Некоммерческое акционерное общество
Алматинский Университет энергетики и связи
Кафедра автоматической электросвязи
ТЕХНОЛОГИИ ЦИФРОВОЙ СВЯЗИ
Методические указания к выполнению лабораторных работ
для студентов всех форм обучения специальности
5В071900 – Радиотехника, электроника и телекоммуникация
Алматы 2012
Содержание
|
Введение |
4 |
|
1 Лабораторная работа. Формирование дискретных сигналов |
7 |
|
2 Лабораторная работа. Передача и восстановление дискретных сигналов |
12 |
|
3 Лабораторная работа. Изучение методов многократной модуляции |
22 |
|
4 Лабораторная работ. Изучение методов построения циклических кодов |
28 |
|
5 Лабораторная работа. Простые межсимвольные помехи |
35 |
|
6 Лабораторная работа. Сверточное кодирование. Код Рида-Соломона |
42 |
|
Список литературы |
52 |
|
Приложение А |
53 |
|
Приложение Б |
67 |
|
Приложение В |
72 |
Введение
Данные методические указания к лабораторным работам по дисциплине «Технологии цифровой связи» включают материалы по четырем основным разделам курса и базируются на моделировании устройств ПДС с помощью пакета моделирования телекоммуникационных систем «SystemView».
Программа «SystemView» весьма полезна именно в том плане, что она позволяет представить системы связи, цифровую обработку сигналов (ЦОС) и средства их анализа в интуитивно понятном для практического применения виде.
Пакет «SystemView» представляет собой мощную интегрированную среду проектирования с почти неограниченными возможностями:
- построения моделей широкополосных систем связи, использующих сложные цифровые сигналы;
- анализа их поведения в различной помеховой и шумовой обстановке;
- отработки алгоритмов работы цифровых адаптивных фильтров.
Панель инструментов состоит из кнопок, которые выполняют следующие функции:
- управление над моделями или группами моделей в окне проектирования;
- пуск и останов моделирования;
- обеспечение доступа к окну анализа и другим сервисным функциям.
Панель библиотек используется для выполнения различных действий с моделями или группой моделей. Для перемещения выбранной модели необходимо:
- дважды быстро нажать мышкой на нужную кнопку;
- либо нажав мышкой и удерживая ее в нажатом состоянии переместить курсор с выделенной моделью на рабочее поле окна проектирования.
Для каждой кнопки панели инструментов и панели библиотек доступна краткая информация. Чтобы увидеть информацию, необходимо подвести указатель к нужной кнопке, после чего в выпадающем окне появится информация о соответствующей кнопке.
Рисунок В.1 - Окно моделирования «SystemView»
Все схемы, используемые в лабораторных работах, по умолчанию установлены в каталоге
C:\ПДС\.
Для того, чтобы запустить процесс моделирования, необходимо создать новый проект, объединяя определенные модели, либо открыть уже существующий проект. Для открытия существующего проекта необходимо щелкнуть по меню “File“ (Файл) и выбрать строку “Open Existing System“ (Открыть существующий проект). На экране должна появиться схема выбранного устройства или системы.
Для запуска процесса моделирования необходимо нажать в панели инструментов на кнопку Run (Пуск). В ходе моделирования в левом нижнем углу строки состояния появляется перемещающаяся полоса, которая показывает, на каком этапе находится процесс моделирования.
Результаты моделирования отображаются в окне анализа. Для перехода в окно анализа необходимо нажать кнопку Analysis Window (Окно анализа) на панели инструментов.
Окно Analysis Window (Окно анализа) является основным инструментом для исследования и анализа полученных данных. В «SystemView» имеется большое количество различных функций, позволяющих выполнить подробное изучение исследуемой системы. Окно анализа показано на рисунке В.2.
Рисунок В.2 - Окно анализа «SystemView»
Одной из особенностей Окна анализа является возможность простого изменения (увеличения) любого графика. Для рассмотрения какой-либо области достаточно выделить с помощью мыши требуемую область. Это свойство очень полезно для исследования отдельных деталей исследуемого процесса. Для возврата изображения в исходное состояние достаточно нажать кнопку Reset Scale на инструментальной панели или, вызвав контекстное меню правой кнопкой мыши, выбрать операцию Rescale. При этом графическое изображение будет возращено в исходное состояние.
Управление режимом отображения координат осуществляется с помощью кнопок LogY и LogX. При этом одна из осей координат графика или обе оси отображаются в логарифмическом масштабе.
Размещение окон можно менять с помощью кнопок Tile Vertical (Разместить вертикально), Tile Horizontal (Разместить горизонтально) и Tile cascade (Разместить каскадом).
Имеется возможность экспорта графических изображений в виде метафайлов или точечных рисунков в другие приложения Windows.
Для анализа результатов «SystemView» имеет мощный встроенный калькулятор. Вызов калькулятора осуществляется с помощью кнопки Sink Calculator, размещенной в правой нижней части Окна анализа.
Более подробные сведения о пакете моделирования телекоммуникационных систем «SystemView» можно почерпнуть из [1].
1 Лабораторная работа. Формирование дискретных сигналов
Цель работы: изучение методов формирования и передачи дискретных сообщений.
1.1 Предварительная подготовка
Изучить методы формирования дискретных сообщений, методы построения линейных кодов.
1.2 Рабочее задание
1.2.1 Исследовать характеристики системы связи при передаче импульсными сигналами малой длительности.
1.2.2 Исследовать методы формирования прямоугольных импульсных сигналов для передачи по линиям связи.
1.2.3 Провести исследование формирования двуполярного кода с возвращением к нулю.
1.2.4 Провести исследование методов формирования линейных кодов RZ, ЧПИ, «Манчестер II» и сравнить спектральные характеристики сообщений при передаче короткими импульсами, прямоугольными импульсами, с помощью кодов RZ, ЧПИ, «Манчестер II».
1.3 Методические указания по выполнению работы
1.3.1 Передача импульсными сигналами малой длительности.
Если мы должны передать данные в двоичном коде (то есть 0' и 1'), возможна передача короткими импульсами, имеющими уровень +1 В при двоичной "1" и -1 В при двоичном "0".
Цифровая система связи (DSP), передает данные со скоростью 1/T символов в секунду. Однако ширина полосы, требуемая для передачи этих данных, значительно выше, чем скорость передачи, так как каждый бит представлен импульсным сигналом, имеющим очень короткую длительность. Как известно спектр одиночного импульса описывается выражением [2]
 .
.
Спектр одиночного импульса затухает в общем случае лишь при бесконечно больших значениях аргумента (имеет бесконечный спектр).
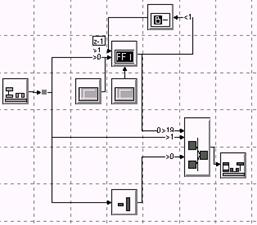
Откройте систему impulse_data.svu (см.рисунок 1.1).
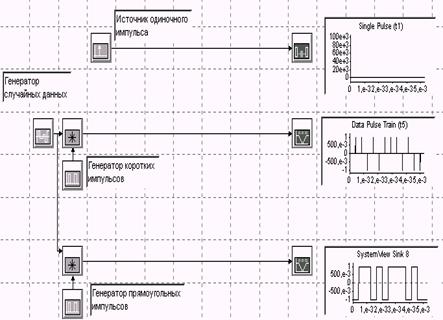
Рисунок 1.1
В данном примере, скорость передачи данных всегда устанавлена равной 2400 бит/с. Следовательно, период повторения импульсов будет равен
![]() .
.
Частота выборок моделирования установлена на более высоком уровне 96 000 Гц (40´2400) для моделирования «аналогового» выходного сигнала.
Запустите систему, и в окне анализа обратите внимание на то, что импульсные данные требуют для передачи бесконечной полосы пропускания; в чем можно убедиться по форме БПФ последовательности данных.
1.3.2 Формирование прямоугольных импульсных сигналов для передачи по линиям связи.
Для уменьшения полосы пропускания, необходимо уменьшить уровень высокочастотных гармоник в спектре импульсов данных. Следовательно, необходимо использовать формирующий фильтр, посредством которого до передачи, данные (импульсы) преобразуются в прямоугольную форму. Спектр прямоугольной последовательности импульсов описывается таким выражением [2]
 .
.
Формирование импульсной последовательности может быть выполнено с помощью цифрового фильтра, имеющего прямоугольную импульсную передаточную функцию длительностью 1/2400 секунды.
Откройте систему squ_pulse.svu (см. рисунок 1.2).
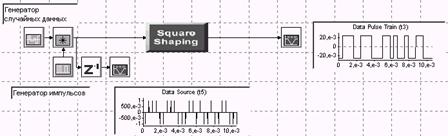
Рисунок 1.2
В этой системе представлено выбранное изображение для фильтра, формирующего прямоугольный импульс. Модуль "Square Shaping" является обыкновенным линейным системным модулем SystemView. SystemView позволяет изменять внешний вид иконки любого модуля по вашему выбору. Замена осуществляется выбором строки "Custom Picture..." контекстного меню нажатием правой кнопки мыши на символе модуля.
а) Рассмотрите импульсную передаточную функцию и вес (все установки при 1/40 = 0.025) фильтра, формирующего прямоугольный импульс, и убедитесь в том, что он является фильтром, имеющим 40 весовых элементов. Частота дискретизации выбрана равной 96 000 Гц. Длительность импульсной передаточной характеристики этого фильтра равна
![]() =
= ![]() = 1/2400 с.
= 1/2400 с.
Убедитесь, что частотная характеристика фильтра, имеет линейную характеристику. Оцените ширину полосы, занимаемой импульсной последовательностью.
б) Запустите процесс моделирования и перейдите в окно анализа. Рассмотрите переданные импульсы и также изучите полосу пропускания последовательности прямоугольных импульсов, просматривая амплитудно-частотную характеристику (спектр) последовательности прямоугольных импульсов.
в) Увеличьте число выборок до 8192 и запустите систему снова, а затем перейдите в окно анализа.
Примечание. Спектральная характеристика сигнала должна носить более сглаженный вид по сравнению с предыдущим запуском.
1.3.3 Формирование двуполярного кода с возвращением к нулю.
Изменяя фильтр, формирующий импульс, получите длительность 1/4800 с. Эта последовательность прямоугольных импульсов имеет название двуполярного кода с возвращением к нулю (return to zero).
Это преобразование осуществляется с помощью цифрового фильтра с прямоугольной импульсной передаточной характеристикой длительностью 1/4800 с. Откройте систему squ_pulse_rz.svu (см. рисунок 1.3).
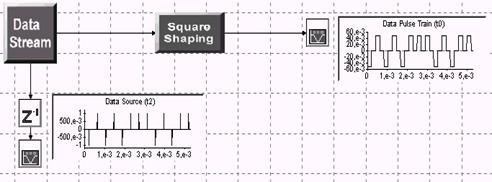
Рисунок 1.3
а) Изучите импульсную передаточную характеристику, и убедитесь, что весовые коэффициенты фильтра, формирующего прямоугольный импульс, соответствуют 1/20 = 0.05 и частота дискретизации выбрана равной 96 000 Гц, длительность импульсной передаточной функции этого фильтра 1/4800-ая секунды. Убедитесь, что частотная характеристика величины фильтра соответствует рисунку (график показан только до частоты 10000 Гц), и что фильтр имеет линейную характеристику.
б) Запустите систему и перейдите в окно анализа. Изучите переданные импульсы и определите полосу пропускания последовательности прямоугольных импульсов с помощью спектра сигнала из последовательности прямоугольных импульсов.
в) Увеличьте число выборок до 8192 для получения более сглаженной (более усредненной) частотной характеристики фильтра, запустите систему снова, и в окне анализа обратите на амплитудно-частотную характеристику. Форма характеристики должна теперь быть более гладкой чем, в предыдущем случае.
1.3.4 Коды линии.
Формы цифровых сигналов, предназначенных для передачи по линии связи, получили наименование линейных кодов (ПК). ЛК применяются для передачи данных без модуляции в первичной полосе частот, начинающейся с нуля. Иначе говоря, данные, представляющие собой обычные двоичные последовательности, перед подачей в линию связи подвергаются соответствующему преобразованию в линейном кодере. Наиболее широкое применение в аппаратуре связи получили такие линейные коды, как код без возвращения к нулю (Non Return to Zero - NRZ), код с чередующейся полярностью импульсов (ЧПИ) (Alternate Mark Inversion - AMI), корреляционные коды («Манчестер II»).
В файле binary_signalling.svu (см. рисунок 1.4) показаны примеры построения устройств формирования вышеуказанных кодов. Кодеры ЧПИ и манчестерского кода формируются с помощью метасистем, структура которых приведена на рисунках 1.5 и 1.6.
Рисунок 1.4
|
Рисунок 1.5 |
Рисунок 1.6 |
а) Сигнальная продолжительность импульса – 0,1 с, следовательно скорость передачи данных - 10 бит/с. Частота дискретизации – 100 Гц, следовательно один бит представлен 10 выборками. Источник данных - текстовый файл из единиц и нулей, который имеет начальную последовательность 0101011100100101000000....
б) Запустите процесс моделирования, и сравните различные сигнальные последовательности в окне анализа.
в) Увеличьте число выборок до 10000, и запустите систему снова. В окне анализа рассмотрите величину частоты спектра, которая была сгенерирована. Зарисуйте спектры исследуемых сигналов.
1.4 Контрольные вопросы
1.4.1 Объясните различие в спектральном составе сигналов, передаваемых короткими импульсами (tи << Tп), и сигналов прямоугольной формы.
1.4.2 Объясните принцип формирования прямоугольного сигнала в схеме, приведенной на рисунке 1.2.
1.4.3 Объясните принципы построения устройств формирования кодов RZ, ЧПИ, «Манчестер II».
1 Лабораторная работа. Передача и восстановление дискретных сигналов
Цель работы: изучение методов передачи и восстановления дискретных сигналов.
2.1 Предварительная подготовка
Изучить методы передачи и восстановления дискретных сигналов:
- восстановление с помощью выборок;
- регистрация с помощью усреднения;
- влияние помех на качество восстановления принимаемых сигналов.
2.2 Рабочее задание
2.2.1 Исследовать метод восстановления данных с помощью выборок.
2.2.2 Исследовать влияние помех на передачу данных в канале с однородными помехами.
2.2.3 Исследовать влияние помех на передачу данных в канале с нормально-распределенными помехами.
2.2.4 Исследовать метод регистрации сигналов с помощью усреднения.
2.3 Методические указания по выполнению работы
2.3.1 Восстановление данных с помощью выборок.
Откройте систему squ_pulse_recover.svu (см. рисунок 2.1).
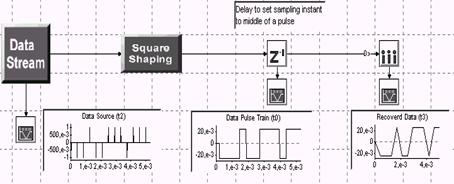
Рисунок 2.1
Формирование импульсной последовательности для этого случая соответствует п.1.3.2. Наиболее простым способом восстановления данных является метод стробирования. При регистрации методом стробирования вид принимаемого элемента («0» или «1») определяется на основании анализа знака импульса в середине единичного интервала. Любое смещение момента регистрации относительно середины единичного интервала приводит к увеличению вероятности неправильной регистрации сигнала. Если смещение значащего момента относительно идеального положения не превышает 0,5tо, то элемент сигнала регистрируется правильно. Величина, на которую допускается смещение значащего момента, не вызывающее неправильный прием, определяет исправляющую способность приемника. В нашем случае исправляющая способность (теоретическая) равна 0,5tо или 50%.
Рисунок 2.2
В нашем случае для размещения стробирующего импульса в середине значащего интервала используется простое устройство выборки с запуском выборки в середине импульса (см. рисунок 2.2).
Запустите систему, и убедитесь в окне анализа, что первоначальные данные на скорости 2400 бит/ с восстановлены правильно.
Определите величину задержки, связанной с восстановлением каждой выборки.
2.3.2 Передача данных в канале с помехами.
Откройте систему squ_pulse_noisy.svu (см. рисунок 2.3).
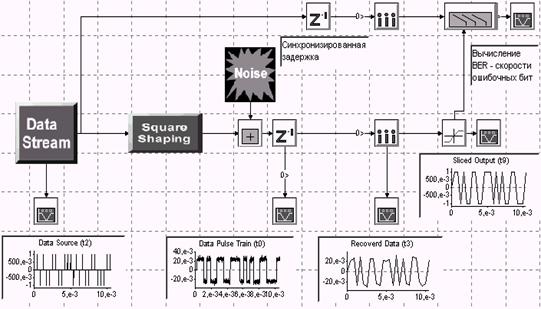
Рисунок 2.3
Предположим, что данные передаются по каналу, имеющему низкий уровень шума. Формирование импульса осуществляется также как в задании 1.3.2.
Из-за шума канала, когда импульсный модулятор производит вывод каждые T секунды, фактически, результатом будет
Y (k) = z (kT) + n (kT).
Обратите внимание на то, что выборка принимается, равной 1, если шум в момент осуществления выборки n (kT) > 1. Если же n (kT) < 1, а данные имеют значение 1, то выборка принимается, равной (-1). Эти ошибки приводят к неправильно определенным битам.
В этом примере модуль BER (bit error rate - скорость появления ошибочных бит) используется для подсчета количества ошибочных бит. Этот модуль просто сравнивает два входных бита (т.е. переданные и полученные биты) и определяет результаты сравнения, которые отражают число обнаруженных ошибок.
Запустите систему. Убедитесь, что при уровне помех, имеющих среднеквадратичное отклонение 0.1/40 = 2.5´10-3, ошибочные биты отсутствуют. Обратите внимание, что амплитуда прямоугольного импульса после его формирования равна 0.025 В.
Увеличьте гауссовский шум в канале до среднеквадратичного отклонения 1/40 = 2.5´102 .Теперь должны появиться несколько ошибочных бит.
Увеличьте число выборок до 40´1000=40 000, что соответствует 1000 бит данных. Сколько ошибочных битов получено теперь?
Увеличьте шум канала выше до среднеквадратичного отклонения
2.5´10-1. Какова
величина BER теперь?
2.3.3 Передача данных в канале с однородными помехами.
Откройте систему uniform_noise_channel.svu (см. рисунок 2.4).
