Некоммерческое акционерное общество
АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра автоматической электросвязи
ТЕОРИЯ ИНФОРМАЦИИ
Методические указания к выполнению лабораторных работ
для студентов очной формы обучения специальности 5В070400 - Вычислительная техника и программное обеспечение
Алматы 2010
СОСТАВИТЕЛИ: К.С.Чежимбаева, А.Д.Мухамеджанова И.Б. Кожабаева. Теория информации. Методические указания к выполнению лабораторных работ для студентов очной формы обучения специальности 5В070400 - Вычислительная техника и программное обеспечение.- Алматы: АУЭС, 2010.- 56 с.
Методические указания содержат требования по оформлению и проведению лабораторных работ. В них приводятся описания каждой лабораторной работы, контрольные вопросы и список рекомендуемой литературы.
Все лабораторные работы составлены с проведениями и обработками опытных данных с применением пакета моделирования «System View.
Методические указания предназначены для студентов специальности 5В070400 - Вычислительная техника и программное обеспечение.
Введение
Данные методические указания к лабораторным работам по дисциплине «Теория информации» включают материалы по четырем основным разделам курса и базируются на моделировании устройств с помощью пакета моделирования телекоммуникационных систем «SystemView».
Программа «SystemView» весьма полезна именно в том плане, что она позволяет представить системы связи, цифровую обработку сигналов (ЦОС) и средства их анализа в интуитивно понятном для практического применения виде.
Пакет «SystemView» представляет собой мощную интегрированную среду проектирования с почти неограниченными возможностями:
- построения моделей широкополосных систем связи, использующих сложные цифровые сигналы;
- анализа их поведения в различной помеховой и шумовой обстановке;
- отработки алгоритмов работы цифровых адаптивных фильтров.
Панель инструментов состоит из кнопок, которые выполняют следующие функции:
- управление над моделями или группами моделей в окне проектирования;
- пуск и остановка моделирования;
- обеспечение доступа к окну анализа и другим сервисным функциям.
Панель библиотек используется для выполнения различных действий с моделями или группой моделей. Для перемещения выбранной модели необходимо:
- дважды быстро нажать мышкой на нужную кнопку;
- либо нажав мышкой и, удерживая ее в нажатом состоянии, переместить курсор с выделенной моделью на рабочее поле окна проектирования.
Для каждой кнопки панели инструментов и панели библиотек доступна краткая информация. Чтобы увидеть информацию, необходимо подвести указатель к нужной кнопке, после чего в выпадающем окне появится информация о соответствующей кнопке.
Рисунок 1 - Окно моделирования «SystemView»
Все схемы, используемые в лабораторных работах, по умолчанию установлены в каталоге
C:\ДПВ\
Для того, чтобы запустить процесс моделирования, необходимо создать новый проект, объединяя определенные модели, либо открыть уже существующий проект. Для открытия существующего проекта необходимо щелкнуть по меню “File“ (Файл) и выбрать строку “Open Existing System“ (Открыть существующий проект). На экране должна появиться схема выбранного устройства или системы.
Для запуска процесса моделирования необходимо нажать в панели инструментов на кнопку Run (Пуск). В ходе моделирования в левом нижнем углу строки состояния появляется перемещающаяся полоса, которая показывает, на каком этапе находится процесс моделирования.
Результаты моделирования отображаются в окне анализа. Для перехода в окно анализа необходимо нажать кнопку Analysis Window (Окно анализа) на панели инструментов.
Окно Analysis Window (Окно анализа) является основным инструментом для исследования и анализа полученных данных. В «SystemView» имеется большое количество различных функций, позволяющих выполнить подробное изучение исследуемой системы. Окно анализа показано на рисунке 2.

Рисунок 2 - Окно анализа «SystemView»
Одной из особенностей Окна анализа является возможность простого изменения (увеличения) любого графика. Для рассмотрения какой-либо области достаточно выделить с помощью мыши требуемую область. Это свойство очень полезно для исследования отдельных деталей исследуемого процесса. Для возврата изображения в исходное состояние достаточно нажать кнопку Reset Scale на инструментальной панели или, вызвав контекстное меню правой кнопкой мыши, выбрать операцию Rescale. При этом графическое изображение будет возращено в исходное состояние.
Управление режимом отображения координат осуществляется с помощью кнопок LogY и LogX. При этом одна из осей координат графика или обе оси отображаются в логарифмическом масштабе.
Размещение окон можно менять с помощью кнопок Tile Vertical (Разместить вертикально), Tile Horizontal (Разместить горизонтально) и Tile cascade (Разместить каскадом).
Имеется возможность экспорта графических изображений в виде метафайлов или точечных рисунков в другие приложения Windows.
Для анализа результатов «SystemView» имеет мощный встроенный калькулятор. Вызов калькулятора осуществляется с помощью кнопки Sink Calculator, размещенной в правой нижней части Окна анализа.
Более подробные сведения о пакете моделирования телекоммуникационных систем «SystemView» можно почерпнуть из [1].
Общие сведения
1 Задание на выполнение соответствующей лабораторной работы студенты получают на предыдущем занятии.
2 Студенты самостоятельно (или на консультации) готовятся по вопросам, указанным в описании лабораторных работ.
3 На первом занятии студенты проходят инструктаж по технике безопасности.
4 Перед выполнением экспериментальной части студенты отвечают на вопросы, отчитываются за допуск к работе.
5 При невыполнении предыдущей работы без уважительной причины студент к выполнению последующей не допускается.
6 Отчет по лабораторной работе должен быть индивидуальным и защищается каждым студентом в отдельности.
7 Отчет должен содержать:
а) титульный лист;
б) название и номер работы;
в) цель работы;
г) рабочее задание;
д) схемы исследований;
е) экранные изображения сигналов и их спектры;
к) необходимые теоретические выкладки;
л) анализ полученных результатов;
м) выводы по работе.
1 Лабораторная работа №1. Исследование амплитудной модуляции
Цель работы: исследование амплитудной модуляции.
1.1 Предварительная подготовка
Изучить методы амплитудной модуляции с ДБП
При создании систем передачи информации в большинстве случаев оказывается, что спектр исходного сигнала, подлежащего передаче, сосредо-точен отнюдь не на тех частотах,которые эффективно пропускает имеющийся канал связи. Кроме того, очень часто необходимо в одном и том же канале связи передавать несколько сигналов одновременно. Одним из способов решения этой задачи является использование частотного разделения каналов, связи при котором разные сигналы занимают неперекрывающиеся полосы частот.
Далее, во многих случаях требуется, чтобы передаваемый сигнал был узкополосным. Это означает, что эффективная ширина спектра намного меньше его центральной частоты:
Перечисленные причины приводят к необходимости такой трансфор-мации исходного сигнала, чтобы требования, предъявляемые к занимаемой сигналом полосе частот, были выполнены, а сам исходный сигнал можно было восстановить. Решение указанной проблемы достигается при использовании модуляции (modulation), сущность которой заключается в следующем. Формируется некоторое колебание (чаще всего гармоническое), называемое несущим колебанием или пpocтo несущей (carrier), и какой-либо из параметров этого колебания изменяется во времени пропорционально исходному сигналу. Исходный сигнал называют модулирующим (modulating signal), а результирующее колебание с изменяющимися во времени параметрами — модулированным сигналом (modulated signal).Обратный процесс—выделение модулирующего сигнала из модулированного колебания — называется демодуляцией (demodulation). Запишем (в очередной раз) гармонический сигнал общего вида:
![]()
У данного сигнала есть три параметра: амплитуда А , частота ω0 и начальная фаза φ0. Каждый из них можно связать с модулирующим сигналом, получив таким образом три основных вида модуляции: амплитудную, частотную и фазовую.
Как видно из названия, при амплитудной модуляции (AM; английский термин — amplitude modulation, AM) в соответствии с модулирующим сигналом меняется амплитуда несущего колебания:
![]()
1.2 Рабочее задание
1.2.1 Исследование схем амплитудной модуляции с ДБП
АМ-сигнал –
это и есть результат умножения модулирующего сигнала (с добавленной постоянной
составляющей) на гармоническое несущее колебание. Спектр огибающей![]() при амплитудной модуляции сдвигается в область несущей частоты
при амплитудной модуляции сдвигается в область несущей частоты , «раздваиваясь» и уменьшаясь в два
раза по уровню. Покажем это на графике, задав какую-нибудь функцию для спектра
огибающей
, «раздваиваясь» и уменьшаясь в два
раза по уровню. Покажем это на графике, задав какую-нибудь функцию для спектра
огибающей ![]() (см.
рисунок 1.1):
(см.
рисунок 1.1):
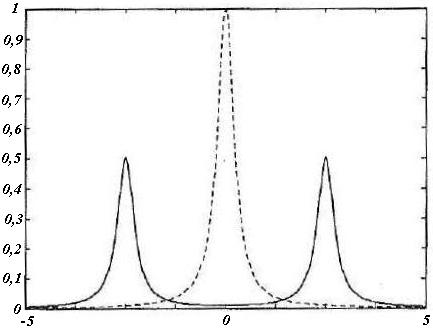
Рисунок 1.1 - Спектры огибающей (пунктирная линия) и АМ-сигнала (сплошная линия)
Итак, спектр АМ-сигнала в общем случае содержит несущую частоту (уровень, которой определяется постоянной составляющей огибающей), а также верхнюю и нижнюю боковые полосы.
Из графиков видно, что ширина спектра АМ-сигнала вдвое больше максимальной (граничной) частоты модулирующего сигнала:
Вычислим значение спектральной функции АМ-сигнала на несущей частоте:
![]()
Первое слагаемое результата – как и положено, деленная пополам постоянная составляющая модулирующего сигнала. А вот второе слагаемое представляет собой «хвост» от второй «половинки» спектра, сконцентрированной в области oтрицательных частот, в окрестностях частоты ω0. Следует иметь в виду, что, поскольку все реальные сигналы имеют конечную длительность (и, следовательно, бесконечно протяженный спектр), данное явление наложения «хвостов» всегда будет иметь место. В большинстве практических ситуаций, однако, несущая частота значительно превышает эффективную граничную частоту спектра огибающей, так что влияние данного эффекта пренебрежимо мало.
Графически проиллюстрируем наложение «хвостов» сдвинутых копий спектра, уменьшив в рассмотренном ранее примере несущую частоту (см.рисунок 1.2):

Рисунок 1.2 - При недостаточно высокой несущей частоте спектр АМ-сигнала (сплошная линия) может быть существенно несимметричным относительно несущей частоты из-за наложения «хвостов».
1.2.2 Исследование схем амплитудной модуляции с ДБП:
- собрать схему амплитудного модулятора с двумя боковыми полосами (см.рисунок 1.1), установить параметры, снять экранные изображения выходного модулированного сигнала и его спектра;
Т а б л и ц а 1.1 – Исходные данные
|
Вариант |
Частота |
Частота |
Коэффициент модуляции |
|
1 |
20 |
200 |
0.2 |
|
2 |
30 |
250 |
0,4 |
|
3 |
50 |
500 |
0,4 |
|
4 |
80 |
800 |
0,5 |
|
5 |
100 |
1000 |
0,5 |
|
Рисунок 1.3 |
Рисунок 1.4 |
- собрать схему амплитудного демодулятора с двумя боковыми полосами (см.рисунок 1.3), рассчитать параметры ФНЧ и установить параметры, снять экранные изображения выходного демодулированного сигнала.
