МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН
Некоммерческое акционерное общество
«Алматинский институт энергетики и связи»
Э.А.Иванов, Ш.А.Бахтаев, М.О.Дулатбаева
Информационно-измерительная техника
Учебное пособие
Алматы 2009
В данном учебном пособии рассматриваются технологии измерений как единство методов, подходов к организации измерений и интерпретации результатов конкретных методик, а также измерительных средств, необходимых для качественного обслуживания энергетических объектов. Современное развитие информационно – измерительной техники характеризуется широким применением радиоэлектроники и всё более возрастающей ролью сбора, обработки, передачи и хранения информации о состоянии электропотребления промышленными объектами на значительных территориальных расстояниях и в текущем режиме. Рассмотрены принципы построения автоматизированных систем сбора, предварительной обработки, хранения и выдачи текущих и прошедших данных расходов электрической энергии.
Содержание
|
Предисловие…………………………………………………………… |
4 |
|
|
1 |
Введение. Измерения и измерительные системы…………… |
5 |
|
2 |
Структурные схемы ИИС и их элементы.………………….. |
10 |
|
3 |
Преобразователи переменного тока и напряжения в электроэнергетике…………………… |
20 |
|
4 |
Преобразователи и измерительные системы постоянного тока и напряжения……………… |
28 |
|
5 |
Цифровые преобразователи и приборы………………………… |
33 |
|
6 |
Цифроаналоговые преобразователи…………………………….. |
47 |
|
7 |
Аналого-цифровые преобразователи прямого действия………. |
51 |
|
8 |
Входной интерфейс измерительных систем……………………. |
55 |
|
9 |
Измерительные системы временных параметров……………… |
60 |
|
10 |
Измерительные системы мощности и расхода энергии переменного тока………………… |
66 |
|
11 |
Информационно- измерительные системы расхода электрической энергии………………… |
73 |
|
Список литературы …………………………………………………….. |
80 |
|
Предисловие
Правилами устройств электроустановок предусмотрены определённые требования к контрольно-измерительным системам контроля основных параметров энергообъектов, видам и количеству приборов контроля и управления.
В настоящее время все системы контроля и управления получают информацию от первичных преобразователей: шунтов и добавочных резисторов в сетях постоянного тока и измерительных трансформаторов тока и напряжения в сетях переменного тока. Измерительными сигналами, в данном случае, служат постоянное напряжение 45 – 150 мВ и ток 3 – 300 мА на постоянном токе, напряжение 100 (100 / Ö 3) В и ток 5 (1) А на переменном токе. Данный уровень сигналов применяется в локальных системах контроля тока, напряжения, частоты напряжения сети, угла сдвига фаз между напряжением и током, мощности и расхода электрической энергии. Такие системы ограничены по расстоянию и по нагрузке на преобразователи. Такие уровни сигналов без предварительного преобразования нельзя использовать в информационных измерительных системах.
Развитие микроэлектроники в интегральном исполнении позволило создать вторичные измерительные преобразователи на базе операционных усилителей.
Такими преобразователями являются источники тока для незаземлённой и заземлённой нагрузки на базе инвертирующего и неинвертирующего операционного усилителя. Для преобразования стандартных величин переменного тока и напряжения разработаны магнитоэлектронные преобразователи – магнитоэлектронные трансформаторы тока и напряжения. Выходной параметр этих преобразователей – постоянное напряжение ± (5 - 10) В.
В целях экономии, минимизации шумов и использования цифровой техники аналоговые сигналы следует преобразовать в дискретные при помощи временного мультиплексирования. Дальнейшее развитие схем информационно – измерительных систем связано с использованием схем выборки и хранения, аналого-цифровых, цифроаналоговых преобразователей и персональных компьютеров.
В данной работе, несмотря на малый объём, рассмотрены основные этапы построения автоматизированных систем измерения и контроля.
В качестве примера представлены схемы автоматизированной системы коммерческого учёта расхода электрической энергии, внедрённой в Сибири РФ.
1 Введение. Измерения и измерительные системы
Производство, передача, преобразование и потребление электрической энергии происходит в больших количествах и на больших территориях. Даже в пределах одного завода получение, преобразование, распределение и потребление электрической энергии производится энергетическими объектами и электрическими потребителями, удалёнными на значительные расстояния. Электропотребление представляет собой в большей степени не стационарный процесс изменения мощности электроприёмников. Всё это указывает на тот факт, что энергетическая система представляет собой большую систему, для которой свойственна вероятностная природа формирования электрических мощностей.
В 70-80г. прошлого века в мире для описания больших систем разрабатывались автоматизированные системы управления технологическими процессами (АСУ ТП). В электроэнергетике эти системы применялись, в основном, для обработки поточной документации – финансовой и технической. Обработка месячных и квартальных отчётов производилось на ЭВМ типа ЕС. В это же время завод приборов (Вильнюс, Литва) стал выпускать информационно - измерительные системы учёта расхода электрической энергии (ИИСЭ 1, 2,3). Они были внедрены на ряде предприятий в Казахстане и позволяли не только вести автоматизированный учёт расхода электроэнергии в течении смены, суток, месяца, квартала, но и контролировать максимальный расход электрической энергии в часы утреннего и вечернего максимума нагрузки предприятия. Для работы такой системы были необходимы счётчики электрической энергии с телеметрическим (импульсным) выходом. Невысокая надёжность отдельных элементов системы, ограниченность точек контроля и расстояний от их до блока обработки, не позволило их широкому распространению.
На станциях, подстанциях и в распределительных устройствах имеется определённый комплект измерительного оборудования для контроля напряжения, тока, мощности, частоты и расхода электрической энергии. Источником информации служат электроизмерительные приборы. Все они входят в локальные (местные) измерительные системы (ЛИС). В ЛИС преобладают функции измерения, а функции обработки и хранения незначительны или отсутствуют совсем. На вход ЛИС поступает множество измеряемых величин, изменяющихся во времени и распределённых в пространстве. На выходе ЛИС получают результаты измерений в виде именованных чисел или отношений измеряемых величин.
Измерительные системы (ЛИС) весьма однотипны и содержат первичный (возможно и вторичный) измерительный преобразователь, линию связи и измерительный прибор. ЛИС содержат ряд каналов – по каждому на измеряемый параметр. Для обеспечения постоянного контроля за работой отдельных элементов системы электроснабжения и учёта потребляемой электроэнергии подлежат измерению значения тока, напряжения, частоты, мощности и расхода электроэнергии, для чего применяют контрольно – измерительные приборы (см. рисунок 1.1).

