с помощью оценки по какой-либо шкале. Обработка матрицы оценок позволяет найти значимые цели, характеризующие их относительную важность.
Одна из возможных модификаций метода состоит в следующем:
1) составляется матрица бинарных предпочтений, в которой предпочтение целей выражается с помощью булевых переменных;
2) определяется цена каждой цели путем суммирования булевых переменных по соответствующей строке матрицы.
Пример.
Эксперт проводит оценку 4-х целей, которые связаны с решением транспортной проблемы:
а) Z1 — построить метрополитен;
б) Z2 — приобрести 2-хэтажный автобус;
в) Z3 — расширить транспортную сеть;
г) Z4 — ввести скоростной трамвай.
Составим матрицу бинарных предпочтений:
|
Zi/Zj |
1 |
2 |
3 |
4 |
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
Определим цену каждой цели (складываем по строкам):
C1 = 3; C2 = 0; C3 = 2; C4 = 1.
Эти числа уже характеризуют важность объектов. Нормируем, т.к. этими числами неудобно пользоваться.
Исковые веса целей:
v1 = 3/6 = 0,5; v2 = 0; v3 = 0,33; v4 = 0,17.
Проверка: сумма vi должна равняться 1.
Получаем следовательно порядок предпочтения целей:
Z1, Z3, Z4, Z2.
Метод последовательных сравнений
В ИТК есть программа, которая реализует этот метод. Типичная задача из области проектирования. Одна из возможных модификаций метода состоит в следующем:
1) Все цели располагаются в виде массива в порядке убывания их важности и назначаются предварительные оценки целей. При этом первая цель массива получает оценку 100, а остальным целям ставятся в соответствие оценки, отражающие их важность.
2) Первая цель массива сравнивается со всеми возможными комбинациями ниже стоящих целей по 2. В случае необходимости оценка первой цели корректируется. Вторая цель массива сравнивается со всеми возможными комбинациями ниже стоящих целей по 2. В случае необходимости оценка 2-ой цели корректируется и т.д.
3) Производится запись скорректированных оценок и расчет на их основе весов целей.
Пример.
Эксперт проводит оценку 4-х целей, которые связаны с решением транспортной проблемы (см.2.3).
Расположим цели в виде массива и назначим предварительные оценки Z1, Z3, Z4, Z2 (я расположил это по интуиции). Выставляем баллы: p1 = 100, p3 = 60, p4 = 40, p2 = 10.
Выполним сравнение целей и корректировку их оценок
Z1(Z3*Z4);
Z1(Z3*Z2);
Z1(Z4*Z2);
Z3(Z4*Z2).
(т.е. цель Z1 сравниваем с комбинацией Z3 и Z4)...
Я считаю, что построить метрополитен лучше, чем 3 и 4, но 3+4 дают 100, поэтому корректируем оценки: p1 = 125; p3 = 60.
Запишем скорректируемые оценки и вычислим значимость целей:
p1 = 125; p3 = 60; p4 = 40; p2 = 10;
v1 = 125/сумма всех оценок = 0,54; v3 = 0,25; v4 = 0,17; v2 = 0,04,
сумма vi должна равяться 1.
Получаем следовательно порядок предпочтения целей: Z1, Z3, Z4, Z2.
Метод ранга
Пусть имеется m экспертов Э1, Э2, Э , Эm и n целей Z1, Z2, ..., Zn. Каждый эксперт проводит оценку целей, пользуясь 10-бальной шкалой, причем оценки могут быть как целыми, так и дробными. В этих условиях веса целей определяются следующим образом:
1) Составляется матрица оценок экспертов:
|
Эj/Zi |
1 |
2 |
… |
n |
|
1 |
11 |
12 |
… |
1n |
|
2 |
21 |
22 |
… |
2n |
|
… |
… |
… |
… |
… |
|
m |
m1 |
m2 |
… |
mn |
2) 0≤pji≤10 (j=1,m, i=1,n).