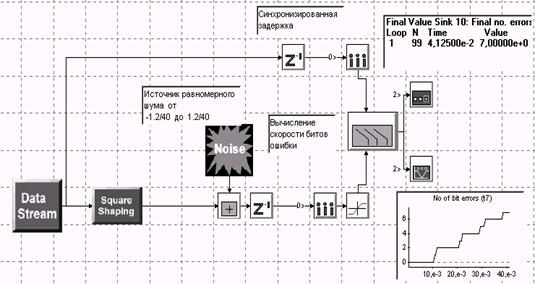
Рисунок 2.4
В этом задании принято, что шум на канале равномерно распределен по функции плотности вероятности, как показано на рисунке 2.5. Поэтому шумовые выборки, вероятно, будут между ±1.2/40. После формирования импульса импульсы данных имеют амплитуду ±1/40. Если данные на входе усилителя-ограничителя (слайсера) имеют величину больше 0 В (двоичная 1), то на выход поступает 1 В, и, если меньше чем 0 В (двоичный 0), то тогда на выход выдается минус 1.
Поэтому возможны два случая, когда могут произойти ошибки:
- P(0/1), когда передан "1" (1/40 В) и обнаружен "0";
- P(1/0) когда передан "0" (1/40 В) и обнаружена "1".
По принятой системе обозначений вероятность P(A/B) обычно называют "условной вероятностью".
|
Рисунок 2.5 |
Рисунок 2.6 |
В симметричном двоичном канале выполняется условие
P(1) = P(0) = 0.5.
Это условие справедливо для большинства цифровых телекоммуникационных систем, так как, в противном случае, используются методы эффективного (статистического) кодирования с целью приближения к указанному условию.
Таким образом, полная вероятность появления ошибок в двоичном симметричном канале связи определяется равенством
Pош = P(1)P(0/1) + P(0)P(1/0).
По форме кривой ФПВ можно определить область шумов, которые могут вызвать ошибку при передаче символа «1» (то есть 1/40 В). Как известно из курса теории вероятностей общая площадь под кривой ФПВ равна 1. Поэтому для нахождения вероятности попадания сигнала в определенную область нужно выполнить интегрирование по соответствующей области под кривой ФПВ (см. рисунок 2.6). Для равномерной ФПВ вычисление осуществляется очень просто
![]() .
.
Следовательно, вероятность ошибки для двоичного симметричного канала с помехами, имеющими равномерное распределение определится, как
![]()
Временные настройки системы установлены равными 4000 выборок, что соответствует передаче 100 бит.
а) Запустите систему, и определите общее количество ошибок, обнаруженных маркером BER, установленным в схеме. Маркер BER увеличивает свое содержимое на 1 при каждом обнаружении ошибки. Обратите внимание, что в схеме использован модуль «FINAL VALUE sink», показывающий текущее общее количество ошибок.
б) Запустите систему несколько раз, каждый раз подсчитывая среднее число ошибок на отдельный запуск
 ,
,
где nошi - число ошибок в отдельном запуске;
m - число запусков.
Объясните полученные результаты.
в) Увеличьте число выборок до 40000, то есть будет передаваться 1000 битов, и сравните полученные результаты с предыдушим пунктом. Выполните пункт (б) при данном числе выборок.
г) Повторите предыдущий пункт при числе выборок, равном 400 000. Выполните пункт (б) при данном числе выборок.
д) Рассчитатайте дисперсию и среднеквадратическое отклонение результатов каждого опыта для п.п. б), в) и г). Объясните полученные результаты.
е) Увеличьте диапазон шума до ± 1.4/40. Не забудьте изменить как максимальное значение, так и минимальные значение (Maximum Value and Minimum Value) параметров для модуля «uniform noise» («однородный шум»). Определите количество ошибок в этом случае: для 100, 1000 и 10000 переданных бит.
Вычислите теоретическое значение Pош для нового значения шума. Сравните ваши расчеты с результатами моделирования.
2.3.4 Передача данных в канале с нормально-распределенными помехами.
Откройте систему gaussian_noise_channel.svu (см. рисунок 2.7).
Для этого задания используется шум канала - аддитивный белый гауссовский шум (АБГШ или AWGN) со среднеквадратичным отклонением σ = 1/40, как показано ниже.
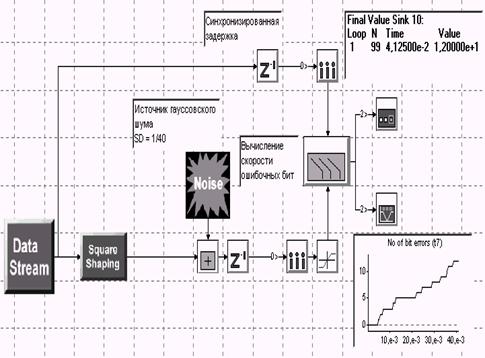
Рисунок 2.7
Следовательно, вероятность шума, имеющего значение меньше чем-1/40 равна около P(n(k)<-1/40) = 0.15. Тогда вероятность ошибки равна
![]()
|
p(x) =
Variance, E [(x2)] = 1/20 Standard Deviation = s |
|
P(X<x) = F (X)
= |

Рисунок 2.8
Данные представляют собой прямоугольные импульсы и детектируются усилителем-ограничителем (слайсером), как показано на рисунке 2.9.
Рисунок 2.9
Вычисленное теоретическое значение вероятности ошибки равно 0.15, что можно подтвердить с помощью моделирования. Система настроена на 4000 выборок, что соответствует передаче 100 бит.
а) Запустите систему, и определите общее количество ошибок, обнаруженных маркером BER.
б) Запустите систему несколько раз, каждый раз подсчитывая среднее число ошибок на отдельный запуск
Nош =  ,
,
где nошi - число ошибок в отдельном запуске; m - число запусков.
Объясните полученные результаты.
в) Увеличьте число выборок до 40000 (1000 переданных бит) и сравните полученные результаты с предыдушим пунктом. Выполните п. б) при данном числе выборок.
г) Повторите предыдущий пункт при числе выборок, равном 400 000. Выполните п. б) при данном числе выборок.
д) Рассчитатайте дисперсию и среднеквадратическое отклонение результатов каждого опыта для п.п. б), в) и г). Объясните полученные результаты.
е) Увеличьте среднеквадратичное отклонение шума до 1/20. Сколько ошибок получено при запуске системы на 40 000 выборок (1000 битов)?
ж) Вычислите теоретическую Pош для нового значения шума, повторно масштабируя ФПВ как на рисунке 2.8. Ваши результаты должны соответствовать результатам моделирования.
2.3.5 Регистрация сигналов с помощью усреднения.
Допустим, что данные передаются по каналу, который имеет низкий уровень шумов, также как и в задании 2.3.1. В предыдущих заданиях значение бита, равное 1 или-1, определялось по одной отдельной принятой выборке на середине прямоугольного импульса. Если момент осуществления выборки совпадает с уровнем шума, большим порогового уровня, то принятый бит будет ошибочным. Более высокая достоверность достигается в случае анализа полной длительности импульса. Следовательно, до усилителя-ограничителя (слайсера) необходимо проинтегрировать по длительности бит данных, произвести выборку результата и наконец, с помощью усилителя-ограничителя принять решение о значении принимаемого элемента (+1 или-1).
Структурная схема системы с предварительным усреднением приведена на рисунке 2.10.
Рисунок 2.10
Основной коррелятор производит интегрирование полученного сигнала. Обратите внимание, что интегрирование/усреднение, показанное здесь, представляет корреляцию полученного зашумленного импульса с идеальным импульсом единичной амплитуды.
Символ интегрирования часто используется для усреднения. Модуль, используемый при моделировании в SystemView, является модулем простого скользящего среднего значения, который выводит среднее число за последние k секунд. При моделировании эта величина устанавливается равной 40/92000 = 416.´10-6, что соответствует среднему числу последних 40 выборок. Они представляют один прямоугольный импульс.
Откройте систему gaussian_noise_channel.svu (см. рисунок 2.7).
а) Установите среднеквадратичное отклонение шума равным 1/20. Поэтому предварительно вероятность ошибки может быть рассчитана так
![]()
т.е. 300 бит ошибок для каждых 1000 бит (используйте интегралы вероятности ошибки из учебника, чтобы вычислить).
б) Теперь откройте систему gaussian_noise_chan_averg.svu (см. рисунок 2.11), где значение прямоугольного импульса усредняется по 40 выборкам его длительности и соответствует усреднению по времени
40/96000 = 0.00041667 с.
Стало ли усреднение более качественным с частотой более 0.3 ошибки/символ?
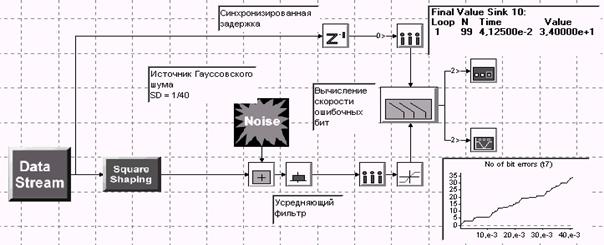
Рисунок 2.11
в) Увеличьте число выборок до 40´1000 = 40 000, что соответствует 1000 бит данных. Сколько ошибочных бит принято теперь?
г) Увеличьте шум канала еще выше до среднеквадратичного отклонения 2.5´10-1. Какова величина BER теперь?
Таким образом, применение усреднения значительно уменьшает число принятых ошибочных бит. В этом упражнении ошибка фиксируется только в том случае, если сумма предыдущих 40 шумовых выборок больше, чем 1/40. Учитывая, что канал в этом упражнении имеет нулевые помехи, появление ошибки маловероятно.
2.4 Контрольные вопросы
2.4.1 В каких случаях используется регистрация сигналов методом стробирования?
- изучение способов построения модуляторов и демодуляторов QAM, восьмипозиционной фазовой модуляции 8PSK, D8PSK и закрепление их на практике;
- исследование поведения сигналов с различными типами модуляции в условиях помех.
3.1 Предварительная подготовка
Изучить методы построения устройств модуляции и демодуляции на основе квадратурной амплитудной модуляции, восьмипозиционной фазовой манипуляции и относительной восьмипозиционной фазовой манипуляции.
3.2 Рабочее задание
3.2.1 Исследование методов реализации и характеристик квадратурной амплитудной модуляции QAM.
3.2.2 Исследование методов реализации и характеристик восьмипозиционной фазовой манипуляции 8PSK и относительной восьмипозиционной фазовой манипуляции D8PSK.
3.3 Методические указания по выполнению работы
3.3.1 Исследование квадратурной амплитудной модуляции.
Квадратурная амплитудная модуляция позволяет достигнуть лучшего использования полосы частот по сравнению с АМ-ДБП. Скорость передачи в системе с AM ДБП может быть удвоена без расширения занимаемой полосы частот, если в одной и той же полосе передавать два аддитивно наложенных друг на друга сигнала, несущие которых сдвинуты по фазе на 90°.
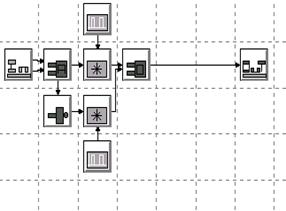
Структурная схема системы с QAM изображена на рисунке 3.1.
Первоначально передаваемые сигналы f1(t) и f2(t) раздельно модулируются с помощью синфазного и квадратурного модуляторов (MI, МQ), подаются на фильтры нижних частот ФНЧ. На выходах устройство по комбинациям обоих принимаемых сигналов восстанавливается первоначальная двоичная последовательность. Вследствие разделения на две независимые ветви при скорости модуляции 1/T можно работать с двойной скоростью передачи 2/Т. Необходимая при изменении скорости, синхронизация обеспечивается местным генератором.
Рисунок 3.1 - Структурная схема системы с квадратурной
амплитудной модуляцией
Для восстановления информации принимаемый сигнал
gM(t) = a(t) cos w0t + b(t) sin w0t
демодулируется в DMI и DMQ путем умножения на ортогональное несущее колебание с необходимой фазой:
gDMI(t) = a(t)
cos2 w0t + b(t)
sin w0t cos w0t =![]() [ a(t)
+ a(t)cos 2w0t
+ b(t)
[ a(t)
+ a(t)cos 2w0t
+ b(t)
sin 2w0t];
gDMQ(t) = a(t)
cos w0t sin w0t + b(t) sin2 w0t =![]() [ b(t) - b(t) sin 2w0t +a(t)
[ b(t) - b(t) sin 2w0t +a(t)
cos 2w0t].
После подавления высокочастотных компонент в приемных фильтрах низких частот ФНЧ сигналы обоих каналов полностью разделены:
gDMI(t) = a(t);
gDMQ(t) = b(t).
Если, однако, фаза несущего колебания отклоняется от требуемого значения, то в канале I или канале Q появляются посторонние компоненты сигнала другого канала. Для синхронизации фазы на приеме либо применяют пилот-сигнал, размещенный в середине полосы частот (в специально созданном для этого провале спектра сигнала), либо из сигнала данных выделяют сигнал ошибки, пропорциональный отклонению фазы.
Для систем QAM с многопозиционными сигналами векторы сигналов могут упорядочиваться различным образом. Различные системы QAM отличаются, хотя и незначительно, друг от друга по чувствительности к помехам. Причина этого заключается в том, что в зависимости от положения векторов сигнала расстояния между соседними состояниями, определяющие чувствительность к помехам, различны.
3.3.1.1 Откройте систему qam_two_signals.svu (см. рисунок 3.2).
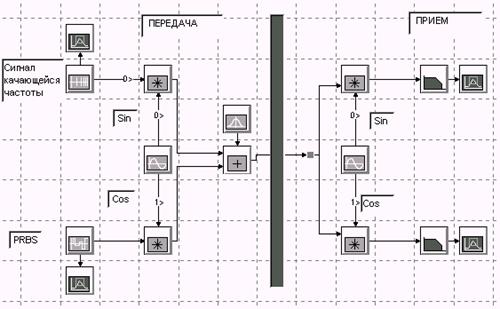
Рисунок 3.2 - Структурная схема модели системы с QAM
а) Запустите систему и сравните сигналы на входах системы и на ее выходах.
б) Установите небольшую фазовую погрешность (например, равную 4°) в местном генераторе приемника. Зарисуйте полученные временные диаграммы и объясните результаты?
в) Добавьте в схему Гауссовский источник шума, установите среднеквадратичное значение (Standard Deviation) шума, равным 0,2 В, и запустите систему опять.
Изменяя среднеквадратическое значение шума ступеняими через 0,1 В определите уровень сигнала при котором появятся искажения принимаемых сигналов.
Оцените значение отношения сигнал/шум для каждого значения щумового сигнала.
3.3.1.2 Откройте систему 16qam_ru.svu (см. рисунок 3.3).
В данной схеме используется два источника псевдослучайного двоичного сигнала (PRBS), что позволяет получить 16-позиционную квадратурную амплитудную модуляцию (16-КАМ или 16-QAM).
а) Запустите систему на выполнение.
С помощью калькулятора SystemView создайте созвездие 16-QAM входных и выходных сигналов. Для этого в калькуляторе SystemView выберите меню Style и затем Scatter Plots. В правой части меню выберите для построения созвездия входных сигналов Pseudorandm1 in верхнем окне и Pseudorandm2 in - в нижнем. Нажмите OK.
Рисунок 3.3 - Структурная схема модели системы 16-QAM
Для построения созвездия выходных сигналов используйте Pseudorandm1 out и Pseudorandm 2 out.
б) Установите значение Standard Deviation (среднеквадратическое отклонение) источника шумов равным 0,2 В. Запустите схему вновь и сравните полученные результаты с предыдущими.
в) Изменяйте значения параметра Standard Deviation ступенями по 0,1 В до появления ошибочно принятых сигналов.
Вычислите отношение сигнал/шум для каждого случая. Объясните полученные результаты.
3.3.2 Исследование многопозиционной фазовой модуляции.
В данном задании исследуются характеристики устройств модуляции-демодуляции с применением восьмипозиционной фазовой манипуляции (8PSK) и относительной восьмипозиционной фазовой манипуляции (D8PSK).
Входной поток данных, поступающий с источника информации, преобразуется в восьмеричную последовательность элементов. Полученная последовательность через синус-косинусный преобразователь поступает в QAM-модулятор и далее в канал связи. На приемной стороне происходит обратное преобразование принятого сообщения. Более подробно процесс формирования и демодуляции относительной восьмипозиционной фазовой манипуляции 8PSK описан в [3].
3.3.2.1 Откройте систему восьмипозиционной фазовой манипуляции 8psk.svu.
а) Запустите систему на выполнение.
Перейдите в окно анализа. Здесь находятся графики сигнала I/Q. Один график для входного, а другой – для выходного сигналов (перед символом фазового демодулятора). Объясните характер входа на I/Q графике.
б) Установите значение Standard Deviaton источника шумов равным 0,2 В. Запустите схему вновь и сравните полученные результаты с предыдущими.
в) Изменяйте значения параметра Standard Deviation ступенями по 0,1 В до появления ошибочно принятых сигналов.
Вычислите отношение сигнал/шум для каждого случая. Объясните полученные результаты.

Рисунок 3.4 - Структурная схема модели системы восьмипозиционной фазовой модуляции (8-PSK)
3.3.2.2 Откройте систему относительной восьмипозиционной фазовой манипуляции 8psk-ber.svu.
а) Сравните, эту систему с предыдущим заданием. Обратите внимание, что система включает кодер и декодер Грея (Gray encoder and decoder).
б) Объясните необходимость введения элементов.
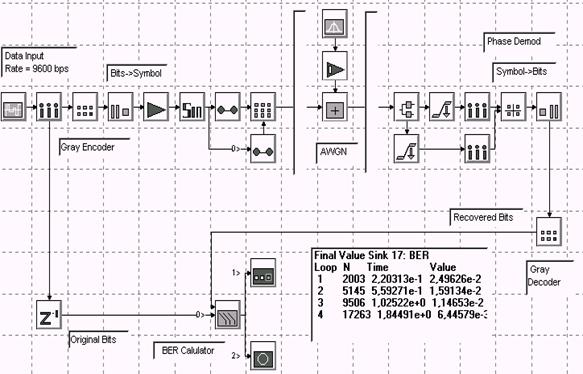
Рисунок 3.5 - Структурная схема модели системы относительной восьмипозиционной фазовой модуляции (D8PSK)
в) Выполните моделирование. Откройте окно анализа, чтобы увидеть кривую скорости появления ошибочных бит BER. Сравните результаты моделирования с теоретическими результатами, представленными в [3].
