АЛМАТИНСКИЙ ИНСТИТУТ ЭНЕРГЕТИКИ И СВЯЗИ
Кафедра электроники и компьютерных технологий
ОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
Методические указания к выполнению лабораторных работ
для студентов специальности
050704 – Вычислительная техника и программное обеспечение
Алматы 2009
СОСТАВИТЕЛИ: Б.С.Байкенов, У.Т. Шанаев. Основы теории управления. Методические указания к выполнению лабораторных работ для студентов специальности 050704 – Вычислительная техника и программное обеспечение. – Алматы: АИЭС, 2009. – 34 с.
Методические указания составлены согласно Типовой учебной программе, утвержденной Министерством образования и науки Республики Казахстан, и в соответствии с требованиями ГОСО специальности, педагогико-психологических основ организации и проведения лабораторных работ. Они предназначены для ознакомления студентов с программой визуального математического моделирования VisSim, используемой при исследовании систем автоматического управления.
В методических указаниях изложены способы упрощения структурных схем, определения временных и частотных характеристик разомкнутых и замкнутых систем, а также рассматриваются основные методы анализа и синтеза непрерывных систем управления с заданными показателями качества регулирования. Затронуты вопросы определения устойчивости, анализа и синтеза цифровых и нелинейных систем.
Методические указания составлены в целях закрепления лекционного материала и применения теории управления в задачах инженерного проектирования систем автоматического управления.
ВВЕДЕНИЕ
Основной целью методических указаний является закрепление теоретических знаний и приобретение студентами практических навыков для решения задач по разработке и проектированию систем автоматического управления. Для решения сложных задач, таких как выбор элементов по заданным характеристикам, выполнение принципов построения структурной схемы в соответствии с выбранным законом управления, использование методов анализа системы на устойчивость, определение частотных и временных характеристик системы была использована программа визуального математического моделирования VisSim..
Название системы VisSim происходит от Visual Simulation – визуальная симуляция или визуальное моделирование, разработана фирмой Visual Solution Inc. Система VisSim предназначена для моделирования различных систем, включая линейные и нелинейные, непрерывные и дискретные, одномерные и многомерные.
Библиотека блоков, представленная в позиции Blocks меню и инструментальными панелями, состоит из:
1.Animation – animate, lineDrow;
2.Annotation – comment, date, label, variable и т.д.;
3. Arithmetic – 1/x, -x, *, /, abs, gain, pow, sign, summingJunction ;
4. Boolean (алгебра логики)- >, <, ==, =>, <=, and, or, not, xor;
5. DDE(связь между программами);
6. Integration (интегрирование) – integrator, limitedIntegrator, resetIntegrator;
7. Linear system – stateSpase, transferFunction;
8. Non linear (нелинейные системы) case, crossdetect, deadband, limit, max, min, merge, relay;
9. Optimization – constraint, cost, unknown, parameterunknown ;
10. Random Generation (генератор случайных чисел) – gaussian, uniform, PRBS;
11. Real Time (реальное время);
12. Signal Consumer (блоки отображения выходного сигнала) – display, plot, meter, histogram, stripChart;
13. Signal Producer (входные сигналы) – const, ramp, step, sinusoid, parabola;
14. Time Delay (время запаздывания) – timeDelay, unitDelay;
15. Transcendental (функции) – sin, cos, exp, ln, log10, tan, atan2, asin, acos;
16. Embed – не используются;
Система моделирования позволяет:
- изменять параметры блоков;
- изменять параметры моделирования, включая алгоритм интегрирования;
- контролировать значения входных и выходных сигналов с помощью устройств отображения информации.
При моделировании VisSim численно интегрирует уравнения, содержащиеся в блок-диаграмме на заданном конечном интервале с фиксированным числом шагов. Устанавливается начало и конец интервала, шаг интегрирования, а также метод интегрирования с указанием этих параметров в окне Edit меню командой Simulation Properties.
Начальные значения параметров блоков и метод интегрирования устанавливаются до момента запуска моделирования в диалоговом окне Block Properties, вызываемом нажатием правой кнопкой мыши (пкм).
В VisSim используется численное интегрирование дифференциальных и разностных уравнений различными методами: Эйлера, трапеций, Рунге-Кутта 2, 4 и 5 порядка, , адаптивный алгоритм Булича-Стоера и обратный Эйлера. По умолчанию используется метод Рунге-Кутта 2-го порядка, удовлетворяющий по скорости и точности вычислений.
VisSim бурно развивается, на сайте разработчика www.vissim.com выставлена версия VisSim 6.0 и пакет расширения Vissim – Add Ons для систем автоматики, а пакет VisSim/Com – для систем телекоммуникации и связи.
1 ЛАБОРАТОРНАЯ РАБОТА № 1. Моделирование систем со сложным соединением звеньев
1. Цель работы: исследование систем с параллельно-последовательным и параллельно-встречным соединением звеньев, а также приобретение навыков определения передаточных функций разомкнутых и замкнутых систем с управляющим и возмущающим воздействиями.
2. Задание
2.1 Исследования ПФ замкнутой системы без возмущающего воздействия
а) Смоделировать систему со сложным соединением звеньев.
Значения ПФ звеньев: W1 = 2; W2 = 3; W3 = 1/(0.1s + 1); W4 = 1/(0.2s + 1);
W5 = 2; W6 = 1/s.