3) Составляется матрица нормированных оценок:
4) ω = pji/∑pji (j=1,m, i=1,n).
5) Вычисляются искомые веса целей:
ωi = ∑ωij/∑∑ωij (i=1,n ∑ωi=1).
Пример.
Найдем веса целей для случая m = 2 и n = 6.
1. Матрица оценок экспертов:
|
Эj/Zi |
1 |
2 |
3 |
4 |
5 |
6 |
|
Э1 |
0 |
|
|
|
|
|
|
Э 2 |
|
|
0 |
|
|
|
2. Матрица нормированных оценок:
|
Эj/Zi |
1 |
2 |
3 |
4 |
5 |
6 |
|
|
Э1 |
0/38 |
0/38 |
0/38 |
0/38 |
0/38 |
0/38 |
|
|
Э 2 |
0/37 |
0/37 |
0/37 |
0/37 |
0/37 |
0/37 |
|
3. Искомые веса целей:
ω1 = (10/38+8/37)/2 = 0,239; ω2 = ... = 0,173; ω3 = ... = 0,254;
ω4 = ... = 0,093; ω5 = ... = 0,079; ω6 = ... = 0,16.
Основная литература: [1] – 262-273 с.
Контрольные вопросы.
1. Классификация проблем принятия рещений.
2. Общие черты неструктуризованных проблем выбора.
3. Классификация проблем принятия решений.
4. Теория многокритериальной полезности.
13 Лекция №13. Методология решения слабо структуризованных проблем
13.1 Категория целей в системном анализе
Системный анализ начинается с выявления и обоснования конечной цели, которую стремятся достичь при решении возникшей проблемы.
Цель выступает обычно как прообраз будущего и обозначает некоторый конечный результат, заранее мыслимый и желаемый. Структуризация конечной цели позволяет определить стратегию ее достижения, и именно в этом состоит практическая ценность данной категории.
В процессе формирования конечной цели могут участвовать: эксперты, системные аналитики и ЛПР.
Множество возможных целей. Множество конкретных целей.
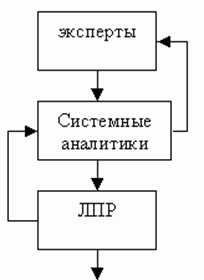
Рисунок 13.1 - Конечная цель
Все цели принято разделять на 3 класса:
1) Функциональные цели, способ достижения которых известен и которые уже достигались в данной системе (выполнение производственного плана). Выпуск дипломированных специалистов.
2) Цели-аналоги, которые достигались какой-либо системой,однако никогда не достигались данной системой. Создание ЛВС; создание работизированной технологической линии.
3) Цели развития или новые цели, которые никогда и никакой системой ранее не достигались: создание ОГАС (общегосударственной системы у-я); создание ЭВМ 5 поколения и др.
Для генерации целей могут служить различные способы:
- натурные эксперименты;
- математическое моделирование;
- правдоподобное рассуждение.
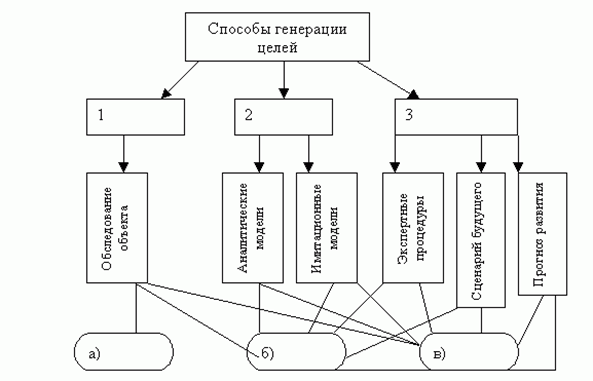
1) натуральные эксперименты а) функциональные цели;
2) математическое моделирование б) цели-аналоги;
3) правдоподобные рассуждения в) цели — развитие.