3.3.2.3 Сравните результаты этих экспериментов для квадратурной амплитудной модуляции QAM, восьмипозиционной фазовой манипуляции 8PSK и относительной восьмипозиционной фазовой манипуляции D8PSK.
3.4 Контрольные вопросы
3.4.1 Поясните, почему система сигналов QAM является обобщением систем сигналов с АМ и ФМ?
3.4.3 В чем заключается отличие в формировании сигналов D8PSK от 8PSK?
3.4.4 Зачем в относительной ФМ применяется кодирование помощью кода Грея?
3.4.5 Что такое обратная работа? В каком случае может возникнуть обратная работа. Предложите и реализуйте метод, позволяющий на приеме обнаружить появление обратной работы.
3.4.6 При каком методе приема PSK сигналов в условиях гауссовых помех обеспечивается меньшая вероятность ошибки?
4 Лабораторная работа. Изучение методов построения циклических кодов
Цель работы: изучение методов построения кодеров и декодеров циклических кодов с различными видами образующих многочленов.
4.1 Предварительная подготовка
4.1.1 Изучить методы кодирования и декодирования циклическими кодами.
4.1.2 Изучить технические средства, применяемые при кодировании и декодировании циклическими кодами.
4.1.3 Изучить возможности обнаружения и исправления ошибок циклических кодов.
4.2 Рабочее задание
4.2.1 Исследовать кодирующее устройство циклического кода, обнаруживающего одиночную ошибку.
4.2.2 Исследовать декодирующее устройство циклического кода, обнаруживающего одиночную ошибку.
4.3 Методические указания по выполнению работы
4.3.1 Исследование кодирующих устройств.
Все известные кодирующие устройства для любых типов циклических кодов, выполненные на регистрах сдвига, можно свести к двум типам схем.
Схемы первого типа вычисляют значения проверочных символов путем непосредственного деления многочлена а(х)хm на образующий многочлен g(x). Это делается с помощью регистра сдвига, содержащего n-k разрядов (см. рисунок 4.1). В данной схеме коэффициенты кодируемого многочлена участвуют в обратной связи не через n-k сдвигов, а сразу с первого такта. Это позволяет устранить разрыв между информационными и проверочными символами.
В исходном состоянии ключ K1 находится в положении 1. Информационные символы одновременно поступают как в линию связи, так и в регистр сдвига, где за k тактов образуется остаток. Затем ключ К1 переходит в положение 2 и остаток поступает в линию связи.
Рисунок
4.1
-
Обобщенная структурная схема кодера
циклического кода
Рассмотрим процесс деления многочлена а(х)хm= (x+1)x на многочлен g(x) = x3+x2+ 1 за k тактов.
Рисунок
4.2
- Структурная
схема кодера циклического
кода с образующим многочленом
g (x)
= x3+x2+1
Схема кодирующего устройства для заданного g(x) приведена на рисунке 4.2. Процесс формирования кодовой комбинации шаг за шагом представлен в таблице 4.1, где черточками отмечены освобождающиеся ячейки, занимаемые новыми информационными символами.
С помощью схем второго типа вычисляют значения проверочных символов как линейную комбинацию информационных символов, т. е. они построены на использовании основного свойства систематических кодов. Кодирующее устройство строится на основе k-разрядного регистра сдвига (рисунок 4.3). Выходы ячеек памяти подключаются к сумматору в цепи обратной связи в соответствии с видом генераторного многочлена
h(x) = (xn + 1) / g(x) = h0 +h1x + … + hkxk .
В исходном положении ключ K1 находится в положении 1. За первые k тактов поступающие на вход информационные символы заполняют все ячейки регистра. После этого ключ переводят в положение 2. На каждом из последующих тактов один из информационных символов выдается в канал связи и одновременно формируется проверочный символ, который записывается в последнюю ячейку регистра. Через n-k тактов процесс формирования проверочных символов заканчивается, и ключ K1 снова переводится в положение 1.
Рисунок
4.3
-
Структурная схема кодера циклического
кода с сумматорами в цепи обратной связи
Таблица 4.1
|
Номер такта |
Вход |
Состояние ячеек регистра |
Выход |
||
|
1 |
2 |
3 |
|||
|
1 2 3 4 5 6 7 |
1 0 0 1 0 0 0 |
1 1 1 1 - - - |
0 1 1 1 1 - - |
1 1 0 0 1 1 - |
1 01 001 1001 01001 101001 1101001 |
В течение последующих k тактов содержимое регистра выдается в канал связи с одновременным заполнением ячеек новой последовательности информационных символов.
Рассмотрим процесс формирования кодовой комбинации с использованием генераторного многочлена для случая g(x) =x3+x2+1 и а(x) = x3+l. Определяем генераторный многочлен
 .
.
Соответствующая h(x) схема кодирующего устройства приведена на рисунке 4.4. Формирование кодовой комбинации поясняется таблице 4.2. Оно начинается после заполнения регистра информационными символами.
Рисунок 4.4
- Кодер
циклического кода с сумматорами в цепи
обратной связи
Таблица 4.2
|
Номер такта |
Состояние ячеек регистра |
Выход |
|||
|
1 |
2 |
3 |
4 |
||
|
1 2 3 4 5 6 7 |
1 0 0 1 0 0 0 |
1 1 1 1 - - - |
0 1 1 1 1 - - |
1 1 0 0 1 1 - |
1 01 001 1001 01001 101001 1101001 |
4.3.1.1 Откройте систему crc_encoder.svu (см. рисунок 4.5)
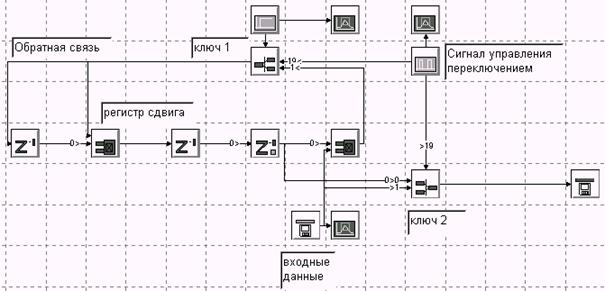
Рисунок 4.5 - Схема исследуемого кодера циклического кода (7,4)
Схема осуществляет формирование циклического кода (7,4). Эта схема формирует 3 дополнительных контрольных разряда для каждых 4 информационных символов с помощью вычисления остатка от деления на образующий полином. В течение первых 4 тактов через ключ 1 данные поступают в регистр сдвига и через ключ 2 поступают на выход устройства. После четырех тактов регистр сдвига формирует контрольные разряды. Ключ 1 размыкается, и через ключ 2 контрольные разряды поступают на выход схемы. Образующий полином - G (X) = X3 + X +1.
Первое входное сообщение - {1011} (самый правый бит сначала). Определите значения выходных символов при использовании этих входных данных и указанного выше образующего многочлена. Запустите систему на выполнение и проверьте правильность полученных значений.
4.3.1.2 По заданию преподавателя соберите и проверьте правильность работы кодера циклического кода для одного из полиномов, приведенных в таблице 4.3.
Таблица 4.3
|
Степень
|
Образующий многочлен |
Число остатков (длина кода) |
|
2 3 3 4 4 5 5 |
x2 + x + 1 x3 + x + 1 x3 + x2 + 1 x4 + x3 + 1 x4 + x + 1 x5 + x2 + 1 x5 + x3 + 1 |
3 7 7 15 15 31 31 |
4.3.2 Исследование декодирующих устройств.
Декодирующие устройства для кодов, обнаруживающих ошибки, по существу ничем не отличаются от схем кодирующих устройств. В них добавляется лишь буферный регистр для хранения принятого сообщения на время проведения операции деления. Если остаток не обнаружен (случай отсутствия ошибки), то информация с буферного регистра считывается в дешифратор сообщения. Если остаток обнаружен (случай наличия ошибки), то информация в буферном регистре уничтожается и на передающую сторону посылается импульс запроса повторной передачи.
В случае исправления ошибок схема несколько усложняется. Информацию о разрядах, в которых произошла ошибка, несет, как и ранее, остаток. Схема декодирующего устройства представлена на рисунке 4.6.
Символы подлежащей декодированию кодовой комбинации, возможно, содержащей ошибку, последовательно, начиная со старшего разряда, вводятся в n-разрядный буферный регистр сдвига и одновременно в схему деления, где за п тактов определяется остаток, который в случае непрерывной передачи сразу же переписывается в регистр второй аналогичной схемы деления.
Начиная с (n+l)-го такта в буферный регистр и первую схему деления начинают поступать символы следующей кодовой комбинации. Одновременно на каждом такте буферный регистр покидает один символ, а в регистре второй схемы деления появляется новый остаток (синдром). Детектор ошибок, контролирующий состояния ячеек этого регистра, представляет собой комбинаторно-логическую схему, построенную с таким расчетом, чтобы она отмечала все те синдромы («выделенные синдромы»), которые появляются в схеме деления, когда каждый из ошибочных символов занимает крайнюю правую ячейку в буферном регистре.
Рисунок 4.6 - Структурная схема декодера циклического кода
При последующем сдвиге детектор формирует сигнал «l», который, воздействуя на сумматор коррекции, исправляет искаженный символ. Одновременно по цепи обратной связи с выхода детектора подается сигнал «1» на входной сумматор регистра второй схемы деления. Этот сигнал изменяет выделенный синдром так, чтобы он снова соответствовал более простому типу ошибки, которую еще подлежит исправить. Продолжая сдвиги, обнаружим и другие выделенные синдромы. После исправления последней ошибки все ячейки декодирующего регистра должны оказаться в нулевом состоянии. Если в результате автономных сдвигов состояние регистра не окажется нулевым, это означает, что произошла неисправимая ошибка.
4.3.2.1 Откройте систему crc_decoder.svu (см. рисунок 4.7).
Схема вычисляет синдром получаемых данных, защищенных циклическим кодом (7,4). Семь битов полученной комбинации поступают в регистр сдвига, с замкнутой обратной связью (ключ 1 - замкнут). После семи тактов в регистре сдвига образуется синдром ошибки. Он может быть использован для исправления ошибок. Если некоторые разряды синдрома не равны нулю, тогда в принятой комбинации имеется ошибка.

Рисунок 4.7
- Схема
исследуемого декодера
циклического кода (7,4)
При отсутствии ошибок значения всех разрядов синдрома должны быть равны нулю. Запустите систему и проверьте, что входная комбинация принята без ошибок.
При передаче комбинации в канале связи вводится одиночная ошибка. Определите номер ошибочного бита.
Измените время ввода ошибки и повторно запустите систему на выполнение. Проверьте правильность работы декодера в этом случае.
4.3.2.2 По заданию преподавателя соберите и проверьте правильность работы декодера циклического кода для одного из полиномов, приведенных в таблице 4.3.
4.4 Контрольные вопросы
4.4.1 Какие коды называют помехоустойчивыми?
4.4.2 За счет чего помехоустойчивый код получает способность обнаруживать и исправлять ошибки?
4.4.3 Запишите соотношения, связывающие минимальное кодовое расстояние с числом обнаруживаемых и исправляемых ошибок.
4.4.4 Каким требованиям должен удовлетворять образующий многочлен циклического кода?
4.4.5 Какие устройства составляют основу технической реализации' циклических кодов?
4.4.6 Нарисуйте схему кодирующего устройства циклического кода и поясните ее работу.
4.4.7 Поясните процесс декодирования циклического кода.
5 Лабораторная работа. Простые межсимвольные помехи
Цель работы: исследовать явление межсимвольной интерференции в простом канале связи; построение глазковой диаграммы; изучить методы, применяемые в технике связи для устранения и уменьшения МСИ.
5.1 Предварительная подготовка
5.1.1 Изучите основные характеристики канала связи.
5.1.2 Изучите основные виды помех и искажений сигнала при передаче его в канале.
5.1.3 Изучите основные методы уменьшения и устранения межсимвольных помех.
5.2 Рабочее задание
5.2.1 Исследование передачи сигналов при идеальной фильтрации.
5.2.2 Построение глазковой диаграммы.
5.2.3 Исследование явления межсимвольной интерференции в простом канале.
5.2.4 Исследование методов уменьшения и устранения межсимвольной интерференции путем использования фильтров типа приподнятого косинуса.
5.2.5 Исследование метода устранения межсимвольной интерференции путем использования эквалайзеров.
5.3 Методические указания по выполнению работы
5.3.1 Межсимвольная интерференция.
Ограничение спектра сигнала в каналах связи, нелинейность частотных характеристик вызывают появление переходных процессов, которые искажают или расширяют импульсный сигнал, проходящий через канал. Если ширина полосы канала приблизительно равна ширине полосы сигнала, то искажение будет превышать длительность передачи символа и приведет к наложению импульсов сигнала (единичные элементы сигнала, растягиваясь во времени, перекрываются соседними элементами). Этот эффект называется межсимвольной интерференцией (МСИ, intersymbol interference - ISI). Это влечет за собой появление колебаний амплитуды принимаемых импульсов и, следовательно, снижает помехоустойчивость передачи дискретной информации. При больших искажениях частотных характеристик передача оказывается невозможной даже при отсутствии помех.
Идеальная фильтрация по Найквисту.
Исследованием проблемы предотвращения появления МСИ при приеме долгое время занимался Найквист. Он показал, что минимальная теоретическая ширина полосы системы, требуемая для детектирования Rs символов/секунду без МСИ, равна Rs/2 Гц. Это возможно, если передаточная функция системы H(f) имеет прямоугольную форму, как показано на рисунке 4.1, а. Для низкочастотных систем с такой H(f), односторонняя ширина полосы фильтра равна 1/2Т (идеальный фильтр Найквиста), импульсная характеристика функции H(f) имеет вид h(t)=sinc(t/T) (см. рисунок 4.1, б). Импульс, описываемый функцией sinc(t/T), называется идеальным импульсом Найквиста; он имеет бесконечную длительность и состоит из многочисленных лепестков: главного и боковых, именуемых хвостами. Найквист установил, что если каждый импульс принятой последовательности имеет вид sinc(t/T), импульсы могут детектироваться без МСИ. Это условие называют первым условием Найквиста. Оно выполняется для импульса, который только в некоторый момент отсчета имеет отличное от нуля характеристическое значение и нулевые значения во всех остальных отсчетных точках. Следовательно, предполагая идеальную синхронизацию процесса взятия выборок, получаем, что МСИ не будет влиять на процесс детектирования.
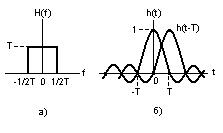
а) прямоугольная передаточная функция системы H(f);
б) принятый импульс h(t)=sinc(t/T).
Рисунок 5.1 – Каналы Найквиста для нулевой межсимвольной интерференции
Соберите систему sinc_pulse.svu (см. рисунок 5.2).
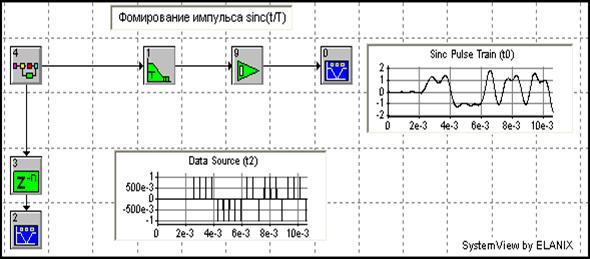
Рисунок 5.2
Последовательность импульсов со скоростью передачи 2400 бит/секунду принимает форму импульса sinc(t/T). Структура метасистемы показана на рисунке 5.3.
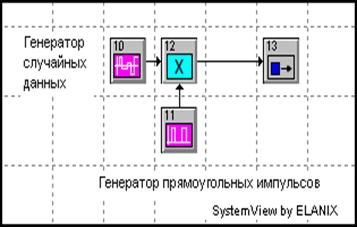
Рисунок 5.3
Запустите систему и в окне анализа обратите внимание на то, что межсимвольная интерференция не возникает в результате перехода через нулевые уровни импульсов sinc(t/T) в моменты выборки.
5.3.2 Построение глазковой диаграммы.
МСИ может серьезно ухудшить характеристики цифровой системы связи. Для качественной оценки степени МСИ используется глазковая диаграмма, полученная в результате измерения отклика системы на заданные низкочастотные сигналы. Она получается следующим образом. Как видно из рисунка 2.4, для построения глазковой диаграммы сигналы данных на интервале T и nT изображаются на одном графике наложенными друг на друга. Такое представление возможно лишь тогда, когда передаваемый сигнал содержит только лишь импульсы длительностью nT, где n – целое число (изохронный сигнал данных). По глазковой диаграмме можно непосредственно определить минимальное отклонение значений сигнала в моменты отсчета. Сумму максимальных расстояний от порогового уровня в некоторой области, где нет переходов, называют раскрытием «глазка». По мере закрытия «глазка» МСИ увеличивается, а по мере открытия – уменьшается. Наряду с этим, по горизонтальному раскрытию «глазка» можно определить краевые искажения (ошибки синхронизации).
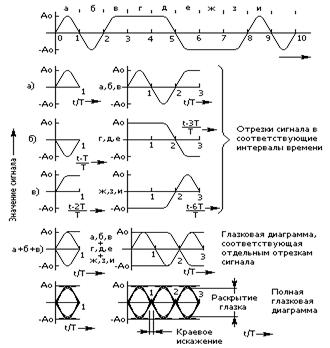
Рисунок 5.4
Снова запустите систему sinc_pulse.svu (см. рисунок 5.2).
В окне анализа выберите из калькулятора SystemView меню Style и затем Slice (см. рисунок 5.5). Установите начальное время, а также установите время деления на частоту передачи символов.
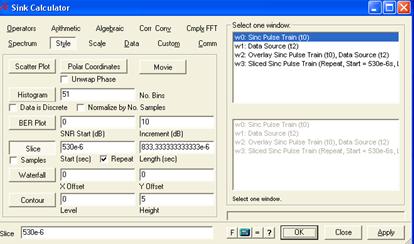
Рисунок 5.5
Вы увидите только две значительные точки пересечения линий, которые представляют собой моменты выборки (обратите внимание на то, что вы также увидите точки пересечения с нулевым уровнем).
5.3.3 Простые межсимвольные помехи в канале связи.
Соберите систему channel_isi. svu (см. рисунок 2.6).