Рисунок 1.1 – Обобщённая схема измерения параметров
высоковольтной
электроустановки
 |
 |
||
а) б)
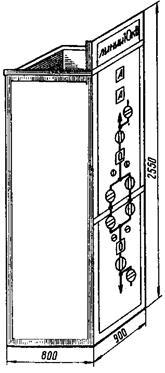
Рисунок 1.2 – Панель линии 6 кВ на щите управления (а)
и монтажная
схема включения амперметра и счетчика активной энергии (б)
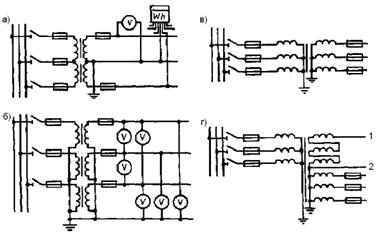
Контрольно-измерительные приборы (КИП) совместно со средствами управления и автоматизации размещают на щитах управления (ЩУ) в диспетчерских пунктах. Кроме главных ЩУ устанавливаются местные щиты управления предназначенные для управления конкретным электроприёмником, например, электродвигателем. Они состоят из панелей или шкафов, на лицевой стороне которых установлены измерительные приборы (см. рисунок 1.2.а). Соединения приборов выполняют с задней стороны. Туда же подводятся и присоединяются измерительные трансформаторы тока и напряжения при помощи контрольных кабелей. Соединения внутри шкафа выполняются в соответствии с монтажными схемами (см. рисунок 1.2, б). Как видно из данной схемы, для измерения установлены амперметр и универсальный трёхфазный счётчик активной энергии 3 ´ 5А; 3 ´ 100 В.
Измерительный прибор (ИП) – средство измерения, предназначенное для получения значений измеряемой физической величины непосредственно по его отсчётному устройству (шкале). Приборы бывают показывающими и регистрирующими (записывающими). Большинство приборов бывают аналоговыми, так как отсчёт по шкале в может быть любой в пределах его диапазона измерения.
Амперметры применяют для непрерывного контроля значения тока на вводах ГПП. РП, подстанций, отходящих линий, перемычках между секция-ми сборных шин. При равномерной нагрузке на линиях устанавливается по одному амперметру, а при неравномерной нагрузке и при необходимости контроля за каждой фазой – по три амперметра.
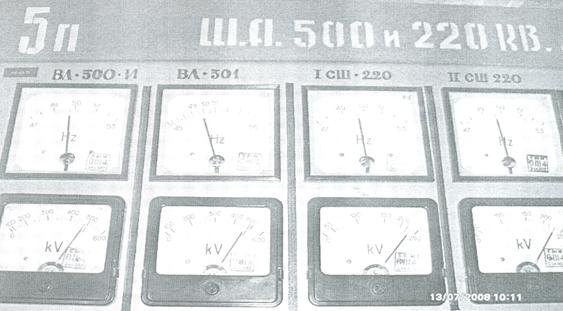
Рисунок 1. 3 – Контрольные измерительные приборы на щите
контроля и управления п/ст «Центральная» РФ
Вольтметры и частотомеры необходимы для контроля за качеством электроэнергии. Вольтметры устанавливают на сторонах ВН и НН ГПП и цеховых подстанций и на каждой секции шин всех напряжений. Частотомеры устанавливают на сборных шинах электростанций и в цепи статоров генераторов, если они предназначены для параллельной работы. На рисунке 1.3 приведена фотография установленных щитовых контрольно – измерительных приборов – частотомеров (верхний ряд) и вольтметров (нижний ряд). Все эти ИП подключены ко вторичным цепям измерительных преобразователей (ИПР) – измерительным трансформаторам напряжения
Счётчики активной и реактивной электроэнергии устанавливаются в местах выработки и потребления электроэнергии для расчётного (коммерческого) и технического учёта электроэнергии.
Ваттметры устанавливают для измерения активной мощности генераторов, мощных трансформаторов, синхронных компенсаторов, высоковольтных синхронных электродвигателей, а также линий, где необходимо контролировать перетоки мощности при двойном питании потребителей.
Ваттметры применяют для измерения реактивной мощности.
Все перечисленные приборы, несмотря на их разное применение, являются преобразователями тока, напряжения, частоты и мощности в угол поворота стрелки относительно шкалы прибора, проградуированной в делениях (см. рисунок 1.4) – ИПр непосредственного отсчёта. В этом случае шкала прибора есть многозначная мера. Одно деление определяет постоянную прибора Cx = Xн / N, (единиц физической величины Х на деление шкалы), где N – число нанесенных на шкале делений; Хн – номинальное значение прибора.
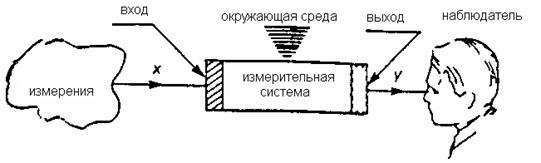 |
Рисунок 1.4- Иллюстрация принципа измерения по методу отклонения (непосредственной оценки)
На предприятиях электроэнергетики, размещённых на больших расстояниях, необходимо измерять или контролировать одновременно сотни, а иногда и тысячи электрических и неэлектрических физических величин. При этом целесообразно принимать решения не на основании результатов отдельных измерений, а потока измерительной информации. Для этих целей применяются информационные измерительные системы (ИИС).
Основным средством измерений в настоящее время становится информационно – измерительная система (ИИС) (см. рисунок 1.5), обеспечивающая восприятие информации об измеряемом объекте или процессе в нём (первичное измерительное преобразование), её выделение из сигналов путём сбора, преобразования и обработки по требуемым алгоритмам, отображения выделенной информации в виде, необходимом для восприятия оператором, либо для передачи в другую систему.
Основное назначение ИИС - получение достоверной информации.
Централью (ядром) системы является аппаратура сбора, регистрации (запоминания) и (или) отображения данных. Чтобы передавать эквиваленты измеряемых величин в централь необходимо обеспечить сопряжение ПИП с централью в соответствии с условиями совместимости их свойств и характеристик.
Системы, содержащие программно – управляемые цифровые вычислительные системы (микропроцессоры МП). Обладают определённой универсальностью и при соответствующем программном обеспечении могут выполнять функции систем различного назначения.
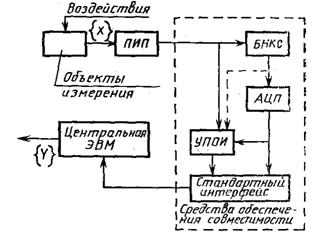 |
ПИП – первичные измерительные преобразователи; БНКС – блоки нормирования и коммутации сигналов; УПОИ – устройства первичной обработки информации; АЦП – аналого – цифровой преобразователь
Рисунок 1.5 – Обобщённая схема ИИС
Измерительные системы, содержащие такие вычислительные средства, называют измерительно-вычислительными (ИВС). ИВС, создаваемые потребителями из стандартных устройств для решения локальных измерительных задач, локальными ИВС. Универсальное ядро ИВС называют измерительно-вычислительным комплексом (ИВК).
ИВК – автоматизированные средства измерения и
обработки информации, предназначенные для исследования сложных объектов и
представляющие собой совокупность программно-управляемых средств (измерительных
и вычислительных) и средств воздействия на объект исследования.
2 Структурные схемы ИИС и их элементы
Структуры ИИС можно классифицировать по различным
признакам.
До сих пор под ИС подразумевали всю совокупность измерительных приборов и
устройств, необходимых для проведения измерений. При этом к понятию ”система”
были отнесены как одиночный прибор, так и сложная измерительная установка. До
сих пор не рассматривалась конфигурация (архитектура) и структура ИС. На
рисунке 2.1 приведена внутренняя структура ИС.
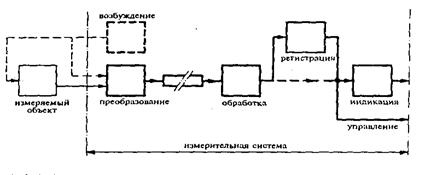 |
Рисунок 2.1- Обобщённая внутренняя структура ИС
В тех случаях, когда измеряемая величина не является активной, необходимо воспользоваться источником возбуждения, который будет оказывать воздействие на измеряемый объект. Тогда отклик объекта (вместе с самим воздействием) будет содержать желаемую информацию.
 |
а) б)
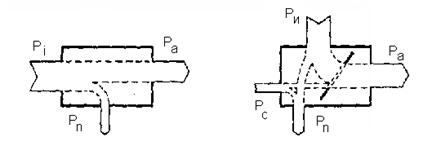
а- Рi – мощность на входе; Ра
– мощность на выходе; Рп – мощность потерь
б- Рс – мощность сигнала; Ри – мощность вспомогательного
источника
Рисунок 2.2 – Пассивный (а) и активный (б)
датчики первичной информации
На рисунке 2.3 приведена обобщённая структурная схема
ИИС.
ИИС содержит следующие устройства:
Пассивные датчики получения первичной информации не потребляют энергию от вспомогательного источника энергии (см. рисунок 2.2,а). Активными являются датчики, которым требуются сторонний источник энергии (см. рисунок 2.2,б). Мощность, которую отдаёт объект измерения (ОИ), практически равна нулю.
- устройства измерения, включающие в себя первичные и вторичные измерительные преобразователи и собственно измерительное устройство, выполняющее операции сравнения с мерой, квантование, кодирование, а в отдельных случаях и коммутатор;
- устройство обработки измерительной информации, выполняющее обработку измерительной информации по определённому алгоритму (сокращение избыточности, математические операции, модуляция и т.п.);
- устройство хранения информации;
- устройство представления информации в виде регистраторов и индикаторов;
- устройство управления, служащее для организации взаимодействия всех узлов ИИС;
- устройство воздействия на объект, включающее в себя генераторы стимулирующих воздействий.
 |
Рисунок 2.3 – Структурная схема ИИС
Информация от ИИС может поступать в ЭВМ или
выдаваться оператору. Оператор или ЭВМ могут воздействовать на устройство
управления ИИС, меняя соответственно программу её работы. В ряде ИИС некоторые
устройства и связи могут отсутствовать. При наличии в составе ИИС компьютера PCI (ISA)
или другой микро-ЭВМ информация к ним может поступать непосредственно от
устройств обработки или (и) хранения.
Современные ИИС представляют в виде блок-схем связанных между собой
функциональных блоков (ФБ) (см. рисунок 2.4).
Функциональными блоками являются:
- первичные преобразователи (ПП), размещённые постоянно в определённых точках пространства или сканирующие (перемещающиеся в пространстве);
- множество аналоговых преобразователей: нормирующие преобразователи аналоговых сигналов (масштабные преобразователи, преобразователи различного вида модуляции сигнала), унифицирующие преобразователи (приведение сигналов к диапазону стандартных значений или к согласованному уровню), коммутаторы аналоговых сигналов, аналоговые вычислительные устройства, устройства памяти, сравнения, аналоговые измерительные приборы (показывающие и регистрирующие);
- множество аналого-цифровых преобразователей (АЦП);
- цифровые устройства – формирователи кодоимпульсных сигналов, коммутаторы, универсальные цифровые вычислительные устройства (микропроцессоры, микро-ЭВМ), накопители информации, устройства вывода, отображения и регистрации информации, цифровые индикаторы и панели;
- цифроаналоговые преобразователи (ЦАП).
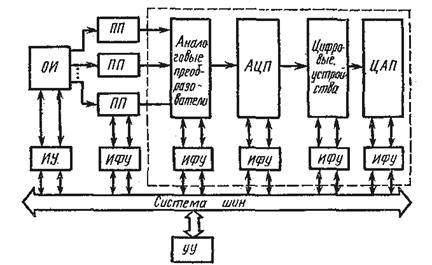 |
Рисунок 2.4 – Функциональная схема ИИС
Функциональные блоки (ФБ) могут соединяться между собой по разному.
Наиболее часто в качестве признака классификации выбирают способ обмена сигналами взаимодействия, т.е. сигналами, которые обеспечивают согласованное преобразование информации всеми функциональными узлами системы.
Структура ИИС зависит также от принятого в системе способа управления – централизованного или децентрализованного (см. рисунок 2.5, 2.6).
 |
Рисунок 2. 5 – Функциональная схема централизованной ИИС
Если множеству всех алгоритмических подсистем соответствует одна техническая подсистема, то имеем централизованную структуру (см. рисунок 2.5). В ней все алгоритмы управления реализуются на одних и тех же технических средствах. Централизованные структуры имеют преимущества: высокая эффективность использования технических средств; возможность объединения всех функциональных задач на одном и том же техническом комплексе; меньшие аппаратурные затраты для обеспечения требуемой надёжности.
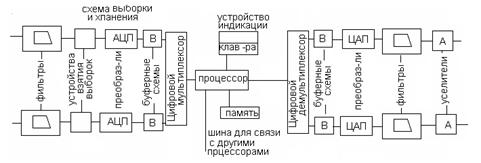 |
Рисунок 2.6 – Децентрализованная структура ИИС
Децентрализованная структура со связанными подсистемами показана на рисунке 2.6. Это – структура, подобная первой, но с наличием связей между техническими подсистемами. По этим связям передаётся осведомительная информация и с их помощью можно более эффективно использовать оборудование. Подсистемы здесь равноправны, т.е. ни одна из них не может управлять другой. В таких структурах один уровень иерархии управления. В таких системах усложняются процессы отладки и модернизации, однако появляется возможность более эффективно использовать ресурсы технических средств. В то же время, как и в предыдущей структуре, управление отдельными задачами в процессе функционирования системы (с целью повышения эффективности управления в целом) здесь невозможно.
 |
 |
||
а) б)
Рисунок 2.7 – Цепочечная (а) и радиальная (б) структура системы соединения функциональных узлов ФУi
Объединение ФБ в одноступенчатой структуре можно выполнить в виде цепочной (каскадной) структуры (см. рисунок 2.7,а.).Все сигналы передаются по индивидуальным для каждого узла шинам, а сами функциональные узлы выполняют заранее заданную операцию над информационным сигналом. Такие системы содержат, например, ряд первичных преобразователей ПП (трансформаторы тока, напряжения, делители напряжения, преобразователи сопротивление – напряжение или ток), циклический коммутатор, посредством которого периодически каждый первичный ПП подключается к ИИС; ряд последовательно включённых с ними групповых нормирующих ИПР, предназначенных для фильтрации, масштабного преобразования и линеаризации выходных сигналов первичных ПП; аналого-цифровой ИП; специализированное устройство обработки информации и регистратор.
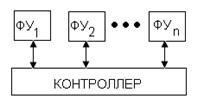
Структуры систем с централизованным управлением разнообразнее, к ним относятся структуры радиальная, магистральная, радиально – цепочечная и радиально – магистральная. Радиальная структура показана на рисунке 2.7,б. Обмен сигналами взаимодействия между функциональными блоками (узлами ФУ) происходит через контроллер. Это позволяет программировать ФУ путём подачи программных сигналов от контроллера, изменять порядок обработки информации и т.д. В данной структуре каждый функциональный узел подключается к контроллеру посредством индивидуальных шин. Однако наращивать число ФУ трудно из-за усложнения контроллера.
Магистральная структура показана на рисунке 2.8.
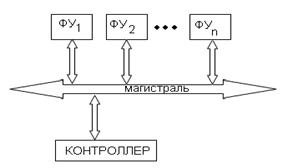 |
Рисунок 2.8 – Магистральная структура системы
В этой структуре имеется общая для всех ФУ специальная шина – магистраль (однопроводная или многопроводная), по которой передаются сигналы взаимодействия. Адресный сигнал показывает, к какому ФУ относится информация, находящаяся на других проводах магистрали. Магистральная структура легко позволяет наращивать число ФУ в системе.
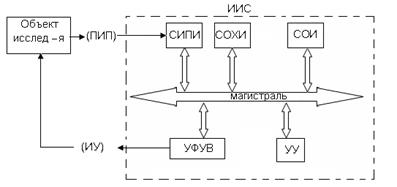 |
Обобщённая структура ИИС показана на рисунке 2.9.
Рисунок 2.9 – Обобщённая структура ИИС
Информация от объекта исследования поступает на
определённое множество первичных ИП (ПИП), преобразуется в электрическую форму
и передаётся на средства измерения и преобразования информации СИПИ, в которых
выходные сигналы ПИП наиболее часто подвергаются следующим операциям:
фильтрации, масштабированию, аналого-цифровому преобразованию. Затем сигналы в
цифровой
форме (см. рисунок 2.10) передаются на цифровые средства обработки и хранения
информации СОХИ для обработки по определённым программам или накапливания, а
также на средства отображения информации СОИ для индикации или регистрации.
Устройство формирования управляющих воздействий УФУВ посредством заданного
множества исполнительных устройств ИУ воздействует на объект исследования для
регулирования, тестирования и т.д.
 |
а) б)
Рисунок 2.10 – Передача данных в форме параллельных – 1 канал (а) и последовательных- 8 каналов (б) битов
Важной разновидностью ИИС являются измерительно-вычислительные комплексы (ИВК) – функционально объединённая совокупность средств измерений, компьюторов и вспомогательных устройств, предназначенная для выполнения конкретной измерительной задачи. Основными признаками принадлежности СИ к ИВК являются: наличие (микро) процессора или компьютера; программное управление средствами измерений; наличие нормированных метрологических характеристик; блочно-модульная структура, состоящая из технической (аппаратной) и программной (алгоритмической) подсистем.
Техническая подсистема должна содержать: СИ электрических и неэлектрических величин (измерительные компоненты); средства вычислительной техники (вычислительные компоненты), меры текущего времени и интервалов времени; средства ввода-вывода аналоговых и цифровых сигналов с нормированными метрологическими характеристиками.
В программную подсистему ИВК входят системное и общее прикладное программное обеспечение (ПО), в совокупности образующие математическое обеспечение системы. Системное ПО представляет собой совокупность программного обеспечения компьютера и дополнительных программных средств, позволяющих работать в аналоговом режиме, управлять измерительными компонентами, обмениваться информацией внутри подсистем комплекса, проводить диагностику технического состояния. Программное обеспечение представляет собой взаимодополняющую, взаимодействующую совокупность подпрограмм, реализующих:
- типовые алгоритмы эффективного представления и обработки измерительной информации, планирования эксперимента и других измерительных процедур;
- архивирование данных измерений;
- метрологические функции (поверка, аттестация, характеристики погрешностей).
По назначению ИВК делятся на типовые, проблемные и специализированные. Типовые комплексы предназначены для решения широкого круга типовых задач автоматизации измерений, испытаний или исследований независимо от области применения. На рисунке 2.11 приведена структурная схема типовой ИВК. Основными составными частями комплекса являются:
- компьютер ISA (PCI) с периферийными устройствами, подключёнными к нему, в том числе посредством компьюторной сети;
- измерительные каналы (ИК), предназначенные для преобразования в цифровой код заданного числа сигналов;
- программное обеспечение;
- интерфейс, организующий связь технических устройств ИВК с компьютером;
- формирователь испытательных сигналов, которыми воздействуют на объект измерения с целью получения измерительных сигналов (например, i-й сигнал вырабатывается с помощью последовательно соединённых ЦАП i и преобразователя напряжение – испытательный сигнал ПНИСi).
Структура ИВК содержит аналоговый измерительный (АИП) и аналого-цифровой (АЦП) преобразователи. При обработке нескольких измерительных сигналов одним АЦП в состав комплекса включается коммутатор, предназначенный для поочерёдного подключения сигналов к входу АЦП. Коммутатор может включаться как после АИП (ИК1), так и перед ним (ИК N).
АИП предназначен для преобразования измерительного сигнала в сигнал, однородный с входным сигналом АЦП (т.е. в напряжение), масштабирования (ослабления или усиления) его до уровня, необходимого для проведения операции аналого–цифрового преобразования с минимальной погрешностью. При наличии нескольких измерительных сигналов (К-сигналов в ИК1) АИП состоит из К независимых последовательно соединённых первичных преобразователей и управляемых компьютором масштабируемых усилителей. Если же измерительные сигналы являются однородными физическими величинами и могут быть поочерёдно выбраны (скоммутированы), то в ИВК целесообразно установить один АИП (ИК N). Он последовательно во времени проводит преобразование измерительного сигнала и его масштабирование.
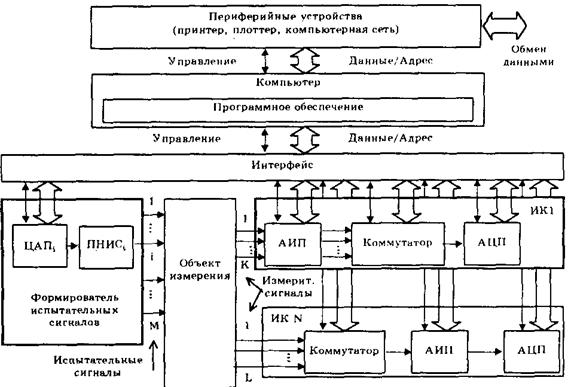 |
К – для первого ИК и l – N -го ИК
Рисунок 2.11 – Структурная схема ИВК
АЦП преобразует сигнал в цифровой код и передаёт его через интерфейс в компьютор. Работой всей аппаратной части ИВК управляет компьютер посредством:
- подачи управляющих сигналов различного рода;
- считывания и передачи по требуемым адресам цифровой информации (сигналы ДАННЫЕ и АДРЕС). Под АДРЕСОМ понимается уникальный цифровой код, присвоенный конкретному ФБ или его части и позволяющий компьютеру однозначно идентифицировать данное устройство.
На рисунке 2.12 приведена небольшая часть распределённой измерительной системы.
Шина IEEE-488 была разработана фирмой Hewlett-Packard и была названа HPIB (Hewlett-Packard Interface Bus). Она известна также как GPIB (General Purpose Interface Bus). В дальнейшем эта шина была принята в Европе Международной электротехнической комиссией в качестве стандарта IEC 625.1 (МЭК 621.1). В последствии она была принята американским институтом инженеров по электротехнике и электронике в качестве стандарта IEEE-488. Эта шина служит гибким интерфейсом между измерительными приборами, компьютерами и периферией.
 |
Рисунок 2.12 - Фрагмент схемы распределённой измерительной системы
 |
Рисунок 2.13 – Структурная схема приборного интерфейса
Интерфейс – система сопряжения между составляющими частями (подсистемами) системы обработки данных, включающая в себя аппаратные средства, линии связи (шины), протокол (совокупность правил, устанавливающий единые принципы взаимодействия подсистем) и программное обеспечение процесса обмена информацией.
Шина является средством связи коллективного пользования: все устройства, включённые в систему, подключаются к шине параллельно. Поэтому шина, состоящая из 16 проводов или линий, подведена к каждому из участников. Шина разработана для программируемых и непрограммируемых электронных устройств. Она ориентирован на сопряжение устройств, расположенных относительно друг друга на расстоянии 20 м и может обслуживать до 15 физических блоков, допускает прямой обмен информации между ними, дистанционное и местное управление устройствами. Данный интерфейс относится к магистральным, соединение устройств между собой осуществляется через многопроводной магистральный канал общего пользования (КОП), называемый также интерфейсной шиной. КОП содержит 16 линий, по которым в цифровом виде передаются информационные данные и управляющие сигналы. Эти линии объединены в три шины: шина данных, шина согласования передачи данных (синхронизации), шина общего управления ИФ. Способ передачи информации параллельно – последовательный с асинхронным режимом обмена. В измерительной системе осуществляется обмен информацией между источником и приёмником под управлением контроллера. Каждый из входящих в систему устройств выполняет функции или источника информации, или приёмника, или контроллера, или любого их сочетания. Взаимосвязь устройств через систему шин показана на рисунке 2.13 применительно к четырём типам устройств, объединяемых в измерительную систему: А – устройство, способное передавать и управлять (например, микро-ЭВМ); В – устройство, способное передавать и принимать (например, цифровой прибор); С – устройство, способное только принимать (например, считывающее устройство); D – устройство, способное только передавать (например, измерительный генератор сигналов).
Шина данных (Data bus) состоит их 8-ми линий, обозначаемых D10 (Data input/output) с соответствующим номером линии (русское обозначение линии данных – ЛД). По этим линиям осуществляется обмен информацией бит – параллельным, байт последовательным способами. Шина данных служит для передачи (приёма) основных данных – результатов измерений, адресных, программных управляющих данных и данных состояний. Обмен информации может происходить между устройствами – источниками и приёмниками информации. Назначение управляющего устройства – контроллера – организация взаимодействия модулей системы.
Шина согласования передачи – шина синхронизации, объединяет три линии: DAV (Data valid) или СД (сопряжения данных); NRED (Not data for data) или ГП (готов к приёму); NDAC (Not data accepted) или ДП (данные приняты). По этим линиям передаются сигналы согласования, подтверждающие соответствие состояний приборов, что необходимо для обмена информацией.
Шина общего управления (General interface management bus attention) состоит из 5-ти линий. По ним передаются управляющие сигналы, которые циркулируют между контроллером и другими устройствами, подключённые к интерфейсу.
Линия ATN (Attention - внимание) или УП (управление) отведена для команды, посылаемой контроллером.
Линия IFC (Interface clear – очистка интерфейса) или ОИ (очистить интерфейс) передаёт сигнал контроллера, приводящий схему и все устройства в начальное состояние.
Линия SRQ (Service request – запрос на обслуживание) или ЗО – является общей для системы.
Линия REN (Remote enable – разрешено дистанционное управление) или ДУ – передача контроллером сигналов программного управления устройствами.
Линия EOI (End of identify – конец обработки, конец идентификации) или КП (конец передачи), служит для посылки команды, указывающей окончание передачи сообщений по шине данных.
3 Преобразователи переменного тока и напряжения в электроэнергетике
На высокой стороне напряжения электрической сети измерения тока и напряжения производятся только с использованием измерительных трансформаторов тока и напряжения (см. рисунок 3.1).
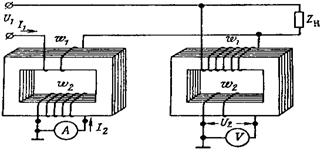 |
Рисунок 3.1 – Схемы включения амперметра и вольтметра через
измерительные трансформаторы
Трансформатор тока (ТТ) – статический электромагнитный аппарат, предназначенный для преобразования большого первичного тока I1 в стандартное значение вторичного тока I2 = 5 А (реже 1 А), измеряемого амперметром электромагнитной системы в ЛИС. На сердечнике из электротехнической стали намотаны первичная обмотка с малым числом витков w1 (в пределе – один виток) и вторичная обмотка с большим числом витков w2. Произведя отсчёт показания амперметра, можно найти ток в сети
Iс = I1 = I2 Kнтт,
где Кнтт = Iн1 / Iн2 = w2 / w1 – номинальный коэффициент трансформации ТТ.
Первичную обмотку ТТ с числом витков w1 включают последовательно в силовую электрическую цепь (см. рисунок 3.1), а ко вторичной обмотке с числом витков w2 также последовательно присоединяют токовые катушки приборов и реле.
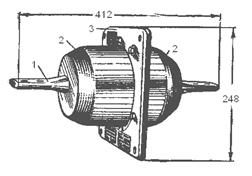
По конструкции первичной обмотки различают ТТ одновитковые (стержневые) и многовитковые (петлевые, катушечные) (см. рисунок 3.2). Магнитопровод (сердечник) обычно выполняют из электротехнической стали, намотанной в форме торойда.
а- одновитковый; б – многовитковый с одним сердечником; в –
многовитковый с двумя сердечниками 1 – первичная обмотка; 2 – изоляция; 3-
сердечник; 4 – вторичная обмотка
Рисунок 3.2 – Принципиальные схемы устройства ТТ
Принцип действия ТТ основан на появлении э.д.с. Е2 взаимной индукции на вторичной обмотке при прохождении первичного тока I1. Под действием этой э.д.с. во вторичной цепи ТТ протекает ток I2 = E2 / Z2, где Z2 – полное сопротивление вторичной цепи ( вторичной обмотки, потребителей тока – приборов, реле, соединительных проводов и контактов). Мощность вторичной нагрузки ТТ - S2 = I22 Z2.
Для обеспечения требуемой точности показаний приборов и надёжности действия аппаратов защиты, подключённых к ТТ, необходимо, чтобы Z2 ³ Z2 ном, где Z2 ном – номинальная мощность нагрузки, при которой погрешности меньше установленных классом точности ТТ-gт .
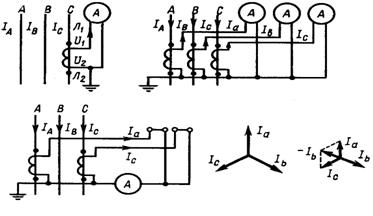 |
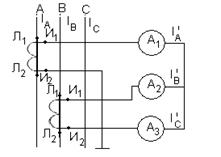
Рисунок 3.3 – Схемы включения ТТ
Для измерения тока в симметричных трёхфазных линиях применяется один ТТ, причём первичная обмотка имеет разметку Л1-Л2 (линия), а вторичная обмотка – И1-И2 (измерение). Такое включение является правильным. В общем случае применяют полукосвенную схему включения ТТ (два ТТ) и косвенную (три ТТ).
ТТ имеют токовые fI и угловые dI погрешности. Токовая погрешность в процентах равна
fI = 100 (Кнтт I2 – I1) / I1
и учитывается в показаниях всех приборов. Угловая погрешность d I определяется углом между векторами токов I1 и I2 и учитывается в показаниях ваттметров и счётчиков. В измерительных системах ИС, предназначенных для коммерческих расчетов, применяют ТТ класса точности gт = 0,5, а для технического учёта - gт = 1,0. В таблице 3.1 приведены нормируемые погрешности ТТ в зависимости от первичного тока.