Рисунок 1.1 – Схема САУ со сложным соединением звеньев
Вставить блоки из меню в соответствии с рисунком 1.1 и соединить между собой: лкм с выхода одного блока на вход другого.
Для установки параметров блоков Const необходимо:
- поставить курсор на каждый блок и при нажатии на пкм появится окно Const Properties - установить значения равное 2 и 3.
Блок ПФ звена находится в меню Blocks – Linear System – Trasfer Function (ПФ) –лкм (левая кнопка мыши).
Параметры блока ПФ устанавливаются наведением курсора на блок и нажатием пкм. В окне свойств блока:
- выделить Polynomial;
- Numerator (числитель) – набрать цифру 1;
- Denominator (знаменатель): пробел выбивает по умолчанию букву s, знак “+” не ставится. Например, в знаменателе такое уравнение 0.1s + 1. Тогда следует набить подряд: 0.1-пробел-1;
- Gain – коэффициент усиления;
- нажать ОК.
Параметры блока Plot (осциллограф) устанавливаются в окне Plot properties:
- активизируйте Fixed Bounds (сделать «галочку» лкм);
- нажать кнопку Axis;
- в окне У Upper Bound вставьте цифру 2 (верхний предел по У);
- в окне У Lower Bound вставьте цифру -1 (нижний предел по У);
- в окне Х Upper Bound и вставить цифру 3 (верхний предел по Х).
Рисунок 1.2 – Вид кривой разгона замкнутой системы
б) Смоделировать эквивалентную схему системы.
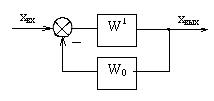
Рисунок 1.3 – Эквивалентная схема САУ
Рисунок 1.4 – Вид кривой разгона эквивалентной схемы системы
в) Определить ПФ замкнутой системы и получить кривую разгона.

Рисунок 1.5 – Вид кривой разгона замкнутой системы
Из полученных графиков переходного процесса, приведенных на рисунках 1.2,1.4,1.5, видно, что ПФ систем одинаковы.
2.2 Исследование ПФ замкнутой системы с возмущающем воздействием.
Смоделировать схему, показанную на рисунке 1.6, и получить:
- кривую разгона при постоянном возмущающем воздействии f = 1;
- кривую разгона при постоянном входном сигнале хвх = 1.
Параметры звеньев указаны в таблице 1.1.
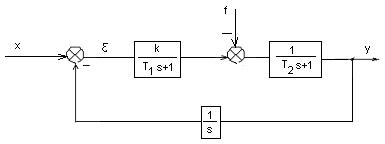
Рисунок 1.6 – Структурная схема системы с возмущающим воздействием
Т а б л и ц а 1.1 – Параметры замкнутой системы
|
№ варианта |
k |
Т1 |
Т2 |
|
1 |
2 |
0.2 |
0.3 |
|
2 |
5 |
0.8 |
0.1 |
|
3 |
8 |
0.9 |
0.2 |
|
4 |
10 |
0.3 |
0.8 |
|
5 |
4 |
0.4 |
0.5 |
|
6 |
7 |
0.1 |
0.6 |
3. Содержание отчета:
- цель работы;
- формулы ПФ звеньев и систем;
- схемы моделирования и графики п.2.1 , п.2.2;
- выводы.
4. Контрольные вопросы
1) Чем отличаются ПФ последовательных звеньев от параллельных?
2) Чему равна ПФ замкнутой системы со стороны задающего воздействия?
3) Чему равна ПФ замкнутой системы со стороны возмущающего воздействия?
4) Чему равна ПФ следящей системы?
5) Какие достоинства и недостатки регулирования по отклонению?
6) Какие достоинства и недостатки регулирования по возмущению?
2 ЛАБОРАТОРНАЯ РАБОТА 2. Исследование динамических характеристик типовых звеньев
1. Цель работы: исследование временных и частотных характеристик типовых звеньев систем автоматического управления.
2. Порядок выполнения работы
1). Определение временных характеристик простейших звеньев.
а). Собрать схему пропорционального звена W(s) = k, при k = 3 (рисунок 2.1).
Блок step генерирует единичную ступенчатую функцию, которая часто используется в качестве возмущающего воздействия для получения переходной характеристики системы h(t), называемой кривой разгона. Работа блока соответствует выражению
y = Am 1(t – td),
где 1(t – td) – единичная ступенчатая функция; t – текущее время моделирования (не путать с реальным временем); td – время задержки ступени; Am – амплитуда ступени.
Рисунок 2.1 – Переходная характеристика пропорционального звена
б). Собрать схему интегрирующего звена W(s) = k/s, при k = 2 (рисунок 2.2).