Рисунок 13.2 - Способы генерации целей
13.2 Структуризация конечной цели в виде дерева целей
Дерево целей представляет собой многоуровневый граф, отражающий иерархию частных целей и задач, возникающих в результате структуризации конечной цели. При этом процесс структуризации конечной цели опирается на 3 базовых принципа:
1) Стратегия достижения конечной цели из самой цели в результате ее декомпозиции.
2) В процессе декомпозиции конечная цель разбивается на подцели, затем каждая из подцелей разбивается на более простые цели и т.д.
3) Декомпозиция конечной цели осуществляется до уровня таких задач, которые возможно решить и с которых возможно начать операцию по достижению конечных целей. В качестве примера структуризации конечной цели может служить дерево целей в методе ПАТТЕРН.
Действия в Персидском заливе:
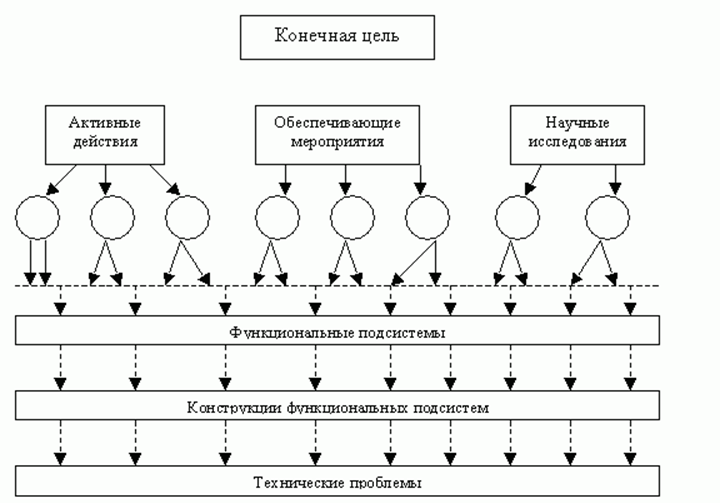
Рисунок 13.3 - Дерево целей
13.3 Проектирование систем с использованием системных принципов
Задача: пусть объектом проектирования является система телекодовой радиосвязи, которая предназначена для помехоустойчивой передачи двоичной информации от источника к получателю.
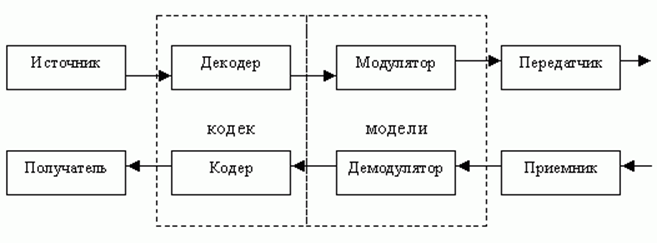
Рисунок 13.4 - Система телекодовой радиосвязи
Кодер — обладает корректирующим свойством (внесением дополнительных символов). Выбираем все, кроме приемника. Известна матрица альтернативных технических средств. Эта матрица уже упорядочена.
|
Тип |
Избыточность кода R |
Стоимость |
Тип |
Пропускная способность I бит/сек |
Стоимость |
Тип |
Мощность передатчика P (КВт) |
Стоимость |
|
K0 |
0 |
0 |
M1 |
600 |
C(M1) |
П1 |
5 |
C(П1) |
|
M2 |
1200 |
C(M2) |
П2 |
15 |
C(П2) |
|||
|
K0 |
0 |
0 |
M3(1) |
1200 |
C(M3) |
П3 |
25 |
C(П3) |
|
K1 |
1/2 |
C(K1) |
M3(2) |
2400 |
||||
|
K0 |
0 |
0 |
M4(1) |
1200 |
C(M4) |
П4 |
60 |
C(П4) |
|
K1 |
1/2 |
C(K1) |
M4(2) |
2400 |
||||
|
K2 |
3/4 |
C(K2) |
M4(3) |
4800 |
|
|
|
|
C(K1)<C(K2), (M1)<C(M2)<C(M3)<C(M4), C(П1)<C(П2)<C(П3)<C(П4), т.к. мы выбираем по интуиции.