Таблица 3.1- Погрешности трансформаторов тока
|
g т ,% |
I1 / I1н,% |
fI , ± % |
d I, ± мин |
Z2 / Z2 ном,% |
|
1 |
5 |
30 |
180 |
25 – 100 |
|
|
20 |
1,5 |
90 |
То же |
|
|
100 -120 |
0,5 |
60 |
--“ -- |
|
0.5 |
5 |
1.5 |
90 |
-- “ -- |
|
|
20 |
0.75 |
45 |
-- “ -- |
|
|
100 - 120 |
0.5 |
30 |
-- “ -- |
 |
Рисунок 3.4 – Графики погрешностей ТТ
Как видно из рисунка 3.4, погрешность fI при Кнтт = w2 / w1 всегда отрицательная и уменьшается с увеличением тока I2. Однако при Кнтт > w2 / w1 можно обеспечить одно значение погрешности fI, равное нулю, после которого она станет положительной. Угловая (фазовая) погрешность также уменьшается с увеличением тока.
Размыкание (разрыв) вторичной цепи ТТ является аварийным.
Трансформатор напряжения (ТН) – статический электромагнитный аппарат, предназначенный для преобразования высокого первичного напряжения U1 в стандартное значение U2 = 100 В (линейное) (или 100 / 1,73 - фазное), измеряемого вольтметром. На сердечнике из электротехнической стали намотаны первичная обмотка с большим числом витков w1 и вторичная обмотка с меньшим числом витков w2. Измерив напряжение по вольтметру U2, можно найти напряжение в сети
Uс = U1 = U2 Kнтн,
где Kнтн = Uн1 / Uн2
= w1 / w2 –
номинальный коэффициент трансформации ТН.
На рисунке 3.5 приведены схемы трёхфазных измерительных трансформаторов напряжения.
 |
а- двух однофазных (открытого треугольника); б- трёх однофазных;
в – одного трехфазного; г – одного пятистержневого
Рисунок 3.5 – Схемы включения ТН
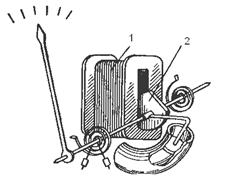
Для измерения переменного тока и напряжения в ЛИС применяются измерительные механизмы электромагнитной системы (ИМ ЭМС) (см. рисунок 3.6).
Принцип его работы заключается во взаимодействии поля неподвижной катушки с измеряемым током с ферромагнитным сердечником, намагничиваемый этим полем. Поворот подвижной части – сердечника со стрелкой уравновешивается противодействующей силой, создаваемой пружиной. Уравнение движения подвижной части прибора, т.е. показывающей стрелки весьма простое
a = к I2,
где к – коэффициент пропорциональности, определяемый геометрическими размерами
и конфигурацией катушки и сердечника.
Из приведённого уравнения шкалы видно, что прибор измеряет действующее значение тока, а поэтому по его шкале сразу определяем результат измерения.
ИМ ЭМС входит в состав амперметров на номинальные токи 1, 5 и 10 А. Приборы имеют, в основном, класс точности 2,5 и 2,0.
Вольтметры ЭМС, используемые в ЛИС для измерения напряжения, отличаются от амперметров наличием добавочного резистора. Вольтметры включаются параллельно нагрузке электрической цепи. Они выпускаются на номинальное напряжение: 100, 150 В.
 |
 |
||
1 – катушка; 2 – ферромагнитный сердечник из пермаллоя; 3 – пружина противодействующая; 4 – демпферное устройство для успокоения
Рисунок 3.6 –Устройство прибора электромагнитной системы
Измерительные трансформаторы обеспечивают гальваническое разделение первичной (высоковольтной) сети от низковольтных (измерительных) цепей с амперметром и вольтметром.
 |
Наиболее совершенной конструкцией ТТ является одновитковый трансформатор, когда первичной обмоткой является проходная шина или медный стержень (см. рисунок 3.7).
1
– проходная шина; 2 – вторичная обмотка в изоляции; 3 –фланец с выводами
Рисунок 3.7 – Продольный одновитковый
трансформатор тока с литой
изоляцией типа ТПОЛ – 10 на 10 кВ и 1000 А с двумя сердечниками
На рисунке 3.8 приведена фотография установки подобного ТТ в высоковольтной установке.
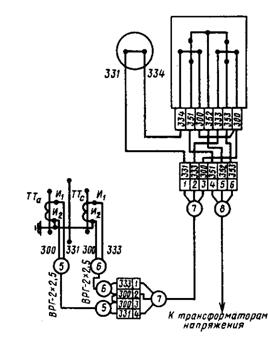
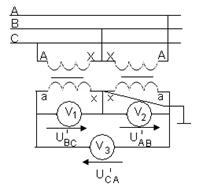
На рисунке 3.9 показан внешний вид ЛИС для измерения напряжения размещённой в КРУ. Там же, для примера, приведена рабочая схема включения ТТ и ТН в высоковольтную однофазную сеть переменного тока. На рисунке 3.10 приведена фотография верхней части ТН типа НТМИ- 10, схема которого приведена на рисунке 3.5,г.
 |
Рисунок 3.8 – Установка ТТ на п/ст
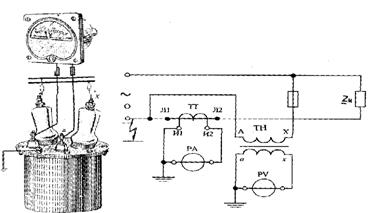 |
Рисунок 3.9 – ЛИС измерения напряжения при помощи ТН
типа НТМИ-10 и схема включения ТТ и ТН в однофазной сети переменного напряжения
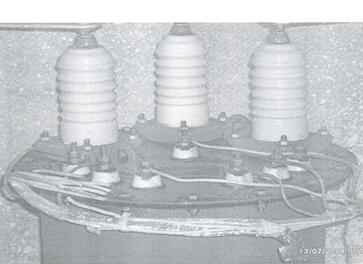 |
Рисунок 3.10 – Фотография внешнего вида ТН типа НТМИ -10 (со стороны высоковольтных и низковольтных выводов)
 |
 |
||
Рисунок 3.11 – Стандартные схемы измерения тока и напряжения при помощи измерительных трансформаторов
Уровни выходных сигналов тока 5 А и напряжения 100 В при обычных схемах измерения (см. рисунок 3.11) неприемлемые для ИИС.
Унификация измерительных сигналов означает, что их параметры не могут выбираться произвольно, а должны отвечать требованиям стандарта на эти сигналы. Так, для ПИП с токовым выходом стандарт ГСП нормирует диапазоны изменения выходного тока 0 – 5 или 0 – 10 мА, а для ПИП с вы-ходным напряжением постоянного тока устанавливается диапазон изменения 0–10 В.
С целью нормирования сигналов первичных измерительных преобразователей (ПИП) используют вторичные измерительные преобразователи (ВИП).
Режим работы ТТ при коротком замыкании вторичной обмотки обеспечивает правильность выражения Кнтт = w2 / w1 . Если во вторичную обмотку (см. рисунок 3.12,а) включим весьма малое сопротивление R - шунт переменного тока (см. рисунок 3.12,б), то можем обеспечить весь малое падение напряжения U, подаваемое на вхзод усилителя УС. Например, если R = 0,2 Ом, то при номинальном режиме U = 5 0,2 = 1 В на выходе усилителя можно получить выходное напряжение подаваемое в линию связи, Uл = 10 В.
 |
а) б)
Рисунок 3.12 – Схема ВИП ТТ (а) и конструкция шунта переменного тока (б)
Шунт представляет бифилярную конструкцию. Активное тело шунта представляет манганиновую ленту 1 изогнутую и сложенную вдвое (в петлю) с целью уменьшения собственной индуктивности. Лента приварена к медным наконечникам 2 с отверстиями для подключения ко вторичной обмотке ТТ.
 |
Рисунок 3.13 – ВИП напряжения на резистивных делителях напряжения
Напряжение 100 В уменьшается при помощи резистивного делителя напряжения, собранного на сопротивлениях Rав-rав и Rсв-rсв (см. рисунок 3.13). Коэффициент деления равен КU = (Rав + rав) / rав.
4 Преобразователи и измерительные системы постоянного тока и напряжения
Для измерения постоянных токов применяются измерительные приборы постоянного тока. На рисунке 4.1 представлена схема амперметра.
 |
Рисунок 4.1 – Принципиальная (а) и структурная (б) схемы электромеханического амперметра магнитоэлектрической системы
Измерение постоянного тока производится приборами на основе измерительного механизма магнитоэлектрической системы (ИМ МЭС) (см. рисунок 4.2).
 |
а) б)
1 – подвижная рамка из тонкого медного провода, намотанного на каркасе (либо без каркаса); 2 - магнитопровод; 3 – полюсные наконечники постоянного магнита; 4 – внутрирамочный цилиндр из стали; 5 – пружины; 6 – индикаторная стрелка; 7 – шкала
Рисунок 4.2 – ИМ МЭС: а – магнитная система; б – конструкция
ИМ МЭС является измерителем тока. Ток, подводимый к рамке через пружины и проходящий по проводам рамки, имеющей сопротивление Rр, взаимодействует с магнитным полем постоянного магнита. В результате рамка начинает поворачиваться под действием вращающего момента
M вр = Bs v I,
где B – индукция в зазоре; s – площадь рамки; v - число витков рамки; I – измеряемый ток.
Под действием этого момента рамка начинает поворачиваться, испытывая противодействие со стороны пружин. Они создают противодействующий момент
M пр = W a
где W – удельный момент пружины; a - угол поворота стрелки относительно шкалы прибора.
Когда эти моменты сравняются, стрелка покажет результат измерения a по шкале в заданных единицах измерения
a = Bs v / W × I = SI,
где S = a / I – чувствительность механизма, имеющая размерность делений на единицу тока.
Обратная величина от чувствительности есть цена деления (постоянная) прибора С= 1 /S, имеющая размерность – единица тока на деление.
 |
а) б)
а) 1 – стрелка; 2 – шкала; 3,9 – полуось; 4,11 – спиральные пружины; 5 – букса; 6 – кольцо из магнитомягкого материала; 7 – рамка; 8 – постоянный магнит; 10 – противовесы; 12,13 – корректоры б) 1 – букса; 2 – стрелка; 3 – шкала; 4,8 – растяжка; 5 – кольцо из магнитомягкого материала; 6 – рамка; 7 – постоянный магнит; 9 – противовесы;
10 – корректор; 11 –
винт корректора
Рисунок 4.3 – ИМ МЭС на кернах (а) и на
растяжках (б)
Современный ИМ МЭС (см. рисунок 4.3) выполняется весьма компактным и с большой чувствительностью. Например механизм на номинальный ток Iпн = 10 мкА имеет сопротивление рамки Rр = 2200 Ом за счёт сопротивления про-вода диаметром 0,02 мм с числом витков 750. При номинальном токе на входном сопротивлении механизма создаётся номинальное падение напряжения Uпн =0,022 В.
Шунт есть первичный элементарный преобразователь ПП (часто его называют масштабным преобразователем). Он осуществляет деление изме-ряемого тока I: Iп –малый ток, протекающий через ИМ, и Iш большой ток, протекающий через шунт. Ток Iп прямо пропорционален току I Iп = IRш/ (Rш+Rп) =Rэкв.
Преобразованный ток, протекая по рамке ИМ, вызывает отклонение стрелки на угол a = Sт Iп = Kпр I.
Это отклонение сравнивается оператором с отметками a ш, на шкале отсчётного устройства амперметра, которые предварительно были нанесены с использованием прецизионной многозначной меры постоянного тока. Шкала с отметками a ш= к Iм выполняет роль многозначной меры.
На токи свыше 20-30 А применяются внешние калиброванные шунты (см. рисунок 4.4). Они выбираются по номинальному току Iн и классу точности шунта gш = (0,1; 0,2; 0,5 и 1,0 %). На шунте указывается нормированное (калиброванное) падение напряжения Uшн = (45;50; 60; 75; 100 и 150 мВ). В качестве ИМ выбирается милливольтметр с соответствующим пределом измерения по напряжению.
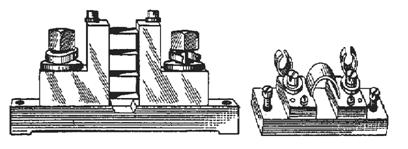 |
Рисунок 4.4 – Внешний вид наружных шунтов
Напряжение с шунта можно усилить нормирующим усилителем и использовать в качестве входного сигнала в ИИС.
Для расширения пределов измерения ИМ МЭС применяются элементарные масштабные преобразователи – добавочные резисторы ДС (сопротивления). Они изготавливаются из манганиновой изолированной проволоки, намотанной на изолированный каркас. ДС включается последовательно с ИМ, образуя измерительную цепь ИЦ. К ИЦ подводится измеряемое напряжение U (см. рисунок 4.5,а).
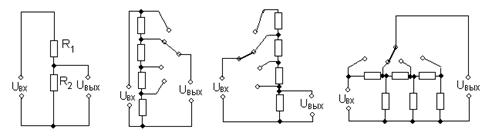
В практической деятельности для измерения напряжения применяются различные схемы делителей напряжения ДН. На рисунке 4.6,а показан простой делитель напряжения. Коэффициент передачи такого делителя KU = R2 / (R1 + R2).
 |
а) б)
Рисунок 4.5 – Измерительная цепь с добавочным резистором (а) и рычажный
магазин добавочных резисторов (б)
 |
а) б) в) г)
Рисунок 4.6- Принцип построения делителей напряжения
На рисунке 4.6,б,в приведены схемы широко известных последова-тельных, а на рисунке 4.6, г лестничных делителей с переключением выходного или входного зажимов.
На рисунке 4.7 приведены основные схемы включения ИМ МЭС для измерения тока с одиночным (однопредельным) шунтом (а), с двухпредельным шунтом (двухпредельный амперметр (б)) и напряжения с добавочным сопротивлением (в).
 |
а) б) в)
Рисунок 4.7 – Измерительные схемы: а – включение шунта; б – двух- предельный амперметр; в – вольтметра с добавочным сопротивлением
Для измерения постоянных токов применяются преобразователи (датчики), принцип действия которых основан на эффекте Холла. Датчик Холла (см. рисунок 4.8,а) – полупроводниковая пластина (InAs – арсенид индия), имеющая две пары диаметрально противоположных выводов. Если к одной паре выводов подвести стабилизированный ток управления I, a пластину поместить в магнитное поле с индукцией B, то на противоположных выводах появится напряжение Холла V, пропорциональное kIB, где k-коэффициент пропорциональности. Выходное напряжение обычно не превышает 15 мВ. Устройство для измерения постоянных токов в проводнике содержит охватывающий этот проводник ферромагнитное кольцо с двумя разрезами, в которые помещены элементы Холла (см. рисунок 4.8,б). Выходные напряжения элементов суммируются
 |
а)
б)
Рисунок 4.8 – Датчик Холла (а) и устройство для измерения
постоянного тока (б)
В связи с развитием микроэлектроники стало возможным использовать в ИИС усилители постоянного тока – операционные усилители ОУ в интегральном исполнении. Подобные схемы усилителей образуют большой класс преобразователей. Схема преобразователя постоянное напряжение – ток приведена на рисунке 4.9.
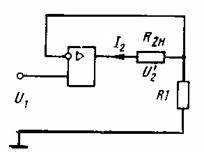 |
Рисунок 4.9 – Преобразователь постоянного напряжения – ток
ОУ имеет два входа: прямой (без значка) и инверсный (со значком ° на входе). Если напряжения на обоих входах ОУ равны и имеют разный знак относительно общего провода (земля), то выходной ток I2 = U1 / R1 и не зависит от сопротивления R2н. Поэтому вместо этого сопротивления включают миллиамперметр с любым внутренним сопротивлением или с этого сопротивления снимают напряжение. Изменяя сопротивление R1, которое образует последовательную обратную связь по току (ПОС), можно изменять пределы измерения данного средства измерения.
5 Цифровые преобразователи и приборы.
Цифровые измерительные приборы (ЦИП) и системы (ЦИС) имеют следующие достоинства: высокая точность, в том числе и в тяжёлых эксплуатационных условиях; возможность запоминать, передавать на расстояния и вводить в ЭВМ результаты измерений; удобство обслуживания и проведения измерений.
 |
Рисунок 5.1 - Схема сбора данных с одним измерительным каналом ИИС
Измерительные системы с информацией в цифровой форме значительно проще и надёжнее в эксплуатации.
Обычно сигнал, полученный в результате
измерения, должен быть подвергнут некоторой обработке, прежде чем он станет
удобным для наблюдения, регистрации или управления. Ранее была рассмотрена
линейная обработка сигнала, такая как ослабление, усиление и компенсация.
Сейчас мы рассмотрим такие преобразования сигналов как аналого-цифровое и
цифроаналоговое (см. рисунок 5.1). Это необходимо сделать, чтобы понять работу
цифровой измерительной системы (ЦИС) (см. рисунок 5.2).
Измеряемая ФВ Х воздействует на первичный измерительный преобразователь (ПП),
имеющий коэффициент преобразования КПП. Он преобразует величину Х в
электрический сигнал, в качестве которого используется главным образом
напряжение, т.е. u = КППХ. Это напряжение, в свою очередь,
поступает на масштабный измерительный преобразователь (МП), необходимый для
изменения пределов измерения ЦИС.
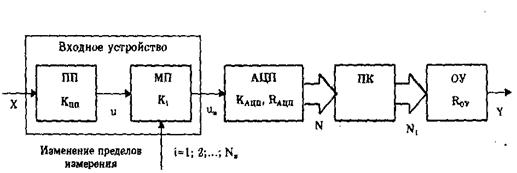 |
Рисунок 5.2 – Структурная схема ЦИС
Он может иметь разное число диапазонов измерения: от 1 до Nп. Диапазон изменения измеряемой величины Х разбивается на Nп под- диапазонов: X1min,….X1max; X2min,…,X2max; …,XNп min,…,XNп max, где Xi min,…,Xi max –минимальные и максимальные точки i-го диапазона измерений.
Масштабный преобразователь так измеряет (уменьшает или увеличивает) входное напряжение в заданное число К i раз (i = 1;2;…; Nп ), чтобы сигнал uн на его входе был нормирован, т.е. его значение находилось в заданных пределах. Как правило, стараются обеспечить выполнение условий, при которых пределы изменения нормированного напряжения совпадают с большей частью допустимого диапазона изменения входного сигнала аналого-цифрового преобразователя (АЦП) при всех возможных значениях измеряемого сигнала. Нормированное напряжение uн = Ki Kпп X преобразуется АЦП в цифровой код N, имеющий разрядность RАЦП. АЦП выполняется однопредельным, рассчитанным на один фиксированный диапазон изменения входного сигнала uн.
Для преобразования аналогового сигнала в цифровой требуется специальное устройство – аналого-цифровой преобразователь (АЦП), а для обратного преобразования - в цифроаналоговый преобразователь (ЦИП).
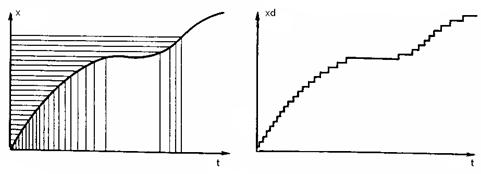 |
Потребуется ещё средство сглаживания сигнала ступенчатой кривой (см. рисунок 5.3).
а)
б)
Рисунок 5.3 – Дискретное представление аналоговой величины (а) и её передача
в виде сигнала ступенчатой формы (б)
Подобное свойственно и регистрации результатов – печатание чисел и вычерчивание соответствующей непрерывной кривой на бумажном носителе. Вместо чисел (при цифровой регистрации) может вычерчиваться соответствующая кривая ступенчатой формы, подобно рисунку 5.3. При быстродействии, согласованном со скоростью изменения измеряемой величины x=f(t), аналоговый прибор может непрерывно отслеживать все изменения этой величины. Цифровой прибор фиксирует мгновенные значения измеряемой величины в дискретные моменты времени (определяются моментами отсчётов), а сами эти значения представляются ограниченным числом ступеней квантования по уровню (числом уровней). Так на рисунке 5.3,а вдоль оси ординат х обозначено 23 уровня (не стандартное). Число этих уровней, соответствующее выбранному (отсчитанному) дискретному значению, представляет цифровой эквивалент этого значения. Выбранное число уровней может быть 23 =8, 24 =16, 25 =32, и далее- 64,128,256 и т.д. В нашем примере 1-й уровень имеет цифровой эквивалент в 5-ти разрядном коде -00001, соответственно, 2-ой – 00010, 3-ий – 00011 и т.д. 23-ий уровень будет представлен кодовой комбинацией 23(10) = 1*24+0*23+1*22+1*21+1*20 =10111(2). Как показано на рисунке 5.3,б, измеряемая величина отображается следующей ступенью, если она при своём изменении превзойдёт предыдущий уровень квантования. Точность цифрового представления измеряемой величины определяется шагом временной дискретизации и шагом квантования по уровню.
Принципиальная разница между аналоговыми и цифровыми ИС заключается в том, что в цифровых ИС величины и соответствующие сигналы, квантованные по уровню, могут быть представлены только конечным числом, тогда как аналоговые величины отображаются бесконечно большим числом значений. Так, если индикатор цифровой ИС отображает 3 разряда десятичного числа, то это означает, что количество значений измеряемой величины не превышает 1000 (от 0 до 999), т.е. бесконечно большое число значений измеряемой величины разбит на 1000 равных интервалов с шагом 1/1000 (квантование по уровню), а при измерениях указывается целое число уровней, с округлением относительно истинного значения аналоговой величины.
Анализ свойств и характеристик аналоговых и цифровых методов и СИ не позволяет однозначно утверждать о превосходстве одних перед другими; это зависит от конкретных применений и возможностей конструктивного исполнения. С точки зрения решения измерительных задач можно утверждать, что цифровые ИС позволяют снизить потери информации при отображении результатов, их хранения, передаче и обработке на ЭВМ благодаря соответствующим преимуществам цифровых сигналов перед аналоговыми.
Важной характеристикой ЦИС является метод преобразования аналоговой измеряемой величины в её цифровой эквивалент, реализованный в АЦП.
В настоящее время применяются методы поразрядного уравновешивания (метод последовательных приближений), двойного интегрирования и преобразования напряжения в частоту. Обозначения в структурных схемах и передаточные функции АЦП и ЦАП показаны на рисунке 5.4.
а) б)
в)
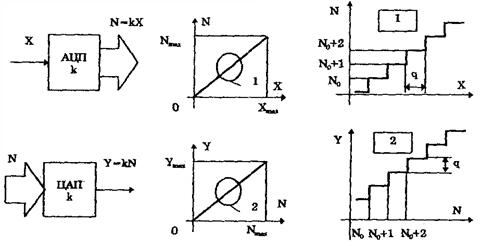 |
Рисунок 5.4 - Обозначения в структурных схемах (а), передаточные функции (б) и части передаточных функций (в) АЦП,ЦАП в увеличенном масштабе
Уравнение преобразования идеального однополярного ЦАП
u = UmN10 / (2R -1) = Um / (2R -1)*(aR-1*2R-1 + aR-2*2R-2 +…+a1*21 +a0*20),
где R- разрядность ЦАП; N10 – значение входного кода в десятичной системе
исчисления; ai –
коэффициенты, которые могут принимать значения, равные нулю или единице. Из
уравнения видно, что квант напряжения на выходе ЦАП, называемый единицей
младшего разряда (ЕМР) равен Um / (2R -1).
Уравнение преобразования идеального однополярного АЦП записывается в виде
N10 = int [ u (2R – 1) / Um],
где int[X]- функция, выделяющая целую часть числа Х. Минимальное изменение напряжения на входе АЦП, которое приводит к изменению выходного кода, называемое разрешающей способностью, равно Um / (2R-1).
Метрологические свойства АЦП и ЦИС в целом
существенно зависят от номинальной ступени квантования АЦП, равной
q = [uн (Nmax) – uн (Nmin)] / [(Nmax – Nmin) - 1] = [uн (Nmax) – uн (Nmin)]/ M,
где Nmax,Nmin – максимальное и минимальное значения выходного кода
АЦП; uн (Nmax), uн (Nmin ) – значения входного напряжения АЦП, соответствующие
Nmax и Nmin.
При использовании двоичного цифрового кода
максимальное число возможных выходных кодовых комбинаций М = 2RАЦП -1.
большое число значений измеряемой величины разбит на 1000 равных интервалов с
шагом 1/1000 (квантование по уровню), а при измерениях указывается целое число
уровней, с округлением относительно истинного значения аналоговой величины.
Наиболее простыми являются АЦП косвенного типа, построенные на основе преобразователя напряжение – время (ПНВ) и напряжение – частота (ПНЧ).
Измерение физической величины (ФВ) (см. рисунок.5.5) производится в несколько этапов:
- ФВ х (генераторная или параметрическая) при помощи соответству-ющего датчика преобразуется в электрический сигнал – напряжение v;
- значение напряжения v запоминается в устройстве выборки и хранения в виде величины V на время проведения цикла измерения;
- величина V преобразуется в одиночный импульс (серию импульсов), длительность tx которого пропорциональна значению напряжения V.
Устройство, осуществляющее данное преобразование и есть ПНВ:
- интервал времени tx измеряется путём заполнения его импульсами стандартной длительности Тх от тактового (счётного) генератора образцовой частоты fc. Эти импульсы подсчитываются счётчиком и в дальнейшем преобразуются в двоичное число. Преобразование ФВ в интервал времени и последующее измерение его длительности - основа АЦП;
- информация в виде двоичного кода преобразуется в десятичный код и отображается на экране алфавитно – цифрового дисплея.
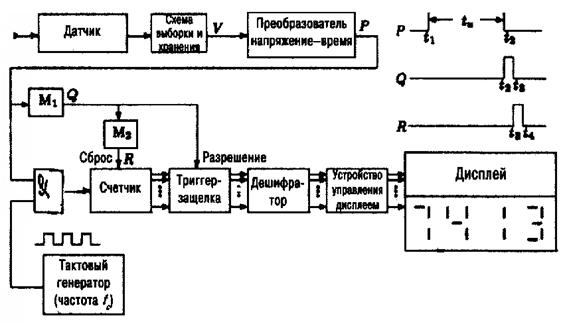 |
Рисунок 5.5 – Цифровое измерение физической величины
Рассмотрим принцип построения и работы АЦП с ПНВ, известный как АЦП с время импульсным преобразованием ВИП (см. рисунок 5.6).
Счётчик подсчитывает импульсы, поступающие с тактового генератора, в течение времени tx. По окончании этого измерительного интервала в момент времени t2 одновибратор (мультивибратор) M1 вырабатывает короткий импульс, по которому триггер – защёлка запоминает содержимое счётчика на этот момент.
 |
В момент времени t3 на счётчик поступает импульс от одновибратора M2 и его показания сбрасываются. Таким образом, электронный вентиль, пропускающий на счётчик импульсы с частотой fc, открыт только в течение интервала tx , а в остальное время закрыт.
Рисунок 5.6 - АЦП на основе преобразователя сигнал – время
Если N есть число импульсов за время tx, то N = f с tx, или N º tx.
 |
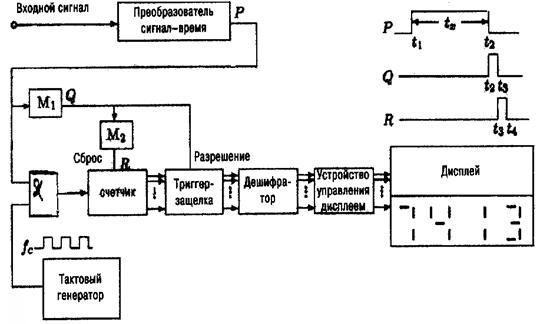
Рисунок 5.7 – АЦП, на основе преобразователя напряжение –время
Если использовать конкретный преобразователь напряжение –время, то схема АЦП выглядит несколько иначе (см. рисунок 5.7).
В качестве ПНВ рассмотрим преобразователь напряжение – время на основе однократного интегрирования (на основе компаратора и одновибратора) (см. рисунок 5.8).
 |
Рисунок 5.8 – Преобразователь напряжение – время на основе компаратора и одновибратора (а) и временные диаграммы сигналов (б)
Управление ПНВ осуществляется подачей импульса запуска на одно-вибратор. Одновибратор (ОВ) – электронное устройство, предназначенное для формирования прямоугольного импульса напряжения требуемой длительности ТМ. В начальный момент времени t = 0¯ выходной сигнал ОВ на прямом выходе нулевой Q = 0, а на инверсном выходе (обратный сигнал) - Q = 1.Так как интегратор Ин закорочен ключём S, то компенсационное напряжение vI = 0.
На прямой вход устройства сравнения (компаратор) СУ подаётся измеряемое напряжение Vx > 0, поэтому на его выходе имеем напряжение Vc = 1. На выходе электронного вентиля Vo = 0. В момент времени t =0 запускается ОВ: Q = 1 и уровень сигнала Vo становится высоким, т.е.равным 1. Ключ S открывается и интегратор начинает интегрировать постоянное напряжение - VR.
Выходное напряжение Ин vI
возрастает линейно во времени и при t = tx vI = Vx. В этот момент срабатывает компаратор и уровень сигналов Vc и Vo
становится низким – нулевым. Из схемы и временных диаграмм сигналов видно, что tx = RC Vx / VR.
Очевидно, что ширина импульса одновибратора TM > t xmax, соответствующего максимальному напряжению Vx, т.е. следующее преобразование возможно через интервал TM.
АЦП, показанный на рисунке 5.7, относится к АЦП косвенного типа, поскольку для преобразования сигналов он использует ПНВ.
Другой АЦП косвенного типа использует преобразователь напряжение – частота ПНЧ (см. рисунок 5 .9).
 |
Рисунок 5.9 – АЦП, на основе преобразователя напряжение – частота
На рисунке 5.10 а представлена структурная схема одного ПНЧ, известного как преобразователь напряжение – частота двойного интегрирования.
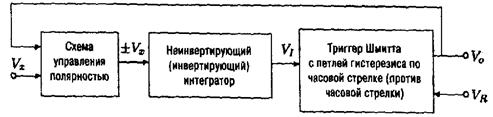
В зависимости от уровня выходного сигнала Vo схема управляет полярностью и подаёт на интегратор напряжение Vx разной полярности. Когда уровень Vo высокий, Vx будет иметь положительную полярность и наоборот (см. рисунок 5.10,б). Напряжение прямоугольной формы Vx поступает на вход интегратора. В процессе преобразования участвуют обе части выходного сигнала интегратора VI. Сигнал VI управляет триггером Шмитта. Триггер Шмитта – это компаратор с положительной обратной связью (см. рисунок 5.11) с характеристикой переключения, представленной на рисунке 5.10,в.
Наибольшее распространение получили АЦП напряжение – время двойного (двухтактного интегрирования) (см. рисунок 5.12).
Схема содержит входное устройство, трёхпозиционный ключ, интегратор Ин, источник образцового напряжения ИОН, устройство сравнения СУ, триггер Тг, генератор счётных (образцовых импульсов) ГСИ, управляющее устройство УУ, логическую схему И (схему совпадения, электронный ключ, временной селектор), счётчик импульсов Си и цифровое отсчётное устройство ЦОУ.
Вначале цикла измерения при t=to УУ вырабатывает калиброванный импульс U´упр с длительностью T1=ToK, где To - период следования счётных импульсов; K - ёмкость счётчика.
В момент появления фронта импульса U´упр ключ переводится в положение 1, и с входного устройства на интегратор поступит напряжение U´x, пропорциональное измеряемому напряжению Ux.
 |
а)
 |
б) в)
Рисунок 5.10 – Структурная схема ПНЧ двойного интегрирования (а),
временные диаграммы сигналов (б), передаточная характеристика по напряжению триггера Шмитта (в)
а) б)
Рисунок 5.11 – Схема (а) и амплитудная характеристика
(б) триггера Шмита
Затем на интервале времени T1 = t1 – to происходит интегрирование напряжения U´x (пропорциональное измеряемому Ux), в результате чего нарастающее напряжение на выходе интегратора будет определяться формулой