1.2.3 Исследование схем балансной амплитудной модуляции:
- собрать схему балансного амплитудного модулятора (см.рисунок 1.5), установить параметры (см.таблица 1.1), снять экранные изображения выходного модулированного сигнала и его спектра;
- собрать схему балансного амплитудного демодулятора (см.рисунок 1.6), рассчитать параметры ФНЧ и установить параметры, снять экранные изображения выходного демодулированного сигнала;
- изменить частоту синхронного детектирования на 10% и объяснить полученные результаты.
|
Рисунок 1.5 |
Рисунок 1.6 |

1.2.4 Исследование схем синхронного детектирования:
- собрать схему амплитудного демодулятора с синхронным детектором (см.рисунок 1.7), установить параметры (см.таблица 1.1), снять экранные изображения выходного демодулированного сигнала;
Рисунок 1.7
- изменить частоту синхронного детектирования на 10% и объяснить полученные результаты.
1.2.5 Исследование схем амплитудной модуляции с ОБП:
Спектры двух боковых полос АМ-сигнала являются зеркальным отражением друг друга, то есть они несут одну и ту же информацию. Поэтому одну из боковых полос можно удалить. Получающаяся модуляция называется однополосной (английский термин – single side band, SSB).
В зависимости от того, какая боковая полоса сохраняется, говорят об однополосной модуляции с использованием верхней или нижней боковой полосы. Формирование однополосного сигнала проще всего пояснить, приведя несколько спектральных графиков (см.рисунок 1.8).
По сути дела, при однополосной модуляции происходит просто
сдвиг спектра сигнала в окрестности частоты несущего колебания. В отличие от
AM, каждая «половинка» спектра смещается в своем направлении: область
положительных частот – к ![]() , а область отрицательных
частот – к
, а область отрицательных
частот – к ![]() .
.
Очевидно, что ширина спектра однополосного сигнала равна ширине спектра модулирующего сигнала. Таким образом, спектр однополосного сигнала оказывается в два раза уже, чем при обычной AM.
В отличие от предыдущих случаев, здесь нам удастся простыми средствами выразить связь между модулированным и модулирующим сигналами. Чтобы сделать это, придется воспользоваться преобразованием Гильберта и понятием аналитического сигнала (см. раздел «Комплексная огибающая» главы 1).

Рисунок 1.8 - Однополосная модуляция:
а – спектр модулирующего сигнала,
б – спектр однополосного сигнала с верхней боковой полосой,
в – то же с нижней боковой полосой
Итак, прежде всего мы формируем из модулирующего сигнала
аналитический сигнал, имеющий односторонний спектр. Умножение этого сигнала ![]() вдвигает его односторонний
спектр на
вдвигает его односторонний
спектр на ![]() вправо (вверх
по частоте), формируя односторонний спектр однополосного сигнала с верхней
боковой полосой. Наконец, чтобы перейти от аналитического сигнала обратно к вещественному,
нужно взять вещественную часть. Формирование сигнала с нижней
боковой полосой описывается аналогично, только умножать
аналитический сигнал нужно на
вправо (вверх
по частоте), формируя односторонний спектр однополосного сигнала с верхней
боковой полосой. Наконец, чтобы перейти от аналитического сигнала обратно к вещественному,
нужно взять вещественную часть. Формирование сигнала с нижней
боковой полосой описывается аналогично, только умножать
аналитический сигнал нужно на ![]() (тогда его спектр сдвинется
влево, в область отрицательных частот, займет положение нижней боковой полосы).
(тогда его спектр сдвинется
влево, в область отрицательных частот, займет положение нижней боковой полосы).
Итак, однополосный сигнал можно представить как сумму двух АМ-сигналов, несущие колебания которых имеют одну и ту же частоту, но сдвинуты по фазе друг относительно друга на 90°. Амплитудными функциями этих АМ-сигналов являются модулирующий сигнал и его квадратурное дополнение. В зависимости от того, складываются эти два АМ-сигнала или вычитаются (а точнее, какая из двух несущих опережает другую по фазе), формируется однополосный сигнал с верхней или нижней боковой полосой.
1.2.6 Исследование схем амплитудной модуляции с ОБП:
-собрать схему амплитудного модулятора и демодулятора с ОБП (см.рисунок 1.9), установить параметры (см.таблица 1.1), снять экранные изображения выходного модулированного сигнала;
-изменить частоту синхронного детектирования на 10% и объяснить полученные результаты;
-ввести в канал связи между модулятором и демодулятором источник гауссовского (нормального) шума. Исследовать влияние помех на искажения сигнала. Снять экранные изображения.
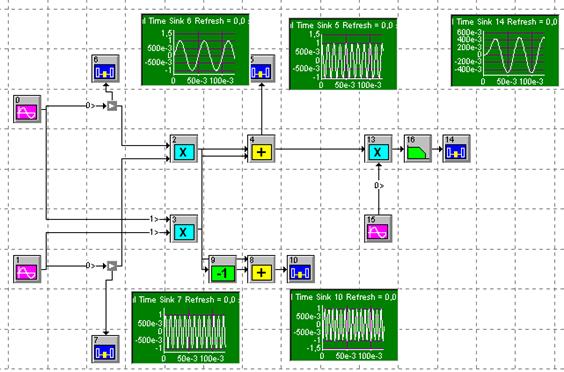
Рисунок 1.9
1.3 Выводы
1.3.1 Измените системное время и запустите систему на выполнение.
1.3.2 Проверьте правильность работы схемы в каждом случае.
1.4 Контрольные вопросы
1.4.1 Назначение АМ.
1.4.2 Определение модуляции.
1.4.3 Для каких целей используется модуляция в системах связи.
1.4.4 В чем сходство и различие понятий: модуляция, манипуляция, дискретная модуляция.
1.4.5 Назначение амплитудного демодулятора.
2 Лабораторная работа №2. Квантование и дискретизация
Цель работы: исследование методов квантования сигналов. Моделирование ADC
2.1 Предварительное задание. Изучить методы квантования сигналов. Моделирование ADC
В любую систему информация поступает в виде сигналов. Различные параметры физических процессов с помощью датчиков обычно преобразуются в электрические сигналы. Как правило, ими являются непрерывно изменяющиеся ток или напряжение, но возможно поступление и импульсных сигналов, как, например, в радиолокации. Печатный текст отображается буквами, цифрами и другими знаками.
 Хотя поступающую информацию можно
хранить, передавать и обрабатывать как в виде непрерывных, так и в виде дискретных
сигналов, на современном этапе развития информационной техники предпочтение
отдается дискретным сигналам, поэтому сигналы, как правило, преобразуются в
дискретные. С этой целью каждый непрерывный сигнал подвергается операциям квантования
по времени (дискретизации) и по уровню.
Хотя поступающую информацию можно
хранить, передавать и обрабатывать как в виде непрерывных, так и в виде дискретных
сигналов, на современном этапе развития информационной техники предпочтение
отдается дискретным сигналам, поэтому сигналы, как правило, преобразуются в
дискретные. С этой целью каждый непрерывный сигнал подвергается операциям квантования
по времени (дискретизации) и по уровню.
Под дискретизацией подразумевают преобразование функции непрерывного времени в функцию дискретного времени, представляемую совокупностью величин, называемых координатами, по значениям которых исходная непрерывная функция может быть восстановлена с заданной точностью. Роль координат часто выполняют мгновенные значения функции, отсчитанные в определенные моменты времени.
Под квантованием подразумевают преобразование некоторой величины с непрерывной шкалой значений в величину, имеющую дискретную шкалу значений. Оно сводится к замене любого мгновенного значения одним из конечного множества разрешенных значений, называемых уровнями квантования.
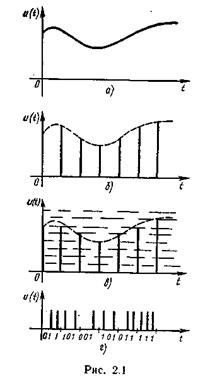
Изменение вида сигнала
![]() (см.рисунок 2.1, а) в результате проведения
операции дискретизации показано на рисунке 2.1,б, а в результате совместного
проведения операций дискретизации и квантования – на рисунке 2.1, в.
(см.рисунок 2.1, а) в результате проведения
операции дискретизации показано на рисунке 2.1,б, а в результате совместного
проведения операций дискретизации и квантования – на рисунке 2.1, в.
Число уровней квантования на рисунке 2.1, в равно 8. Обычно их значительно больше. Передача такого множества различных по уровню импульсов даже на небольшие расстояния применяется крайне редко. Если провести нумерацию уровней, то их передача сведется к передаче чисел. Тогда, выразив эти числа в какой-либо системе счисления, можно обойтись меньшим множеством передаваемых сигналов. Как правило, дискретный сигнал преобразуется в последовательность чисел, выраженных в двоичном коде. Каждое дискретное значение сигнала представляется в этом случае последовательностью сигналов двух уровней. Наличие или отсутствие импульса на определенном месте интерпретируется единицей или нулем в соответствующем разряде двоичного числа.
Цифровая форма представления сигнала
![]() (см.рисунок 2.1, а) показана на рисунке 2.1, г.
Для восьми уровней достаточно трех двоичных разрядов. Импульсы старших разрядов
расположены крайними справа.
(см.рисунок 2.1, а) показана на рисунке 2.1, г.
Для восьми уровней достаточно трех двоичных разрядов. Импульсы старших разрядов
расположены крайними справа.
При передаче и обработке информации в цифровой технике существует принципиальная возможность снижения вероятности получения ошибочного результата до весьма малых значений. Она возникает потому, что при использовании дискретных сигналов, во-первых, применимы такие методы кодирования, которые обеспечивают обнаружение и исправление ошибок, а во-вторых, можно избежать свойственного аналоговым сигналам эффекта накопления искажений в процессе их передачи и обработки, поскольку квантованный сигнал легко восстановить до первоначального уровня всякий раз, когда величина накопленных искажений приблизится к половине кванта. Практическая реализация указанных методов наиболее эффективна при минимальном числе уровней, равном двум.
Дискретизация по частотному критерию. Правило выбора предельного шага при равномерной дискретизации с использованием модели сигнала с ограниченным спектром в наиболее четкой форме сформулировано и доказано акад. В. А. Котельниковым в виде теоремы, получившей в отечественной литературе его имя*.
* В зарубежной литературе эту теорему называют теоремой Найквиста или просто теоремой отсчетов.
Теорема Котельникова. Теорема
устанавливает принципиальную возможность полного восстановления детерминированной
функции с ограниченным спектром по ее отсчетам и указывает предельное значение
интервала времени между отсчетами, при которой такое восстановление еще
возможно. Она формулируется следующим образом: функция ![]() допускающая преобразование
Фурье и имеющая непрерывный спектр, ограниченный полосой частот от 0 до
допускающая преобразование
Фурье и имеющая непрерывный спектр, ограниченный полосой частот от 0 до ![]() полностью определяется
дискретным рядом своих мгновенных значений, отсчитанных через интервалы времени
полностью определяется
дискретным рядом своих мгновенных значений, отсчитанных через интервалы времени
![]()
Физическая основа теоремы выявляется при рассмотрении связи между формой функции и шириной ее спектра. Только в случае, когда спектр функции безграничен, ее значения в сколь угодно близкие моменты времени могут изменяться произвольно (корреляционная связь между ними отсутствует).