Матрицу составили в порядке изменения характеристик.
Стоимость — дело соглашения. Выбирать только по стоимости не целесообразно. Выбор нужно производить по техническим требованиям.
Требуется найти оптимальный по стоимости вариант системы, который обеспечивает передачу информации со скоростью V = 1200бит/сек и вероятность ошибки не более, чем Pош = 0,001 (т.е. 1 ошибка на 1000 передаваемых символов).
1. Традиционный подход предусматривает выбор самых дешевых кодека, модема и передатчика, исходя из заданных требований к системе.
Выбор кодека: K0 → C(K0) = 0.
Выбор модема: M2 → C(M2).
Выбор передатчика: Pош = f(P) или f(P) = 10-3.
Эту мощность обеспечивает только П4 — С(П4).
В результате выбора имеем:
Вопт = (K0, M2, П4).
С = С(M2) + С(П4).
Вариант системы со звездочкой не является opt, т.к. стоимость системы по этому варианту не является минимальной, хотя на каждом из этапов выбиралось самое дешевое решение.
2. Системный подход предусматривает отбор допустимых вариантов системы, исходя из заданных требований, оценку этих вариантов по стоимости и выбор варианта с минимальной стоимостью.
3. Отбираем сочетание кодеков и модемов по заданной скорости передачи информации Vпер = (1-R)*I = 1200, где R - характеристика по модемам; I — пропускная способность по модемам. Данному условию удовлетворяют такие сочетания: (K0, M2), (K0, M3(1)), (K0, M4(1)), (K1, M3(2)), (K1, M4(2)), (K2, M4(3)).
4. Отобранные сочетания кодеков и модемов проверяем на требования по вероятности ошибки: Pош = 0,001. Если в i-том решении Р < 60 КВт, то сочетание кодека и модема вместе с соответствующим передатчиком относят к разряду допустимых.
5. Определяем стоимость допустимых сочетаний кодека, модема и передатчика C = C(Kдоп) + C(Mдоп) + C(Пдоп).
6. Выбираем допустимое сочетание кодека, модема и передатчика, оптимальное по критерию стоимости.
В данной задаче оптимальное решение следующее:
Вопт = (K1, M4(2), П2) (**).
C = С(K1) + С(M4(2)) + С(П2).
Вариант системы (**) является оптимальным, т.к. стоимость системы по этому варианту является минимальной, причем система оптимизировалась в целом как единый объект. Каждая система должна оптимизироваться в целом, т.е. как единый объект с заданным целевым назначением, т.к. оптимизация по частям не дает в общем случае оптимальной системы и оправдано лишь в двух типичных ситуациях:
1) Когда части системы независимы по оптимизируемым параметрам (это очень редкий случай).
2) Когда оптимизация системы в целом затруднительна в силу ее сложности или каких-либо других причин.
Основная литература: [1] – 273-284 с.
Контрольные вопросы.
1. Анализ методов выявления и решения слабоструктурированных проблем в управленческой деятельности.
2. Слабоструктурированные проблемы в современных задачах управления.
3. Слабоструктурированные проблемы: от методологии к управленческой практике.
4. Анализ методов решения слабоструктурированных проблем.
14 Лекция №14. Основы принятия решений при многих критериях
14.1 Постановка задачи векторной оптимизации и классификация многокритериальных методов
В упрощенном виде задача векторной оптимизации формируется следующим образом:
Имеется n конкурирующих решений:
1) {Si} = {S1, S2, ..., Sn}, т.е. стратегий, структур, проектов, плакатов и т.д. и m частных критериев.
2) {Kj} = {K1, K2, ..., Km}, не всегда согласованных между собой и противоречивых.
