МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ
КАЗАХСТАН
Некоммерческое акционерное общество
«Алматинский институт энергетики и связи»
А.Д.Динасылов
КОНСТРУИРОВАНИЕ И СИСТЕМЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ ЭНЕРГООБОРУДОВАНИЯ И ЭНЕРГОСИСТЕМ
Учебное пособие
Алматы 2007
УДК 621.81.(075.8)
ББК 32.88
Д46. Конструирование и системы автоматизированного проектирования энергооборудования и энергосистем:
Учебное пособие /А.Д.Динасылов;
АИЭС. Алматы, 2007. – 84 с. Ил.44, табл. 1, библиогр. - 19 назв.
ISBN 9965-850-16-X
В первой части учебного пособия, включающей разделы 1-3, излагаются основные принципы построения систем автоматизированного проектирования (САПР), рассматривается структура САПР и их аспекты. Во второй части пособия (разделы 4-5) рассматривается состав и возможности программного комплекса APM WinMachine, приводятся постановки и примеры решения с помощью модуля APM Structure3D, входящего в этот комплекс, конструкторских и расчетно-исследовательских задач, характерных для теплоэнергетики.
Пособие предназначено для магистрантов, обучающихся по специальности «Теплознергетика», но может быть полезным и для студентов других специальностей.
ББК 32.88
РЕЦЕНЗЕНТЫ: АТУ, канд. техн. наук, проф. К.У.Карымсаков,
канд. техн. наук, доц. С.Н.Тойбаев.
Печатается по плану издания Министерства образования и науки
Республики Казахстан на 2007 г.
|
Д |
2303040000 00(05)-07 |
ISBN 9965-850-16-X
© НАО «Алматинский институт энергетики и связи», 2007 г.
Содержание
Введение 4
1 Общие понятия об автоматизированном проектировании 5
1.1 Системный подход к проектированию 5
1.2 Структура процесса проектирования 9
1.3 САПР и их место среди других автоматизированных систем 20
2 Техническое обеспечение САПР 27
2.1 Структура ТО САПР 27
2.2 Аппаратура рабочих мест в САПР 33
3 Понятия о системных средах САПР 37
3.1 Общие понятия 37
3.2 Подходы к интеграции программного обеспечения в САПР 40
3.3 Уровни управления проектированием в САПР 42
4 Состав и характеристика модулей программно-методического
комплекса APM WinMacine 42
4.1 Двумерный графический редактор APM Graph 44
4.2 Модуль трехмерного моделирования объектов APM Studio 53
4.3 Инструменты конечно-элементного анализа в системе
APM WinMachine 60
4.4 Назначение и возможности модуля конечно-элементного
анализа APM Structure3D 62
4.5 Модуль проектирования балочных элементов конструкций
APM Beam 64 5 Примеры постановки и решения конструкторских и расчетно-
исследовательских задач с использованием модуля APM
Structure3D 67
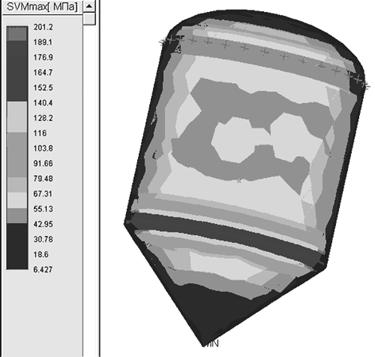
5.1 Расчет и конструирование корпусов технологических аппаратов 67
5.2 Создание трехмерной модели и частотный анализ лопатки турбины 74
Список литературы 82
Введение
Потребности общества в новых промышленных изделиях и технический прогресс обусловливают необходимость выполнения большого объема проектных работ. Проектируемые объекты становятся более сложными, а требования к качеству проектов и срокам их выполнения оказываются все более жесткими. Удовлетворить этим требованиям в рамках традиционных методов проектирования путем увеличения числа проектировщиков нельзя ввиду ограниченности возможностей параллельного проектирования. Проблема находит свое решение в применении автоматизированного проектирования (АП), под которым понимается такой способ проектирования, при котором все проектные операции и процедуры или большая их часть осуществляются посредством взаимодействия человека с компьютерными системами.
В развитии энергетики из важнейших является проблема оптимального проектирования и разработки отдельных энергетических объектов и их элементов. Такими объектами являются тепловые и атомные электростанции, котельные установки, нефтеперерабатывающие заводы, энергопотребляющие и другие предприятия, образующие основу сложного современного топливно-энергетического комплекса. Источники тепловой и электрической энергии являются сложными многопараметрическими и многосвязными системами, взаимодействующими с электроэнергетическими системами, с потребителями, с обслуживающими предприятиями и с окружающей средой. Успешное решение задач оптимизации источников энергии возможно только при условии тесной интеграционной увязки вопросов их проектирования как с анализом общих вопросов развития энергетики, так и с физико-техническими разработками технологических циклов и процессов, с изучением свойств рабочих тел, топлива и конструкционных материалов, характеристик надежности оборудования. Проведение таких комплексных исследований возможно лишь с использованием иерархической системы математических моделей (ММ) в рамках САПР – систем автоматизированного проектирования. Математическое моделирование позволяет проводить контролируемый эксперимент в ситуациях, где экспериментирование на реальных объектах практически неосуществимо или экономически нецелесообразно; при этом, проводя эксперименты с ММ, зачастую можно больше узнать о внутренних факторах, чем при опытах с реальной системой.
Автоматизация проектирования занимает особое положение среди информационных технологий – это синтетическая дисциплина, составными частями которой являются ряд других информационных технологий. Так, техническое обеспечение САПР основано на использовании вычислительных сетей и телекоммуникационных технологий, здесь используются не только персональные компьютеры, но также рабочие станции, серверы и даже мейнфреймы. Математическое обеспечение САПР включает в себя большое число методов вычислительной математики, статистики, математического программирования, дискретной математики, теории искусственного интеллекта. Программные комплексы САПР относятся к числу наиболее сложных современных программных систем, зачастую основанных на использовании разновидностей операционной системы Unix и языков программирования C++, Java и других, на современных CASE-технологиях, реляционных и объектно-ориентированных системах управления, на стандартах открытых систем и обмена данными в компьютерных средах.
Отметим, что конкретная САПР разрабатывается единожды специалистами по САПР, а применяется при проектировании многих объектов. В современных условиях знание основ автоматизации проектирования требуется каждому инженеру-проектировщику. Предприятия, ведущие разработку без САПР или с малой степенью их использования, оказываются неконкурентоспособными как вследствие больших материальных и временных затрат на проектирование, так и вследствие невысокого качества проектов. Инженер-проектировщик должен знать алгоритмы, реализованные в проектных модулях САПР, так как это помогает быстрее достигать целей и избегать ошибок в формулировке задач, назначении исходных данных и интерпретации результатов.
Доступная учебная литература по САПР на русском языке в основном издана в конце 80-х годов и к настоящему времени она устарела. Исключением является учебник [1], ориентированный на студентов специальности «Информатика и вычислительная техника». Целью настоящего учебного пособия является изложение основ АП для магистрантов, обучающихся по специальности «Теплоэнергетика». Ввиду ограниченности объема пособия пришлось отказаться от рассмотрения ряда вопросов, поэтому здесь излагаются лишь некоторые наиболее общие положения и подходы к автоматизированному проектированию. В пособие в основном вошли материалы, содержащиеся в [1], опубликованные автором ранее материалы [3-9], а также материалы [10-12], опубликованные за последние годы сотрудниками Научно-технического центра «Автоматизация проектирования машин» (г. Королев, Московская область, Россия).
1 Общие понятия об автоматизированном проектировании
1.1 Системный подход к проектированию
1.1.1 Основные понятия об инженерном проектировании
Проектирование технического объекта заключается в создании, преобразовании и представлении в принятой форме образа еще не существующего объекта. Образ объекта (его составных частей) создается в воображении человека в результате творческого процесса или генерируется по некоторым алгоритмам в процессе взаимодействия человека с компьютером. Проектирование инициируется потребностями в тех или иных объектах (промышленных изделиях, процессах, объектах строительства, тепловой и электрической энергии). Проектирование состоит из разработки технического предложения и (или) технического задания (ТЗ), отражающих потребности, и собственно результатов проектирования в виде проектной документации.
ТЗ представляется в виде некоторых документов, и оно является исходным (первичным) описанием объекта. Результатом проектирования обычно служит комплект документации, который содержит сведения, достаточные для изготовления объекта в заданных условиях. Это и есть проект, представляющий собой окончательное описание объекта. Тогда можно сказать, что проектирование есть процесс, заключающийся в получении исходного описания объекта и его преобразовании в окончательное описание на основе выполнения комплекса работ исследовательского, расчетного и конструкторского характера.
Преобразование исходного описания в окончательное порождает ряд промежуточных описаний, каждое из которых представляет собой итоги решения некоторого круга задач. Промежуточные описания используются для обсуждения и принятия решений по окончанию или определению путей продолжения процесса проектирования (проектные решения). Проектирование, при котором все проектные решения (их часть) получают путем взаимодействия человека и компьютера, называют автоматизированным, в отличие от ручного (без использования компьютеров) или автоматического (без участия человека). Автоматическое проектирование возможно лишь в отдельных случаях несложных объектов. Требованиям сегодняшнего дня соответствует автоматизированное проектирование (АП). Система, реализующая АП, есть САПР - система автоматизированного проектирования (CAD System - Computer Aided Design System).
Проектирование сложных объектов основывается на применении идей и принципов, изложенных в ряде подходов, теорий. Наиболее общим из них является системный подход, идеи которого широко используются в различных методиках проектирования.
1.1.2 Основные принципы системного подхода
Грамотные специалисты в конкретных предметных областях зачастую используют системный подход интуитивно. Однако интуитивный подход без применения правил системного анализа может оказаться недостаточным для решения все более усложняющихся задач инженерной деятельности. Основной принцип системного подхода заключается в рассмотрении частей явления или сложной системы с учетом их взаимодействия. Системный подход включает в себя выявление структуры системы, определение типов связей и атрибутов, анализ влияния внешней среды. Такой подход позволяет отбросить несущественные факторы при проектировании и моделировании и перейти к постановке оптимизационных задач. Сами системы автоматизированного проектирования и управления относятся к числу наиболее сложных современных искусственных систем. Их проектирование и сопровождение невозможны без системного подхода. Поэтому с позиций системного подхода следует рассматривать не только проектирование сложных объектов, но и изучать современные автоматизированные системы и технологии их применения.
Интерпретация и конкретизация системного подхода имеют место в ряде известных подходов с другими названиями, которые также можно рассматривать как компоненты системотехники. Это - структурный, блочно-иерархический (БИП), объектно-ориентированный подходы.
Структурный подход подразумевает синтез вариантов системы из компонентов (блоков) и оценку вариантов при их частичном переборе с предварительным прогнозированием характеристик компонентов.
БИП использует идеи декомпозиции сложных описаний объектов проектирования (ОП) и, что также важно, средств их создания на иерархические уровни и аспекты. БИП вводит понятия восходящего и нисходящего проектирования, позволяет устанавливать связи между параметрами соседних иерархических уровней.
Ряд важных структурных принципов, используемых при разработке информационных систем, и, прежде всего, их программного обеспечения (ПО), выражен в объектно-ориентированном подходе к проектированию (ООП). При таком подходе обеспечиваются следующие преимущества в решении проблем управления сложностью и интеграции ПО: 1) модели приложений получают большую структурную определенность за счет распределения данных и процедур между классами объектов; 2) сокращается объем спецификаций благодаря введению в описания иерархии объектов и отношений наследования между свойствами объектов разных уровней иерархии: 3) уменьшается вероятность искажения данных вследствие ошибочных действий за счет ограничения доступа к определенным категориям данных в объектах; 4) облегчается согласование и интеграция ПО за счет описания в каждом классе объектов допустимых обращений к ним и принятых форматов сообщений.
Кроме отмеченного, для всех подходов к проектированию сложных систем характерно следующее: 1) декомпозиция проектных задач и документации, выделение стадий и этапов проектирования, проектных процедур; 2) итерационный характер проектирования; 3) типизация и унификация проектных решений и средств проектирования.
1.1.3 Некоторые понятия системного анализа
Дадим определения терминов, наиболее часто используемых в системном анализе и в САПР.
Система - множество взаимосвязанных элементов.
Элемент - часть системы, представление о которой нецелесообразно подвергать дальнейшему расчленению при проектировании.
Сложная система - система, характеризуемая большим числом элементов и большим числом взаимосвязей элементов. Сложность системы определяется также видом взаимосвязей элементов, свойствами целенаправленности, целостности, членимости, иерархичности, многоаспектности. Очевидно, что сами САПР являются сложными системами в силу наличия у них перечисленных свойств и признаков.
Подсистема - часть системы (подмножество элементов и их взаимосвязей), которая имеет свойства системы.
Надсистема - система, по отношению к которой рассматриваемая система является подсистемой.
Структура - отображение совокупности элементов системы и их взаимосвязей; понятие структуры отличается от понятия самой системы тем, что здесь принимают во внимание лишь типы элементов и связей без конкретных значений их параметров.
Параметр - величина, выражающая свойство системы, ее части или влияющей на систему среды. Обычно в моделях систем в качестве параметров рассматривают величины, не изменяющиеся в процессе исследования системы. Параметры подразделяют на внутренние, внешние и выходные, выражающие свойства элементов системы, внешней среды и самой системы, соответственно. Векторы параметров будем обозначать X=(x1, x2, … xn), Q=(q1 ,q2 ,…,qk ), Y=(y1, y2, … ym) соответственно.
Фазовая переменная - величина, характеризующая энергетическое или информационное наполнение элемента или подсистемы.
Состояние - совокупность значений фазовых переменных, зафиксированных в одной временной точке процесса функционирования.
Поведение (динамика) системы - изменение состояния системы в процессе функционирования.
Система без последействия – система, поведение которой при t > t0 определяется заданием состояния в момент t0 и вектором внешних воздействий Q(t). В системах с последействием, кроме этого, нужно знать предысторию поведения, т. е. состояния системы в моменты, предшествующие t0.
Вектор переменных состояния - неизбыточное множество фазовых переменных V, задание значений которых в некоторый момент времени полностью определяет поведение системы в дальнейшем (в автономных системах без последействия).
Пространство состояний - множество возможных значений вектора переменных состояния.
Фазовая траектория - представление процесса, то есть, зависимости V(t) в виде последовательности точек в пространстве состояний.
Рассмотрим некоторые из упомянутых выше характеристик сложных систем.
Целенаправленность - свойство искусственной системы, выражающее назначение системы. Это свойство необходимо для оценки эффективности вариантов системы.
Целостность - свойство системы, характеризующее взаимосвязанность элементов и наличие зависимости выходных параметров от параметров элементов, при этом большинство выходных параметров не является простым повторением или суммой параметров элементов.
Иерархичность - свойство сложной системы, выражающее возможность и целесообразность ее иерархического описания, то есть представления в виде нескольких уровней, между компонентами которых имеются отношения целое - часть.
Системотехника состоит из разделов: иерархическая структура систем, организация их проектирования; анализ и моделирование систем; синтез и оптимизация систем.
Моделирование включает в себя две задачи: 1) создание моделей сложных систем (modeling); 2) анализ свойств систем на основе исследования их моделей (simulation).
Синтез подразделяют на две задачи: 1) синтез структуры проектируемых систем (структурный синтез); 2) выбор численных значений параметров элементов систем (параметрический синтез). Эти задачи относятся к принятию проектных решений.
Моделирование и оптимизацию желательно выполнять с учетом статистической природы систем. Детерминированность есть лишь частный случай. При проектировании характерны нехватка достоверных исходных данных, неопределенность условий принятия решений. Учет статистического характера данных может основываться на методе статистических испытаний (Монте-Карло), а принятие решений - на использовании методов теории нечетких множеств, экспертных систем и др.
Пример - Паровая турбина является сложной системой в силу наличия у нее большого числа элементов, разнообразных связей между элементами и подсистемами, свойств целенаправленности, целостности, иерархичности. Подсистемами являются части высокого, среднего и низкого давления, подогреватели и конденсаторы. Надсистемой является паротурбинная установка, включающая в себя, кроме турбины, котельный агрегат и электрогенератор. Внутренние параметры турбины – число рабочих дисков, геометрия диафрагм, дисков и лопаток и др. Выходные - мощность турбины, кпд, расход пара и др. Внешние параметры – характеристики пара на входе, нагрузка на выходе.
1.2 Структура процесса проектирования
1.2.1 Иерархия проектных спецификаций и уровней проектирования
При использовании БИП к проектированию представления о проектируемой системе расчленяют на иерархические уровни. На верхнем уровне используют наименее детализированное представление, отражающее самые общие черты и особенности проектируемой системы. На следующих уровнях степень подробности описания возрастает, при этом рассматривают уже отдельные блоки системы с учетом воздействия на каждый из них его соседей. Такой подход позволяет на каждом уровне формулировать задачи приемлемой сложности, поддающиеся решению с помощью имеющихся средств проектирования. Разбиение на уровни должно быть таким, чтобы документация на блок была обозрима и воспринимаема одним человеком. То есть, БИП есть декомпозиционный (по-другому – диакоптический) подход, заключающийся в разбиении задачи большой размерности на последовательно и (или) параллельно решаемые группы задач малой размерности, что сокращает требования к вычислительным ресурсам.