Рисунок 2.2 – Переходная характеристика интегрирующего звена
Вставив блок step и блок интегратора 1/s, расположенных на панели инструментов, необходимо правильно соединить между собой: лкм с выхода блока step на вход 1/s. Затем, вставив блок Plot , установить его параметры:
- установить курсор на блок Plot и щелкнуть пкм, появится диалоговое окно Plot properties;
- активизируйте Fixed Bounds (сделать «галочку» лкм);
- нажмите кнопку Axis;
- в окне Y Upper Bound вставьте цифру 40 (верхний предел по Y);
- в окне X Upper Bound и вставить цифру 40 (верхний предел по X).
Далее соединить выход блока интегратора с входом блока Plot – цвет входа означает цвет графика.
Для установки шага и метода интегрирования в блоке меню Simulate выбрать команду Simulation Properties:
- в поле Range установить Start = 0;
- в поле Range установить Step Size = 0.01;
- в поле Range установить параметр End = 40;
- в поле Integration Method выбирается алгоритм.
По умолчанию выбирается метод Рунге-Кутта 2 порядка.
2). Определение временных характеристик звеньев 1-го порядка.
а). Собрать схему инерционного звена W(S) = k/(TS + 1) при k = 2, T = 5с. (рисунок 2.3).

Рисунок 2.3 – Схема инерционного звена 1 порядка
Вызов блока передаточной функции осуществляется через блок меню Blocks – Linear Systems – Trasfer Function (передаточная функция) – лкм.
Установка коэффициентов передаточной функции звена:
- установить курсор на блоке ПФ и нажать правую кнопку мыши;
- выделить Polynomial;
- Numerator (числитель) – набрать необходимую цифру;
- Denominator(знаменатель): пробел выбивает по умолчанию букву S, знак “+” не ставится. Например, в знаменателе такое уравнение 10s2 + 2s + 1. Тогда следует набить подряд: 10-два пробела-2-пробел-1.
-Gain – коэффициент усиления ПФ;
- нажать ОК.
Ранее выбранный метод интегрирования и размер шага в блоке Simulate можно оставить без изменения.
В блоке plot - в окне Y UPPER Bound вставьте цифру 2 (верхний предел по Y).
б). Собрать схему инерционно-дифференцирующего звена W(s) = ks/(Ts + 1) при k = 10, T = 5с. (рисунок 2.4).

Рисунок 2.4 –Кривая разгона инерционно-дифференцирующего звена
3). Определение временных характеристик звеньев 2-го порядка.
а).
Собрать схему апериодического звена 2-порядка
![]() при
к = 2, Т1 = 0,2с, Т2 = 0,3с (рисунок 2.5).
при
к = 2, Т1 = 0,2с, Т2 = 0,3с (рисунок 2.5).

Рисунок 2.5 – Кривая разгона апериодического звена 2-го порядка
б). Собрать схему колебательного звена W(s) = k./(T2 s2 + 2ξTs +1) при k = 2, T = 3,16c, ξ = 0,316 (рисунок 2.6).
Рисунок 2.6 – Кривая разгона колебательного звена
в). Собрать схему консервативного звена W(s) = k./(T2 s2 +1) при k = 2, T = 1c, ξ = 0 (рисунок 2.7).