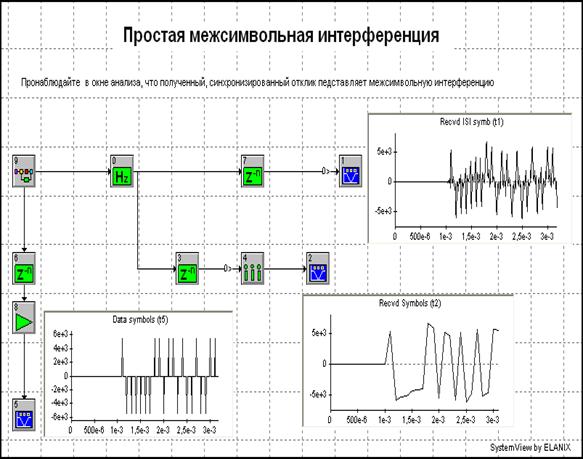
Рисунок 5.6
Эта система использует простой канал. Частота выборок установлена на 80000 Гц. Частота передачи символов – 10000 символов в секунду (10000 Бод). Задана правильная синхронизирующая задержка (со значением 44):
а) запустите систему и обратите внимание на полученные импульсные характеристики при данной частоте выборок и на то, что при частоте передачи 10000 символов в секунду присутствуют МСИ;
б) обратите внимание на эффект элайзинга (см. рисунок 2.7) и более плоскую характеристику канала с уменьшенной частотой отсчетов;
в) заметьте, насколько важна правильная синхронизирующая задержка. Увеличьте значение синхронизирующей задержки дискретизатора до 50. Запустите систему и перейдите в окно анализа. Обратите внимание на импульсную характеристику.
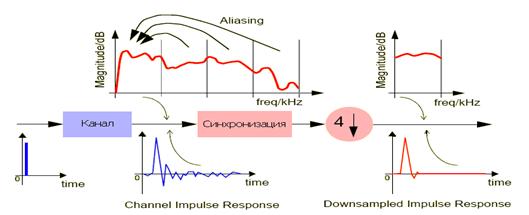
Рисунок 5.7
5.3.4 Фильтр с характеристикой типа приподнятого косинуса.
Одна из часто используемых передаточных функций H(f) принадлежит к классу функций Найквиста (нулевая МСИ в моменты взятия выборок) и называется приподнятым косинусом (raised-cosine).
Соберите систему rc_pulse. svu (см. рисунок 5.8).
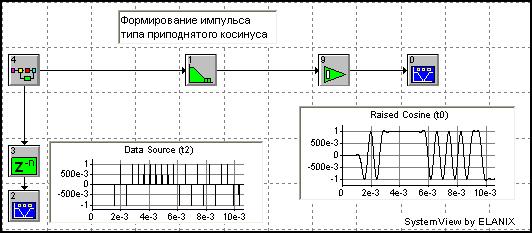
Рисунок 5.8
Последовательность импульсов со скоростью передачи 2400 бит/секунду принимает форму импульса типа приподнятого косинуса. Коэффициент сглаживания фильтра r=1:
а) запустите систему и обратите внимание на то, что межсимвольная интерференция не возникает в результате перехода через нулевые уровни импульсов типа приподнятого косинуса в моменты выборки;
б) постройте для этой системы глазковую диаграмму;
в) поменяйте фильтр на фильтр типа корня из приподнятого косинуса. Отметьте, что наблюдается МСИ. Объясните, чем это обусловлено и как решается эта проблема;
г) откройте и запустите снова систему channel_isi.svu (см. рисунок 5.6). Поменяйте в системе фильтр поочередно на sin(t/T), raised cosine, root raised cosine и сравните с приведенными выше примерами. Есть ли МСИ в приемнике?
5.3.5 Выравнивание.
Одним из методов обработки или фильтрации сигнала, направленным на устранение или снижение МСИ, является выравнивание (equalizing).
Соберите систему lms_equalize. svu (см. рисунок 5.9).
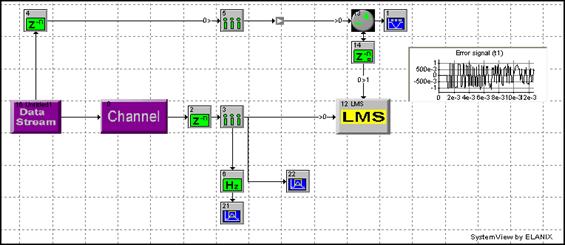
Рисунок 5.9
Запустите систему. Здесь вы увидите невыровненный выходной сигнал и выровненный сигнал. Определите, в каком из них МСИ меньше. Все необходимые параметры для каждого пункта работы №2 приведены в приложении А.
Сделайте выводы о проделанной работе.
5.4 Контрольные вопросы
5.4.1 Чем обусловлено появление межсимвольной интерференции?
5.4.2 Условия Найквиста. Идеальная фильтрация Найквиста.
5.4.3 Как влияют на передачу сигнала ошибки синхронизации?
5.4.4 Методы уменьшения и устранения МСИ в канале связи.
5.4.5 Какое устройство выполняет функцию устранения влияния МСИ на переданный сигнал?
5.4.6 Сравните применяемые эквалайзеры.
6 Лабораторная работа. Сверточное кодирование. Код Рида-Соломона
Цель работы: изучение методов построения кодеров и декодеров сверточных кодов, кода Рида-Соломона.
6.1 Предварительная подготовка
6.1.1 Изучить методы кодирования и декодирования сверточных кодов.
6.1.2 Изучить технические средства, применяемые при кодировании и декодировании сверточных кодов.
6.1.3 Изучить возможности обнаружения и исправления ошибки сверточных кодов.
6.1.4 Изучить методы кодирования и декодирования кодов Рида-Соломона.
6.2 Рабочее задание
6.2.1 Исследовать кодирующее и декодирующее устройство сверточного кода.
6.2.2 Исследовать кодирующее устройство кода Рида-Соломона, исправляющее ошибки.
6.3 Методические указания по выполнению работы
6.3.1 Исследование кодера сверточного кода.
В сверточном коде блок из n символов кода, формируемых кодером в любой выбранный интервал времени, зависит не только от k информационных символов, поступивших на его вход в течение этого же интервала времени, но и от информационных символов, поступивших в течение (K-1) предыдущих интервалов. Параметр K называется длиной кодового ограничения. Для сверточных кодов значение параметров n и k выбираются малыми. Сверточные коды могут использоваться для исправления случайных ошибок, ошибок, группирующихся в пакеты, и для тех и других. Кодер двоичного сверточного кода содержит kK-разрядный регистр и n сумматоров по модулю 2. Обобщенная структурная схема кодера сверточного кода приведена на рисунке 6.1.
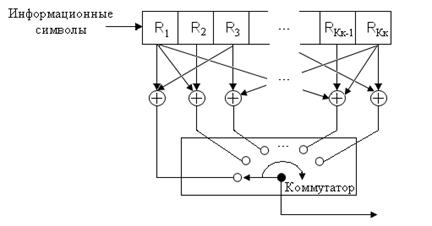
Рисунок 6.1 – Обобщенная структурная схема кодера сверточного кода
На рисунке 6.2 приведены пример кодера сверточного кода с параметрами k=1, n=2, K=3, Rk=1/2. Информационные символы поступают на вход регистра, а символы кода формируются на выходе коммутатора. Коммутатор (КМ) последовательно опрашивает выходы сумматоров по модулю 2 в течение интервала времени, равного длительности информационного символа (бита).
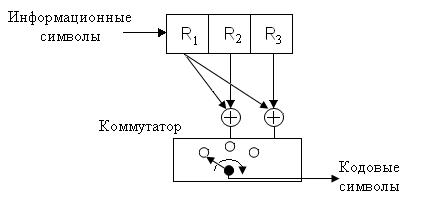
Рисунок 6.2 – Структурная схема кодера несистематического сверточного кода со скоростью1/2
Процедуры кодирования и декодирования удобно описывать с помощью так называемого кодового дерева, которое отображает последовательности на выходе кодера для любой возможной входной последовательности. На рисунке 6.3 приведено кодовое дерево кодера, изображенного на рисунке 6.2, для блока из пяти информационных символов. Если первый символ принимает значение 0, то на выходе кодера формируется пара символов 00. Если первый символ принимает значение 1, то на выходе кодера формируется пара символов 11. Это показано с помощью двух ветвей, которые выходят из начального узла. Верхняя ветвь соответствует 0, нижняя – 1. В каждом из последующих узлов ветвление происходит аналогичным образом: из каждого узла исходит две ветви, причем верхняя ветвь соответствует 0, а нижняя – 1. Ветвление будет происходить вплоть до последнего символа входного блока. Вслед за ним все входные символы принимают значение 0, и образуется только одна обрывающаяся ветвь. Таким образом, каждой из возможных входных комбинаций информационных символов соответствует своя вершина на кодовом дереве. В данном случае имеется 32 вершины. С помощью кодового дерева легко построить выходную последовательность символов кода, соответствующую определенной входной последовательности. Например, входной последовательности 11010 соответствует выходная последовательность, лежащая на пути, изображенном пунктирной линией. Анализируя структуру кодового дерева на рисунке 1.3, можно заметить, что, начиная с узлов третьего уровня, она носит повторяющийся характер. Действительно, группа ветвей, заключенных в прямоугольники, изображенные пунктирными линиями, полностью совпадают. Это означает, что при поступлении на вход четвертого символа выходной символ кода будет одним и тем же, независимо от того, каким был первый входной символ: 0 или 1. Другими словами, после первых трех групп выходных символов кода входные последовательности 1х1х2х3х4… и 0х1х2х3х4… будут порождать один и тот же выходной символ.
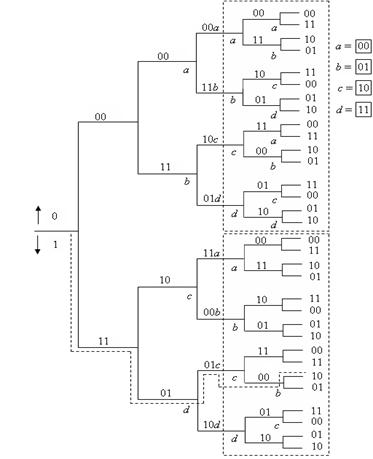
Рисунок 6.3 – Кодовое дерево для кодера, изображенного
на рисунке 6.2
6.3.1.1 Соберите систему simple_coder. svu (см. рисунок 6.4)
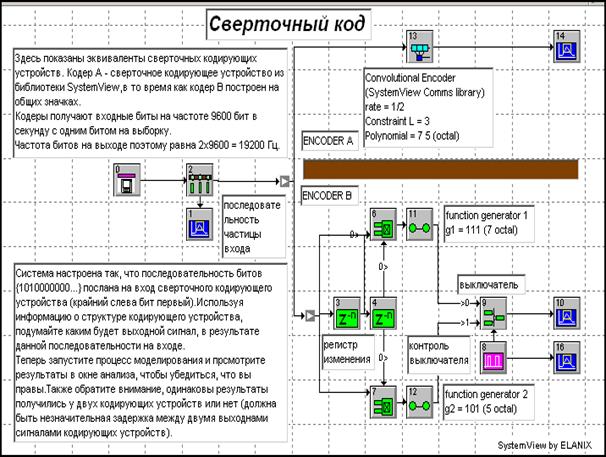
Рисунок 6.4 – Система simple_coder.svu
В данном примере сверточный кодер реализован с использованием дискретных компонентов и стандартного сверточного кодера SystemView:
а) для входной последовательности 101000 определите, каким будет выход через «ручное» вычисление либо из эквивалентной схемы или от использования диаграммы состояния, предположите, что кодеры пускаются в режиме 00;
б) перед запуском системы проследите, чтобы норма
осуществления выборки ![]() была
установлена на 19,2 Гц, а данные являются входными по норме 9,6 кбит после downsampler. Следовательно, кодер принимает данные в 9,6 kbit/s при 19,2 kbit/s на выходе. Обратите внимание, что символические параметры подтверждают,
что это правильно;
была
установлена на 19,2 Гц, а данные являются входными по норме 9,6 кбит после downsampler. Следовательно, кодер принимает данные в 9,6 kbit/s при 19,2 kbit/s на выходе. Обратите внимание, что символические параметры подтверждают,
что это правильно;
в) запустите систему, и отметьте закодированный выход для данного входа.
Проследите, чтобы символ стандартного сверточного кода имел время ожидания двух бит перед дискретным выполнением; это просто функция символического проектирования. Также обратите внимание, что «полиноминалы» кодера удобно представлены октальными величинами, т.е. {78 58} = {111 101}.
Параметры для схемы Сверточный код приведены в приложении Б.
6.3.1.2 Соберите систему simple_coder(2 variant). svu (см. рисунок 6.5)
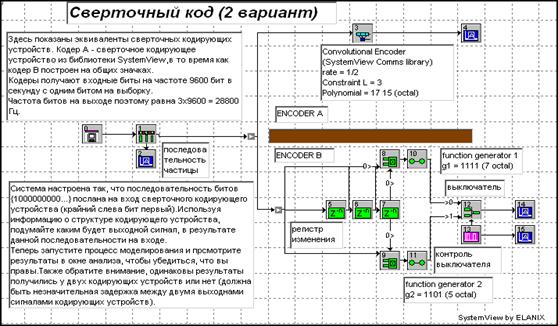
Рисунок 6.5 – Система simple_coder(2 variant).svu
Проделайте аналогичные действия, как и в предыдущем упражнении.
Параметры для схемы Сверточный код (2 вариант) приведен в приложении Б.
6.3.2 Исследование декодеров сверточного кода.
Среди различных алгоритмов декодирования сверточных кодов алгоритм максимального правдоподобия Витерби получил наиболее широкое распространение в системах связи, в которых необходимо обеспечить экономию энергетического ресурса.
При декодировании в соответствии с критерием максимального правдоподобия выбирается то кодовое слово из множества возможных, которое ближе всего располагается к принятому кодовому слову в пространстве кодовых слов. Поскольку имеется 2К кодовых слов, то при реализации алгоритма максимального правдоподобия необходимо обеспечить запоминание всех кодовых слов и их сравнение с принятым словом. С увеличением К сложность вычислений и, следовательно, декодера возрастают.
Обратимся к решетчатой диаграмме, изображенной на рисунке 6.6. Задача состоит в том, чтобы для некоторой принятой последовательности символов найти путь на решетчатой диаграмме, соответствующий выходной последовательности символов, в максимальной степени совпадающей с принятой последовательностью.
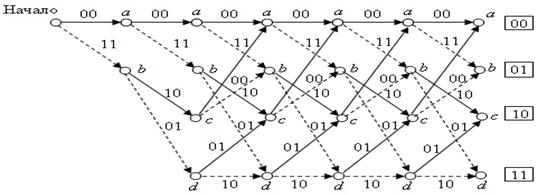
Рисунок 6.6 – Решетчатая диаграмма для кодера, изображенного
на рисунке 6.2
Предположим, что первые шесть символов последовательности есть 01 00 01. Рассмотрим два пути, состоящих из трех ветвей (для шести символов) и заканчивающихся в узлах a, b, c и d. Из двух путей сохраним лишь тот, который в максимальной степени согласуется с последовательностью 01 00 01 (путь с минимальным расстоянием). Оставшийся для каждого узла такой путь будем называть «выжившим».
Имеются два пути в узел третьего уровня a: 00 00 00 и 11 10 11. Эти пути имеют расстояния от принятой последовательности 01 00 01, равные соответственно 2 и 3. Выжившим путем вычисления расстояния следует считать путь 00 00 00. Процедуру повторим для узлов b, c и d. Например, для узла c имеются два пути, соответствующих выходным последовательностям 00 11 10 и 11 01 01 и имеющих расстояния, соответственно 5 и 2. Выжившим следует считать путь 11 01 01. Аналогичным образом производится отбор выжившим путей для узлов b и d. В результате из восьми возможных путей сохраняются только четыре. Причина, по которой отбрасываются четыре пути, состоит в следующем. Два пути, сходящиеся, например, в узле третьего уровня a, имеют два одинаковых первых символов, оба пути должны сойтись именно в этом узле a и в будущем выродиться в один.
Таким образом, необходимо запомнить четыре выживших путей и их расстояние от принятой последовательности. В общем случае количество выживших путей равно количеству состояний, т.е. 2К-1.
Теперь рассмотрим два очередных принятых символов. Допустим, принимается последовательность символов 01 00 01 00. Сравним два выживших путей, которые сходятся в узле a четвертого уровня. Они могут выходить только из узлов a и c третьего уровня и соответствовать последовательностям 00 00 00 00 и 11 01 01 11, которые имеют расстояния, соответственно равные 2 и 4 от принятой последовательности 01 00 01 00. Следовательно, путь 00 00 00 00 следует считать выжившим для узла a четвертого уровня. Далее аналогичная процедура отбора повторяется для узлов b, c и d.
Отметим, что до окончания декодирования сохраняются только четыре конкурирующих пути, которые соответствуют выжившим путям для узлов b, c и d. Остается решить вопрос, когда произвести усечение алгоритма и принять решение в пользу одного из четырех оставшихся путей. Это можно сделать принудительно, положив последние два информационных символа равными 00, т.е. осуществить сброс. При поступлении на вход регистра первого символа 0 необходимо рассматривать выжившие пути только для узлов a и c, поскольку переход в узлы b и d возможен только при поступлении на вход символа 1. При поступлении на вход регистра второго символа 0 необходимо рассмотреть только выжившие пути, сходящиеся в узле a, поскольку при поступлении символов 00 декодер должен перейти в состояние a.
При реализации алгоритма Витерби объем памяти и сложность вычислений пропорциональна 2К, поэтому его целесообразно использовать при длине кодового ограничения К<10. При больших длинах кодового ограничения, которые необходимы для достижения низких значений вероятности ошибок, обычно используется алгоритм последовательного декодирования.
6.3.2.1 Соберите систему conv_coder_decoder. svu (см. рисунок 6.7).