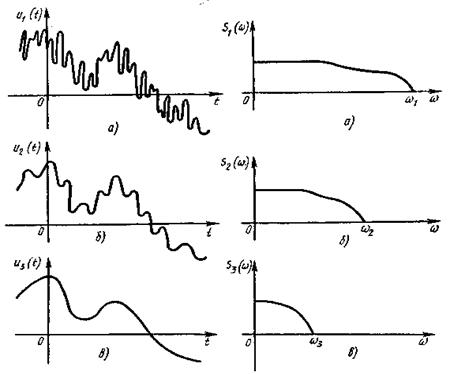
Рисунок 2.2
Сокращение высокочастотной части
спектра до граничной частоты ![]() равнозначно
устранению из временной функции выбросов, которые могли быть сформированы этими
высокочастотными составляющими (см.рисунок 2.2, а). При
меньших граничных частотах
равнозначно
устранению из временной функции выбросов, которые могли быть сформированы этими
высокочастотными составляющими (см.рисунок 2.2, а). При
меньших граничных частотах ![]() (см.рисунок 2.2, б) и
(см.рисунок 2.2, б) и
![]() (см.рисунок 2.2, в)
имеем более сглаженные функции времени. Поскольку значения этих функций в
моменты времени
(см.рисунок 2.2, в)
имеем более сглаженные функции времени. Поскольку значения этих функций в
моменты времени ![]() в пределах
некоторого интервала
в пределах
некоторого интервала ![]() не могут изменяться существенно,
можно ограничиться значениями функции, взятыми через интервалы
не могут изменяться существенно,
можно ограничиться значениями функции, взятыми через интервалы ![]() (отсчетами).
(отсчетами).
2.2 Рабочее задание
В этом разделе мы будем использовать квантователь из библиотеки функциональных значков SystemView, чтобы квантовать входной сигнал на фиксированное количество битов. Моделирование в предыдущих случаях, входные сигналы различных лексем были с точностью плавающей точки, поэтому для большинства целей мы можем предположить, что (заметного) квантования нет.
2.2.1 Квантование сигнала
Соберите схему, приведенную на рисунке 2.1.
Установите следующие параметры в системе.
|
Системное время |
|
|
Частота дискретизации, Гц |
200 |
|
Число отсчетов |
256 |
|
Источник пилообразного сигнала |
|
|
|
Amp = 1,875 v |
|
|
Freq = 5 Hz |
|
|
Offset = -1 v |
|
|
Phase = 0 deg |
|
|
Max Rate = 1e+3 Hz |
|
Квантователь |
|
|
|
Bits = 4 |
|
|
Max Input = ±1 v |
|
|
Signed Integer Output |
|
|
Max Rate = 1e+3 Hz |
|
Усилитель |
Gain = -125e-3 |
|
|
Gain Units = Linear |
|
|
Max Rate = 1e+3 Hz |
Система берет (с точностью плавающей точки) квантованный выходной сигнал генератора пилообразного сигнала с амплитудой напряжения 1,875 В и преобразует его в целое квантованное число. Все источники выходных сигналов в SystemView, по умолчанию установлены на точность с плавающей точкой (исключая, конечно, источники, которые считываются из файла, которые могут быть установлены на точность с фиксированной точкой).

Рисунок 2.1
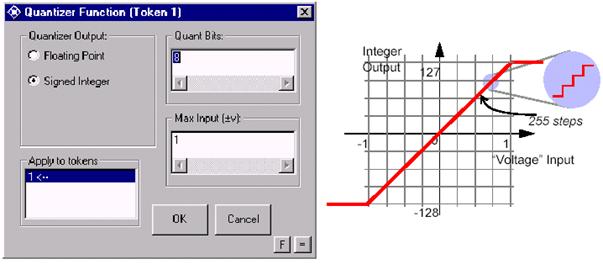
Рисунок 2.2 - Диалоговое окно квантователя и соответствующие характеристики ввода/вывода
а) просмотрите параметры значка 4-х битного квантователя и убедитесь, что имеет входные/выходные характеристики, показанные на рисунке 2.2.
Обратите внимание, входной квантователь является
восьмибитным, поэтому вторичная амплитуда дополнения находится в пределах от ![]() до
до![]() , например: -8 до +7;
, например: -8 до +7;
б) запустите систему и затем в окне анализа убедитесь, что
значения выборок такие, как предполагались на выходе квантователя
рассмотренного выше. (Не забудьте нажать мерцающую синим цветом кнопку
«Загрузить обновленные данные блока» ![]() , чтобы увидеть обработанные данные только прошедшего
процесса моделирования);
, чтобы увидеть обработанные данные только прошедшего
процесса моделирования);
в) определите погрешность квантования, вычисление которой осуществляется модулями 3, 4 и 5. Объясните полученные результаты;
г) модифицируйте параметры квантователя ![]() так, чтобы обеспечить
трехбитное квантование (8 уровней как показано на рисунке 2.3) с таким же ±1
колебанием напряжения, как раньше. Запустите систему и убедитесь, что результаты
такие, как предполагалось, и совпадают с данными таблицами, показанными на
рисунке 2.3;
так, чтобы обеспечить
трехбитное квантование (8 уровней как показано на рисунке 2.3) с таким же ±1
колебанием напряжения, как раньше. Запустите систему и убедитесь, что результаты
такие, как предполагалось, и совпадают с данными таблицами, показанными на
рисунке 2.3;
д) модифицируйте систему так, чтобы амплитуда пилообразного сигнала на входе была равна 2 В. Запустите систему и обратите внимание на эффект «сжимания» ADC. Это происходит потому, что присутствует проблема нелинейности, которая появляется тогда, когда входное напряжение на ADC слишком высокое;
е) обратите внимание, что в диалоговом окне параметров квантователя, можно настроить вывод так, что он будет выводиться в форме с плавающей точкой или как целое число. Произвести такую настройку можно при помощи радио-кнопок показанных на рисунке 2.2. Теперь установите форму вывода «с плавающей точкой», запустите процесс моделирования и объясните то, что теперь показывается на выходе;
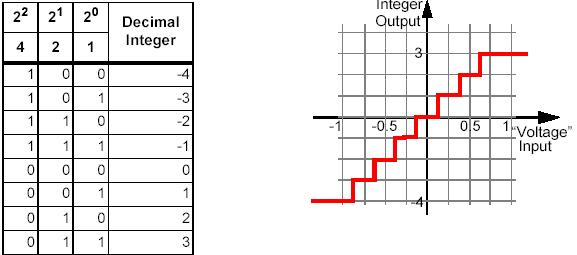
Рисунок 2.3 - 3 битный квантователь, характеристики ввода-вывода
ж) измените модуль генератора прямоугольных импульсов на генератор синусоидальных сигналов (ГСН), запустите систему повторно при значении выходных напряжений ГСН, равных 1,75, 1,875 и 2,0 В. Объясните полученные результаты.
2.2.2 Дискретизация и наложение спектров (aliasing)
В этом разделе мы продемонстрируем явление элайзинга. Вспомните из лекций о том, что, если частотные составляющие сигнала больше чем fs/2 , то проявляется элайзинг. Элайзинг проявится в искажении сигнала. Например, если тон в 6000 Гц является входным сигналом для системы ЦОС (без анти-элайзинга и фильтров восстановления) и произведена выборка в 10000 Гц, то сигнал будет интерпретироваться как тон в 4000 Гц.
Одним из простейших способов тестирования линейности системы по особенностям частоты является подача на вход чистого тона или синусоидального сигнала.
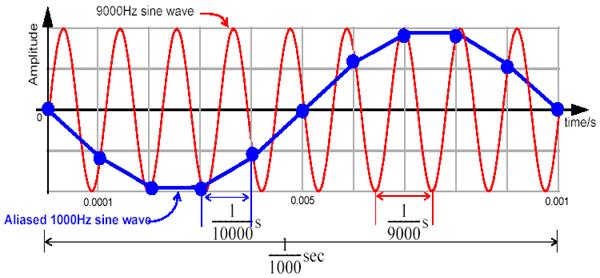
Рисунок 2.4 - Элайзинг синусоидального сигнала частотой 9000 Гц на 1000 Гц, при квантовании частотой 10000 Гц
Чтобы увидеть, как выглядит сигнал, подвергнутый элайзингу,
рассмотрим рисунок, для которого производится выборка тона в 9000 Гц для ![]() =10000 Гц.
Судя по рисунку выше, ясно, что
=10000 Гц.
Судя по рисунку выше, ясно, что ![]() =5000 и
9000 Гц будет псевдонимизироваться. По диаграмме видно, что когда мы
восстанавливаем сигнал, то получаем 1000 Гц синусоидальную волну.
=5000 и
9000 Гц будет псевдонимизироваться. По диаграмме видно, что когда мы
восстанавливаем сигнал, то получаем 1000 Гц синусоидальную волну.
2.3 Простой элайзинг
Соберите схему, приведенную на рисунке 2.5.

Рисунок 2.5
Установите следующие параметры в системе.
|
Системное время |
|
|
Частота дискретизации, Гц |
10000 |
|
Число отсчетов |
32 |
|
Источник синусоидального сигнала |
|
|
|
Amp = 1 v |
|
|
Freq = 1e+3 Hz |
|
|
Offset = -1 v |
|
|
Phase = 0 deg |
|
|
Output 0 = Sine t1 |
|
|
Max Rate = 1e+3 Hz |
Убедитесь, что все параметры обоих генераторов синусоидальных волн (в первом примере) абсолютно идентичны.
а) запустите процесс моделирования, и затем в окне анализа ![]() проверьте
выходные сигналы обоих генераторов синусоидальных сигналов: они должны быть
идентичны. Обратите внимание на разные названия двух блоков. Включая и выключая
проверьте
выходные сигналы обоих генераторов синусоидальных сигналов: они должны быть
идентичны. Обратите внимание на разные названия двух блоков. Включая и выключая
![]() , убедитесь,
что когда осуществляется выборка в 1000 Гц, в синусоидальном сигнале в 10000 Гц
присутствуют 10 выборок на период;
, убедитесь,
что когда осуществляется выборка в 1000 Гц, в синусоидальном сигнале в 10000 Гц
присутствуют 10 выборок на период;
б) измените частоту верхнего генератора синусоидальных волн на 2000 Гц. Запустите систему и убедитесь в том, что сигнал на выходе совпадает с тем, который вы предполагаете;
в) теперь измените частоту верхнего генератора
синусоидальных волн на 4500 Гц. Это частота приближается к половине частоты
выборки ![]() =5000Гц
=5000Гц
Убедитесь, просмотрев результаты в окне анализа ![]() , что
сигнал на выходе такой, как предполагался.
, что
сигнал на выходе такой, как предполагался.
Обратите внимание, что теперь более двух выборок на период и, следовательно, когда окно SystemView объединяет выборки между собой прямыми линиями (интерполяция первого порядка), сигнал выглядит несколько «нелепо» (обратитесь к картинке 3.12).
Тем не менее, квантование сигнала осуществляется в соответствии с критерием Найквиста, и поэтому вся информация о синусоидальном сигнале (амплитуда, фаза и частота) сохраняется;
г) в этот раз мы изменяем частоту верхнего генератора
синусоидального сигнала на верхнюю границу половины частоты выборки ![]() 2 = 5000 Гц,
т.е. на значение 9000 Гц. Пронаблюдайте, что выходной сигнал, когда выборка производится
для 10 000 Гц, подвергнулся элайзингу и выглядит как синусоидальный сигнал
частотой 1000 Гц;
2 = 5000 Гц,
т.е. на значение 9000 Гц. Пронаблюдайте, что выходной сигнал, когда выборка производится
для 10 000 Гц, подвергнулся элайзингу и выглядит как синусоидальный сигнал
частотой 1000 Гц;
д) увеличьте частоту верхнего генератора синусоидальных волн до более чем 11 000 Гц. Обратите внимание, что на выходе мы опять видим синусоидальный сигнал частотой 1000 Гц.