В момент времени t=t1 управляющий сигнал U“упр, поступающий с УУ, переводит ключ в положение 2 и на Ин с ИОН поступает образцовое отрицательное напряжение Uион. Одновременно с этим другой управляющий сигнал U“упр опрокидывает триггер.
Интегрирование напряжения –Uион происходит быстрее, так как в схеме установлено | Uион | ³ U´x . Интегрирование образцового напряжения продолжается до тех пор, пока выходное напряжение Ин снова не станет равным нулю ( при этом T2 = t2 – t1). Поэтому в течение времени второго интервала на выходе Ин формируется спадающее напряжение

При этом длительность интервала интегрирования T2 не больше, чем выше амплитуда измеряемого напряжения U´x .
 |
а)
 |
б)
Рисунок 5.12 - Структурная схема преобразователя с
двойным
интегрированием
В момент времени t= t2 напряжение Uи на выходе Ин становится равным нулю и устройство сравнения (второй вход которого соединён с корпусом) выдаёт сигнал на Тг, возвращая его в исходное состояние. На его выходе формируется импульс Uт длительностью T2, поступающий на вход схемы И. На другой её вход подается сигнал UГСИ с ГСИ. По окончании импульса Uт, поступающего с Тг, процесс измерения прекращается.
Преобразование измеряемого временного интервала T2
в эквивалентное число импульсов N осуществляется по электронному методу счётных
импульсов – заполнением указанного интервала периодическими импульсами ГСИ и
подсчётом их числа Си. На Си, а значит, и на ЦОУ записывают число импульсов NUсч,
пропорциональное измеряемому напряжению ![]() Ux:
Ux:
Из этого выражения можно получить следующие формулы:
T1=ToK; T2
» ToN
; U´x
Т1= UИОНT2,
откуда поучаем U´x = UИОН N / K.
Структурная схема цифрового устройства по методу двойного интегрирования несколько иного плана показана на рисунке 5.13.
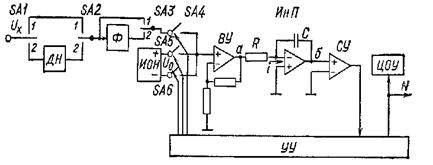 |
Рисунок 5.13 – Структурная схема цифрового прибора по методу двойного интегрирования
Измеряемое напряжение Ux непосредственно (переключатели SA1, SA2 в позиции 1) или через делитель напряжения ДН (SA1, SA2 в позиции 2), с помощью которого выбирается нужный поддиапазон измерения, затем через фильтр Ф (SA3 в позиции 2), или непосредственно (SA3 в позиции1) подаётся на ключ SA4. Система ключей SA4, SA5, SA6 предназначена для подачи на входной усилитель ВУ измеряемого или одного из опорных напряжений положительной или отрицательной полярности, последние вырабатываются источником опорных напряжений ИОН в виде высокостабильных одинаковых по абсолютной величине, но разных по знаку напряжений постоянного тока.
ВУ представляет собой усилитель постоянного тока с большим входным сопротивлением (более 1000 МОм) и регулируемым посредством отрицательной обратной связи ООС коэффициентом усиления. Если Ux < 10 В, то оно подаётся на входное устройство ВУ непосредственно (SA1, SA2 в позиции1); при этом входное сопротивление ВУ более 1000 МОм. Если же Ux >10 В, то оно подаётся на ДН (SA1, SA2 в позиции 2) и входное сопротивление определяется сопротивлением ДН, которое обычно 10 МОм. При измерении напряжений менее одного вольта, например, на поддиапазонах 0,1 и 0,01В, коэффициент усиления ВУ выбирают соответственно равным 10 или 100 с тем, чтобы напряжение на выходе ВУ изменялось в одних пределах независимо от выбранного поддиапазона измерения.
К выходу ВУ подключён интегрирующий преобразователь ИнП на основе операционного усилителя с конденсатором в цепи ООС. Резистор R преобразует входное напряжение ИнП в пропорциональное значение тока ix = UxKд Kу / R, где Kд и Kу – коэффициенты передачи ДН и ВУ; для выключенного ДН ( SA1, SA2 в позиции 1) Kд = 1. Этот ток, если пренебречь входным током усилителя ИнП, протекает через конденсатор С и заряжает его, при этом входное напряжение ИнП возрастает.
Обозначим U1 напряжение на выходе ИнП (в точке б рисунка 5.13) в момент t1 окончания заряда конденсатора