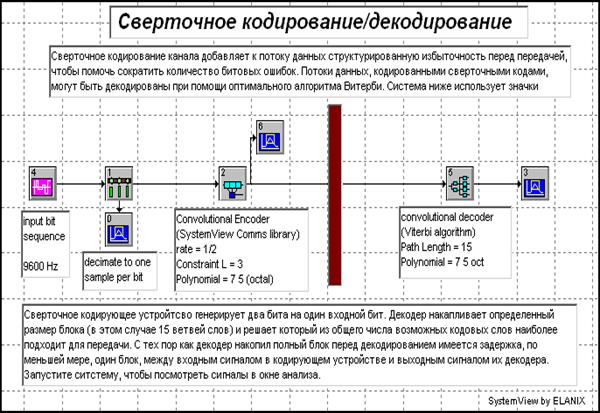
Рисунок 6.7 – Система conv_coder_decoder.svu
В этом примере использован тот же кодер (7,5), что и в предыдущем задании, и сверточный декодер, или декодер Витерби, длиной дорожки 15:
а) запустите систему и убедитесь, что последовательность на выходе декодирована правильно. Заметьте, что имеется время ожидания 17 бит. Как вы это объясните?
б) запустите систему и отметьте кодированный выход для данного входа. Проследите, чтобы символ стандартного сверточного кодера имел время ожидания двух бит перед выполнением. Это просто функция символического проектирования.
Параметры для схемы Сверточное кодирование/декодирование приведены в приложении Б.
6.3.3 Исследование кода Рида – Соломона, исправляющего ошибки.
Рассматривая основные двоичные коды, исправляющие ошибки, очевиден недостаток этих кодов – малая загруженность линии связи. Действительно, через линию проходит только два сигнала: сигнал “0” и сигнал “1” , в то же время как возможности линии допускают гораздо меньшую дискретность и большее количество дискретных уровней.
Наличие ошибок, обусловленных помехами в каналах передачи, а также физическими повреждениями носителей в каналах хранения, требует введения избыточности в информацию, подлежащей передачи и хранению.
Помехоустойчивая обработка двоичной информации кодов с основанием 2а позволяет получить достаточно простые реализации кодирующих и декодирующих устройств при высокой исправляющей и обнаруживающей способностях как в отношении независимых, так и корректированных ошибок. К ним относятся линейные блоковые коды с основанием 2а
Коды Рида – Соломона, или РС-коды, относятся к недвоичным циклическим кодам, т. е. кодам, символы которых взяты из конечного поля, содержащего q > 2 элементов и обозначаемого GF(q), где q – степень некоторого простого числа.
Пусть необходимо передать по каналу связи последовательность из M двоичных элементов вида: 111 … 1 101 … 1 011 … 0 100 … 1.Разобьем эту последовательность на блоки по m элементов и обозначим их через некоторые символы b0, b1, b2, …, bN–1, где N=M/m. Полное число различных значений m-элементных блоков равно q=2m.
Таким образом, передаваемая последовательность представляется в виде некоторой q-ичной последовательности: b0, b1, …, bS, …bN-1.
Некоторая совокупность q-ичных последовательностей образует q-ичный код. Такие коды, как и двоичные коды, могут быть простыми и помехоустойчивыми.
Кодовые комбинации q-ичного кода могут быть представлены в виде многочленов с q-ичными коэффициентами – элементами поля GF(q). При этом q-ичные коэффициенты как элементы поля GF(q) являются в рассмотренном примере многочленами с двоичными коэффициентами.
Например
![]() ,
(6.1)
,
(6.1)
где ![]()
Здесь bi=0,1, а z – формальная переменная многочлена с двоичными коэффициентами.
Кодом Рида-Соломона (РС - кодом) называют циклический
(N,K)-код, при N = q–1, множество кодовых комбинаций которого представляется многочленами
степени N–1 и менее с коэффициентами из поля GF(q), где q > 2 и является
степенью простого числа, а корнями порождающего многочлена являются N–K
последовательных степеней: α, α2, α3, …, αD–1,
некоторого элемент α![]() GF(q), где D – минимальное кодовое
расстояние (N,K)-кода.
GF(q), где D – минимальное кодовое
расстояние (N,K)-кода.
Из определения вытекает, что РС-код является подклассом БЧХ - кодов с m0 = 1. Обычно считают элемент a примитивным элементом поля GF(q), т. е. все степени a от 1-й до (q–1)-й являются всеми различными ненулевыми элементами поля GF(q). Порождающий многочлен РС - кода имеет степень N–K = D–1 и по теореме Безу может быть найден в виде произведения
 .
(6.2)
.
(6.2)
В соответствии с теорией циклических кодов, порождающий многочлен g(x) является делителем xN–1 над GF(q).
Таким образом, РС-код над полем GF(q) имеет длину кодовой комбинации N = q–1, число избыточных элементов в ней N–K = D–1 и минимальное кодовое расстояние D = N–K+1.
Коды с подобным значением минимального кодового расстояния в теории кодирования получили название максимальных.
При фиксированных N и K не существует кода, у которого минимальное кодовое расстояние больше, чем у РС-кода. Этот факт часто является веским основанием для использования РС-кодов. В то же время РС-коды всегда оказываются короче всех других циклических кодов над тем же алфавитом. РС-коды длины N<q–1 называют укороченными, а коды длины q (или q+1) – расширенными (удлиненными) на один (или два) символа.
Коды Рида – Соломона обладают всеми свойствами линейных кодов, следовательно, за счет этого можно строить порождающие и проверочные матрицы.
6.3.3.1 Откройте систему reed – Solomon.svu (см. рисунок 6.8).
Это упражнение демонстрирует BER представление ошибки исправления кода Рида – Соломона.
В этом упражнении используется BER значок из Библиотеки Связи, который был спроектирован для изменения частоты ошибок на бит:
а) сколько бит на входе необходимы, чтобы получить символ для кодирующего устройства? Модуляция – основная полоса частот диаметрально противоположной сигнализации. Поэтому кодируемые символы должны быть обратно преобразованы в биты;
б) рассмотрите процесс моделирования еще раз, чтобы понять как действует каждый значок. Значок источника шума установлен в 0,25 W/Hz. Каково соответствующее ему значение Eb/N0;
в) запустите файл упражнения. Переместитесь в окно анализа, чтобы рассмотреть кривую BER. Какое Вы можете сделать заключение насчет эффективности кода когда значение Eb/N0 является сравнительно высоким?
Параметры для схемы кода Рида – Соломона приведены в приложении Б.
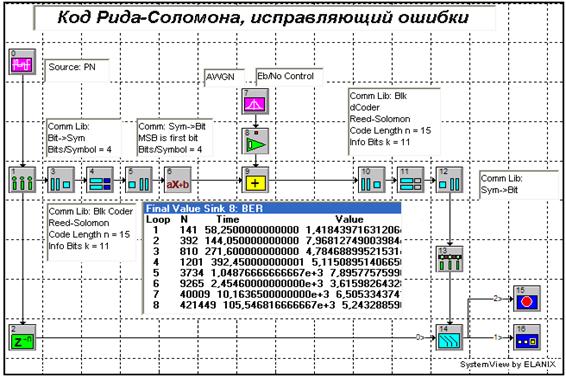
Рисунок 6.8
6.4 Контрольные вопросы
6.4.1 Какие коды называют помехоустойчивыми?
6.4.2 За счет чего помехоустойчивый код получает способность обнаруживать и исправлять ошибки?
6.4.3 Назовите основные структуры сверточных кодов.
6.4.4 Основные применения сверточных кодов.
6.4.5 Кокой характерной особенностью обладают сверточные коды?
6.4.6 Объясните алгоритм декодирования Витерби.
6.4.7 Какие коды называют кодами Рида – Соломона?
6.4.8 В качестве чего используются коды Рида – Соломона?
6.4.9 Перечислите основные достоинства и недостатки, а также свойства кодов Рида – Соломона.
Список литературы
1. Разевиг В.Д., Лаврентьев Г.В., Златин И.Л. SystemView - средство системного проектирования радиоэлектронных устройств - М.: Горячая линия-Телеком, 2002.
2. Дмитриев В.И. Прикладная теория информации: Учебник.- М.: Высш.шк., 1989.
3. Скляр Б. Цифровая связь: Теоретические основы и практическое применение. - М.: Вильямс, 2003.
4. Гаранин М.В., Журавлев В.И., Кунегин С.В. Системы и сети передачи информации. - М.: Радио и связь, 2000.
5. Телекоммуникационные системы и сети: Учебное пособие. Т.1 /Под ред. В.П. Шувалова: - М.: Горячая линия-Телеком, 2003.
6. Передача дискретных сообщений: Учебник/Под ред. В.П. Шувалова. - М.: Радио и связь, 1990.
7. Боккер П. Передача данных. Техника связи в системах телеобработки данных./Пер. с нем. Т.1. - М.: Связь, 1980.
Приложение А
SystemView by ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 1\impulse_data_ru.svu
Title: Created by: Bob Stewart
System Time:0 - 5,323e-3 sec, dT=1,042e-5 sec, Sample Rate=9,6e+4 Hz, Samples=512, Loops=1
Token Attribute Type Parameters
0 Source Impulse Gain = 1, Start = 0 sec, Offset = 0 v
1 Sink Real Time Input from t0 Output Port 0
2 Source PN Seq Amp = 1 v, Offset = 0 v, Rate = 2,4e+3 Hz, Levels = 2, Pha
se = 0 deg
3 Source Pulse Train Amp = 1 v, Freq = 2,4e+3 Hz, PulseW = 10,4167e-6 sec, Of
fset = 0 v, Phase = 0 deg
4 Multiplier - - - -
5 Sink SystemView Input from t4 Output Port 0
6 Source Pulse Train Amp = 1 v, Freq = 2,4e+3 Hz, PulseW = 416,667e-6 sec, Of
fset = 0 v, Phase = 0 deg
7 Multiplier - - - -
8 Sink SystemView Input from t7 Output Port 0
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 1\squ_pulse_rz_ru.svu
Title: Created by: Bob Stewart
Token Attribute Type Input Tokens Output Tokens
0 Sink SystemView 1 - -
1 Operator Linear Sys 8 0 2 Sink SystemView 3 - -
3 Operator Smpl Delay 8 2 4 MetaSystem Custom_1 - - - -
5 (m4) Source PN Seq - - 7 6 (m4) Source Pulse Train - - 7
7 (m4) Multiplier - - 5,6 8 8 (m4) Meta I/O Meta Out 7 1,3
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 1\binary_signalling_ru.svu
Title: Created by: ADDyy
System Time:0 - 9,95e-1 sec, dT=5,0e-3 sec, Sample Rate=2,00e+2 Hz, Samples=200, Loops=1
Token Attribute Type Parameters
0 Sink Real Time Input from t8 Output Port 0, Max Input Rate = 200 Hz
1 Sink Real Time Input from t5 Output Port 0, Max Input Rate = 200 Hz
2 Source Pulse Train Amp = 1 v, Freq = 10 Hz, PulseW = 50,e-3 sec, Offset = 0 v,
Phase = 0 deg, Max Rate = 200 Hz
3 Sink Real Time Input from t4 Output Port 0, Max Input Rate = 200 Hz
4 Multiplier - - - -
5 Adder - - - -
6 Source Step Fct Amp = -500,e-3 v, Start = 0 sec, Offset = 0 v, Max Rate =
200 Hz
7 Router - - - -
8 Source PN Seq Amp = 500,e-3 v, Offset = 500,e-3 v, Rate = 10 Hz, Levels =2, Phase = 0 deg, Max Rate = 200 Hz
9 Sink Real Time Input from t20 Output Port 0, Max Input Rate = 200 Hz
10 Sink Real Time Input from t30 Output Port 0, Max Input Rate = 200 Hz
11 MetaSystem Custom_1 --
12 (m11) Operator NOT Threshold = 500,e-3, True = 1, False = 0, Max Rate = 200
Hz
13 (m11) Source Pulse Train Amp = 1 v, Freq = 10 Hz, PulseW = 50,e-3 sec, Offset = 0 v,
Phase = 0 deg, Max Rate = 200 Hz
14 (m11) Multiplier - - - -
15 (m11) Source Pulse Train Amp = 1 v, Freq = 10 Hz, PulseW = 50,e-3 sec, Offset = 0 v,
Phase = 180 deg, Max Rate = 200 Hz
16 (m11) Multiplier - - - -
SystemView Summary Page 2
17 (m11) Operator OR Threshold = 500,e-3, True = 1, False = 0, Max Rate = 200Hz
18 (m11) Operator AND Threshold = 500,e-3, True = 1, False = 0, Max Rate = 200Hz
19 (m11) Meta I/O Meta In --
20 (m11) Meta I/O Meta Out --
21 MetaSystem Custom_2 --
22 (m21) Logic FF-D-1 Gate Delay = 0 sec, Threshold = 500,e-3 v, True Output = 1 v
, False Output = 0 v, Rise Time = 0 sec, Fall Time = 0 sec, Set
* = t28 Output 0, Data = t23 Output 0, Clock = t29 Output 0,
Clear* = t24 Output 0, Output 0 = Q t27 , Output 1 = Q* t23, Max Rate (Port 0) = 200 Hz
23 (m21) Logic Buffer Gate Delay = 0 sec, Threshold = 500,e-3 v, True Output = 1 v, False Output = 0 v, Rise Time = 0 sec, Fall Time = 0 sec, Max Rate = 200 Hz
24 (m21) Source Step Fct Amp = 1 v, Start = 0 sec, Offset = 0 v, Max Rate = 200 Hz
25 (m21) Router - - - -
26 (m21) Operator Negate Max Rate = 200 Hz
27 (m21) Operator Switch Min Ctrl Input = 0 v, Max Ctrl Input = 1 v, Input 0 = t26 Output 0,
Input 1 = t29 Output 0, Control = t22 Output 0, Max Rate = 200 Hz
28 (m21) Source Step Fct Amp = 1 v, Start = 0 sec, Offset = 0 v, Max Rate = 200 Hz
29 (m21) Meta I/O Meta In --
30 (m21) Meta I/O Meta Out --
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 1\binary_signalling_ru.svu
Title: Created by: ADDyy
Token Attribute Type Input Tokens Output Tokens
0 Sink Real Time 7 - - 1 Sink Real Time 5 - -
2 Source Pulse Train - - 4 3 Sink Real Time 4 - -
4 Multiplier - - 2,7 3,29 5 Adder - - 7,6 1
6 Source Step Fct - - 5 7 Router - - 8 4,5,0,19
8 Source PN Seq - - 7 9 Sink Real Time 20 - -
10 Sink Real Time 30 - - 11 MetaSystem Custom_1 - - - -
12 (m11) Operator NOT 18 16 13 (m11) Source Pulse Train - - 14
14 (m11) Multiplier - - 18,13 17 15 (m11) Source Pulse Train - - 16
16 (m11) Multiplier - - 12,15 17
17 (m11) Operator OR 14,16 20
18 (m11) Operator AND 19,19 14,12 19 (m11) Meta I/O Meta In 7 18,18
20 (m11) Meta I/O Meta Out 17 9 21 MetaSystem Custom_2 - - - -
22 (m21) Logic FF-D-1 28,23,25,24 27,23 23 (m21) Logic Buffer 22 22
24 (m21) Source Step Fct - - 22 25 (m21) Router - - 29 22,26,27
26 (m21) Operator Negate 25 27 27 (m21) Operator Switch 26,25,22 30
28 (m21) Source Step Fct - - 22 29 (m21) Meta I/O Meta In 4 25
30 (m21) Meta I/O Meta Out 27 10
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 2\squ_pulse_recover_ru.svu
Title: Created by: Bob Stewart
System Time:0 - 5,323e-3 sec, dT=1,042e-5 sec, Sample Rate=9,6e+4 Hz, Samples=512, Loops=1
Token Attribute Type Parameters
0 Sink SystemView Input from t4 Output Port 0, Max Input Rate = 96e+3 Hz
1 Operator Linear Sys Custom Digital System, 40 Num Coefs, Decimate By 1, Quant
Bits = None, Init Cndtn = 0, DSP Mode Disabled, FPGA Aware = True, Icon = square_shape.bmp, RTDA Aware = Full, Max Rate = 96e+3 Hz
2 Sink SystemView Input from t10 Output Port 0, Max Input Rate = 96e+3 Hz
3 Sink SystemView Input from t5 Output Port 0, Max Input Rate = 2,4e+3 Hz
4 Operator Smpl Delay Delay = 20 samples, Attribute = Passive, Initial Condition = 0v, Fill Last Register, Output 0 = Delay t5 t0 , Output 1 = Delay - dT , Max Rate (Port 0) = 96e+3 Hz
5 Operator Sampler Interpolating, Rate = 2,4e+3 Hz, Aperture = 0 sec, Aperture
Jitter = 0 sec, Max Rate = 2,4e+3 Hz
6 MetaSystem Custom_1 --
7 (m6) Source PN Seq Amp = 1 v, Offset = 0 v, Rate = 2,4e+3 Hz, Levels = 2, Phase = 0 deg,
Max Rate = 96e+3 Hz
8 (m6) Source Pulse Train Amp = 1 v, Freq = 2,4e+3 Hz, PulseW = 10,4167e-6 sec, Offset = 0 v, Phase = 0 deg, Max Rate = 96e+3 Hz
9 (m6) Multiplier - - - -
10 (m6) Meta I/O Meta Out –
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 2\squ_pulse_recover_ru.svu
Title:Created by: Bob Stewart
Token Attribute Type Input Tokens Output Tokens
0 Sink SystemView 4 - - 1 Operator Linear Sys 10 4
2 Sink SystemView 10 - - 3 Sink SystemView 5 - -
4 Operator Smpl Delay 1 5,0 5 Operator Sampler 4 3
6 MetaSystem Custom_1 - - - - 7 (m6) Source PN Seq - - 9