Рисунок 2.7 – Кривая разгона консервативного звена
4). Определение временных характеристик особых звеньев.
а). Собрать схему неминимально-фазового звена 1-го порядка W(s) = k./(Ts - 1) при k = 2, T = 5c (рисунок 2.8).
Рисунок 2.8 – Кривая разгона неминимально-фазового звена
б).
Собрать схему запаздывающего звена ![]() (рисунок 2.9).
(рисунок 2.9).
Блок задержки ![]() находится в меню Blocks – Time Delay –
timeDelay, а время задержки выставляется через блок
const,
подсоединяемый к входу t блока задержки. Например, блок задержки с временем
τз = 1с имеет вид:
находится в меню Blocks – Time Delay –
timeDelay, а время задержки выставляется через блок
const,
подсоединяемый к входу t блока задержки. Например, блок задержки с временем
τз = 1с имеет вид:
Рисунок 2.9 – Кривая разгона запаздывающего звена
3. Содержание отчета:
- цель работы;
- краткие теоретические сведения;
- схемы и кривые разгона типовых звеньев;
- выводы.
4. Контрольные вопросы
1) Что такое кривая разгона?
2) Что такое передаточная функция?
3) Как строится АФЧХ?
4) Чем отличается АЧХ от ФЧХ?
5) Чем отличается переходная функция от импульсной?
6) Чем отличатся статические характеристики от динамических?
3 ЛАБОРАТОРНАЯ РАБОТА 3. Исследование устойчивости линейных систем по критерию Михайлова
1. Цель работы: исследование влияния полюсов передаточной функции замкнутой системы на устойчивость и построение годографа Михайлова.
2. Порядок выполнения работы
1). Собрать схему замкнутой системы с заданными параметрами и получить переходную характеристику (рисунок 3.1).
Рисунок 3.1 – Переходная характеристика замкнутой системы
2). Получить расчетным путем ПФ замкнутой системы и собрать схему (рисунок 3.2).
Рисунок 3.2 – Переходная характеристика замкнутой системы
3). Осуществить расчет действительной и мнимой части характеристического уравнения и собрать схему для построения кривой Михайлова (рисунок 3.3).
Характеристическое уравнение замкнутой системы принимает вид
0,06s3 + 0,5s2 + s + 1 = 0
Осуществив замену s = jω, получим действительную и мнимую часть функции Михайлова
Real = X = a0 – a2ω2 = 1 – 0,5 ω2 и Im = Y = a1ω – a3ω3 = ω – 0,06ω3.
Изменяя частоту ω от 0 до ∞ с помощью блока ramp, получим кривую Михайлова (рисунок 3.3). В окне свойств блока pow устанавливается необходимая степень: 2 или 3.
Рисунок 3.3 – Кривая Михайлова замкнутой системы
3. Задание
1). В прямой канал схемы замкнутой системы, приведенной на рисунке 3.1, добавить инерционное звено с постоянной времени Т3 и коэффициентом усиления К.
2). Построить годограф Михайлова для замкнутой системы, параметры звеньев которой указаны в таблице 3.1.
Т а б л и ц а 3.1 – Параметры системы
|
№ варианта |
1 |
2 |
3 |
4 |
5 |
6 |
|
К |
4 |
6 |
8 |
1 |
3 |
6 |
|
Т1 |
0,6 |
0,3 |
0,9 |
0,2 |
0,5 |
0,7 |
|
Т2 |
0,2 |
0,5 |
0,3 |
0,8 |
0,3 |
0,7 |
|
Т3 |
0,3 |
0,8 |
0,2 |
0,5 |
0,9 |
0,3 |
4. Содержание отчета:
- цель работы;
- теория;
- схема системы с переходной характеристикой (кривая разгона);
- годограф Михайлова;
- выводы.
5. Контрольные вопросы
1).В чем заключается критерий Михайлова?
2).На какой угол повернется вектор (jω – рm) при изменении ω от - ∞ до +∞?
3).Как изменится годограф при добавлении отрицательных полюсов?
4). Как изменится годограф при добавлении положительных полюсов?
5).Что определяет квадрант, в котором заканчивается кривая Михайлова?
6).В чем заключается следствие критерия Михайлова?
4 ЛАБОРАТОРНАЯ РАБОТА 4. Исследование устойчивости систем по критерию Найквиста
1. Цель работы: приобретение навыков по определению АЧХ и ФЧХ, а также определение устойчивости системы по критерию Найквиста и виду ЛАЧХ разомкнутой системы.
2. Порядок выполнения работы
1). Собрать заданную замкнутую систему и получить кривую разгона при К = 0,5 и К = 6,1.

Рисунок 4.1 – Кривая разгона устойчивой замкнутой системы при К = 0.5
Блок генератора постоянных сигналов slider находится в блоке меню Blocks-Signal producer- slider. В схеме он выполняет функции регулятора САУ.
Рисунок 4.2 – Кривая разгона неустойчивой замкнутой системы при К = 6.1
2). Снять АЧХ и ФЧХ разомкнутых систем при К = 0,5.
Для этого необходим блок для измерения отношения амплитуд и фаз mag_has, который находится в блоке меню Diagrams-Toolbox-Tools-Magnitude Phase. Затем нужно снять его копию и поместить в окно основной схемы: выделение лкм – Edit-Copy – закрыть окно Magnitude Phase. В окне основной программы сделать вставку блока mag_has: Edit-Paste. Установив в блоке Sin амплитуду 1, Td = 0,5 с и изменяя в нем частоту, записать в виде таблицы измеренные значения A(ω) и φ(ω). Важно поймать частоту, при которой отношение амплитуд будет равно 1 – показания верхнего индикатора.
Рисунок 4.3 – АЧХ и ФЧХ разомкнутой системы при f = 1.6 рад/с
3). Снять АЧХ и ФЧХ разомкнутых систем при К = 6.1, т.е. повторить п.2.
4. Содержание отчета:
- цель работы;
- теория;
- структурная схема замкнутой системы;
- АЧХ и ФЧХ разомкнутых систем;
- ЛАЧХ устойчивой и неустойчивой систем;
- выводы.
5. Контрольные вопросы
1). Какой критерий лежит в основе определения устойчивости по виду ЛАЧХ?
2). Что такое частота среза?
3). Сформулировать условия устойчивости для систем с АФХ первого рода.
4). Сформулировать условия устойчивости для систем с АФХ второго рода.
5). Чему равна ПФ запаздывающего звена?
6). Что такое критическая частота ωкр системы с запаздыванием?
5 ЛАБОРАТОРНАЯ РАБОТА 5. Исследование качества регулирования систем
1. Цель работы: исследование влияния параметра П-регулятора на устойчивость системы с заданными показателями качества регулирования.
2. Порядок выполнения работы.
а). Смоделировать заданную структурную схему системы и получить графики переходных процессов ε(t) и кривой разгона h(t) при отсутствии возмущения f = 0 c заданными показателями качества (рисунок 5.1).