Для оценки конкурирующих решений по частным критериям используются различные средства: экспертные процедуры, мат. моделирование, натуральные эксперименты. При этом множество конкурирующих решений отображается в матрицу векторных оценок:
|
|
S1 |
S2 |
... |
Sn, |
|
[kji] = |
k11 |
k12 |
... |
k1n |
|
k21 |
k22 |
... |
k1n |
|
|
... |
... |
... |
... |
|
|
km1 |
km2 |
... |
kmn. |
Исходя из матрицы векторных оценок и системы предпочтений ЛПР, выбирается рациональное решение.
E = optSj {[kji] - система предпочтений ЛПР},
opt — некоторый оператор векторной оптимизации.
Выбор рационального решения связан с преодолением неопределенностей, которые имеются в связи с наличием многих критериев. Эта неопределенность является принципиальной. Для ее компенсации есть лишь одна единственная возможность: использование системы предпочтений ЛПР (т.е. дополнительной, субъективной информации).
Использование субъективной информации ЛПР позволяет преодолеть принципиальные трудности и выбрать рациональный критерий.
Все множество методов векторной оптимизации можно разбить на 5 классов:
1) Методы, основанные на формализации, в виде задач математического программирования.
2) Методы, основанные на реинжинировании критериев и их последовательном применении.
3) Методы, использующие обобщенный критерий для сравнительной оценки альтернатив.
4) Методы, не использующие обобщенный критерий для сравнительной оценки альтернатив.
5) Методы, реализующие процессы структуризации и адаптации при выборе рациональных решений.
Методы расположены в порядке возрастания их потенциальной характеристики (классификационный признак — полнота реализации принципа системности). Методы 1-го и 2-го класса не реализуют в полной мере принцип системности. Методы 3-го класса достаточно конструктивны (их легко использовать), однако не всегда удается обосновать и построить обобщенный критерий. Методы 4-го класса более прогрессивны, т.к. они предусматривают активное использование ЛПР в процессе анализа альтернатив. Методы 5-го класса отражают современные тенденции в области векторной оптимизации и находят применение в современных перспективных интерактивных автоматизированных системах.
АСНИ, САПР, АСЛПР, ... поддержки принятия решений.
1-3 — используют;
4-5 — разрабатывают (в том числе и на нашей кафедре).
14.2 Принцип согласованного оптимума В.Парето
В.Парето обосновал принцип согласованного оптимума, ориентируясь на конфликтную ситуацию между несколькими субъектами с пересекающимися интересами (1870 г). Согласованный оптимум означает преобразование конфликтной ситуации в такую ситуацию, в которой ни один из участников конфликта не может улучшить свое состояние, не причинив своими действиями вреда партнерам. Состояние согласованного оптимума является наилучшим для всех взаимодействующих субъектов. Леонард Заде распространил принцип согласованного оптимума на технические системы (1963 г).
В процессе их проектирования стремятся оптимизировать систему по многим, часто противоречивым критериям. Однако оптимизация системы по одному из критериев практически исключает возможность оптимизации по другим критериям. Поэтому важно найти согласованный оптимум для всех используемых критериев.
Если векторная оптимизация осуществляется с использованием обобщенного критерия, то реализуются обычно следующие процедуры:
1) Выполняется обоснование способа свертки частных критериев в обобщенный критерий.
2) Учитывается важность частных критериев.
3) Векторные оценки приводятся к безразмерному виду.
4) Для всех конкурирующих решений вычисляются обобщенные скалярные оценки.
5) Определяется область компромисса, содержащая парето-оптимальные решения (т.е. такие решения, когда улучшения состояния по каждым из критериев ухудшает состояние по другим критериям).
6) Выбирается рациональное решение в области компромиссов с учетом системы предпочтений ЛПР.
14.3 Общая технологическая схема принятия решений при многих критериях
Принятие решений является наиболее массовой операцией в процессе создания некоторой АСУ практически на всех ее этапах.
1. Оценка целесообразности разработки и предварительный выбор структуры АСУ.
2. Предварительный выбор технических решений.
3. Окончательный выбор структуры АСУ.