Обозначим далее Uxср среднее значение измеряемого напряжения на интервале от 0 до t1, тогда
![]() Uxср t1 .
Uxср t1 .
В момент времени t = t1 ключ SA4 размыкается и замыкается SA5 или SA6. Теперь на вход ВУ подаётся опорное напряжение,
полярность которого выбирается так, чтобы оно было противоположным полярности Ux и снимало заряд с конденсатора С, накопленный за время замкнутого состояния
SA4. На рисунке 5.14,а показана временная диаграмма
напряжения в точках а и б схемы.
а) б)
Рисунок
5.14 – Временные диаграммы АЦП
двойного интегрирования
На диаграмме видно два такта в цикле работы преобразователя: первый такт длительностью t1 соответствует заряду конденсатора С, второй такт длительностью t2 – его разряду.
Это и послужило основой для названия метода преобразования – двухтактное интегрирование.
Момент окончания интервала t2 соответствует моменту прохождения выходным напряжением ИнП через нулевой уровень, что фиксируется сравнивающим устройством СУ. Напряжение U2, до которого разрядится конденсатор за время t2, равно

где io = Uo / R – входной ток интегрирующего преобразователя, вызываемый напряжением Uo.
Значение Uo постоянно и во времени не меняется, поэтому
![]() .
.
Так как напряжение на выходе ИнП в начале и в конце
цикла измерения равно нулю, то справедливо равенство U1 = U2.
Поставим, полученные выше выражения, получим KдUxсрt1=Uot2, откуда ![]() t2 = (Kд t1)/ Uo × Uxср.
t2 = (Kд t1)/ Uo × Uxср.
Величины Kд, t1 и Uo выбираются постоянными, что обеспечивает зависимость между Uxср и t2 вида прямой пропорциональности.
Интервал t2 измеряется путём заполнения импульсами напряжения высокой частоты генератора импульсов со стабильным периодом to (см. рисунок 5.14.б) и последующим их подсчётом. Обозначим N число импульсов, которое укладывается на интервале t2, тогда
![]()
Интервал времени t1 обычно задаётся тем же генератором высокой частоты путём подсчёта счётчиком импульсов определённого числа No периодов колебаний этого генератора t1 = Noto. Подставив значение t1 в уравнение для N, получим окончательно
![]()
Величины Кд и Uo стабильны, а No – число, поэтому связь между N и Uxср отличается высокой стабильностью.
Преобразователь по методу двойного интегрирования можно представить в виде (см. рисунок 5.15).
 |
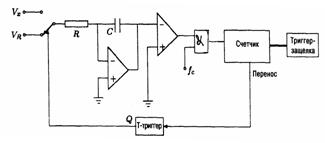 |
||
а) б)
Рисунок 5.15 –Временная диаграмма (а); упрощённая схема (б) преобразователя двойного интегрирования
Интегрирующий конденсатор сначала заряжают при помощи входного напряжения Vx в течение известного времениT1, а потом разряжают за время tx , подключив его к источнику опорного напряжения -VR, как показано на рисунке 5.15,а.
Из рисунка видно, что
![]() .
.
Значит tx пропорционально Vx. Схема такого преобразователя называется преобразователем двухтактного интегрирования.
Точное
значение интервала времени T1 можно
определить при помощи счётчика импульсов. И для преобразования информации в
двоичный код, и для установки интервала T1 используется один и тот же счётчик. При этом
значение T1 задаётся
2NТс . Значение tx
будет максимальным, когда напряжение Vx максимально и
равно Vm. Поэтому максимальное время преобразования
определяется выражением
Тc = Т1
+ max tx =
2 T1 = 2 N+1 Тc
.
Отсюда
видно, что на одно преобразование напряжения в цифровой код требуется 2 N+1 периодов тактового
генератора. Несмотря на то, что преобразователи данного типа не обладают
высоким быстродействием, они широко применяются в ИИС. Число импульсов,
подсчитанных в течение интервала времени tx,
равно
fctx = fcT1 Vx / VR = 2N Vx/ VR .
Отсюда
![]()
6 Цифроаналоговые преобразователи
Цифроаналоговые преобразователи (ЦАП) более просты для понимания, чем аналого- цифровые (АЦП). К тому же некоторые типы АЦП построены на основе ЦАП.
Входной сигнал ЦАП запишем в виде двоичного кода
В = [ ВN-1ВN-2ВN-3Вo],
где Вк (k = 0,1,2, …, N-1) равны либо 0, либо 1. Выходной сигнал ЦАП (см. рисунок 6.1) Vo пропорционален десятичному значению двоичного числа В и, следовательно, его можно представить в виде
Vo ВN-1ВN-2ВN-3Вo
= V [ ВN-12N-1 + ВN-22N-2 + ВN-32N-3 + … +Вo2o
]=
=V![]() = VВ, (6.1)
= VВ, (6.1)
где V – коэффициент пропорциональности.
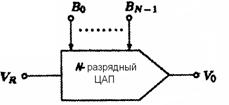 |
VR- источник образцового напряжения постоянного тока
Рисунок 6.1 – Представление ЦАП в схемах
Следовательно, V =кVR, где к – константа. Наиболее просты схемы ЦАП с резистивными элементами.
На рисунке 6.2 приведена схема простейшего 4-х разрядного ЦАП. Он состоит: из резисторов с весами Rо, Rо/2, Rо/4 и Rо/8, что соответствует двоичному коду 8-4-2-1; электронных ключей Z0, Z1, Z2 и Z3; решающего усилителя на базе операционного усилителя.
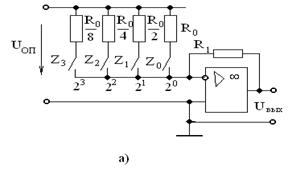 |
Рисунок 6.2 – Схемы ЦАП
Замкнутому состоянию ключа соответствует подключение
соответствующего резистора. Например, десятичное число 5 отображается двоичной
кодовой комбинацией ![]() .
Будут замкнуты нулевой и третий ключи, В общем случае возможны различные
варианты подобных ЦАП (см. рисунок 6.3)
.
Будут замкнуты нулевой и третий ключи, В общем случае возможны различные
варианты подобных ЦАП (см. рисунок 6.3)
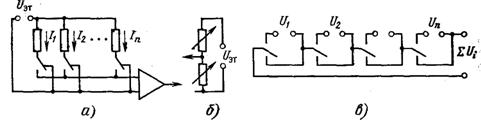 |
а) б) в)
 |
а – с суммированием токов; б – с делением напряжений; в – с
суммированием напряжений; Uэт – эталонное напряжение
Рисунок 6.3 – Цифроаналоговый преобразователь с резистивными
матрицами
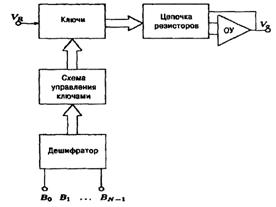
Рисунок 6.4 – Структурная схема ЦАП на основе
программируемого
усилителя
Из уравнения (6.1) видно, что отношение Vo/V – это целые числа от 0 до 2N-1, соответствующие всевозможным значениям разрядов. Следовательно, N- разрядный ЦАП можно построить на основе программируемого усилителя (ПрУ) (см. рисунок 6.4). Необходим ПрУ с коэффициентами усиления, представленными в виде арифметического ряда, состоящего из членов вида 2N с первым членом, равным 0.
Для двухразрядного ЦАП необходимо реализовать следующие коэффициенты усиления: (0, 1, 2, 3) / к. Для того, чтобы число элементов схемы было минимальным, коэффициент к должен принимать следующие значения: все отрицательные числа, 1 и 3. На рисунке 6.5 показана схема ЦАП, построенная на основе программируемого инвертирующего усилителя. Аналогичным образом, для случая к = 3 представлена схема ЦАП на базе программируемого аттенюатора (см. рисунок 6.6).