Рисунок 5.1 – Модель системы при Кp = 1.9 и f = 0
2). Используя модель системы, получить графики переходных процессов ε(t) и кривой разгона h(t) при возмущения f = 1 c заданными показателями качества (рисунок 5.2).
Рисунок 5.2 – Графики переходных процессов по заданию ε(t) и кривой разгона h(t) при f = 1
б). Изменяя Кр с помощью блока slider, получить графики переходных процессов ε(t) и кривой разгона h(t) при возмущении f = 1 системы, находящейся на границе устойчивости (рисунок 5.3).

Рисунок 5.3 – Модель системы, находящейся на границе устойчивости
в). Получить графики переходных процессов R(t) и кривой разгона h(t) устойчивой системы при постоянном задающем воздействии х = 1 c заданными показателями качества (рисунок 5.4).

Рисунок 5.4 - Графики переходных процессов по возмущению R(t) и кривой разгона h(t) при х = 1
По характеру существенно отличаются переходные процессы по заданию и возмущению (рисунок 5.1 и рисунок 5.4 соответственно). Первые стремятся от прежнего установившегося значения (условно принимаемого за ноль) к новому становившемуся значению. Переходные процессы по возмущению f должны стремиться к прежнему установившемуся значению, т.к. регулятор должен компенсировать внешние возмущения полностью в астатической системе или с точностью до σст в статической.
Во всех моделях используется блок фиксации
соединения wirePositioner, который позволяет удобно располагать блоки
диаграммы. Блок находится в меню Blocks -
Annotation –
wirePositioner. ![]()
Еще один новый блок используется в данных моделях – блок slider, генерирующий постоянный сигнал, величину которого можно менять, плавно перемещая движок регулятора (слайдера) с помощью лкм. Блок slider находится в меню Blocks – Signal Producer – slider.
Рисунок 5.5 – Условное обозначение блока slider
После установки курсора на блок и нажатия пкм, появляется окно свойств, в котором задаются в данных моделях:
- Current Value (текущее значение, по умолчанию 0);
- Upper Bound (верхний предел 10, по умолчанию 100);
- Lower Bound (нижний предел 0, по умолчанию -100).
- Increment (приращение, по умолчанию 1).
Для изменения сигнала с произвольным приращением с помощью лкм перемещается движок регулятора.
3. Содержание отчета:
- цель работы;
- вывод условия устойчивости системы через Кр по критерию Гурвица;
- графики и схемы;
- выводы.
4. Контрольные вопросы
1) Какими показателями оценивается качество переходных процессов?
2) Что представляет собой время регулирования?
3) Что называется перерегулированием?
4) Чему равно приемлемое число колебаний N?
5) Какие методы оценки качества являются прямые?
6) Какое основное преимущество косвенных методов оценки качества?
6 ЛАБОРАТОРНАЯ РАБОТА № 6. Моделирование типовых законов регулирования
1. Цель работы: исследование типовых законов регулирования и синтеза регуляторов.
2. Задание
Необходимо определить параметры П-регулятора, обеспечивающий устойчивость системы и требуемое качество регулирования. САУ состоит из объекта управления ОУ с передаточной функцией
![]()
исполнительного устройства ИУ с передаточной функцией
![]()
и регулятора с передаточной функцией Wрег (s).
Структурная схема следящей системы с ООС приведена на рисунке 6.1.
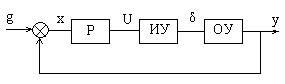
Рисунок 6.1 – Структурная схема следящей системы
3. Порядок выполнения работы
а). Смоделировать следящую систему с параметрами Т1 = 1с; Т2 = 2с; Т3 = 3с и Wрег (s) = К.
Критический коэффициент передачи П-регулятора по критерию Гурвица равен:
Ккр = (1 + τ2 + τ3) (1 + 1/τ2 + 1/τ3) – 1 = 11 – 1 = 10,
где τ2 = Т2/T1 = 2; τ3 = Т3/T1 = 3.
Изменяя коэффициент передачи К < 10 П-регулятора, добиться устойчивости и требуемого качества регулирования системы.