2.4 Восстановление дискретизированных сигналов
Соберите систему:
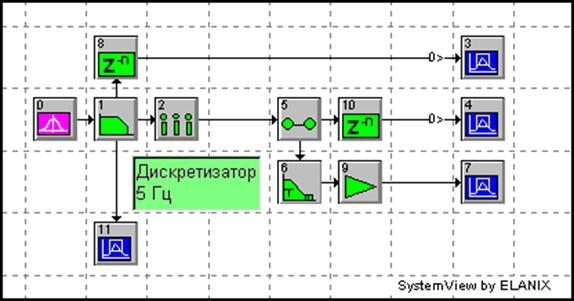
Рисунок 2.6
Установите следующие параметры в системе.
|
System Time: |
0 - 1,022e+1 sec, |
dT=2,0e-2 sec, |
Sample Rate=5,0e+1 Hz, |
|
|
Samples=512, |
Loops=1 |
|
||
|
|
||||
|
0 Source Gauss Noise |
Std Dev = 1 v, |
Mean = 0 v, |
Max Rate = 50 Hz |
|
|
|
||||
|
1 Operator Linear Sys Butterworth Lowpass IIR, |
6 Poles, |
Fc = 1 Hz, |
Quant Bits =None, |
|
|
Init Cndtn = Transient |
DSP Mode Disabled |
MaxRate = 50 Hz |
||
|
|
|
|
||
|
|
||||
|
2 Operator Sampler |
Non-Interp Right |
Rate = 5 Hz |
Aperture = 0 sec |
|
|
Aperture Jitter = 0 sec |
Max Rate = 5 Hz |
|
||
|
3 Sink Analysis |
Input from t8 |
Output Port 0 |
Max Input Rate = 50 Hz |
|
|
4 Sink Analysis |
Input from t10 |
Output Port 0 |
Max Input Rate = 50 Hz |
|
|
5 Operator Hold Zero |
Gain = 1 |
Out Rate = 50 Hz |
Max Rate = 50 Hz |
|
|
6 Operator Linear Sys Comm Sin(t)/t FIR |
Symbol Rate = 5 Hz |
Decimate By 1 |
Quant Bits = None |
|
|
Taps = 41 |
Init Cndtn = Transient |
DSP Mode Disabled |
||
|
Max Rate = 50 Hz |
|
|
||
|
|
|
|
|
|
|
7 Sink Analysis |
Input from t9 |
Output Port 0 |
Max Input Rate = 50 Hz |
|
|
8 Operator Smpl Delay |
Delay = 20 samples = 400e-3 sec |
Attribute = Passive |
Initial Condition = 0 v |
|
|
Fill Last Register |
Output 0 = Delay t3 |
Output 1 = Delay – dT |
||
|
Max Rate (Port 0) = 50 Hz |
|
|
||
|
9 Operator Gain |
Gain = 10 |
Gain Units = Linear |
Max Rate = 50 Hz |
|
|
10 Operator Smpl Delay |
Delay = 20 samples, = 400e-3 sec |
Attribute = Passive |
Initial Condition = 0 v |
|
|
Fill Last Register |
Output 0 = Delay t4 |
Output 1 = Delay – dT |
||
|
Max Rate (Port 0) = 50 Hz |
|
|
||
|
11 Sink Analysis |
Input from t1 |
Output Port 0 |
Max Input Rate = 50 Hz |
|
Это упражнение иллюстрирует источник случайных помех с ограниченной полосой пропускания 1 Гц (односторонние). Над этим сигналом была произведена выборка с частотой в 5 Гц, а затем он был восстановлен, используя функцию sinc (sin x/x). В уравнении (2.1) показано, что спектр X(f) дискретизированного сигнала определяется как:
![]() (2.2)
(2.2)
где, ![]()
где X(f) - спектр оригинала недискретизированного сигнала. Как далее показывается в приложении E к учебнику, наиболее качественное восстановление исходного сигнала x(t) из его отсчетов xs(t) определяется как:
![]() . (2.3)
. (2.3)
Принимая во внимание формулу 2.2 для числа отсчетов K в модели, мы имеем
![]() (2.4)
(2.4)
а) выполните моделирование
для проверки основных описанных операций. В окне анализа ![]() посмотрите на
спектр выбранного сигнала и обратите внимание на повторение (копию) спектра,
который представлен формулой 2.2.
посмотрите на
спектр выбранного сигнала и обратите внимание на повторение (копию) спектра,
который представлен формулой 2.2.
б) посмотрите на входной сигнал (с ограниченной полосой шума), дискретизированный сигнал и восстановленный сигнал. Являются ли исходный и восстановленный сигналы эквивалентными?
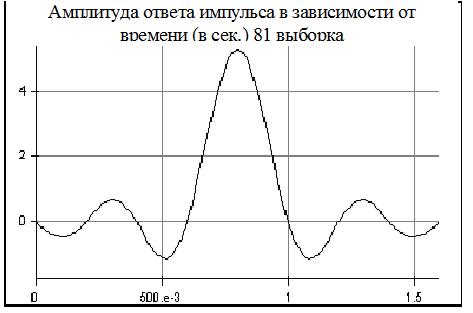
Рисунок 2.6 – Усеченная sinc форма волны (81 сигнал)
в) обратите внимание, что для идеального восстановления дискретизированного сигнала, как показано в формуле 2.2, требуется идеальная функция sinc, т.е. с бесконечным числом сигналов (taps). Посмотрите на импульсную характеристику функции sinc, используя открывающееся диалоговое окно параметра маркера sinc (маркер 6), и обратите внимание, что конечное число сигналов - это усеченная sinc форма волны, как показано на рисунке 2.6, так как импульсная характеристика полностью не спадает до нуля.
г) чтобы получать более точное представление о sinc сигнале, число выборок (taps) фильтра sinc должно быть увеличено. Установите параметры функционального модуля 6 следующими:
|
Operator: Linear Sys - Comm |
||
|
Taps = 501 |
Quant Bits = None |
DSP Mode Disabled |
|
Symbol Rate = 5 Hz |
Init Cndtn = Transient |
Max Rate = 50 Hz |
|
Decimate By 1 |
|
|
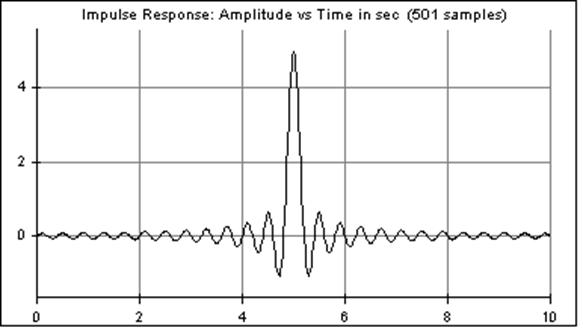
Рисунок 2.8 - Усеченная sinc форма сигнала (501 выборка)
Сравните результаты восстановления с предыдущим случаем.
2.5 Дуобинарное упражнение
Соберите систему:
File name: Duobinary_ru.svu
Title: Duobinary.svu
System Time:0 - 5,11e+0 sec, dT=1,0e-2 sec, Sample Rate=1,00e+2 Hz, Samples=512, Loops=1
Token Attribute Type Parameters
0 Source PN Seq Amp = 500e-3 v, Offset = 500e-3 v, Rate = 10 Hz, Levels = 2, Phase = 0 deg, Max Rate = 100 Hz
Hz
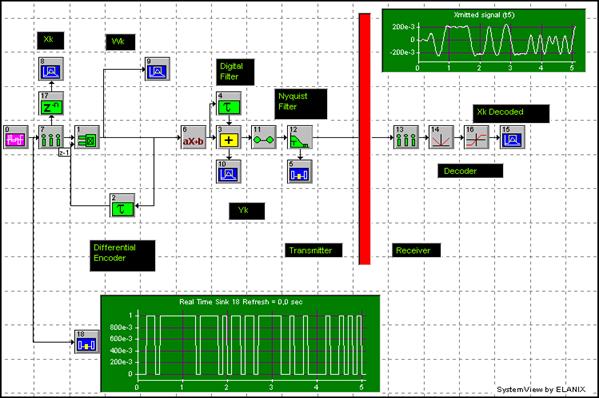
Рисунок 2.9
1 Operator XOR Threshold = 500e-3, True = 0, False = 1, Max Rate = 10
2 Operator Delay Non-Interpolating, Delay = 100e-3 sec, = 1,0 smp, Output 0 = Delay , Output 1 = Delay - dT t1 , Max Rate (Port 1) = 10 Hz
3 Adder - - - -
4 Operator Delay Non-Interpolating, Delay = 100e-3 sec, = 1,0 smp, Output 0 = Delay t3 , Output 1 = Delay - dT , Max Rate (Port 0) = 10 Hz
5 Sink Real Time Input from t12 Output Port 0, Max Input Rate = 100 Hz
6 Function Poly -1+(2x), Max Rate = 10 Hz
7 Operator Sampler Non-Interp Right, Rate = 10 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 10 Hz
8 Sink Analysis Input from t17 Output Port 0, Max Input Rate = 10 Hz
9 Sink Analysis Input from t1 Output Port 0, Max Input Rate = 10 Hz
10 Sink Analysis Input from t3 Output Port 0, Max Input Rate = 10 Hz
11 Operator Hold Zero, Gain = 1, Out Rate = 100 Hz, Max Rate = 100 Hz
12 Operator Linear Sys Comm Sin(t)/t FIR, Symbol Rate = 10 Hz, Decimate By 1, Quant Bits = None, Taps = 81, Init Cndtn = 0, DSP Mode Disabled, Max Rate = 100 Hz
13 Operator Sampler Non-Interp Right, Rate = 10 Hz, Aperture = 0 sec, Aperture Jitter = 0 sec, Max Rate = 10 Hz
14 Function Rectify Zero Point = 0 v, Max Rate = 10 Hz
15 Sink Analysis Input from t16 Output Port 0, Max Input Rate = 10 Hz
16 Function Limiter Max Input = ±0 v, Max Output = ±1 v, Max Rate = 10 Hz
17 Operator Smpl Delay Delay = 4 samples, = 400e-3 sec, Attribute = Passive, Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t8 , Output 1 = Delay - dT , Max Rate (Port 0) = 10 Hz
18 Sink Real Time Input from t0 Output Port 0, Max Input Rate = 100 Hz
2.6 Выводы
2.6.1 Запустите схему с упражнением.
2.6.2 Поработайте над декодером символов, чтобы проверить критерии принятия того или иного решения задачи.
2.7 Контрольные вопросы
2.7.1 Чему равна частота дискретизации?
2.7.2 Раскажите теорему Котельникова.
На каких принципах основана дискретизая непрерывных сообщений по времени.
2.7.3 В каких устройствах она впервые нашла применение?
2.7.4 Какая разница между дискретизацией и квантованием непрерывных сообщений?
3 Лабораторная работа №3. Помехоустойчивое кодирование
Цель работы: исследование помехоустойчивого кодирования.
3.1 Предварительная подготовка
Изучить методы помехоустойчивого кодирования
Бурный рост теории и практики помехоустойчивого кодирования в последнее десятилетие связан в первую очередь с созданием средств телеобработки данных, вычислительных систем и сетей, региональных автоматизированных систем управления, систем автоматизации научных исследований. Высокие требования к достоверности передачи, обработки и хранения информации в указанных системах диктовали необходимость такого кодирования информации, которое обеспечивало бы возможность обнаружения и исправления ошибки.