4. Окончательный выбор технических решений по построению п/с и АСУ в целом.
5. Окончательный выбор технических решений по созданию аппаратуры.
6. Окончательный выбор технических решений по разработке математического обеспечения.
7. Организация АСУ на базе выбранных технических решений.
8. Отладка, испытание и внедрение АСУ.
Принятие решений при многих критериях базируются на принципе согласованного оптимизма В.Парето и представляет собой многошаговый интеративный процесс, который начинается с появлением проблемы и заключается реализацией решений.
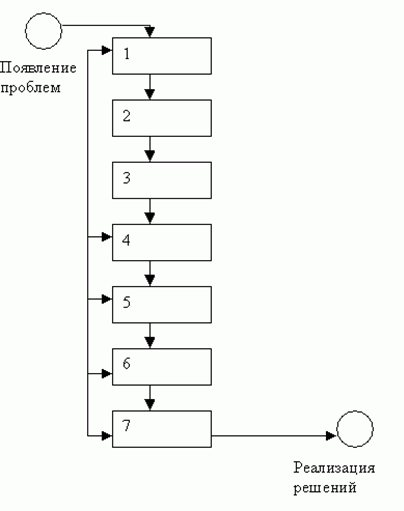
Рисунок 14.1 - Принятие решения
1. Сбор исходных данных и структуризация проблемы:
а) ограничение сложности;
б) отображение ситуации;
г) оценка ресурса;
д) выявление взаимосвязей.
2. Выявление и систематизация потенциальных возможных решений.
3. «Просеивание» решений, выделение множества конкурирующих решений.
4. Обоснование частных критериев для оценки конкурирующих решений.
5. Построение логико-математической системной модели и ее верификации.
6. Выбор рационального решения, которые должны быть:
а) единственным;
б) своевременным;
в) реализуемым;
г) устойчивым;
д) перспективным.
14.4 Циклы проектирования и уровни оптимизации сложных технических систем
Сейчас в стадии становления находится новое научное направление, а именно: качества сложных систем, в частности, АСУ различных уровней и назначения. В проблематику данного направления входят вопросы обеспечения качества систем на всех этапах их создания и развития. Современное представление о процессе проектирования сложных технических систем включает 3 характерных цикла:
1) внешнее проектирование;
2) формирование облика системы;
3) внутреннее проектирование.
Первый цикл представляет конкретизацию целей и функций системы, а также представление требований к ее характерам качества.
Второй цикл служит для корректной увязки требований внешнего проектирования с конструкторскими и технологическими возможностями внутреннего проектирования и состоит в выборе рациональной структуры из некоторого множества конкурирующих структур.
Третий цикл предполагает разработку выбранной структуры и ее реализацию в виде комплекса технических факторов.
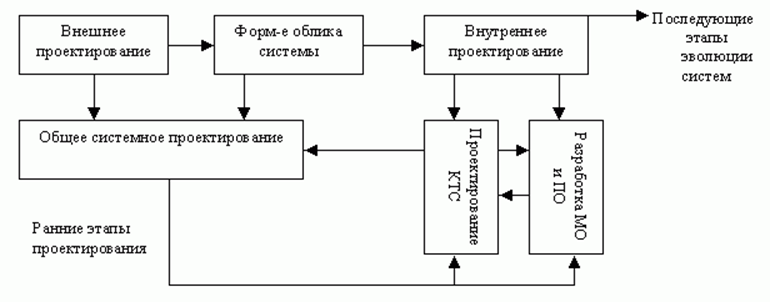
Рисунок 14.2 - Циклы проектирования технических систем
Циклам проектирования соответствуют следующие уровни оптимизации систем:
1) Глобальная оптимизация, т.е. поиск прогрессивной технической идеи для создаваемой системы.
2) Структурная оптимизация, т.е. выбор рациональной структуры системы в рамках используемой технической идеи.
3) Параметрическая оптимизация, т.е. подбор наилучшей совместимости параметров для выбранной структуры систем.