Рисунок 6.2 – Устойчивая система при Wрег (s) = К = 6.2
Показатели качества регулирования:
- точность ∆ = 0,1Y0 ;
- перерегулирование σ <30%.
2) Не изменяя схемы следящей системы, установить ПИ-регулятор с параметрами К = Var и Ти = 0.1с (рисунок 6.3).
Рисунок 6.3 – Следящая система с ПИ-регулятором
б). Собрать следящую систему (рисунок 6.4) и проверить ошибку воспроизведения задающего сигнала.
Рисунок 6.4 – Схема следящей системы
в) Включить в схему ПИ-регулятор и сравнить ошибки воспроизведения входного задающего сигнала (рисунок 6.5).
Блок PI находится в меню Diagrams-Toolbox-Controls-PI. Параметры настройки осуществляются через блоки Variable, но строго по соответствующему названию – Proportional Gain и Integral Gain.
Рисунок 6.5 – Схема следящей системы с ПИ-регулятором
г) Включить в схему ПИД-регулятор и сравнить ошибки воспроизведения задающего сигнала.
Блок PID находится в меню Diagrams-Toolbox-Controls-PID. Сумматор вместе с инвертирующим (отрицательным) входом входит в состав блока, поэтому в схеме он отсутствует.
Рисунок 6.6 – Схема следящей системы с ПИД-регулятором
Как видно из графика ошибка воспроизведения управляющего сигнала полностью отсутствует. С помощью блока Variable можно осуществить изменение параметров ПИД-регулятора, строго соблюдая названия коэффициентов ПФ. Параметры ПИД-регулятора по умолчанию К = 10, Ти = 1с, Тд = 0,1с.
Рисунок 6.7 – Параметры настройки ПИД-регулятора
4. Содержание отчета:
- цель работы;
- ПФ регуляторов;
- расчеты, схемы и графики;
- выводы.
5. Контрольные вопросы
1) Какие существуют законы регулирования?
2) В чем заключаются
недостатки П-регулятора?
3) В чем заключается достоинство ПИ-регулятора?
4) Как практически осуществляется настройка регуляторов?
5) В чем заключается критерий Вишнеградского?
6) Какое основное преимущество имеет ПИД-регулятор?
7 ЛАБОРАТОРНАЯ РАБОТА № 7. Исследование динамических характеристик цифровых систем
1. Цель работы: исследование временных и частотных характеристик цифровых БИХ-фильтров, а также ознакомление с возможностями VisSim при моделировании цифровых систем.
2. Порядок выполнения работы.
1). Определить временные характеристики БИХ-фильтра непрерывных и цифровых сигналов.
а) БИХ-фильтр с запаздыванием описывается передаточной функцией непрерывных сигналов:
![]()
с параметрами К = 2, Т1 = 2, Т2 = 3, Td = 2.
Кривая разгона БИХ-фильтра с заданной ПФ непрерывных сигналов имеет вид, показанный на (рисунок 7.1).
Рисунок 7.1 – Кривая разгона БИХ-фильтра
б) Дискретная ПФ БИХ-фильтра получается путем табличного перехода из s в z и принимает вид:

где Т = 0.1с - шаг квантования.
Схема дискретной ПФ БИХ-фильтра имеет вид

Рисунок 7.2 – Кривая разгона БИХ-фильтра с дискретной ПФ
Блок цифровой ПФ находится там же, где аналоговая. Коэффициент масштабирования Gain в блоке свойств ПФ равен 0.01. В поле Discrete сделать отметку (переход на z-функции), затем установить интервал времени дискретизации dT = 0.01.
2) Определить временные и частотные характеристики цифрового ФНЧ.
![]()
а) Временные характеристики цифрового ФНЧ.
Рисунок 7.3 – Кривая разгона цифрового ФНЧ
Выход фильтра можно представить как
y(z) = x(z) + 0,2x(z)z -1 + 0,9y(z)z -1.
Блок ![]() можно создать из блоков: Регистр Задержки
(Blocks – Time Delay – unitDelay) и блока константы
можно создать из блоков: Регистр Задержки
(Blocks – Time Delay – unitDelay) и блока константы ![]() . Выделить и создать сложный блок с
именем: z^-1. Тогда схема фильтра будет иметь вид
. Выделить и создать сложный блок с
именем: z^-1. Тогда схема фильтра будет иметь вид

Рисунок 7.3 – Кривая разгона цифрового ФНЧ
б) Получить АЧХ фильтра НЧ при f = 0.1, 10, 100 рад/с, используя блок mag_phas. Адрес блока в меню Diagrams-Toolbox-Tools-Magnitude Phase.
3. Содержание отчета:
- цель работы;
- кривая разгона фильтра НЧ и АЧХ;
- выводы.
4. Контрольные вопросы:
1). Что такое импульсное звено?
2). Чем отличается импульсная САУ от аналоговой?
3). Какую функцию выполняет формирующего звена?
4). Чему равна ПФ приведенной непрерывной части системы?
5). Почему для описания цифровых систем применяют z-преобразование?
8 ЛАБОРАТОРНАЯ РАБОТА 8. Исследование устойчивости цифровых систем
1. Цель работы: исследование влияния параметров замкнутой цифровой системы на устойчивость путем математического моделирования на VisSim.
2. Порядок выполнения работы
Дана следящая цифровая система, структурная схема которой имеет вид

Рисунок 8.1 - Структурная схема следящей цифровой системы
На рисунке 8.1 представлена исходная цифровая замкнутая САУ без квантования по уровню, где WНЧ – ПФ непрерывной части. ПФ приведенной непрерывной части WПНЧ получается путем перемножения ПФ непрерывной части и знаменателя ПФ АИМ – 1/р.