В этом случае кодирование должно осуществляться так, чтобы сигнал, соответствующий принятой последовательности символов, после воздействия на него предполагаемой в канале помехи оставался ближе к сигналу, соответствующему конкретной переданной последовательности символов, чем к сигналам, соответствующим другим возможным последовательностям. (Степень близости обычно определяется по числу разрядов, в которых последовательности отличаются друг от друга.)
Это достигается ценой введения при кодировании избыточности, которая позволяет так выбрать передаваемые последовательности символов, чтобы они удовлетворяли дополнительным условиям, проверка которых на приемной стороне дает возможность обнаружить и исправить ошибки.
Коды, обладающие таким свойством, называют помехоустойчивыми. Они используются как для исправления ошибок (корректирующие коды), так и для их обнаружения.
3.2 Рабочее задание
Это систематический ![]() – код,
в котором операции кодирования и декодирования проводятся как проверка на
четность. Кодовое расстояние для этого кода d0=2.
При этом код всегда обнаруживает однократные ошибки. Разрешенная комбинация
этого кода при любом числе информационных символов имеет всего один
проверочный. Размещение проверочного символа в кодовой комбинации не имеет
значения. Обычно его ставят в конце после информационных. Значение символа в
проверочном разряде выбирается из условия, что общее число единиц в
образованной таким образом разрешенной кодовой комбинации было четным (отсюда и
название кода), т.е. чтобы сумма по модулю для всех символов кодовой комбинации
равнялась нулю.
– код,
в котором операции кодирования и декодирования проводятся как проверка на
четность. Кодовое расстояние для этого кода d0=2.
При этом код всегда обнаруживает однократные ошибки. Разрешенная комбинация
этого кода при любом числе информационных символов имеет всего один
проверочный. Размещение проверочного символа в кодовой комбинации не имеет
значения. Обычно его ставят в конце после информационных. Значение символа в
проверочном разряде выбирается из условия, что общее число единиц в
образованной таким образом разрешенной кодовой комбинации было четным (отсюда и
название кода), т.е. чтобы сумма по модулю для всех символов кодовой комбинации
равнялась нулю.
- собрать схему кодера с проверкой на четность (см.рисунок 3.1), установить параметры, снять экранные изображения выходного сигнала;
- объяснить методику кодирования и декодирования кода, а также принципы обнаружения ошибок;
- собрать схему декодера кода с проверкой на четность (см. рисунок 3.2), снять экранные изображения выходного сигнала;
- ввести в схему источник искажений (см.рисунок 3.3). Исследовать работу схемы с учетом искажений первого, второго и т.д. символов;
- постройте кодер и декодер кода с проверкой на нечетность.
|
Рисунок 3.1 |
Рисунок 3.2. |
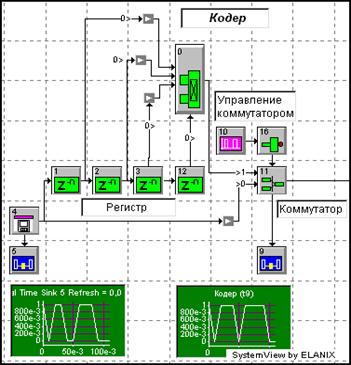
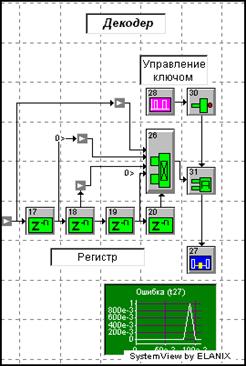
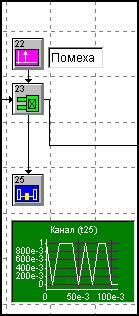
Рисунок 3.3 - Источник искажений
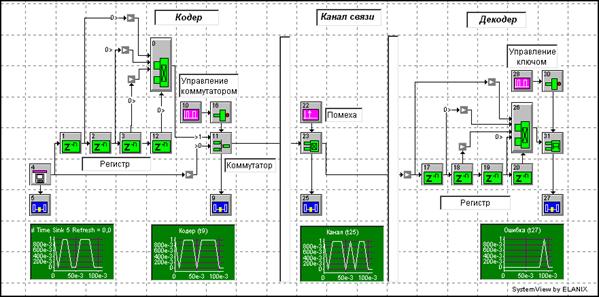
Рисунок 3.4 - Полная схема кодера-декодера с проверкой на четность
3.2.2 Исследование схем кодера и декодера Хэмминга (7,4)
Коды Хэмминга (Hamming codes) – это простой класс блочных кодов, которые имеют следующую структуру:
![]()
где![]() . Минимальное расстояние для
этих кодов равно 3, поэтому они способны исправлять все модели ошибки из двух
или малого числа ошибок в блоке. Коды Хэмминга принадлежат к очень
ограниченному классу блочных кодов, называемых ограниченными.
. Минимальное расстояние для
этих кодов равно 3, поэтому они способны исправлять все модели ошибки из двух
или малого числа ошибок в блоке. Коды Хэмминга принадлежат к очень
ограниченному классу блочных кодов, называемых ограниченными.
- собрать схему кодера (см.рисунок 3.5), установить параметры в соответствии с листом System Summary и списком соединений Connection List, снять экранные изображения выходного сигнала;
- объясните принципы построения кодера, для чего запишите проверочные равенства и сравните их с реализацией на рисунок 3.5;
- преобразуйте схему кодера в метасистему и сохраните ее под именем HammingEncoder.mta (см.рисунок 3.6);
- подключите выход метасистемы кодера Хэмминга к модели канала связи (см.рисунок 3.7);
- изменяя время включения источников помех, проверьте их влияние на качество передачи;
- соберите схему декодера кода Хэмминга (см.рисунок 3.8);
- проверьте правильность совместной работы кодера и декодера.
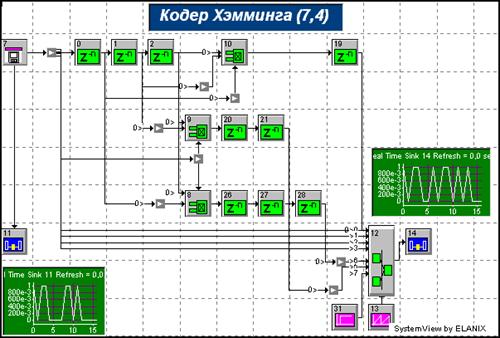
Рисунок 3.5
-
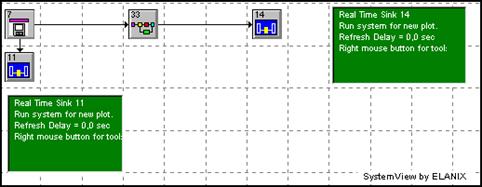
Рисунок 3.6
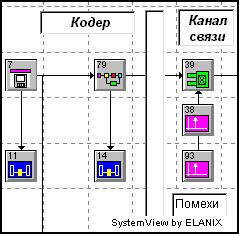
Рисунок 3.7
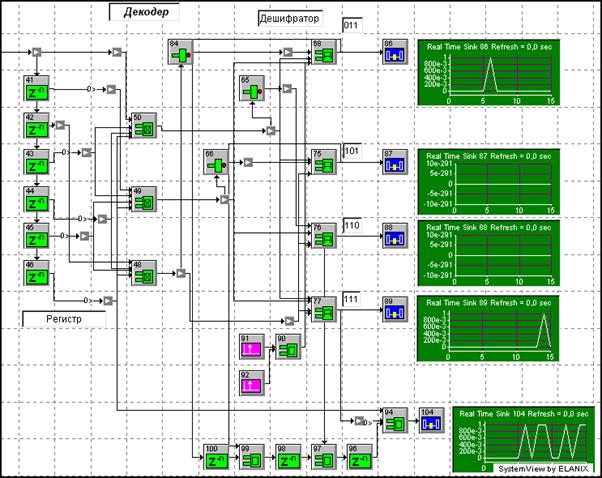
Рисунок 3.8
3.3 Выводы
Используя схемы, приведенные в п. 3.2.3, постройте схемы кодера и декодера Хэмминга (8,4), обнаруживающего двойную и исправляющего одиночную ошибки.
Примечание
Схемы соединений и параметры элементов приведены в приложениях:
- OddEvenEncDec Summary
- OddEvenEncDec ConnectionList
- HammingDecSummary
- HammingDecConnectionList
3.4 Контрольные вопросы
3.4.1 Какие типы кодов получаются при кодировании источников информации?
3.4.2 Каким образом исправляются ошибки в кодах, которые обнаруживают только их?
3.4.3 В чем состоят основные принципы корректирования ошибок?
3.4.4 Дайте определение кодового расстояния.
3.4.5 При каких условиях код может обнаруживать или исправлять ошибки?
3.4.6 Пояснить принципы помехоустойчивого кодирования.
4 Лабораторная работа №4. Моделирование системы Bluetooth
Цель работы: изучение радиочастотной части для коротких расстояний беспроводной системы передачи данных Bluetooth.
4.1 Предварительная подготовка
Изучить систему передачи данных Bluetooth
Bluetooth является недорогой маломощной технологией для построения радиосетей для небольших расстояний [1]. Эта технология была первоначально разработана для устранения кабельных соединений к электронным приборам таких, как беспроводные наушники.
Таблица 4.1 - Спецификация системы Bluetooth
Спецификация |
Значение |
|
Полоса частот |
2.45 GHz полоса ISM |
|
Количество переключаемых каналов FH |
23 или 79 в зависимости от страны |
|
Скорость скачков FH |
1600 скачков/с |
|
Разнос каналов FH |
1 МГЦ |
|
Метод дуплексирования |
TDD |
|
Формат дуплекса |
625 сек (1/1600 сек) вкл. и выкл |
|
Формат модуляции |
GFSK |
|
GFSK BT |
0.5 |
|
Модуляционная скорость передачи данных |
1 MBps |
|
Индекс модуляции |
От 0.28 до 0.35 |
Система Bluetooth должна обеспечить возможность создания неболь-ших персональных сетей (PAN - Personal Area Network). Спецификация Bluetooth определяет две системы радиосвязи, которые изучаются в этой лабораторной работе, а также стек протоколов. На рисунке 4.1 приведено сравнение между моделью взаимодействия открытых систем ISO и моделью Bluetooth.
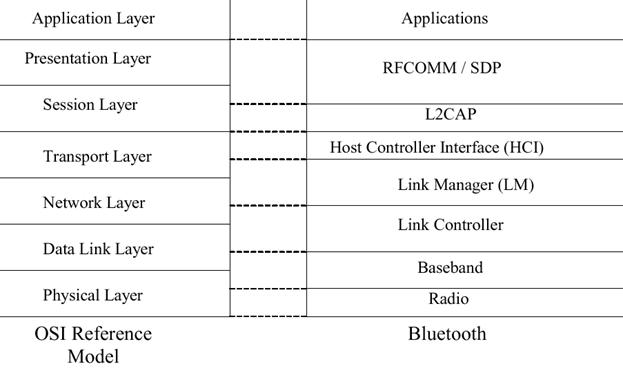
Рисунок 4.1 - Сравнение между моделью взаимодействия открытых систем ISO и моделью Bluetooth
Рассмотрим кратко функции системы Bluetooth уровни до части контроллера линков (Link Controller).
Радио-часть, называемая BlueRF отвечает за радио-интерфейс, такой как модуляция, поскольку основная полоса частот отвечает за канальное кодирование и декодирование, низкий уровень управления синхронизацией и менеджмент линками пакетов данных. Контроллер линков откликается на команды более высокого уровня от менеджера линков и несет из операции уровня линка поверх несколько продолжительностей пакета данных как процесс установления соединения от пакета к пакету.