Оптимизация системы последовательно на всех 3-х уровнях приводит к синтезу структуры, удовлетворяющей заданным требованиям по качеству.
Наибольший эффект в обеспечении качества системы дает глобальная оптимизация (Глушков, Мясников, Половинкин) - 30-50%, наименьший эффект — параметрическая оптимизация - 10-15%, структурная оптимизация занимает промежуточное положение - 20-30%. Причем степень оптимизации зависит весьма существенно от множества конкурирующих структур и их проработки по векторному критерию качества.
Основная литература: [1] – 284-298 с.
Контрольные вопросы.
1. Основные определения теории принятия решений.
2. Модель деятельности лица, принимающего решения.
3. Анализ методов теории принятия решений.
4. Основные стадии в методах принятия решений.
15 Лекция №15. Современные тенденции в области системного анализа
15.1 Принципы организации систем поддержки принятия решений
В настоящее время появился новый класс АС, а именно: АС поддержки принятия решений АСППР.
Все АСППР представляют собой интерактивный человеко-машинный комплекс ЛПР-ЭВМ, который реализует тот или иной метод принятия речи с активным участием ЛПР. Этот комплекс служит для усиления интеллекта ЛПР при решении трудно формализуемых задач проектирования, управления и др. АСППР помогает ЛПР преодолевать трудности, связанные с процессом принятия решений.
1. Принятие размерности, т.е. большое число альтернатив.
2. Многокритериальность решаемых задач.
3. Ограничение по используемым ресурсам.
4. Неполноту информации о создаваемой системе.
5. Неполноту информации о внешней среде.
6. Жесткие требования на время решения задачи и др.
АСППР реализует новую информационную технологию решения задач, а именно: ЛПР задает схему решения задачи, а система доводит ее до конечного решения. Причем человек контролирует процесс решения задачи и вносит соответствующие коррективы (см. рисунок 15.1):
1) диалоговый процессор;
2) планировщик;
3) подсистема объяснения;
4) база АСППР;
5) база значений;
6) база моделей;
7) база данных;
8) ППП.
Структурные компоненты АСППР выполняют следующие функции.
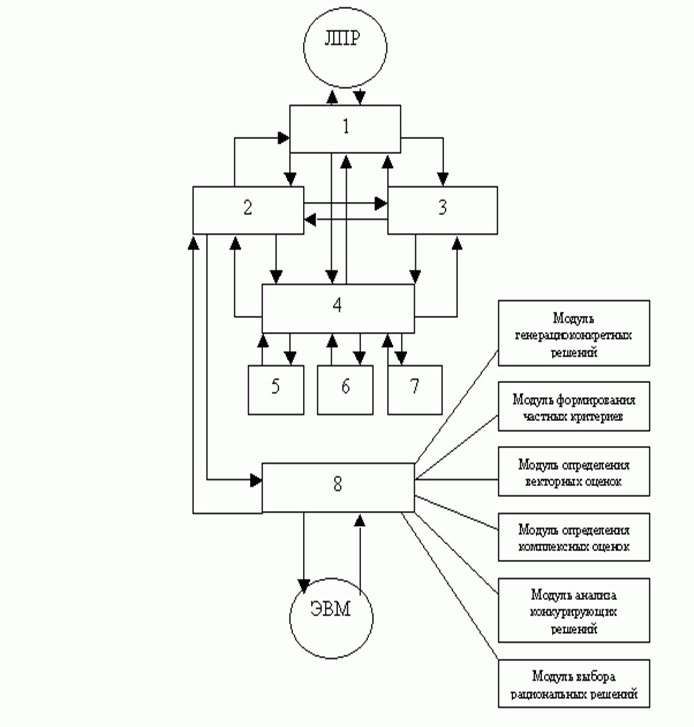
Рисунок 15.1 - Функции АСППР (автоматизированной системы поддержки принятия решений)
1. Интерфейс ЛПР со всеми компонентами системы.
2. Планировщик организует процесс решения задачи по исходящим данным ЛПР.