Можно говорить не только об иерархических уровнях описания ОП, но и об иерархических уровнях процесса проектирования, понимая под каждым из них совокупность спецификаций некоторого иерархического уровня совместно с постановками задач, методами получения описаний и решения возникающих проектных задач. Список иерархических уровней в каждом случае может быть своим, но для большинства случаев характерно следующее наиболее крупное выделение уровней:
а) системный уровень, на котором решают наиболее общие задачи проектирования систем, машин и процессов; результаты представляют в виде структурных схем, генпланов, схем размещения оборудования, диаграмм потоков данных и т. п.;
б) макроуровень, на котором проектируют устройства и узлы машин и приборов; результаты - функциональные, принципиальные и кинематические схемы, сборочные чертежи;
в) микроуровень, на котором проектируют детали и элементы машин и приборов.
В каждом случае число выделяемых уровней и их наименования могут быть различными. Так, в турбиностроении имеются уровни деталей, узлов, машин, комплексов. В теплоснабжении системный уровень подразделяют на уровни проектирования объектов (промышленных, жилых) и уровень проектирования тепловых сетей.
В зависимости от последовательности решения задач иерархических уровней различают нисходящее, восходящее и смешанное проектирование (стили проектирования). Последовательность решения задач от нижних уровней к верхним уровням характеризует восходящее проектирование; обратная последовательность приводит к нисходящему проектированию; в смешанном стиле имеются элементы как восходящего, так и нисходящего проектирования. Для сложных систем обычно предпочитают нисходящее проектирование. Отметим, однако, что при наличии заранее спроектированных составных блоков (устройств) можно говорить о смешанном проектировании.
Неопределенность и нечеткость исходных данных при нисходящем проектировании (так как еще не спроектированы компоненты) или исходных требований при восходящем проектировании (поскольку ТЗ имеется на всю систему, а не на ее части) обуславливают необходимость прогнозировать недостающие данные с последующим их уточнением. То есть, процесс проектирования имеет итерационный характер, когда выполняется последовательное приближение к окончательному решению.
Наряду с декомпозицией описаний на иерархические уровни применяют разделение представлений об ОП на аспекты.
Аспект описания (страта) - описание системы или ее части с некоторой оговоренной точки зрения, определяемой функциональными, физическими или иного типа отношениями между свойствами и элементами.
Различают функциональный, информационный, структурный и поведенческий (процессный) аспекты описаний. Функциональный аспект описания объекта или его функциональное описание относят к функциям системы и чаще всего представляют его функциональными схемами. Информационное описание включает в себя основные понятия предметной области (сущности), словесное пояснение или числовые значения характеристик (атрибутов) используемых объектов, а также описание связей между этими понятиями и характеристиками. Информационные модели можно представлять графически (графы, диаграммы сущность-отношение), в виде таблиц или списков. Структурное описание относится к морфологии системы; оно характеризует составные части системы и их взаимные соединения. Структурное описание может быть представлено структурными схемами, а также различной конструкторской документацией. Поведенческое описание характеризует процессы функционирования (алгоритмы) системы и (или) технологию создания системы. Иногда аспекты описаний связывают с подсистемами, функционирование которых основано на различных физических процессах.
В общем случае выделение аспектов может быть неоднозначным. Так, помимо указанного подхода, часто выделяют такие аспекты как функциональное проектирование (разработка принципов действия, структурных, функциональных, принципиальных схем), конструкторское проектирование (определение форм и пространственного расположения компонентов изделий), алгоритмическое проектирование (разработка алгоритмов и программного обеспечения) и технологическое проектирование (разработка технологических процессов). Примерами аспектов (страт) в случае самих САПР могут служить также рассматриваемые далее виды обеспечения АП.
1.2.2 Стадии проектирования
Стадии проектирования - наиболее крупные части проектирования как процесса, развивающегося во времени. Обычно выделяют стадии научно-исследовательских работ (НИР), эскизного проекта или опытно-конструкторских работ (ОКР), технического, рабочего проектов, испытаний опытных образцов или опытных партий. Стадию НИР иногда называют предпроектными исследованиями или стадией технического предложения. По мере перехода от стадии к стадии степень подробности проработки проекта возрастает, и рабочий проект должен быть достаточным для изготовления опытных или серийных образцов. Близким к определению стадии, но менее четким является понятие этапа проектирования.
Стадии (этапы) проектирования подразделяют на составные части, называемые проектными процедурами. Примерами проектных процедур могут служить подготовка деталировочных чертежей, анализ кинематики, моделирование переходного процесса, оптимизация параметров и другие проектные задачи. Проектные процедуры могут быть расчленены на более мелкие компоненты, называемые проектными операциями. Так, при анализе прочности детали с использованием сеточных методов операциями являются: построение сетки, выбор или расчет внешних воздействий, собственно моделирование полей напряжений и деформаций, представление результатов моделирования в графической и текстовой формах. Проектирование сводится к выполнению некоторых последовательностей проектных процедур - маршрутов проектирования.
Иногда разработку ТЗ на проектирование называют внешним проектированием, а реализацию ТЗ - внутренним проектированием.
1.2.3 Содержание технических заданий на проектирование
В ТЗ на проектирование объекта указывают, как минимум, следующие данные:
а) назначение объекта;
б) условия эксплуатации. Наряду с качественными характеристиками (представленными словесными описаниями) имеются числовые параметры, называемые внешними параметрами, для которых указаны области допустимых значений. Примеры внешних параметров: температура окружающей среды, внешние силы, нагрузки и т. п.;
в) требования к выходным параметрам, которые характеризуют свойства объекта, интересующие потребителя. Они имеют вид условий работоспособности
yi R Ti (1.1)
где уi - i-й выходной параметр;
R ![]() {равно, меньше, больше, больше
или равно, меньше или равно} - вид отношения;
{равно, меньше, больше, больше
или равно, меньше или равно} - вид отношения;
Тi - норма i-го выходного параметра. В случае R = «равно» нужно задать требуемую точность выполнения равенства.
Примеры условий работоспособности: расход топлива газотурбинного электрогенератора на 100 кВт-ч энергии <5 л; инерционность тепловой сети < 4 час.
1.2.4 Классификация моделей и параметров, используемых при АП
При АП проектировщик оперирует с моделью, отражающей интересующие его свойства объекта. В САПР используются не физические модели, а модели-спецификации. Среди моделей-спецификаций различают упомянутые выше функциональные, поведенческие, информационные, структурные модели (описания). Модели называют математическими (ММ), если они формализованы средствами математики.
В свою очередь, ММ могут быть геометрическими, топологическими, динамическими, логическими и т. п., если они отражают соответствующие свойства объектов. Наряду с ММ при проектировании используют информационные модели в виде диаграмм сущность-отношение, геометрические модели-чертежи. В дальнейшем, если не оговорено, под словом модель будет подразумеваться математическая модель.
Функциональная ММ представляет собой алгоритм вычисления вектора выходных параметров Y при заданных векторах внутренних Х и внешних Q параметров.
ММ модели могут быть символическими и численными. При использовании символических моделей оперируют не значениями величин, а их символическими обозначениями (идентификаторами). Численные модели могут быть аналитическими, то есть их можно представить в виде явно выраженных зависимостей выходных параметров Y от параметров внутренних Х и внешних Q, или алгоритмическими, в которых связь Y, Х и Q задана неявно в виде алгоритма моделирования. Важнейший частный случай алгоритмических моделей – имитационные модели, которые отображают процессы в системе при наличии внешних воздействий на систему. Другими словами, имитационная модель - это алгоритмическая поведенческая модель.
Классификацию ММ выполняют и по другим признакам. Так, в зависимости от иерархического уровня выделяют модели уровней системного, функционально-логического, макроуровня (сосредоточенного) и микроуровня (распределенного). По используемому математическому аппарату различают модели лингвистические, теоретико-множественные, абстрактно-алгебраические, нечеткие, автоматные и т. п.
Например, на системном уровне преимущественно применяют ММ систем массового обслуживания и сети Петри, на функционально-логическом уровне - автоматные модели на основе аппарата передаточных функций или конечных автоматов, на макроуровне - системы алгебро-дифференциальных уравнений, на микроуровне - дифференциальные уравнения в частных производных. В системах конструирования применяются геометрические модели.
Кроме того, есть понятия полных моделей и макромоделей, моделей статических и динамических, детерминированных и стохастических, аналоговых и дискретных.
Полная модель объекта в отличие от макромодели описывает не только процессы на внешних выводах моделируемого объекта, но и внутренние для объекта процессы.
Статические модели описывают статические состояния ОП. Динамические модели отражают поведение системы, то есть, в них обязательно фигурирует время.
Стохастические и детерминированные модели различают в зависимости от учета или не учета случайных факторов.
В аналоговых моделях фазовые переменные являются непрерывными величинами, в дискретных – дискретными. Дискретные модели являются логическими (булевыми), если состояние системы и ее элементов описывается булевыми величинами. В ряде случаев полезно применение смешанных моделей, в которых одна часть подсистем характеризуется аналоговыми моделями, другая - логическими.
Информационные модели относятся к информационной страте автоматизированных систем, их используют для описания связей между единицами информации и, прежде всего, при инфологическом проектировании баз данных (БД).
Наибольшие трудности возникают при создании моделей слабоструктурированных систем, что характерно, прежде всего, для системного уровня проектирования. Здесь значительное внимание уделяется экспертным методам. В теории систем сформулированы рекомендации по подбору экспертов при разработке модели, по организации экспертизы, по обработке полученных результатов.
Обычно в имитационных моделях фигурируют фазовые переменные. Так, на макроуровне имитационные модели представляют собой системы алгебро-дифференциальных уравнений
Ф(dV/dt, V, t )=0, при t=0 V=V0 (1.2)
где V — вектор фазовых переменных;
t — время;
V0 — вектор начальных условий.
К фазовым переменным относятся напряжения и токи в электрических цепях, силы и скорости - в механических системах, давления и расходы - в гидравлических.
Выходные параметры систем могут быть двух типов. Во-первых, это параметры-функционалы, т. е. функционалы зависимостей V(t ) в случае использования (1.2). Примеры таких параметров: амплитуды сигналов, временные задержки, мощности рассеивания и т. п. Во-вторых, это параметры, характеризующие способность ОП работать при определенных внешних условиях. Последние являются граничными значениями диапазонов внешних переменных, в которых сохраняется работоспособность объекта.
1.2.5 Типовые проектные процедуры
Проектная процедура называется типовой, если она предназначена для многократного применения при проектировании разных типов объектов. Классификация типовых проектных процедур представлена на рисунке 1.
Различают проектные процедуры анализа и синтеза. Синтез заключается в создании описания объекта, а анализ — в определении свойств и исследовании работоспособности объекта по его описанию, то есть при синтезе создаются, а при анализе оцениваются проекты объектов.
Процедуры анализа делятся на процедуры одновариантного и многовариантного анализа. В том и другом случае по заданным значениям внутренних и внешних параметров объекта требуется определить значения выходных параметров. Полезно использовать геометрическую интерпретацию задачи, связанную с понятием пространства внутренних параметров. Это n-мерное пространство, в котором для каждого из n внутренних параметров xi выделена координатная ось.
При одновариантном анализе задается некоторая точка в этом пространстве, и в этой точке требуется определить значения выходных параметров. Подобная задача сводится к однократному решению системы уравнений и неравенств, составляющих ММ, что и обусловливает название.
Многовариантный анализ заключается в исследовании свойств объекта в некоторой области пространства внутренних параметров. Это требует многократного решения систем уравнений и неравенств (выполнения одновариантного анализа).
Процедуры синтеза подразделяются на процедуры структурного и параметрического синтеза.
Целью структурного синтеза является определение структуры объекта - перечня типов элементов, составляющих объект, и способа связи элементов между собой в составе объекта. То есть, в процедурах синтеза осуществляется выбор содержания проектных решений. Процедуры синтеза относятся к наиболее трудноформализуемым процедурам при проектировании.
В процедурах оформления документации синтезируется форма представления описаний проектных решений, поэтому они также могут классифицироваться как процедуры синтеза.
Параметрический синтез заключается в определении числовых значений параметров элементов при заданных структуре и условиях работоспособности на выходные параметры объекта, то есть при параметрическом синтезе нужно найти точку или область в пространстве внутренних параметров, в которых выполняются те или иные условия (обычно условия работоспособности).
Создать проект объекта (изделия или процесса) означает выбрать его структуру, определить значения всех параметров и представить результаты в нужной форме. Результаты (проектная документация) могут быть выражены в виде чертежей, схем, пояснительных записок, программ для программно-управляемого технологического оборудования и других документов на бумаге или на машинных носителях информации.
Разработка (или выбор) структуры объекта - проектная процедура, называемая структурным синтезом, а расчет (или выбор) значений параметров элементов Х - процедура параметрического синтеза.
Задача структурного синтеза формулируется в системотехнике как задача принятия решений (ЗПР). Ее суть заключается в определении цели, множества возможных решений и ограничивающих условий.
Классификацию ЗПР осуществляют по ряду признаков. По числу критериев различают задачи одно- и многокритериальные. По степени неопределенности различают ЗПР детерминированные, ЗПР в условиях риска - при наличии в формулировке задачи случайных параметров, ЗПР в условиях неопределенности, то есть при неполной или недостоверной исходной информации.
Реальные задачи проектирования, как правило, являются многокритериальными. Одна из основных проблем постановки многокритериальных задач - установление правил предпочтения вариантов. Способы сведения многокритериальных задач к однокритериальным задачам и последующие пути решения изучаются в таких дисциплинах, как методы оптимизации и математическое программирование.
Наличие случайных факторов усложняет решение ЗПР. Основные подходы к решению ЗПР в условиях риска заключаются или в решении «для наихудшего случая», или в учете в целевой функции математического ожидания и дисперсии выходных параметров. В первом случае задачу решают как детерминированную при завышенных требованиях к качеству решения, что является главным недостатком подхода. Во втором случае достоверность результатов решения намного выше, но возникают трудности с оценкой целевой функции. Применение метода Монте-Карло в случае алгоритмических моделей становится единственным выходом, и, следовательно, для решения требуются значительные вычислительные ресурсы.
Существуют две группы ЗПР в условиях неопределенности. Одна из них решается при наличии противодействия разумного противника. Такие задачи изучаются в теории игр, для задач проектирования в технике они не характерны. Во второй группе противодействие достижению цели оказывают силы природы. Для их решения полезно использовать теорию и методы нечетких множеств.
Конструирование, разработка технологических процессов, оформление проектной документации - частные случаи структурного синтеза.
Задачу параметрического синтеза называют параметрической оптимизацией, если ее решают как задачу математического программирования
extr F(X), X ![]() D (1.3)
D (1.3)
где F(X) - целевая функция;
Х - вектор управляемых (называемых также проектными или варьируемыми) параметров;
Dx = {X | j(Х) < О, y(Х) =0} - допустимая область;
j(Х) и y(Х) - функции-ограничения.
 |
Пример - Трехступенчатый компрессор (рисунок 2) предназначен для сжатия воздуха, поступающего из атмосферы, до давления 64 атм в количестве N моль/ч. Предполагается, что сжатие двустороннее и адиабатическое; после каждой ступени газ охлаждается до начальной температуры T. Здесь управляемые параметры Х = (выходное давление на первой ступени и на второй ступени); выходные параметры Y = (потребляемая энергия, выходное давление на третьей ступени). В качестве целевой функции F(X) можно выбрать потребляемую энергию, а значение выходное давление на третьей ступени является функцией-ограничением (в виде равенства) – получаем задачу параметрической оптимизации.
Следующая после синтеза группа проектных процедур - процедуры анализа. Цель анализа - получение информации о характере функционирования и значениях выходных параметров Y при заданных структуре объекта, сведениях о внешних параметрах Q и параметрах элементов X. Если заданы фиксированные значения параметров Х и Q, то имеет место процедура одновариантного анализа, которая сводится к решению уравнений математической модели, например, такой, как модель (1.2), и вычислению вектора выходных параметров Y. Если заданы статистические сведения о параметрах Х, и нужно получить оценки числовых характеристик распределений выходных параметров (например, оценки математических ожиданий и дисперсий), то это процедура статистического анализа. Если требуется рассчитать матрицы абсолютной А и (или) относительной В чувствительности, то имеет место задача анализа чувствительности.
Элемент Aji матрицы А называют абсолютным коэффициентом чувствительности, он представляет собой частную производную j-го выходного параметра уj по i-ому параметру хi. Другими словами, Аji является элементом вектора градиента j-го выходного параметра. На практике удобнее использовать безразмерные относительные коэффициенты чувствительности Bji , характеризующие степень влияния изменений параметров элементов на изменения выходных параметров
 (1.4)
(1.4)
где xi ном и yj ном - номинальные значения параметров хi и уj соответственно.
В процедурах многовариантного анализа определяется влияние внешних параметров, разброса и нестабильности параметров элементов на выходные параметры. Процедуры статистического анализа и анализа чувствительности - характерные примеры процедур многовариантного анализа.
Далее в настоящем учебном пособии будут рассмотрены некоторые вопросы математического моделирования в САПР применительно к проектированию теплоэнергетического оборудования. С некоторыми методами математического моделирования можно ознакомиться по [1, 2].
1.2.6 Типичная последовательность проектных процедур
На рисунке 3 представлена типичная последовательность проектных процедур на одном из этапов нисходящего проектирования.
На предыдущем этапе решались задачи (k-1)-го иерархического уровня. Одним из результатов решения этих задач при нисходящем проектировании является формулировка ТЗ на проектирование систем k-гo уровня.
Совокупность процедур модификации X, анализа и оценки результатов анализа представляет собой процедуру параметрического синтеза. Если модификации Х подчинены стратегии поиска наилучшего значения некоторого показателя качества (целевой функции), то процедура параметрического синтеза является процедурой оптимизации. Возможно, что путем параметрического синтеза не удастся добиться приемлемой степени выполнения условий работоспособности. Тогда используют другой путь, связанный с модификациями структуры. Синтезируется новый вариант структуры, и для него повторяются процедуры формирования модели и параметрического синтеза. Если не удается получить приемлемое проектное решение и на этом пути, то ставится вопрос о корректировке ТЗ, сформулированного на предыдущем этапе проектирования. Такая корректировка может потребовать повторного выполнения ряда процедур k-го иерархического уровня, что и обусловливает итерационный характер проектирования.