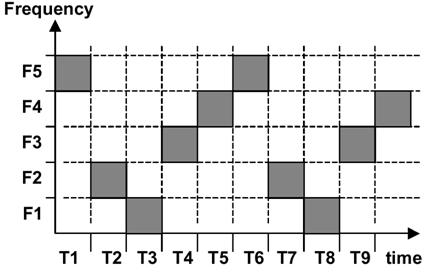
Bluetooth должен конкурировать с другими технологиями, как беспроводные локальные сети, поскольку он использует тот же самый свободный от лицензий спектр ISM (индустриальный, научный и медицинский) 2.4 GHz, который, как ожидается, будет переполнен. Поэтому, этот метод, называемый расширением спектра с прыгающей частотой (FHSS - frequency hopping spread spectrum), используется для устройств Bluetooth , чтобы они могли соединиться между собой. Метод прыгающей частоты заключается в передаче сигнала данных в короткий промежуток времени или временной интервал (timeslot) на одной несущей частоте и передаче на другой несущей частоте в следующем временном интервале, как показано на рисунке 4.2. Перескок (hopping) может выполняться на уровне битов. Это означает, что каждый отдельный информационный бит может передаваться на различных несущих частотах. Для каждого переданного пакета устройство Bluetooth повторно настраивается на следующий радиоканал в последовательности перескоков (hopping); поэтому Bluetooth выполняет перескок на уровне пакета. Для правильного приема данных получатель должен знать точную последовательность перескоков передатчика. Таким образом, синхронизация между передатчиком и приемником является критическим местом в связи с перескоком частот.
Радиоканал Bluetooth является каналом с перескоком, в котором время между перескоками равно 625µsec [3]. Устройство Bluetooth, называемое мастер управления каналами с перескоками, определяет последовательность перескоков для всех других устройств называемых ведомыми (slaves). Полное дуплексное соединение между устройствами получается с помощью дуплексного разделения времени (TDD - time division duplex). Ведущее устройство использует опрос для каждого слота ведущий-ведомый и решает, какому из ведомых устройств будет разрешена передача. Bluetooth использует модулятор гауссовской манипуляции (GFSK - Gaussian Frequency Shift Keying), который генерирует положительное отклонение частоты, когда передается двоичная 1, и отрицательное отклонение частоты, при передаче двоичного 0. Наконец, рабочий диапазон составляет приблизительно от 10 м до 100 м в зависимости от передаваемой мощности от 0 dBm до 20 dBm. Радиочасть Bluetooth может быть выполнена на основе структур с нулевой промежуточной частотой (IF - Intermediate Frequency) или прямого преобразования, гетеродинной модуляции или модуляции отдельным битом, IQ модуляцией многоуровневых отсчетов, используя поисковые таблицы, и прямую передачу модуляции на передающий синтезатор. На рисунках 4.3 и 4.4 показаны пути передачи и приема, соответственно, простой гетеродинной системы с модуляцией отдельного бита. Вход передатчика и выход приемника подключены к уровню основной полосы частот.

Рисунок 4.4 - Путь приема простого радиоприемника с модуляцией
отдельного бита [1]
Примечание. Хотя диапазон рабочих частот системы Bluetooth находится в полосе 2.4GHz, намного более удобно и просто выполнить моделирование системы в диапазоне основной полосы частот. В нашем примере не используется модуляция передаваемого сигнала на частоте 2.4GHz.
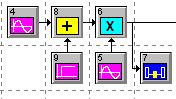
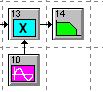
4.2.1 Соберите систему в соответствии с рисунком 4.5, листом соединений (Connection List) и списком параметров системы (System Summary).
Генерация команд скачка частоты. Модули 1, 2, 3 и 4 генерируют частотные команды FH. Модуль 2 является генератором однородного набора случайных чисел в диапазоне от 0 до 79·106 (79 частот и разнос - 1 МГц). Выходной сигнал этого модуля затем дискретизируется по скорости скачков, равной 1600 скачков/сек. Целая часть генерирует частотную команду скачков.
Генерация частотных данных. Сигнал от источника данных 1 MBps (модуль 6) поступает на гауссовский ФНЧ (модуль 7), установленный для создания ЛУ (BT), равного 0.5. Далее сигнал усиливается модулем 8 в 140000 раз. Это позволяет получить желаемый индекс частотной модуляции 0.28.
Модулятор GFSK. Управляющий сигнал скачка частоты добавляется к сигналу данных, и композитный сигнал управляет модулятором на базе генератора, управляемого напряжением ГУН (модуль 0). ГУН установлен на номинальную частоту 10.7 МГц. При демодуляции сигнала все скачки сводятся к этой промежуточной частоте.
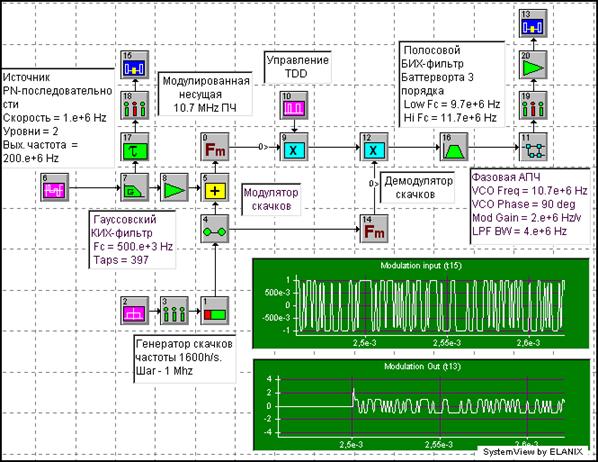
Рисунок 4.5 - Схема моделирования системы Bluetooth
Управление TDD. Управление TDD достигается обнулением выхода модулятора. Период сигнала прямоугольной формы (модуль10) устанавливается равной 1.25 мс. Он включается на 625 мкс и затем отключается на 625 мкс.
Демодуляция скачков частоты. Команды скачков частоты используются для управления ГУН (модуль14). Выход ГУН смешивается с полученным сигналом СПЧ. Разностная частота равна 10.7 МГц промежуточной частоты, а суммарная частота устраняется полосовым фильтром (модуль16).
При обработке. После операции восстановления сигнала перескока частоты, результирующий сигнал находится на 10.7 МГц. Трехполюсный БИХ-фильтр (модуль16) с полосой пропускания ниже Fc, равной 9.7e+6 Гц, и выше Fc, равной 11.7e+6 Гц, используется как стандартный фильтр промежуточной частоты.
Демодуляция ФАПЧ. Фазовая АПЧ (модуль11) используется, чтобы непосредственно демодулировать сигнал на 10.7 МГц промежуточной частоты. Модуль ФАПЧ имеет внутренний ФНЧ после фазового детектора для устранения суммарной частоты замкнутой цепи. Частота среза устанавливается на 4 МГц, которая достаточно широка для передачи желаемого сигнала. Усиление модуляции устанавливается на 2e6. Это дает время реакции цепи, достаточное для демодулирования сигнала.
4.2.2 Выполните моделирование
Просмотрите входной и выходной модулированные сигналы в соответствующих окнах получателей сигналов (модули 15 и 13, соответственно).
4.2.3 Установите временные характеристики моделирования:
Start Time,![]() ................................................................. 0
................................................................. 0
Stop Time,![]() .................................................................
81.915
.................................................................
81.915
No. of Samples................................................................... 16384
Sample Rate, MHz............................................................... 200
Система Bluetooth является дуплексной системой с временным разделением (TDD - Time Division Duplex). Продолжительность каждого слота составляет 62 μsec. Поэтому, время моделирования меньше длительности одного тайм-слота Bluetooth. Модуль управления TDD в верхней части схемы ограничивает временной интервал для передатчика. Можно увеличить время моделирования, чтобы увидеть результат управления TDD путем установки времени остановки, равной 120 μsec.
Запустите процесс моделирования и просмотрите изменения в выходном сигнале после окончания тайм-слота. После этого установите время остановки снова равным 81.91 μsec.

Рисунок 4.6 - Окно установки системного времени
4.2.4 Перетащите указатель динамического системного пробника, расположенного в правом нижнем углу окна проектирования, на модуль 6 (источник PN-последовательности). Это позволит просматривать выходной сигнал модуля во время проектирования.
Теперь запустите моделирование нажатием кнопки F5. Переведите кнопку "Time" (Время) динамического системного пробника в положение "Frequency" (Частота). Это переведет пробник в режим спектроанализатора. Обратите внимание, что максимальный частотный диапазон сигнала может быть равен 100 MHz. Как это связано со скоростью дискретизаций, установленной при моделировании?
Подключите вход B динамического системного пробника к модулю 12. Переведите режим работы пробника в двухканальный режим, чтобы иметь возможность наблюдать два канала одновременно. После этого подключите вход B пробника поочередно к модулям 16, 11, 19 и 20, чтобы просмотреть сигналы в этих точках схемы. Сравните параметры этих сигналов.
Закройте окно пробника после завершения процесса моделирования.
4.2.5 Модификация проекта
В данном пункте исследуется влияние аддитивного белого гауссовского шума (АБГШ или AWGN - additive white Gaussian noise). Для этого необходимо добавить в схему модули сумматора и источника АБГШ, как показано на рисунке 4.7.
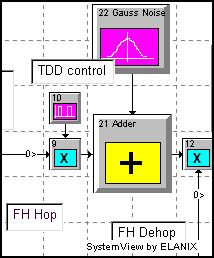
Рисунок 4.7 - Установка источника помех (аддитивного белого гауссоского шума).
Установите параметры источника АБГШ следующими:
Подключите динамический системный пробник к источнику АБГШ для того, чтобы можно было наблюдать форму АБГШ. Переведите пробник в режим анализатора спектра и сделайте вывод о свойствах АБГШ.
Измените параметры источника АБГШ на следующие:
Пронаблюдайте изменения в выходном сигнале приемника.
4.2.6 Изучение влияния изменения PN-последовательности
Разъедините модули 4 и 14. Продублируйте модули 1, 2, 3 и 4 вместе с относящимися к ним соединениями. Подключите вновь полученный генератор переключающей последовательности к модулю частотного модулятора 14. К выходам модулей 1 и 24 Fractional подключите получатели Sink-Real Time. Фрагмент схемы с вышеуказанными элементами приведен на рисунке 4.8.
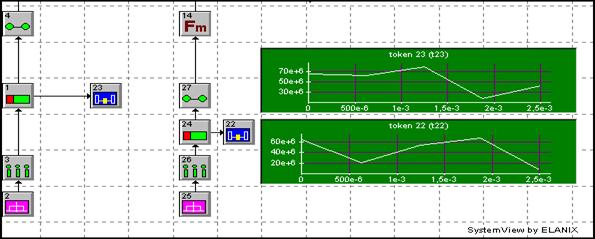
Рисунок 4.8
Установите следующие временные параметры схемы:
Или
Stop Time (sec)...............................................................
![]()
Запустите процесс моделирования. Объедините графики сигналов модулей 22 и 23 (Sink-Real time). Объясните полученные результаты.
|
|
|
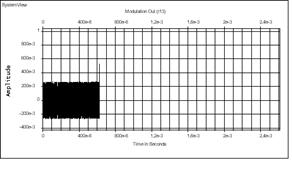
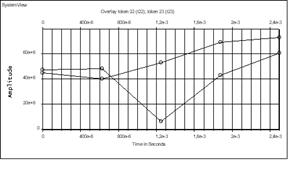
Рисунок 4.9 - Пример моделирования с разными источниками PN-последовательности
4.3 Выводы
4.3.1 Сделайте анализ по полученным результатам
4.4 Контрольные вопросы
4.4.1 В чем заключается спецификация Bluetooth.