Рисунок 6.5 – Двухразрядный ЦАЦ при к = - 1
 |
Рисунок 6.6 – Двухразрядный ЦАП при к = 3
ЦАП выпускаются в виде интегральных схем. В таблице
6.1 приведены технические характеристики прецизионных ЦАП. В зависимости от
значений параметров выделяют прецизионные и быстродействующие ЦАП.
Прецизионные ЦАП имеют погрешность линейности преобразования (см. рисунок
6.7), а быстродействующие время установления (интервал времени от
подачи входного сигнала до вхождения выходного сигнала в заданные пределы) tуст = 100 нс.
Большинство современных ЦАП построено по схеме с токовыми аналоговыми ключами (см. рисунок 6.8), однако в своём составе микросхемы не содержат суммирующий операционный усилитель ОУ. Для преобразования выходного тока ЦАП в выходное напряжение используют внешние ОУ (см. рисунок 6.9).
 |
 |
||
Совокупность значений выходного значения ЦАП xi в зависимости от значений входного кода ai называется характеристикой преобразования (ХП) (см. рисунок 6.7). В системе координат код – выходная аналоговая величина ХП можно представить либо в виде прямой линии по некоторым углам к оси абсцисс, либо в виде ступенчатой функции. Характерными точками ХП являются её начальная и конечная точки. Дискретность изменения выходного сигнала определяется числом разрядов ЦАП, но при этом возможны отклонения конкретных значений аналоговой величины от их номинальных значений.
|
Рисунок 6.7 – Характеристика преобразования ЦАП ключа |
Рисунок 6.8- Схема электронного |
|
Т а б л и ц а 6.1 |
|
|
Тип микро схем |
Число раз- рядов, N |
t уст. мкс |
dл, % |
Uвых, В (Iвых, мА) |
Uип, В
|
Uоп, В
|
Рпот, Вт |
U1вх/ U0вх |
|
КР572ПА1 КР572ПА1 К594ПА1 К1108ПА1
К417ПА1
К417ПА2
К427ПА1 |
10 12 12 12
13
13
16 |
5 15 3,5 0,4
15
15
30 |
0,1…0,8 0,02…0,1 0,02 0,02
0,02*
0,02*
0,02 |
±1 (5…10) (2) (3…7)
±10
±10
±10 |
+5,4 +5; +15 -15 +5; -15 -15 ±5;15 12 +5; 15 12 ±15;5 |
10,24 10,24 10,24 10,24
-
10
- |
0,1 0,4 0,7 0,9
0,7
0,7
0,5 |
3,6/0,8 2,4/0,8 2,0/0,8 2,0/0,8
2,4/0,8
2,4/0,8
2,4/0,8 |
|
* Для группы Б – 0,1; для группы В – 0,3 |
||||||||
Для реального преобразователя ступени квантования в разных точках ХП отличаются друг от друга, поэтому на практике подсчитывают среднее значение ступеней квантования, которое называется младшим значащим разрядом (МЗР) и является единицей измерения выходной аналоговой величины. ЦАП характеризуется нелинейностью, дифференциальной линейностью, немонотонностью.
В аналоговом электронном ключе на базы транзисторов подаётся напряжение либо +6,756 В, либо -6,75 В. В первом случае транзистор Т1 находится в режиме насыщения, и напряжение на его эмиттере приблизительно равно 5 В, в то время как Т2 закрыт. Значения напряжения база – эмиттер на обоих транзисторах остаётся равным 0,75 В. Во втором случае транзистор Т2 открыт, а Т1 закрыт.Теперь напряжение на эмиттере приблизительно равно – 5 В.
Основной характеристикой ЦАП является разрешающая
способность, определяемая числом разрядов N. Теоретически
ЦАП, преобразующий N – разрядные коды, должен обеспечить 2N
различных значений выходного сигнала с разрешающей способностью (2N-1)
-1. Абсолютное значение минимального компенсационного напряжения quk (кванта напряжения) определяется как предельным
принимаемым числом 2N-1, так и максимальным выходным напряжением ЦАП Uвых. Так при 12-ти разрядах число независимых квантов
(ступенек) выходного напряжения ЦАП Uk составляет 212
-1 = 0,0245 %. Выбранное с помощью опорного источника напряжение шкалы,
например Uшк =1 В,
разделённое на это число квантов, даёт абсолютную разрешающую способность ЦАП:
δшк = Uшк / (2 12
-1) = 103 мВ/ (2 12 -1) = 2 ,45 мВ.
7 Аналого-цифровые преобразователи прямого действия
Существует много АЦП данного типа, а каждая схема имеет множество модификаций. Далее будут рассмотрены только несколько вариантов таких АЦП, отличающихся высоким быстродействием.
В настоящее время наиболее распространён АЦП интегрирующего (следящего) типа (см. рисунок 7.1). Для работы ЦАП используется источник образцового напряжения ИОН (VR), который выдаёт в схему опорное напряжение Uоп. Принцип работы можно понять из рассмотрения его функциональной схемы.
Импульсом запуска UЗ (не показан) счётчик импульсов СИ –СЧЁТЧИК устанавливается в нулевое состояние и подключается измеряемое напряжение Vx к устройству сравнения УС (на базе ОУ).
На выходе УС начинает действовать напряжение VС, которое подаётся на один из входов электронного ключа ЭК (логическая схема совпадения И) (см. рисунок 7.1,а).
На второй его вход подаются тактовые импульсы fc с частотой 1 МГц от генератора импульсов ГИ (не показан).
 |
Рисунок 7.1 - Интегрирующий АЦП (а) и временные диаграммы работы (б)
ЭК, как элемент совпадения, пропускает эти импульсы на вход счётчика СИ. СИ начинает считать импульсы и выдаёт на выходе кодовые двоичные комбинации. При 8-ми разрядном счётчике это последовательность кодовых чисел: 00000001; 00000010; 0000011,….,11111111. Эти кодовые числа поступают на вход 8-ми разрядного цифроаналогового преобразователя ЦАП. ЦАП преобразует кодовые комбинации в дискретные значения компенсационного напряжения Vf. На рисунке 7.1,б приведен ступенчатый график образования напряжения Vf . Когда наступит момент, что VХ – Vf > 0, сработает УС, VС = 0 и ЭК будет закрыт для прохождения тактовых импульсов. Кодовая комбинация передаётся из счётчика на преобразователь кодов и устройство индикации.
Из временных диаграмм сигналов, показанных на рисунке 7.1,б, видно, что самое большое время преобразования требуется для максимального значения vx(t), при котором счётчик будет полностью заполнен , то оно будет равно 2Nfc или 2N периодам тактового генератора.
На рисунке 7.2 представлена структурная схема модифицированного интегрирующего ЦАП. В этой схеме простой счётчик заменён на реверсивный. Когда компаратор (устройство сравнения) имеет ВЫСОКИЙ (НИЗКИЙ) уровень входного сигнала Vc , т.е. когда Vx больше (меньше или равно) напряжению обратной связи Vf , счётчик работает в режиме прямого счёта (обратного счёта). Значение выходного сигнала ЦАП Vf может меняться с шагом, равным 1МЗР.
Рисунок 7.2 – Структурная схема следящего АЦП
Следовательно, если значение Vx не будет кратно МЗР, счётчик при получении последовательных тактовых импульсов будет считать то в одном, то в другом направлении. Таким образом, выходной сигнал АЦП будет колебаться между двумя значениями, различающимися на 1 МЗР. Следящий АЦП не требует на входе схемы выборки и хранения. Цифровой выходной сигнал постоянно отслеживает аналоговый сигнал. Таким образом, следящий АЦП обладает хорошим быстродействием в случае плавного изменения входного сигнала.
Пример 7.1
Тактовая частота 8-ми разрядного следящего АЦП равна 1 МГц. Требуется определить максимальное время преобразования аналогового сигнала.
Решение:
Максимальное время преобразования соответствует максимальному изменению входного сигнала. В этом случае счётчик будет полностью заполнен, т. е. его показания будут равны 2N. Следовательно, равно 2N fc = 28 /106 = 256 мкс.
 |
Рисунок 7.3 – Структурная схема АЦП последовательного приближения
На рисунке 7.3 представлен “интеллектуальный” АЦП последовательного (кодоимпульсного) преобразования. В АЦП данного типа аналоговый сигнал Vx сравнивается в компараторе (сравнивающем устройстве) с напряжением Vn, полученным от N- разрядного ЦАП.
Принцип действия АЦП похож на игру: играют игрок А – компаратор, который отвечает однозначными ответами «Да» или «Нет» на вопросы игрока В (представляет остальную часть схемы).
Аналоговый сигнал Vx сначала сравнивается с текущим напряжением υ1, полученным от ЦАП при первом тактовом импульсе генератора с частотой fс при подаче на его вход кода 100..0. Если Vx > υ1, СРЗ (старший значащий разряд) остаётся равным 1, в противном случае СРЗ становится равным 0. Далее на ЦАП подаётся код, в котором (N-1) разряд равен 1,а остальное 0, т.е.*100…0. Полученное напряжение ЦАП υ2 снова сравнивается с аналоговым сигналом. Если Vx > υ2, (N-1) разряд остаётся равным 1, в противном случае становится равным 0. Этот процесс повторяется до тех пор, пока не будут перебраны все разряды. Полученный цифровой код на входе ЦАП будет соответствовать аналоговому сигналу.
Таким образом, напряжение n-приближения
равно
υn = десятичное значение кода ВN-1ВN-2…ВN-n…В1В0,

где цифровое значение сигнала Vx соответствует
 |
Рисунок 7.4 – Графики, поясняющие принцип измерения напряжения 5В
Пример 7.2
Необходимо измерить аналоговое напряжение 5В при помощи АЦП последовательного приближения.
Решение:
Напряжение 5(10) = 0 · 23 + 1· 22
+ 0 ·21 + 1 ·20 (2) = 0101(код).
Работа АЦП поясняется графиками, представленными на рисунке 7.4
8 Входной интерфейс измерительных систем
На рисунке 8.1,а приведена структурная схема цифрового вольтметра – индивидуального переносного прибора, а на рисунке 8.1,б – структурная схема микропроцессорной измерительной системы.
Рисунок 8.1 – Структурные схемы
В этих обеих схемах требуется входной интерфейс, который в виде типового интерфейса (см. рисунок 8.1,в), как правило состоит из преобразователей сигналов различных датчиков и преобразователей, мультиплексора и устройства выборки и хранения.
Входной интерфейс – комплекс устройств, предназначенных для согласования аналоговых выходных сигналов датчиков и преобразователей со входами АЦП.

Рисунок 8.2 – Взаимодействие объекта измерения и наблюдателя
В ИИС (см. рисунок 8.2) наблюдателем выступают аппаратные средства обработки, хранения и отображения информации. В любом случае при наличии возмущений необходимо согласовывать элементы системы по импедансу (сопротивлению), напряжению и видам передаваемых сигналов.
 |
Поскольку датчик (преобразователь) и остальная часть ИС имеют разные точки заземления, то, как правило, возникают проблемы, связанные с тем, что потенциалы их «земель серьёзно отличаются друг от друга». Если уровень измерительного сигнала достаточно высок, то эта проблема не стоит очень остро. Но в случае малых сигналов и длинных соединительных линий можно уменьшить “паразитные” наводки витых пар проводов и
коаксиальных экранированных кабелей (см. рисунок 8.3).
На первой схеме (см. рисунок 8.3,а) кабель присоединён к корпусу источника сигнала, но изолирован от корпуса приёмника RC-цепью.
Рисунок 8.3 – Цепи заземления с экранированными кабелями для сигналов низкого
уровня
Если далее сигнал подать на дифференциальный усилитель (операционный усилитель), произойдёт подавление сигнала “наводки” на экране кабеля. Для предупреждения повреждения входного каскада следует подключить резистор с малым сопротивлением и шунтирующий конденсатор. На второй схеме (см. рисунок 8.3,б) показано «псевдодифференциальное» включение входного каскада. Сопротивление 10 Ом, включённое между общей точкой усилителя и схемной землёй, во много раз превышает полное сопротивление заземления источника сигнала, поэтому потенциал общей точки усилителя в этом случае определяется опорной землёй источника. Если входной каскад будет иметь весьма большой коэффициент усиления, то помехи на линии заземления станут несущественными.
Входы АЦП должны быть защищены даже от кратковременного превышения напряжения выше некоторого допустимого уровня. Многие АЦП имеют встроенные диоды защиты от статического разряда. Например, такая внутренняя защита в АЦП AD 771* фирмы Analog Devices (см. рисунок 8.4).
 |
Рисунок 8.4 – Внутренняя защита от статического разряда
Часто этого бывает недостаточно, тогда на входе буферного усилителя (повторителя) устанавливают ограничитель напряжений, передаточная характеристика которого показана на рисунке 8.5,а.
 |
а) б)
Рисунок 8.5 – Схема защиты от перенапряжений
Один из вариантов такого ограничителя показана на рисунке 8.5,б, которая выполнена на двухстороннем стабилитроне.
Фильтрация используется для удаления нежелательных составляющих из измеряемого сигнала. Многие АЦП имеют внутренние средства фильтрации. В случае использования внешнего RC- фильтра его рекомендуется включать как показано на рисунке 8.6,а. Такое включение будет обеспечивать подавление как дифференциального, так и синфазного шума. Фильтр, включённый по схеме, показанной на рисунке 8.6,б, не будет подавлять синфазный шум, но будет обеспечивать значительно большее уменьшение дифференциального шума. Если применяется внешняя фильтрация, то надо всегда помнить об ограничении величин R и C. В случае больших номиналов RC нужно применять активные фильтры или АЦП с высоким импедансом.
 |
а) б)
Рисунок 8.6 – Схемы внешних пассивных фильтров
Часто аналоговый сигнал надо предварительно усиливать до подачи на АЦП. В этом случае применяется инструментальный усилитель ИУ (см. рисунок 8.7, а и б). В его структуре входят два неинвертирующих усилителя (а), подключённых ко входам простого однокаскадного дифференциального усилителя (б). Такой усилитель имеет большое входное сопротивление и высокий коэффициент подавления синфазного сигнала. Его коэффициент усиления регулируется с помощью резистора R3.

а) б)
Рисунок 8.7 – Варианты внешних усилителей: 1 – а; 2 – б; 3 – а и б
Такой усилитель подавляет помехи сетевой частоты, которые являются синфазными напряжениями для обоих входов ИУ. Для предварительного усиления можно применить дифференциальный усилитель на двух ОУ, показанных на рисунке 8.8.