8 (m6) Source Pulse Train - - 9 9 (m6) Multiplier - - 7,8 10
10 (m6) Meta I/O Meta Out 9 1,2
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 2\squ_pulse_noisy_ruADD.svu
Title: Created by: Bob Stewart
System Time:0 - 1,066e-2 sec, dT=1,042e-5 sec, Sample Rate=9,6e+4 Hz, Samples=1024, Loops=1
Token Attribute Type Parameters
0 Sink SystemView Input from t4 Output Port 0, Max Input Rate = 96e+3 Hz
1 Operator Linear Sys Custom Digital System, 40 Num Coefs, Decimate By 1, Quant
Bits = None, Init Cndtn = 0, DSP Mode Disabled, FPGA Awar
e = True, Icon = square_shape.bmp, RTDA Aware = Full, Ma
x Rate = 96e+3 Hz
2 Sink SystemView Input from t18 Output Port 0, Max Input Rate = 96e+3 Hz
3 Sink SystemView Input from t5 Output Port 0, Max Input Rate = 2,4e+3 Hz
4 Operator Smpl Delay Delay = 20 samples, Attribute = Passive, Initial Condition = 0v,
Fill Last Register, Output 0 = Delay t5 t0 , Output 1 = Delay - dT , Max Rate (Port 0) = 96e+3 Hz
5 Operator Sampler Interpolating, Rate = 2,4e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec,
Max Rate = 2,4e+3 Hz
6 Source Gauss Noise Std Dev = 2,5e-3 v, Mean = 0 v, Icon = noisy.bmp, Max Rate= 96e+3 Hz
7 Adder - - - -
8 Function Limiter Max Input = ±0 v, Max Output = ±1 v, Max Rate = 2,4e+3 Hz
9 Sink SystemView Input from t8 Output Port 0, Max Input Rate = 2,4e+3 Hz
10 Comm BER Rate No. Trials = 1 bits, Threshold = 0 v, Offset = 0 sec, Output 0= BER ,
Output 1 = Cumulative Avg , Output 2 = Total Errorst11 , Max Rate (Port 2) = 2,4e+3 Hz
11 Sink SystemView Input from t10 Output Port 2, Max Input Rate = 2,4e+3 Hz
12 Operator Sampler Interpolating, Rate = 2,4e+3 Hz, Aperture = 0 sec, ApertureJitter = 0 sec, Max Rate = 2,4e+3 Hz
13 Operator Smpl Delay Delay = 40 samples, Attribute = Passive, Initial Condition = 0v, Fill Last Register, Output 0 = Delay t12 , Output 1 = Delay -dT , Max Rate (Port 0) = 96e+3 Hz
14 MetaSystem Custom_1 --
15 (m14) Source PN Seq Amp = 1 v, Offset = 0 v, Rate = 2,4e+3 Hz, Levels = 2, Phase = 0 deg, Max Rate = 96e+3 Hz
SystemView Summary Page 2
16 (m14) Source Pulse Train Amp = 1 v, Freq = 2,4e+3 Hz, PulseW = 10,4167e-6 sec, Offset = 0 v, Phase = 0 deg, Max Rate = 96e+3 Hz
17 (m14) Multiplier - - - -
18 (m14) Meta I/O Meta Out --
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 2\squ_pulse_noisy_ruADD.svu
Title: Created by: Bob Stewart
Token Attribute Type Input Tokens Output Tokens
0 Sink SystemView 4 - - 1 Operator Linear Sys 18 7
2 Sink SystemView 18 - - 3 Sink SystemView 5 - -
4 Operator Smpl Delay 7 5,0 5 Operator Sampler 4 3,8
6 Source Gauss Noise - - 7 7 Adder - - 6,1 4
8 Function Limiter 5 9,10 9 Sink SystemView 8 - -
10 Comm BER Rate 8,12 11 11 Sink SystemView 10 - -
12 Operator Sampler 13 10 13 Operator Smpl Delay 18 12
14 MetaSystem Custom_1 - - - - 15 (m14) Source PN Seq - - 17
16 (m14) Source Pulse Train - - 17 17 (m14) Multiplier - - 15,16 18
18 (m14) Meta I/O Meta Out 17 2,1,13
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 2\uniform_noise_channel_ru.svu
Title: Created by: Bob Stewart
System Time:0 - 4,166e-2 sec, dT=1,042e-5 sec, Sample Rate=9,6e+4 Hz, Samples=4000, Loops=1
Token Attribute Type Parameters
0 Operator Linear Sys Custom Digital System, 40 Num Coefs, Decimate By 1, Quant
Bits = None, Init Cndtn = 0, DSP Mode Disabled, FPGA Aware = True, Icon = square_shape.bmp, RTDA Aware = Full, Max Rate = 96e+3 Hz
1 Operator Smpl Delay Delay = 20 samples, Attribute = Passive, Initial Condition = 0v, Fill Last Register, Output 0 = Delay t2 , Output 1 = Delay -dT , Max Rate (Port 0) = 96e+3 Hz
2 Operator Sampler Interpolating, Rate = 2,4e+3 Hz, Aperture = 0 sec, ApertureJitter = 0 sec,
Max Rate = 2,4e+3 Hz
3 Source Unif Noise Min = -30,e-3 v, Max = 30,e-3 v, Icon = noisy.bmp, Max Rate= 96e+3 Hz
4 Adder - - - -
5 Function Limiter Max Input = ±0 v, Max Output = ±1 v, Max Rate = 2,4e+3 Hz
6 Comm BER Rate No. Trials = 1 bits, Threshold = 0 v, Offset = 0 sec, Output 0= BER , Output 1 = Cumulative Avg , Output 2 = Total Errorst7 t10 , Max Rate (Port 2) = 2,4e+3 Hz
7 Sink SystemView Input from t6 Output Port 2, Max Input Rate = 2,4e+3 Hz
8 Operator Sampler Interpolating, Rate = 2,4e+3 Hz, Aperture = 0 sec, ApertureJitter = 0 sec, Max Rate = 2,4e+3 Hz
9 Operator Smpl Delay Delay = 40 samples, Attribute = Passive, Initial Condition = 0
v, Fill Last Register, Output 0 = Delay t8 , Output 1 = Delay -dT , Max Rate (Port 0) = 96e+3 Hz
10 Sink Final Value Input from t6 Output Port 2, Max Input Rate = 2,4e+3 Hz
11 MetaSystem Custom_1 --
12 (m11) Source PN Seq Amp = 1 v, Offset = 0 v, Rate = 2,4e+3 Hz, Levels = 2, Pha
se = 0 deg, Max Rate = 96e+3 Hz
13 (m11) Source Pulse Train Amp = 1 v, Freq = 2,4e+3 Hz, PulseW = 10,4167e-6 sec, Of
fset = 0 v, Phase = 0 deg, Max Rate = 96e+3 Hz
14 (m11) Multiplier - - - -
15 (m11) Meta I/O Meta Out --
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 2\uniform_noise_channel_ru.svu
Title: Created by: Bob Stewart
Token Attribute Type Input Tokens Output Tokens
0 Operator Linear Sys 15 4
1 Operator Smpl Delay 4 2
2 Operator Sampler 1 5
3 Source Unif Noise - - 4
4 Adder - - 3,0 1
5 Function Limiter 2 6 6 Comm BER Rate 5,8 7,10
7 Sink SystemView 6 - - 8 Operator Sampler 9 6 9 Operator Smpl Delay 15 8 10 Sink Final Value 6 - -
11 MetaSystem Custom_1 - - - - 12 (m11) Source PN Seq - - 14
13 (m11) Source Pulse Train - - 14 14 (m11) Multiplier - - 12,13 15
15 (m11) Meta I/O Meta Out 14 0,9
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 2\gaussian_noise_channel_1_ru.svu
Title: Created by: Bob Stewart
System Time:0 - 4,166e-2 sec, dT=1,042e-5 sec, Sample Rate=9,6e+4 Hz, Samples=4000, Loops=1
Token Attribute Type Parameters
0 Operator Linear Sys Custom Digital System, 40 Num Coefs, Decimate By 1, QuantBits = None, Init Cndtn = 0, DSP Mode Disabled, FPGA Aware = True, Icon = square_shape.bmp, RTDA Aware = Full, Max Rate = 96e+3 Hz
1 Operator Smpl Delay Delay = 20 samples, Attribute = Passive, Initial Condition = 0
v, Fill Last Register, Output 0 = Delay t2 , Output 1 = Delay -dT , Max Rate (Port 0) = 96e+3 Hz
2 Operator Sampler Interpolating, Rate = 2,4e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec,
Max Rate = 2,4e+3 Hz
3 Source Gauss Noise Std Dev = 25,e-3 v, Mean = 0 v, Icon = noisy.bmp, Max Rate = 96e+3 Hz
4 Adder - - - -
5 Function Limiter Max Input = ±0 v, Max Output = ±1 v, Max Rate = 2,4e+3 Hz
6 Comm BER Rate No. Trials = 1 bits, Threshold = 0 v, Offset = 0 sec, Output 0= BER , Output 1 = Cumulative Avg , Output 2 = Total Errorst7 t10 , Max Rate (Port 2) = 2,4e+3 Hz
7 Sink SystemView Input from t6 Output Port 2, Max Input Rate = 2,4e+3 Hz
8 Operator Sampler Interpolating, Rate = 2,4e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec,
Max Rate = 2,4e+3 Hz
9 Operator Smpl Delay Delay = 40 samples, Attribute = Passive, Initial Condition = 0
v, Fill Last Register, Output 0 = Delay t8 , Output 1 = Delay -dT , Max Rate (Port 0) = 96e+3 Hz
10 Sink Final Value Input from t6 Output Port 2, Max Input Rate = 2,4e+3 Hz
11 MetaSystem Custom_1 --
12 (m11) Source PN Seq Amp = 1 v, Offset = 0 v, Rate = 2,4e+3 Hz, Levels = 2, Pha
se = 0 deg, Max Rate = 96e+3 Hz
13 (m11) Source Pulse Train Amp = 1 v, Freq = 2,4e+3 Hz, PulseW = 10,4167e-6 sec, Of
fset = 0 v, Phase = 0 deg, Max Rate = 96e+3 Hz
14 (m11) Multiplier - - - -
15 (m11) Meta I/O Meta Out --
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 2\gaussian_noise_channel_1_ru.svu
Title: Created by: Bob Stewart
Token Attribute Type Input Tokens Output Tokens
0 Operator Linear Sys 15 4 1 Operator Smpl Delay 4 2
2 Operator Sampler 1 5 3 Source Gauss Noise - - 4
4 Adder - - 3,0 1 5 Function Limiter 2 6
6 Comm BER Rate 5,8 7,10 7 Sink SystemView 6 - -
8 Operator Sampler 9 6 9 Operator Smpl Delay 15 8
10 Sink Final Value 6 - - 11 MetaSystem Custom_1 - - - -
12 (m11) Source PN Seq - - 14 13 (m11) Source Pulse Train - - 14
14 (m11) Multiplier - - 12,13 15 15 (m11) Meta I/O Meta Out 14 0,9
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 2\gaussian_noise_chan_averg_ru.svu
Title: Created by: Bob Stewart
System Time:0 - 4,166e-2 sec, dT=1,042e-5 sec, Sample Rate=9,6e+4 Hz, Samples=4000, Loops=1
Token Attribute Type Parameters
0 Operator Linear Sys Custom Digital System, 40 Num Coefs, Decimate By 1, Quant Bits = None, Init Cndtn = 0, DSP Mode Disabled, FPGA Aware = True, Icon = square_shape.bmp,
RTDA Aware = Full, Max Rate = 96e+3 Hz
1 Operator Average Time Window = 416,667e-6 sec, Max Rate = 96e+3 Hz
2 Operator Sampler Interpolating, Rate = 2,4e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec,
Max Rate = 2,4e+3 Hz
3 Source Gauss Noise Std Dev = 250,e-3 v, Mean = 0 v, Icon = noisy.bmp, Max Rate = 96e+3 Hz
4 Adder - - - -
5 Function Limiter Max Input = ±0 v, Max Output = ±1 v, Max Rate = 2,4e+3 Hz
6 Comm BER Rate No. Trials = 1 bits, Threshold = 0 v, Offset = 0 sec, Output 0= BER , Output 1 = Cumulative Avg , Output 2 = Total Errorst7 t10 , Max Rate (Port 2) = 2,4e+3 Hz
7 Sink SystemView Input from t6 Output Port 2, Max Input Rate = 2,4e+3 Hz
8 Operator Sampler Interpolating, Rate = 2,4e+3 Hz, Aperture = 0 sec, ApertureJitter = 0 sec,
Max Rate = 2,4e+3 Hz
9 Operator Smpl Delay Delay = 40 samples, Attribute = Passive, Initial Condition = 0v, Fill Last Register, Output 0 = Delay t8 , Output 1 = Delay -dT , Max Rate (Port 0) = 96e+3 Hz
10 Sink Final Value Input from t6 Output Port 2, Max Input Rate = 2,4e+3 Hz
11 MetaSystem Custom_1 --
12 (m11) Source PN Seq Amp = 1 v, Offset = 0 v, Rate = 2,4e+3 Hz, Levels = 2, Pha
se = 0 deg, Max Rate = 96e+3 Hz
13 (m11) Source Pulse Train Amp = 1 v, Freq = 2,4e+3 Hz, PulseW = 10,4167e-6 sec, Of
fset = 0 v, Phase = 0 deg, Max Rate = 96e+3 Hz
14 (m11) Multiplier - - - -
15 (m11) Meta I/O Meta Out --
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 2\gaussian_noise_chan_averg_ru.svu
Title: Created by: Bob Stewart
Token Attribute Type Input Tokens Output Tokens
0 Operator Linear Sys 15 4
1 Operator Average 4 2
2 Operator Sampler 1 5
3 Source Gauss Noise - - 4
4 Adder - - 3,0 1
5 Function Limiter 2 6
6 Comm BER Rate 5,8 7,10
7 Sink SystemView 6 - -
8 Operator Sampler 9 6
9 Operator Smpl Delay 15 8 10 Sink Final Value 6 - -
11 MetaSystem Custom_1 - - - - 12 (m11) Source PN Seq - - 14
13 (m11) Source Pulse Train - - 14 14 (m11) Multiplier - - 12,13 15
15 (m11) Meta I/O Meta Out 14 0,9
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 3\qam_two_signals_ru.svu
Title: Two Signal QAM
Created by: Bob Stewart
System Time:0 - 8,192e-2 sec, dT=2,5e-6 sec, Sample Rate=4,0e+5 Hz, Samples=32768, Loops=1
Token Attribute Type Parameters
0 Source Sinusoid Amp = 1 v, Freq = 100e+3 Hz, Phase = 0 deg, Output 0 = Sine t8,
Output 1 = Cosine t7
1 Multiplier - - - -
2 Multiplier - - - -
3 Operator Linear Sys Linear Phase Lowpass IIR, 8 Poles, Fc = 10e+3 Hz, Quant Bits = None, Init Cndtn = Transient, DSP Mode Disabled, FPGA Aware = True, RTDA Aware = Full
4 Sink Analysis Input from t14 Output Port 0
5 Sink Analysis Input from t3 Output Port 0
6 Adder - - - -
7 Multiplier - - - -
8 Multiplier - - - -
9 Source Freq Sweep Amp = 1 v, Start Frq = 100 Hz, Stop Frq = 2e+3 Hz, Period
= 81,9188e-3 sec, Phase = 0 deg, Output 0 = Quadrature (Sin) t8 t13 , Output 1 = In-Phase (Cos)
10 Source PN Seq Amp = 1 v, Offset = 0 v, Rate = 400 Hz, Levels = 4, Phase
= 0 deg
11 Source Sinusoid Amp = 1 v, Freq = 100e+3 Hz, Phase = 0 deg, Output 0 = Sine t1 ,
Output 1 = Cosine t2
12 Sink Analysis Input from t10 Output Port 0
13 Sink Analysis Input from t9 Output Port 0
14 Operator Linear Sys Linear Phase Lowpass IIR, 8 Poles, Fc = 10e+3 Hz, Quant Bits = None, Init Cndtn = Transient, DSP Mode Disabled, FPGA Aware = True, RTDA Aware = Full
15 Router - - - -
16 Source Gauss Noise Std Dev = 0 v, Mean = 0 v
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 3\qam_two_signals_ru.svu
Title: Two Signal QAM
Created by: Bob Stewart
Token Attribute Type Input Tokens Output Tokens
0 Source Sinusoid - - 8,7 1 Multiplier - - 15,11 3
2 Multiplier - - 15,11 14 3 Operator Linear Sys 1 5
4 Sink Analysis 14 - - 5 Sink Analysis 3 - -
6 Adder - - 7,8,16 15 7 Multiplier - - 0,10 6
8 Multiplier - - 0,9 6 9 Source Freq Sweep - - 8,13
10 Source PN Seq - - 7,12 11 Source Sinusoid - - 1,2
12 Sink Analysis 10 - - 13 Sink Analysis 9 - -
14 Operator Linear Sys 2 4 15 Router - - 6 1,2
16 Source Gauss Noise - - 6
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 3\16qam_ru_ADDyy.svu
Title: Two Signal QAM
Created by: Bob Stewart
System Time:0 - 1,638e-1 sec, dT=2,5e-6 sec, Sample Rate=4,0e+5 Hz, Samples=65536, Loops=1
Token Attribute Type Parameters
0 Source Sinusoid Amp = 1 v, Freq = 100e+3 Hz, Phase = 0 deg, Output 0 = Sine t8 , Output 1 = Cosine t7
1 Multiplier - - - -
2 Multiplier - - - -
3 Operator Linear Sys Linear Phase Lowpass IIR, 8 Poles, Fc = 10e+3 Hz, Quant Bit
s = None, Init Cndtn = Transient, DSP Mode Disabled, FPGA
Aware = True, RTDA Aware = Full
4 Sink Analysis Input from t14 Output Port 0
5 Sink Analysis Input from t3 Output Port 0
6 Adder - - - -
7 Multiplier - - - -
8 Multiplier - - - -
9 Source PN Seq Amp = 1 v, Offset = 0 v, Rate = 400 Hz, Levels = 4, Phase= 0 deg
10 Source PN Seq Amp = 1 v, Offset = 0 v, Rate = 400 Hz, Levels = 4, Phase= 0 deg
11 Source Sinusoid Amp = 1 v, Freq = 100e+3 Hz, Phase = 0 deg, Output 0 = Sine t1 , Output 1 = Cosine t2
12 Sink Analysis Input from t10 Output Port 0
13 Sink Analysis Input from t9 Output Port 0