4.4.2 Функции системы Bluetooth.
4.4.3 Метод прыгающей частоты.
4.4.4 Объясните дуплексную систему с временным разделением (TDD - Time Division Duplex).
4.4.5 Влияние аддитивного белого гауссовского шума (АБГШ или AWGN - additive white Gaussian noise).
5 Лабораторная работа №5. Исследование методов частотного и временного разделения каналов
Цель работы: изучение методов частотного и временного разделения каналов.
5.1 Предварительная подготовка
Изучить методы построения устройств частотного и временного разделения каналов.
5.2 Предварительная подготовка
Один из способов разделения канальных сигналов (или разделения каналов) заключается в следующем. В качестве переносчиков выбирают гармонические несущие колебания с различными частотами. В результате каждый первичный сигнал после преобразования в канальный сигнал (т.е. после модуляции) будет размещаться в своей полосе частот. В качестве примера на рисунке 5.1 показано преобразование Л/ первичных сигналов, имеющих одинаковые спектры, путем модуляции по амплитуде (AM) несущих колебаний с различными частотами. Интервал между несущими частотами соседних каналов должен быть таким, чтобы полосы частот канальных сигналов не перекрывались.
На рисунке 5.2 представлена структурная схема
многоканальной системы передачи. Первичные сигналы
![]() (
(![]() ,
, ![]() ,…
,…![]() Ц,
Ц, преобразуются
устройствами Ц,
преобразуются
устройствами Ц, ![]() \
модулированные несущие колебания
\
модулированные несущие колебания ![]() полученные
на выходе этих устройств, называются канальными сигналами. В отличие от
первичных сигналов, имеющих общий спектр, канальные разнесены по спектру
(см.рисунок 5.2). Групповой сигнал
полученные
на выходе этих устройств, называются канальными сигналами. В отличие от
первичных сигналов, имеющих общий спектр, канальные разнесены по спектру
(см.рисунок 5.2). Групповой сигнал ![]() получается
объединением канальных сигналов
получается
объединением канальных сигналов![]() в устройстве объединения (УО).
в устройстве объединения (УО).
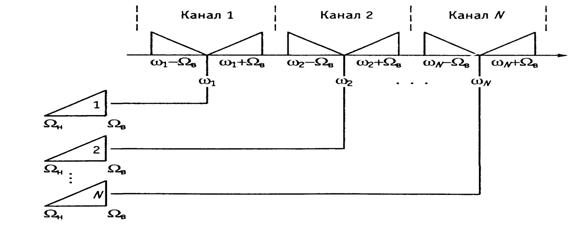
Рисунок 5.1 – Преобразование первичных сигналов в канальные
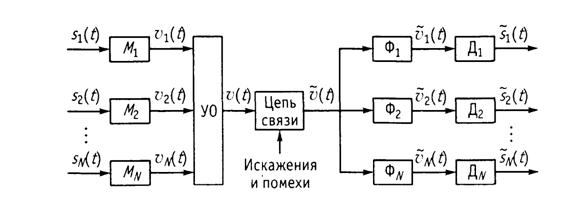
Рисунок 5.2 – Многоканальная система передачи с частотным разделением каналов
На приемном конце канальные сигналы выделяются
из группового с помощью разделительных частотных фильтров Ф1, Ф2,.....
, ФN, пропускающих сигналы своего канала и подавляющих остальные.
Восстановление первичных сигналов![]() 1
1![]() 2
2![]() N
N![]() из канальных
из канальных ![]() производится
с помощью демодуляторов Д1, Д2 ,..... ,ДN.
производится
с помощью демодуляторов Д1, Д2 ,..... ,ДN.
Системы передачи, в которых канальные сигналы размещаются в неперекрывающихся частотных полосах, получили название систем передачи с частотным разделением каналов (ЧРК).
5.2.1 Соберите систему передачи информации с частотным разделением (см. рисунок 5.3).
5.2.2 Запустите систему на выполнение и проверьте соответствие между передаваемыми и принимаемыми сигналами в каждом канале.
5.2.3 Установите уровень передаваемого сигнала в верхнем и нижнем каналах равным нулю (модули 0 и 8), и определите уровни паразитного сигнала в них при различных уровнях информационного сигнала (модуль 4) центрального канала. Уровень информационного сигнала может быть установлен равным 1, 2, 5 и 10 В.

Рисунок 5.3
Полученные данные сведите в таблицу.
5.2.4 Сравните параметры каналообразующих элементов между собой и рассчитайте параметры двух дополнительных каналов, которые должны размещаться в частотных промежутках между исходными тремя каналами.
Проведите проверку рассчитанных каналов на их взаимное влияние на соседние каналы. Объясните полученные результаты.
5.3 Пусть в качестве переносчика
первичного сигнала ![]() выбрана
периодическая последовательность узких импульсов и осуществлена модуляция этой
последовательности по амплитуде. Полученный в результате АИМ-сигнал - канальный
сигнал
выбрана
периодическая последовательность узких импульсов и осуществлена модуляция этой
последовательности по амплитуде. Полученный в результате АИМ-сигнал - канальный
сигнал ![]() первого
канала показан на рисунке 5.4, а. Выберем последовательность импульсов в
качестве переносчика второго первичного сигнала
первого
канала показан на рисунке 5.4, а. Выберем последовательность импульсов в
качестве переносчика второго первичного сигнала ![]() таким образом, чтобы импульсы АИМ-сигнала
таким образом, чтобы импульсы АИМ-сигнала ![]() второго канала передавались в те промежутки времени, когда
цепь свободна от передачи импульсов первого канала (см. рисунок 5.4, б). Канальные
импульсы третьего (см. рисунок 5.4, в) и других каналов также должны быть
сдвинуты во времени относительно импульсов первых двух каналов и друг друга.
Групповой сигнал
второго канала передавались в те промежутки времени, когда
цепь свободна от передачи импульсов первого канала (см. рисунок 5.4, б). Канальные
импульсы третьего (см. рисунок 5.4, в) и других каналов также должны быть
сдвинуты во времени относительно импульсов первых двух каналов и друг друга.
Групповой сигнал ![]() получается
после объединения канальных сигналов
получается
после объединения канальных сигналов ![]() (см.рисунок 5.4, г).
(см.рисунок 5.4, г).
Получить канальные АИМ-сигналы практически очень легко. Роль АИМ-модуляторов могут выполнять электронные ключи (ЭК) (см.рисунок 5.5), на которые нужно подать первичные сигналы. Ключи управляются импульсными переносчиками. Работа АИМ-модуляторов сводится к следующему: импульсы переносчиков поочередно открывают ключи, на выходах которых появляются первичные сигналы.
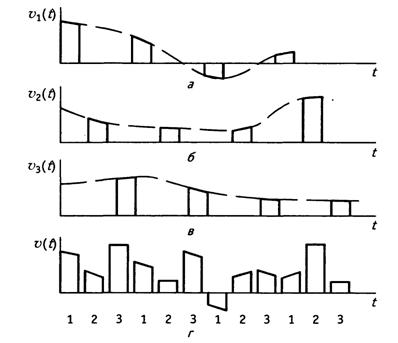
Рисунок 5.4 – Временной принцип объединения канальных сигналов
(а-в) в групповой (г)
Нужно позаботиться лишь о том, чтобы последовательности
импульсов, подаваемые на ключи ЭК, были сдвинуты во времени относительно друг
друга (см. рисунок 5.5). Эту задачу (см. рисунок 5.5) выполняет распределитель
импульсов каналов (РИК), управляемый генератором импульсов (ГИ). Таким образом,
импульсы каждого канала, несущие в своей амплитуде информацию о первичном
сигнале, передаются по цепи только в определенные промежутки времени.
Разделение каналов на приеме (т.е. выделение канальных импульсов из группового
сигнала) можно легко осуществить также с помощью ЭК, которые должны работать
синхронно и синфазно с ключами передающей части. Другими словами, ключ каждого
канала должен открываться тогда, когда по цепи приходят импульсы данного
канала, и быть закрытым во время прихода импульсов других каналов. Это
достигается с помощью управления ключами ЭК импульсными последовательностями
(такими же, как и на передаче), вырабатываемыми в РИК приемной части и
синхронизированными с импульсами передатчика с помощью схемы синхронизации СС
(см. рисунок 5.5). Канальные импульсы 17![]() с помощью УО объединяются в групповой сигнал
с помощью УО объединяются в групповой сигнал ![]()
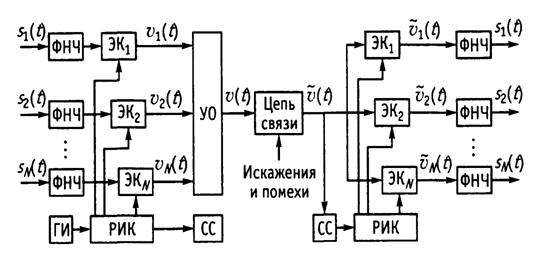
Рисунок 5.5 – Многоканальная система передачи с временным разделением каналов
Описанные системы передачи (см. рисунок 5.5), в которых канальные сигналы передаются по цепи в неперекрывающиеся промежутки времени, называются системами передачи с временным разделением каналов (ВРК).
5.3.1 Соберите схему многоканальной системы передачи с временным разделением (см. рисунок 5.6).

Рисунок 5.6
Для полного восстановления принятых сигналов необходимо выполнить их фильтрацию. Выберите тип необходимых фильтров и рассчитайте их параметры.
Пример выполнения системы с фильтрами типа Comm приведен на рисунке 5.7.

Рисунок 5.7
Пример системы с использованием фильтра-задержки на 20 отсчетов приведен на рисунке 5.8.
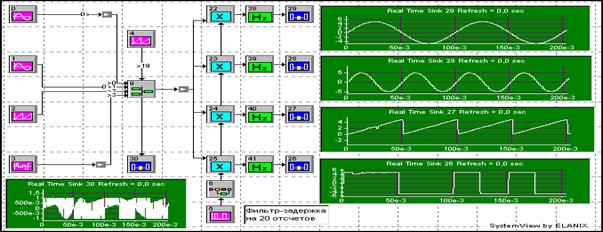
Рисунок 5.8
5.3.3 На рисунке 5.9 показана схема приемного распределителя каналов (модуль 6).
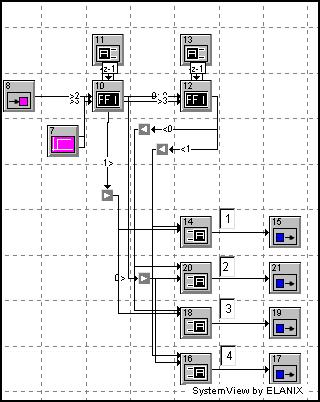
Рисунок 5.9
Примечание. Приемный распределитель каналов собирается в основном окне и затем преобразуется в мета-систему. Входной модуль 8 и выходные модули 15, 17, 19 и 21 вводятся в мета-систему автоматически.
5.4 Выводы
5.4.1 Сделайте анализ по полученным результатам.
5.5 Контрольные вопросы
5.5.1 Назовите способы разделения каналов по частоте - FDMA (Frequency Division Multiple Access).