В соответствии с таблицей z-преобразования, получим ПФ приведенной непрерывной части

где d = ехр(-Ти /Т1).
Учитывая, что в z-преобразовании z = ехр(-рТ), тогда ПФ формирующего звена будет равна
![]()
Дискретная ПФ разомкнутой системы будет равна
![]()
После умножения на z2/z2, получим
![]()
ПФ замкнутой цифровой системы равна
![]() (8.1)
(8.1)
Характеристическое уравнение замкнутой системы примет вид
![]() (8.2)
(8.2)
где ![]()
Осуществив подстановку в
формулу (6) вместо ![]() , получим новое характеристическое
уравнение в w-преобразованиях
, получим новое характеристическое
уравнение в w-преобразованиях
![]()
По критерию Шура-Кона для устойчивости системы коэффициенты характеристического уравнения должны быть положительными
 (8.3)
(8.3)
Подставляя в (7) а1 и а0 , получим условия устойчивости
![]()
![]()
![]()
Из теории доказано, что функции kпр1 ∙ Ти и kпр2 ∙ Ти , зависящие от Ти/Т1 , приблизительно равны 2. Тогда можно считать, что
![]()
Это выражение показывает, что предельный коэффициент усиления устойчивой системы обратно пропорционален длительности импульса форсирующего звена (модулятора) Ти.
Таким образом, для устойчивости следящей системы необходимо, чтобы коэффициент усиления непрерывной части находился в пределах
![]() (8.4)
(8.4)
3. Задание
1). По заданным Т1 = 1с и Ти = 0,2с находим d = exp(-Ти/Т1) = 0,8187, kпр = 10 и по формуле (8.1) получим выражение для ПФ заданной следящей системы
![]() (8.5)
(8.5)
2). Изменяя k = 1, 5, 10 и внося эти значения в (8.5), получить ПФ и графики кривой разгона.
Рисунок 8.2 – Кривая разгона системы при К = 1

Рисунок 8.3 – Кривая разгона системы при К = 5
3). Разделим (8.5) на z2 и получим ПФ системы
![]() (8.6)
(8.6)
а).Составить схему по этой ПФ, используя составной блок с именем z^-1 и временем импульса Ти = 0,2с. Для создания блока z^-1 в меню Blocks-Time-unitDelay достаем блок 1/z, подсоединяем к нему на вход b блок pulse train, находящийся на панели инстументов, и выставляем к нем, в строке time between Pulses – Ти = 0,2с. Затем выделяем блоки и в меню Edit-Creat Compound Block открывается окно своств, в котором набирается имя z^-1.
![]()
б).Плавно изменяя с помощью блока slider коэффициент k, получить кривые разгона с наилучшими показателями качества регулирования.

Рисунок 8.4 – Кривая разгона системы при К = 3,3
4. Содержание отчета:
- цель работы;
- краткие сведения из теории;
- схемы и графики;
- выводы.
5. Контрольные вопросы
1).Чему равна ПФ замкнутой импульсной системы?
2).Чему равен выходной сигнал замкнутой импульсной системы, выраженный в разностном уравнении?
3).Действителен ли критерий Найквиста для импульсных систем?
4).Что такое w-преобразование и когда оно применяется?
5).Что представляет собой абсолютная и относительная псевдочастота?
6).Основное достоинство и преимущество критерия Шура-Кона?
9 ЛАБОРАТОРНАЯ РАБОТА 9. Исследование особенностей нелинейных систем
1. Цель работы: исследование временных характеристик нелинейной замкнутой системы путем математического моделирования.
2. Порядок выполнения работы.
1). По заданной ПФ линейной части системы, собрать схему замкнутой нелинейной системы с положительной обратной связью (ПОС). Нелинейным элементом (НЭ) является блок ограничения с порогом Dx = ±10.
Рисунок 9.1 – Кривая разгона замкнутая линейной системы с ПОС

Рисунок 9.2 – Кривая разгона замкнутой нелинейной системы с блоком ограничения при Dх = ±10
Как видно из диаграммы примерно на 10-й секунде возникают устойчивые автоколебания, т.е. используя блок ограничения можно имитировать работу генератора.
2) Не изменяя ПФ линейной части, собрать замкнутую линейную систему с отрицательной обратной связью (ООС) и получить кривую разгона.
Рисунок 9.3 – Кривая разгона замкнутая линейной системы с ПОС
3). Не изменяя ПФ разомкнутой системы, вставить релейный блок relay и получить кривую разгона.
Рисунок 9.4 – Кривая разгона нелинейной системы с релейным блоком и нулевой зоной нечувствительности deadBand = 0
Из диаграммы видно, что процесс превратился из апериодического в периодический с отрицательными полуволнами.
4). Исследовать влияние величины входного гармонического сигнала на нелинейную систему с релейным элементом.