Проектирование системы начинается с синтеза исходного варианта ее структуры. Для оценки этого варианта создается математическая модель. После выбора исходных значений параметров элементов выполняется анализ варианта, по результатам которого становится возможной его оценка. Обычно оценка заключается в проверке выполнения условий работоспособности, сформулированных в ТЗ. Если условия работоспособности выполняются в должной мере, то полученное проектное решение принимается и формулируются ТЗ на проектирование элементов данного уровня (т. е. систем следующего (k+1)-гo уровня). Если же полученное проектное решение неудовлетворительно, выбирается один из возможных путей улучшения проекта.
Обычно проще всего осуществить изменения числовых значений параметров элементов, составляющих вектор X.
Характерная особенность взаимосвязи проектных процедур анализа и синтеза заключается в их вложенности. Вложенность означает, что анализ входит как составная часть в оптимизацию, а оптимизация — в синтез; однократное выполнение процедуры оптимизации требует многократного выполнения процедуры анализа, а однократное решение задачи синтеза — многократного решения задачи оптимизации. Очевидно, что такой же характер взаимодействия имеют процедуры анализа — однократный многовариантный анализ основан на многократном одновариантном анализе. Нетрудно подсчитать, что синтез проектного решения на очередном этапе проектирования может потребовать выполнения чрезмерно большого количества вариантов анализа. Если ввести коэффициент fij,, равный количеству выполнений процедуры i, вложенной в процедуру j, при однократном выполнении процедуры j, а процедурам синтеза, оптимизации, многовариантного и одновариантного анализа присвоить номера соответственно 1, 2, 3, 4, то f41 =
= f21 ۰f32۰ f43. Тогда при f21 = f32 = f43 = 100 получаем f41 = 106 , что при высоком порядке уравнений может оказаться непомерным даже для современных компьютеров.
Приведенный пример свидетельствует о большой трудоемкости проектирования и о необходимости поиска путей сокращения этой трудоемкости. Разработка способов сокращения затрат вычислительных ресурсов на выполнение проектных процедур — актуальная проблема АП. Один из путей решения этой проблемы - применение достаточно точных и сложных ММ и алгоритмов анализа только на завершающих итерациях синтеза. Для большинства просматриваемых вариантов структуры при этом выполняется лишь ориентировочная оценка на основе косвенных критериев, упрощенных моделей и алгоритмов. Такая оценка позволяет без существенных затрат вычислительных ресурсов отсеять неперспективные вариантов и оставить для тщательного анализа малое число вариантов.
1.3 САПР и их место среди других автоматизированных систем
1.3.1 Структура САПР
Как и любая сложная система, САПР состоит из подсистем (рисунок 4). Различают проектирующие и обслуживающие подсистемы САПР.
 |
Проектирующие подсистемы непосредственно выполняют проектные процедуры. Примерами таких подсистем могут служить модули геометрического трехмерного моделирования объектов, изготовления конструкторской документации, схемотехнического анализа, трассировки трубопроводов в тепловых сетях.
Обслуживающие подсистемы обеспечивают функционирование проектирующих подсистем, их совокупность часто называют системной средой (или оболочкой) САПР. Типичными обслуживающими подсистемами являются подсистемы управления проектными данными (PDM - Product Data Management), управления процессом проектирования (DesPM - Design Process Management), пользовательского интерфейса для связи разработчиков с ЭВМ, CASE (Computer Aided Software Engineering) для разработки и сопровождения программного обеспечения САПР, обучающие подсистемы для освоения пользователями технологий, реализованных в САПР.
Структурирование САПР по различным аспектам обусловливает появление видов обеспечения САПР. Принято выделять семь видов обеспечения:
а) техническое (ТО), включающее различные аппаратные средства (компьютеры, периферийные устройства, сетевое оборудование, линии связи, измерительные средства);
б) математическое (МО), объединяющее математические методы, модели и алгоритмы для выполнения проектирования;
в) программное (ПО), представляемое компьютерными программами САПР;
г) информационное (ИО), состоящее из баз данных (БД), систем управления базами данных (СУБД), а также других данных, используемых при проектировании; вся совокупность используемых при проектировании данных называется информационным фондом САПР, а БД вместе с СУБД носит название банка данных (БнД);
д) лингвистическое (ЛО), выражаемое языками общения между проектировщиками и компьютерами, языками программирования и языками обмена данными между техническими средствами САПР;
е) методическое (МетО), включающее различные методики проектирования, иногда к МетО относят также математическое обеспечение;
ж) организационное (ОО), представляемое штатными расписаниями, инструкциями и другими документами, регламентирующими работу проектного предприятия.
1.3.2 Разновидности САПР
Классификацию САПР осуществляют по ряду признаков, например, по приложению (области применения), целевому назначению, масштабам (комплексности решаемых задач), характеру базовой подсистемы - ядра САПР.
По приложениям наиболее представительными и широко используемыми являются следующие группы САПР:
а) САПР для применения в отраслях общего машиностроения. Их часто называют машиностроительными САПР или MCAD (Mechanical CAD) системами;
б) САПР для радиоэлектроники. Их названия - ECAD (Electronic CAD) или EDA (Electronic Design Automation) системы;
в) САПР в области архитектуры и строительства.
Кроме того, известно большое число более специализированных САПР, выделяемых в указанных группах или представляющих самостоятельную ветвь в классификации. Примерами таких систем являются САПР больших интегральных схем (БИС); САПР летательных аппаратов; САПР электрических машин и т. п.
По целевому назначению различают САПР или подсистемы САПР, обеспечивающие разные аспекты (страты) проектирования. Так, в составе MCAD появляются CAE/CAD/CAM-системы:
а) САПР функционального проектирования, иначе САПР-Ф или САЕ (Computer Aided Engineering) системы;
б) конструкторские САПР общего машиностроения - САПР-К, часто называемые просто CAD-системами;
в) технологические САПР общего машиностроения - САПР-Т, иначе называемые автоматизированными системами технологической подготовки производства АСТПП или системами САМ (Computer Aided Manufacturing).
По масштабам различают отдельные программно-методические комплексы (ПМК) САПР, например, комплекс анализа прочности механических изделий в соответствии с методом конечных элементов (МКЭ) или комплекс анализа электронных схем; системы ПМК; системы с уникальными архитектурами не только программного (software), но и технического (hardware) обеспечении.
По характеру базовой подсистемы различают следующие разновидности САПР:
а) САПР на базе подсистемы машинной графики и геометрического моделирования. Эти САПР ориентированы на приложения, где основной процедурой проектирования является конструирование, т. е. определение пространственных форм и взаимного расположения объектов. Поэтому к этой группе систем относится большинство графических ядер САПР в области машиностроения. В настоящее время появились унифицированные графические ядра, применяемые более чем в одной САПР (это ядра Parasolid фирмы EDS Unigraphics и ACIS фирмы Intergraph);
б) САПР на базе СУБД. Они ориентированы на приложения, в которых при сравнительно несложных математических расчетах перерабатывается большой объем данных. Такие САПР преимущественно встречаются в технико-экономических приложениях, например, при проектировании бизнес-планов, но имеют место также при проектировании объектов, подобных щитам управления систем автоматики;
в) САПР на базе конкретного прикладного пакета. Фактически это автономно используемые программно-методические комплексы, например, имитационного моделирования производственных процессов, расчета прочности по методу конечных элементов, синтеза и анализа систем автоматического управления и т. п. Часто такие САПР относятся к системам САЕ. Примерами могут служить программы логического проектирования на базе языка VHDL, математические пакеты типа MathCAD, Matlab и др.;
г) комплексные (интегрированные) САПР, состоящие из совокупности подсистем предыдущих видов. Характерными примерами комплексных САПР являются CAE/CAD/CAM-системы в машиностроении или САПР БИС. Так, САПР БИС включает в себя СУБД и подсистемы проектирования компонентов, принципиальных, логических и функциональных схем, топологии кристаллов, тестов на годность изделий. Для управления такими системами применяют специализированные системные среды.
1.3.3 Функции, характеристики и примеры CAE/CAD/CAM-систем
Функции CAD-систем в машиностроении подразделяют на функции двухмерного (2D) и трехмерного (3D) проектирования. К функциям 2D относятся черчение, оформление конструкторской документации; к функциям 3D - получение трехмерных моделей, метрические расчеты, реалистичная визуализация.
Среди CAD-систем различают «легкие» и «тяжелые» системы. Первые ориентированы преимущественно на 2D графику, сравнительно дешевы и менее требовательны в отношении ресурсов. Вторые ориентированы на геометрическое моделирование (3D), более универсальны и дороги; здесь оформление чертежей выполняется с помощью заранее разработанных 3D-моделей. Между ними располагаются «средние» системы.
Основные функции САМ-систем: разработка технологических процессов, синтез управляющих программ для технологического оборудования с числовым программным управлением (ЧПУ), моделирование процессов обработки, в том числе построение траекторий движения инструмента и заготовки при обработке, генерация постпроцессоров для оборудования с ЧПУ (NC - Numerical Control), расчет норм времени обработки.
Наиболее известны следующие CAE/CAD/CAM-системы в машиностроении:
а) «тяжелые» системы (в скобках указана фирма, разработавшая или распространяющая продукт): Unigraphics (EDS Unigraphics); Solid Edge (Intergraph); Pro/Engineer (PTC - Parametric Technology Corp.), CATIA (Dassault Systemes), EUCLID (Matra Datavision), CADDS.5 (Computervision, ныне входит в PTC) и др.;
б) «средние» системы: Cimatron, Microstation (Bentley), Euclid Prelude (Matra Datavision), T-FlexCAD (Ton Системы. Москва) и др.;
в) «легкие» системы: AutoCAD (Autodesk); АДЕМ; bCAD (ПроПро Группа, Новосибирск); Caddy (Ziegler Informatics); Компас (Аскон, С.Петербург); Спрут (Sprut Technology, Набережные Челны): Кредо (НИВЦ АСК. Москва).
С ростом возможностей персональных ЭВМ грани между «тяжелыми» и «легкими» CAD/CAM-системами стираются.
Функции САЕ-систем довольно разнообразны, так как они связаны с процедурами анализа, моделирования, оптимизации проектных решений. В состав машиностроительных САЕ-систем, прежде всего, включают программы для следующих процедур:
а) моделирование полей физических величин, в том числе анализ прочности, который чаще всего выполняется в соответствии с МКЭ;
б) расчет состояний и переходных процессов на макроуровне;
в) имитационное моделирование сложных производственных систем на основе моделей массового обслуживания и сетей Петри.
Примеры систем моделирования полей физических величин в соответствии с МКЭ: Nastran, Ansys, Cosmos, Nisa, Moldflow.
Примеры систем моделирования динамических процессов на макроуровне: Adams и Dyna - в механических системах. Spice - в электронных схемах, ПА9, ENPORT - для многоаспектного моделирования, т. е. для моделирования систем, принципы действия которых основаны на взаимовлиянии физических процессов различной природы.
Для удобства адаптации САПР к нуждам конкретных приложений, для ее развития целесообразно иметь в составе САПР инструментальные средства адаптации и развития. Эти средства представлены той или иной CASE-технологией, включая языки расширения. В некоторых САПР применяют оригинальные инструментальные среды.
Примерами могут служить объектно-ориентированная интерактивная среда CAS.CADE в системе EUCLID, содержащая библиотеку компонентов, в САПР T-Flex CAD 3D предусмотрена разработка дополнений в средах Visual C++ и Visual Basic.
Большое значение для обеспечения открытости САПР, ее интегрируемости с другими автоматизированными системами (АС) имеют интерфейсы, представляемые реализованными в системе форматами межпрограммных обменов. Очевидно, что, в первую очередь, необходимо обеспечить связи между САЕ, CAD и САМ-подсистемами.
В качестве языков - форматов межпрограммных обменов - используются IGES, DXF, Express (стандарт ISO 10303-11, входит в совокупность стандартов STEP), SAT (формат ядра ACIS) и др.
Наиболее перспективными считаются диалекты языка Express, что объясняется общим характером стандартов STEP, их направленностью на различные приложения, а также на использование в современных распределенных проектных и производственных системах. Язык Express используется во многих системах интерфейса между CAD/CAM-системами. В частности, в систему CAD++ STEP включена среда SDAI (Standard Data Access Interface), в которой возможно представление данных об объектах из разных систем CAD и приложений (но описанных по правилам языка Express). CAD++ STEP обеспечивает доступ к базам данных большинства известных САПР с представлением извлекаемых данных в виде STEP-файлов. Интерфейс программиста позволяет открывать и закрывать файлы проектов в базах данных, производить чтение и запись сущностей. В качестве объектов могут использоваться точки, кривые, поверхности, текст, примеры проектных решений, размеры, связи, типовые изображения, комплексы данных и т. п.
1.3.4 Понятие о CALS-технологии
CALS-технология - это технология комплексной компьютеризации сфер промышленного производства, с целью унификации и стандартизации спецификаций промышленной продукции на всех этапах ее жизненного цикла. Основные спецификации представлены проектной, технологической, производственной, маркетинговой, эксплуатационной документацией. В CALS-системах предусмотрены хранение, обработка и передача информации в компьютерных средах, оперативный доступ к данным. Соответствующие системы автоматизации назвали автоматизированными логистическими системами или CALS (Computer Aided Logistic Systems). Под логистикой обычно понимают дисциплину, посвященную вопросам снабжения и управления запасами, а функции CALS намного шире и связаны со всеми этапами жизненного цикла промышленных изделий, поэтому применяют и более соответствующую предмету расшифровку аббревиатуры CALS - Computer Acquisition and LifeCycle Support.
Применение CALS позволяет существенно сократить объемы проектных работ, так как описания многих составных частей оборудования, машин и систем, проектировавшихся ранее, хранятся в базах данных сетевых серверов, доступных любому пользователю технологии CALS. Существенно облегчается решение проблем ремонтопригодности, интеграции продукции в различного рода системы и среды, адаптации к меняющимся условиям эксплуатации, специализации проектных организаций. Успех на рынке той или иной сложной технической продукции требует использования CALS.
Развитие CALS-технологии должно привести к появлению так называемых виртуальных производств, при которых процесс создания спецификаций с информацией для программно управляемого технологического оборудования по изготовлению изделия может быть распределен во времени и пространстве между многими организационно автономными проектными подразделениями. Среди достижений CALS-технологии - легкость распространения передовых проектных решений, возможность воспроизведения частей проекта в новых разработках и др.
Построение открытых распределенных автоматизированных систем для проектирования и управления в промышленности составляет основу современной CALS-технологии. Главная проблема их построения - обеспечение единообразного описания и интерпретации данных независимо от места и времени их получения в общей системе, имеющей масштабы вплоть до глобальных. Структура проектной, технологической и эксплуатационной документации, языки ее представления должны быть стандартизованными. Тогда становится реальной успешная работа над общим проектом разных коллективов, разделенных во времени и пространстве и использующих разные CAE/CAD/CAM-системы. Одна и та же конструкторская документация может быть использована многократно в разных проектах, а одна и та же технологическая документация адаптирована к разным производственным условиям, что позволяет существенно сократить и удешевить общий цикл проектирования и производства. Кроме того, упрощается эксплуатация систем. То есть, информационная интеграция является неотъемлемым свойством CALS-систем. Поэтому в основу CALS-технологии положен ряд стандартов, обеспечивающих такую интеграцию.
Важные проблемы, требующие решения при создании комплексных САПР - управление сложностью проектов и интеграция ПО. Эти проблемы включают вопросы декомпозиции проектов, распараллеливания проектных работ, целостности данных, межпрограммных интерфейсов и др.
1.3.5 Комплексные автоматизированные системы
Известно, что частичная автоматизация зачастую не дает ожидаемого повышения эффективности функционирования предприятий. Поэтому предпочтительным является внедрение интегрированных САПР, автоматизирующих все основные этапы проектирования изделий. Дальнейшее повышение эффективности производства и конкурентоспособности выпускаемой продукции возможно за счет интеграции систем проектирования, управления и документооборота.
Такая интеграция лежит в основе создания комплексных систем автоматизации, в которых помимо функций собственно САПР реализуются средства для автоматизации функций управления проектированием, документооборота, планирования производства, учета и т. п.
Проблемы интеграции лежат в основе технологии Юпитер, пропагандируемой фирмой Intergraph. Пример сращивания некоторых подсистем из САПР и АСУ - программный продукт TechnoDOCS (российская фирма Весть). Его функции - интеграция программ документооборота с проектирующими пакетами (конкретно с AutoCAD, Microstation и другими программами, выполняемыми в Windows-средах и поддерживающими взаимодействие по технологиям DDE или OLE, разработанным фирмой Microsoft); ведение архива технической документации, маршрутизация работ и прохождение документации, контроль исполнения, управление параллельным проектированием, то есть, координацией выполняемых коллективно проектных работ.
В основу CALS-технологии положен ряд стандартов и прежде всего это стандарты STEP, а также Parts Library, Mandate, SGML (Standard Generalized Markup Language), EDIFACT (Electronic Data Interchange For Administration, Commerse, Transport) и др. Стандарт SGML устанавливает способы унифицированного оформления документов определенного назначения - отчетов, каталогов, бюллетеней и т. п., а стандарт EDIFACT - способы обмена подобными документами.
Одна из известных реализаций CALS-технологии разработана фирмой Соmputervision. Эта технология названа EPD (Electronic Product Definition) и ориентирована на поддержку процессов проектирования и эксплуатации изделий машиностроения.