5.5.2 Назовите методы множественного доступа с временным разделением каналов TDMA (Time Division Multiple Access,).
5.5.3 Схема распределения частотных поддиапазонов по ячейкам сотовой сети а) для FDMA;
б) для TDMA.
5.5.4 Объясните функциональную схему простейшей системы многоканальной связи с разделением каналов по частоте.
5.5.5 Объясните функциональную схему простейшей системы многоканальной связи с разделением каналов по времени.
6 Лабораторная работа №6. Исследование кодового разделения каналов
Цель работы: изучение метода кодового разделения каналов.
6.1 Предварительная подготовка
Изучить принципы построения устройств кодового разделения каналов
Для разделения сигналов могут использоваться не только такие очевидные признаки, как частота, время и фаза. Наиболее общим признаком является форма сигналов. Различающиеся по форме сигналы могут передаваться одновременно и иметь перекрывающиеся частотные спектры, и тем не менее такие сигналы можно разделить, если выполняется условие их ортогональности. Пусть в качестве переносчиков выбраны импульсы, последовательность которых образует, например, степенной ряд.
В предположении, что информация содержится в
коэффициентах ![]() ,
, ,
..., для группового сигнала запишем
,
..., для группового сигнала запишем![]()
Члены ряда линейно независимы, и,
следовательно, ни один из канальных сигналов ![]() не
может быть образован линейной суммой всех других сигналов. Это легко понять,
обратив внимание на то, что многочлен от
не
может быть образован линейной суммой всех других сигналов. Это легко понять,
обратив внимание на то, что многочлен от ![]() может
быть тождественно равен нулю только в том случае, когда все его коэффициенты
равны нулю.
может
быть тождественно равен нулю только в том случае, когда все его коэффициенты
равны нулю.
В последние годы успешно развиваются цифровые методы разделения сигналов по их форме, в частности, в качестве переносчиков различных каналов используются дискретные ортогональные последовательности в виде функций Уолша, Радемахера и другие. Широкое развитие методов разделения по форме сигналов привело к созданию систем связи с разделением "почти ортогональных" сигналов, представляющих собой псевдослучайные последовательности, корреляционные функции и энергетические спектры которых близки к аналогичным характеристикам "ограниченного" белого шума. Такие сигналы называют шумоподобными (ШПС). Основной характеристикой ШПС является база сигнала В, определяемая как произведение ширины его спектра F на его длительность Т.
База ШПС характеризует расширение его спектра по сравнению со спектром исходного сигнала. Расширение спектра частот может осуществляться умножением исходного сигнала (например, двухчастотной ЧМ) на псевдослучайную последовательность (ПСП) с периодом повторения Т (равным длительности интервала модуляции исходного ЧМ-сигнала).
Поскольку параметры сигнала ШПС (значения бит ПСП - два набора значений в случае двухчастотной ЧМ) известны, то прием ШПС может производится приемниками, рассчитанными на прием сигналов с известными параметрами. В результате отношение сигнал/шум на выходе приемника улучшается в В раз по отношению ко входу.
В зарубежных источниках для обозначения данного принципа применяется понятие кодового разделения каналов Code Division Multiply Access (CDMA).
6.2 Рабочее задание
6.2.1 Изучите временные характеристики псевдослучайных последовательностей. Для этого соберите простейшую схему с генератором функций Уолша (см. рисунок 6.1).
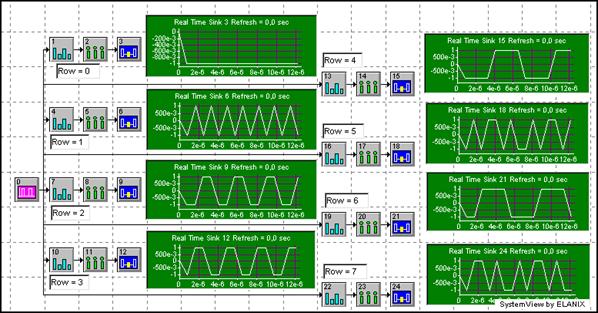
Рисунок 6.1
Используя материалы, приведенные в приложении, объясните принципы формирования псевдослучайных последовательностей. Заполните таблицу для функций Уолша [8´8].
Используя материалы, приведенные в приложении и [1], сделать выводы о свойствах ПСП.
6.2.2 Исследуйте автокорреляционные и взаимно-корреляционные функции для псевдослучайных последовательностей порядка 8 и 64. Номера строк ПСП (от нуля до 63) задаются преподавателем. Соберите схему, приведенную на рисунке 6.2.
Запустите схему на выполнение и, затем, перейдите в окно анализа.
Постройте автокорреляционные и взаимно-корреляционную функции для выходных сигналов модулей 3 и 5 (см.рисунок 6.2). Для этого в окне анализа вызовите калькулятор SystemView и перейдите на вкладку Corr Conv (см.рисунок 6.3).
Т а б л и ц а 6.1
Порядок |
Такты |
|||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
1 |
0 |
1 |
0 |
1 |
0 |
1 |
0 |
1 |
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|

Рисунок 6.2
В диалоговом окне калькулятора SystemView последовательно выберите опцию AutoCorrelate для окон w0 Вых. Сигнал 1 и w4 Вых. Сигнал 2, а затем - опцию Cross Correlate для этих же окон. Для сравнительного анализа объедините построенные графики в один с помощью опции Operators/Overlay Plot. Сравните полученные графики и сделайте вывод о возможности использования ПСП в качестве признака для кодового разделения каналов.
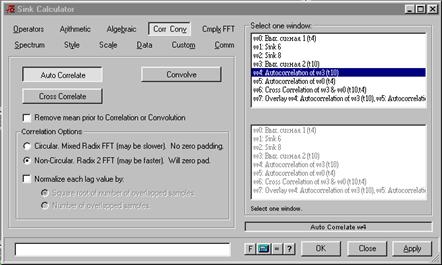
Рисунок 6.3
6.2.3 Соберите схему кодового разделения каналов (см.рисунок 6.4).
Модулятор выполняется на перемножающем устройстве (модуль 3). На его первый вход подается сигнал от источника (модуль 0). На второй вход перемножителя 3 поступает псевдослучайная последовательность (ПСП) от генератора функций Уолша (модуль 4). Сигнал с расширенным спектром с выхода модулятора 3 выдается в сумматор 7 и далее в канал связи.
На приемной стороне сигнал из канала связи поступает на первый вход демодулятора (модуль 9), на второй вход которого поступает ПСП с выхода генератора функций Уолша (модуль 11). Окончательное восстановление демодулированного сигнала выполняется с помощью интегратора со сбросом (модуль 12). Интегратор 12 включает дополнительное ключевое устройство, которое преобразует проинтегрированный сигнал в цифровую форму. Для сравнения в схему включен интегратор со сбросом (модуль 17), работающий в режиме непрерывного интегрирования. Более подробные сведения о работе устройства можно получить из приложения, а также работы [1`][1].
При сборке схемы модули 1, 5 и 6 в схему не включаются и будут использованы позже.
Запустите схему на выполнение и изучите полученные временные диаграммы.
6.2.4 Дополните схему элементами передатчика второго канала (модули 1, 5 и 6). Запустите схему на выполнение вновь. Теперь в канале связи будут иметься два различных сигнала с расширенным спектром. Сравните временные диаграммы в канале связи на выходе демодулятора и на выходе интегратора. Сделайте вывод о выполняемых ими функциях. При необходимости используйте математические выкладки из приложения и [1].
6.2.5 Дополните схему элементами приемника второго канала (см.рисунок 6.5).

Рисунок 6.4
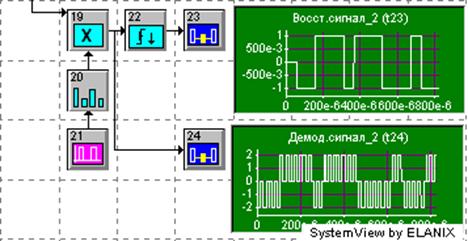
Рисунок 6.5
Убедитесь, что на выходе системы отсутствует влияние между каналами. Для этого установите значение амплитуды выходного сигнала источника сообщений (модуль 0) равным нулю. Запустите систему и просмотрите временные диаграммы выходных сигналов.
Теперь восстановите амплитуду сигнала на выходе модуля 0 и установите амплитуду сигнала на выходе модуля 1 равной нулю. Запустите систему вновь и просмотрите временные диаграммы выходных сигналов.
6.2.6 Теперь проверьте влияние мощности передаваемых сигналов на другие каналы. Для этого по очереди изменяйте значения амплитуды источников сообщений (модули 0 и 1) от 0 до 10 Вольт, ступенями через 2 Вольт.
6.3 Выводы
Сделайте выводы о влиянии мощности передаваемых сигналов на другие каналы.
6.4 Контрольные вопросы
6.4.1 Назначение множественного доступа с кодовым разделением каналов.
6.4.2 Почему используются ортогональные коды в системах CDMA?
6.4.3 Что позволяет модуляция с расширением спектра и методы CDMA?
6.4.4 Назначение коррелятора.
6.4.5 Поясните принцип работы системы сотовой связи с кодовым разделением каналов.
Список литературы
1 Скляр Б. Цифровая связь. Теоретические основы и практическое применение: 2-е изд. /Пер. с англ.- М.: Издательский дом «Вильямс», 2003. - 1104 с.
2 Разевиг В.Д., Лаврентьев Г.В., Златин И.Л. SystemView - средство системного проектирования радиоэлектронных устройств / Под ред. В. Д. Разевига. - Горячая линия-Телеком, 2002. - 352 с.
3 Сергиенко А.Б. Цифровая обработка сигналов.- СПб.: Питер, 2002. - 608 с.
4 Загидуллин Р.Ш, Карутин С.Н, Стешенко В.Б. SystemView-системотехническое моделирование устройств обработки сигналов.-М.: Горячая линия.-2005.-294 с.
Содержание
|
Общие сведения |
7 |
|
1 Лабораторная работа №1 |
7 |
|
1.1 Предварительная подготовка |
8 |
|
1.2 Рабочее задание |
13 |
|
1.3 Выводы |
14 |
|
1.4 Контрольные вопросы |
14 |
|
2 Лабораторная работа №2 |
14 |
|
2.1 Предварительная подготовка |
16 |
|
2.2 Рабочее задание |
20 |
|
2.3 Простой элайзинг |
22 |
|
2.4 Восстановление дискретизованных сигналов |
25 |
|
2.5 Дуобинарное упражнение |
25 |
|
2.6 Выводы |
27 |
|
2.7 Контрольные вопросы |
27 |
|
3 Лабораторная работа №3 |
27 |
|
3.1 Предварительная подготовка |
28 |
|
3.2 Рабочее задание |
32 |
|
3.3 Выводы |
32 |
|
3.4 Контрольные вопросы |
32 |
|
4 Лабораторная работа №4 |
33 |
|
4.1 Предварительная подготовка |
36 |
|
4.2 Рабочее задание |
41 |
|
4.3 Выводы |
41 |
|
4.4 Контрольные вопросы |
41 |
|
5 Лабораторная работа №5 |
41 |
|
5.1 Предварительная подготовка |
41 |
|
5.2 Рабочее задание |
43 |
|
5.3 Выводы |
47 |
|
5.4 Контрольные вопросы |
47 |
|
6 Лабораторная работа №6 |
48 |
|
6.1 Предварительная подготовка |
49 |
|
6.2 Рабочее задание |
53 |
|
6.3 Выводы |
53 |
|
6.4 Контрольные вопросы |
53 |
|
Список литературы |
54 |