Рисунок 8.8 – Схема предварительного усилителя
9 Измерительные системы временных параметров
В качестве математической модели основного параметра электрической сети переменного тока принята синусоидальная функция u (или i) = Um(или Im) sin (w t +j). Частота w, период Т = 1 / w и угол сдвига фаз являются временными параметрами.
Фундаментом для частотно-временных измерений служит группа государственных стандартов частоты – высокоточных мер частоты и времени, объединяющая рубидиевый, цезиевый, водородный и кварцевый стандарты.
Привязку к ним практических измерений осуществляют при помощи приемников сигналов эталонных частот – меток времени.
Метки точного времени (МТВ) передаются регулярно каждый час по программам центрального радиовещания РФ и Республики Казахстан. Они задаются эталоном времени и частоты.
Сигналы МТВ состоят из шести прямоугольных радиоимпульсов, заполненных гармоническим сигналом частотой 1000 Гц. Длительность каждого радиоимпульса составляет 100 мс, период повторения – 1 с (см. рисунок 10.1, а).
В основу аппаратуры автоматического периодического допускового контроля АДК положено использование сигналов меток точного времени (МТВ).
|
|
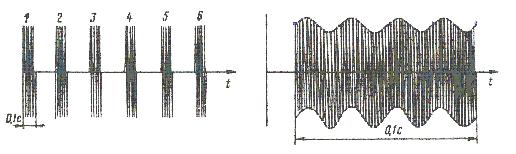
а) б)
Рисунок 9.1 – Сигналы меток точного времени (а) и их примерная форма при
использовании в аппаратуре АДК (б)
В аппаратуре АДК первый сигнал МТВ используется для запуска устройства формирования и для подачи команды начала контроля. Второй сигнал используется для контроля коэффициента гармоник, третий, четвертый и пятый сигналы – для контроля АЧХ тракта.
Для контроля АЧХ в сигналы МТВ автоматически подмешиваются сигналы дополнительных частот, уровень которых примерно на 20 дБ меньше уровня сигнала основной частоты 1000 Гц. В этом случае, хотя форма сигналов МТВ и искажается (см. рисунок 9.1,б), слуховое восприятие такого суммарного сигнала не существенно отличается от восприятия не преобразованных сигналов МТВ.
Современное измерение частоты электрических колебаний методом непосредственной оценки выполняется электронно-счетным методом (методом дискретного счета).
Принцип измерения неизвестной частоты виден из рисунка 10.2.
 |
а) б)
Рисунок 9.2 – Упрощённая структурная схема измерения частоты (а) и
временная диаграмма импульсов (б)
Напряжение с неизвестной частотой ![]() преобразуется усилителем
ограничителем УО (в сущности формирующим устройством ФУ) (см. рисунок 9.2,а) в
короткие импульсы
преобразуется усилителем
ограничителем УО (в сущности формирующим устройством ФУ) (см. рисунок 9.2,а) в
короткие импульсы ![]() постоянной
амплитуды с длительностью tx =
1 / f x, т.е.
период этих импульсов такой же, как у исходного колебания. Электронный ключ ЭК
в нормальном состоянии разомкнут. Только при поступлении прямоугольного
импульса с длительностью То (см. рисунок 10.2,б) значительно больше,
чем tx, ЭК замыкается и исходные импульсы числом N поступают
на счётчик импульсов. На выходе будет зафиксировано N = То
/ tx, или N = То f
x, т.е. неизвестная частота f
x пропорциональна числу импульсов, так как То
величина стабильная. Рассмотрим принцип получения стабильного интервала То.
постоянной
амплитуды с длительностью tx =
1 / f x, т.е.
период этих импульсов такой же, как у исходного колебания. Электронный ключ ЭК
в нормальном состоянии разомкнут. Только при поступлении прямоугольного
импульса с длительностью То (см. рисунок 10.2,б) значительно больше,
чем tx, ЭК замыкается и исходные импульсы числом N поступают
на счётчик импульсов. На выходе будет зафиксировано N = То
/ tx, или N = То f
x, т.е. неизвестная частота f
x пропорциональна числу импульсов, так как То
величина стабильная. Рассмотрим принцип получения стабильного интервала То.
Частота сигнала определятся количеством периодов за одну секунду. Следовательно, измерив число периодов в интервале времени, равном 1 с, можно определить частоту сигнала. На рисунке 10.3 показана подобная схема выполнения таких измерений .
Рисунок 10.3 – Схема для измерения частоты fс
В данном случае интервал измерения То определён в 1 с. Он установлен делителем частоты. Делитель частоты – устройство, которое делит (уменьшает) частоту 1 МГц (или 10 МГц) образцового генератора счётных импульсов ГСИ (или тактового генератора).
 |
Импульсы, которые считает счётчик есть по существу единичный код (см. рисунок 9.4)
Рисунок 9.4 – Последовательность импульсов – единичный код
Электронный ключ ЭК представляет логическую схему (см. рисунок 9.5,а), выполняющую логическую операцию конъюнкции (логического умножения) – И. На выходе схемы будет 1 тогда и только тогда, когда на её обоих входах присутствует 1. Как видно из рисунка 10.4,б, на выходе будет 1, когда на первом входе действует импульс 3.
 |
а) б)
Рисунок 9.5 - Условное обозначение (а) и временные диаграммы
электронного ключа (временного селектора) (б)
На рисунке 9.6 показано каким образом импульсы ЭК заполняют установленный интервал Т (или То).
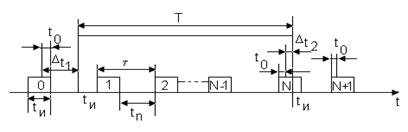 |
Рисунок 9.6 – Временная диаграмма работы электронного ключа
Рассмотрим схемы измерения частотно-временных параметров гармонических сигналов (см. рисунок 9.7).

Рисунок 9.7 – Измерение временных параметров с применением
метода дискретного счёта (соответственно, сверху вниз: частота,
период, периода с усреднением
Во всех трёх схемах усилитель - ограничитель преобразует гармонический сигнал с измеряемой частотой ¦х в импульсы, сдвинутые по времени на интервал tх = 1/ ¦х. Опорный генератор – генератор образцовых импульсов (счётных) с частотой ¦о = 1 МГц. Делитель частоты ДЧ делит исходную частоту ¦о в к раз, кратное 10 (101… 107 ), т.е. тем самым увеличивает время счёта То = Тсч. Например, ¦о = 1 МГц и к = 102 имеем частоту ¦сч = 1×106/ 102 = 104 Гц и, соответственно, счётный период (интервал) Тсч =1/ 104 =10-4= 100 мс. При ¦х = 50 Гц или Тх = 1/50 =0,02 с = 20 мс вентиль (ключ) открывается ДЧ на время Тсч = 100 мс; за это время через вентиль на счётчик импульсов пройдёт число импульсов N =100 / 20 = 5 с периодом 20 мс, что по точности явно недостаточно. Относительная погрешность в процентах такого устройства составляет d¦ = ±100 [d0 + 1/ (¦х Тсч)],%, где d0 = 10-7…10-9 – относительная погрешность установки частоты ГИ; ¦х – частота измеряемого сигнала. Если принять допустимую относительную погрешность измерения частоты d¦д = 0,1%, то нужно установить время счёта Тсч³100/( d¦д¦х ) = 100/ (0,1×50) = 20 с.
Измерение периода – обратный процесс измерения частоты, поэтому в периодометре вентиль открывается преобразованными импульсами измерительного сигнала, сдвинутыми по времени на tх. ДЧ вырабатывает импульсы, которые играют роль меток времени и имеют частоту заполнения интервала tх ¦з =¦0/к. Например, при ¦0 = 1 МГц и к=103 имеем ¦з = 106 / 103 Гц = 103 имеем длительность меток времени t =1 / 103 =10-3 с. При измерении периода Тх = 0,02 с счётчик импульсов сосчитает число импульсов N =0,02 / 10-3=20 импульсов.
Суммарная относительная погрешность измерения периода нормируется в процентах и определяется по формуле
δт = ± 100 [δкг + То/Тх].
Ориентировочно, погрешность равна δт = ± 100 10-3 / 0,02 = 5 %.
Одним из основных параметров электрического гармонического колебания, определяющих состояние колебательного процесса в любой заданный момент времени, является фаза. Наряду с фазой одного колебания используется соотношение фаз двух колебаний. В этом случае используется понятие фазового сдвига. На рисунке 10.7 приведены схема и диаграммы, поясняющие принцип работы цифрового фазометра.
Цифровой фазометр (ЦФ) работает следующим образом.
Преобразователь Dφ ®Dt (разность фаз - время) из подаваемых на его входы синусоидальных сигналов u1 (измеряемого) и u2 (вспомогательного, опорного) формирует последовательность прямоугольных импульсов u3 с фазовым сдвигом, имеющих длительность Dt и период повторения Т, равные соот-ветственно сдвигу фаз во времени и периоду повторения входных сигналов. Импульсы u3, а также счётные импульсы u4, вырабатываемые формирователем счётных импульсов и имеющие период повторения То, подают на входы временного селектора ВС. ВС открывают на время , равное длительности t импульсов u3, и в течение этого интервала пропускает на вход счётчика импульсы u4. На выходе селектора формируются пакеты импульсов u5, следующие с периодом Т.
За один период исследуемых сигналов на счётчик поступит число импульсов, равное n = Dt / To. Фазовый сдвиг пропорционален числу счётных n импульсов, поступивших на счётчик, т.е.
φ =3600 n То / Т.
 |
а)
б)
а – структурная схема;
б – временные диаграммы
Рисунок 9.8 – Цифровой фазометр для измерения значении фазы
10 Измерительные системы мощности и расхода энергии переменного тока
Мощность – параметр электрической сети энергообъекта, которая подлежит обязательному измерению. В ЛИС применяются ваттметры электро-динамической системы (см. рисунок 10.1).

а) б) в)
1 – неподвижная катушка двухсекционная; 2 – подвижная катушка
(рамка); 3 – воздушный успокоитель; 4 – противодействующие и токоподводящие
пружины
Рисунок 10.1 - Измерительный механизм электродинамической системы
ИМ ЭДС: а – схема взаимного расположения катушек; б – электромагнитное поле в
катушках; в – конструкция механизма
В ИМ ЭДС элементом подвижной части, участвующим в создании вращающего момента, является рамка 2, намотанная тонким проводом и закреплённая на оси. Подведение тока к этой рамке производится посредством 2-х пружин 4. С подвижной частью жёстко связана стрелка, которая при помощи подвижной части перемещается над неподвижной укреплённой шкалой. К неподвижной части ИМ относится катушка 1, которая может быть намотана провода большого сечения.
Принцип работы ИМ ЭД системы основан на взаимодействии электрического поля, создаваемого током Iн неподвижной катушки, с током Iп, проходящего по рамке. Наличие двух раздельных токов в катушке и рамке позволяет использовать в качестве токовой (неподвижную) и напряженческой (подвижную рамку) (см. рисунок 10.2).
Именно такая схема применяется в ваттметрах, причём ток I неподвижной двухсекционной неподвижной катушки А есть вторичный ток измерительного трансформатора тока, а ток рамки Б определяется подведённым напряжением от измерительного трансформатора напряжения I2 = U / Z2.
|
|

а) б)
Рисунок 10.2 – Принципиальная схема (а) и
векторная диаграмма
(б) катушки и рамки
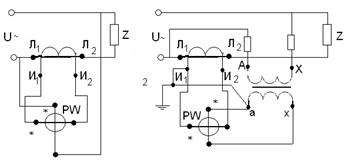 |
а) б)
Рисунок 10.3 – Схемы включения ваттметра для измерения
мощности в однофазной сети переменного тока с напряжением 0,4 кВ (а) и в
однофазной
сети переменного тока с напряжением более 1 кВ (б)
В этом случае шкала ваттметра линейная и соответствует градуировочной характеристике a = Кэд IU cos j = Ра, где Кэд – коэффициент преобразования ИМ ЭД системы; Ра – активная мощность, а cos j- коэффициент мощности. Постоянная ваттметра определяется через номинальные значения тока и напряжения и число делений шкалы – Ср = UнIн / N. Щитовые ваттметры имеют класс точности 1,5.
При измерении мощности в высоковольтных электрических цепях ваттметр включается посредством измерительных трансформаторов тока и напряжения (см. рисунок 10.3). В этом случае активная мощность равна
Р = Ср a КнттКнтн.
Итак, в аналоговом ваттметре мощность Р определяется как среднее значение произведения мгновенных значений напряжения u (t)и тока I (t), т.е.
 -
активная мощность
-
активная мощность
Цифровые системы измерения мощности – дискретные ваттметры, которые выполняют следующую математическую операцию

где ui и ii – дискретные значения напряжения и тока (например, рисунок 11.4,в), соответствующие одному и тому же моменту времени.
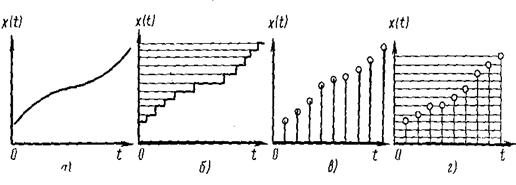 |
а) б) в) г)
Рисунок 10.4 – Виды сигналов: а – аналоговый; б –
квантованный по уровню; в – дискретный; г – цифровой (дискретизированный по
времени и
квантованный по уровню)
Значение Р точно определяет мощность сигнала, если взято бесконечное число выборок (рисунок 10.5)
Рисунок 10.5 – Стробоскопический метод взятия выборок
На рисунке показан некоторый периодический процесс х(t). Выборки можно производить на интервале повторения с периодом Tw длительностью шага дискретизации Dt. В этом случае получим n дискретных значений. Учитывая, что мгновенные значения тока и напряжения в течении 10-15 периодов не изменяются или изменяются не существенно, можно производить стробирование. Суть метода заключается в том, что в каждом периоде считывается одно дискретное значение сигнала, причём каждое последующее значение – с задержкой времени, равной TM = TW + Dt. В результате получим те же 12 дискретных значений, взятых в моменты времени t 1,t2, t3 , t4…. t12.
Несмотря на многообразие цифровых систем мощности, можно рекомендовать следующую структурную схему ЦСМ в виде определённых функциональных узлов (см. рисунок 10.6).
Рисунок 10.6 – Структурная схема цифровой измерительной системы
мощности
Так как ток 5 А и напряжение 100 В, снимаемые с измерительных трансформаторов тока и напряжения, весьма большие для использования в электронных схемах, то применяются датчики тока (ДТ) и напряжения (ДН) – вторичные преобразователи ток ® напряжение и напряжение ® напряжение (показаны в виде блоков масштабирования). Остальные фунциональные узлы схемы уже известны.
На рисунке 10.7 приведена структурная схема ЦСМ типа “АЛЬФА ABB VEI Metronica”.
ДН – делитель напряжения; ДТ – делитель тока
Рисунок 10.7 – Структурная схема ЦЭС
Важным параметром любого энергообъекта является расход электрической энергии, который определяется следующей математической формулой
В ЛИС измерение расхода энергии производится интегрирующими приборами – счётчиками индукционной системы (см. рисунок 10.8)
Индукционный счётчик (см. рисунок 10.8,а) содержит два неподвижных электромагнита 1 – магнитопроводы с катушками: токовый (нижний) и напряженческий (верхний). Токовая катушка включается в разрез провода с контролируемым током, а напряженческая – параллельно нагрузке с контролируемой мощностью.
Подвижная система – алюминиевый тонкий диск на оси, связанной червячной передачей с цифровым механическим счётчиком барабанного типа cостоящего из ряда дисков, с нанесёнными на них цифрами.
 |
а)

б) в)
Рисунок 10.8 – Схематическое устройство однофазного счётчика индукционной системы (а); токи резания в его диске (б); схема включения в электрическую сеть
Диск вращается в зазоре полюсных наконечников электромагнитов.
Электромагниты создают рабочие магнитные потоки:
токовый - ФI @ I; напряженческий
– ФU @ U
.Токовый поток пересекает диск дважды (см. рисунок 10.8,б), а поток напряжения
– один раз. При пересечении потоками диска в теле диска наводятся вихревые тока
резания iI и
iU. Происходит взаимодействие потоков и токов, в
результате чего диск вращается. При вращении на диск действует
противодействующий момент магнитоиндукционного характера за счёт постоянного
магнита, охватывающего диск. В результате воздействия двух моментов диск
вращается с постоянной скоростью, пропорциональной активной мощности. Вращение
фиксируется цифровыми барабанчиками. Счётчик имеет определённое передаточное число–1
кВт × ч ® N
оборотов,
что определяет его номинальную постоянную СW = 3600 / N Вт× с /об.
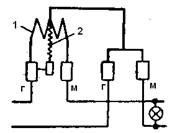 |
 |
||
Схема включения счётчика (см. рисунок 23.1,в) требует обязательного разрыва обоих проводов при присоединении к электрической сети (см. рисунок 10.9,а). Трёхфазные электросчётчики образуются путём объединения в одном корпусе 2 –х или 3 –х измерительных механизмов (см. рисунок 10.9,б).
а) б)
Рисунок 10. 9 – Схемы подключения счётчиков: однофазного в сети 220 В (а);
трёхфазного универсального 3 ´ 5 А, 3 ´ 100 В в высоковольтной сети (б)
Рисунок 10.10 – Внешний вид спереди и в разрезе однофазного
индукционного счётчика
В настоящее время измерение расхода электрической энергии производится электронными цифровыми счётчиками (см. рисунок 10.11) с цифровой индикацией (см. рисунок 10.12) и цифровым выходом, что позволяет передавать информацию по цифровым каналам.
На рисунке 10.10 показан внешний вид многофункционального электронного счётчика Альфа фирмы АВВ.