В CALS-системах на всех этапах жизненного цикла изделий используется документация, полученная на этапе проектирования. Поэтому естественно, что составы подсистем в CALS и комплексных САПР в значительной мере совпадают.
Технологию EPD реализуют:
а) CAD - система автоматизированного проектирования;
б) САМ - автоматизированная система технологической подготовки производства (АСТПП);
в) САЕ - система моделирования и расчетов;
г) CAPE (Concurrent Art-to-Product Environment) - система поддержки параллельного проектирования (concurrent engineering);
д) PDM - система управления проектными данными, представляющая собой специализированную СУБД (DBMS - Data Base Management System);
е) 3D Viewer - система трехмерной визуализации;
ж) CADD - система документирования;
и) CASE - система разработки и сопровождения программного обеспечения, методики обследования и анализа функционирования предприятий.
Основу EPD составляют системы CAD и PDM, в качестве которых используются CADDS5 и Optegra соответственно.
В значительной мере специфику EPD определяет система Optegra. В ней отображается иерархическая структура изделий, включающая все сборочные узлы и детали. В Optegra можно получить информацию об атрибутах структуры любого элемента, а также ответы на типичные для баз данных вопросы типа «Укажите детали из материала X» или «В каких блоках используются детали изготовителя Y9» и т п.
Важной для пользователей особенностью Optegra является работа вместе с многооконной системой визуализации 3D Viewer. Пользователь может одновременно следить за информацией в нескольких типовых окнах:
а) в информационном браузере, где высвечиваются данные, запрашиваемые из почтового ящика Internet, корпоративных ресурсов, из персональной БД;
б) окно структуры изделия, представляемой в виде дерева. Можно получать ответы на запросы подсветкой деталей Dj (листьев дерева), удовлетворяющих условиям запроса;
в) 3D визуализатор, в котором высвечивается трехмерное изображение изделия; ответы на запросы даются и в этом окне цветовым выделением деталей Dj;
г) окно пользовательского процесса, в котором в нужной последовательности в виде иконок отображается перечень задач, заданный пользователю для решения.
2 Техническое обеспечение САПР
2.1 Структура ТО САПР
2.1.1 Требования к ТО САПР
Техническое обеспечение (ТО) САПР включает в себя различные технические средства (hardware), используемые для выполнения АП: компьютеры, периферийные устройства, сетевое оборудование, а также оборудование вспомогательных систем (например, измерительных), поддерживающих проектирование.
Технические (аппаратные) средства САПР должны обеспечивать: 1) выполнение необходимых процедур на основе имеющегося ПО; 2) взаимодействие между проектировщиками и компьютерами в интерактивном режиме; 3) взаимодействие между работающими над одним проектом членами коллектива.
Первое требование обусловливает наличие в САПР вычислительных машин и систем с достаточной производительностью и емкостью памяти. Второе требование относится к пользовательскому интерфейсу и выполняется за счет включения в САПР удобных средств ввода-вывода данных и, прежде всего, устройств обмена графической информацией. Третье требование обусловливает объединение аппаратных средств САПР в вычислительную сеть.
Общая структура ТО САПР представляет собой сеть узлов, связанных между собой средой передачи данных (рисунок 5). Узлами (станциями данных) являются рабочие места проектировщиков, часто называемые автоматизированными рабочими местами (АРМ) или рабочими станциями (WS - Workstation). Узлами могут быть также большие ЭВМ (мейнфреймы), отдельные периферийные и измерительные устройства. Именно в АРМ должны быть средства для интерфейса проектировщика с ЭВМ. Вычислительная мощность может быть распределена между различными узлами вычислительной сети.
 Среда передачи данных представляет собой каналы передачи данных, состоящие из линий связи и
коммутационного оборудования.
Среда передачи данных представляет собой каналы передачи данных, состоящие из линий связи и
коммутационного оборудования.
В каждом узле можно выделить оконечное оборудование данных (ООД), выполняющее определенную работу по проектированию, и аппаратуру окончания канала данных (АКД), предназначенную для связи ООД со средой передачи данных. Так, в качестве ООД можно рассматривать персональный компьютер (ПК), в качестве АКД - сетевую плату.
Канал передачи данных - средство двустороннего обмена данными, включающее в себя АКД и линию связи. Линией связи называют часть физической среды, используемую для распространения сигналов в определенном направлении; примерами линий связи могут служить коаксиальный кабель, витая пара проводов, волоконно-оптическая линия связи (ВОЛС). Близким является понятие канала (канала связи), под которым понимают средство односторонней передачи данных; примером может быть полоса частот, выделенная одному передатчику при радиосвязи. В линии можно образовать несколько каналов, по каждому из которых передается своя информация; здесь линия разделяется между несколькими каналами.
2.1.2 Типы сетей, используемых в САПР
Существуют два метода разделения линии передачи данных: временное мультиплексирование (иначе разделение по времени или TDM - Time Division Method), при котором каждому каналу выделяется некоторый квант времени, и частотное разделение (FDM - Frequency Division Method), при котором каналу выделяется некоторая полоса частот. Метод разделения линии передачи данных определяет тип сети.
 |
В САПР небольших проектных организаций, насчитывающих не более единиц-десятков компьютеров, которые размещены в одной или нескольких соседних комнатах, используется локальная сеть. Локальная вычислительная сеть (ЛВС или LAN - Local Area Network) имеет линию связи, к которой подключаются все узлы сети. При этом топология соединений узлов (рисунок 6) может быть шинной (bus), кольцевой (ring), звездной (star). Протяженность линии и число подключаемых узлов в ЛВС ограничены.
В более крупных проектных организациях, когда в сеть включены десятки-сотни компьютеров, относящихся к разным проектам и управленческим подразделениям и размещенных в помещениях одного или нескольких зданий, используют корпоративную сеть. В структуре такой сети можно выделить ряд ЛВС, называемых подсетями, и средства связи ЛВС между собой. В эти средства входят коммутационные серверы (блоки взаимодействия подсетей). Если коммутационные серверы объединены отделенными от ЛВС-подразделений каналами передачи данных, то они образуют подсеть, называемую опорной (или транспортной), и вся сеть имеет иерархическую структуру.
Если здания проектной организации разнесены значительно (вплоть до расположения в разных городах), то корпоративная сеть становится территориальной сетью (WAN - Wide Area Network). В территориальной сети различают магистральные каналы передачи данных (магистральную сеть), имеющие значительную протяженность, и каналы передачи данных, связывающие ЛВС или совокупность ЛВС отдельного здания с магистральной сетью и называемые абонентской линией (или линией последней мили).
Обычно создание выделенной магистральной сети, обслуживающей единственную организацию, экономически невыгодно, поэтому чаще прибегают к услугам провайдера, то есть организации, предоставляющей услуги многим пользователям. Здесь внутри корпоративной сети связь осуществляется через магистральную сеть общего пользования. Для этого можно использовать, например, телефонную сеть. Наиболее распространенной формой доступа к этим сетям является Internet.
Кроме обеспечения взаимосвязи удаленных сотрудников организации, Internet обеспечивает возможность получения других информационных услуг. Так, развитие виртуальных предприятий, работающих на основе CALS-технологий, подразумевает информационные обмены через территориальные сети.
Структура ТО САПР для крупной организации представлена на рисунке 7. Здесь показана типичная структура крупных корпоративных сетей САПР, называемая архитектурой клиент-сервер. В сетях клиент-сервер выделяется один или несколько узлов, называемых серверами, которые выполняют управляющие или общие для группы пользователей проектные функции в сети, а остальные узлы (рабочие места) являются терминальными, их называют клиентами, в них работают пользователи. В общем случае сервером называют совокупность программных средств, ориентированных на выполнение определенных функций, но если эти средства сосредоточены на конкретном узле вычислительной сети, то понятие сервер относится именно к узлу сети.
 |
Сети клиент-сервер классифицируют по характеру распределения функций между серверами (по типам серверов). Различают: файл-серверы для хранения файлов, разделяемых многими пользователями; серверы баз данных автоматизированной системы; серверы приложений для решения конкретных прикладных задач; коммутационные серверы (блоки взаимодействия сетей или серверы доступа) для взаимосвязи сетей и подсетей; специализированные серверы для выполнения определенных телекоммуникационных услуг, например, серверы электронной почты.
В случае специализации серверов по определенным приложениям сеть называют сетью распределенных вычислений. Если сервер приложений обслуживает пользователей одной ЛВС, то естественно назвать его локальным. Но поскольку в САПР имеются приложения и базы данных, разделяемые пользователями разных подразделений и, следовательно, клиентами разных ЛВС, то эти серверы относят к группе корпоративных, подключаемых обычно к опорной сети.
Наряду с архитектурой клиент-сервер применяют одноранговые сети, в которых любой узел в зависимости от решаемой задачи может выполнять как функции сервера, так и функции клиента. Организация взаимодействия в таких сетях при числе узлов, превышающем несколько десятков, становится слишком сложной, поэтому одноранговые сети применяют только в небольших САПР.
В соответствии со способами коммутации различают сети с коммутацией каналов и с коммутацией пакетов. В первом случае при обмене данными между узлами А и В в сети создается физическое соединение между А и В, которое во время сеанса связи используется только этими абонентами (например, телефонная сеть). Здесь передача информации происходит быстро, но каналы связи используются неэффективно, так как возможны длительные паузы и канал «простаивает». При коммутации пакетов физического соединения, которое в каждый момент сеанса связи соединяло бы абонентов А и В, не создается. Сообщения разделяются на порции, называемые пакетами, которые передаются в разветвленной сети от А к В или обратно через промежуточные узлы с возможной буферизацией (временным запоминанием) в них. Таким образом, линия используется для передачи большого числа разных сообщений с максимальным заполнением пауз.
2.1.3 Понятия об эталонной модели взаимосвязи открытых систем
Для удобства модернизации сложных информационных систем их делают максимально открытыми, приспособленными для внесения изменений в некоторую часть системы при сохранении остальных частей неизменными. В отношении вычислительных сетей реализация концепции открытости привела к появлению эталонной модели взаимосвязи открытых систем (ЭМВОС), предложенной международной организацией стандартизации (ISO - International Standard Organization). В этой модели дано описание общих принципов, правил, соглашений, обеспечивающих взаимодействие информационных систем и называемых протоколами.
В ЭМВОС информационную сеть рассматривают как совокупность функций (протоколов), которые подразделяют на группы, называемые уровнями. Разделение на уровни позволяет вносить изменения в средства реализации одного уровня без перестройки средств других уровней, что значительно упрощает и удешевляет модернизацию средств по мере развития техники.
ЭМВОС содержит семь уровней:
а) на физическом (physical) уровне осуществляется представление информации в виде электрических или оптических сигналов, преобразование формы сигналов, выбор параметров физических сред передачи данных, организуется передача информации через физические среды;
б) на канальном (link) уровне выполняется обмен данными между соседними узлами сети, то есть, узлами, непосредственно связанными физическими соединениями без промежуточных узлов. Пакеты канального уровня называют кадрами;
в) на сетевом (network) уровне происходит формирование пакетов по правилам тех промежуточных сетей, через которые проходит исходный пакет, и маршрутизация пакетов, то есть, определение и реализация маршрутов, по которым передаются пакеты. Другими словами, маршрутизация сводится к образованию логических каналов. Логическим каналом называют виртуальное соединение двух или более объектов сетевого уровня, при котором возможен обмен данными между этими объектами. Понятию логического канала необязательно соответствует физическое соединение линий передачи данных между связываемыми пунктами. Это понятие введено для абстрагирования от физической реализации соединения. Еще одной функцией сетевого уровня после маршрутизации является контроль нагрузки на сеть с целью предотвращения перегрузок, отрицательно влияющих на работу сети;
г) на транспортном (transport) уровне обеспечивается связь между оконечными пунктами (в отличие от предыдущего сетевого уровня, на котором обеспечивается передача данных через промежуточные компоненты сети). К функциям транспортного уровня относятся мультиплексирование и демультиплексирование (сборка-разборка пакетов в конечных пунктах), обнаружение и устранение ошибок в передаче данных, реализация заказанного уровня услуг (например, скорости и надежности передачи);
д) на сеансовом (session) уровне определяются тип связи (дуплекс или полудуплекс), начало и окончание заданий, последовательность и режим обмена запросами и ответами взаимодействующих партнеров;
е) на представительном (presentation) уровне реализуются функции представления данных (кодирование, форматирование, структурирование). Например, на этом уровне выделенные для передачи данные преобразуются из одного кода в другой;
ж) на прикладном (application) уровне определяются и оформляются в сообщения те данные, которые подлежат передаче по сети.
Сеть может содержать лишь часть уровней. Так, в простых (неразветвленных) ЛВС отпадает необходимость в средствах сетевого и транспортного уровней. Одновременно сложность функций канального уровня делает целесообразным его разделение в ЛВС на два подуровня: управление доступом к каналу (MAC - Medium Access Control) и управление логическим каналом (LLC - Logical Link Control). К подуровню LLC, в отличие от подуровня MAC, относится часть функций канального уровня, не зависящих от особенностей передающей среды.
Передача данных через разветвленные сети происходит при использовании инкапсуляции-декапсуляции порций данных. Так, сообщение, пришедшее на транспортный уровень, делится на сегменты, которые получают заголовки и передаются на сетевой уровень. Сегментом обычно называют пакет транспортного уровня. Сетевой уровень организует передачу данных через промежуточные сети. Для этого сегмент может быть разделен на части (пакеты), если сеть не поддерживает передачу сегментов целиком. Пакет снабжается своим сетевым заголовком (то есть, происходит инкапсуляция). При передаче между узлами промежуточной ЛВС требуется инкапсуляция пакетов в кадры с возможной разбивкой пакета. Приемник декапсулирует сегменты и восстанавливает исходное сообщение.
2.2 Аппаратура рабочих мест в САПР
2.2.1 Вычислительные системы в САПР
В качестве средств обработки данных в современных САПР широко используют рабочие станции, серверы, ПК. Большие ЭВМ и в том числе суперЭВМ обычно не применяют, так как они дороги и для них отношение производительность-цена существенно ниже, чем у серверов и рабочих станций.
На базе рабочих станций или ПК создают АРМ. Типичный состав АРМ: ЭВМ с одним или несколькими микропроцессорами, с внешней, оперативной и кэш-памятью и шинами для связи устройств; устройства ввода-вывода (клавиатура, мышь, дисплей); в состав АРМ могут входить принтер, сканер, плоттер и другие устройства.
Память ЭВМ обычно имеет иерархическую структуру. Поскольку при большом объеме трудно добиться высокой скорости записи и считывания данных, память делят на сверхбыстродействующую кэш-память малой емкости, основную оперативную память умеренного объема и медленную внешнюю память большой емкости, причем кэш-память часто разделяют на кэш первого и второго уровней. Кэш-память встраивается в процессорный кристалл.
Для связи наиболее быстродействующих устройств (процессора, оперативной и кэш-памяти, видеокарты) используется системная шина с пропускной способностью до 2-4 Гбайт в секунду. Кроме системной шины, на материнской плате компьютера имеется шина расширения для подключения сетевого контроллера и быстрых внешних устройств, а также шина медленных внешних устройств, таких как клавиатура, мышь, принтер и т. п.
В настоящее время стандартным ПК можно считать компьютер с двухъядерным процессором (Core2Duo), мировые компьютерные гиганты Intel и AMD уже в ближайшее время намерены запустить в массовое производство четырехъядерные процессоры. Многоядерность сродни использованию нескольких процессоров в одном компьютере, но здесь они находятся в одном кристалле и не полностью независимы. При использовании разработанного ранее программного обеспечения, созданного для работы с одним ядром, это позволяет запустить одновременно несколько ресурсоемких задач соответственно числу ядер без какого-либо дискомфорта. Для ускорения же одного процесса использование многоядерного процесса ничего не дает, и здесь требуется разработка нового поколения программного обеспечения, ориентированного на распараллеливание процессов для использования нескольких ядер одновременно. Цена системного блока с двухъядерным процессором и типичной комплектацией составляет порядка 1 тыс. долларов США.
Рабочие станции (workstation) по сравнению с ПК представляют собой вычислительные системы, ориентированные на выполнение определенных функций. Специализация обеспечивается как набором программ, так и аппаратно за счет использования дополнительных специализированных процессоров. Так, в САПР для машиностроения преимущественно применяют графические рабочие станции для выполнения процедур геометрического моделирования и машинной графики. Эта направленность требует мощного процессора, высокоскоростной шины, памяти достаточно большой емкости. Высокая производительность процессора необходима в виду того, что графические операции (например, перемещения изображений, их повороты, удаление скрытых линий и др.) часто выполняются по отношению ко всем элементам изображения. Такими элементами в трехмерной (3D) графике при аппроксимации поверхностей полигональными сетками являются многоугольники, их число может превышать 104. При этом для удобства работы проектировщика в интерактивном режиме задержка при выполнении команд не должна превышать нескольких секунд. Но поскольку каждая такая операция по отношению к каждому многоугольнику реализуется большим числом машинных команд, требуемое быстродействие составляет десятки миллионов машинных операций в секунду. Такое быстродействие при приемлемой цене достигается применением наряду с основным универсальным процессором также дополнительных графических процессоров, в которых определенные графические операции реализуются аппаратно.
В наиболее мощных рабочих станциях в качестве основных обычно используют высокопроизводительные микропроцессоры с сокращенной системой команд (с RISC-архитектурой), работающие под управлением одной из разновидностей операционной системы Unix. В менее мощных станциях используется технология Wintel (то есть, микропроцессоры Intel и операционные системы Windows). Графические процессоры выполняют такие операции, как, например, растеризация - представление изображения в растровой форме для ее визуализации, перемещение, вращение, масштабирование, удаление скрытых линий и т. п.