14 Operator Linear Sys Linear Phase Lowpass IIR, 8 Poles, Fc = 10e+3 Hz, Quant Bits = None, Init Cndtn = Transient, DSP Mode Disabled, FPGA Aware = True, RTDA Aware = Full
15 Router - - - -
16 Source Gauss Noise Std Dev = 0 v, Mean = 0 v
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 3\16qam_ru_ADDyy.svu
Title: Two Signal QAM
Created by: Bob Stewart
Token Attribute Type Input Tokens Output Tokens
0 Source Sinusoid - - 8,7
1 Multiplier - - 15,11 3 2 Multiplier - - 15,11 14
3 Operator Linear Sys 1 5 4 Sink Analysis 14 - -
5 Sink Analysis 3 - - 6 Adder - - 7,8,16 15
7 Multiplier - - 0,10 6 8 Multiplier - - 0,9 6
9 Source PN Seq - - 8,13 10 Source PN Seq - - 7,12
11 Source Sinusoid - - 1,2 12 Sink Analysis 10 - -
13 Sink Analysis 9 - - 14 Operator Linear Sys 2 4
15 Router - - 6 1,2 16 Source Gauss Noise - - 6
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 3\8PSK_ru.svu
Title: 8-PSK Communication System
Created by: ELANIX
System Time:0 - 5,12e-1 sec, dT=1,563e-5 sec, Sample Rate=6,4e+4 Hz, Samples=32768, Loops=1
Token Attribute Type Parameters
0 Source PN Seq Amp = 500,e-3 v, Offset = 500,e-3 v, Rate = 9,6e+3 Hz, Levels = 2, Phase = 0 deg, Max Rate = 64e+3 Hz
1 Operator Sampler Non-Interp Right, Rate = 9,6e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 9,6e+3 Hz
2 Comm Bit->Sym MSB is first bit, Bits/Symbol = 3, Threshold = 500,e-3, RTDAAware = SystemView, Max Rate = 3,2e+3 Hz
3 Function Sine Phase = 0 deg, Output 0 = SIN (0 deg) t4 t19 , Output 1 =COS (90 deg) t5 t20 , Max Rate (Port 0) = 3,2e+3 Hz
4 Operator Hold Last Value, Gain = 1, Out Rate = 64e+3 Hz, Max Rate = 64e+3 Hz
5 Operator Hold Last Value, Gain = 1, Out Rate = 64e+3 Hz, Max Rate = 64e+3 Hz
6 Comm Quad Mod Amp = 1 v, Freq = 16e+3 Hz, Phase = 0 deg, In-Phase = t4Output 0, Quadrature = t5 Output 0, RTDA Aware = Full, MaxRate = 64e+3 Hz
7 Adder - - - -
8 Source Gauss Noise Pwr Density =1,e-6 W/Hz, System=1 ohm, Mean=0v, Max Rate = 64e+3 Hz
9 Comm IQ Mixer LO Amp = 2 v, Freq = 16e+3 Hz, IQ Rotate = 0 deg, Amp Error = 0 dB, Phse Error = 0 deg, Output 0 = In-Phase t10 , Output 1 = Quadrature t11 , Max Rate (Port 0) = 64e+3 Hz
10 Comm Intg-Dmp Continuous, Intg Time = 312,5e-6 sec, Offset = 0 sec, MaxRate = 64e+3 Hz
11 Comm Intg-Dmp Continuous, Intg Time = 312,5e-6 sec, Offset = 0 sec, MaxRate = 64e+3 Hz
12 Operator Sampler Non-Interp Right, Rate = 3,2e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 3,2e+3 Hz
13 Operator Sampler Non-Interp Right, Rate = 3,2e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 3,2e+3 Hz
14 Comm Sym->Bit MSB is first bit, Bits/Symbol = 3, RTDA Aware = SystemView,
Max Rate = 9,6e+3 Hz
SystemView Summary Page 2
15 Operator Gain Gain = 785,398e-3, Gain Units = Linear, Max Rate = 3,2e+3
Hz
16 Comm PSK Demod Coherent, No. Phase States = 8, Rotation = 0 deg, In-Phase= t13 Output 0, Quadrature = t12 Output 0, Output 0 = Symbols t14 , Output 1 = Phase , RTDA Aware = Full, Max Rate (Port 0) = 3,2e+3 Hz
17 Sink Analysis Input from t12 Output Port 0, Max Input Rate = 3,2e+3 Hz
18 Sink Analysis Input from t13 Output Port 0, Max Input Rate = 3,2e+3 Hz
19 Sink Analysis Input from t3 Output Port 0, Max Input Rate = 3,2e+3 Hz
20 Sink Analysis Input from t3 Output Port 1, Max Input Rate = 3,2e+3 Hz
21 Operator Smpl Delay Delay = 6 samples, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t22 , Output 1 = Delay -dT , Max Rate (Port 0) = 9,6e+3 Hz
22 Comm BER Rate No. Trials = 25 bits, Threshold = 500,e-3 v, Offset = 0 sec,Output 0 = BER , Output 1 = Cumulative Avg t23 , Output 2 =Total Errors , Max Rate (Port 1) = 384 Hz
23 Sink Final Value Input from t22 Output Port 1, Max Input Rate = 384 Hz
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 3\8PSK_ru.svu
Title: 8-PSK Communication System
Created by: ELANIX
Token Attribute Type Input Tokens Output Tokens
0 Source PN Seq - - 1 1 Operator Sampler 0 2,21
2 Comm Bit->Sym 1 15 3 Function Sine 15 4,5,19,20
4 Operator Hold 3 6 5 Operator Hold 3 6
6 Comm Quad Mod 4,5 7 7 Adder - - 8,6 9
8 Source Gauss Noise - - 7 9 Comm IQ Mixer 7 10,11
10 Comm Intg-Dmp 9 12 11 Comm Intg-Dmp 9 13
12 Operator Sampler 10 16,17 13 Operator Sampler 11 16,18
14 Comm Sym->Bit 16 22 15 Operator Gain 2 3
16 Comm PSK Demod 13,12 14 17 Sink Analysis 12 - -
18 Sink Analysis 13 - - 19 Sink Analysis 3 - -
20 Sink Analysis 3 - - 21 Operator Smpl Delay 1 22
22 Comm BER Rate 21,14 23 23 Sink Final Value 22 - -
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 3\8PSK-BER_ru.svu
Title: 8-PSK Communication System
Created by: ELANIX
System Time:0 - 1,638e+1 sec, dT=1,563e-5 sec, Sample Rate=6,4e+4 Hz, Samples=1048576, Loops=4
Token Attribute Type Parameters
0 Source PN Seq Amp = 500,e-3 v, Offset = 500,e-3 v, Rate = 9,6e+3 Hz, Levels = 2, Phase = 0 deg, Max Rate = 64e+3 Hz
1 Operator Sampler Non-Interp Right, Rate = 9,6e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 9,6e+3 Hz
2 Comm Bit->Sym MSB is first bit, Bits/Symbol = 3, Threshold = 500,e-3, RTDA
Aware = SystemView, Max Rate = 3,2e+3 Hz
3 Function Sine Phase = 0 deg, Output 0 = SIN (0 deg) t4 , Output 1 = COS (90 deg) t5 , Max Rate (Port 0) = 3,2e+3 Hz
4 Operator Hold Last Value, Gain = 1, Out Rate = 64e+3 Hz, Max Rate = 64e+3 Hz
5 Operator Hold Last Value, Gain = 1, Out Rate = 64e+3 Hz, Max Rate = 64e+3 Hz
6 Comm Quad Mod Amp = 1 v, Freq = 16e+3 Hz, Phase = 0 deg, In-Phase = t4Output 0, Quadrature = t5 Output 0, RTDA Aware = Full, MaxRate = 64e+3 Hz
7 Adder - - - -
8 Source Gauss Noise Pwr Density = 52,0833e-6 W/Hz, System = 1 ohm, Mean = 0v,
Max Rate = 64e+3 Hz
9 Comm IQ Mixer LO Amp = 2 v, Freq = 16e+3 Hz, IQ Rotate = 0 deg, Amp Error = 0 dB, Phse Error = 0 deg, Output 0 = In-Phase t10 , Output 1 = Quadrature t11 , Max Rate (Port 0) = 64e+3 Hz
10 Comm Intg-Dmp Continuous, Intg Time = 312,5e-6 sec, Offset = 0 sec, MaxRate = 64e+3 Hz
11 Comm Intg-Dmp Continuous, Intg Time = 312,5e-6 sec, Offset = 0 sec, Max
12 Operator Sampler Non-Interp Right, Rate = 3,2e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 3,2e+3 Hz
13 Operator Sampler Non-Interp Right, Rate = 3,2e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 3,2e+3 Hz
14 Comm Sym->Bit MSB is first bit, Bits/Symbol = 3, RTDA Aware = SystemView, Max Rate = 9,6e+3 Hz
SystemView Summary Page 2
15 Operator Smpl Delay Delay = 12 samples, Attribute = Passive, Initial Condition = 0
v, Fill Last Register, Output 0 = Delay t16 , Output 1 = Delay -dT , Max Rate (Port 0) = 9,6e+3 Hz
16 Comm BER Rate No. Trials = 1 bits, Threshold = 500,e-3 v, Offset = 112 bits,
Output 0 = BER , Output 1 = Cumulative Avg t17 , Output 2 =Total Errors t19 , Max Rate (Port 2) = 9,6e+3 Hz17 Sink Final Value Input from t16 Output Port 1, Max Input Rate = 9,6e+3 Hz
18 Operator Gain Gain = -5 dB, Gain Units = dB Power, Max Rate = 64e+3 Hz,
Global Link Active
19 Sink Cndtnl Stop Input from t16 Output Port 2, Max Input Rate = 9,6e+3 Hz
20 Operator Gain Gain = 785,398e-3, Gain Units = Linear, Max Rate = 3,2e+3Hz
21 Comm Gray Code Encode, MSB is First, Word Size = 3 bits, Threshold = 0 v,
RTDA Aware = Full, Max Rate = 9,6e+3 Hz
22 Comm PSK Demod Coherent, No. Phase States = 8, Rotation = 0 deg, In-Phase= t13 Output 0, Quadrature = t12 Output 0, Output 0 = Symbols t14 , Output 1 = Phase , RTDA Aware = Full, Max Rate (Port 0) = 3,2e+3 Hz
23 Comm Gray Code Decode, MSB is First, Word Size = 3 bits, Threshold = 0 v,
RTDA Aware = Full, Max Rate = 9,6e+3 Hz
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 3\8PSK-BER_ru.svu
Title: 8-PSK Communication System
Created by: ELANIX
Token Attribute Type Input Tokens Output Tokens
0 Source PN Seq - - 1
1 Operator Sampler 0 15,21
2 Comm Bit->Sym 21 20
3 Function Sine 20 4,5
4 Operator Hold 3 6
5 Operator Hold 3 6
6 Comm Quad Mod 4,5 7
7 Adder - - 18,6 9
8 Source Gauss Noise - - 18
9 Comm IQ Mixer 7 10,11
10 Comm Intg-Dmp 9 12
11 Comm Intg-Dmp 9 13
12 Operator Sampler 10 22
13 Operator Sampler 11 22
14 Comm Sym->Bit 22 23
15 Operator Smpl Delay 1 16
16 Comm BER Rate 15,23 19,17
17 Sink Final Value 16 - -
18 Operator Gain 8 7
19 Sink Cndtnl Stop 16 - -
20 Operator Gain 2 3
21 Comm Gray Code 1 2
22 Comm PSK Demod 13,12 14
23 Comm Gray Code 14 16
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры:File name: D:\_ \ 4\CRC_encoder_ru.svu
Title: Created by: Bob Stewart
System Time:0 - 6,0e+0 sec, dT=1,0e+0 sec, Sample Rate=1,0e+0 Hz, Samples=7, Loops=1
Token Attribute Type Parameters
0 Source Ext 1ch C:\Program Files\Syste ...\CRC_input_1.txt, Text data, Pad =0 samples, Pad with zeros, Start sample = 1
1 Operator Smpl Delay Delay = 1 samples, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t3 , Output 1 = Delay - dT
2 Operator Smpl Delay Delay = 1 samples, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t9 , Output 1 = Delay - dT
3 Operator XOR Threshold = 500,e-3, True = 1, False = 0
4 Operator Switch Min Ctrl Input = 0 v, Max Ctrl Input = 1 v, Input 0 = t9 Output0, Input 1 = t0 Output 0, Control = t5 Output 0
5 Source Pulse Train Amp = 1 v, Freq = 142,857e-3 Hz, PulseW = 4 sec, Offset =0 v, Phase = 0 deg
6 Operator Switch Min Ctrl Input = 0 v, Max Ctrl Input = 1 v, Input 0 = t7 Output0, Input 1 = t8 Output 0, Control = t5 Output 0
7 Source Step Fct Amp = 0 v, Start = 0 sec, Offset = 0 v
8 Operator XOR Threshold = 500,e-3, True = 1, False = 0
9 Operator Smpl Delay Delay = 1 samples, Attribute = Active, Initial Condition = 0 v,
Fill Last Register, In/Out Rate = 1 Hz, Output 0 = Delay t8 t4, Output 1 = Delay - dT
10 Sink Analysis Input from t5 Output Port 0
11 Sink Ext 1ch Input from t4 Output Port 0
12 Sink Analysis Input from t0 Output Port 0
13 Sink Analysis Input from t7 Output Port 0
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 4\CRC_encoder_ru.svu
Title: Created by: Bob Stewart
Token Attribute Type Input Tokens Output Tokens
0 Source Ext 1ch - - 8,4,12
1 Operator Smpl Delay 6 3
2 Operator Smpl Delay 3 9
3 Operator XOR 6,1 2
4 Operator Switch 9,0,5 11
5 Source Pulse Train - - 6,4,10
6 Operator Switch 7,8,5 3,1
7 Source Step Fct - - 6,13
8 Operator XOR 9,0 6
9 Operator Smpl Delay 2 8,4
10 Sink Analysis 5 - -
11 Sink Ext 1ch 4 - -
12 Sink Analysis 0 - -
13 Sink Analysis 7 - -
SystemViewby ELANIX
SYSTEM SUMMARY
Параметры: File name: D:\_ \ 4\CRC_decoder_ru.svu
Title: CRC decoder
Created by: ADDyy
System Time:0 - 1,0e+1 sec, dT=1,0e+0 sec, Sample Rate=1,0e+0 Hz, Samples=11, Loops=1
Token Attribute Type Parameters
0 Source Ext 1ch C:\Program Files\Syste ...\CRC_input2.txt, Text data, Pad =0 samples, Pad with zeros, Start sample = 1
1 Operator Smpl Delay Delay = 1 samples, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t3 , Output 1 = Delay - dT
2 Operator Smpl Delay Delay = 1 samples, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t8 , Output 1 = Delay - dT
3 Operator XOR Threshold = 500,e-3, True = 1, False = 0
4 Operator Switch Min Ctrl Input = 0 v, Max Ctrl Input = 1 v, Input 0 = t8 Output0, Input 1 = t6 Output 0, Control = t11 Output 0
5 Operator Switch Min Ctrl Input = 0 v, Max Ctrl Input = 1 v, Input 0 = t9 Output0, Input 1 = t8 Output 0, Control = t11 Output 0
6 Source Step Fct Amp = 0 v, Start = 0 sec, Offset = 0 v
7 Operator XOR Threshold = 500,e-3, True = 1, False = 0
8 Operator Smpl Delay Delay = 1 samples, Attribute = Active, Initial Condition = 0 v,
Fill Last Register, In/Out Rate = 1 Hz, Output 0 = Delay t4 t5, Output 1 = Delay - dT
9 Source Step Fct Amp = 0 v, Start = 0 sec, Offset = 0 v
10 Sink Analysis Input from t4 Output Port 0
11 Source Pulse Train Amp = 1 v, Freq = 100,e-3 Hz, PulseW = 7 sec, Offset = 0 v, Phase = 0 deg
12 Source Impulse Gain = 1, Start = 1 sec, Offset = 0 v
13 Operator XOR Threshold = 500,e-3, True = 1, False = 0
14 Sink Analysis Input from t13 Output Port 0
15 Sink Analysis Input from t11 Output Port 0
16 Sink Analysis Input from t0 Output Port 0
SystemView by ELANIX
SYSTEM CONNECTION LIST
File name: D:\_ \ 4\CRC_decoder_ru.svu
Title: CRC decoder
Created by: ADDyy
Token Attribute Type Input Tokens Output Tokens
0 Source Ext 1ch - - 13,16
1 Operator Smpl Delay 7 3
2 Operator Smpl Delay 3 8
3 Operator XOR 1,5 2
4 Operator Switch 8,6,11 10
5 Operator Switch 9,8,11 7,3
6 Source Step Fct - - 4 7 Operator XOR 13,5 1
8 Operator Smpl Delay 2 4,5 9 Source Step Fct - - 5
10 Sink Analysis 4 - - 11 Source Pulse Train - - 4,5,15
12 Source Impulse - - 13 13 Operator XOR 12,0 7,14
14 Sink Analysis 13 - - 15 Sink Analysis 11 - -
16 Sink Analysis 0 - -
Приложение Б
Параметры: channel_isi /простых межсимвольных помех в канале связи
SYSTEM SUMMARY
System Time: 0 – 3,1875e-3 sec, dT=12,5e-6, Sample Rate=80e+3 Hz, Samples=256, Loops=1
|
Token |
Attribute |
Type |
Parameters |
|
0 |
Operator |
Lynear Sys |
Custom Digital System, 128 Num Coefs, Decimate by 1, Quant Bits=None, Init Cndtn=Transient, DSP Mode Disabled, Max Rate=80e+3 Hz |
|
1 |
Sink |
SystemView |
Input from t7 Output Port 0, Max Input Rate=80e+3 Hz |
|
2 |
Sink |
SystemView |
Input from t4 Output Port 0, Max Input Rate=10e+3 Hz |
|
3 |
Operator |
Smpl Delay |
Delay=44 samples, Attribute=Passive, Initial Condition=0 v, Fill Last Register, Max Rate=80e+3 Hz |
|
4 |
Operator |
Sampler |
Interpolating, Rate=10e+3 Hz, Aperture=0 sec, Aperture Jitter=0 sec, Max Rate=10e+3 Hz |
|
5 |
Sink |
SystemView |
Input from t8 Output Port 0, Max Input Rate=80e+3 Hz |
|
6 |
Operator |
Smpl Delay |
Delay=88 samples, Attribute=Passive, Initial Condition=0 v, Fill Last Register, Max Rate=80e+3 Hz |
|
7 |
Operator |
Smpl Delay |
Delay=44 samples, Attribute=Passive, Initial Condition=0 v, Fill Last Register, Max Rate=80e+3 Hz |