Рисунок 10.11 – Внешний вид электронного счётчика серии Альфа

Рисунок 10.12 – Дисплей счётчика – жидкокристаллический индикатор
В цифровых счётчиках достижим любой класс точности, при условии выбора соответствующей элементной базы и алгоритмов обработки информации. В простейшем случае, когда требуется лишь измерение числа импульсов, вывод информации на дисплей и защита при аварийных сбоях напряжения питания (т.е. фактически цифрового функционального аналога существующего индукционного счётчика), система может быть построена, например, на базе простейшего микроконтроллера фирмы Motorola MC68 НC05KJ1.
11 Информационно-измерительные системы расхода электрической энергии
Особенностью крупных потребителей электроэнергии, таких как нефтедобывающие компании или АО-энерго, является наличие больших расстояний между объектами и необходимость организации нескольких центров сбора информации (в составе общего информационно- измерительного комплекса).
Основной задачей, возникающей в таких системах является необходимость организации каналов связи на больших территориях и передачи данных коммерческого учёта между несколькими серверами сбора в составе системы.
Структура системы показана на рисунке 11.1.
Данная система охватывает 12 энергообъектов класса напряжения 220/110 кВ, по которым проходит граница балансовой принадлежности.
Единственным техническим решением, которое решает проблему сбора информации с объектов, удалённых друг от друга на расстояния до 600 км, при почти полном отсутствии каких-либо каналов связи, является использование спутниковой космической связи.
В целом, в системе задействованы электронные счётчики СЭТ4-ТМ02.2 (производства Нижегородского завода им. Фрунзе, РФ), контроллеры ОМЬ -40 (производства НПО “Мир”, РФ) и программное обеспечение СТМ “ОМЬ”. Передача коммерческой информации от АСКУЭ в НК «ЮКОС» осуществлена по корпоративной ЛВС, в ОАО «Томскэнерго » и в ОАО «Тюменьэнерго» по коммутируемой телефонной линии.
В целом система была спроектирована и внедрена как автоматизированная информационно-измерительная система для коммерческого учёта расхода электроэнергии АСКУЭ.
Система выполняет следующие функции (операции):
· измерение мощности и расхода электрической энергии с заданным интервалом времени;
· сбор информации путём регулярного, с заданным интервалом времени, опроса текущих показателей счётчиков, контроллеров, устройств сбора и передачи данных (УСПД) в базу данных с привязкой по адресу и времени;
· хранение информации об энергопотреблении и о поступаемой электроэнергии и о состоянии системы во встроенных архивах контроллеров и в коммерческой базе данных на сервере сбора системы с привязкой по времени;
· отображение информации по запросу пользователей о техническом (3…5 мин) оперативном контроле потребляемой (заявленной) мощности;
· отображение информации о коммерческом учёте с интервалом 30 мин.
В системе задействованы различные каналы связи: выделенные и коммутируемые телефонные линии; радиоканалы; ЛВС; ВЧ- каналы; спутниковые.
В системе могут быть использованы многофункциональные счётчики электроэнергии: СЭТ-ТМО2.2; СЭТ4-ТМ01; ПСЧ; Альфа; ЕвроАльфа; ЦЭ6822; ЦЭ6850 РФ, электросчётчики фирмы «Сайман» РК.
Многоуровневая структурная схема АСКУЭ с несколькими центрами сбора информации приведена на рисунке 13.2.
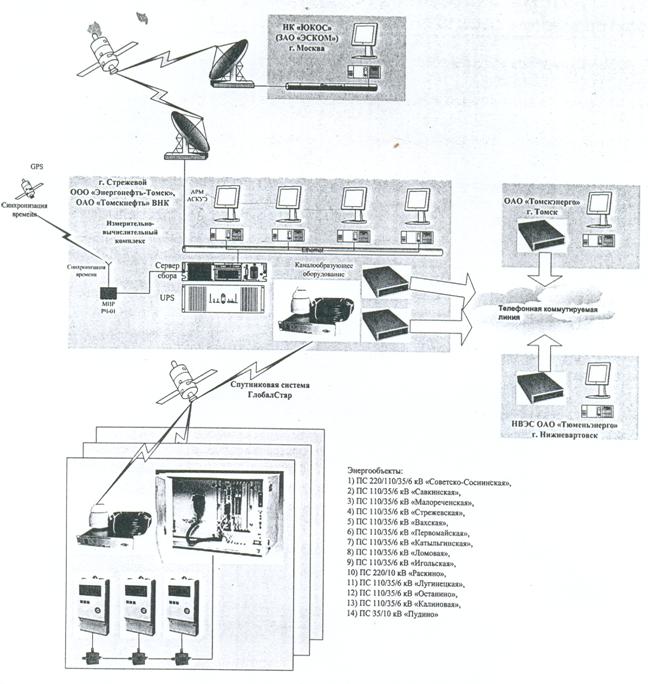
Рисунок 11.1 – Структурная схема АСКУЭ ОАО «Томскнефть»
В состав АСКУЭ входят:
· измерительные трансформаторы тока и напряжения;
· вторичные цепи измерительных трансформаторов от трансформаторов до счётчиков;
· контроллер и устройство сбора и передачи данных;
· компьютер с комплектом специализированных программ;
· специализированные программы обеспечения центра сбора информации и программное обеспечение для параметрирования электросчётчиков, контроллеров и УСПД.
Использование контроллеров на уровне энергообъектов делает возможным организацию резервных каналов связи, позволяет организовать эффективный оперативный контроль потребления/выдачи электроэнергии и мощности. Устройство сбора и передачи данных УСПД-01 позволяет дежурному персоналу контролировать непосредственно на объекте параметры потребления благодаря наличию встроенного индикатора и клавиатуры.

Рисунок 11.2 – Структурная схема многоуровневой автоматизированной
ИИС с несколькими центрами сбора информации
Контроллер обеспечивает сбор информации с цифровых счётчиков о состоянии подключённых нагрузок в режиме реального времени (мгновенные значения токов, напряжений, мощностей и параметров качества электрической энергии).
Встроенные архивы контроллеров обеспечивают хранение:
· суточных графиков нагрузок средних 30-ти минутных мощностей по каждому каналу не менее 35 суток;
· суточных графиков нагрузок средних 30-ти минутных мощностей по каждой группе не менее 3-х месяцев.
Контроллер установлен в шкафу (см. рисунок 11.3).
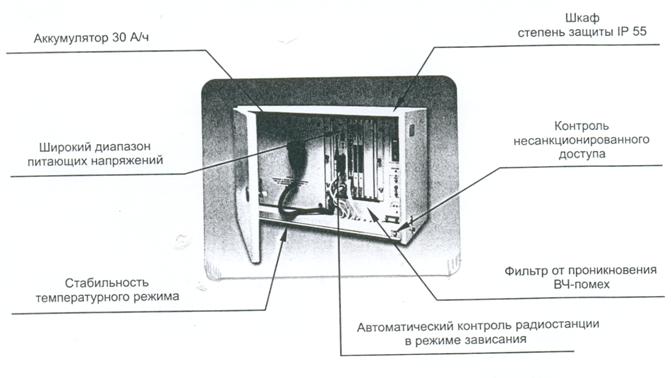
Рисунок 11.3 - Внешний вид контроллера
Данное устройство осуществляет: защиту измерительной информации и метрологических характеристик АИИС КУЭ от несанкционированного доступа или изменения; защита канала передачи данных от импульсных помех; обеспечение бесперебойного питания; преобразование интерфейса передачи данных. В шкафу объединяются отдельные компоненты АИИС КУЭ: мультиплексоры, преобразователи интерфейсов; средства связи; устройства синхронизации системного времени; оборудование для резервного питания.
Устройство сбора и передачи данных УСПД предназначено для выполнения в автоматическом режиме следующих функций:
- сбор информации со счётчиков электрической энергии и интеллектуальных датчиков по цифровым интерфейсам RS-232, RS-485;
- сбор информации со счётчиков электрической энергии, оснащённых импульсными телеметрическими выходами;
- обмен данными по интерфейсам RS-232, RS-485, Ethernet 10ВASE-T;
- обработка принятой информации в соответствии с заданной конфигурацией параметров УСПД и передача обработанной информации в центр сбора;
- автоматическая корректировка текущего времени и календарных данных счётчиков электроэнергии с цифровым интерфейсом.
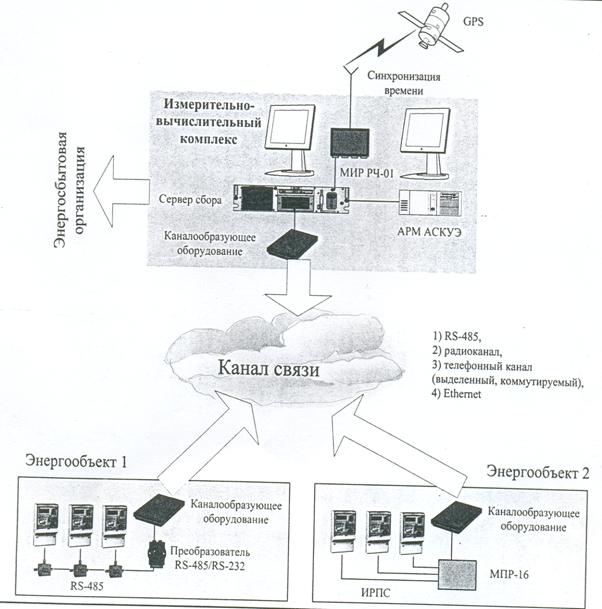
Рисунок 11.4 – Многоуровневая структурная схема автоматизированной
ИИС с прямым подключением счётчиков к центру сбора информации
Прямое подключение счётчиков к центру сбора информации рекомендуется в системах с небольшим количеством (2,3) энергообъектов и счётчиков с надёжными каналами связи и отсутствием оперативного 3…5- минутного контроля потребления/выдачи электроэнергии. В многоуровневой структурной схеме с прямым подключением счётчиков (см. рисунок 11.4) к центру сбора информации на уровне энергообъекта (электроустановки) отсутствует контроллер или УСПД.
Измерительно – вычислительный комплекс (ИВК) (центр сбора информации (ЦСИ)) – решает задачи автоматического сбора, диагностики, автоматизированной обработки и хранения информации по учёту электро-энергии, отсчёт времени МИР РЧ-01, автоматизированного сбора и обработки информации по состоянию измерительно-вычислительного комплекса электроустановки (ИВКЭ) и информационно-измерительного комплекса точки учёта (ИИК ТУ), контроля достоверности информации, а также обеспечения интерфейсов возможностью доступа к информации со стороны внешних систем.
В состав технических средств ИВК входят:
- сервер;
- оборудование связи;
- устройство синхронизации;
- специализированное программное обеспечение;
- общесистемное программное обеспечение.
Программное обеспечение имеет в своём составе модуль привязки к системе единого времени. Радиочасы МИР РЧ-01 осуществляют синхронизацию времени и обеспечивают систему данными о мировом времени, принимаемых со спутниковой навигационной системы – Global Positioning System (GPS). Прецизионный хронограф осуществляет приём сигналов мирового времени со спутниковой системы GPS и выдачу данных в специальном формате по интерфейсу RS- 232.
Для связи на уровне счётчик –УСПД осуществлены прямые соединения по стандартному цифровому интерфейсу RS-485.
При использовании телефонных каналов связи городских и ведомственных АТС применяются модемы ZyXEL
Использование радиоканала позволяет просто решить задачу передачи данных. Имеется весьма широкий спектр радиостанций, например, Motorola, Vertex и др.
Возможно использование спутниковых каналов связи через услуги оператора спутниковой связи компании ЗАО «ГлобалТел» - экслюзивный оператор глобальной мобильной и стационарной мультисервисной спутниковой системы связи «Globalstar». В этом случае следует применять спутниковые модемы, например, UALCOOM , ERICSSON и др.
В рассматриваемой АИИС КУЭ в качестве операционной системы серверов применена стандартная операционная система Windows NT/ 2000 /XP. В качестве сервера базы данных используется Microsoft SOL Server.
Параметрирование контроллера осуществляется с компьютера через интерфейс RS-232 или RS0485. Программное обеспечение ПО «Конфигуратор» совместно с контроллером настраивает УСПД на конкретные каналы связи и режимы работы.
ПО «Учёт» предназначено для конфигурирования групп учёта, отображения информации АИИС КУЭ на графиках, оперативного контроля потребляемой мощности (см. рисунок 12.5). ПО «Расчётный центр» предназначено для формирования отчётных форм, рассылки документов по электронной почте, транспортирования отчётов в стандартные приложения.
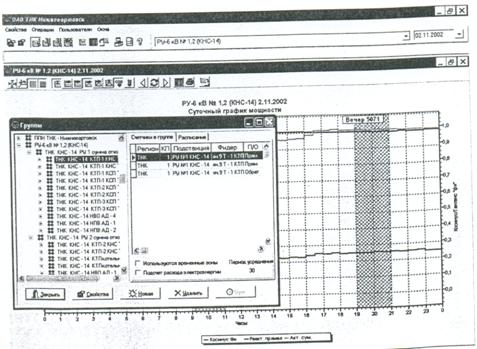 |
ПО «Мониторинг» предназначено для оперативного контроля присоединённых нагрузок в режиме реального времени (на основе данных по качеству электроэнергии, считываемых с многофункциональных счётчиков) (см. рисунок 11.6).
Рисунок 11.5 – Программное обеспечение «Учёт»
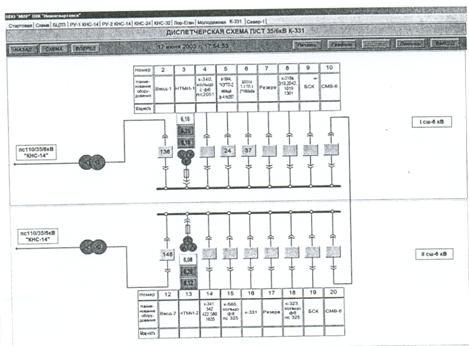 |
Рисунок 11.6 – Программное обеспечение «Мониторинг»
Список литературы
1. Хетагуров В.А. Проектирование автоматических систем обработки и управления (АСОИТ).-М.: Высш. Шк, 2006.
2. Информационно – измерительная техника и электроника: Учебник для студ. высш. учеб. заведений / [Г.Г.Раннев и др.] – М.: Изд. Центр «Академия», 2006.
3. Раннев Г.Г., Тарасенко А.П. Методы и средства измерений: Учебник для студ. высш. учеб. заведений. – М.: АС АДЕМА, 2004.
4. Харт Х. Введение в измерительную технику. - М.: Мир,1999.
5. Классен К.Б. Основы измерений. Электронные методы и приборы в измерительной технике. – М.: Постмаркет, 2000.
6. Ратхор Т.С. Цифровые измерения. Методы и схемотехника. – М.: Техносфера, 2004.