Типичные характеристики рабочих станций: несколько процессоров, 2-8 Гбайт оперативной, несколько сотен гигабайт внешней памяти, наличие кэш-памяти, системная шина со скоростями от сотен Мбайт/с до 2-4 Гбайт/с.
В зависимости от назначения существуют АРМ конструктора, АРМ технолога, АРМ руководителя проекта и т. п. Они могут различаться составом периферийных устройств и характеристиками ЭВМ.
В АРМ конструктора (в графических рабочих станциях) в последнее время используются жидкокристаллические цветные мониторы. Типичные значения размера экрана по диагонали составляют 19...30 дюймов (фактически изображение занимает площадь на 5...8 % меньше, чем указывается в паспортных данных). Разрешающая способность монитора, то есть, число различимых пикселей (отдельных точек, из которых состоит изображение), лежит в пределах от 1280х1024 до 2560х1600 (несколько другие цифры для широких мониторов с соотношением сторон 16:10 в отличие от традиционных с соотношением сторон 5:4). При этом чем ниже частота кадровой развертки (частота регенерации изображения), тем более заметно мерцание экрана. Желательно иметь частоту кадровой развертки не ниже 75 Гц. Стоимость жидкокристаллических мониторов с диагональю 21´´ в настоящее время колеблется в пределах от 380 до 1000 долларов США.
Специально выпускаемые серверы высокой производительности обычно имеют структуру симметричной многопроцессорной вычислительной системы. В них системная память разделяется всеми процессорами, каждый процессор может иметь свою сверхоперативную память сравнительно небольшой емкости, число процессоров 1, 2, 4, 8, изредка больше. Например, сервер HP DL580G4 имеет 4 процессора CoreXeon 3000, ОЗУ 2 Гб, и его цена составляет порядка 10 тыс. долларов США.
2.2.2 Периферийные устройства
Прежде всего, рассмотрим устройства, используемые для ввода графической информации. Проблема ввода графической информации возникает в связи с тем, что внедрение САПР и, тем более, комплексной автоматизации предприятия требует представления всей документации в электронном виде.
Существующее на большинстве предприятий теплоэнергетического комплекса состояние документации можно назвать критическим. Так, если говорить о генпланах, то в лучшем случае имеются планшеты-оригиналы, которые выполнены вручную и не содержат достоверной информации: со временем сети перекладывали, ремонтировали, а изменения далеко не всегда отображались на чертежах. Иногда генплан и сводный план инженерных сетей представляют собой многократно скопированные и измененные «синьки», так что разобраться в подобных чертежах крайне непросто. Более того, бывает и так, что есть некий вариант генерального плана предприятия и один опытный специалист, который должен помнить все изменения и текущее состояние всего генплана. Чтобы решить проблему, организация должна:
а) перевести имеющиеся «твердые копии» (чертежи, синьки, планшеты, геодезические журналы и т.п.) в удобную для работы электронную форму;
б) отразить на генплане текущее состояние;
в) внедрить программное обеспечение для работы с электронным генпланом;
г) организовать удобный доступ к генплану проектировщиков, диспетчеров, администрации и других специалистов.
Для ввода графической информации с имеющихся документов в САПР используют сканеры, раньше использовались дигитайзеры.
Дигитайзер применялись для ручного ввода (ручной «сколки» чертежей). Он имеет вид кульмана, по его электронной доске перемещается курсор, на котором расположен визир и кнопочная панель. Курсор имеет электромагнитную связь с сеткой проводников в электронной доске. При нажатии кнопки в некоторой позиции курсора происходит занесение в память информации о координатах этой позиции.
Для автоматического ввода информации с имеющихся текстовых или графических документов используют сканеры планшетного или протяжного типа. Способ считывания - оптический. В сканирующей головке размещаются оптоволоконные самофокусирующиеся линзы и фотоэлементы. Разрешающая способность в разных моделях составляет от 300 до 800 точек на дюйм (dpi).
Считанная с помощью сканера информация имеет растровую форму, и программное обеспечение сканера представляет ее в одном из стандартных форматов, например TIFF, GIF, PCX, JPEG. Для дальнейшей обработки желательно выполнить векторизацию - перевод графической информации в векторную форму, например, в формат DXF. Это можно сделать с помощью специального программного обеспечения типа RasterDesk или Spotlight. Их использование позволяет устранить линейные и нелинейные искажения - результат старения документа, а также посторонних воздействий; удаляется «мусор» (помехи, возникающие при многократном исправлении, копировании и т.д.): электронные чертежи приводятся в форму, удобную для чтения и редактирования.
В настоящее время получают распространение трехмерные сканеры, которые позволяют получать трехмерную модель объекта. Для этого объект помещают в камеру, где, поворачивая его различным образом, получают необходимые изображения. Специальное программное обеспечение позволяет создать по этим изображениям трехмерную модель объекта.
Для вывода информации применяют принтеры и плоттеры. Принтеры ориентированы на получение документов малого формата (A3, А4), плоттеры - для вывода графической информации на широкоформатные носители. Принцип действия и тех и других в настоящее время либо лазерный, либо струйный.
Типичная разрешающая способность принтеров и плоттеров 300 dpi, в настоящее время она повышена до 720 dpi. В современных устройствах управление осуществляется встроенными микропроцессорами. Время вывода монохромного изображения формата А1 – 2…7 мин, цветного - в два раза больше.
В последнее время для быстрой организации производства стала применяться так называемая технология быстрого прототипирования (Rapid Prototyping), позволяющая строить физические модели по данным трехмерного компьютерного моделирования. Последние могут создаваться непосредственно в пакетах трехмерного моделирования или по данным компьютерной томографии (CT), магнито-резонансного сканирования (MRI), по результатам измерений на координатно-измерительных машинах. Трехмерная компьютерная модель вначале «разрезается» компьютером на ряд тонких плоских сечений. Эти сечения посылаются компьютером на установку быстрого прототипирования (трехмерный принтер), которая послойно строит деталь. Геометрия каждого слоя определяется поперечным сечением детали. Все слои скрепляются между собой. Полученная деталь является концептуальной моделью, используемой для визуальной оценки конструкции, для проверки формы и сборки изделия, для некоторых испытаний функциональности и т.д. Такую технологию предлагает, например, фирма Z Corporation: так, цветной трехмерный принтер Z406 строит детали из нетоксичных порошковых материалов на основе крахмала или гипса и водного связующего вещества, причем за два часа он может построить 6 деталей, размером и формой представляющих собой что-то типа баночки для газированного напитка.
Сканеры, принтеры и плоттеры могут входить в состав АРМ или разделяться пользователями нескольких рабочих станций в составе локальной сети.
Ввиду ограниченности объема настоящего курса лекций мы не будем останавливаться на таких вопросах технологии работы в вычислительных сетях (методы доступа, топология, протоколы и т.п.).
3 Понятия о системных средах САПР
3.1 Общие понятия
САПР относятся к числу наиболее сложных и наукоемких автоматизированных систем (АС). В ПО АС принято выделять общесистемное ПО, системные среды и прикладное ПО.
К общесистемному ПО относят операционные системы (ОС) используемых ЭВМ и вычислительных систем и сетевое ПО типовых телекоммуникационных услуг. Основные функции сетевой ОС: управление каталогами и файлами; управление ресурсами; коммуникационные функции; защита от несанкционированного доступа; обеспечение отказоустойчивости; управление сетью. Не останавливаясь на этих вопросах, перейдем к рассмотрению системных сред САПР.
Наряду с выполнением собственно проектных процедур необходимо автоматизировать также управление проектированием, поскольку сам процесс проектирования становится все более сложным и зачастую приобретает распределенный характер. На крупных и средних предприятиях заметна тенденция к интеграции САПР с системами управления предприятием и документооборота, Для управления столь сложными интегрированными системами в их составе имеется специальное ПО - системная среда САПР или АС.
Первые системные среды САПР, называвшиеся мониторными подсистемами или Framework (FW), появились на рубеже 70-80-х гг. В настоящее время основными функциями системных сред САПР являются управление данными, управление проектированием, интеграция ПО, реализация интерфейса с пользователем САПР, помощь в разработке и сопровождении ПО САПР.
Важно отметить, что проблема системных сред САПР, зародившаяся в процессе становления САПР электронной промышленности, получила развитие при реализации CALS-технологии в различных отраслях машиностроения.
В типичной структуре ПО системных сред современных САПР можно выделить следующие подсистемы. Ядро отвечает за взаимодействие компонентов системной среды, доступ к ресурсам ОС и сети, возможность работы в гетерогенной среде, настройку на конкретную САПР (конфигурирование) с помощью специальных языков расширения. Подсистема управления проектом, называемая также подсистемой сквозного параллельного проектирования CAPE (Concurrent Art-to-Product Environment), выполняет функции слежения за состоянием проекта, координации и синхронизации параллельно выполняемых процедур разными исполнителями. Примерами подсистем управления проектами в машиностроении могут служить Design Manager в САПР Euclid, UG/Manager в Unigraphics. Иногда в отдельную подсистему выделяют управление методологией проектирования. При этом под методологией понимают совокупность методов и средств образования маршрутов проектирования - последовательностей проектных операций и процедур, ведущих к цели проектирования.
Методы построения маршрутов проектирования (workflow) зависят от типа проектных задач. Различают простые задачи, выполняемые одной программой, линейные, в которых нет разветвлений в межпрограммных связях, и комплексные. Методы построения маршрутов могут быть основаны на предварительном описании задач или на предварительном описании правил конструирования задач. В описании задач фигурируют порты, с которыми соотнесены данные. Порты могут быть обязательными и необязательными, порождающими дополнительные данные или данные нового объекта. Описания задач даются в виде графов или на языках расширения.
Подсистема управления методологией проектирования представлена в виде базы знаний. В ней содержатся следующие сведения о предметной области: информационная модель (например, в виде диаграмм сущность-отношение), иерархическая структура проектируемых объектов (например, в виде И-ИЛИ-дерева), описания типовых проектных процедур, типовые фрагменты маршрутов проектирования (т.н. потоки процедур), соответствие между процедурами и имеющимися пакетами прикладных программ, ограничения на их применение и т. п. Часто такую БЗ дополняют обучающей подсистемой, используемой для подготовки специалистов к использованию САПР.
Современные системы управления проектными данными называют PDM (Product Data Manager). PDM предназначены для информационного обеспечения проектирования и выполняют следующие функции:
а) хранение проектных данных и доступ к ним, в том числе ведение распределенных архивов документов, их поиск, редактирование, маршрутизация и визуализация;
б) управление конфигурацией изделия, т. е. ведение версий проекта, управление внесением изменений;
в) создание спецификаций;
г) защита информации;
д) интеграция данных (поддержка типовых форматов, конвертирование данных).
Основной компонент PDM - банк данных (БнД). Он состоит из системы управления базами данных и баз данных (БД). Межпрограммный интерфейс в значительной мере реализуется через информационный обмен с помощью банка данных. PDM отличает легкость доступа к иерархически организованным данным, обслуживание запросов, выдача ответов не только в текстовой, но и в графической форме, привязанной к конструкции изделия. Поскольку взаимодействие внутри группы проектировщиков в основном осуществляется путем обмена данными, то в системе PDM часто совмещают функции управления данными и параллельным проектированием.
Подсистема интеграции ПО предназначена для организации взаимодействия программ в маршрутах проектирования. Она состоит из ядра, отвечающего за интерфейс на уровне подсистем, и оболочек процедур, согласующих конкретные программные модули, программы и (или) программно-методические комплексы (ПМК) со средой проектирования.
Интеграция ПО базируется на идеях объектно-ориентированного программирования. Следует различать синтаксический и семантический аспекты интеграции. Синтаксическая интеграция реализуется с помощью унифицированных языков и форматов данных, технологий типа ODBC для доступа к общему банку данных или компонентно-ориентированных (CBD - Component-Based Development) технологий. Пример унифицированного формата - TES (Tool Encapsultion Specification), предложенного консорциумом CFI. Информация из TES используется для создания оболочек модулей при инкапсуляции. Семантическая интеграция подразумевает автоматическое распознавание разными системами смысла передаваемых между ними данных и достигается значительно труднее.
Подсистема пользовательского интерфейса включает в себя текстовый и графический редакторы и поддерживается системами многооконного интерфейса типа Х Window System или Open Look.
Подсистема CASE предназначена для адаптации САПР к нуждам конкретных пользователей, разработки и сопровождения прикладного ПО. Ее можно рассматривать как специализированную САПР, в которой объектом проектирования являются новые версии подсистем САПР, в частности, адаптированные к требованиям конкретного заказчика. Другими словами, такие CASE-подсистемы позволяют пользователям формировать сравнительно с малыми затратами усилий варианты прикладных ПМК из базового набора модулей под заданный узкий диапазон конкретных условий проектирования. В таких случаях CASE-подсистемы называют инструментальными средами.
CASE-система, как система проектирования ПО, содержит компоненты для разработки структурных схем алгоритмов и «экранов» для взаимодействия с пользователем в интерактивных процедурах, средства для инфологического проектирования БД, отладки программ, документирования, сохранения «истории» проектирования и т. п. Наряду с этим, в CASE-подсистему САПР входят и компоненты со специфическими для САПР функциями.
Так, в состав САПР Microstation (фирма Bentley Systems) включена инструментальная среда Microstation Basic и язык MDL (Microstation Development Language) с соответствующей программной поддержкой Язык MDL - С-подобный, с его помощью можно лаконично выразить обращения к проектным операциям и процедурам. В целом среда Microstation Basic близка по своим функциям к среде MS Visual Basic, в ней имеются генератор форм, редактор, конструктор диалога, отладчик.
САПР Спрут (российская фирма Sprut Technologies) вообще создана как инструментальная среда для разработки пользователем потоков задач конструкторского и технологического проектирования в машиностроении с последующим возможным оформлением потоков в виде пользовательских версий САПР. Сконструированный поток поддерживается компонентами системы, в число которых входят графические 2D и 3D подсистемы, СУБД, продукционная экспертная система, документатор, технологический процессор создания программ для станков с ЧПУ, постпроцессоры.
3.2 Подходы к интеграции программного обеспечения в САПР
Для создания программного обеспечения (ПО) САПР так же, как и других сложных автоматизированных информационных систем, определяющее значение имеют вопросы интеграции ПО. Теоретической базой для создания технологий интеграции ПО в САПР являются:
а) методология АП, в соответствии с которой осуществляются типизация проектных процедур и маршрутов проектирования в различных предметных областях, выявление типичных входных и выходных данных процедур, построение информационных моделей приложений и их обобщение, сравнительный анализ альтернативных методов и алгоритмов выполнения типовых процедур;
б) объектно-ориентированная методология, в соответствии с которой множества сущностей, фигурирующих в процессах проектирования, подразделяются на классы, в классах появляются свои процедуры и типы данных с отношениями наследования. Эти классы могут быть инвариантными и прикладными. Их унификация приводят к появлению таких понятий и средств, как интегрированные ресурсы и прикладные протоколы, фигурирующие в стандартах STEP, или унифицированные программные компоненты типа графических ядер конструкторских САПР. Именно наличие типовых процедур и единообразное толкование атрибутов объектов в рамках конкретных протоколов позволяют разным программным системам «понимать» друг друга при взаимодействии.
Наряду с типовыми графическими ядрами известны типовые ПМК имитационного моделирования, конструирования деталей и механизмов, технологической подготовки производства и др. Возможность использования типовых программ в составе программных комплексов обусловлена унификацией интерфейсов при обменах данными.
В некоторых маршрутах проектирования обмены данными должны происходить с высокой частотой, что обусловливает специфические требования к интерфейсам. Примером могут служить задачи имитационного моделирования, в которых требуется имитировать взаимодействие процессов, описываемых с помощью различного МО (например, на сосредоточенном и распределенном иерархических уровнях, или с помощью аналоговых и дискретных моделей). Для таких задач при моделировании характерно воспроизведение временной последовательности событий, происходящих в анализируемых взаимодействующих системах. Соответственно взаимодействие программ моделирования может происходить через фиксированное число временных шагов или по мере совершения тех или иных событий в моделируемых системах.
Так, в программах смешанного аналого-дискретного моделирования электронных устройств аналоговая часть моделируется с помощью программы анализа электронных схем, а дискретная часть - с помощью программы логического моделирования. Влияние аналоговой части на дискретную отображается в ММ модели путем преобразования непрерывных фазовых переменных в логические переменные в местах сопряжения частей модели, обратное влияние выражается в преобразовании идеализированных логических сигналов в заданные функции времени, соответствующие электрическим сигналам заданной формы. Очевидно, что в содержательной части сообщений, передаваемых из одной части в другую, должны быть сведения либо о состояниях, выражаемых значениями фазовых переменных в интерфейсных узлах, либо о событиях - изменениях фазовых переменных. Обмен сообщениями может происходить многократно в течение акта одновариантного анализа.
В программно-методических комплексах конструирования происходит обработка графической информации. Содержательная часть сообщений относится к геометрическим элементам, их размерам и положению в пространстве. В программах технологической подготовки механической обработки деталей наряду с геометрической информацией о конструкциях заготовок в передаваемые сообщения могут входить сведения об инструменте, технологической оснастке, оборудовании, режимах обработки, нормах времени, траекториях движения инструмента и рабочих органов оборудования и т. п.
Другими словами, в каждом приложении совокупность используемых при обменах понятий, предметных переменных и числовых параметров существенно ограничена и достаточно определена для того, чтобы можно было ставить вопрос о типизации моделей и языка взаимодействия. Такие вопросы решаются в рамках технологий STEP/CALS. Число приложений, нашедших свое описание в прикладных протоколах STEP ограничено, но совокупность таких протоколов может расширяться.