3. % объяснения протоколирует процесс решения задачи и выдает протокол ЛПР.
4. База данных содержит информацию по конкретной предметной области и правило принятия решения опытных ЛПР (база знаний может загружаться самим ЛПР в процессе решения задачи).
5. База моделей содержит аналитические и имитационные модели для анализа решения.
6. База данных содержит исходные, промежуточные и конечные данные для анализа и синтеза решения.
7. ППП реализует выбранный метод принятия решений и представляет собой библиотеку программных модулей.
15.2 Состояние проблемы и перспективы системных исследований
СА — это новое научное направление интеграционного типа, которое разрабатывает системную методологию принятия решений в процессе создания и развития сложных технических систем. В частности, АСУ различных уровней и назначения. Характерно, что системный анализ выступает в одной связке с математическим моделированием и системным проектированием, т.к. анализ решений требует их модельной проработки, а проектирование есть основная сфера применения СА. Кроме того, СА опирается на достижения современной информатики, вычислительной техники и автоматизации.
В рамках системного анализа развивается теория принятия решений при многих критериях, которая приобретает статус научной подкладки в задачах прогнозирования, планирования, проектирования и управления. При этом особую важность имеет разработка прикладных инженерных методик, реализующих методологию системного анализа и позволяющих учесть многовариантность, многокритериальность, разнообразие внешней среды, неопределенность и риск.
Проблемы в области системного анализа связаны с разработкой научного инструментария для принятия решений. В частности, для инженерной практики, необходимы следующие методы:
- методы структуризации исследуемых объектов;
- методы декомпозиции и композиции;
- методы получения экспертной информации;
- методы многоцелевого математического программирования (40 на новом уровне);
- методы дискретной многокритериальной оптимизации;
- методы генерации альтернативных решений;
- методы отбраковки неперспективных решений;
- методы идентификации предпочтения ЛПР;
- методы психологического обоснования решений и др.
Перспективы в области СА связаны с:
1) дальнейшим развитием концептуального и математического аппарата;
2) с автоматизацией процессов принятия решений на основе новой информационной технологии решения задач.
Автоматизации подлежат процессы принятия решений в АСУП, АСНИ, САПР, АСТПП, ГАП, АСКИ (комплексных испытаний) и др. системах.
Особое место занимает АСППР, которые создаются специально для усиления интеллекта ППР в задачах принятия решений.
Основная литература: [1] – 298-312 с.
Контрольные вопросы.
1. Состояние проблемы и перспективы системных исследований.
2. Принципы организации систем поддержки принятия решений.
Список литературы
1. Антонов А.В. Системный анализ. — М.: Высшая школа, 2004. — 454 с.
2. Анфилатов В.С., Емельянов А.А., Кукушкин А.А. Системный анализ в управлении: Учебное пособие / Под ред. А.А. Емельянова. — М.: Финансы и статистика, 2002. — 368 с.
3. Блауберг И.В., Садовский В.Н., Юдин Э.Г. Проблемы методологии системного анализа. — М.: Наука, 1970. — 456 с.
4. Блауберг И.В., Юдин Э.Г. Становление и сущность системного подхода. — М.: Наука, 1973.
5. Бондаренко Н.И. Методология системного подхода к решению проблем: история, теория, практика. — СПб.: Изд-во Санкт-Петербургского ун-та экономики и финансов, 1997. — 388 с.
6. Бодров В.И., Лазарева Т.Я., Мартемьянов Ю.Ф. Математические методы принятия решений. Учебное пособие. - Тамбов Издательство ТГТУ, 2004.-83 с.
7. Васильев В.И., Романов Л.Г., Червонный А.А. Основы теории систем: Конспект лекций. — М.: МГТУ ГА, 1994. — 104 с.
8. Волкова В.Н., Денисов А.А. Основы теории систем и системного анализа. — СПб.: СПбГТУ, 1997. — 510 с.
Доп. план 2013 г., поз. 8