Рисунок 9.5 – Реакция нелинейной системы с релейным блоком при гармоническом сигнале Um = 1 и f = 1рад/с
Изменяя амплитуду синусоидального сигнала Um = 0.1, 10, 100, определить изменение коэффициент передачи системы.
В отчете привести зависимость К = f(хвх ).
5). Повторить п.4 при хвх = 1 и частотах f = 0,1; 1; 10.
В отчете привести частотную зависимость А(ω).
3. Содержание отчета:
- цель работы;
- схемы и графики;
- выводы.
4. Контрольные вопросы
1). Какая система называется нелинейной?
2). Что означает неоднозначность характеристики НЭ?
3). Что подразумевается под участком насыщения НЭ?
4). Чем обусловлена зона нечувствительности НЭ?
5). Какие объекты обладают гистерезисными характеристиками?
6). Какой вид имеет релейная характеристика?
10 ЛАБОРАТОРНАЯ РАБОТА 10. Исследование устойчивости нелинейных систем по фазовым портретам
1. Цель работы: исследование устойчивости нелинейной замкнутой системы по виду фазового портрета.
2. Порядок выполнения работы
1). Смоделировать следящую линейную систему управления двигателем с Тм = 0.1с .
Рисунок 10.1 - Графики отклонения от заданного угла, скорости двигателя и угла положения линейной системы
2). Смоделировать нелинейную следящую систему управления двигателем с двухпозиционным релейным элементом.

Рисунок 10.2 - Графики отклонения от заданного угла, скорости двигателя и угла положения НС
Как видно из графиков при малых отклонениях Х (левый plot) возникают устойчивые автоколебания скорости (синий цвет) и угла (красный цвет на правом plote).
3). При подаче входного синусоидального сигнала с Um = 1В и f = 0.1 рад/с и отметив опцию ХУ в окне свойств plot с соответствующими пределами, получить фазовый портрет нелинейной системы.
Рисунок 10.3 – Фазовый портрет НС при f = 0.1рад/с, А = 1 и deadBand = 0
Рисунок 10.4 – Фазовый портрет НС при f = 0.1рад/с, А = 1 и deadBand = 0.1
3. Содержание отчета
- цель работы;
- схемы и графики;
- выводы.
4. Контрольные вопросы
1) Что означает термин устойчивости в малом, большом и целом для НС?
2). Какой режим определяет особая точка?
3). Что называется фазовым портретом?
4). Как определяется устойчивость системы по виду фазового портрета?
5). Что означает устойчивый предельный цикл?
6). Что означают точки излома фазовой траектории?
СПИСОК ЛИТЕРАТУРЫ
1. Анхимюк В.Л. Теория автоматического управления. – Мн.: Дизайн ПРО, 2002. – 352 с.
2. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1975. – 767 с.
3. Бесекерский В.А. Сборник задач по теории автоматического регулирования и управления. – М.: Наука, 1978. – 524 с.
4. Душин С.Е. Теория автоматического управления: Учебник /Под ред. В.Б. Яковлева. – М.: Высшая школа, 2003. – 576 с.
5. Дьяконов В. П. VisSim + Mathcad + MATLAB. Визуальное математическое моделирование. – М.: СОЛОН-Пресс, 2004. – 384 с.
6. Методы классической и современной теории автоматического управления: Учебник: В 5 т.- Т.1: Математические модели, динамические характеристики и анализ систем автоматического управления / Под ред. Н.Е. Егупова. – М.: Изд-во МГТУ им. Н.Э.Баумана, 2004. – 656 с.
7. Справочник по теории автоматического управления / Под ред. А.А.Красовского.- М.: Наука, 1987. – 712 с.
8. Теория автоматического управления. В 2 ч. /Под ред. А.А.Воронова. - М.: Высшая школа, 1986. - Ч.1. - 367 с.; Ч.2. – 504 с.
9. Теория автоматического управления. В 2 ч. /Под ред. А.В.Нетушила. - М.: Высшая школа, 1976. - Ч.1. - 401 с.; 1983. - Ч.2. – 432 с.
СОДЕРЖАНИЕ
Введение…………………………………………………………………………..3
1. Моделирование систем со сложным соединением звеньев………………...5
2. Исследование динамических характеристик типовых звеньев…………….8
3. Исследование устойчивости систем по критерию Михайлова…………….12
4. Исследование устойчивости систем по критерию Найквиста……………..14
5. Исследование качества регулирования систем……………………………..16
6. Моделирование типовых законов регулирования…………………………..19
7. Исследование динамических характеристик цифровых систем…………...22
8. Исследование устойчивости цифровых систем……………………………..24
9. Исследование особенностей нелинейных систем…………………………..28
10. Исследование устойчивости нелинейных систем
по фазовым портретам……………………………………………………….30
Список литературы……………………………...........................................….32