Прикладные протоколы STEP представляют семантическую сторону интеграционных технологий. Для интеграции нужна не только унификация моделей приложений, но и унификация механизмов взаимодействия, примерами которых являются технологии OLE, DDE, а также компонентно-ориентированные технологии.
3.3 Уровни управления проектированием в САПР
В зависимости от степени автоматизации управляющих функций можно выделить несколько уровней управления проектированием:
а) компонентный; на этом уровне пользователь должен знать специфические особенности каждой конкретной программы, используемой в маршруте проектирования; при организации маршрута он должен позаботиться об информационных интерфейсах используемых программ; другими словами, системная среда лишь предоставляет сведения об имеющихся программах и их интерфейсах;
б) ресурсный; пользователь по-прежнему оперирует программами при компиляции маршрута проектирования, но системная среда позволяет скрыть специфику каждой программы, так как общение унифицировано;
в) задачный; пользователь составляет маршрут проектирования не из отдельных программ, а из отдельных проектных процедур; покрытие маршрута программами выполняет системная среда;
г) проблемный; пользователь формулирует задания в форме «что нужно сделать», а не «как это сделать», т. е. не определяет маршрут проектирования, а ставит проектную проблему.
4 Состав и характеристика модулей программно-методического комплекса APM WinMacine
В этой главе рассматривается состав и назначение модулей программно-методического комплекса APM WinMacine 9.2, установленного в компьютерном классе кафедры «Инженерная графика и прикладная механика» (ИГиПМ) АИЭС. С использованием APM WinMacine выполняется лабораторный практикум по дисциплине «Конструирование и САПР энергосистем и энергооборудования» для магистрантов, обучающихся по специальности «Теплоэнергетика».
Программно-методический комплекс APM WinMachine является программным продуктом Научно-технического центра «Автоматизация проектирования машин» (НТЦ АПМ), г. Королев, Московская область. При написании разделов 4 и 5 настоящего учебного пособия были использованы электронные и печатные материалы, опубликованные сотрудниками НТЦ АПМ.
Система APM WinMachine представляет собой программно-методический комплекс или инструментально-экспертную CAD/CAE систему, включающую инструменты и программы для автоматизированного расчета и проектирования деталей машин, механизмов, элементов конструкций и узлов. Кроме этого, она имеет современные графические средства, встроенные базы данных, необходимую информационную базу знаний, разветвленную систему подсказок и электронный учебник по основам проектирования машин.
APM WinMachine содержит программы для расчета:
а) энергетических и кинематических параметров машин;
б) прочности, жесткости и устойчивости элементов конструкций;
в) выносливости при переменных режимах нагружения;
г) вероятности отказов, надежности и износостойкости отдельных элементов;
д) динамических характеристик элементов конструкций.
Кроме того, в APM WinMachine имеется набор инструментальных средств расчета и анализа. Эти средства, а также проектируемые детали, в зависимости от назначения разделены на подсистемы (модули), которые могут функционировать как в составе системы, так и самостоятельно. Система содержит открытые для пользователя расчетные алгоритмы.
Каждый модуль предоставляет пользователю интегрированную среду, которая в общем случае включает в себя специализированный графический редактор, встроенные базы данных, полный цикл вычислений и разнообразные средства представления результатов расчета.
Система APM WinMachine включает в себя следующие модули:
а) АРМ Graph - плоский чертежно-графический редактор для оформления конструкторской документации, имеющий удобные функции параметрического задания геометрических объектов;
б) АРМ Studio - модуль создания трехмерных поверхностных и твердотельных моделей со встроенным генератором разбиения на конечные элементы;
в) АРМ Mechanical Data - база данных стандартных деталей и узлов, справочных данных по общему машиностроению;
г) АРМ Material Data - модуль хранения и редактирования параметров материалов;
д) АРМ Construction Data - база данных графической информации по стандартным деталям и элементам строительных конструкций;
е) АРМ Technology Data - база данных стандартных информационных данных для проектирования технологических процессов;
ж) АРМ Base - модуль создания и редактирования баз данных;
и) АРМ DOCs - модуль автоматизации работы с техническими данными;
к) АРМ Book - электронный учебник «Основы проектирования машин», в котором изложены основные методы расчета, реализованные в системе АРМ WinMachine;
л) АРМ Beam, АРМ Truss - модули расчета и проектирования балочных элементов конструкций и плоских ферм методом конечных элементов;
м) АРМ Structure3D - модуль расчета и проектирования произвольных конструкций, состоящих из пластинчатых, стержневых, а также объемных элементов и их произвольных комбинаций методом конечных элементов. С его помощью можно рассчитать напряженно-деформированное состояние конструкции в статическом режиме, выполнить расчеты на устойчивость и определение собственных частот, а также проанализировать поведение конструкции при произвольном динамическом нагружении. Модуль АРМ Structure 3D имеет сертификат ГОССТРОЯ РФ;
н) АРМ Joint - модуль расчета и проектирования соединений деталей машин и элементов конструкций, который позволяет выполнить комплексный расчет всех типов резьбовых, сварных, заклепочных соединений и соединений деталей вращения;
п) АРМ Trans - модуль проектирования передач вращения, предназначенный для расчета всех типов зубчатых передач, а также червячных, ременных и цепных передач, и генерации чертежей элементов этих передач в автоматическом режиме;
р) АРМ Shaft - модуль расчета, анализа и проектирования валов и осей;
с) АРМ Bear - модуль расчета неидеальных подшипников качения, позволяющий провести комплексный анализ опор качения всех известных типов;
т) АРМ Plain - модуль расчета и анализа радиальных и упорных подшипников скольжения, работающих в условиях жидкостного и полужидкостного трения;
у) АРМ Drive - модуль расчета и проектирования привода произвольной структуры, а также планетарных и волновых передач. С его помощью выполняется комплексный расчет кинематических характеристик и проектирование как привода в целом, так и отдельных его элементов, с автоматической генерацией чертежей, как отдельных деталей, так и в сборе, включая корпус;
ф) АРМ Spring - модуль расчета и проектирования пружин и других упругих элементов машин;
ч) АРМ Cam, АРМ Slider - модули расчета и проектирования кулачковых механизмов с автоматической генерацией чертежей и рычажных механизмов произвольной структуры;
ц) АРМ Screw - модуль для расчета неидеальных передач поступательного движения. Он способен рассчитать винтовые передачи скольжения, шарико-винтовые и планетарные винтовые передачи;
ш) АРМ Technology - модуль проектирования технологических процессов.
Система АРМ WinMachine предназначена для персональных компьютеров и работает в средах Microsoft Windows - 2000, NT, XP.
Ниже некоторые из модулей системы рассмотрены более подробно.
4.1 Двумерный графический редактор APM Graph
Модуль APM Graph предназначен для выполнения графической части компьютерной подготовки конструкторской документации. Он является частью системы автоматизированного проектирования APM WinMachine, но может использоваться и как самостоятельный программный продукт.
APM Graph можно эффективно использовать для подготовки исходных данных для расчетных модулей системы APM WinMachine. С этой целью в каждой из прикладных расчетных программ имеется возможность импорта графической информации.
Для отрисовки объектов имеется набор примитивов, таких как линия, окружность, дуга, точка, сплайн, многоугольник и другие. При этом объекты можно рисовать как в свободном режиме, так и связанными с другими объектами: параллельно, перпендикулярно, касательно и т.д. При отрисовке примитивов существует возможность привязки к контрольным точкам (концам линии, центрам дуг и окружностей и др.), к середине отрезка, к пересечению объектов, отрисовки объектов касательно или нормально к ранее созданным объектам и пр.
Для каждого примитива существует несколько способов задания. В зависимости от установленных параметров геометрические связи между объектами могут закрепляться и отслеживаться при редактировании. Точные числовые параметры примитивов можно ввести в диалоговом окне ручного ввода.
В модуле APM Graph имеются команды для нанесения линейных, угловых и радиальных размеров. Размеры проставляются как в автоматическом, так и полуавтоматическом режиме. Реализована возможность расчета размерных цепей. Размеры легко редактируются и модифицируются. Имеется возможность простановки допусков линейных и угловых величин. Величины допусков программа считывает из библиотеки APM Mechanical Data.
Для рисования объектов различными типами линий имеется встроенный редактор типов линий. Разработанные типы линий можно записывать в файл и подгружать их в дальнейшем в других чертежах.
При вводе текста имеется возможность форматирования абзаца: задание отступов, интервалов, выравнивания, угла наклона. Штрихование областей происходит тремя различными вариантами: выбором одного объекта из контура, выбором всех объектов контура, задание точки внутри контура. При этом вид штриховки может быть одним из следующих: сплошная заливка, градиентная заливка, наклонными линиями, предопределенная штриховка и текстурная, когда в качестве образца используется *.bmp или *.wfm файл.
Имеется возможность простановки различных типов специальных символов: допусков, знака базы, знака шероховатости, выносок и специальных знаков. Для соединения линий и дуг можно создать скругления или фаски по различным типам параметров.
В чертежно-графическом редакторе есть
возможность прямой прорисовки графических символов, выполненных согласно
существующим стандартам на оформление графической документации. Эти символы
используются в качестве условных обозначений чистоты обработки поверхности
детали, технических требований на эти поверхности, а также некоторых
специальных элементов, таких как сварные швы, уровень и т. д.
Удобным инструментом оформления конструкторской документации является редактор таблиц, использование которого существенно облегчает работу по оформлению технических документов, включающих таблицы различных форм и размеров. С помощью этого редактора можно сформировать таблицу произвольного содержания, выбрать подходящий тип линий и заполнить поля необходимой текстовой информацией.
Объекты чертежа можно редактировать различными способами: перемещать, создавать копии, вращать, масштабировать, зеркально отображать, создавать прямоугольный и круговой массивы, смещать объекты и т.д. Можно производить разрыв линий, дуг, окружностей или сплайнов в точке или между двумя точками, операции усечения и выравнивания любых объектов.
Для более удобной работы с чертежом предусмотрена работа с блоками. Блок - это совокупность объектов, с которой можно работать как с одним объектом. Можно создавать блоки из отдельных примитивов, а также использовать вложения блоков друг в друга. Блоки можно сохранять в отдельный файл для организации библиотек конструкций и их элементов.
Для удобства работы над чертежом пользователь имеет возможность размещения объектов по различным слоям. В менеджере слоев можно управлять включением/отключением и блокировкой/разблокировкой слоев, а также настраивать для каждого слоя по умолчанию соответствующий тип линии.
Информация в эскиз может поступать и из сторонних графических редакторов, путем ее импорта из форматов *.dxf, *.agr. Также возможен экспорт геометрии из эскиза в плоский графический редактор APM Graph.
Трехмерные модели импортируются в APM Studio через обменный формат STEP. Далее они могут быть подвержены необходимому редактированию и подготовке к оценке напряженно-деформированного состояния.
Для работы с выносными элементами чертежа (разрезами, видами и т.п.) используется специальная система видов. Ее использование повышает удобство работы пользователя со сложными деталировочными и сборочными чертежами.
С использованием стандартного буфера обмена можно передавать или получать графическую или текстовую информацию из различных сторонних текстовых и графических редакторов.
 |
В чертежном редакторе существует буфер на 200 undo-redo команд. Он позволит вернуться назад при осуществлении неверных действий.
Следует отметить, что дополнительно с редактором поставляется набор стандартных баз данных, используемых при проектировании новых или модернизации старых изделий. Это: APM Mechanical Data – база данных стандартных деталей и узлов, справочных данных по общему машиностроению; APM Construction Data – база данных графической информации по стандартным деталям и элементам строительных конструкций; APM Technology Data – база данных стандартных информационных данных для проектирования технологических процессов. Для работы с базами данных реализованы специализированные механизмы, позволяющие пользователю быстро и наглядно просматривать и находить нужную информацию.
В режиме печати изображения на принтер или плоттер имеется возможность выбора нескольких вариантов определения области печати, предварительного просмотра и разбиения листа на форматы.
В модуле APM Graph реализована возможность параметрического задания графических объектов. Так как обычно машина примерно наполовину состоит из типовых деталей и узлов, то параметризация является очень удобным инструментом при конструировании машин. Параметризация позволяет после выполнения необходимых расчетов автоматически прорисовывать геометрические объекты, если последние были заданы параметрически.
При работе в этом режиме автоматически сохраняется последовательность выполняемых команд и их атрибутов. Параметры создаваемых моделей описываются набором переменных. Этим переменным можно присваивать соответствующие имена и задавать необходимые числовые и функциональные соотношения. Функциональные соотношения могут быть совершенно произвольными, т. е. описанными произвольными аналитическими функциями. Для задания таких функций имеется специальный редактор анализа и преобразования аналитических выражений.
Стандартные конструктивные графические элементы, оформленные в виде параметрических объектов в среде APM Graph, включены в состав баз данных APM Mechanical Data, APM Construction Data, APM Technology Data. Они служат базовым элементом для автоматической генерации чертежей по результатам расчета в инженерных модулях.
В случае использования параметрических моделей появляется возможность хранения библиотек стандартных конструкций и их элементов. При вставке параметрической модели в рабочий чертеж пользователь задает значения переменных, по которым строится параметрический блок. Пока он не расчленен на отдельные элементы, в нем сохраняются все параметрические связи и возможность модификации переменных, которыми описана модель.
На рисунках 8 – 12 приведен ряд примеров работы в графическом редакторе APM Graph.
4.2 Модуль трехмерного моделирования объектов APM Studio
Модуль APM Studio предназначен для проектирования объектов в трехмерном пространстве с использованием функций поверхностного и твердотельного моделирования. Он является одним из основных инструментов системы APM WinMachine. APM Studio создан на геометрическом ядре APM Engine, разработанном в НТЦ АПМ. Помимо геометрических инструментов, в свой состав модуль включает режим Конечно-элементный анализ и встроенные генераторы конечно-элементной сетки. Это позволяет импортировать модель с нанесенной конечно-элементной сеткой, нагрузками и закреплениями в расчетный модуль APM Structure3D, где можно произвести все необходимые прочностные расчеты и получить общую картину напряженно-деформированного состояния конструкции.
С использованием функций трёхмерного моделирования в модуле APM Studio могут создаваться поверхностные и твердотельные объекты.
Одним из основных понятий пространственного моделирования является понятие эскиза (sketch). Эскиз может быть как одной из ортогональных координатных плоскостей, так и произвольной плоскостью в пространстве. Все плоские построения выполняются в эскизе. При этом применяются следующие функции: отрисовка линий, окружностей, дуг, многоугольников, простановка фасок и скруглений, усечение, выравнивание по границе, смещение, копирование, перемещение, зеркальное отображение, создание массивов - прямоугольного и кругового, поворот объектов и т. д.
При создании плоских изображений в эскизе можно использовать элементы плоской (2D) параметризации: закрепление параллельности, перпендикулярности, угловых и линейных размеров и т.п.
Поверхности создаются с помощью операций над плоскими кривыми, подготовленными в эскизах. В APM Studio возможно формирование поверхностей следующими командами: сфера, выталкивание по нормали и по произвольной кривой, вращение, контурная плоскость и др. Криволинейные поверхности можно задавать набором произвольных поперечных сечений.
Для создания более сложных поверхностей можно использовать такие операции, как пересечение, скругление, простановка фасок, сшивка поверхностей, удаление существующих граней и т.д.
Твердые тела создаются при помощи процедур выталкивания, вращения, кручения, выталкивания по пути и т.п., производимых над плоскими объектами (замкнутыми контурами), подготовленными в эскизах. Для создания более сложных моделей необходимо использовать выбор типа производимой операции: объединение, вычитание, пересечение. То есть, модель на экране будет представлять результат выбранного типа операции над существующим и вновь создаваемым объектом.
Интерфейс модуля APM Studio можно разделить на пять областей: главное меню, рабочее окно, панели инструментов, окно дерева операций и строка состояния. Данные области могут выстраиваться пользователем на экране по его усмотрению.
В дереве операций отображаются все объекты, созданные пользователем в модуле APM Studio. Перемещаясь по дереву, можно отследить всю историю создания 3D модели.
Корнем дерева операций является Деталь. Самым первым элементом дерева операций располагается узел Геометрия. Он содержит координатные плоскости, проходящие через начало координат, которые можно выбирать в качестве плоскостей эскизов. Далее идут сами объекты: эскизы, кривые, поверхности, твердые тела, а также перечень проделанных операций. Каждая поверхность или твердое тело, нарисованные в модуле APM Studio, обозначаются в дереве операций узлом. Находясь в режиме выбора нужные элементы можно выбирать из дерева операций, и выполнять над ними следующие операции: временно не отображать на экране (скрыть), переименовать, выделить, удалить, редактировать и т. д.
При переходе в режим Конечно-элементный анализ автоматически открывается новое дерево операций, в котором отображаются закрепления и нагружения, произведенные пользователем. С элементами этого дерева можно проводить те же операции, что и с элементами дерева построения 3D модели.
Рабочее окно (окно редактирования) является основным окном редактора и предназначается для модификации и отображения результата операций, проделанных пользователем в модуле APM Studio при построении 3D модели.
Рабочее окно функционирует в двух режимах – режим редактирования плоского или трехмерного эскиза и режим редактирования 3D объектов (поверхностей, твердых тел). Автоматически при переходе из одного режима в другой становятся доступны для использования команды и функции, необходимые при создании плоских или пространственных объектов.
Для ориентации объектов в пространстве в редакторе используется глобальная ортогональная система координат. Относительно нее также происходит задание нагружения и закрепления созданных моделей при работе в режиме Конечно-элементный анализ.
При работе в редакторе APM Studio некоторые операции вызываются наиболее часто и доступ к ним через меню или панели инструментов бывает иногда неудобен, с точки зрения уменьшения временных затрат. Среда редактирования APM Studio содержит экспресс-функции, вызываемые с помощью клавиш мыши и клавиатуры, необходимые для перемещения и вращения вида, динамического изменения масштаба.