|
8 |
Operator |
Gain |
Gain=5,4e+3, Gain Units=Linear, Max Rate=80e+3 Hz |
|
9 |
MetaSystem |
Custom_1 |
-- |
|
10(m9) |
Source |
PN Seq |
Amp=1 v, Offset=0 v, Rate=10e+3 Hz, Levels=2, Phase=0 deg, Max Rate=80e+3 Hz |
|
11(m9) |
Source |
Pulse Train |
Amp=1 v, Freq=10e+3 Hz, PulseW= 12,5e-6 sec, Offset=0 v, Phase=0 deg, Max Rate=80e+3 Hz |
|
12(m9) |
Multiplier |
-- |
-- |
|
13(m9) |
Meta I/O |
Meta Out |
-- |
SYSTEM CONNECTION LIST
|
Token |
Attribute |
Type |
Input Tokens |
Output Tokens |
|
0 |
Operator |
Lynear Sys |
13 |
3, 7 |
|
1 |
Sink |
SystemView |
7 |
-- |
|
2 |
Sink |
SystemView |
4 |
-- |
|
3 |
Operator |
Smpl Delay |
0 |
4 |
|
4 |
Operator |
Sampler |
3 |
2 |
|
5 |
Sink |
SystemView |
8 |
-- |
|
6 |
Operator |
Smpl Delay |
13 |
8 |
|
7 |
Operator |
Smpl Delay |
0 |
1 |
|
8 |
Operator |
Gain |
6 |
5 |
|
9 |
MetaSystem |
Custom_1 |
-- |
-- |
|
10 (m9) |
Source |
PN Seq |
-- |
12 |
|
11 (m9) |
Source |
Pulse Train |
-- |
12 |
|
12 (m9) |
Multiplier |
-- |
10, 11 |
13 |
|
13 (m9) |
Meta I/O |
Meta Out |
12 |
6, 0 |
Параметры lms_equalize/ выравнивание
SYSTEM SUMMARY
System Time: 0 - 1,024e-1 sec, dT=1,25e-5 sec, Sample Rate=8,0e+4 Hz, Samples=8192, Loops=1
|
Token |
Attribute |
Type |
Parameters |
|
0 |
Operator |
Lynear Sys |
Custom Digital System, 128 Num Coefs, Decimate By 1, Quant Bits = None, Init Cndtn = Transient, DSP Mode Disabled, Max Rate = 80e+3 Hz |
|
1 |
Sink |
SystemView |
Input from t8 Output Port 0, Max Input Rate = 10e+3 Hz |
|
2 |
Operator |
Smpl Delay |
Delay = 44 samples = 550e-6 sec, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t3, Output 1 = Delay - dT , Max Rate (Port 0) = 80e+3 Hz |
|
3 |
Operator |
Sampler |
Interpolating, Rate = 10e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 10e+3 Hz |
|
4 |
Operator |
Smpl Delay |
Delay = 88 samples = 1,1e-3 sec, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t5 , Output 1 = Delay - dT , Max Rate = 80e+3 Hz |
|
5 |
Operator |
Sampler |
Interpolating, Rate = 10e+3 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 10e+3 Hz |
|
6 |
Operator |
Lynear Sys |
Custom Digital System, 30 Num Coefs, Decimate By 1, Quant Bits = None, Init Cndtn = 0, DSP Mode Disabled, Max Rate = 10e+3 Hz |
|
7 |
Custom
|
LMS
|
Numerator Coeffs = 30, Mu = 100e-12, Leakage Factor = 1, First Tap Value = 0, Middle Tap Value = 0, Last Tap Value = 0, Subsample Factor = 1, Update Rate = 1, Filename for Final Weights = Digit…\General\lms_equalise_temp.txt, Max Rate = 10e+3 Hz |
|
8 |
Custom |
SUBTRACT |
Max Rate = 10e+3 Hz |
|
9 |
Operator |
Smpl Delay |
Delay = 1 samples, = 100e-6 sec, Attribute = Active, Initial Condition = 0 v, Fill Last Register, In/Out Rate = 10e+3 Hz, Output 0 = Delay t12 , Output 1 = Delay - dT |
|
10 |
Router |
-- |
-- |
|
11 |
MetaSystem |
Untitled_1 |
-- |
|
12 (m11) |
Source |
PN Seq |
Amp = 1 v, Offset = 0 v, Rate = 10e+3 Hz, Levels = 2, Phase = 0 deg, Max Rate = 80e+3 Hz |
|
13 (m11) |
Source |
Pulse Train |
Amp = 1 v, Freq = 10e+3 Hz, PulseW = 12,5e-6 sec, Offset = 0 v, Phase = 0 deg, Max Rate = 80e+3 Hz |
|
14 (m11) |
Multiplier |
-- |
-- |
|
15 (m11) |
Meta I/O |
Meta Out |
-- |
|
16 |
Sink |
Analysis |
Input from t6 Output Port 0, Max Input Rate = 10e+3 Hz
|
|
17 |
Sink |
Analysis |
Input from t3 Output Port 0, Max Input Rate = 10e+3 Hz |
SYSTEM CONNECTION LIST
|
Token |
Attribute |
Type |
Input Tokens |
Output Tokens |
|
0 |
Operator |
Lynear Sys |
15 |
2 |
|
1 |
Sink |
SystemView |
8 |
-- |
|
2 |
Operator |
Smpl Delay |
0 |
3 |
|
3 |
Operator |
Sampler |
2 |
6, 7 |
|
4 |
Operator |
Smpl Delay |
15 |
5 |
|
5 |
Operator |
Sampler |
4 |
10 |
|
6 |
Operator |
Lynear Sys |
3 |
16 |
|
7 |
Custom |
LMS |
3, 9 |
-- |
|
8 |
Custom |
SUBTRACT |
10, 9 |
9, 1 |
|
9 |
Operator |
Smpl Delay |
8 |
7 |
|
10 |
Router |
-- |
5 |
8 |
|
11 |
MetaSystem |
Untitled_1 |
-- |
-- |
|
12 (m11) |
Source |
PN Seq |
-- |
14 |
|
13 (m11) |
Source |
Pulse Train |
-- |
14 |
|
14 (m11) |
Multiplier |
-- |
12, 13 |
15 |
|
15 (m11) |
Meta I/O |
Meta Out |
14 |
0, 4 |
|
16 |
Sink |
Analysis |
6 |
-- |
|
17 |
Sink |
Analysis |
3 |
-- |
Параметры sinc_pulse/ идеальной фильтрации по Найквисту
SYSTEM SUMMARY
System Time: 0 – 10,6563e-3 sec, dT = 10,4167e-6, Sample Rate = 96e+3 Hz, Samples = 1024, Loops = 1
|
Token |
Attribute |
Type |
Parameters |
|
0 |
Sink |
SystemView |
Input from t9 Output Port 0, Max Input Rate = 96e+3 Hz |
|
1 |
Operator |
Lynear Sys |
Comm Sin(t)/t FIR, Symbol Rate = 2,4e+3 Hz, Decimate By 1, Quant Bits = None, Taps = 501, Init Cndtn = 0, DSP Mode Disabled, Max Rate = 96e+3 Hz |
|
2 |
Sink |
SystemView |
Input from t3 Output Port 0, Max Input Rate = 96e+3 Hz |
|
3 |
Operator |
Smpl Delay |
Delay = 250 samples = 2,60417e-3 sec, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t2 , Output 1 = Delay - dT , Max Rate (Port 0) = 96e+3 Hz |
|
4 |
MetaSystem |
Untitled_1 |
-- |
|
5 |
Source |
PN Seq |
Amp = 1 v, Offset = 0 v, Rate = 2,4e+3 Hz, Levels = 2, Phase = 0 deg, Max Rate = 96e+3 Hz |
|
6 |
Source |
Pulse Train |
Amp = 1 v, Freq = 2,4e+3 Hz, PulseW = 10,4167e-6 sec, Offset = 0 v, Phase = 0 deg, Max Rate = 96e+3 Hz |
|
7 |
Multiplier |
-- |
-- |
|
8 |
Meta I/O |
Meta Out |
-- |
|
9 |
Operator |
Gain |
Gain = 32 dB, Gain Units = dB Power, Max Rate = 96e+3 Hz |
SystemView by ELANIX
SYSTEM CONNECTION LIST
|
Token |
Attribute |
Type |
Input Tokens |
Output Tokens |
|
0 |
Sink |
SystemView |
9 |
-- |
|
1 |
Operator |
Linear Sys |
8 |
9 |
|
2 |
Sink |
SystemView |
3 |
-- |
|
3 |
Operator |
Smpl Delay |
8 |
2 |
|
4 |
MetaSystem |
Untitled1 |
-- |
-- |
|
5 (m4) |
Source |
PN Seq |
-- |
7 |
|
6 (m4) |
Source |
Pulse Train |
-- |
7 |
|
7 (m4) |
Multiplier |
-- |
5, 6 |
8 |
|
8 (m4) |
Meta I/O |
Meta Out |
7 |
1, 3 |
|
9 |
Operator |
Gain |
1 |
0 |
Параметры rc_pulse /типа приподнятого косинуса
SYSTEM SUMMARY
System Time: 0 - 1,066e-2 sec, dT=1,042e-5 sec, Sample Rate=9,6e+4 Hz, Samples=1024, Loops=1
|
Token |
Attribute |
Type |
Parameters |
|
0 |
Sink |
SystemView |
Input from t9 Output Port 0, Max Input Rate = 96e+3 Hz |
|
1 |
Operator |
Lynear Sys |
Raised Cosine (Parametric) FIR, Symbol Rate = 2,4e+3 Hz, Decimate By 1, Quant Bits = None, Roll-Off Factor = 1, Taps = 301, Init Cndtn = 0, DSP Mode Disabled, Max Rate = 96e+3 Hz |
|
2 |
Sink |
SystemView |
Input from t3 Output Port 0, Max Input Rate = 96e+3 Hz |
|
3 |
Operator |
Smpl Delay |
Delay = 150 samples = 1,5625e-3 sec, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t2 , Output 1 = Delay - dT , Max Rate = 96e+3 Hz |
|
4 |
MetaSystem |
Untitled_1 |
-- |
|
5 |
Source |
PN Seq |
Amp = 1 v, Offset = 0 v, Rate = 2,4e+3 Hz, Levels = 2, Phase = 0 deg, Max Rate = 96e+3 Hz |
|
6 |
Source |
Pulse Train |
Amp = 1 v, Freq = 2,4e+3 Hz, PulseW = 10,4167e-6 sec, Offset = 0 v, Phase = 0 deg, Max Rate = 96e+3 Hz |
|
7 |
Multiplier |
-- |
-- |
|
8 |
Meta I/O |
Meta Out |
-- |
|
9 |
Operator |
Gain |
Gain = 32 dB, Gain Units = dB Power, Max Rate = 96e+3 Hz |
Приложение В
Параметры для схемы Сверточный код
Start Time = 0 sec, Stop Time = 781,25e-6 sec,
Time Spacing = 52,0833333333333e-6 sec,
Sample Rate = 19,2е+3 Hz , Sampler = 16,
Freq. Res = 1,2e+3 Hz , Loops = 1.
|
Token |
Attribute |
Type |
Parameters |
|
0
1
2
3
4
6
7
8
9
10
11
12
13
14
16
|
Sourse
Sink
Operator
Operator
Operator
Operator
Operator
Sourse
Operator
Sink
Operator
Operator
Communications
Sink
Sink
|
Import
Analysis
Sample/Hold
Delays
Delays
Logic
Logic
Periodic
Logic
Analysis
Sample/Hold
Sample/Hold
Encode/Decode
Analysis
Analysis
|
Data Format: Text; Start output with sample number: 1; Pad output using previous value; Pad output using: 1 samples per input sample.
------------------------------------------------------------------
Sample Rate = 19,2е+3 Hz
Initial Condition: Fill Last Register; Token Attribute: Passive; Delay (samples):1; Initial Condition (v):0.
Initial Condition: Fill Last Register; Token Attribute: Passive; Delay (samples):1; Initial Condition (v):0.
Threshold: 500e-3; True Output: 1; False Output: 0.
Threshold: 500e-3; True Output: 1; False Output: 0.
Amplitude (v 0-p): 1; Offset (v): 0; Frequency (Hz): 9,6e+3; Phase (deg): 180; Pulse Width:52,0833333333333e-6;
Min Ctrl Input (v): 0; Max Ctrl Input (v): 1.
------------------------------------------------------------------
Hold Value: Last Sample; Gain: 1.
Hold Value: Last Sample; Gain: 1.
Output Len (n):2; Info Bits (k): 1; Constraint Len (l): 3; Threshold (v): 500e-3; Offset: 0; Offset Options: Seconds; Encode Polynomials (Octal): 7 5.
------------------------------------------------------------------
------------------------------------------------------------------ |
Параметры для схемы Сверточный код (2 вариант).
Start Time = 0 sec, Stop Time = 520,833333333333e-6 sec,
Time Spacing = 34,7222222222222e-6 sec,
Sample Rate = 28,8e+3 Hz , Sampler = 16,
Freq. Res = 1,8e+3 Hz , Loops = 1.
|
Token |
Attribute |
Type |
Parameters |
|
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15 |
Sourse
Operator
Sink
Communications
Sink
Operator
Operator
Operator
Operator
Operator
Operator
Operator
Operator
Sourse
Sink
Sink
|
Import
Sample/Hold
Analysis
Encode/Decode
Analysis
Delays
Delays
Delays
Logic
Logic
Sample/Hold
Sample/Hold
Logic
Periodic
Analysis
Analysis
|
Data Format: Text; Start output with sample number: 1; Pad output using previous value; Pad output using: 1 samples per input sample.
Sample Rate = 19,2е+3 Hz
------------------------------------------------------------------
Output Len (n):2; Info Bits (k): 1; Constraint Len (l): 3; Threshold (v): 500e-3; Offset: 0; Offset Options: Seconds; Encode Polynomials (Octal): 17 15.
------------------------------------------------------------------
Initial Condition: Fill Last Register; Token Attribute: Passive; Delay (samples):1; Initial Condition (v):0.
Initial Condition: Fill Last Register; Token Attribute: Passive; Delay (samples):1; Initial Condition (v):0.
Initial Condition: Fill Last Register; Token Attribute: Passive; Delay (samples):1; Initial Condition (v):0.
Threshold: 500e-3; True Output: 1; False Output: 0.
Threshold: 500e-3; True Output: 1; False Output: 0.
Hold Value: Last Sample; Gain: 1.
Hold Value: Last Sample; Gain: 1.
Min Ctrl Input (v): 0; Max Ctrl Input (v): 1.
Amplitude (v 0-p): 1; Offset (v): 0; Frequency (Hz): 9,6e+3; Phase (deg): 180; Pulse Width:34,7222222222222e-6; -----------------------------------------------------------------
------------------------------------------------------------------ |
Параметры для схемы Сверточное кодирование/ декодирование
Start Time = 0 sec, Stop Time = 6,61458333333333e-3 sec,
Time Spacing = 52,0833333333333e-6 sec,
Sample Rate = 19,2е+3 Hz , Sampler = 128,
Freq. Res = 150 Hz , Loops = 1.
|
Token |
Attribute |
Type |
Parameters |
|
0
1
2
3
4
5
6
|
Sink
Operator
Communications
Sink
Sourse
Communications
Sink
|
Analysis
Sample/Hold
Encode/Decode
Analysis
Noise/PN
Encode/Decode
Analysis
|
----------------------------------------
Sample Rate = 19,2е+3 Hz
Output Len (n):2; Info Bits (k): 1; Constraint Len (l): 3; Threshold (v): 500e-3; Offset: 0; Offset Options: Seconds; Encode Polynomials (Octal): 7 5. ----------------------------------------
Amplitude (
Output Len (n):2; Info Bits (k): 1; Constraint Len (l): 3; Path Length: 15; Threshold (v): 500e-3; Offset: 0; Select Bit Decision: Hard Decision; Offset Options: Seconds; Encode Polynomials (Octal): 7 5. --------------------------------------------- |
Параметры для схемы кода Рида - Соломона
Start Time = 0 sec, Stop Time = 192,238750000001e+1sec,
Time Spacing = 183,333333333334e-3 sec,
Sample Rate = 5,45454545454544 Hz, Sampler = 1048576,
Freq. Res = 5,20185990767044e-6Hz , Loops = 8.
|
Token |
Attribute |
Type |
Parameters |
|
0
1
2
3
4
5
6
7
8
9 10
11
12
13
14
15
16
|
Sourse
Operator
Operator
Comm
Comm
Comm
Function
Sourse
Operator
Adder Comm
Comm
Comm
Operator
Comm
Sink
Sink Tokens |
PN Seq
Sampler
Sampler Delay
Bit -> Sym
Blk Coder
Sym -> Bit
Roly
Gauss Noise
Gain
-- Bit -> Sym
Blk dCoder
Sym -> Bit
ReSample
BER Rate
Cndtnl Stop
Final Value |
Amp = 500e-3v, Offset = 500e-3v, Rate = 4Hz, Levers = 2, Phase = 0. Sample Rate = 4Hz, Aperture = 0sec, Jitter = 0 sec. Sample Type: Non – Interp look Right
Delay(sampler): = 95, Initial Condition = 0v. Initial Condition: Fill Last Register. Token Attribute: Passive
Bit/Symbol: = 4, Threshold = 500e-3v. Select Bit Orders: MSB First
Code Length n: = 15, Information Symbols k: = 11 Correct t: = 2, Offset (Symbols) = 0, Pad Zeros: = 0/ Select Block Code: Reed – Solomon. Offset Options: Bits or Symbols
Bit/Symbol: = 4. Select Bit Orders: MSB First
x^5 Coeff: = 0, x^4 Coeff: = 0, x^3 Coeff: = 0, x^2 Coeff: = 0, x^1 Coeff: = 2, x^0 Coeff: =-1.
Density = 250e-3 W/Hz. Constant Parameter: Density in 1 ohm.
Gain = -7 Gain Units: dB Power
------------------------------------------------------------------ Bit/Symbol: = 4, Threshold = 500e-3v. Select Bit Orders: MSB First
Code Length n: = 15, Information Symbols k: = 11 Correct t: = 2, Offset (Symbols) = 1, Pad Zeros: = 0. Select Block Code: Reed – Solomon. Offset Options: Bits or Symbols
Bit/Symbol: = 4. Select Bit Orders: MSB First
Sample Rate = 4Hz
No.Trials ≠ 1bits, Threshold = 500e-3v, Offset = 92bits, Offset Options: Bits or Symbols Threshold = 20v.Select Action: Go To Next loop. Sink Memory: Retain lest Sample
--------------------------------------------------- |
Основной план 2012 г., поз. 125