При создании какой-либо кривой можно вызвать объектную привязку, которая необходима для данного конкретного случая. Она получила название локальной привязки.
В модуле достаточно широко развита система контекстных меню для различных случаев редактирования объектов.
|
|
|
Рисунок 13 – Последовательность операций при подготовке модели для расчета |
|
|
|
Рисунок 14 – Объемная модель корпуса карбюратора
|
|
|
|
Рисунок 15 – Объемная модель зубчатой передачи |
|
|
|
Рисунок 16 - Модель литого диска колеса в модуле APM
Studio |
|
|
|
Рисунок 17 - Модель, импортированная из модуля APM
Studio |
Как было сказано выше, APM Studio представляет собой также эффективный инструмент создания объектов для конечно-элементного анализа в модуле APM Structure3D.
В модуле предусмотрен специальный режим - Конечно-элементный анализ. В данном режиме работа ведется непосредственно с самой моделью, а не с конечно-элементной сеткой, что является положительным фактором, упрощающим выполнение требуемых операций. Непосредственно в окне редактора модель может быть произвольным образом закреплена и нагружена как силовыми, так и термическими воздействиями. Далее для создания конечно-элементного представления объекта в модуле APM Studio существует функция генерации конечно-элементной сетки, при вызове которой разбиение объекта с заданным шагом.
При наличии в модели сложных и неравномерных геометрических переходов может быть проведено так называемое адаптивное разбиение. При этом автоматически (с учетом максимального коэффициента сгущения, введенного пользователем) генератор КЭ-сетки сам варьирует величину шага разбиения для того, чтобы результат процесса был более качественным.
Модуль APM Structure3D позволяет импортировать созданную и разбитую на конечные элементы поверхностную или твердотельную модель, подготовить ее к расчету (задать толщину пластинам, материал и т.д.) и произвести несколько типов расчета. Это: определение напряженно-деформированного состояния, устойчивости, распределения температурных полей, собственных частот, анализ поведения конструкции при произвольно меняющихся во времени внешних нагружениях (вынужденная динамика).
На рисунках 13 -17 прведены примеры создания моделей объектов в модуле APM Structure3D.
4.3 Инструменты конечно-элементного анализа в системе APM WinMachine
Метод конечных элементов (МКЭ) является наиболее перспективным численным методом, позволяющим производить анализ напряженно-деформированного состояния (НДС) сложной конструкции. С его использованием можно достаточно точно описать как геометрию конструкции, так и характер приложенных к ней нагрузок и свойства материала конструкции.
Основная идея метода заключается в том, что при анализе сплошная среда моделируется разбиением ее на конечные области (элементы), в каждой из которых поведение этой среды описывается с помощью отдельного набора выбранных функций, представляющих собой перемещения в указанной области. Эти функции задаются так, чтобы они удовлетворяли условиям непрерывности описываемых ими характеристик во всей среде.
Если конструкция в целом неоднородна и состоит из большого количества отдельных конструктивных элементов, каждый из которых описывается своим дифференциальным уравнением, то метод конечных элементов является, по сути, единственным методом, позволяющим рассчитать напряженное состояние конструкции, динамику, устойчивость и другие характеристики любой детали при произвольном нагружении и закреплении.
Основными типами конечных элементов, которыми оперируют модули системы АРМ WinMachine, являются (рисунки 18 и 19): стержневой (ферменный или балочный), пластинчатый (плоско-напряженный) и трехмерный объемный (сплошной). Первые два типа могут быть изгибаемыми осесимметричными и изгибаемыми пластинчатыми.
Таким образом, задача расчета НДС конструкции сводится к следующему. Прежде всего, проводится разбиение этой конструкции на конечные элементы. Взаимодействие конечных элементов друг с другом осуществляется через общие узлы по определенным законам, причем описывающие эти законы уравнения различны для различных типов конечных элементов. С учетом выбранного типа конечного элемента формируется матрица жесткости, как отдельного конечного элемента, так и конструкции в целом. В конечном итоге матрица жесткости сводится к системам алгебраических уравнений. Эти уравнения дополняются законами, описывающими воздействующие внешние силы, а также заданными ограничениями на перемещения отдельных частей конструкции (опоры). Совместным решением полученных систем уравнений можно найти величины перемещений и напряжений, которые будут иметь место в каждом из конечных элементов конструкции. Дальнейшим суммированием результатов от отдельных конечных элементов определяется и общая деформация конструкции в различных направлениях, и деформации отдельных ее элементов, и возникающие внутренние напряжения в любых ее частях.
 |
||
 |
||
Результаты расчета позволяют получить картину распределения напряжений. Для наглядности величины напряжений показываются в виде цветовой гаммы.
Далее в настоящем разделе будет представлено описание модулей системы APM Beam и APM Structure3D, реализующих метод конечных элементов. В разделе 5 приводятся результаты расчетов с использованием этих модулей.
4.4 Назначение и возможности модуля конечно-элементного
анализа APM Structure3D
Модуль APM Structure3D предназначен для комплексного анализа трехмерных конструкций. В нем могут быть рассчитаны стержневые, тонкие пластинчатые и объемные твердотельные конструкции, а также их произвольные комбинации. Таким образом имеется возможность расчета всевозможных строительных и машиностроительных конструкций и их элементов. Под комплексным анализом понимается расчет напряженно-деформированного состояния перечисленных объектов произвольной геометрической формы при произвольном нагружении и закреплении, а также ряд других расчетов. Анализ полученных результатов позволяет выбрать наилучшие конструктивные решения.
Модуль APM Structure3D позволяет решать следующие задачи:
а) определение полей эквивалентных напряжений и их составляющих;
б) расчет линейных, угловых и результирующих перемещений;
в) определений внутренних усилий;
г) расчет устойчивости и формы потери устойчивости;
д) определение частот собственных колебаний и собственных форм;
е) расчет вынужденных колебаний и анимация колебательного процесса по заданной вынуждающей нагрузке, расчет на вибрацию оснований;
ж) расчет температурных полей и температурных напряжений;
и) расчет усталостной прочности;
к) геометрически нелинейные расчеты;
л) автоматический подбор сечений из условий прочности, жесткости, устойчивости для металлоконструкций машиностроительного назначения и строительных конструкций по СНиП;
м) проектирование узлов металлоконструкций;
н) автоматическая генерация номенклатуры элементов, составляющих конструкцию.
Для рассчитываемых конструкций могут использоваться следующие типы моделей:
- стержневые (машиностроительного и строительного назначения);
- пластинчатые и оболочечные (изолированные, а также в комбинации со стержневыми, твердотельными и вантовыми конструкциями);
- вантовые и другие, включающие гибкие элементы;
- твердотельные модели и их комбинации со стержневыми, пластинчатыми, оболочечными и вантовыми моделями;
- сборки.
Используемыми типами конечных элементов могут быть:
а) стержневые элементы (линейные, геометрически нелинейные);
б) гибкие элементы (канаты и нити);
в) пластинчатые (линейные, геометрически нелинейные);
г) оболочечные (линейные, геометрически нелинейные);
д) твердотельные (линейные и физически нелинейные);
е) произвольная комбинация перечисленных выше объектов.
При выполнении расчетов могут быть заданы следующие типы нагрузок:
- сосредоточенные силы и моменты;
- распределенные нагрузки по длине, площади и объему;
- нагрузки, заданные перемещением;
- снеговые нагрузки по СНиП;
- ветровые нагрузки по СНиП;
- сейсмические нагрузки по СНиП с учетом распределенных и сосредоточенных масс, линейных и вращательных степеней свободы;
- комбинация нагрузок;
- центробежные силы;
- гравитационные силы;
- температурое нагружение;
- произвольная комбинация перечисленных выше нагрузок.
Задаваемые виды материалов:
а) однородные материалы;
б ) многослойные материалы;
Имеется возможность дополнительно задать:
- внецентренное соединение стержневых элементов;
- шарнирное соединение элементов конструкции;
- упругие связи между элементами;
- освобождение от связей;
- упругие опоры;
- совместные перемещения;
- сосредоточенные массы;
- импорт/экспорт сетки конечных элементов (в форматах NASTRAN, DXF, SFM);
- локальную систему координат в узле;
Дополнительно можно получить:
а) значение массы конструкции в целом и масс отдельных элементов конструкции;
б) реакции в опорах;
в) карты распределения напряжений в произвольном сечении стержня;
г) эпюры внутренних силовых факторов для отдельного элемента и для конструкции в целом;
д) величину провисания гибкого элемента;
е) отчет по результатам расчета в формате RTF.
Разбиение на конечные элементы выполняется автоматически с постоянным и адаптивным шагами. Кроме того, имеются средства для создания пользовательских библиотек.
Модели конструкций можно либо создавать графическими средствами, входящими в состав системы APM WinMachine, либо импортировать из сторонних графических редакторов с помощью сторонних форматов (STEP, DXF).
В разделе 5 приведено два примера использования модуля APM Structure3D для конструирования и расчетного исследования элементов теплоэнергетического оборудования.
4.5 Модуль проектирования балочных элементов конструкций APM Beam
При проектировании балочных конструкций важно определить напряженно-деформированное состояние балки и рассчитать ее динамические характеристики. Кроме того, важными параметрами являются реакции в опорах, которые необходимы для расчета и проектирования сопряженных с балкой деталей.
Модуль APM Beam предназначен для выполнения комплексного проверочного расчета балки в условиях произвольного нагружения и закрепления. При этом балка может состоять из нескольких участков различной длины и различного поперечного сечения.
С помощью APM Beam можно получить следующие результаты:
а) реакции в опорах балки;
б) распределение моментов и углов изгиба по длине балки;
в) распределение моментов и углов поворота при кручении;
г) распределение поперечных и продольных деформаций;
д) распределение эквивалентных напряжений по длине балки;
е) распределение поперечных сил;
ж) карты распределения напряжений в любом произвольном сечении по длине балки;
и) частоты собственных колебаний.
Кроме того, результаты расчетов дают возможность построить графики собственных форм балки на соответствующей собственной частоте.
На этапе подготовки исходных данных для дальнейших расчетов используется специализированный графический редактор APM Beam. Редактор, имеющий полный набор всех необходимых процедур, предоставляет пользователю удобные средства для задания и редактирования длины и поперечного сечения участка балки, ввода нагрузок, действующих на балку, задания различного вида опор и их местоположения, задания внешних сосредоточенных масс и моментов инерции в случае расчета поперечных и крутильных колебаний балочных конструкций.
При вводе параметров можно использовать встроенный графический редактор либо модуль APM Graph, а также базу данных APM Mechanical Data. Графический редактор прост в обращении, в нем сохранена преемственность с другими программными продуктами НТЦ АПМ.
При выполнении проверочных расчетов используются комбинированные методы.
 Расчет перемещений выполняется энергетическим методом
Мора. В случае статически неопределимых балок раскрытие статической неопределимости
проводится методом сил, при этом коэффициенты канонических уравнений метода сил
рассчитываются с использованием интегралов Мора. Расчет напряжений кручения в поперечном
сечении ведется методом конечных элементов, а напряжений изгиба и сдвига — методом
момента инерции. При выполнении расчетов методом конечных элементов разбиение
на треугольные конечные элементы выполняется автоматически. Величины эквивалентных
нормальных и касательных напряжений рассчитываются по энергетической теории
прочности.
Расчет перемещений выполняется энергетическим методом
Мора. В случае статически неопределимых балок раскрытие статической неопределимости
проводится методом сил, при этом коэффициенты канонических уравнений метода сил
рассчитываются с использованием интегралов Мора. Расчет напряжений кручения в поперечном
сечении ведется методом конечных элементов, а напряжений изгиба и сдвига — методом
момента инерции. При выполнении расчетов методом конечных элементов разбиение
на треугольные конечные элементы выполняется автоматически. Величины эквивалентных
нормальных и касательных напряжений рассчитываются по энергетической теории
прочности.
На рисунке 20 показаны некоторые элементы интерфейса модуля APM Beam, на рисунках 21 – 23 приведены примеры результатов расчета балочных конструкций в данном модуле.
Модуль APM Beam позволяет выполнить комплексный расчет балки и в случае необходимости подобрать наиболее подходящее для нее поперечное сечение. Кроме того, в модуле имеется возможность провести методом начальных параметров комплекс динамических расчетов, предусматривающий определение частот собственных колебаний и собственных форм балки.
5 Примеры постановки и решения конструкторских и расчетно-исследовательских задач с использованием модуля APM Structure3D
5.1 Расчет и конструирование корпусов технологических аппаратов
В современных условиях в связи с интенсивным развитием теплоэнергетики и нефтегазовой промышленности особую актуальность приобретают проблемы комплексного расчетного анализа элементов различных технологических аппаратов. Конструкции аппаратов становятся все более сложными, и на первый план выходит задача их расчета на прочность. Тщательный прочностной анализ позволяет снизить материалоемкость и, следовательно, стоимость аппаратов. Ниже приведены результаты исследования вопроса о повышении точности прочностных расчетов реакционных емкостных аппаратов, а также частичной оптимизации их конструкции, опубликованные в [13].
Проводить прочностной расчет подобных конструкций можно одним из двух методов: аналитическим, применяемым при ручном расчете, и численным, при котором используются методы решения задач прочности с помощью вычислительных средств, рассматривая корпус аппарата как единую систему с учетом наличия люков, штуцеров, фланцев, опор и привода.
Аналитические методы расчета корпусов химических аппаратов основаны на расчетных моделях гладких оболочек. При этом обечайка, крышка и днище аппарата рассчитываются на прочность и устойчивость как отдельные элементы с использованием определенных допущений [14, 15].
5.1.1 Постановка задачи, последовательность прочностного расчета и анализа результатов расчета
В качестве примера был рассмотрен реакционный аппарат (рисунок 24), состоящий из корпуса сложной формы и устройства перемешивания с приводом. Корпус состоит из эллиптической крышки 1, цилиндрической обечайки 2 и днища 3 конической формы с углом при вершине конуса 45°. Крышка соединяется с обечайкой при помощи фланца 4 и имеет люк-лаз 5. Сверху на аппарате монтируется мотор-привод 6 для вращения мешалки 7. Аппарат крепится к стойкам основания с помощью четырех опор-лап 8.
Были выполнены расчеты для корпуса со следующими параметрами: диаметр обечайки (d) — 2000 мм, высота обечайки (L) — 1800 мм, соотношение полуосей эллиптической крышки — 1:2, диаметр фланца (dф) — 2174 мм, толщина фланца (h) — 135 мм, диаметр люка (dл) — 400 мм.
Модель корпуса аппарата создавалась как поверхностная в 3D-редакторе модуля APM Studio. Вначале строилась гладкая оболочка (рисунок 25), которая постепенно усложнялась: оболочка с фланцем; оболочка с фланцем и люком; оболочка с фланцем, люком и опорами-лапами (рисунок 26). Принималось, что корпус реакционного аппарата крепится шарнирно к жесткой станине с помощью четырех опор-лап. Далее производился расчет на прочность, на устойчивость и на определение собственных частот и форм в модуле APM Structure3D.
Анализ производился путем сопоставления результатов расчета модели корпуса, полученных с помощью модуля APM Structure3D, с результатами теоретического расчета. Подчеркнем, что подобное сравнение можно провести только для гладкой модели, такой как на рисунке 25. Для более сложных моделей получить аналитически значения коэффициентов концентрации напряжений на сложных участках невозможно.
Для выполнения прочностного расчета корпуса необходимо вначале сгенерировать конечно-элементную сетку (КЭС) с определенным значением максимальной длины стороны конечного элемента (шаг разбиения), а затем передать ее в модуль APM Structure3D. В зависимости от величины шага разбиения конструкция в автоматическом режиме подвергается разбиению на определенное число конечных элементов. На рисунке 27 приведена КЭС упрощенной гладкой модели, результаты расчета которой использовались для сравнения с теоретическими результатами. На рисунке 28 показана КЭС окончательной модели корпуса с фланцем и люком.
После построения модели и разбиения ее на конечные элементы был проведен статический прочностной расчет модели корпуса, а также расчет на устойчивость.
Статический расчет выполнялся исходя из того, что толщина стенки стального корпуса равна 16 мм, а перепад внешнего давления составляет 1 МПа.
Результаты статического расчета (карта эквивалентных напряжений) представлены на рисунке 29. На рисунке 30 приведены результаты расчета модели корпуса на устойчивость в виде значений коэффициента запаса по устойчивости и формы потери устойчивости.
Результат конечно-элементного анализа любой конструкции (величина напряжений и параметры устойчивости) в значительной степени зависит от количества использованных при расчете конечных элементов разбиения. После того как количество элементов разбиения достигнет определенного уровня, результат будет близок к теоретическому значению. Однако следует отметить, что необходимое количество элементов разбиения, в свою очередь, очень сильно зависит от их типа элементов (стержневые, пластинчатые или объемные), конкретного вида конструкции, ее нагружения. В случае расчета на устойчивость необходимое количество элементов разбиения зависит также от возможной формы потери устойчивости.

В рассматриваемом примере был произведен расчет коэффициента запаса устойчивости гладкой модели с разным шагом разбиения (различным количеством конечных элементов). На рисунке 31 представлена зависимость коэффициента запаса по устойчивости от числа конечных элементов (кривая 1). Из анализа этой кривой видно, что если число конечных элементов превышает 2000, то значение коэффициента запаса устойчивости почти не меняется. Это может служить показателем оптимальности разбиения на конечные элементы. При количестве конечных элементов 3576 (максимальная сторона конечного элемента равна 125 мм) коэффициент запаса устойчивости имел значение 2,181.
Увеличение количества элементов до 4000 и более (пунктирный участок кривой 1) практически не дает улучшений в плане точности, однако приводит к значительному возрастанию времени выполнения расчета компьютером.
Аналитический расчет запаса устойчивости данного корпуса, произведенный по известным методикам [1, 2], дает значение запаса устойчивости чуть меньше 2 (прямая 2 на рисунке 31). Такое приближение к результату численного расчета говорит о том, что аналитический расчет дает чуть заниженные значения коэффициента запаса по устойчивости корпуса аппарата. Следует отметить, что формулы для аналитического расчета, полученные на упрощенных моделях, лишь приближенно оценивают влияние крышки и днища на устойчивость обечайки корпуса аппарата. Использование численного метода решения систем уравнений методом конечных элементов в модуле APM Structure3D позволяет рассчитывать конструкцию в целом, без упрощений, причем с более высокой точностью, чем при аналитическом расчете.
 |
5.1.2 Оптимизация конструкции обечайки
Дальнейшие расчеты на устойчивость и прочность данного типоразмера гладкого корпуса аппарата (рисунок 24) были проведены для режима работы Рнар = 0,4 МПа и внутреннего избыточного давления Рвн = 0,8 МПа.
Толщина стенки корпуса определялась по известным аналитическим методикам и составила 11,8 мм при расчетном напряжении 123 МПа. Запас устойчивости при этой толщине из аналитического расчета после уточняющих итераций составил nуст = 2,24. Расчет коэффициента запаса по устойчивости, выполненный с использованием модуля APM Structure3D, показал несколько большее значение этого коэффициента, а именно nуст = 2,26 (при количестве конечных элементов nкэ = 1804). Расчет на устойчивость корпуса аппарата с учетом фланца), выполненный в модуле APM Structure3D, показал увеличение запаса устойчивости до 2,2653. Дополнительное введение в корпус аппарата люка, в свою очередь, также повысило коэффициент запаса устойчивости до 2,861 (при nкэ = 2000).
При воздействии внутреннего избыточного давления напряжение в обечайке, рассчитанное по безмоментной теории оболочек Лапласа, составило 68,2 МПа. Расчет напряжений в модуле APM Structure3D, выполненный при той же геометрии расчетной модели и параметрах нагружения, показал уровень напряжения в средней части обечайки порядка 60-70 МПа (рисунок 32).
Достоинством метода конечных элементов является возможность определения краевых напряжений в зонах перехода цилиндрической обечайки в коническое днище и эллиптическую крышку. По результатам статического расчета была построена эпюра напряжений, возникающих в корпусе аппарата в зависимости от его меридиональной координаты. На рисунке 32 показана эпюра изменения эквивалентных напряжений в первоначальной конструкции корпуса. Если в середине обечайки напряжения в два раза меньше допустимых, составляющих порядка 123 МПа, то в зоне перехода цилиндра в конус они намного превышают допустимые и достигают почти 200 МПа. Для уменьшения краевых напряжений был сделан утолщенный участок перехода от конуса к цилиндру (рисунок 33). Толщина переходного участка была принята равной 25 мм. При этом расчеты показали снижение напряжений в зоне перехода цилиндра в конус с 200 МПа до 20-30 МПа.
Исследование влияния условий закрепления в опорах-лапах показало, что жесткая заделка вызывает повышенные напряжения в этих зонах. Значительно снизить концентрацию напряжений в опорах позволяет шарнирно-подвижное опирание.
Результаты выполненного расчетного исследования позволили сформулировать следующие выводы:
а) прочностной расчет корпусов аппаратов в модуле APM Structure3D необходимо предварять расчетом шага разбиения корпуса (минимально допустимое число элементов сетки разбиения), при котором контролируемые параметры, такие как коэффициент запаса устойчивости и величины напряжений, становятся постоянными. При таких параметрах разбиения модуль прочностного расчета APM Structure3D дает очень близкое соответствие результатов по сравнению с известными аналитическими решениями;
б) уточненный расчет величины напряжений, коэффициентов запаса устойчивости с учетом сложности формы аппаратов в модуле APM Structure3D позволяет существенно снизить металлоемкость конструкций.
5.2 Создание трехмерной модели и частотный анализ лопатки
турбины
Развитие энергомашиностроения на современном этапе характеризуется тенденциями повышения единичной мощности энергетических установок с паровыми и газовыми турбинами. Поэтому разработка и совершенствование основных элементов турбоустановок на основе применения уточненных методов расчета является актуальной проблемой энергетики.
Наиболее ответственными элементами паровых и газовых турбин являются рабочие лопатки. В условиях эксплуатации на них действуют возмущающие силы, кратные числу оборотов ротора n и произведению числа направляющих лопаток на число оборотов z∙n. Для отстройки рабочих лопаток от опасных резонансных режимов необходимо исследовать спектр собственных колебаний лопаток.
Лопатки современных паровых и газовых турбин представляют собой как незакрученные, так и закрученные стержни переменного поперечного сечения, связанные в пакеты проволокой и бандажом. Незакрученные лопатки используют для первых ступеней турбин и последних ступеней компрессоров. Поперечное сечение лопатки имеет несимметричный профиль. При этом возникают изгибно-крутильные колебания в поле центробежных сил, причем влияние последних на собственные частоты колебаний лопаток довольно существенно. Кроме того, при точной постановке задачи следует учитывать также упругую связанность лопаток, влияние сдвиговых деформаций, податливость заделки и влияние температуры на механические свойства материала лопатки. Данная задача не имеет решения в замкнутом виде, поэтому на практике для ее решения привлекаются различные приближенные методы [16, 17]. Одним из самых эффективных для решения подобных задач считается метод начальных параметров (МКЭ). При этом задача определения собственных частот колебаний лопатки может быть решена с учетом всех существенных факторов практически с любой точностью, однако это требует составления достаточно сложных программ.
Ниже показана возможность выполнения анализа невращающейся лопатки турбины с помощью пакета конечно-элементного анализа APM Structure 3D. Закрепление лопатки в корневом сечении принимается абсолютно жестким; влияние податливости заделки в дальнейшем может быть учтено с использованием приближенных методов [16]. После определения собственных частот колебаний невращающейся лопатки для вращающейся лопатки влияние центробежных сил на частоты колебаний может быть выполнено с использованием соотношений, приведенных в [16,17].
5.2.1 Построение корневого сечения лопатки и расчет его геометрических характеристик в системе Mechanical Desktop
Трехмерную модель в пакете APM Structure 3D будем создавать с помощью операции «Вытолкнуть», которая позволяет получить трехмерную модель с пропорциональным изменением размеров двумерного контура сечения, а также с поворотом сечения вдоль оси выталкивания.
 Построение модели начинается с изображения корневого
сечения лопатки. При построении профиля можно использовать уравнение теоретического
профиля (рисунок 34) по Биргеру
Построение модели начинается с изображения корневого
сечения лопатки. При построении профиля можно использовать уравнение теоретического
профиля (рисунок 34) по Биргеру
 ,
,
где знак плюс относится к верхней кривой профиля, знак минус – к нижней; координаты центра тяжести m=0,43b, n=0,76h.
Профиль лопатки должен быть плавным, без изломов, поэтому удобно создавать его с помощью сплайнов. В пакете APM Structure 3D не предусмотрено вычерчивание примитивов в виде сплайнов. Поэтому выберем следующий путь построения сечения: в системе Mechanical Desktop [3] по точкам построим корневое сечение лопатки с помощью сплайна; построенный контур обведем с помощью полилинии, и сохраним файл в формате .dxf, после чего в с помощью процедуры AMINERTIA выполним расчет геометрических характеристик сечения. Отметим, что геометрические характеристики сечений используются при учете влияния центробежных сил и податливости заделки на собственные частоты лопатки. Впоследствии в пакете APM Structure 3D выполним импорт построенного рисунка для дальнейшей его обработки.
Координаты точек профиля приведены в таблице 1.
Т а б л и ц а 1
|
Сторона профиля |
вогнутая |
выпуклая |
||||||||||||
|
x |
1.0 |
11.5 |
36.2 |
60.0 |
77.0 |
86.3 |
91.3 |
0.5 |
15.0 |
30.5 |
51.0 |
68.5 |
82.0 |
92.0 |
|
y |
0.0 |
5.0 |
12.2 |
8.5 |
-0.8 |
-6.8 |
-12.0 |
0.1 |
18.0 |
28.0 |
27.7 |
17.0 |
2.0 |
-11.0 |

Запустим программу Mechanical Desktop 2004, построим точки (рисунок 35) и обведем их сплайном (рисунок 36). Далее обводим сплайн полилинией другого цвета и удаляем сплайн. Сохраняем рисунок в формате .dxf. Запускаем команду расчета геометрических характеристик сечения AMINERTIA. В результате расчета выводятся (рисунок 37) значения параметров корневого сечения лопатки, которые могут быть использованы при дальнейших аналитических расчетах.
Затем запускаем APM Structure 3D и разворачиваем окно Вид сверху. Выполняяем импорт сохраненного в формате .dxf. файла с корневым сечением лопатки. Из падающего меню Рисование выбираем пункт Пластина, затем подпункт Произвольная с разбиением и, включив привязку (по умолчанию при нажатой клавише Shift), вычерчиваем пластину, обходя контур импортированного рисунка. После того, как контур будет замкнут, он примет вид, показанный на рисунке 38 (чтобы сетка была гуще в тонкой части лопатки, при обводке шаги брались мельче). В появляющемся окне Параметры разбиения (рисунок 40) согласимся с предлагаемыми опциями, нажав кнопку OK.
|
 Отметим, что выталкивание, масштабирование и поворот сечения
осуществляются относительно какого-либо узла конечно-элементной сетки. В рассматриваемом
примере в качестве такого узла выбран узел, расположенный достаточно близко от
центра тяжести сечения (координаты центра тяжести были определены в Mechanical
Desktop с помощью процедуры AMINERTIA). Для того чтобы точно определить
направляющий вектор (вектор умножения), проходящий через центр тяжести,
пришлось выполнить дополнительные разбиения пластины.
Отметим, что выталкивание, масштабирование и поворот сечения
осуществляются относительно какого-либо узла конечно-элементной сетки. В рассматриваемом
примере в качестве такого узла выбран узел, расположенный достаточно близко от
центра тяжести сечения (координаты центра тяжести были определены в Mechanical
Desktop с помощью процедуры AMINERTIA). Для того чтобы точно определить
направляющий вектор (вектор умножения), проходящий через центр тяжести,
пришлось выполнить дополнительные разбиения пластины.
Перед тем, как выполнить сам расчет, из объемной модели лопатки необходимо удалить вспомогательные элементы (стержни и пластины), затем нужно задать опоры.
Для удаления вспомогательных элементов надо, прежде всего, выключить показ объемных элементов, отжав соответствующую кнопку Объемные элементы на панели инструментов Фильтры вида. Кроме того, нужно отключить показ узлов, отжав на этой же панели кнопку Показать узлы.
Это приводит к тому, что при выделении элементов модели ни объемные элементы, ни узлы выделяться не будут, остаются только вспомогательные элементы – стержни и пластины. Их надо выделить и удалить, после чего следует вновь включить показ узлов и объемных элементов.
Расстановку опор выполняем следующим образом: выделяем все узлы элементов, лежащие в корневом сечении лопатки, и из падающего меню Рисование выбираем пункт Опора. В раскрывающемся при этом окне Установка опоры выбираем тип опоры (заделка), при котором запрещаются все линейные и угловые перемещения.
 |
После этого выполняется расчет. На рисунке 42 показаны результаты расчета 5-и низших собственных частот для модели лопатки, показанной на рисунке 41 (масштабный коэффициент составляет 0.7, угол закручивания - 30º). Здесь приведены значения собственных частот и соответствующие формы собственных колебаний лопатки. При числе элементов, равном 3500, непосредственно решение без учета подготовки модели и просмотра результатов составило для компьютера типа Pentium IV со средними параметрами около одной минуты. Как видно на рисунке, здесь имеют место как изгибные, так и крутильные колебания, причем самая низшая частота соответствует изгибным колебаниям, а вторая снизу частота соответствует крутильным колебаниям.
Представляет интерес сопоставление значений собственных частот для закрученной лопатки и для незакрученной лопатки. На рисунке 43 представлены результаты расчета 5-и низших собственных частот для модели той же лопатки с теми же размерами, что выше, но без закручивания. Оказалось, что из 5-и низших собственных частот для незакрученной лопатки 4 частоты имеют более высокое значение, а одна, четвертая, - более низкое.
 |
На рисунке 44 показаны результаты расчета 5-и низших собственных частот для модели лопатки с тем же корневым сечением, но, в отличие от двух предыдущих случаев, имеющей постоянное сечение. Как видим, для этого случая все 5 низших собственных частот имеют более низкие значения, чем для рассмотренных выше случаев.
Результаты расчетов в пакете конечно-элементного анализа APM Structure 3D сопоставлялись с результатами расчетов в программном комплексе конечно-элементного анализа ANSYS, версия 9. Комплекс МКЭ ANSYS широко применяется для решения сложных задач любой физической природы, описываемых дифференциальными уравнениями в частных производных [4, 5].
 |
Сопоставление собственных частот для рассматриваемой модельной задачи показало достаточно близкие результаты.
В заключение отметим, что модуль APM Structure 3D по сравнению с мощными программными комплексами конечно-элементного анализа, такими как ANSYS или Nastran, имеет более ограниченные возможности. Указанные программные комплексы позволяют решать практически любые задачи, описываемые дифференциальными уравнениями в частных производных, в том числе в линейной и нелинейной постановках, стационарные и нестационарные задачи и т.д. Так, одним из многочисленных достоинств комплекса ANSYS [18, 19] является возможность очень простого представления результатов в виде анимации с возможностью их сохранения в виде *.avi-файлов. К несомненным достоинствам российского программного комплекса APM WinMachine, в состав которого входит модуль APM Structure 3D, является его низкая цена (на порядок ниже, чем аналогичные комплексы из дальнего зарубежья). С учетом того, что университетская лицензия на APM WinMachine позволяет сэкономить порядка 90% от коммерческой стоимости комплекса, можно заключить, что по соотношению «цена/производительность» комплекс APM WinMachine не уступает зарубежным аналогам, и с его помощью можно решать достаточно сложные задачи инженерного анализа.
Список литературы
1. Норенков И.П. Основы автоматизированного проектирования: Учебник для вузов. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. – 360 с.
2. Динасылов А.Д. Разработка проектных модулей САПР теплотехнологических аппаратов. Математическое обеспечение: Учебное пособие. – Алматы: АИЭС, 2001. – 88 с.
3. Динасылов А.Д. Механика. Решение некоторых задач механики в системе Mechanical Desktop: Учебное пособие. – Алматы: АИЭС, 2007. –90 с.
4. Динасылов А.Д. САПР в теплоэнергетике. Конструирование оборудования ТЭС: Конспект лекций в 2-х частях. - ч.1. - Введение в автоматизированное проектирование. – Алматы: АИЭС, 2002. – 39 с.
5. Динасылов А.Д. САПР в теплоэнергетике. Конструирование оборудования ТЭС: Конспект лекций в 2-х частях. - ч.2. - Автоматизированное проектирование теплоэнергетического оборудования. – Алматы: АИЭС, 2002. – 77 с.
6. Динасылов А.Д. Инженерная и компьютерная графика. Введение в компьютерную графическую систему AutoCAD: Учебное пособие. - Алматы: АИЭС, 2003. – 104 с.
7. Динасылов А.Д. Расчет на ЭВМ стержней, пластин и вращающихся неравномерно нагретых дисков методом начальных параметров: Конспект лекций. - Алматы: АЭИ, 1994. – 115 с.
8. Динасылов А.Д. Расчеты на прочность и основы конструирования элементов теплоэнергетического оборудования (тонкостенные и толстостенные сосуды, трубы, вращающиеся диски): Конспект лекций. - Алматы: АЭИ, 1993. – 97 с.
9. Динасылов А.Д., Казыханов Х.Р. Системный аналих машинных агрегатов на основе графов связей: Учебное пособие. – Алма-Ата: КазПТИ, 1990. – 80 с.
10. Шелофаст В.В. Основы проектирования машин. – М.: Изд-во АПМ. – 472 с.
11. Шелофаст В.В., Чугунова Т.Б. Основы проектирования машин. Примеры решения задач. – М.: Изд-во АПМ. 2004. – 240 с.
12. Замрий А.А. Проектирование и расчет методом конечных элементов трехмерных конструкций в среде APM Structure 3D. – М.: Издательство АПМ, 2004. – 208 с.
13. Васильев В. Расчет корпусов химических аппаратов сложной формы//САПР и графика. – 2006. - №8.- С. 47-51.
14. Бакластов А.М., Горбенко В.А., Удыма П.Г. Проектирование, монтаж и эксплуатация тепломассообменных установок: Учебное пособие для вузов. – М.: Энергоиздат, 1981. – 336 с.
15.Павлов К.Ф., Романов П.Г., Носков А.А. Примеры и задачи по курсу процессов и аппаратов химической технологии. – Л.: Химия, 1969. – 624 с.
16. Вибрации в технике: Справочник. В 6-ти т. /Ред. В.Н.Челомей (пред.). – М.: Машиностроение, 1980. – т. 3. - Колебания машин, конструкций и их элементов /Под ред. Ф.М.Диментберга и К.С.Колесникова, 1980. – 544 с.
17. Костюк А.Г. Динамика и прочность турбомашин. – М.: Машиностроение, 2000. – 264 с.
18. 4. Басов К.А. ANSYS: Справочник пользователя. – М.: ДМК Пресс, 2005. – 640 с.
19. Каплун А.Б., Морозов Е.М., Олферьева М.А. ANSYS в руках инженера: Практическое руководство.- М.: Едиториал УРСС, 2004. – 272 с.